


www.emaxmodel.com
SKYLINE32
1
SKYLINE32 Instruction Manual V1.2
Key Features ...................................................................................................................................................................... 1
Hardware And Connection ................................................................................................................................................. 2
Connecting Motor .............................................................................................................................................................. 4
Aircraft Assembly .............................................................................................................................................................. 5
Configuration Software ........................................................................................................................................................
1. Install Driver .......................................................................................................................................................... 5
2. Install Configuration Software ............................................................................................................................... 5
Parameter Adjustment Introduction ................................................................................................................................... 5
Cleanflight-Configurator Parameter Adjustment Introduction ................................................................................... 6
1. Flight Controller Setting ................................................................................................................................ 6
2. Accelerometer and Magnetometer Calibration ............................................................................................... 6
3. ESC Calibration ............................................................................................................................................. 6
4. Mode Selections ............................................................................................................................................. 7
Baseflight-ConfiguratorParameter Adjustment Introduction ..................................................................................... 8
1. Flight Controller Setting ................................................................................................................................ 8
2. Accelerometer and Magnetometer Calibration ............................................................................................... 8
3. ESC Calibration ............................................................................................................................................. 8
4. Mode Selections ............................................................................................................................................. 9
Transmitter Joystick Command (Mode 2 transmitter as example below) .......................................................................... 9
Firmware Upgrade ............................................................................................................................................................ 11
Trouble Removal ............................................................................................................................................................... 11
Feature
1 .
Dimensions : SKYline32(35mm×35mm×5mm )(1378mil×1378mil×197mil )),SKYline32
MINI(30mm×16mm×7.5mm)(1181mil×630mil×295mil)
2.Weight:SKYline32(Acro 4.8g,Advanced 5.4g)(Acro 0.169oz,Advanced 0.190oz),SKYline32 MINI(Acro
2.5g,Advanced 2.6g)(Acro 0.088oz,Advanced 0.092oz)。(Wires are not included)。
3.
32-bit ARM micro processor running at 3.3V/72MHz.
4.
With gyro, Magnetometer, and space reserved for Barometer and outer flash(used for recording data)
Note: Outer flash space only for SKYline32 Acro version
5.Support Manual mode(not select any flight mode), Angle mode(Angle), Horizon mode(Horizon), Heading hold mode
(Headadj), Head-free mode(Headfree), Altitude hold flight mode(Baro).
Note: Altitude hold flight mode
(Baro) only for SKYline32 Advanced & Mini adv anced vers ion
6.Support Quad-, Tri-, Hex-, Octo-, various multirotors
7.Support RC input - Standard, CPPM (PPM Sum),and Spektrum.,etc.
8.
Battery voltage monitoring and low voltage alarm. Note: SKYLINE32 MINI version without this function
9. Built-in FrSky telementry converter
Note: SKYLINE32 MINI version without this function
10.Support OSD module input. Note: SKYLINE32 MINI version without this function
11.Support OLED input Note: SKYLINE32 MINI version without this function
12. Onboard Micro-USB for setup and configuration.

www.emaxmodel.com
SKYLINE32
2
13.Cleanflight configuration and Baseflight configuration GUI
14.GPS position hold / return to home
Note:SKYLINE32 hardware is compatible with NAZE32 firmware, including Baseflight and Cleanflight. Below are the
links to the source codes:
https://github.com/cleanflight/cleanflight
https://github.com/multiwii/baseflight
SKYLINE32 is loaded with Cleanflight-Configurator. The Cleanflight-Configurator GUI must be downladed from the
Chrome Extension store.
Baseflight is another firmware option and requires the Baseflight GUI, also available form the
Chrome Extension Store. This manual will introduce basic instruction for these parameter adjusting software. For
more, kindly check“http://yinyanmodel.com/En/DownView.asp?ID=40”
Note: with firmware and configuration based on “MultiWii” software, the processor used is not Atmel AVR, and can not be
compiled via Arduino or other AVR tools. Below is some information about STM32 development:
http://code.google.com/p/afrodevices/wiki/STM32Development
Hardware And Connection
SKYLINE32 Hardware Connector
SKYLINE32 Mini Hardware Connector
①Serial communication connector. Used for external serial communication, such as OSD module with serial
communication.

www.emaxmodel.com
SKYLINE32
3
②RC Input(PWM/CPPM)/ Servo Output / GPS connector.
Default pins order is (from top to bottom): GND,+5V,CH1-CH8. CH1-CH8 for channels: AIL,ELE,THR,RUD,
AUX1…AUX4.
PPM GPS Standard
Connection Connection Connection 10Pin Wire RC_IN
When GPS feature is enabled, CH3 and CH4 are used for GPS connection.(CH3:TX, CH4:RX). When using
CPPM receiver, these are normally unused, with standard receiver, connect AIL to 1, ELE to CH2, THR to CH5,
RUD to CH6, and AUX1/2 to CH7 and CH8.
When using CPPM receiver, CH5 to CH8 can also be used as motor or servo outputs, depending on airframe type
and configuration.
③Bootloader pads: ***ONLY USE IF GUI CAN NOT CONNECT TO SKYLINE32. This is not required for
normal firmware updates. When upgrading firmware, use a forcep to short pads together and power
SKYLINE32 on by USB cable. After power LED indicator turns blue, then remove the short. Firmware updated
tool can then be used to reload firmware.
Download source: http://yinyanmodel.com/En/DownView.asp?ID=39
④Battery Voltage Monitor: connect this header to battery or power distribution board to enable battery voltage
monitoring. Supports Up to 6S LiPo battery.
。
Warning: No reverse polarity protection - connecting battery in reverse will instantly destroy the hardware.
Note: MINI version without this connector
Power 2Pin Wire Vbat
⑤
ESC / Servo Headers: From right to left: GND,+5V,PWM1- PWM6. Standard mode: PWM1-PWM6 for ESC
input M1-M6; Servo mode: PWM1-PWM6 for servo input S1, S2 and ESC input M1-M4.
Servo Mode Standard Mode 8Pin wire PWM_Out
⑥
Buzzer: connect a buzzer here while battery voltage monitor is enabled, buzzer used for a low voltage alarm.
Setting battery voltage in Configuration of
Parameter adjustment, kindly refer to
http://yinyanmodel.com/En/DownView.asp?ID=40” Note: MINI version without this connector.

www.emaxmodel.com
SKYLINE32
4
Buzzer 2Pin wire Buzzer
⑦I2 Connector:Used for outer I2C communication equipment, such as OLED module. Note: MINI version without
this connector.
⑧SWD port: for software modification during software development period. Note: MINI version without this
connector.
5Pin wire SWD
⑨
Micro-USB port: For firmware upgrade and configuration.
⑩FSY connector: FrSky output,Connect this connector with transmit and ground from FrSky receiver telemetry port
(wire usually included with receiver, such as X4R and DR4II.)
Note: MINI version without this connector.
⑪Status LED(Green)。
⑫
Mode LED (Red): The LED will be on for the corresponding mode chosen.
⑬
Power LED (Blue): LED on when the board is power on.
[A]Withstand voltage 3.3VGPIO port,This pad connected with the STM32 PB5 pin. Can not be connected to 5V
voltage, otherwise it will burn the parts Note: MINI version without such pads.
[B]Withstand voltage 5VGPIO port, this pad connected with the STM32 PB5. Can be connected to 5V IO port.
Note: MINI version without such pads.
[C]5V extented pad, this pad used for RC input & ESC connector, convenient for supply power for other 5v parts
Note: MINI version without such pads.
[D]3.3V extented pad.It offer power supply for other low voltage parts,such as spectrum,satelite RC or bluetooth
module,etc. Note: MINI version without such pads.
[E]Ground pad.when use 5V and 3.3V entended power for out parts,the out parts could occupy same space with
flight controller.
Note: MINI version without such pads.
[F] 3.3V ADC input pad,it is connected with PA5 of STM32(ADC12_IN5) Note: This pad with 3.3V,5V couldn’t be
connected.MINI version without such pads. Note:Right connection,avoid parts damage.

www.emaxmodel.com
SKYLINE32
5
Motor Connection
Figures below show motor position and rotation:
In the above figure, the front of red arrow points to the head of the multirotor. The arrows in the small circles point
to the direction of motor rotation. Motor numbers are marked inside the circles and S1 stands for servo. Purple
motors are top, and blue circle are bottom.
Note: Configurations with more than 6 motors require CPPM receiver.
Aircraft assembly
Please install flight controller and ESC on your aircraft. Please refer to the instructions above for proper connection
of the SKYLINE32 to the ESC’s and receiver. Anti shock, anti-vibration mounting is recommended, preferably with
soft double-sided adhesive to increase the damping effect. Avoid vibration of gyro, to increase flight stability.
Parameter Adjustment Installation
1.Program driver installation:
Please install the driver program to your computer if you do not have it already.
(1)Please choose the compatible driver for your computer, link
http://www.silabs.com/products/mcu/pages/usbtouartbridgevcpdrivers.aspx
(2) Install the driver program on your computer.
(3)Please switch the ESC switch to ON
(4)Connect flight controller to computer with Micro USB cable
(5)Follow steps to install the driver.
2. Install Configuration Software
(1)Please install Google chrome web browser.
(2)Open Google Chrome web browser, go to "Chrome Web Store" and search BaseFlight - Configurator.
(3)Add " BaseFlight - Configurator" App.

www.emaxmodel.com
SKYLINE32
6
Note: Installing Cleanflight Configurator is similar to Baseflight Configurator, we will not discuss it in this manual
Parameter adjustment
Cleanflight-Configurator Parameter adjustment
1. Parameter adjustment and FC connection
(1)Connect flight controller to computer with Micro USB cable.
(2)In Cleanflight Configurator App, select the COM port that displays when you connect the Skyline 32.
Baud Rate should be 115200
(3)Click "Connect", flight controller and configurator and connected when the button change to green.
2. Acc & Compass calibration
Please select "SETUP"
①Calibrate Accelerometer
(1)Calibrate Accelerometer: Place board or frame on a level surface, then select "Calibrate Accelerometer". Once
the accelerometer calibration is complete, date will be save automatically. Note: Starting or ending accelerometer
calibration will be show in the message display. (Make sure not to move the board or frame during calibration).
②Calibrate Magnetometer
(2)Calibrate Magnetometer: Select "Calibrate Magnetometer", make sure to rotate the board or frame 360 degree in
all axis within 30sec (rotate axis included: Roll axis, pitch axis and yaw axis). Note: Starting or ending magnetometer
calibration will be show in the message displa y.
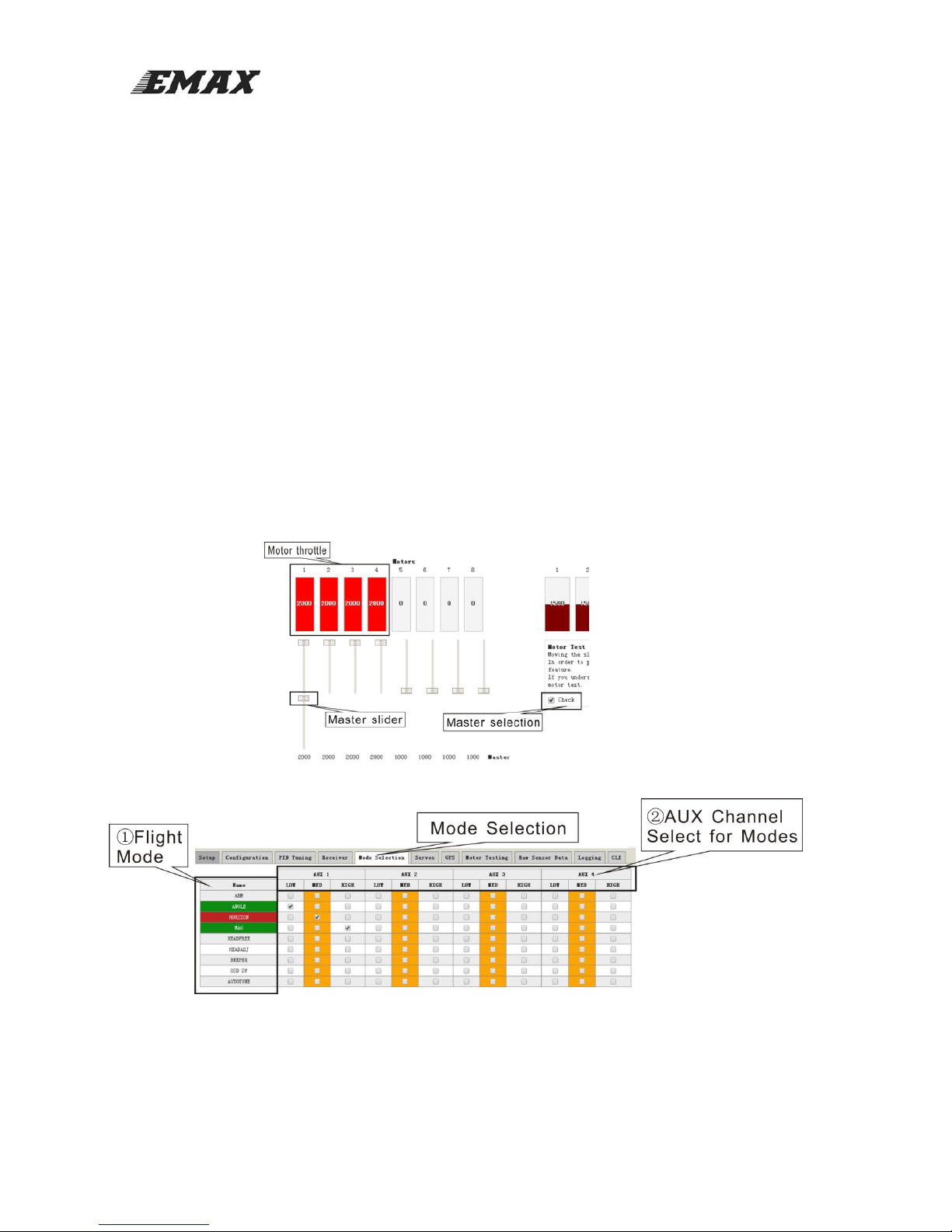
3. ESC Calibration
Please make sure to REMOVE PROPELLERS before perform ESC Calibration!
(1)Please select "Configuration", change Maximum Throttle to 2000 and save
(2)Please select "Motor Testing"
①Please check the box for Motor Test

www.emaxmodel.com
SKYLINE32
7
②Move the “Master” slider to MAXIMUM
Apply power to your ship so that all ESC’s are powered. When your ESC’s play their intital tune, move throttle
“Master” quickly to the bottom. You will then hear a confirmation tune. When the tune ends the ESC calibration is
completed. If an ESC continues to beep, unplug the power and start over.
4. Select Mode
Switching interface into Mode selection.
①Modes: ARM, ANGLE, HORIZON, MAG, HEADFREE, etc. To add a mode click “Add Range” and then assign
channel. AUX1 is channel 6 and AUX2 is channel 7.
②Channel Select for Modes.
Click “Add Range”button under any mode to add flight mode. Then select a channel in the drop-down
box as channel for that mode.Then check the box and save the setting by click "SAVE" at right bottom
corner. If the corresponding flight mode of selected channel is active. Then when switching to the
channels, flight Modes Options screen will be highlighted green. Other will highlighted red on the
screen. Red LED also indicates whether the it is active or not(red light means that the selected flight
mode is not active). Some models will be based on hardware sensors access situation to decide whether
to display. For example, with hardware without a barometer module ,Altitude hold will not be available.
Some modes need to be selected at the same time to function correctly.
5. Receiver Calibration
1.***Please remove ALL propellers for these steps.
2 Go to the Receiver tab. Connect power to the flight controller and power on your RC transmitter.

www.emaxmodel.com
SKYLINE32
8
Check to see the proper bar moves when your RC transmitter stick is moved. If the wrong bar moves,
select a different option in the “Channel Mapping”drop down box. Once you have the controls selected
properly, make sure they move in the proper direction. Throttle at the bottom should indicate 1000,
and throttle max should be 2000. When the rudder stick is left, the scale should show 1000. If these
are reversed, reverse the channel in your radio and check again. Also check the range. When the
control sticks on your transmitter are moved, they should go from 1000-2000. If there are within
10 that is okay, anything more then that you will need to adjust your endpoints on your radio.
Also on the receiver tab is Pitch, Roll, and Yaw Rate. These set how responsive the ship is. For
a very tame ship set at .25 for all three. For more aggressive try pitch and roll at .56 and yaw
at .36. Test fly and then adjust according to your preference.
Now, the basic set of flight control has been completed, you can fly now.
Baseflight-Configurator Introduction
1. Flight Controller and Configurator
(1)Connect flight controller to computer with Micro USB cable,飞控蓝色电源灯点亮,同时飞控系统开始自检。
Self test as bellows:
Red green led flashes fast→red led flashes fast→green led off→red led off,green led then flashes a
few times then off (if at this time the red light is constantly green after it is off , indicating some kind
of flight mode has been selected and valid)→ self check completed
(2)In Baseflight Configurator App, select COM port and Baud Rate
(3)Click "Connect", flight controller and configurator and connected when the button change to green.
2. Accelerometer and Magnetom eter Calibration
Please select "SETUP"
①Calibrate Accelerometer
www.emaxmodel.com
SKYLINE32
9
(1)Calibrate Accelerometer: Place board or frame on leveled surface, then select "Calibrate Accelerometer". Once
the accelerometer calibration is complete, date will be save automatically. Note: Starting or ending accelerometer
calibration will be show in the message display. (Make sure not to move the board or frame during calibration).
②Calibrate Magnetometer
(2)Calibrate Magnetometer: Select "Calibrate Magnetometer", make sure to rotate the board or frame 360 degree in
all axis within 30sec (rotate axis included: Roll axis, pitch axis and yaw axis). Note: Starting or ending magnetometer
calibration will be show in the message displa y.
3. ESC Calibration
Please make sure to REMOVE PROPELLERS before perform ESC Calibration!
(1)Please select "Configuration", change Maximum Throttle to 2000 and save
((2)Please select "Motor Testing"
①Please check the box for Motor Test
②Move the “Master” slider to MAXIMUM
Apply power to your ship so that all ESC’s are powered. When your ESC’s play their intital tune, move throttle
“Master” quickly to the bottom. You will then hear a confirmation tune. When the tune ends the ESC calibration is
completed. If an ESC continues to beep, unplug the power and start over.
4. Mode Selections
(1)Please select "Mode Selection"
①Modes: ARM, ANGLE, HORIZON, MAG, HEADFREE, HEADADJ, BEEPER, OSD SW, etc... Some modes
will not appear unless sensor is connected. Ex: If barometer is not connected to the flight controller, the altitude
mode will not display in the list.

www.emaxmodel.com
SKYLINE32
10
②AUX Channel Select for Modes.
(2)AUX Channel for Modes: Select desired AUX channel for mode, then check the box and save the setting
by click the "SAVE" at right bottom corner. When the mode is selected and the switch is activated
selected mode name will highlight green. Non selected modes will highlight red on the screen.
Some modes need to be selected at the same time to function correctly.
5. Receiver Calibration
1.***Please remove ALL propellers for these steps.
2 Go to the Receiver tab. Connect power to the flight controller and power on your RC transmitter.
Check to see the proper bar moves when your RC transmitter stick is moved. If the wrong bar moves,
select a different option in the “Channel Mapping”drop down box. Once you have the controls selected
properly, make sure they move in the proper direction. Throttle at the bottom should indicate 1000,
and throttle max should be 2000. When the rudder stick is left, the scale should show 1000. If these
are reversed, reverse the channel in your radio and check again. Also check the range. When the
control sticks on your transmitter are moved, they should go from 1000-2000. If there are within
10 that is okay, anything more then that you will need to adjust your endpoints on your radio.
Also on the receiver tab is Pitch, Roll, and Yaw Rate. These set how responsive the ship is. For
a very tame ship set .25 for all three. For more aggressive try pitch and roll at .56 and yaw at .36.
Test fly and then adjust according to your preference.
Now, the basic set of flight control has been completed, you can fly now.
Transmitter Joystick Command (Mode 2 transmitter as
example below)
The below chart is stick order of left hand throttle transmitter
If using right hand transmitter,move the stick to the bottom when disarm it,and then move the Yaw axis(direction axis)
to max.Move the stick to bottom before locking,then move the Yaw axis to minimum.

www.emaxmodel.com
SKYLINE32
11
Firmware update
For introduction of firmware update,kindly check http://yinyanmodel.com/En/DownView.asp?ID=39
Troubleshooting
1. Roll and pitch drifting
- Recalibrate Acc
- Using Acc Trim stick
2. Course shift
- Recalibrate ESC
- Calibrate compass(mag)。
- Selecting MAG flight mode.
 Loading...
Loading...