

DYNEX MAS28139ND, MAS28139NC, MAS28139NB, MAS28139FS, MAS28139FE Datasheet
...
MA28139
1/34
The OBT ASIC will interface any user to the ESA On Board
Data Handling bus. Developed under ESA Contract, it
conforms to ESA OBDH, Digital Bus Interface and Internal
User Bus Standards.
The OBT has 2 separate functions. The first is a 5 channel
modem which, on the bus side, provides the digital waveforms
necessary to operate the Litton Bus drivers, and receives the
outputs of the Litton bus detectors. On the user side, it
provides an input / output at Digital Bus Interface level. The
second function, internally coupled to the first, provides a
multiplexing / demultiplexing function of the DBI signals down
to Internal User Bus levels and vectored 16 bit serial register
read and write commands (see section 7.2 of ESA standard
TTC-B-01). In effect, the second function of the OBT provides
the core of an RTU.
The Interrogation and Response bus data streams of the
two functions may be either coupled together (in RT mode) or
isolated (in CT mode). The device may hence be used as a
modem only, an RTU kernel only or as a combined modem
and RTU kernel. In RT mode, the Interrogation bus data
stream can be observed and the Response bus data from
associated devices, such as an MA28138 Remote Bus
Interface, can be combined with that from the RTU kernel
before being used by the modem circuits to modulate the
Response bus. Bi-directional access to the Block Transfer bus
is provided in either mode.
When used to interface a central terminal to the OBDH bus,
the OBT should be continuously clocked in order to output
timing to all users on the I-bus as dummy interrogations from
the CT. Commands and telemetry are normally sent on the I
and BT busses whilst responses and telemetry normally return
on the R and BT busses.
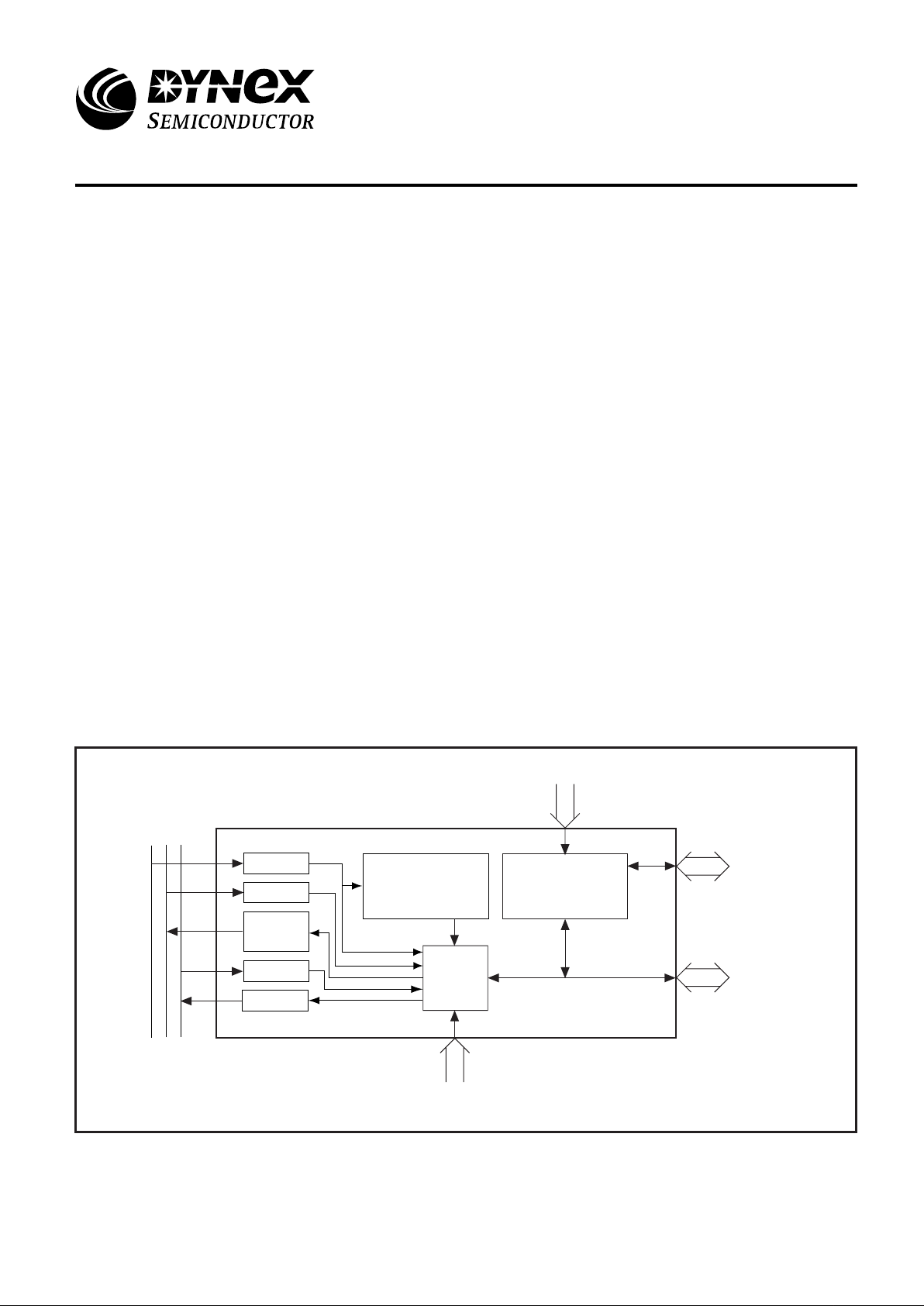
Figure 1: Block Diagram
CONTROL
LOGIC
RTU
KERNEL
CONTROL
PINS
CLK DETECTOR,
WATCHDOG
DIGITAL
BUS
INTERFACE
INTERNAL
USER
BUS
CONFIGURATION PINS
OBDH BUS
I R BT
I Rx
R Rx
I (CTU)
R (RTU)
BT Rx
BT Rx
Tx
FEATURES
■ Radiation Hard
■ Low Power Consumption
■ Single CMOS-SOS ASIC Implementation
■ Latch-up Free
■ High SEU Immunity
■ Fully Compliant with ESA OBDH, IUB, DBI and RBI
Specification
■ Contains OBDH Bus Modem and RTU Kernel
■ Supports Bi-directional Data Transfer on Response and
Block Transfer Bus
MA28139
OBDH Bus Terminal
Replaces June 1999 version, DS3592-5.0 DS3592-6.0 January 2000
MA28139
2/34
APPLICATION
PAYLOAD INTERFACES
The OBT converts the OBDH bus to an Internal User Bus,
and a Digital Bus Interface. The OBT can connect OBDH to
existing ESA standard payload interfaces such as the MSS
PIU (payload interface unit), ICU (intelligent control unit), SBC
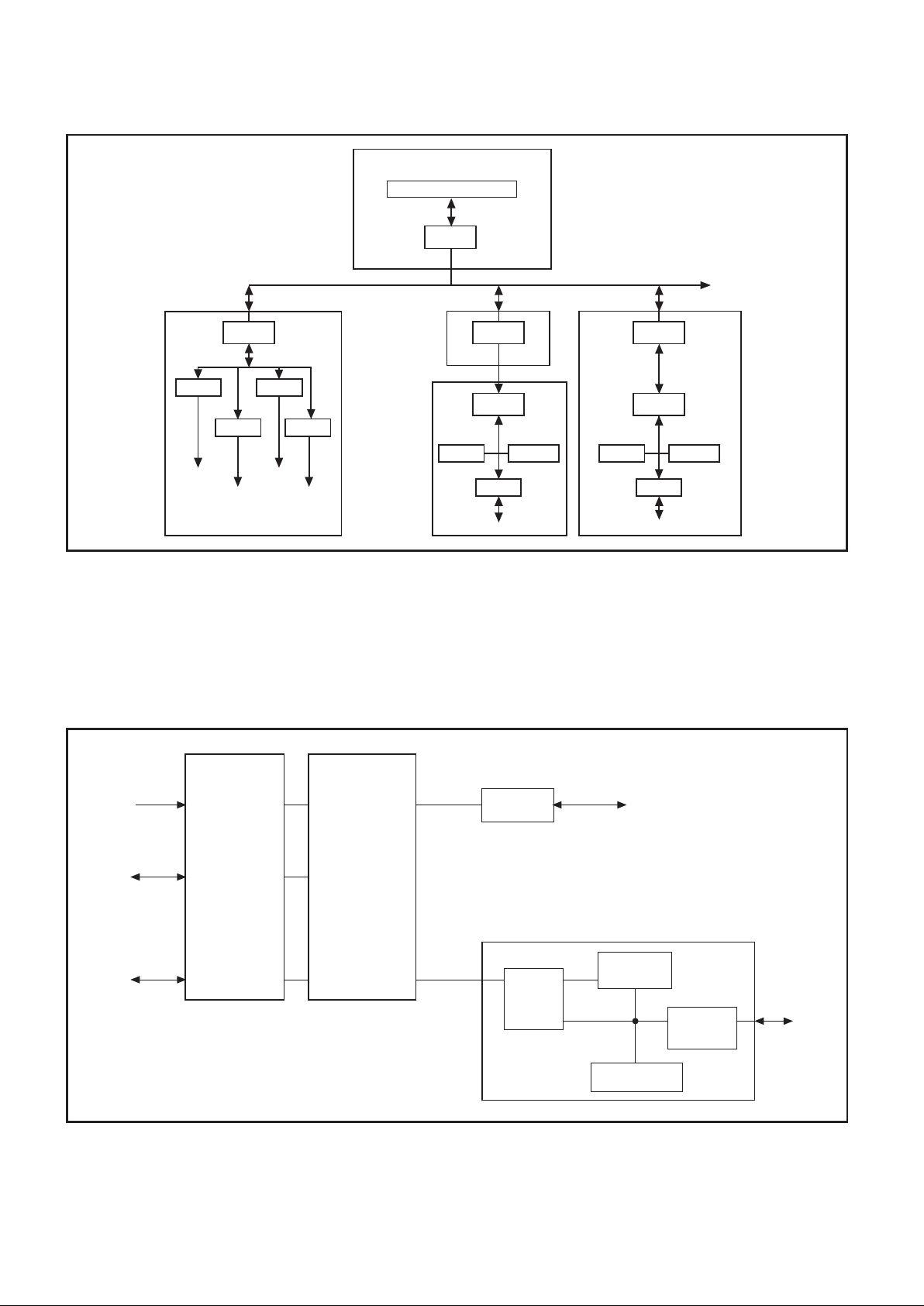
Figure 3: Payload Interface
Figure 2: Application
DBI
IUB
PIU
PAYLOAD
BT-Bus
R-Bus
I-Bus
RBI
MA28138
µP
MEMORY
I/O
PAYLOAD
DMA
AD-BUS
SBC
OBDH
ANALOGUE
HYBRID
OR
DISCRETE
CIRCUIT
OBDH
BUS
TERMINAL
MA28139
(single board MIL-STD-1750 computer) or FTC (fault tolerant
computer).
The OBT and analogue components/transformers can be
integrated in the PIU, ICU, SBC, etc.
CENTRAL TERMINAL
Bus Controller
OBT
OBTOBTOBT
DMUX MPX
DMUX ADC
RBI
RAM µP
I/O
RBI
RAM µP
I/O
IUB
DBU
DBI
ODBH BUS
DBI
Commands
Timing
Digital
Data
Analogue
Data
Address
REMOTE TERMINAL
INTELLIGENT TERMINAL
DBI
CT
RT
RT
UP TO A T OTAL OF 62 TERMINALS
MA28139
3/34
FUNCTIONAL DESCRIPTION
In RT mode, power up resets the OBT and causes it to
deselect both busses. Two watchdog counters monitor the
Nominal l-bus and the Redundant l-bus. If either bus becomes
active, that bus will be selected. If the selected bus stops, the
OBT watchdog times out and resets both the OBT and the
user. If both busses become active, the Nominal bus will be
selected in preference to the Redundant one. A change in bus
selection will always result in the OBT and the user being
reset. Responses from the user are always returned on the
selected bus. Setting ‘SIMUL’ high causes both BATs to drive
both the Nominal and the Redundant busses irrespective of
the current bus selection. The time-out period may be set to
any desired number of bits by varying the ‘LOSC’ frequency.
The OBT derives all timing from, and is synchronous with, the
selected l-bus. The OBT demodulates the l-bus to the DBI and
decodes commands to the IUB.
The CTpRTn mode pin causes the modem circuits and the
RTU Kernel to be either cascade or isolated. If CTpRTn is low
(RT mode), the RIRSYNC, CLK, DATA and VAL signals are
routed to the RTU Kernel and the associated pins act as
outputs; responses from the RTU Kernel are ORed with those
from the external RRTDATA and RRTEN inputs and can be
independently monitored on the DATARRT and ENRRT pins.
In this mode any reset caused by the Clock Detector
watchdogs is also combined with the power up reset input.
If CTpRTn is high (CT mode), the modem and RTU Kernel
functions are isolated to permit the device to be used as either
a modem within the CTU or an RTU Kernel interfacing to an
external modem where the RIRSYNC, CLK, DATA and VAL
pins act as inputs. The right-hand multiplexer bank is switched
to the upper position so that the CT drives the OBDH via the
CIT and CBT (if used) pins and receives responses/telemetry
via the CRR and CBR (if used) pins. Note: in CT mode, BAT1
must be connected to the l-busses.
In RT mode, the CITSEL, MOD, CLK, SYNC and INV pins
are disabled and the clocks are supplied by the l-bus BAR in
response to the selected bus. In CT mode, the Clock Detector
is functional and drives the TlMEOUTn pin but is unable to
cause internal reset on time-out; in this mode the CT must
supply all clocks and select the operational bus.
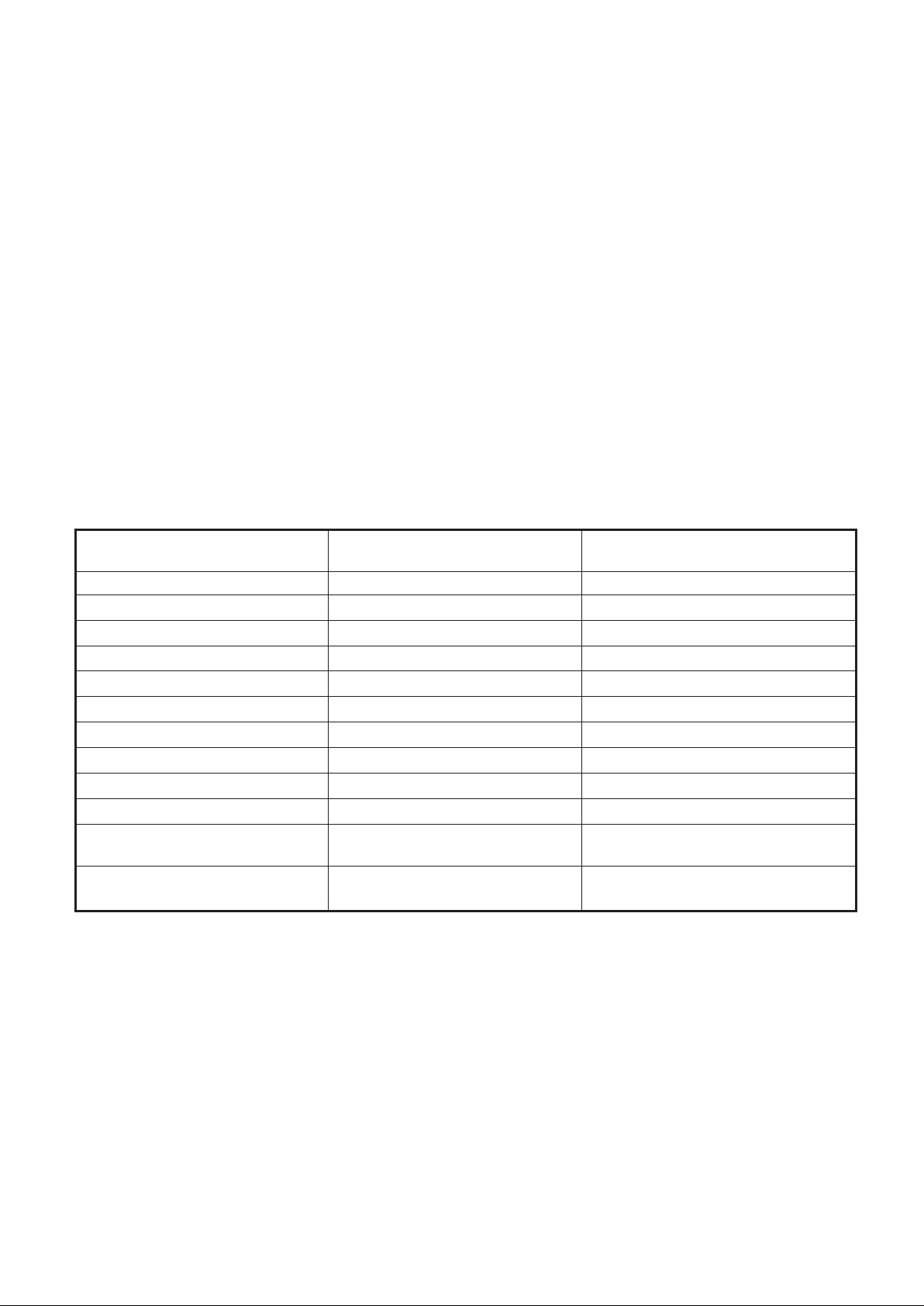
The changes depending upon selection of RT mode or CT mode with the CTpRTn pin are defined in the table below:
Functional Signal CT Mode Source RT Mode Source
(CTpRTn = ‘1’) (CTpRTn = ‘0’)
BAT1, 2 modulation clock CITMOD input pin Recovered R2F
BAT1, 2 data clock CITCLK input pin Recovered RIRCLK
BAT1 data input RRTDATA input pin RRTDATA OR DATARRT (RTU Kernel)
BAT1 tx enable ‘1’ RRTEN OR DATAEN (RTU Kernel)
BAT1 sync code tx enable CITSYNC input pin ‘0’
BAT1 bit invalidate tx enable CITINV input Pin ‘0’
BAT1, 2 bus selection CITSEL and SIMUL input pins Detected active bus and SIMUL input pin
BAT2 data input RBTDATA input Pin RBTDATA input pin
BAT2 tx enable RBTEN input pin RBTEN input pin
BAT1, 2, BAR1, 2, 3 reset MRSTn input pin TlMEOUTn AND MRSTn input pin
RIRSYNC, CLK, DATA, outputs inputs
VAL pin direction
BAT/BAR and RTU Kernel separated coupled
coupling
MA28139
4/34
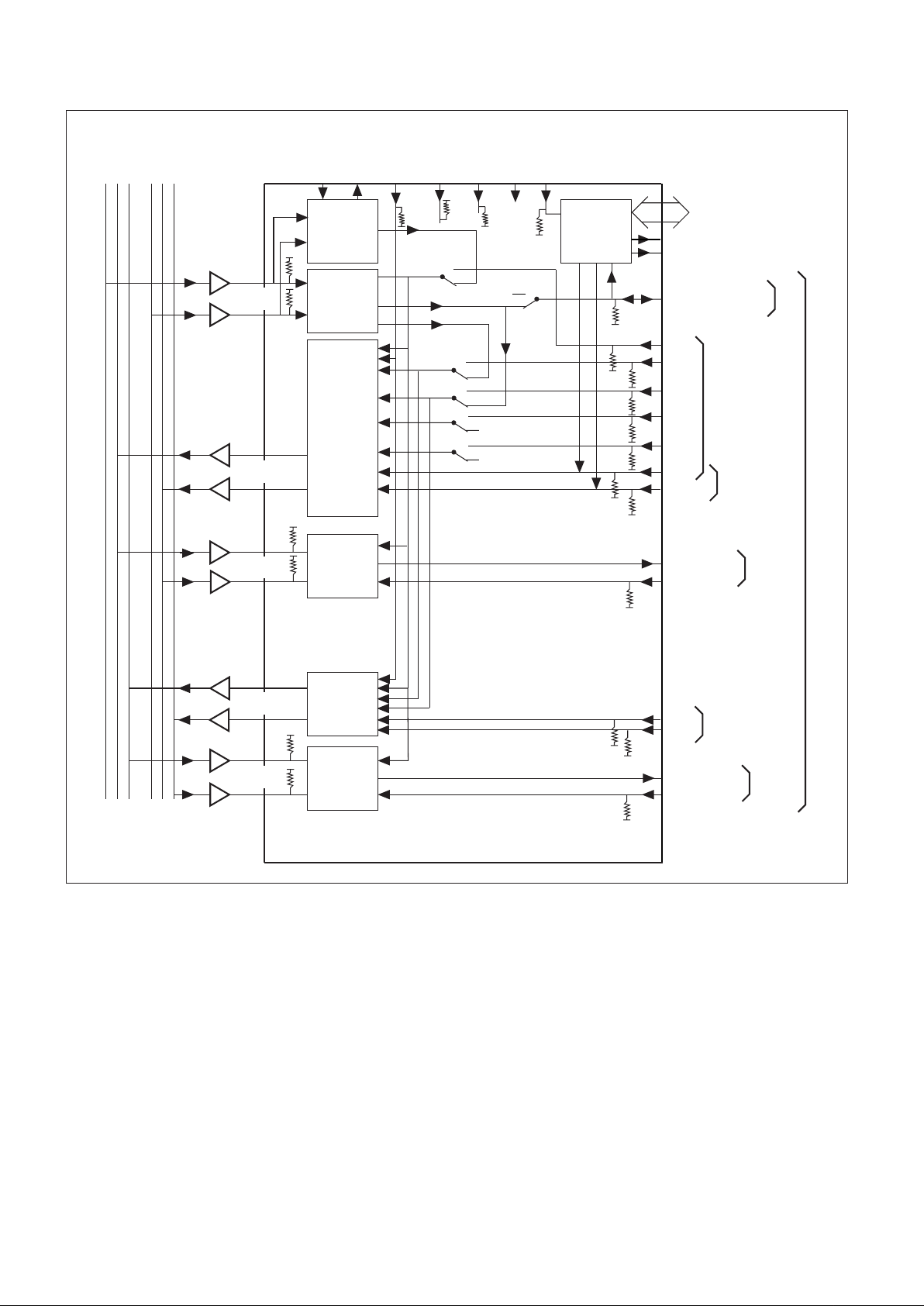
Figure 4: Architecture
MODEM Modulation Waveforms are compliant with ESA document THB/Apo/KZ/1386/av. Waveforms indicating the
operation of BAT1, 2 and BAR1, 2, 3 in both the CT and RT modes are shown in Figures 5 to 8.
Note: Switches in lower position - RT mode
Switches in upper position - CT mode
BUS
TIME
OUT SIMULCTMODE RESET
IUB
SYNC, CLK, DATA, VAL RIR
SEL
MOD
CLK
SYNC
INV
DATA
EN
CLK, DATA, VAL
INIT
DATA
EN
CLK, DATA, VAL
INIT
RBR/
CBR
RBT/CBT
RRR/CRR
CIT
RRT
DBI
BAR1
I-BUS RX
BAT1
BAR2
R-BUS RX
BAT2
BT-BUS TX
BAR3
BT-BUS RX
MA28139 OBT
0v
CLK
2F
OBDH
CLOCK
DETECTOR
WATCHDOG
NOMINAL
BUS #1
REDUNDANT
BUS #2
I R BT
I R BT
NIDS1/2n,
RIDS1/2n
RR1-4,
NRE, RRE
NRDS1/2n
RRDS1/2n
BR1-4,
NBE, RBE
NBDS1/2n,
RBDS1/2n
R-BUS TX
(RT MODE)
I-BUS TX
(CT MODE)
TA0-5
TAV
DATARRT
ENRRT
RTU
KERNEL
0v
BUS 1/2
ACTIVE
LOSC
OPEN
MA28139
5/34
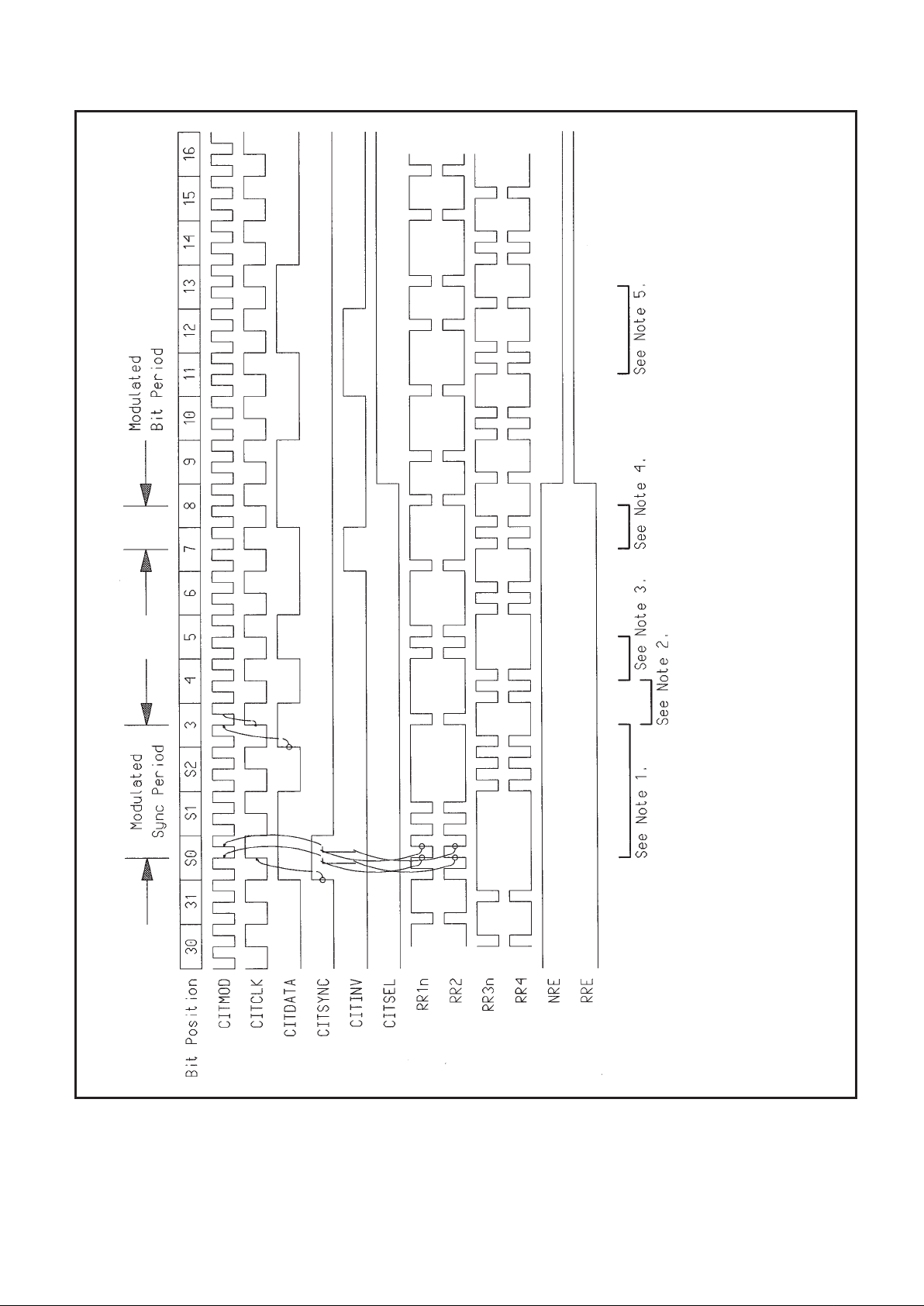
Figure 5: CT Mode Bus Adaptor Transmitter Waveforms
Note 1: Raising CITSYNC for one bit period causes an invalid bit, a valid bit and another invalid bit to be modulated. The exact pattern is determined
by RRTDATA; ‘110’ gives the classic H0H0H0L0L0L0 sync pattern.
Note 2: Valid Litton ‘1’ modulated.
Note 3: Valid Litton ‘0’ modulated.
Note 4: Invalid Litton ‘0’ modulation is caused by raising CITINV for one bit period.
Note 5: Raising CITINV for more than one bit period only causes one invalid bit to be modulated.
Note 6: BAT2 operation is similar, but SYNC and INV are not available.
MA28139
6/34
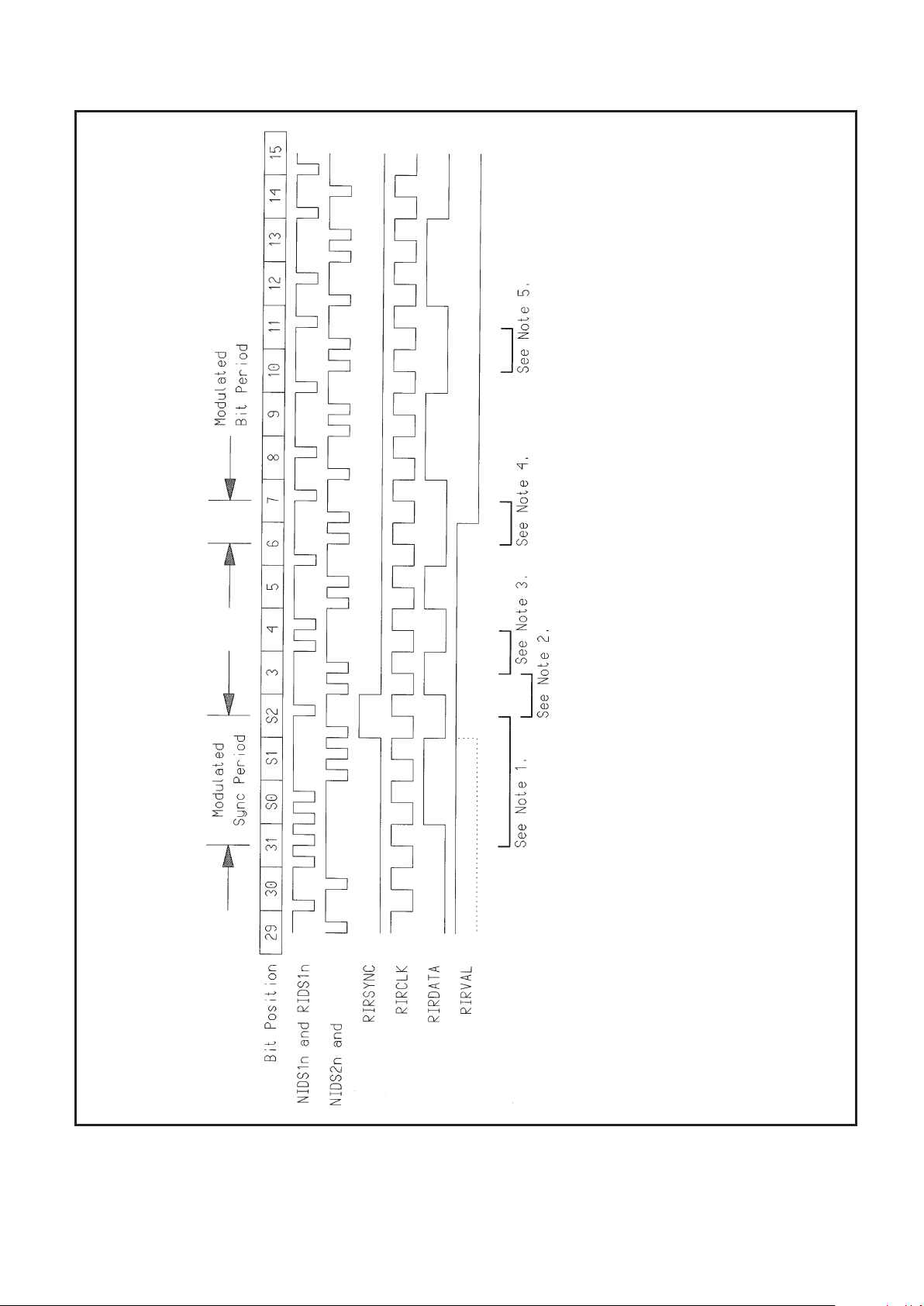
Figure 6: RT Mode Bus Adaptor Transmitter Waveforms
Note: BAR2 and BAR3 operation are similar with different nomenclature.
MA28139
7/34
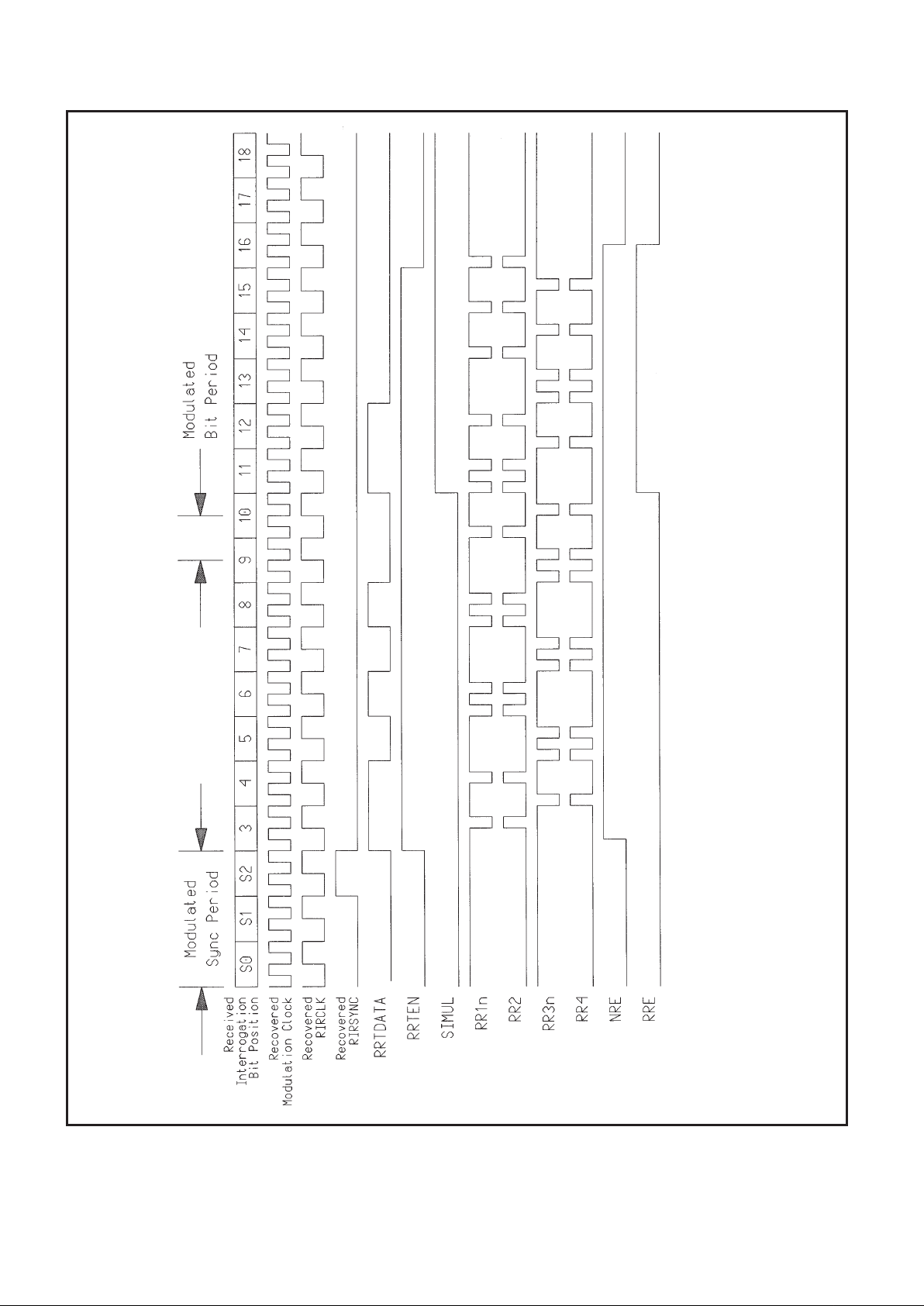
Figure 7: RT Mode Bus Adaptor Receiver Waveforms
Note 1: H0H0H0L0L0L0 sync pattern detected and resets phase of RIRCLK.
Note 2: Valid Litton ‘1’ detected.
Note 3: Valid Litton ‘0’ detected.
Note 4: Invalid Litton ‘0’ detected.
Note 5: Further invalid bits do not affect RIRVAL - it will rise as RIRSYNC rises.
Note 6: BAR2 and BAR3 operation is similar, but SYNC is not available and RRRINIT and RBRINIT are provided.
RIDS2n
MA28139
8/34
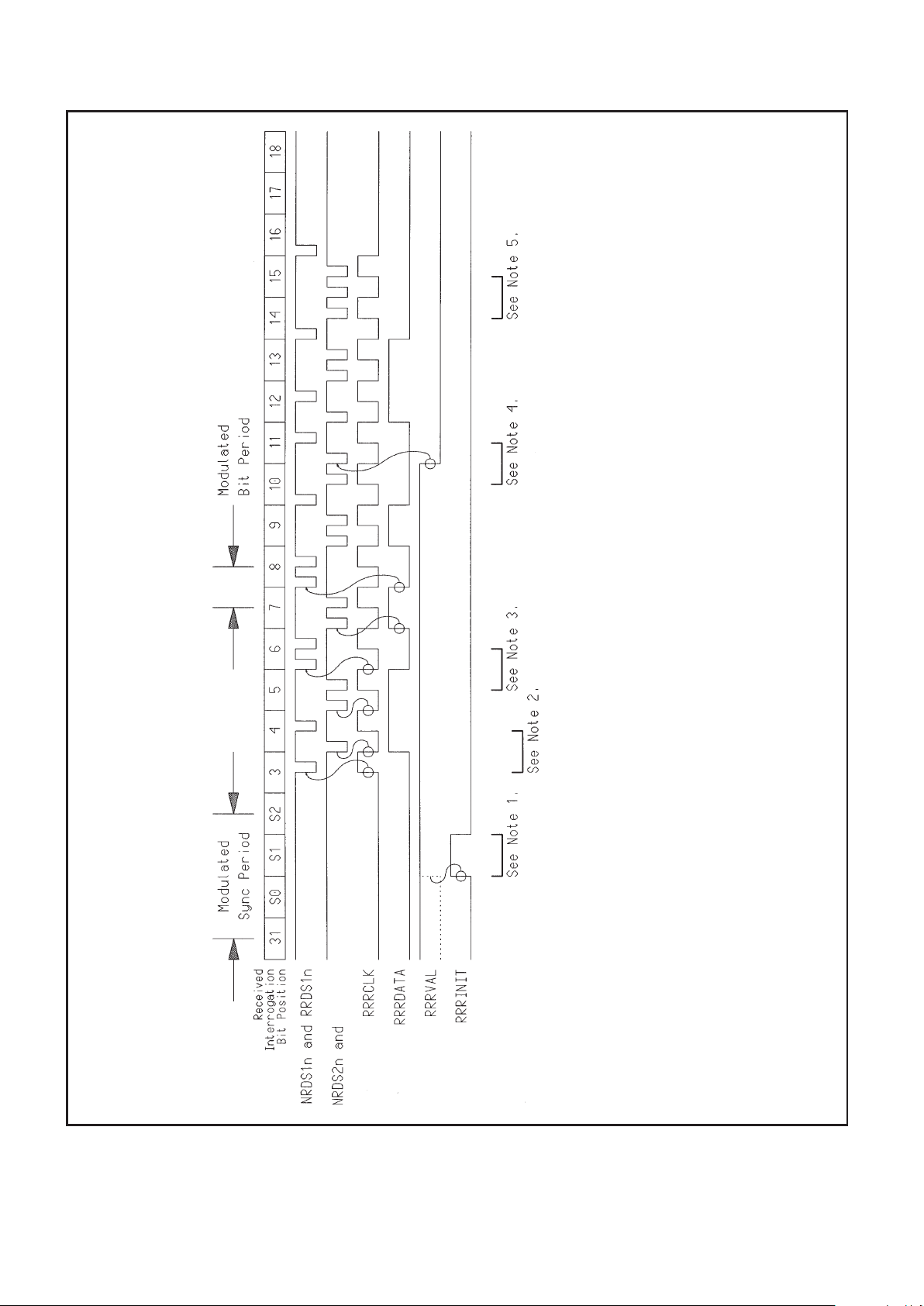
Figure 8: BAR2 Bus Adaptor Receiver Waveforms
Note 1: RRRINIT asynchronously resets RRRVAL to clear errors detected in the previous response.
Note 2: Valid Litton ‘1’ detected.
Note 3: Valid Litton ‘0’ detected.
Note 4: Invalid Litton ‘0’ detected.
Note 5: Further invalid bits do not affect RRRVAL - it will rise as RRRINIT rises.
Note 6: BAR3 operation is similar, but is intended to support Block Transfer - RBRINIT hence occurs once per block.
Note 7: Operation of BAR2 and BAR3 does not depend on RT mode or CT mode, except for bus selection.
RIDS2n
MA28139
9/34
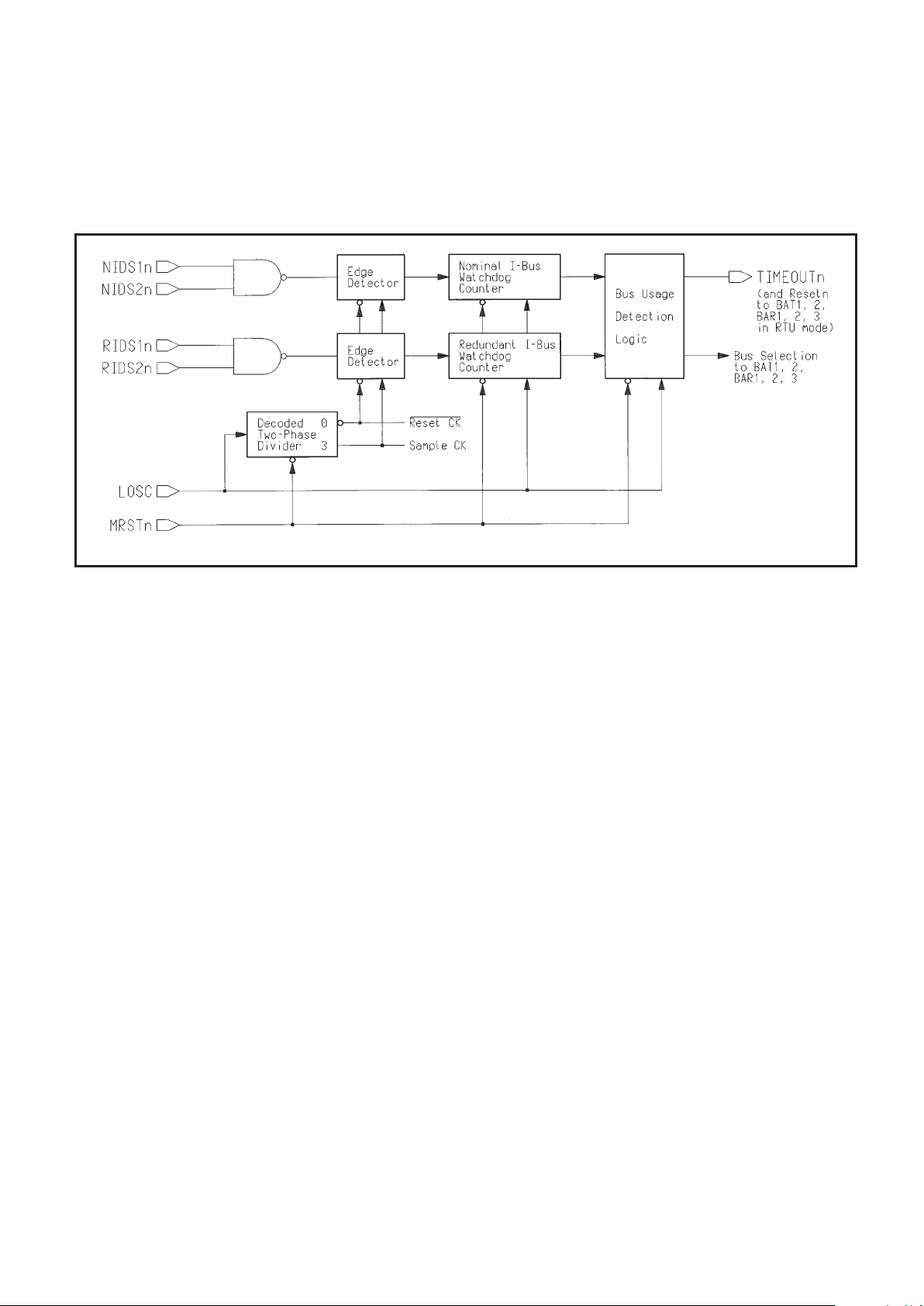
CLOCK DETECTOR OPERATION
The Clock Detector architecture is shown in Figure 9; a
separate channel is essentially provided for each of the
Nominal and Redundant Interrogation busses. Associated
waveforms are shown in Figure 10.
Figure 9: Clock Detector Architecture
Each channel contains an Edge Detector and a 5-bit
Watchdog Counter which respond only to high-to-low
transitions on their respective Interrogation bus DS1n inputs. A
common Bus Usage Detection circuit is used to generate timeout pulses (used for internal and external reset) and bus
selection signals from the results of the watchdogs.
The local oscillator input, LOSC, is divided and decoded to
generate an active low reset and an active high sample clock.
When applied to both input Edge Detectors, these signals
permit input high-to-low transitions to be detected for one
LOSC cycle in every two (between the reset ↓ and sample
clock ↑). Once such transitions have been detected by a
sample clock, the associated watchdog counter is reset. The
MSB of each watchdog counter is used as an indication of its
bus’s status - active or inactive. Should the watchdog counter
overflow (i.e. its MSB be set to 1), the associated bus will be
considered inactive.
The status of the Nominal and Redundant Interrogation
busses is used to determine internal bus selection for the
modulation of Response and Block Transfer data in the
device’s RT mode. If neither bus is considered active, the
TlMEOUTn pin will be held low and RT mode reception of all 3
busses will be inhibited. If one bus is considered active, RT
mode reception will occur on the same set of bus circuits
(redundancy) as the active Interrogation bus. If both busses
are considered active, RT mode reception from the Nominal
set of bus circuits will be performed. RT mode transmission will
always occur on the same set of bus circuits (redundancy) as
selected for reception unless the SIMUL pin is held high, in
which case transmission will occur simultaneously on both the
Nominal and Redundant busses.
Both watchdog counters are fully set at power up to mark
both busses as inactive - in this way, a missing LOSC input will
not cause inactive busses to be deemed active.
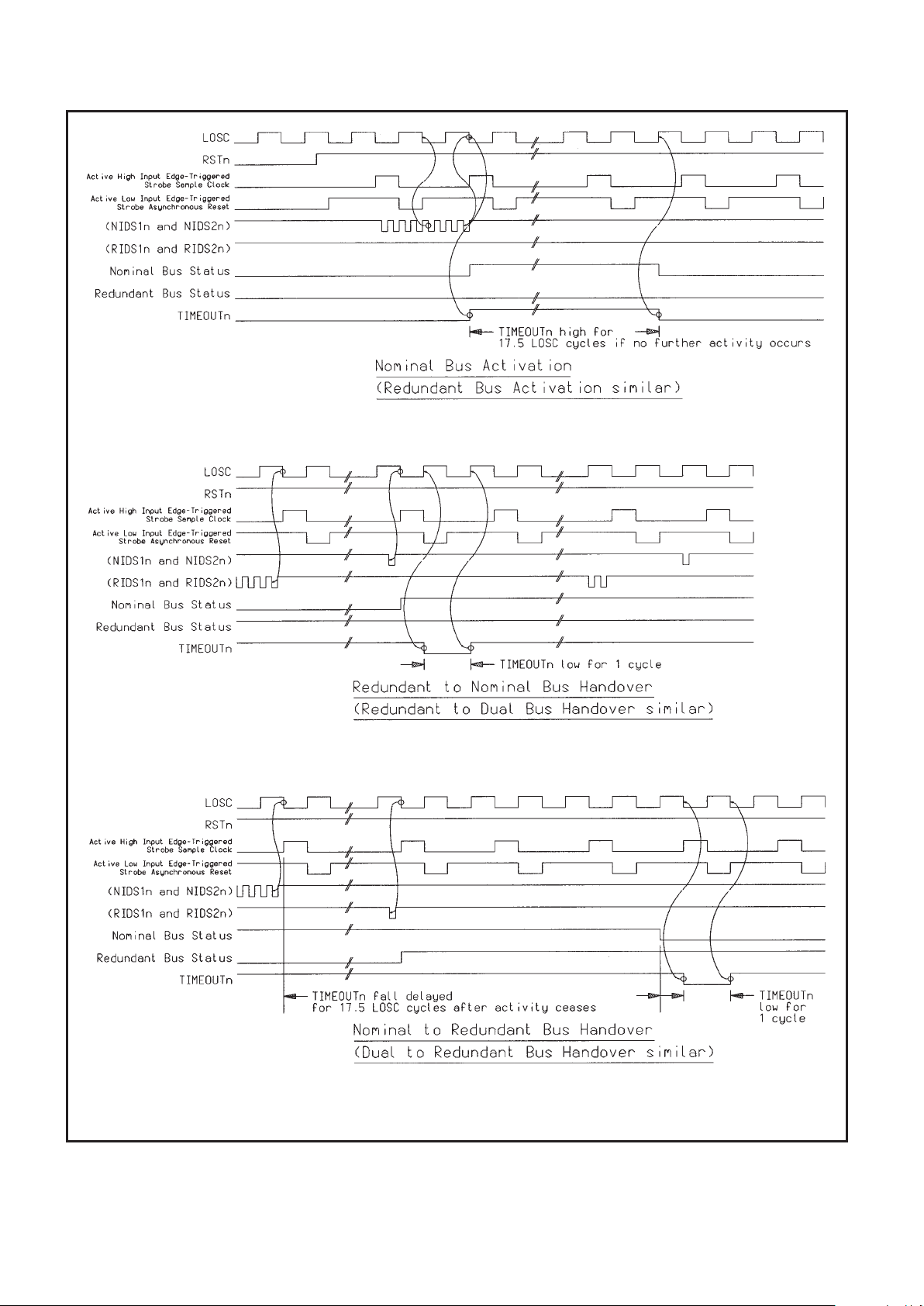
For a single detected input transition, 17.5 to 18.5 LOSC
cycles will elapse before the relevant bus is considered
inactive. If near-instantaneous Nominal-to-Redundant or Dualto-Redundant bus handover occurs, the change-over will be
delayed by 18 to 19 LOSC cycles, in order to preserve the
priority of the Nominal bus. If near-instantaneous Redundantto-Nominal or Redundant-to-Dual bus handover occurs, the
change-over will occur after 1.5 to 2.5 LOSC cycles since the
Nominal bus takes priority. In either of these cases, a 1 LOSC
cycle TlMEOUTn pulse is always generated to ensure that
internal reset occurs.
The frequency of the local oscillator may be varied to make
the nominal time-out period of 17.5 LOSC cycles correspond
to any desired number of (missing) bits on the Interrogation
bus. Variation of the duty cycle does not vary the time-out
period. After 16 LOSC cycles without detected input
transitions, the associated watchdog times-out and is detected
on the next LOSC ↑ edge; the generation of a TlMEOUTn
pulse and reset are then inevitable.
For proper Clock Detector operation, (at least) one high-tolow input transition must be detected within a period of 16
LOSC cycles of the last such detection, but transitions made
during alternate LOSC cycles (the phase is difficult to predict)
will not be detected. Local oscillator clock signals which are
harmonically-related to the modulation clock by an integer ratio
are thus a cause for concern, although this problem is perhaps
only likely to occur in experimental set-ups.
MA28139
10/34
Figure 10: MA28139 Clock Detector Operation
Note: If both busses are determined by their watchdogs to be active (as indicated above by their status), the
Nominal Bus will always be used by the Bus Adaptor Transmitter and Receiver circuits instead of the
Redundant Bus.
MA28139
11/34
The requirement to respect set-up and hold times for the
capture of the Edge Detector outputs by the LOSC high-to-low
transition means that LOSC signals which are harmonicallyrelated to the Litton modulation clock but whose phase can not
be controlled can never be guaranteed to provide reliable
operation.
For asynchronous local oscillator signals, there will be no
concern if we are simply able to place two or more Litton DSn
high-to-low edges into each LOSC cycle, so that:
τ
MOD
≤ τ
LOSC
- tSU - t
HOLD
and the time-out period of 16 τ
LOSC
is hence approximately
8 bit periods or more.
However, suppose that the periods of the modulation clock
and the local oscillator clock are such that the relationship
between them is:
τ
MOD
= m τ
LOSC
where m is a positive integer.
In order to respect the setup and hold times, tSU + t
HOLD
respectively, between the DSn ↓, and LOSC ↓ edges, it is
necessary to avoid such harmonic relationships; it can be
shown that around these spot frequencies it is necessary to
ensure that either:
w τ
MOD
≥ x τ
LOSC
+ tSU + t
HOLD
or
y τ
MOD
≤ z τ
LOSC
- tSU - t
HOLD
where the integer constants w, x, y and z are given in the
table below.
Since two modulation clock cycles occur per bit, the timeout period at these harmonics will then be:
16 τ
LOSC
≈ 16 τ
MOD
/ m ≈ 8 / m bit periods.
m w x y z Approx. time-out
period (bit periods)
1 151517178
27158154
3 5 15 5 15 2.67
43134152
5 3 15 3 15 1.6
6 2 13 2 11 1.33
717171.14
8192151
919190.88
10 1 11 1 9 0.8
11 1 11 1 11 0.73
12 1 13 1 11 0 67
13 1 13 1 13 0.62
14 1 15 1 13 0.57
15 1 15 1 15 0.53
In summary, slow local oscillator clocks which cause
relatively long timeout periods ≥ 8 bit periods are not
considered a problem; very long time-outs can be reliably
implemented. For shorter time-out periods, however, it is
necessary to avoid harmonic relationships between the Litton
modulation clock and the local oscillator. The simplest
practical method for avoiding such relationships would be to
arrange for the ratio
n = τ
MOD
/ τ
LOSC
to have a half-integer value such that n = 0.5, 1.5, 2.5,
...using an independent crystal oscillator if necessary.
 Loading...
Loading...