

DigitalSemiconductor21164
AlphaMicroprocessorMotherboard
User’sManual
Order Number: EC–QLJLC–TE
Revision/Update Information: This document supersedes the
Alpha 21164 Microprocessor Motherboard
User’s Manual (EC–QLJLB–TE).
Digital Equipment Corporation
Maynard, Massachusetts
March 1996
Possession, use, or copying of the software described in this publication is authorized only
pursuant to a valid written license from Digital or an authorized sublicensor.
While Digital believes the information included in this publication is correct as of the date of
publication, it is subject to change without notice.
Digital Equipment Corporation makes no representations that the use of its products in the
manner described in this publication will not infringe on existing or future patent rights, nor do
the descriptions contained in this publication imply the granting of licenses to make, use, or sell
equipment or software in accordance with the description.
© Digital Equipment Corporation 1996.
All rights reserved.
Printed in U.S.A.
Alpha AXP, AlphaGeneration, DEC, DECchip, DECladebug, Digital, Digital Semiconductor,
OpenVMS, VAX, VAX DOCUMENT, VMS, the AlphaGeneration design mark, and the
DIGITAL logo are trademarks of Digital Equipment Corporation.
Digital Semiconductor is a Digital Equipment Corporation business.
Digital UNIX Version 3.2 for Alpha is a UNIX 93 branded product.
Centronics is a trademark of Genicom Corporation.
CompuServe is a registered trademark of CompuServe, Inc.
FaxBACK is a registered trademark and Intel and UPI are trademarks of Intel Corporation.
GRAFOIL is a registered trademark of Union Carbide Corporation.
IEEE is a registered trademark of The Institute of Electrical and Electronics Engineers, Inc.
MACH is a trademark of Advanced Micro Devices, Inc.
Micron is a registered trademark of Micron Corporation.
Microsoft is a registered trademark and NT and Windows NT are trademarks of Microsoft
Corporation.
Motorola is a registered trademark of Motorola, Inc.
National is a registered trademark of National Semiconductor Corporation.
PS/2 is a registered trademark of International Business Machines Corporation.
SPEC is a trademark of Standard Performance Evaluation Corporation.
TriQuint is a registered trademark of TriQuint Semiconductor, Inc.
UNIX is a registered trademark in the United States and other countries, licensed exclusively
through X/Open Company Ltd.
Xilinx is a trademark of Xilinx, Incorporated.
All other trademarks and registered trademarks are the property of their respective owners.
This document was prepared using VAX DOCUMENT Version 2.1.
Contents
About This Manual........................................... vii
1 Introduction to the EB164
1.1 System Components and Features........................ 1–1
1.1.1 Digital Semiconductor 21171 Core Logic Chipset .......... 1–1
1.1.2 Memory Subsystem ................................ 1–3
1.1.3 L3 Bcache Subsystem Overview ....................... 1–3
1.1.4 PCI Interface Overview . . ........................... 1–3
1.1.5 ISA Interface Overview . . ........................... 1–4
1.1.6 Miscellaneous Logic ................................ 1–4
1.1.7 Software Support .................................. 1–5
1.1.8 Component Layout ................................. 1–5
1.2 EB164 Summary . . ................................... 1–6
2 System Configuration and Connectors
2.1 Configuration Jumpers ................................. 2–1
2.2 EB164 Connectors . ................................... 2–8
3 Starting and Using the EB164
3.1 Hardware Requirements ............................... 3–1
3.2 Software Requirements ................................ 3–2
3.3 Hardware Configuration ............................... 3–2
3.4 Software Configuration ................................ 3–8
3.4.1 Starting Windows NT ARC Firmware .................. 3–9
3.4.2 Going to the Debug Monitor from Windows NT ARC
Firmware ........................................ 3–9
3.4.3 Returning to Windows NT ARC Firmware from the Debug
Monitor ......................................... 3–10
iii

4 Functional Description
4.1 PCI Interrupts and Arbitration . . ........................ 4–1
4.1.1 Interrupts ....................................... 4–1
4.1.2 Arbitration ....................................... 4–5
4.2 ISA Bus Devices...................................... 4–5
4.3 dc Power Distribution . ................................ 4–5
4.4 PCI Devices . ........................................ 4–7
4.5 Flash ROM. . ........................................ 4–8
4.5.1 Special ROM Header ............................... 4–8
4.5.2 Flash ROM Structure............................... 4–11
4.5.3 Flash ROM Access . ................................ 4–13
5 EB164 Requirements, Power, and Parameters
5.1 Power Requirements . . ................................ 5–1
5.2 Environmental Requirements . . . ........................ 5–2
5.3 Physical Board Parameters ............................. 5–2
A Supporting Vendor Products
A.1 Products Included .................................... A–1
A.2 Products Not Included . ................................ A–2
B Technical Support and Ordering Information
B.1 Obtaining Technical Support ............................ B–1
B.2 Ordering Digital Semiconductor Products . . ................ B–1
B.3 Ordering Digital Semiconductor Literature . ................ B–2
B.4 Ordering Third-Party Literature . ........................ B–3
Index
Figures
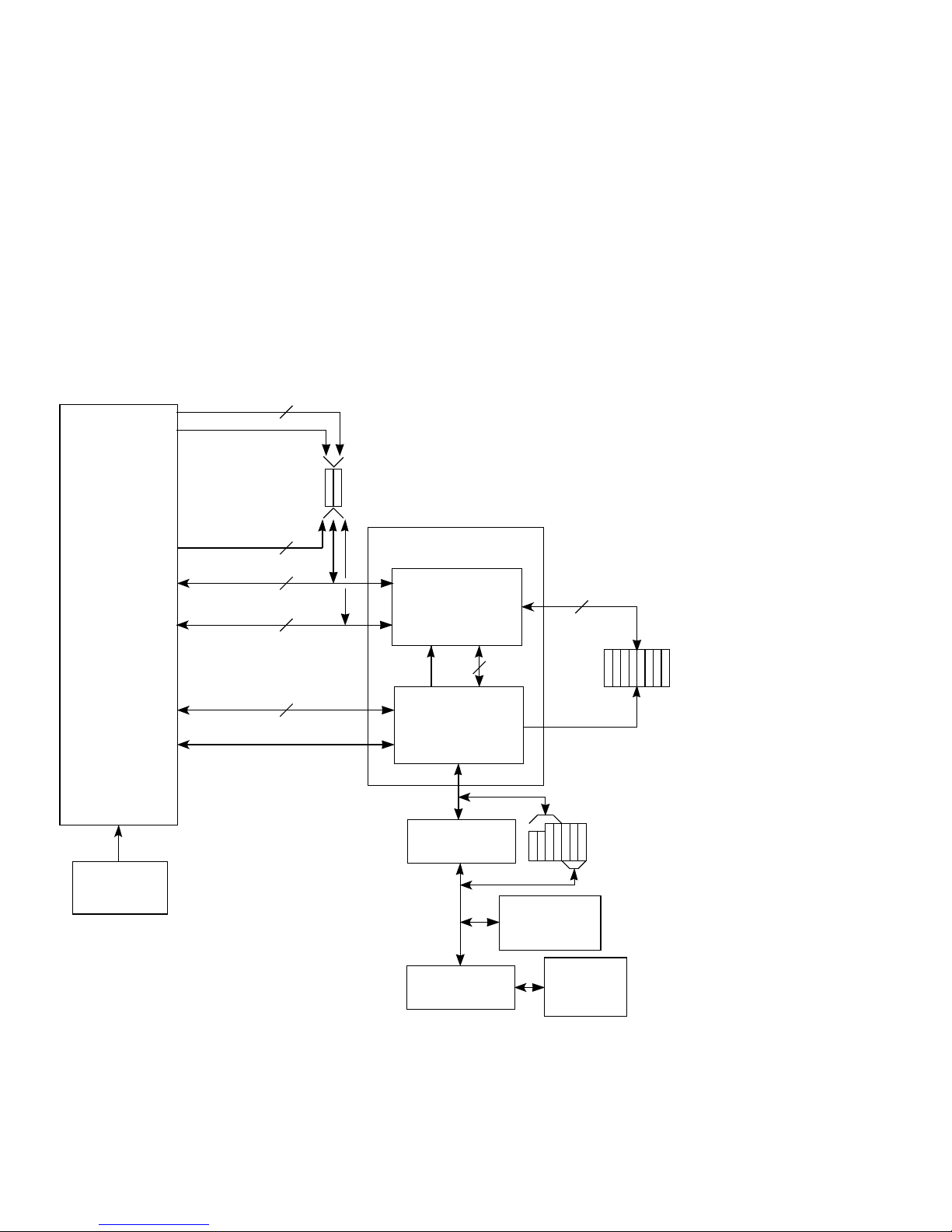
1–1 EB164 Functional Block Diagram ..................... 1–2
1–2 Board Component Layout . . . ........................ 1–6
2–1 EB164 Jumper Locations ............................ 2–2
2–2 Configuration Jumpers .............................. 2–3
2–3 EB164 Connector Locations . . ........................ 2–8
2–4 Detail of Header Connector J2 ........................ 2–9
iv

3–1 Fan/Heat Sink Assembly . ........................... 3–4
3–2 EB164 Power Connectors . ........................... 3–7
4–1 Interrupt Logic . ................................... 4–2
4–2 Interrupt and Interrupt Mask Registers ................ 4–5
4–3 dc Power Distribution . . . ........................... 4–6
4–4 Special Header Content . . ........................... 4–8
5–1 Board Component Layout ........................... 5–3
Tables
1–1 Main Memory Sizes ................................ 1–3
1–2 EB164 Features Summary ........................... 1–7
2–1 Configuration Jumper Position Descriptions . . . .......... 2–4
2–2 EB164 Connector Descriptions ........................ 2–10
4–1 EB164 System Interrupts ........................... 4–3
4–2 PCI-to-ISA SIO Bridge Interrupts . . ................... 4–4
4–3 Special Header Entry Descriptions . ................... 4–9
4–4 Flash ROM Image Selection .......................... 4–11
5–1 Power Supply dc Current Requirements ................ 5–1
5–2 Board Component List . . . ........................... 5–4
v

This manual describes Digital Semiconductor’s 21164 Alpha microprocessor
motherboard (EB164), a module for computing systems based on the 21164
Alpha microprocessor and the Digital Semiconductor 21171 chipset.
Audience
This manual is intended for users of the EB164 to assist them in installing the
EB164 and populating it with memory modules and peripheral cards.
Scope
This manual describes the features, configuration, and installation of the
EB164. This manual does not include specific bus specifications (for example,
PCI or ISA buses). Additional information is available in the appropriate
vendor and IEEE specifications. See Appendix B for information about how to
obtain additional technical support and how to order additional documentation.
Content
This manual contains the following chapters and appendixes:
• Chapter 1, Introduction to the EB164, is an overview of the EB164,
About This Manual
including its components, uses, and features.
• Chapter 2, System Configuration and Connectors, describes the user
environment configuration; board connectors and functions; jumper
functions; and identifies jumper and connector locations.
• Chapter 3, Starting and Using the EB164, lists additional hardware and
software requirements, provides information on how to configure the
hardware and software, and describes the motherboard startup procedures.
• Chapter 4, Functional Description, describes some of the functional
elements of the EB164, such as flash ROM contents, interrupt assignments,
and power distribution.
vii

• Chapter 5, EB164 Requirements, Power, and Parameters, describes the
EB164 power and environmental requirements, and identifies major board
components.
• Appendix A, Supporting Vendor Products, lists suggested vendor sources
for supporting components, such as, power supply, SIMMs, enclosure, and
so forth.
• Appendix B, Technical Support and Ordering Information, describes how to
obtain Digital Semiconductor information and technical support, and how
to order Digital Semiconductor products and associated literature.
Document Conventions
This section provides the conventions used in this document.
Caution: Cautions indicate potential damage to equipment or data.
Note: Notes provide additional information.
Numbering: All numbers are decimal or hexadecimal unless otherwise
indicated. In case of ambiguity, a subscript indicates the radix of nondecimal
numbers. For example, 19 is a decimal number, but 1916and 19A are
hexadecimal numbers.
Extents: Extents are specified by a single number, or a pair of numbers in
angle brackets (< > ) separated by a colon ( :) and are inclusive. For example,
bits <7:3> specify an extent including bits 7, 6, 5, 4, and 3. Multiple bit fields
are shown as extents.
Register Figures: Register figures have bit and field position numbering
starting at the right (low-order) and increasing to the left (high-order).
Signal Names: Signal names in text are printed in boldface lowercase type.
For example, ‘‘ . . . bits data<127:0> are delivered to the Bcache SIMM
connectors . . . ’’
viii
Introduction to the EB164
This chapter provides an overview of the EB164 motherboard and describes
the EB164, its components, features, and uses.
1.1 System Components and Features
The EB164 is implemented in industry-standard parts and uses a Digital
Semiconductor 21164 Alpha microprocessor (21164) running at 266, 300, or 333
MHz. The functional components are shown in Figure 1–1 and are introduced
in the following subsections.
1.1.1 Digital Semiconductor 21171 Core Logic Chipset
The 21164 is supported by the Digital Semiconductor 21171 (21171) chipset.
The 21171 consists of the following two application-specific integrated circuit
(ASIC) types:
• One copy of the 21171-CA control, I/O interface, and address chip (CIA)
provides the interface between the 21164, main memory (addressing and
control), and the peripheral component interconnect (PCI) bus. It also
provides the data switch companion chips with control information to direct
the data flow.
1
• Four copies of the 21171-BA data switch chip (DSW) provide the memory
interface data path and route PCI data through the CIA chip.
The chipset includes the majority of functions required to develop a highperformance PC or workstation, requiring minimum discrete logic on the
module. It provides flexible and generic functions to allow its use in a wide
range of systems.
Introduction to the EB164 1–1
1.1 System Components and Features
Figure 1–1 EB164 Functional Block Diagram
Digital Semiconductor
21164 Alpha
Microprocessor
Support
− Oscillator
− Serial ROM
Index
Control
Bcache Tag
Data
Check
Address
Commands
19
10
128
16
37
Bcache
SIMM
Sockets (X2)
Digital Semiconductor
21171 Core Logic Chipset
Digital Semiconductor
Control
Digital Semiconductor
Control, I/O Interface,
and Address
21171−BA
Data Switch
(X4)
21171−CA
PCI−to−ISA
Bridge
Data
64
Flash ROM
Time−of−Year
Keyboard/Mouse
256
Data
DRAM
SIMM
Sockets
(X8)
Address/Control
3 Dedicated PCI Slots
2 Dedicated ISA Slots
1 Shared PCI/ISA Slot
1–2 Introduction to the EB164
Combination
Controller
2 IDE Devices
Diskette
Parallel Port
2 Serial Ports
MK−2306−01A
1.1.2 Memory Subsystem
The dynamic random-access memory (DRAM) provides 32MB to 512MB with
a 256-bit data bus. The memory is contained in one bank of eight commodity
single inline memory modules (SIMMs). Single- or double-sided SIMMs may
be used. Each SIMM is 36 bits wide, with 32 data bits and 4 check bits,
with 70 ns or less access. Table 1–1 lists the SIMM sizes supported and the
corresponding main memory size for 256-bit arrays.
Table 1–1 Main Memory Sizes
SIMM Size Eight SIMMs (256-Bit Array)
1M236 32MB
2M236 64MB
4M236 128MB
8M
2
36 256MB
16M236 512MB
All eight SIMM connectors (J3 through J10) must be populated. See Figure 2–3
and Table 2–2.
1.1 System Components and Features
1.1.3 L3 Bcache Subsystem Overview
The board-level external L3 backup cache (Bcache) subsystem supports
multiple cache sizes and access times. Cache sizes supported are 2MB with
Alpha cache SIMMs populated with 128K28 SRAMs, and 4MB and 8MB with
SIMMs populated with 512K28 SRAMs. Speeds of 6 ns to 15 ns can be used.
The EB164 has a 2MB 10-ns Bcache SIMM. See Appendix A for order
information.
1.1.4 PCI Interface Overview
The EB164 PCI interface is the main I/O bus for the majority of functions
(SCSI interface, graphics accelerator, and so on). The PCI interface provides a
selectable PCI speed between 25 MHz and 33 MHz (based on the 21164 clock
divisor). An onboard PCI-to-ISA bridge is provided through an Intel 82378ZB
Saturn I/O (SIO) chip.
The PCI bus has three dedicated PCI expansion slots (one 64-bit and two
32-bit) and one shared 64-bit PCI/ISA slot.
Introduction to the EB164 1–3

1.1 System Components and Features
1.1.5 ISA Interface Overview
The ISA bus has two dedicated slots and a third shared ISA/PCI slot. It
provides the following system support functions:
• Mouse and keyboard controller functions—provided by an Intel 8242 chip.
• An IDE interface, a diskette controller, two universal asynchronous
receiver–transmitters (UARTs) with full modem control, and a bidirectional
parallel port—provided by a National 87312 combination chip.
• A time-of-year (TOY) function—provided by a Dallas Semiconductor
DS1287 chip.
• Operating system support—provided by a 1MB flash ROM that contains
firmware and debug monitor code.
Users can develop code on a host system, and load software into the EB164
through a serial line, diskette, or Ethernet board. In addition, sectors of
the flash ROM can be programmed for application-specific purposes.
1.1.6 Miscellaneous Logic
The EB164 contains the following miscellaneous components:
• Clocks
A 26.66-MHz oscillator and phase-locked loop (PLL) clock generator provide
a clock source to the 21164 microprocessor and system.
A 14.3-MHz crystal and frequency generator provide a clock source for ISA
devices.
• Serial ROM
A Xilinx XC17128 serial ROM (SROM) contains initial code that is loaded
into the 21164 instruction cache (Icache) on power-up. A serial line
interface is also provided to allow direct connection to a terminal line for
debugging purposes.
• Programmable array logic (PAL) devices for the following functions:
One PAL for utility bus (Ubus) decoding
One PAL for interrupts
Two PAL devices for memory row address strobe (RAS) bank generation
and buffering
1–4 Introduction to the EB164

1.1.7 Software Support
Software support code, consisting of a debug monitor and Windows NT ARC
firmware is contained in a 1MB flash ROM. The monitor provides functions
that allow you to:
• Download files through serial and Ethernet ports and diskette.
• Load data from a ROM through the debug monitor.
• Examine and deposit the EB164 system registers, a few 21164 internal
processor registers (IPRs), and I/O mapped registers.
• Examine and modify DRAM and I/O mapped memory.
• Disassemble CPU instructions in memory.
• Transfer control to programs in memory.
• Perform native debugging operations, including breakpoints and single
stepping.
• Perform full source-level debugging operations by using DECladebug
software running on a host communicating through an Ethernet
connection.
1.1 System Components and Features
• Perform a memory image dump.
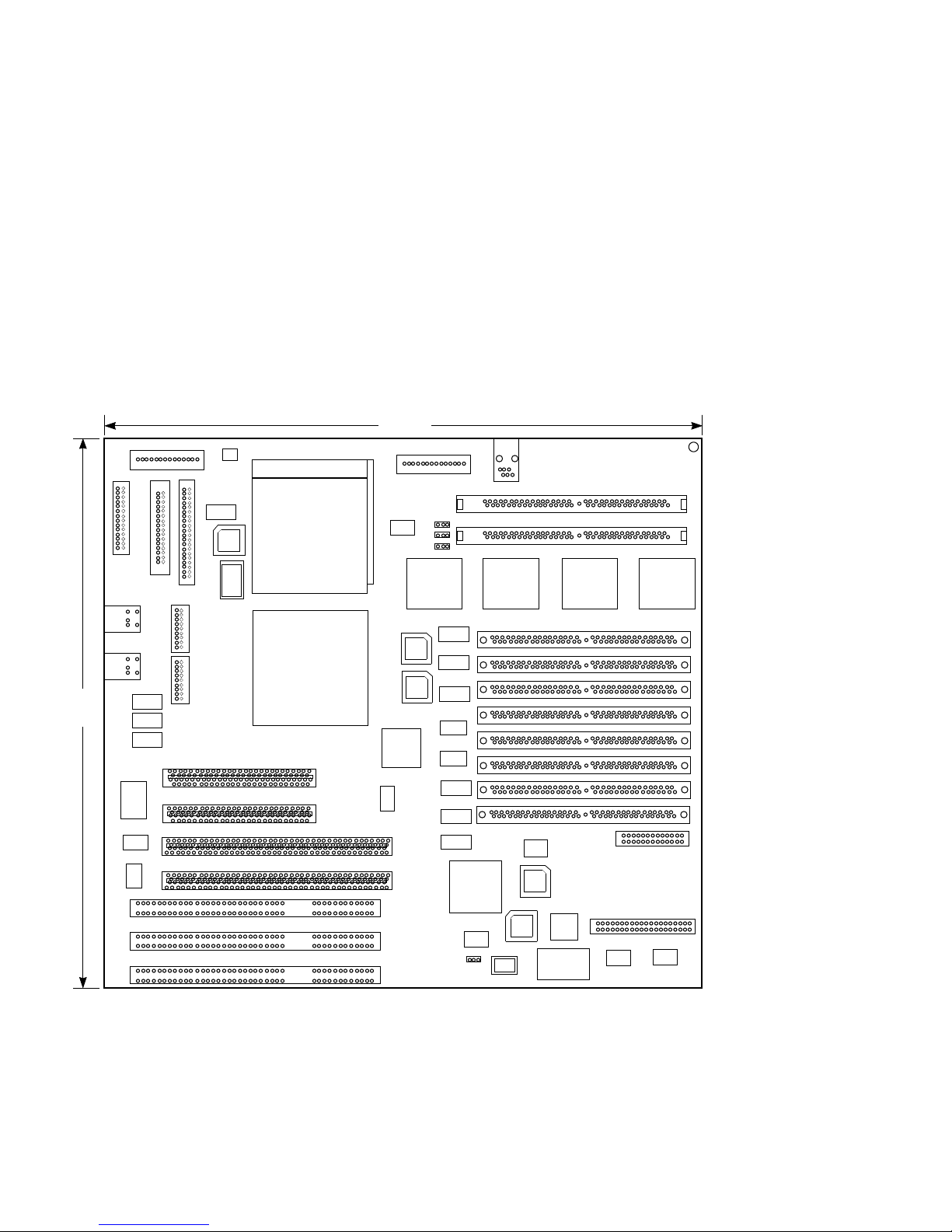
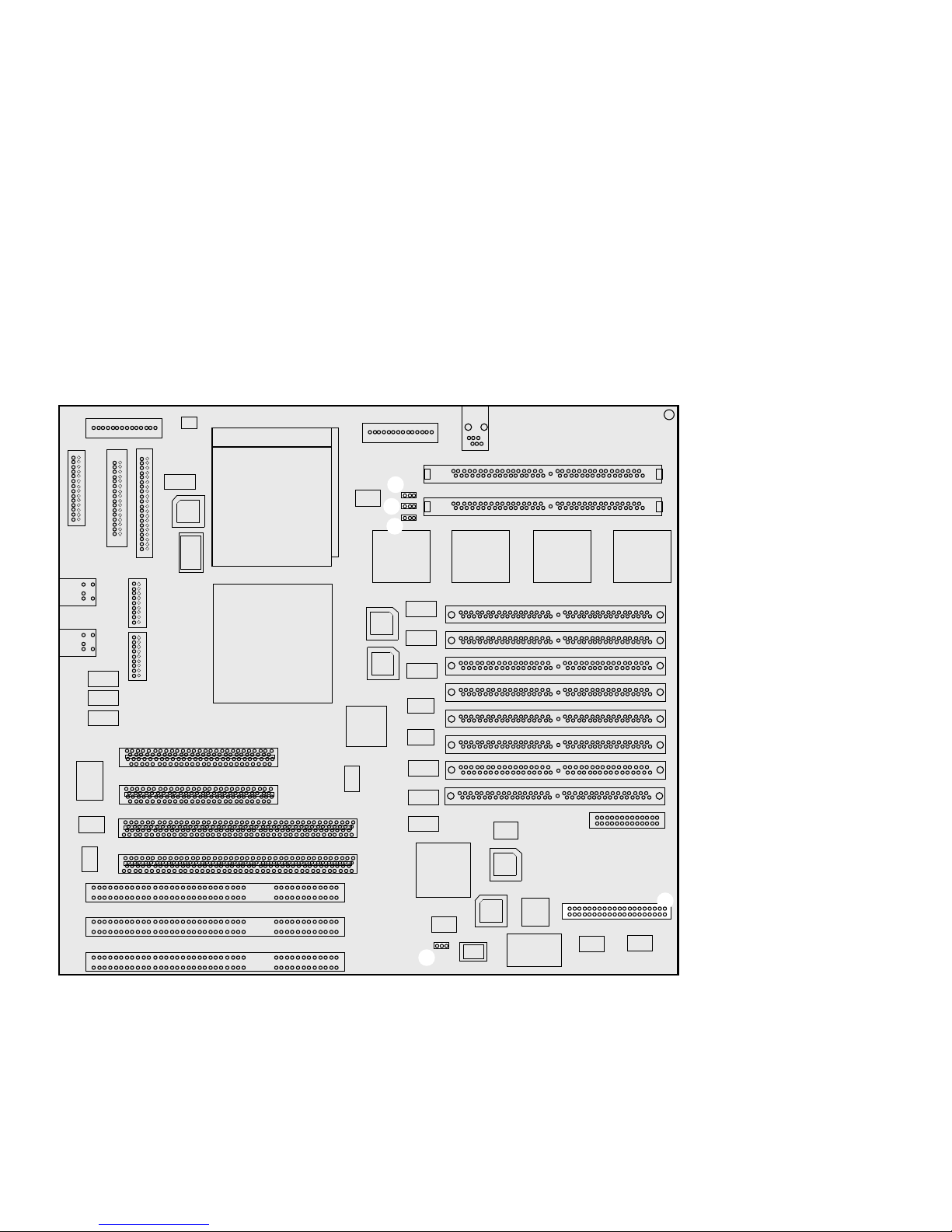
1.1.8 Component Layout
Figure 1–2 shows the EB164 board component layout and dimensions.
Introduction to the EB164 1–5
1.1 System Components and Features
Figure 1–2 Board Component Layout
1
33.15 cm
(13.05 in)
1
30.73 cm
(12.10 in)
11
13
12
7
8
1
34
5
6
9
2
10
14
1
16
19
18
17
20
21
1
15
1.2 EB164 Summary
The features of the EB164 are listed and described in Table 1–2.
1–6 Introduction to the EB164
MK−2306−32
Table 1–2 EB164 Features Summary
Characteristic Description
Operating Systems
1.2 EB164 Summary
Supported operating
systems
Microsoft Windows NT. For information on Digital UNIX
operating system support, see your local distributor or your
Digital sales representative.
System Characteristics
CPU and clock speed Digital Semiconductor 21164 Alpha microprocessor at 266,
300, or 333 MHz
CPU upgradable ZIF socket for 21164 upgrade
Instruction issue Up to 4 instructions issued per clock cycle
Word size 64 bits
Address size 40-bit physical address, 43-bit virtual address
Floating-point format VAX (F and G) and IEEE (S and T) data types
Memory (DRAM)
1
Minimum DRAM 32MB plus ECC
Maximum DRAM 512MB plus ECC
Memory (ROM) 1MB flash ROM
External L2 cache Configurable for 2MB, 4MB, 8MB (128-bit data)
Memory bus width 256 bits plus ECC
Performance metrics The EB164 performance is listed here:
21164 Bcache SPECint92 SPECfp92
266 MHZ 2MB, 10ns 300.6 417.4
300 MHZ 2MB, 10ns 335
(estimated)
460
(estimated)
333 MHZ 2MB, 10ns 365.2 518
Graphics
Graphics options Refer to the Microsoft Hardware Compatibility List for
1
Minimum DRAM recommended: 32MB for Windows NT and Digital UNIX.
Windows NT to determine which graphics cards are
supported. See Section B.4 for information on how to obtain
the listing.
(continued on next page)
Introduction to the EB164 1–7
1.2 EB164 Summary
Table 1–2 (Cont.) EB164 Features Summary
Characteristic Description
Input/Output
Input device interfaces PS/2 style keyboard and mouse
Serial Two RS423-compatible (9-position) serial communications
Parallel One parallel (Centronics compatible) communications port
Bus options Total of 6 option slots
PCI bus Supports two 64-bit PCI options slots at 5V and two 32-bit
ISA bus Supports three 16-bit ISA option slots
IDE One IDE interface supporting up to 2 drives
Diskette One 82077-compatible diskette controller supporting up to 2
Environmental Characteristics (Operating)
Operating temperature 10°C to 40°C (50°F to 104°F)
Maximum rate of (dry
bulb) temperature
change
Relative humidity
Maximum wet bulb
Minimum dew point
EMC compliance Compliance certification is the responsibility of the system
Shock and vibration Passing of shock and vibration tests is dependent on the
ports
PCI option slots at 5V
drives with 1.44MB and 2.88MB formats
6
11°C/hour
10%–90% noncondensing
32°C (90°F)
2°C (36°F)
integrator. The EB164 was tested in industry-representative
enclosures to prove feasibility of emissions compliance.
method used to mount the system board, the design of the
enclosure, and how the enclosure is supported. Testing is
the responsibility of the system integrator.
2°C/hour (20°F/hour64°F/hour)
Physical Characteristics
Form factor Standard, full-size PC AT board
Width/depth 30.73 cm (12.10 in)233.15 cm (13.05 in)
1–8 Introduction to the EB164
System Configuration and Connectors
The EB164 uses jumpers to implement configuration parameters such
as variations in backup cache (Bcache) size, access timing, and speed, as
well as boot parameters. These jumpers must be configured for the user’s
environment. Onboard connectors are provided for the I/O interfaces, single
inline memory modules (SIMMs), and serial and parallel peripheral ports.
After the module is configured, power can be applied, and the debug monitor
can be run. The debug monitor and its commands are described in the Alpha
Microprocessors Evaluation Board Debug Monitor User’s Guide. Appendix B
provides information about other software design tools.
2.1 Configuration Jumpers
Figure 2–1 identifies the location of the software and hardware configuration
jumpers, and Table 2–1 provides descriptions. Figure 2–2 provides a detailed
view of the configuration jumpers and their function.
2
System Configuration and Connectors 2–1
2.1 Configuration Jumpers
Figure 2–1 EB164 Jumper Locations
1
1
J17
J16
J15
1
2–2 System Configuration and Connectors
J14
1
J1
MK−2306−30
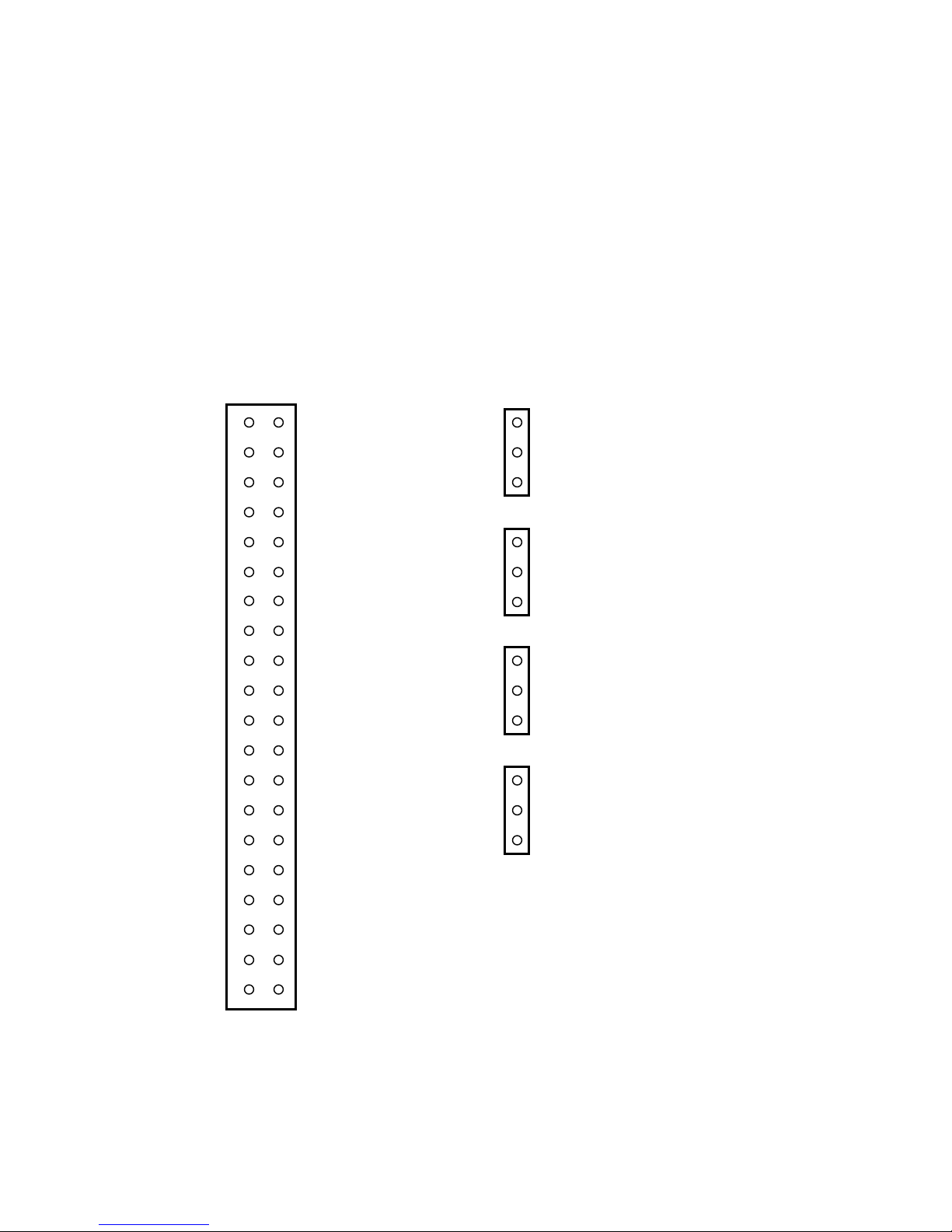
Figure 2–2 Configuration Jumpers
J1
CONF4
CONF5
CONF6
CONF7
CONF8
CONF9
CONF10
CONF11
CONF12
CONF13
CONF14
CONF15
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
irq3
irq2
irq1
irq0
Reserved
BC_SIZE<2>
BC_SIZE<1>
BC_SIZE<0>
BC_SPEED<2>
BC_SPEED<1>
BC_SPEED<0>
Mini−Debugger
BOOT_OPTION
Reserved
BC_RD_FAST
Reserved
Reserved
Reserved
Reserved
Reserved
2.1 Configuration Jumpers
J17
J16
J15
J14
1
index22
2
3
1
index21
2
3
1
index20
2
3
1
Flash ROM
Write Protect/
2
Write Enable
3
MK−2306−04
System Configuration and Connectors 2–3
2.1 Configuration Jumpers
Table 2–1 Configuration Jumper Position Descriptions
Feature Jack/Jumper—Pins and Description
System clock
divisor
J1—1/2, —3/4, —5/6, —7/8
J1—1/2
(irq3)
In In Out Out 3
In Out In In 4
In Out In Out 5
In Out Out In 6
In Out Out Out 7
Out In In In 8
Out In In Out 9
Out In Out In 10
Out In Out Out 11
Out Out In In 12
Out Out In Out 13
Out Out Out In 14
Out Out Out Out 15
J1—3/4
(irq2)
Divisor 8 is used for 266 MHz.
Divisor 9 is used for 300 MHz.
Divisor 10 is used for 333 MHz.
J1—5/6
(irq1)
J1—7/8
(irq0) Ratio
2–4 System Configuration and Connectors
(continued on next page)

2.1 Configuration Jumpers
Table 2–1 (Cont.) Configuration Jumper Position Descriptions
Feature Jack/Jumper—Pins and Description
BC_SIZE<2:0> J1—11/12 (CONF4), —13/14 (CONF5), —15/16 (CONF6)
These jumpers allow the Bcache to emulate the sizes specified
in the following table. These jumpers are changed in conjunction
with the appropriate index jumpers J17, J16, and J15.
Bcache size–
index address bits
<22:20>
CONF4
Pins 11/12
CONF5
Pins 13/14
CONF6
Pins 15/16 Bcache
In In In Reserved
In In Out Reserved
In Out In Reserved
In Out Out 2MB (default)
Out In In 4MB
Out In Out 8MB
Out Out In Reserved
Out Out Out Reserved
J17, J16, J15
1
Jumper
2MB
(default) 4MB
2
8MB
2
J17 (index22) 2 to 3 2 to 3 1 to 2
J16 (index21) 2 to 3 1 to 2 1 to 2
J15 (index20) 1 to 2 1 to 2 1 to 2
1
SIMMs populated with 128K28 or 512K28 SRAMs
2
SIMMs populated with 512K28 SRAMs
(continued on next page)
System Configuration and Connectors 2–5

2.1 Configuration Jumpers
Table 2–1 (Cont.) Configuration Jumper Position Descriptions
Feature Jack/Jumper—Pins and Description
BC_SPEED<2:0> J1—17/18 (CONF7), —19/20 (CONF8), —21/22 (CONF9)
These jumpers select the Bcache timing parameters used to
compute the BC_CONFIG register value. Select the jumper
configuration that matches the access time for the SRAMs being
used.
CONF7
Pins
17/18
In In In Reserved
In In Out 6-ns SRAM timing
In Out In 8-ns SRAM timing
In Out Out 10-ns SRAM timing (default)
Out In In 12-ns SRAM timing
Out In Out 15-ns SRAM timing
Out Out In Reserved
Out Out Out Reserved
Mini-Debugger J1—23/24 (CONF10)
The Alpha SROM Mini-Debugger is provided in the SROM. This
jumper (In) causes the SROM initialization to trap to the MiniDebugger (connector J13) after all initialization is complete, but
before starting the execution of the system flash ROM code. The
default position for this jumper is out.
CONF8
Pins
19/20
CONF9
Pins
21/22 Bcache Speed
(continued on next page)
2–6 System Configuration and Connectors

2.1 Configuration Jumpers
Table 2–1 (Cont.) Configuration Jumper Position Descriptions
Feature Jack/Jumper—Pins and Description
BOOT_OPTION J1—25/26 (CONF11)
This jumper selects the image to be loaded into memory from
the system flash ROM. With the jumper out (bit = 1), the first
image (debug monitor) is loaded. With the jumper in (bit = 0),
alternate images can be loaded depending upon the value stored in
TOY RAM location 0x3F. The default position for this jumper is in.
For system flash ROMs that contain a single image, the header is
optional. If the header does not exist, the entire 1MB system flash
ROM is loaded and executed at physical address zero.
For more information on the system ROM header and boot images,
refer to Section 4.5.1.
BC_RD_FAST J1—29/30 (CONF13)
This jumper forces a Bcache read speed setting of 1 cycle faster
than nominal.
BC_RD_FAST Bcache Speed
Flash ROM writeprotect/writeenable jumper
In Make read speed 1 cycle faster
Out Nominal read speed (default)
J14
Jumper Pins Function
1 to 2 Flash ROM write-protect
2 to 3 Flash ROM write-enable (default)
System Configuration and Connectors 2–7

2.2 EB164 Connectors
2.2 EB164 Connectors
Figure 2–3 shows the EB164 connectors and Table 2–2 describes them.
Figure 2–4 provides a detail of header connector J2.
Figure 2–3 EB164 Connector Locations
J29
J33
1
J31
J34
J32
J25
J24
J23
J22
J30
1
J18
J28
J27
J26
J13
J12
J11
J10
J9
J8
J7
J6
J5
J4
J3
1
J2
J21
J20
J19
2–8 System Configuration and Connectors
1
MK−2306−31

Figure 2–4 Detail of Header Connector J2
2.2 EB164 Connectors
IDE Drive
Active
Indicator
Speaker
Fan 1
Fan 2
Fan 3
J2
11
13
15
17
19
21
23
1
Ground Pins:
5, 8, 9, 12, 13, 16,
3
5
18, 22, and 25
+12−V Pins:
3, 7, and 11
7
9
System Halt Button
System Reset Button
Keyboard Lock Switch
Power On
Indicator
25
MK−2306−27A
System Configuration and Connectors 2–9

2.2 EB164 Connectors
Table 2–2 EB164 Connector Descriptions
Connector Pins Description
J10 72 DRAM 0 SIMM
J9 72 DRAM 1 SIMM
J8 72 DRAM 2 SIMM
J7 72 DRAM 3 SIMM
J6 72 DRAM 4 SIMM
J5 72 DRAM 5 SIMM
J4 72 DRAM 6 SIMM
J3 72 DRAM 7 SIMM
J11 60 Bcache 0 SIMM
J12 60 Bcache 1 SIMM
Main Memory/Bcache SIMMs
Note: To fill a 256-bit data path, all SIMM connectors J3
through J10 must be populated.
Note: Both Bcache SIMM connectors must be populated.
PCI Connectors
J22 184 PCI64 connector 0
J23 184 PCI64 connector 1
J24 124 PCI32 connector 2
J25 124 PCI32 connector 3
ISA Connectors
J19 98 ISA connector slot 0
J20 98 ISA connector slot 1
J21 98 ISA connector slot 2
Keyboard Connector
J32 6 Keyboard connector
2–10 System Configuration and Connectors
(continued on next page)

2.2 EB164 Connectors
Table 2–2 (Cont.) EB164 Connector Descriptions
Connector Pins Description
Mouse Connector
J34 6 Mouse connector
National 87312 Combination Chip Connectors
J33 26 Parallel port connector
Connects to an external 25-pin connector.
J27 10 Serial communication port 1 connector
Note: This connector can be used as a terminal port for the
debug monitor.
J26 10 Serial communication port 2 connector
J31 34 Diskette drive connector
J28 40 IDE drive connector
SROM Data/Clock
J13 6 SROM data/clock serial port input connector
Note: This connector can be used as a terminal port for the
Mini-Debugger.
J2 26 Header connector J2 is a straight double-row header with
J2—3/5, —7/9,
—11/13
J2—15/17 2 IDE drive active indicator pins
2 each Up to three 12-V cooling fans may be connected to these
standard 0.025-in pins on 0.10-in centers. Connections to
it may be made by means of individual 2- or 4-pin female
plugs. Figure 2–4 provides a detail of header connector J2.
System Enclosure Fans
pins.
IDE Drive Active Indicator
(continued on next page)
System Configuration and Connectors 2–11

2.2 EB164 Connectors
Table 2–2 (Cont.) EB164 Connector Descriptions
Connector Pins Description
J2—19/21/23/25 — Speaker connector pins
J2—26 1 Power on indicator pin
J2—8/10 2 System halt button pins
J2–12/14 2 System reset button pins
J2–18/20 2 Keyboard lock switch pins
Speaker
Power On Indicator
Connect LED from this pin to ground.
System Halt Button
System Reset Button
Keyboard Lock Switch
2–12 System Configuration and Connectors
(continued on next page)

Table 2–2 (Cont.) EB164 Connector Descriptions
Connector Pins Description
Power Connectors
J18 12 Board power connector
Pin Voltage/Signal
1 +3.3 V
2 +3.3 V
3 +3.3 V
4 Ground
5 Ground
6 Ground
7 Ground
8 Ground
9 Ground
10 +3.3 V
11 +3.3 V
12 +3.3 V
2.2 EB164 Connectors
(continued on next page)
System Configuration and Connectors 2–13

2.2 EB164 Connectors
Table 2–2 (Cont.) EB164 Connector Descriptions
Connector Pins Description
J29 12 Board power connector
Pin Voltage/Signal
1 p_dcok
2 Vdd (+5 V)
3 +12 V
4 –12 V
5 Ground
6 Ground
7 Ground
8 Ground
9–5V
10 Vdd (+5 V)
11 Vdd (+5 V)
12 Vdd (+5 V)
Note: Power for the EB164 is provided by a user-supplied
power supply. Digital does not provide this power supply.
(Refer to Chapter 5 for more information.)
J30 3 CPU fan power and sensor
Caution: Fan sensor required.
The fan must have a built-in sensor that drives a signal
if the airflow stops. The sensor must be connected to pin
J30—2. The fan supplied with the EB164 includes an airflow
sensor.
2–14 System Configuration and Connectors

Starting and Using the EB164
This chapter lists hardware, software, and accessories that users must obtain
to completely furnish a functioning computer system. The chapter then
describes how to configure the hardware and software. Finally, the chapter
describes how to start and use the EB164.
3.1 Hardware Requirements
Before turning on the power to your EB164, you must provide the following
components in addition to those supplied in the kit. The components needed
depend upon the intended use of the EB164 board.
• A 21164 Alpha microprocessor (266-, 300-, or 333-MHz speed).
• If a 300-MHz or 333-MHz microprocessor is used, the oscillator must be
changed. Refer to Appendix A for part numbers and sources. The board
ships with parts to complement a 266-MHz microprocessor.
• Eight 72-pin, 36-bit, 5-V, DRAM SIMM memory modules (connectors
J3 through J10). SIMMs must consist of identical devices. Digital
recommends that all SIMMs be purchased from the same vendor.
3
• Two Alpha L3 cache SRAM SIMMs (connectors J11 and J12). Part
numbers for 2MB cache sizes are listed in Appendix A.
• An industry-standard PC power supply that includes a 3.3-V dc output,
rated at a minimum of 339 W (refer to Appendix A).
• A PS/2 compatible 101-key keyboard.
• A PS/2 compatible mouse.
• A supported PCI or ISA bus graphics card, cables, and a compatible
monitor.
• A supported PCI or ISA bus SCSI controller and cables.
• A SCSI CD–ROM drive.
• An IDE or SCSI hard drive.
Starting and Using the EB164 3–1

3.1 Hardware Requirements
• A 3.5-in diskette drive and cable.
• A 9-pin serial line cable.
• A terminal or a serial line connection to a host system with appropriate
cables.
Refer to the Alpha Microprocessors Evaluation Board Windows NT 3.51
Installation Guide provided in the EB164 Windows NT 3.51 Installation Kit
and the Hardware Compatibility List for Windows NT to determine which
SCSI controllers and graphics cards are supported.
For more information about hardware requirements and for the location of
board connectors and jumpers, see Chapter 2.
3.2 Software Requirements
The following software media is required to install and run the Windows NT
operating system:
• A Windows NT 3.51 CD–ROM
• An EB164 Windows NT 3.51 installation diskette
3.3 Hardware Configuration
Once you have acquired the necessary hardware, it must be assembled into
a system. This section lists the necessary steps. The system does not have
to be assembled in the order presented. However, if you are installing the
motherboard into an enclosure, Digital recommends that you install the
microprocessor and heat sink first.
Caution: Static-Sensitive Component
Due to the sensitive nature of electronic components to static electricity,
Digital strongly advises that anyone handling the 21164 Alpha
microprocessor wear a properly grounded antistatic wrist strap. Use
of antistatic mats, ESD approved workstation, or exercising other good
ESD practices is recommended.
3–2 Starting and Using the EB164

3.3 Hardware Configuration
1. Install the 21164 Alpha microprocessor in ZIF socket U42.
a. Observe antistatic precautions.
b. Lift the ZIF socket actuator handle to a full 90° angle.
c. Make sure that all the pins on the 21164 are straight.
d. The ZIF socket and 21164 are keyed to allow for proper installation.
Align the 21164, with its missing AD01 pin, with the corresponding
plugged AD01 position on the ZIF socket. Gently lower into position.
e. Close the ZIF socket actuator handle to its locked position.
2. If you are installing a 266-MHz microprocessor, you do not need to change
any other components or associated jumper settings.
If you are installing a 300-MHz or 333-MHz microprocessor, you must
also reconfigure the clock divisor jumpers on header J1 as described in
Table 2–1. You must also change the oscillator. Refer to Appendix A for
part numbers and sources.
3. Install the heat sink and heat sink fan as directed in the following steps.
Heat sinks and accompanying fans are available from Digital in kit form,
or from recommended vendors as kits or component piece parts.
A TS30 manual nut/torque driver with the following attachments is
required to affix the heat sink and fan to a 21164:
• 1/4-in hex bit
• 7/16-in socket with 1/4-in hex drive
• #2 Phillips screwdriver bit
Install the heat sink only after the 21164 has been assembled to the
board ZIF socket.
Note
Starting and Using the EB164 3–3

3.3 Hardware Configuration
Refer to Figure 3–1 for heat sink and fan assembly details.
Figure 3–1 Fan/Heat Sink Assembly
Screw, 6-32 x 0.875 in
Qty 4
Guard, Fan
Fan
Clip, Heat Sink/Chip/Fan
Nut, Hex, 1/4-20, 2011-T3
Aluminum, 0.438 in Across
Flats, Qty 2
Torque to 20 +/- 2 in-lbs
Heat Sink, with Fan
Mounting Holes
a. Put the GRAFOIL thermal pad in place. The GRAFOIL pad is used
to improve the thermal conductivity between the chip package and the
heat sink by replacing micro air pockets with a less insulative material.
Perform the following steps to position the GRAFOIL pad:
1) Perform a visual inspection of the package slug to ensure that it is
free of contamination.
3–4 Starting and Using the EB164
Thermal Pad
21164 Alpha Microprocessor
LJ04412A.AI5

3.3 Hardware Configuration
2) Wearing clean gloves, pick up the GRAFOIL pad. Do not do this
with bare hands because skin oils can be transferred to the pad.
3) Place the GRAFOIL pad on the gold-plated slug surface and align
it with the threaded studs.
b. Attach the microprocessor heat sink. The heat sink material is clear
anodized, hot-water-sealed, 6061-T6 aluminum. The nut material is
2011-T3 aluminum (this grade is critical). Perform the following steps
to attach the heat sink:
1) Observe antistatic precautions.
2) Align the heat sink holes with the threaded studs on the ceramic
package.
3) Handle the heat sink by the edges and lower it on to the chip
package, taking care not to damage the stud threads.
4) Set a calibrated torque driver to 20 in-lb,62 in-lb, (2.3 N m,
6
0.2 N m.) The torque driver should have a mounted 7/16-in
socket.
5) Insert a nut into the 7/16-in socket, place on one of the studs, and
tighten to the specified torque. Repeat for second nut.
6) If the sink/chip/fan clip is used, install it properly by positioning
it over the assembly and hooking its ends around the ZIF socket
retainers.
c. Perform the following steps to attach the heat sink fan assembly:
1) Place the fan assembly on top of the heat sink, aligning the fan
mounting holes with the corresponding threaded heat sink holes.
Align the fan so that the fan power/sensor wires exit the fan closest
to connector J30 (see Figure 2–3). Fan airflow must be directed
into the heat sink (fan label facing down toward the heat sink).
2) Place the fan guard on top of the fan. Orient the guard so that the
corner mounting areas lay flush against the heat sink.
3) Secure the fan and fan guard to the heat sink with four
6–3220.875-in screws.
4) Plug the fan power/sensor cable into connector J30 (see
Figure 2–3).
Starting and Using the EB164 3–5

3.3 Hardware Configuration
4. Install the two L3 cache SRAM SIMMs into sockets J11 and J12. Refer to
Table 2–2 for socket locations.
5. Install eight system memory DRAM SIMMs. Refer to Table 2–2 for socket
locations.
a. Observe antistatic precautions. Handle SIMMs at the edges only to
prevent damage.
b. SIMMs must be installed in groups of eight consisting of identical
devices.
c. Hold the SIMM at an angle with the notch facing the key in the socket.
d. Firmly push the module into the connector and stand the module
upright.
e. Make sure that the SIMM snaps into the metal locking clips on both
ends.
6. If you intend to mount the motherboard in a system enclosure, do so now.
Install the power supply into the enclosure first, then the motherboard.
Appendix A lists a suggested enclosure and a suggested power supply. The
enclosure you use should be able to accept a standard, full-size PC AT
board.
7. Connect the power supply to the EB164 board, as shown in Figure 3–2,
with standard power to J29, and with 3.3-V dc power to J18.
8. If you are using an enclosure, mount the 3.5-in diskette drive, hard drive,
and CD–ROM drive. Refer to the manufacturer’s instructions for installing
these devices.
9. Connect the supplied 3.5-inch diskette drive. The 34-pin diskette drive
cable goes from connector J31 on your EB164 to the diskette drive. The
drive should be connected at the very end of the cable closest to the twist
in the cable. Attach a power connector to the drive. Again, make sure to
insert the connector in the proper orientation so that pin 1 on the cable
matches pin 1 on the board header (as indicated on the module).
10. Install the SCSI controller in a free PCI or ISA connector and attach the
CD–ROM drive. If you will be using a SCSI hard drive, install the hard
drive now. Refer to the manufacturer’s instructions for installing these
devices. Verify that a unique SCSI ID is assigned to each device you attach
to the SCSI bus.
3–6 Starting and Using the EB164

Figure 3–2 EB164 Power Connectors
EB164 Board
1
J29
21164
Microprocessor
3.3 Hardware Configuration
J29
Pin Voltage/Signal
p_dcok
1
Vdd
2 (+5 V)
3 +12 V
4 −12 V
5 Ground
6 Ground
7 Ground
8 Ground
9 −5 V
Vdd
10 (+5 V)
Vdd
11 (+5 V)
Vdd
12 (+5 V)
J18
J18
Pin Voltage/Signal
1 +3.3 V
1
2 +3.3 V
3 +3.3 V
4 Ground
5 Ground
6 Ground
7 Ground
8 Ground
9 Ground
10 +3.3 V
11 +3.3 V
12 +3.3 V
MK−2306−28
Starting and Using the EB164 3–7

3.3 Hardware Configuration
11. If you will be using an IDE hard drive, attach your IDE cable to connector
J28 in the proper orientation and install your hard drive. The disk
should be configured as the primary device on the IDE bus. Refer to the
manufacturer’s instructions for setting up the hard drive.
12. If you plan to use your EB164 on a network, install the Ethernet controller
board (DE435) in one of the PCI connectors as outlined in the DE435
documentation.
13. Install the graphics card into either a PCI or ISA connector, depending on
the card you are using. Connect the graphics card to a compatible monitor
following the graphics card manufacturer’s instructions.
14. Connect the keyboard cable to connector J32.
15. Connect the mouse cable to connector J34.
16. Connect the 9-pin serial port adapter cable, provided in the kit, to the
COM1 connector at J27. Insert the connector in the proper orientation, so
that pin 1 on the cable matches pin 1 on the board header (as indicated on
the module).
17. Connect your terminal to the COM1 port, using a cable arrangement
appropriate to your terminal. Set the terminal to 9600 baud, 8 data bits, 1
stop bit, no parity.
18. Connect miscellaneous items such as, enclosure fans, reset button, speaker,
power indicator, hard drive active indicator (if using an IDE drive),
keyboard lock switch, and so forth.
3.4 Software Configuration
Two firmware programs have been loaded into the EB164 1MB flash ROM.
They are the debug monitor and the Windows NT ARC firmware. The debug
monitor is a serial line monitor program used to perform software and
hardware debug functions. The Windows NT ARC firmware is used to load and
boot Windows NT. The EB164 system has been configured to start the Windows
NT ARC firmware by default.
The serial ROM firmware uses a value stored in the nonvolatile RAM of the
real-time clock to determine which firmware image to load. Once the Windows
NT ARC firmware is running, you can switch to the debug monitor firmware.
3–8 Starting and Using the EB164

3.4 Software Configuration
3.4.1 Starting Windows NT ARC Firmware
Start the Windows NT ARC firmware using the following procedure.
1. Verify that the jumper from J14-2 to J14-3 is inserted, allowing the flash
ROM to be written. If the Windows NT ARC firmware is unable to write to
flash ROM, it prints the
2. Verify that the jumper at J1–25/26 is installed (see CONF11 on the
module). The presence of the jumper at J1–25/26 forces the serial
ROM firmware to load the alternate image selected by the value in the
nonvolatile TOY RAM. The absence of this jumper overrides the value
stored in the TOY RAM and causes the first image, the debug monitor, to
be loaded.
3. Turn on the power to the EB164. After the power-up diagnostics are run,
the ARC console boot menu appears on the graphics display.
If the ARC console boot menu does not appear, check the output of COM1
for error messages and review your hardware configuration.
You are ready for software installation. Refer to the Alpha Microprocessors
Evaluation Board Windows NT 3.51 Installation Guide for instructions.
device error
message and stops.
3.4.2 Going to the Debug Monitor from Windows NT ARC Firmware
You may use either of these two methods to access the debug monitor from the
Windows NT ARC firmware.
A. Use the ARC firmware menus to choose the debug monitor.
1. At the Boot menu, choose Supplementary menu....
2. At the Supplementary menu, choose Setup the system....
3. At the Setup the system menu, choose Machine specific setup....
4. At the Machine specific setup menu, choose Debug Monitor.
5. Turn off the power to the EB164, then turn the power back on.
B. Turn off the power to the EB164, remove the jumper from J1-25/26
(CONF11 on the module), then turn on the power to the EB164.
Starting and Using the EB164 3–9

3.4 Software Configuration
3.4.3 Returning to Windows NT ARC Firmware from the Debug Monitor
The following methods may be used to return to the Windows NT ARC
firmware from the debug monitor.
A. If you used item A in section Section 3.4.2 to enter the debug monitor, then
use this procedure to return to Windows NT ARC firmware.
The firmware contained in the serial ROM on your EB164 determines
which firmware image is loaded from the flash ROM at power-up. The
serial ROM firmware uses a value stored in the nonvolatile RAM of the
real-time clock to determine which firmware image to load. At this point,
you want the serial ROM to load the Windows NT ARC firmware.
1. Use the following debug monitor commands to select Windows NT ARC
firmware, by writing the value 1 to the TOY RAM. and to verify the
selection:
EB164> bootopt nt
O/S type selected: "The Windows NT Operating System"
....Firmware type: "Windows NT Firmware"
EB164> bootopt
Predefined bootoptions are...
"0" "Alpha Evaluation Board Debug Monitor" "DBM"
"1" "The Windows NT Operating System" "NT"
"2" "OpenVMS" "VMS"
"3" "Digital UNIX" "UNIX"
O/S type selected: "The Windows NT Operating System"
....Firmware type: "Windows NT Firmware"
EB164>
The EB164 does not support the OpenVMS operating system.
2. Turn off power to the EB164. Verify the presence of a jumper at
J1–25/26 (see CONF11 on the module).
3. Turn on the power to the EB164. After the power-up diagnostics are
run, the ARC console boot menu appears on the graphics display.
3–10 Starting and Using the EB164
Note

3.4 Software Configuration
B. If you used item B in section Section 3.4.2 to enter the debug monitor, then
use this procedure to return to Windows NT ARC firmware.
1. Turn off the power to the EB164, insert the jumper from J1-25/26
(CONF11 on the module).
2. Turn on the power to the EB164. After the power-up diagnostics are
run, the ARC console boot menu appears on the graphics display.
If the ARC console boot menu does not appear, check the output of
COM1 for error messages and review your hardware configuration.
Starting and Using the EB164 3–11


4
Functional Description
This chapter describes the functional operation of the EB164. The description
introduces the Digital Semiconductor 21171 ASIC support chipset and
describes its implementation with the 21164 microprocessor, its supporting
memory, and I/O devices. Figure 1–1 shows the EB164 major functional
components.
Information, such as bus timing and protocol, found in other data sheets
and reference documentation is not duplicated. See Appendix B for a list of
supporting documents and order numbers.
Note
For detailed descriptions of bus transactions, chipset logic, and
operation, refer to the Alpha 21164 Microprocessor Hardware Reference
Manual and the DECchip 21171 Core Logic Chipset Technical Reference
Manual.
For details of the PCI interface, refer to the PCI System Design Guide.
4.1 PCI Interrupts and Arbitration
The following sections describe the EB164 interrupt and arbitration (arbiter)
logic.
4.1.1 Interrupts
PCI-, ISA-, and CIA-generated interrupts are each described. Figure 4–1 shows
the interrupt logic.
Functional Description 4–1

4.1 PCI Interrupts and Arbitration
Figure 4–1 Interrupt Logic
21164
jmp_irq3*
jmp_irq2*
jmp_irq1*
cpu_irq3
cpu_irq2
jmp_irq0*
jmp_pwr_fail*
jmp_mch_hlt**
error_nmi
eb164.5
cia_error
sio_nmi
Control,
pwr_fail_irq
mch_hlt_irq
cpu_irq0
cpu_irq1
MUX
rtc_irq_h
Pull−Down
and Address
I/O Interface,
sys_mch_chk_irq
eb164.5
Pull−Down
pci_isa_irq
cia_int
Pull−Down
Pull−Down
eb164.8
cpu_reset_l
Bridge
PCI−to−ISA
eb164.2
*From J1 jumpers
**From Halt switch
MK−2306−22
eb164.25
sio_int
PCI Bus
System
Interrupt
PLD
pci_isa_irq
xn
irq_reset_l
Decodes
sense_dis
ISA Bus
eb164.20−.22
PCI
Slots
pci_int _l
4–2 Functional Description
Ubus<7:0>
eb164.30
Combination
Keyboard
drq<7:5, 3:0>
ISA
Slots
eb164.27eb164.32
Controller
Controller
and Mouse
<7:3><12, 1>
irq<15:3 ,1>
eb164.26

4.1 PCI Interrupts and Arbitration
The PCI-to-ISA SIO bridge chip provides the functionality of two 8259
interrupt control devices. These ISA-compatible interrupt controllers are
cascaded such that 14 external and two internal interrupts are available. The
PCI interrupt acknowledge command should be used to read the interrupt
request vector from the SIO.
However, the EB164 has more interrupt signals than the 14 external interrupts
the SIO can handle. Therefore, all the ISA interrupts are sent to the SIO
except for the two CIA interrupts, the time-of-year (TOY) interrupt, and the
16 PCI interrupts. They are sent to an external interrupt PAL. This PAL
takes these interrupts, as well as an OR of the nonexistent memory (NMI)
and error signals from the SIO, and generates cpu_irq<3:0>. During reset,
cpu_irq<3:0> convey the system clocking ratios and delays, which are set by
jumpers on J1.
Table 4–1 lists each system interrupt, its fixed interrupt priority level (IPL),
and its EB164 implementation. Table 4–2 lists each SIO interrupt and its
EB164 implementation.
Table 4–1 EB164 System Interrupts
21164 Interrupt IPL
1
Suggested Usage EB164 Usage
cpu_irq<0> 20 Corrected system
cpu_irq<1> 21 — PCI and ISA interrupts
cpu_irq<2> 22 Interprocessor and
cpu_irq<3> 23 — Reserved
pwr_fail_irq 30 Powerfail interrupt Reserved
sys_mch_chk_irq 31 System machine
mch_hlt_irq — Halt Reserved
1
IPL = interrupt priority level (fixed)
error
timer interrupts
check interrupt
Corrected ECC error and
sparse space reserved
encodings detected by CIA
Time-of-year clock interrupt
SIO NMI and CIA errors
Functional Description 4–3

4.1 PCI Interrupts and Arbitration
Table 4–2 PCI-to-ISA SIO Bridge Interrupts
Priority Label Controller Internal/External Interrupt Source
1 IRQ0 1 Internal Internal timer 1
2 IRQ1 1 External Keyboard
3–10 IRQ2 1 Internal Interrupt from controller 2
3 IRQ8#
4 IRQ9 2 External ISA bus pin B04
5 IRQ10 2 External ISA bus pin D03
6 IRQ11 2 External ISA bus pin D04
7 IRQ12 2 External Mouse
8 IRQ13 2 External Reserved
9 IRQ14 2 External IDE
10 IRQ15 2 External ISA bus pin D06
11 IRQ3 1 External 87312 combination controller
12 IRQ4 1 External 87312 combination controller
13 IRQ5 1 External 87312 combination controller
14 IRQ6 1 External 87312 combination controller
15 IRQ7 1 External 87312 combination controller
1
2 External Reserved
1
The # symbol indicates an active low signal.
Interrupt PLDs Function
The MACH210A PLD is an 8-bit I/O slave on the ISA bus at hex addresses
804, 805, and 806. This is accomplished by a decode of the three ISA address
bits sa<2:0> and the three ecas_addr<2:0> bits.
Each interrupt can be individually masked by setting the appropriate bit in the
mask register. An interrupt is disabled by writing a 1 to the desired position
in the mask register. An interrupt is enabled by writing a 0. For example,
bit <7> set in interrupt mask register 1 indicates that the INTB2 interrupt is
disabled. There are three mask registers located at ISA addresses 804, 805,
and 806.
An I/O read transaction at ISA addresses 804, 805, and 806 returns the state of
the 17 PCI interrupts rather than the state of the masked interrupts. On read
transactions, a 1 means that the interrupt source shown in Figure 4–2 has
asserted its interrupt. The mask register can be updated by writing addresses
804, 805, or 806. The mask register is write-only.
4–4 Functional Description

Figure 4–2 Interrupt and Interrupt Mask Registers
Interrupt and Interrupt Mask Register 1 (ISA Address 804h)
76543210
Interrupt and Interrupt Mask Register 2 (ISA Address 805h)
76543210
Interrupt and Interrupt Mask Register 3 (ISA Address 806h)
76543210
RAZ = Read-as-Zero, Read-Only
Notes:
Interrupt Mask Register Is Write-Only
4.1.2 Arbitration
Arbitration logic is implemented in the Intel 82378ZB Saturn I/O (SIO)
chip. The arbitration scheme is flexible and software programmable. Refer
to the Intel 82420/82430 PCIset ISA and EISA Bridges document for more
information about programmable arbitration.
4.1 PCI Interrupts and Arbitration
inta0inta1inta2inta3intb0intb1intb2 sio
intb3intc0intc1intc2intc3intd0intd1intd2
RAZRAZRAZRAZRAZRAZRAZ intd3
LJ-04211.AI
4.2 ISA Bus Devices
Two dedicated ISA expansion slots are provided in addition to the combination
ISA/PCI slot. System support features such as serial lines, parallel port,
integrated device electronics (IDE), and diskette controller are embedded on
the module by means of an 87312 combination controller chip. Also shown is
the utility bus (Ubus) with its system support devices.
4.3 dc Power Distribution
The EB164 derives its system power from a user-supplied PC power supply.
The power supply must provide +12 V dc and –12 V dc, –5 V dc, +3 V dc,
and Vdd (+5 V dc). The dc power is supplied through power connectors J18
and J29. (See Figure 4–3.) Power is distributed to the board logic through
dedicated power planes within the 6-layer board structure.
Functional Description 4–5

4.3 dc Power Distribution
Figure 4–3 dc Power Distribution
Fans (J1)Flash ROM
Integrated
Circuits/Clocks
+5 V Pull−Ups
Spkr
eb164.22eb164.26
P/J30
Fan
21164
Pull−Downs
eb164.2
MK−2306−25
+3 V Pull−Ups
ISA Conn. PCI32 Conn.
Vdd
+12 V
23456
J29
−12 V
−5 V
718
4–6 Functional Description
+3 V
GND (Vss)
J18
293104115126
Power
Connectors
eb164.40
7
8
9
101112

As shown in Figure 4–3, the +12 V dc, –12 V dc, and –5 V dc are supplied to
ISA connectors J19, J20, and J21. The +12 V dc and –12 V dc are supplied
to ISA connectors and PCI32 connectors J24 and J25. The +12 V dc is also
supplied to the CPU fan connector J30, auxiliary fan connector pins on header
J2, and to the flash ROM write-enable conector J14. Vdd is supplied to ISA
connectors, PCI32 connectors and most of the board’s integrated circuits. The
+3 V dc is supplied to the 21164 microprocessor.
4.4 PCI Devices
The EB164 uses the PCI bus as the main I/O bus for the majority of peripheral
functions. The board implements the ISA bus as an expansion bus for system
support functions and relatively slow peripheral devices.
The PCI bus supports multiplexed, burst mode, read and write transfers.
It supports synchronous operation of between 25 MHz and 33 MHz. It also
supports either a 32-bit or 64-bit data path with 32-bit device support in
the 64-bit configuration. Depending upon the configuration and operating
frequencies, the PCI bus supports anywhere between 100MB/s (25-MHz, 32-bit)
to 264MB/s (33-MHz, 64-bit) peak throughput. The PCI provides parity on
address and data cycles. Three physical address spaces are supported:
4.3 dc Power Distribution
1. 32-bit memory space
2. 32-bit I/O space
3. 256-byte-per-agent configuration space
The bridge from the 21164 system bus to the 64-bit PCI bus is provided by the
CIA chip. It generates the required 32-bit PCI address for 21164 I/O accesses
directed to the PCI. It also accepts 64-bit double address cycles and 32-bit
single address cycles. However, the 64-bit address support is subject to some
constraints.
Functional Description 4–7

4.5 Flash ROM
4.5 Flash ROM
The flash ROM, sometimes called the system ROM, is a 1MB, nonvolatile,
writable ROM. After the serial ROM (SROM) code initializes the EB164
system, the flash ROM code prepares the system for booting. The flash ROM
headers, structure, and access methods are described here.
4.5.1 Special ROM Header
The MAKEROM tool is used to place a special header on ROM image files.
The SROM allows the system (flash) ROM to contain several different ROM
images, each with its own header. The header informs the SROM where to load
the image, and whether or not it has been compressed with the MAKEROM
tool. The header is optional for system ROMs containing a single image. If
the header does not exist, the complete 1MB system flash ROM is loaded
and executed starting at physical address zero. Figure 4–4 shows the header
content.
Figure 4–4 Special Header Content
31 0
Validation Pattern 5A5AC3C3
Inverse Validation Pattern A5A53C3C
Header Size (Bytes)
Image Checksum
Image Size (Memory Footprint)
Decompression Flag
Destination Address Lower Longword
Destination Address Upper Longword
Reserved<31:16>
Flash ROM Image Size
Optional Firmware ID<31:0>
Optional Firmware ID<63:32>
Header Checksum (excluding this field)
0x00
0x04
0x08
0x0C
0x10
0x14
0x18
0x1C
Header Rev<7:0>Firmware ID<15:8>
0x20
0x24
0x28
0x2C
0x30
4–8 Functional Description
MK−2306−19

Table 4–3 describes each entry in the special header.
Table 4–3 Special Header Entry Descriptions
Entry Description
4.5 Flash ROM
Validation and inverse
validation pattern
Header size (bytes) This longword provides the size of the header block, which
Image checksum This longword is used to verify the integrity of the ROM.
Image size The image size is used by the SROM code to determine how
Decompression flag The decompression flag informs the SROM code whether
Destination address This quadword contains the destination address for the
Firmware ID The firmware ID is a byte that specifies the firmware type.
This quadword contains a special signature pattern used to
validate that the special ROM header has been located. The
pattern is 5A5AC3C3A5A53C3C.
varies among versions of the header specification.
When the header is located, SROM code determines where
the image begins based on the header size. Additional data
added to the header is ignored by older SROM code.
A header size of 32 bytes implies version 0 of the header
specifications.
much of the system flash ROM should be loaded.
the MAKEROM tool was used to compress the ROM image
with a repeating byte algorithm. The SROM code contains
routines that execute the decompression algorithm. Other
compression and decompression schemes, which work
independently from this scheme, may be employed.
image. The SROM code loads the image at this address and
begins execution.
This information facilitates image boot options necessary to
boot different operating systems.
Firmware Name
Debug monitor 0 Alpha evaluation board
Windows NT 1 Windows NT ARC firmware
Alpha SRM 2 Alpha System Reference
Firmware
Type Firmware Description
debug monitor
Manual console
(continued on next page)
Functional Description 4–9

4.5 Flash ROM
Table 4–3 (Cont.) Special Header Entry Descriptions
Entry Description
Header revision The revision of the header specification used in this header.
Flash ROM image size The flash ROM image size reflects the size of the image as
Optional firmware ID This optional field can be used to provide additional
Header checksum The checksum of the header. This is used to validate the
This is necessary to provide for changes to the header
specification. Version 0 headers are identified by the size of
the header (32 bytes).
it is contained in the flash ROM.
firmware information such as firmware revision or a
character descriptive string of up to 8 characters.
presence of a header beyond the validation provided by the
validation pattern.
4–10 Functional Description

4.5.2 Flash ROM Structure
During the power-up and initialization sequence, the EB164 always loads the
first image if BOOT_OPTION=1 (jumper J1—25/26 not installed). Then the
first image (the debug monitor) will be booted.
If jumper J1—25/26 (BOOT_OPTION) is installed (see Figure 2–2), the EB164
reads the value at location 0x3F of the TOY RAM. The EB164 uses the value
found there to determine which image will be selected (see Table 4–4). The
selected image is loaded and executed.
Table 4–4 Flash ROM Image Selection
TOY RAM
1
Value
0x00 0 Evaluation board debug monitor firmware
0x01 1 Windows NT ARC firmware
0x02 2 Alpha SRM firmware (OpenVMS)
0x03 2 Alpha SRM firmware (Digital UNIX)
0x8n NA
Firmware ID2Image Description
4
4.5 Flash ROM
3
3
SROM code loads the nth image from flash ROM.
If n=0, the SROM code loads the entire flash ROM
contents.
If n=1, 2, . . . , the SROM code loads the first image,
second image, and so on.
1
Operating system type. Found at TOY RAM address 0x3F.
2
Found in image header.
3
Note: SRM firmware is not included in the EB164 kit.
The flash ROM contains only one of these images.
4
Not applicable.
If an image is specified and is not found, the EB164 loads the first image found
in the flash ROM with a valid header. If no valid header is found, the entire
1MB flash image is loaded at address 0x00000000.
The following sequence of steps describes how to change the value stored in
TOY RAM location 0x3F by using either the basic debug monitor commands or
the debug monitor
bootopt
command.
Functional Description 4–11

4.5 Flash ROM
Changing TOY RAM Location 0x3F—Debug Monitor
Use the debug monitor
In the example shown here, the
bootopt
command to change the value in location 3F.
bootopt
command is used to change the value
bootopt
in location 3F from 0 to 1:
EB164> bootopt
!
Predefined bootoptions are...
"0" "Alpha Evaluation Board Debug Monitor" "DBM"
"1" "The Windows NT Operating System" "NT"
"2" "OpenVMS" "VMS"
"3" "Digital UNIX" "UNIX"
O/S type selected: "Alpha Evaluation Board Debug Monitor"
....Firmware type: "DBM Firmware"
EB164> bootopt nt
"
O/S type selected: "The Windows NT Operating System"
....Firmware type: "Windows NT Firmware"
EB164> bootopt
#
Predefined bootoptions are...
"0" "Alpha Evaluation Board Debug Monitor" "DBM"
"1" "The Windows NT Operating System" "NT"
"2" "OpenVMS" "VMS"
"3" "Digital UNIX" "UNIX"
O/S type selected: "The Windows NT Operating System"
....Firmware type: "Windows NT Firmware"
EB164>
Command
!
Use the debug monitor
bootopt
which image is selected.
"
Use the debug monitor
from 0 to 1.
#
Use the debug monitor
has changed from 0 to 1.
4–12 Functional Description
command to see the image choices and note
bootopt nt
bootopt
command to verify that the selected image
command to change the selected image

4.5.3 Flash ROM Access
The flash ROM can be viewed as two banks of 512KB each. At power-up
the lower 512KB bank is accessed using the address range 86.FFF8.0000 to
86.FFFF.FFFF.
Setting address bit 19 (flash_adr19) allows you to access the higher 512KB
of flash ROM. Write a 1 to the register at address 0x800 to set address bit 19.
Manually deposit a 1 to address 0x800 or enter the following command from
the debug monitor:
> wb 800 1
The address range for the higher bank is 86.FFF8.0000 to 86.FFFF.FFFF, the
same as for the lower bank. Access is now to the higher bank and will continue
until the EB164 is reset, ora0iswritten to the register at address 0x800.
The write-enable jumper must be installed at J14—2/3 (see Figure 2–1
and Figure 2–2). This enables writing to the flash ROM.
4.5 Flash ROM
Note
Functional Description 4–13


EB164 Requirements, Power, and
This chapter describes the EB164 environmental requirements, power, and
physical board parameters.
5.1 Power Requirements
The EB164 derives its main dc power from a user-supplied power supply. The
board has a total power dissipation of 116 W, excluding any plug-in PCI and
ISA devices. Table 5–1 lists the power requirement for each dc supply voltage.
The power supply must supply a dcok signal to the system reset logic.
Table 5–1 Power Supply dc Current Requirements
Voltage Current
+3.3 V dc 16.0 A
+5 V dc 10.0 A
–5 V dc 0 A
+12 V dc 1.0 A
–12 V dc 100.0 mA
1
5
Parameters
1
Values indicated are for a fully populated EB164 system module excluding plug-in PCI and ISA
devices, with a CPU clock speed of 266 MHz.
The 21164 cooling fan must have a built-in sensor that will drive a
signal if the airflow stops. The sensor is connected to EB164 board
connector J30. When the signal is generated, it resets the system.
Caution: Fan Sensor Required
EB164 Requirements, Power, and Parameters 5–1

5.2 Environmental Requirements
5.2 Environmental Requirements
The 21164 microprocessor is cooled by a small fan blowing directly into the
chip’s heat sink. The EB164 motherboard is designed to run efficiently using
only this fan. Additional fans may be necessary depending upon cabinetry and
I/O board requirements.
The EB164 is specified to run within the following environment:
Parameter Specification
Operating temperature 10°C to 40°C (50°F to 104°F)
Storage temperature –55°C to 125°C (–67°F to 257°F)
Relative humidity 10% to 90% with maximum wet bulb temperature 28°C
Rate of (dry bulb)
temperature change
(82°F) and minimum dew point 2°C (36°F)
6
11°C/hour
2°C/hour (20°F/hour64°F/hour)
5.3 Physical Board Parameters
The EB164 board consists of a 6-layer printed-wiring board (PWB) with
components mounted to side 1 only. The board is populated with integrated
circuit packages together with supporting active and passive components. The
EB164 is a standard, full-size PC AT board with the following dimensions:
• Width: 30.73 cm (12.10 in ±0.0005 in)
• Length: 33.15 cm (13.05 in ±0.0005 in)
• Height: 6.0 cm (2.375 in)
The board can be used in certain desktop and deskside systems that have
adequate clearance for the 21164 heat sink and fan. All ISA and PCI
expansion slots are usable in standard desktop or deskside enclosures.
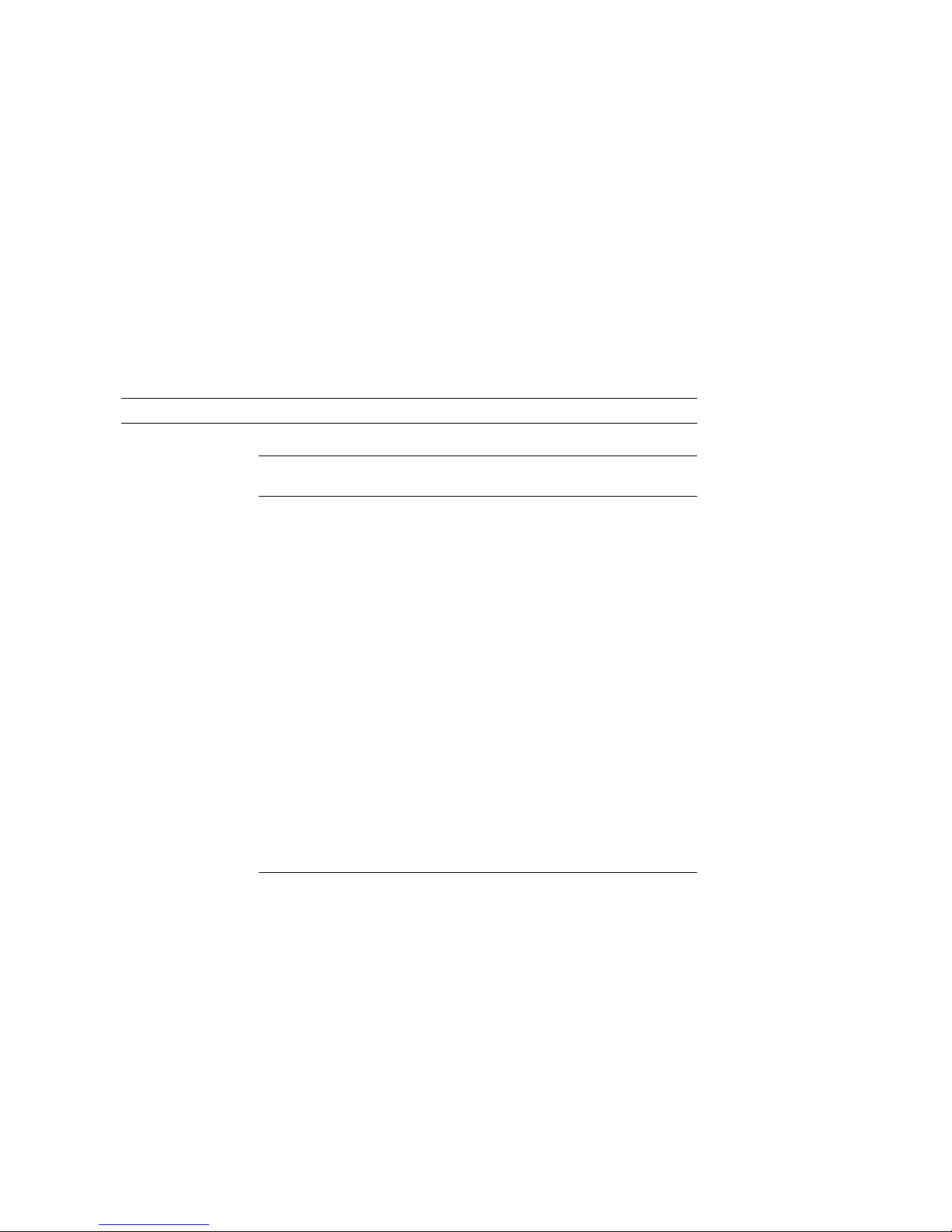
Figure 5–1 shows the board and component outlines, and identifies the major
components. Table 5–2 lists the components. Refer to Chapter 2 for jumper
and connector functions and locations.
5–2 EB164 Requirements, Power, and Parameters

Figure 5–1 Board Component Layout
1
33.15 cm
(13.05 in)
1
5.3 Physical Board Parameters
30.73 cm
(12.10 in)
11
13
12
7
8
1
34
5
6
9
2
10
14
1
16
19
18
17
20
21
1
15
MK−2306−32
EB164 Requirements, Power, and Parameters 5–3

5.3 Physical Board Parameters
Table 5–2 Board Component List
Locator
Number
1 U42 Digital Semiconductor 21164 Alpha microprocessor
2 U41 21171-CA control, I/O interface, and address (CIA) chip
3 U32 21171-BA data switch (DSW0) chip
4 U15 21171-BA data switch (DSW2) chip
5 U10 21171-BA data switch (DSW1) chip
6 U2 21171-BA data switch (DSW3) chip
7 U50 TriQuint TQ2061 phase-locked loop (PLL) clock chip
8 U49 26.66-MHz clock oscillator
9 U31 Main memory row address strobe (RAS) PAL
10 U30 Main memory row address strobe (RAS) PAL
11 U58 National 87312 combination chip
12 U57 ISA clock frequency generator chip
13 X2 14.318-MHz clock oscillator
14 U33 Motorola 88PL117 phase-locked loop (PLL) system clock chip
15 U17 Intel 82378ZB PCI-to-ISA SIO bridge chip
16 U12 Xilinx serial ROM (initialization code) chip
17 U11 MACH210A interrupt request and PCI arbiter PAL
18 U13 Ubus decoder PAL
19 U14 Flash ROM chip
20 U7 Intel 8242 mouse and keyboard controller chip
21 U6 Dallas Semiconductor DS1287 time-of-year (TOY) clock chip
Component
Number Component Description
5–4 EB164 Requirements, Power, and Parameters

Supporting Vendor Products
To obtain components and accessories that are not included with your EB164
motherboard, Digital Equipment Corporation suggests the following vendors.
In doing so, Digital does not warrant these components or guarantee that they
will function in all configurations.
A.1 Products Included
The following products are included in the EB164 motherboard kit.
• Alpha microprocessor clock solution. Components available from:
TriQuint Semiconductor
2300 Owen Street
Santa Clara CA 95054
Phone: 408–982–0900 ext 142
FAX: 408–982–0222
NEL Frequency (crystal oscillator source)
A
CPU Frequency Oscillator Frequency
21164-266 26.66 MHz (included) TQ2061 (included)
21164-300 30.0 MHz (not supplied) TQ2061 (included)
21164-333 33.33 MHz (not supplied) TQ2061 (included)
• Heat sink and fan solution. Components included: heat sink, GRAFOIL
pad, 2 hex nuts, heat sink clips, 60-mm fan, fan guard, and 4 screws.
Components available from:
United Machine and Tool Design
River Road
Fremont NH 03044
Phone 603–642–5040
FAX 603–642–5819
TriQuint PLL Part
Number
Supporting Vendor Products A–1

A.1 Products Included
• Bcache (Level 3) cache SIMMs
Cache Size
2MB @10 ns 128K280 2 Digital PN, 21A04-M1
SIMM
Configuration Qty Vendor/Part Number
A.2 Products Not Included
The following products are not included in the EB164 motherboard kit.
• DRAM system memory—70 ns DRAM SIMMs (5 V, 72 pin)
1M236, 2M236, 4M236, 8M236, 16M236.
The DRAM SIMMs must be n236 SIMMs.
• Power supply—+3.3 V, +5 V, –5 V, +12 V, –12 V, available from:
Emacs Electronics USA, Inc.
1410 Gail Borden Place C-4
El Paso TX 79935
Phone: 915–599–2688
Part number: AP2-5300F (300 W)
Autec Power Systems
69 Moreland Rd
Simi Valley, CA 93065
Phone: 805–522–0888
Part number: PCB-3330-1010-D (339 W)
Note
• Enclosure
Axxion part number TL17 (modified for Digital applications).
A–2 Supporting Vendor Products

Technical Support and Ordering
B.1 Obtaining Technical Support
If you need technical support or help deciding which literature best meets your
needs, call the Digital Semiconductor Information Line:
B
Information
United States and Canada
Outside North America
1–800–332–2717
+1–508–628–4760
B.2 Ordering Digital Semiconductor Products
To order the EB164, contact your local distributor.
The following table lists some of the semiconductor products available from
Digital. To obtain a Digital Semiconductor Product Catalog, contact the Digital
Semiconductor Information Line.
Product Order Number
Digital Semiconductor 21164 Alpha Microprocessor Motherboard
(EB164) 266-MHz Kit
(Supports the Windows NT operating system.)
Digital Semiconductor 21164 333-MHz Alpha Microprocessor 21164–333
Digital Semiconductor 21164 300-MHz Alpha Microprocessor 21164–300
Digital Semiconductor 21164 266-MHz Alpha Microprocessor 21164–266
Digital Semiconductor 21164 266-MHz Alpha Microprocessor for
Windows NT
21A04-A0
21164–P1
Technical Support and Ordering Information B–1

B.3 Ordering Digital Semiconductor Literature
B.3 Ordering Digital Semiconductor Literature
The following table lists some of the available Digital Semiconductor literature.
For a complete list, contact the Digital Semiconductor Information Line.
Title Order Number
Alpha AXP Architecture Reference Manual
Alpha AXP Architecture Handbook EC–QD2KA–TE
Alpha 21164 Microprocessor Data Sheet EC–QAEPC–TE
Alpha 21164 Microprocessor Hardware Reference Manual EC–QAEQC–TE
Alpha 21164 Microprocessor Product Brief EC–QAENB–TE
Alpha 21164 Microprocessor Evaluation Board Read Me
First
Alpha 21164 Microprocessor Evaluation Board Product
Brief
Digital Semiconductor 21164 Alpha Microprocessor
Evaluation Board User’s Guide
DECchip 21171 Core Logic Chipset Product Brief EC–QC3EB–TE
DECchip 21171 Core Logic Chipset Technical Reference
Manual
Answers to Common Questions about PALcode for Alpha
AXP Systems
PALcode for Alpha Microprocessors System Design Guide EC–QFGLB–TE
Alpha Microprocessors Evaluation Board Windows NT
3.51 Installation Guide
SPICE Models for Alpha Microprocessors and Peripheral
Chips: An Application Note
Alpha Microprocessors SROM Mini-Debugger User’s
Guide
Alpha Microprocessors Evaluation Board Debug Monitor
User’s Guide
Alpha Microprocessors Evaluation Board Software Design
Tools User’s Guide
1
EY–T132E–DP
EC–QD2VB–TE
EC–QCZZD–TE
EC–QD2UD–TE
EC–QE18B–TE
EC–N0647–72
EC–QLUAD–TE
EC–QA4XC–TE
EC–QHUXA–TE
EC–QHUVC–TE
EC–QHUWA–TE
1
To purchase the Alpha AXP Architecture Reference Manual, call 1–800–DIGITAL from the U.S. or
Canada, contact your local Digital office, or call Digital Press at 1–800–366–2665.
B–2 Technical Support and Ordering Information

B.4 Ordering Third-Party Literature
You can order the following third-party literature directly from the vendor:
Title Vendor
B.4 Ordering Third-Party Literature
PCI System Design Guide PCI Special Interest Group
PCI Local Bus Specification, Rev 2.1 PCI Special Interest Group
82420/82430 PCIset ISA and EISA
Bridges (includes 82378IB/ZB SIO)
PN 290483
UPI-41AH/42AH Universal Peripheral
Interface 8-Bit Slave Microcontroller
PN 210393
Flash Memory
PN 210830
PC87311/PC87312 (SuperI/O II/III)
Floppy Disk Controller with Dual
UARTs, Parallel Port, and IDE Interface
PN 11362
Hardware Compatability List Contact Microsoft’s Customer Service
1–800–433–5177 (U.S.)
1–503–797–4207 (International)
1–503–234–6762 (FAX)
(See previous entry.)
Intel Corporation
Literature Sales
P.O. Box 7641
Mt. Prospect, IL 60056 USA
1–800–628–8686
FaxBACK® Service
1–800–628–2283
BBS 1–916–356–3600
Intel Corporation
(See previous entry.)
Intel Corporation
(See previous entry.)
National Semiconductor Corporation
2900 Semiconductor Drive
P.O. Box 58090
Santa Clara, CA 95052 USA
1–800–272–9959
representatives at 1–800–426–9400,
or access CompuServe Information
Systems in Library 1 of the WINNT
forum (GO WINNT) or Library 17 of the
MSWIN32 forum (GO MSWIN32).
Technical Support and Ordering Information B–3


Index
A
Airflow requirements, 5–2
Alpha
documentation, B–2
Arbitration scheme, 4–5
Associated literature, B–2
B
Backup cache
See Bcache
Bcache
Digital part number, A–2
index jumpers, 2–5
SIMM connectors, 2–10
size jumpers, 2–4
speed jumpers, 2–5
subsystem, 1–3
BC_RD_FAST jumper, 2–7
Block diagram, 1–1
interrupt logic, 4–1
power distribution, 4–5
Board
configuration, 2–1
connectors, 2–8
jumpers, 2–1
Boot option jumper, 2–6
Bridge
See SIO chip
C
Cache
See Bcache
21171 chipset, 1–1
Chipset support, 1–1
Clock divisor jumper, 2–4
COM1 connector, 2–11
COM2 connector, 2–11
Components
See System components
Configuration, 2–1 to 2–14
hardware, 3–2
software, 3–8
Configuration jumpers, 2–1
Connectors, 2–8
Bcache SIMM, 2–10
CPU fan power, 2–14
CPU fan sensor, 2–14
debug monitor interface, 2–11
diskette, 2–11
DRAM SIMM, 2–10
IDE drive, 2–11
ISA bus, 2–10
keyboard, 2–10
Mini-Debugger, 2–11
mouse, 2–11
parallel port, 2–11
PCI bus, 2–10
power, 2–13, 2–14
serial interface ports, 2–11
speaker, 2–12
SROM port, 2–11
system enclosure fan power, 2–11
Index–1

Conventions, viii
Cooling fan, CPU
power connectors, 2–14
sensor connector, 2–14
Current
dc ampere requirements, 5–1
D
dc power distribution, 4–5
See also Power requirements
dc power requirements, 5–1
Debug and monitor ROM
system support, 1–5
Debug monitor, 3–8
interface connector, 2–11
Digital Semiconductor 21171 chipset, 1–1
Diskette drive, 1–8
connector, 2–11
controller, 1–4
hardware requirement, 3–2
installation, 3–6
Documentation, B–2
DRAM
SIMM connectors, 2–10
Dynamic RAM
See DRAM
Flash ROM, 1–5
developing code, 1–4
loading code, 1–4
write-enable jumper, 2–7
write-protect jumper, 2–7
Floppy drive
See Diskette drive
Functional description, 4–1 to 4–13
dc power distribution, 4–5 to 4–7
interrupts, 4–1 to 4–4
ISA bus devices, 4–5
PCI devices, 4–7
G
GRAFOIL pad, 3–4
H
Halt button, 2–12
Hard drive connector, 2–11
Hardware requirements, 3–1 to 3–2
Heat sink, 3–3, 3–4, 3–5
Heat sink fan, 3–3, 3–4, 3–5
CPU environment, 5–2
power connectors, 2–14
sensor, 5–1
sensor connector, 2–14
E
Environmental requirements, 5–2
F
Fan, CPU
See Heat sink fan
Fan, heat sink
See Heat sink fan
Fan, system enclosure
See System enclosure fan
Features
See System features
Index–2
I
IDE, 4–5
drive active pins, 2–11
drive cable, 3–8
drive connector, 2–11
interface, 1–4, 1–8
Industry Standard Architecture
See ISA
Integrated device electronics
See IDE
Interrupt mask registers, 4–4
Interrupts, 4–1
ISA
arbitration, 4–5
bus connectors, 2–10

ISA (cont’d)
devices, 4–5
interface overview, 1–4
J
Jumpers, 2–1
Bcache index, 2–5
Bcache size, 2–4
Bcache speed, 2–5
BC_RD_FAST, 2–7
boot option, 2–6
Flash ROM write-protect/write-enable,
2–7
Mini-Debugger, 2–6
system clock divisor, 2–4
system configuration, 2–1
K
Keyboard
connector, 2–10
lock switch, 2–12
L
L3 cache
See Bcache
Level 3 cache
See Bcache
Literature, B–2, B–3
M
Memory
SIMM connectors, 2–10
Memory subsystem, 1–3
See also DRAM
Mini-Debugger
connector, 2–11
jumper, 2–6
Mouse connector, 2–11
O
Operating systems
flash ROM support, 1–4
software support, 1–5
supported operating systems, 1–7
Ordering products, B–1
P
Parallel port connector, 2–11
Parts
ordering, B–1
PCI
arbitration, 4–5
bus connectors, 2–10
devices, 4–7
interface overview, 1–3
Peripheral component interconnect
See PCI
Physical board
component layout, 5–2
parameters, 5–2
Power connectors, 2–13, 2–14
Power distribution, 4–5
Power on indicator, 2–12
Power requirements, 5–1
See also Power distribution
Power supply
dc ampere requirements, 5–1
wattage requirements, 5–1
R
RAM
See DRAM; SRAM
Registers
interrupt mask, 4–4
Related documentation, B–2
Reset button, 2–12
ROM
See Flash ROM; Serial ROM (SROM)
Index–3

S
Saturn I/O chip
See SIO chip
Semiconductor Information Line, B–1
Serial interface connectors, 2–11
Serial ROM
See SROM
SIMM
connectors, 2–10
Single inline memory module
See SIMM
SIO chip, 1–3, 4–3, B–3
Software requirements, 3–2
Software support, 1–5
Speaker connection pins, 2–12
SRAM, 1–3, 2–6, 2–10, 3–1, 3–6
SROM
code, 1–5
connector, 2–11
system support, 1–5
Static RAM
See SRAM
Support chipset, 1–1
System components, 1–1
System enclosure fan
power connectors, 2–11
System features, 1–1
System I/O chip
See SIO chip
System ROM
See Flash ROM
System software
software support, 1–5
T
Technical support, B–1
Third-party documentation, B–3
Tools, 3–3
U
UART, 1–4
Ubus, 4–5
Universal asynchronous receiver–transmitter
See UART
Utility bus
See Ubus
V
Vendor products, A–1
W
Windows NT ARC firmware, 3–8
Index–4
 Loading...
Loading...