

Page 1

0
Rev 6/93
DBP - Rev 6/93
Page 2
1
ELMO-WARRANTY PERFORMANCE
The warranty performance covers only ELMO's products and only the
elimination of problems that are due to manufacturing defects resulting in
impaired function, deficient workmanship or defective material. Specifically
excluded from warranty is the elimination of problems which are caused by
abuse, damage, neglect, overloading, wrong operation, unauthorized
manipulations etc.
The following maximum warranty period applies:
12 months from the time of operational startup but not later than 18 months
from shipment by the manufacturing plant.
Units repaired under warranty have to be treated as an entity. A breakdown
of the repair procedure (for instance of the repair of a unit into repair of
cards) is not permissible.
Damage claims, including consequential damages, which exceed the warranty
obligation will be rejected in all cases.
If any term or condition in this warranty performance shall be at variance
or inconsistent with any provision or condition (whether special or general)
contained or referred to in the Terms and Conditions of Sales set out at the
back of Elmo's Standard Acknowledge Form, than the later shall prevail and be
effective.
DBP - Rev 6/93
Page 3
2
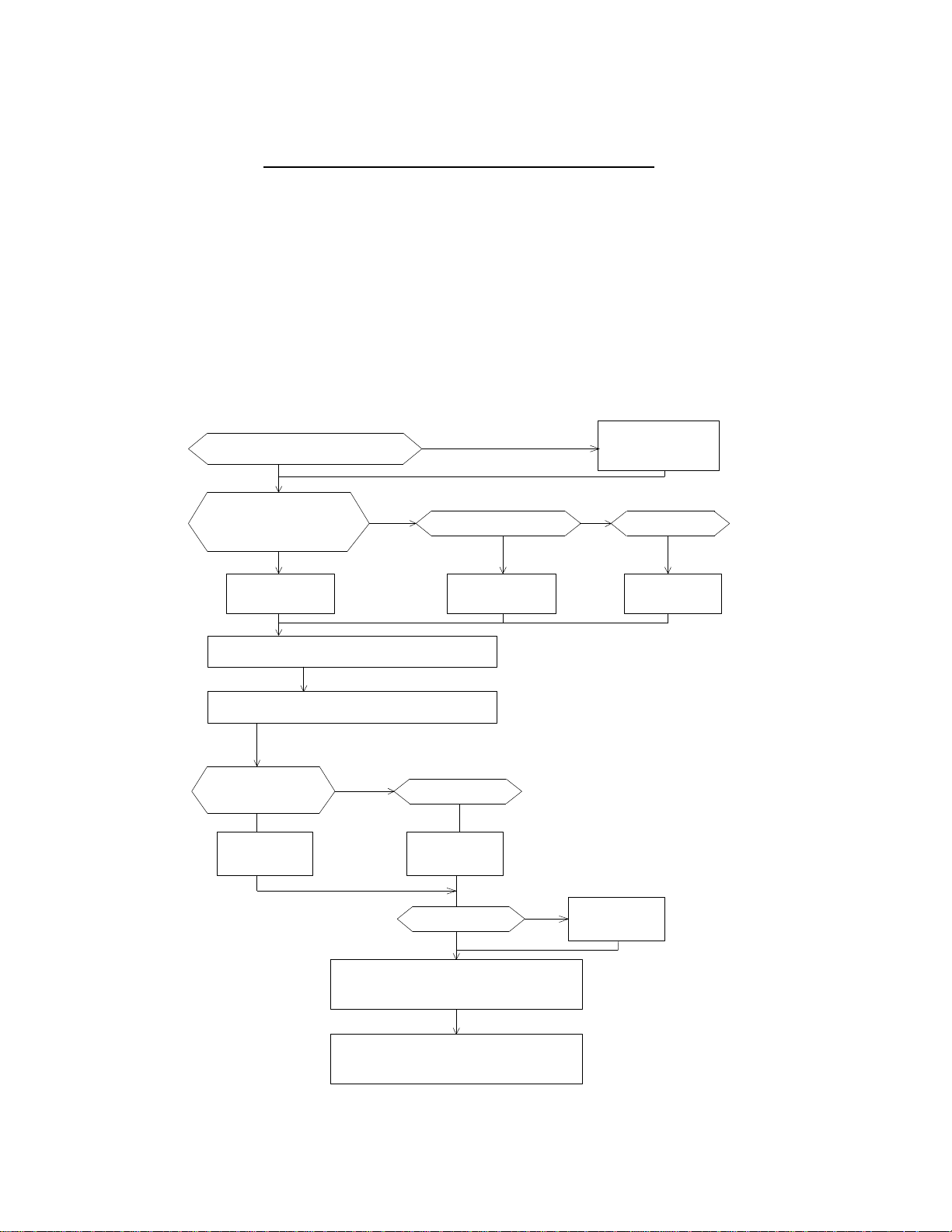
How to use this manual - Flow Chart
The DBP HARDWARE MANUAL will lead you toward a successful start-up of your
digital amplifier. Please review carefully the following flow chart and write
down the chapters that you have to follow in the right order. Only after
performing all the steps you may proceed to the software manual.
If you are a new user of the DBP, you better not skip chapters 1-4 which
will familiarize you with the product.
Familiar with the DBP ?
Panel (H) version or Rack (R)
w/o Elmo mother board ?
Read chapter 5.1
Terminals
Read chapter 6 - Installation
Read chapter 7.1 - Start-Up
Hall sensors with
optical encoder ?
Read 7.2
no
no
Rack (R) with Elmo mother board ? Elmo enclosure ?
Read chapter 5.2
Terminals
no
Resolver ?
Read 7.3
Read chapters
1,2,3,4
no
Read chapter 5.3
Terminals
DBP - Rev 6/93
Adding velocity loop ? Read Appendix B
Read chapter 8 - Applying power - Adjustments
Read chapter 9 - Summaries
yes
Page 4

3
TABLE OF CONTENTS
1.Description .......................................................... 7
2. Type Designation ................................ ................... 8
3. Technical Specification ............................................ 9
3.1 Digital I/O specification ................................ ... 10
3.2 Analog input specification .................................. 13
3.3 Sensors specification ................................ ....... 14
3.3.1 Encoder ................................ ............. 14
3.3.2 Resolver ................................ ............ 14
3.4 Communication ............................................... 16
3.4.1 RS232 Configuration ................................. 16
3.4.2 RS485 Configuration ................................. 16
3.5 Battery backup .............................................. 16
3.6 Performance ................................ ................. 16
4. System Operation ................................ ................... 18
4.1 RS485 and Checksum Protocol ................................. 18
4.2 Current Control ............................................. 18
4.2.1 Current feedback, Current feedback multiplier (CFM) and
Current loop ................................ ............... 19
4.3 Digital current limits ................................ ...... 20
4.3.1 Time dependent peak current limit ................... 20
4.4 Digital position and speed control .......................... 21
4.5 Operation of the shunt regulator ............................ 25
4.6 Commutation signals format .................................. 26
4.7 Protective functions ................................ ........ 27
4.7.1 Short circuit protection ............................ 27
4.7.2 Under/over voltage protection ....................... 27
4.7.3 Temperature protection .............................. 27
4.7.4 Internal power supply failure ....................... 27
4.7.5 Loss of commutation feedback ........................ 27
4.7.6 Low back-up Battery voltage ......................... 27
5. Terminal Description ................................ ............... 33
5.1 Terminals for Horizontal and Rack mounting versions ......... 33
5.2 Mother Boards terminals (MBA-DBP/3U and MBA-DBP/6U) ......... 43
5.3 Terminals for DBP mounted in ENCD. .......................... 54
5.4 Communication Port Connector ................................ 64
DBP - Rev 6/93
Page 5

4
6. Installation procedures ............................................65
6.1 Mounting.....................................................65
6.2 Wiring....................................................... 65
6.3 Load inductance................................ ..............66
6.4 AC power supply................................ ..............66
6.5 Wiring diagrams................................ ..............67
6.5.1 Motor's windings ................................ .....67
6.5.2 AC power wiring ................................ ......68
6.5.3 Hall sensors wiring ................................ ..77
6.5.4 RS232 Communication wiring ...........................78
6.5.5 RS485 Communication wiring ...........................79
6.5.6 Main encoder wiring ................................ ..81
6.5.7 Resolver wiring ................................ ......82
6.5.8 Auxiliary encoder wiring .............................83
6.5.9 Pulse/Direction signals wiring .......................84
7. Start - Up Procedures .............................................. 85
7.1 Common procedures for all amplifiers types ...................85
7.1.1 Commutation signals format ...........................85
7.1.2 CFM function ................................ .........85
7.1.3 Abort logic ................................ ..........85
7.1.4 Setting the auxiliary position input format ..........86
7.1.5 Selecting the communication bus ......................86
7.1.6 Preparing the automatic baud rate selection ..........86
7.2 Setting the main optical encoder format ......................87
7.3 Setting the R/D circuit......................................87
8. Applying power - Adjustments ................................ .......94
Step 1 - Applying Power ................................ .....94
Step 2 - Establishing the communication .....................95
Step 3 - Checking the feedback elements .....................95
Step 4 - Adjusting the current limits .......................95
Step 5 - Latch mode of the protective functions .............96
Step 6 - Connecting the Motor ...............................96
9. Tables and Summaries ............................................... 97
9.1 Display diagnostics................................ ..........97
9.2 Summary of DIP switches......................................98
Appendix A - Current loop response ................................ .....99
DBP - Rev 6/93
Page 6

5
Appendix B - Adding a velocity feedback ............................... 101
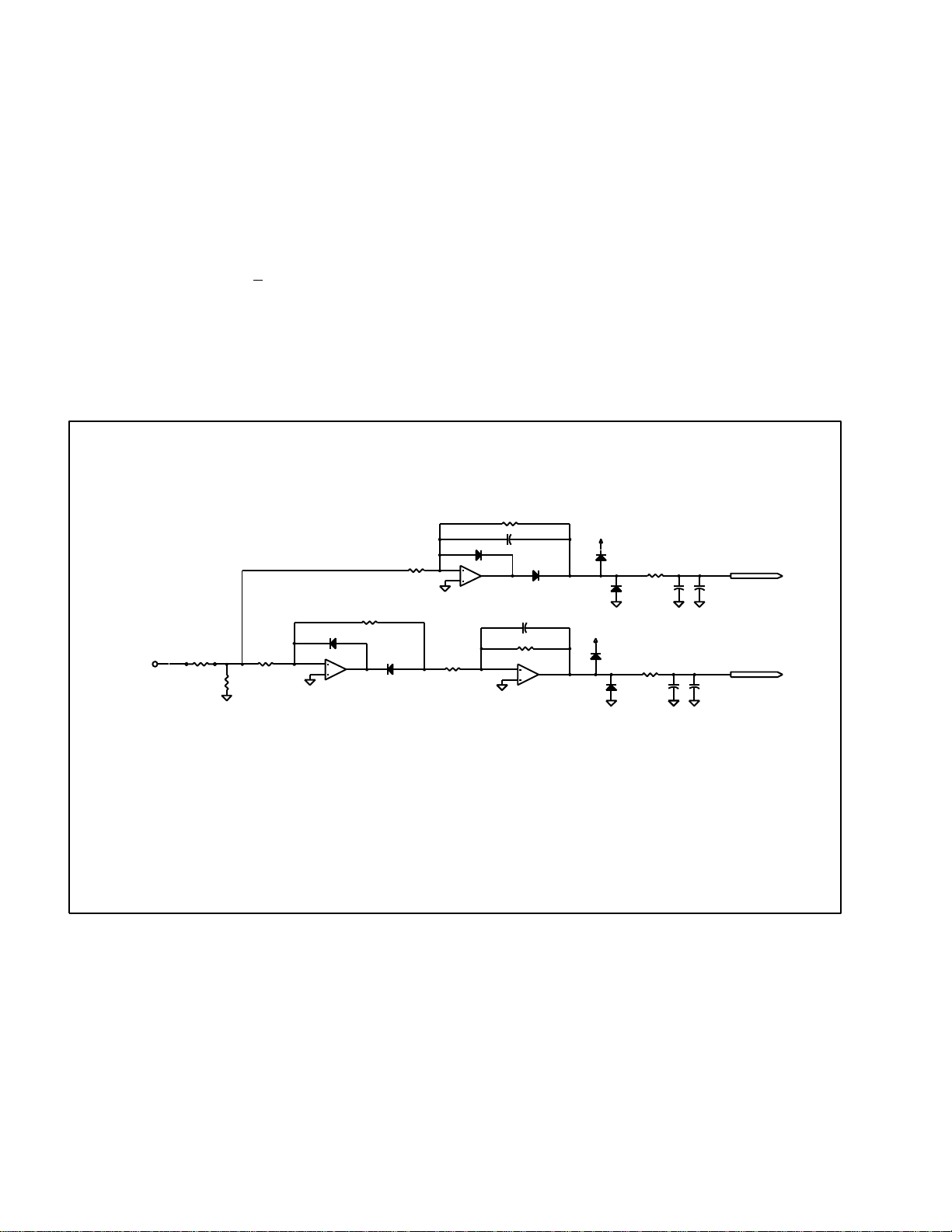
Appendix C - Differential amplifier connection ........................ 102
DIMENSIONAL DRAWINGS ................................ ................... 103
PANEL (H), DBP1 ................................ .................. 104
PANEL (H), DBP2 ................................ .................. 107
PANEL (H), DBP3 ................................ .................. 110
PANEL (H), DBP4 ................................ .................. 113
PANEL (H), DBP6 ................................ .................. 116
RACK 3U/13T ................................ ...................... 119
RACK 3U/20T ................................ ...................... 122
RACK 6U/14T ................................ ...................... 125
RACK 6U/21T ................................ ...................... 128
ENCD - 3U/... ................................ .................... 130
ENCD - 6U/... ................................ .................... 131
EXTERNAL SHUNT RESISTOR ................................ .......... 132
List of ELMO Service Centers ........................................... 133
DBP - Rev 6/93
Page 7
6
1.Description
The DBP series are digital, full wave, three phase servo amplifiers designed
for high performance brushless servo motors in the range of up to 7KW. They
utilize power MOSFETs and Surface Mounting Technology which contribute to its
high efficiency and compact design. The DBP operates from a single AC supply
(either single or three phase) and, when using the galvanic isolation option,
it can be connected directly to the Mains.
The DBP is constructed from two main PCBs mounted on a heat sink plate. The
lower board contains the rectifying bridge, the power switching transistors
which drive the motor, terminals for the power stage, the switch mode power
supply, the protection logic and commutation logic. The upper PCB is the
Digital Control Board (DCB) which contains the digital control logic, terminals
for the control stage, D-type connector for the communication and a 4-digit
display.
The DBP requires a position sensor in order to enable its operation. It can
be either a Resolver or a combination of an optical encoder and Hall effect
sensors. When using a Resolver, a small interface card is mounted on top of the
DCB.
The DBP is available in either panel version or rack version with two DIN
41612 connectors. The rack version can be fitted in a panel mount enclosure
(ENCD-3U or ENCD-6U), that is specially designed for a simple hook-up
procedure.
The amplifiers are fully protected against the following faults:
* Under/over voltage
* Shorts between the outputs or between the outputs to ground.
* RMS current limit.
* Insufficient load inductance.
* Loss of commutation signals.
* Excess temperature.
* Excess position error.
Analog Section Standard Features:
* Single AC supply (single or three phase)
* Zero Deadband.
* Motor current monitor.
* Motor speed monitor.
* Extra differential operational amplifier.
DBP - Rev 6/93
Page 8
7
DBP F- 24 / 270 R R O
* Standard commutation sensors: Hall effect sensors or a Resolver.
* Galvanic isolation of the control stage - option.
Digital Section Standard Features
* Accepts motion commands via RS232 or RS485
* Buffering for pipe lining instructions prior to execution
* Battery-backed RAM for storing user programs and parameters
* Conditional statements for controlling program execution real- time.
* Programmable time and position trip points
* Variables for entering and changing system parameters
* 5 Uncommitted inputs
* 2 uncommitted high speed inputs.
* 10 Uncommitted outputs
* Arithmetic and logic functions for manipulating parameters
* Digital filter with programmable gain, damping and integrator
* Error handling, end of travel, emergency stop, status reporting.
* 0-600,000 quadrature counts/second speed range
* One analog input - 11 bit resolution
* Master/slave operation with programmable following ratio (master information
from an optical encoder or from Pulse and Direction inputs)
* Dual-loop capability
* Adjustable continuous and peak current limits
* 4-digit display for diagnostics.
2. Type Designation
DBP series amplifier
Fan cooling required for full rating
Rated continuos current
Max. operating AC voltage
I - Isolation *
O - Off line:
Isolation + Inrush current limit
E - Optical encoder + Hall sensors
R - Resolver
R - Rack mounting
H - Panel mounting
DBP - Rev 6/93
Page 9
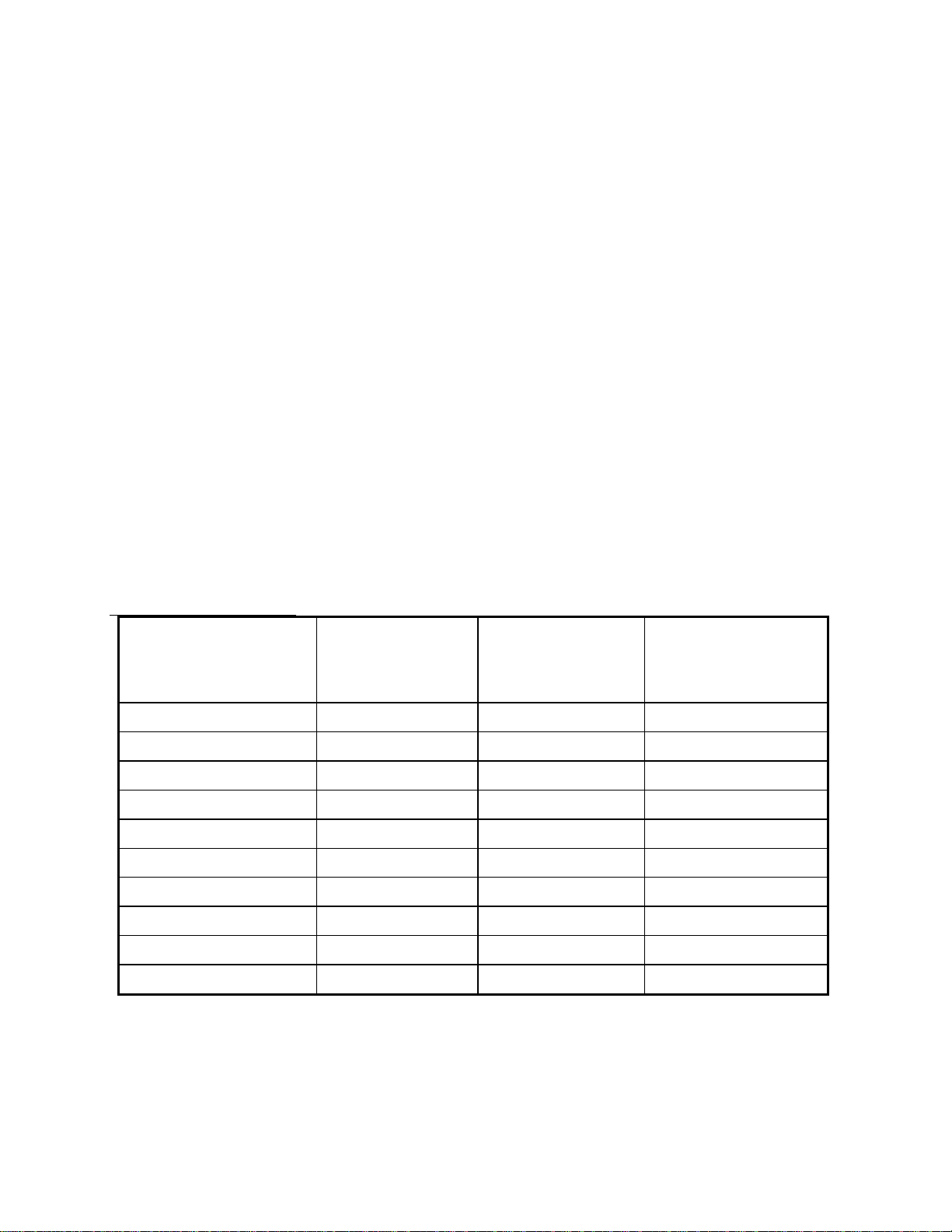
3. Technical Specification
8
Type AC Supply
min max
*
Current
limits
Size
Panel(H)
Size
Rack(R)
Weight
(Kg)
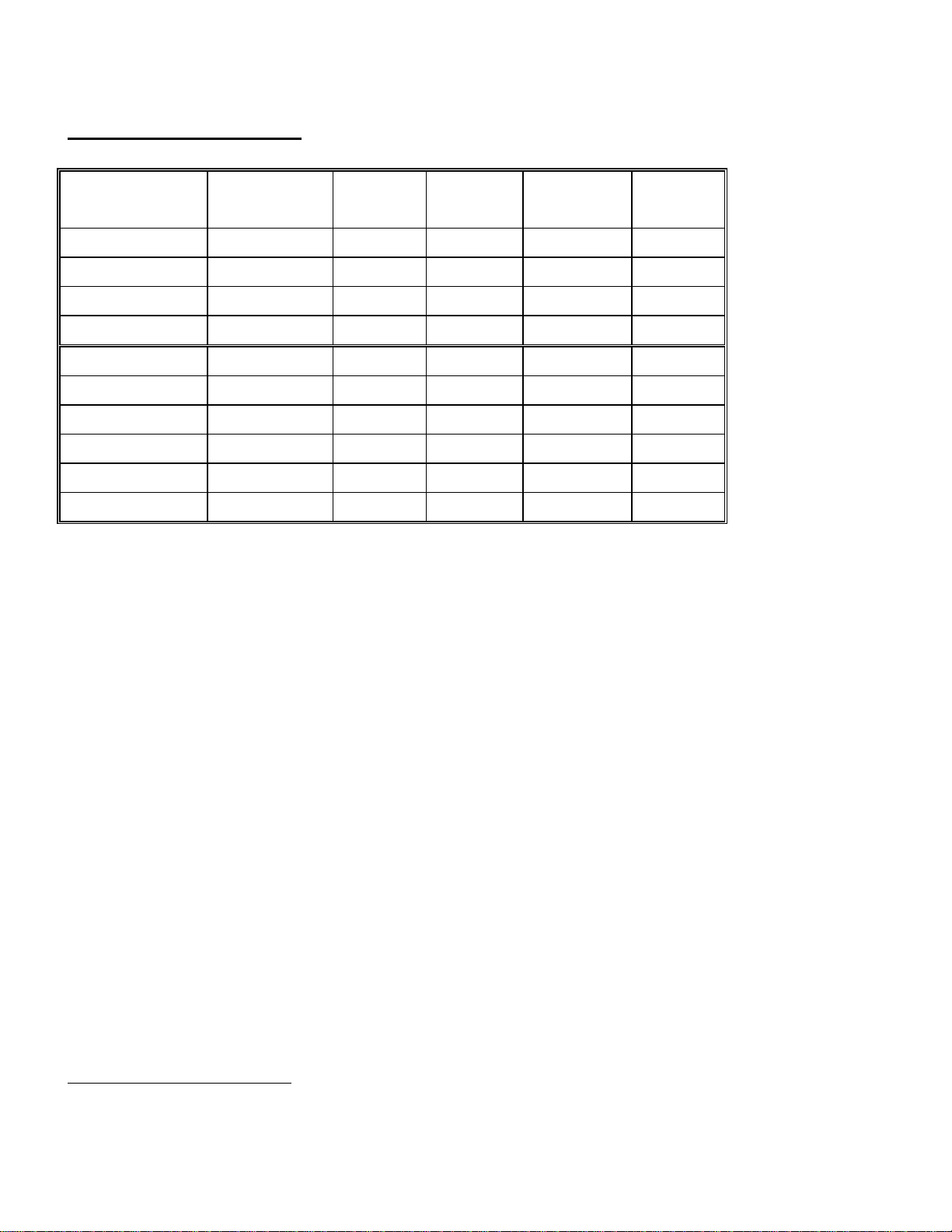
DBP-12/135 28- 135 12/24 DBP2 3U/20T 1.4
DBP-20/135 28- 135 20/40 DBP3 6U/21T 3
DBP- 8/270 100- 270 8/16 DBP2 3U/20T 1.4
DBP-16/270 100- 270 16/32 DBP3 6U/21T 3
DBPF-12/135 28- 135 12/24 DBP1 3U/13T 0.7
DBPF-20/135 28- 135 20/40 DBP4 6U/13T 1.3
DBPF-30/135 28- 135 30/60 DBP6 6U/21T 3
DBPF- 8/270 100- 270 8/16 DBP1 3U/13T 0.7
DBPF-16/270 100- 270 16/32 DBP4 6U/13T 1.3
DBPF-24/270 100- 270 24/48 DBP6 6U/21T 3
*
These are the absolute minimum-maximum AC supply voltage under any condition.
DBP - Rev 6/93
Page 10
9
General
* DC output voltage is 130% of AC input voltage.
* 2KHz current loop response
* Outputs voltages of +5V/0.2A, +15V/0.1A for external use.
* Efficiency at rated current - 97%.
* Operating temperature: 0 - 50°C.
* Storage temperature: -10 - +70°C.
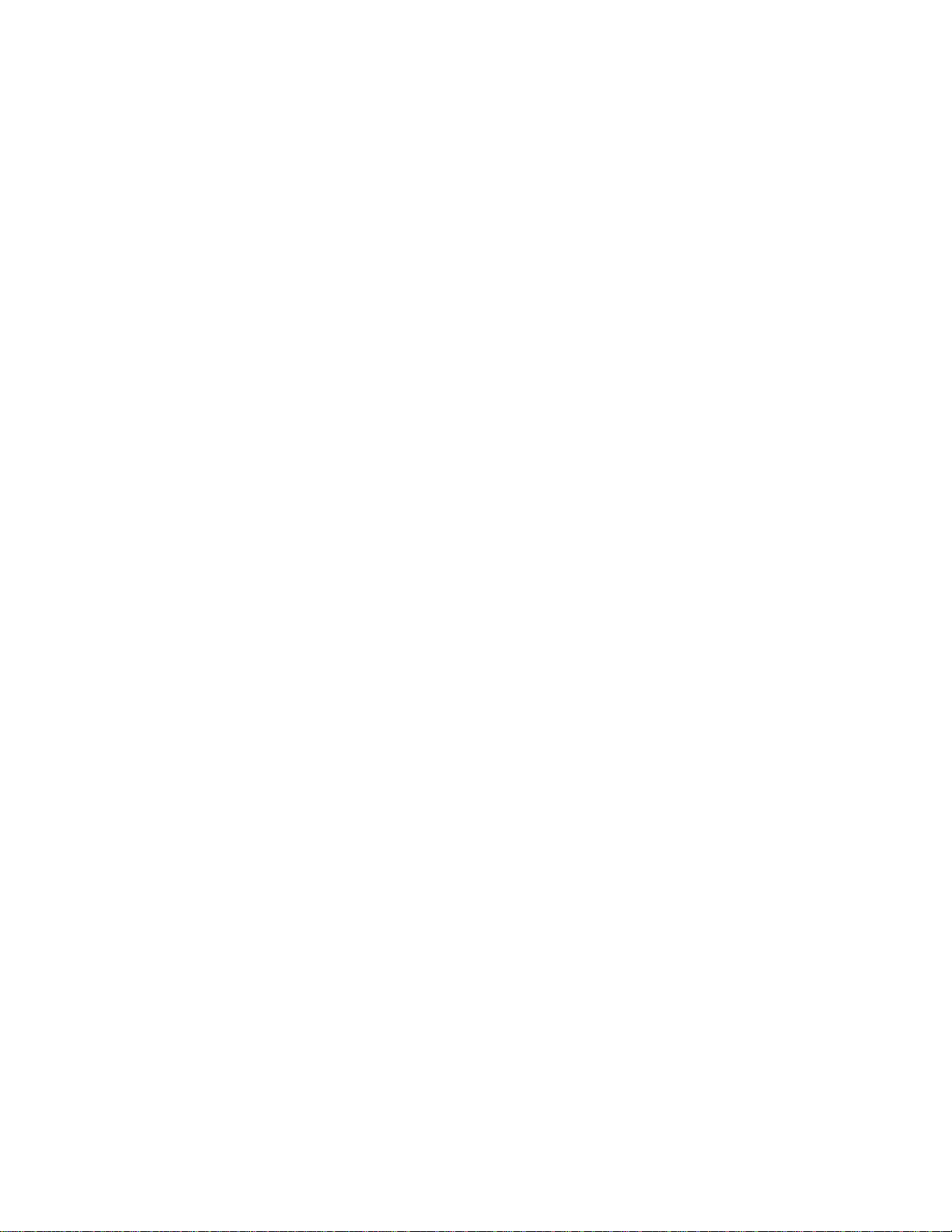
3.1 Digital I/O specification
Digital Inputs:
High/Low input definition: Vil<1V, Vih>2.4V
Maximum input voltage: 30V
Input impedance: 3-7Kohm
Input hysteresis: typ 1V.
When left open: low level.
Input threshold level can be shifted on request.
The fast inputs capture events (input voltage level
going from low to high) of less then 10 µsec duration.
Digital Outputs:
High/Low output definition: Vol<0.4V, Voh>4V
Output level: 0-5V
Recommended output current: Iol=Ioh=5mA
Maximum output current +10mA
The outputs are normally at low level.
DBP - Rev 6/93
Page 11
10
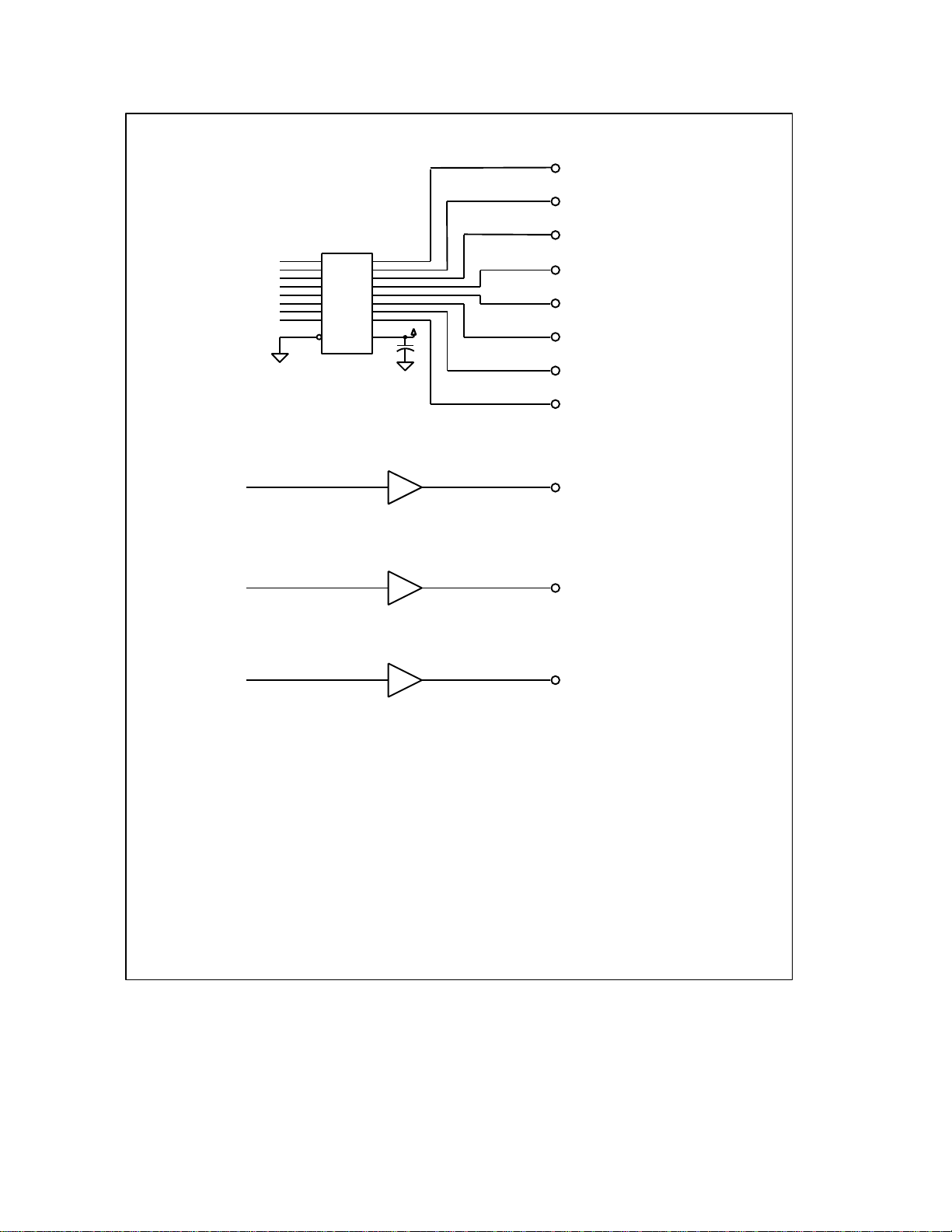
U17
Q0
D0
Q1
D1
Q2
D2
Q3
D3
Q4
D4
Q5
D5
Q6
D6
Q7
D7
VCC
OC
74HCT373A
2
5
6
9
12
15
16
19
+5V
20
3 2
U11A
74HCT4050
5 4
13b
14b
15b
16b
17b
OUT 1
OUT 2
OUT 3
OUT 4
OUT 5
1b
2b
3b
5a
OUT 6
OUT 7
OUT 8
OUT9
6a
OUT10
U11B
74HCT4050
7 6
U11C
7a
MOTION
COMPLETE
74HCT4050
DIGITAL OUTPUTS
DBP - Rev 6/93
Page 12
11
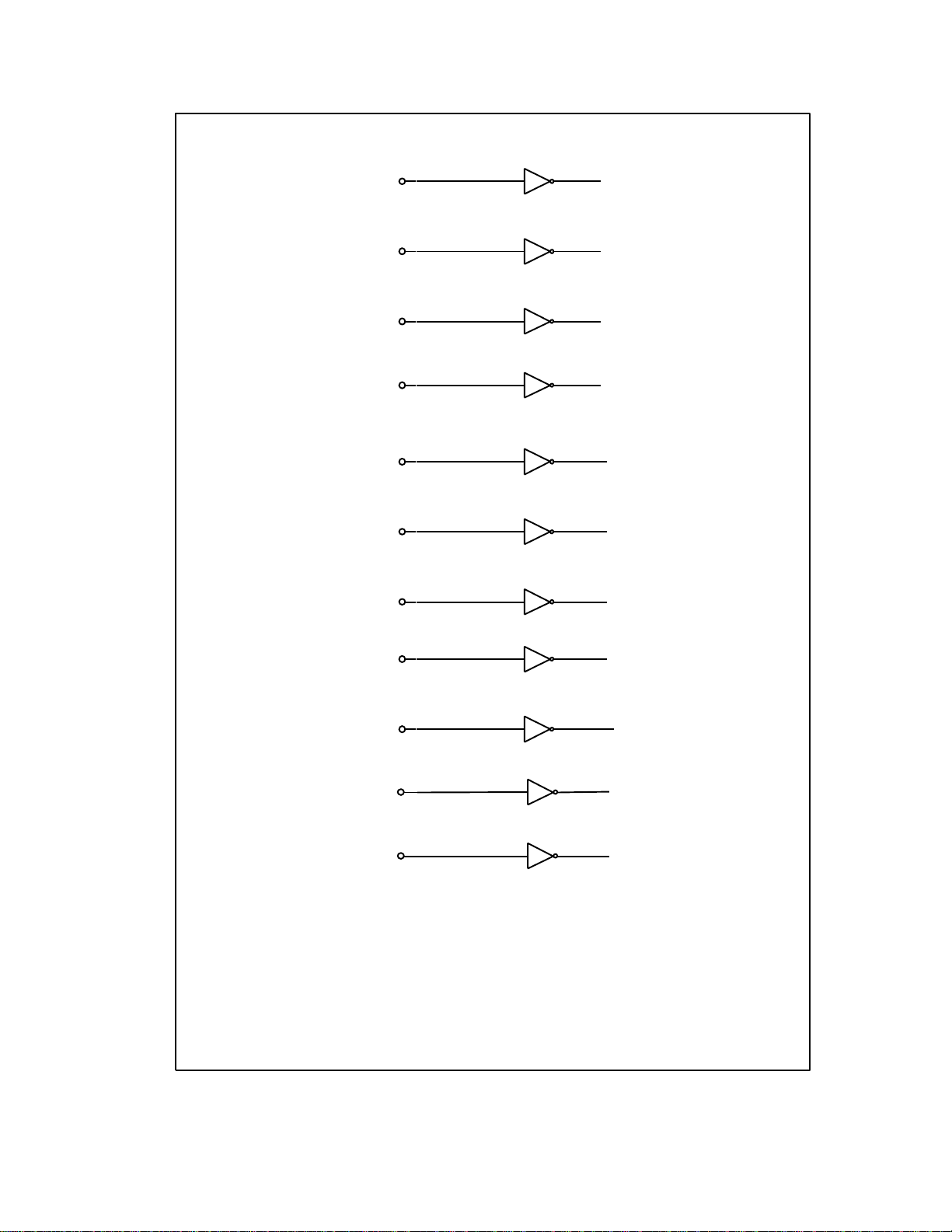
FORWARD
LIMIT SWITCH
REVERSE
LIMIT SWITCH
HOME INPUT
ABORT INPUT
9a
10a
12a
13a
18b
I1
I2
I3
I4
19b
20b
21b
1 3
4 6
SN75C189AD
10 8
13 11
1 3
4 6
10 8
13 11
U100A
SN75C189AD
U100B
U100C
SN75C189AD
U100D
SN75C189AD
U102A
SN75C189AD
U102B
SN75C189AD
U102C
SN75C189AD
U102D
SN75C189AD
DBP - Rev 6/93
I5
22b
1 3
INDEX SLAVE
I6
15a
16a
I7
4 6
10 8
DIGITAL INPUTS
U103A
SN75C189AD
U103B
SN75C189AD
U103C
SN75C189AD
Page 13
12
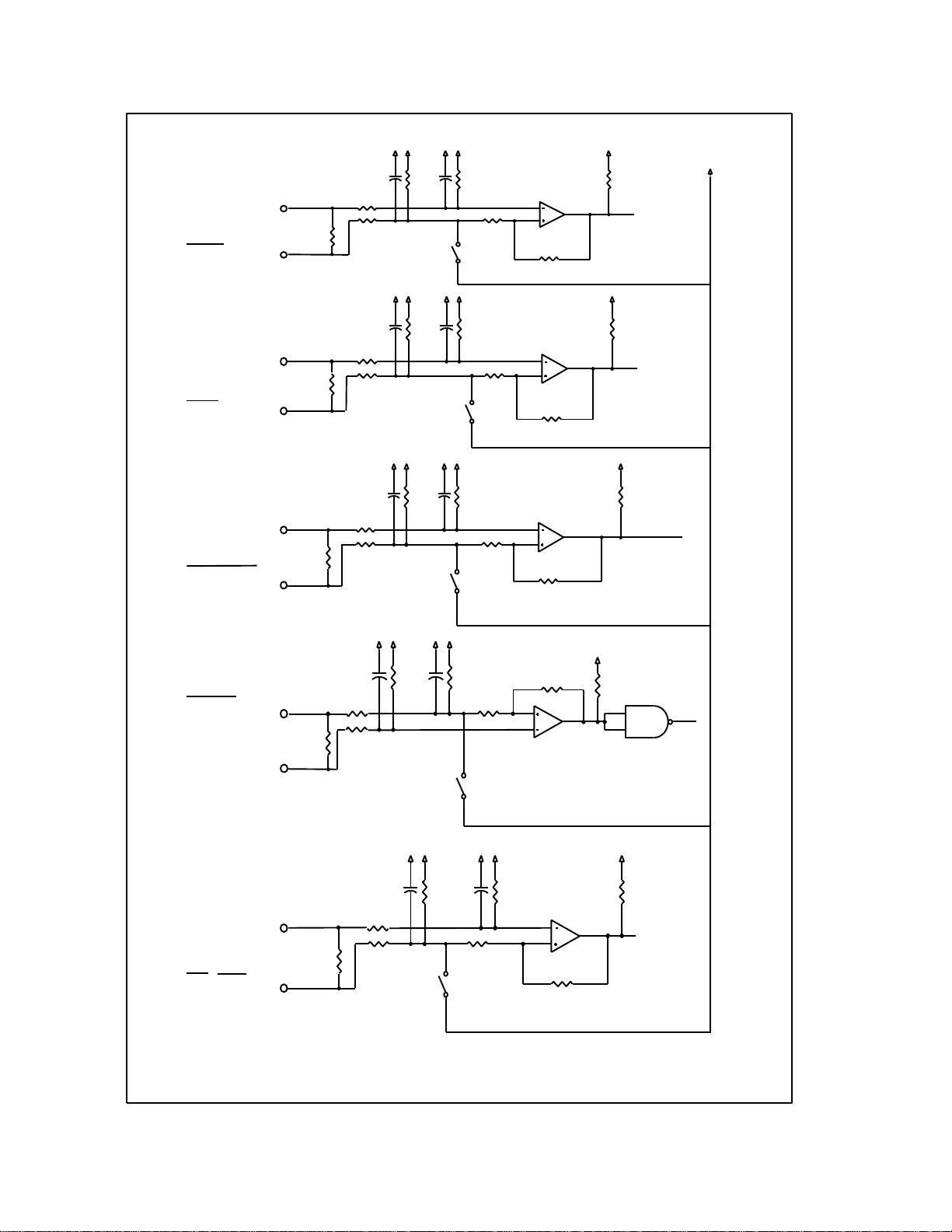
3.2 Analog input specification
Maximum input voltage:
- When R1 (470ohm) is inserted, the absolute value of the input voltage should be
less than 5V.
- When the absolute value is higher than 5V, R1(Kohm) = 2Vi-10 should be inserted.
The µP reads always +5V.
Resolution of the digital conversion: 11 bit full scale.
Typical offset: 5 bits
470K
VREF
4700PF
VREF
300
4700PF 4700PF
300
4700PF
DIGITAL GND
U1\10
U1\11
ANALOG
INPUT
18a
R1
*
1 2
10K
DIGITAL GND
470k
6
5
U8B
DIGITAL GND
7
470k
470k
9
10
DIGITAL GND
20K
4700PF
8
U8C
1000PF
20K
13
12
U8D
DIGITAL GND
14
DBP - Rev 6/93
ANALOG INPUT
Page 14
13
3.3 Sensors specification
3.3.1 Encoder
The encoder must be incremental with two TTL channels in quadrature and 90 °
phase shift.
High/Low input definition: Vil<1.5V, Vih>3V
Input voltage range: 0-15V
Input hysteresis 1.5V
Input impedance: 1Kohm to 5V.
Maximum frequency main encoder: 150KHz
Maximum frequency auxiliary encoder: 250KHz
Noise protection by analog and digital filters
When left open the input is internally pulled to high level.
3.3.2 Resolver
Resolver Option Feature:
* 10,12,14 and 16 bit resolution set by the user.
* Maximum tracking rate 1040 rps (10 bits).
* Velocity output.
* Encoder A, B, outputs + programmable index output.
Reference parameters:
Max. voltage: 20Vptp or 7Vrms
Minimum output voltage: 2Vrms
Max. current: 80mA
Max frequency: 20KHz outputs:
DBP - Rev 6/93
Page 15
CH B
CH B
27a
*
R705
28a
1000P
100
100
+5v+5v
1K
1000P
DS3
+5v
14
+5v
1K
100K
+5V
1K
3
2
7
U105
301K
Vref
CH A
CH A
AY/PULSE
AY/PULSE
INDEX
INDEX
29a
30a
21a
22a
31a
32a
*
R704
*
*
R707
R708
100
100
1000P
100
100
1000P
100
100
1000P
+5v
+5v +5v
+5v +5v
+5v
1K
1000P
1K
1000P
1K
1000P
DS5
+5v+5v
+5v
DS6
+5v+5v
DS2
1K
+5v
1K
1K
100K
100K
100K 11
10
+5v
1K
3
2
3
2
301K
301K
301K
U104
U107
13
U31D
7
+5v
2.49K
7
+5V
1K
4
5 6U121B
REMARK:
R704 - 708 ARE NOT INSTALLED IN FACTORY STANDARD SETTING.
DBP - Rev 6/93
BY/DIR
BY/DIR
23a
24a
+5v +5v
+5v
1000P
100
R706*
100
1K
DS4
1000P
+5v
1K
3
2
100K
301K
ENCODER INPUTS
+5v
2.49K
7
U106
Page 16

15
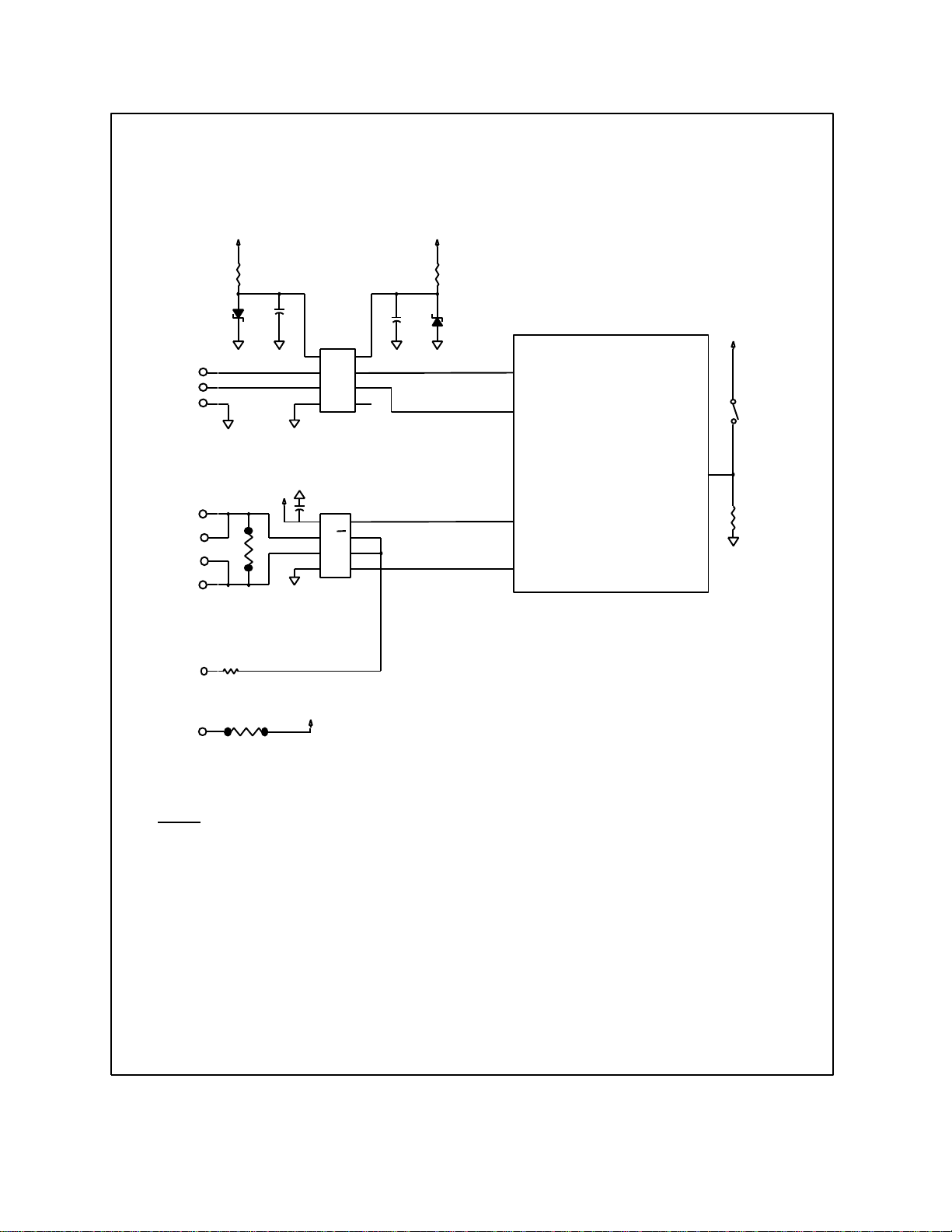
3.4 Communication
3.4.1 RS232 Configuration
The RS232 is configured for 8-bit, no parity, full duplex and it will echo all
the transmissions.
Baud rates: 300,600,1200,2400,4800,9600,19200,38400,57600
No hardware handshaking is required.
3.4.2 RS485 Configuration
The RS485 is configured for 8-bit, no parity, half duplex.
Baud rates: 300,600,1200,2400,4800,9600,19200,38400,57600
No hardware handshaking is required.
3.5 Battery backup
180mAH battery that at rated operating and storage condition will last for
at least 40,000 non operating hours.
3.6 Performance
Position range: +230 quadrature counts
Velocity range: +600,000 counts/sec
Velocity resolution: 1 count/s
Acceleration range: 91 - 11.8x106 count/s
Acceleration resolution: 91 counts/s
2
DBP - Rev 6/93
Page 17
16
RS232
DZ13v
TRANSMIT
RECEIVE
GND
RS485
T/R-
T/R+
TRANSMIT/
RECEIVE CONTROL
+5V
3
2
5
6
7
8
9
1
4
-15V
120
ohm
1K
300
0.1MF
* R802
*
+5v
R119
U115
1
-V
7
DY
5
RA
4
GND
SN75155
0.1MF
U114
8
VCC
7
B
6
A
5
GND
SN75LS176
+5v
RE
DE
DA
RY
RTC
R
D
+15V
300
DZ13v
0.1MF
8
+V
2
3
6
+5v
DS9
RS232-OFF
RS485-ON
RS485/RS232
1
2
3
4
1K
Notes:
R119 - LINE TERMINATION RESISTOR, USED ON BOTH ENDS OF LONG LINES. NORMALLY NOT MOUNTED.
*
* R802 - SMD RESISTOR. NORMALLY NOT MOUNTED
DBP - Rev 6/93
COMMUNICATION
Page 18
17
4. System Operation
4.1 RS485 and Checksum Protocol
The RS485 in the DCB is configured as 8-bit, no parity, 1 stop bit, half
duplex. The following baud rates are available: 300, 600, 1200, 2400, 4800,
9600, 19200, 38400, 57600. No hardware handshaking is required.
In the RS-485, which is a Half Duplex system, all the Transmitters and all
the Receivers share the same Multidrop wire. Therefore, each character that is
transmitted on the line, is automatically received by all the Receivers. This
is an inherently "confused" way to transmit data and no "Echo" procedure can
assure reliable communication.
In order to solve this reliability problem, it is necessary to use standard
protocols procedures.
It is important to understand that using RS485 with the DCB products without
any protocol is possible. This is also the default condition whenever the RS485
is activated. However, the reliability of the communication is only assured
when activating the protocol. This is done by sending the command CK1 from the
host to the DCB.
Chapter 1.2.1 in the DCB Software manual explains the standard protocol used
and supplied by Elmo.
4.2 Current Control
The analog part of the DBP is actually a standard amplifier that operates in
current mode. However, the DCB receives continuously analog information about
the current magnitude, direction and ripple. This information is processed to
obtain digital control of the following features:
* Continuous current limit
* Peak current limit
* Time dependent peak current limit
* Current ripple
DBP - Rev 6/93
Page 19
18
4.2.1 Current feedback, Current feedback multiplier (CFM) and
Current loop
Three current feedbacks are obtained by measuring the voltage drop across
current sensing resistors or by current transformers (when using the isolation
option). These three signals are synthesized and multiplexed which result in a
single voltage signal proportional to phases currents. It is then compared to
the current command. The error is processed by the current amplifier to provide
a voltage command to the PWM section.
Current loop control is obtained by op amp U21/A (current amplifier) and R4,
C1 which form a lag-lead network for current loop. The standard amp is equipped
with R4 and C1 to get optimum current response for an average motor in this
power range. These components are mounted in solderless terminals.
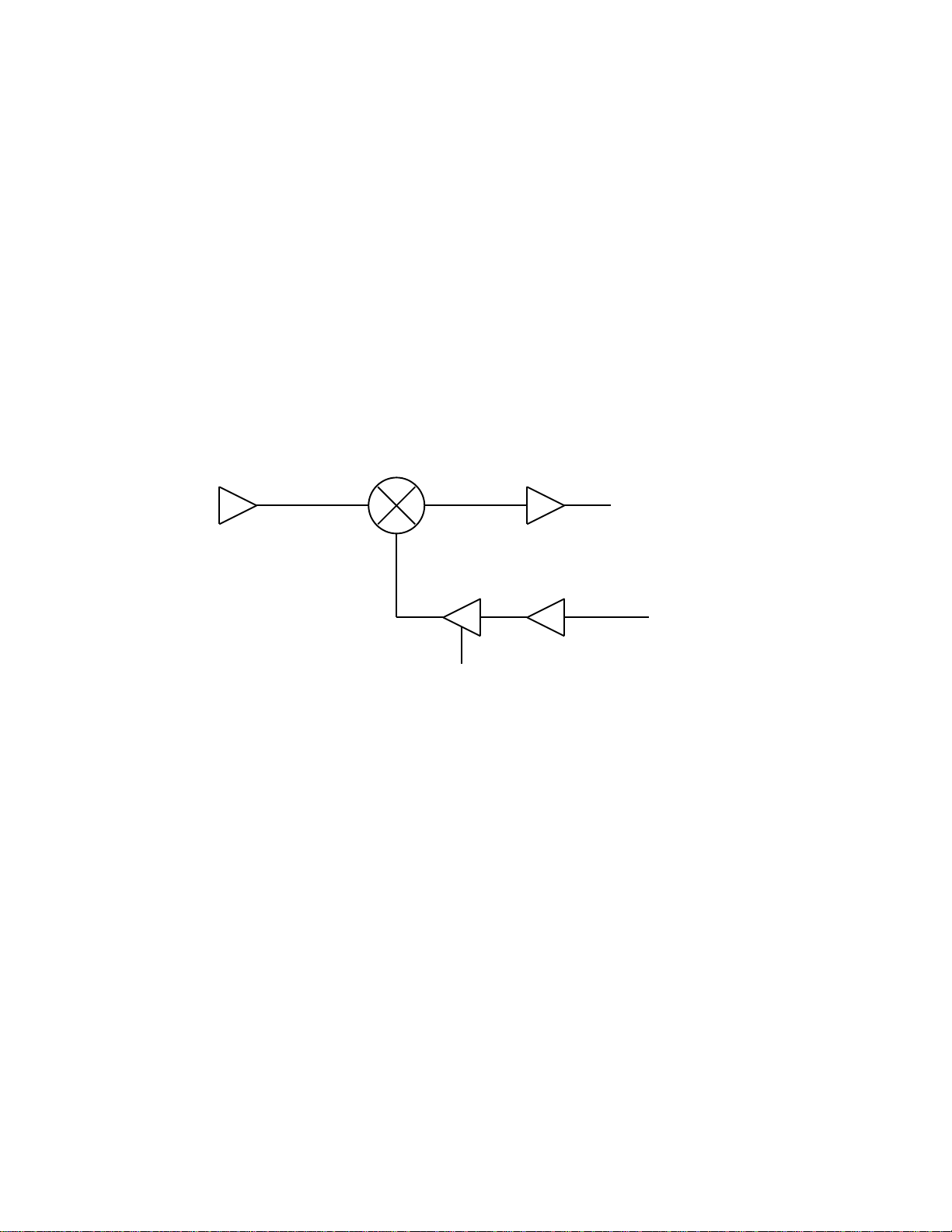
Error amplifier Current amplifier
x2
Current feedback
CFM
The amplifier is equipped with a Current Feedback Multiplier (CFM). By
turning DIP switch 2 (on the upper board of the power stage) to ON, the signal
of the current feedback is multiplied by 2 and consequently the following
changes occur:
- Current gains are multiplied by 2.
- Current monitor is divided by 2.
- Current limits are divided by 2.
- Dynamic range is improved.
- Commutation ripple is reduced.
DBP - Rev 6/93
Page 20
19
This function should be activated whenever the rated current AND the peak
current of the motor are less than 20% of the amplifier rated continuous and
peak limits respectively.
Sometimes, oscillations may occur in the current loop due to the fact that
the feedback gain was multiplied. This can be resolved by substituting R4 with
a lower value.
4.3 Digital current limits
The servo amplifier can operate in the following voltage-current plane:
+V
-Ip -Ic
Intermittent
zone
Ic - Continuous current Ip - Peak current
Each amplifier is factory adjusted to have this shape of voltage-current
operating area with rated values of continuous and peak current limits. By
using the command CL(n) for the continuous and PL(n) for the peak it is
possible to adjust the current limits (continuous and peak independently) from
the rated values down to 10% of the rated values.
Continuous
zone -V
Fig. 4.1: Voltage-Current plane
Ic Ip
4.3.1 Time dependent peak current limit
The peak current duration is a programmable parameter which is also a
function of the peak amplitude and the motor operating current before the peak
demand. The user defines the maximum duration of the full amplitude peak by the
instruction PDn - n cannot be more than 2 seconds. In addition to this
definition, a digital filter is employed to ensure that the RMS value of the
current will not exceed the continuous current limit. The duration of Ip is
given by:
DBP - Rev 6/93
Page 21
20
Ip - Iop
Tp = 2.2ln --------- Ip - Ic
Iop - Actual operating current before the peak demand.
The result of this filter is that the maximum peak can last for a maximum of
2 seconds. A lower peak can last longer.
Example: A motor is driven by an DBPF-10/135 amplifier at constant speed and
constant current of 5A. What is the maximum possible duration of a 20A peak ?
20 - 5
Tp = 2.2ln -------- = 0.892 seconds
20 - 10
4.4 Digital position and speed control
The DCB accepts motion commands via an RS232 or RS485 communication line and
receives position feedback in an incremental encoder format either from an
encoder or from the resolver/digital circuit. The DCB derives the closed-loop
position error by comparing the command position and the feedback position. The
error is processed by a digital filter to yield with an analog motor command.
The analog +5 volt range motor command is then amplified by the power
amplifier.
Following is a summary of all the operating modes of the DCB and a detailed
discussion of each of them.
Control Modes
Holding Modes.
Start Modes
Program Mode
Termination Modes
Status reporting
Define origin modes
DBP - Rev 6/93
Page 22
21
Control Modes
The DCB can be commanded to control the position of a motor, its torque or
its velocity using three basic control modes:
- Position Mode
- Velocity Mode
- Position Follower Mode
Position Mode
In the position mode the motor will advance a specified distance and then
stop. This distance can be represented as an absolute position (PA n) or as a
relative distance from the current position (PR n). The motion will follow a
trapezoidal or triangular profile with the acceleration (AC n) and slew
velocity (SP n) set by the user.
Velocity Mode
In the velocity mode the motor will accelerate to a specified slew speed. It
will hold this speed until a stop condition is received (see termination
modes), or a new velocity/direction is commanded.
Position Follower
It can also control the motor as a position follower of a master encoder or
a pulse and direction signals.
Holding Modes.
The holding modes describe the behavior of the system after it has stopped.
There are three holding modes:
- Servo
- Motor Off
Servo Mode
In the servo mode (SV) the system maintains stopping position by using its
control law to correct for any position errors.
Motor Off Mode
In the Motor Off mode is, the power bridge and the position control are shut
off and there no torque is generated by the amplifier. The Motor Off mode is
useful in robotics applications in the teaching mode.
DBP - Rev 6/93
Page 23
22
Start Modes
There are three start modes to begin a move:
Direct command
A move can be initiated directly by a command from the host or a terminal.
Program
A move can be initiated by a command included in the user program.
Input condition
Another alternative is to have the move started by a conditional statement
specified by the user program.
Program Mode
A set of commands can be implemented as a user program to allow for
automatic and/or complex types of moves. The user may specify software
variables, conditional statements, subroutines and error routines which enable
enhanced motion control.
Termination Modes
A motion can be terminated in a variety of ways. In all but emergency
termination modes the motor will be decelerated gradually to a stop and then
will enter one of the stationary modes (Servo, or Motor Off). In a position
mode move, the motion will terminate naturally upon reaching the desired final
position. In all of the control modes the motion can be terminated by a command
from the host. An additional means of termination is from one of the local
inputs.
Activating the forward and reverse limit switch inputs can be another means
of terminating a move. Upon contacting the switch, the #[ routine will be
activated. This is a user programmed routine that should normally include a
stop command to decelerate the motor to a full stop.
There are two methods of generating an emergency stop. The first is by an
abort command from the host, and the other is by the local abort input. Upon
receipt of either of these commands the system will go immediately to its
stationary mode.
Another "unnatural" way to terminate a motion is whenever an internal
amplifier inhibit (due to one of the protections) occurs. This turns off the
power stage and the motor will decelerate to a stop by friction only. There are
two modes of handling the internal amplifier inhibit:
Latch Mode
The power stage is disabled and only a reset will release it.
DBP - Rev 6/93
Page 24
23
Auto restart
The power stage inhibit will automatically be released upon clearing the
cause of the inhibit.
Status Reporting
Status is available to the user in several ways.
Communication
In response to the Tell Status command (TS) the DCB sends a coded message
describing the status of the amplifier.
In addition, the host may request certain information at any time. This
consists of the state of the system (GN?, ZR?, PL?, KI?), the state of the
local inputs (TI), the torque level (TT), the current motor position (TP), the
current motor velocity (TV) and the reason for a stop condition (TC).
Refer to the DCB Software Manual for further details.
Hardware signal
Motion complete signal
This output will go to high when motion is complete.
Inhibit output
Whenever the amplifier is inhibited, this open collector output goes to low.
When using Elmo's mother boards a potential free relay replaces the open
collector output.
4-digit display
Whenever a fault occurs, a fault message will be displayed for easy visual
information. See chapter 9.1 for a summary of all amplifier's fault
indications.
Define origin modes
The origin is that location at which the absolute position of the motor
equals zero. This special location may be defined in two ways. First, the user
may send a command (DH) which defines the current motor position to be the
origin. The alternate method is to request the DCB to perform the homing
sequence by commanding HM.
DBP - Rev 6/93
Page 25
24
4.5 Operation of the shunt regulator
A shunt regulator is included in the power supply section of the DBP. The
shunt regulator is a switching type, wherein dissipative elements (resistors)
are switched across the DC bus, whenever the voltage reaches a predetermined
level (Vr). The function of the shunt regulator is to regulate the voltage of
the DC bus during the period of motor deceleration, when there is a net energy
outflow from the motor to the amplifier. The amplifier handles this reverse
energy just as efficiently as it provides energy to the motor, hence, most of
the energy is passed through the amplifier to the power supply, where the
returning energy charges the filter capacitors above their normal voltage
level, as determined by the AC incoming voltage.
When the capacitors charge-up reaches the predetermined voltage level (Vr),
the shunt regulator begins its regulating action. The bus is regulated to this
range until regeneration ceases.
All the double Eurocard size amplifiers are equipped with two outputs for
connecting an external shunt resistor , hence increasing the power dissipation
capability.
SHUNT specifications
Type Reg.
Voltage
(Vr)
DBP-12/135 193 13 N/A
DBP-20/135 193 26 21
DBP-8/270 383 8 N/A
DBP-16/270 383 16 12
DBPF-12/135 193 13 N/A
DBPF-20/135 193 26 N/A
DBPF-30/135 193 26 21
DBPF-8/270 383 8 N/A
DBPF-16/270 383 16 12
DBPF-24/270 383 16 12
Internal
Reg.
Current (A)
External Reg.
Current (A)
DBP - Rev 6/93
Page 26
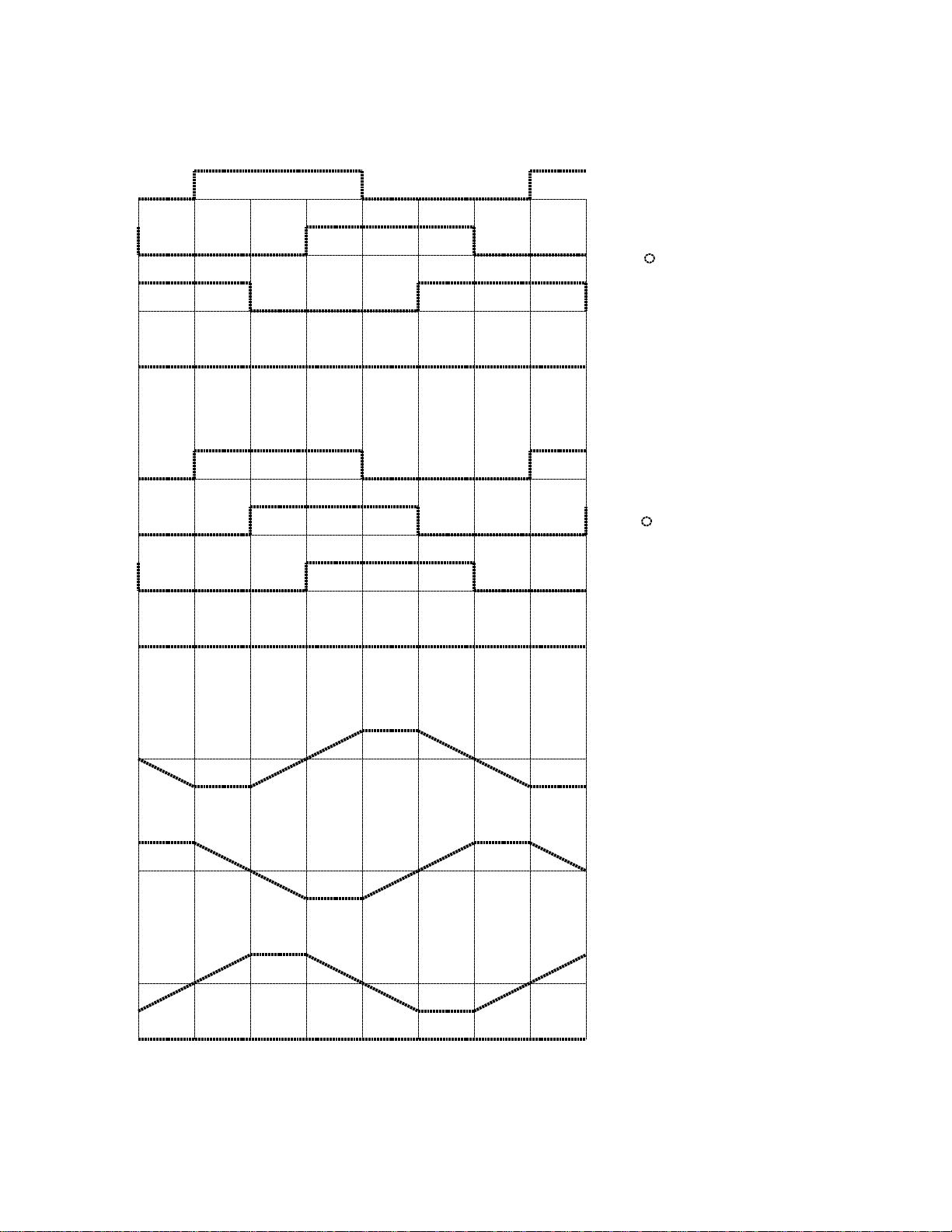
4.6 Commutation signals format
A
B
C
25
60 FORMAT (120)
300
A
B
C
0
300
+
-
Vac
(360)
(360)
60 120 180 240 300 360 600
(0)
30 FORMAT
60 120 180 240 300 360 600
(0)
+
Vba
0
-
Vcb
+
0
-
300
(360)
DBP - Rev 6/93
MOTOR BEMF
60 120 180 240 300 360 600
(0)
Page 27

26
4.7 Protective functions
All the protective functions except "Low Back-up Battery Voltage" activate
an interrupt to the main processor which inhibits the power bridge and disable
current flow to or from the motor. The user can interrogate the processor in
order to verify the cause of the inhibit. An indication of the fault will
appear on the display. The following protections are processed by the DCB:
4.7.1 Short circuit protection
The amplifier is protected against shorts between outputs, or either output
to ground, or either output to the positive supply line.
4.7.2 Under/over voltage protection
Whenever the DC bus voltage is under or over the limits indicated in the
technical specifications, the amplifier will be inhibited.
4.7.3 Temperature protection
Temperature sensor is mounted on the heatsink. If, for any reason, the
temperature exceeds 85°C the amplifier will be inhibited. The amplifier will
restart when the temperature drops below 80 °C. The user can always interrogate
the DCB about the heatsink temperature by using the command T?.
4.7.4 Internal power supply failure
In any case that the sum of the internal power supplies is below 13V or its
difference higher than 1V, the amplifier will be inhibited.
4.7.5 Loss of commutation feedback
Lack of either of the commutation signals will inhibit the amplifier.
4.7.6 Low back-up Battery voltage
When the battery voltage goes below 2.4V the DCB will send a message on the
communication line and will display "BATT" on the display.
DBP - Rev 6/93
Page 28
+VS
27
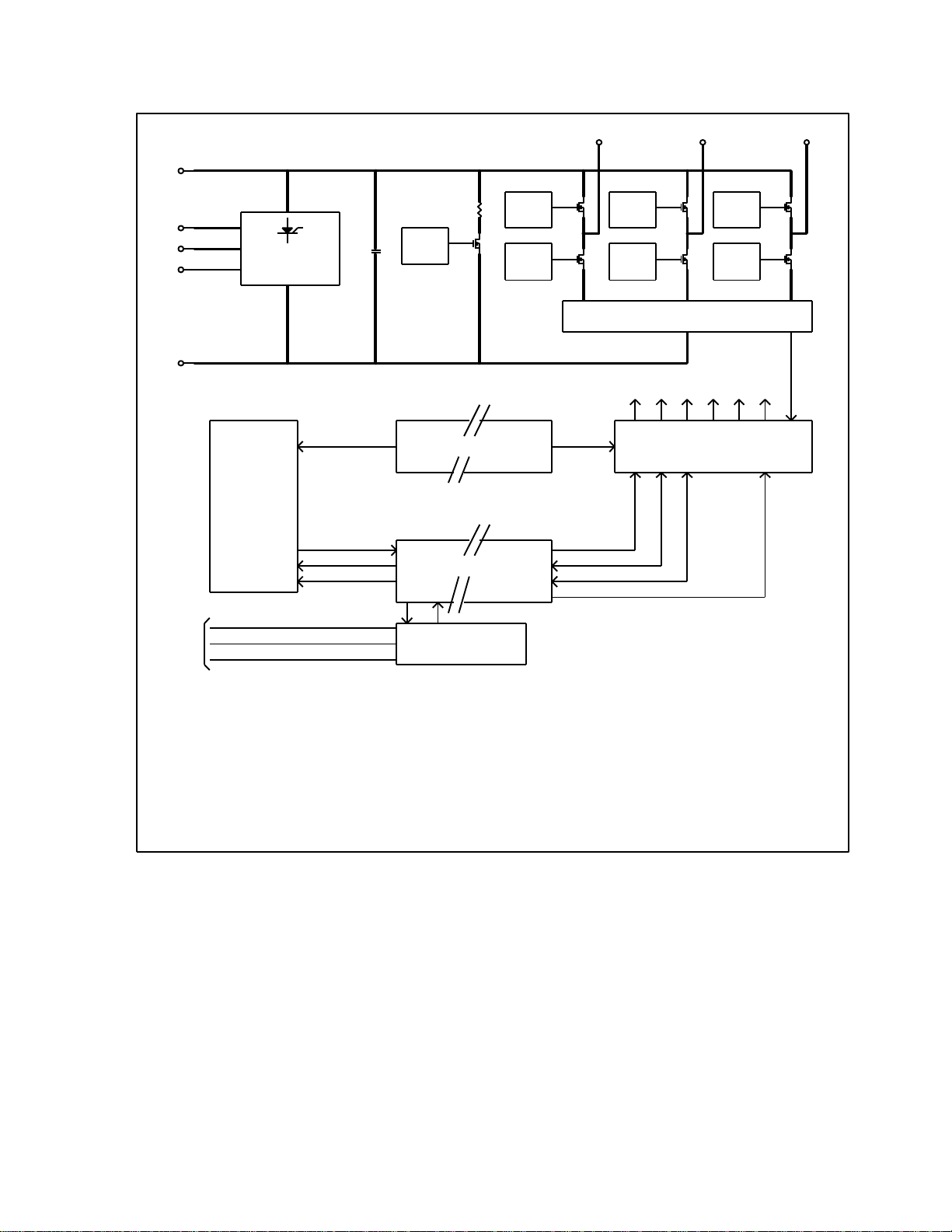
MOTOR OUTPUTS
AC
AC
AC
CONTROL
HA
HB
HC
RECTIFING,
CURRENT
INRUSH LIMIT
POWER
COMMON
SUPPLIES
PWM SIGNAL
PROTECTIONS
CURRENT FEED BACK
SHUNT
CONTROL
SMPS
ISOLATION
"HALL" SIGNAL
PROCESSING
D1 D2 D3
D4
SUPPLIES
PWM SIGNALS
PROTECTIONS
CURRENT FEED BACK
"HALLS" SIGNALS
CURRENT SENSING
D1 D2 D3 D4
COMMUTATION
CURRENT PROCESSING
D6D5
D5 D6
DBP - Rev 6/93
DBP 3U - BLOCK DIAGRAM
Page 29
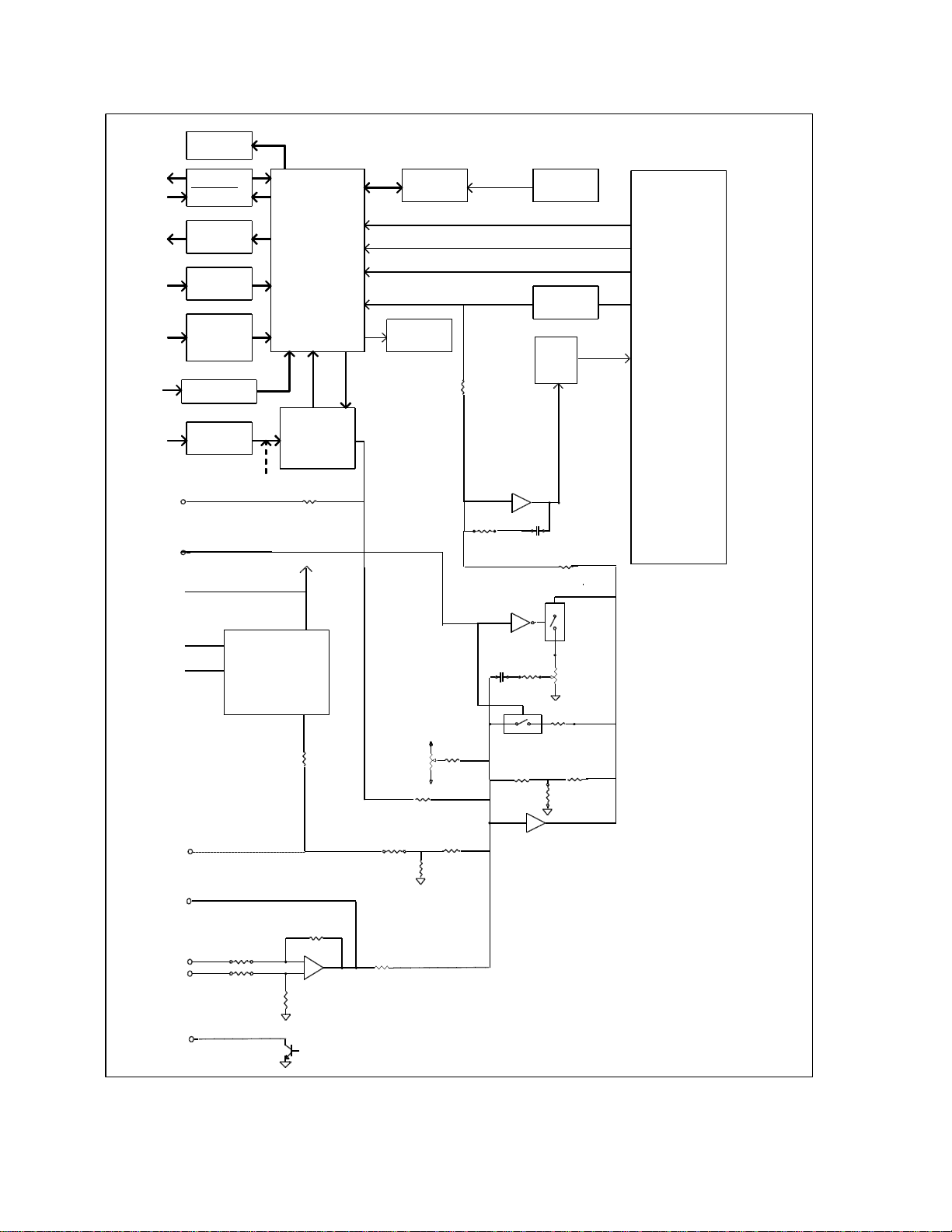
Display
28
RS232
RS485
Outputs
Buffers
Inputs
Buffer
Aux
Encoder
Buffer
Analog in
Encoder
MOTOR COMMAND
VELOCITY/ CURRENT MODE
TO POSITION
PROCESSOR
ENCODER OUTPUTS
Master
Processor
Position
ProcessorBuffer
MEMORY
SHORT SIGNAL
UNDER / OVER - SIGNAL
TEMP SIGNAL
Current
limits
CURRENT
AMPLIFIER
100K
R4
BATTERY
BACK UP
POWER
STAGE
Current
Feedback
PWM
A
.01UF
C1
RESOLVER
OPTION
VELOCITY
FEEDBACK
SIGNAL
TACH INPUT (OPTION)
(TACH OUTPUT WITH RESOLVER OPTION)
R2
R3
INH. OUT 10MA/30V
10K
10K
+
1K
R800
100K
option
R6
OFFSET
OPTION
100K
R7
C2
+V
1M
-V
100K
10K
100K
ERROR
R5
A
option
619K
100K
AMPLIFIER
DCB BLOCK DIAGRAM
DBP - Rev 6/93
Page 30
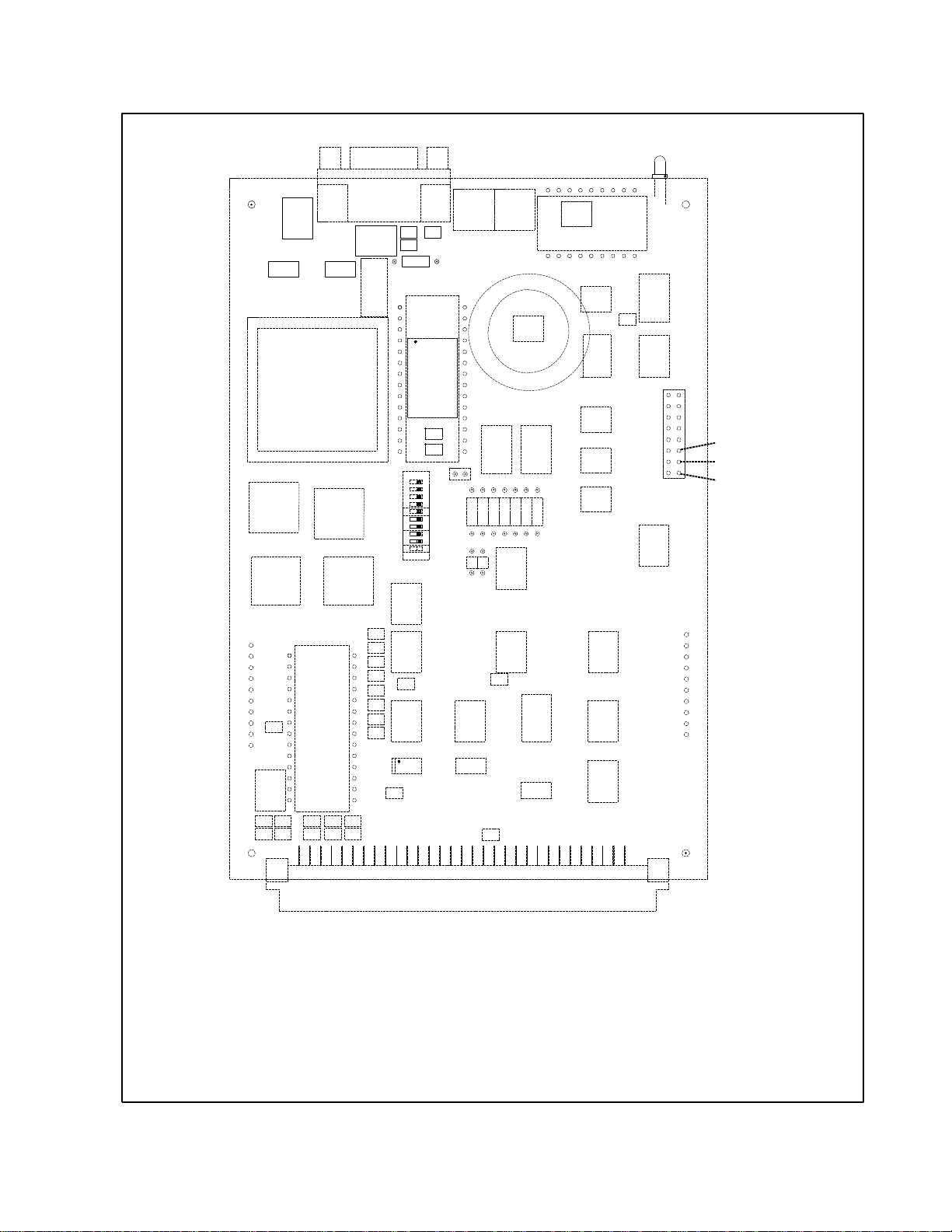
U120
U114
N80C196KB-12
U115
U123
Y1
29
L1
JC
R713
R712
R119
T1T2
R802
U116
U5
U130
U25
U22
U109
R566
U108
JP
JR
U102
R504
R505
U10
U17
R705
506
507
518
519
U18
C300
513
C313
C312
DS
1
2
3
4
U101
U100
C139
U103
U106
ON
5
6
7
8
9
OFF
U7
R500
R501
R502
R503
R508
R509
R510
R511
R708
706
704
U28
JE
R R
R
1 234 5 6 7
C1C2
R800
U31
U107
R707
U27
R R R R
U21
U9 U21
U11
D7
U112
U113
U26
U29
HC
HB
HA
U20
JPR
U8
DCB COMPONENTS LAYOUT
DBP - Rev 6/93
Page 31

30
JR/5
JR/6
JR/9
SIN. INPUT
JR/10
JR/7
COS. INPUT
JR/8
Ref. oscillator output
R192
Ref. osc. common
C60
R193
R194
2K
2K
R228
R233
C62
R196
RESOLVER TO
DIGITAL CONVERTER
C61
+V
R196
POSITION
BITS
R197
R201
C67
R200
C68
JPR/8
JPR/9
JPR/10
JR/2
JR/3
JR/1
JR/4
HA
HB
HC
ENCODER A
ENCODER B
ENCODER I
1K
R242
R243
R244
DS11
Velocity feedback
HALLS + ENCODER
PROCESSOR
DS12
DS13
DS14
DCB RESOLVER OPTION BLOCK DIAGRAM
DBP - Rev 6/93
Page 32

1
JR
10
U24
OFF
11
12
13
DS2
14
U25
ON
60
c c c c
686762
61
31
195
197
U22
201
R
R
R
R
196
200
R
R
c
192
R
233
228
194
R
R
R
JPR
1
193
U30
10
U28
U29
U23
RESOLVER BOARD
COMPONENTS LAYOUT
DBP - Rev 6/93
Page 33

32
5. Terminal Description
5.1 Terminals for Horizontal and Rack mounting versions
POWER BOARD - 3U size
H R Function
1 (32a,c)
2 (30a,c
3 (28a,c)
4 (26a,c)
5 (24a,c)
6 (22a,c)
7 (20a,c)
8
9
(18a,c
16a,c)
10 (14c)
Motor phase A output. With the DIN connector both pins must be
connected.
Motor phase B output. With the DIN connector both pins must be
connected.
Motor phase C output. With the DIN connector both pins must be
connected.
AC supply-phase A. With the DIN connector both pins must be
connected.
AC supply-phase B. With the DIN connector both pins must be
connected.
AC supply-phase C. With the DIN connector both pins must be
connected.
DC power positive (+Vs)
DC power common
Hall sensor A
*
11 (12c)
12 (10c)
13 (8c)
14 (6c)
15 (4c)
16 (2c)
Hall sensor B *
Hall sensor C *
+15VDC for Hall sensors supply.
Circuit common for the Hall sensors supply (Control common).
24V common - for the fan supply only.
+24VDC, 400mA for use with brushless fan
*
-1V < Vil < 1V ; 2V < Vih < 30V
Source sink capability - 2mA min.
DBP - Rev 6/93
Page 34

Power Board - 6U size - Supplies terminals
H R FUNCTION
33
+VS 4ac,2ac
NC
SO 8ac
NC
POW
14ac,12ac
External shunt resistor connection / +VS.
NOT CONNECTED
External shunt resistor connection.
NOT CONNECTED
POWER COMMON
COM
NC
AC 20ac,18ac
NOT CONNECTED
AC supply-phase A. With the DIN connector all pins must be
connected.
AC 26ac,24ac
AC supply-phase B. With the DIN connector all pins must be
connected.
AC 32ac,30ac
AC supply-phase C. With the DIN connector all pins must be
connected.
Power Board - 6U size - Motor terminals
H R FUNCTION
HC 2c
HB 4c
HA 6c
-FAN 8c
+FAN 10c
MC 18ac,16ac,14a
Hall sensor C
Hall sensor B *
Hall sensor A
24V common - for the fan supply only
+24VDC, 400mA for use with brushless fan
Motor phase C output. With the DIN connector all pins must
be connected.
MB 26c,24ac,22ac
Motor phase B output. With the DIN connector all pins must
be connected.
MA 32ac,30ac,28c
Motor phase A output. With the DIN connector all pins must
be connected.
*
-1V < Vil < 1V ; 2V < Vih < 30V
*
*
Source sink capability - 2mA min.
DBP - Rev 6/93
Page 35

Control board
H & R Function Remarks
34
1a Output 6
1b Current monitor
2a Output 7
2b Velocity / current mode
selection
3a Output 8
3b Motion command (+5V)
4a Circuit common
*
This analog output represents the actual current
in the motor. The scale (in A/V) is: Ip / 7.5
Ip - Rated peak current of amplifier.
*
When input is left open (low level) the analog
part of the amplifier is working in current mode.
when a high level signal is applied (>2V), the
analog part of the amplifier is working as a high
gain velocity amplifier.
**
*
This analog output represents the current command
from the position loop to the power amplifier. It
is useful for monitoring the position loop
response.
4b Circuit common
5a Fast output 9
5b +5V output
*
There are several +5V terminals. The accumulative
external load should not exceed 200mA.
6a Fast output 10
*
6b Circuit common
7a Motion Complete
This output will go to high when motion is
complete. *
7b +15V output
8a Inhibit output
100mA.
Whenever the amplifier is inhibited, this open
collector output goes low.
8b -15V output
100mA.
*
Vol<0.4V, Voh>4V, Output level: 0-5V, max output current +5mA
**
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
DBP - Rev 6/93
Page 36

Control board - cont.
H & R Function Remarks
35
9a Forward limit switch
9b positive input of a
differential amplifier.
10a Reverse limit switch
10b Negative input of a
differential amplifier.
11a Circuit common
11b Output of a
differential amplifier.
12a Home switch
12b Tachogenerator
output/input
13a Abort input
13b Output 1
This committed input activates the #[ subroutine.
*
See Appendix C.
This committed input activates the #[ subroutine.*
See Appendix C.
See Appendix C.
*
When using the resolver option this output is the
velocity monitor with a scale of 8V for maximum
speed. See 7.3.
This input must be connected to high level voltage
to enable the amplifier.*
**
14a Circuit common
14b Output 2
15a Fast input 6
**
This fast response input can capture events with a
duration of less than 10µs. An event is defined as
an input voltage transition from low to high. *
15b Output 3
16a Fast input 7
16b Output 4
17a Reset input
17b Output 5
**
Same function as Fast Input 6 (15a). *
**
*
**
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
**
Vol<0.4V, Voh>4V, Output level: 0-5V, max output current +5mA
DBP - Rev 6/93
Page 37

Control board - cont.
H & R Function Remarks
36
18a Analog input
18b Input 1
19a +5V output
19b Input 2
20a Circuit common
20b Input 3
21a Auxiliary encoder input
(Ay) or pulse input for
Pulse and Direction
mode.
21b Input 4
22a Auxiliary encoder
This input is monitored by the main µP. When |Vi|
< 5V, R1=470ohm should be inserted. When |Vi|> 5V,
R1(Kohm)=2Vi-10 should be inserted. The µP always
reads a range of +5V.
*
There are several +5V terminals. The accumulative
external load should not exceed 200mA.
*
*
*
complementary input (-
Ay) or complementary
Pulse and Direction
mode
22b Input 5 or Index Input.
If a homing sequence is required, the Index Input
must be connected to Input 5 *
23a Auxiliary encoder input
(By) or Direction input
for Pulse and Direction
mode
23b Resolver reference
Max. voltage: 20Vptp or 7Vrms
Max current: 80mA
Max frequency: 20KHz
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
DBP - Rev 6/93
Page 38

Control board - cont.
H & R Function Remarks
24a Auxiliary encoder
complementary input (By) or Complementary
Direction input for
Pulse and Direction
mode
37
24b Resolver reference
common.
25a +5V output
25b Cosine signal input.
26a Circuit common
26b Cosine signal common.
27a Channel B input
27b Sine signal input.
28a Channel -B input
28b Sine signal common
29a Channel A input
29b Circuit common
30a Channel -A input
30b Index output
31a -Index input
The reference voltage to the resolver must be
taken from terminals 23b and 24b only.
There are several +5V terminals. The accumulative
external load should not exceed 200mA.
See 7.3
For the auxiliary encoder
See 7.3
See 7.3
See 7.3
For the main encoder
For resolver option only.
31b Channel B output
32a Index input
32b Channel A output
Remark: In the following paragraphs the terminals will be related to all the
mounting types as in the following sample:
H/R-2a,E-J4/13.
DBP - Rev 6/93
Page 39

38
CONTROL BOARD
32
32
POWER BOARD
1
b
a
24
c
a
TERMINALS OF DBP
RACK VERSION - 3U SIZE
DBP - Rev 6/93
Page 40

39
TERMINALS LAYOUT
CONTROL BOARD
FAN
24
C+15
- +
14 15 16
1
b
a
32
MOTOR OUT
A
B C
1 2 3 4
AC input
~ ~
5 6 7 8
~
POWER
+VS
COM.AB
HALL
SUPPLY
C
91011 12 13
DBP - PANEL (H) MOUNTING TYPE
DBP - Rev 6/93
EUROCARD SIZE TYPES
Page 41

40
M4
4
1
2
3
15
16
17
18
19
AC
MA
MB
MC
+FAN
-FAN
HA
HB
HC
32
5
6
7
8
9
10
11
12
13
14
AC
AC
N.C
POW
COM.
N.C
S.O
N.C
+VS
1
ba
DBP - PANEL (H) MOUNTING TYPE
DOUBLE EUROCARD SIZE TYPE
DBP - Rev 6/93
Page 42

32
J1
POWER
41
2
C
A
A
32
32
J3
POWER
2
C
A
CONTROL
1
ba
DBP-6U RACK TYPE
CONNECTORS
DBP - Rev 6/93
Page 43

42
5.2 Mother Boards terminals (MBA-DBP/3U and MBA-DBP/6U)
Use: For all DBP amplifiers (3U/6U size) with Resolver or optical encoder
feedback. The encoder outputs are driven by line drivers to improve noise
immunity.
Termination: Screw type terminals for the power and D-type connectors for the
signals.
POWER TERMINALS FOR MBA-DBP/3U
H R Function
1 (32a,c)
2 (30a,c
3 (28a,c)
4 (26a,c)
5 (24a,c)
6 (22a,c)
7 (20a,c)
8
9
10
(18a,c
16a,c)
Motor phase A output. With the DIN connector both pins must be
connected.
Motor phase B output. With the DIN connector both pins must be
connected.
Motor phase C output. With the DIN connector both pins must be
connected.
AC supply-phase A. With the DIN connector both pins must be
connected.
AC supply-phase B. With the DIN connector both pins must be
connected.
AC supply-phase C. With the DIN connector both pins must be
connected.
DC power positive (+Vs)
DC power common
Ground, this terminal is connecred through a screw to the rack
15 (4c)
16 (2c)
DBP - Rev 6/93
chassis.
24V common - for the fan supply only.
+24VDC, 400mA for use with brushless fan
Page 44

43
POWER TERMINALS FOR MBA-DBP/6U
Terminal Function
M1 Motor phase A output.
M2 Motor phase B output.
M3 Motor phase C output.
GND Ground. This terminal is connected to the ENC chassis.
AC AC supply-phase A.
AC AC supply-phase B.
AC AC supply-phase C.
COM DC power common
VS DC power positive
SO Auxiliary shunt output, for external shunt resistor.
DBP - Rev 6/93
Page 45

44
Signals connector - J1 (MBA-DBP/3U and MBA-DBP/6U)
Pin Function
1 Channel A input
2 Channel -A input
3 Channel B input
4 Channel -B input
5 -Index input
6 Index input
7 +5V output
8 +15V output
9 Circuit common
Signals connector - J2 (MBA-DBP/3U and MBA-DBP/6U)
Pin Function
1 Resolver reference
Remarks
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +15V pins. The accumulative
external load should not exceed 100mA.
Remarks
Max. voltage: 20Vptp or 7Vrms
2 Resolver reference
common.
3 Cosine signal input.
4 Cosine signal common.
5 Sine signal input.
6 Sine signal common
7 +15V output
8 -15V output
9 Circuit common
Max current: 80mA
Max frequency: 20KHz
The reference voltage to the resolver must be
taken from pins 1 and 2 only.
See 7.3
See 7.3
See 7.3
See 7.3
There are several +15V pins. The accumulative
external load should not exceed 100mA.
There are several -15V pins. The accumulative
external load should not exceed 100mA.
DBP - Rev 6/93
Page 46

45
Signals connector - J3 (MBA-DBP/3U and MBA-DBP/6U)
Pin Function
1 positive input of a
differential amplifier.
2 Negative input of a
differential amplifier.
3 Output of a
differential amplifier.
4 Circuit common
5 Analog input
6 Circuit common
7 Circuit common
8 Current monitor
Remarks
See Appendix C.
See Appendix C.
See Appendix C.
This input is monitored by the main µP. When |Vi|
< 5V, R1=470ohm should be inserted. When |Vi|>
5V, R1(Kohm)=2Vi-10 should be inserted. The µP
always reads a range of +5V.
This analog output represents the actual current
in the motor. The scale (in A/V) is: Ip / 7.5
9 Circuit common
10 +5V output
11 +15V output
12 -15V output
13 Channel B output
14 Channel A output
15 Index output
16 Not connected
17 Inhibit output
Ip - Rated peak current of amplifier.
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +15V pins. The accumulative
external load should not exceed 100mA.
There are several -15V pins. The accumulative
external load should not exceed 100mA.
For resolver option only.
Relay contact (potential free).
The relay contact is closed whenever the
amplifier is enabled. Contact rating: 0.5A, 200V,
10W.
DBP - Rev 6/93
Page 47

Signals connector - J3 - cont.
46
Pin Function
18 Inhibit output
19 Motion command (+5V)
20 Circuit common
21 Reset input
22 Circuit common
23 Tachogenerator
output/input
24 Circuit common
Remarks
Relay contact (potential free).
The relay contact is closed whenever the
amplifier is enabled. Contact rating: 0.5A, 200V,
10W.
This analog output represents the current command
from the position loop to the power amplifier. It
is useful for monitoring the position loop
response.
*
When using the resolver option this output is the
velocity monitor with a scale of 8V for maximum
speed. See 7.3.
25 Velocity / current mode
selection
When input is left open (low level) the analog
part of the amplifier is working in current mode.
when a high level signal is applied (>2V), the
analog part of the amplifier is working as a high
gain velocity amplifier. *
26 Not connected
Signals connector - J4 (MBA-DBP/3U and MBA-DBP/6U)
Pin Function
1 Input 1
2 Input 2
Remarks
*
*
3 Circuit common
4 Input 3
5 Input 4
*
*
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
DBP - Rev 6/93
Page 48

Signals connector - J4 - cont.
47
Pin Function
6 Input 5 or Index Input.
7 Circuit common
8 Fast input 6
9 Fast input 7
10 Circuit common
11 +5V output
12 +5V output
13 Output 7
14 +5V output
Remarks
If a homing sequence is required, the Index Input
must be connected to Input 5.
This fast response input can capture events with
a duration of less than 10µs. An event is defined
as an input voltage transition from low to high.
Same function as Fast Input 6 (8).
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +5V pins. The accumulative
external load should not exceed 200mA.
**
There are several +5V pins. The accumulative
external load should not exceed 200mA.
*
15 Output 1
16 Output 2
17 Output 3
**
**
**
18 Circuit common
19 Output 4
20 Output 5
21 Output 6
**
**
**
22 Circuit common
23 Output 9
**
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
**
Vol<0.4V, Voh>4V, Output level: 0-5V, max output current +5mA
DBP - Rev 6/93
Page 49

Signals connector - J4 - cont.
48
Pin Function
24 Output 10
25 Motion Complete
26 Output 8
Remarks
*
This output will go to high when motion is
complete.
*
*
Signals connector - J6 (MBA-DBP/3U and MBA-DBP/6U)
Pin Function
Remarks
1 Auxiliary encoder
complementary input (By) or Complementary
Direction input for
Pulse and Direction
mode
2 Auxiliary encoder input
(By) or Direction input
for Pulse and Direction
mode
3 Auxiliary encoder input
(Ay) or pulse input for
Pulse and Direction
mode.
4 Auxiliary encoder
complementary input (Ay) or complementary
Pulse and Direction
mode
*
Vol<0.4V, Voh>4V, Output level: 0-5V, max output current +5mA
DBP - Rev 6/93
Page 50

Signals connector - J6 - cont.
49
Pin Function
5 Auxiliary encoder index
input
6 +5V output
7 +15V output
8 Circuit common
9 Home switch
10 +5V output
11 Abort input
12 +5V output
13 Forward limit switch
Remarks
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +15V pins. The accumulative
external load should not exceed 100mA.
*
There are several +5V pins. The accumulative
external load should not exceed 200mA.
This input must be connected to high level
voltage to enable the amplifier. *
200mA
This committed input activates the #[ subroutine.
*
14 Reverse limit switch
This committed input activates the #[ subroutine.
*
15 Circuit common
J1A, FAN TERMINALS - (MBA-DBP/6U ONLY)
10
11
24VDC common - fan only.
+24VDC isolated supply for fan (max. 400mA)
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
DBP - Rev 6/93
Page 51

50
Signals connector - J8 (MBA-DBP/3U and MBA-DBP/6U)
1 Channel A output
2 Channel -A output
3 Channel B output
4 Channel -B output
5 Encoder index output
6 Encoder -index output
7 Circuit common
8 Circuit common
9 Circuit common
10 Hall A
11 Hall B
12 Hall C
13 +15V
Main encoder buffered output (20mA, 0-5V)
Main encoder buffered output (20mA, 0-5V)
Main encoder buffered output (20mA, 0-5V)
Main encoder buffered output (20mA, 0-5V)
For resolver option only buffered output
(20mA, 0-5V)
For resolver option only buffered output
(20mA, 0-5V)
*
*
*
There are several +15V pins. The accumulative
external load should not exceed 100mA.
14 +5V output
There are several +5V pins. The accumulative
external load should not exceed 200mA.
15 Circuit common
Remark: In the following paragraphs the terminals will be related to all the
mounting types as in the following sample:
H/R-2a,E-J4/13.
*
-1V < Vil < 1V ; 2V < Vih < 30V
Source sink capability - 2mA min.
DBP - Rev 6/93
Page 52

J6
51
1
2
J8
1
8
15
9
25
26
1
5
9
15
8
J4
10
1
6
J1
5
9
9
8
7
6
1
2
5
4
3
1
6
2
1
9
5
15
25
26
16
DBP - Rev 6/93
J2
J3
MBA - DBP/3U
J7
Page 53

52
J1
J2
J6
+VS
1
8
1
5
1
5
SO
9
15
6
9
6
9
1
25 26
J4
1
25 26
J3
2
2
J8
9
1
5
15
8
10
11
J1A
POW. COM.
AC
AC
AC
M3
M2
M1
MBA-DBP/6U
DBP - Rev 6/93
Page 54

5.3 Terminals for DBP mounted in ENCD.
POWER TERMINALS FOR MBA-DBP/3UE (3U size)
Terminal Function
53
1
2
3
4
5
6
7
8,9
10
11
POWER TERMINALS FOR MBA-DBP/6UE (6U size)
Terminal Function
MA
MB
MC
Motor phase A output.
Motor phase B output.
Motor phase C output.
AC supply-phase A.
AC supply-phase B.
AC supply-phase C.
DC power positive (+Vs)
DC power common
Ground
Ground
Motor phase A output.
Motor phase B output.
Motor phase C output.
GND
AC
AC
AC
POW COM
+VS
SO
Attention:
DC power commons, control commons and fan common are floating with respect to each
other. Do not short them unless specified.
For isolated amplifiers connecting control common to ground is accomplished by
inserting R2 (short resistor) on the mother board.
Ground
AC supply-phase A.
AC supply-phase B.
AC supply-phase C.
POWER COMMON
External shunt resistor connection / +VS.
External shunt resistor connection.
DBP - Rev 6/93
Page 55

54
Signals connector - J1 (MBA-DBP/3UE and MBA-DBP/6UE)
Pin Function
1 Channel A input
2 Channel -A input
3 Channel B input
4 Channel -B input
5 -Index input
6 Index input
7 +5V output
8 +15V output
9 Circuit common
Signals connector - J2 (MBA-DBP/3UE and MBA-DBP/6UE)
Pin Function
1 Resolver reference
Remarks
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +15V pins. The accumulative
external load should not exceed 100mA.
Remarks
Max. voltage: 20Vptp or 7Vrms
2 Resolver reference
common.
3 Cosine signal input.
4 Cosine signal common.
5 Sine signal input.
6 Sine signal common
7 +15V output
8 -15V output
9 Circuit common
Max current: 80mA
Max frequency: 20KHz
The reference voltage to the resolver must be
taken from pins 1 and 2 only.
See 7.3
See 7.3
See 7.3
See 7.3
There are several +15V pins. The accumulative
external load should not exceed 100mA.
There are several -15V pins. The accumulative
external load should not exceed 100mA.
DBP - Rev 6/93
Page 56

55
Signals connector - J3 (MBA-DBP/3UE and MBA-DBP/6UE)
Pin Function
1 positive input of a
differential amplifier.
2 Negative input of a
differential amplifier.
3 Output of a
differential amplifier.
4 Circuit common
5 Analog input
6 Circuit common
7 Circuit common
8 Current monitor
Remarks
See Appendix C.
See Appendix C.
See Appendix C.
This input is monitored by the main µP. When |Vi|
< 5V, R1=470ohm should be inserted. When |Vi|>
5V, R1(Kohm)=2Vi-10 should be inserted. The µP
always reads a range of +5V.
This analog output represents the actual current
in the motor. The scale (in A/V) is: Ip / 7.5
9 Circuit common
10 +5V output
11 +15V output
12 -15V output
13 Channel B output
14 Channel A output
15 Index output
16 Not connected
17 Inhibit output
Ip - Rated peak current of amplifier.
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +15V pins. The accumulative
external load should not exceed 100mA.
There are several -15V pins. The accumulative
external load should not exceed 100mA.
For resolver option only.
Relay contact (potential free).
The relay contact is closed whenever the
amplifier is enabled. Contact rating: 0.5A, 200V,
10W.
DBP - Rev 6/93
Page 57

Signals connector - J3 - cont.
56
Pin Function
18 Inhibit output
19 Motion command (+5V)
20 Circuit common
21 Reset input
22 Circuit common
23 Tachogenerator
output/input
24 Circuit common
Remarks
Relay contact (potential free).
The relay contact is closed whenever the
amplifier is enabled. Contact rating: 0.5A, 200V,
10W.
This analog output represents the current command
from the position loop to the power amplifier. It
is useful for monitoring the position loop
response.
*
When using the resolver option this output is the
velocity monitor with a scale of 8V for maximum
speed. See 7.3.
25 Velocity / current mode
selection
When input is left open (low level) the analog
part of the amplifier is working in current mode.
when a high level signal is applied (>2V), the
analog part of the amplifier is working as a high
gain velocity amplifier. *
Signals connector - J4 (MBA-DBP/3UE and MBA-DBP/6UE)
Pin Function
1 Input 1
2 Input 2
Remarks
*
*
3 Circuit common
4 Input 3
5 Input 4
*
*
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
DBP - Rev 6/93
Page 58

Signals connector - J4 - cont.
57
Pin Function
6 Input 5 or Index Input.
7 Circuit common
8 Fast input 6
9 Fast input 7
10 Circuit common
11 +5V output
12 +5V output
13 Output 7
14 +5V output
Remarks
If a homing sequence is required, the Index Input
must be connected to Input 5.
This fast response input can capture events with
a duration of less than 10µs. An event is defined
as an input voltage transition from low to high.
Same function as Fast Input 6 (8).
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +5V pins. The accumulative
external load should not exceed 200mA.
**
There are several +5V pins. The accumulative
external load should not exceed 200mA.
*
15 Output 1
16 Output 2
17 Output 3
**
**
**
18 Circuit common
19 Output 4
20 Output 5
21 Output 6
22 Output 8
23 Output 9
**
**
**
**
**
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
**
Vol<0.4V, Voh>4V, Output level: 0-5V, max output current +5mA
DBP - Rev 6/93
Page 59

Signals connector - J4 - cont.
58
Pin Function
24 Output 10
25 Motion Complete
Remarks
*
This output will go to high when motion is
complete.
*
Signals connector - J6 (MBA-DBP/3UE and MBA-DBP/6UE)
Pin Function
Remarks
1 Auxiliary encoder
complementary input (By) or Complementary
Direction input for
Pulse and Direction
mode
2 Auxiliary encoder input
(By) or Direction input
for Pulse and Direction
mode
3 Auxiliary encoder input
(Ay) or pulse input for
Pulse and Direction
mode.
4 Auxiliary encoder
complementary input (Ay) or complementary
Pulse and Direction
mode
*
Vol<0.4V, Voh>4V, Output level: 0-5V, max output current +5mA
DBP - Rev 6/93
Page 60

Signals connector - J6 - cont.
59
Pin Function
5 Auxiliary encoder index
input
6 +5V output
7 +15V output
8 Circuit common
9 Home switch
10 +5V output
11 Abort input
12 +5V output
13 Forward limit switch
Remarks
There are several +5V pins. The accumulative
external load should not exceed 200mA.
There are several +15V pins. The accumulative
external load should not exceed 100mA.
*
There are several +5V pins. The accumulative
external load should not exceed 200mA.
This input must be connected to high level
voltage to enable the amplifier. *
200mA
This committed input activates the #[ subroutine.
*
14 Reverse limit switch
This committed input activates the #[ subroutine.
*
15 Circuit common
J1A, FAN TERMINALS - (MBA-DBP/3UE and MBA-DBP/6UE)
10
11
24VDC common - fan only.
+24VDC isolated supply for fan (max. 400mA)
*
Vil<1V, Vih>2.4V, Maximum input voltage: +30VDC
DBP - Rev 6/93
Page 61

60
Signals connector - J8 (MBA-DBP/3UE and MBA-DBP/6UE)
1 Channel A output
2 Channel -A output
3 Channel B output
4 Channel -B output
5 Encoder index output
6 Encoder -index output
7 Circuit common
8 Circuit common
9 Circuit common
10 Hall A
11 Hall B
12 Hall C
13 +15V
Main encoder buffered output (20mA, 0-5V)
Main encoder buffered output (20mA, 0-5V)
Main encoder buffered output (20mA, 0-5V)
Main encoder buffered output (20mA, 0-5V)
For resolver option only buffered output
(20mA, 0-5V)
For resolver option only buffered output
(20mA, 0-5V)
*
*
*
There are several +15V pins. The accumulative
external load should not exceed 100mA.
14 +5V output
There are several +5V pins. The accumulative
external load should not exceed 200mA.
15 Circuit common
Remark: In the following paragraphs the terminals will be related to all the
mounting types as in the following sample:
H/R-2a,E-J4/13.
*
-1V < Vil < 1V ; 2V < Vih < 30V
Source sink capability - 2mA min.
DBP - Rev 6/93
Page 62

61
MBA-DBP/3UE
CIRCUIT COM. 15
+5V 14
+15V 13
HALL C 12
HALL B 11
HALL A 10
CIRCUIT COMMON 9
CIRCIT COMMON 15
REVERSE LIMIT SW 14
FORWARD LIMIT SW 13
+5V 12
ABROT INPUT 11
+5V 10
HOME INPUT 9
J8
4 CH. A AUX. INPUT
3 CH. A AUX. INPUT
2 CH. B AUX. INPUT
1 CH. B AUX. INPUT
J6
8 CIRCUIT COM.
7 CIRCUIT COM.
6 INDEX
OUT
OUT
5 INDEX
4 CH B
OUT
3 CH B
OUT
OUT
2 CH A
1 CH A OUT
8 CIRCUIT COMMON
.
7 +15V
6 +5V
5 INDEX
CIRCUIT COMMON 9
INDEX INPUT 6
COMPLETE
MOTION
OUT 10 24
OUT 9 23
OUT 8 22
OUT 6 21
OUT 5 20
OUT 4 19
CIRCUIT COMMON 18
0UT 3 17
OUT 2 16
OUT 1 15
+15V 8
+5V 7
+5V 14
25
J1
J4
5 INDEX INPUT
_
4 CH. B INPUT
3 CH. B INPUT
_
2 CH. A INPUT
1 CH. A INPUT
13 OUT 7
12 +5V
11 +5V
10 CIRCUIT COMMON
9 INPUT 7
8 INPUT 6
7 CIRCUIT COMMON
6 INPUT 5
5 INPUT 4
4 INPUT 3
3 CIRCUIT COMMON
2 INPUT 2
1 INPUT 1
CURRENT/VELOCITY MODE 25
CIRCUIT COMMON 9
-15V 8
+15V 7
SIN. SIGNAL COMMON 6
CIRUIT COMMON 24
TACHO COMMON 23
CIRUIT COMMON 22
RESET INPUT 21
CIRUIT COMMON 20
MOTOR COMMAND OUT 19
INHIBIT OUTPUT 18
INHIBIT OUTPUT 17
N.C. 16
INDEX OUTPUT 15
CHA. A OUTPUT 14
J2
5 SIN. SIGNAL INPUT
4 COS. SIGNAL COMMON
3 COS. SIGNAL INPUT
2 Vref COMMON
1 Vref OUTPUT
13 CHA. B OUTPUT
12 -15V
11 +15V
10 +5V
9 CIRCUIT COMMON
8 CURRENT MONITOR
7 CIRCUIT COM.
6 CIRCUIT COM.
5 ANALOG INPUT
4 CIRCUIT COM.
3 OUT DIFF. AMP.
2 DIFF IN(-)
1 DIFF. IN (+)
J3
MOTOR OUTPUT
A
CONTROL
COMMON
R2
J1A
FAN
R2< 1ohm IS USED TO SHORT
CONTROL COMMON TO
GROUND WHEN USING
-
+
ISOLATED AMP.
J6
+VS
AC INPUT
B
2 31
C
4 5
POWER
POSITIVE
6 7
POWER
COMMON
GROUND
10
118 9
DBP - Rev 6/93
Page 63

62
MBA-DBP/6UE
CIRCUIT COM. 15
+5V 14
+15V 13
HALL C 12
HALL B 11
HALL A 10
CIRCUIT COMMON 9
CIRCIT COMMON 15
REVERSE LIMIT SW 14
FORWARD LIMIT SW 13
+5V 12
ABROT INPUT 11
+5V 10
HOME INPUT 9
J8
3 CH. A AUX. INPUT
2 CH. B AUX. INPUT
1 CH. B AUX. INPUT
J6
8 CIRCUIT COM.
7 CIRCUIT COM.
6 INDEX
OUT
OUT
5 INDEX
4 CH B
OUT
3 CH B
OUT
OUT
2 CH A
1 CH A OUT
8 CIRCUIT COMMON
7 +15V
6 +5V
5 INDEX
4 CH. A AUX. INPUT
MOTION
.
CIRCUIT COMMON 18
CONTROL COMMON
CIRCUIT COMMON 9
+15V 8
+5V 7
INDEX INPUT 6
COMPLETE
25
OUT 10 24
OUT 9 23
OUT 8 22
OUT 6 21
OUT 5 20
OUT 4 19
0UT 3 17
OUT 2 16
OUT 1 15
+5V 14
J1
J4
5 INDEX INPUT
_
4 CH. B INPUT
3 CH. B INPUT
_
2 CH. A INPUT
1 CH. A INPUT
13 OUT 7
12 +5V
11 +5V
10 CIRCUIT COMMON
9 INPUT 7
8 INPUT 6
7 CIRCUIT COMMON
6 INPUT 5
5 INPUT 4
4 INPUT 3
3 CIRCUIT COMMON
2 INPUT 2
1 INPUT 1
CURRENT/VELOCITY MODE 25
CIRCUIT COMMON 9
-15V 8
+15V 7
SIN. SIGNAL COMMON 6
CIRUIT COMMON 24
TACHO COMMON 23
CIRUIT COMMON 22
RESET INPUT 21
CIRUIT COMMON 20
MOTOR COMMAND OUT 19
INHIBIT OUTPUT 18
INHIBIT OUTPUT 17
N.C. 16
INDEX OUTPUT 15
CHA. A OUTPUT 14
J2
5 SIN. SIGNAL INPUT
4 COS. SIGNAL COMMON
3 COS. SIGNAL INPUT
2 Vref COMMON
1 Vref OUTPUT
13 CHA. B OUTPUT
12 -15V
11 +15V
10 +5V
9 CIRCUIT COMMON
8 CURRENT MONITOR
7 CIRCUIT COM.
6 CIRCUIT COM.
5 ANALOG INPUT
4 CIRCUIT COM.
3 OUT DIFF. AMP.
2 DIFF IN(-)
1 DIFF. IN (+)
J3
FAN
_
+
MA MB MC
R2<1ohm, is used to short control common to
ground only when ISOLATED amplifier
R2
GND
is used.
AC AC AC POW
COM.
+VS SO
DBP - Rev 6/93
Page 64

63
5.4 Communication Port Connector
The serial communication is available via a 9 pins D connector (Jc) with the
following pin assignment:
RS232
Pin Function
2 Receive
3 Transmit
5 Common
When using an IBM XT as an host, pins 4 and 5 should be connected together on the 25
pins D connector (computer side). When using an IBM AT as an host, pins 7 and 8
should be connected together on the 9 pins D connector (computer side).
RS485
Pin Function
5 Common
6,7 T/R 8,9 T/R +
DBP - Rev 6/93
Page 65

64
6. Installation procedures
6.1 Mounting
The DBP series dissipates its heat by natural convection except DBPF types
which are fan cooled. For optimum dissipation the amplifiers have to be mounted
with the fins in vertical position.
6.2 Wiring
Proper wiring, grounding and shielding techniques are important in obtaining
proper servo operation and performance. Incorrect wiring, grounding or
shielding can cause erratic servo performance or even a complete lack of
operation.
a) Keep motor wires as far as possible from the signal level wiring (feedback
signals, control signals, etc.).
b) If additional inductors (chokes) are required, keep the wires between the
amplifier and the chokes as short as possible.
c) Minimize lead lengths as much as is practical. Although the amplifier is
protected against long (inductive) supply wires it is recommended to keep
the leads as short as possible.
d) Use twisted and shielded wires for connecting all signals (command and
feedback). Avoid running these leads in close proximity to power leads or
other sources of EMI noise.
e) Use a 4 wires twisted and shielded cable for the motor connection.
f) Shield must be connected at one end only to avoid ground loops.
g) All grounded components should be tied together at a single point (star
connection). This point should then be tied with a single conductor to an
earth ground point.
h) After wiring is completed, carefully inspect all conditions to ensure
tightness, good solder joint etc.
DBP - Rev 6/93
Page 66

65
6.3 Load inductance
The total load inductance must be sufficient to keep the current ripple
within the limits - 50% of the adjusted continuous current limit. The current
ripple (Ir) can be calculated by using the following equation:
0.5 x Vs
Ir = ---------- (A)
f x L
L - load inductance in mH.
Vs - Voltage of the DC supply in Volts.
f - Frequency in KHz.
If motor inductance does not exceed this value, 3 chokes should be added (to
each motor phase) summing together the required inductance
Lch = L - Lp
Lch - Choke inductance
Lp - Total inductance between two phases (in Y connection it is the sum of two
phases).
6.4 AC power supply
AC power supply can be at any voltage in the range defined within the
technical specifications. It must have the capability to deliver power to the
amplifier (including peak power), without significant voltage drops. Any
voltage below the minimum or above the maximum will disable the amplifier.
The recommended AC voltage are:
1.2 x VAC(min) < VAC < 0.9 x VAC(max)
Note - Single phase connection:
When using a single phase supply, voltage drop due to loading is expected.
The magnitude of the voltage drop depends on the load current, motor velocity,
stiffness of the power source and total bus capacitance. It is recommended not
to use single phase connection for output current higher than 20A.
For 3U size amplifiers it is recommended to add external capacitance as
follows:
For 135V units up to 1200µF
For 270V units up to 600µF
DBP - Rev 6/93
Page 67

6.5 Wiring diagrams
Power wires twisted together
Power wires twisted and shielded
6.5.1 Motor's windings
66
Motor
Chassis
A
B
C
MA
MB
MC
DBP
Heatsink / GND
Minimum acceptance
======================================================================
Motor
Chassis
A
B
C
MA
MB
MC
DBP
Heatsink / GND
======================================================================
Motor
Chassis
DBP - Rev 6/93
A
C
Acceptable for most applications
MA
B
MB
DBP
MC
Heatsink / GND
Optimum wiring, minimum RFI
Page 68

6.5.2 AC power wiring
67
Fuse
Fuse
Fuse
AC
AC
AC
DBP + O option
+Vs
DC power common
Control common
Heatsink
A. Direct connection to the
three phase mains
B. External fuses are needed for 3U size only
======================================================================
Fuse
Fuse
AC
AC
DBP + O option
Fuse
Autotransformer
A. External fuses are needed for 3U size only
B. Using autotransformer with
three phase mains
DBP - Rev 6/93
AC
+Vs
DC power common
Control common
Heatsink
Page 69

68
Guide lines for connecting non-isolated AC supplies
Ground:
Control common
Motor chassis
Amplifier's heatsink
Do not ground:
Power common
(The power common is a hot point and any grounding will cause an input
rectifier failure).
Caution:
- If source of motor command is grounded, use amplifier's differential input.
Otherwise, a ground loop is created.
DBP - Rev 6/93
Page 70

Isolating transformer
69
Fuse
Fuse
Fuse
AC
DBP + I option
AC
AC
+Vs
DC power common
Control common
Heatsink
A. Extenal fuses are needed for 3U size only
Guide lines for connecting an Isolated amplifier with an isolating power transformer
Ground:
DC power common
Control common
Motor chassis
Amplifier's heat sink.
Caution:
- If source of motor command is grounded, use amplifier's differential input.
Otherwise, a ground loop is created.
DBP - Rev 6/93
Page 71

70
Isolating transformer
Fuse
Fuse
Fuse
AC
AC
NON-ISOLATED DBP
AC
+Vs
DC power common is internally
connected to control common
Heatsink
A. External fuses are needed for 3U size only
Guide lines for connecting a non isolated amplifier with an isolating power transformer
Ground:
DC power common
Motor chassis
Amplifier's heat sink
Do not ground:
Control common - It is internally connected to the power common. Grounding the
control common will create a ground loop.
Caution:
- If source of motor command is grounded, use amplifier's differential input.
Otherwise, a ground loop is created.
DBP - Rev 6/93
Page 72

71
DIRECT CONNECTION TO
THE THREE PHASE MAINS
NOTE: DC POWER TERMINALS ARE
CONNECTED IF SINGLE PHASE
IS USED OR IF SHUNT CURRENT
HAS TO BE INCREASED
A. External fuses are needed
for 3U size only
Fuse
Fuse
Fuse
To additional
DBPs
AC
AC
DBP
O option
AC
+Vs
DC power common
Control common
Heatsink
AC
AC
DBP
O option
AC
+Vs
DC power common
Control common
Heatsink
DBP - Rev 6/93
CONNECTING MORE THAN ONE DBP
Page 73

ISOLATING
TRANSFORMER
72
NOTE: DC POWER TERMINALS ARE
CONNECTED IF SINGLE PHASE
IS USED OR IF SHUNT CURRENT
HAS TO BE INCREASED
A. External fuses are needed
for 3U size only
Fuse
Fuse
Fuse
To additional
DBPs
AC
AC
DBP
I option
AC
+Vs
DC power common
Control common
Heatsink
AC
AC
DBP
I option
AC
+Vs
DC power common
Control common
Heatsink
DBP - Rev 6/93
CONNECTING MORE THAN ONE DBP
Page 74

CONNECTING MORE THAN ONE DBP
ISOLATING
TRANSFORMER
73
NOTE: DC POWER TERMINALS ARE
CONNECTED IF SINGLE PHASE
IS USED OR IF SHUNT CURRENT
HAS TO BE INCREASED
A. External fuses are needed
for 3U size only
Fuse
Fuse
Fuse
To additional
DBPs
AC
AC
NON
ISOLATED DBP
AC
+Vs
DC POWER COMMON IS
INTERNALLY CONNECTED
TO CONTROL COMMON
Heatsink
AC
AC
AC
NON
ISOLATED DBP
+Vs
DC POWER TERMINAL IS
INTERNALLY CONNECTED
TO CONTROL COMMON
Heatsink
DBP - Rev 6/93
Page 75

74
See chapter 6.4 for details
Fuse
Fuse
AC
AC
DBP
AC
External
capacitance
+Vs
DC power common
Control common
Heatsink
SINGLE PHASE CONNECTION
All rules about supply connections described in the previous pages are also valid
for multi-IBP and/or single phase connection.
DBP - Rev 6/93
Page 76

For 135V types the standard value of
75
AC
AC
AC
+Vs
DBP
Rex is 9.1ohm/225Watt
For 270V types the standard value of
Rex is 33ohm/225Watt
Rex
SO
Control common
Heatsink
CONNECTING THE EXTERNAL SHUNT RESISTOR
DOUBLE EUROCARD SIZE ONLY
DBP - Rev 6/93
Page 77

6.5.3 Hall sensors wiring
HALL SENSORES CONNECTION
76
HALL SENSORES
HALL A
HALL B
HALL C
REMARK:
15
14
13
12
11
10
9
+15V
GND
8
7
6
5
4
3
2
1
J8
TWISTED PAIR
SHIELDING
DBP - Rev 6/93
Page 78

6.5.4 RS232 Communication wiring
RS232 COMMUNICATION
JC
5
9
4
8
T
3
7
R
2
6
1
77
COMPUTER
RXD
TXD
RST CTS
DBP - Rev 6/93
NOTE:
SHIELDING MUST BE CONNECTED AT COMPUTER END ONLY
SYMBOLS:
TWISTED PAIR
SHIELDING
Page 79

6.5.5 RS485 Communication wiring
RS 485 COMMUNICATION
JC
5
9
4
8
3
7
2
6
1
AMP. No 1
78
COMPUTER
T/R-
T/R+
DBP - Rev 6/93
NOTES:
1. SHIELDING MUST BE CONNECTED AT COMPUTER END ONLY
2. PIN No.1 TRANSMIT/RECEIVE CONTROL
3. PIN No.4 +5V
SYMBOLS:
TWISTED PAIR
SHIELDING
Page 80

79
RS485 COMMUNICATION
JC
5
9
4
8
3
7
2
6
1
AMP. No 1
JC
5
9
4
8
3
7
2
6
1
COMPUTER
T/RT/R+
AMP. No 2
AMP. No 32
SYMBOLS:
JC
5
9
4
8
3
7
2
6
1
NOTES:
1. SHIELDING MUST BE CONNECTED AT COMPUTER
END ONLY.
2. PIN No.1 TRANSMIT/RECEIVE CONTROL
3. PIN No.4 +5V
TWISTED PAIR
SHIELDING
DBP - Rev 6/93
Page 81

6.5.6 Main encoder wiring
ENCODER CONNECTION
J1
5
9
4
8
3
7
2
6
1
DIFFERENTIAL ENCODER CONNECTION
J1
5
9
4
8
3
7
2
6
1
80
A
+V
B
A
I
B
ENCODER
I
B
A
+V
I
ENCODER
NOTES:
1.THIS CONNECTION IS FOR AN ENCODER WITH +5V SUPPLY.
FOR AN ENCODER OF +15V SUPPLY, USE J1 PIN 8 INSTEAD OF PIN 7.
2.THE METAL FRAME OF J1 IS INTERNALLY CONNECTED TO THE DCB
COMMON. THE SHIELDING SHOULD BE CONNECTED EITHER
TO J1 PIN 9 OR TO THE METAL FRAME OF J1.
SYMBOLS:
DBP - Rev 6/93
TWISTED PAIR
SHIELDING
Page 82

6.5.7 Resolver wiring
RESOLVER CONNECTION
J2
5
9
4
8
3
7
2
6
1
81
RESOLVER
S3
S1
S4
S2
R2
R1
NOTES:
1. PIN No 7 = +15V
2. PIN No 8 = -15V
3. PIN 9 AND THE METAL FRAME OF J2 ARE INTENALLY CONNECTED
TO THE DCB COMMON. THE SHIELDINGS OF ALL THE PAIRS
SHOULD BE CONNECTED EITHER TO J2 PIN 9 OR TO THE
FRAME OF J2.
SYMBOLS:
TWISTED PAIR
SHIELDING
DBP - Rev 6/93
Page 83

6.5.8 Auxiliary encoder wiring
AUXILIARY ENCODER CONNECTION
J6
8
15
7
14
6
13
5
12
4
11
3
10
2
9
1
DIFFERENTIAL AUXILIARY
82
+V
I
ENCODER
A
B
J6
8
7
14
6
13
5
12
4
11
3
10
2
9
1
NOTES:
1.THIS CONNECTION IS FOR AN ENCODER WITH +5V SUPPLY.
FOR AN ENCODER OF +15V SUPPLY, USE J6 PIN 7 INSTEAD OF PIN 6.
2.THE METAL FRAME OF J6 AND PIN 8 ARE INTERNALLY CONNECTED TO
THE DCB COMMON. THE SHIELDING SHOULD BE CONNECTED EITHER
TO J6 PIN 8 OR TO THE METAL FRAME OF J6.
SYMBOLS:
ENCODER CONNECTION
TWISTED PAIR
+V
I
I
ENCODER
A
A
B
B
DBP - Rev 6/93
SHIELDING
Page 84

83
6.5.9 Pulse/Direction signals wiring
PULSE & DIRECTION INPUT CONNECTION
J6
8
15
7
14
6
13
5
12
4
11
3
10
2
9
1
DIFFERENTIAL PULSE & DIRECTION
CONTROLLER
PULSE
DIRECTION
J6
8
7
14
6
13
5
12
4
11
3
10
2
9
1
NOTES:
1.THE METAL FRAME OF J6 AND PIN 8 ARE INTERNALLY CONNECTED TO
THE DCB COMMON. THE SHIELDING SHOULD BE CONNECTED EITHER
TO J6 PIN 8 OR TO THE METAL FRAME OF J6.
SYMBOLS:
INPUT CONNECTION
TWISTED PAIR
CONTROLLER
- PULSE
PULSE
DIRECTION
- DIRECTION
DBP - Rev 6/93
SHIELDING
Page 85

84
7. Start - Up Procedures
7.1 Common procedures for all amplifiers types
7.1.1 Commutation signals format
Select the position of DIP switch 1 on the upper board of the power stage
according to the commutation signal format the motor has.
DS1 positions: ON (down): 30° OFF (up): 60°
For all Resolver versions it should be 60 °.
7.1.2 CFM function
Select the position of DIP switch 2 on the upper board of the power stage
according to the motor's rated current. If it is less than 20% of the
amplifier's rated current select:
DS2 to ON (down)
Otherwise,
DS2 to OFF (up) - No CFM
7.1.3 Abort logic
Make sure that the Abort input is connected to a High (logic) voltage
source.
DBP - Rev 6/93
Page 86

85
7.1.4 Setting the auxiliary position input format
This step is valid only for those applications that need to use the auxiliary
position input. You may skip this step if you do not use it.
When using an Optical encoder
Set DS 7 to OFF
When a the encoder has differential outputs:
Set DS 4 and 5 to OFF
Otherwise they should be ON.
When using Pulse and Direction signals
Set DS 7 to ON
7.1.5 Selecting the communication bus
Select the desired communication bus as follows:
For RS232: Set DS9 to OFF
For RS485: Set DS9 to ON
7.1.6 Preparing the automatic baud rate selection
The DCB baud rate will automatically match the host baud rate when DS1 is
set to ON.
Set DS1 to ON
DBP - Rev 6/93
Page 87

86
7.2 Setting the main optical encoder format
When a differential encoder is used:
Set DS 2,3,6 to OFF
Otherwise they should be ON.
7.3 Setting the R/D circuit
Set DS 2,3,6 to ON
The Resolver interface circuit consists of three basic blocks:
R/D converter
The R/D conversion is done by a variable resolution, monolithic converter
type 2S82 of Analog Devices. It accepts two signals from the Resolver (sine and
cos.) and converts them into binary position data bits. The resolution of the
position bits is user selectable 10, 12 ,14 and 16 (only for standard encoder
resolution). In addition, the R/D creates a signal that is proportional to the
Resolver velocity. This signal is being used as a velocity feedback.
EPROM
The EPROM creates "Hall" signals by mapping the position data bits accepted
from R/D into suitable Hall signals to operate a specific brushless motor. In
addition, the encoder index (marker) signal is also produced from the EPROM.
The EPROM is designated as follows:
2 4 X S STD
Encoder resolution
Resolver's poles number
Commutation address
R/D resolution
Ratio of motor/resolver
poles numbers
X=User selectable, 0=10 bits
2=12 bits, 4=14 bits, 6=16 bits
In the S (standard) version zero crossing of phases B C occurs at position
address "0" of the Resolver.
DBP - Rev 6/93
Page 88

87
Oscillator
Creates sinusoidal waveform signal to excite the primary of the Resolver.
Oscillator Frequency/Amplitude Selection (R228,R233)
The frequency (fr) and amplitude (Vr) needed to excite the Resolver are
taken from the Resolver data sheet.
Selecting the frequency:
R228 = 110/fr (Kohm)
0.1KHz < fr (KHz) < 20KHz
Selecting the amplitude:
Pay attention that the RMS amplitude does not exceed 7Vrms or that the peakto-peak (ptp) value is within the range of 2V < Vr
peak-to-peak value:
R233 = 6/(Vr - 2) (Kohm)
For Vr in RMS value:
R233 = 6/(2.82Vr - 2) (Kohm)
Reference Voltage level to R/D (R192)
In order to adjust the reference voltage input level to 2Vrms, select R192
as follows:
For Vr
R192 = 50 x (Vr
<2V, install R192=100 ohm.
rms
- 2) (Kohm)
rms
< 20V. For Vr in
ptp
DBP - Rev 6/93
Page 89

Signal input level (R193,R194)
88
The R/D inputs (Vin
Resolver output = Vin
R193 = R194 = Vin
(R
stator
When Vin
The standard R/D converter will not operate for Vin
for OEM applications.
Velocity Signal
The tracking converter technique generates an internal signal at the output of
the integrator that is proportional to the rate of change of the input angle.
This dc analog output (velocity signal) is buffered and represented at terminal
H/R-12b,E-J3/23. Max output voltage is +8V.
in Kohm).
<2V, install R193=R194=100 ohm.
rms
rms
) are adjusted to the sin/cos. Resolver outputs by:
rms
= Vr
rms
- 2 - R
x Transformation ratio
rms
stator
(Kohm)
<1.8V. Consult factory
rms
This velocity signal can be internally connected to the summing junction of
the error amplifier by inserting R7 - see Appendix B for more details. However,
the standard procedure does not require closing the velocity loop.
Select maximum actual velocity of the application and calculate the maximum
tracking rate T of the Resolver as follows:
T = rpm x Q / 120
T unit is rps: Resolver electrical revolution per second
Q - number of poles of Resolver ;
rpm - mechanical revolution per minute.
Selecting the Resolution
The resolution can be selected to be 10,12,14 or 16 bits by use of DIP
switches 13 and 14. When selecting the resolution the rps limits should not be
exceeded:
DBP - Rev 6/93
Page 90

89
10 bit = 1040 rps
12 bit = 260 rps
14 bit = 65 rps
16 bit = 16.5rps
Resolution DS13 DS14
10 ON ON
12 ON OFF
14 OFF ON
16 OFF OFF
Note:
- Each resolution change must be followed by new components selection
procedure.
- When changing resolution under dynamic conditions, a period of uncertainty
will exist before position and velocity data is valid.
Encoder resolution
In the STD mode (DS12 OFF), the encoder signals A,B are created by the EPLD
and can have only the following basic resolutions (for 2 pole Resolver):
256 for 10 bits
1024 for 12 bits
4096 for 14 and 16 bits
When the Resolver is more than 2 poles, the resolution for one shaft
rotation will be:
Er = QxS / 8
Q = number of Resolver poles ;
S = resolution of converter (210,212,or 214)
When different encoder resolution is needed the encoder signals are
generated by the EPROM and the R/D resolution is no longer user selectable.
This option requires
- DS12 at ON
- Special EPROM which is programmed for this resolution.
DBP - Rev 6/93
Page 91

90
HF Filter (R195, R196, C61, C62)
The function of the HF filter is to reduce the amount of noise present on
the signal inputs to the 2S82, reaching the Phase Sensitive Detector and
affecting the outputs. Values should be chosen so that
15Kohm < R195=R196 < 30Kohm
160x10
C61 = C62 = ------------ (pF)
R195 x fr
fr = Reference frequency in KHz
R195 in Kohm
This filter gives an attenuation of 3 times at the input to the phase
sensitive detector.
AC Coupling of Reference Input (C60)
Select C60 so that there is no significant phase shift at the reference
frequency. That is,
106 100 x R192
C60 = -------------- (pF) Rx = ------------ (Kohm)
fr(KHz) x Rx 100 + R192
3
R192 in Kohm
If Rx yields less than 50K, install a value of Rx=50K in the C60 equation.
Maximum Tracking Rate (R201)
The VCO input resistor R201 sets the maximum tracking rate of the converter
and hence the velocity scaling as at the maximum tracking rate, the velocity
output will be 8V.
Decide on your required maximum tracking rate, "T" , in revolutions per
second. Note that "T" must not exceed the specified maximum tracking rate or
1/16 of the reference frequency.
DBP - Rev 6/93
Page 92

91
R201 = 5.92 x 107 / T x p (Kohm)
where p = bit per rev
= 1,024 for 10 bits resolution
= 4,096 for 12 bits
= 16,384 for 14 bits
= 65,536 for 16 bits
Closed Loop Bandwidth Selection (C67, C68, R200)
a. Choose the Closed Loop 3dB Bandwidth (fbw) required ensuring that
f
> 10 x f
ref
bw
Recommended bandwidth values:
250Hz for 3KHz
300Hz for 5KHz
500Hz for 10KHz
b. Select C67 so that
2.5x10
C67 = ------------- (pF)
R201 x f
with R201 in Kohm and fbw in Hz as selected above.
c. C68 is given by
9
2
bw
DBP - Rev 6/93
C68 = 40 x C67 (pF)
Page 93

d. R200 is given by
92
127 x 10
R200 = ------------- (Kohm)
fbw x C68
fbw in Hz, C68 in pF
R200 value should be at least three times R197.
Gain Scaling Resistor (R197)
R197 should be installed according the following table:
536Kohm for 10 bits resolution
130Kohm for 12 bits
33Kohm for 14 bits
8.2Kohm for 16 bits
7
DBP - Rev 6/93
Page 94

93
8. Applying power - Adjustments
Important remarks:
A. If all the previous steps were accomplished you may now disconnect the motor
leads, turn the power on and continue with the following adjustments.
Step 1 - Applying Power
Apply power and check for LED Vs of the DCB that should be "ON", indicating
that the system supplies are present. The display should read: "F-OK". If you
get another message, refer to the following table to find the cause of the
problem. Turn the power off, clear the cause of the problem and re-power the
unit.
Event Display Display
after
Recurring
DIP switch 1 - ON BAUD OK
Load is under cont. current limit CLIM C-OK
Battery Low BATT B-OK
Abort condition (hardware only) ABRT A-OK
Amplifier's power stage disabled
*
AMPD H-OK
-15V out of limits -15V F-OK
Under or Over Voltage VOLT F-OK
+15V out of limits +15V F-OK
Over Temperature TEMP F-OK
Commutation problem CMMT F-OK
Short condition at the power outputs SHRT F-OK
*
The AMPD message appears in two cases:
1. When MO (Motor Off) command is given.
2. Position error exceeds the allowed value.
DBP - Rev 6/93
Page 95

94
Step 2 - Establishing the communication
Press CR (carriage return) in the host several times until the DCB sends the
message "Communication OK".
If you want to "lock" the baud rate in the DCB:
- Turn off the power and remove the amplifier from the rack if it is a rack
version.
- Set DS1-OFF.
Now the baud rate you selected is stored in the SRAM.
It is possible to change DS1 at any time. However, the DCB will notice the change
only upon power on or hardware reset.
Step 3 - Checking the feedback elements
- Turn on the power.
- Rotate the motor shaft manually and interrogate the position with the
instruction:
TP (CR)
The controller response should vary as the motor is turned. If this does not
occur, check the feedback signals.
- When using the auxiliary encoder input, rotate the auxiliary encoder and
interrogate the position with the instruction: PY.
The controller response should vary as the encoder is turned. If this does
not occur, check the feedback signals. The DCB is counting quadrature pulses.
This means that for encoders or resolvers the answer for a TP command will be 4
times the number of basic encoder pulses and for Pulse/Direction mode it will
be twice the number of pulses.
Step 4 - Adjusting the current limits
Defining the amplifier type
- Define the maximum current of the amplifier by the instruction:
MCn
n - rated peak current of the amplifier in A as given in the table of chapter
3.
For example: n is 48 for DBPF-24/270
DBP - Rev 6/93
Page 96

95
Current limit adjustments
- Define the continuous current limit by the instruction:
CLn.m (n.m - current in A)
- Define the peak current limit by the instruction:
PLn.m (n.m - current in A)
- Define the maximum peak current duration by the instruction:
PDn.m (n.m - seconds)
Step 5 - Latch mode of the protective functions
All the protective functions activate internal inhibit. There are two modes
of resetting the amplifier after the cause of the inhibit disappears:
Self Restart: (LM0)
The amplifier is inhibited only for the period that the inhibit cause is
present.
Latch (LM1)
Each failure latches the Inhibit and the failure message on the display. For
restart (after clearing the failure source), reset has to be performed by
applying logic 0 at the reset input (H/R-17a,E-J3/21), or by turning the power
off and on.
For safety reason it is recommended to use the amplifier in the LATCH MODE - LM1
Step 6 - Connecting the Motor
- Turn off the power.
- Connect the leads of the motor.
- Turn on the power.
For proper operation, the system must have negative feedback. If the motor
remains in the same position and returns to the same position when you turn the
motor shaft and let go, then the position feedback is negative as required. If
the motor runs away you have positive feedback. To correct the feedback, just
reverse the encoder leads.
DBP - Rev 6/93
Page 97

96
9. Tables and Summaries
9.1 Display diagnostics
Each amplifier's fault is stored immediately in the DCB RAM. In addition to
that, a Failure Message is displayed. Following are all the valid Display
Messages:
Event Display Display
after
Recurring
DIP switch 1 - ON BAUD OK
Load is under cont. current limit CLIM C-OK
Battery Low BATT B-OK
Abort condition (hardware only) ABRT A-OK
Amplifier's power stage disabled
*
AMPD H-OK
-15V out of limits -15V F-OK
Under or Over Voltage VOLT F-OK
+15V out of limits +15V F-OK
Over Temperature TEMP F-OK
Commutation problem (for brushless drives
CMMT F-OK
only)
Short condition at the power outputs SHRT F-OK
*
The AMPD message appears in two cases:
1. When MO (Motor Off) command is given.
2. Position error exceeds the allowed value.
DBP - Rev 6/93
Page 98

97
9.2 Summary of DIP switches
Power stage board
(2 poles DIP switch)
DIP switch OFF (UP) ON (DOWN)
DS1 60° commutation signals format 30° commutation signals format
DS2 No CFM Activate CFM
Control stage board
(9 poles DIP switch)
DIP switch ON OFF
DS1 Auto-selection of Baud rate Latch last value
DS2 Non-differential channel A Diff. input of channel A
DS3 Non-differential channel B Diff. input of channel B
DS4 Non-differential channel Ay Diff. input of channel Ay
DS5 Non-differential channel By Diff. input of channel By
DS6 Non-differential index Diff. index
DS7 Pulse/Direction format Encoder channels format
DS8 N/C
DS9 RS485 RS232
4 poles DIP switch (for Resolver)
Switch OFF ON
DS11 Tacho signal disconnected Tacho signal connected to error
amplifier.
DS12 Standard encoder resolution Non-standard encoder resolution
DS13 14 bit resolution (DS14-ON)
16 bit resolution (DS14-OFF)
DS14 12 bit resolution (DS13-ON)
16 bit resolution (DS13-OFF)
10 bit resolution (DS14-ON)
12 bit resolution (DS14-OFF)
10 bit resolution (DS13-ON)
14 bit resolution (DS13-OFF)
DBP - Rev 6/93
Page 99

98
Appendix A - Current loop response
In most applications it is not necessary to adjust the current loop to
achieve the optimum response. When there are extreme electrical parameters in
the armature circuit (inductance and resistance) the standard components values
of 0.01µF for C1 and 100Kohm for R4 may not yield with the optimum response.
The current loop should be optimized as follows:
- Insert R7 (1K) to connect the tacho input to the error amplifier. The
amplifier must not be configured into velocity mode. If the resolver option
is used, make sure that DS11 is OFF.
- Apply power to the amplifier and send the command BA.
- Provide the tacho input H/R-12b,E-J3/23 with a bi-directional square wave
current command (100-200Hz, +2.0V waveform is often employed).
- Monitor the load current either by a current probe or by the current monitor.
If the current response is not critically damped, use the following
procedure:
- Short circuit C1 with a short jumper wire.
- Replace R4 with a decade resistance box. Initially set the box resistance at
10Kohm.
- Apply the square wave test signal to the amplifier input.
- Apply power, and while monitoring the load current, gradually increase the
value of the box resistance until optimum response as depicted in Fig A-1 is
achieved.
- Substitute the closest standard value discrete resistor for R4 and remove the
decade resistance box.
- Remove the shorting jumper across C1, and again check the response using the
square wave test signal.
- If the previous step does not yield satisfactory results, if unacceptable
overshooting has been noted, substitute a larger value than 0.01 µF; or, if
the response is overdamped, substitute a smaller value than 0.01 µF.
Repetition of this procedure should yield an optimum choice for C1.
DBP - Rev 6/93
Page 100

99
C1 too small / R4 too large
Reference input signal
C1 too large / R4 too small
Critically damped
Fig. A-1
Typical current response waveforms
DBP - Rev 6/93
 Loading...
Loading...