

Page 1

EN
KNX RF-MSG-DST
Rad io actuator
Item number 70712
Installation and Adjustment
Page 2

Page 3

1 Contents
1. Description ........................................................................................... 3
1.0.1. Scope of delivery .......................................................................................... 3
1.1. Technical Data .......................................................................................................... 3
2. Installation and start-up ....................................................................... 4
2.1. Installation notes ...................................................................................................... 4
2.1.1. Safety advice ................................................................................................. 5
2.2. Notes on wireless equipment ................................................................................. 5
2.3. Connection ................................................................................................................ 5
2.3.1. Device Design ................................................................................................ 7
2.4. Establish radio connection ...................................................................................... 7
2.5. Activate retransmitter function ............................................................................... 8
2.6. Notes on mounting and commissioning ................................................................ 8
3. Transfer protocol ................................................................................. 9
3.1. List of all communication objects ........................................................................... 9
4. Parameter setting .............................................................................. 12
4.1. General settings ..................................................................................................... 12
4.2. Operating Mode ..................................................................................................... 12
4.2.1. Drive - Shutter, Blind, Awning, Window ................................................... 12
4.3. Control ..................................................................................................................... 15
4.3.1. Manual ......................................................................................................... 20
4.3.2. Automation – external ................................................................................ 21
4.3.3. Scenes ......................................................................................................... 21
Elsner Elektronik GmbH • Sohlengrund 16 • 75395 Ostelsheim • Germany
Radio actuator KNX RF-MSG-DST • from software version 0.1.0 ETS programme version 1.0
Status: 27.06.2018 • Subject to technical changes. Errors excepted.
Page 4
2 Clarification of signs
Installation, inspection, commissioning and troubleshooting of the device
must only be carried out by a competent electrician.
This manual is amended periodically and will be brought into line with new software
releases. The change status (software version and date) can be found in the contents footer.
If you have a device with a later software version, please check
www.elsner-elektronik.de in the menu area "Service" to find out whether a more up-todate version of the manual is available.
Clarification of signs used in this manual
Safety advice.
Safety advice for working on electrical connections, components,
etc.
DANGER!
WARNING!
CAUTION!
ATTENTION!
“Control unit”
“Manual”
... indicates an immediately hazardous situation which will lead to
death or severe injuries if it is not avoided.
... indicates a potentially hazardous situation which may lead to
death or severe injuries if it is not avoided.
... indicates a potentially hazardous situation which may lead to
trivial or minor injuries if it is not avoided.
... indicates a situation which may lead to damage to property if it is
not avoided.
The symbol is followed by a menu path. In this menu the settings
just described can be changed.
The symbol is followed by chapter information with a page number. In this chapter you will find additional information about the
setting just described.
Page 5
3 Description
1. Description
The KNX RF-MSG-DST is a radio actuator for KNX radio (KNX RF). The actuator controls one drive (blind, shutter, awning or window). Via an additional connector, another
motor control unit is supplied with power (loop-through function).
The KNX RF-MSG-DST uses the KNX RF S standard.
Functions:
• 1 connection for 230 V-drive (STAK3)
• 1 output 230 V AC (STAK3) for supply of further motor control units
• Reception of the control signal via radio KNX RF
• Retransmitter function (from version 1.1): Forwarding of all received KNX
RF telegrams. These can be received by KNX RF participants with the same
domain address. This allows the range of the KNX RF signal to be increased
• Automatic runtime measurement of the drives for positioning (incl. fault
reporting object)
• Position feedback (movement position, also slat position for shutters)
• Position storage (movement position) via 1-bit object (storage and call-up
e.g. via buttons)
• Scene control for movement position with 16 scenes per drive (also slat
position for shutters)
• Blocking objects and alarm reports have different priorities, so safety
functions always take precedence (e.g. wind block)
• Manual or automatic priority setting via time or communication object
• Brief time limit (movement command blocked) and 2 movement limits
Configuration is made using the KNX software ETS 5. The product file can be down-
loaded from the ETS online catalogue and the Elsner Elektronik website on www.els-
ner-elektronik.de in the “Service” menu.
1.0.1. Scope of delivery
•Actuator
• Magnet for teaching procedure (telescopic rod)
• Rubber seal
Available accessories:
• Mains connection wire (5 m)
• Connection wire (available in 1 m; 2,5 m; 5 m)
1.1. Technical Data
Housing Plastic
Protection category IP 54*
Dimensions approx. 149 x 72 x 29 (W x H x D, mm)
Weight approx. 168 g
Ambient temperature Operation -25…+70 °C, storage -30…+85°C
Radio actuator KNX RF-MSG-DST • Version:27.06.2018 • Technical changes and errors excepted.
Page 6
4 Installation and start-up
Ambient humidity max. 95% RH, avoid condensation
Operating voltage 230 V AC
Input STAS3 plug (230 V)
Output 1 x 230 V AC (loop-through), STAK3 coupling, max. 1.5
Communication objects 52
Assignments max. 1024
Radio frequency 868,3 MHz
*The Radio actuator KNX RF-MSG-DST should be installed in a protected area
despite a high protection category because water can enter in via the connectors.
Please observe the instructions in Chapter Connection.
The product conforms with the provisions of EU directives.
kW switch-on load per mains connection
1 × drive, STAK3 coupling, 230 V AC (up/down/N/PE),
loadable to max. 4 A / 230 V AC
2. Installation and start-up
2.1. Installation notes
Installation, testing, operational start-up and troubleshooting should
only be performed by an electrician.
DANGER!
Risk to life from live voltage (mains voltage)!
There are unprotected live components within the device.
• VDE regulations and national regulations are to be followed.
• Ensure that all lines to be assembled are free of voltage and take
precautions against accidental switching on.
• Do not use the device if it is damaged.
• Take the device or system out of service and secure it against
unintentional use, if it can be assumed, that risk-free operation is no
longer guaranteed.
The device is only to be used for its intended purpose. Any improper modification or
failure to follow the operating instructions voids any and all warranty and guarantee
claims.
After unpacking the device, check it immediately for possible mechanical damage. If it
has been damaged in transport, inform the supplier immediately.
The device may only be used as a fixed-site installation; that means only when assembled and after conclusion of all installation and operational start-up tasks and only in
the surroundings designated for it.
Radio actuator KNX RF-MSG-DST • Version:27.06.2018 • Technical changes and errors excepted.
Page 7
5 Installation and start-up
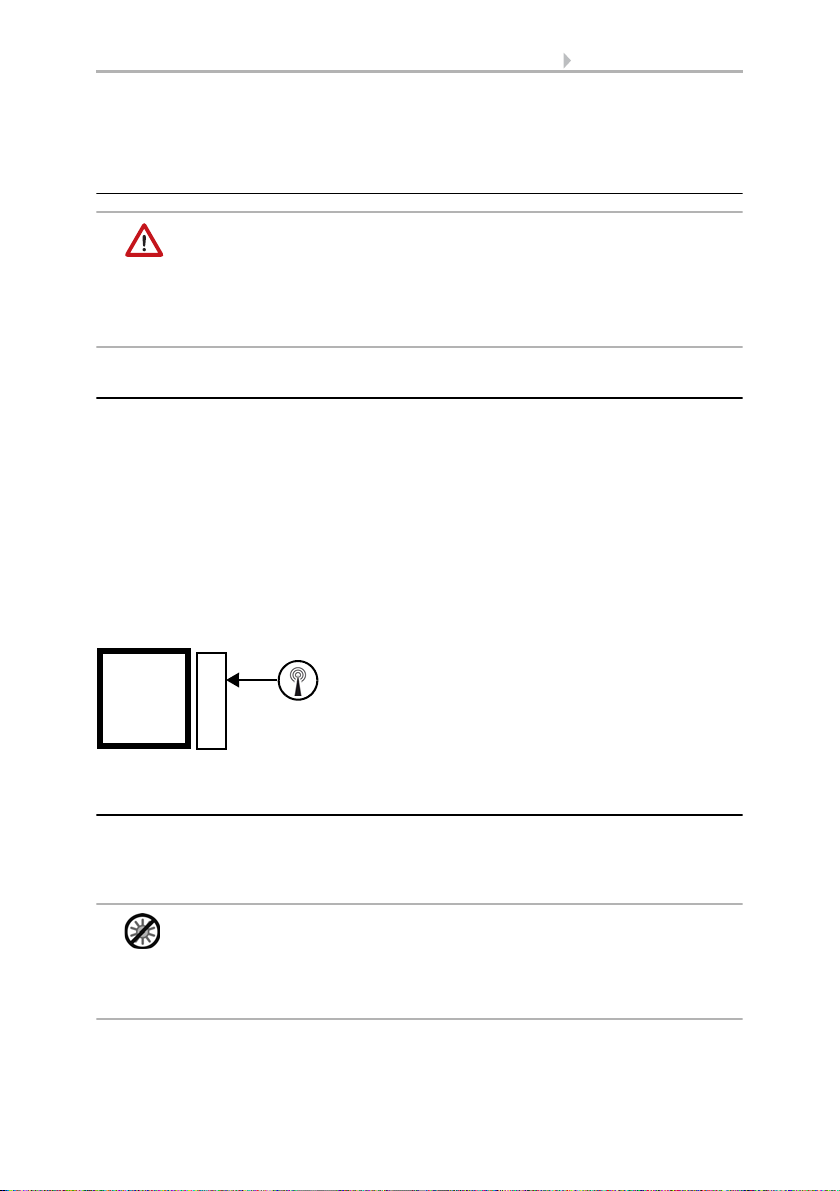
The antenna symbol on the housing shows the
position of the antenna in KNX RF-MSG-DST. This
side must not be positioned directly on metal
surfaces or objects. Otherwise, the radio signal might
disturbed.
Metal
profile
KNX RF-MSG-DST
Elsner Elektronik is not liable for any changes in norms and standards which may occur
after publication of these operating instructions.
2.1.1. Safety advice
WARNING!
Risk of injury caused by components moved automatically!
If the wireless connection between the control unit and the wireless
actuator is interrupted, connected devices can no longer be operated.
• For that reason do not connect drives to the wireless actuator which
could be hazardous to human life!
2.2. Notes on wireless equipment
When planning facilities with devices that communicate via radio, adequate radio reception must be guaranteed. The range will be limited by legal regulation and structural circumstances. Avoid sources of interference and obstacles between receiver and
transmitter, that could disturb the wireless communication. Those would be for example:
• Walls and ceilings (especially concrete and solar protection glazing).
• Metal surfaces next to the wireless participants (e. g. aluminium construction
of a conservatory).
• Other wireless devices and powerful local transmitters (e.g. wireless
headphones), which transmit on the same frequency. Please maintain a
minimum distance of 30 cm between wireless transmitters for that reason.
2.3. Connection
The radio module is connected between the appliance and the power supply. It may
only be connected to flexible lines using STAK/STAS connectors. The connectors must
be locked using the locking bow.
Do not expose to continuous sun radiation to avoid overheating.
The housing is not UV-resistant.
• Assembly the device in a protected area (e. g. in
the box for the blinds/marquee/shutters in a construction
profile beneath the roof tiles or in a housing).
Radio actuator KNX RF-MSG-DST • Version:27.06.2018 • Technical changes and errors excepted.
Page 8

6 Installation and start-up
No water may run along the supply line and device because water
can enter in via the connectors.
• Assembly the device in a protected area (e. g. in
the box for the blinds/marquee/shutters in a construction
profile beneath the roof tiles or in a housing).
• Lay the supply lines out and down from the device.
No vibrations!
• Assemble the device in a place that is free of vibrations.
Radio actuator KNX RF-MSG-DST • Version:27.06.2018 • Technical changes and errors excepted.
Page 9

2.3.1. Device Design
1 Neutral conductor
2L
3 nc (not connected)
PE
Motor output
STAK3 coupling
for STAK3 plug
Input mains voltage
STAS3 plug for
STAK3 coupling
1Neutral cond.
2Up
3Down
PE
Output
mains voltage
STAK 3 coupling
for STAK3 plug
1 Neutral cond.
2L
3nc (
PE
PRG
Magnet
(side)
and LED
PE
PE
PE
1
3
2
1
3
2
3
2
7 Installation and start-up
2.4. Establish radio connection
The device is integrated into the KNX system with a media coupler or a KNX RF USB
stick. (For further information see the corresponding manual/data sheet.)
1. Start the programming mode of the KNX RF-MSG with the enclosed magnet (telescopic rod). The programming LED lights up.
Radio actuator KNX RF-MSG-DST • Version:27.06.2018 • Technical changes and errors excepted.
Page 10

8 Installation and start-up
If the device is set up as a retransmitter, it transmits
all received KNX RF telegrams. These can be received by KNX RF participants with the same domain
address. As a result, the radio range of a KNX RF
system can be increased.
The function must be activated in the ETS in the property window of the device by ticking the box "Retransmitter".
2.5. Activate retransmitter function
2.6. Notes on mounting and commissioning
Device must not be exposed to water (rain). This could result in the electronic being
damaged. A relative air humidity of 95% must not be exceeded. Avoid bedewing.
Radio actuator KNX RF-MSG-DST • Version:27.06.2018 • Technical changes and errors excepted.
Page 11

9 Transfer protocol
3. Transfer protocol
3.1. List of all communication objects
Abbreviations:
R Read
WWrite
C Communication
T Transfer
No. Name Func-
1 Software version Readable R-C- [217.1]
100 Status automatic or manual
mode
101 Manual long-term Input RWC- [1.8]
102 Manual short-term Input RWC- [1.10]
103 Manual movement position Input RWC- [5.1]
104 Manual slat position Input RWC- [5.1]
105 Automatic mode long-term Input RWC- [1.8]
106 Automatic mode short-term Input RWC- [1.10]
107 Automatic mode movement
position
108 Automatic mode slat position Input RWC- [5.1]
109 Change from manual to
automatic mode
110 Automatic mode blocking object Input RWC- [1.1]
111 current movement position Output R-CT [5.1]
112 current slat position Output R-CT [5.1]
113 Status object Output R-CT [1.1]
114 Approach position memory for
manual
tion
Output R-CT [1.1]
Input RWC- [5.1]
Input RWC- [1.1]
Input RWC- [1.1]
Flags Data Point
Type
DPT_Version
DPT_Switch
DPT_UpDown
DPT_Start
DPT_Scaling
DPT_Scaling
DPT_UpDown
DPT_Start
DPT_Scaling
DPT_Scaling
DPT_Switch
DPT_Switch
DPT_Scaling
DPT_Scaling
DPT_Switch
DPT_Switch
Size
2 Bytes
1 Bit
1 Bit
1 Bit
1 Byte
1 Byte
1 Bit
1 Bit
1 Byte
1 Byte
1 Bit
1 Bit
1 Byte
1 Byte
1 Bit
1 Bit
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 12

10 Transfer protocol
No. Name Func-
tion
115 Learn object position memory
Input RWC- [1.1]
for manual 0
116 Learn object position memory
Input RWC- [1.1]
for manual 1
119 Approach position memory for
Input RWC- [1.1]
automatic
120 Learn object position memory
Input RWC- [1.1]
for automatic 0
121 Learn object position memory
Input RWC- [1.1]
for automatic 1
Flags Data Point
Type
DPT_Switch
DPT_Switch
DPT_Switch
DPT_Switch
DPT_Switch
124 Call up / saving scenes Input RWC- [18.1]
DPT_SceneContr
ol
178 Drive running Output R-CT [1.1]
DPT_Switch
179 Malfunction object Output R-CT [1.1]
DPT_Switch
180 Block 1 - Blocking object Input RWC- [1.1]
DPT_Switch
181 Block 1 - Wind blocking object Input RWC- [1.1]
DPT_Switch
182 Block 1 - Wind blocking reading Input RWC- [9.5]
DPT_Value_Wsp
183 Block 1 - Wind blocking status Output R-CT [1.1]
DPT_Switch
184 Block 1 - Rain blocking object Input RWC- [1.1]
DPT_Switch
185 Block 2 - Blocking object Input RWC- [1.1]
DPT_Switch
186 Block 2 - Wind blocking object Input RWC- [1.1]
DPT_Switch
187 Block 2 - Wind blocking reading Input RWC- [9.5]
DPT_Value_Wsp
188 Block 2 - Wind blocking status Output R-CT [1.1]
DPT_Switch
189 Block 2 - Rain blocking object Input RWC- [1.1]
DPT_Switch
190 Block 3 - Blocking object Input RWC- [1.1]
DPT_Switch
191 Block 3 - Wind blocking object Input RWC- [1.1]
DPT_Switch
192 Block 3 - Wind blocking reading Input RWC- [9.5]
DPT_Value_Wsp
Size
1 Bit
1 Bit
1 Bit
1 Bit
1 Bit
1 Byte
1 Bit
1 Bit
1 Bit
1 Bit
2 Bytes
1 Bit
1 Bit
1 Bit
1 Bit
2 Bytes
1 Bit
1 Bit
1 Bit
1 Bit
2 Bytes
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 13

11 Transfer protocol
No. Name Func-
tion
Flags Data Point
Type
193 Block 3 - Wind blocking status Output R-CT [1.1]
DPT_Switch
194 Block 3 - Rain blocking object Input RWC- [1.1]
DPT_Switch
195 Block 4 - Blocking object Input RWC- [1.1]
DPT_Switch
196 Block 4 - Wind blocking object Input RWC- [1.1]
DPT_Switch
197 Block 4 - Wind blocking reading Input RWC- [9.5]
DPT_Value_Wsp
198 Block 4 - Wind blocking status Output R-CT [1.1]
DPT_Switch
199 Block 4 - Rain blocking object Input RWC- [1.1]
DPT_Switch
200 Block 5 - Blocking object Input RWC- [1.1]
DPT_Switch
201 Block 5 - Wind blocking object Input RWC- [1.1]
DPT_Switch
202 Block 5 - Wind blocking reading Input RWC- [9.5]
DPT_Value_Wsp
203 Block 5 - Wind blocking status Output R-CT [1.1]
DPT_Switch
204 Block 5 - Rain blocking object Input RWC- [1.1]
DPT_Switch
205 Movement limitation 1 - Blocking
object
206 Movement limitation 2 - Blocking
object
Input RWC- [1.1]
DPT_Switch
Input RWC- [1.1]
DPT_Switch
207 Short time restriction Input RWC- [1.1]
DPT_Switch
Size
1 Bit
1 Bit
1 Bit
1 Bit
2 Bytes
1 Bit
1 Bit
1 Bit
1 Bit
2 Bytes
1 Bit
1 Bit
1 Bit
1 Bit
1 Bit
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 14

12 Parameter setting
4. Parameter setting
The default settings of the parameter are labelled by an underscore.
4.1. General settings
First, set the general parameters for the bus communication (transmission delay). Additionally, you can indicate if for the programming of scenes all, or only the changed
settings are applied to the bus.
When labelling objects, you can enter an additional label (abbreviation) for the objects
of the device, e.g. ‘LR’ for ‘living room’, to make the room installation more transparent.
Send delay of threshold values after
voltage returns
Send delay of switching and status outputs
after voltage returns
For the use of scenes:
Application when programming all parameters • only changed parameters
Object labelling [Free text max. 20 characters]
4.2. Operating Mode
Choose the operating mode of the drive.
Operating mode • do not use
5 s … 2 h
5 s … 2 h
• shutter
• blind
• awning
• window
4.2.1. Drive - Shutter, Blind, Awning, Window
Set the general parameters for the drive.
Driving direction:
Up/down, on/off or open/close can be exchanged.
Exchange UP/DOWN (shutter, blinds)
Exchange ON/OFF (awning)
Exchange OPEN/CLOSE (window)
Runtime:
The runtime between the end positions is the basis for moving into intermediate positions (e.g. for movement range limits and scenes). You can enter the runtime numerically (in seconds) or have the runtime determined automatically. The actuator specifies
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
no • yes
Page 15

13 Parameter setting
the end positions with help from the greater current on the drive output. For this, regular reference movements (see below) should be set.
Use an automatic runtime measurement no • yes
Use an automatic runtime measurement no
Runtime DOWN in sec (shutter, blinds)
Runtime OFF in sec (awning)
Runtime UP in sec (window)
Runtime OPEN in sec (shutter, blinds)
Runtime ON in sec (awning)
Runtime CLOSE in sec (window)
1 … 320; 60
1 … 320; 65
If a dead time is observed while starting the curtain, then this can be entered manually
at this point or calculated automatically. Obey the manufacturer's instructions for the
curtain.
Use dead times • no
during the position travel from closed
position in 10 ms (only for manual input)
for position movement from all other
positions in 10 ms (only for manual input)
for slat movement from closed
position in 10 ms (only for manual input)
for movement with change of direction
in 10 ms (only for manual input)
for slat movement from all other
positions in 10 ms (only for manual input)
• yes, enter by hand
• yes, calculate automatically
0 ... 600
0 ... 600
0 ... 600
0 ... 600
0 ... 600
Runtime zero position and step setting of slats:
(only for shutters)
The zero position is the starting position of 0% as the initial point of movement positions. Adjusting the zero position runtime, multiple shades of a façade can be optically
synchronised.
Step time x step number determines the turning time of the slats.
Runtime zero position in 0.1 sec 0 … 255
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 16

14 Parameter setting
Step time in 10 ms 1 … 100; 20
Step number slats 1 … 255; 5
If the short time command for shutters (step command) is used only for slat
adjustment, but not for positioning the curtain, the following parameter is set to "Yes".
The parameter appears only for shutters.
Allow step commands only for slat
adjustment
no • yes
Break time:
The required break times during a change of direction of the drive should be adjusted
according to the specifications of the motor manufacturer.
Break time for a change of direction
in 0.1 sec
5 … 100; 10
Reference movement:
With the regular movement to the two end positions the runtime is adjusted again.
This is especially important for the automatic runtime determination. Therefore, it can
be set here after how many movements before a positioning movement a reference
movement will be performed. The reference movement is always in the direction of the
secure position (retracting when shading, closing windows).
Perform a reference movement no • yes
Perform a reference movement yes
for more than
movements before an auto positioning
movement
1 ... 255; 10
Slat turning:
(only for shutters)
The slat turning should be adjusted according to the specifications of the motor manufacturer.
Turn slats • never
• only after positioning movement
• after each movement
Status object and drive position:
The status and current position can be sent to the bus. By sending of 1, the status object indicates that the retracted or closed position has been exited and it is suitable for
example for monitoring windows.
The exact drive position can be sent on the bus if required. The variable delay ensures
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 17

15 Parameter setting
that the bus is not blocked by too many data packets during a longer movement. The
position can also be transmitted cyclically.
Use status object no • yes
Use drive position feedback no • yes
Position transmit delay after change in 0.1 s
(only for feedback)
Transmit drive position cyclically
(only for feedback)
0...50; 10
no • 5 s • 10 s • ... • 2 h
Scenes:
Here the scene menu is activated for this output channel.
Use scenes no • yes
See Scenes, page 21.
4.3. Control
Set the behavior of the drive here.
Set the behavior after reset and download as well as the direction of reference travel.
Behavior after reset and download • no action
Direction of reference travel • in safe position
• Up command
• Down command
• in closed position
(move out shading)
• in open position (window)
• shortest route
Blocking objects:
The output channel can be blocked in case of rain, wind or other events. The manual
operation is then not possible. Blocking and monitoring are configured here first. For
setting the individual blocks, separate menu items "Blocking X" will appear (see
chapter Block – blocking objects, page 17, Block – wind blocking, page 18 and Block –
rain blocking, page 19).
The priorities of the blocking objects correspond to the sequence listed (Block 1 has the
highest priority, Block 5 the lowest).
Use Block 1 (high priority) • no
Use block 2 • no
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
• yes, with blocking object
• yes, as wind blocking
• yes, as rain blocking
• yes, with blocking object
• yes, as wind blocking
• yes, as rain blocking
Page 18

16 Parameter setting
Use block 3 • no
Use block 4 • no
Use Block 5 (low priority) • no
Priority is • Block 5 over Manual
Use monitoring of blocking objects No • Yes
Monitoring period for blocking objects
(only if using monitoring of the blocking
objects)
Behaviour if a blocking object is not
received
(only if blocking object monitoring is used)
• yes, with blocking object
• yes, as wind blocking
• yes, as rain blocking
• yes, with blocking object
• yes, as wind blocking
• yes, as rain blocking
• yes, with blocking object
• yes, as wind blocking
• yes, as rain blocking
• Manual over Block 5
5s... • 2 h; 5 min
• Stop
• Up command • Down command
(Shutters/roller blinds)
• On command • Off command
(Awnings)
• Close command • Open command
(Windows)
Use movement limit 1/2:
The movement limits are activated here, and can then be configured in their own menu
items. See “Movement limits” on page 20.
Short time restriction (for blinds):
If short time restriction is active, only short time movement commands are still possible manually. If the function "Allow step commands only for blind adjustment" is activated simultaneously, (siehe Drive - Shutter, Blind, Awning, Window, page 12) only the
slats can still be adjusted by hand but no longer the movement position of the shutter.
Restriction is active for object value 1.
Use short time limit no • yes
Value of the object in front of 1.
Communication and bus voltage
restoration
(if short time restriction is used)
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
0 • 1
Page 19

17 Parameter setting
Automatic reset:
With the manual operation the automatic of the drive is deactivated. Here it is set when
the automatic is reactivated.
Manual switches to automatic after • expiry of a waiting period
Waiting period in min
(if "Expiration of a waiting period" was
chosen)
Switch to automatic for an object value
(if "Receipt of an object" was chosen)
• receiving an object
• expiration of a waiting period or receipt of
an object
1...255; 20
0 • 1 • 0 or 1
Automatic blocking object:
With the automatic blocking object, the automatic can be deactivated for a short term
(e.g. if present or during speeches in conference rooms).
Use automatic blocking object no • yes
Mode:
Here it is also specified in which mode the channel is found when the voltage returns,
i.e. after a power failure. The mode (manual or automatic) is send as a status object to
the bus.
Operating mode after power returns • Automatic
Send status object • 1 for automatic | 0 for manual
Send delay of the status output
Automatic or Manual in 0.1 sec
• Manual
• 0 for automatic | 1 for manual
0...50
Block – blocking objects
The menu item only appears if a block with blocking object was configured for "control". Here it is specified was happens for object value 1 and 0. Via the free blocking object, a fire alarm scenario may be configured for example (create escape routes by retracting the shading, smoke extraction via windows). This can prevent being locked out
on the patio (opened window contact of the patio door blocks the shutter in front of the
door).
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 20

18 Parameter setting
Designation [Block 1 ... 5]
If blocking object has value =1 • no action
Position in % (only if by using a block, a
specific position is achieved)
Slat position in % (only if by using a block,
a specific shutter position is achieved)
If blocking object has value =0
For manual operation before and after
blocking
For automatic operation after blocking follow automatic
Value of the object before the 1st
communication and bus voltage return
Enter a designation here!
• stop
• move into position
• up-command • down-command
(shutter/blind)
• retract-command
(awning)
• close-command • open-command
(window)
0...100
0...100
• no action
• move into last position
0...1
• extend-command
Block – wind blocking
The menu item only appears if a wind blocking was configured for "control". The input
object "wind blocking" is linked with the output object of a wind sensor. The input can
be a 1bit object (smaller or larger than a threshold value), as well as a 16bit object
(measurement value).
Designation [Wind blocking]
Type of input object 1 bit • 16 bit
1 bit input object:
Type of input object 1 bit
If blocking object has value =1 • no action
Position in % (only if by using a block, a
specific position is achieved)
Enter a designation here!
• stop
• move into position
• up-command • down-command
(shutter/blind)
• retract-command • extend-command
(awning)
• close-command • open-command
(window)
0...100
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 21

19 Parameter setting
Slat position in % (only if by using a block,
a specific shutter position is achieved)
Waiting period in secure position in min
after blocking
Behaviour after waiting period
For manual operation before and after
blocking
For automatic operation after blocking follow automatic
0...100
1...255; 5
• no action
• move into last position
16 bit input object:
Type of input object 16 bit
As of wind speed in m/s
blocking
If blocking is active • no action
Waiting period in secure position in min
after blocking
Behavior after waiting period
For manual operation before and after
blocking
For automatic operation after blocking follow automatic
Send current blocking status no • yes
2...30; 5
• stop
• move into position
• up-command • down-command
(shutter/blind)
• retract-command • extend-command
(awning)
• close-command • open-command
(window)
1...255; 5
• no action
• move into last position
Block – rain blocking
The menu item only appears if a rain blocking was configured for "control". The input
object "rain blocking" is linked with the output object of a rain sensor.
Designation [rain blocking]
If blocking object has value =1 • no action
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Enter a designation here!
• stop
• move into position
• up-command • down-command
(shutter/blind)
• retract-command • extend-command
(awning)
• close-command • open-command
(window)
Page 22

20 Parameter setting
Position in % (only if by using a block, a
specific position is achieved)
Slat position in % (only if by using a block,
a specific shutter position is achieved)
Waiting period in secure position in min
after blocking
Behaviour after waiting period
For manual operation before and after
blocking
For automatic operation after blocking follow automatic
0...100
0...100
1...255; 5
• no action
• move into last position
Movement limits
The menu item appears only if a movement limit was activated in ‘Control’. Movement
limits can be used to restrict manual movement. The limit is active for object value 1.
Limitation type • completely
Value of the object in front of 1.
Communication and bus voltage
restoration
If limiting the movement position:
Limitation type • movement position
Movement allowed in the position range
from (in %) 0...100
to (in %) 0...100
If limiting the slat angle (shutters only):
Limitation type • slat angle
Movement allowed in the angle range
from (in %) 0...100
to (in %) 0...100
• movement position
• slat angle (for shutters)
• allow UP only
• allow DOWN only
0 • 1
4.3.1. Manual
Position memory for the manual movement can be activated here. The position set
here can be overwritten via a learning object at any time. The memorised position can
be retrieved again at a later time.
For shutters, both the movement and the slat position can be stored.
Use position memory no • yes
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 23

21 Parameter setting
Use different positions for object values 0
and 1
Position in % 0...100
Allow calling via command sequence: longterm = 1, short-term = 1
Use learning object for new position no • yes
Transfer when programming
(when learning object is used)
no • yes
(if ‘yes’ is selected, there will be a division
into positions for object value 0 and object
value 1)
no • yes
• all parameters
• changed parameters only
4.3.2. Automation – external
The position storage for automatic movement is activated here. The pre-set position
can be overwritten at any time via a learning object. The memorised position can be
retrieved again at a later time. For configuration options, see chapter “Manual” on
page 20.
4.3.3. Scenes
A group address for scenes must be filed in the KNX system to control the scenes.
The input object ‘Channel X: call/save scenes’ of the actuator is linked to this group address.
A scene is called, then the scene number is communicated to the actuator. The
movement position saved for this scene number in the actuator is then taken.
If the scene saving function is used, then the current movement position is saved for
this scene number in the actuator.
The ‘Scenes’ menu item of the actuator is only shown if ‘Use scenes: yes’ was selected
in the settings for the drive channel. Every drive can have up to 16 scene save
points for movement positions.
Activate a scene save point.
Use scene save point X no • yes
Assign a scene number to the scene save point. Use this scene number to call/save the
movement position stored in the actuator. Make sure that every scene number is used
only once per drive channel.
Scene number 0...127
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 24

22 Parameter setting
Set the movement position. If it is allowed to save scenes via the bus, this position only
applies after the ETS download until the first manual saving. Afterwards, the new
movement position saved in the actuator is used.
Shutter position in % or
0...100; 50
Blind position in % or
Awning position in % or
Window position in %
Slat position in %
0...100; 70
(only for shutters)
Radio actuator KNX RF MSG-DST Version: 27.06.2018 • Technical changes and errors excepted.
Page 25

Page 26

Elsner Elektronik GmbH Control and Automation Engineering
Sohlengrund 16
75395 Ostelsheim Phone +49 (0) 70 33 / 30 945-0 info@elsner-elektronik.de
Germany Fax +49 (0) 70 33 / 30 945-20 www.elsner-elektronik.de
Technical support: +49 (0) 70 33 / 30 945-250
 Loading...
Loading...