

Page 1

EdgeTech
4 Little Brook Road
West Wareham, MA 02576
0057
2491
4
4125 SIDE SCAN SONAR SYSTEM
USER HARDWARE MANUAL
0004823_REV_C
Tel: (508) 291-
Fax: (508) 291-
www.EdgeTech.com
Page 2

ii
The information, figures, and specifications in this manual are proprietary and are issued in strict
confidence on condition that they not be copied, reprinted, or disclosed to a third party, either wholly or
in part, without the prior, written consent of EdgeTech. Any reproduction of EdgeTech supplied software
or file sharing is strictly prohibited.
©Copyright 2014 by EdgeTech. All rights reserved.
Microsoft® and Windows® are registered trademarks of Microsoft Corporation.
Kevlar® is a registered trademark of the DuPont Company.
Intel® and Pentium® are registered trademarks of Intel Corporation.
Novagard G624® is a trademark of Novagard Solutions, Inc.
Storm Case™ is a trademark of Pelican, Inc.
Centrino
TM
is a trademark of Intel Corporation.
Kellems® is a registered trademark of Hubbell Incorporated.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 3

iii
WARNIN G – READ THIS FIRS T!
Radiation
High Voltages
Improper Line Voltage
W
All personnel involved with the installation, operation, or maintenance of the equipment described in this
manual should read and understand the warnings and recommendations provided below.
Static Sensitive Devices
This equipment contains devices that are extremely sensitive to static electrical charges. Therefore
extreme care should be taken when handling them, as static electricity may be present on the body and
clothing. Normal handling precautions involve the use of anti-static protection materials and grounding
straps for personnel.
This equipment generates, uses, and can radiate radio frequency energy. Therefore if the equipment is
not installed properly, it may cause interference with radio communications. The equipment has not been
tested for compliance with the appropriate FCC rules designed to provide reasonable protection against
such interference when operated in a commercial environment. Therefore when operating the equipment
in a residential area, the user may be required to take whatever measures are needed and incur any
expenses necessary to eliminate interference; it is the user's responsibility to verify that the system
complies with the applicable FCC emission limits.
High Voltage may be present in all parts of the system. Use caution when the electronics are removed
from their containers for servicing.
Operation with improper line voltage may cause serious damage to the equipment. Always ensure that
the proper line voltage is used.
Page 4

iv
HARDWA R E VA RIATI ONS AND COM PATIB I LITY
H
The 4125 SIDE SCAN SONAR SYSTEM contains both standard PC and proprietary hardware. At times
EdgeTech may change the standard components due to their availability or performance improvements.
Although the component manufacturers, along with their models and styles may change from unit to unit,
replacement components will generally be interchangeable.
EdgeTech will make every effort to see that replacement components are interchangeable and use the
same software drivers. At times, however, direct replacements may not exist. When this happens,
EdgeTech will provide the necessary drivers with the replacement part.
EdgeTech may also change certain hardware per customer requirements. Therefore, portions of this
manual, such as parts lists and test features, are subject to change. These sections should be used for
reference only. When changes are made that affect system operation, they will be explicitly noted. Also,
some options and features may not be active in the customer’s unit at time of delivery. Upgrades will be
made available when these features are implemented.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 5

v
PREF A CE
Purpose of this Manual
Summary of Sections
P
We, the employees at EdgeTech, would like to thank you for purchasing 4125 SIDE SCAN SONAR SYSTEM.
At EdgeTech, it is our policy to provide high quality, cost effective products and support services that meet
or exceed your requirements. We also strive to deliver them on time and to continuously look for ways to
improve them. We take pride in the products we manufacture and want you to be entirely satisfied with
your equipment.
The purpose of this manual is to provide the user with information on the installation and use of
EdgeTech’s 4125 SIDE SCAN SONAR SYSTEM. For detailed information relating to software that came with
this device, refer to the appropriate user software manual.
Although this manual encompasses the latest operational features of 4125 SIDE SCAN SONAR SYSTEM,
some features may be periodically upgraded. Therefore the information in this manual is subject to
change and should be used for reference only.
This manual is divided into the following five sections and three appendices:
SECTION 1: Overview. Describes the 4125 system, its applications, major components, and available
options. Also includes a section about EdgeTech’s role as the leader in underwater technology over the
past few decades.
SECTION 2: Specifications. Details the topside processor, tow vehicle, cables, and options. Also includes
technical descriptions for some of the major computer components within the system.
SECTION 3: Set-up & Activation. Explains how to properly unpack, set-up, test, deploy, and recover the
4125 system.
SECTION 4: Maintenance. Describes the basic maintenance procedures required for different parts of the
system.
SECTION 5: Troubleshooting. Explains how to disassemble and reassemble the tow vehicle chassis.
Describes the procedure for recalibrating the compass. And provides basic troubleshooting techniques.
APPENDIX A: Backup & Restore. Provides the instructions for making a copy of the hard drive onto a
provided USB drive and then using this same drive to restore the system in the unlikely event of its failure.
APPENDIX B: Printers. Describes the various printers that may be used with the 4125 Series system.
APPENDIX C: Tow Characteristics. Includes graphical representations of the tow vehicle and cable at
various lengths, depths, and weights.
Page 6
vi
Warnings, Cautions, and Notes
Liability
W
Where applicable, warnings, cautions, and notes are provided in this manual as follows:
WARNING!
Identifies a potential hazard that could cause personal injury or death to
yourself or to others.
CAUTION!
Identifies a potential hazard that could be damaging to equipment or
could result in the loss of data.
NOTE: Recommendations or general information that is particular to
the material being presented. It may also refer to another part of this
manual or to another manual.
EdgeTech has made every effort to document 4125 SIDE SCAN SONAR SYSTEM in this manual accurately
and completely. However, EdgeTech assumes no liability for errors or for any damages that result from
the use of this manual or the equipment it documents. EdgeTech reserves the right to upgrade features
of this software and to make changes to this manual without notice at any time.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 7

vii
WARRAN TY ST ATEMENT
W
All equipment manufactured by EdgeTech is warranted against defective components and workmanship
for a period of one year after shipment. Warranty repair will be done by EdgeTech free of charge.
Shipping costs are to be borne by the customer. Malfunction due to improper use is not covered in the
warranty, and EdgeTech disclaims any liability for consequential damage resulting from defects in the
performance of the equipment. No product is warranted as being fit for a particular purpose, and there is
no warranty of merchantability. This warranty applies only if:
i. The items are used solely under the operating conditions and in the manner recommended in
Seller's instruction manual, specifications, or other literature.
ii. The items have not been misused or abused in any manner, nor have repairs been attempted
thereon without the approval of EdgeTech Customer Service.
iii. Written notice of the failure within the warranty period is forwarded to Seller and the directions
received for properly identifying items returned under warranty are followed.
iv. The return notice authorizes Seller to examine and disassemble returned products to the extent
Seller deems necessary to ascertain the cause for failure.
The warranties expressed herein are exclusive. There are no other warranties, either expressed or implied,
beyond those set forth herein, and Seller does not assume any other obligation or liability in connection
with the sale or use of said products. Any product or service repaired under this warranty shall be
warranted for the remaining portion of the original warranty period only.
Equipment not manufactured by EdgeTech is supported only to the extent of the original manufacturer's
warranties.
Page 8

viii
SOFT W A R E SE R VICE OVERVI EW
Software Updates and Enhancements
S
EdgeTech provides software services free of charge. The SSA does not address customer-specified
modifications or enhancements. These services may be ordered separately. Furthermore, EdgeTech
software upgrades are meant for the sole use of EdgeTech customer. Any reproduction of EdgeTech
supplied software or file sharing is strictly prohibited.
EdgeTech customers can download new software releases with all modifications and enhancements along
with user's manual changes from the EdgeTech ftp site. Major software issues, should they occur, will be
reported directly to the customer. New software releases consist of the following:
x Software enhancements that are not on the price list
x Software fixes and changes
x Product integration
x Documentation updates to on-line help
x Tests for compatibility with other modules
Software patches consist of software that has undergone the following:
x Minor software enhancements
x Software fixes and changes
x Software Telephone, Facsimile, and E-mail Support
The SSA entitles EdgeTech customers to contact EdgeTech Customer Service by telephone, facsimile, or
e-mail to report a difficulty, to discuss a problem or to receive advice on the best way to perform a task.
When contacted, EdgeTech Customer Service will do the following:
x Respond within 24 hours
x Immediately attend to serious problems affecting operations
x Attempt to find an immediate work-around
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 9

ix
RETU R NED MAT ERIAL AU T HORIZ ATION
R
Prior to returning any equipment to EdgeTech, a Returned Material Authorization (RMA) number must be
obtained. The RMA will help us identify your equipment when it arrives at our receiving dock and track
the equipment while it is at our facility. The material should be shipped to the address provided in the
EdgeTech Customer Service section. Please refer to the RMA number on all documents and
correspondences as well.
All returned materials must be shipped prepaid. Freight collect shipments will not be accepted. EdgeTech
will pay freight charges on materials going back to the customer after they have been evaluated and/or
repaired.
CAUTION!
Never attempt to ship portable topside units in their Storm Case alone.
Although rugged, these cases are not intended to be used as shipping
containers, and the delicate internal components could be damaged if
used in this manner.
The following steps apply only to material being returned from outside the Continental United States.
Follow them carefully to prevent delays and additional costs.
1. All shipments must be accompanied by three copies of your proforma invoice, showing the value
of the material and the reason for its return. If the reason is for repair, it must be clearly stated in
order to move through customs quickly and without duties being charged. Whenever possible,
please send copies of original export shipping documents with the consignment.
2. If the value of the equipment is over $1000, the following Shipper's oath must be sent with the
invoice. This oath can be typed on the invoice, or on a separate letterhead:
"I, ______________________________, declare that the articles herein specified are the growth,
produce, or manufacture of the United States; that they were exported from the United States
from the port of _____________________, on or about _______________; that they are returned
without having been advanced in value or improved in condition by any process of manufacture
or any other means; and that no drawback, or allowance has been paid or admitted hereof."
Signed ______________________________
3. If there is more than one item per consignment, a packing list must accompany the shipment. It
is acceptable to combine the proforma invoice and packing list as long as the contents of each
carton are clearly numbered and identified on the invoice.
4. Small items can be shipped prepaid directly to EdgeTech by FedEx, DHL, UPS, Airborne, etc.
Page 10

x
5. If the equipment is the property of EdgeTech (formerly EG&G Marine Instruments Division),
please insure for full value.
6. Fax one invoice, packing list, and a copy of the airway bill to EdgeTech upon shipment.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 11

xi
CUSTOME R SE R VICE
C
Customer service personnel at EdgeTech are always eager to hear from users of our products. Your
feedback is welcome, and is a valuable source of information which we use to continually improve these
products. Therefore we encourage you to contact EdgeTech Customer Service to offer any suggestions or
to request technical support:
E-mail: service@edgetech.com
Mail: 4 Little Brook Road
West Wareham, MA 02576
Telephone: (508) 291-0057
Facsimile: (508) 291-2491
24-Hour Emergency
Technical Support Line: (508) 942-8043
For more information please go to www.EdgeTech.com.
Page 12

xii
COMPAN Y BACK GROUND
C
EdgeTech (formerly EG&G Marine Instruments) traces its history in underwater data acquisition and
processing back to 1966. EdgeTech has designed, developed and manufactured products, instruments and
systems for the acquisition of underwater data, including marine, estuarine, and coastal applications for
over 45 years.
The company has responded to the needs of the scientific, Naval and offshore communities by providing
equipment, such as sub-bottom profilers, side scan sonar, acoustic releases, USBL positioning systems and
bathymetric systems that have become standards in the industry.
EdgeTech has also consistently anticipated and responded to future needs through an active research and
development program. Current efforts are focused on the application of cutting edge CHIRP, DS, and
acoustic technology.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 13

xiii
TABL E OF C ONTEN T S
T
WARNING – READ THIS FIRST! ..................................................................................................................... iii
Radiation .................................................................................................................................................. iii
High Voltages ........................................................................................................................................... iii
Improper Line Voltage ............................................................................................................................. iii
HARDWARE VARIATIONS AND COMPATIBILITY ........................................................................................... iv
PREFACE ........................................................................................................................................................ v
Purpose of this Manual ............................................................................................................................. v
Summary of Sections ................................................................................................................................ v
Warnings, Cautions, and Notes ................................................................................................................ vi
Liability ..................................................................................................................................................... vi
WARRANTY STATEMENT ............................................................................................................................. vii
SOFTWARE SERVICE OVERVIEW ................................................................................................................ viii
Software Updates and Enhancements................................................................................................... viii
RETURNED MATERIAL AUTHORIZATION ...................................................................................................... ix
CUSTOMER SERVICE ..................................................................................................................................... xi
COMPANY BACKGROUND ........................................................................................................................... xii
TABLE OF CONTENTS ...................................................................................................................................xiii
LIST OF FIGURES .......................................................................................................................................... xix
LIST OF TABLES ............................................................................................................................................. xx
SECTION 1: OVERVIEW ......................................................................................................................... 1-1
1.1 4125 Series Applications ............................................................................................................... 1-1
1.2 Main System Components ............................................................................................................ 1-2
1.3 4125-P Portable Topside Processor .............................................................................................. 1-2
1.4 Tow Vehicle ................................................................................................................................... 1-3
1.5 Tow Cable ...................................................................................................................................... 1-6
1.6 Optional Equipment ...................................................................................................................... 1-6
1.6.1 Additional Telemetry ................................................................................................. 1-6
1.6.2 Depressor Wing .......................................................................................................... 1-6
1.6.3 Keel Weight ................................................................................................................ 1-7
1.6.4 HullScan W/O and W/ Telemetry Kits ........................................................................ 1-7
Page 14

xiv
1.6.5 Over the Side Option .................................................................................................. 1-7
SECTION 2: SPECIFICATIONS ..................................................................................................... ............ 2-1
2.1 4125-P Portable Topside Processor .............................................................................................. 2-1
2.1.1 Technical Descriptions of Internal Components ........................................................ 2-2
2.2 4125 Tow Vehicle .......................................................................................................................... 2-6
2.3 Over the Side Mounting Option .................................................................................................... 2-9
2.4 Cables ............................................................................................................................................ 2-9
SECTION 3: SETUP AND ACTIVATION ................................................................................................... 3 -1
3.1 Unpacking and Inspection ............................................................................................................. 3-1
3.2 Power Requirements .................................................................................................................... 3-1
3.2.1 Use of an Uninterrupted Power Supply ..................................................................... 3-2
3.2.2 Changing a Non-US Power Plug ................................................................................. 3-2
3.3 Navigation Interface ..................................................................................................................... 3-2
3.4 Placement of the 4125-P Portable Topside Processor ................................................................. 3-2
3.5 Topside Controls and Indicators ................................................................................................... 3-3
3.6 4125-P Portable Topside Processor Connections ......................................................................... 3-5
3.7 TCP/IP Address Settings ................................................................................................................ 3- 6
3.8 Assembling the 4125 Tow Vehicle ................................................................................................ 3-6
3.9 Connecting the System Components ............................................................................................ 3-7
3.9.1 Connecting and Attaching the Tow Cable to the Tow Vehicle ................................... 3-8
3.9.2 Connecting the 4125-P Portable Topside Processor .................................................. 3-9
3.10 System Activation and Test ...................................................................................... 3-10
3.10.1 Preparing a Wired ETHERNET LAN Connection ....................................................... 3-10
3.10.2 Preparing a Wireless ETHERNET LAN Connection .................................................... 3-11
3.10.3 Activating the 4125 Series System ........................................................................... 3-11
3.11 Performing Pre-deployment Checks ........................................................................ 3-12
3.12 Tow Vehicle Deployment ......................................................................................... 3-14
3.13 Tow Vehicle Recovery .............................................................................................. 3-16
SECTION 4: MAINTENANCE .................................................................................................................. 4 -1
4.1 Cleaning the 4125-P Portable Topside Processor ......................................................................... 4-1
4.2 Inspecting and Cleaning the Connections ..................................................................................... 4-1
4.3 Re-arming the Tow Vehicle ........................................................................................................... 4-2
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 15

xv
SECTION 5: TROUBLESHOOTING .......................................................................................................... 5-1
5.1 Restoring the Operating System to the Hard Drive ...................................................................... 5-1
5.2 Disassembling and Reassembling the Tow Vehicle ...................................................................... 5-1
5.2.1 Disassembly ................................................................................................................ 5-2
5.2.2 Reassembly ................................................................................................................ 5-4
5.3 Calibrating the Compass ............................................................................................................... 5-5
5.3.1 Entering the Known Magnetic Deviation ................................................................... 5-5
5.3.2 Hard Iron Calibration .................................................................................................. 5-6
5.3.3 Soft Iron Calibration ................................................................................................... 5-8
5.4 General Troubleshooting ................................................................................................... ........... 5-9
5.5 4125-P Portable Topside Processor Troubleshooting................................................................. 5-10
5.6 4125 Tow Vehicle Troubleshooting ............................................................................................ 5-10
5.7 Tow Cable Inspection .................................................................................................................. 5-11
5.7.1 Locating a Shorted Conductor.................................................................................. 5-12
5.7.2 Locating an Open Conductor ................................................................................... 5-12
5.7.3 Locating a Resistance Breakdown ............................................................................ 5-13
5.7.4 Damaged Tow Cable Connector ............................................................................... 5-13
5.8 Part Numbers for Major Topside Components .......................................................................... 5-13
5.9 Part Numbers for Major Tow Vehicle Components.................................................................... 5-14
APPENDIX A: BACKUP AND RESTORE ..................................................................................................... A-1
A.1 Backing up the System Drive .................................................................................................... A-1
A.2 Restoring the System Drive ...................................................................................................... A-1
APPENDIX B: PRINTERS ........................................................................................................................... B-1
APPENDIX C: TOWING CHARACTERISTICS............................................................................................... C-1
C.1 4125 Standard Towfish Cable Layback Plots ............................................................................. C-1
C.1.1 Config. 1: 4125, 207551 Cable - 50m Long ........................................................................ C-3
C.1.2 Config. 2: 4125, 207551 Cable - 100m Long ...................................................................... C-4
C.1.3 Config. 3: 4125, 207551 Cable - 150m Long ...................................................................... C-5
C.1.4 Config. 4: 4125 + 15 lb. Keel Weight, 207551 Cable - 50m Long....................................... C-6
C.1.5 Config. 5: 4125 + 15 lb. Keel Weight, 207551 Cable - 100m Long..................................... C-7
C.1.6 Config. 6: 4125 + 15 lb. Keel Weight, 207551 Cable - 150m Long..................................... C-8
C.1.7 Config. 7: 4125 + Depressor Wing, 207551 Cable - 50m Long .......................................... C-9
Page 16

xvi
C.1.8 Config. 8: 4125 + Depressor Wing, 207551 Cable - 100m Long ...................................... C-10
C.1.9 Config. 9: 4125 + Depressor Wing, 207551 Cable - 150m Long ...................................... C-11
C.1.10 Config. 10: 4125 + 15 lb. Keel Wt. + Dep. Wing, 207551 Cable - 50m ............................ C-12
C.1.11 Config. 11: 4125 + 15 lb. Keel Wt. + Dep. Wing, 207551 Cable - 100m Long .................. C-13
C.1.13 Config. 12: 4125 + 15 lb. Keel Wt. + Depressor Wing, 207551 Cable – 150m ................. C-14
C.2 4125 Telemetry Towfish Cable Layback Plots ......................................................................... C-15
C.2.1 Config. 1: 4125, 23080 Cable - 50m Long ........................................................................ C-19
C.2.2 Config. 2: 4125, 23080 Cable - 100m Long ...................................................................... C-20
C.2.3 Config. 3: 4125, 23080 Cable - 200m Long ...................................................................... C-21
C.2.4 Config. 4: 4125, 23080 Cable - 300m Long ...................................................................... C-22
C.2.5 Config. 5: 4125 + 15 lb. Keel Weight, 23080 Cable - 50m Long ....................................... C-23
C.2.6 Config. 6: 4125 + 15 lb. Keel Weight, 23080 Cable - 100m Long..................................... C-24
C.2.7 Config. 7: 4125 + 15 lb. Keel Weight, 23080 Cable - 200m Long..................................... C-25
C.2.8 Config. 8: 4125 + 15 lb. Keel Weight, 23080 Cable - 300m Long..................................... C-26
C.2.9 Config. 9: 4125 + Depressor Wing, 23080 Cable - 50m Long .......................................... C-27
C.2.10 Config. 10: 4125 + Depressor Wing, 23080 Cable - 100m Long ...................................... C-28
C.2.11 Config. 11: 4125 + Depressor Wing, 23080 Cable - 200m Long ...................................... C-29
C.2.12 Config. 12: 4125 + Depressor Wing, 23080 Cable - 300m Long ...................................... C-30
C.2.13 Config. 13: 4125 + 15 lb. Keel Wt. + Depressor Wing, 23080 Cable - 50m ..................... C-31
C.2.14 Config. 14: 4125 + 15 lb. Keel Wt. + Depressor Wing, 23080 Cable – 100m ................... C-32
C.2.15 Config. 15: 4125 + 15 lb. Keel Wt. + Depressor Wing, 23080 Cable - 200m ................... C-33
C.2.16 Config. 16: 4125 + 15 lb. Keel Wt. + Depressor Wing, 23080 Cable – 300m ................... C-34
C.2.17 Config. 17: 4125, A304874 Cable - 50m Long ................................................................. C-35
C.2.18 Config. 18: 4125, A304874 Cable - 100m Long ............................................................... C-36
C.2.19 Config. 19: 4125, A304874 Cable - 200m Long ............................................................... C-37
C.2.20 Config. 20: 4125, A304874 Cable - 300m* Long ............................................................. C-38
C.2.21 Config. 21: 4125 + 15 lb. Keel Weight, A304874 Cable - 50m Long ................................ C-39
C.2.22 Config. 22: 4125 + 15 lb. Keel Weight, A304874 Cable - 100m Long .............................. C-40
C.2.23 Config. 23: 4125 + 15 lb. Keel Weight, A304874 Cable - 200m Long .............................. C-41
C.2.24 Config. 24: 4125 + 15 lb. Keel Weight, A304874 Cable - 300m* Long ............................ C-42
C.2.25 Config. 25: 4125 + Depressor Wing, A304874 Cable - 50m Long .................................... C-43
C.2.26 Config. 26: 4125 + Depressor Wing, A304874 Cable - 100m Long .................................. C-44
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 17

xvii
C.2.27 Config. 27: 4125 + Depressor Wing, A304874 Cable - 200m Long .................................. C-45
C.2.28 Config. 28: 4125 + Depressor Wing, A304874 Cable - 300m* Long ................................ C-46
C.2.29 Config. 29: 4125 + 15 lb. Keel Wt. + Depressor Wing, A304874 Cable - 50m ................. C-47
C.2.30 Config. 30: 4125 + 15 lb. Keel Wt. + Dep. Wing, A304874 Cable - 100m ........................ C-48
C.2.31 Config. 31: 4125 + 15 lb. Keel Wt. + Dep. Wing, A304874 Cable - 200m ........................ C-49
C.2.32 Config. 32: 4125 + 15 lb. Keel Weight + Dep. Wing, A304874 Cable - 300m* ................ C-50
C.2.33 Config. 33: 4125, A320327 Cable - 50m Long ................................................................. C-51
C.2.34 Config. 34: 4125, A320327 Cable - 100m Long ............................................................... C-52
C.2.35 Config. 35: 4125, A320327 Cable - 200m Long ............................................................... C-53
C.2.36 Config. 36: 4125, A320327 Cable - 300m Long ............................................................... C-54
C.2.37 Config. 37: 4125, A320327 Cable - 400m Long ............................................................... C-55
C.2.38 Config. 38: 4125 + 15 lb. Keel Weight, A320327 Cable - 50m Long ................................ C-56
C.2.39 Config. 39: 4125 + 15 lb. Keel Weight, A320327 Cable - 100m Long .............................. C-57
C.2.40 Config. 40: 4125 + 15 lb. Keel Weight, A320327 Cable - 200m Long .............................. C-58
C.2.41 Config. 41: 4125 + 15 lb. Keel Weight, A320327 Cable - 300m Long .............................. C-59
C.2.42 Config. 42: 4125 + 15 lb. Keel Weight, A320327 Cable - 400m Long .............................. C-60
C.2.43 Config. 43: 4125 + Depressor Wing, A320327 Cable - 50m Long .................................... C-61
C.2.44 Config. 44: 4125 + Depressor Wing, A320327 Cable - 100m Long .................................. C-62
C.2.45 Config. 45: 4125 + Depressor Wing, A320327 Cable - 200m Long .................................. C-63
C.2.46 Config. 46: 4125 + Depressor Wing, A320327 Cable - 300m Long .................................. C-64
C.2.47 Config. 47: 4125 + Depressor Wing, A320327 Cable - 400m Long .................................. C-65
C.2.48 Config. 48: 4125 + 15 lb. Keel Wt. + Dep. Wing, A320327 Cable - 50m .......................... C-66
C.2.49 Config. 49: 4125 + 15 lb. Keel Wt. + Dep. Wing, A320327 Cable – 100m ....................... C-67
C.2.50 Config. 50: 4125 + 15 lb. Keel Wt. + Dep. Wing, A320327 Cable - 200m ........................ C-68
C.2.51 Config. 51: 4125 + 15 lb. Keel Wt. + Dep. Wing, A320327 Cable - 300m ........................ C-69
C.2.52 Config. 52: 4125 + 15 lb. Keel Wt. + Dep. Wing, A320327 Cable - 400m ........................ C-70
C.2.53 Config. 53: 4125, A302799 Cable - 50m Long ................................................................. C-71
C.2.54 Config. 54: 4125, A302799 Cable - 100m Long ............................................................... C-72
C.2.55 Config. 55: 4125, A302799 Cable - 200m Long ............................................................... C-73
C.2.56 Config. 56: 4125, A302799 Cable - 300m Long ............................................................... C-74
C.2.57 Config. 57: 4125, A302799 Cable - 400m Long ............................................................... C-75
C.2.58 Config. 58: 4125, A302799 Cable - 500m Long ............................................................... C-76
Page 18

xviii
C.2.59 Config. 59: 4125, A302799 Cable - 600m Long ............................................................... C-77
C.2.60 Config. 60: 4125 + 15 lb. Keel Weight, A302799 Cable - 50m Long ................................ C-78
C.2.61 Config. 61: 4125 + 15 lb. Keel Weight, A302799 Cable - 100m Long .............................. C-79
C.2.62 Config. 62: 4125 + 15 lb. Keel Weight, A302799 Cable - 200m Long .............................. C-80
C.2.63 Config. 63: 4125 + 15 lb. Keel Weight, A302799 Cable - 300m Long .............................. C-81
C.2.64 Config. 64: 4125 + 15 lb. Keel Weight, A302799 Cable - 400m Long .............................. C-82
C.2.65 Config. 65: 4125 + 15 lb. Keel Weight, A302799 Cable - 500m Long .............................. C-83
C.2.66 Config. 66: 4125 + 15 lb. Keel Weight, A302799 Cable - 600m Long .............................. C-84
C.2.67 Config. 67: 4125 + Depressor Wing, A302799 Cable - 50m Long .................................... C-85
C.2.68 Config. 68: 4125 + Depressor Wing, A302799 Cable - 100m Long .................................. C-86
C.2.69 Config. 69: 4125 + Depressor Wing, A302799 Cable - 200m Long .................................. C-87
C.2.70 Config. 70: 4125 + Depressor Wing, A302799 Cable - 300m Long .................................. C-88
C.2.71 Config. 71: 4125 + Depressor Wing, A302799 Cable - 400m Long .................................. C-89
C.2.72 Config. 72: 4125 + Depressor Wing, A302799 Cable - 500m Long .................................. C-90
C.2.73 Config. 73: 4125 + Depressor Wing, A302799 Cable - 600m Long .................................. C-91
C.2.74 Config. 74: 4125 + 15 lb. Keel Wt. + Dep. Wing, A302799 Cable - 50m .......................... C-92
C.2.75 Config. 75: 4125 + 15 lb. Keel Wt. + Dep. Wing, A302799 Cable – 100m ....................... C-93
C.2.76 Config. 76: 4125 + 15 lb. Keel Wt. + Dep. Wing, A302799 Cable - 200m ........................ C-94
C.2.77 Config. 77: 4125 + 15 lb. Keel Wt. + Dep. Wing, A302799 Cable - 300m ........................ C-95
C.2.78 Config. 78: 4125 + 15 lb. Keel Wt. + Dep. Wing, A302799 Cable - 400m ........................ C-96
C.2.79 Config. 79: 4125 + 15 lb. Keel Wt. + Dep. Wing, A302799 Cable - 500m ........................ C-97
C.2.80 Config. 80: 4125 + 15 lb. Keel Weight + Dep. Wing, A302799 Cable - 600m .................. C-98
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 19

xix
LIS T OF FIGURE S
L
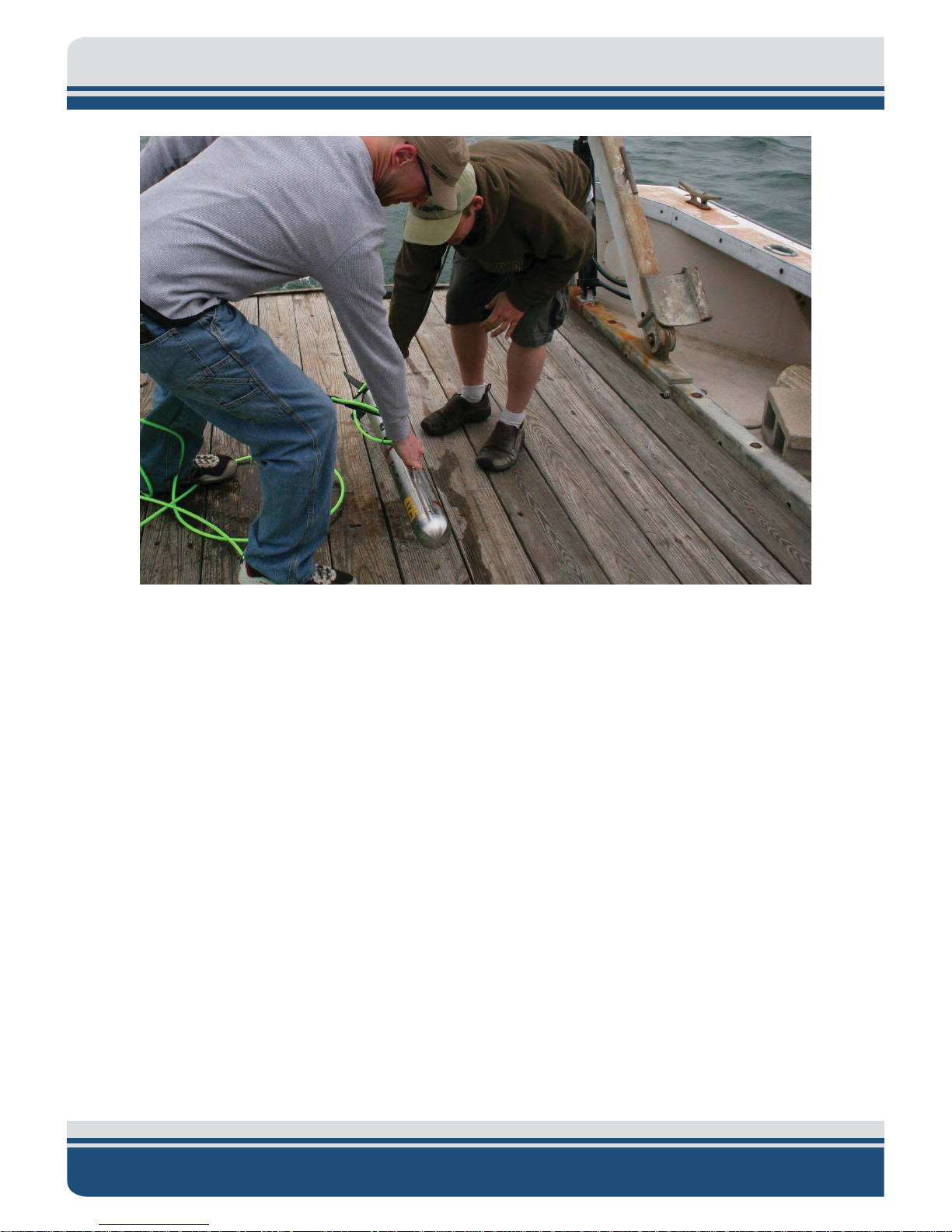
Figure 1-1: Readying the Towfish for Deployment .................................................................................... 1-2
Figure 1-2: 4125 Series Towfish, Topside, and Tow Cable ......................................................................... 1-5
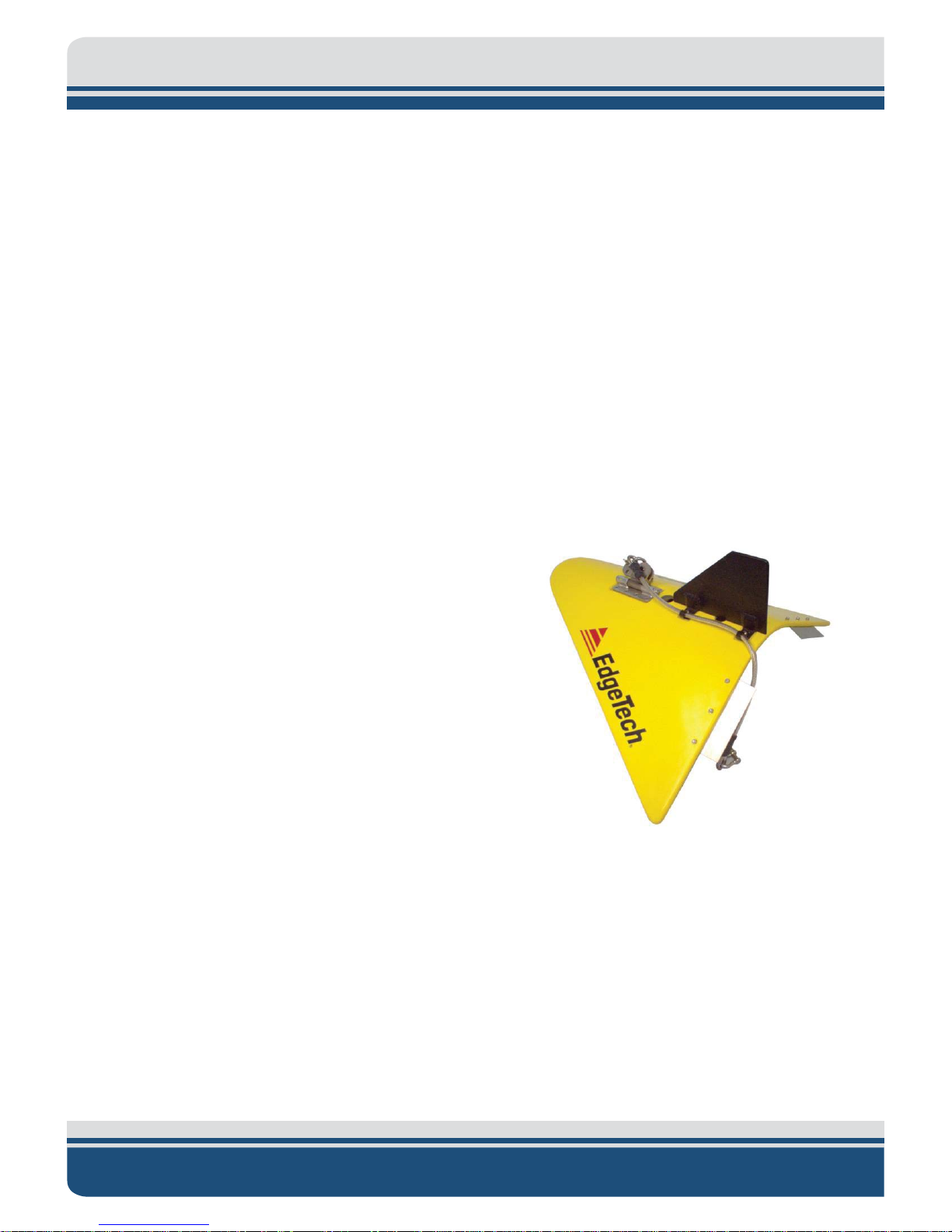
Figure 1-3: Depressor Wing ....................................................................................................................... 1-6
Figure 2-1: 4125 Series Dual Frequency Side Scan Sonar System Overall Block Diagram ......................... 2-3
Figure 2-2: 4125-P Portable Topside Processor Wiring Diagram ............................................................... 2-4
Figure 2-3: 4125 Portable Topside Processor Chassis................................................................................ 2-5
Figure 2-4: Kevlar Reinforced Tow Cable ................................................................................................. 2-10
Figure 2-5: Kevlar Reinforced Tow Cable, Telemetry .............................................................................. 2-11
Figure 2-6: AC Power Cable ...................................................................................................................... 2-12
Figure 2-7: DC Power Cable ..................................................................................................................... 2-13
Figure 2-8: ETHERNET Cable .................................................................................................................... 2-14
Figure 3-1: 4125-P Portable Topside Processor Side Panel ....................................................................... 3-4
Figure 3-2: 4125 Tow Vehicle Tail Fins Assembly ...................................................................................... 3-7
Figure 3-3: AC Power, DC Power, and ETHERNET Cables .......................................................................... 3-8
Figure 3-4: Tow Vehicle with Tow Cable Connected and Attached ........................................................... 3-9
Figure 3-5: DISCOVER 4125 Towfish Control Tab .................................................................................... 3-12
Figure 3-6: Rub Test being Performed ..................................................................................................... 3-13
Figure 3-7: Rub Test Screen Shot ............................................................................................................. 3-13
Figure 3-8: 4125 Tow Vehicle being Deployed ........................................................................................ 3-15
Figure 3-9: Bottom Track Tab................................................................................................................... 3-16
Figure 5-1: Tow Vehicle Parts of Note ....................................................................................................... 5-2
Figure 5-2: Electronics Bottle and Transducer Array Sections Separated ................................................. 5-2
Figure 5-3: Cables Disconnected from the Electronics Bottle ................................................................... 5-3
Figure 5-4: Removing the Phillips Head Screws from the Electronics Bottle............................................. 5-3
Figure 5-5: Removing the Electronics Chassis from the Electronics Bottle ............................................... 5-4
Figure 5-6: The COM3 Window in Hyper Terminal .................................................................................... 5-7
Figure 5-7: Hard Iron X Y Calibration Complete ......................................................................................... 5-7
Figure 5-8: Hard Iron Z Calibration Complete ............................................................................................ 5-8
Figure 5-9: Soft Iron Calibration Screen Prompts ...................................................................................... 5-9
Page 20

xx
LIS T OF TABLE S
L
Table 2-1: 4125-P Portable Topside Processor .......................................................................................... 2-2
Table 2-2: Tow Vehicle Specifications ........................................................................................................ 2 -8
Table 3-1: AC Power Cord Wiring .............................................................................................................. 3-2
Table 3-2: Topside Processor or ETHERNET Devices TCP/IP Addresses .................................................... 3-6
Table 3-3: Tow Vehicle ETHERNET Devices IP Addresses .......................................................................... 3-6
Table 5-1: Topside Processor System Troubleshooting Guide ................................................................ 5-10
Table 5-2: 4125 Tow Vehicle Troubleshooting Guide .............................................................................. 5-11
Table 5-3: Part Numbers for Major 4125-P Topside Processor Components .......................................... 5-14
Table 5-4: Part Numbers for Major 4125 Tow Vehicle Components ....................................................... 5-15
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 21

1-1
SECT I ON 1 : OVERV I EW
1.1
4125 Series Applications
S
The EdgeTech 4125 Series Dual-frequency Side Scan Sonar System is a frequency-modulated (FM), dualfrequency, side scan sonar that uses EdgeTech’s proprietary Full Spectrum “chirp” technology to generate
high-resolution, side scan imagery at longer ranges than conventional continuous-wave (CW) systems.
The system is designed primarily for search and recovery operations, along with surveys in shallow water.
The 4125 Series is available in two, dual simultaneous frequency configurations depending on the
application: 400/900 kHz and 600/1600 kHz. For shallow water survey applications, the 400/900-kHz
frequency set is the best choice, as it provides an ideal combination of range and resolution. For ultrahigh resolution imagery at shorter ranges, the 600/1600 kHz set is the recommended choice.
In both configurations, the frequencies are transmitted as linearly-swept, wide-band, high energy acoustic
pulses, and the received echoes are processed into high signal-to-noise (SNR) images that can be directly
displayed as shades of gray or color on a computer monitor. The SNR images can also be printed on a
continuous feed thermal printer, or stored in real time onto a large capacity hard drive and archived onto
a DVD.
Applications for the 4125 Series Dual-frequency Side Scan Sonar System are many, including:
x Hydrographic surveys
x Geological surveys
x Search and recovery
x Channel conditioning/clearance surveys
x Bridge, pier, and harbor wall inspections
x Hull inspections
x Port security
x Archaeological surveys
Page 22
1-2
1.2
Main System Components
1.3
4125-P Portable Topside Processor
Figure 1-1: Readying the Towfish for Deployment
1
The 4125 Series Dual-frequency Side Scan Sonar System is composed a 4125-P Portable Topside Processor,
a 4125 Tow Vehicle (commonly called a Towfish), and a tow cable. These components are shown in Figure
1 2.
In addition, the tow vehicle is available with or without the additional telemetry option, which enables
the use of longer tow cables. Without the additional telemetry option, tow cables up to 150 meters in
length can be used. With the additional telemetry option, the system will perform with cable lengths up
to 600 meters. Contact EdgeTech Customer Service for the specific cable types.
The 4125-P Portable Topside Processor is shown in Figure 1-2. It provides power and downlink telemetry
to the tow vehicle for sonar control and receives uplink side scan data, sensor data, and status information
from the tow vehicle for processing, storage, and display.
The topside unit includes a laptop computer with Windows 7 and the EdgeTech DISCOVER 4125 Side Scan
Sonar software preinstalled. DISCOVER 4125 provides control, storage, and display of the sonar data. The
data can be stored in XTF and JSF formats.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 23

1-3
1.4
Tow Vehicle
The 4125-P Portable Topside Processor interfaces with the tow vehicle either over a direct 10/100BaseT
connection or, with the additional telemetry option, over a 10BaseT connection that uses very high bit
rate digital subscriber line (VDSL) modems. The topside unit also interfaces with a global positioning
system (GPS) over a USB to serial or RS-232 serial interface.
The topside processor integrates tow vehicle and DC power supplies, an ETHERNET switch, a wireless
router, and, with the additional telemetry option, an VDSL modem, all housed within a single, compact,
rugged, water-tight (when closed) Pelican Storm Case. It runs on either AC or DC power, and interfaces
with the laptop computer over a wired or wireless 10/100BaseT ETHERNET connection. The computer can
be stored inside the enclosure when not in use.
CAUTION!
Never attempt to use the portable topside’s storm case as a shipping
container. Doing so could void warranties and/or result in system
damage.
1
The 4125 Tow Vehicle is available with a choice of 400/900 kHz or 600/1600 kHz operating frequencies,
and with or without the additional telemetry option. It contains the sonar transducer arrays and the
electronics required to transmit and receive the sonar signals; to receive the downlink commands from
the topside processor; and to provide the uplink side scan data, sensor data, and status information to
the topside processor.
The electronics are contained inside a single, lightweight stainless steel, 200-meter depth-rated housing,
comprising the aft section of the tow vehicle. The forward section is flooded and includes both the port
and starboard transducer arrays. A single O-ring sealed end cap is attached to each end of the housing to
seal it, and the forward end cap contains bulkhead connectors for connecting to the transducer arrays. An
adapter cable also connects to this end cap.
The cable snakes through a hole in the transducer array section and includes an inline connector for
connecting to the tow cable. The tow vehicle interfaces with the topside processor either over a
10/100BaseT ETHERNET connection, or (with the additional telemetry option only) over a 10BaseT
connection that uses VDSL modems in both the tow vehicle and the topside processor.
The tow vehicle is also equipped with four stabilizer fins, a stainless steel nose for hydrodynamic balance,
and two convenient carrying handles. A towing arm is rigidly mounted to a tow point on the top of the
tow vehicle housing adjacent to the tow cable connector. The tow cable attaches to a shackle on the
towing arm.
Additional mounting holes are provided on the tow point should it be necessary to reposition the towing
arm forward or aft to adjust the balance of the tow vehicle. The towing arm also includes a safety release
Page 24
1-4
mechanism, which causes a shear pin to release the tow point should the tow vehicle hit an obstruction
or become snagged. If this happens, the tow vehicle will rotate nose down, and a safety cable, which is
attached from the tow point to the rear of the tow vehicle, will pull the tow vehicle over the obstruction
or through the snag, stern first.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 25

1-5
Towing arm
Stainless steel
housing
Shear pin
Shackle
Safety cable
Tow cable
connector
Port transducer array
4125-P Portable Topside Processor with Laptop Computer
Laptop computer
4125-P Portable
Topside Processor
Tow cable
4125 Tow vehicle
Kellems grip
Tow cable
Safety cable
Tow cable
connector
Tie wraps
Waterproof
splice
Shackle
Shear pin
Figure 1-2: 4125 Series Towfish, Topside, and Tow Cable
Page 26
1-6
1.5
Tow Cable
1.6
Optional Equipment
1.6.1
Additional Telemetry
1.6.2
Depressor Wing
Figure 1-3: Depressor Wing
1
The 4125 Series Dual-frequency Side Scan Sonar System includes a 50-meter tow cable, terminated at
both ends. The tow cable is used both to connect to the tow vehicle, and to tow it behind the survey
vessel. Tow cables are available as either a Kevlar-reinforced six conductor or an RG-58 coax cable, which
includes a single conductor and a shield.
The coax cable is used only for systems that include the additional telemetry option. Up to 150 meters of
6 conductor cable or 600 meters of coax cable can be used. Contact EdgeTech Customer Service for
available cable lengths other than the supplied 50-meter cable. A cable grip is also included for attaching
the tow cable to a shackle on the towing arm of the tow vehicle.
Optional equipment that can be installed and used with a 4125 Series Dual-frequency Side Scan Sonar
System includes:
x Additional telemetry (specified when ordering tow vehicle)
x Keel Weight Kit (p/n 0008464)
x Depressor Wing Kit (p/n 0007860)
x HullScan Kit, W/O Telemetry (p/n 0008478)
x HullScan Kit, W/ Telemetry (p/n 0008477)
x Over the Side Mount (p/n 0007633)
The additional telemetry option increases the maximum
length tow cable that can be used from 150 meters to 600
meters by using VDSL modems to establish the
communications link between the tow vehicle and the
topside processor instead of a direct ETHERNET connection.
Contact EdgeTech Customer Service for the specific cable
types.
The Depressor Wing Kit provides a depressor wing (shown in Figure 1-3) that can be attached to the tow
vehicle, allowing it to be towed deeper and faster without increasing the length of tow cable in the water.
The depressor wing attaches to the top of the tow vehicle and pushes it deeper by exerting a downward
force on the tow vehicle as it moves through the water. A safety cable with a shear pin mechanism is
attached to prevent loss of the wing should it become snagged.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 27

1-7
1.6.3
Keel Weight
1.6.4
HullScan W/O and W/ Telemetry Kits
1.6.5
Over the Side Option
1
The Keel Weight Kit provides an additional 15 lbs. of weight to the tow vehicle.
Two HullScan Kits are available, W/O Telemetry and W/ Telemetry. Each of these kits enables a tow vehicle
to be inverted such that the transducer arrays are angled upward instead of downward. In this
configuration the tow vehicle can be used to scan the hulls of ships. The HullScan W/O Telemetry kit is for
tow vehicles that do not have the additional telemetry option. The HullScan W/ is for those that do.
This option allows the towfish to be mounted on a pole for shallow water survey or for vertical imaging.
Contact EdgeTech Customer Service for more information.
Page 28

Page 29
2-1
SECT I ON 2 : SPEC I FIC A T IONS
2.1
4125-P Portable Topside Processor
Size:
19.0
49.0
39.0
Weight:
13.2 kg (29 lbs.)
(w/ laptop computer)
10 kg (22 lbs.)
(w/o laptop computer)
Case construction:
High
Case
Black
Case sealing method:
Watertight cover with O
Shipping container type:
Carton
Shipping container size:
63.5 cm (25 in.) high
53.3 cm (21 in.) wide
53.3 cm (21 in.) deep
Shipping weight:
21.8 kg (48 lbs.)
Operating
-41
Storage temperature:
-20
Operating relative humidity:
0
S
The specifications for the EdgeTech 4125 Series Dual-frequency Side Scan Sonar System include electrical,
mechanical, and environmental characteristics for the main system components as follows:
x 4125-P Portable Topside Processor
x 4125 Tow Vehicle
x Cables
NOTE: All specifications are subject to change without notice.
The specifications for the 4125 Portable Topside Processor are shown below:
color:
Temperature:
4125-P PORTABLE TOPSIDE PROCESSOR
cm (7.3 in.) high
cm (19.2 in.) wide
cm (15.2 in.) deep
-impact structural polypropylene
–40°C (-40–104°F)
–60°C (-4–140°F)
-ring seal and purge valve
–80% (non condensing)
Page 30
2-2
Non
0
AC input power:
90
110 watts operating, auto switching
0.6 A/1.1 A at 120 VAC idling/operating
0.3 A/0.56 A at 240 VAC idling/operating
DC input power:
12
4.3 A/6.0 A at 12 VDC idling/operating
2.4 A/3.3 A at 24 VDC idling/operating
Power to tow vehicle:
7
Processor:
Intel Pentium M 730, 2.4 GHz
Memory:
2 GB
Data storage:
160 GB hard drive
Operating system:
Windows
Application software:
DISCOVER 4
Display:
15.4
Keyboard:
Laptop keyboard
Pointing device:
Laptop mouse pad
Wireless
Centrino 802.11b
Tow vehicle interface:
10/100BaseT TCP/IP
2.1.1
Technical Descriptions of Internal Components
4125-P PORTABLE TOPSIDE PROCESSOR
-operating storage relative humidity:
–100%
–260 VAC, 50/60 Hz, 72–
–24 VDC, 72 watts operating
5 VDC at 1 A max
7
125
-inch LCD
ETHERNET:
ETHERNET w/o telemetry
Table 2-1: 4125-P Portable Topside Processor
2
This section provides an overall general description of the hardware elements comprising the 4125-P
Portable Topside Processor of the 4125 Series Dual-frequency Side Scan Sonar System. This information,
which includes printed circuit board summary descriptions, chassis photos, component call-outs, and a
wiring diagram, can be useful for troubleshooting purposes and installing optional equipment. The 4125
Tow Vehicle is considered non-user-serviceable and therefore specific information of this type is not
provided for it. However, an overall block diagram of the system is shown in Figure 2-1.
A wiring diagram of the 4125-P Portable Topside Processor is shown in Figure 2-2, and the electronics
chassis is shown in Figure 2-3:
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 31

2-3
Figure 2-1: 4125 Series Dual Frequency Side Scan Sonar System Overall Block Diagram
Page 32

4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
2-4
Figure 2-2: 4125-P Portable Topside Processor Wiring Diagram
Page 33

Power board
(under panel)
Power Separation
board
VDSL Modem
board
15-amp fuse
AC Line Filter
(under panel)
Power Supply
Wireless
Bridge /
ETHERNET
Switch board
2-5
Figure 2-3: 4125 Portable Topside Processor Chassis
Page 34

2-6
2.2
4125 Tow Vehicle
The main hardware elements in the 4125-P Portable Topside Processor include the following components
and circuit boards:
Power board. The Power board inputs +24 VDC on J2 from the 24 VDC Power Supply and
generates the 75 VDC tow vehicle power, which is output on J5 to the Power Separation board,
and from this board to the tow vehicle.
The Power board also includes +5, +12, and +15 VDC power supplies. The +5 VDC is output on J3
to the Wireless Bridge/ETHERNET Switch board, and the +12 VDC is output on J6 and J8 to the
VDSL Modem board and the fans, respectively. For DC operation, 12–24 VDC is input on J1.
VDSL Modem board. The VDSL Modem board, which is used only with the additional telemetry
option, converts the uplink data VDSL signals received from the tow vehicle and input on P4 from
J3 of the Power Separation board into ETHERNET 10/100BaseT signals. These signals are then
output on P2 to the Wireless Bridge/ETHERNET Switch board, and from J1 of this board to the
laptop computer.
Similarly, the VDSL Modem board converts the downlink ETHERNET 10/100BaseT based command
signals from the laptop computer into the VDSL downlink command signals, which are then output
on P4 to J3 of the Power Separation board to be combined with 75 VDC tow vehicle power, and
transmitted to the tow vehicle.
24 VDC Power Supply. The 24 VDC Power Supply inputs AC power from the AC Line Filter to
generate +24 VDC, which is output to the Power board.
AC Line Filter. The AC Line Filter filters the AC power input and outputs the filtered power to the
24 VDC Power Supply.
Wireless Bridge/ETHERNET Switch. The Wireless Bridge/ETHERNET Switch board connects the
VDSL Modem board, the tow vehicle, and the laptop computer to the same local area network
(LAN). This board also enables a wireless connection to the laptop computer.
Power Separation board. With the additional telemetry option only, the Power Separation board
combines downlink command signals and uplink data that are input on J3 from P4 of the VDSL
Modem board with 75 VDC tow vehicle power from J5 of the Power board for transmission to the
tow vehicle.
If the additional telemetry option is not included, the Power Separation board is used only to
route the 75 VDC tow vehicle power to the tow vehicle Commands and data are sent and received,
respectively, over a direct ETHERNET connection to the tow vehicle.
2
The specifications for the 4125 Tow Vehicle are shown below:
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 35

2-7
Size:
98.0 cm (39.0 in.) long; 9.6
diameter, w/o
telemetry
112.0 cm (44.0 in.) long; 9.6
diameter, w
telemetry
Weight in air:
16.7 kg (36.7 lbs.) w/o telemetry
20.4 kg (45.0 lbs.) w/ telemetry
Weight in salt water:
11.3 kg (24.9 lbs.) w/o telemetry
14.4 kg (31.6 lbs.) w/ telemetry
Construction:
Stainless steel
Depth rating:
200 m (656 ft.)
Maximum tow cable length:
150 m w/o telemetry
600 m w/ telemetry (loop resistance cannot exceed 14
ohms). Contact EdgeTech Customer Service for the
specific cable types.
Tow cable conductors:
(2) #18 and (2)
RG
Kevlar tow cable breaking load:
545 kg (1200 lbs.)
Input power:
7
Towing speed
1
Shear force:
420 kg (930 lbs.)
Frequencies:
400/900 kHz or 600/1600 kHz
Pulse type:
Chirp or CW
Data interface:
10/100BaseT TCP/IP
VDSL
Operating range:
150 m
75 m
120 m
35 m
Across track resolution:
2.3
1.5
1.5
0.6
4125 Tow Vehicle
cm (3.75 in.)
cm (3.75 in.)
-58 coax w/ telemetry
5 VDC, 50 watts maximum
–8 knots
w/ telemetry
twisted shielded pairs w/o telemetry
ETHERNET w/o telemetry
(400 kHz)
(900 kHz)
(600 kHz)
(1600 kHz)
cm (400 kHz)
cm (900 kHz)
cm (600 kHz)
cm (1600 kHz)
Page 36

2-8
Along track resolution:
80 cm @ 100 m (400 kHz)
58 cm @ 100 m (600 kHz)
40 cm @ 50 m (400 kHz)
29 cm @ 50 m (600 kHz)
24 cm @ 50 m (900 kHz)
20 cm @ 25 m (400 kHz)
14 cm @ 25 m (600 kHz)
12 cm @ 25 m (900 kHz)
.08 cm @ 25 m (1600 kH
.05 cm @ 15 m (1600 kHz)
Horizontal beam width:
0
0.28°
0.33°
0.20°
Vertical beam width:
50°
Side lobes:
<
Transducer array depression angle:
Factory set at 33
Operating temperature:
0–45°C (32–113°F)
Heading accuracy:
1.
Heading resolution:
0.1
Pitch and roll accuracy:
0.1
Pitch and roll resolution:
0.1°
Pressure sensor accuracy:
0.5% of depth when calibrated for 0 m
Pressure sensor working depth:
0–200 m
Pressure
>200 m
Navigation interfaces:
RS
Options:
Additional telemetry
Keel Weight Kit
Depressor Wing Kit
HullScan Kit, W/O Telemetry
HullScan Kit, W/ Telemetry
4125 Tow Vehicle
.46° (400 kHz)
(900 kHz)
(600 kHz)
(1600 kHz)
z)
sensor tolerance:
-36 dB
0° RMS
°
°
-232, NMEA0183
°, adjustable to 25°
Table 2-2: Tow Vehicle Specifications
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 37

2-9
2.3
Over the Side Mounting Option
2.4
Cables
2
EdgeTech also offers an over-the-side mounting option for the 4125 series tow vehicle. Contact EdgeTech
Customer Service for more information.
Outline drawings of the supplied cables are listed below along with their corresponding figure numbers.
x Figure 2-4: Kevlar Reinforced Tow Cable
x Figure 2-5: Kevlar Reinforced Tow Cable, Telemetry
x Figure 2-6: AC Power Cable
x Figure 2-7: DC Power Cable
x Figure 2-8: ETHERNET Cable
Page 38

4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
2-10
Figure 2-4: Kevlar Reinforced Tow Cable
Page 39

2-11
Figure 2-5: Kevlar Reinforced Tow Cable, Telemetry
Page 40

4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
2-12
Figure 2-6: AC Power Cable
Page 41

2-13
Figure 2-7: DC Power Cable
Page 42

4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
2-14
Figure 2-8: ETHERNET Cable
Page 43

3-1
SECT I ON 3 : SETU P AND A CTIV ATION
3.1
Unpacking and Inspection
3.2
Power Requirements
S
Setup and test of the EdgeTech 4125 Series Dual-frequency Side Scan Sonar System encompasses
unpacking, inspecting, and connecting the system components (including an optional printer); connecting
a navigation system if required; activating the system; and verifying operation using the EdgeTech
DISCOVER 4125 Side Scan Sonar software. This section provides instructions on how to perform these
tasks, along with how to deploy, tow, and recover the tow vehicle.
The tow vehicle is shipped in a foam-lined Pelican Storm Case. The 4125-P Portable Topside Processor is
shipped in a cardboard box with its associated cables, including the tow cable, depending on its length.
Before unpacking the system components, inspect the shipping containers for any damage. Report any
damage to the carrier and to EdgeTech.
If the shipping containers appear free of damage, carefully unpack the components and inspect them for
damage as well. Also check the packing list, verifying that all the items on the list are included. Again, if
any damage is found, report it to the carrier and to EdgeTech. If any items are missing, immediately
contact EdgeTech Customer Service. Do not install or operate any equipment that appears to be damaged.
Although the items shipped will vary, depending on the customer requirements, the 4125 Series Dualfrequency Side Scan Sonar System typically includes the items listed below.
x 4125-P Portable Topside Processor
x 4125 Tow Vehicle
x Laptop computer
x Laptop computer power supply
x 50-meter tow cable
x AC power cable
x DC power cable
x ETHERNET cable
x Software CDs
x Spares kit
After unpacking the system components, store the shipping containers, including any packing materials,
in a safe place for later use. When transporting or storing the system, pack all items in their original
shipping containers in the same manner in which they were originally shipped. Store the system in a dry
environment when not in use.
The power requirements for the 4125-P Portable Topside Processor are 90–260 VAC, 50/60 Hz or 12–24
VDC.
Page 44

3-2
3.2.1
Use of an Uninterrupted Power Supply
3.2.2
Changing a Non-US Power Plug
3.3
Navigation Interface
3.4
Placement of the 4125-P Portable Topside Processor
3
The AC power source should be continuously free of high-amplitude, high-frequency transients, as this
type of interference could cause degraded performance or damage to the equipment. An uninterruptable
power supply (UPS) with power surge protection is recommended for powering the equipment.
However, whether or not a UPS is used, never use an AC power source that also powers electric motors
on the survey vessel, such as pumps and winches. In addition, do not use switching type battery chargers
or DC to AC converters with square wave outputs.
An AC power cord is provided for connecting the Deck Unit to a standard U.S. 3-pronged outlet. For nonU.S. power outlets, modify this cord by cutting off the 3-pronged plug and attaching the appropriate plug.
Refer to Table 3-1 for connection information.
AC POWER CORD
WIRE COLOR
Black
White
Green
FUNCTION
AC line
AC neutral
Earth ground
Table 3-1: AC Power Cord Wiring
NOTE: The 4125-P Portable Topside Processor is shipped configured for
the end user’s country voltage requirements.
The 4125 Series Dual-frequency Side Scan Sonar System accepts all standard National Marine Electronics
Association (NEMA) 0183 message sentence formats from a connected global positioning system (GPS) or
integrated navigation system.
The 4125-P Portable Topside Processor can be located in a wet environment if the cover is kept closed.
Otherwise it should be located and set up in a dry, sheltered area that is protected from weather and
water spray, and where the temperature is consistently between 0°C and 40°C (32°F and 104°F). However,
avoid areas of direct sunlight, especially in tropical environments, as heat build-up could occur.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 45

3-3
3.5
Topside Controls and Indicators
The location should also enable direct communications with the deck crew that is handling the tow
vehicle. Secure the topside processor in place, using tie downs if necessary, near the required AC power
source.
3
The 4125-P Portable Topside Processor includes controls and indicators on the side panel as shown in
Figure 3-1.
Page 46

POWER
indicator
FISH POWER
indicator
POWER
switch
5A/250V
fuse
TOWCABLE
connector
ETHERNET
connector
AC INPUT
connector
DC INPUT
connector
LINK
indicator
CM
indicator
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
3-4
Figure 3-1: 4125-P Portable Topside Processor Side Panel
Page 47

The 4125-P Portable Topside Processor controls and indicators are the following:
3.6
4125-P Portable Topside Processor Connections
POWER Toggle switch. Turns on the 4125-P Portable Topside Processor.
(Switch)
POWER Red indicator. Illuminated when the 4125-P Portable Topside
(Indicator) Processor is on.
FISH POWER: Red indicator. Illuminated when the 4125-P Portable Topside
Processor is on and the tow vehicle is properly connected to it. The
indicator is off if no power is being drawn by the tow vehicle.
NOTE: The 4125-P Portable Topside Processor will automatically switch
off power to the tow vehicle should the processor be disconnected from
the tow vehicle for an extended period. The power will also be turned off
if an over current or under current condition exists. To reactivate the
power to the tow vehicle, turn the POWER switch off and then on again.
3-5
LINK: Green indicator. Flashes when the 4125-P Portable Topside Processor
is connected to a tow vehicle that does not include the additional
telemetry option. For a tow vehicle that does include the additional
telemetry option, the indicator flashes while a reliable
communications link with the tow vehicle is being established and
then illuminates continuously when the link is found.
CM Red indicator Flashes at 1 HZ is an undercurrent condition exist and 2
(Current Memory) HZ if an over current condition exist between the topside and tow fish.
If flashing, check the tow cable for shorts or for non-continuity on pins
1 and 2.
3
The 4125-P Portable Topside Processor connections are made using connectors on the side panel as
shown in Figure 3-1.
The 4125-P Portable Topside Processor connections are the following:
TOWCABLE: 6-pin female bulkhead connector. Connects to the tow cable.
ETHERNET: 4-pin female bulkhead connector. Provides a 10/100BaseT ETHERNET
connection to the laptop computer.
DC INPUT: 2-pin male bulkhead connector. Connects to 12–24 VDC power.
Page 48

3-6
3.7
TCP/IP Address Settings
DEVICE
TCP/IP ADDRESS
Wireless bridge
192.9.0.225
DEVICE
TCP/IP ADDRESS
CPU board
192.9.0.101
3.8
Assembling the 4125 Tow Vehicle
AC INPUT: 3-pin male bulkhead connector. Connects to 90–260 VAC, 50/60 Hz
power.
3
The 4125 Series Dual-frequency Side Scan Sonar System includes a number of ETHERNET devices
connected on a common local area network (LAN), and each of these devices has a factory set TCP/IP
address which under normal circumstances does not require changing.
However, should any of these devices be replaced, or if upgrades are later installed, it may be required
that the TCP/IP addresses be reconfigured. In addition, any computer that is to be connected to the 4125P Portable Topside Processor must have its IP address set to 192.9.0.nnn, where nnn is any integer from
1 to 100, except for the following reserved addresses:
The factory IP address setting of the wired ETHERNET connection for the laptop computer included with
the 4125-P Portable Topside Processor is 192.9.0.99, and for the wireless ETHERNET connection, the
factory setting is 192.9.0.100. For a list of the topside processor ETHERNET devices and their TCP/IP
addresses, refer to Table 3-2, and for the tow vehicle, Table 3-3.
x 192.9.0.225
x 192.9.0.101
Table 3-2: Topside Processor or ETHERNET Devices TCP/IP Addresses
Table 3-3: Tow Vehicle ETHERNET Devices IP Addresses
To assemble the tow 4125 Tow Vehicle, refer to Figure 3-2 and the following instructions:
1. Insert the four tail fins into the tail fin slots in the tail cone.
2. While holding the tow vehicle vertically with the nose down, insert the tail cone with the installed
tail fins into the tow vehicle body.
3. Install the tail fin locking bolt with the urethane washer into the tow vehicle body and securely
tighten them.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 49

3-7
3.9
Connecting the System Components
Tail fin (4)
Tow vehicle body
Tail cone
Tail fin
locking
bolt
Urethane
washer
Shear point
4. Check that the tail fins are inserted properly, with the shear point engaging on the tow vehicle
body. When installed correctly, the fins will align at 45 degrees off the vertical and horizontal
planes.
5. Insert the line provided through the hole in each of the tail fins, stringing them together, and then
tie each end of the line to the rear carrying handle.
Figure 3-2: 4125 Tow Vehicle Tail Fins Assembly
3
Most of the system components connect to the 4125-P Portable Topside Processor. Optional components,
such as a printer, navigation system, and cable counters connect to the supplied laptop.
Page 50

3-8
3.9.1
Connecting and Attaching the Tow Cable to the Tow Vehicle
WARNING!
Do not connect the tow cable to the topside processor before connecting
it to the tow vehicle, otherwise injury or death can occur if the exposed
connector on the tow cable is energized. Always connect the tow cable to
the tow vehicle first.
When connecting the system components, refer to sub-section 3.6: 4125-P Portable Topside Processor
Connections for the location and description of the connectors. The AC Power, DC Power, and ETHERNET
cables used with the 4125-P Portable Topside Processor are shown in Figure 3-3.
Figure 3-3: AC Power, DC Power, and ETHERNET Cables
3
A tow cable is shown connected and attached to a tow vehicle in Figure 3-4.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 51

3-9
3.9.2
Connecting the 4125-P Portable Topside Processor
Kellems grip
Tow cable
Safety cable
Tow cable
connector
Tie wraps
Waterproof
splice
Shackle
Shear pin
Figure 3-4: Tow Vehicle with Tow Cable Connected and Attached
To connect and attach the tow cable to the tow vehicle:
1. Verify that the tow cable is not connected to the 4125 Portable Topside Processor.
2. Verify that the tow cable connector on the tow vehicle and the mating female connector on the
tow cable are free of corrosion or dirt. If dirty, clean them with contact cleaner.
3. Apply a thin film of silicone grease to the pins of the tow cable connector on the tow vehicle.
4. Mate the connectors by pressing them firmly together. Do not wiggle the connectors.
5. Secure the locking sleeve.
6. Attach the loop of the Kellems grip to the shackle on the towing arm and secure the shackle bolt
with seizing wire or a tie wrap.
3
To connect the 4125-P Portable Topside Processor:
1. Verify that the 4125-P Portable Topside Processor is not connected to AC power.
2. Verify that the tow cable is properly connected and attached to the tow vehicle, and then connect
the tow cable to the TOW CABLE connector.
3. If using the wired ETHERNET connection, connect the ETHERNET cable to the ETHERNET connector
of the laptop computer. The ETHERNET cable may be extended up to 100 feet using a Category 5
ETHERNET crossover or straight patch cable.
Page 52

3-10
3.10 System Activation and Test
3.10.1 Preparing a Wired ETHERNET LAN Connection
4. Do not make this connection if the wireless ETHERNET connection will be used, as only one
ETHERNET connection can be connected or enabled at the same time.
5. If a printer will be used, connect the printer to the laptop computer through an USB ETHERNET
adapter.
6. If a navigation system will used, connect the navigation system serial output to COM 1 or a USB
port of the laptop computer.
7. Do one of the following to connect power:
x Connect the AC power cable to the AC INPUT connector and to the AC power source.
x Connect the red clamp of the DC power/ETHERNET cable to the positive terminal of the DC
power source, and connect the black clamp to the negative terminal.
x Connect both the AC and DC power sources as described above.
8. Connect the laptop computer power supply to the computer and to the AC power source.
3
After the connections to the topside processor have been completed, the 4125 Series Dual-frequency Side
Scan Sonar System can be activated and some pre-deployment checks performed prior to deployment of
the tow vehicle as a test to verify that the system is operating properly.
When performing the system activation and test, refer to sub-section 3.5 Topside Controls and Indicators
for the location and description of the controls and indicators on the topside processor. In addition, should
the system not activate properly or the pre-deployment checks fail, refer to SECTION 5:
TROUBLESHOOTING for assistance on how to isolate and correct the problem.
The wired ETHERNET LAN connection is made by connecting the supplied ETHERNET cable from the 4125P Portable Topside Processor to the laptop computer. If an ETHERNET Category 5 cable greater than 10
meters is connected instead, the Network Adapter on the laptop computer should be set to 10 Mbit/s,
Full Duplex.
In addition, the 4125-P Portable Topside Processor auto senses straight and crossover ETHERNET cables,
along with 10 or 100-Mbit/s connections. Therefore the laptop computer’s LAN adapter can be set to
AutoSense for LAN speed and duplex settings.
1. To prepare the laptop computer to use the wired ETHERNET connection:
2. Turn on the laptop computer and the 4125-P Portable Topside Processor.
3. Click the Wireless Networking icon on the Windows Desktop or on the System Tray, and then
disable it. Or, if there is a switch on the laptop computer, turn it off.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 53

3-11
3.10.2 Preparing a Wireless ETHERNET LAN Connection
3.10.3 Activating the 4125 Series System
4. Verify that the ETHERNET cable is connected to the ETHERNET connector of the 4125-P Portable
Topside Processor and to the ETHERNET connector of the laptop computer.
5. Click the ETHERNET LAN icon on the Windows Desktop or the System Tray, and then enable it.
The ETHERNET LAN should indicate "Connected" in the Local Area Network Properties Box. If not,
check all the connections and verify that the TCP/IP address setting is correct as described in subsection 3.7: TCP/IP Address Settings. Also verify that the ETHERNET LAN is enabled and that the
topside processor is turned on.
3
The Wireless Networking connection is made using the wireless networking capability of the laptop
computer.
To prepare the laptop computer to use the wired ETHERNET connection:
1. Turn on the laptop computer and the 4125-P Portable Topside Processor.
2. Click the ETHERNET LAN icon on the Windows Desktop or on the System Tray, and then disable it.
Alternatively, unplug the ETHERNET cable from the laptop computer.
3. Click the Wireless Networking icon on the Windows Desktop or on the System Tray, and then
enable it, and if there is a switch on the laptop computer, turn it on.
4. The Wireless Networking should indicate "sonarlink" within 30 seconds. If not, verify that the
ETHERNET LAN is disabled, that the Wireless Networking is enabled, and that the topside
processor is turned on.
To activate the 4125 Series Dual-frequency Side Scan Sonar System:
1. Start the DISCOVER 4125 Side Scan Sonar software on the laptop computer.
2. If using the wired ETHERNET connection, verify that the wireless network switch is disabled and
the ETHERNET LAN is enabled. If the wireless ETHERNET connection is being used, verify that the
wireless network switch is on and Wireless Networking is enabled.
3. Turn on the POWER switch on the side panel of the 4125-P Portable Topside Processor.
The POWER and FISH POWER indicators should illuminate, and the CM indicator will initially
illuminate for about 5 seconds and then go out once the connection is found. The LINK indicator
should flash if a tow vehicle without the added telemetry option is connected.
For a tow vehicle with the additional telemetry, the LINK indicator should flash while a reliable
communications link with the tow vehicle is being established, and then illuminate continuously
when the link is found. In addition, the NET indicator on the Status bar at the bottom of the Main
window should indicate as follows:
Page 54

3-12
3.11 Performing Pre-deployment Checks
3
The pre-deployment checks should be performed after the system is activated and before the tow vehicle
is deployed. These checks involve verifying that data can be recorded and played back in DISCOVER 4125;
rubbing your hand on the transducer arrays while observing the Sonar display in the DISCOVER 4125 Main
window; verifying correct heading, pitch and roll outputs; and zeroing the pressure sensor:
1. Activate the system as described above.
CAUTION!
Do not allow the transducer arrays on the tow vehicle to continuously
transmit in air for an extended period as damage to the transducer arrays
could occur.
2. In the DISCOVER 4125 Main window, click the Towfish Control tab on the Lower Control panel.
This tab is shown in Figure 3-5.
Figure 3-5: DISCOVER 4125 Towfish Control Tab
3. Select the High Sonar On and Low Sonar On check boxes.
The transducer arrays on the tow vehicle should begin transmitting and data should begin scrolling on the
Sonar display in the DISCOVER 4125 Main window.
4. Start recording a file while performing the pre-deployment test below, and then play back the file
to verify that the SS data and navigation information is present
5. Rub the port and starboard transducer arrays (as seen in Figure 3-6) while observing the Sonar
display in the DISCOVER 4125 Main window.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 55

Figure 3-6: Performing a Rub Test
3-13
6. You should observe streaks or noise spikes in the waterfall display, as seen in Figure 3-7.
Figure 3-7: Rub Test Screen Shot
7. Verify that the heading, pitch, and roll sensors are working correctly by rotating, tilting, and rolling
the tow vehicle while observing the Heading, Pitch, and Roll displays in the Lower Indicator bar in
the DISCOVER 4125 Main window.
8. Verify that the Pressure display indication is at or nearly zero. The pressure sensor can be zeroed
on deck in DISCOVER 4125 software under External Device Controls.
Page 56

3-14
3.12 Tow Vehicle Deployment
3
The 4125 Tow Vehicle can be towed at speeds of up to 4.8 knots while still meeting NOAA and IHO-44S
specifications of 3 pings on a 1-meter cubed target at 100 meters. Shown in Figure 3-6 is a 4125 Tow
Vehicle being deployed.
CAUTION
The deployment instructions below are only meant as a general guide.
Due to varying conditions, exact deployment methods will change and it
is up to the end user to modify their deployment procedure to match the
conditions they are working under.
CAUTION!
When lowering the tow vehicle in an area where the bottom topography
is not known, be careful not to strike the bottom or a submerged object.
Otherwise, damage to the tow vehicle may occur. In addition, at all times
during the survey, carefully monitor tow vehicle altitude, as failure to do
so may result in the tow vehicle hitting the bottom or becoming snagged.
CAUTION!
Do not tow the tow vehicle too close to the survey vessel. Towing in this
manner can cause the tow vehicle to be pulled in against the hull of the
ship due to the low pressure of the propeller wash and the effect of the
water flowing by the hull. In addition, sonar reflections from the hull may
be evident in the records.
CAUTION!
Do not tow the tow vehicle with the nose angled up or down. Doing so can
degrade the sonar imagery. Verify that the tow vehicle is as level as
possible when towing it. Adjust the position of the tow arm so the towfish
is as level as possible.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 57

3-15
Figure 3-8: 4125 Tow Vehicle being Deployed
NOTE 1: For detailed towing characteristics for a number of tow cable
lengths and tow vehicle speeds, refer to APPENDIX C: TOWING
CHARACTERISTICS.
NOTE 2: For detailed information about the EdgeTech DISCOVER 4125
Side Scan Sonar software, including how to record data, refer to the
DISCOVER 4125 Side Scan Processor Software User’s Manual.
To deploy the tow vehicle:
1. With the survey vessel stopped or under way at up to two knots, slowly and carefully lower the
tow vehicle into the water, well away from the propeller. Do not let the tow vehicle strike the hull
of the survey vessel.
2. Lower the tow vehicle to a depth of about three meters, or just below the propeller wash.
3. Click the Towfish Control tab and select the range for each frequency. This tab is shown in Figure
3-5.
Page 58

3-16
3.13 Tow Vehicle Recovery
4. Click the Bottom Track tab on the Lower Control panel. This tab is shown in Figure 3-9.
Figure 3-9: Bottom Track Tab
5. On the Bottom Track tab make the required settings to track the bottom (check the TrackBottom
and Tracking Indicator boxes) and note the tow vehicle altitude in the Altitude display. Refer to
the DISCOVER software manual for details on setting up bottom tracking.
6. Lower the tow vehicle such that its altitude is 10–15% of the range selection.
7. Increase the survey vessel speed to the desired survey speed and adjust the amount of cable out
such that the altitude of the tow vehicle remains at 10–15% of the range selection.
8. If a pressure sensor is installed, verify that the Pressure display indication is correct.
9. Secure the tow cable to the survey vessel.
10. Begin recording data.
3
CAUTION!
The following procedure is only meant as a general guide. Due to varying
condition, exact recovery methods will change and it is up to the end user
to modify their procedure to match the conditions they are working under.
1. To recover the tow vehicle:
2. Click the Towfish Control tab and clear the High Sonar On and Low Sonar On check boxes. This tab
is shown in Figure 3-5.
3. Slowly pull in the tow cable until the tow vehicle is just below the surface.
4. Slow the survey vessel speed to under two knots, or, if practical, put the survey vessel in neutral
while the tow vehicle is brought on board.
5. Retrieve the tow vehicle from the water and carefully lower it on deck.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 59

3-17
6. Turn off the POWER switch.
7. Disconnect the tow cable from the tow cable connector.
8. Install the dummy plug on the tow cable connector.
Refer to SECTION 4: MAINTENANCE on for instructions on how to clean and inspect the tow vehicle, tow
cable, and the underwater connectors after use.
Page 60

Page 61

4-1
SECT I ON 4 : MAINT ENANCE
4.1
Cleaning the 4125-P Portable Topside Processor
4.2
Inspecting and Cleaning the Connections
S
The 4125 Series Dual-frequency Side Scan Sonar System is ruggedly designed and built, and therefore
requires little maintenance. However, to ensure long-lasting, reliable service, some periodic maintenance
is recommended.
Maintenance on the 4125 Series Dual-frequency Side Scan Sonar System should be performed on a regular
basis, or as often as necessary, depending on use. However, most of the maintenance is performed after
each deployment and recovery cycle of the tow vehicle.
The 4125-P Portable Topside Processor requires minimal maintenance. However, the TOWCABLE
connector should be periodically lubricated, and the other connectors on the side panel should be
inspected regularly.
To inspect and clean the tow vehicle and the tow cable after use:
1. Wash down the tow vehicle and the tow cable with clean, fresh water. Be sure to remove any
debris on the tow vehicle body and tail fins.
2. Inspect the port and starboard transducer arrays, and thoroughly spray them to remove any
buildup of debris. If they exhibit any oily residue, clean them using a soft cloth, along with a mild,
non-abrasive detergent and water.
CAUTION!
Do not use harsh chemical detergents on the transducer arrays.
3. Inspect the tail fins for warping and replace them where necessary.
4. Inspect the shear pin and replace it if it is worn or damaged.
5. Dry the tow vehicle in shade, and when dry, store it in its case.
Regularly inspect the contacts on the male pins of each underwater connector in the tow vehicle and on
the tow cable for corrosion or oxidation. To remove any oxidation, rub the contacts lightly with 800 grit
emery cloth cut into strips equal to or less than the width of a contact. A pencil eraser can also be used
for this purpose. Clean the female sockets using a cotton swab and rubbing alcohol. A .22 caliber bore
brush with only nylon bristles can be used to remove light oxidation.
Page 62

4-2
4.3
Re-arming the Tow Vehicle
To extend the life and increase the reliability of the connectors, apply a thin film of silicone dielectric
grease, such as Novagard G624 general purpose silicone grease or an equivalent, to the entire surface of
each male pin. A small amount of grease should also be applied to the opening of each female socket. Use
only a small amount, as packing too much grease will cause a hydraulic lock, preventing the connectors
from being properly mated.
NOTE: Remember to always install dummy connectors on the
connectors of the tow cable and the tow vehicle tow cable connector.
4
Should the shear pin snap, the tow vehicle must be rearmed with a new one. Spare shear pins and
retaining clips are in the spares kit. Be sure to use a plastic shear pin from the spares kit. Use of a metal
shear pin is not recommended unless it is the only available option. A metal pin may not shear if the tow
vehicle hits an obstruction or becomes snagged, resulting in the loss of the tow vehicle should the tow
cable break.
In addition, when the tow cable connector on the tow vehicle pulls out during recovery from a snag, it
exposes the live tow cable contacts to seawater. Immediately deactivate the system if this happens to
prevent electrolysis on the connector pins. Always check the female tow cable connector and tow fish
connector for any evidence of damager prior to rearming the tow vehicle. If any oxidation is present, the
tow cable may have to be re-terminated.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 63

5-1
SECT I ON 5 : TROUBL ESHOO T ING
5.1
Restoring the Operating System to the Hard Drive
5.2
Disassembling and Reassembling the Tow Vehicle
S
This section includes instructions on how to disassemble and reassemble a tow vehicle should internal
components need replacing. In addition, some troubleshooting procedures are included to assist in
identifying and correcting possible setup or operational problems should they occur.
A USB drive is provided in order to back up the system, and then restore it in the unlikely event of its
failure. For instructions on how to perform both of these procedures, refer to APPENDIX B: PRINTERS.
The procedures below describe how to disassemble and reassemble a tow vehicle to access and remove
the electronics chassis. The tools required are a 1/8-inch Allen wrench and a Phillips screw driver.
WARNING!
High voltages that can cause injury or death are present in the tow
vehicle. Turn off the topside processor and disconnect the tow cable
before disassembling the tow vehicle.
CAUTION!
Opening the electronics chassis may void the user’s warranty unless
preapproved by EdgeTech. Contact EdgeTech Customer Service before
opening the chassis.
Page 64

5-2
5.2.1
Disassembly
Transducer
array section
Screw (8)
Electronics
bottle
section
Figure 5-1: Tow Vehicle Parts of Note
Figure 5-2: Electronics Bottle and Transducer Array
5
To disassemble the tow vehicle:
1. Place the tow vehicle on a clean, dry, flat
surface.
2. Remove the eight screws that secure the
electronics bottle section to the transducer
array section of the tow vehicle.
3. Pull the two sections apart far enough to be
able to access the connectors inside.
Sections Separated
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 65

4. Disconnect the three cables from the
Figure 5-3: Cables Disconnected from the Electronics
Figure 5-4: Removing the Phillips Head Screws from the
electronics bottle.
5-3
5. Remove the two Phillips head screws from
the electronics bottle. These screws are
located under the “Void if Removed” labels.
6. Remove the electronics chassis from the
electronics bottle by pulling the electronics
bottle connector end cap straight out as
shown in Figure 5-5.
7. Lay the electronics chassis on a clean, flat
surface.
Bottle
Electronics Bottle
Page 66

5-4
5.2.2
Reassembly
Electronics
bottle connector
end cap
Figure 5-5: Removing the Electronics Chassis from the
8. If it is desired to reconnect the tow cable
connector for troubleshooting and test
purposes, place the electronics chassis
alongside the transducer array of the tow
vehicle and reconnect the connectors.
Electronics Bottle
WARNING!
With the tow vehicle powered, high voltages that can cause injury or
death are present on the electronics chassis. Use caution when working
on the electronics chassis with the tow vehicle powered.
5
Before reassembling the tow vehicle, replace O-Rings with new ones from the accessories kit.
When installing a new O-ring, first clean the O-ring surfaces on both the housing and the end cap with a
paper towel, and then apply a light coating of silicone lubricant to the new O-ring around its entire surface
before installing it. If no scratches, nicks, or dirt are found when cleaning the O-ring, leave it installed and
apply a light coat of silicone grease only.
To reassemble the tow vehicle, reverse the disassembly procedure.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 67

5-5
5.3
Calibrating the Compass
5.3.1
Entering the Known Magnetic Deviation
5
The compass in the tow vehicle is factory calibrated to magnetic north. To provide a more accurate target
location, however, it is necessary to enter the known magnetic deviation for the survey location into the
compass to obtain true north.
To enter the known magnetic deviation:
The COM3 window opens.
1. Activate the system and connect to the tow vehicle through the remote desktop connection with
IP address 192.9.0.101.
2. Close the Sonar.exe window on the desktop.
3. Using the remote desktop program Choose
Start/Programs/Accessories/Communications/HyperTerminal.
4. In the Connect To dialog box, select COM3 from the Connect Using drop-down list box, and then
click OK.
5. In the Port Settings dialog box, click Restore Defaults.
6. Select 19200 from the Bits per second drop-down list box, and then click OK.
7. Confirm that there are compass data being received in the COM3 window as shown in Figure 5-6
on page 5-8.
8. Press <Esc>, and then uppercase "Q."
9. Enter the declination angle to correct for deviation. The value is in 10x degrees and ranges from -
1800 to 1800. For example, enter -150 for -15.0 degrees and 92 for 9.2 degrees.
10. Close HyperTerminal and start sonar.exe.
If it is suspected that the heading information is not accurate, the compass should be re calibrated.
Calibrating the compass requires a flat, easily-rotated, continuously-level platform on which to lay the tow
vehicle. Mark the four cardinal points (0, 90, 180, and 270 degrees) on the platform using a hand-held
compass.
There are two compass calibration procedures: "hard iron" and "soft iron." Hard iron calibration cancels
out the effects of magnetized ferrous materials near the compass for all three magnetic sensing elements:
X, Y, and Z. Soft iron cancels out the effects of non-magnetized ferrous materials. The hard iron calibration
should be performed first, followed immediately by the soft iron calibration.
Page 68

5-6
5.3.2
Hard Iron Calibration
5
To perform the hard iron calibration:
The COM3 window opens.
1. Set up the platform with the tow vehicle on it well away from any metal objects, such as buildings
or cars.
2. Activate the system.
3. Verify that the platform remains level to within a degree when rotating it 360 degrees by
observing the Pitch and Roll displays.
4. Close the Sonar.exe window on the desktop.
5. Using the remote desktop program Choose
Start/Programs/Accessories/Communications/HyperTerminal.
6. In the Connect To dialog box, select COM3 from the Connect Using drop-down list box, and then
click OK.
7. In the Port Settings dialog box, click Restore Defaults.
8. Select 19200 from the Bits per second drop-down list box, and then click OK.
9. Confirm that there are compass data being received in the COM3 window as shown in Figure 5-6.
10. Press <Esc>, and then uppercase "C."
11. Slowly rotate the tow vehicle at least 360 degrees, taking at least 20 seconds to do so, and
stopping the calibration by pressing the Space bar when "….." is observed in the COM3 window
as shown in Figure 5-7.
12. Turn the tow vehicle 90 degrees on its side such that the towing arm is parallel to the platform.
13. Press <Esc>, and then uppercase "Z."
14. Slowly rotate the tow vehicle at least 360 degrees, taking at least 20 seconds to do so, and
stopping the calibration by pressing the Space bar when "….." is observed in the COM3 window
as shown in Figure 5-8.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 69

5-7
Figure 5-6: The COM3 Window in Hyper Terminal
Figure 5-7: Hard Iron X Y Calibration Complete
Page 70

5-8
5.3.3
Soft Iron Calibration
Figure 5-8: Hard Iron Z Calibration Complete
5
To perform the soft iron calibration:
1. Return the tow vehicle to its upright position.
2. Press <Esc>, and then "$."
NOTE: Double check that the nose of the tow vehicle is the north
reference and not 180 degrees off.
3. Select option 2, and then follow the screen prompts using the compass as shown in Figure 5-9 to
ensure accurate alignment as follows:
x Align platform exactly north, 0 degrees, and then press the Space bar.
x Align exactly east, 90 degrees, and then press the Space bar.
x Align exactly south, 180 degrees, and then press the Space bar.
x Align exactly west, 270 degrees, and then press the Space bar.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 71

5-9
5.4
General Troubleshooting
Figure 5-9: Soft Iron Calibration Screen Prompts
4. Align the tow vehicle with each of the cardinal points again, one at a time, while observing the
Heading display. Verify that the heading is accurate at each point.
5. Exit from Hyperterminal.
6. Double-click the Sonar.exe icon ( ) on the desktop, or turn the tow vehicle power off and then
on again.
The Sonar window will open again.
5
Should some operational or performance problems occur with the 4125 Series Dual-frequency Side Scan
Sonar System, it may be possible to correct them using the troubleshooting guides in the following pages.
For the 4125-P Portable Topside Processor, a tabular troubleshooting guide is provided in Table 5-1, and
for the 4125 Tow Vehicle, in Table 5-2.
These troubleshooting guides identify some symptoms that could occur, and present one or more possible
causes, along with the recommended corrective action for each. Perform the corrective action for any
given symptom in the order of probable causes, which generally corresponds to the degree of
troubleshooting difficulty, from the simple to the more complex.
Before proceeding with any corrective action, verify that the topside processor is plugged into an
appropriate AC or DC power source and that the processor is switched on.
Page 72

5-10
5.5
4125-P Portable Topside Processor Troubleshooting
No power and the POWER
indicator is off.
The POWER switch is not
on.
Verify that the POWER switch is
turned on.
No AC power.
Verify that the topside processor is
connected to 90–260 VAC, 50/60 Hz
power. Check the AC power source.
No DC power.
Verify that the topside processor is
connected to 12
–24 VDC power.
The 5-amp fuse on the side panel of
the topside processor is blown.
Check the fuse for continuity.
Replace if necessary.
5.6
4125 Tow Vehicle Troubleshooting
No sonar data.
The tow cable is faulty.
Check the tow cable. Repair or
replace the cable if it is damaged.
The ETHERNET cable is faulty.
Check the ETHERNET cable. Repair
or replace the cable if it is damaged.
The tow vehicle does not respond
to commands.
NET: ON is displayed in the
DISCOVER 4125 Status bar.
Disconnected ETHERNET cable.
Verify that the ETHERNET cable is
properly connected.
No power to the topside processor.
Verify that topside
processor is
connected to power.
The network is not set up correctly.
Verify that the IP address of the
ETHERNET Adapter in the laptop
computer is set to 192.9.0.99.
Poor connection between the tow
vehicle and the topside processor.
Click Start on the Windows desktop,
and then click Run and enter "cmd"
in the Open text box. At the
command prompt enter "ping
192.9.0.101." If the response is
"reply from 192.9.0.101…", then the
connection is good. If the response
is "Request timed out.”, then the
5
NOTE: Be sure to also verify that all the cables on the topside processor
and the tow vehicle are mated and are not loose or damaged. Most
causes of operational or performance problems are a result of poor
connections.
SYMPTOM PROBABLE CAUSE CORRECTIVE ACTION
turned
Table 5-1: Topside Processor System Troubleshooting Guide
SYMPTOM PROBABLE CAUSE CORRECTIVE ACTION
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 73

SYMPTOM PROBABLE CAUSE CORRECTIVE ACTION
tow vehicle is not connected or the
IP address is misconfigured. If the
response is “Hardware error.”, then
there is no connection to the
topside processor.
Poor electrical contacts inside the
tow vehicle or the topside
processor.
Contact EdgeTech Customer Service
for assistance.
Distortion and noise in the port
and starboard images.
Noise or interference from the
ship’s wake.
Check if the tow vehicle is in the
ship’s wake. If it is, reposition it
away from the wake.
Interference from
sounder.
Turn off the ship’s echo sounder.
The shear pin is fractured.
Check the shear pin for damage.
Replace it if it is.
One or more fins are missing,
damaged or obstructed.
Inspect the tow vehicle fins.
Remove any debris and repair
or
replace any damaged fins.
GPS data are not displayed in the
DISCOVER 4125 Status bar.
The GPS is not connected to the
laptop computer.
Verify that the GPS is connected to
the laptop computer.
Incorrect selection or setup of the
GPS serial port on the
computer.
Use HyperTerminal to verify that
the navigation string is being input
on the correct serial port. If not,
choose the correct serial port in
DISCOVER and configure it in
accordance with the GPS serial
interface requirements.
Obstruction
antenna.
Remove the obstruction. Also verify
that the antenna is not close to the
ship’s antenna.
5.7
Tow Cable Inspection
the ship’s echo
5-11
above the GPS
laptop
Table 5-2: 4125 Tow Vehicle Troubleshooting Guide
5
If you think cable or connector has malfunctioned, perform the following three simple cable inspections:
x Check for cable twisting.
x Check the external jacket.
x Perform a point to point continuity test of the conductors.
Inspect whether any part of cable was bent beyond the allowable radius. The minimum bending radius of
tow cable used with the 4125 Series Dual-frequency Side Scan Sonar System is 6 inches. The cable may
suffer damage when the cable is wound or twisted with less than this radius.
Page 74

5-12
5.7.1
Locating a Shorted Conductor
5.7.2
Locating an Open Conductor
Also, do not severely twist the cable, as this may cause damage to the molded section of the cable and
connector. If the tow vehicle becomes snagged during towing and is rotated excessively, damage to the
connector may have resulted. Test the cable before using to prevent additional damage.
5
The presence of a shorted or open conductor in a tow cable can be determined by using a multimeter.
To locate a shorted or open conductor:
R1+R2 =_______________
R1+Rs =_______________
R2+Rs =_______________
1. Disconnect both cable ends.
2. Short the two connector pins (or conductors if un-terminated) of the shorted pair at both ends
and measure the total resistance between the ends.
3. Remove the shorts.
4. Measure the resistance between a shorted pair on one end with an ohmmeter on the Rx1 scale.
5. Measure the resistance from the other end.
6. Add the measurements in Step 4 and 5 above, subtract the measurement in Step 2, and divide
the result by 2.
Rs =_________________
7. Subtract the value in Step 6 from the measurements in Step 4 and 5.
R1 =_________________
R2 =_________________
The distance to the short from end #1 is the ratio of R1/(R1+R2) times the total cable length. Recheck
from end #2 which is R2/(R1+R2) times the cable length.
An open conductor in a tow cable is much more difficult to locate than a short. Therefore a capacitance
bridge is recommended to diagnose this problem. Measuring the capacitance from the open conductor
to the shield on both ends allows two different capacitance readings to be recorded. This represents a
direct ratio related to cable length and distance of break from each end.
Before cutting the cable, double-check the same ratio of capacitance using an adjacent good conductor in
a multi-conductor cable. Capacitance may vary from conductor to conductor, depending on their
separation.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 75

5-13
5.7.3
Locating a Resistance Breakdown
5.7.4
Damaged Tow Cable Connector
5.8
Part Numbers for Major Topside Components
DESCRIPTION, PART NUMBER
ASSY POWER BOARD 4125 MOD MODEM, 0009300
POWER SUPPLY CHASSIS SW AC
WIRELESS BRIDGE / SWITCH, 0007470
CIRCUIT PROTECT HOLDER FUSE 5X20MM 5A 250V, 0003728
CIRCUIT PROTECT HOLDER FUSE BLADE 15A 32V FAST, 0009587
Most breaks occur around the tow cable termination, or where a previous repair has been made. A cable
break may be found or confirmed by laying out the cable and then attaching an ohmmeter across each
end of the open conductor. Flex the cable first near the termination or repaired section, and then along
its entire length until the break is reached. When flexing, the ends of the broken conductor may touch,
giving a continuity reading on the meter.
5
Insulation breakdown is the most difficult fault to locate. Cable leakage is not necessarily located near the
end terminations. However, the area near each termination receives the most abuse and is, therefore,
subject to suspicion. Cutting the cable end until leakage disappears will prove successful in many cases.
CAUTION!
Prior to cutting the cable for any of the above reasons, a careful visual
examination should be made for any signs of physical damage.
With both ends disconnected, the tow cables should measure between 100 Mega-ohms and infinity
between conductors with a 500 VDC Meg ohmmeter. When using a Simpson 260 Multi-meter, all cables,
conductor-to-conductor or conductor-to-shield, should measure infinity. Any leakage on the multi-meter
indicates cable leakage.
The tow vehicle includes a safety release mechanism which prevents the vehicle from being snagged.
When the release trips, the tow cable connection to the fish disconnects, exposing the high-voltage pins
to seawater. Pin corrosion will start to occur as long as power is still applied. If the power is not
immediately removed, there may be permanent damage to the connector. Should this happen, the tow
cable will require re-termination.
The major 4125-P Portable Topside Processor components and their part numbers are listed below:
-DC 88-264 INPUT 24 OUTPUT 13A 312W, 0007469
Page 76

5-14
DESCRIPTION, PART NUMBER
ASSY SUB CABLE POWER AC 4125P, 0002531
ASSY CABLE 4125 DC POWER, 0007478
LAPTOP PC DI
ASSY SUB CABLE 4125 ETHERNET OUTPUT, 0008563
PLATE BAFFLE 4125P AL, 0007676
PCB ASSY TOP POWER SEP 4125 TOPSIDE, 0008564
ASSY SUB MODEM 4125 VDSL ZYTEL LED CONNECTION, 0009299
5.9
Part Numbers for Major Tow Vehicle Components
DESCRIPTION, PART NUMBER
W/O ADDITIONAL
TELEMETRY OPTION
W/ ADDITIONAL TELEMETRY
OPTION
400/900 kHz
600/1600 kHz
400/900 kHz
600/1600 kHz
NOSE END CAP 4125 LT SS, 0008546
NOSE 4125 SS, 0007536
TUBE FRONT 4125 GEN2 SS, 0007540
TAIL CONE 4125, 0007543
FIN TAIL 4125 316 SS, 0007542
THUMBSCREW 4125 TAIL END CAP 316 SS, 0007545
HARDWARE WASHER STD 0.562 INCH ID 1.375 INCH OD
RUBBER, 0007197
RAIL TOW LONG 4125 SHORT CABLE 316 SS, 0008370
RAIL TOW SHORT 4125 SHORT CABLE 316 SS, 0008371
PIN SHEAR 4125
0007538
HARDWARE SHACKLE BOW 5/16 SB 216 316 SS, 0006635
EDGETECH, 0009897
Table 5-3: Part Numbers for Major 4125-P Topside Processor Components
5
The major 4125 Tow Vehicle components and their part numbers are listed below:
X X
X X
X X X X
X X X X
X X X X
X X X X
X X X X
X X X X
X X X X
TOW FISH 0.25 INCH DIA DELRIN,
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
X X X X
X X X X
Page 77

5-15
DESCRIPTION, PART NUMBER
W/O ADDITIONAL
TELEMETRY OPTION
W/ ADDITIONAL TELEMETRY
OPTION
400/900 kHz
600/1600 kHz
400/900 kHz
600/1600 kHz
DUCER SIDE SCAN RX
0008529
DUCER SIDE SCAN RX
0007559
ASSY CABLE 4125
0008531
ASSY KIT ACCESSORY 4125, 0007606
ASSY SUB CABLE RECOVERY 4125 LT 23 INCH, 0007696
ASSY SUB CABLE RECOVERY 4125 19 INCH, 0008532
GROMMET,PUSH
ASSY
ASSY SONARPRO 4125 LT 600
ASSY SONARPRO 4125 400
ASSY SONARPRO 4125 600
CONN DUMMY PLUG WETMATE 06 POS FEMALE, 0003869
CONN LOCKING
FMCDLS
HARDWARD SHACKLE ANCHOR 4125 316 SS, 0006633
KONTRON CPU 0014080
-SP 400-850 KHZ 4125 SP 300M,
-SP 540-1600 KHZ 4125 SP 300M,
EXTENSION POWER/TELEMETRY,
X X X X
X X
X X
-IN,.5"ID,1-1/16OD, 0007728 X X X X
SONARPRO 4125 LT 400-900 KHZ, 0007831 X
-1600 KHZ, 0007832 X
X X
X X
X X X X
-900 KHZ, 0007580 X
-1600 KHZ, 0007691 X
X X X X
SLEEVE CIRC FEMALE BLACK MCDLS-
-F, 0004065
X X X X
X X X X
X X X X
Table 5-4: Part Numbers for Major 4125 Tow Vehicle Components
Page 78

Page 79

A
A P P E N D I X A : B A C K U P A N D R E S T O R E
A.1 Backing up the System Drive
A.2 Restoring the System Drive
The following section outlines the procedures for backing up and restoring the system drive.
To back up the system drive:
1. Insert image disk into USB slot and boot the computer.
2. To enter setup, press F2 for laptops or Del for rack-mount systems.
3. Go to Boot and change HDD BBS Priorities.
4. Highlight option 1 and change to Image Disk.
5. Confirm Boot Option Priorities are set to DVD, then Image Disk.
6. Save and Exit.
A-1
Paragon software will load:
7. Click Cancel under Confirm Network (if applicable).
8. Select Post-mortem Backup, and then click Next.
9. Ensure all check boxes below are checked (First hard disk track & Master book record & OS Part
(C:)
10. Click Next, and then select save data to local/network drives.
11. Click Next, and then select Recovery Media OR Group # PC# (if reusing a flash drive).
12. Name archive group, product, and s/n. Then click next.
13. Insert the date for the comment (e.g., 2/23/2013). Then click next.
14. You have now successfully backed up the system.
1. Insert the Image Disk into USB slot and boot computer.
2. Press F2 for laptops and Del for rack-mount systems.
3. Go to Boot and change HDD BBS Priorities.
4. Highlight option one and change to Image Disk
5. Confirm Boot Option Priorities are set to DVD, then Image Disk.
6. Save and Exit.
Page 80

A-2
Paragon software will load:
7. Click Cancel under Confirm Network (if applicable).
8. Click Post-mortem Restore.
9. Select Recovery Media, and Product and s/n.
10. Click Next.
11. Select Basic MBR Hard Disk number and click Next.
12. Select the drive to restore the archive to and click Next.
13. Do not select any options and click Next.
14. Click Yes, Apply these Changes Physically.
15. Click Next.
16. After the restore is complete, reboot the PC and right click on Computer>Properties.
If you have internet access, do the following:
17. Set the direct LAN connection to automatic and connect ETHERNET cable.
18. Click the Change Windows Key
19. Type the correct ID.
20. Activate this ID and affix sticker to the rear of the computer.
21. Reset the direct LAN connection to 192.9.0.99.
22. Set the wireless connection to 192.9.0.100, and rename it, removing the wireless number.
23. Rename the computer to product type-xxxxx.
If you do not have Internet access, call 888-725-1047. This is the direct number to Windows 7 Professional
Activation help.
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 81

B-1
A P P E N D I X B : P R I N T E R S
A
Printers connect to the 4125 Rack Mount Topside Processor and 4125-P Portable Topside Processor via
an ETHERNET cable. The user-supplied computer connects to the printer via ETHERNET.
The following ETHERNET-only printers work well with the 4125 Series system:
x iSys V 8.5 ETHERNET
x iSys V12 ETHERNET
x Ultra 200 HD
x Ultra 120 HD
x ESP HSP 100 ETHERNET
x EPC 1086 NT ETHERNET
x EPC 1086
x TDU 850
x EPC 9206
x Geoprinter 975
NOTE: EdgeTech Topsides support the ETHERNET-only Printers listed
above. Consult manufacturer’s operating manual for printer
requirements and set up.
Page 82

Page 83

C-1
A P P E N D I X C : T O W I N G C H A R A C T E R I S T I C S
C.1 4125 Standard Towfish Cable Layback Plots
A
This section includes graphical plots representing the towing characteristics of the 4125 Tow Vehicle for
various cable lengths, tow vehicle speeds, and tow vehicle depths. These plots are available for equipment
selection purposes only. In addition, when selecting a particular plot, it should be verified prior to being
used for detailed survey planning.
The plots contained within this document have been generated under the following conditions/
assumptions:
x Sea State = 0 (no vessel heave motion)
x Ocean current = 0
x Solutions are for steady state Tow Vessel Speeds (2 to 8 knots, 1 kt increments)
x Cables Examined: .40” Soft Tow Cable (207551)
x Cable lengths 50m to 150m
Ocean currents will be a factor for virtually all cases in which the system is used. By following the simple
procedure below the existing plots can be used for predicting the tow fish depth when ocean currents are
present (assuming the ocean current is uniform with depth).
Tow Vessel moving into the current:
Tow Fish Relative Speed = Tow Vessel Speed + Ocean Current
Example: Tow Vessel Speed - 5kts, Ocean Current 1 kt, Tow Fish Relative Speed = 6 kts; Use the 6
kts data curve in the graphs listed within
Tow Vessel moving with the current:
Tow Fish Relative Speed = Tow Vessel Speed - Ocean Current
Example: Tow Vessel Speed - 5kts, Ocean Current 1 kt, ->Tow Fish Relative Speed = 4 kts; Use the
4 kts data curve in the graphs listed within
Page 84

C-2
Tow Vessel
Direction
Ocean Current
Direction
CONFIGURATION # TOWFISH TOW CABLE LENGTH (M)
1 4125 50
2 4125 100
3 4125 150
4 4125 + 15 lb. Keel Weight 50
5 4125 + 15 lb. Keel Weight 100
6 4125 + 15 lb. Keel Weight 150
7 4125 + Depressor Wing 50
8 4125 + Depressor Wing 100
9 4125 + Depressor Wing 150
10 4125 + 15 lb. Keel Weight + Depressor Wing 50
11 4125 + 15 lb. Keel Weight + Depressor Wing 100
12 4125 + 15 lb. Keel Weight + Depressor Wing 150
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 85

C
C.1.1 Config. 1: 4125, 207551 Cable - 50m Long
C-3
0
-5
6 kts
-10
-15
-20
5 kts
4 kts
3 kts
Tow Cable Shape & Tow Fish Position
Depth (m )
-25
-30
2 kts
Kevlar Tow Cable - p/n 207551,
Length - 50m
-35
-40
-55 -50 -45 -40 -35 -30 -25 -20 -15 -10 -5 0
Position Aft of Tow Vessel (m)
0
Tow Cable Length vs Depth
Tow Fish - 4125
-5
6 kts
-10
-15
-20
5 kts
4 kts
3 kts
Depth (m)
-25
-30
2 kts
Kevlar Tow Cable - p/n 207551,
Length - 50m
-35
-40
0 5 10 15 20 25 30 35 40 45 50 55
Tow Fish - 4125
Cable Length (m)
Page 86

C-4
C.1.2 Config. 2: 4125, 207551 Cable - 100m Long
C
0
-5
-10
-15
-20
-25
6 kts
5 kts
4 kts
3 kts
Tow Cable Shape & Tow Fish Position
Depth (m )
-30
-35
Kevlar Tow Cable - p/n 207551,
-40
2 kts
-45
-50
-110 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0
Position Aft of Tow Vessel (m)
0
Tow Cable Length vs Depth
Length - 100m
Tow Fish - 4125
-5
-10
-15
-20
-25
6 kts
5 kts
4 kts
3 kts
Depth (m)
-30
-35
-40
-45
-50
0 10 20 30 40 50 60 70 80 90 100 110
Kevlar Tow Cable - p/n 207551,
Length - 100m
Tow Fish - 4125
2 kts
Cable Length (m)
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 87

C
C.1.3 Config. 3: 4125, 207551 Cable - 150m Long
C-5
0
-10
6 kts
5 kts
-20
4 kts
-30
Depth (m)
-40
-50
3 kts
2 kts
Tow Cable Shape & Tow Fish Position
Kevlar Tow Cable - p/n 207551,
Length - 150m
-60
-70
-160 -140 -120 -100 -80 -60 -40 -20 0
0
Position Aft of Tow Vessel (m)
Tow Cable Length vs Depth
Tow Fish - 4125
-10
-20
-30
Depth (m )
-40
-50
Kevlar Tow Cable - p/n 207551,
Length - 150m
-60
-70
0 20 40 60 80 100 120 140 160
Tow Fish - 4125
Cabl e Length (m)
6 kts
5 kts
4 kts
3 kts
2 kts
Page 88

C-6
C.1.4 Config. 4: 4125 + 15 lb. Keel Weight, 207551 Cable - 50m Long
C
0
-5
-10
-15
-20
-25
6 kts
5 kts
4 kts
Tow Cable Shape & Tow Fish Position
3 kts
Depth (m)
-30
-35
2 kts
Kevlar Tow Cable - p/n 207551,
Length - 50m
Tow Fish - 4125 +15 lbf Wt
-40
-45
-50
-55 -50 -45 -40 -35 -30 -25 -20 -15 -10 -5 0
Position Aft of Tow Vessel (m)
0
-5
-10
-15
-20
-25
Tow Cable Length vs Depth
6 kts
5 kts
4 kts
3 kts
Depth (m)
-30
Kevlar Tow Cable - p/n 207551,
-35
-40
-45
-50
0 5 10 15 20 25 30 35 40 45 50 55
Length - 50m
Tow Fish - 4125 +15 lbf Wt
Cable Length (m)
2 kts
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 89

C
C.1.5 Config. 5: 4125 + 15 lb. Keel Weight, 207551 Cable - 100m Long
C-7
0
-10
6 kts
5 kts
-20
4 kts
-30
3 kts
Depth (m)
-40
Tow Cable Shape & Tow Fish Position
Kevlar Tow Cable - p/n 207551,
-50
-60
-70
-100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0
2 kts
Position Aft of Tow Vessel (m)
Length - 100m
Tow Fish - 4125 +15 lbf Wt
0
-10
-20
-30
Depth (m)
-40
Tow Cable Length vs Depth
Kevlar Tow Cable - p/n 207551,
-50
-60
-70
0 10 20 30 40 50 60 70 80 90 100
Length - 100m
Tow Fish - 4125 +15 lbf Wt
Cable Length (m)
6 kts
5 kts
4 kts
3 kts
2 kts
Page 90

C-8
C.1.6 Config. 6: 4125 + 15 lb. Keel Weight, 207551 Cable - 150m Long
C
0
-10
6 kts
-20
5 kts
-30
Depth (m)
-40
-50
4 kts
3 kts
Tow Cable Shape & Tow Fish Position
Kevlar Tow Cable - p/n 207551,
Length - 150m
Tow Fish - 4125 +15 lbf Wt
-60
2 kts
-70
-160 -140 -120 -100 -80 -60 -40 -20 0
Position Aft of Tow Vessel (m)
0
-10
-20
-30
Depth (m)
-40
-50
Kevlar Tow Cable - p/n 207551,
Tow Cable Length vs Depth
Length - 150m
Tow Fish - 4125 +15 lbf Wt
-60
-70
0 20 40 60 80 100 120 140 160
Cable Length (m)
6 kts
5 kts
4 kts
3 kts
2 kts
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 91

C
C.1.7 Config. 7: 4125 + Depressor Wing, 207551 Cable - 50m Long
C-9
0
-5
-10
-15
-20
-25
6 kts
5 kts
Depth (m )
-30
-35
-40
-45
-50
-55 -50 -45 -40 -35 -30 -25 -20 -15 -10 -5 0
Tow Cable Shape & Tow Fish Position
4 kts
3 kts
2 kts
Kevlar Tow Cable - p/n 207551,
Length - 50m
Tow Fish - 4125 +Depressor
Position Aft of Tow Vessel (m)
0
-5
-10
-15
-20
-25
Depth (m)
-30
-35
-40
-45
-50
0 5 10 15 20 25 30 35 40 45 50 55
Kevlar Tow Cable - p/n 207551,
Length - 50m
Tow Fish - 4125 +Depressor
Tow Cable Length vs Depth
6 kts
5 kts
4 kts
3 kts
2 kts
Cable Length (m)
Page 92

C-10
C.1.8 Config. 8: 4125 + Depressor Wing, 207551 Cable - 100m Long
C
0
-10
-20
6 kts
-30
Depth (m)
-40
-50
5 kts
4 kts
3 kts
Tow Cable Shape & Tow Fish Position
Kevlar Tow Cable - p/n 207551,
2 kts
-60
-70
-110 -100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0
0
Position Aft of Tow Vessel (m)
Tow Cable Length vs Depth
Length - 100m
Tow Fish - 4125 + Depressor
-10
-20
6 kts
-30
Depth (m)
-40
-50
Kevlar Tow Cable - p/n 207551,
Length - 100m
-60
-70
0 10 20 30 40 50 60 70 80 90 100 110
Tow Fish - 4125 + Depressor
Cabl e Length (m)
5 kts
4 kts
3 kts
2 kts
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 93

C
C.1.9 Config. 9: 4125 + Depressor Wing, 207551 Cable - 150m Long
C-11
0
-10
-20
-30
-40
-50
Depth (m)
-60
6 kts
5 kts
4 kts
3 kts
Tow Cable Shape & Tow Fish Position
Kevlar Tow Cable - p/n 207551,
-70
-80
-90
-160 -140 -120 -100 -80 -60 -40 -20 0
2 kts
Position Aft of Tow Vessel (m)
0
Tow Cable Length vs Depth
Length - 150m
Tow Fish - 4125 + Depressor
-10
-20
-30
-40
-50
Depth (m )
-60
-70
Kevlar Tow Cable - p/n 207551,
Length - 150m
Tow Fish - 4125 + Depressor
-80
-90
0 20 40 60 80 100 120 140 160
Cabl e Length (m)
6 kts
5 kts
4 kts
3 kts
2 kts
Page 94

C-12
C.1.10 Config. 10: 4125 + 15 lb. Keel Wt. + Dep. Wing, 207551 Cable -
50m
C
0
-5
-10
-15
-20
-25
Depth (m)
-30
-35
-40
6 kts
Tow Cable Shape & Tow Fish Position
5 kts
4 kts
3 kts
2 kts
Kevlar Tow Cable - p/n 207551,
Length - 50m
Tow Fish - 4125 + 15lbf +Depressor
-45
-50
-55 -50 -45 -40 -35 -30 -25 -20 -15 -10 -5 0
Position Aft of Tow Vessel (m)
0
-5
-10
-15
-20
-25
Depth (m)
-30
-35
Kevlar Tow Cable - p/n 207551,
Tow Cable Length vs Depth
6 kts
5 kts
4 kts
3 kts
Length - 50m
-40
-45
-50
0 5 10 15 20 25 30 35 40 45 50 55
Tow Fish - 4125 + 15lbf +Depressor
Cable Length (m)
2 kts
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 95

C
C.1.11 Config. 11: 4125 + 15 lb. Keel Wt. + Dep. Wing, 207551 Cable -
100m Long
C-13
0
-10
-20
6 kts
-30
Depth (m)
-40
-50
5 kts
4 kts
3 kts
Tow Cable Shape & Tow Fish Position
Kevlar Tow Cable - p/n 207551,
Length - 100m
Tow Fish - 4125 + 15lbf +Depressor
-60
-70
-100 -90 -80 -70 -60 -50 -40 -30 -20 -10 0
0
2 kts
Position Aft of Tow Vessel (m)
Tow Cable Length vs Depth
-10
-20
-30
Depth (m)
-40
-50
Kevlar Tow Cable - p/n 207551,
-60
-70
0 10 20 30 40 50 60 70 80 90 100
Tow Fish - 4125 + 15lbf +Depressor
6 kts
5 kts
4 kts
3 kts
Length - 100m
2 kts
Cable Length (m)
Page 96

C-14
C.1.13 Config. 12: 4125 + 15 lb. Keel Wt. + Depressor Wing, 207551 Cable
– 150m
C
0
-10
-20
-30
-40
Depth (m)
-50
-60
-70
-80
-160 -140 -120 -100 -80 -60 -40 -20 0
6 kts
5 kts
4 kts
3 kts
Tow Cable Shape & Tow Fish Position
Kevlar Tow Cable - p/n 207551,
Length - 150m
Tow Fish - 4125 + 15lbf + Depressor
2 kts
Position Aft of Tow Vessel (m)
0
-10
-20
-30
-40
Depth (m)
-50
-60
Kevlar Tow Cable - p/n 207551,
Tow Cable Length vs Depth
Length - 150m
-70
-80
0 20 40 60 80 100 120 140 160
Tow Fish - 4125 + 15lbf + Depressor
Cable Length (m)
6 kts
5 kts
4 kts
3 kts
2 kts
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 97

C-15
C.2 4125 Telemetry Towfish Cable Layback Plots
Tow Vessel
Direction
Ocean Current
Tow Vessel
C
The plots contained within this document have been generated under the following conditions/
assumptions:
x Sea State = 0 (no vessel heave motion)
x Ocean current = 0
x Solutions are for steady state Tow Vessel Speeds (2 to 8 knots, 1 kt increments)
x Cables Examined: .375” Soft Tow Kevlar (23080), .25” Double Armored (A304874), .32” Double
Armored (A320327), .45” Double Armored (A302799)
x Cable lengths 50m to 600m
Ocean currents will be a factor for virtually all cases in which the system is used. By following the simple
procedure below the existing plots can be used for predicting the tow fish depth when ocean currents are
present (assuming the ocean current is uniform with depth).
Tow Vessel moving into the current:
Tow Fish Relative Speed = Tow Vessel Speed + Ocean Current
Ex: Tow Vessel Speed - 5kts, Ocean Current 1 kt, ->Tow Fish Relative Speed = 6 kts; Use the 6 kts
data curve in the graphs listed within
Tow Vessel moving with the current:
Tow Fish Relative Speed = Tow Vessel Speed - Ocean Current
Ex: Tow Vessel Speed - 5kts, Ocean Current 1 kt, ->Tow Fish Relative Speed = 4 kts; Use the 4 kts
data curve in the graphs listed within
Direction
Direction
Page 98

C-16
CONFIGURATION #
TOWFISH
CABLE TYPE
LENGTH (M)
1
4125
23080 (.375” Kevlar)
50
2
4125
23080
100
3
4125
23080
200
4
4125
23080
300
5
4125 + 15 lb. Keel Weight
23080
50
6
4125 + 15 lb. Keel Weight
23080
100
7
4125 + 15 lb. Keel Weight
23080
200
8
4125 + 15 lb. Keel Weight
23080
300 9 4125 + Depressor Wing
23080
50
10
4125 + Depressor Wing
23080
100
11
4125 + Depressor Wing
23080
200
12
4125 + Depressor Wing
23080
300
13
4125 + 15 lb. Keel Weight + Depressor Wing
23080
50
14
4125 + 15 lb. Keel Weight + Depressor Wing
23080
100
15
4125 + 15 lb. Keel Weight + Depressor Wing
23080
200
16
4125 + 15 lb. Keel Weight + Depressor Wing
23080
300
17
4125
A304874 (.25” Armored)
50
18
4125
A304874
100
19
4125
A304874
200
20
4125
A304874
300
21
4125 + 15 lb. Keel Weight
A304874
50
22
4125 + 15 lb. Keel Weight
A304874
100
23
4125 + 15 lb. Keel Weight
A304874
200
24
4125 + 15 lb. Keel Weight
A304874
300
25
4125 + Depressor Wing
A304874
50
26
4125 + Depressor Wing
A304874
100
27
4125 + Depressor Wing
A304874
200
28
4125 + Depressor Wing
A304874
300
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
Page 99

C-17
CONFIGURATION #
TOWFISH
CABLE TYPE
LENGTH (M)
29
4125 + 15 lb. Keel Weight + Depressor Wing
A304874
50
30
4125 + 15 lb. Keel Weight + Depressor Wing
A304874
100
31
4125 + 15 lb. Keel Weight + Depressor Wing
A304874
200
32
4125 + 15 lb. Keel Weight + Depressor Wing
A304874
300
33
4125
A320327 (.32” Armored)
50
34
4125
A320327
100
35
4125
A320327
200
36
4125
A320327
300
37
4125
A320327
400
38
4125 + 15 lb. Keel Weight
A320327
50
39
4125 + 15 lb. Keel Weight
A320327
100
40
4125 + 15 lb. Keel Weight
A320327
200
41
4125 + 15 lb. Keel Weight
A320327
300
42
4125 + 15 lb. Keel Weight
A320327
400
43
4125 + Depressor Wing
A320327
50
44
4125 + Depressor Wing
A320327
100
45
4125 + Depressor Wing
A320327
200
46
4125 + Depressor Wing
A320327
300
47
4125 + Depressor Wing
A320327
400
48
4125 + 15 lb. Keel Weight + Depressor Wing
A320327
50
49
4125 + 15 lb. Keel Weight + Depressor Wing
A320327
100
50
4125 + 15 lb. Keel Weight + Depressor Wing
A320327
200
51
4125 + 15 lb. Keel Weight + Depressor Wing
A320327
300
52
4125 + 15 lb. Keel Weight + Depressor Wing
A320327
400
53
4125
A302799 (.45” Armored)
50
54
4125
A302799
100
55
4125
A302799
200
56
4125
A302799
300
Page 100

C-18
CONFIGURATION #
TOWFISH
CABLE TYPE
LENGTH (M)
57
4125
A302799
400
58
4125
A302799
500
59
4125
A302799
600
60
4125 + 15 lb. Keel Weight
A302799
50
61
4125 + 15 lb. Keel Weight
A302799
100
62
4125 + 15 lb. Keel Weight
A302799
200
63
4125 + 15 lb. Keel Weight
A302799
300
64
4125 + 15 lb. Keel Weight
A302799
400
65
4125 + 15 lb. Keel Weight
A302799
500
66
4125 + 15 lb. Keel Weight
A302799
600
67
4125 + Depressor Wing
A302799
50
68
4125 + Depressor Wing
A302799
100
69
4125 + Depressor Wing
A302799
200
70
4125 + Depressor Wing
A302799
300
71
4125 + Depressor Wing
A302799
400
72
4125 + Depressor Wing
A302799
500
73
4125 + Depressor Wing
A302799
600
74
4125 + 15 lb. Keel Weight + Depressor Wing
A302799
50
75
4125 + 15 lb. Keel Weight + Depressor Wing
A302799
100
76
4125 + 15 lb. Keel Weight + Depressor Wing
A302799
200
77
4125 + 15 lb. Keel Weight + Depressor Wing
A302799
300
78
4125 + 15 lb. Keel Weight + Depressor Wing
A302799
400
79
4125 + 15 lb. Keel Weight + Depressor Wing
A302799
500
80
4125 + 15 lb. Keel Weight + Depressor Wing
A302799
600
4125 SIDE SCAN SONAR SYSTEM 0004823_REV_C
 Loading...
Loading...