

www.conrad.pl
Karty interfejsu
IF-U1 / IF-C1 / IF-R1 / IF-A1 / IF-G1
IF-U1 (USB): 33 100 212
IF-R1 (RS232): 33 100 213
IF-R1 (CAN): 33 100 214
IF-R1 (ANA): 33 100 215
IF-R1 (GPIB): 33 100 216
Strona 1 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
O kartach interfejsu
1. Ogólnie
Karty interfejsu IF-R1, IF-C1, IF-U1 oraz IF-G1 dostarczają cyfrowe, a IF-A1 analogowe złącze do
sterowania jednostką jak PC lub PLC. Urządzenia jak, na przykład, zasilacz mogą być monitorowane,
kontrolowane i konfigurowane używając interfejsu z odpowiednim oprogramowaniem.
Tylko z PSI 9000: w połączeniu z IF-C1 użytkownik może zrealizować bramę z RS232 lub portu USB
komputera PC do szyny CAN. Dzięki temu nie potrzeba dodatkowych elementów sprzętowych aby
podłączyć PC do CAN. Brama umożliwia sterowanie do 30 jednostek w linii za pomocą kart
RS232/USB oraz CAN.
Jeśli urządzenie zostało wyposażone w kartę interfejsu, jest to automatycznie rozpoznawane i
udostępniane są odpowiednie menu do konfiguracji.
Menu konfiguracji różnią się pomiędzy modelami i są używane do ustawienia parametrów
komunikacje. Ustawienia są przechowywane wewnątrz jednostki.
Dodatkowo karty IF-R1 i IF-U1 wspierają połączenie równoległe i/lub szeregowe wielu zasilaczy
laboratoryjnych serii PSI 9000 do prawdziwego systemu master-slave (System Link Mode).
Analogowa karta interfejsu IF-A1 bezpośrednio sięga do zasilacza. Umożliwia to szybkie
monitorowanie rzeczywistych wartości i szybkie ustawianie (z bardzo krótkim opóźnieniem)
ustawionych wartości w zakresie nominalnych wartości urządzenia. Cyfrowe wejścia i wyjścia są
parametryzowane.
1.1 Użycie
Karty interfejsu muszą być używane z jednostkami specjalnie do nich poznaczonymi.
Zestaw narzędzi Labview VI jest dostarczany w zestawie, co ułatwi użycie i implementacje kart
interfejsu w IDE LabView.
Implementacja w innych aplikacjach i środowiskach jest możliwa, lecz bardzo skomplikowana.
Struktura telegramu jest wyjaśniona szczegółowo w jednym z rozdziałów.
Zakres napięcia sygnałów analogowego wejścia i wyjścia karty IF-A1 jest możliwy do ustawienia w
zakresie 0 do 10V. Cyfrowe wejścia mogą być przełączane pomiędzy dwoma różnymi zakresami
napięcia dla poziomu logicznego i domyślnego poziomu logicznego mogą być predefiniowane dla
przypadku, gdy wejścia nie są używane.
1.2 Koncept
Karty interfejsu są wpinane i dzięki temu możliwe do zastosowania w razie potrzeby. Są
kompatybilne z różnymi rodzajami urządzeń jak obciążenia elektroniczne. W związku z izolacją
elektryczną 2000V możesz również podłączać wiele urządzeń z różnymi potencjałami.
Strona 2 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
Karty cyfrowe IF-R1, IF-C1 oraz IF-U1 wspierają unikatowy protokół komunikacji zorientowany
obiektowo. Każdy typ urządzenia posiada wewnętrzną listę obiektów, która różni się zależnie od cech
urządzenia. Przesyłane obiekty są sprawdzane pod kątem walidacji i prawidłowości. Wartości
nieprawidłowe lub błędne oraz obiekty generują błąd, który jest wysyłany jako telegram odpowiedzi.
Cyfrowa karta IF-G1 używa międzynarodowego standardu języka komend SCPI (Standard Commands
for Programmable Instruments).
1.3 Gwarancja / Naprawa
Uwaga: Karta interfejsu nie może być naprawiana przez użytkownika!
W razie konieczności skorzystania z gwarancji lub defektu prosimy skontaktować się z lokalnym
dealerem aby uzyskać informację o niezbędnych krokach. Karty podlegają dwuletniej gwarancji
statutowej (dla Niemiec), która jest niezależna od gwarancji (i jej czasu trwania) urządzenia w którym
zamontowana jest karta.
1.4 Używane symbole
W opisie wyświetlane i sterujące elementy są oznaczone różnymi symbolami.
= Tylko wyświetlone, wszystkie elementy, które są tylko wyświetlane i reprezentują stan są
oznaczone tym symbolem
= Parametr, wartości, które można zmieniać są oznaczone tym symbolem i pogrubione.
= Elementy menu, wybieralne, prowadzące do kolejnego pod-poziomu lub do ostatniego poziomu
z parametrami.
Nawiasy {…} oznaczają możliwe opcje lub zakresy dla parametrów.
1.5 Zakres dostawy
1x Karta interfejsu
1x płyta CD z oprogramowaniem i instrukcjami obsługi
1x Skrócona instrukcja instalacji
1x Kabel sieciowy 0,5 m 1:1 (tylko z IF-R1 i IF-U1)
1x Kabel USB A-A, 1,8 m (tylko z IF-U1)
1x Kabel RS232, 3 m (tylko z IF-R1)
1x Kabel adapterowy do wgrywania nowszego firmware’u (tylko z IF-G1)
2. Specyfikacja techniczna
Strona 3 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Ogólna
Izolacja elektryczna 2000V
Wymiary (Szer. x Wys. x Dł.) 24 x 80 x 100 mm
Bezpieczeństwo EN 60950
Standardy EMI EN61000-6-4, EN 61000-6-2, EN 55022 Klasa B
Kategoria przepięciowa Klasa II
Temperatura działania 0 … 40°C
Temperatura przechowywania -20 … 70°C
Wilgotność względna <80% (bez kondensacji)
Akcesoria narzędzia Labview VI
IF-R1 (RS232)
Złącza 1 x gniazdo żeńskie D-Sub 9 pin, 2 x gniazdo RJ45
Ilość baud 9600 Bd, 19200 Bd, 38400 Bd, 57600 Bd
Długość przewodu Zależnie od ilości baud, do 15 m
System Link Mode (tylko z PSI 9000) tak
Maks. Ilośc jednostek 30
Terminacja szyny ustawiana w menu jednostki
Przewód sieciowy 0,5 m
IF-U1 (USB)
Złącza 1 x USB typ A, 2 x gniazdo RJ45
Standard USB 1.1
Długość przewodu Maks. 5 m
System Link Mode (tylko z PSI 9000) tak
Maks. Ilośc jednostek 30
Terminacja szyny ustawiana w menu jednostki
Strona 4 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Przewód sieciowy 0,5 m
IF-C1 (CAN)
Złącza 1 x gniazdo żeńskie D-Sub 9 pin,
1 x gniazdo męskie D-Sub 9 pin
Ilość baud 20 kBd … 1 MBd w krokach
Terminacja szyny ustawiana w menu jednostki
Standard CAN V2.0 część A
IF-A1 (Analog)
Złącza 1 x gniazdo żeńskie D-Sub 25 pin
Wejścia analogowe
Zakres napięcia wejściowego
Zakres maksymalny -5V … +15V
Zakres nominalny 0V … 10V
Impedancja wejścia 25 kΩ
Rozdzielczość
VSEL, CSEL, PSEL (RSEL) <2 mV
Błąd względny
VSEL, CSEL, PSEL 0,1%
RSEL (Opcja) 0,25%
Czas odpowiedzi <4 ms
Strona 5 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Wyjścia analogowe:
Zakres nominalnego napięcia wyjściowego
VMON, CMON, PMON 0V … 10V
I
maks. przy 10V 2 mA
out
VREF 1V … 10V
I
maks. przy 10V 10 mA
out
Rozdzielczość
VMON, CMON, PMON, VREF <2 mV
Błąd względny
VMON, CMON, PMON, VREF 0,1%
Czas stabilizacji wyjść analogowych <4 ms
Napięcie pomocnicze 12 … 15V
Maksymalny prąd 50 mA
Wyjścia cyfrowe:
Napięcie wejściowe
Maksymalny zakres -5 … +30V
Jeśli ustawione na: Poziom = LOW
U
U
<1V
low
>4V
High
Jeśli ustawione na: Poziom=HIGH
U
U
<5V
low
>9V
High
Prąd wejściowy
Jeśli ustawiony na niski zakres i poziom domyślny = L
Uin= 0V 0 mA
Uin= 12V +2,6 mA
Uin= 24V +5 mA
Strona 6 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
Jeśli ustawiony na niski zakres i poziom domyślny = H
Uin= 0V -1,5 mA
Uin= 12V +2,2 mA
Uin= 24V +6 mA
Jeśli ustawiony na wysoki zakres i poziom domyślny = L
Uin= 0V 0 mA
Uin= 12V +1,6 mA
Uin= 24V +3,5 mA
Jeśli ustawiony na wysoki zakres i poziom domyślny = H
Uin= 0V -1,5 mA
Uin= 12V +0,7 mA
Uin= 24V +4,5 mA
Czas odpowiedzi1) <10 ms
IF-G1 (GPIB)
Złącza gniazdo żeńskie Centronics 24 pin
Standard szyny IEEE 488.1/2
Długość przewodu (GPIB) 2 m na urządzenie, całkowita 20 m
Rodzaj przewodu (GPIB) Przewód standardu GPIB
1)
Aby obliczyć całkowity czas odpowiedzi zmiany kroku z analogowego wejścia interfejsu do wyjścia
zasilania należy dodać czas odpowiedzi urządzenia do tego czasu.
2)
Czas pomiędzy zaistnieniem zjawiska, o którym ma być powiadomienie i moment wykonania
powiadomienia
Strona 7 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
3. Instalacja
3.1 Po rozpakowaniu
Po rozpakowaniu sprawdź kartę interfejsu pod kątem widocznych fizycznych uszkodzeń. Jeśli
zauważysz jakieś uszkodzenia nie używaj i nie podłączaj karty do urządzenia!
3.2 Wkładanie karty
Karta może być włożona wyłącznie wówczas, gdy urządzenie jest całkowicie wyłączone. Jednostka nie
musi być otworzona. Odkręć wkręty z pokrywy slotu lub już umieszczonej karty i wyciągnij
zaślepkę/kartę. Włóż nową kartę zachowując ostrożność aż płytka karty dotknie tylnej strony
urządzenia. Jeśli jest przestrzeń pomiędzy tylną ścianą i płytką karty nie dokręcaj wkrętów, gdyż
karta nie została umieszczona prawidłowo! Podłączenie PC i/lub innej jednostki musi zostać
zakończone przed ponownym włączeniem jednostki. Karta zostanie automatycznie wykryta przez
urządzenie po włączeniu go i może zostać teraz skonfigurowana.
Uwaga dotycząca IF-A1: Zanim włożysz kartę należy prawidłowo skonfigurować zworki. Przejdź do
rozdziału 4.4.1 Konfiguracja IF A1, podrozdział „Cyfrowe wejścia”.
Uwaga: W przypadku, gry karta nie zostanie rozpoznana po włączeniu jednostki może zajść potrzeba
uaktualnienia firmware’u urządzenia. Skontaktuj się z dealerem aby uzyskać więcej informacji.
Uwaga! Na karcie znajdują się elementy wrażliwe na ESD. Musisz stosować się do ogólnych
wytycznych ESD podczas obchodzenia się z kartą i podczas jej instalacji.
3.3 Łączenie kart interfejsu
Przy modelach z więcej niż jednym slotem na karty stosuje się następujące ograniczenia:
- nigdy nie instaluj dwóch kart tego samego typu
- karty IF-R1 oraz IF-U1 nie mogą być używane razem
- IF-G1 nie może być łączone z IF-C1
4. Użytkowanie w urządzeniach serii PSI 9000
Karty interfejsów są zaprojektowane do użytkowania w różnych typach urządzeń. Zależnie od
typowych cech indywidualnego urządzenia, jak np. obciążenie elektroniczne, wyniki działania mogą
się różnić. Ten rozdział opisuje konfigurację i obsługę kart przy wykorzystaniu w zasilaczach
laboratoryjnych serii PSI 9000. Jeśli zakupiłeś inne urządzenie skorzystaj z odpowiedniego rozdziału.
Informacje na temat obsługi i nawigacji w menu i stronach parametrów różnych typów urządzeń
odnajdziesz w odpowiednich instrukcjach obsługi.
4.1 Karta IF-R1 RS232
Strona 8 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
Karta IF-R1 interfejsu RS 232 łączy zasilacz z jednostką kontrolną (PC) za pomocą portu szeregowego
zwanego także portem COM. Ustawienia połączenia szeregowego muszą być skonfigurowane po obu
stronach z takimi samymi wartościami. W zasilaczu jest to wykonywane w menu setup. Musi zostać
użyty kabel 1:1.
IF-R1 dostarcza dodatkowy interfejs szeregowy, który jest używany do łączenia kilku zasilaczy budując
System Link Mode. Więcej informacji na ten temat uzyskasz w rozdziale 6. System Link Mode (tylko
PSI9000).
Nigdy nie podłączaj żadnego z tych portów do hubu lub switcha Ethernet lub portu Ethernet w PC!
4.1.1 Konfigurowanie IF-R1
Karta interfejsu jest konfigurowana w menu setup.
Absolutnie niezbędne jest wybranie i ustawienie unikatowego adresu urządzenia zwanego także
„device node” /węzeł urządzenia/ dla każdego podłączonego lub podpiętego zasilacza. Tylko wtedy
jednostka będzie prawidłowo zidentyfikowana i obsługiwana. Adres ten jest wykorzystywany do
dostępu do urządzenia.
Aktywuj menu za pomocą
Domyślnie: 1
= {1 ..30} Wybierz od 1 do 30 węzłów urządzeń
zależy od wpiętej karty
zależy od wpiętej karty
Tutaj możesz ustawić pożądany węzeł urządzenia i możesz uzyskać przegląd, które karty są aktualnie
zainstalowane. Wybierając kartę za pomocą
Wchodzisz w menu konfiguracji dla konkretnie wybranej karty. Każda karta musi zostać
skonfigurowana indywidualnie. Możesz wybrać parametry do ustawienia:
= {9,6 kBd, 19,2 kBd, 38,4 kBd, 57,6 kBd}
Domyslnie: 57,6 kBd
Strona 9 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
Wybrana częstotliwość baud musi być dobrana do długości kabla. Przy 15 m rekomendowana jest
maksymalna prędkość transmisji 9,6 kBd. 1 kBd = 1000 Bd.
4.2 Karta IF-U1 USB
Interfejs USB IF-U1 pracuje podobnie do karty RS232, lecz jest znacznie wygodniejszy do podłączania
kilku urządzeń do PC za pomocą hubu USB. Możesz podłączyć i sterować do 30 jednostek za pomocą
tylko jednego PC i jednego portu USB.
Karta IF-U1 oferuje dodatkowy interfejs szeregowy, który jest używany do łączenia kilku zasilaczy aby
zbudować System Link Mode.
Nigdy nie podłączaj żadnego z tych portów do hubu lub switcha Ethernet lub portu Ethernet w PC!
Więcej informacji na ten temat w rozdziale 4.5 System Link Mode.
4.2.1 Konfigurowanie IF-U1
Karta interfejsu jest konfigurowana w menu setup.
Absolutnie niezbędne jest wybranie i ustawienie unikatowego adresu urządzenia zwanego także
„device node” /węzeł urządzenia/ dla każdego podłączonego lub podpiętego zasilacza. Tylko wtedy
jednostka będzie prawidłowo zidentyfikowana i obsługiwana. Adres ten jest wykorzystywany do
dostępu do urządzenia.
Aktywuj menu za pomocą
Domyślnie: 1
= {1 ..30} Wybierz od 1 do 30 węzłów urządzeń
zależy od wpiętej karty
zależy od wpiętej karty
Tutaj możesz ustawić pożądany węzeł urządzenia i możesz uzyskać przegląd, które karty są aktualnie
zainstalowane. Dalsza konfiguracja interfejsu USB nie jest wymagana.
Strona 10 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
4.3 Karta IF-C1 CAN
Standard CAN: V2.0 część A
Długość przewodu: Zależnie od częstotliwości baud
Specjalizacja: Brama do kart RS232 lub kart USB
Komunikacja za pomocą szyny CAN jest przeznaczona do wymagań aplikacji testowych i systemów
np. w branży samochodowej. Kolejna implementacja do istniejącego systemu i modyfikacja
powiązanego oprogramowania jest możliwa i bezproblemowa.
Sieć urządzeń CAN daje przewagę w postaci szybszej komunikacji i odpornej na awarie topologii. Chip
sterownika na karcie CAN może obsługiwać do 110 węzłów urządzenia (temin węzły urządzenia jest
używany do adresów jednostek CAN). Narzędzia LabView VI odpowiedzialne za protokół komunikacji
są w stanie obsłużyć do 30 jednostek na segment adresów (RID). W związku z tym teoretycznie
możliwe jest ustawienie systemu z 110 jednostkami, które będą działały w przynajmniej 4
segmentach adresu. Segmenty adresów są możliwe do relokacji, dzięki czemu jedno lub więcej
urządzeń może być zaimplementowane do istniejącego systemu CAN bez konieczności rekonfiguracji
całego systemu.
4.3.1 Konfigurowanie IF-C1
Karta interfejsu jest konfigurowana w menu setup.
Absolutnie niezbędne jest wybranie i ustawienie unikatowego adresu urządzenia zwanego także
„device node” /węzeł urządzenia/ dla każdego podłączonego lub podpiętego zasilacza. Tylko wtedy
jednostka będzie prawidłowo zidentyfikowana i obsługiwana. Adres ten jest wykorzystywany do
dostępu do urządzenia.
Aktywuj menu za pomocą
Domyślnie: 1
= {1 ..30} Wybierz od 1 do 30 węzłów urządzeń
zależy od wpiętej karty
zależy od wpiętej karty
Tutaj możesz ustawić pożądany węzeł urządzenia i możesz uzyskać przegląd, które karty są aktualnie
zainstalowane. Wybierając kartę za pomocą:
Strona 11 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
Wchodzisz w menu konfiguracji dla konkretnie wybranej karty. Każda karta musi zostać
skonfigurowana indywidualnie. Możesz wybrać parametry do ustawienia:
Domyślnie: 100 kBd
= { 10 kBd { 60, 65, 70, 75, 80, 85}%,
20 kBd { 60, 65, 70, 75, 80, 85}%,
50 kBd { 60, 65, 70, 75, 80, 85}%,
100 kBd { 60, 65, 70, 75, 80, 85}%,
125 kBd { 58, 68, 70, 75, 81, 87}%,
250 kBd { 58, 68, 70, 75, 81, 87}%,
500 kBd { 58, 66, 75, 83}%,
1 MBd { 58, 66, 75, 83}%}
Relokowanie segmentów adresów
W przypadku, gdy urządzenia są doposażone w kartę CAN i implementowane do istniejącego systemu
CAN do relokowania adresu segmentu używany jest relokowalny segment identyfikacji (RID), aby
dopasować adresy nowych jednostek do zakresu adresów już istniejących jednostek, lub aby ustawić
go z dala od zakresu by uniknąć kolidowania.
Szyna CAN po standardzie V2.0a definiuje adres o długości 11 bitów (=identyfikator). Rezultatem tego
jest całkowita ilość 2048 identyfikatorów, z czego możliwych do wybrania jest 2032. Te 2048
identyfikatorów jest rozdzielone 32 segmentami adresów, po 64 adresy każdy. Adres początkowy jest
determinowany przez RID.
Domyślnie: 0
{0 .. 31} Wybór (relokacja) zakresu adresów
Wewnątrz każdego segmentów adresów znajdują się 62 adresy do dowolnego przypisania, podczas
gdy do 30 jednostek używa dolnego zakresu i z 2 adresami fizycznymi ( identyfikatory, jeden do
wysyłania i jeden do zapytania o dane) na jednostkę zabierają adresy od 2 … 61. Adresy 0 oraz 1
każdego zakresu adresów są zarejestrowane na wiadomości nadawane do wszystkich (broadcast). W
efekcie istnieje 32*2 adresów do broadcastów.
Do wiadomości typu broadcast adresy są statyczne:
[RID*64 +0] oraz [RID*64 +1].
Przykład: RID jest ustawione na 5 ( zobacz także menu setup swojego urządzenia). Broadcast zostanie
nadany do wszystkich jednostek w tym zakresie adresów. Identyfikator obliczany jest jako 5*64 = 320
= 0x140 lub 0x141 dla zapytań.
Dla wiadomości typu singlecast każdy „węzeł urządzenia ” jest okupowany przez kolejne dwa adresy:
Strona 12 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
[RID*64 +węzeł urządzenia *2 ] oraz [RID*64 +węzeł urządzenia *2 + 1]
Przykład: RID zostało ustawione na 13, adres urządzenia (węzeł) na 12. Aby wysłać wiadomość do
tego urządzenia identyfikator musi wynosić: 13*64 + 12*2 = 856 (0x358). Identyfikator 857 (0x359)
jest używany do zapytań.
Terminator szyny
Szyna CAN wymaga rezystora teminującego o wartości 120 Omów na obu krańcach szyny. Jeśli
jednostka jest zlokalizowana na końcu łańcucha / linii i nie jest podłączona do kolejnej jednostki, musi
zostać terminowana. Parametr „bus terminate” /terminacja szyny/ jest używany do prostego
ustawienia germinacji bez jakiegokolwiek sprzętowego terminowania zworkami.
Domyślnie: NO
=YES Szyna jest terminowana rezystorem 120 Ω
=NO Brak terminacji
Funkcja bramy (tylko PSI 9000)
Domyślnie: Client
= Client Urządzenie jest monitorowane i kontrolowane przez jednostkę zewnętrzną jak PC lub
SPS
=Gateway Karta interfejsu dodatkowo służy jako brama pomiędzy kartami CAN oraz RS232 / USB
Karta RS232 lub USB wewnątrz urządzenia, które jest ustawione jako brama (tutaj: PSI 9000) pozwala
użytkownikowi na kontrolowanie i monitorowanie wszystkich dalszych jednostek, które są
podłączone do tego urządzenia za pomocą CAN. Potrzebne jest wyłącznie urządzenie z dodatkową
kartą interfejsu IF-R1 lub IF-U1, aby ustawić system z szyną CAN. Obie karty RS232 i USB mogą
wykorzystywać świetne parametry szyny CAN w niewielkim stopniu. Aby używać szyny CAN z pełną
przepustowością (wysokie prędkości transferu danych) i z wykorzystaniem dużej liczby urządzeń
rekomendowane jest bezpośrednie sterowanie szyną za pomocą sprzętu typu CAN master.
Strona 13 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Pin
Nazwa
Funkcja
Opis
Poziom
Specyfikacja
elektryczna
1
AI1
PSEL / RSEL
Wejście analogowe:
Ustawiona wartość mocy /
rezystancji
0 .. 10 V odpowiada
0 .. 100% z P
nom
/ R
nom
Typowa dokładność
<0,1%1)
Impedancja wejścia RI
> 25k
2
AI3
CSEL
Wejście analogowe:
Ustawiona wartość natężenia
0 .. 10 V odpowiada
0 .. 100% z I
nom
3
AI2
VSEL
Wejście analogowe:
Ustawiona wartość napięcia
0 .. 10 V odpowiada
0 .. 100% z U
nom
4
AO3
PMON
Wyjście analogowe:
Rzeczywista wartość mocy
0 .. 10 V odpowiada
0 .. 100% z P
nom
Typowa dokładność
<0,1%1) przy I
max
=
+2mA
4)
Ochrona przed
zwarciem GND
5
AO1
VMON
Wyjście analogowe:
Rzeczywista wartość napięcia
0 .. 10 V odpowiada
0 .. 100% z U
nom
6
AO2
CMON
Wyjście analogowe:
Rzeczywista wartość natężenia
0 .. 10 V odpowiada
0 .. 100% z I
nom
7
DO1
CV
Wyjście cyfrowe:
Tryb stałego napięcia
CV aktywne = Niski
CV nieaktywne = Wysoki
Kwasi- otwarty
kolektor z rezystorem
pull-up przeciw VCC
I
max
=-10 mA4) przy
U
low
=0,3 V
U
max
=0 .. 30V
Ochrona przed
zwarciem GND
Odbiornik: U
low
<1V;
U
high
> 4V)
8
DO2
OVP
Wyjście cyfrowe:
Tryb ochrony
przeciwprzepięciowej
OVP = Wysoki
Brak OVP = Niski
9
DO3
OT
Wyjście cyfrowe:
Błąd przekroczenia temperatury
OT = Wysoki
Brak OT = Niski
10
DO4
Mains
Wyjście cyfrowe:
Napięcie sieciowe OK
Mains OK. = Niski
Mains not OK. = Wysoki
11
DO5
Standby
Wyjście cyfrowe:
Wyjście wyłączone
Wyjście wył. = Niski
Wyjście wł. = Wysoki
12
DO6
CC
Wyjście cyfrowe:
Tryb stałego natężenia „CC”
CC aktywny = Niski
CC nie aktywny = Wysoki
13
DO7
CP
Wyjście cyfrowe:
Tryb stałej mocy „CP”
14 AGND SEL2)
Potencjał referencyjny wejść
analogowych
Referencja dla
sygnałów SEL
15
AGND2)
Potencjał referencyjny wyjść
analogowych
Referencja dla
sygnałów MON i VREF
16
17 N.C.
18
AO0
VREF
Wyjście analogowe:
Napięcie referencyjne
10 V
Typowa dokładność
<0,1%1) przy I
max
=
+8mA
4)
Ochrona przed
zwarciem GND
19 +VCC
Napięcie pomocnicze
(odniesienie: DGND)
12 V .. 16 V
I
max
= +50 mA
4)
Ochrona przed
zwarciem GND
20
DGND
2)
Potencjał referencyjny portów
cyfrowych
Referencja dla +VCC,
sygnałów sterowania i
powiadomienia
21
22
DI1
SEL-enable
Wejście cyfrowe:
Zworka ustawiona na „Niski
Predefiniowany
4.4.1 Przypisanie pinów analogowego interfejsu (gniazdo D-Sub, 25 pin)
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
Strona 14 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
www.conrad.pl
www.conrad.pl
Przełączenie na zewnętrzny
interfejs (inaczej: działanie
lokalne)
poziom”
SEL-enable wł. = Niski
SEL-enable wył. = Wysoki
poziom wejściowy
(zakres
Wysoki/Niski);3)
1) U
low
< 1 V; U
high
> 4 V
lub
2) U
low
< 5 V; U
high
>9 V
Predefiniowana logika
z poziomu wejścia nie
podpięta:
Otwarte = wysoki
poziom lub niski
poziom
23
DI2
Rem-SB
Wejście cyfrowe:
Wyjście wyłączone
Zworka ustawiona na „Niski
poziom”
Wyjście wł. = Niski
Wyjście wył. = Wysoki
24 Zarezerwowany
25 N.C.
1)
Zawsze odniesione do poziomu końcowego napięcia 10 V, nawet, gdy zakres jest ograniczony
2)
AGND oraz DGND są podłączone wewnętrznie. AGND SEL przy Pinie 14 jest niezależny. Służy jako
odniesienie do wzmacniaczy różnicowych wszystkich wejść analogowych. Dix, DOx, +Vcc są
odnoszone do DGND. VREF, VMON, CMON, PMON są odnoszone do AGND. VSEL, CSEL oraz PSEL są
odnoszone do AGND SEL.
3)
Cyfrowe wejście, zależnie od ustawienia za pomocą zworek:
a) Ustawienie Wysokiego Zakresu (wysoki próg): U
24V; I = +4,5 mA, Progi: U
< 5 V; U
low
high
> 9 V
b) Ustawienie Niskiego Zakresu (niski próg): U
+6 mA, Progi: U
4)
Dodatnie prądy wypływają z urządzenia, ujemne wpływają do niego.
< 1 V; U
low
high
> 4 V
= 0 V; I = -1,5 mA, U
in
= 0 V; I = -1,5 mA, U
in
= 12 V; I = +0,7 mA, U
in
= 12 V; I = +2,2 mA, U
in
= 24V; I =
in
4.4.2 Ogólne
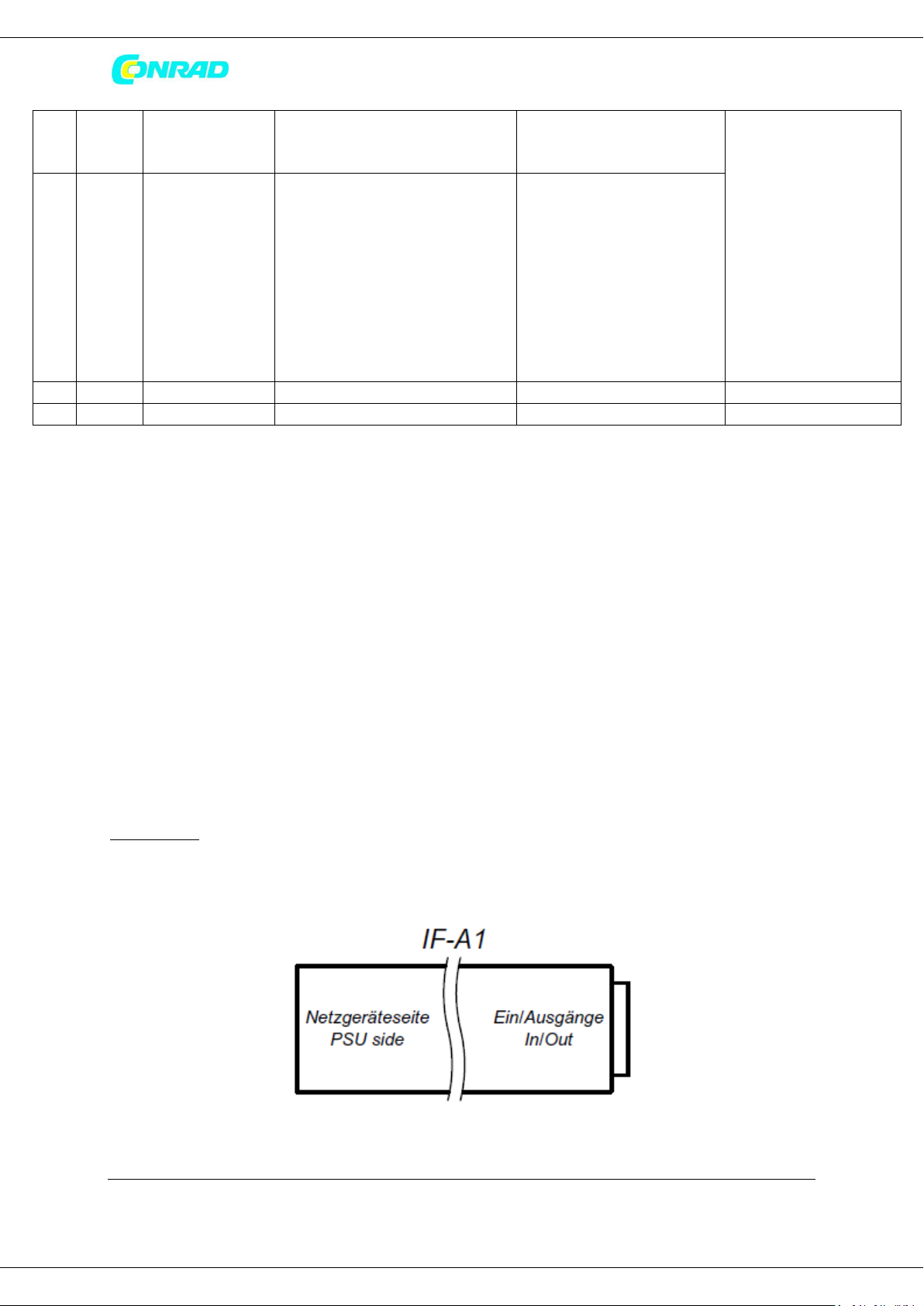
Interfejs IF-A1 jest analogowym interfejsem z cyfrowymi i analogowymi wejściami i wyjściami, z
izolacją galwaniczną i możliwością modyfikowania. Wizualizacja:
=
in
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
Strona 15 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
www.conrad.pl
www.conrad.pl
Możliwość modyfikowania oznacza, że możesz modyfikować te wejścia i wyjścia dopasowując je do
potrzeb, ale zawsze w zakresie napięcia 0 .. 10 V. W urządzeniach z dwoma slotami na karty
rozszerzeń (np. PSI 9000) możliwe jest łączenie IF-A1 z kartą cyfrowego interfejsu (np. IF-U1 (USB)),
aby sterować, na przykład, urządzenie za pomocą USB i wyprowadzać rzeczywiste wartości za
pomocą wyjść analogowych karty analogowej. Lub vice-versa, Sterujesz urządzeniem za pomocą
zestawu analogowych wartości i odczytujesz i rejestrujesz rzeczywiste wartości w PC za pomocą RS
232, CAN lub USB.
Ogólne zastosowanie: wszystkie funkcje monitorujące i nadzorujące są stale aktywne, nawet jeśli
dwie karty (jedna cyfrowa i jedna analogowa) są na wyposażeniu. Tylko sterowanie urządzeniem z
ustawionych wartości wymaga aktywacji trybu zewnętrznego (IF-A1) odpowiedzialnego za tryb zdalny
(cyfrowe interfejsy), podczas gdy tryb zdalny (sterowanie za pomocą karty cyfrowego interfejsu) ma
priorytet.W przypadku, gdy urządzenie jest sterowane za pomocą interfejsu analogowego (tryb
zewnętrzny, wskazywany na wyświetlaczy za pomocą extern ) i sterowanie urządzenia za pomocą
cyfrowego interfejsu jest aktywne, urządzenie przełączy się w tryb zdalny (wskazywany na
wyświetlaczy za pomocą remote )
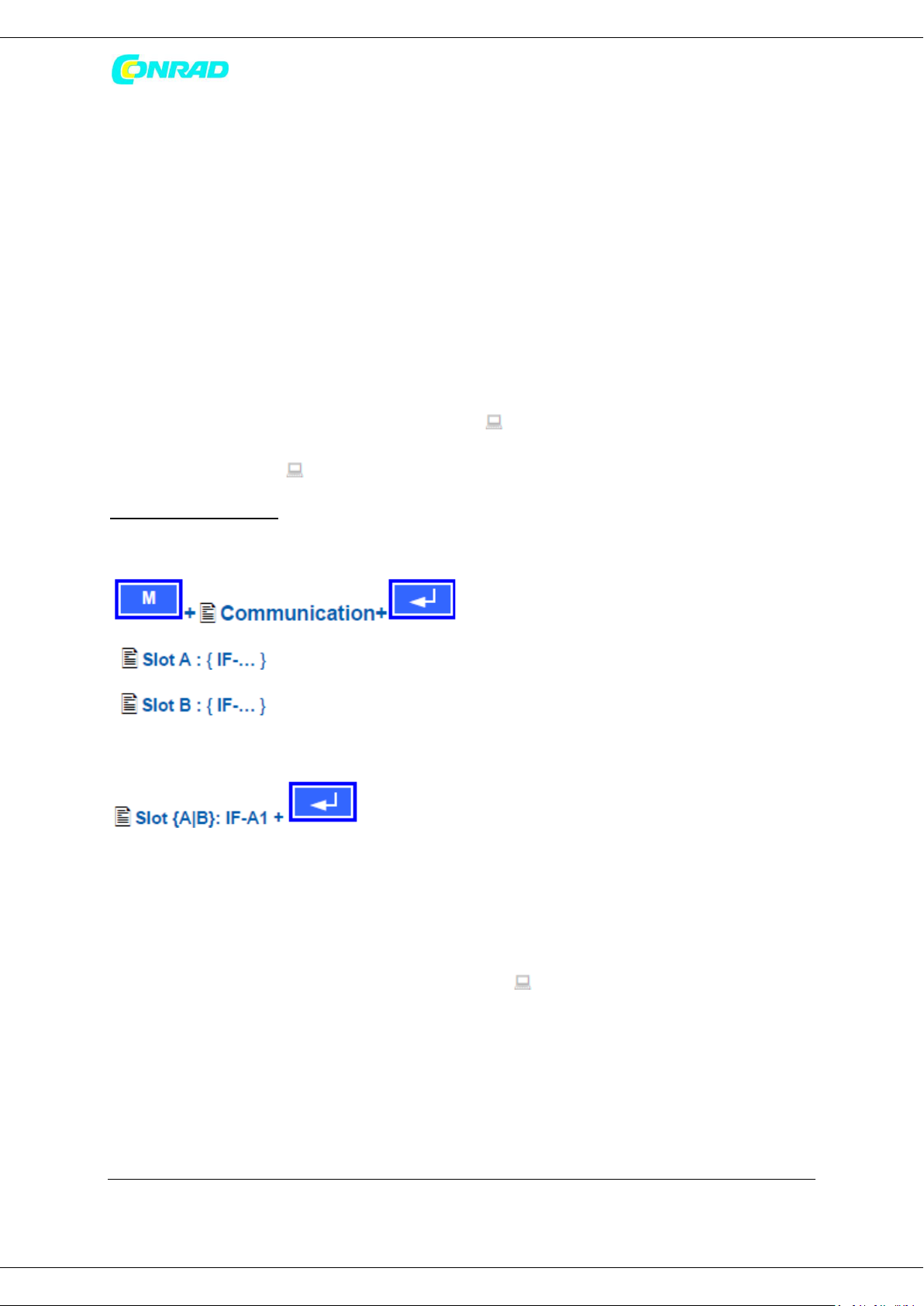
4.4.3 Konfiguracja IF-A1
Interfejs jest konfigurowany w menu komunikacji:
Nazwa pierwszej karty interfejsu (jeśli jest włożona)
Nazwa drugiej karty interfejsu (jeśli jest włożona)
Tutaj możesz widzieć przegląd wyposażonych kart. Za pomocą:
Karta analogowego interfejsu jest wybierana do konfiguracji. Możliwe jest ustawienie następujących
parametrów:
Wejścia analogowe
Analogowe wartości ustawień są akceptowane przez urządzenie, gdy znajduje się w trybie
zewnętrznym (wskazywanym na wyświetlaczy za pomocą extern )
Interfejs analogowy IF-A1 posiada trzy analogowe wejścia z tymi cechami:
AI1: PSEL (zewnętrzna ustawiona wartość dla mocy) lub RSEL (zewnętrzna ustawiona wartość dla
rezystancji wewnętrznej, opcjonalne z odblokowanym działaniem U/I/R)
AI2: CSEL (zewnętrzna ustawiona wartość dla prądu)
Strona 16 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
AI3: VSEL (zewnętrzna ustawiona wartość dla napięcia)
Maksymalne i minimalne napięcie wejściowe może byś ustawione wcześniej. Wejścia analogowe
mogą adoptować w ten sposób sygnały wejściowe. Ograniczając standardowy zakres napięcia 0 .. 10
V do niższych wartości zmniejsza się również rozdzielczość. Przykład: Jeśli zakres napięcia jest
ustawiony na różnicę 1 V pomiędzy U
max
i U
, rozdzielczość i dokładność będzie zmniejszona o
min
współczynnik 10.
Pierwsza wartość odpowiada za U
, (minimalne napięcie wejścia), drugie dla U
min
(maksymalne
max
napięcie wejścia). Wartości:
U
{0,00 V… 4,00 V}
min =
U
= {4,00 V… 10,00 V}
max
Dopasowany zakres napięcia, na przykład 2,00 V … 8,00 V odpowiada ustawionej wartości w
procentach 0 … 100%. Wyższa lub niższa wartość jest traktowana jako U
min
lub U
max
.
Domyślnie: Psel 0,00 10,00 V
={Psel | Rsel} zewnętrzna ustawiona wartość dla mocy / rezystancji
Rsel jest dostępne tylko dla aktywnego trybu U/I/R.
Domyślnie: Psel 0,00 10,00 V
= Vsel zewnętrzna ustawiona wartość dla napięcia
Domyślnie: Psel 0,00 10,00 V
= Csel zewnętrzna ustawiona wartość dla natężenia
Wyjścia analogowe
Rzeczywiste wartości napięcia, prądu i mocy wyjściowej są wyprowadzane poprzez analogowe
wyjścia. Te wyjścia mogą być adoptowane do indywidualnych wymagań. Pierwsza wartość oznacza
U
(minimalne napięcie wyjściowe) druga to U
min
U
{0,00 V… 9,00 V}
min =
U
= {4,00 V… 10,00 V}, co ważne: U
max
max
> U
min
(maksymalne napięcie wyjściowe). Wartości:
max
Ograniczając standardowy zakres napięcia 0 .. 10 V do niższych wartości zmniejsza się również
rozdzielczość. Przykład: Jeśli zakres napięcia jest ustawiony na różnicę 1 V pomiędzy U
max
i U
min
,
rozdzielczość i dokładność będzie zmniejszona o współczynnik 10.
Napięcie referencyjne jest wyjątkiem. Może być ustawione w zakresie od 1 V do 10 V.
Strona 17 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
Domyślnie: 10,00 V
= Vref Regulowane napięcie referencyjne w zakresie {1V .. 10V}.
Domyślnie: 0,00V 10,00 V
= Vmon Monitorowana (rzeczywista) wartość napięcia wyjściowego
Domyślnie: 0,00V 10,00 V
= Cmon Monitorowana (rzeczywista) wartość napięcia wyjściowego
Domyślnie: 0,00V 10,00 V
= Pmon Monitorowana (rzeczywista) wartość napięcia wyjściowego
Wejścia cyfrowe
Karta interfejsu IF-A1 posiada trzy parametryzowane cyfrowe wejścia DI1, DI2, oraz DI3 (rezerwowe,
nie używane).
Domyślnie: LOW
external
= LOW Zewnętrzna kontrola urządzenia za pomocą IF-A1 jest aktywna nisko. Jeśli domyślny
logiczny poziom DI1 jest ustawiony na LOW za pomocą zworki na PCB, zewnętrzne
sterowanie będzie od razu aktywne podczas włączania urządzenia.
= HIGH Zewnętrzna kontrola urządzenia za pomocą IF-A1 jest aktywna wysoko.
Po aktywacji zewnętrznego sterowania, zasilacz może być sterowany za pomocą wejść VSEL, CSEL
i/lub PSEL. Sygnał statusu i rzeczywiste wartości analogowe są zawsze wyprowadzane.
extern Wyświetlacz wskazuje, zę urządzenie jest sterowane zewnętrznie za pomocą interfejsu
analogowego.
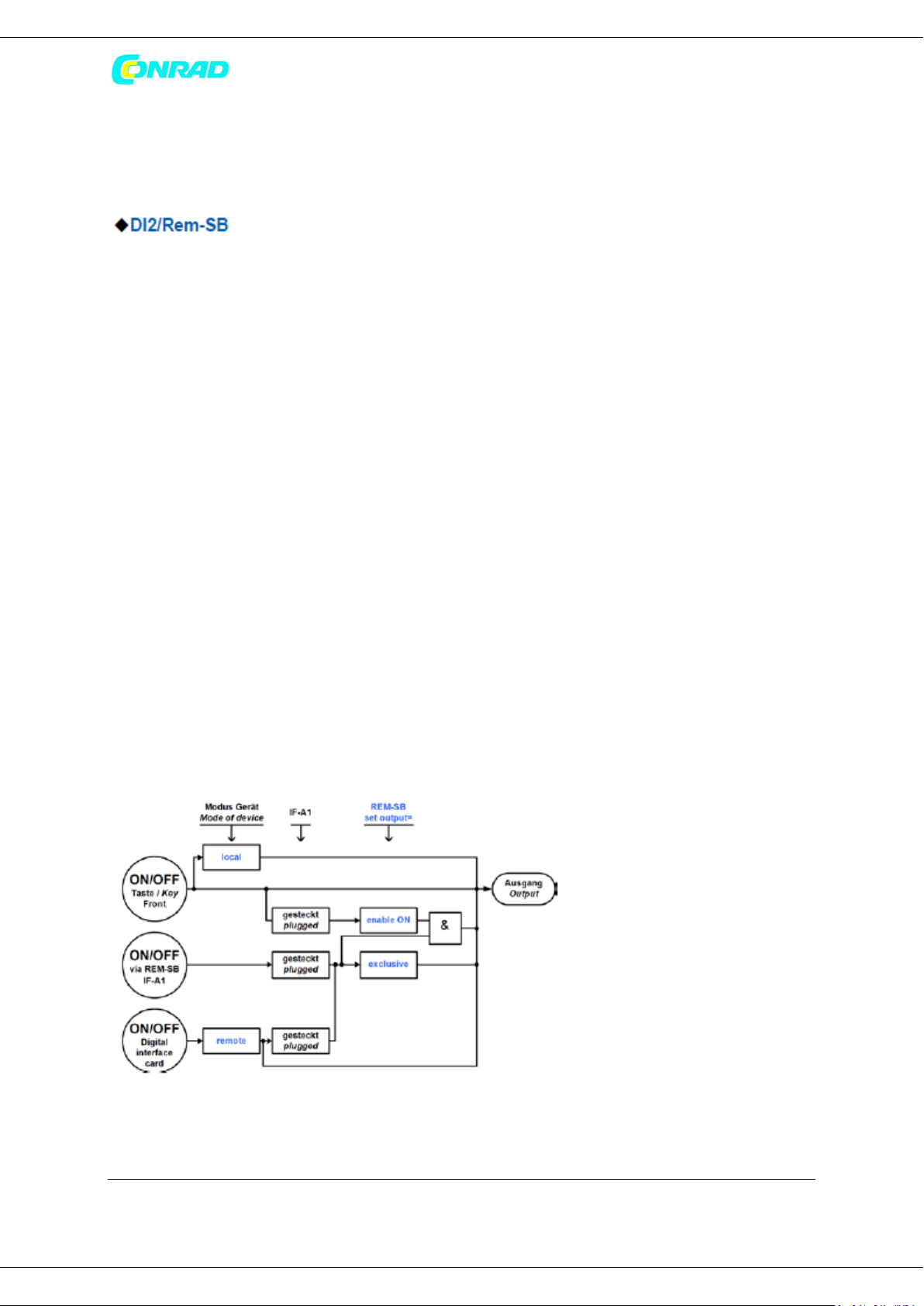
DI2/RemSB
Możesz włączać i wyłączać zasilacz, uruchamiać go lub blokować za pomocą tego wejścia. Zależnie od
ustawienia Set output , wejście DI2/Sem-SB determinuje, czy wyjście jest sterowane wyłącznie w
trybie zewnętrznycm (za pomocą interfejsu analogowego) odpowiednio trybu zdalnego (za pomocą
cyfrowego interfejsu) lub czy wymaga uruchomienia za pomocą przycisku ON/OFF. Uruchomienie to
jest sygnalizowane za pomocą auto ON. Używając ustawienia On/Off, wyjście mocy jest
bezpośrednio sterowane za pomocą wejścia DI2/Rem-SB. Uwaga! Nie może to być przerwane za
Strona 18 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
pomocą przycisku ON/OFF z przodu urządzenia lub komendy z karty cyfrowego interfejsu (wyjątek:
urządzenie jest w trybie „lokalnym”, wówczas wejście jest ignorowane).
Set output Domyślnie: Enable ON
= enable ON Przycisk ON/OFF musi być użyty aby włączyć wejście
= exclusive Wyjście zasilacza może być włączone i wyłączone za pomocą wejścia
DI2/Rem-SB lub za pomocą karty cyfrowego interfejsu (jeśli jest włożona)
Gdy używane jest ustawienie enable ON , wyjście musi być włączone przynajmniej jeden raz.
Ustawiając Power ON = restore (zob. Menu konfiguracji Twojego urządzenia) wyjście mocy będzie
automatycznie włączane po utracie zasilania, jeśli zostało włączone zanim pojawiła się utrata
zasilania. Może być następnie właczane/wyłączane jak zawsze.
Uwaga: Wyjście zasilacza może zawsze (wyjątek: wyłącznie tryb lokalny) wyłączone za pomocą
wejścia DI2/Rem-SB, nawet Gdy tryb zewnętrzny nie jest aktywny.
Standby Domyślnie: LOW
= LOW Wejście jest aktywne nisko, standby jest aktywowane poziomem napięcia < 1
V lub < 5 V (zależnie od ustawienia zworki).
= HIGH Wejście jest aktywne wysoko, standby jest aktywowane poziomem napięcia >
4 V lub > 9 V (zależnie od ustawienia zworki).
Schemat pokazuje zmianę różnych stanów i warunków dla trybu lokalnego, zdalnego i zewnętrznego
podczas włączania i wyłączania wyjścia mocy:
Strona 19 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
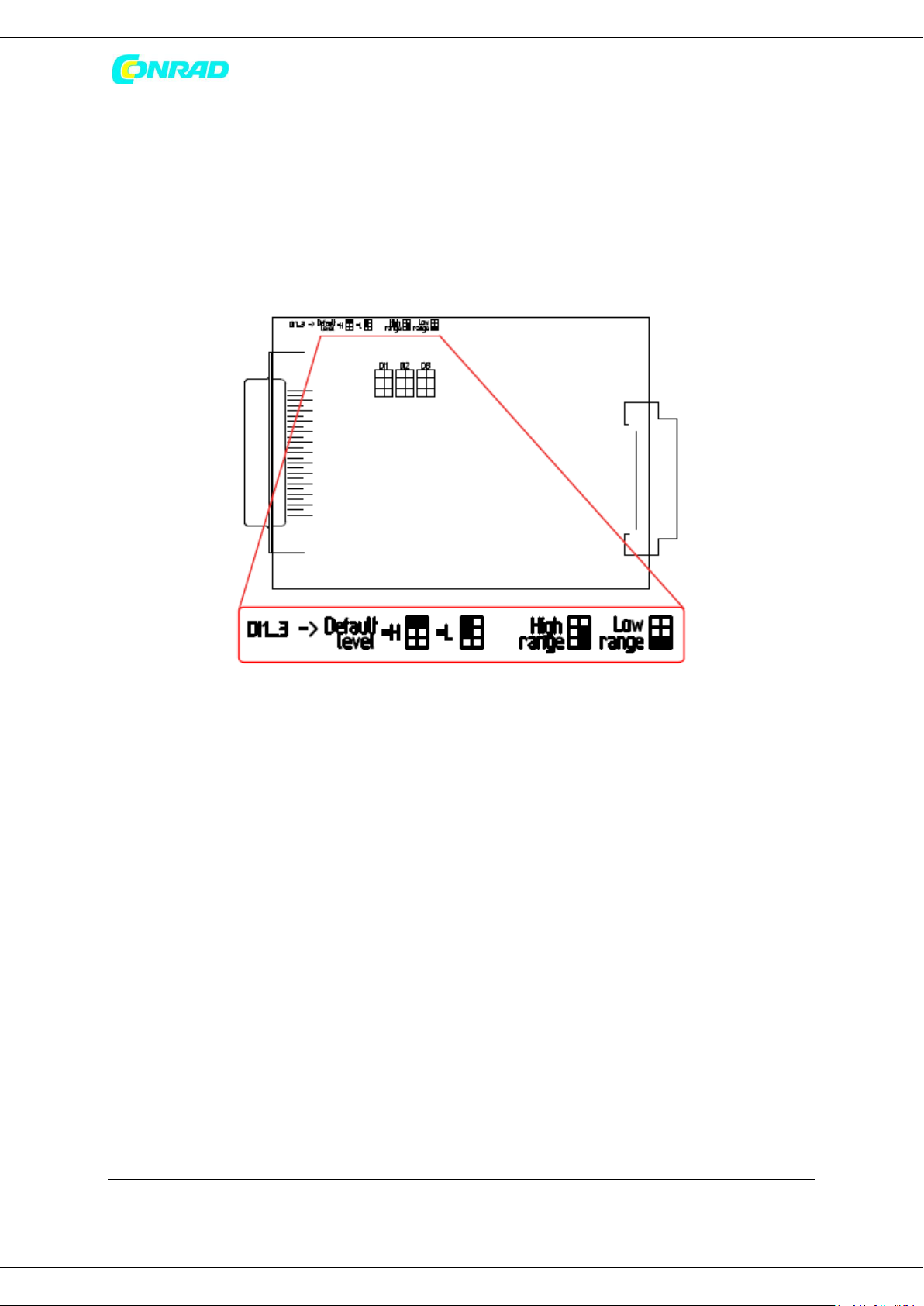
Ustawienie zworek dla DI 1-3
Zworki DI 1-3 na PCB są używane do ustawienia fizycznego zachowania tych wejść. Selektor „poziom
domyślny” definiuje domyślny logiczny poziom odpowiedniego wejścia. Oznacza to, że jeśli domyślny
poziom logiczny jest ustawiony na High. Wejście musi być zostać aktywnie przełączone do stanu Low
za pomocą zewnętrznej aplikacji (np. przekaźnika) aby zmienić poziom logiczny. Domyślny poziom
logiczny wymaga uwagi, gdyż definiuje zachowanie zasilacza poprzez sygnały sterujące SEL-enable
oraz Rem_SB.
Poziom domyślny definiuje stan logiczny wejścia, gdy nie jest podpięte.
High range wybiera zakres napięcia wyjściowego dla wysokiego stanu wejścia. High odpowiada
napięciu > 9 V a Low napięciu < 5 V.
Low range wybiera zakres napięcia wyjściowego dla niskiego stanu wejścia. High odpowiada napięciu
> 4 V a Low napięciu < 1 V.
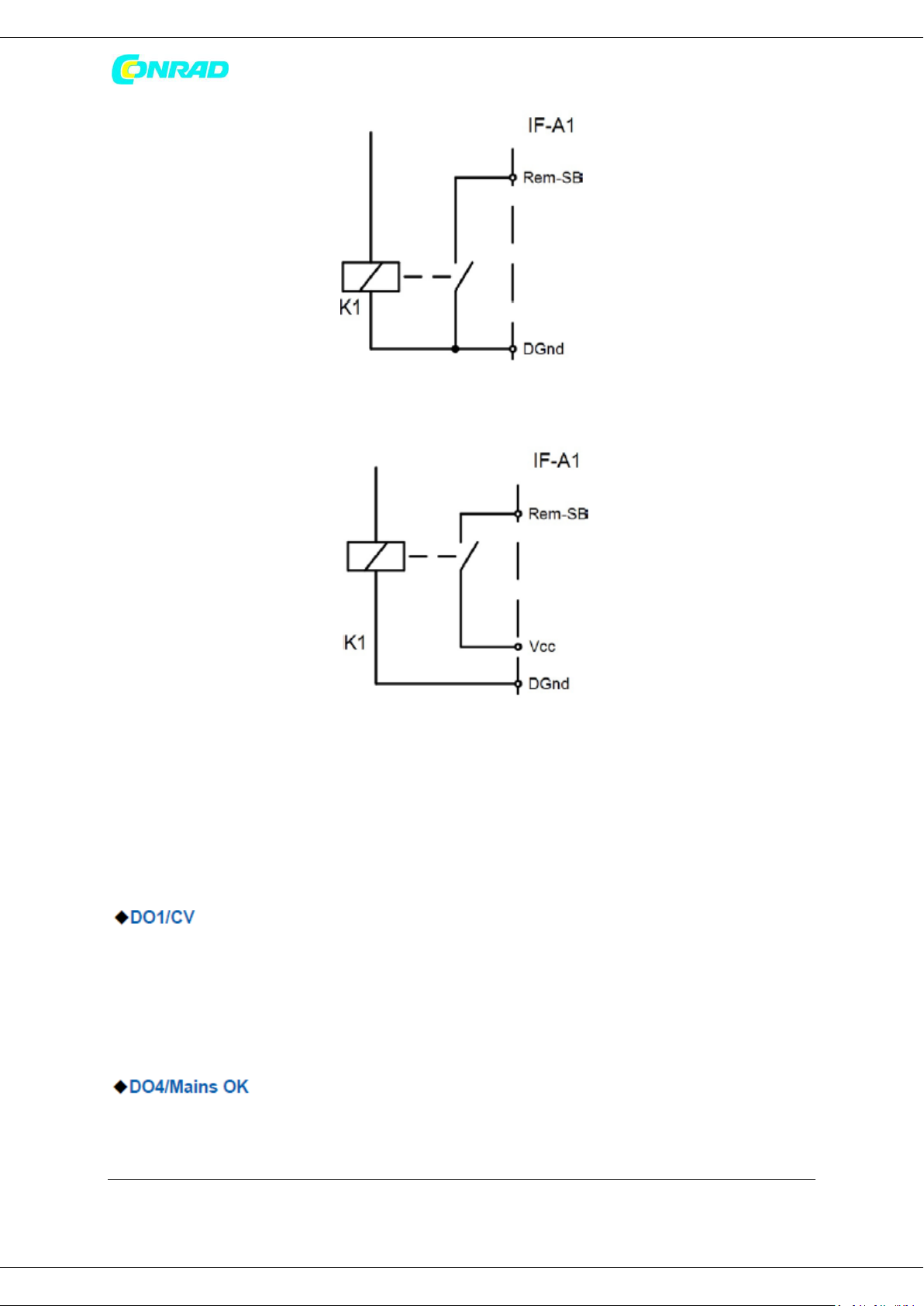
Przykłady: wejście DI2/Rem-SB, które jest używane do włączania i wyłączania (standby) wyjścia mocy
może być aktywowane sygnałem LOW lub HIGH zależnie od konfiguracji podczas ustawiania.
Przykład 1: Wejście będzie przeciągnięte do GND za pomocą przekaźnika i wyłączać wyjście mocy. W
związku z tym należy skonfigurować zworkę dla DI2 na „Default level = H” i użyć ustawienia Standby =
LOW i Set output = enable ON. Wyjście zasialcza może być teraz przełączane przekaźnikiem.
Strona 20 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
www.conrad.pl
Przykład 2: Wyjście będzie wyłączane za pomocą obwodu awaryjnego. Zworka dla DI2 musi zostać
ustawiona na „Default level = L”, ustawienie Standby = LOW. Ten przykład używa przekaźnika do Vcc.
Oczywiście możliwych jest wiele innych kombinacji.
Cyfrowe wyjścia z determinowaną funkcjonalnością
Cyfrowe wyjścia DO1, DO4, DO5 oraz DO6 nie mogą posiadać funkcjonalności zdefiniowanej przez
użytkownika, ale mogą mieć odwrócony stan wyjść logicznych.
Domyślnie: LOW
= { LOW | HIGH}
Jeśli wybrany został LOW, wyjście jest przyciągane do GND jak tylko tryb regulacji zasilacza jest
zdeterminowany przez ustawioną wartość napięcia (operacja CV). Jeśli wybrany został HIGH, wyjście
jest przyciągane do 12 … 15 V.
Domyślnie: LOW
= { LOW | HIGH}
Strona 21 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Jeśli wybrany został LOW, wyjście jest przyciągane do GND tak długo, jak długo pojawia się napięcie
zasilania. Jeśli wybrany został HIGH, wyjście jest przyciągane do 12 … 15 V.
Domyślnie: LOW
= { LOW | HIGH}
Jeśli wybrany został LOW, wyjście jest przyciągane do GND jeśli moc wyjścia urządzenia jest
wyłączona (standby). Jeśli wybrany został HIGH, wyjście jest przyciągane do 12 … 15 V.
Domyślnie: LOW
= { LOW | HIGH}
Jeśli wybrany został LOW, wyjście jest przyciągane do GND jak tylko tryb regulacji zasilacza jest
zdeterminowany przez ustawioną wartość natężenia (operacja CC).. Jeśli wybrany został HIGH,
wyjście jest przyciągane do 12 … 15 V.
Cyfrowe wyjścia z funkcjonalnością definiowaną przez użytkownika
Cyfrowe wyjścia DO2, DO3 oraz DO7 mogą być konfigurowane a ich poziomy logiczne mogą być
odwracane.
Domyślnie: OVP LOW
Domyślnie: OT LOW
Domyślnie: CP LOW
Jedna poniżej podanych funkcji może zostać przypisana do każdego z wyjść:
= remote Wskazuje , że zasilacz jest zdalnie sterowany za pomocą karty interfejsu
cyforwego
= OT Wskazuje błąd przekroczenia temperatury
=CP Wskazuje , że zasilacz jest regulowany poprzez ustawioną wartość mocy
(działanie CP).
= Alarm Wskazuje , że wystąpił alarm. Wyjście zasilacza automatycznie wyłącza się a
alarm może być wskazany przez to wyjście.
= trip U Uruchomiony przez przekroczenie limitów U> i /lub U< (zob. instrukcję
= trip U Uruchomiony przez przekroczenie limitów I> i /lub I< (zob. instrukcję obsługi
obsługi PSI 9000).
PSI 9000).
Strona 22 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
= trip U+I Uruchomiony przez przekroczenie limitów U>, U< I>, i /lub I< (zob. instrukcję
obsługi PSI 9000).
Definiowanie poziomu logicznego po wskazaniu/uruchomieniu:
= LOW Wyjście jest przyciągane do GND jak tylko wybrana funkcja staje się aktywna.
Poziom logiczny jest odwrócony, jeśli warunek nie jest spełniony.
= HIGH Wyjście jest przyciągane do +15 V przez opornik o dużej rezystancji, jak tylko
wybrana funkcja staje się aktywna. Poziom logiczny jest odwrócony, jeśli
warunek nie jest spełniony.
4.5 Karta IF-G1 GPIB
Karta interfejsu IF-G1 oferuje standaryzowany, cyfrowy interfejs (GPIB) zgodny z IEEE 488.1/2. Jego
instalacja jest opisana w skróconej instrukcji instalacji zawartej w zestawie.
W razie drugiej karty użytej wewnątrz urządzenia serii PSI 9000, IF-G1 może być połączony wyłącznie
z kartą analogową IF-A1 lub z cyfrowymi kartami IF-R1 oraz IF-U1. Nie może być łączona razem z kartą
interfejsu IF-C1 CAN!
4.5.1 Informacje o komunikacji
Karta ta mnie używa protokołu komunikacji zorientowanego obiektowo, używa międzynarodowo
standaryzowanego zestawu komend SCPI. SCPI używa zwykłego tekstu w formacie ASCII, który może
ułatwić programowanie.
4.5.2 Sterowanie urządzeniem za pomocą GPIB
Z zasady procedura dostępu i kontroli naszych urządzeń jest taka sama jak innych kart cyfrowych.
Gdy karta GPIB jest podłączona do PC i została skonfigurowana, możesz w prosty sposób odpytywać
o status i aktualne wartości z urządzenia. Sterowanie urządzeniem takie jak włączanie i wyłączanie
wejść i wyjść lub wysyłanie wartości do ustawienia wymaga aktywacji trybu zdalnego sterowania. To
nie dzieje się automatycznie. Odpowiednie rozkazy są opisane poniżej.
Uwaga: za pomocą GPIB możesz połączyc tylko do 15 jednostek na jednej szynie!
4.5.3 Objaśnienie terminów
GPIB General Purpose Interface Bus /Szyna Interfejsu Ogólnego Przeznaczenia/
IEEE60488.1 standaryzuje interfejs GPIB do komputera hosta (stare synonimy: szyna IEC, szyna
IEC 625, standard ANSI MC1.1)
SCPI Standard Commands for Programmable Instruments / Standardowe rozkazy dla
intrumentów programowalnych/ => ustandaryzowany język komend do
komunikacji z instrumentami i urządzeniami pomiarowymi.
Strona 23 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
4.5.4 Różnice w stosunku do innych kart interfejsów
Do komunikacji połączenia do komputera hosta (PC, SPC lub podobny) używany jest interfejs GPIB i
rozkazy bazujące na tekście zgodnym z SCPI. Protokół znacząco różni się od innych kart interfejsu IFxx. Wszystkie one używają protokołu zorientowanego obiektowo, nie standaryzowanego protokołu
komunikacji, który został zunifikowany dla wszystkich innych kart interfejsów cyfrowych.
4.5.5 Transmisja i czas wykonania
Protokół SCPI musi zostać przetłumaczony na wewnętrzny, co zajmuje troszkę czasu.
Czas translacji protokołu i czas wykonania przez wewnętrzny mikrokontroler urządzenia są zależne od
komend i muszą być dodane do czasu transmisji.
Typowymi wartościami są:
Czas translacji protokołu Tp: 2 ms
Czas transmisji do wewnętrznego mikrokontrolera T
Czas wykonania przez wewnętrzny mikrokontroler T
: 0,5 ms
T,MC
: 2 ms
E,MC
W przypadku, gdy PC-host spodziewa się odpowiedzi całkowity czas może wynosić
/zapytanie / T
/odpowiedź/ T
Request
Response
= T
= T
+ Tp + T
T,GPIB
+ 0,2 * Tp + T
T,MC
T,MC
+ T
E,MC
T,MC
+ T
T,GPIB
Zależnie od wysłanego rozkazu.
Czas transmisji T
szyny GPIB jest bardzo krótki i wynosi zwykle 200 µs. Rekomendowany czas
GPIB
interwału między komendami > 30 ms. Krótsze czasy mogą prowadzić do błędów wykonania.
4.5.6 Konfigurowanie karty IF-G1
Karta jest konfigurowana w menu setup.
Uwaga: zdecydowanie konieczne jest wybranie unikatowego węzła urządzenia (=adresu) dla każdej
jednostki, która jest podpięta do tego samego komputera PC. Tylko wtedy urządzenie może być
identyfikowane i adresowane w prawidłowy sposób. Wejście do menu setup:
= {1 ..15} Wybierz spośród 15 węzłów urządzeń
Domyślnie: 1
1)
zależy od wpiętej karty
Strona 24 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
zależy od wpiętej karty
Tutaj możesz ustawić pożądany węzeł urządzenia i możesz uzyskać przegląd, które karty są aktualnie
zainstalowane. W razie zmiany ustawień bez restartowania urządzenia, musisz wysłać rozkaz *RST
aby wysłać nowe ustawienia.
Uwaga! W zasilaczach PSI 9000 z firmware w wersji do 3.04 i w obciążeniach elektronicznych serii
EL3000/9000 z firware w wersji do 2.11 karta interfejsu jest wykrywana jako „IF-C1”, czyli jako karta
interfejsu CAN. Musi ona zostać ustawiona na 100 kBd, brak germinacji szyny oraz RID=0, aby
funkcjonował a prawidłowo. Dla firmware od wersji 3.05 (PSI) oraz 2.12 (EL) karta jest prawidłowo
wykrywana jako IF-G1.
1)
Nawet jeśli w urządzeniu mogą zostać ustawione adresy do 30, dla GPIB wspierane są wyłącznie
adresy od 1 do 15. Od adresu 16 przypisanie zaczyna się znów od 0, w związku z tym adres 16 jest
ZABRONIONY.
4.5.7 Akcesoria
Kabel, który jest załączony w zestawie służy do aktualizacji firmware’u mikroprocesora na karcie do
kolejnych wydawanych wersji.
4.5.8 Rozkazy SCPI
Rozkazy SCPI są wysyłane jako zwykły tekst. Koniec musi być zaznaczony tok enem LF (Line Feed, 0xA,
ASCII 10).
IF-G1 ignoruje CR = kod ASCII 13 (0xD), w przypadku, gdy jest wysłane przed LF (Line feed). Jeśli CR
pojawi się po LF, spowoduje błąd w kolejnym rozkazie.
Transmisja z urządzenia wymaga, aby najpierw wysłać wiadomość z hosta (PC/SPC itp.). Musi to być
zakończone za pomocą LF. IF-G1 odpowie, jeśli host spodziewa się odpowiedzi. W takim wypadku na
końcu linii należy umieścić rozkaz „?”.
Rozkazy, które muszą ustawić stan lub wartość zawsze składają się ze słowa rozkazu oraz jednej lub
kilku wartości oddzielanych przecinkami. Przykład:
<ROZKAZ>˽<wartość numeryczna>,<wartość numeryczna>…
Każdy rozkaz możesz wysłać w wersji skróconej lub kompletnej. W poniższym rozdziale skrócona
wersja jest podawana wielkimi literami i jest zawsze częścią wersji kompletnej.
Formatowanie składni
Specyfikacja zgodnie z „odnośnikiem rozkazów 1999 SCPI”.
W rozkazach i/lub odpowiedziach mogą pojawić się następujące formatowania składni:
Strona 25 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
<Numeric value> Ta wartość numeryczna odpowiada wartości na wyświetlaczu
urządzenia i zależy od wartości nominalnych urządzenia. Stosowanie:
- wartość musi być wysłana po rozkazie i być oddzielona spacją
- zamiast wartości numerycznej możesz użyć także:
MIN (odpowiada wartości minimalnej parametru)
Lub
MAX (odpowiada wartości maksymalnej parametru)
Uwaga! Ustawianie wartości większych niż nominalne spowoduje
błąd!
<NR1> Wartość numeryczna bez części dziesiętnej
<NR2> Wartość numeryczna z częścią dziesiętną
<NRf> Wartość numeryczna z częścią dziesiętną i exponentą
<NRf+> Zawiera <NR1>, <NR2>,<NR3> jak również MIN oraz MAX
Unit V Wolt
A Amper
OHM Om
s Sekundy
<CHAR> 0 .. 255: Liczba dziesiętna (wyjście)
#B0000 0000 … #B1111 1111: Widok binarny
#H00 .. #HFF: Widok heksadecymalny
<+INT> 0 .. 32768: dodatnia liczba całkowita (wyjście)
#B0000 0000 0000 0000… #B1111 1111 1111 1111: Widok binarny
#H0000 .. #HFFFF: Widok heksadecymalny
<B0> 1 lub ON: Funkcja jest aktywowana
0 lub OFFF: Funkcja jest dezaktywowana
<B1> BRAK: działanie lokalne, możliwe jest przełączenie na zdalne
sterowanie
<B2> ON lub 1: Pomiar automatyczny z x rund
ONCE lub 0: pojedynczy pomiar z x rund, uruchamiany przez *TRG
<ERR> Błąd i numer zdarzenia (-800 do 399)
<SRD> String /łańcuch znaków/
<LF> Token końca linii (Line feed, 0x0A)
<Time> [[ddd],[hh],[mm],[s]s.s[s][s][s][s][s][s]]
Standardowy format jest w sekundach (s.s)
Strona 26 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
; Średnik jest używany do oddzielenia wielu rozkazów w wiadomości
: Dwukropek jest używany do rozdzielania głównych słów kluczowych od
pomniejszych słów kluczowych
[] małe litery i elementy w nawiasach kwadratowych są opcjonalne
? Znak zapytania identyfikuje zapytanie. Zapytanie może być połączone z
transmisją danych. Tutaj może zajść konieczność poczekania na
odpowiedź systemu zanim wysłane zostaną dane
-> Odpowiedź z urządzenia
Rozkazy i parametry charakterystyczne dla urządzenia
Czerwony: tylko kompatybilne z zasilaczami PSI
Niebieski: tylko kompatybilne z obciążeniami elektrycznymi
Czarny: kompatybilne z dowolnym urządzeniem
Typowe rozkazy IEEE488.2
*IDN? Zwraca identyfikację urządzenia, składa się z:
Tekstu użytkownika, sprzedawcy urządzenia, nazwy urządzenia,
numeru seryjnego urządzenia, wersji firmware’u urządzenia,
numeru(ów) seryjnego(ych) i wersji firmware’u(ów) podpiętych kart
interfejsów <LF>
*RST Resetuje urządzenie wykonując:
- ustawienie go w tryb zdalnego sterowania (jeśli jest to dozwolone)
- ustawienie wejścia/wyjścia na OFF
- zresetowanie wszystkich poprzednich alarmów urządzenia
- ustawienie wartości:
Uset = 0, Iset = 0, Pset = MAX, Rset = MIN
*TRG Uruchamia pomiar
*CLS Czyści wszystkie rejestry wydarzeń i statusów kontrolera GPIB
*ESE<CHAR> Ustawia Rejestr Uruchomienia Statusu Wydarzenia
*ESE? Odczytuje Rejestr Uruchomienia Statusu Wydarzenia
*ESR? Odczytuje Rejestr Uruchomienia Statusu Wydarzenia, który jest
*SRE<CHAR> Ustawia Rejestr Uruchomienia Żądania Serwisu
czyszczony po odczycie
Strona 27 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
*SRE? Odczytuje Rejestr Uruchomienia Żądania Serwisu
*STB? Odczytuje Rejestr Bajtu Statusu, który jest czyszczony po odczycie
Generowanie żądania serwisu (SRQ)
Sterownik GPIB automatycznie zajmuje się działaniami, które są uruchamiane za pomocą bitu rsv w
rejestrze statusu STB.
Po generowaniu żądania serwisu i kolejnych zapytań za pomocą *STB? Od hosta, rejestr jest
czyszczony.
Schemat jest zilustrowany na poniższym diagramie.
SRQ jest generowane jak tylko bit rsv w rejestrze Bajtu Statusu (STB) zostaje ustawiony a
odpowiadające bity dla wydarzeń, które mogą spowodować SRQ są aktywowane w Rejestrze Żądania
Uruchomienia Serwisu (SRE).
To, które wydarzenia mogą spowodować żądanie serwisu jest wybierane za pomocą polecenia
*SRE<CHAR> poprzez Rejestr Uruchomienia Statusu Wydarzenia.
Rejestr statusu STB składa się z następujących bitów:
Bit 0: Nie używany
Bit 1: Nie używany
Bit 2: err, kolejka błędów pełna ; ta kolejka jest czyszczona poprzez odczytanie jej i bit jest także
resetowany. Lista może przechowywać do 4 ostatnich błędów.
Bit 3: ques, rejestr podejrzanego statusu jest aktywny (jedno lub więcej wydarzeń zostało
zarejestrowanych)
Bit 4: Nie używany
Bit 5: esr, standardowy Rejestr Statusu Wydarzenia (ESR), maksowany przez Rejestr Uruchomienia
Statusu Wydarzenia (ESE) sygnalizuje, że zostało zarejestrowane jedno lub więcej wydarzeń
Bit 6: rsv, zawsze aktywny
Bit 7: oper, sygnalizuje, że jedno lub więcej wydarzeń jest przechowywane w Rejestrze Statusu
Operacji
Bity wydarzeń różnych rejestrów raportują do STB, gdy wydarzenia uaktywnione do raportowania
miały miejsce; poprzez odpowiednie bity w rejestrach wydarzeń (*ESE, *SRE odp. STAT:QUES:ENAB,
STAT:OPER:ENAB).
Bity wejścia rejestrów są przypisane zgodnie z tym co przedstawiono na diagramie. Czerwony
oznacza, że te sygnały są dostępne tylko dla urządzenia PSI 9000, niebieski wyłącznie dla
EL3000/9000.
Strona 28 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Bity ESR są następujące:
Bit 0: Operacja zakończona, odnosi się do opcji uśredniania (zob. poniżej), jest ustawiony, gdy
uśrednianie zakończyło się sukcesem
Bit 1: Nie używany
Bit 2: Nie używany
Bit 3: Błąd zależny od urządzenia (Defekt sprzętu itp.) błędy od -399 do -300 odp. 100 …399
Bit 4: Błąd wykonania (ograniczenie prądu, inne limity przekroczone); błędy od -299 do -200
Bit 5: Błąd rozkazu; błędy od -199 do -100
Bit 6: Nie używany
Bit 7: Zasilanie włączone (urządzenie zostało włączone)
Rejestry wydarzeń i statusów mogą być czyszczone używając polecenia *CLS.
Strona 29 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Rozkazy statusów
Rejestr Statusu Działania (OPER) (zob. diagram na wcześniejszej stronie) przechowuje kilka statusów
(zdalne, lokalne, itp.) w rejestrze Warunek i przesyła je do rejestru Wydarzenie tak długo jak są
uruchomione przez Enable. Maski Positive transition oraz Negative transition determinują, czy
wydarzenia są uruchamiane narastającym zboczem czy opadającym zboczem. Może to być
wykorzystane do wykrywania pojawienia się i zniknięcia statusu.
To samo tyczy się Rejestru Podejrzanego Statusu (QUES). Konfiguracja dla OPER, jak to pokazano na
diagramie powodowałaby wydarzenie tylko jeśli sygnał „local” zmienia się ze stanu niskiego na
wysoki. Sygnał „Function mode” z drugiej strony powodował by także zdarzenie przy zboczu
opadającym.
STATus
:OPERation Status zależny od operacji
:EVENT? -><+INT> Zapytania do wydarzeń w Rejestrze Statusu Operacji
:CONDition? -><+INT> Zapytanie warunki wydarzenia OPER
:ENABle <+INT> Uaktywnia wydarzenia dla OPER
:ENABle? -><+INT> Zapytanie
:PTRtransition <+INT> Zdarzenie będzie rejestrowane przy zboczu narastającym
:PTRtransition? -><+INT> Zapytanie
:NTRtransistion <+INT> Zdarzenie będzie rejestrowane przy zboczu opadającym
:NTRtransition? -><+INT> Zapytanie
:QUEStionable Zdarzenia charakterystyczne dla urządzenia i funkcji
:EVENT? -><+INT> Zapytania do wydarzeń w Rejestrze Podejrzanego Statusu
:CONDition? -><+INT> Zapytanie warunki wydarzenia QUES
:ENABle <+INT> Uaktywnia wydarzenia dla QUES
:ENABle? -><+INT> Zapytanie
:PTRtransition <+INT> Zdarzenie będzie rejestrowane przy zboczu narastającym
:PTRtransition? -><+INT> Zapytanie
:NTRtransistion <+INT> Zdarzenie będzie rejestrowane przy zboczu opadającym
:NTRtransition? -><+INT> Zapytanie
Strona 30 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Przykłady:
STAT:OPER? Zapytanie do Rejestru OPERation Status Event Register
STAT:QUES? Zapytanie do Rejestru QUEStionable Status Event Register
STAT:OPER:ENAB˽255 Uaktywnia wszystkie zdarzenia dla Rejestru OPERation Status Event Register
Rozkazy systemowe
[SYSTem:]
ERRor:ALL? -><Err>[,<Err>]… Zapytanie do kolejki błędów, używane do odczytu
opisów i kodów błędów
ERRor:NEXT? -><Err> Zapytanie wyłącznie o ostatni błąd w kolejce; jeśli
kolejka jest pusta, bity err, esr oraz ESR:Condition są
czyszczone
LOCK
[:STATE] -><B0> 1= ustawienie urządzenia w tryb zdalnego sterowania,
jeśli SYST:LOCK:OWN? Uzyska odpowiedź „NONE”
0 = wyjście z trybu zdalnego sterowania, przywraca
urządzenie w tryb normalnego działania
Uwaga: urządzenie może być monitorowane wyłącznie, jeśli nie jest w trybie zdalnym. Oznacza to,
że możesz pytać wyłącznie o rzeczywiste wartości i status. Aby ustawić status, tryby i ustawić
wartości musisz przełączyć urządzenie za pomocą LOCK:STATE 1 lub *RST (zob. 2.2). Aby tak
uczynić, tryb zdalny nie może być zablokowany. Więcej informacji o warunkach, blokadach i trybach
możesz znaleźć w instrukcji obsługi Twojego urządzenia. Zapytanie o stan zamknięcia może być
wykonane rozkazem:
[SYSTem:]
LOCK
:OWNer? -><B1> Pobranie aktualnego stanu zamknięcia
NONE: jeśli zwrócone, urządzenie może przejść
w tryb zdalny (Bity 8, 9, 10 =0 w
OPER:Condition)
LOCal: urządzenie jest trybie lokalnym i jest
zablokowane dla trybu zdalnego (Bity 8=1,
9=0, 10 =0 w OPER:Condition) Tryb zewnętrzny
jest interpretowany jako LOCal. (Bity 8=0, 9=0,
10 =1 w OPER:Condition)
Strona 31 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
REMote: urządzenie jest w trybie zdalnym
poprzez IF-G1 (Bity 8=0, 9=1, 10 =0 w
OPER:Condition)
VERSion? -><SRD> Zapytanie o wersję SCPI
Przykłady:
SYST:LOCK:OWN? Zapytanie o stan zablokowania aby określić czy możliwy jest tryb
zdalny
SYST:LOCK:STAT˽1 Ustawia urządzenie w tryb zdalnego sterowania (zezwolone
ustawianie wartości
SYST:LOCK:˽ON J.w.
Rozkazy do sterowania wejściem / wyjściem
Aktywuje / dezaktywuje wejście /wyjście mocy. Logiczne przypisanie OUTP odp. INP jest używane.
Oznacza, że używając INP z zasilaczem, który posiada OUTPut, będzie ignorowane. Obciażenie
elektryczne będzie reagowało tak samo i vice versa.
OUTPut[:STATe]? -> <B0> Zapytanie o stan wyjścia zasilacza
OUTPut[:STATe] <B0> Przełącza wyjście zasilacza (Wł/Wył)
INPut[:STATe]? -> <B0> Zapytanie o stan wyjścia obciążenia el.
INPut[:STATe] <B0> Przełącza wejście obciążenia el. (Wł/Wył)
Przykłady:
OUTP˽ON Włącza wyjście mocy, nie resetuje alarmów ostrzeżeń i nie anuluje
ich. Oznacza to, że jeśli alarm jest aktywny, rozkaz nie zostanie
wykonany.
INP˽1 JW. Ale dla wejścia (obciążenia elektrycznego
Rozkazy pomiarowe
Używane do odczytu najnowszego wyniku pomiaru. Jesteś zobowiązany zwracać uwagę na
ustawienie uśredniania ( zob. „Uśrednianie”) gdy używasz rozkazów pomiarowych.
Strona 32 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
MEASure
[:SCALar]
:VOLTage[:DC]? -><NRf>Unit Zapytanie: Aktualna wartość napięcia
:CURRent[:DC]? -><NRf>Unit Zapytanie: Aktualna wartość natężenia
:POWer[:DC]? -><NRf>Unit Zapytanie: Aktualna wartość mocy
[:ARRay]? <NRf>Unit Zapytanie: Rzeczywista wartość napięcia, nateżenia,
mocy
Przykłady:
MEAS:CURR? Pomiar aktualnej wartości natężenia odp. Zwraca wartość uśrednioną.
MEAS:ARR? Zwraca ilość wartości zależną od urządzenia. Dla PSI/EL: U, I, P
Rozkazy ustawienia wartości
Ustawienie wartości może być także odczytane poprzez dodanie znaku zapytania na koniec rozkazu.
Dla znaczenia trybów A, B oraz A/B przy obciążeniach elektronicznych należy skorzystać z instrukcji
użytkownika dla tych urządzeń!
I. Ustawienie wartości napięcia / próg przeciwprzepięciowy
(Specyfikacja zgodnie z „1999 SCPI Command reference”: 19 Source Subsystem)
Dla obciążeń elektronicznych stosuje:
Rozkazów charakterystycznych wyłącznie dla obciążeń elektronicznych wspieranych od
firmware w wersji 3.01.
Wartość ustawiona HIGH musi być większa niż wartość ustawiona LOW, w przeciwnym razie
urządzenie generuje błąd. Rozkaz HIGH oraz LOW są ważne tylko dla poziomu A/B działania i
będą generowały błąd w innych trybach sterowania.
Zapytanie i ustawienie ustalonych wartości jest zawsze dedykowane aktualnie wybranemu
„Level Control” i wybranemu wcześniej trybowi/”Mode”/. To jest, gdy Level A jest aktywny,
ustawiona wartość wysłana za pomocą VOLT jest ustawiona dla Level A itd., ale tylko jeśli
wybrany został wcześniej tryb CV. W przeciwnym razie wartość ustawiona jest ignorowana i
generowany jest błąd. Tryb kontroli musi być wybrany zanim urządzenie zostanie ustawione
w trybie zdalnego sterowania. Inne wartości ustawione, nie należące do wybranego
wcześniej trybu nie mogą zostać ustawione i muszą być ustawione wcześniej. W związku z
tym dla ciągłego zdalnego sterowania urządzenia rekomendujemy opcję „Keep set values” w
Strona 33 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
menu setup ustawione na „no”, co spowoduje zresetowanie ustawionych wartości do
wartości domyślnych podczas wyboru trybu.
[SOURce:]
VOLTage
[:LEVel]? -><NRf>Unit Zapytanieo ostanio ustawioną wartość napięcia
Poziom A lub B, zależnie od tego, który jest aktywny
[:LEVel] <NRf+>Unit Ustawienie napięcia Poziom A lub B, zależnie od
tego, który jest aktywny
:HIGH <NRf+>Unit Ustawienie napięcia dla poziomu A w trybie Level
A/B
:HIGH? -><NRf>Unit Zapytanie o ustawioną wartość napięcia dla
poziomu A w trybie Level A/B
:LOW <NRf+>Unit Ustawienie napięcia dla poziomu B w trybie Level
A/B
:LOW? -><NRf>Unit Zapytanie o ustawioną wartość napięcia dla
poziomu B w trybie Level A/B
:PROTection[:LEVel] <NRf+>Unit Ustawienie progu nadnapięciowego (OVP) (tylko,
gdy wyjście jest wyłączone)
:PROTection[:LEVel]? -><NRf>Unit Zapytanie o ustawioną wartość progu OVP
Przykłady
VOLT˽5.05 Ustawia napięcie wyjściowe zasilacza na 5,05V odp. Granica napięcia w
ob. el
VOLT˽6.91˽V Przykład z jednostką
VOLT? Zapytanie o ostatnio ustawioną wartość
SOUR:VOLT:PROT˽67 Ustawia wartość progu OVP na 67 V (tylko PSI 9000), jeśli wyjście
urządzenia jest wyłączone. W przeciwnym razie rozkaz jest ignorowany i
generowany jest błąd.
(Specyfikacja zgodnie z „1999 SCPI Command reference”: 19 Source Subsystem)
Dla obciążeń elektronicznych stosuje:
II. Ustawienie wartości natężenia
Strona 34 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Rozkazów charakterystycznych wyłącznie dla obciążeń elektronicznych wspieranych od
firmware w wersji 3.01.
Wartość ustawiona HIGH musi być większa niż wartość ustawiona LOW, w przeciwnym razie
urządzenie generuje błąd. Rozkaz HIGH oraz LOW są ważne tylko dla poziomu A/B działania i
będą generowały błąd w innych trybach sterowania.
Zapytanie i ustawienie ustalonych wartości jest zawsze dedykowane aktualnie wybranemu „Level
Control” i wybranemu wcześniej trybowi/”Mode”/. To jest, gdy Level A jest aktywny, ustawiona
wartość wysłana za pomocą VOLT jest ustawiona dla Level A itd., ale tylko jeśli wybrany został
wcześniej tryb CV. W przeciwnym razie wartość ustawiona jest ignorowana i generowany jest błąd.
Tryb kontroli musi być wybrany zanim urządzenie zostanie ustawione w trybie zdalnego sterowania.
Inne wartości ustawione, nie należące do wybranego wcześniej trybu nie mogą zostać ustawione i
muszą być ustawione wcześniej. W związku z tym dla ciągłego zdalnego sterowania urządzenia
rekomendujemy opcję „Keep set values” w menu setup ustawione na „no”, co spowoduje
zresetowanie ustawionych wartości do wartości domyślnych podczas wyboru trybu.
[SOURce:]
CURRent
[:LEVel]? -><NRf>Unit Zapytanie o ostatnio ustawioną wartość natężenia
Poziom A lub B, zależnie od tego, który jest aktywny
[:LEVel] <NRf+>Unit Ustawienie natężenia Poziom A lub B, zależnie od
tego, który jest aktywny
[SOURce:]
CURRent
:HIGH <NRf+>Unit Ustawienie natężenia dla poziomu A w trybie Level
A/B
:HIGH? -><NRf>Unit Zapytanie o ustawioną wartość natężenia dla
poziomu A w trybie Level A/B
:LOW <NRf+>Unit Ustawienie natężenia dla poziomu B w trybie Level
A/B
:LOW? -><NRf>Unit Zapytanie o ustawioną wartość natężenia dla
poziomu B w trybie Level A/B
Przykłady
CURR˽20.00 Ustawia natężenie wejściowe lub wyjściowe zależnie od rodzaju
CURR:HIGH? Zapytanie o ustawioną wartość natężenia dla poziomu A w trybie LevelA/B
urządzenia
Strona 35 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
SOUR:CURR:LOW˽0.4˽A Ustawia wartość natężenia dla poziomu A w trybie Level A/B na 0,4 A
III. Ustawienie wartości mocy
(Specyfikacja zgodnie z „1999 SCPI Command reference”: 19 Source Subsystem)
Dla obciążeń elektronicznych stosuje:
Rozkazów charakterystycznych wyłącznie dla obciążeń elektronicznych wspieranych od
firmware w wersji 3.01.
Wartość ustawiona HIGH musi być większa niż wartość ustawiona LOW, w przeciwnym razie
urządzenie generuje błąd. Rozkaz HIGH oraz LOW są ważne tylko dla poziomu A/B działania i
będą generowały błąd w innych trybach sterowania.
Zapytanie i ustawienie ustalonych wartości jest zawsze dedykowane aktualnie wybranemu „Level
Control” i wybranemu wcześniej trybowi/”Mode”/. To jest, gdy Level A jest aktywny, ustawiona
wartość wysłana za pomocą VOLT jest ustawiona dla Level A itd., ale tylko jeśli wybrany został
wcześniej tryb CV. W przeciwnym razie wartość ustawiona jest ignorowana i generowany jest błąd.
Tryb kontroli musi być wybrany zanim urządzenie zostanie ustawione w trybie zdalnego sterowania.
Inne wartości ustawione, nie należące do wybranego wcześniej trybu nie mogą zostać ustawione i
muszą być ustawione wcześniej. W związku z tym dla ciągłego zdalnego sterowania urządzenia
rekomendujemy opcję „Keep set values” w menu setup ustawione na „no”, co spowoduje
zresetowanie ustawionych wartości do wartości domyślnych podczas wyboru trybu.
[SOURce:]
POWer
[:LEVel]? -><NRf>Unit Zapytanie o ostatnio ustawioną wartość mocy
Poziom A lub B, zależnie od tego, który jest aktywny
[:LEVel] <NRf+>Unit Ustawienie mocy Poziom A lub B, zależnie od tego,
który jest aktywny
:HIGH <NRf+>Unit Ustawienie mocy dla poziomu A w trybie Level A/B
:HIGH? -><NRf>Unit Zapytanie o ustawioną wartość mocy dla poziomu A
w trybie Level A/B
:LOW <NRf+>Unit Ustawienie mocy dla poziomu B w trybie Level A/B
:LOW? -><NRf>Unit Zapytanie o ustawioną wartość mocy dla poziomu B
w trybie Level A/B
Przykłady
POW:LEW˽2300W Ustawia ograniczenie mocy na 2300W jeśli taka wartość jest dozwolona
Strona 36 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
POW:LOW˽MIN Ustawia wartość mocy poziomu B w trybie Level A/B na 0W.
IV. Ustawienie wartości wewnętrznej rezystancji
(Specyfikacja zgodnie z „1999 SCPI Command reference”: 19 Source Subsystem)
Dla obciążeń elektronicznych stosuje:
Rozkazów charakterystycznych wyłącznie dla obciążeń elektronicznych wspieranych od
firmware w wersji 3.01.
Wartość ustawiona HIGH musi być większa niż wartość ustawiona LOW, w przeciwnym razie
urządzenie generuje błąd. Rozkaz HIGH oraz LOW są ważne tylko dla poziomu A/B działania i
będą generowały błąd w innych trybach sterowania.
Zapytanie i ustawienie ustalonych wartości jest zawsze dedykowane aktualnie wybranemu „Level
Control” i wybranemu wcześniej trybowi/”Mode”/. To jest, gdy Level A jest aktywny, ustawiona
wartość wysłana za pomocą VOLT jest ustawiona dla Level A itd., ale tylko jeśli wybrany został
wcześniej tryb CV. W przeciwnym razie wartość ustawiona jest ignorowana i generowany jest błąd.
Tryb kontroli musi być wybrany zanim urządzenie zostanie ustawione w trybie zdalnego sterowania.
Inne wartości ustawione, nie należące do wybranego wcześniej trybu nie mogą zostać ustawione i
muszą być ustawione wcześniej. W związku z tym dla ciągłego zdalnego sterowania urządzenia
rekomendujemy opcję „Keep set values” w menu setup ustawione na „no”, co spowoduje
zresetowanie ustawionych wartości do wartości domyślnych podczas wyboru trybu.
Dla obciążeń elektronicznych stosuje się: Zakres rezystancji 1 jest mniejszym z dwóch zakresów
[SOURce:]
RESistance (Zakres zestystancji 1 lub 2 zależnie od tego co jest aktualnie aktywne)
[:LEVel]? -><NRf>Unit Zapytanie o ostatnio ustawioną wartość rezystancji
wewnętrznej Poziom A lub B, zależnie od tego,
który jest aktywny
[:LEVel] <NRf+>Unit Ustawienie wartości rezystancji wewnętrznej
Poziom A lub B, zależnie od tego, który jest aktywny
:HIGH <NRf+>Unit Ustawienie rezystancji dla poziomu A w trybie Level
A/B
:HIGH? -><NRf>Unit Zapytanie o ustawioną wartość rezystancji dla
poziomu A w trybie Level A/B
:LOW <NRf+>Unit Ustawienie rezystancji dla poziomu B w trybie Level
A/B
Strona 37 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
:LOW? -><NRf>Unit Zapytanie o ustawioną wartość rezystancji dla
poziomu B w trybie Level A/B
Przykłady
RES˽1.300 Ustawia pożądaną wartość rezystancji wewnętrznej na 1,3 Oma.
RES:HIGH? Zapytanie o ostatnio ustawioną wartość rezystancji poziomu A w trybie
Level A/B, zakres 1 lub 2.
V. Ustawienie wartości wewnętrznej rezystancji
(Specyfikacja zgodnie z „1999 SCPI Command reference”: 19 Source Subsystem)
Dla obciążeń elektronicznych stosuje:
Rozkazów charakterystycznych wyłącznie dla obciążeń elektronicznych wspieranych od firmware w
wersji 3.01.
Wartości ustawione dla szerokości impulsu A (HIGH) oraz B (LOW), jak również czas wznoszenia mogą
być zapytane w dowolnym momencie. Zobacz także punkty I do IV. Ustawienie jest dozwolone tylko,
jeśli działanie Level A/B i tryb zdalnego sterowania są aktywne. Czas musi zostać podany w
sekundach. Zakresy są określane następująco:
Szerokość pulsu A lub B: 0.0005s … 100.0s
Czas wznoszenia: 0.0003s … 0.2s
Wynika z tego okres (=szerokość impulsu A+B) od 100µs … 200s czasu, który odpowiada 10 kHz …
0.005Hz. Cykl zadania jest w związku z tym regulowany od 50 µs od 100s lub 0.025% do 99,975%.
Uwaga: Wartości czasów muszą być zawsze podane z częścią dziesiętną, w przeciwnym razie
zwracany jest błąd.
[SOURce:]
PULSe
:TRANsition[:LEADing] <Time>[Unit] Ustawienie czasu narastania/opadania
:TRANsition[:LEADing]? -><Time>[Unit] Zapytanie o czas narastania/opadania
:WIDTh
:HIGH <Time>[Unit] Ustawienie szerokości impulsu dla poziomu A
(wyższego poziomu)
Strona 38 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
:HIGH? -><Time>[Unit] Zapytanie o szerokość impulsu dla poziomu A
(wyższego poziomu)
:WIDTh
:LOW <Time>[Unit] Ustawienie szerokości impulsu dla poziomu B
(niższego poziomu)
:LOW? -><Time>[Unit] Zapytanie o szerokość impulsu dla poziomu B
(niższego poziomu)
Przykłady
PULS:TRAN˽0.1˽s Ustawia czas narastania/opadania na 100 ms niezależnie od okresu czasu
PULS:WIDT:HIGH˽50.0 Ustawia szerokość impulsu dla poziomu A na 50 S
Uśrednianie
(Specyfikacja zgodnie z „1999 SCPI Command reference”: 4 Calculate Subsystem)
CALCulate
:AVERage:COUNt? -><1 .. 100> Zapytanie o ilość pomiarów braną do uśrednienia
:AVERage:COUNt <1 .. 100> Ustawia ilość pomiarów branych do wartości
uśrednionej (domyślne 100, *RST nie ma efektu)
:AVERage:AUTO B2 Używając „ONCE” wykonany zostanie tylko jeden
pomiar
Używając „ON” pomiar jest powtarzany
automatycznie
:AVERage:STATe B2 „ON” rozpoczyna, “OFF” zatrzymuje uśrednianie
Przykłady
CALC:AVER:COUN˽8 Jeśli rzeczywiste wartości są zakolejkowane z MEAS:, wartość średnia
ostatnich 8 pomiarów jest zwracana
CALC:AVER:STAT˽OFF Przerywa uśrednianie, przesyłana jest tylko ostatnia mierzona wartość
UWAGA! Ustawienie nie jest zapisywane. Resetuje się do domyślnej wartości 100 po ponownym
uruchomieniu urządzenia.
Strona 39 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
<ERR>
Wiadomość
Opis
0
“No error“
Błąd pustej kolejki, brak błędów
-100
“Command error“
Niewłaściwa komenda użyta
-101
“Invalid character”
Błędny znak w rozkazie
-102
“Syntax error“
-103
“Invalid separator“
-108
“Parameter not allowed”
-109
“Missing parameter“
-113
“Undefined header“
Nieznany rozkas
-120
“Numeric data error”
-131
“Invalid suffix”
lub jednostka
-141
“Invalid character data“
-151
“Invalid string data“
-200
“Execution error“
Błąd ogólny pojawiający się w różnych sytuacjach
-201
“Invalid while in local”
Tryb zdalny jest zablokowany, urządzenie w trybie lokal
Uśrednianie przeprowadza x pomiarów wszystkich wartości rzeczywistych w pewnym interwale, i te
pomiary są używane do obliczenia wartości średniej. Może zostać zakolejkowane rozkazem MEAS: po
zakończeniu cyklu pomiarowego.
Jeśli uśrednianie zostało włączone za pomocą CALC:AVER:STAT ON, cykl pomiarowy jest rozpoczęty
przez *TRG (w ustawieniu CALC:AVER:AUTO ONCE), który mierzy zaleznie od CALC:AVER:COUNT x
razy zanim bit OPC w statusie Rejestru Statusu Wydarzeń ESR jest ustawiony. Sygnalizuje to, jeśli jest
aktywne, stan za pomocą bitu esr w rejestrze statusu STB. Rejestr statusu STB automatycznie
generuje wezwanie żądania serwisu.
Tylko po tym wartość mierzona jest dozwolona do odczytania. W razie, gdy jest odczytana zbyt
szybko interfejs zwróci błąd -200, Execution terror.
Jeśli uśrednianie zostałow włączone za pomocą CALC:AVER:STAT ON oraz CALC:AVER:AUTO ON, cykl
pomiarowy powtarza się automatycznie. Wartości mierzone i status urządzenia są rejestrowane co
20 ms, tak aby domyślne ustawienie 20 pomiarów w OPC było ustawione co 2000 ms. Wartość
pomiaru może być odczytana po zapytaniu o bit OPC.
Uwaga! Podczas używania uśredniania, wymagane jest zapytanie o bit OPC zanim wartości
mierzone zostaną odczytane za pomocą MEAS. W przeciwnym razie zwracany jest błąd.
4.5.9 Błędy
Błędy są zbierane w kolejce błędów. Bit err wskazuje na pojawienie się nowego błędu. Może być
zapytany za pomocą wezwania żądania serwisu. Kolejka błędów jest kolejkowana osobno i jest
automatycznie czyszczona po przeczytaniu.
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
Strona 40 z 68
www.conrad.pl

www.conrad.pl
-203
„Command protected“
Dostęp do sekwencji zabroniony lub tryb nie
uruchomiony (tryb R)
Dostęp do funkcji i parametru zabroniony
-223
“Too much data“
-224
“Illegal parameter value”
-225
“Out of memory”
-240
“Hardware error”
Brak bramy/maks. Ilość węzłów CAN przekroczona/
węzeł CAN nieznany
-241
„Hardware missing”
-220
“Parameter error”
Obiekt nie zdefiniowany
-221
“Settings conflict“
Brak dostępu, naruszenie prawa odczytu-zapisu
Wejście do menu tylko gdy OUTPUT OFF
Dostęp do wartości ustawionych zabroniony (urządzenie
nie jest w trybie slave)
-222
“Data out of range”
Wartości przekraczają graniczne
-223
“Too much data“
Długość obiektu nieprawidłowa
-232
“Invalid format“
Błędny format daty
-350
“Queue overflow”
Przepełnienie bufora zdarzenia
-360
“Communication error”
Różne błędy komunikacji (zob. też 9.2.3)
Błąd ramki
Suma kontrolna niewłaściwa, itp.
-361
“Parity error in program
message“
Przy RS232 błąd parzystości
-362
“Framing error in program
message“
-363
“Input buffer overrun“
-365
“Time out error“
<ERR>
Wiadomość
Opis
100 – 199
Zob. tablicę alarmów w
rozdziale 9.4
Tylko wyświetlenie, jedności i dziesiątki kolumn kodu
błędu są identyczne jak kod błędu w tabeli
200 – 299
Zob. tablicę alarmów w
rozdziale 9.4
Ostrzeżenia, jedności i dziesiątki kolumn kodu błędu są
identyczne jak kod błędu w tabeli
300 - 399
Zob. tablicę alarmów w
rozdziale 9.4
Alarmy, jedności i dziesiątki kolumn kodu błędu są
identyczne jak kod błędu w tabeli
Aby zobaczyć więcej błędów kończących się alarmami zależnymi od urządzenia, ostrzeżeniami i
powiadomieniami skonsultuj się z instrukcją obsługi urządzenia.
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
Strona 41 z 68
www.conrad.pl

www.conrad.pl
5. Używanie w urządzeniach serii EL3000/EL9000
Obciążenia elektroniczne serii EL3000 oraz EL9000 wspierają następujące karty interfejsów:
IF-U1, IF-R1, IF-C1, IF-G1
Informacja o karcie IF-G1 z interfejsem GPIB: w urządzeniach z firmware w wersji 2.11 lub starszym
karta jest wykrywana jako IF-C1 (Karta CAN) i musi być skonfigurowana następująco:
- CAN Baudrate: 100 kBd
- Bus termination: no
- Relocatable ID: 0
Także w urządzeniach z firmware w wersji 2.14 lub niższym karta nie jest prawidłowo wspierana.
Rekomendujemy aktualizację firmware. Należy skontaktować się z dealerem.
Przy firmware w wersji 3.01 i nowszym nie ma żadnych ograniczeń.
Ogólna funkcjonalność kart interfejsów jest taka sama jak podczas korzystania z nich w zasilaczach.
Ilość cech jest ograniczona lecz także inna.
Należy skonsultować się z poprzednimi rozdziałami aby uzyskać szczegółowe informacje o kartach
interfejsów.
Możesz skonfigurować karty interfejsów w menu setup w urządzeniach. Jest ono aktywowane
przełączeniem przełącznika Level Control w pozycję Setup.
Zależnie od tego która karta jest stosowana (obciążenia elektroniczne posiadają wyłącznie jeden slot
na kartę) dostępna jest inna selekcja parametrów. Parametry i ich wartości są takie same jak w
rozdziale 4.1 do 4.3 i zostały tam objaśnione, za wyjątkiem braku możliwości ustawienia Sample point
dla CAN.
Nie ma również możliwości ustawienia parametrów dla kart USB oraz IEEE.
Przykład menu dla karty CAN:
Strona 42 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Przykład menu dla karty RS232:
6. System Link Mode (tylko PSI 9000)
System Link Mode (tylko dla serii PSI 9000) wspiera połączenia szeregowe i równoległe. Bez
dodatkowego interfejsu dowolne urządzenie będzie wyświetlało swoje własne rzeczywiste i
ustawione wartości oraz błędy, podczas używania w konfiguracji master-slave równolegle lub
szeregowo za pomocą szyny Share (dzielenia). Ustawiona wartość i wartość rzeczywista napięcia
musi być pomnożona przez ilość szeregowo podłączonych jednostek. Połączenie równoległe działa
analogicznie do szeregowego. Tutaj ustawiona i rzeczywista wartość natężenia musi być mnożona.
System Link Mode przenosi rzeczywiste wartości z urządzeń slave do możliwego do zdefiniowania
urządzenia master a wartości ustawione w drugą stronę. Urządzenie master wyświetla i sumuje
wszystkie wartości rzeczywiste i ustawione, tak jakby podłączone urządzenia działały jak jedno.
Wyświetla również sygnały, ostrzeżenia i alarmy wszystkich wskazanych urządzeń slave.
System Link Mode wspiera do 30 połączonych urządzeń, lecz rekomendowane jest, by nie łączyć
więcej niż 10 urządzeń równolegle.
Przykład:
Cztery urządzenia PSI 9080-100 zostaną połączone. Każde z nich może dostarczyć 3kW mocy. Jeśli
połączysz szeregowo dwa zestawy urządzeń połączonych równolegle, można osiągnąć maksymalne
napięcie 160 V i maksymalny prąd 200 A podczas gdy cały zestaw dostarcza 12kW mocy
Strona 43 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
6.1 Obsługa System Link Mode
6.1.1 Wyświetlanie i obsługa urządzenia master
Jednostka master jest używana do regulowania wartości ustawionych dla całego systemu i do
wyświetlania zsumowanych wartości ustawionych i rzeczywistych.
Konfiguracja urządzenia master definiuje zachowanie całego systemu. Wszystkie wartości mogą być
ustawione w jednym urządzeniu.
Urządzenie master wyświetla także ilość jednostek podpiętych szeregowo ( s2) oraz równolegle (
p2).
6.1.2 Wyświetlanie urządzeń slave
Zobacz poniżej wyświetlanie urządzeń slave jeśli tylko są „online” w stosunku do urządzenia master.
Każde urządzenie w systemie połączenia musi być ustawione w trybie System Link Mode. Musisz
wyróżnić urządzenie, które będzie miało uprawnienia master i jak jednostki slave są rozłożone, aby
master wiedział, które są podłączone szeregowo, a które równolegle.
Przykład: urządzenie slave jest online i moc wyjściowa systemu jest wyłączona (standby). (1,2)
oznacza, że to urządzenie slave jest podłączone do urządzenia master równolegle (2).
Jeśli wyjście jest wyłączone urządzenie slave może być ustawione offline za pomocą przycisku
i nie jest wówczas podpięte do urządzenia master. Może zostać teraz skonfigurowane.
Strona 44 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
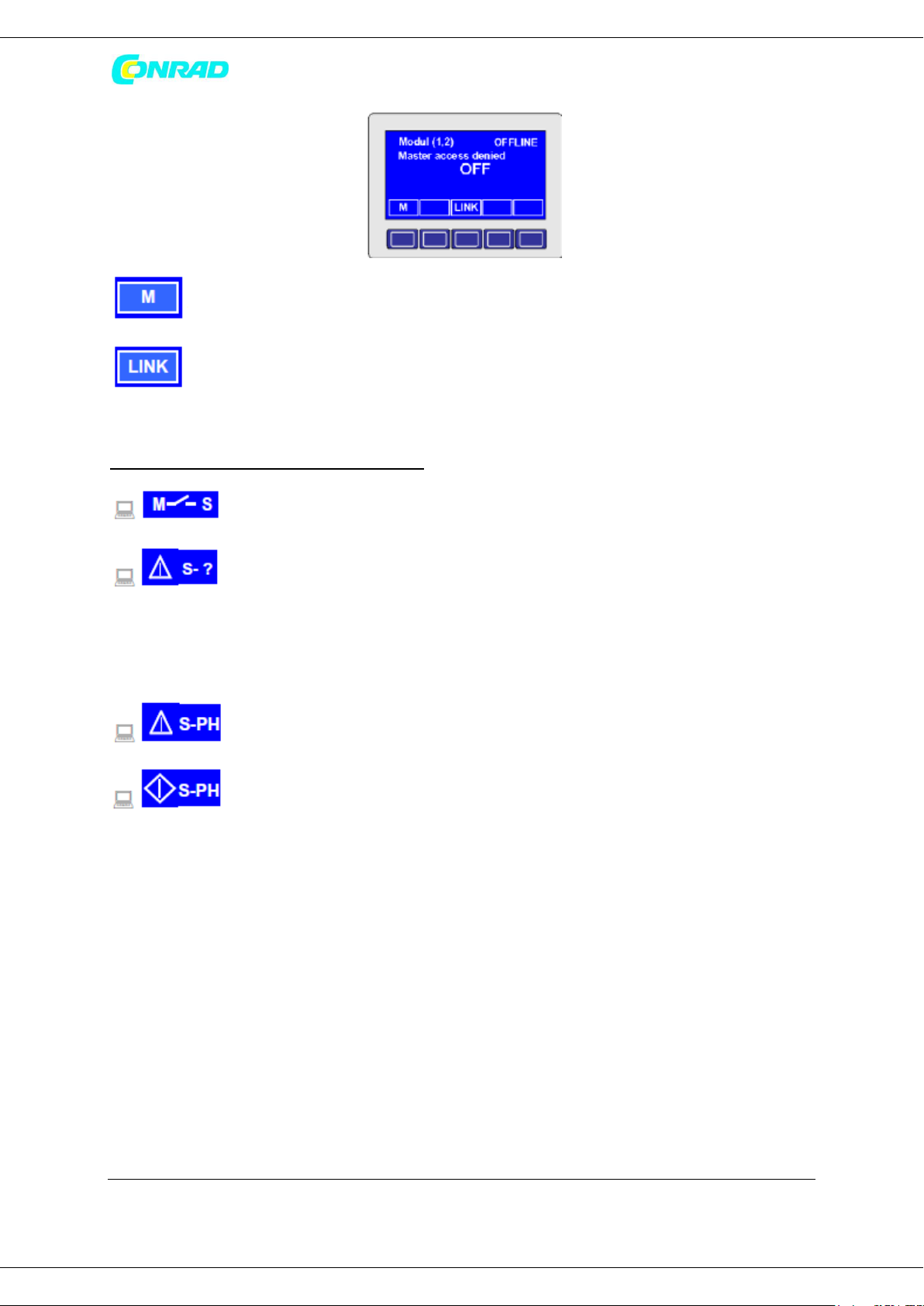
www.conrad.pl
Przycisk MENU aktywuje menu.
Przycisk LINK jest używany do ponownego połączenia urządzenia z urządzeniem master.
6.1.3 Alarmy specjalne, ostrzeżenia i sygnały
Urządzenie master wskazuje, że nie wszystkie urządzenia slave są online.
Alarm od urządzenia slave
Alarm jest generowany jeśli urządzenie slave nie komunikuje się podczas gdy urządzenie master
ustawiło wyjście mocy na ON. Taka sytuacja może mieć miejsce, jeśli System Link jest uszkodzony lub
gdy urządzenie slave zostało wyłączone ze źródła zasilania.
alarm lub
ostrzeżenie z ustawieniem „Auto ON”
Jest pokazywane, gdy połączenie do urządzenia slave zostało utracone w przypadku, gdy urządzenie
slave zostało wyłączone lub pojawiła się utrata zasilania.
Ostrzeżenie z ustawieniem „Auto ON” wyłącza wyjście mocy do momentu, aż usterka powodująca
błąd jest usunięta. System następnie załączy automatycznie wyście. Błąd musi zostać zauważony i
zmieni się w sygnał, jeśli będzie nadal występował. Sygnał zanika, jeśli błąd zniknie lub zostanie
usunięty.
Fakt pojawienia się alarmu lub ostrzeżenia z „Auto ON” zależnie od ustawień „Reactivation after
Power ON” (zob. instrukcję obsługi PSI 9000, sekcja „Definiowanie parametrów działania)”.
Strona 45 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Domyślnie: OFF
= OFF Wyjście mocy jest wyłączone (standby) po przywróceniu zasilania sieciowego lub po
włączeniu jednostki
= restore Wyjście mocy jest automatycznie ustawiane w ostatni stan przed awarią. Może to być
zarówno stan włączenia jak i wyłączenia.
Alarm lub
ostrzeżenie z ustawieniem „Auto ON”
Jest pokazywane, gdy jedno lub kilka urządzen slave informuje o przekroczeniu temperatury w
stopniach mocy.
Fakt pojawienia się alarmu lub ostrzeżenia z „Auto ON” zależnie od ustawień „Reactivation after
Power ON” (zob. instrukcję obsługi PSI 9000, sekcja „Definiowanie parametrów działania)”.
Domyślnie: auto ON
= OFF Wyjście mocy jest wyłączone (standby) po schłodzeniu zasilacza i zniknięciu alarmu o
przekroczonej temperaturze.
= Auto ON Wyjście mocy jest automatycznie włączane ponownie po schłodzeniu zasilacza i
zniknięciu alarmu o przekroczonej temperaturze.
Jedno lub więcej urządzeń slave zgłosiło błąd przekroczenia progu napięcia. Wyjście mocy zostanie
wyłączone i może być włączone wyłącznie po potwierdzeniu odczytania alarmu.
6.2 Konfiguracja System Link Mode
Aby używać System Link Mode musi być ono najpierw ustawione i skonfigurowane. Dodatkowe porty
(SIO2) na kartach IF-R1 lub IF-U1 muszą być połączone do odpowiadających portów kolejnej
jednostki. W zestawie zawarty jest kabel sieciowy CAT 5. Urządzenie końcowe będzie terminowane
ustawieniem w menu setup.
Wejdź w menu dowolnego urządzenia aktywuj menu komunikacji i wybierz kartę do
skonfigurowania:
Strona 46 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Domyślnie: not used
= not available Porty SIO2 nie są dostępne.
= not used Porty SIO2 nie są używane.
= {Master|Slave} Jednostka jest zdefiniowana jako master lub slave
Następujące dwa parametry pojawiają się wyłącznie w menu jednostki zdefiniowanej jako urządzenie
Master:
Tutaj możesz poinformować urządzenie master ile jednostek jest podłączonych równolegle a ile
szeregowo.
Domyślnie: 1
= {1 .. x} Ustawienie ilości jednostek podłączonych szeregowo do urządzenia master,
niezależnie czy pośrednio czy bezpośrednio (zob. poniższy diagram).
Dozwolona ilość jednostek połączonych szeregowo również zależy od maksymalnego dozwolonego
napięcia izolacji!
Domyślnie: 1
= {1 .. 30} Ustawienie ilości jednostek podłączonych równolegle do urządzenia master,
niezależnie czy pośrednio czy bezpośrednio.
Następujące dwa parametry pojawiają się wyłącznie w menu jednostki zdefiniowanej jako urządzenie
Slave:
Domyślnie: 1
= {1 .. x} Ustawienie położenia urządzenia w systemie (zob. diagram poniżej).
Dozwolona ilość jednostek połączonych szeregowo również zależy od maksymalnego dozwolonego
napięcia izolacji!
Strona 47 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Domyślnie: 1
= {1 .. 30} Ustawienie położenia urządzenia w systemie.
Przykład: jedno urządzenie slave jest podłączone szeregowo do urządzenia master oraz trzy
dodatkowe urządzenia slave są połączone równolegle do pierwszego urządzenia slave. Te cztery
dodatkowe urządzenia muszą mieć parametr serial ustawiony na 2 oraz parametr parallel ustawiony
na 1 ... 4.
Zobacz kolejny przykład na diagramie:
Uwaga! Pozycja serial = 1 / parallel = 1 jest dedykowana dla urządzenia master i nie może być
ustawiona na żadnym z urządzeń slave, które i tak tej pozycji nie jest w stanie zaakceptować.
Port SIO2 wymaga również germinacji, jeśli urządzenie slave jest na końcu struktury (jeden z dwóch
portów jest pusty). Terminacja ustawiana jest parametrem:
Domyślnie: NO
= NO Brak terminacji
= YES SIO2 jest terminowany
7. Przegląd dotyczący komunikacji
Rozdział 7 nie dotyczy komunikacji tekstowej za pomocą rozkazów SCPI dla karty IF-G1 GPIB!
7.1 Wyjaśnienie pojęć
Telegram: łańcuch bajtów o zmiennej długości. Jest wysyłany do lub z urządzenia.
Singlecast: zapytanie lub prosta wiadomość do pojedynczej jednostki. Jeśli urządzenia są połączone w
łańcuch, jak np. CAN, telegram jest odbierany przez wszystkie jednostki, lecz tylko akceptowany przez
adresowaną. Dotyczy tylko CAN.
Strona 48 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Broadcast: zapytanie lub prosta wiadomość do wszystkich jednostek. Oznacza to, że każda jednostka
podłączona do PC, nie zależnie od tego czy poprzez USB, CAN czy RS232, otrzyma tą wiadomość od
razu. Dotyczy tylko CAN.
Multicast: podobnie do broadcast lecz tylko do pewnej grupy jednostek, adresowanej poprzez
odpowiedni identyfikator (RID). Dotyczy tylko CAN.
Object: /obiekt/ ze swoimi właściwościami, opisuje adres obiektu i inicjuje zdefiniowane reakcje z
docelową jednostką.
Message: /wiadomość/ pakiet danych charakterystyczny dla CAN.
7.2 Wstęp
Protokół komunikacyjny ze swoim zorientowanym obiektowo telegramem jest strukturą bardzo
skomplikowaną. Rekomendowane jest więc, aby korzystać z gotowych komponentów
przystosowanych do LabView. Integracja z innymi środowiskami jak Visual Basic, C lub .NET wymaga
wiedzy programistycznej dotyczące przygotowania i używania interfejsów sprzętowych jak CAN lub
USB oraz adresowania ich sterowników. Tutaj objaśnimy tylko strukturę pakietu danych (telegramu),
nie będziemy opisywać jak jest prawidłowo wysyłany.
7.3 Informacje ogólne dotyczące komunikacji
Firmware różnych rodzajów urządzeni jest zaprogramowany na różne możliwe do przewidzenia
okoliczności występujące podczas kontrolowania wielu jednostek jednocześnie. W związku z tym nie
zawsze jest możliwe przeprowadzenie akcji w dowolnym momencie w dowolnym stanie urządzenia.
Na przykład dane managera funkcji serii PSI 9000 (zob. Instrukcję obsługi) są możliwe do wysyłania w
stanie standby urządzenia. W przeciwnym razie zwrócony zostanie komunikat błędu wskazujący
użytkownikowi na fakt, że urządzenie nie jest w trybie standby.
7.4 Informacje o sterowniku USB
Producent chipu USB dla karty IF-U1 oferuje dwa odrębne sterowniki dla Windows 98/ME, które są
połączone w jeden sterownik dla Windows XP/2003/Vista. Jeden z nich jest oryginalnym
sterownikiem USB, drugi tworzy wirtualny port szeregowy COM (VCP) dla każdej karty USB, która jest
podłączona. Podczas używania LabView do tworzenia swoich aplikacji musisz wybrać, który sterowni
ma być zainstalowany na systemie Win98/ME. Jeśli sterownik VCP jest używany i w związku z tym
również port COM, musisz umieścić narzędzia VI komunikacji RS232 dla karty USB. W systemach
Windows XP/2000/Vista musisz tylko zdecydować który sterownik będzie wykorzystywany i wybrać
odpowiednie narzędzie VI do komunikacji.
Domyślnie funkcjonalność VCP połączonych sterowników jest włączona.
Implementacja sterownika VCP jest prostsza, ale sterownik ten jest bardziej podatny na problemy i
błędy komunikacji. Tworzy on także nowy port COM dla każdej karty USB, co komplikuje zarządzanie
portami. Sterownik USB wymaga od użytkownika stworzenia własnych rutyn, które obsługują
Strona 49 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
niskopoziomową komunikację USB, aby zapewnić właściwy transport i komunikację danych z
systemem. Te rutyny nie są przez nas oferowane. Kod źródłowy jest dostępny na stronie
internetowej producenta FTDI pod adresem www. ftdichip.com. Chip USB jest oznaczony jako
FT232B.
7.5 Struktura komunikacji
Komunikacja ze sterowanymi jednostkami jest bazowana na następujących typach telegramów:
a) Simple Messager /prosta wiadomość/: wysyłany jest obiekt, który na przykład ustawia
napięcie wyjściowe. Jak tylko akcja jest dozwolona przez aktualny stan urządzenia, obiekt jest
akceptowany i wykonywany. Urządzenie nie wyśle żadnej odpowiedzi. Jeśli akcja nie jest
dozwolona, wysłana zostanie odpowiedź w postaci wiadomości błędu.
b) Query /zapytanie/: zapytanie jest wysyłane poprzez wykorzystanie pewnych obiektów, np.
„Get actual values /pobierz aktyalne wartości/”, spodziewana jest odpowiedź. Jeśli zapytanie
jest dozwolone przez aktualny stan urządzenia, urządzenie wykonuje je i odpowiada.
Odpowiedź zawiera dane będące obiektem zapytania. Jeśli akcja nie jest dozwolona, wysłana
zostanie odpowiedź w postaci wiadomości błędu.
c) Event /Wydarzenie/: jest wiadomością błędu, która jest wysyłana przez urządzenie bez
żądania, na przykład, jeśli dostęp do obiektu nie jest dozwolony lub gdy poprzednia
wiadomość nie została rozpoznana z jakiegokolwiek powodu, np. gdy została zniekształcona
przez zewnętrzne interferencje. Zawiera kod błędu.
7.6 Struktura telegramu IF-R1 oraz IF-U1
Karty interfejsów IF-R1 oraz IF-U1 używają tej samej struktury telegramu, ta używana przez interfejs
CAN karty IF-C1 jest inna. Przeczytaj poniższe informacje jeśli używasz karty IF-C1. Poprzez transmisję
szeregową jednego bajtu za pomocą karty RS232 wysłane są następujące bity:
Bit startu + 8 bitów danych + bit parzystości + bit stopu
Parzystość jest sprawdzana pod kątem „odd”.
Karta USB pracuje wewnętrznie korzystając z charakterystyki RS232. Dla obu typów kart wymagane
jest ustawienie przynajmniej następujących parametrów transmisji dla konkretnego sterownika:
Baud rate: 57600 kBd
Parity: odd
Stop bits: 1
Strona 50 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Telegram posiada następującą strukturę
SD + DN + OBJ + DATA + CS
I jest zbudowany z następujących bajtów:
Bajt 0: SD (start delimiter)
Start delimiter determinuje jak obchodzić się z telegramem w dalszej części. Znaczenia bitów:
Bity 0 – 3: Długość danych (Bity 3- 18)
Definiuje długość danych -1 danych w telegramie. Przy zapytaniu podawana jest długość danych
przewidywanych.
Bit 4
0 = Telegram z urządzenia do jednostki kontrolnej
1 = Telegram z jednostki kontrolnej do urządzenia
Bit 5
0 = Singlecast, telegram do konkretnego węzła urządzenia
1 = Broadcast/Multicast, telegram do wszystkich węzłów urządzeń
Broadcast działa wyłącznie dla jednostek podłączonych do szyny, jak w przypadku CAN.
Bity 6+7: rodzaj transmisji
00 = Zarezerwowane
01 = Zapytanie o dane
10 = Odpowiedź na zapytanie
11 = Wysłane dane (bez żądania)*
* Może się także zdarzyć dla urządzenia
Bajt 1: DN (device node)
Węzeł urządzenia identyfikuje I adresuje urządzenia wewnątrz szyny systemu. Każdy numer węzła
musi być przypisany tylko raz. Używane to jest do adresowania konkretnego urządzenia. Zakres
wartości: 1 … 30, pozostałe są nieprawidłowe. Używając CAN, CAN ID jest obliczane z wykorzystaniem
węzła urządzenia. Zob. rozdział 7.7 aby poznać szczegóły.
Strona 51 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Bajt 2: OBJ
Obiekty komunikacji dla urządzenia są adresowane za pomocą tego bitu. Na liście obiektów
komunikacji (zob. rozdział 9.3) wypisane są obiekty oraz ich funkcje.
Bajt 3 - 18: Data field
Pole danych może mieć długość 1 – 16 bajtów, w związku z tym długość telegramu jest zmienna. Jeśli
wysłane jest zapytanie (PC -> urządzenie) i nie wysłane zostaną żadne dane, zakres danych nie jest
używany i suma kontrolna telegramu (zob. poniżej) pojawia się od razu po bajcie 2. Tylko gdy
odpowiedź (urządzenie ->PC) jest wysłana, nawet jeśli jest to Wydarzenie, pojawią się dane o
konkretnej długości.
Word x: CS (check sum)
Suma kontrolna jest zawsze zlokalizowana na końcu telegramu. Jest obliczana jako proste dodawanie
wszystkich bajtów telegramu. Ma długość dwóch bajtów. Bit wyższy jest umieszczony przed bitem
niższym .
Przykład telegramu:
Obiekt nr 71 (zapytanie rzeczywistej wartości) zostanie wysłany do urządzenia o numerze węzła 1.
Telegram musi wyglądać następująco (wartości heksadecymalne):
55 01 47 00 9D
Spodziewana odpowiedź może wyglądać następująco:
85 01 47 64 00 1E 00 50 00 01 9F
(wynika z tego: 80 V, 30 A oraz 2400 W przy zasilaczu 80 V, 100 A i 3000W, jak przy przykładowym PSI
9080-100).
Zobacz także kolejny rozdział aby poznać informacje o przeliczaniu wartości ustawianych i
rzeczywistych.
Więcej przykładów w rozdziale 9.
7.6.1 Translacja wartości ustawianych i rzeczywistych
Wartości ustawiane i rzeczywiste (zob. listę obiektów komunikacji) są, z kilkoma wyjątkami, wysyłane
jako wartości procentowe, gdzie 0x6400 odpowiada 100%. Jeśli urządzenie posiada nominalne
napięcie 80 V i umieszczona w odpowiedzi wartość rzeczywista wynosi 0x3200 (0x32 =50 = 50%),
odpowiada to wartości 40 V napięcia wyjściowego.
Strona 52 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Bit wysoki jest wartością procentową (0x64 = dziesiętnie 100) a bit niski jest miejscem dziesiętnym.
Musisz przetłumaczyć wyściowe wartości ustawione i wejściowe wartości rzeczywiste zanim mogą
zostać użyte.
Wartość rzeczywista =
Przykład: Wartość nominalna urządzenia wynosi 80 V, wartość procentowa wartości rzeczywistej
uzyskana w wiadomości to 0x2454 = 9300. Wynika z tego wartość rzeczywista o wartości: (80 * 9300
/ 25600 = 29,06 V
Procent wartości ustawionej =
Przykład: Wartość ustawiona napięcia wynosi 25,36V, nominalna wartość urządzenia wynosi 80 V.
Korzystając ze wzoru mamy:
Procentowa wartość ustawiona = (25600 * 25,36) / 80 = 8115 = 0x1FB3.
Musisz oczywiście zaokrąglić wartości dziesiętne do wartości heksadecymalnych.
7.7 Struktura wiadomości dla IF-C1
Interfejs IF-C1 wspiera standard CAN V2.0a. Format rozszerzonego adresu nie jest używany.
Chip sterownika CAN wymaga identyfikatora, do 8 bajtów danych i długości danych aby
przeprowadzić transmisję. Identyfikator /Identifier/ ma długość 11 bitów (CAN 2.0a) i jest opisany
przez węzeł urządzenia /device node/, RID oraz typ wiadomości. Dla każdej jednostki definiujemy
dwa identyfikatory (zob. także rozdział 4.3.1):
[RID*64 + device node * 2] oraz
[RID*64 + device node * 2 + 1]
Gdzie pierwszy identyfikator jest używany do wiadomości „send only” a drugi do zapytań.
Wiadomość może zawierać maksymalnie 8 bajtów. Pierwszy bajt jest numerem obiektu komunikacji.
Po tym możesz umieścić do 7 bajtów danych (zob. listę obiektów komunikacji).
Aby wysłać obiekt z polem danych długości 16 bajtów wymagane jest wysłanie przynajmniej trzech
wiadomości a pole danych musi zostać rozbite pomiędzy te trzy wiadomości.
Długość danych jest związana tylko z telegramem, który ma być wysłany (lub otrzymany) jako
następny. W telegramie CAN możliwych do wysłania jest 8 bajtów. Zobacz również rozdział o
dzieleniu telegramów.
Strona 53 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Dwa przykłady:
a) Urządzenie musi zostać ustawione w tryb zdalny. Jest to wymagane do sterowania
urządzeniem za pomocą rozkazów statusu lub do ustawienia wartości. Węzeł urządzenia
został ustawiony na 15 a RID na 3. Wiadomość jest typu „send only”. Identyfikator wynosi: 3
* 64 + 15 * 2 = 222D lub 0xDE po przeliczeniu. Zgodnie z listą obiektów w rozdziale 9
używamy obiektu 54 (heks. 0x36) z bitami danych 0x10 (maska) oraz 0x10 (ustaw zdalnie).
Wynik długości danych to 3. Wiadomość CAN wymaga tych bajtów:
ID DL DATA
DE 03 36 10 10
W przypadku, gdy nie chcesz ustawiać stanu, lecz zapytać o niego używany jest identyfikator
0xDF (zapytanie= +1) i w związku z tym, że jest to zapytanie, sam obiekt wystarcza jako dane.
Bajty dla wiadomości CAN wyglądają następująco
DF 01 36
A odpowiedź powinna wyglądać tak:
DF 01 36 10 10
7.7.1 Dzielenie wiadomości
Wiadomość podzielona to wiadomość, która jest rozdzielana na wiele wiadomości (tylko możliwe dla
obiektów w formacie „string”). Po numerze obiektu (= adres obiektu) wstawiany jest dodatkowy
identyfikator. Dodatkowy identyfikator dla pierwszej wiadomości wynosi 0xFF, dla drugiej 0xFE, dla
trzeciej 0xFD. Kolejność tych wiadomości nie jest określona. Telegram musi być złożony z tych
wiadomości później. Podczas używania funkcji bramy podzielone telegramy nie są składane przez
bramę. Musi to zostać zrobione przez jednostkę nadrzędnej kontroli.
7.7.2 Timing wiadomości
Singlecast:
Po każdym zapytaniu urządzenie zwykle potrzebuje 5 ms do maksymalnie 50 ms aby odpowiedzieć.
Możesz wysyłać zapytania jedno po drugim. Jeśli jednak zostało otrzymane wydarzenie, wymagane
jest odczekanie min. 50 ms. Rekomendowany jest czas 100 ms aby nie spowolnić pracy urządzenia
przez zbyt nasiloną komunikację.
Podczas używania funkcji bramy musisz wziąć pod uwagę czas poświęcony na przesyłanie telegramu z
jednego systemu na drugi. Odpowiedź może być opóźniona o maksymalnie 200 ms.
Strona 54 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Po otrzymaniu wiadomości o błędzie przez bramę, powinieneś odczekać przynajmniej 100 ms przed
kolejną transmisją.
Broadcast:
Po każdym broadcaście zapytania wszystkie szyny dzielące jednostki mogą odpowiadać jednocześnie.
Zależnie od systemu baud rate i ilość jednostek jak również dodatkowy ruch na szynie mogą pojawić
się większe lub mniejsze opóźnienia. Czas nie jest możliwy do obliczenia i może być tylko szacowany
wzorem: ilość jednostek na szynie * czas odpowiedzi przy singlecast. W większości przypadków czas
odpowiedzi będzie krótszy.
7.8 Struktura wiadomości dla IF-G1
Struktura wiadomości dla komunikacji tekstowej za pomocą GPIB jest opisana w rozdziale 4.5.7
8. Komunikacja z LabView
8.1 Przegląd narzędzi Labview VI
Dla prostej integracji wielu różnych urządzeń do istniejących aplikacji LabView dostarczamy zestaw
narzędzi Labview VI.
Te wirtualne narzędzia (VI) umożliwiają prostą implementację i programowanie aplikacji bez
konieczności uczenia się niskopoziomowej komunikacji.
Aby wykorzystać funkcjonalność tych narzędzi wymagane jest uruchomienie narzędzia
deweloperskiego LabView firmy National Instruments. Narzędzia wspierają wersję 7.0 i wyższe. Na
życzenie istnieje możliwość dostarczenia narzędzi współpracujących z wersją 6.1.
Wymagane są następujące minimalne parametry systemu:
Pentium 3 z 256 MB pamięci RAM
System operacyjny Windows (98 lub XP)
Aktualizacja dla narzędzi może zostać pobrana ze strony internetowej www.elektroautomatik.de, jeśli
będzie dostępna.
Strona 55 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
8.1.1 Instalacja
Aby zainstalować narzędzia i móc ich użyć w środowisku LabView należy przeczytać instrukcję
dostępną na płycie CD w pliku „instalation_english.pdf”.
Po instalacji możesz znaleźć narzędzia VI w menu kontekstowym LabView IDE w „Instrument I/O->
Instrument drivers-> IF-XX”.
Niektóre VI są przeznaczone tylko dla urządzeń serii PSI 9000 i będą współpracowały wyłącznie z
nimi. Posiadają skrót PSI9 przez nazwą pliku oraz na ikonach VI. Inne VI są dostępne tylko dla
obciążeń elektronicznych serii EL3000 oraz EL 9000. Posiadają skrót EL przed nazwami i na ikonach.
Zastosowanie i funkcjonalność jest opisana w instrukcji użytkownika VI. Możesz je otworzyć z menu
kontekstowego LabView lub bezpośrednio z płyty CD w katalogu „\software\labview_7+\”.
Zależnie od wersji systemu może zajść konieczność skopiowania pliku pomocy aby mieć do niego
bezpośredni dostęp.
Rozróżniamy trzy kategorie narzędzi VI:
1. Narzędzia komunikacyjne
2. Narzędzia standardowe
3. Narzędzia specjalne
Ważne! Zawsze używaj narzędzi odpowiadających twojemu urządzeniu. Proszę skonsultować się z
plikiem pomocy dotyczącym Labview VI zawartym na płycie CD aby mieć przegląd i wiedzę na
temat obsługi.
8.1.2 Krótka informacja o narzędzia komunikacyjnych
Narzędzia komunikacyjne służą jako rodzaj sterowników do różnych szyn danych i odpowiadających
im interfejsów. Bez komunikacji działającej w tle żadne urządzenie nie może zostać adresowane. W
związku z tym musisz używać narzędzi komunikacyjnych i uruchomić je zanim rozpoczniesz
korzystanie ze standardowych narzędzi VI. Każdy rodzaj interfejsu korzysta ze swoich narzędzi. To jest
tylko przegląd narzędzi komunikacyjnych. Informacje szczegółowe są zamieszczone w instrukcji
obsługi narzędzi VI.
-CAN.vi
Odczyt/zapis obiektów komunikacji z protokołem CAN z kartą IF-C1. Nie będzie uruchomiony
domyślnie, ponieważ użytkownik musi dodać standard CAN VI jego sprzętu CAN, który jest
dostarczany przez producenta oprogramowania.
-RS232.vi
Odczyt/zapis obiektów komunikacji z protokołem RS232 z kartą IF-R1
-USB.vi
Odczyt/zapis obiektów komunikacji z protokołem USB z kartą IF-U1
Strona 56 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
-Communication_layer.vi
Rdzeń narzędzi komunikacji VI, używa jednego z trzech pozostałych VI.
Z narzędziami RS232 i USB możesz sterować maksymalnie 29 urządzeniami, jeśli urządzenie
podłączone do PC jest skonfigurowane jako brama (tylko PSI 9000) do szyny CAN (zob. „4.3 karta IFC1 CAN”). Funkcja bramy jest rekomendowana tylko dla niskiego ruchu szyny. Bezpośrednia
komunikacja z szyną CAN z urządzenia master(PC) jest znacznie bardziej wygodna i znacznie szybsza.
Wymaga jednak dodatkowej karty CAN master w PC.
8.1.3 Krótka informacja o narzędzia standardowych
Standardowe narzędzi VI są najczęściej używanymi narzędziami i są dopasowane do różnych typów
urządzeń, aby móc wykorzystywać wszystkie specyfikacje. Możesz sterować i konfigurować niemal
dowolną funkcjonalność konkretnego urządzenia. Możesz używać (umieszczać) je tak często jak tego
potrzebujesz, lecz możliwe jest uruchamianie tylko kilku VI na raz jeśli adresują różne urządzenia.
Te narzędzia wymagają narzędzi komunikacyjnych uruchomionych i skonfigurowanych wcześniej.
Jest to tylko przegląd narzędzi standardowych VI, szczegółowe informacje są dostępne i instrukcji
obsługi narzędzi VI.
- init.vi
Jest uruchamiane raz na początku całej aplikacji, lecz po uruchomieniu narzędzi komunikacji (których
wymaga do pracy). Inicjalizuje urządzenia, które mogą zostać wykryte. Odczytuje wszystkie
niezbędne dane wymagane przez system do prawidłowej obsługi przez pozostałe narzędzia.
- set_mode.vi
Ustawia tryb urządzenia zależnie od zewnętrznego sterowania i wyłączenia wejść/wyjść urządzenia.
Są dwa bity służące do aktywacji trybu zdalnego lub przełączania wyjścia/wejścia mocy urządzenia.
„Remote” ustawia urządzenie w trybie zdalnym. Tryb zdalny jest wymagany, aby sterować
urządzeniem, np. ustawiając wartości lub przesyłając dane. Bez włączonego trybu zdalnego
urządzenie może być tylko zapytane o przesłanie rzeczywistych wartości lub danych statusu.
Tryb zdalny może być aktywowany jeżeli urządzenie na to pozwala. Zależy to od aktualnego trybu
urządzenia. Tryb lokalny lub inny specjalny stan może spowodować odmówienie przełączenia.
Ustawienie trybu zdalnego i stanu wejścia/wyjścia jednocześnie jest niemożliwe!
- wr_set_values.vi
Zapisuje ustawione wartości dla U/I/P/R zgodnie z typem urządzenia, jeśli uruchomiony jest tryb
zdalny. Nie wysyła i ustawia wszystkich czterech wartości na raz, każda wartość jest wysyłana jako
osobny obiekt. Jeśli ustawiona wartość nie jest możliwa lub dana do zmiany, odpowiedni obiekt nie
Strona 57 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
jest wysyłany. Wartości wejściowe są automatycznie ograniczane do parametrów urządzenia.
Narzędzie wysyła prostą wiadomość i nie wymaga wygenerowania odpowiedzi.
- actual_values.vi
Zapytuje o rzeczywiste wartości dla U, I oraz P. Są one zwrócone na raz, więc narzędzie działa szybko.
Wartości te zawsze mieszczą się w granicach wartości urządzenia i powinny być takie same, jak
wyświetlane na ekranie urządzenia.
8.1.4 Użycie
Aby poznać funkcjonalność konkretnego VI należy przeczytać plik pomocy LabView, który może być
odnaleziony w podfolderze \data po instalacji narzędzi lub bezpośrednio na płycie CD.
Ważne! :
- narzędzia komunikacyjne (CAN.vi, USB.vi, RS232.vi, tylko jedno na raz) jak również warstwa
komunikacji muszą zostać uruchomione.
- narzędzie komunikacyjne nie może być umieszczone wewnątrz sekwencji, case’a lub pętli.
- aby skomunikować się i sterować urządzeniem po rozpoczęciu komunikacji konieczne jest
zainicjalizowanie za pomocą psi9_init.vi odpowiednio el_init.vi; powinno to być wykonane raz.
- wszystkie inne VI mogą być arbitralnie użyte w run time (np. w pętli), ponieważ komunikacja
zarządza przepływem danych i zwraca wiadomość o błędzie, jeśli pojawią się jakieś problemy.
- równoległe umieszczenie VI, które są używane do zapytań o rzeczywiste wartości danych różnych
urządzeń na raz są nadal przetwarzane w kolejności, ponieważ komunikacja może obsłużyć wyłącznie
jedno urządzenie w danym czasie, nawet wysyłając wiadomości typu broadcast; dotyczy to USB i
RS232, gdyż w IEEE nie ma broadcastowania.
9. Komunikacja bez LabView
9.1 Ogólnie
Następujące sekcje Zajmują się kompozycją telegramów komunikacyjnych, zależnościami komunikacji
od stanu urządzenia i problemami z tym związanymi bez wyjaśniania jak wykorzystywać sterownik
USB podczas używania karty USB lub jak zbudować kompletną wiadomość CAN podczas używania
karty CAN. Użytkownik musi te zagadnienia poznać samodzielnie.
Informacja o sterowniku USB
Na płycie CD dołączonej w zestawie w katalogu \manuals\other\ftdi znajduje się PDF opisujący
szczegółowo funkcje sterownia USB. Ogólnie urządzenie, w tym wypadku sprzęt USB musi być
Strona 58 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
najpierw otwarty (FT-Open lub podobne), następnie skonfigurowane (TF_SetBaudRate ,
FT_SetDataCharacteristics, itd.) a następnie zapisane (TF_Write) lub odczytane (TF_GetQueueStatus,
TF_Read). Jak tylko urządzenie nie jest używane zaleca się je zamknąc (FT_Close). Otwieranie i
zamykanie urządzenia może być wykonywane tak często jak to konieczne, konfiguracja musi zostać
wykonana tylko raz, na okres, gdy urządzenie jest zasilane. Funkcje FT_Write oraz FT_Read służą do
przesyłania bajtów telegramów zorientowanej obiektowo komunikacji opisanej w kolejnych
rozdziałach.
9.2 Poradnik tworzenia telegramów
Programowanie różnych urządzeń w których wykorzystywane są karty interfejsów zawsze podąża
według tego samego schematu. Różni się tylko cyframi i funkcjonalnością obiektów komunikacji,
które są wspierane przez konkretne serie urządzeń.
Generalne zasady:
- Monitorowanie, tj. tylko pytanie o rzeczywiste wartości i status jest zawsze możliwe. Urządzenie nie
musi znajdować się w trybie zdalnym.
- Ustawianie statusu i wartości (sterowanie) wymaga aktywowania trybu zdalnego (zdalny w tym
przypadku oznacza, że urządzenie jest sterowane zdalnie poprzez kartę interfejsu cyfrowego)
- Tryb zdalny może być blokowany przez szczególne okoliczności. Na przykład tryb lokalny (tylko PSI
9000) lub inne tryby, w których znajduje się urządzenie i które nie zezwalają na zdalną kontrolę.
Więcej informacji znajdziesz w instrukcji obsługi konkretnego urządzenia.
Aby rozpocząć sterowanie urządzeniem, na przykład poprzez wysłanie wartości musisz
1. Aktywować tryb zdalny (obiekt 54)
2. Wysłać wartość do ustawienia
3. Włączyć wejście/wyjście (jeśli nie zostało wcześniej)
Tryb zdalny powinien zostać następnie opuszczony, jeśli użytkownik nie będzie z niego nadal
korzystał. Tak długo aż jest aktywny, urządzenie nie może być obsługiwane ręcznie lub w ograniczony
sposób. Tryb jest wskazywany na wyświetlaczu.
Przykład 1: Aktywacja zdalnego trybu przez IF-R1/IF-U1
Zgodnie z formatem telegramu (zob. rozdział 7.5) pierwszy bajt jest rozpoczęciem, które zależy od
typu i kierunku telegramu. Dla tego przykładu SD będzie wynosiło 0xD1 i bitowo wygląda tak:
Strona 59 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Alternatywnie może to być uproszczone korzystając z wartości heksadecymalnych. Rozpoczynając od
bitów 6+7 mamy:
SD = Typ wiadomości + typ wysłania + kierunek + długość
Rodzaj wiadomości to
0xC0 Wysłanie danych lub
0x40 Zapytanie o dane
Typ wysyłania to
0x00 Singlecast lub
0x20 Broadcast
Kierunek to
0x10 z PC do urządzenia lub
0x00 z urządzenia do PC
I długość danych -1 może wynosić
0x00 … 0x0F do 16 bitów danych (dla CAN zob. rozdział 7.6.1 „Dzielenie wiadomości”)
Zawsze pamiętaj, że długość danych jest zdefiniowana jako ilość bajtów -1!!!
Adres (węzeł) skomunikowanego urządzenia wynosi 5, obiekt do użycia to 54 (heksadecymalnie
0x36), maska zdalnego trybu (zob. także tabela w rozdziale 9.3) wynosi 0x10 i bajt kontroli dla trybu
zdalnego również wynosi 0x10. Otrzymujemy telegram:
D1 05 36 10 10 01 2C
Aby odwrócić to polecenie, czyli wyłączyć tryb zdalny musisz wysłać D1 05 36 10 00 01 1C. Maska
pozostaje taka sama, zmienia się tylko bajt kontroli.
Przykład 2: Zapytanie o rzeczywiste wartości za pomocą karty CAN
W CAN, SD , suma kontrolna CS nie są używane. Potrzebujemy więc tylko obiektu, zgodnie z tabelą 71
(heks. = 0x47), identyfikatora ID (dla obliczenia zob. rozdział 7.6) oraz długości bajtów do wysłania. W
wiadomości CAN obiekt jest uwzględniany w długości danych, więc wiadomość miałaby długość 1,
ponieważ wysyłamy tylko obiekt, który pyta o rzeczywistą wartość. Adres urządzenia (węzeł) wynosi
5, RID wynosi 8. Zgodnie ze wzorem identyfikator wynosi 8 * 64 + 5 * 2 + 1 = 523 ( heks. = 0x20B). +1,
gdyż jest to wiadomość typu zapytanie.
Strona 60 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Wysyłamy teraz jeden bajt do ID 0x20B. Wiadomość CAN musi wyglądać następująco:
Uwaga! To NIE jest kombinacja bitów, która jest naprawdę wysyłana przez szynę CAN. Sterownik
CAN łączy ze sobą różne bity i dodaje do tego sumę kontrolną. To są wyłącznie bity, które muszą
być przesłane do jednostki sterownika CAN.
Odpowiedź na to zapytanie wygląda następująco:
Taki sam identyfikator, długość danych wynosi 6, ponieważ wysyłane są trzy rzeczywiste wartości o
wielkości 16 bitów każdy. Rzeczywiste wartości są przesyłane jako procenty wartości i muszą zostać
przetłumaczone na wartości liczbowe. Zob. rozdział 7.5.1 „translacja wartości” aby poznać szczegóły.
Dla obciążenia EL 9080-200 rzeczywiste wartości to 100% dla napięcia (=80V), 10% dla natężenia (=20
A) oraz 66,7% dla mocy (= 1600 W).
Wartości nominalne mocy, natężenia i napięcia mogą być odczytane z urządzenia za pomocą
odpowiednich obiektów i użyte do przetłumaczenia wartości na liczby.
9.2.1 Format czasu
Format czasu reprezentuje czas od 1 µs do 100 h poprzez wartość 16 bitową. Takie stemple czasowe
są sprawdzane przez urządzenie i wysyłane jako prawdziwe. Wartości, które są zbyt wysokie lub zbyt
niskie nie są akceptowane i zwrócą wiadomość o błędzie. Górne 4 bity są wykorzystywane jako maska
do określenia zakresu czasu, pozostałe bity reprezentują wartość czasu. Ten format czasu jest
wykorzystywany do zapisu (tj. ustawienia) lub odczytu wartości czasu.
Dotyczy to każdego urządzenia posiadającego funkcję zależną od czasu, jeśli tylko wartość czasu jest
ustawialna/możliwa do odczytania. Rozdzielczość zakresów czasu w tabeli poniżej niekoniecznie
odpowiada rozdzielczości urządzenia, do którego są wysłane. W taki wypadku wartości są
zaokrąglane w dół. Przykład: Wysłana jest wartość czasu 0x23E7. Reprezentuje to 999 x 1µs = 999 µs.
Ręcznie ustawiana wartość czasu w urządzeniu w tym zakresie czasowym wynosi 0,95 ms lub 1 ms.
999µs jest zaokrąglane w dół do 950µs. W związku z tym zwrócone zostanie 0x23B6 (=950) podczas
odczytu, zamiast wysłanych 0x23E7.
Strona 61 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Nie wszystkie urządzenia używają masek z tabeli poniżej
* jeśli maska jest używana do translacji wartości czasu w czas rzeczywisty stosuje się bity 15…13 lub
15…12 zależnie od użytego zakresu czasu.
Dla obciążeń elektronicznych czas narastania (obiekt 92) jest stosowany zgodnie z tabelą poniżej
**wartości różniące się od szerokości kroku /step width/ są zaokrąglane
Dla obciążeń elektronicznych szerokość impulsu (obiekt 90 i 91) jest stosowany zgodnie z tabelą
poniżej:
**wartości różniące się od szerokości kroku /step width/ są zaokrąglane
Przykład 1: Czas narastania dla obciążenia elektrycznego będzie ustawiony na 75 md. Szerokość
kroku dla zakresu czasowego na obciążeniu przy 75 ms wynosi 1 ms. Musimy więc wykorzystać zakres
czasowy 0x6000. Jego rozdzielczość wynosi 0,1 ms, co skutkuje wartością czasu 750 (75ms : 0,1ms).
To jest tłumaczone na 0x2EE. Razem z maską otrzymujemy wartość 0x62EE jako wartość czasu dla
czasu narastania (obiekt 92).
Strona 62 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Użytkownicy LabView muszą dostarczyć czas w inny sposób, zobacz dokumentację VI aby poznać
szczegóły.
Przykład 2: Wartość czasu dla testu baterii (tylko obciążenia elektroniczne) została odczytana i będzie
tłumaczona na normalny format czasu. Ogólna rozdzielczość testu czasu baterii wynosi 1s. Jako, że
zakres czasowy pozwala na rozdzielczość 1s tylko do 1h czas powyżej 1h jest podawany w minutach i
godzinach.
Wartość, dla przykładu, 0x8743 będzie tłumaczona na 1859 s lub 30m59s, podczas gdy wartość
0xC532 będzie tłumaczona na 1330m lub 22h10m. Sekundy w tym wypadku są pomijane dla tego
zakresu czasowego.
Przykład 3:
Ustawienie szerokości impulsu dla A (obiekt 90) na 5s. Zgodnie z powyższą tabelą maska zakresu
czasu wynosi 0x4000. W połączeniu z rozdzielczością 10ms dla tego zakresu, wartość 500 (5s : 0,01s),
heksadecymalnie 0x1F4 jest wynikiem. Całkowita wartość czasu wynosiłaby 0x41F4.
9.2.2 Wskazówki
I. Wykrywanie węzła urządzenia (nie z GPIB)
Jeśli chcesz, na przykład, sterować urządzeniem przez USB i nie znasz węzła urządzenia, możesz na
przykład użyć broadcastu dla węzła 9 i zapytać o klasę urządzenia. Urządzenie lub urządzenia
odpowiedzą za pomocą swojego/swoich węzłów, które posłużyły do ustawień. Węzeł urządzenia
może być użyty również do sterowania i rozróżniania urządzeń.
II. Tryb zdalny i standby
Obiekt 54 jest używany do aktywacji/dezaktywacji trybu zdalnego sterowania lub wejścia/wyjścia
urządzenia. Obiekt może być użyty do aktywowania obu na raz, lecz jest silnie zalecane, aby tak nie
robić, gdyż ustawienie wejścia/wyjścia wymaga, by tryb zdalnego sterowania był uruchomiony
wcześniej, w przeciwnym razie pojawi się wiadomość o błędzie. Powinieneś raczej aktywować
najpierw zdalne sterowanie a następnie wyjście/wejście poprzez ponowne wysłanie obiektu 54 tym
razem z innym bajtem kontroli. Przy dezaktywacji postępuj odwrotnie.
Użyteczne też jest odczytanie stanu urządzenia za pomocą obiektu 70 aby sprawdzić, czy obiekt 54
został ustawiony prawidłowo.
9.2.3 Usuwanie usterek
Problem: Urządzenie nie reaguje lub odpowiada na rozkazy
Możliwa przyczyna dla USB
Strona 63 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Karta USB wymaga sterownika. Sprawdź czy sterownik został zainstalowany i czy jest
zainstalowany prawidłowo, poprzez sprawdzenie czy wyświetla się w zakładce menadżera
urządzeń Windows w kontrolerach USB.
Sterownik USB może być używany jako oryginalny sterownik USB lub dodatkowo może on
tworzyć wirtualne porty COM dla każdej karty USB podłączonej do PC, zależnie od
konfiguracji sterownika. Więc urządzenie USB może także być używane jako sprzęt RS232.
Używając LabView wymagane jest tylko podmienienie USB.vi na RS232.vi.
Do komunikacji z urządzeniem używany jest błędny węzeł urządzenia (=adres).
Możliwe przyczyny z RS232
Nie używasz kabla 1:1 do komunikacji z kartą RS232.
Do komunikacji z urządzeniem używany jest błędny węzeł urządzenia (=adres).
Urządzenie i PC są skonfigurowane z innymi baudrates.
Przewód komunikacyjny jest zbyt długi dla skonfigurowanego baudrate.
Możliwe przyczyny z GPIB
Jeśli podłączone jest więcej urządzeń do szyny IEEE ich adresy mogą się dublować
Użyto błędnej składni. Na przykład obciążenie elektroniczne nie reaguje na rozkaz OUTP,
ponieważ posiada wejścia. Możliwe, że użyto błędnego rozkazu lub do błędnego urządzenia.
Możliwe przyczyny z CAN:
Użyto błędnego ID CAN. Zob. rozdział 4.3.1 aby wiedzieć jak obliczać prawidłowo ID CAN.
Błędne ustawione baudrate lub błędny wybrany sample point (tylko dla PSI 9000)
Urządzenie jest zlokalizowane na końcu szyny i nie jest terminowane
Problem: Wysłano wiele zapytań, ale nie na wszystkie uzyskano odpowiedzi
Przyczyna: Zapytania zostały wysłane zbyt szybko jedno po drugim. Zależnie od rodzaju komunikacji i
prędkości, czas wykonania dla urządzenia, który należy brać pod uwagę może się różnić.
Ogólna zasada: Latencja = Czas transmisji + czas wykonania
Czas wykonania wynosi średnio 5 - 20 ms, zależnie od rodzaju zapytania. Czas transmisji może być
obliczony na podstawie baudrate i ilości wysłanych bitów.
Problem: Wartości przesłane do ustawienia nie zostały ustawione
Możliwe przyczyny:
Strona 64 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Urządzenie nie jest w trybie zdalnego sterowania lub aktualnie nie może zostać ustawione w
tym trybie.
Jeśli wysłane wartości są błędne (zbyt duże lub zbyt małe) lub zakres standardowy wartości (0
.. 0x6400 dla napięcia, natężenia itd.) jest dodatkowo ograniczony poprzez wartości limitów
(tylko PSI 9000) zamiast ustawienia zwrócona zostanie informacja o błędzie.
Problem: Zwrócona została wiadomość o błędzie
Wiadomości o błędzie służą temu, aby wskazać co jest źródłem błędu. Tabela poniżej przedstawia
przegląd możliwych kodów błędów, które mogą zostać zwrócone z urządzenia do PC, oraz ich
znaczeń. Niektóre błędy są spowodowane błędogennymi zapytaniami/wiadomościami, inne mogą
pochodzić z samego urządzenia. Służą jako wskazówka do celów usuwania usterek.
Wiadomości błędów są w formacie telegramu, tj zawierają SD, numer obiektu (aby zidentyfikować
błąd, 0xFF jest użyte jako numer obiektu) oraz pole danych. Pole danych zawiera kod błędu.
Przykład: W przypadku, gdy chcesz ustawić napięcie obiektem 50 a urządzenie nie jest w trybie
zdalnego sterowania otrzymasz kod błędu C0 07 FF 09 01 CF od urządzenia, którego węzeł wynosi 7.
Objaśnienie niektórych kodów błędów:
Kod 0x7: numer obiektu użytego w telegramie jest nieznany urządzeniu. Spowodowane jest to
faktem, że nie wszystkie urządzenia używają wszystkich obiektów.
Kod 0x8: długość pola danych w telegramie jest zdefiniowana w liście obiektów. Ten błąd będzie
zwrócony, jeżeli wartość ustawiana, która zawsze wynosi 2 bajty , gdyż jest typu int została wysłana,
lecz pole danych zawierało tylko jeden bajt. Nawet jeśli początek zawierał prawidłową długość
telegramu. Jest to zabezpieczenie przed ustawianiem błędnych wartości
Kod 0x9: obiekt ustawiający wartość został wysłany, lecz urządzenie nie znajduje się w trybie
zdalnego sterowania. W tym stanie masz tylko uprawnienia do odczytywania, nie do zapisywania.
Musisz ustawić urządzenie w tryb zdalny.
Kody 0xB/0xD/0x14: Wiadomości s usuwane z bufora wiadomości, jeśli są prawidłowo wykonane.
Gdy przychodzą zbyt szybko, bufor zostanie przepełniony i nie może odebrać żadnych nowych
wiadomości.
Kod 0xE: Stringi muszą być przesyłane w inny sposób korzystając z CAN. Jeśli długość stringa jest
większa niż 8 znaków musisz podzielić wiadomość korzystając z tokenów początku stringa 0xFF, 0xFE
itd. Zob. także rozdział 7.7.1.
Kody 0x30/0x31: są one powiązane z wartościami ustawianymi. Wszystkie ustawiane wartości mają
limit dolny i górny, które są definiowane przez zasilacze PSI 9000. Domyślny limit górny wynosi
0x6400, dolny 0.
Limity dotyczą również wartości czasowych.
Strona 65 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
Kod 0x32: wartość czasowa używająca błędnego zakresu czasu została wysłana. Nie są przekroczone
granice, ale i tak powoduje to błąd.
Kody 0x36/0x37: Warunki dostępu do tych danych nie są spełnione. Zobacz listę obiektów aby
poznać warunki dostępu (kolumna 4).
9.3 Lista obiektów komunikacji
9.3.1 Definicje kolumn
Ta lista jest odniesieniem do tworzenia aplikacji zdefiniowanych przez użytkownika bez korzystania z
LabView.
1sza kolumna zawiera numery obiektów (=adresy obiektów). Ten numer musi być przypisany do
bajtu OBJ w telegramie.
Strona 66 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
3cia kolumna definiuje czy obiekt jest tylko do odczytu, tj. czy może służyć tylko do zapytania czy
również do zapisywania. Odczyt jest zawsze możliwy, zwany także monitoringiem. Ustawianie
wartości lub statusów wymaga by urządzenie znajdowało się w trybie zdalnym (zob. rozdział 9.2).
4ta kolumna definiuje specjalne warunki dostępu obiektu. Wykonanie tych obiektów dodatkowo
zależy od jednego z poniższych warunków. Jeśli warunek nie jest podany, obiekt nie jest wykonywany
i urządzenie zwróci wiadomość błędu zawierającą kod błędu. Znaczenie cyfr:
1 = Wejście/wyjście urządzenia zostało wyłączone (obiekt jest akceptowany wyłącznie, gdy wyjście/wejście mocy
jest w trybie standby)
2 = Opcja „rezystancja wewnętrzna” musi zostać odblokowana (obiekt jest akceptowany i wykonywany przez
urządzenie z odblokowaną opcją rezystancji wewnętrznej).
3 = Aktywna musi być opcja transferu danych funkcyjnych* (obiekt jest akceptowany i wykonywany przez
urządzenie, jeśli wcześniej urządzenie zostało ustawione przez inny obiekt w stan obioru i ustawienia danych funkcyjnych)
4 = Manager funkcyjny jest włączony*( obiekt jest akceptowany i wykonywany przez urządzenie, jeśli wcześniej
włączony został manager funkcyjny)
5 = Manager funkcyjny jest wyłączony*( obiekt jest akceptowany i wykonywany przez urządzenie, jeśli wcześniej
wyłączony został manager funkcyjny)
Tylko seria PSI 9000
Uwaga! Generalnie wymagane jest ustawienie urządzenia w tryb zdalnego sterowania zanim
wysłany zostanie obiekt, który ma zmienić wartość parametru urządzenia.
5ta kolumna definiuje typy danych w polu data field telegramu. Używane są powszechnie znane typy
danych.
6ta kolumna definiuje długość danych pola data field. W obiektach z typem danych string ten bajt
definiuje maksymalną długość stringa.
7ma kolumna jest używana do maskowania danych typu „char”. Maska definiuje które bitu mają być
ustawione lub nie ustawione. W telegramie pierwszy bajt pola data field jest maską a drugi bajt jest
bajtem kontrolnym, który będzie maskowany przez pierwszy. Definiuje bity, które będą zmienione.
Obiekty innych typów danych nie używają masek.
8ma i 9ta kolumna podają szczegóły dotyczące zawartości pola data field.
Niektóre obiekty używają dwubajtowego formatu czasu, który jest wyjaśniony w rozdziale 9.2.1
Strona 67 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl

www.conrad.pl
10. Złącza
Strona 68 z 68
Dystrybucja Conrad Electronic Sp. z o.o., ul. Kniaźnina 12, 31-637 Kraków, Polska
Copyright © Conrad Electronic 2015, Kopiowanie, rozpowszechnianie, zmiany bez zgody zabronione.
www.conrad.pl
 Loading...
Loading...