


Distance Laser Sensor
DLS-C 15 / DLS-C 30
DLS-CH 15 / DLS-CH 30
FLS-C 10 / FLS-C 30
FLS-CH 10 / FLS-CH 30
Technical Reference Manual
V5.02
Please check www.dimetix.com
for the latest version
This Manual is Valid for software version 0500 or later

TECHNICAL REFERENCE MANUAL
Table of Contents
1 Introduction...................................................................................................................................................................................................4
1.1 Product identification...........................................................................................................................................................................5
1.2 Components........................................................................................................................................................................................5
1.3 Validity.................................................................................................................................................................................................5
2 Application examples....................................................................................................................................................................................6
2.1 Serial interface RS-232 / RS-422...........................................................................................................................................................6
2.2 Analog and digital output....................................................................................................................................................................6
2.3 External display....................................................................................................................................................................................6
2.4 External trigger....................................................................................................................................................................................6
2.5 SSI connection.....................................................................................................................................................................................7
2.6 Positioning...........................................................................................................................................................................................7
3 Device overview and setup............................................................................................................................................................................8
3.1 Connection for configuration...............................................................................................................................................................8
3.2 Output interfaces.................................................................................................................................................................................9
3.2.1 Output configuration example...................................................................................................................................................9
3.3 Operation modes...............................................................................................................................................................................10
3.3.1 Controlled mode......................................................................................................................................................................10
3.3.2 Stand-alone mode....................................................................................................................................................................11
3.4 Measuring characteristics...................................................................................................................................................................12
3.4.1 Measuring characteristics overview..........................................................................................................................................12
3.4.2 Moving target characteristic.....................................................................................................................................................13
3.4.3 Error behavior...........................................................................................................................................................................14
3.5 Special user commands......................................................................................................................................................................15
3.5.1 Offset / Gain.............................................................................................................................................................................15
3.5.2 Output format..........................................................................................................................................................................15
3.6 Output value filter..............................................................................................................................................................................16
3.6.1 Moving average filter...............................................................................................................................................................16
3.6.2 Spike suppression filter.............................................................................................................................................................16
3.6.3 Error suppression filter..............................................................................................................................................................16
4 Installation...................................................................................................................................................................................................17
4.1 Mounting...........................................................................................................................................................................................17
4.1.1 Mounting of the device............................................................................................................................................................17
4.1.2 Mounting for the reflective plate..............................................................................................................................................17
4.1.3 Alignment of the laser beam....................................................................................................................................................17
4.1.4 Laser Life time consideration....................................................................................................................................................17
4.2 Device wiring.....................................................................................................................................................................................17
4.2.1 Power supply............................................................................................................................................................................17
4.2.2 Cable connection.....................................................................................................................................................................17
4.2.3 Shield and ground....................................................................................................................................................................17
4.2.4 Serial connection......................................................................................................................................................................18
4.2.5 Analog / Digital connection......................................................................................................................................................19
4.2.6 SSI connection..........................................................................................................................................................................19
4.2.7 External trigger connection......................................................................................................................................................20
5 Technical data.............................................................................................................................................................................................21
5.1 Measuring accuracy definition...........................................................................................................................................................21
5.2 Measuring performance influences....................................................................................................................................................21
5.3 Prevention of erroneous measurements.............................................................................................................................................22
5.3.1 Rough surfaces.........................................................................................................................................................................22
5.3.2 Transparent surfaces................................................................................................................................................................22
5.3.3 Wet, smooth, or high-gloss surfaces........................................................................................................................................22
5.3.4 Inclined, round surfaces............................................................................................................................................................22
5.3.5 Multiple reflections...................................................................................................................................................................22
5.3.6 Influence of sun light................................................................................................................................................................22
5.4 Specifications.....................................................................................................................................................................................23
6 Electrical components.................................................................................................................................................................................24
6.1 ID switch............................................................................................................................................................................................24
6.2 Reset switch.......................................................................................................................................................................................24
6.3 Digital output.....................................................................................................................................................................................24
6.4 Digital input.......................................................................................................................................................................................24
6.5 Analog output...................................................................................................................................................................................25
6.6 RS-232 serial interfaces......................................................................................................................................................................25
6.7 RS-422 serial interface.......................................................................................................................................................................25
6.8 SSI output..........................................................................................................................................................................................26
6.8.1 SSI Specification.......................................................................................................................................................................26
6.8.2 SSI Timing................................................................................................................................................................................26
6.9 Connector..........................................................................................................................................................................................27
6.9.1 D-Sub connector......................................................................................................................................................................27
6.9.2 Screw terminal.........................................................................................................................................................................27

TECHNICAL REFERENCE MANUAL
7 Physical dimensions.....................................................................................................................................................................................28
8 Factory settings...........................................................................................................................................................................................28
8.1 Standard configuration......................................................................................................................................................................28
8.2 User configured measurement...........................................................................................................................................................28
9 Command set.............................................................................................................................................................................................29
9.1 General..............................................................................................................................................................................................29
9.1.1 Command termination <trm>..................................................................................................................................................29
9.1.2 Device identification N.............................................................................................................................................................29
9.1.3 Parameter separator.................................................................................................................................................................29
9.1.4 Set/Get commands...................................................................................................................................................................29
9.1.5 Startup sequence.....................................................................................................................................................................29
9.2 Operation commands........................................................................................................................................................................30
9.2.1 Distance measurement (sNg)....................................................................................................................................................30
9.2.2 Single sensor tracking (sNh)......................................................................................................................................................30
9.2.3 Single sensor tracking with timer(sNh).....................................................................................................................................30
9.2.4 Tracking with buffering – Start (sNf).........................................................................................................................................31
9.2.5 Read out - Tracking with buffering(sNq)...................................................................................................................................31
9.2.6 STOP/CLEAR command (sNc)....................................................................................................................................................31
9.2.7 Signal measurement (sNm).......................................................................................................................................................31
9.2.8 Temperature measurement (sNt)..............................................................................................................................................32
9.2.9 Laser ON (sNo).........................................................................................................................................................................32
9.2.10 Laser OFF (sNp).......................................................................................................................................................................32
9.3 Configuration commands..................................................................................................................................................................33
9.3.1 Set communication parameter (sNbr).......................................................................................................................................33
9.3.2 Measuring characteristic configuration (sNuc)..........................................................................................................................34
9.3.3 Set auto start configuration (sNA)............................................................................................................................................35
9.3.4 Set/Get analog output min level (sNvm)...................................................................................................................................35
9.3.5 Set/Get analog output value in error case (sNve)......................................................................................................................35
9.3.6 Set/Get analog output distance range (sNv).............................................................................................................................36
9.3.7 Set/Get digital output levels (sNn)............................................................................................................................................37
9.3.8 Configure digital input (sNDI1).................................................................................................................................................38
9.3.9 Read digital input (sNRI)...........................................................................................................................................................38
9.3.10 Interface 2 configuration (RS-422 / SSI)..................................................................................................................................39
9.3.11 Set/Get error value on SSI output...........................................................................................................................................40
9.3.12 Set/Get measurement filter configuration (sNfi).....................................................................................................................40
9.3.13 Save configuration parameters (sNs)......................................................................................................................................40
9.3.14 Set configuration parameters to factory default (sNd)............................................................................................................41
9.3.15 Get software version (sNsv)....................................................................................................................................................41
9.3.16 Get serial number (sNsn)........................................................................................................................................................41
9.3.17 Get device generation and type (dg)......................................................................................................................................42
9.3.18 Get device type (dt)................................................................................................................................................................42
9.4 Special user operation commands.....................................................................................................................................................43
9.4.1 User distance measurement (sNug)..........................................................................................................................................43
9.4.2 User single sensor tracking (sNuh)............................................................................................................................................43
9.4.3 User single sensor tracking with timer(sNuh)............................................................................................................................44
9.4.4 User tracking with buffering – Start (sNuf)...............................................................................................................................44
9.4.5 Read out – User tracking with buffering (sNuq)........................................................................................................................44
9.5 Special User configuration commands...............................................................................................................................................45
9.5.1 Set user auto start configuration (sNuA)...................................................................................................................................45
9.5.2 Set/Get user distance offset (sNuof).........................................................................................................................................45
9.5.3 Set/Get user distance gain (sNuga)...........................................................................................................................................45
9.5.4 User output protocol (sNuo).....................................................................................................................................................46
9.6 Error codes.........................................................................................................................................................................................47
10 Safety instructions.....................................................................................................................................................................................48
10.1 Use of the instrument......................................................................................................................................................................48
10.2 Limits to use....................................................................................................................................................................................48
10.3 Areas of responsibility......................................................................................................................................................................49
10.4 Hazards in use.................................................................................................................................................................................49
10.5 Laser classification...........................................................................................................................................................................50
10.6 Electromagnetic compatibility (EMC)...............................................................................................................................................51
10.7 Producer Standards..........................................................................................................................................................................51
10.8 Disposal...........................................................................................................................................................................................51
10.9 Labeling...........................................................................................................................................................................................52
10.10 Laser Specification.........................................................................................................................................................................52
10.11 Maintenance..................................................................................................................................................................................52
10.12 Service...........................................................................................................................................................................................52

TECHNICAL REFERENCE MANUAL
1 Introduction
The DLS-C(H) and FLS-C(H) are powerful distance-measuring instruments for integration into industrial applications. They allow accurate and
contactless distance measurement over a wide range using the reflection of a laser beam:
Key features
• Compatible with DIMETIX DLS-B(H) and DLS-A(H) Laser Distance Sensor
• Measurement range 0.05 to 500 m
• Serial interface (RS-232 and RS-422)
• SSI interface (FLS-C(H) only)
• Connection of up to 10 modules on a single RS-422 line
• Wide range power supply (9...30VDC), heating option (24...30VDC)
• Programmable analog output (0/4...20mA)
• Two programmable digital outputs (DO1 and DO2)
• Digital output for error signalization (DOE)
• One programmable digital input (DI1)
• ASCII protocol to control external displays
• D-Sub connector and screw terminal joint for easy connection of DLS-C(H) / FLS-C(H)
• IP65 (protected against ingress of dust and water)
• 4 LEDs for status signaling
• Complementary configuration software available at Dimetix web site (www.dimetix.com)
• Optional: Internal heater for device operation down to -40°C
• Laser class II (<0.95mW)
• Accessories for easy use of the sensor
Use of controls or adjustments or performance of procedures other than those specified in this
Technical Reference Manual may result in hazardous radiation exposure.
For easy startup with the DLS / FLS sensor, please use our free
configuration software from our web-page:
www.dimetix.com/UtilitySW
Distance Laser Sensor Page 4/53
Measured distance
Target
Measuring
reference
DLS-C(H)
FLS-C(H)
Fig. 1 Standard application

TECHNICAL REFERENCE MANUAL
1.1 Product identification
The product is identified by the label on the top of the sensor:
DLS-C Version with a measurement rate of up to 6 Hz and a maximum measuring distance of 150m
Typical Accuracy
1.5mm 3.0mm
Standard version DLS-C 15
Part No.: 500622
DLS-C 30
Part No.: 500621
Extended temperature range DLS-CH 15
Part No.: 500624
DLS-CH 30
Part No.: 500623
FLS-C Version with a measurement rate of up to 250 Hz and a maximum measuring distance of 500m
Typical Accuracy
1.0mm 3.0mm
Standard version FLS-C 10
Part No.: 600502
FLS-C 30
Part No.: 600501
Extended temperature range FLS-CH 10
Part No.: 600504
FLS-CH 30
Part No.: 600503
1.2 Components
1 Status LEDs
status signaling
2 15-Pin D-Sub connector
RS-422, RS-232, SSI , analog, digital output
3 Cable gland (M16 x 1.5mm)
for connection cable insertion
4 Cover
provides access to the screw terminal,
Screwdriver-type is Torx T9
5 Reset switch
resets the DLS-C(H)/FLS-C(H) to default settings
6 Screw terminal
RS-422, RS-232, SSI, analog, digital output
7 ID switch
defines the Device ID for RS-422 operation
8 Laser beam outlet
9 Receiver optics
10 Product label
see 10.9 Labeling on page 52
1.3 Validity
This manual is valid for DLS-C(H) and FLS-C(H) devices with the following software version:
Interface software version: 0500 or later
Module software version: 0400 or later
To get the software version use the command described in 9.3.15 Get software version (sNsv) on page 41
Distance Laser Sensor Page 5/53
7
6
5
9
1
8
10
1
2
1
10
4
3

TECHNICAL REFERENCE MANUAL
2 Application examples
Since the configuration of the DLS-C(H)/FLS-C(H) is very flexible the device is usable in various situations. The following application examples
give an idea of possible applications. Please visit www.dimetix.com for a detailed description of the mentioned application examples and
check for additional application examples.
2.1 Serial interface RS-232 / RS-422
While the RS-232 should be used for the configuration of the device (See
3.1 Connection for configuration on page 8) the RS-422 is made for
communication in industrial environment (See 3.3.1 Controlled mode on
page 10 and 4.2.4 Serial connection on page 18).
Fig. 2 shows the connection of multiple DLS-C(H)/FLS-C(H) devices to a
Siemens S7 PLC. A detailed application note can be found on
www.dimetix.com.
For RS-422 connections use twisted pair cables only!.
2.2 Analog and digital output
Activate the stand-alone mode (3.3.2 Stand-alone mode on page 11) and the
device is ready to use. It starts measuring after power on and updates the analog
and digital output according to the configuration. See 9.3.4 and the following
chapters for the configuration commands.
2.3 External display
If Display Mode is enabled, the DLS-C(H)/FLS-C(H) formats the measured distance
as ASCII string, which is understood by External Displays with a serial interface.
Since the DLS-C(H)/FLS-C(H) transfers this formatted string automatically on the
serial interface after completing a measurement. Measurement results can be
displayed on an external display without an additional controller.
Check www.dimetix.com for a detailed application note.
2.4 External trigger
The DLS-C(H)/FLS-C(H) includes the option of triggering measurements with an
external switch or push button on Digital Input 1 (DI 1). Using the Digital Input DI 1
disables the Digital Output DO 1.
Please refer to 3.3.2.2 Manual start configuration on page 11
Distance Laser Sensor Page 6/53
12
13
AO
AGND
DO/DI 1
V+
7,8
9
1k
DO/DI 1
V+
7,8
9
1k
2
1
Rx
Tx
m
GND
14,15
RS232 or RS422
R+R-T+
T-
ID switch
Position 0
CP 340 Zusa tzkarte
5
463
14,15
7,8
V+
R+R-T+
T-
ID switch
Position 1
5
463
14,15
7,8
V+
R+R-T+
T-
ID switch
Position 9
5
463
14,15
7,8
V+
Vcc
0V
(slave) (slave) (slave)
CP340-RS 4 22/485;
6ES7 340-1CH 00-0AE0
Pin 2
Pin 9
Pin 4
Pin 11
Pin 8
Sub-D
Buchse 15pol
Siemens S7
DLS-C(H)/FLS-C(H)
DLS-C(H)/FLS-C(H)
DLS-C(H)/FLS-C(H)
DLS-C(H)
FLS-C(H)
DLS-C(H)
FLS-C(H)
DLS-C(H)
FLS-C(H)
12
14,15
13
24V=
9..30VDC
24..30VDC for He ating Option
0V
AO
AGND
DO 1
DO 2
V+
GND
7,8
9
10
Fig. 2: RS-422 connection to S7 PLC
Fig. 3: AO and DO connection
Fig. 4: External display connection
Fig. 5: Use digital input as external trigger

TECHNICAL REFERENCE MANUAL
2.5 SSI connection
Set the FLS-C(H) in stand-alone mode (3.3.2 Stand-alone mode on page 11) and
connect it to a SSI master as shown in Fig. 6. The measured distances are
immediately available at the SSI output. See 9.3.10 Interface 2 configuration (RS422 / SSI) on page 39 for the detailed command description.
Never connect the SSI master before the FLS-C(H) interface 2 is configured as SSI
interface.
2.6 Positioning
The figure on the left shows a typical positioning application. In this
application the SSI interface of the FLS-C(H) is directly connected to a
position input of a motor drive. The drive controls the motor In such a
way, that the sledge moves to the position given as set point by the
PLC.
The encoder is used for security reasons to double check the movement
by the Drive.
In this applications the FLS-C(H) uses the SSI interface (4.2.6 SSI
connection on page 19) and the moving target characteristic (3.4.2
Moving target characteristic on page 13.
Please check on www.dimetix.com for detailed application notes.
Distance Laser Sensor Page 7/53
Possition
SSI
Field bus
PLC
Drive
Cloc k+
SSI cloc k
SS I data
R+
R-
T+
T-
5
4
6
3
7, 8
V+
(SS I Cloc k in + )
(SS I Cloc k in -)
(SSI data out +)
(SSI data out -)
14, 15
0V
Vc c
shie lde d twiste d p air
con ne ction
GND
SSI master
(i.e. co ntro ller)
SSI s lave
FLS-C(H )
Cloc k-
Dat a+
Dat a-
Term inal
Shie ld
Fig. 6: SSI connection example
Fig. 7: Positioning application

TECHNICAL REFERENCE MANUAL
3 Device overview and setup
We recommend that you carry out the configuration steps in an office before mounting the device, especially if you are not familiar with
the DLS-C(H)/FLS-C(H).
Configure the outputs first and second do the configuration of the operation mode. The following sections describe the configuration steps
and give an example.
3.1 Connection for configuration
To be able to configure the DLS-C(H)/FLS-C(H), it must be powered and connected to a PC. Figure 8 shows the necessary connections. On
the PC, any terminal program can be used to communicate with the module. A configuration utility is also available on the web page
www.dimetix.com.
Distance Laser Sensor Page 8/53
DLS-C(H)
9 pin
D-Sub
Tx
Gnd
2
5
3
Tx
Rx
2
1
GND
V+
Rx
15 pin
D-Sub
9..30VDC
24..30VDC for Heating option
+-
14,15
7,8
Default setting:
Baud:
Bit:
Parity:
Stop:
19200
7
even
1
COM1 or COM2
DLS-C(H)
FLS-C(H)
Fig. 8 Connection for DLS-C(H)/FLS-C(H) configuration

TECHNICAL REFERENCE MANUAL
3.2 Output interfaces
The DLS-C(H)/FLS-C(H) contains different interfaces. Measurement results and errors are signaled at the outputs as described below.
RS-232
The RS-232 is meant for the configuration of the device, however measurement can also be taken using the RS-232
interface. Measurement results and/or error codes are sent corresponding to the command description. To use this
interface host system is needed as described in 3.3.1 Controlled mode on page 10.
RS-422
The RS-422 operates like the RS-232, but it is an industrial interface and therefore not only usable for configuration
but also for controlled measurement as described in 3.3.1 Controlled mode on page 10.
The RS-422 can not be used simultaneous with the SSI interface since it uses the same signal lines.
SSI Output
The SSI Interface is only implemented in the FLS type. The SSI interface is updated after each successful measurement
as well as after an error occurs. If the interface is activated, it is updated in all operation modes.
Binary and Gray code as well as error signalization is supported. (See 4.2.6 SSI connection on page 19)
Analog Output
The analog output is updated in controlled and stand-alone mode. It is configurable and works with two ranges:
- 0..20mA
- 4..20mA
Digital Outputs
Three digital outputs are included in the DLS-C(H)/FLS-C(H). Two of them are programmable, while the third is used
to signal an error state of the device. The digital outputs are updated in all operation modes.
3.2.1 Output configuration example
After connecting the DLS-C(H)/FLS-C(H), the following steps are necessary to configure the output behavior.
No. Action Comment Command
1
Set current output range Defines the current output range from 0 to
20mA or from 4 to 20mA.
Example for device 0:
Set current output range from 4mA to 20mA.
s0vm+1<trm>
1)
2
Set distance range Defines the minimum distance (D
min
) and the
maximum distance (D
max
) for the current
range of the analog output.
Example for device 0:
Set distance range from 0m to 10m
s0v+00000000+00100000<trm>
1)
3
Set analog output in case of
an error
Sets the current that should be applied in
case of an error.
Example for device 0:
Set current to 0mA in case of an error.
s0ve+000<trm>
1)
4
Configure digital output Set the ON and OFF level for the digital
outputs.
Example for device 0:
DO 1: off=2000mm on=2005mm
DO 2: off=4000mm on=4005mm
s01+00020000+00020050<trm>
1)
s02+00040000+00040050<trm>
1)
5
Configure SSI Output Activate SSI output (RS-422 is deactivated)
Example for device 0:
Set SSI configuration
Set output value in error case to 12345
s0SSI+1<trm>
1)
s0SSIe+12345<trm>
1)
6
Save settings The changed configuration must be saved to
make it permanent.
Example for device 0:
Save settings for device 0
s0s<trm>
1)
1) Commands are described in 9 Command set on page 29
Note: If the serial line settings of the device have been lost, please reset the configuration to the factory settings (8 Factory settings on
page 28) using the reset button (6.2 Reset switch on page 24). Please note that the ID switch must be reset manually.
Distance Laser Sensor Page 9/53

TECHNICAL REFERENCE MANUAL
3.3 Operation modes
The first decision to be taken is the type of operating mode that will be used to perform distance measurements. While the controlled mode
provides maximum flexibility and accuracy, it is often not suitable for integration into existing drives, PLCs or analog environments. In such
cases the Stand-alone mode might be preferred.
controlled mode stand-alone mode
Auto start Manual start
The measurement is controlled by a host with
commands such as
- sNg
- sNh
- sNuf
The measurement starts after power
on. This must be configured with the
command
- sNA
- sNuA
After configuring the DO1 as DI1, the
measurement can be triggered by an
external signal. Use the following
command
- sNDI
See 9.2 Operation commands starting on page 30 See 9.3.3 Set auto start
configuration (sNA) on page 35
See 9.3.8 Configure digital input (sNDI1)
on page 38
After each measurement all outputs are updated corresponding to the configuration (See 9.3 Configuration commands on page 33).
3.3.1 Controlled mode
In controlled mode, each operation of a DLS-C(H)/FLS-C(H) is triggered by a command sent from a host system over a serial line. While a
single device can be connected to the host system using the RS-232 interface, up to 10 devices can be connected to a single serial RS-422
line. The related command set is described in Chapter 9 on page 29.
3.3.1.1 Configuration
After connecting the module, the steps below are necessary to configure the DLS-C(H)/FLS-C(H) for the controlled interface mode.
No. Action Comment Command
1 Set ID switch Changes to the Device ID are activated after a
power cycle.
Example for device 0:
Change the ID Switch to position 0
Set ID switch to position 0
Power OFF; Wait 10s; Power ON
2
Set controlled mode Set the DLS-C(H)/FLS-C(H) to the controlled
mode, if not already in controlled mode.
Example for device 0:
Set to controlled mode by means of the stop
command.
s0c<trm>
1)
3
Set communication
parameters
If necessary, change the settings for the serial
interface.
Example for device 0:
Set serial interface to 19200 Baud, 8 Bit, no
Parity
s0br+2<trm>
1)
Power OFF; Wait 10s; Change settings on the
host; Power ON
1) Commands are described in 9 Command set on page 29
Note: If the communication parameters of the device are lost, please reset the configuration to the factory settings ( 8 Factory settings
on page 28) using the reset button (6.2 Reset switch on page 24). Please note that the ID switch must be reset manually.
3.3.1.2 Host software
Host software is required for operation of the DLS-C(H)/FLS-C(H) in controlled mode. When connecting multiple devices to a single serial
line (RS-422), strict Master-Slave communication must be implemented (DLS-C(H)/FLS-C(H) operates as slave). For software sample-code or
application-notes please consult our web site www.dimetix.com.
Careful testing of the host software together with the devices prior to installation is strongly recommended.
Distance Laser Sensor Page 10/53

TECHNICAL REFERENCE MANUAL
3.3.2 Stand-alone mode
Before starting the stand-alone mode, output configuration must be done (See 3.2 Output interfaces on page 9)
3.3.2.1 Auto start configuration
The following steps are necessary to configure the DLS-C(H)/FLS-C(H) for stand-alone mode with auto start.
No. Action Comment Command
1
Set auto start Set the DLS-C(H)/FLS-C(H) to the stand-alone
mode with auto start and with the desired
sample rate.
Example for device 0:
Set sample rate to fastest possible speed.
s0A+0<trm>
1)
1) Commands are described in 9 Command set on page 29
Note: If the serial line settings of the device have been lost, please reset the configuration to the factory settings (8 Factory settings on
page 28) using the reset button (6.2 Reset switch on page 24). Please note that the ID switch must be reset manually.
3.3.2.2 Manual start configuration
Configure the Digital Input (see 9.3.8 Configure digital input (sNDI1) on page 38) to activate the external trigger to start measurements.
No. Action Comment Command
1
Activate digital input DI1 Defines the action for a trigger event on DI1.
Example for device 0:
Configure DI1 to start and stop tracking. If
DI1 is high, distances are measured and the
result is transferred to the output at all
interfaces. If DI1 goes to low, the
measurement stops
s0DI1+3<trm>
1)
2
Save settings The changed configuration must be saved to
make it permanent.
Example for device 0:
Save settings for device 0 s0s<trm>
1)
1) Commands are described in 9 Command set on page 29
Note: If the serial line settings of the device have been lost, please reset the configuration to the factory settings (8 Factory settings on
page 28) using the reset button (6.2 Reset switch on page 24). Please note that the ID switch must be reset manually.
Distance Laser Sensor Page 11/53

TECHNICAL REFERENCE MANUAL
3.4 Measuring characteristics
Multiple measuring characteristics are available in the FLS-C measuring devices to meet different requirements for various applications. With
these measuring characteristics measuring rate and accuracy can be optimized for special requirements.
The FLS-C measuring device at factory settings has an accuracy of ±1 mm (FLS-C(H) 10) respectively ±3 mm (FLS-C(H) 30) at 2σ. Measuring
rate depends on environmental conditions such as target surface, distance, background light (e.g. sun light), etc. Good environmental
conditions increase measuring rate (e.g. white target surface or orange reflective target plate and dark environment).
3.4.1 Measuring characteristics overview
Available in DLS-C(H)
Available in FLS-C(H)
Measuring
character-
istic
Measuring
rate
Typical accuracy @
2σ
Description
Error behavior
1)
User Commands
2)
FLS-C(H) 10FLS-C(H)
30
Normal Commands
2)
Normal
(factory
setting)
max. 10
Hz
3)
1)
±1 mm ±3 mm
Measuring range on natural surface: typical 65 m
Configuration command: sNuc+0+0
4)
A
Fast max. 20 Hz1)±2 mm ±6 mm
Increased measuring rate up to 20 Hz.
Configuration command: sNuc+0+1
4)
A
Precise max. 6 Hz1)~±0.8 mm ~±2.4 mm
Increased accuracy of ±0.8 mm
Surveying applications, short range applications etc.
Configuration command: sNuc+0+2
4)
A
Natural
surface
max. 6Hz,
can drop to
0.25Hz @ up
to approx.
80m
~±5 mm
@ up to
approx.
80m
~±15 mm
@ up to
approx.
80m
Increased measuring range on natural surfaces:
typical 80 meters
Measuring against far away natural surfaces or bad reflective
surfaces such as black synthetic granules, etc.
Configuration command: sNuc+0+3
4)
A
Timed
user
programmed
DLS: ≤ 6Hz,
FLS: ≤ 35Hz
variable variable
The device does not check the signal condition to ensure the
specified accuracy is reached, a measurement value is transferred
to the output at a defined measuring rate.
This mode serves for applications where the accuracy is not
important but the reaction time is critical
Configuration command: sNuc+1+1
4)
A
Moving
Target
250Hz,
SSI can poll
with up to
500Hz
±1 mm ±3 mm
The device measures to a continuously moving target and the
distance changes without any jumps.
This measurement characteristic supervises the max speed,
checks for distance jumps and includes a special filter to
eliminate errors occurring for only a very short time.
Configuration command: sNuc+2+04) (with error freezing)
sNuc+2+14) (without error freezing)
B
1) The behavior in case of an error depends on the configuration. See 3.4.3 Error behavior on page 14
2) Changed characteristics do not influence all commands
3) Good environmental conditions (e.g. white target surface or orange reflective target plate and dark environment).
4) For the description of the command see 9.3.2 Measuring characteristic configuration (sNuc) on Page 34
Distance Laser Sensor Page 12/53

TECHNICAL REFERENCE MANUAL
3.4.2 Moving target characteristic
For continuous movements of a target which typically appears in positioning applications like automatic warehouses there is a special
measurement characteristic built into the FLS-C (H) called “Moving target”(See 2.6 Positioning on page 7 for a sample application)
To operate the FLS-C(H) in this measurement characteristic
successfully, distance jumps must not occur. The laser beam
must always hit the target.
This measurement characteristic combines a fast measurement rate with the unique accuracy of the FLS-C(H). The measurement rate is
fixed and does not change during operation.
For RS-232, RS-422, analog and digital outputs, the output rate is 250Hz. The SSI interface can return reliable measurement data at up to
500Hz read out rate corresponding to the clock received from the master.
When measuring to a stopped target, the resulting distance will stay at a single value, it does not occur any deviation of the distance. This is
necessary if the sensor is used for positioning in closed looped applications.
An optimized error handling suppresses short errors, that may occur by a short break of the laser beam. In addition an over speed detector
(>10m/s) detects improper situations, which results in an error. This ensures robust operation in positioning applications.
The behavior of the device in case of a severe error can be defined by the operator (See 3.4.3 Error behavior on page 14).
For a description of the configuration command see 9.3.2 Measuring characteristic configuration (sNuc) on page 34.
Distance Laser Sensor Page 13/53
V
V
V
> 150mm
distance jump
moving target jumping target
Fig. 9: Condition for moving target characteristic

TECHNICAL REFERENCE MANUAL
3.4.3 Error behavior
The device has different error behaviors depending on the measuring characteristics and on the start operation.
3.4.3.1 A - Behavior
In case the device detects an error, this error is signalized at the outputs. On the serial and SSI output the error code will be visible
depending on the configuration. The error will be visible at the output until the device performs a successful measurement and outputs the
new distance value or the device will be reset by command (sNc) or by a power cycle.
3.4.3.2 B – Behavior (in moving target characteristic)
This error behavior is only relevant when using the moving target measurement characteristic.
Configuration
with error freezing
sNuc+2+0
1)
without error freezing
sNuc+2+1
1)
Situation
Temporary error The temporary error is converted into a
permanent error. This error must be reset as
described below.
The temporary error disappears as soon as the error
condition is cleared (a successful measurement is
done).
Permanent error The permanent error must be reset as described
below.
The permanent error must be reset as described
below.
The error reset function depending on the start condition. The following diagram shows the error reset for the different start configurations.
Stand-alone mode: Auto start configuration
(3.3.2.1 Auto start configuration on page 11)
In this operation the measurement starts automatically at power on.
A signalized error is reset automatically after 5 seconds. The reset is
done by an automatic restart of the device. This restart maximal
takes about 4 seconds.
Stand-alone mode: Manual start configuration
(3.3.2.2 Manual start configuration on page 11)
In this operation the measurement is started with a digital input. In
case of an error, the reset of a signalized error is done by restarting
the measurement with the digital input.
1) For the description of the command see 9.3.2 Measuring characteristic configuration (sNuc) on Page 34
Distance Laser Sensor Page 14/53
t < 4 sec
Initialization
*
t = min. 1 sec
Error
DO Error
Digital
Input
Output
SSI
Output
RS-232/422
ON
HIGH
OFF
LOW
Start
measuring
Stop
measuring
Measuring values Measuring values
Measuring valuesMeasuring values
Error value
Configured Error valu e
(s SSIe)N
Value = 0
no output
Value = 0
no output
t = 5 sec
Error time
t < 4 sec
Initialization
*
DO Error
Output
SSI
ON
OFF
Error
Automatic
restart
Measuring values Measuring values
Configured Error va lue
(s SSIe)N
Value = 0

TECHNICAL REFERENCE MANUAL
3.5 Special user commands
The standard command set is extended by a special user command set, which makes it possible to change the output format and apply a
offset and gain.
User command configuration do not influence Analog, Digital and SSI outputs.
3.5.1 Offset / Gain
The user can set an individual user gain and offset to create user defined output values. The output value is calculated as follows.
Value
User
=(Distance+Offset
User
)⋅
GainNum
User
GainDen
User
See 9.5.2 Set/Get user distance offset (sNuof) and
9.5.3 Set/Get user distance gain (sNuga) on page 45
With the offset and gain the result of the user commands (See 9.4 Special user operation commands on page 43) are changed only.
Analog, Digital and SSI output values are not affected.
3.5.2 Output format
The DLS-C(H)/FLS-C(H) is able to format the output value on the serial interface (RS-232/RS-422) in order to fit it to an ASCII display. By the
command sNuo the length of the output value can be defined as well as the position of the decimal point. This command in combination
with a gain and offset allows the direct connection of an external display as described under 2.3 External display on page 6.
The command is described under 9.5.4 User output protocol (sNuo) on page 46
Distance Laser Sensor Page 15/53
TECHNICAL REFERENCE MANUAL
3.6 Output value filter
The DLS-C(H)/FLS-C(H) contains a filter for the measurement value, which can be activated and offers different configurations. This filter is
available in the following Measuring characteristics (see 3.4 Measuring characteristics) on the DLS-C(H) and the FLS-C(H):
- Normal
- Fast
- Precise
- Natural Surface
- Timed
The output value filter is made of a moving average, a spike suppression as well as an error suppression filter. These filters are all
configurable to offer most possible flexibility for the adaption of the DLS-C(H)/FLS-C(H) device to various applications.
This filter is inactive for the moving target characteristic.
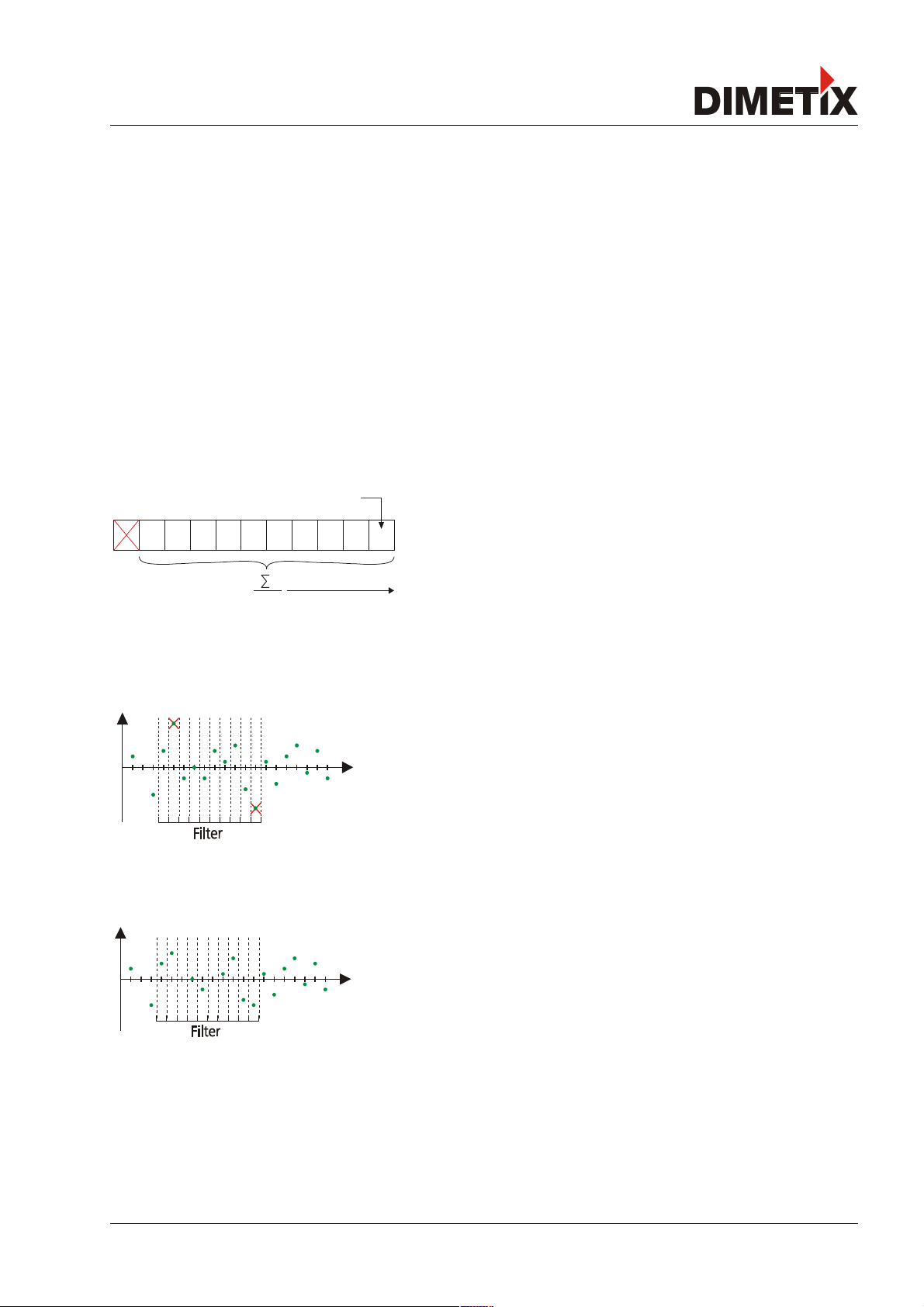
3.6.1 Moving average filter
The moving average filter averages a specified number of measurements.
Maximum 32 measurement values can be averaged. If a new measurement
value is present, this value will be added to the filter values, while the last
value will be removed. The sum of all measurement values divided by the
size of the filter is transferred to all outputs.
3.6.2 Spike suppression filter
The spike suppression eliminates pairs of min max values inside the filter values (Number of
filter values can be defined). Always the smallest and largest values are removed from the
average calculation.
3.6.3 Error suppression filter
A maximum number of errors inside the filtered values can be suppressed. If the number of
errors inside the filtered values is less as the specified value, no error is shown at the output
See 9.3.12 Set/Get measurement filter configuration (sNfi) on page 40
Distance Laser Sensor Page 16/53
New Measurement Value
filtered result
n
Filter
10
8
4
5
3
2
9
7
6
17
18
13
12
11
1
15
16
14
19
Error
Error
10
8
4
5
3
2
9
7
6
17
18
13
12
11
1
15
16
14
19
Fig. 10 Moving average filter
Fig. 11: Spike suppression filter
Fig. 12: Error suppression

TECHNICAL REFERENCE MANUAL
4 Installation
4.1 Mounting
4.1.1 Mounting of the device
Three M4 threaded holes in the bottom of the DLS-C(H)/FLS-C(H) make it easy to mount the device.
Always obey all applicable safety regulations and never use the device outside the specifications stated under 5 Technical data on page 21.
4.1.2 Mounting for the reflective plate
Measuring to the reflective plate may generate erroneous measurements, if the reflective plate is
mounted exactly at an angle of 90° to the laser beam. Therefore mount the reflective plate like shown
in figure 13.
Avoid direct sunlight on the reflective plate to increase measurement performance.
4.1.3 Alignment of the laser beam
Alignment of the laser beam is often difficult when the target is far away, as the laser spot is not visible. An optional telescopic viewfinder
and an alignment jig is available to simplify the alignment procedure. (See www.dimetix.com for additional accessories and further details).
4.1.4 Laser Life time consideration
since the life time of the laser is limited, operate the device in a way, that the laser is switched on only when necessary. The laser life time
stated under 5 Technical data on page 21 relates to the time while the laser is on.
4.2 Device wiring
4.2.1 Power supply
For trouble-free operation use a separate power supply for the DLS-C(H)/FLS-C(H).
FLS-C, DLS-C: 9...30V, 0.5A DC
FLS-CH, DLS-CH: 24...30V, 2.5A DC
4.2.2 Cable connection
A ferrite core must be fitted to the connecting cable. Use a ferrite core with an impedance of 150 Ω to 260 Ω at 25MHz and 640 Ω to 730
Ω at 100MHz. For example you can use KCF-65 from KE Kitagawa.
4.2.3 Shield and ground
The DLS-C(H)/FLS-C(H) contains two electrically isolated grounds, the
general ground (GND) and the analog ground (AGND). GND and
AGND are connected to the housing by a RC element. Please see
figure 19.
Distance Laser Sensor Page 17/53
Sensor
Laser Beam
1-3°
Reflective plate
Screw terminal
GND
AGND
15 pin D-Sub
GND
AGND
20nF
1M
10nF
500k
DLS-C(H)
FLS-C(H)
Fig. 13: Reflective Plate mounting
Fig. 14 Connection between shield and ground

TECHNICAL REFERENCE MANUAL
4.2.4 Serial connection
This connection is mainly used for the controlled mode or to configure the device.
RS-232
Only point-to-point communication is possible when using the RS-232 interface.
Never connect multiple DLS-C(H)/FLS-C(H)s on a RS-232 serial line
RS-422
It is possible to connect multiple devices on a single RS-422 line. To ensure proper operation, strict Master-Slave communication must be
applied. It is important, that the Master has full control of the communication and never initiates a new communication before termination
of the previous communication (answer from the DLS-C(H)/FLS-C(H) or timeout).
For RS-422 connections, use shielded twisted pair cables only! For detailed information following the RS-422 guidelines.
Ensure, that all DLS-C(H)/FLS-C(H)s are set to different ID numbers.
The RS-422 interface cannot be used simultaneous with the SSI interface.
Distance Laser Sensor Page 18/53
DLS-B(H)
DLS-C(H)
FLS-C(H)
Tx
Host
(PC or PLC)
Rx
TxRx
2
7,8
1
14,15
V+
9..30VDC
24..30VDC with Heating
0V
DLS-C(H) / FLS-C(H)
DLS-C(H) / FLS-C(H)
DLS-C(H) / FLS-C(H)
R+R-T+
T-
ID switch
Position 0
Host
(PC or PLC)
R
t
R
t
5
463
14,15
R
t
R
t
7,8
V+
R+R-T+
T-
ID switch
Position 1
5
463
14,15
7,8
V+
R+
R-
T+
T-
ID switch
Position 9
5
463
14,15
7,8
V+
9..30VDC
24..30VDC with Heating
0V
(slave) (slave) (slave)
(master)
Fig. 15 Point-to-point connection with RS-232
Fig. 16: Connecting multiple devices with RS-422

TECHNICAL REFERENCE MANUAL
4.2.5 Analog / Digital connection
This connection is mainly used with the stand-alone mode. The analog interface of the DLS-C(H)/FLS-C(H) is isolated from the rest of the
device (See 4.2.3 Shield and ground on page 17). When using the analog interface, connect the analog ground (AGND).
Make sure, that the total resistance in the analog path is lower than 500 Ω.
4.2.6 SSI connection
Connect a SSI master according to the connection diagram in Fig. 18. It is compulsory to use a twisted pair cable. See 6.8 SSI output on
page 26 and 6.8 SSI output on page 26 for additional information on the SSI interface.
Typical cable length
The maximum transmission rate depends on the cable length as shown in the following table. For detailed cable specification use the SSI
guidelines. The transmission rate must be specified at the SSI master.
Max. cable length (typical) max. transmission rate (typical)
< 12.5 m < 810 kBaud
< 25 m < 750 kBaud
< 50 m < 570 kBaud
< 100 m < 360 kBaud
< 200 m < 220 kBaud
< 400 m < 120 kBaud
< 500 m < 100 kBaud
The RS-422 interface cannot be used simultaneous with the SSI interface.
The SSI Interface is implemented in the FLS-C(H) only.
Distance Laser Sensor Page 19/53
Analog Input
0..20mA
12
14,15
13
Digital Input
24V=
9..30VDC
24..30VDC for Heating Option
0V
PLC
AO
AGND
DO 1
DO 2
V+
GND
7,8
9
10
DLS-C(H)
FLS-C(H)
Cl oc k +
SS I c loc k
SS I da ta
R+
R-
T+
T-
5
4
6
3
7, 8
V+
(SS I Cl oc k in + )
(SS I Cl oc k in - )
(SS I dat a out + )
(SS I dat a out - )
14 ,15
0V
Vc c
shielded tw isted p air
con n ection
G ND
SSI master
(i.e. co n troller)
SSI slave
FLS-C(H )
Cl oc k -
Da t a+
Da t a-
Term ina l
Shi eld
Fig. 17: Connection of an instrument and a PLC
Fig. 18: Connection of a SSI Master

TECHNICAL REFERENCE MANUAL
4.2.7 External trigger connection
The DO1 (Digital Output 1) can also be used as digital input. For safety
reasons, always use a resistor to protect the connection terminal.
The function of digital input can be configured by the command sNDI1
(see 9.3.8 Configure digital input (sNDI1) on page 38)
Distance Laser Sensor Page 20/53
DO/DI 1
V+
7,8
9
1k
DLS-C(H)
FLS-C(H)
Fig. 19: Connection for external triggering

TECHNICAL REFERENCE MANUAL
5 Technical data
5.1 Measuring accuracy definition
The measuring accuracy corresponds to the ISO-recommendation ISO/R 1938-1971 with
a statistical confidence level of 95.4% (i.e. ± twice the standard deviation σ, refer to
diagram on the right). The typical measuring accuracy relates to average conditions for
measuring. It is ±1.0mm for the FLS-C(H) 10, ±1.5mm for the DLS-C(H) 15 and ± 3.0mm
for the DLS-C(H)/FLS-C(H) 30 valid in the tracking mode.
Maximum deviation may occur under unfavorable conditions such as bright sunlight or
when measuring to poorly reflecting or very rough surfaces. Measuring accuracy may
deteriorate by approximately ±0.02mm/m for distances above 30m.
The DLS-C(H)/FLS-C(H) does not compensate changes of atmospheric environment. These
changes can influence the accuracy if measuring long distances (>150m) under
conditions very different from 20°C, 60% relative humidity and 953 mbar air pressure.
The influences of the atmospheric environment are described in
B.Edlen: “The Refractive Index of Air, Metrologia 2”, 71-80 (1966)
5.2 Measuring performance influences
The DLS-C(H)/FLS-C(H) is an optical instrument, whose operation is influenced by environmental conditions. Therefore, the measuring range
achieved in use may vary. The following conditions may influence the measuring range:
Key Factors increasing range Factors reducing range
Target surface Bright and reflective surfaces such as the target plates
(See Accessories)
Matt and dark surfaces
Green and blue surfaces
Airborne particles Clean air Dust, fog, heavy rainfall, heavy snowfall
Sunshine Darkness Bright sunshine on the target
The measurement range may be influenced by the configuration of the measurement characteristic. See 9.3.2 Measuring characteristic
configuration (sNuc) on page 34.
The DLS-C(H)/FLS-C(H) does not compensate the influence of the atmospheric environment, which may be relevant when measuring long
distances (e.g. > 150m). These effects are described in:
B.Edlen: “The Refractive Index of Air, Metrologia 2”, 71-80 (1966)
Distance Laser Sensor Page 21/53
99.7%
95.4%

TECHNICAL REFERENCE MANUAL
5.3 Prevention of erroneous measurements
5.3.1 Rough surfaces
On a rough surface (e.g. coarse plaster), measure against the center of the illuminated area. To avoid measuring to the bottom of gaps in
the surface use a target plate (see accessories on www.dimetix.com) or board.
5.3.2 Transparent surfaces
To avoid measuring errors, do not measure against transparent surfaces such as colorless liquids (such as water) or (dust-free) glass. In case
of unfamiliar materials and liquids, always carry out a trial measurement.
Erroneous measurements can occur when aiming through glass panes
or if there are several objects in the line of sight.
5.3.3 Wet, smooth, or high-gloss surfaces
1 Aiming at an “acute“ angle deflects the laser beam. The DLS-C(H)/FLS-C(H) may receive a signal that is
too weak (error message 255) or it may measure the distance targeted by the deflected laser beam.
2 If aiming at a right angle, the DLS-C(H)/FLS-C(H) may receive a signal that is too strong (error message 256).
5.3.4 Inclined, round surfaces
Measurement is possible as long as there is enough target surface area for the laser spot. On irregular and round surfaces the arithmetic
average of the illuminated surfaces will be measured.
5.3.5 Multiple reflections
Erroneous measurements may occur if the laser beam is reflected by other objects than the target. Avoid any reflective object along the
measurement path.
5.3.6 Influence of sun light
Aiming directly to the sun or the sun is exactly behind the target could make it impossible to measure distances.
Distance Laser Sensor Page 22/53

TECHNICAL REFERENCE MANUAL
5.4 Specifications
Typical measuring accuracy for
DLS-C 15 / DLS-CH 15
1)
DLS-C 30 / DLS-CH 30
1)
FLS-C 10 / FLS-CH 10
1,3,4)
FLS-C 30 / FLS-CH 30
1,3)
± 1.5 mm @ 2σ
± 3.0 mm @ 2σ
± 1.0 mm @ 2σ
± 3.0 mm @ 2σ
Accuracy of the analog output
DLS-C(H)
FLS-C(H)
(9.3.6 Set/Get analog output distance range (sNv) on page 36)
0.2% programmed span (12 Bit)
0.1% programmed span (12 Bit)
Typical repeatability for
DLS-C 15 / DLS-CH 15
1)
DLS-C 30 / DLS-CH 30
1)
FLS-C 10 / FLS-CH 10
1)
FLS-C 30 / FLS-CH 30
1)
± 0.4 mm @ 2σ
± 0.5 mm @ 2σ
± 0.3 mm @ 2σ
± 0.5 mm @ 2σ
Smallest unit displayed 0.1 mm
Measuring range on natural surfaces 0.05 m to approx. 65 m (80m on natural surface characteristic3))
Measuring range on orange (reflective) target plate DLS-C(H)
FLS-C(H)
Approx. 25 m to 150 m
Approx. 0.5 m to 500 m
Measuring reference from front edge (See 7 Physical dimensions)
Typical diameter of laser spot at target at a distance of
5)
(diffraction rings)
4mm @ 5m; 8mm @ 10m; 15mm @ 30m
Time for a measurement
Single measurement: DLS-C(H) / FLS-C(H)
3)
Tracking: DLS-C(H)
3)
FLS-C(H)
3)
Typical: 0.3 s to 4 s
Typical: 0.15 s to 4 s
Typical: 4 ms to 4 s
Max target speed while moving target characteristic is active Typical: 10m/s up to 150m
7m/s up to 500m/s
Light source Laser diode 620-690 nm (red)
IEC 60825-1:2007; Class 2
FDA 21CFR 1040.10 and 1040.11
Beam divergence:0.16 x 0.6 mrad
Pulse duration: 0.45x10-9 s
Maximum radiant power: 0.95 mW
Laser Life Time typical 50'000h @ 20°C (See 4.1.4 Laser Life time consideration on page 17)
ESD IEC 61000-4-2
EMC EN 61000-6-4
EN 61000-6-2
Power supply 9 ... 30V DC 0.6A for DLS-C / FLS-C
24 ... 30V DC 2.5A for DLS-CH /FLS-CH(Heating option)
Dimensions 150 x 80 x 55 mm
Temperature range during operation
2)
DLS-C 15 / DLS-C 30 / FLS-C 10 / FLS-C 30
DLS-CH 15 / DLS-CH 30 / FLS-CH 10 / FLS-CH 30
-10 °C to +50 °C
-40 °C to +50 °C
Temperature range during storage -40 °C to +70 °C
Degree of Protection IP65; IEC60529 (protected against ingress of dust and water)
Weight DLS-C, FLS-C: 690 g
DLS-CH, FLS-CH: 720 g
Standard interface 1 serial asynchronous interface RS-232
1 serial asynchronous interface RS-422
1 SSI (only FLS-C(H))
1 programmable analog output 0/4 .. 20mA
2 programmable digital outputs
1 programmable digital input
1 digital output for error status
1) See 5.1 Measuring accuracy on page 21.
2) In case of permanent continuous measurement (tracking mode) the max. temperature is reduced to 45°C
3) Accuracy and measurement speed depend on configuration (See 9.3.2 Measuring characteristic configuration (sNuc) on page 34)
4) By measuring on the orange reflecting target plate the accuracy may be reduced to ± 1.5 mm @ 2s
5) The spot-size can vary depending on production lot
Distance Laser Sensor Page 23/53

TECHNICAL REFERENCE MANUAL
6 Electrical components
To open the side cover, a Torx T9 screwdriver is needed.
6.1 ID switch
This switch is used to set the Device ID and can be set from 0 to 9. The default setting is 0.
6.2 Reset switch
To reset the device to factory settings do the following:
• Change ID Switch to position 0
• Switch OFF the power for the device
• Press the reset button and keep it pressed
• Switch on the power for the device
• Keep the reset button pressed until all LEDs on the device are illuminated
• Release the reset button
• Switch the power OFF and wait 5 seconds
• Switch on the power and wait until the green power LED is on
6.3 Digital output
The DLS-C(H)/FLS-C(H) contain two digital outputs for level monitoring (DO 1 and DO 2)
and one digital output for error signalization (DO E). These outputs are open drain
outputs as shown in figure 20 and can drive up to 200mA. Maximum switching voltage
is 30V DC. In the ON state, the FET transistor is electro conductive.
6.4 Digital input
The Digital Output (DO 1) can be configured as a Digital Input (DI 1). This is useful for triggering measurements by means of an external
switch or push button. Please refer to chapter 4.2.7 External trigger connection on page 20.
Low Level is: U
DI1
< 2VDC
High Level is: U
DI1
> 9VDC and U
DI1
< 30VDC
Distance Laser Sensor Page 24/53
ID switch
Reset switch
GND
DO
Power Supply 24 VDC
ON = FET closed
OFF = FET open
V+
Fig. 20: Open drain output with external load

TECHNICAL REFERENCE MANUAL
6.5 Analog output
The analog output of the DLS-C(H)/FLS-C(H) is a current source (0..20mA or 4..20mA). It is capable of driving loads up to 500 Ω.
e
Dist
=Accuracy
Device
+
( MaxDist
Conf
−MinDist
Conf
)∗Accuracy
AO
100
e
Dist
Total error in mm MaxDist
Conf
Configured max Distance in mm
Accuracy
Gerät
Device accuracy in mm MinDist
Conf
Configured min Distance in mm
AccuracyAO Accuracy of the analog output in %
Example:
Device accuracy
Min. Distance
Max. Distance
Accuracy analog output FLS
Total error
DLS-C(H) 30
±3 mm
0 mm
10'000 mm
±0.1%
3mm+
(10000−0)∗0.1
100
=±13mm
The stated errors include all possible errors as Temperature drift, linearity, surface color and measurement distance.
The best accuracy of ±1.5 mm for the DLS-C(H) 15 and ±1 mm for the FLS-C(H) 10 can only be
achieved by using the digital interfaces (RS-232, RS-422 or SSI)
6.6 RS-232 serial interfaces
The RS-232 interface is used for device configuration. It is made to connect the sensor to a PC to do the configuration either by terminal
program or by the UtilitySW (See 3.1 Connection for configuration on page 8).
If the Moving Target measurement characteristic is active, a measurement speed of 250Hz is only
possible if the baud rate is set to 115200. Lower baud rates reduce the measurement speed
6.7 RS-422 serial interface
The RS-422 interface is made for industrial communication and therefore long cables (twisted pair) are supported. This interface is thought
to use the DLS-C(H)/FLS-C(H) in controlled mode.
The RS-422 interface cannot be used simultaneous with the SSI interface.
If the Moving Target measurement characteristic is active, a measurement speed of 250Hz is only
possible if the baud rate is set to 115200. Lower baud rates reduce the measurement speed
Distance Laser Sensor Page 25/53

TECHNICAL REFERENCE MANUAL
6.8 SSI output
The SSI Interface is implemented in the FLS-C(H) only.
6.8.1 SSI Specification
SSI parameters Setting for FLS-C(H)
Distance output values 0.. 16777215 1/10mm (max. 1.67km)
Measurement value coding Binary or gray, MSB first
Transmission mode Configurable, 23/24-bit measurement value, error bit, error code
Resolution 0.1mm
Read out rate ≤ 500Hz
SSI clock rate from controller 83KHz to 1MHz, depending of cable length.
Time lag between two data packets, pause time t
p
> 1ms
Monoflop time, t
m
25μs
Electrical levels, line driver RS-422/485
Cable connection Twisted pair, shielded
6.8.2 SSI Timing
t
m
Monoflop Time: Minimum time to detect the end of transmission. After tm, the data line goes to idle state and the slave starts
updating the internal value for the next transmission.
t
p
Pause time: Pause time between two consecutive clock sequences of the master.
The SSI is initially in the idle mode, where the data and clock lines stay HIGH 1 and the slave keeps updating its internal value.
The transmission mode is evoked when the master initiates a sequence by pulling the clock line to low. Once, the slave receives the
resulting falling edge 2 at the clock signal line, it automatically stops updating its internal value. With the first rising edge 3 of the clock
line, the MSB of the sensor’s value is transmitted and with consequent rising edges, the data bits are sequentially transmitted.
After the transmission of the complete data word 4 (e.g. LSB is transmitted) an additional last rising edge 5 of the clock sets the clock line
to HIGH. The slave sets or leaves the data line to low and remains there for the time tm, to recognize the transfer timeout . If a falling edge
of the clock signal (data-output request) is received within the time tm, the same data as before will be transmitted again (multiple
transmission).
If there were no clock pulses within time tm, the slave starts updating its internal value after setting the data line to HIGH (idle mode). This
marks the end of a single transmission of a data word. Once the slave receives a clock signal at a time, tp (>=tm,) the updated position value
is frozen and the transmission of the new value begins as described earlier.
Distance Laser Sensor Page 26/53
clock
pin 5/6
bit 23
bit 22
bit 21
bit 20
bit 3
bit 2
bit 1
data
bit 4
......
2
8
2097152
0
0
0
0
0
0
......
1st data packet transmission
pause time
2nd data packet
t
m
2 3 4 5 6 20 21 22 23 24 25
bit 0
1 2 3
master
slave
monoflop time
t
p
1
1
2
1
3
4
5
Fig. 21: Timing diagram SSI

TECHNICAL REFERENCE MANUAL
6.9 Connector
6.9.1 D-Sub connector
Pin Designator Description
1 Rx RS-232 receive line
2 Tx RS-232 send line
3 T-
RS-422 send line negative
SSI data output negative (for FLS-C(H) if configured for SSI)
4 T+
RS-422 send line positive
SSI data output positive (for FLS-C(H) if configured for SSI)
5 R-
RS-422 receive line negative
SSI clock input negative (for FLS-C(H) if configured for SSI)
6 R+
RS-422 receive line positive
SSI clock input positive (for FLS-C(H) if configured for SSI)
7 V+
8 V+
DC Power
+ 9V…+30V for DLS-C / FLS-C
+24V…+30V for DLS-CH / FLS-CH (Heating option)
9 DO 1 Digital output 1 (Open Drain) or Digital input 1
10 DO 2 Digital output 2 (Open Drain)
11 DO E Digital output for error signalization (Open Drain)
12 AGND Analog ground
13 AO Analog output (0/4..20mA)
14 GND Ground line
15 GND Ground line
6.9.2 Screw terminal
Designator Description
R+
RS-422 send line negative
SSI data output negative (for FLS-C(H) if configured for SSI)
R-
RS-422 send line positive
SSI data output positive (for FLS-C(H) if configured for SSI)
T+
RS-422 receive line negative
SSI clock input negative (for FLS-C(H) if configured for SSI)
T-
RS-422 receive line positive
SSI clock input positive (for FLS-C(H) if configured for SSI)
Tx RS-232 Transmit line
Rx RS-232 Receive line
AGND Analog ground
AO Analog output (0/4..20mA)
DO E Digital output for error signalization (Open Drain)
DO 2 Digital output 2 (Open Drain)
DO 1 Digital output 1 (Open Drain) or Digital input 1
GND Ground line
V+
Power DC
+9V...+30V DLS-C / FLS-C
+24...+30V DLS-CH / FLS-CH (Heating option)
Distance Laser Sensor Page 27/53
No.1
1
9
15
8

TECHNICAL REFERENCE MANUAL
7 Physical dimensions
All dimensions in mm
8 Factory settings
8.1 Standard configuration
Operation Mode
Controlled
Serial Communication
Setting 7 Baud: 19200
Data bit: 7
Parity: Even
Stop bit: 1
Analog outputs
Min output: 4mA
Error output: 0mA
Range min: 0m
Range max: 10m
SSI Output
Inactive (default is RS-422 active)
Replacement value in case of an error: 0
Device ID
ID Number: 0
Digital output 1 (DOUT1)
ON: 2m + 5mm = 2005mm
OFF: 2m - 5mm = 1995mm
Digital output 2 (DOUT2)
ON: 1m – 5mm = 995mm
OFF: 1m + 5mm = 1005mm
Digital input 1 (DI1)
Inactive, configured as output
8.2 User configured measurement
User distance offset and gain
User distance offset = 0mm
User Gain Num = 1000
User Gain Den = 1000
Measurement characteristic
Normal
Measurement Filter
inactive
Output protocol
No special configuration, display distance
Distance Laser Sensor Page 28/53
Gain=
GainNum
User
GainDen
User
=
1000
1000
=1
37.3
12.2
28.0
150.0
38.5
88.5
Measuring reference
= =
3 x M4 x 5
54.0
80.0
M16 x 1.5
40.0
= =
152.5
80.0
Laser Beam
19.0

TECHNICAL REFERENCE MANUAL
9 Command set
9.1 General
9.1.1 Command termination <trm>
All commands for the DLS-C(H)/FLS-C(H) are ASCII based and terminated <trm> with <cr><lf>.
9.1.2 Device identification N
Since the device can be addressed with the ID switch, the ID is represented in the commands by N.
At the location of the N insert the Device ID.
9.1.3 Parameter separator
The command syntax uses the '+' sign as parameter separator. The '+' sign can be replaced by the minus '-' sign if applicable by the
command.
9.1.4 Set/Get commands
All configuration commands that are used to set configuration values can also be used to read the currently set value by omitting the
parameter. The command syntax is described as follows:
Set command Get command
Command
sNuof+xxxxxxxx<trm> sNuof<trm>
Return successful
gNuof?<trm> gNuof+xxxxxxxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Offset in 1/10 mm; + positive / - negative
zzz Error code
9.1.5 Startup sequence
After power on, the DLS-C(H)/FLS-C(H) does all the initializations and sends a start sequence gN?. On this sequence, the N stands for the
Device ID. After sending this start sequence, the DLS-C(H)/FLS-C(H) is ready to use.
Distance Laser Sensor Page 29/53

TECHNICAL REFERENCE MANUAL
9.2 Operation commands
9.2.1 Distance measurement (sNg)
Triggers simple measurement of distance. Each new command cancels an active measurement.
Command
Command
sNg<trm>
Return successful
gNg+xxxxxxxx<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Distance in 1/10 mm
zzz Error code
9.2.2 Single sensor tracking (sNh)
Triggers continuous measurements of the distance. The measurements are made as fast as possible (Measurement speed depends on target
conditions). This command is not to be used with more than one DLS-C(H)/FLS-C(H) on a RS-232/RS-422 line. The measurements are
continued until the STOP/CLEAR command is issued. The status LEDs and the digital outputs are updated corresponding to the new
measured distance.
Never use this command if more than one module is connected to the RS-232/RS-422 line
Command
Command
sNh<trm>
Return successful
gNh+xxxxxxxx<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Distance in 0.1mm
zzz Error code
9.2.3 Single sensor tracking with timer(sNh)
This command does the same as the sNf command, but the unit sends the results directly to the output.
Never use this command if more than one device is connected to the RS-422 line
Command
Command
sNh+xxx<trm>
Return successful
gNh+yyyyyyyy<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxx Sampling time in 10ms (if 0 -> use max. possible sample rate)
yyyyyyyy Distance in 0.1mm
zzz Error code
Distance Laser Sensor Page 30/53

TECHNICAL REFERENCE MANUAL
9.2.4 Tracking with buffering – Start (sNf)
Triggers continuous measurements of the distance with internal buffering in the device (buffer for one measurement). The rate of
measurements is defined with the sampling time. If the sampling time is set to zero, the measurements are executed as fast as possible
(Measuring speed depends on target conditions). The last measurement can be read out from the module with the command sNq. The
measurements are continued until the 'sNc' command is issued.
Set command Get command
Command
sNf+xxxxxxxx<trm> sNf<trm>
Return successful
gNf?<trm> gNf+xxxxxxxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters N Device ID
xxxxxxxx Sampling time in 10ms (if 0 -> max possible rate)
zzz Error code
9.2.5 Read out - Tracking with buffering(sNq)
After starting “tracking with buffering” with the command sNf, the latest measurement can be read out from the module with the
command sNq. This command does not work if the tracking with buffering is not started.
Command
Command
sNq<trm>
Return successful
gNq+xxxxxxxx+c<trm>
Return error
gN@Ezzz+c<trm>
Parameters
N Device ID
xxxxxxxx Distance in 0.1mm
c 0 = no new measurement since last sNq command
1 = one new measurement since last sNq command, not overwritten
2 = more than one measurement since last sNq command, overwritten
zzz Error code
9.2.6 STOP/CLEAR command (sNc)
Stops the current execution and resets the status LEDs as well as the digital outputs.
Command
Command
sNc<trm>
Return successful
gN?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
zzz Error code
9.2.7 Signal measurement (sNm)
Signal measurement can be done continuously or with a single measurement. The signal strength is returned as a relative number in the
typical range of 0 to 40 millions.
The value for the signal strength is just an approximate value, it differs from device to device and also depends on environment conditions.
Command
Command
sNm+c<trm>
Return successful
gNm+xxxxxxxx<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
c 0: single measurement
1: repetitive measurements ! warning: use with one sensor only
xxxxxxxx Signal strength (range 0.. 40 millions)
zzz Error code
Distance Laser Sensor Page 31/53

TECHNICAL REFERENCE MANUAL
9.2.8 Temperature measurement (sNt)
Triggers measurement of the temperature inside the sensor.
Command
Command
sNt<trm>
Return successful
gNt+xxxxxxxx<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Temperature in 0.1°C
zzz Error code
9.2.9 Laser ON (sNo)
Switches the laser beam ON for easy adjustment.
Command
Command
sNo<trm>
Return successful
gN?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
zzz Error code
9.2.10 Laser OFF (sNp)
Switches the laser OFF.
Command
Command
sNp<trm>
Return successful
gN?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
zzz Error code
Distance Laser Sensor Page 32/53

TECHNICAL REFERENCE MANUAL
9.3 Configuration commands
9.3.1 Set communication parameter (sNbr)
Sets the communication parameters for the serial interface.
This command saves all configuration parameters to Flash.
The changed baud rate is activated after the next power on.
Bold = default parameters (first use or after reset)
Command
Command
sNbr+yy<trm>
Return successful
gN?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
yy Defines the new settings
yy Baud rate Data bits Parity yy Baud Rate Data bit Parity
00 1200 8 N 06 9600 7 E
01 9600 8 N 07 19200 7 E
02 19200 8 N 08 38400 8 N
03 1200 7 E 09 38400 7 E
04 2400 7 E 10 115200 8 N
05 4800 7 E 11 115200 7 E
Distance Laser Sensor Page 33/53

TECHNICAL REFERENCE MANUAL
9.3.2 Measuring characteristic configuration (sNuc)
Multiple measuring characteristic available in the FLS-C measuring devices meet different requirements for various applications. With these
measuring characteristics measuring rate and accuracy can be optimized for special requirements.
While on factory settings, the FLS-C measuring device has an accuracy of ±1 mm 2σ (FLS-C(H) 10) respectively ±3 mm 2σ (FLS-C(H) 30).
Measuring rate depends on environmental conditions such as target surface, distance, background light (e.g. sun light), etc. Good
environmental conditions increase measuring rate (e.g. white target surface or orange reflective target plate and dark environment).
For a detailed description of the different measuring characteristics see 3.4 Measuring characteristics on page 12.
The configuration command sNuc is applied to the special user commands and to the standard
commands.
Set command Get command
Command
sNuc+a+b<trm> sNuc
Return successful
gNuc+xxxxxxxx+yyyyyyyy<trm>
gNuc+xxxxxxxx+yyyyyyyy<trm>
Return error
gN@Ezzz<trm>
gN@Ezzz<trm>
Parameters
N Device ID
a = 0 b = 0: Normal
1: Fast
2: Precise
3: Natural surface
a = 1 b = 1: Timed
a = 2 b = 0: Moving target characteristic with error freezing
Every error will be preserved. For an error reset, the measurement must
be restarted according to the configured operation mode.
(See 3.4.3 Error behavior on page 14)
1: Moving target characteristic without error freezing
Distance jumps or unfavorable signal conditions may cause a temporary
or permanent error.
Temporary error
As soon as the FLS is able to determine a new distance value, the error
will disappear and the output will show the new distance value. The
shortest possible time to display an error is 4..5ms.
Permanent error
The FLS is not able to determine a distance anymore. The error will be
shown with an output rate of up to 250Hz. For an error reset, the
measurement must be restarted according to the configured
operation mode.
(See 3.4.3 Error behavior on page 14)
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
Distance Laser Sensor Page 34/53

TECHNICAL REFERENCE MANUAL
9.3.3 Set auto start configuration (sNA)
This command activates the stand-alone mode with auto start of the DLS-C(H)/FLS-C(H). It triggers continuous measurements of the
distance. The analog, digital and SSI outputs are updated according to the measured distance values. The sampling time defines the
measurement rate. If the sampling time is set to zero, the measurements are executed as fast as possible (depending on target conditions).
The stand-alone mode with auto start is active until the STOP/CLEAR command (sNc) is received by the device.
The operating mode is stored in the DLS-C(H)/FLS-C(H) and activated immediately. This mode is also
activated after next power ON.
Internally, “tracking with buffering” is started (command sNf). Therefore, the latest measurement
can also be read out from the module with the command sNq.
Command
Command
sNA+xxxxxxxx<trm>
Return successful
gNA?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Sampling time in 10 ms (if 0 -> max. possible rate)
zzz Error code
9.3.4 Set/Get analog output min level (sNvm)
This command sets the minimum analog output current level (0 or 4 mA).
Set command Get command
Command
sNvm+x<trm> sNvm<trm>
Return successful
gNvm?<trm> gNvm+x<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
x Minimum output for analog out
0: Minimum current is 0 mA
1: Minimum current is 4 mA
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
9.3.5 Set/Get analog output value in error case (sNve)
This command sets the analog output current level in mA in case of an error. This level can be lower than the minimum level set in 9.3.4
Set/Get analog output min level (sNvm).
Set command Get command
Command
sNve+xxx<trm> sNve<trm>
Return successful
gNve?<trm> sNve+xxx<<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxx Value in case of an error in 0.1mA
If the value is set to 999, in case of an error keep the last valid distance
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
Distance Laser Sensor Page 35/53

TECHNICAL REFERENCE MANUAL
9.3.6 Set/Get analog output distance range (sNv)
Sets the minimum and maximum distances corresponding to the minimum and maximum analog output current levels.
0...20mA 4...20mA
Aout=
DIST −D
min
D
max−Dmin
∗20mA
Aout=
DIST −D
min
D
max−Dmin
∗16mA+4mA
Aout Analog current output
DIST Actual measured distance
D
min
Distance programmed for the minimum output current
D
max
Distance programmed for the maximum output current
Set command Get command
Command
sNv+xxxxxxxx+yyyyyyyy<trm> sNv<trm>
Return successful
gNv?<trm> gNv+xxxxxxxx+yyyyyyyy<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Minimum distance in 1/10 mm corresponding to 0mA / 4mA
yyyyyyyy Maximum distance in 1/10 mm corresponding to 20mA
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
Distance Laser Sensor Page 36/53

TECHNICAL REFERENCE MANUAL
9.3.7 Set/Get digital output levels (sNn)
Sets the distance levels at which the digital outputs are switched ON and OFF with a hysteresis.
Two different situations are possible:
ON level > OFF level
The ON level of the hysteresis is larger than the OFF level. With an increasing
distance, the digital output is switched on (open drain output is closed) when
the distance exceeds the ON level. With a decreasing distance, the digital output
is switched off (open drain output is open) when the distance falls below the
OFF level.
ON level < OFF level
The ON level of the hysteresis is smaller than the OFF level. With a decreasing
distance, the digital output is switched on (open drain output is closed) when
the distance falls below the ON level. With an increasing distance, the digital
output is switched off (open drain output is open) when the distance exceeds
the OFF level.
Set command Get command
Command
sNn+xxxxxxxx+yyyyyyyy<trm> sNn<trm>
Return successful
gNn?<trm> gNn+xxxxxxxx+yyyyyyyy<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
n Digital output port (1 or 2)
xxxxxxxx Distance ON level in 1/10 mm for switching digital output ON
yyyyyyyy Distance OFF level in 1/10 mm for switching digital output OFF
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
Distance Laser Sensor Page 37/53
DO
Distance
Off On
0
closed
open
DO
Distance
OffOn
0
closed
open

TECHNICAL REFERENCE MANUAL
9.3.8 Configure digital input (sNDI1)
The digital output 1 of the DLS-C(H)/FLS-C(H) can also be used as digital input. The command sNDI1 configures an action for the device.
The state of the digital input can be read with the command sNRI.
On active digital input, the digital output function of DO1 is deactivated
Set command Get command
Command
sNDI1+xxxxxxxx<trm> sNDI1<trm>
Return successful
gNDI1?<trm> sNDI1+xxxxxxxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx 0: Digital input inactive (DO1 active)
1: activate the digital input to read out its state with the command
9.3.9 Read digital input (sNRI).
2: Trigger Distance measurement (sNg)
3: Start/Stop Single sensor Tracking (sNh)
4: Start/Stop Tracking with buffering (sNf)
5: Trigger User Distance measurement (sNug)
6: Start/Stop Single sensor User Tracking (sNuh)
7: Start/Stop User Tracking with buffering (sNuf)
8: Start/Stop Single sensor Timed Tracking (sNh+)
1)
9: Start/Stop Single sensor User Timed Tracking (sNuh+)
1)
zzz Error code
1) Uses time for the tracking as set by a previous sNh+ or sNuh+ command
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
9.3.9 Read digital input (sNRI)
Displays the state of the digital input, if the input is not inactive. (Necessary configuration of the digital input: sNDI1+1)
Command
Command
sNRI<trm>
Return successful
gNRI+x<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
x 0: Input Off (Signal Low)
1: Input On (Signal High)
zzz Error code
Distance Laser Sensor Page 38/53

TECHNICAL REFERENCE MANUAL
9.3.10 Interface 2 configuration (RS-422 / SSI)
The SSI interface is implemented on the FLS-C(H) device only and deactivated by default. Since the SSI interface uses the same connection
as the RS-422 interface only one of these two interface can be used at the same time.
Use the stand-alone mode with auto start to automatically update the SSI output value.
(9.3.3 Set auto start configuration (sNA) page 35)
Connect the device by RS-232 to do the configuration and use the following commands to activate the SSI interface. See also 4.2.6 SSI
connection on page 19 and 6.8 SSI output on page 26.
Set command Get command
Command
sNSSI+xxx<trm> sNSSI<trm>
Return successful
gNSSI?<trm> gNSSI+xxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxx binary coded:
Bit0 0: Interface 2 (IF2) functions as RS-422 (SSI is deactivated)
1: Interface 2 (IF2) functions as SSI (RS-422 is deactivated)
Bit1 0: Binary coded data output
1: Gray coded data output
Bit2 0: no error bit output
1: error bit attached to the output data value
Bit3 0: no additional error code output
1: attach 8bit error code (Code -200)
Bit4 0: 24 bit data value
1: 23 bit data value
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
9.3.10.1 Configuration examples
24 Bit data, Error code and Error bit
Data (24 Bit binary) Error code (binary) Error bit
MSB LSB MSB LSB
23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 0
Configuration:
01101 13→
Bit0 = 1: Interface 2 (IF2) functions as SSI
(RS-422 is deactivated)
Bit1 = 0: Binary coded data output
Bit2 = 1: Error bit attached to the output data value
Bit3 = 1: Attach 8 bit error code (Code -200)
Bit4 = 0: 24 bit data value
Command: sNSSI+13
23 Bit data and Error bit
Data (23 Bit gray) Error bit
MSB LSB
22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 0
Configuration:
10111 23→
Bit0 = 1: Interface 2 (IF2) functions as SSI
(RS-422 is deactivated)
Bit1 = 1: Gray coded data output
Bit2 = 1: Error bit attached to the output data value
Bit3 = 0: No additional error code output
Bit4 = 1: 23 bit data value
Command: sNSSI+23
24 Bit data
Data (24 Bit binary)
MSB LSB
23 22 21 20 19 18 17 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Configuration:
00001 1→
Bit0 = 1: Interface 2 (IF2) functions as SSI
(RS-422 is deactivated)
Bit1 = 0: Binary coded data output
Bit2 = 0: No error bit output
Bit3 = 0: No additional error code output
Bit4 = 0: 24 bit data value
Command: sNSSI+1
Distance Laser Sensor Page 39/53

TECHNICAL REFERENCE MANUAL
9.3.11 Set/Get error value on SSI output
In case of an error the SSI output will show a value corresponding to this configuration. There can be a replacement value in a range of 0 to
16777215 (24Bit) or 0 to 8388607 (23Bit), the last valid distance value or the error code.
All values are shown either as binary value or gray coded depending on configuration.
Set command Get command
Command
sNSSIe+xxxxxxxx<trm> sNSSIe<trm>
Return successful
gNSSIe?<trm> gNSSIe+xxxxxxxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx 0..2
24
-1 / 0..223-1: Replacement value
In case of an error, the data value will be replaced by
this replacement value. (depending on the settings, the value
will be converted to gray code):
-1: in case of an error the last distance value will stay at the output.
-2: in case of an error the error code will be at the output
(converted to gray code if configured)
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
9.3.12 Set/Get measurement filter configuration (sNfi)
The filter applied to the measurement value can be configured according the following command
Set command Get command
Command
sNfi+aa+bb+cc<trm> sNfi<trm>
Return successful
gNfi?<trm> gNfi+aa+bb+cc<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
aa Filter length (0: Filter off, 32: max value)
bb Number of spikes to suppress (always pairs of min and max value)
cc max number of errors to suppress.
Condition: 2*bb+cc <= 0.4*aa
zzz Error code
See 3.6 Output value filter on page 16 for additional information.
9.3.13 Save configuration parameters (sNs)
This command saves all configuration parameters, which are set by the commands above. The parameters are written to the Flash Memory.
Command
Command
sNs<trm>
Return successful
gNs?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
zzz Error code
Distance Laser Sensor Page 40/53

TECHNICAL REFERENCE MANUAL
9.3.14 Set configuration parameters to factory default (sNd)
This command restores all configuration parameters to their factory default values. The parameters are written to the Flash Memory and
therefore permanently saved.
The communication parameters are also reset to factory settings.
Command
Command
sNd<trm>
Return successful
gN?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
zzz Error code
9.3.15 Get software version (sNsv)
Retrieves the software version of the DLS-C(H)/FLS-C(H).
Command
Command
sNsv<trm>
Return successful
gNsv+xxxxyyyy<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxx Internal measuring module software version number
yyyy Interface software version
zzz Error code
9.3.16 Get serial number (sNsn)
Retrieves the serial number of the DLS-C(H)/FLS-C(H).
Command
Command
sNsn<trm>
Return successful
gNsn+xxxxxxxx<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Serial number of the device
zzz Error code
Distance Laser Sensor Page 41/53

TECHNICAL REFERENCE MANUAL
9.3.17 Get device generation and type (dg)
This command returns the device type, generation and current communication settings.
Works only from device generation C on.
Never use this command if more than one device is connected to the RS-422 line
Command
Command
dg
Return successful
gNdg+xxx+yz?<trm>
Return error
gN@Ezzz
Parameters
N Device ID
xxx Bit coded number to identify the device:
0x53 (83) DLS-C / FLS-C
y (additional internal information)
z Communication settings (see command sNbr+C)
zzz Error code
9.3.18 Get device type (dt)
This command returns the device type.
Never use this command if more than one device is connected to the RS-422 line
Command
Command
dt
Return successful
gNdt+xyy<trm>
Return error
gN@Ezzz
Parameters
N Device ID
x Generation shown as a number.
yy Device number.
Output for xyy
301: DLS-C(H)
302: FLS-C(H)
zzz Error code
Distance Laser Sensor Page 42/53

TECHNICAL REFERENCE MANUAL
9.4 Special user operation commands
The special user commands are user configurable and are an extension to the standard commands. Use these commands carefully and only
if you really understand their impact.
The syntax of the user commands differ to the standard commands as follows:
Standard Commands: sNxx
User Commands: sNuxx
The user configuration parameters influence the result of the user commands. A gain and offset may be applied to the measurement result
and the output format may be configured.
9.4.1 User distance measurement (sNug)
Triggers simple distance measurement, similar to the command 9.2.1 Distance measurement (sNg) on page 30. This command returns the
distance corrected with the user offset and user gain as set with t he commands 9.5.2 Set/Get user distance offset (sNuof) and 9.5.3 Set/Get
user distance gain (sNuga) on page 45.
This command takes the user distance offset and user gain into account
Command
Command
sNug<trm>
Return successful
gNug+xxxxxxxx<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Distance in 0.1mm
zzz Error code
9.4.2 User single sensor tracking (sNuh)
Triggers continuous measurement of the distance and outputs the result immediately to the serial interface. The distance measurement is
executed as fast as possible (depending on target conditions). The measured distance is corrected with the user offset and user gain as set
with the commands 9.5.2 Set/Get user distance offset (sNuof) and 9.5.3 Set/Get user distance gain (sNuga) on page 45. The measurements
are continued until the STOP/CLEAR command (sNc) is received by the device.
This command takes the user distance offset into account
Never use these commands if more than one device is connected to the RS-422 line
Command
Command
sNuh<trm>
Return successful
gNuh+xxxxxxxx<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Distance in 0.1mm
zzz Error code
Distance Laser Sensor Page 43/53
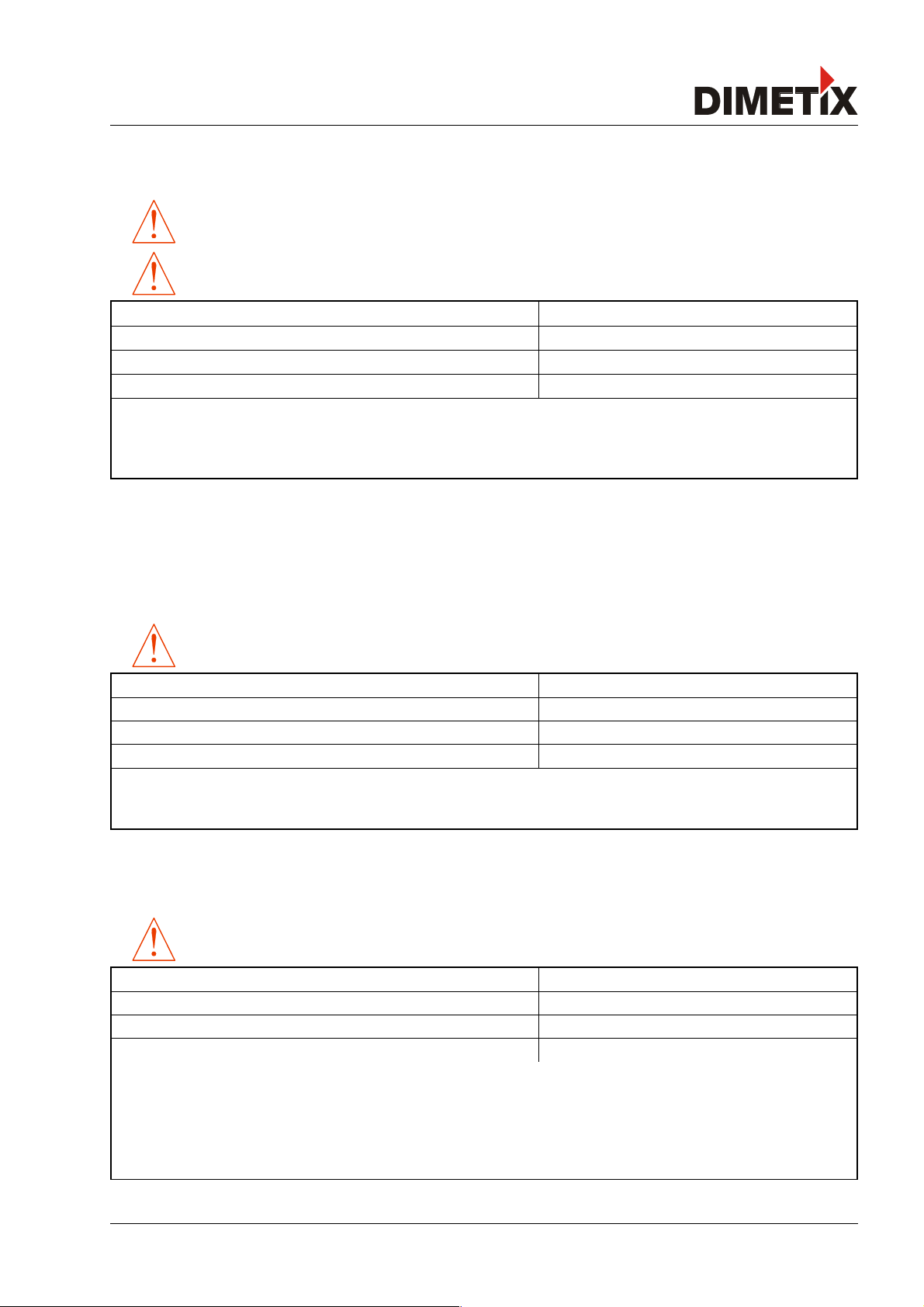
TECHNICAL REFERENCE MANUAL
9.4.3 User single sensor tracking with timer(sNuh)
This command does the same as the sNuf command, but the unit sends the results directly to the output.
This command takes the user distance offset and user gain into account
Never use this command if more than one device is connected to the RS-422 line
Command
Command
sNuh+xxx<trm>
Return successful
gNuh+yyyyyyyy<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxx Sampling time in 10ms (if 0 -> use max. possible sample rate)
yyyyyyyy Distance in 0.1mm
zzz Error code
9.4.4 User tracking with buffering – Start (sNuf)
Triggers continuous measurement of the distance with internal buffering in the device (buffer for one measurement). The measured
distance is corrected with the user offset and user gain as set with the command 9.5.2 Set/Get user distance offset (sNuof) and 9.5.3
Set/Get user distance gain (sNuga) on page 45. Define the rate of measurements with the sampling time. If the sampling time is set to zero,
the measurements are executed as fast as possible. The latest measurement can be read out from the device with the command sNuq. The
measurements are continued until the stop/clear command (sNc) is issued.
This command takes the user distance offset and user gain into account
Set command Get command
Command
sNuf+xxxxxxxx<trm> sNuf<trm>
Return successful
GNuf?<trm> gNuf+xxxxxxxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N device ID
xxxxxxxx Sampling time in 10ms (if 0 -> use max. possible sample rate)
zzz Error code
9.4.5 Read out – User tracking with buffering (sNuq)
After starting “User-configured tracking with buffering” with the command sNuf, the latest measurement can be read out from the DLSC(H)/FLS-C(H).
This command takes the user distance offset and user gain into account
Command
Command
sNuq<trm>
Return successful
gNuq+xxxxxxxx+c<trm>
Return error
gN@Ezzz+c<trm>
Parameters
N device ID
xxxxxxxx Distance in 0.1mm
c 0 = no new measurement since last sNuq command
1 = one new measurement since last sNuq command, not overwritten
2 = more than one measurement since last sNuq command, overwritten
zzz Error code
Distance Laser Sensor Page 44/53

TECHNICAL REFERENCE MANUAL
9.5 Special User configuration commands
9.5.1 Set user auto start configuration (sNuA)
This command activates the user stand-alone mode with auto start of the DLS-C(H)/FLS-C(H). It triggers continuous measurement of the
distance. The distance output at the serial interface (RS-232 and RS-422) is corrected with the user offset and user gain as set with the
command 9.5.2 Set/Get user distance offset (sNuof) and 9.5.3 Set/Get user distance gain (sNuga) on page 45. The analog, digital and SSI
outputs are updated according to the measured distance values. The sampling time defines the measurement rate. If the sampling time is
set to zero, the measurements are executed as fast as possible (depending on target conditions).
The user stand-alone mode with auto start is active until the STOP/CLEAR command (sNc) is received by the device.
The operating mode is stored in the DLS-C(H)/FLS-C(H) and activated immediately. This mode is also
activated after next power ON.
Internally, “tracking with buffering” is started (command sNuf). Therefore, the latest measurement
can also be read out from the module with the command sNuq.
Command
Command
sNuA+xxxxxxxx<trm>
Return successful
gNuA?<trm>
Return error
gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Sampling time in 10 ms (if 0 -> max. possible rate)
zzz Error code
9.5.2 Set/Get user distance offset (sNuof)
The user can set an individual overall offset correction for all distance measurement commands in this 'Special User Command' section. The
standard distances measurement commands are not involved (See 3.5.1 Offset / Gain on page 15).
Set command Get command
Command
sNuof+xxxxxxxx<trm> sNuof<trm>
Return successful
gNof?<trm> gNuof+xxxxxxxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Offset in 1/10 mm; + positive / - negative
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
9.5.3 Set/Get user distance gain (sNuga)
The user can set an individual user gain to create user defined output values. The output value is calculated as follows (See 3.5.1 Offset /
Gain on page 15).
Set command Get command
Command
sNuga+xxxxxxxx+yyyyyyyy<trm> sNuga<trm>
Return successful
gNuga?<trm> gNuga+xxxxxxxx+yyyyyyyy<trm>
Return error
gN@Ezzz gN@Ezzz
Parameters
N Device ID
xxxxxxxx GainNum
User
yyyyyyyy GainDen
User
GainDen
User
Must not be zero
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
Distance Laser Sensor Page 45/53

TECHNICAL REFERENCE MANUAL
9.5.4 User output protocol (sNuo)
This command modifies the output for the user configured commands. The output can be configured to fit the requirement of an external
display.
A parameter for the output mode between 100 and 189 defines the format for an external display. The last digit of the parameter defines
the field length for the output number. The output of a distance measurement will be right aligned. The decimal point will be inserted at
the position (counted from right) defined by middle digit (See 3.5.2 Output format on page 15).
Set command Get command
Command
sNuo+xxxxxxxx<trm> sNuo
Return successful
gNuo?<trm> gNuo+xxxxxxxx<trm>
Return error
gN@Ezzz<trm> gN@Ezzz<trm>
Parameters
N Device ID
xxxxxxxx Output Mode
0: display distance
1: display additional information
1ab: output formatted for external display
a: Number of digits after decimal point
b: Field with (sign included) must be greater than 0
Conditions: a≤b, if a=b, no decimal point is output.
zzz Error code
Configuration parameters need to be saved (See 9.3.13 Save configuration parameters (sNs) on page 40)
Distance Laser Sensor Page 46/53

TECHNICAL REFERENCE MANUAL
9.6 Error codes
No. Format Meaning and elimination
203
@E203
Wrong syntax in command, prohibited parameter in command entry or non-valid result
210
@E210
Not in tracking mode, start tracking mode first
211
@E211
Sampling too fast, set the sampling time to a larger value
212
@E212
Command cannot be executed, because tracking mode is active, first use command sNc to stop tracking
mode
220
@E220
Communication error, check configuration settings
230
@E230
Distance value overflow caused by wrong user configuration. Change user offset (and/or user gain)
231
@E231
Wrong mode for digital input status read, activate DI1
232
@E232
Digital output 1 cannot be set if configured as digital input
233
@E233
Number cannot be displayed. (Check output format)
234
@E234
Distance out of range
236
@E236
Digital output manual mode cannot be activated when configured as digital input
252
@E252
Temperature too high
(contact Dimetix if error occurs at room temperature)
253
@E253
Temperature too low
(contact Dimetix if error occurs at room temperature)
254
@E254
Bad signal from target, It takes too long to measure according distance. Use white surface or reflective
target.
255
@E255
Received signal too weak or target lost in moving target characteristic
(Use different target and distances, if the problem persists, please contact Dimetix)
256
@E256
Received signal too strong
(Use different target and distances, if the problem persists, please contact Dimetix)
258
@E258
Power supply voltage is too high
259
@E259
Power supply voltage is too low
260
@E260
Distance cannot be calculated because of ambiguous targets. Use clearly defined targets to measure the
distance.
263
@E263
Too much light, use only Dimetix reflective target plate.
In moving target characteristic, distance jump occured
264
@E264
Too much light, measuring on reflective targets not possible
330
@E330
Acceleration of the target too strong or distance jump (in moving target characteristic only)
331
@E331
Over speed of target (in moving target characteristic only)
360
@E360
Configured measuring time is too short, set longer time or use 0
361
@E361
Configured measuring time is too long, set shorter time
not listed Hardware failure (Contact Dimetix)
Before contacting Dimetix, please collect as much information as possible.
Distance Laser Sensor Page 47/53

TECHNICAL REFERENCE MANUAL
10 Safety instructions
The following instructions are to enable the person responsible for the DLS-C(H)/FLS-C(H), and the user of the instrument, to anticipate and
avoid operational hazards.
The DLS-C(H)/FLS-C(H) is made to be integrated into technical systems. Basic technical training is therefore essential. This device may only
be operated by trained personnel.
The person responsible for the instrument must ensure that all users understand these instructions and adhere to them.
If the DLS-C(H)/FLS-C(H) is part of a system, the manufacturer of such a system is responsible for all safety-related issues, such as the
manual, labeling and instruction.
10.1 Use of the instrument
Permitted use:
The permitted use of the DLS-C(H)/FLS-C(H) is: measuring distances.
Prohibited use:
1) Use of the instrument without instruction
2) Use outside the stated limits
3) Deactivation of safety systems and removal of explanatory and hazard labels
4) Opening of the equipment, except to open the cover for access to the screw terminal
5) Carrying out modification or conversion of the product
6) Operation after failure in operation
7) Use of accessories from other manufacturers without the express approval of Dimetix
8) Aiming directly into the sun
9) Deliberate dazzling of third parties; also in the dark
10) Inadequate safeguards at the surveying location (e.g. when measuring on roads, etc.)
WARNING:
Prohibited use can lead to injury, malfunction, and material damage. It is the duty of the person responsible for the
instrument to inform the user about hazards and how to counteract them. The DLS-C(H)/FLS-C(H) must not be
operated until the user has been adequately instructed.
10.2 Limits to use
See 5 Technical data on page 21.
Environment:
Suitable for use in an atmosphere appropriate for permanent human habitation. The device must not be used in environments such as but
not limited to:
– aggressive vapor or liquids (salt, acid, poisson, etc.)
– snow and rain
– radiation (radioactive, heat, etc.)
– explosive atmosphere
Distance Laser Sensor Page 48/53

TECHNICAL REFERENCE MANUAL
10.3 Areas of responsibility
Responsibilities of the manufacturer of the original equipment Dimetix AG, CH-9100 Herisau (Dimetix):
Dimetix is responsible for supplying the product, including the Technical Reference Manual and original accessories, in a completely safe
condition.
Responsibilities of the manufacturer of non-Dimetix accessories:
The manufacturers of non-Dimetix accessories for the DLS-C(H)/FLS-C(H) are responsible for developing, implementing and communicating
safety concepts for their products. They are also responsible for the effectiveness of these safety concepts in combination with the Dimetix
equipment.
Responsibilities of the person in charge of the instrument:
WARNING:
The person responsible for the instrument must ensure that the equipment is used in accordance with the
instructions. This person is also accountable for the deployment of personnel and for their training and for the
safety of the equipment when in use.
The person in charge of the instrument has the following duties:
1) To understand the safety instructions for the product and the instructions in the Technical Reference Manual.
2) To be familiar with local safety regulations relating to accident prevention.
3) To inform Dimetix immediately if the equipment becomes unsafe.
10.4 Hazards in use
WARNING:
The absence of instruction, or the inadequate provision of instruction, can lead to incorrect or prohibited use, and
can give rise to accidents with far-reaching personal, material and environmental consequences.
Precautions:
All users must follow the safety instructions given by the manufacturer and the directions of the person responsible for the instrument.
CAUTION:
Beware of erroneous distance measurements if the instrument is defective or if it has been dropped or has been
misused or modified.
Precautions:
Carry out periodic test measurements, particularly after the instrument has been subject to abnormal use, and before, during and after
important measurements. Make sure the DLS-C(H)/FLS-C(H) optics are kept clean.
WARNING:
If labels are hidden when the DLS-C(H)/FLS-C(H) is installed, this could lead to dangerous situations.
Precautions:
Always ensure the visibility of DLS-C(H)/FLS-C(H) labels at all times or add labels in accordance with the local safety regulations.
CAUTION:
When using the instrument for distance measurements or for positioning moving objects (e.g. cranes, building
equipment, platforms, etc.) unforeseen events (e.g. breaking the laser beam) may cause erroneous measurements.
Distance Laser Sensor Page 49/53

TECHNICAL REFERENCE MANUAL
Precautions:
Only use this product as a measuring sensor, not as a control device. The system must be configured and operated in such a way that no
damage will occur in the event of an erroneous measurement, malfunction of the device or power failure due to installed safety measures
(e.g. safety limit switch).
WARNING:
Operate the equipment appropriately in accordance with the regulations in force. Always prevent access to the
equipment by unauthorized personnel.
Precautions:
Do not point the telescope directly at the sun.
CAUTION:
Be careful when pointing a telescope towards the sun, because the telescope functions as a magnifying glass and
can injure eyes and/or cause damage inside the DLS-C(H)/FLS-C(H).
10.5 Laser classification
The DLS-C(H)/FLS-C(H) produces a visible laser beam, which emerges from the front of the instrument.
It is a Class 2 laser product in accordance with:
- IEC60825-1 (2007) ”Radiation safety of laser products”
- EN60825-1 (2007) ”Radiation safety of laser products”
It is a Class II laser product in accordance with:
- FDA 21CFR 1040.10 and 1040.11 (US Department of Health and Human Service, Code of Federal Regulations)
Laser Class 2/II products:
Do not stare into the laser beam or direct it towards other people unnecessarily. Eye protection is normally afforded by aversion responses
including the blink reflex.
WARNING:
Looking directly into the beam with optical aids (binoculars, telescopes) can be hazardous.
Precautions:
Do not look into the laser beam. Make sure the laser is aimed above or below eye level. (particularly with fixed installations, in machines,
etc.).
CAUTION:
Looking into the laser beam may be hazardous to the eyes.
Distance Laser Sensor Page 50/53

TECHNICAL REFERENCE MANUAL
10.6 Electromagnetic compatibility (EMC)
The term ”electromagnetic compatibility” is taken to mean the capability of the DLS-C(H)/FLS-C(H) to function smoothly in an environment
where electromagnetic radiation and electrostatic discharges are present, and without causing electromagnetic interference to other
equipment.
WARNING:
Electromagnetic radiation can cause interference in other equipment. Although the DLS-C(H)/FLS-C(H) meets the
strict regulations and standards that are in force in this respect, Dimetix cannot completely exclude the possibility
that interference may be caused to other equipment.
10.7 Producer Standards
Dimetix hereby certifies that the product has been tested and complies with the specifications as stated in this 'Technical Reference
Manual'. The test equipment used is in compliance with national and international standards. This is established by our Quality
Management System. Further, the DLS-C(H)/FLS-C(H) devices are produced in compliance with 2002/95/EG «RoHS».
10.8 Disposal
This symbol on the product or on its packaging indicates that this product must not be disposed of with your
other household waste. Instead, it is your responsibility to dispose of the equipment by handing it over to a
designated collection point for the recycling of waste electrical and electronic equipment. The separate collection
and recycling of your waste equipment at the time of disposal will help to conserve natural resources and ensure
that it is recycled in a manner that protects human health and the environment. For more information about
where you can drop off your waste equipment for recycling, please contact your local city office, your household
waste disposal service or the dealer where you purchased the product.
In countries in which Dimetix has no subsidiaries, Dimetix delegates the duty for the disposal in compliance with
2002/96/EG«WEEE» to the local dealer or to the customer, if no dealer is present.
Distance Laser Sensor Page 51/53

TECHNICAL REFERENCE MANUAL
10.9 Labeling
10.10 Laser Specification
Standard applied EN60825-1:2007
IEC60825-1:2007
Emitted wavelength 620-690nm
Beam divergence 0.16 x 0.6 mrad
Pulse duration
0.45x10-9s
Max. radiant power 0.95 mW
10.11 Maintenance
The DLS-C(H)/FLS-C(H) is almost maintenance free. The only thing you have to do is to clean the surfaces of the lenses.
CAUTION:
Look after the surfaces of the lenses with same care that you would apply to spectacles, cameras and
field glasses. Clean the optical parts (small laser output glass and the round lens) only with a clean soft
glasses cleaning cloth and avoid scratching of the optical parts. All other cleanser or resolvent are not
allowed.
10.12 Service
If you need to service the device, please contact Dimetix for instructions.
CAUTION:
The warranty is void if the device is opened except the cover of the screw terminal. Removing the label
is also understood as opening.
Distance Laser Sensor Page 52/53
FLS-C 30
Part No.: 600 501
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 0.6A=
Type:
FLS-C 10
Part No.: 600 502
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 0.6A=
Type:
FLS-CH 30
Part No.: 600 503
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 2.5A=
Type:
FLS-CH 10
Part No.: 600 504
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 2.5A=
Type:
DLS-C 30
Part No.: 500 621
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 0.6A=
Type:
DLS-C 15
Part No.: 500 622
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 0 .6A=
Type:
DLS-CH 30
Part No.: 500 623
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 2.5A=
Type:
DLS-CH 15
Part No.: 500 624
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 2 .5A=
Type:
1
9 15
8
Pow er
Err or
DO 1
DO 2
1 Rx
2 Tx
3 T -
4 T+
5 R -
6 R+
7 V+
8 V+
9 DO 1
10 DO 2
11 DO E (Er ror)
12 AG ND
13 AO
14 G ND
15 G ND
RS2 32
If 2
LASER RADIATION
DO NOT STARE INTO BEAM
CLASS 2 LASER PRODUCT
Dimetix AG CH-9100 Herisau
WWW.DIMETIX.COM
Com pli es wi th 21C FR 1040.10 and
1040.1 1 except for devia tions pursu ant
to Las er No tice no.50, dat ed M ay 2001 ,
wi th IE C 60825- 1 (2001) a nd
EN 60825-1 (2001)
620- 690nm
0.95m W m ax.
Cl ass 2
Las er P roduct
Made in Switzerland
FLS-C 10
Part No.: 600 502
Manufactured:
Serial No.: 123456
11/2009
Power: 9..30V / 0.6A=
Type:
Fig. 22: Location of the label
Fig. 24: all existing type labels
Fig. 23: DLS-C / FLS-C label inclusive type label

TECHNICAL REFERENCE MANUAL
Important Notice
Dimetix reserves the right to make corrections, modifications, enhancements, improvements and other changes to its products,
documentation and services at any time and to discontinue any product or service without notice. We try to give our best possible effort to
provide you with perfect documents, but we can not guarantee for incorrect information. Customers should obtain the latest relevant
information before placing orders and should verify that such information is up to date and complete. All products are sold subject to
Dimetix terms and conditions of sale supplied at the time of order acknowledgment.
© Copyright by Dimetix
Dimetix AG
Degersheimerstr. 14
CH-9100 Herisau
Switzerland
Tel. + 41–71–353 00 00
Fax + 41–71–353 00 01
info@dimetix.com
www.dimetix.com
Distance Laser Sensor Page 53/53
LASER RADIATION
DO NOT STARE INTO BEAM
CLASS 2 LASER PRODUCT
 Loading...
Loading...