

Digi MiniCore RCM5700 Series, MiniCore RCM6700 Series, RCM5700, RCM5750, RCM5760 User Manual
...Page 1

MiniCore RCM5700/RCM6700
C-Programmable Ethernet Core Module
Downloaded from Elcodis.com electronic components distributor
User’s Manual
90001191_B
Page 2

MiniCore RCM5700/RCM6700 User’s Manual
Part Number 90001191 • Printed in U.S.A.
©2008–2010 Digi International Inc. • All right s reserved .
Digi International reserves the right to make changes and
improvements to its products without providing notice.
T rademarks
Rabbit, MiniCore, and Dynamic C are registered trademarks of Digi International Inc.
Wi-Fi is a registered trademark of the Wi-Fi Alliance.
Rabbit 5000, Rabbit 6000and MiniCore are trademark s of D igi Int ernatio nal Inc.
The latest revision of this manual is available at www.rabbit.com.
Downloaded from Elcodis.com electronic components distributor
Page 3

TABLE OF CONTENTS
1. Introduction
1.1 RCM5700/RCM6700 Features ......................6
1.2 Advantages of the RCM5700 and RCM6700 8
1.3 Development and Evaluation Tools ...............9
1.3.1 Standard Development Kit ....................9
1.3.2 Deluxe Development Kit .......................9
1.3.3 Software ...............................................10
1.3.4 Online Documentation .........................10
2. Getting Started
2.1 Install Dynamic C........................................11
2.2 Hardware Connections.................................12
2.2.1 Step 1 — Prepare the Interface Board for
Development ...............................................12
2.2.2 Step 2 — Install Module on
Interface Board ............................................13
2.2.3 Step 3 — Connect USB Cable .............15
2.3 Starting Dynamic C......................................17
2.4 Run a Sample Program.................................17
2.4.1 Troubleshooting ...................................17
2.5 Where Do I Go From Here?.........................18
2.5.1 Technical Support ................................18
3. Running Sample Programs
3.1 Introduction..................................................19
3.2 Sample Programs..........................................20
3.2.1 Use of Serial Flash (not supported for
RCM5700/RCM5710) ................................24
4.4.1 Clocks ..................................................38
4.4.2 Spectrum Spreader ..............................38
4.5 Memory........................................................39
4.5.1 RAM ....................................................39
4.5.2 Program Flash Memory .......................39
4.5.3 Mass Storage Serial Flash ...................39
4.5.4 Encryption RAM Memory ..................39
5. Software Reference
5.1 More About Dynamic C...............................40
5.2 Dynamic C Function Calls..........................42
5.2.1 Digital I/O ...........................................42
5.2.2 Serial Communication Drivers ............42
5.2.3 User Block ...........................................42
5.2.4 RCM5700/RCM6700 Cloning ............43
5.2.5 TCP/IP Drivers ....................................43
5.2.6 Serial Flash Drivers (not supported on
RCM5700/RCM5710) ................................43
5.3 Upgrading Dynamic C .................................43
5.3.1 Add-On Modules .................................43
Appendix A. RCM5700/RCM6700
Specifications
A.1 Electrical and Mechanical Characteristics..45
A.1.1 mini PCI Express Connector Design
Recommendations .......................................52
A.2 Rabbit 5000 and 6000 Microprocessor Charac-
teristics..............................................................54
A.3 Jumper Configurations................................55
4. Hardware Reference
4.1 RCM5700/RCM6700 Digital Inputs and Outputs
26
4.1.1 Memory I/O Interface ..........................33
4.1.2 Other Inputs and Outputs .....................33
4.2 Serial Communication..................................34
4.2.1 Serial Ports ...........................................34
4.2.2 Ethernet PHY .......................................36
4.2.3 Programming Port ...............................36
4.3 Programming Modes....................................37
4.3.1 Standalone Operation of the
RCM5700/RCM6700 ..................................38
4.4 Other Hardware............................................38
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 3
Downloaded from Elcodis.com electronic components distributor
Appendix B. Interface Board
B.1 Introduction.................................................58
B.1.1 Interface Board Features .....................59
B.2 Mechanical Dimensions and Layout...........60
B.2.1 Headers ...............................................61
B.3 Ethernet .......................................................62
B.3.1 RJ-45 ...................................................62
B.3.2 RCM6700 LEDs ................................. 62
B.4 Power Supply ..............................................63
B.5 Using the Interface Board............................ 64
B.5.1 Add Additional Boards .......................65
B.6 Interface Board Jumper Configurations......66
Page 4

Appendix C. Prototyping Board
C.1 Introduction .................................................68
C.1.1 Prototyping Board Features ................68
C.2 Mechanical Dimensions and Layout ...........69
C.2.1 Headers ...............................................71
C.3 Using the Prototyping Board.......................72
C.3.1 Add Additional Boards .......................73
Appendix D. Digital I/O Accessory Board
D.1 Introduction.................................................75
D.1.1 Digital I/O Accessory Board Features 75
D.2 Mechanical Dimensions and Layout...........76
D.2.1 Headers ...............................................77
D.3 Using the Digital I/O Accessory Board.......78
D.3.1 Configuration ......................................79
D.3.2 Add Additional Boards .......................81
Appendix E. Serial Communication
Accessory Board
E.1 Introduction..................................................83
E.1.1 Serial Communication Accessory Board
Features .......................................................83
E.2 Mechanical Dimensions and Layout ...........84
E.2.1 Headers ...............................................85
E.3 Using the Serial Communication Accessory
Board.................................................................86
E.3.1 Configuration ......................................87
E.3.2 Add Additional Boards .......................89
Appendix F. Using the TCP/IP Features
F.1 TCP/IP Connections.....................................90
F.2 TCP/IP Primer on IP Addresses...................92
F.2.1 IP Addresses Explained .......................94
F.2.2 How IP Addresses are Used ................95
F.2.3 Dynamically Assigned Internet Addresses
96
F.3 Placing Your Device on the Network..........97
F.4 Running TCP/IP Sample Programs .............98
F.4.1 How to Set IP Addresses in the Sample
Programs .....................................................99
F.4.2 How to Set Up your Computer for Direct
Connect .....................................................100
F.5 Run the PINGME.C Sample Program.......101
F.6 Running Additional Sample Programs With Di-
rect Connect....................................................102
F.7 Where Do I Go From Here?.......................103
Appendix G. Power Supply
G.1 Power Supplies..........................................104
G.1.1 Battery Backup for the
RCM5700/RCM5710 and RCM6700 Family .
105
G.1.2 Battery-Backup Circuit .....................106
G.1.3 Reset Generator .......................... ......106
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 4
Downloaded from Elcodis.com electronic components distributor
Page 5

1. INTRODUCTION
The RCM5700 and RCM6700 are compact modules in a mini PCI
Express form factor, and incorporate the powerful Rabbit® 5000 and
6000 microprocessors with integrated 10/100Base-T Ethernet func
tionality and onchip SRAM. The Rabbit® 5000 and 6000 microprocessor features include hardware DMA, I/O lines shared with up to six
serial ports and four levels of alternate pin functions that include vari
able-phase PWM, an external I/O bus, quadrature decoder, and input
capture. This equates to a MiniCore module that is fast, efficient, and
the ideal solution for a wide range of embedded applications.
Development Kits are available with the essentials that you need to
-
-
design your own microprocessor-based system, and includes a com
plete Dynamic C software development system. The Development Kit
also contains an Interface Board with USB and Ethernet connections
that will allow you to evaluate the RCM5700 or RCM6700, and a Pro
totyping Board to help you to develop your own applications. You will
also be able to write and test software for the RCM5700/RCM6700
modules, including Ethernet applications.
The RCM5700 has a Rabbit 5000 microprocessor operating at up to 50.0 MHz, flash memory,
two clocks (main oscillator and real-time clock), and the circuitry necessary to reset and manage
the Rabbit 5000. The RCM6700 has a Rabbit 6000 processor operating at up to 187.5 MHz and
1MB of internal SRAM. An edge connector brings out the MiniCore module user interface to a
52-pin mini PCI Express socket on the motherboard the core module is mounted on.
The RCM5700/RCM6700 receives its +3.3 V power from the motherboard on which it is
mounted. The MiniCore module can interface with other CMOS-compatible digital devices
through the motherboard.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 5
Downloaded from Elcodis.com electronic components distributor
Page 6

1.1 RCM5700/RCM6700 Features
• Small size: ranges from 1.20" × 2.00" × 0.12" (30 mm × 51 mm × 3 mm) for the RCM5700/
RCM6700 model to 1.20" × 2.00" × 0.73" (30 mm × 51 mm × 19 mm) for the RCM5760/
RCM6760 model
• Microprocessor: RCM5700: Rabbit 5000 running at 50.0 MHz
RCM6700: Rabbit 6000 running at 187.5 MHz
• Up to 35 general-purpose I/O lines each configurable with up to four alternate functions
• 3.3 V I/O lines
•
Six CMOS-compatible serial ports — f
and two ports are configurable as SDLC/HDLC serial ports
• Ethernet PHY interface chooses Ethernet interface automatically based on whether a crossover
cable or a straight-through cable is used in a particular setup
• External I/O bus can be configured for 8 data lines, 8 address lines (shared with parallel I/O
lines), and I/O read/write
• RCM5700: 128KB SRAM (on Rabbit 5000 chip) and 1MB flash memory, with 2MB serial
flash and 512KB SRAM on RCM5750/RCM5760 models
RCM6700: 1MB SRAM (on Rabbit 6000 chip) and 1MB serial flash, with 4MB serial flash
and additional 1MB external SRAM on RCM6750/6760 models.
our ports are configurable as a clocked serial port (SPI),
• Real-time clock (battery-backable on all models except the RCM5750/5760)
• Watchdog supervisor
There are four RCM5700 production models. Table 1-1 summarizes their main features.
Table 1-1. RCM5700 Features
Feature RCM5700 RCM5710 RCM5750 RCM5760
Microprocessor
Ethernet Port
External SRAM — 512KB (8-bit)
SRAM
Flash Memory (program) 1MB
Flash Memory
(mass data storage)
Serial Ports
10/100Base-T
PHY only
6 shared high-speed, CMOS-compatible ports:
6 are configurable as asynchronous serial ports;
4 are configurable as clocked serial ports (SPI);
2 are configurable as SDLC/HDLC serial ports;
1 asynchronous serial port is used during programming
Rabbit® 5000 at 50.0 MHz
10/100Base-T,
RJ-45, 2 LEDs
128KB (Rabbit® 5000 onchip)
— 2MB (serial flash)
10/100Base-T
PHY only
10/100Base-T,
RJ-45, 2 LEDs
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 6
Downloaded from Elcodis.com electronic components distributor
Page 7

The RCM5700 and RCM5750 models already have an Ethernet PHY device, the Integrated Circuit Systems ICS1893BK. The RCM5710 and RCM5760 are identical to the RCM5700 and
RCM5750 respectively, except that they have an integrated 10/100 Base-T magnetic RJ-45 jack
with two LEDs on the MiniCore printed circuit board.
There are four RCM6700 production models. Table 1-2 summarizes their main features.
Table 1-2. RCM6700 Features
Feature RCM6700 RCM6710 RCM6750 RCM6760
Microprocessor Rabbit® 6000 at 200.0 MHz
Ethernet Port
External SRAM — 1MB (16-bit)
RAM 1MB (Rabbit® 6000 onchip)
SRAM 32KB (Rabbit® 6000 onchip, battery-backable)
Flash Memory
(mass data storage)
Serial Ports
10/100Base-T
PHY only
1MB (serial flash) 4 MB (serial flash)
6 shared high-speed, CMOS-compatible ports:
6 are configurable as asynchronous serial ports;
4 are configurable as clocked serial ports (SPI);
2 are configurable as SDLC/HDLC serial ports;
1 asynchronous serial port is used during programming
10/100Base-T,
RJ-45, 2 LEDs
10/100Base-T
PHY only
10/100Base-T,
RJ-45, 2 LEDs
The Rabbit 6000 has an Ethernet PHY built into the processor . The RCM6710 and RCM6760 are
identical to the RCM6700 and RCM6750 respectively , except that they have an integrated 10/100
Base-T magnetic RJ-45 jack with two LEDs on the MiniCore printed circuit board.
Placing the RJ-45 Ethernet jack on the motherboard, which is what must be done with the
RCM5700/RCM6700 and RCM5750/RCM6750 models, provides significant design advantages
because the core module may then be placed anywhere on the motherboard. Rabbit’s Technical
Note TN266, PCB Layout for the Ethernet PHY Interface, provides complete design recommen
dations. If the RJ-45 Ethernet jack is on the MiniCore printed circuit board, as it is on the
RCM5710/RCM5760/RCM6710/RCM6760 modules, the edge of the MiniCore module with the
Ethernet jack must be positioned along the edge of the motherboard to allow access to the jack
since the entire assembly will likely be inside a customer-designed enclosure.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 7
Downloaded from Elcodis.com electronic components distributor
Page 8

All RCM5700/RCM6700 models are programmed through a USB connector on the motherboard
using a USB cable supplied with the Development Kit. The RCM5750/RCM5760 may also be
programmed remotely over an Ethernet link using the Remote Program Update library with
Dynamic C v. 10.56 or later. The RCM67xx series may also be used with the Remote Program
Update with Dynamic C v . 10.64 or later . See Application Note AN421, Remote Pr ogram Update,
for more information.
NOTE: The RabbitLink cannot be used to program the RCM5700 or RCM6700.
Appendix A provides detailed specifications for the RCM5700 and RCM6700.
1.2 Advantages of the RCM5700 and RCM6700
• Fast time to market using a fully engineered, “ready-to-run/ready-to-program” microprocessor
core.
• Competitive pricing when compared with the alternative of purchasing and assembling indi-
vidual components.
• Easy C-language program development and debugging
• Rabbit Field Utility to download compiled Dynamic C .bin files.
• Generous memory size allows large programs with tens of thousands of lines of code, and sub-
stantial data storage.
• Reference design allows integrated Ethernet port for network connectivity, with royalty-free
TCP/IP software.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 8
Downloaded from Elcodis.com electronic components distributor
Page 9

1.3 Development and Evaluation Tools
1.3.1 Standard Development Kit
The RCM5700/RCM6700 Standard Development Kit contains the hardware essentials you will
need to use your RCM5700 or RCM6700 module. These items are supplied in the standard version of the Development Kit.
• RCM5700 or RCM6700 module.
• Interface Board with standoffs/connectors.
• Prototyping Board with standoffs/connectors.
• USB cable to program MiniCore via Interface Board.
• Dynamic C CD-ROM, including product documentation on disk.
• Getting Started instructions.
• Registration card.
1.3.2 Deluxe Development Kit
In addition to the items included in the standard Development Kit, the Deluxe Development Kit
contains the following items.
• Universal AC adapter, 5 V DC, 2 A (includes Canada/Japan/U.S., Australia/N.Z., U.K., and
European style plugs). Development Kits sold in North America may contain an AC adapter
with only a North American style plug.
• Digital I/O and Serial Communication accessory boards for use with certain sample programs.
• CAT 5/6 Ethernet cable and DB9 to 10-pin header serial cable.
• Rabbit 5000 or 6000 Processor Easy Reference poster.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 9
Downloaded from Elcodis.com electronic components distributor
Figure 1-1. Standard Development Kit
Page 10

1.3.3 Software
The RCM5700/RCM5710 is programmed using version 10.44 or later of Dynamic C; the
RCM5750/RCM5760 requires version 10.56 or later of Dynamic C; and the RCM6700 family
requires version 10.64 or later. A compatible version is included on the Development Kit
CD-ROM.
In addition to the Web-based technical support included at no extra charge, a one-year telephonebased technical support subscription is also available for purchase. For further information and
complete documentation, contact your Rabbit sales representative or authorized distributor, or
visit our Web site at www.rabbit.com.
1.3.4 Online Documentation
The online documentation is installed along with Dynamic C, and an icon for the documentation
menu can be placed on the workstation’s desktop. Double-click this icon to reach the menu. If the
icon is missing, use your browser to find and load default.htm in the docs folder, found in the
Dynamic C installation folder.
The latest versions of all documents are always available for download from our Web sites.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 10
Downloaded from Elcodis.com electronic components distributor
Page 11

2. GETTING STARTED
This chapter describes the RCM5700/RCM6700 hardware in more
detail, and explains how to set up and use the accompanying Interface
Board.
NOTE: This chapter (and this manual) assume that you have the RCM5700/RCM6700 Development Kit. If you purchased an MiniCore module by itself, you will have to adapt the information
in this chapter and elsewhere to your test and development setup.
2.1 Install Dynamic C
Dynamic C must be installed to develop and debug programs for the RCM5700/RCM6700 series
of modules (and for all other Rabbit hardware). The latest version of Dynamic C is included on
CD in the Development Kit and is also available for download at www.rabbit.com.
If you have not yet installed Dynamic C, do so now by inserting the Dynamic C CD from the
Development Kit in your PC’s CD-ROM drive. If autorun is enabled, the CD installation will
begin automatically.
If autorun is disabled or the installation does not start, use the Windows Start | Run menu or Windows Disk Explorer to launch
The installation program will guide you through the installation process. Most steps of the process
are self-explanatory.
Once your installation is complete, you will have up to three new icons on your PC desktop. One
icon is for Dynamic C, another opens the documentation menu, and the third is for the Rabbit Field
Utility, a tool used to download precompiled software to a target system.
If you have purchased any of the optional Dynamic C modules, install them after installing
Dynamic C. The modules may be installed in any order. Y ou must install the modules in the same
folder where Dynamic C was installed.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 11
setup.exe
from the root folder of the CD-ROM.
Downloaded from Elcodis.com electronic components distributor
Page 12

2.2 Hardware Connections
There are three steps to connecting the Interface Board for use with Dynamic C and the sample
programs:
1. Insert standoffs/connectors on the Interface Board.
2. Install the MiniCore module on the Interface Board.
3. Connect the USB cable between the Interface Board and the workstation PC.
2.2.1 Step 1 — Prepare the Interface Board for Development
Insert a short plastic standoff supplied from the Development Kit in one of the corner holes from
the bottom of the Interface Board, then secure it with a long plastic standoff from above as shown
in Figure 2-2. Repeat this step so that plastic standoffs/connectors are in place at all four positions.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 12
Downloaded from Elcodis.com electronic components distributor
Figure 2-2. Insert Standoffs/Connectors
Page 13

2.2.2 Step 2 — Install Module on Interface Board
Position the MiniCore module with the edge connectors facing the mini PCI Express socket J1A at
an angle as shown in Figure 2-3 below. Insert the edge connectors into the mini PCI Express
socket J1A, then press down on the opposite edge of the MiniCore module to snap it into place in
holder J1B.
Figure 2-3. Install the MiniCore Module on the Interface Board
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 13
Downloaded from Elcodis.com electronic components distributor
Page 14

Should you need to remove the MiniCore module, use two fingernails to hold back the spring clip
at J1B from the two MiniCore corners, lift up the edge of the MiniCore above J1B, then pull the
MiniCore away to remove the edge connectors from the mini PCI Express socket.
CAUTION:
Remove power before attempting to insert or remove the MiniCore in
the mini PCI Express socket.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 14
Downloaded from Elcodis.com electronic components distributor
Page 15
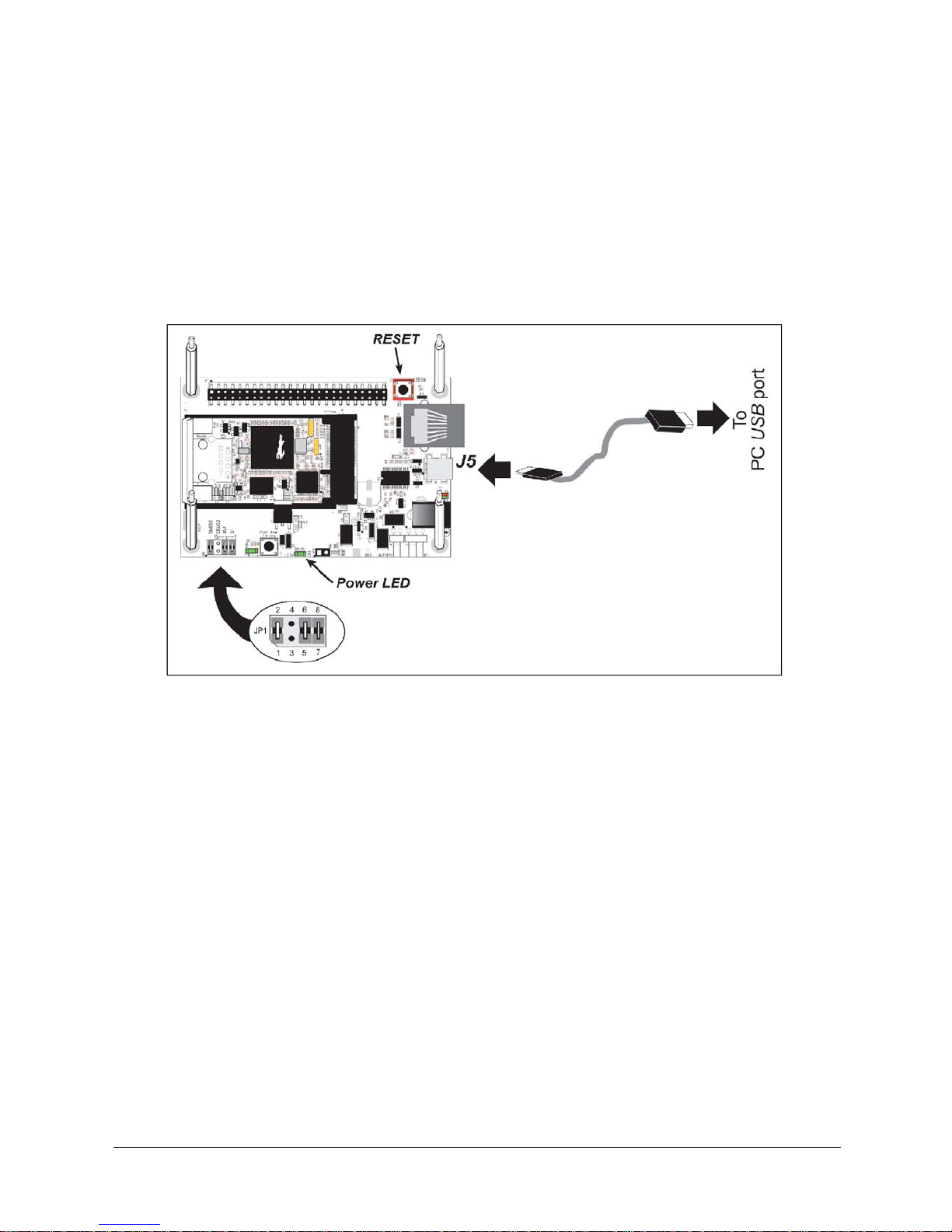
2.2.3 Step 3 — Connect USB Cable
The USB cable connects the RCM5700/RCM6700 to the PC running Dynamic C to download
programs and to monitor the MiniCore module during debugging. It also supplies power to the
Interface Board and the MiniCore via the USB interface.
Connect the USB cable between USB connector J5 on the Interface Board and your PC as shown
in Figure 2-4. Note that the USB cable connectors are different at either end, so there is only one
way to connect them between the PC and the Interface Board.
Figure 2-4. Connect USB Cable
Your PC should recognize the new USB hardware, and the LEDs next to the USB connector on
the Interface Board will flash — if you get an error message, you will have to instal l U SB d riv ers .
Drivers for Windows XP are available in the Dynamic C
Cable\WinXP_2K
other operating systems are available online at
folder — double-click
DPInst.exe
www.ftdichip.com/Drivers/VCP.htm.
Drivers\Rabbit USB Programming
to install the USB drivers. Drivers for
The green power LED on the Interface Board should light up when you connect the USB cable.
The MiniCore and the Interface Board are now ready to be used.
NOTE: A RESET button is provided on the Interface Board above the Ethernet jack to allow a
hardware reset without disconnecting power.
NOTE: Pins 1–2 on header JP1 on the Interface Board must be jumpered to download and debug
applications and sample programs with Dynamic C running. Pins 1–2 should be left unjumpered
to run an program already loaded in flash memory.
CAUTION: Do not jumper pins 1–3 on header JP1 on the Interface Board.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 15
Downloaded from Elcodis.com electronic components distributor
Page 16
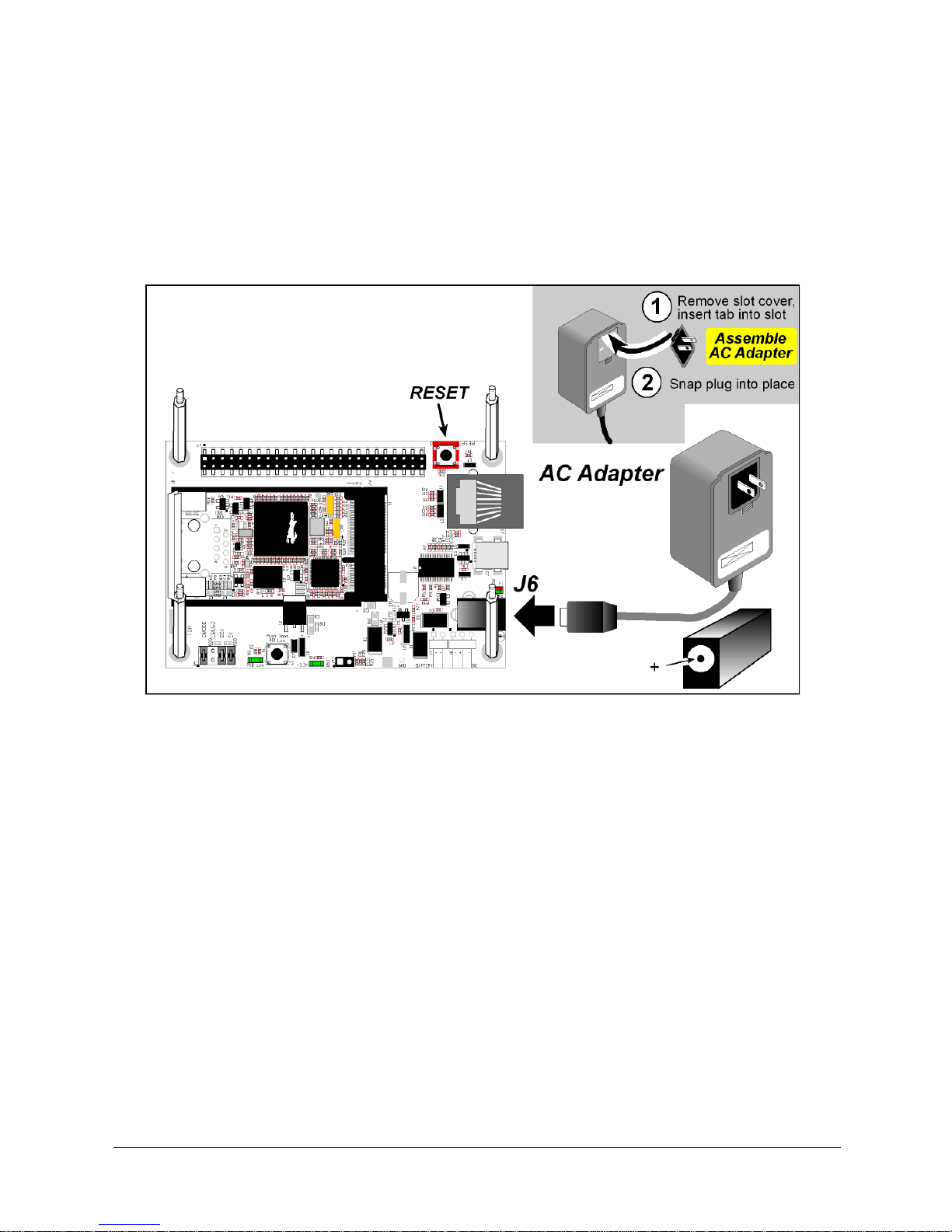
2.2.3.1 Alternate Power Supply Connections — Deluxe Development Kit
The deluxe Development Kit contains a separate AC adapter that may be used to supply power to
the Interface Board and the RCM5700/RCM6700 when the USB cable is not connected or when
more power is needed than the 500 mA the USB cable is able to supply . The AC adapter may also
be used to supply power when the USB cable is connected, in which case the power supply
through the USB cable will be disconnected automatically.
Figure 2-5. Alternate Power Supply Connections—Deluxe Development Kit
First, prepare the AC adapter for the country where it will be used by selecting the plug. The
deluxe Development Kit presently includes Canada/Japan/U.S., Australia/N.Z., U.K., and Euro
pean style plugs. Snap in the top of the plug assembly into the slot at the top of the AC adapter as
shown in Figure 2-5, then press down on the spring-loaded clip below the plug assembly to allow
the plug assembly to click into place. Release the clip to secure the plug assembly in the AC
adapter.
Connect the AC adapter to DC input jack J6 on the Interface Board as shown in Figure 2-5. Plug
in the AC adapter. The green power LED on the Interface Board should light up. The MiniCore
and the Interface Board are now ready to be used.
Note that the center pin of J6 is positive.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 16
Downloaded from Elcodis.com electronic components distributor
Page 17

2.3 Starting Dynamic C
If you already have Dynamic C installed, you are now ready to test your programming connections by running a sample program. Start Dynamic C by double-clicking on the Dynamic C icon
on your desktop or in your Start menu. Select Store Program in Flash on the “Compiler” tab in
the Dynamic C Options > Project Options menu. Then click on the “Communications” tab and
verify that Use USB to Serial Converter is selected to support the USB cable. Click OK.
You may have to select the COM port assigned to the USB cable on your PC. In Dynamic C, select
Options > Project Options, then select this COM port on the “Communications” tab, then click
OK.
2.4 Run a Sample Program
Find the file PONG.C, which is in the Dynamic C SAMPLES folder. To run the program, open it
with the File menu, compile it using the Compile menu, and then run it by selecting Run in the
Run menu. The STDIO window will open on your PC and will display a small square bouncing
around in a box.
This program shows that the CPU is working.
2.4.1 Troubleshooting
If you receive the message
Could Not Open Serial Port
, check that the COM port assigned
to the USB cable was identified and set up in Dynamic C as described above. This same error
occurs when Windows has already allocated the COM port to another process.
If you receive the message
No Rabbit Processor Detected
, the USB cable may be connected to the wrong COM port, or the connection may be faulty . First, check both ends of the USB
cable to ensure that it is firmly plugged into the PC and the USB connector in the Interface Board.
Ensure that the module is firmly and correctly installed in its connector on the Interface Board.
If Dynamic C appears to compile the BIOS successfully, but you then receive a communication
error message when you compile and load a sample program, it is possible that your PC cannot
handle the higher program-loading baud rate. Try changing the maximum download rate to a
slower baud rate as follows.
• Locate the Serial Options dialog on the “Communications” tab in the Dynamic C Options >
Project Options
menu. Select a slower Max download baud rate. Click OK to save.
If a program compiles and loads, but then loses target communication before you can begin
debugging, it is possible that your PC cannot handle the default debugging baud rate. Try lower
-
ing the debugging baud rate as follows.
• Locate the Serial Options dialog on the “Communications” tab in the Dynamic C Options >
Project Options
menu. Choose a lower debug baud rate. Click OK to save.
Press <Ctrl-Y> to f orce Dyna mic C to r ecom pile the B IOS. You should receive a
successfully
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 17
Downloaded from Elcodis.com electronic components distributor
message once this step is completed successfully.
Bios compiled
Page 18

2.5 Where Do I Go From Here?
If the sample program ran fine, you are now ready to go on to other sample programs and to develop
your own applications. The source code for the sample programs
them for your own use. The RCM5700/RCM6700 User’s Manual also provides complete hard-
ware reference information for the RCM5700/RCM6700, the Interface Board, the Prototyping Board,
and the accessory boards in the Deluxe Development Kit.
For advanced development topics, refer to the Dynamic C User’s Manual.
2.5.1 Technical Support
NOTE: If you purchased your MiniCore through a distributor or through a Rabbit partner, contact
the distributor or partner first for technical support.
If there are any problems at this point:
• Use the Dynamic C Help menu to get further assistance with Dynamic C.
• Check the Rabbit Technical Bulletin Board and forums at www.rabbit.com/support/bb/ and at
www.rabbit.com/forums/.
• Use the Technical Support e-mail form at www.rabbit.com/support/.
is provided to allow you to modify
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 18
Downloaded from Elcodis.com electronic components distributor
Page 19

3. RUNNING SAMPLE PROGRAMS
To develop and debug programs for the RCM5700/RCM6700 (and for
all other Rabbit hardware), you must install and use Dynamic C. This
chapter provides a tour of its major features with respect to the
RCM5700/RCM6700.
3.1 Introduction
To help familiarize you with the RCM5700/RCM6700 modules, Dynamic C includes several
sample programs. Loading, executing and studying these programs will give you a solid hands-on
overview of the RCM5700/RCM6700’ s capabilities, as well as a quick start with Dynamic C as an
application development tool.
NOTE: The sample programs assume that you have at least an elementary grasp of ANSI C. If
you do not, see the introductory pages of the Dynamic C User’s Manual for a suggested reading
list.
In order to run the sample programs discussed in this chapter and elsewhere in this manual,
1. Your RCM5700/RCM6700 must be installed on the Interface Board as described in Chapter 2,
“Getting Started.”
2. Dynamic C must be installed and running on your PC.
3. The USB cable must connect the Interface Board to your PC.
4. Power must be applied to the RCM5700/RCM6700 through the Interface Board.
Refer to Chapter 2, “Getting Started,” if you need further information on these steps.
To run a sample program, open it with the File menu (if it is not still open), then compile and run
it by selecting Run in the Run menu (or press F9). The RCM5700/RCM6700 must be in Program
Mode (see Figure 4-12) and must be connected to a PC using the USB cable.
Complete information on Dynamic C is provided in the Dynamic C User’s Manual.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 19
Downloaded from Elcodis.com electronic components distributor
Page 20

3.2 Sample Programs
Of the many sample programs included with Dynamic C, several are specific to the
RCM5700/RCM6700. These programs will be found in the
PLES\RCM6700
folder, depending on your MiniCore model. Sample programs in the
folder one level up are generally generic samples that can be run on any Rabbit-based product
Before you compile and run the following sample programs, make sure that pins 1–2, 5–6, and 7–
8 on header JP1 of the Interface Board are jumpered. Each sample program has comments that
describe the purpose and function of the program. Follow the instructions at the beginning of the
sample program.
CAUTION: Do not jumper pins 1–3 on header JP1 on the Interface Board.
SAMPLES\RCM5700
or
SAM-
SAMPLES
•
FLASHLED01.C
—demonstrates the use of costatements to flash LED DS1 on the Interface
Board. PD0 on the MiniCore is used to drive the LED.
•
FLASHLED01A.C
—demonstrates the use of a state machine with standard C constructs to flash
LED DS1on the Interface Board. PD0 on the MiniCore is used to drive the LED.
•
FLASHLED02.c
—demonstrates the use of costatements to detect and debounce switch S1
being pressed on the Interface Board. LED DS1 flashes on the Interface Board, and the rate at
which it flashes changes each time you press switch S1. I/O control for the LED is provided by
PD0 on the MiniCore, and PD1 detects the activity on switch S1.
•
FLASHLED02A.c
—detects and debounces switch S1 being pressed on the Interface Board.
LED DS1 flashes on the Interface Board, and the rate at which it flashes changes each time you
press switch S1. I/O control for the LED is provided by PD0 on the MiniCore, and PD1 detects
the activity on switch S1.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 20
Downloaded from Elcodis.com electronic components distributor
Page 21

The Digital I/O accessory board needs to be installed to run the
TOSERIAL.C
sample programs. This accessory board is included only with the Deluxe Develop-
SWITCHLEDS.C
and the
SERIAL-
ment Kit.
To install the Digital I/O accessory board, insert the strip of header pins included with the acces-
sory board into the socket at J12 on the bottom side of the Digital I/O accessory
up the Digital I/O accessory board with the Interface Board standoffs/
connectors and install the
board. Then line
Digital I/O accessory board pins into socket J2 on the Interface Board. Secure the Digital I/O
accessory board with the long plastic standoffs/connectors from above as shown in Figure 3-6.
Figure 3-6. Install Digital I/O Accessory Board
Pins 1–2, 3–4, 5–6, and 7–8 on headers JP5 and JP8 on the Digital I/O accessory board must be
jumpered. Pins 2–4 and 3–5 on header JP7 on the Digital I/O accessory board must also be jumpered.
•
SWITCHLEDS.C
—monitors switches S1, S2, S3, and S4 on the Digital I/O accessory board and
lights LEDs DS1–DS4 when the corresponding pushbutton switch is pressed. LEDs DS1–DS2
on the Digital I/O accessory board are controlled by PA4–PA7, and switches S1–S4 are con
-
trolled by PB4–PB7 respectively.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 21
Downloaded from Elcodis.com electronic components distributor
Page 22

The
SERIALTOSERIAL.C
SAMPLES\RCM6700\SERIAL
•
SERIALTOSERIAL.C
sample program is in the
SAMPLES\RCM5700\SERIAL
or
folder, depending on your MiniCore model.
—monitors switches S1, S2, S3, and S4 on the Digital I/O accessory
board and lights LEDs DS1–DS4 when the corresponding pushbutton switch is pressed. LEDs
DS1–DS2 on the Digital I/O accessory board are controlled by PA4–PA7, and switches S1–S4
are controlled by PB4–PB7 respectively. The sample program sends messages from Serial Port
B to Serial Port C to indicate that a switch was pressed. Messages received by Serial Port C are
displayed in Dynamic C’s STDIO window.
Before you compile and run this sample program, you will need to connect J2 pin 19 (PC0/TxD)
to J2 pin 22 (PC3/RxC) or the corresponding holes on P2.
If you are using the Serial Communication Accessory Board, you should connect pin 3 (TXD) on
header J3 to pin 5 (RXC) on header J4 instead.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 22
Downloaded from Elcodis.com electronic components distributor
Page 23

The Serial Communication accessory board needs to be installed to run the following serial sample program in the
SAMPLES\RCM5700\SERIAL
or
SAMPLES\RCM6700\SERIAL
folder, depending on your MiniCore model. This accessory board is included only with the Deluxe Development
Kit.
T o insta ll the Serial Communication accessory board, insert the stri p of header pins included with
the accessory board into the socket at J12 on the bottom side of the Serial Communication acces
sory
board. Then line up the
Digital I/O accessory board standoffs/
Serial Communication
connectors and install the Serial Communication accessory
accessory board with the Interface Board or
board pins into socket J2 on the Interface Board or the Digital I/O accessory board. Secure the
Serial Communication accessory board with the long plastic standoffs/connectors from above as
shown in Figure 3-6.
-
Figure 3-7. Install Serial Communication Accessory Board
Pins 1–2, 3–4, 5–6, and 7–8 on header JP5 on the Serial Communication accessory board must be
jumpered. Pins 1–2 and 3–4 on header JP7 on the Serial Communication accessory board must
also be jumpered.
•
SIMPLE5WIRE.C
—This program demonstrates 5-wire RS-232 serial communication with
flow control on Serial Port C and data flow on Serial Port D.
T o set up the Serial Communication accessory board, you will need to tie TxD and RxD on the
RS-232 header at J3, then tie CTS and RTS, also on J3, using jumpers as shown in Figure 3-7.
Once you have compiled and run this program, you can test flow control by disconnecting the
CTS jumper from RTS while the program is running. Characters will no longer appear in the
STDIO window, and will display again once CTS is connected back to R TS.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 23
Downloaded from Elcodis.com electronic components distributor
Page 24

Once you have loaded and executed these sample programs and have an understanding of how
Dynamic C and the RCM5700/RCM6700 modules interact, you can move on and try the other
sample programs, or begin developing your own application.
3.2.1 Use of Serial Flash (not supported for RCM5700/RCM5710)
The following sample programs from the
with the RCM5750/RCM5760 models.
•
SERIAL_FLASHLOG.C
—This program runs a simple W eb server and stores a log of hits on the
SAMPLES\RCM5700\Serial_Flash
folder may be used
home page of the serial flash “server.” This log can be viewed and cleared from a browser at
http://10.10.6.100/. You will likely have to first “configure” your network interface card for a
“10Base-T Half-Duplex,” “100Base-T Half-Duplex,” or an “Auto-Negotiation” connection on
the “Advanced” tab, which is accessed from the control panel (Start > Settings > Control
l) by choosing Network Connections.
Pane
•
SFLASH_INSPECT.C
—This program is a handy utility for inspecting the contents of a serial
flash chip. When the sample program starts running, it attempts to initialize a serial flash chip
on Serial Port B. Once a serial flash chip is found, the user can perform five different commands to print out the contents of a specified page, print out the contents of a range of pages,
clear (set to zero) all the bytes in a specified page, set all bytes on the specified page to a given
value, or save user-specified text to a selected page.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 24
Downloaded from Elcodis.com electronic components distributor
Page 25

4. HARDWARE REFERENCE
Chapter 4 describes the hardware components and principal hardware subsystems of the RCM5700/RCM6700. Appendix A, “RCM5700/RCM6700 Specifications,” provides complete physical and electrical specifications.
Figure 4-8 shows the Rabbit-based subsystems designed into the RCM5700/RCM6700.
Figure 4-8. RCM5700/RCM6700 Subsystems
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 25
Downloaded from Elcodis.com electronic components distributor
Page 26

4.1 RCM5700/RCM6700 Digital Inputs and Outputs
Figure 4-9 shows the RCM5700/RCM6700 pinouts for the edge connector.
The edge connectors are designed to interface with a 52-pin mini PCI Express socket.
Pin 8 has different functionality between the RCM5700 and RCM6700, due to differences in the
Ethernet PHY designs. On the RCM5700, it is the activity LED signal, while on the RCM6700 it
is +2.5V for the Ethernet interface.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 26
Downloaded from Elcodis.com electronic components distributor
Figure 4-9. RCM5700/RCM6700 Pinouts
Page 27

Figure 4-10 shows the use of the Rabbit 5000/6000 microprocessor ports in the RCM5700/
RCM6700 modules.
Figure 4-10. Use of Rabbit 5000/6000 Ports
The ports on the Rabbit microprocessor used in the RCM5700/RCM6700 are configurable, and so
the defaults can be reconfigured. Table 4-3 lists the Rabbit factory defaults and the alternate configurations.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 27
Downloaded from Elcodis.com electronic components distributor
Page 28
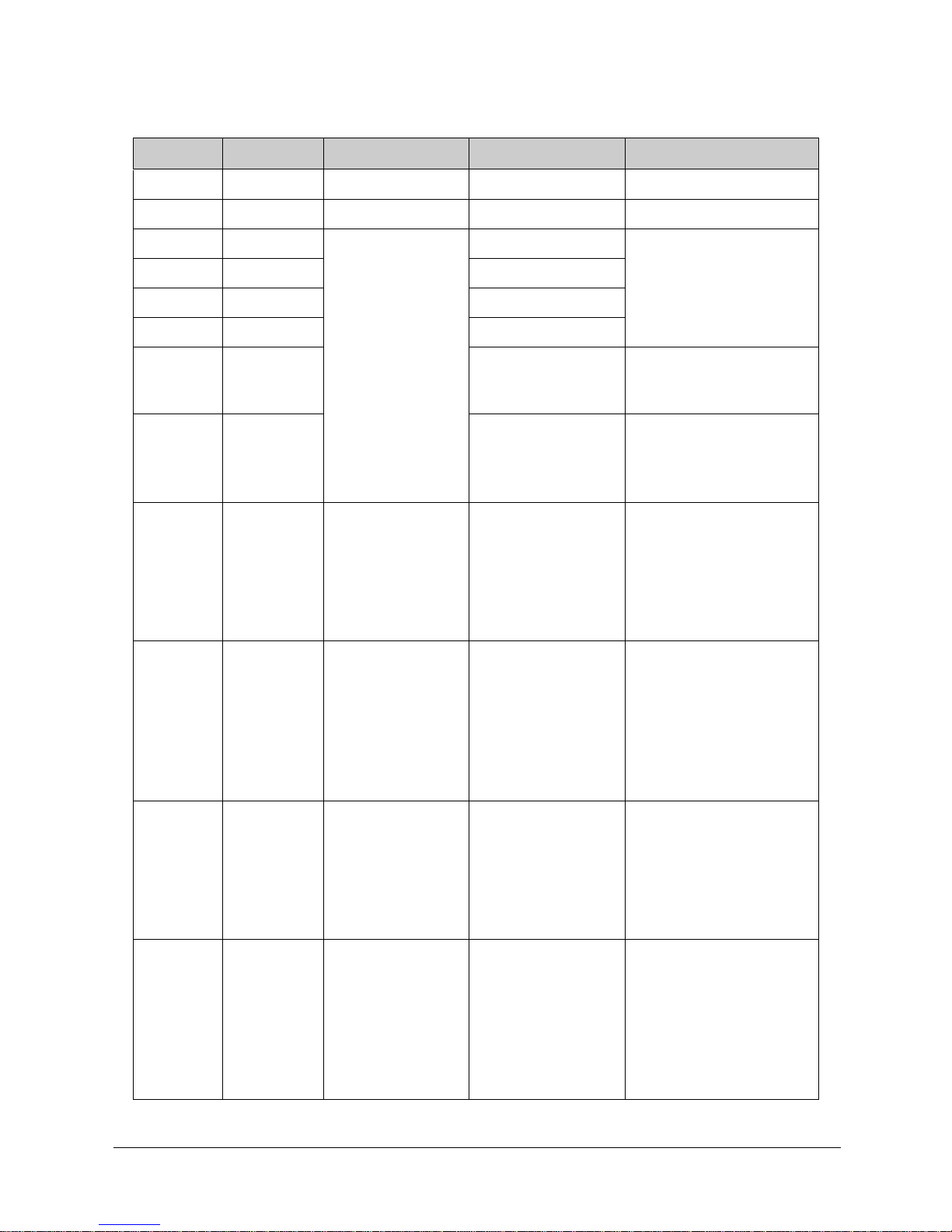
Table 4-3. RCM5700/RCM6700 Pinout Configurations
Pin Pin Name Default Use Alternate Use Notes
1 GND
2 +3.3 V
3 Tx+
4 Rx+
5 Tx–
6 Rx–
Ethernet
7 LNK
ACT
8
(RCM5700)
+2.5V
(RCM6700)
9 PE0 Input/Output
10 PE1 Input/Output
Not connected on the
RCM5710/5760/6710/6760
Requires external pulldown
on the RCM5700/5750/6700/
6750
Requires external pullup on
the RCM5700/5750
I/O Strobe I0
A20
Timer C0
TCLKF
INT0
QRD1B
I/O Strobe I1
A21
Timer C1
RXD/RCLKF
INT1
QRD1A
Input Capture
11 PE2 Input/Output
12 PE3 Input/Output
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 28
Downloaded from Elcodis.com electronic components distributor
I/O Strobe I2
A22
Timer C2
TXF
DREQ0
QRD2B
I/O Strobe I3
A23
Timer C3
RXC/RXF/SCLKD
DREQ1
QRD2A
Input Capture
Page 29

Table 4-3. RCM5700/RCM6700 Pinout Configurations
Pin Pin Name Default Use Alternate Use Notes
I/O Strobe I5
INT1
13 PE5 Input/Output
14 PE6 Input/Output
15 PE7 Input/Output
16 /RESET_IN Input Input to Reset Generator
17 PD0 Input/Output
PWM1
RXB/RCLKE
Input Capture
I/O Strobe I6
PWM2
TXE
DREQ0
I/O Strobe I7
PWM3
RXA/RXE/SCLKC
DREQ1
Input Capture
I/O Strobe I0
Timer C0
D8
INT0
SCLKD/TCLKF
QRD1B
Serial Port E
18 PD1 Input/Output
IA6
I/O Strobe I1
Timer C1
D9
INT1
RXD/RCLKF
QRD1A
Input Capture
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 29
Downloaded from Elcodis.com electronic components distributor
Page 30
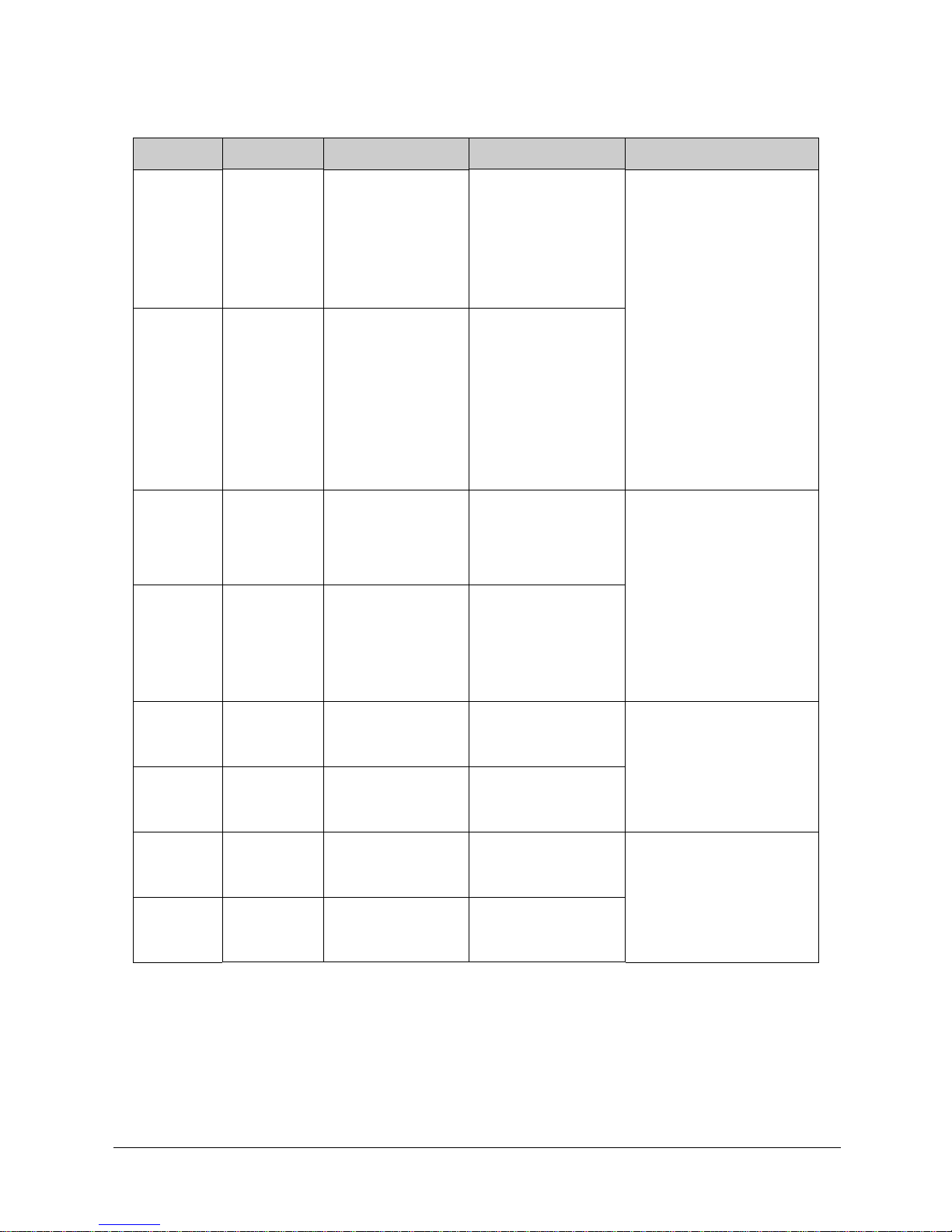
Table 4-3. RCM5700/RCM6700 Pinout Configurations
Pin Pin Name Default Use Alternate Use Notes
I/O Strobe I2
Timer C2
19 PD2 Input/Output
D10
DREQ0
TXF/SCLKC
QRD2B
20 PD3 Input/Output
21 PC0 Input/Output
22 PC1 Input/Output
23 PC2 Input/Output
24 PC3 Input/Output
25 PC4 Input/Output
26 PC5 Input/Output
IA7
I/O Strobe I3
Timer C3
D11
DREQ1
RXC/RXF
QRD2A
Input Capture
TXD
I/O Strobe I0
Timer C0
TCLKF
RXD/TXD
I/O Strobe I1
Timer C1
RCLKF
Input Capture
TXC/TXF
I/O Strobe I2
Timer C2
RXC/TXC/RXF
I/O Strobe I3
Timer C3
TXB
I/O Strobe I4
PWM0
RXB/TXB
I/O Strobe I5
PWM1
Serial Port F
Serial Port D
Serial Port C
Serial Port B
(The RCM5750/RCM5760
and RCM6700 family serial
flash uses Alternate Serial
Port B (PD4/PD5).
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 30
Downloaded from Elcodis.com electronic components distributor
Page 31

Table 4-3. RCM5700/RCM6700 Pinout Configurations
Pin Pin Name Default Use Alternate Use Notes
SCLKB (used by serial flash
on RCM5750/RCM5760 and
RCM6700 family.)
Due to serial boot flash
SCLKB
27 PB0 Input/Output
External I/O Address
IA6
28 /RESET Reset output Reset input
/SWR
29 PB2 Input/Output
External I/O Address
IA0
/SRD
30 PB3 Input/Output
External I/O Address
IA1
SA0
31 PB4 Input/Output
External I/O Address
IA2
requirements, the RCM6700
family’s edge connector pin 27
(PB0 / SCLKB) must not be
used for general purpose I/O.
Although reserved for SCLKB
only, this usage may be shared
with an off-minicore SPI
device.
Reset output from Reset
Generator or external reset
input
SA1
32 PB5 Input/Output
External I/O Address
IA3
/SCS
33 PB6 Input/Output
External I/O Address
IA4
/S LAVAT N
34 PB7 Input/Output
External I/O Address
IA5
Slave port data bus
35–42 PA[0:7] Input/Output
(SD0–SD7)
External I/O data bus
(ID0–ID7)
43 /IORD Output External I/O read strobe
44 VBAT_EXT Battery input
45 /IOWR Output External I/O write strobe
SCLKA
46 PB1 Input/Output
External I/O Address
Programming port SCLKA
IA7
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 31
Downloaded from Elcodis.com electronic components distributor
Page 32

Table 4-3. RCM5700/RCM6700 Pinout Configurations
Pin Pin Name Default Use Alternate Use Notes
47 STATUS Output Programming port
TXA/TXE
48 PC6 Input/Output
49 SMODE Input
50 PC7 Input/Output
51 GND
52 +3.3 V
I/O Strobe I6
PWM2
RXA/TXA/RXE
I/O Strobe I7
PWM3
SCLKC
Input Capture
Programming port
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 32
Downloaded from Elcodis.com electronic components distributor
Page 33

4.1.1 Memory I/O Interface
The Rabbit 5000 address lines (A0–A19) and data lines (D0–D7) are routed to the onboard flash
memory chip. I/O write (/IOWR) and I/O read (/IORD) are available for interfacing to external
devices.
Parallel Port A can also be used as an external I/O data bus to isolate external I/O from the main
data bus. Parallel Port B pins PB2–PB7 can also be used as an external address bus.
When using the external I/O bus for either Ethernet or the LCD/keypad module on the Prototyping Board or for any other reason, you must add the following line at the beginning of your program.
#define PORTA_AUX_IO // required to enable external I/O bus
Selected pins on Parallel Ports D and E as specified in Table 4-3 may be used for input capture,
quadrature decoder, DMA, and pulse-width modulator purposes.
4.1.2 Other Inputs and Outputs
The status, /RESET_IN, and SMODE I/O are normally associated with the programming port.
Since the status pin is not used by the system once a program has been downloaded and is running, the status pin can then be used as a general-purpose CMOS output. The programming port is
described in more detail in Section 4.2.3.
/RESET_IN is an external input used to reset the Rabbit 5000/6000 microprocessor and the MiniCore memory. /RESET is an output from the reset circuitry that can be used to reset other peripheral devices.
The two SMODE pins, SMODE0 and SMODE1, are tied together, and may be used as a special
input when the MiniCore is operating in the Run Mode. The logic state of these two pins determines the startup procedure after a reset.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 33
Downloaded from Elcodis.com electronic components distributor
Page 34

4.2 Serial Communication
The RCM5700/RCM6700 board does not have any serial level converters directly on the board.
However, an Ethernet or other serial interface may be incorporated on the board the MiniCore is
mounted on. For example, the Serial Communication accessory board in the Deluxe Development
Kit has an RS-232 transceiver, and the Interface Board has Ethernet and USB connections.
4.2.1 Serial Ports
There are six serial ports designated as Serial Ports A, B, C, D, E, and F. All six serial ports can
operate in an asynchronous mode up to the baud rate of the system clock divided by 8. An asynchronous port can handle 7 or 8 data bits. A 9th bit address scheme, where an additional bit is sent
to mark the first byte of a message, is also supported.
Serial Port A is normally used as a programming port, but may be used either as an asynchronous
or as a clocked serial port once application development has been completed and the MiniCore is
operating in the Run Mode.
Serial Ports B, C, and D can also be operated in the clocked serial mode. In this mode, a clock line
synchronously clocks the data in or out. Either of the two communicating devices can supply the
clock.
Note that Alternate Serial Port B, which uses PD4 and PD5, is used together with the clock on
PB0 for the serial flash on the RCM5750/RCM5760 and RCM6700 family. If you wish to use the
regular Serial Port B I/O pins (PC4 and PC5) as serial I/O pins with the RCM5750/RCM5760 or
RCM6700 family, your application must manage its sharing of Serial Port B so as to avoid any
conflicts with using the onboard serial flash.
Serial Ports E and F can also be configured as SDLC/HDLC serial ports. The IrDA protocol is
also supported in SDLC format by these two ports. Serial Ports E and F must be configured before
they can be used. The following macros show one way to do this.
#define SERE_TXPORT PEDR
#define SERE_RXPORT PEDR
#define SERF_TXPORT PFDR
#define SERF_RXPORT PFDR
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 34
Downloaded from Elcodis.com electronic components distributor
Page 35

Table 4-4 summarizes the possible parallel port pins for the serial ports and their clocks.
Table 4-4. Rabbit 5000 and 6000 Serial Port and Clock Pins
Serial Port A
Serial Port B
Serial Port C
Serial Port D
TXA PC6, PC7
RXA PC7,PE7 RXE PE7, PC7
Serial Port E
SCLKA PB1 RCLKE PE5, PC5
TXB PC4, PC5 TCLKE PE4, PC4
RXB PC5, PE5
SCLKB PB0 RXF PD3, PE3, PC3
TXC PC2, PC3 RCLKF PD1, PE1, PC1
RXC PC3, PD3, PE3 TCLKF PD0, PE0, PC0
SCLKC PD2, PE2, PE7, PC7
TXD PC0, PC1
RXD PC1, PD1, PE1
SCLKD
PD0, PD3, PE0, PE3,
PC3
Serial Port F
RCLKE/TCLKE and RCLKF/TCLKF must be
selected to be on the same parallel port as RXE/
TXE and RXF/TXF respectively.
TXE PE6, PC6
TXF PD2, PE2, PC2
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 35
Downloaded from Elcodis.com electronic components distributor
Page 36

4.2.2 Ethernet PHY
All RCM5700/RCM6700 models have an Ethernet PHY, which can either be accessed through
the Interface Board or directly on the RCM5710/5760/6710/6760. The PHY connections or integrated 10/100Base-T connections on MiniCores with an on-board RJ-45 jack are via 0 jumpers
on headers JP2–JP5 (see Table A-6 in Appendix A.3). Rabbit’ s Technical Note TN266, PCB Lay-
out for the Ethernet PHY Interface, provides further details about designing your own PHY
interface.
The pinout for the RJ-45 Ethernet jack (J1) is shown in Figure 4-11. Note that some Ethernet connectors are numbered in reverse to the order used here.
The RJ-45 Ethernet jack incorporates green and yellow LEDs, one to indicate Ethernet link (LINK),
and one to indicate Ethernet activity (ACT).
The RJ-45 connector is shielded to minimize EMI effects to/from the Ethernet signals.
Figure 4-11. RJ-45 Ethernet Port Pinout
4.2.3 Programming Port
The RCM5700/RCM6700 programming port is accessed via the USB connector (J5) on the Interface Board. The programming port uses the Rabbit CPU’s Serial Port A for communication.
Dynamic C uses the programming port to download and debug programs.
The programming port is also used to cold-boot the Rabbit processor on the RCM5700/RCM6700
after a reset.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 36
Downloaded from Elcodis.com electronic components distributor
Page 37

4.3 Programming Modes
The USB cable is used to connect the programming port of the RCM5700/RCM6700 to a PC
USB port via the Interface Board.
Whenever the MiniCore is reset, the operating mode is determined by the state of the SMODE
pins. The MiniCore is automatically in Program Mode when the SMODE pins, which are tied
together, are pulled up to +3.3 V. This happens when the MiniCore is installed on the Interface
Board, and pins 1–2 on header JP1 on the Interface Board are jumpered. When the SMODE pins
are pulled low by removing the jumpers from pins 1–2 on header JP1 on the Interface Board, the
Rabbit 5000/6000 will operate in the Run Mode once the MiniCore is reset.
Figure 4-12. Switching Between Program Mode and Run Mode
When you use the USB cable supplied with the Standard Development Kit while the MiniCore is
operating in the Run Mode, the MiniCore will reboot once approximately 2
tial startup. To avoid this reboot, you will have to use the AC adapter supplied with the Deluxe
Development Kit, your own 5 V power supply, or you will need a special USB cable that has a
separate “power only” connection option to supply power via the Interface Board to operate the
MiniCore in the Run Mode.
A program “runs” in either mode, but can only be downloaded and debugged when the MiniCore
is in the Program Mode.
Refer to the Rabbit 5000 Microprocessor User’s Manual or Rabbit 6000 Microprocessor User's
Manual for more information on the programming port.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 37
Downloaded from Elcodis.com electronic components distributor
seconds after its ini-
Page 38

4.3.1 Standalone Operation of the RCM5700/RCM6700
The RCM5700/RCM6700 must be programmed via the Interface Board or via a similar arrangement on a customer-supplied board. Once the MiniCore has been programmed successfully, reset
the MiniCore. The MiniCore may be reset by cycling power off/on or by pressing the RESET button on the Interface Board. The jumper across pins 1–2 on header JP1 on the Interface Board must
be removed in order for the MiniCore to operate in the Run Mode after it is reset. The MiniCore
module may now be removed from the Interface Board for end-use installation.
CAUTION: Power to the Interface Board or other boards should be disconnected when removing
or installing your RCM5700/RCM6700 module to protect against inadvertent shorts across the
pins or damage to the MiniCore if the pins are not plugged in correctly. Do not reapply power
until you have verified that the MiniCore module is plugged in correctly.
4.4 Other Hardware
4.4.1 Clocks
The RCM5700 takes advantage of the Rabbit 5000 microprocessor’s internal clock doubler. A
built-in clock doubler allows half-frequency crystals to be used to reduce radiated emissions. The
50.0 MHz frequency specified for the RCM5700 model is generated using a 25.0 MHz crystal.
The RCM5700 requires that the clock doubler remain enabled for proper Ethernet operation.
The RCM6700 requires that the clock doubler remain disabled, but takes advantage of the Rabbit
6000 microprocessor's internal PLL, providing clock speeds up to 187.5 MHz.
4.4.2 Spectrum Spreader
The Rabbit 5000/6000 features a spectrum spreader, which helps to mitigate EMI problems. The
spectrum spreader is on by default on the RCM5700, but is off on the RCM6700 because of its
115 MHz maximum clock limitation. It may also be turned off or set to a stronger setting. The
means for doing so is through a simple configuration macro as shown below.
1. Select the “Defines” tab from the Dynamic C Options > Project Options menu.
2. Normal spreading is the default, and usually no entry is needed. If you need to specify normal
spreading, add the line
ENABLE_SPREADER=1
For strong spreading, add the line
ENABLE_SPREADER=2
To disable the spectrum spreader, add the line
ENABLE_SPREADER=0
NOTE: The strong spectrum-spreading setting is not recommended since it may limit the maximum clock speed or the maximum baud rate. It is unlikely that the strong setting will be used in a
real application.
3. Click OK to save the macro. The spectrum spreader will be set according to the macro value
whenever a program is compiled using this project file.
NOTE: Refer to the Rabbit 5000 Microprocessor User’s Manual or the Rabbit 6000 Micropr o-
cessor User’s Manual for more information on the spectrum-spreading setting and the maximum
clock speed.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 38
Downloaded from Elcodis.com electronic components distributor
Page 39

4.5 Memory
4.5.1 RAM
RCM5700 boards have 128KB of onchip SRAM on the Rabbit 5000 microprocessor. The
RCM5750/RCM5760 models also have 512KB of external SRAM.
RCM6700 boards have 1MB of onchip RAM and 32KB of onchip battery-backable SRAM on the
Rabbit 6000 microprocessor. The RCM6750/6760 models also have 1MB of external SRAM.
4.5.2 Program Flash Memory
All RCM5700 models have 1MB of parallel flash memory installed at U3. RCM6700/RCM6710
have a 1MB serial flash and RCM6750/RCM6760 have a 4MB serial flash installed.
NOTE: Rabbit recommends that any customer applications should not be constrained by the sector size of the flash memory since it may be necessary to change the sector size in the future.
A “user block” area is defined to store persistent data. The function calls writeUserBlock()
and readUserBlock() are provided for this. Refer to the Dynamic C Function Reference Manual
for additional information.
4.5.3 Mass Storage Serial Flash
The RCM5750/RCM5760 have 2MB of serial flash available to store data and web pages. Sample
programs in the
memory.
SAMPLES\RCM5700\Serial_Flash
folder illustrate the use of serial flash
The RCM6700/RCM6710 have 1MB of serial flash memory, and RCM6750/RCM6760 have
4MB of serial flash memory. The serial flash is used to store the program code, but can also be
used to store data and web pages. Sample programs in the
SAMPLES\RCM6700\Serial_Flash
folder illustrate the use of the serial flash memory.
4.5.4 Encryption RAM Memory
The tamper detection feature of the Rabbit 5000/6000 microprocessor can be used to detect any
attempt to enter the bootstrap mode. When such an attempt is detected, the VBAT RAM memory
in the Rabbit 5000/6000 chip is erased.
Downloaded from Elcodis.com electronic components distributor
rabbit.com 39
Page 40

5. SOFTWARE REFERENCE
Dynamic C is an integrated development system for writing embedded
software. It runs on a Windows-based PC and is designed for use with
single-board computers and other devices based on the Rabbit micro
processor . Chapter 5 describes the libraries and function calls related to
the RCM5700/RCM6700.
5.1 More About Dynamic C
Dynamic C has been in use worldwide since 1989. It is specially designed for programming
embedded systems, and features quick compile and interactive debugging. A complete reference
guide to Dynamic C is contained in the Dynamic C User’s Manual.
You should do your software development in the flash memory on the RCM5700/RCM6700. The
flash memory and options are selected with the Options > Program Options > Compiler menu.
NOTE: Do not depend on the flash memory sector size or type in your program logic. The
RCM5700/RCM6700 and Dynamic C were designed to accommodate flash devices with
various sector sizes in response to the volatility of the flash-memory market.
Developing software with Dynamic C is simple. Users can write, compile, and test C and assembly code without leaving the Dynamic C development environment. Debugging occurs while the
application runs on the target. Alternatively , us ers can compile a program to an image file for later
loading. Dynamic C runs on PCs under Windows NT and later—see Rabbit’s Technical Note
TN257, Running Dynamic C
Dynamic C under Windows Vista. Programs c an be downl oaded at baud rates o f up to 460,800 bps
after the program compiles.
®
With Windows Vista®, for additional information if you are using
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 40
Downloaded from Elcodis.com electronic components distributor
Page 41

Dynamic C has a number of standard features.
• Full-feature source and/or assembly-level debugger, no in-circuit emulator required.
• Royalty-free TCP/IP stack with source code and most common protocols.
• Hundreds of functions in source-code libraries and sample programs:
Exceptionally fast support for floating-point arithmetic and transcendental functions.
RS-232 and RS-485 serial communication.
Analog and digital I/O drivers.
I2C, SPI, GPS, file system.
LCD display and keypad drivers.
• Powerful language extensions for cooperative or preemptive multitasking
• Loader utility program to load binary images into Rabbit targets in the absence of Dynamic C.
• Provision for customers to create their own source code libraries and augment on-line help by
creating “function description” block comments using a special format for library functions.
• Standard debugging features:
Breakpoints—Set breakpoints that can disable int errupts.
Single-stepp ing—Step into or over functions at a source or machine code level, µC/OS-II aware.
Code disassembly—T he disassemb ly window displays addresses, opcodes, mnemonics, and machine cycle
times. Switch between debugging at machine-code level and source-code level by simply opening or closing
the disassembly window.
Watch expressions—Watch expressions are compiled when defined, so complex expressions including func-
tion calls may be placed into watch expressions. Watch expressions can be updated with or without stopping
program execution.
Register window—All processor registers and flags are displayed. The contents of general registers may be
modified in the window by the user.
Stack window—shows the contents of the top of the stack.
Hex memory dump—displ ays the contents of memory at any address.
STDI O win dow—
debugging purposes.
printf
printf
outputs to this window and keyboard input on the host PC can be detected for
output may also be sent to a serial port or file.
Downloaded from Elcodis.com electronic components distributor
rabbit.com 41
Page 42

5.2 Dynamic C Function Calls
5.2.1 Digital I/O
The RCM5700/RCM6700 was designed to interface with other systems, and so there are no drivers written specifically for the Rabbit 5000/6000 I/O. The general Dynamic C read and write
functions allow you to customize the parallel I/O to meet your specific needs. For example, use
WrPortI(PEDDR, &PEDDRShadow, 0x00);
to set all the Port E bits as inputs, or use
WrPortI(PEDDR, &PEDDRShadow, 0xFF);
to set all the Port E bits as outputs.
When using the external I/O bus on the Rabbit 5000/6000 chip, add the line
#define PORTA_AUX_IO // required to enable external I/O bus
to the beginning of any programs using the auxiliary I/O bus.
The sample programs in the Dynamic C
SAMPLES\RCM5700 and SAMPLES\RCM6700
folders
provide further examples.
5.2.2 Serial Communication Drivers
Library files included with Dynamic C provide a full range of serial communications support. The
RS232.LIB
library provides a set of circular-buffer-based serial functions. The
PACKET.LIB
library provides packet-based serial functions where packets can be delimit e d by the 9th bit, by
transmission gaps, or with user-defined special characters. Both libraries provide blocking functions, which do not return until they are finished transmitting or receiving, and nonblocking functions, which must be called repeatedly until they are finished, allowing other functions to be
performed between calls. For more information, see the Dynamic C Function Reference Manual
and Rabbit’s Technical Note TN213, Rabbit Serial Port Software, both included with the online
documentation.
5.2.3 User Block
None of the user block memory area is reserved. This leaves the address range 0–1FF A in the user
block available for your application.
These address ranges may change in the future in response to the volatility in the flash memory
market, in particular sector size. The sample program
SAMPLES\USERBLOCK
folder can be used to determine the version of the ID block, the size of the
USERBLOCK_INFO.C
in the Dynamic C
ID and user blocks, whether or not the ID/user blocks are mirrored, the total amount of flash
memory used by the ID and user blocks, and the area of the user block available for your applica
tion.
-
The
USERBLOCK_CLEAR.C
sample program shows you how to clear and write the contents of the
user block that you are using in your application (the calibration constants in the reserved area and
the ID block are protected).
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 42
Downloaded from Elcodis.com electronic components distributor
Page 43

5.2.4 RCM5700/RCM6700 Cloning
The RCM5700/RCM6700 does not have a programming header, and is programmed through the
USB connection on the Interface Board. Rabbit’ s Cloning Board does not support cloning through
a USB connection. If there is a need to copy programs, the Rabbit Field Utility can be used to
download compiled Dynamic C .bin files.
5.2.5 TCP/IP Drivers
The TCP/IP drivers are located in the
LIB\Rabbit4000\TCPIP
folder.
Complete information on these libraries and the TCP/IP functions is provided in the Dynamic C
TCP/IP User’s Manual.
5.2.6 Serial Flash Drivers (not supported on RCM5700/RCM5710)
The Dynamic C
use the serial flash. The FAT file system function calls from in the Dynamic C
te
m\FAT_CONFIG
LIB\SerialFlash\SFLASH.LIB
.LIB
library are not supported.
library provides the function calls needed to
LIB\FileSys-
5.3 Upgrading Dynamic C
Dynamic C patches that focus on bug fixes are available from time to time. For the latest patches,
workarounds, and bug fixes, check the Web site www.rabbit.com/support/.
5.3.1 Add-On Modules
Starting with Dynamic C version 10.40, Dynamic C includes the popular µC/OS-II real-time
operating system, point-to-point protocol (PPP), FAT file system, RabbitWeb, and other select
libraries. Starting with Dynamic C version 10.56, Dynamic C includes the Rabbit Embedded
Security Pack featuring the Secure Sockets Layer (SSL) and a specific Advanced Encryption
Standard (AES) library.
In addition to the Web-based technical support included at no extra charge, a one-year telephonebased technical support subscription is also available for purchase.
For further information and complete documentation, visit our Web site at www.rabbit.com.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 43
Downloaded from Elcodis.com electronic components distributor
Page 44

APPENDIX A. RCM5700/RCM6700
SPECIFICATIONS
Appendix A provides the specifications for the RCM5700 and
RCM6700.
MiniCore RCM5700/RCM6700 User ’s Manual rabbit.com 44
Downloaded from Elcodis.com electronic components distributor
Page 45

A.1 Electrical and Mechanical Characteristics
Figures A-1(a) and A-1(b) show the mechanical dimensions for the RCM5700/RCM6700 and
RCM5760/RCM6760. The related dimensions for the RCM5710/6710 and RCM5750/RCM6750
are listed in Table A-1. (All measurements are in inches followed by millimeters enclosed in parentheses.)
Figure A-1(a). RCM5700/RCM6700 Dimensions
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 45
Downloaded from Elcodis.com electronic components distributor
Page 46

Figure A-1(b). RCM5760/RCM6760 Dimensions
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 46
Downloaded from Elcodis.com electronic components distributor
Page 47

It is recommended that you allow for an “exclusion zone” of 0.08" (2 mm) around the
RCM5700/RCM6700 top and bottom and 0.04" (1 mm) around the three non-connector edges
when the RCM5700/RCM6700 is incorporated into an assembly that includes other printed circuit boards. This “exclusion zone” that you keep free of other components and boards will allow
for sufficient air flow, and will help to minimize any electrical or electromagnetic interference
between adjacent boards. Figure A-2 shows this “exclusion zone” for the RCM5700/RCM6700
model.
Figure A-2. RCM5700/RCM6700 “Exclusion Zone”
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 47
Downloaded from Elcodis.com electronic components distributor
Page 48

Table A-1 lists the electrical, mechanical, and environmental specifications for the RCM5700.
Table A-1. RCM5700 Specifications
Parameter RCM5700 RCM5710 RCM5750 RCM5760
Microprocessor
EMI Reduction Spectrum spreader for reduced EMI (radiated emissions)
Ethernet Port
Flash Memory (program) 1MB
Flash Memory
(mass data storage)
External SRAM — 512KB (8-bit)
SRAM
Backup Battery
General-Purpose I/O
Additional Inputs Reset in
Additional Outputs Status, reset out
External I/O Bus
10/100Base-T
PHY only
— 2MB (serial flash)
Connection for user-supplied backup
battery
(to support RTC)
up to 35 parallel digital I/0 lines configurable with four layers of alternate
functions
8 address lines (shared with parallel I/O lines),
Rabbit® 5000 at 50.0 MHz
10/100Base-T,
RJ-45, 2 LEDs
128KB (Rabbit® 5000 onchip)
Can be configured for 8 data lines and
plus I/O read/write
10/100Base-T
PHY only
None
10/100Base-T,
RJ-45, 2 LEDs
6 high-speed, CMOS-compatible ports:
• all 6 configurable as asynchronous (with IrDA), 4 as clocked serial (SPI),
Serial Ports
and 2 as SDLC/HDLC
• 1 clocked serial port shared with programming port
Serial Rate Maximum asynchronous baud rate = CLK/8
Slave Interface
Real-Time Clock Yes
Timers
Watchdog/Supervisor Yes
Pulse-Width Modulators
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 48
Slave port allows the RCM5700 to be used as an intelligent peripheral device
slaved to a master processor
Ten 8-bit timers (6 cascadable from the first),
one 10-bit timer with 2 match registers, and
one 16-bit timer with 4 outputs and 8 set/reset registers
4 channels synchronized PWM with 10-bit counter or
4 channels variable-phase or synchronized PWM with 16-bit counter
Downloaded from Elcodis.com electronic components distributor
Page 49

Table A-1. RCM5700 Specifications
Parameter RCM5700 RCM5710 RCM5750 RCM5760
Input Capture
Quadrature Decoder
Power
Operating Temperature –40 °C to +85°C
Humidity 5% to 95%, noncondensing
Connectors
Board Size
2-channel input capture can be used to time input signals from various port
pins
2-channel quadrature decoder accepts inputs
from external incremental encoder modules
3.15 V DC (min.) – 3.45 V DC (max.)
70 mA @ 3.3 V (typical — without Ethernet)
200 mA @ 3.3 V (typical — with Ethernet)
Edge connectors for interface with
52-pin mini PCI Express socket
1.20" × 2.00" ×
0.12"
(30 mm × 51 mm
× 3 mm)
1.20" × 2.00" ×
0.70"
(30 mm × 51 mm
× 18 mm)
1.20" × 2.00" ×
0.27"
(30 mm × 51 mm
× 7 mm)
1.20" × 2.00" ×
0.73"
(30 mm × 51 mm
× 19 mm)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 49
Downloaded from Elcodis.com electronic components distributor
Page 50

Table A-2 lists the electrical, mechanical, and environmental specifications for the RCM6700.
Table A-2. RCM6700 Specifications
Parameter RCM6700 RCM6710 RCM6750 RCM6760
Microprocessor
EMI Reduction
Ethernet Port
Flash Memory
(mass data storage)
External SRAM — 1MB (16-bit)
RAM
SRAM 32KB (Rabbit 6000 onchip, battery-backable)
Backup Battery
General-Purpose I/O
Additional Inputs Reset in
Additional Outputs Status, reset out
External I/O Bus
10/100Base-T
up to 35 parallel digital I/0 lines configurable with four layers of alternate
functions
Spectrum spreader for reduced EMI (radiated emissions)
PHY only
1 MB (serial flash) 4 MB (serial flash)
Connection for user-supplied backup battery
8 address lines (shared with parallel I/O lines),
Rabbit® 6000 at 187.5 MHz
(when running below 115 MHz)
10/100Base-T,
RJ-45, 2 LEDs
1MB (Rabbit® 6000 onchip)
(to support RTC)
Can be configured for 8 data lines and
plus I/O read/write
10/100Base-T
PHY only
10/100Base-T,
RJ-45, 2 LEDs
6 high-speed, CMOS-compatible ports:
• all 6 configurable as asynchronous (with IrDA), 4 as clocked serial (SPI),
Serial Ports
and 2 as SDLC/HDLC
• 1 clocked serial port shared with programming port
Serial Rate Maximum asynchronous baud rate = CLK/8
Slave Interface
Real-Time Clock Yes
Timers
Watchdog/Supervisor Yes
Pulse-Width Modulators
Input Capture
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 50
Slave port allows the RCM6700 to be used as an intelligent peripheral device
slaved to a master processor
Ten 8-bit timers (6 cascadable from the first),
one 10-bit timer with 2 match registers, and
one 16-bit timer with 4 outputs and 8 set/reset registers
4 channels synchronized PWM with 10-bit counter or
4 channels variable-phase or synchronized PWM with 16-bit counter
2-channel input capture can be used to time input signals from various port
pins
Downloaded from Elcodis.com electronic components distributor
Page 51

Table A-2. RCM6700 Specifications
Parameter RCM6700 RCM6710 RCM6750 RCM6760
Quadrature Decoder
210 mA @ 3.3V
(typical -- with
Power
Operating Temperature –40 °C to +85°C
Humidity 5% to 95%, noncondensing
Connectors
Board Size
Ethernet)
120 mA @ 3.3V
(typical -- without
Ethernet
1.20" × 2.00" ×
0.12"
(30 mm × 51 mm
× 3 mm)
2-channel quadrature decoder accepts inputs
from external incremental encoder modules
3.15 V DC (min.) – 3.45 V DC (max.)
250 mA @ 3.3V
(typical -- with
Ethernet)
130 mA @ 3.3V
(typical -- without
Ethernet)
Edge connectors for interface with
220 mA @ 3.3V
(typical -- with
Ethernet)
130 mA @ 3.3V
(typical -- without
Ethernet)
52-pin mini PCI Express socket
1.20" × 2.00" ×
0.70"
(30 mm × 51 mm
× 18 mm)
1.20" × 2.00" ×
0.27"
(30 mm × 51 mm
× 7 mm)
260 mA @ 3.3V
(typical -- with
Ethernet)
140 mA @ 3.3V
(typical -- without
Ethernet)
1.20" × 2.00" ×
0.73"
(30 mm × 51 mm
× 19 mm)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 51
Downloaded from Elcodis.com electronic components distributor
Page 52

A.1.1 mini PCI Express Connector Design Recommendations
The MiniCore is mounted on the Interface Board via a mini PCI Express connector and a corresponding locking latch connector. These are offered by manufacturers as a matched set, although
in some cases different manufacturer’s parts may be interchangeable. Table A-3 lists the recom-
mended parts for the mini PCI Express connector and the locking latch connector used for the Interface
Board. (All measurements are in inches followed by millimeters enclosed in parentheses.)
Table A-3. Interface Board Connector-Related Parts
Connector Part Manufacturer Part Number
mini PCI Express Connector Pinrex 984-63-0 5220 2 498-0090
Latch Connector FOXCONN AS0B226S68K-7F 498-0091
Figure A-3 shows a footprint for the SMT connectors in Table A-3.
Rabbit Store Part
Number
Figure A-3. PCB SMT Footprint for Pinrex and FOXCONN Connectors
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 52
Downloaded from Elcodis.com electronic components distributor
Page 53

Other manufacturers such as Molex offer similar connectors and latches, but these can have different mechanical structures and PCB footprints to what we use on the Interface Board. Table A-4
lists a pair of matched Molex parts that might be used.
Table A-4. Molex Connector-Related Parts
Connector Part Molex Part Number
mini PCI Express Connector 67910-0002
Latch Connector 48099-4000
Follow the PCB design and layout recommendations and considerations provided by the manufacturer for the connector and latch that you select.
The MiniCore may also be mounted with standoffs instead of a latch connector — this is the type of
mounting recommended for the MiniCore to maximize both the vibration resistance and the ground
connections via the standoffs between the MiniCore module and the board it is mounted on. The
height of the standoffs will depend on the mini PCI Express connector selected — Table A-5 provides some examples. Figure A-4 shows a footprint for this mounting option based on the mini
PCI Express connector in Table A-3.
Figure A-4. PCB Standoff Footprint with mini PCI Express Connectors
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 53
Downloaded from Elcodis.com electronic components distributor
Page 54

Table A-5. Standoff Heights Based on mini PCI Express Connectors
mini PCI Express Connector
Height
6.8 mm 4.4 mm Used with Interface Board
9.2 mm 6.8 mm Used with Accessory Kit
Standoff Height Remarks
The SMT connectors are ideal in a development environment, where the latch connector facilitates swapping MiniCore modules as development progresses. The absence of holes also maximizes trace routing flexibility on the printed circuit board. The standoff option offers better
vibration resistance and grounding once you are ready to deploy your application based on the
RCM5700/RCM6700.
The Rabbit store sells an accessory kit (Part No. 101-1306) with the standoffs, screws, and mini
PCI Express connector needed to mount an MiniCore module using the footprint shown in Figure
A-4. The heights of the mini PCI Express connector and the associated standoffs in the accessory
kit are shown in millimeters at right.
A.2 Rabbit 5000 and 6000 Microprocessor Characteristics
The Rabbit 5000 Microprocessor User’s Manual and Rabbit 6000 Microprocessor User's Man-
ual, which are included with the online documentation, provide complete specifications and tim-
ing diagrams for the Rabbit 5000 and 6000 microprocessors.
Rabbit’s Technical Note TN227, Interfacing External I/O with Rabbit Microprocessor Designs,
which is also included with the online documentation, contains suggestions for interfacing I/O
devices to the Rabbit 5000/6000 microprocessors.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 54
Downloaded from Elcodis.com electronic components distributor
Page 55

A.3 Jumper Configurations
Figure A-5 shows the header locations used to configure the various RCM5700/RCM6700
options via jumpers. Note that some early versions of the RCM5700 model sold in 2008 and 2009
do not have jumper locations JP2–JP5 — this does not affect the functionality of the RCM5700
model.
Figure A-5. Location of RCM5700/RCM6700 Configurable Position
Table A-6 lists the configuration options for the RCM5700, and Table A-7 lists the configuration
options for the RCM5700.
Table A-6. RCM5700 Jumper Configurations
Header Description Pins Connected
1–2 More than 1MB
JP1 Flash Memory Size
2–3 Up to 1MB
1–2 Tx+ to RJ-45 jack (J1)
JP2 Tx+
2–3 Tx+ to mini PCI Express pins
1–2 Tx– to RJ-45 jack (J1)
JP3 Tx–
2–3 Tx– to mini PCI Express pins
1–2 Rx– to RJ-45 jack (J1)
JP4 Rx–
2–3 Rx– to mini PCI Express pins
1–2 Rx+ to RJ-45 jack (J1)
JP5 Rx+
2–3 Rx+ to mini PCI Express pins
NOTE: The jumper connections are made using 0 surface-mounted resistors.
Factory
Default
×
RCM5710/
RCM5760
RCM5700/
RCM5750
RCM5710/
RCM5760
RCM5700/
RCM5750
RCM5710/
RCM5760
RCM5700/
RCM5750
RCM5710/
RCM5760
RCM5700/
RCM5750
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 55
Downloaded from Elcodis.com electronic components distributor
Page 56

Table A-7. RCM6700 Jumper Configurations
Header Description Pins Connected
1–2 Tx+ to RJ-45 jack (J1)
JP2 Tx+
2–3 Tx+ to mini PCI Express pins
1–2 Tx– to RJ-45 jack (J1)
JP3 Tx–
2–3 Tx– to mini PCI Express pins
1–2 Rx– to RJ-45 jack (J1)
JP4 Rx–
2–3 Rx– to mini PCI Express pins
1–2 Rx+ to RJ-45 jack (J1)
JP5 Rx+
2–3 Rx+ to mini PCI Express pins
NOTE: The jumper connections are made using 0 surface-mounted resistors.
Factory
Default
RCM6710/
RCM6760
RCM6700/
RCM6750
RCM6710/
RCM6760
RCM6700/
RCM6750
RCM6710/
RCM6760
RCM6700/
RCM6750
RCM6710/
RCM6760
RCM6700/
RCM6750
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 56
Downloaded from Elcodis.com electronic components distributor
Page 57

APPENDIX B. INTERFACE BOARD
Appendix B describes the features and accessories of the Interface
Board, and explains the use of the Interface Board to demonstrate the
RCM5700 and RCM6700. The Interface Board has power-supply con
nections and a USB interface to program either MiniCore module.
-
MiniCore RCM5700/RCM6700 User ’s Manual rabbit.com 57
Downloaded from Elcodis.com electronic components distributor
Page 58

B.1 Introduction
The Interface Board included in the Development Kit makes it easy to connect MiniCore module
to a power supply and a PC workstation for development. It also provides an Ethernet port.
The Interface Board is shown below in Figure B-1, with its main features identified.
Figure B-1. Interface Board
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 58
Downloaded from Elcodis.com electronic components distributor
Page 59

B.1.1 Interface Board Features
• Power Connection—Power is supplied to the Interface Board either from the PC via the USB
connection or through a power supply jack, J6. A chip at U4 disconnects the USB power supply from the rest of the Interface Board when power is supplied through jack J6
Users providing their own power supply should ensure that it delivers +5 V DC at 10 W.
• Regulated Power Supply—The raw DC voltage is routed to a 3.3 V linear regulator. The regulator provides stable power to the MiniCore module and other boards connected to it.
• Power LED—The power LED lights whenever power is connected to the Interface Board.
• Reset Switch—A momentary-contact, normally open switch is connected directly to the Mini-
Core’ s /RESET_IN pin. Pressing the switch forces a hardware reset of the system.
• mini USB Connector—A USB cable is used to connect the MiniCore via the Interface Board
to your PC to enable you to program your MiniCore module.
• mini PCI Express socket—The Interface Board provides a 52-pin mini PCI Express socket
to enable you to install your MiniCore module. There is a snap-in holder to hold the opposite
end of the MiniCore module firmly in place.
• I/O Switch and LED—One momentary-contact, normally open switch is connected to PD1 on
the MiniCore module and may be read as an input by sample applications.
One LED is connected to PD0 on the MiniCore module, and may be driven as an output indicator by sample applications.
• Ethernet—One 10/100Base-T Ethernet port is available on the Interface Board with an RJ-45
jack at J3. LNK and ACT LEDs indicate a live Ethernet link and Ethernet activity.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 59
Downloaded from Elcodis.com electronic components distributor
Page 60

B.2 Mechanical Dimensions and Layout
Figure B-2 shows the mechanical dimensions and layout for the Interface Board. All measurements are
in inches followed by millimeters enclosed in parentheses.
Figure B-2. Interface Board Dimensions
Table B-1 lists the electrical, mechanical, and environmental specifications for the Prototyping
Board.
Table B-1. Interface Board Specifications
Parameter Specification
Board Size 2.50" × 3.75" × 0.60" (64 mm × 95 mm × 15 mm)
Ethernet Port 10/100Base-T, RJ-45, 2 LEDs
Operating Temperature –40°C to +85°C
Humidity 5% to 95%, noncondensing
Input Voltag e +5 V DC
Output Voltage +3.3 V DC
Maximum Current Draw
(including user-added circuits)
Other Connectors
nominal 500 mA max. for USB supply,
1.5 A for separate power supply
One 2 × 25 IDC header sockets, 0.1" pitch,
One 52-pin mini PCI Express socket to accept RCM5700
One mini USB connector
One 2 mm power supply jack
Standoffs/Spacers 4
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 60
Downloaded from Elcodis.com electronic components distributor
Page 61

B.2.1 Headers
The Interface Board has a header socket at J2 for physical connection to other boards. J2 is a
2 × 25 SMT header socket with a 0.1" pin spacing. Figure B-3 shows the layout of another board
to be plugged into the Interface Board — this footprint is identical for the Prototyping Board and
the two accessory boards. The values are relative to the mounting hole.
Figure B-3. Interface Board Footprint.
(All measurements are in inches followed by millimeters enclosed in parentheses.)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 61
Downloaded from Elcodis.com electronic components distributor
Page 62

B.3 Ethernet
B.3.1 RJ-45
The Ethernet filter circuit is different between the Rabbit 5000 and Rabbit 6000 Ethernet designs.
If an RJ-45 jack is present on the MiniCore, then the appropriate circuitry is on the MiniCore. If
the interface board Ethernet RJ-45 is to be used, then a given interface board will support Ethernet
only for either the RCM5700 or RCM6700 family, but not both. The interface board supplied in
the Development Kit is properly configured for the MiniCore in the kit.
B.3.2 RCM6700 LEDs
The RCM6700/RCM6750 only support a single off-board Ethernet status LED, unlike the
RCM5700/RCM5750 which support two (LINK and ACT). The signal used as ACT on the
RCM5700 is replaced with +2.5 V for the Ethernet circuitry on the RCM6700. To provide the
same information, a combined LINK+ACT signal is used: off means no link, on means link, and
blink means activity. The on-board Ethernet LEDs on the RJ-45 jack behave identically in both
the RCM5700 and RCM6700.
If the RCM5700’s two-LED configuration is desired for a RCM6700-based design, the behavior
of the LINK+ACT signal must be changed to just LINK, and a GPIO pin must be assigned as the
ACT signal. The Interface Board is designed to support either PE3 or PE5 as the ACT signal, and
can be configured by defining macros and placing jumpers as shown in Table B-2.
Table B-2. Interface Board Ethernet LED Configuration for RCM6700
Mode Behavior
LINK off is no link
Single LED
Dual LEDs,
ACT is PE3
Dual LEDs,
ACT is PE5
LINK on is link, blink
off for activity
LINK off is no link
LINK on is link
ACT off is no activity
ACT on is activity
(matches RCM5700)
JP80
Setting
4–6 None (default behavior)
1–3
4–6
1–2
4–6
ENET_ACTIVITY_ON_PE3
ENET_ACTIVITY_ON_PE5
Macros to define
The Ethernet LEDs are under software control on the RCM6700, so other configurations are possible as well. See the RCM6700-specific section of
LIB\Rabbit4000\TCPIP
folder for more
details.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 62
Downloaded from Elcodis.com electronic components distributor
Page 63

B.4 Power Supply
The MiniCore requires a regulated 3.15 V – 3.45 V DC power source to operate. Depending on
the amount of current required by the application, different regulators can be used to supply this
voltage.
The Interface Board has an onboard +3.3 V linear regulator. The Interface Board is protected
against reverse polarity by a Shottky diode at D3 as shown in Figure B-4.
Figure B-4. Interface Board Power Supply
Power may be supplied to the Interface Board either via the mini USB connector at J5 or through
the power supply jack J6. When a separate power supply is used, the chip at U4 disables power
from the mini USB connector, which continues to supply power only to the USB interface chip.
Diodes at D1 and D2 prevent power from going back to the other power supply that is not supplying power. A separate power supply is required whenever the Interface Board is not connected to
the PC.
A jumper on header JP2 controls the current limiting applied to the power drawn via the mini
USB connector — the current is nominally limited to 500 mA when no jumper is installed
(default), and is nominally limited to 700 mA when a jumper is installed.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 63
Downloaded from Elcodis.com electronic components distributor
Page 64

B.5 Using the Interface Board
The Interface Board is also a demonstration board. It can be used to demonstrate the functionality
of the
The Interface Board comes with the basic components necessary to demonstrate the operation of
the
demonstrate the interface to the Rabbit micro processor. Reset switch S2 is the hardwar e re set fo r
the
MiniCore
MiniCore
MiniCore
right out of the box without any modifications to either board.
. One LEDs (DS1) is connected to PD0, and one switch (S1) is connected to PD1 to
.
The Interface
header
socket
Board provides the user with
MiniCore
connection points brought out conveniently to
J2. Other boards such as the Prototyping Board or the accessory boards from the
Deluxe Development Kit can be plugged into header socket J2.
shown in Figure B-5.
The pinouts for header socket J2 are
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 64
Downloaded from Elcodis.com electronic components distributor
Figure B-5. Interface Board Pinout
Page 65

B.5.1 Add Additional Boards
The Prototyping Board and the two accessory boards included with the Deluxe Development Kit
may be installed on the Interface Board as shown in Figure B-6.
Figure B-6. Install Additional Boards on Interface Board
1. Insert the header strip into header socket J2 on the Interface Board or the board already
installed above the Interface Board.
2. Line up the board being installed above the pins extending from the header socket and the
stand-offs/connectors.
3. Press down to install the board.
4. Insert additional plastic standoffs/connectors as shown to hold the board firmly in place and to
hold another board if desired.
When additional boards are installed, the board-to-board spacing is 0.7" (17.8 mm). Multiple
boards should be installed in this sequence from bottom to top.
• Interface Board with
MiniCore
installed.
• Prototyping Board.
• Serial Communication accessory board.
• Digital I/O accessory board.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 65
Downloaded from Elcodis.com electronic components distributor
Page 66

B.6 Interface Board Jumper Configurations
Figure B-7 shows the header locations used to configure the various Interface Board options via
jumpers.
Figure B-7. Location of Configurable Jumpers on Interface Board
Table B-3 lists the configuration options using either jumpers or 0 surface-mount resistors.
Table B-3. Interface Board Jumper Configurations
Header Description Pins Connected
SMODE pins pulled up
JP1 Dynamic C Setup
JP2
mini USB Connector Power
Supply Current Limiting
* The
MiniCore
will operate in Run Mode when these pins are not jumpered.
1–2
(Programming Mode)
3–4 Reserved for future use
5–6 LED DS1 connected
7–8 Switch S1 connected
1–2 Nominal 700 mA
n.c. Nominal 500 mA
*
Factory
Default
×
×
×
×
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 66
Downloaded from Elcodis.com electronic components distributor
Page 67

APPENDIX C. PROTOTYPING BOARD
Appendix C describes the features and accessories of the Prototyping
Board, and explains the use of the Prototyping Board to build prototypes of your own circuits. The Prototyping Board mounts on the Interface Board from which it receives its power and signals.
MiniCore RCM5700/RCM6700 User ’s Manual rabbit.com 67
Downloaded from Elcodis.com electronic components distributor
Page 68

C.1 Introduction
The Prototyping Board included in the Development Kit provides a prototyping area for more
advanced hardware development. The Prototyping Board is shown below in Figure C-1, with its
main features identified.
Figure C-1. Prototyping Board
C.1.1 Prototyping Board Features
• Power Connection—Power is supplied to the Prototyping Board via the MiniCore header
socket connections.
• Power LED—The power LED lights whenever power is connected to the Prototyping Board.
• Module Extension Headers—The complete pin set of the MiniCore module is duplicated
below header J2. Developers can solder wires directly into the appropriate holes, or, for more
flexible development, a 2 × 25 header strip with a 0.1" pitch can be soldered into place. See
Figure C-4 for the header pinouts.
• Prototyping Area—A generous prototyping area is provided for the installation of through-
hole and surface-mount components. +3.3 V and ground buses run along the left and right
edges of the through-hole prototyping area. The through-hole area is set up to accept components with a pitch of 0.1" or widths of 0.3" or 0.6". Several areas for surface-mount devices are
also available. (Note that there are SMT pads on both the top and the bottom of the Prototyping
Board.) Each SMT pad is connected to a hole designed to accept a 30 AWG solid wire.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 68
Downloaded from Elcodis.com electronic components distributor
Page 69

C.2 Mechanical Dimensions and Layout
Figure C-2 shows the mechanical dimensions and layout for the Prototyping Board.
Figure C-2. Prototyping Board Dimensions
(All measurements are in inches followed by millimeters enclosed in parentheses.)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 69
Downloaded from Elcodis.com electronic components distributor
Page 70

Table C-1 lists the electrical, mechanical, and environmental specifications for the Prototyping
Board.
Table C-1. Prototyping Board Specifications
Parameter Specification
Board Size 2.50" × 3.75" × 0.52" (64 mm × 95 mm × 13 mm)
Operating Temperature –40°C to +85°C
Humidity 5% to 95%, noncondensing
Operating Voltage +3.3 V DC
Current Draw from Interface
Board (excluding user-added
circuits)
2 mA
Prototyping Area
Connectors
Standoffs/Spacers 4
1.7" × 2.7" (40 mm × 70 mm) throughhole, 0.1" spacing,
additional space for SMT components
Two 2 × 25 IDC header sockets, 0.1" pitch
(a 2 × 25 IDC header strip is included to connect the Prototyping
Board to the Interface Board below it)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 70
Downloaded from Elcodis.com electronic components distributor
Page 71

C.2.1 Headers
The Prototyping Board has a header socket at J2 for physical connection to other boards above it,
and a header socket at J12 on the bottom side to connect to boards below it. J2 and J12 are 2 × 25
SMT header sockets with a 0.1" pin spacing. Figure C-3 shows the layout of another board to be
plugged into the Interface Board — this footprint is identical for the Prototyping Board and the
two accessory boards. The values are relative to the mounting hole.
Figure C-3. MiniCore Boards Footprint
(All measurements are in inches followed by millimeters enclosed in parentheses.)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 71
Downloaded from Elcodis.com electronic components distributor
Page 72

C.3 Using the Prototyping Board
The
Prototyping Board provides the user with MiniCore connection points brought out conveniently
to labeled points below header J2.
The pinouts for header socket J2 are shown in Figure C-4.
There is a 1.7" × 2.7" through-hole prototyping space available on the Prototyping Board.
holes in the prototyping area are spaced at 0.1" (2.5 mm).
edge of the Prototyping Board for easy access.
point-
to-point wiring with 20 to 30 AWG wire between the prototyping area, the
traces,
and the surrounding area where surface-mount components may be installed.
provided around the surface-mounted components that may be installed around the prototyping
area.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 72
Downloaded from Elcodis.com electronic components distributor
Figure C-4. MiniCore Boards Pinout
The
+3.3 V and GND traces run along the left
Small to medium circuits can be prototyped using
+3.3 V and GND
Small holes are
Page 73

C.3.1 Add Additional Boards
The Prototyping Board and the two accessory boards included with the Deluxe Development Kit
may be installed on the Interface Board as shown in Figure C-5.
Figure C-5. Install Additional Boards
1. Insert the header strip into header socket J2 on the Interface Board or the board already
installed above the Interface Board.
2. Line up the board being installed above the pins extending from the header socket and the
stand-offs/connectors.
3. Press down to install the board.
4. Insert additional plastic standoffs/connectors as shown to hold the board firmly in place and to
hold another board if desired.
When additional boards are installed, the board-to-board spacing is 0.7" (17.8 mm). Multiple
boards should be installed in this sequence from bottom to top.
• Interface Board with MiniCore installed.
• Prototyping Board.
• Serial Communication accessory board.
• Digital I/O accessory board.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 73
Downloaded from Elcodis.com electronic components distributor
Page 74

APPENDIX D. DIGITAL I/O ACCESSORY
BOARD
Appendix D describes the features and accessories of the Digital I/O
accessory board, and explains how to use the Digital I/O accessory
board. The Digital I/O accessory board mounts on the Interface Board
or other board already installed on the Interface Board from which it
receives its power and signals.
MiniCore RCM5700/RCM6700 User ’s Manual rabbit.com 74
Downloaded from Elcodis.com electronic components distributor
Page 75

D.1 Introduction
The Digital I/O accessory board included in the Deluxe Development Kit provides Pushbutton
switches and LEDs to use in conjunction with selected sample programs. The Digital I/O accessory board is shown below in Figure D-1, with its main features identified.
Figure D-1. Digital I/O Accessory Board
D.1.1 Digital I/O Accessory Board Features
• Power Connection—Power is supplied to the Digital I/O accessory board via the MiniCore
header socket connections.
• Power LED—The power LED lights whenever power is connected to the Digital I/O acces-
sory board.
• Module Extension Headers—The complete pin set of the MiniCore module is duplicated
below header J2. Developers can solder wires directly into the appropriate holes, or, for more
flexible development, a 2 × 25 header strip with a 0.1" pitch can be soldered into place. See
Figure D-4 for the header pinouts.
• I/O Switches and LEDs—Four momentary-contact, normally open switches are connected to
PB4–PB7 on the MiniCore module and may be read as an input by sample applications.
Four LEDs are connected to PA4–PA7 on the MiniCore module, and may be driven as an out-
put indicator by sample applications.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 75
Downloaded from Elcodis.com electronic components distributor
Page 76

D.2 Mechanical Dimensions and Layout
Figure D-2 shows the mechanical dimensions and layout for the Digital I/O accessory board.
Figure D-2. Digital I/O Accessory Board Dimensions
(All measurements are in inches followed by millimeters enclosed in parentheses.)
Table D-1 lists the electrical, mechanical, and environmental specifications for the Digital I/O
accessory board.
Table D-1. Digital I/O Accessory Board Specifications
Parameter Specification
Board Size 2.50" × 3.75" × 0.52" (64 mm × 95 mm × 13 mm)
Operating Temperature –40°C to +85°C
Humidity 5% to 95%, noncondensing
Operating Voltage +3.3 V DC
Current Draw from Interface Board 6 mA (typical)
Two 2 × 25 IDC header sockets, 0.1" pitch
Connectors
Standoffs/Spacers 4
(a 2 × 25 IDC header strip is included to connect the Digital I/O
accessory board to the board below it)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 76
Downloaded from Elcodis.com electronic components distributor
Page 77

D.2.1 Headers
The Digital I/O accessory board has a header socket at J2 for physical connection to other boards
above it, and a header socket at J12 on the bottom side to connect to boards below it. J2 and J12
are 2 × 25 SMT header sockets with a 0.1" pin spacing. Figure D-3 shows the layout of another
board to be plugged into the Digital I/O accessory board — this footprint is identical for the Prototyping Board and the two accessory boards. The values are relative to the mounting hole.
Figure D-3. MiniCore Boards Footprint
(All measurements are in inches followed by millimeters enclosed in parentheses.)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 77
Downloaded from Elcodis.com electronic components distributor
Page 78

D.3 Using the Digital I/O Accessory Board
The Digital I/O accessory board
provides the user with MiniCore connection points brought out
conveniently to labeled points below header J2.
Figure D-4.
The pinouts for header socket J2 are shown in
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 78
Downloaded from Elcodis.com electronic components distributor
Figure D-4. MiniCore Boards Pinout
Page 79

D.3.1 Configuration
The pushbutton switches may be configured active high (pulled down) or active low (pulled up)
via jumper settings on header JP7 for the four switches installed. Jumpers on JP12 may be set up
in a similar way after additional switches are installed at S5–S8.
Figure D-5. Pushbutton Switch Configuration
The four LED output indicators are set up as sinking outputs. Four additional LEDs may be
installed at DS5–DS8.
Jumpers on headers JP5 and JP8 connect the MiniCore signals to the pushbutton switches or
LEDs. These jumpers may be removed and other MiniCore signals may be connected to the
switch or LED positions above these headers via headers JP6 and JP9.
Table D-2 lists the connec-
tion options for the switches and LEDs.
Table D-2. Digital I/O Accessory Board Switch/LED Connection Options
Default MiniCore
Signal
PB4
PB5 S2 3–4 2
PB6 S3 5–6 3
PB7 S4 7–8 4
Switch/LED
*
S1
Connected via Alternate Connection
Header Pins Header Pin
JP5
1–2
JP6
1
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 79
Downloaded from Elcodis.com electronic components distributor
Page 80

Table D-2. Digital I/O Accessory Board Switch/LED Connection Options
Default MiniCore
Signal
PA4 DS1
PA5 DS2 3–4 2
PA6 DS3 5–6 3
PA7 DS4 7–8 4
PB0
PB1 S6 3–4 2
PB2 S7 5–6 3
PB3 S8 7–8 4
PA0 DS5
PA1 DS6 3–4 2
PA2 DS7 5–6 3
PA3 DS8 7–8 4
* Switches S1–S4 are pulled high or low via jumpers on header JP7.
† Switches S5–S8 are pulled high or low via jumpers on header JP12 (not stuffed).
Switch/LED
†
S5
Connected via Alternate Connection
Header Pins Header Pin
1–2
JP8
1–2
JP10
1–2
JP13
JP9
JP11
JP14
1
1
1
NOTE: Switches S5–S8, LEDs DS5–DS8, and the corresponding configuration headers JP10–
JP14 and circuits are not stuffed.
Figure D-6 shows the locations of the configurable jumpers.
Figure D-6. Location of Configurable Jumpers on Digital I/O Accessory Board
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 80
Downloaded from Elcodis.com electronic components distributor
Page 81

D.3.2 Add Additional Boards
The Prototyping Board and the two accessory boards included with the Deluxe Development Kit
may be installed on the Interface Board as shown in Figure D-7.
Figure D-7. Install Additional Boards
1. Insert the header strip into header socket J2 on the Interface Board or the board already
installed above the Interface Board.
2. Line up the board being installed above the pins extending from the header socket and the
stand-offs/connectors.
3. Press down to install the board.
4. Insert additional plastic standoffs/connectors as shown to hold the board firmly in place and to
hold another board if desired.
When additional boards are installed, the board-to-board spacing is 0.7" (17.8 mm). Multiple
boards should be installed in this sequence from bottom to top.
• Interface Board with MiniCore installed.
• Prototyping Board.
• Serial Communication accessory board.
• Digital I/O accessory board.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 81
Downloaded from Elcodis.com electronic components distributor
Page 82

APPENDIX E. SERIAL COMMUNICATION
ACCESSORY BOARD
Appendix E describes the features and accessories of the Serial Communication accessory board, and explains how to use the Serial Communication accessory board. The Serial Communication accessory
board mounts on the Interface Board or other board already installed
on the Interface Board from which it receives its power and signals.
MiniCore RCM5700/RCM6700 User ’s Manual rabbit.com 82
Downloaded from Elcodis.com electronic components distributor
Page 83

E.1 Introduction
The Serial Communication accessory board included in the Deluxe Development Kit provides
two 3-wire serial ports to use in conjunction with selected sample programs. The Serial Communication accessory board is shown below in Figure E-1, with its main features identified.
Figure E-1. Serial Communication Accessory Board
E.1.1 Serial Communication Accessory Board Features
• Power Connection—Power is supplied to the Serial Communication accessory board via the
MiniCore header socket connections.
• Power LED—The power LED lights whenever power is connected to the Serial Communica-
tion accessory board.
• Module Extension Headers—The complete pin set of the MiniCore module is duplicated
below header J2. Developers can solder wires directly into the appropriate holes, or, for more
flexible development, a 2 × 25 header strip with a 0.1" pitch can be soldered into place. See
Figure E-4 for the header pinouts.
• RS-232 Headers—Serial Ports C and D are brought out as 3-wire RS-232 ports on headers J4
and J3 respectively. Header J4 can be set up as a 5-wire RS-232 serial port with flow control
provided by Serial Port C.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 83
Downloaded from Elcodis.com electronic components distributor
Page 84

E.2 Mechanical Dimensions and Layout
Figure E-2 shows the mechanical dimensions and layout for the
Serial Communication
board. (All measurements are in inches followed by millimeters enclosed in parentheses.)
accessory
Figure E-2. Serial Communication Accessory Board Dimensions
Table E-1 lists the electrical, mechanical, and environmental specifications for the Se rial Communication accessory board.
Table E-1. Serial Communication Accessory Board Specifications
Parameter Specification
Board Size 2.50" × 3.75" × 0.52" (64 mm × 95 mm × 13 mm)
Operating Temperature –40°C to +85°C
Humidity 5% to 95%, noncondensing
Operating Voltage +3.3 V DC
Current Draw from Interface
Board
Connectors
Standoffs/Spacers 4
10 mA (typical)
Two 2 × 25 IDC header sockets, 0.1" pitch
(a 2 × 25 IDC header strip is included to connect the Serial
Communication accessory board to the board below it)
Two 2 × 5 IDC headers, 0.1" pitch
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 84
Downloaded from Elcodis.com electronic components distributor
Page 85

E.2.1 Headers
The Serial Communication accessory board has a header socket at J2 for physical connection to
other boards above it, and a header socket at J12 on the bottom side to connect to boards below it.
J2 and J12 are 2 × 25 SMT header sockets with a 0.1" pin spacing. Figure E-3 shows the layout of
another board to be plugged into the Serial Communication accessory board — this footprint is
identical for the Prototyping Board and the two accessory boards. The values are relative to the
mounting hole.
Figure E-3. MiniCore Boards Footprint
(All measurements are in inches followed by millimeters enclosed in parentheses.)
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 85
Downloaded from Elcodis.com electronic components distributor
Page 86

E.3 Using the Serial Communication Accessory Board
The Serial Communication accessory board
provides the user with MiniCore connection points
brought out conveniently to labeled points below header J2.
RS-232 headers at J3 and J4 are shown in Figure E-4.
The pinouts for header socket J2 and the
Figure E-4. Serial Communication Accessory Board Pinout
The remaining RS-232 header positions at J5 and J6, and the RS-485 screw-terminal header position at J1 are unstuffed.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 86
Downloaded from Elcodis.com electronic components distributor
Page 87

E.3.1 Configuration
Serial Ports C and D are brought out as 3-wire RS-232 serial ports on headers J4 and J3 respectively. Jumpers may be installed on header JP7 to use header J3 as a 5-wire RS-232 serial port
with flow control provided by Serial Port C.
Jumpers on headers JP5 connect the MiniCore signals to the RS-232 transceiver . Jumpers may be
installed on header JP7 to use header J3 as a 5-wire RS-232 serial port with flow control provided
by Serial Port C. Note that Serial Port C does not support flow control using serial DMA, so the
following macro must be used with flow control via Serial Port C on the Serial Communication
accessory board.
#define SER_DMA_DISABLE
The jumpers at header JP5 connect the Serial Port D and Serial Port C signals to the RS-232 transceiver. These jumpers may be removed so that other MiniCore serial port signals may be connected via JP6 to the RS-232 transceiver.
Table E-2. Serial Communication Accessory Board RS-232 Connection Options
Default
MiniCore
Signal
PC0
PC1 3–4 2
PC2
PC3 7–8 4
PE6
PE7 3–4 2
PC4
PC5 7–8 4
PD0 —
PD1
PD2
PD3 7–8 4
* Configured via header JP7.
† Configured via header JP10 (unstuffed).
‡ Termination and bias resistors enabled via header JP13 (unstuffed).
Header Serial Port
J3
J3/J4
J5
J5/J6
J1
*
†
‡
Serial Port D
(RS-232)
Serial Port C
(RS-232)
Serial Port E
(RS-232)
Serial Port B
(RS-232)
Flow Enable 3–4 2
Serial Port F
(RS-485)
Connected via Alternate Connection
Header Pins Header Pin
JP5
JP8
JP11
1–2
JP6
5–6 3
1–2
JP9
5–6 3
1–2
JP12
5–6 3
1
1
1
NOTE: Headers J1, J5, J6, and the associated circuits and configuration headers are not stuffed.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 87
Downloaded from Elcodis.com electronic components distributor
Page 88

Figure E-5 shows the locations of the configurable header positions.
Figure E-5. Location of Configurable Jumpers on Serial Communication Accessory Board
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 88
Downloaded from Elcodis.com electronic components distributor
Page 89

E.3.2 Add Additional Boards
The Prototyping Board and the two accessory boards included with the Deluxe Development Kit
may be installed on the Interface Board as shown in Figure E-6.
Figure E-6. Install Additional Boards
1. Insert the header strip into header socket J2 on the Interface Board or the board already
installed above the Interface Board.
2. Line up the board being installed above the pins extending from the header socket and the
stand-offs/connectors.
3. Press down to install the board.
4. Insert additional plastic standoffs/connectors as shown to hold the board firmly in place and to
hold another board if desired.
When additional boards are installed, the board-to-board spacing is 0.7" (17.8 mm). Multiple
boards should be installed in this sequence from bottom to top.
• Interface Board with MiniCore installed.
• Prototyping Board.
• Serial Communication accessory board.
• Digital I/O accessory board.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 89
Downloaded from Elcodis.com electronic components distributor
Page 90

APPENDIX F. USING THE TCP/IP FEATURES
F.1 TCP/IP Connections
Programming and development can be done with the MiniCore without connecting the Ethernet
port to a network. However, if you will be running the sample programs that use the Ethernet
capability or will be doing Ethernet-enabled development, you should connect the Ethernet port
on the Interface Board at this time.
Before proceeding you will need to have the following items.
• If you don’t have Ethernet access, you will need at least a 10Base-T Ethernet card (available
from your favorite computer supplier) installed in a PC.
• Two CAT 4/5 Ethernet cables and a hub, or one CAT 4/5 Ethernet cable.
The Ethernet cables and a 10Base-T Ethernet hub are available from Rabbit in a TCP/IP tool kit.
More information is available at www.rabbit.com.
Now you should be able to make your connections.
1. Connect the AC adapter and the USB cable as shown in Chapter 2, “Getting Started.”
2. Ethernet Connections
There are four options for connecting the Interface Board to a network for development and
runtime purposes. The first two options permit total freedom of action in selecting network
addresses and use of the “network,” as no action can interfere with other users. We recommend
one of these options for initial development.
• No LAN — The simplest alternative for desktop development. Connect the Interface Board’s
Ethernet port directly to the PC’s network interface card using an CAT 4/5 Ethernet cable.
• Micro-LAN — Another simple alternative for desktop development. Use a small Ethernet
10Base-T hub and connect both the PC’s network interface card and the Interface Board’s
Ethernet port to it using standard network cables.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 90
Downloaded from Elcodis.com electronic components distributor
Page 91

The following options require more care in address selection and testing actions, as conflicts
with other users, servers and systems can occur:
• LAN — Connect the Interface Board’s Ethernet port to an existing LAN, preferably one to
which the development PC is already connected. You will need to obtain IP addressing information from your network administrator.
• WAN — The RCM5700/RCM6700 is capable of direct connection to the Internet and other
Wide Area Networks, but exceptional care should be used with IP address settings and all network-related programming and development. W e recommend that development and debugging
be done on a local network before connecting a Rabbit-based system to the Internet.
TIP: Checking and debugging the initial setup on a micro-LAN is recommended before connect-
ing the system to a LAN or WAN.
The PC running Dynamic C does not need to be the PC with the Ethernet card.
3. Apply Power
The MiniCore module and Interface Board are now ready to be used.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 91
Downloaded from Elcodis.com electronic components distributor
Page 92

F.2 TCP/IP Primer on IP Addresses
Obtaining IP addresses to interact over an existing, operating, network can involve a number of
complications, and must usually be done with cooperation from your ISP and/or network systems
administrator. For this reason, it is suggested that the user begin instead by using a direct connection between a PC and the Interface Board using a CAT 4/5 Ethernet cable or a simple arrangement with a hub.
In order to set up this direct connection, the user will have to use a PC without networking, or disconnect a PC from the corporate network, or install a second Ethernet adapter and set up a separate private network attached to the second Ethernet adapter. Disconnecting your PC from the
corporate network may be easy or nearly impossible, depending on how it is set up. If your PC
boots from the network or is dependent on the network for some or all of its disks, then it probably
should not be disconnected. If a second Ethernet adapter is used, be aware that Windows TCP/IP
will send messages to one adapter or the other, depending on the IP address and the binding order
in Microsoft products. Thus you should have different ranges of IP addresses on your private network from those used on the corporate network. If both networks service the same IP address,
then Windows may send a packet intended for your private network to the corporate network. A
similar situation will take place if you use a dial-up line to send a packet to the Internet. Windows
may try to send it via the local Ethernet network if it is also valid for that network.
The following IP addresses are set aside for local networks and are not allowed on the Internet:
10.0.0.0 to 10.255.255.255, 172.16.0.0 to 172.31.255.255, and 192.168.0.0 to 192.168.255.255.
The Interface Board uses a 10/100Base-T type of Ethernet connection, which is the most common
scheme. The RJ-45 connectors are similar to U.S. style telephone connectors, except they are
larger and have 8 contacts.
An alternative to the direct connection using a CAT 4/5 Ethernet cable is a direct connection using
a hub. The hub relays packets received on any port to all of the ports on the hub. Hubs are low in
cost and are readily available. The RCM5700/RCM6700 uses 10/100Mps Ethernet, so the hub or
Ethernet adapter can be a 10 Mbps unit or a 10/100 Mbps unit.
In a corporate setting where the Internet is brought in via a high-speed line, there are typically
machines between the outside Internet and the internal network. These machines include a combi
nation of proxy servers and firewalls that filter and multiplex Internet traffic. In the configuration
below, the MiniCore could be given a fixed address so any of the computers on the local network
would be able to contact it. It may be possible to configure the firewall or proxy server to allow
hosts on the Internet to directly contact the controller, but it would probably be easier to place the
controller directly on the external network outside of the firewall. This avoids some of the configuration complications by sacrificing some security.
-
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 92
Downloaded from Elcodis.com electronic components distributor
Page 93

If your system administrator can give you an Ethernet cable along with its IP address, the netmask
and the gateway address, then you may be able to run the sample programs without having to
setup a direct connection between your computer and the MiniCore. You will also need the IP
address of the nameserver, the name or IP address of your mail server , and your domain name for
some of the sample programs.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 93
Downloaded from Elcodis.com electronic components distributor
Page 94

F.2.1 IP Addresses Explained
IP (Internet Protocol) addresses are expressed as 4 decimal numbers separated by periods, for
example:
216.103.126.155
10.1.1.6
Each decimal number must be between 0 and 255. The total IP address is a 32-bit number consisting of the 4 bytes expressed as shown above. A local network uses a group of adjacent IP
addresses. There are always 2N IP addresses in a local network. The netmask (also called subnet
mask) determines how many IP addresses belong to the local network. The netmask is also a 32bit address expressed in the same form as the IP address. An example netmask is:
255.255.255.0
This netmask has 8 zero bits in the least significant portion, and this means that 28 addresses are a
part of the local network. Applied to the IP address above (216.103.126.155), this netmask would
indicate that the following IP addresses belong to the local network:
216.103.126.0
216.103.126.1
216.103.126.2
etc.
216.103.126.254
216.103.126.255
The lowest and highest address are reserved for special purposes. The lowest address
(216.102.126.0) is used to identify the local network. The highest address (216.102.126.255) is
used as a broadcast address. Usually one other address is used for the address of the gateway out
of the network. This leaves 256 - 3 = 253 available IP addresses for the example given.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 94
Downloaded from Elcodis.com electronic components distributor
Page 95

F.2.2 How IP Addresses are Used
The actual hardware connection via an Ethernet uses Ethernet adapter addresses (also called
MAC addresses). These are 48-bit addresses and are unique for every Ethernet adapter manufactured. In order to send a packet to another computer, given the IP address of the other computer, it
is first determined if the packet needs to be sent directly to the other computer or to the gateway.
In either case, there is an Ethernet address on the local network to which the packet must be sent.
A table is maintained to allow the protocol driver to determine the MAC address corresponding to
a particular IP address. If the table is empty, the MAC address is determined by sending an Ethernet broadcast packet to all devices on the local network asking the device with the desired IP
address to answer with its MAC address. In this way, the table entry can be filled in. If no device
answers, then the device is nonexistent or inoperative, and the packet cannot be sent.
Some IP address ranges are reserved for use on internal networks, and can be allocated freely as
long as no two internal hosts have the same IP address. These internal IP addresses are not routed
to the Internet, and any internal hosts using one of these reserved IP addresses cannot communicate on the external Internet without being connected to a host that has a valid Internet IP address.
The host would either translate the data, or it would act as a proxy.
Each MiniCore module has its own unique MAC address, which consists of the prefix 0090C2
followed by a code that is unique to each MiniCore module. For example, a MAC address might
be 0090C2C002C0.
TIP: You can always obtain the MAC address on your module by running the sample program
DISPLAY_MAC.C
from the
SAMPLES\TCPIP
folder.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 95
Downloaded from Elcodis.com electronic components distributor
Page 96

F.2.3 Dynamically Assigned Internet Addresses
In many instances, devices on a network do not have fixed IP addresses. This is the case when, for
example, you are assigned an IP address dynamically by your dial-up Internet service provider
(ISP) or when you have a device that provides your IP addresses using the Dynamic Host Configuration Protocol (DHCP). The MiniCore modules can use such IP addresses to send and receive
packets on the Internet, but you must take into account that this IP address may only be valid for
the duration of the call or for a period of time, and could be a private IP address that is not directly
accessible to others on the Internet. These addresses can be used to perform some Internet tasks
such as sending e-mail or browsing the Web, but it is more difficult to participate in conversations
that originate elsewhere on the Internet. If you want to find out this dynamically assigned IP
address, under Windows NT or later you can run the
ipconfig
command (Start > Run >cmd)
while you are connected and look at the interface used to connect to the Internet.
Many networks use IP addresses that are assigned using DHCP. When your computer comes up,
and periodically after that, it requests its networking information from a DHCP server . The DHCP
server may try to give you the same address each time, but a fixed IP address is usually not guaranteed.
If you are not concerned about accessing the MiniCore from the Internet, you can place the MiniCore on the internal network using an IP address assigned either statically or through DHCP.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 96
Downloaded from Elcodis.com electronic components distributor
Page 97

F.3 Placing Your Device on the Network
In many corporate settings, users are isolated from the Internet by a firewall and/or a proxy server.
These devices attempt to secure the company from unauthorized network traffic, and usually
work by disallowing traffic that did not originate from inside the network. If you want users on
the Internet to communicate with your MiniCore, you have several options. You can either place
the MiniCore directly on the Internet with a real Internet address or place it behind the firewall. If
you place the MiniCore behind the firewall, you need to configure the firewall to translate and
forward packets from the Internet to the MiniCore.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 97
Downloaded from Elcodis.com electronic components distributor
Page 98

F.4 Running TCP/IP Sample Programs
We have provided a number of sample programs demonstrating various uses of TCP/IP for networking embedded systems. These programs require you to connect your PC and the MiniCore
module together on the same network. This network can be a local private network (preferred for
initial experimentation and debugging), or a connection via the Internet.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 98
Downloaded from Elcodis.com electronic components distributor
Page 99

F.4.1 How to Set IP Addresses in the Sample Programs
With the introduction of Dynamic C 7.30 we have taken steps to make it easier to run many of our
sample programs. You will see a
TCPCONFIG
macro. This macro tells Dynamic C to select your
configuration from a list of default configurations. You will have three choices when you encounter a sample program with the
TCPCONFIG
macro.
1. You can replace the
MY_GATEWAY
, and
2. You can leave
10.10.6.100
10.10.6.1
of
10.1.1.2
. If you would like to change the default values, for example, to use an IP address
for the MiniCore module, and
TCPCONFIG
MY_NAMESERVER
TCPCONFIG
at the usual default of 1, which will set the IP configurations to
, the netmask to
macro with individual
macros in each program.
255.255.255.0
, and the nameserver and gateway to
10.1.1.1
MY_IP_ADDRESS, MY_NETMASK
for your PC, you can edit the values in
the section that directly follows the “General Configuration” comment in the
TCP_CONFIG.LIB
3. You can create a
Instructions for doing this are at the beginning of the
LIB\Rabbit4000\TCPIP
There are some other “standard” configurations for
tures such as DHCP. Their values are documented at the top of the
the
LIB\Rabbit4000\TCPIP
library. You will find this library in the
CUSTOM_CONFIG.LIB
library and use a
TCP_CONFIG.LIB
folder.
TCPCONFIG
folder. More information is available in the Dynamic C TCP/IP
LIB\Rabbit4000\TCPIP
TCPCONFIG
that let you select different fea-
TCP_CONFIG.LIB
User’s Manual.
,
folder.
value greater than 100.
library in the
library in
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 99
Downloaded from Elcodis.com electronic components distributor
Page 100

F.4.2 How to Set Up your Computer for Direct Connect
Follow these instructions to set up your PC or notebook. Check with your administrator if you are
unable to change the settings as described here since you may need administrator privileges. The
instructions are specifically for Windows 2000, but the interface is similar for other versions of
Windows.
TIP: If you are using a PC that is already on a network, you will disconnect the PC from that net-
work to run these sample programs. Write down the existing settings before changing them to
facilitate restoring them when you are finished with the sample programs and reconnect your
PC to the network.
1. Go to the control panel (Start > Settings > Control Panel), and then double-click the Net-
work icon.
2. Select the network interface card used for the Ethernet interface you intend to use (e.g., TCP/IP
Xircom Credit Card Network Adapter
) and click on the “Properties” button. Depending on
which version of Windows your PC is running, you may have to select the “Local Area Connection” first, and then click on the “Properties” button to bring up the Ethernet interface dialog. Then “Configure” your interface card for a “10Base-T Half-Duplex” or an “AutoNegotiation” connection on the “Advanced” tab.
NOTE: Your network interface card will likely have a different name.
3. Now select the IP Address tab, and check Specify an IP Ad dre s s , or select T CP/IP and click
on “Properties” to assign an IP address to your computer (this will disable “obtain an IP
address automatically”):
IP Address : 10.10.6.101
Netmask : 255.255.255.0
Default gateway : 10.10.6.1
4. Click <OK> or <Close> to exit the various dialog boxes.
MiniCore RCM5700/RCM6700 User’s Manual rabbit.com 100
Downloaded from Elcodis.com electronic components distributor
 Loading...
Loading...