

TouchSystem
Programmer's
Guide
CARROLLTOUCH
TOUCHPRODUCTS
ancompanyAMP
Touch System
Programmer’s
Guide
CARROLL TOUCH
TOUCH PRODUCTS
an AMP company
August 1996
Part #: 2970-0011-01-Rev A

Copyright
Copyright ©1996 Carroll Touch. All rights reserved.
Trademarks
Smart-Frame is a trademark of Carroll Touch, Round Rock, Texas.
IBM and PC are trademarks of International Business Machines
Corporation.
All other brands and product names are trademarks of their respective
owners.
Disclaimer
Carroll Touch has a policy of continually improving products as new
technology becomes available. Carroll Touch reserves the right to make
changes and improvements to the specifications of this equipment at
any time without notice.
Carroll Touch has made every attempt to ensure that the information in
this document is accurate and complete. Carroll Touch assumes no
liability for any damages that result from the use of this manual or the
equipment it documents. Carroll Touch reserves the right to make
changes to this document at any time without notice.

CARROLL TOUCH Table of Contents
Table of Contents
Welcome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xi
Purpose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
Audience . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
Conventions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
1. Introduction to Infrared Touch Systems . . . . . . . 1-1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Touch Frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Touch Controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Interpolating Touch Coordinates. . . . . . . . . . . . . . . . . . . . 1-3
Reporting Touch Coordinates . . . . . . . . . . . . . . . . . . . . . . 1-4
Failed Beams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
Criteria for Failing a Beam . . . . . . . . . . . . . . . . . . . . . 1-5
Failed Beam Timing Parameters . . . . . . . . . . . . . . . . . 1-5
Criteria for Unfailing a Beam . . . . . . . . . . . . . . . . . . . 1-7
Failed Beam Reports . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
2. Introduction to Guided Wave Touch Systems . . . 2-1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Touch Screens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
Touch Controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
EEPROM File and Parameters . . . . . . . . . . . . . . . . . . . . . 2-3
3. General Programming Issues . . . . . . . . . . . . . . . . 3-1
Hardware Configurations . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Built-In Controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
External Controllers. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
Application Program Interface . . . . . . . . . . . . . . . . . . 3-4
Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
Floating Point Calibration Program Design . . . . . . . . 3-7
Floating Point Calibration Examples. . . . . . . . . . . . . . 3-8
HBC I/O Registers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
Sending a Touch Command to the HBC . . . . . . . . . . . 3-9
Receiving Touch Data from the HBC . . . . . . . . . . . . 3-10
Polling Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
Interrupt Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
Resetting the HBC. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-11
i

Table of Contents CARROLL TOUCH
4. Smart-Frame Protocol . . . . . . . . . . . . . . . . . . . . . . 4-1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
SFP and SFP-II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Types of SFP Commands . . . . . . . . . . . . . . . . . . . . . . . . . 4-2
Communication Commands . . . . . . . . . . . . . . . . . . . . 4-3
Reporting Method Commands. . . . . . . . . . . . . . . . . . . 4-3
Touch Mode Commands . . . . . . . . . . . . . . . . . . . . . . . 4-4
Information Request Commands. . . . . . . . . . . . . . . . . 4-5
System Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-5
Reports. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-6
Touch System Initialization. . . . . . . . . . . . . . . . . . . . . . . . 4-7
Resetting the Touch System . . . . . . . . . . . . . . . . . . . . 4-7
Power Cycle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
Dedicated Reset Signal . . . . . . . . . . . . . . . . . . . . . 4-7
Break (Hardware Detected). . . . . . . . . . . . . . . . . . 4-7
HBC Hardware Reset Register . . . . . . . . . . . . . . . 4-8
Break (Firmware Detected) . . . . . . . . . . . . . . . . . . 4-8
Reset (45H) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
Performing the Autobaud/Autoparity Sequence . . . . . 4-8
Checking for Touch System Errors . . . . . . . . . . . . . . . 4-9
Setting the Reporting Method and Touch Mode . . . . 4-10
Touch System Initialization Examples . . . . . . . . . . . . . . 4-10
Using Autobaud/Autoparity . . . . . . . . . . . . . . . . . . . 4-10
Using a Fixed Baud Rate. . . . . . . . . . . . . . . . . . . . . . 4-11
Using the HBC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
Using an SBC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-12
Compatibility Issues/Programming Tips. . . . . . . . . . . . . 4-12
Number of Processors Independence . . . . . . . . . . . . 4-13
Firmware Version Independence. . . . . . . . . . . . . . . . 4-13
Frame Size Independence . . . . . . . . . . . . . . . . . . . . . 4-13
Touch System Response Time Independence . . . . . . 4-13
SFP Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-14
Autobaud/Autoparity Delay Time. . . . . . . . . . . . . . . 4-14
Maximum Command Completion Time . . . . . . . . . . 4-14
Reset Time/Diagnostics Completion Time . . . . . . . . 4-14
SFP Programming Examples. . . . . . . . . . . . . . . . . . . . . . 4-14
5. Smart-Frame Protocol II . . . . . . . . . . . . . . . . . . . . 5-1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Extensibility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
Modal Protocols. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-4
Backward Compatibility . . . . . . . . . . . . . . . . . . . . . . . 5-4
Types of SFP-II Functions. . . . . . . . . . . . . . . . . . . . . . . . . 5-5
Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
ii

CARROLL TOUCH Table of Contents
Commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-6
Validation Layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
Interpretation Layer. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-8
Reports. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-8
Validation Layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-9
Interpretation Layer. . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
Example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
Reporting Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-11
Report Transfer Mode . . . . . . . . . . . . . . . . . . . . . . . . 5-11
Error Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-12
Invalid Command Number . . . . . . . . . . . . . . . . . . . . 5-12
Invalid Parameter Value . . . . . . . . . . . . . . . . . . . . . . 5-13
Unsupported Feature . . . . . . . . . . . . . . . . . . . . . . . . . 5-13
Invalid Byte Count. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-14
Not Enough Parameters. . . . . . . . . . . . . . . . . . . . . . . 5-17
Too Many Parameters . . . . . . . . . . . . . . . . . . . . . . . . 5-17
Overloaded Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-18
Shared Parameters between SFP and SFP-II. . . . . . . . . . 5-19
Touch Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-19
Report Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
6. Touch Application Program Interface (TAPI) . . 6-1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Installing a TAPI Driver . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
SBC Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
HBC Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
RS-232 Driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-4
Error Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-6
Determining if a TAPI Driver Is Installed. . . . . . . . . . . . . 6-7
Calling TAPI Functions. . . . . . . . . . . . . . . . . . . . . . . . . . . 6-7
Touch System Initialization Using a TAPI Driver . . . . . . 6-8
TAPI Programming Examples. . . . . . . . . . . . . . . . . . . . . . 6-9
7. CTKERN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-2
Scaling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-4
Touch Reporting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5
Calibration and Scaling Examples. . . . . . . . . . . . . . . . . . . 7-5
Temporal Filter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-8
Methods for Interfacing CTKERN and an Application
Program. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-9
Polling Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-9
Interrupt Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-9
iii

Table of Contents CARROLL TOUCH
Loading the CTKERN Driver . . . . . . . . . . . . . . . . . . . . . . 7-9
Command Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-9
Error Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-10
Determining If the CTKERN Driver Is Installed . . . . . . 7-13
Calling CTKERN Functions . . . . . . . . . . . . . . . . . . . . . . 7-13
CALIB.EXE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-13
Command Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-14
Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-15
Calibrate Mono, EGA, VGA Video Modes . . . . 7-16
Calibrate Other Video Modes . . . . . . . . . . . . . . . 7-17
Edit Entry. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-18
Delete Entry. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-18
CALIB.DAT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-20
CTKERN Programming Examples . . . . . . . . . . . . . . . . . 7-20
8. Dynamic Link Library (DLL) Functions . . . . . . . 8-1
Calling Windows Driver DLL Functions . . . . . . . . . . . . . 8-2
A. Smart-Frame Protocol Command Reference . . . A-1
Add_Exit_Point_Modifier (29H) ()) . . . . . . . . . . . . . .A-5
Clear_Touch_Report_Buffer (3DH) (=) . . . . . . . . . . .A-6
Continuous_Mode (27H) (’) . . . . . . . . . . . . . . . . . . . .A-7
Coordinate_Reporting (23H) (#) . . . . . . . . . . . . . . . . .A-8
Echo_Off (21H) (!) . . . . . . . . . . . . . . . . . . . . . . . . . .A-10
Echo_On (20H) (SPACE) . . . . . . . . . . . . . . . . . . . . .A-11
Enter_Point_Mode (25H) (%) . . . . . . . . . . . . . . . . . .A-12
Exit_Point_Mode (28H) (() . . . . . . . . . . . . . . . . . . . .A-13
Get_Configuration_Report (33H) (3) . . . . . . . . . . . .A-14
Get_Error_Report (32H) (2) . . . . . . . . . . . . . . . . . . .A-15
Get_Failed_Beam_Report (36H) (6). . . . . . . . . . . . .A-19
Get_Firmware_Version_Report (34H) (4) . . . . . . . .A-21
Get_Frame_Size_Report (37H) (7) . . . . . . . . . . . . . .A-23
Get_One_Report (46H) (F) . . . . . . . . . . . . . . . . . . . .A-24
Get_State_Report (47H) (G) . . . . . . . . . . . . . . . . . . .A-25
Hardware_Flow_Control_Off (42H) (B). . . . . . . . . .A-27
Hardware_Flow_Control_On (41H) (A). . . . . . . . . .A-28
Report_Transfer_Off (43H) (C) . . . . . . . . . . . . . . . .A-29
Report_Transfer_On (44H) (D). . . . . . . . . . . . . . . . .A-30
Reset (45H) (E) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-31
Run_Diagnostics (3AH) (:) . . . . . . . . . . . . . . . . . . . .A-32
Scan_Reporting (22H) (”) . . . . . . . . . . . . . . . . . . . . .A-33
Software_Reset (3CH) (<). . . . . . . . . . . . . . . . . . . . .A-34
SwitchToSFP-II (65H) . . . . . . . . . . . . . . . . . . . . . . .A-35
Touch_Scanning_Off (2BH) (+) . . . . . . . . . . . . . . . .A-37
iv

CARROLL TOUCH Table of Contents
Touch_Scanning_On (2AH) (*) . . . . . . . . . . . . . . . .A-38
Tracking_Mode (26H) (&) . . . . . . . . . . . . . . . . . . . .A-39
B. Smart-Frame Protocol II Function Reference . . B-1
GetConfiguration (11H) . . . . . . . . . . . . . . . . . . . . . . .B-3
GetCoordinateRanges (10H) . . . . . . . . . . . . . . . . . . . . B-8
GetProtocolVersion (65H). . . . . . . . . . . . . . . . . . . . .B-10
GetTouchState (01H). . . . . . . . . . . . . . . . . . . . . . . . . B-12
SetReportProperties (21H) . . . . . . . . . . . . . . . . . . . . B-14
SetReportTransferMode (22H) . . . . . . . . . . . . . . . . . B-19
SetTouchModes (20H) . . . . . . . . . . . . . . . . . . . . . . . B-24
SwitchToClassicSFP (64H). . . . . . . . . . . . . . . . . . . . B-29
C. TAPI Function Reference . . . . . . . . . . . . . . . . . . . C-1
CheckForReports (3) . . . . . . . . . . . . . . . . . . . . . . . . . . C-3
GetCommunicationParameters (4) . . . . . . . . . . . . . . . C-4
GetReports (2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-6
GetTAPIDriverConfiguration (6) . . . . . . . . . . . . . . . .C-7
GetUserEventHandlerParameters (8) . . . . . . . . . . . . . C-8
Reset (0). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-9
SendCommand (1). . . . . . . . . . . . . . . . . . . . . . . . . . . C-10
SetCommunicationParameters (5). . . . . . . . . . . . . . . C-11
SetSBCFrameSize (40H). . . . . . . . . . . . . . . . . . . . . . C-13
SetUserEventHandler (7). . . . . . . . . . . . . . . . . . . . . .C-14
D. CTKERN Function Reference . . . . . . . . . . . . . . . D-1
GetCalibrationTableEntry (7) . . . . . . . . . . . . . . . . . . .D-5
GetCommunicationParameters (22) . . . . . . . . . . . . . .D-7
GetCTKERNDriverConfiguration (20). . . . . . . . . . . .D-8
GetCurrentCalibrationModeAndParameters (5) . . . . .D-9
GetCurrentScalingModeAndParameters (10) . . . . . .D-10
GetTAPIDriverConfiguration (19) . . . . . . . . . . . . . .D-11
GetTemporalFilterModeAndParameters (16) . . . . . .D-12
GetTouchState (1) . . . . . . . . . . . . . . . . . . . . . . . . . . .D-13
GetTouchSystemStatus/Configuration (17) . . . . . . .D-15
GetUserEventHandlerModeAndParameters (25) . . .D-16
GetZ-AxisScalingModeAndParameters (13) . . . . . .D-17
Reset (0). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . D-18
SendSmart-FrameProtocolCommand
AndGetReport (18) . . . . . . . . . . . . . . . . . . . . . . . .D-20
SetCalibrationMode (3). . . . . . . . . . . . . . . . . . . . . . .D-22
SetCalibrationParameters (4). . . . . . . . . . . . . . . . . . .D-23
SetCalibrationTableEntry (6) . . . . . . . . . . . . . . . . . .D-24
SetCommunicationParameters (21). . . . . . . . . . . . . .D-26
SetScalingMode (8). . . . . . . . . . . . . . . . . . . . . . . . . .D-28
v

Table of Contents CARROLL TOUCH
SetScalingParameters (9). . . . . . . . . . . . . . . . . . . . . .D-29
SetTemporalFilterMode (14). . . . . . . . . . . . . . . . . . .D-31
SetTemporalFilterParameters (15) . . . . . . . . . . . . . .D-34
SetTouchState (2) . . . . . . . . . . . . . . . . . . . . . . . . . . .D-36
SetUserEventHandlerMode (23) . . . . . . . . . . . . . . . .D-37
SetUserEventHandlerParameters (24). . . . . . . . . . . .D-39
SetZ-AxisScalingMode (11) . . . . . . . . . . . . . . . . . . .D-40
SetZ-AxisScalingParameters (12) . . . . . . . . . . . . . . .D-41
E. Dynamic Link Library (DLL) Function Reference E-1
DisableMouse (11) . . . . . . . . . . . . . . . . . . . . . . . . . . . E-3
DisableTouch (12). . . . . . . . . . . . . . . . . . . . . . . . . . . . E-4
EnableMouse (9) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . E-5
EnableTouch (10) . . . . . . . . . . . . . . . . . . . . . . . . . . . . E-6
GetMouseInfo (13) . . . . . . . . . . . . . . . . . . . . . . . . . . . E-7
GetTemporalFilterInfo (18). . . . . . . . . . . . . . . . . . . . . E-8
GetTouchInfo (14). . . . . . . . . . . . . . . . . . . . . . . . . . . . E-9
GetTouchStateandCoord (5) . . . . . . . . . . . . . . . . . . . E-10
InitializeTouch (16). . . . . . . . . . . . . . . . . . . . . . . . . . E-11
SetCalibInfo (7). . . . . . . . . . . . . . . . . . . . . . . . . . . . . E-12
SetTemporalFilterInfo (17) . . . . . . . . . . . . . . . . . . . . E-14
SetTouchEvents (8) . . . . . . . . . . . . . . . . . . . . . . . . . . E-16
Glossary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .GL-1
Index. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . IN-1
vi

CARROLL TOUCH Table of Contents
List of Figures
Figure 1-1. Infrared Touch Frame . . . . . . . . . . . . . . . . . . . . . . . . 1-2
Figure 1-2. Beam Averaging - Example 1 . . . . . . . . . . . . . . . . . . 1-3
Figure 1-3. Beam Averaging - Example 2 . . . . . . . . . . . . . . . . . . 1-4
Figure 2-1. Guided Wave Touch Screen . . . . . . . . . . . . . . . . . . . 2-2
Figure 3-1. Built-In Smart-Frame Controller Hardware . . . . . . . 3-2
Figure 3-2. RS-232 Controller Hardware (Modular IR Touch
Systems) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Figure 3-3. SBC and HBC Hardware (Modular IR Touch
Systems) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
Figure 3-4. Touch Control Software . . . . . . . . . . . . . . . . . . . . . . . 3-5
Figure 3-5. Touch Calibration Screen . . . . . . . . . . . . . . . . . . . . . 3-6
Figure 7-1. Touch System to Application Communication . . . . . 7-3
Figure 7-2. Calibration Mode Fixed or Automatic and Scaling
Mode Fixed or Automatic . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-6
Figure 7-3. Calibration Mode Fixed or Automatic and Scaling
Mode Disabled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
Figure 7-4. Calibration Mode Disabled and Scaling Mode
Fixed or Automatic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-7
Figure 7-5. Calibration Mode Disabled and Scaling Mode
Disabled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-8
Figure 7-6. Calibration Main Menu Screen . . . . . . . . . . . . . . . . 7-15
Figure 7-7. Calibration Menu Screen . . . . . . . . . . . . . . . . . . . . . 7-16
Figure 7-8. Calibration Target Screen . . . . . . . . . . . . . . . . . . . . 7-16
Figure 7-9. Calibration Other Video Mode Screen #1 . . . . . . . . 7-17
Figure 7-10. Calibration Other Video Mode Screen #2 . . . . . . . 7-17
Figure 7-11. Calibration Other Video Mode Screen #3 . . . . . . . 7-18
Figure 7-12. Calibration Manual Edit Menu Screen . . . . . . . . . 7-19
Figure 7-13. Calibration Exit Prompt Screen . . . . . . . . . . . . . . . 7-19
Figure B-1. Flow Diagram for Report Transfer Mode . . . . . . . . B-19
Figure D-1. Temporal Filter Spatial Box Size . . . . . . . . . . . . . .D-32
vii
Table of Contents CARROLL TOUCH
viii

CARROLL TOUCH Table of Contents
List of Tables
Table 1-1. Failed Beam Timing Parameters . . . . . . . . . . . . . . . . . 1-5
Table 3-1. HBC I/O Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-9
Table 3-2. Status Register Bit 0 Values . . . . . . . . . . . . . . . . . . . 3-10
Table 3-3. Status Register Bit 1 Values . . . . . . . . . . . . . . . . . . . 3-10
Table 4-1. SFP Communication Commands . . . . . . . . . . . . . . . . 4-3
Table 4-2. SFP Reporting Method Commands . . . . . . . . . . . . . . 4-4
Table 4-3. SFP Touch Mode Commands . . . . . . . . . . . . . . . . . . . 4-4
Table 4-4. SFP Information Request Commands . . . . . . . . . . . . . 4-5
Table 4-5. SFP System Commands . . . . . . . . . . . . . . . . . . . . . . . 4-6
Table 4-6. SFP Default Settings . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
Table 6-1. TAPI Error Messages and Explanations . . . . . . . . . . . 6-6
Table 7-1. CTKERN Error Messages . . . . . . . . . . . . . . . . . . . . . 7-10
Table A-1. SFP Commands in Alphabetical Order . . . . . . . . . . .A-3
Table A-2. SFP Commands in Numerical Order . . . . . . . . . . . . .A-4
Table A-3. Smart-Frame Protocol Error Report Error Codes . . .A-16
Table A-4. Touch System Default Settings . . . . . . . . . . . . . . . .A-34
Table B-1. SFP-II Functions in Alphabetical Order . . . . . . . . . . . B-2
Table B-2. SFP-II Functions in Numerical Order . . . . . . . . . . . .B-2
Table B-3. ComponentTypes, AttributeTags and
AttributeValues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-5
Table C-1. TAPI Functions in Alphabetical Order . . . . . . . . . . . . C-2
Table C-2. TAPI Functions in Numerical Order . . . . . . . . . . . . . C-2
Table C-3. Typical BL/BH Register Contents . . . . . . . . . . . . . . . C-7
Table D-1. CTKERN Functions in Alphabetical Order . . . . . . . .D-3
Table D-2. CTKERN Functions in Numerical Order . . . . . . . . . .D-4
Table D-3. Typical BX Register Contents . . . . . . . . . . . . . . . . . .D-8
Table D-4. Typical BL/BH Register Contents . . . . . . . . . . . . . .D-11
Table E-1. Windows Driver DLL Functions in
Alphabetical Order . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . E-2
Table E-2. Windows Driver DLL Functions in
Numerical Order . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . E-2
Table E-3. Definition of Touch Events . . . . . . . . . . . . . . . . . . . E-17
ix

Table of Contents CARROLL TOUCH
x
WelcomeWelcome
s computers become a part of daily life, a technology that makes
A
them easier to use has become a necessity. Carroll Touch provides
the solution through the power of touch.
Thank you for your purchase of a Carroll Touch product and welcome
to Carroll Touch.
Purpose
Audience
Organization
This Programmer’s Guide is designed to:
• Give an overview of the touch technologies used by Carroll Touch,
with a particular emphasis on hardware and software information
(such as calibration and initialization) needed by programmers.
• Define the use and functions of the Smart-Frame Protocol, the
Smart-Frame Protocol II, the Touch Application Program Interface
(TAPI) driver, the CTKERN application interface, and the
Windows driver dynamic link libraries (DLLs).
This guide is designed for the programmer or software engineer who
integrates Carroll Touch touch systems with host computer systems.
Chapter 1, “Introduction to Infrared Touch Systems,” is an overview of
Carroll Touch infrared touch system hardware and operating principles.
Touch System Programmer’s Guide xi

Welcome CARROLL TOUCH
Chapter 2, “Introduction to Guided Wave Touch Systems,” is an
overview of Carroll Touch guided wave touch system hardware and
operating principles.
Chapter 3, “General Programming Issues,” includes information on
programming topics that apply to all Carroll Touch touch systems, such
as calibration and HBC I/O registers.
Chapter 4, “Smart-Frame Protocol,” gives an overview of the SFP
firmware protocol, including a discussion of command and report
types, initialization, timing, and programming tips and examples.
Chapter 5, “Smart-Frame Protocol II,” gives an overview of the SFP-II
firmware protocol, which extends the capabilities of SFP by offering
support of z-axes and higher resolution. Explanations of command and
report formats are included.
Chapter 6, “Touch Application Program Interface (TAPI),” includes an
overview of the TAPI software functions, and TAPI driver installation
and initialization information.
Chapter 7, “CTKERN,” includes an overview of the CTKERN
software functions, CTKERN driver installation, and parameters. It
also discusses the operation of the CTKERN calibration program
(CALIB.EXE).
Chapter 8, “Dynamic Link Library (DLL) Functions,” describes how to
use the DLL function calls to the Carroll Touch Windows driver.
Appendix A, “Smart-Frame Protocol Command Reference,” gives the
specifications for each SFP command and report.
Appendix B, “Smart-Frame Protocol II Function Reference,” gives the
specifications for each SFP-II function.
Appendix C, “TAPI Function Reference,” gives the specifications for
each TAPI function.
Appendix D, “CTKERN Function Reference,” gives the specifications
for each CTKERN function.
Appendix E, “Dynamic Link Library (DLL) Function Reference,”
gives the specifications for each Windows driver DLL.
xii Touch System Programmer’s Guide

CARROLL TOUCH Welcome
Conventions
For clarity, this guide uses certain conventions to visually distinguish
different types of information. The conventions are:
• Bold is used to emphasize a word or phrase, including definitions
of important concepts.
MALL CAPITAL LETTERS (such as SPACE or ENTER) indicates a
• S
key on the keyboard.
• Courier font indicates file names, directory names, messages
displayed by the computer, parameters in command lines, and
information to be typed by the user.
• Italics indicate a command, function name, or mode (such as
Debug Mode).
• Reports (such as the Touch Coordinate Report) and menus (such as
the Configuration Menu) use initial capital letters.
• Courier italic font indicates a variable in a command line
for which you must substitute a value.
• Hexadecimal numbers in text are identified with capital H; for
example, 1BH is the hexadecimal value 1B. Command and report
formats and examples reproduce numbers as they appear on the
screen and thus do not use the H convention.
• Information of particular importance or actions that may have
undesirable results if performed improperly are included under the
headings
Note and Caution.
Touch System Programmer’s Guide xiii

Welcome CARROLL TOUCH
xiv Touch System Programmer’s Guide
1
Introduction to
Introduction to
Infrared Touch
Infrared Touch
Systems
Systems
his chapter gives an overview of Carroll Touch scanning infrared
T
touch systems, and covers the following topics:
• Overview.
• Touch Frames.
• Touch Controllers.
• Interpolating Touch Coordinates.
• Reporting Touch Coordinates.
• Failed Beams.
Touch System Programmer’s Guide 1-1
Chapter 1 - Introduction to Infrared Touch Systems CARROLL TOUCH
Overview
A Carroll Touch infrared touch system consists of a touch controller and
touch frame or a combined touch frame and controller. The touch
system uses scanning infrared (IR) beam technology to detect operator
input. Generating an invisible grid of IR light beams in front of the host
video display screen, the touch system reports touch input when the IR
light field is interrupted by a stylus (typically a finger). This input can
be used by a touch application just as similar applications use input from
pointing devices such as a mouse, light pen or trackball.
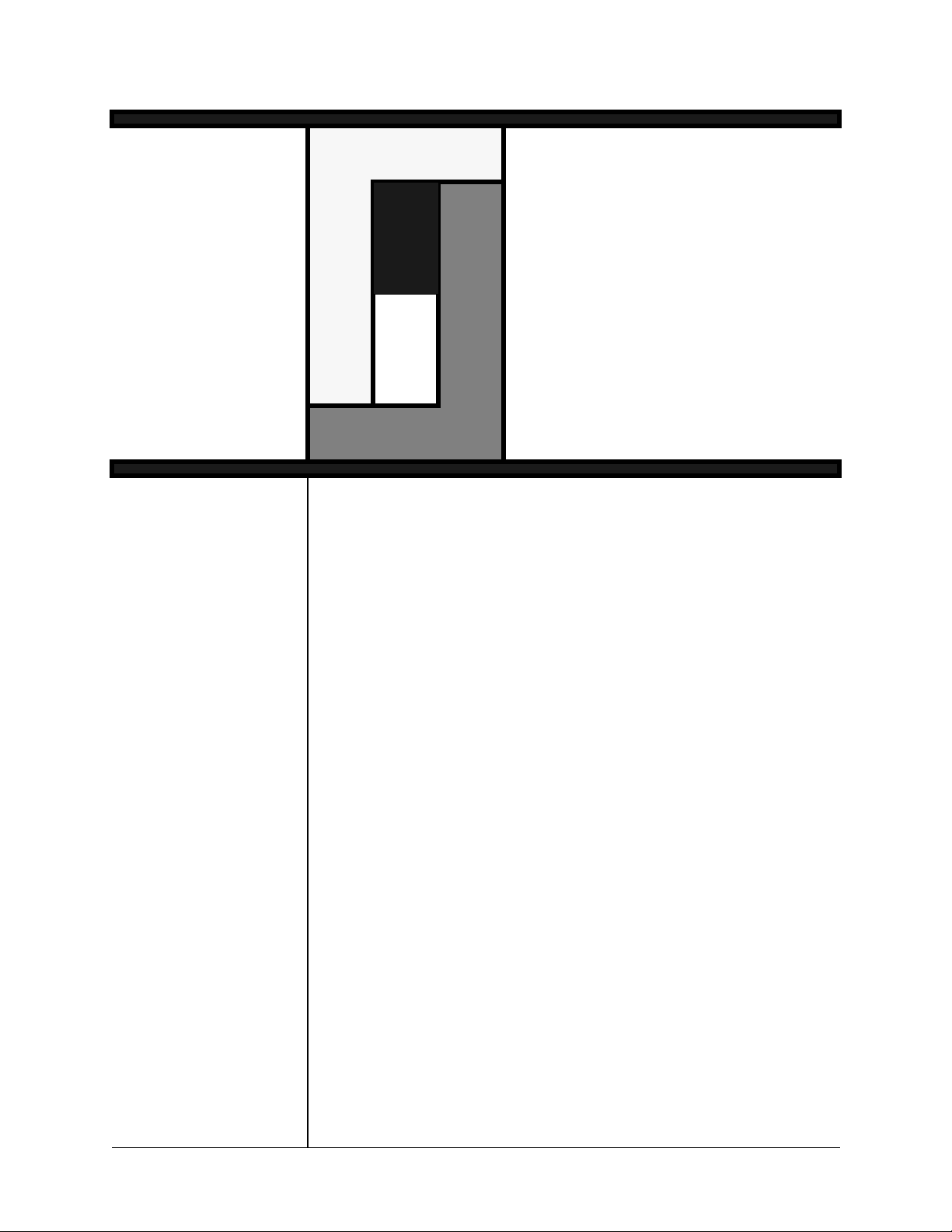
Touch Frames
The typical Carroll Touch touch frame is a thin, flat rectangle comprised
of four joined printed circuit boards (PCBs). Two adjacent PCBs contain
arrays of IR light emitting diodes (LEDs), while the other two PCBs
contain arrays of phototransistor/receivers. Each IR LED and the
phototransistor opposite it is called an opto-pair. The IR LED of each
opto-pair emits an IR light beam that is detected by the phototransistor.
The x-axis and y-axis arrays of opto-pairs are pulsed sequentially to
create a grid of IR beams, as shown in Figure 1-1.
Figure 1-1. Infrared Touch Frame
A beam, or a beam pair, consists of an IR LED and phototransistor
directly across from each other in the touch frame.
Touch Controller
The touch controller is the circuitry required to create and monitor the
IR grid. A sequence of electrical pulses is sent to the LEDs to create the
1-2 Touch System Programmer’s Guide
CARROLL TOUCH Chapter 1 - Introduction to Infrared Touch Systems
grid of IR beams in front of the video display surface. This grid of IR
beams is the touch active area.
When a stylus enters the touch active area, light beams are obstructed at
a particular location on the grid. The touch frame then transmits to the
controller a list that indicates which beams have been interrupted. The
controller converts this list into an x, y coordinate that identifies the
location of the touch. The x, y coordinate data is transmitted to the host
processor via the PC bus or the RS-232 serial port and is then processed
and used by the application program.
Interpolating Touch Coordinates
To achieve finer resolution than the physical IR beam grid provides,
Carroll Touch IR touch systems interpolate a virtual beam between each
pair of physical beams. The physical beams are assigned even numbers
(0, 2, 4, and so on). The virtual beams are assigned odd numbers (1, 3,
5, and so on). The combination of physical beams and virtual beams
results in a set of logical beams.
The coordinate system formed by the logical beams is called the logical
coordinate system. The origin of the logical coordinate system (0, 0) is
located in the upper left corner of the display. When multiple beams are
interrupted, the touch system averages them and reports one x, y logical
coordinate pair to the host, a process known as beam averaging.
Examples of beam averaging are shown in Figures 1-2 and 1-3.
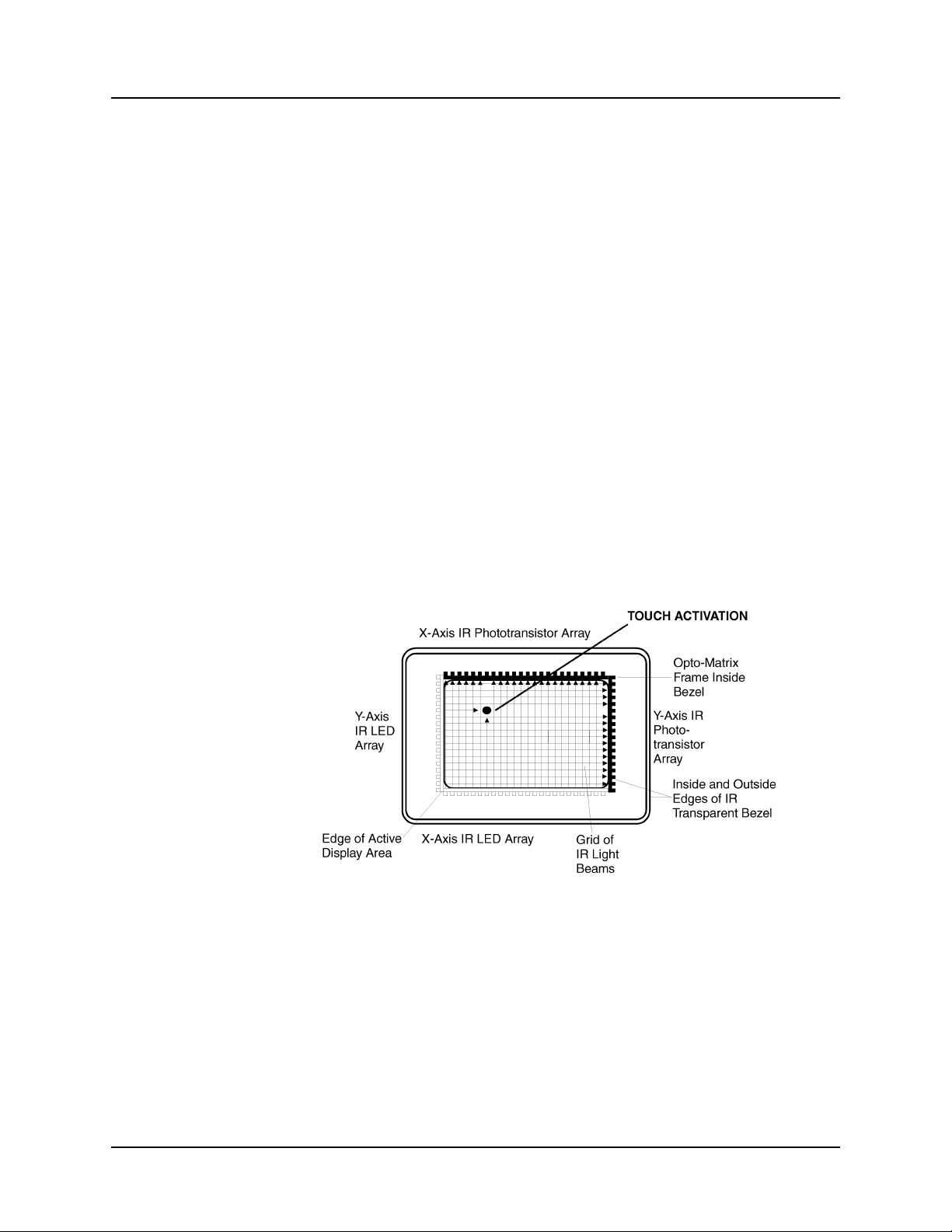
02 04 0806 1000
00
02
04
06
08
4,4
Figure 1-2. Beam Averaging - Example 1
In Figure 1-2, beams 2, 4, and 6 are interrupted on both the x- and
y-axes. The logical coordinate pair reported to the host is 4, 4.
Touch System Programmer’s Guide 1-3
Chapter 1 - Introduction to Infrared Touch Systems CARROLL TOUCH
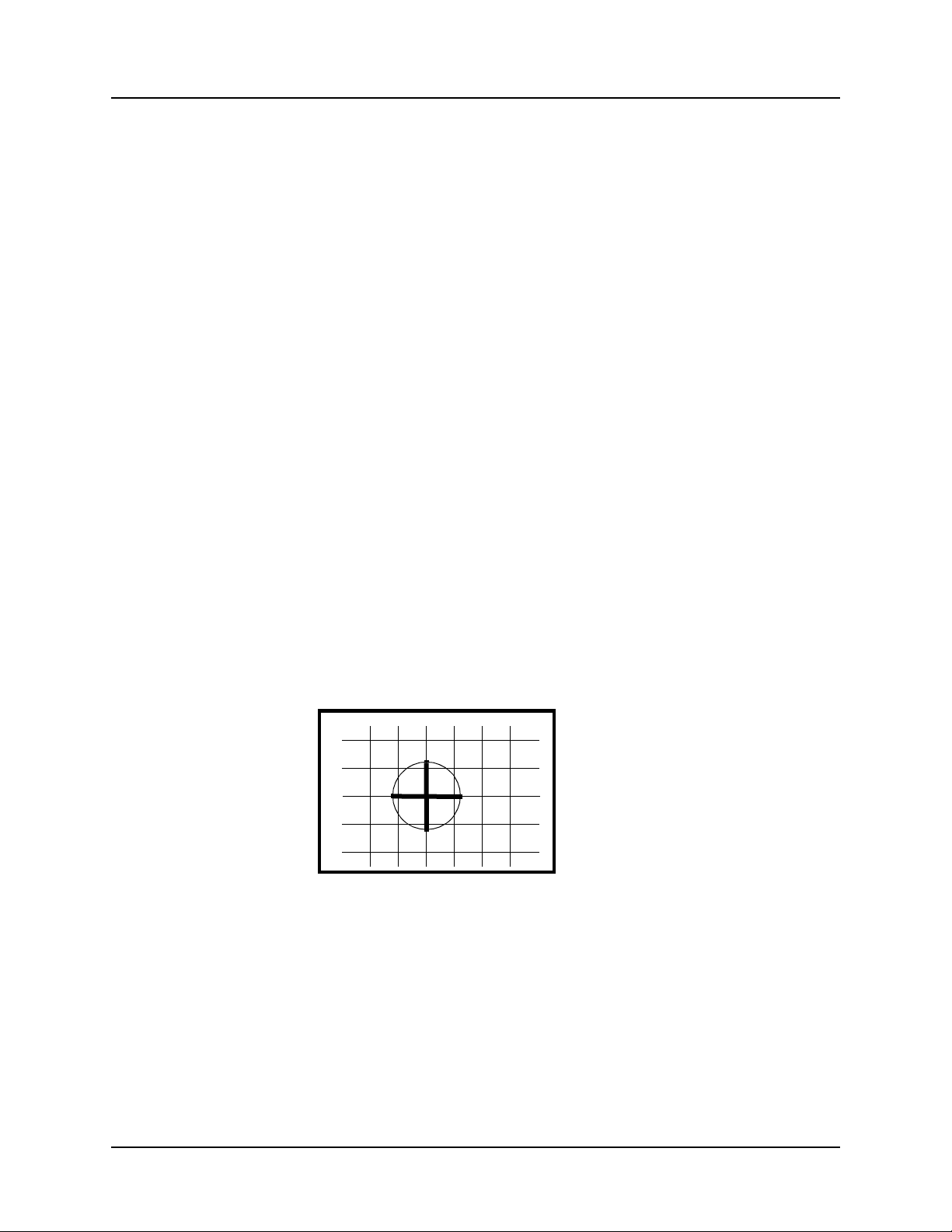
02 04 0806 1000
00
02
04
06
08
5,5
Figure 1-3. Beam Averaging - Example 2
In Figure 1-3, beams 2, 4, 6, and 8 are interrupted on both the x- and
y-axes. The logical coordinate pair reported to the host is 5, 5.
Reporting Touch Coordinates
For a touch to be reported, at least one x beam and one y beam must be
interrupted. If no beams are interrupted in either the x- or y-axis, the
touch is ignored.
The lowest logical coordinate reported for any axis on any touch frame
is zero. The maximum logical coordinate that may be reported for a
given touch frame axis may be determined from the number of physical
beams on that touch frame axis as follows:
Failed Beams
Maximum logical coordinate = 2 x (number of physical beams - 1)
For example, on a frame that has 40 x-axis beams and 30 y-axis beams,
the maximum logical coordinates for the frame are:
Maximum logical x coordinate = 2 x (40 - 1) = 78
Maximum logical y coordinate = 2 x (30 - 1) = 58
Therefore, the reported coordinates would range from 0 to 78 on the
x-axis and from 0 - 58 on the y-axis.
Carroll Touch touch systems have incorporated into their firmware a
mechanism for detecting defective beam pairs and removing them from
consideration when determining the location of a stylus within the touch
frame. This failed beam mechanism provides a measure of fault
tolerance for the touch system so that, in the event of an opto-component
1-4 Touch System Programmer’s Guide
CARROLL TOUCH Chapter 1 - Introduction to Infrared Touch Systems
failure, the touch system simply suffers a localized loss of resolution in
one coordinate axis, rather than being completely inoperable.
Criteria for Failing a Beam
The touch system considers a beam to be interrupted if the IR light level
at the phototransistor is below a threshold level. A beam is considered
failed if it appears to be interrupted for a given period of time.
The touch system detects failed beams:
• During power up.
• When the touch system is reset using the SFP Reset (45H)
command or BREAK.
• When the touch system diagnostics are run using the SFP
Run_Diagnostics (3AH) command.
• While the touch system is scanning the beams during normal
operation.
In the first three cases, the time required to fail a beam is less than one
second. In the last case, the time required to fail a beam is determined
by the failed beam timing parameters.
The touch system maintains a table of beams that have been determined
to have failed.
Failed Beam Timing Parameters
The values for the various failed beam timing parameters are different
for ASIC-based touch systems and non-ASIC-based touch systems, as
shown in Table 1-1.
Table 1-1. Failed Beam Timing Parameters
Parameter
Valid Touch Fail Time 59 - 62 sec. 225 - 270 sec.
Non-Contiguous Touch Fail Time 2.2 - 4.4 sec. 10 - 20 sec.
ASICBased
Non-ASICBased
Single Axis Touch Fail Time 2.2 - 4.4 sec. 10 - 20 sec.
Unfail Time 2.2 - 4.4 sec. 10 - 20 sec.
A touch system is probably ASIC-based if it is a modular touch system,
or an invasively integrated Smart-Frame with a five switch
Communication Parameters jumper block on the frame. If you are
Touch System Programmer’s Guide 1-5

Chapter 1 - Introduction to Infrared Touch Systems CARROLL TOUCH
unsure whether your system is ASIC-based and if you need to know the
values of the failed beam timing parameters, use the touch system
diagnostics software (CTDIAG) to observe the amount of time required
to fail beams that are interrupted by a valid touch.
Table 1-1 gives a range of values rather than a specific value because the
touch system firmware checks for failed beams at a regular interval (2.2
seconds or 10 seconds). A beam that appears to be interrupted just after
the firmware checks takes longer to fail than a beam that appears to be
interrupted just before the firmware checks.
Note
Custom touch systems may have different values for the failed
beam timing parameters from those given in Table 1-1.
During normal operation, with the touch system scanning the beams, a
beam is considered failed if it is interrupted for the amount of time
specified by the Valid Touch Fail Time parameter and if the pattern of
interrupted beams appears to indicate a valid touch with a single stylus.
(A touch is considered valid if there appears to be one and only one
region of contiguous interrupted beams in each coordinate axis.) Thus,
a single stylus that remains stationary within the touch screen for the
Valid Touch Fail Time causes beams to be failed.
If beams are interrupted on only one axis of the touch frame, the
interrupted beams are failed in the amount of time specified by the
Single Axis Touch Fail Time parameter.
For any other pattern of interrupted beams, such as more than one region
of interrupted beams in an axis, the interrupted beams are failed in the
amount of time specified by the Non-Contiguous Touch Fail Time
parameter. Thus, multiple styli that remain stationary for longer than the
Non-Contiguous Touch Fail Time result in beams being failed, as do
non-contiguous touches.
For example, if you place a piece of tape over the opto-devices in one
axis of the touch screen, the beams obstructed by the tape are determined
by the touch system firmware to be failed and are added to the failed
beam table only after the amount of time specified by the Invalid Touch
Fail Time parameter has elapsed. If you then remove the tape, the time
specified in the Unfail Time parameter must elapse before the beams are
considered unfailed by the touch system firmware.
1-6 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 1 - Introduction to Infrared Touch Systems
Criteria for Unfailing a Beam
If a failed beam appears not to be interrupted for the amount of time
specified by the Unfail Time parameter, it is unfailed and removed from
the failed beam table by the touch system firmware.
Failed Beam Reports
Two SFP commands can be used to generate reports related to the failed
beam status of the touch system: Get_Error_Report (32H) and
Get_Failed_Beam_Report (36H). See Appendix A, “Smart-Frame
Protocol Command Reference,” for details on these commands.
Touch System Programmer’s Guide 1-7

Chapter 1 - Introduction to Infrared Touch Systems CARROLL TOUCH
1-8 Touch System Programmer’s Guide
2
T
Introduction to
Introduction to
Guided Wave
Guided Wave
Touch Systems
Touch Systems
his chapter gives an overview of Carroll Touch guided wave touch
systems and covers the following topics:
• Overview.
• Touch Screens.
• Touch Controllers.
• EEPROM File and Parameters.
Touch System Programmer’s Guide 2-1

Chapter 2 - Introduction to Guided Wave Touch Systems CARROLL TOUCH
Overview
A Carroll Touch guided wave touch system consists of a touch
controller and touch screen. The touch system uses guided acoustic
wave (GW) technology to detect operator input for a variety of
applications. Generating invisible acoustic waves, the touch system
reports touch input when the wave motion is attenuated by a stylus
(typically a finger). This input can be used by a touch application just as
similar applications use input from pointing devices such as a mouse,
light pen or trackball.
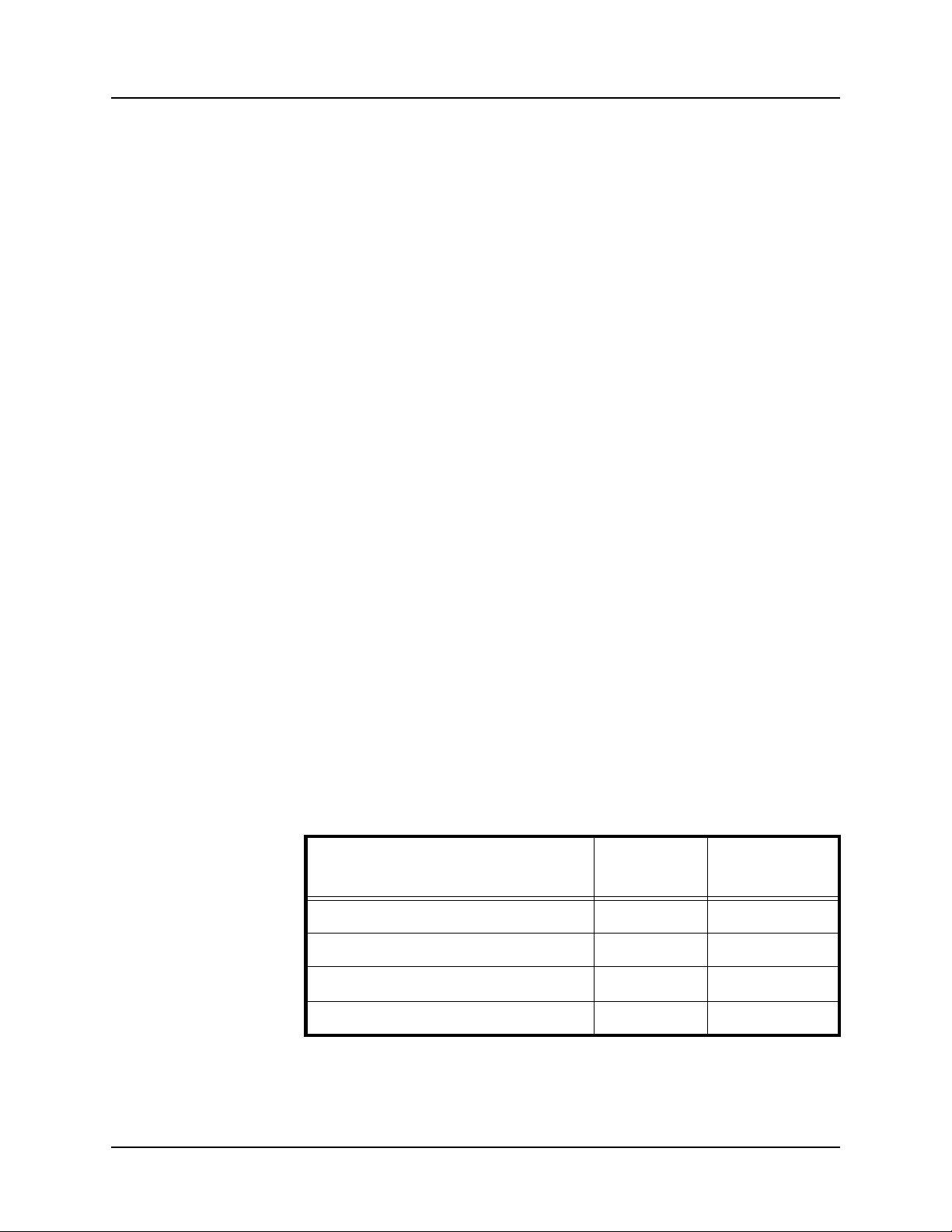
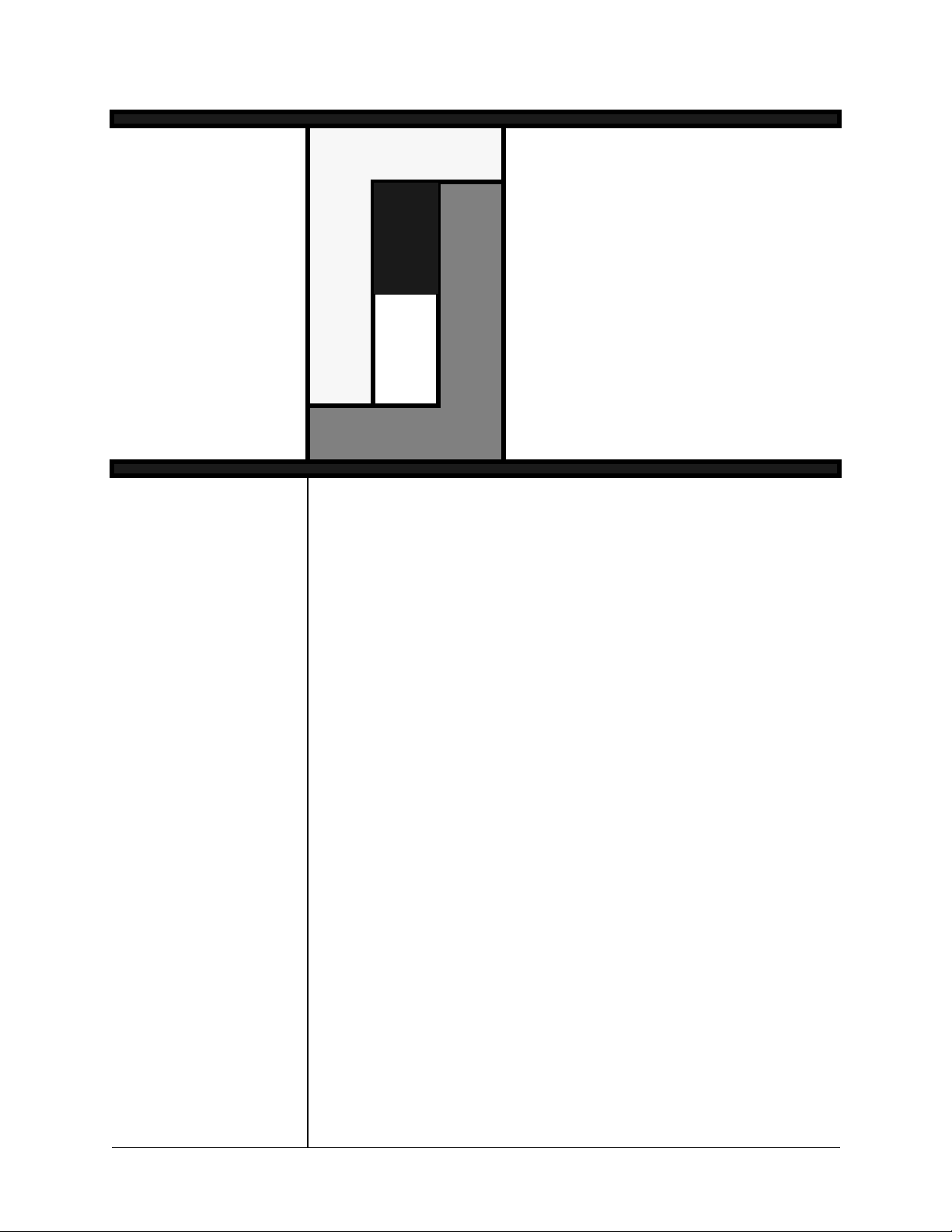
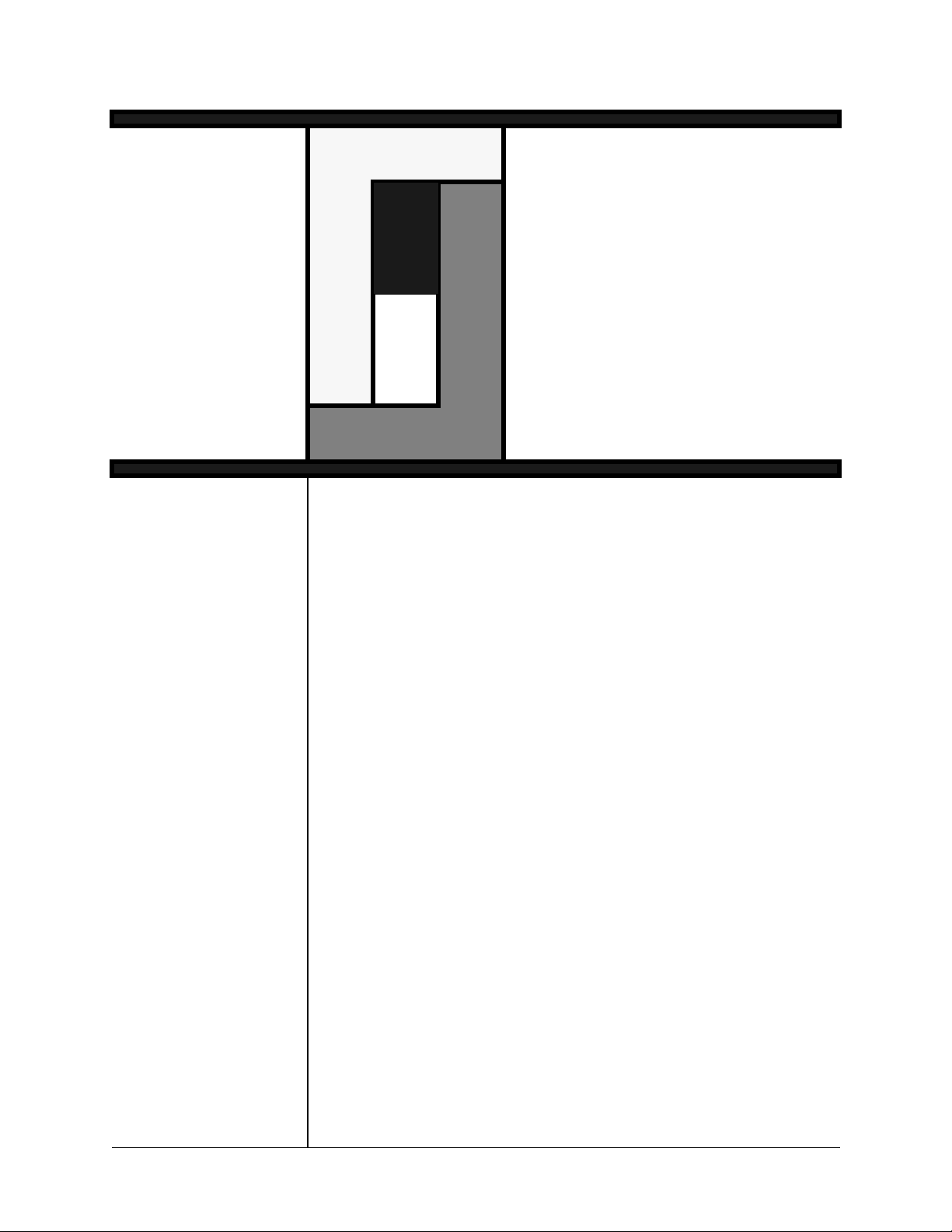
Touch Screens
Guided acoustic wave technology is based on transmitting acoustic
waves through a glass overlay placed over the display surface. A
transducer mounted on the edge of the glass emits an acoustic wave. The
wave travels along the reflector array, is redirected across the overlay to
the reflecting edge, and returns to the array where it is reflected back to
the transducer. The first reflector will send a signal back first, then the
second, and so on, as shown in Figure 2-1.
Figure 2-1. Guided Wave Touch Screen
Touch Controllers
The touch controller is the circuitry required to create and monitor the
acoustic waves. A sequence of electrical pulses is sent to the transducer
located in the upper left of the glass overlay to generate the acoustic
waves. The area covered by the acoustic waves is the touch active area.
2-2 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 2 - Introduction to Guided Wave Touch Systems
When a stylus enters the touch active area, acoustic waves are attenuated
at that location on the overlay. The touch screen then transmits to the
controller information indicating the location of the attenuated waves.
The controller converts this information to an x, y coordinate that
identifies the location of the touch. The x, y coordinate data is
transmitted to the host processor via the controller and is then processed
and used by the application program.
EEPROM File and Parameters
Guided wave touch screens use an electrically erasable programmable
read-only memory (EEPROM) chip. An associated file stores the values
of the EEPROM parameters that control many features of the touch
screen. The following EEPROM values may be displayed, modified,
saved, and restored:
• Touch sensitivity.
• Touch active region.
• Transducer corner.
• Coordinate origin corner.
• Transducer orientation.
• Touch refresh time.
• No touch refresh time.
• Temporal filter space.
• Temporal filter time.
Touch System Programmer’s Guide 2-3

Chapter 2 - Introduction to Guided Wave Touch Systems CARROLL TOUCH
2-4 Touch System Programmer’s Guide
3
General
General
Programming
Programming
Issues
Issues
his chapter includes information that may apply to any Carroll
T
Touch touch system. It discusses the following topics:
• Hardware Configurations.
• Calibration.
• HBC I/O Registers.
Touch System Programmer’s Guide 3-1

Chapter 3 - General Programming Issues CARROLL TOUCH
Hardware Configurations
There are two major types of Carroll Touch controller configurations:
built-in controllers (used in infrared Smart-Frames) and external
controllers (used in modular infrared and guided wave touch systems).
Built-In Controllers
An infrared Smart-Frame touch system has controller electronics
built onto the touch frame itself. The Smart-Frame touch system
communicates directly with the host computer through the host serial
port. Figure 3-1 illustrates the built-in Smart-Frame controller hardware.
Built-in
Controller
(Infrared
SmartFrame)
RS-232 Cable
Host PC
Figure 3-1. Built-In Smart-Frame Controller Hardware
The Smart-Frame communicates serially with the host computer using a
selectable baud rate (300, 600, 1200, 2400, 4800, 9600, 19,200 or
autobaud) and parity (odd, even, none, autoparity). Default values for
the standard Smart-Frame are autobaud and autoparity.
External Controllers
External controllers connect to the touch system via the Modular Digital
Interface (MDI) cable in modular infrared touch systems or an 8-pin
mini-DIN sensor cable in guided wave systems. The MDI cable carries
digital signals, while the mini-DIN sensor cable carries analog signals.
A modular infrared touch system consists of any one of a number of
IR-transparent protective bezels that house and protect a touch frame,
matched with any one of three modular touch controllers: the software-
3-2 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 3 - General Programming Issues
based controller (SBC), hardware-based controller (HBC), and RS-232
controller. A guided wave touch system uses HBCs or RS-232
controllers. Figure 3-2 illustrates the RS-232 controller hardware.
External
Controller
(Guided Wave
or Modular IR
Touch Frame)
MDI/Sensor Cable
RS-232
Controller
RS-232 Cable
Host PC
Figure 3-2. RS-232 Controller Hardware (Modular IR Touch Systems)
The RS-232 controller is a PCB that has its own protective housing and
requires an external power supply. The RS-232 controller
communicates with the modular touch frame via the MDI cable and with
the host computer through the host serial port.
The RS-232 controller communicates serially with the host computer
using a selectable baud rate (300, 600, 1200, 2400, 4800, 9600, 19,200
or autobaud) and parity (odd, even, none, autoparity). Default values for
the RS-232 controller are autobaud and autoparity.
Figure 3-3 illustrates the SBC and HBC controller hardware. The SBC
and HBC are PCBs that fit into an expansion slot of an IBM-compatible
PC, communicating with and drawing power for the touch system
directly from the host through the PC bus. Both controllers
communicate with the modular touch frame via the MDI cable.
The SBC and HBC communicate with the host via several I/O registers.
The SBC and HBC also support interrupt-driven communications.
Touch System Programmer’s Guide 3-3

Chapter 3 - General Programming Issues CARROLL TOUCH
Modular
IR Touch
Frame
Modular
IR Touch
Frame
MDI Cable
SBC
Controller
Card
Host Host
PC PC
HBC
Controller
Card
SBC(TAPI)
Driver
SBC TAPI Driver
PC Bus I/O Ports
Software Interrupt
Figure 3-3. SBC and HBC Hardware (Modular IR Touch Systems)
Application Program Interface
As shown in Figure 3-4, application programs may interface with
Smart-Frame systems and systems using the HBC or RS-232 controller
directly via the Smart-Frame Protocol. Smart-Frame systems and
systems using the RS-232 controller are identical in terms of software.
Both communicate using the Smart-Frame Protocol via the RS-232
serial interface. Systems using the HBC communicate with the
application program using the Smart-Frame Protocol via the HBC I/O
registers. For more details about the I/O registers, see “HBC I/O
Registers” later in this chapter. The SBC cannot use the Smart-Frame
Protocol directly because the SBC has no processor on board. The
Smart-Frame Protocol is discussed in Chapter 4, “Smart-Frame
Protocol.”
As also shown in Figure 3-4, application programs may interface with
Smart-Frame systems and systems using the SBC, HBC, or RS-232
controller using the Smart-Frame Protocol via a Touch Application
Program Interface (TAPI) driver. This is the same Smart-Frame
Protocol used when interfacing directly to the touch system hardware.
3-4 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 3 - General Programming Issues
A
P
CTKERN
P
L
I
SMART-FRAME
C
PROTOCOL (VIA TAPI)
A
T
I
SMART-FRAME
PROTOCOL (DIRECT)
O
N
TAPI TAPI TAPI
RS-232
DRIVER
CTKERN
HBC
DRIVER
SBC
DRIVER
M
P
R
O
G
R
A
SMARTFRAME
MDI
RS-232
CONTROLLER
HBC
CONTROLLER
FRAME
SBC
CONTROLLER
Figure 3-4. Touch Control Software
There are three TAPI drivers: the SBC driver, the HBC driver, and the
RS-232 driver. The RS-232 driver works with Smart-Frames as well.
Each TAPI driver communicates with the touch system using the
hardware interface appropriate for the touch system, and with the
application program using the TAPI functions that are accessed via a
software interrupt. The TAPI interface is the same regardless of which
TAPI driver is used. This means that you may make an application touch
system hardware-independent by interfacing at the TAPI driver level
rather than directly to the touch system hardware. The TAPI software
functions are discussed in Chapter 6.
Figure 3-4 also shows that application programs may interface with
Smart-Frame systems and systems using the SBC, HBC, or RS-232
controller via the CTKERN driver. The CTKERN driver communicates
with the touch system using the TAPI driver appropriate for the touch
system, and with the application program using the CTKERN functions,
which are accessed via a software interrupt. CTKERN is a DOS driver
that provides calibration and scaling support, as well as easy-to-use
touch state reporting. CTKERN also features an installable user event
handler that allows interrupt-driven communication with the application
program. The CTKERN functions are discussed in Chapter 7.
Touch System Programmer’s Guide 3-5

Chapter 3 - General Programming Issues CARROLL TOUCH
TOUCH_MAX_Y
Calibration
The size of the display area of the video monitor frequently does not
match the size of the touch active area of the touch frame. The touch
active area is usually larger than the display area. The relationship of
touch and video coordinates is shown in Figure 3-5. In addition, the
display area on most video monitors may actually shift position or drift,
while the touch active area remains constant. To establish and maintain
alignment of the touch active area with the active display area, the touch
screen must be calibrated. A calibration procedure such as the one that
follows identifies the touch coordinates of the extreme outside corners
of the video image displayed on the monitor and derives calibration
parameters that may then be used to convert touch coordinates into
video coordinates.
0
0
0
0
VIDEO_MAX_Y
TOUCH_MAX_X
VIDEO_MAX_X
Figure 3-5. Touch Calibration Screen
It is strongly recommended that a calibration program be included in any
touch application or driver. Touch applications or drivers should not use
hard-wired values that are specific to a particular touch frame and
monitor. Use of a calibration program takes care of variations in monitor
image size and location and allows touch applications to be used on
different sizes of monitors and/or touch systems without modifying the
touch application or driver.
This calibration must be performed at least once for each physical touch
screen/video monitor pair. This procedure produces four calibration
parameters that should be stored by the host computer in some form of
nonvolatile storage, which lets the calibration be performed only once.
3-6 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 3 - General Programming Issues
Once calibration is completed, the host software may use the calibration
parameters to convert touch coordinates into video coordinates (pixel
coordinates). These may then be used in the remainder of the host
software.
Some monitors do not maintain a constant video image size and
placement for all of the video modes that they support. For this reason,
the calibration should be performed using the same video mode as the
touch application in order to assure an accurate calibration.
Floating Point Calibration Program Design
When designing a program to calibrate the touch screen, include the
following steps:
1. Prompt the user to touch the upper left corner of the video screen.
2. Save the coordinates returned as TOUCH_UL_X and
TOUCH_UL_Y.
3. Prompt the user to touch the lower right corner of the video screen.
4. Save the coordinates returned as TOUCH_LR_X and
TOUCH_LR_Y.
A good way to prompt the user to touch the corners is to draw a
border around the edge of the screen and prompt the user to touch
each point using a target in the respective corner and text centered
on the screen.
5. Calculate the four calibration parameters as follows:
OFFSET_X = TOUCH_UL_X
OFFSET_Y = TOUCH_UL_Y
SCALE_X = VIDEO_MAX_X / (TOUCH_LR_X -
TOUCH_UL_X)
SCALE_Y = VIDEO_MAX_Y / (TOUCH_LR_Y -
TOUCH_UL_Y)
6. Save the four calibration parameters to a nonvolatile storage area, if
available. If none is available, the calibration procedure must be
followed each time the system is powered up.
The floating point calibration procedure is now complete. In your
application program, convert the touch coordinates reported by the
touch system into the equivalent video coordinates with these equations:
VIDEO_X = SCALE_X * (TOUCH_X - OFFSET_X)
VIDEO_Y = SCALE_Y * (TOUCH_Y - OFFSET_Y)
Touch System Programmer’s Guide 3-7

Chapter 3 - General Programming Issues CARROLL TOUCH
You may also want to limit VIDEO_X and VIDEO_Y to the ranges
defined by VIDEO_MAX_X and VIDEO_MAX_Y. It is recommended
that the touch coordinates be converted to video coordinates
immediately upon their receipt from the touch system, and that video
coordinates be used in the remainder of the application program.
Floating Point Calibration Examples
If the coordinates resulting from calibration of a system with 640 x 480
resolution are:
TOUCH_UL_X = 10
TOUCH_UL_Y = 7
TOUCH_LR_X = 150
TOUCH_LR_Y = 110
and the system has a resolution of 640 x 480:
VIDEO_MAX_X = 639
VIDEO_MAX_Y = 479
the four calculated calibration parameters are:
OFFSET_X = 10
OFFSET_Y = 7
SCALE_X = 639 / (150 - 10) = 4.5643
SCALE_Y = 479 / (110 - 7) = 4.65
Following are three examples of how to solve for different values of
VIDEO_X and VIDEO_Y:
If TOUCH_X = 7 and TOUCH_Y = 10, then:
VIDEO_X = 4.5643 * (10 - 10) = 0
VIDEO_Y = 4.65 * (7 - 7) = 0
If TOUCH_X = 60, and TOUCH_Y= 80, then:
VIDEO_X = 4.5643 * (60 - 10) = 228
VIDEO_Y = 4.65 * (80 - 7) = 339
If TOUCH_X = 150, and TOUCH_Y= 110, then:
VIDEO_X = 4.5643 * (150 - 10) = 639
VIDEO_Y = 4.65 * (110 - 7) = 479
3-8 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 3 - General Programming Issues
HBC I/O Registers
Overview
The HBC communicates with the PC through the PC bus via three
consecutive I/O registers. The base address of these I/O registers is set
by the I/O address jumpers on the HBC board, and may be set in
increments of 16 to any I/O address between 200H and 3F0H inclusive.
The three I/O registers are defined in Table 3-1.
Table 3-1. HBC I/O Registers
I/O Address Name
I/O Base
Address
I/O Base
Address + 1
I/O Base
Address +2
The touch controller may be used in polling mode or in interrupt mode.
In polling mode, the application software must check the Status
Register before sending or receiving data. In interrupt mode, the
application software must check the Status Register when sending data
to the touch controller, but may install an interrupt handler to receive
data from the touch controller. The interrupt number used is set by the
interrupt number jumpers on the HBC board, as described in the HBC
installation instructions. When using polling mode, set these jumpers to
none to prevent the HBC from generating any interrupts.
Data Register R/W Used to send commands to
Status
Register
Hardware
Reset Register
Read/
Write
and receive reports from
the touch controller.
R Used to check the touch
controller communications
status (i.e. ready to receive
commands, reports
available).
W Used to reset the touch
controller.
Description
Sending a Touch Command to the HBC
The procedure used to send a touch command to the HBC is the same
for both interrupt mode and polling mode.
Before sending a command to the touch controller, you must first
perform an I/O read of the Status Register (Base Address + 1). Bit 0 of
the Status Register indicates whether the touch controller is ready to
Touch System Programmer’s Guide 3-9

Chapter 3 - General Programming Issues CARROLL TOUCH
receive a command or whether it is busy. Table 3-2 shows the values of
Bit 0 of the Status Register.
Table 3-2. Status Register Bit 0 Values
Bit 0 Description
0 Touch controller ready to receive command.
1 Touch controller busy.
If Bit 0 of the Status Register is 0, you may send a command to the touch
controller by performing an I/O write to the Data Register (Base
Address). If Bit 0 of the Status Register is 1, do not send a touch
command to the touch controller.
Receiving Touch Data from the HBC
The procedure used to receive data from the HBC differs depending on
which communication mode you are using.
Polling Mode
When using polling mode, the application software polls the Status
Register (Base Address + 1) to check if touch data is available in the
Data Register (Base Address).
Before reading the Data Register, you must first perform an I/O read of
the Status Register. Bit 1 of the Status Register indicates whether there
is touch data available in the Data Register. Table 3-3 shows the values
of Bit 1 of the Status Register.
Table 3-3. Status Register Bit 1 Values
Bit 1 Description
0 Touch data available.
1 No touch data available.
If Bit 1 of the Status Register is 0, you may receive a byte of touch data
by performing an I/O read of the Data Register. If Bit 1 of the Status
Register is 1, there is no data available in the Data Register.
3-10 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 3 - General Programming Issues
Interrupt Mode
When using interrupt mode, the touch controller uses a PC hardware
interrupt to notify the application software that touch data is available in
the Data Register (Base Address). When the display is touched with
touch enabled, or an information request command is received by the
touch system, the touch system sends touch data to the Data Register.
The HBC then interrupts the host computer, indicating that data is
available in the Data Register. The application software’s interrupt
handler should perform an I/O read of the Data Register to receive a byte
of touch data from the touch system.
Resetting the HBC
The procedure to perform a hardware reset on the HBC is the same for
both interrupt and polling communication modes. To cause a hardware
reset of the touch controller, perform an I/O write to the Hardware Reset
Register (Base Address + 2).
Note that the value of the data byte written to the Hardware Reset
Register does not matter.
Touch System Programmer’s Guide 3-11

Chapter 3 - General Programming Issues CARROLL TOUCH
3-12 Touch System Programmer’s Guide

4
Smart-Frame
Smart-Frame Protocol
Protocol
his chapter gives an overview of the SFP firmware protocol,
T
including a discussion of command and report types, initialization,
timing, and programming tips and examples.
The chapter discusses the following topics:
• Overview.
• SFP and SFP-II.
• Types of SFP Commands.
• Reports.
• Touch System Initialization.
• Touch System Initialization Examples.
• Using an SBC.
• Compatibility Issues/Programming Tips.
• SFP Timing.
• SFP Programming Examples.
See Appendix A, “Smart-Frame Protocol Command Reference,” for
the specifications of each Smart-Frame Protocol command.
Touch System Programmer’s Guide 4-1

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
Overview
The Smart-Frame Protocol (SFP) regulates communication between
the touch system and the application program.
Smart-Frame Protocol commands are used to:
• Initialize the touch system.
• Establish host-to-touch communications.
• Select the touch system reporting and operating modes.
• Request special reports.
• Manage report transfer.
• Execute diagnostic functions.
SFP and SFP-II
The SFP, defined in 1985, is currently used by most Carroll Touch
touch systems, but will eventually be supplanted by Smart-Frame
Protocol II (SFP-II) on newer touch systems.
The SFP is implemented as a modal protocol, meaning that, even if a
touch system supports both the SFP and SFP-II, it can only support one
protocol at a time and, during that time, cannot accept commands from
the other protocol. To switch between protocols, use the
SwitchToSFP-II (65H) SFP command and the SwitchToClassicSFP
(64H) SFP-II function.
Types of SFP Commands
Smart-Frame Protocol commands are grouped into five logical
categories:
• Communication commands.
• Reporting method commands.
• Touch mode commands.
• Information request commands.
• System commands.
SFP commands may be invoked with either a hexadecimal code or an
ASCII code, and many of the commands have associated reports. To
issue a command under the Smart-Frame Protocol, simply type its
function number. An SFP command example is 32, the hexadecimal
code for the Get_Error_Report (32H) command.
4-2 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 4 - Smart-Frame Protocol
Communication Commands
Communication between the touch system and the host computer can
be regulated by hardware or software flow control. Communication
commands are shown in Table 4-1.
Table 4-1. SFP Communication Commands
Command Name
Hardware_Flow_Control_On 41H A None
Hardware_Flow_Control_Off 42H B None
Report_Transfer_Off 43H C None
Report_Transfer_On 44H D None
Get_One_Report 46H F varies
Hardware flow control regulates the transmission of data from the
touch system to the host and from the host to the touch system by using
RS-232 control signals. To enable and disable this type of data flow
control, use the Hardware_Flow_Control_On (41H) and
Hardware_Flow_Control_Off (42H) commands.
Software flow control regulates transmission of data from the touch
system to the host on a report-by-report basis. To implement this type
of data flow control, use the Report_Transfer_On (44H) command,
Report_Transfer_Off (43H) command, or the Get_One_Report (46H)
command.
Hex
Code
ASCII
Code
Associated
Report
The default flow control method is software flow control.
Reporting Method Commands
Reporting methods determine the form in which data is sent from the
touch system to the host. Both the desired reporting method and touch
mode should be selected before turning touch system scanning on,
although they may also be changed with scanning on. The commands
used to select the reporting method are shown in Table 4-2.
Touch System Programmer’s Guide 4-3

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
Table 4-2. SFP Reporting Method Commands
Command Name
Hex
Code
ASCII
Code
Associated
Report
Scan_Reporting 22H “ Scan Report
Coordinate_Reporting 23H # Touch Coordinate Report
Add Exit Coordinate
Point Report
Non-Contiguous
Coordinate Report
Scan reports present interrupt beam data with no software interpretation
and are used for diagnostic and testing purposes. Coordinate reports
present interrupt beam data in the form of x, y (x-axis, y-axis)
coordinate pairs for application processing.
Touch Mode Commands
Touch mode commands select the conditions under which touch
coordinates are reported when the reporting method is set to coordinate
reporting. Touch mode commands are shown in Table 4-3.
Table 4-3. SFP Touch Mode Commands
Command Name
Hex
Code
ASCII
Code
Associated
Report
Enter_Point_Mode 25H % Touch Coordinate Report
Tracking_Mode 26H & Touch Coordinate Report
Continuous_Mode 27H ‘ Touch Coordinate Report
Exit_Point_Mode 28H ( Touch Coordinate Report
Add_Exit_Point_
29H ) Touch Coordinate Report
Modifier*
*Add Exit Point is a modifier that is used with other touch modes. It is not a stand-alone touch
mode.
To change the touch mode, simply send the touch mode command that
selects the new touch mode. For example, to change from Enter Point
Mode to Tracking Mode, send the Tracking_Mode (26H) command.
4-4 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 4 - Smart-Frame Protocol
Changing the touch mode clears the Add Exit Point modifier. To
disable the Add Exit Point modifier without changing the current touch
mode, simply send the desired touch mode command again.
For example, to select Tracking Mode with Add Exit Point, send the
Tracking_Mode (26H) command followed by the
Add_Exit_Point_Modifier (29H) command. To deselect Add Exit Point
and remain in Tracking Mode, send the Tracking_Mode (26H)
command again.
Information Request Commands
Information request commands query the touch system for system
status reports, such as error, configuration, firmware version, failed
beam, frame size, and state reports. Information request commands are
shown in Table 4-4.
Table 4-4. SFP Information Request Commands
Command Name
Get_Error_Report 32H 2 Error Report
Get_Configuration_Report 33H 3 Configuration Report
Get_Firmware_Version_
Report
Get_Failed_Beam_Report 36H 6 Failed Beam Report
Get_Frame_Size_Report 37H 7 Frame Size Report
Get_State_Report 47H G State Report
Hex
Code
34H 4 Firmware Version
ASCII
Code
Associated
Report
Report
System Commands
System commands control all touch system functions such as
initialization, software reset, diagnostics, and scanning. The system
commands are shown in Table 4-5.
Touch System Programmer’s Guide 4-5

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
Table 4-5. SFP System Commands
Reports
Command Name
Echo_On 20H Space None
Echo_Off 21H ! None
Touch_Scanning_On 2AH * None
Touch_Scanning_Off 2BH + None
Run_Diagnostics 3AH : Error Report
Software_Reset 3CH < None
Clear_Touch_Report_Buffer 3DH = None
Reset 45H E None
SwitchToSFP-II 65H SFP-II Protocol
Hex
Code
ASCII
Code
Associated
Report
Version Report or
Error Report
An SFP report has the following format:
header reportbytes trailer
The trailer is always FF. An example of a report returned from the
Get_Error_Report (32H) command is:
F8 00 FF
F8 is the header, 00 indicates no errors, and FF is the trailer. An
example of a touch coordinate report is:
FE 35 2D FF
FE is the header; 35 and 2D are the x, y touch coordinates; and FF is
the trailer.
4-6 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 4 - Smart-Frame Protocol
Touch System Initialization
To initialize a touch system that uses the Smart-Frame Protocol, take
the following steps:
1. Reset the touch system.
2. Perform the autobaud/autoparity sequence, if appropriate, then the
software reset command.
3. Check for any errors that may have been detected.
4. Set the desired reporting method and touch mode.
Details on each step are in the following sections.
Resetting the Touch System
The following methods may be used to reset the touch system. Be sure
to use a method that is appropriate for the touch system being used.
Power Cycle
This method resets everything. For touch systems that communicate
serially, Clear To Send (CTS) is deasserted (negative voltage) to
indicate that the touch system is busy until the touch system is ready to
accept commands. For serial touch systems that have their
communication parameters set to autobaud/autoparity, this occurs
when the touch system enters the autobaud sequence by sending breaks.
Dedicated Reset Signal
On some Smart-Frame systems, a dedicated reset signal line is present.
If present, this signal is on pin 8 of the 2 x 5 pin communication
connector that is on the frame. To reset the touch system, deassert this
pin by applying negative voltage for a minimum of 10 ms. This type of
reset is equivalent to cycling the power to the touch system. This signal
is not present on the modular RS-232 controller.
Break (Hardware Detected)
For touch systems that use the modular RS-232 controller, a break of at
least 400 ms resets the touch system. To send a break of 400 ms, set the
Transmit Data (TD) signal to the “space” condition (positive voltage),
wait 400 ms, and set the TD signal back to the “mark” condition
(negative voltage). For PC systems, the “Set Break” bit in the Line
Control Register of the 8250 USART chip is used to set and/or clear the
break condition. This type of reset is equivalent to cycling the power to
the touch system.
Touch System Programmer’s Guide 4-7

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
HBC Hardware Reset Register
For touch systems that use the modular HBC, writing any value to the
HBC Hardware Reset Register (Base Address +2) resets the touch
system. This type of reset is equivalent to cycling the power to the touch
system.
Break (Firmware Detected)
For all touch systems that communicate serially, a break of at least
150ms resets the touch system. To send a break of 150ms, set the
Transmit Data (TD) signal to the “space” condition (positive voltage),
wait 150ms, and set the TD signal back to the “mark” condition
(negative voltage). For PC systems, the “Set Break” bit in the Line
Control Register of the 8250 USART chip is used to set and/or clear the
break condition. This type of reset is equivalent to cycling the power to
the touch system, except that Clear To Send (CTS) is not affected if
hardware flow control was not enabled before the reset.
Reset (45H)
This Smart-Frame Protocol command resets everything. If the touch
system communicates serially and hardware flow control is enabled,
CTS is deasserted (negative voltage) to indicate that the touch system
is busy until the touch system is ready to accept commands. For serial
touch systems that have their communication parameters set to
autobaud/autoparity, this occurs when the touch system enters the
autobaud/autoparity sequence by sending breaks. If hardware flow
control is disabled, Clear To Send (CTS) is not affected. This type of
reset is equivalent to cycling the power to the touch system, except that
the Clear To Send (CTS) is not affected if hardware flow control was
not enabled before the reset. Also, if the touch system communicates
serially but is set to use a fixed baud rate and parity (not
autobaud/autoparity), or if the touch system uses the HBC, the touch
system sends a Power Up Report (F1 FF) when it is ready to receive
commands.
In all cases, the touch system is ready to receive commands within one
second after the reset occurs. Touch applications must delay for one
second after resetting the touch system. In cases where a break is sent,
the one second time does not begin until the break is released.
Performing the Autobaud/Autoparity Sequence
If you are using a touch system that communicates serially and is set to
use autobaud/autoparity, you must perform the autobaud/autoparity
4-8 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 4 - Smart-Frame Protocol
sequence to allow the touch system to establish baud rate and parity that
is used by the host.
To perform the autobaud/autoparity sequence, the host must send five
ASCII carriage returns (CR - 0DH) followed by a delay of at least
100ms after each carriage return. The touch system uses these carriage
returns to determine the baud rate used by the host. When the touch
system has determined the baud rate of the host, it stops sending breaks
to the host; the host need not send additional carriage returns after this
occurs. The simplest method, however, is for the host to send five
carriage returns with delays and ignore the breaks sent by the touch
system. This is the recommended method.
Regardless of whether or not the touch system uses autobaud/
autoparity, the host must send a Software_Reset (3CH) command
followed by a delay of at least 100ms. This clears the touch system
buffers and resets the touch system parameters listed in Table 4-6 to
their defaults. If autobaud/autoparity is being used, this also establishes
the parity being used by the host.
Table 4-6. SFP Default Settings
System Parameters Default Setting
Touch Scanning Off
Reporting Method Coordinate reporting
Touch Mode Tracking Mode
Add Exit Point Modifier Off
Report Transfer Off
Hardware Flow Control Off
Checking for Touch System Errors
To confirm that the initialization sequence was successful, determine
the status of the touch system by sending the Get_Error_Report (32H)
command. The Error Report that is returned lists any errors detected by
the touch system. Since report transfer has not been enabled yet, the
host must enable it so that the touch system can transmit the Error
Report. This is accomplished by sending the Report_Transfer_On
(44H) command to the touch system before sending the
Get_Error_Report (32H) command.
Touch System Programmer’s Guide 4-9

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
The contents of the Error Report vary according to whether the touch
system has a single processor or dual processors.
If the touch system did not detect any errors, the Error Report appears
as follows:
F8 00 FF Reports no errors for single processor
systems.
F8 00 00 FF Reports no errors for dual processor
systems.
If the touch system detects errors, the 00 byte is replaced by an error
code count, followed by error codes. These error codes are identified in
the Get_Error_Report (32H) documentation in Appendix A.
If the Error Report is not received by the host, there is a communication
error. Run the initialization sequence again or send the Echo_On (20H)
command to determine the source of the communication problem.
Setting the Reporting Method and Touch Mode
The host may now complete the initialization sequence and enable
touch system scanning. It should send the appropriate Smart-Frame
Protocol commands to set the desired reporting method and touch
mode, send any other parameters (such as hardware flow control, and
so forth), then send the Touch_Scanning_On (2AH) command.
Touch System Initialization Examples
The following examples represent the recommended initialization
sequences for various touch system hardware configurations.
Using Autobaud/Autoparity
To initialize a touch system that communicates serially and uses
autobaud/autoparity, use the following initialization sequence:
1. Send a 400ms break. You may send a Reset (45H) command
instead, but this only works if the touch system has previously
been set to receive commands at the current baud rate and parity
and is not recommended.
2. Wait one second for the touch system to complete its power-on
testing.
4-10 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 4 - Smart-Frame Protocol
3. Send five carriage returns (CRs - 0DH) with a 100ms delay after
each CR.
4. Send the Software_Reset (3CH) and delay 100ms.
5. Send the Report_Transfer_On (44H) command, followed by the
Get_Error_Report (32H) command.
6. Read the Error Report sent by the touch system. If the report is
received correctly and indicates no errors, the touch system is
ready to use. If the report is not received correctly, or contains
errors, take the appropriate action.
7. Send the Get_Frame_Size_Report (37H) command.
8. Read the Frame Size Report sent by the touch system. If the frame
size is 223 x 223 (DFH x DFH), you can assume that the touch
system is a guided acoustic wave system. If the frame size is
reported as any other value, you can assume that the touch system
is a scanning infrared system.
Using a Fixed Baud Rate
To initialize a touch system that communicates serially and used a fixed
baud rate, use the following initialization sequence:
1. Send a 400ms break. You may send a Reset (45H) command
instead, but this only works if the touch system has previously
been set to receive commands at the current baud rate and parity
and is not recommended.
2. Wait one second for the touch system to complete its power-on
testing.
3. Send the Software_Reset (3CH) command and delay 100ms.
4. Send the Report_Transfer_On (44H) command, followed by the
Get_Error_Report (32H) command.
5. Read the Error Report sent by the touch system. If the report is
received correctly and indicates no errors, the touch system is
ready to use. If the report is not received correctly, or contains
errors, take the appropriate action.
Using the HBC
To initialize a touch system that uses the modular hardware-based
controller (HBC), use the following initialization sequence:
1. Write to the HBC Hardware Reset Register (Base Address +2).
2. Wait one second for the touch system to complete its power-on
testing.
3. Send the Software_Reset (3CH) command and delay 100ms.
Touch System Programmer’s Guide 4-11

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
4. Send the Report_Transfer_On (44H) command, followed by the
Get_Error_Report (32H) command.
5. Read the Error Report sent by the touch system. If the report is
received correctly and indicates no errors, the touch system is
ready to use. If the report is not received correctly, or contains
errors, take the appropriate action.
Using an SBC
Touch systems that include the SBC are unique because they use the
CPU of the host PC to manage the scanning of the frame and reporting
of touch coordinates instead of using a dedicated microprocessor.
The following exceptions to the standard Smart-Frame Protocol exist
for SBC-based touch systems:
• The scan reporting method is not supported by the SBC. Sending
the Scan_Reporting (22H) command to the SBC has no effect.
• Sending the Echo_On (20H) command, the Echo_Off (21H)
command, or the Reset (45H) command to the SBC has no effect,
and causes the Invalid Command error to occur.
• The Hardware_Flow_Control_On (41H) and the Hardware_
Flow_Control_Off (42H) commands apply only to touch systems
that communicate serially, and have no effect when sent to the
SBC.
When using an SBC-based touch system, turning touch scanning on via
the Touch_Scanning_On (2AH) command causes the SBC hardware to
begin issuing hardware interrupts. Turning touch scanning off via the
Touch_Scanning_Off (2BH) command causes the SBC hardware to
stop issuing hardware interrupts. Since the SBC TAPI driver only uses
host CPU time when an interrupt is issued by the SBC hardware,
turning touch scanning off whenever possible releases host CPU time
that would otherwise be used by the SBC TAPI driver for other uses.
Compatibility Issues/Programming Tips
An application or driver that is hard-wired to a typical size or model of
CT touch system may require modification if a different touch system
is used. Applications and drivers that use the Smart-Frame Protocol to
interface to the touch system should be designed to work with all types
and sizes of touch systems that use the Smart-Frame Protocol. This lets
you continue to use the application or driver without modification if a
different size and/or model of CT touch system is used. The following
design rules should be followed.
4-12 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 4 - Smart-Frame Protocol
Number of Processors Independence
Get_Error_Report (32H) causes an Error Report to be returned that
details the errors for each processor in the touch system. Use the
Get_Configuration_Report (33H) command to get a Configuration
Report that includes the number of processors in the touch system to
properly interpret this report. Do not hard wire the code that interprets
the Error Report to work with a specific number of processors.
Firmware Version Independence
Get_Firmware_Version_Report (34H) causes a Firmware Version
Report to be returned that lists firmware versions for various touch
system components. Do not hard wire the code that interprets the
Firmware Version Report to only work with a specific number of
version reports or a specific firmware version.
Frame Size Independence
If a software calibration and scaling program, as described in this guide,
is used, a change to a touch system with a different size frame simply
requires that the calibration program be run on the new touch system.
The frame size difference is reflected in the calibration parameters, and
the touch application or driver code itself does not need to be modified.
Do not hard wire the touch application or driver to a specific frame size,
since this requires the touch application or driver to be modified if a
different size frame is used.
Touch System Response Time Independence
The amount of time required for a touch system to process a command
may vary, depending upon the model of the touch system. This, coupled
with the fact that there is no provision for software flow control in the
host-to-touch system direction, means that the input queue of the touch
system could overflow, causing commands to be missed if the touch
system is bombarded with commands at a faster rate than it can process
them. This usually occurs only when a long sequence of initialization
commands is issued at a high baud rate.
To prevent this overrun and loss of command characters:
1. Use a delay of approximately 10 milliseconds between commands
to allow the touch system time to process each command before
the next is sent.
2. Use a lower baud rate.
Touch System Programmer’s Guide 4-13

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
Using a baud rate above 2400 baud does not produce any increase in
apparent touch responsiveness. This is due to the fact that the
communication bandwidth required to transmit the four-byte touch
coordinate reports at the typical rate of 30 scans per second is slightly
above 1200 baud. Therefore, using a baud rate above 2400 baud is
unnecessary and merely reduces the noise immunity of the
communication channel while producing no increase in apparent touch
responsiveness.
SFP Timing
The following timing parameters apply to touch systems that use the
Smart-Frame Protocol.
Autobaud/Autoparity Delay Time
During the autobaud/autoparity initialization sequence, a delay of at
least 100 milliseconds must be present between the carriage returns and
after the Software_Reset (3CH) command. This delay is required in
order for the autobaud/autoparity algorithms to work properly.
Maximum Command Completion Time
The maximum amount of time required for a Smart-Frame Protocol
command to be processed and a corresponding report (if any) to be
generated is one second. Touch applications should use at least this
amount of time as their time-out value when awaiting a Smart-Frame
report.
Reset Time/Diagnostics Completion Time
The maximum amount of time required for a touch system that uses the
Smart-Frame Protocol to become ready to begin the autobaud/
autoparity sequence or to receive commands is one second. Touch
applications should either wait at least this amount of time or wait for
some other signal that the touch system is ready to receive commands
(such as the assertion of the Clear To Send (CTS) signal if serial
hardware flow control is used) before beginning the autobaud/
autoparity sequence or sending commands to the touch system.
SFP Programming Examples
The Carroll Touch Driver/Demo Disk contains five short example
programs under the heading of “Programmer’s Guide Programming
Examples.” They demonstrate how to interface directly to
RS-232-based and HBC-based touch systems using the Smart-Frame
4-14 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 4 - Smart-Frame Protocol
Protocol. Both a polling method and an interrupt-driven method are
shown for each type of touch system. All of these programs were
developed using Borland C. Minor modifications may be required for
other compilers.
The example files are:
CT.H - Contains a CT header file.
UART8250.H - Contains a 8250 serial UART header file.
RS232POL.C - Contains an RS-232 polling example.
RS232INT.C - Contains an RS-232 interrupt example.
HBCPOL.C - Contains an HBC polling example.
HBCINT.C - Contains an HBC interrupt example.
Touch System Programmer’s Guide 4-15

Chapter 4 - Smart-Frame Protocol CARROLL TOUCH
4-16 Touch System Programmer’s Guide

5
Smart-Frame
Smart-Frame Protocol II
Protocol II
his chapter gives an overview of the Smart-Frame Protocol-II, a
T
firmware protocol that extends the capabilities of the SFP by
offering support for higher resolution and a z-axis. Explanations of
command formats and report formats are included.
This chapter discusses the following topics:
• Overview.
• Types of SFP-II Functions.
• Functions.
• Commands.
• Reports.
• Error Reporting.
• Overloaded Functions.
• Shared Parameters between SFP and SFP-II.
See Appendix B, “Smart-Frame Protocol II Function Reference,” for
the specifications of each Smart-Frame Protocol II function.
Touch System Programmer’s Guide 5-1

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
Overview
The Smart-Frame Protocol II (SFP-II) is a firmware protocol intended
to be the successor to the existing Smart-Frame Protocol firmware
protocol, which was defined in 1985. Driving factors behind the
development of the SFP-II protocol are:
• The introduction of touch systems using guided acoustic wave
technology, which supports high resolution touch coordinates as
well as z-axis touch coordinates - features not supported by the
existing Smart-Frame Protocol.
• The need for general and architectural enhancements to the SFP.
SFP-II has been initially implemented on guided acoustic wave
systems, but is designed for and will be implemented on all Carroll
Touch systems.
Extensibility
SFP-II is designed to support true extensibility, allowing features to be
added or removed over time. It does this by providing a standard
mechanism whereby applications or drivers that interface with the
touch system can determine which features the touch system supports.
This mechanism consists of two parts: the touch system can report the
protocol version (not to be confused with the firmware version) to an
application or driver via the Protocol Version Report, and the
application or driver can use the SetReportProperties (21H) command
to request that a Report Properties Report be sent. This report includes
a parameter called FunctionVersion that can be used to determine if a
particular function is supported.
The protocol version number reflects the unique set of features
supported by that version of the protocol. Any time that a feature is
added, removed, or changed in such a way that it would be visible to the
user using the published SFP-II functions, the protocol version number
is incremented.
The protocol version number of the SFP is (retroactively) defined to be
1.0. Note, however, that because the SFP contains no mechanism for
reporting the protocol version number, SFP touch systems do not
actually respond with a Protocol Version Report. Instead, if an
application or driver receives no response when attempting to switch to
SFP-II mode using the SwitchToSFP-II (65H) SFP command, it should
timeout waiting for the command, and then assume that the touch
system only supports SFP (SFP 1.0).
5-2 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
Protocol version numbers greater than 1.0 but less than 2.0 will be used
during the development of the SFP-II protocol. When the SFP-II
protocol is complete, that is, when it incorporates the initial set of
desired features, that version of the protocol will be given a version
number of 2.0. Subsequent changes to the protocol will result in
changes to the subminor, minor, or major portions of the protocol
version number, depending upon the extent of the changes.
One of the main purposes for extensibility is to allow properly written
applications and drivers to work with touch systems that support SFP
and touch systems that support SFP-II. A “properly written” application
or driver uses the following sequence of steps during touch system
initialization to determine the protocol version and act accordingly:
1. Initialize the touch system using the common initialization
sequence.
2. Attempt to switch to SFP-II mode by issuing the SwitchToSFP-II
(65H) SFP command.
3. If the touch system does not respond with a Protocol Version
Report within the SFP timeout time (one second), the application
or driver should assume that the touch system supports only the
SFP (SFP 1.0), and use only SFP commands and expect only SFP
reports.
4. If the touch system responds with a protocol version report that
indicates a protocol version number of 2.0 or above, the
application or driver may use all of the standard SFP-II commands
and reports. The application or driver may also (optionally) use
SetReportProperties (21H) command to request Report Properties
Reports to ensure that each command that it uses is supported. This
optional step is recommended if the application uses commands or
reports that were not included in the original SFP-II protocol (SFP
2.0).
In summary, applications or drivers can use the Protocol Version
Report to determine the firmware protocol version. The protocol
version can be used to determine whether the touch system supports
only SFP or SFP and SFP-II. The application or driver may also use the
Protocol Version Report in conjunction with the protocol version
revision history to determine the exact features that the firmware
supports. Finally, for maximum protection against protocol changes,
the application or driver can use the SetReportProperties (21H)
function to ensure that each command that it intends to use is supported.
Touch System Programmer’s Guide 5-3

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
Modal Protocols
The SFP-II is implemented as a modal protocol, meaning that, even if
a touch system supports both the SFP and SFP-II, it can only support
one protocol at a time and, during that time, cannot accept commands
from the other protocol. To switch between protocols, use the
SwitchToSFP-II (65H) SFP command and the SwitchToClassicSFP
(64H) SFP-II function.
Note
The SFP-II protocol currently lacks many necessary features that
are supported in SFP, so it is necessary for the host to switch
between the SFP and SFP-II to access these features. When the
SFP-II protocol specification is complete, it will include all
necessary features, eliminating the need to switch protocols.
Backward Compatibility
Touch systems that implement SFP-II (known as SFP-II aware touch
systems) also implement the existing SFP to ensure backward
compatibility with existing touch systems and to avoid obsoleting the
installed base of touch applications. Backward compatibility means
that:
1. SFP-II aware touch systems may be used with existing
applications that use the SFP without requiring the application to
be modified.
This is possible because the initialization sequence is identical for
both SFP-II aware and non SFP-II aware touch systems, and
because SFP-II aware touch systems power up under SFP and
remain in SFP until explicitly commanded to switch to SFP-II.
2. Applications and drivers may be written to use both SFP-II aware
touch systems and non SFP-II aware touch systems (albeit with
reduced functionality).
This is possible because a mechanism exists whereby applications
and drivers can interrogate the touch system to determine whether
the touch system supports SFP-II. The application or driver may
choose to use the advanced functions of SFP-II or to use only the
SFP.
5-4 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
Types of SFP-II Functions
SFP-II functions are currently grouped into four logical categories. The
logical categories are reserved in groups of 16 (10H), with each group
containing functions that have similar purposes.
• Reset and touch reporting:
GetTouchState (01H)
• Status reporting:
GetCoordinateRanges (10H)
GetConfiguration (11H)
• Parameter setting and reporting:
SetTouchModes (20H)
SetReportProperties (21H)
SetReportTransferMode (22H)
• Mode switching:
SwitchToClassicSFP (64H)
GetProtocolVersion (65H)
Functions
Touch systems that support SFP-II communicate with applications and
drivers via the use of SFP-II functions. Each function consists of a
command and a corresponding report, even if that report is simply a
null report that only returns the report number and the command error
status. The report number is the same as the command number for each
command/report pair.
Each command/report pair may be thought of as corresponding to a
function call in a language such as C, with the command parameters (if
any) representing the parameters that are passed into the function, and
the report parameters (if any) representing the parameters that are
returned by the function.
The host computer sends SFP-II commands to the touch system, and the
touch system responds by sending SFP-II reports to the host. The touch
system must respond with the corresponding SFP-II report packet for
each and every SFP-II command packet that it receives. The host, in
turn, must wait until it receives the corresponding SFP-II report packet
after sending an SFP-II command packet before it can send another
SFP-II command packet.
The host should use a one second timeout when waiting for the report
packet. If the report packet has not arrived after that time, the host
should retry sending the command. If the touch system still does not
Touch System Programmer’s Guide 5-5

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
respond after another timeout period, the host should send enough FFH
bytes to ensure that the touch system’s input buffer overflows, and then
retry the command again. Note that the host could certainly send the
FFH bytes without retrying the command if it so chose. Refer to “Error
Reporting,” later in this chapter, for more details on error handling.
This design greatly simplifies the handling of command and report
packets for the touch system and the host. The touch system cannot
queue up command packets from the host, thus preventing many
potential overrun and timing problems.
Commands
An SFP-II command has the format:
header packetbytecount commandnumber
optionalparameters trailer
header = Defined to be 66H.
packetbytecount
= Length of the command number + the command
parameters (if any) in bytes. For example, a command
with two bytes of parameters has a byte count of 3 (one
byte for the command number and two bytes for the
parameters).
commandnumber
= One byte opcode that identifies the SFP-II command.
Valid opcodes are 00H through BFH.
optionalparameters
= Parameters for the SFP-II command. The maximum
number of parameter bytes is 252 (FCH).
trailer
= Defined to be FFH.
The maximum length of an SFP-II command packet is 256 bytes.
The format for SFP-II commands reflects the fact that SFP-II is a
layered protocol. There are two layers, the validation layer and the
interpretation layer.
5-6 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
Validation Layer
The format for SFP-II commands at the validation layer is:
header packetbytecount interpretationlayer
trailer
The validation layer consists of the outer portions of the command
format and “wraps” around the inner portions of the command format,
or the interpretation layer. To detect a valid SFP-II command in the
incoming stream of bytes, the touch system firmware detects the
header, reads the byte count that follows the header, reads the number
of bytes specified by the byte count (the command packet), and verifies
that the following byte is a trailer byte. If the segment of the incoming
byte stream under consideration fits this format, the segment is deemed
to be a valid SFP-II command packet and the command number and
parameters are forwarded to the interpretation layer.
Interpretation Layer
The format for SFP-II commands at the interpretation layer is:
commandnumber optionalparameters
To interpret the command, the touch system firmware first jumps to the
appropriate command handler using a jump table. If the command
number does not correspond to a defined SFP-II command, the
command is deemed invalid and a report is sent to the host with the
command error parameter set to the Invalid Command value.
If the command handler determines that the appropriate number of
parameter bytes for the command is not present, or that one or more of
the parameter bytes are otherwise invalid for the command (parameter
is out of range, not set to a valid value for this particular touch system,
and so forth), the corresponding SFP-II report is sent to the host with
the command error parameter set to indicate the missing or invalid
parameter byte. The parameters that the host sent in the command are
echoed to the host in this report.
If the command handler determines that the appropriate number of
parameter bytes for the command is present and that all of the
parameter bytes are valid for that command, the touch system processes
the command and sends the corresponding SFP-II report back to the
host. The command error parameter is set to the “valid command and
parameters” value to indicate that both the command and parameters
were valid.
Touch System Programmer’s Guide 5-7

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
The bytes within the command packet are indexed beginning at 0 for
the SFP-II command number, and ending at (command packet byte
count - 1) for the last parameter byte. The length of the command
packet is given by the packet byte count from the validation layer.
Example
A simple example of an SFP-II command is the GetTouchState (01)
command, which has one byte of data and no optional command
parameters, is:
66 01 01 FF
A more complex example of a SFP-II command is the imaginary Fubar
command, which expects a one byte parameter (bip) and a two byte
parameter (flap):
66 04 <Fubar> <Bip> <FlapHi> <FlapLo> FF
Reports
If the command opcode for Fubar is 27H, and the values of the Bip and
Flap parameters are 18H and 8923H, respectively, the command packet
is as follows:
66 04 27 18 89 23 FF
An SFP-II report has the format:
header packetbytecount commanderrorstatus
reportnumber optionalreportparameters trailer
header = Defined to be EOH.
packetbytecount
= Length of the report number + the command error status
+ the report parameters (if any) in bytes. For example, a
report with two bytes of parameters would have a byte
count of 4 (one byte for the command number, one byte
for the command error status, and two bytes for the
parameters).
commanderrorstatus
= A one byte parameter that indicates whether the SFP-II
command number and/or the SFP-II command
5-8 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
parameters of the SFP-II command packet that solicited
the report were valid.
If the command number and parameters were all valid,
this parameter is 0.
If there was an error associated with one of the command
parameters, this parameter contains a number that points
to the first byte of the parameter that was in error. If there
are multiple parameters with errors, only the first one is
indicated.
If the command number is invalid, this parameter is FFH.
If no SFP-II command packet was associated with this
report (i.e, the report is an unsolicited report), this
parameter is 0. Refer to “Error Reporting,” later in this
chapter, for more information on this parameter.
reportnumber
= One byte opcode that identifies the SFP-II report. Valid
opcodes are 00H through BFH.
optionalreportparameters
= Parameters for the SFP-II report. The maximum number
of parameter bytes is 251 (FBH).
trailer= Defined to be FFH.
The maximum length of an SFP-II report packet is 256 bytes.
The generic report format for SFP-II reports reflects the fact that SFP-II
is a layered protocol. There are two layers, the validation layer and the
interpretation layer.
Validation Layer
The format for SFP-II reports at the validation layer is as follows:
header packetbytecount interpretationlayer
trailer
Note that the validation layer consists of the outer portions of the report
format and “wraps” around the inner portions of the format, or the
interpretation layer. To detect a valid SFP-II report in the incoming
stream of bytes, the host must detect the header, read the byte count that
Touch System Programmer’s Guide 5-9

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
follows the header, read the number of bytes specified by the byte count
(the report packet), and verify that the following byte is a trailer byte.
If the segment of the incoming byte stream under consideration fits this
format, the segment is deemed to be a valid SFP-II report packet and
the command error status, report number, and parameters are forwarded
to the interpretation layer.
Interpretation Layer
The format for SFP-II reports at the interpretation layer is as follows:
commanderrorstatus reportnumber
optionalreportparameters
To interpret the report, the host should first examine the command error
status parameter. If the command error status parameter indicates an
error, the host should take the appropriate action.
The host should then examine the report number. If the report number
does not correspond to a defined SFP-II report, the host should deem
the report invalid.
Finally, the host should examine the report to determine that the
appropriate number of parameter bytes for the report is present. If the
appropriate number is not present, or one or more of the parameter
bytes are otherwise invalid for the report (parameter is out of range and
so forth), the host should deem the report invalid.
If the host determines that all information in the interpretation layer is
valid, the host should process the command.
The bytes within the report packet are indexed beginning at 0 for the
SFP-II report number, and ending at (report packet byte count - 1) for
the last parameter byte. The length of the report packet is given by the
packet byte count that was read during the validation layer.
Example
An example of a report issued in response to a valid SFP-II command,
GetProtocolVersion (command 65), is:
E0 04 00 65 02 12 FF
E0 and FF are the header and footer, respectively. 04 indicates the
report contains four bytes. 00 is the command error status (Cmderr)
and indicates the report is valid. 65 is the report number, which is the
5-10 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
command number. The parameters 02 and 12 represent the
ProtocolVersionHi and ProtocolVersionLo bits, indicating protocol
version 2.12.
Reporting Modes
Each SFP-II report has a reporting mode associated with it that
specifies when the report is to be sent. The available reporting modes
are:
Solicited Only Mode - The touch system sends the selected
report after receiving the corresponding
command.
Parameter Change Mode- The touch system sends the selected
report after receiving the corresponding
command and whenever any of the
parameters contained in the report
changes.
Continuous Mode - The touch system sends the selected
report after receiving the corresponding
command and each time that it executes
its main executive loop.
Parameter Change Mode and Continuous Mode produce “unsolicited
reports,” because reports are sent by the touch system even though it
has not received a corresponding SFP-II command. The default
reporting mode of most reports is Parameter Change Mode. The
exceptions to this are the Multi Touch State and Raw Touch State
Reports, which are solicited only.
Use the SetReportProperties (21H) function to set the reporting mode
of reports.
Report Transfer Mode
When report transfer is disabled, unsolicited reports are not transferred
from the touch system to the host. Solicited reports continue to be
transferred from the touch system to the host.
When report transfer is enabled, both solicited and unsolicited reports
are transferred.
Use the SetReportTransferMode (22H) function to set the reporting
mode of reports.
Touch System Programmer’s Guide 5-11

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
Error Reporting
SFP-II uses a command error status parameter (Cmderr) to report errors
in commands sent to the touch system. The one-byte parameter is part
of every SFP-II report and indicates whether the SFP-II command
number and/or command parameters were valid.
Note
The use of the Cmderr parameter to indicate unsupported features
is especially useful during the period that the SFP-II specification
is being developed. Features that have been specified but not yet
implemented will be indicated in this manner. The host should
check Cmderr in all reports returned from the touch system to
recognize these unsupported features.
Cmderr has a value of 0 if the command number and parameters are all
valid, or if the report is an unsolicited report.
When an error occurs, the command number and parameter bytes (if
any) that were sent by the host are echoed to the host in the
corresponding report. The touch system does not take any of the actions
and/or change the values of any of the parameters in the command.
Invalid Command Number
When an invalid command number is detected, an SFP-II report packet
is sent with Cmderr set to FF.
For example, if function 93H is undefined and the host sends the
following command:
66 01 93 FF
The touch system responds with the following report:
E0 02 FF 93 FF
The first FF byte is Cmderr and indicates that there is no command
defined with an opcode value of 93H.
If function 94H is undefined and the host sends the following
command:
66 04 94 01 02 03 FF
5-12 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
The touch system responds with the following report:
E0 05 FF 94 01 02 03 FF
The first FF byte is Cmderr and indicates that there is no command
defined with an opcode value of 94H. Note that the parameters that
were sent with the invalid command packet (01 02 03) are returned
along with the invalid command number.
Invalid Parameter Value
When the parameter number is out of range, an SFP-II report packet is
sent with Cmderr containing a number that points to the first byte of the
parameter that was in error. If there were multiple parameters with
errors, only the first one is indicated.
If the host sends the SetTouchModes (20H) command as follows:
66 04 20 01 04 03 FF
The touch system responds with the following report:
E0 05 02 20 01 04 03 FF
The 02 byte is Cmderr and indicates that the second parameter is out of
range. (The value of 04 for TouchStateReportType is not among the
valid values of 01, 02, or 03.) Since the 04 byte is out of range, the error
results and is reported in Cmderr. The third parameter is also out of
range. This parameter is the TouchReportingMode parameter, which
has valid values of 00, 01, and 02. The 03 byte is out of range.
However, this is not reported to the host because Cmderr only reports
the first invalid parameter if multiple parameters are invalid.
Unsupported Feature
When a parameter value requests an option that the particular firmware
implementation does not support, an SFP-II report packet is sent with
Cmderr containing a number that points to the first byte of the
parameter that was in error. If there were multiple parameters with
errors, only the first one is indicated.
Suppose the host sends the SetTouchModes (20H) command as follows
to (1) enable touch detection; (2) set the TouchStateReportType to the
Multi Touch State Report; and (3) set the Touch Reporting Mode to
Continuous:
Touch System Programmer’s Guide 5-13

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
66 04 20 01 02 02 FF
If the particular firmware implementation in the touch system does not
support the MultiTouchState value of the TouchStateReportType
parameter (the first 02H byte in the command), the touch system
responds with the following report:
E0 05 02 20 01 02 02 FF
The 02 byte is Cmderr and indicates that the second parameter is in
error. This parameter is the TouchStateReportType parameter. The
value of 02H is a valid value for this parameter and represents a request
by the host that the touch data be returned using the Multi Touch State
Report. However, since this particular firmware does not support the
MultiTouchState reporting method, the touch system returns the error
in Cmderr to indicate this to the host.
Invalid Byte Count
The touch system reports an invalid byte count if it reads the number of
bytes specified by the byte count and the next byte received is not a
command packet trailer byte.
Note that this means that if the number of bytes received after the byte
count is less than the byte count, no error is generated until enough
additional bytes are received to match the byte count or the touch
system’s input buffer overflows. The touch system does not use any
sort of timeout technique if it receives fewer bytes than expected.
This error also occurs if the touch system’s input buffer overflows
while it is attempting to read the number of bytes specified by the byte
count.
When an invalid byte count is detected, an SFP-II report packet is sent
with the Cmderr parameter set to FEH and the SFP-II report number set
to the command number.
For example, suppose the host sends the following command:
66 04 20 01 04 03 FF
Due to noise on the serial line, the touch system actually receives an
extra byte after the first parameter as follows:
66 04 20 01 86 04 03 FF
5-14 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
The touch system responds with the following report:
E0 06 FE 20 01 86 04 03 FF
FE is the Cmderr parameter and indicates that a byte count mismatch
error occurred. 20 is the ReportNumber parameter, and the following
four bytes echo the parameters that the touch system received.
As a second example, suppose the touch system has an input buffer size
of 32 bytes and the host sends the following, lengthy, incorrect
command:
66 50 FA 01 02 03 ... 4F FF
The touch system reads bytes until its input buffer overflows, then
responds with the following report:
E0 06 FE FA 01 02 03 ... 1D FF
FE is the Cmderr parameter and indicates that a byte count mismatch
error occurred. The following 30 bytes echo the command number and
parameters that the touch system received before the input buffer
overflowed.
For a complex example, suppose the touch system has an input buffer
size of 32 bytes and the host sends the command as follows:
66 04 20 01 04 03 FF
Due to noise on the serial line, the touch system actually receives a
value of 40H (64 decimal) for the byte count instead of 04H as follows:
66 40 20 01 04 03 FF
The touch system reads all seven bytes of the command and places
them in its input buffer. No report is sent because the touch system is
expecting a command that is 64 bytes in length (not counting the
header, byte count and trailer), but only 5 of the 64 bytes have arrived
(the command number, the three parameter bytes, and the trailer, which
the touch system interprets as byte 5 of the 64 bytes that it expects to
receive).
The host can then wait until the command completion timeout time of
one second has elapsed, and then re-send the command. The seven
bytes contained in the command are interpreted by the touch system as
bytes 6 through 12 of the 64 bytes that it is expecting, and it again sends
Touch System Programmer’s Guide 5-15

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
no report. At this point, there are 14 bytes in the input buffer, with 18
bytes remaining.
If the host repeats the timeout and re-send cycle three more times, the
input buffer overflows when the third command is sent, and the touch
system responds with the following report:
E0 06 FE 20 01 04 03 FF 66 04 20 01 04 03 FF 66
04 20 01 04 03 FF 66 04 20 01 04 03 FF 66 04 20
01 FF
FE is the Cmderr parameter and indicates that a byte count mismatch
error occurred. The following 30 bytes echo the command number and
parameters that the touch system received before the input buffer
overflowed. The touch system is now looking for a new command, and
if the host sent the command once more, the touch system would
receive it, process it, and return a report (presuming no error occurred
in sending this latest command).
The time to re-synchronize this entire sequence would be a little over
four seconds - the original command timeout (one second) plus three
retry timeouts (one second each). The fourth retry would not result in a
timeout because the touch system would send the report that contained
the bytes read.
The host need not wait for enough timeout and re-send cycles to fill the
input buffer, however. The host can accelerate re-synchronization by
issuing enough FFH bytes to flush the touch system’s input buffer. This
forces the input buffer to overflow and causes the touch system to begin
looking for a new command. For example, if the host had used this
method after the first report timeout had occurred, the touch system
would have responded with the following report:
E0 06 FE 20 01 04 03 FF FF FF FF FF FF FF FF FF
FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
FF FF
FE is Cmderr and indicates that a byte count mismatch error occurred.
The following 30 bytes echo the command number and parameters, as
well as the flushing FFHs that the touch system received before the
input buffer overflowed. The touch system is now looking for a new
command, and if the host sent the command once more, the touch
system would receive and process it, and return a report (presuming no
error occurred in sending this latest command). With this approach, the
time to re-sync is a little over one second (the timeout for only the
original command).
5-16 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
Not Enough Parameters
If the number of command parameters is less than the number of
command parameters expected for the command, an SFP-II report
packet is sent with Cmderr pointing to the location of the first missing
parameter (the trailer).
Note that this case differs from the invalid byte count case. In this case,
the command packet byte count is consistent with the total number of
bytes in the command number and parameters, there just weren’t
enough parameters.
If the host sends the SetTouchModes (20H) command as follows to
enable touch detection and set the TouchStateReportType to the Multi
Touch State Report, but leaves off the required third parameter (the
TouchReportingMode parameter):
66 03 20 01 02 FF
The touch system responds with the following report:
E0 04 03 20 01 02 FF
The 03 byte is Cmderr and indicates that a third parameter was
expected but not present.
Too Many Parameters
If the number of command parameters is greater than the number of
command parameters expected for the command, an SFP-II report
packet is sent with Cmderr pointing to the location of the first extra
parameter.
Suppose the host sends the SetTouchModes (20H) command as follows.
The first three parameters correctly enable touch detection (01), set the
TouchStateReportType to the Multi Touch State Report (02), and set
the TouchReportingMode to Continuous (02). However, an erroneous
fourth parameter (04) is also included:
66 05 20 01 02 02 04 FF
The touch system responds with the following report:
E0 06 04 20 01 02 02 04 FF
The 04 byte is Cmderr and indicates that an extra parameter (the fourth
parameter) was present but not expected.
Touch System Programmer’s Guide 5-17

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
Overloaded Functions
Some SFP-II functions are overloaded in a manner similar to the way
that C++ supports overloaded functions.
An overloaded function is a function that is normally used to set the
values of some parameters, but can also be used to get the values of the
same parameters.
• To set the parameter values, the host sends the complete command
including all parameters. The touch system sets the parameters
using the values sent by the host, and returns a report that contains
the resulting values for the parameters.
• To get the parameter values, the host sends only the command
number with none of the parameter values present or a subset of
the parameter values present, depending on the function definition.
The touch system returns a report that contains the parameter
values.
If the host sends a command that includes the command number and a
partial list of parameters, it is an illegal action and an invalid parameter
error is returned in Cmderr.
For example, to get the current touch values using the SetTouchModes
(20H) command, the host sends the command as follows:
66 01 20 FF
The touch system responds with the following report:
E0 05 00 20 01 01 00 FF
This report indicates no errors in Cmderr and reports the values for the
three parameters defined for the function that were in effect when the
command was sent (01, 01, and 00). No parameter values were
changed.
However, to set the touch values using the SetTouchModes (20H)
command, the host sends the command as follows:
66 04 20 01 01 01 FF
The touch system responds with the following report:
E0 05 00 20 01 01 01 FF
5-18 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 5 - Smart-Frame Protocol II
This report indicates no errors in Cmderr and reports the values for the
three parameters defined for the function after the parameter values
were changed as a result of the host sending the command (three 01
values).
If the host sends a partial list of parameters for the SetTouchModes
(20H) command as follows:
66 02 20 00 FF
The touch system responds with the following report:
E0 03 02 20 00 FF
This report indicates that the second parameter byte was erroneous via
Cmderr (the 02 byte) and echoes the parameters that the host sent. A
Cmderr value of 02H indicates that the touch system expected more
parameters than were actually received.
Shared Parameters between SFP and SFP-II
Most global parameters (that is, parameters that are not associated with
a particular function) in SFP and SFP-II are independent of one another.
However, some global parameters are shared between SFP and SFP-II
and maintain their value when the protocol changes.
Because touch systems that support SFP and SFP-II power up in the
SFP, shared parameters have an SFP default value but no SFP-II default
value. The initial value of shared parameters at the time that the touch
system is switched to the SFP-II is equivalent to the value of the
corresponding SFP parameter at that time.
The global parameters that are currently shared include Touch
Detection and Report Transfer.
Touch Detection
In the SFP, the Touch Scanning parameter is enabled and disabled via
the Touch_Scanning_On (2AH) and Touch_Scanning_Off (2BH) SFP
commands and is reported in the Touch Scanning parameter of the
Get_State_Report (47H) SFP command.
In SFP-II, the Touch Detection parameter is set and reported via the
TouchDetection parameter of the SFP-II function.
Touch System Programmer’s Guide 5-19

Chapter 5 - Smart-Frame Protocol II CARROLL TOUCH
Report Transfer
The method of transferring reports differs slightly between SFP and
SFP-II. In SFP, turning Report Transfer off disables all reports, both
solicited and unsolicited. In SFP-II, setting the ReportTransferMode
parameter to disabled inhibits unsolicited reports but does not inhibit
solicited reports.
In the SFP, the Report Transfer parameter is enabled and disabled via
the Report_Transfer_On (44H) and Report_Transfer_Off (43H) SFP
commands and is reported in the Report Transfer parameter of the
Get_State_Report (47H) SFP command.
In SFP-II, the ReportTransferMode parameter is set and reported via
the ReportTransferMode parameter of the SetTouchModes (20H)
SFP-II function.
If Report Transfer is disabled when the touch system is switched to
SFP-II, any SFP reports that are pending at that time are sent before
the SFP-II Protocol Version Report is sent. The Report Transfer
parameter remains set to disabled.
Note
The Report Transfer shared parameter is implemented in the GW
DSP Serial Controller in a different manner from that described
here because the SetReportTransferMode (22H) SFP-II function is
not implemented on this controller. The ReportTransfer parameter
is shared as described, but when the controller is switched from
SFP mode to SFP-II mode, the ReportTransfer shared parameter is
set to enabled. When the controller is switched from SFP-II back
to SFP, the ReportTransfer shared parameter does not change
value.
5-20 Touch System Programmer’s Guide

6
Touch
Touch
Application
Application
Program Interface
Program Interface
(TAPI)
(TAPI)
his chapter includes an overview of the TAPI software functions,
T
the specifications for each function, TAPI driver installation and
initialization, and programming examples.
The chapter discusses the following topics:
• Overview.
• Installing a TAPI Driver.
• Determining if a TAPI Driver Is Installed.
• Calling TAPI Functions.
• Touch System Initialization Using a TAPI Driver.
• TAPI Programming Examples.
See Appendix C, “TAPI Function Reference,” for the specifications of
each TAPI function.
Touch System Programmer’s Guide 6-1

Chapter 6 - Touch Application Program Interface (TAPI) CARROLL TOUCH
Overview
The Touch Application Program Interface (TAPI) is a set of software
functions that lets an application communicate with a Carroll Touch
touch system using the Smart-Frame Protocol without interfacing
directly to the hardware. Using the TAPI interface protocol yields the
following benefits:
• An application that interfaces to a TAPI driver is independent of
the touch system hardware. Each touch system hardware
configuration has a TAPI driver, and all of these TAPI drivers
share a common interface (the TAPI interface). As a result, an
application that uses TAPI may be used with various touch system
hardware configurations without modification by simply loading
the appropriate TAPI driver.
• It is generally easier to write an application that uses TAPI
software interrupt calls to communicate with the touch system than
to write an application that interfaces directly to the touch system
hardware.
The TAPI interface does not include support for calibration or touch
coordinate scaling. These two functions must be performed by the
touch application itself, just as in touch applications that interface
directly to the touch system hardware.
There are three TAPI drivers:
• Software-based controller (SBC) driver.
• Hardware-based controller (HBC) driver.
• RS-232 controller driver.
TAPI driver is a generic term used to describe all three drivers. Each
TAPI driver is a terminate-and-stay-resident (TSR) program that makes
it possible to use the touch system via a software interrupt rather than
by directly accessing the touch system hardware.
The SBC driver must be loaded to use a touch system that uses the SBC.
The SBC is unable to use the Smart-Frame Protocol directly because
the SBC has no processor on board. Use of the HBC or RS-232 drivers
with touch systems that use the HBC or RS-232 controller is optional,
since the application may interface directly to the HBC or RS-232
controller using the Smart-Frame Protocol.
The TAPI drivers run on an IBM or IBM-compatible PC. Each TAPI
driver communicates with any Carroll Touch touch system or controller
6-2 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 6 - Touch Application Program Interface (TAPI)
that recognizes the Smart-Frame Protocol and communicates either
serially through a comm port or directly through the PC bus.
Installing a TAPI Driver
To install a TAPI driver, simply run the executable driver file with
additional command line parameters, if appropriate, from the DOS
command line. This loads the driver into memory as a TSR program.
SBC Driver
If you have set the I/O address or the interrupt number parameter of the
SBC to values other than the default parameters, or if you are using a
touch frame that has a different number of x-axis or y-axis beams than
the default, you must provide the correct values for these parameters on
the command line when installing the SBC driver.
The SBC driver command line has the following syntax:
SBC options
The available options are:
U = Uninstalls the driver.
An = I/O address. n may range from 200H to 3F0H. The
default is 300H.
In = Interrupt number override. n may be 2, 3, 4, 5, or 7. The
default is 7.
Xn = Number of x beams on frame. The default is 40.
Yn = Number of y beams on frame. The default is 30.
Sn = TAPI software interrupt. n may be the number of any
unused software interrupt. The default is 55H.
The command line is case insensitive and the command line parameters
may be arranged in any order. For example, to install an SBC driver
using an I/O address of 320H, interrupt 5, and 30 x-beams and 20
y-beams, you can type either:
SBC A320 I5 X30 Y20
or
sbc i5 x30 a320 y20
Touch System Programmer’s Guide 6-3

Chapter 6 - Touch Application Program Interface (TAPI) CARROLL TOUCH
HBC Driver
If you have set the I/O address or the interrupt number parameters of
the HBC to values other than the default parameters, you must provide
the correct values for these parameters on the command line when
installing the HBC driver.
The HBC driver command line has the following syntax:
HBC options
The available options are:
U = Uninstalls the driver.
An = I/O address. n may range from 200H to 3F0H. The
default is 300H.
In = Interrupt number. n may be 2, 3, 4, 5, or 7. The default
is 7.
Sn = TAPI software interrupt. n may be the number of any
unused software interrupt. The default is 55H.
The command line is case insensitive and the command line parameters
may be arranged in any order. For example, to install an HBC driver
using an I/O address of 340H, hardware interrupt 2, and software
interrupt 57H, you can type either:
HBC A340 I2 S57
or
hbc i2 a340 s57
RS-232 Driver
If you have set the baud rate or parity parameters of the RS-232
controller board to values other than the default values of
autobaud/autoparity, or if you are using an RS-232 port other than the
default value of COM1, you must provide the correct values for these
parameters on the command line when installing the RS-232 driver.
The RS-232 driver command line has the following syntax:
RS232 options
The available options are:
6-4 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 6 - Touch Application Program Interface (TAPI)
U = Uninstalls the driver.
Cn = Serial port. n may be 1 or 2. The default is 1. If the A and
I parameters are used, the C parameter is ignored.
Bn = Baud rate. n may be 3, 12, 24, 48, or 96. The default is
48.
Pn = Parity. n may be E (even), O (odd) or N (none). The
default is N.
Sn = TAPI software interrupt. n may be any unused software
interrupt. The default is 55H.
An = I/O address override. n may range from 0H to FFFFH.
The A and I parameters must be used together. An error
condition occurs if one override parameter is used
without the other being present.
In = Interrupt number override. n may be 2, 3, 4, 5, 6, or 7.
The A and I parameters must be used together. An error
condition occurs if one override parameter is used
without the other being present.
The command line is case insensitive and the command line parameters
may be arranged in any order. For example, to operate the RS-232
controller at a baud rate of 4800 with no parity through serial
communication port 1, you can type either:
RS232 C1 B48 PN
or
rs232 b48 c1 pn
If you wish to use the RS-232 driver with a serial port that uses a base
I/O address and/or interrupt number other than the standard values of
3F8H and 4 for COM1 or 2F8H and 3 for COM2, you may use the A
and I parameters to override the default values.
Touch System Programmer’s Guide 6-5

Chapter 6 - Touch Application Program Interface (TAPI) CARROLL TOUCH
Error Messages
Table 6-1 defines the error messages and meanings for the TAPI
drivers.
Table 6-1. TAPI Error Messages and Explanations
Message: Invalid command line parameter.
Valid command line parameters are:
Meaning: The command line syntax is invalid. The installation
process is aborted.
Message: A CT driver is already installed at
software interrupt xxH.
Meaning: A CT driver has been previously installed on the same
software interrupt. xxH denotes the software interrupt.
The TAPI driver looks only for the string CT DRIVER
-. It does not look for a specific type of driver.
Message: Communication error - unable to send
command.
Check that the touch system is
properly connected.
Meaning: The TAPI driver could not initialize the touch system
because the driver could not send commands to the
touch system. A timeout occurred while attempting to
transmit the command.
Message: Communication error - report expected
but not received.
Check that the touch system is
properly connected.
Meaning: The TAPI driver could not initialize the touch system
because a report that was expected was not received. A
timeout occurred while waiting for the report.
Message: The selected RS-232 serial port was
not found.
Meaning: The RS-232 driver could not initialize the touch system
because the driver could not find the specified serial
port.
6-6 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 6 - Touch Application Program Interface (TAPI)
Table 6-1. TAPI Error Messages and Explanations (Continued)
Message: TAPI driver installation failed.
Meaning: This error message accompanies other error messages
and indicates that installation was aborted due to the
stated condition.
Message: Communication error - report expected
but not received.
Check that the touch system is
properly connected.
Meaning: The TAPI driver could not initialize the touch system
because a report that was expected was not received. A
timeout occurred while waiting for the report.
Message: No TAPI driver resident at software
interrupt XXH. Uninstall aborted.
Meaning: An attempt is made to uninstall a TAPI driver at
software interrupt XXH, but no TAPI signature is
detected at that software interrupt.
Message: The I/O Address Override (a) and
Interrupt Number override (i)
parameters must both be present in
order to override the I/O address and
interrupt number.
Meaning: One override parameter is present without the other.
Determining if a TAPI Driver Is Installed
An application program may determine if a TAPI driver is installed by
performing a string compare starting at the address pointed to by the
TAPI software interrupt vector +2. For all TAPI drivers, the first 9
characters read CT DRIVER. The type of driver is identified by an
additional string:
CT DRIVER - SBC Identifies an SBC driver.
CT DRIVER - HBC Identifies an HBC driver.
CT DRIVER - 232 Identifies an RS-232 driver.
Calling TAPI Functions
To call a TAPI function, load the registers as described in the “Call
with” sections for the TAPI functions described in Appendix C. Then,
Touch System Programmer’s Guide 6-7

Chapter 6 - Touch Application Program Interface (TAPI) CARROLL TOUCH
call the TAPI driver software interrupt and read the registers as
described in the “Returns” section for that function.
The following example illustrates how to call TAPI functions:
int SendSmartFrameCommand (char command, int
TAPI_sw_int)
{
union REGS regs;
regs.x.ax = 1;
regs.h.bh = 0;
regs.h.bl = 0x32;
int86 (0x55, ®s, ®s);
if (regs.x.cx)
return (1);
return (0);
} /* SendSmartFrameCommand */
Touch System Initialization Using a TAPI Driver
To initialize the touch system using a TAPI driver, send the following
functions and commands in this order:
1. Call Reset (0).
2. Call SendCommand (1), with the Software_Reset (3CH) as the
Smart-Frame command (BL = 3CH). If SendCommand returns a
nonzero value in CX, abort the routine.
3. Wait at least 100 ms.
4. Call SendCommand (1), with Report_Transfer_On (44H) as the
Smart-Frame command (BL = 44H).
5. Call SendCommand (1), using Get_Error_Report (32H).
6. Call GetReports (2), which loads the report into the report buffer
pointed to by BX and DX.
7. Read the Error Report out of the buffer. If there are no errors, the
report reads F8 00 FF.
At this point you may set the desired touch mode using SendCommand
(1) with the appropriate Smart-Frame Protocol command, then turn on
scanning by using SendCommand (1) with a Touch_Scanning_On
(2AH) command. The touch system is now initialized.
6-8 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 6 - Touch Application Program Interface (TAPI)
TAPI Programming Examples
The CT Driver/Demo Disk contains three short example programs
under the heading of “Programmer’s Guide Programming Examples.”
They demonstrate how to interface to RS-232-based and HBC-based
touch systems via a TAPI driver using the Smart-Frame Protocol. Both
a polling method and an interrupt-driven method are shown for each
type of touch system. All of these programs were developed using
Borland C. Minor modifications may be required for other compilers.
The example files are:
CT.H Contains a Carroll Touch header file.
TAPIPOL.C Contains a TAPI polling example.
TAPIINT.C Contains a TAPI interrupt example.
Touch System Programmer’s Guide 6-9

Chapter 6 - Touch Application Program Interface (TAPI) CARROLL TOUCH
6-10 Touch System Programmer’s Guide

7
CTKERN
CTKERN
his chapter describes the features and capabilities of the CTKERN
T
driver, as well as its installation procedures and parameters. It also
discusses the operation of the CTKERN calibration program
(CALIB.EXE).
This chapter discusses the following topics:
• Overview.
• Calibration.
• Scaling.
• Touch Reporting.
• Calibration and Scaling Examples.
• Temporal Filter.
• Methods for Interfacing CTKERN and an Application Program.
• Loading the CTKERN Driver.
• Determining if the CTKERN Driver Is Installed.
• Calling CTKERN Functions.
• CALIB.EXE.
• CALIB.DAT.
• CTKERN Programming Examples.
See Appendix D, “CTKERN Function Reference,” for the
specifications of each CTKERN function.
Touch System Programmer’s Guide 7-1

Chapter 7 - CTKERN CARROLL TOUCH
Overview
The CTKERN driver communicates with the touch system using the
TAPI driver appropriate for the touch system, and with the application
program using the CTKERN functions, which are accessed via a
software interrupt.
CTKERN is a DOS driver that offers the following features:
• Calibration support, including multiple calibrations to allow for
monitors that do not maintain a constant image size when
displaying multiple video modes.
• Touch coordinate scaling support, including multiple sets of
scaling parameters to automatically support multiple video modes.
• Easy-to-use touch state reporting.
• Support for user-installable touch event handlers for
interrupt-driven applications.
• Uninstall capability.
Calibration
The application software may not issue TAPI function calls while
CTKERN is loaded. In fact, when CTKERN loads, it reads the TAPI
software interrupt vector, saves it, and uses it to call the TAPI driver
instead of the software interrupt. The TAPI software interrupt is
replaced by a pointer to a return from interrupt instruction within
CTKERN, blocking any calls to TAPI. The return from interrupt
instruction is followed by a NOP and the CT DRIVER - string, so that
the driver detection mechanism continues to indicate an installed TAPI
driver at the TAPI software interrupt. When CTKERN is unloaded, it
replaces the TAPI software interrupt vector with the value that was
saved, re-enabling calls to TAPI.
The overall relationship between the touch hardware, the TAPI drivers,
the CTKERN driver, and the application software is illustrated in
Figure 7-1.
CTKERN allows up to ten sets of video mode specific calibration
parameters. By using multiple calibrations, CTKERN can allow for
monitors that do not maintain a constant image size when displaying
multiple video modes. One of these sets is designated as the default
calibration.
There are three options for calibration: disabled, fixed, and automatic.
If calibration is disabled, the touch coordinates reported by CTKERN
7-2 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 7 - CTKERN
Application Software
(CTKERN function calls)
(CTKERN User Event Handler)
CTKERN Driver
(TAPI function calls)
(TAPI User Event Handler)
TAPI Driver
(SBC, HBC, RS-232)
(Serial Xmit or I/O Ports)
(Hardware Interrupt)
Touch Hardware
(SBC, HBC, RS-232)
Figure 7-1. Touch System to Application Communication
are not calibrated. If fixed calibration is selected, the default calibration
is always used, regardless of the BIOS video mode being used. If
automatic calibration is selected, CTKERN intercepts BIOS Int 10H
and watches for SetVideoMode (0). When a SetVideoMode function
occurs, CTKERN switches to the calibration parameters for that video
mode if they exist. If no calibration exists for that video mode,
CTKERN switches to the default calibration parameters.
SetCalibrationParameters (4) may also be used to set the calibration
parameters to arbitrary values that are not related to any calibration
table entry.
CTKERN attempts to read a file of calibration parameters (stored, by
default, in CALIB.DAT) when it is loaded. This file is created by
CALIB.EXE, the CTKERN calibration program, described later in this
chapter. If no calibration file is present or if the calibration file contains
multiple default calibrations, CTKERN does not load, but instead prints
an appropriate error message.
The CTKERN internal table of calibration parameters may be read or
modified while CTKERN is loaded by calling
GetCalibrationTableEntry (7) or SetCalibrationTableEntry (6),
respectively.
Touch System Programmer’s Guide 7-3

Chapter 7 - CTKERN CARROLL TOUCH
Scaling
CTKERN has the ability to scale the touch coordinates to a
user-defined coordinate system. There are three options for scaling:
disabled, fixed, and automatic.
If scaling is disabled, the touch coordinates reported by CTKERN are
not scaled.
If fixed scaling is selected, the touch coordinates reported by CTKERN
are scaled using 0, 0 for the upper left x and y scaling parameters and
(Xres - 1, Yres - 1) from the calibration parameters of the default
calibration entry for the lower right x and y scaling parameters, then are
passed on to the application program. If no calibration entry is marked
as the default, the Xres, Yres values of the first calibration entry
(calibration table index 0) are used.
If automatic scaling is selected, the touch coordinates reported by
CTKERN are scaled using 0, 0 for the upper left x and y scaling
parameters and (Xres - 1, Yres - 1) from the calibration parameters for
the currently selected BIOS video mode for the lower right x and y
scaling parameters, then are passed on to the application program. The
driver determines the video mode by intercepting calls to BIOS mode
10H function 0 (Set Video Mode). If an entry in the table of calibration
parameters that corresponds to that video mode exists, the Xres, Yres
values of those calibration parameters are used. If no such entry exists,
the Xres, Yres values of the default calibration parameters are used. If
no calibration entry is marked as the default, the Xres, Yres values of
the first calibration entry (calibration table index 0) are used.
SetScalingParameters (9) may also be used to set the scaling
parameters to arbitrary values that are not related to the Xres and Yres
parameters in any calibration table entry.
CTKERN has the ability to scale the z-axis pressure parameter returned
by touch systems that support z-axis pressure detection. There are only
two options for z-axis scaling: disabled and enabled. When z-axis
scaling is disabled, the raw z-axis parameter reported by the touch
system is reported by CTKERN. If z-axis scaling is enabled, the z-axis
parameter reported by the touch system is scaled linearly within the
range defined by user-definable minimum and maximum pressure
values.
7-4 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 7 - CTKERN
Touch Reporting
The application program may get touch reporting information from
CTKERN either by calling GetTouchState (1) that returns the current
touch state, or by setting up a user event handler that is called whenever
the touch state changes by using SetUserEventHandlerMode (23).
Possible touch states are:
NT Not touched, with scaled (if enabled), calibrated (if enabled)
coordinates of the last place the screen was touched. If the
screen has not been touched since the driver was last loaded
or reset, the coordinates returned are 0, 0.
TO Touched, with scaled (if enabled), calibrated (if enabled)
coordinates of where the screen is currently being touched.
NC Non-contiguous.
The touch state is automatically maintained by CTKERN using an
interrupt-driven background process.
CTKERN also includes SetTouchState (2) to manually set the touch
state to a user-specified state. This can be useful for debugging and so
forth.
Calibration and Scaling Examples
Because the calibration and scaling modes of CTKERN may be
independently set, there are four possible combinations of calibration
and scaling modes, as shown in Figure 7-2 through 7-5:
Figure 7-2: Calibration mode = Fixed or automatic
Scaling mode = Fixed or automatic
Figure 7-3: Calibration mode = Fixed or automatic
Scaling mode = Disabled
Figure 7-4: Calibration mode = Disabled
Scaling mode = Fixed or automatic
Figure 7-5: Calibration mode = Disabled
Scaling mode = Disabled
Each figure illustrates the touch coordinates that are returned for that
particular combination of calibration and scaling modes. The touch
Touch System Programmer’s Guide 7-5

Chapter 7 - CTKERN CARROLL TOUCH
active area is indicated by the striped area. The range of touch
coordinates that are returned by a touch within the touch active area is
indicated by the coordinate pairs at the upper left and lower right
corners of either the touch active area defined during calibration (the
inner rectangle) or the touch active area of the touch system (the outer
rectangle).
The examples all assume the following:
• A touch frame with 80 logical x-axis coordinates numbered 0 - 79,
and 60 logical y-axis coordinates numbered 0 - 59.
• Scaling parameters set to match a 640 x 480 VGA display.
Upper left x = 0
Upper left y = 0
Lower right x = 639
Lower right y = 479
• Touches at (5, 4) and (74, 55) for the upper left and lower right
corners, respectively, during calibration.
The numbers on the outside of the outer rectangle indicate the logical
touch coordinates along each axis.
0
5
0
(0,0)
4
55
59
74 79
(639,479)
Figure 7-2. Calibration Mode Fixed or Automatic and Scaling Mode
Fixed or Automatic
7-6 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 7 - CTKERN
(639,479)
0
5
0
(0,0)
4
74 79
55
59
(69,51)
Figure 7-3. Calibration Mode Fixed or Automatic and Scaling Mode
Disabled
(0,0)
55
0
5
0
4
74 79
59
Figure 7-4. Calibration Mode Disabled and Scaling Mode Fixed or
Automatic
Touch System Programmer’s Guide 7-7

Chapter 7 - CTKERN CARROLL TOUCH
(79,59)
(0,0)
0
5
0
4
55
59
74 79
Figure 7-5. Calibration Mode Disabled and Scaling Mode Disabled
Temporal Filter
When enabled, the temporal filter acts much like a low pass filter in the
time domain for all touch state transitions. You must define two
parameters, Spatial Filter Box Size and Temporal Filter Time.
When the stylus touches the screen, the center of the spatial filter box
is set to the coordinates where the screen was first touched. The touch
state is set to “touched” only after the stylus has remained in the spatial
filter box for the length of time specified by the Temporal Filter Time
parameter.
If the stylus moves beyond the spatial filter box, the Temporal Filter
Time and the center of the spatial filter box are reset. The coordinates
are not updated until the stylus has once again remained in the spatial
filter box for the Temporal Filter Time. The coordinates associated with
the “not touched” state are still the exit point, but the touch state
becomes “not touched” only after the stylus is out of the screen for the
Temporal Filter Time. The touch state is set to “non-contiguous” only
after a non-contiguous stylus has been in the touch screen for the
Temporal Filter Time.
7-8 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 7 - CTKERN
Methods for Interfacing CTKERN and an Application Program
Application programs generally use either an interrupt mode or a
polling mode to retrieve touch information.
Polling Mode
Using the polling mode, the application program periodically checks
the touch state using GetTouchState (1). If the application does this at
a comparatively rapid rate, touch state information is current. If the
application polls at a slower rate, there is danger of missing transitions
in the touch state during the time between polls.
Interrupt Mode
In the interrupt mode, the application program installs a CTKERN user
event handler (UEH) using SetUserEventHandler (7). Whenever the
touch state changes, CTKERN places the touch state parameters in the
CPU registers and calls the application’s UEH. The application’s UEH
then reads the parameters from the registers and copies them into
variables within the application. The application program should keep
the CTKERN UEH as short as possible, as touch information may be
lost if the screen is touched while the hardware interrupts are turned off.
If the CTKERN UEH is disabled for a period of time then re-enabled,
touch state changes that occurred while the UEH was disabled are lost.
Loading the CTKERN Driver
Command Line
The CTKERN driver command line has the following syntax:
ctkern options
The available options follow.
U = Uninstalls the driver.
Tn = TAPI software interrupt. n may be any unused software
interrupt. The default is 55H.
Kn = CTKERN software interrupt. n may be any unused
software interrupt. The default is 56H.
Touch System Programmer’s Guide 7-9

Chapter 7 - CTKERN CARROLL TOUCH
Dx = Pathname to calibration data file. x may be any valid
pathname. The default is CALIB.DAT in the current
DOS drive and directory.
The command line is case-insensitive and the command line parameters
may be arranged in any order. An example command line is:
CTKERN K59 t57
If you use the uninstall command line parameter (U) to uninstall a
CTKERN driver that is installed on an interrupt other than the default,
you must also specify the CTKERN software interrupt on the command
line by using the K parameter. For example, to uninstall a copy of
CTKERN that was installed on software interrupt 59, use the following
command line:
CTKERN U K59
Error Messages
Table 7-1 defines the error messages and meanings for the CTKERN
driver.
Table 7-1. CTKERN Error Messages
Message: A CT driver is already installed at
software interrupt xxH.
Meaning: A CT driver has been previously installed on S/W
interrupt xxH. CTKERN looks only for the string CT
DRIVER - . It does not look for a specific type of driver.
Message: Bad calibration entry in CALIB.DAT as
follows:
<the text line in CALIB.DAT that has the problem>
Meaning: A calibration entry in CALIB.DAT has bad syntax.
Message: CTKERN installation failed.
Meaning: This error message accompanies other error messages
and indicates that installation was aborted.
7-10 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 7 - CTKERN
Table 7-1. CTKERN Error Messages (Continued)
Message: Invalid command line parameter.
Valid CTKERN command line parameters
are:
(followed by a list of valid command line parameters)
Meaning: The CTKERN command line syntax is invalid.
Message: No CALIB.DAT file found.
Meaning: The calibration data file could not be found.
Message: No TAPI driver loaded at software
interrupt xxH.
Meaning: CTKERN could not find a TAPI driver at S/W interrupt
xxH.
Message: TAPI driver communication error -
invalid report received.
Check that the touch system is
properly connected.
Meaning: CTKERN could not initialize the touch system because
an invalid SFP report was received.
Message: TAPI driver communication error -
report expected but not received.
Check that touch system is properly
connected.
Meaning: CTKERN could not initialize the touch system because
an SFP report that was expected was not received. (The
TAPI CheckForReports function returned a report length
of 0 in CX and CTKERN timed out waiting for the
report.)
Message: TAPI driver communication error -
unable to send command.
Check that the touch system is
properly connected.
Meaning: The CTKERN driver could not initialize the touch
system because the TAPI driver reported that it could not
send SFP commands to the touch system. (The TAPI
SendCommand function returned an error code in CX.)
Touch System Programmer’s Guide 7-11

Chapter 7 - CTKERN CARROLL TOUCH
Table 7-1. CTKERN Error Messages (Continued)
Message: The CALIB.DAT file contains multiple
default calibrations.
Meaning: CALIB.DAT contains more than one default calibration.
Message: The CALIB.DAT file does not contain a
default calibration.
Meaning: The calibration data file contains no default calibration.
Message: The CALIB.DAT file is invalid.
Meaning: The calibration data file does not contain the string
Carroll Touch Calibration Data File as
its first line of text.
Message: The calibration parameters of the
following calibration entry in
CALIB.DAT are too large for the touch
system currently being used (the sum
of the offset value and span value is
greater or equal to the frame size in
one or both axes):
(followed by the bad calibration entry)
Enter a Y to truncate the X and/or Y
span values to the frame size so that
this entry is valid for the touch
system being used and continue loading
CTKERN. Press any other key to abort
CTKERN installation.
Meaning: A calibration entry has parameters too large for the touch
system being used.
Press the Y key to truncate the value and continue to load.
You must truncate all out of range calibration entries for
CTKERN to load. The truncation applies only to the
CTKERN driver resident in memory; the CALIB.DAT
file is not modified. Run CALIB.EXE to modify the
CALIB.DAT file so it contains calibration entries that
are correct for the touch system in use.
Press any key other than Y to abort CTKERN and display
the bad calibration entry.
7-12 Touch System Programmer’s Guide

CARROLL TOUCH Chapter 7 - CTKERN
Determining If the CTKERN Driver Is Installed
An application program may determine if the CTKERN driver is
installed by performing a string compare starting at the address pointed
to by the CTKERN software interrupt vector + 2. For all CT drivers, the
first nine characters will be CT DRIVER. The type of driver (CTKERN
in this case) is identified by an additional string:
CT DRIVER - CTKERN
Calling CTKERN Functions
The CTKERN functions may be accessed via the CTKERN driver
software interrupt (default 56H).
To call a CTKERN function, load the registers as described in the “Call
with” section for the CTKERN functions described in Appendix D.
Then call the CTKERN driver software interrupt (default 56H) and read
the registers as described in the “Returns” section for that function.
CALIB.EXE
An example of a CTKERN function call is:
int GetTouchState (int ctkern_sw_int,
int *x_coordinate, int *y_coordinate)
{
union REGS regs;
int touch_state;
regs.x.ax =1;
int86(ctkern_sw_int, ®s, ®s);
touch_state = (int) regs.h.bl;
*x_coordinate = regs.x.cx;
*y_coordinate = regs.x.dx;
return(touch_state);
} /* GetTouchState */
Note that both a TAPI driver and the CTKERN driver must be installed
to run CALIB.EXE, the CTKERN calibration program.
Touch System Programmer’s Guide 7-13
 Loading...
Loading...