

Page 1

1
DYNertia3 user manual
Manual version 8.1 (≥ V3.3.0)
DISCLAIMER: This software and hardware is provided "as is" without warranty of any kind, either express or implied, including, without limitation, any warranty of merchantability and fitness for a
particular purpose. In no event shall the creators of this software be liable for any direct, special, incidental or consequential damages arising out of the use or inability to use the software. The creators
and distributors of this software shall not be liable for any loss, damages or costs, arising out of, but not limited to, lost profits or revenue, loss of use of the software, loss of data or equipment, the costs
WARNING: This hardware and software is protected by law and international treaties. Unauthorized reproduction or distribution of DYNertia3, or any portion of it, may result in severe civil and criminal
of recovering software, data or equipment or claims by third parties, damage to equipment, or other similar costs.
For continuous product improvement and due to ongoing development, we reserve the right to alter specifications without notice.
penalties and will be prosecuted to the maximum extent possible under law.
DYNertia3 software is copyright- Ross Mclean 2017
DYNertia3 hardware & firmware is copyright- Darren Todd 2017
www.dtec.net.au
Page 2

2
DYNertia3 user manual
STOP !!!
Please read the appropriate ‘Quick Start’ guide for your dyno
type (Chassis or Engine & Inertia or Brake) first.
Actual testing is outlined there!!!
This ‘full’ manual contains much detail; by reading the ‘Quick Start’
guide first you will gain a basic understanding of the concepts and
key points required.
There are sample files installed along with DYNertia3 software so you can connect
the hardware and learn to use many of the features without needing to perform actual
tests. It is much easier to study without the noise of a screaming engine!
All examples in this manual use ‘Metric’ units such as kph/Kw/Nm etc. DYNertia3 can
be set in the software to ‘Imperial’ if you prefer mph/Hp/Ft Lb etc!
www.dtec.net.au
Page 3

3
DYNertia3 user manual
Table of Contents
Chapter 1: Introduction .............................................................................................................................. 10
Introduction .......................................................................................................................................................... 11
Features ................................................................................................................................................................ 12
Overview- ......................................................................................................................................................... 12
Analysing Test Results-.................................................................................................................................. 12
Data Acquisition- ............................................................................................................................................. 13
File Management- ............................................................................................................................................ 14
Printing- ............................................................................................................................................................ 14
Additional Functions- ..................................................................................................................................... 14
Load Control Options (EC and PC units)- ..................................................................................................... 15
Chapter 2: Hardware Installation ............................................................................................................... 16
Hardware Mounting .............................................................................................................................................. 17
Mounting the DYNertia3 Sensor and Magnet ............................................................................................... 17
Alternate Sensors to the supplied one ......................................................................................................... 18
Mounting the Electronic Control Unit ........................................................................................................... 19
Hardware Wiring ................................................................................................................................................... 20
Power supply connection ............................................................................................................................... 20
Example of typical wiring (additional devices shown) ................................................................................ 21
‘Linking’ Hardware to PC ..................................................................................................................................... 22
Chapter 3: ‘Brake’ Style Dyno Setup ......................................................................................................... 23
Brake (Absorber) Style Dyno Setup ................................................................................................................... 24
Basic concept .................................................................................................................................................. 24
Variations ......................................................................................................................................................... 25
Types of testing used with brake (retarder/absorber) style dyno’s ........................................................... 25
Load cell calibration and wiring for Brake type ........................................................................................... 25
Chapter 4: ‘Setup’ Menu Options .............................................................................................................. 26
Hardware- Setup Menu ........................................................................................................................................ 27
Brake / Inertia Button ................................................................................................................................ 27
Chassis / Engine Button ........................................................................................................................... 27
Inertia Mass Constants ............................................................................................................................. 27
Roller Circumference ................................................................................................................................ 27
Tire Circumference .................................................................................................................................... 27
Mass RPM Limit ......................................................................................................................................... 27
Sensor/Mass Ratio .................................................................................................................................... 28
Pulse Generator ......................................................................................................................................... 28
Tacho / Speedometer ................................................................................................................................ 28
OBDII Adapter input for Engine RPM and vehicle speed ...................................................................... 28
RPM Adapter input for Engine RPM ........................................................................................................ 28
Brake Inertia Correction (Only in ‘BRAKE’ mode) ................................................................................. 29
After Run Auto Braking/Vehicle Loading ................................................................................................ 29
Hardware Connections ............................................................................................................................. 30
Circumference Calculator ......................................................................................................................... 30
Moment Of Inertia Calculator ................................................................................................................... 30
Software- Setup Menu ......................................................................................................................................... 31
Graph Smoothness ......................................................................................................................................... 31
Point by Point (Open Loop Brake Mode) ................................................................................................ 31
Inertia Mode Graph Smoothness ............................................................................................................. 31
Passwords ....................................................................................................................................................... 31
Password (Program & Setup)................................................................................................................... 31
Lambda / AFR .................................................................................................................................................. 31
Preferred Lambda/AFR Channel .............................................................................................................. 31
Custom Fuel – Stoic/AFR and Name ....................................................................................................... 31
Graph ................................................................................................................................................................ 32
Auto Display of Last Run .......................................................................................................................... 32
www.dtec.net.au
Page 4

4
DYNertia3 user manual
Graph Torque Traces ................................................................................................................................ 32
Graph Trace ID’s ........................................................................................................................................ 32
Auto Shift Traces Right ............................................................................................................................ 32
RPM / Speed Scales .................................................................................................................................. 32
Power / Torque Scales .............................................................................................................................. 32
Run .................................................................................................................................................................... 32
Run Screens – Chart Reorders ................................................................................................................ 32
Run Duration .............................................................................................................................................. 32
Use Actual run Min RPM ........................................................................................................................... 32
Run Summary ............................................................................................................................................ 32
Live Slip Monitor ....................................................................................................................................... 32
Display .............................................................................................................................................................. 33
Multiple Monitor Support .......................................................................................................................... 33
Hide Windows Desktop ............................................................................................................................. 33
Data Window Transparency ..................................................................................................................... 33
Screensaver: .............................................................................................................................................. 33
About ................................................................................................................................................................ 33
Display of System Details ......................................................................................................................... 33
System .............................................................................................................................................................. 34
End of Each Run ........................................................................................................................................ 34
DYNO Correction Systems ....................................................................................................................... 34
Run D3 Snapshot ...................................................................................................................................... 34
Configuration Reset .................................................................................................................................. 34
General ............................................................................................................................................................. 35
Metric / Imperial ......................................................................................................................................... 35
Media (Audio) ............................................................................................................................................. 35
Remote ‘Page Turner’ Actions ................................................................................................................. 35
Data Consistency ...................................................................................................................................... 35
Point by Point (Brake Mode) .................................................................................................................... 36
Ratios................................................................................................................................................................ 37
Last Ratio Set ............................................................................................................................................ 37
Low Speed / RPM Operation .................................................................................................................... 37
Set Ratio- Change Increment ................................................................................................................... 37
Run Comments ................................................................................................................................................ 37
Comment Editing ....................................................................................................................................... 37
Comments added to each new Run ........................................................................................................ 37
Company Name ......................................................................................................................................... 37
Outputs ............................................................................................................................................................. 37
All Outputs (DYNertia3 and accessories) ............................................................................................... 37
Auxiliary Outputs (DYNertia3) .................................................................................................................. 37
File Storage Paths (Icon) ................................................................................................................................ 38
Set DYNertia3 base file storage path ...................................................................................................... 38
User Details (Icon) ........................................................................................................................................... 38
Set User Details ......................................................................................................................................... 38
Archive Storage Paths (Icon) ......................................................................................................................... 39
Set DYNertia3 archive storage path ........................................................................................................ 39
Load Control- Setup Menu .................................................................................................................................. 39
Communications- Setup Menu ........................................................................................................................... 40
Interface Port No. ...................................................................................................................................... 40
Link Button................................................................................................................................................. 40
Manual Set Button ..................................................................................................................................... 40
DYNertia3 ......................................................................................................................................................... 40
DYNertia Sensor Test ................................................................................................................................ 40
Weather Watch ................................................................................................................................................ 40
Update Interval .......................................................................................................................................... 40
Load Controller ................................................................................................................................................ 41
Torque Sensor ................................................................................................................................................. 41
OBDII................................................................................................................................................................. 41
Device Manager ............................................................................................................................................... 41
Open Windows Device Manager .............................................................................................................. 41
Printer .................................................................................................................................................................... 42
www.dtec.net.au
Page 5

5
DYNertia3 user manual
PRM/Speed Source .............................................................................................................................................. 42
Sensor Configuration .......................................................................................................................................... 42
Data Limits / Alarms ............................................................................................................................................. 42
Losses Systems ................................................................................................................................................... 42
Main Graph Trace Colour (Visible only from ‘Graph’ screen) ......................................................................... 42
Grid ........................................................................................................................................................................ 42
Operator ................................................................................................................................................................ 42
Chapter 5: RPM Input Options ................................................................................................................... 43
Engine RPM, Purpose and Options .................................................................................................................... 44
Why we may need engine RPM ...................................................................................................................... 44
Windows used for RPM setup (referred to in this chapter) ........................................................................ 44
RPM input Options (7 Available!) .................................................................................................................. 45
RPM Adapter input .......................................................................................................................................... 47
Summary of your RPM options ...................................................................................................................... 49
General RPM input information ..................................................................................................................... 49
Chapter 6: Overview- 2 Main Windows ..................................................................................................... 50
Two Main DYNertia3 Windows (DYNO / GRAPH) .............................................................................................. 51
DYNO Window ...................................................................................................................................................... 52
Record Settings ............................................................................................................................................... 52
Minimum Run RPM .................................................................................................................................... 52
Maximum Run RPM ................................................................................................................................... 52
Current Ratio.............................................................................................................................................. 52
Mode ........................................................................................................................................................... 53
Status .......................................................................................................................................................... 53
DYNertia3 Hardware Lamps (DYN) .......................................................................................................... 53
Run Control ...................................................................................................................................................... 54
Start Run Button ........................................................................................................................................ 54
Correction Factors .......................................................................................................................................... 55
User Comments Field ..................................................................................................................................... 55
Output controls and Status ............................................................................................................................ 55
Dial Gauge Displays ........................................................................................................................................ 56
Power & Torque dials ................................................................................................................................ 56
RPM/Speed dial ......................................................................................................................................... 56
Gauges Mode ................................................................................................................................................... 56
Data Gauges ON Button ........................................................................................................................... 56
Speed to RPM (ratio setting) .......................................................................................................................... 56
Strip Charts ................................................................................................................................................ 56
Data Dial Gauges ....................................................................................................................................... 56
GRAPH Window.................................................................................................................................................... 57
Tool Bar Button Functions ............................................................................................................................. 57
Exit .............................................................................................................................................................. 57
Print ............................................................................................................................................................ 57
RPM/Speed Mode ...................................................................................................................................... 57
GRAPH/DYNO ............................................................................................................................................ 57
Selecting Trace to Analyze ............................................................................................................................. 57
Selecting Trace to Display.............................................................................................................................. 57
Graph controls ................................................................................................................................................. 58
Data displays ................................................................................................................................................... 59
Run Time Gauges/Charts (Visible only from ‘DYNO’ Window) ....................................................................... 60
RPM and Speed Scales ................................................................................................................................... 60
Chapter 7: Weather Corrections ................................................................................................................ 61
Correction Factors .......................................................................................................................................... 62
Viewing Weather Data ..................................................................................................................................... 63
Chapter 8: Loading/Viewing Files.............................................................................................................. 64
Loading of files into ‘GRAPH’ Window .............................................................................................................. 65
Previewing (DYNertia3 File Explorer) and Selecting Files .......................................................................... 65
www.dtec.net.au
Page 6

6
DYNertia3 user manual
DYNertia3 file Explorer ................................................................................................................................... 66
Creating / Deleting folders for tests .............................................................................................................. 68
Reviewing Audio Files .................................................................................................................................... 69
Secondary GRAPH Window ................................................................................................................................ 70
Viewing Files (‘GRAPH’ Window) ....................................................................................................................... 71
Adjusting Graph appearance ......................................................................................................................... 71
Zooming ........................................................................................................................................................... 71
Clear Graph Trims ........................................................................................................................................... 71
Clear Graph ...................................................................................................................................................... 71
Trace Visibility ................................................................................................................................................. 71
Grid ................................................................................................................................................................... 71
Chapter 9: Trim, Merge & Join Runs ......................................................................................................... 72
Trim a Run ............................................................................................................................................................. 73
Merge Runs ........................................................................................................................................................... 74
Join Runs .............................................................................................................................................................. 75
Chapter 10: Test Notes- Add/Save ............................................................................................................ 76
Adding Test Notes................................................................................................................................................ 77
‘User’ comments field ..................................................................................................................................... 77
Accessing User Comments ...................................................................................................................... 77
Templates .............................................................................................................................................................. 78
Saving notes and applying to other tests ..................................................................................................... 78
Chapter 11: Printing & Exporting .............................................................................................................. 79
Printing .................................................................................................................................................................. 80
General Printing .............................................................................................................................................. 80
Print ............................................................................................................................................................ 80
Setup Printer .............................................................................................................................................. 80
Offset Correction ....................................................................................................................................... 80
Printing main Graph screens ......................................................................................................................... 81
Dyno Operator ........................................................................................................................................... 81
Information for Printed Output................................................................................................................. 81
Print ............................................................................................................................................................ 81
Select Page ................................................................................................................................................ 81
Customising your printout ............................................................................................................................. 82
User Details and Company Logo ............................................................................................................. 82
Customer Disclaimer ................................................................................................................................ 82
Notes to print ........................................................................................................................................................ 83
General comments for printing ...................................................................................................................... 83
Produce comments on the main graph for printing .................................................................................... 83
Exporting data ...................................................................................................................................................... 84
Select a Trace to export ............................................................................................................................ 84
Chapter 12: Live Data Viewing ................................................................................................................... 85
Gauge Screens ..................................................................................................................................................... 86
Observing the engine data ............................................................................................................................. 86
Observing the Data Channels ............................................................................................................................. 88
Display Current AFR/Lambda ............................................................................................................................. 89
Chapter 13: Analysing Data (‘View’ Menu) ................................................................................................ 90
Trace Info .............................................................................................................................................................. 91
Secondary Graph ................................................................................................................................................. 91
Individual Trace Set ............................................................................................................................................. 92
Compare ................................................................................................................................................................ 93
Torque Analysis ................................................................................................................................................... 94
Losses ................................................................................................................................................................... 95
Lambda / AFR Deviation ...................................................................................................................................... 96
Distance / Speed / Time / RPM Analysis ............................................................................................................ 97
Slip / Tyre Growth................................................................................................................................................. 98
www.dtec.net.au
Page 7

7
DYNertia3 user manual
Run Duration Info ................................................................................................................................................. 99
Point to Point Times .......................................................................................................................................... 100
XY Graph ............................................................................................................................................................. 101
Run Data vs Time ............................................................................................................................................... 102
Chapter 14: Inputs- Using ........................................................................................................................ 103
Pin Allocations ................................................................................................................................................... 104
General Input Notes ........................................................................................................................................... 105
Important general information ..................................................................................................................... 105
Wiring inputs for best results ...................................................................................................................... 105
Connecting Sensors .......................................................................................................................................... 106
General sensor connection (0-5V input shown) ........................................................................................ 106
Resistive sensor connection ....................................................................................................................... 107
Connection of DTec’s ‘Thermo-Amp’ thermocouple amplifier (for K-type sensors) ............................. 107
Air/fuel ratio meter connection (DTec ‘WB2’ unit as example)................................................................. 108
Connection of load cell for brake (absorber) style dyno’s ....................................................................... 108
RPM Adapter Input ............................................................................................................................................. 109
General notes on wiring the RPM adapter input (secondary way of measuring RPM) .......................... 109
Using a DTec ‘RPM adapter’ for the RPM adapter input ........................................................................... 109
Basic connections for a DTec ‘RPM adapter’ to DYNertia3’s RPM Adapter input ................................. 110
Connections for a DTec ‘RPM adapter’ to suit spark plug wire sensing ................................................. 110
Connections for a DTec ‘RPM adapter’ to suit coil ‘switching’ signals .................................................. 110
Connections for a DTec ‘RPM adapter’ to suit coil ‘drive’ signals .......................................................... 111
Connections for a DTec ‘RPM adapter’ to suit ‘VR’ (inductive) sensors ................................................. 111
Sensor Configuration ........................................................................................................................................ 112
Configuring an input channel using pre-settings ...................................................................................... 112
Creating your own linear (2 points, straight line) sensor calibrations .................................................... 113
Naming and calibrating of Lambda / AFR meter inputs ............................................................................ 114
Creating your own non-linear sensor calibrations .................................................................................... 114
Testing sensor configurations ..................................................................................................................... 116
Getting the best data ..................................................................................................................................... 117
Channel Filtering ..................................................................................................................................... 117
Reference Voltage Correction ................................................................................................................ 117
Sensor Alarm Points .......................................................................................................................................... 118
Sensor On / Off (Recording) .............................................................................................................................. 118
Data Consistency ............................................................................................................................................... 119
Chapter 15: Outputs- Using ..................................................................................................................... 120
Auxiliary Connections ....................................................................................................................................... 121
Connecting outputs if required .................................................................................................................... 121
Output functions ........................................................................................................................................... 121
‘Run’ Output ............................................................................................................................................. 121
‘User’ Output ............................................................................................................................................ 121
‘Brake’ Output .......................................................................................................................................... 122
Chapter 16: Load Controllers .................................................................................................................. 123
Hardware Mounting & Basic Wiring ................................................................................................................. 124
Mounting the speed sensor................................................................................. Error! Bookmark not defined.
Mounting electrical components ........................................................................ Error! Bookmark not defined.
Eddy Current Load Controller Wiring .............................................................................................................. 125
Eddy controller wiring (basic- no accessories) ......................................................................................... 125
Eddy current controller wiring harness connections ................................................................................ 126
PWM Current Load Controller Wiring .............................................................................................................. 127
Wiring PWM controller wiring (basic- no accessories) ............................................................................. 127
PWM current controller wiring harness connections ................................................................................ 128
Load Cell Connection ........................................................................................................................................ 129
Wiring of the load cell (including pressure sensor style) ......................................................................... 129
Load Cell Setup & Calibration ........................................................................................................................... 130
Sensor Calibration ........................................................................................................................................ 130
Manual Sensor Calibration ........................................................................................................................... 132
Automatic Sensor Drift Cancellation ........................................................................................................... 132
www.dtec.net.au
Page 8

8
DYNertia3 user manual
Brake ‘Closed Loop’ PID Tuning ...................................................................................................................... 133
Load control system commissioning .......................................................................................................... 133
Load Unit- Current Limitation ................................................................................................................ 133
Load Control Output ............................................................................................................................... 133
Throttle Servo Speed .............................................................................................................................. 133
Sudden RPM/Speed Drop Warning ....................................................................................................... 134
PID Test Settings ..................................................................................................................................... 134
Setup procedure ...................................................................................................................................... 135
Proportional value ................................................................................................................................... 135
Integral value ........................................................................................................................................... 135
Derivative value ....................................................................................................................................... 135
Upload Settings ....................................................................................................................................... 136
Saving and Loading Configurations ..................................................................................................... 136
Last Runs PID Power .............................................................................................................................. 136
PID Settings History ................................................................................................................................ 136
Over Temperature Load Thermostat ..................................................................................................... 136
‘Closed Loop’ Windows ..................................................................................................................................... 137
Load control window .................................................................................................................................... 137
Manual testing load control.......................................................................................................................... 137
Manual Load Control ............................................................................................................................... 137
Manual Target Fast Setting .................................................................................................................... 137
Ramp testing load control ............................................................................................................................ 138
Ramp Load Control ................................................................................................................................. 138
Ramp Mode Editor ................................................................................................................................... 138
Saving and Loading Timelines............................................................................................................... 138
Step testing load control .............................................................................................................................. 139
Step Load Control ................................................................................................................................... 139
Step Mode Editor ..................................................................................................................................... 139
Saving and Loading Timelines............................................................................................................... 139
User testing load control .............................................................................................................................. 140
User Load Control ................................................................................................................................... 140
User Mode Editor ..................................................................................................................................... 140
Saving and Loading Timelines............................................................................................................... 140
Run Options, Files and Information ............................................................................................................ 141
Timeline Preview and Selection ............................................................................................................. 141
Throttle Trims .......................................................................................................................................... 141
Manual Min RPM ...................................................................................................................................... 141
Manual Mode Load Response ................................................................................................................ 142
Load Control Keyboard Steps................................................................................................................ 142
Run Min/Max ............................................................................................................................................ 142
Auxiliary Outputs .................................................................................................................................... 142
Run Throttle ............................................................................................................................................. 142
Record Run .............................................................................................................................................. 142
Load Controller Auxiliary Options.................................................................................................................... 143
Expansion port overview .............................................................................................................................. 143
Expansion port connection details ............................................................................................................. 143
Expansion port functions ............................................................................................................................. 144
Throttle Output ........................................................................................................................................ 144
Throttle Input ........................................................................................................................................... 144
Auxiliary Outputs 1 and 2 ....................................................................................................................... 145
Over Temperature Alarm Input .............................................................................................................. 145
Chapter 17: Losses Correction ................................................................................................................ 146
’Losses’ System ................................................................................................................................................. 147
What are the effects of Mechanical Losses?.............................................................................................. 147
What does Measured Mechanical Loss Correction do? ........................................................................... 147
Are these “Losses” worth worrying about? ............................................................................................... 147
Configuration Window .................................................................................................................................. 148
USER ESTIMATED Mechanical Loss Correction ....................................................................................... 150
MEASURED Mechanical Loss Correction ................................................................................................... 151
General setup for DYNO Loss testing ......................................................................................................... 152
www.dtec.net.au
Page 9

9
DYNertia3 user manual
How often should I run DYNO losses correction? ..................................................................................... 152
Observing effect of Losses Correction ....................................................................................................... 153
Chapter 18: Maths Channels .................................................................................................................... 154
Concept .......................................................................................................................................................... 155
Sample expressions, simple ........................................................................................................................ 157
Testing an expression .................................................................................................................................. 157
Variables in detail .......................................................................................................................................... 157
Creating and saving a math’s expression .................................................................................................. 158
Applying an expression to a dyno file ........................................................................................................ 158
‘Exception’ notifications ............................................................................................................................... 159
Chapter 19: ‘Utilities’ Menu ...................................................................................................................... 160
Send an email ................................................................................................................................................ 161
Lambda AFR Converter ....................................................................................................................... 161
RPM / Torque / Power Calculator ................................................................................................................. 162
Metric / Imperial convertor for Torque / Power .......................................................................................... 162
Display current Weather Data ...................................................................................................................... 162
Display Current AFR/Lambda ...................................................................................................................... 163
RPM/Speed Stability ...................................................................................................................................... 163
Data Diagnostics ........................................................................................................................................... 164
Chapter 20: Trouble Shooting & FAQ’s................................................................................................... 165
Trouble Shooting- Common Issues ................................................................................................................. 166
Frequently Asked Questions (FAQ’s) .............................................................................................................. 169
Chapter 21: Specifications ....................................................................................................................... 170
Specifications ..................................................................................................................................................... 171
Notes ................................................................................................................................................................... 172
Chapter 22: Additions & Changes ........................................................................................................... 173
Software V3.4.x Changes & Errata ................................................................................................................... 174
www.dtec.net.au
Page 10
10
Chapter 1: Introduction
Chapter 1: Introduction
Overview and features!
www.dtec.net.au
Page 11
11
Chapter 1: Introduction
Introduction
The DYNertia3 Dynamometer package allows for simple and inexpensive "Do It Yourself" construction / upgrade of an
Inertia or Brake Dyno.
Perfect for any one interested in engine / vehicle tuning, testing and modification whether it be car, bike or even model
sized engines.
For those requiring ‘Closed Loop’ Brake control, please refer to our chapter on the optional ‘Load Controller’ systems,
this is an additional unit that interfaces to the DYNertia3 box.
An Inertia type Dyno operates on the principle of calculating the Power required to accelerate a known mass, which is
simply an additional 'flywheel' coupled to the engine or vehicle. The controller senses the velocity of the rotating mass
and outputs this and other data to the DYNertia3 software. No expensive Load Cell is required and repeatability is
excellent.
Brake type Dyno’s use an absorber system (Hydraulic, Friction, Eddy Current etc) to load the engine and the resultant
Torque is measured by a ‘Load Cell’. In ‘Brake’ mode DYNertia3 uses this Torque input and RPM to calculate Power.
The DYNertia3 software package handles all of the functions required for Dyno control: configuration, saving Runs,
correcting for atmospheric conditions, filtering, displaying data, printing, overlaying and analyzing multiple Runs.
A rotation sensor is included with the DYNertia3 Controller; you simply attach a magnet (supplied) to the Inertial Mass /
Brake or drive system. Optionally, we can supply a Hall sensor designed to sense a metal ‘target’ rather than a
magnet, allowing a metal protrusion or tooth to be used as the Sensor "target".
The closed loop Load Controller systems use an alternative sensor system (sensor is still provided by us) as it is
triggered by a target wheel with multiple teeth.
For Engine or Chassis Inertia Dyno's we also provide a comprehensive guide to assist in the design and construction of
the Inertia Assembly. All you need in addition to this is the DYNerta3 package and a PC with a USB port.
Five analogue data channels and one digital input (secondary RPM input) are available for displayed and recording these are completely flexible and can be used for sensors such as Air Fuel ratio, Exhaust Temperature, Pressure, Load
Cell, secondary RPM etc. Two ‘Math’s’ channels can be created from any of the existing data (create your own
formulas), just think of the tuning possibilities!
www.dtec.net.au
Page 12

12
Chapter 1: Introduction
Features
Overview-
Suitable for chassis and engine dyno designs, either direct or indirect drive to the inertia flywheel. Power measurement
can also be taken from a ‘load cell’ for use on brake style dynos (e.g. water, eddy current, hydraulic, friction). DYNertia3
does not control the actual load on a brake style dyno, the load must be controlled manually (i.e. it’s not closed loop).
For closed loop control of a load please see our optional ‘Load controller’ unit and related chapter.
Software provided handles all data management, analyzing and graphing required for your dyno project with powerful
features yet a ‘clean’ interface. Both Metric and Imperial modes are provided, Power, Torque and setup parameters are
changed from kph/Kw/Nm/ºC to mph/Hp/Ft Lb/ ºF etc.
Comprehensive Manual provided, also design & construction information is available for the mechanical dyno system,
including an Excel spread sheet to assist with choosing and calculating the moment of inertia for your requirements.
Included magnetic sensor (hall effect) has an indicator for diagnostics. Integrated ‘optical isolation’ circuitry in the data
acquisition systems helps limit ignition interference and provides PC protection.
As an inertia dyno, accuracy is only limited by mechanical system variation, internally each rotation is timed to 1μs (1
millionth of a second). Dual microprocessors share the data acquisition and precision timing tasks.
Ideal for portable applications (track days & exhibitions). Power supply can be from a simple 12VDC battery, 7 to18VDC
is required, e.g. a cordless drill or bike battery is ideal! We recommend a battery as resistance to interference and data
acquisition signals is far better than with a ‘plug pack’!
Compact, approximately 110L x 83W x 45H (mm) with a small remote sensor for easy adaptation to your design.
No ignition system adapters are needed for RPM sensing. It can determine engine RPM from shaft RPM by ‘learning’
their relationship (ratio). Up to 8 gears can be learnt and later selected for quick testing in any gear; the ratio can also be
manually entered if no tachometer, simply based on number of sprocket teeth (e.g. for chain drive kart engine dynos).
If an engine RPM input (not otherwise required) from the engine is available, then this can not only be used as engine
RPM but also means the difference between engine and shaft/flywheel RPM can be plotted to show clutch engagement
RPM or reveal wheel slip on a chassis dyno.
Inertia value for up to 3 Inertia mass flywheels can be stored and easily selected for designs with adjustable Inertia mass
to tailor to engine characteristics.
Compensation for Dyno Inertia during ‘brake’ testing is easily applied. Great if you have an inertia dyno, but wish to add
an additional load (brake/retarder) for ‘running in’ engines or ‘steady state’ testing.
Analysing Test Results-
Supports multiple monitors, if a second monitor is available then key Windows can be viewed separately to allow clear
analysis, even if viewing and comparing many test results.
Overlay up to 10 Power and Torque graphs simultaneously, including the ‘Last Run’ which automatically appears after
your Run is completed. Run trace color sets are user selectable, however ‘Last Run’ always graphed in red for quick
identification.
Analyse and compare test results by easily ‘hiding’ any particular Run trace or quickly replacing with other saved Runs
for comparison.
A reference Run trace can be locked so that it always stays on the screen for comparisons against other tests.
Up to 4 sets of Runs can be merged to create a brand new 'averaged' Run. Perfect for getting the most from
analysis. The new generated file appears just like any other in DYNertia3. Comments are automatically attached that
reveal the individual runs that it was generated from for future reference.
All 5 analogue channels are recorded with each Run for analysis and their value at the cursor are shown in a floating
'data box' (which can also be saved to ‘clipboard’). DYNertia3 can overlay 2 chosen data channels with the existing
Power and Torque traces for display or all of the data for any trace can be shown in a separate single Window for
detailed analysis.
Select a graph trace; an onscreen cursor makes the dials (power, torque and RPM/speed) display exactly what was
happening at that point in the test Run.
Advanced torque analysis is provided to graphically display ‘area under the curve’ and related statistics for comparing
multiple traces.
www.dtec.net.au
Page 13

13
Chapter 1: Introduction
Analysing Test Results (cont.)-
The percentage difference between a reference trace and the remaining traces can be shown graphically, for all data.
Instantly see where each modification either improves or degrades performance compared to other runs. Great tool!
Lambda / AFR deviation is shown in a special Window that allows you to set a target value, it shows you where and by
how much the real test results varied (essential for quick mixture tuning). Obviously an AFR meter must be connected!
Select any RPM/speed points and the time between them is shown for all Runs (up to 10), clearly reveals ‘real world’
acceleration improvements after modifications. Best performing Runs between all points are highlighted.
Full data table display of ‘point by point’ Power, Torque, RPM and Speed are produced for detailed study and can be
exported directly into Microsoft Excel (with field headings included) or a text file (comma delimited ASCII, CSV.) can be
generated, even the main graph view can be exported as a bitmap image (‘.bmp’) for further analysis and file sharing.
The relationship between distance traveled, time elapsed, Speed and RPM can be studied in a graphical analysis
screen.
XY graph, choose any data to plot against another and display values at the cursor.
Math’s ‘Expressions’ (formula) can be applied to any existing data to generate an additional 2 data channels. A powerful
tool is provided to easily write, test and apply your concepts.
Click on the Run of interest to show all the data that relates to it. The test conditions, max readings, set up details or any
of your personal notes that are saved along with each run can all be reviewed.
Full manual ‘zoom’ available on Power, Torque and RPM displays to display selected graph regions of interest.
Runs can be ‘trimmed’, the lower and upper speed section of graphs can removed if visually required (e.g. if tests start
and finish RPM were inappropriately set) and the Run re-saved.
User selectable ‘Trace Shift’, the last 10 trace sets are always displayed (each new test trace ‘shifts’ the oldest one out
of selection) - great when performing comparisons.
‘Auto Load’ your graph after a Run – can be selected to automatically switch to the graph display after each test Run or
you can opt to do as many Runs as you like in quick succession and analyse as a graph later. A brief test summary is
also immediately available after each test Run is completed.
Onscreen graph legend to rapidly identify Run trace set colors and filenames and a run summary is available to give the
key data for all the selected runs in one concise table.
Data corrected for weather conditions with world standards (SAEJ607, SAEJ1349, DIN70020 or uncorrected). The
environmental conditions and resultant correction factor are stored with each Run. Data can be manually entered or
‘Weather Watch’, automatic updating weather station is available as an option (USB to PC).
Data Acquisition-
Data acquisition of 5 analogue input voltages is incorporated (‘common’ ground). This allows the monitoring of variables
such as air fuel ratio, exhaust temperature etc.
Inputs can be 0-5V or 0-15V (each channel has a range selection switch)
Resistive sensors, such as standard automotive temperature sensors, can be easily connected as each channel has a
selection switch that enables an internal ‘pull up’ resistor (just connect the sensors 2 wires directly to DYNertia3!).
A data logging function is provided allowing the 5 input channels (plus the digital RPM input) to be logged to the PC. The
logging rate can be set and the data is saved (with field headings included) as a text file (.CSV) for later analysis in
Microsoft Excel etc.
Input data can be viewed separately (can even be displayed on separate screen if dual monitors used) or is available
whilst performing testing. Minimum and maximum alarms can be set to alert if sensors detect anything outside an
acceptable level (lean mixtures, engine temperature overheat or oil pressure loss as examples).
The input channels are fully scalable, even for non-linear sensors. Many sensor choices are already pre-calibrated and
DYNertia3 software doesn't just display the input voltage measured, a table for each input allows it to be calibrated and
displayed in any units you choose (eg Lambda, air/fuel ratio, degrees, PSI etc).
For configuring non-linear sensors, such as automotive style temperature sensors, there is a tool provided that just
requires 3 test points to be entered and it creates a full calibration table.
www.dtec.net.au
Page 14

14
Chapter 1: Introduction
Data Acquisition (cont.)-
Simple screw type terminals on a removable terminal plug allow for quick and easy sensor wiring. Both a 5 Volt and 12
Volt output to power auxiliary sensors is also present if required.
An additional digital channel is provided if you wish to have engine RPM directly measured (via a Hall sensor or DTec’s
‘RPM adapter’). This option can help reveal tyre slip/growth on a chassis dyno or centrifugal clutch engagement RPM.
There is a dedicated analysis screen to examine slip/tyre growth.
File Management-
Designed to perform testing quickly- common user settings are saved to reduce set up times and any personal notes
you’ve entered in the provided form (general, vehicle, owner details etc) can be saved as a ‘template’ and applied to
other runs to save re-entering the details, even copies the Run’s set up details. Files can also be set to ‘auto name’, the
file name simply increments with each test (and can carry over any personal notes), no need to even re-enter a name.
Advanced previewing function (‘DYNertia3 File Explorer’) shows graphs, summary details and the data table of all saved
runs, this allows quick selection for loading into the main graph screen or for file management purposes. A cursor is
even available to highlight points of interest on the graph and indicate that same location in the data table- no more
browsing through cryptic file names!
User configurable directories- have as many separate directories to store your runs in as required and file protection can
be applied to prevent individual files from being accidentally changed or overwritten if required.
Printing-
Color print outs of your chosen graph or overlaid graphs (up to 5 printed on same graph) is only a mouse click away,
complete with preview. A report page is also generated that has a summary of all the important test conditions, max
readings, date, time, company logo, graph notes etc.
Printouts includes Run trace sets legends, colors and filenames, the graphs ‘grid lines’ can even be turned off!
Comments can be placed on the graphs to appear on the printouts.
Printing of specific areas of interest can be performed using the manual ‘zoom’ function.
Additional Functions-
‘Point by Point’ testing mode for brake style dyno’s allows recording of individual data points at the press of a button.
These individual data sets are then combined to construct a conventional Run trace for easy analysis and comparisons.
For dyno competition entertainment, after a run maximum Power and Torque can be displayed in large format for crowds
to easily see (result in both imperial and metric units).
Graphs are fully auto-scaled, Power, Torque and RPM scales are automatically configured for optimal display.
Flexible options for performing a test; a Run can be from ‘start’ command to ‘stop’ command or from ‘start’ command to
zero power. A minimum speed can also be specified and data below this will be discarded, this eliminates any different
start points of tests due to operator error.
All dial gauges have digital displays incorporated.
Gauges display ‘real time’ data during monitoring or setup. Ideal for steady state tuning with a brake type dyno! (only
RPM is displayed 'real time' in Inertia mode)
Data ‘Smoothing’ that is applied to the Power traces is adjustable to ensure you don’t miss out any detail but still end up
with optimal appearing graphs.
There is a “Losses” function that can be used to measure and apply a correction to data for mechanical losses in your
dyno system like friction and windage (typically very small) even or/and for driveline losses due to friction.
DYNertia3 is fully isolated (optically) from the PC, this helps prevent any damage to the PC from incorrect connections
(power DYNertia3 from a battery source for this full isolation!). DYNertia3 is also protected from reversed polarity supply
connection.
A ‘system in motion’ (“Run”) output is available that is active as long as the flywheel is rotating, or a function is used that
may result in rotation. This can directly control a relay to operate safety control systems/warnings if required or for
automatic fan controls etc.
www.dtec.net.au
Page 15

15
Chapter 1: Introduction
Additional Functions (cont.)-
An ‘Auto Brake’ output is available that can directly operate a relay for an automatic brake for slowing the flywheel down
if you wish, or an automatic cooling fan for cooling friction style brakes. The time it’s active for after a test Run is
adjustable in the software. The output can alternatively be operated manually in the software and will be active for either
a short time or continuously.
A ‘user controlled’ output is available can directly operate a relay, it is manually turned on or off from the software and
can be used for any general purpose function e.g. remotely turning on a cooling fan, pumps wheel clamps etc.
Tools to work out the moment of inertia of your dyno system, calibrate non linear sensors, convert air:fuel ratios to
Lambda and for analysing relationships between Power / Torque / RPM are incorporated.
Keyboard ‘shortcuts’ assist with easy operation and an inexpensive and commercially available wireless keyboard or
even a remote ‘page turner’ (the device often seen used for PowerPoint presentations) can be used as a remote control
that can start/stop Runs, turn the gauges on/off and allow automatic file incrementing (no need to type in a new name).
Very convenient if operating both the vehicle and the dyno single handedly.
Load Control Options (EC and PC units)-
For controlling a brake type dyno in ‘closed loop’ mode we have available additional modules that connect into the
DYNertia3 unit.
There is an Eddy current power supply unit that provides the high voltage DC required by the eddy brake (retarder) and
also available is a unit with PWM output for alternative dyno types.
The load control option allows full closed loop control of the dyno. You can set a target RPM/speed to maintain it or
perform ramp and step testing.
Control of an electronic throttle servo is also possible with either load controller option. The ‘servo pulse’ output can be
used with conventional servo motors and allows integration of the throttle for either manual control or integrated into the
test procedure.
www.dtec.net.au
Page 16

16
Chapter 2: Hardware Installation
Chapter 2: Hardware Installation
Hardware mounting
Alternate sensor options
Basic power wiring (see ‘Inputs- Using’ chapter for full details)
‘Linking’ hardware to the software
www.dtec.net.au
Page 17
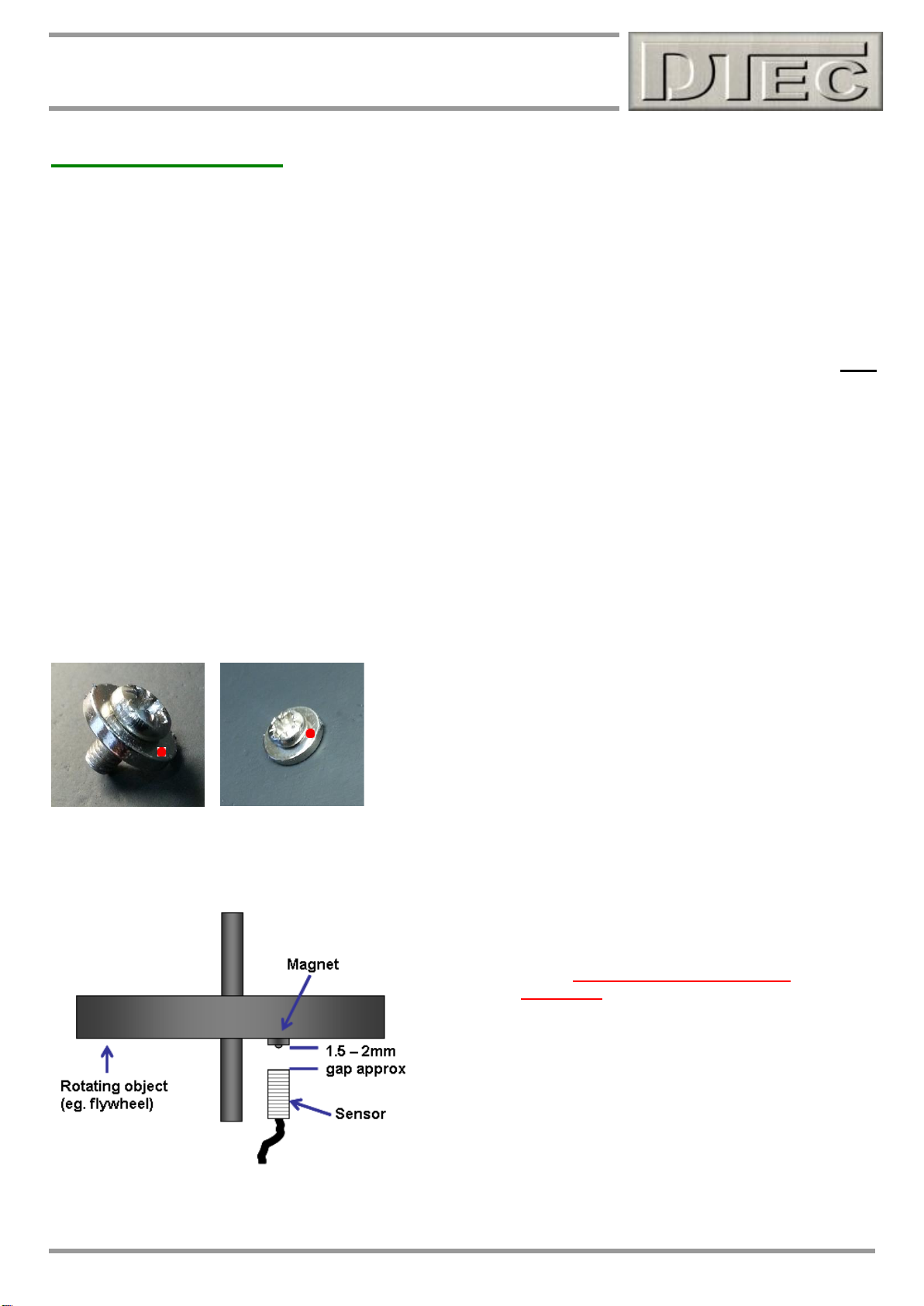
17
Chapter 2: Hardware Installation
Hardware Mounting
Mounting the DYNertia3 Sensor and Magnet
NOTE: When DYNertia3 is used with the optional ‘Load Controller’ (for ‘closed loop’ dyno) the sensor type and
mounting procedure shown below is not relevant, please see the ‘Load controller’ chapter for details.
DYNertia3 times the rotational period of a component by sensing its position magnetically. The included sensors ‘face’
contains a magnet sensing ‘Hall Effect’ switch. The sensor detects the position of the magnet attached to the rotating
dyno flywheel/load brake/shaft and processes to trigger the timing procedure.
NOTE: The rotation sensor system is the main RPM input used by DYNertia3 for Power calculation and therefore must
always be setup for operation. If you choose to also use the engine ignition system (or other source) as a secondary
RPM input then please read the chapter on ‘RPM Input Options’ in this manual regarding this optional input!
A small (9mm x 1.5mm with 3mm mounting hole) but very powerful ‘rare earth’ magnet is included with the kit. The
magnet is small as this reduces the forces involved when rotating so it is easier to secure safely.
Do not mount the magnet at the perimeter of the dyno flywheel/shaft/sprocket etc. as the centrifugal forces will be
highest; choose a location towards the centre area. The magnet is also very fragile and must be handled with care!
NOTE: The included sensor will only detect the ‘South’ Pole of a magnet, so the magnet must be have the South Pole
(marked with red paint) facing the sensor!!
Mounting by screwing/gluing flat to dyno flywheel-
Dyno flywheel is drilled and tapped for 3mm screw (2.5mm drill size is
usual for 3mm tapping). Short (min 6mm) screw inserted into magnet.
Do not over tighten or magnet may crack!
Magnet epoxy glued and screwed to dyno flywheel with South Pole outwards.
The sensor face must be positioned 1.5 - 2mm from the
magnets South Pole (or the head of the screw if one is used
to secure magnet).
www.dtec.net.au
Page 18
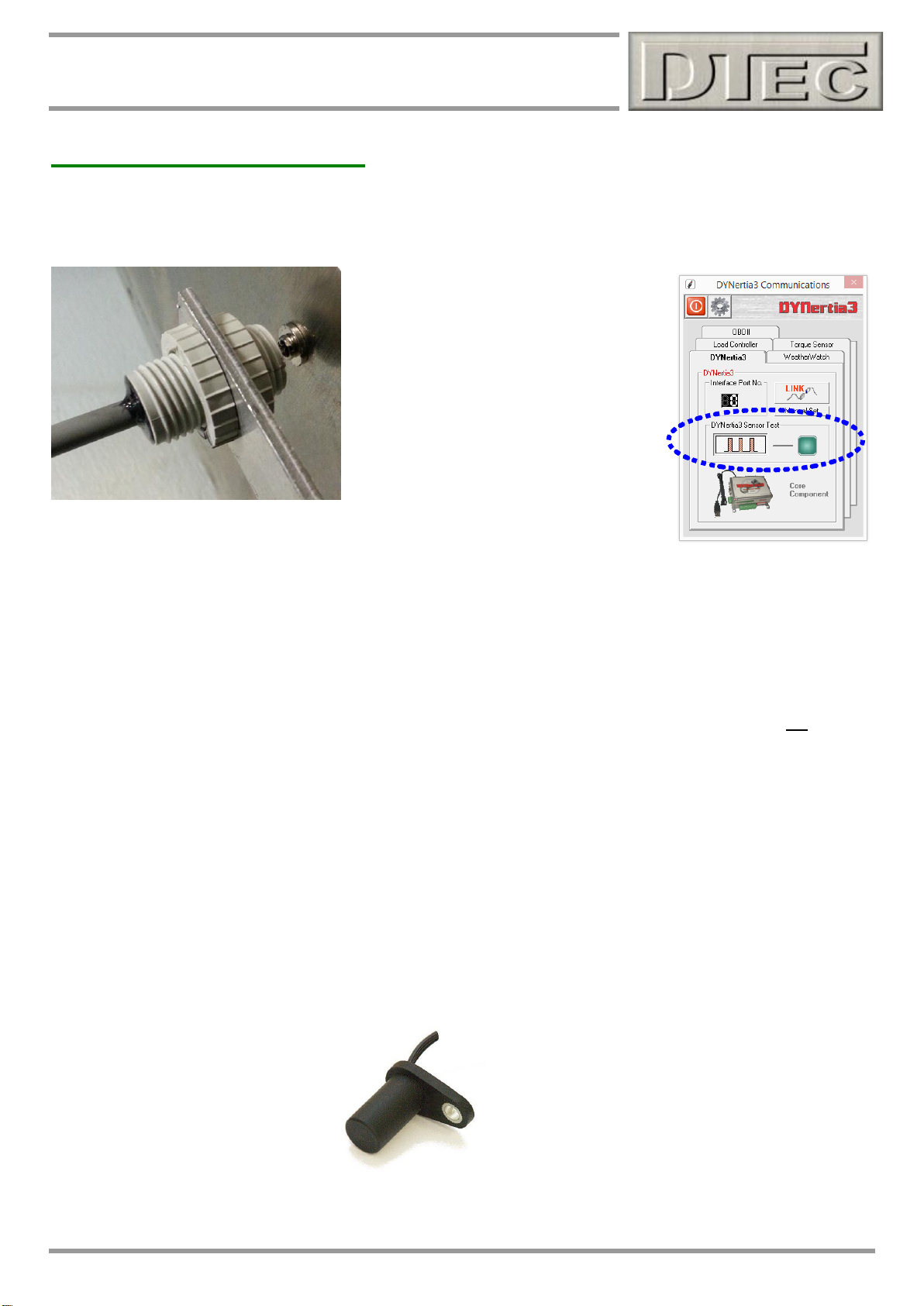
18
Chapter 2: Hardware Installation
Hardware Mounting (cont.)
A16mm diameter hole is required to mount the sensor. Do not over tighten the lock nuts or they will be damaged. A
small ‘blob’ of silicon sealant or similar is applied to the edge of the nuts to stop them loosening with vibration.
Tip- After the ‘Linking’ process (discussed
later) the sensor operation can be checked
via the button “DYNertia3 Sensor Test”. The
indicator and an audible noise can be used
to confirm sensor operation during rotation.
The indicator lamp/noise triggers for a short
time as the magnet approaches the sensor
(only on approach).
KEY POINTS- 1.5 – 2mm gap. Safe magnet mounting, South Pole (marked with red
paint) of magnet facing towards the sensor!
Alternate Sensors to the supplied one
DYNertia3 can accept other types of sensors if you prefer. The sensor input terminal is a digital input; it will not accept
voltage from an inductive sensor (VR). The ‘signal’ terminal of DYNertia3 needs to be ‘pulled’ to ground when a target
object is detected. Sensors that switch to ground like this are called ‘open collector’ style and include most industrial
proximity sensors (too slow generally) and also the majority of automotive camshaft sensors (‘Hall’ type).
NOTE: If you are unsure please just contact us for help; we are not responsible if you damage the unit from incorrect
connection!
Hall sensors- Hall sensors are ‘switching’ style sensors and are compatible, they are available to detect either magnet
or metal ‘target’ objects. This may be a good choice if you wish to detect a rotating metal object rather than a magnet
like the provided sensor does i.e. perhaps you have a protruding ‘key’ in a shafts key way. A common metal sensing
sensor example (shown below) is the ‘Honeywell 1GT101DC’ sensor or most automotive camshaft sensors are good.
www.dtec.net.au
Page 19
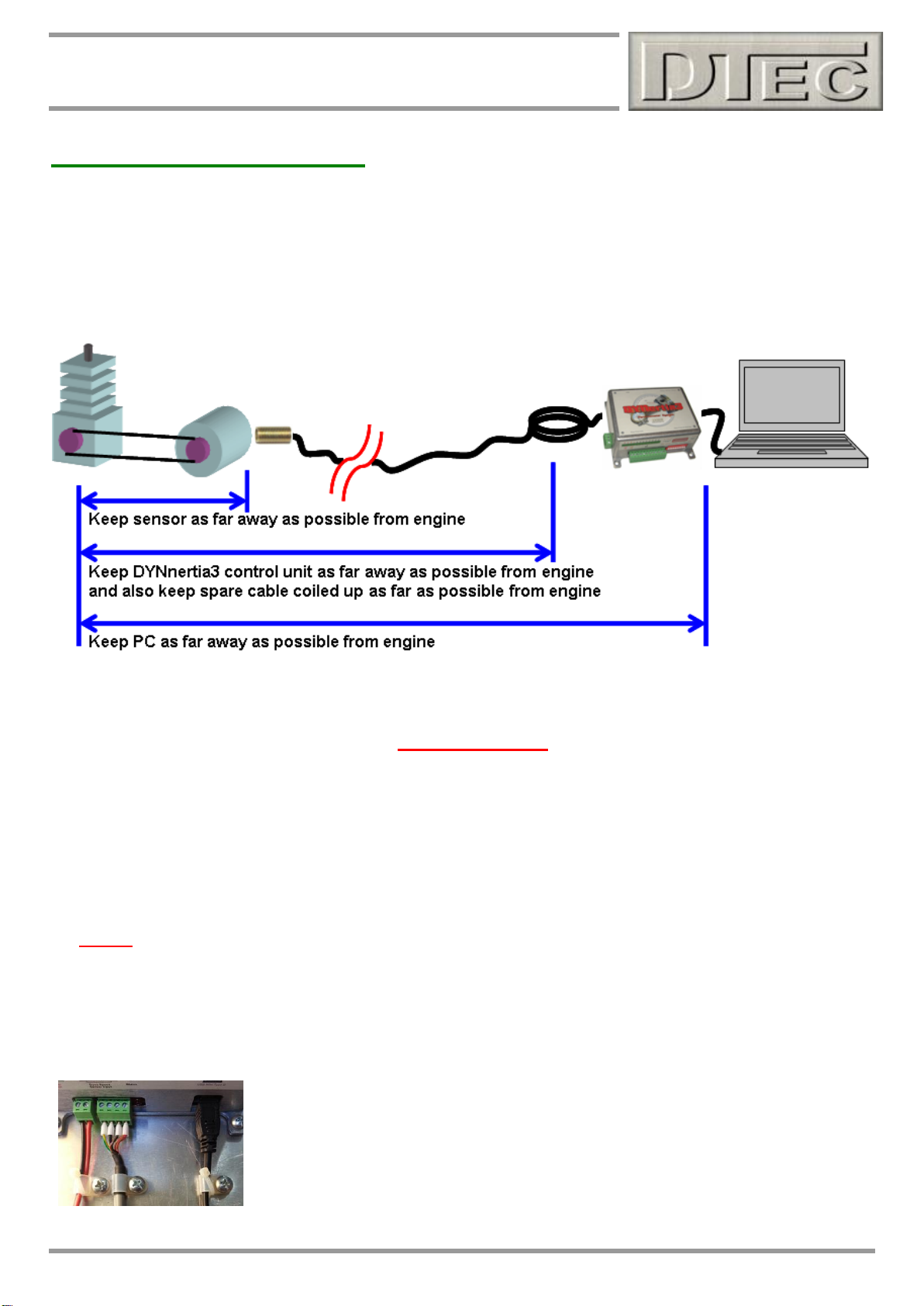
19
Chapter 2: Hardware Installation
Hardware Mounting (cont.)
Mounting the Electronic Control Unit
Strong vibration may also destroy the sensor and control unit (as with all electronics) so it is important to consider
mounting arrangements carefully.
NOTE: Engines with CDI ignitions, especially in conjunction with copper core spark plug leads and non-resistive spark
plugs can generate large electrical interference for all electronics including PC’s. It is very important to apply the
following mounting and cable routing suggestions to avoid any problems!
It is very important to keep the PC, DYNertia3 and it’s cabling well away from large sources such as ignition systems-
1) Mount the sensor unit at the furthest distance (‘every inch counts’!) from the engine as possible. Route all cables
as far as possible away from the engine (and any electric motors such as cooling fans) and keep the controller and PC
at a distance. Coil any spare cable up neatly at the PC. Keep the sensors lead away from the USB lead or any other
wiring.
It’s best to route cables inside a protective metal tubing or keep separated from the engine by mounting behind the
earthed metal of the dyno frame or shields. Secure at the DYNertia3 control unit to prevent movement of the cables.
DYNertia3 software can even be operated by remote control if required (wireless keyboard or a PC ‘page turner’ as one
option), tests can be started and stopped and new files even created (names incremented).
2) Always use resistive Spark plugs and suppressed Spark plug leads to prevent interference (at least during testing).
Tip- A suppressed spark plug lead from a car can be put in series with the existing spark plug to reduce interference.
This additional spark lead is essential on many go-kart engines as they have particularly ‘noisy’ ignition systems!
3) Follow the wiring advice in the “Inputs- Using” chapter on wiring if measuring from additional sensors.
Secure any leads close to the DYNertia3 control box. The aim is so that the leads are
completely prevented from movement, as this will place stress on the connectors and
wiring.
www.dtec.net.au
Page 20
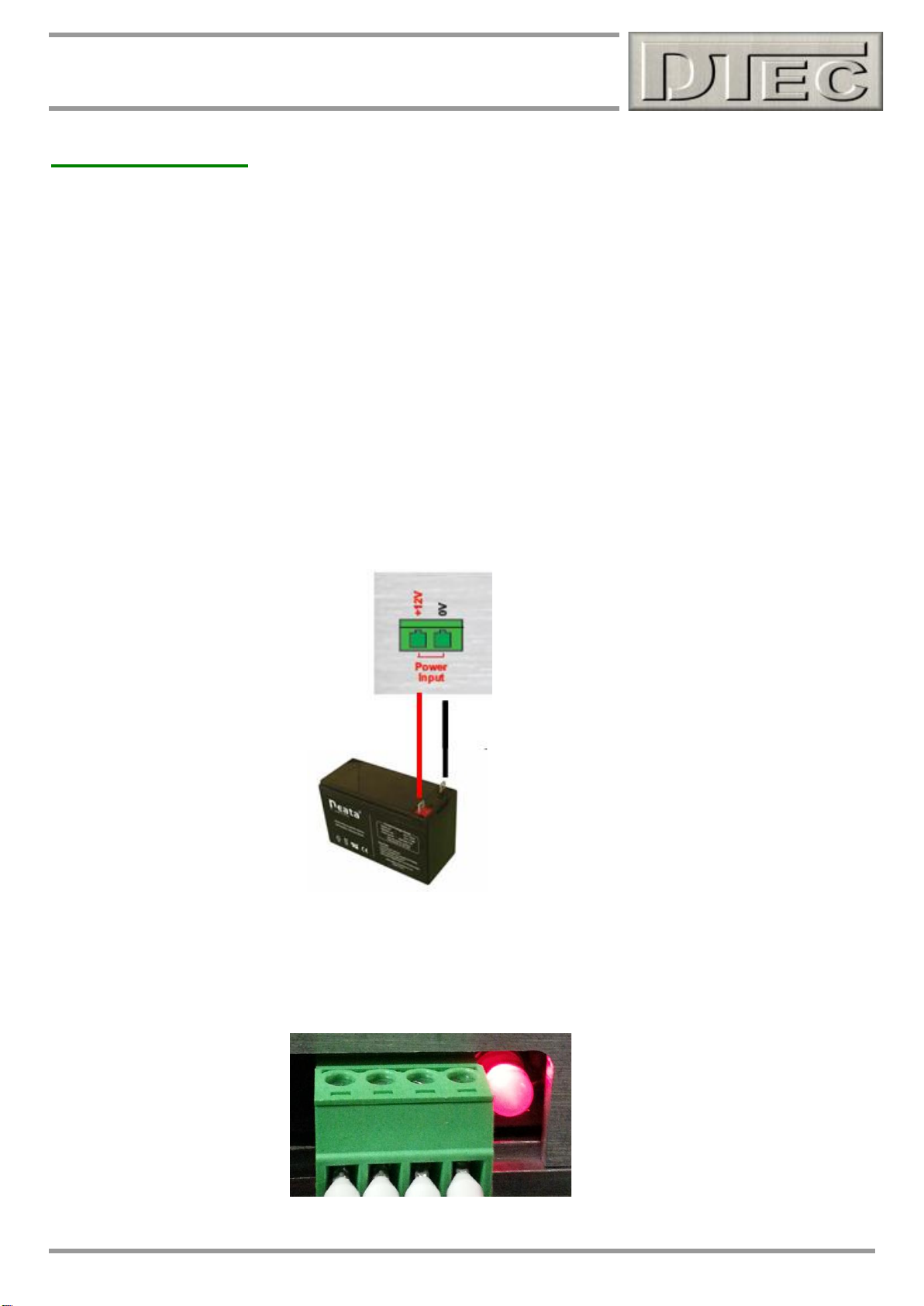
20
Chapter 2: Hardware Installation
Hardware Wiring
Power supply connection
Please see chapter called ‘Inputs- Using’ of this manual for full wiring details on connection of data acquisition devices,
below we just cover the power supply connection required for basic operation.
Power supply can be from a simple 12VDC battery, 7 to 18VDC required. DYNertia3 typically draws less than 50mA so
very little demand is put on a battery e.g. a cordless drill or bike battery is ideal!.
A power pack connected to mains is NOT recommended, especially if data acquisition is being used. The resistance to
interference and stability of the data acquisition signals is generally much better with a battery! This is very dependant
on the dyno installation, PC used and engine types being tested (as to how much interference they produce). If using a
power supply it should be fully regulated (not just a battery charger!) and be trailed to ensure it is acceptable.
Full isolation protection (optical) for the PC is only provided when DYNertia3 is powered from a battery source.
NOTE: Very low battery voltage (less than 7VDC) will cause poor sensor operation and erratic results. Please monitor!
With power connected to DYNertia3 the status LED (next to the sensor connector) will blink twice at first to indicate
microprocessor is initialising. After this the LED will illuminate to indicate power, but don’t assume there is not a power
supply problem based solely on LED operation, it takes very little voltage to light an LED!
www.dtec.net.au
Page 21
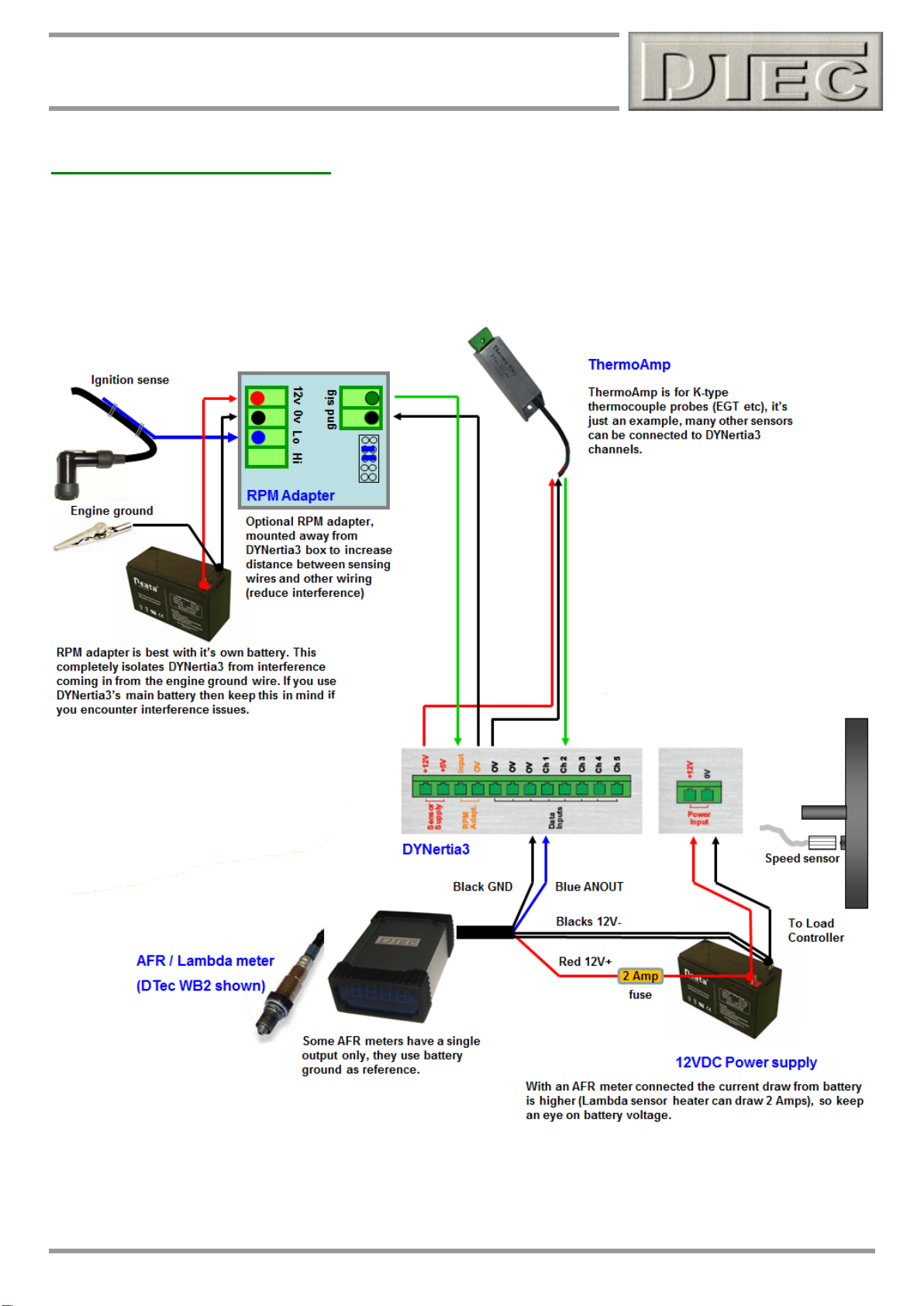
21
Chapter 2: Hardware Installation
Hardware Wiring (cont.)
Example of typical wiring (additional devices shown)
Please see chapter called ‘Inputs- Using’ of this manual for full wiring details on connection of data acquisition devices.
For brake type dyno’s there will be a load cell and amplifier to be connected to channel 5, this is covered in more detail
in the Brake dyno ‘quick start guide’ and in the chapter ‘Load Controller’ in this manual..
NOTE: In this diagram if the AFR meter was reversed it would damage the DYNertia3 unit. Make sure the meter is not
accidently connected incorrectly to the battery or to the DYNertia3 unit !
www.dtec.net.au
Page 22
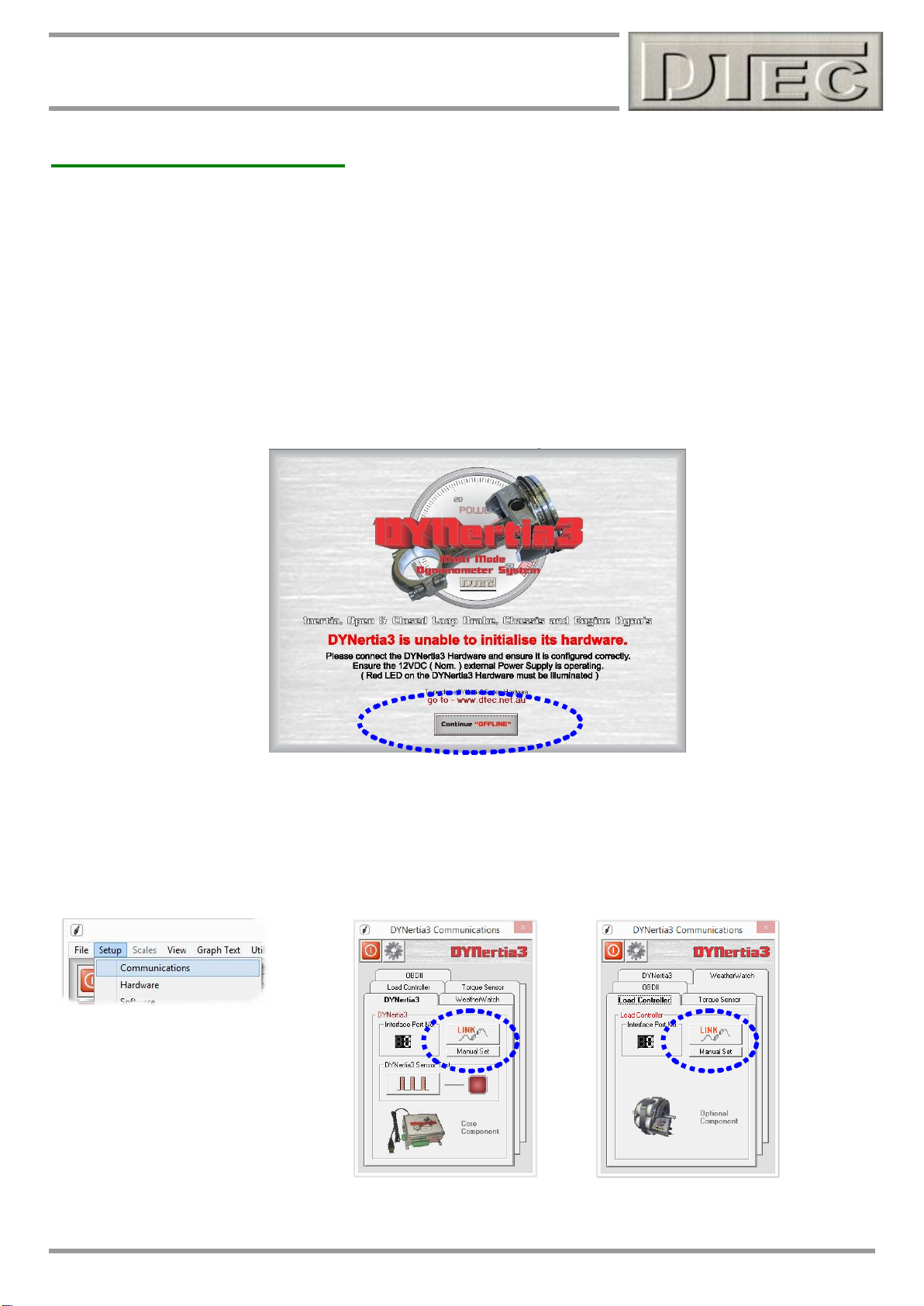
22
Chapter 2: Hardware Installation
‘Linking’ Hardware to PC
Do not run other programs when using DYNertia3, background processes could interfere.
1. When you first run DYNertia3 you will be shown this Window. Press the “Continue OFFLINE” button, this is
necessary as DYNertia3 software does not yet know what PC communication port your control units are connected
to, it must be first ‘Linked’.
Once ‘Linked’ DYNertia3 will automatically find the hardware in future when it is connected, powered and the software is
started. If you plug DYNertia3 or Load Controller hardware into another USB port you may need to re-link.
This Window will also appear whenever DYNertia3 is started and the control units are not connected, powered or
‘Linked’. Pressing the “Continue OFFLINE” button allows you to continue to use DYNertia3 to view and analyse data ‘offline’ (i.e. with no hardware connected to the PC).
2. Power your DYNertia3 and Load Control units and plug the USB in, start DYNertia3 software, select the menu option
“Setup” and then choose “Communication” and then press the “LINK” button to DYNertia3 to automatically configure
the port interface. Then repeat for ‘Load Controller’ or ‘Weather Watch’ if connected.
www.dtec.net.au
Page 23

23
Chapter 3: ‘Brake’ Style Dyno Setup
Chapter 3: ‘Brake’ Style Dyno Setup
Setting up a brake (absorber) style dyno, instead or in addition to an
Inertia style Dyno!
The following basic information regarding brake type dyno’s
is relevant for an ‘open loop’ or ‘closed loop’ dyno system.
You must also refer to the chapter ‘Load Controller’ for
specific details on brake dyno setup, regardless of type.
www.dtec.net.au
Page 24
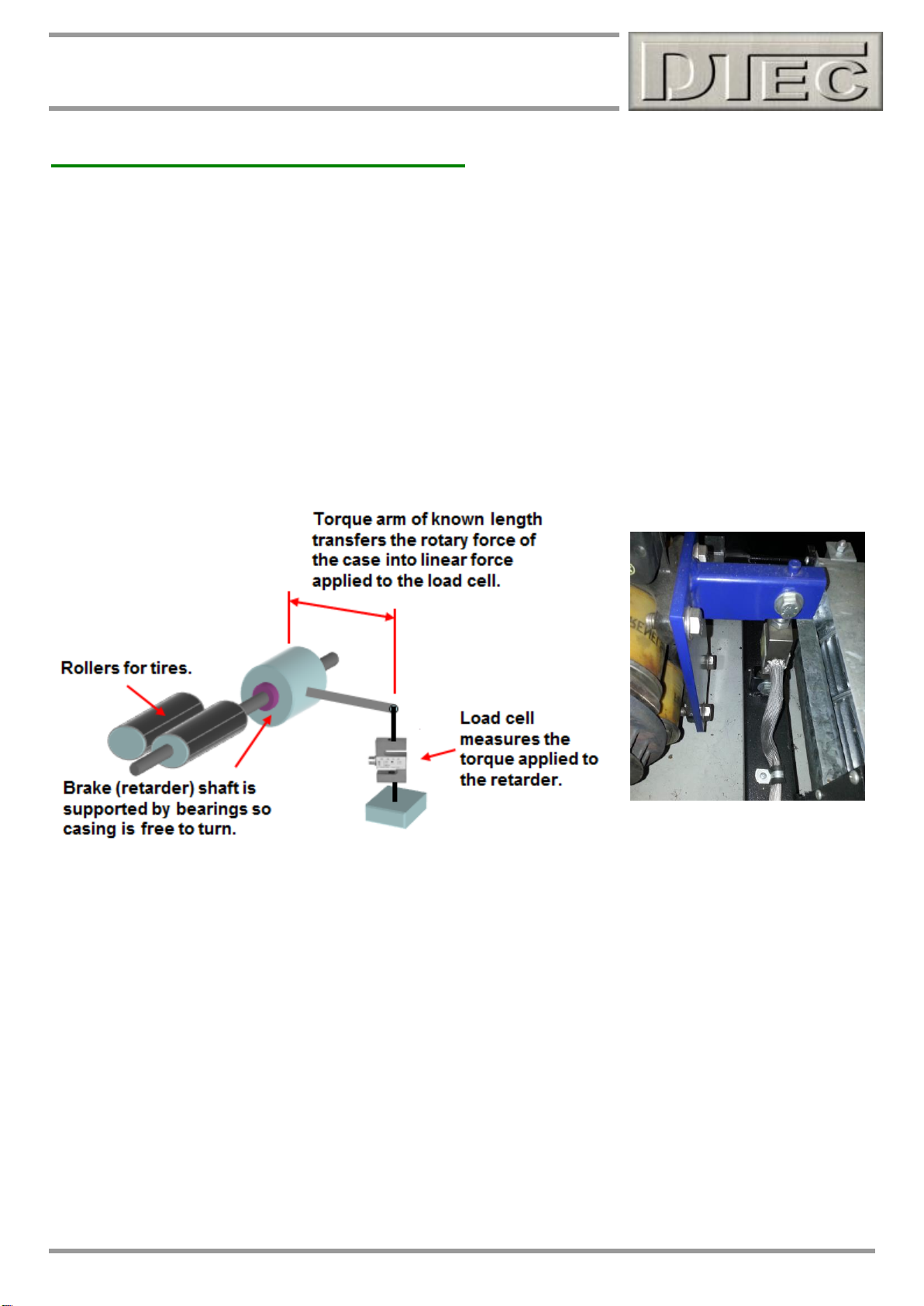
24
Chapter 3: ‘Brake’ Style Dyno Setup
Brake (Absorber) Style Dyno Setup
Basic concept
Brake (or absorber) style dyno’s rely on a device to apply load to the engine. In a chassis dyno, this device absorbing
the power (we will use the term 'brake' or 'retarder') is generally mounted on the end of the rollers shaft so its case could
rotate as a load is applied if unrestrained. It is this rotational force that is measured to calculate the torque. Engine dyno
have the brake either directly mounted to the engine or via a reduction drive (Eddy retarders have a limited max RPM)
The case is attached to a load cell sensor via a ‘torque arm’ that transfers the rotary motion into the linear one applied to
the sensor.
The length of the arm acts as a lever, so this can be designed to suit the measuring range of your load cell and give
appropriate sensitivity (or even made with several load cell attachment points for variability).
Note: We use the term "load cell" here for our 'torque sensor', but this can be an alternative style such as a hydraulic
master cylinder and pressure sensor or even a mechanical spring and coil type 'potentiometer'.
Note: Please see the chapter on ‘Load Controller’ for the load cell wiring and calibration procedures.
If we know the force (in Nm allowing for the length of 'torque arm') applied to the load cell and the RPM of the shaft we
can calculate power by the metric formula Kw = (Nm x RPM) / 9549, this will be power at the wheels. By using a chassis
dyno we can have a very convenient and quick way of testing modifications, unfortunately the effect of drivetrain losses
and tire losses do have an impact, an engine dyno avoids many of these ‘losses’.
See www.DTec.net.au website ‘downloads’ for information (‘Brake Chassis Design Tool’ or ‘Brake Engine Design Tool’)
The DYNertia3 controller senses the speed of the brakes rotating shaft and outputs this data, along with the load cell
information to the PC for analysis and storage.
DYNertia3 software package handles all the functions required of dyno acquisition: setting up, saving runs, correcting for
atmospheric conditions, filtering, displaying data, printing, overlaying and analyzing multiple runs.
www.dtec.net.au
Page 25
25
Chapter 3: ‘Brake’ Style Dyno Setup
Brake (Absorber) Style Dyno Setup (cont.)
Open Loop systems- You control he load manually, DYNerta3 does not have control over the brake.
Closed Loop systems- You can enter an RPM/speed and have DYNertia3 vary the load to maintain that RPM
automatically i.e. the load controller unit directly controls the brake and observes the result to allow continual adjustment.
Note: Basic DYNertia3 system alone does not control the actual brake/retarder load, this must be manually controlled. It
has ‘open loop’ functionality i.e. you cannot enter an RPM and have DYNertia3 vary the load to maintain that RPM
automatically.
For ‘closed loop’ control you need the optional ‘Load Controller’ hardware unit. For closed loop control of your load
please see web site for information on the ‘Load controller’ unit (also see the ‘Load Controller’ chapter in this manual).
In Brake mode, DYNertia3 uses Torque data from the load cell and roller RPM calculate Power. The measured Torque
is corrected to engine RPM (calculated from the dyno’s included sensor and ratio information or measured directly from
the engine). If the ratios are set incorrect then the readings will be incorrect i.e. if you just use roller RPM on a chassis
dyno then Torque will be shown as it appears at the roller only and not related to engine RPM. This is called ‘Tractive
Torque’ (Torque at the tyre) and will be higher than engine Torque due to the gears multiplying effects. It is really the
Torque delivered to the road and can be used as an effective tunning tool due to the increase in Torque resolution!
Variations
As noted earlier, some brake style dyno use a hydraulic cylinder (like a vehicle ‘master cylinder’) as the ‘load cell’, by
fitting a pressure sensor into the cylinder this provides the torque output. Alternatively some very old systems use a
spring assembly to counter the brakes rotation and then measure the displacement of this with a linear potentiometer
(position sensor).
Both can be interfaced into DYNertia3!
Mechanical instability will cause poor quality data, some old friction style brake dyno’s even have shock absorbers to
dampen movement (those just mentioned with springs in their load measurement system).
It can be very difficult to allow steady rising of the RPM for a ‘run’ without a good control system for your load, friction
brake systems are particularly difficult to operate smoothly and are often best operated for brief ‘steady state’ tunning
(‘Point by Point‘ mode is ideal). Excessive Inertia in your system can also cause difficulties on low power engines i.e. the
inertia load can end up limiting the acceleration during a test and not the load absorber device.
Types of testing used with brake (retarder/absorber) style dyno’s
Two main tests can be performed with a brake style dyno, a ‘ramp run’ or a ‘steady state’ test-
A ‘steady state’ test is where the load is applied until the engine RPM reaches a desired set point (with a fixed throttle
opening) and data is then recorded and displayed at that speed.
A ‘ramp’ test is performed by adjusting the brake load to allow the engine to accelerate through the RPM range whilst
DYNertia3 graphs the Power using the load cell as a Torque input.
Load cell calibration and wiring for Brake type
Please see the chapter on ‘Load Controller’ as the wiring and calibration procedures are explained there. Open loop or
closed loop control still uses the same load cell configuration.
www.dtec.net.au
Page 26

26
Chapter 4: ‘Setup’ Menu Options
Chapter 4: ‘Setup’ Menu Options
Hardware setup
Software setup
Communications setup
Sensor setup
Losses setup
Main Graph Appearance setup
Configuration reset
www.dtec.net.au
Page 27
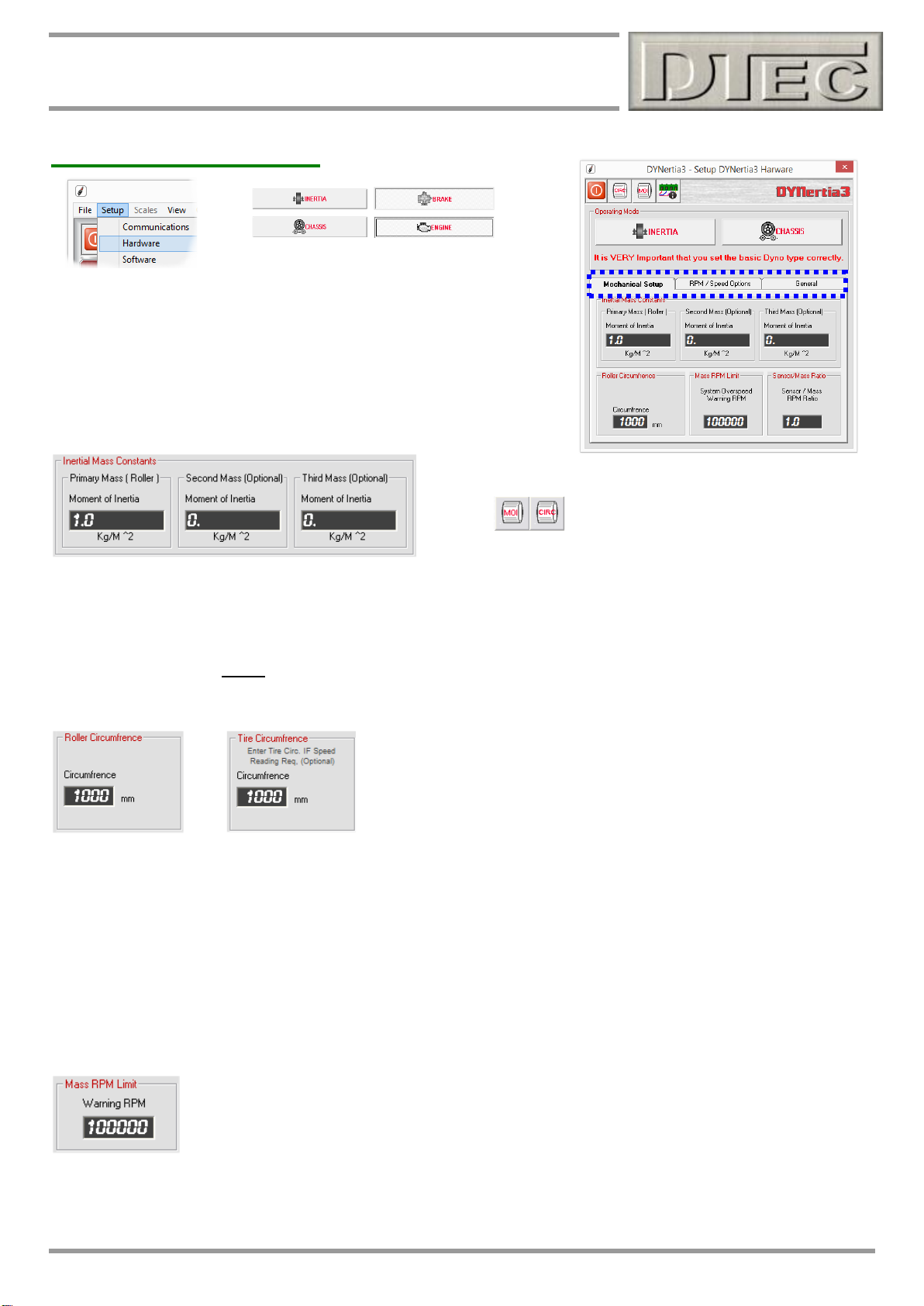
27
Chapter 4: ‘Setup’ Menu Options
Hardware- Setup Menu
Brake / Inertia Button: Determines if you are using a brake
(retarder/absorber) type dyno or an Inertia type dyno. If you select a brake
style dyno then DYNertia3 will expect to see a ‘load cell’ input into channel
5 of the data acquisition connector. This will be used as the primary torque
input for Power calculations rather than the inertia value.
Chassis / Engine Button: Determines if you are using a chassis or
engine type dyno.
Tip- Helpful Tools!
Inertia Mass Constants: The dynos “Primary Mass” (the main dyno ‘flywheel’ and any significant rotating
components) inertial value is entered here (see “MOI” button for a tool to help calculate if not already known). If the dyno
design incorporates multiple selectable dyno flywheels then their values can be entered in “Second Mass” and “Third
Mass” to allow quick selection in main Dyno screen.
These extra masses are added to the primary inertia value when selected in the ‘Dyno’ screens “Record Settings” box.
The entry screen for roller circumference is only revealed when a chassis
dyno is selected.
The entry screen for tire circumference is only revealed when an engine
dyno is selected.
Roller Circumference: Used for chassis dyno’s to allow speed in kph/mph to be displayed if required (see “CIRC”
button for a tool to help calculate if not already known).
Tire Circumference: Optionally is used for engine dyno’s if you wish to display speed in kph/mph as oppose to just
RPM. The road speed can be simulated as the dyno will now know what distance would be travelled for every turn of the
drive shaft.
For an engine dyno, enter the distance in mm that the vehicle would travel per rotation of the shaft that the dyno speed
sensor is mounted to, not necessarily the actual ‘tire circumference’
Note: Units will be metric or imperial based on your choice in menu “Setup/Software”.
Mass RPM Limit: You can apply an RPM limit alarm to your system if you wish i.e. if there is a maximum safe limit you
wish for your mass/flywheel not to exceed. If DYNertia3 detects an over speed condition it will give very obvious alerts to
the danger and force an end to your test session.
www.dtec.net.au
Page 28

28
Chapter 4: ‘Setup’ Menu Options
Hardware- Setup Menu (cont.)
The entry screen for sensor/mass ratio is only revealed when an inertia dyno is
selected.
The entry screen for pulse generator is only revealed when a brake dyno is
selected AND the optional ‘Load Controller’ is configured (‘Linked’).
Sensor/Mass Ratio: On some special purpose dyno applications it may be that there is extremely low rotation speed
and therefore limited flywheel/roller timing data. This feature allows designs such as this to drive a sensor wheel via
gearing (or friction contact) at a higher RPM and thus can have the sensor trigger magnet speed applied rather than the
flywheel e.g. if the sensor magnet was spinning twice as fast as flywheel/roller then a value of 2 would be required.
It is also used where the sensor is not actually mounted on the flywheel/roller but on another shaft that rotates at a
different speed to the inertial mass.
Note: Trying to use this feature to allow triggering from multiple trigger targets on the flywheel/roller will result in poor
data quality; it will need excessive filtering to smooth out the ‘jitter’ from tolerances between your trigger targets.
Pulse Generator: The number of teeth on the trigger wheel is entered. See load controller chapter for details.
Tacho / Speedometer: The filtering speed determines the level of smoothing applied to the display. This has the effect
of displaying values that are not so wildly changing due to small cyclic variations in engine firing and dyno mechanical
tolerances.
Tip- Too large a ‘Smoothing’ numbers and disturbances that may be of interest can be hidden
OBDII Adapter input for Engine RPM and vehicle speed: If you have the optional OBDII interface (not available at
time of this manual) then you can choose to have this data used for various functions rather than just the calculated
RPM and speed (which is derived from the main flywheel/roller speed sensor).
RPM Adapter input for Engine RPM: If you have a suitable input adapter (such as DTec’s ‘RPM Adapter’) or sensor
connected to DYNertia3’s RPM Adapter input then you can choose to have this engine RPM value used for various
functions rather than just the calculated RPM (which is derived from the main flywheel/roller speed sensor).
NEVER connect ignition system directly to the RPM Adapter input!
RPM Adapter input is required if ‘slip’ analysis is to be performed. ‘Slip’ is dyno RPM compared to engine RPM, this is
handy for checking clutch engagement RPM or looking for loss of tyre traction on a chassis dyno.
It is important that if the RPM Adapter input is used then the number of pulses received that
represents a single engine rotation must be entered. It can be fractional e.g. 4 strokes only fire every
0.5 rev (which is once every 2 revolutions!) so “0.5” would be entered (2 stroke = “1”)
NOTE: Read the chapter “RPM Input Options” chapter for full setup details and “Inputs-
Using” chapter for connection!
www.dtec.net.au
Page 29
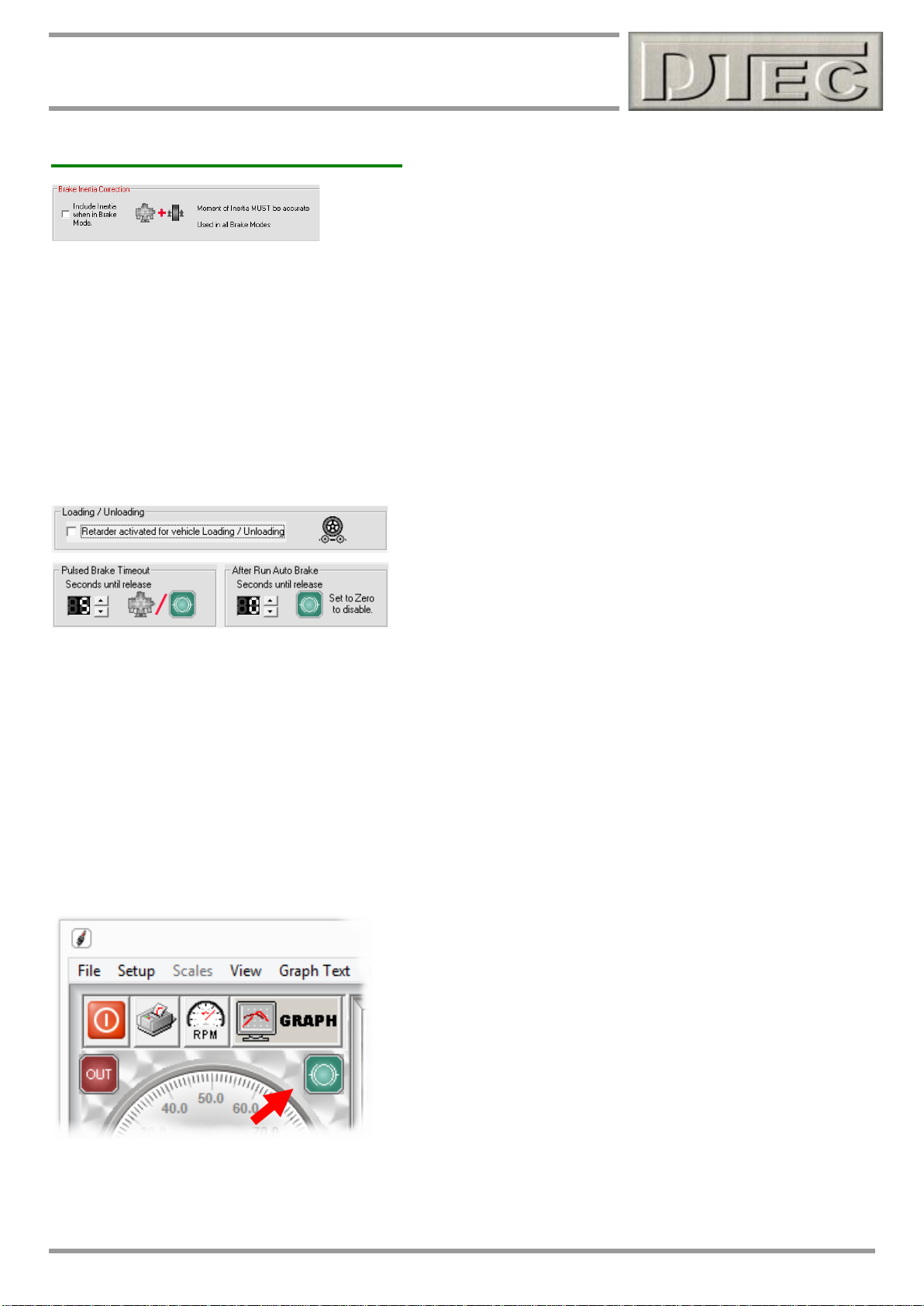
29
Chapter 4: ‘Setup’ Menu Options
Hardware- Setup Menu (cont.)
Brake Inertia Correction (Only in ‘BRAKE’ mode): If you have a brake style dyno and are performing ‘ramp’ runs
then the inertia of your dyno may be a considerable factor. If you select this option, and have the Inertia value correctly
entered, then DYNertia3 will basically operate as both Inertia and brake dyno simultaneously i.e. it will calculate the
power used to accelerate the mass as well as derive the power from the load cell.
Note: Excessive inertia built into a brake dyno (i.e. an inertia dyno with a brake added) will result in incorrect results as
high inertia will mean the load cell will not be reading as the brake will have no control of the ramp rate until power
overcomes the inertia effect, if at all!
After Run Auto Braking/Vehicle Loading:
Note: The use of the “Brake” output depends on the dyno type you
have setup. If you have a load controller connected then the settings
even alter to allow interaction with the operation of the eddy brake.
The ‘Brake’ output terminal may be used to operate an automatic brake for slowing the flywheel down if you wish,
operating a vehicle lift/jack to remove vehicle from rollers, an automatic cooling fan for friction style brakes or to control
the eddy retarder for vehicle removal if a load controller is fitted.
No load controller fitted- ‘Brake’ output terminal can go active from after a run is stopped and remain on for the time
set in ‘After Run Auto Brake’. It can also be manually activated for a pre-set time (‘Pulsed Brake Timeout’) or toggled
on/off at will.
load controller fitted- As above regarding the output terminal, however simultaneously in conjunction with the ‘Brake’
output terminal the actual eddy retarder is also powered with maximum power (to its set power limit). This function is for
locking the rollers to allow easier vehicle removal on a chassis dyno.
To allow this the ‘Retarder activated for vehicle loading/unloading’ should be enabled.
Besides the automatic function upon ending a test, the brake output
can alternatively be briefly operated (based on ‘Puled Brake Timeout’)
by manually selecting the icon (visible on both GRAPH and DYNO
screen) with a ‘Left’ click, this allows for setting up safely and also
applying brief braking pulses
Alternatively a ‘Right’ click on the icon will hold the output on
continuously until another ‘Right’ click is done again i.e. ‘Right’ click
toggles the output state. If not allocated to a brake; this output would be
perfect for remotely turning on a cooling fan etc.
Note: Further details for the complete output functions are outlined in the chapter “Outputs- Using”
www.dtec.net.au
Page 30
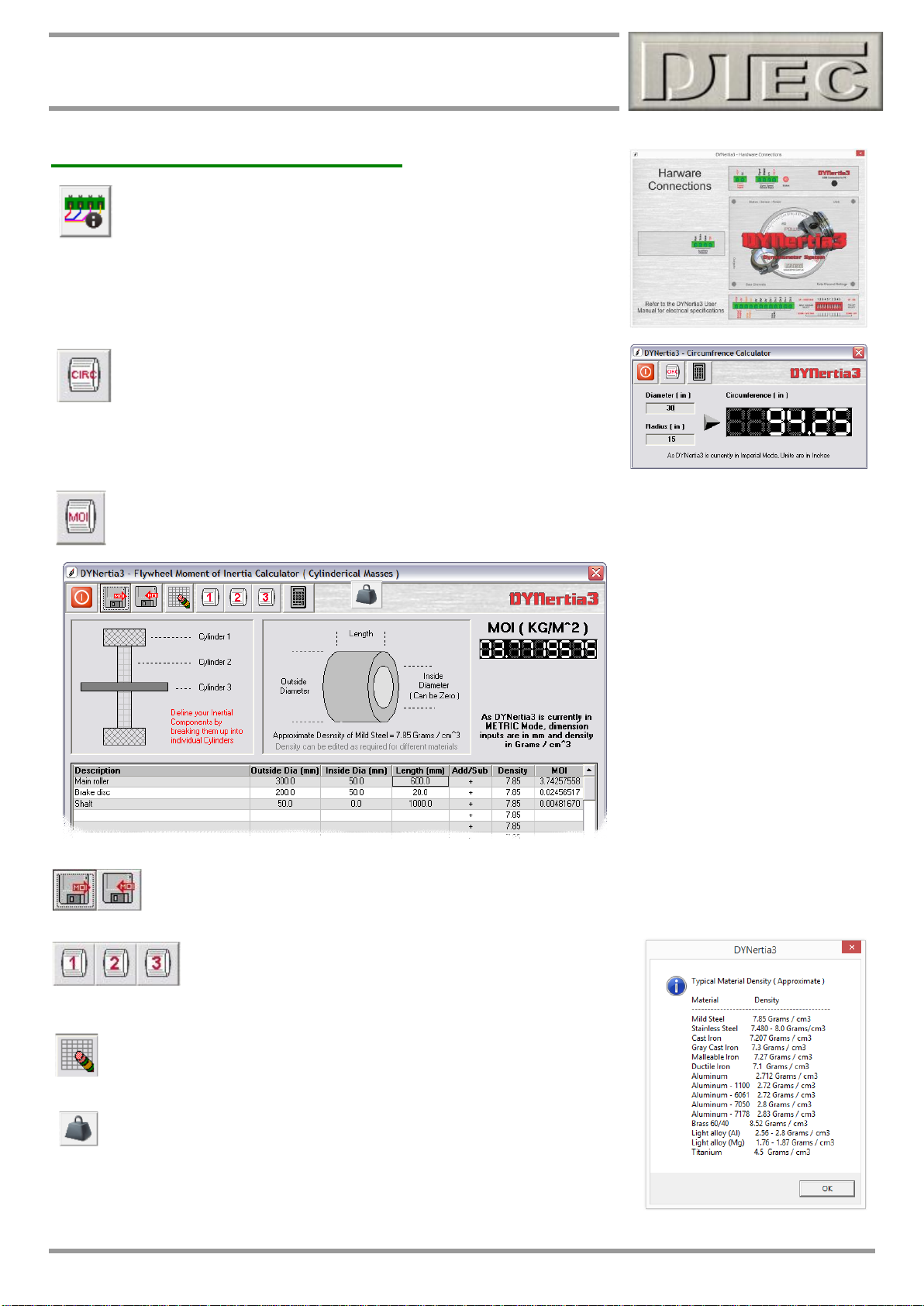
30
Chapter 4: ‘Setup’ Menu Options
Hardware- Setup Menu (cont.)
Hardware Connections: An overview of terminal designations on the
DYNertia3 hardware. Handy if your decals are not visible.
Circumference Calculator: Tool to help calculate your rollers
circumference if you do not already know it.
Units will be metric or imperial based on your choice in menu
“Setup/Software” (Imperial or Metric). Pressing the “Circ” button will
transfer the value into the “Roller Circumference” field in this ‘Hardware’ menu.
Moment Of Inertia Calculator: Tool to help you calculate the Moment of Inertia (MOI) of your dyno. If the
dyno design incorporates multiple selectable flywheels then their values can be saved separately as a
“Second Mass” and “Third Mass”.
Once the values of components have been entered into the rows they can be saved (or loaded) for later
use and reference.
Simply press one of the numbered buttons and the MOI value
will be directly transferred into the “Inertial Mass Constants”
field in this ‘Hardware’ menu.
‘Eraser’ button clears the filled in fields so new values can be entered.
From within the ‘MOI’ calculator you can press the icon of a weight to get a
reference of density of metals as shown here.
www.dtec.net.au
Page 31

31
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu
Graph Smoothness
Point by Point (Open Loop Brake Mode): When testing on a brake
style dyno (or using a brake on inertia dyno) and operating in ‘Point by
Point’ testing mode we can choose how to join up the individually
recorded data points to create a trace.
“Fitted Curve” provides a mathematically smoothed line that can be
adjusted using the tension setting (how close the line comes to the data
points).
“Linear” setting just joins the data points without smoothing; it is best
used if data points are not too far outside expected values, perhaps due
to recording some data when the dyno system had not yet stabilised at the fixed RPM.
Inertia Mode Graph Smoothness: When testing on an inertia dyno this filtering value determines the level of
smoothing applied to the data.
This has the effect of displaying data that is not so wildly changing due to small cyclic variations in engine firing and
dyno mechanical tolerances.
Passwords
Password (Program & Setup): Option to enter a password to lock out
access from either changing settings or running the DYNertia3 software.
Entering a password in the field will automatically enable the function to
use this entered password every time DYNertia3 is started. To remove
password protection you must delete (USE ‘BACKSPACE’ KEY) all text
from the password field until you will see the word “Inactive’ appear
before you close down the ‘’Software Setup’ menu.
Note: If password is forgotten DTec will need to be contacted to allow program access, so don’t’ lose password!!!
Lambda / AFR
Preferred Lambda/AFR Channel: Set to input channel your AFR meter
is connected to, saves re-selecting in later analysis Windows.
Custom Fuel – Stoic/AFR and Name: If you are using a special fuel
that is not in our standard list, then you can enter a custom AF ratio here.
This is only required if you are using this fuel for analysis using AFR, it is
not required for working in Lambda. See chapter “Inputs- Using” for
details of ‘Current Lambda/AFR’ analysis Window.
www.dtec.net.au
Page 32

32
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
Graph
Auto Display of Last Run: When selected, DYNertia3 will
automatically open the Graph Window and add the test Run just
performed to the set of traces so you can view it immediately.
Tip- If testing many times before analysing traces then it’s faster with
this function off!
Graph Torque Traces: The axis of the graph are automatically scaled,
if you prefer the torque traces to sit below the power traces then select (graph scales can still be altered manually and
override this setting). Feature is just a visual preference, traditional dyno graphs have the torque scaled lower when
displayed.
Graph Trace ID’s: Appends the min and max power to the test run names (visible on Main and Secondary graphs).
Auto Shift Traces Right: Setting ‘Auto Shift’ means that each time a new ‘Run’ is performed that it’s loaded as the
‘last run trace’ and the previous last Run becomes trace number 1, trace 1 moves to trace 2, 2 moves to 3, 3 moves to 4
and 4 is removed from selection. This feature allows for the graph to always contain the latest Runs.
There is the additional option to leave trace set 4 as a reference trace. You can choose to ‘Exempt Trace Set 4’. This
means that trace 4 will remain as loaded and not be shifted off the screen.
RPM / Speed Scales: If the data gathered is slightly above/ below the start or end graph range it will be interpolated for
better graph appearance.
Power / Torque Scales: The axis of the graph are automatically scaled, the units used are ‘neat’ increments (e.g.
90Kw, 100Kw etc). If you are testing very small power engines then it may make analysis easier if fractional scales are
used (e.g. 4.34Kw, 5.5Kw etc)
Run
Run Screens – Chart Reorders: Determines after a test when the
chart recorder data is frozen to allow viewing.
Run Duration Calculated until: Run time duration displayed in the
data will start at the press of the “start run” button (or F12) and end at
these two options, either ‘stop’ pressed (or F12) or zero Power
detected.
Use Actual run Min RPM: The trace will use the actual minimum
RPM seen, and not the start RPM as set on the “DYNO’ screen in the ‘Record Settings’ field.
Tip- Normally leave this un-ticked for a better looking Run trace, avoids having irrelevant data on the graph i.e. RPM
showing that is even below when the actual test began
Run Summary: Selecting “large Summary” will produce a large summary
screen showing both imperial and metric data after a Run. Screen is designed
for use in public displays such as ‘dyno competitions’.
Live Slip Monitor: Warning when chassis dyno slip (measured engine RPM
vs RPM calculated from roller) exceeds difference.
www.dtec.net.au
Page 33

33
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
Display
Multiple Monitor Support: DYNertia3 can display its data across two
monitors, this allows comfortably analysing large amounts of data. You
can select what monitor displays the main Graph Window or other
selected Windows.
Hide Windows Desktop: Resets Windows ‘desktop’ for an attractive
‘backdrop’ when DYNertia3 is running. This can be used for
applications were the PC screen size/resolution cannot be set to
exclude the background.
Note: DYNertia3 is a fixed sized Window and cannot be enlarged (‘maximised’) to fill the whole screen, set the screen
resolution for best appearance.
Data Window Transparency: Sets the transparency level of the ‘floating’ data box that is used in several analysis
screens & also the main Graph Window. ‘Transparent’ menu then controls the function from within the data box!
The ‘floating’ data box shown is usually displayed by ‘Right’ clicking on the Right hand scales of a graph or screen
Screensaver: Disables screen saver to prevent it from interfering with DYNertia3 software, for example if it turns on
and you are in the vehicle ready to test, you may need to get out and reset (e.g. if you had no keyboard in the vehicle).
About
Display of System Details: Displays Firmware version, hardware
version, copyright information and what options are enabled.
www.dtec.net.au
Page 34

34
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
System
End of Each Run: This enforces saving of the test results.
DYNO Correction Systems: This allows tests to be corrected to a
standard set of atmospheric conditions for consistency as the
environmental test conditions change. Correction to world standards
SAEJ607, SAEJ1349, DIN70020 or uncorrected can be applied. SAE
J607 is chosen by default as it is in widespread use. See chapter
“Weather Corrections” for details.
Run D3 Snapshot: This is only used for trouble shooting. It generates a package for DTec support; it allows us to view
your settings and other data that will help us reproduce any faults you may have. It is much easier/quicker than trying to
guide you on what files to manually copy and email!
It requires (and will prompt) you have a user name and email address entered in user details screen, in menu
“Setup/Software”. You can press the option to directly email or otherwise you can save, transfer and email the file from
another PC.
Configuration Reset: Resets all current settings and returns software to default
configuration. You will be warned before the reset and given the option to
continue.
It does not delete any test files etc, it just restores settings.
Before the reset you will be asked if you would like a file to be created that has all
the current settings written down. This will be saved in the DYNertia3 folder (it is
named “SETTINGS.txt”) and this file will also be made available to you for reading
or saving.
This file can be used to retrieve any settings you may wish to manually re-enter,
such as Inertia value, circumference etc.
www.dtec.net.au
Page 35

35
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
General
Metric / Imperial: Selects the units used by DYNertia3, kph/Kw/Nm/ºC
to mph/Hp/Ft Lb/ ºF etc. Mixed units are not presently available
(exception is the large Run summary screen below!).
Media (Audio): Enables an audio input via the PC’s microphone. This
can be used to simply save a commentary during a test or to record the
actual engine noise. For further details see chapter “Overview- 2 Main
screens” for details of controls on Dyno Window and also chapter
“Loading/Viewing files” regarding “reviewing Audio files”.
Remote ‘Page Turner’ Actions: Allows the allocation of tasks to the PC’s ‘page up’ and ‘down buttons’, this also
allows an inexpensive and commercially available remote keyboard or ‘page turner’ (the device often seen used for
PowerPoint presentations) to become a remote control. Very convenient if operating the vehicle and the dyno single
handed, also allows the PC to be kept away from the interference of the engines ignition system.
Your PC’s ‘page up’ and ‘page down’ buttons can be set to allow-
Start/stop runs
Save data when doing ‘Point by Point’ testing (brake style dyno’s)
Fine RPM/speed increase (closed loop systems)
Coarse RPM/speed increase (closed loop systems)
Save
Close
Automatic file incrementing (no need to type in a new name).
Other functions are altered when enabled so to reduce the need for any unnecessary key presses, for example screens
that appear after a run are displayed for a small time and then automatically close.
Data Consistency: Sets the warning that occurs when traces are loaded that were recorded with different sensor
calibrations to those in use.
‘Clicking’ on the illuminated “!” warning icon will reveal a screen that will show the inconsistencies and allow you to
determine if an issue or even allow you to alter the scaling if this is the only issue. This ‘Data Consistency’ screen
appears also in the chapter ‘Inputs- Using’ under ‘Data Consistency’ and will be detailed fully there.
www.dtec.net.au
Page 36

36
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
General (cont.)
Point by Point (Brake Mode): In the menu option ‘Setup/Hardware” the choice ‘Brake’ mode must be selected. This
field is relevant if you are manually loading the engine via a brake device (friction, magnetic, water etc) i.e. if you do not
have our optional ‘Load Controller’ for ‘closed loop’ control.
Ticking the box allows ‘steady state’ testing with a brake style dyno using ‘Step testing’ (or ‘Point by Point’ as we call it)Recording data in ‘steady state’ mode rather than performing a traditional dyno ‘Run’ (ramp test): In this mode tests are
built up by recording data at various test points. The data is then used to construct a graph and even data from multiple
test sessions can be ‘joined’ to form one test.
Tip- This mode of testing is the often the best option for those with limited performing brakes added to their inertia
dyno’s. Particularly friction brakes, as these can only hold the load for a very small period of time. The test data can be
recorded each time a target load/speed point is held and a Run graph will be built up from these individual recordings.
When you press the “Start Run” button (or F12) on the ‘Dyno’ screen a new button called “Save
Current Readings” is now revealed!
Note: Traces made from ‘Point by Point’ will show “Err” when
viewing Run duration information as this is irrelevant.
You can now run the engine and apply the dyno load to hold at any suitable RPM.
When stable press the ‘Save Current Reading’ button to store that data.
Test at any RPM, in any order e.g. you can be at any RPM without worrying about if it
is greater or less than the last recording and there is no time limit as to when you take
each reading.
Every time you press the button the new data is saved.
It is normal practice to test at set RPM intervals (‘steps’) but this is not essential
When you press “Stop Run” button (or F12) a graph
trace will be created from your saved data points and
this can be viewed like any other test Run trace.
Each time the data is saved a counter will display this in the ‘Record Settings’ status
field
.
www.dtec.net.au
Page 37

37
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
Ratios
Last Ratio Set: Setting allows for the ‘Record Settings’ field called
“Current Ratio” to automatically select the last ratio that was ‘taught’ or
manually set as the one to use for RPM.
Tip- Having this ticked prevents you from setting a new ratio and then
forgetting to actual select it for use. The only time you might de-select is
if you are setting up a whole range of ratios in one go rather than a
single on you wish to use.
Low Speed / RPM Operation: Allows for very slow speed operation in regards to speed that the system determines it
is not operating and zero’s all gauges. If in low speed it will take several seconds (approx. 4 – 8 sec) of no rotation
before the system considers that motion has stopped and to reset the gauges etc. to zero.
Set Ratio- Change Increment: Adjusts the step sizes used in the ‘Speed to RPM’ screen to adjust a set ratio value i.e.
to ‘nudge’ the value for fine tuning if matching DYNertia3 RPM to vehicles tacho etc.
Run Comments
Comment Editing: Allows you to alter the comments of an existing file
after testing has been performed i.e. during review.
Comments added to each new Run: Allows testing comments you
have made to be automatically transferred to the next test. This function
is designed for quick testing i.e. you are doing multiple tests of the
same modification. Without this each new test has all its comments
cleared.
Note: Does not apply to the operator and company name, these are pulled in from the user details (over page).
Company Name: Company name can be automatically added to all test comments. Details are entered with the ‘Set
User detail’ button at top of software setup window (icon of house and man).
Outputs
All Outputs (DYNertia3 and accessories): Outputs (Brake and User)
can be set to turn off upon exit. This ensures devices connected to the
auxiliary output terminals (see chapter “Outputs- Using”) can be left in a
suitable state upon exiting the software.
This function extends to optional load controller also.
Note: ‘Run’ output (active on rotation) is not controlled via the software
so is only turned off with no rotation or if DYNertia3 power is removed.
Auxiliary Outputs (DYNertia3): The ‘User’ auxiliary output can be set to turn on at each Run, the “OUT” icon on
GRAPH and DYNO Windows turns a green colour to reflect active output operation.
Note: Further details for the complete output functions are outlined in the chapter “Outputs- Using”
www.dtec.net.au
Page 38

38
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
File Storage Paths (Icon)
Set DYNertia3 base file storage path: By default DYNertia3 creates a certain structure of where it stores
your test Runs and other saved data. Under ‘C’ drive is created a main folder (Base path) that other folders
are stored under. You can use any folder you like (either created in Windows Explorer or perhaps an existing
Folder of previous tests) as long as it is located under this ‘Base path’, as shown in black in the information
Window seen here.
When you select a Folder on the Left Hand side and
it is confirmed as ‘correct’ by the green indicator then
that will be used by DYNertia3 for saving files into.
Tip- The default setup paths should be left alone
unless you have a specific reason for renaming or
changing the file structure.
User Details (Icon)
Set User Details: Data and your company logo image used here
appear on the printouts. The logo can be inserted by pressing the
“ADD“ button or if you do not wish to use a logo, press “X” button.
The logo should be a Bitmap (BMP) and have an aspect ratio of 2:1 to prevent
distortion.
A link to a ‘Customer Disclaimer’ document can also be configured here. As legal
requirements in countries varies we have not provided a disclaimer.
When setup, this disclaimer can be printed under the menu option
“File/Print/Customer Disclaimer”.
www.dtec.net.au
Page 39

39
Chapter 4: ‘Setup’ Menu Options
Software- Setup Menu (cont.)
Archive Storage Paths (Icon)
Set DYNertia3 archive storage path: DYNertia3 can be set to archive your files automatically (archiving can
also be done at any time from menu “File/Archive now”.
This screen allows you to select a time period, in days, that will automatically save the files from one location to another
location
DYNertia3 will scan all files in the selected root folder and any subfolders underneath it for relevant files. Saved run files
and any files you have created (many Windows allow you to save information to a file)
It can be configured to just save all files including old ones or to just save the new ones based on date reduces storage
space)
Tip- Information at the top of the Window shows when the last
archive was created and when the next one is due.
Load Control- Setup Menu
See chapter “Load Controllers” for full details.
www.dtec.net.au
Page 40

40
Chapter 4: ‘Setup’ Menu Options
Communications- Setup Menu
Select each tab in turn depending on device being linked.
Interface Port No.: DYNertia3 software needs to know which USB PC port the
hardware has been allocated to. Unfortunately, when installing particular USB
devices, modern PC’s allocate them to almost any communication port number
and will even change this depending on what USB socket is being plugged into.
See “Link” below.
Link Button: The easiest way to set the “Port No.” is to plug in the hardware and press the “Link” Hardware button. It
will step through all of the port options and try to establish communication with the hardware, when found, the port
setting is automatically saved and should remain valid for the USB socket you have plugged into, if you use another
socket you may need to search again.
Manual Set Button: If you know the port that is allocated you can manually set the number.
DYNertia3
DYNertia Sensor Test: Designed as a quick check that the sensor is working
correctly and DYNertia3 is receiving the signal. The indicator and an audible
noise can be used to confirm sensor operation during rotation. The indicator
lamp/noise triggers for a short time as the magnet approaches the sensor (only
on approach).
Note: The test will not work at high speed (lamp won’t flash); it is only a setup test at low very RPM.
Weather Watch
Weather Watch is an optional USB device that will allow weather data
(temperature, pressure and humidity) to be automatically imported into
DYNertia3 rather than manually entering from a third party weather station.
Update Interval: Sets how often the weather data is imported into DYNertia3 to update the correction values.
Note: See chapter “Weather Corrections” for full details on ‘Weather Watch’ weather station.
Tip- The menu option “Utilities/Current Weather Data” allows you to view the live data from the optional ‘Weather
Watch’ station including RAD (Relative Air Density).
www.dtec.net.au
Page 41

41
Chapter 4: ‘Setup’ Menu Options
Communications- Setup Menu (cont.)
Load Controller
These settings all relate to the optional ‘Load Controller’ unit. This is used for closed loop load control (Eddy current
retarders directly or PWM controlled devices) and for servo based throttle motor control.
Note: All Load control options are an additional component to DYNertia3, they are not standard. Please see our website
www.dtec.net.au for full details of these options.
Windows that relate the Load Controller are only visible when it is connected and ‘linked’. Information regarding wiring,
configuration and using all appear in the relevant chapter.
Torque Sensor
Linking of the digital load cell amplifier for brake type dyno (not available at time of this manual)
OBDII
Linking of the OBDII diagnostic port reader (not available at time of this manual)
Device Manager
Open Windows Device Manager: A short cut to open the Microsoft Windows
function that can allow you to see what PC port has been allocated to the DYNertia3
equipment.
The Windows Device Manager is a very helpful tool to trouble shoot problems with the PC not
communicating to DYNertia3 components.
When the USB lead is connected to the PC we need to see a Port (COM & LPT) called “USB
Serial Port (COM x)” or there is an issue with the installation of the USB ‘driver’ software or the
USB connection.
This port name should appear even if DYNertia3 is not powered up (though you cannot actually
‘Link’ DYNertia3 to PC without it being powered).
Disconnecting and reconnecting the USB lead whilst observing this screen below should show the port being removed
from the list and then being added again.
Tip- The devices that are linked are shown
on the main ‘DYNO’ screen
www.dtec.net.au
Page 42

42
Chapter 4: ‘Setup’ Menu Options
Printer
See chapter “Printing and exporting” for full details.
PRM/Speed Source
Selects the RPM/Speed source to be used.
See chapter “RPM Input Options” for full details.
Note: The option to use ‘RPM Input’ is only visible if in the menu option
‘Setup/Hardware’ it is enabled and configured.
Note: OBDII diagnostic port reader is not available at time of this manual.
Sensor Configuration
See chapter “Inputs- Using” for full details, load cell calibration is also found in this menu choice, some additional
information regarding this is also in the ‘Load Controller’ chapter.
Data Limits / Alarms
See chapter “Inputs- Using” for full details.
Losses Systems
Refer to chapter ‘Losses Systems’ for detailed information.
Main Graph Trace Colour (Visible only from ‘Graph’ screen)
You can select a new colour for any of the traces individually here.
You can select any display colour from the pallet to associate with selected trace number, it will be
stored permanently.
Tip- The colours chosen are also used for printing (on a white background), so keep this in mind and
avoid very light colours if printing is planned.
Grid
Set if the main graph is to have a grid displayed as background behind the graph traces.
Operator
Allows entry of the operators name, this can be transferred with the comments (see “Setup Software” chapter) and will
also appear on the printouts.
www.dtec.net.au
Page 43

43
Chapter 5: RPM Input Options
Chapter 5: RPM Input Options
Why engine RPM may be required
Screens used to configure RPM
Options for obtaining Engine RPM
www.dtec.net.au
Page 44

44
Chapter 5: RPM Input Options
Engine RPM, Purpose and Options
Why we may need engine RPM
Power is a function of speed and torque. When power is measured at the dyno roller or shaft it is the same as at the
engine (ignoring the actually quite large losses). Any gearing will multiple the torque, but will also reduce the RPM and
therefore power remains the same. So once we have the power, if we wish to display torque of the engine we need to
know the engine RPM so we can then ‘derive’ it to remove the effect of gearing.
The need for engine RPM (either calculated via ratio or measured), not just dyno RPM from shaft speed sensor is -
Inertia dyno- Engine RPM is needed to calculate engine torque. Power is directly calculated from dyno flywheel
acceleration rate and therefore does not need engine RPM. If no engine RPM is available then the torque displayed will
be at the actual dyno shaft/roller/flywheel, but power will be the same as at the engine!
Brake dyno- Engine RPM is needed to calculate engine torque. The ‘load cell’ input directly measures torque and at
the dyno shaft/roller, the RPM is also measured here, we can then calculate power at that location. If no engine RPM is
available then the torque displayed will be at the actual dyno shaft/roller, but power will be the same as at the engine!
Either type- Engine RPM via a ratio (in conjunction with being directly measured) is required for the ‘Slip’ (speed
difference) to be displayed correctly if used. The exception is a direct drive engine dyno.
Note: The term “engine” power or torque is ‘loosely’ used here; it is ignoring the very real drivetrain losses etc.
Windows used for RPM setup (referred to in this chapter)
The following pages will refer to this ‘RPM Source’ selection window; it can be accessed
via several methods. The menu option ‘Setup/RPM Speed Source’ is one method.
From the DYNO Window, icon bottom right of torque dial. ‘RPM Source’
indicator shows if the RPM source is from the ‘RPM adapter’ (spark plug
icon) or speed sensor (roller icon) Pressing on this symbol will open the
selection menu to allow quickly changing.
If you have the ‘Speed to RPM’ window open (shown below) then pressing the
‘Source’ icon will also open the selection menu.
There will also be reference to a ‘Speed to RPM’ button, this is found on the main DYNO Window.
This button opens the Window below used to quickly set gear ratios if required.
Tip- It is also possible to give any ratios a name of your choice. This can be useful if it is an engine dyno and you
regularly change engines that use different gearing or you may save ratios for common bikes on a chassis dyno etc.
Tip- When “Speed to RPM” pressed, running a test is prevented and the RPM/speed Gauge
will read RPM only as viewing the RPM may be required in the setup process!
‘Record Settings’ field will be referred to in some RPM options as the “Current Ratio” must be
appropriately set for any RPM option chosen. Visible on the main ‘DYNO’ Window.
www.dtec.net.au
Page 45

45
Chapter 5: RPM Input Options
RPM input Options (7 Available!)
To avoid the need to attach engine RPM sensors (difficult on some engines), many options allow us to derive engine
RPM from the drive ratio between the engine and the dyno RPM (as measured by DYNertia3 sensor at its location).
Option 1- No RPM used-
You can select DYNertia3 to run in ‘Speed’ mode (Kph/Mph instead of RPM as an axis), this requires no engine RPM
input but the Torque shown will be at the roller (Power shown is at engine though). This is for very quick testing on a
chassis dyno as it requires no setup at all.
RPM/speed Mode: Switches the dyno from displaying RPM as the graph X-axis
to speed. Roller circumference must be correctly entered in the menu option
“Setup/Hardware”. Button is on Top Left side of either ‘DYNO’ or ‘GRAPH’ Window.
Option 2- Shaft RPM-
For a ‘direct drive’ engine dyno; in the ‘Record Settings’ panel for “Current Ratio” select
“Shaft RPM”.
If the dyno brake/flywheel shaft turns at the same speed as the engine then shaft RPM is the
same as engine RPM. DYNertia3 will then know that its measured shaft speed can be
assumed to be the engine RPM.
Option 3- Ratio Teach-
If DYNertia3 knows the drive ratio between the engine and the dyno it can calculate actual engine RPM from the dyno
RPM (as measured by its sensor). This option will require that the engine has a tacho already fitted.
Tip- If vehicle has no tacho fitted, but you have an ‘RPM Adapter’, you can use this automatic teaching function but
instead of a fixed target you can use the RPM signal from the ‘RPM Adapter’. See “Option 6” for details.
Ensure the “Use Default RPM/Speed System” is selected as the RPM source.
Run the vehicle until the tacho matches the ‘Engine Target RPM’ in your test gear (4000 RPM in this example shown)
alter this set point if RPM not suitable, then simply press a ‘Compute Ratio’ button of choice. The calculated ratio will
now appear in the field above the button.
That’s it! DYNertia3 now knows the engine RPM for any vehicle speed in the gear just used. You can ‘teach’ other
gears also if you want to do testing in multiple gears (up to 8). We recommend you use “Compute Ratio 4” for 4th gear
etc.
www.dtec.net.au
Page 46

46
Chapter 5: RPM Input Options
Option 4- Manual Ratio Entry-
If DYNertia3 knows the drive ratio between the engine and the dyno it can calculate actual engine RPM from the dyno
RPM (as measured by its sensor). This option will require you to know the drive ratio being used, this is usually not
practical for a chassis dyno as tyre size, roller size, gear box and final drive ratio must all be known and calculated. If
testing engines without gearboxes (e.g. kart) then this is a very good option.
e.g. For an engine dyno: Ratio = Number of dyno flywheel gear teeth divided by number of teeth on engine drive gear.
Ensure the “Use Default RPM/Speed System” is selected as the RPM source.
Manually enter a ratio into ‘User Ratio’ or any of the 8 ‘Compute Ratio’ fields, then press
Enter key.
You can enter data for other gears also if you want to do testing in multiple gears (up to 8). We recommend you use
“Compute Ratio 3” for 3rd gear etc.
Ensure you select the correct set ratio in the ‘Record Settings’ panel for “Current Ratio”, choose “User” if you have used
the ‘User Ratio’ field (or any of the 8 ratios if these were used).
Option 5- Manual RPM to Speed Entry-
If DYNertia3 knows the speed the vehicle does at a certain engine RPM then on a chassis dyno it can then calculate
engine RPM from the dyno speed (as measured by its sensor).
Manually enter an RPM and speed separated by a “=” sign, enter into ‘User Ratio’ or any of the 8 ‘Compute Ratio’ fields,
then press Enter key. The example above was used as this vehicle does 1550RPM at 100kph in 5th gear.
You can enter data for other gears also if you want to do testing in multiple gears (up to 8). We recommend you use
“Compute Ratio 5” for 5th gear etc.
www.dtec.net.au
Page 47

47
Chapter 5: RPM Input Options
RPM Adapter input
Using the ‘RPM Adapter’ input with DYNertia3 opens up other options for RPM input as it directly measures engine RPM.
If engine has no tacho fitted, but you have an ‘RPM Adapter’ you can use it to automatically ‘teach’ a ratio. This uses the
RPM adapter as a temporary tacho only (‘Option 6’ below).
It can also be used as a direct source of the RPM, this is useful if the vehicle has a torque convertor effecting torque at
the shaft/roller (‘Option 7’ below).
Note: Even if used for Engine RPM a drive ratio is still required for the ‘Slip’ (speed difference) to be displayed correctly
if used.
NEVER connect ignition system directly to DYNertia3, power it from a separate battery to DYNertia3’s and wire as
shown. Please read “Inputs- Using” chapter of this manual to see details of engine connection options.
Tip- It is best to do initial dyno setup testing before using a direct Engine RPM source; this avoids any error due to
miss-wiring or electrical interference.
Option 6- Alternative RPM Source for Ratio Teach (Not Continuous RPM Measurement)-
If the optional ‘RPM Adapter’ (or ‘OBDII’ scanner) input source is configured then pressing a ‘Compute Ratio’ button of
your choice allows DYNertia3 to automatically calculate the ratio between engine RPM (from ‘RPM Adapter’ input) and
the dyno RPM. No need to hold at a target RPM, just hold engine steady at any RPM in the test gear you wish to ‘teach’
the ratio of.
Note: ‘RPM Adapter’ input can be used as the only RPM source for all functions (gauge displays, graph scales,
min/max record settings and correcting shaft/roller torque readings to the engine). However, using the RPM adapter just
to temporarily obtain a ratio which is then used to calculate the engine RPM smoothes the effect of engine power pulse
fluctuations and gives more stable torque readings.
This ‘mixed’ method of RPM measuring is the best option if you are using the RPM Adapter input.
To ensure the ‘RPM Input’ source can be
selected” Check Box is checked in menu
option ‘Setup/Hardware’.
Select the “Use DYNertia’s RPM Input” source using the menu option ‘Setup/RPM Speed
Source’ or by pressing the icon bottom right of torque dial. Pressing on this symbol will
open the selection menu.
If you have the ‘Speed to RPM’ window open (shown below) then pressing the
‘Source’ icon will also open the selection menu.
PTO
www.dtec.net.au
Page 48

48
Chapter 5: RPM Input Options
Option 6- (cont.)
No need to hold at a target RPM, just hold engine steady at any RPM in the test gear you
wish to ‘teach’ the ratio of and press a ’Compute Ratio’ button of your choice.
Note: After using the source of alternative RPM to teach a ratio you now select the
source “Use Default RPM/Speed System” to use this new ratio. Ensure this new ratio is
chosen in the ‘DYNO’ screens “Record Settings” field!
Tip- This is a great method if you have an unstable RPM adapter input as once ‘taught’
this ratio is used to derive the engine RPM (not the RPM Adapter). You can even
disconnect adapter form the engine, which now also removes a potential source of
interference into DYNertia3.
Option 7- Alternative RPM Source-
This uses the optional ‘RPM Adapter’ (or ‘OBDII’ scanner) input source as the sole engine RPM source for all functions
(gauge displays, graph scales, min/max record settings and correcting shaft/roller torque readings to the engine).
To ensure the ‘RPM Input’ source can be selected the check box “RPM Input” is checked in menu option
‘Setup/Hardware’.
Also, you need to set the ‘Pulses per Revolution’, this allows the software to work out the true engine RPM from the
frequency of the pulses e.g. a 4-stroke engine typically fires a spark only once every 2 revolutions so ‘0.5’ would be the
entry. A 2-stroke fires every revolution so ‘1’ would be the entry.
Select the “Use DYNertia’s RPM Input” source using the menu option ‘Setup/RPM Speed
Source’ or by pressing the icon bottom right of torque dial. Pressing on this symbol will
open the selection menu.
If you have the ‘Speed to RPM’ window open (shown below) then pressing the
‘Source’ icon will also open the selection menu.
Note: It is vital to have a perfect RPM Adapter input signal at all RPM for ‘Option 7’, if unsure then refer to previous
section on using the RPM adapter for automatic ratio teaching (‘one off’ use’) and use ‘Option 6’.
Note: Setting a drive ratio is still required for the ‘Slip’ (speed difference) to be displayed correctly if used.
www.dtec.net.au
Page 49

49
Chapter 5: RPM Input Options
Summary of your RPM options
Your options (previously detailed) depend on the dyno design-
Engine dyno, dyno flywheel/brake coupled directly to the engine (1 flywheel rotation = 1 engine rotation)
# Option 2 is best.
No setting required, instead select “Shaft RPM” in the ‘Record Settings’ panel for “Current Ratio”.
Engine dyno, dyno flywheel/brake driven via gearing (1 flywheel rotation = x engine rotations)
# Option 3,4,6,7 can be used. Option 4 is very easy and very accurate (assuming clutch is engaged).
Set “User Ratio” based on the gearing (eg. Number of dyno flywheel driven gear teeth divided by number of teeth on
engine drive gear). Select “User” in the ‘Record Settings’ panel for “Current Ratio”.
If ratio unknown and the engine has a tacho or you have an ‘RPM Adapter’ input connected then another option is to
simply use the ‘teaching’ options 3 or 6.
Chassis dyno (1 roller rotation = x engine rotations)
# Option 1,3,4,5,6,7 can be used. Option 1 is easiest (no RPM scale though), 3 is fast (but assumes constant test gear).
DYNertia3 can be ‘taught’ the relationship (ratio) of dyno roller to engine, up to 8 gears can be learnt and later selected
in the ‘Record Settings’ panel for “Current Ratio”, allows for very quick testing of the vehicle in any gear.
Enter an appropriate RPM as “Engine Target RPM”, choose a test gear, hold the engine RPM at the RPM number you
entered and when steady press the ‘Compute Ratio’ button of choice.
If you have the ‘RPM adapter’ input connected then DYNertia3 can read RPM from the engine directly or be ‘taught’ a
drive ratio to relate engine RPM to dyno RPM (RPM at the dyno’s sensor location). For this make sure you choose
correct settings in the “Setup/Hardware” menu. Press a ‘Compute Ratio’ of your choice and the ratio will be calculated
regardless of current engine RPM i.e. there is no need to set any RPM to hold the engine at! Just hold the engine RPM
relatively steady at any RPM for good results.
General RPM input information
It is important to understand that DYNertia3 can calculate engine RPM for its operations from it’s included sensor. If the
vehicle has gears and you are testing in a different gear to the selected ratio then the tacho will read incorrectly!
If you don’t set a ratio i.e. let the RPM used be roller RPM (select ‘roller RPM’ in ‘Record Settings’ panel). This will result
in the Torque figure being ‘tractive effort’ (at the wheels) and not engine torque. This can be very interesting as it’s the
actual power getting to the ground (for given dyno design) !
Note: ‘Slip’ calculations can’t operate with engines fitted with CVT transmissions or automatics that can’t be locked into
a set gear for testing, this is due to them having a continually changing drive ratio between engine and dyno flywheel.
The change in engine RPM vs dyno flywheel RPM would be shown as slip, even though this is not the case (may be of
interest anyway for development).
Note: Ramp testing on Brake type chassis dyno is best done using speed/sec and not RPM/sec, this is due to the
system needing a drive ratio to be set and maintained. Gear shifts or torque convertor slip will render it inaccurate due to
the fact that the dyno control system is controlling the roller RPM (a precision closed control loop) i.e. engine RPM must
be converted to roller RPM by the software to set the ramp rate, it can’t do this if the drive ratio changes.
Tip- If you know you’ll only be testing in one gear then only bother teaching that particular gear.
Tip- You can even name your ‘taught’ ratios for easy selection e.g. you may often test engine types with different
sprocket sizes, just pre-set the ratios and name after the engine type etc.
Tip- The small arrows next to the ratio buttons allow ‘nudging’ the value for fine
tunning if matching DYNertia3 RPM to vehicles tacho etc. (“Setup/Software” sets
step)
www.dtec.net.au
Page 50

50
Chapter 6: Overview- 2 Main Windows
Chapter 6: Overview- 2 Main Windows
2 Main Windows of DYNertia3
Features visible on the ‘DYNO’ & ‘GRAPH’ Windows
Scaling the Gauges and Charts during testing (‘runtime’)
www.dtec.net.au
Page 51

51
Chapter 6: Overview- 2 Main Windows
Two Main DYNertia3 Windows (DYNO / GRAPH)
Press the “DYNO” / “GRAPH” button to change between the 2 main Windows of DYNertia3.
The ‘DYNO’ Window is used to select and create files, enter the weather details, record vehicle test data, ‘teach’ gear
ratios, view RPM/speed and control the testing.
Note: This Window is only visible when the control unit is connected, powered and ‘Linked’.
Note: The Row of gauges (input channel
data) shown along the bottom of the
screen are visible with a single monitor.
With duel monitors this data is displayed
on the second monitor instead and
replaced with the test ‘comments’ field
(also found in ‘View’ menu).
The ‘GRAPH’ Window displays the Power and Torque as traces that can be overlayed and analysed. Traces from a test
Run can be selected, loaded from file and compared.
Note: The Most menu options can only
be selected from this GRAPH screen
(they are ‘greyed’ out in DYNO screen)
Note: The RPM/Speed button makes
the software use either units of RPM or
speed (e.g. kph) for the controls,
displays and graphs.
Note: When test Runs are visible on the
graph we refer to them as ’traces’.
Note: The DYNertia3 Window does not
size itself to the PC screen, if you wish you can adjust your PC screen resolution to best suit (Program Window size
is1024 x 768)
www.dtec.net.au
Page 52

52
Chapter 6: Overview- 2 Main Windows
DYNO Window
Record Settings
Minimum Run RPM: Is what you want to start the test at- This sets the point that will be used to start graphing data
when testing. It is usually set just above the slowest speed that you can hold steady on the dyno before you accelerate
for a ‘run’. If set too high your graph will simply be missing data below this speed and if set too low then unsightly
readings may be visible at the start of your graph due to the engine ‘surging’ against the dyno flywheel load as you
prepare to accelerate (inertia dyno). If you have DYNertia3 set to end a test when negative power is detected then a low
setting may also cause a test to end early, this could occur if you decelerate accidentally at low RPM whilst getting ready
to accelerate for a test.
Maximum Run RPM: Is what you want to end the test at- This sets the point that will determine at what point the
graphing screen ‘trims’ off the trace, it does not determine when the actual dyno ‘run’ is over (i.e. it will ignore the data
after the set maximum). It is usually set just below your maximum planned RPM. If set too low your graph will simply be
missing some high speed data and if set too high then unsightly spacing may be visible at the end of your graph.
Note: Either RPM or speed is used depending on the operating mode set. To change the dynos mode use the ‘mode’
tool bar button (icon of ‘gauge’, Top Left of active screen); RPM or speed settings are both stored independently.
Tip- Clicking on the text “Maximum” or “Minimum” will allow direct fast direct entry of the
values.
Current Ratio: The selection here is used by DYNertia3 to work out (derive) engine RPM by relating it to dyno RPM
from the speed sensor and this will depend on the gear being used during testing on chassis dynos.
Set the vehicle gear you wish to test in or select “Shaft RPM” if the dyno is directly coupled to the engine (1 flywheel
rotation = 1 engine rotation). There is also a “User” option for selecting a fixed ratio, this is used for dynos were the dyno
shaft is indirectly driven by the engine via gearing. Ratio data is set with the “Speed to RPM” button (middle RH side of
screen above).
Note: Details about setting ratios are covered in the chapter “RPM Input Options”
Incorrect setting of ratios will result in engine Torque being displayed incorrectly as it is calculated from Power using
engine RPM, Power figures will be unaffected as they are based on flywheel mass RPM (inertia dyno) or load cell &
roller RPM (brake dyno).
www.dtec.net.au
Page 53

53
Chapter 6: Overview- 2 Main Windows
DYNO Window (cont.)
Record Settings (cont.)
Mode: If multiple flywheels are used (up to 3) then selecting the number will update the inertia value used in the power
calculations, this allows for quicker operation than re-entering the new inertia value each time dyno flywheels are
changed/engaged. The inertia values are set in the menu option “setup/hardware”.
If Dyno type selected is a ‘Brake’ (in the ‘setup/Hardware’ menu) then this
fact is shown here instead of the rollers shown above for ‘Inertia’ mode.
Status: Displays if “Recording” DYNertia3 is gathering data from a Run, “Ready” when waiting for a Run, “Gauges” if
‘Gauges on’ or “Calibrate” if ‘Speed to RPM’ button are pressed (this indicates that the tacho/speedo dial gauge is
operational for reference but an actual test Run cannot be performed in these modes)
DYNertia3 Hardware Lamps (DYN): Lamp is green when associated DYNertia3
hardware has been detected and communication established, red if not. If this is
the case, firstly check that the unit is plugged into the computer correctly and
powered up then confirm that the “Setup/Communication” menu has the correct
port configuration.
Weather Watch Lamp (WW): Lamp is green when the optional ‘Weather Watch’ (automatic weather station) hardware
is connected into the PC’s USB port, has been detected and communication established, red if not. The lamp will ‘blink’
as it updates the weather data.
Load Control System Lamp (LC): Lamp is green when the optional ‘Load Control’ hardware is connected, has been
detected and communication established, red if not. This unit is used for closed loop load control (Eddy current retarders
directly or PWM controlled devices) and for servo based throttle motor control.
Torque Sensor (TS): Lamp is green when the optional ‘Digital Load Cell Amplifier’ hardware is connected, has been
detected and communication established red if not. Not available at time of this manual.
OBDII Scanner (OBDII): Lamp is green when the optional ‘OBDII Scanner’ hardware is connected, has been detected
and communication established red if not. Not available at time of this manual.
www.dtec.net.au
Page 54

54
Chapter 6: Overview- 2 Main Windows
DYNO Window (cont.)
Run Control
Start Run Button: Starts and stops DYNertia3 recording data from a test Run. This can also be
done by using a ‘page turner’ or the shortcut keys allocated to this (menu ‘Setup/Software’). During a
run the indicator lamp labelled “RUNNING” will flash repeatedly.
The buttons symbol will change from a dial to a set of keys and the text to “LOCKED” when running a
test is prohibited, this happens when ‘Speed to RPM’ button is active. A locked symbol will also show
that a selected file is protected and can’t be altered or overwritten (locked in the menu option “View/
File explorer’” using the ‘key’ icon)
If the DYNertia3 is in Brake ‘Point to Point’ mode (Setup/Software) then this buttons
symbol will alter, Please see chapter “Setup Menus” for details of this mode.
www.dtec.net.au
Page 55

55
Chapter 6: Overview- 2 Main Windows
DYNO Window (cont.)
Note: Comments field shown here will be
replaced by a row of gauges if single
monitor screen is used. Pressing the
“Gauges” button will expose this
‘comments field’.
Correction Factors
The current weather conditions- temp, relative humidity and absolute barometric pressure can be used so that
environmental corrections can be applied to the data. Refer to the chapter “Weather Correction”.
User Comments Field
Any notes and data you wish to record (eg. engine data, customer details and modifications) can be entered here to
store with the test. Refer to the chapter “Test Notes- Add/Save”.
Output controls and Status
Brake and User controlled outputs. Refer to the chapter “Outputs- Using”.
Recording audio files is done by pressing this ‘Mic Input’ button on the ‘GRAPH’ or ‘DYNO’ screen (turns
microphone on/off) to record during the duration of the run. Enabled in menu “Setup/Software”
An audio file (.wav) will be saved along with the completed run file. Files will be visible along with the normal ‘run’ files in
‘File Explorer’. ‘Clicking’ on the audio files name will open a small screen allowing the file to be played. This can be used
to simply save a commentary during a test or to record the actual engine noise.
‘Losses’ system status. A tool that measures and applies a correction for dyno system losses (friction, windage
etc) and also for vehicle driveline losses. Refer to chapter ‘Losses correction’. Pressing on this symbol will open
the menu to allow quickly changing.
‘Dyno Mode’ indicator, shows if ‘Brake’ or ‘Inertia’ type dyno has been selected in menu choice
“Setup/Hardware”. If Brake type is selected and the symbol is green then the optional closed loop ‘Load
Controller’ is connected and communicating, refer to www.dtec.net.au for purchase and further details.
‘RPM Source’ indicator shows if the RPM source is from the ‘RPM adapter’ (spark plug icon) or speed
sensor (roller icon) as set in the menu “Setup/Hardware”. Pressing on this symbol will open the menu to
allow quickly changing.
www.dtec.net.au
Page 56

56
Chapter 6: Overview- 2 Main Windows
DYNO Window (cont.)
Dial Gauge Displays
Left hand dials are active for viewing
when the “Gauges” or “Speed to RPM”
button is pressed, also during a ‘Run’.
The range of the gauges is set in the
‘Scales’ menu or by clicking on the dials.
Power & Torque dials:
Note: Power and Torque gauges only
operate if dyno is a ‘brake’ type dyno, as
setup in “Setup/Hardware”.
RPM/Speed dial: Dials display either
RPM or speed depending on the
operating mode set by the ‘mode’ button
(icon of a ‘gauge’, Top Left of active
screen).
Tip- The RPM dials source will depend on the settings in “Setup/Hardware” regarding the ‘RPM Adapter’ input, see
“RPM Input options” chapter of manual for full details.
Gauges Mode
Data Gauges ON Button: Reveals the data acquisition dials, strip charts (shown above)
and enables the dial displays to display live information (i.e. not just to be used for
analysing graph traces).
This function is used for ‘steady state’ tunning when using a load cell, monitoring engines whilst testing or for setting up
an engine to confirm that DYNertia3 is receiving accurate data and that all settings are correct, especially the gear ratio
settings (i.e. that the ratio of dyno speed to engine speed is correct and RPM/speed reads correct). This mode can also
be used to calibrate vehicle speedometers.
Note: Rotation of the flywheel is required for these dials/charts to display data! To view data without rotation use the
menu choice ‘Utilities/Data Diagnostics’ instead.
Speed to RPM (ratio setting)
This button reveals a window used to quickly set gear ratios if required for RPM input setup.
Refer to the chapter “RPM Input Options”
Strip Charts: Scales come from the settings in the menu option ‘Scales’ and charts can be paused by pressing the
button ‘Pause Charts’ at the bottom.
Note: The RPM/speed chart is active whenever the ‘Gauges’ button is active but the Power and Torque charts (like their
corresponding dial gauges) only operate if dyno is setup as a ‘brake’ style dyno in ‘Setup/Hardware’.
Data Dial Gauges: All 5 data channels are displayed, but channel 5 is unavailable if the dyno is set as a ‘brake’ style
dyno in ‘Setup/Hardware’, as in this mode the load cell must be connected to this channel!
Names displayed above the dials come from the channel names in menu option ‘Setup/Sensor Configuration’ and scales
are also obtained from these menu settings.
Every gauge has a programmable alarm feature that can be set under menu “Setup/Data Limits Alarms”. When triggered
the ‘ALARM’ lamp display turns red or orange.
www.dtec.net.au
Page 57

57
Chapter 6: Overview- 2 Main Windows
GRAPH Window
Tool Bar Button Functions
Exit: Saves and exits DYNertia3.
Print: Opens the printing menu, same as
the menu option “File/Print”.
RPM/Speed Mode: Switches the dyno
from displaying RPM as the graph X-axis
to speed, also alters the RPM/Speed dial
gauge. Speed is applicable for a chassis
dyno when the roller circumference has
been correctly entered in the menu option
“Setup/Hardware”.
GRAPH/DYNO: Switches between the Dyno Window and the Graph Window. Switching automatically to this Graphing
Window after a test can be chosen in the menu option “Setup/Software/Auto Display Graph of Last Run”.
Selecting Trace to Analyze
Each button selects the data trace on the graph to be analysed (L = Last run). The chosen
trace is the one that will have its values displayed by the dial gauges as the cursor ‘cross
hairs’ are positioned along it.
Tip- Cursor colour matches the colour of the trace selected.
Selecting Trace to Display
To ‘hide’ a trace ‘click’ on its tick box “”. To change its colour ‘click’ on the coloured bar.
To view associated data and notes ‘click’ on the “?” button.
# To actually load a ‘Run’ trace to view, click on the trace number button (Left Hand of each panel, in this case trace “3”)
and the ‘File Explorer’ screen will open to the files location to allow previewing and selecting (by Left and then Right
Clicking on it) of any stored Run file. See chapter “Loading and Viewing Files”
The “?” button for each trace will display the
main test data in summary and any recorded
notes can be viewed an edited by selecting
the appropriate tab.
If you click on the Power and Torque coloured header section (pink in this example) you can select
any display colour from the pallet to associate with this trace number, it will be stored permanently.
Tip- The colours chosen are also used for printing (on a white background), so keep this in mind
and avoid very light colours if printing is planned.
www.dtec.net.au
Page 58

58
Chapter 6: Overview- 2 Main Windows
GRAPH Window (cont.)
Graph controls
The horizontal graphs X-scale is either
RPM or speed depending on the operating
mode set by the ‘mode’ button (icon of
‘gauge’, Top Left of screen).
Based on whichever data trace you have
selected (buttons under RPM/speed dial)
you can Click on the screen to produce a
measurement cursor (‘cross hairs’) that
can be moved to any spot by Clicking or
dragging the ‘Slide control’ at the bottom of
the screen. The relevant measurement
information will be displayed on the dial
gauges.
“” buttons (lower Left & Right corners)
allows the trimming (or ‘zooming in’ ) of the
trace image by moving the graph start and
finish points, this can also remove any
unwanted trace sections, particularly useful for ensuring the printed image appears as you wish.
Tip- To permanently trim Run traces there is a function under the menu choice “File/Trim Runs”.
“” buttons (lower Left & Right corners) allows the trimming (or ‘zooming in’ ) of the trace image by altering the graph
Power and Torque scales, this can also remove any unwanted trace sections, particularly useful for ensuring the printed
image appears as you wish.
Tip- The scales will initially be selected from the graph scale settings you have chosen (start and finish RPM/speed).
“?” button (lower Left corner) will open a panel that shows key summary data for all of the loaded traces. Operating
“Mode” (Inertia or Brake) that the dyno was set in during testing is also shown here.
Tip- ‘Double clicking’ on any row will bring
up a full information screen on that trace
The “Comments” button in lower
Right corner opens the recorded
notes that can be viewed and
edited for the selected trace, chosen
using the ‘Trace Select’ buttons in lower
LH corner of the GRAPH screen.
www.dtec.net.au
Page 59

59
Chapter 6: Overview- 2 Main Windows
GRAPH Window (cont.)
Data displays
Traces for the input data channels 1 & 2 (labelled CH1 and CH2) appear overlaid on the graph,
they can be turned off in the menu option “View/Trace Visibility” if required.
Tip- Positioning the mouse over the "CH1" and "CH2" scale labels will reveal whatever
channel description is being used i.e. "CH1" may be configured as Lambda so "Lambda" will be
displayed.
A 'floating’ data values box can be activated on the graph to show the values of
all data channels at the point marked by the graph's cursor.
The data box is turned on/off with a mouse 'click' over the right hand graph
scale.
‘Clipboard’ menu allows you to ‘paste’ the data displayed in the data box onto the Windows ‘clipboard’, this means you
can paste it into any text program you like, such as ‘Word’ or ‘Notepad’. Ideal if you want a permanent record of all the
data that is displayed at the cursor location on the graph. Along with the data are copied details of the displayed traces.
Due to the quantity of data, allocated channel names are not displayed. To view allocated
Channel names and know what data is being shown in the box, position your mouse over the
channels digits and text will appear i.e. it might say "Case temp" or whatever name you have
allocated to the channel/sensor.
Tip- The data value box’s transparency (activated from its menu) level can be adjusted in the menu option
“Setup/Software/Display” so that it does not obscure the view behind it. The box can be freely dragged by its border to
any screen position (‘click and drag’ the box’s edge).
www.dtec.net.au
Page 60

60
Chapter 6: Overview- 2 Main Windows
Run Time Gauges/Charts (Visible only from ‘DYNO’ Window)
RPM and Speed Scales
The “Scales” menu (visible only from DYNO window) sets the max scale for the RPM/speed dial gauge only when
displaying in ‘real time’; when the ‘Speed to RPM’ or ‘Gauges’ buttons are pressed and during testing. Chart speed is
also configured here.
Will show units of speed or RPM depending on mode setting in main Windows (‘dial’ icon)
Note: When the Gauges are used for analysing graphs (showing the value at the cursor) their scale is automatically
selected based on the scales used in the GRAPH Window, not this setting.
Torque gauge maximum value will also affect the Power gauge as this as automatically scaled (based on the RPM value
entered)
Note: The Torque and Power settings are only visible when in ‘Brake mode’ as this is the only mode ‘real time’
Power/Torque gauges operate in during a run.
Tip- Clicking on the gauges dials will also open up this ‘Scales’ menu option.
www.dtec.net.au
Page 61

61
Chapter 7: Weather Corrections
Chapter 7: Weather Corrections
Weather corrections
‘Weather Watch’ weather station
Viewing weather data
www.dtec.net.au
Page 62

62
Chapter 7: Weather Corrections
Correction Factors
The current weather conditions- temp, relative humidity and absolute barometric pressure can be used so that
corrections can be applied to the data. This allows tests to be corrected to a standard set of atmospheric conditions and
allows consistency as the environmental test conditions change. If manually applying (eg. from a third party weather
station) then it’s important to keep an eye on your weather station whilst running tests, you will be surprised how quickly
conditions change!
An optional accessory USB device called ‘Weather Watch’ is available that automatically interfaces with DYNertia3 and
updates the readings at regular intervals. Refer to this manual under ‘Menu options- “Setup/Communications” for details
on connecting (known as ‘Linking’).
NOTE: Barometric pressure figure used should be ‘absolute’ and not ‘corrected’. Corrected is given in the typical news
weather report. We want the actual measured pressure at the Dyno and not one corrected to sea level.
Correction to world standards SAEJ607, SAEJ1349, DIN70020 or uncorrected can be applied via the menu option
“setup/software/System”. The correction factor being applied, weather data entered and the selected correction
standard are recorded automatically with each test for reference. SAE J607 is chosen by default as it is in widespread
use.
www.dtec.net.au
Page 63

63
Chapter 7: Weather Corrections
If weather data causes excessive correction then a warning will appear and runs will be
prohibited until values entered reduce the correction factor within range.
Viewing Weather Data
Allows the viewing of the weather data from the optional DTec ‘Weather Watch’ automatic weather station. Ensure it is
connected and configured to a PC USB port via “Setup/Communication”.
In the menu option “Utilities/Current Weather Data” you can view the live data from the optional ‘Weather Watch’ station
including RAD (Relative Air Density).
The chart speed can be adjusted to suit your monitoring requirements with the ‘Chart Speed’ control.
Tip- The Relative Air Density (RAD) is also displayed for tunning purposes and can be recorded as a reference. Please
see the ‘Weather Watch’ documentation for more information on RAD and other ‘stand alone’ tuning features.
The ‘RAD Reference’ button saves the current RAD at the time it is pressed so any changes, and therefore air/fuel
mixture changes, are easily noted.
www.dtec.net.au
Page 64

64
Chapter 8: Loading / Viewing Files
Chapter 8: Loading/Viewing Files
Loading files into the Graph Window
‘File Explorer’ Window
Secondary Graph Window
Basic Viewing of files on Graph Window
www.dtec.net.au
Page 65

65
Chapter 8: Loading / Viewing Files
Loading of files into ‘GRAPH’ Window
Previewing (DYNertia3 File Explorer) and Selecting Files
Loading files into the GRAPH Window is a key function. It is only loaded files that can be then selected and anaylised in
the other Windows of DYNertia3. The Main GRAPH Window is itself also a convenient screen to overlay and compare
test results.
If you have just performed a test then this ‘Graph’ Window will appear automatically if menu ‘Setup/Software’ “Auto
display of last run” is selected (default setting). The last test Run you did will appear as a red trace (not shown here) and
any others already ‘loaded’ will be shown as various alternate coloured traces.
Tip- DYNertia3 already has some test Runs in a folder called ‘Samples’, use these to practice loading and viewing files
and to learn the software operation.
NOTE: It is only ‘loaded’ files that can be then selected and analysed in the other screens of DYNertia3
‘DYNertia3 File Explorer’ is used to pick a storage Folder of choice and when each file within it is selected (one Left
‘Click’) its data table, general notes, key data and preview graph are shown.
Traces to view and analyse are ‘loaded’ onto the Graph screen by using the coloured
boxes beneath the graph. There is one for each of the 5 traces (10 counting secondary
screen traces) that can be viewed.
To load a new trace into the graph for viewing or to change an existing one ‘Click’ on a trace number (button numbered
“3” in this example above), this will open our ‘DYNertia3 File Explorer’ screen where we can select a run to be shown as
trace ‘3’.
Single ‘Right Click’ on a file of interest and it will be loaded as the new ‘trace set’ back in the main graph screen! (Left
Click first to highlight, shown next page)
‘DYNertia3 File explorer’ can also be opened from the ‘DYNO’ screen (button as shown to right), from the menu option
‘View/DYNertia File Explorer’ or by pressing ‘ctrl + F’ buttons as a shortcut.
www.dtec.net.au
Page 66

66
Chapter 8: Loading / Viewing Files
DYNertia3 file Explorer
In ‘DYNertia3 File Explorer’ you can pick a directory Folder of choice and when each file is selected (one Left ‘Click’) its
data table, general notes, key data and preview graph are shown.
Preview files by selecting and viewing the sample graph and data table; if the graph is Clicked on then the values at the
cursor will be also highlighted in pink in the data table (to the nearest data set) and vis versa.
# ‘Right Click’ on a selected file of interest and it will be loaded as the new ‘trace set’ back in the main graph screen.
If you are selecting a Folder that you wish to use to save runs into, or that’s contents will need to view for
naming test Runs into, then press the ‘File Storage’ icon (top Left) and it will become the default file path for
saving new files into and will open whenever DYNertia3 File Explorer is opened.
Note: It is important when selecting or creating a Folder to save runs into that this button is used. It will be these
Folders contents that are shown in the main Dyno screen!
Tip- Maximum data values, test time, date and notes stored in the ‘general’ section of the comments are also indicated
in DYNertia3 File Explorer’s top header panel.
Locking Files: The ‘key’ symbol button will lock or unlock a file so that accidental overwriting can be
prevented i.e. You won’t be able to pick that file and re-save a test run over the top of it or modify comments.
A locked file is indicated by a red box “File Locked”, unlocked by green box “File Unlocked” when selected.
File Type: Symbols show if data is a continuous trace or was built up in ‘Point by Point’ testing
mode as is usually done when ‘steady state’ testing on a brake style dyno.
Losses Correction Status: Shows if losses correction was applied to the test results. See chapter “Losses
correction”.
www.dtec.net.au
Page 67

67
Chapter 8: Loading / Viewing Files
DYNertia3 File Explorer (cont.)
Maths Channels: Opens screen to generate and apply mathematical functions to generate extra data
channels. This function will be explained fully in the chapter “Maths Channels”.
Find All: Is a screen to help
search and locate any test Run
files on your computer.
When you select a Folder it will display all
files that have the extension “DYN2” or
DYN3” as these are your saved test Runs.
Tip- ’Click’ on a file name to view
associated comments.
If you are selecting a Folder that
you wish to use to save runs into,
or that’s contents will need to view
for naming test Runs into, then press the
‘File Storage’ icon (top Left) and it will become the
default file path for saving new files into and will
open whenever DYNertia3 File Explorer is opened.
Trace Information: Shows all of the
information relating to the highlighted
test Run.
www.dtec.net.au
Page 68

68
Chapter 8: Loading / Viewing Files
Creating / Deleting folders for tests
Next to the Folder list is a black arrow “►”, ‘Clicking’ on this will open a menu that allows you to create or delete new
Folders easily.
Once you type in a Folder name, press the button shown to create the Folder and also set it as default. It will
then be used to save files into and view when explorer is opened.
Pressing this will create the Folder but not set it as the default. Used if you are just creating Folders in
preparation, but not yet using.
Pressing will delete a selected file. You will be warned if it is in use i.e. already selected in a graph screen.
Pressing will delete a selected Folder.
Tip- You can create, delete, move and alter file names in ‘Windows Explorer’ just as with any Windows program.
Changing file names and locations whilst in use or selected will cause DYNertia3 to obviously produce error messages
(it can’t find them any more). You will need to re-select your files of choice from their new location. Do not rename the
actual ‘default’ Folder being used by DYNertia3, an error will occur!
www.dtec.net.au
Page 69

69
Chapter 8: Loading / Viewing Files
Reviewing Audio Files
Audio files can be used to save a commentary during a test or to record the actual engine noise.
If the ‘Media‘ option in the menu choice “Setup/Software/General” is
enabled then there will be audio files (.wav) visible along with the normal
‘run’ files (.DYN3) in ‘DYNertia3 File Explorer’ (assuming you have some
audio tracks recorded).
Recording audio files is done by pressing the ‘Mic Input’ button on the ‘Graph’ or ‘Dyno’ screen (turns
microphone on/off) to record during the duration of the run. An audio file (.wav) will be saved along with the
completed run file. This can be used to save a commentary during a test or to record the actual engine noise.
‘Clicking’ on the audio files name will open a small Window allowing the file to be played and reviewed.
The controls are standard audio symbols with the exception of the middle ‘Loop’ button that sets a repeat play function.
The section of recording can be narrowed down by using the ‘Mark In and Mark Out’ controls, these determine the start
and finish time of the recording that is actually played back.
www.dtec.net.au
Page 70

70
Chapter 8: Loading / Viewing Files
Secondary GRAPH Window
To allow the viewing and Analysing of up to 10 trace sets there can be opened a second Graph screen. This appears
very similar to the main Graph screen but has limited menu options as it is for selecting, viewing and printing, not
controlling dyno functions.
This second Graph screen can display 5 traces; it is ideally suited to PC’s with dual monitors connected as can then
reside on the second screen
It is loaded with files the same way the main screen is, via a ‘Click’ on a trace number (numbered buttons beside each
coloured band).
All controls and menu functions are the same as the main Graph screen so will not be covered here.
www.dtec.net.au
Page 71

71
Chapter 8: Loading / Viewing Files
Viewing Files (‘GRAPH’ Window)
Adjusting Graph appearance
The main GRAPH Window is convenient for quickly comparing runs and is a powerful analysis tool in its own right!
Note: Refer to manual section “Overview- 2 Main Screens” for information on GRAPH screen controls.
Note: Also refer to manual section “Trim, Join & Merge Runs” for important information on manipulating traces!
Zooming
The scales are automatically set of the
highest data values. To ‘zoom’ in or ‘trim’
the graph use the “” buttons in the
lower graph corners.
Clear Graph Trims
Menu “View/Clear Graph Trims” clears all of
the manual adjustments (Zoom) made to
the graph scales and returns to the
automatic scale selection.
Tip- There is a menu option “File/Trim a
Run” that creates and saves a new file
using whatever start and stop RPM points
you choose. This is good to permanently
remove any unwanted sections of a trace
that may occur due to poor setting of the
‘Run Minimum & Maximum’ speeds!
Traces to view and analyse are ‘loaded’ onto the GRAPH screen by using the
coloured boxes beneath the graph. Un-checking a traces Check Box will hide it
from view, it does not remove it. Check it and it becomes visible again. Handy
when the graph screen is getting cluttered or for printing only selected traces.
Clear Graph
To remove traces off the screen (un-load them) press your keyboards ‘Shift’ and
‘Delete’ button (or menu option “View/Clear Graph”). Files are not harmed; they are
just not selected for viewing
Trace Visibility
Individual data can be removed from view on
the graph using the “View/Trace Visibility’ menu.
Grid
Found in menu “Setup/Grid”, allows the grid lines to be removed from the graph,
this effects printing also as what is on the screen is what is printed.
Tip- ‘The export functions found under the ‘File’ menu also give you the freedom to export to Microsoft’s ‘Excel’, this
opens up infinite possibilities to graph and analyse the data as required.
www.dtec.net.au
Page 72

72
Chapter 9: Trim, Merge & Join runs
Chapter 9: Trim, Merge & Join Runs
Trim- change start and end points
Merge- create an average of 2 runs
Join- merge data points into a single trace
www.dtec.net.au
Page 73

73
Chapter 9: Trim, Merge & Join runs
Trim a Run
Trimming a Run cuts off any RPM points above and below the RPM range selected. This is
used to remove permanently any sections of your Run trace you do not wish to have,
particularly if your RPM start and finish points where not set ideally and you have a ‘messy’
looking trace or have a large part of the RPM scale not used.
The new trimmed Run trace will be saved under a name of your choice as a whole new file!
1. Choose the trace number set you wish to trim with the selection buttons
2. Set the Min and Max RPM you wish to have remaining in your data
3. Press the “Trim” button and you will be prompted to name the file and choose a location to save.
Tip- For fast setting of the RPM points use the “+1000” buttons, this will increment the adjustments by 1000 RPM at a
time.
www.dtec.net.au
Page 74

74
Chapter 9: Trim, Merge & Join runs
Merge Runs
Multiple Runs can be ‘merged’ together to form a new ’averaged’ Run. This function is
particularly useful when multiple Runs have been performed and only slight variations exist,
you may wish to create an average of these to smooth out the variations. Many testers do
multiple Runs after any modification to ensure consistency, merging compliments this practice
perfectly.
A merged Run will be based on up to 4 visible traces (2, 3, or 4). It is required that trace set “1” be loaded and visible as
this is used as the ‘master’ when DYNertia3 generates the new data (any of your recorded comments will copy from this
to the new file). The files merged will be all of the ones visible on the Graph Window. The new averaged Run will be
loaded as the ‘last run’ trace automatically. After the new averaged Run is created you will be asked if you want to hide
the other graph Runs so only the new one remains visible.
Tip- The menu option “View/Clear Graphs” (or ‘Delete’) can be used to clear all of the graph traces so you can pick
entirely new ones to merge if you wish.
Note: ‘Point by Point’ Runs (those done in brake mode by storing individual data sets) cannot be merged. They can
however be joined, that is to combine all data into 1 set. This is done with the in the menu option “File/Join Runs”
The new ‘averaged’ Run will appear as a complete data file and is treated just like any other Run. The General
comments field of the new files notes will automatically have appended a list of the files that it was generated from.
There are different methods used to indicate that a file is the result of merging multiple Runs, depending on the screen-
An “!” symbol will appear next to the run when a ‘graph summary’ is viewed and ‘DYNertia3 File explorer’ has a
note on top of the preview graph.
For indication purposes the weather correction data from the chosen runs is also averaged into the new weather fields
as is the actual correction figure generated by them.
Tip- It is not suggested to merge runs that have been performed under different weather correction standards i.e. don’t
merge SAEJ607 runs with DIN 70020 etc. as the result will be meaningless for analysis, as will be the result if the
original runs vary greatly from each other.
www.dtec.net.au
Page 75

75
Chapter 9: Trim, Merge & Join runs
Join Runs
Multiple ‘Point by Point’ tests can be ‘joined’ together to form a new ’combined’ test. This
function is particularly useful when multiple data sets have been recorded in certain RPM
ranges and you wish to combine all of the data into a single common set. Many testers do
small lots of testing at particular points of interest, joining compliments this practice perfectly.
A ‘joined’ Run will be based on up to 4 visible traces (2, 3, or 4). It is required that trace set “1”
be loaded and visible as this is used as the ‘master’ when DYNertia3 generates the new data
(any of your recorded comments will copy from this to the new file). The files merged will be all
of the ones visible on the Graph Window. The new trace will be loaded as the ‘last run’ trace
automatically. After the new joined Run is created you will be asked if you want to hide the
other graph Runs so only the new one remains visible.
Tip- The menu option “View/Clear Graphs” (or ‘Delete’) can be used to clear all of the graph traces so you can pick
entirely new ones to join if you wish.
Note: Only ‘Point by Point’ Runs (those done in brake mode by storing individual data sets) can be joined. The screen
image above shows a red indicator that one of the traces was not ‘Point by Point’!
The new ‘joined’ Run will appear as a complete data file and is treated just like any other run. The General comments
field of the new files notes will automatically have appended a list of the files that it was generated from.
If there are ‘gaps’ between the data sets you will be warned, but joining will still continue. This is to let you know that the
data doesn’t overlap e.g. there may be a big gap between RPM finish of one trace and RPM start of another, therefore
the trace may have a ‘Hole’ in the data.
When joining data sets with overlap of RPM points (as is best to avoid ‘gaps’) precedence is given to the lowest
numbered trace e.g. if 1 and 2 are joined the overlapping points from 2 will be disregarded.
There are different methods used to indicate that a file is the result of joining multiple data sets, depending on the
screen-
An “!” symbol will appear next to the run when a ‘graph summary’ is viewed and ‘File explorer’ has a note on top
of the preview graph.
For indication purposes the weather correction data from the chosen Runs is also averaged into the new weather fields
as is the actual correction figure generated by them.
Tip- It is not suggested to merge runs that have been performed under different weather correction standards i.e. don’t
merge SAEJ607 runs with DIN 70020 etc. as the result will be meaningless for analysis, as will be the result if the
original runs vary greatly from each other.
www.dtec.net.au
Page 76

76
Chapter 10: Test Notes- Add/Save
Chapter 10: Test Notes- Add/Save
Adding notes to tests
Save/attach notes to other test files
www.dtec.net.au
Page 77

77
Chapter 10: Test Notes- Add/Save
Adding Test Notes
‘User’ comments field
Any notes and data you wish to record (eg. engine data, customer details and modifications) can be entered here, there
are pre-defined fields and a general notes area. The information is stored along with the test data when the Run is
performed and can be reviewed and even altered when a saved file is loaded.
Accessing User Comments: There are several ways to access the comments fields depending on what screen you
are in and if dual monitors are in use.
Notes can be quickly entered before testing by using the comments field. This may not be visible with a single monitor
as it is replaced by a row of gauges. Press the ‘Gauges’ button to toggle the view.
In the lower Right hand corner of the GRAPH screen is the button to open the comments for the
selected run. They can be viewed and edited.
Note: To select the trace of interest use the buttons below the
dials on the Left hand of GRAPH screen.
The menu option “View/Comments (Selected Run)” will open the comments fields
for the selected run.
Tips- You can lock any file to protect it from accidental change in the menu option “View/File Explorer” (‘key’ icon). If a
chosen file is already locked when selected, the “Start Run” button changes to “Locked” (image of a set of keys).
www.dtec.net.au
Page 78

78
Chapter 10: Test Notes- Add/Save
Templates
Saving notes and applying to other tests
If you have entered details into the comments field below (from the DYNO screen) and you want to apply them to other
tests without having to retype your notes, then save it as a ‘Template’ with the ‘Save’ button in the top Right corner.
The applied information can be further added to or altered at any time.
To apply it to any other files use the ‘Load’ button.
Tip- A ‘Template’ of the information can be created and saved without having an actual test file open.
When the template is saved or attached it will transfer some dyno settings also (gear ratio, weather correction standard
used, min start RPM and the test gear), this is to speed up retesting on vehicles/engines by simply attaching a previous
made template if you wish. Templates are saved as special files (“.DIT”).
When applying a saved template to a file, a choice of
what data entries you wish to attach will become
available e.g. you may be testing the same vehicle as
previously but wish to only add new general comments
due to modifications.
Tick the appropriate box’s and press the ‘load’ button to
apply.
Tip- In menu “Setup/Software/Run Comments” you can select to
have ‘Comments added to each new run’, this allows comments
you have made to be automatically transferred to the next test. This
function is designed for quick testing i.e. you are doing multiple
tests of the same modification. Without this each new test has all its
comments cleared.
Note: Does not apply to the operator and company name, these
are pulled in from the user details.
www.dtec.net.au
Page 79

79
Chapter 11: Printing & Exporting
Chapter 11: Printing & Exporting
Printing screens
Adding comments to print
Exporting data
www.dtec.net.au
Page 80

80
Chapter 11: Printing & Exporting
Printing
General Printing
Many Screens allow you to print. Generally the printout is ‘what you see is what you get’, which means it is important to
set up the screens appearance first to produce the best results.
A common error is not setting up the X-axis (RPM/Speed) to avoid too low or too high a scale, especially if the test start
and stop conditions were poorly setup in the “record settings field” when testing.
You can alter the trace images on the main GRAPH Window using the ▲▼►◄ symbols, the scale set here is often
carried over into other analyser screens. Graphs traces can be permanently ‘Trimmed’ (‘File’ menu) to also adjust the
appearance
Print: Button initiates the printing and gives any options available for a
particular Window you wish to print from. This can include the choice of
pages to preview if appropriate (detailed graphs and data printout has
multiple pages).
Setup Printer: Menu option “Setup/Printer”
opens a window that allows you to Select a
printer to use, add a new printer or correct
offset.
A separate print ‘help’ menu is also revealed
and this should be read!
.
Tip- You can print to a PDF writer if you wish to save the image as a PDF document rather than print directly. There
are many free writers available (one is loaded with DYNrtia3 called ‘PDFill’)
Offset Correction: A trial print on A4 should be done first, If not aligned properly then this button will allow for
the image to be shifted on the page when printed; most printers have a positioning error to some extent. When
aligning, the image will not alter its position on the screen, only on the actual page printed.
www.dtec.net.au
Page 81

81
Chapter 11: Printing & Exporting
Printing main Graph screens
Printing the images from the main GRAPH Window is done from the usual print icon.
Graph only option
Summary Graph and data
Detailed graph and data
Tip- Printing follows the format of the main Graph Window, scales and traces selected there are as printed.
Printing from the main Graph Window reveals a preview Window
that has several buttons as explained below. The preview Window
will change based on the printout type selected.
Dyno Operator: The name of operator can appear on the printout if desired.
Information for Printed Output: Information entered here appears on the 2nd printed page (information
summary page).
Print: Button will print the pages.
Select Page: Multiple pages are available for printing, a graph page that gets its image from the main
Graph Window, summary page and detailed information pages that shows key data from the selected
traces on the graph.
www.dtec.net.au
Page 82

82
Chapter 11: Printing & Exporting
Customising your printout
The logo in the printouts can be user defined. It must be a ‘BMP’ image, it should have a 2:1 aspect ratio to appear
undistorted when viewed. In the menu “Setup/Software” is a button that opens the user details form as below-
User Details and Company Logo: Data and your logo image used here
appears on the printouts. The logo can be inserted by pressing the
“Add“ button or if you do not wish to use a logo, press “X” button.
The user details appear on the detailed and summary printouts.
Customer Disclaimer: A disclaimer notice can be saved and printed for issuing to the customer prior to dyno testing. It
is up to the user to produce a legally binding disclaimer in line with their local regulations.
When the print button is pressed a form opens to allow vehicle information
to be entered and this will be added to printouts.
The name of operator can appear on the printout, if desired, by pressing the user button when shown.
The detailed printout option allows greater information to be displayed; it appears on the 2nd page and is
entered by using the comments button.
In some screens this button will open a general comments form that will generate notes that can be placed on the actual
graph, see “Notes To Print” section for details.
www.dtec.net.au
Page 83

83
Chapter 11: Printing & Exporting
Notes to print
General comments for printing
Several screens allow the addition of single notes superimposed for printing. The main Graph Window has its own menu.
Produce graph comment for printing: Type in your comment, press ‘text’ button and when you click on the
graph the text will appear. Use the eraser button to delete the text comment or to redo for placing again. The
arrow button returns without making a change.
Produce comments on the main graph for printing
Choosing this menu option will open the Window below. Type in your comments, press text and when you click on the
graph the text will appear. Use the eraser button to delete the text comment or to redo for placing again.
Note: Clearing the graph traces will clear the comments (menu ‘View/Clear Graphs’ or pressing ‘Shift’ and ‘Delete’ key)
www.dtec.net.au
Page 84

84
Chapter 11: Printing & Exporting
Exporting data
Data tables can be exported into Microsoft Excel directly (with or without field
headings included) or a general delimited text file (CSV) can be generated (exported
files follow either Metric or imperial depending on the current operating mode).
Alternatively the main graph image can be exported as a bitmap image (‘.bmp’) for
further analysis and file sharing.
Select a Trace to export: Any of the 10 traces loaded into the main GRAPH Window can be selected.
You can set the RPM increments with the controls (eg every 100 rpm increment) and with this button you can
choose to include the actual first and last RPM point along with the RPM incremented points.
You can add field headings to the top of the data columns for meaningful reference when viewing.
Below is shown a ‘Bitmap’ export of a main Graph Window.
www.dtec.net.au
Page 85

85
Chapter 12: Live Data Viewing
Chapter 12: Live Data Viewing
Screens for monitoring data live during testing
Note: Not all screens are visible with a single monitor and not all data
is relevant to all systems e.g. live power if in Inertia dyno mode
www.dtec.net.au
Page 86

86
Chapter 12: Live Data Viewing
Gauge Screens
Observing the engine data
The available windows to view data in depend on the fitment of a second monitor.
If a multiple monitors are fitted then there will be a dropdown list of possible display
Windows for the second monitor.
Note: Press the ‘GAUGES’ button to turn second display on and off.
Due to limited screen space, with only a single monitor the data is
displayed as shown to the Left.
There are chart recorders and gauges for RPM, torque and power, whilst
the 4 data channels are displayed on a second set of gauges with alarm
limits.
Note: Some displays are not relevant with inertia dyno testing i.e. live display of Power and Torque is not possible.
Below is a preview of the Windows available on a second monitor.
This ‘Graph’ screen is the main one used on a brake
style dyno whilst testing. It draws the curve as the
test progresses.
Tip- ”Show Data” button under RH scale
reveals digital readout of data at the cursor.
Large clearly visible ‘Dashboard’ allows easy steady
state tunning observations.
www.dtec.net.au
Page 87

87
Chapter 12: Live Data Viewing
Observing the engine data (cont.)
‘Tunning’ screen allows display of the
data with emphasis on input channels.
The alarms and limits (“Setup/Data
Alarm Limits”) are applied and a bar
graph shows deviation from a target
(deviation is also selected in
“Setup/Data Alarm Limits”)
There are ‘Single’ and ‘Dual’ chart recorders available to select from also.
‘Large Text” displays selected data in
digital format.
www.dtec.net.au
Page 88

88
Chapter 12: Live Data Viewing
Observing the Data Channels
The ‘Data Channel’ viewing and logging Window should not be overlooked for viewing live data
in certain cases, though generally it is designed for sensor configuration and calibration.
Note: Window is found in the menu “Utilities”, not these Gauges selections.
Data logging to the PC is also available and data is
continually written (CSV format) at the intervals set.
To record (log) data a file must be first named by pressing the ‘Disc’ icon.
You can choose to save ‘header’ names to the columns of logged data.
Logging data is started by this button.
Log files can be easily previewed with this ‘Monitor’ button.
The data shown can be in the actual units calibrated for the channels (i.e. channel 1 may be calibrated to show Lambda
from a lambda meter), optionally by pressing the “In mV” button the 'raw' mV readings measured are displayed, this is
prior to any sensor calibration being applied.
A red "Err" reading means the input voltage or RPM is outside the input range (0 - 5000mV or less than 250RPM) or if a
sensor alarm/limit is applied.
Note: Torque is automatically selected for channel 5 if you are in ‘Brake’ mode (only channel used for a load cell!)
Tip- This screen is ideal for calibrating sensors as you can use the “In mV” button to display the 'raw' mV readings (0-
5000mV).
Note: DYnertia3 internally reads mV from 0-5000, If you select a switch setting of 0-15V range you are dividing the
input by 3 before it is measured. The ‘raw’ values will be still in the 0-5000 range eg. 9V input would be 3000mV raw.
www.dtec.net.au
Page 89

89
Chapter 12: Live Data Viewing
Display Current AFR/Lambda
If a Lambda meter (Air Fuel Ratio- AFR) is connected to an input channel then it can be
displayed in this indication Window (‘Utilities’ menu) for high visibility during tuning.
Note: Window is found in the menu “Utilities”, not these Gauges selections.
The width of the acceptable operating band is set in the “Window” control field. The centre
location of the operating band is adjusted with the ‘slider’ control (shown set at 1 in the images
below).
It is important to set the input channel selection button that has the Lambda meter connected (usually channel 1 is used)
Note: Both Lambda and AFR units are used; therefore the ’stoichiometric’ point of the fuel must be known (so
DYNertia3 can calculate AFR from Lambda and visa versa). Choose the fuel from the drop down list or add your own
custom ratio by pressing the “C” button (this can also be selected under menu choice ‘Setup/Software/Lambda AFR’).
DYNertia3 will pick up if you have calibrated your input channel in units of Lambda or AFR by checking if the words
appear in the selected sensor name under menu option ‘Setup/Sensor Configuration’ “ Lambda “ or “ AFR “ are the
terms it searches for (note the space either side). Knowing this allows DYNertia3 to apply the appropriate calculation to
give you both units of Lambda and AFR regardless of your sensor configuration.
If the Lambda reading goes outside the acceptable ‘Set Point’ range then the gauge surroundings change to a very
noticeable red colour to alert that a problem exists.
Tip- Filtering (smoothing) values applied to the data can be altered set in the menu ‘Setup/Sensor Calibration’.
www.dtec.net.au
Page 90

90
Chapter 13: Analysing Data (‘View’ Menu)
Chapter 13: Analysing Data (‘View’ Menu)
Analysis tools for getting the most from your recorded data
www.dtec.net.au
Page 91

91
Chapter 13: Analysing Data (‘View’ Menu)
Trace Info
Opens a Window that shows the key summary data for all of the loaded traces.
Tip- “?” button in the lower Left corner of a viewed graph is the shortcut.
Double ‘Click’ on any trace set listed to open up the detailed ‘Trace Information’ screen shown below.
Secondary Graph
To allow up to 10 traces to be analysed a secondary Window can be enabled, especially useful if you have dual
monitors fitted and enabled as it can be displayed there. This Window allows selection and control of traces, just as the
main Graph Window does.
www.dtec.net.au
Page 92

92
Chapter 13: Analysing Data (‘View’ Menu)
Individual Trace Set
Shows all of the available data for a single chosen Run.
Individual data channels for the chosen Run can be turned on/off (‘eye’ visibility buttons in the menu bar) and the trace
being viewed can be from any of those loaded and selected into the main dyno ‘GRAPH’ screens. Only available Runs
and their active data channels will have the buttons highlighted for operation!
‘Floating’ data value box is
activated by a ‘Click’ in the
Right hand scale margin to
turn on/off. Cursors are used
to help analyse the
information, position the
mouse and ‘Click’ on the
graph. The cursor can also
be ‘Dragged’ by holding the
mouse button down whilst
moving over the graph.
Tip- The data value box’s
transparency level can be
adjusted in the menu option
“Setup/Software” so that it
does not obscure the view
behind it. The box can be
freely dragged by its border
to any screen position (‘Click
and drag’ the box’s edge).
Clipboard menu allows you to ‘paste’ the data displayed in the data box onto the Windows ‘clipboard’, this means you
can paste it into any text program you like, such as Word or Notepad. Ideal if you want a permanent record of all the
data that is displayed at the cursor location on the graph. Along with the data are copied details of the displayed traces.
Scale on Left side is power (as all other units are on Right axis).
Select a Trace to view: Any of the 10 traces loaded into the main GRAPH Window can be selected.
Tip- The cursors horizontal bar can be used as a guide to read of values from the Left axis if required (if ‘floating box’ is
not being used for example)
Tip- The RPM scale is taken from the main graph screen,
so trimming the main graph (e.g. using the corner arrows)
will vary what is seen in this screen.
Information: This button will reveal a summary
table (Trace Info) of the data associated with the
trace set currently being viewed.
www.dtec.net.au
Page 93

93
Chapter 13: Analysing Data (‘View’ Menu)
Compare
Compares the percentage of difference between all selected Run traces (any data set) and highlights variations.
Individual data channels for the chosen traces can be turned on/off (‘eye’ visibility buttons in the menu bar) and the trace
being viewed can be from any of those loaded and selected into the main dyno ‘GRAPH’ Window. Only available traces
and their active data channels will have the buttons highlighted for operation!
The reference trace is the one that all others are compared to. The difference percentages
displayed in the data box’s in the right hand side are relative to this selected trace.
Select Traces to compare: Choose to view the traces loaded in the Main dyno ‘GRAPH’ Window or
those loaded in the Secondary Graph Window.
Tip- The RPM scale is taken from the main GRAPH Window, so trimming the main graph (e.g. using the corner arrows)
will vary what is seen in this screen.
www.dtec.net.au
Page 94

94
Chapter 13: Analysing Data (‘View’ Menu)
Torque Analysis
A powerful tool that reveals the area under the Torque curve, average Torque, maximum Torque, RPM that developed
maximum Power and Torque.
The RPM points that are calculated between can be easily adjusted in the menu bar. This allows for quickly trimming
down the Runs to compare certain key areas.
The ‘Markers’ button activates markers (vertical lines) on the screens show the peak RPM for maximum
Power and Torque.
Note: The ‘Curve Area’ is a mathematical calculation and has no standard unit of measurement (it is derived from RPM
and Torque data).
www.dtec.net.au
Page 95

95
Chapter 13: Analysing Data (‘View’ Menu)
Losses
Losses system is a DYNertia3 software feature. It is a tool that measures and applies a correction for dyno system
losses (friction, windage etc) and also for vehicle driveline losses, it allows analysis of this data also in the Windows
shown below.
Note: Please see the chapter “Losses Corrections” for details
www.dtec.net.au
Page 96

96
Chapter 13: Analysing Data (‘View’ Menu)
Lambda / AFR Deviation
Reveals the deviation of a trace’s mixture from a target value for tuning air fuel ratio (AFR)
Clicking on the Window will reveal a cursor; actual Lambda deviation and RPM at that point is displayed in the menu bar.
The span (scale range) shown and the target value can be easily set using the ▼▲ buttons.
Units of Lambda or AFR can be selected. Selecting AFR will alter the scale range to suit a sensor calibrated as
AFR and not Lambda i.e. ensure the sensor input is correctly setup for either Lambda or AFR units, depending
on what you wish to use (see chapter “Inputs- Using”)
Select input channel: The channel that the Lambda meter is
connected to can be freely selected, though by default the preference
setting in ‘Setup/Software/Lambda AFR’ is used.
Select a Trace to view: Any of the 10 traces loaded into the main Graph Windows can be selected.
Individual Trace view: The trace selected will be shown in the ‘Individual Trace’ Window for a detailed look
at all of the data and what the consequences of the mixture deviation may have been at the cursor point.
Tip- See also the manual chapter ‘Inputs- Using’ for the ‘Current Lambda / AFR’ live tunning Window information.
www.dtec.net.au
Page 97

97
Chapter 13: Analysing Data (‘View’ Menu)
Distance / Speed / Time / RPM Analysis
This Window allows the relationship between these variables to be easily examined. As the test Run is carried out at any
point we can see the distance actually covered by the vehicle (providing we have set up an appropriate tyre
circumference), the current speed, engine RPM and time it has taken to reach this point.
Clicking on the screen brings up a cursor and the data at this point is displayed on the dial gauges.
The cursor can be positioned and “P1” button pressed, move cursor again and press “P2” button, the
data at both points is displayed on the Right hand side along with the difference calculated.
This reminds the user that trace starts at the start of the recorded Run, which is not from
stand still i.e. it represents a rolling start and zero distance is marked at the start of the Run
(in the case above the bike was already travelling at 66KPH at the start)
The graph can be trimmed by manually entering an accumulated distance to end the scale at e.g. in the
example above we could enter a value less than 574 meters if we wished!
Select a Trace to view: Any of the 10 traces loaded into the main Graph Windows can be selected.
www.dtec.net.au
Page 98

98
Chapter 13: Analysing Data (‘View’ Menu)
Slip / Tyre Growth
Shows the percentage of difference of a trace’s RPM (measured from DYNertia3’s speed sensor but using the drive ratio
to correct to engine RPM) to that of the secondary RPM source, if used. This Window was designed to show problems
with clutch slip, loss of tyre traction and also the engagement points of centrifugal clutches.
The graph above clearly shows major ‘slip’ at one point, this is due to the engines clutch releasing under power
(certainly explained a dip in the Power curve seen also when testing!)
Note: The ‘RPM Adapter’ input and drive ratios must be setup, it is this ‘RPM adapter’ engine RPM that is compared to
the calculated RPM (from dyno speed and ratio) to measure slip.
Note: ‘Slip’ calculations can’t operate with engines fitted with CVT transmissions or automatics that can’t be locked into
a set gear for testing, this is due to them having a continually changing drive ratio between engine RPM and dyno RPM.
It is normal to see a variation from 0%, there will always be a small amount of slip, particularly on a chassis dyno. There
will also be mathematical ‘rounding’ errors, ignition timing variations and measurement errors (e.g. if your ratio setup is
poor) that can cause a deviation.
Clicking on the screen will reveal a cursor; actual RPM and slip values at that point are shown in the menu bar.‘
Select a Trace to view: Any of the 10 traces loaded into the main Graph Windows can be selected.
“” buttons (lower Left & Right corners) allows the trimming (or ‘zooming in’ ) of the trace image by moving the graph
start and finish points, this can also remove any unwanted trace sections, particularly useful for ensuring the printed
image appears as you wish.
“” buttons (Left ) allows the trimming (or ‘zooming in’ ) of the trace image by altering the graph percentage scales.
“” buttons (Right) allows the offsetting of the trace image by altering the graph percentage scales offset from zero.
Individual Trace view: The trace selected will be shown in the ‘Individual Trace’ screen for a detailed look at
all of the data and what the consequences of the slip may have been at the cursor point.
www.dtec.net.au
Page 99

99
Chapter 13: Analysing Data (‘View’ Menu)
Run Duration Info
Opens a Window that allows the entry of any two speed or RPM points and displays the time between them.
Tip- “Err” displays when there is no selected trace to display i.e. above trace 5,8,9 and last run were not loaded on the
main Graph Window so the data is missing!
Enter any start and finish RPM point or Speed point if you are running in ‘Speed” mode, press “Calculate” to update the
figures.
Select Speed or RPM: Choose the units to time.
Great for showing changes in acceleration rate between tests (i.e. 100 – 200 kph times).
Tip- The two values will initially be selected from the graph scale settings you have chosen (Run start and finish
RPM/speed).
www.dtec.net.au
Page 100

100
Chapter 13: Analysing Data (‘View’ Menu)
Point to Point Times
Opens a Window that compares multiple Runs and highlights which performed best (or worst) between any RPM or
speed points that you choose. The chosen traces are those selected in the GRAPH Screen. Manually enter any RPM or
speed points that you wish to analyse between.
Green highlights the trace that had the shortest acceleration time between your chosen points.
Red highlights the trace that had the longest acceleration time between your chosen points.
Tip- “Err” displays when there is no selected trace to display i.e. above trace 5,8,9 and last run were not loaded on the
main GRAPH Window so the data is missing!
The RPM or speed mode is automatically selected depending on what mode you are
currently running the dyno in (selected on the main screens with the ‘dial’ icon)
The minimum and maximum coloured selections can be turned on or off to help visibility. When both are
off the trace data is all white and not coloured.
Your range settings can be saved or loaded for future reference.
www.dtec.net.au
 Loading...
Loading...