

Emerson EV1000-4T0015G, EV1000-2S0007G, EV1000-2S0022G, EV1000-4T0007G, EV1000-4T0022G User Manual
...Page 1

EV1000 Series General Purpose Variable Speed Drive
User Manual
Version: V1.4
Revision Date: February 1, 2004
BOM:31010988
Emerson Network Power provides customers with technical support.
Users may contact the nearest Emerson local sales office or service
center.
Copyright © 2004 by Emerson Network Power Co., Ltd.
All rights reserved. The contents in this document are subject to change
without notice.
Emerson Network Power Co., Ltd.
Address: No.1 Kefa Rd., Science & Industry Park, Nanshan District
518057, Shenzhen China
Homepage: www.emersonnetworkpower.com.cn
Customer Service Hotline: 800-820-6510, (86) 21-23017141,
(86) 755-86011668
E-mail: support@emersonnetwork.com.cn
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 2

艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 3

Contents
Preface............................................................... 1
Chapter 1 Safety Information ........................... 2
1.1 Danger and Warning Definitions ......... 2
1.2 Notes for Installations .........................2
1.3 Notes for Using the Drive....................3
1.3.1 About Motor and Load .............. 3
1.3.2 About Variable Speed Drive ..... 3
1.4 Disposing Unwanted Drive ................. 4
Chapter 2 Specifications and Optional Parts ... 5
2.1 Specifications...................................... 5
2.2 Product Series Introduction ................ 7
2.2.1 EV1000 Models ........................ 7
2.2.2 Ordering Information.................7
2.2.3 Size .......................................... 7
2.2.4 LED Keypad Display Unit
TDP-LED02 Size..................................8
2.3 Optional Parts..................................... 8
2.3.1 Braking Resistor ....................... 8
2.3.2 LED Status Indicator Unit
TDP-LED03.......................................... 9
2.3.3 TDP-LED02 Holders and Wires 9
2.3.4 Communication Parts .............10
Chapter 3 Installation and Wiring ................... 11
3.1 Installation ........................................ 11
3.1.1 Installation Methods Compliant
With EMC Requirements.................... 11
3.1.2 Noise Suppression ................. 13
3.1.3 Using Surge Suppressor......... 15
3.1.4 Leakage current...................... 15
3.1.5 Applications of Power Filter .... 15
3.1.6 AC Line Reactor Applications . 16
3.2 Wiring ............................................... 16
3.2.1 Overview................................. 17
3.2.2 Power Terminals.....................19
3.2.3 Control Circuit Wiring..............20
3.2.4 Onsite Wiring Requirements ... 27
3.2.5 Earthing .................................. 28
Chapter 4 Operation Procedures ...................
29
4.1 Definitions of Terms..........................29
4.1.1 The Drive’s Control Modes......29
4.1.2 Frequency Setting Methods ....29
4.1.3 Drive’s Operating Status .........29
4.1.4 Operating Mode ......................29
4.2 Operation Guide................................30
4.2.1 Operation of LED Keypad .......30
4.2.2 Keypad Function Explanation .31
4.2.3 Indicator Description ...............31
4.2.4 Parameter Setting Method ......31
4.2.5 Speed Setting .........................33
4.2.6 How to Lock/Unlock Keypad ...34
Chapter 5 Parameters ....................................35
5.1 Basic Parameters (F0) ......................35
5.2 Reference Frequency (F1)...................38
5.3 Start/Brake Parameter (F2) ...............39
5.4 Auxiliary Operating Parameters (F3) .42
5.5 PLC Parameters (F4) ........................45
5.6 Close-loop Control (F5) .....................48
5.7 Traverse Parameters (F6) .................52
5.8 Multi-function Terminal (F7) ..............54
5.9 Display Control (F8) ..........................65
5.10 Enhanced Function (F9)..................67
5.11 Reserved (FA).................................73
5.12 Communication (FF) .......................73
5.13 Moter’s Parameters (FH).................74
5.14 Protection (FL) ................................76
5.15 Operating Time (Fn)........................79
5.16 Protection of Parameters (FP).........79
Chapter 6 Troubleshooting .............................81
Chapter 7 Maintenance ..................................86
7.1 Routine Maintenance ........................86
7.2 Periodic Maintenance
........................86
7.3 Replacing of Easily-worn Parts .........87
7.4 Storage of the Drive ..........................87
7.5 Warranty ...........................................88
Appendix 1 Parameter Set .............................89
Appendix 2 Communication Protocol ...........135
Appendix 3 Optional Parts............................151
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 4

艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 5

Preface 1
EV1000 Series General Purpose Variable Speed Drive User Manual
Preface
Thank you for using EV1000 Series variable speed drive made by Emerson Network Power Co., Ltd.
EV1000 Series satisfies high performance requirements by using a unique control method to achieve
high torque, high accuracy and wide speed-adjusting range. Its anti-tripping function and capabilities of
adapting to severe power network, temperature, humidity and dusty environment exceed those of similar
product made by other companies, which improves the product’s reliability noticeably;
EV1000 considers customers’ needs and combines general-purpose function and industrial-oriented
functions. It features PI control, simpe PLC, flexible I/O terminals and pluse frequency setting, You can
select whether to save the parameters upon poweroff or stop, bind frequency setting channel with
command channel, zero frequency return difference control zero frequency hysteresis, main and
auxiliary frequency setting, traverse operation, length control, etc. It is an integral, cost-effective and
highly reliable solution for manufacturer in the related fields.
EV1000 Series can satisfy the customers’ requirements on low noise and EMI by using optimized PWM
technology and EMC design.
This manual provides information on installation, wiring, parameter setting, trouble-shooting, and routine
maintenance. In order to ensure the correct installation and operation of the drive, please read this
manual carefully before using and keep it in a safe place.
Unpacking and Inspection
Upon unpacking, please check for:
Any damage occurred during transportation;
Check whether the rated values on the nameplate of the drive are in accordance with your order.
Our product is manufactured and packed at the factory with great care. If there is any error, please
contact any of our distributors or us.
The user manual is subjected to change without notifying the customers due to the continuous process
of product improvements.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 6

2 Chapter 1 Safety Information
EV1000 Series General Purpose Variable Speed Drive User Manual
Chapter 1 Safety Information
1.1 Danger and Warning
Definitions
Danger
!
Operations without following instructions
can cause personal injury or death
Attention
!
Operations without following instructions
can cause personal injury or damage to
product or other equipment.
1.2 Notes for Installations
Danger
!
Please install the drive on fire-retardant
material such as metal.
·Keep the drive away from combustible
materials.
·Keep the drive away from explosive gas.
·Only qualified personnel shall wire the drive.
·Note that the control terminal of EV1000 drive
is of ELV(Extra Low Voltage)circuit, therefore,
do not connect the control terminal with other
devices directly. For example, before
connecting the RS485 terminal with the PC’s
RS232 terminal, an adapter with isolating
protections must be connected in between;
·Never wire the drive unless the input AC
supply is totally disconnected; otherwise, there
is danger of electric shock. During power-on,
do not touch the cables, control terminals,
radiator and the pore plate on the housing of
the drive.
·The drive must be properly earthed to reduce
electrical accident.
·Install the cover before switching on the drive,
to reduce the danger of electric shock and
explosion.
·For drives that have been stored for longer
than 2 years, increase its input voltage
gradually before supplying full rated input
voltage to it in order to avoid electric shock and
explosion.
·Perform the maintenance job after confirming
that the charging LED is off or the DC Bus
voltage is below 36V.
·Only trained professionals can change the
components, it is prohibited to leave wires or
metal parts inside the drive to avoid the risk of
fire.
·Parameter settings of the control board that
has been changed must be revised, otherwise
accidents may occur.
·The bare portions of the power cables must
be bound with insulation tapes.
·When using optional parts, it is recommended
to use those provided by Emerson Network
Power, to secure safety.
Attention
!
·Don’t carry the drive by its cover. Its cover
cannot sustain the weight and may drop.
·Please install the drive on a strong support,
failing which the drive may fall off.
·Don’t install the drive in places where water
pipes may leak onto it.
·Don't allow screws, washers and other metal
foreign matters to fall inside the drive,
otherwise there is a danger of fire or damage;
·Don't operate the drive if parts are not
complete; there is a danger of a fire or human
injury;
·Don't install the drive under direct sunshine; it
may be damaged by heat;
·Don’t short circuit P1/PB and terminal (-),
there is a danger of fire or the drive may be
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 7

Chapter 1 Safety Information 3
EV1000 Series General Purpose Variable Speed Drive User Manual
damaged.
·Cable lugs must be connected to main
terminals firmly.
·Don’s apply supply voltage (AC 110V or
higher) to the control terminals except
terminals TA, TB and TC.
1.3 Notes for Using the Drive
Pay attention to the following issues when using
EV1000 Series drive:
1.3.1 About Motor and Load
Compared to working at mains frequency, there
will be some increase in temperature, noise and
vibration in the motor. The EV1000 Series are
voltage source inverters. Its output voltage is in
PWM wave. Being non-sinusoidal, there will be
some harmonics.
Low Speed Rotation with Constant Torque
When a standard motor is driven at low speed for
a long time, there will be insufficient cooling for a
self-ventilated motor. Overheating can result in
insulation damaged. Special variable frequency
motor is recommended for constant torque
operation at low speed.
Motor’s over-temperature protecting
threshold
The drive can protect the motor from
over-temperature. If the power rating of the drive
is greater than the motor, be sure to adjust the
protection parameters to ensure the motor is
properly protected.
Operate above 50Hz
When running the motor above 50Hz, there will
be increase in vibration and noise. The rate at
which the torque is available from the motor is
inversely proportionally to its increase in running
speed. Ensure that the motor can still provide
sufficient torque to the load.
Lubrication of mechanical devices
Over time, the lubricants in mechanical devices,
such as gear box, geared motor, etc. when
running at low speed, will deteriorate. Frequent
maintenance is recommended.
Regenerative Energy
When lifting load, regenerative energy is
produced, the drive will trip on overvoltage when
it cannot absorb the regenerative energy of the
load. Therefore, a proper braking unit is required.
Mechanical resonance point of load
The drive system may encounter mechanical
resonance with the load when operating within
certain band of output frequency. Skip
frequencies have to be set to avoid it.
Frequent start and stop
The drive should be started and stopped via its
control terminals. It is prohibited to start and stop
the drive directly through contactors at the input
side, which may damage the drive.
Insulation of Motors
Before using the drive, the insulation of the
motors must be checked, especially, if it is used
for the first time or if it has been stored for a long
time. This is to reduce the risk of the Drive from
being damaged by the poor insulation of the
motor winding. Wiring diagram is shown in Fig.
1-1. Please use 500V insulation tester to measure
the insulation resistance. It should not be less
than 5MΩ.
1.3.2 About Variable Speed Drive
Varistors for Surge Protection or Capacitors Used
to Improve the Power Factor
Don't connect any varistor or capacitor to the
output terminals of the drive, because the drive's
output voltage waveform is pulse wave. Tripping
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 8

4 Chapter 1 Safety Information
EV1000 Series General Purpose Variable Speed Drive User Manual
or damage to components may occur as shown in
Fig.1-1.
M
U
V
W
EV1000
Drive
Fig. 1-1 Capacitors at output are prohibited
Circuit breakers connected to the output of
the drive
If circuit breaker or contactor needs to be
connected between the drive and the motor, be
sure to operate these circuit breakers or contactor
when the drive has no output to avoid damaging
of the drive.
Using host communication function
When frequently modifying the parameters
through host communication function, improper
command will cause physical damage to the
EEROM inside the drive. Please refer to
Appendix 2.
Using outside the range of rated voltage
The drive is not suitable to be used out of the
specified range of operation voltage. If needed,
please use suitable voltage regulation device.
Protection against lightning strike
There are transient surge suppressors inside the
Drive which protects it against lighting strike.
Derating due to Altitude
Derating must be considered when the drive is
installed at high altitude, greater than 1000m.
This is because the cooling effect of the Drive is
less effective in the thin air. Fig.1-2 that shows the
relationship between the altitude and rated
current of the Drive.
100%
90%
80%
1000
400030002000
(m)
Iout
Fig. 1-2 Drive Derating at different altitudes.
1.4 Disposing Unwanted Drive
When disposing the Drive, pay attention to the
following factors:
The capacitors may explode when they are burnt.
Poisonous gas may be generated when the
plastic parts like front covers are burnt.
Disposing method: Please dispose the Drive as
industrial waste.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 9

Chapter 2 Specifications and Optional Parts 5
EV1000 Series General Purpose Variable Speed Drive User Manual
Chapter 2 Specifications and Optional Parts
2.1 Specifications
Table 2-1 EV1000 Specifications
Item Description
Rated voltage & frequency
EV1000-4Txxxxx: 380V~440V; 50Hz/60Hz
EV1000-2Sxxxxx: 200V~240V; 50Hz/60Hz
Input
Permissible fluctuation range
Continuous fluctuation rate: ≤±10%,
short time fluctuation rate: ≤–15%~+10%;
Voltage unbalance rate: <3%; Frequency: ±5%
Rated voltage
EV1000-4Txxxxx: 0~380V/440V
EV1000-2Sxxxxx: 0~200V/240V
Frequency 0Hz~650Hz
Output
Over load ability
G type: 150% rated current for 1 minute, 180% rated current for
3s/1s (380V/220V series)
P type: 120% rated current for 1 minute
Modulation mode Flux vector PWM modulation
Speed range 1:50
Starting torque 150% rated torque at 1Hz
Accuracy of speed at steady
state
≤±
1% rated synchronous speed
Accuracy of frequency
Digital setting: highest frequency×±0.01%.
Analog setting: highest frequency×±0.2%
Setting frequency resolution
Digital setting:0.01Hz. Analog setting: highest frequency×0.1%
Torque boost Auto torque boost, Manual torque boost 0.1%~30.0%
V/F curve
4 modes: 1 self-defined V/F curve and 3 kinds of quadratic V/F
modes (power exponent: 2.0, 1.7 and 1.2)
Acc/dec curve
3 modes: linear, S curve and automatic acc/dec;
4 acc/dec time: unit (minute/second), 60 hours at most
DC braking
Start frequency: 0.00~60.00Hz, duration: 0.1~60.0s
Threshold current: G type: 0.0~150.0%, P type: 0.0~130.0%
Jog
Jog frequency: 0.10~50.00Hz; Acc/Dec time: 0.1~60.0s.
Jog interval adjustable
Main control
functions
On-board PI controller Able to configure close-loop control system easily
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 10

6 Chapter 2 Specifications and Optional Parts
EV1000 Series General Purpose Variable Speed Drive User Manual
Item Description
Auto-energy saving operation
V/F curve is optimized automatically according to the load condition
to perform energy-saving operation.
Auto voltage regulation (AVR) Constant output voltage even if electric network voltage fluctuates
Auto current limiting
Operating current is limited automatically to avoid frequent tripping
of the drive.
Traverse for texile motor Traverse control, central Traverse adjustable
Set length control When reaching set length, the drive will stop
Droop control When many drives control single load
Tone selection Set the tone of the motor when it is running
Immunity to transient power
failure
The drive gives output even if power failure occurs
Customized
functions
Channel binding
Command channel can bind with frequency setting channel and
switched synchronizingly
Methods of inputting commands Via keypad panel, terminals and serial ports.
Methods of setting up frequency
Digital setting; Analog voltage/current setup; pulse setting, serial
port
Pulse output terminal
0~50kHz pulse signal output. Signals can be reference frequency
and output frequency
Operating
function
Analog output terminals
2 analog outputs of 0/4~20mA and 0~10V(selectable). Able to
output signals like reference frequency and output frequency.
LED keypad
Able to show 21 parameters, such as: frequency setting, output
frequency, output power and current during operation; frequency
setting.
Control
panel
Keypad lock and key definition Total lock or partially lock. Some keys’ function definable.
Protection function
Phase loss failure, Over/Under current, Over/Under voltage
protection, Over heat, and Overload protections
Optional parts
Flush mount faceplate for remote keypad, remote keypad cables
and Profibus adapter
Operating environment
In-door, free from moisture, dust, corrodent or flammable gases, oil
mist, vapor, water leakage or salt water.
Altitude Less than 1000m
Ambient temperature
-10℃~+40℃( derating is required from 40℃ to 50℃, increase
every 1℃ above 40℃, derate 2%, highest temperature allowed:
50℃ )
Humidity Less than 95%RH, no condensing
Vibration Less than 5.9m/s2 (0.6g)
Environment
Storage temperature
-40℃~+70℃
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 11

Chapter 2 Specifications and Optional Parts 7
EV1000 Series General Purpose Variable Speed Drive User Manual
Item Description
Protection level IP20
Enclosure
Cooling Fan cooling
Mounting mode Mounted in a cabinet
2.2 Product Series Introduction
2.2.1 EV1000 Models
Table 2-2 Drive series
Drive Model
(G: contant torque;
P:pump,fan load)
Rated
Capacity
(kVA)
Rated
input
current
(A)
Rated
output
current
(A)
Motor
power
(kW)
EV1000-2S0004G 1.0 5.3 2.5 0.4
EV1000-2S0007G 1.5 8.2 4.0 0.75
EV1000-2S0015G 3.0 14.0 7.5 1.5
EV1000-2S0022G 4.0 23.0 10.0 2.2
EV1000-4T0007G 1.5 3.4 2.3 0.75
EV1000-4T0015G 3.0 5.0 3.7 1.5
EV1000-4T0022G 4.0 5.8 5.0 2.2
EV1000-4T0037G
EV1000-4T0037P
5.9 10.5 8.8 3.7
EV1000-4T0055G
EV1000-4T0055P
8.9 14.6 13.0 5.5
2.2.2 Ordering Information
Refer to Fig. 2-1a and Fig. 2-1b
series
motor
power(kW)
code
0004
0007
0015
0022
0037
0055
0.4
0.75
1.5
2.2
3.7
5.5
4 T 0 0 2 2 G
EV1000
input
code
voltage
code
220V 2
380V 4
code type
fan, pump
contant torque
P
G
Fig. 2-1a Explanations of Drive Models
EV1000-4T0022G
2.2kW
3PH AC 380V-440V 5.8A 50Hz/60Hz
4kVA 5A 0-650Hz 0-440V
MODEL:
POWER:
INPUT:
OUTPUT:
S/N:
Emerson Network Power Co., Ltd.
Drive model
Motor power
Rated input voltage, current, freq.
Rated output capacity,
current, freq., voltage
Bar code
Fig. 2-1b EV1000 Drive Nameplate
2.2.3 Size
Please refer to Fig. 2-2 and Table 2-3.
W
D
A
B
H
E
Fig. 2-2 EV1000 Drive Size
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 12

8 Chapter 2 Specifications and Optional Parts
EV1000 Series General Purpose Variable Speed Drive User Manual
Table 2-3 Dimensions and Weights
Drive Model
Moter
power (kW) A (mm) B (mm)H (mm)W (mm)D (mm)E (mm)
Diameter of
mounting hole (mm)
Gross
weight (kg)
EV1000-2S0004G 0.4
EV1000-2S0007G 0.75
91 137 145 101 130 4 1.2
EV1000-2S0015G 1.5
EV1000-4T0007G 0.75
EV1000-4T0015G 1.5
EV1000-4T0022G 2.2
120 170 180 130 146 4 1.8
EV1000-2S0022G 2.2
EV1000-4T0037G 3.7
EV1000-4T0037P 3.7
EV1000-4T0055G 5.5
EV1000-4T0055P 5.5
140 230 245 155 160
10
5 4.0
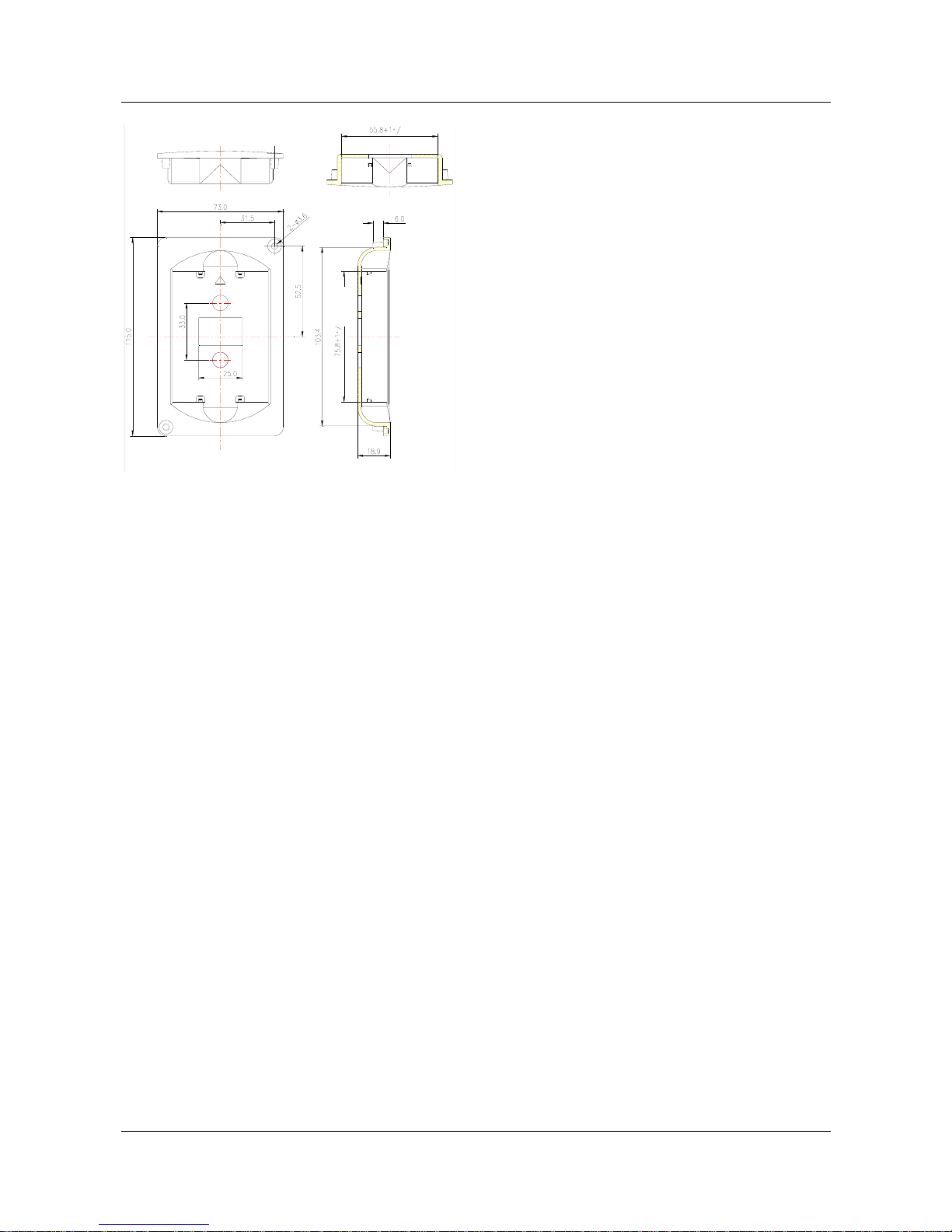
2.2.4 LED Keypad Display Unit
TDP-LED02 Size
The LED keypad display unit TDP-LED02
(standard configuration) also applies to TD1000
series drives. Through it, operation and
configuration of the drive can be done. Refer to its
size in Fig. 2-3.
Fig. 2-3 LED keypad display unit
2.3 Optional Parts
You may order the optional parts below from our
company.
2.3.1 Braking Resistor
The drive is equipped with braking unit. If there is
a need for energy-consuming braking, please
select a braking resistor in Table 2-4. Please refer
the wiring of braking resistor and the drive to Fig.
2-4. The wire specifications are listed in Table
3-2.
M
R
S
T
U
V
W
PE
PB
P(+)
braking
resistor
Fig. 2-4 Wiring the drive with braking resistor
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 13

Chapter 2 Specifications and Optional Parts 9
EV1000 Series General Purpose Variable Speed Drive User Manual
Table 2-3 Braking Resistor Specs
Model Specs
Usage
rate
(%)
Torque
(%)
Max.
continuous
work time
(s)
EV1000-2S0004G
200Ω/100W
10 100 10
EV1000-2S0007G
150Ω/200W
10 100 10
EV1000-2S0015G
100Ω/400W
10 100 10
EV1000-2S0022G
70Ω/500W
10 100 10
EV1000-4T0007G
300Ω/400W
10 100 10
EV1000-4T0015G
300Ω/400W
10 100 10
EV1000-4T0022G
200Ω/500W
10 100 10
EV1000-4T0037G
200Ω/500W
10 100 10
EV1000-4T0037P
200Ω/500W
10 100 10
EV1000-4T0055G
100Ω/1000W
10 100 10
EV1000-4T0055P
100Ω/1000W
10 100 10
Note:
If you have any special braking requirement, please
contact the supplier or us.
2.3.2 LED Status Indicator Unit
TDP-LED03
TDP-LED03 has no configuration or operation
function, but it can indicate powerup, run or fault
status of the drive by the red, green and yellow
LEDs on it.
Refer to Fig. 2-5.
If you buy many EV1000 drives and plan to use
terminal control mode after testing and no need to
modify the parameters thereafter, you may order
one TDP-LED02 display unit to do the test and for
the rest, TDP-LED03 can satisfy your need as
well. In this case, the frequency setting and
operation control are done through terminals. You
can know the status of the drive through
TDP-LED03.
POW
RUN
ERR
Attention: the panel is
for status display only.
Fig. 2-5 TDP-LED03
TDP-LED03 indicators definitions:
Mark Color of LED MEANING
POW RED ON: drive standby
RUN GREEN ON: drive is running
ERR YELLOW ON: drive fault
Note:
TDP-LED03 and TDP-LED02 are of same sizes.
2.3.3 TDP-LED02 Holders and Wires
The holders and wires of TDP-LED02 LED
display unit are matched, you should order them
as a kit.
We provide 3 kinds of the wires:
TDC-CB00P6A(0.6m)
TDC-CB0015A(1.5m)
TDC-CB0030A(3.0m)
Holder model: TDF-KB01. Please refer to Figure
2-6.
Note:
1. Both ends of TDP-LED02 wire should be secured
by M3*8 screw.
2. When using the keypad separated from the drive,
it is recommended to use the cable special for
EV1000 drive, to avoid reverse connection.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 14
10 Chapter 2 Specifications and Optional Parts
EV1000 Series General Purpose Variable Speed Drive User Manual
Fig. 2-6 TDF-KB01 Holders Dimensions
2.3.4 Communication Parts
1. Flush Mount Faceplate for Remote Keypad
Model: TDO-RC02
RS485 serial communication mode is used
between the drive and the remote control panel. A
4-core cable is used to connect the drive and the
panel, and the maximum distance is up to 1000m.
Master/slave communication mode is used. The
panel is the master and the drive is the slave.
One flush mount faceplate can control several
drives by connecting the communication cables of
485+ and 485- of each drive to form a RS485
network.
Functions:
1. Able to control the start, stop, jog operation,
fault reset of slaves and change the frequency
settings and direction of rotation.
2. Identify the type of slave machine automatically.
Able to monitor the operating frequency,
frequency setting, output voltage and current,
analog close-loop feedback, analog close-loop
setting and external counting value automatically.
2. Cable for the Flush Mount Faceplate
Model: FRC21W1 (3.0M)
FRC21W2 (30M)
For connecting the flush mount faceplate and the
drive.
3. Profibus Adapter
Model: TDS-PA01
Able to connect EV1000 drive to PROFIBUS
network via the TDS-PA01. In the PROFIBUS
network system, the drive operates as a slave.
Functions:
1. To send control commands to drive (such as:
start, stop and jog);
2. To send speed or frequency reference signal to
the drive;
3. To read operating status information and actual
values from the drive;
4. To reset the drive when fault occurs in it.
4.DrvWindows Supervision Software
Version: DrvWindows V1.2
Applicable to the RS485 industrial control network
made up of TD1000, EV1000, TD2000, TD2100,
or EV2000. It can real-time monitor the status of
the drive. It features friendly interface and easy
operation.
Function: slave polling, frequency setting, run and
stop control, function code query and modification.
one side
one side
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 15

Chapter 3 Installation and Wiring 11
EV1000 Series General Purpose Variable Speed Drive User Manual
Chapter 3 Installation and Wiring
3.1 Installation
Please mount the drive vertically indoors, with
good ventilative conditions.
When selecting mounting environment, the
followings should be taken into account:
Ambient temperature should be within the range
of -10℃~40 ℃. If the temperature is higher than
40 ℃, the Variable Speed Drive should be
derated and forced heat dissipation is required;
Humidity should be lower than 95%,
non-condensing
Mount in the location where vibration is less than
5.9m/ s
2
(0.6G);
Mount in the location free of direct sunlight, dust,
metal powder, corrosive gas or combustible gas.
If there are any special requirements for
installation, please contact us for clarifications.
The requirements on mounting space and
clearance are shown in Fig. 3-1 and Fig. 3-2.
When two Variable Speed Drives are mounted
one on top the other, an air flow diverting plate
should be fixed in between as shown in Fig. 3-2.
10cm
or above
5cm
or
above
5cm
or
above
10cm
or above
air expulsion by fan
Fig. 3-1 Installation clearances
DRIVEⅠ
DRIVEⅡ
Electric cabinet
...
Fig. 3-2 Installation of several drives
drive1
drive
Fig. 3-2 Installation of one on top the other
3.1.1 Installation Methods Compliant With
EMC Requirements
In a traction system composed of the drive and a
motor, if the drive, controllers and transducer are
installed in one cabinet, the disturbance they
generate should be depressed at the connection
points, therefore, a noise filter and inrush reactor
should be installed in the cabinet, so that EMC
requirement is met inside it.
The drive is usually installed in a metal cabinet.
The instruments outside the metal cabinet is
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 16

12 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
shielded and may be disturbed lightly. The cables
are the main EMI source, if you connect the
cables according to the manual, the EMI can be
suppressed effectively.
In system design phase, to reduce EMI, insulating
the noise source and using noise snubber are
best choice. But the cost is considerable. If there
are a few sensitive devices on site, just install
power line filter beside them is enough. Note that
the drive and contactor are noise source, and the
automatic devices, encoder and transducer are
sensible to them.
Divide the system into several EMC areas, refer
to Fig. 3-4.
Hint:
1. After installing EMI filter and AC reactor, the drive can satisfy IEC 61800-3 standard.
2. The input/output EMI filter should be installed close to the drive as possible.
3. Refer to Appendix 3 for the specifications of optional parts.
Mechanical
system
manufacturing
mechanic s
Sensor
(
such as
:
temperature, position,
pressure
)
Control
Equipment
(
Such as: PC
)
Mains
Input reactor
Linear
noise filter
Input Filter
Drive
electric cabinet
Area
Ⅴ
Area
Ⅲ
Area
Ⅰ
Area
Ⅵ
Motor
Area
Ⅱ
earthing separation
board
Area
Ⅳ
detecting signal cable
Motor cables
Fig. 3-4 Recommended System Layout
Attention:
·Area Ⅰshould be used to install transformers for control power supply, control system and sensor.
·Area Ⅱ should be used for interface of signal and control cables with good immunity level.
·Area Ⅲ should be used to install noise generating devices such as input reactor, drive, brake unit and
contactor.
·Area Ⅳ should be used to install output noise filter.
·Area Ⅴ should be used to install power source and cables connecting the RFI filter.
·Area Ⅵ should be used to install the motor and motor cables.
·Areas should be isolated in space, so that electro-magnetic decoupling effect can be achieved.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 17

Chapter 3 Installation and Wiring 13
EV1000 Series General Purpose Variable Speed Drive User Manual
·The shortest distance between areas should be 20cm.
·Earthing bars should be used for decoupling among areas, the cables from different area should be
placed in different tubes.
·The filter should be installed at the interfaces between different areas if necessary.
·Bus cable(such as RS485) and signal cable must be shielded.
10kV
Power
Transformer
Motor
metal
cabinet
AC input reactor
Metal
cabinet
PLC or
meters
circuit breaker
filter
AC Output
reactor
>30cm
>50cm
Drive
motor cable
control cable
>20cm
Power
source
cable of
inverter
Isolation
Transformer
power
source cable
of meters
Fig. 3-5 Installation of the drive
3.1.2 Noise Suppression
The noise generated by the drive may disturb the equipment nearby. The degree of disturbance is
dependent on the drive system, immunity of the equipment, wire connections, installation clearance and
earthing methods.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 18

14 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
Table 3-1 Method of Noise Suppression
Noise emission paths Actions to reduce the noise
If the external equipment shares the same
AC supply with the drive, the drive’s noise
may be transmitted along its input power
supply cables, which may cause nuisance
tripping to other external equipment.
Install noise filter at the input side of the drive, and use an isolation
transformer or line filter to prevent the noise from disturbing the external
equipment.
If the signal cables of measuring meters,
radio equipment and sensors are installed
in a cabinet together with the drive, these
equipment cables will be easily disturbed.
(1)The equipment and the signal cables should be as far away as
possible from the drive. The signal cables should be shielded and the
shielding layer should be grounded. The signal cables should be placed
inside a metal tube and should be located as far away as possible from
the input/output cables of the drive. If the signal cables must cross over
the power cables, they should be placed at right angle to one another.
(2)Install radio noise filter and linear noise filter(ferrite common-mode
choke) at the input and output sides of the drive to suppress the emission
noise of power lines.
(3)Motor cables should be placed in a tube thicker than 2mm or buried in
a cement conduit. Power cables should be placed inside a metal tube
and be grounded by shielding layer (Motor cable should be a 4-core
cable, where one core should be connected to the PE of the drive and
another should be connected to the motor’s enclosure).
If the signal cables are routed in parallel
with the power cables or bundle these
cables together, the induced
electro-magnetic noise and induced ESD
noise may disturb the signal cables.
Avoide this kind of routing. Other equipment sensibleto EMI should also
be located as far away as possible from the drive. The signal cables
should be placed inside a metal tube and should be placed as far away
as possible from the input/output cables of the drive. The signal cables
and power cables should be shielded cables. EMC interference will be
further reduced if they could be placed inside metal tubes. The clearance
between the metal tubes should be at least 20cm.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 19

Chapter 3 Installation and Wiring 15
EV1000 Series General Purpose Variable Speed Drive User Manual
3.1.3 Using Surge Suppressor
The devices such as relay, contactor and
electro-magnetic braking kit, which may generate
great noises, should be installed with surge
suppressors even if installed outside of the drive
cabinet.
220VAC
Varistor
Diode
Drive
220VAC
RC-Filter
+24VDC
Fig. 3-6 Installation of Relay, contactor and
electro-magnetic braking kit
3.1.4 Leakage current
Leakage current may flow through the drive’s
input and output capacitors and the motor’s
capacitor. The leakage current value is
dependent on the distributed capacitance and
carrier wave frequency. The leakage current
includes ground leakage current and the leakage
current between lines.
Ground leakage current
The ground leakage current not only flows into
the drive system, but also into other equipment
via earthing cables. It may cause leakage current
circuit breaker and relays to be falsely activated.
The higher the drive’s carrier wave frequency, the
higher the leakage current, and also, the longer
the motor cable, the greater is the leakage
current.
Suppressing methods:
Reduce the carrier wave frequency, but the motor
noise may be higher.
Motor cables should be as short as possible;
The drive and other equipment should use
leakage current circuit breaker designed for
protecting the product against high-order
harmonics/surge leakage current.
Leakage current between lines
The line leakage current flowing outside through
the distributed capacitors of the drive may false
trigger the thermal relay, especially for the drive of
which power rating is less than 7.5kW. When the
cable is longer than 50m, the ratio of leakage
current to motor rated current may increase to a
level that can cause the external thermal relay to
trigger unexpectedly.
Suppression methods:
Reduce the carrier wave frequency, but the motor
audible noise is higher.
Install reactor at the output side of the drive.
In order to protect the motor reliably, it is
recommended to use a temperature sensor to
detect the motor’s temperature, and use the
drive’s over-load protection device (electronic
thermal relay) instead of an external thermal
relay.
3.1.5 Applications of Power Filter
Power source filter should be used in the
equipment that may generate strong EMI or the
equipment that is sensitive to EMI. The power
source filter should be a low pass filter through
which only 50Hz current can flow and high
frequency current is rejected.
The power line filter ensures the equipment can
satisfy the conducting emission and conducting
sensitivity in EMC standard. It can also suppress
the radiated emission of the equipment.
It can prevent the EMI generated by the
equipment from entering power cable, and also
prevent the EMI generated by power cable from
entering equipment.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 20

16 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
Common mistakes in using power line filter
1. Too long power cable
The filter inside the cabinet should be located
near to the input power source. The length of the
power cables should be as short as possible.
2. The input and output cables of the AC supply
filter are too close
The distance between input and output cables of
the filter should be as far apart as possible,
otherwise the high frequency noise may be
coupled between the cables and bypass the filter.
Thus, the filtering effect becomes ineffective.
3. Bad earthing of filter
The filter’s enclosure must be connected properly
to the metal casing of the drive. In order to be
earthed well, a special earthing terminal on the
filter’s enclosure should be used. If you use one
cable to connect the filter to the case, the earthing
is useless due to high frequency interference.
When the frequency is high, so too is the
impedance of cable, hence there is little bypass
effect.
The filter should be mounted in the enclosure of
equipment. Ensure to clear away the insulation
paint between the filter case and the enclosure for
good earth contact.
3.1.6 AC Line Reactor Applications
Input AC Line Reactor
A line reactor should be used if the distortion of
power network is severe or the input current
harmonic level is high even after a DC reactor has
been connected to the drive. It can also be used
to improve the AC input power factor of the drive.
Output AC Line Reactor
When the cables from the drive to motor are
longer than 80m, multi-strand cables and an AC
line reactor should be used to suppress the high
frequency harmonics. Thus, the motor insulation
is protected. At the same time, leakage current
and unexpected trigger are reduced.
3.2 Wiring
Danger
!
·
Wiring can only be done after the Variable Speed
Drive’s AC power is disconnected, all the LEDs on
the operation panel are off and after waiting for at
least 5 minutes. Then, you can remove the panel.
·
Wiring job can only be done after confirming the
Charge indicator inside the drive has extinguished
and the voltage between main circuit power terminals
+ and - is below DC36V.
·
Wire connections can only be done by trained and
authorized personnel.
·
Check the wiring carefully before connecting
emergency stopping or safety circuits.
·
For the sake of safety, the drive and motor must be
earthed because there is leakage current inside the
drive.
·
Check the Variable Speed Drive’s voltage level
before supplying power to it, otherwise human
injuring or equipment damage may happen.
Attention
!
·
Check whether the Variable Speed Drive’s rated
input voltage is in compliant with the AC supply
voltage before using.
·
Dielectric strength test of the drive has been done
in factory and the user needs not do it again.
·
Refer to chapter 2 on how to connect braking
resistor or braking kit.
·
It is prohibited to connect the AC supply cables to
the drive’s terminals U, V and W.
·
Grounding cables should be copper cables with
cross-sectional area bigger than 3.5mm
2
, and the
grounding resistance should be less than 10Ω.
·
The drive should be connected to the AC supply via
a circuit breaker or fuse to provide input over-current
protection and also for maintenance purpose.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 21

Chapter 3 Installation and Wiring 17
EV1000 Series General Purpose Variable Speed Drive User Manual
Attention
!
·
The control terminals of the drive is of ELV (Extra
Low Voltage) circuit. Do not touch them once
energized;
·
If the external device has touchable terminals of
SELV (Safety Extra Low Voltage) circuit. Remember
to connect isolating protections in between.
Otherwise, the SELV circuit will be degraded to ELV
circuit;
·
When connecting the drive with PC, do choose
RS485/232 adapters with isolating protections that
measure up to safety requirements.
3.2.1 Overview
You should finish the power circuit and control
circuit wiring.
First, remove the screws on the keypad, open the
front door and then you will see the power
terminals and control terminals.
For different models of the drive, the power
terminals layout is different, which will be
described in details later.
Beneath the keypad display unit, there are control
terminal strip: CN5, CN6 and jumper CN16,
CN17, CN10.
CN5 is for relay output; CN6 is for analog, digital
I/O and communication interfaces.
CN16, CN17 and CN10 are jumpers, through
which the output of voltage or current signal is set.
The terminals will be described in details later.
The figure below is the systematic wiring of the
drive.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 22

18 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
Open collector signal
PB
(-)
R
S
T
R
S
T
3-phase
380V
50/60Hz
M
U
V
W
PE
Auxiliary
Power
circuit breaker
PG
P24
COM
X4
X5
PE
EV1000
DC current meter
0/4-20mA current
signal
AO1
AO2
Output pulse singal
COM
GND
TB
TC
TA
Programmable relay output
RS485-
RS485+
Standard RS485
X1
X2
X3
X4
X5
Multifuction input
1
FWD
REV
FWD/STOP
REV/STOP
PLC
COM
Speed command
0~10
V
VCI
GND
VRF
PE
0~10V/0
~20mA
Y1
output 2
:
Output 1: open collector signal
CCI
P24
I
V
CN10
0/2~
10V
.
.
.
CN16
0/4~20
mA
Multifuction input
2
Multifuction input
3
Multifuction input 4
Multifuction input
5
CN17
0/2~
10V
0/4~20
mA
.
.
.
.
.
.
Y2
P(+)
Power circuit
Control circuit
P24
Fig. 3-7 Systematic Wiring Diagram
Hint:
1. In the above Figure., “O” is th e terminal in power circuit, and “⊙” is the control terminal;
2. Terminal CCI can input voltage or current signal by switching the jumper CN10 on control board;
3. Built-in braking kit is installed and a braking resistor is required to be connected between P(+) and PB;
4. Refer to section 3.2.3 for the using of control terminals.
5. MCCB must be installed at the input si de of each drive in the cabinet.
6. Refer the cable section area and MCCB capacity to Table 3-2.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 23

Chapter 3 Installation and Wiring 19
EV1000 Series General Purpose Variable Speed Drive User Manual
Table 3-2 Recommended MCCB Capacity and Copper Cable Section Area
Power Circuit(mm2)
Model
MCCB
Circuit
breaker (A)
Input cable Braking line Output cable Earth cable
Control cable
(mm2)
EV1000-2S0004G 16 1.5 1.0 1.0 2.5 1
EV1000-2S0007G 20 2.5 1.0 1.0 2.5 1
EV1000-2S0015G 32 4 1.5 2.5 2.5 1
EV1000-2S0022G 50 6 1.5 2.5 2.5 1
EV1000-4T0007G 10 1.0 1.0 1.0 2.5 1
EV1000-4T0015G 16 1.5 1.0 1.5 2.5 1
EV1000-4T0022G 16 1.5 1.5 1.5 2.5 1
EV1000-4T0037G 25 2.5 1.5 2.5 2.5 1
EV1000-4T0037P 25 2.5 1.5 2.5 2.5 1
EV1000-4T0055G 32 4 2.5 4 2.5 1
EV1000-4T0055P 32 4 2.5 4 2.5 1
Note:
If the control circuit uses multi-strand cable, the single-core cable section area can be 0.5mm2.
3.2.2 Power Terminals
1. EV1000-2S0004G,EV1000-2S0007G
The power terminal layout is shown in the figure
below:
P
(+)
(-)
PB
U WVN
L
Table 3-3 Definitions of Power Terminals
Mark Definition
L、N
1-phase AC 220V input
P(+)、PB
External braking resistor
P(+)、(-)
DC positive, negative bus
input
U、V、W
3-phase AC outputs
PE
Protective earth (on the
heater)
Note:
The tig
htening torque is 14kgf.cm. Protective earth
wire should be connected to the heater’s screw marked
with
。
2.EV1000-4T0007G,EV1000-4T0015G,
EV1000-4T0022G EV1000-2S0015G
T
P(+)
PB (―)
S
Input terminals (top position)
Output terminal (bottom)
R
PEVU W
Table 3-4 Definitions of Power Terminals
Mark Definition
R、S、T
3-phase AC inputs
P(+)、PB
External braking resistor
P(+)、(-)
DC bus inputs
U、V、W
3-phase AC outputs
PE Protective earth
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 24

20 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
Note:
The tightening torque should be 17kgf.cm. For
EV1000-2S0015G, power cable can be connected to
any two of R, S, T.
3.EV1000-4T0037G,EV1000-4T0037P,
EV1000-4T0055G,EV1000-4T0055P,
EV1000-2S0022G
PB
S
V
W
R
P(+)
T U
Table 3-5 Definitions of Power Terminals
Mark Definition
R、S、T
3-phase AC input
P(+)、PB
External braking resistor
U、V、W
3-phase output
PE Protective earth (on the heater)
Note:
The tig
htening torque is 17kgf.cm. Protective earth
wire should be connected to the heater’s screw marked
with
。For EV1000-2S0022G, power cable can be
connected to any two of R, S, T.
3.2.3 Control Circuit Wiring
1.Control Terminals and Jumpers
Refer the layout to Fig. 3-8. control terminal
function is listed in Table 3-6; Jumper’s function in
Table 3-7. Be sure to set the jumper and wire the
terminals properly. It is recommended to use
cable of section area bigger than 1mm
2
.
CN16 CN17 CN10
CN6
CN5
CN3
Fig. 3-8 Layout of Control Terminals and Jumpers
Table 3-6 Function of Control Terminals
Mark Function
CN5 Relay outputs
CN6 Analog I/O, digtial I/O
Table 3-7 Jumpers’ Function
Mark Function & Setting Default
CN10
CCI current/voltage input selection
I: 0/4~20mA current signal
V: 0~10V voltage signal
0~10V
CN16
AO1 current/voltage input selection
0/4~20mA: AO1 current signal
0/2~10V: AO1 voltage signal
0~10V
CN17
AO2 current/voltage input selection
0/4~20mA: AO2 current signal
0/2~10V: AO2 voltage signal
0~10V
2.Jumper Usage
CN10 jumper usage:
Fig. a means that 0~10V analog voltage
input is selected;Fig. b means that 0/4~20mA
analog current input is selected.
CN16 or CN17 jumper usage:
Fig. a means that 0~10V analog voltage output is
selected;Fig. b means that 0/4~20mA analog
current output is selected.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 25

Chapter 3 Installation and Wiring 21
EV1000 Series General Purpose Variable Speed Drive User Manual
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 26

22 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
3.CN5 Terminals Wiring
The layout of CN5 is shown in the figure below:
TBTA TC
TA-TB: normally closed; TA-TC: normally open
Contact capacity: 250VAC/2A(COSφ=1),250VAC/1A(COSφ=0.4),30VDC /1A
TA, TB and TC can be defined as multi-functional digital output signals. Please refer to Section 5.8.
If there are inductive loads, such as: electro-magnetic relay and contactor, surge snubber circuit, e.g. RC
circuit, varistor, fly-wheel diode (pay attention to the polarity when used in a DC circuit), should be
installed. Note that the leakage current should be less than the current in the contactor or relay. The
components in the snubber circuit should be installed near to the relay or contactor coil.
4.CN6 Wiring
CN6 Terminal strip layout:
P24 X1 X2 X3 COM X4 X5 VRF VCI CCI GND
P24 PLC Y1 Y2 COM FWD REV AO1 AO2 GND +RS485-
Hint:
The “+RS485-” in the above figure means RS485+ and RS485-.
Table 3-8 CN5, CN6 Terminal Function Table
Category Terminals Name Function Specification
RS485+ RS485 +
Communic
ation
RS485-
RS485
communication
port
RS485 -
Standard RS-485
communication port, please
use twisted-pair cable or
shielded cable.
VCI
Analog input
VCI
analog voltage input
(reference ground: GND)
Input voltage range:0~10V
(input resistance:100kΩ)
resolution:1/2000
Analog
input
CCI
analog input
CCI
accept analog voltage/current input. Jumper
CN10 can select voltage or current input
mode, Voltage input mode is the
default.(reference ground: GND)
Input voltage range:0~10V
(input resistance:100kΩ)
Input current range:0~20mA
(input resistance:500Ω)
resolution:1/2000
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 27

Chapter 3 Installation and Wiring 23
EV1000 Series General Purpose Variable Speed Drive User Manual
Category Terminals Name Function Specification
AO1
Analog output
1
Be able to output analog voltage/current (total
12 kinds of signals). Jumper CN16 can select
voltage or current input mode, Voltage input
mode is the default mode. Refer to F7.26 for
details. (reference ground: GND)
Analog
output
AO2
Analog output
2
Be able to output analog voltage/current (total
12 kinds of signals). Jumper CN17 can select
voltage or current input mode, Voltage input
mode is the default mode. Refer to F7.27 for
details.(reference ground: GND)
Output current range:
0/4~20mA
Output voltage range:
0/2~10V
X1~X3
multi-functional
digital inputs
X1~X3
Can be defined as multi-functional digital
inputs, see Section 5.8
Reference ground: COM
Optical-isolator 2-way input
input resistance: 2kΩ
maximum input frequency:
200Hz
Input voltage range: 9~30V
X4~X5
multi-functional
digital inputs
X4~X5
Having the same function as X1~X3, besides,
it can be defined as high-speed pulse inputs.
see Section 5.8.
Reference ground: COM
Optical-isolator 2-way input
Single way max. input
frequency: 100kHz,
2-way max. input frequency:
50kHz
Max. reference pulse
frequency: 50Hz
Input voltage range: 9~30V
Input impedance: 620Ω
FWD
Run forward
command
Optical-isolator two-way input programmable
terminal, max. input frequency: 200Hz
REV
Reverse run
command
Optical-isolator two-way input programmable
terminal, max. input frequency: 200Hz
PLC
Common
terminal
Common terminal for multi-functional inputs
P24 +24V supply Providing +24V power supply
Output: +24V,
Setpoint accuracy: ±10%
Max. output current: 200mA
(150mA for model 2S0007G
and 2S0004G)
Digital
Input
COM
+24V common
terminal
Isolated internally with GND Isolated internally with GND
Y1
Open collector
output 1
Programmable terminals, defined as
multi-function digital outputs, see Section 5.8.
Optical-isolator output:
24V
DC
/50mA
Digital
output
Y2
Open collector
output 2
Programmable terminals, defined as
multi-function digital outputs, see Section 5.8.
Optical-isolator output:
24V
DC
/50mA
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 28

24 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
Category Terminals Name Function Specification
VRF
+10V power
supply
Provide +10V power supply
Power
supply
GND
GND of +10V
power supply
reference ground of analog signal and 10V
power supply
Output: +10V,
Setpoint accuracy: ±10%
Max. output current: 100mA
Others TA/TB/TC Relay output
TA, TB and TC can be defined as
multi-functional digital output signals. Please
refer to Section 5.8.
TA-TB: normally closed;
TA-TC: normally open
Contact capacity: 250VAC/2A
(COSφ=1), 250VAC/1A
(COSφ=0.4), 30VDC /1A
1)Analog Input Terminal Wiring
① Terminal VCI receives analog voltage input,
the wiring diagram is as follows:
Shield layer near the drive
is grounded
VRF(+10V)
VCI
GND
PE
0~+10V
EV1000
●
●
●
Fig. 3-9 VCI Wiring Diagram
② Terminal CCI receives analog signal. Select
current or voltage signal by setting jumper. Refer
to the figure below:
PV Series
···
CCI current
I
V
···
CCI voltage
I
V
CN10
Shield near the drive is
connected to the PE
VRF(+10V)
CCI
GND
PE
0
~
+10V
or 0/4
~
20mA
●
●
●
●
Fig. 3-10 CCI Wiring Diagram
2)Analog Output Terminal Wiring
If the analog output terminal AO1 and AO2 are
connected with analog meter, it can measure
many parameters. The jumpers for AO1 and AO2
are CN16 and CN17.
analog current
output
AO1:
CN16;AO2:
CN17
AO1
AO2
GND
···
0/4-20mA
0/2-10V
analog
meter
···
anlog voltage
output
0/4-20mA
0/2-10V
PV Series
●
●
●
Fig. 3-11 Analog Output Terminal Wiring
Hint:
1. When using analog input, you should install
capacitor-filter or common-mode inductor between
VCI and GND, or between CCI and GND.
2. Analog I/O signals are sensible to interference,
ensure to use shielded cable and ground it properly.
The cable length should be as short as possible.
3)Serial Communication Port Connection
The drive can be connected to the host with
RS485 port directly.
Fig. 3-9 shows the connection of the drive with
the host with RS232 port.
Fig. 3-13 shows the connection of the drive to
PROFIBUS system via TDS-PA01 PROFIBUS
adapter.
Using above wiring method, you can build a
“single-master single slave” system or a
“single-master multi-slaves” system. The drives in
the network can be monitored, and be controlled
remotely and automatically in real time by using a
PC or PLC controller. Thus more complicated
operation control can be realized.
EV1000
EV1000
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 29

Chapter 3 Installation and Wiring 25
EV1000 Series General Purpose Variable Speed Drive User Manual
Function terminal
-
RS485
-
+
RS485
+
EV 1000
RS485 port
RS485/RS232
converter
Ter m in al Function
RS485
- -
RS485
+ +
Function Ter mi na l
5V power
+
5V
Transmit TXD
Receive RXD
Ground GND
Sign-a
l
Pin
PE
Enclo-
sure
RXD 2
TXD 3
GND 5
DTR 4
DSR 6
RI 9
CD 1
RTS 7
CTS 8
shielded
cable
●
●
Fig. 3-12 RS485-(RS485/RS232)-RS232 communication cable
Func
Terminal
signal-Func
RS485-
RS485+
EV1000
RS485 port
Twisted
cable
EV2000
TD3000
Be able to connect
1-32 RS485
Connect to
PROFIBUS
Func
RS485-
RS485+
TDS-PA01
fieldbus
TDS-PA01
TDS-PA01
Te rm i n al
A
B
signal+ Func
Fig. 3-13 RS485-(TDS-PA01)-PROFIBUS Wiring Diagram
Precautions for communication port connection:
z The PE terminal of each drive should be
earthed at a nearby grounding point;
z The GND terminal of each drive should be
connected together;
z RS485 communication uses shielded cables,
which is earthed at one side. The earth wire of
the shielded cable is connected to RS485
communication module (PE).
If the above standard wiring methods cannot
meet the requirements, you can take the actions
below:
z Use isolated RS485 communication module;
z If the noise is transmitted through the GND
line to the drive or other devices, which
results in malfunction of them, you may
disconnect the GND lines.
4)Multi-function Input Terminal and FWD, REV
Wiring
The multi-function input terminals use full-bridge
rectifying circuit, as the below figure shows. PLC
is the common terminal for X1~X5, FWD and
REV. The PLC terminal can sink or source current.
Wire connections X1~X5, FWD and REV is
flexible and the typical wiring is shown below:
① Connection method 1
It is default to use the drive’s internal power
source 24V, i.e. PLC connected with P24.
If you want to use external power supply, make
sure to remove the wire between PLC and P24.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 30

26 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
current
+24V
X1、X2
. . . X5
FWD、REV
PLC
EV1000
+3.3V
COM
P24
R
DC
+
-
K
+
-
Fig. 3-14 External Power Supply Wiring Diagram
② Connection Method 2
Drive’s internal +24V power supply is used and
the external controller uses PNP transistors
whose common emitters are connected, as
shown in Fig. 3-15.
Shield near the drive
should be grounded
COM
●
EV1000
P
E
●
PLC
FWD
●
●
●
P24
COM
●
●
24V
DC
D2
+
-
3.3V
●
X5
●
3.3V
External Controller
Fig. 3-15 Internal +24V Wiring Diagram (source)
Drive’s internal +24V power supply is used and
the external controller uses PNP transistors
whose common emitters are connected, as
shown in Fig. 3-16.
●
●
●
●
●
●
●
● ●
●
shield grounded near
the drive
EV1000
P
E
PLC
FWD
P24
COM
24V
DC
D2
+
-
3.3V
X5
3.3V
External controller
Fig. 3-16 Internal +24V Wiring Diagram (drain)
When using External power supply, remember to
disconnect PLC and P24.
●
●
●
●
●
●
●
● ●
9~30V
+
-
shield earthed near the
drive
EV1000
P
E
PLC
FWD
P24
COM
24V
DC
D2
+
-
3.3V
X5
3.3V
External controller
Fig. 3-17 External Power Supply Wiring (Source)
●
●
●
●
●
●
●
● ●
●
+
-
9~30V
Shield earthed near the drive.
EV1000
P
E
PLC
FWD
P24
COM
24V
DC
D2
+
-
3.3V
X5
3.3V
External Controller
Fig. 3-18 External Power Supply Wiring (drain)
5)Multi-function Output Terminal Wiring
① Terminal Y1 can use the internal 24V power
supply, see the figure below:
EV1000
P24
+5V
+24V
COM
Y1
R
Relay
Fig. 3-19 Multi-function Output Terminal Wiring 1
② Terminal Y1 can also use external power (9~
30V) supply.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 31

Chapter 3 Installation and Wiring 27
EV1000 Series General Purpose Variable Speed Drive User Manual
DC 9~
30V
EV1000
COM
Y1
P24
+5V
+24V
+ -
R
Relay
Fig. 3-20 Multi-function Output Terminal Wiring 2
③ When Terminal Y2 is used as digital pulse
frequency output, it can also use the internal 24V
power supply.
+24V
EV1000
P24
R
Y2
COM
+5V
+24V
digital frequency
meter
Fig. 3-21 Terminal Y2 Wiring 1
④ When Terminal Y2 is used as digital pulse
frequency output, it can also use the external
power supply (9~30V).
+24V
EV1000
P24
R
Y2
COM
+5V
+24V
digital fr equency meter
9~30V
+
-
Fig. 3-22 Terminal Y2 Wiring 2
Note:
1. Don’t short terminals P24 and COM, otherwise the
control board may be damaged.
2. Please use multi-core shielded cable or multi-strand
cable (above 1mm) to connect the control terminals.
3. When using a shielded cable, the shielded layer’s
end that is nearer to the drive should be connected to
PE.
4. The control cables should be as far away (at least
20cm) as possible from the main circuits and high
voltage cables (including power supply cables, motor
cables, relay cables and cables of contactor). The
cables should be vertical to each other to reduce the
disturbance to minimum.
3.2.4 Onsite Wiring Requirements
To avoid mutual EMI disturbance, the control
cables, power cable and motor cable should be
installed as apart as possible, especially when
they are routed in parallel for rather long distance.
If the signal cable must cross the power cable or
motor cable, keep them at right angle to each
other.
Power source or motor cable
Motor cable
Signal/Control cable
Power cable
Signal/Control cable
>50cm
>30cm
>20cm
Fig. 3-23 Cable Routing Schematic Diagram
If the section area of the motor cable is too big,
the motor should derate. Refer the drive’s cable
specs in Table 3-2. Since the larger the section
area of cables, the greater their capacitance to
the ground, therefore, the output current should
derate 5% with increasing every category of cable
section area.
Shielded/armored cable: high-frequency
low-impedance shielded cable should be used,
such as woven copper mesh, aluminum mesh or
metal mesh.
The control cable should be shielded, and the
clamps at both ends of the metal mesh should be
connected to the earth terminal of the drive
enclosure.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 32

28 Chapter 3 Installation and Wiring
EV1000 Series General Purpose Variable Speed Drive User Manual
Use conductive plate and dentate pad to clear
away the paint between the screws and metal
casing, to ensure good conductivity.
PE
PE
enclosure
enclosure
Fig. 3-24 Correct Shied Layer Earthling
PE
PE
Enclosure
Enclosure
Fig. 3-25 Incorrect Shield Layer Earthing
3.2.5 Earthing
Independent earthing pole(Recommended)
drive
other
equipmen
PE
Fig. 3-26 Earthing Diagram 1
Shared earthing pole(acceptable)
drive
other
equipment
PE
Fig. 3-27 Earthing Diagram 2
Shared earthing lines(not allowed)
drive
Other
equipment
PE(
G)
Fig. 3-28 Earthing Diagram 3
Besides, pay attention to the following points:
In order to reduce the earthing resistance, flat
cable should be used because the high frequency
impedance of flat cable is smaller than that of
round cable with the same CSA.
For 4-core motor cable, the end of one cable
should be connected to the PE of the drive, and
the other end should be connected to the motor’s
enclosure. If the motor and the drive each has its
own earthing pole, then the earthing effect is
better.
If the earthing poles of different equipment in one
system are connected together, then the leakage
current will be a noise source that may disturb the
whole system. Therefore, the drive’s earthing pole
should be separated with the earthing pole of
other equipment such as audio equipment,
sensors and PC, etc.
In order to reduce the high frequency impedance,
the bolts used for fixing the equipment can be
used as the high frequency terminal. The paints
on the bolt should be cleaned.
The earthing cable should be as short as possible,
that is, the earthing point should be as close as
possible to the drive.
Earthing cables should be located as far away as
possible from the I/O cables of the equipment that
is sensitive to noise, and lead should also be as
short as possible.
drive
other
equipment
PE
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 33

Chapter 4 Operation Procedures 29
EV1000 Series General Purpose Variable Speed Drive User Manual
Chapter 4 Operation Procedures
4.1 Definitions of Terms
In the follow-up sections, you may encounter the
terms describing the control, running and status
of drive many times. Please read this section
carefully. It will help you to understand and use
the functions to be discussed correctly.
4.1.1 The Drive’s Control Modes
It defines the methods by which drive receives
operating commands like START, STOP, FWD,
REV, JOG and others.
Keypad control: The drive is controlled by RUN,
STOP and JOG keys on the LED keypad;
Terminal control: The drive is controlled by
terminals FWD, REV and COM (two-wire mode),
Xi (3-wire mode);.
Host control: The operations such as START and
STOP is controlled by host PC.
The control modes can be selected by parameter
F0.03, multi-function input terminals (function No.
27, 28 and 29 of F7.00).
4.1.2 Frequency Setting Methods
There are 7 methods to set frequency, they are:
▲and ▼ key on the keypad;
Terminal UP/DN;
Serial communication port;
Analog VCI;
Analog CCI;
Terminal (PULSE);
Potentiometer on the keypad.
How to select the frequency setting methods,
please refer to F0.00.
How to set Frequency
The output frequency is decided after calculating
the values from one or more of the 7 frequency
setting channels, which involves the concept of
main and auxiliary reference frequency.
Main reference frequency: set by F0.00,
multi-speed (MS) or close loop control.
The main reference frequency is decided by the
priority of running mode. The priority level is
Jog>close loop>PLC>MS (multi-speed)>common
running, e.g. if the drive is running in MS mode,
the primary reference frequency is MS frequency.
Auxiliary reference frequency: set by
F9.01~F9.04.
Preset frequency: the sum of main and auxiliary
frequency multiply a factor, which is set in F9.05
and F9.06. Please refer to F9.05, F9.06 and Fig.
5-58 in chapter 5.
4.1.3 Drive’s Operating Status
There are 3 operating status: stop, operating and
motor parameter tuning.
Stop: After the drive is switched on and initialized,
if no operating command is received or the stop
command is executed, then the drive enters stop
status.
Operating: after receiving run command, the drive
begins to operate.
Motor parameter tuning: If FH.09 is set at 1 or 2,
after giving RUN command, the drive will enter
motor parameter tuning status, and then it will
stay in stop status.
4.1.4 Operating Mode
The drive has 5 kinds of operating modes which
can be arranged in the sequence of “Jog>Close
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 34

30 Chapter 4 Operation Procedures
EV1000 Series General Purpose Variable Speed Drive User Manual
loop operation>PLC>MS>Simple operation”
according to the priority.
Jog:
When the drive is in stop status, it will operate
according to Jog frequency after it receives the
Jog operation command (See F3.13~F3.16).
Close-loop operation:
If the close-loop operating function is enabled
(F5.00=1), the drive will select the close-loop
operation mode, meaning that it will perform PI
regulation according to the reference and
feedback values (See explanations of Parameter
F5). Close-loop operating function can be
disabled by multi-function terminal (function No.
20), and the drive will then select other operating
mode of lower priority level.
PLC running:
PLC function is enabled if the one’s place of
F4.00 setting is a non-zero value. The drive will
run according to the preset mode, see F4 function
group. It can be disabled by multi-function
terminal (function No.21).
MS Running:
Select multi-frequency 1~7(F3.23~F3.29)by
the combination of multi-function terminal
(function No. 1, 2, 3), which is not zero.
Simple Running: open-loop operation.
The above 5 operating modes determine 5
frequency setting sources. Except Jog, the other
four frequency setting can be adjusted or
combined with auxiliary frequency. The frequency
of PLC, MS and simple running can also be
adjusted by traverse.
4.2 Operation Guide
4.2.1 Operation of LED Keypad
LED keypad display unit is to receive command and display parameters.
PRG
FUNC
DATA
RUN
STOP
RESET
UNIT
HZ
A
V
PARAMETER
.
LED display
Program/Escape
Shift
Status indicator
UP/DOWN key
Frequency indicator
Current indicator
Voltage indicator
Menu operation/save
Potentiometer indicator
Potentiometer
STOP
RESET
Run key
Fig. 4-1 LED Keypad Display Unit
When using the keypad separated from the drive, it is recommended to use the cable special for EV1000
drive, to avoid reverse connection.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 35

Chapter 4 Operation Procedures 31
EV1000 Series General Purpose Variable Speed Drive User Manual
4.2.2 Keypad Function Explanation
There are 7 keys on the LED keypad display unit, refer the function of each key in Table 4-1.
Table 4-1 Key’s Function
Key Name Function
PRG Program key To shift between stop state and program state
FUNC/DATA Function/data key To shift between function code menus, confirm modification
▲
Increase key To increase data or function code number
▼
Decrease key To decrease data or function code number
Shift key
To scroll over the displayed parameters, such as voltage, frequency;
to select the digit to be modified
RUN Run key In the keypad operating mode, press the key to start running
STOP/RESET Stop/Reset
In keypad mode, stop the drive or reset in case of alarm or fault;
Terminal control mode: reset in case of alarm or fault.
/ Potentiometer Set frequency
4.2.3 Indicator Description
Function of the Indicators on the keypad:
Indicator Meaning Color Mark
Frequency indicator ON: current LED display is frequency Green Hz
Current indicator ON: current LEDdisplay is current Green A
Voltage indicator ON: current LEDdisplay is voltage Green V
Potentiometer indicator Set frequency by the potentiometer Green None
Status indicator ON: the drive is running Green RUN
Implication of the combination of indicators:
Indicator combination Meaning
Hz+A Both ON: set speed (r/min) Both flah: actual speed
A+V Both ON: set line speed (m/s) Both flah: actual line speed
Hz+V Both ON: set percentage (%) Both flash: actual percentage
If all the above indicators (A, V, Hz) go out, it means the displayed parameter has no unit.
4.2.4 Parameter Setting Method
1.Parameter System
The EV1000 series drive has 17 function group: F0~F9, FA, FF, FH, FL, Fn, FP and FU. Each function
group includes many parameter, which is presented as function group number + parameter number, e.g.
F5.08.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 36

32 Chapter 4 Operation Procedures
EV1000 Series General Purpose Variable Speed Drive User Manual
2.Menu Structure and Parameter
When setting parameter through LED keypad display unit, function group is listed in menu level 1,
parameter in menu level 2, and settings of parameters in menu level 3. See Appendix 1.
3.Examples of Parameter Setting
The setting of parameter is presented in decimal (DEC) and hexadecimal (HEX) format. If it is set in
hexadecimal format, each digit of the setting is independent to one another, which can be 0~F. The re
are at most 4 digits, they are: one’s place, ten’s place, hundred’s place and thousand’s place. You may
select certain digit by pressing key, and use ▲ and ▼ key to increase or decrease values.
Example 1: To change the frequency from 50Hz to 40Hz(F0.12: 50.00 40.00)
1. Press PRG key to enter programming state, the LED displays F0.
2. Press FUNC/DATA key, “F0.00” is displayed. Press ▲ key until “F0.12” is displayed.
3. Press FUNC/DATA key, you will see 50.00.
4. Press key, to move the cursor to the digit “5”.
5. Press ▼ key once, to change the digit to “4”.
6. Press FUNC/DATA key to save the modification and you will see the next parameter F0.13.
7. Press PRG key to exit the programming state.
enter menu level 3
F0.12
enter menu level 1
enter menu level 2
Save
▼
F0
F0.00
50.00
50.00
5 0.00
40
. 00
F0.13
F0.12
-
F0 -
-
F0 -
50.00
40.00
FUNC
DATA
FUNC
DATA
FUNC
DATA
PRG
PRG
PRG
PRG
Not
save
Example 2: Settings of HEX format.
Take F8.01 (Display parameter during running) for example. Suppose you hope to display: reference
setting, actual speed, set speed, actual line speed and set line speed.
Since each digit is mutually independent, you may set them separately. First you should decide the
binary value, and then convert it into hex format. The conversion of binary value to HEX value is shown
in Table 5-11.
1. Set one’s place.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 37
Chapter 4 Operation Procedures 33
EV1000 Series General Purpose Variable Speed Drive User Manual
Refer to the figure below. Reference Frequency is decided by the BIT2 of the one’s place of F8.01. If
BIT2=1, it means the parameter will be displayed. For those parameters you don’t want to display, you
may set the corresponding bit at Zero. Therefore, it turns out to be “0100”, after converting to HEX value,
it is 4. So , you should set the one’s place at 4.
2. Set Ten’s place
Similarly, set the corresponding bit at “1” for those parameters you want to display, you will get “1111 ”, i .e.
“F”.
3. Set Hundred’s and Thousand’s place
Since no parameters related to hundred’s and thousand’s place are required to display, so they are set at
zero.
From the above, F8.01 is set at 00F4.
Thousand
Hundred
Te n
one
BIT0:
output freq.
(before compensation)
BIT1:
output freq.
(after comensation)
BIT2:
set freq.
BIT3:
output current
(A)
BIT0
:actual speed
(rpm)
BIT1:set speed
(rpm)
BIT2:actual line speed (m/s)
BIT3
:set line speed
(m/s)
BIT0
:output power
BIT1
:output torque
(%)
BIT2
:reserved
BIT3
:reserved
BIT0
:reserved
BIT1
:reserved
BIT2
:reserved
BIT3
:reserved
Under menu level 3, if no digit of a parameter is blinking, it means it is unchangeable. The possible
reasons are:
The parameter is unchangeable, such as measured parameters, operation log, etc;
The parameter can be changed at stop state only;
The parameter is protected. When FP.01=1 or 2, the parameter is protected. You should set FP.01=0 to
allow the modification.
4.2.5 Speed Setting
If the initial state is actual speed, set speed, actual line speed or set line speed, you may press ▲ or ▼
key to change the set speed and set line speed real-time. If you want to change the reference setting,
press key to shift the LED display to frequency then change it.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 38

34 Chapter 4 Operation Procedures
EV1000 Series General Purpose Variable Speed Drive User Manual
4.2.6 How to Lock/Unlock Keypad
Lock Keypad: Set the hundred’s place of F9.07 at non-zero value. Press FUNC/DATA key and PRG key
at the same time, thus the keypad is locked.
Fig.4-2 Lock LED Keypad Display Unit
Unlock: at stop or operating state, press FUNC/DATA key, and then press ▼ three times. Note that the
operation will not change the value of F9.07.
Note:
Even though the hundred’s place of F9.07 is not zero (allow to lock the keypad), every time the drive is powered
up, the keypad is not locked.
+
F0 -F9-50.00
F9.00
F9.0700200 0 20
0120
F9.08 -F9- 50.00
50.00
FUNC
DATA
FUNC
DATA
FUNC
DATA
FUNC
DATA
PRG
PRG
PRG
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 39

Chapter 5 Parameters 35
EV1000 Series General Purpose Variable Speed Drive User Manual
Chapter 5 Parameters
Note:
The contents in the“【】”are factory default.
5.1 Basic Parameters (F0)
F0.00 Frequency setting method
Range: 0~6 【6
】
0: digital setting 1, set by ▲ or ▼ key.
Initial frequency is the value of F0.02 and it can
be adjusted via ▲ and ▼ keys on the keypad.
1: digital setting 2, set by terminal UP/DN
Initial frequency is the value of F0.02 and it can
be adjusted via terminal UP/DN.
2: digital setting 3, set through serial port
Initial frequency is the value of F0.02 and it can
be adjusted via serial port.
3: VCI analog setting(VCI-GND)
The reference frequency is set by analog voltage
input via terminal VCI and the input voltage range
is DC 0~10V
DC
.
4: CCI analog setting(CCI-GND)
The reference frequency is set by analog voltage
or current input via terminal CCI and the input
range is DC 0~10 V
DC
(if jumper CN10 is placed
at V side) or DC0~20mA (if jumper CN10 is
placed at I side).
5. Terminal Pulse Setting
The reference frequency is set by terminals X4 or
X5, see F7.03~F7.04. The input pulse range:
15~30V, 0~50.0kHz.
6. Keypad Analog Setting
The reference frequency is set by the
potentiometer on the keypad. Range: 0~max.
output frequency (F0.05).
Note:
For method 3, 4 and 5, the frequency calculation curve
is given in F1.00~F1.11, please refer to 5.2.
F0.01 Digital Frequency Control
Range: 00~11
【00】
Valid only when F0.00=0, 1, 2.
Thousand
Hundred Te n One
0
: Save after power off
1
: not save after power off
Reserved
0
: hold frequency after stop
1
:
restore to F0.02
after stop
Reserved
Fig. 5-1 F0.01 Setting
One’s place of F0.01:
0: when the drive is powered off or at
undervoltage state, update F0.02 by the actual
frequency at that time.
1: when the drive is powered off or at
undervoltage state, F0.02 remains unchanged.
Ten’s place of F0.01:
0: the reference frequency when the drive stops
will be saved.
1: The reference frequency will restore to F0.02
when the drive stops.
F0.02 Frequency digital
setting
Range: lower limit~upper limit
【
50.00Hz】
When the frequency is set in digital mode (F0.00
=0, 1, 2), F0.02 is the initial reference frequency.
F0.03 Control mode
Range: 0, 1, 2
【0】
EV1000 has 3 control mode:
0: LED keypad display unit
Use RUN and STOP key on the keypad to control
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 40

36 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
the drive.
1: Terminal control: Input operating commands
via terminals
Use terminals FWD, REV, to start and stop the
drive.
2: Serial port control: Input operating commands
via serial port
Use serial port to start and stop the drive.
Note:
Note that during operating process, the control modes
can be changed by changing the setting of F0.03. Be
careful if you want to do so.
F0.04 Running Direction
Range: 0, 1
【0】
The function applies to keypad control and serial
port control, but not terminal control mode.
0: Forward 1: Reverse
F0.05 Max. output
frequency
Range: Max {50.00, F0.12 upper
limit}~650.00Hz【50.00Hz】
F0.06 Base frequency
Range: 1.00~650.00Hz 【50.00Hz
】
F0.07 Max. output
voltage
Range: 1~480V 【drive’s rated】
The max. frequency refers to the allowed max.
output frequency of the drive. Refer to the f
max
in
Fig. 5-2;
Base frequency normally corresponds with the
rated frequency of the motor. It is the Min
frequency when the drive outputs the highest
voltage, as shown in Fig. 5-2 as f
b
Max output voltage is the drive’s output voltage
when the drive outputs base frequency, as shown
in Fig. 5-2 as V
max.
This corresponds to the rated
voltage of the motor.
f
max
output
voltage
f
b
f
Hf
L
output
frequency
V
max
Fig. 5-2 Characteristic Parameters Definition
The f
H
and fL are defined by F0.12 and F0.13 as
upper limit and lower limit of frequency
respectively.
Note:
Please set fmax, fb and Vmax according to motor
parameters on its nameplate. Failing to do so may
damage the motor.
F0.08 Reserved
F0.09 Torque boost
Range: 0~30.0%【0.0%】
In order to compensate the torque drop at low
frequency, the drive can boost the voltage so as
to increase the torque. If F0.09 is set to 0, auto
torque boost is enabled and if set at non-zero,
manual torque boost is enabled, as shown in Fig.
5-3.
Vb:manual torque boost Vmax:Max output voltage
fz:cut-off freq. for torque boost
fb:basic operating freq.
output
voltage
f
b
V
b
V
max
output
freq.
f
z
Fig. 5-3 Torque boost (shadow area: boost value)
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 41

Chapter 5 Parameters 37
EV1000 Series General Purpose Variable Speed Drive User Manual
Note:
1. Wrong para meter setting can cause overheating of
the motor or triggers the over-current protection of the
drive.
2. Refer to F0.21 for definition of fz.
3. When using synchron motor, you should select
manual torque boost, and adjust V/F curve according
to the motor parameters and application.
F0.10 Acc time 1
Range: 0.1~3600s(min)【6.0s
】
F0.11 Dec time 1
Range: 0.1~3600s(min)【6.0s
】
output
frequency
t
1
f
max
t
2
time
Fig. 5-4 Acc/Dec time definition
Acc time is the time taken for the motor to
accelerate from 0 Hz to the maximum frequency
(as set in F0.05), see t
1
in Fig. 5-4.
Dec time is the time taken for the motor to
decelerate from maximum frequency (F0.05) to 0
Hz, see t
2
in Fig. 5-4.
EV1000 has four pair of acc/dec time. Here we
only introduce acc/dec 1. Please find acc/dec
time 2~4 in section 5.4: F3.17~F3.22.
Hint:
The unit of acc/dec 1~4 can be selected by F9.09, the
options are: minute, second. The default is second.
F0.12 Upper limit of
freq.
Range: upper limet~max. output
frequency【50.00Hz】
F0.13 Lower limit of
frequency
Range: 0~upper limet of frequency
【
0.00Hz】
Please refer fH and fL in Fig. 5-2.
Note:
It is possible for the actual output frequency to
fluctuate within ±2.5Hz in the bus-voltage control
process.
F0.14 V/F curve setting
Range: 0~3【0】
F0.15 V/F freq. F3
Range: F0.17~F0.06【0.00Hz
】
F0.16 V/F voltage V3
Range: F0.18~100.0%【0.0
%】
F0.17 V/F freq. F2
Range: F0.19~F0.15【0.00Hz
】
F0.18 V/F voltage V2
Range: F0.20~F0.16【0.0%】
F0.19 V/F freq. F1
Range: 0~F0.17【0.00Hz】
F0.20 V/F voltage V1
Range: 0~F0.18【0.0%】
This group of parameters defines the V/F setting
modes so as to satisfy the requirements of
different loads. Three fixed curves and one
user-defined curve can be selected according to
the setting of F0.14.
If F0.14 is set to 1, a 2-order curve is selected, as
shown in Fig. 5-5 as curve 1;
If F0.14 is set to 2, a 1.7-order curve is selected,
as shown in Fig. 5-5 as curve 2;
If F0.14 is set to 3, a 1.2-order curve is selected,
as shown in Fig. 5-5 as curve 3;
The above V/F curves are suitable for the
variable-torque loads such as fan & pumps. The
user can select the curves according to the actual
load so as to achieve the best energy-saving
effects.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 42
38 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
0
1
Output voltage(V)
Output frequency(Hz)
2
3
Vmax
Fb
Vmax:Max output voltage
(F0.07)
Fb
:
Basic operating frequency
(F0.06)
0
Fig. 5-5 Torque-reducing curve
If F0.14 is set to 0, you can define a curve by
F0.15~F0.20, i.e. a polygonal line defined by 3
points(V1, F1),(V2, F2),(V3, F3), to satisfy
the needs of special loads, as shown in Fig. 5-6.
The default is a straight line, shown in Fig. 5-5 as
curve 0.
Voltage %
Frequency Hz
Fb
100%
V1
V2
F1
F2
V3
F3
V1~V3: segment 1~3, voltage pencentage
F1~F3: frequency segment 1~3
Fb: base fr equency F0.0 6
Fig. 5-6 User Defined V/F Curve
F0.21 Manual torque boost
cutoff point
Range: 0~50%【10.0%】
F0.21 defines the ratio of the cut-off frequency
used for manual torque boost to the base
frequency (defined by F0.06), as shown in Fig.
5-3 as fz. This cut-off frequency adapts to any V/F
curve defined by F0.14.
5.2 Reference Frequency (F1)
F1.00 Freq. Curve selection
Range: 000~111
【
000】
F1.01 Gain of reference
frequency selector
Range: 0.00~9.99
【
1.00】
F1.02 Filter constant
Range: 0.01~50.00s
【
0.50s】
F1.03 Max. input pulse freq.
Range: 0.1~50.0kHz
【
10.0kHz】
F1.04 Ratio of Min. input of
curve 1 to F1.03
Range: 0.0%~100.0
%
【
0.0%】
F1.05 Frequency corresponds
to min. input if curve 1
Range: 0.0~650.0Hz
【
0.00Hz】
F1.06 Ratio of Max. input of
curve 1 to F1.03
Range: 0.0%~100.0
%
【
100.0%】
F1.07 Frequency corresponds
to max. input of curve 1
Range: 0.0~650.0Hz
【
50.00Hz】
F1.08 Ratio of Min. input of
curve 2 to F1.03
Range: 0.0%~100.0
%
【
0.0%】
F1.09 Frequency corresponds
to min. input
Range: 0.0~650.0Hz
【
0.00Hz】
F1.10 Ratio of Max. input of
curve 2 to F1.03
Range: 0.0%~100.0
%
【
100.0%】
F1.11 Frequency corresponds
to max. input
Range: 0.0~650.0Hz
【
50.00Hz】
When selecting VCI and CCI or PULSE input as
open loop setting method, the process is shown in
Fig. 5-7.
Reference
freq.
Select a
method
F0.00
Gain
F1.01
Filter
F1.02
Select
curve 1 or 2
F1.00
A
P
Fig. 5-7 The process of setting reference freq.
After the input passes through the filter and gain
processor, the relationship of its value and
reference frequency is determined by curve 1 or
curve 2, which are decided by F1.04~F1.07 and
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 43

Chapter 5 Parameters 39
EV1000 Series General Purpose Variable Speed Drive User Manual
F1.08~F1.11 respectively. Both of them can work
as positive or negative logic, as shown in Fig. 5-8.
f
max
f
min
Amin
Amax
(1)
(2) Negative
Amin
Amax
A
A
f
max
f
min
A
: analog terminal input
fmin:
Freq.corresponding
to Min reference freq.
fmax:
Freq.corresponding to
Max reference freq.
Reference freq.
f
max
f
min
Amin
Amax
(1) Positive
(2)
Amin
Amax
A
A
f
max
f
min
Amin:
Min reference
Amax:
Max reference
Reference freq.
Fig. 5-8 Reference Freq. Curve
When the analog input A is 100%, it is a 10V or
20mA signal and the reference frequency is the
maximum; when the pulse input is 100%, it
corresponds to F1.03 (max. input pulse
frequency).
F1.02 defines the filter time. The longer the time,
the stronger the immunity to disturbance, the
slower the response, and vice versa.
F1.00 is to select the reference frequency curve
of VCI, CCI and PULSE setting method, see
Fig. 5-9.
Thousand
Hundred
Te n One
VCI frequency curve selection
0: Curve
1: Curve 2
Reserved
CCI frequency curve selection
0
: Curve
1
1
: Curve
2
Pulse curve selection
0
: Curve 1
1
: Curve 2
Fig. 5-9 Frequency Curve Selection
Suppose you want to:
① set reference frequency by terminal pulse
signal;
② input signal range: 1kHz~20kHz;
③ 1kHz input for reference frequency 50Hz,
20kHz input for reference frequency 5Hz;
To meet the above requirement, you should set:
①F0.00=5, set terminal pulse mode;
②F7.03=45, input pulse signal from X4;
③F1.00=100, select curve 2;
④F1.03=20.0kHz, set max. pulse frequency at
20kHz;
⑤F1.08=1÷20×100%=5.0%, to set the ratio of
min input of curve 2 (1kHz) to F1.03 (20kHz);
⑥F1.09=50.00Hz; reference frequency
corresponds to min. input.
⑦F1.10=20÷20×100%=100.0%, to set the ratio
of max. input of curve 2 (1kHz) to F1.03 (20kHz)
⑧F1.11=5.00Hz, to set the reference frequency
corresponding to max. input.
Pulse input
F0.00=5, F1.00=100, F1.03=20, F7.03=45
Output freq.
F1.09=50
F1.11=5
F1.08=5
F1.10=100
Fig. 5-10 Frequency Set By Pulse Signal
5.3 Start/Brake Parameter (F2)
F2.00 Start mode
Range: 0, 1【0】
F2.00=0: start at start frequency (F2.01)
The drive is started at start frequency and in
preset time F2.02.
F2.00=1: brake first and then start at start
frequency
DC brake first, (refer to F2.03 and F2.04), and
then start in the manner of F2.00=0.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 44

40 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
Note:
1. Start mode 1 applies to small-inertia motor when
the drive stops, the motor is still rotating. For
large-inertia load, do not restart until the motor stops.
2. When driving synchronized motor, it is
recommended to use start mode 0.
F2.01 Start frequency
Range: 0.20~60.00Hz
【
0.50Hz】
F2.02 Start frequency
hold time
Range: 0.0~10.0s【0.0s】
Start frequency refers the frequency at which the
drive starts, as shown in Fig. 5-11 as f
S
; start
frequency hold time refers the time within which
the drive runs at start frequency during startup, as
shown in Fig. 5-11 as t
1
:
t
1
Time
f
s
f
max
Freq. (Hz)
Fig. 5-11 Relation of Start Freq. and Start Time
Note:
The start frequency is not limited by lower limit of the
frequency.
F2.03 DC brake current
at startup
Range: depending on model
【
0.0%】
F2.04 DC brake time at
startup
Range: depending on model
【
0.0s】
F2.03 and F2.04 are valid only when you set
F2.00=1, that is, braking before starting. See Fig.
5-12.
DC brake current at startup is determined by drive
model, for G type: 0~150% of drive’s rated current
(max. current among the 3 phases), P type:
0~130% of drive’s rated current (max. current
among the 3 phases).
If the brake time at startup is set at 0.0s, no brake
process.
Output
frequency
Output
voltage
(effective
value
)
Braking
energy
DC
injection
braking time
Running
command
Time
Time
Fig. 5-12 Start Mode 1
F2.05 Acc/Dec mode
Range: 0, 1, 2【0】
F2.05=0: linear Acc/Dec
The output frequency increase or decrease
according to a fixed slope, see Fig. 5-13.
F2.05=1: S curve Acc/Dec
The output frequency increase or decrease
according to S curve, see Fig. 5-14.
F2.05=2: automatic Acc/Dec
The output current of the drive is limited below the
current limiting level according to the load, see
FL.07. The Acc/Dec is done smoothly.
Frequency
Time
f
max
t
1
t
2
Fig. 5-13 Linear Acc/Dec Curve
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 45
Chapter 5 Parameters 41
EV1000 Series General Purpose Variable Speed Drive User Manual
1
2
3
3
2
1
t
1
t
2
f
max
Frequency
Time
Fig. 5-14 Acc/Dec S Curve
t
f
Accelera tion
Deceleration
Fig. 5-15 Auto Acc/Dec
Note:
In auto Acc/Dec mode, the Acc/Dec time (F0.10,
F0.11, F3.17~F3.22) becomes invalid.
F2.06 S curve start time
Range: 10~50%【20.0
%】
F2.07 S curve rising time
Range: 10~80%【60.0
%】
F2.06 and F2.07 are valid only when F2.05=1 (S
curve mode) and F2.06+F2.07≤90%.
S curve start time is illustrated in Fig. 5-14 as ①,
the change rate of output frequency is increasing
from 0.
S curve rising time is illustrated in Fig. 5-14 as ②,
the change rate remains the same.
S curve end time is illustrated in Fig. 5-14 as ③.
The change rate decreases to 0.
S curve Acc/Dec is suitable to the start and stop
of elevetor, conveyer, etc.
F2.08 Stop mode
Range: 0, 1, 2【0】
0: decelerate to stop
When the drive receives Stop command, it will
reduce output frequency to zero and stop within
preset deceleration time.
1. Coast to stop
When the drive receives Stop command, it will
stop outputting frequency and stop gradually
relying on load inertia.
2: Deceleration+DC braking
When the drive receives Stop command, it will
reduce output frequency within preset Dec time.
When it arrives at the frequency threshold of DC
braking, the DC braking begins. Please refer to
F2.09~F2.12.
F2.09 Frequency threshold
of DC brake
Range: 0.00~60.00Hz
【
0.00Hz】
F2.10 DC brake delay time
Range: 0.00~10.00s【0.00s
】
F2.11 DC brake current
Range: Depending on model
【
0.0%】
F2.12 DC brake time at
stop
Range: Depending on
model【0.0s】
DC braking delay time is the period from arriving
at frequency threshold (F2.09)to starting
braking.
During the period, there is no output from the
drive. This function can prevent current overshoot
of high power motor at startup.
The braking current is different depending on
drive’s model, G type: 0~150% of drive’s rated
current (max. current among the 3 phases), P
type: 0~130% of drive’s rated current (max.
current among the 3 phases).
If the brake time at stop is set at 0.0s, there is no
braking process.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 46

42 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
Output Freq.
Initial Freq.of braking
Output
volt
(RMS value)
Braking
Energy
Braking time
Operating
command
Waiting time
Fig. 5-15 Deceleration +DC braking Process
F2.13 Dynamic braking
Range: 0, 1【0】
0: disabled
1: enabled
Note:
Please set this parameter properly according to your
needs, otherwise, the control performance will be
suffered.
F2.14 Ration of braking
time to total operating time
Range: 0.0~100.0%【2.0
%】
The max. continuous dynamic braking time is
calculated with 100s as a cycle.
Note:
The resistance and power of the braking resistor
should be considered.
5.4 Auxiliary Operating
Parameters (F3)
F3.00 Anti-reverse setting
Range: 0, 1【0】
0: reverse allowed
1: reverse not allowed
Note:
The function is effective to all command giving
method, including keypad, terminal and serial port.
F3.01 FWD/REV
transition time
Range: 0~3600s【0.0s】
It refers to the time period when the drive’s
rotation changes from FWD to REV or REV to
FWD, see Fig. 5-16 as t
1
.
Time
t
1
Output
frequency
Fig. 5-16 Transition time from FWD to REV
F3.02~F3.04 RESERVED
F3.05 Auto energy saving
Range: 0, 1【0】
0: disabled
1: enabled
The drive can detect load current and adjust
voltage accordingly to save energy.
Note:
This function is preferable to the load such as fan and
pump.
F3.06 AVR Function
Range: 0, 1, 2【2】
0: disabled
1: always enabled
2: disabled during decelerating
AVR: auto voltage adjustment. This function can
keep constant output voltage when the input
voltage deviates from rated value. Therefore, the
function should be enabled all the time especially
when the input voltage is higher than the rated
value.
If AVR is disabled during deceleration, the Dec
time is shorter but the current is higher, otherwise,
the motor decelerates smoothly with lower current,
but the Dec time is longer.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 47
Chapter 5 Parameters 43
EV1000 Series General Purpose Variable Speed Drive User Manual
F3.07 Slip compensation gain
Range: 0.0~300.0
%
【
100.0%】
F3.08 Slip compensation limit
Range: 0.0~250.0
%
【
200.0%】
F3.09 Compensation time
Range: 0.1~25.0s
【
2.0s】
The change in motor torque will affect motor slip
and result in speed change. Through slip
compensation, the output frequency can be
adjusted according to motor load torque, so as to
reduce speed change caused by load change.
See Fig. 5-17.
100%
Motor's
load
Slip
Positive slip
compensation
-100%
Negative slip
compensation
Fig. 5-17 Auto Slip Compensation
Electromotion state: Increase the gain of slip
compensation gradually when the actual speed is
lower than the reference speed (F3.07)
Power generation state: Increase the gain of slip
compensation gradually when the actual speed is
higher than the reference speed (F3.07).
Slip compensation range: limit of slip
compensation(F3.08)×rated slip (FH.08).
Note:
The value of automatically compensated slip is
dependent on the motor’s rated slip, therefore the
motor’s rated slip must be set correctly (FH.08)
F3.10 Carrier wave
frequency (CWF)
Range: 0.7~15.0kHz
【
Depending on model】
Table 5-1 Relation of Model and Carrier Freq.
CWF
Model
Default
(kHz)
EV1000-2S0007G 8
Others 10
Table 5-2 Carrier Freq. and Performance
CWF
Performance
Decreasing Increasing
Motor noise
↑
↓
Leakage current
↓
↑
Interference
↓
↑
Note:
1. To get the best control effect, the ratio of carrier
wave frequency to the max. operating frequency of
the drive should be lower than 36.
2. The displayed curren t m ight hav e error when the
carrier frequency is lower。
F3.11 CWF auto adjustment
Range: 0、1【1】
0: Disabled
1: Enabled
When CWF auto adjustment is enabled, the drive
can adjust CWF automatically according to the
temperature inside the drive.
F3.12 Motor tone
Range: 0~10【0】
If CWF is set under 6kHz, tuning this parameter
can change the tone of operating motor.
If it is set at 0, the function is disabled.
F3.13 Jog frequency
Range: 0.10~50.00Hz
【
5.00Hz】
F3.14 Jog interval
Range: 0.0~100.0s【0.0s】
F3.15 Jog Acc time
Range: 0.1~60.0s【6.0s】
F3.16 Jog Dec time
Range: 0.1~60.0s【6.0s】
F3.13~F3.16 define parameters related to jog.
As Fig.5-18 shows, t
1
and t3 are actual jog Acc
and Dec time; t
2
is jog time; t4 is the interval
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 48

44 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
between jog (F3.14), f1 is jog frequency (F3.13).
Actual jog Acc and Dec time are calculated by the
formula below:
t
1
=
F3.13×F3.15
F0.05
t
3
=
F3.13×F3. 16
F0.05
Jog command Jog command
f
1
t
1
t
3
t
2
t
4
Time
Frequency
Time
Fig. 5-18 Jog Parameters Illustration
Interval of Jog operation (F3.14) is the period
between two executed jog commands. The jog
command sent during the interval is invalid, and
the drive continues to operate at zero frequency.
If this command exist until the end of the interval,
it will be executed.
Note:
1. In Jog operation process, the drive starts according
to starting mode 0 and stops according to stopping
mode 0. The unit of Acc/Dec time is second.
2. Jog operation can be controlled by terminals and
serial port.
F3.17 Acc time 2
Range: 0.1~3600s(min) 【6.0s
】
F3.18 Dec time 2
Range: 0.1~3600s(min) 【6.0s
】
F3.19 Acc time 3
Range: 0.1~3600s(min) 【6.0s
】
F3.20 Dec time 3
Range: 0.1~3600s(min) 【6.0s
】
F3.21 Acc time 4
Range: 0.1~3600s(min) 【6.0s
】
F3.22 Dec time 4
Range: 0.1~3600s(min) 【6.0s
】
Three kinds of Acc/Dec time can be defined, and
the drive’s Acc/Dec time 1~4 can be selected by
different combinations of control terminals, refer
to F7.00~F7.07 for the definitions of terminals
used to select Acc/Dec time.
Note:
Acc time 1 and Dec time 1 is defined in F0.10 and
F0.11 respectively.
F3.23 MS Freq.1 Range: Lower limit~upper limit
【
5.00Hz】
F3.24 MS Freq. 2
Range: Lower limit~upper limit
【
10.00Hz】
F3.25 MS Freq. 3
Range: Lower limit~upper limit
【
20.00Hz】
F3.26 MS Freq. 4
Range: Lower limit~upper limit
【
30.00Hz】
F3.27 MS Freq. 5
Range: Lower limit~upper limit
【
40.00Hz】
F3.28 MS Freq. 6
Range: Lower limit~upper limit
【
45.00Hz】
F3.29 MS Freq. 7
Range: Lower limit~upper limit
【
50.00Hz】
These frequencies will be used in simple PLC
operation and multi-speed operation, refer to the
introductions of F7.00~F7.07 and group F4
parameters.
F3.30 Skip freq.
Range: 0.00~650.00Hz
【
0.00Hz】
F3.31 Skip freq. 1
range
Range: 0.00~30.00Hz
【
0.00Hz】
F3.32 Skip freq. 2
Range: 0.00~650.00Hz
【
0.00Hz】
F3.33 Skip freq. 2
range
Range: 0.00~30.00Hz
【
0.00Hz】
F3.34 Skip freq. 3
Range: 0.00~650.00Hz
【
0.00Hz】
F3.35 Skip freq. 3
range
Range: 0.00~30.00Hz
【
0.00Hz】
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 49

Chapter 5 Parameters 45
EV1000 Series General Purpose Variable Speed Drive User Manual
F3.30~F3.35 are used to skip the mechanical
resonant frequency of load.
The drive’s preset frequency can skip some
frequency as shown in Fig. 5-19. Three skip
frequency at most can be set.
Adjusted preset
frequency
Skip
frequency 3
Skip
frequency 2
Skip
frequency 1
Skip
range
3
Skip
range 2
Preset
frequency
Skip range 1
Fig. 5-19 Skip Frequency and Its Range
5.5 PLC Parameters (F4)
Simple PLC is a multi-speed generator, through
which, the drive can change frequency and
direction according to the running time. This
function is realized through PLC (programmable
controller) before, now the drive can do it by itself.
See Fig. 5-20.
Fig. 5-20 Simple PLC operation
In Fig. 5-20, a
1~a7
, d1~d7 are the Acc and Dec
time of the respective stage; f
1~f7
and T1~T7 will
be defined in later parameters.
The PLC stage and PLC cycle are indicated by
the 500mS signals from output terminals Y1 and
Y2 of open collector output or relay output. See
F7.10~F7.12.
F4.00 Simple PLC mode
Range: 0000~1123
【
0000】
Thous.
Hund. Ten One
PLC
running mode selection
0
: disabled
1
: stop after single cycle
2
: retain value after 1 cycle
3
: continuous
Save PLC status after poweroff
0: not save
1
: save the stage and frequency at poweroff
PLC
running after interrupt
0
: start from first stage
1
:start from the stage frequency
where the drive stop
2
:start from the frequency when it stops
time unit
0
: second
1
: minute
Fig. 5-21 Simple PLC Running Mode
One’s place of F4.00, PLC running mode
selection
0: Disabled
The PLC function is disabled.
1: stop after a single cycle
As Fig.5-22 shows, the drive stops after a single
cycle automatically. It will start given another Run
command.
RUN
command
f
1
f
2
f
3
f
4
f
5
f
6
f
7
T1T2T3T4T5T6T
7
a
1
a
2
a
3
d
3
a
4
d
5
a
5
a
6
d
7
d
7
Fig. 5-22 Stop After a Single PLC Cycle
2: Maintain value of the last stage after 1 cycle
As Fig. 5-23 shows, the drive holds the frequency
and direction of the last stage after single cycle.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 50

46 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
RUN
command
f
1
f
2
f
3
f
4
f
5
f
6
f
7
T1T2T3T4T5T6T
7
a
1
a
2
a
3
d
3
a
4
d
5
a
5
a
6
d
7
Fig. 5-23 Maintain Last Stage After Single Cycle
3: Continuous cycle.
The drive continue running cycle after cycle until
Stop command is received.
RUN
command
STOP
command
f
1
f
2
f
3
f
4
f
5
f
6
f
7
T
1
PLC
operation
f
1
f
2
f
3
f
4
f
5
f
6
f
7
f
1
d
1
d
1
d
2
First cycle
Second cycle
...
T2T3T4T6T5T
7
T1T2T3T4T6T5T
7T1
Fig. 5-24 PLC Continuous Cycle
Ten’s place of F4.00: Restart mode after PLC
interruption
0: start from the first stage
The drive restarts from the first stage of PLC after
interrupts, such as Stop command, fault or
poweroff.
1: continue from the stage frequency where the
drive stops
When the drive stops caused by Stop command
or fault, it can record the time that it has
undergone in the current stage. After receiving
Run command, it will run at the preset frequency
of the stage for the remaining time of the stage,
as Fig. 5-25 shows.
Stopping signal
...
Stage 1
f
1
a
1
Output freq.Hz
Remnant time of
stage 2
f
2
d
2
a
2
...
f
3
a
3
a
1
: Acc time of stage 1
2
: Acc time of stage 2
a
3
: Acc time of stage 3
2
: Dec time of stage 2
f
1
: Freq. of stage 1
2
: Freq. of stage 2
f
3
: Freq. of stage 3
Operating
time of
stage 2
Time
a
d
f
Fig. 5-25 PLC Restart Mode 1
2: Start from the frequency where it stops
When the drive stops caused by Stop command
or fault, it can record both the time it has
undergone in the current stage and the very
frequency when the drive stops. It will pick up the
recorded frequency and run for the remaining
time of the stage. See Fig. 5-26.
a
1
: Acc time of stage 1
2
: Acc time of stage 2
a
3
: Acc time of stage 3
2
: Dec time of stage 2
f
1
: Freq. of stage 1
2
: Freq. of stage 2
f
3
: Freq. of stage 3
Stopping signal
...
Stage 1
f
1
a
1
Operating
time of
stage 2
Remnant time of
stage 2
Output freq. Hz
Time
f
2
d
2
a
2
...
f
3
a
3
d
2
a
a
f
Fig. 5-26 PLC Start Mode 2
Note:
The difference between PLC start mode 1 and mode 2
is that in mode 2, the drive can record the operating
frequency when the drive stops and continue to
operate at the recorded frequency after restart.
Hundred’s place of F4.00: Save PLC state after
poweroff
0: not save
The PLC state will not be saved when poweroff,
and the drive will start from the first stage after
powerup.
1: save
The PLC state, including the stage, frequency, run
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 51

Chapter 5 Parameters 47
EV1000 Series General Purpose Variable Speed Drive User Manual
time will be saved when poweroff, and the drive
will start according to the setting of ten’s place of
F4.00 after powerup.
Thousand’s place: Selection of time unit
0: Second
1: Minute
This unit is only valid for defining the PLC
operating time. The unit of Acc/Dec time in PLC
operation is determined by F9.09.
Note:
1. A stage is ineffective if its run time is set to 0.
2. You can use terminals to pause and disable PLC
operation, and clear the memorized parameters. See
F7 parameters.
F4.01 Stage 1 setting
Range: 000~323
【000】
F4.02 Stage 1 run time
Range: 0~6500s (min)【20.0s
】
F4.03 Stage 2 setting
Range: 000~323【000】
F4.04 Stage 2 run time
Range: 0~6500s (min)【20.0s
】
F4.05 Stage 3 setting
Range: 000~323
【000】
F4.06 Stage 3 run time
Range: 0~6500s(min)【20.0s
】
F4.07 Stage 4 setting
Range: 000~323【000】
F4.08 Stage 4 run time
Range: 0~6500s (min)【20.0s
】
F4.09 Stage 5 setting
Range: 000~323【000】
F4.10 Stage 5 run time
Range: 0~6500s (min)【20.0s
】
F4.11 Stage 6 setting
Range: 000~323
【000】
F4.12 Stage 6 run time
Range: 0~6500s(min)【20.0s
】
F4.13 Stage 7 setting
Range: 000~323
【000】
F4.14 Stage 7 run time
Range: 0~6500s (min)【20.0s
】
F4.01, F4.03, F4.05, F4.07, F4.09, F4.11 and
F4.13 are to set frequency, direction, Acc/Dec
time of PLC stages. See Fig. 5-27:
T H
Te n
One
Frequency setting
0: Preset frequency i
1: Determined by F0.00
2: Preset close-loop reference i
3: Determined by F5.01
Acc/Dec time selection
0: Acc/Dec 1
1: Acc/Dec 2
2: Acc/Dec 3
3: Acc/Dec 4
Running direction selection
0: Forward
1: Reverse
2: Determined by running
command
Reserved
Fig. 5-27 PLC Stage i setting(i=1~7)
One’s place:
0: select MS frequency i, e.g. i=3, means the
frequency for stage 3 is MS frequency 3, see
F3.23~F3.29.
1: the frequency is determined by F0.00
2: MS close loop setting I, e.g. i=2, the frequency
of stage 2 is MS close loop setting 2. See F5.20
~F5.26.
3: Determined by F5.01.
PLC can realize close-loop operation in a certain
stage. Close-loop reference selectors can be
preset close-loop reference I or determined by
parameter F5.01; and the feedback is determined
by F5.02. When the setting method is determined
by F5.01, the terminals can be selected via
close-loop input. See F7.00~F7.07 and
F5.20~F5.26 for details
Note:
When the PLC operating direction is determined by
operating commands, the motor’s operating direction
can be changed by external command. For example,
Running forward can be ordered by terminal
FWD-COM. The direction is decided by running
command and if it cannot be determined, the drive
will runs in the direction of last operating stage.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 52

48 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
5.6 Close-loop Control (F5)
Usually, the close loop control can be divided into
two types: analog close loop and pulse close loop
according to feedback. Fig. 5-28 and Fig. 5-29
are analog and pulse close loop control wiring
diagram.
380V
EV1000
U
V
W
PE
M
P24
CCI
VRF
VCI
GND
FWD
COM
1-3K
R
S
T
P
Output
Pressure
transducer
.
GND
.
.
.
.
.
.
.
QF
Fig. 5-28 Build-in PI Analog Feedback Control
VRF
VCI
GND
1-3K
R
S
T
380V
QF
·
·
·
U
V
W
PE
M
FWD
COM
PG
A/A
B/B
PG power supply
X4
P24
X5
PG ground
·
·
·
·
·
EV1000
Fig. 5-29 PG Speed Close Loop Control System
Analog feedback control system:
An analog feedback control system can be
formed by a pressure transducer as the feedback
sensor of the internal PI.
As shown in, pressure reference (voltage signal)
is input via terminal VCI, while the feedback
pressure value is input to terminal CCI in the form
of 0~20mA current signal. The reference signal
and feedback signal are detected by the analog
channel. The start and stop of the drive can be
controlled by terminal FWD.
The above system can also use a TG (speed
measuring generator) as speed close speed-loop
control
PG speed close-loop control:
A speed close-loop control system can be formed
by external control terminals X
4
and X5, and pulse
generator (PG).
As shown in Fig. 5-29, close speed-loop input can
come from a potentiometer in the form of voltage
signal via terminal VCI, while the feedback value
of the close loop is input by PG in pulse mode via
terminal X4 and X5. The start and stop of the
drive can be controlled by terminal FWD.
In Fig. 5-29,
A and B are PG’s dual phase quadrature output;
P24 is connected to the power source of PG;
Speed reference is the voltage signal of 0~10V.
The voltage signal corresponds to synchronous
speed n
0
which, in turn, corresponds to 0~Max
frequency (F0.05). P is the number of poles of
motor (FH.00).
n
0
=120×f
max
/P
Refer to function No. 47~48 of F7.00~F7.04 for
the functions of input terminals X4, X5.
Note:
1. The reference can also be input via keypad or serial
port;
2. Dual-phase input can improve the speed
measurement accuracy, while single phase input
wiring is simple;
3. Dual-phase pulse can only be input in quadrature
mode;
4. If PG is supplied from terminal P24, then the max
load current of optical PG must be less than 100mA.
The mechanism of the build-in PI is shown in the
figure below.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 53

Chapter 5 Parameters 49
EV1000 Series General Purpose Variable Speed Drive User Manual
Reference
Reference
regulation
(F5.08 and F5.10)
ε
Error limit
(F5.15)
Output
+
-
Feedback
regulation
(F5.09 F5.11)
Feedback
KP
×
(F5.12)
Ki
×
(F5.13)
Regulation
(F5.16)
ε
ε
∑
+
+
Fig. 5-30 PI Working Mechanism
Where:
KP proportional gain; Ki: integral gain. In Fig. 5-30,
refer to F5.01~F5.15 for the definitions of
close-loop reference, feedback, error limit and
proportional and Integral parameters.
There are two features of internal PI:
The relationship between reference and feedback
can be defined by F5.08~F5.11.
For example: In Fig. 5-2828, if the reference is
0~10V analog signal, the expected controlled
value is 0~1MP, and the pressure signal is
4~20mA, then the relationship between reference
and feedback is shown in Fig. 5-31.
10V
0
Reference
4mA
20mA
Feedback
Fig. 5-31 Reference (Input) and Feedback
The reference value is based on 10V (i.e. 10V
means 100% input); and the feedback value is
based on 20mA (20mA corresponds to 100%
output).
Close-loop characteristic is selected through
F5.16 to satisfy different applications.
In order to meet the control requirements, the
motor’s speed should be increased with reference
speed. This kind of control characteristic is called
positive response. If the motor speed is required
to be decreased when the reference value is
increased, this control characteristic is called
negative response.
See Fig. 5-32. F5.16 defines the two
characteristics.
Close loop
reference
Speed
Positive
Negative
Fig. 5-32 Close-loop Control Characteristics
After the system type is determined, the following
procedures can be used to determine the close
loop parameters:
z Determine the close-loop reference and
feedback channel(F5.01 and F5.02);
z Define the relationship between
close-loop reference and feedback value
(F5.08~F5.11);
z Determine the speed reference of speed
close-loop control and the number of
revolutions of PG (F5.06~F5.07);
z Determine the close-loop regulation
characteristic, that is, if the motor speed
decreases while the input reference
increases, then the close-loop control
characteristic should be set to negative
(F5.16=1);
z Set integral regulation and close-loop
frequency (F5.17~F5.19);
z Adjust close-loop filter time, sampling
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 54

50 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
cycle, bias limit and gain factor
(F5.12~F5.15).
F5.00 Close loop control
Range: 0、1【0】
0: disabled
1: enabled
F5.01 Reference input
method
Range: 0~4【1】
0: digital setting
Take the value of F5.05(set analog close loop
feedback, F5.02=0~5);
Take the value of F5.06, (set pulse close loop
feedback, F5.02=6).
1: VCI (0~10V)
2: CCI
Pay attention to the setting of jumper CN10.
3: Keypad
4: PULSE
Note:
The motor speed is controlled by pulse feedback.
Given analog input 10V (20mA) or max. input
frequency F1.03, the output pulse will be max.
frequency F0.05, which corresponds to the motor
synchronous speed n
0(n0
=120fmax/P).
F5.02 Feedback method
Range: 0~6【1】
0: VCI analog voltage 0~10V
1: CCI analog input
2: VCI+ CCI
3: VCI-CCI
4: Min {VCI,CCI}
5: Max {VCI, CCI}
When current input is selected, the signal will be
converted to voltage signal, whose value is
determined by the formula: Vout=mA/2;
F5.02=6, pulse
It can be single-phase or 2-phase PG close loop
feedback. Please refer to multi-function input
terminal X4, X5 (F7.03~F7.04).
F5.03 Input filter
Range: 0.01~50.00s【0.50s
】
F5.04 Feedback filter
Range: 0.01~50.00s【0.50s
】
Both the input signal and feedback signal have
some noise signals. These signals can be filtered
by setting the time constant of filter (settings of
F5.03 and F5.04). The bigger the time constant,
the better the immunity capability, but the
response becomes slow. The smaller the time
constant, the faster the response, but the
immunity capability becomes weak.
F5.05 Digital reference
input
Range: 0.00~10.00V【0.00
】
When analog feedback is selected (F5.02=0~5),
this function allows parameter setting from
keypad or serial port.
F5.06 Speed close-loop
setting
Range: 0~39000rpm【0 rpm
】
When PG pulse feedback is selected (F5.02=6),
speed can be set through keypad or serial port.
F5.07 Pulse number per
revolution of encoder
Range: 1~9999【1024】
Please set this parameter according to the
characteristics of the pulse encoder.
F5.08 Min. input
Range: 0.0%~F5.10【0.0%】
F5.09 Feedback of
min. input
Range: 0.0~100.0%【20.0
%】
F5.10 Max. input
Range: F5.08~100.0%【100.0
%】
F5.11 Feedback of
max. input
Range: 0.0~100.0%【100.0
%】
F5.08~F5.11 define the relation of analog close
loop input and feedback. The values of the above
parameters are percentage of input or feedback
value to reference value (10V or 20mA or F1.03).
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 55
Chapter 5 Parameters 51
EV1000 Series General Purpose Variable Speed Drive User Manual
Feedback
direct
proportion
Feedback
Inverse
proportion
F5.11
F5.09
F5.10
F5.08
Feedback
Input
F5.09
F5.11
F5.10
F5.08
Feedback
Input
Fig. 5-33 Relation of Input and Feedback
F5.12 Proportional gain
Kp
Range: 0.000~9.999【0.050
】
F5.13 Integral gain Ki
Range: 0.000~9.999【0.050
】
F5.14 Sampling cycle T
Range: 0.01~50.00s【0.50s
】
The bigger the proportional gain Kp, the faster the
response, but oscillation may occur easily if Kp is
too big.
If only proportional gain K
P
is used in regulation,
the error cannot be eliminated completely.
Therefore, it is preferred to use the integral gain
Ki to form a PI control system. The bigger the Ki,
the faster the response, but oscillation may occur
if Ki is too big.
F5.04 refers to the sampling cycle of feedback
value. The PI regulator calculate once in each
sampling cycle. The bigger the sampling cycle the
slower the response.
F5.15 Error limit
Range: 0.0~20%【2.0%】
F5.15 is the max. error between system output
and the close-loop reference, as shown in Fig.
5-34. PI regulator stops operation when the
feedback error is within this range. Setting this
parameter correctly is helpful to improve the
system output accuracy and stability.
Error limit
Feedback value
R
ef
Output
Freq
time
time
Fig. 5-34 Error Limit Schematic Diagram
F5.16 Close-loop
regulation characteristic
Range: 0, 1【0】
0: Positive logic
Set F5.16 to 0 if the motor speed is required to
increase with the reference.
1: Negative logic
Set F5.16 to 1 if the motor speed is required to
decrease with the increase of the reference.
F5.17 Integral regulation
Range: 0, 1【0】
0: Stop integral regulation when the frequency
reaches the upper or lower limits
1: Continue the integral regulation when the
frequency reaches the upper or lower limits
It is recommended to set the parameter at 0 for
the system that requires fast response.
F5.18 Preset frequency
Range:0.00~650.00Hz
【
0.00Hz】
F5.19 Preset frequency
hold time
Range: 0.0~3600s【0.00s
】
The above parameters are helpful for the close
loop control to enter stable state quickly.
After close-loop running is started, the drive will
accelerate to the preset frequency F5.18 within
the accelerate time, and hold the frequency for a
period of time (F5.19), and then run according to
close-loop characteristic.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 56

52 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
hold time
Output Freq.
Preset freq.
T
Fig. 5-35 Close-loop preset frequency
Note:
If you don’t need preset frequency, just set F5.18 and
F5.19 at 0.
F5.20 MS close-loop
setting 1
Range: 0.0~10.00V【0.00V
】
F5.21 MS close-loop
setting 2
Range: 0.0~10.00V【0.00V
】
F5.22 MS close-loop
setting 3
Range: 0.0~10.00V【0.00V
】
F5.23 MS close-loop
setting 4
Range: 0.0~10.00V【0.00V
】
F5.24 MS close-loop
setting 5
Range: 0.0~10.00V【0.00V
】
F5.25 MS close-loop
setting 6
Range: 0.0~10.00V【0.00V
】
F5.26 MS close-loop
setting 7
Range: 0.0~10.00V【0.00V
】
Besides the 3 close-loop setting methods defined
in F5.01, the MS close-loop voltage setting
F5.20~F5.26 can also be used.
MS close-loop setting 1~7 can be selected
through external terminals, please refer to
F7.00~F7.04 (function No. 30~32). It can also
used with simple PLC close-loop, see F4
parameters.
The MS close-loop setting has priority over the
methods defined in F5.01.
5.7 Traverse Parameters (F6)
Traverse function applies to textile and chemical fiber industry, or others that requires lateral movement
or rolling. The typical application is shown in Fig. 5-36.
The drive works as follows:
The drive accelerates to preset traverse frequency F6.02 and stay at it for a period of time (F6.03). Next,
It will arrive at central frequency within Acc time, and then it will operate according to traverse amplitude
(F6.04), skip frequency (F6.05), traverse cycle (F6.06) and rise time (F6.07) one cycle after another until
the Stop command is received. It will then decelerate to stop within Dec time.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 57

Chapter 5 Parameters 53
EV1000 Series General Purpose Variable Speed Drive User Manual
Freq. (Hz)
Lower limit of freq. F
L
Upper limit of
freq. F
H
Step
freq.=AW*F6.05
Waiting time
F6.03
Rising
time=F6.06*F6.07
Traverse
operating
cycle
Central Freq. Fset
Traverse amplitude Aw=Fset*F6.04
- Aw
+ Aw
Run
command
stop
command
t
Decelerate
according
to Dec time
a1
a1
Preset freq.
Accelerate
according
to Acc time
Fig. 5-36 Traverse Operation
The central frequency is the frequency of simple operation, MS running or PLC.
The traverse is invalid for jog or close-loop running.
When both PLC and traverse are enabled, the traverse is invalid when transferring to another PLC stage.
The output frequency begins to traverse after arriving at the PLC preset frequency within Acc/Dec time.
When receiving Stop command, the drive will stop according to PLC Dec time.
F6.00 Traverse function
selection
Range: 0~1
【0】
0: disabled
1: enabled
F6.01 Traverse mode
Range: 0000~1111
【0000】
This parameter is to set the operating mode of
traverse. Refer to the figure below.
Thou
Te n
One
Start mode
0: auto
1: terminal config. (manually)
Restart mode
0: start to the state before power-off
1: restart, no other requirement
Amplitude
0: varied(based on central freq.)
1: fixed (based on max. freq.)
Save traverse state upon power failure
0: save
1: not save
Hun
Fig. 5-37 Traverse Mode Setting
One’s place of F6.01: transfer mode
0: auto
The drive will stay at traverse preset frequency
(F6.02) for a period of time (F6.03), and then
begin traverse automatically.
1: terminal configuration (manually)
When multi-function terminal is enabled and the
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 58

54 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
corresponding parameter is set at 33, the drive
will enter traverse mode. If the terminal is
disabled, the drive will exit traverse mode and
stay at preset frequency F6.02.
Ten’s place of F6.01: amplitude control
0: varied amplitude
The traverse amplitude changes with central
frequency. The change rate is defined in F6.04.
1: fixed amplitude
The traverse amplitude is determined by max.
frequency and F6.04.
Hundred’s place of F6.01: start/stop mode
0: start to the state before stop
1: just restart, no other requirement
Thousand’s place of F6.01: save traverse state
upon power failure
This function is valid only when the hundred place
of F6.04 is set at 0.
0: save
1: not save
Note:
You can set any of F7.00~7.04 at 34 to reset the
traverse state.
F6.02 Preset traverse
frequency
Range: 0.00Hz~650.0Hz
【
0.00Hz】
F6.03 Preset traverse
frequency hold time
Range: 0.0~3600.0s【0.0s
】
F6.02 defines the frequency before entering
traverse state.
When the traverse start mode (F6.01) is set at
“auto”, F6.03 specifies the time period that the
drive run at preset traverse frequency. F6.03 is
invalid if F6.01 set at “manually start”. Please
refer to Fig. 5-36.
F6.04 Traverse
amplitude
Range: 0.0~50.0
%【0.0%】
Varied amplitude: AW=central frequency×F6.04
Fixed amplitude: AW=max. frequency
F0.05×F6.04
Note:
The traverse frequency is limited by upper and lower
limit of frequency. Improper setting of the frequency
limit will result in faults.
F6.05 Step freq.
Range: 0.0~50.0%(of amplitude)
【
0.0%】
Refer to Fig. 5-36. If it is set at 0, then there will
be no step frequency.
F6.06 Traverse cycle
Range: 0.1~999.9s【10.0s
】
It defines the period of traverse operation
including rising time and falling time.
Note:
Under traverse mode, auto Acc/Dec is not allowed,
otherwise, the traverse cycle will become abnormal.
F6.07 Rise time of
triangular wave
Range: 0~100.0
%【50.0%】
It defines the rising time of traverse operation that
equals to F6.06×F6.07 (s) and falling time,
F6.06×(1-F6.07) (s).Please refer to Fig. 5-36.
Note:
You may choose S curve Acc/Dec mode during
traverse operation, which can help the running more
smoothly.
5.8 Multi-function Terminal (F7)
F7.00 Function of multi-function
terminal X1
Range: 0~43【0
】
F7.01 Function of multi-function
terminal X2
Range: 0~43【0
】
F7.02 Function of multi-function
terminal X3
Range: 0~43【0
】
F7.03 Function of multi-function
terminal X4
Range: 0~47【0
】
F7.04 Function of multi-function
terminal X5
Range: 0~48【0
】
F7.05~ F7.07 Reserved
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 59

Chapter 5 Parameters 55
EV1000 Series General Purpose Variable Speed Drive User Manual
The multi-function terminals can realize various
functions. You may assign functions to them by
setting parameters F7.00~F7.04. Please refer to
Table 5-3. Take X1~X3 for example in the
following description.
Table 5-3 Functions of Multi-function Terminals
Setting Functions
0 No function
1 MS frequency 1
2 MS frequency 2
3 MS frequency 3
4 Acc/Dec time 1
5 Acc/Dec time 2
6 External fault normally-open input
7 External fault normally-close input
8 RESET signal
9 Forward jog
10 Reverse jog
11 Coast-to-stop(FRS)
12 Frequency increase (UP)
13 Frequency decrease (DN)
14 PLC operation pause
15 Acc/Dec prohibit
16 3-wire operation control
17
External interrupt signal normally-open
input
18
External interrupt signal normally-close
input
19 DC injection braking command (DB)
20 Disable close-loop
21 Disable PLC
22 Frequency setting method 1
23 Frequency setting method 2
24 Frequency setting method 3
25 Reference freq. is input via terminal CCI
26 Reserved
Setting Functions
27 Terminal control mode is forcibly enabled
28 Control mode 1
29 Control mode 2
30 MS close-loop mode 1
31 MS close-loop mode 2
32 MS close-loop mode 3
33 Start traverse operation
34 Reset the traverse operating status
35 External stop command
36 Reserved
37 Drive operation prohibiting
38 Reserved
39 Clear length
40 Clear auxiliary reference frequency
41 Reset PLC Stop status
42 Clear counter’s record
43 Signal of triggering counter
44 Input the signal of length
45 Pulse input
46 Single-phase speed measuring
47 Speed measuring input SM1(only for X4)
48 Speed measuring input SM2(only for X5)
The functions are explained as follows:
1~3: MS terminals
If any three of F7.00~F7.04 are set at 1, 2, 3
respectively, Up to 8 segments of speed can be
defined through the combination of the ON and
OFF state of the 3 terminals.
Table 5-4 MS Speed
X3 X2 X1 Freq.
OFF OFF OFF Common freq.
OFF OFF ON MS freq. 1
OFF ON OFF MS freq. 2
OFF ON ON MS freq. 3
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 60
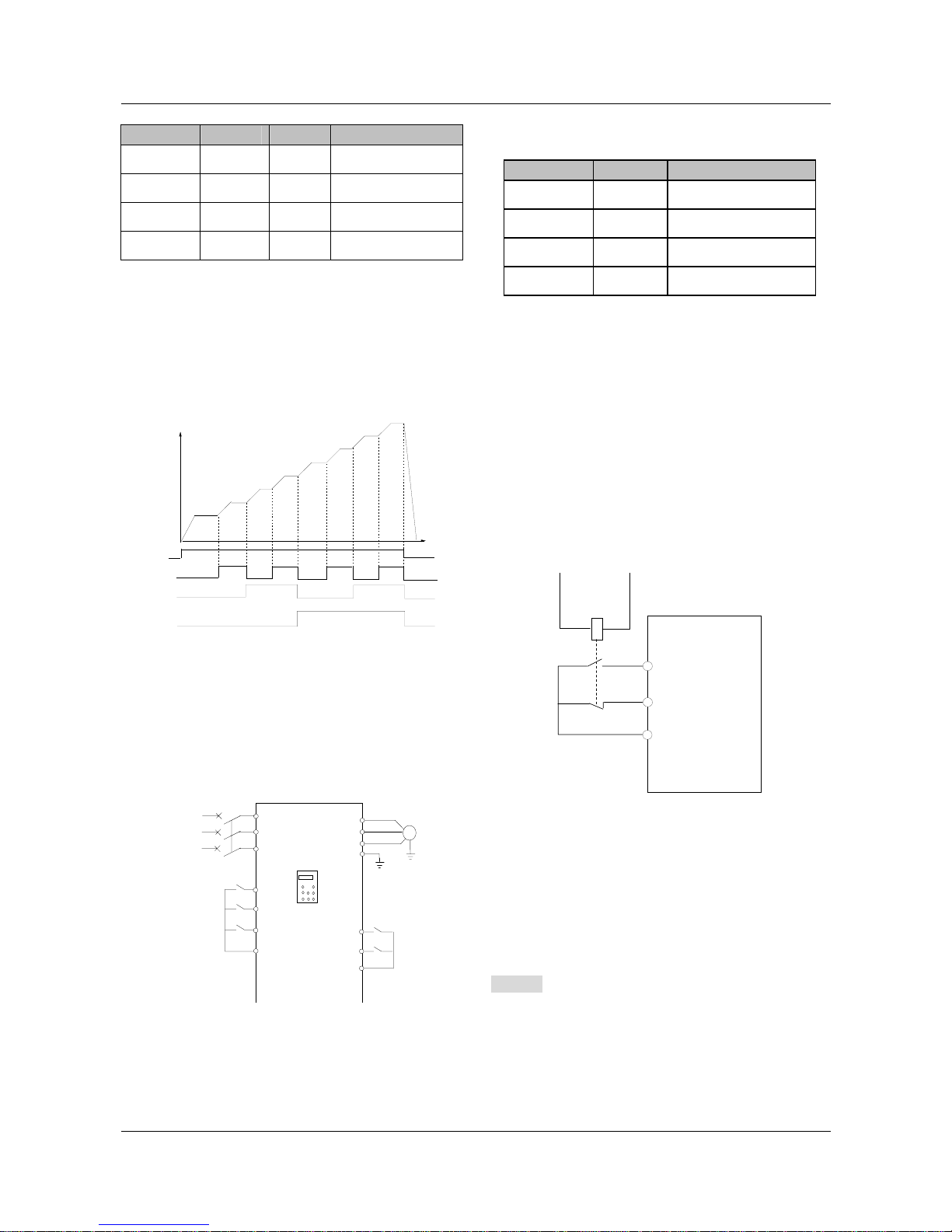
56 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
X3 X2 X1 Freq.
ON OFF OFF MS freq. 4
ON OFF ON MS freq. 5
ON ON OFF MS freq. 6
ON ON ON MS freq. 7
The MS frequency will be used in MS running and
simple PLC operation. Let’s see an example:
Set the parameters corresponding to X1, X2 and
X3: F7.00=1, F7.01=2, F7.02=3, then X1, X2 and
X3 are used to perform MS running. See Fig.
5-38.
speed7
K
3
Output freq.
speed1
speed2
speed3
speed4
speed5
speed6
Speed
command
K
1
K
2
Common
operating
freq.
Time
Fig. 5-38 MS Running
Fig. 5-39 illustrated the wiring of terminal control
of MS running. K
4
and K5 control the running
direction. The combination of K
1
, K2 and K3 can
enable common running or MS running with 1~7
speeds.
EV1000
U
V
W
PE
M
X1
X2
COM
FWD
COM
R
S
T
3-phase
power
supply
QF
.
.
.
.
.
.
X3
REW
.
k1
k2
k3
k4
k5
Fig. 5-39 Wiring of MS Running
4~5:Acc/Dec time terminals
Table 5-5 Acc/Dec Time Defined by Terminal
State Commination
Terminal 2 Terminal 1 Acc/Dec time selection
OFF OFF Acc time 1/Dec time 1
OFF ON Acc time 2/Dec time 2
ON OFF Acc time 3/Dec time 3
ON ON Acc time 4/Dec time 4
By combination of the ON/OFF state of Terminal 1
and 2, you can get 4 groups of Acc/Dec time.
6~7: External fault signal
(normally-open/close input)
If the setting is 6~7, fault signal of external
equipment can be input via the terminal, which is
convenient for the drive to monitor the fault of
external equipment. Once the drive receives the
fault signal, it will display “E015”. The fault signal
has two input modes, i.e. normally-open and
normally-close.
X4
X5
COM
KM
EV1000
·
·
·
Fig. 5-40 Normally-open/close input
In Fig. 5-40, X4 is normally open input and X5
normally close input. KM is external fault relay.
8: Reset
If any of F7.00~F7.04 is set at 8, the drive can be
reset via the terminal when the drive has a fault.
The function of this terminal is the same with the
RESET key on the keypad.
9~10: External jog command(JOGF/JOGR)
If any of F7.00~F7.04 is set at 9~10, the terminal
can enable the jog operation. JOGF is terminal for
forward jog operation command and JOGR is
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 61
Chapter 5 Parameters 57
EV1000 Series General Purpose Variable Speed Drive User Manual
terminal for reverse jog operation command. Jog
frequency, jog interval and jog Acc/Dec time are
defined in F3.13~F3.16.
11: Coast to stop
This function is the same with F2.08, however, it
is realized by terminal and convenient for remote
control.
12~13: Frequency increase (UP)/decrease
(DN)
If the setting is 12~13, the terminal can be used to
increase or decrease frequency instead of and
keys on the panel for remote control. This
terminal is valid when F0.00=1 or F9.01=2.
Increasing or decreasing rate is determined by
F7.09.
14: Pause command for simple PLC
If the setting is 14, the terminal is used to pause
the PLC operation and the drive operates at zero
frequency when the terminal is enabled, but the
running time is not counted. If the terminal is
disabled, the drive will start at start frequency and
continue the PLC operation. Refer to
F4.00~F4.14 for the use of this terminal.
15: Acc/Dec prohibit
The motor is immune to any external command
except Stop command and maintain the present
speed.
Note:
This function is disabled during normal decelerating
to stop.
16: 3-wire operation control.
Refer to F7.08 .
17~18: External interrupt signal
normally-open input
When the drive receives an interrupt signal during
running, it will stop outputs and run at zero
frequency. Once the signal removed, the drive will
resume previous running at start frequency.
As Fig. 5-40 shows, there are X4, normally open
contacts and X5, normally closed contact.
Note:
Different from function 6~7, the external interrupt
signal will not cause alarm, and the drive will resume
previous running once the signal removed.
19: DC Braking (DB)
If the setting is 19, the terminal can be used to
perform DC injection braking to the motor that is
running for emergency stop and accurate location.
Initial braking frequency, braking delay time and
braking current are defined by F2.09~F2.11.
Braking time is decided by the bigger value
between F2.12 and the period that the terminal is
effective.
20: Disable close-loop
If the setting is 20, the terminal can be used to
realize the flexible switching between close-loop
operation and low level operating mode.
Note:
The switching between operation modes is possible
when the drive is in close-loop mode (F5.00=1).
When the drive is switched to low level operating
mode, its start/stop, operating direction, ACC/Dec
time are shifted to the corresponding operating
modes accordingly.
21: Disable PLC
If the setting is 21, the terminal is used to realize
the flexible switching between PLC operation and
low level operating mode.
Note:
The switching between operation modes is possible
only when the drive is in PLC operation (the one’s
place of F4.00 is not 0).
When the drive is switched to low level operating
mode, its start/stop, operating direction, ACC/Dec
time are shifted to the corresponding operating
modes accordingly.
22~24: Reference frequency setting method
Through the combination of the ON/OFF state of
X1, X2 and X3, you can select different frequency
setting method, which will come into effect
regardless of F0.00.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 62

58 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
Table 5-6 Frequency Setting Mode Selection
X3 X2 X1 Mode
OFF OFF OFF None
OFF OFF ON Digital setting1
OFF ON OFF Digital setting 2
OFF ON ON Digital setting 3
ON OFF OFF VCI analog setting
ON OFF ON CCI analog setting
ON ON OFF PULSE
ON ON ON LED keypad
25: Frequency reference is input via terminal
CCI
If the setting is 25, the frequency reference will be
input via terminal CCI forcibly. The frequency
input will be changed to the previous one if this
terminal function is disabled.
26: Not used
27: Terminal control mode is enabled
When this terminal function is enabled, the
operating command is input through this terminal
forcibly. The drive will be controlled in the
previous mode if FWD/REV terminal function is
disabled.
28~29: Control mode selection X1~X2
Table 5-7 Control Mode Selection
X2 X1 Control mode
OFF OFF None
OFF ON LED keypad
ON OFF Terminal
ON ON Serial port
The selection of control mode is realized by the
combination of ON/OFF state of any two of
X1~X5. In the above table, you should set
F7.00=28, F7.01=29.
30~32: MS close-loop terminal (3 terminals of
X1~X5)
Table 5-8 MS Close-loop Setting Selection
X3 X2 X1 MS close-loop reference
OFF OFF OFF By F5.01
OFF OFF ON MS Close-loop setting 1
OFF ON OFF MS Close-loop setting 2
OF ON ON MS Close-loop setting 3
ON OFF OFF MS Close-loop setting 4
ON OFF ON MS Close-loop setting 5
ON ON OFF MS Close-loop setting 6
ON ON ON MS Close-loop setting 7
The various MS close-loop setting is realized by
the combination of ON/OFF state of terminal X1~
X3.
33: Start traverse operation
If the traverse operation is set to be manual start,
then traverse function is enabled if this function is
selected. Refer to F6.
34: Traverse reset
If traverse operation is enabled, closing the
terminal can clear the information about traverse
status no matter the drive is in auto or manual
start mode. Traverse operation continues after
this terminal is disconnected. See F6.
35: external Stop command
This Stop command is valid to all control modes.
When this function is enabled, the drive will stop
as specified F2.08.
36: Reserved
37: Prohibit drive from operating
If this function is enabled, the drive that is
operating will coast to stop and the drive ready to
run will be prohibited to start. This function is
mainly used as safety protection.
38: Reserved
39: Clear the length information
The setting of F9.15 (length) will be cleared to
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 63

Chapter 5 Parameters 59
EV1000 Series General Purpose Variable Speed Drive User Manual
zero.
40: Clear the setting of auxiliary reference
frequency
This function is valid for auxiliary reference
frequency (F9.01=1, 2 and 3) to clear it to zero, so
that the reference frequency is determined solely
by main reference.
41: Reset PLC state
When the drive stops in PLC mode, the
memorized PLC operating information (operating
stage, operating time, operating frequency, etc.)
will be cleared.
42: clear the counter to zero
This function is to clear the counter to zero and is
used in conjunction with function 43.
43: Input signal to trigger the counter
When the setting is 43, this terminal is used to
input counting pulse signal to the internal counter
of the drive. The max. pulse frequency is 200Hz.
The present counting value can be saved at
power off. See F7.33 and F7.34 for details.
44: input the signal of length
This function is only effective to multi-function
input terminals X4 and X5. The terminal is used in
fixed-length control. Length is calculated by input
pulses. See F9.14~F9.19 for details.
45: pulse frequency input
This function is effective only to multi-function
input terminals X4 and X5. The terminal is used to
input pulse signal that is used as frequency
reference. Refer tp F1 parameters for the
relationship between input pulse frequency and
the reference frequency.
46: Single-phase speed measuring input
This function is effective only to multi-function
input terminals X4 and X5. See section 3.2.3 for
input characteristics. The speed control accuracy
is ±0.1%. Single-phase speed feedback control
can be realized by using this terminal and PG.
47: Speed measuring input SM1
48: Speed measuring input SM2
This function is effective only to multi-function
input terminals X4 and X5. See section 3.2.3 for
input characteristics. The speed control accuracy
is ±0.1%. 2-phase speed feedback control can
be realized by using this terminal and PG.
Note:
When the drive is in motor auto-tuning status, No.
44~47 functions of X4 are disabled automatically.
F7.08 FWD/REV operating
modes setup
Range: 0~3【0】
This parameter defines four operating modes
controlled by external terminals.
0: 2-wire operating mode 1
0
0
Run forward
Run reverse
Stop
K
1
FWD
COM
REV
EV1000
.
.
.
PLC
P24
.
.
K
2
K
2K1
0
1
0
1
1
1
Command
Stop
.
.
.
.
.
Fig. 5-41 2-wire operating mode 1
1: 2-wire operating mode 2
0
0
Run forward
St
o
p
Stop
K
1
COM
.
.
.
PLC
P24
.
.
K
2
K
2K1
0
1
0
1
11
0
0
Running command
Run reverse
FWD
REV
EV1000
.
.
.
.
.
0
1
Fig. 5-42 2-wire operating mode 2
2: 3-wire operating mode 1
FWD
Xi
REV
SB3
COM
SB1
SB2
EV1000
.
.
.
.
PLC
P24
.
.
Fig. 5-43 3-wire operating mode 1
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 64
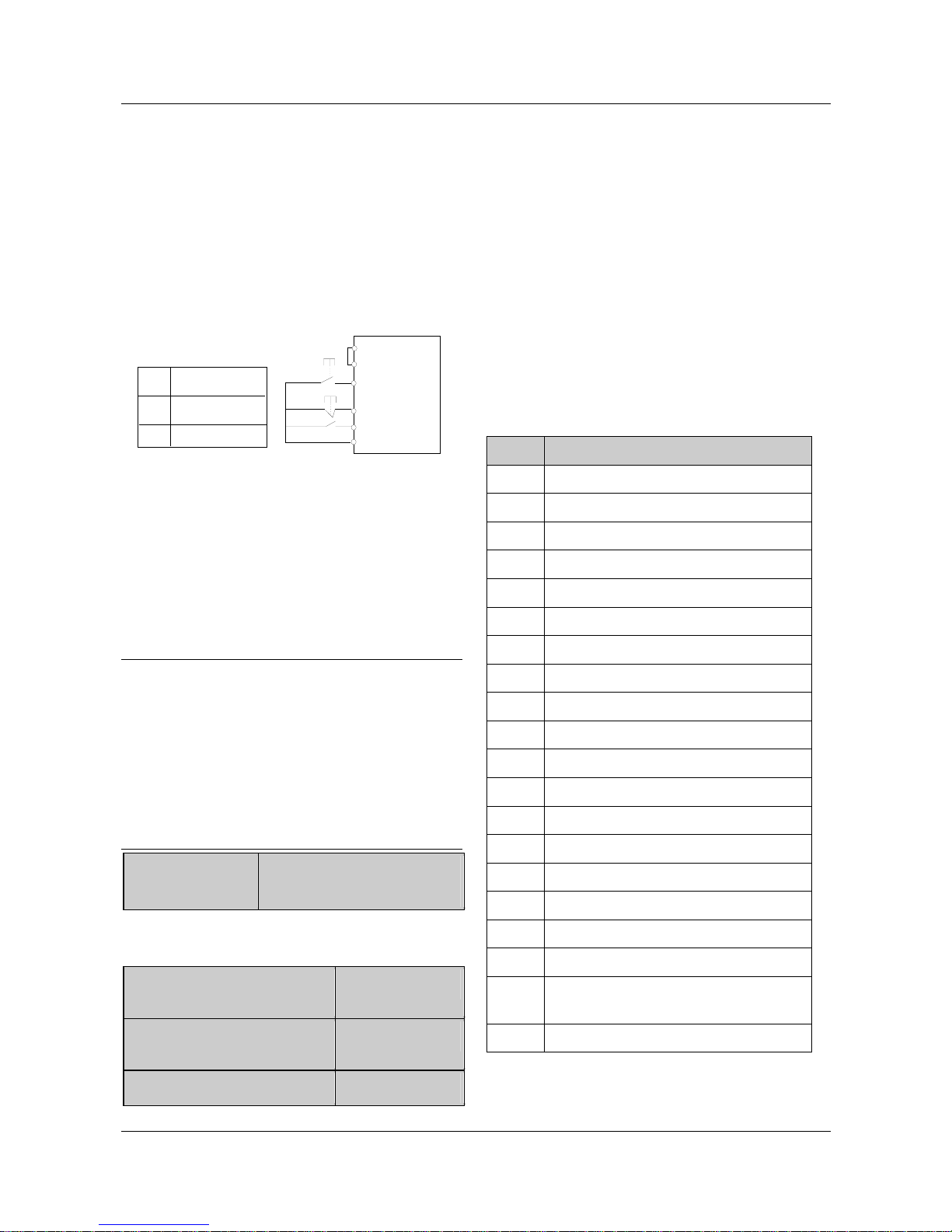
60 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
Where:
SB1:Stop button
SB2: Run forward button
SB3: Run reverse button
Terminal Xi is the multi-function input terminal of
X1~X5. For this case, the corresponding
parameter should be set at 16 (3-wire operation).
3: 3-wire operation mode 2
FWD
Xi
REV
K
COM
SB1
SB2
0
K
1
Running direction
Forward
Reverse
EV1000
.
.
.
.
PLC
P24
.
.
Fig. 5-44 3-wire operation mode 2
Where:
SB1:Stop button
SB2: Run button
Terminal Xi is the multi-function input terminal of
X1~X5. For this case, the corresponding
parameter should be set at 16 (3-wire operation).
Note:
In terminal control mode, for 2-wire operating mode 1
and 2, although the terminal is effective, the drive will
not run if there is external stop command. If you want
to start the drive, you should act ivate FWD/REV
terminal again, e.g. set any of F7.00~F7.04 at 11 or 35,
PLC stop after single cycle, stop after preset length
arrival, Stop key pressed (see F9.07). When the drive
stops due to a fault, it will start immediately if the
terminal FWD/REV is enabled and the fault is cleared
F7.09 UP/DN rate
Range: 0.01~99.99Hz/s
【
1.00Hz/s】
To define the increase/decrease rate when using
UP/DN terminal to change reference frequency.
F7.10 Open collector output
terminal Y1
Range: 0~19【0
】
F7.11 Open collector output
terminal Y2
Range: 0~32【1
】
F7.12 Relay output function
Range: 0~19【16
】
Refer to section 3.3.2 for the output
characteristics of Y1, Y2 and the relay’s output
terminal. Table 5-9 shows the functions of the
above 3 terminals. Note that one function can be
selected repeatedly.
F7.11=20~32, Y2 is the output pulse frequency,
range: 0~max. pulse frequency (F7.32). The
relation between the output pulse frequency and
the parameters it presents are shown in 20~32 in
the table below. The extended function 2 of host
is to control Y2 by serial port directly. The max
setting of F7.32 is 65535. See Appendix 2.
Table 5-9 Parameter Setting and Function of
Output Terminals
Setting Function
0 Drive running signal (RUN)
1 Frequency arrival signal (FAR)
2 Frequency detection threshold (FDT1)
3 Frequency detection threshold (FDT2)
4 Overload signal (OL)
5 Low voltage lock-up signal (LU)
6 External Stop command (EXT)
7 Higher limit of frequency (FHL)
8 Lower limit of frequency (FLL)
9 Zero-speed running
10 Completion of simple PLC operation
11 PLC cycle completion indication
12 Preset counting value arrival
13 Specified counting value arrival
14 Preset length arrival
15 Drive ready (RDY)
16 Drive fails
17 Extended function 1 of host
18
Upper and lower limits of traverse
frequency
19 Preset operation time out
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 65

Chapter 5 Parameters 61
EV1000 Series General Purpose Variable Speed Drive User Manual
Setting Function Range
20
Freq. before slip
compensation
0
~
Max. output freq.
21
Freq. after slip
compensation
0
~
Max. output freq.
22 Preset freq.
0
~
Max. output freq.
23 Output current
0
~
2 times of drive’s
rated current
24 Output current
0
~
2 times of drive’s
rated current
25 Output torque
0
~
2 times of moter’s
rated torque
26 Output voltage
0
~
1.2 times of drive’s
rated voltage
27 Bus voltage
0
~
800V
28 VCI
0
~
10V
29 CCI
0
~
10V/0~20mA
30 Output power
0
~
2 times of rated
power
31 Extended
function 2 of host
0
~
65535
32 Potentiometer
setting
0
~
10V
The explanation of output signal is shown in Table
5-9.
0: Drive running signal (RUN)
This signal will be given if the drive is running.
1: Frequency arrival signal (FAR)
See F7.13.
2: Frequency detection threshold (FDT1)
See F7.14~F7.15.
3: Frequency detection threshold (FDT2)
See F7.16~F7.17.
4: Overload signal (OL)
The signal will be given if the drive’s output
current is bigger than the value defined by FL.05
and the overload time is longer than the time
defined by FL.06. This function is usually used for
overload pre-alarm. See Fig.5-73.
5: Low voltage lock-up signal (LU)
The signal will be given when the DC bus voltage
is lower than the low voltage limit, and the LED
displays “P.oFF”.
6: External stopping command (EXT)
The terminal outputs the indicating signal if the
drive outputs tripping signal caused by external
fault (E015).
7: Higher limit of frequency (FHL)
The signal is given if the preset frequency is
higher than upper limit of frequency and the
operating frequency reaches the upper limit of
frequency.
8: Lower limit of frequency (FLL)
The signal is given if the preset frequency is
higher than lower limit of frequency and the
operating frequency reaches the lower limit of
frequency.
9: Zero-speed running
The signal is given if the drive’s output frequency
is 0 and the drive is in operating status.
10: Completion of simple PLC operation stages
The signal is given (pulse, 500ms) if the present
stage of PLC operation is finished.
11: PLC cycle completion indication
The signal (pulse, 500ms) is given if one cycle of
PLC operation is finished.
12: preset counting value arrival
13: reference length arrival
Refer to F7.33~F7.34.
14: preset length arrival
The signal is given if the setting of F9.15 (actual
length) is bigger than F9.14 (preset length). The
length counting terminal is the one whose
parameter (F7.03 or F7.04) is set at 44.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 66

62 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
15: drive ready (RDY)
The RDY signal is output when the drive has no
fault, its DC bus voltage is normal, the Start
Prohibit function is disabled. It is ready to start.
16:Drive fails
The signal is given if the drive has faults.
17: Extended function 1 of host
The output signal of terminal Y1, Y2 or TC is
directly controlled by a serial port. Refer to the
communication protocol of EV1000.
18:Upper and lower limits of traverse frequency.
The signal will be given if the range of traverse
frequency calculated based on central frequency
is higher than upper limit of frequency (F0.12) or
lower than the lower limit of frequency (F0.13), as
shown in Fig.5-45.
Before limiting amplitude
Upper limit o
f freq
Lower limit of freq.
T
raverse
operation
Y1:
upper and lower limit
of traverse operation
After limiting amplitude
Central freq.
Fig. 5-45 Limiting the Amplitude of Traverse
19: preset operating time out
The signal is given if the drive’s total operating
time (Fn.01) reaches preset operating time
(Fn.00).
Note:
When F7.04 is set at 44~46, the pulse output function
of Y2 is disabled automatically.
F7.13 Freq. arrival detection
range (FAR)
Range: 0.00~650.00Hz
【
2.50Hz】
As shown in Fig. 5-46, if the drive’s output
frequency is within the detecting range of preset
frequency, a pulse signal will be output. It is
complementary to No.1 function in Table 9-1.
detecting range
Time
Time
Y
Preset
freq.
Output
Fig. 5-46 Freq. Arrival Signal Output
F7.14 FDT1 level
Range: 0.00~650.00Hz
【
50.00Hz】
F7.15 FDT1 lag
Range: 0.00~650.00Hz
【
1.00Hz】
F7.16 FDT2 level
Range: 0.00~650.00Hz
【
25.00Hz】
F7.17 FDT2 lag
Range: 0.00~650.00Hz
【
1.00Hz】
F7.14~F7.15 is a complement to the No.2
function in Table 5-9. F7.16~F7.17 is a
complement to the No.3 function in Table 5-9.
Their functions are same. Take F7.14~F7.15 for
example: when the drive’s output frequency
reaches FDT1 level, it outputs an indicating signal
until its output frequency drops below FDT1 level
(FDT1 level-FDT1 lag). As shown in Fig. 5-47.
FDT1 lag
Time
Time
Y
FDT1 level
Output
frequency
Fig. 5-47 Frequency Detection
F7.18~F7.25
Reserved
These parameters are not used.
F7.26 AO1 output function
Range: 0~12【0】
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 67
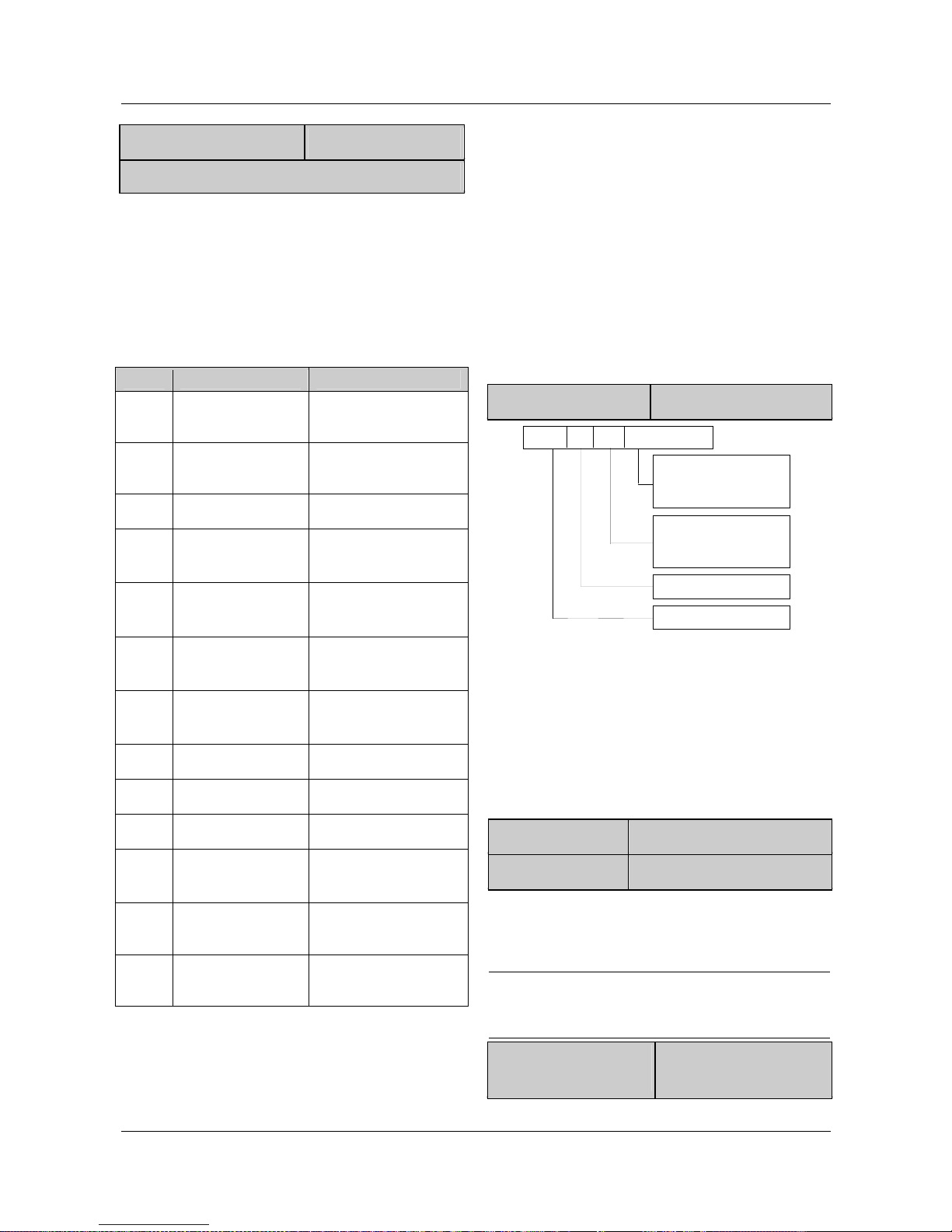
Chapter 5 Parameters 63
EV1000 Series General Purpose Variable Speed Drive User Manual
F7.27 AO2 output selection
Range: 0~12【3】
F7.28 Reserved
AO1 and AO2 are analog output terminals.
Refer to section 3.3.2 for the output
characteristics of AO1 and AO2, their analog
output ranges are defined by F7.29.
Refer to Table 5-10 for the function of F7.26 and
F7.27.
Table 5-10 Signals from AO1 and AO2
Setting Function Range
0
Output freq. before
compensation
0
~
max. output freq.
1
Output freq. after
compensation
0
~
max. output freq.
2 Preset freq.
0
~
max. output freq.
3 Output current
0
~
2 times of drive’s
rated current
4 Output current
0
~
2 times of drive’s
rated current
5 Output torque
0
~
2 times of motor’s
rated torque
6 Output voltage
0
~
1.2 times of drive’s
rated voltage
7 Bus voltage
0
~
800V
8 VCI
0
~
10V
9 CCI
0
~
10V/0~20mA
10 Output power
0
~
2 times of rated
power
11
Extended function 2
of host
0
~
65535
12
Setting of
potentiometer
0~10V
Using extended function 2 of host, AO1 and AO2
output can be controlled by serial port directly. If
F7.26 or F7.27 is set at 11, the output of AO1 or
AO2 “65535” corresponds to max. analog output
10V (20mA). Please refer to Appendix 2.
Suppose you want:
AO1 outputs 4~20mA, which means the bus
voltage is 0~800V.
You should do the following configuration:
①F7.26=7, output signal presenting bus voltage;
②F7.29=01, AO1 output: 4~20mA;
③F7.30=100%, output gain 100%;
④Select 0/4-20mA of CN16 jumper.
F7.29 Analog output range
Range: 00~11【00】
Thou.
Hun.
Ten
One's place
AO1 output range
0: 0~10V or 0~20mA
1: 2~10V or 4~20mA
Reserved
AO2 output range
0:
0~10Vor0~20mA
1: 2~10Vor4~20mA
Reserved
Fig. 5-48 Analog Output Type Selection
The parameter is to select the output type, i.e.
voltage or current, of AO1 and AO2.
CN16 jumper is for AO1, “I” represents current,
“V” represents voltage.
CN17 jumper is for AO2, “I” represents current,
“V” represents voltage.
F7.30 AO1 output gain
Range: 0.0~200.0%【100.0
%】
F7.31 AO2 output gain
Range: 0.0~200.0%【100.0
%】
You can change the measurement range or
calibrate error of AO1 and AO2 outputs by
adjusting the output gain.
Note:
The parameter will come into effect immediately
while you change it.
F7.32 Max output pulse
freq. of Y2
Range: 0~50.0kHz
【
10.0KHz】
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 68

64 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
It defines the max. pulse frequency from terminal
Y2. Refer to F7.12.
F7.33 Preset counting value
Range: F7.34~9999【0】
F7.34 Specified counting
value
Range: 0~F7.33【0】
F7.33 and F7.34 are complementary to Function
No.12 and No.13 in Table 5-9.
When the number of pulses defined by F7.33 are
input from Xi, Yi or relay will output an indicating
signal.
Suppose F7.33=8, as Fig. 5-49 shows, when 8
consecutive pulses are input from Xi, Y1 will
output an indicating signal.
When the number of pulses defined by F7.34 are
input from Xi, Yi or relay will output an indicating
signal which will last until the number of pulses
defined by F7.33 are input.
Suppose F7.34=5, 7.33=8, as Fig. 5-49 shows,
when 5 consecutive pulses are input from Xi, Y2
will output an indicating signal and it holds the
signal until the 8th pulse passes. Note that if
F7.34 is bigger than F7.33, then F7.34 is invalid.
1234567 89
Xi
input
Y
1
Y
2
Fig. 5-49 Preset counting value and specified
counting value
F7.35 Positive or negative
logic of terminal
Range: 000~FFFH【000H
】
Thou.
Hun. Ten
One's place
BIT0 : positive/negative logic of
X1
BIT1 : positive/negative logic of
X2
BIT2 : positive/negative logic of X3
BIT3 : positive/negative logic of X4
BIT0 : positive/negative logic of X5
BIT1
BIT2
BIT3:
BIT0
: positive/negative logic of
FWD
BIT1
: positive/negative logic of
REV
BIT2
: positive/negative logic of
Y1
BIT3
: positive/negative logic of
Y2
BIT0: reserved
BIT1: reserved
BIT2: reserved
BIT3: reserved
: reserved
: reserved
: reserved
Fig. 5-50 Positive or Negative Logic of Terminal
The parameter defines the positive or negative
logic of terminals, where positive logic refers that
the terminal Xi is enabled when it connects with
the common terminal and disabled if
disconnected; negative logic is the opposite of
positive logic.
If the bit is set at “0”, it means positive logic, and
“1” for negative logic.
Suppose you require X1~X5 to be positive logic,
FWD and REV negative logic, Y1 positive logic
and Y2 negative logic, you should set the one’s
place at 0, ten’s place at 0, hundred’s place at
(1011)
2 ,
i.e B(Hex). Therefore, F7.35 should be
set at 0B00.
The conversion from binary code to Hex value is
shown in Table 5-13.
Table 5-11 Convertion from Binary to Hex
Binary
BIT3 BIT2 BIT1 BIT0
Hex
(LED display)
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 69

Chapter 5 Parameters 65
EV1000 Series General Purpose Variable Speed Drive User Manual
Binary
BIT3 BIT2 BIT1 BIT0
Hex
(LED display)
0 1 1 0 6
0 1 1 1 7
1 0 0 0 8
1 0 0 1 9
1 0 1 0 A
1 0 1 1 B
1 1 0 0 C
1 1 0 1 D
1 1 1 0 E
1 1 1 1 F
Note:
1. Factory setting of all the terminals is positive logic.
2. When Y2 is set to output pulse, i.e. F7.11 is set at
20~32, the logic definition is invalid.
5.9 Display Control (F8)
F8.00 Accumulated length
Range: 0.0~999.9km
【0】
This parameter records the accumulated length
value. If No.39 function in Table 5-3 (clear length)
is enabled, the length will be added to this
parameter, but if F9.15 (actual length) is changed
to 0 manually, the previous record before the
modification will not be added.
If you change this parameter, you just modify the
history record, no other effect.
F8.01 LED displayed
parameter selection 1
Range: 000~3FFH
【
3FFH】
Thousand
Hundred
Te n O ne
BIT0:
output freq.
(before compensation)
BIT1:
output freq.
(after comensation)
BIT2:
set freq.
BIT3:
output current
(A)
BIT0
:actual speed
(rpm)
BIT1:set speed
(rpm)
BIT2:actual line speed (m/s)
BIT3
:set line speed (m/s)
BIT0
:output power
BIT1
:output torque
(%)
BIT2
:reserved
BIT3
:reserved
BIT0
:reserved
BIT1
:reserved
BIT2
:reserved
BIT3
:reserved
Fig. 5-51 LED Displayed Parameter 1 Setting
F8.01 and F8.02 define the parameters that can
be displayed by LED when the drive is operating.
If Bit is set at 0, the parameter will not be
displayed;
If Bit is set at 1, the parameter will be displayed.
As to the conversion of binary format to Hex
format, please refer to Table 5-11. You may press
key to scroll through the parameters.
F8.02 LED displayed
parameter selection 2
Range: 000~3FFH
【
000H】
Thousand
Hundred
Ten
One
BIT0:
output voltage (V)
BIT1:
bus voltage (V)
BIT2:
VCI (V)
BIT3:
CCI (V)
BIT0
:analog close-loop feedback
BIT1
:analog close-loop setting
BIT2
:external counting value
BIT3
:terminal status
BIT0
:actual length
BIT1
:preset length
BIT2
:accumulated length
BIT3
:reserved
BIT0
:reserved
BIT1
:reserved
BIT2
:reserved
BIT3
:reserved
Fig. 5-52 LED Displayed Parameter 1 Setting
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 70

66 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
The displayed terminal information includes
status of terminal X1~X5, bi-direction
open-collector output terminals Y1 and Y2, and
relay output terminal TC. The status of terminals
are indicated by the “On” or “Off’ of LED. If the
LED turns on, that means the terminal is enabled,
and the terminal is disabled if the LED turns off,
as shown in Fig.5-53:
Fig. 5-53 Terminal Status Indication
In Fig.5-53, X1, X2, X4, X5, Y1 and TC are
enabled, X3 and Y2 disabled. There are four
LEDs are always illuminate for the convenience of
observation.
Note:
1. When the rotating speed and line speed are
displayed, these values can be modified by pressing
▲ and ▼ in real time (no need to shift to frequency
display status).
2. When F8.01 and F8.02 are all set to 0, the
frequency before compensation will be displayed.
3. You may press key to scroll through the
parameters that has been set to display in F8.01 and
F8.02 when the drive is operating.
F8.03 Displayed Parameter
at Stop state
Range: 0000~3FFFH
【
1FFH】
Thousand
Hundred
Ten
One
BIT0: reference freq.
BIT1: external counting value
BIT2: actual speed (rpm)
BIT3: prest speed (rpm)
BIT0
: actual line speed
BIT1
: preset line speed
BIT2
: VCI (V)
BIT3
: CCI (V)
BIT0
: analog close loop feedback
BIT1
: analog close-loop setting
BIT2: actual length
BIT3: preset length
BIT0
: terminal state
BIT1
: bus voltage
BIT2
: accumulated length
BIT3
: reserved
Fig. 5-54 Parameter Displayed at Stop State
F8.01 and F8.02 define the parameters that can
be displayed by LED when the drive is operating.
If Bit is set at 0, the parameter will not be
displayed;
If Bit is set at 1, the parameter will be displayed.
As to the conversion of binary format to Hex
format, please refer to Table 5-11. You may press
key to scroll through the parameters.
Note:
1. When the rotating speed and line speed are
displayed, these values can be changed by pressing ▲
and ▼ in real time (no need to change to frequency
displaying status).
2. When the setting of F8.03 is 0, the preset frequency
will be displayed.
F8.04 Rotating speed
display factor
Range: 0.1~999.9%【100.0
%】
It is used to calibrate the error of rotating speed
display. It has no effect on the actual speed.
F8.05 Line speed factor
Range: 0.1~999.9%【1.0
%】
It is used to calibrate the error of line speed
display. It has no effect on the actual speed.
F8.06 Close-loop
parameter display factor
Range: 0.1~999.9%
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 71
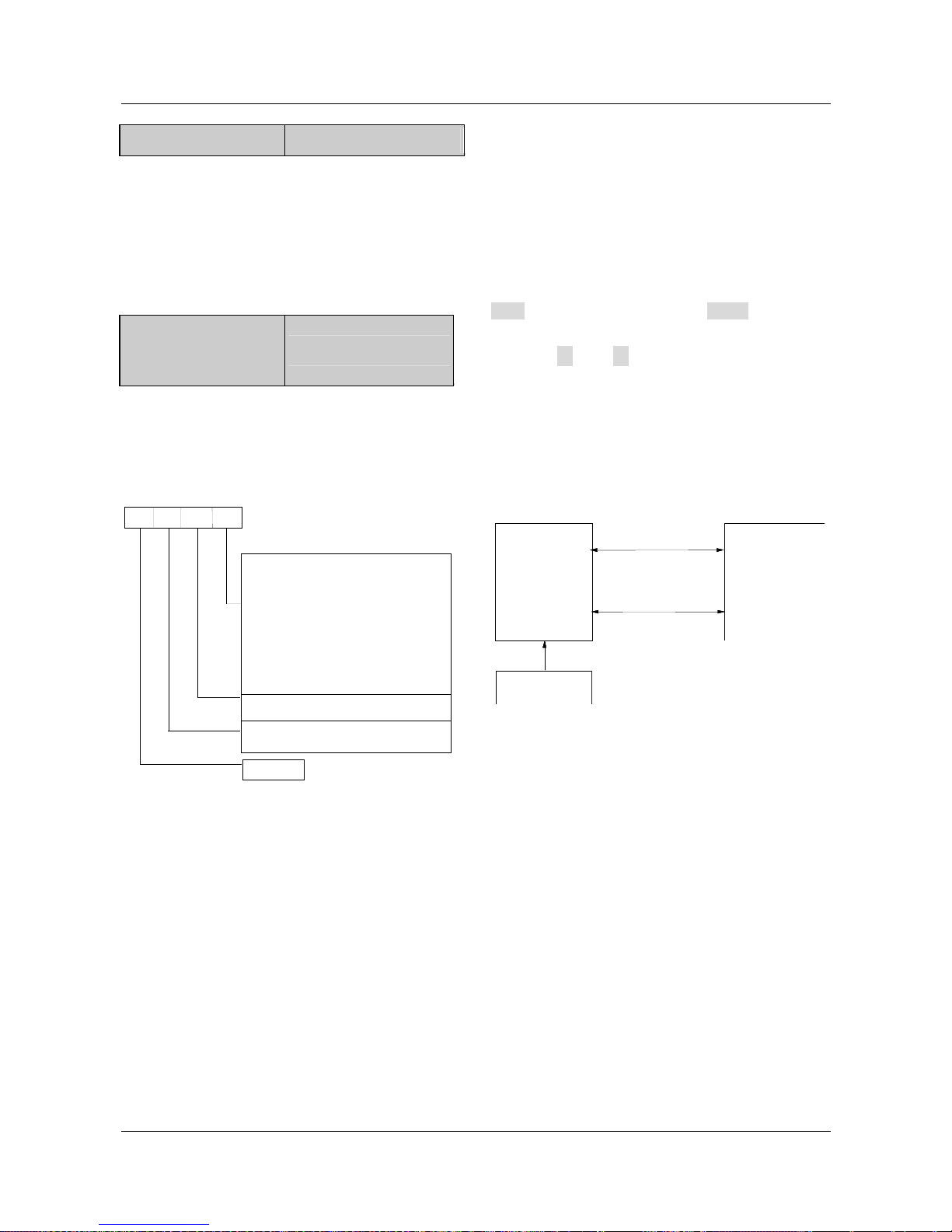
Chapter 5 Parameters 67
EV1000 Series General Purpose Variable Speed Drive User Manual
【
100.0%】
It is used to calibrate the error between preset or
feedback parameters and the actual ones. It has
no effect on close-loop PI regulation. the actual
speed.
5.10 Enhanced Function (F9)
F9.00 Operating
command bundled with
freq. setting method
Range: 000~777【000】
This function defines the combination of 3
operating command and 7 frequency setting
method, so that they can be switched at the same
time.
Thou.
Hun.
Te n
One
Freq. reference in panel control mode
0: No bundling
1: Digital setting1 (
and
▼
)
2: Digital setting 2 ( terminal
UP/DN
)
3: Digital setting 3 (serial port )
4: VCI analog input
5: CCI analog input
6: Pulse terminal input
Freq. reference in terminal control mode
0~7 : same with above
Freq. reference in serial port control mode
Reserved
▲
0~7 : same with above
7: Potentiometer
Fig. 5-55 Operating command bundled with freq.
Setting method
The reference frequency setting method is
defined by F0.00, see section 5.1 for details.
Different control modes can bundle to one
reference frequency setting method.
You may follow the methods below to change
control command and frequency setting method
simultaneously.
Method 1:Change F0.03;
Method 2: use terminal X1~X5 function No. 28
and 29.
For example:
In order to realize remote and local control, it
requires that:
①Control modes selection: The control modes
can be selected by terminal remotely or by F0.03
locally;
②If keypad (panel) control mode is used, press
RUN to run the drive and press STOP to stop the
drive. The preset frequency can be adjusted by
pressing ▲ and ▼.
③If terminal control mode is used, close FWD to
run forward and close REV to run reverse. The
preset frequency is adjusted via VCI.
④ Terminal control mode is enabled after the
drive is switched on.
Remote
Multi-function input
Te rmi na l X i
Local
Panel control
modeTe rm in al con tr ol
mode
Digital setting
mode 1
VCI input
PANEL/REMOTE
ENTER/DATA
Power on
Fig. 5-56 Local and Remote Control
To meet the above requirements,
Set F0.03=1, to select terminal control mode and
remote control is enabled after the drive is
switched on;
Set F7.00=28, and F7.01=29 to select
multi-function input terminal X1 and X2 to input
operating commands;
Set F7.08=1 to select 2-wire control mode 2. The
drive run forward when FWD is enabled, and run
reverse when REV is enabled;
Set F9.00=041, then terminal control mode is
bundled to VCI analog input, and the panel
control mode is bundled to digital setting 1.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 72

68 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
EV1000
U
V
W
PE
M
R
S
T
3-phase
power supply
QF
PLC
COM
VRF
VCI
GND
.
.
.
.
.
REV
.
.
.
P24
FWD
1~3k
.
PE
K1
K2
.
X1
.
X2
K3
K4
Fig. 5-57 Wiring for Remote and Local Control
Note:
If factory setting is 000, no bundling of operating
command and frequency setting method.
F9.01 Auxiliary freq.
setting method
Range: 0~13
【0】
F9.02 Auxiliary
reference factor
Range: 0.00~9.99【1.00】
F9.03 Digital auxiliary
ref.
Range: 0.00~650.0Hz
【
0.00Hz】
F9.04 Digital auxiliary
ref. control
Range: 000~111
【000】
The preset frequency is the final result of the
combination of main frequency and auxiliary
frequency. F9.01~F9.04 are for auxiliary
frequency. Fig.5-57 shows the course of
frequency combination.
auxiliary freq.
preset freq.
factor
F9.05, F9.06
∑
f1
f2
f3
f4
no auxiliary freq. (F9.01=0)
digital setting
(
F9.01=1~3
)
analog setting(F9.01=4~13
)
main freq.
common operation freq. (F0.00=0~5)
MS freq.(F3.23~F3.29
)
simple PLC freq.(F4.00~F4.14
)
close-loop freq. (F5.00~F5.26)
Fig. 5-58 Preset Freq. Calculation Method
▲▼
Serial
port
UPDN
CCI
PULSE
VCI
Analog
Digital
Aux. ref. freq.
Gain processing
F9.02
Pre-processi ng
Initial value and si gn
of aux. ref.
F9.03 and F9.04
Setting F9.04
Setting of F1.00
Setting
of
F9.01
Pre-processing
Fig. 5-59 Auxiliary Frequency Processing
Table 5-12 Auxiliary Freq. Setting Method
Setting Description Note
0 No auxiliary freq. Auxiliary freq.=0
1
Digital setting 1,
adjust by ▲ and ▼
2
Digital setting 2,
adjust by UP/DN
3
Digital setting 3, set
by serial port
Set by F9.03. Whether
the frequency before
power failure will be
saved depending the
setting of F9.04.
4 VCI analog setting
5 CCI analog setting
6 Terminal PULSE
7 - VCI analog setting
8 - CCI analog setting
9 -Terminal PULSE
10 VCI-5
11 CCI-5
12 PULSE-0.5×F1.03
13 Potentiometer
Depend on actual input.
Refer to F1.00.
Select digital setting 3, you may set F9.03 via
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 73

Chapter 5 Parameters 69
EV1000 Series General Purpose Variable Speed Drive User Manual
serial port to change auxiliary frequency.
If VCI-5 or CCI-5 is selected, take 5V input as the
point corresponding to zero frequency, 0~5V input
corresponds to negative output, 5~10V input
corresponds to positive output. See Fig.5-60.
Fig. 5-60 Frequency Setting Via VCI-5 or CCI-5
If PULSE-0.5×F1.03 is taken as auxiliary
frequency setting method, one half of F1.03 (max.
pulse freq.) as the point corresponding to zero
frequency, 0~0.5 times of F1.03 input
corresponds to negative output, 0.5~1 times of
F1.03 input corresponds to positive output. See
Fig.5-61.
0
F1.03
Pulse
Auxiliary frequency
0.5 fmax
-0.5 fmax
Pmid——1/2 *Max input pulse frequency (F1.03)
fmax——frequency corresponds to Max analog
value (F1.07 or F1.11)
Pmid
Fig. 5-61 PULSE-0.5×F1.03 As Freq. Input
F9.02: Analog auxiliary reference factor
It is valid when F9.01=4~12. The auxiliary
reference undergoes F9.02 gain calculation first,
and then output according to F1.00.
F9.03: initial value of digital auxiliary reference
It is valid when F9.01=1~3. It is the initial setting
of any of the 3 method.
F9.04: digital auxiliary reference control
It is valid when F9.01=1~3. See Fig. 5-62.
Thou.
Ten
One
Save
0: Save ref. Freq. upon power outage
1: Not save ref. F
req. upon power
outage
Stopping freq.
0: Hold ref. Freq. at stop
1: Clear ref. Freq. at stop
Sign of auxi. ref. Freq.
0: +, main ref+ auxi. ref. Freq.
1: -, main ref
-
auxi. ref. Freq.
Reserved
Hun.
Fig. 5-62 Digital Auxiliary Freq. Setting
One’s place of F9.04
0: save the auxiliary freq. at power off
The auxiliary frequency will be saved in F9.03,
and the sign of the freq. saved in F9.04.
1: not save the auxiliary freq. at power off
Ten’s place of F9.04
0: maintain the auxiliary freq. if the drive stops
1: preset frequency is cleared if the drive stops
Hundred’s place of F9.04: sign of auxiliary freq.
0: (+) positive sign.
Preset freq. is the sum of main freq. and auxiliary
freq.
1: (+) negative sign
Preset freq. is the result of main freq. minus
auxiliary freq.
Note:
When the inputting mode of auxiliary reference
frequency is the same with that of main reference
frequency, the auxiliary reference frequency setting is
invalid.
F9.05 Preset freq.adjust mode
Range: 0~2
【0】
F9.06 Factor for calculating
preset freq.
Range: 0.0%~200.0%
【100.0%】
F9.05 defines how to calculate the preset
frequency. Refer to Fig. 5-57.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 74

70 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
0: disabled
No additional summing operation to the sum of
main freq. and auxiliary freq. See Fig. 5-58.
1: regulate based on max. output freq. (F005)
Preset freq. f4=f3+F0.05×(F9.06-100%)
2: regulate based on current output freq. (F005)
Preset freq.f4=f3+f3× (F9.06-100%)=f3×F9.06
F9.07 STOP/RESET key’s
function and keypad lock
Range: 000~402 【000
】
This function defines the function of
STOP/RESET key and keypad lock selection.
Thou.
Hun.
Te n
One
STOP/RESET
0: Active in keypad control mode
1: Active in all control modes
2: Active in keypad control mode,
drive displays E015 if used in
other control modes
Reserved
Keypad lock-up
0: No lock up
1: Lock up
2: Lock all the keys except STOP
3: Lock up all the keys except
4: Lock up except RUN and STOP
Reserved
Fig. 5-63 Stop/Reset Key’s Function and
Keypad Lockup
One’s place: STOP/RESET key’s function
It is to set the usage and function of
STOP/RESET key when you want to stop the
drive.
0: effective when keypad control is selected.
1: effective for keypad, terminal and serial port
control. Press this key and the drive will stop in
specified manner.
2: effective for keypad, terminal and serial port
control. In keypad control mode, press this key
and the drive will stop in specified manner. But in
terminal or serial port control mode, pressing this
key will trigger E015 alarm and the drive will coast
to stop.
STOP/RESET can be used to reset a fault in all
control mode.
Ten’s place: reserved
Hundred’s place: lock up keypad selection
You can select to lock all or part of the keys.
0: not lock the keypad.
1: lock all keys on the keypad.
2: lock all keys on the keypad except
STOP/RESET key.
3: lock all keys on the keypad except key.
4: lock all keys on the keypad except RUN and
STOP key.
Keypad locking method: press FUNC/DATA key
and PRG key at the same time for 3 seconds.
Unlocking method: press FUNC/DATA key and
hold it, press ▼ key three times (within 3
seconds).
F9.08 Reserved
F9.09 Acc/Dec time unit
Range: 0, 1
【0】
0: second
1: minute
It is valid for all acceleration or deceleration
except jog and traversing operation.
The Acc/Dec time can be as long as 60 hours.
Note:
It is recommended to select Second as time unit.
F9.10 Droop control
Range: 0.00~10.00Hz
【
0.00Hz】
The function applies to the occasion that many
drives control a single load for equalizing power
distribution. As Fig. 5-64 shows, 5 drives are
driving a conveyer of 5 motors.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 75

Chapter 5 Parameters 71
EV1000 Series General Purpose Variable Speed Drive User Manual
Drive
Motor
Conveyer
1
2 3 4 5
Load
Fig. 5-64 Droop Control
When some drive’s load is too heavy, it will
reduce output power to shirk part of the load
according to F9.10. You may adjust the value
gradually. Refer to Fig.5-65 for the relation of load
and output frequency.
o
Torque
Rated
torque
Synchronuous speed
Droop control
No droop control
Speed
Fig. 5-65 Droop Control Effect
F9.11 High usage of bus voltage
Range: 0、1
【1】
When the electric network voltage is much lower
(under 15% of rated voltage) or the drive works
with a heavy load for long time, it will boost its bus
voltage usage rate to increase output voltage.
0: disabled
1: enabled
Note:
If F9.11 is enabled, the output harmonic components
will increase slightly.
F9.12 Zero freq.
threashold
Range: 0.00~650.00Hz
【0.00Hz】
F9.13 Zero freq.
hysteresis
Range: 0.00~650.00Hz
【0.00Hz】
The above two parameters are to set zero
frequency hysteresis control.
Take analog CCI for example, see Fig.5-66:
Startup process:
When the Run command is given out, only after
CCI current arrives at I
b
and the corresponding
frequency reaches fb, does the drive start and
accelerate to the preset frequency.
Stop:
During operation, if CCI current reduces to I
b
, the
drive will not stop until it reaches Ia and the
corresponding frequency becomes fa, where fa is
the threshold of zero frequency defined by F9.12.
The difference between fb and fa is zero
frequency hysteresis, defined by F9.13.
This function can realize dormancy to save
energy. In addition, the frequent start and stop at
threshold frequency can be avoided.
0
Actual
frequency
setting
presetl frequency
fa fc fb
CCI current input
Imax
Imin
Ib
Ia
Ic
Fmin
Fmax
fa: Zero frequency threshold
fb: fa+ zero freq. hysteresis
fc: Freq. corresponding to Ic(CCI input)
preset frequency
Fig. 5-66 Zero Freq. Hysteresis
F9.14 Preset length
Range: 0.000~65.535km
【
0.000km】
F9.15 Actual length
Range: 0.000~65.535km
【
0.000km】
F9.16 Length factor
Range: 0.001~30.000【1.000
】
F9.17 Length calibrate
Range: 0.001~1.000【1.000】
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 76
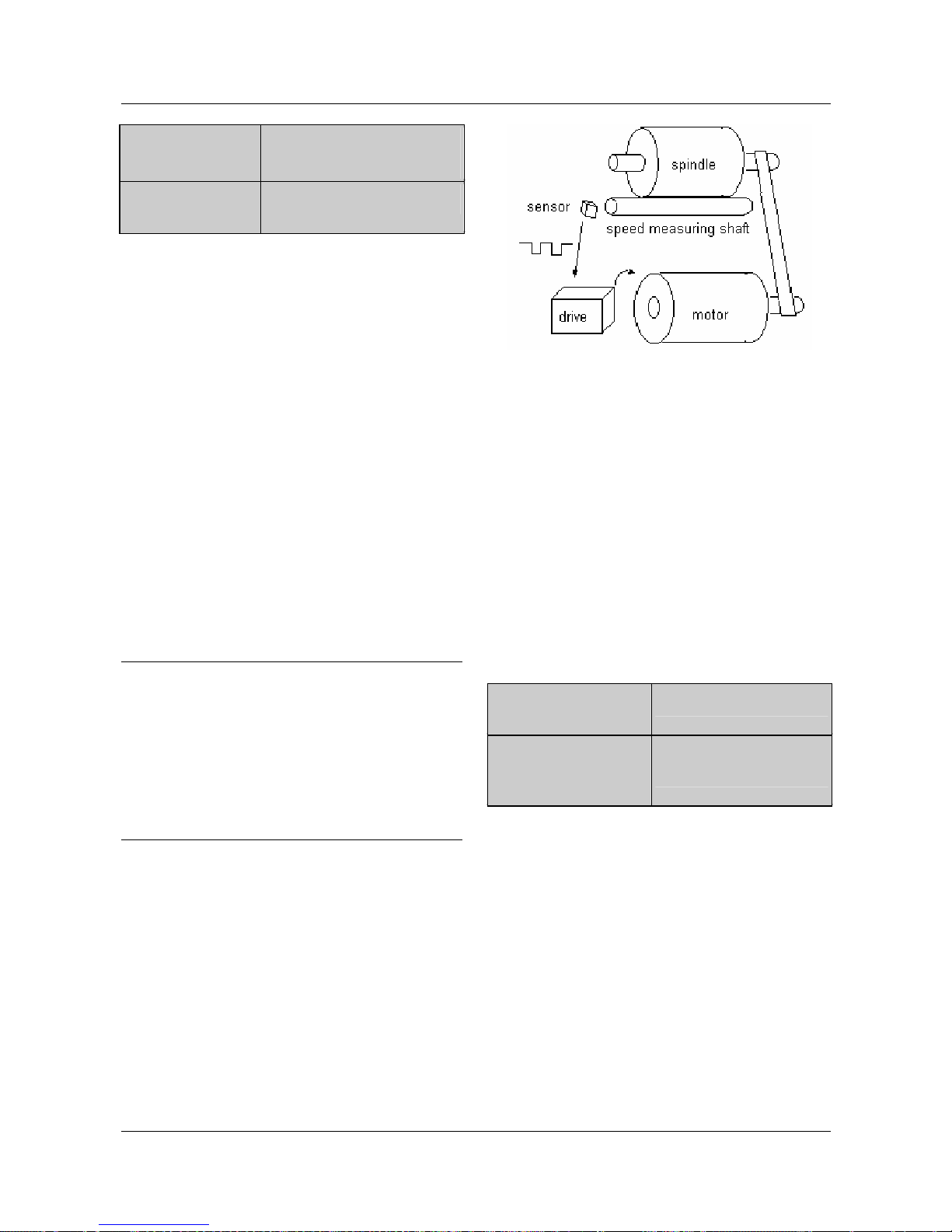
72 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
F9.18 Shaft
circumference
Range: 0.01~100.00cm
【
10.00cm】
F9.19 Pulse per
revolution
Range: 1~9999
【1】
The above parameters are used for length control,
i.e. the drive will stop when arriving certain length.
The counting pulse is input from X4 or X5 which is
defined as function No. 44, refer to F7.03~F7.04.
The length is calculated based on F9.19 and
F9.18.
Calculated length=number of counting pulse÷
number of pulse per revolution × shaft
circumference
After correcting the calculated length by F9.16
and F9.17, the actual length is obtained.
Actual length=calculated length×F9.16÷F9.17
When the actual length(F9.15)≥preset length
(F9.14), the drive will stop automatically. You
must clear the actual length record or modify the
setting of it to a value smaller than F9.14, or the
drive cannot be started.
Note:
The actual length can be cleared by multi-function
input terminal, i.e. to set the corresponding parameter
of Xi at 39. The actual length and pulse number can be
calculated only after this terminal is disconnected.
Actual length (F9.15) will be saved after power off
automatically.
Function of stop at fixed length is disabled if F9.14 is
set to 0, but the calculated length is still effective.
Application of stop at fixed length:
Fig. 5-67 Application of Stop at Fixed Length
In Fig. 5-67, the drive drives the motor, and the
motor, in turn, drives the spindle through the
conveyer. The shaft that contact with the spindle
can measure the line speed of it which will be
transmit to the drive by the sensor in the form of
pulse. The drive will calculate the length based on
the number of pulses it received. When the actual
length ≥preset length, the drive will give Stop
command automatically to stop the spinning. The
operator can remove the spindle and close the
“Clear Length” terminal (set any of F7.00~7.04 at
39). The drive is then ready for the next spindle
process.
F9.20 Low voltage
compensation (trip-free)
Range: 0、1【0】
F9.21 Freq. decrease
rate during voltage
compensation
Range: 0.00~99.99Hz/s
【10.00Hz/s】
F9.20 is to select whether to enable low voltage
compensation in case of voltage drop or
undervoltage by reducing output frequency to get
energy feedbacked from the load, so that the
drive will not trip.
F9.20=0, disabled
F9.20=1, enabled
If the setting of F9.21 is set too big, the feedback
energy of motor will be more than expected and
may cause over-voltage protection; if the setting
of F9.21 is set to small, the feedback energy of
motor is not enough, hence trip might occur. It is
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 77

Chapter 5 Parameters 73
EV1000 Series General Purpose Variable Speed Drive User Manual
recommended to set F9.21 according to load and
its inertia.
F9.22 Conditions of restart
after power failure
Range: 0, 1 【0】
F9.23 Restart delay after
power failure
Range: 0.0~10.0s
【0.5s】
F9.22 and F9.23 are to set how the drive restarts
after power failure given different control mode.
F9.22=0, not auto restart.
F9.22=1, the drive will auto restart if the Start
condition can be satisfied after a period of time
specified by F9.23.
In fact, whether to auto restart depends on F9.22,
drive’s state at power failure and control mode.
Refer to Table 5-13.
Table 5-13 Conditions of Restart after Power-on
Control mode at power-on
Keypad
Serial
port
Terminal 1
and 2,
3-wire
Terminal 1
and 2,
2-wire
F9.22
State
before
power
off
None None None None Yes
Stop 0 0 0 0 0
0
Run
0 0 0 0 0
Stop 0 0 0 0 1
1
Run
1 1 1 0 1
Note:
1. Table 5-13 shows the drive’s action under different
conditions. “0” means the drive is ready to start, and
“1” means auto start.
2. When the control mode is keypad or serial port or
3-wire terminal 1 and 2, there is no RUN command at
power on.
3. If there is a Stop command, the drive will not start.
4. When restart is allowed, the drive will start
according to F2.00.
5.11 Reserved (FA)
FA.00~FA.11
Reserved
5.12 Communication (FF)
FF.00 Communication
config
Range: 0000~1127H【0005
】
Thou. Hun. Ten One
Baud rate
:
0: 300bps
1: 600bps
2: 1200bps
3: 2400bps
4: 4800bps
5: 9600bps
6: 19200bps
7: 38400bps
Data format
0: 1-8-1 format, no parity
1: 1-8-1 format, even parity
2: 1-8-1format, odd parity
Virtual input terminal
0: Disabled
1: Enabled
Wiring mode:
0: Cable
(RS485)
1: MODEM
(RS232-RS485 adapter required)
Fig.5-68 Communication Configuration
This parameter sets the communication mode.
Virtual terminal is set by host command to
simulate the actual terminal. Each bit of the
command represents the state of corresponding
terminal. Please refer to Appendix 2. When the
virtual terminal, which function the same as the
actual one, is effective, the actual terminal is
disabled.
The setting of the thousand’s place does not
affect the communication. When MODEM mode
is selected, every time the drive is powered on,
the MODEM will be initialized through the RS485
port, so that it can response automatically after
receiving 3 ring signals for remote control.
Remember that a RS485-RS232 adapter is
needed.
FF.01 Local address
Range: 0~127
【1】
During serial communication, the parameter can
identify local drive’s address.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 78

74 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
Note:
”127” is the broadcasting address. When it is set so,
the slave can receive and execute the command by
host, but will not answer back.
FF.02 Communicate
timeout detect
Range: 0~1000.0s【0.0s
】
When the communication signal is lost for a
period longer than the setting of this parameter,
the drive deems that communication fault occurs.
When it is set at 0, the drive will not detect the
communication status.
FF.03 Response delay
Range: 0~1000ms【5ms】
Response delay refers to the time from the drive
receiving and executing the command of the host
to returning reply frame to the host.
5.13 Moter’s Parameters (FH)
FH.00 Motor’s poles
Range: 2~14【4】
FH.01 Rated power
Range: 0.4~999.9kW
【
Depending on model】
FH.02 Rated current
Range: 0.1~999.9A
【
Depending on model】
FH.00~FH.02 are to set motor’s parameters. Be
sure to input the values according to motor’s
nameplate.
Note:
The motor’s power should match that of the drive.
Generally the motor’s power is allowed to be lower
than that of the drive by 20% or bigger by 10%,
otherwise the control performance cannot be ensured.
FH.03 Current without
load I0
Range: 0.1~999.9A【Depending
on model】
FH.04 Stator
resistance %R1
Range: 0.0~50.00%【Depending
on model】
FH.05 Leakage
inductance %Xl
Range: 0.0~50.00%【Depending
on model】
FH.06 Rotor
resistance%R2
Range: 0.0~50.00%【Depending
on model】
FH.07 Mutual
inductance%Xm
Range: 0.0~2000.0
%
【
Depending on model】
Please refer the above parameters to Fig. 5-69.
R
m
X
m
I
0
I
1
U
1
R
1
j
X
1
l
R
2
j
X
2
l
1-S
S
R
2
I
2
Fig. 5-69 Motor’s Equivalent Circuit
In Fig. 5-6868, R
1
, X1l, R2, X2l, Xm and I0 represent
stator’s resistance, stator’s leakage inductance,
rotor’s resistance, rotor’s leakage inductance,
mutual inductance and current without load
respectively. The setting of FH.05 is the sum of
stator’s leakage inductance and rotor’s
inductance.
The settings of FH.04 ~FH.07 are all percentage.
Formula used for calculating stator’s resistance or
rotor’s resistance:
()
%100
3/
% ×
⋅
=
IV
R
R
R: Stator’s resistance or rotor’s resistance that is
converted to the stator’s side;
V: rated voltage;
I: motor’s rated current
Formula for calculating (leakage inductance or
mutual inductance):
()
%100
3/
% ×
⋅
=
IV
X
X
X: the sum of leakage inductance of stator and
rotor, or mutual inductance. The rotor’s
inductance has been converted to the stator’s
side;
V: rated voltage;
I: motor’s rated current
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 79

Chapter 5 Parameters 75
EV1000 Series General Purpose Variable Speed Drive User Manual
If motor’s parameters are available, please set
FH.04 ~FH.07 to the values calculated according
to the above formula.
If the drive performs auto-tuning of motor’s
parameters, then the settings of FH.03~FH.07
after the auto-tuning process will be updated.
After motor power(setting of FH.01) is changed,
the drive will set FH.02~FH.07 to corresponding
parameters.
FH.08 Rated slip
frequency
Range: 0.00~20.00Hz
【
0.00Hz】
Motor’s rated slip frequency can be calculated by
the motor’s rated speed (on the nameplate):
Rated slip frequency = motor’s rated frequency
(i.e. basic operating frequency F0.06)×(motor’s
synchronous speed-motor’s rated speed)÷
motor’s synchronous speed.
Where: motor’s synchronous speed = motor’s
rated frequency ×120÷number of motor’s
poles(FH.00)
After setting the slip frequency, the slip
compensation will be enabled by F3.07~F3.09.
FH.09 Auto tuning
Range: 0~2【0】
FH09 can be used to measure and write-in the
motor’s parameters automatically.
0: Auto-tuning is disabled
1: Stationary auto-tuning (Start auto-tuning to a
standstill motor)
Before starting auto-tuning, values on the motor’s
nameplate must be input correctly (FH.00~
FH.02).
When starting auto-tuning to a standstill motor,
the stator’s resistance (%R1), rotor’s resistance
(%R2) and the leakage inductance (%X1) will be
measured and the measured values will be
written into FH.04, FH.05 and FH.06
automatically.
FH.09=2: rotating auto-tuning
When starting a rotating auto-tuning, at first, the
motor is in standstill status, and the stator’s
resistance (%R1), rotor’s resistance (%R2) and
the leakage inductance (%X1) will be measured,
and then the motor begins to rotate, mutual
inductance (%XM), I
0
will be measured and
written into FH.04, FH.05, FH.06, FH.07 and
FH.03 automatically.
After auto-tuning, FH.09 will be set to 0
automatically.
Auto-tuning procedures:
1) Set the “F0.06 basic operating frequency” and
“F0.07 Max output voltage” correctly according to
the motor’s feature;
2) Set the FH.00, FH.01 and FH.02 correctly;
3) If FH.09 is set to 2, Acc time (F0.10) and Dec
time (F0.11) should be set correctly and remove
the load from the motor and check the safety;
4) Set FH.09 to 1 or 2, press FUNC/DATA, and
then press RUN to start auto-tuning;
5) When the operating LED turns off, that means
the auto-tuning is over.
Note:
When setting FH.09 to 2, you may increase Acc/Dec
time if over-current or over-voltage fault occurs in the
auto-tuning process;
When setting FH.09 to 2, the motor’s load must be
removed before starting rotating auto-tuning;
The motor must be in standstill status before starting
the auto-tuning, otherwise the auto-tuning cannot be
executed normally;
If it is inconvenient to start auto-tuning (e.g. the motor
cannot break away from the load), or you don’t
require much on motor’s control performance, you can
use stationary auto-tuning or even disable the function.
You may input the values on the motor’s nameplate
correctly (FH.00~FH.02).
If the auto-tuning function is unavailable and there is
motor’s parameters on the nameplate, you should
input the values correctly (FH.00~FH.02), and then
input the calculated values (FH.03~FH.07). Please set
the parameters correctly.
If auto-tuning is not successful, the drive alarms and
displays fault E024.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 80

76 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
FH.10 Motor stabilization
fator
Range: 0~255
【
Depending on model
】
FH.10 is used to suppress the oscillation caused
by the drive and the motor. If the drive’s output
current changes constantly at fixed load, the
oscillation can be reduced by adjusting FH.10.
FH.11~FH.21 Reserved
5.14 Protection (FL)
FL.00 Motor overload
protection mode
Range: 0、1、2【1】
0: disabled
The overload protection is disabled. Be careful to
use this function because the drive will not protect
the motor in case of overload;
1:Common motor (with low speed compensation)
Since cooling conditions of common motor
deteriorates at low speed, the motor’s thermal
protection threshold should also be adjusted. The
“Low Speed” here refers to the operating
frequency lower than 30Hz.
2: Variable frequency motor (without low speed
compensation)
The cooling effect of variable frequency motor is
not affected by the motor’s speed, so low speed
compensation is not necessary.
FL.01 Motor overload
protection factor
Range: 20.0~110.0%【100.0
%】
In order to apply effective overload protection to
different kinds of motors, the Max output current
of the drive should be adjusted as shown in Fig.
5-70.
Motor overload
protective
coefficient
100%
80%
1min
Time
Current
200%
160%
Fig. 5-70 Motor’s overload protection coefficient
The efficient is calculated by the formula below:
Motor overload
protection coefficient
motor rated current
inverter's rated output current
×
100
%
=
Generally, the Max load current is the motor’s
rated current.
Note:
If the motor’s rated current does not match that of the
drive, adjust FL.00~FL.01 to perform overload
protection.
FL.02 Stall overvoltage
Range: 0, 1【1】
FL.03 Stall overvoltage
point
Range:Depending on model
FL.02=0, function disabled
FL.02=1, enabled
The setting of FL.03 is given in the table below:
Model Range Default
380V 120.0%~150.0% 140.0%
220V 110.0%~130.0% 120.0%
When the drive is decelerating, the motor’s
decreasing rate may be lower than that of the
drive’s output frequency due to the inertia of load.
At this time, the motor will feed the energy back to
the drive, resulting in voltage rise on the drive's
DC bus, which will cause overvoltage trip.
Function of FL.02: during the deceleration, the
drive detects the bus voltage and compares it with
the stall over voltage point defined by FL.03. If the
bus voltage exceeds FL.03, the drive will stop
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 81

Chapter 5 Parameters 77
EV1000 Series General Purpose Variable Speed Drive User Manual
reducing its output frequency. When the detected
bus voltage is lower than the point, the
deceleration will continue. Please refer to in Fig.
5-71.
Overvolt
point at
stall
Output
freq.
Time
Time
Fig. 5-71 Stall Overvoltage
Note:
1. The drive will alarm and display “E015” if it has
been in stall over-voltage status for more than 1
minute.
2. If the stall point is set too low, you should prolong
the Acc and Dec time properly.
3. If the stall point is set too high, it is useless for
overvoltage protection.
FL.04 Overload detection
config
Range: 000~111【000】
FL.05 Overload detection
threshold
Range: Depending on
model
FL.06 Overload alarm
delay
Range: 0.0~60.0s【5.0s
】
EV1000 has overload protection over motor and
drive. See Table 2-1 for drive overload protection,
and FL.00 and FL.01 for motor overload
protection. FL.04~FL.06 can monitor the overload
condition before overload protection acts.
FL.04 defines the overload detection mode,
action mode and reference current.
Thou.
Hun. Ten One
Overload detection mode
0: Detect all the time
1: Detect in case of constant speed
Overload action mode
0: No alarm, continue operation
1: Alarm and stop operation
Reference current
0: motor's rated current (E014)
1: drive's rated current (E013)
Reserved
Fig. 5-72 Overload Detection Configuration
One’s place of FL.04: overload detection mode
0: the detection is done as long as the drive is
operating.
1: the detection is done only when the drive works
at constant speed.
Ten’s place of FL.04: action mode
0: The overload is ignored, no alarm.
1: During “Overload Alarm Effective Period”, the
drive will alarm and stop operation. The
“Overload Alarm Effective Period” means the
drive’s operating current has exceeds FL.05 and
whose duration has exceed overload alarm delay
(FL.06).
Hundred’s place of FL.04: reference current
0: the overload detection threshold (FL.05) is set
based on motor’s rated current. Fault code E014.
1: the overload detection threshold (FL.05) is set
based on drive’s rated current. Fault code E013.
FL.05 defines the threshold for overload alarm. It
is a percentage of either drive’s or motor’s rated
current. Refer to setting of the hundred’s place of
FL.04. The setting of FL.05 also relates to the
type of the drive. Please refer the table below:
Type Setting Range Default
G 20.0%~180.0% 130.0%
P 20.0%~130.0% 120.0%
Overload alarm delay FL.06, please refer to Fig.
5-73.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 82

78 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
Alarm
alarm delay
alarm delay
Overload threshold
Output current
Effective period
Time
Time
Fig. 5-73 Overload Detection and Alarm
Note:
1. Overload detection threshold should be lower than
the overload protection threshold;
2. During the overload alarm delay period, if the
drive’s current becomes lower than overload detection
threshold, no alarm will be triggered.
FL.07 Auto current limiting
threshold
Range: Depending on model
FL.08 Freq.decrease rate
rate during current limiting
Range: 0.00~99.99Hz/s
【
10.00Hz/s】
FL.09 Action mode of auto
current limiting
Range: 0~4【2】
Auto current limiting function is used to limit the
load current under the preset current in real time
to avoid trip due to over-current. This function is
especially useful for the applications of larger load
inertia or sharp change of load.
FL.07 defines the threshold for current limiting. Its
setting is a percentage of drive’s rated current Ie.
Type Setting Range Default
G 20.0%~180.0% 150.0%
P 20.0%~130.0% 110.0%
FL.08 defines the decreasing rate of output
frequency when the drive is in auto current
limiting status.
If FL.08 is set too small, overload fault may occur.
If FL.08 is set too big, the drive may be in energy
generation status for long time that may result in
overvoltage protection.
The action mode of auto current limiting function
is decided by FL.09.
FL.09=0: disabled;
FL.09=1: auto current limiting is effective during
acceleration or deceleration but ineffective at
constant speed, no silencing function;
FL.09=2: effective all the time, no silencing
function;
FL.09=3: auto current limiting is effective during
acceleration or deceleration but ineffective at
constant speed, with silencing function;
FL.09=4: effective all the time, with silencing
function.
Because the output frequency might change
during current limiting, the function should be
used for applications that require constant speed
and stable frequency output.
FL.10 Auto reset times
Range: 0~10【0】
FL.11 Auto reset interval
Range: 2.0~20.0s【5.0s】
Auto Reset function can reset a fault according to
the preset FL.10 and FL.11. If FL.10 is set to 0,
auto reset is disabled. Protective action will be
taken if a fault occurs.
Note:
Overcurrent protection and external fault (E015)
cannot be reset automatically.
During the reset interval, the drive’s stops operation
and restarts on the fly when the reset is finished.
Be careful when using auto-reset function, otherwise
human injure or material loss may occur.
FL.12 Protective action
mode 1
Range: 000~101【000】
FL.13 Protective action
mode 2
Range: 0000~1211【0000
】
The fault alarm and protective action can be
prohibited by setting FL.12 and FL.13, so that the
drive can continue working.
FL.12 defines the protective action in case of
communication and E
2
PROM error.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 83

Chapter 5 Parameters 79
EV1000 Series General Purpose Variable Speed Drive User Manual
Thou.
Hun.
Ten
One
Action for communicat ion fault
0: Alarm and coast to stop
1: No alarm, continue operation
2: No alarm, stop
(only in serial port control mode)
3: No alarm, stop
( all control modes)
Reserved
Action for EEPROM fault
0: Alarm and coast to stop
1: No alarm, continue operation
Reserved
Fig. 5-74 Protective Action Mode 1 Setting
FL.13 defines the action mode for undervoltage,
auto reset interval fault lockup and output phase
loss.
Thou.
Hun. Te n
One
Indication for under volt fault
-
0: No indication
1: Indicate the fault
Indication for auto reset fault
0: No indication
1: Indicate the fault
Fault lock -up
0: Disable
1: Enable (no fault indication)
2: Enable (indicate the fault)
Phase-loss protection
0: Input&output phase failure protect
1
: No input phase failure protect
2: No output phase failure protect
3: No
phase loss protect
Fig. 5-74 Protective Action Mode 2 Setting
Attention
!
Please be careful when using
FL.12 and FL.13, otherwise human injure or
material loss may occur.
FL.14 Fault type of the
first time
Range: 0~24【0】
FL.15 Fault type of the
second time
Range: 0~24【0】
FL.16 Fault type of the
third time (latest)
Range: 0~24【0】
FL.17 Bus voltage at the
last fault
Range: 0~999V【0V】
FL.18 Output current at
the last fault
Range:0~999.9A【0.0A】
FL.19 Freq. at the last
fault
Range:0.00~650.00Hz
【
0.00Hz】
EV1000 has 24 kinds of alarms. It can memorize
the types of 3 latest faults (FL.14~FL.16), and the
voltage, current and frequency (FL.17~FL.19) of
the most recent fault.
See chapter 6 for the detailed introductions to the
alarm.
5.15 Operating Time (Fn)
Fn.00 Preset operating time
Range: 0~65.535kh【0】
Fn.01 Total operating time
Range: 0~65.535kh【0】
Fn.02 Reserved
Fn.03 Reserved
If the accumulated operating time has amount to
Fn.00, the drive will give out an indicating signal.
Please refer to F7.10~F7.12.
Fn.01 is the total accumulated operating time
from delivery till now.
5.16 Protection of Parameters
(FP)
FP.00 User password
Range: 0000~9999【0000
】
User’s password can prevent unauthorized
persons from checking and modifying the
parameters.
Set FP.00 to 0000 if the user’s password is not
necessary.
If you want to set the user’s password, input a
4-digit number, press FUNC/DATA to confirm. If
not pressing any key within 5 minutes, the
password will become effective.
Changing the password:
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 84

80 Chapter 5 Parameters
EV1000 Series General Purpose Variable Speed Drive User Manual
Press PRG, input the old password, and then
select FP.00 (at this time FP.00=0000), input new
password and press FUNC/DATA to confirm. The
password will become effective if not pressing
any key within 5 minutes.
Note:
Please learn the password by heart.
FP.01 Write-in protection
Range: 0~2
【1】
FP.01 is to set the mode of write-in protection of
parameters.
0: All parameters are allowed to be changed;
1: No parameters can be changed except the
F0.02 and FP.01;
2: No parameters can be changed except FP.01.
Note:
The factory setting of FP.01 is 1. If you need modify
parameters, FP.01 must be set to 0; and then set it to 1
or 2 after modification to protect these parameters.
FP.02 Parameter
initialization
Range: 0~2
【0】
0: disabled
1: clear fault record
Clear the contents of FL.14~FL.19.
2: restore to factory defaults
If FP.02 is set at 2, the parameters listed before
FL.14 except FH.00 and FH.08 will be restored to
factory defaults.
After the initialization, the parameter will change
to 0 automatically.
FP.03~FP.04 Reserved
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 85

Chapter 6 Troubleshooting 81
EV1000 Series General Purpose Variable Speed Drive User Manual
Chapter 6 Troubleshooting
All the possible faults of EV1000 have been given in Table 6-1. Fault code range is E001~E024. You can
user can check the faults according to the following table and record detailed fault phenomena before
seeking service. Please contact the sales distributor when you need technical supports.
Table 6-1 Fault Information and Diagnosis
Fault
code
Fault
descriptions
Possible reasons Actions
Too short Acc time Prolong the Acc time
V/F curve is not suitable.
Check and adjust V/F curve, adjust torque boost
or set the motor parameters correctly to ensure
the normal auto torque boost works well.
The rotating motor re-starts after the drive
stops instantly.
Start when the motor stops
Low AC supply voltage Check the drive’s input AC supply
E001
Over-current in
Acc process
Drive power is too small Select a higher power drive
Too short Dec time Prolong the Dec time
Negative-torque load or the load inertia is
too high
Connect suitable braking device
E002
Over-current in
Dec process
Too low drive’s power Select the drive with larger capacity
Sudden change of load Reduce the change of the load
Too short Acc/Dec time Prolong Acc/Dec time
Abnormal load Check the load
Low AC supply voltage Check the AC supply voltage
E003
Over-current in
constant speed
operation
Too low drive’s power Select the drive with larger capacity
Abnormal AC supply voltage Check the AC supply voltage
Too short Acc/Dec time Prolong the Acc time
E004
Over voltage in
Acc process
The drive is re-started with a rotating motor Start when the motor stops
Too short Dec time (with reference to
generated energy)
Prolong the Dec time
E005
Over voltage in
Dec process
Negative-torque load or the load inertia is
too high
Use suitable dynamic braking device
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 86

82 Chapter 6 Troubleshooting
EV1000 Series General Purpose Variable Speed Drive User Manual
Fault
code
Fault
descriptions
Possible reasons Actions
Abnormal AC supply voltage Check the AC supply voltage
Too short Acc/Dec time Prolong the Acc/Dec time
Abnormal change of input voltage Install input reactor
E006
Over voltage in
constant-speed
operating
process
Too high load inertia Use suitable dynamic braking device
E007
Over voltage of
drive’s control
power supply
Abnormal AC supply voltage Check the AC supply voltage or seek service
E008 Reserved Reserved Reserved
E009
Output phase
loss
Output phase failure among Phase U, V
and W
Check the drive’s output wiring
Check the cable and the motor
E010 Reserved Reserved Reserved
Ambient over-temperature Lower the ambient temperature
Obstruction of ventilation channel Clear the ventilation channel
Fan does not work Replace the fan
E011
Rectifier’s
heatsink
overheat
Inverter fault Seek service
E012 Reserved Reserved Reserved
Too short Acc time Prolong Acc time
Too large DC braking energy
Reduce DC braking current, prolong braking
time
Improper V/F curve Adjust V/F curve or torque boost value
The drive is re-started with a rotating motor Start when the motor stops
Low AC supply voltage Check the AC supply voltage
E013 Drive overload
Too heavy load Select the drive with larger power
Improper V/F curve Set V/F curve and torque boost value correctly
Low AC supply voltage Check the AC supply voltage
Common moter operating at low speed,
large load for long time
Select special motor for such operating condition
Incorrect setting of motor overload
protection factor
Correct the setting
E014 Motor Overload
Moter blocked or load sudden change Check the load
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 87

Chapter 6 Troubleshooting 83
EV1000 Series General Purpose Variable Speed Drive User Manual
Fault
code
Fault
descriptions
Possible reasons Actions
Press STOP key when operating at
non-keypad mode
Check the present operating mode
Press STOP when the drive is in stall
status
Set the operating parameters correctly
The drive will report E015 fault if it is in stall
status for 1 minute
Set the operating parameters correctly
E015
Emergency stop
or external
equipment fails
Terminal used for stopping the drive in an
emergency is closed
Disconnect the terminal if the external fault is
cleared
E016
E
2
PROM R/W
fault
R/W fault of control parameters
Press STOP/RESET to reset
Seek service
Wrong baud rate setting Set the baud rate correctly
Serial port communication error
Press STOP/RESET to reset
Seek service
Host PC does not work
Check whether the host PC is working or not;
Check the wiring
E017
RS232/RS485
communication
failure
Improper setting of alarm conditions Modify FF.02, FF.0, FL.12
E018 Reserved Reserved Reserved
Wires or connectors of control board are
loose
Check and re-wire
Auxiliary power supply is damaged Seek service
E019
Current
detection circuit
is faulty
Current detection circuit fault Seek service
E020
System
disturbance
Severe disturbance from outside
Press STOP/RESET to reset or install power
filter at the input side of the drive.
E021 Reserved Reserved Reserved
E022 Reserved Reserved Reserved
E023 Reserved Reserved Reserved
Input motor parameters wrong
Re-input moter parameter according to the
nameplate
E024 Tuning fault
Tuning overtime Check motor cables and limit it within 100m.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 88
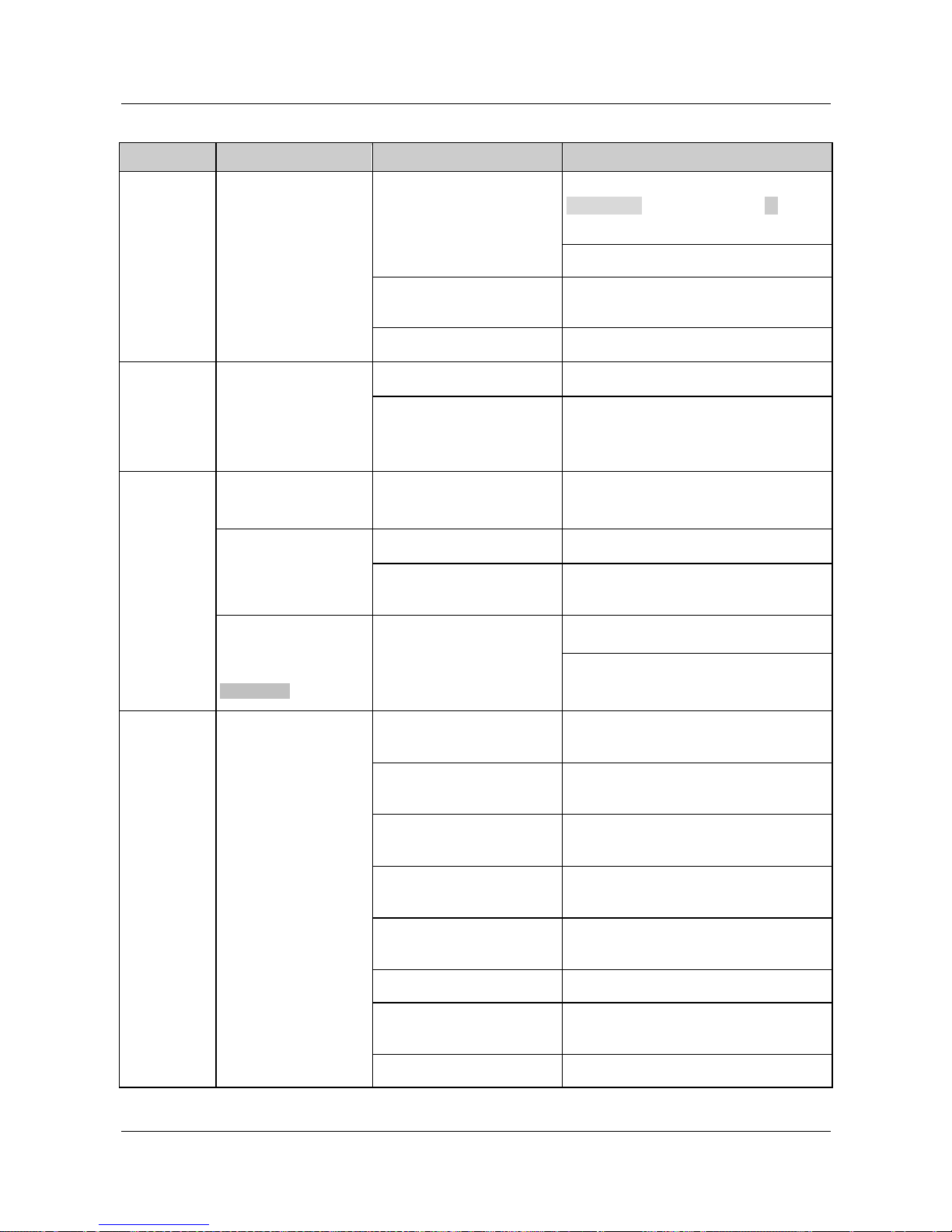
84 Chapter 6 Troubleshooting
EV1000 Series General Purpose Variable Speed Drive User Manual
Table 6-1 Operation Related Faults and Counteractions
Phenomena Conditions
Possible reasons of fault Actions to take
In stop or operating state, keep pressing
FUNC/DATA key, when pressing ▼ key
three times.
Keypad locked
Power off the drive and then power on again.
Panel’s cables are not well
connected.
Check the wiring
No response
of keys
Part of the keys or all the
keys are disabled
Panel’s keys are damaged
Replay operation panel or seek service
Not power on. Power on
LED no display
No LED segment
illuminates
Keypad cable reverse
connected
Immediately remove the keypad and connect
it again correctly. If the problem persists,
please connect our technical support person.
Cannot be changed
during operating
Parameter modification
property is
×
Settings of parameters can be changed in
stop status
Set FP.01 to 1 or 2 Set FP.01 to 0
Settings of part of
parameters cannot be
changed.
Parameter’s modification
property is *
The parameters cannot be changed by user.
Input correct user’s password
Parameter
setting cannot
be changed
No parameter but
“0.0.0.0.” is displayed
when pressing
MENU/ESC.
User’s password is required
Seek service
“Coast to stop” terminal
effective
Check “coast to stop” terminal
“Operation prohibition” terminal
effective
Check “operation prohibition” terminal
“External stop” terminal
effective
Check “external stop” terminal
Preset length arrives Check length setting or delete actual length
value
In 3-wire control mode, the
control terminal not closed.
Close the control terminals
Alarm due to fault Clear the fault
Improper setting of host virtual
terminals
Cancel the virtual terminal function or
reconfigure it, or modidy F7.35
Drive does not
run
Press RUN key, the drive
does not run and RUN
indicator is off.
Incorrect input terminal logic Check F7.35 setting
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 89

Chapter 6 Troubleshooting 85
EV1000 Series General Purpose Variable Speed Drive User Manual
Phenomena Conditions
Possible reasons of fault Actions to take
Alarm occurs Find out the reason and reset.
Single cycle of PLC finishes Check PLC configuration
Preset length arrives Clear the actual length value or set F9.14 at
0
Interruption of the
communication between the
drive and host or flush mount
faceplate
Check communication cables and FF.02,
FF.03, FL.12 settings
Power failure Check the power supply
Command input method
changed
Check the command input method and
corresponding parameter
The drive stops
automatically without
STOP command. The
RUN indicator goes out.
Positive/negative logic of
control terminal changed
Check F7.35.
Auto reset of fault Check reason of fault and the auto reset
function
Simple PLC pause Check PLC pause function (terminal)
Interrupt signal feedback from
external devices
Check the configuration of external interrupt
and faulty external devices
Stop at zero-frequency Check F9.12 and F9.13
Reference frequency is 0 Check the reference frequency
Skip frequency Check skip frequency
Positive logic, close loop
feedback>reference frequency
Negative logic, close loop
feedback<reference frequency
Check the close loop setting and feedback
Frequency adjustment is set at
0
Check F9.05 and F9.06
Unexpected
stops during
running
The drive stops
automatically without
STOP command. The
RUN indicator is still on,
zero-frequency running
Restart low voltage
compensation function
enabled, and low supply
voltage
Check the configuration of restart and the
input voltage
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 90

86 Chapter 7 Maintenance
EV1000 Series General Purpose Variable Speed Drive User Manual
Chapter 7 Maintenance
Many factors such as ambient temperature, humidity, dust, vibration, internal component aging, wear
and tear will give rise to the occurrence of potential faults. Therefore, it is necessary to conduct routine
maintenance to the drives.
Note:
As safety precautions, before carrying out check and maintenance of the drive, please ensure that :
The drive has been switched off;
The charging LED lamp in the drive is off, which can be seen after removing the cover.
7.1 Routine Maintenance
The drive must be operated in the environment specified in the Section 2.1. Besides, some unexpected
accidents may occur during operation. The user should perform the routine maintenance to ensure a
good operation environment according to the table below. A good way to prolong the lifetime of the drive
is to record the routine operation data, find out and clear faults in the early stage.
Table 7-1 Daily Checking Items
Object Item Method Criterion
Temperature
humidity
Thermometer,
hygrometer
-10
℃~
+40℃. Derate if at 40℃~50℃
Dust, water and leakage observe No sign of leakage
Vibration Vibration meter Less than 5.9m/s2 (0.6g)
Environment
Gas Smell No strange smell
Heat Touch the casing Normal air flow
Sound Listen No strange sound
Output current Clamp meter Within rated range
Drive
Output voltage Voltage meter Within rated range
Heat Touch No overheat
Motor
Sound Listen No strange sound
7.2 Periodic Maintenance
You should check the drive every 3 months or 6 months according to the actual environment.
Note:
1. Only trained personnel can dismantle the drives for repairing or device replacement;
2. Don't leave metal parts like screws or pads in the drive, otherwise the equipment may be damaged.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 91
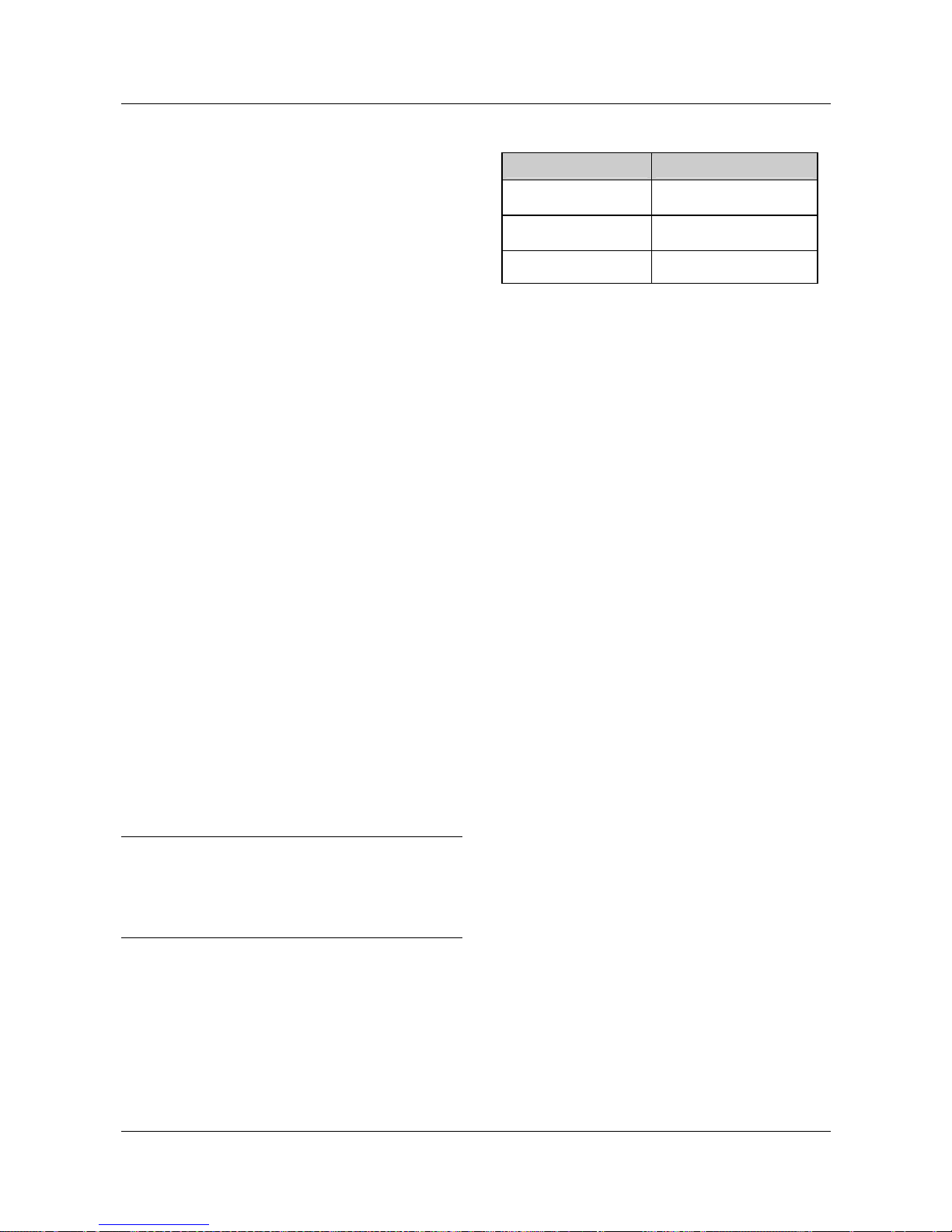
Chapter 7 Maintenance
87
EV1000 Series General Purpose Variable Speed Drive User Manual
General Inspection:
1. Whether screws of control terminals are loose.
If so, tighten them with a screwdriver;
2. Whether the main circuit terminals are properly
connected; whether the mains cables are over
heated;
3. Whether the power cables and control cables
are damaged, check especially for any wear on
the cable insulation
4. Whether the insulating tapes around the cable
lugs are stripped;
5. Clean the dust on PCBs and air ducts with a
vacuum cleaner;
6. For drives that have been stored for a long time,
it must be powered on every 2 years. When
supplying AC power to the drive, use a voltage
regulator to raise the input voltage to rated input
voltage gradually. The drive should be powered
for 5 hours without driving a motor load.
7. Before performing insulation tests, all main
circuit input/output terminals should be
short-circuited with conductors. Then proceed
insulation test to the ground. Insulation test of
single main circuit terminal to ground is prohibited,
The drive can be damaged by such a test. Please
use a 500V Mega-Ohm-Meter.
8. If performing insulation test to the motor, be
sure to disconnect the cables between the drive
and it. Otherwise, the drive might be damaged.
Hint:
Dielectric test of the drive has already been done in
the factory. It is not necessary for the user to do
dielectric test again in order to avoid potential damage
of its internal components.
7.3 Replacing of Easily-worn
Parts
The easily-worn parts of the drive are cooling fan
and electrolytic capacitor, whose life has close
relation with the environment and maintenance.
Refer to the table below.
Part Life
Fan
30
~
40 thousand hours
Electrolytic capacitor
40
~
50 thousand hours
Relay TA/TB/TC About 100,000 times
You can decide the time when the components
should be replaced according to their service
time.
1. Cooling fan
Possible cause of damages: wear of the bearing,
aging of the fan vanes.
Criteria:
After the drive is switched off, check if abnormal
conditions such as crack exists on fan vanes and
other parts. When the drive is switched on, check
if drive running is normal, and check if there is
any abnormal vibration.
2. Electrolytic capacitors
Possible cause of damages: high ambient
temperature, aging of electrolyte and large pulse
current induced by rapid changing loads.
Criteria: Check if frequent over-current or
over-voltage failures occur during drive start-up
with load. Check if there is any leakage of liquids
(electrolytes). Check if the safety valve protrudes.
Measure static capacitance and insulation
resistance.
3.Relay TA/TB/TC
Possible cause of damages: erosion, frequent
operation.
Criteria: ON/OFF malfunction.
7.4 Storage of the Drive
The following points must be followed for the
temporary and long-term storage of drive:
1. Store in locations free of high temperature,
humidity, dust, metal powder, and with good
ventilation.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 92

88 Chapter 7 Maintenance
EV1000 Series General Purpose Variable Speed Drive User Manual
2. Long-term storage will cause the deterioration
of electrolytic capacitors. Therefore, the drive
must be switched on for a test within 2 years, for
at least 5 hours. The input voltage must be
applied gradually with a voltage regulator to the
rated value.
7.5 Warranty
ENP will offer warranty service in the case of the
following situations:
1. The warranty clause is confined only to the
drive;
2. ENP will take the responsibility of 18 months
defects liability period for any faults or damages
under the normal operation conditions as of
manufacture date. After 18 months, maintenance
will be charged;
3. Even within 18 months, maintenance would be
charged under the following conditions:
① Damages incurred to the drive due to
mis-operations which are not in compliance with
"User Manual";
② Damages incurred to the drive due to fire,
flood, abnormal voltage and so on;
③ Damages incurred to the drive due to the
improper use of drive functions;
4. Service fee will be charged according to the
actual costs. If there are any maintenance
contracts, the contract prevails.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 93

Appendix 1 Parameter Set 89
EV1000 Series General Purpose Variable Speed Drive User Manual
Appendix 1 Parameter Set
EV1000 Series drive’s parameters are organized
in groups. Each group has several parameters
that are identified by “Group No.+ Parameter SN.”.
Parameter F X.YZ denotes that the parameter
belongs to group “X” and its SN is “YZ”. For
example, “F5.08” belongs to group 5 and its SN is
8.
For the convenience of setting the parameters,
the group number corresponds to the menu level,
1, parameter number corresponds to menu level
2 and parameters of parameter correspond to the
menu level 3.
The setting of parameter is presented in decimal
(DEC) and hexadecimal (HEX) format. If it is set
in hexadecimal format, each digit of the setting is
independent to one another.
Explanation of the columns in Parameter
Table:
The “LCD display” in third row refers to the
parameter’s name displayed by LED; The “setting
range” in fourth row is the valid ranges of
parameter settings; The “minimum unit” is the min.
value of the parameter; The “factory setting” in
sixth row is the primary factory settings; The
“modification” in seventh row is the properties of
modification (that is, whether it is allowed to be
modified and conditions for modification):
“O” denotes the parameters can be revised when
the drive is in operating or stop status;
“×” denotes the parameters can not be revised
when the drive is operating;
“*” denotes the parameters are actually detected
and can not be revised;
“-” denotes the parameters that are set by factory
and the user cannot modify it;
(The drive has already set the “auto-checking”
function to the modification property of each
parameter, so as to avoid wrong modification by
the user.)
The drive provides passwords to protect the
parameters against unauthorized modifications.
After the user’s password is set (that is, the
settings of FP.00 are not zero), the drive will
require you to input the password before the user
press the MENU/ESC to edit the parameter
settings, otherwise you cannot set the parameters.
For the parameters set by factory, you can only
set the parameters after inputting factory
password (you should not change the settings of
the parameters set by factory because the drive
may operate abnormally or may be damaged if
the parameters are not set correctly).
After setting the password, please don’t press the
keys within 5 minutes so as to enable the
password. If the password is input correctly and
the keys have not been pressed for longer than 5
minutes, the drive will be locked by the password
again. The user’s password can be changed any
time if the password protection is not locked up.
The password that is input last time is valid.
The user’s password can be disabled by setting
FP.00 to 0. If FP.00 is not set to 0, then the
parameters will be protected by the password.
The above rules should be observed when
changing the password and parameter’ settings
via the serial port.
Attention
!
It is defaulted that no parameters except F0.02 are
allowed changing. If you need change them, please
first set FP.01(parameter write-in protection) from 1
to 0.
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 94

90 Appendix 1 Parameter Set
EV1000 Series General Purpose Variable Speed Drive User Manual
Table 1 Parameter Set
Group 0: Basic Operating Parameters
Para. Name Range Min unit Default Modification
F0.00
Frequency
setting method
0: digital setting 1, set by ▲ or ▼ key.
1: digital setting 2, set by terminal UP/DN
2: digital setting 3, set through serial port
3: VCI analog setting ( VCI-GND)
4: CCI analog setting ( CCI-GND)
5. Terminal Pulse Setting
6. Keypad potentiometer
1 0
○
F0.01
Digital Frequency
Control
One’s place of F0.01:
0: reference frequency saved upon power failure.
1: reference frequency saved upon power failure.
Ten’s place of F0.01:
0: reference frequency saved when the drive
stops.
1: The reference frequency will restore back to
F0.02 when the drive stops.
1 00
○
F0.02 Frequency digital
setting
F0.13~F0.12 (when F0.00=0,1,2)
0.01Hz 50.00Hz
○
F0.03 Control mode
0: LED keypad control
1: terminal control
2: serial port
1 0
○
F0.04 Running
Direction
0: Forward
1: Reverse
1 0
○
F0.05 Max. output freq.
Max {50.00, F0.12}~650.0Hz
0.01Hz 50.00Hz
×
F0.06 Base frequency
1.00~650.0Hz
0.01Hz 50.00Hz
×
F0.07 Max. output
voltage
1~480V
1V
Drive’s
rating
×
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 95

Appendix 1 Parameter Set 91
EV1000 Series General Purpose Variable Speed Drive User Manual
Group 0: Basic Operating Parameters
Para. Name Range Min unit Default Modification
F0.08 Reserved - - - -
F0.09 Torque boost
0: (auto) 0.1%~30.0% 0.1% 0.0%
○
F0.10 Acc time 1
F0.11 Dec time 1
0.1~3600
(default unit is second, other options refer to F9.09)
0.1 6.0s
○
F0.12 Upper limit of
freq.
F0.13~F0.05
0.01Hz 50.00Hz
×
F0.13 Lower limit of
freq.
0.00~F0.12
0.01Hz 0.00Hz
×
F0.14 V/F curve
0: user-defined V/F curve, based on F0.15~F0.20
1: curve1, a 2-order curve
2: curve 2, a 1.7-order curve
3: curve 3, a 1.2-order curve
1 0
×
F0.15 V/F freq. F3
F0.17~F0.06
0.01Hz 0.00Hz
×
F0.16 V/F voltage V3
F0.18~100.0% 0.1% 0.0%
×
F0.17 V/F freq. F2
F0.19~F0.15
0.01Hz 0.00Hz
×
F0.18 V/F voltage V2
F0.20~F0.16 0.1% 0.0%
×
F0.19 V/Ffreq. F1
0.00~F0.17
0.01Hz 0.00Hz
×
F0.20 V/F voltage V1
0~F0.18 0.1% 0.0%
×
F0.21 Manual torque
boost cutoff point
0.0~50.0% (based on F0.06)
0.1% 10.0%
○
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 96

92 Appendix 1 Parameter Set
EV1000 Series General Purpose Variable Speed Drive User Manual
Group 1: Reference Frequency
Para. Name Range Unit Default Modification
F1.00 Freq. Curve selection
One’s place of F1.00: VCI curve selection
0: curve 1
1: curve 2
Ten’s place of F1.00: CCI curve selection
0: curve 1
1: curve 2
Hundred’s place of F1.00: PULSE curve selection
0: curve 1
1: curve 2
1 000
○
F1.01 Gain of reference
frequency selector
0.00~9.99
0.01 1.00
○
F1.02 Filter time
0.01~50.00s
0.01s 0.50s
○
F1.03 Max. input pulse freq.
0.1~50.0k
0.1k 10.0k
○
F1.04
Ratio of Min. input of
curve 1 to F1.03
0.0%~F1.06
0.1% 0.0%
○
F1.05
Frequency
corresponds to min.
input of curve 1
0.00~F0.05
1 0.00Hz
○
F1.06
Ratio of Max. input of
curve 1 to F1.03
F1.04~100.0%
0.1% 100.0%
○
F1.07
Frequency
corresponds to max.
input of curve 1
0.00~F0.05
1 50.00Hz
○
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 97

Appendix 1 Parameter Set 93
EV1000 Series General Purpose Variable Speed Drive User Manual
Group 1: Reference Frequency
Para. Name Range Unit Default Modification
F1.08
Ratio of Min. input of
curve 2 to F1.03
0.0%~F1.10 0.1% 0.0%
○
F1.09
Frequency
corresponds to min.
input of curve 2
0.00~F0.05
1 0.00Hz
○
F1.10
Ratio of Max. input of
curve 2 to F1.03
F1.08~100.0%
0.1% 100.0%
○
F1.11
Frequency
corresponds to max.
input of curve 2
0.00~F0.05
1 50.00Hz
○
Note: All the analog value in the table is shown in volt, it can be converted to current by the formula:
V=mA/2.
Group 2: Start/Brake Parameters
Para. Name Range Unit Default Modification
F2.00 Start mode
0: start at start frequency (F2.01)
1: brake first and then start at start frequency
Note: start course can refer to the start after first
power-on, power recovery, fault reset and coast to
stop.
1 0
×
F2.01 Start freq.
0.20~60.00Hz
0.01Hz 0.50Hz
○
F2.02 Start freq. hold time
0.0~10.0s
0.1s 0.0s
○
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 98
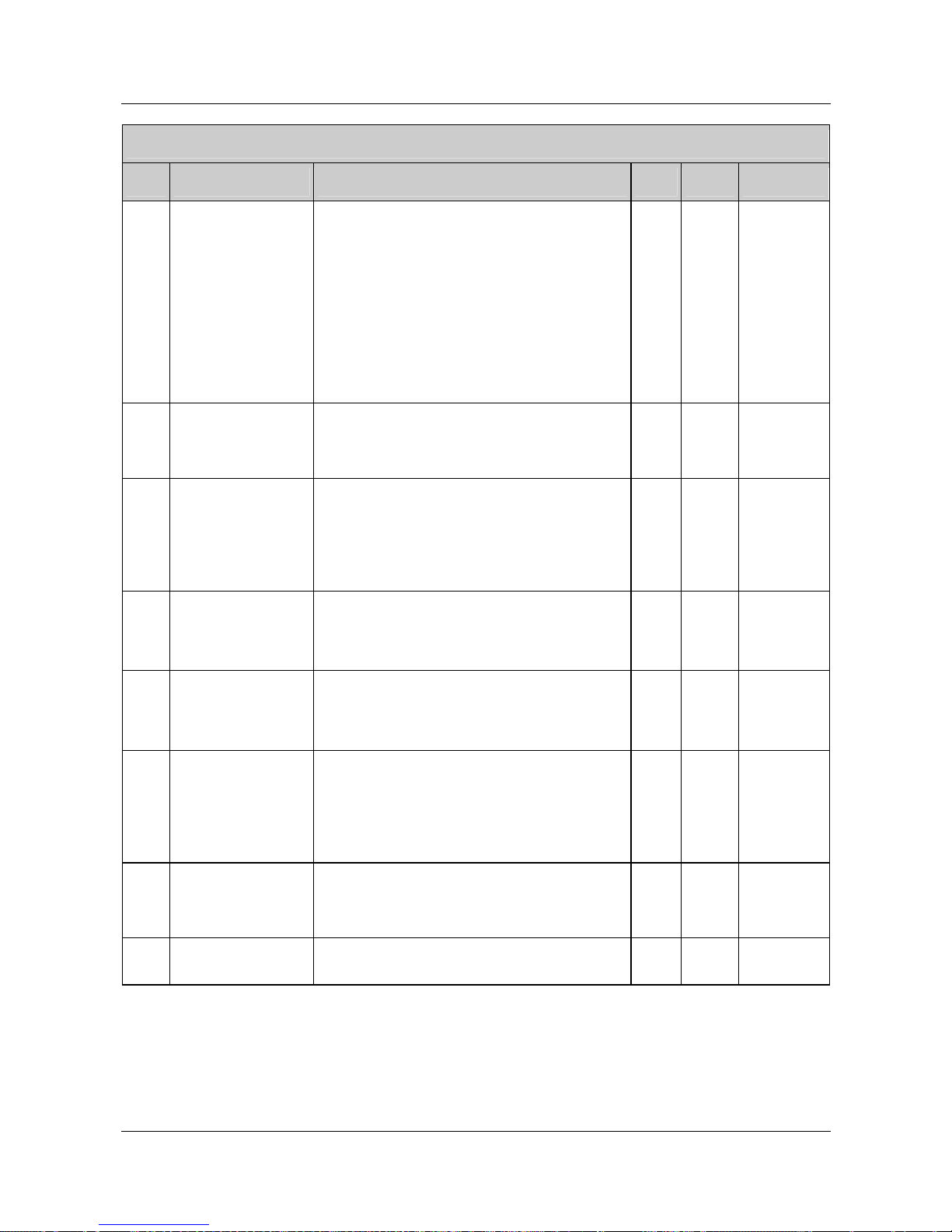
94 Appendix 1 Parameter Set
EV1000 Series General Purpose Variable Speed Drive User Manual
Group 2: Start/Brake Parameters
Para. Name Range Unit Default Modification
F2.03
DC brake current at
startup
G type:
0.0~150.0% of drive’s rated current (max. among
phases)
P type:
0.0~130.0%of drive’s rated current (max. among
phases)
0.1% 0.0%
○
F2.04
DC brake time at
startup
0.0: disabled, 0.1~60.0s 0.1s 0.0s
○
F2.05 Acc/Dec mode
0: linear
1: S curve
2: auto
1 0
×
F2.06 S curve start time
10.0%~50.0% (Acc/Dec time)
F2.06+F2.07≤90%
0.1% 20.0%
○
F2.07 S curve rising time
10.0%~80.0% (Acc/Dec time)
F2.06+F2.07≤90%
0.1% 60.0%
○
F2.08 Stop mode 0: decelerate to stop
1: coast to stop
2: decelerate to stop+ DC brake
1 0
×
F2.09 Frequency threshold of
DC braking
0.00~60.00Hz
0.01Hz 0.00Hz
○
F2.10 DC brake delay
0.00~10.00s
0.01s 0.00s
○
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 99

Appendix 1 Parameter Set 95
EV1000 Series General Purpose Variable Speed Drive User Manual
Group 2: Start/Brake Parameters
Para. Name Range Unit Default Modification
F2.11 DC brake current
G type: 0~150% of drive’s rated current (max. among
the 3 phases),
P type: 0~130% of drive’s rated current (max. current
among the 3 phases).
0.1% 0.0%
○
F2.12 DC brake time at stop
0.0: disabled
0.1~60.0s
0.1s 0.0s
○
F2.13 Dynamic braking
0: disabled
1: enabled
1 0
×
F2.14
Ration of braking time
to total operating time
0.0~100.0%
0.1% 2.0%
×
Group 3: Auxiliary Operating Parameters
Para. Name Range Unit Default Modification
F3.00 Anti-reverse setting
0: reverse allowed
1: reverse not allowed
1 0
×
F3.01 FWD/REV transition time
0~3600s
0.1s 0.0s
○
F3.02 Reserved - - 0 *
F3.03 Reserved - - 0 *
F3.04 Reserved - - 0 *
F3.05 Auto energy saving
0: disabled
1: enabled
1 0
×
F3.06 AVR function
0: disabled
1: always enabled
2: disabled during decelerating
1 2
×
F3.07 Slip compensation gain
0.0%~300.0% 0.1
%
100.0%
○
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
Page 100
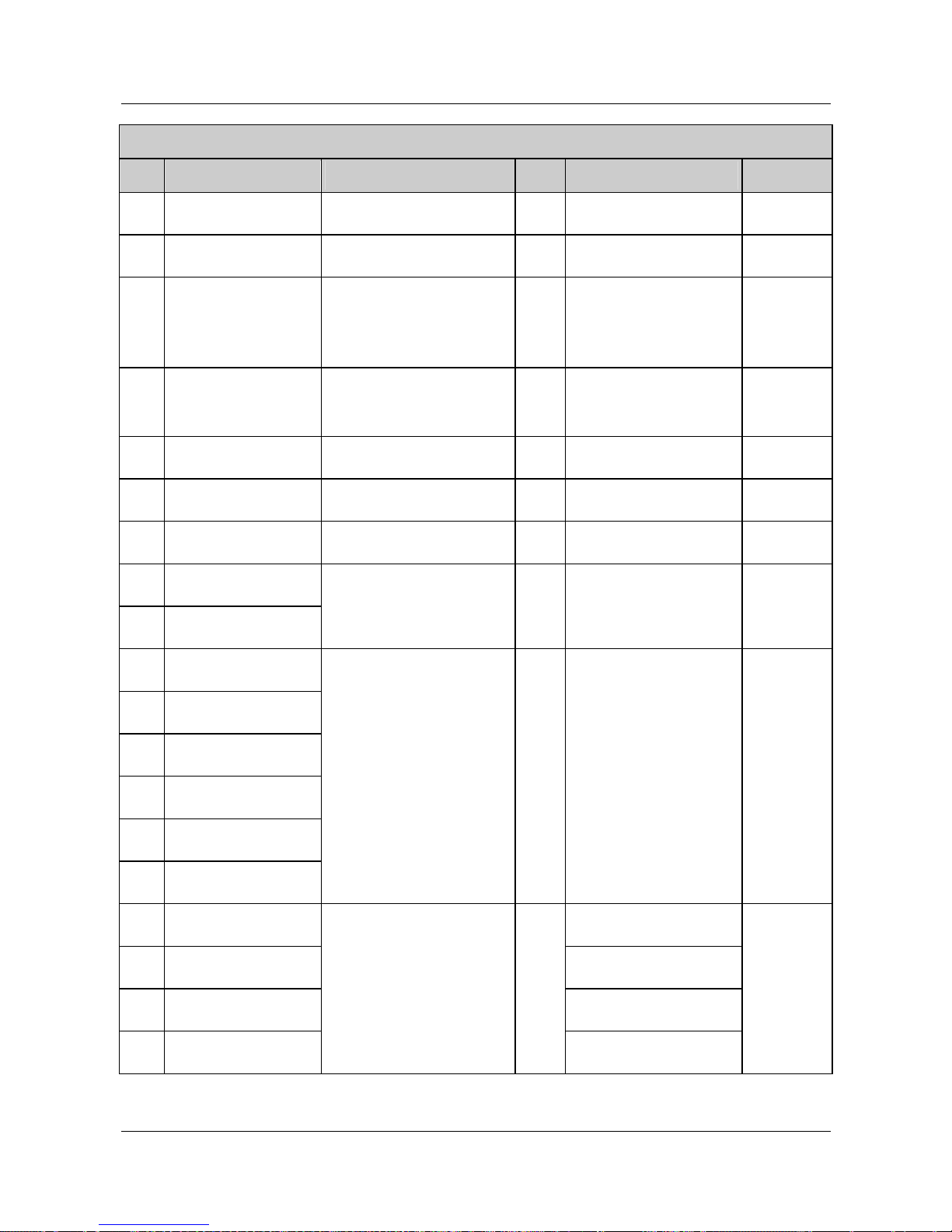
96 Appendix 1 Parameter Set
EV1000 Series General Purpose Variable Speed Drive User Manual
Group 3: Auxiliary Operating Parameters
Para. Name Range Unit Default Modification
F3.08 Slip compensation limt
0.0%~250.0% 0.1
%
200.0%
○
F3.09 Compensation time
0.1~25.0s
0.1s 2.0s
×
F3.10
Carrier wave frequency
(CWF)
0.7k~15k
0.1kHz
10.0kHz (EV1000-
2S0007G:8kHz)
○
F3.11 CWF auto adjustment
0: Disabled
1: Enabled
1 1
○
F3.12 Motor tone
0~10
1 0
○
F3.13 Jog frequency
0.10~50.00Hz
0.01Hz 5.00Hz
○
F3.14 Jog interval
0.0~100.0s
0.1s 0.0s
○
F3.15 Jog Acc time
F3.16 Jog Dec time
0.1~60.0s
0.1 6.0s
○
F3.17 Acc time 2
F3.18 Dec time 2
F3.19 Acc time 3
F3.20 Dec time 3
F3.21 Acc time 4
F3.22 Dec time 4
0.1~3600 (default unit: S, refer
to F9.09)
0.1 6.0s
○
F3.23 MS freq. 1 5.00Hz
F3.24 MS freq. 2 10.00Hz
F3.25 MS freq. 3 20.00Hz
F3.26 MS freq. 4
F0.13~ F0.12
0.01Hz
30.00Hz
○
艾默生变频器、艾默生CT高级授权代理商--广州盟雄 020-85543394 qq:2294731312
 Loading...
Loading...