

Page 1

Page 2

Preface
Thank you very much for purchasing DELTA’s AC servo products.
This manual will be helpful in the installation, wiring, inspection, and operation of Delta AC servo drive and
motor. Before using the product, please read this user manual to ensure correct use.
You should thoroughly understand all safety precautions (DANGERS, WARNINGS and STOPS) before
proceeding with the installation, wiring and operation. If you do not understand please contact your local
Delta sales representative. Place this user manual in a safe location for future reference.
Using This Manual
Contents of this manual
This manual is a user guide that provides the information on how to install, operate and maintain
ASDA-AB series AC servo drives and ECMA series AC servo motors. The contents of this manual
are including the following topics:
z Installation of AC servo drives and motors
z Configuration and wiring
z Trial run steps
z Control functions and adjusting methods of AC servo drives
z Parameter settings
z Communication protocol
z Inspection and maintenance
z Troubleshooting
z Application examples
Who should use this manual
This user manual is intended for the following users:
z Those who are responsible for designing.
z Those who are responsible for installing or wiring.
z Those who are responsible for operating or programming.
z Those who are responsible for maintaining or troubleshooting.
Important precautions
Before using the product, please read this user manual thoroughly to ensure correct use and store
this manual in a safe and handy place for quick reference whenever necessary. Besides, please
observe the following precautions:
z Do not use the product in a potentially explosive environment.
z Install the product in a clean and dry location free from corrosive and inflammable gases
or liquids.
z Do not connect a commercial power supply to the U, V, W terminals of motor. Failure to
observe this precaution will damage either the Servo motor or drive.
Revision March 2008, Doc. Name: 2007PDD23000011 i
Page 3

Preface|ASDA-AB Series
z Ensure that the drive and motor are correctly connected to a ground. The grounding
method must comply with the electrical standard of the country.
z Do not disconnect the AC servo drive and motor while the power is ON.
z Do not attach, modify and remove wiring when power is applied to the AC servo drive and
motor.
z Before starting the operation with a mechanical system connected, make sure the
emergency stop equipment can be energized and work at any time.
z Do not touch the drive heat sink or the servo motor during operation. Otherwise, it may
result in serious personnel injury.
PLEASE READ PRIOR TO INSTALLATION FOR SAFETY.
Carefully note and observe the following safety precautions when receiving, inspecting, installing, operating,
maintaining and troubleshooting. The following words, DANGER, WARNING and STOP are used to mark
safety precautions when using the Delta’s servo product. Failure to observe these precautions may void
the warranty!
ASDA-AB series drives are open type servo drives and must be installed in an NEMA enclosure such as a
protection control panel during operation to comply with the requirements of the international safety
standards. They are provided with precise feedback control and high-speed calculation function
incorporating DSP (Digital Signal Processor) technology, and intended to drive three-phase permanent
magnet synchronous motors (PMSM) to achieve precise positioning by means of accurate current output
generated by IGBT (Insulated Gate Bipolar Transistor).
ASDA-AB series drives can be used in industrial applications and for installation in an end-use enclosure that
do not exceed the specifications defined in the ASDA-AB series user manual (Drives, cables and motors are
for use in a suitable enclosure with a minimum of a UL Type 1 rating).
The words, DANGER, WARNING and STOP, have the following meaning:
Indicates a potentially hazardous situation and if not avoided, may result in serious injury
or death.
Indicates a potentially hazardous situation and if not avoided, may result in minor to
moderate injury or serious damage to the product.
Indicates an improper action that it is not recommended to do and if doing it may cause
damage, malfunction and inability.
Unpacking Check
¾ Please ensure that both the servo drive and motor are correctly matched for size (power rating). Failure to observe this
precaution may cause fire, seriously damage the drive / motor or cause personal injury.
Installation
¾ Do not install the product in a location that is outside the stated specification for the drive and motor. Failure to observe this
caution may result in electric shock, fire, or personal injury.
ii
Revision March 2008, Doc. Name: 2007PDD23000011
Page 4

Wiring
Operation
Preface|ASDA-AB Series
¾ Connect the ground terminals to a class-3 ground (Ground resistance should not exceed 100 Ω). Improper grounding may result
in electric shock or fire.
¾ Do not connect any power supplies to the U, V, W terminals. Failure to observe this precaution may result in serious injury,
damage to the drive or fire.
¾ Ensure that all screws, connectors and wire terminations are secure on the power supply, servo drive and motor. Failure to
observe this caution may result in damage, fire or personal injury.
¾ Before starting the operation with a mechanical system connected, change the drive parameters to match the user-defined
parameters of the mechanical system. Starting the operation without matching the correct parameters may result in servo drive
or motor damage, or damage to the mechanical system.
¾ Ensure that the emergency stop equipment or device is connected and working correctly before operating the motor that is
connected to a mechanical system.
¾ Do not approach or touch any rotating parts (e.g. shaft) while the motor is running. Failure to observe this precaution may
cause serious personal injury.
¾ In order to prevent accidents, the initial trial run for servo motor should be conducted under no load conditions (separate the
motor from its couplings and belts).
¾ For the initial trial run, do not operate the servo motor while it is connected to its mechanical system. Connecting the motor to
its mechanical system may cause damage or result in personal injury during the trail run. Connect the servo motor once it has
successfully completed a trail run.
¾ Caution: Please perform trial run without load first and then perform trial run with load connected. After the servo motor is
running normally and regularly without load, then run servo motor with load connected. Ensure to perform trial run in this order
to prevent unnecessary danger.
¾ Do not touch either the drive heat sink or the motor during operation as they may become hot and personal injury may result.
Maintenance and Inspection
¾ Do not touch any internal or exposed parts of servo drive and servo motor as electrical shock may result.
¾ Do not remove the operation panel while the drive is connected to an electrical power source otherwise electrical shock may
result.
¾ Wait at least 10 minutes after power has been removed before touching any drive or motor terminals or performing any wiring
and/or inspection as an electrical charge may still remain in the servo drive and servo motor with hazardous voltages even after
power has been removed.
¾ Do not disassemble the servo drive or motor as electric shock may result.
¾ Do not connect or disconnect wires or connectors while power is applied to the drive and motor.
¾ Only qualified personnel who have electrical knowledge should conduct maintenance and inspection.
Main Circuit Wiring
¾ Install the encoder cables in a separate conduit from the motor power cables to avoid signal noise. Separate the conduits by
30cm (11.8inches) above.
¾ Use multi-stranded twisted-pair wires or multi-core shielded-pair wires for signal, encoder (PG) feedback cables. The maximum
length of command input cable is 3m (9.84ft.) and the maximum length of encoder (PG) feedback cables is 20m (65.62ft.).
¾ As a charge may still remain in the drive with hazardous voltages even after power has been removed, be sure to wait at least 10
minutes after power has been removed before performing any wiring and/or inspection.
¾ It is not recommended to frequently power the drive on and off. Do not turn the drive off and on more than once per minute as
high charging currents within the internal capacitors may cause damage.
Main Circuit Terminal Wiring
¾ Please perform the wiring after the terminal blocks are all removed from the drive.
¾ Insert only one wire into one terminal on the terminal block.
¾ When inserting wires, please ensure that the conductors are not shorted to adjacent terminals or wires.
¾ Ensure to double check the wiring before applying power to the drive.
¾ If the wiring is in error, perform the wiring again with proper tools. Never use force to remove the terminals or wires. Otherwise,
it may result in malfunction or damage.
Revision March 2008, Doc. Name: 2007PDD23000011 iii
Page 5

Preface|ASDA-AB Series
NOTE
1) In this manual, actual measured values are in metric units. Dimensions in (imperial
units) are for reference only. Please use metric for precise measurements.
2) The content of this manual may be revised without prior notice. Please consult our
distributors or download the most updated version at
http://www.delta.com.tw/industrialautomation
.
.
iv
Revision March 2008, Doc. Name: 2007PDD23000011
Page 6

Table of Contents
Chapter 1 Unpacking Check and Model Explanation............................................................. 1-1
1.1 Unpacking Check ........................................................................................................................ 1-1
1.2 Model Explanation ....................................................................................................................... 1-2
1.2.1 Nameplate Information .....................................................................................................1-2
1.2.2 Model Name Explanation ................................................................................................. 1-3
1.3 Servo Drive and Servo Motor Combinations............................................................................... 1-5
1.4 Servo Drive Features................................................................................................................... 1-6
1.5 Control Modes of Servo Drive ..................................................................................................... 1-8
1.6 Molded-case Circuit Breaker and Fuse Current.......................................................................... 1-9
Chapter 2 Installation and Storage......................................................................................... 2-1
2.1 Installation Notes ......................................................................................................................... 2-1
2.2 Storage Conditions...................................................................................................................... 2-1
2.3 Installation Conditions ................................................................................................................. 2-2
2.4 Installation Procedure and Minimum Clearances........................................................................ 2-3
Chapter 3 Connections and Wiring ........................................................................................ 3-1
3.1 Connections................................................................................................................................. 3-1
3.1.1 Connecting to Peripheral Devices .................................................................................... 3-1
3.1.2 Servo Drive Connectors and Terminals ........................................................................... 3-3
3.1.3 Wiring Methods................................................................................................................. 3-5
3.1.4 Motor Power Cable Connector Specifications.................................................................. 3-7
3.1.5 Encoder Connector Specifications ................................................................................... 3-8
3.1.6 Cable Specifications for Servo Drive................................................................................ 3-9
Revision March 2008, Doc. Name: 2007PDD23000011
Page 7

Table of Contents|ASDA-AB Series
3.2 Basic Wiring................................................................................................................................. 3-11
3.3 Input / Output Interface Connector -CN1..................................................................................... 3-14
3.3.1 CN1 Terminal Identification .............................................................................................. 3-14
3.3.2 Signals Explanation of Connector CN1 ............................................................................ 3-16
3.3.3 User-defined DI and DO signals....................................................................................... 3-26
3.3.4 Wiring Diagrams of I/O Signals (CN1).............................................................................. 3-26
3.4 Encoder Connector CN2 ............................................................................................................. 3-30
3.5 Serial Communication Connector CN3 ....................................................................................... 3-31
3.5.1 CN3 Terminal Layout and Identification ........................................................................... 3-31
3.5.2 Connection between PC and Connector CN3.................................................................. 3-32
3.6 Standard Connection Example.................................................................................................... 3-33
3.6.1 Position (Pt) Control Mode (220V models)....................................................................... 3-33
3.6.2 Position (Pt) Control Mode (110V models)....................................................................... 3-34
3.6.3 Position (Pr) Control Mode (220V models)....................................................................... 3-35
3.6.4 Position (Pr) Control Mode (110V models)....................................................................... 3-36
3.6.5 Speed Control Mode (220V models) ................................................................................ 3-37
3.6.6 Speed Control Mode (110V models) ................................................................................ 3-38
3.6.7 Torque Control Mode (220V models) ............................................................................... 3-39
3.6.8 Torque Control Mode (110V models) ............................................................................... 3-40
Chapter 4 Display and Operation........................................................................................... 4-1
4.1 Description of the Digital Keypad ................................................................................................ 4-1
4.2 Display Flowchart ........................................................................................................................ 4-2
4.3 Status Display.............................................................................................................................. 4-3
4.3.1 Save Setting Display ........................................................................................................ 4-3
4.3.2 Abort Setting Display ........................................................................................................ 4-3
Revision March 2008, Doc. Name: 2007PDD23000011
Page 8

Table of Contents|ASDA-AB Series
4.3.3 Fault Message Display .....................................................................................................4-3
4.3.4 Polarity Setting Display..................................................................................................... 4-3
4.3.5 Monitor Setting Display..................................................................................................... 4-4
4.4 General Function Operation ........................................................................................................ 4-6
4.4.1 Fault Code Display Operation .......................................................................................... 4-6
4.4.2 JOG Operation.................................................................................................................. 4-6
4.4.3 Position Learning Operation ............................................................................................. 4-7
4.4.4 DO Force Output Diagnosis Operation ............................................................................ 4-9
4.4.5 DI Diagnosis Operation .................................................................................................... 4-10
4.4.6 DO Diagnosis Operation................................................................................................... 4-10
Chapter 5 Trial Run and Tuning Procedure ........................................................................... 5-1
5.1 Inspection without Load............................................................................................................... 5-1
5.2 Applying Power to the Drive ........................................................................................................ 5-3
5.3 JOG Trial Run without Load ........................................................................................................ 5-7
5.4 Speed Trial Run without Load ..................................................................................................... 5-9
5.5 Position Trial Run without Load................................................................................................... 5-11
5.6 Tuning Procedure........................................................................................................................ 5-14
5.6.1 Tuning Flowchart .............................................................................................................. 5-15
5.6.2 Load Inertia Estimation Flowchart .................................................................................... 5-16
5.6.3 AutoMode (PI) Tuning Flowchart...................................................................................... 5-17
5.6.4 AutoMode (PDFF) Tuning Flowchart................................................................................ 5-19
5.6.5 Manual Mode Tuning Flowchart ....................................................................................... 5-21
5.6.6 Limit of Load Inertia Estimation ........................................................................................ 5-22
5.6.7 Relationship between Tuning Modes and Parameters .................................................... 5-23
5.6.8 Gain Adjustment in Manual Mode .................................................................................... 5-23
Revision March 2008, Doc. Name: 2007PDD23000011
Page 9

Table of Contents|ASDA-AB Series
Chapter 6 Control Modes of Operation .................................................................................. 6-1
6.1 Control Modes of Operation ........................................................................................................ 6-1
6.2 Position Control Mode ................................................................................................................. 6-2
6.2.1 Command Source of Position (Pt) Control Mode ............................................................. 6-2
6.2.2 Command Source of Position (Pr) Control Mode............................................................. 6-3
6.2.3 Structure of Position Control Mode .................................................................................. 6-4
6.2.4 P-curve Filter for Position Control..................................................................................... 6-5
6.2.5 Electronic Gear Ratio ....................................................................................................... 6-8
6.2.6 Low-pass Filter ................................................................................................................. 6-9
6.2.7 Timing Chart of Position (Pr) Control Mode ..................................................................... 6-10
6.2.8 Position Loop Gain Adjustment ........................................................................................ 6-10
6.3 Speed Control Mode.................................................................................................................... 6-13
6.3.1 Command Source of Speed Control Mode ...................................................................... 6-13
6.3.2 Structure of Speed Control Mode..................................................................................... 6-14
6.3.3 Smoothing Strategy of Speed Control Mode.................................................................... 6-15
6.3.4 Analog Speed Input Scaling ............................................................................................. 6-18
6.3.5 Timing Chart of Speed Control Mode............................................................................... 6-19
6.3.6 Speed Loop Gain Adjustment........................................................................................... 6-19
6.3.7 Resonance Suppression .................................................................................................. 6-24
6.4 Torque Control Mode................................................................................................................... 6-28
6.4.1 Command Source of Torque Control Mode ..................................................................... 6-28
6.4.2 Structure of Torque Control Mode.................................................................................... 6-29
6.4.3 Smoothing Strategy of Torque Control Mode................................................................... 6-29
6.4.4 Analog Torque Input Scaling ............................................................................................ 6-30
6.4.5 Timing Chart of Torque Control Mode.............................................................................. 6-31
Revision March 2008, Doc. Name: 2007PDD23000011
Page 10

Table of Contents|ASDA-AB Series
6.5 Control Modes Selection ............................................................................................................. 6-32
6.5.1 Speed / Position Control Mode Selection......................................................................... 6-32
6.5.2 Speed / Torque Control Mode Selection .......................................................................... 6-33
6.5.3 Torque / Position Control Mode Selection........................................................................ 6-33
6.6 Others.......................................................................................................................................... 6-35
6.6.1 Speed Limit....................................................................................................................... 6-35
6.6.2 Torque Limit...................................................................................................................... 6-35
6.6.3 Regenerative Resistor ...................................................................................................... 6-36
6.6.4 Analog Monitor.................................................................................................................. 6-40
6.6.5 Electromagnetic Brake ..................................................................................................... 6-43
Chapter 7 Parameters............................................................................................................7-1
7.1 Definition...................................................................................................................................... 7-1
7.2 Parameter Summary ................................................................................................................... 7-2
7.2.1 Parameters List by Group................................................................................................. 7-2
7.2.2 Parameters List by Function............................................................................................. 7-9
7.3 Detailed Parameter Listings ........................................................................................................ 7-20
Table 7.A Input Function Definition ............................................................................................... 7-89
Table 7.B Output Function Definition ............................................................................................ 7-93
Chapter 8 MODBUS Communications................................................................................... 8-1
8.1 Communication Hardware Interface............................................................................................8-1
8.2 Communication Parameter Settings............................................................................................8-5
8.3 MODBUS Communication Protocol ............................................................................................ 8-9
8.4 Communication Parameter Write-in and Read-out ..................................................................... 8-17
Chapter 9 Maintenance and Inspection ................................................................................. 9-1
9.1 Basic Inspection .......................................................................................................................... 9-1
Revision March 2008, Doc. Name: 2007PDD23000011
Page 11

Table of Contents|ASDA-AB Series
9.2 Maintenance ................................................................................................................................ 9-2
9.3 Life of Replacement Components ............................................................................................... 9-2
Chapter 10 Troubleshooting..................................................................................................... 10-1
10.1 Fault Messages Table ................................................................................................................. 10-1
10.2 Potential Cause and Corrective Actions...................................................................................... 10-3
10.3 Clearing Faults ............................................................................................................................ 10-8
Chapter 11 Specifications ........................................................................................................ 11-1
11.1 Specifications of Servo Drive (ASDA-AB Series)........................................................................ 11-1
11.2 Specifications of Servo Motor (ECMA Series) ............................................................................ 11-4
11.3 Servo Motor Speed-Torque Curves ............................................................................................ 11-7
11.4 Overload Characteristics ............................................................................................................. 11-8
11.5 Dimensions of Servo Drive .......................................................................................................... 11-16
11.6 Dimensions of Servo Motor ......................................................................................................... 11-20
11.7 EMI Filters Selection.................................................................................................................... 11-23
Chapter 12 Application Examples ............................................................................................ 12-1
12.1 Position Control (including homing function)............................................................................... 12-1
12.2 Roller Feeding ............................................................................................................................. 12-3
12.3 Connecting to Delta DVP-EH Series PLC................................................................................... 12-4
12.4 Connecting to Delta TP04 Series ................................................................................................ 12-9
12.5 Position Control Mode (Pr Mode) ................................................................................................ 12-11
12.6 Feed Step Control ....................................................................................................................... 12-14
12.7 Internal Auto Running Mode........................................................................................................ 12-25
12.8 Homing Function ......................................................................................................................... 12-30
12.9 External Controller Connection Examples................................................................................... 12-37
Appendix A Accessories ........................................................................................................... A-1
Revision March 2008, Doc. Name: 2007PDD23000011
Page 12

Table of Contents|ASDA-AB Series
About this Manual…
User Information
Be sure to store this manual in a safe place.
Due to constantly growing product range, technical improvement and alteration or changed texts, figures and
diagrams, we reserve the right of this manual contained information change without prior notice.
Coping or reproducing any part of this manual, without written consent of Delta Electronics Inc. is prohibited.
Technical Support and Service
Welcome to contact us or visit our web site (http://www.delta.com.tw/industrialautomation/
) if you need any
technical support, service and information, or, if you have any question in using the product. We are looking
forward to serve you needs and willing to offer our best support and service to you. Reach us by the
following ways.
ASIA
DELTA ELECTRONICS, INC.
Taoyuan Plant 1
31-1, XINGBANG ROAD,
GUISHAN INDUSTRIAL ZONE,
TAOYUAN COUNTY 33370, TAIWAN, R.O.C.
TEL: 886-3-362-6301
FAX: 886-3-362-7267
NORTH/SOUTH AMERICA
DELTA PRODUCTS CORPORATION (USA)
Raleigh Office
P.O. BOX 12173
5101 DAVIS DRIVE,
RESEARCH TRIANGLE PARK, NC 27709, U.S.A.
TEL: 1-919-767-3813
FAX: 1-919-767-3969
JAPAN
DELTA ELECTRONICS (JAPAN), INC.
Tokyo Office
DELTA SHIBADAIMON BUILDING
2-1-14 SHIBADAIMON, MINATO-KU,
TOKYO, 105-0012, JAPAN
TEL: 81-3-5733-1111
FAX: 81-3-5733-1211
EUROPE
DELTRONICS (THE NETHERLANDS) B.V.
Eindhoven Office
DE WITBOGT 15, 5652 AG EINDHOVEN,
THE NETHERLANDS
TEL: 31-40-259-2850
FAX: 31-40-259-2851
Revision March 2008, Doc. Name: 2007PDD23000011
Page 13

Table of Contents|ASDA-AB Series
This page intentionally left blank.
Revision March 2008, Doc. Name: 2007PDD23000011
Page 14

Chapter 1 Unpacking Check and Model Explanation
1.1 Unpacking Check
After receiving the AC servo drive, please check for the following:
Ensure that the product is what you have ordered.
Verify the part number indicated on the nameplate corresponds with the part number of your order
(Please refer to Section 1.2 for details about the model explanation).
Ensure that the servo motor shaft rotates freely.
Rotate the motor shaft by hand; a smooth rotation will indicate a good motor. However, a servo motor
with an electromagnetic brake can not be rotated manually.
Check for damage.
Inspect the unit to insure it was not damaged during shipment.
Check for loose screws.
Ensure that all necessary screws are tight and secure.
If any items are damaged or incorrect, please inform the distributor whom you purchased the product from or
your local Delta sales representative.
A complete and workable AC servo system should be including the following parts:
Part I : Delta standard supplied parts
(1) Servo drive
(2) Servo motor
(3) 5 PIN Terminal Block (for L1, L2, R(L1M), S(L2M), T) (available for 100W ~ 1.5kW models)
(4) 3 PIN Terminal Block (for U, V, W) (available for 100W ~ 1.5kW models)
(5) 3 PIN Terminal Block (for P, D, C) (available for 100W ~ 1.5kW models)
(6) One operating lever (for wire to terminal block insertion; available for 100W ~ 1.5kW models)
(7) One jumper bar (for short the circuit of the terminal pins; available for 2kW ~ 3kW models)
(8) Quick Start
Part II : Optional parts, not Delta standard supplied part (Refer to Appendix A)
(1) One power cable, which is used to connect servo motor and U, V, W terminals of servo drive. This
power cable is with one green grounding cable. Please connect the green grounding cable to the
ground terminal of the servo drive.
Revision March 2008, Doc. Name: 2007PDD23000011 1-1
Page 15

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
(2) One encoder cable, which is used to connect the encoder of servo motor and CN2 terminal of servo
drive.
(3) CN1 Connector: 50 PIN Connector (3M type analog product)
(4) CN2 Connector: 20 PIN Connector (3M type analog product)
(5) CN3 Connector: 6 PIN Connector (IEEE1394 analog product)
1.2 Model Explanation
1.2.1 Nameplate Information
ASDA-AB Series Servo Drive
Nameplate Explanation
Serial Number Explanation
ASMT Series Servo Motor
Nameplate Explanation
Serial Number Explanation
1-2 Revision March 2008, Doc. Name: 2007PDD23000011
Page 16

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
1.2.2 Model Name Explanation
ASDA-AB Series Servo Drive
Revision March 2008, Doc. Name: 2007PDD23000011 1-3
Page 17

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
ECMA Series Servo Motor
1-4 Revision March 2008, Doc. Name: 2007PDD23000011
Page 18

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
1.3 Servo Drive and Servo Motor Combinations
The table below shows the possible combination of Delta ASDA-AB series servo drives and ECMA series
servo motors. The boxes () in the model names are for optional configurations. (Please refer to Section 1.2
for model explanation)
Power Servo Drive Servo Motor
100W
ASD-A0111-AB
ASD-A0121-AB
ECMA-C30401S (S=8mm)
200W
ASD-A0211-AB
ASD-A0221-AB
ECMA-C30602S (S=14mm)
ECMA-C30604S (S=14mm)
400W
ASD-A0411-AB
ASD-A0421-AB
ECMA-C308047 (7=14mm)
ECMA-E31305S (S=22mm)
ECMA-G31303S (S=22mm)
750W ASD-A0721-AB
ECMA-C30807S (S=19mm)
ECMA-G31306S (S=22mm)
ECMA-C31010S (S=22mm)
1000W ASD-A1021-AB
ECMA-E31310S (S=22mm)
ECMA-G31309S (S=22mm)
1500W ASD-A1521-AB ECMA-E31315S (S=22mm)
ECMA-C31020S (S=22mm)
2000W ASD-A2023-AB
ECMA-E31320S (S=22mm)
ECMA-E31820S (S=35mm)
The drives shown in the above table are designed for use in combination with the specific servo motors.
Check the specifications of the drives and motors you want to use.
Also, please ensure that both the servo drive and motor are correctly matched for size (power rating). If the
power of motor and drive is not within the specifications, the drive and motor may overheat and servo alarm
would be activated. For the detail specifications of servo drives and motors, please refer to Chapter 11
“Specifications”.
The drives shown in the above table are designed according to the three multiple of rated current of motors
shown in the above table. If the drives which are designed according to the six multiple of rated current of
motors are needed, please contact our distributors or your local Delta sales representative.
Revision March 2008, Doc. Name: 2007PDD23000011 1-5
Page 19

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
1.4 Servo Drive Features
220V models
1-6 Revision March 2008, Doc. Name: 2007PDD23000011
Page 20

110V models
Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
Revision March 2008, Doc. Name: 2007PDD23000011 1-7
Page 21

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
1.5 Control Modes of Servo Drive
The Delta Servo can be programmed to provide six single and five dual modes of operation.
Their operation and description is listed in the following table.
Mode Code Description
Single
Mode
External Position Control Pt
Internal Position Control Pr
Speed Control S
Internal Speed Control Sz
Torque Control T
Tz Torque control for the servo motor is only achieved via
Internal Torque Control
Position control for the servo motor is achieved via an
external pulse command.
Position control for the servo motor is achieved via by 8
commands stored within the servo controller. Execution of
the 8 positions is via Digital Input (DI) signals.
Speed control for the servo motor can be achieved via
parameters set within the controller or from an external
analog -10 ~ +10 VDC command. Control of the internal
speed parameters is via the Digital Inputs (DI). (A maximum
of three speeds can be stored internally).
Speed control for the servo motor is only achieved via
parameters set within the controller. Control of the internal
speed parameters is via the Digital Inputs (DI). (A maximum
of three speeds can be stored internally).
Torque control for the servo motor can be achieved via
parameters set within the controller or from an external
analog -10 ~ +10 VDC command. Control of the internal
torque parameters is via the Digital Inputs (DI). (A
maximum of three torque levels can be stored internally).
parameters set within the controller. Control of the internal
torque parameters is via the Digital Inputs (DI). (A
maximum of three torque levels can be stored internally).
Pt-S Either Pt or S control mode can be selected via the Digital
Inputs (DI)
Pt-T Either Pt or T control mode can be selected via the Digital
Inputs (DI)
Dual Mode
The above control modes can be accessed and changed via by parameter P1-01. If the control mode is
changed, switch the drive off and on after the new control mode has been entered. The new control mode
will only be valid after drive off/on action. Please see safety precautions on page iii (switching drive off/on
multiple times).
Pr-S Either Pr or S control mode can be selected via the Digital
Inputs (DI)
Pr-T Either Pr or T control mode can be selected via the Digital
Inputs (DI)
S-T Either S or T control mode can be selected via the Digital
Inputs (DI)
1-8 Revision March 2008, Doc. Name: 2007PDD23000011
Page 22

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
1.6 Molded-case Circuit Breaker and Fuse Current
Model Name Breaker Fuse
Operation Mode General General
ASD-A0111-AB 10A 10A
ASD-A0211-AB 10A 10A
ASD-A0411-AB 20A 40A
ASD-A0121-AB 5A 5A
ASD-A0221-AB 5A 5A
ASD-A0421-AB 10A 20A
ASD-A0721-AB 10A 20A
ASD-A1021-AB 15A 25A
ASD-A1521-AB 20A 40A
ASD-A2023-AB 30A 60A
Revision March 2008, Doc. Name: 2007PDD23000011 1-9
Page 23

Chapter 1 Unpacking Check and Model Explanation|ASDA-AB Series
This page intentionally left blank.
1-10 Revision March 2008, Doc. Name: 2007PDD23000011
Page 24

Chapter 2 Installation and Storage
2.1 Installation Notes
Pay close attention on the following installation notes:
Do not bend or strain the connection cables between servo drive and motor.
When mounting servo drive, make sure to tighten screws to secure the drive in place.
If the servo motor shaft is coupled directly to a rotating device ensure that the alignment specifications of
the servo motor, coupling, and device are followed. Failure to do so may cause unnecessary loads or
premature failure to the servo motor.
If the length of cable connected between servo drive and motor is more than 20m, please increase the
wire gauge of the encoder cable and motor connection cable (connected to U, V, W terminals).
Make sure to tighten the screws for securing motor.
2.2 Storage Conditions
The product should be kept in the shipping carton before installation. In order to retain the warranty coverage,
the AC servo drive should be stored properly when it is not to be used for an extended period of time. Some
storage suggestions are:
Store in a clean and dry location free from direct sunlight.
Store within an ambient temperature range of -20°C to +65°C (-4°F to 149°F).
Store within a relative humidity range of 0% to 90% and non-condensing.
Do not store in a place subjected to corrosive gases and liquids.
Correctly packaged and placed on a solid surface.
Revision March 2008, Doc. Name: 2007PDD23000011 2-1
Page 25

Chapter 2 Installation and Storage|ASDA-AB Series
2.3 Installation Conditions
Operating Temperature
ASDA-AB Series Servo Drive : 0°C to 55°C (32°F to 131°F)
ECMA Series Servo Motor : 0°C to 40°C (32°F to 104°F)
The ambient temperature of servo drive for long-term reliability should be under 45°C (113°F).
If the ambient temperature of servo drive is greater than 45°C (113°F), please install the drive in a well-
ventilated location and do not obstruct the airflow for the cooling fan.
Caution
The servo drive and motor will generate heat. If they are installed in a control panel, please ensure sufficient
space around the units for heat dissipation.
Pay particular attention to vibration of the units and check if the vibration has impacted the electric devices in
the control panel. Please observe the following precautions when selecting a mounting location. Failure to
observe the following precautions may void the warranty!
Do not mount the servo drive or motor adjacent to heat-radiating elements or in direct sunlight.
Do not mount the servo drive or motor in a location subjected to corrosive gases, liquids, or airborne
dust or metallic particles.
Do not mount the servo drive or motor in a location where temperatures and humidity will exceed
specification.
Do not mount the servo drive or motor in a location where vibration and shock will exceed specification.
Do not mount the servo drive or motor in a location where it will be subjected to high levels of
electromagnetic radiation.
2-2 Revision March 2008, Doc. Name: 2007PDD23000011
Page 26

Chapter 2 Installation and Storage|ASDA-AB Series
2.4 Installation Procedure and Minimum Clearances
Installation Procedure
Incorrect installation may result in a drive malfunction or premature failure of the drive and or motor. Please
follow the guidelines in this manual when installing the servo drive and motor.
The ASDA-AB servo drive should be mounted perpendicular to the wall or in the control panel. In order to
ensure the drive is well ventilated, ensure that the all ventilation holes are not obstructed and sufficient free
space is given to the servo drive. Do not install the drive in a horizontal position or malfunction and damage
will occur.
Drive Mounting
The ASDA-AB Servo drives must be back mounted vertically on a dry and solid surface such as a NEMA
enclosure. A minimum spacing of two inches must be maintained above and below the drive for ventilation
and heat dissipation. Additional space may be necessary for wiring and cable connections. Also, as the drive
conducts heat away via the mounting, the mounting plane or surface should be conductor away and not
conduct heat into the drive from external sources
Motor Mounting
The ECMA Servo motors should be mounted firmly to a dry and solid mounting surface to ensure maximum
heat transfer for maximum power output and to provide a good ground.
For the dimensions and weights specifications of servo drive or motor, please refer to Chapter 11
“Specifications".
Minimum Clearances
Install a fan to increase ventilation to avoid ambient temperatures that exceed the specification. When
installing two or more drive adjacent to each other please follow the clearances as shown in the following
diagram.
Revision March 2008, Doc. Name: 2007PDD23000011 2-3
Page 27

Chapter 2 Installation and Storage|ASDA-AB Series
Minimum Clearances
Side by Side Installation
2-4 Revision March 2008, Doc. Name: 2007PDD23000011
Page 28

Chapter 3 Connections and Wiring
This chapter provides information on wiring ASDA-AB series products, the descriptions of I/O signals and
gives typical examples of wiring diagrams.
3.1 Connections
3.1.1 Connecting to Peripheral Devices
Figure 3.1 220V Servo Drive
Revision March 2008, Doc. Name: 2007PDD23000011 3-1
Page 29

Chapter 3 Connections and Wiring|ASDA-AB Series
Figure 3.2 110V Servo Drive
3-2 Revision March 2008, Doc. Name: 2007PDD23000011
Page 30

Chapter 3 Connections and Wiring|ASDA-AB Series
3.1.2 Servo Drive Connectors and Terminals
Terminal
Identification
L1, L2
R, S, T
(for 220V models)
L1M, L2M
(for 110V models)
U, V, W
FG (
P, D, C
)
Terminal
Description
Control circuit
terminal
Main circuit
terminal
Servo motor output
Regenerative
resistor terminal
Notes
Used to connect single-phase AC control circuit power.
(Control circuit uses the same voltage as the main circuit.)
Used to connect single-phase or three-phase AC main
circuit power depending on connecting servo drive model.
For single-phase 220V models, connect R and S terminals
to power. For single-phase 110V models, connect L1M and
L2M terminals to power. For three-phase models, connect
all three R, S, and T terminals to power. To provide control
circuit power, two jumpers can be added from R and S to
L1 and L2.
Used to connect servo motor
Terminal Symbol Wire Color
U Red
V White
W Black
FG(
Internal resistor
External resistor
)
Ensure the circuit is closed between P
and D, and the circuit is open between
P and C.
Connect regenerative resistor to P and
C, and ensure an open circuit between
P and D.
Green
two places
CN1
CN2
CN3
NOTE
Ground terminal
I/O connector
Encoder connector
Communication
connector
Used to connect grounding wire of power supply and servo
motor.
Used to connect external controllers. Please refer to section
3.3 for details.
Used to connect encoder of servo motor. Please refer to
section 3.4 for details.
Terminal Symbol Wire Color
A Black
/A Black/Red
B White
/B White/Red
Z Orange
/Z Orange/Red
+5V Brown & Brown/White
GND Blue & Blue/White
Used to connect PC or keypad. Please refer to section 3.5
for details.
1) U, V ,W , CN1, CN2, CN3 terminals provide short circuit protection.
Revision March 2008, Doc. Name: 2007PDD23000011 3-3
Page 31

Chapter 3 Connections and Wiring|ASDA-AB Series
Wiring Notes
Please observe the following wiring notes while performing wiring and touching any electrical
connections on the servo drive or servo motor.
1. Please note that the main circuit terminals of 110V models are L1M and L2M, and there is no
terminal T in 110V models. In other words, the terminal T in 220V models becomes no function
in 110V models.
2. Ensure to check if the power supply and wiring of the "power" terminals (R(L1M), S(L2M), T, U,
V, & W) is correct.
3. Please use shielded twisted-pair cables for wiring to prevent voltage coupling and eliminate
electrical noise and interference.
4. As a residual hazardous voltage may remain inside the drive, please do not immediately touch
any of the "power" terminals (R(L1M), S(L2M), T, U, V, & W) and/or the cables connected to
them after the power has been turned off and the charge LED is lit. (Please refer to the Safety
Precautions on page ii).
5. The cables connected to R(L1M), S(L2M), T and U, V, W terminals should be placed in separate
conduits from the encoder or other signal cables. Separate them by at least 30cm (11.8 inches).
6. If the encoder cable is too short, please use a twisted-shield signal wire with grounding
conductor. The wire length should be 20m (65.62ft.) or less. For lengths greater than 20m
(65.62ft.), the wire gauge should be doubled in order to lessen any signal attenuation.
7. As for motor cable selection, please use the 600V PTFE wire and the wire length should be less
than 98.4ft. (30m). If the wiring distance is longer than 30m (98.4ft.), please choose the
adequate wire size according to the voltage.
8. The shield of shielded twisted-pair cables should be connected to the SHIELD end (terminal
marked
9. For the connectors and cables specifications, please refer to section 3.1.6 for details.
) of the servo drive.
3-4 Revision March 2008, Doc. Name: 2007PDD23000011
Page 32

Chapter 3 Connections and Wiring|ASDA-AB Series
3.1.3 Wiring Methods
For servo drives from 100W to 1.5kW the input power can be either single or three-phase. For servo
drives 2kW and above only three-phase connections are available. But, 220V single-phase models are
available in 1.5kW and below only and 110V single-phase models are available in 400W and below only.
In the wiring diagram figures 3.3, 3.4 & 3.5:
Power ON : contact “a” (normally open)
Power OFF : contact “b” (normally closed)
MC : coil of electromagnetic contactor, self-holding power, contact of main circuit power
Figure 3.3 Single-Phase Power Supply (1.5kW and below, 220V models)
Revision March 2008, Doc. Name: 2007PDD23000011 3-5
Page 33

Chapter 3 Connections and Wiring|ASDA-AB Series
Figure 3.4 Single-Phase Power Supply (400W and below, 110V models)
Figure 3.5 Three-Phase Power Supply (all 220V models)
3-6 Revision March 2008, Doc. Name: 2007PDD23000011
Page 34

Chapter 3 Connections and Wiring|ASDA-AB Series
3.1.4 Motor Power Cable Connector Specifications
The boxes () in the model names are for optional configurations. (Please refer to section 1.2 for model
explanation.)
Motor Model Name U, V, W / Electromagnetic Brake Connector
ECMA-C30401S (100W)
ECMA-C30602S (200W)
ECMA-C30604S (400W)
ECMA-C308047 (400W)
ECMA-C30807S (750W)
HOUSING: JOWLE (C4201H00-2*2PA)
ECMA-C30401S (100W)
ECMA-C30602S (200W)
ECMA-C30604S (400W)
ECMA-C308047 (400W)
ECMA-C30807S (750W)
HOUSING: JOWLE (C4201H00-2*3PA)
Terminal
Identification
A
B
ECMA-C31010S (1000W)
ECMA-E31310S (1000W)
ECMA-E31315S (1500W)
ECMA-C31020S (2000W)
ECMA-E31820S (2000W)
C
3106A-20-18S
D
3106A-24-11S
Revision March 2008, Doc. Name: 2007PDD23000011 3-7
Page 35

Chapter 3 Connections and Wiring|ASDA-AB Series
Terminal
Identification
A 1 2 3 4 - -
B 1 2 4 5 3 6
C F I B E G H
D D E F G A B
U
(Red)
V
(White)
W
(Black)
CASE GROUND
(Green)
BRAKE1
(Blue)
BRAKE2
(Brown)
NOTE
1) The coil of brake has no polarity. The names of terminal identification are BRAKE1 (Blue) and
BRAKE2 (Brown).
2) The power supply for brake is DC24V. Never use it for VDD, the +24V source voltage.
3.1.5 Encoder Connector Specifications
The boxes () in the model names are for optional configurations. (Please refer to section 1.2 for model
explanation.)
Motor Model Name Encoder Connector
ECMA-C30401S (100W)
ECMA-C30602S (200W)
ECMA-C30604S (400W)
ECMA-C308047 (400W)
ECMA-C30807S (750W)
HOUSING: AMP (1-172161-9)
ECMA-G31303S (300W)
ECMA-E31305S (500W)
ECMA-G31306S (600W)
ECMA-G31309S (900W)
ECMA-C31010S (1000W)
ECMA-E31310S (1000W)
ECMA-E31315S (1500W)
ECMA-C31020S (2000W)
3106A-20-29S
Terminal
Identification
A
B
3-8 Revision March 2008, Doc. Name: 2007PDD23000011
Page 36

Chapter 3 Connections and Wiring|ASDA-AB Series
Terminal
Identification
AMP (1-
172161-9)
A 1 4 2 5 3 6 7 8 9
Terminal
Identification
3106A-20-
29S
B A B C D F G S R L
A
(Black)
A
(Blue)
/A
(Black
/Red)
/A
(Blue
/Black)
B
(White)
B
(Green)
/B
(White
/Red)
/B
(Green
/Black)
Z
(Orange)
Z
(Yellow)
/Z
(Orange
/Red)
/Z
(Yellow
/Black)
+5V
(Brown &
Brown/White)
+5V
(Red & Red
/White)
GND
(Blue &
Blue/White)
GND
(Black &
Black
/White)
BRAID
SHELD
BRAID
SHELD
3.1.6 Cable Specifications for Servo Drive
The boxes () in the model names are for optional configurations. (Please refer to section 1.2 for model
explanation.)
Power Cable
Servo Drive and Servo Motor
ASD-A0111-AB
ASD-A0121-AB
ECMA-C30401S 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
L1, L2 R, S, T U, V, W P, C
Power Cable - Wire Gauge AWG (mm2)
ASD-A0211-AB
ASD-A0221-AB
ASD-A0411-AB
ASD-A0421-AB
ASD-A0721-AB
ASD-A1021-AB
ASD-A1521-AB ECMA-E31315S 1.3 (AWG16) 2.1 (AWG14) 1.3 (AWG16) 2.1 (AWG14)
ASD-A2023-AB
ECMA-C30602S 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
ECMA-C30604S 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
ECMA-C308047 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
ECMA-E31305S 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
ECMA-G31303S 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
ECMA-C30807S 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
ECMA-G31306S 1.3 (AWG16) 2.1 (AWG14) 0.82 (AWG18) 2.1 (AWG14)
ECMA-C31010S 1.3 (AWG16) 2.1 (AWG14) 1.3 (AWG16) 2.1 (AWG14)
ECMA-E31310S 1.3 (AWG16) 2.1 (AWG14) 1.3 (AWG16) 2.1 (AWG14)
ECMA-G31309S 1.3 (AWG16) 2.1 (AWG14) 1.3 (AWG16) 2.1 (AWG14)
ECMA-C31020S 1.3 (AWG16) 2.1 (AWG14) 2.1 (AWG14) 2.1 (AWG14)
ECMA-E31320S 1.3 (AWG16) 2.1 (AWG14) 2.1 (AWG14) 2.1 (AWG14)
ECMA-E31820S 1.3 (AWG16) 2.1 (AWG14) 3.3 (AWG12) 2.1 (AWG14)
Revision March 2008, Doc. Name: 2007PDD23000011 3-9
Page 37

Chapter 3 Connections and Wiring|ASDA-AB Series
Encoder Cable
Servo Drive
Wire Size Core Number UL Rating Standard Wire Length
ASD-A0111-AB
ASD-A0121-AB
ASD-A0211-AB
ASD-A0221-AB
ASD-A0411-AB
ASD-A0421-AB
ASD-A0721-AB 0.13 (AWG26) 10 core (4 pair) UL2464 3m (9.84ft.)
ASD-A1021-AB 0.13 (AWG26) 10 core (4 pair) UL2464 3m (9.84ft.)
ASD-A1521-AB 0.13 (AWG26) 10 core (4 pair) UL2464 3m (9.84ft.)
ASD-A2023-AB 0.13 (AWG26) 10 core (4 pair) UL2464 3m (9.84ft.)
NOTE
1) Please use shielded twisted-pair cables for wiring to prevent voltage coupling and eliminate
electrical noise and interference.
2) The shield of shielded twisted-pair cables should be connected to the SHIELD end (terminal
marked
0.13 (AWG26) 10 core (4 pair) UL2464 3m (9.84ft.)
0.13 (AWG26) 10 core (4 pair) UL2464 3m (9.84ft.)
0.13 (AWG26) 10 core (4 pair) UL2464 3m (9.84ft.)
) of the servo drive.
Encoder Cable - Wire Gauge AWG (mm2)
3-10 Revision March 2008, Doc. Name: 2007PDD23000011
Page 38

Chapter 3 Connections and Wiring|ASDA-AB Series
3.2 Basic Wiring
Figure 3.6 Basic Wiring Schematic of 100W ~ 1.5kW, 220V models
Revision March 2008, Doc. Name: 2007PDD23000011 3-11
Page 39

Chapter 3 Connections and Wiring|ASDA-AB Series
Figure 3.7 Basic Wiring Schematic of 2kW, 220V models
3-12 Revision March 2008, Doc. Name: 2007PDD23000011
Page 40

Chapter 3 Connections and Wiring|ASDA-AB Series
Figure 3.8 Basic Wiring Schematic of 100W ~ 400W, 110V models
Revision March 2008, Doc. Name: 2007PDD23000011 3-13
Page 41

Chapter 3 Connections and Wiring|ASDA-AB Series
3.3 Input / Output Interface Connector -CN1
The CN1 Interface Connector provides access to three signal groups:
i General interface for the analog speed and torque control, encoder reference signal from the motor,
pulse / direction inputs, and reference voltages.
ii 8 programmable Digital Inputs (DI), can be set via parameters P2-10 ~ P2-17
iii 5 programmable Digital Outputs (DO), can be set via parameters P2-18 ~ P2-22
A detailed explanation of each group is available in Section 3.3.2, Tables 3.A, 3.B & 3.C.
3.3.1 CN1 Terminal Identification
Figure 3.9 The Layout of CN1 Drive Connector
3-14 Revision March 2008, Doc. Name: 2007PDD23000011
Page 42

Chapter 3 Connections and Wiring|ASDA-AB Series
CN1 Terminal Signal Identification
1 DO4+ Digital output 26 DO4- Digital output
2 DO3- Digital output 27 DO5- Digital output
3 DO3+ Digital output 28 DO5+ Digital output
4 DO2- Digital output 29 NC No Connection
5 DO2+ Digital output 30 DI8- Digital input
6 DO1- Digital output 31 DI7- Digital input
7 DO1+ Digital output 32 DI6- Digital input
8 DI4- Digital input 33 DI5- Digital input
9 DI1- Digital input 34 DI3- Digital input
10 DI2- Digital input 35
11 COM+
12 GND
14 NC No Connection
15 MON2 40 NC No Connection
16 MON1
18 T_REF
20 VCC
22 /OA
24 /OZ
Analog input
signal ground
Analog monitor
output 1
Analog torque
Input
+12V power
output
(for analog
command)
Encoder
/A pulse output
Encoder /Z
pulse output
13 GND
17 VDD 42 V_REF
19 GND 44 GND
21 OA
23 /OB
25 OB 50 OZ
Power input
(12~24V)
Analog input
signal ground
Analog monitor
output 2
+24V power
output (for
external I/O)
Analog input
signal ground
Encoder
A pulse output
Encoder /B
pulse output
Encoder B
pulse output
PULL
HI
37 /SIGN
39 NC No Connection
41 /PULSE Pulse input (-)
43 PULSE Pulse input (+)
45 COM-
47 COM-
49 COM- VDD(24V)
Pulse applied
power
Position sign ()
VDD(24V)
power
ground
VDD(24V)
power ground
power ground
36 SIGN
38 NC No Connection
46 NC No Connection
48 OCZ
Position sign
(+)
Analog speed
input (+)
Analog input
signal ground
Encoder Z
pulse
Open-collector
output
Encoder Z
pulse
Line-driver
output
NOTE
1) The terminals marked "NC" must be left unconnected (No Connection). The NC terminals are used
within the servo drive. Any outside connection to the NC terminals will result in damage to the drive
and void the warranty!
Revision March 2008, Doc. Name: 2007PDD23000011 3-15
Page 43

Chapter 3 Connections and Wiring|ASDA-AB Series
3.3.2 Signals Explanation of Connector CN1
The Tables 3.A, 3.B, & 3.C detail the three groups of signals of the CN1 interface. Table 3.A details the
general signals. Table 3.B details the Digital Output (DO) signals and Table 3.C details the Digital Input
(DI) signals. The General Signals are set by the factory and can not be changed, reprogrammed or
adjusted. Both the Digital Input and Digital Output signals can be programmed by the users.
Table 3.A General Signals
Signal Pin No Details
Motor speed command: -10V to +10V, corresponds
Analog
Signal
Input
Analog
Monitor
Output
Position
Pulse
Input
Position
Pulse
Output
V_REF 42
T_REF 18
MON1
MON2
PULSE
/PULSE
SIGN
/SIGN
PULL HI 35
OA
/OA
OB
/OB
OZ
/OZ
16
15
41
43
37
36
21
22
25
23
50
24
to the maximum speed programmed P1-55
Maximum Speed Limit (Factory default 3000 RPM).
Motor torque command: -10V to +10V, corresponds
to -100% to +100% rated torque command.
The MON1 and MON2 can be assigned drive and
motor parameters that can be monitored via an
analogue voltage.
Please reference parameter P0-03 for monitoring
commands and P1-04 / P1-05 for scaling factors.
Output voltage is reference to the power ground.
The drive can accept two different types of pulse
inputs: Open Collector and Line Driver.
Three different pulse commands can be selected via
parameter P1-00. Quadrature , CW + CCW pulse &
Pulse / Direction.
Should an Open Collector type of pulse be used this
terminal must be lulled high to pin 17.
The motor encoder signals are available through
these terminals. The encoder output pulse count can
be set via parameter P1-46.
Wiring Diagram
(Refer to 3-3-3)
C1
C1
C2
C3/C4
C3
C11/C12
VDD is the +24V source voltage provided by the
drive. Maximum permissible current 500mA.
COM+ is the common voltage rail of the Digital Input
and Digital Output signals. Connect VDD to COM+
for source mode. For external applied power sink
mode (+12V to +24V), the positive terminal should
be connected to COM+ and the negative to COM-.
VCC is a +12V power rail provided by the drive. It
can be used for the input on an analog speed or
torque command. Maximum permissible current
100mA.
The polarity of VCC is with respect to Ground (GND).
-
-
Power
Power
VDD 17
11
COM+
COM-
VCC 20
GND
45
47
49
12,13,
19,44
3-16 Revision March 2008, Doc. Name: 2007PDD23000011
Page 44

Chapter 3 Connections and Wiring|ASDA-AB Series
Signal Pin No Details
Wiring Diagram
(Refer to 3-3-3)
14,29,
Other NC
38,39,
40,46,
See previous note for NC terminals CN1 connector
on page 3-11.
-
48
The Digital Input (DI) and Digital Output (DO) have factory default settings which correspond to the
various servo drive control modes. (See section 1.5). However, both the DI's and DO's can be
programmed independently to meet the requirements of the users.
Detailed in Tables 3.B and 3.C are the DO and DI functions with their corresponding signal name and
wiring schematic. The factory default settings of the DI and DO signals are detailed in Table 3.G and
3.H.
All of the DI's and DO's and their corresponding pin numbers are factory set and non-changeable,
however, all of the assigned signals and control modes are user changeable. For Example, the factory
default setting of DO5 (pins 28/27) can be assigned to DO1 (pins 7/6) and vise versa.
The following Tables 3.B and 3.C detail the functions, applicable operational modes, signal name and
relevant wiring schematic of the default DI and DO signals.
Table 3.B DO Signals
DO
Signal
DO
Code
Assigned
Control
Mode
Pin No.
(Default)
+ -
SRDY is activated when the servo drive is
SRDY 01 ALL 7 6
ready to run. All fault and alarm conditions, if
present, have been cleared.
SON is activated when control power is
applied the servo drive. The drive may or
may not be ready to run as a fault / alarm
condition may exist.
SON 02
Not
assigned
- -
Servo ON (SON) is "ON" with control power
applied to the servo drive, there may be a
fault condition or not. The servo is not ready
to run. Servo ready (SRDY) is "ON" where
the servo is ready to run, NO fault / alarm
exists. (P2-51 should turn servo ready SRDY
off / on)
ZSPD is activated when the drive senses the
motor is equal to or below the Zero Speed
Range setting as defined in parameter P1-
38.
ZSPD 03 ALL 5 4
For Example, at factory default ZSPD will be
activated when the drive detects the motor
rotating at speed at or below 10 rpm. ZSPD
will remain activated until the motor speed
increases above 10 RPM.
Details
(*1)
Wiring Diagram
(Refer to 3-3-3)
C5/C6/C7/C8
Revision March 2008, Doc. Name: 2007PDD23000011 3-17
Page 45

Chapter 3 Connections and Wiring|ASDA-AB Series
DO
Signal
DO
Code
Assigned
Control
Mode
Pin No.
(Default)
+ -
TSPD is activated once the drive has
detected the motor has reached the Target
TSPD 04 ALL 3 2
Rotation Speed setting as defined in
parameter P1-39. TSPD will remain activated
until the motor speed drops below the Target
Rotation Speed.
1. When the drive is in Pt mode, TPOS will
2. When the drive is in Pr mode, TPOS will
TPOS 05
Pt, Pr, Pt-
S,
Pt-T, Pr-S,
1 26
Pr-T
TQL is activated when the drive has detected
TQL 06
Not
assigned
- -
that the motor has reached the torques limits
set by either the parameters P1-12 ~ P1-14
of via an external analog voltage.
Details
(*1)
be activated when the position error is
equal and below the setting value of P1-
54.
be activated when the drive detects that
the position of the motor is in a -P1-54 to
+P1-54 band of the target position. For
Example, at factory default TPOS will
activate once the motor is in -99 pulses
range of the target position, then
deactivate after it reaches +99 pulses
range of the desired position.
Wiring Diagram
(Refer to 3-3-3)
ALRM is activated when the drive has
detected a fault condition. (However, when
ALRM 07 ALL 28 27
Reverse limit error, Forward limit error,
Emergency stop, Serial communication error,
and Undervoltage these fault occur, WARN
is activated first.)
BRKR 08 ALL 1 26 BRKR is activated actuation of motor brake.
HOME is activated when the servo drive has
detected that the "HOME" sensor (Digital
HOME 09 Pt, Pr 3 2
Input 24) has been detected and the home
conditions set in parameters P1-47, P1-50,
and P1-51 have been satisfied.
OLW is activated when the servo drive has
OLW 10 ALL - -
detected that the motor has reached the
output overload level set by the parameter
P1-56.
Servo warning output. WARN is activated
when the drive has detected Reverse limit
WARN 11 ALL - -
error, Forward limit error, Emergency stop,
Serial communication error, and
Undervoltage these fault conditions.
Internal position command completed output.
CMDOK is activated when the servo drive
CMDOK 12 ALL - -
has detected that the internal position
command has been completed or stopped
after the delay time which is set by the
parameter P1-62 has elapsed.
C5/C6/C7/C8
Footnote *1: The "state" of the output function may be turned ON or OFF as it will be dependant on the
settings of P2-18~P2-22.
3-18 Revision March 2008, Doc. Name: 2007PDD23000011
Page 46

Chapter 3 Connections and Wiring|ASDA-AB Series
NOTE
1) PINS 3 & 2 can either be TSPD or HOME dependent upon control mode selected.
2) PINS 1 & 26 are different depending on control mode either BRKR or TPOS.
Table 3.C DI Signals
DI
Signal
DI
Code
SON 01 ALL 9
Assigned
Control
Mode
Pin No.
(Default)
Details
(*2)
Servo On. Switch servo to "Servo Ready".
Check parameter P2-51.
A number of Faults (Alarms) can be
cleared by activating ARST. Please see
table 10-3 for applicable faults that can be
ARST 02 ALL 33
cleared with the ARST command.
However, please investigate Fault or
Alarm if it does not clear or the fault
description warrants closer inspection of
the drive system.
GAINUP 03 ALL - Gain switching
Wiring Diagram
(Refer to 3-3-3)
CCLR 04 Pt 10
ZCLAMP 05 ALL -
CMDINV 06 Pr, T, S -
HOLD 07
CTRG 08
Not
assigned
Pr,
Pr-S, Pr-T
Internal position control command pause
10
TRQLM 09 S, Sz 10
SPDLM 10 T, Tz 10
When CCLR is activated the setting is
parameter P2-50 Pulse Clear Mode is
executed.
When this signal is On and the motor
speed value is lower than the setting value
of P1-38, it is used to lock the motor in the
instant position while ZCLAMP is On.
When this signal is On, the motor is in
reverse rotation.
C9/C10
When the drive is in Pr mode and CTRG is
activated, the drive will command the
motor to move the stored position which
correspond the POS 0, POS 1, POS 2
settings. Activation is triggered on the
rising edge of the pulse.
ON indicates the torque limit command is
valid.
ON indicates the speed limit command is
valid.
POS0 11 Pr 34
POS1 12 Pr-S, Pr-T 8
POS2 13 - -
SPD0 14 34
SPD1 15
S, Sz, Pt-S,
Pr-S, S-T
When the Pr Control Mode is selected the
8 stored positions are programmed via a
combination of the POS 0, POS 1, and
POS 2 commands. See table 3.D.
Select the source of speed command:
See table 3.E.
8
Revision March 2008, Doc. Name: 2007PDD23000011 3-19
Page 47

Chapter 3 Connections and Wiring|ASDA-AB Series
DI
Signal
DI
Code
TCM0 16 34
Assigned
Control
Mode
Pt, T, Tz,
Pin No.
(Default)
Pt-T, Pr-T,
TCM1 17
S-T
8
S-P 18 Pt-S, Pr-S 31
S-T 19 S-T 31
T-P 20 Pt-T, Pr-T 31
EMGS 21 ALL 30
CWL 22
CCWL 23
Pt, Pr, S, T
Sz, Tz
Pt, Pr, S, T
Sz, Tz
32
31
Details
(*2)
Select the source of torque command:
See table 3.F.
Speed / Position mode switching
OFF: Speed, ON: Position
Speed / Torque mode switching
OFF: Speed, ON: Torque
Torque / Position mode switching
OFF: Torque, ON: Position
It should be contact “b” and normally ON
or a fault (ALE13) will display.
Reverse inhibit limit. It should be contact
“b” and normally ON or a fault (ALE14) will
display.
Forward inhibit limit. It should be contact
“b” and normally ON or a fault (ALE15) will
display.
Wiring Diagram
(Refer to 3-3-3)
ORGP 24
TLLM 25
TRLM 26
SHOM 27
INDEX0 28
INDEX1 29
INDEX2 30
INDEX3 31
INDEX4 32
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Not
assigned
When ORGP is activated, the drive will
-
command the motor to start to search the
reference “Home” sensor.
Reverse operation torque limit (Torque
-
limit function is valid only when P1-02 is
enabled)
Forward operation torque limit (Torque
-
limit function is valid only when P1-02 is
enabled)
When SHOM is activated, the drive will
command the motor to move to “Home”.
- Feed step selection input 0 (bit 0)
- Feed step selection input 1 (bit 1)
- Feed step selection input 2 (bit 2)
- Feed step selection input 3 (bit 3)
- Feed step selection input 4 (bit 4)
C9/C10
MD0 33
MD1 34
MDP0 35
MDP1 36
Not
assigned
Not
assigned
Not
assigned
Not
assigned
- Feed step mode input 0 (bit 0)
- Feed step mode input 1 (bit 1)
- Manually continuous operation
- Manually single step operation
3-20 Revision March 2008, Doc. Name: 2007PDD23000011
Page 48

Chapter 3 Connections and Wiring|ASDA-AB Series
DI
Signal
DI
Code
JOGU 37
JOGD 38
STEPU 39
STEPD 40
STEPB 41
AUTOR 42
Assigned
Control
Mode
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Not
assigned
Pin No.
(Default)
-
-
-
-
-
-
Details
(*2)
Forward JOG input. When JOGU is
activated, the motor will JOG in forward
direction. [see P4-05]
Reverse JOG input. When JOGD is
activated, the motor will JOG in reverse
direction. [see P4-05]
Step up input. When STEPU is activated,
the motor will run to next position.
Step down input. When STEPD is
activated, the motor will run to previous
position.
Step back input. When STEPB is
activated, the motor will return to first
position.
Auto run input. When AUTOR is activated,
the motor will run automatically according
to internal position command. For time
interval setting, please see P2-52 to P2-
59.
Wiring Diagram
(Refer to 3-3-3)
C9/C10
GNUM0 43
GNUM1 44
INHP 45
Not
assigned
Not
assigned
Not
assigned
Electronic gear ratio (Numerator) selection
0 [See P2-60~P2-62]
Electronic gear ratio (Numerator) selection
1 [See P2-60~P2-62]
Pulse inhibit input. When the drive is in
-
position mode, if INHP is activated, the
external pulse input command is not valid.
Footnote *2: The "state" of the input function may be turned ON or OFF as it will be dependant on the
settings of P2-10~P2-17.
Revision March 2008, Doc. Name: 2007PDD23000011 3-21
Page 49

Chapter 3 Connections and Wiring|ASDA-AB Series
Table 3.D Source of Position Command
POS2 POS1 POS0 Parameter
OFF OFF OFF P1-15, P1-16
OFF OFF ON P1-17, P1-18
OFF ON OFF P1-19, P1-20
OFF ON ON P1-21, P1-22
ON OFF OFF P1-23, P1-24
ON OFF ON P1-25, P1-26
ON ON OFF P1-27, P1-28
ON ON ON P1-29, P1-30
Table 3.E Source of Speed Command
SPD1 SPD0 Parameter
OFF OFF
S mode: analog input
Sz mode: 0
OFF ON P1-09
ON OFF P1-10
ON ON P1-11
Table 3.F Source of Torque Command
TCM1 TCM0 Parameter
T mode: analog input
OFF OFF
Tz mode: 0
OFF ON P1-12
ON OFF P1-13
ON ON P1-14
The default DI and DO signals in different control mode are listed in the following table 3.G and table
3.H. Although the content of the table 3.G and table 3.H do not provide more information than the table
3.B and table 3.C above, as each control mode is separated and listed in different row, it is easy for user
to view and can avoid confusion. However, the Pin number of each signal can not be displayed in the
table 3.G and table 3.H.
3-22 Revision March 2008, Doc. Name: 2007PDD23000011
Page 50

Chapter 3 Connections and Wiring|ASDA-AB Series
Table 3.G Default DI signals and Control modes
Signal
DI
Code
Function Pt Pr S T Sz Tz Pt-S Pt-T Pr-S Pr-T S-T
SON 01 Servo On DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1 DI1
ARST 02 Reset DI5 DI5 DI5 DI5 DI5 DI5
GAINUP 03
Gain switching in speed
and position mode
CCLR 04 Pulse clear (see P2-50) DI2 DI2 DI2
ZCLAMP 05 Low speed CLAMP
CMDINV 06
HOLD 07
Command input reverse
control
Internal position control
command pause
Command triggered
CTRG 08
(available in P mode
DI2 DI2 DI2
only)
TRQLM 09 Torque limit enabled DI2 DI2
SPDLM 10 Speed limit enabled DI2 DI2
POS0 11
Position command
selection (1~8)
DI3 DI3 DI3
POS1 12
POS2 13
SPD0 14
SPD1 15
TCM0 16
TCM1 17
S-P 18
S-T 19
T-P 20
Position command
selection (1~8)
Position command
selection (1~8)
Speed command
selection (1~4)
Speed command
selection (1~4)
Torque command
selection (1~4)
Torque command
selection (1~4)
Position / Speed mode
switching (OFF: Speed,
ON: Position)
Speed / Torque mode
switching (OFF: Speed,
ON: Torque)
Torque / Position mode
switching (OFF: Torque,
ON: Position)
DI4 DI4 DI4
DI3 DI3 DI3 DI5 DI3
DI4 DI4 DI4 DI6 DI4
DI3 DI3 DI3 DI3 DI5 DI5
DI4 DI4 DI4 DI4 DI6 DI6
DI7 DI7
DI7
DI7 DI7
EMGS 21
CWL 22
CCWL 23
Revision March 2008, Doc. Name: 2007PDD23000011 3-23
Emergency stop (contact
b)
Reverse inhibit limit
(contact b)
Forward inhibit limit
(contact b)
DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8 DI8
DI6 DI6 DI6 DI6 DI6 DI6
DI7 DI7 DI7 DI7 DI7 DI7
Page 51

Chapter 3 Connections and Wiring|ASDA-AB Series
Signal
ORGP 24
TLLM 25
TRLM 26
SHOM 27 Move to “Home”
INDEX0 28
INDEX1 29
INDEX2 30
INDEX3 31
DI
Code
Reference “Home”
sensor
Reverse operation
torque limit (torque limit
function is valid only
when P1-02 is enabled)
Forward operation
torque limit (torque limit
function is valid only
when P1-02 is enabled)
Feed step selection input
0 (bit 0)
Feed step selection input
1 (bit 1)
Feed step selection input
2 (bit 2)
Feed step selection input
3 (bit 3)
Function Pt Pr S T Sz Tz Pt-S Pt-T Pr-S Pr-T S-T
INDEX4 32
MD0 33 Feed step mode input 0
MD1 34 Feed step mode input 1
MDP0 35
MDP1 36
JOGU 37 Forward JOG input
JOGD 38 Reverse JOG input
STEPU 39
STEPD 40
STEPB 41
AUTOR 42 Auto run input
Feed step selection input
4 (bit 4)
Manually continuous
operation
Manually single step
operation
Step up input (available
in Pr mode only)
Step down input
(available in Pr mode
only)
Step back input.
(available in internal auto
running mode only)
Electronic gear ratio
GNUM0 43
GNUM1 44
INHP 45 Pulse inhibit input
(Numerator) selection 0
[see P2-60~P2-62]
Electronic gear ratio
(Numerator) selection 1
[see P2-60~P2-62]
3-24 Revision March 2008, Doc. Name: 2007PDD23000011
Page 52

Chapter 3 Connections and Wiring|ASDA-AB Series
NOTE
1) For Pin numbers of DI1~DI8 signals, please refer to section 3.3.1.
Table 3.H Default DO signals and Control modes
Signal
SRDY 01 Servo ready DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1 DO1
SON 02 Servo On
ZSPD 03 Zero speed DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2 DO2
TSPD 04 Speed reached DO3 DO3 DO3 DO3 DO3 DO3 DO3 DO3 DO3
TPOS 05 Positioning completed DO4 DO4 DO4 DO4 DO4 DO4 DO4
TQL 06 Reached torques limits
ALRM 07
BRKR 08 Electromagnetic brake DO4 DO4 DO4 DO4
DO
Code
Servo alarm output
(Servo fault)
Function Pt Pr S T Sz Tz Pt-S Pt-T Pr-S Pr-T S-T
DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5 DO5
HOME 09 Home completed DO3DO3
OLW 10 Output overload warning
WARN 11 Servo warning output
NOTE
1) For Pin numbers of DO1~DO5 signals, please refer to section 3.3.1.
Revision March 2008, Doc. Name: 2007PDD23000011 3-25
Page 53
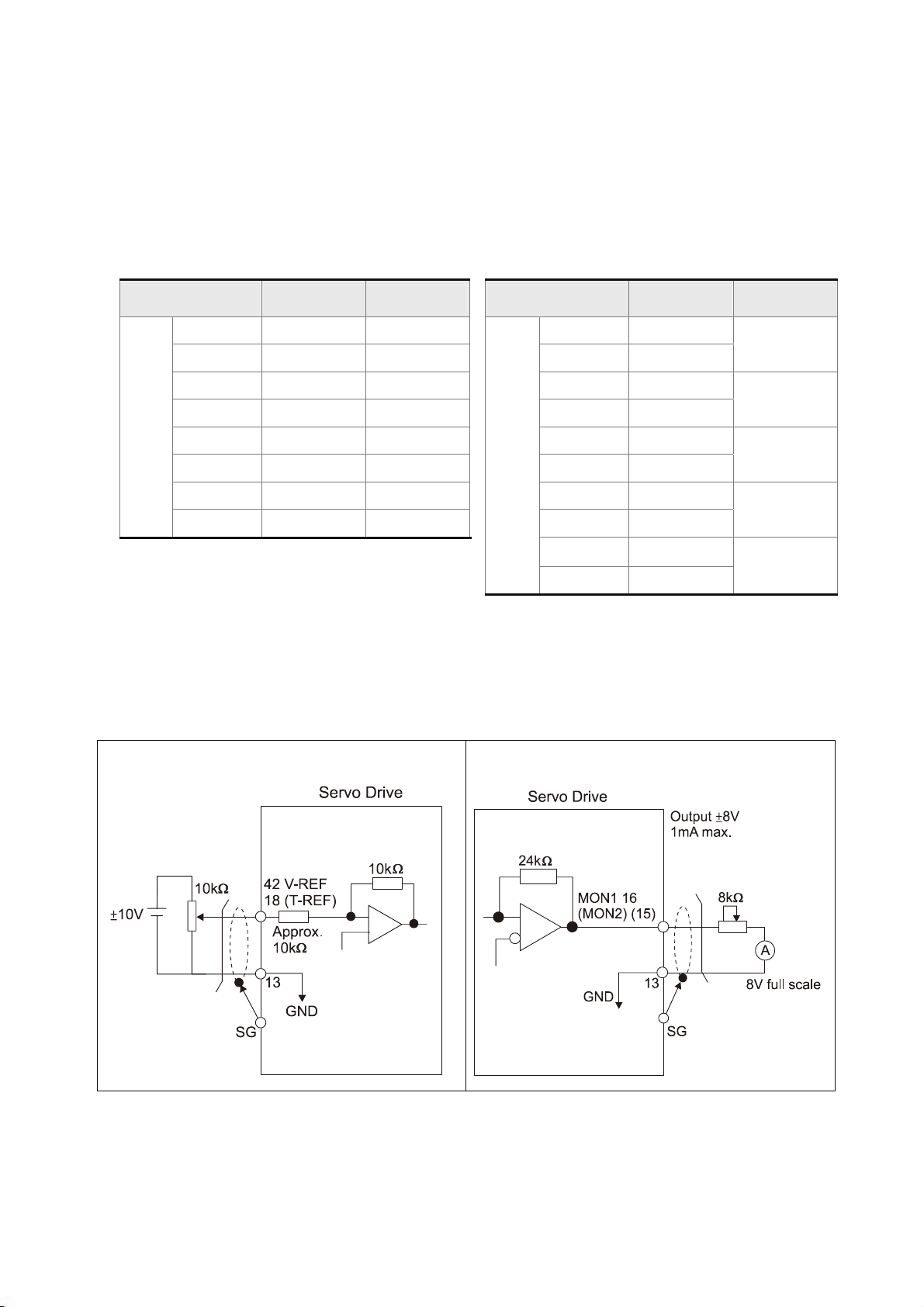
Chapter 3 Connections and Wiring|ASDA-AB Series
3.3.3 User-defined DI and DO signals
If the default DI and DO signals could not be able to fulfill users’ requirements, there are still user-
defined DI and DO signals. The setting method is easy and they are all defined via parameters. The
user-defined DI and DO signals are defined via parameters P2-10 to P2-17 and P2-18 to P2-22.
Please refer to the following Table 3.I for the settings.
Table 3.I User-defined DI and DO signals
Signal Name Pin No. Parameter Signal Name Pin No. Parameter
DI1- 9 P2-10 DO1+ 7
DI2- 10 P2-11 DO1- 6
DI3- 34 P2-12 DO2+ 5
DI
DO5+ 28
DI4- 8 P2-13 DO2- 4
DI5- 33 P2-14 DO3+ 3
DO
DI6- 32 P2-15 DO3- 2
DI7- 31 P2-16 DO4+ 1
DI8- 30 P2-17 DO4- 26
DO5- 27
3.3.4 Wiring Diagrams of I/O Signals (CN1)
The valid voltage range of analog input command in speed and torque mode is -10V ~+10V. The
command value can be set via relevant parameters.
C1: Speed / Torque analog signal input C2: Analog monitor output (MON1, MON2)
P2-18
P2-19
P2-20
P2-21
P2-22
3-26 Revision March 2008, Doc. Name: 2007PDD23000011
Page 54

Chapter 3 Connections and Wiring|ASDA-AB Series
There are two kinds of pulse inputs, Line driver input and Open-collector input. Max. input pulse
frequency of Line driver input is 500kpps and max. input pulse frequency of Open-collector input is
200kpps.
C3-1: Pulse input, for the use of internal power
supply (Open-collector input)
¾ Caution: Do not use dual power supply. Failure to observe this caution may result in damage to the servo drive
and servo motor.
C3-2: Pulse input, for the use of external power
supply (Open-collector input)
C4: Pulse input (Line driver)
Because this
photocoupler is a
unidirectional
optocoupler, please pay
close attention on the
current direction of input
pulse command.
Revision March 2008, Doc. Name: 2007PDD23000011 3-27
Page 55

Chapter 3 Connections and Wiring|ASDA-AB Series
Be sure to connect a diode when the drive is applied to inductive load.
(Permissible current: 40mA, Instantaneous peak current: max. 100mA)
C5: Wiring of DO signal, for the use of internal
power supply, general load
C7: Wiring of DO signal, for the use of external
power supply, general load
C6: Wiring of DO signal, for the use of internal
power supply, inductive load
C8: Wiring of DO signal, for the use of external
power supply, inductive load
Use a relay or open-collector transistor to input signal.
3-28 Revision March 2008, Doc. Name: 2007PDD23000011
Page 56

Chapter 3 Connections and Wiring|ASDA-AB Series
C9: Wiring of DI signal, for the use of internal power
supply
¾ Caution: Do not use dual power supply. Failure to observe this caution may result in damage to the servo drive
and servo motor.
C10: Wiring of DI signal, for the use of external
power supply
C11: Encoder output signal (Line driver) C12: Encoder output signal (Photocoupler)
Revision March 2008, Doc. Name: 2007PDD23000011 3-29
Page 57
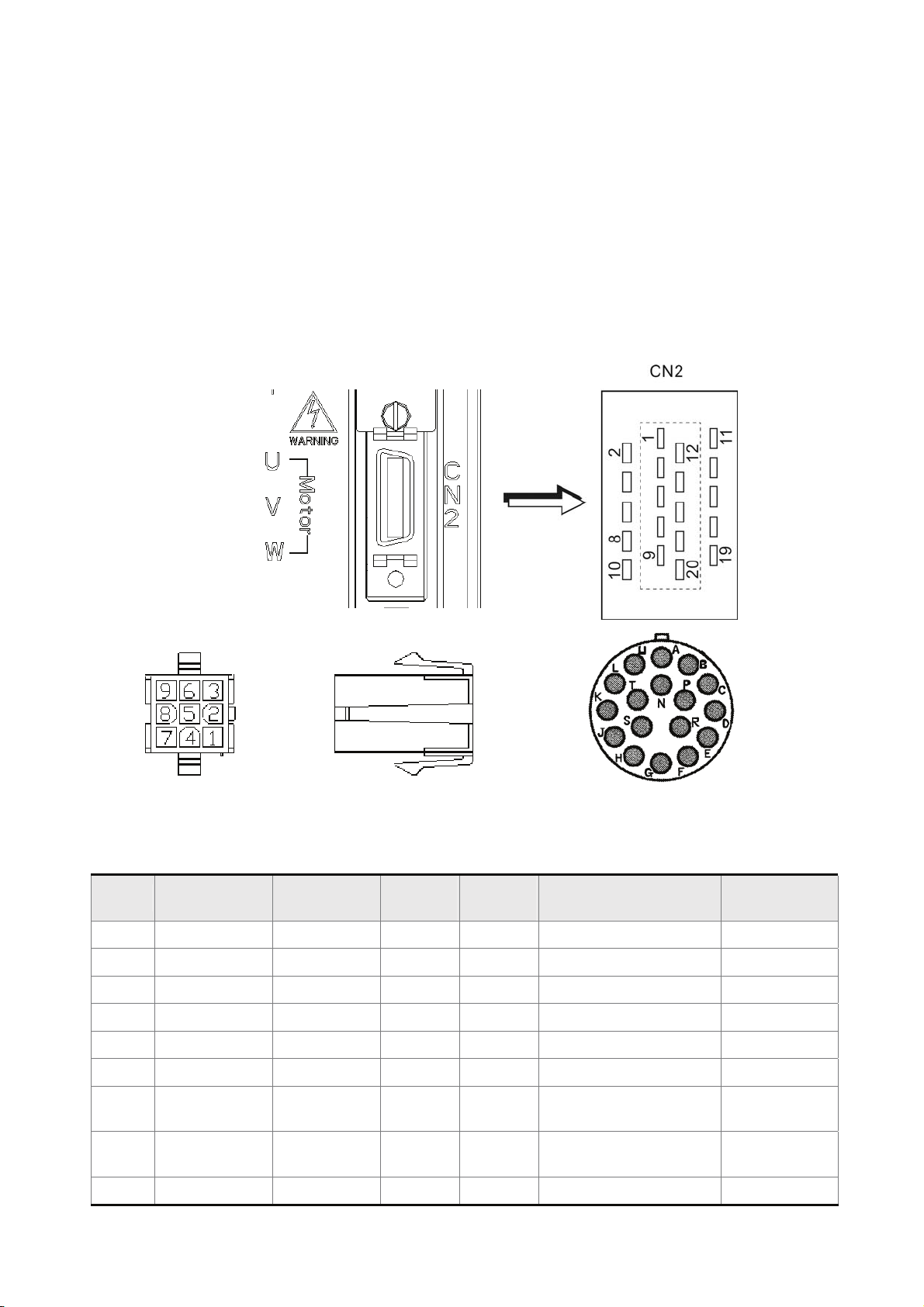
Chapter 3 Connections and Wiring|ASDA-AB Series
3.4 Encoder Connector CN2
Integrated within the servo motor is an incremental encoder with 2,500PPR and commutation signal.
When power is first applied to the servo drive, control algorithms detect the motor's rotor position through
imbedded sensors in the motor within 500msec approximately.
Feedback to the amplifier of the UVW signals for commutation is via the ABZ encoder signal wires.
Following rotor position sensing the amplifier automatically switches to encoding for commutation control.
The 2500PPR encoder is automatically multiplied to 10000PPR by X4 logic for increased control accuracy.
Figure 3.10 The layout of CN2 Drive Connector
Quick Connector
HOUSING: AMP (1-172161-9)
CN2 Terminal Signal Identification
PIN No. Signal Name
2 /Z phase input /Z G A6 Encoder /Z phase output Orange/Red
4 /A phase input /A B A2 Encoder /A phase output Black/Red
5 A phase input A A A1 Encoder A phase output Black
7 B phase input B C A3 Encoder B phase output White
9 /B phase input /B D A4 Encoder /B phase output White/Red
Terminal
Identification
Military
Connector
Quick
Connector
Military Connector
3106A-20-29S
Description Color
10 Z phase input Z F A5 Encoder Z phase output Orange
14, 16 Encoder power +5V S A7 Encoder 5V power
13, 15 Encoder power GND R A8 Grounding
Shielding Shielding L 9 Shielding Shielding
3-30 Revision March 2008, Doc. Name: 2007PDD23000011
Brown &
Brown/White
Blue &
Blue/White
Page 58

Chapter 3 Connections and Wiring|ASDA-AB Series
3.5 Serial Communication Connector CN3
3.5.1 CN3 Terminal Layout and Identification
The servo drive can be connected to a PC or controller via a serial communication connector. Users can
operate the servo drive through PC software supplied by Delta (contact to the dealer). The
communication connector/port of Delta servo drive can provide three common serial communication
interfaces: RS-232, RS-485, and RS-422 connection. RS-232 is mostly be used but is somewhat limited.
The maximum cable length for an RS-232 connection is 15 meters (50 feet). Using RS-485 or RS-422
interface can allow longer distance for transmission and support multiple drives to be connected
simultaneously.
Figure 3.11 The layout of CN3 Drive Connector
CN3 Terminal Signal Identification
PIN No. Signal Name
1 Grounding GND -
2 RS-232 data transmission RS-232-TX
3 RS-422 data receiving RS-422-RX+
RS-232 data receiving RS-232_RX
4
RS-422 data receiving RS-422_RX-
5 RS-422 data transmission RS-422-TX+
6 RS-422 data transmission RS-422-TX-
Terminal
Identification
Description
For data transmission of the servo drive.
Connected to the RS-232 interface of PC.
For data receiving of the servo drive
(differential line driver + end)
For data receiving of the servo drive.
Connected to the RS-232 interface of PC.
For data receiving of the servo drive
(differential line driver - end)
For data transmission of the servo drive
(differential line driver + end)
For data transmission of the servo drive
(differential line driver - end)
NOTE
1) For the connection of RS-485, please refer to page 8.2 and 8.3.
2) There are two kinds of IEEE1394 communication cables available on the market. If the user uses
one kind of cable, which its GND terminal (Pin 1) and its shielding is short-circuited, the
communication may be damaged. Never connect the case of the terminal to the ground of this kind
of communication cable.
Revision March 2008, Doc. Name: 2007PDD23000011 3-31
Page 59

Chapter 3 Connections and Wiring|ASDA-AB Series
3.5.2 Connection between PC and Connector CN3
3-32 Revision March 2008, Doc. Name: 2007PDD23000011
Page 60

Chapter 3 Connections and Wiring|ASDA-AB Series
3.6 Standard Connection Example
3.6.1 Position (Pt) Control Mode (220V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to C4 wiring diagram on page 3-26. If it is open-collector input, please refer to C3
wiring diagram on page 3-26.
3. Please refer to parameter P1-46 in Chapter 7.
Revision March 2008, Doc. Name: 2007PDD23000011 3-33
Page 61

Chapter 3 Connections and Wiring|ASDA-AB Series
3.6.2 Position (Pt) Control Mode (110V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to C4 wiring diagram on page 3-26. If it is open-collector input, please refer to C3
wiring diagram on page 3-26.
3. Please refer to parameter P1-46 in Chapter 7.
3-34 Revision March 2008, Doc. Name: 2007PDD23000011
Page 62

Chapter 3 Connections and Wiring|ASDA-AB Series
3.6.3 Position (Pr) Control Mode (220V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to parameter P1-46 in Chapter 7.
Revision March 2008, Doc. Name: 2007PDD23000011 3-35
Page 63

Chapter 3 Connections and Wiring|ASDA-AB Series
3.6.4 Position (Pr) Control Mode (110V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to parameter P1-46 in Chapter 7.
3-36 Revision March 2008, Doc. Name: 2007PDD23000011
Page 64

Chapter 3 Connections and Wiring|ASDA-AB Series
3.6.5 Speed Control Mode (220V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to parameter P1-46 in Chapter 7.
Revision March 2008, Doc. Name: 2007PDD23000011 3-37
Page 65
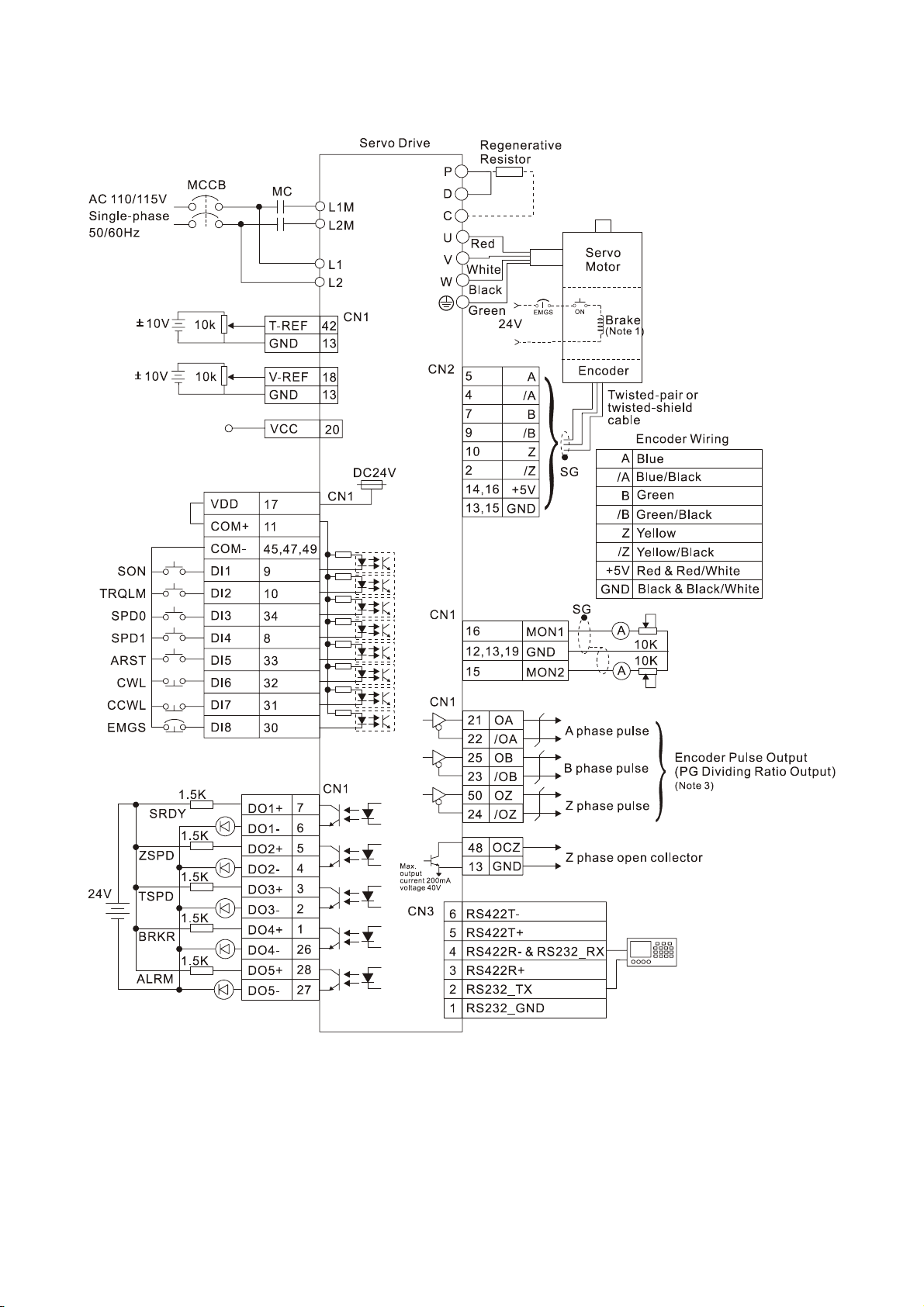
Chapter 3 Connections and Wiring|ASDA-AB Series
3.6.6 Speed Control Mode (110V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to parameter P1-46 in Chapter 7.
3-38 Revision March 2008, Doc. Name: 2007PDD23000011
Page 66

Chapter 3 Connections and Wiring|ASDA-AB Series
3.6.7 Torque Control Mode (220V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to parameter P1-46 in Chapter 7.
Revision March 2008, Doc. Name: 2007PDD23000011 3-39
Page 67

Chapter 3 Connections and Wiring|ASDA-AB Series
3.6.8 Torque Control Mode (110V models)
Note:
1 The coil of brake has no polarity.
2. Please refer to parameter P1-46 in Chapter 7.
3-40 Revision March 2008, Doc. Name: 2007PDD23000011
Page 68

Chapter 4 Display and Operation
This chapter describes the basic operation of the digital keypad and the features it offers.
4.1 Description of the Digital Keypad
The digital keypad includes the display panel and function keys. The Figure 4.1 shows all of the features of
the digital keypad and an overview of their functions.
Figure 4.1
Name Function
LCD Display
Charge LED The Charge LED lights to indicate the power is applied to the circuit.
The LCD Display (5-digit, 7-step display panel) shows the monitor codes, parameter
settings and operation values of the AC servo drive.
MODE Key. Pressing MODE key can enter or exit different parameter groups, and
switch between Monitor mode and Parameter mode.
SHIFT Key. Pressing SHIFT key can scrolls through parameter groups. After a
parameter is selected and its value displayed, pressing SHIFT key can move the
cursor to the left and then change parameter settings (blinking digits) by using arrow
keys.
UP and DOWN arrow Key. Pressing the UP and DOWN arrow key can scroll through
and change monitor codes, parameter groups and various parameter settings.
SET Key. Pressing the SET key can display and save the parameter groups, the
various parameter settings. During diagnosis operation, pressing SET key can execute
the function in the last step. (The parameter settings changes are not effective until the
SET key is pressed.)
Revision March 2008, Doc. Name: 2007PDD23000011 4-1
Page 69

Chapter 4 Display and Operation|ASDA-AB Series
4.2 Display Flowchart
Figure 4.2 Keypad Operation
1. When the power is applied to the AC servo drive, the LCD display will show the monitor function
codes for approximately one second, then enter into the monitor mode.
2. In monitor mode, pressing UP or DOWN arrow key can switch monitor parameter code. At this time,
monitor display symbol will display for approximately one second.
3. In monitor mode, pressing MODE key can enter into parameter mode, pressing the SHIFT key can
switch parameter group and pressing UP or DOWN arrow key can change parameter group code.
4. In parameter mode, the system will enter into the setting mode immediately after the Set key is
pressed. The LCD display will display the corresponding setting value of this parameter
simultaneously. Then, users can use UP or DOWN arrow key to change parameter value or press
MODE key to exit and return back to the parameter mode.
5. In parameter setting mode, the users can move the cursor to left by pressing the SHIFT key and
change the parameter settings (blinking digits) by pressing the UP or DOWN arrow key.
6. After the setting value change is completed, press SET key to save parameter settings or execute
command.
7. When the parameter setting is completed, LCD display will show the end code “-END-“ and
automatically return back to parameter mode.
4-2 Revision March 2008, Doc. Name: 2007PDD23000011
Page 70

Chapter 4 Display and Operation|ASDA-AB Series
4.3 Status Display
4.3.1 Save Setting Display
After the SET key is pressed, LCD display will show the following display messages for approx. one
second according to different status.
Display Message Description
The setting value is saved correctly.
This parameter is read only. Write-protected. (cannot be changed)
Invalid password or no password was input.
The setting value is error or invalid.
4.3.2 Abort Setting Display
Display Message Description
4.3.3 Fault Message Display
Display Message Description
The servo system is running and it is unable to accept this setting
value to be changed.
This parameter will not be stored in EEPROM.
This parameter is valid after restarting the drive.
In parameter mode, pressing MODE key can abort parameter
setting change and return to monitor mode. In parameter setting
mode, pressing MODE key can return back to parameter mode.
After returning back to parameter mode, pressing MODE key
again can abort parameter setting change.
When the AC servo drive has a fault, LCD display will display
“ALEnn”. “ALE” indicates the alarm and “nn” indicates the drive
fault code. The display range of alarm code “nn” is 1 to 23. For the
list of drive fault code, please refer to parameter P0-01 or refer to
Chapter 10 (Troubleshooting).
4.3.4 Polarity Setting Display
Display Message Description
Positive value display. When entering into parameter setting
mode, pressing UP or DOWN arrow key can increase or decrease
the display value. SHIFT key is used to change the selected digit
(The selected digit will blink).
Revision March 2008, Doc. Name: 2007PDD23000011 4-3
Page 71

Chapter 4 Display and Operation|ASDA-AB Series
Display Message Description
Negative value display. When the parameter setting is greater
than four digits (for the setting value within the range of less than
five decimal places), after the display value is set, continuously
press SHIFT key for many times and then the lit decimal points
are used to indicate a negative value.
Negative value display. When the parameter setting is less than
five digits (for the setting value within the range of five decimal
places), after the display value is set, continuously press SHIFT
key for many times and then the negative sign will show up to
indicate a negative value.
4.3.5 Monitor Setting Display
When the AC servo drive is applied to power, the LCD display will show the monitor function codes for
approximately one second and then enter into the monitor mode. In monitor mode, in order to change
the monitor status, the users can press UP or DOWN arrow key or change parameter P0-02 directly to
specify the monitor status. When the power is applied, the monitor status depends on the setting value
of P0-02. For example, if the setting value of P0-02 is 2 when the power is applied, the monitor function
will be Pulse counts of pulse command, the C.P monitor codes will first display and then the pulse
number will display after.
P0-02
Setting
0
1
2
Display Message Description Unit
Motor feedback pulse number (absolute
value)
Motor feedback rotation number
(absolute value)
Pulse counts of pulse command pulse
pulse
rev
3
Rotation number of pulse command rev
4
Position error counts pulse
5
Input frequency of pulse command r/min
6
Motor speed r/min
7
Speed input command Volt
8
Speed input command r/min
4-4 Revision March 2008, Doc. Name: 2007PDD23000011
Page 72

Chapter 4 Display and Operation|ASDA-AB Series
P0-02
Setting
9
10
11
12
13
14
15
Display Message Description Unit
Torque input command Volt
Torque input command %
Average load %
Peak load %
Main circuit voltage Volt
Ratio of load inertia to motor inertia time
Motor feedback pulse number (relative
value) / Position latch pulse number
pulse
16
The following table lists the display examples of monitor value:
Display Message Description
Motor feedback rotation number (relative
value) / Position latch rotation number
Positive value display. No positive sign is displayed to indicate
it is a positive value.
Display value: +1234.
Negative value display (The decimal place is less than five).
The negative sign is displayed to indicate it is a negative value.
Display value: -1234.
Negative value display (The decimal place is greater than four).
The lit decimal points are used to indicate it is a negative value.
Display value: -12345.
Decimal value display.
Display value: 12.34.
rev
Revision March 2008, Doc. Name: 2007PDD23000011 4-5
Page 73
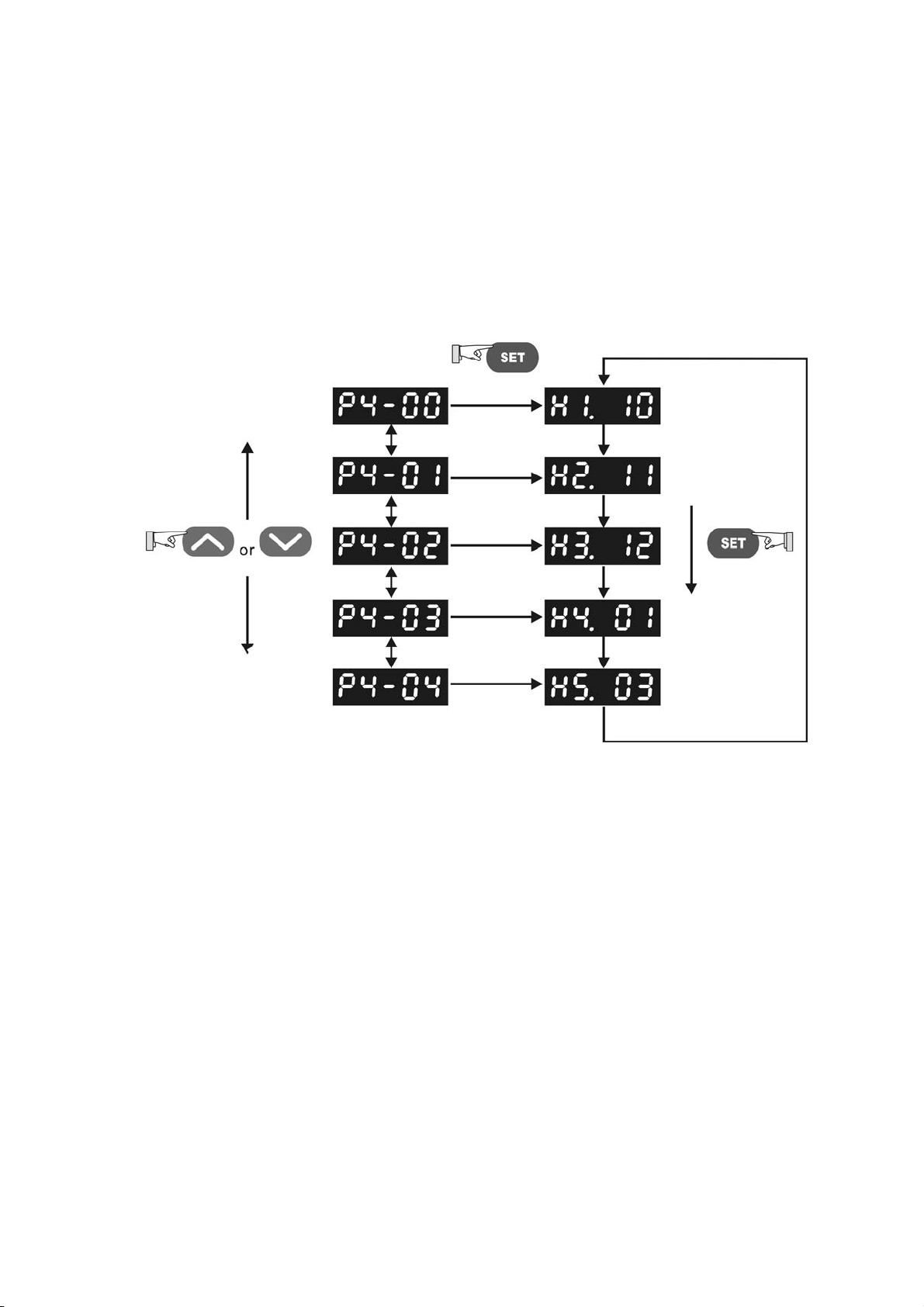
Chapter 4 Display and Operation|ASDA-AB Series
4.4 General Function Operation
4.4.1 Fault Code Display Operation
After entering the parameter mode P4-00 to P4-04 (Fault Record), press SET key to display the
corresponding fault code history for the parameter or press UP arrow key to display the fault code of H1
to H5 in order. H1 indicates the most recent occurred fault code, H2 is the previous occurred fault code
before H1 and so on. Please refer to the Figure 4.3. The recently occurred error code is 10.
Figure 4.3
4-6 Revision March 2008, Doc. Name: 2007PDD23000011
Page 74

Chapter 4 Display and Operation|ASDA-AB Series
4.4.2 JOG Operation
After entering parameter mode P4-05, the users can follow the following steps to perform JOG operation.
(Please also refer to Figure 4.4).
Step1. Press the SET key to display the JOG speed. (The default value is 20 r/min).
Step2. Press the UP or DOWN arrow keys to increase or decrease the desired JOG speed. (This also
can be undertaken by using the SHIFT key to move the cursor to the desired unit column (the
effected number will blink) then changed using the UP and DOWN arrow keys. The example
display in Figure 4.4 is adjusted as 100 r/min.)
Step3. Press the SET key when the desired JOG speed is set. The Servo Drive will display "JOG".
Step4. Press the UP or DOWN arrow keys to jog the motor either CCW or CW. The motor will only
rotate while the arrow key is activated.
Step5. To change JOG speed again, press the MODE key. The servo Drive will display "P4 - 05".
Press the SET key and the JOG speed will displayed again. Refer back to #2 and #3 to change
speed.
NOTE
1) JOG operation is effective only when Servo On (when the servo drive is enabled).
Figure 4.4
Revision March 2008, Doc. Name: 2007PDD23000011 4-7
Page 75

Chapter 4 Display and Operation|ASDA-AB Series
4.4.3 Position Learning Operation
Follow the following steps to perform position learning operation (Please also refer to Figure 4.5).
1. Activate the internal position learning function (Set P2-30=4).
2. After enter into parameter mode P4-05, press Set key and the LED display will show learning
moving speed value. The default setting is 20 r/min.
3. Press UP or DOWN arrow key to set the desired moving speed value. In the example shown below,
the value is adjusted to 100 r/min.
4. Press Set key then JOG o1 will display and enter position learning mode.
5. In the position learning mode (display JOGox), pressing UP or DOWN arrow key at any time can
rotate Servo motor in forward or reverse rotation. Servo motor will immediately stop running if
releasing the UP or DOWN arrow key. This operation is only available during Servo system is On
(Servo On).
6. After position is selected, press Set key then the display JOGo1 will change to JOGo2. At the same
time, the absolute position of servo motor will be memorized inside of the memory. (P1-15 : 1st
Position Command for Rotation, P1-16 : 1st Position Command for Pulse)
7. In the position learning mode (display JOGox), pressing Shift key can directly change the “x” value
of the display “JOGox” so as to jump rapidly to the particular learning position where should be
modified. There is no position memorized at this time.
Figure 4.5
4-8 Revision March 2008, Doc. Name: 2007PDD23000011
Page 76

Chapter 4 Display and Operation|ASDA-AB Series
The learning position and internal memorized position are listed as below:
Learning
Position
JOGo1 P1-15 (1st Position Command for Rotation), P1-16 (1st Position Command for Pulse)
JOGo2 P1-17 (2nd Position Command for Rotation), P1-18 (2nd Position Command for Pulse)
JOGo3 P1-19 (3rd Position Command for Rotation), P1-20 (3rd Position Command for Pulse)
JOGo4 P1-21 (4th Position Command for Rotation), P1-22 (4th Position Command for Pulse)
JOGo5 P1-23 (5th Position Command for Rotation), P1-24 (5th Position Command for Pulse)
JOGo6 P1-25 (6th Position Command for Rotation), P1-26 (6th Position Command for Pulse)
JOGo7 P1-27 (7th Position Command for Rotation), P1-28 (7th Position Command for Pulse)
JOGo8 P1-29 (8th Position Command for Rotation), P1-30 (8th Position Command for Pulse)
Internal Memorized Position
4.4.4 DO Force Output Diagnosis Operation
For testing, the digital outputs can be forced to be activated (ON) or inactivated (OFF) by using
parameter P4-06. Follow the setting method in Figure 4.6 to enter into DO force output diagnosis
operation (OP xx) mode (“xx” indicates the parameter range from 00 to 1F). Pressing UP or DOWN
arrow key can change “xx” value from 00 to 1F (hexadecimal format) and force digital outputs DO1 to
DO3 to be activated (ON) or inactivated (OFF). The DO function and status is determined by P2-18 to
P2-22. This function is enabled only when Servo Off (the servo drive is disabled).
Figure 4.6
Revision March 2008, Doc. Name: 2007PDD23000011 4-9
Page 77

Chapter 4 Display and Operation|ASDA-AB Series
4.4.5 DI Diagnosis Operation
Following the setting method in Figure 4.7 can perform DI diagnosis operation (parameter P4-07).
According to the ON and OFF status of the digital inputs DI1 to DI8, the corresponding status will
display on the servo drive LED display. When the segment lit and display on the screen, it means that
the corresponding digital input signal is ON. (Please also refer to Figure 4.7)
Figure 4.7
4.4.6 DO Diagnosis Operation
Following the setting method in Figure 4.8 can perform DO diagnosis operation (parameter P4-09).
According to the ON and OFF status of the digital outputs DO1 to DO5, the corresponding status will
display on the servo drive LED display. When the segment lit and display on the screen, it means that
the corresponding digital input signal is ON. (Please also refer to Figure 4.8)
Figure 4.8
4-10 Revision March 2008, Doc. Name: 2007PDD23000011
Page 78

Chapter 5 Trial Run and Tuning Procedure
This chapter, which is divided into two parts, describes trial run for servo drive and motor. One part is to
introduce the trial run without load, and the other part is to introduce trial run with load. Ensure to complete
the trial run without load first before performing the trial run with load.
5.1 Inspection without Load
In order to prevent accidents and avoid damaging the servo drive and mechanical system, the trial run
should be performed under no load condition (no load connected, including disconnecting all couplings and
belts). Do not run servo motor while it is connected to load or mechanical system because the unassembled
parts on motor shaft may easily disassemble during running and it may damage mechanical system or even
result in personnel injury. After removing the load or mechanical system from the servo motor, if the servo
motor can runs normally following up the normal operation procedure (when trial run without load is
completed), then the users can connect to the load and mechanical system to run the servo motor.
¾ In order to prevent accidents, the initial trial run for servo motor should be conducted under no load conditions
(separate the motor from its couplings and belts).
¾ Caution: Please perform trial run without load first and then perform trial run with load connected. After the
servo motor is running normally and regularly without load, then run servo motor with load connected. Ensure
to perform trial run in this order to prevent unnecessary danger.
After power in connected to AC servo drive, the charge LED will light and it indicates that AC servo drive is
ready. Please check the followings before trial run:
Item Content
z Inspect the servo drive and servo motor to insure they were not damaged.
z To avoid an electric shock, be sure to connect the ground terminal of servo drive to
the ground terminal of control panel.
z Before making any connection, wait 10 minutes for capacitors to discharge after
the power is disconnected, alternatively, use an appropriate discharge device to
discharge.
z Ensure that all wiring terminals are correctly insulated.
Inspection before
operation
(Control power is not
applied)
z Ensure that all wiring is correct or damage and or malfunction may result.
z Visually check to ensure that there are not any unused screws, metal strips, or any
conductive or inflammable materials inside the drive.
z Never put inflammable objects on servo drive or close to the external regenerative
resistor.
z Make sure control switch is OFF.
z If the electromagnetic brake is being used, ensure that it is correctly wired.
z If required, use an appropriate electrical filter to eliminate noise to the servo drive.
z Ensure that the external applied voltage to the drive is correct and matched to the
controller.
Revision March 2008, Doc. Name: 2007PDD23000011 5-1
Page 79

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
Item Content
z Ensure that the cables are not damaged, stressed excessively or loaded heavily.
When the motor is running, pay close attention on the connection of the cables
and notice that if they are damaged, frayed or over extended.
z Check for abnormal vibrations and sounds during operation. If the servo motor is
vibrating or there are unusual noises while the motor is running, please contact the
dealer or manufacturer for assistance.
z Ensure that all user-defined parameters are set correctly. Since the characteristics
Inspection during
operation
(Control power is
applied))
of various machinery equipment are different, in order to avoid accident or cause
damage, do not adjust the parameter abnormally and ensure the parameter setting
is not an excessive value.
z Ensure to reset some parameters when the servo drive is off (Please refer to
Chapter 7). Otherwise, it may result in malfunction.
z If there is no contact sound or there be any unusual noises when the relay of the
servo drive is operating, please contact your distributor for assistance or contact
with Delta.
z Check for abnormal conditions of the power indicators and LED display. If there is
any abnormal condition of the power indicators and LED display, please contact
your distributor for assistance or contact with Delta.
5-2 Revision March 2008, Doc. Name: 2007PDD23000011
Page 80

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.2 Applying Power to the Drive
The users please observe the following steps when applying power supply to the servo drive.
1. Please check and confirm the wiring connection between the drive and motor is correct.
1) Terminal U, V, W and FG (frame ground) must connect to Red, White, Black and Green cables
separately (U: Red, V: White, W: Black, FG: Green). If not connect to the specified cable and
terminal, then the drive cannot control motor. The motor grounding lead, FG must connect to
grounding terminal. For more information of cables, please refer to section 3.1.
2) Ensure to connect encoder cable to CN2 connector correctly. If the users only desire to execute
JOG operation, it is not necessary to make any connection to CN1 and CN3 connector. For more
information of the connection of CN2 connector, please refer to Section 3.1 and 3.4.
¾ Do not connect the AC input power (R, S, T) to the (U, V, W) output terminals. This will damage the AC servo
drive.
2. Main circuit wiring
Connect power to the AC servo. For three-phase input power connection and single-phase input power
connection, please refer to Section 3.1.3.
3. Turn the Power On
The Power includes control circuit power (L1, L2) and main circuit power (R, S, T). When the power is on,
the normal display should be shown as the following figure:
As the default settings of digital input signal, DI6, DI7 and DI8 are Reverse Inhibit Limit (CWL), Forward
Inhibit Limit (CCWL) and Emergency Stop (EMGS) respectively, if the users do not want to use the
default settings of DI6~DI8, the users can change their settings by using parameters P2-15 to P2-17
freely. When the setting value of parameters P2-15 to P2-17 is 0, it indicates the function of this DI signal
is disabled. For more information of parameters P2-15 to P2-17, please refer to Chapter 7 “Parameters”.
If the parameter P0-02 is set as motor speed (06), the normal display should be shown as the following
figure:
If there is no text or character displayed on the LED display, please check if the voltage of the control
circuit terminal (L1and L2) is over low.
Revision March 2008, Doc. Name: 2007PDD23000011 5-3
Page 81

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
1) When display shows:
Over voltage:
The main circuit voltage has exceeded its maximum allowable value or input power is error (Incorrect
power input).
Corrective Actions:
Use voltmeter to check whether the input voltage falls within the rated input voltage.
Use voltmeter to check whether the input voltage is within the specified limit.
2) When display shows:
Encoder error:
Check if the wiring is correct. Check if the encoder wiring (CN2) of servo motor is loose or incorrect.
Corrective Actions:
Check if the users perform wiring recommended in the user manual.
Examine the encoder connector and cable.
Inspect whether wire is loose or not.
Check if the encoder is damaged.
3) When display shows:
Emergency stop activated:
Please check if any of digital inputs DI1~DI8 signal is set to “Emergency Stop” (EMGS).
Corrective Actions:
If it does not need to use “Emergency Stop (EMGS)” as input signal, the users only need to
confirm that if all of the digital inputs DI1~DI8 are not set to “Emergency Stop (EMGS)”. (The
setting value of parameter P2-10 to P2-17 is not set to 21.)
5-4 Revision March 2008, Doc. Name: 2007PDD23000011
Page 82
Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
If it is necessary to use “Emergency Stop (EMGS)” as input signal, the users only need to
confirm that which of digital inputs DI1~DI8 is set to “Emergency Stop (EMGS)” and check if
the digital input signal is ON (It should be activated).
4) When display shows:
Reverse limit switch error:
Please check if any of digital inputs DI1~DI8 signal is set to “Reverse inhibit limit (CWL)” and check if
the signal is ON or not.
Corrective Actions:
If it does not need to use “Reverse inhibit limit (CWL)” as input signal, the users only need to
confirm that if all of the digital inputs DI1~DI8 are not set to “Reverse inhibit limit (CWL)”. (The
setting value of parameter P2-10 to P2-17 is not set to 22.)
If it is necessary to use “Reverse inhibit limit (CWL)” as input signal, the users only need to
confirm that which of digital inputs DI1~DI8 is set to “Reverse inhibit limit (CWL)” and check if
the digital input signal is ON (It should be activated).
5) When display shows:
Forward limit switch error:
Please check if any of digital inputs DI1~DI8 signal is set to “Forward inhibit limit (CCWL)” and check if
the signal is ON or not.
Corrective Actions:
If it is no need to use “Forward inhibit limit (CCWL)” as input signal, the users only need to
confirm that if all of the digital inputs DI1~DI8 are not set to “Forward inhibit limit (CCWL)”. (The
setting value of parameter P2-10 to P2-17 is not set to 23.)
If it is necessary to use “Forward inhibit limit (CCWL)” as input signal, the users only need to
confirm that which of digital inputs DI1~DI8 is set to “Forward inhibit limit (CCWL)” and check if
the digital input signal is ON (It should be activated).
Revision March 2008, Doc. Name: 2007PDD23000011 5-5
Page 83

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
When “Digital Input 1 (DI1)” is set to Servo On (SON), if DI1 is set to ON (it indicates that Servo On
(SON) function is enabled) and the following fault message shows on the display:
6) When display shows:
Overcurrent:
Corrective Actions:
Check the wiring connections between the servo drive and motor.
Check if the circuit of the wiring is closed.
Remove the short-circuited condition and avoid metal conductor being exposed.
7) When display shows:
Undervoltage:
Corrective Actions:
Check whether the wiring of main circuit input voltage is normal.
Use voltmeter to check whether input voltage of main circuit is normal.
Use voltmeter to check whether the input voltage is within the specified specification.
NOTE
1) If there are any unknown fault codes and abnormal display when applying power to the drive or servo on
is activated (without giving any command), please inform the distributor or contact with Delta for
assistance.
5-6 Revision March 2008, Doc. Name: 2007PDD23000011
Page 84

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.3 JOG Trial Run without Load
It is very convenient to use JOG trial run without load to test the servo drive and motor as it can save the
wiring. The external wiring is not necessary and the users only need to connect the digital keypad to the
servo drive. For safety, it is recommended to set JOG speed at low speed. Please refer to the following steps
to perform JOG trial run without load.
STEP 1: Turn the drive ON through software. Ensure that the setting value of parameter P2-30 should be
set to 1 (Servo On).
STEP 2: Set parameter P4-05 as JOG speed (unit: r/min). After the desired JOG speed is set, and then
press SET key, the drive will enter into JOG operation mode automatically
STEP 3: The users can press UP and DOWN key to change JOG speed and press SHIFT key to adjust the
digit number of the displayed value.
STEP 4: Pressing SET key can determine the speed of JOG operation.
STEP 5: Pressing UP key and the servo motor will run in CCW direction. After releasing UP key, the motor
will stop running.
STEP 6: Pressing DOWN key and the servo motor will run in CW direction. After releasing DOWN key, the
motor will stop running.
CW and CCW Definition:
CCW (Counterclockwise): when facing the servo motor shaft, CCW is reverse running.
CW (Clockwise): when facing the servo motor shaft, CW is forward running.
STEP 7: When pressing MODE key, it can exit JOG operation mode.
In the example below, the JOG speed is adjusted from 20r/min (Default setting) to 100r/min.
SE T
SE T
CC W
Revision March 2008, Doc. Name: 2007PDD23000011 5-7
CW
Page 85

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
Speed
0
Press Release
If the servo m otor does not rotate, please chec k if the wiring of
U, V, W terminals and encoder is correct or not.
If the servo motor does not rotate proper ly, pl ease check i f the
of U, V, W cables is connected correctly.phas e
Pres s
CCW
5-8 Revision March 2008, Doc. Name: 2007PDD23000011
Page 86

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.4 Speed Trial Run without Load
Before speed trial run, fix and secure the motor as possible to avoid the danger from the reacting
force when motor speed changes.
STEP 1:
Set the value of parameter P1-01 to 02 and it is speed (S) control mode. After selecting the operation mode
as speed (S) control mode, please restart the drive as P1-01 is effective only after the servo drive is restarted
(after switching power off and on).
STEP 2:
In speed control mode, the necessary Digital Inputs are listed as follows:
Digital Input
Parameter Setting
Value
Sign Function Description CN1 PIN No.
DI1 P2-10=101 SON Servo On DI1-=9
DI2 P2-11=109 TRQLM Torque limit enabled DI2-=10
DI3 P2-12=114 SPD0 Speed command selection DI3-=34
DI4 P2-13=115 SPD1 Speed command selection DI4-=8
DI5 P2-14=102 ARST Reset DI5-=33
DI6 P2-15=0 Disabled This DI function is disabled -
DI7 P2-16=0 Disabled This DI function is disabled -
DI8 P2-17=0 Disabled This DI function is disabled -
By default, DI6 is the function of reverse inhibit limit, DI7 is the function of forward inhibit limit and DI6 is the
function of emergency stop (DI8), if the users do not set the setting value of parameters P2-15 to P2-17 to 0
(Disabled), the faults (ALE13, 14 and 15) will occur (For the information of fault messages, please refer to
Chapter 10). Therefore, if the users do not need to use these three digit inputs, please set the setting value
of parameters P2-15 to P2-17 to 0 (Disabled) in advance.
All the digital inputs of Delta ASDA-AB series are user-defined, and the users can set the DI signals freely.
Ensure to refer to the definitions of DI signals before defining them (For the description of DI signals, please
refer to Table 7.A in Chapter 7). If any alarm code displays after the setting is completed, the users can
restart the drive or set DI5 to be activated to clear the fault. Please refer to section 5.2.
The speed command is selected by SPD0, SPD1. Please refer to the following table:
Speed
Command No.
S1 0 0
DI signal of CN1
SPD1 SPD0
Command Source Content Range
External analog
command
Voltage between V-REF
and GND
+/-10V
S2 0 1 P1-09 0 ~ 5000r/min
S3 1 0 P1-10 0 ~ 5000r/min
S4 1 1
Internal parameter
P1-11 0 ~ 5000r/min
0: indicates OFF (Normally Open); 1: indicates ON (Normally Closed)
Revision March 2008, Doc. Name: 2007PDD23000011 5-9
Page 87
Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
The settings of speed command:
P1-09 is set to 3000
Input value command Rotation direction
P1-10 is set to 100 + CW
P1-11 is set to -3000 - CCW
STEP 3:
1. The users can use DI1 to enable the servo drive (Servo ON).
2. If DI3 (SPD0) and DI4 (SPD1) are OFF both, it indicates S1 command is selected. At this time, the
motor is operating according to external analog command.
3. If only DI3 is ON (SPD0), it indicates S2 command (P1-09 is set to 3000) is selected, and the motor
speed is 3000r/min at this time.
4. If only DI4 is ON (SPD1), it indicates S3 command (P1-10 is set to 100) is selected, and the motor
speed is 100r/min at this time.
5. If DI3 (SPD0) and DI4 (SPD1) are ON both, it indicates S4 command (P1-11 is set to -3000) is
selected, and the motor speed is -3000r/min at this time.
6. Repeat the action of (3), (4), (5) freely.
7. When the users want to stop the speed trial run, use DI1 to disable the servo drive (Servo OFF).
5-10 Revision March 2008, Doc. Name: 2007PDD23000011
Page 88
Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.5 Position Trial Run without Load
Before position trial run, fix and secure the motor as possible to avoid the danger from the reacting
force when the motor speed changes.
STEP 1:
Set the value of parameter P1-01 to 01 and it is position (Pr) control mode. After selecting the operation
mode as position (Pr) control mode, please restart the drive and the setting would be valid.
STEP 2:
In position control mode, the necessary DI setting is listed as follows:
Digital Input
Parameter Setting
Value
Sign Function Description CN1 PIN No.
DI1 P2-10=101 SON Servo On DI1-=9
DI2 P2-11=108 CTRG Command trigged DI2-=10
DI3 P2-12=111 POS0 Position command selection DI3-=34
DI4 P2-13=112 POS1 Position command selection DI4-=8
DI5 P2-14=102 ARST Reset DI5-=33
DI6 P2-15=0 Disabled This DI function is disabled -
DI7 P2-16=0 Disabled This DI function is disabled -
DI8 P2-17=0 Disabled This DI function is disabled -
By default, DI6 is the function of reverse inhibit limit, DI7 is the function of forward inhibit limit and DI6 is the
function of emergency stop (DI8), if the users do not set the setting value of parameters P2-15 to P2-17 to 0
(Disabled), the faults (ALE13, 14 and 15) will occur (For the information of fault messages, please refer to
Chapter 10). Therefore, if the users do not need to use these three digit inputs, please set the setting value
of parameters P2-15 to P2-17 to 0 (Disabled) in advance.
All the digital inputs of Delta ASDA-AB series are user-defined, and the users can set the DI signals freely.
Ensure to refer to the definitions of DI signals before defining them (For the description of DI signals, please
refer to Table 7.A in Chapter 7). If any alarm code displays after the setting is completed, the users can
restart the drive or set DI5 to be activated to clear the fault. Please refer to section 5.2.
For the information of wiring diagram, please refer to Section 3.6.2 (Wiring of position (Pr) control mode).
Because POS2 is not the default DI, the users need to change the value of parameter P2-14 to 113.
Revision March 2008, Doc. Name: 2007PDD23000011 5-11
Page 89

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
The position command is selected by POS0 ~ POS2. Please refer to the following table:
Position
Command
Internal
Position 1
Internal
Position 2
Internal
Position 3
Internal
Position 4
Internal
Position 5
Internal
Position 6
Internal
Position 7
Internal
Position 8
POS2 POS1 POS0 CTRG Parameters
P1-15 Rotation No. (+/- 30000)
0 0 0
P1-16
P1-17 Rotation No. (+/- 30000)
0 0 1
P1-18
P1-19 Rotation No. (+/- 30000)
0 1 0
P1-20
P1-21 Rotation No. (+/- 30000)
0 1 1
P1-22
P1-23 Rotation No. (+/- 30000)
1 0 0
P1-24
P1-25 Rotation No. (+/- 30000)
1 0 1
P1-26
P1-27 Rotation No. (+/- 30000)
1 1 0
P1-28
P1-29 Rotation No. (+/- 30000)
1 1 1
P1-30
Moving Speed
Register
P2-36 (V1)
P2-37 (V2)
P2-38 (V3)
P2-39 (V4)
P2-40 (V5)
P2-41 (V6)
P2-42 (V7)
P2-43 (V8)
Description
Pulse No. (+/- max cnt)
Pulse No. (+/- max cnt)
Pulse No. (+/- max cnt)
Pulse No. (+/- max cnt)
Pulse No. (+/- max cnt)
Pulse No. (+/- max cnt)
Pulse No. (+/- max cnt)
Pulse No. (+/- max cnt)
0: indicates OFF (Normally Open); 1: indicates ON (Normally Closed)
The users can set the value of these 8 groups of commands (P1-15 ~ P1-30) freely. The command can be
absolute position command (P1-33 =0) or relative position command (P1-33 =1).
For example:
Set P1-33 to 1 (Absolute position command)
(The new setting will be effective after the servo drive is restarted (after switching power
off and on))
Set P1-15 to 1 (rotation number)
Set P1-16 to 0 (pulse number)
The command of internal position 1: P1-15 Rotation No. + P1-16 Pulse No.
Set P1-17 to 10 (rotation number)
Set P1-18 to 0 (pulse number)
The command of internal position 2: P1-17 Rotation No. + P1-18 Pulse No.
Set P1-19 to -10 (rotation number)
Set P1-20 to 0 (pulse number)
The command of internal position 3: P1-19 Rotation No. + P1-20 Pulse No.
Set P1-21 to 100 (rotation number)
Set P1-22 to 0 (pulse number)
The command of internal position 4: P1-21 Rotation No. + P1-22 Pulse No.
Set P1-23 to -1000 (rotation number)
Set P1-24 to 0 (pulse number)
The command of internal position 5: P1-23 Rotation No. + P1-24 Pulse No.
5-12 Revision March 2008, Doc. Name: 2007PDD23000011
Page 90

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
Set P1-25 to 0 (rotation number)
Set P1-26 to 100 (pulse number)
The command of internal position 6: P1-25 Rotation No. + P1-26 Pulse No.
Set P1-27 to 0 (rotation number)
Set P1-28 to 1000 (pulse number)
The command of internal position 7: P1-27 Rotation No. + P1-28 Pulse No.
Set P1-29 to -10 (rotation number)
Set P1-30 to 2500 (pulse number)
The command of internal position 8: P1-29 Rotation No. + P1-30 Pulse No.
Input command Rotation direction
+ CW
- CCW
STEP 3:
1. The users can use DI1 to enable the servo drive (Servo ON).
2. Set DI2 (CTRG) to be ON, it indicates the command of internal position 1 (P1-15 Rotation No. + P1-
16 Pulse No.) 1 turn is selected, and the motor has rotated one turn at this time.
3. Set DI3 (POS0) to be ON first and then enable DI2 (CTRG) to be ON, it indicates the command of
internal position 2 (P1-17 Rotation No. + P1-18 Pulse No.)10 turn is selected, and the motor has
rotated ten turns.
4. Set DI3 (POS0), DI4 (POS1) and DI5 (POS2) to be ON first and then enable DI2 (CTRG) to be ON, it
indicates the command of internal position 8 (P1-29 Rotation No. + P1-30 Pulse No.)10.25turn is
selected, and the motor has rotated 10.25 turns.
5. Repeat the action of (3), (4), (5) freely.
6. When the users want to stop the speed trial run, use DI1 to disable the servo drive (Servo OFF).
Revision March 2008, Doc. Name: 2007PDD23000011 5-13
Page 91

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.6 Tuning Procedure
Table 5.A Estimate the ratio of Load Inertia to Servo Motor Inertia (J_load /J_motor): JOG Mode
Tuning Procedure
1. After wiring is completed, when power in connected to the AC servo drive, the
right side display will show on the LCD display.
2. Press MODE key to enter into parameter mode.
3. Press SHIFT key twice to select parameter group.
4. Press UP key to view each parameter and select parameter P2-17.
5. Press SET key to display the parameter value as shown on the right side.
6. Press SHIFT key twice to change the parameter values. Use UP key to cycle
through the available settings and then press SET key to determine the
parameter settings.
7. Press UP key to view each parameter and select parameter P2-30.
8. Press SET key to display the parameter value as shown on the right side.
9. Select parameter value 1. Use UP key to cycle through the available settings.
10. Press SET key to write parameter value to the drive, and the right side display
will show on the LCD display.
11. At this time, the servo drive is ON and the right side display will appear next.
12. Press DOWN key three times to select the ratio of Load Inertia to Servo Motor
Inertia (J_load /J_motor).
13. Display the current ratio of Load Inertia to Servo Motor Inertia (J_load /J_motor).
(5.0 is default setting.)
14. Press MODE key to select parameter mode.
15. Press SHIFT key twice to select parameter group.
16. Press UP key to select user parameter P4-05.
17. Press SET key and JOG speed 20r/min will be displayed. Press UP and DOWN
key to increase and decrease JOG speed. To press SHIFT key one time can
add one digit number.
Display
18. Select desired JOG speed, press SET key and it will show the right side display.
19. Pressing UP key is forward rotation and pressing DOWN key is reverse rotation.
20. Execute JOG operation in low speed first. After the machine is running smoothly, then execute JOG
operation in high speed.
5-14 Revision March 2008, Doc. Name: 2007PDD23000011
Page 92

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
21. The ratio of Load Inertia to Servo Motor Inertia (J_load /J_motor) cannot be shown in the display of
JOG parameter P4-05 operation. Please press MODE key twice continuously and the users can see
the ratio of Load Inertia to Servo Motor Inertia (J_load /J_motor). Then, execute JOG operation again,
press MODE key once and press SET key twice to view the display on the keypad. Check if the value
of J_load /J_motor is adjusted to a fixed value and displayed on the keypad after acceleration and
deceleration repeatedly.
5.6.1 Tuning Flowchart
Revision March 2008, Doc. Name: 2007PDD23000011 5-15
Page 93

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.6.2 Load Inertia Estimation Flowchart
5-16 Revision March 2008, Doc. Name: 2007PDD23000011
Page 94

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.6.3 AutoMode (PI) Tuning Flowchart
Set P2-32 to 2 (2: AutoMode (PI) [Continuous adjustment] )
P2-31 Auto Mode Responsiveness Level (Default setting: B=4)
A: No function
B: Responsiveness level of auto-tuning mode
A
B
not used
Adjust P2-31: Increase the setting value of P2-31. Increase the value “B” to speed the responsiveness
or reduce the noise.
Adjust P2-25: According to the setting value of P2-31 speed and adjust the responsiveness.
Continuously adjust until the satisfactory performance is achieved, and then set P2-32 to 3 (3:
AutoMode (PI) [Fix the ratio of Load Inertia to servo motor inertia and response level can be adjusted] )
In AutoMode (PI), the value “B” indicates the
responsiveness setting. When the setting value is
higher, the responsiveness is faster.
to finish the tuning procedure.
Revision March 2008, Doc. Name: 2007PDD23000011 5-17
Page 95

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
Table 5.B P2-31 Value “B” Setting in AutoMode (PI) and the setting of P2-00, P2-25
P2-31 value “B” Speed Loop Responsive Recommended Setting Value of P2-25
0 20Hz 13
1 30Hz 9
2 40Hz 6
3 60Hz 4
4 85Hz 3
5 120Hz 3
6 160Hz 2
7 200Hz 1
8 250Hz 1
9 and above 300Hz 0
5-18 Revision March 2008, Doc. Name: 2007PDD23000011
Page 96

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.6.4 AutoMode (PDFF) Tuning Flowchart
Set P2-32 to 4 (4: AutoMode (PDFF) [Continuous adjustment] )
P2-31 Auto Mode Responsiveness Level (Default setting: B=4)
A: No function
B: Responsiveness level of auto-tuning mode
A
B
not used
Adjust P2-31: Increase the setting value of P2-31. Increase the value “B” to speed the responsiveness
or reduce the noise.
Continuously adjust until the satisfactory performance is achieved, and then set P2-32 to 5 (5:
AutoMode (PDFF) [Fix the ratio of Load Inertia to servo motor inertia and response level can be
adjusted] ) to finish the tuning procedure.
In AutoMode (PDFF), the value “B” indicates the
responsiveness setting. When the setting value is
higher, the responsiveness is faster.
Revision March 2008, Doc. Name: 2007PDD23000011 5-19
Page 97

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
Table 5.C P2-31 Value “B” Setting in AutoMode (PDFF) and the Speed Loop Responsiveness.
P2-31 value “B” Speed Loop Responsiveness P2-31 value “B” Speed Loop Responsiveness
0 20HZ 8 120Hz
1 30 HZ 9 140HZ
2 40 HZ A 160HZ
3 50 HZ B 180HZ
4 60 HZ C 200Hz
5 70 Hz D 220Hz
6 80Hz E 260Hz
7 100Hz F 300HZ
5-20 Revision March 2008, Doc. Name: 2007PDD23000011
Page 98

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.6.5 Manual Mode Tuning Flowchart
Position Mode
Revision March 2008, Doc. Name: 2007PDD23000011 5-21
Page 99

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
Speed Mode
5.6.6 Limit of Load Inertia Estimation
The accel. / decel. time for reaching 2000r/min must be below 1 second. The rotation speed must be
above 200r/min. The load inertia must be 100 multiple or less of motor inertia. The change of external
force and the inertia ratio can not be too much. In AutoMode (P2-32 is set to 3 or 5), it will stop
estimating the load inertia. The measured load inertia value will not be saved when the power is cut off.
When re-apply the power to the drive every time, the setting value of P1-37 is equal to the initial value of
load inertia value. But, the measured inertia value will be memorized in P1-37 automatically when:
(1) Switching AutoMode #2 to AutoMode #3
(2) Switching AutoMode #4 to AutoMode #5
5-22 Revision March 2008, Doc. Name: 2007PDD23000011
Page 100

Chapter 5 Trial Run and Tuning Procedure|ASDA-AB Series
5.6.7 Relationship between Tuning Modes and Parameters
Tuning Mode P2-32
Manual Mode
0(Default
setting)
AutoSet
Parameter
None
User-defined Parameter Gain Value
P2-00 (Proportional Position Loop Gain)
P2-04 (Proportional Speed Loop Gain)
P2-06 (Speed Integral Compensation)
P2-25 (Low-pass Filter Time Constant of
Resonance Suppression)
Fixed
AutoMode (PI)
[Continuous]
AutoMode (PI)
[Fixed Inertia] (The
inertia ratio is
determined by P1-
37)
AutoMode (PDFF)
[Continuous]
AutoMode (PDFF)
[Fixed Inertia] (The
inertia ratio is
determined by P1-
37)
When switching mode #3 to #0, the setting value of P2-00, P2-04 and P2-06 will change to the value
2
3
4
5
P2-00
P2-04
P2-06
P2-00
P2-04
P2-06
P2-00
P2-04
P2-06
P2-25
P2-26
P2-00
P2-04
P2-06
P2-25
P2-26
P2-31 Value B (Level of Responsiveness)
P2-25 (Low-pass Filter Time Constant of
Resonance Suppression)
P1-37 (Ratio of Load Inertia to Servo Motor
Inertia [J_load / J_motor])
P2-31 Value B (Level of Responsiveness)
P2-25 (Low-pass Filter Time Constant of
Resonance Suppression)
P2-31 Value B (Level of Responsiveness)
P1-37 (Ratio of Load Inertia to Servo Motor
Inertia [J_load / J_motor])
P2-31 Value B (Level of Responsiveness)
Continuous
Adjusting
Fixed
Continuous
Adjusting
Fixed
that measured in #3 auto-tuning mode.
When switching mode #5 to #0, the setting value of P2-00, P2-04, P2-06, P2-25 and P2-26 will change
to the value that measured in #5 auto-tuning mode
5.6.8 Gain Adjustment in Manual Mode
The position and speed responsiveness selection is depending on and determined by the the control
stiffness of machinery and conditions of applications. Generally, high reponsiveness is essential for the
high frequency positioning control of mechanical facilities and the applications of high precision process
system. However, the higher responsiveness may easily result in the resonance of machinery system.
Therefore, for the applications of high responsiveness, the machinery system with control stiffness is
needed to avoid the resonance. Especially when adjusting the responsiveness of unfamiliar machinery
system, the users can gradually increase the gain setting value to improve responsiveness untill the
resonance occurs, and then decrease the gain setting value. The relevant parameters and gain
adjusting methods are described as follows:
Revision March 2008, Doc. Name: 2007PDD23000011 5-23
 Loading...
Loading...