

Eaton EC4P-221-MTXD1, EC4P-221-MTXX1, EC4P-221-MRXD1, EC4P-221-MRXX1, EC4P-221-MTAD1 User guide
...
User Manual
Programmable Logic Controller
easyControl EC4-200
10/10 MN05003003Z-EN
replaces 01/08 AWB2724-1584GB

All brand and product names are trademarks or registered
trademarks of the owner concerned.
Emergency On Call Service
Please call your local representative:
http://www.eaton.com/moeller/aftersales
or
Hotline After Sales Service:
+49 (0) 180 5 223822 (de, en)
AfterSalesEGBonn@eaton.com
Original Operating Instructions
The German-language edition of this document is the original
operating manual.
Translation of the original operating manual
All editions of this document other than those in German language
are translations of the original German manual.
1
st
edition 2006, edition date 09/06
2
nd
edition 12/06
3
rd
edition 03/07
4
th
edition 01/08
5
th
edition 10/10
See revision protocol in the “About this manual“ chapter
© Eaton Industries GmbH, 53105 Bonn
Author: Peter Roersch
Production: Thomas Kracht, Barbara Petrick
Translation: OneWord
All rights reserved, including those of the translation.
No part of this manual may be reproduced in any form
(printed, photocopy, microfilm or any other process) or processed,
duplicated or distributed by means of electronic systems without
written permission of Eaton Industries GmbH, Bonn.
Subject to alteration without notice.

Danger!
Dangerous electrical voltage!
Before commencing the installation
• Disconnect the power supply of the device.
• Ensure that devices cannot be accidentally restarted.
• Verify isolation from the supply.
• Earth and short circuit.
• Cover or enclose neighbouring units that are live.
• Follow the engineering instructions (AWA) of the
device concerned.
• Only suitably qualified personnel in accordance with
EN 50110-1/-2 (VDE 0105 Part 100) may work on
this device/system.
• Before installation and before touching the device ensure
that you are free of electrostatic charge.
• The functional earth (FE) must be connected to the protective
earth (PE) or to the potential equalisation. The system installer
is responsible for implementing this connection.
• Connecting cables and signal lines should be installed so
that inductive or capacitive interference does not impair the
automation functions.
• Install automation devices and related operating elements in
such a way that they are well protected against unintentional
operation.
• Suitable safety hardware and software measures should be
implemented for the I/O interface so that a line or wire
breakage on the signal side does not result in undefined
states in the automation devices.
• Ensure a reliable electrical isolation of the low voltage for the
24 volt supply. Only use power supply units complying with
IEC 60364-4-41 (VDE 0100 Part 410) or HD 384.4.41 S2.
• Deviations of the mains voltage from the rated value must
not exceed the tolerance limits given in the specifications,
otherwise this may cause malfunction and dangerous
operation.
• Emergency stop devices complying with IEC/EN 60204-1 must
be effective in all operating modes of the automation devices.
Unlatching the emergency-stop devices must not cause restart.
• Devices that are designed for mounting in housings or control
cabinets must only be operated and controlled after they have
been installed with the housing closed. Desktop or portable
units must only be operated and controlled in enclosed
housings.
• Measures should be taken to ensure the proper restart of
programs interrupted after a voltage dip or failure. This should
not cause dangerous operating states even for a short time.
If necessary, emergency-stop devices should be implemented.
• Wherever faults in the automation system may cause
damage to persons or property, external measures must be
implemented to ensure a safe operating state in the event of
a fault or malfunction (for example, by means of separate limit
switches, mechanical interlocks etc.).
Eaton Industries GmbH
Safety instructions
I

II
10/10 MN05003003Z-EN
Contents
About this manual 7
List of revisions 7
Additional documentation 7
Reading conventions 8
1 Device application 9
EC4-200 part number overview 9
2 Setup 11
Inputs 11
– Function and cursor buttons as inputs 12
– Diagnostics inputs 12
– Inputs for high-speed counters 12
Outputs 13
Memory card (MCC) 13
– Memory card data 13
– Data access on the memory card 13
RUN/STOP/SF and CAN/NET LEDs 13
Real-time clock 14
Interfaces 14
– Programming interface for connection to a PC 14
– Multi-function interface (MFI) 14
– Cable connections 15
CAN/easyNet interfaces 16
3 Expansion units 17
Inputs 17
– Diagnostics inputs 17
Outputs 17
4 Mounting 19
Mounting on top-hat rail 19
Mounting on mounting plate 19
5 Installation 21
Connecting the power supply 21
Connecting digital inputs 21
Connecting analog inputs 21
– Setpoint potentiometers connection 22
– Temperature sensor connection 22
– Connecting the 20 mA sensor 22
Connecting a pulse transmitter/incremental encoder 23
– Connecting pulse transmitter 23
– Connecting the incremental encoder 23
Connecting outputs 24
– Connect relay outputs 24
– Connecting transistor outputs 25
– Connecting the analog output 26
Memory card, CAN/easyNet, PC connection 27
– Fitting or removing the memory card 27
– CAN/easyNet, PC connection 27
Connecting expansion devices/network modules 28
– Local expansion 28
– Remote expansion 28
1
Contents
10/10 MN05003003Z-EN
6Operation 29
Keypad 29
Selecting menus and entering values 29
Selecting or toggling between menu items 29
– Cursor display 29
– Setting values 29
Choosing the main and system menu 30
– Status display 30
– Status display with time 30
Menu structure 31
– Main menu without password protection 31
– Main menu with password protection 32
– System menu 32
– System menu 33
7 Description of settings 35
Password protection 35
– Password setup 35
– Selecting the scope of the password 35
– Activating the password 35
– Access with password protection 35
– Changing or deleting the password range 36
Changing the menu language 37
Setting date and time 37
Startup behaviour 37
– Setting the startup behaviour 37
Setting LCD contrast and backlight 38
8 Configuration of the inputs/outputs (I/O) 39
Representation of the inputs/outputs in the configuration 39
Displaying the local inputs/outputs 39
Changing the folder function 39
Displaying the inputs/outputs of the expansion devices 40
9Operation 41
General 41
– Overview of memory sizes 41
– Memory definition 41
Startup behaviour 41
– Startup behaviour with boot project on the memory
card 41
Setting the startup behaviour in the programming
software 43
Program START/STOP 43
– Program start (STOP l RUN) 43
– Behaviour after shutdown/interruption of the power
supply 43
–Program stop (RUN l STOP) 43
– Starting/stopping the program via external switch 44
Program processing and system time 44
Cycle time monitoring 44
Reset 44
– Warm reset 44
– Cold reset 44
–Hard Reset 44
– Restoring factory settings (factory set) 44
– Behaviour of variables after Reset 45
2
10/10 MN05003003Z-EN
Contents
Test and commissioning 45
– Breakpoint/single-step mode 45
– Single-cycle mode 45
– Forcing variables and inputs/outputs (Forcing) 45
– Status display in the programming software 45
High-speed counters (Counter) 45
– Counter functions (inputs/outputs) 46
Incremental input 47
– Explanation of the input/output signals (I/Q) 47
– Overview of input/output signals (I/Q) 48
– Functions of the input/output signals 48
– Referencing 48
System events 49
– START, COLD START, WARM START, STOP 49
– Interrupt inputs I1 … I4 50
– Counter interrupt 50
– Timer interrupt 50
Interrupt processing 52
– Steps for interrupt processing 52
– Example of interrupt processing 52
Direct I/O access 53
– Description of functions 53
Error code for “direct I/O access” 54
Generating and transferring a boot project 55
– Storing a boot project on a memory card 55
– Boot project and operating system (OS) on memory
card 55
– Erase boot project 55
Download/update operating system 56
– Transferring the operating system from the PC to the
PLC 56
– Transferring the OS from PC to the memory card 57
– Transferring the OS from the memory card to the
controller 57
10 Browser commands 59
– Setting Ethernet parameters 59
Description of important Browser commands 60
– canload 60
– setrtc 60
11 Libraries, function blocks and functions 61
Using libraries 61
Installing additional system libraries 61
EC4-200 specific functions 62
– EC_Util.lib library 62
– EC_Visu.lib/EC_Visu2.lib library 62
12 Connection setup PC – EC4-200 63
Connection setup via RS232 63
Defining/changing the PC’s communication settings 63
Changing the communication parameters (baud rate) of
the CPU 64
Connection setup via Ethernet 64
Scan/Modify the IP address 66
3
Contents
10/10 MN05003003Z-EN
13 Defining system parameters via the STARTUP.INI file 67
Overview 67
Structure of the INI file 67
Creating the Startup.INI file 67
Switching on the PLC with the fitted memory card
containing the Startup.INI file 67
Changing settings 68
Deleting the Startup.INI file 68
14 Programming:via a CANopen network (Routing) 69
Prerequisites 69
Routing features of the controller 69
Routing through XC200 69
Notes on routing 70
Setting the node ID/routing ID 70
Setting the master station 71
Setting the device station 71
PLC combinations for routing 72
15 RS232 interface in Transparent mode 73
16 Interactive display 75
Display form 75
– Switching between Status display and Entry/output
mode 75
– Function/function block overview 76
Description of important functions / function blocks 77
– FUNCTION Disp_EnableDisplay: BOOL (*Changing
Status display <-> Entry/output mode*) 77
– General programming procedure 80
– Example of text and values output 81
– Example of a screen output with texts and value
entries 83
Multifunction display MFD-CP4 on the EC4-200 86
–MFD setup 86
17 EC4-200 network modules 87
EASY205-ASI 87
– Cyclic data exchange 87
– Configuration 88
– Setting the station address 88
EASY221-CO, EASY204-DP, EASY222-DN 88
– Cyclic data exchange 88
– Configuration 89
– Setting the station address 89
– Acyclic data exchange 89
4
10/10 MN05003003Z-EN
Contents
Appendix 93
Network CAN/easyNet 93
– Accessories 93
Example program for PLC START/STOP using external
switch 94
easy800-PC-CAB connection cable 95
Dimensions and weight 95
Technical data 96
– Transistor outputs 101
– Analog output 103
Character sets 104
Index 107
The previous Chapter 17: "The easyNet network" and
h
Chapter 18: "Programming via easyNet (routing)“ are
omitted.
You will find this information in far greater detail in the
manual MN05006004Z-EN (previously 08/07 AWB2786-
1593) "Data transfer between easy and IEC PLCs
(easyNet)".
5

10/10 MN05003003Z-EN
6
10/10 MN05003003Z-EN
About this manual
List of revisions
The following significant amendments have been introduced since previous issues:
Edition date Page Keyword new Modification
12/06 87 EC4-200 network modules
03/07 9 Addition of types EC4P-222-… j
14 Ethernet interface j
15 Cable connections j
59 Browser commands for Ethernet j
67 Startup.INI mit with Ethernet entries j
104 Character sets j
01/08 29 Selecting or toggling between menu items j
33 System menu j
49 START, COLD START, WARM START, STOP j
50 Interrupt inputs I1 … I4 j
51 Timer interrupt j
87 Chapter 17: "The easyNet network" and
Chapter 18: "Programming via easyNet (routing)“
are omitted.
You will find this information in far greater detail in the manual
MN05006004Z-EN (previously 08/07 AWB2786-1593en)
" Data transfer between easy and IEC PLCs (easyNet)".
10/10 all Change to Eaton notation j
j
Additional documentation
At different points in this manual, references are made to more
detailed descriptions in other manuals. This documentation is
stored as a PDF file when the product CD is installed on your PC.
To find documentation choose the following in the Windows Start
menu:
Programs
l Moeller Software l easy Soft CoDeSys l
Documentation…
It is also possible to download the PDF files from the FTP server.
This always provides the latest data.
ftp://ftp.moeller.net/DOCUMENTATION/AWB_MANUALS/
Concrete information regarding communication with CAN stations
and their configuration can be found in the following listed
documentation:
• AN27K19GB: Communication between two PLCs using
network variables via CAN (AN2700K19GB.PDF)
• AN27K20GB: Coupling multiple stand-alone PLCs
(CAN-Device) via CANopen (AN2700K20GB.PDF)
• Engineering of CAN stations (AN2700K27GB.PDF)
(To be found in Windows start menu under Programs
l
Moeller Software l easy Soft CoDeSys l Application
examples…)
• MN05010001Z-EN (previously AWB2786-1554GB):
Library description CANUser.lib, CANUser_Master.lib.
The functions of the CANUser.lib and CANUser_Master.lib
libraries enable you to access CAN objects directly.
(To be found in Windows start menu under Programs
l
Moeller Software l easy Soft CoDeSys l Documentation…)
7
About this manual
Reading conventions
10/10 MN05003003Z-EN
Select ‹File
“File” menu.
h
h
i
j
For clarity of layout, we adhere to the following conventions in this
manual: at the top of left-hand pages you will find the Chapter
heading, at the top of right-hand pages the current Section
heading; exceptions are the first pages of Chapters and empty
pages at the end of Chapters.
r New› means: activate the instruction “New” in the
Draws your attention to interesting tips and
supplementary information.
Caution!
Warns of the risk of material damage.
Caution!
Warns of the possibility of serious damage and slight
injury.
Warning!
Indicates the risk of major damage to property, or serious
or fatal injury.
8
10/10 MN05003003Z-EN
1 Device application
The controllers of the EC4-200 series are programmable switching
and control devices. They can be used in domestic applications,
machine building and plant construction. An EC4-200 controller
can be used as a stand-alone controller or connected to remote
input/output devices via the CANopen interface. This interface also
allows you to communicate with other PLCs (with a CANopen
interface).
The EC4P-222-... controller types have an additional Ethernet
interface.
From version 2.0 of the operating system the controllers have the
following features:
• Connection of expansion devices/controllers via easyLink
• Connection of the MFD-CP4 multi-function display via the
multi-function interface
• Transparent mode via the multi-function interface
• Direct access to local I/O and the high-speed counters
• Integration in the easyNet network via the easyNet/
CAN interface
Controllers from version 2.10 can be connected to the ASI,
PROFIBUS-DP, CAN or DeviceNet networks with suitable network
interfaces.
The controller is programmed with the easySoft CoDeSys
programming software. This software should be installed on a
standard PC with the Windows NT, 2000 or XP operating system.
Further information on the software is provided in the manual for
the programming software (MN05010003Z-EN; previously
AWB2700-1437GB).
This software provides you with a simple entry in the IEC
programming languages such as:
• Instruction List (IL)
• Function Block Diagram (FBD)
• Ladder Diagram (LD)
• Structured Text (ST)
• Sequential Function Chart (SFC).
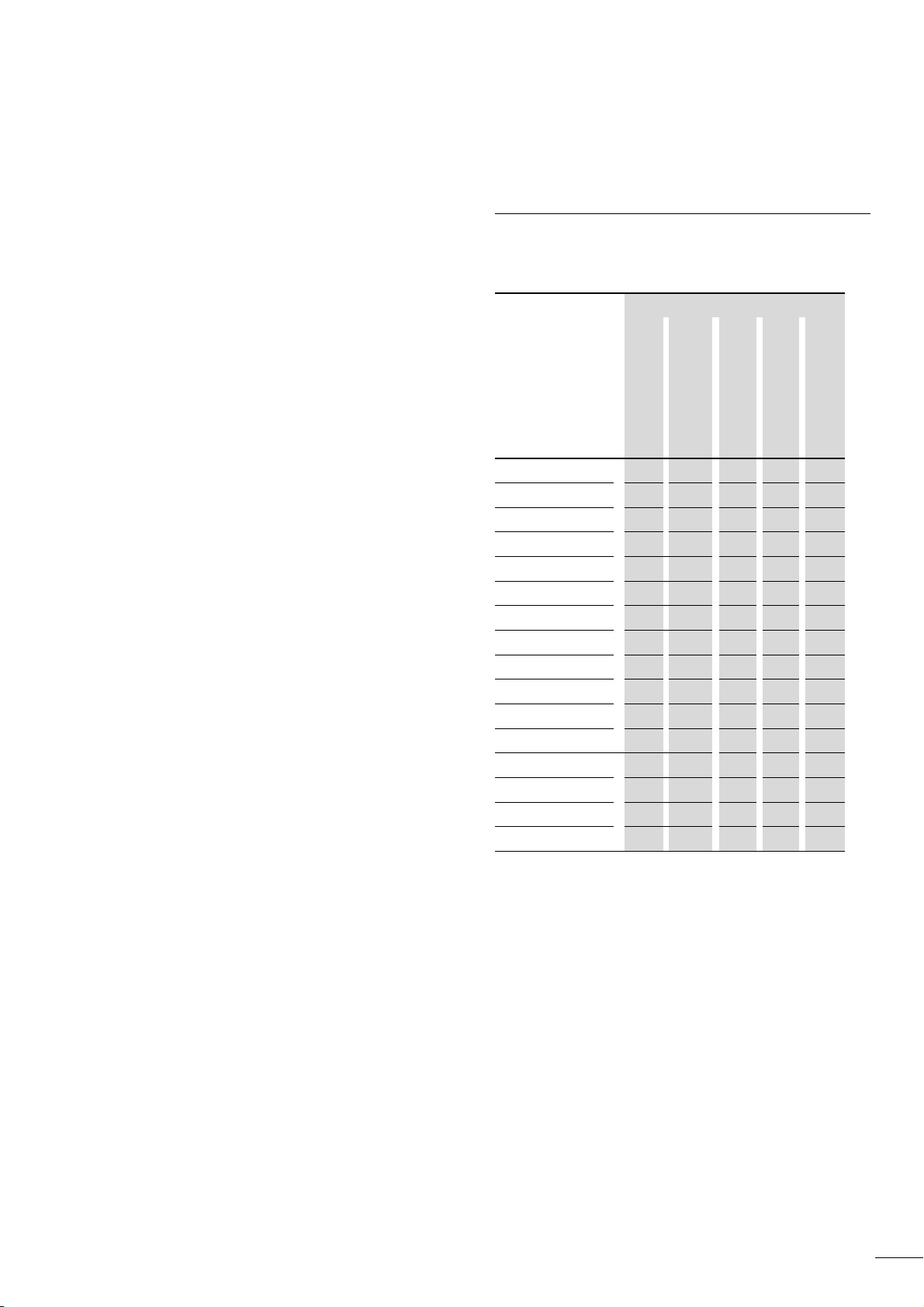
EC4-200 part number overview
The EC4-200 series contains controllers with different displays and
the type and number of inputs/outputs.
Part no. Features
Keys/display
Transistor outputs
EC4P-221-MTXD1 x 8 – – –
EC4P-221-MTXX1 – 8 – – –
EC4P-221-MRXD1 x – 6 – –
EC4P-221-MRXX1 – – 6 – –
EC4P-221-MTAD1 x 8 – x –
EC1P1-MTAX1 – 8 – x –
EC4P-221-MRAD x – 6 x –
EC4P-221-MRAX1 – – 6 x –
EC4P-222-MTXD1 x 8 – – x
EC4P-222-MTXX1 – 8 – – x
EC4P-222-MRXD1
EC4P-222-MRXX1 – – 6 – x
EC4P-222-MTAD1 x 8 – x x
EC1P1-MTAX1 – 8 – x x
EC4P-222-MRAD
EC4P-222-MRAX1 – – 6 x x
x – 6 – x
x – 6 x x
Relay outputs
Analog output
Ethernet connection
This provides a large number of operators such as:
• Logic operators such as AND, OR, …
• Arithmetic operators such as ADD, MUL, …
• Comparison operators such as <,=, >
You use the programming software to create, test and document
a project. Functions for analog processing, closed-loop control and
function blocks such as timers, counters simplify programming.
9

10/10 MN05003003Z-EN
10
10/10 MN05003003Z-EN
Q1 Q2 Q3 Q4 Q5 Q6
RUN
STOP
SF
CAN/
NET
e
abd
c
f
g
h
i
j
k
l
p
r
o
m
q
Q7 Q8Q5 Q6Q3 Q4Q1 Q2+24V 0V
RUN
STOP
SF
CAN/
NET
e
abd
f
g
h
i
j
k
l
p
r
o
n
q
c
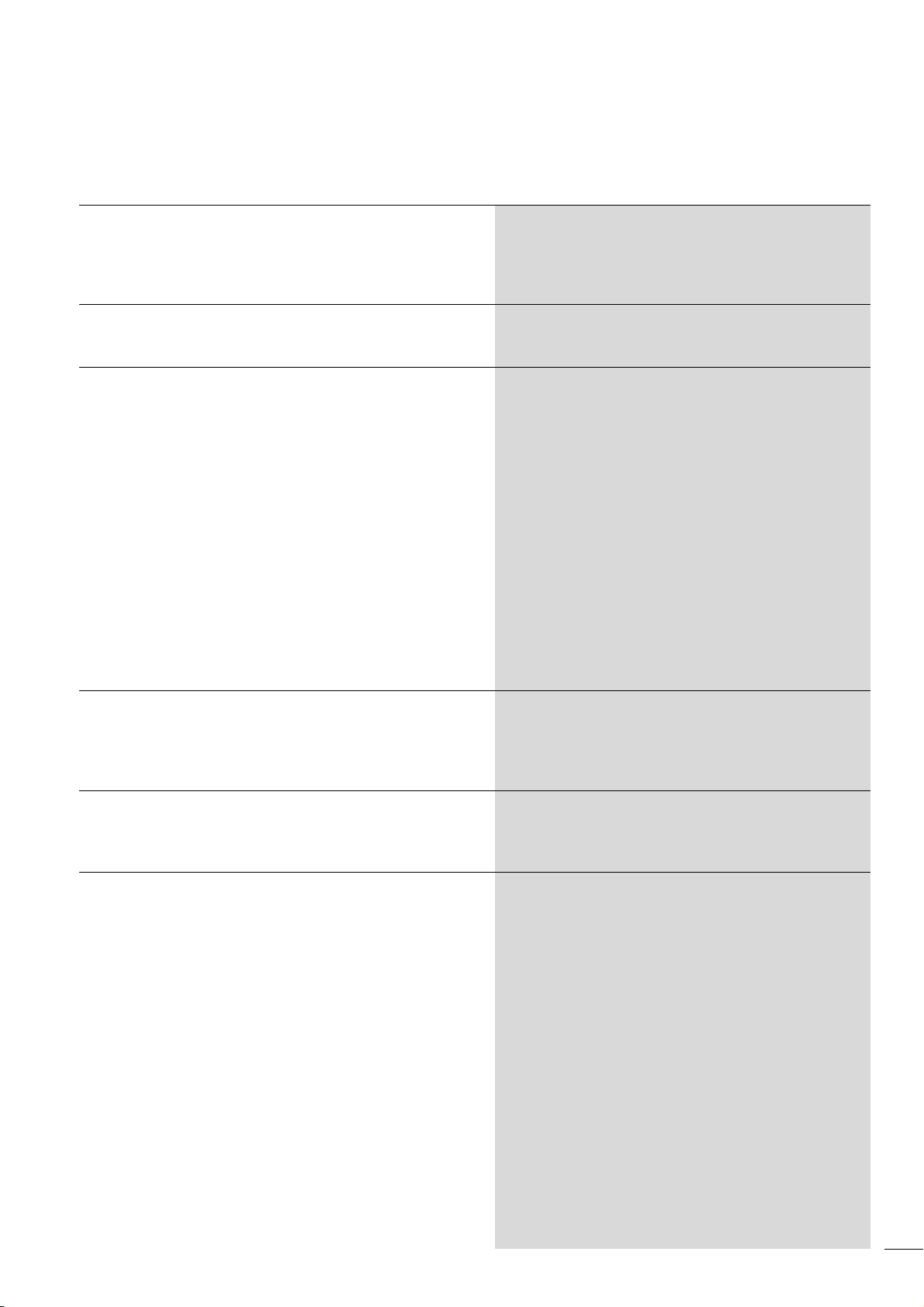
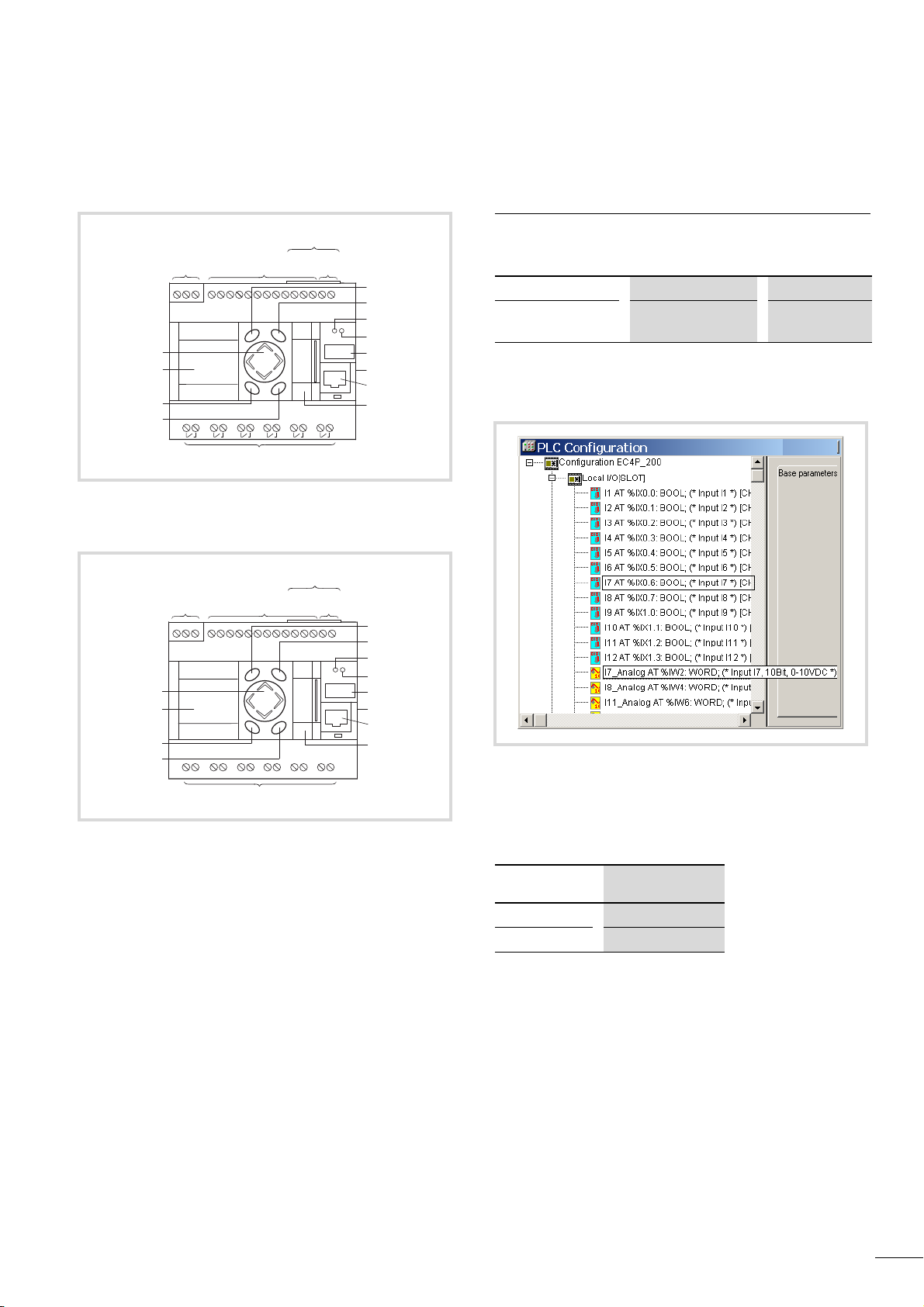
2Setup
Figure 1: Front of the EC4P-221-MRAD1,
Legend a figure 2
Inputs
Table 1: Type and number of inputs
Digital 12 (I1…I12) 24 V DC
of which can be used
4 (I7, I8, I11, I12) 24 V DC/0…10 V
as analog
Inputs I7, I8, I11, I12 can also be used as analog inputs. They are
selected in the user program by means of the appropriate syntax
used in the PLC configurator.
Figure 2: Front of the EC4P-221-MTAD1
a 24 V DC power supply
b Inputs
c Interface for connecting the CAN network
d Analog output, 0 – 10 V (not active)
e DEL button
f ALT button
g RUN/STOP/SF LED
h CAN/NET LED
i Field for device labelling
j easyLink interface to expansion device
k Programming interface for connection to a PC
l Multi-function interface
m Relay outputs
n Transistor outputs
o OK button
p ESC button
q LCD display (EC4P-22x-M…D1)
r Cursor buttons P1…P4 (rocker button)
Figure 3: Selection between digital and analog input, e.g. I7
When programming the inputs as digital inputs in the user
program, the input voltage of 8 V forms the limit value for the
TRUE/FALSE signals.
Voltage [V] State
F 8 FALSE
>8
Technical data:
TRUE
a page 96
Inputs I1, I2, I3, I4 can be used for:
• generating interrupts (inputs I1, I2, I3, I4)
• controlling high-speed counters such as:
– 16 or 32-bit counters, for counting pulses (I1, I2),
up/down counting
– Incremental counters, 32-bit, for processing the signals of an
incremental encoder (I1, I2, I3, I4).
The function is selected in the PLC configuration. However, several
functions cannot be used at the same time.
11

Setup
P2
OK
P3
ALT
P4
ESC
P1
DEL
10/10 MN05003003Z-EN
Example: If you are using input I1 for a high-speed counter (16bit), I2 can be used for another high-speed counter (16-bit) but not
for generating an interrupt. Inputs I3 and I4 likewise cannot be
used for generating an interrupt.
Connection description
a figure 22 on page 23.
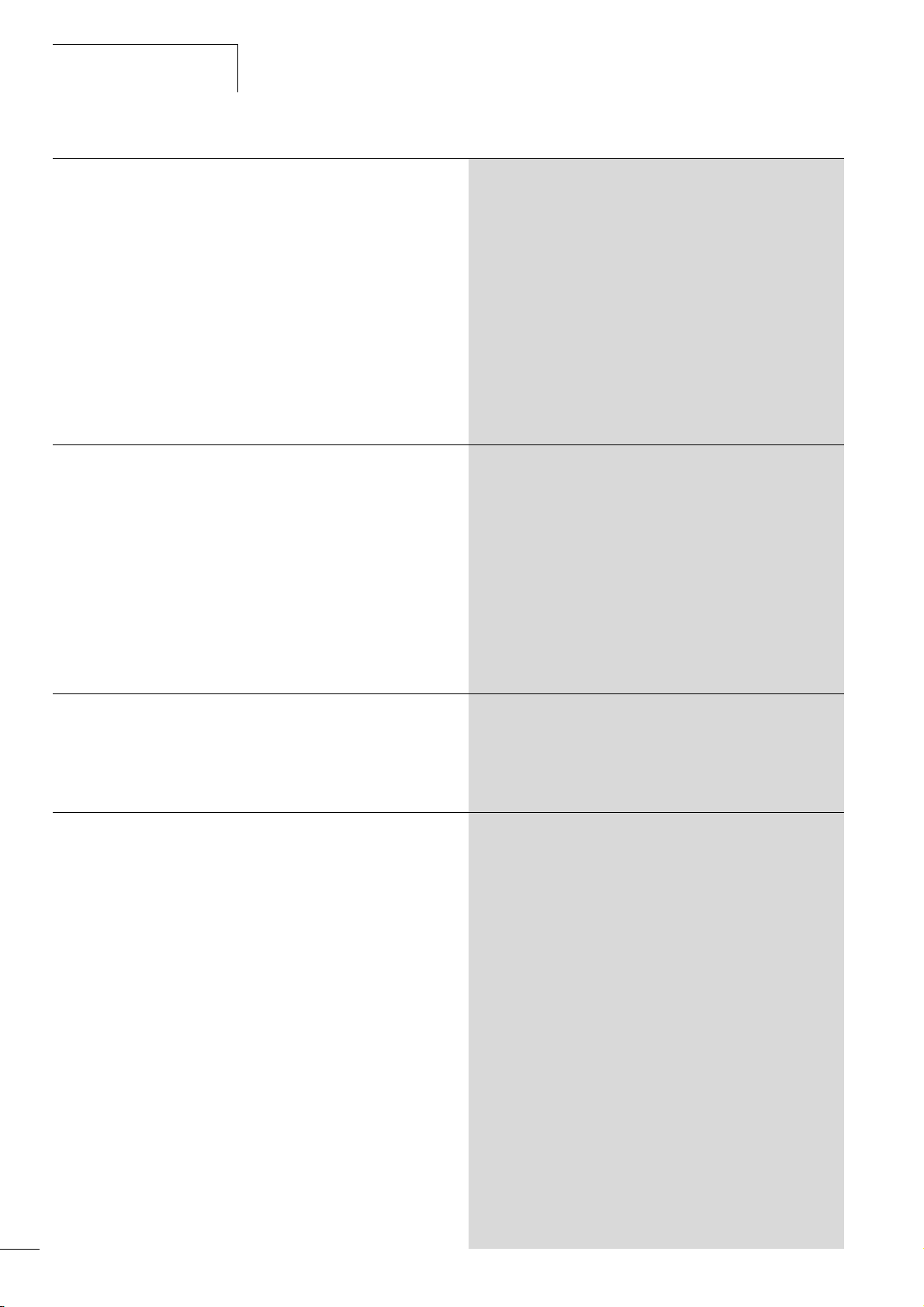
Function and cursor buttons as inputs
The front plate of the device is provided with the function buttons
DEL, ALT, ESC, OK which are arranged around the rocker switch.
The rocker switch is divided into 4 sections with the cursor button
designations P1 to P4. The function and cursor buttons are
represented in the PLC configuration as inputs. These inputs are
scanned in the program according to general syntax rules. Only
one button can be actuated at a time, otherwise uncontrolled
states may occur when these buttons are scanned.
Figure 4: Function buttons and rocker switch with cursor buttons
P1, P2, P3, P4
Diagnostics inputs
The inputs I13, I14, I15, I16 provide you with additional
information:
Input Function
I13 No function
I14 Expansion device via easyLink (not yet active in the
operating system version 1.x):
0: ok, 1: not ok
I15 Outputs Q1, Q2, Q3, Q4:
0: No short-circuit, 1: Short-circuit
I16 Outputs Q5, Q6, Q7, Q8:
0: No short-circuit, toggle: Short-circuit
The inputs can be scanned in the program with symbolic operands.
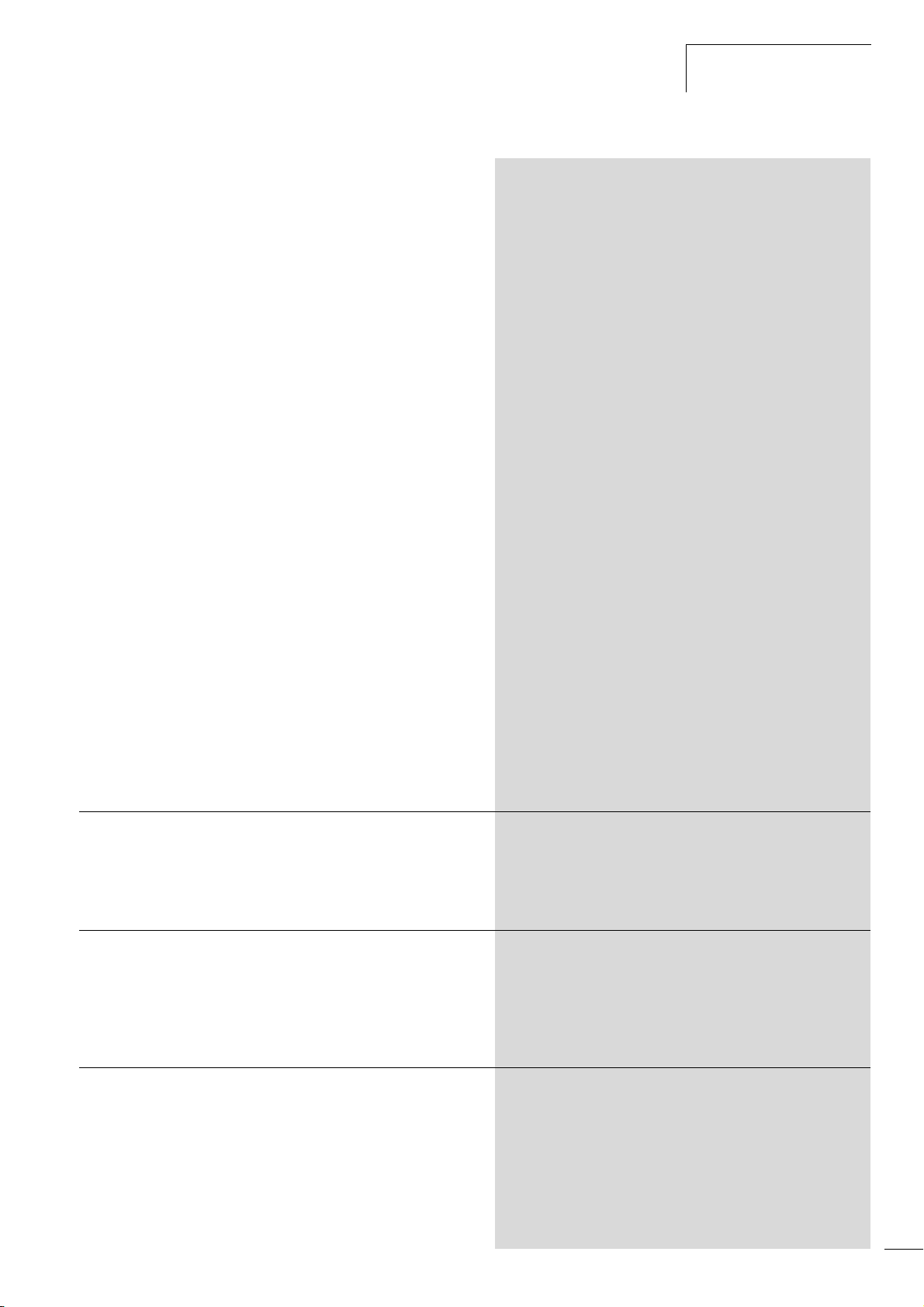
Inputs for high-speed counters
You can choose between several different functions:
•1 x 32-bit counter, for counting pulses (up/down)
•2 x 16-bit counters, for counting pulses (up/down); the count
direction (up/down) can be set via the DIRECTION operand in
the program.
•1 x incremental value counter, 32-bit, for processing the
signals of an incremental encoder; the count direction is set by
the edge sequence of the encoder.
Figure 5: Inputs of the rocker and function buttons
The GetDisplayInfo function block from the EC_Visu2.lib library
enables you to control the scanning of the buttons according to
the active menu on the controller,
a section
“EC_Visu.lib/EC_Visu2.lib library”, page 62.
You can select the counter type in the PLC configuration.
The function of the high-speed counter requires the setting of
inputs and the scanning of outputs in a POU, e.g. PLC_PRG.
This POU must not be called by an interrupt generated by a
counter.
For further information see section “High-speed counters
(Counter)”, page 45.
12

10/10 MN05003003Z-EN
Outputs
Outputs
Table 2: Type and number of outputs
EC4P-221/222-MT…
transistor outputs
EC4P-221/222-MR…
relay outputs
8 (Q1…Q8) 24 V DC/0.5 A
6 (Q1…Q6) 250 V AC/8 A
The transistor outputs are provided with a short-circuit monitoring
function. In the event that a short-circuit occurs at one of the
outputs, this is indicated via the diagnostics inputs I15/I16. I15 is
set to 1 if a short-circuit occurs at the outputs Q1 to Q4. Input I16
is toggled if a short-circuit occurs on Q5 to Q6.
Caution!
i
Scan I15/I16 in the program. In the event of a short-circuit
set the outputs to 0 in order to prevent the thermal
overload of the output circuit.
Memory card (MCC)
The memory card is used for data storage and supports the FAT16
file system.
Memory card data
On the memory card you can save the following data:
Data Transfer method
Boot project Browser command: copyprojtommc
Startup.INI file Browser command: createstartupini
Operating system (OS) Updating the OS, a page 56
Source code of the
project
General data Online mode/Online menu:
Online mode/Online menu: load source
code
Write file to PLC
Load file from PLC
A brief description of the browser commands is provided from
page 59.
Caution!
h
In order to avoid any loss of data, ensure that you have
closed all files of the program before removing / inserting
the memory card or switchingoff the power supply.
Data access on the memory card
RUN/STOP/SF and CAN/NET LEDs
After power up, the CPU can switch to the following states, as
indicated by the LEDs:
Table 3: LED status indicator
LED Meaning/CPU status
RUN/STP/SF CAN/NET
red red
orange orange
red off
red
flashing
orange off No user program present
green
flashing
green –
red – Cycle time exceeded
orange
flashing
red
flashing
1) LED is only relevant during startup/system test
1)
1)
red
flashing
– Load user program
–
red
flashing
System test being run (up to 6 seconds after
start; after 6 seconds if no user program is
present).
CPU in NOT READY!
1)
System update in progress
System test finished without error
System test found a fault
1)
CPU in NOT READY
CPU in STOP
Load user program
CPU in RUN
CPU in STOP
Continuous loop detected in program
CPU in STOP
Fatal error
If the CPU is in RUN status, the CAN/NET LED indicates the
following states:
Table 4: LED status signals for CAN/easyNet
LED Meaning
RUN/STP/SF CAN/NET
green off Communication not active
green red Bus status STOP
green orange
green green
Bus status PREOPERATIONAL
Station can be initialised, no transfer of
process data
Bus status OPERATIONAL
Process data transferred
Functions such as FileOpen or FileRead allow you to access the
files of the memory card from the user program. These functions
are provided in the library EC_File.lib and are described in the
Function Blocks manual (MN05010002Z-EN; previously
AWB2786-1456GB).
13
Setup
12345678
10/10 MN05003003Z-EN
Real-time clock
The PLC is provided with a real-time clock that can be accessed in
the user program via functions from the SysLibRTC library.
The functions are described in the PDF file „SysLibRTC“.
After the software is installed, this file can be opened via
<Programs
Documentation
l Moeller Software l easySoft CoDeSys l
l Automation Manuals>.
You can read and set with the browser commands “getrtc” and
“setrtc” respectively. More information is provided in section
“setrtc” on page 60.
During a voltage loss the clock is backed up for at least 72 hours.
Interfaces
Programming interface for connection to a PC
Communication between PLC and the programming device is
implemented via the programming interface, consisting of an RJ45
connector.
The connector is provided with an RS232 interface and an
additional Ethernet interface on the EC4P- 222-... PLC types for
programming.
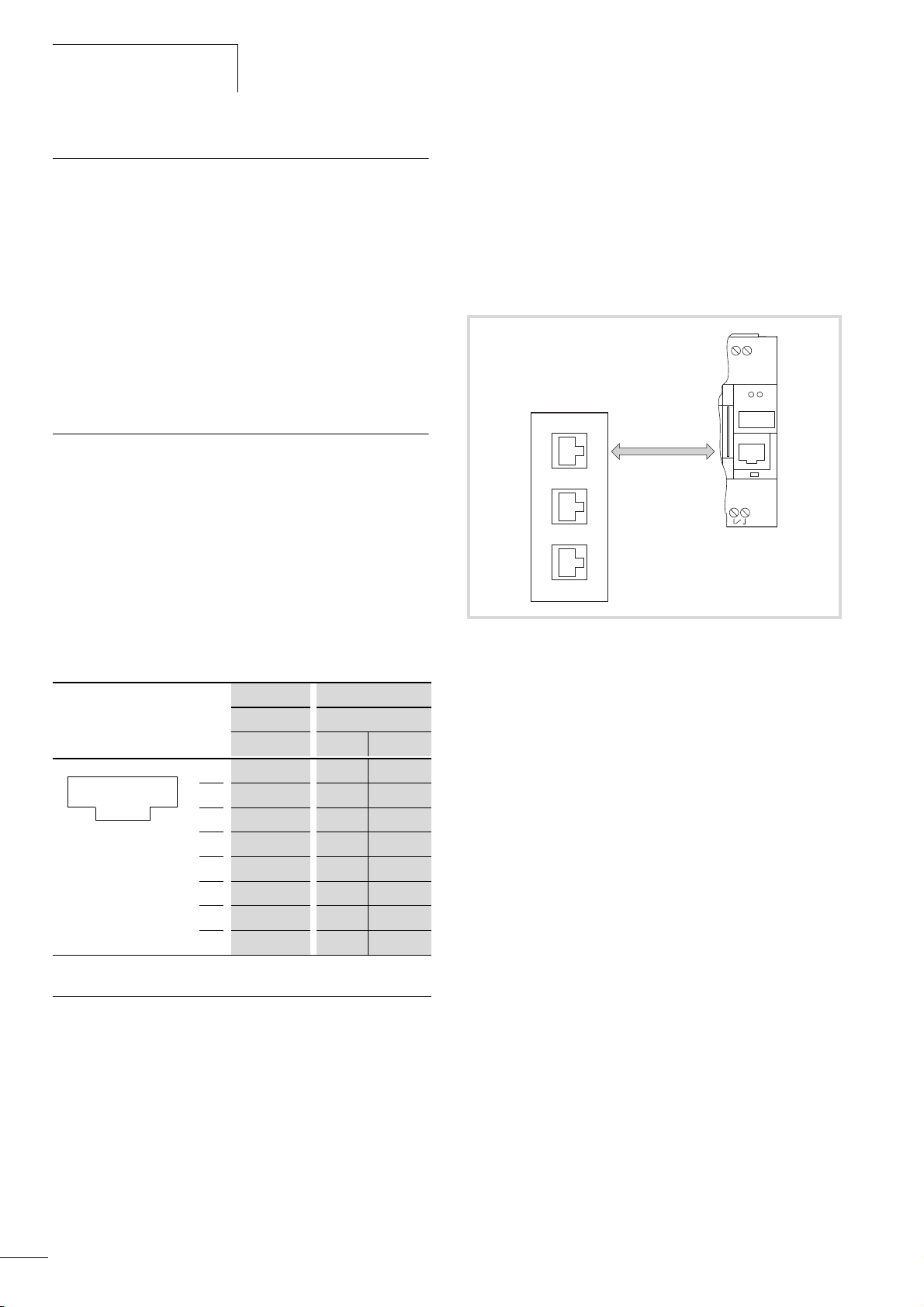
Splitting the RS232/Ethernet interface
Using a cable splitter XT-RJ45-ETH-RS232 you can communicate
simultaneously via the RS232 and the Ethernet interface.
The connection between the PLC and the cable splitter is
established using the EASY-NT-30/80/130 cable. The pin
assignment of the RS232 and Ethernet connector socket of the
cable splitter corresponds with the pin assignment of the
programming interface as shown in table 5.
RUN
CAN/
STOP
NET
SF
XT-RJ45-ETH-RS232
I
N
E
T
H
E
R
N
E
T
R
S
2
3
2
Figure 6: Connecting the PLC with XT-RJ45-ETH-RS232
EASY-NT-30/80/150
RJ45
RJ45
RJ45
Table 5: Signal assignment of the programming interface
EC4P-221… EC4P-222-…
Signal Signal
RJ45 RS232 RS232 Ethernet
1 – – Tx+
2 – – Tx-
3
– – Rx+
4 GND GND
1)
5 TxD TxD –
6
– – Rx-
7 GND GND
1)
8 RxD RxD –
1) The GND signal is not required for an Ethernet connection. Therefore
use a cable with unassigned terminal pins 4 and 7!
Transparent mode
In order to establish a point-to-point connection (without
handshake cables) to another device, switch the RS232 interface
to Transparent mode using the functions from the library
EC_SysLibCom.lib. In Transparent mode, the interface is
addressed as COM1.
a chapter “RS232 interface in Transparent mode”, page 73.
See also:
a section “CAN/easyNet, PC connection”, page 27
a chapter 12 „Connection setup PC – EC4-200“, page 63
Multi-function interface (MFI)
The controller can alternatively communicate with the following
devices via this interface:
•Memory card
The memory card should be fitted in an adapter which is then fitted
on this slot.
• MFD-CP4 multi-function display
The MFD is a display with HMI features that is mounted away from
the PLC. It displays the content of the PLC display. Integrated
buttons enable you to send signals to the controller and control
the processing of the program. The MFD can be mounted in a
control cabinet door up to 5 m away from the controller.
The devices are connected with the cable MFD-CP4-800-CAB5.
• Terminal/printer
A terminal enables you to display and enter alphanumeric
characters. A printer can also be used to output data. The terminal
is connected to the PLC via an RS232 interface using the EASY800PC-CAB cable. The cable with the components for adapting the
PLC signals must be provided with a separate power supply from
the terminal. The signals and pin assignment of the interface must
be implemented in compliance with the RS232 specification.
14
10/10 MN05003003Z-EN
RUN
STOP
SF
CAN/
NET
a
b
PC
(RS232)
c
d
RJ45
Interfaces
In order to supply the components in the cable, the RTS signal
device must be set in the (terminal) device,
a section “easy800-
PC-CAB connection cable” on page 95.
The RS232 interface that is addressed with COM2 must be set to
Transparent mode in order to send or receive data to or from the
terminal.
a chapter “RS232 interface in Transparent mode” on page 73.
The functions for opening and closing the interface and for
sending and receiving data are described in the library
EC_SysLibCom.lib.
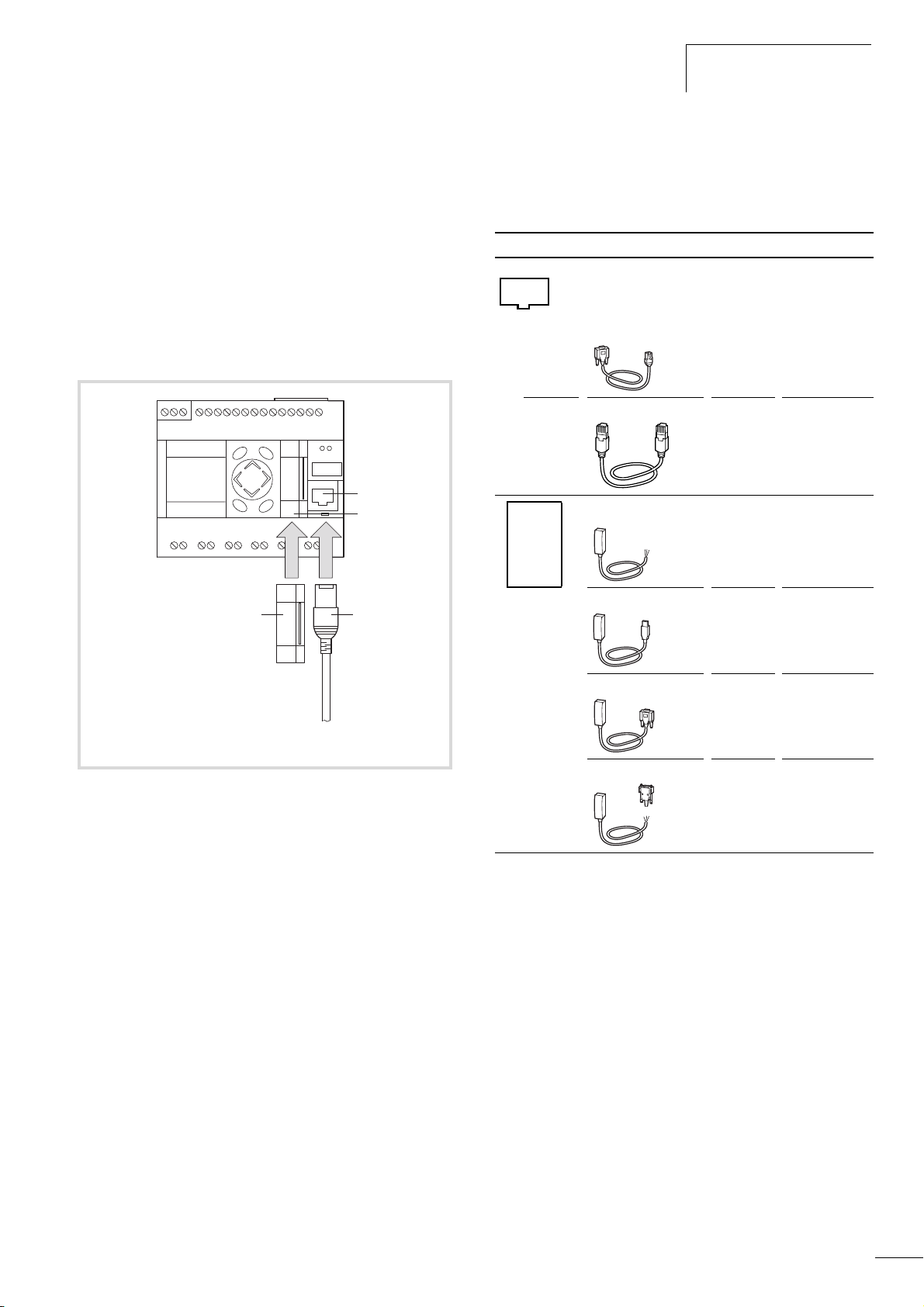
Cable connections
The following overview shows the cable types that can be
connected to the PLC and their functions.
Interface Cable type Device Function
RS232 EU4A-RJ45-CAB1 PC,
terminal/
printer
Ethernet XT-CAT5-X-2 PC Program
MFI MFD-CP4-800-CAB5 MFD-CP4 Display
easy800-USB-CAB PC Program
Program,
transparent
mode (COM1)
extension
Figure 7: Interfaces
a Programming interface for connection to a PC
b Multi-function interface
c Programming cable, e.g. EU4A-RJ45-CAB1
d Adapter with memory card or cable connection
easy800-PC-CAB Terminal/
printer
easy800-MO-CAB PC,
terminal/
printer
Transparent
mode (COM2)
Program,
transparent
mode (COM1)
15
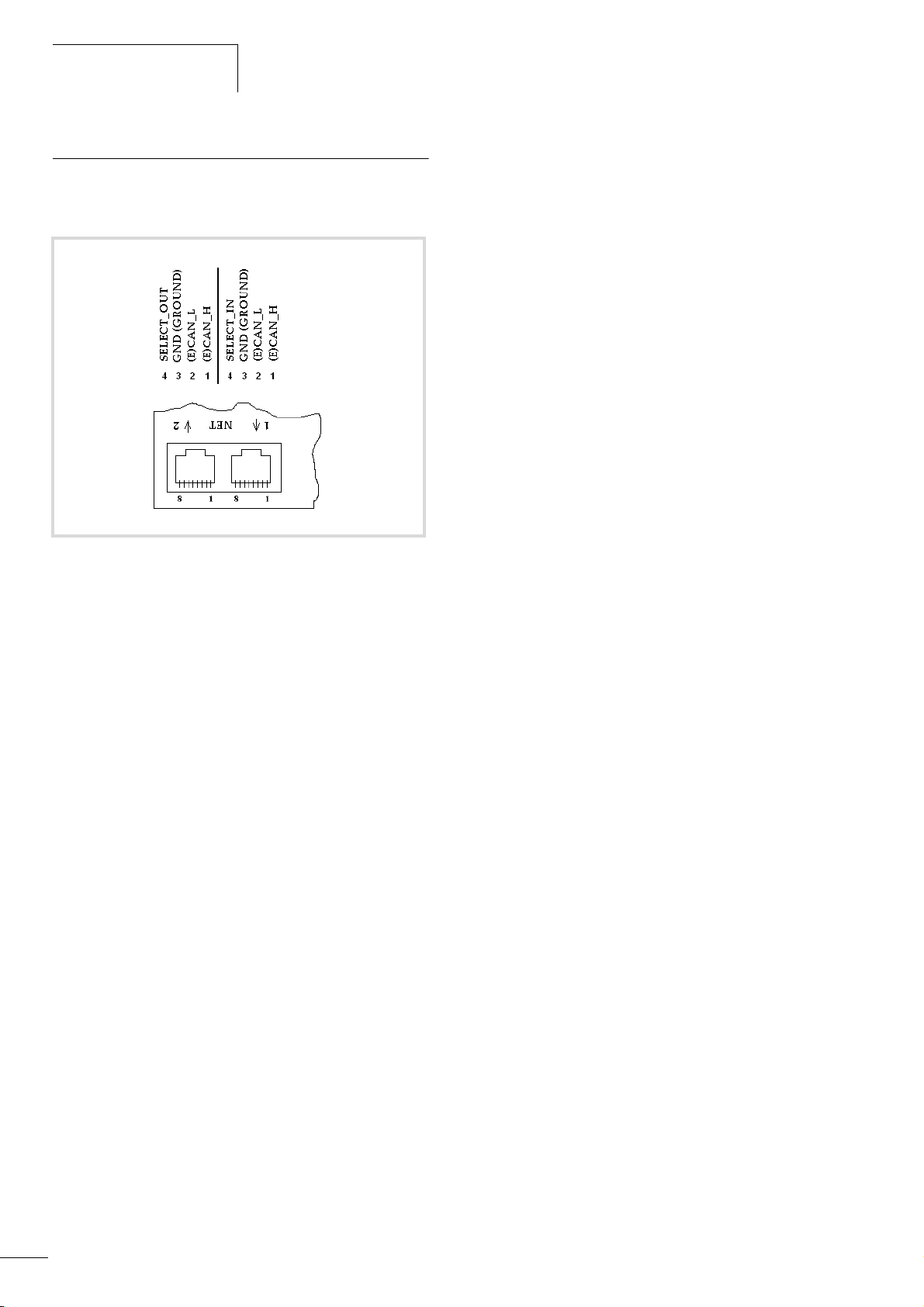
Setup
CAN/easyNet interfaces
The PLC is provided with a CAN/easyNET interface with two slots
that are internally connected via terminals.
10/10 MN05003003Z-EN
Figure 8: CAN/easyNet interfaces
CANopen
The CAN interface is designed as a CANopen interface in
compliance with the CIA specification DS301V4.0. The PLC can be
operated both as an NMT master as well as a CAN device on CAN
networks. When used as a CAN device the PLC requires an address
(= Node ID) for identification on the bus. Permissible node IDs are
1, … ,127. The configuration of the master and the device is
carried out in the PLC configuration.
a section “Network CAN/easyNet”, page 93.
16
10/10 MN05003003Z-EN
3 Expansion units
You connect the expansion devices directly to the PLC via the
easyLink interface. The following expansion devices can be used to
increase the number of PLC inputs and outputs.
Type overview of expansion devices
Part no. Supply
voltage
connection
EASY618-AC-RE 100 … 230 V AC12 AC 6 relays
EASY618-DC-RE 24 V DC 12 DC 6 relays
EASY620-DC-TE 24 V DC 12 DC 8 transistor
EASY202-RE – – 2 relay
Inputs Outputs
outputs with
common
power supply
for several
outputs
The EASY200-EASY coupling device enables you to connect a
remote expansion device to the controller via a 30 m 2-wire or
multi-core cable.
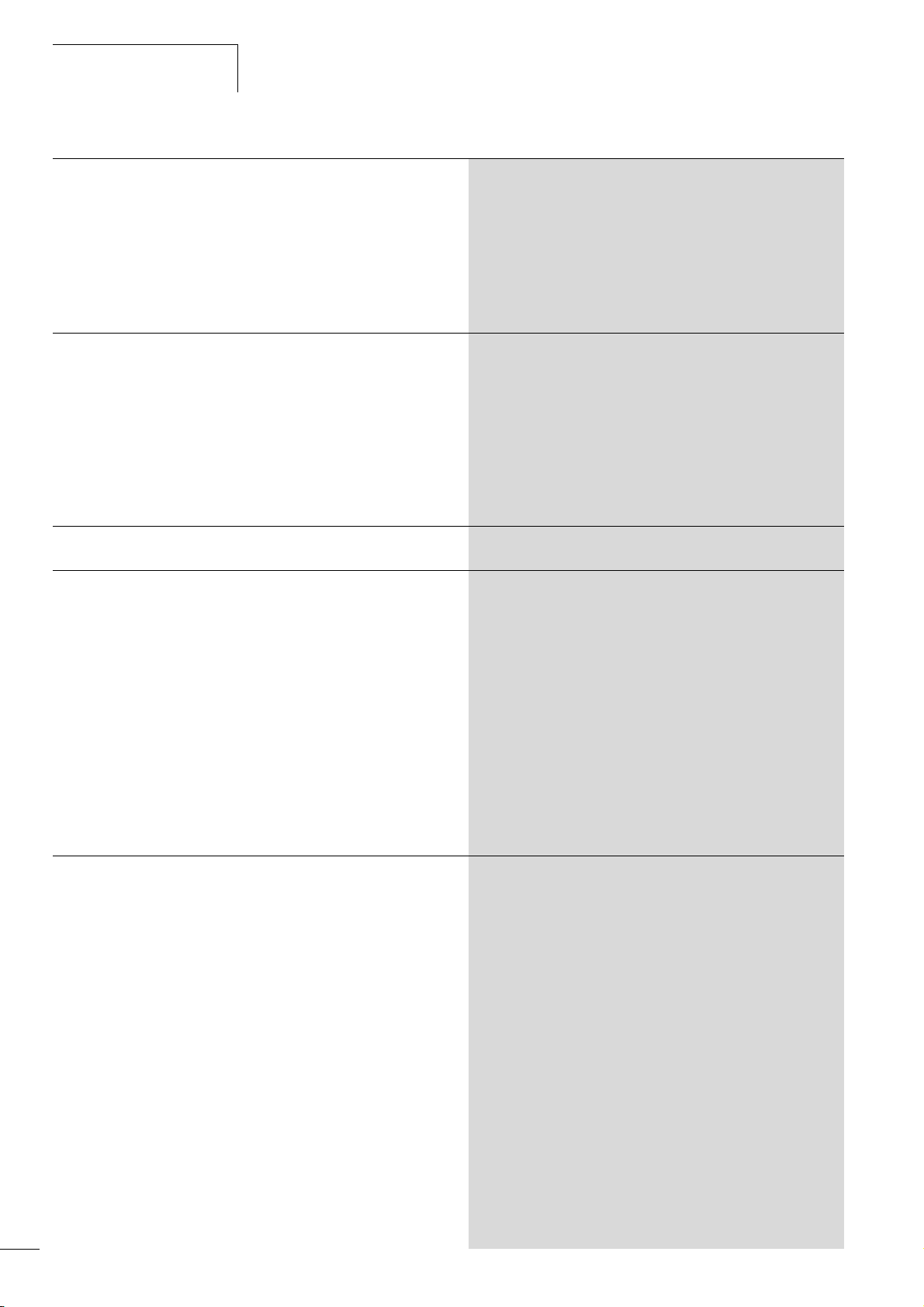
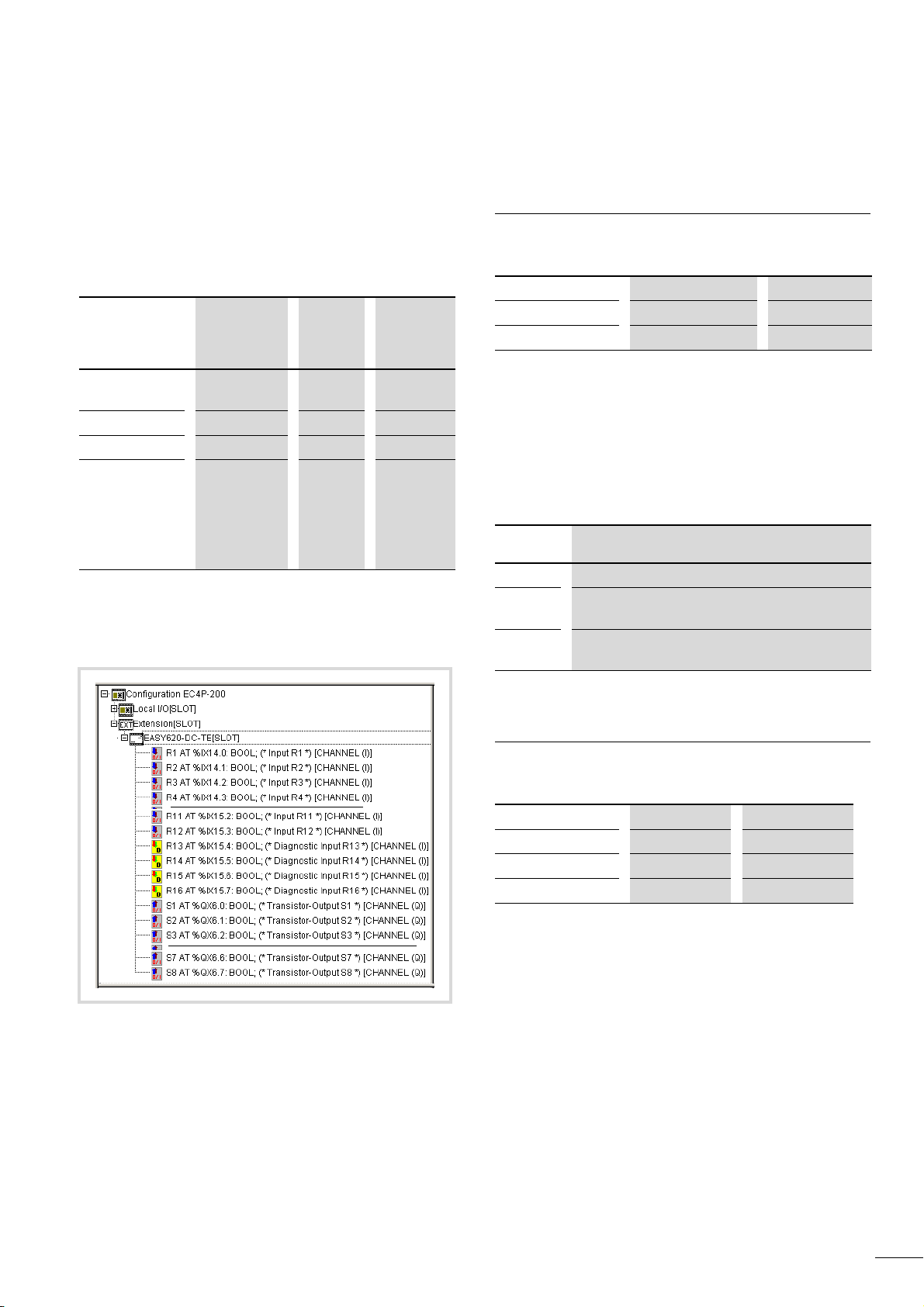
Overview of inputs/outputs
Inputs
Table 6: Number of inputs and symbolic operands
Part no. Number Operand
EASY6…-…-…
EASY620-DC-TE 4 (diagnostic) R13, … ,R16
12 R1, … ,R12
They are selected in the user program by means of the appropriate
syntax used in the PLC configurator.
Diagnostics inputs
The inputs R15, R16 provide you with additional information:
Table 7: Functions of the diagnostics inputs
Input Function
R13,R14 No function
R15 Outputs S1, S2, S3, S4:
0: No short-circuit, toggle: Short-circuit
R16
Outputs S5, S6, S7, S8:
0: No short-circuit, toggle: Short-circuit
Figure 9: I/Os of the EASY620-DC-TE
The inputs can be scanned in the program with symbolic operands.
Outputs
Table 8: Number of outputs and symbolic operands
Part no. Number Operand
EASY618 6 S1,…, S6
EASY620 8 S1,…, S8
EASY202-RE 2 S1,S2
The transistor outputs are provided with a short-circuit monitoring
function. In the event that a short-circuit occurs at one of the
outputs, this is indicated via the diagnostics inputs R15/R16.
R15 is set to 1 if a short-circuit occurs at the outputs S1 to S4.
Input R16 is toggled if a short-circuit occurs on S5 to S6.
17

10/10 MN05003003Z-EN
18
10/10 MN05003003Z-EN
30 mm
(1.18“)
30 mm
(1.18“)
30 mm
(1.18“)
30 mm
(1.18“)
1
2
CLICK !
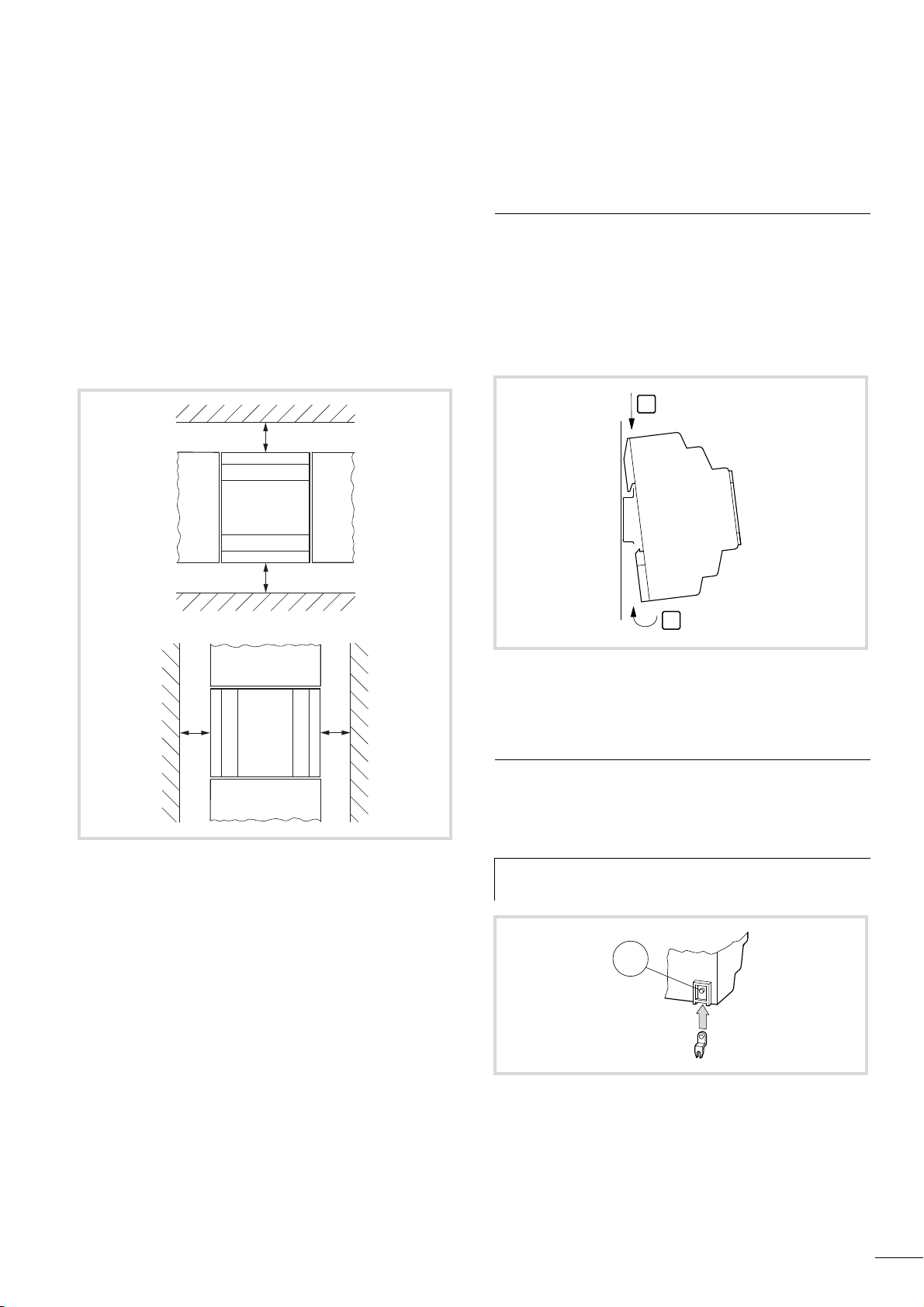
4 Mounting
Install the PLC in a control cabinet, a service distribution board or
in an enclosure so that the power supply terminals and other
terminals are protected against direct contact during operation.
The PLC can be installed vertically or horizontally on a top-hat rail
in compliance with IEC/EN 60715 or on a mounting plate using
fixing brackets.
Ensure that the terminal side has a clearance of at least 3 cm from
the wall and from neighbouring devices in order to simplify wiring.
Mounting on top-hat rail
X Place the device diagonally on the upper lip of the top-hat rail.
Press down lightly on both the device and the top-hat rail until
the unit snaps over the lower edge of the top-hat rail. The
spring mechanism should ensure that the device snaps into
position automatically.
X Check that the device is seated firmly.
Figure 11: Mounting on top-hat rail
.
The device is mounted vertically on a top-hat rail in the same way.
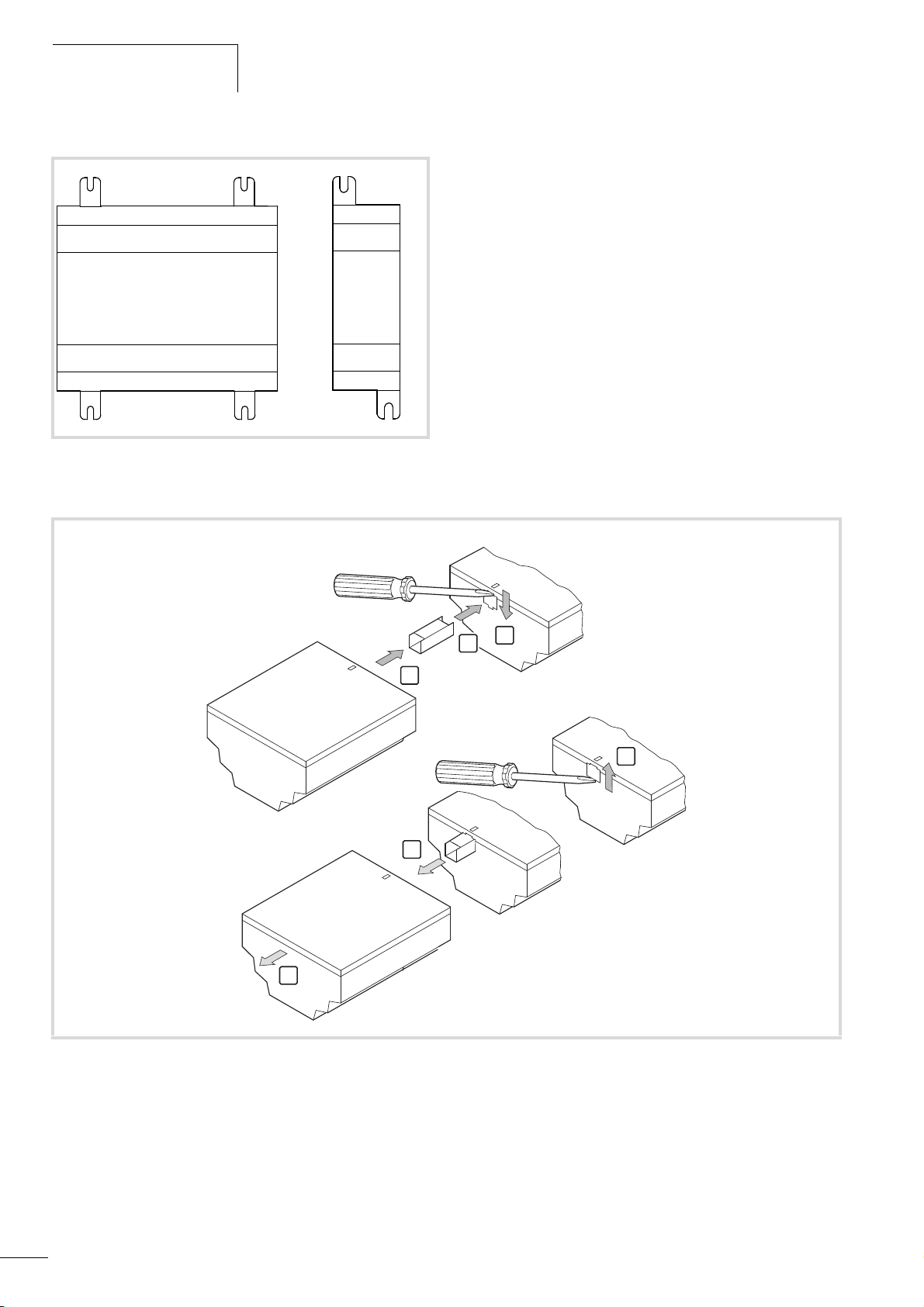
Mounting on mounting plate
Fixing brackets that can be inserted on the rear of the device are
required for screw mounting. The fixing brackets are available as
an accessory.
Figure 10: Observing the clearances for wiring
Three fixing brackets are sufficient for a device with four
h
fixing points.
Figure 12: Inserting a fixing bracket
19
Mounting
aa
aa
4
5
3
2
1
6
EC4-200
EASY-LINK-DS
EASY200-EASY
EASY202-RE
EASY6…-RE/-TE
Figure 13: Screw fixing the devices
a Fixing brackets
10/10 MN05003003Z-EN
Figure 14: Connecting the expansion unit/network module to the EC4-200
20
10/10 MN05003003Z-EN
...V
0 V0 V
L01 –
F1
L01
+
DC : +24 V
I1
I3I2
I4
I6I5
I7
...
L01+
L01-
0 V l1 I2 I7
...V
F1
0 V
l3 I4
l5 I6
...
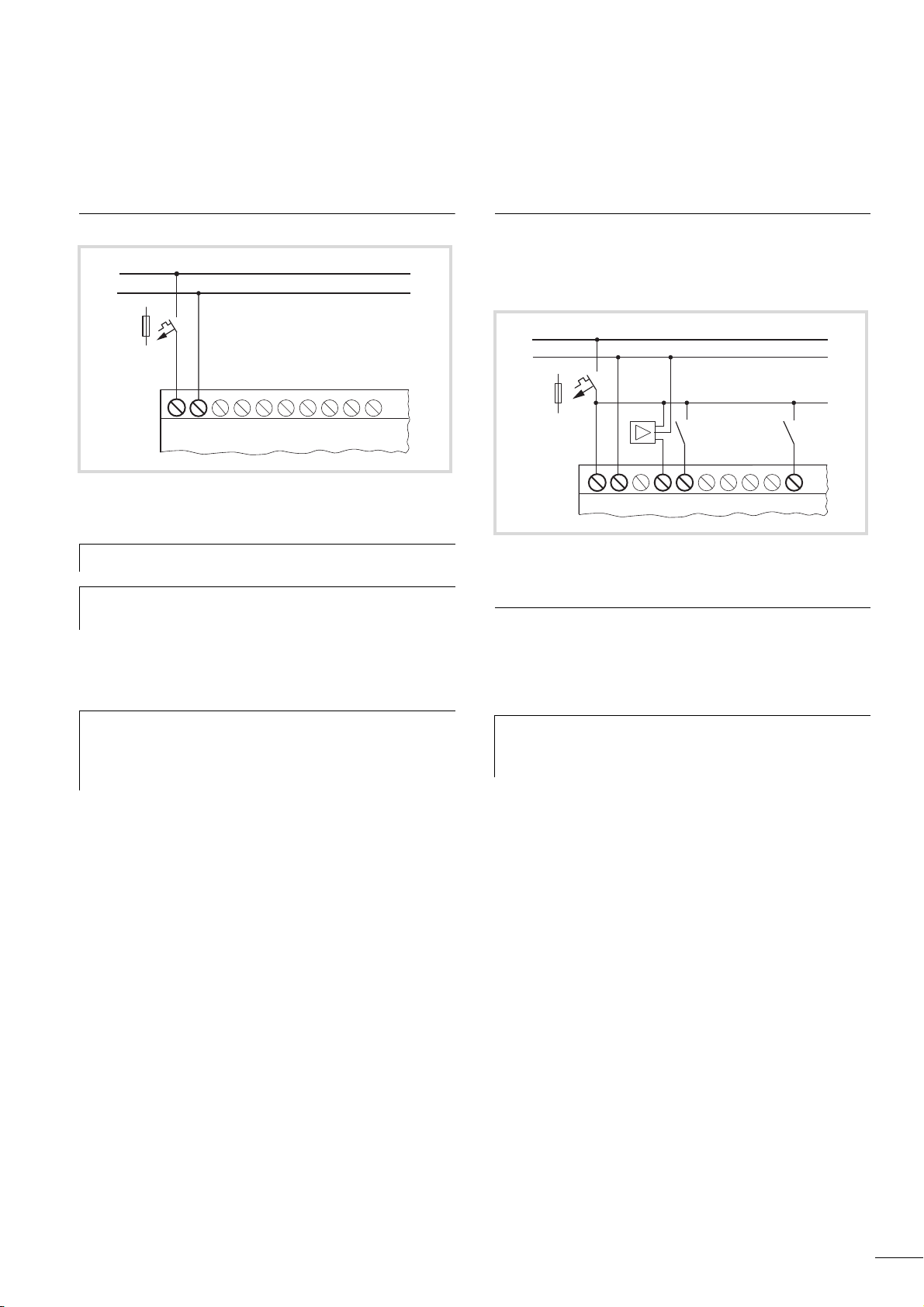
5 Installation
Connecting the power supply
Figure 15: Connecting the power supply
The two 0 V terminals are connected internally!
Die EC4-200 is protected against polarity reversal.
h
The necessary connection data is provided chapter
h
“Technical data”, page 96.
Cable protection
Protect the supply cables with a miniature circuit-breaker or at
least a 1A (slow blow) fuse (F1).
Connecting digital inputs
Use input terminals I3 to I4 to connect pushbutton actuators,
switches or 1 or 12-wire proximity switches. Given the high
residual current, do not use 2-wire proximity switches.
Figure 16: Connecting digital inputs
Connecting analog inputs
Inputs I7, I8, I11 and I12 can also be used to connect analog
voltages ranging from 0 V to 10 V.
The resolution is 10-bit = 0 to 1023.
The controller behaves like a capacitor the first time it is
h
powered up. The switching device and the supply device
for switching on the power supply must be designed for
Caution!
i
Observe the following when laying and connecting analog
cables:
this, i.e. no Reed relay contacts, no proximity switches.
X Use screened, twisted pair conductors, to stop interference of
the analogue signals.
X With short cable lengths, ground the shield at both ends using
a large contact area. If the cable length is more than around
30 m, grounding at both ends can result in equalisation
currents between the two grounding points and thus in the
interference of analog signals. In this case only earth the
conductor on one side.
X Don‘t lay the signal conductor parallel to the power conductor.
X Connect inductive loads that you are switching via the outputs
to a separate power supply or use a suppressor circuit for
motors and valves. If the controller is run with motors, solenoid
valves or contactors via the same power supply, the switching
may cause interference on the analog input signals.
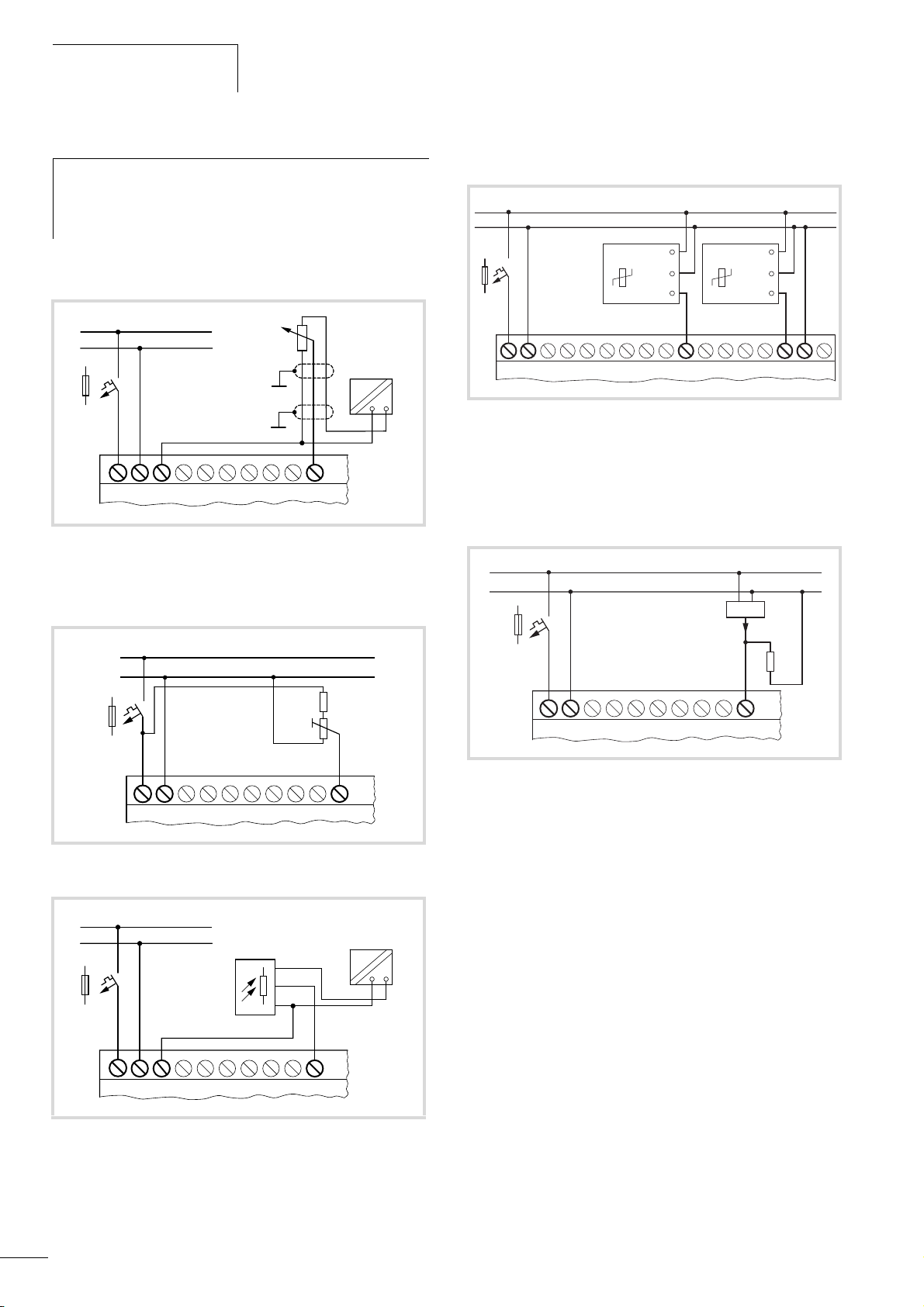
The following circuits show examples of analog measuring
applications.
21
Installation
L01⫹
L01⫺
0 V
+12 V
I724 V
0 V0 V
F1
I2I1
I4I3
I6I5
...
H
h
L01⫺
L01⫹
1.3 kO/0.25 W
1 kO/0.25 W
0 V 0 V I7
24 V
F1
...
I6
I2
I1
I4
I3 I5
0 V
0...10 V
12 V
L01
⫹
L01⫺
0 V
+12 V
I724 V
0 V0 V
...
F1
I2I1
I4I3
I6I5
h
H
+24 V H
0 V
Out
0...10 V
–35...55 °C
+24 V H
0 V
Out
0...10 V
–35...55 °C
L01⫹
L01⫺
I724 V 0 V
F1
I60 V I2I1 I4I3 I5 I8 I10I9 I12I11 0 V –
L01⫹
F1
L01⫺
a
500 O
4…20 mA
I724 V 0 V0 V I2I1 I4I3 I6I5
...
10/10 MN05003003Z-EN
Ensure that the reference potential is galvanically
h
connected. Connect the 0 V of the power supply unit for
the setpoint potentiometer and various sensors shown in
the examples with the 0 V of the power supply.
Setpoint potentiometers connection
Figure 17: Setpoint potentiometer
Use a potentiometer with the resistance F 1 kO, e.g. 1 kO,
0.25 W.
Temperature sensor connection
Figure 20: Temperature sensor
Connecting the 20 mA sensor
A 4…20 mA (0…20 mA) sensor can be connected easily with an
external 500 O resistor.
Figure 18: Setpoint potentiometer with upstream resistor
Figure 19: Brightness sensor
Figure 21: 20 mA sensor
a Analog sensor
The following values apply:
• 4 mA = 1.9 V
• 10 mA = 4.8 V
• 20 mA = 9.5 V
(according to U = R x I = 478 O x 10 mA ~ 4.8 V)
22
10/10 MN05003003Z-EN
0 V
0 V
...V
L01 –
F1
L01 +
I1
I2 I3
I4 I5
I6
L02 +
24 V H
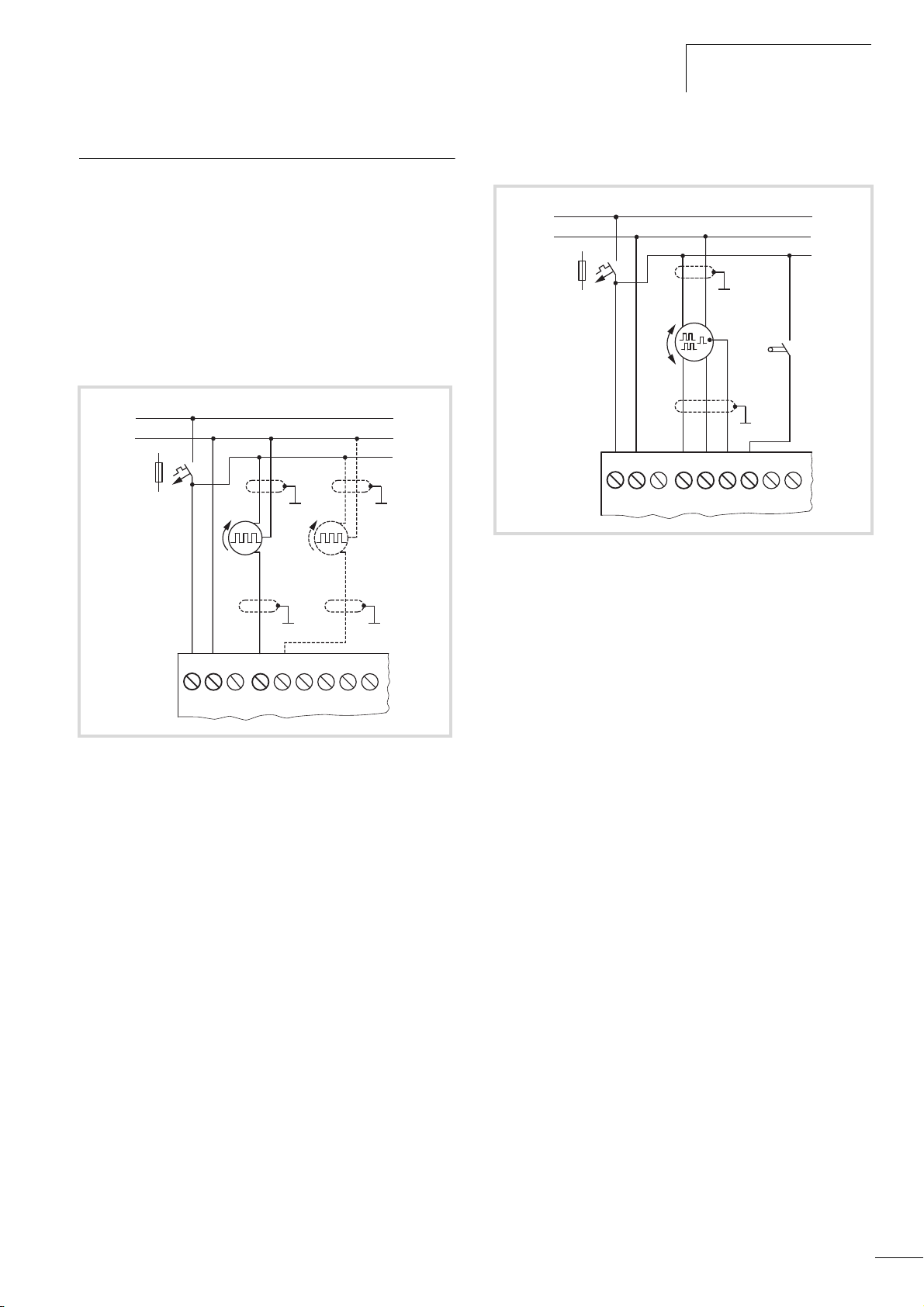
Connecting a pulse transmitter/incremental encoder
Connecting a pulse transmitter/incremental encoder
Inputs I1 to I4 are designed so that high-speed signals from pulse
transmitters/incremental encoders can be counted.
The following connection options are possible:
•1 x pulse transmitters (32-bit)
•2 x pulse transmitters (16-bit)
•1 x incremental encoder (32-bit).
Connecting pulse transmitter
Connecting the incremental encoder
L01 +
L01 –
L02 +
F1
K1
AB
...V
0 V
0 V
24 V H
Figure 23: Connecting the incremental value encoder
A, B: square-wave incremental signals that have a 90 degree phase shift
C: Reference signal
K1: Reference window switch
C
I1
I2 I3
I4 I5
I6
Figure 22: Connecting pulse transmitter
The figure shows the connection of a pulse transmitter which
sends pulses to input I1. An internal counter processes the pulses.
You can choose between a 16-bit counter (max. 65535) and 32-bit
counter (max. 4294967295). The pulse transmitter for the 32-bit
counter must only be connected to I1. Only if a 16-bit counter was
used at I1, can another pulse transmitter (32-bit) be connected to
I2.
23
Installation
Connecting outputs
The relay or transistor outputs are used to switch loads such as
fluorescent tubes, filament bulbs, contactors, relays or motors.
Check the technical thresholds and output data before installing
such devices (
a page 100, 101).
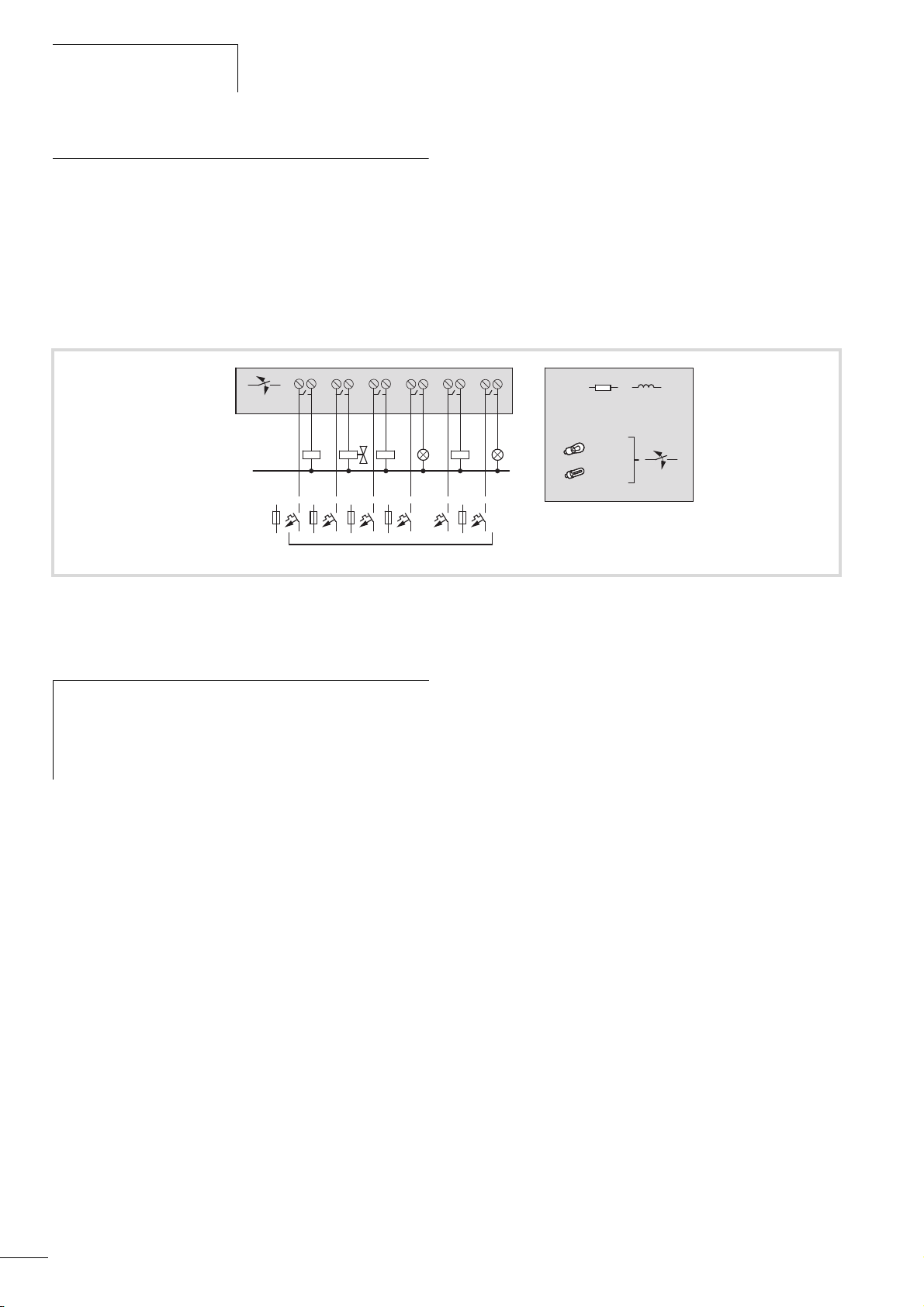
Connect relay outputs
EC4P-221/222-MR…, EASY6..-DC-RE
10/10 MN05003003Z-EN
10 000 000
0 V H, N
F
8 A/B 16
L1, L2, L3 (115/230 V h)
+ 24 V H
12 2 2 2 2 2
Q1
Q2
1
1
Figure 24: Relay outputs EC4P-221/222-MR…
Unlike the inputs, you can connect the EC4P-221/222-MR…,
EASY6..-..RE relay outputs to different phase conductors.
Caution!
i
Do not exceed the maximum voltage of 250 V AC on a
relay contact. If the voltage exceeds this threshold,
flashover may occur at the contact, resulting in damage to
the device or a connected load.
1
1
1
Q6Q5Q4Q3
RL
24 V H 8 A
115 V h 8A
230 V h 8A
1000 W
10 x 58 W
2A
2A
2A
25 000
24
10/10 MN05003003Z-EN
0 V
Q1
S1 S2 S3 S4 S5 S6 S7 S8
Q2 Q3 Q4 Q5 Q6 Q7 Q8
F 10 A
Q
24 V
Q
0 V
Q
24 V
Q
F 10 A
f 2.5 A
f 2.5 A
0 V H
24 V H
EC4P-221/222-MT…
EASY6…-DC-TE
(20.4 – 28.8 V H)
+ 24 V H
RL
5 W/24 V
0.5 A
24 V H
0.5 A
+ 24 V H
Q., S.
U
emax
< UZ < 33 V
0 V H
Q., S.
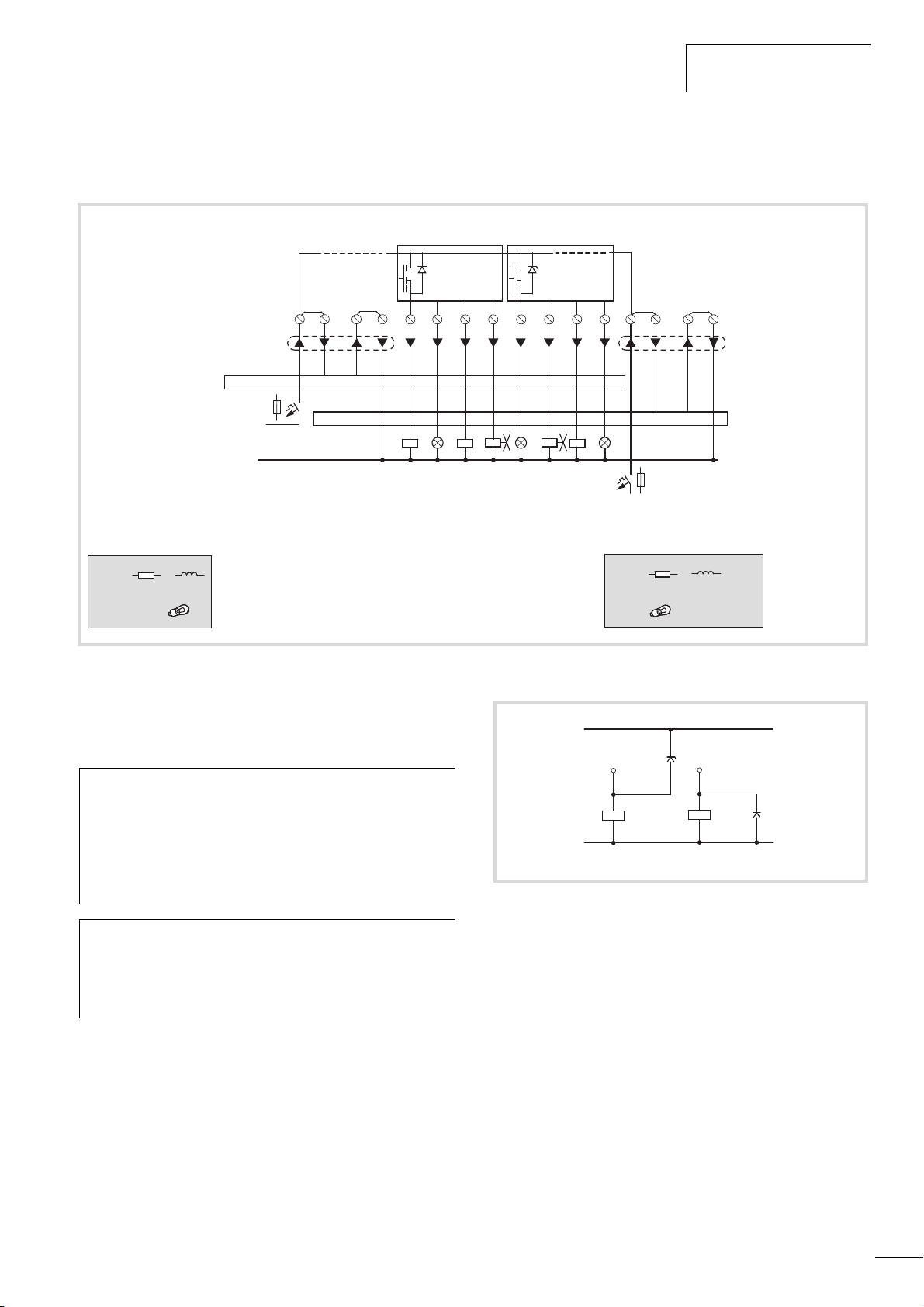
Connecting transistor outputs
EC4P-221/222-MT…, EASY6…-DC-TE
Connecting outputs
EC4P-221/222-MT… EASY6…-DC-…
RL
24 V H
Q1 – Q4
Q5 – Q8
0.5 A
3 W
5 W
0.5 A
24 V
Figure 25: Transistor outpus EC4P-221/222-MT…, EASY6-DC-TE
Parallel connection:
Up to four outputs can be connected in parallel in order to increase
the power. This enables a maximum output current of 2 A.
Caution!
i
Please note the following when switching off inductive
loads:
Suppressed inductive loads cause less interference in the
entire electrical system. It is generally recommended to
connect the suppressor as close as possible to the
inductance.
Caution!
i
Only outputs of the same group (Q1 to Q4 or Q5 to Q8)
can be connected in parallel; e.g. Q1 and Q3 or Q5, Q7
and Q8. Outputs connected in parallel must be switched
at the same time.
If inductive loads are not suppressed, the following must be
observed: Several inductive loads should not be switched off
Figure 26: Inductive load with suppressor circuit
Behaviour with short-circuit/overload
A transistor output will switch off in the event of a short-circuit or
overload. The output will switch back on up to the maximum
temperature after a cooling time that depends on the ambient
temperature and the current level. If the fault continues, the
output will switch off and on until the fault is rectified or the power
supply is switched off.
simultaneously to avoid overheating the driver blocks in the worst
possible case. If in the event of an Emergency-Stop the +24 V DC
power supply is to be switched off by means of a contact, and if
this would mean switching off more than one controlled output
with an inductive load, then you must provide suppressor circuits
for these loads (
a following diagrams).
25
Installation
0 V
0 V
24 V H
...V
L01 –
F1
L01 +
I1
I2
I11
I12
0 V
QA1
0 V
0 V
24 V H
24 V
L01 –
F1
L01 +
I1
I2
I11
I12
0 V
QA1
0 V IA
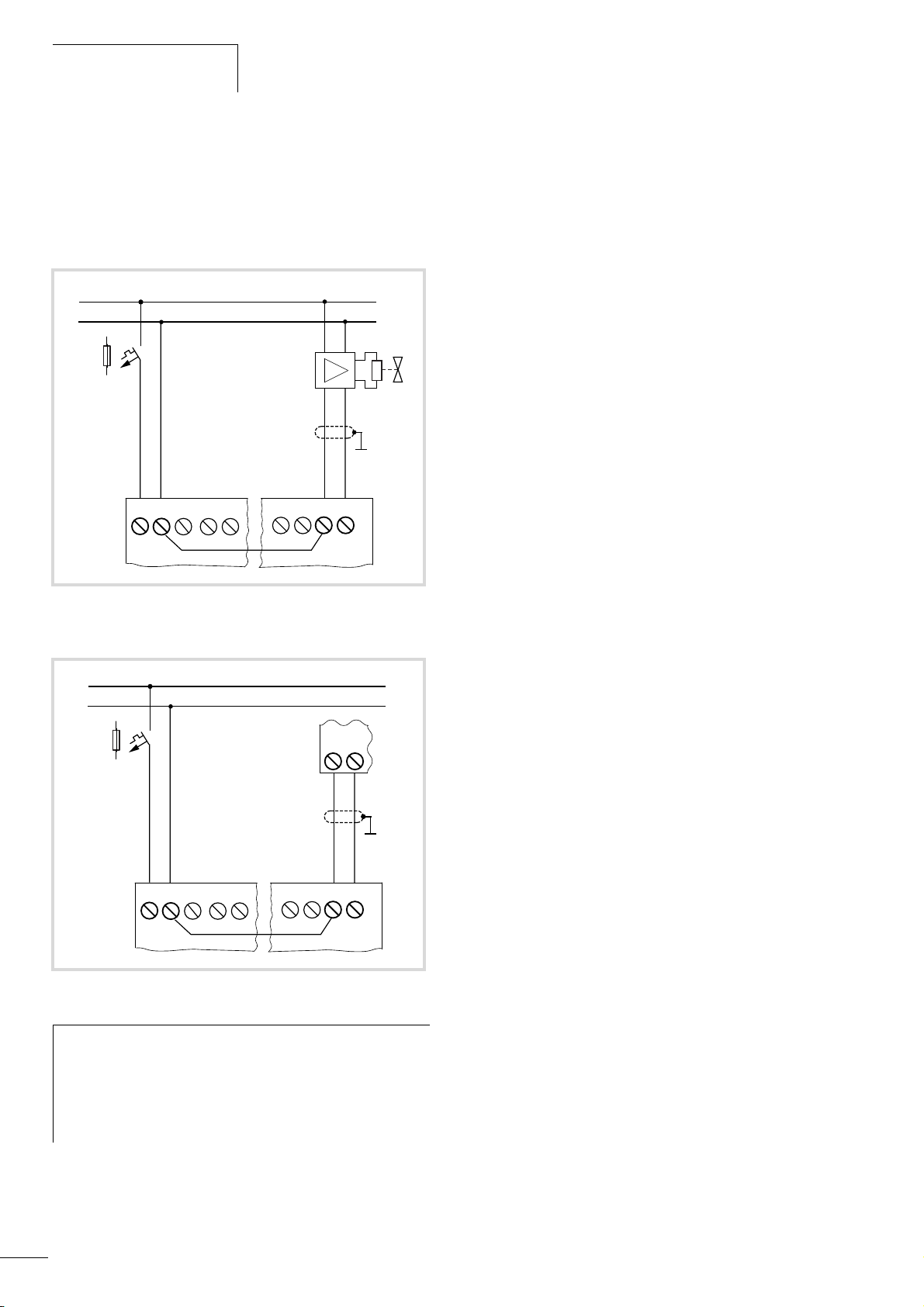
Connecting the analog output
The EC4-200 is provided with one analog output QA 01, 0 V up to
10 V DC, 10-bit resolution (0 to 1023). The analog output can be
used for controlling servo valves and other actuators.
Connecting servo valve
10/10 MN05003003Z-EN
Figure 27: Connecting servo valves
Setpoint entry for a drive
Figure 28: Setpoint entry for a drive
Caution!
i
Analog signals are more sensitive to interference than
digital signals so that more care must be taken when
laying and connecting the signal cables. Incorrect
switching states may occur if they are not connected
correctly.
26
 Loading...
Loading...