

Page 1

Transit Time Ultrasonic Flow Meters
TFX Ultra
TTM-UM-00136-EN-08 (March 2018)
User Manual
Page 2

Transit Time Meter, TFX Ultra
Page ii March 2018TTM-UM-00136-EN-08
Page 3

User Manual
CONTENTS
Scope of This Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Unpacking and Inspection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Terminology and Symbols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Considerations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Quick-Start Operating Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Transducer Location. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Electrical Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Pipe Preparation and Transducer Mounting. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Initial Settings and Powerup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Application Versatility. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
CE Compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
User Safety. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Data Integrity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Product Identication. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Transmitter Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Transmitter Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Power Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Transducer Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Select a Mounting Location . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Select a Mounting Conguration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Enter the Pipe and Liquid Parameters. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Mount the Transducer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Transducer Mounting Congurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Inputs/Outputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4-20 mA Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Reset Total Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Control Outputs (Flow-Only Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Rate Alarm Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Frequency Output (Flow-Only Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Totalizer Output Option (Energy Model) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
RS485 Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Page iii March 2018 TTM-UM-00136-EN-08
Page 4

Transit Time Meter, TFX Ultra
Ethernet Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
USB Programming Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Heat Flow for Energy Model Only . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Installing Surface-Mounted RTDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Installing Insertion (Wetted) RTDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Wiring RTDs to the Transmitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Replacing RTDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Parameter Conguration Using the Keypad. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Startup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Conguration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Menu Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Basic Menu (BSC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Channel 1 Menu (CH1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Channel 2 Menu (CH2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Options Menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Sensor Menu (SEN). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Security Menu (SEC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Service Menu (SER) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Service Menu (SER) continued . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Display Menu (DSP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Parameter Conguration Using UltraLink Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
System Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Installation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Initialization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Conguration Menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Basic Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Flow Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Filtering Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Output Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Security Tab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Display Tab. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Strategy Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Calibration Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Remove the Zero Oset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Select Flow Rate Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Page iv March 2018TTM-UM-00136-EN-08
Page 5

User Manual
Set Multiple Flow Rates. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
UltraLink Error Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Target Dbg Data Screen Denitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Saving the Conguration on a PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Printing a Conguration Report . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Menu Maps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Basic Menu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Channel 1 Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Channel 2 Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Sensor Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Security Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Service Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Display Menu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Communications Protocols . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Non-Ethernet Module Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Ethernet Module Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
EtherNet/IP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
TCP Object (F5
Ethernet Link Object (F6
Reset Totalizer Object (65
– 1 Instance) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
HEX
– 1 Instance) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
HEX
1 Instance) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
HEX -
Modbus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
BACnet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
BACnet Conguration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
BACnet Object Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Annex A—Protocol Implementation Conformance Statement (Normative). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Annex A—Protocol Implementation Conformance Statement (Normative). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Ethernet Port Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Network Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Heating and Cooling Measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Rate of Heat Delivery . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
In-Field Calibration of RTD Temperature Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Equipment Required . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Replacing or Re-Calibrating RTDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Brad Harrison® Connector Option . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Product Labels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Page v March 2018 TTM-UM-00136-EN-08
Page 6

Transit Time Meter, TFX Ultra
Control Drawings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
CE Compliance Drawings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104
KFactors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Calculating KFactors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Specications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .108
System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Transducers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109
Software Utilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .109
North American Pipe Schedules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110
Fluid Properties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .115
Page vi March 2018TTM-UM-00136-EN-08
Page 7

Scope of This Manual
SCOPE OF THIS MANUAL
This manual is divided into two main sections:
• “Quick-Start Operating Overview” on page8 is intended to help you get the TFX Ultra flow metering system up and
running quickly. Refer to the detailed instructions if you require additional information.
• The remaining chapters provide a detailed description of all software settings and hardware installation guidance.
MPORTANTI
Read this manual carefully before attempting any installation or operation. Keep the manual accessible for future reference.
UNPACKING AND INSPECTION
Upon opening the shipping container, visually inspect the product and applicable accessories for any physical damage such
as scratches, loose or broken parts, or any other sign of damage that may have occurred during shipment.
OTE:N If damage is found, request an inspection by the carrier’s agent within 48 hours of delivery and file a claim with the
carrier. A claim for equipment damage in transit is the sole responsibility of the purchaser.
SAFETY
Terminology and Symbols
Indicates a hazardous situation, which, if not avoided, is estimated to be capable of causing death or serious
personal injury.
Indicates a hazardous situation, which, if not avoided, could result in severe personal injury or death.
Indicates a hazardous situation, which, if not avoided, is estimated to be capable of causing minor or moderate
personal injury or damage to property.
Considerations
The installation of the TFX Ultra must comply with all applicable federal, state, and local rules, regulations, and codes.
EXPLOSION HAZARD SUBSTITUTION OF COMPONENTS MAY IMPAIR SUITABILITY FOR CLASS I, DIVISION 2.
AVERTISSMENT
RISQUE D’EXPLOSION LA SUBSTITUTION DE COMPOSANTS PEUT RENDRE CEMATÉRIEL INACCCEPTABLE POUR LES
EMPLACEMENTS DE CLASSE I, DIVISION 2.
DO NOT CONNECT OR DISCONNECT EITHER POWER OR OUTPUTS UNLESS THE AREA IS KNOWN TO
BE NONHAZARDOUS.
AVERTISSMENT
RISQUE D’EXPLOSION. NE PAS DÉBRANCHER TANT QUE LE CIRCUIT EST SOUSTENSION, À MOINS QU’LL NE S’AGISSE
D’UN EMPLACEMENT NON DANGEREUX.
MPORTANTI
Not following instructions properly may impair safety of equipment and/or personnel.
MPORTANTI
Must be operated by a Class 2 supply suitable for the location.
Page 7 March 2018 TTM-UM-00136-EN-08
Page 8
Quick-Start Operating Overview
QUICKSTART OPERATING OVERVIEW
If you are familiar with installing TFX Ultra meters, follow these instructions to get the system up and running quickly. Refer to
the detailed instructions if you require additional information.
OTE:N The following steps require information supplied by the transmitter itself so it will be necessary to supply power to
the transmitter, at least temporarily, to obtain setup information.
Transducer Location
• In general, select a mounting location on the piping system with a minimum of ten pipe diameters
(10 × the pipe inside diameter) of straight pipe upstream and five straight diameters downstream.
See Table 2 on page16 for additional configurations.
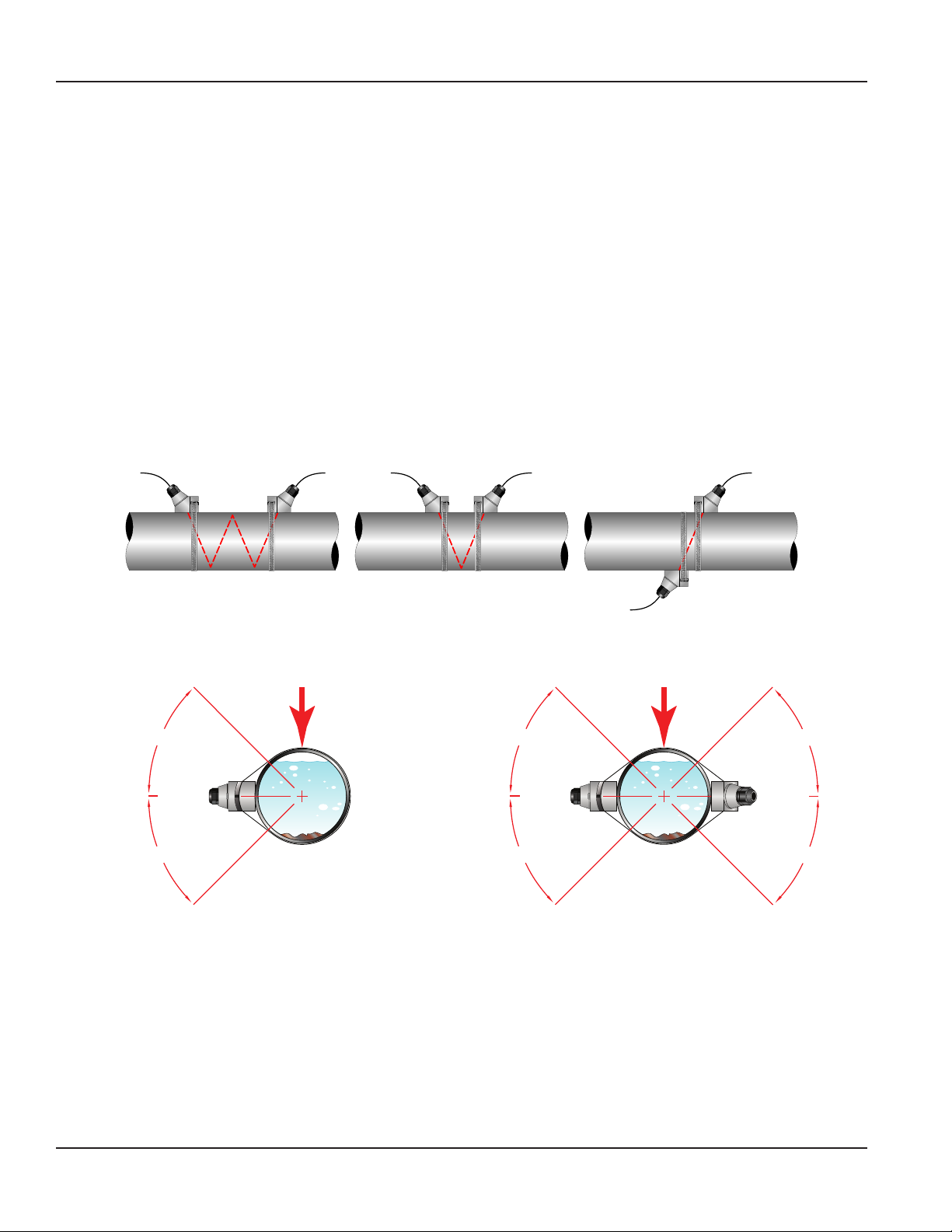
• If the application requires DTTR, DTTN, DTTL or DTTH transducers, select a mounting method for the transducers based on
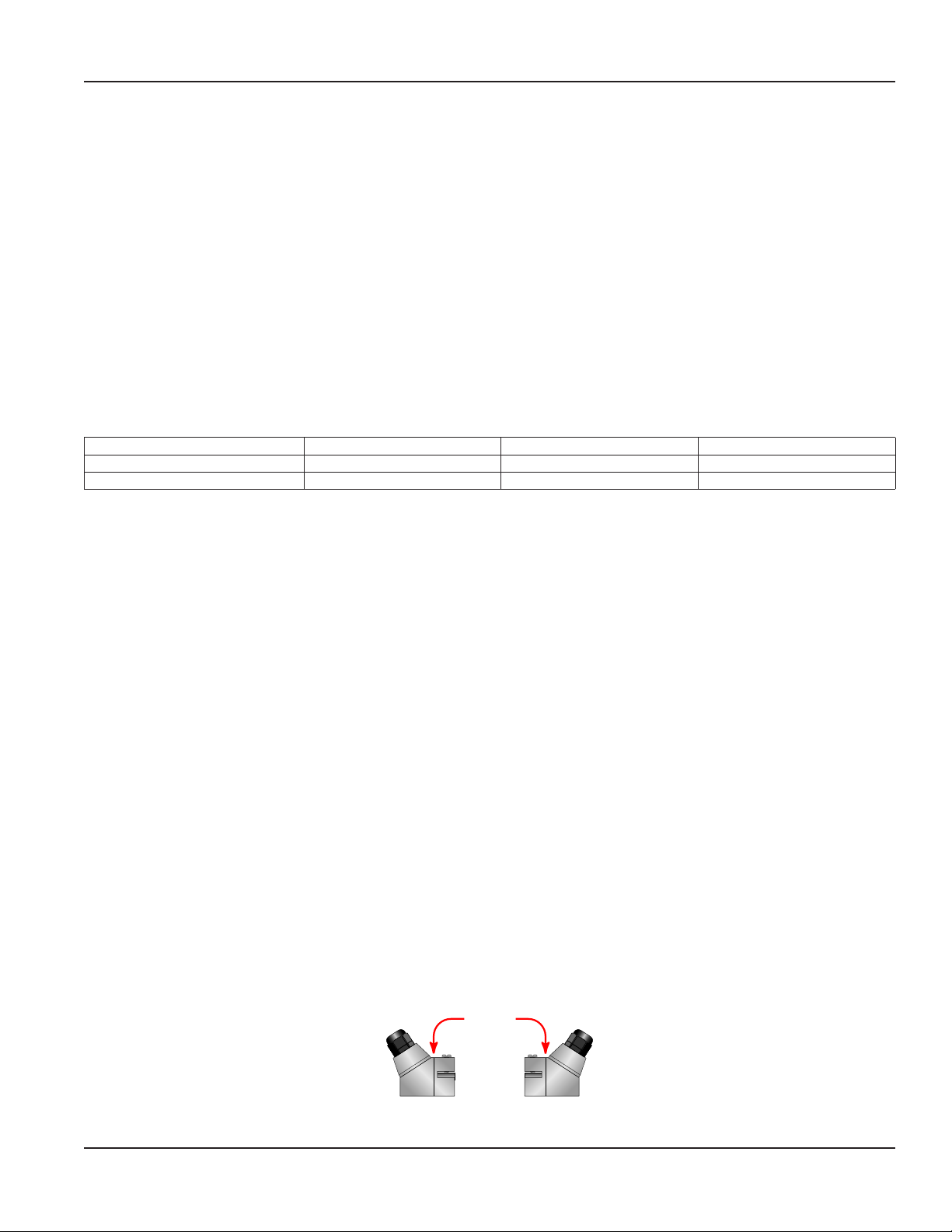
pipe size and liquid characteristics. See Table 3 on page17. The three transducer mounting configurations are shown in
Figure 1. See “Transducer Mounting Configurations” on page20 for mounting procedures.
• Avoid installations on downward flowing pipes or pipes that may become partially filled.
OTE:N All DTTS and DTTC transducers use V–Mount configuration.
TOP VIEW
OF PIPE
W-Mount V-Mount Z-Mount
45°
YES
45°
W and V Mount
Electrical Connections
Transducer/Power Connections
Top of
Pipe
TOP VIEW
OF PIPE
45°
YES
45°
Figure 1: Transducer mounting configurations
TOP VIEW
OF PIPE
Z Mount
Top of
Pipe
45°
YES
45°
1. Route the transducer cables from the transducer mounting location back to the transmitter enclosure. Connect the
transducer wires to the terminal block in the transmitter enclosure.
2. Verify that power supply is correct for the transmitter’s power option.
a. Line voltage AC transmitters require 95…264V AC, 47…63 Hz @ 17 VA maximum.
b. Low voltage AC transmitters require 20…28V AC, 47…63 Hz @ 0.35 VA maximum.
c. DC transmitters require 10…28V DC @ 5 Watts maximum.
Page 8 March 2018TTM-UM-00136-EN-08
Page 9

Quick-Start Operating Overview
4. Connect power to the transmitter.
5. Enter the following data into the transmitter via the integral keypad or the UltraLink software utility:
1 Transducer mounting method 7 Pipe liner thickness
2 Pipe O.D. (Outside Diameter) 8 Pipe liner material
3 Pipe wall thickness 9 Fluid type
4 Pipe material 10 Fluid sound speed*
5 Pipe sound speed* 11 Fluid viscosity*
6 Pipe relative roughness* 12 Fluid specific gravity*
OTE:N * Nominal values for these parameters are included within the transmitter operating system. The nominal values may
be used as they appear or may be modified if the exact system values are known.
6. Record the value calculated and displayed as transducer spacing XDC SPAC.
Pipe Preparation and Transducer Mounting
DTTR, DTTN, DTTL and DTTH Transducers
1. Place the transmitter in signal strength measuring mode. This value is available on the transmitters display Service Menu or
in the data display of the UltraLink software utility.
2. The pipe surface, where the transducers are to be mounted, must be clean and dry. Remove scale, rust or loose paint to
ensure satisfactory acoustic conduction. Wire brushing the rough surfaces of pipes to smooth bare metal may also be
useful. Plastic pipes do not require preparation other than cleaning.
3. Apply a single 1/2 inch (12 mm) bead of acoustic couplant grease to the upstream transducer and secure it to the pipe
with a mounting strap.
4. Apply acoustic couplant grease to the downstream transducer and press it onto the pipe using hand pressure at the lineal
distance calculated in “Transducer Location” on page8.
5. Space the transducers according to the recommended values found during programming or from the UltraLink software
utility. Secure the transducers with the mounting straps at these locations.
DTTS and DTTC Transducers
1. Place the transmitter in signal strength measuring mode. This value is available on the transmitter’s display Service Menu or
in the data display of the UltraLink software utility.
2. The pipe surface, where the transducers are to be mounted, must be clean and dry. Remove scale, rust or loose paint to
ensure satisfactory acoustic conduction. Wire brushing the rough surfaces of pipes to smooth bare metal may also be
useful. Plastic pipes do not require preparation other than cleaning.
3. Apply a single 1/2 inch (12 mm) bead of acoustic couplant grease to the top half of the transducer and secure it to the pipe
with the bottom half or with U-bolts.
4. Tighten the nuts so the acoustic coupling grease begins to ow out from the edges of the transducer and from the gap
between the transducer and the pipe.
MPORTANTI
Do not overtighten. Overtightening will not improve performance and may damage the transducer.
Initial Settings and Powerup
1. Apply power to the transmitter.
2. Verify that SIG STR is greater than 5.0.
3. Input the units of measure and the I/O data.
Page 9 March 2018 TTM-UM-00136-EN-08
Page 10

Introduction
INTRODUCTION
This transit time ultrasonic transmitter is designed to measure the fluid velocity of liquid within a closed conduit. The
transducers are a non-contacting, clamp-on or clamp-around type, which provide the benefits of non-fouling operation and
ease of installation.
This family of transit time transmitters uses two transducers that function as both ultrasonic transmitters and receivers. The
transducers are clamped on the outside of a closed pipe at a specific distance from each other.
Application Versatility
The TFX Ultra transmitter can be successfully applied on a wide range of metering applications. The simple-to-program
transmitter allows the standard product to be used on pipe sizes ranging from 1/2 …100 inches (12…2540 mm)*. A variety of
liquid applications can be accommodated:
ultrapure liquids cooling water potable water river water chemicals
plant effluent sewage reclaimed water others
Because the transducers are non-contacting and have no moving parts, the transmitter is not affected by system pressure,
fouling or wear.
CE Compliance
The transmitter can be installed in conformance to CISPR 11 (EN 55011) standards. See “CE Compliance Drawings” on
page104.
User Safety
The TFX Ultra transmitter employs modular construction and provides electrical safety for the operator. The display face
contains voltages no greater than 28V DC. The display face swings open to allow access to user connections.
DANGER
THE POWER SUPPLY BOARD CAN HAVE LINE VOLTAGES APPLIED TO IT, SO DISCONNECT ELECTRICAL POWER BEFORE
OPENING THE INSTRUMENT ENCLOSURE. WIRING SHOULD ALWAYS CONFORM TO LOCAL CODES AND THE NATIONAL
ELECTRICAL CODE.
Data Integrity
Non-volatile flash memory retains all user-entered configuration values in memory for several years at 77° F (25° C), even if
power is lost or turned off. Password protection is provided as part of the Security menu (SEC MENU) and prevents inadvertent
configuration changes or totalizer resets.
Product Identication
The serial number and complete model number of the transmitter are located on the top outside surface of the transmitter
body. Should technical assistance be required, please provide our customer service department with this information. See
“Product Labels” on page96.
Page 10 March 2018TTM-UM-00136-EN-08
Page 11
Transmitter Installation
TRANSMITTER INSTALLATION
Transmitter Location
Mount the enclosure in an area that is convenient for servicing and calibration or for observing the LCD readout.
1. Locate the transmitter within the length of the transducer cables supplied or exchange the cable for one that is of
proper length.
2. Mount the transmitter in a location:
• Where little vibration exists.
• That is protected from corrosive fluids.
• That is within the transmitters ambient temperature limits –40 …185° F (–40…85° C).
• That is out of direct sunlight. Direct sunlight may increase transmitter temperature to above the maximum limit.
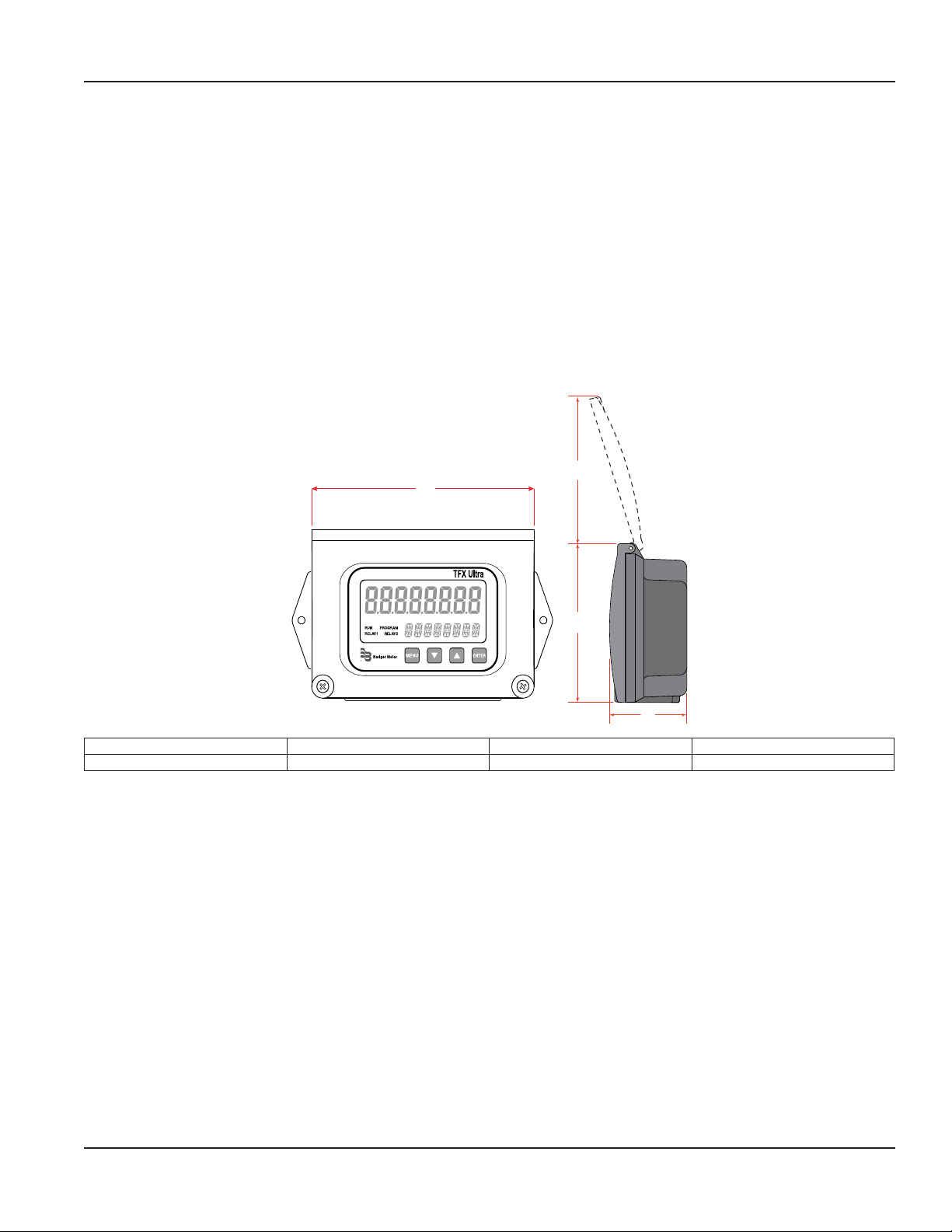
B
A
C
D
A B C D
6.00 in. (152.4 mm) 4.20 in. (106.7 mm) 4.32 in. (109.7 mm) 2.06 in. (52.3 mm)
Figure 2: Transmitter enclosure dimensions
3. Refer to Figure 2 for enclosure and mounting dimension details. Allow enough room for door swing, maintenance and
conduit entrances. Secure the enclosure to a at surface with two fasteners.
4. Use conduit holes where cables enter the enclosure from the bottom. Use plugs to seal any holes that are not used for
cable entry. An optional cable gland kit (part number D010-1100-000 ) is available for inserting the transducer and power
cables. Order the kit directly from the manufacturer.
OTE:N Use NEMA 4 (IP-65) rated fittings/plugs to maintain the watertight integrity of the enclosure. Generally, the right
conduit hole (viewed from front) is used for power, the left conduit hole for transducer connections, and the center
hole is used for I/O wiring.
Page 11 March 2018 TTM-UM-00136-EN-08
Page 12
Transmitter Installation
Power Connections
Electrical Symbols
Function Direct Current Alternating Current Earth (Ground) Protective Ground Chassis Ground
Symbol
Table 1: Electrical symbols
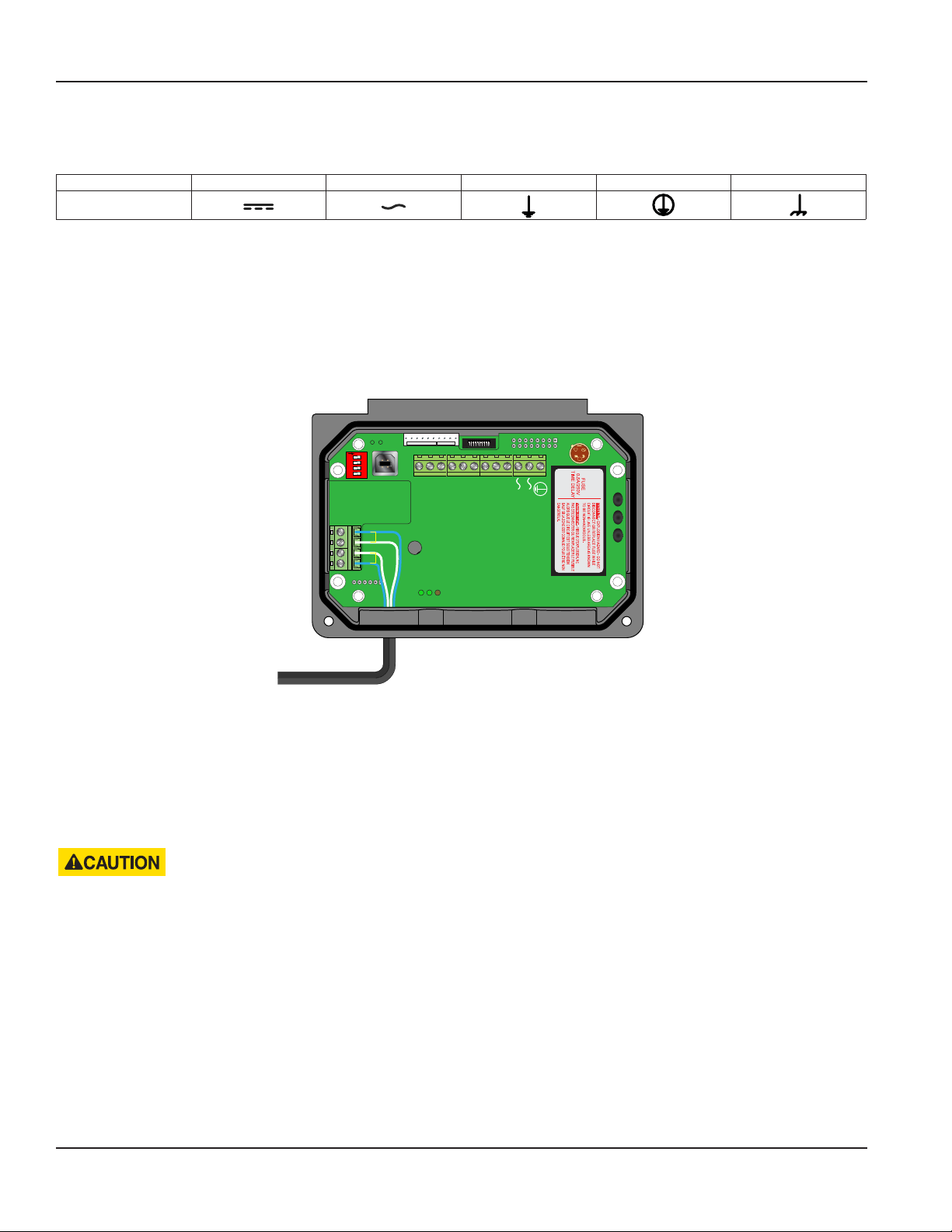
Transducer Connections
1. To access terminal strips for wiring, loosen the two screws in the enclosure door and open.
2. Guide the transducer terminations through the transmitter conduit hole in the bottom-left of the enclosure.
3. Secure the transducer cable with the supplied conduit nut (if exible conduit was ordered with the transducer).
4. The terminals within transmitter are screw-down barrier terminals. Connect the wires at the corresponding screw
terminals in the transmitter. Observe upstream and downstream orientation and wire polarity. See Figure 3.
372
VE
D
ACL
C US
E167432
PRODUCT SERVICE
TUV
RoHS
DC OUT :
R
+15V / 0.3A
$
R2807
1500mA250V
C US
R
W
AC IN : 100-240VAC,50/60Hz
PWC-15E
www.astrodyne.com
0.15A
-Vo
ACN
strodyne
+Vo
O
N
1 2 3 4
+
+
-
-
-
-
+
+
Downstream
Downstream
Upstream
Upstream
RS485 Gnd
RS485 A(-)
RS485 B(+)
Modbus
TFX Rx
TFX Tx
Signal Gnd.
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
95 - 264 VAC
AC Neutral
To Transducers
Figure 3: Transducer connections
OTE:N Transducer cables have two wire color combinations. For the blue and white combination, the blue wire is positive
(+) and the white wire is negative (–). For the red and black combination, the red wire is positive (+) and the black
wire is negative (–). The transducer wires are labeled to indicate which pair is upstream or downstream.
5. Connect power to the screw terminal block in the transmitter using the conduit hole on the right side of the enclosure.
See Figure 4 and Figure 5. Use wiring practices that conform to local and national codes such as The National Electrical
Code Handbook in the U.S.
ANY OTHER WIRING METHOD MAY BE UNSAFE OR CAUSE IMPROPER OPERATION OF THE TRANSMITTER.
OTE:N This transmitter requires clean electrical line power. Do not operate this transmitter on circuits with noisy
components (such as fluorescent lights, relays, compressors, or variable frequency drives). Do not use step-down
transformers from high voltage, high amperage sources. Do not to run signal wires with line power within the same
wiring tray or conduit.
Page 12 March 2018TTM-UM-00136-EN-08
Page 13
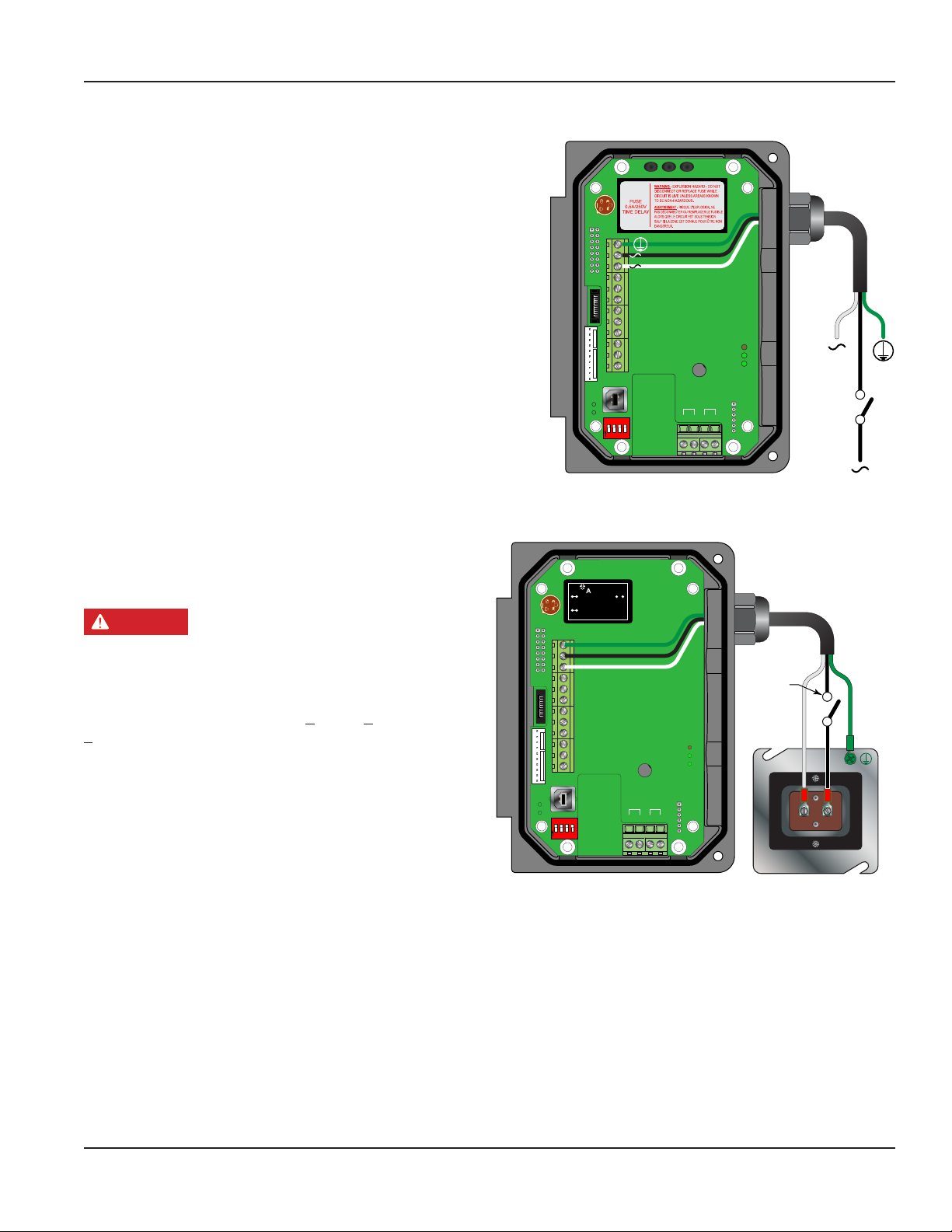
Line Voltage AC Power Connections
Connect 95…264V AC, AC neutral and chassis ground to the
terminals shown in Figure 4. Do not operate without an earth (chassis)
ground connection.
MPORTANTI
Permanently connected equipment and multi-phase equipment uses a
switch or circuit breaker as a means of disconnect. The switch or circuit
breaker conforms to the following:
• A switch or circuit breaker is included in the building installation.
• The switch is in close proximity to the equipment and within easy reach
of the operator.
• The switch is marked as the disconnecting device for the equipment.
Wiring of this equipment in ordinary locations must be in accordance with
ANSI/NFPA 70, National Electrical Code (NEC), Canadian Electrical Code
(CEC) or IEC 60364 as required by local codes. Wiring of this equipment in
hazardous locations requires special considerations such a those described
in National Electrical Code (NEC) Article 500, Canadian Electrical Code
(CEC), CSA C22.1 or IEC 60079-14.
Transmitter Installation
ACN
strodyne
1500mA250V
372
W
C US
VE
D
R
O
1 2 3 4
N
www.astrodyne.com
PWC-15E
AC IN : 100-240VAC,50/60Hz
DC OUT :
C US
ACL
E167432
95 - 264 VAC
95 - 264 VAC
AC Neutral
AC Neutral
Signal Gnd.
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
RS485 Gnd
RS485 A(-)
RS485 B(+)
R
+15V / 0.3A
Figure 4: Line voltage AC power connections
+Vo
-Vo
0.15A
R2807
$
TUV
RoHS
PRODUCT SERVICE
Modbus
TFX Rx
TFX Tx
Downstream
Upstream
-
-
+
+
Switch
or
Circuit
Breaker
Low Voltage AC Power Connections
Connect 20…28V AC, AC neutral and chassis ground to the
terminals shown in Figure 5.
372
strodyne
1500mA250V
IN: 18-36VAC
W
C US
VE
-IN+
OUT: 15VDC
D
R
ASD06-24S15
OUT−
OUT+
DANGER
Chassis Gnd.
DO NOT OPERATE WITHOUT AN EARTH CHASSIS
GROUND CONNECTION.
The 24V AC power supply option for this transmitter
is intended for a typical HVAC and Building Control
Systems (BCS) powered by a 24V AC, nominal, power
source. This power source is provided by AC line power
to 24V AC drop-down transformer and is installed by the
installation electricians.
OTE:N In electrically noisy applications, grounding the
transmitter to the pipe where the transducers are
mounted may provide additional noise suppression.
This approach is only effective with conductive metal
pipes. The earth (chassis) ground derived from the
line voltage power supply should be removed at
the transmitter and a new earth ground connected
between the transmitter and the pipe
being measured.
OTE:N Wire gauges up to 14 AWG can be accommodated in the transmitter terminal blocks.
OTE:N AC-powered transmitters are protected by a field-replaceable fuse. The fuse is a time delay fuse rated at 0.5A/250V
and is equivalent to Wickmann P.N. 3720500041 or 37405000410.
24 VAC
AC Neutral
Signal Gnd.
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
RS485 Gnd
RS485 A(-)
RS485 B(+)
Test
P1
O
1 2 3 4
N
Modbus
TFX Rx
TFX Tx
Downstream
Upstream
-
-
+
+
Switch
or
Circuit
Breaker
24V AC Transformer
Figure 5: Low voltage AC power connections
Page 13 March 2018 TTM-UM-00136-EN-08
Page 14
Transmitter Installation
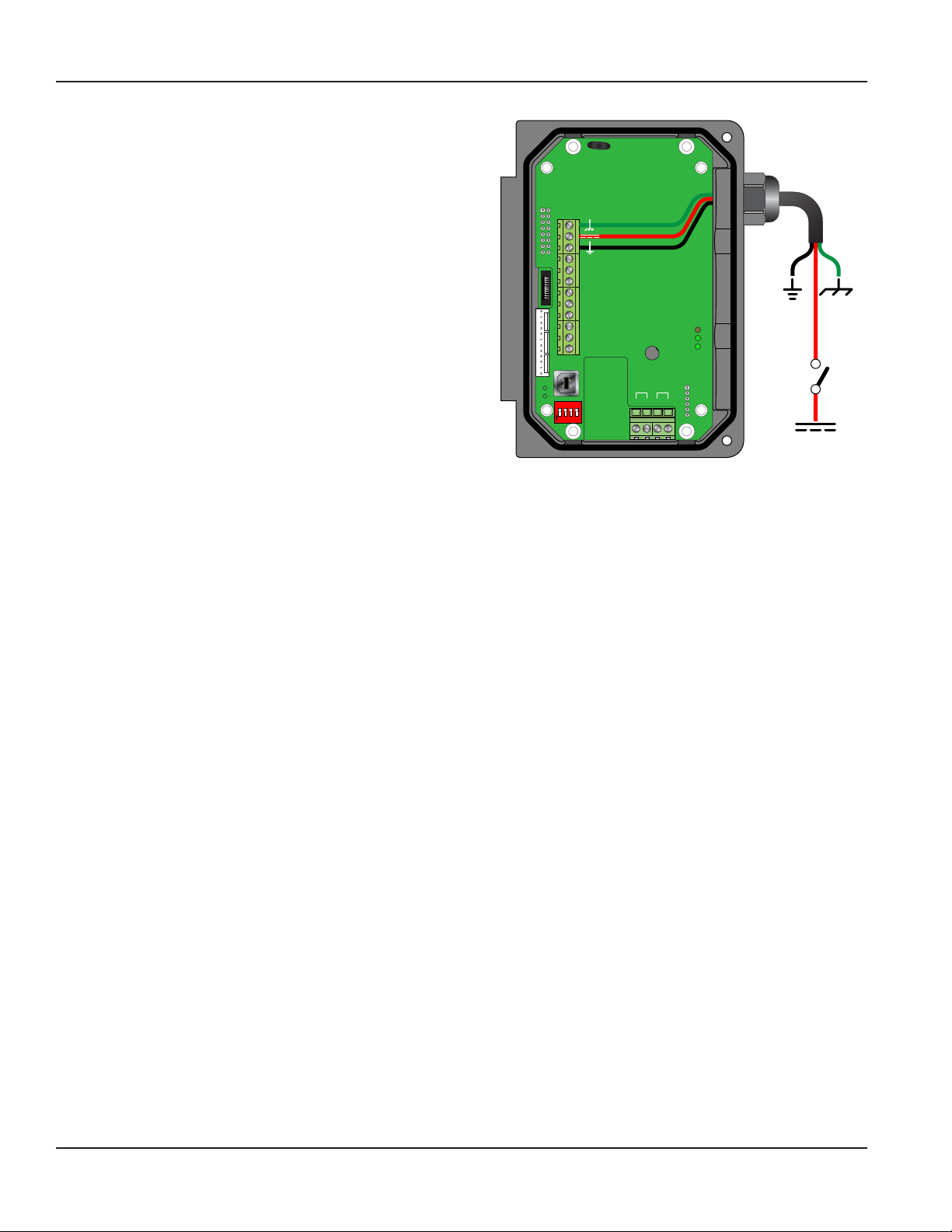
DC Power Connections
The transmitter may be operated from a 10…28V DC source, as
long as the source is capable of supplying a minimum of 5 Watts
of power.
Connect the DC power to 10…28V DC In, power ground, and
chassis ground, as in Figure 6.
OTE:N DC-powered transmitters are protected by an
automatically resetting fuse. This fuse does not
require replacement.
For CE compliance, a Class 2 DC power supply is required.
O
N
1 2 3 4
10 - 28 VDC
10 - 28 VDC
Power Gnd.
Power Gnd.
Signal Gnd.
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
RS485 Gnd
RS485 A(-)
RS485 B(+)
Modbus
TFX Rx
TFX Tx
Downstream
Upstream
-
-
+
+
Figure 6: DC power connections
Power
Ground
Switch
or
Circuit
Breaker
10…28 VDC
Chassis
Ground
Page 14 March 2018TTM-UM-00136-EN-08
Page 15
Transducer Installation
TRANSDUCER INSTALLATION
The transducers for the TFX Ultra transmitter contain piezoelectric crystals that transmit and receive ultrasonic signals through
the walls of liquid piping systems.
DTTR, DTTN, DTTL and DTTH transducers are relatively simple and straightforward to install, but spacing and alignment of the
transducers is critical to the system’s accuracy and performance. CAREFULLY EXECUTE THESE INSTRUCTIONS.
DTTS and DTTC small pipe transducers have integrated transmitter and receiver elements that eliminate the requirement for
spacing measurement and alignment.
Mounting the DTTR, DTTN, DTTL and DTTH clamp-on ultrasonic transit time transducers takes five steps:
1. Select the optimum location on a piping system.
2. Select a mounting conguration.
3. Enter the pipe and liquid parameters into the UltraLink software utility or key them into the transmitter. The UltraLink
software utility or the transmitter’s rmware calculates proper transducer spacing based on these entries.
4. Prepare the pipe and mount the transducers.
5. Wire the transducers to the transmitter.
Downstream+
DownstreamUpstreamUpstream+
Figure 7: Transducer connections
The Energy model transmitter requires two 1000 Ohm, three-wire, platinum RTDs. The RTDs are available in surface-mount
and insertion (wetted) styles. Use surface-mount RTDs on well insulated pipes. Use insertion RTDs on non-insulated pipes.
Select a Mounting Location
The first step in the installation process is the selection of an optimum location for the flow measurement to be made. For this
to be done effectively, a basic knowledge of the piping system and its plumbing are required.
An optimum location is defined as:
• A piping system that is completely full of liquid when measurements are being taken. The pipe may become completely
empty during a process cycle, which will result in the error code 0010 (Low Signal Strength) displaying on the transmitter
while the pipe is empty. This error code will clear automatically once the pipe refills with liquid. Do not mount the
transducers in an area where the pipe may become partially filled, such as the highest point in a flow loop. Partially filled
pipes will cause erroneous and unpredictable operation of the transmitter.
• A piping system that contains lengths of straight pipe such as those described in Table 2. The optimum straight pipe
diameter recommendations apply to pipes in both horizontal and vertical orientation. The straight runs in Table 2 apply to
liquid velocities that are nominally 7 fps (2.2 mps). As liquid velocity increases above this nominal rate, the requirement for
straight pipe increases proportionally.
• An area where the transducers will not be inadvertently bumped or disturbed during normal operation.
• NOT on downward flowing pipes unless adequate downstream head pressure is present to overcome partial filling of or
cavitation in the pipe.
Page 15 March 2018 TTM-UM-00136-EN-08
Page 16
Transducer Installation
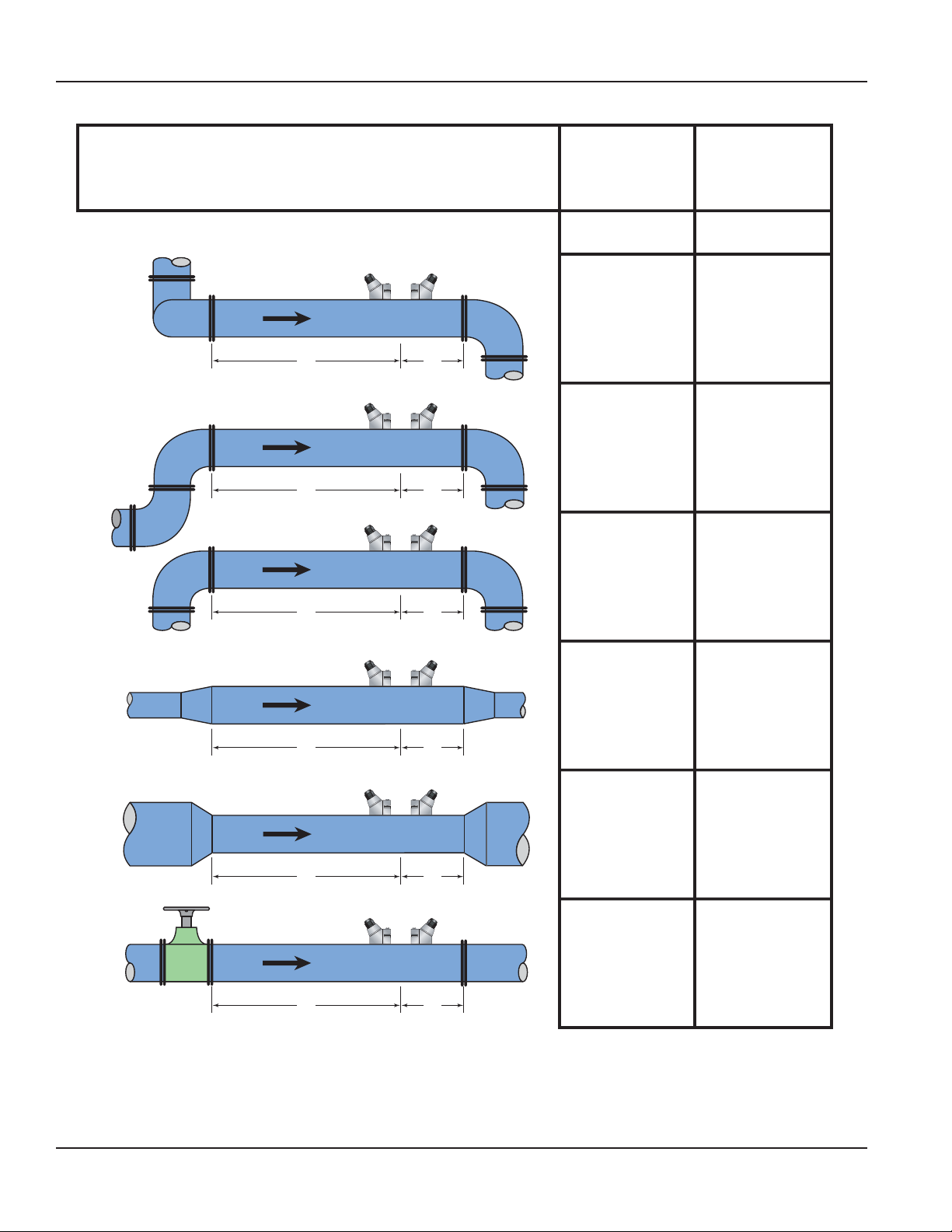
Piping Conguration
and Transducer Positioning
Flow
*
Flow
*
Flow
**
**
Upstream
Pipe
Diameters
Downstream
* **
24
14
10
Pipe
Diameters
5
5
5
*
Flow
*
Flow
*
Flow
*
Table 2: Piping configuration and transducer positioning
The TFX Ultra system will provide repeatable measurements on piping systems that do not meet these pipe diameter
requirements, but the accuracy of the readings may be influenced.
**
**
**
**
10
10
24
5
5
5
Page 16 March 2018TTM-UM-00136-EN-08
Page 17

Transducer Installation
Select a Mounting Conguration
The transmitter can be used with six different transducer types: DTTR, DTTN, DTTL, DTTH DTTS and DTTC. Meters that use
the DTTR, DTTN, DTTL or DTTH, transducer sets consist of two separate sensors that function as both ultrasonic transmitters
and receivers. These transducers are clamped on the outside of a closed pipe at a specific distance from each other. DTTS
and DTTC transducers integrate both the transmitter and receiver into one assembly that fixes the separation of the
piezoelectric crystals.
The DTTR, DTTN, DTTL and DTTH transducers can be mounted in:
• W-Mount where the sound traverses the pipe four times. This mounting method produces the best relative travel time
values but the weakest signal strength.
• V-Mount where the sound traverses the pipe twice. V-Mount is a compromise between travel time and signal strength.
• Z-Mount where the transducers are mounted on opposite sides of the pipe and the sound crosses the pipe once. Z-Mount
will yield the best signal strength but the smallest relative travel time.
Transducer Mounting
Configuration
Pipe Material Pipe Size Liquid Composition
Plastic (all types)
W-Mount
Carbon Steel
Stainless Steel
Copper
Ductile Iron
2…4 in. (50…100 mm)
Not recommended
Cast Iron
Plastic (all types)
V-Mount
Carbon Steel
Stainless Steel
Copper 4…30 in. (100…750 mm)
Ductile Iron
Cast Iron
4…12 in. (100…300 mm)
Low TSS (Total Suspended
Solids); non-aerated
2…12 in. (50…300 mm)
Plastic (all types) > 30 in. (> 750 mm)
Z-Mount
Carbon Steel
Stainless Steel
Copper > 30 in. (> 750 mm)
Ductile Iron
Cast Iron
Table 3: Transducer mounting modes for DTTR, DTTN, DTTL and DTTH
> 12 in. (> 300 mm)
> 12 in. (> 300 mm)
The transducers can be mounted in V-Mount where the sound transverses the pipe two times, W-Mount where the sound
transverses the pipe four times, or in Z-Mount where the transducers are mounted on opposite sides of the pipe and the
sound crosses the pipe once. The selection of mounting method is based on pipe and liquid characteristics which both have
an effect on how much signal is generated. The transmitter operates by alternately transmitting and receiving a frequency
modulated burst of sound energy between the two transducers and measuring the time interval that it takes for sound to
travel between the two transducers. The difference in the time interval measured is directly related to the velocity of the liquid
in the pipe.
The appropriate mounting configuration is based on pipe and liquid characteristics. Selecting the proper transducer
mounting method is an iterative process. Table 3 contains recommended mounting configurations for common applications.
These recommended configurations may need to be modified for specific applications if such things as aeration, suspended
solids, out-of-round piping or poor piping conditions are present.
TOP VIEW
OF PIPE
TOP VIEW
OF PIPE
TOP VIEW
W-Mount V-Mount Z-Mount
Figure 8: Transducer mounting modes for DTTR, DTTN, DTTL and DTTH
OF PIPE
Page 17 March 2018 TTM-UM-00136-EN-08
Page 18
Transducer Installation
Top of
45°
YES
45°
W and V Mount
Top of
45°
YES
45°
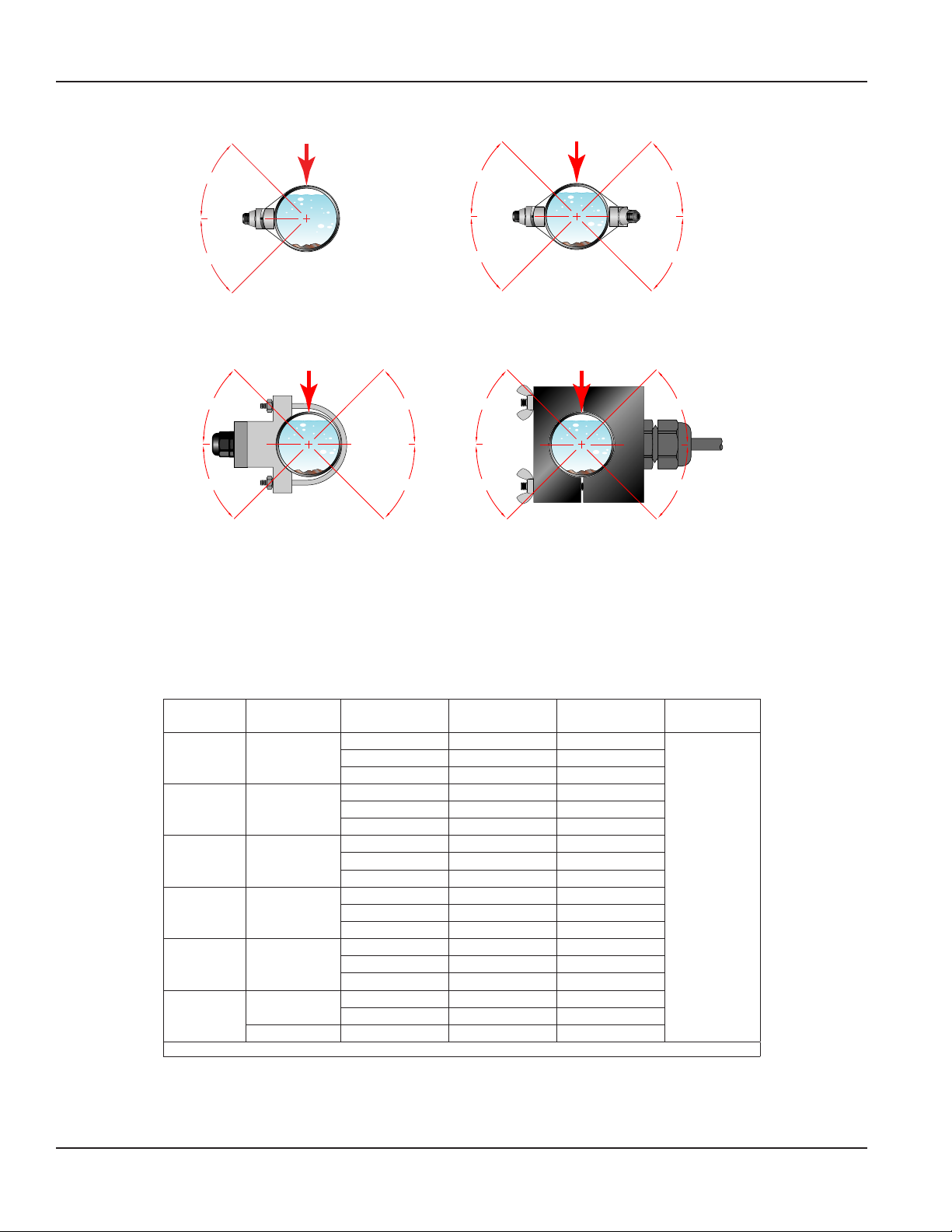
Flow Meter
Mounting Orientation
2” DTTS and DTTC Transducers
Pipe
Pipe
YES
45°
YES
45°
DTTR, DTTN, DTTL and DTTH Transducers
45°
45°
45°
YES
45°
Top of
Pipe
Z-Mount
Flow Meter
Mounting Orientation
Top of
Pipe
Flow Meter
Mounting Orientation
DTTS and DTTC Transducers
45°
YES
45°
45°
YES
45°
Figure 9: Transducer orientation for horizontal pipes
For pipes 24 inches (600 mm) and larger, use the DTTL transducers with a transmission frequency of 500 kHz.
DTTL transducers may also be advantageous on pipes between 4…24 inches if there are less quantifiable complicating
aspects, such as sludge, tuberculation, scale, rubber liners, plastic liners, thick mortar, gas bubbles, suspended solids,
emulsions, or pipes that are partially buried where a V-mount is required or desired.
For DTTS and DTTC transducers, the transducers are V-mount. The frequency setting depends on the pipe material.
Pipe Size
Frequency
Setting
Transducer
DTTSnP DTFXn-A ANSI
1/2 in. 2 MHz
DTTSnC DTFXn-G Copper
DTTSnT DTFXn-M Stainless Steel
DTTSnP DTFXn-B ANSI
3/4 in. 2 MHz
DTTSnC DTFXn-H Copper
DTTSnT DTFXn-N Stainless Steel
DTTSnP DTFXn-C ANSI
1 in. 2 MHz
DTTSnC DTFXn-I Copper
DTTSnT DTFXn-P Stainless Steel
DTTSnP DTFXn-D ANSI
1-1/4 in. 2 MHz
DTTSnC DTFXn-J Copper
DTTSnT DTFXn-Q Stainless Steel
DTTSnP DTFXn-E ANSI
1-1/2 in. 2 MHz
DTTSnC DTFXn-K Copper
DTTSnT DTFXn-R Stainless Steel
DTTSnP DTFXn-F ANSI
DTTSnC DTFXn-L Copper
2 in.
1 MHz
2 MHz DTTSnT DTFXn-S Stainless Steel
DTTS transducer designation refers to both DTTS and DTTC transducer types.
Table 4: Transducer mounting modes for DTTS / DTTC
Integral
Transducer
Pipe
Mounting
Configuration
V
Page 18 March 2018TTM-UM-00136-EN-08
Page 19
Transducer Installation
Enter the Pipe and Liquid Parameters
The TFX Ultra metering system calculates proper transducer spacing based on the piping and liquid information you enter
into the transmitter via the integral keypad or the UltraLink software utility.
The most accuracy is achieved when the transducer spacing is exactly what the transmitter calculates, so use the calculated
spacing if the signal strength is satisfactory. If the pipe is not round, the wall thickness not correct or the actual liquid being
measured has a different sound speed than the liquid programmed into the transmitter, the spacing can vary from the
calculated value. In that case, place the transducers at the highest signal level observed when moving the transducers slowly
around the mount area.
OTE:N Transducer spacing is calculated on “ideal” pipe. Ideal pipe almost never exists, so you may need to alter the
transducer spacing. An effective way to maximize signal strength is to configure the display to show signal strength,
fix one transducer on the pipe and then—starting at the calculated spacing—move the remaining transducer small
distances forward and back to find the maximum signal strength point.
MPORTANTI
Enter all of the data on this list, save the data and reset the transmitter before mounting the transducers.
The following information is required before programming the instrument:
Transducer mounting configuration Pipe liner thickness (if present) Pipe O.D. (outside diameter) Pipe liner material (if present)
Pipe wall thickness Fluid type Pipe material Fluid sound speed
Pipe sound speed
1
Nominal values for these parameters are included within the transmitter’s operating system. The nominal values may be used as they appear or may be modied if exact system
values are known.
1
Fluid viscosity
1
Table 5: Parameters required
Pipe relative roughness
1
Fluid specific gravity
OTE:N Much of the data relating to material sound speed, viscosity and specific gravity is pre-programmed into the
transmitter. You need to modify this data only if you know that a particular application’s data varies from the
reference values. See “Configuration” on page35 for instructions on entering configuration data into the transmitter
via the transmitter’s keypad. See “Parameter Configuration Using UltraLink Software” on page48 for data entry via
the software.
After entering the data listed above, the transmitter will calculate proper transducer spacing for the particular data set. The
distance will be in inches if the transmitter is configured in English units, or millimeters if configured in metric units.
1
1
Mount the Transducer
After selecting an optimal mounting location and determining the proper transducer spacing, mount the transducers onto
the pipe.
1. Clean the surface of the pipe. If the pipe has external corrosion or dirt, wire brush, sand or grind the mounting location
until it is smooth and clean. Paint and other coatings, if not flaked or bubbled, need not be removed. Plastic pipes typically
do not require surface preparation other than soap and water cleaning.
2. Orient and space the DTTR, DTTN, DTTL and DTTH transducers on the pipe to provide optimum reliability and
performance. On horizontal pipes, when Z-Mount is required, mount the transducers 180 radial degrees from one another
and at least 45 degrees from the top-dead-center and bottom-dead-center of the pipe. See Figure 9. Also see “Z-Mount
Configuration” on page22. On vertical pipes, the orientation is not critical.
The spacing between the transducers is measured between the two spacing marks on the sides of the transducers. These
marks are approximately 0.75 inches (19 mm) back from the nose of the DTTR, DTTN and DTTH transducers, and 1.2 inches
(30 mm) back from the nose of the DTTL transducers. See Figure 10.
Mount DTTS and DTTC transducers with the cable exiting within ±45 degrees of the side of a horizontal pipe. On vertical
pipes, the orientation does not apply.
Alignment
Marks
Figure 10: Transducer alignment marks
Page 19 March 2018 TTM-UM-00136-EN-08
Page 20
Transducer Installation
Transducer Mounting Congurations
V-Mount and W-Mount Configurations
Apply the Couplant
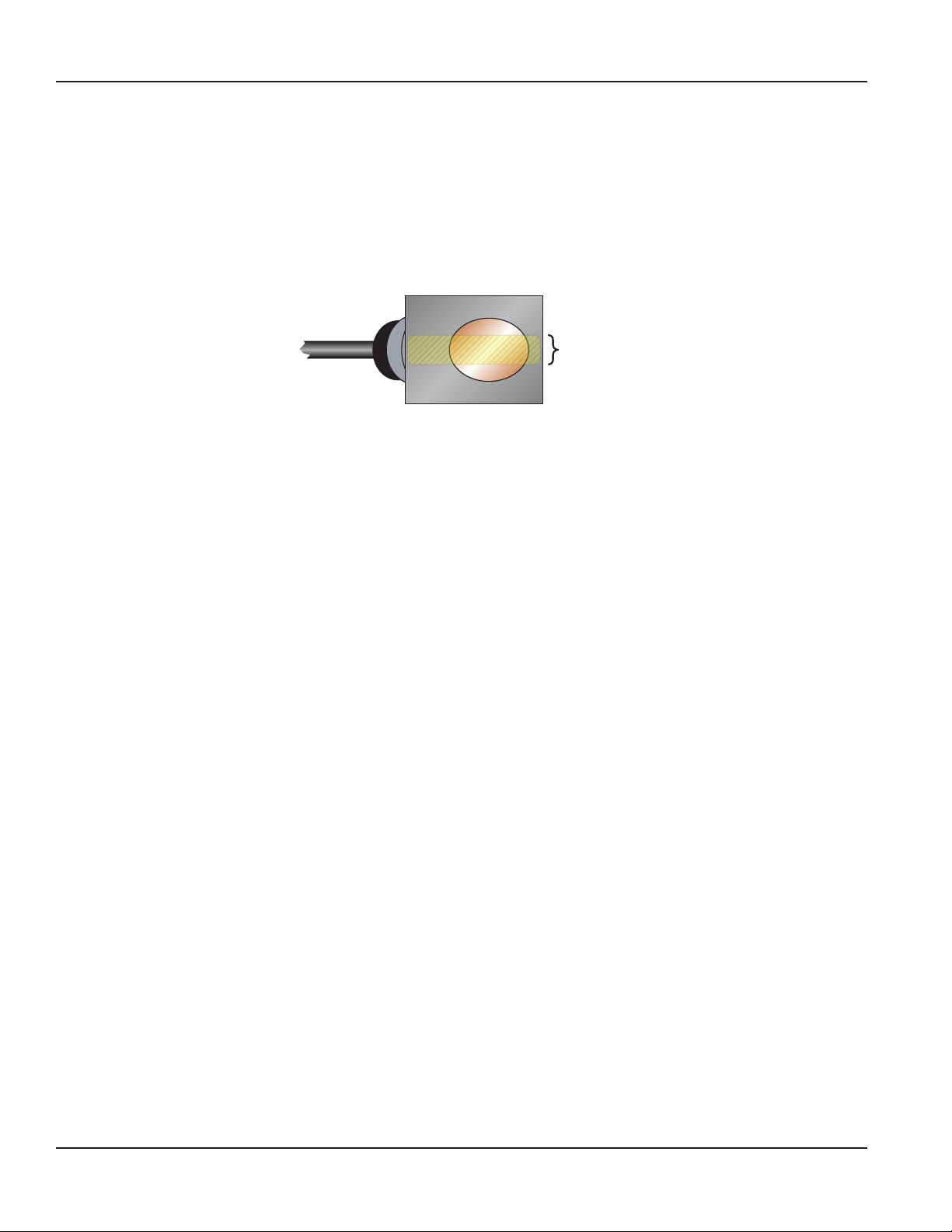
For DTTR, DTTN, DTTL and DTTH transducers, place a single bead of couplant, approximately 1/2 inch (12 mm) thick, on the
flat face of the transducer. See Figure 11. Couplant is provided with the transducers. Generally, a silicone-based grease is used
as an acoustic couplant, but any good quality grease-like substance that is rated to not ow at the operating temperature
of the pipe is acceptable. For pipe surface temperature over 130° F (55° C), use high temperature acoustic coupant such as
Krytox® LVP (P.N. D002-2011-012). For installations that must be silicone free, use Molykote G-N couplant (P.N. D002-2011-009).
½ in.
(12 mm)
Figure 11: Application of couplant
Position and Secure the Transducer
1. Place the upstream transducer in position on the pipe. Slide the strap into the arched groove on the end of the transducer.
Wrap the strap around the pipe. Slide the free end of the strap into the end clip of the strap with the screw at 90 degrees
to the strap. Pull the strap through until it loosely ts around the pipe. Rotate the screw so it is parallel to the strap and
tighten the screw slightly to help hold the transducer onto the pipe. Verify that the transducer is true to the pipe and
adjust as necessary. Tighten the strap screw to secure the transducer to the pipe.
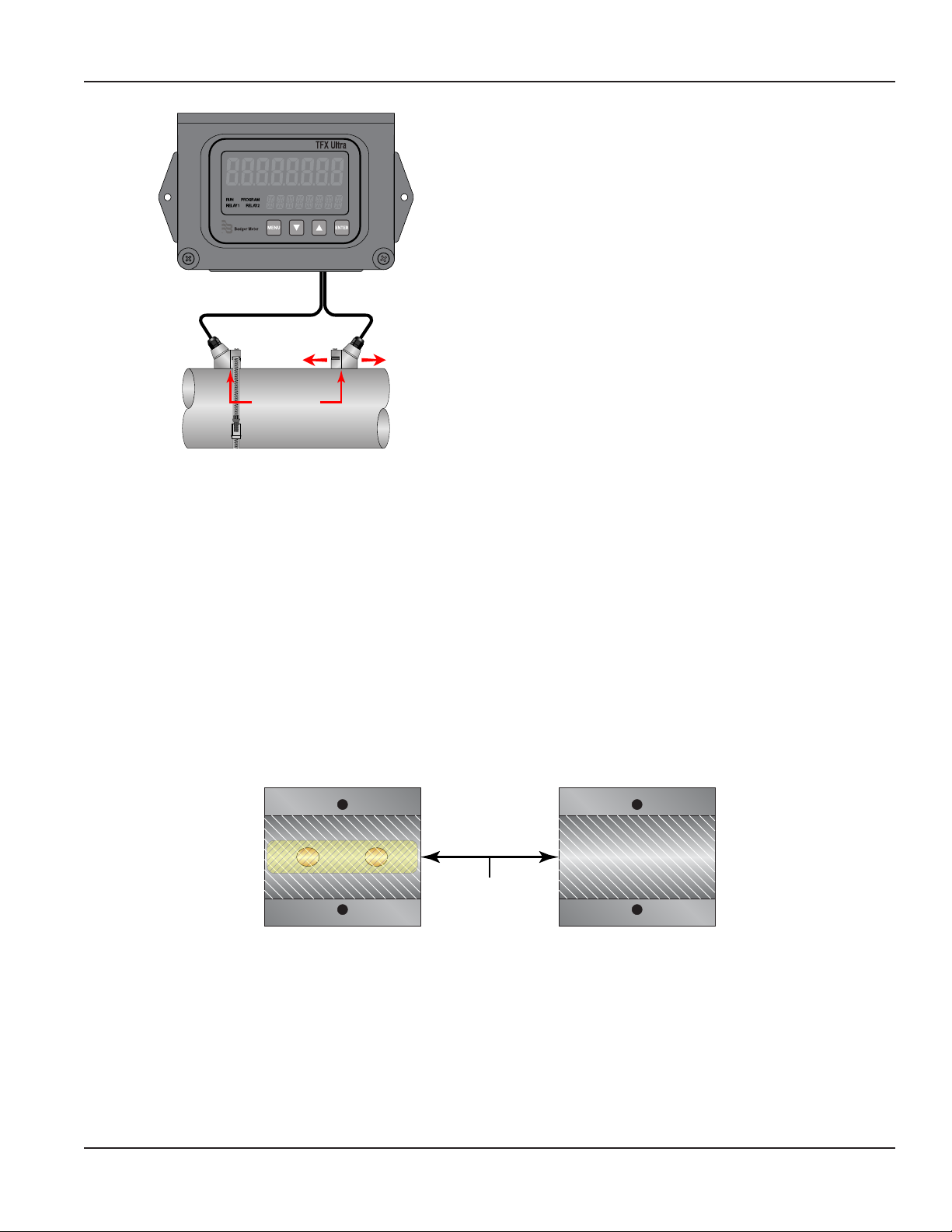
2. Place the downstream transducer on the pipe at the calculated transducer spacing. See Figure 12 on page21. Apply rm
hand pressure. If signal strength is greater than ve, secure the transducer at this location. If the signal strength is not ve
or greater, using rm hand pressure slowly move the transducer both towards and away from the upstream transducer
while observing signal strength.
Signal strength can be displayed on the transmitter’s display or on the main data screen in the UltraLink software utility.
See “Parameter Configuration Using UltraLink Software” on page48. Clamp the transducer at the position where the
highest signal strength is observed. The factory default signal strength setting is ve. However, there are many applicationspecic conditions that may prevent the signal strength from attaining this level. Signal levels less than ve will probably
not be acceptable for reliable readings.
OTE:N Signal strength readings update only every few second. Move the transducer 1/8 inch then wait to see if the signal is
increasing or decreasing. Repeat until the highest level is achieved.
3. If, after adjusting the transducers, the signal strength does not rise to above ve, use an alternate transducer mounting
conguration. If the mounting conguration was W-Mount, re-congure the transmitter for V-Mount, move the
downstream transducer to the new spacing distance and repeat the procedure “Mount the Transducer” on page19.
Page 20 March 2018TTM-UM-00136-EN-08
Page 21
Transducer Installation
OTE:N Mounting the high temperature transducers is similar
to mounting the DTTR/DTTN/DTTL transducers. High
temperature installations require acoustic couplant
that is rated not to flow at the operating temperature
of the pipe surface.
OTE:N Use the DTTL on pipes 24 inches and larger and not
on pipes smaller than 4 inches. You can consider
using the DTTL transducers on pipes smaller than
24 inches if there are less quantifiable aspects—such
as sludge, tuberculation, scale, rubber liners, plastic
liners, thick mortar liners, gas bubbles, suspended
solids, emulsions—and smaller pipes that are
perhaps partially buried where a V-Mount is required
or desired.
Transducer
Spacing
Figure 12: Transducer positioning
DTTS/DTTC Small Pipe Transducer Installation
The small pipe transducers are designed for specific pipe outside diameters. Do not attempt to mount a DTTS/DTTC
transducer onto a pipe that is either too large or too small for the transducer. Instead, contact the manufacturer to arrange for
a replacement transducer that is the correct size.
1. Apply a thin coating of acoustic coupling grease to both halves of the transducer housing where the housing will contact
the pipe. See Figure 13.
2. On horizontal pipes, mount the transducer in an orientation so the cable exits at ±45 degrees from the side of the pipe.
Do not mount with the cable exiting on either the top or bottom of the pipe. On vertical pipes, the orientation does not
matter.
3. Tighten the wing nuts or U-bolts so the acoustic coupling grease begins to ow out from the edges of the transducer or
from the gap between the transducer halves.
MPORTANTI
Do not overtighten. Overtightening will not improve performance and may damage the transducer.
4. If signal strength is less than ve, remount the transducer at another location on the piping system.
1/16 in. (1.5 mm)
Acoustic Couplant
Grease
Figure 13: Application of acoustic couplant — DTTS/DTTC transducers
OTE:N If a DTTS/DTTC small pipe transducer was purchased separately from the transmitter, the following configuration
procedure is required.
Page 21 March 2018 TTM-UM-00136-EN-08
Page 22
Transducer Installation
DTTS/DTTC Small Pipe Transducer Calibration Procedure
1. Establish communications with the transit time transmitter.
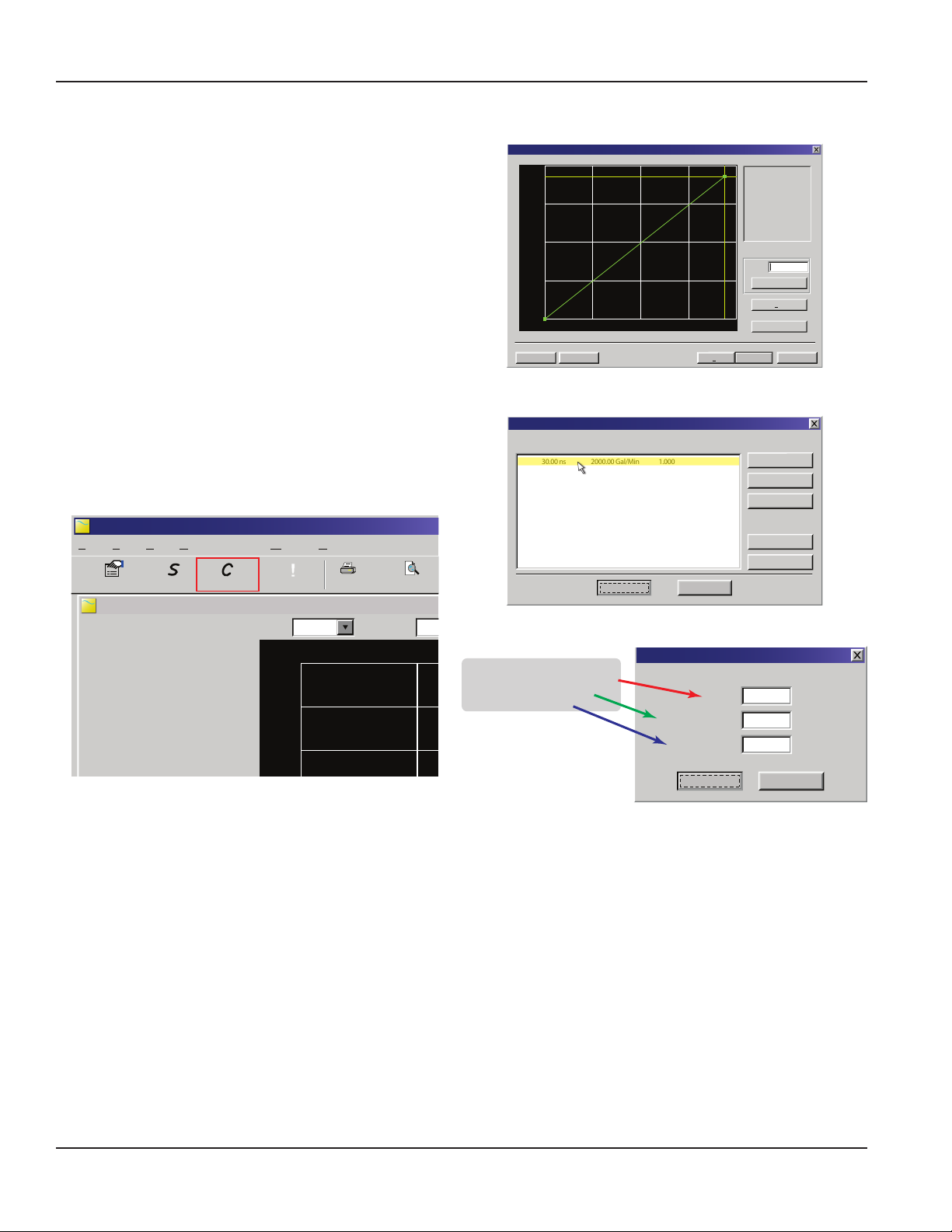
2. From the tool bar, select Calibration. See Figure 16.
3. On the pop-up screen, click Next twice to get to
Page 3 of 3. See Figure 14.
4. Click Edit.
5. If a calibration point is displayed in Calibration Points Editor,
record the information, then highlight and click Remove.
See Figure 15.
6. Click ADD...
7. Enter Delta T, Un-calibrated Flow, and Calibrated Flow
values from the DTTS/DTTC calibration label, then click OK.
See Figure 17.
8. Click OK in the Edit Calibration Points screen.
9. The display will return to Page 3 of 3. Click Finish.
See Figure 14.
10. After Writing Conguration File is complete, turn o the
power. Turn on the power again to activate the new
settings.
Calibration (Page 3 of 3) - Linearization
28.2
Gal/M
Figure 14: Calibration points editor
Calibration Points Editor
Select point(s) to edit or remove:
30.00 ns 2000.00 Gal/Min 1.000
Delta Time
< Back
1) Please establish a
reference ow rate.
1FPS / 0.3MPS Minimum.
2) Enter the reference ow
rate below. (Do not enter 0)
3) Wait for ow to stabilize.
4) Press the Set button.
Flow:
Set
Edit
Export...
CancelFile Open... File Save...
Finish
Add...
Edit...
Remove
UltraLINK Device Addr 127
U
Conguration CalibrationStrategy
Device Addr 127
U
1350 Gal/Min
Flow:
Pos:
Neg:
0 OB
0 OB
0 OB
15.6%
100%
-2.50 ns
09:53:39
Totalizer Net:
Sig. Strength:
Margin:
Delta T:
Last Update:
!
Errors
2000
1600
1200
HelpWindowC ommunicationsViewE ditF ile
Print PreviePrint
Scale:60 MinTime:
200
Model: DTTSJP-050-N000-N
S/N: 39647 Delta-T: 391.53nS
Uncal. Flow: 81.682 GPM
Cal. Flow: 80 GPM
OK
Figure 15: Calibration page 3 of 3
Edit Calibration Points
Cancel
Delta T:
Uncalibrated Flow:
Calibrated Flow:
OK
391.53
81.682
80.000
Select All
Select All
Select None
Select None
Cancel
ns
Gal/Min.
Gal/Min.
Figure 16: Data display screen
Figure 17: Edit calibration points
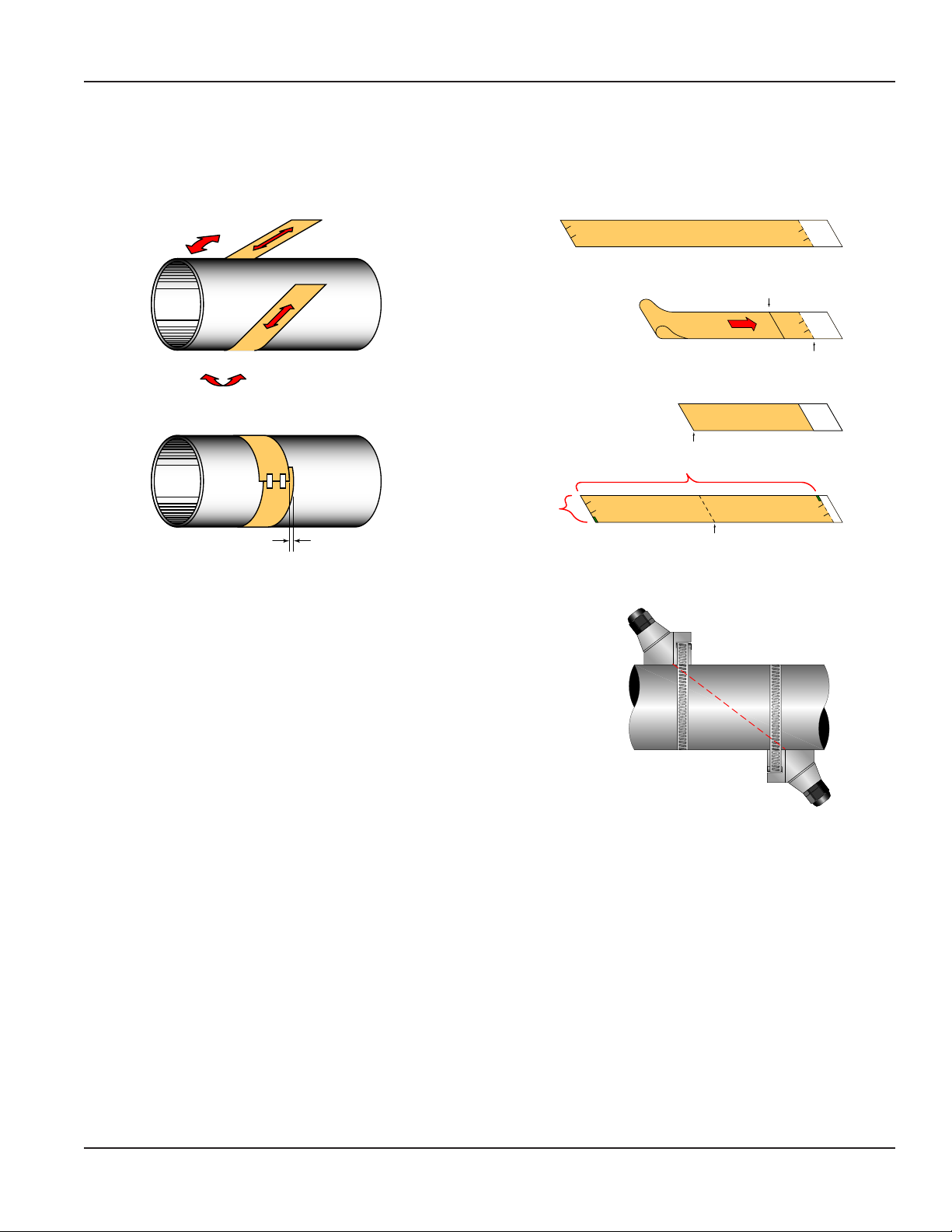
Z-Mount Configuration
Installation on larger pipes requires careful measurements of the linear and radial placement of the DTTR, DTTN, DTTL and
DTTH transducers. Failure to properly orient and place the transducers on the pipe may lead to weak signal strength and/or
inaccurate readings. This section details a method for properly locating the transducers on larger pipes. This method requires
a roll of paper such as freezer paper or wrapping paper, masking tape and a marking device.
1. Wrap the paper around the pipe in the manner shown in Figure 18. Align the paper ends to within 1/4 inch (6 mm).
2. Mark the intersection of the two ends of the paper to indicate the circumference. Remove the template and spread it out
on a at surface. Fold the template in half, bisecting the circumference. See Figure 19.
3. Crease the paper at the fold line. Mark the crease. Place a mark on the pipe where one of the transducers will be located.
See Figure 9 for acceptable radial orientations. Wrap the template back around the pipe, placing the beginning of the
paper and one corner in the location of the mark. Move to the other side of the pipe and mark the pipe at the ends of
the crease. Measure from the end of the crease (directly across the pipe from the rst transducer location) the dimension
derived in “Select a Mounting Configuration” on page17. Mark this location on the pipe.
Page 22 March 2018TTM-UM-00136-EN-08
Page 23
Transducer Installation
4. The two marks on the pipe are now properly aligned and measured. If access to the bottom of the pipe prohibits the
wrapping of the paper around the circumference, cut a piece of paper 1/2 the circumference of the pipe and lay it over the
top of the pipe. The equation for the length of 1/2 the circumference is: 1/2 Circumference = Pipe O.D. × 1.57
The transducer spacing is the same as found in “Position and Secure the Transducer” on page20. Mark opposite corners of the
paper on the pipe. Apply transducers to these two marks.
Edge of
Paper
Line Marking
Circumference
Fold
Pipe Circumference
Transducer
Spacing
LESS THAN ¼” (6 mm)
Crease
(Center of Pipe)
Figure 18: Paper template alignment
Figure 19: Bisecting the pipe circumference
5. For DTTR, DTTN, DTTL and DTTH transducers, place a single bead of
couplant, approximately 1/2 inch (12 mm) thick, on the at face of the
transducer. See Figure 11. Generally, a silicone-based grease is used
as an acoustic couplant, but any good quality grease-like substance
that is rated to not ow at the operating temperature of the pipe
is acceptable.
6. Place the upstream transducer in position and secure with a stainless
TOP VIEW
OF PIPE
steel strap or other fastening device. Straps should be placed in the
arched groove on the end of the transducer. A screw is provided to help
hold the transducer onto the strap. Verify that the transducer is true to
the pipe, adjust as necessary. Tighten transducer strap securely. Larger
pipes may require more than one strap to reach the circumference of
the pipe.
Figure 20: Z-Mount transducer placement
7. Place the downstream transducer on the pipe at the calculated transducer spacing. See Figure 20. Using rm hand
pressure, slowly move the transducer both towards and away from the upstream transducer while observing signal
strength. Clamp the transducer at the position where the highest signal strength is observed. A signal strength between
5…98 is acceptable.
The factory default signal strength setting is five. However there are many application-specific conditions that may
prevent the signal strength from attaining this level. A minimum signal strength of five is acceptable as long as this signal
level is maintained under all flow conditions.
On certain pipes, a slight twist to the transducer may cause signal strength to rise to acceptable levels. Certain pipe and
liquid characteristics may cause signal strength to rise to greater than 98. The problem with operating this transmitter with
very high signal strength is that the signals may saturate the input amplifiers and cause erratic readings. Strategies for
lowering signal strength would be changing the transducer mounting method to the next longest transmission path. For
example, if there is excessive signal strength and the transducers are mounted in a Z-Mount, try changing to V-Mount or
W-Mount. Finally, you can also move one transducer slightly off-line with the other transducer to lower signal strength.
8. Secure the transducer with a stainless steel strap or other fastener.
Page 23 March 2018 TTM-UM-00136-EN-08
Page 24

Transducer Installation
Mounting Rail System Installation for DTTR
For remote flow DTTR transducers with outside diameters between 2…10 inches (50…250 mm) , the rail mounting kit aids
in installation and positioning of the transducers. Transducers slide on the rails, which have measurement markings that are
viewable through the sight opening.
1. Install the single mounting rail on the side of the pipe with the stainless steel bands provided. Do not mount it on the top
or bottom of the pipe. On vertical pipe, orientation is not critical. Check that the track is parallel to the pipe and that all
four mounting feet are touching the pipe.
2. Slide the two transducer clamp brackets toward the center mark on the mounting rail.
3. Place a single bead of couplant, approximately 1/2 inch (12 mm) thick, on the at face of the transducer.
See Figure 11 on page20.
4. Place the rst transducer in between the mounting rails near the zero point on the scale. Slide the clamp over the
transducer. Adjust the clamp and transducer so the notch in the clamp aligns with the zero on the scale. See Figure 22.
5. Secure with the thumb screw. Check that the screw rests in the counter bore on the top of the transducer. (Excessive
pressure is not required. Apply just enough pressure so that the couplant lls the gap between the pipe and transducer.)
6. Place the second transducer in between the mounting rails near the dimension derived in the transducer spacing section.
Read the dimension on the mounting rail scale. Slide the transducer clamp over the transducer and secure with the
thumb screw.
Figure 21: Mounting rail system for DTTR
Mounting Track Installation for DTTN/DTTH
A convenient transducer mounting track can be used for pipes that have outside diameters between 2…10 inches
(50…250 mm) and for DTTN/DTTH transducers. If the pipe is outside of that range, mount the transducers separately.
1. Install the single mounting rail on the side of the pipe with the stainless steel bands provided. Do not mount it on the top
or bottom of the pipe. On vertical pipe, orientation is not critical. Check that the track is parallel to the pipe and that all
four mounting feet are touching the pipe.
2. Slide the two transducer clamp brackets toward the center mark on the mounting rail.
3. Place a single bead of couplant, approximately 1/2 inch (12 mm) thick, on the at face of the transducer.
See Figure 11 on page20.
4. Place the rst transducer in between the mounting rails near the zero point on the scale. Slide the clamp over the
transducer. Adjust the clamp and transducer so the notch in the clamp aligns with the zero on the scale. See Figure 22.
5. Secure with the thumb screw. Check that the screw rests in the counter bore on the top of the transducer. (Excessive
pressure is not required. Apply just enough pressure so that the couplant lls the gap between the pipe and transducer.)
6. Place the second transducer in between the mounting rails near the dimension derived in the transducer spacing section.
Read the dimension on the mounting rail scale. Slide the transducer clamp over the transducer and secure with the
thumb screw.
Top View
of Pipe
Figure 22: Mounting track installation
Page 24 March 2018TTM-UM-00136-EN-08
Page 25
Loop Load (Ohms)
Inputs/Outputs
INPUTS/OUTPUTS
General
The transmitting system is available in two configurations:
• The Flow-Only model is equipped with a 4-20 mA output, two open collector outputs, a rate frequency output, and
RS485 communications using the Modbus RTU command set.
• The Energy (BTU) model has inputs for two 1000 Ohm RTD sensors in place of the rate frequency and alarm outputs. This
model allows the measurement of pipe input and output temperatures so energy usage calculations can be performed.
4-20 mA Output
The 4-20 mA output interfaces with most recording and logging systems by transmitting an analog current signal that is
proportional to system flow rate. The 4-20 mA output is internally powered (current sourcing) and can span negative to
positive flow/energy rates.
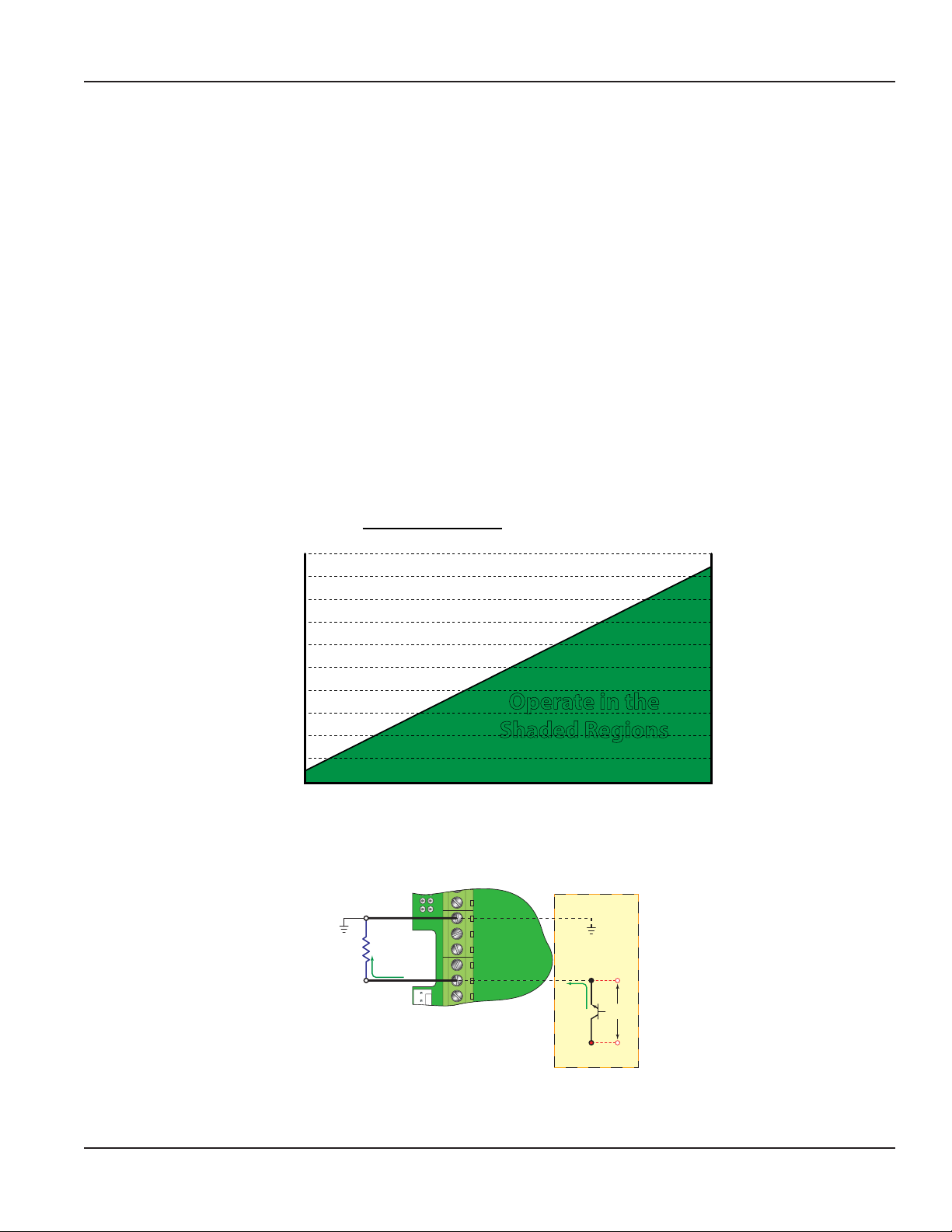
For AC-powered transmitters, the 4-20 mA output is driven from a 15V DC source located within the transmitter. The source
is isolated from earth ground connections within the transmitter. The AC-powered transmitter can accommodate loop loads
up to 400 Ohms. DC-powered transmitters use the DC power supply voltage to drive the current loop. The current loop
is not isolated from DC ground or power. Figure 23 shows graphically the allowable loads for various input voltages. The
combination of input voltage and loop load must stay within the shaded area of Figure 23.
Supply Voltage - 7 VDC
0.02
1100
1000
900
800
700
600
500
400
300
200
100
10 12 14 16 18 20 22 24 26 28
= Maximum Loop Resistance
Operate in the
Shaded Regions
Supply Voltage (VDC)
Figure 23: Allowable loop resistance (DC powered transmitters)
90-265 VAC
Loop
Resistance
AC Neutral
Signal Gnd.
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
Signal Ground
7 VDC
Drop
Meter Power
Figure 24: 4-20 mA output
The 4-20 mA output signal is available between the 4-20 mA Out and Signal Gnd terminals as shown in Figure 24.
Page 25 March 2018 TTM-UM-00136-EN-08
Page 26
Inputs/Outputs
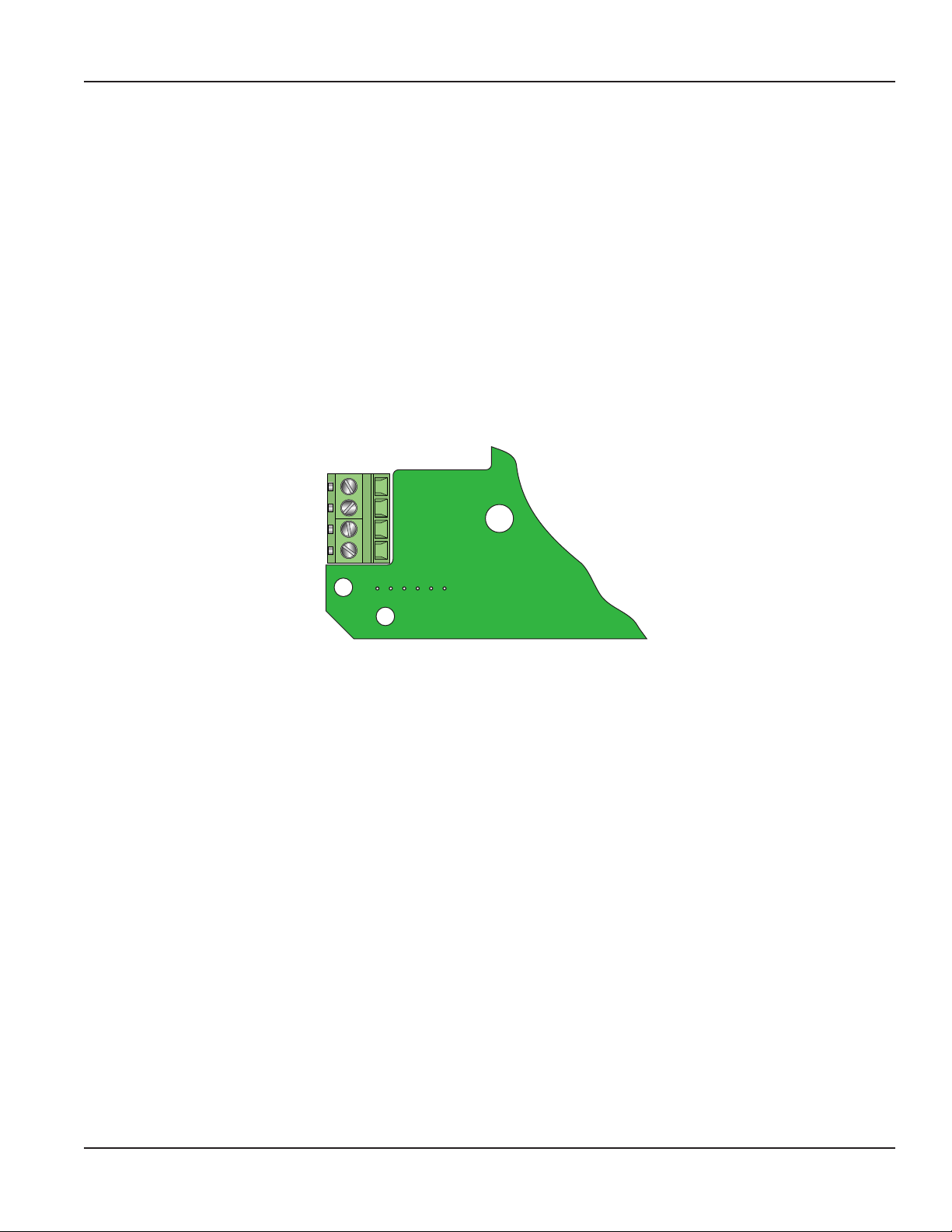
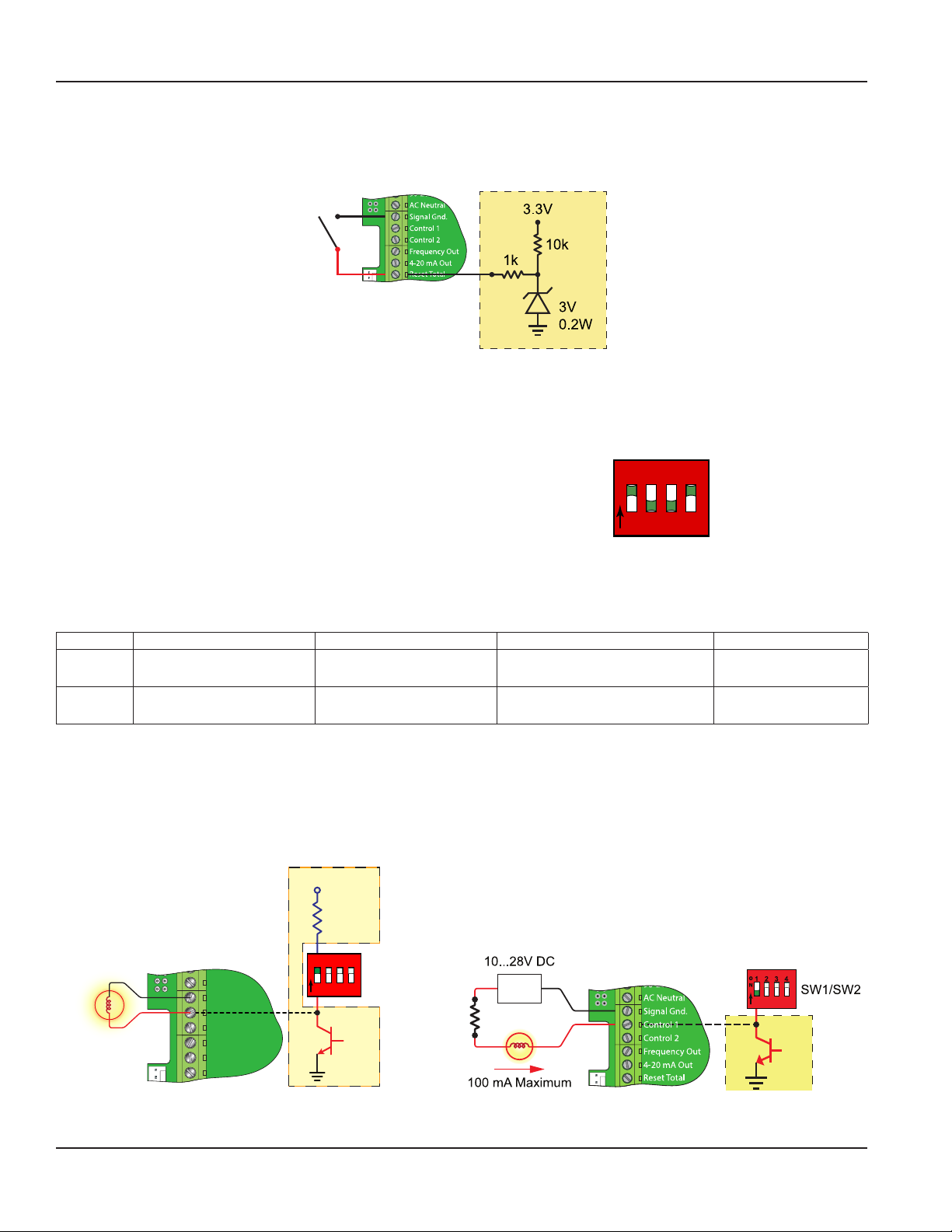
Reset Total Input
The Reset Total Input can be used with a push-button to reset the flow totals. When the Reset Total Input is connected to
signal ground, the total displayed on the meter is reset to zero.
Figure 25: Reset total input
Control Outputs (Flow-Only Model)
Two independent open collector transistor outputs are included with the Flow-Only model. Each output can be configured
for one of the following functions:
• Rate Alarm
• Signal Strength Alarm
O
1 2 3 4
N
• Totalizing/Totalizing Pulse
• Errors
Figure 26: Switch settings
• None
Both control outputs are rated for a maximum of 100 mA and 10…28V DC. A pullup resistor can be added externally or an
internal 10k Ohm pullup resistor can be selected using DIP switches on the power supply board.
Switch S1 S2 S3 S4
On
Off
Control 1 Pullup
Resistor IN circuit
Control 1 Pullup
Resistor OUT of circuit
Control 2 Pullup
Resistor IN circuit
Control 2 Pullup
Resistor OUT of circuit
Table 6: Dip switch functions
Frequency output Pullup Resistor
IN circuit
Frequency Output Pullup Resistor
OUT of circuit
Square Wave Output
Simulated Turbine
Output
OTE:N All control outputs are disabled when a USB cable is connected.
For the Rate Alarm and Signal Strength Alarm the on/off values are set using either the keypad or the UltraLink
software utility.
Typical control connections are illustrated in Figure 27. Please note that only the Control 1 output is shown. Control 2 is
identical except the pullup resistor is governed by SW2.
VCC
10k
O
90-265 VAC
AC Neutral
Signal Gnd.
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
1 2 3 4
N
SW1/SW2
Figure 27: Typical control connections
Page 26 March 2018TTM-UM-00136-EN-08
Page 27
Inputs/Outputs
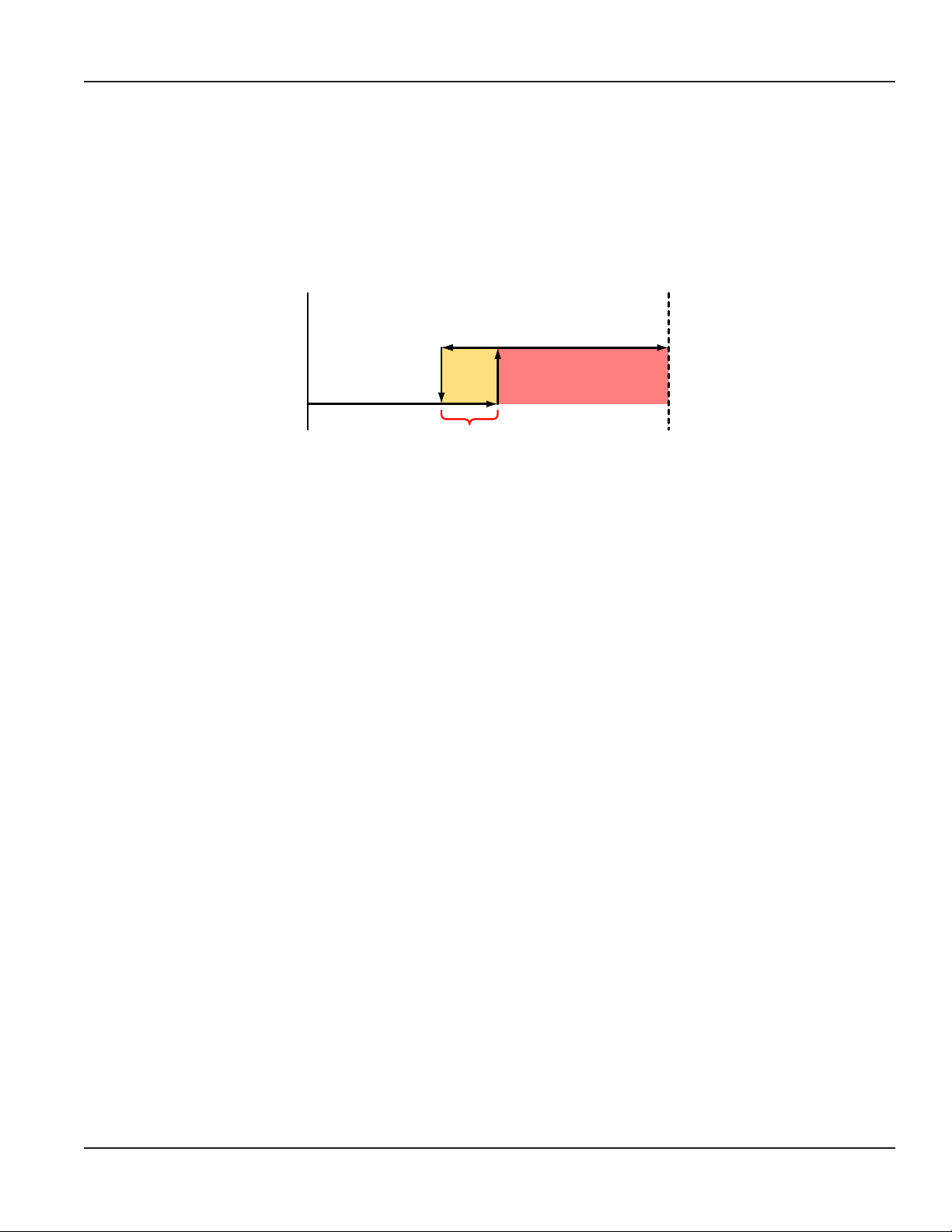
Rate Alarm Outputs
The flow rate output permits output changeover at two separate flow rates, allowing operation with an adjustable switch
deadband. Figure 28 illustrates how the setting of the two setpoints influences rate alarm operation.
A single-point flow rate alarm would place the ON setting slightly higher than the OFF setting, allowing a switch deadband to
be established. If a deadband is not established, switch chatter (rapid switching) may result if the flow rate is very close to the
switch point.
Minimum
Flow
Maximum
Flow
Output ON
Output OFF
Figure 28: Single point alarm operation
Set OFF
Deadband
Set ON
OTE:N All control outputs are disabled when a USB cable is connected.
Signal Strength Alarm
The SIG STR alarm will provide an indication that the signal level reported by the transducers has fallen to a point where flow
measurements may not be possible. It can also be used to indicate that the pipe has emptied. Like the rate alarm described
previously, the signal strength alarm requires that two points be entered, establishing an alarm deadband. A valid switch
point exists when the ON value is lower than the OFF value. If a deadband is not established and the signal strength decreases
to approximately the value of the switch point, the output may chatter.
Batch/Totalizer Output (Flow-Only Model)
Totalizer mode configures the output to send a 100 mSec pulse each time the display totalizer increments divided by the
TOT MULT. The TOT MULT value must be a whole, positive numerical value. This output is limited to 1 Hz maximum.
For example, if the totalizer exponent TOTL E is set to E0 ×1 and the totalizer multiplier TOT MULT is set to 1, then the
output will pulse each time the totalizer increments one count, or each single, whole measurement unit totalized.
If the totalizer exponent TOTL E is set to E2 ×100 and the totalizer multiplier TOT MULT is set to 1, then the control output
will pulse each time the display totalizer increments or once per 100 measurement units totalized.
If the totalizer exponent TOTL E is set to E0 ×1 and the totalizer multiplier TOT MULT is set to 2, the control output will
pulse once for every two counts that the totalizer increments.
Error Alarm Outputs
When a control output is set to ERROR mode, the output will activate when any error occurs in the transmitter that has caused
the transmitter to stop measuring reliably. See “Brad Harrison® Connector Option” on page95.
Page 27 March 2018 TTM-UM-00136-EN-08
Page 28
Inputs/Outputs
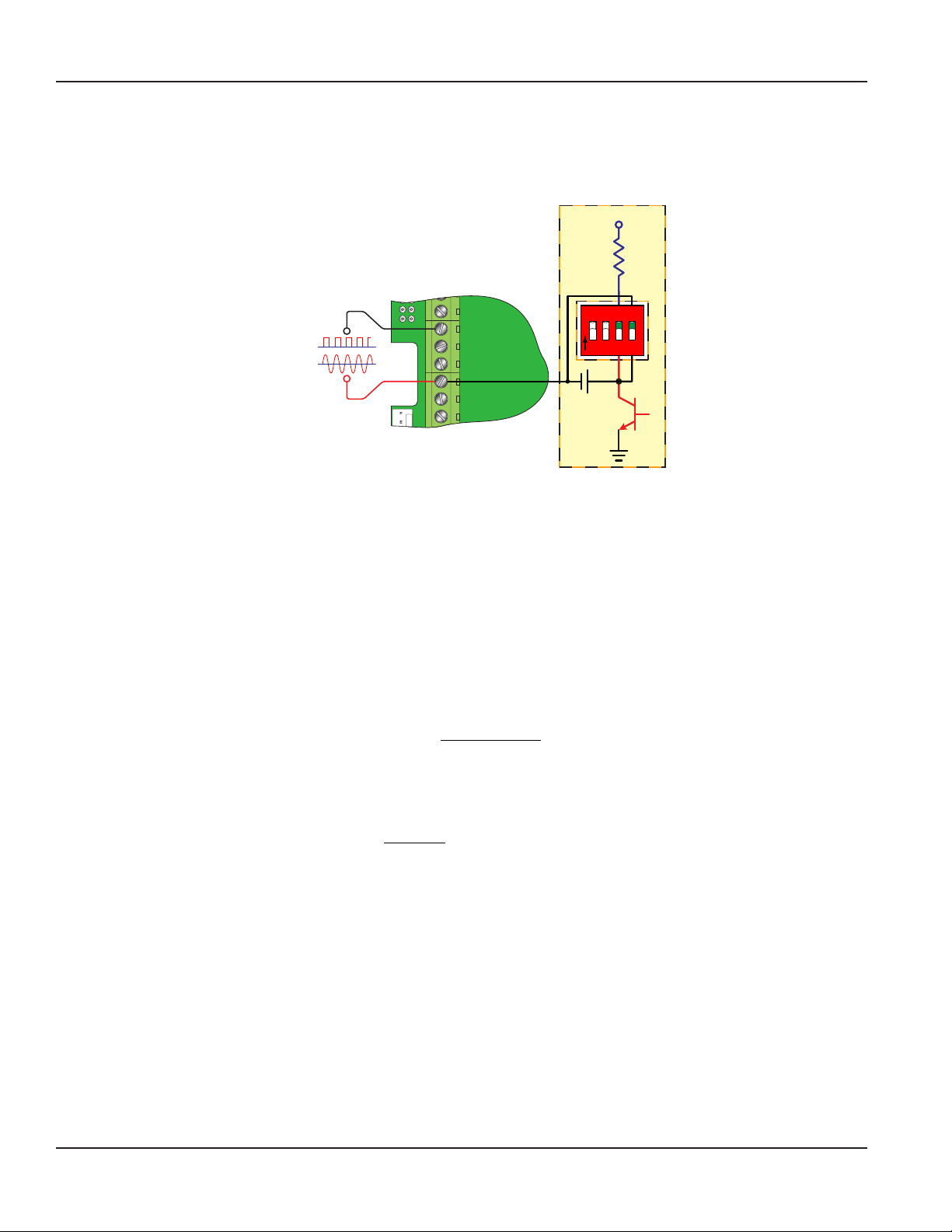
Frequency Output (Flow-Only Model)
The frequency output is an open-collector transistor circuit that outputs a pulse waveform that varies proportionally with flow
rate. This type of frequency output is also know as a Rate Pulse output. The output spans from 0 Hz, normally at zero flow rate
to 1000 Hz at full flow rate (configuration of the MAX RATE parameter is described in “Startup” on page35.
+V
10k
90-265 VAC
SW4 Closed
SW4 Open
AC Neutral
Signal Gnd.
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
O
1 2 3 4
N
Frequency Output
Figure 29: Frequency output switch settings
OTE:N When a USB programming cable is connected, the RS485 and frequency outputs are disabled.
The frequency output is proportional to the maximum flow rate entered into the transmitter. The maximum output frequency
is 1000 Hz.
If, for example, the MAX RATE parameter was set to 400 gpm, then an output frequency of 500 Hz (half of the full scale
frequency of 1000 Hz) would represent 200 gpm.
In addition to the control outputs, the frequency output can be used to provide total information by use of a Kfactor. A
Kfactor simply relates the number of pulses from the frequency output to the number of accumulated pulses that equates to
a specific volume.
For this transmitter, the relationship is described by the following equation. The 60,000 relates to measurement units in
volume/min. Measurement units in seconds, hours or days would require a different numerator.
K factor
60,000
=
Full Scale Units
A practical example would be if the MAX RATE for the application were 400 gpm, the Kfactor (representing the number of
pulses accumulated needed to equal one gallon) would be:
K factor
60,000
= =
400
gpm
150
Pulses Per Gallon
If the frequency output is to be used as a totalizing output, the transmitter and the receiving instrument must have identical
Kfactor values programmed into them to ensure that accurate readings are being recorded by the receiving instrument.
Unlike standard mechanical transmitters such as turbines, gear or nutating disc meters, the Kfactor can be changed by
modifying the MAX RATE flow rate value. See “Calculating KFactors” on page106.
Page 28 March 2018TTM-UM-00136-EN-08
Page 29
Inputs/Outputs
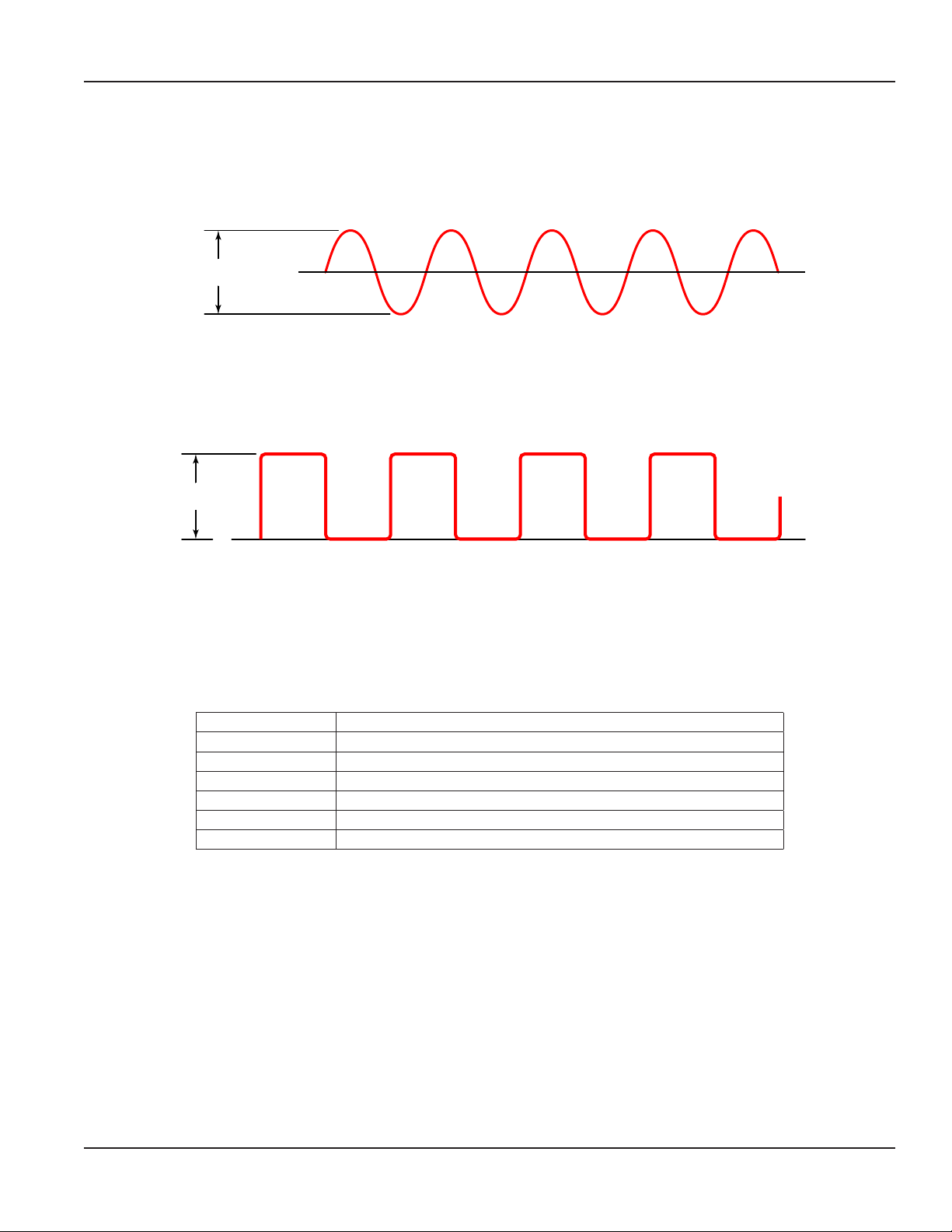
There are two frequency output options available:
• The Turbine Meter Simulation option is used when a receiving instrument is capable of interfacing directly with a
turbine transmitter’s magnetic pickup. The output is a relatively low voltage AC signal whose amplitude swings above and
below the signal ground reference. The minimum AC amplitude is approximately 500 mV peak-to-peak. To activate the
turbine output circuit, turn SW4 OFF.
500 mV
p-p
0
Figure 30: Frequency output waveform (simulated turbine)
• The Square-Wave Frequency option is used when a receiving instrument requires that the pulse voltage level be either
of a higher potential and/or referenced to DC ground. The output is a square-wave with a peak voltage equaling the
instrument supply voltage when the SW3 is ON. If desired, an external pullup resistor and power source can be used by
leaving SW3 OFF. Set SW4 to ON for a square-wave output.
+V
0
Figure 31: Frequency output waveform (square wave)
Totalizer Output Option (Energy Model)
Energy models can be ordered with a totalizer pulse output option. This option is installed in the position where the Ethernet
option would normally be installed.
Optional Totalizing Pulse Specifications
Parameter Specication
Signal One pulse for each increment of the totalizer’s least significant digit
Type Opto-isolated, open collector transistor
Pulse Width 30 mSec, maximum pulse rate 16 Hz
Voltage 28V DC maximum
Current 100 mA maximum (current sink)
Pullup Resistor 2.8 …10 k Ohms
Table 7: Optional energy usage totalizing pulse output
OTE:N The totalizer pulse output option and the Ethernet communications output cannot be installed in the same Energy
model at the same time.
Page 29 March 2018 TTM-UM-00136-EN-08
Page 30
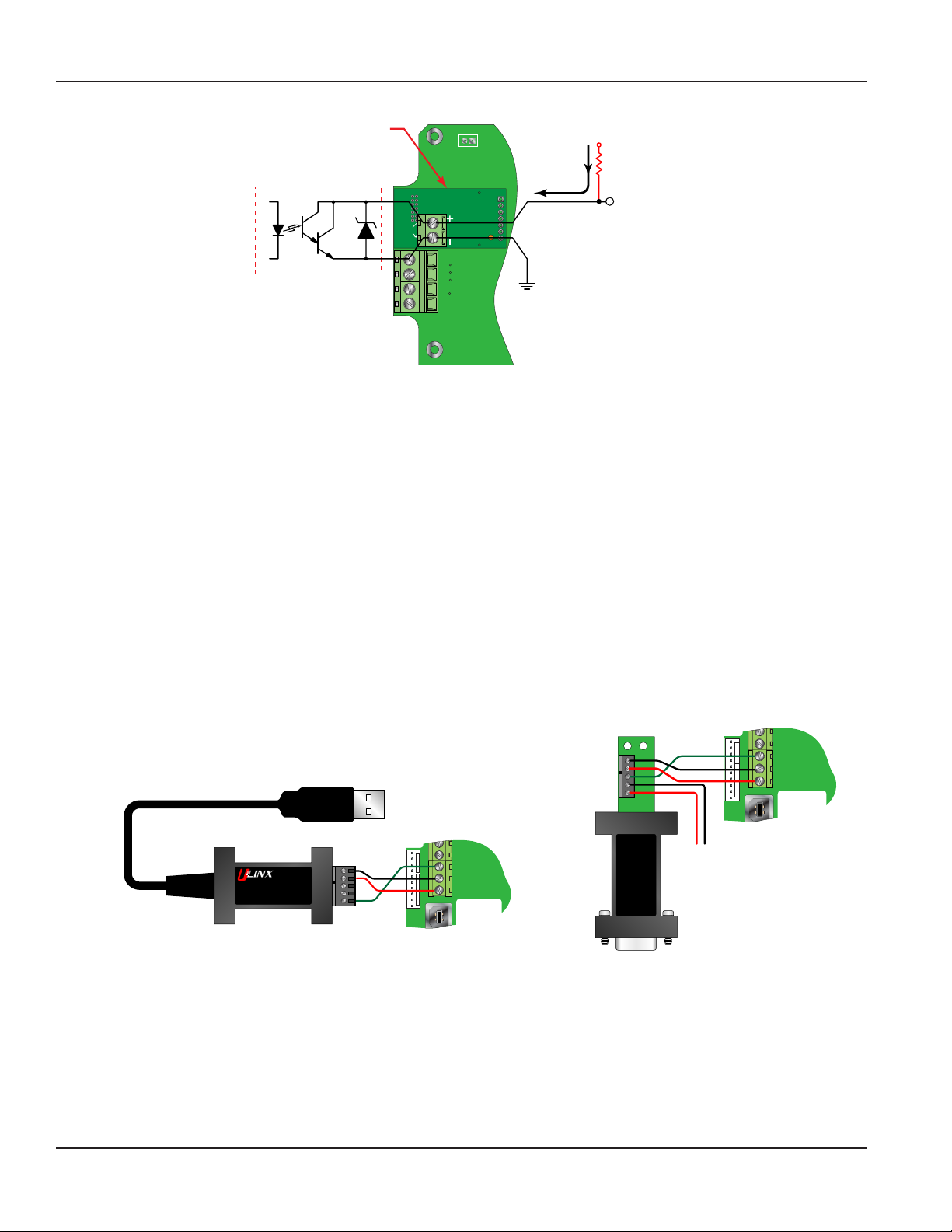
RS-485 Converter
Inputs/Outputs
Totalizing
Pulse Output
Option
TB1
RxD
Total Pulse
100 mA
Maximum
V
CC
2.8k…10k
Pullup
Resistor
Isolated Output
Total Pulse
Internal
Figure 32: Energy model auxiliary totalizer output option
Wiring and configuration of the Energy model is similar to the totalizing pulse output for the Flow-Only model. This option
must use an external current limiting resistor.
RS485 Port
The RS485 feature allows up to 126 transmitters to be placed on a single three-wire cable bus. All transmitters are assigned a
unique numeric address that allows all of the transmitters on the cable network to be independently accessed. A Modbus RTU
command protocol is used to interrogate the transmitters. See “Communications Protocols” on page66.
Flow rate, total, signal strength and temperature (if so equipped) can be monitored over the digital communications bus.
Baud rates up to 9600 and cable lengths to 5000 feet (1500 meters) are supported without repeaters or end-of-line resistors.
To interconnect transmitters, use three-wire shielded cable (like the Belden 9939 or equal). In noisy environments, connect
the shield on one end to a good earth-ground connection. Use a USB-to-RS485 converter (like the B&B Electronics
P/N 485USBTB-2W) to communicate with a PC running Windows XP, Windows Vista and Windows 7. For computers with
RS232C serial ports, use an RS232C-to-RS485 converter (like the B&B Electronics P/N 485SD9TB illustrated in Figure 33), to
interconnect the RS485 network to a communication port on a PC. If more than 126 transmitters must be monitored, an
additional converter and communication port are required.
OTE:N When a USB programming cable is connected, the RS485 and frequency outputs are disabled.
4-20 mA Out
Reset Total
TD(A)-
TD(B)+
GND
GND
+12V
RS485 Gnd
RS485 A(-)
RS485 B(+)
4-20 mA Out
Reset Total
RS485 Gnd
RS485 A(-)
RS485 B(+)
Model 485USBTB-2W
A (-)
B (+)
A (-)
B (+)
GND
USB to RS485
Figure 33: RS485 network connections
Page 30 March 2018TTM-UM-00136-EN-08
RS-485
Model 485SD9TB
RS-232
To 12V DC
Supply
RS232 to RS485
Page 31

Heat Flow for Energy Model Only
Ethernet Port
The Ethernet port is 10/100 Base T with an RJ connector and supports BACnet IP, Modbus TCP/IP and EtherNet/IP protocols.
The Ethernet option must be ordered with the transmitter. For Energy models, the Ethernet option is not available with the
Totalizing Pulse option.
See”Communications Protocols” on page66 for information on configuring Ethernet settings.
USB Programming Port
The USB programming port is a USB 2.0 Type B connector similar to the USB port on many printers. The USB programming
port on the transmitter is the cable connection point from a computer with UltraLink software. UltraLink is used for
configuring, calibrating and troubleshooting the meter.
See “Parameter Configuration Using UltraLink Software” on page48 for further details.
HEAT FLOW FOR ENERGY MODEL ONLY
The Energy model allows the integration of two 1000 Ohm, platinum RTDs with the transmitter, effectively providing an
instrument for measuring energy consumed in liquid heating and cooling systems. RTDs ordered with the Energy model are
factory calibrated and shipped with the transmitter.
The Energy model has multiple heat ranges. Select the range that encompasses the temperature range of your application.
The three-wire surface-mount RTDs are attached at the factory to a plug-in connector. Install the RTDs on or in the pipe as
recommended, and then plug the RTDs into the RTD connector in the transmitter.
Four ranges of surface-mount RTDs and two lengths of wetted insertion probes are offered. Other cable lengths for surface
mount RTDs are available. Contact the manufacturer for additional offerings.
All RTDs are 1000 Ohm platinum, three-wire devices. The surface-mount RTDs are available in standard lengths of 20 feet
(6 meters), 50 feet (15 meters) and 100 feet (30 meters) of attached shielded cable.
Installing Surface-Mounted RTDs
Use surface-mount RTDs on well insulated pipe. Use insertion (wetted) RTDs on pipes that are not insulated.
1. Select areas on the supply and return pipes where the RTDs will be mounted.
2. Remove or peel back the insulation all the way around the pipe in the installation area.
3. Clean an area slightly larger than the RTD down to bare metal on the pipe.
4. Place a small amount of heat sink compound on the pipe in the RTD installation location. See Figure 35.
5. Press the RTD rmly into the compound. Fasten the RTD to the pipe with the included stretch tape.
6. Route the RTD cables back to the transmitter and secure the cable so that it will not be pulled on or abraded inadvertently.
7. Replace the insulation on the pipe. Check that the RTDs are not exposed to air currents.
Page 31 March 2018 TTM-UM-00136-EN-08
Page 32

Heat Flow for Energy Model Only
BACK OF
CONNECTOR
RETURN LINE
Heat Tape
1000 Ω
RTD #2
MINCO
1000 Ω
SUPPLY LINE
RTD #1
Figure 34: RTD schematic
Installing Insertion (Wetted) RTDs
OTE:N The hot tap shutoff shown in Figure 36 is customer-supplied.
Insertion RTDs are typically installed through 1/4 inch (6 mm) compression
fittings and isolation ball valves.
1. Insert the RTD suciently into the ow stream such that a minimum of
1/4 inch (6 mm) of the probe tip extends into the pipe diameter.
RTDs should be mounted within ±45 degrees of the side of a horizontal
pipe. On vertical pipes, the orientation is not critical.
2. Route the RTD cables back to the transmitter and secure the cable so it
will not be pulled on or abraded inadvertently.
If the cables are not long enough to reach the transmitter, route the
cables to an electrical junction box and add cable from that point. Use
three-wire shielded cable, such as Belden® 9939 or equal.
OTE:N Adding cable adds to the resistance the transmitter reads and may
have an effect on absolute accuracy. If cable is added, add the
same length to both RTDs to minimize errors due to changes in
cable resistance.
Heat Sink
Clean RTD Mounting
Area to Bare Metal Surface
Figure 35: Surface mount RTD installation
Figure 36: Insertion style RTD installation
Compound
Wiring RTDs to the Transmitter
After the RTDs have been mounted to the pipe:
1. Route the cable back to the transmitter through the middle hole in the enclosure.
2. Insert the RTD connector into the mating connector on the circuit board. Be sure that the alignment tab on the RTD cable
is up.
Page 32 March 2018TTM-UM-00136-EN-08
Page 33

Heat Flow for Energy Model Only
ACN
strodyne
1500mA250V
372
W
C US
VE
D
R
AC IN : 100-240VAC,50/60Hz
DC OUT :
C US
ACL
E167432
95 - 264 VAC
AC Neutral
Signal Gnd.
4-20 mA Out
Reset Total
RS485 Gnd
RS485 A(-)
RS485 B(+)
www.astrodyne.com
PWC-15E
+15V / 0.3A
R
+Vo
-Vo
0.15A
R2807
$
TUV
RoHS
PRODUCT SERVICE
RTD 1
RTD 2
Exc.
Exc.
Sig.
Sig.
Gnd.
Gnd.
Shield
Shield
0 to 50°C
TEMP. SET
0 to 100°C
-40 to 200°C
Modbus
TFX Rx
TFX Tx
Downstream
Upstream
-
-
+
+
RTD’s
SUPPLY LINE
MINCO
RTD #1
MINCO
RETURN LINE
RTD #2
Figure 37: Wiring RTDs to the transmitter
Replacing RTDs
Complete RTD replacement kits, including the Energy model’s plug-in connector and calibration values for the transmitter, are
available from the manufacturer.
You can also use other manufacturer’s RTDs. The RTDs must be 1000 Ohm, platinum RTDs suitable for a three-wire connection.
A connection adapter (part number D005-0350-300) is available to facilitate connection to the Energy model. See Figure 38.
OTE:N You have to calibrate third-party RTDs according to the directions supplied on the meter being used. See “In-Field
Calibration of RTD Temperature Sensors” on page92.
WHITE
PIN #8
PIN #6
PIN #4
PIN #2
PIN #5
PIN #3
PIN #1
RED
BLACK
GREEN
BROWN
BLUE
DRAIN
RTD2
RTD1
WHITE
BLACK
RED
DRAIN
GREEN
BLUE
BROWN
Figure 38: Energy model RTD adapter connections
PIN#5
PIN#3
PIN#1
PIN#8
PIN#6
PIN#4
PIN#2
Page 33 March 2018 TTM-UM-00136-EN-08
Page 34

Parameter Conguration Using the Keypad
PARAMETER CONFIGURATION USING THE KEYPAD
A transmitter with a keypad can be configured through the keypad interface or by using the Windows-compatible UltraLink
software utility. When a USB programming cable is connected, the RS485 and frequency outputs are disabled.
Transmitters without a keypad can only be configured using the UltraLink software utility. See “Parameter Configuration
Using UltraLink Software” on page48 for software details. Of the two methods of configuration, the UltraLink software
utility provides more advanced features and offers the ability to store and transfer meter configurations between similar
transmitters. All entries are saved in non-volatile FLASH memory and are retained indefinitely in the event of a power loss.
The transmitter’s keypad is a four-key tactile feedback interface that lets you view and change configuration parameters used
by the operating system.
Mode
Indicators
Keypad
Key Function
Press MENU to toggle between RUN mode and PROGRAM mode.
Press MENU while in PROGRAM mode to exit from configuration parameter selection
MENU
ENTER
and menus. However, if you changed any configuration parameters, you will be
prompted to save the changes before returning to RUN mode. At the prompt, select
YES to save the changes.
The arrow keys have two functions. Use them to:
• Scroll through the menus and configuration parameters
• Adjust numerical values
Press ENTER from the RUN mode to view the current software version.
Press ENTER from the PROGRAM mode to:
• Access the configuration parameters in the various menus.
• Initiate changes in configuration parameters.
• Accept configuration parameter changes.
Figure 39: Keypad interface
Table 8: Keypad functions
Page 34 March 2018TTM-UM-00136-EN-08
Page 35

Startup
STARTUP
The TFX Ultra system requires a full pipe of liquid for a successful startup. Do not attempt to make adjustments or change
configurations until a full pipe is verified.
OTE:N If you used Dow 732 RTV to couple the transducers to the pipe, make sure the adhesive is fully cured before you try
to take readings. Dow 732 RTV takes 24 hours to cure satisfactorily.
1. Verify that all wiring is properly connected and routed, as described in “Transducer Installation” on page15.
2. Verify that the transducers are properly mounted, as described in “Transducer Installation” on page15.
3. Apply power to the transmitter. The transmitter display will briey show a software version number and then all of the
segments will illuminate in succession.
4. Verify that the pipe is full of liquid.
5. Go to SER MENU > SIG STR and conrm that the signal strength is 5…98. If the signal strength is lower than ve, check the
transducer mounting methods and liquid/pipe characteristics you entered. If what you entered is correct, you need to
recongure the installation to increase the signal strength. For example, change a W-Mount transducer installation to a
V-Mount installation. Or change a V-Mount installation to a Z-Mount installation.
OTE:N Mounting configuration changes apply only to DTTR, DTTN, DTTL and DTTH transducer sets.
6. Go to SER MENU > SSPD FPS and SSPD MPS and conrm that the actual measured liquid sound speed is within two percent
of the value entered as FLUID SS in the BSC MENU. The pipe must be full of liquid in order to make this measurement.
Once the transmitter is operating properly, see “Parameter Configuration Using the Keypad” on page34 for additional
programming features.
CONFIGURATION
Menu Structure
The transmitter’s firmware has a hierarchical menu structure. See “Menu Maps” on page64 for a visual path to the
configuration parameters.
The seven menus used in the transmitter firmware are as follows:
Menu Meaning Function
BSC MENU BASIC Contains all of the configuration parameters necessary to initially program the transmitter to measure flow.
CH1 MENU CHANNEL 1 Configures the 4-20 mA output. Applies to both the Flow-Only and Energy models.
CH2 MENU CHANNEL 2
SEN MENU SENSOR Used to select the transducer type such as DTTN or DTTS.
SEC MENU SECURITY Used to reset totalizers, return filtering to factory settings, and revise security level of a password.
SER MENU SERVICE Contains system settings that are used for advanced configuration and zeroing the transmitter on the pipe.
DSP MENU DISPLAY Used to configure transmitter display functions.
The following pages define the configuration parameters located in each of the menus.
Configures the type and operating parameters for channel 2 output options. Channel 2 parameters are
specific to the model of transmitter used.
Page 35 March 2018 TTM-UM-00136-EN-08
Page 36

Conguration
Basic Menu (BSC)
The basic menu contains all of the configuration parameters necessary to make the transmitter operational.
Parameter Meaning Options Description
The English/metric selection will also configure the transmitter to display sound speeds
in pipe materials and liquids as either feet per second (fps) or meters per second (mps),
respectively.
UNITS Measurement standard
ADDRESS
BAUD Baud rate of RS485
BACNET ID BACnet device ID value 0…4194303 Applies to BACnet networks only.
XDCR MNT
XDCR HZ
FLO DIR
PIPE OD Pipe outside diameter
PIPE WT Pipe wall thickness
PIPE MAT Pipe material
Modbus or BACnet
address
Transducer mounting
method
Transducer transmission
frequency
Transducer flow
direction
ENGLSH (Inches)
METRIC (Millimeters)
1…126
9600
14400
19200
38400
56000
57600
76800
V
W
Z
500 kHZ
1 MHZ
2 MHZ
FORWARD
REVERSE
ENGLSH (Inches)
METRIC (Millimeters)
ENGLSH (Inches)
METRIC (Millimeters)
Select a material. This list is provided as an example. Additional pipe materials are added periodically. Select the
appropriate pipe material from the list or select OTHER if the material is not listed.
Acrylic ACRYLIC Glass Pyrex PYREX St Steel 304/316 SS 316
Aluminum ALUMINUM Nylon NYLON St Steel 410 SS 410
Brass (Naval) BRASS HD Polyethylene HDPE St Steel 430 SS 430
Carbon Steel CARB ST LD Polyethylene LDPE PFA PFA
Cast Iron CAST IRN Polypropylene POLYPRO Titanium TITANIUM
Copper COPPER PVC CPVC PVC/CPVC Asbestos ASBESTOS
Ductile Iron DCTL IRN PVDF PVDF Other OTHER
Fiberglass-Epoxy FBRGLASS St Steel 302/303 SS 303
IMPORTANT: If the UNITS entry has been changed from ENGLSH to METRIC or from
METRIC to ENGLSH, the entry must be saved and the instrument reset (power cycled
or System Reset SYS RSET entered) in order for the transmitter to initiate the change in
operating units. Failure to save and reset the instrument will lead to improper transducer
spacing calculations and an instrument that may not measure properly.
This address is for the EIA-485 port only. Ethernet addresses are set via the integrated
HTML application in the Ethernet Port. For transmitters ordered with a Modbus RTU
option, enter a value 1…126. For transmitters ordered with a BACnet MS/TP option, enter
a value 0…127. Each transmitter connected on the network must have a unique address
number assigned.
Selects the mounting orientation for the transducers based on pipe and liquid
characteristics. See “Transducer Installation” on page15 .
Transducer transmission frequencies are specific to the type of transducer and the size
of pipe. In general the DTTL 500 kHz transducers are used for pipes greater than 24
inches (600 mm). DTTR, DTTN and DTTH 1 MHz transducers, are for intermediate sized
pipes between 2 inches (50 mm) and 24 inches (600 mm). The DTTS and DTTC, 2 MHz
transducers, are for pipe sizes between 1/2 inch (13 mm) and 2 inches (50 mm)
Allows the change of the direction the transmitter assumes is forward. When mounting
transmitters with integral transducers, this feature allows upstream and downstream
transducers to be “electronically” reversed making upside down mounting of the display
unnecessary.
Enter the pipe outside diameter in inches if ENGLSH was selected as UNITS; in millimeters if
METRIC was selected.
Charts listing popular pipe sizes have been included in the Appendix of this manual.
Correct entries for pipe O.D. and pipe wall thickness are critical to obtaining accurate flow
measurement readings.
Enter the pipe wall thickness in inches if ENGLSH was selected as UNITS; in millimeters if
METRIC was selected.
See “North American Pipe Schedules” on page110 for charts listing popular pipe sizes.
Correct entries for pipe O.D. and pipe wall thickness are critical to obtaining accurate flow
measurement readings.
Page 36 March 2018TTM-UM-00136-EN-08
Page 37
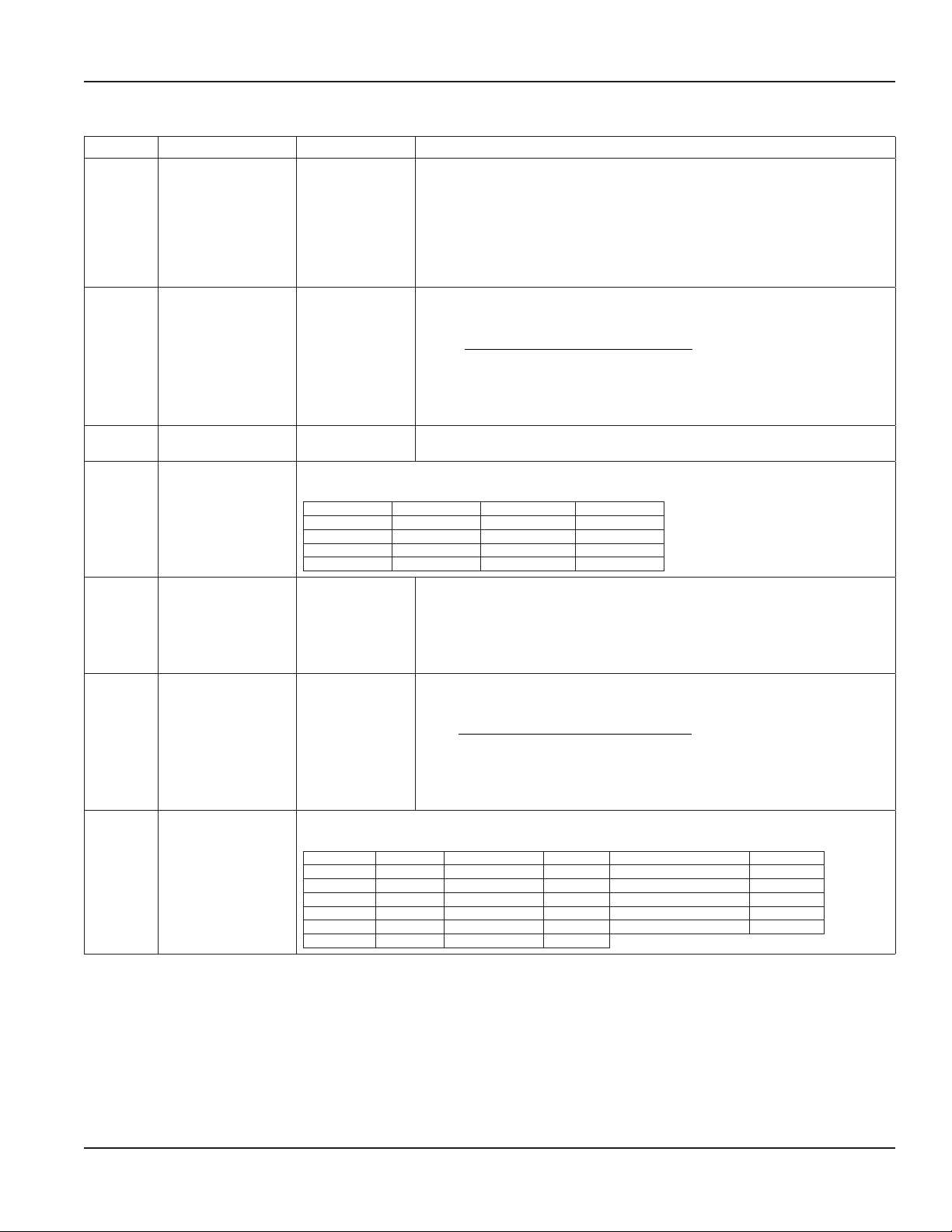
Basic Menu (BSC) continued
Parameter Meaning Options Description
Specifies the speed of sound value, shear or transverse wave, for the pipe wall. If the UNITS
value was set to ENGLSH, the entry is in fps (feet per second). METRIC entries are made in
mps (meters per second).
PIPE SS Pipe sound speed
PIPE R
Pipe material relative
roughness
LINER T Pipe liner thickness
LINER MA Pipe liner material
LINER SS
LINER R
Speed of sound in the
liner
Liner material relative
roughness
FL TYPE Fluid/media type
ENGLSH (fps)
METRIC (mps)
(Enter a numeric
value)
ENGLSH (Inches)
METRIC (Millimeters)
Select a liner material. This list is provided as an example. Additional materials are added periodically. Select the
appropriate material from the list or select OTHER if the liner material is not listed.
Tar Epoxy TAR EPXY HD Polyethylene HDPE
Rubber RUBBER LD Polyethylene LDPE
Mortar MORTAR Teflon (PFA) TEFLON
Polypropylene POLYPRO Ebonite EBONITE
Polystyrene POLYSTY Other OTHER
ENGLSH (fps)
METRIC (mps)
(Enter a numeric
value)
Select a fluid type. This list is provided as an example. Additional liquids are added periodically. Select the
appropriate liquid from the list or select OTHER if the liquid is not listed.
Water Tap WATER Ethanol ETHANOL Oil Hydraulic, Petro-based HYD OIL
Sewage SEWAGE Ethylene Glycol ETH-GLYC Oil Lubricating LUBE OIL
Acetone ACETONE Gasoline GASOLINE Oil Motor, SAE 20/30 MTR OIL
Alcohol ALCOHOL Glycerin GLYCERIN Water Distilled WATR-DST
Ammonia AMMONIA Isopropyl Alcohol ISO-ALC Water Sea WATR-SEA
Benzene BENZENE Kerosene KEROSENE Other OTHER
Brine BRINE Methanol METHANOL
If a pipe material was chosen from the PIPE MAT list, a nominal value for speed of sound
in that material will be automatically loaded. If the actual sound speed is known for the
application piping system and that value varies from the automatically loaded value, the
value can be revised.
If OTHER was chosen as PIPE MAT, then a PIPE SS must also be entered.
The transmitter provides flow profile compensation in its flow measurement calculation.
The ratio of average surface imperfection as it relates to the pipe internal diameter is used
in this compensation algorithm and is found by using the following formula:
PipeR =
If a pipe material was chosen from the PIPE MAT list, a nominal value for relative roughness
in that material will be automatically loaded. If the actual roughness is known for the
application piping system and that value varies from the automatically loaded value, the
value can be revised.
If the pipe has a liner, enter the pipe liner thickness. Enter this value in inches if ENGLSH
was selected as UNITS; in millimeters if METRIC was selected.
Allows adjustments to be made to the speed of sound value, shear or transverse wave, for
the pipe wall. If the UNITS value was set to ENGLSH, the entry is in fps (feet per second).
METRIC entries are made in mps (meters per second).
If a liner was chosen from the LINER MA list, a nominal value for speed of sound in that
media will be automatically loaded. If the actual sound speed rate is known for the pipe
liner and that value varies from the automatically loaded value, the value can be revised.
The transmitter provides ow prole compensation in its ow measurement calculation.
The ratio of average surface imperfection as it relates to the pipe internal diameter is used
in this compensation and is found by using the following formula:
Liner R
=
If a liner material was chosen from the LINER MA list, a nominal value for relative roughness
in that material will be automatically loaded. If the actual roughness is known for the
application liner and that value varies from the automatically loaded value, the value can
be revised.
Linear RMS Meas urementof the Pipes Internal Wall Surface
Linear RMS Measurement of the Liner’s Internal Wall Surface
Inside Diameter of the Pipe
Inside Diameter of the Liner
Conguration
Page 37 March 2018 TTM-UM-00136-EN-08
Page 38

Conguration
Basic Menu (BSC) continued
Parameter Meaning Options Description
Allows adjustments to be made to the speed of sound entry for the liquid. If the UNITS
value was set to ENGLSH, the entry is in fps (feet per second). METRIC entries are made in
mps (meters per second).
If a fluid was chosen from the FL TYPE list, a nominal value for speed of sound in that media
will be automatically loaded. If the actual sound speed is known for the application fluid
and that value varies from the automatically loaded value, the value can be revised.
If OTHER was chosen as FL TYPE, a FLUID SS will need to be entered. A list of alternate
fluids and their associated sound speeds is located in the Appendix located at the back of
this manual.
Fluid sound speed may also be found using the Target DBg Data screen available in the
UltraLink software utility. See “Target Dbg Data Screen Definitions” on page63.
Allows adjustments to be made to the absolute viscosity of the liquid in centipoise.
Ultrasonic transmitters use pipe size, viscosity and specific gravity to calculate Reynolds
numbers. Since the Reynolds number influences flow profile, the transmitter has to
compensate for the relatively high velocities at the pipe center during transitional or
laminar flow conditions. The entry of FLUID VI is used in the calculation of Reynolds and
the resultant compensation values.
If a fluid was chosen from the FL TYPE list, a nominal value for viscosity in that media will
be automatically loaded. If the actual viscosity is known for the application fluid and that
value varies from the automatically loaded value, the value can be revised.
If OTHER was chosen as FL TYPE, then a FLUID VI must also be entered. See “Fluid Properties”
on page115 for a list of alternate fluids and their associated viscosities.
Allows adjustments to be made to the specific gravity (density relative to water) of
the liquid.
As stated previously in the FLUID VI section, specific gravity is used in the Reynolds
correction algorithm. It is also used if mass flow measurement units are selected for rate
or total.
If a fluid was chosen from the FL TYPE list, a nominal value for specific gravity in that media
will be automatically loaded. If the actual specific gravity is known for the application fluid
and that value varies from the automatically loaded value, the value can be revised.
If OTHER was chosen as FL TYPE, a SP GRVTY may need to be entered if mass flows are to
be calculated. See “Specifications” on page108 for list of alternate fluids and their specific
gravities.
FLUID SS
FLUID VI
SP
GRAVITY
Speed of sound in the
fluid
Absolute viscosity of
the fluid
Fluid specific gravity
ENGLSH (fps)
METRIC (mps)
(Enter a numeric
value in centipoise)
(Enter a numeric
value)
Page 38 March 2018TTM-UM-00136-EN-08
Page 39

Basic Menu (BSC) continued
Parameter Meaning Options Description
Allows adjustments to be made to the specific heat capacity of the liquid.
If a fluid was chosen from the FL TYPE list, a default specific heat will be automatically
loaded. This default value is displayed as SP HEAT in the BSC MENU. If the actual specific
heat of the liquid is known or it differs from the default value, the value can be revised. See
Table 6, Table 7 and Table 8 for specific values. Enter a value that is the mean of both pipes.
° F ° C
32…212 0…100 1.00
250 121 1.02
300 149 1.03
350 177 1.05
Specific Heat Capacity Values for Common Fluids
SP HEAT
XDC SPAC
RATE UNT
RATE INT
Fluid specific heat
capacity
Transducer spacing
calculation
Engineering units for
flow rate
Time interval for flow
rate
BTU/lb
ENGLSH (Inches)
METRIC (Millimeters)
Select an engineering unit for flow rate measurements.
US Gallons US Gallons Pounds LB
Liters Liters Kilograms KG
Millions of US Gallons MGal British Thermal Units BTU
Cubic Feet Cubic Ft Thousands of BTUs MBTU
Cubic Meters Cubic Me Millions of BTUs MMBTU
Acre Feet Acre Ft 1 Ton/HR [12000 BTU] TONHR
Oil Barrels Oil Barr [42 US Gallons] Kilojoule kJ
Liquid Barrels Liq Barr [31.5 US Gallons] Kilowatt kWH
Feet Feet Megawatt MWH
Meters Meters
SEC Seconds
MIN Minutes
HOUR Hours
DAY Days
Fluid
Ethanol 32 0 0.65
Methanol 54 12 0.60
Brine 32 0 0.71
Brine 60 15 0.72
Sea Water 63 17 0.94
Temperature Ethylene Glycol Solution (% by Volume)
° F ° C 25 30 40 50 60 65 100
–40 –40 n/a n/a n/a n/a 0.68 0.70 n/a
0 –17.8 n/a n/a 0.83 0.78 0.72 0.70 0.54
40 4.4 0.91 0.89 0.845 0.80 0.75 0.72 0.56
80 26.7 0.92 0.90 0.86 0.82 0.77 0.74 0.59
120 84.9 0.93 0.92 0.88 0.83 0.79 0.77 0.61
160 71.1 0.94 0.93 0.89 0.85 0.81 0.79 0.64
200 93.3 0.95 0.94 0.91 0.87 0.83 0.81 0.66
240 115.6 n/a n/a n/a n/a n/a 0.83 0.69
OTE:N This value is calculated by the firmware after all pipe parameters have been
This value represents the one-dimensional linear measurement between the transducers
(the upstream/downstream measurement that runs parallel to the pipe). This value
is in inches if ENGLSH was selected as UNITS; in millimeters if METRIC was selected.
This measurement is taken between the lines which are scribed into the side of the
transducer blocks.
If the transducers are being mounted using the transducer track assembly, a measuring
scale is etched into the track. Place one transducer at 0 and the other at the appropriate
measurement.
Select a time interval for flow rate measurements.
Conguration
Specific Heat Capacity for Water
Temperature
Temperature
° F ° C
Specific Heat Capacity BTU/lb °F
entered. The spacing value only pertains to DTTR,DTTN, DTTL and DTTH
transducer sets.
Specific Heat BTU/lb ° F
Specific Heat BTU/lb ° F
Page 39 March 2018 TTM-UM-00136-EN-08
Page 40

Conguration
Basic Menu (BSC) continued
Parameter Meaning Options Description
Select an engineering unit for flow totalizer measurements.
US Gallons US Gallons Pounds LB
Liters Liters Kilograms KG
Millions of US Gallons MGal British Thermal Units BTU
TOTL UNT Totalizer units
TOTL E
MIN RATE
MAX RATE
FL COFF Flow cutoff
DAMP PER System damping value 0…100%
Flow totalizer exponent
value
Minimum flow rate
settings
Maximum flow rate
settings
Cubic Feet Cubic Ft Thousands of BTUs MBTU
Cubic Meters Cubic Me Millions of BTUs MMBTU
Acre Feet Acre Ft 1 Ton/HR = 12000 BTU TONHR
Oil Barrels Oil Barr [42 US Gallons] Kilojoule kJ
Liquid Barrels Liq Barr [31.5 US Gallons] Kilowatt kWH
Feet Feet Megawatt MWH
Meters Meters
Used for setting the flow totalizer exponent. This feature is useful for accommodating
a very large accumulated flow or to increase totalizer resolution when flows are small
(displaying fractions of whole barrels, gallons, etc.) The exponent is a × 10n multiplier,
where “n” can be from –1 (× 0.1)…6 (× 1000,000).
Table 9 should be referenced for valid entries and their influence on the display. Selection
of E-1 and E0 adjusts the decimal point on the display. Selection of E1, E2 and E3 causes
an icon of × 10, × 100 or × 1000 respectively to appear to the right of the total flow
display value.
E1…E6
(Enter a numeric
value)
(Enter a numeric
value)
(Enter a numeric
value)
Exponent Display Multiplier
A minimum rate setting is entered to establish filter software settings and the lowest
rate value that will be displayed. Volumetric entries will be in the rate units and interval
selected previously. For unidirectional measurements, set MIN RATE to zero. For
bidirectional measurements, set MIN RATE to the highest negative (reverse) flow rate
expected in the piping system.
OTE:N The transmitter will not display a flow rate at flows less than the MIN RATE value.
A maximum volumetric flow rate setting is entered to establish filter software settings.
Volumetric entries will be in the rate units and Interval selected previously. For
unidirectional measurements, set MAX RATE to the highest (positive) flow rate expected in
the piping system. For bidirectional measurements, set MAX RATE to the highest (positive)
flow rate expected in the piping system.
A low flow cutoff entry is provided to allow very low flow rates (that can be present when
pumps are off and valves are closed) to be displayed as zero flow. Typical values that
should be entered are between 1.0% and 5.0% of the flow range between MIN RATE and
MAX RATE.
Flow filter damping establishes a maximum adaptive filter value. Under stable flow
conditions (flow varies less than 10% of reading), this adaptive filter will increase the
number of successive flow readings that are averaged together up to this maximum
value. If flow changes outside of the 10% window, the flow filter adapts by decreasing the
number of averaged readings which allows the transmitter to react faster. Increasing this
value tends to provide smoother steady-state flow readings and outputs. If very erratic
flow conditions are present or expected, other filters are available for use in the UltraLink
software utility.
E–1 × 0.1 (÷10)
E0 × 1 (no multiplier)
E1 × 10
E2 × 100
E3 × 1000
E4 × 10,000
E5 × 100,000
E6 × 1000,000
As a result, if the MIN RATE is set to a value greater than zero, the transmitter will
display the MIN RATE value, even if the actual flow/energy rate is less than the
MIN RATE.
For example, if the MIN RATE is set to 25 and actual rate is 0, the transmitter
display will indicate 25. Another example, if the MIN RATE is set to -100 and the
actual flow is -200, the transmitter will indicate -100. This can be a problem if
the transmitter MIN RATE is set to a value greater than zero because at flows
below the MIN RATE the rate display will show zero flow, but the totalizer which
is not affected by the MIN RATE setting will keep totalizing.
Page 40 March 2018TTM-UM-00136-EN-08
Page 41

Conguration
Channel 1 Menu (CH1)
The CH1 menu controls how the 4-20 mA output is spanned for all transmitter models and how the frequency output is
spanned for the flow-only model.
Parameter Meaning Description
FL 4MA Flow at 4 mA The FL 4MA and FL 20MA settings are used to set the span for both the 4-20 mA output and the 0…1000 Hz
FL 20MA Flow at 20 mA
CAL 4MA 4 mA calibration The 4-20 mA output is factory calibrated and should not require adjustment. If small adjustments to the DAC
CAL 20 MA 20 mA calibration
4-20 TST 4-20 mA test Allows a simulated flow value to be sent from the 4-20 mA output. By incrementing this value, the 4-20 mA
frequency output on the Flow-Only models.
The 4-20 mA output is internally powered (current sourcing) and can span negative to positive flow/energy rates.
This output interfaces with virtually all recording and logging systems by transmitting an analog current that is
proportional to system flow rate. Independent 4 mA and 20 mA span settings are established in firmware using
the flow measuring range entries. These entries can be set anywhere in the –40…40 fps (–12…12 mps) range
of the instrument. Resolution of the output is 12-bits (4096 discrete points) and the can drive up to a 400 Ohm
load when the transmitter is AC powered. When powered by a DC supply, the load is limited by the input voltage
supplied to the instrument. See Figure 23 for allowable loop loads.
FL 4MA — Flow at 4 mA
FL 20MA — Flow at 20 mA
The FL 4MA and FL 20MA entries are used to set the span of the 4-20 mA analog output and the frequency output
on Flow-Only models. These entries are volumetric rate units that are equal to the volumetric units configured as
RATE UNT and RATE INT discussed previously.
For example, to span the 4-20 mA output from –100…100 gpm, with 12 mA being 0 gpm, set the FL 4MA and FL
20MA inputs as follows:
FL 4MA = –100.0
FL 20MA = 100.0
If the transmitter were a Flow-Only model, this setting would also set the span for the frequency output. At –100
gpm, the output frequency would be 0 Hz. At the maximum flow of 100 gpm, the output frequency would be
1000 Hz, and in this instance a flow of zero would be represented by an output frequency of 500 Hz.
Example 2 – To span the 4-20 mA output from 0…100 gpm, with 12 mA being 50 gpm, set the FL 4MA and FL
20MA inputs as follows:
FL 4MA = 0.0
FL 20MA = 100.0
For the Flow-Only model, in this instance zero flow would be represented by 0 Hz and 4 mA. The full scale flow or
100 gpm would be 1000 Hz and 20 mA, and a midrange flow of 50 gpm would be expressed as 500 Hz and 12 mA.
(Digital to Analog Converter) are needed, for instance if adjustment due to the accumulation of line losses from
long output cable lengths are required, the CAL 4mA and CAL 20 MA can be used.
CAL 4 MA — 4 mA DAC Calibration Entry (Value)
CAL 20 MA— 20 mA DAC Calibration Entry (Value)
The CAL 4MA and CAL 20 MA entries allow fine adjustments to be made to the zero and full scale of the 4-20
mA output. To adjust the outputs, an ammeter or reliable reference connection to the 4-20 mA output must
be present.
OTE:N Calibration of the 20 mA setting is conducted much the same way as the 4 mA adjustments.
OTE:N The CAL 4MA and CAL 20MA entries should not be used in an attempt to set the 4-20 mA range. Use
FL 4MA and FL 20MA, detailed above, for this purpose.
output will transmit the indicated current value.
4 mA Calibration Procedure
1. Disconnect one side of the current loop and connect the ammeter in series (disconnect either wire at the terminals
labeled 4-20 mA Out or Signal Gnd).
2. Using the arrow keys, increase the numerical value to increase the current in the loop to 4 mA. Decrease the value to
decrease the current in the loop to 4 mA. Typical values range between 40…80 counts.
3. Reconnect the 4-20 mA output circuitry as required.
Page 41 March 2018 TTM-UM-00136-EN-08
Page 42

Conguration
20 mA Calibration Procedure
1. Disconnect one side of the current loop and connect the ammeter in series (disconnect either wire at the terminals
labeled 4-20 mA Out or Signal Gnd).
2. Using the arrow keys, increase the numerical value to increase the current in the loop to 20 mA. Decrease the value to
decrease the current in the loop to 20 mA. Typical values range between 3700…3900 counts.
3. Reconnect the 4-20 mA output circuitry as required.
Page 42 March 2018TTM-UM-00136-EN-08
Page 43

Conguration
Channel 2 Menu (CH2)
The CH2 menu is used to congure model specic I/O options. The Flow-Only model presents a dierent set of parameters
than the Energy model.
Options Menu
IT IS POSSIBLE TO CHOOSE OPTIONS PERTAINING ONLY TO THE FLOWONLY MODEL WHEN AN ENERGY MODEL IS
PRESENT. THE OPPOSITE IS ALSO TRUE. THE PROPER MENU TYPE MUST BE CHOSEN FOR THE ACTUAL METER. FOLLOW
THIS CAUTION OR TRANSMITTER READINGS WILL BE UNPREDICTABLE.
Parameter Meaning Options Description
Inputs from two 1000 Ohm platinum RTD temperature sensors allow
measurements of heating or cooling usage.
The values used to calibrate the RTD temperature sensors are derived
in the laboratory and are specific to the RTD and to the electronic
circuit it is connected to. The RTDs on new transmitters come with the
calibration values already entered into the Energy model and should
not need to be changed.
Field replacement of RTDs is possible thru the use of the keypad
or the UltraLink software utility. If the RTDs were ordered from the
manufacturer, they will come with calibration values that need to be
loaded into the Energy model.
New, non-calibrated RTDs will need to be field calibrated using an ice
bath and boiling water to derive calibration values. See “Replacing
RTDs” on page33.
Surface Mount RTDs
D010-3000-301
D010-3000-200 Single, 3 inch (75 mm), 0.25 inch OD
D010-3000-203 Single, 6 inch (150 mm), 0.25 inch OD
Set of two, 200° C maximum temperature (20 feet
of cable)
Insertion RTDs
RTD
Input values for Energy
models.
RTD1 A Calibration Value for RTD1 A
RTD1 B Calibration Value for RTD1 B
RTD2 A Calibration Value for RTD2 A
RTD2 B Calibration Value for RTD2 B
Output options for
Flow-Only models.
Scroll to the end of the
Options menu to select
CONTROL 1, CONTROL 2
or TOT MULT.
CONTROL 1 or
CONTROL/
HZ
RTD POS RTD position
CONTROL 2
Function of CONTROL
1 or CONTROL 2 digital
output
TOT MULT*
Totalizer multiplier
for CONTROL 1 or
CONTROL 2
ON* (Enter a numeric value) Sets value at which the alarm output will turn ON.
OFF* (Enter a numeric value) Sets value at which the alarm output will turn OFF.
The setup options for both CONTROL 1
and CONTROL 2 follow the same menu
path. For a complete view of the menu
options, see “Menu Maps” on page64.
Select one of the following:
FLOW—Flow Alarm Values
SIG STR—Signal Strength Alarm Values
ERRORS Outputs on any error condition.
NONE Outputs disabled.
POSTOTAL Output totalizing pulse for positive flow based on TOT MULT.
NEGTOTAL Output totalizing pulse for negative flow based on TOT MULT.
(Enter a numeric value)
NORMAL
SWAPPED
Two independent open collector transistor outputs are included with
the Flow-Only model. Each output can be configured independently.
Output turns on when flow is at or above the ON flow rate and turns off
when flow falls to or below the OFF flow rate. See “Rate Alarm Outputs”
on page27.
Output turns on when signal strength is at or above the ON signal
strength and turns off when signal strength falls to or below the OFF
signal strength.
Sets the multiplier value applied to the totalizing pulse output if
POSTOTAL or NEGTOTAL is selected for the output.
In cases that the RTD1 and RTD2 are mounted on the opposite pipes,
the parameter allows the RTD positions to be swapped virtually.
* TOT MULT, ON, and OFF parameters will appear when the corresponding option is selected.
Page 43 March 2018 TTM-UM-00136-EN-08
Page 44

Conguration
Sensor Menu (SEN)
The SEN MENU allows access to the various types of transducers the transmitter can work with. Selecting the proper
transducers in conjunction with the transducer mount XDCR MNT and transducer frequency XDCR HZ is critical to accurate
operation of the transmitter.
Parameter Meaning Options Description
DTTR (Use DTTN)
DTTN Used on pipes 2 inches (51 mm) and larger
DTTH High temperature version of DTTN
DTTL Used on pipes 24 inches (600 mm) and larger
For pipes 24 inches (600 mm) and larger the DTTL transducers using a transmission frequency of 500 kHz
are recommended.
DTTL transducers may also be advantageous on pipes between 4…24 inches if there are less quantifiable complicating
aspects such as, sludge, tuberculation, scale, rubber liners, plastic liners, thick mortar, gas bubbles, suspended solids,
emulsions, or pipes that are perhaps partially buried where a V-mount is required.
XDC TYPE Transducer Type
DT1500 Used with the M5-1500 and D1500 legacy transmitters.
COP TUBE 1/2…1-1/2 in. copper tubing used with DTTS and DTTC small pipe transducers
ASA PIPE 3/4…1-1/2 in. ANSI schedule pipes used with DTTS and DTTC small pipe transducers
TUBING 3/4 in. or larger stainless steel tubing used with DTTS and DTTC small pipe transducers
1/2 TUBE 1/2 in. stainless steel tubing used with DTTS and DTTC small pipe transducers
1/2 PIPE 1/2 in. ANSI schedule pipe (steel, PVC and so on) used with DTTS and DTTC small pipe transducers
1 INCH W 1 in. wetted transducer
2 IN PIPE 2 in. ANSI schedule pipe used with DTTS and DTTC small pipe transducers
2 IN
COPPER
2 in. copper tubing used with DTTS and DTTC small pipe transducers
Security Menu (SEC)
The SEC MENU menu allows access to transmitter functions that may need to be protected from changes.
Parameter Meaning Options Description
TOT RES Totalizer reset
SYS RSET System reset
CH PSWD
Change
password
YES
NO
YES
NO
0…9999
Resets the totalizing displayed on the LCD to zero.
Restarts the transmitter’s microprocessor. This is similar to power cycling the transmitter.
The password comes from the factory set to 0000. When set to 0000 the password function is disabled. By
changing the password from 0000 to some other value (any value between 0001…9999), configuration
parameters will not be accessible without first entering the password value when prompted. If the value is left
at 0000, no security is invoked and unauthorized changes can be made. Access to resetting of the totalizer is
also protected by this password. If the password is lost or forgotten, contact the manufacturer for a universal
password to unlock the transmitter.
Page 44 March 2018TTM-UM-00136-EN-08
Page 45

Conguration
Service Menu (SER)
The SER MENU menu allows access to transmitter setup values that may need revision due to application-specific conditions
and information valuable in troubleshooting.
Parameter Meaning Description
SSPD MPS
SSPD FPS
SIG STR
SIG COF
TEMP 1 C
TEMP 1 F
TEMP 2 C
TEMP 2 F
TEMP DIFF C
TEMP DIFF F
Liquid sound
speed in meters
per second,
reported by the
firmware
Liquid sound
speed in feet per
second
Signal strength
reported by the
firmware
Low signal cutoff
value
Temperature of
RTD 1
Temperature of
RTD 1
Temperature of
RTD 2
Temperature of
RTD 2
Temperature
difference
Temperature
difference
The transmitter performs an actual speed-of-sound calculation for the liquid it is measuring. The calculation varies with
temperature, pressure and fluid composition.
The transmitter compensates for fluid sound speeds that vary within a window of ± 10% of the liquid specified in the BSC
MENU. If this range is exceeded, error code 0011 appears on the display and you must correct the sound speed entry.
The value indicated in SSPD measurement should be within 10% of the value specified in the BSC MENU item FLUID SS. (The
SSPD value itself cannot be edited.) If the actual measured value is significantly different (> ± 10%) than the BSC MENU’s
FLUID SS value, there may be a problem with the instrument setup. An entry such as FL TYPE, PIPE OD or PIPE WT may be in
error, the pipe may not be round or the transducer spacing is not correct.
The following table lists sound speed values for water at varying temperatures. If the transmitter is measuring sound speed
within 2% of the table values, then the installation and setup of the instrument is correct.
Temperature Velocity Temperature Velocity Temperature Velocity
° C ° F mps fps ° C ° F mps fps ° C ° F mps fps
0 32 1402 4600 80 176 1554 5098 160 320 1440 4724
10 50 1447 4747 90 194 1550 5085 170 338 1412 4633
20 68 1482 4862 100 212 1543 5062 180 356 1390 4560
30 86 1509 4951 110 230 1532 5026 190 374 1360 4462
40 104 1529 5016 120 248 1519 4984 200 392 1333 4373
50 122 1543 5062 130 266 1503 4931 220 428 1268 4160
60 140 1551 5089 140 284 1485 4872 240 464 1192 3911
70 158 1555 5102 150 302 1466 4810 260 500 1110 3642
The SIG STR value is a relative indication of the amount of ultrasound making it from the transmitting transducer to
the receiving transducer. The signal strength is a blending of esoteric transit time measurements distilled into a usable
overall reference.
The measurement of signal strength assists service personnel in troubleshooting the transmitter system. In general, expect
the signal strength readings to be greater than five on a full pipe with the transducers properly mounted. Signal strength
readings that are less than five indicate a need to choose an alternative mounting method for the transducers or that an
improper pipe size has been entered.
Signal strength below the low signal cutoff SIG C-OF value will generate a 0010 error (Low Signal Strength) and require
either a change in the SIG C-OF value or transducer mounting changes.
OTE:N If the transmitter is configured to display totalizer values, the display will alternate between error 0010 and the
Signal strength readings in excess of 98 may indicate that a mounting method with a longer path length may be required.
For example, if transducers mounted on a 3 inch PVC pipe in V-Mount cause the measured signal strength value to exceed
98, change the mounting method to W-Mount for greater stability in readings.
Because signal strength is not an absolute indication of how well a transmitter is functioning, there is no real advantage to
a signal strength of 50 over a signal strength of 10.
0.0…100.0
Reported by the firmware in C°. When RTD is selected from the CH2 menu and RTDs are connected to the Energy model,
the firmware will display the temperature measured by RTD 1 in ° C.
Reported by the firmware in F°. When RTD is selected from the CH2 menu and RTDs are connected to the Energy model, the
firmware will display the temperature measured by RTD 1 in ° F.
Reported by the firmware in C°. When RTD is selected from the CH2 menu and RTDs are connected to the Energy model,
the firmware will display the temperature measured by RTD 2 in ° C.
Reported by the firmware in F°. When RTD is selected from the CH2 menu and RTDs are connected to the Energy model, the
firmware will display the temperature measured by RTD 2 in ° F.
Reported by the firmware in C°. When RTD is selected from the CH2 menu and RTDs are connected to the Energy model,
the firmware will display the difference in temperature measured between RTD 1 and RTD 2 in ° C.
Reported by the firmware in F°. When RTD is selected from the CH2 menu and RTDs are connected to the Energy model, the
firmware will display the difference in temperature measured between RTD 1 and RTD 2 in ° F.
Options:
totalizer value.
The SIG C-OF is used to drive the transmitter and its outputs to the SUB FLOW (Substitute Flow described
below) state if conditions occur that cause low signal strength. A signal strength indication below 5 is
generally inadequate for measuring flow reliably, so the minimum setting for SIG C-OF is 5. A good practice
is to set the SIG C-OF at approximately 60…70% of actual measured maximum signal strength.
OTE:N The factory default Signal Strength Cutoff is 5.
If the measured signal strength is lower than the SIG C-OF setting, an error 0010 will be shown on the
transmitter’s display until the measured signal strength becomes greater than the cutoff value.
A signal strength indication below 2 is considered to be no signal at all. Verify that the pipe is full of liquid,
the pipe size and liquid parameters are entered correctly, and that the transducers have been mounted
accurately. Highly aerated liquids will also cause low signal strength conditions.
Page 45 March 2018 TTM-UM-00136-EN-08
Page 46

Conguration
Service Menu (SER) continued
Parameter Meaning Options Description
Substitute Flow SUB FLOW is a value that the analog outputs and the flow rate display will indicate when
an error condition in the transmitter occurs. The typical setting for this entry is a value that will make the
instrument display zero flow during an error condition.
Substitute flow is set as a percentage between MIN RATE and MAX RATE. In a unidirectional system, this
value is typically set to zero to indicate zero flow while in an error condition. In a bidirectional system,
the percentage can be set such that zero is displayed in a error condition. To calculate where to set the
substitute flow value in a bidirectional system, perform the following calculation:
SUB FLOW
SET ZERO
DFLT 0
COR FTR
Substitute flow
value
Set zero flow
point
Set default zero
point
Correction
Factor
0.0…100.0
NO
YES
NO
YES
0.500…1.500
S ubstitute F low
Some typical settings to achieve zero with respect to MIN RATE and MAX RATE settings are listed below.
OTE:N *The UltraLink software utility is required to set values outside of 0.0…100.0.
Min Rate Setting Max Rate Setting Sub Flow Setting Display Reading During Errors
Because every transmitter installation is slightly different and sound waves can travel in slightly
different ways through these various installations, it is important to remove the zero offset at zero flow
to maintain the transmitter’s accuracy. A provision is made using this entry to establish “Zero” flow and
eliminate the offset.
1. The pipe must be full of liquid.
2. Flow must be absolute zero - securely close any valves and allow time for any settling to occur.
3. Press ENTER, use the arrow keys to make the display read YES.
4. Press ENTER.
If the flow in a piping system cannot be shut off, allowing the SET ZERO procedure described above to
be performed or if an erroneous “zero” flow was captured - like can happen if SET ZERO is conducted
with flowing fluid, then the factory default zero should be used. To use the D-FLT 0 function, simply
press ENTER, then press an arrow key to display YES on the display and then press ENTER.
The default zero places an entry of zero (0) into the firmware instead of the actual zero offset entered by
using the SET ZERO procedure.
This function can be used to make the transmitter agree with a different (or reference) transmitter by
applying a correction factor / multiplier to the readings and outputs. A factory calibrated system should
be set to 1.000. The range of settings for this entry is 0.500 to 1.500. The following examples describe two
uses for the COR FTR entry:
• The transmitter is indicating a flow rate that is 4% higher than another transmitter located in the
same pipe line. To make the transmitter indicate the same flow rate as the other transmitter, enter a
COR FTR of 0.960 to lower the readings by 4%.
• An out-of-round pipe, carrying water, causes the transmitter to indicate a measured sound speed
that is 7.4% lower than the Table 4.5 value. This pipe condition will cause the transmitter to indicate
flow rates that are 7.4% lower than actual flow. To correct the flow readings, enter 1.074.
100
×
=
100 -
Max imum Flow Minimum F low
Max imum Flow
-
0.0 1000.0 0.0 0.000
-500.0 500.0 50.0 0.000
-100.0 200.0 33.3 0.000
0.0 1000.0 -5.0* -50.00
Page 46 March 2018TTM-UM-00136-EN-08
Page 47

Parameter Conguration Using UltraLink Software
Display Menu (DSP)
The DISPLAY menu parameters control what is shown on the display and the rate at which displayed items alternate
(dwell time).
Parameter Meaning Options Description
DISPLAY Display
POS, Positive Flow Only
TOTAL Totalizer options
SCN DWL
BTCH MUL Batch multiplier (Enter a value)
Screen display
dwell time
NEG, Negative Flow Only
NET, Net Flow
BATCH, Batch Mode
FLOW
TOTAL
BOTH
1…10 seconds
The transmitter will only display the flow rate with the DISPLAY set to FLOW - it will not
display the total flow. The transmitter will only display the total flow with the DISPLAY set
to TOTAL - it will not display the flow rate. By selecting BOTH, the display will alternate
between FLOW and TOTAL at the interval selected in SCN DWL.
Select POS to view the positive direction total only. Select NEG to view the negative
direction total only. Select NET to display the net difference between the positive direction
and negative direction totals. Select the BAT CH to configure the totalizer to count up to
a value that is entered as BTCH MUL. After reaching the BTCH MUL value, the display will
return to zero and will repeat counting to the BTCH MUL value.
Adjustment of SCN DWL sets the time interval that the display will dwell at FLOW and then
alternately TOTA L values when BOTH is chosen from the display submenu. This adjustment
range is from 1…10 seconds.
BTCH MUL, Batch Multiplier (Value)
If BAT CH was chosen for the totalizer mode, a value for batch accumulation must be
entered. This is the value to which the totalizer will accumulate before resetting to zero
and repeating the accumulation. This value includes any exponents that were entered in
the BSC MENU as TOTAL E.
For example:
1. If BTCH MUL is set to 1000, RATE UNT to LITERS and TOTL E to E0 (liters × 1), then the
batch totalizer will accumulate to 1000 liters, return to zero and repeat indenitely.
The totalizer will increment 1 count for every liter that has passed.
2. If BTCH MUL is set to 1000, RATE UNT to LITERS and TOTL E to E2 (liters × 100), then the
batch totalizer will accumulate to 100,000 liters, return to zero and repeat indenitely.
The totalizer will only increment 1 count for every 100 liters that has passed.
Page 47 March 2018 TTM-UM-00136-EN-08
Page 48

Parameter Conguration Using UltraLink Software
PARAMETER CONFIGURATION USING ULTRALINK SOFTWARE
The UltraLink software utility is used for configuring, calibrating and communicating with transit time flow meters. It has
numerous troubleshooting tools to make diagnosing and correcting installation problems easier.
A PC can be hard-wired to the transmitter through a standard USB connection.
System Requirements
The software requires a PC-type computer, running Windows 98, Windows ME, Windows 2000, Windows NT, Windows XP,
Windows Vista or Windows 7 operating systems and a USB communications port.
Installation
1. From the Windows Start button, choose the Run command. From the Run dialog box, use Browse to navigate to the
USP_Setup.exe le and double-click.
2. The USP Setup will automatically extract and install on the hard disk. The USP icon can then be copied to the desktop.
OTE:N If a previous version of this software is installed, it must be un-installed before a new version of the software can be
installed. Newer versions will ask to remove the old version and perform the task automatically. Older versions must
be removed using the Microsoft Windows Add/Remove Programs applet.
OTE:N Most PCs will require a restart after a successful installation.
Initialization
1. Connect the B end of the USB 2.0 A/B communications cable (P.N. D005-2117-003) to the transmitter’s USB communication
port and the A end to a USB port on the computer.
OTE:N Power up the transmitter prior to running this software.
OTE:N While the USB cable is connected, the RS485 and frequency outputs are disabled.
2. Double-click the USP icon to start the software.
UltraLink software will attempt to connect to the transmitter. If communications cannot be established, you will be prompted
to select a Com Port and Com Port Type. For a USB cable connection, select COM6 and RS232 / USB.
Figure 40: Serial port connection
Page 48 March 2018TTM-UM-00136-EN-08
Page 49

Parameter Conguration Using UltraLink Software
The first screen is the RUN mode screen, which contains real-time information regarding flow rate, totals, signal strength,
communications status, and the transmitter’s serial number. The COMM indicator in the lower right corner indicates that the
serial connection is active. If the COMM box contains a red ERROR indication, select Communications on the Menu bar and
select Initialize. Choose the appropriate COM port and the RS232 / USB Com Port Type. Proper communication is verified
when a green OK is indicated in the lower right corner of the PC display and the Last Update indicator in the text area on the
left side of the screen changes from red to an active clock indication.
Figure 41: Data display screen
Page 49 March 2018 TTM-UM-00136-EN-08
Page 50

Conguration Menu
CONFIGURATION MENU
The Configuration menu has six tabs used to control how the transmitter is set up and responds to varying
Configuration
flow conditions. The first screen that appears after clicking the Configuration button is the Basic tab.
Figure 42: Basic tab
Basic Tab
Use the General options to select the measurement system—English (inches) or Metric (millimeters)—for transmitter setup,
and choose from a number of pre-programmed small pipe configurations in the Standard Configurations drop-down menu. If
the general entries are altered from those at transmitter startup, click Download and cycle power to the transmitter.
When using the Standard Configurations drop-down menu alternate, menu choices can be made by using the
following guidelines:
1. Select the transducer type and pipe size for the transducer to be used. The rmware will automatically enter the
appropriate values for that pipe size and type. Every entry parameter except for Units, Modbus Address, Standard
Congurations, Frequency, Flow Direction and Specic Heat Capacity will be unavailable behind a grayed out entry box.
2. Go back to the Standard Congurations drop-down menu and select Custom. As soon as Custom is chosen, the previously
grayed out selections will become available for editing.
3. Make any changes to the basic conguration deemed necessary and click Download.
4. To ensure that the conguration changes take eect, turn the power o and then back on again to the transmitter.
Also under the General heading is a field for entering a Modbus address. If the transmitter is to be used on a multi-drop RS485
network, it must be assigned a unique numerical address. This box allows that unique address to be chosen.
OTE:N This address does not set the Modbus TCP/IP, EtherNet/IP, BACnet address. That is set via the web page interface that
is integrated into the Ethernet port.
OTE:N Do not confuse the Modbus address with the device address as seen in the upper left-hand corner of the display. The
Device Addr is included for purposes of backward compatibility of first generation transmitter products. The device
address has no function and will not change when used with this transmitter family.
Page 50 March 2018TTM-UM-00136-EN-08
Page 51

Conguration Menu
Transducer Type selects the transducer that will be connected to the transmitter. Select the appropriate transducer type from
the drop-down list. This selection influences transducer spacing and transmitter performance, so it must be correct. If you are
unsure about the type of transducer to which the transmitter will be connected, consult the shipment packing list or call the
manufacturer for assistance.
OTE:N A change of transducer type will cause a system configuration error 1002: Sys Config Changed to occur. This error will
clear when the microprocessor is reset or power is cycled on the transmitter.
Transducer Mount selects the orientation of the transducers on the piping system. See “Transducer Installation” on page15
and Table 3 on page17 for detailed information regarding transducer mounting modes for particular pipe and liquid
characteristics. Whenever the transducer mounting mode is changed, a download command and subsequent microprocessor
reset or transmitter power cycle must be conducted.
Transducer Frequency selects a transmission frequency for the various types of transducers. In general, the larger the pipe the
slower the transmission frequency needs to be to attain a good signal.
Frequency Transducers Mounting Modes Pipe Size and Type
2 MHz
1 MHz
500 kHz Large Pipe W, V, and Z 24 in. and Greater
All 1/2…1-1/2 in. Small Pipe and Tube
2 in. Tubing
2 in. ANSI Pipe and Copper Tube Selected by Firmware Specific to Transducer
Standard and High Temp W, V, and Z 2 in. and Greater
Table 9: Transducer Frequencies
Selected by Firmware Specific to Transducer
Transducer Spacing is a value calculated by the transmitter’s firmware that takes into account pipe, liquid, transducer and
mounting information. This spacing will adapt as these parameters are modified. The spacing is given in inches for English
units selection and millimeters for metric. This value is the lineal distance that must be between the transducer alignment
marks. Selection of the proper transducer mounting method is not entirely predictable and many times is an iterative process.
OTE:N This setting only applies to DTTR, DTTN, DTTL and DTTH transducers.
Transducer Flow Direction allows the change of the direction the transmitter assumes is forward. When mounting transmitters
with integral transducers, use this feature to reverse upstream and downstream transducers, making upside-down mounting
of the display unnecessary.
Select a Pipe Material the pull-down list. If the pipe material used is not found in the list, select Other and enter the actual
pipe material Sound Speed and Roughness (much of this information is available at web sites such as www.ondacorp.com/
tecref_acoustictable.html) for pipe relative roughness calculations.
Pipe O.D. and Wall Thickness are based on the physical dimensions of the pipe on which the transducers will be mounted.
Enter this value in inches for English units or millimeters for metric units.
OTE:N See “North American Pipe Schedules” on page110 for charts listing popular pipe sizes. Correct entries for pipe O.D.
and pipe wall thickness are critical to obtaining accurate flow measurement readings.
Liner Material is selected from the pull-down list. If the pipe liner material used is not included in the list, select Other and
enter liner material Sound Speed and Roughness (much of this information is available at web sites such as www.ondacorp.
com/tecref_acoustictable.html). See “Liner material relative roughness” on page 38 for pipe liner relative roughness calculations.
Fluid Type is selected from a pull-down list. If the liquid is not found in the list, select Other and enter the liquid Sound Speed
and Absolute Viscosity into the appropriate boxes. The liquid’s specific gravity is required if mass measurements are to be
made, and the specific heat capacity is required for energy measurements.
Use the RS485 Communications option to change the RS485 Baud Rate and BACnet MSTP Device ID (used in the Microchip
communications microcontroller).
Page 51 March 2018 TTM-UM-00136-EN-08
Page 52

Conguration Menu
Flow Tab
Flow Rate Units are selected from the drop-down lists. Select an appropriate rate unit and time from the two lists. This entry
also includes the selection of Flow Rate Interval after the virgule ( / ) sign.
Totalizer Units are selected from dropdown lists. Select an appropriate totalizer unit and totalizer exponent. The totalizer
exponents are in scientific notation and permit the eight digit totalizer to accumulate very large values before the totalizer
“rolls over” and starts again at zero.
Figure 43: Flow tab
Min Flow is the minimum volumetric flow rate setting entered to establish filtering parameters. Volumetric entries will be in
the flow rate units. For unidirectional measurements, set Min Flow to zero. For bidirectional measurements, set Min Flow to the
highest negative (reverse) flow rate expected in the piping system.
Max Flow is the maximum volumetric flow rate setting entered to establish filtering parameters. Volumetric entries will be in
the flow rate units. For unidirectional measurements, set Max Flow to the highest (positive) flow rate expected in the piping
system. For bidirectional measurements, set Max Flow to the highest (positive) flow rate expected in the piping system.
Low Flow Cutoff is provided to allow very low flow rates (that can be present when pumps are off and valves are closed) to be
displayed as zero flow. Typical values that should be entered are between 1.0…5.0% of the flow range between
Min Flow and Max Flow.
Low Signal Cutoff is used to drive the transmitter and its outputs to the value specified in the Substitute Flow field when
conditions occur that cause low signal strength. A signal strength indication below 5 is generally inadequate for measuring
flow reliably, so generally the minimum setting for low signal cutoff is 5. A good practice is to set the low signal cutoff at
approximately 60…70% of actual measured maximum signal strength. The factory default low signal cutoff is five.
If the measured signal strength is lower than the low signal cutoff setting, a Signal Strength too Low highlighted in red will
become visible in the text area to the left in the Data Display screen until the measured signal strength becomes greater than
the cutoff value.
Signal strength indication below two is considered to be no signal at all. Verify that the pipe is full of liquid, the pipe size and
liquid parameters are entered correctly, and that the transducers have been mounted accurately. Highly aerated liquids will
also cause low signal strength conditions.
Substitute Flow is a value that the analog outputs and the flow rate display will indicate when an error condition in the
transmitter occurs. The typical setting for this entry is a value that will make the instrument display zero flow during an
error condition.
Substitute flow is set as a percentage between Min Flow and Max Flow. In a unidirectional system, this value is typically set
to zero to indicate zero flow while in an error condition. In a bidirectional system, the percentage can be set such that zero is
displayed in an error condition. To calculate where to set the Substitute Flow value in a bidirectional system, use:
100
×
=
S ubstitute F low
100 -
Max imum Flow Minimum F low
Max imum Flow
-
Page 52 March 2018TTM-UM-00136-EN-08
Page 53

Conguration Menu
Entry of data in the Basic and Flow tabs is all that is required to provide flow measurement functions to the transmitter. If
you are not going to use input/output functions, click Download to transfer the configuration to the transmitter. When the
configuration has been completely downloaded, turn the power to the transmitter off and then on again to guarantee the
changes take effect.
Filtering Tab
The Filtering tab contains several filter settings for the transmitter. These filters can be adjusted to match response times and
data “smoothing” performance to a particular application.
Figure 44: Filtering tab
Time Domain Filter (range 1…256) adjusts the number of raw data sets (the wave forms viewed on the software Diagnostics
Screen) that are averaged together. Increasing this value will provide greater damping of the data and slow the response
time of the transmitter. Conversely, lowering this value will decrease the response time of the transmitter to changes in flow/
energy rate. This filter is not adaptive, it is operational to the value set at all times.
OTE:N The transmitter completes a measurement in approximately 350…400 mS. The exact time is pipe size dependent.
Flow Filter (Damping) establishes a maximum adaptive filter value. Under stable flow conditions (flow that varies less than the
Flow Filter Hysteresis entry), this adaptive filter will increase the number of successive flow readings that are averaged together
up to this maximum value. If flow changes outside of the flow filter hysteresis window, the filter adapts by decreasing the
number of averaged readings and allows the transmitter to react faster.
The damping value is increased to increase stability of the flow rate readings. Damping values are decreased to allow the
transmitter to react faster to changing flow rates. The factory settings are suitable for most installations. Increasing this value
tends to provide smoother steady-state flow readings and outputs.
Flow Filter Hysteresis creates a window around the average flow measurement reading allowing small variations in flow
without changing the damping value. If the flow varies within that hysteresis window, greater display damping will occur up
to the maximum values set by the flow filter entry. The filter also establishes a flow rate window where measurements outside
of the window are examined by the Bad Data Rejection filter. The value is entered as a percentage of actual flow rate.
For example, if the average flow rate is 100 gpm and the Flow Filter Hysteresis is set to 5%, a filter window of 95…105 gpm is
established. Successive flow measurements that are measured within that window are recorded and averaged in accordance
with the Flow Filter Damping setting. Flow readings outside of the window are held up in accordance with the Bad Data
Rejection filter.
Flow Filter MinHysteresis sets a minimum hysteresis window that is invoked at sub 0.25 fps (0.08 mps) flow rates, where the “of
rate” flow filter hysteresis is very small and ineffective. This value is entered in pico-seconds (ρsec) and is differential time. If
very small fluid velocities are to be measured, increasing the flow filter minhysteresis value can increase reading stability.
Flow Filter Sensitivity allows configuration of how fast the Flow Filter Damping will adapt in the positive direction.
Increasing this value allows greater damping to occur faster than lower values. Adaptation in the negative direction is not
user adjustable.
Page 53 March 2018 TTM-UM-00136-EN-08
Page 54

Conguration Menu
Bad Data Rejection is a value related to the number of successive readings that must be measured outside of the Flow Filter
Hysteresis or Flow Filter MinHysteresis windows before the transmitter will use that flow value. Larger values are entered into
Bad Data Rejection when measuring liquids that contain gas bubbles, as the gas bubbles tend to disturb the ultrasonic signals
and cause more extraneous flow readings to occur. Larger Bad Data Rejection values tend to make the transmitter more
sluggish to rapid changes in actual flow rate.
Output Tab
The entries made in the Output tab establish input and output parameters for the transmitter. Select the appropriate function
from the pull-down menu and click Download. When a function is changed from the factory setting, a configuration error
1002 will result. This error will be cleared by resetting the transmitter microprocessor from the Communications/Commands/
Reset Target button or by cycling power on the transmitter. Once the proper output is selected and the microprocessor is
reset, calibration and configuration of the modules can be completed.
Figure 45: Output tab
Channel 1, 4-20 mA Configuration
OTE:N The 4-20 mA Output menu applies to all transmitters and is the only output choice for Channel 1.
The channel 1 menu controls how the 4-20 mA output is spanned for all models and how the frequency output is spanned for
the flow-only model.
The Flow at 4 mA / 0 Hz and Flow at 20 mA / 1000 Hz settings are used to set the span for both the 4-20 mA output and the
0…1000 Hz frequency output on the Flow-Only model.
The 4-20 mA output is internally powered (current sourcing) and can span negative to positive flow/energy rates. This output
interfaces with virtually all recording and logging systems by transmitting an analog current that is proportional to system
flow rate. Independent 4 mA and 20 mA span settings are established in firmware using the flow measuring range entries.
These entries can be set anywhere in the –40…40 fps (–12 …12 mps) range of the instrument. Resolution of the output is
12 bits (4096 discrete points) and can drive up to a 400 Ohm load when the transmitter is AC powered. When powered by a
DC supply, the load is limited by the input voltage supplied to the instrument. See Figure 23 for allowable loop loads.
Flow at 4 mA / 0 Hz
Flow at 20 mA / 1000 Hz
The Flow at 4 mA / 0 Hz and Flow at 20 mA / 1000 Hz entries are used to set the span of the 4-20 mA analog output and
the frequency output on Flow-Only model. These entries are volumetric rate units that are equal to the volumetric units
configured as rate units and rate interval.
For example, to span the 4-20 mA output from –100…100 gpm with 12 mA being 0 gpm, set the Flow at 4 mA / 0 Hz and Flow
at 20 mA / 1000 Hz inputs as follows:
Flow at 4 mA / 0 Hz = –100.0
Flow at 20 mA / 1000 Hz = 100.0
Page 54 March 2018TTM-UM-00136-EN-08
Page 55

Conguration Menu
If the transmitter is a Flow-Only model, this setting would also set the span for the frequency output. At –100 gpm, the output
frequency would be 0 Hz. At the maximum flow of 100 gpm, the output frequency would be 1000 Hz, and in this instance a
flow of zero would be represented by an output frequency of 500 Hz.
Example 2 – To span the 4-20 mA output from 0 …100 gpm with 12 mA being 50 gpm, set the Flow at 4 mA / 0 Hz and Flow at
20 mA / 1000 Hz inputs as follows:
Flow at 4 mA / 0 Hz = 0.0
Flow at 20 mA / 1000 Hz = 100.0
For the transmitter, in this instance, zero flow would be represented by 0 Hz and 4 mA. The full scale flow or 100 gpm would
be 1000 Hz and 20 mA and a midrange flow of 50 gpm would be expressed as 500 Hz and 12 mA.
The 4-20 mA output is factory calibrated and should not require adjustment. If small adjustments to the DAC (Digital to
Analog Converter) are needed, for instance if adjustments due to the accumulation of line losses from long output cable
lengths are required, the Calibration 4 mA and Calibration 20 mA can be used.
Calibration 4 mA — 4 mA DAC Calibration Entry (Value)
Calibration 20 mA— 20 mA DAC Calibration Entry (Value)
The Calibration 4 mA and Calibration 20 mA entries allows fine adjustments to be made to the “zero” and full scale of the 4-20
mA output. To adjust the outputs, an ammeter or reliable reference connection to the 4-20 mA output must be present.
OTE:N Calibration of the 20 mA setting is conducted much the same way as the 4 mA adjustments.
OTE:N The Calibration 4 mA and Calibration 20 mA entries should not be used in an attempt to set the 4-20 mA range. Use
Flow at 4 mA / 0 Hz and Flow at 20 mA / 1000 Hz detailed above for this purpose.
4 mA Calibration Procedure
1. Disconnect one side of the current loop and connect the ammeter in series (disconnect either wire at the terminals
labeled 4-20 mA Out or Signal Gnd).
2. Using the arrow keys, increase the numerical value to increase the current in the loop to 4 mA. Decrease the value to
decrease the current in the loop to 4 mA. Typical values range between 40…80 counts.
3. Reconnect the 4-20 mA output circuitry as required.
20 mA Calibration Procedure
1. Disconnect one side of the current loop and connect the ammeter in series (disconnect either wire at the terminals
labeled 4-20 mA Out or Signal Gnd).
2. Using the arrow keys, increase the numerical value to increase the current in the loop to 20 mA. Decrease the value to
decrease the current in the loop to 20 mA. Typical values range between 3700…3900 counts.
3. Reconnect the 4-20 mA output circuitry as required.
4-20 Test, 4-20 mA Output Test (Value)
Allows a simulated flow value to be sent from the 4-20 mA output. By incrementing this value, the 4-20 mA output will
transmit the indicated current value.
Page 55 March 2018 TTM-UM-00136-EN-08
Page 56

Conguration Menu
Channel 2, RTD Configuration for Energy Model Only
OTE:N The Channel 2 Menu is used to configure model specific I/O options. The Flow-Only model presents a different set of
parameters than the Energy model.
IT IS POSSIBLE TO CHOOSE OPTIONS PERTAINING ONLY TO THE FLOWONLY MODEL WHEN AN ENERGY MODEL IS
PRESENT. THE OPPOSITE IS ALSO TRUE. THE PROPER MENU TYPE MUST BE CHOSEN FOR THE ACTUAL TRANSMITTER. IF
NOT, THE OUTPUTS OR TRANSMITTER READINGS WILL BE UNPREDICTABLE.
Inputs from two 1000 Ohm platinum RTD temperature sensors allow the measurement of energy delivered in liquid heating
and cooling systems.
The values used to calibrate the RTD temperature sensors are derived in the laboratory and are specific to a specific RTD. The
RTDs on new transmitters come with the calibration values already entered into the Energy model and should not need to
be changed.
Field replacement of RTDs is possible thru the use of the keypad or the software. If the RTDs were ordered from the
manufacturer, they will come with calibration values that need to be loaded into the Energy model.
RTD Calibration Procedure
1. Enter the calibration values for RTD #1 A and RTD #1 B followed by RTD #2 A and RTD #2 B.
2. Double-click Download to send the values to memory.
3. Turn the power o and then back on to the transmitter to enable the changes to take eect.
Figure 46: Channel 2 input (RTD)
New, non-calibrated RTDs will need to be field calibrated using an ice bath and boiling water to derive calibration values. See
“In-Field Calibration of RTD Temperature Sensors” on page92.
Page 56 March 2018TTM-UM-00136-EN-08
Page 57

Conguration Menu
Channel 2, Control Output Configuration for Flow-Only Model
Two independent open-collector transistor outputs are included with the Flow-Only model. Each output can be
configured independently.
Figure 47: Channel 2 output choices
None
All alarm outputs are disabled.
Batch / Total
Multiplier value to which the totalizer will accumulate before resetting to zero and
repeating the accumulation. This value includes any exponents that were entered in the
BASIC menu as TOTAL E.
Flow
ON sets value at which the alarm output will switch from OFF to ON.
OFF sets value at which the alarm output will switch from ON to OFF.
Signal Strength
ON sets value at which the alarm output will turn ON.
OFF sets value at which the alarm output will turn OFF.
Errors
Alarm outputs on any error condition. See “Brad Harrison® Connector Option” on page95.
Page 57 March 2018 TTM-UM-00136-EN-08
Page 58

Conguration Menu
Security Tab
Use the Security tab to enter your system password.
Figure 48: Security tab
Display Tab
Use the Display tab to select display options.
Figure 49: Display tab
Page 58 March 2018TTM-UM-00136-EN-08
Page 59

STRATEGY MENU
The Strategy menu parameters are factory-set. To change these parameters, call Technical Support.
Strategy Menu
Figure 50: Strategy menu
Page 59 March 2018 TTM-UM-00136-EN-08
Page 60

Calibration Menu
CALIBRATION MENU
The Calibration menu contains a powerful multi-point routine for calibrating the transmitter to a primary
Calibration
The first screen, Page 1 of 3 establishes a baseline zero flow rate measurement for the transmitter.
measuring standard in a particular installation. To initialize the three-step calibration routine, click Calibration.
Figure 51: Calibration Page 1 of 3
Remove the Zero Oset
Because every transmitter installation is slightly different and sound waves can travel in slightly different ways through these
installations, it is important to remove the zero offset at zero flow to maintain the transmitter’s accuracy. The zeroing process
is essential in systems using the DTTS and DTTC transducer sets for accuracy. To establish zero flow and eliminate the offset:
1. Establish zero ow in the pipe (verify that the pipe is full of uid, turn o all pumps, and close a dead-heading valve). Wait
until the delta time interval shown in Current Delta T is stable (and typically very close to zero).
2. Click Set.
3. Click Next when prompted, then click Finish to advance to Page 2 of 3.
Select Flow Rate Units
Use Page 2 of 3 to select the engineering units for the calibration.
1. Select an engineering unit from the Flow Rate Units drop-down menu.
2. Click Next to advance to Page 3 of 3.
Figure 52: Calibration page 2 of 3
Page 60 March 2018TTM-UM-00136-EN-08
Page 61

Calibration Menu
Set Multiple Flow Rates
Use Page 3 of 3 to set multiple actual flow rates to be recorded by the transmitter.
To calibrate a point:
1. Establish a stable, known ow rate (veried by a real-time primary ow instrument).
2. Enter the actual ow rate in the Flow window and click Set.
3. Repeat for as many points as desired.
4. Click Finish when you have entered all points.
If you are using only two points (zero and span), use the highest flow rate anticipated in normal operation as the calibration
point. If an erroneous data point is collected, remove it (click Edit, select the bad point, click Remove).
Figure 53: Calibration page 3 of 3
Zero values are not valid for linearization entries. Flow meter zero is entered on Page 1 of 3. If a zero calibration point is
attempted, the following error message displays:
Figure 54: Zero value error
Page 61 March 2018 TTM-UM-00136-EN-08
Page 62

Calibration Menu
UltraLink Error Codes
Revised 9-19-2014
Code Description Correction
0001 Serial number not present
Signal Strength is below Signal Strength Cutoff
0010
Warnings
Class C
Errors
Class B
Errors
Class A
Errors
entry
Measured speed of sound in the liquid is greater
0011
than ±10% of the value entered during
transmitter setup
0020 Heat flow is selected and there is no RTD
1001 System tables have changed
1002 System configuration has changed
3001 Invalid hardware configuration Upload corrected file.
3002 Invalid system configuration Upload corrected file.
3003 Invalid strategy file Upload corrected file.
3004 Invalid calibration data Re-calibrate the system.
3005 Invalid speed-of-sound calibration data Upload new data.
3006 Bad system tables Upload new table data.
4001 Flash memory full Return transmitter to factory for evaluation
Hardware serial number has become inoperative – system
performance will not be influenced.
Low signal strength is typically caused by one of the
following:
» Empty pipe
» Improper programming/incorrect values
» Improper transducer spacing
» Non-homogeneous pipe wall
Removing the resistors from the transducer terminal block
can boost the signal.
Verify that the correct liquid was selected in the BASIC menu.
Verify that pipe size parameters are correct.
Verify that you are using an Energy model and that the RTDs
are connected.
Initiate a transmitter RESET by cycling power or by selecting
SYSTEM RESET in the SEC MENU.
Initiate a transmitter RESET by cycling power or by selecting
SYSTEM RESET in the SEC MENU.
Table 10: Error codes
Page 62 March 2018TTM-UM-00136-EN-08
Page 63

Calibration Menu
Target Dbg Data Screen Denitions
Field Description
Device Type Auto-filled.
Calc Count The number of flow calculations performed by the transmitter beginning at the time the power to the transmitter was last turned off
Sample Count The number of samples currently being taken in one second.
Raw Delta T (ηs) The actual amount of time it takes for an ultrasonic pulse to cross the pipe.
Course Delta T The transmitter series that uses two wave forms. The coarse to find the best delay and other timing measurements and a fine to do
Gain The amount of signal amplification applied to the reflected ultrasound pulse to make it readable by the digital signal processor.
Gain Setting/
Waveform Power
Tx Delay The amount of time the transmitting transducer waits for the receiving transducer to recognize an ultrasound signal before the
Flow Filter The current value of the adaptive filter.
SS (Min/Max) The minimum and maximum signal strength levels encountered by the transmitter beginning at the time the power to the
Signal Strength State indicates if the present signal strength minimum and maximum are within a pre–programmed signal strength window.
Sound Speed The actual sound speed being measured by the transducers at that moment.
Reynolds is a number indicating how turbulent a fluid is. Reynolds numbers between 0 and 2000 are considered laminar flow. Numbers
Reynolds Factor The value applied to the flow calculation to correct for variations in Reynolds numbers.
and then on again.
the flow measurement.
The first number The gain setting on the digital pot (automatically controlled by the AGC circuit). Valid numbers are from 1…100. The
second number The power factor of the current waveform being used. For example, 8 indicates that a 1/8 power wave form is being
used.
transmitter initiates another measurement cycle.
transmitter was last turned off and then on again.
between 2000…4000 are in transition between laminar and turbulent flows and numbers greater than 4000 indicate turbulent flow.
Figure 55: Target Dbg data screen
Saving the Conguration on a PC
The complete configuration of the transmitter can be saved from the Configuration screen. Select File Save button located in
the lower left-hand corner of the screen and name the file. Files are saved as a *.dcf extension. This file may be transferred to
other transmitters or may be recalled should the same pipe be surveyed again or multiple transmitters programmed with the
same information.
Printing a Conguration Report
Select File > Print to print a calibration/configuration information sheet for the installation.
Page 63 March 2018 TTM-UM-00136-EN-08
Page 64

Menu Maps
MENU MAPS
Basic Menu
UNITS
Programming Units
English
Metric
ADDRESS
Multi-Drop Device Address
Numeric Entry (1 . . . 126)
BAUD
Baud Rate of RS485
9600
14400
19200
38400
56000
57600
76800
BACNET ID
BACnet Device ID Value
0 . . . 4194303
XDCR MNT
Transducer Mounting
V
W
Z
XDCR HZ
Transducer Frequency
1 MHz
2 MHz
500 kHZ
FLOW DIR
Flow Direction
Forward
Reverse
PIPE OD
Pipe Outside Diameter
English (Inches)
Metric (mm)
PIPE WT
Pipe Wall Thickness
English (Inches)
Metric (mm)
PIPE MAT
Pipe Material
Acrylic
Aluminum
Brass (Naval)
Carbon Steel
Cast Iron
Copper
Ductile Iron
Fiberglass-Epoxy
Glass Pyrex
Nylon
HD Polyethylene
LD Polyethylene
Polypropylene
PVC CPVC
PVDF
St Steel 302/303
St Steel 304/316
St Steel 410
St Steel 430
PFA
Titanium
Asbestos
Other
PIPE SS
Pipe Sound Speed
English (FPS)
Metric (MPS)
PIPE R
Relative Roughness
Numeric Entry
LINER T
Pipe Liner Thickness
English (Inches)
Metric (mm)
LINER MA
Pipe Liner Material
Ebonite
Mortar
HDPE
LDPE
Polypropylene
Polystyrene
Rubber
Tar Epoxy
Teon PFA
Other
LINER SS
Pipe Liner Sound Speed
English (FPS)
Metric (MPS)
LINER R
Liner Roughness
Numeric Entry
FL TYPE
Fluid Type
Water Tap
Sewage
Acetone
Alcohol
Ammonia
Benzene
Brine
Ethanol
Ethylene Glycol
Gasoline
Glycerin
Isoproply Alcohol
Kerosene
Methanol
Oil Hydraulic
Oil Lubricating
(SAE 20/30)
Oil Motor
Water Distilled
Water Sea
Other
(petro-base)
Fluid Sound Speed
English (FPS)
Metric (MPS)
SP GRVTY
Specic Gravity
Numeric Entry
Nominal Heat Capacity
Numeric Entry
Transducer Spacing
English (Inches)
Metric (mm)
Note:
This value is calculated
by rmware.
RATE UNT
Oil Barr
Liq Barr (31.5 Gal)
1
FLUID SS
FLUID VI
Fluid Viscosity
CPS
SP HEAT
XDC SPAC
Rate Units
Gallons
Liters
MGal
Cubic Ft
Cubic Me
Acre Ft
(42 Gal)
Feet
Meters
LB
KG
1
BTU
1
MBTU
MMBTU
1
TONHR
1
kJ
1
kWH
1
MWH
RATE INT
Rate Interval
Sec
Min
Hour
Day
TOTL UNT
Total Units
Gallons
Liters
MGal
Cubic Ft
Cubic Me
Acre Ft
(42 Gal)
Oil Barr
Liq Barr (31.5 Gal)
Feet
Meters
LB
KG
1
BTU
1
MBTU
1
MMBTU
1
TONHR
1
kJ
1
kWH
1
MWH
TOTL E
Totalizer Exponent
E-1(-10)
E0 (X1)
E1 (X10)
E2 (X100)
E3 (X1,000)
E4 (X10,000)
E5 (X100,000)
E6 (X1,000,000)
1
The heat ow
measurements only
appear when RTD is
chosen in the Output 2
menu.
MIN RATE
Minimum Flow Rate
Numeric Entry
MAX RATE
Maximum Flow Rate
Numeric Entry
FL C-OFF
Low Flow Cuto
Numeric Entry
DAMP PER
Damping Percentage
Numeric Entry
Channel 1 Menu
4-20MA
4-20 mA Setup
FL 4MA
FL 20MA
CAL 4MA
CAL 20MA
4-20 TST
Page 64 March 2018TTM-UM-00136-EN-08
Page 65

Menu Maps
Channel 2 Menu
• The Channel 2 menu allows the configuration of meter-specific I/O parameters.
• RTD values are specific to a particular RTD.
• The menu structure and programming are identical for both Control 1 and Control 2, but the choice of function for a
specific control output is independent of the other.
OPTIONS
Channel 2 Options
RTD
CONTROL/HZ
CONTROL
Control Number Choice
CONTROL 1
CONTROL 2
RTD
RTD Calibration Values
RTD1 A
RTD1 B
RTD2 A
RTD2 B
RTD POS
FLOW
Flow Output On/O Values
ON (Value)
OFF (Value)
Sensor Menu
XDC TYPE
Transducer Type Selection
050SX
050HX
050LX
0NNSC
0NNSP
0NNSM
CONTROL/HZ
Control / Frequency Choices
TOTALIZE
FLOW
SIG STR
ERRORS
NONE
POSTOTAL
NEGTOTAL
Security Menu
TOT MULT
Totalizer Multiplier
TOT MULT (Value)
Signal Strength Values
ON (Value)
OFF (Value)
SEC MENU
Security Menu
TOTAL RESET
SYSTEM RESET
CHANGE PASSWORD
SIG STR
Service Menu
SER MENU
Service Menu
SOUND SPEED MPS
SOUND SPEED FPS
SIGNAL STRENGTH
TEMPERATURE 1 C
TEMPERATURE 1 F
TEMPERATURE 2 C
TEMPERATURE 2 F
DIFF TEMP C
DIFF TEMP F
LOW SIGNAL CUTOFF
SUBSTITUTE FLOW
SET ZERO
DEFAULT ZERO
CORRECTION FACTOR
Display Menu
DISPLAY
Items Shown on Display
FLOW
TOTAL
BOTH
TOTAL
Totalizing Mode
NET
POSITIVE
NEGATIVE
BATCH
SCN DWL
Display Dwell Time
SCAN DWELL (1-10)
BTCH MUL
Batch Multiplier
BTCH MUL (1-32,000)
Page 65 March 2018 TTM-UM-00136-EN-08
Page 66

Communications Protocols
COMMUNICATIONS PROTOCOLS
Non-Ethernet Module Models
The following three parameters can be set through the TFX menu or the UltraLink software utility:
• Modbus RTU
• Address: = Meter Address / Modbus Address
• Baud Rate: = Baud Rate Selection (9600, 14400, 19200, 38400, 56000, 57600, 76800)
• BACnet ID: = Not Used (Value does not affect Modbus in any way)
• BACnet MSTP
• Address: = Meter Address / BACnet MAC Address
• Baud Rate: = Baud Rate Selection (9600, 14400, 19200, 38400, 56000, 57600, 76800)
• BACnet ID: = BACnet Device ID
Ethernet Module Models
The Ethernet communication parameters are set through the internal web pages of the Ethernet module, not through the TFX
menu or the UltraLink software utility. See “Ethernet Port Settings” on page83 for details.
• Modbus TCP/IP
• Address: = IP Address
• Baud Rate: = Does not exist for Modbus TCP/IP. Com speed = Ethernet Link Speed.
• BACnet ID: = Not Used (Value does not affect Modbus TCP/IP in any way)
• BACnet IP
• Address: = IP Address
• Baud Rate = Does not exist for BACnet IP. Com speed = Ethernet Link Speed.
• BACnet ID: = BACnet Device ID
• Ethernet IP
• Address: = IP Address
• Baud Rate: = Does not exist for Ethernet IP. Com speed = Ethernet Link Speed.
• BACnet ID: = Not Used (Value does not affect Ethernet IP in any way)
Page 66 March 2018TTM-UM-00136-EN-08
Page 67

Communications Protocols
EtherNet/IP
Overview
EtherNet/IP is an open industrial Ethernet network with Common Industrial Protocol (CIP™) at its upper layers. ODVA manages
the development of CIP network technologies and standards (www.odva.org).
EtherNet/IP Addressing
The following table describes all of the data types used.
USINT Unsigned Short Integer (8-bit)
UINT Unsigned Integer (16-bit)
UDINT Unsigned Double Integer (32-bit)
INT Signed Integer (16-bit)
DINT Signed Integer (32-bit)
STRING Character String (1 byte per character)
SHORT STRINGNN Character String (1st byte is length; up to NN characters)
BYTE Bit String (8-bits)
WORD Bit String (16-bits)
DWORD Bit String (32-bits)
REAL IEEE 32-bit Single Precision Floating Point
Table 11: Data types
Identity Object (01
– 1 Instance)
HEX
The following tables contain the attribute, status, and common services information for the Identity Object.
Class Attributes (Instance 0)
Attribute ID Name Data Type Data Value Access Rule
1 Revision UINT 1 Get
Instance Attributes (Instance 1)
Attribute ID Name Data Type Data Value Access Rule
1 Vendor Number UINT 1126 Get
2 Device Type UINT 00
HEX
3 Product Code Number UINT 1 Get
4
Product Major Revision
Product Minor Revision
USINT
USINT
01
01
5 Status WORD See Below Get
6 Serial Number UDINT TFX Get
7 Product Name SHORT STRING32 TFX Get
User Configurable
16
Product Description
SHORT STRING32 TFX Get/Set
Name
Get
Get
Page 67 March 2018 TTM-UM-00136-EN-08
Page 68

Communications Protocols
Common Services
Service Code
05
HEX
0E
HEX
10
HEX
Message Router Object (02
Class Level Instance Level
– 1 Instance)
HEX
Implemented for
Service Name
No Yes Reset
Yes Yes Get_Attribute_Single
No Yes Set_Attribute_Single
***No supported services or attributes***
Assembly Object (04HEX – 2 Instances)
Class Attributes (Instance 0)
Attribute ID Name Data Type Data Value Access Rule
1 Revision UINT 2 Get
2 Max Instance UINT 101 Get
Input Instance Attributes (Instance 100)
Attribute ID Name Data Type Default Data Value Access Rule
3 Input Data USINT[56] 0 Get
Input Instance 100 – 100 Bytes (Single Precision Floating Point)
Bytes Description
0 - 3 Signal Strength
4 - 7 Flow Rate
8 - 11 Net Totalizer
12 - 15 Positive Totalizer
16 - 19 Negative Totalizer
20 - 23 Temp1 degC
24 - 27 Temp2 degC
28 - 31 Diff Temp(1-2) degC
32 - 35 Diff Temp(2-1) degC
36 - 39 Abs Diff Temp degC
40 - 43 Temp1 degF
44 - 47 Temp2 degF
48 - 51 Diff Temp(1-2) degF
52 - 55 Diff Temp(2-1) degF
56 - 59 Abs Diff Temp degF
60 - 63 Flow Rate GPM
64 - 67 Flow Rate LPM
68 - 71 Flow Rate CFH
72 - 75 Flow Rate CMH
76 - 79 Flow Rate FPS
80 - 83 Flow Rate MPS
84 - 87 Flow Unit Code
88 - 91 Total Unit Code
92 - 95 Total Exponent Unit Code
96 - 99 Time Unit Code
Page 68 March 2018TTM-UM-00136-EN-08
Page 69

Input Instance 101 – 200 Bytes (Double Precision Floating Point)
Bytes Description
0 - 7 Signal Strength
8 - 15 Flow Rate
16 - 23 Net Totalizer
24 - 31 Positive Totalizer
32 - 39 Negative Totalizer
40 - 47 Temp1 degC
48 - 55 Temp2 degC
56 - 63 Di Temp(1-2) degC
64 - 71 Di Temp(2-1) degC
72 - 79 Abs Di Temp degC
80 - 87 Temp1 degF
88 - 95 Temp2 degF
96 - 103 Di Temp(1-2) degF
104 - 111 Di Temp(2-1) degF
112 - 119 Abs Di Temp degF
120 - 127 Flow Rate GPM
128 - 135 Flow Rate LPM
136 - 143 Flow Rate CFH
144 - 151 Flow Rate CMH
152 - 159 Flow Rate FPS
160 - 167 Flow Rate MPS
168 - 175 Flow Unit Code
176 - 183 Total Unit Code
184 - 191 Total Exponent Unit Code
192 - 199 Time Unit Code
Communications Protocols
Input Instance Common Services
Service Code
0E
HEX
Class Level Instance Level
Connection Manager Object (06
Implemented for
Yes Ye s Get_Attribute_Single
)
HEX
***No supported services or attributes***
Service Name
Page 69 March 2018 TTM-UM-00136-EN-08
Page 70
Communications Protocols
TCP Object (F5
– 1 Instance)
HEX
The following tables contain the attribute and common services information for the TCP Object.
Class Attributes
Attribute ID Name Data Type Data Value Access Rule
1 Revision UINT 2 Get
Instance Attributes
Attribute ID Name Data Type Default Data Value Access Rule
1 Status1 DWORD 1 Get
2 Configuration Capability
2
DWORD 0 Get
3 Configuration Control3 DWORD 0 Get
Physical Link Object4
4
Structure of:
Path Size
Path
Array Of WORD
Interface Configuration5
Structure of:
IP Address
Network Mask
5
Gateway Address
Name Server
Name Server 2
Domain Name Size
Domain Name
Host Name6
6
Structure of:
Host Name Size
Host Name
UINT
UDINT
UDINT
UDINT
UDINT
UDINT
UINT
STRING
UINT
STRING
2
0x20F6
0x2401
0
0
0
0
0
0
0
0
0
Get
Get
Get
Common Services
Service Code
0E
1
See section 5-3.2.2.1 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
2
See section 5-3.2.2.2 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
3
See section 5-3.2.2.3 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
4
See section 5-3.2.2.4 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
5
See section 5-3.2.2.5 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
6
See section 5-3.2.2.6 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
Page 70 March 2018TTM-UM-00136-EN-08
HEX
Class Level Instance Level
Yes Yes Get_Attribute_Single
Implemented for
Instance Level
Page 71

Communications Protocols
Ethernet Link Object (F6
– 1 Instance)
HEX
The following tables contain the attribute and common services information for the Ethernet Link Object.
Class Attributes
Attribute ID Name Data Type Data Value Access Rule
1 Revision UINT 3 Get
Instance Attributes
Attribute ID Name Data Type Default Data Value Access Rule
1 Interface Speed7 UDINT 100 Get
2 Interface Flags
3 Physical Address9
8
DWORD 3 Get
USINT
Array[6]
0 Get
Common Services
Service Code
0E
7
See section 5-4.2.2.1 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
8
See section 5-4.2.2.2 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
9
See section 5-4.2.2.3 of “Volume 2: EtherNet/IP Adaptation of CIP” from ODVA for more details on this attribute.
Reset Totalizer Object (65
HEX
HEX -
Class Level Instance Level
Yes Yes Get_Attribute_Single
1 Instance)
Implemented for
Service Name
Class Attributes (Instance 0)
Attribute ID Name Data Type Data Value Access Rule
1 Revision UINT 1 Get
Instance Attributes (Instance 1)
Attribute ID Name Data Type Default Data Value Access Rule
1 Reset Totalizers BOOL
*Write “1” to reset
*Will always read “0”
Common Services
Service Code
0E
HEX
10
HEX
Class Level Instance Level
Yes Yes Get_Attribute_Single
No Yes Set_Attribute_Single
Implemented for
Service Name
Get/Set
Page 71 March 2018 TTM-UM-00136-EN-08
Page 72

Communications Protocols
Modbus
Data Formats
Bits Bytes Modbus Registers
Long Integer 32 4 2
Single Precision IEEE754 32 4 2
Double Precision IEEE754 64 8 4
Table 12: Available data formats
Modbus Register / Word Ordering
Each Modbus Holding Register represents a 16-bit integer value (2 bytes). The official Modbus standard defines Modbus as a
‘big-endian’ protocol where the most significant byte of a 16-bit value is sent before the least significant byte. For example,
the 16-bit hex value of ‘1234’ is transferred as ‘12’ ‘34’.
Beyond 16-bit values, the protocol itself does not specify how 32-bit (or larger) numbers that span over multiple registers
should be handled. It is very common to transfer 32-bit values as pairs of two consecutive 16-bit registers in little-endian word
order. For example, the 32-bit hex value of ‘12345678’ is transferred as ‘56’ ‘78’ ‘12’ ‘34’. Notice the Register Bytes are still sent in
big-endian order per the Modbus protocol, but the Registers are sent in little-endian order.
Other manufacturers, store and transfer the Modbus Registers in big-endian word order. For example, the 32-bit hex value of
‘12345678’ is transferred as ‘12’ ‘34’ ‘56’ ‘78’. It does not matter in which order the words are sent, as long as the receiving device
knows which way to expect it. Since it is a common problem between devices regarding word order, many Modbus master
devices have a configuration setting for interpreting data (over multiple registers) as ‘little-endian’ or ‘big-endian’ word order.
This is also referred to as swapped or word-swapped values and allows the master device to work with slave devices from
different manufacturers.
If, however, the endianness is not a configurable option within the Modbus master device, it is important to make sure it
matches the slave endianess for proper data interpretation. The transmitter actually provides two Modbus Register maps to
accommodate both formats. This is useful in applications where the Modbus Master cannot be configured for endianness.
Communication Settings
Baud Rate 9600
Parity None
Data Bits 8
Stop Bits 1
Handshaking None
Table 13: Communications settings
Page 72 March 2018TTM-UM-00136-EN-08
Page 73

Modbus Register Mappings for Modbus RTU and Modbus TCP/IP
Communications Protocols
Data
Component
Name
Signal Strength 40100 - 40101 40200 - 40201 40300 - 40303 —
Flow Rate 40102 - 40103 40202 - 40203 40304 - 40307
Net Totalizer 40104 - 40105 40204 - 40205 40308 - 40311
Positive Totalizer 40106 - 40107 40206 - 40207 40312 - 40315
Negative Totalizer 40108 - 40109 40208 - 40209 40316 - 40319
Temperature 1 40110 - 40111 40210 - 40211 40320 - 40323 ºC
Temperature 2 40112 - 40113 40212 - 40213 40324 - 40327 ºC
Di Temp (1-2) 40114 - 40115 40214 - 40215 40328 - 40331 ºC
Di Temp (2-1) 40116 - 40117 40216 - 40217 40332 - 40335 ºC
Abs Di Temp 40118 - 40119 40218 - 40219 40336 - 40339 ºC
Temperature 1 40120 - 40121 40220 - 40221 40340 - 40343 ºF
Temperature 2 40122 - 40123 40222 - 40223 40344 - 40347 ºF
Di Temp (1-2) 40124 - 40125 40224 - 40225 40348 - 40351 ºF
Di Temp (2-1) 40126 - 40127 40226 - 40227 40352 - 40355 ºF
Abs Di Temp 40128 - 40129 40228 - 40229 40356 - 40359 ºF
Flow Rate 40130 - 40131 40230 - 40231 40360 - 40363 GPM
Flow Rate 40132 - 40133 40232 - 40233 40364 - 40367 LPM
Flow Rate 40134 - 40135 40234 - 40235 40368 - 40371 CFH
Flow Rate 40136 - 40137 40236 - 40237 40372 - 40375 CMH
Flow Rate 40138 - 40139 40238 - 40239 40376 - 40379 FPS
Flow Rate 40140 - 40141 40240 - 40241 40380 - 40383 MPS
Flow
Unit Code
Total
Unit Code
Total Exponent
Unit Code
Time
Unit Code
Long Integer
Format
40142 - 40143 40242 - 40243 40384 - 40387
40144 - 40145 40244 - 40245 40388 - 40391
40146 - 40147 40246 - 40247 40392 - 40395
40148 - 40149 40248 - 40249 40396 - 40399
Table 14: Modbus register map for ‘Little-endian’ word order master devices
MODBUS Registers
Single Precision
Floating Point
Format
Double Precision
Floating Point
Format
Gallons, Liters, MGallons, Cubic Feet, Cubic Meters,
Acre Feet, Oil Barrel, Liquid Barrel, Feet, Meters, Lb,
1 = Gallons
2 = Liters
3 = MGallons
4 = Cubic Feet
5 = Cubic Meter
6 = Acre Feet
7 = Oil Barrel
8 = Liq Barrel
9 = Feet
10 = Meters
1 = E-1
2 = E0
3 = E1
4 = E2
1 = Second
2 = Minute
3 = Hour
4 = Day
For reference: If the transmitters Net Totalizer = 12345678 hex
Register 40102 would contain 5678 hex (Word Low)
Register 40103 would contain 1234 hex (Word High)
Units
Kg, BTU, MBTU, MMBTU, TON
Per
Second, Minute, Hour, Day
11 = LB
12 = Kg
13 = BTU
14 = MBTU
15 = MMBTU
16 = Ton
17 = KJ
18 = kWh
19 = MWh
5 = E3
6 = E4
7 = E5
8 = E6
5 = msec
6 = usec
7 = nsec
8 = psec
Page 73 March 2018 TTM-UM-00136-EN-08
Page 74

Communications Protocols
Data
Component
Name
Signal Strength 40600 - 40601 40700 - 40701 40800 - 40803 —
Flow Rate 40602 - 40603 40702 - 40703 40804 - 40807
Net Totalizer 40604 - 40605 40704 - 40705 40808 - 40811
Positive Totalizer 40606 - 40607 40706 - 40707 40812 - 40815
Negative Totalizer 40608 - 40609 40708 - 40709 40816 - 40819
Temperature 1 40610 - 40611 40710 - 40711 40820 - 40823 ºC
Temperature 2 40612 - 40613 40712 - 40713 40824 - 40827 ºC
Di Temp (1-2) 40614 - 40615 40714 - 40715 40828 - 40831 ºC
Di Temp (2-1) 40616 - 40617 40716 - 40717 40832 - 40835 ºC
Abs Di Temp 40618 - 40619 40718 - 40719 40836 - 40839 ºC
Temperature 1 40620 - 40621 40720 - 40721 40840 - 40843 ºF
Temperature 2 40622 - 40623 40722 - 40723 40844 - 40847 ºF
Di Temp (1-2) 40624 - 40625 40724 - 40725 40848 - 40851 ºF
Di Temp (2-1) 40626 - 40627 40726 - 40727 40852 - 40855 ºF
Abs Di Temp 40628 - 40629 40728 - 40729 40856 - 40859 ºF
Flow Rate 40630 - 40631 40730 - 40731 40860 - 40863 GPM
Flow Rate 40632 - 40633 40732 - 40733 40864 - 40867 LPM
Flow Rate 40634 - 40635 40734 - 40735 40868 - 40871 CFH
Flow Rate 40636 - 40637 40736 - 40737 40872 - 40875 CMH
Flow Rate 40638 - 40639 40738 - 40739 40876 - 40879 FPS
Flow Rate 40640 - 40641 40740 - 40741 40880 - 40883 MPS
Flow
Unit Code
Total
Unit Code
Total Exponent
Unit Code
Time
Unit Code
Long Integer
Format
40642 - 40643 40742 - 40743 40884 - 40887
40644 - 40645 40744 - 40745 40888 - 40891
40646 - 40647 40746 - 40747 40892 - 40895
40648 - 40649 40748 - 40749 40896 - 40899
Table 15: Modbus register map for ‘Big-endian’ word order master devices
MODBUS Registers
Single Precision
Floating Point
Format
Double Precision
Floating Point
Format
Gallons, Liters, MGallons, Cubic Feet, Cubic Meters,
Acre Feet, Oil Barrel, Liquid Barrel, Feet, Meters, Lb,
1 = Gallons
2 = Liters
3 = MGallons
4 = Cubic Feet
5 = Cubic Meter
6 = Acre Feet
7 = Oil Barrel
8 = Liq Barrel
9 = Feet
10 = Meters
1 = E-1
2 = E0
3 = E1
4 = E2
1 = Second
2 = Minute
3 = Hour
4 = Day
For reference: If the transmitters Net Totalizer = 12345678 hex
Register 40602 would contain 1234 hex (Word High)
Register 40603 would contain 5678 hex (Word Low)
Units
Kg, BTU, MBTU, MMBTU, TON
Per
Second, Minute, Hour, Day
11 = LB
12 = Kg
13 = BTU
14 = MBTU
15 = MMBTU
16 = Ton
17 = KJ
18 = kWh
19 = MWh
5 = E3
6 = E4
7 = E5
8 = E6
5 = msec
6 = usec
7 = nsec
8 = psec
Modbus Coil Description Modbus Coil Notes
Reset Totalizers 1
Forcing this coil on will reset all totalizers. After reset, the coil automatically
returns to the off state.
Table 16: Modbus coil map
Page 74 March 2018TTM-UM-00136-EN-08
Page 75

Communications Protocols
BACnet
BACnet is a communication protocol for building automation and control networks, including BACnet/IP with Ethernet
cabling and BACnet MS/TP with EIA-485 wiring. The protocol is supported and maintained by ASHRAE Standing Standard
Project Committee 135.
BACnet IP Object Mappings
Object Description
Signal Strength AI1 Analog Input 1 —
Flow Rate (Flow model)
Energy Rate (BTU model)
Net Totalizer AI3 Analog Input 3
Positive Totalizer AI4 Analog Input 4
Negative Totalizer AI5 Analog Input 5
Temperature 1 AI6 Analog Input 6 ºC
Temperature 2 AI7 Analog Input 7 ºC
Di Temp (1-2) AI8 Analog Input 8 ºC
Di Temp (2-1) AI9 Analog Input 9 ºC
Abs Di Temp AI10 Analog Input 10 ºC
Temperature 1 AI11 Analog Input 11 ºF
Temperature 2 AI12 Analog Input 12 ºF
Di Temp (1-2) AI13 Analog Input 13 ºF
Di Temp (2-1) AI14 Analog Input 14 ºF
Abs Di Temp AI15 Analog Input 15 ºF
Flow Rate AI16 Analog Input 16 GPM
Flow Rate AI17 Analog Input 17 LPM
Flow Rate AI18 Analog Input 18 CFH
Flow Rate AI19 Analog Input 19 CMH
Flow Rate AI20 Analog Input 20 FPS
Flow Rate AI21 Analog Input 21 MPS
Flow
Unit Code
Total
Unit Code
Total Exponent
Unit Code
Time
Unit Code
BACnet Object
(Access Point)
AI2 Analog Input 2
AI22 Analog Input 22
AI23 Analog Input 23
AI24 Analog Input 24
AI25 Analog Input 25
Binary Output 1
Notes Available Units
Gallons, Liters, MGallons, Cubic Feet, Cubic Meters, Acre
Feet, Oil Barrel, Liquid Barrel, Feet, Meters, Lb, Kg, BTU,
Second, Minute, Hour, Day
1 = Gallons
2 = Liters
3 = MGallons
4 = Cubic Feet
5 = Cubic Meter
6 = Acre Feet
7 = Oil Barrel
8 = Liq Barrel
9 = Feet
10 = Meters
1 = E-1
2 = E0
3 = E1
4 = E2
1 = Second
2 = Minute
3 = Hour
4 = Day
MBTU, MMBTU, TON
Per
11 = LB
12 = Kg
13 = BTU
14 = MBTU
15 = MMBTU
16 = Ton
17 = KJ
18 = kWh
19 = MWh
5 = E3
6 = E4
7 = E5
8 = E6
5 = msec
6 = usec
7 = nsec
8 = psec
Reset Totalizers BO1
Writing a (1) active state to this
object will reset all totalizers.
The Object will then automati-
cally return to the (0) inactive
state.
Table 17: BACnet IP object mappings
—
Page 75 March 2018 TTM-UM-00136-EN-08
Page 76

Communications Protocols
BACnet MSTP Object Mappings
Object Description
Signal Strength AI1 Analog Input 1 —
Flow Rate (Flow model)
Energy Rate (BTU model)
Net Totalizer AI3 Analog Input 3
Positive Totalizer AI4 Analog Input 4
Negative Totalizer AI5 Analog Input 5
Temperature 1 AI6 Analog Input 6 ºC
Temperature 2 AI7 Analog Input 7 ºC
Temperature 1 AI11 Analog Input 11 ºF
Temperature 2 AI12 Analog Input 12 ºF
Flow Rate AI16 Analog Input 16 GPM
Flow Rate AI17 Analog Input 17 LPM
Reset Totalizers BO1
BACnet Object
(Access Point)
AI2 Analog Input 2
Binary Output 1
Writing a (1) active state to this
object will reset all totalizers.
The Object will then automati-
cally return to the (0) inactive
Table 18: BACnet MSTP object mappings
Notes Available Units
Gallons, Liters, MGallons, Cubic Feet, Cubic Meters, Acre
Feet, Oil Barrel, Liquid Barrel, Feet, Meters, Lb, Kg, BTU,
Second, Minute, Hour, Day
state.
MBTU, MMBTU, TON
Per
—
Page 76 March 2018TTM-UM-00136-EN-08
Page 77

BACnet Conguration
To change settings, click Edit to access a category.
Communications Protocols
Figure 56: BACnet configuration screen
Page 77 March 2018 TTM-UM-00136-EN-08
Page 78

Communications Protocols
BACnet Object Support
Twenty-seven BACnet standard objects are supported, a Device object (DEx), a Binary Output object (BO1), and twenty-five
Analog Input objects (AI1 through A25). The BACnet/IP UDP port defaults to 0xBAC0. The Object Identifier (BACnet Device ID)
and Location can both be modified through the web page interface.
DEx Object_Identifier
Object_Name Up to 32 characters W
Object_Type DEVICE (8) R
System_Status OPERATIONAL or NON_OPERATIONAL R
Vendor_Name “Badger Meter, Inc.” R
Vendor_Identifier 306 R
Model_Name “TFX” R
Application_Software_Version “1.24” R
Location
Protocol_Version 1 R
Protocol_Revision 2 R
Protocol_Services_Supported
Protocol_Object_Types_Supported { AnalogInput, BinaryOutput, Device } R
Object_List
Max_APDU_Length_Accepted 1476 R
Segmentation_Supported 3 – NONE R
APDU_Timeout 3000 default R
Number_Of_APDU_Retries 1 default R
Device_Address_Binding always empty R
Database_Revision 0 R
“Sample Device Location”
Up to 64 characters - can modify through web page
{ readProperty, writeProperty, readPropertyMultiple,
writePropertyMultiple, deviceCommunicationControl, who-Has, who-Is }
DEx, AI1, AI2, AI3, AI4, AI5, AI6, AI7, AI8, AI9, AI10, AI11, AI12, AI13, AI14,
AI15, AI16, AI17, AI18, AI19, AI
BO1 W
Table 19: BACnet standard objects
Can modify “x” through web page (1-9999)
Defaults to DEx
W
R
R
Page 78 March 2018TTM-UM-00136-EN-08
Page 79

Annex A—Protocol Implementation Conformance Statement (Normative)
BACnet Protocol Implementation Conformance Statement
Date: 05/30/2014
Vendor Name: Badger Meter, Inc.
Product Name: TFX Ultra Flow meter
Product Model Number: TFX
Application Software Version: 2.03
Firmware Revision: N/A
BACnet Protocol Revision: 10
Product Description:
Clamp-on ultrasonic flow and energy meters for liquids
BACnet Standardized Device Profile (Annex L):
BACnet Operator Workstation (B-OWS)
BACnet Building Controller (B-BC)
BACnet Advanced Application Controller (B-AAC)
BACnet Application Specific Controller (B-ASC)
BACnet Smart Sensor (B-SS)
BACnet Smart Actuator (B-SA)
Communications Protocols
List all BACnet Interoperability Building Blocks Supported (Annex K):
• Data Sharing-ReadProperty-B (DS-RP-B)
• Data Sharing-WriteProperty-B (DS-WP-B)
• Data Sharing - ReadProperty Multiple - B (DS-RPM-B)
• Data Sharing - WriteProperty Multiple - B (DS-WPM-B)
• Device Management-Dynamic Device Binding-B (DM-DDB-B)
• Device Management-Dynamic Object Binding-B (DM-DOB-B)
• Device Management-DeviceCommunicationControl-B (DM-DCC-B)
Segmentation Capability:
Segmented requests supported Window Size
Segmented responses supported Window Size
Standard Object Types Supported:
• 1 Device Object
• 11 Analog Input Objects
• 1 Binary Output Object
Page 79 March 2018 TTM-UM-00136-EN-08
Page 80

Communications Protocols
Data Link Layer Options:
BACnet IP, (Annex J)
BACnet IP, (Annex J), Foreign Device
ISO 8802-3, Ethernet (Clause 7)
ANSI/ATA 878.1, 2.5 Mb. ARCNET (Clause 8)
ANSI/ATA 878.1, RS-485 ARCNET (Clause 8), baud rate(s): ____________
MS/TP master (Clause 9), baud rate(s): 9600, 19200, 38400, 76800
MS/TP slave (Clause 9), baud rate(s):
Point-To-Point, EIA 232 (Clause 10), baud rate(s):
Point-To-Point, modem, (Clause 10), baud rate(s):
LonTalk, (Clause 11), medium: __________
Other:
Device Address Binding:
Is static device binding supported? (This is currently necessary for two-way communication with MS/TP slaves and certain
other devices.) Yes No
Networking Options:
Router, Clause 6 - List all routing configurations, e.g., ARCNET-Ethernet, Ethernet-MS/TP, etc.
Annex H, BACnet Tunneling Router over IP
BACnet/IP Broadcast Management Device (BBMD)
Does the BBMD support registrations by Foreign Devices? Yes No
Character Sets Supported:
Indicating support for multiple character sets does not imply that they can all be supported simultaneously.
ANSI X3.4
IBM /Microsoft DBCS ISO 8859-1
ISO 10646 (UCS-2) ISO 10646 (UCS-4) JIS C 6226
If this product is a communication gateway, describe the types of non-BACnet equipment/networks(s) that the
gateway supports:
Not supported
Page 80 March 2018TTM-UM-00136-EN-08
Page 81

Annex A—Protocol Implementation Conformance Statement (Normative)
(This annex is part of this Standard and is required for its use.)
BACnet Protocol Implementation Conformance Statement
Date: 5/12/14
Vendor Name: Badger Meter, Inc.
Product Name: TFX Ultra Flow meter
Product Model Number: TFX
Application Software Version: 2.03
Firmware Revision: N/A
BACnet Protocol Revision: 10
Product Description:
Clamp-on ultrasonic flow and energy meter for liquids.
BACnet Standardized Device Profile (Annex L):
BACnet Operator Workstation (B-OWS)
BACnet Advanced Operator Workstation (B-AWS)
BACnet Operator Display (B-OD)
BACnet Building Controller (B-BC)
BACnet Advanced Application Controller (B-AAC)
BACnet Application Specific Controller (B-ASC)
BACnet Smart Sensor (B-SS)
BACnet Smart Actuator (B-SA)
Communications Protocols
List all BACnet Interoperability Building Blocks Supported (Annex K):
• Data Sharing-ReadProperty-B (DS-RP-B)
• Data Sharing-WriteProperty-B (DS-WP-B)
• Data Sharing - ReadProperty Multiple - B (DS-RPM-B)
• Data Sharing - WriteProperty Multiple - B (DS-WPM-B)
• Device Management-Dynamic Device Binding-B (DM-DDB-B)
• Device Management-DeviceCommunicationControl-B (DM-DCC-B)
Segmentation Capability:
Able to transmit segmented messages Window Size
Able to receive segmented messages Window Size
Standard Object Types Supported:
Dynamically
Create?
1-Device Object No No Location Location None special
25-Analog Input No No None None Double_Value None special
1-Binary Output No No None None None None special
Dynamically
Delete?
Optional
Properties
Supported
Writeable
non-Required
Properties
Proprietary
Properties
Property Range
Limits
Page 81 March 2018 TTM-UM-00136-EN-08
Page 82

Communications Protocols
Data Link Layer Options:
BACnet IP, (Annex J)
BACnet IP, (Annex J), Foreign Device
ISO 8802-3, Ethernet (Clause 7)
ATA 878.1, 2.5 Mb. ARCNET (Clause 8)
ATA 878.1, EIA-485 ARCNET (Clause 8), baud rate(s) ____________
MS/TP master (Clause 9), baud rate(s):
MS/TP slave (Clause 9), baud rate(s):
Point-To-Point, EIA 232 (Clause 10), baud rate(s):
Point-To-Point, modem, (Clause 10), baud rate(s):
LonTalk, (Clause 11), medium: __________
BACnet/ZigBee (ANNEX O)
Other:
Device Address Binding:
Is static device binding supported? (This is currently necessary for two-way communication with MS/TP slaves and certain
other devices.) Yes No
Networking Options:
Router, Clause 6 - List all routing configurations, e.g., ARCNET-Ethernet, Ethernet-MS/TP, etc.
Annex H, BACnet Tunneling Router over IP
BACnet/IP Broadcast Management Device (BBMD)
Does the BBMD support registrations by Foreign Devices? Yes No
Does the BBMD support network address translation? Yes No
Network Security Options:
Non-secure Device - is capable of operating without BACnet Network Security
Secure Device - is capable of using BACnet Network Security (NS-SD BIBB)
Multiple Application-Specific Keys:
Supports encryption (NS-ED BIBB)
Key Server (NS-KS BIBB)
Character Sets Supported:
Indicating support for multiple character sets does not imply that they can all be supported simultaneously.
ANSI X3.4
ISO 10646 (UTF-8) IBM /Microsoft DBCS ISO 8859-1
ISO 10646 (UCS-2) ISO 10646 (UCS-4) JIS X 0208
If this product is a communication gateway, describe the types of non-BACnet equipment/networks(s) that the
gateway supports:
Not supported
Page 82 March 2018TTM-UM-00136-EN-08
Page 83

Communications Protocols
Ethernet Port Settings
Changing IP Connections
Follow this procedure to get to the internal web page of the Ethernet Module. From the conguration page, you will be able
to edit the Device ID and save the changes.
OTE:N Your actual internal web pages may differ in appearance from those below.
OTE:N USB-to-Ethernet adapter, skip to step 9. If connecting Ethernet directly, the Ethernet portion of the computer must
be configured correctly.
1. Disconnect the Ethernet cable from the PC.
2. From the Control Panel, open Network Connections.
3. Double-click on the Ethernet Adapter (1394 is rewire, not Ethernet) to bring up its properties.
4. Scroll down and select Internet Protocol (TCP/IP).
5. Click Properties.
Page 83 March 2018 TTM-UM-00136-EN-08
Page 84

Communications Protocols
6. MAKE NOTE OF THE EXISTING IP ADDRESS AND SUBNET MASK! YOU WILL NEED TO CHANGE BACK WHEN FINISHED.
If this is not done, the PC will not re-connect to the original network.
7. Enter the IP and Subnet mask shown above and click OK.
8. Click Close on the previous window.
9. Connect an Ethernet crossover cable between the PC and the Ethernet module.
10. Apply power to the transmitter.
11. Open Internet Explorer, type http://192.168.0.100 in the address bar and click Enter.
12. Enter your user name and password. (The transmitter’s factory default user name is Admin. The factory default password
is blank.)
Page 84 March 2018TTM-UM-00136-EN-08
Page 85

The Main Page refreshes every 5 seconds and provides real-time data from the transmitter.
Communications Protocols
Page 85 March 2018 TTM-UM-00136-EN-08
Page 86

Communications Protocols
13. Click Conguration on the Main Page to display the Ultrasonic Flow Meter device conguration page.
Page 86 March 2018TTM-UM-00136-EN-08
Page 87

Communications Protocols
14. Click the Edit link to change Device Conguration, Location, Network Settings or Passwords.
15. Make the necessary network changes and click Save Settings. Internet Explorer will no longer communicate with the
module because its IP address has changed.
After the module resets and the adapter has been re-configured, you can then use the new IP address to connect to the
internal webpage.
Also note you must choose an IP address that is not being used in the existing network.
16. Disconnect the Ethernet crossover cable and go back into the Ethernet adapter settings and restore the IP and subnet
values saved from step 6.
The module should now be set up to work on the new network.
Network Settings
IP address, IP subnet, IP gateway, and Device Description are configured through the web interface. IP address and subnet
defaults to 192.168.0.100 and 255.255.255.0. Connection to the web interface requires an Ethernet crossover cable, power to
the transmitter, and a PC with a web browser. Typing http://192.168.0.100 in the address bar will allow connection to the
transmitter’s web interface for editing.
Access to the transmitter’s data requires the entry of a user name and password. The transmitter’s default user name is admin
and the password is blank from the factory.
OTE:N Changing the IP address will require use of the new number when trying to access the web page. Each transmitter
must be set up with a unique IP address when trying to network multiple transmitters.
MPORTANTI
When changes are made to the IP address, you must retain the new number for future access.
Figure 57: Network login screen
Page 87 March 2018 TTM-UM-00136-EN-08
Page 88

Troubleshooting
TROUBLESHOOTING
DTTS/DTTC Small Pipe Transducer Calibration Procedure
1. Establish communications with the transit time transmitter.
2. From the tool bar, select Calibration. See Figure 60.
3. On the pop-up screen, click Next twice to get to
Page 3 of 3. See Figure 58.
4. Click Edit.
5. If a calibration point is displayed in Calibration Points Editor,
record the information, then highlight and click Remove.
See Figure 59.
6. Click ADD...
7. Enter Delta T, Un-calibrated Flow, and Calibrated Flow
values from the DTTS/DTTC calibration label, then click OK.
See Figure 61.
8. Click OK in the Edit Calibration Points screen.
9. The display will return to Page 3 of 3. Click Finish.
See Figure 58.
10. After Writing Conguration File is complete, turn o the
power. Turn on the power again to activate the new
settings.
Calibration (Page 3 of 3) - Linearization
28.2
Gal/M
Figure 58: Calibration points editor
Calibration Points Editor
Select point(s) to edit or remove:
30.00 ns 2000.00 Gal/Min 1.000
Delta Time
< Back
1) Please establish a
reference ow rate.
1FPS / 0.3MPS Minimum.
2) Enter the reference ow
rate below. (Do not enter 0)
3) Wait for ow to stabilize.
4) Press the Set button.
Flow:
Set
Edit
Export...
CancelFile Open... File Save...
Finish
Add...
Edit...
Remove
UltraLINK Device Addr 127
U
Conguration CalibrationStrategy
Device Addr 127
U
1350 Gal/Min
Flow:
Pos:
Neg:
0 OB
0 OB
0 OB
15.6%
100%
-2.50 ns
09:53:39
Totalizer Net:
Sig. Strength:
Margin:
Delta T:
Last Update:
!
Errors
2000
1600
1200
HelpWindowC ommunicationsViewE ditF ile
Print PreviePrint
Scale:60 MinTime:
200
Model: DTTSJP-050-N000-N
OK
Figure 59: Calibration page 3 of 3
Edit Calibration Points
Cancel
S/N: 39647 Delta-T: 391.53nS
Uncal. Flow: 81.682 GPM
Cal. Flow: 80 GPM
Delta T:
Uncalibrated Flow:
Calibrated Flow:
OK
391.53
81.682
80.000
Select All
Select All
Select None
Select None
Cancel
ns
Gal/Min.
Gal/Min.
Figure 60: Data display screen
Figure 61: Edit calibration points
Warning and error message numbers are displyed in the flow measurement location when ERROR is displayed on the bottom
of the screen. The error numbers correspond to the numbers listed for UltraLink.
Page 88 March 2018TTM-UM-00136-EN-08
Page 89

Symptoms: Transmitter does not power up.
Possible Causes Recommended Action
• No power or inadequate power
• Blown fuse (AC Model only)
• Display ribbon cable not seated
properly
• Measure voltage at the power terminals and check that the voltage matches the labels by the
power terminals.
• Check the fuse near the power terminals. If fuse is blown, verify the voltage and polarity is
correct and reset the fuse.
• Inspect ribbon cable connections. LED’s on power board will light up – with no LCD display.
• Replace the transmitter if the above actions do not resolve the issue.
Symptoms: Flow reading appears to be incorrect.
Possible Causes Recommended Action
• Incorrect positioning of
transducers
• Poor contact between
transducers and pipe
• Poor placement of transducers
• Low signal strength
• Process loop issues
• Incorrect pipe settings
• Meter not calibrated?
• Display not set up correctly
Refer to the Transducer Mounting Configuration section for details on proper installation.
At the transducer:
• Verify that the spacing of the transducers is set correctly. On most transducers, a scribe mark on
the side of the transducers indicates the point of measurement—NOT from the end points of
the transducers.
• Verify that the transducers are aligned correctly. For Z-Mount, verify the transducers are 180°
from each other.
• Make sure there is a good contact between the transducers and pipe and a thin coat of acoustic
coupling is applied. For integral mount, check for over-tightening of the transducers.
Process loop and general location:
• Make sure the transducers are on the sides of the pipe and NOT on the top of the pipe.
• Check that the transducers are NOT located at the highest point in the loop where air may
accumulate.
• Check that the transducers are NOT on a downward flowing pipe unless adequate downstream
head pressure is present to overcome partial filling or cavitation.
• Check that the transducers have adequate straight pipe upstream and downstream.
• Check process loop for entrained air or particulates which will impact the flow readings.
• Pipes may develop scale, product build-up or corrosion over time. As a result, the effective wall
thickness may be different than a new pipe and wall thickness or liner parameters may need to
be adjusted (PIPE WT, LINER T, LINER MA, LINER SS, LINER R).
At the transmitter:
• Verify that parameters match the installation: XDCR MNT, XDCR HZ, PIPE OD, PIPE WT, PIPE MAT,
PIPE SS, PIPE R, LINER T, LINER MA, LINER SS, LINER R, FL TYPE, FLUID SS, FLUID VI, SP GRAVITY.
• Check that the SIG STR parameter in the Service Menu (SER MENU) is between 5…98.
◊ If the signal strength is greater than 98, change the mounting to increase the path length.
For example from a Z-mount to V-mount or a V-mount to a W-mount. Repeat the startup
and configuration steps.
◊ If the signal strength is less than 5, change the mounting to decrease the path length. For
example from a W-mount to a V-mount or a V-mount to a Z-mount. Repeat the startup and
configuration steps.
• Zero the meter. See “DTTS/DTTC Small Pipe Transducer Calibration Procedure” on page88..
Troubleshooting
Symptoms: Unstable flow.
Possible Causes Recommended Action
• Installation issues
• Flow instability
• Transducers mounting is loose
• Transducers are moved
• Check process loop for variations of entrained air which will impact the flow
• Check for pump induced flow instability.
• Ensure the transducers are secure and are in area where the transducers will not be
inadvertently bumped or disturbed.
Page 89 March 2018 TTM-UM-00136-EN-08
Page 90

Troubleshooting
Symptoms: Flow readout is opposite of the flow direction.
Possible Causes Recommended Action
• Integral mount transmitter
is mounted in reverse flow
direction so display is properly
oriented
• Up and down transducers
wiring reversedFlow direction
parameter is reversed
• Change the transducer flow direction parameter (Basic Menu > FLO DIR).
• Rewire the up and down transducers to the transmitter.
Symptoms: (Energy Models only) Energy reading appears to be incorrect.
Possible Causes Recommended Action
• Incorrect flow readings
• Incorrect temperature reading
Energy is directly calculated from the volumetric flow and temperature difference.
• Verify flow readings are within expected range:
◊ If in PROGRAM mode, press MENU to return to the RUN mode.
• Verify temperatures readings are within expected range:
◊ Service Menu (SER) TEMP 1, TEMP 2 and TEMP DIFF
Refer to symptoms for incorrect flow and temperature readings.
Symptoms: (Energy Models only) Energy reading is opposite of the flow direction.
Possible Causes Recommended Action
• Flow reading is opposite the flow
direction
• RTDs mounted in reverse order
• Verify the flow reading is correct. If not, refer to symptom “Flow reading is opposite of the flow
direction”.
• If flow reading is correct, then verify RTD readings.
◊ Refer to symptom “Temperature (RTD) reading appears to be incorrect”.
◊ Swap the RTDs mounting locations.
◊ In Rev S or later, change the RTD position parameter from NORMAL to SWAPPED: Basic
Menu (BSC) > RTD POS.
Symptoms: (Energy Models only) Temperature (RTD) reading appears to be incorrect.
Possible Causes Recommended Action
• Incorrect wiring
• Cable issue
• RTD not functioning
• RTD needs recalibration
Refer to Heat Flow for Energy Models Only section for details on proper mounting and wiring.
• Check that the RTDs are properly wired to transmitter (pins RTD1 A and B, RTD2 A and B).
• For surface mount RTDs, verify that RTDs are installed on a well-insulated pipe. Ensure that the
surface mounted RTDs have good thermal contact by verifying surface is bare metal and heat
sink compound is used.
• Verify that the fluid temperature is within range of the RTD specifications.
• At the transmitter, disconnect the RTD wiring. Measure the resistance between pin #6 and pins
#2/4, and between #5 and pins #1/3. The resistance should be 843… 2297 ohms depending
on the fluid temperature. The resistance between pins #2 and #4, and #1 and #3 should be less
than 5 ohms.
◊ If the measurements are significantly out of range or there appears to be an open or short
in the cable, replace the RTD.
◊ If the RTD appears to be functional, it may need to be recalibrated. See “In-Field Calibration
of RTD Temperature Sensors” on page92.
Symptoms: Current, frequency or pulse outputs do not match the readings.
Possible Causes Recommended Action
• Incorrect parameter settings
• Wiring or control system
configuration issues
Verify that the parameters for the output are set properly.
• 4…20 mA: refer to FL 4MA and FL 20MA in the Channel 1 menu
• Frequency output (Flow-only meter): refer to MAX RATE in the Basic Menu (BSC)
• Totalizing pulse: refer to TOT MULT and TOTL E in the Basic Menu (BSC) for proper configuration.
The pulse output is limited to one pulse per second. For frequency or pulse outputs, verify the
proper switch settings, ground reference, voltage source and load compatible with the control
system. Refer to Inputs/Outputs for proper wiring.
Page 90 March 2018TTM-UM-00136-EN-08
Page 91

Heating and Cooling Measurement
HEATING AND COOLING MEASUREMENT
The Energy model is designed to measure the rate and quantity of heat delivered to a given building, area or heat exchanger.
The instrument measures the volumetric flow rate of the heat exchanger liquid (water, water/glycol mixture, brine, etc.), the
temperature at the inlet pipe and the temperature at the outlet pipe. Heat delivery is calculated by the following equation:
Rate of Heat Delivery
1
V
QKdV
=
Where:
Q = Quantity of heat absorbed
V = Volume of liquid passed
K = Heat coefficient of the liquid
θ = Temperature difference between supply
and return
The RTD temperature measurement circuit in the Energy model measures the differential temperature of two 1000 Ohm,
three-wire platinum RTDs. The three-wire configuration allows the temperature sensors to be located several hundred feet
away from the transmitter without influencing system accuracy or stability.
The Energy model allows integration of two 1000 Ohm platinum RTDs with the energy transmitter, effectively providing
an instrument for measuring energy delivered in liquid cooling and heating systems. If RTDs were ordered with the energy
transmitter, they have been factory calibrated and are shipped connected to the module as they were calibrated.
Field replacement of RTDs is possible thru the use of the keypad or the UltraLink software utility. If the RTDs were ordered
from the manufacturer of the Energy model, they will come with calibration values that need to be loaded into the
Energy model.
New, non-calibrated RTDs will need to be field-calibrated using an ice bath and boiling water to derive calibration values. This
procedure is outlined below.
θ
∆
∫
0
V
Temperature Response Positive Temperature Coefficient
Type 1000 Ohm
Accuracy ±0.3 °C (0.0385 curve)
Platinum RTD
Page 91 March 2018 TTM-UM-00136-EN-08
Page 92

MINCO
MINCO
In-Field Calibration of RTD Temperature Sensors
INFIELD CALIBRATION OF RTD TEMPERATURE SENSORS
Replacement RTD temperature sensors used in heat flow measurements must be calibrated in the field for proper operation.
Failure to calibrate the RTDs to the specific BTU inputs will result in inaccurate heat-flow measurements.
Equipment Required
• Ice Bath
100 °C
• Boiling Water Bath
• Laboratory Grade Thermometer (accurate to 0.1 °C)
0 °C
• Software Utility
Figure 62: Standards of known temperature
Replacing or Re-Calibrating RTDs
This procedure works with pairs of surface-mount RTDs or pairs of insertion RTDs supplied by the manufacturer of the
Energy model.
1. Connect the RTDs.
2. Establish communications with the transmitter using the UltraLink software utility.
3. Click Conguration and select the Output tab.
The screen should now look something like the following:
System Configuration
Channel 1:
Output
4-20mA / Frequency
Security
DisplayBasic Flow Filtering
Channel 2:
RTD
4 mA
0
400
32
3837
Test
4
RTD #1:
A: B:
RTD #2:
A: B:
0.00000.0000
0.00000.0000
Calibrate
Calibrate
Download Cancel
Flow at 4mA / 0Hz: Gal/M
Flow at 20mA / 1KHz: Gal/M
Calibration/Test
Calibration
20 mA
Test
File Open... File Save...
Figure 63: Output configuration screen
4. If RTD is not selected in the Channel 2 dropdown list, select it now.
5. Insert both RTD temperature sensors and the laboratory grade thermometer into either the ice bath or the boiling water
bath and allow about 20 minutes for the sensors to come up to the same temperature.
OTE:N An ice bath and boiling water bath are used in these examples because their temperatures are easy to maintain
and provide known temperature reference points. Other temperature references can be used as long as there is a
minimum delta T of 40° C between the two references.
OTE:N For maximum RTD temperature below 100° C, the hot water bath should be heated to the maximum temperature for
that RTD.
Page 92 March 2018TTM-UM-00136-EN-08
Page 93

RTD Calibration (Step 1 of 2)
In-Field Calibration of RTD Temperature Sensors
6. Click Calibrate and the following screen should now be visible. Make sure that the Calibrate Both RTDs at same temperature
box is checked and then enter the temperature to the nearest 0.1° C in the box labeled Reference Temp (deg C).
Calibrate RTD 1, or select the checkbox below to calibrate both RTDs at the same
temperature. Make sure that the RTD is at a known temperature and enter this
temperature below:
Reference Temp (deg C):
DAC Value:
Calibrated Temp (deg C):
Calibrated Temp (deg F):
Calibrate Both RTDs at same temperature
RTD 1
0.0 °C
32.0 °F
First Cal Point
1
RTD 2
3
0.0 °C
32.0 °F
Cancel
OK
Figure 64: RTD calibration (Step 1 of 2)
7. Click Next.
The procedure for step 2 of 2 is similar to step 1 except the second water bath is used.
8. Insert both RTD temperature sensors and the laboratory grade thermometer into the second water bath and allow about
20 minutes for the sensors to come up to the same temperature.
9. Make sure that the Both RTDs at same temperature box is checked and then enter the temperature to the nearest 0.1° C in
the Temp (deg C) box.
RTD Calibration (Step 2 of 2)
Calibrate RTD 1, or select the checkbox below to calibrate both RTDs at the same
temperature. Make sure that the RTD is at a known temperature and enter this
temperature below:
Reference Temp (deg C):
DAC Value:
Calibrated Temp (deg C):
Calibrated Temp (deg F):
Second Cal Point
RTD 1
1
0.0 °C
32.0 °F
RTD 2
0.0 °C
32.0 °F
3
Calibrate Both RTDs at same temperature
Cancel
OK
Figure 65: RTD calibration (Step 2 of 2)
10. Click OK.
11. Click Download on the System Conguration screen to save the calibration values to the transmitter. After the download is
complete, cycle the transmitter power o and on to make the newly downloaded values take eect.
If the calibration points are not separated by at least 40° C or if either one or both of the RTDs are open, the following error
message will be displayed:
UltraLINK
Calibration points are too close. Calibration not usable.
!
OK
Figure 66: Calibration point error
Page 93 March 2018 TTM-UM-00136-EN-08
Page 94

In-Field Calibration of RTD Temperature Sensors
Check the RTD’s resistance values with an ohmmeter to make sure they are not “open” or “shorted”. See Table 21 for typical RTD
resistance values. Next, check to make sure that no incorrect “Cal Point” values were entered inadvertently.
Heat Capacity of Water (J/g°C)
°C 0 1 2 3 4 5 6 7 8 9
0 4.2174 4.2138 4.2104 4.2074 4.2045 4.2019 4.1996 4.1974 4.1954 4.1936
10 4.1919 4.1904 4.1890 4.1877 4.1866 4.1855 4.1846 4.1837 4.1829 4.1822
20 4.1816 4.0310 4.1805 4.1801 4.1797 4.1793 4.1790 4.1787 4.1785 4.1783
30 4.1782 4.1781 4.1780 4.1780 4.1779 4.1779 4.1780 4.1780 4.1781 4.1782
40 4.1783 4.1784 4.1786 4.1788 4.1789 4.1792 4.1794 4.1796 4.1799 4.1801
50 4.1804 4.0307 4.1811 4.1814 4.1817 4.1821 4.1825 4.1829 4.1833 4.1837
60 4.1841 4.1846 4.1850 4.1855 4.1860 4.1865 4.1871 4.1876 4.1882 4.1887
70 4.1893 4.1899 4.1905 4.1912 4.1918 4.1925 4.1932 4.1939 4.1946 4.1954
80 4.1961 4.1969 4.1977 4.1985 4.1994 4.2002 4.2011 4.2020 4.2029 4.2039
90 4.2048 4.2058 4.2068 4.2078 4.2089 4.2100 4.2111 4.2122 4.2133 4.2145
Table 20: Heat capacity of water
Standard RTD (Ohms)
°C °F 100 Ohm 1000 Ohm
–50 –58 80.306 803.06
–40 –40 84.271 842.71
–30 –22 88.222 882.22
–20 –4 92.160 921.60
–10 14 96.086 960.86
0 32 100.000 1000.00
10 50 103.903 1039.03
20 68 107.794 1077.94
25 77 109.735 1097.35
30 86 111.673 1116.73
40 104 115.541 1155.41
50 122 119.397 1193.97
60 140 123.242 1232.42
70 158 127.075 1270.75
80 176 130.897 1308.97
90 194 134.707 1347.07
100 212 138.506 1385.06
110 230 142.293 1422.93
120 248 146.068 1460.68
130 266 149.832 1498.32
Table 21: Standard RTD resistance values
Page 94 March 2018TTM-UM-00136-EN-08
Page 95

BRAD HARRISON® CONNECTOR OPTION
O
N
1 2 3 4
Control 1
Control 2
Frequency Out
4-20 mA Out
Reset Total
RS485 Gnd
RS585 A(-)
+
Downstream
-
-
Upstream
+
RS485 B(+)
TFX Tx
Modbus
TFX Rx
4-20 mA Out
Brad Harrison® Connector Option
Signal Gnd.
Signal Gnd.
10 - 28 VDC
10 - 28 VDC
Power Gnd.
Power Gnd.
Cable
D005-0956-001 (Straight Connector)
D005-0956-002 (90° Connector)
Bulkhead Connector
D005-0954-001
10 - 28 VDC
4-20 mA Out
Power Gnd.
Signal Gnd.
Figure 67: Brad Harrison connections
2
1
3
4
2
1
3
4
Page 95 March 2018 TTM-UM-00136-EN-08
Page 96

Product Labels
PRODUCT LABELS
Figure 68: Product labels
Page 96 March 2018TTM-UM-00136-EN-08
Page 97

INTENTIONAL BLANK PAGE
User Manual
Page 97 March 2018 TTM-UM-00136-EN-08
Page 98

Control Drawings
CONTROL DRAWINGS
Figure 69: Control drawing I.S. barrier and DTT transducers
Page 98 March 2018TTM-UM-00136-EN-08
Page 99

Control Drawings
Figure 70: Control drawing
Page 99 March 2018 TTM-UM-00136-EN-08
Page 100

Control Drawings
Figure 71: Control drawing
Page 100 March 2018TTM-UM-00136-EN-08
 Loading...
Loading...