

Page 1

Automation for a Changing World
Delta Fan/Pump
Vector Control Drive
CP2000
Series
Page 2
WHY CP2000?
Delta Industrial Automation Green Technology
Delta Industrial Automation introduces the CP2000 Series AC motor drive for
energy-saving HVAC systems and for pump and fan applications. The CP2000
Series is equipped with special HVAC parameters and PID control functions
for efcient operation, as well as multi-segment V/F control curve and soft
start functions to assist frequent torque change and constant
output applications with energy-saving performance.
1
Page 3
2
Page 4
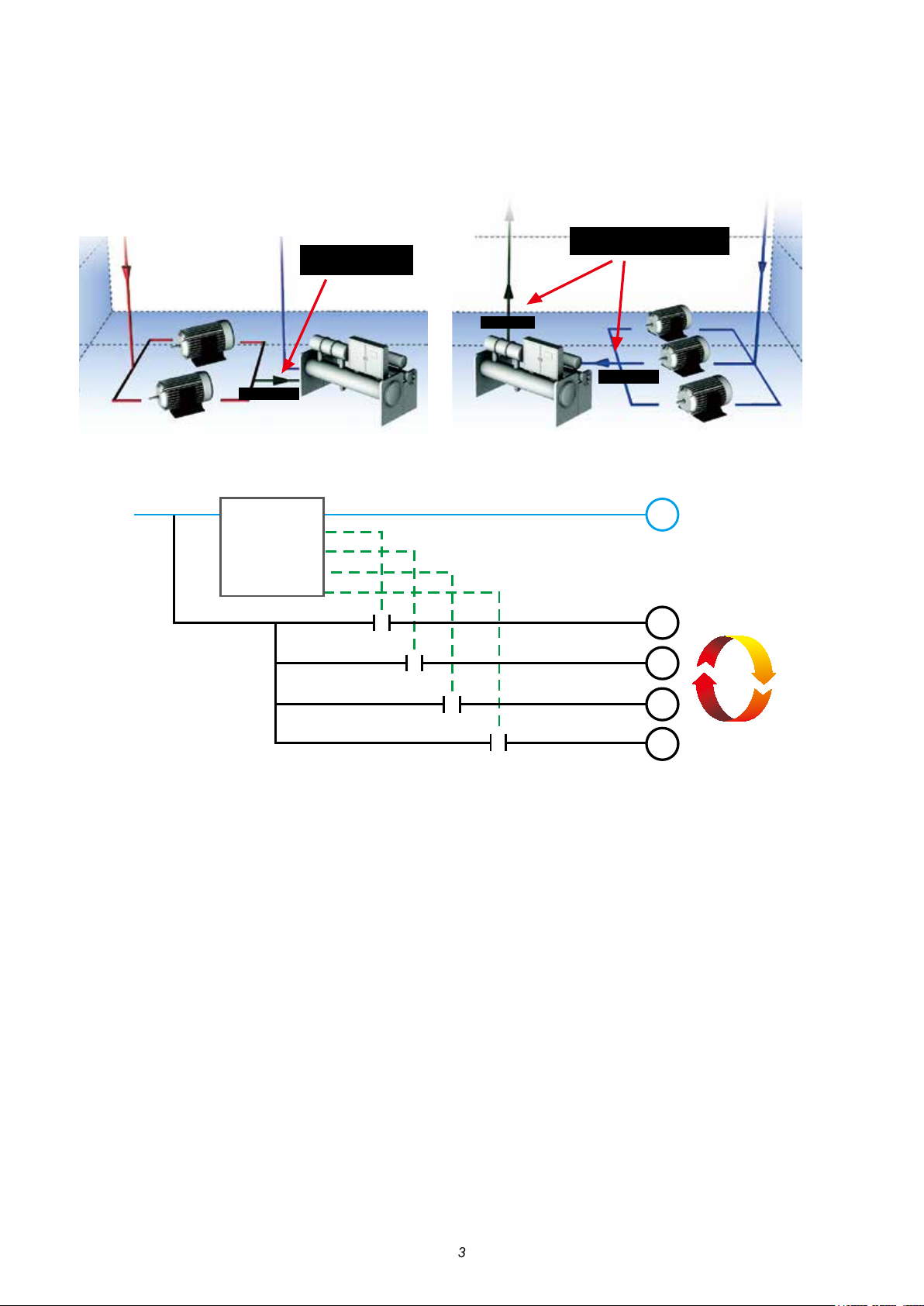
Water Circulation Pump Control
Measures cool water
return temperature
Cool Water
Circulation Pump
lce water
Cool water
Figure1: Multi-Pump Control
Measures cool water and return
water temperature
Ice Water
Circulation Pump
Water inlet
RST
Variable Frequency
M
Control of Pumps
CP2000
MC1
MC2
MC3
MC4
Figure 2: Fixed Amount and Circulation Control
M1
M2
M3
Circulation Control
M4
Features
►
LCD keypad - An easy-to-use text panel with TP Editor software allows users to customize the main page screen
►
Quick setting functions to support self-dened parameter groups and parameter duplication for fast and easy
installation
►
Modular design for exible extension and easy maintenance
►
High-speed communications include BACnet and MODBUS. Optional communication cards are available upon
purchase: PROFIBUS DP, DeviceNet, MODBUS TCP, EtherNet/IP and CANopen
►
Extended life cycle
►
Enhanced conformal coating on PCBs for superior durability in critical environments
►
Fire mode and bypass functions: continuous pressure to extract smoke when emergencies occur
►
Various modes for fans/pump applications including PID control, sleep/wake up functions, ying start and skip
frequency
►
Multi-pumps synchronous control of up to 8 motors at one time and provides xed amount and xed time
circulation control
►
Built-in 10 K steps PLC programming capacity and Real Time Clock (RTC)
3
Page 5

Advanced Drive Technology
High Performance Variable
Frequency Drive Technology
1.Sensorless Vector Control (SVC)
2.Dual rating design
(Light duty & Normal duty)
3.Excellent variable torque control of
asynchronous motors
Modular Design
1.Hot pluggable LCD keypad
2.I/O extension card
3.Various communication cards
4.Removable fans
Environmental Adaptability
Versatile Drive Control
1.Built-in PLC function
2.Built-in brake unit*
3.Networking drive system
4.Auto energy saving
*Note: Please refer to the Product Specication for more details.
1.50°C operation temperature
2.Built-in DC choke*
3.Coated circuit boards
4.Built-in EMC lter*
5.International safety standard
CE/UL/CUL
Standard Models
Power range:
230 V (kW) 0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45 55 75 90
230 V (HP) 1 2 3 5 7.5 10 15 20 25 30 40 50 60 75 100 125
Frame Size A B C D E
230 V 0.75 ~ 90 kW, 460 V 0.75 ~ 500 kW
460 V (kW) 0.75 1.5 2.2 3.7 4.0 5.5 7.5 11 15 18.5 22 30 37
460 V (HP) 1 2 3 5 5 7.5 10 15 20 25 30 40 50
Frame Size A B C
460 V (kW) 45 55 75 90 110 132 160 185 220 280 315 355 400 500
460 V (HP) 60 75 100 125 150 175 215 250 300 375 425 475 536 675
Frame Size D0 D E F G
Power range:
575 V (kW) 1.5 2.2 3.7 5.5 7.5 11 15
575 V (HP) 2 3 5 7.5 10 15 20
Frame Size
690 V (kW) 18.5 22 30 37 45 55 75 90 110 132 160 200
690 V (HP) 25 30 40 50 60 75 100 125 150 175 215 270 335 425
Frame Size C D E F G
690 V (kW) 400 450 560 630
690 V (HP) 530 600 745 840
Frame Size H
575 V 1.5 ~ 15 kW, 690 V 18.5 ~ 630 kW
A B
H
250
315
4
Page 6
High-Speed Network
►
Advanced network functions
▪ Built-in
RS-485 (MODBUS)
▪ Built-in BACnet MS/TP
►
Various communication card options
DeviceNet、MODBUS TCP、EtherNet/IP、CANopen (DS402)
、
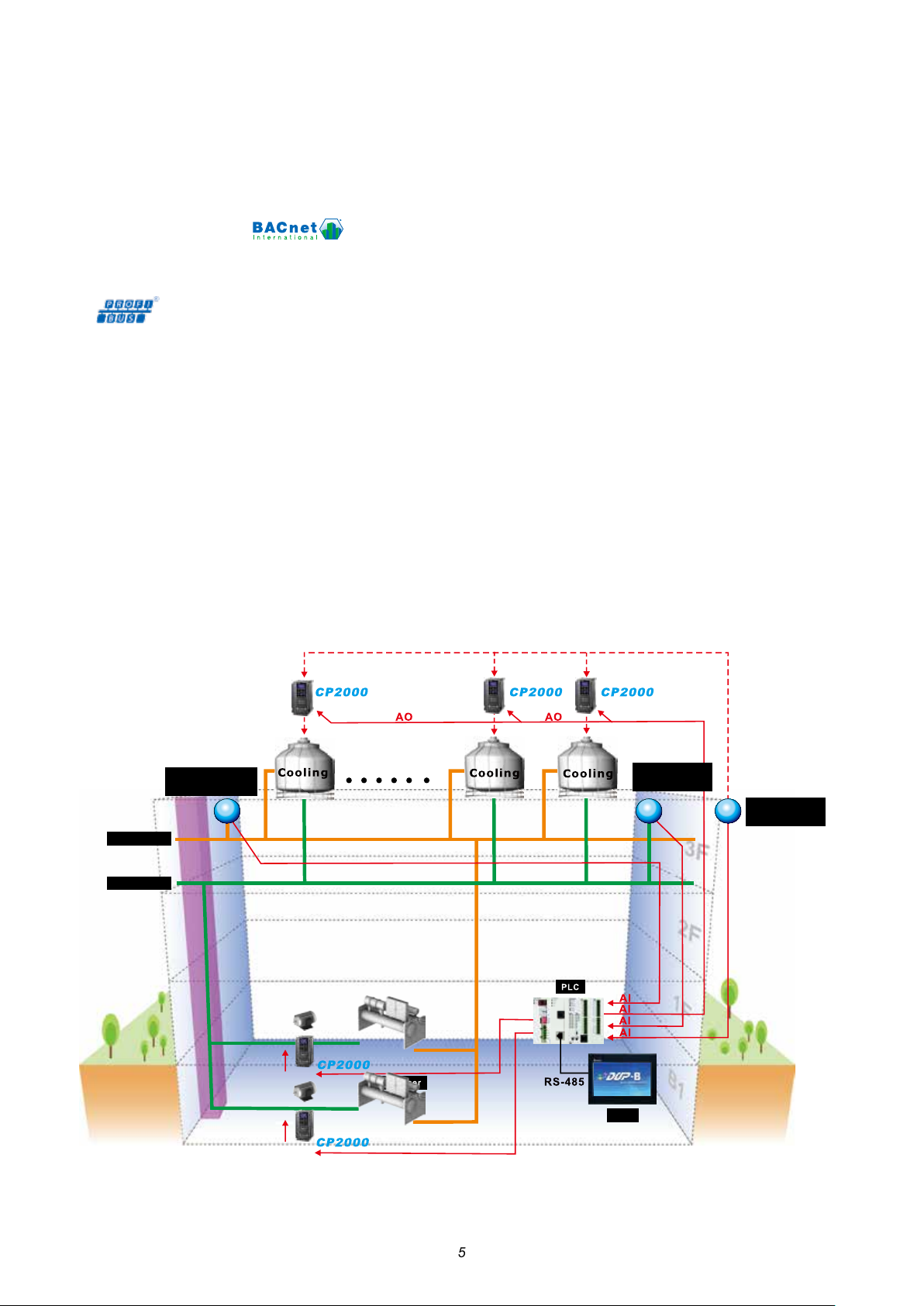
Building Automation Applications
►
4-point adjustable V/F control - Real-time adjustment of output voltage under variable torque load
environments, especially for pump and fan applications.
►
Flying start and auto restart after momentary power loss functions, suitable for fan application.
►
Skip frequency function avoids mechanical resonance and protects the equipment.
►
Low-current protection function prevents free load operation.
►
Built-in BACnet communication protocol saves wiring for building automation applications.
Water outlet
Water inlet
Water
outlet temperature
HMI
Water inlet
temperature
Wet bulb
temperature
5
Page 7

Improves Motor Performance
►
Sensorless Vector Control (SVC) and auto-tuning functions to improve motor performance for variable
torque load applications.
►
Deceleration Energy Backup (DEB) function decelerates motor to a stop when sudden power failure
occurs to protect the equipment from damage.
►
Auto adjusting acceleration/deceleration speed, reduces mechanical vibration when activating and
stopping the equipment and provides smooth operation.
►
Energy saving control functions include PID control, sleep/wakeup mode and auto-energy saving mode.
Pressure measured
by pressure sensor
Chilled water
Proportional
electromagnetic valve
ACU Ventilation Fan
Return water
Built-in PLC Function
►
Built-in 10 K steps PLC function supports independent and distributed control when connecting to a
network system for high operation exibility.
►
Real Time Clock (RTC) function facilitates the PLC program writing process for ON/OFF chronology,
daylight saving operation and many other settings.
Standards
■CE
Low Voltage:
EN61800-5-1
■UL, cUL
■C-Tick
■ROHS
EMC:
EN61000-3-12, EN61800-3, IEC61000-6-2, IEC61000-6-4,
IEC61000-4-2, IEC61000-4-3, IEC61000-4-4, IEC61000-4-5, IEC61000-4-6, IEC61000-4-8
6
Page 8

Modular Design
Powerful motor drive control functions. The modular design satises various system applications
with higher exibility and is easy to maintain. Accessories include input/output extension cards,
communication cards, hot pluggable LCD keypad, removable terminal blocks and removable fans.
• KPC-CC01 keypad
• Standard RJ45 cable for remote operation.
• Easy to install and remove with one press.
• RFI Jumper
• Remove the safety screws
and press on both side tabs to
remove the cover.
• The product nameplate shows the
input/output voltage, input /output
current, frequency range, and
more.
• Modular fan design, easy to
replace and clean, extending product
life.
High Adaptability to Environment
►
Built-in DC choke to supress harmonics*
►
Built-in EMC lter for noise suppression*
►
Enhanced conformal coating on PCBs for
superior durability in critical environments.
Heat
►
The electronic components of the drive are
isolated from the cooling system to reduce
heat interference. Dissipated heat can be
discharged by ange-mounting installation,
and forced fan cooling can import cold air
into the heat sink. The heat dissipation
performance is optimized by these two
cooling methods.
Note: Please refer to the Product Specication for more detail
dissipation
7
Dust-proof
Interference
immunity
Page 9
Environment for Operation, Storage and
DO NOT expose the AC motor drive to harsh environments, such as dust, direct sunlight, corrosive / ammable gasses, humidity, liquid or vibrations.
Installation Location
Package Drop
Impact
1
Transportation
The salts in the air must be less than 0.01 mg / cm2 per year.
IEC60364-1 / IEC60664-1 Pollution degree 2, indoor use only
Surrounding
Temperature
Rated Humidity
Air Pressure
Environment
Pollution Level
Altitude
Vibration
Operation Position
Storage / Transportation -25 ºC ~ +70 ºC
Only allowed at non-condensation, non-frost, non-conductive environment.
Operation Max. 95%
Storage / Transportation Max. 95%
Only allowed at non-condensation, non-frost, non-conductive environment.
Operation / Storage 86 to 106 kPa
Transportation 70 to 106 kPa
IEC60721-3-3
Operation Class 3C2; Class 3S2
Storage Class 1C2; Class 1S2
Transportation Class 2C2; Class 2S2
Only allowed at non-condensation, non-frost, non-conductive environment.
If the AC motor drive is installed at an altitude of 0 to 1000m, follow normal
Operation
Storage / Transportation ISTA procedure 1A (according to weight) IEC60068-2-31
1.0 mm, peak to peak value range from 2 Hz to 13.2 Hz; 0.7 G ~ 1.0 G range from 13.2 Hz to 55 Hz;
1.0 G range from 55 Hz to 512 Hz. Comply with IEC 60068-2-6.
IEC / EN 60068-2-27
Max. allowed offset angle ±10 º
(under normal installation position)
operation restrictions. If it is installed at altitude 1000 ~ 3000 m, decrease 1% of
rated current or lower 0.5 ºC of temperature for every 100m increase in altitude.
Maximum altitude for Corner Grounded TN system is 2000m; for application over
2000m, please contact Delta for more details.
0 10
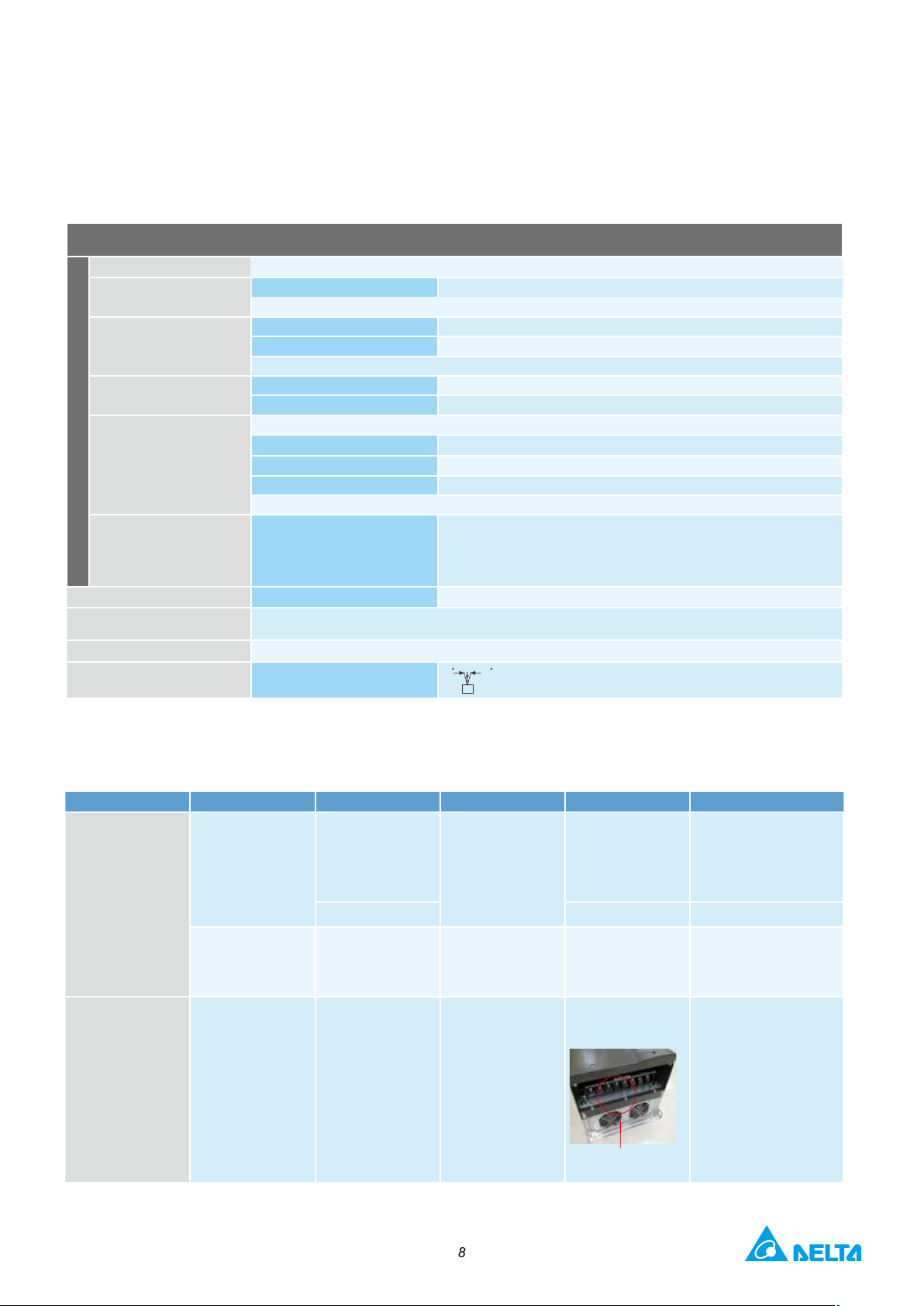
Specication for Operation Temperature and
Protection Level
Model Frame Top Cover Conduit Box Protection Level OperationTemperature
230 V & 460 V:
ND: -10 ° C ~ 50 ° C
LD: -10 ° C ~ 40 ° C
V & 690 V:
575
-10 ° C ~ 50 ° C
-10 ° C ~ 40 ° C
-10 ° C ~ 40 ° C
230 V & 460 V:
ND: -10 ° C ~ 50 ° C
LD: -10 ° C ~ 40 ° C
690 V:
-10 ° C ~ 50 ° C
(ND = Normal Duty
LD = Light Duty)
VFDxxxxCPxxx-21
VFDxxxxCPxxx-00
Frame A ~ C
230 V: 0.75 ~ 30 kW
460 V: 0.75 ~ 37 kW
575 V: 1.5 ~ 15 kW
690 V: 18.5 ~ 37 kW
Frame D ~ H
230 V: > 37 kW
460 V: > 45 kW
690 V: > 45 kW
Frame D ~ H
230 V: > 37 kW
460 V: > 45 kW
690 V: > 45 kW
Remove top cover
Standard with top cover IP20/UL Type1/NEMA1
N/A Conduit box IP20/UL Type1/NEMA1
N/A No conduit box
Standard conduit plate
IP20/UL Open Type
IP00
IP20 / UL Open Type
Protection degree for
the circled area is IP00;
other areas are IP20
8
Page 10
460 V
Models VFD-����CP43�-��
VFD-����CP4E�-��
Rated Output Capacity (kVA)
Rated Output Current (A)
Applicable Motor Output ( kW)
Applicable Motor Output (HP)
Overload Tolerance
Rated Output Capacity (kVA)
2.2
2.4
3.2
4.8
7.2
8.4101419253036
48
Rated Output Current (A)
1.7
Applicable Motor Output ( kW)
Applicable Motor Output (HP)
Efciency (%)
Power Factor
Carrier Frequency (kHz)
Max. Output Frequency (Hz)
Input Current (A) Light Duty
Input Current (A) Normal Duty
Rated Voltage / Frequency
Operating Voltage Range
323 ~ 528 V
Frequency Tolerance
47 ~ 63 Hz
Cooling Method
Braking Chopper
Frame A, B, C, Built-in
DC Choke
Frame A, B, C, Optional
Frame A, B, C of VFD____CP4E_-__; EMC lter Built-in
Frame A, B, C of VFD____CP43_-__; N / A
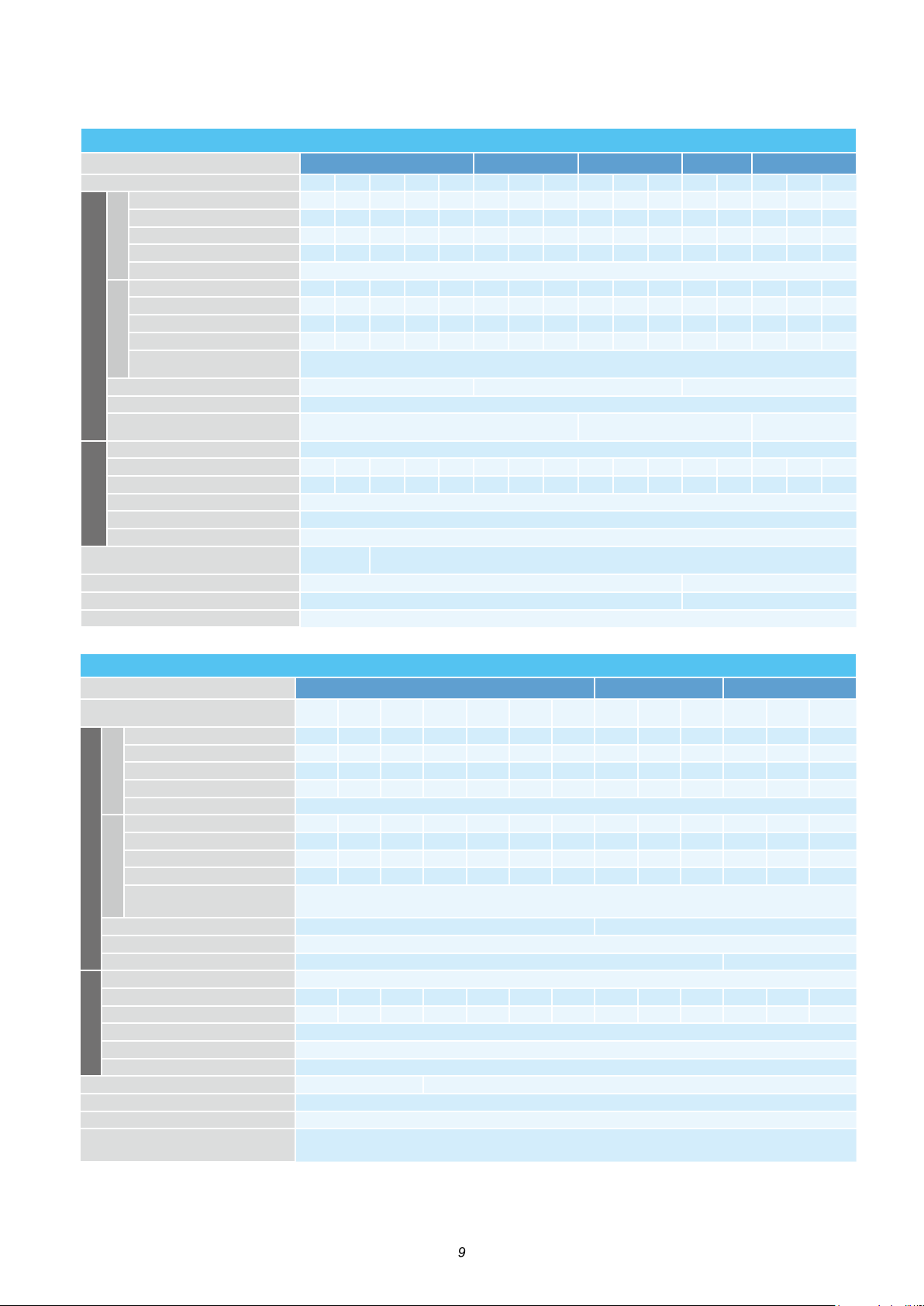
Specifications
230 V
A
BCD
E
Model VFD-����CP23�-��
Rated Output Capacity (kVA)
Rated Output Current (A)
Applicable Motor Output ( kW)
Applicable Motor Output (HP)
Rated Output Capacity (kVA)
1.2
2.0
3.2
4.4
6.810132026303648587286
102
Rated Output Current (A)
3
Applicable Motor Output (HP)
Efciency (%)
Power Factor
Max. Output Frequency (Hz)
Input Current (A) Light Duty
Input Current (A) Normal Duty
Rated Voltage / Frequency
Operating Voltage Range
170 ~ 265 V
Frequency Tolerance
47 ~ 63 Hz
Natural
cooling
Braking Chopper
Frame A, B, C, Built-in
Frame D and above: Optional
DC Choke
Frame A, B, C, Optional
Frame D and above: Built-in 3%
EMC Filter
Frame Size
LIGHT DUTY
Overload Tolerance 120% of rated current for 1 minute during every 5 minutes
Applicable Motor Output ( kW) 0.4 0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45 55 75
Output Rating
Overload Tolerance
NORMAL DUTY
Carrier Frequency (kHz)
Input Rating
007 015 022 037 055 075 11 0 150 185 220 300 370 450 550 750 900
2.0 3.0 4.0 6.0 8.4 12 18 24 30 36 42 58 72 86 110 128
5 7.5 10 15 21 31 46 61 75 90 105 146 180 215 276 322
0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45 55 75 90
1 2 3 5 7.5 10 15 20 25 30 40 50 60 75 100 125
5 8 11 17 25 33 49 65 75 90 120 146 180 215 255
0.5 1 2 3 5 7.5 10 15 20 25 30 40 50 60 75 100
120% of rated current for 1 minute during every 5 minutes;
160% of rated current for 3 seconds during every 25 seconds
96 96.5 97
> 0.98
2 ~ 15 kHz
(default setting 8 kHz)
599.00 Hz 400.00 Hz
6.4 9.6 15 22 25 35 50 65 83 100 116 146 180 215 276 322
3.9 6.4 12 16 20 28 36 52 72 83 99 124 143 171 206 245
3-phase
AC 200 V ~ 240 V (-15% ~ +10%),50 / 60 Hz
2 ~ 10 kHz
(default setting 6 kHz)
AC
2 ~ 9 kHz
(default setting 4 kHz)
Cooling Method
Frame Size
LIGHT DUTY
Output Rating
Overload Tolerance
NORMAL DUTY
Input Rating
Fan Cooling
Optional
A B C
007 015 022 037 040 055 075 11 0 150 185 220 300 370
2.4 3.3 4.4 6.8 8.4 10.4 14.3 19 25 30 36 48 58
3 4.2* 5.5* 8.5* 10.5 13* 18* 24* 32* 38* 45 60* 73*
0.75 1.5 2.2 3.7 4.0 5.5 7.5 11 15 18.5 22 30 37
1 2 3 5 5 7.5 10 15 20 25 30 40 50
120% of rated current for 1 minute during every 5 minutes
3.0 4.0 6.0 9.0 10.5 12 18 24 32 38 45 60
0.4 0.75 1.5 2.2 3.7 4.0 5.5 7.5 11 15 18.5 22 30
0.5 1 2 3 5 5 7.5 10 15 20 25 30 40
120% of rated current for 1 minute during every 5 minutes;
160% of rated current for 3 seconds during every 25 seconds
96 96.5
> 0.98
2 ~ 15 kHz (
4.3 6.0 8.1 12.4 16 20 22 26 35 42 50 66 80
3.5 4.3 5.9 8.7 14 15.5 17 20 26 35 40 47 63
3-phase
default
8 kHz) 2 ~ 10 kHz (
599.00 Hz
AC 380 V ~ 480 V (-15% ~ +10%), 50 / 60 Hz
AC
default
6 kHz)
EMC Filter
*Rated current for B type model (e.g. VFD015CP43B-21)
Natural cooling Fan cooling
9
Page 11

460 V
Frame Size
Model VFD-���� CP43�-��
450
550
750
900
Rated Output Capacity (kVA)
Rated Output Current (A)
Applicable Motor Output (HP)
Overload Tolerance
Rated Output Capacity (kVA)
Rated Output Current (A)
Applicable Motor Output ( kW)
Applicable Motor Output (HP)
Efciency (%)
Power Factor
Max. Output Frequency (Hz)
Input Current (A) Light Duty
Input Current (A) Normal Duty
Rated Voltage / Frequency
Operating Voltage Range
323 ~ 528 V
Frequency Tolerance
47 ~ 63 Hz
Cooling Method
Fan cooling
Braking Chopper
DC Choke
EMC Filter
Frame D and above: Optional
Model VFD-���C53A-21
Applicable Motor Output (HP)
LIGHT DUTY
NORMAL DUTY
Efciency (%)
Power Factor
Carrier Frequency (kHz)
Input Current (A) Light Duty
Input Current (A) Normal Duty
Rated Voltage / Frequency
Operating Voltage Range
446 ~ 660 VAC
Frequency Tolerance
47 ~ 63 Hz
AC Drive Weight
3 ± 0.3 Kg
4.8 ± 1 Kg
Cooling Method
Natural cooling
Fan cooling
Braking Chopper
Built-in
DC Choke
Optional
Applicable Motor Output ( kW)
LIGHT DUTY
Output Rating
Overload Tolerance
NORMAL DUTY
Carrier Frequency (kHz)
Input Rating
D0 D E F G H
1100 1320 1600 1850 2200 2800 3150 3550 4000 5000
73 88 120 143 175 207 247 295 367 422 491 544 613 773
91 110 150* 180 220 260* 310 370* 460 530 616 683 770 930
45 55 75 90 110 132 160 185 220 280 315 355 400 500
60 75 100 125 150 175 215 250 300 375 425 475 536 675
120% of rated current for 1 minute during every 5 minutes
58 73 88 120 143 175 207 247 295 367 438 491 544
73 91 110 150 180 220 260 310 370 460 550 616 683
37 45 55 75 90 110 132 160 185 220 280 315 355
53 60 75 100 125 150 175 215 250 300 375 425 475
120% of rated current for 1 minute during every 5 minutes;
160% of rated current for 3 seconds during every 25 seconds
97 97.5
> 0.98
2 ~ 10 kHz
(default setting 6 kHz)
2 ~ 9 kHz
(default setting 4 kHz)
599.00 Hz 400.00 Hz
91 110 150 180 220 260 310 370 460 530 616 683 770
74 101 114 157 167 207 240 300 380 400 494 555 625
3-phase
AC 380 V ~ 480 V (-15% ~ +10%), 50 / 60 Hz
AC
Frame D and above: Optional
Frame D and above: Built-in 3%
720
866
450
600
930
866
575 V
Frame Size
015 022 037 055 075 110 150
2 3 5 7.5 10 15 20
Rated Output Capacity (kVA)
Rated Output Current (A)
Applicable Motor Output (kW)
Applicable Motor Output (HP)
Rated Output Capacity (kVA)
Rated Output Current (A)
Output*
Applicable Motor Output (kW)
Applicable Motor Output (HP)
3 4.3 6.7 9.9 12.1 18.7 24.2
3 4.3 6.7 9.9 12.1 18.7 24.2
1.5 2.2 3.7 5.5 7.5 11 15
2 3 5 7.5 10 15 20
2.5 3.6 5.5 8.2 10 15.4 19.9
2.5 3.6 5.5 8.2 10 15.5 20
0.75 1.5 2.2 3.7 5.5 7.5 11
1 2 3 5 7.5 10 15
3.8 5.4 10.4 14.9 16.9 21.3 26.3
3.1 4.5 7.2 12.3 15 18 22.8
Input
* Parameter 00-16; available load modes: Light Duty (LD) and Normal Duty (ND); default setting is LD mode
A B
97 98
2 ~15 kHz (default setting 4 kHz)
-Phase
3
525 VAC ~ 600 V
> 0.98
( -15% ~ +10%), 50 / 60 Hz
AC
10
Page 12

F
G
H
Model VFD-���CP63A-��
Rated Output Capacity (kVA)
Applicable Motor Output ( 690V, kW)
Applicable Motor Output ( 690V, HP)
Applicable Motor Output (575V, HP)
Rated Output Current (A)
Applicable Motor Output ( 690V, kW)
132
160
200
250
315
355
450
630
Applicable Motor Output ( 690V, HP)
Applicable Motor Output (575V, HP)
150
150
200
250
350
400
450
500
Rated Output Current (A)
Efciency (%)
Power Factor
Input Current (A) Light Duty
Input Current (A) Normal Duty
Rated Voltage / Frequency
Operating Voltage Range
446 ~ 759 VAC
Frequency Tolerance
47 ~ 63 Hz
AC Drive Weight
88 ± 1.5 Kg
135 ± 4 Kg
243 ± 5 Kg
Cooling Method
Fan cooling
Braking Chopper
Frame D and above (optional)
DC Choke
Frame D and above (built-in)
Specifications
Frame Size
Model VFD-���CP63A-��
Output*
LIGHT DUTY
Rated Output Capacity (kVA)
Applicable Motor Output ( 690V, kW)
Applicable Motor Output ( 690V, HP)
Applicable Motor Output (575V, HP)
Rated Output Current (A)
NORMAL DUTY
Rated Output Capacity (kVA)
Applicable Motor Output ( 690V, kW)
15
18.522303745557590110
Applicable Motor Output ( 690V, HP)
Rated Output Current (A)
Efciency (%)
Power Factor
Carrier Frequency (kHz)
Input
Input Current (A) Light Duty
Input Current (A) Normal Duty
Rated Voltage / Frequency
Operating Voltage Range
446 ~ 759 VAC
Frequency Tolerance
47 ~ 63 Hz
AC Drive Weight
10 ± 1.5 Kg
39 ± 1.5 Kg
61 ± 1.5 Kg
Cooling Method
Fan cooling
Braking Chopper
Frame C (built-in)
Frame D and above (optional)
DC Choke
Frame C (optional)
Frame D and above (built-in)
Applicable Motor Output (575V, HP)
690 V
C D E
185 220 300 370 450 550 750 900 1100 1320
29 36 43 54 65 80 103 124 149 179
18.5 22 30 37 45 55 75 90 11 0 132
25 30 40 50 60 75 100 125 150 175
20 25 30 40 50 60 75 100 125 150
24 30 36 45 54 67 86 104 125 150
24 29 36 43 54 65 80 103 124 149
20 25 30 40 50 60 75 100 125 150
15 20 25 30 40 50 60 75 100 125
20 24 30 36 45 54 67 86 104 125
97
2 ~ 9 kHz (default setting 4 kHz)
29 36 43 54 65 81 84 102 122 147
24 29 36 43 54 65 66 84 102 122
3-Phase 525 VAC ~ 690 V
> 0.98
( -15% ~ +10%), 50 / 60 Hz
AC
690 V
Frame Size
1600 2000 2500 3150 4000 4500 5600 6300
215 263 347 418 494.5 534.7 678.5 776
160 200 250 315 400 450 560 630
215 270 335 425 530 600 745 850
LIGHT DUTY
Rated Output Capacity (kVA)
Output*
NORMAL DUTY
Carrier Frequency (kHz)
Input
* Parameter 00-16; available load modes: Light Duty (LD) and Normal Duty (ND) ; default setting is LD mode
150 200 250 350 400 450 500 675
180 220 290 350 430 465 590 675
179 215 239 347 402.5 442.7 534.7 776
175 215 270 335 425 475 600 850
150 180 220 290 350 385 465 675
97 98
2 ~ 9 kHz (default setting 4 kHz)
178 217 292 353 454 469 595 681
148 178 222 292 353 388 504 681
-Phase
3
525 VAC ~ 690 V
> 0.98
( -15% ~ +10%), 50 / 60 Hz
AC
2 ~ 9 kHz
(default setting
3 kHz)
11
Page 13

General Specifications
Control Characteristics
Control Method
Starting Torque
V / F Curve
Torque Limit
Frequency Output Accuracy
Output Frequency Resolution
Accel. / decel. Time
Protection Characteristics
Over-Temperature Protection
Control Mode
Speed Response Ability
Max. Output Frequency (Hz)
Overload Tolerance
Frequency Setting Signal
Main Control Function
Fan Control
Motor Protection
Over-Current Protection
Over-Voltage Protection
Stall Prevention
Restart After Instantaneous
Power Failure
Grounding Leakage Current
Protection
International Certications
Pulse Width Modulated (PWM)
230 V / 460 V
1: V / F (V / F control), 2: SVC (Sensorless Vector Control), 3: PM (Permanent Magnet Motor)
575 V / 690 V
1: V / F,2: SVC
Reach up to 150% or above at 0.5 Hz
4 point adjustable V / F curve and square curve
5 Hz
Light Duty: Max. 130% torque current; Normal Duty: Max. 160% torque current
230 V model: 599.00 Hz (55 kW and above: 400.00 Hz)
460 V model: 599.00 Hz (90 kW and above: 400.00 Hz)
575 V / 690 V
Digital command: ±0.01%, -10 °C ~ +40 °C, Analog command: ±0.1%, 25 ±10 °C
Digital command: 0.01 Hz; Analog command: Max. output frequency x 0.03 / 60 Hz (±11 bit)
Light duty: 120% of rated current for 1 minute
Normal duty: 120% of rated current for 1 minute;160% of rated current for 3 seconds
0 ~ +10 V, 4 ~ 20 mA, 0 ~ 20 mA
0.00 ~ 600.00 / 0.0 ~ 6000.0 seconds
Fault restart Torque limit Smart stall Dwell 3-wire sequence
Speed search Parameter copy JOG frequency Slip compensation Torque compensation
S-curve accel / decel Energy saving control
PID control
(with sleep function)
Over-torque detection MODBUS communication (RS-485 RJ45, Max. 115.2 kbps)
230 V model: Model with spec higher than VFD185CP23 (included) are PWM control;
Model with spec lower than VFD150CP23 (not included) are on / off switch control.
460 V model: Model with spec higher than VFD220CP43 (included) are PWM control;
Model with spec lower than VFD185CP43 (not included) are on / off switch control.
575 V / 690 V
Electronic thermal relay protection
230 V / 460 V
Light duty: Over-current protection for 200% rated current,
Normal duty: Over-current protection for 240% rated current,
Current clamp (Light duty: 130 ~ 135%);(Normal duty: 170 ~ 175%)
575 V / 690 V
Over-current protection for 225% rated current
Current clamp (Light duty: around 128 ~ 141%);(Normal duty: around 170 ~ 175%
230 V model: drive will stop when DC-BUS voltage exceeds 410 V
460 V model: drive will stop when DC-BUS voltage exceeds 820 V
575 V / 690 V
built-in temperature sensor
Stall prevention during acceleration, deceleration and running indepenently
Parameter setting up to 20 seconds
Leakage current is higher than 50% of rated current of the AC motor drive
model:
model
:
model: 599.00 Hz
, pulse input
Accel / Decel. Time
switch
Auto-Tuning (rotational,
stationary)
model
model
model
model: drive will stop when DC-BUS voltage exceeds
: PWM
:
:
control
DC injection braking
at start / stop
Frequency / lower limit
settings
BACnet
Communication
)
1189 V
Momentary power loss
ride thru
16-step speed (max.)
Note: EAC Certification is for 230V and 460V models only
12
Page 14

Wiring
Wiring Diagram for Frame A ~ C
*Input: 3-phase power
Fuse/NFB (No Fuse Breaker)
R (L1)
S(L 2)
T( L3)
NOTE
NOTE
It is recommended to
install a protective
circuit at RB-RC to
protect it from
system damage.
When fault occurs, the contact will switch
ON to shut the power and protect the
power system.
NOTE
RB1 and RC1 are the multifunction output
terminals
Factory setting:NPN(SINK)Mode
Please refer to Figure 2 for
wiring of NPN mode and PNP mode.
FWD/STOP
REV/STOP
Multi-step 1
Multi-step 2
Multi-step 3
Factory
setting
NOT E
NOT
Do NOT apply the main voltage directly
to above terminals.
NOT E
* 1
A jumper is factory-installed between DCM, SCM1
and SCM2. Remove the short circuiting jumper before
wiring these terminals.
A jumper is factory-installed between +24V, STO1
* 2
and STO2. Remove the short circuiting jumper before
wiring these terminals
S
T
O P
E
S
afet y PLC
Multi-step 4
A/
N
N A/
A/
N
N A/
Digital Signal Common
O FF
MC
ON
MC
S A
+ 2 4 V D C
*1
*2
Jumper
RB1
R C1
FW D
RE V
MI 1
MI 2
MI 3
MI 4
MI
MI 6
MI 7
MI
DC M
DC choke (optional)
-
+2 B2
R (L1 )
S (L2 )
T (L 3)
4
+2
CO M
5
8
+1
V
DCM
SC M1
SCM2
+ 24V
ST O1
S
T O 2
Brake resistor (optional)
U( T1 )
V(T 2)
W (T3)
RA1
at COS (0.4)
RC1
at COS (0.4)
RA2
Multifunction output terminals
RC 2
RA 3
at COS (0.4)
30V
RC 3
8 1
Option slot 1
SG ND
8 1
SG+
Communication extension card
Motor
IM
3~
Multifunction output terminals
250 Vac/3 A (N.C. )
30Vd c/5 A (N.O.)
30Vd c/3 A (N.C. )
d c/5 A (N .O.)
Analog Multifunction
Output Terminal
Analog Signal Common
Analog Multifunction
Output Terminal
)
A (250 Vac/3 N .O.
A (250 Vac/1.2 N.O.)
,estimate
,estimate
A (250 Vac /1.2 N.C.)
)
A (25 0Va c/3 N. O.
A (2 50 Vac/ 1.2 N. O.)
,estimate
MODBUS RS-485
Pi n 1~2, 7, 8:
Pi n 3, 6: SGN D
Pi n 4:SGPi n 5:SG+
Reserved
5K
+10V/20 mA
3
0~10 VDC or 0/4~20 mA
2
1
0~10 VDC or 0/4~20 mA
0~+10 V
Analog Multifunction
Output Terminal
+10 V
AVI1
ACI
AVI2
ACM
13
Option slot 3
I/O & RELAY extension card
Control terminals
Shielded leads & cable
Page 15

Wiring Diagram for Frame D0 and above
*Input: 3-phase power
Fuse/NFB (No Fuse Breaker)
R (L1 )
S (L2)
T (L3 )
O FF
SA
MC
ON
MC
NOTENOTE
It is recommended to
install a protective
circuit at RB-RC to
protect it from
system damage.
When fault occurs, the contact will switch
ON to shut the power and protect the
power system.
NOT E
RB1 and RC1 are the multifunction output
terminals
Factory setting:NPN(SINK)Mode
Please refer to Figure 2 for
wiring of NPN mode and PNP mode.
FWD/STOP
REV/STOP
Multi-step 1
Multi-step 2
Multi-step 3
Factory
setting
Multi-step 4
N A/
N A/
N
A/
N A/
NOT E
NOT
Do NOT apply the main voltage directly
to above terminals.
NOT E
* 1
A jumper is factory-installed between DCM, SCM1
and SCM2. Remove the short circuiting jumper before
wiring these terminals.
A jumper is factory-installed between +24V, STO1
* 2
and STO2. Remove the short circuiting jumper before
wiring these terminals.
E STO P
Safet y P LC
Digital Signal Common
+ 24 VD
*1
*2
+1/ DC+
R (L1)
S (L2)
T (L3)
-/ DC-
U (T1)
V (T2 )
W (T3)
Motor
IM
3~
RB 1
RC1
+ 2
CO M
FW D
RE V
MI 1
MI 2
MI 3
MI 4
MI
4 V
5
Multifunction output terminals
RA1
2 50Va c/3 A (N .C. )
at COS (0.4)
RC1
at COS (0.4)
30 Vdc /5 A (N. O.)
30 Vdc /3 A (N. C.)
RA2
A (2 50Va c/3 N.O .
A (2 50V ac/1 .2 N. O.)
A (2 50V ac /1.2 N. C.)
)
,estimate
,estimate
MI 6
MI 7
M
I
DC M
8
Multifunction output terminals
RC 2
250 Vac /3 N. O.
250 Vac /1.2 N .O .)
RA 3
at COS (0.4)
)
A (
A (
,estimate
30V dc /5 A (N. O.)
RC 3
Analog Multifunction
Output Terminal
C
DCM
Analog Signal Common
Analog Multifunction
Output Terminal
SC M1
SCM2
+ 24 V
S T O
ST O2
8 1
8 1
1
Option slot 1
MODBUS RS-485
SG ND
Pi n 1~2, 7, 8:
Pi n 3, 6: SGN D
SG+
Pi n 4:SGPi n 5:SG+
Communication extension card
Reserved
5K
+10 V/20 mA
3
0~10 VDC or 0/4~20 mA
2
1
0~10 VDC or 0/4~20 mA
0~+10 V
Analog Multifunction
Output Terminal
+10 V
AVI1
ACI
AVI2
ACM
14
Option slot 3
I/O & RELAY extension card
Control terminals
Shielded leads & cable
Page 16

Dimensions
mm
inch
MODEL
Digital Keypad
Frame A
VFD007CP23A-21
VFD015CP23A-21
VFD022CP23A-21
VFD037CP23A-21
VFD055CP23A-21
VFD007CP43A-21
VFD015CP43B-21
VFD022CP43B-21
VFD037CP43B-21
VFD040CP43A-21
VFD055CP43B-21
VFD075CP43B-21
Standard LCD keypad
VFD007CP4EA-21
VFD015CP4EB-21
VFD022CP4EB-21
VFD037CP4EB-21
VFD040CP4EA-21
VFD055CP4EB-21
VFD075CP4EB-21
VFD015CP53A-21
VFD022CP53A-21
VFD037CP53A-21
Optional selection:
LED keypad
W
W1
See Detail A
See Detail B
D
D1
S1
Detail A (Mounting Hole)
S1
Detail B (Mounting Hole)
Frame W H D W1 H1 D1* Ø Ø1 Ø2 Ø3
A
130.0 250.0 170.0 116.0 236.0 45.8 6.2 22.2 34.0 28.0
5.12 9.84 6.69 4.57 9.29 1.80 0.24 0.87 1.34 1.10
*D1: Flange mount.
15
Page 17

mm
Frame B
MODEL
MODEL
W
W1
See Detail A
D
D1
VFD075CP23A-21
VFD110CP23A-21
VFD150CP23A-21
VFD110CP43B-21
See Detail B
S1
VFD150CP43B-21
VFD185CP43B-21
VFD110CP4EB-21
Detail A (Mounting Hole)
VFD150CP4EB-21
VFD185CP4EB-21
VFD055CP53A-21
VFD075CP53A-21
VFD110CP53A-21
VFD150CP53A-21
Detail B (Mounting Hole)
S1
Frame W H D W1 H1 D1* S1 Ø1 Ø2 Ø3
B1
inch 7.48 12.60 7.48 6.81 11.93 3.07 0.33 0.87 1.34 1.72
Frame C
190.0 320.0 190.0 173.0 303.0 77.9 8.5 22.2 34.0 43.8
W
W1
See Detail A
D
D1
*D1: Flange mount.
VFD185CP23A-21
VFD220CP23A-21
VFD300CP23A-21
VFD220CP43A-21
VFD300CP43B-21
See Detail B
S1
VFD370CP43B-21
VFD220CP4EA-21
VFD300CP4EB-21
Detail A (Mounting Hole)
VFD370CP4EB-21
VFD185CP63A-21
VFD220CP63A-21
VFD300CP63A-21
VFD370CP63A-21
Detail B (Mounting Hole)
S1
Frame W H D W1 H1 D1* S1 Ø1 Ø2 Ø3
mm 250.0 400.0 210.0 231.0 381.0 92.9 8.5 22.2 34.0 50.0
C1
inch 9.84 15.75 8.27 9.09 15.00 3.66 0.33 0.87 1.34 1.97
16
*D1: Flange mount.
Page 18

Dimensions
Frame
WHDW1H1H2H3
D1*D2S1S2Ø1Ø2Ø3
Frame
WHDW1H1H2H3
D1*D2S1
S2
Frame
WHDW1H1H2H3
D1*D2S1S2Ø1Ø2Ø3
mm
Frame
WHDW1H1H2H3
D1*D2S1S2Ø1Ø2Ø3
mm
MODEL
FRAME_D1
FRAME_D0-1
MODEL
FRAME_D2
FRAME_D0-2
Frame D1 / D0-1
See Detail A
See Detail B
VFD370CP23A-00
VFD450CP23A-00
VFD750CP43B-00
VFD900CP43A-00
VFD450CP63A-00
VFD550CP63A-00
mm 330.0 - 275.0 285.0 550.0 525.0 492.0 107.2 16.0 11.0 18.0 - - -
D1
inch 12.99 - 10.83 11.22 21.65 20.67 19.37 4.22 0.63 0.43 0.71 - - -
D0-1
mm 280.0 - 255.0 235.0 500.0 475.0 442.0 94.2 16.0 11.0 18.0
inch 11.02 - 10.04 9.25 19.69 18.70 17.40 3.71 0.63 0.43 0.71
Frame D2 / D0-2
VFD450CP43S-00
VFD550CP43S-00
(Mounting Hole)
See Detail A
Detail A
Detail B
(Mounting Hole)
*D1: Flange mount.
VFD370CP23A-21
VFD450CP23A-21
VFD750CP43B-21
VFD900CP43A-21
VFD450CP63A-21
VFD550CP63A-21
D2
inch 12.99 27.10 10.83 11.22 21.65 20.67 19.37 4.22 0.63 0.43 0.71 3.00 1.34 0.87
D0-2
inch 11.02 21.19 10.04 9.25 19.69 18.70 17.40 3.71 0.63 0.43 0.71 2.47 1.34 0.87
See Detail B
VFD450CP43S-21
VFD550CP43S-21
Detail A
(Mounting Hole)
Detail B
(Mounting Hole)
330.0 688.3 275.0 285.0 550.0 525.0 492.0 107.2 16.0 11.0 18.0 76.2 34.0 22.0
280.0 614.4 255.0 235.0 500.0 475.0 442.0 94.2 16.0 11.0 18.0 62.7 34.0 22.0
*D1: Flange mount.
17
Page 19

Frame E1
mm
MODEL
MODEL
See Detail A
See Detail B
VFD550CP23A-00 VFD750CP63A-00
S1
S3 D2
S2
VFD750CP23A-00 VFD900CP63A-00
VFD900CP23A-00 VFD1100CP63A-00
VFD1100CP43A-00 VFD1320CP63A-00
Detail A
(Mounting Hole)
Detail B
(Mounting Hole)
VFD1320CP43B-00
Frame W H D W1 H1 H2 H3 D1* D2 S1 S2 S3 Ø1 Ø2 Ø3
E1
Frame E2
370.0 - 300.0 335.0 589.0 560.0 528.0 143.0 18.0 13.0 13.0 18.0 - - -
inch 14.57 - 11.81 13.19 23.19 22.05 20.80 5.63 0.71 0.51 0.51 0.71 - - -
*D1: Flange mount.
See Detail A
S1
S3 D2
S2
See Detail B
VFD550CP23A-21 VFD750CP63A-21
VFD750CP23A-21 VFD900CP63A-21
VFD900CP23A-21 VFD1100CP63A-21
VFD1100CP43A-21 VFD1320CP63A-21
Detail A
(Mounting Hole)
Detail B
(Mounting Hole)
VFD1320CP43B-21
Frame W H D W1 H1 H2 H3 D1* D2 S1 S2 S3 Ø1 Ø2 Ø3
mm 370.0 715.8 300.0 335.0 589.0 560.0 528.0 143.0 18.0 13.0 13.0 18.0 22.0 34.0 92.0
E2
inch 14.57 28.18 11.81 13.19 23.19 22.05 20.80 5.63 0.71 0.51 0.51 0.71 0.87 1.34 3.62
*D1: Flange mount.
18
Page 20

Frame
WHDW1H1H2H3
D1*D2S1S2S3Ø1Ø2
Ø3
mm
Dimensions
MODEL
MODEL
Frame F1
VFD1600CP43A-00
VFD1850CP43B-00
VFD1600CP63A-00
VFD2000CP63A-00
mm 420.0 - 300.0 380.0 800.0 770.0 717.0 124.0 18.0 13.0 25.0 18.0 - - -
F1
inch 16.54 - 11.81 14.96 31.50 30.32 28.23 4.88 0.71 0.51 0.98 0.71 - - -
Detail A
(Mounting Hole)
Detail B
(Mounting Hole)
*D1: Flange mount.
Frame F2
VFD1600CP43A-21
VFD1850CP43B-21
VFD1600CP63A-21
VFD2000CP63A-21
Frame W H D W1 H1 H2 H3 D1* D2 S1 S2 S3 Ø1 Ø2 Ø3
F2
420.0 940.0 300.0 380.0 800.0 770.0 717.0 124.0 18.0 13.0 25.0 18.0 92.0 35.0 22.0
inch 16.54 37.00 11.81 14.96 31.50 30.32 28.23 4.88 0.71 0.51 0.98 0.71 3.62 1.38 0.87
Detail A
(Mounting Hole)
Detail B
(Mounting Hole)
*D1: Flange mount.
19
Page 21

Frame G1
Frame
WHDW1H1H2H3S1S2S3Ø1Ø2Ø3
mm
mm
inch
MODEL
MODEL
W1
DW
S3
S1
S1
VFD2200CP43A-00
VFD2800CP43A-00
VFD2500CP63A-00
VFD3150CP63A-00
S2
Detail A
(Mounting Hole)
Detail B
(Mounting Hole)
Frame W H D W1 H1 H2 H3 S1 S2 S3 Ø1 Ø2 Ø3
G1
Frame G2
500.0 - 397.0 440.0 1000.0 963.0 913.6 13.0 26.5 27.0 - - -
19.69 - 15.63 217.32 39.37 37.91 35.97 0.51 1.04 1.06 - - -
W1
DW
VFD2200CP43A-21
VFD2800CP43A-21
VFD2500CP63A-21
VFD3150CP63A-21
G2
inch 19.69 48.83 15.63 217.32 39.37 37.91 35.97 0.51 1.04 1.06 0.87 1.34 4.63
S3
S1
S2
Detail A
(Mounting Hole)
S1
Detail B
(Mounting Hole)
500.0 1240.2 397.0 440.0 1000.0 963.0 913.6 13.0 26.5 27.0 22.0 34.0 117.5
20
Page 22

Dimensions
mm
inch
mm
inch
MODEL
Frame H1
VFD3150CP43A-00
VFD3550CP43A-00
VFD4000CP43A-00
VFD5000CP43A-00
Frame W H D W1 W2 W3 W4 W5 W6 H1 H2 H3 H4
H1
Frame H5 D1 D2 D3 D4 D5 D6 S1 S2 S3 Ø1 Ø2 Ø3
H1
700.0 1435.0 398.0 630.0 290.0 - - - - 1403.0 1346.6 - -
27.56 56.5 15.67 24.80 11.42 - - - - 55.24 53.02 - -
- 45.0 - - - - - 13.0 26.5 25.0 - - -
- 1.77 - - - - - 0.51 1.04 0.98 - - -
21
Page 23

HDW1W2W3
W4
mm
inch
D1D2D3D4D5
D6
mm
inch
MODEL
Frame H2
VFD3150CP43C-00
VFD3550CP43C-00
VFD4000CP43C-00
VFD5000CP43C-00
Frame W
H2
Frame H5
H2
Side fasteners
700.0 1745.0 404.0 630.0 500.0 630.0 760.0 800.0 - 1729.0 1701.6 - -
27.56 68.70 15.9 24.80 19.69 24.80 29.92 31.50 - 68.07 66.99 - -
- 51.0 38.0 65.0 204.0 68.0 137.0 13.0 26.5 25.0 - - -
- 2.0 1.50 2.56 8.03 2.68 5.4 0.51 1.04 0.98 - - -
Side fasteners
W5 W6 H1 H2 H3 H4
S1 S2 S3 Ø1 Ø2 Ø3
22
Page 24

Dimensions
HDW1W2W3
W4
mm
inch
D1D2D3D4D5
D6
mm
inch
MODEL
Frame H3
VFD3150CP43C-21
VFD3550CP43C-21
VFD4000CP43C-21
VFD5000CP43C-21
Frame W
H3
Frame H5
H3
Side fasteners
700.0 1745.0 404.0 630.0 500.0 630.0 760.0 800.0 - 1729.0 1701.6 - -
27.56 68.70 15.9 24.80 19.69 24.80 29.92 31.50 - 68.07 66.99 - -
- 51.0 38.0 65.0 204.0 68.0 137.0 13.0 26.5 25.0 22.0 34.0 117.5
- 2.0 1.50 2.56 8.03 2.68 5.4 0.51 1.04 0.98 0.87 1.34 4.63
Side fasteners
W5 W6 H1 H2 H3 H4
S1 S2 S3 Ø1 Ø2 Ø3
23
Page 25

690 V Frame H1
WHDW1W2W3W4W5W6H1H2H3H4
H5D1D2D3D4D5D6S1S2S3Ø1Ø2Ø3
MODEL
690V FRAME
_H1
VFD4000CP63A-00
VFD4500CP63A-00
VFD5600CP63A-00
VFD6300CP63A-00
框號
H1
H1
mm 700.0 - 398.0 - 630.0 290.0 - - - - 1435.0 1403.0 -
inch 27.56 - 15.67 - 24.80 11.42 - - - - 56.50 55.24 -
框號
mm 1346.6 45.0 - - - - - 13.0 26.5 25.0 - - -
inch 53.02 1.77 - - - - - 0.51 1.04 0.98 - - -
MODEL
24
Page 26

Dimensions
WHDW1W2W3W4W5W6H1H2H3H4
mm
inch
H5D1D2D3D4D5D6S1S2S3Ø1Ø2Ø3
mm
inch
MODEL
690V
690 V Frame H2
FRAME_H2
VFD4000CP63A-21
VFD4500CP63A-21
VFD5600CP63A-21
VFD6300CP63A-21
框號
H3
框號
H3
Side Fasteners
700.0 1745.0 404.0 800.0 630.0 - 500.0 630.0 760.0 1729.0 - - 1701.6
27.56 68.70 15.91 31.50 24.80 - 19.69 24.80 29.92 68.07 - - 66.99
1346.6 51.0 38.0 65.0 204.0 68.0 137.0 13.0 26.5 25.0 22.0 34.0 117.5
53.02 2.01 1.50 2.56 8.03 2.68 5.39 0.51 1.04 0.98 0.87 1.34 4.63
25
Page 27

▪ EMC-D611A
▪ EMC-R6AA
▪ EMC-BPS01
Accessories
▪ EMC-D42A
Terminals Description
COM
MI10 ~ MI13
I/O Extension Card
I/O Extension Card
MO10 ~ MO11
MXM
Terminals Description
AC AC power common for multi-function input terminal (Neutral)
MI10 ~ MI15
Common for multi-function input terminals
Select SINK (NPN) / SOURCE (PNP) in J1 jumper / external power supply
Refer to parameters 02-26 ~ 02-29 to program the multi-function inputs MI10 ~ MI13.
Internal power is applied from terminal E24: +24 V
External power +24 V
ON: the activation current is 6.5 mA; OFF: leakage current tolerance is 10 μA
Multi-function output terminals (photocoupler)
Duty-cycle: 50%; Max. output frequency: 100 Hz
Max. current: 50 mA; Max. voltage: 48 V
Common for multi-function output terminals MO10, MO11 (photocoupler)
Max 48 V
Refer to Pr. 02.26 ~ Pr. 02.31 for multi-function input selection
Input voltage: 100 ~ 130 V
Input impedance: 27 Kohm
Terminal response time: ON: 10 ms; OFF: 20 ms
50 mA
DC
: max. voltage 30 VDC, min. voltage 19 VDC, 30 W
DC
DC
; Input frequency: 57 ~ 63 Hz
AC
± 5% 200 mA, 5 W
DC
Relay
Extension Card
24V Power
Shift Card
Terminals Description
Refer to Pr. 02.36 ~ Pr. 02.41 for multi-function input selection
Resistive load:
RA10 ~ RA15
RC10 ~ RC15
3 A (N.O.) / 250 V
5 A (N.O.) / 30 V
Inductive load (COS 0.4)
2.0 A (N.O.) / 250 V
2.0 A (N.O.) / 30 V
I
t is used to output each monitor signal, such as for drive in operation, frequency attained or overload indication.
AC
DC
AC
DC
Terminals Description
When the AC motor drive power is off, the external power supply card provides external power to the
24 V GND
network system, PLC function, and other functions to allow continued operations.
Input power: 24
Maximum input current: 0.5 A
Note:
Do not connect the control terminal +24 V (Digital control signal common: SOURCE) directly to the EMC-BPS01 input terminal 24 V.
Do not connect control terminal GND directly to the EMC-BPS01 input terminal GND.
V
±5%
DC
26
Page 28

Accessories
▪ CMC-MOD01
Network Interface
Network Interface
Interface
Transmission speed
Transmission cable
PROFIBUS DP Connector
Transmission cable
Communication
GSD document
▪ CMC-EIP01
Network Interface
Transmission method
Features
►
MDI / MDI-X auto-detect
►
Supports MODBUS TCP protocol
►
AC motor drive keypad / Ethernet
conguration
►
E-mail alarm
►
Baud rate: 10 / 100 Mbps auto-detect
►
Virtual serial port
RJ-45 with Auto MDI / MDIX
Number of ports 1 Port
Transmission method IEEE 802.3, IEEE 802.3u
Category 5e shielding 100M
Network protocol
10 / 100 Mbps Auto-Detect
ICMP, IP, TCP, UDP, DHCP, SMTP,
MODBUS over TCP / IP, Delta Conguration
Features
►
MDI / MDI-X auto-detect
►
Supports MODBUS TCP and Ethernet / IP
protocol
Network Interface
Interface RJ-45 with Auto MDI / MDIX Transmission speed 10 / 100 Mbps Auto-Detect
Number of ports 1 Port
Transmission cable Category 5e shielding 100M
►
Baud rate: 10 / 100 Mbps auto-detect
IEEE 802.3, IEEE 802.3u
Network protocol
►
AC motor drive keypad / Ethernet
conguration
►
Virtual serial port
ICMP, IP, TCP, UDP, DHCP, SMTP,
MODBUS over TCP / IP, Delta Conguration
▪ CMC-PD01
Features
►
Supports PZD control data exchange
►
Supports PKW polling AC motor drive parameters
►
Supports user diagnosis function
►
Auto-detects baud rates; supports Max. 12 Mbps
Interface DB9 connector
Transmission method High-speed RS-485
Electrical isolation 500 V
Shielded twisted pair cable
DC
Message type Cyclic data exchange
Module name CMC-PD01
DELA08DB.GSD
Company ID 08DB (HEX)
Serial transmission
speed supported
(auto-detection)
9.6 kbps; 19.2 kbps; 93.75 kbps; 187.5 kbps;
125 kbps; 250 kbps; 500 kbps; 1.5 Mbps; 3 Mbps;
6 Mbps; 12 Mbps (bits per second)
27
Page 29

DeviceNet Connector
Interface
DeviceNet Connector
Interface
Communication protocol
▪ CMC-DN01
Features
Network Interface
Number of ports
Transmission speed
RJ-45 Pin denition
2
CAN_L
►
Based on the high-speed communication interface of Delta HSSP protocol, able to
conduct immediate control of an AC motor drive
►
Supports Group 2 only connection and polling I/O data exchange
►
For I/O mapping, supports Max. 32 words of input and 32 words of output
►
Supports EDS le conguration in DeviceNet conguration software
►
Supports all baud rates on DeviceNet bus: 125 kbps, 250 kbps, 500 kbps and extendable
serial transmission speed mode
►
Node address and serial transmission speed can be set up on AC motor drive
►
Power supplied from AC motor drive
5-Pin 5.08mm pluggable connector
Transmission method CAN
Transmission cable
Transmission speed
Network protocol DeviceNet protocol
▪ EMC-COP01
Interface RJ-45
Transmission method CAN
Transmission cable CAN standard cable
Communication protocol CANopen
Shielded twisted pair cable
(with 2 power cables)
125 kbps, 250 kbps, 500 kbps and
extendable serial transmission
speed mode
8~1
Male
1 Port
1 M 500 k 250 k 125 k 100 k 50 k
8~1
Female
50 PIN communication terminal
Transmission method SPI communication
Terminal function
Pin Pin name Denition
1 CAN_H CAN_H bus line (dominant high)
3 CAN_GND Ground / 0 V / V-
6 CAN_GND Ground / 0 V / V-
1. Communicating with AC motor drive
2. Transmitting power supply from AC motor drive
Delta HSSP protocol
CAN_L bus line (dominant low)
28
Page 30

▪ CANopen Communication Cable
Accessories
L
Model: TAP-CB05, TAP-CB10
L ± 10
8
H1
1
Title Part No.
1 UC-CMC003-01A 300 11.8
2 UC-CMC005-01A 500 19.6
3 UC-CMC010-01A 1000 39
8
H2
1
4 UC-CMC015-01A 1500 59
5 UC-CMC020-01A 2000 78.7
6 UC-CMC030-01A 3000 118.1
7 UC-CMC050-01A 5000 196.8
8 UC-CMC100-01A 10000 393.7
9 UC-CMC200-01A 20000 787.4
mm inch
▪ CANopen Breakout Box
66.50 [2.62]
Model: TAP-CN03
▪ Digital Keypad Accessories: RJ45 Extension Leads and CMC-EIP01 Cables
Applicable Models: CBC-K3FT, CBC-K5FT, CBC-K7FT, CBC-K10F, CBC-K16FT
Title Part No. Explanation
1 CBC-K3FT RJ45 extension lead, 3 feet (approximately 0.9 m)
2 CBC-K5FT RJ45 extension lead, 5 feet (approximately 1.5 m)
3 CBC-K7FT RJ45 extension lead, 7 feet (approximately 2.1 m)
4 CBC-K10FT RJ45 extension lead, 10 feet (approximately 3 m)
5 CBC-K16FT RJ45 extension lead, 16 feet (approximately 4.9 m)
29
Page 31

Ordering Information
Frame A
Frame B
Frame C
Frame D
Frame Size
Power
Range
230 V:
0.75 ~ 5.5 kW
460 V:
0.75 ~ 7.5 kW
575 V:
1.5 ~ 3.7 kW
230 V:
7.5 ~ 15 kW
460 V:
11 ~ 18.5 kW
575 V:
5.5 ~ 15 kW
230 V:
18.5 ~ 30 kW
460 V:
22 ~ 37 kW
690 V:
18.5 ~ 37 kW
230 V:
37 ~ 45 kW
460 V:
45 ~ 90 kW
690 V:
55 ~ 75 kW
VFD007CP 23A-21
VFD015CP 23A-21
VFD022CP 23A-21
VFD037CP 23A-21
VFD055CP 23A-21
VFD075CP 23A-21
VFD110CP 23A-21
VFD150CP 23A-21
VFD185CP 23A-21
VFD220CP 23A-21
VFD300CP 23A-21
Frame D1:
VFD370CP 23A-00
VFD450CP 23A-00
VFD750CP 43B-00
VFD900CP 43A-00
Frame D0-1:
VFD450CP 43S-00
VFD550CP 43S-00
VFD007CP 43A-21
VFD015CP 43B-21
VFD022CP 43B-21
VFD037CP 43B-21
VFD040CP 43A-21
VFD055CP 43B-21
VFD075CP 43B-21
VFD110CP 43B-21
VFD150CP 43B-21
VFD185CP 43B-21
VFD220CP 43A-21
VFD300CP 43B-21
VFD370CP 43B-21
Frame D2:
VFD370CP 23A-21
VFD450CP 23A-21
VFD750CP 43B-21
VFD900CP 43A-21
Frame D0-2:
VFD450CP 43S-21
VFD550CP 43S-21
Models
VFD007CP 4EA-21
VFD015CP 4EB-21
VFD022CP 4EB-21
VFD037CP 4EB-21
VFD040CP 4EA-21
VFD055CP 4EB-21
VFD075CP 4EB-21
VFD110CP 4EB-21
VFD150CP 4EB-21
VFD185CP 4EB-21
VFD220CP 4EA-21
VFD300CP 4EB-21
VFD370CP 4EB-21
VFD015CP 53A-21
VFD022CP 53A-21
VFD037CP 53A-21
VFD055CP 53A-21
VFD075CP 53A-21
VFD110CP 53A-21
VFD150CP 53A-21
VFD185CP 63A-21
VFD220CP 63A-21
VFD300CP 63A-21
VFD370CP 63A-21
Frame D1:
VFD450CP 63A-00
VFD550CP 63A-00
Frame D2:
VFD450CP 63A-21
VFD550CP 63A-21
Frame E
Frame F
Frame G
230 V:
55 ~ 90 kW
460 V:
110 ~ 132 kW
690 V:
75 ~ 132 kW
460 V:
160 ~ 185 kW
690 V:
160 ~ 200 kW
460 V:
220 ~ 280 kW
690 V:
250 ~ 315 kW
Frame E1:
VFD550CP 23A-00
VFD750CP 23A-00
VFD900CP 23A-00
VFD1100CP 43A-00
VFD1320CP 43B-00
Frame F1:
VFD1600CP 43A-00
VFD1850CP 43B-00
Frame G1:
VFD2200CP 43A-00
VFD2800CP 43A-00
Frame E2:
VFD550CP 23A-21
VFD750CP 23A-21
VFD900CP 23A-21
VFD1100CP 43A-21
VFD1320CP 43B-21
Frame F2:
VFD1600CP 43A-21
VFD1850CP 43B-21
Frame G2:
VFD2200CP 43A-21
VFD2800CP 43A-21
Frame E1:
VFD750CP 63A-00
VFD900CP 63A-00
VFD1100CP 63A-00
VFD1320CP 63A-00
Frame E2:
VFD750CP 63A-21
VFD900CP 63A-21
VFD1100CP 63A-21
VFD1320CP 63A-21
Frame F1:
VFD1600CP 63A-00
VFD2000CP 63A-00
Frame F2:
VFD1600CP63A-21
VFD2000CP63A-21
Frame G1:
VFD2500CP 63A-00
VFD3150CP 63A-00
Frame G2:
VFD2500CP 63A-21
VFD3150CP 63A-21
30
Page 32

Ordering Information
Power
Frame Size
Frame H
Frame H
(690 V Model)
Range
460 V:
315 ~ 500 kW
690 V:
400 ~ 630 kW
Frame H1:
VFD3150CP 43A-00
VFD3550CP 43A-00
VFD4000CP 43A-00
VFD5000CP 43A-00
Model Name
VFD 1100 CP 43 A - 2 1
Frame H2:
VFD3150CP 43C-00
VFD3550CP 43C-00
VFD4000CP 43C-00
VFD5000CP 43C-00
Models
Frame H3:
VFD3150CP 43C-21
VFD3550CP 43C-21
VFD4000CP 43C-21
VFD5000CP 43C-21
Frame H1:
VFD4000CP 63A-00
VFD4500CP 63A-00
VFD5600CP 63A-00
VFD6300CP 63A-00
Frame H2:
VFD4000CP 63A-21
VFD4500CP 63A-21
VFD5600CP 63A-21
VFD6300CP 63A-21
Installation Type
A, B, S Wall Mount
C Floor Mount
Product Series
CP CP2000
Applicable Motor Capacity
007: 0.75 kW ~ 6300: 630 kW
* Refer to product specification for detailed information
NEMA Protection Level
0 UL Open Type
1 NEMA 1
IP Protection Level
0 IP00
2 IP20
Input Voltage / Phase
23 230 V 3-Phase
43 460 V 3-Phase
4E 460 V 3-Phase (EMC lter built-in)
53 575 V 3-Phase
63 690 V 3-Phase
Product
Variable Frequency Drive
31
Page 33

Attention
Standard Motors
Output reactor
Please refer to manual to use the output
AC reactor when the output cable is long.
Torque Characteristics and
Temperature Rise
When a standard motor is drive controlled, the
motor temperature will be higher than with DOL
operation.
Please reduce the motor output torque when
operating at low speeds to compensate for less
cooling efficiency.
For continuous constant torque at low speeds,
external forced motor cooling is recommended.
Vibration
When the motor drives the machine, resonances
may occur, including machine resonances.
Abnormal vibration may occur when operating a
2-pole motor at 60Hz or higher.
Noise
When a standard motor is drive controlled, the
motor noise will be higher than with DOL
operation.
To lower the noise, please increase the carrier
frequency of the drive. The motor fan can be
very noisy when the motor speed exceeds 60Hz.
Special Motors
High-speed Motor
To ensure safety, please try the frequency
setting with another motor before operating the
high-speed motor at 120Hz or higher.
Explosion-proof Motor
Please use a motor and drive that comply with
explosion-proof requirements.
Submersible Motor & Pump
The rated current is higher than that of a
standard motor.
Please check before operation and select the
capacity of the AC motor drive carefully.
The motor temperature characteristics differ
from a standard motor, please set the motor
thermal time constant to a lower value.
Brake Motor
When the motor is equipped with a mechanical
brake, the brake should be powered by the
mains supply.
Damage may occur when the brake is powered
by the drive output. Please DO NOT drive the
motor with the brake engaged.
Gear Motor
In gearboxes or reduction gears, lubrication may
be reduced if the motor is continuously operated
at low speeds.
Please DO NOT operate in this way.
Synchronous Motor
These motors need suitable software for
control. Please contact Delta for more
information.
Environmental Conditions
Installation Position
1. The drive is suitable for installation in a place
with ambient temperature from -10
2. The surface temperature of the drive and
brake resistor will rise under specific
operation conditions. Therefore, please
install the drive on materials that are
noncombustible.
3. Ensure that the installation site complies with
the ambient conditions as stated in the manual.
o
C to 50oC.
Wiring
Limit of Wiring Distance
For the remote operation, please use
twist-shielding cable and the distance between
the drive and control box should be less than
20m.
Maximum Motor Cable Length
Motor cables that are too long may cause
overheating of the drive or current peaks due to
stray capacitance.
Please ensure that the motor cable is less than
30m.
If the cable length can't be reduced, please lower
the carrier frequency or use an AC reactor.
Choose the Right Cable
Please refer to current value to choose the right
cable section with enough capacity or use
recommended cables.
Grounding
Please ground the drive completely by using the
grounding terminal.
How to Choose the Drive
Capacity
Standard Motor
Please select the drive according to applicable
motor rated current listed in the drive
specification.
Please select the next higher power AC drive in
case higher starting torque or quick
acceleration/deceleration is needed.
Special Motor
Please select the drive according to: Rated
current of the drive > rated current of the motor
Transportation and Storage
Please transport and store the drive in a place
that meets environment specifications.
Peripheral Equipment
Molded-Case Circuit Breakers
(MCCB)
Please install the recommended MCCB or ELCB
in the main circuit of the drive and make sure that
the capacity of the breaker is equal to or lower
than the recommended one.
Add a Magnetic Contactor(MC) in
the Output Circuit
When a MC is installed in the output circuit of the
drive to switch the motor to commercial power or
other purposes, please make sure that the drive
and motor are completely stopped and remove
the surge absorbers from the MC before
switching it.
Add a Magnetic Contactor (MC) in
the Input Circuit
Please only switch the MC ONCE per hour or it
may damage the drive. Please use RUN/STOP
signal to switch many times during motor
operation.
Motor Protection
The thermal protection function of the drive can
be used to protect the motor by setting the
operation level and motor type
(standard motor or variable motor).
When using a high-speed motor or a
water-cooled motor the thermal time constant
should be set to a lower value.
When using a longer cable to connect the motor
thermal relay to a motor, high-frequency currents
may enter via the stray capacitance.
It may result in malfunctioning of the relay as the
real current is lower than the setting of thermal
relay. Under this condition, please lower the
carrier frequency or add an AC reactor to solve
this.
DO NOT Use Capacitors to Improve
the Power Factor
Use a DC reactor to improve the power factor of
the drive. Please DO NOT install power factor
correction capacitors on the main circuit of the
drive to prevent motor faults due to over current.
Do NOT Use Surge Absorber
Please DO NOT install surge absorbers on the
output circuit of the drive.
Lower the Noise
To ensure compliance with EMC regulations,
usually a filter and shielded wiring is used to
lower the noise.
Method Used to Reduce the Surge
Current
Surge currents may occur in the phase-lead
capacitor of the power system, causing an
overvoltage when the drive is stopped or at low
loads.
It is recommended to add a DC reactor to the
drive.
Single-phase Motor
Single-phase motors are not suitable for being
operated by an AC Motor Drive. Please use a
3-phase motor instead when necessary.
32
 Loading...
Loading...