

Page 1
20 15 05 -1 8
50 12 61 25 03 -H SE 3
Page 2
Preface
Thank you for choosing the Hybrid Energy System (HES) designed exclusively for the Delta Injection
Machine, which consists of Hybrid Servo Controller (VFD-VJ) series and servo oil pump.
These production instructions provide the users with complete information regarding the installation,
parameter configuration, anomaly diagnosis, troubleshooting, and routine maintenance of the Hybrid
Servo Driver. To ensure correct installation and operation of the hybrid servo driver, please read the
instructions carefully before installing the machine. In addition, please store the enclosed CD-ROM
properly and pass down to the machine users.
The Hybrid servo driver is a delicate power electronics product. For the safety of the operators and the
security of the machine, please only allow professional electrical engineers to conduct installation, tests,
and adjust machine parameters. Please carefully read the contents of the instructions that are marked
with "Danger" and "caution". Please contact your local Delta agents for any questions and our
professional team will be happy to assist you.
PLEASE READ PRIOR TO INSTALLATION FOR SAFETY.
; Make sure to turn off the power before starting wiring.
; Once the AC power is turned off, when the POWER indicator of the Hybrid Servo
DANGER
Controller is still on, it means there is still high voltage inside the Hybrid Servo
Controller, which is very dangerous and do not touch the internal circuits and
components. To conduct the maintenance safely, please make sure the voltage
between +1 and - is lower than 25Vdc using the handheld multimeter before
starting the operation.
; The internal circuit board of Hybrid Servo Controller houses CMOS IC, which is
vulnerable to electrostatics. Please do not touch the circuit board by and without
any anti-electrostatics measures.
; Never modify the components or wiring inside the Hybrid Servo Controller.
; The E
series uses the third type of ground scheme while the 460V series uses special
ground.
; This series of products cannot be operated in environments that endanger human
safety.
; Please keep children or strangers from approaching Hybrid Servo Controller.
terminal of Hybrid Servo Controller must be grounded correctly. The 230V
Page 3
; Never connect AC power to the output terminals U/T1, V/T2, and W/T3 of Hybrid
Servo Controller.
; Please do not conduct stress test on the internal components of Hybrid Servo
Controller, for the semiconductor devices therein may be damaged by high-voltage
breakdown.
; Even when the servo oil pump is off, the main loop terminal of Hybrid Servo
Controller can still be loaded with high voltage that can be seriously dangerous.
; Only qualified professional electrical engineers can conduct tasks of installation,
wiring, and maintenance of Hybrid Servo Controller。
; When Hybrid Servo Controller uses external terminals as its run command sources,
the servo oil pump may start running immediately after the power is connected,
which may be dangerous with any personnel present.
; Please choose a safe area to install Hybrid Energy System, where there is no high
temperature, direct sunlight, moisture, and water dripping and splash.
; Please follow the instructions when installing Hybrid Energy System. Any
unapproved operation environment may lead to fire, gas explosion, and
electroshock.
; When the wiring between the hybrid controller and the hybrid servo motor is too
long, it may compromise the interlayer insulation of the motor. Please install a
reactor between them (please refer to Appendix A) to avoid burning of the hybrid
servo motor from damaged insulation.
; The voltage rating of the power supply of Hybrid Servo Controller 230 series cannot
be higher than 240V (no higher than 480V for 460 series) and the associated
current cannot exceed 5000A RMS ( no higher than 10000A RMS for models with
40HP (30kW))
NOTE
To provide detailed product descriptions, the illustrations are made with the exterior cover or safety shield removed. When
the product is running, ple ase mak e sur e the exterior cover is secured a nd th e wiring is correct to ensure safety by fol lowing
the instructions of the manual.
The figures in the manual are made for illustration purposes and will be slightly different from the actual products. However,
the discrepancy will not affect the interests of clients.
Since our products are being constantly improved, for information about any changes in specifications, please contact our
local agents or visit ( http://www.delta.com.tw/industrialautomation/ ) to download the most recent versions.
Page 4

Table of Contents
Chapter 1 Use and Installation
1-1 Exterior of Product................................................................................................................ 1-2
1-2 Specifications........................................................................................................................1-3
1-3 Introduction of Hybrid Energy System................................................................................... 1-5
1-4 Instal lation ............................................................................................................................ 1-6
Chapter 2 Wiring
2-1 Wiring...................................................................................................................................2-2
2-2 Wiring of Servo oil Pump ...................................................................................................... 2-4
2-3 Descriptions of Main Loop Terminals ....................................................................................2-5
2-4 Descriptions of Control Loop Terminals.................................................................................2-8
Chapter 3 Start Up
3-1 Description of Control Panel ................................................................................................. 3-2
3-2 Adjustment Flow Chart..........................................................................................................3-4
3-3 Explanations for the Adjustment Steps..................................................................................3-5
Chapter 4 Parameter Functions
4-1 Summary of Parameter Settings...........................................................................................4-2
4-2 Detailed Description of Parameters..................................................................................... 4-10
Chapter 5 Methods of Anomaly Diagnosis
5-1 Unusual Signal......................................................................................................................5-2
5-2 Over Current (oc)..................................................................................................................5-7
5-3 Ground Fault (GFF)..............................................................................................................5-7
5-4 Over Voltage (ov).................................................................................................................. 5-8
5-5 Low Voltage (Lv)...................................................................................................................5-8
5-6 Overheat (oH1).....................................................................................................................5-9
5-7 Overload (oL)........................................................................................................................5-9
5-8 Phase Loss (PHL)...............................................................................................................5-10
5-9 Resolutions for Electromagnetic Noise and Induction Noise................................................5-11
5-10 Environment and Facilities for Installation.................................................................. 5-12
Page 5

Chapter 6 Maintenance
Regular Main tenance..................................................................................................................6-2
Appendix A. Instructions of Product Packaging
A-1 Descriptions of Product Packaging ...................................................................................... A-2
A-2 Detailed List of Product Packaging...................................................................................... A-3
Appendix B Optional Accessories
B-1 Non-fuse Circuit Breaker...................................................................................................... B-2
B-2 Reactor................................................................................................................................ B-3
B-3 Digital Keypad KPV-CE01.................................................................................................... B-8
B-4 Communication Card..........................................................................................................B-12
B-5 EMI Filter............................................................................................................................B-13
B-6 Brake Unit………………………………………………………………………………………..…B-15
Page 6
Chapter 1 Use and Installation|HES Series
Chapter 1 Use and Installation
1-1 Exterior of Product
1-2 Product Specifications
1-3 Introduction of Hybrid Energy System
1-4 Product Installation
Upon receipt of the product, the clients are advised to keep the product in its original packaging box. If
the machine won't be used temporarily, for future maintenance safety and compliance with the
manufacturer's warranty policy, please pat attention to the following for product storage:
; Store in a clean and dry location free from direct sunlight or corrosive fumes.
°
; Store within an ambient temperature range of -20
; Store within a relative humidity range of 0% to 90% and non-condensing
environment.
; Avoid storing the product in environments with caustic gases and liquids.
; Avoid placing the product directly on the ground. The product should be placed on
suitable benches and desiccators should be placed in the packaging bags in harsh
storage environments.
; Avoid installing the product in places with direct sunlight or vibrations.
; Even if the humidity is within the required value, condensation and freezing can still
happen when there is drastic change of temperature. Avoid storing products in such
environment.
; If the product has been taken out of the packaging box and in use for over three
C to +60 °C.
months, the temperature of the storage environment must be below 30°C. This
considers the fact when the electrolytic capacitor is stored with no current conduction
and the environment temperature is too high, its properties may deteriorate. Please
do not store the product in the situation of no current conduction for more than one
year.
1-1
Page 7
Chapter 1 Use and Installation|HES Series
A
1-1 Exterior of Product
All Hybrid Energy System has passed strict quality control before being shipped out from the factory,
with enforced packaging that sustains impacts. Upon opening the packaging of the Hybrid Energy
System, the customers are recommended to conduct the examination by the following steps:
; Check if there is any damage to Hybrid Energy System during shipping.
; Upon opening the box, check if the model number of Hybrid Energy System matches that
listed on the external box.
For any mismatch of the listed data with your order or any other issues with the product, please
contact your local agent or retailer.
Model Explanation
HES 100 G 43
Ver si on
Input Voltage
Pressure
Flow Rate
Hybrid Energy System
23: 230V 3-PHASE
43:460V 3-PHASE
G: 140bar
H: 180bar
Z: 180bar
050: 50 L/min
063: 63L/min
080: 80L/min
100: 100L/min
125: 125L/min
160 160L min
: /
200 200L min
: /
250 250L min
: /
1-2
Page 8
Chapter 1 Use and Installation|HES Series
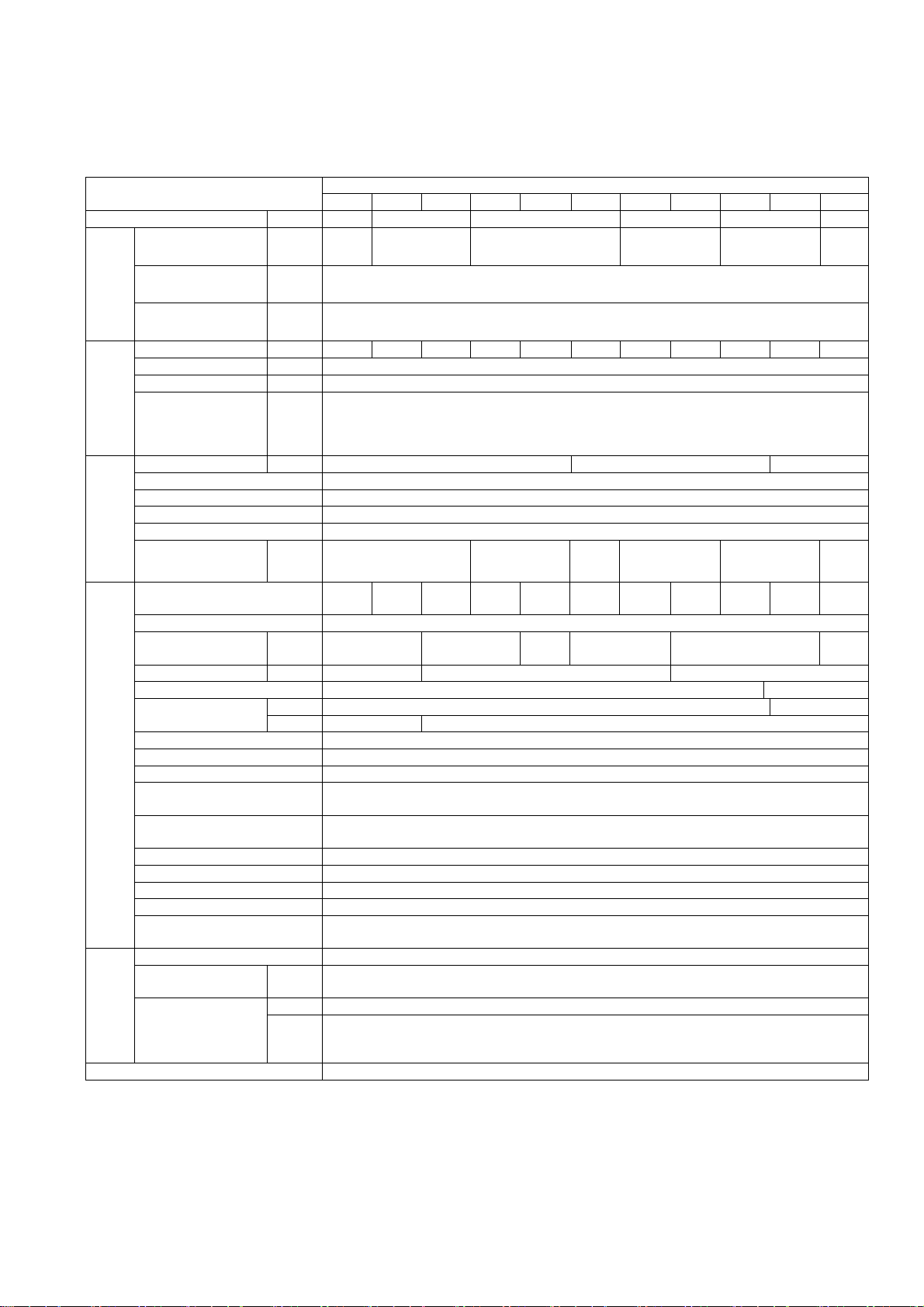
1-2 Specifications
230V Series Specifications
Model Number
Oil Pump Capacity cc/rev 25 32 40 50 64 80
Flow Rate L/min 63 80 100 125 160 200
Linear % Below 1% F.S.
Flow Rate
Specifications
Magnetic Hysteresis % Below 1% F.S.
Maximum Pressure Mpa 18 14 18 14 18 18 14 18 14 18 14
Minimum Pressure Mpa 0.1
Linear % Below 1% F.S.
Pressure
Magnetic Hysteresis % Below 1% F.S.
Specifications
Power kW 11 15 20
Insulation Grade Grade A (UL)
Cooling Method Forced Air Cooling
Environment Temperature 0 ~ 40 °C
Environment Humidity 20 ~ 90 RH (No condensation)
Specifications
Servo Oil Pump
Weight kg
063H 080G 080H 100G 100H 100Z 125G 125H 160G 160H 200G
82 83 95 108 110 144
HES____23A
VFD-___VL23A(_)
Input Voltage (V) 3-Phase 200~240V, 50/60Hz
Rated Output
Capacity
Weight kg 10 13 36
Brake Unit Built-in Plugged-in
Brake resistor
Speed Inspector Resolver
Pressure Command Input 0~10V Support three-point calibration
Flow Rate Command Input 0~10V Support three-point calibration
Multi-functional Input
Terminal
Multi-functional Output
Terminal
Servo Controller Specifications
Analog Output Voltage 2 ch dc 0~10V
Cooling Method Forced Air Cooling
Environment Temperature -10 ~ 45 °C
Environment Humidity Below 90 RH (No condensation)
Protection Functions
Working Medium HL-HLP DIN51 524 Part1/2 R68,R46
Operation
Temperature
Actuation Oil
Viscosity
Miscellaneous Safety, Reactor, and EMI filter are optional.
kVA 19 25 29 34 46 56
W 1000 1500
°C -20 to 100
@40 °C 67.83
@100
°C
110
(06HA)
Ω 8.3 5.8
Over current, over voltage, low voltage,, over heating, and overload in Hybrid Servo
110
(08GA)
Controller and over heating, overload, and abnormal speed in Hybrid Servo Motor.
150
(08HA)
150
(10GA)
2 ch DC24V 50mA, 1 ch Relay output
185
(10HA)
220
(10ZA)
5ch DC24V 8mA
8.62
220
(12GA)
300
(12HA)
300
(16GA)
370
(16HA)
370
(20GA)
1-3
Page 9
Chapter 1 Use and Installation|HES Series
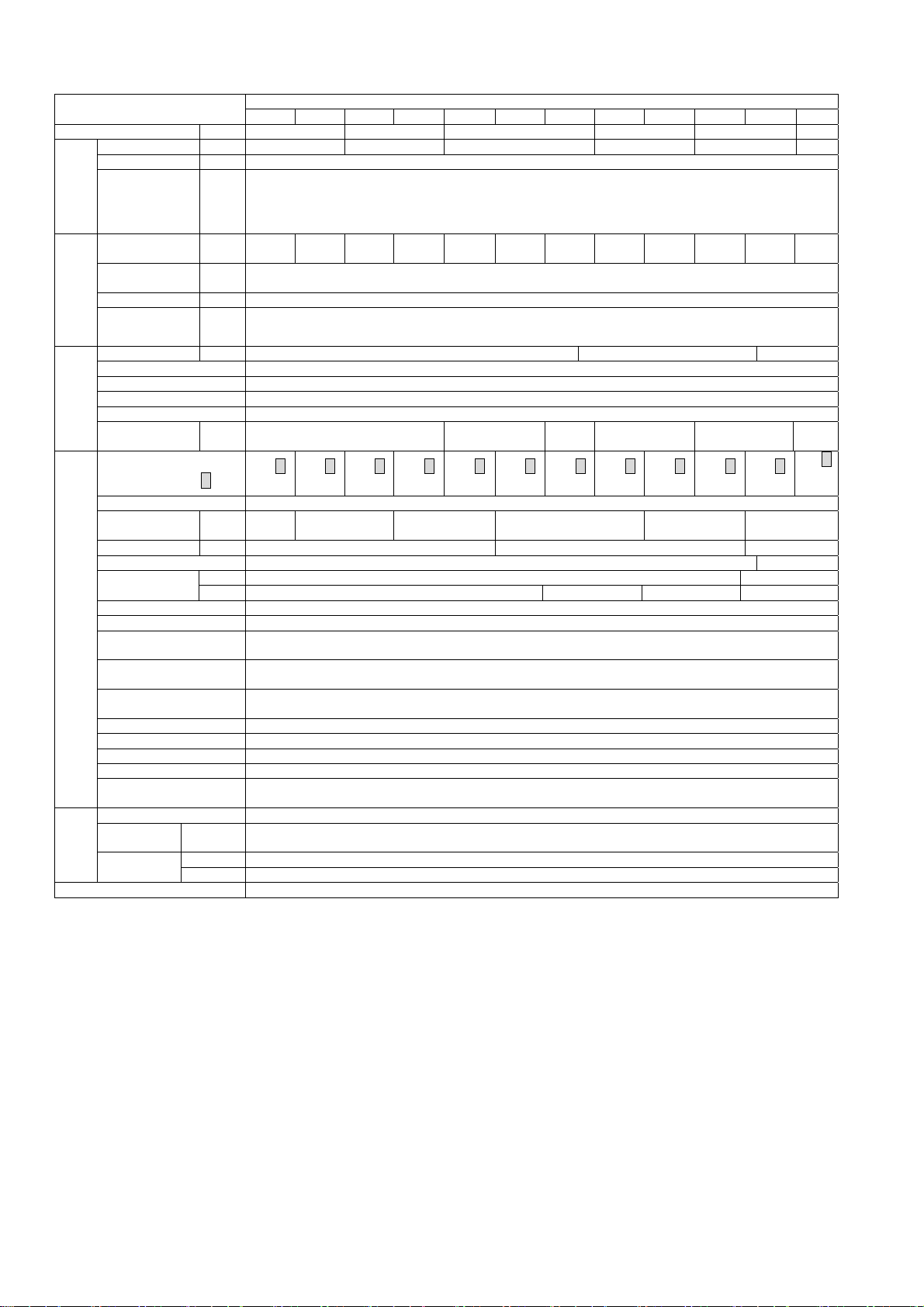
460V Series Specifications
Model Number
Oil Pump Capacity cc/rev 25 32 40 50 64 80
Flow Rate L/min 63 80 100 125 160 200
Linear % Below 1% F.S.
063G 063H 080G 080H 100G 100H 100Z 125G 125H 160G 160H 200G
HES____43A
Flow rate
Pressure
Servo Oil Pump
Actuation Oil
Magnetic
Hysteresis
Specifications
Maximum
Pressure
Minimum
Pressure
Linear % Below 1% F.S.
Magnetic
Specifications
Hysteresis
Power kW 11 15 20
Insulation Grade A grade (UL)
Cooling Method Forced Air Cooling
Environment Temperature 0 ~ 40 °C
Environment Humidity 20 ~ 90 RH(No condensation)
Weight of Servo
Specifications
Oil Pump
Model Number
VFD-___VL43A (_)
Input Voltage Three-Phase 380 ~ 460V, 50/60Hz
Rated Output
Capacity
Weight kg 10 13 36
Brake Unit Built-in Plugged-in
Brake resistor
Speed Inspector Resolver
Pressure Command Input 0~10V Support three-point calibration
Flow Rate Command
Input
Multi-functional Input
Terminal
Multi-functional Output
Servo Controller Specifications
Environment Temperature -10 ~ 45 °C
Terminal
Analog Output Voltage 2 ch dc 0~10V
Cooling Method Forced Air Cooling
Environment Humidity Below 90 RH(No condensation)
Protection Functions
Working Medium HL-HLP DIN51 524 Part1/2 R68,R46
Operation
Temperature
Viscosity
Miscellaneous Safety, Reactor, and EMI filter are optional.
% Below 1% F.S.
Mpa 14 18 14 18 14 18 18 14 18 14 18 14
Mpa 0.1
% Below 1% F.S.
kg 82 83 95 108 110 144
110A
(06GA)
KVA 19 25 29 34 46 56
W 1000 1500
Ω 25 20 14 13
°C -20 to 100
@40 °C 67.83
@100 °C 8.62
150B
(06HA)
Over current, over voltage, low voltage, over heating, and overload in Hybrid Servo Controller and over
150B
(08GA)
185B
(08HA)
heating, overload, and abnormal speed in Hybrid Servo Motor.
185B
(10GA)
0~10V Support three-point calibration
2 ch DC24V 50mA, 1 ch Relay output
220A
(10HA)
5ch DC24V 8mA
220A
(10ZA)
220A
(12GA)
300B
(12HA)
300B
(16GA)
370B
(16HA)
370B
(20GA
)
1-4
Page 10
Chapter 1 Use and Installation|HES Series
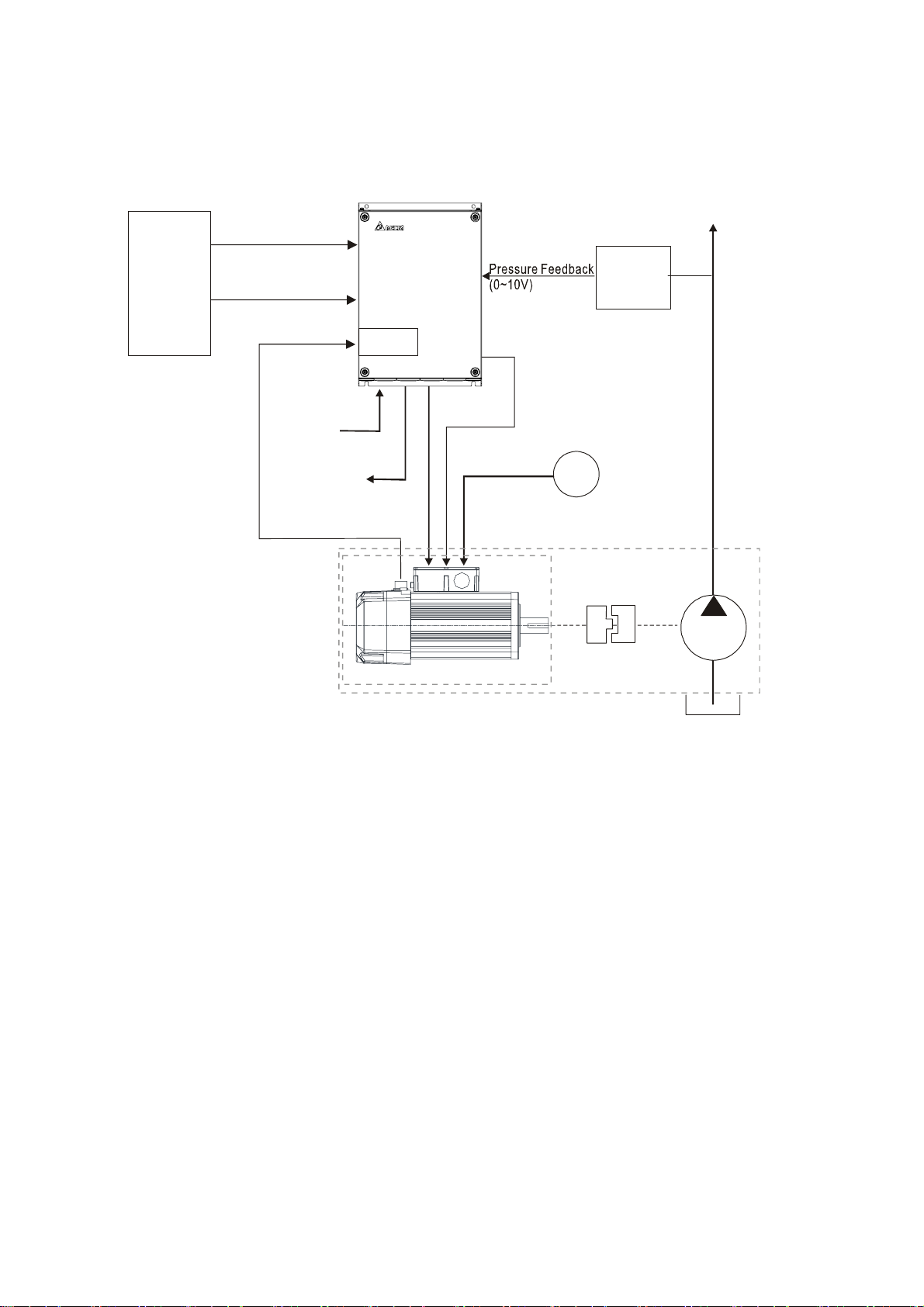
1-3 Introduction of Hybrid Energy
System
Injector
Controller
Pressure Command
(0~10V)
Flow Rate Command
(0~10V)
RST
Power Terminal
Brake resistance/
Brake Unit
Encoder signal
Delta Hybrid
Servo
Controller
PG Card
U V W
Pressure
Sensor
Over heat protection
switch
AC
FAN
220V
Servo oil pump
Oil Pump
Servo motor
1-5
Page 11
Chapter 1 Use and Installation|HES Series
e
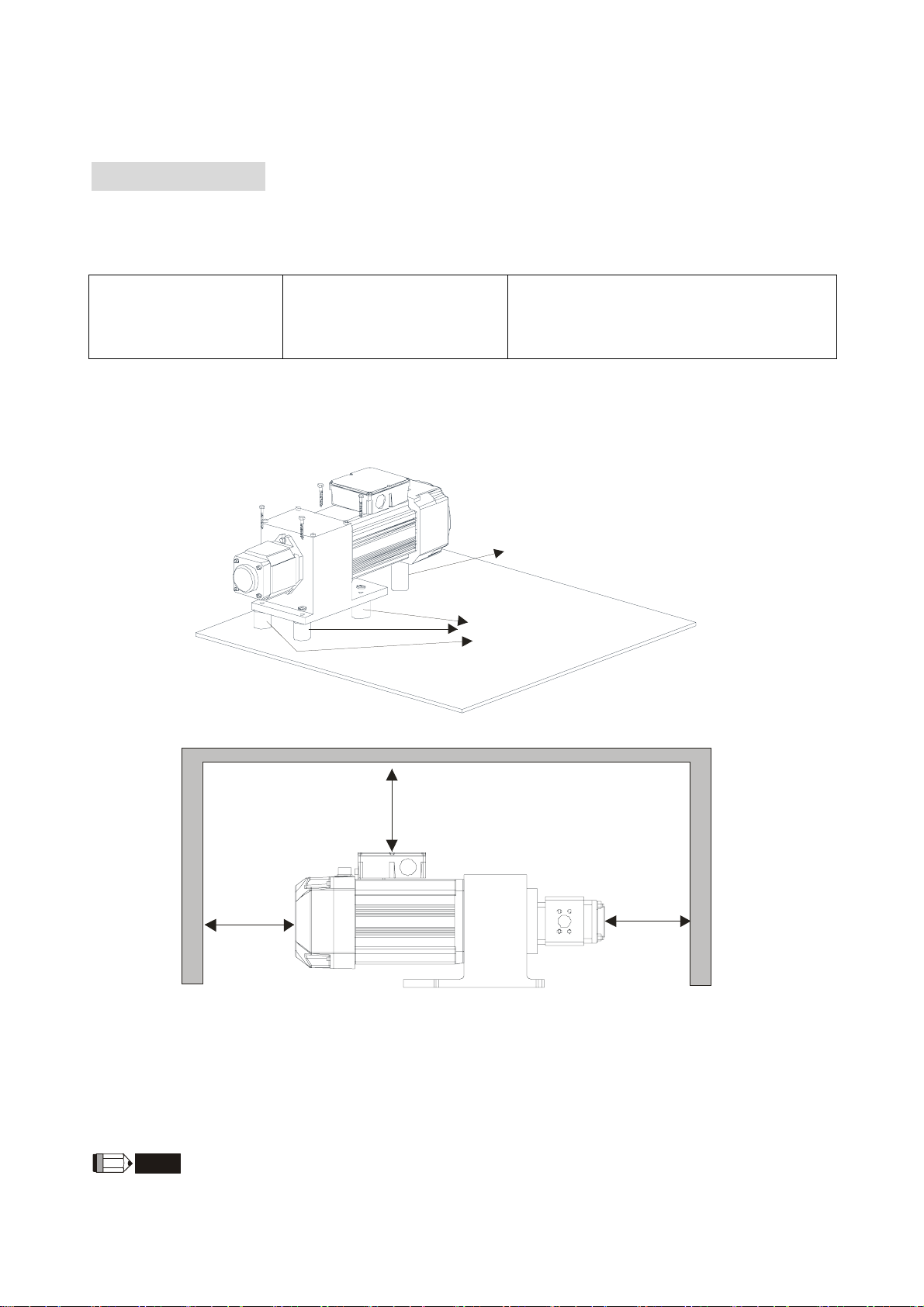
1-4 Installation
Servo Oil Pump
Please install the servo oil pump in an environment with the following conditions to ensure safe
product operation:
Conditions of Operation
Environment
The figure below shows that HES is installed on the machine. The screws must be secured to the
rubber mat to fixate the servo oil pump. It is recommended to add iron bars as the support of the
hybrid servo motor.
Environment Temperature
Relative Humidity
Oil Temperature
0°C~ 40°C
20%~90%, No condensation
0°C~ 60°C (15°C~ 50°C is recommended)
Iron bar
Rubber Mat*4
Installation Space
10cm
[4inch]
10cm
[4inch]
Installation Distanc
Since heat is generated as the hybrid servo motor is running, certain space must be reserved to
ensure good circulation of the cooling air as shown in the figure above.
When the hybrid servo motor is running, the temperature of the external cover will reach to about
100°C. Please do not touch it with hand to avoid burns.
NOTE
Please do not let any foreign objects such as fiber, paper pieces, wood chips or metal pieces to adhere to the cooling fan
of the hybrid servo motor.
10cm
[4inch]
1-6
Page 12
Chapter 1 Use and Installation|HES Series
Pipelines & Connections
Remove all protection caps on the pump
Choose suitable oil tube and connectors (Maximum intake flow rate 1m/s)
Recommended Specifications of intake oil tube
Flow Rate(L/min) Tube Diameter (inch) Length (m)
80 Above 1.5 Within 1.5
100 Above 1.5 Within 1.5
125 Above 2 Within 1.5
160 Above 2.25 Within 1.5
200 Above 2.5 Within 1.5
Absolute intake oil pressure: Maximum 2 bar
Prior to assembly, the iron dusts in the connectors and oil tubes must be removed.
The filter for the oil inlet must be above 150mesh.
NOTE
For safety, please install safety valve in the oil line loop.
Do not add check valve to the oil outlet of the oil pump to avoid poor response of Hybrid Energy System.
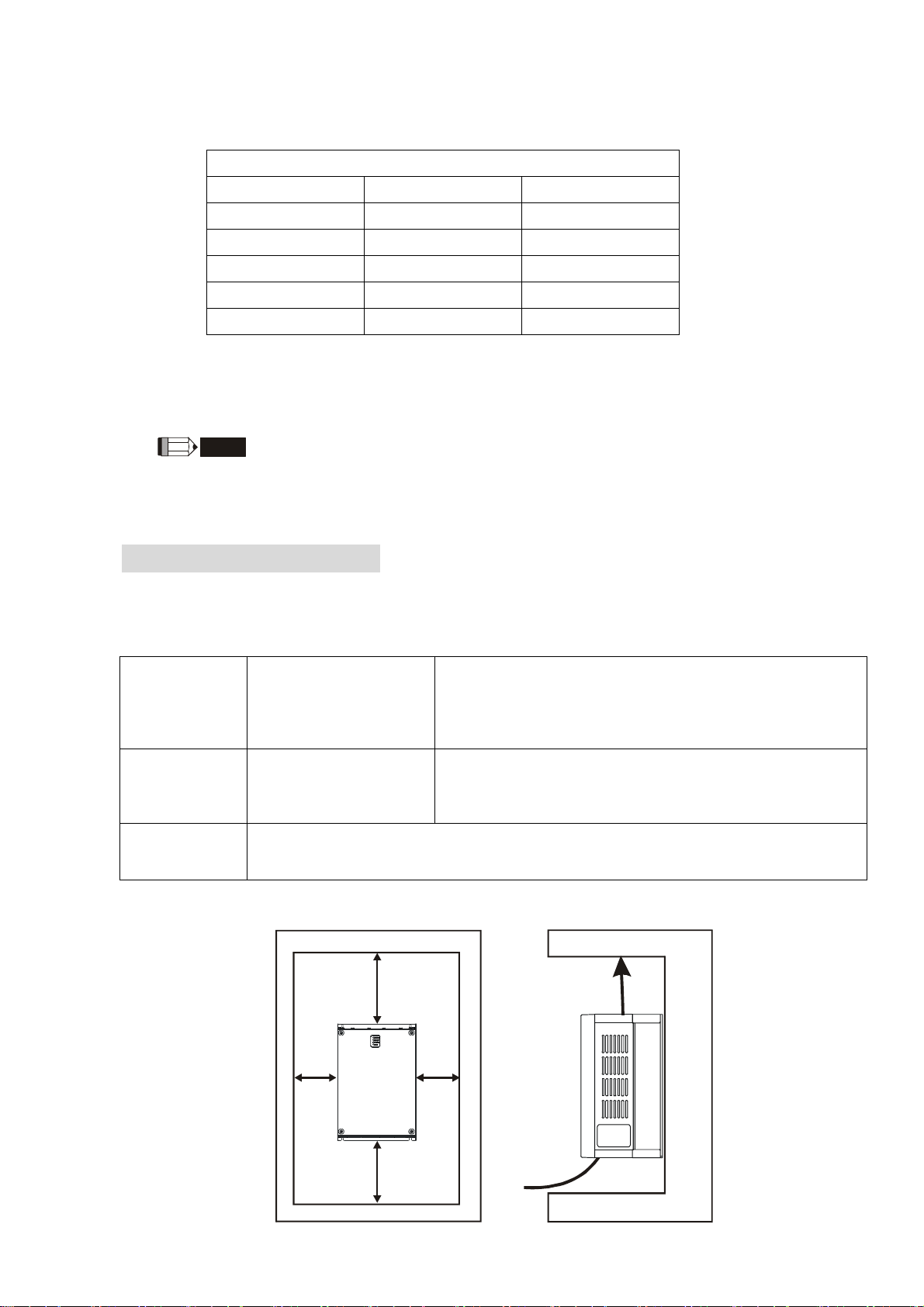
Hybrid Servo Controller
Please install the Hybrid Servo Controller in an environment with the following conditions to ensure
safe product operation:
Conditions of
Operation
Environment
Conditions of
Storage and
Shipping
Environment
Contamination
Protection Grade
Environment Temperature
Relative Humidity
Installation heights
Environment Temperature
Relative Humidity
2nd Grade: suitable for factory environments with medium to low contamination
Installation Space
Pressure
Vibration
Pressure
Vibration
-10°C~ +45°C
<90%,No condensation
86 ~ 106 kPa
<1000m
<20Hz: 9.80 m/s
-20°C~ +60°C (-4°F ~ 140°F)
<90%,No condensation
86 ~ 106 kPa
<20Hz: 9.80 m/s
2
(1G) max; 20~50H:5.88 m/s2 (0.6G) max
2
(1G) max; 20 ~ 50Hz: 5.88 m/s2 (0.6G) max
W
H
W
Air Flow
H
1-7
Page 13

Chapter 1 Use and Installation|HES Series
HP
W
mm (inch)
H
mm (inch)
7.5-20HP 75 (3) 175 (7)
25-75HP 75 (3) 200 (8)
100HP 75 (3) 250 (10)
; The Hybrid Servo Controller must be installed vertically with screws to sturdy structures. Do not
install it upside down, tilted, or horizontally.
; Since heat is generated when Hybrid Servo Controller is running, good circulation of the
cooling air must be provided as shown in the figure above. Certain space is reserved in the
design to allow the heat generated to dissipate upwards. As a result, do not install the machine
below any equipment that cannot stand excessive heat. If the machine is installed in the control
plate, special care must be given to maintain good air flow for cooling so that the surrounding
temperature of Hybrid Servo Controller won’t exceed the regulated values. Do not install Hybrid
Servo Controller in any closed box with poor air flow and cooling, which will lead to machine
malfunction.
; As the Hybrid Servo Controller is running, the temperature of the cooling plate will change with
the environment temperature and the load, with the maximum temperature reaching to about
90°C. Therefore, the backside of installation materials for Hybrid Servo Controller must be able
to sustain high temperature.
; When multiple Servo Controllers are installed in one single control plate, it is recommended to
install them with laterally to avoid heat interference among each other. If stacking installation is
needed, spacers must be installed to minimize the effect of the heat from the lower machine on
the upper machine.
NOTE
Do not add check valve to the oil outlet of the oil pump to avoid poor response of Hybrid Energy System.
The product should be installed in a control plate made of inflammable materials such as metal to avoid the risk of fire.
1-8
Page 14
Chapter 2 Wiring|HES Series
Chapter 2 Wiring
2-1 Wiring
2-2 Wiring of Servo Oil Pump
2-3 Descriptions of Main circuit Terminals
2-4 Descriptions of Control Loop Terminals
Upon opening the top cover of the Hybrid Servo Controller and reveal the wiring terminal bus, check if
the terminals of each Main circuit circuit and control loop circuit are labeled clearly. Pay attention to the
following wiring descriptions to avoid any incorrect connection.
; The Main circuit power terminals R/L1, S/L2, and T/L3 of the Hybrid Servo Controller are for power
input. If the power supply is connected by accident to other terminals, the Hybrid Servo Controller
will be damaged. In addition, it is necessary to verify that the voltage/current rating of power supply
is within the numbers listed on the name plate.
; The ground terminal must be grounded well, which can avoid being stricken by lightning or
occurrence of electrocution and minimize interference by noise.
; The screw between each connection terminal and the wire must be tightened securely to avoid
sparking by getting loose from vibration.
; If the wiring is to be changed, first step is to turn off the power of the Hybrid Servo
Controller, for it takes time for the DC filter capacitor in the internal loop to
completely discharge. To avoid any danger, the customer can wait for the charging
DANGER
indicator (READY light) to be of completely and measure the voltage with a DC
voltmeter. Make sure the measured voltage is below the safety value of 25Vdc
before starting the wiring task. If the user fails to let the Hybrid Servo Controller
completely discharge, residual voltage will build up internally, which will cause
short circuit and spark if wiring is conducted. Therefore, it is recommended that the
user should only conduct the wiring when there is no voltage to ensure his/her
safety.
; The wiring task must be conducted only by professional personnel. Make sure that
the power is off before starting to avoid incidence such as electrocution.
; During wiring, please follow the requirements of the electrical regulations to select
proper gauges and conduct wiring accordingly to ensure safety.
; Check the following items after finishing the wiring:
1. Are all connections correct?
2. No loose wires?
3. No short-circuits between terminals or to ground?
2-1
Page 15
Chapter 2 Wiring|HES Series
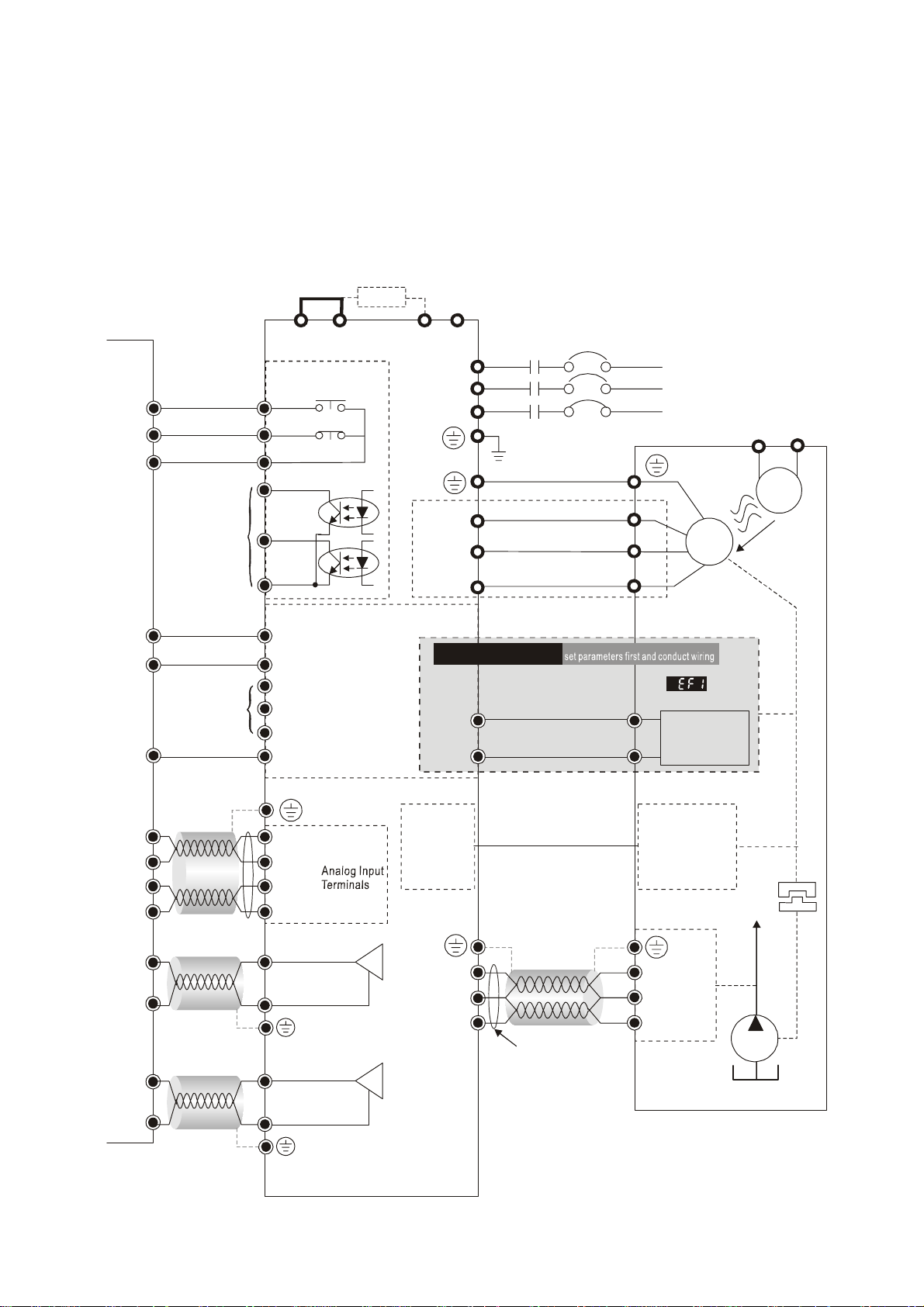
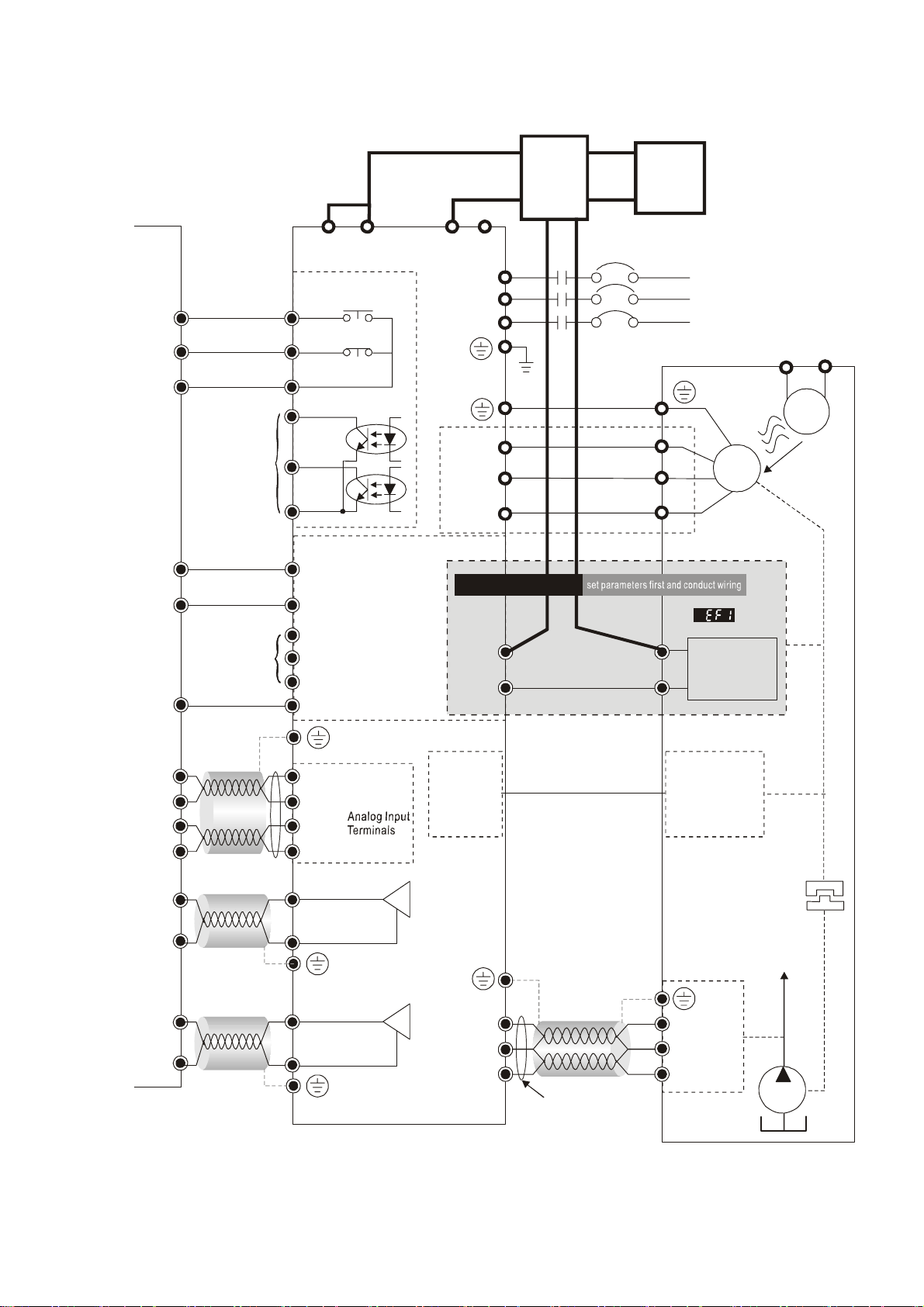
2-1 Wiring
The wiring of the hybrid energy system consists of that for the servo oil pump and that for the Hybrid
Servo Controller. The user must follow the wiring loop below for all wire connections.
Standard Wiring Diagram
HES063A23A~HES125G23A; HES063G43A~HES160G43A;
Brake Resistor (optional)
Controller
Start Oil
Pump
Reset
r
o
t
a
c
i
d
n
I
n
o
i
t
c
n
u
f
l
a
M
Unused
Unused
+2/B1
+1
Output terminal
RA
RB
RC
MO1
MO2
MCM
input terminal
SON
RES
MI3
MI4
MI5
COM
-
B2
R
S
T
Note 2*
U
V
W
Correct Wiring Method
If wiring is conducted before setting
parameters, error message will be displayed
EMG
COM
L1
L2
L3
U
V
W
Protection
switch for
electromotor
overheating
M
3~
w
o
l
B
l
e
220V
AC
FAN
t
o
t
r
i
o
a
m
o
r
t
c
e
e
h
r
o
t
Pressure
Command
Flow Rate
Command
Feedback
Signal
Feedback
Signal
PI
ACM
QI
ACM
AFM
0~10Vdc/2mA
ACM
Set as output frequency
as manufactured
AFM1
0~10Vdc
ACM
It is only about pressure
feedback output signal
PG Card
+24V
ACM
PO
2-2
Please use the
enclosed clips
Encoder
Connector
1
2
3
Pressure Sensor
Page 16
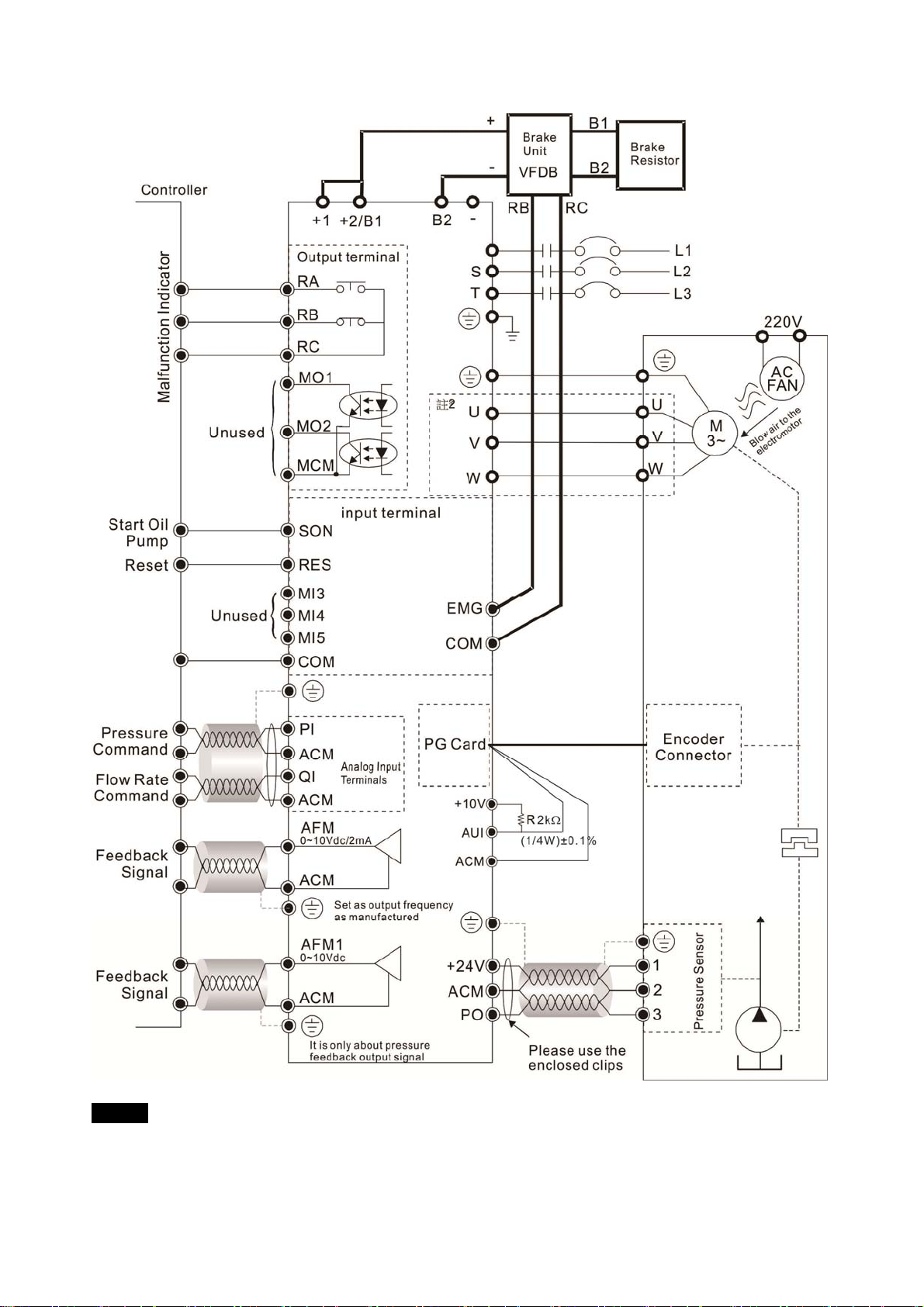
HES125H23A~HES200G23A;
HES160H43A~HES200G43A;
Chapter 2 Wiring|HES Series
Controller
Start Oil
Pump
Reset
r
o
t
a
c
i
d
n
I
n
o
i
t
c
n
u
f
l
a
M
Unused
Unused
+1
+2/B1
Output terminal
RA
RB
RC
MO1
MO2
MCM
input terminal
SON
RES
MI3
MI4
MI5
COM
B2
+
Brake
Unit
-
VFDB
RB
-
B1
B2
RC
S
T
註*
2
U
V
W
Correct Wiring Method
If wiring is conducted before setting
parameters, error message will be displayed
EMG
COM
Brake
Resistor
U
V
W
L1
L2
L3
M
3~
Protection
switch for
electromotor
overheating
220V
w
o
l
B
e
l
e
AC
FAN
o
t
r
i
a
m
o
r
t
c
e
h
t
r
o
t
o
Pressure
Command
Flow Rate
Command
Feedback
Signal
Feedback
Signal
PI
ACM
QI
ACM
AFM
0~10Vdc/2mA
ACM
Set as output frequency
as manufactured
AFM1
0~10Vdc
ACM
It is only about pressure
feedback output signal
PG Card
+24V
ACM
PO
Pl ease use the
enclosed clips
Encoder
Connector
1
2
3
Pressure Sensor
2-3
Page 17
Chapter 2 Wiring|HES Series
HES250M43C
Note 1*
The RB, RC wiring of the braking unit: the overheat protection wiring of the braking unit.
2-4
Page 18
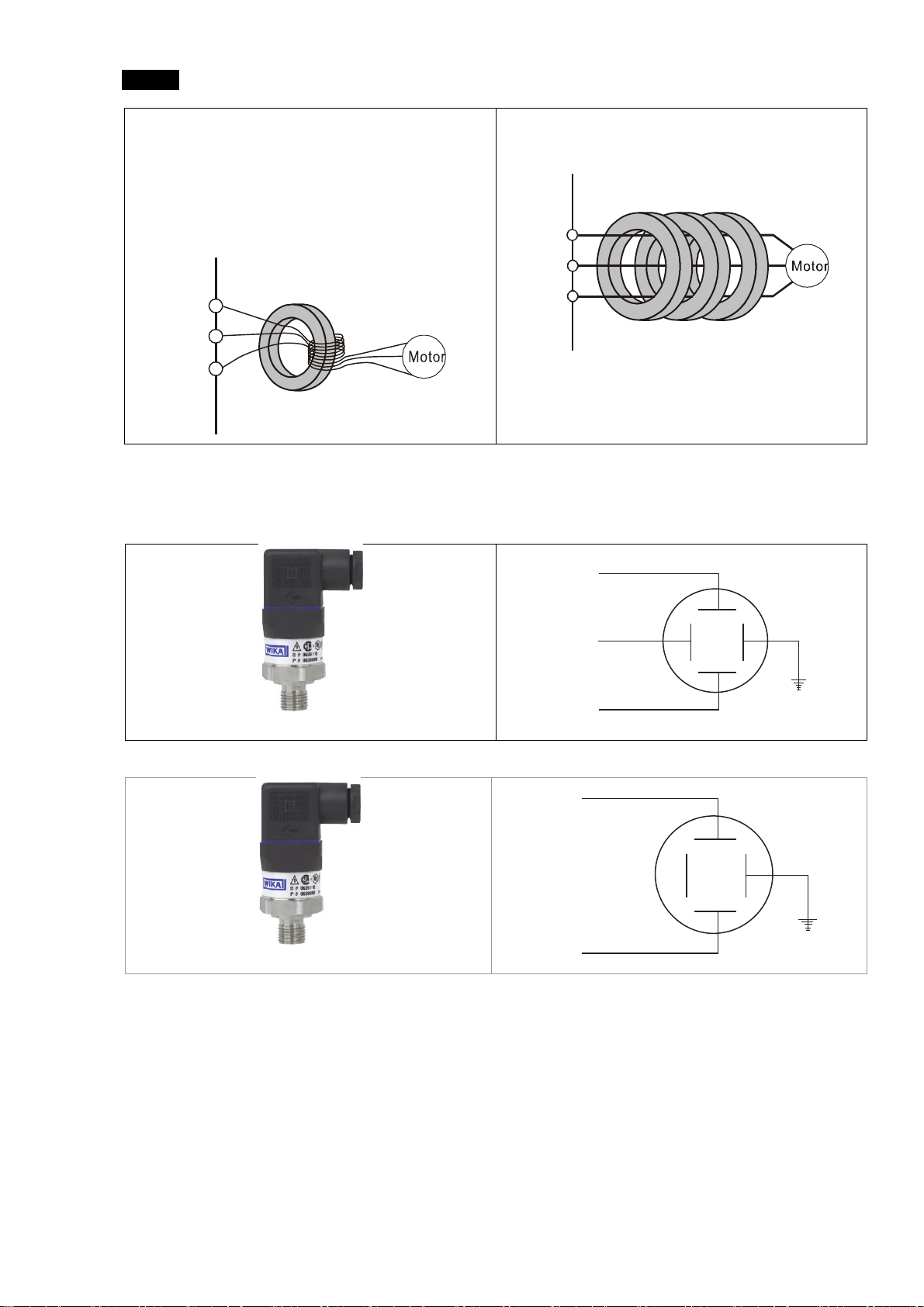
Note 2*
ACM
Chapter 2 Wiring|HES Series
For models with power rating below 22kW
(including 22kW)
For models with power rating below 30kW
(including 30kW)
(it is recommended to wrap the output wire
around the zero-phase reactor for over three
times before connecting it to the motor)
U/T1
V/T2
W/T3
U/T1
V/T2
W/T3
Wiring Diagram of Pressure Sensor
Voltage type pressure Sensor => Pin1: 24V, Pin2 : ACM, Pin3 : PO
24V
PO
Connector of Pressure Sensor
Current type pressure Sensor => Pin1: 24V ,Pin2 : PO , Pin3 : N/A
24V
Connector of Pressure Sensor
PO
1
3
4
2
1
4
3
2
2-5
Page 19
Chapter 2 Wiring|HES Series
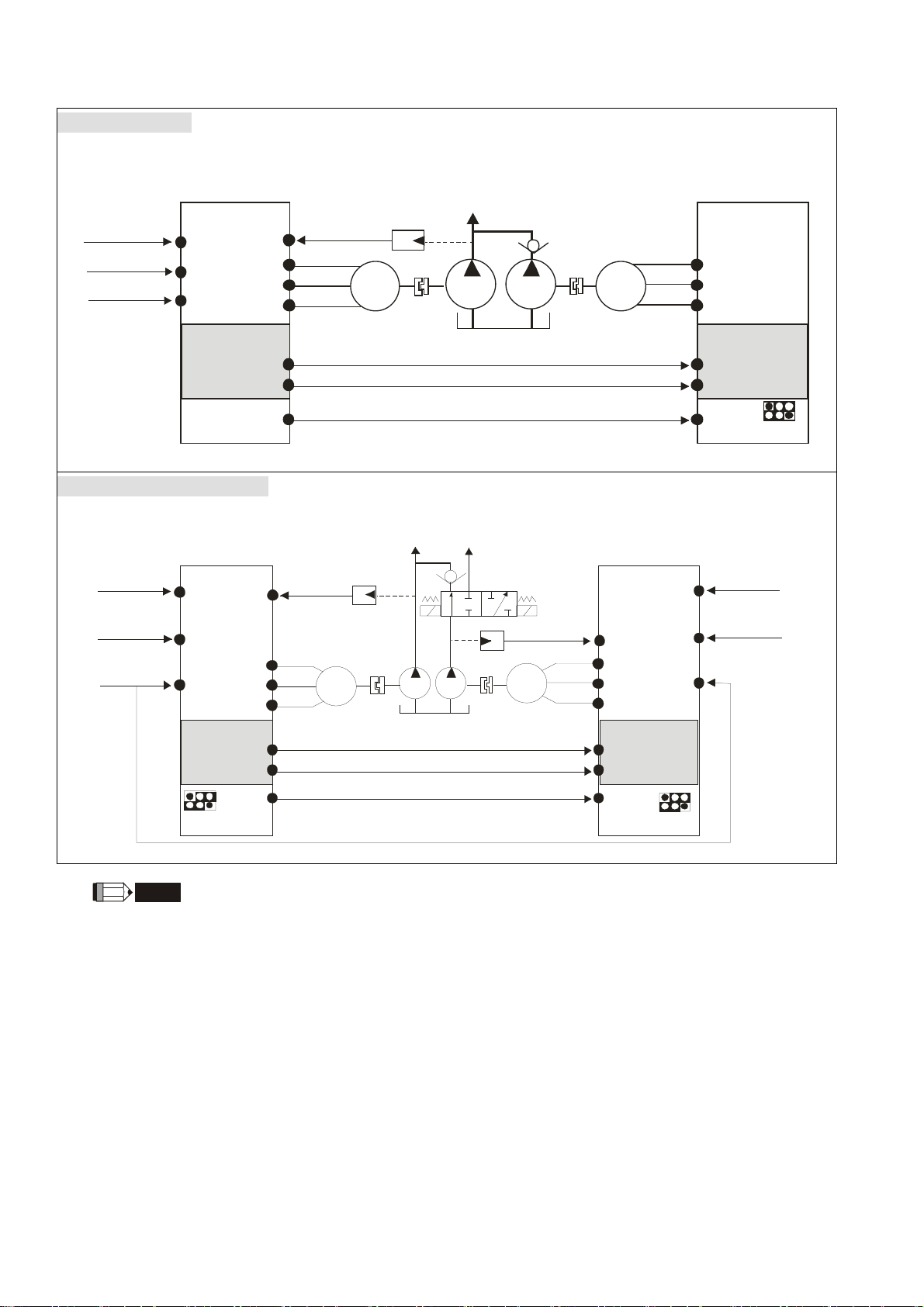
1
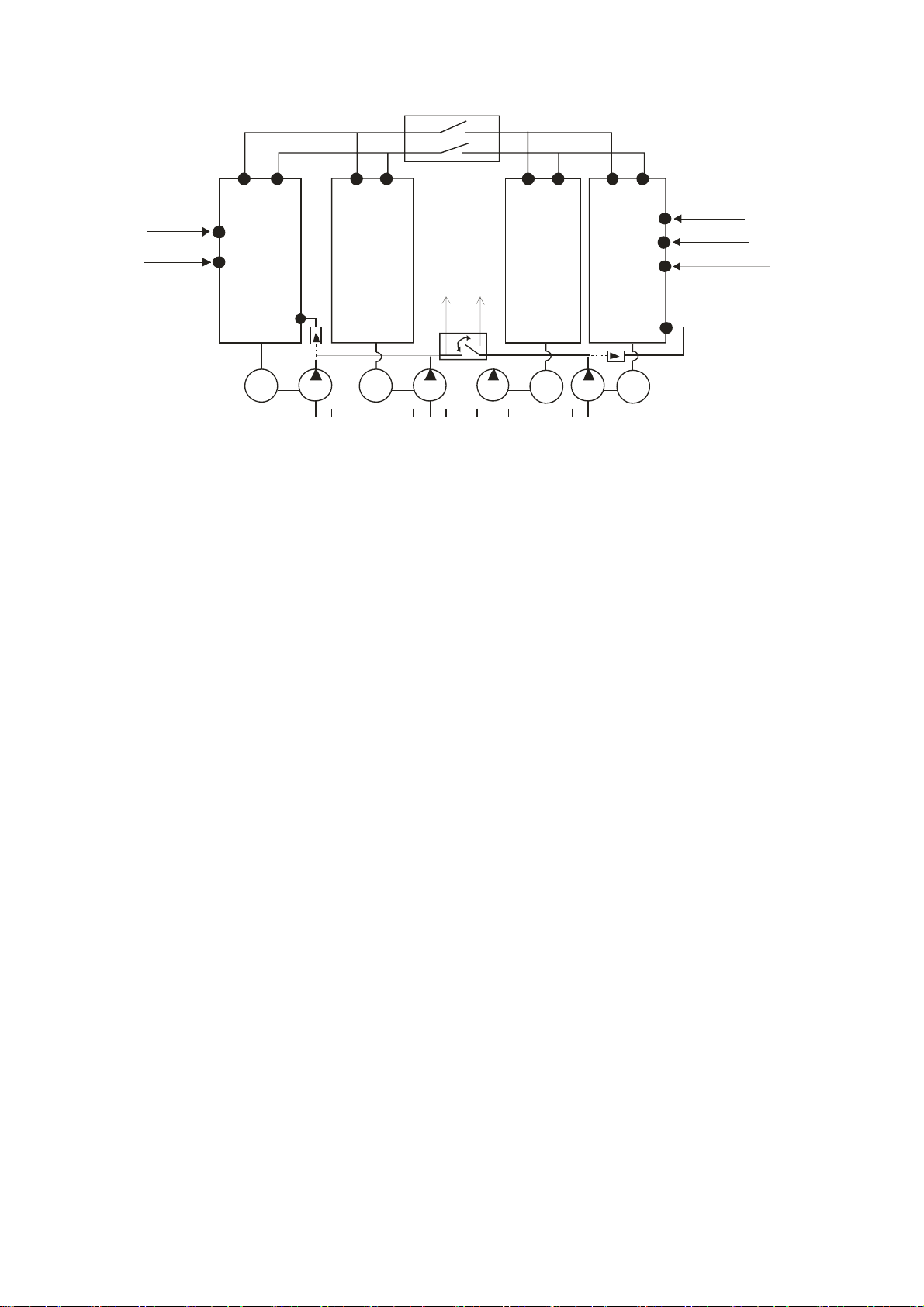
Multi-pump Operation Mode
Confluence Mode
Master
(03-13=1)
Pressure
Command
Combine
Command
Hydraulic Pump
Activation
PI
QI
SON
PO
EMVJ-MF01
SG+
SG-
MO
Confluence-Diversion Mode
Master 1
(03-13=1)
Pressure
Command
Flow
Command
*3
PI
PO
QI
U
MI
V
W
EMVJ-MF01
SG+
SG-
MO
IN.PWR.
SINK
U
V
W
*1
Pressure
Feedback
*1
Pressure
Feedback
M
3~
M
3~
Motion Command
Hydraulic
Outle t 1
Operation Indication
Confluence/Diversion signals
*2
Hydraulic
Outle t 2
Pressure
Feedback
M
3~
*2
M
3~
Master 2/ Slave
(03-13=2)
PI
PO
U
V
W
EMVJ-MF01
SG+
SG-
SON
QI
MI
IN.PWR.
SINK
Slave
(03-13=2 or 3)
U
V
W
EMVJ-MF01
SG+
SG-
SON
IN.PWR.
Pressure
Command
Flow
Command
SINK
NOTE
*1 For firmware version 2.03 and above, the operating commands are given through the communications.
Therefore, the parameters for the slave is 01-01 = 2
*2 For firmware version 2.03 and above, it is not necessary to install this check valve. By selecting the slave
parameter 03-21 at the slave to see if the slave will perform the reverse depressurization. Parameters
03-21 = 0 for not performing the reverse depressurization.
*3 For firmware version 2.03 and above, the diversion/confluence signal is supplied to only Master 2/Slave. It
is not necessary to supply the signal to Master 1.For the following control arrangement, it is necessary to
disconnect the communications during diversion.
2-6
Page 20
Chapter 2 Wiring|HES Series
t
- .Confluence
When the signals are , the communication will be a short circui
When the signals are , the communication becomes an open circuit.
Diversion
Pressure
Command
Flow
Command
SG+
SG-
PI
QI
Mater 1
03 13 1
-=
PO
M M
SG+
SG-
Slave Slave
03 13 2
-=
Hydraulic outlet 1
SG+
Hydraulic outlet 2
03 13 2
-=
M M
SG-
SG+
SG-
PI
QI
MI
Mater 3
03 13 3
-=
PO
Pressure
Command
Flow Command
Confluence/Diversion
Signals
2-7
Page 21
Chapter 2 Wiring|HES Series
A
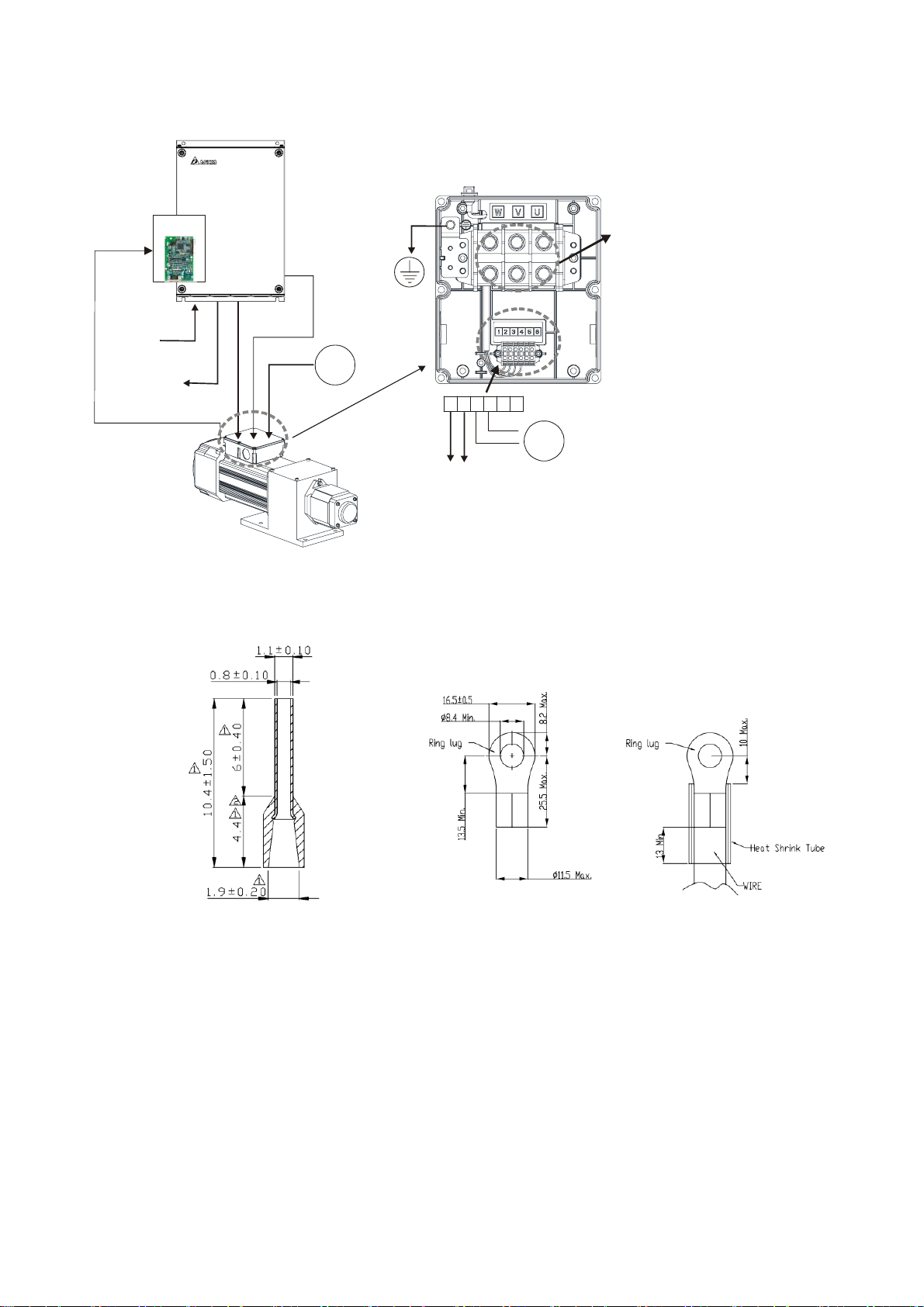
2-2 Wiring of Servo oil Pump
Delta
Hydraulic
Servo Motor
PG Card
RST
Power Side
Brake
Resistance/
Brake Unit
Encoder Signal
Controller
U V W
Hydraulic Servo Pump
Crimp Terminals
Temperature Rise
Protection Switch
AC
FAN
220V
Temperature Rise
Protection Switch
Electri c Box
123456
Corresponding to
Hydraulic Servo
Motor Controller
WVU
(Crimp Terminal
Specification as
shown in Figure 2)
(Crimp Terminal Specification as shown in Figure 1)
C
FAN
220V
Terminal Torque: 82kg-m (71in-lbf)
Figure 1
Figure 2
2-8
Page 22
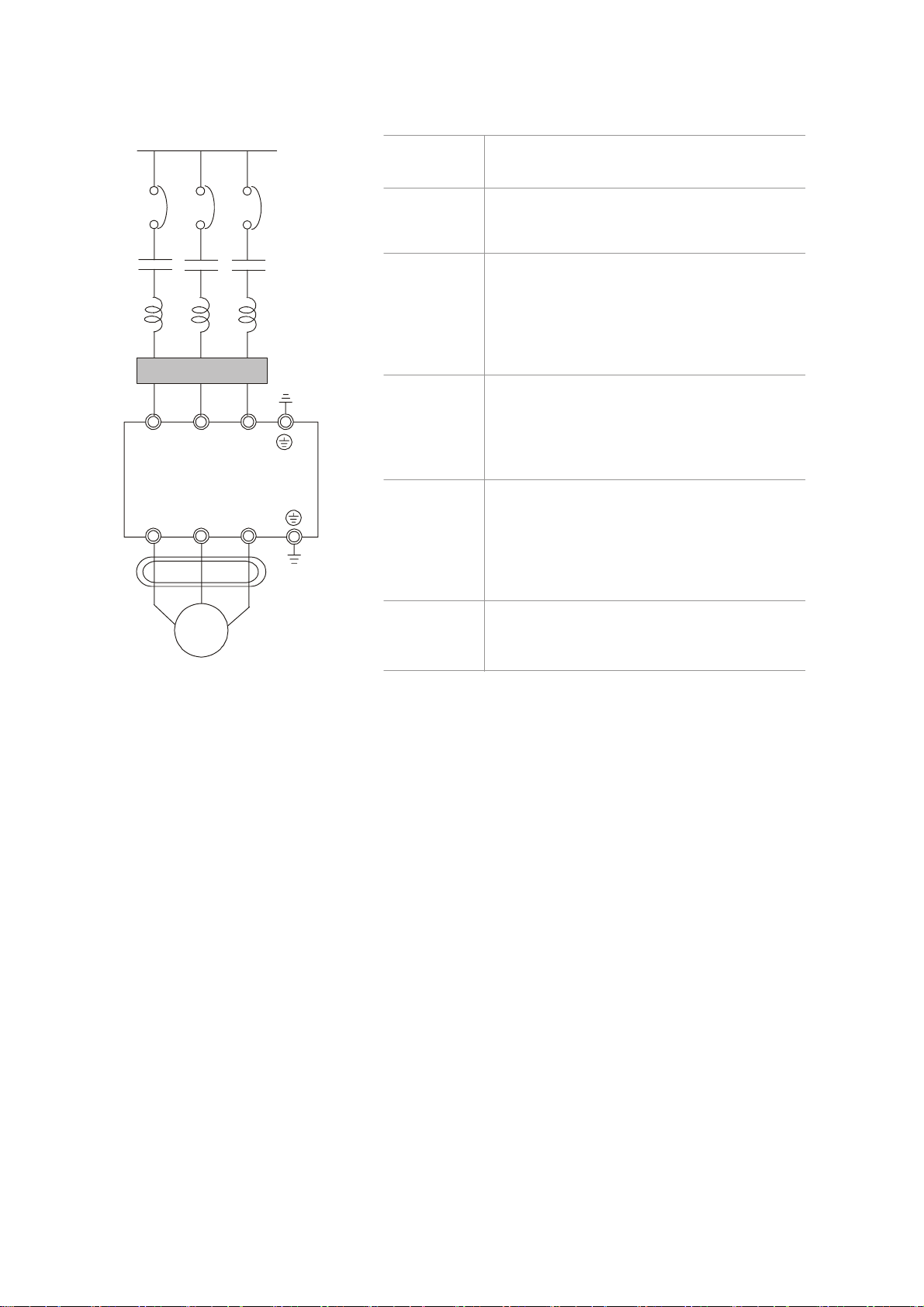
External Wiring of Hybrid Servo Controller
Chapter 2 Wiring|HES Series
Power Supply
EMI Filter
R/L1 S/L2
U/T1
V/T2
M
3~
Fuse/NFB
Magnetic
Contactor
Input AC
Line Reactor
T/L3
W/T3
Zero-Phase
Reactor
Power
Supply
Fuse/NFB
(Optional)
Magnetic
Contactor
Input AC
Line Reactor
Zero-Phase
Reactor
EMI Filter
Please follow the power rating listed in the
user's manual (chapter 1)
A larger current may be generated when the
power is turned on. Please refer to Appendix
B-1 to select suitable non-fused switch or fuse.
Turning on/off the side electromagnetic
contactor can start/stop the hybrid servo
controller. However, frequent switching may
lead to malfunction. It is advised not to turn
on/off the hybrid servo controller for more
than 1 time/hour.
When the output capacity exceeds 1000kVA,
it is recommended to add an AC reactor to
improve the power factor, with the wiring
(Optional)
distance within 10m. Please refer to
Appendix B-2 for details.
This is to reduce the radiation interference,
especially in places with audio devices.
It can also reduce the interferences at the
input and output sides. Please refer to
appendix B-2 for details. The effective
range is from AM band to 10MHz.
It can be used to reduce electromagnetic
interference. Please refer to Appendix B-5
for details.
2-9
Page 23

Chapter 2 Wiring|HES Series
2-3 Main Circuit
Terminal Label Description
R/L1, S/L2, T/L3 AC line input terminals
U/T1, V/T2, W/T3 Output of Hybrid Servo Controller, connected to hybrid servo motor
For power improvement of the connection terminal of DC reactor. Please
+1, +2/B1
remove the shorting plate in installation (DC reactors are built-in in models
with power
≧37KW)
Connection terminal of brake resistor. Please follow the selection table to
+2/B1, B2
purchase suitable ones.
Earth connection, please comply with local regulations.
;
The wiring for the Main circuit must be isolated from that for the control loop to avoid
malfunction.
;
Please use isolation wires for control wiring as much as possible. Do not expose the
section where the isolation mesh is stripped before the terminal.
;
Please use isolation wire or wire tube for power supply wiring and ground the
isolation layer or both ends of wire tube.
;
Usually the control wire does not have good insulation. If the insulation is broken for
any reason, high voltage may enter the control circuit (control board) and cause
circuit damage, equipment accident, and danger to operation personnel.
;
Noise interferences exist between the Hybrid Servo Controller, hybrid servo motor,
and their wirings. Check if the pressure sensor and associated equipments for any
malfunction to avoid accidents.
;
The output terminals of the Hybrid Servo Controller must be connected to the hybrid
servo motor with the correct order of phases.
;
When the wiring between the Hybrid Servo Controller and hybrid servo motor is very
long, it may cause tripping of hybrid servo motor from over current due to large
high-frequency current generated by the stray capacitance between wires. In
addition, when the leakage current increases, the precision of the current value
becomes poor. In such case, an AC reactor must be connected to the output side.
; The ground wire of the Hybrid Servo Controller cannot be shared with other large
current load such as electric welding tool. It has to be grounded separately.
;
To avoid lightning strike and incidence of electrocution, the external metal ground
wire for the electrical equipments must be thick and short and connected to the
ground terminal of the Hybrid Servo Controller system.
;
When multiple Hybrid Servo Controllers are installed together, all of them must be
directly connected to a common ground terminal. Please refer to the figure below to
make sure there is no ground loop.
2-10
Page 24
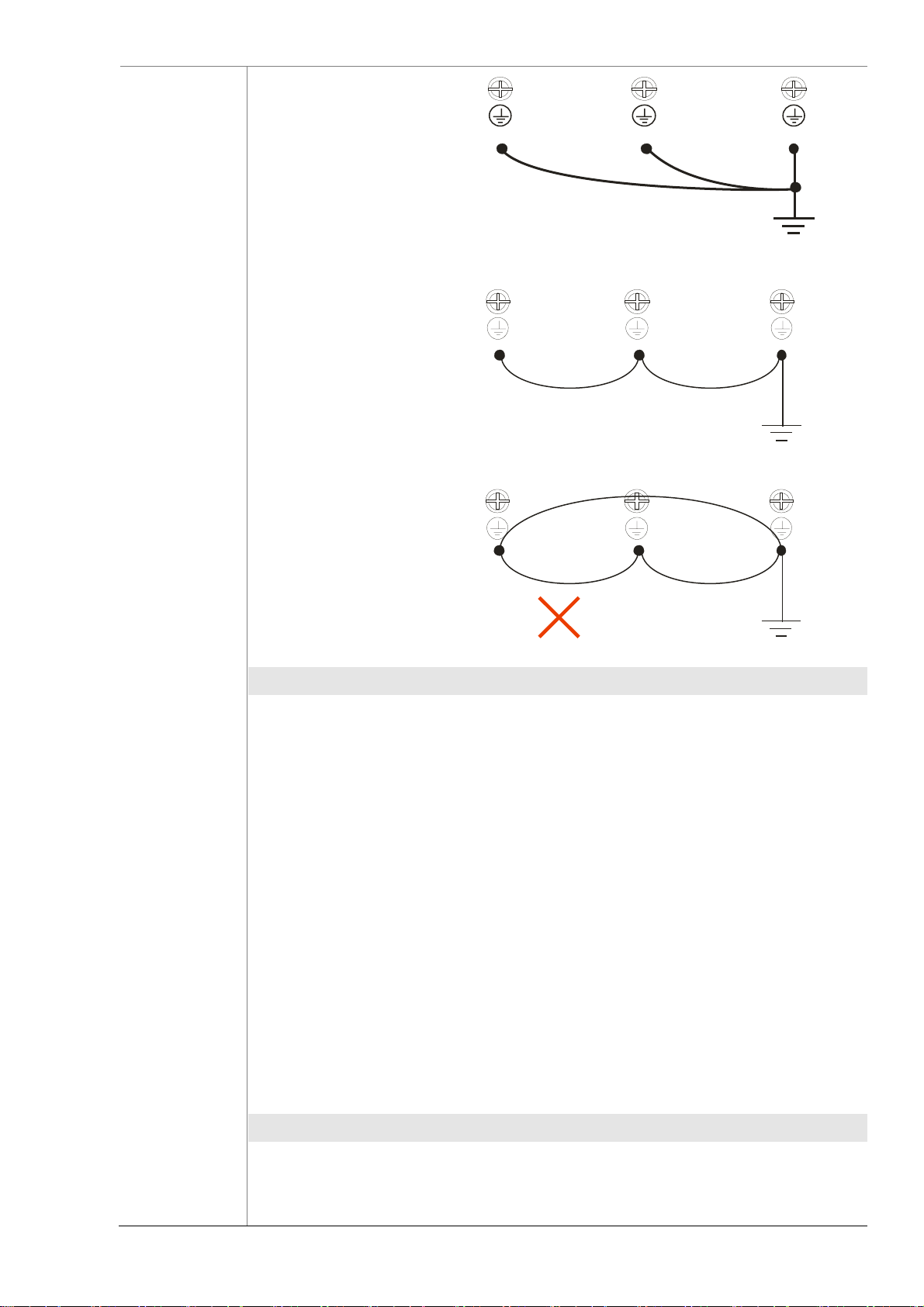
t
Grounding terminals
Chapter 2 Wiring|HES Series
Grounding terminals
Grounding terminals
Mains power terminals (R/L1, S/L2, T/L3):
Excellen
good
Not allowed
;
Connect these terminals (R/L1, S/L2, T/L3) via a non-fuse breaker or earth leakage
breaker to 3-phase AC power (some models to 1-phase AC power) for circuit
protection. It is unnecessary to consider phase-sequence.
;
The wire between the three-phase AC input power supply and the Main circuit
terminals (R/L1, S/L2, and T/L3) must be connected to a non-fused switch.
;
Please make sure to fasten the screw of the main circuit terminals to prevent sparks
which is made by the loose screws due to vibration.
;
Verify the voltage of power supply and the associated maximum available current.
Please refer to Chapter 1 Descriptions of Specifications.
;
If the Hybrid Servo Controller is equipped with a leakage circuit breaker for leakage
protection, please select the circuit breaker that has a sensing current above 200mA
and action time over 0.1 second to avoid malfunction.
;
Please use isolation wire or wire tube for power supply wiring and ground the
isolation layer or both ends of wire tube.
Output terminals for main circuit (U, V, W) :
;
The output side of Hybrid Servo Controller cannot be connected with advance phase
capacitor, surge absorber, advance phase capacitor, or L-C and R-C filters.
2-11
Page 25
Chapter 2 Wiring|HES Series
Terminals [+1, +2] for connecting DC reactor, terminals [+1, +2/B1] for connecting brake
resistor:
;
These terminals are used to improve the power factor of DC reactor. There are
shorting plates on them when they leave the factory. Remove the shorting plates
before connecting the DC reactor.
;
For models with power >30kW, there is no driver loop for brake resistor inside. To
increase the brake capability, please use an external brake unit and brake resistor
(both are optional).
;
Never short [B2] or [-] to [+2/B1], which will damage the Hybrid Servo Controller.
+1
Shorting Plate of DC Reactor
2-12
Page 26
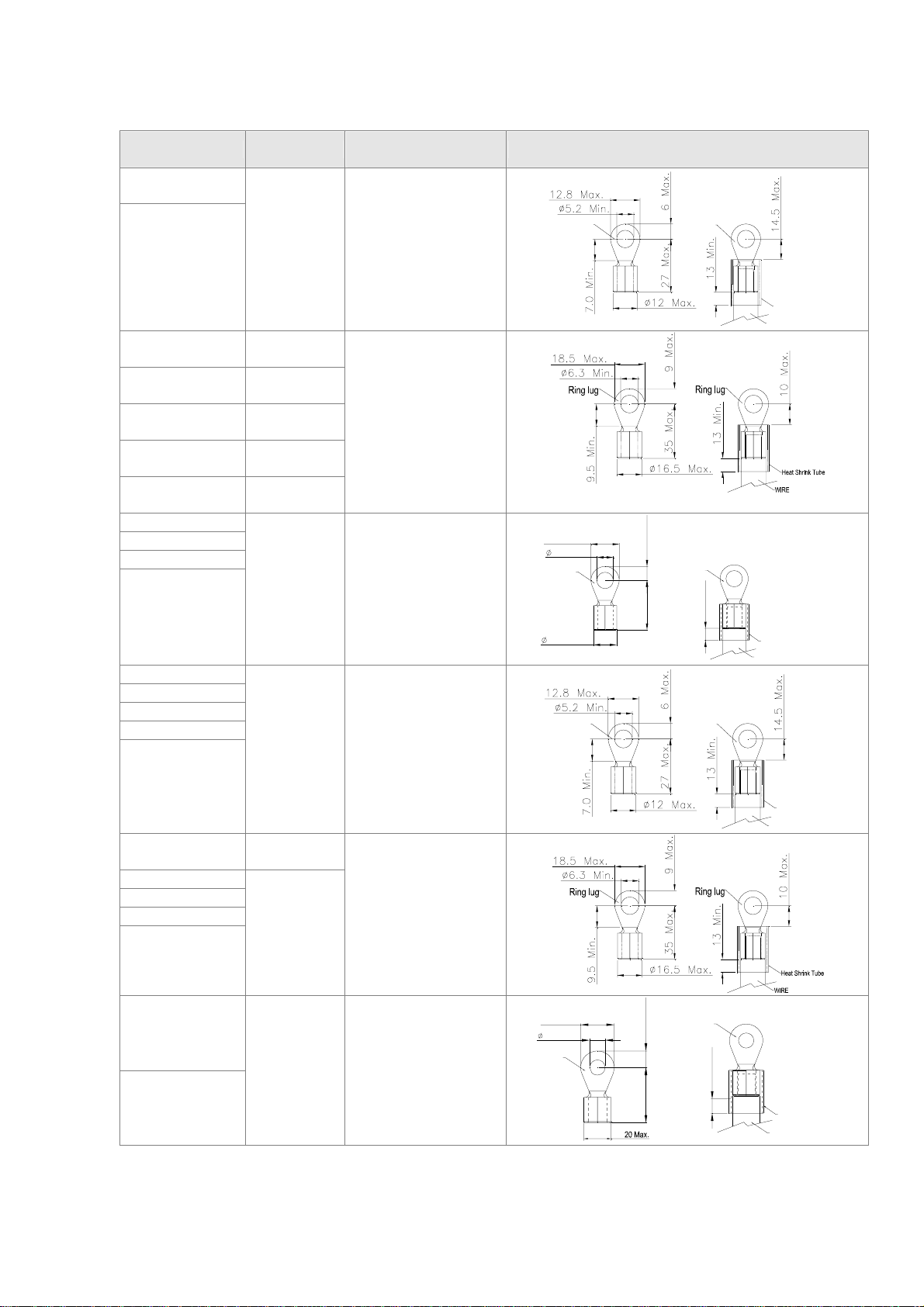
Main Circuit Terminals
Model No. Wiring
HES063H23A
tightening torque on
the drive's terminal
Chapter 2 Wiring|HES Series
crimp type terminal
HES080G23A
HES080H23A
HES100G23A
HES100H23A
HES100Z23A
HES125G23A
HES125H23A
HES160G23A
HES160H23A
HES200G23A
HES063G43A
HES063H43A
HES080G43A
HES080H43A
4AWG
(21mm
4AWG
(21mm
4AWG
(21mm
4AWG
(21mm
2AWG
(33mm
2AWG
(33mm
2AWG
(33mm
8AWG
(8mm
Ring lug
2
)
2
)
2
)
2
)
2
)
2
)
2
)
2
)
30kgf-cm
(26 lbf-in)
50kgf-cm
(43.4 lbf-in)
200kgf-cm
(173 lbf-in)
30kgf-cm
(26 lbf-in)
28 Max.
8.2 Min.
Ring lug
28 Max.
Ring lug
Ring lug
Heat Shrink Tube
WIRE
17 Max.48 Max.
Ring lug
13 Min.
Heat Shrink Tube
WIRE
Ring lug
HES100G43A
HES100H43A
8AWG
(8mm
2
)
HES100Z43A
HES125G43A
HES125H43A
6AWG
(13mm
2
)
50kgf-cm
(43.4 lbf-in)
HES160G43A
HES160H43A
4AWG
(21mm
2
)
80kgf-cm
(70 lbf-in)
22 Max.
8.2 Min.
Ring lug
HES200G43A
NOTE:
HES160H23A, HES200G23A installations must use 90℃ wire.
The other model use UL installations must use 600V, 75℃ or 90℃wire. Use copper wire only.
for more information, if you want to use higher class of overheat protection material.
10.5 Max.32 Max.
Heat Shr ink Tube
WIRE
Ring lug
13 Min.
Heat Shrink Tube
WIRE
Please contact Delta
2-13
Page 27
Chapter 2 Wiring|HES Series
A
A
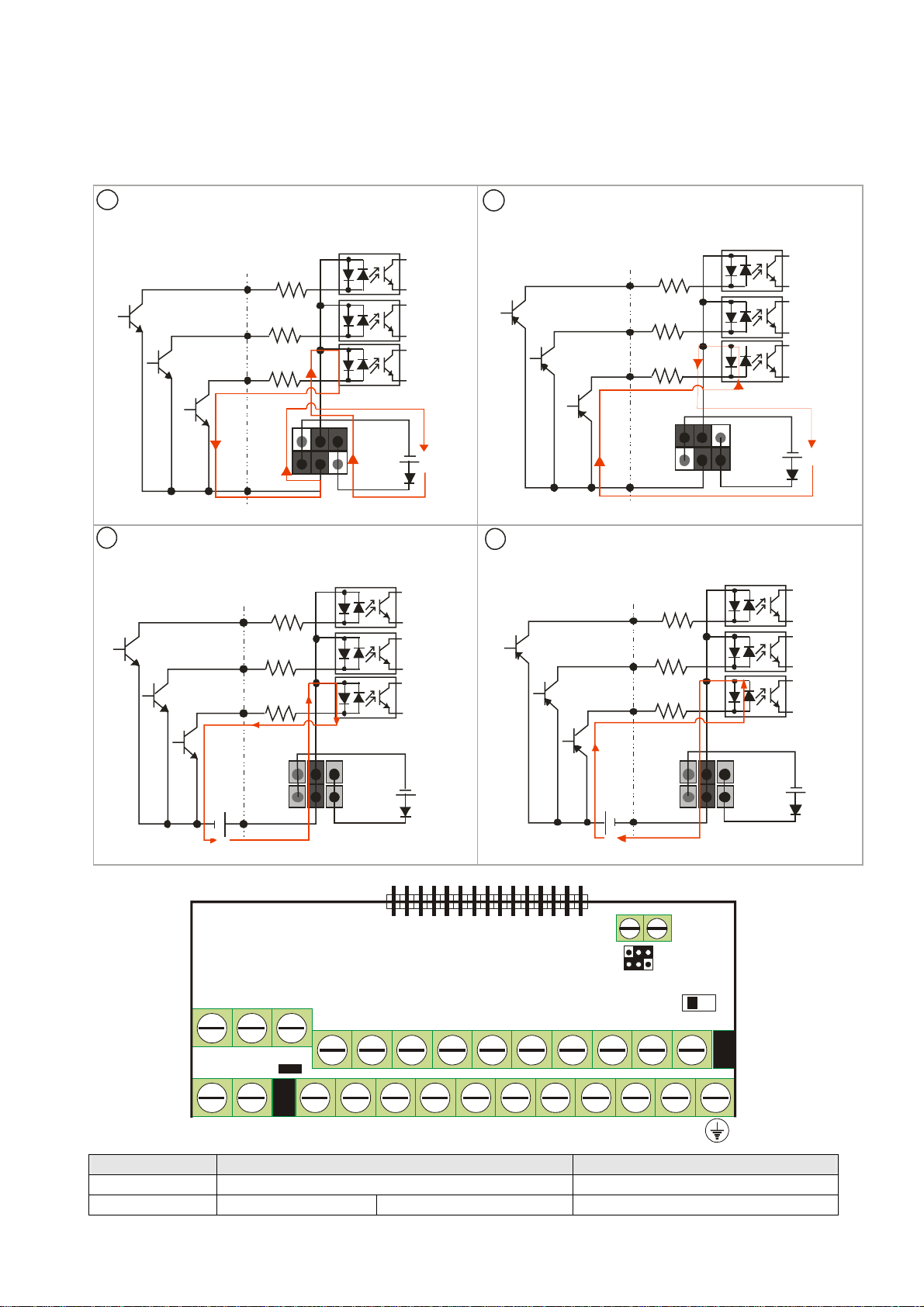
2-4 Control Terminals
Description of SINK(NPN)/SOURCE(PNP)Mode Switching Terminal
1
Sink mode Source mode
With internal power (+24Vdc)
SON
EMG
RES
+24V
COM
3
Sink mode
With external power (+24Vdc)
SON
2
With internal power (+24Vdc)
4
Source mode
With external power (+24Vdc)
SON
EMG
RES
+24V
COM
SON
EMG
RES
+
COM
external power +24Vdc
The position of the External Terminals
MCMRBSON
RES
+24V
MI4
EMG
RES
+
external power +24Vdc
Mode Switch Terminal
COM
Sink/Source
+10V
PI ACMQI
AUI
DCM
COM
+E24 V
SW100
V
+24V
I
RARC
MO1
MO2
EMG
MI3
MI5
AFM1
+24V
FM
PO
CM
Frame Torque Wire Gauge
C, D, E 8 kgf-com (6.9 in-lbf) 22-14 AWG (0.3-2.1mm2)
Terminal: 0V/24V 1.6 kgf-com(1.4 in-lbf) 30-16 AWG (0.051-1.3mm2)
2-14
Page 28
Chapter 2 Wiring|HES Series
A
A
M
t
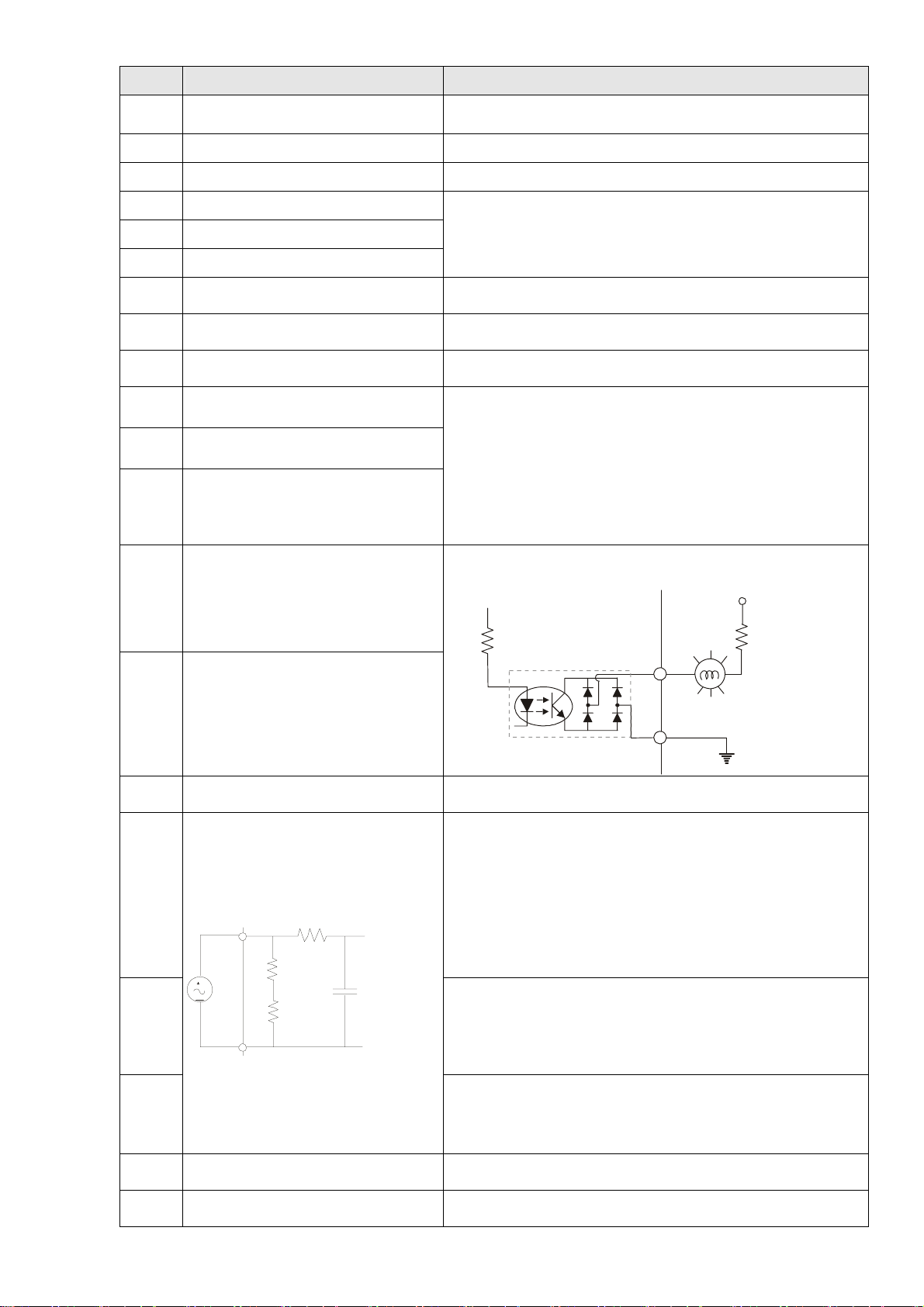
Terminal Function
SON Run-Stop
Between terminals SON-DCM: conducting (ON);run: open
circuit (OFF), Stop
Factory Setting (NPN mode)
EMG Abnormal input from outside Abnormal input from outside
RES Reset reset
MI3 Multiple Function Input: Option 3
No function is set for default setting
When conducting (ON), input voltage is 24Vdc (Max:30Vdc)
MI4 Multiple Function Input: Option 4
MI5 Multiple Function Input: Option 5
COM
+E24V
DCM
Common terminal of digital control
signals (Sink)
Common terminal of digital control
signals (Source)
Common terminal of digital control
signals (Sink)
Malfunctioning abnormal connection
RA
1 (Relay always open a)
Malfunctioning abnormal connection
RB
1 (Relay always closed b)
and output impedance is 3.75k;In open circuit (OFF), the
allowable leakage current is 10A
Common terminal of multiple function input terminals
+24V 80m
Common terminal of multiple function input terminals
Resistive Load:
5A(N.O.)/3A(N.C.) 240VAC
5A(N.O.)/3A(N.C.) 24VDC
Inductive Load:
RC Multi-function Relay Common
1.5A(N.O.)/0.5A(N.C.) 240VAC
1.5A(N.O.)/0.5A(N.C.) 24VDC
Hybrid Servo Controller outputs various types of monitoring
signals with the transistor operating in open collector mode.
MO1
Multi-function Output 1
(Photocoupler)
Max: 48Vdc/50mA
MO1
~
MO2
MO2
MCM
Multi-function Output 2
(Photocoupler)
Multi-function Output Common
(Photocoupler)
PO
PO/PI/QI circuit
PO/PI/QI
PO/PI/QI Circui
PI
AC
Internal Circuit
QI
+10V Configuration Voltage
+24V
Power supply terminal of pressure
sensor
Internal circuit
MCM
Max. 48VDC 50m
Pressure Feedback
Impedance:200k
Resolution:12 bits
Range:0 ~ 10V or 4~20mA=
0~maximum Pressure Feedback value (Pr.00-08)
To input current, firmware v2.04 or above and a new I/O
control board (the one has SW100 switch) are required.
See parameter 03-12 for more information.
Pressure Command
Impedance:200k
Resolution:12 bits
Range:0 ~ 10V=
0~maximum pressure command value (Pr.00-07)
Flow Rate Command
Impedance:200k
Resolution:12 bits
Range:0 ~ 10V=0~maxium flow rate
Power supply for analog configuration +10Vdc 20mA
(variable resistor 3~5k)
Configuration power supply for pressure sensor +24Vdc
100mA
2-15
Page 29
Chapter 2 Wiring|HES Series
A
A
Terminal Function
nalog Voltage
+10V
AUI
AFM
CM Analog control signal (common) Common for ACI, AUI1, AUI2
AUI
-10V
AUI circuit
Internal Circuit
AFM
ACM
Impedance:11.3k
Resolution:12 bits
Range:-10~+10VDC
Impedance:16.9k (voltage output)
Output Current: 20mA max
Resolution: 0~10V corresponds to maximum operation
frequency
Range: 0~10V
Function Setting: Pr.00-05
*Control signal wiring size: 18 AWG (0.75 mm2) with shielded wire.
Factory Setting (NPN mode)
Analog Input Te r m inals (PO, PI, QI, AUI, ACM)
; The maximum input voltage of PI, PO, and QI cannot exceed +12V and no more than +/-12V
for AUI. Otherwise, the analog input function may become ineffective.
; Analog input signals are easily affected by external noise. Use shielded wiring and keep it as
short as possible (<20m) with proper grounding. If the noise is inductive, connecting the shield
to terminal ACM can bring improvement.
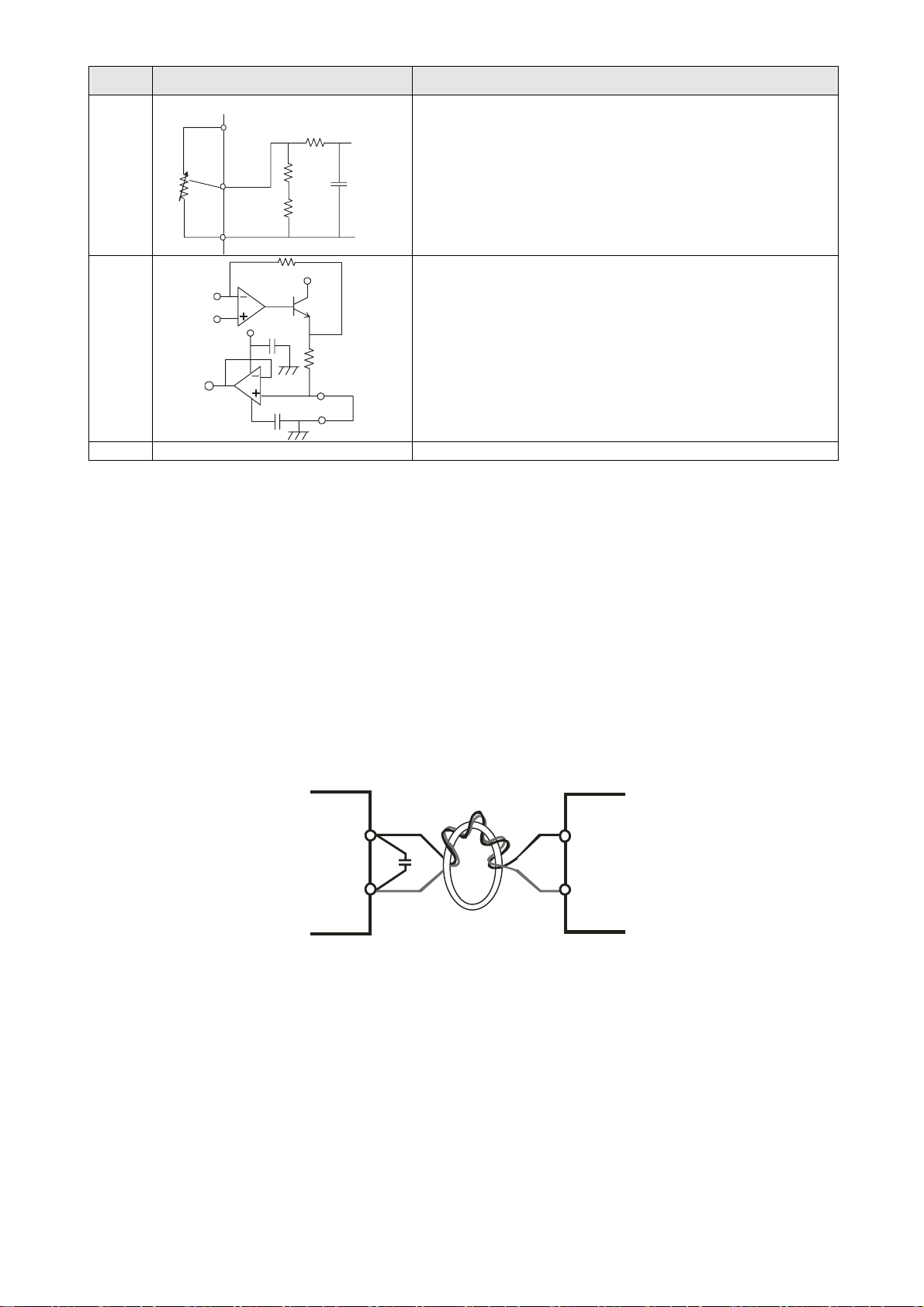
; The interference generated by the Hybrid Servo Controller can cause the pressure sensor to
malfunction. IN this case, a capacitor and a ferrite core can be connected to the pressure
sensor side, as shown in the figure below:
Thre aded for three rounds or
more in the same phase
Output
terminal
PO
C
-V
Ferrite core
ACM
Transistor outputs (MO1, MO2, MCM)
; Make sure to connect the digital outputs to the right polarity.
; When connecting a relay to the digital outputs connect a surge absorber across the coil and
check the polarity.
2-16
Page 30

Chapter 3 Flow of machine Adjustment|HES Series
Chapter 3 Start Up
3-1 Description of Control Panel
3-2 Adjustment Flow Chart
3-3 Explanations for the Adjustment Steps
; Please verify again before operation that the wiring is done correctly, especially that
the output terminals U/T1, V/T2, and W/T3 of the Hybrid Servo Controller cannot
have any power input. Make sure that the ground terminal
correctly.
; Do NOT operate the AC motor drive with humid hands.
; Check for loose terminals, connectors or screws.
; Make sure that the front cover is well installed before applying power.
; In case of abnormal operation of the Hybrid Servo Controller and the associated
servo motor, stop the operation immediately and refer to “Troubleshooting” to check
the causes of anomalies. After the output of the Hybrid Servo Controller is stopped,
when the power terminals L1/R, L2/S, and L3/T of the main circuit are still
connected, touching the output terminals U/T1, V/T2, and W/T3 of the Hybrid Servo
Controller may lead to electric shock.
is connected
3-1
Page 31

Chapter 3 Flow of machine Adjustment|HES Series
3-1 Description of Control Panel
Description of the Digital Keypad KPVJ-LE01
Run key
start AC drive
operation
Stop / Rese t ke y
Stop driver operation
and reset in case of
anomaly
Status Display
1
Display the drive r’s current status.
LED Display
2
Indicates frequency, voltage, current, user defined units and etc.
UP and DOWN Key
3
Set the parameter number and changes the numerical data, such a s Master Frequenc
MODE
4
Change between different display mode.
ENTER
5
Used to enter/modify programming parameters.
Descriptions of Function Display Items
Display Message
Displays theAc driver Master frequency
Displays the actual output frequency at terminals U/T1, V/T2, and W/T3.
User defined unit (where U = F x Pr.00.04)
Displays the output current at terminals U/T1, V/T2, and W/T3.
Descriptions
Displays the AC motor drive forward run status.
Displays the AC motor drive reverse run status.
Displays the parameter item
Displays the actual stored value of the selected parameter.
3-2
Page 32

Chapter 3 Flow of machine Adjustment|HES Series
Display Message
External Fault.
Display “End” for approximately 1 second if input has been accepted by
pressing
key. After a parameter value has been set, the new value is
automatically stored in memory. To modify an entry, use the
keys.
Display “Err”, if the input is invalid.
How to Operate the Digital Keypad
Setting Mode
START
NOTE:
In the selection mode, pr ess
Descriptions
and
GO START
to set the parameters.
Setting parameters
NOTE
:
In the parameter setting mode, you can press
To shift data
Setting direction
Success to
set param ete r.
(When operation source is digital keypad)
or
Input data error
to return the selecting mode.
3-3
Page 33

Chapter 3 Flow of machine Adjustment|HES Series
Reference Table for the 7-segment LED Display of the Digital Keypad
Number 0 1 2 3 4 5 6 7 8 9
Seven Segment
Display
English letter A a B C c D d E e F
Seven Segment
Display
English letter f G g H h I i J j K
- -
-
-
Seven Segment
Display
English letter k L l M m N n O o P
Seven Segment
Display
English letter p Q q R r S s T t U
Seven Segment
Display
English letter u V v W w X x Y y Z
Seven Segment
Display
English letter z
Seven Segment
Display
-
-
- -
- -
-
-
- - -
-
- - - -
-
-
3-4
Page 34

Chapter 3 Flow of machine Adjustment|HES Series
3-2 Adjustment Flow Chart
Set the servo
Check i f the pressure
feedback signal is
Cali brate pressure and flow
Adjust Injection /Hold up
Hybrid
motor code
normal
YES
commands
Execute venting
NO
Troub leshoot
Complete
*The firmware version is 2.04 and above, just proceeds the process to set up HES ID code.
*The firmware version is 2.05 and above, starts from “Execute venting”.
3-5
Page 35

Chapter 3 Flow of machine Adjustment|HES Series
3-3 Explanations for the Adjustment Steps
Operate the following steps with the digital operator (KPVJ-LE01/ KPV-CE01)
Prior to starting running, please verify again if the wiring is correct, especially that the output
terminals U/T1, V/T2, and W/T3 of the Hybrid Servo Controller must correspond to the U, V, and
W terminals of the Hybrid servo motor, respectively.
Step 1. Parameter Entry of Hybrid Servo Motor
Do not connect the external terminals SON-COM and EMG-COM for the time being.
Restore the factory default values by setting the Parameter 00-02 = 10
Parameter reset
Pr. 00-02
Please make sure if the command source has been restored to the factory default
10: Parameter reset
(operation by external terminals)
When KPVJ-LE01/KPV-CE01 is used, set Pr. 01-01=0
Source of Run Command
Pr. 01-01
0: Operated by digital operator
1: Operated by external terminals, Stop on keypad is disabled
2: Communication port RS-485 is activated and Stop on keypad is
disabled
Set Pr. 01-35 of the Hybrid servo motor
HES063H23A, HES080G23A, HES080H23A,
Pr. 01-35 = 16
HES100G23A,HES100H23A
HES063G43A, HES063H43A, HES080G43A, HES080H43A,
Pr. 01-35 = 17
HES100G43A,HES100H43A
HES125G23A, HES125H23A, HES160G23A,HES160H23A Pr. 01-35 = 18
HES125G43A, HES125H43A, HES160G43A,HES160H43A Pr. 01-35 = 19
HES160H23A, HES200G23A Pr. 01-35 = 20
HES160H43A, HES200G43A Pr. 01-35 = 21
Disregard the error message EF1 that will appear at this point.
After power outage, connect the heating switch of the hybrid servo motor to the external
terminal EMG-COM and restart the power supply.
* For firmware version 2.04 and above
3-6
Page 36

Chapter 3 Flow of machine Adjustment|HES Series
Step 2. Entry HES ID code*
Do not connect the external terminals SON-COM and EMG-COM for the time being.
Restore the factory default values by setting the Parameter 00-02 = 10
Parameter reset
Pr. 00-02
Please make sure if the command source has been restored to the factory default
10: Parameter reset
(operation by external terminals)
When KPVJ-LE01/KPV-CE01 is used, set Pr. 01-01=0
Source of Run Command
Pr. 01-01
0: Operated by digital operator
1: Operated by external terminals, Stop on keypad is disabled
2: Communication port RS-485 is activated and Stop on keypad is
disabled
Source of Run Command
Pr. 01-01 0: Operated by digital operator
1: Operated by external terminals, Stop on keypad is disabled
2: Communication port RS-485 is activated and Stop on keypad is
disabled
Set Pr. 01-37 of HES ID#
Model ID# Model ID#
HES063H23A 2120 HES063G43A 2040
HES080G23A 3020 HES063H43A 2140
HES080H23A 3120 HES080G43A 3040
HES100G23A 4020 HES080H43A 3140
HES100H23A 4120 HES100G43A 4040
HES100Z23A 4220 HES100H43A 4140
HES125G23A 5020 HES100Z43A 4240
HES125H23A 5120 HES125G43A 5040
HES160G23A 6020 HES125H43A 5140
HES200G23A 7020 HES160G43A 6040
HES160H43A 6140
HES200G43A 7040
HES200H43C 7142
HES320M43C 9342
Disregard the error message EF1 that will appear at this point.
After power outage, connect the heating switch of the hybrid servo motor to the external
terminal EMG-COM and restart the power supply.
3-7
Page 37

Chapter 3 Flow of machine Adjustment|HES Series
Step 3.Check Pressure Feedback Signal
Firs, set input voltage Pr. 00-04 = 11 PO
Selection of Display Mode
Pr. 00-04
11: Display the signal of PO analog input terminal, with 0~10V
corresponding to 0~100%.
Set Pr. 00-08=corresponding pressure settings of the 10V pressure sensor
Maximum value of pressure feedback
Pr. 00-08 0~250Bar
Set speed command to 10rpm and press【RUN】. Check the pressure value is >0 on the
pressure gauge.
When the pressure value is
; Gradually increase the rotation speed.
; Check that each directional valve is closed.
≦0,
When the pressure value is >0
; Check that the voltage reading displayed on the operation panel is consistent with the
pressure reading on the pressure gauge.
Example: 10V on the pressure sensor corresponds to 250bar. When the pressure gauge
reading is 50 bar, the output voltage on the pressure sensor should be
approximately 50/250*10=2V. So the voltage displayed on the operation panel will
be 20.0(%).
Meanwhile, observe if there is any oil leak.
Step 4. Check Pressure and Flow Commands
This action does not need to start the servo oil pump.
For the firmware version is 2.04 and above, theoretical values of three-point calibration of
pressure and flow commands are auto-imported after entering HES ID code. Afterward,
detailed adjustment can be proceeded with the following methods.
Pr. 00-09 = 1 refers to the pressure control mode
Pressure Control Mode
Pr. 00-09 0: Speed control
1: Pressure control
Pr. 00-04 = 12 sets the PI input voltage
Selection of Display Mode
Pr. 00-04
Pr. 00-07 = corresponding pressure value with 10V on the pressure controller command
12: Display the signal value of the PI analog input terminal, with
0~10V corresponding to 0~100%.
Maximum pressure command
Pr. 00-07 0~250Bar
With the maximum pressure set by the controller, observe the associated value displayed
on the operation panel and set it to 00-14.
With the controller setting at half the maximum pressure, observe the associated value
3-8
Page 38

Chapter 3 Flow of machine Adjustment|HES Series
displayed on the operation panel and set it to 00-15.
With the controller setting at the lowest pressure, observe the associated value displayed
on the operation panel and set it to 00-16.
Example: 10V on the pressure sensor corresponds to 250bar. If the maximum pressure
on the controller is 140bar and corresponds to 10V, the Pr. 00-07=140. Set 140bar
through the controller and the voltage reading displayed on the operation panel is
approximately 56.0(140/250*100%). Enter this value to Pr. 00-14. Next, set 70bar
through the controller and the voltage reading displayed on the operation panel is
approximately 28.0 (70/250*100%). Enter this value to Pr. 00-15. Lastly, set 0bar
through the controller and the voltage reading displayed on the operation panel is
approximately 0.0(0/250*100%). Enter this value to Pr. 00-16.
Example: 10V on t he pressure sensor corresponds to 250bar. However, t he maximum
pressure on the controller is 140bar and corresponds to 7V. As a result, Pr . 00-07 =
140/7*10=200. The following steps are the same as described in the previous
example. Set 200bar through the controller first, followed by setting 100bar, and
0bar in the last step. Enter the corresponding values to the associated par ameters.
Pr. 00-04 = 25 refers to the QI input voltage
Selection of Display Mode
Pr. 00-04
25: Displays the signal value of the QI analog input terminal, with
0~10V corresponding to 0~100%.
Set 100% flow rate through the controller, observe the reading displayed on the operation
panel and enter it to 00-17
Set 50% flow rate through the controller, observe the reading displayed on the operation
panel and enter it to 00-18
Set 0% flow rate through the controller, observe the reading displayed on the operation
panel and enter it to 00-19
Step 5. Send Run Command via Controller
Check that Pr. 00-09 is 1 (pressure control mode)
Pressure Control Modes
Parameter00-09
Settings
Pr. 01-01=1
0: Speed Control
1: Pressure Control
Source of Run Command
Pr. 01-01 0: Operated by digital operator
1: Operated by external terminals, Stop on keypad is disabled
2: Communication port RS-485 is activated and Stop on keypad is
disabled
In case of power outage, connect SON-COM and turn on the power supply.
3-9
Page 39

Chapter 3 Flow of machine Adjustment|HES Series
Step 6. Bleed the circuit and make sure if there is any plastic material in the barrel.
The machine can start operation only when there are no plastic materials
inside the barrel.
For low-pressure and low-speed conditions (within 30% of the rated values), use the
“manual operation” through the controller for the operation of each cylinder. During the
operation, check the pipe connection for leaks or strange noise in the pump.
When the air is bleeding completely, if there is any pressure fluctuation during operation,
please adjust the pressure control Parameter PI in accordance with the method described
in the “Description of Parameters”.
Step 7. Adjustment for injection/pressure holding
Heat up the barrel to the required temperature and set the controller in manual control
mode.
Set the Ki value of the three-stage PI to 0 (Pr. 00-21, 00-23, and 00-25)and the three-stage
Kp value to be small (≦50.0)
Execute the injection, with “Preset Target” set at low pressure (<50Bar) and low flow rate
(<30%)
Press “Injection” on the controller and the injection will be started or the system will directly
enter the pressure holding operation (depending on the location of the oil cylinder)
In the hold up state, Increase the speed bandwidth to the maximum value of 40Hz (Pr.
00-10) while causing no vibration to the hybrid servo motor.
In the pressure holding state, when the pressure gauge needle or the monitored waveform
shows no signs of vibration, the pressure feedback is stabilizing. Now the three sets of Kp
values can be increased.
When the pressure feedback becomes unstable, lower the three sets of Kp values by 20%
(Example: lower the preset values of the three sets of Kp values from 100% to 80%),
followed by adjusting the three sets of Ki values to eliminate the steady-state error and
speed up the system response.
Upon completion of the above steps, increase the pressure command of “Preset Target”.
Observe if the pressure feedback becomes stable. Proceed with troubleshooting in case of
any anomaly, as described below:
Troubleshooting for Pressure Instability
Unstable pressure over the entire section
1. Set Pr. 00-09 = 0 for speed control
2. With the oil line in the closed state, send the low speed rotation command to make the
pressure feedback 40~50% of the pressure command value (Pr. 00-07)
3. Check if the pressure waveform shows any jitters through the monitoring software.
Jitter in Pressure Waveform
The possible cause is interference from ground. If the motor or the three-phase
3-10
Page 40

Chapter 3 Flow of machine Adjustment|HES Series
power supply is grounded, disconnect the ground wire. If the motor or the
three-phase power supply is not grounded, add the ground wire for interference
protection.
The other possibility is the ground issue of the shielding mesh (as illustrated by
the bold red lines in the figure below). If the shielding mesh is grounded,
disconnect the ground wire. If the shielding mesh is not grounded, add the ground
wire for interference protection.
PG Card
14,16
13,15
5
4
7
9
+24V
ACM
PO
Resolve r
R1
R2
S2
S4
S1
S3
+V
-V
Output
terminal
P
r
e
s
s
u
r
e
4. Please contact the original manufacturer if the anomaly still cannot be resolved after
resorting to the methods described above.
Step 8. Adjustment of System Transient Response
Reduce the pressure ramp up time by increasing Kp1 (Pr. 00-20) and reducing Ki1 (Pr.
00-21) times
When the pressure is over-adjusted, increase Kp3 (Pr. 00-24) and reduce Ki3 (Pr. 00-25)
times
3-11
Page 41

Chapter 3 Flow of machine Adjustment|HES Series
Confluence Machine Tuning Procedure
Follow the associated descriptions in Chapter 2 to lay out the wiring.
Follow steps 1 and 2 described above to enter the electrical codes for the master/slave
machines. Then proceed with the steps below.
Master setting
Set the Parameter 03-06 = 1
Multifunction Output 2 (MO1)
Setting value
1: Operation indication
of Pr. 03-06
Connect the Master’s MO1 output terminal to the Slave’s SON terminal and Master's MCM
terminal to the Salve's COM terminal.
For the firmware version 2.03 and above, it is not necessary to perform the two steps
described above
Set the Parameter 03-13 = 1
Confluence Master/Slave Selection
Setting value
of Pr. 03-13
0: No function
1: Master 1
2: Slave/Master 2
3: Slave/Master 3
Set the Parameter 03-14
Slave's proportion of the Master’s flow
Setting value
0.0~6553.5%
of Pr. 03-14
For firmware version 2.03 and above, the Parameter 03-17 can be configured to determine
the activation level for the Slave
Slave’s activation level
Setting value
0~100%
of Pr. 03-17
Slave setting
Parameter 01-01=1
Source of operation command
Setting value
of Pr. 01-01
0: Operation by using the digital keypad
1: Operation by using the external terminals. The Stop button on the
keypad is disabled.
2: Communication using RS-485. The Stop button on the keypad is
disabled
3-12
Page 42

Chapter 3 Flow of machine Adjustment|HES Series
For firmware version 2.03 and above, set the Parameter 01-01=2
Source of operation command
Setting value
of Pr. 01-01
0: Operation by using the digital keypad
1: Operation by using the external terminals. The Stop button on the
keypad is disabled.
2: Communication using RS-485. The Stop button on the keypad is
disabled
Set the Parameter 03-15 = 1
Source of Frequency Command
Setting value
of Pr. 03-15
0: Digital Operation Panel
1: RS485 Communication
2~5: reserved
Shut down the power and then supply the power again
Set an arbitrary value of the frequency command at the Master to check if the Slave has the
same value of the frequency command
Set 10rpm at the Master and then press RUN to see if the Slave is also running. If not,
check the wiring or the parameter setting for any problem
Set the Slave Parameter 03-13 = 2
Confluence Master/Slave Selection
Setting value
of Pr. 03-13
0: No function
1: Master 1
2: Slave/Master 2
3: Slave/Master 3
For firmware version 2.03 and above, the Parameter 03-21 can be set at the Slave to
decide if the Salve is performing the reversed operation for depressurization.
Note: If it is required to reverse the operation for depressurization at the Slave, it is
necessary to make sure that the pump outlet port is not installed with a check valve and the
Parameter 03-16 should be set as 500%
Slave reverse operation for depressurization
Setting value
of Pr.03-21
0: Disable
1: Enable
Limit for the Slave reverse depressurization torque
Setting value
0~500%
of Pr. 03-16
3-13
Page 43

Chapter 3 Flow of machine Adjustment|HES Series
Shut off the power and the re-supply power for the Slave, and then set the Slave in the
speed control mode
Speed Control Mode
Setting value
of Pr. 00-09
0: Speed control
1: Pressure control
In this case, the Master can be tuned according to the Step 3 – Step 6 described above
Confluence/Diversion Mode Adjustment
Procedure
Follow the associated descriptions in Chapter 2 to lay out the wiring.
In the diversion state, follow steps 1-8 described above to individually adjust the parameters of
each driver.
In a confluence condition, please refer to the machine adjustment procedure for the confluence
operation
Complete the above steps.
Set the Master for pressure control mode
Parameter 00-09 = 1 for pressure control mode
Pressure control mode
Setting value
of Pr. 00-09
0: Speed control
1: Pressure control
Set the Slave for speed control mode
Para m eter 00-09 = 0 for speed control mode
Speed Control Mode
Setting value
of Pr.00-09
0: Speed control
1: Pressure control
Respectively set the master/slave multi-function input state. For the firmware version 2.03 and
above, it is necessary to set these parameters for the Slave only
Parameter 03-00~03-02 = 45 confluence/diversion signal input
Multi-function Input
Setting values
of Pr. 03-00~03-02
Through the controller, perform the entire confluence/diversion operation.
0: No function
45: Confluence/Diversion signal input
3-14
Page 44

Chapter 4 Parameter Functions|HES Series
Chapter 4 Parameters
4-1 Summary of Parameter Settings
4-2 Detailed Description of Parameters
4-1
Page 45

Chapter 4 Parameter Functions|HES Series
4-1 Summary of Parameter Settings
00 System Parameters the parameter can be set during operation
Parameter
code
00-00
00-01
00-02
00-03
00-04
Function of the parameter Settings
12:230V, 7.5HP
13:460 V, 7.5HP
14:230V, 10HP
15:460V, 10HP
16:230V, 15HP
17:460V, 15HP
18:230V, 20HP
19:460V, 20HP
Hybrid Servo Controller
model
code ID
Display of rated current of
the Hybrid Servo Controller
Reset parameter settings
Software version
Selection of multi-function
display
Read only
20:230V, 25HP
21:460V, 25HP
22:230V, 30HP
23:460V, 30HP
24:230V, 40HP
25:460V, 40HP
26:230V, 50HP
27:460V, 50HP
29:460V, 60HP
31:460V, 75HP
33:460V, 100HP
Display the model specific values
5: Rest the kWh at drive stop
10: Reset parameter values
0: Display the output current (A)
1: Reserved
2: Display the actual output frequency (H)
3: Display the DC-BUS voltage (U)
4: Display the output voltage (E)
5: Display the output power angle (n)
6: Display the output power in kW (P)
7: Display the actual motor speed rpm (r)
8: Display the estimated output torque (%)
9: Display the PG feedback (G)
10: Reserved
11: Display the signal value of the analog input
terminal PO % (1.)
12: Display the signal value of the analog input
terminal PI % (2.)
13: Display the signal value of the analog input
terminal AUI % (3.)
14: Display temperature of the heat sink in °C (t.)
15: Display temperature of IGBT in °C (T)
16: The status of digital input (ON/OFF) (i)
17: The status of digital output (ON/OFF) (o)
18: Reserved
19: The corresponding CPU pin status of the digital
input (i.)
20: The corresponding CPU pin status of the digital
output (o.)
21~24: Reserved
25: Display the signal value of the analog input
terminal QI % (5.)
26: Display the actual pressure value (Bar) (b.)
27: Display the kWh value (K)
28: Display the motor temperature (currently only
support KTY84) (T.)
Default
value
Read only
Read only
0
Read only
0
VF
FOCPG
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
FOCPM
4-2
Page 46

Chapter 4 Parameter Functions|HES Series
Parameter
code
00-05
00-06
00-07
00-08
00-09
00-10
00-11
00-12
00-13
00-14
00-15
00-16
00-17
00-18
00-19
00-20
00-21
00-22
00-23
00-24
00-25
00-26
00-27
00-28
00-29
00-30
00-31
Function of the parameter Settings
Analog output function
selection
Display the speed (rpm)
defined by the user
Maximum value for the
pressure command
Maximum pressure
feedback value
Pressure control mode
Speed bandwidth
Pressure feedback filtering
time PO
Pressure command filtering
time PI
Flow command filtering time
QI
Percentage for the pressure
command value (Max)
Percentage for the pressure
command value (Mid)
Percentage for the pressure
command value (Min)
Percentage for the flow
command value (Max)
Percentage for the flow
command value (Mid)
Percentage for the flow
command value (Min)
P gain 1
I integration time 1
P gain 2
I integration time 2
P gain 3
I integration time 3
Pressure stable region
Base pressure 0.0~100.0%
Depressurization speed
Ramp up rate of pressure
command
Ramp down rate of pressure
command
Ramp up rate of flow
command
0.0~1000.0
0.0~1000.0
0.0~1000.0
0~40Hz
0.00~500.00 seconds
0.00~500.00 seconds
0.00~500.00 seconds
0: Output frequency (Hz)
1: Frequency command (Hz)
2: Motor speed (Hz)
3: Output current (A)
4: Output voltage
5: DC Bus voltage
6: Power factor
7: Power
8: Output torque
9: PO
10: PI
11: AUI
12~20: Reserved
0~39999 rpm
0~400Bar
0~400 Bar
0: Speed control
1: Pressure control
0.000~1.000 second
0.000~1.000 second
0.000~1.000 second
0.0~100.0%
0.0~100.0%
0.0~100.0%
0.0~100.0%
0.0~100.0%
0.0~100.0%
0~100%
0~100%
0~1000ms
0~1000ms
0~1000 ms
Default
value
0
2500
140
250
0
20
0.000
0.000
0.000
56.0
28.0
0.0
100.0
50.0
0.0
50.0
2.00
50.0
2.00
50.0
2.00
25
0.1
25
0
100
80
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
VF
FOCPG
○ ○
○ ○
FOCPM
4-3
Page 47

Chapter 4 Parameter Functions|HES Series
Parameter
code
00-32
00-33
00-34
00-35
00-36
00-37
00-38
00-39 I gain of pressure overshoot
00-40 Reserved
00-41 Reserved
00-42 Pressure overshoot level
00-43 Percentage of maximum
00-44 Pressure command
00-45 Percentage of flow
00-46 Pressure reference S1 time
00-47 Pressure reference S2 time
00-48 Flow reference S1 time
00-49 Flow reference S2 time
Function of the parameter Settings
Ramp down rate of flow
command
Valve opening delay time
Reserved
Over-pressure detection
level
Detection of disconnection
of pressure feedback
Differential gain
Pressure/flow control
function selection
1
flow
command
0.0~100.0 %
0~1000 ms
0~200 ms
0~400Bar
0 : No function
1: Enable (only for the pressure feedback output signal
within 1~5V)
Bit 0: 0: Switch the PI Gain according to the pressure
feedback level
1: Switch the PI Gain according to the
multi-function input terminal
Bit 1: 0: No pressure/flow control switch
1: Switch between the pressure and flow control
0.00~500.00 seconds
0~100% 2
0~100% 100
0~400 bar 0
0~100% 0
0~1000ms 0
0~1000ms 0
0~1000ms 0
0~1000ms 0
Default
value
80
0
230
0
0.0
0
0.2
VF
FOCPG
FOCPM
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
4-4
Page 48

Chapter 4 Parameter Functions|HES Series
01 Motor Parameters the parameter can be set during operation
Parameter
code
01-00
01-01
01-02
01-03
01-04
01-05
01-06
01-07
01-08
01-09
01-10
01-11
01-12
01-13
01-14
01-15
01-16
01-17
01-18
Function of the parameter Settings
0: VF
1: Reserved
2: Reserved
Control mode
Source of operation
command
Motor’s maximum operation
frequency
Motor’s rated frequency
Motor’s rated voltage
Acceleration time setting
Deceleration time setting
Motor Parameter Auto
Tuning
Rated current of the
induction
motor (A)
Rated power of the induction
motor
Rated speed of the induction
motor
Number of poles of the
induction motor
No-load current of the
induction motor (A)
Stator resistance (Rs) of the
induction Motor
Rotor resistance (Rr) of the
induction Motor
Magnetizing inductance
(Lm)
of the induction Motor
Total leakage inductance
(Lx)
of the induction motor
Rated current of the
synchronous motor
Rated power of the
synchronous motor
3: FOCPG
4: Reserved
5: FOCPM
6: Reserved
0: Operation by using the digital keypad
1: Operation by using the external terminals. The Stop
button
on the keypad is disabled.
2: Communication using RS-485. The Stop button on the
keypad is disabled
50.00~600.00Hz
0.00~600.00Hz
230V Series: 0.1V~255.0V
460V Series: 0.1V~510.0V
0.00~600.00 seconds
0.00~600.00 seconds
0: No function
1: Rolling test for induction motor(IM) (Rs, Rr, Lm, Lx,
no-load
current)
2: Static test for induction motor(IM)
3: Reserved
4: Auto measure the angle between magnetic pole and PG
origin
5: Rolling test for PM motor
40~120% of the drive’s rated current
0~655.35kW
0~65535rpm
1710 (60Hz 4-pole); 1410 (50Hz 4-pole)
2~20
0~Default value of Parameter 01-08
0~65.535Ω
0~65.535Ω
0.0~6553.5mH
0.0~6553.5mH
0~655.35 Amps
0.00 – 655.35kW
Default
value
5
1
166.67
113.33
220.0
440.0
0.00
0.00
0
#.##
#.##
1710
4
#.##
#.###
#.###
#.#
#.#
0.00
0.00
VF
FOCPG
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○
○ ○ ○
○ ○ ○
○ ○
○ ○
○ ○
○ ○
○
○
○
○
○
○
○
○
○
○
○
○
○
FOCPM
4-5
Page 49

Chapter 4 Parameter Functions|HES Series
Parameter
code
01-19
01-20
01-21
01-22
01-23
01-24
01-25
01-26
01-27
01-28
01-29
01-30
01-31
01-32
01-33
01-34
01-35
Function of the parameter Settings
Rated speed of the
synchronous motor
Number of poles of the
synchronous motor
Inertia of the synchronous
motor’s rotor
Stator’s phase resistance
(Rs) of the synchronous
motor
Stator’s phase inductance
(Ld) of the synchronous
motor
Stator’s phase inductance
(Lq) of the synchronous
motor
Back EMF of the
synchronous motor
Encode type
PG Offset angle of
synchronous motor
Number of poles of the
resolver
Encoder pulse
Encoder’s input type setting
System control
Unity value of the system
inertia
Carrier frequency
Reserved
Motor ID
1~20000
5KHz; 10KHz
0~65535rpm
2~20
0.0~6553.5 *10-4 kg.m
0.000~65.535Ω
0.00.0~655.35mH
0.00.0~655.35mH
0~65535 V/krpm
0: ABZ
1: ABZ+HALL (only used for Delta’s servo motors)
2: ABZ+HALL
3: Resolver
0.0~360.0°
1~5
0: No function
1: Phase A leads in a forward run command and phase B
leads in a reverse run command
2: Phase B leads in a forward run command and phase A
leads in a reverse run command
3: Phase A is a pulse input and phase B is a direction input.
(low input=reverse direction, high input=forward
direction)
4: Phase A is a pulse input and phase B is a direction input.
(low input=forward direction, high input=reverse
direction)
5: Single-phase input
0: No function
1: ASR automatic tuning
2: Estimation of inertia
1~65535 (256 = 1 per unit)
0 : No function
16: Delta’s Hybrid servo motor ECMA-ER181BP3
(11kW220V)
17: Delta’s Hybrid servo motor ECMA-KR181BP3
(11kW380V)
18: Delta’s Hybrid servo motor ECMA-ER221FPS
(15kW220V)
19: Delta’s Hybrid servo motor ECMA-KR221FPS
(15kW380V)
20: Delta’s Hybrid servo motor ECMA-ER222APS
(20kW220V)
21: Delta’s Hybrid servo motor ECMA-KR222APS
(20kW380V)
2
Default
value
1700
8
0.0
0.000
0.00
0.00
0
3
0.0
1
1024
1
1
400
5
0
VF
FOCPG
○ ○
○ ○
○ ○
○ ○
○ ○
○
○ ○ ○
FOCPM
○
○
○
○
○
○
○
○
○
○
4-6
Page 50

Chapter 4 Parameter Functions|HES Series
Parameter
code
01-36
01-37
Function of the parameter Settings
0: When the driver runs forward, the motor rotates
counterclockwise. When the driver runs reverse, the
motor
Change the rotation
direction
HES ID #
rotates clockwise.
1: When the driver runs forward, the motor rotates
clockwise.
When the driver runs reverse, the motor rotates
counterclockwise.
0: non-functional
See parameter description
Default
value
0
0
VF
FOCPG
○ ○ ○
○ ○ ○
FOCPM
4-7
Page 51

Chapter 4 Parameter Functions|HES Series
02 Parameters for Protection the parameter can be set during operation
Parameter
code
02-00
02-01
02-02
02-03
02-04
02-05
02-06
Function of the
parameter
Software brake level
Present fault record 0: No error record
Second most recent fault
record
Third most recent fault
record
Fourth most recent fault
record
Fifth most recent fault
record
Sixth most recent fault
record
230V series: 350.0~450.0Vdc
460V series: 700.0~900.0Vdc
1: Over-current during acceleration (ocA)
2: Over-current during deceleration (ocd)
3: Over-current during constant speed (ocn)
4: Ground fault (GFF)
5: IGBT short-circuit (occ)
6: Over-current at stop (ocS)
7: Over-voltage during acceleration (ovA)
8: Over-voltage during deceleration (ovd)
9: Over-voltage during constant speed (ovn)
10: Over-voltage at stop (ovS)
11: Low-voltage during acceleration (LvA)
12: Low-voltage during deceleration (Lvd)
13: Low-voltage during constant speed (Lvn)
14: Low-voltage at stop (LvS)
15: Phase loss protection (PHL)
16: IGBT over-heat (oH1)
17: Heat sink over-heat for 40HP and above (oH2)
18: TH1 open: IGBT over-heat protection circuit error
(tH1o)
19: TH2 open: heat sink over-heat protection circuit
error
(tH2o)
20: IGBT over heated and unusual fan function (oHF)
21: Hybrid Servo Controller overload (oL)
22: Motor over-load (EoL1)
23: Reserved
24: Motor over-heat, detect by PTC (oH3)
25: Reserved
26: Over-torque 1 (ot1)
27: Over-torque 2 (ot2)
28: Reserved
29: Reserved
30: Memory write error (cF1)
31: Memory read error (cF2)
32: Isum current detection error (cd0)
33: U-phase current detection error (cd1)
34: V-phase current detection error (cd2)
35: W-phase current detection error (cd3)
36: Clamp current detection error (Hd0)
37: Over-current detection error (Hd1)
38: Over-voltage detection error (Hd2)
39: Ground current detection error (Hd3)
40: Auto tuning error (AuE)
41: Reserved
42: PG feedback error (PGF1)
43: PG feedback loss (PGF2)
44: PG feedback stall (PGF3)
Settings
Default
value
380.0
760.0
0
0
0
0
0
0
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○ ○
○
○
○
○
○
○ ○
○
○
○
○
VF
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
FOCPG
FOCPM
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
4-8
Page 52

Chapter 4 Parameter Functions|HES Series
Parameter
code
02-07
02-08
02-09
02-10
02-11
02-12
02-13
02-14
02-15
02-16
02-17
02-18
02-19
Function of the
parameter
Low voltage level
PTC action selection
PTC level
PTC detection filtering time
PTC type
Motor fan activation level
Electronic thermal relay
selection 1
Electronic thermal
characteristic for motor
Output frequency at
malfunction
Output voltage at
malfunction
DC voltage at malfunction
Output current at
malfunction
IGBT temperature at
malfunction
Settings
45: PG slip error (PGF4)
46: Reserved
47: Reserved
48: Reserved
49: External fault input (EF)
50: Emergency stop (EF1)
51: Reserved
52: Password error(PcodE)
53: Reserved
54: Communication error (cE1)
55: Communication error (cE2)
56: Communication error (cE3)
57: Communication error (cE4)
58:Communication time out (cE10)
59: PU time out (cP10)
60: Braking transistor error (bF)
61~63: Reserved
64: Safety relay Error (SRY)
65: PG card information error (PGF5)
66: Over pressure (ovP)
67: Pressure feedback fault (PfbF)
160.0~220.0Vdc
320.0.0~440.0Vdc
0: Warn and keep operation
1: Warn and ramp to stop
2: Warn and coast to stop
0.0~150.0%
0.0~150.0℃
0.00~10.00 seconds
0: Not assigned
1: KTY84
0.0~100.0%
0.0~150.0℃
0: Inverter motor
1: Standard motor
2: Disable
30.0~600.0 seconds
0.00~655.35 Hz Read only
0.0~6553.5 V Read only
Default
value
180.0
360.0
0
50.0
0.20
0
50.0
2
60.0
0.0~6553.5 V Read only
0~655.35 Amps Read only
0.0~6553.5 ℃
Read only
VF
FOCPG
FOCPM
○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○
4-9
Page 53

Chapter 4 Parameter Functions|HES Series
03 Digital/Analog Input/Output Parameters
the parameter can be set during operation
Parameter
code
03-00
03-01
03-02
03-03
03-04
03-05
03-06
03-07
03-08
03-09
03-10
03-11
03-12
03-13
03-14
03-15
03-16
03-17
03-18
03-19
03-20
03-21
Function of the parameter Settings
Multi-function input
command 3 (MI3)
Multi-function input
command 4 (MI4)
Multi-function input
command 5 (MI5)
Digital input response time
Digital input operation
direction
Multi-function output 1
(Relay 1)
Multi-function Output 2
(MO1)
Multi-function Output 3
(MO2)
Multi-function output
direction
Low-pass filter time of
keypad display
Maximum output voltage for
pressure feedback
Minimum output voltage for
pressure feedback
Type of Pressure Feedback
Selection
Confluence Master/Slave
Selection
Slave's proportion of the
Master’s flow
Source of frequency
command
Limit for the Slave reverse
depressurization torque
Slave’s activation level
Communication error
treatment
Time-out detection
Start-up display selection
Slave reverse operation for
depressurization
0.0~100.0 seconds
0: No function
44: Injection signal input
45: Confluence/Diversion signal input
46: Reserved
47: Multi-level pressure PI command 1
48: Multi-level pressure PI command 2
51: flow command
0.001~ 30.000 sec
0~65535 0
0: No function
1: Operation indication
9: Hybrid Servo Controller is ready
11: Error indication
44: Displacement switch signal
45: Motor fan control signal
0~65535
0.001~65.535 seconds
5.0~10.0 V
0.0~2.0 V
0: Current
1: Voltage
0: No function
1: Master 1
2: Slave/Master 2
3: Slave/Master 3
0.0~65535.5 %
0: Digital keypad
1: RS485 Communication
2~5: Reserved
0~500%
0.0~100.0%
0: Warn and keep operation
1: Warn and ramp to stop
2: Warn and coast to stop
3: No action and no display
0: F (frequency command)
1: H (actual frequency)
2: Multi-function display (user-defined 00-04)
3: A (Output current)
0: Disabled
1: Enabled
Default
value
0
0
0
0.005
11
0
0
0
0.010
10.0
0.0
1
0
100.0
0
20
50.0
3
0.0
0
0
VF
FOCPG
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
FOCPM
4-10
Page 54

Chapter 4 Parameter Functions|HES Series
4-11
Page 55

Chapter 4 Parameter Functions|HES Series
V
V
V
V
V
4-2 Detailed Description of Parameters
00 System Parameters the parameter can be set during o
peration
Control mode
Control mode
Parameter 00-00 is used to determine the capacity of the Hybrid servo motor which has been
configured in this parameter in factory. In addition, the current value of Parameter (00-01) can
Hybrid Servo Controller model code ID
F FOCPG FOCPM
Factory default: Read only
Settings Read only
Display of rated current of the Hybrid Servo Controller
F FOCPG FOCPM
Factory default: Read only
Settings Read only
be read out to check if it is the rated current of the corresponding model.
Display value of the
current value of Parameter 00-01 for the related Parameter 00-00.
230V Series
Power (KW)
Horse Power (HP)
Model ID
5.5 7.5 11 15 18.5 22 30 37
7.5 10 15 20 25 30 40 50
12 14 16 18 20 22 24 26
460V Series
Power (KW)
Horse Power (HP)
Model ID
5.5 7.5 11 15 18.5 22 30 37 45 55 75
7.5 10 15 20 25 30 40 50 60 75 100
13 15 17 19 21 23 25 27 29 31 33
Control mode
Reset parameter settings
F FOCPG FOCPM
Settings 0: No function
5: Rest the kWh at drive stop
10: Reset parameter values
Factory default: 0
If it is necessary to restore the parameters to factory default, just set this parameter to “10”.
Control mode
Software version
F FOCPG FOCPM
Settings
Read only
Factory default: #.##
Control mode
Selection of multi-function display
F FOCPG FOCPM
Factory default: 0
Settings 0: Display the output current (A)
1: Reserved
2: Display the actual output frequency (H)
3: Display the DC-BUS voltage (U)
4: Display the output voltage (E)
5: Display the output power angle (n)
6: Display the output power in kW (P)
7: Display the actual motor speed(r 00: forward speed; - 00:
negative speed)
U
U
U
U
U
U
U
U
4-12
Page 56

Chapter 4 Parameter Functions|HES Series
V
8: Display the estimated output torque (%) (t 0.0: positive
torque; - 0.0: negative torque) (%)
9: Display the PG feedback (G)
10: Reserved
11: Display the signal value of the analog input terminal PO
with 0~10V mapped to 0~100%
12: Display the signal value of the analog input terminal PI
with 0~10V mapped to 0~100%
13: Display the signal value of the analog input terminal PI
with -10~10V mapped to 0~100%
14: Display temperature of the heat sink in °C (t.)
15: Display temperature of the IGBT power module °C
16: The status of digital input (ON/OFF)
17: The status of digital output (ON/OFF)
18: Reserved
19: The corresponding CPU pin status of the digital input
20: The corresponding CPU pin status of the digital output
21~24: Reserved
25: Display the signal value of the analog input terminal OI
with 0~10V mapped to 0~100%
26: Display the actual pressure value (Bar)
27: Display the kWh value
28: Display the motor temperature (currently only support
KTY84)
U
U
U
U
U
U
U
U
U
U
U
U
U
U
U
U
U
This parameter defines the contents to be displayed in the U page of the digital keypad
KPV-CE01 (as shown in the figure).
Control mode
Analog output function selection
F FOCPG FOCPM
Settings 0~20
Summary of functions
Setting Value Function Description
0 Output frequency (Hz) The maximum frequency is 100%
1 Frequency command (Hz) The maximum frequency is 100%
2 Motor speed (Hz) 600Hz is used as 100%
3 Output current (A) 2.5 times of the rated current of the Hybrid Servo
Controller is used as 100%
4 Output voltage 2 times of the rated current of the Hybrid Servo
Controller is used as 100%
5 DC BUS voltage 450V (900V) =100%
6 Power factor -1.000~1.000=100%
7 Power Rated power of the drive =100%
8 Output torque Rated torque =100%
9 PO (0~10V=0~100%)
10 PI (0~10V=0~100%)
11 AUI (-10~10V=0~100%)
12~20 Reserved
Factory default: 0
4-13
Page 57

Chapter 4 Parameter Functions|HES Series
V
V
V
V
V
V
Control mode
Display the speed (rpm) defined by the user
F FOCPG FOCPM
Factory default: 0
Settings 0~39999 rpm
Set the maximum speed of the motor corresponding to the 100% flow.
Control mode
Maximum value for the pressure command
F FOCPG FOCPM
Factory default: 250
Settings 0~400Bar
The 0~10V for the pressure command on the controller is mapped to 0~the value of this
parameter.
Firmware version 2.04 and above, maximum value 400Bar, the previous version’s maximum
allowed value is 250Bar.
Control mode
Maximum pressure feedback value
F FOCPG FOCPM
Settings 0~400Bar
Factory default: 250
The 0~10V for the pressure sensor is mapped to 0~the value of this parameter.
Control mode
Pressure control mode
F FOCPG FOCPM
Settings 0: Speed control
1: Pressure control
Factory default: 0
This parameter determines the control mode of the Hybrid Servo Controller. It is recommended
to use the speed control at the initial start up. After the motor, pump, pressure sensor, and the
entire system are checked without any error, switch to the pressure control mode to enter the
process control.
Control mode
Speed bandwidth
FOCPG FOCPM
Settings 0~40Hz
Factory default: 20
Set the speed response. The larger value indicates the faster response.
Control mode
Pressure feedback filtering time PO
Pressure Command Filter Time PI
Pressure Command Filter Time PI
F FOCPG FOCPM
Settings 0.000~1.000 seconds
Factory default: 0.000
Noises may reside in the analog input signals of the control terminals PO, PI, and QI. The noise
may affect the control stability. Use an input filter to eliminate such noise.
If the time constant is too large, a stable control is obtained with poorer control response. If it is
too small, a fast response is obtained with unstable control. If the optimal setting is not known,
adjust it properly according to the instability or response delay.
Control mode
Percentage for the pressure command value (Max)
Percentage for the pressure command value (Mid)
Percentage for the pressure command value (Min)
F FOCPG FOCPM
Factory default: 100.0
Settings 0.0~100.0%
4-14
Page 58

Chapter 4 Parameter Functions|HES Series
V
V
V
V
V
V
V
To set these parameters, it is necessary to set Parameter 00-09 as 1
Parameter 00-04 = 12 for PI input voltage
Send the maximum pressure command through the controller and then check the
multi-function display page to enter this value into 00-14
Send a half pressure command through the controller and then check the multi-function display
page to enter this value into 00-15
Send the minimum pressure command through the controller and then check the multi-function
display page to enter this value into 00-16
Example: If the pressure sensor indicates 250bar at 10V. If the controller’s maximum pressure
of 140bar corresponds to 10V, then Parameter 00-07=140. Set the pressure as 140bar by
using the controller, the voltage value shown on the display is about 56.0 (140/250 *
100%). Enter this value into the Parameter 00-14. Then set the pressure as 70bar on the
controller, and now the value displayed on the keypad is about 28.0 (70/250 * 100%).
Enter this value to the Parameter 00-15. Then set the pressure as 0 bar on controller, and
the voltage value shown on the keypad is about 0.0 (0/250 * 100%). Enter this value in the
Parameter 00-16.
Control mode
Control mode
Control mode
Percentage for the flow command value (Max)
F FOCPG FOCPM
Factory default: 100.0
Settings 0.0~100.0%
Percentage for the flow command value (Mid)
F FOCPG FOCPM
Factory default: 50.0
Settings 0.0~100.0%
Percentage for the flow command value (Min)
F FOCPG FOCPM
Factory default: 0.0
Settings 0.0~100.0%
To set these parameters, it is necessary to set Parameter 00-09 as 1
Parameter 00-04 = 25 for QI input voltage
Send the 100% flow rate through the controller and then check the multi-function display page
to enter this value into 00-17
Send the 50% flow rate through the controller and then check the multi-function display page to
enter this value into 00-18
Send the 0% flow rate through the controller and then check the multi-function display page to
enter this value into 00-19
Control mode
Control mode
Control mode
P gain 1
P gain 2
P gain 3
F FOCPG FOCPM
Settings 0.0~1000.0
I integration time 1
I integration time 2
I integration time 3
F FOCPG FOCPM
Settings 0.00~500.00 seconds
Differential gain
F FOCPG FOCPM
Factory default: 50.0
Factory default: 2.00
Factory default: 0.0
Settings 0.0~100.0 %
Control mode
Pressure stable region
F FOCPG FOCPM
Settings 0~100%
Factory default: 25
4-15
Page 59

Chapter 4 Parameter Functions|HES Series
d
V
V
Pressure
Pressure Feedback
P3, I3
00-26
P2, I2
Pressure
Comman
00-26
P2, I2
P1, I1
Time
Adjust the Kp value to a proper level first, and then adjust the Ki value (time). If the pressure
has overshoot, adjust the kd value.
Appropriate Kp value
Kp value is too low
Kp value is too high
Control mode
Appropriate Ki value (time)
Kd value is too low
Base pressure
F FOCPG FOCPM
Settings 0.0~100.0%
Ki value is too high (time)
Appropriate Kd value
Factory default: 0.1
Ki value is too low (time)
Kd value is too hi gh
Set the minimum pressure value 100% corresponding to Parameter 00-08
Typically, it is necessary to maintain a certain base pressure to ensure that the oil pipe is in fully
filled condition so as to avoid the activation delay of the cylinder when a pressure/flow
command is activated.
Control mode
Depressurization speed
F FOCPG FOCPM
Settings 0~100%
Factory default: 25
Set the highest rotation speed at depressurization. The 100% value is mapped to Parameter
01-02 (the maximum rotation speed of the motor)
4-16
Page 60

Chapter 4 Parameter Functions|HES Series
V
V
V
2
V
Control mode
Control mode
Ramp up rate of pressure command
F FOCPG FOCPM
Factory default: 0
Settings 0~1000ms
Ramp down rate of pressure command
F FOCPG FOCPM
Factory default: 100
Settings 0~1000ms
Ramp the pressure value for the pressure command so as to reduce the vibration of the
machine.
Set the time required for ramping the pressure from 0~the maximum pressure (00-08).
Pressure
command given
to controller
Pressure
command after
driver processing
Time
00-29 00-30
Control mode
Ramp up rate of flow command
Ramp down rate of flow command
F FOCPG FOCPM
Settings 0~1000ms
Factory default: 80
Ramp the flow value for the flow command so as to reduce the vibration of the machine.
Set the time required for ramping the flow from 0~the maximum flow (01-02).
Flow command
given to
controller
Flow command
after driver
Control mode
processing
00-31 00-3
Valve opening delay time
F FOCPG FOCPM
Settings 0~200ms
Factory default: 0
Time
When both the pressure command and flow command activate the machine to start from idle,
the flow starts to output. However, due to the slower response of the valve in the
hydraulic circuit,
the sudden surge of the pressure may occur. The pressure may recover to normal till the valve
is fully opened.
To avoid the aforementioned effect, set this parameter to increase time for the
flow output delay.
Pressure
Command
Befo re pressu re
feedback adjustment
After pressure
feedback adjustment
Parameter 00-33
Flow
Command
Befo re flo w feed bac k
adjustment
After flow feedback
adjustment
4-17
Page 61

Chapter 4 Parameter Functions|HES Series
V
V
V
V
V
Reserved
Control mode
Over-pressure detection level
F FOCPG FOCPM
Settings 0~400 Bar
Factory default: 230
When the pressure feedback exceeds this parameter setting, an “ovP over pressure” error
message may occur.
Firmware version 2.04 and above, maximum value 400Bar, the previous version’s maximum
allowed value is 250Bar.
Control mode
Detection of disconnection of pressure feedback
F FOCPG FOCPM
Factory default: 0
Settings 0: No function
1: Enable (only for the pressure feedback output signal within 1~5V)
When this parameter is set as 1 and if the pressure feedback signal is below 1V or 4mA, an
"Pfbf pressure feedback fault” error message may occur.
Control mode
Pressure/flow control function selection
F FOCPG FOCPM
Factory default: 0
Bit 0:
Settings
0: Switch the PI Gain according to the pressure feedback level
1: Switch the PI Gain according to the multi-function input terminal
Bit 1:
0: No pressure/flow control switch
1: Switch between the pressure and flow control
When the Bit 0 of this parameter is set as 1, the PI Gain for the pressure can be switched in
conjunction with the multi-function input terminal
Pr. 03-00~03-02 d= 47 Pr. 03-00~03-02 d= 48
OFF OFF PI1(Parameters 00-20 & 00-21)
ON OFF PI2(Parameters 00-22 & 00-23)
OFF ON PI3(Parameters 00-24 & 00-25)
When the Bit 1 of this parameter is set as 1, the pressure feedback is lower than the pressure
stable region (please refer to the description of Parameter 00-26) so the flow control will be
performed.
Control mode
When it enters the pressure stable region, the pressure control will be performed.
Integration Time – Pressure Overshoot 1
F FOCPG FOCPM
Factory default : 0.2
Settings 0.00~500.00 seconds
Control mode
Level of the pressure overshoot
F FOCPG FOCPM
Factory default : 2
Settings 0~100%
By using the factory setting 250 bar of the Pr00-08 Maximum Pressure Feedback, when the
pressure is over 5 bar (250*2%=5 bar), another integral time of Pr00-39 will do overshoot
protection.
When Pr00-38=1 and Pr00-39=0,Pr00-42 is disable.
4-18
Page 62

Chapter 4 Parameter Functions|HES Series
V
V
V
Reserved
Reserved
Control mode
Percentage of the maximum flow
F FOCPG FOCPM
Factory default : 100
Settings 0~100%
Set up this parameter to adjust the maximum rotation frequency (maximum flow rate). It is not
necessary to stop the motor drive to set up this parameter. When this parameter is set to be
100%, it corresponds to the maximum rotation frequency of Pr01-02.
Control mode
Pressure Command
F FOCPG FOCPM
Factory default : 0
Settings 0~400bar
Control mode
Percentage of Flow command
F FOCPG FOCPM
Factory default :0
Settings 0~100%
When Pr00-44 ≠ 0, Pressure Command will not be given by the analog signal but input by
Pr00-44.
When Pr00-45 ≠ 0, Flow Command will not be given by the analog signal but input by Pr00-45.
Pr00-44 & Pr00-45 can be applied in an environment without input of analog signal to do simple
test.
4-19
Page 63

Chapter 4 Parameter Functions|HES Series
V
V
V
V
Control mode
Pressure Command Rising/ Descending S1 curve
F FOCPG FOCPM
Factory default : 0
Settings 0~1000ms
Control mode
Pressure Command Rising/ Descending S2 Curve
F FOCPG FOCPM
Factory default : 0
Settings 0~1000ms
To increase the smoothness at start or stop while increasing or decreasing the percentage of
the pressure command. The longer the pressure reference time, the smoother it will be.
Control mode
Pressure Command Rising/ Descending S1 Curve
F FOCPG FOCPM
Factory default : 0
Settings 0~1000ms
Control mode
Flow Command Rising/.Descending S2 Curve
F FOCPG FOCPM
Factory default : 0
Settings 0~1000ms
To increase the smoothness at start or stop while increasing or decreasing the percentage of
the flow command. The longer the flow reference time, the smoother it will be.
4-20
Page 64

Chapter 4 Parameter Functions|HES Series
V
V
V
01 Motor Parameters the parameter can be set during operation
Control mode
This parameter determines the control mode of this AC motor.
0: V/F control, the user can design the required V/F ratio. It is used for induction motors.
1: Reserved
2: Reserved
3: FOC vector control + Encoder. It is used for induction motors.
4: Reserved
5: FOC vector control + Encoder. It is used for synchronous motors.
6: Reserved
Control mode
F FOCPG FOCPM
0:V/F
1: Reserved
2: Reserved
Settings
3: FOCPG
4: Reserved
5: FOCPM
6: Reserved
Factory default: 5
Control mode
Source of operation command
F FOCPG FOCPM
Factory default: 1
Settings 0: The operation command is controlled by the digital operation panel
1: The operation command is controlled by the external terminals. The
STOP button on the keypad panel is disabled
2: The operation command is controlled by the communication interface.
The STOP button on the keypad panel is disabled
For the operation command, press the PU button to allow the “PU” indicator to be lit. In this
case, the RUN, JOG, and STOP button are enabled.
Control mode
Motor’s maximum operation frequency
VF FOCPG FOCPM
Factory default: 166.67
Settings 50.00~600.00Hz
Set the maximum operation frequency range of the motor. This setting is corresponding to the
maximum flow for the system.
Control mode
Motor’s rated frequency
VF FOCPG FOCPM
Settings 0.00~600.00Hz
Factory default: 113.33
Typically, this setting is configured according to the rated voltage and frequency listed in the
specifications on the motor’s nameplate. If the motor is intended for 60Hz, set this value as
60Hz; if the motor is intended for 50Hz, set this value as 50Hz.
The motor’s rated frequency will be different as Rated speed of the synchronous motor
(Pr.01-19) and Number of poles of the synchronous motor (Pr.01-20) change.
Control mode
Motor’s rated voltage
F FOCPG
Settings 230V series: 0.1~255.0V
460V series: 0.1~510.0V
Factory default: 220.0/440.0
Typically, this setting is configured according to the rated operation voltage shown on the
motor’s nameplate. If the motor is intended for 220V, set this value as 220.0V; if the motor is
intended for 200V, set this value as 200.0V.
4-21
Page 65

Chapter 4 Parameter Functions|HES Series
V
V
V
Control mode
Control mode
Acceleration time setting
F FOCPG FOCPM
Settings
Deceleration time setting
F FOCPG FOCPM
0.00~600.00 seconds
Settings 0.00~600.00 seconds
Factory default: 0.00
Factory default: 0.00
The acceleration time determines the time required for the Hybrid servo motor to accelerate
from 0.0Hz to [the motor’s maximum frequency] (01-02). The deceleration time determines the
time required for the Hybrid servo motor to decelerate from [the motor’s maximum frequency]
(01-02) to 0.0Hz.
Motor Parameter Auto Tuning
Settings Control mode
0: No function
1: Rolling test for induction motor(IM) (Rs, Rr, Lm,
Lx, no-load current)
2: Static test for induction motor(IM)
3: Reserved
4: Auto measure the angle between magnetic pole
and PG origin
5: Rolling test for PM motor
Factory default: 0
F FOCPG FOCPM
○ ○
○ ○
○ ○
If the parameter is set as 1~2, it will perform the parameter automatic tuning for the Induction
○
○
motor. In this case, press the [Run] button to perform the automatic measurement operation
immediately. After the measurement is complete, the values are filled into Parameters
01-13~16 (no-load current, Rs, Rr, Lm, and Lx), respectively.
Induction motor AUTO-Tuning procedure:( Rolling test)
1. All parameters of the Hybrid Servo Controller are set to factory settings and the motor is
connected correctly.
2. Users are strongly advised to disconnect the motor from any load before tuning. That is to
say, the motor contains only the output shaft and connects to neither a belt nor a
decelerator. Otherwise, it will be impossible to disconnect the motor from any loads. Static
tuning is advised
※.
3. Set the rated voltage 01-04, rated frequency 01-03, rated current 01-08, rated power 01-09,
rated speed 01-10, and number of poles 01-11 of the motor with correct values,
respectively. For the acceleration/deceleration time, please set the correct values.
4. Set Parameter 01-07 as 1 and then press the RUN button on the keypad. The auto tuning
process for the motor is carried out immediately. (Note: the motor starts running).
5. After the process is finished, check if the motor’s parameters (parameters 01-13 ~ 16)
have been automatically entered with the measurement data.
4-22
Page 66

6. Equivalent circuit of the motor
I
Rs
Chapter 4 Parameter Functions|HES Series
Lx
Pr. 01-13
V
S
Motor equivalent circuit used by VJ
NOTE
* When the static tuning (parameters 01-07 = 2) is used, you must enter the no-load current ot the motor. It is
generally 20 to 50% of the rated current.
Pr .01-16
Lm
Pr.01-15
Rr
Pr. 01-14
If the parameter is set as 5, it will perform the parameter automatic tuning for the synchronous
motor. In this case, press the [Run] button to perform the automatic measurement operation
immediately. After the measurement is complete, the values are filled into Parameters 01-22
(Rs), 01-23 & 24 (Ld & Lq), 01-25 (Back EMF of the synchronous motor), respectively.
Synchronous motor AUTO-Tuning procedure:(static measurement)
1. All parameters of the Hybrid Servo Controller are set to factory settings and the motor is
connected correctly.
2. Set the rated current 01-17, rated power 01-18, rated speed 01-19, and number of poles
01-20 of the motor with correct values, respectively. For the acceleration/deceleration
time, please set the values according to the motor’s capacity.
3. Set Parameter 01-07 as 5 and then press the RUN button. The auto tuning process for
the motor is carried out immediately. (Note: the motor starts running slightly).
4. After the process is finished, check if the motor’s parameters (parameters 01-22 ~ 01-25)
have been automatically entered with the measurement data.
If the Parameter is set as 4, the automatic measurement of the angle between magnetic pole
and the PG origin for the synchronous motor is performed. In this case, press the [Run] button
to immediately perform automatic measurement. The measured data will be entered into
Parameter 01 -27.
Angle between magnetic pole and the PG origin Auto-Tuning process for the synchronous
motor:
1. After the measurement process for parameter value of 5 is performed completely or
manually enter the Parameters 01-03, 01-17 and 01-25, respectively.
2. Before tuning, it is recommended to separate the motor and the load.
3. Set Parameter 01-07 as 4 and then press the RUN button on the keypad. The auto
tuning process for the motor is carried out immediately. (Note: the motor starts running).
4. After the process is complete, please check if the values for the angle between magnetic
poles and PG origin have been automatically entered in the Parameter 01-27.
4-23
Page 67

Chapter 4 Parameter Functions|HES Series
Control mode
Rated current of the induction motor (A)
FOCPG
Unit: Ampere
Settings 40~120% of the rated driving current
Factory default: #.##
To set this parameter, the user can set the rated motor current range shown on the motor’s
nameplate. The factory default is 90% of the rated current of the Hybrid Servo Controller.
For example: For the 7.5HP (5.5kW) motor, the rated current is 25, the factory settings: 22.5A.
The customers can set the parameter within the range 10 ~ 30A.
25*40%=10 25*120%=30
Control mode
Rated power of the induction motor
FOCPG
Factory default: #.##
Settings 0 – 655.35kW
Set the motor’s rated power. The factory default value is the power of the Hybrid Servo
Controller.
Control mode
Rated speed of the induction motor
FOCPG
Factory default:
1710 (60Hz 4-pole)
1410 (50Hz 4-pole)
Settings 0~65535
This parameter sets the rated speed of the motor. It is necessary to refer to the specifications
shown on the motor’s nameplate.
Control mode
Number of poles of the induction motor
FOCPG
Factory default: 4
Settings 2~20
This parameter sets the number of motor number of poles (odd number is not allowed).
Control mode
No-load current of the induction motor (A)
FOCPG
Unit: Ampere
Settings 0~ Default value of Parameter 01-08
Factory default: 40
The factory default is 40% of the rated current of the Hybrid Servo Controller.
Control mode
Control mode
Stator resistance (Rs) of the induction motor
FOCPG
Rotor resistance (Rr) of the induction motor
FOCPG
Factory default: #.##
Factory default: #.##
Settings 0~65.535Ω
Control mode
Control mode
Magnetizing inductance (Lm) of the induction motor
FOCPG
Total leakage inductance (Lx) of the induction motor
FOCPG
Factory default: #.##
Factory default: #.##
Settings 0.0~6553.5mH
Control mode
Rated current of the synchronous motor
FOCPM
Settings 0~655.35 Amps
Factory default: 0.00
The user can set the rated current shown on the synchronous motor’s nameplate.
4-24
Page 68

Chapter 4 Parameter Functions|HES Series
4
Control mode
Rated power of the synchronous motor
FOCPM
Settings 0.00 – 655.35kW
Factory default: 0.00
This Parameter sets the rated power of the synchronous motor.
Control mode
Rated speed of the synchronous motor
FOCPM
Settings 0~65535
Factory default: 1700
This parameter sets the rated speed of the synchronous motor. It is necessary to refer to the
specifications shown on the motor’s nameplate.
Control mode
Number of poles of the synchronous motor
FOCPM
Factory default: 8
Settings 2~20
This parameter sets the number of the synchronous motor’s number of poles (odd number is
not allowed).
Control mode
Inertia of the synchronous motor’s rotor
FOCPM
Settings 0.0~6553.5 *10
-
kg.m2
Factory default: 0.0
Control mode
Stator’s phase resistance (Rs) oth the synchronous motor
FOCPM
Factory default: 0
Settings 0~65.535Ω
Enter the phase resistance of the synchronous motor.
Control mode
stator’s phase inductance(Ld) of the synchronous motor
stator’s phase inductance(Lq) of the synchronous motor
FOCPM
Factory default: 0.00
Settings 0.0~655.35mH
Enter the synchronous motor’s phase inductance. For surface type magnets (SPM), Ld = Lq; for
built-in magnets (IPM), Ld ≠ Lq.
Control mode
Back EMF of the synchronous motor
FOCPM
Settings 0~65535 V/krpm
Factory default: 0
Enter the back EMF of the synchronous motor.
Control mode
Encoder type selection
FOCPM
Factory default: 3
Settings 0: ABZ
1: ABZ+HALL (only used for Delta’s servo motors)
2: ABZ+HALL
3: Resolver
Look up table for Encoders & PG cards
Parameter Setting Encoder Type Applicable PG Card
01-26=0 A, B, Z EMVJ-PG01U
01-26=1,2 A, B, Z+U, V, W EMVJ-PG01U
01-26=3 Resolver EMVJ-PG01/02R
4-25
Page 69

Chapter 4 Parameter Functions|HES Series
B
B
Control mode
PG Offset angle of synchronous motor
FOCPM
Settings 0.0~360.0°
Factory default: 0.0
Offset angle of the PG origin for the synchronous motor.
Control mode
Number of poles of the resolver
FOCPM
Settings 1~5
Factory default: 1
Control mode
Encoder Pulse
FOCPG FOCPM
Settings 1~20000
Factory default: 1024
This parameter can be set the encoder's number of pulses per revolution (PPR).
Control mode
Encoder’s input type setting
FOCPG FOCPM
Settings 0: No function
Factory default: 1
1: Phase A leads in a forward run command and phase B leads in a reverse
run command.
Forward
Rotation
Forward Rotation
A
B
Re verse Ro tati on
2: Phase B leads in a forward run command and phase A leads in a reverse
run command.
Forward Rotation
Reverse Rotation
A
Forward
Rotation
3: Phase A is a pulse input and phase B is a direction input. (low
input=reverse direction, high input=forward direction).
Forward Rotation Reverse Rotation
A
Forward
Rotation
4: Phase A is a pulse input and phase B is a direction input. (low
input=forward direction, high input=reverse direction).
Forward
Rotation
Forward Rotation
A
B
Reverse Rotation
5: Single-phase input
Forward
Rotation
A
Enter the correct setting for the pulse type is helpful in controlling the stability.
Control mode
System control
FOCPG FOCPM
Settings 0: No function
1: ASR automatic tuning
2: Estimation of inertia
Factory default: 1
If the setting value is 1: The speed control gain is determined by Parameters 00-10
If the setting value is 2: The system inertia is estimated. Please refer to descriptions in Chapter
3
4-26
Page 70

Chapter 4 Parameter Functions|HES Series
A
A
A
Control mode
Unity value of the system inertia
FOCPG FOCPM
Settings 1~65535 (256 = 1 per unit)
Factory default: 400
Control mode
Carrier frequency
FOCPG FOCPM
Settings 5 kHz; 10kHz
Factory default: 5
When this parameter is configured, please re-start the Hybrid Servo Controller.
The carrier frequency of the PWM output has a significant influence on the electromagnetic
noise of the motor. The heat dissipation of the Hybrid Servo Controller and the interference from
the environment may also affect the noise. Therefore, if the ambient noise is greater than the
motor noise, reducing the carrier frequency of the drive may have the benefits of reducing a
temperature rise; if the carrier frequency is high, even if a quiet operation is obtained, the
overall wiring and interference control should be taken into consideration.
Reserved
Control mode
Motor ID
FOCPG FOCPM
Factory default: 0
Settings 0 : No function
16: Delta’s Hybrid servo motor ECM
-ER181BP3 (11kW220V)
17: Delta’s Hybrid servo motor ECMA- KR181BP3 (11kW380V)
18: Delta’s Hybrid servo motor ECM
-ER221FPS (15kW220V)
19: Delta’s Hybrid servo motor ECMA-KR221FPS (15kW380V)
20: Delta’s Hybrid servo motor ECMA-ER222APS (20kW220V)
21: Delta’s Hybrid servo motor ECM
-KR222APS (20kW380V)
Control mode
Change the rotation direction
FOCPG FOCPM
Settings
0: When the driver runs forward, the motor rotates counterclockwise.
When the driver runs reverse, the motor rotates clockwise.
Factory default: 0
1: When the driver runs forward, the motor rotates clockwise. When the
driver runs reverse, the motor rotates counterclockwise.
This parameter can be modified only when the machine is shut down. For an induction motor
after the parameters are configured completely, it will change the running direction. For a
synchronous motor, it is necessary to perform the magnetic pole detection and re-start the
drive.
4-27
Page 71

Chapter 4 Parameter Functions|HES Series
Control mode
HES ID#
FOCPG FOCPM
Settings 0 : No function
Example: HES100G23A
Model ID#
HES063H23A 2120 HES063G43A 2040
HES080G23A 3020 HES063H43A 2140
HES080H23A 3120 HES080G43A 3040
HES100G23A 4020 HES080H43A 3140
HES100H23A 4120 HES100G43A 4040
HES100Z23A 4220 HES100H43A 4140
HES125G23A 5020 HES100Z43A 4240
HES125H23A 5120 HES125G43A 5040
HES160G23A 6020 HES125H43A 5140
HES220G23A 7020 HES160G43A 6040
Model ID#
HES160H43A 6140
HES200G43A 7040
HES200H43C 7142
HES320M43C 9342
Factory default: 0
4-28
Page 72

Chapter 4 Parameter Functions|HES Series
V
02 Parameters for Protection the parameter can be set during operation
Control mode
Sets the reference point of software brake. The reference value is the DC bus voltage.
Software brake level
VF FOCPG FOCPM
Settings 230V series: 350.0~450.0Vdc
460V series: 700.0~900.0Vdc
Factory default: 380.0/760.0
Present fault record
Second most recent fault record
Third most recent fault record
Fourth most recent fault record
Fifth most recent fault record
Sixth most recent fault record
Settings Control mode
0: No error record
1: Over-current during acceleration (ocA)
2: Over-current during deceleration (ocd)
3: Over-current during constant speed (ocn)
4: Ground fault (GFF)
5: IGBT short-circuit (occ)
6: Over-current at stop (ocS)
7: Over-voltage during acceleration (ovA)
8: Over-voltage during deceleration (ovd)
9: Over-voltage during constant speed (ovn)
10: Over-voltage at stop (ovS)
11: Low-voltage during acceleration (LvA)
12: Low-voltage during deceleration (Lvd)
13: Low-voltage during constant speed (Lvn)
14: Low-voltage at stop (LvS)
15: Phase loss protection (PHL)
16: IGBT over-heat (oH1)
17: Heat sink over-heat for 40HP and above (oH2)
18: TH1 open: IGBT over-heat protection circuit error (tH1o)
19: TH2 open: heat sink over-heat protection circuit error
F FOCPG FOCPM
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
(tH2o)
20: IGBT over heated and unusual fan function (oHF)
21: Hybrid Servo Controller overload (oL)
22: Motor 1 overload (EoL1)
23: Reserved
24: Motor over-heat, detect by PTC (oH3)
25: Reserved
26: Over-torque 1 (ot1)
27: Over-torque 2 (ot2)
28: Reserved
29: Reserved
30: Memory write error (cF1)
31: Memory read error (cF2)
32: Isum current detection error (cd0)
33: U-phase current detection error (cd1)
34: V-phase current detection error (cd2)
35: W-phase current detection error (cd3)
36: Clamp current detection error (Hd0)
37: Over-current detection error (Hd1)
38: Over-voltage current detection error (Hd2)
39: Ground current detection error (Hd3)
40: Auto tuning error (AuE)
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
4-29
Page 73

Chapter 4 Parameter Functions|HES Series
V
–
V
V
41: Reserved
42: PG feedback error (PGF1)
43: PG feedback loss (PGF2)
44: PG feedback stall (PGF3)
45: PG feedback slip (PGF4)
46: Reserved
47: Reserved
48: Reserved
49: External fault input (EF)
50: Emergency stop (EF1)
51: Reserved
52: Password error (PcodE)
53: Reserved
54: Communication error (cE1)
55: Communication error (cE2)
56: Communication error (cE3)
57: Communication error (cE4)
58: Communication time out (cE10)
59: PU time out (cP10)
60: Braking transistor error (bF)
61~63: Reserved
64: Safety relay Error (SRY)
65: PG card information error (PGF5)
66: Over pressure (ovP)
67: Pressure feedback fault (PfbF)
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
As a fault occurs and the machine is forced shutting down, the event will be recorded. During
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
○
shutting down, the LvS is not recorded.
Control mode
Low voltage level
F FOCPG FOCPM
Settings 230V Series: 160
460V Series: 320 – 440V
Factory default: 180/360
220V
This parameter is used to set the LV discrimination level.
Input Voltage
30V(60V)
02-07
LV
Control mode
PTC action selection
F FOCPG FOCPM
Settings 0: Warn and keep operation
1: Warn and ramp to stop
2: Warn and coast to stop
Factory default: 0
Parameter 02-08 is used to define the operation mode of the drive after the PTC is activated.
Control mode
PTC level
F FOCPG FOCPM
Settings 0.0~150.0%
0.0~150.0℃
Factory default: 50.0
4-30
Page 74

Chapter 4 Parameter Functions|HES Series
V
V
V
V
V
This parameter defines the maximum value of the analog input for 100% of the activation level
of the PTC.
Control mode
PTC detection filtering time
F FOCPG FOCPM
Settings 0.00 – 10.00 seconds
Factory default: 0.20
Control mode
PTC type
F FOCPG FOCPM
Settings 0: Not assigned
1: KTY84
Factory default: 0
When this parameter is set as 1, the unit for Parameters 02-09 and 02-12 will be changed from
% to °C.
When this parameter is set as 1, the default setting of Pr.02-09 will change from 50% to 125℃.
Control mode
Motor fan activation level
F FOCPG FOCPM
Settings 0.0~100.0%
0.0~150.0℃
Factory default: 50.0
When the Parameters 03-05 to 03-07 for the multi-function output terminal are set to 45, the
motor fan will start or stop according to this parameter setting.
Control mode
Control mode
Electronic thermal relay selection 1
F FOCPG FOCPM
Factory default: 2
Settings 0: Inverter motor
Electronic thermal characteristic for motor
F FOCPG FOCPM
1: Standard motor
2: Disable
Factory default: 60.0
Settings 30.0~600.0 seconds
To prevent self-cooled motor from over heating at low speed operation, the user can set the
electronic thermal relay to limit the allowed output power of the Hybrid Servo Controller.
Control mode
Control mode
Control mode
Control mode
Control mode
Output frequency at malfunction
VF FOCPG FOCPM
Settings 0.00~655.35Hz
Ourput voltage at malfunction
VF FOCPG FOCPM
Settings 0.0~6553.5V
DC side voltage at malfunction
VF FOCPG FOCPM
Settings 0.0~6553.5V
Ourput current at malfunction
VF FOCPG FOCPM
Settings 0.00~655.35Amp
IGBT temperature at malfunction
VF FOCPG FOCPM
Settings 0.0~6553.5℃
Factory default: Read only
Factory default: Read only
Factory default: Read only
Factory default: Read only
Factory default: Read only
4-31
Page 75

Chapter 4 Parameter Functions|HES Series
V
V
c
V
V
V
V
y
03 Digital/Analog Input/Output Parameters
the parameter can be set during operation
Control mode
When the value of this parameter is set as 44, the pressure feedback is lower than the pressure
stable region (please refer to the description of Parameter 00-26) so the flow control will be
Multi-function input command 3 (MI3)
Multi-function input command 4 (MI4)
Multi-function input command 5 (MI5)
F FOCPG FOCPM
Factory default: 0
Settings 0: No function
44: Injection signal input
45: Confluence/Diversion signal input
46: Reserved
47: Multi-level pressure PI command 1
48: Multi-level pressure PI command 2
51: flow command
performed.
When it enters the pressure stable region, the pressure control will be performed.
If the setting value is 45, the confluence (OFF)/diversion (ON) function will be performed. For
detailed operation, please refer to Chapter 2 for wiring and Chapter 3 for tuning.
Please refer to the description Parameters 00-36 if the setting value is 47 and 48,
When under the pressure control (Pr00-09=1) and the external terminal is ON, the speed
command is the flow command. It is no longer necessary to learn what the flow command is
through the calculation of PI pressure.
Control mode
Digital input response time
F FOCPG FOCPM
Settings 0.001~30.000 se
Factory default: 0.005
This parameter is used to delay and confirm the signal on the digital input terminal.
Control mode
Digital input operation direction
F FOCPG FOCPM
Settings 0~65535
Factory default: 0
This parameter defines the activation level of the input signal.
Bit 0 for the SON terminal, bit 2 for the EMG terminal, bit 3 for the RES terminal, bits 4~6
correspond to MI3~MI5, respectively.
Control mode
Control mode
Control mode
Multi-function output 1 (Relay 1)
F FOCPG FOCPM
Multi-function Output 2 (MOI)
F FOCPG FOCPM
Multi-function Output 3 (MO2)
F FOCPG FOCPM
Factory default: 11
Factory default: 0
Factory default: 0
Settings 0: No function
1: Operation indication
9: Hybrid Servo Controller is read
11: Error indication
44: Displacement switch signal
45: Motor fan control signal
4-32
Page 76

Chapter 4 Parameter Functions|HES Series
V
V
V
V
V
V
Control mode
Multi-function output direction
F FOCPG FOCPM
Settings 0~65535
Factory default: 0
This parameter is used for bit-wise setting. If the corresponding bit is 1, the multi-function
output is set as reverse direction.
Control mode
Low-pass filtering time of keypad display
F FOCPG FOCPM
Factory default: 0.010
Settings 0.001~65.535 seconds
This parameter can be set to reduce the fluctuation of the readings on the keyapd.
Control mode
Maximum output voltage for pressure feedback
F FOCPG FOCPM
Factory default: 10.0
Settings 5.0~10.0 V
Control mode
Minimum output voltage for pressure feedback
F FOCPG FOCPM
Factory default: 0.0
Settings 0.0~2.0V
This parameter defines the pressure feedback output voltage type.
If the pressure feedback has a bias, can adjust this parameter to eliminate the bias.
Control mode
Type of Pressure Feedback Selection
F FOCPG FOCPM
Settings 0:
1:
Current
Voltage
Factory default: 1
PO (Pressure Feedback) terminal: Add a current-fed pressure feedback (4~20mA)
The following are required when using it:
Switch the SW100 on the I/O board to “I”.
Set Pr03-12 = 0 (4~20mA)
Set Pr00-36 =1 (Enable detection of the pressure feedback disconnection)
Control mode
Confluence Master/Slave Selection
F FOCPG FOCPM
Settings 0: No function
1: Master 1
2: Slave/Master 2
3: Slave/Master 3
Factory default: 0
In a stand-alone system, this parameter is set as 0
In a confluence system, the parameter is set as 1 for the Master and 2 for the Slave
With multi-function input terminal function 45, the confluence/diversion can be configured. For
detailed operation, please refer to Chapter 2 for wiring and Chapter 3 for tuning.
The difference between Master 2 and Master 3 is that the Master 3 can be configured as
confluent with other Slaves during confluence, however, the Master 2 can be configured for
stand-alone operation.
When Pr.03-13 is set as 2: Slave, at the same time, Pr.01-01 will be set as 2 and Pr.03-15 will
be set as 1 automatically.
4-33
Page 77

Chapter 4 Parameter Functions|HES Series
V
V
V
V
V
V
Control mode
Slave's proportion of the Master’s flow
F FOCPG FOCPM
Factory default: 100.0
Settings 0.0~65535.5 %
This parameter setting is required only for the Master but not needed for the Slave.
In a confluence system, this parameter value defines the Slave’s portion of the Master’s flow.
Example: Slave is 60L/min and Master is 40L/min, so the setting is 60/40 * 100% = 150%
For confluence of more than 2 pump, the values for the slaves must be the same. For
example, if the total flow for a three-pump system is 200L/min, where the Master is
40L/min, then the two Slaves should be 80L/min. The setting of Parameter 03-14 should
be 160/40 = 400%
Control mode
Source of frequency command
F FOCPG FOCPM
Settings 0: Digital Operation Panel
1: RS485 Communication
2~5: Reserved
Factory default: 0
This parameter is used for EMVJ-MF01.For detailed operation, please refer to Chapter 3 for
tuning.
In a confluence system, if the Slave’s frequency command is given through the RS485
communication, the setting value should be 1.
Control mode
Limit for the Slave reverse depressurization torque
F FOCPG FOCPM
Factory default: 20
Settings 0~500%
Set the torque limit for the Slave’s reverse operation.
Control mode
Slave’s activation level
F FOCPG FOCPM
Settings 0~100%
Factory default: 50
This parameter setting is required only for the Master but not needed for the Slave.
This parameter determines the activation level for the Slave. A 100% value corresponds to the
full flow of the Master.
Control mode
Communication error treatment
F FOCPG FOCPM
Settings 0: Warn and keep operation
1: Warn and ramp to stop
2: Warn and coast to stop
3: No action and no display
Factory default: 0
This parameter is used to set the handling status of the drive when a communication timeout
error (such as disconnection) occurs.
Control mode
Time-out detection
F FOCPG FOCPM
Settings 0.0~100.0 seconds
Factory default: 0.0
This parameter is used to set the time of the time-out event for the communication and the
keypad transmission.
4-34
Page 78

Chapter 4 Parameter Functions|HES Series
V
V
Control mode
Start-up display selection
F FOCPG FOCPM
Factory default: 0
Settings 0: F (frequency command)
1: H (actual frequency)
2: Multi-function display (user-defined 00-04)
3: A (Output current)
This parameter is used to set the contents of the start-up screen. The content of the
user-defined option is displayed in accordance with the setting value of Parameter 00-04.
Control mode
Slave reverse operation for depressurization
F FOCPG FOCPM
Factory default: 0
Settings 0: Disabled
1: Enabled
This parameter setting is required only for the Slave but not needed for the Master.
When the parameter is set as 1, it is necessary to make sure that the outlet end of the Slave is
not installed with any one-way valve and the parameter 03-16 is set as 500.
4-35
Page 79

Chapter 5 Methods of Anomaly
5-1 Unusual Signal
5-1-1 Indicator Display
5-1-2 Error Messages Displayed on Digital Operation Panel KPVJ-LE01
5-2 Over current (OC)
5-3 Ground fault (GFF)
5-4 Over voltage (OV)
5-5 Low voltage (Lv)
5-6 Overheat (OH1)
5-7 Overload (OL)
Chapter 5 Methods of Anomaly Diagnos is |HES Series
Diagnosis
5-8 Phase loss in power supply (PHL)
5-9 Resolutions for electromagnetic noise and induction noise
5-10 Environment and facilities for installation
The Hybrid Servo Controller is capable of displaying warning messages such as over voltage, low
voltage, and over current and equipped with the protection function. Once any malfunction occurs, the
protection function will be activated and the Hybrid Servo Controller will stops its input, followed by the
action of the anomaly connection point and stopping of the servo oil pump. Please refer to the cause
and resolution that corresponds to the error message displayed by the Hybrid Servo Controller for
troubleshooting. The error record will be stored in the internal memory of the Hybrid Servo Controller
(up to the most recent six error messages) and can be read by the digital operation panel or
communication through parametric readout.
; Upon the occurrence of anomaly, wait for five seconds after the anomaly is resolved
before pressing the RESET key.
; For Hybrid Servo Controllers with power
power is turned off and for ten minutes for models with power
≦ 22kW, wait for five minutes after the
≧ 30kW. Verif y that
the charging indicator is off. Measure the DC voltage between terminals
which should be below DC25V before opening the machine cover and starting the
inspection.
5-1
~ ,
Page 80

Chapter 5 Methods of Anomaly Diagnos is |HES Series
5-1 Unusual Signal
5-1-1 Indicator Display
1
Indicator of PG card pow er
Ind icator of Encoder f e edba ck
2
3
Warning indicator
When the sin or cos phase voltage is lower than required values in the rotational
transfor mer, t he war ning indi cator wil l be on. Pl ease check if the encoder wire is
connected corr ec tly. If it h ap pe ns in operat ion, please check for an y
inte rference.
4
Powe r indicat or
Powe r indicat or
5
5-2
Page 81

Chapter 5 Methods of Anomaly Diagnos is |HES Series
5-1-2 Error Messages Displayed on Digital Operation Panel
KPVJ-LE01
Display Code Description of Anomaly Troubleshooting
Over current occurs in
acceleration; output current
exceeds by three times the rated
current of the frequency inverter
Over current occurs in
deceleration; output current
exceeds by three times the rated
current of the frequency inverter
Over current occurs when running;
output current exceeds by three
times the rated current of the
frequency inverter
Over current occurs when the
system is off. Unusual hardware
circuit by current detection
Shorting of top and bottom bridges
in IGBT module are detected by
Hybrid Servo Controller
Over voltage occurs on the
internal DC high voltage side
detected by Hybrid Servo
Controller in acceleration
Over voltage occurs on the
internal DC high voltage side
detected by Hybrid Servo
Controller in deceleration
Over voltage occurs on the
internal DC high voltage side
detected by Hybrid Servo
Controller when running
Over voltage occurs when the
system is off. Unusual hardware
circuit by current detection
The DC voltage of Hybrid Servo
Controller is lower than the setting
in Pr.02-07 in acceleration
The DC voltage of Hybrid Servo
Controller is lower than the setting
in Pr.02-07 in deceleration
The DC voltage of Hybrid Servo
Controller is lower than the setting
in Pr.02-07 when running at
constant speed
The DC voltage of Hybrid Servo
Controller is lower than the setting
in Pr.02-07 when off
Phase los protection
Check if the insulation of the wire from U-V-W
to the hybrid servo motor is bad
Check if the hybrid servo motor is stalled
Replace with the Hybrid Servo Controller with
larger output capacity
Check if the insulation of the wire from U-V-W
to the hybrid servo motor is bad
Check if the hybrid servo motor is stalled
Replace with the Hybrid Servo Controller with
larger output capacity
Check if the insulation of the wire from U-V-W
to the hybrid servo motor is bad
Check if the hybrid servo motor is stalled
Replace with the Hybrid Servo Controller with
larger output capacity
Send back to manufacturer for repair
Send back to manufacturer for repair
230: DC 450V
460V: DC 900V
Check if the input voltage is within the range
of voltage rating of Hybrid Servo Controller
and monitor for any occurrence of surge
voltage
For Hybrid Servo Controller with power below
22kW, the issue can be resolved by adjusting
the software brake action level in Pr.02-00
For Hybrid Servo Controller with power
above 22kW, the issue can be resolved by
adjusting the action level in the brake unit
(Please refer to Appendix B-6 for details.)
Check if the input voltage is within the range
of voltage rating of Hybrid Servo Controller
and monitor for any occurrence of surge
voltage
Check if the voltage of input power is normal
Check if there is any sudden heavy load
Adjust the low voltage level in Pr.02-07
Check if only single phase power is sent or
phase los occurs for three phase models
For models with 40HP and above, check if
the AC side fuse is blown
5-3
Page 82

Chapter 5 Methods of Anomaly Diagnos is |HES Series
Display Code Description of Anomaly Troubleshooting
Ground wire protection, applies
when Hybrid Servo Controller
detects the output is grounded and
the ground current is higher than
its rated value by over 50%. Note
that this protection is only for
Hybrid Servo Controller and not for
human.
Overheating of IGBT detected by
Hybrid Servo Controller,
exceeding the protection level
7.5~15HP: 90℃
20~100HP: 100℃
Over heating of heat sink detected
by Hybrid Servo Controller,
exceeding the protection level
(90 )℃
IGBT over heated and unusual fan
function
Output current exceeds the
maximum cap acity o f H yb rid S erv o
Controller
Check the wire of hybrid servo motor is
shorted or grounded
Check if IGBT power module is damaged
Check if the output side wire has bad
insulation
Check if environment temperature if too high
Check if there is any foreign object on the
heat sink and if the fan is running
Check if there is sufficient space for air
circulation for Hybrid Servo Controller
Check if environment temperature if too high
Check if there is any foreign object on the
heat sink and if the fan is running
Check if there is sufficient space for air
circulation for Hybrid Servo Controller
Check the fan kit to see if it is blocked.
Return to factory for repair.
Check if the motor is overloaded
Increase the output capacity of Hybrid Servo
Controller
Servo motor overloaded Change the product conditions
DC Fuse blown on (FUSE), for
models below (including) 30HP
Abnormal memory write in
Check if the transistor module fuse is bad
Check if the load side is shorted
Press RESET key to return all parameters to
factory default values
If the above does not work, send back to
Abnormal memory readout
manufacturer for repair
Detection of abnormal output of
three-phase total current
Detection of abnormal current in U
phase
Detection of abnormal current in V
phase
Turn off the power and restart. If the same
problem persists, send back to manufacturer
for repair
Detection of abnormal current in W
phase
When external EF terminals are
closed, Hybrid Servo Controller
stops its output
Troubleshoot and press ”RESET”
When external EMG terminal is
not connected to the heating
switch of hybrid servo motor or the
motor is overheated (130℃),
Troubleshoot and press ”RESET”
Hybrid Servo Controller stops its
input
Abnormal brake crystal detected
by Hybrid Servo Controller
Press RESET. If the display still shows “bF”,
please send the unit back to manufacturer for
repair
5-4
Page 83

Chapter 5 Methods of Anomaly Diagnos is |HES Series
Display Code Description of Anomaly Troubleshooting
Abnormal in OH1 hardware wire Send back to manufacturer for repair
Abnormal in OH2 hardware wire Send back to manufacturer for repair
Abnormal cc protection hardware
wire
Abnormal oc protection hardware
wire
Abnormal ov protection hardware
wire
Turn off the power and restart. If the same
problem persists, send back to manufacturer
for repair
Abnormal GFF protection
hardware wire
Open circuit of PG feedback Check the PG feedback wiring
Stalled PG feedback
Check the PG feedback wiring
Check PI gain and the settings for
acceleration/deceleration are suitable
Abnormal PG slip
Send back to manufacturer for repair
Check if the settings of Pr.01-26 match those
Incorrect PG card information
in the installed PG card. If so, please send
back to manufacturer for repair
Check if the safety loop card is installed
Abnormal installation or action of
JP18, the safety loop card/control
board pin
correctly on the control board and if the
output action is normal
Check if pin JP18 is inserted into the wrong
position on the control board
Check if the pressure sensor is working
Pressure is too high
properly
Adjust pressure PI control Pr.00-20~00-37
Check if the wiring of pressure sensor is
Open circuit of pressure feedback
correct
Check if the pressure sensor signal is below
1V
Alarm reset
Once the issue that tripped the system and triggers the alarm is eliminated, one can resume the
system to normal status by pressing the Reset key on the panel (as shown in the figure) to set the
external terminal to "Anomaly reset command" and sending the command by turning on the
terminal or via communication. Before any anomaly alarm is resolved, make sure the operation
signal is at open circuit status (OFF) to avoid immediate machine running upon anomaly reset that
may case mechanical damage or personnel casualty.
5-5
Page 84

Chapter 5 Methods of Anomaly Diagnos is |HES Series
F
H
U
KPV-CE01
EXT PU
JOG
RUN
PU
STOP
RESET
5-6
Page 85

5-2 Over Current (OC)
Chapter 5 Methods of Anomaly Diagnos is |HES Series
Remove short circuit
or ground fault
Troubleshoot
short circuit
Reduce load or
increase hybrid serv o
controller capacity
ocA
Over current in
accel er at i o n
Check for any shorts between
Yes
motor connection terminals U,
V, and W or shorts to groun d
ocd
over current in
decele r at i on
No
Yes
Check for overload
No
It's likely hybrid servo
controller breaks down or
malfunctions due to
noise. Please contact
Delta for assistance.
oc
over current
while running at
constant speed
5-3 Ground Fault (GFF)
GFF
Ground fault
Check if the output
circuit (cable or motor)
of hybrid servo controller
is shorted to ground
Yes
Resol v e
ground fault
No
It's li kely hybrid servo controller
breaks down or malfunctions
due to noise. Please contact
Delta for assistance.
5-7
Page 86

Chapter 5 Methods of Anomaly Diagnos is |HES Series
5-4 Over Voltage (ov)
OV: Over voltage
Lower voltage of power
supply within the upper
limit
It's likely hybrid servo
controller breaks down or
malfuncti ons due to noise.
Please contact Delta for
assistance.
No
No
exceeds the protection value in
5-5 Low Voltage (Lv)
Lv
Low voltage
If there is power outage (including
momentary blackout)
No
Check if voltage of
power supply is wi thin
the regulated range
Yes
If the voltage of DC BUS
action
Yes
Consider
implementing brake
Yes
unit
Reset and
restart
Any broken devices or
bad connection in the
supply circuit
No
If voltage of power supply
is within regulated range
Yes
Any load in the same power
supply system that has larger
load of starting current
No
If Lv occurs when the circuit
breaker and electromagnetic
contactor are ON
No
It's likely hybrid servo controller breaks
down or malfunctions due to noise.
Please contact Delta for assistance.
Yes
Yes
No
Replace broken componen ts
and correct connection
Modify power supply system to
comply with the regulations
No
If the capacity of power supply
transformer is appropriate
Yes
5-8
Page 87

5-6 Over Heat (OH)
Hybrid servo controller is
overheated
Heat sink is
overheated
Chapter 5 Methods of Anomaly Diagnos is |HES Series
Is the temperature of heat sink
higher than 90
Is load too heavy
Is cooling fan running
Is airway of cooling fan clogged
Is environment temperature within
regulated range
Yes
No
Yes
No
Yes
°
C
Yes
No
Yes
No
No
Temperature detection circuit on
circuit board malfunctions. Please
contact Delta for assistan ce.
Reduce load
Replace cooling fan
Remove the clog
It's likely hybrid servo controller breaks
down or malfunctions due to noise. Please
contact Delta for assista nce.
Adjusted the
temperature regulated range
environment
to
5-7 Overload (oL)
Hybrid servo controller is
Reduce load or increase the
capacity of hybrid servo controller
overl oa de d
5-9
Page 88

Chapter 5 Methods of Anomaly Diagnos is |HES Series
5-8 Phase Loss (PHL)
Power supply suffers
phase loss
Are main circuit power terminals R, S, and T all
connected completely
Yes
Are all screws on terminal
plate tightened
Yes
Is voltage of the three phase
power supply unbalanced
No
It's likely hybrid servo controller
breaks down or malfunctions due
to noise. Please contact Delta for
assistance.
No
Yes
No
Connect the thres
phases securely
Tighten all screws
Please check wiring and
power system for
abnormal behavior
5-10
Page 89

Chapter 5 Methods of Anomaly Diagnos is |HES Series
5-9 Electromagnetic/Induction Noise
If there exist noise sources around Hybrid Servo Controller, they will affect Hybrid Servo Controller
through radiation or the power lines, leading to malfunction of control loop and causing tripping or
even damage of Hybrid Servo Controller. One natural solution is to make Hybrid Servo Controller
more immune to noise. However, it is not economical and the improvement is limited. It is best to
resort to methods that achieve improvements outside Hybrid Servo Controller.
1. Add surge killer on the relay or contact to suppress switching surge between ON/OFF.
2. Shorten the wiring length of the control circuit or serial circuit and separate from the main
circuit wiring.
3. Comply with the wiring regulation for those shielded wire and use isolation amplifier for
long wire.
4. The ground terminal of Hybrid Servo Controller must be connected to ground by
following the associated regulations. It must have its own ground connection and cannot
share with electrical welder and other power equipments.
5. Insert noise filter to the input terminal of Hybrid Servo Contr oller to prevent the noise
entering from the power lines.
In a word, three-level solutions for electromagnetic noise are “no product”, “no spread” and “no
receive”.
5-11
Page 90

Chapter 5 Methods of Anomaly Diagnos is |HES Series
5-10 Environment and Facilities for Installation
The Hybrid Servo Controller is a device for electronic components. Detailed descriptions of the
environment suitable for its operation can be found in the specifications. If the listed regulations cannot
be followed for any reason, there must be corresponding remedial measures or contingency solutions.
1. To prevent vibration, anti-vibration spacer is the last choice. The vibration tolerance must
be within the specification. The vibration effect is equal to the mechanical stress and it
cannot occur frequently, continuously or repeatedly to prevent damaging AC motor drive.
2. Store in a clean and dry location free from corrosive fumes/dust to prevent rustiness, poor
contact. It also may cause short by low insulation in a humid location. The solution is to
use both paint and dust-proof. For particular occasion, use the enclosure with whole-seal
structure.
3. The environment temperatur e must be just right. If the t emperature is too high or too low,
the lifetime and action reliability of electronic components will be affected. For
semiconductor devices, once the conditions exceed the rated values, consequences
associated with “damage” are expected. As a result, in addition to providing cooler and
shades that block the direct sunlight that are aimed to achieve required environment
temperature, it is also necessary to perform cleaning and spot check the air filter in the
storage tray of Hybrid Servo Controller and the angle of cooling fan. Moreover, the
microcomputer may not work at extremely temperature, space heater is needed for
machines that are installed and operated in cold regions.
4. Avoid moisture and occurrence of condensation. If the Hybrid Servo Controller is expecte d
to be shut down for an extended period of time, be careful not to let condensation happen
once the air conditioning is turned off. It is also preferred that the cooling equipment in the
electrical room can also work as a dehumidifier.
5-12
Page 91

Chapter 6 Maintenance|HES Series
Chapter 6 Maintenance
Maintenance and Inspections
The Hybrid Servo Controller has a comprehensive fault diagnostic system that includes several different
alarms and fault messages. Once a fault is detected, the corresponding protective functions will be
activated. The following faults are displayed as shown on the Hybrid Servo Controller digital keypad
display. The six most recent faults can be read from the digital keypad or communication.
The Hybrid Servo Controller is made up by numerous components, such as electronic components,
including IC, resistor, capacity, transistor, and cooling fan, relay, etc. These components can’t be used
permanently. They have limited-life even under normal operation. Preventive maintenance is required to
operate this Hybrid Servo Controller in its optimal condition, and to ensure a long life.
Check your Hybrid Servo Controller regularly to ensure there are no abnormalities during operation and
follows the precautions::
; Wait for five minutes after the Hybrid Servo Controller with power 22kW≦ is
disconnected with power supply and wait for ten minutes for units with power ≧
30kW and verify that the charging indicator is off. Measure to make sure that the DC
voltage between terminals
inspection.
; Only qualified personnel can install, wire and maintain Hybrid Servo Controller.
Please take off any metal objects, such as watches and rings, before operation. And
only insulated tools are allowed.
; Never attempt any alternation of the Hybrid Servo Controller.
; Make sure that installation environment comply with regulations without abnormal
noise, vibration and smell.
~ is lower than DC25V before starting the
6-1
Page 92

Chapter 6 Maintenance|HES Series
Maintenance and Inspections
Before the check-up, always turn off the AC input power and remove the cover. Wait at least 10
minutes after all display lamps have gone out, and then confirm that the capacitors have fully
discharged by measuring the voltage between DC+ and DC-. The voltage between DC+ and
DC-should be less than 25VDC.
Ambient environment
Maintenance Period
Check Items Methods and Criterion
Check the ambient temperature, humidity,
vibration and see if there are any dust, gas, oil or
water drops
If there are any dangerous objects Visual inspection ○
Visual inspection and
measurement with
equipment with standard
specification
Daily Half
year
○
One
Year
Actuation Oil
Maintenance Period
Check Items Methods and Criterion
If oil is sufficient Visual inspection ○
If the oil temperature is below 60°C
(recommended temperature is 15°C~ 50°C)
If the oil color is normal Visual inspection ○
Replace Actuation Oil regularly ○
By thermometer ○
Daily Half
year
One
Year
Servo Oil Pump
Period of inspection
Check Items Methods and Criterion
If the set screws of Servo Oil Pump are loose Visual inspection
If the coupling screws of Servo Oil Pump are
loose
If the cooling fan of hybrid servo motor is running
normally and the air flow is sufficient
Clean the cooling fan of hybrid servo motor
regularly
Visual inspection
Visual inspection
Daily Half
year
○
○
○
○
One
Year
Voltage
Maintenance Period
Check Items Methods and Criterion
Check if the voltage of main circuit and control
circuit is correct
Measure with multimeter
with standard specification
Daily Half
year
○
One
Year
Keypad
Period of inspection
Check Items Methods and Criterion
Is the display clear for reading Visual inspection ○
Any missing characters ○
6-2
Daily Half
year
One
Year
Page 93

Chapter 6 Maintenance|HES Series
Mechanical parts
Period of inspection
Check Items Methods and Criterion
If there is any abnormal sound or vibration
If there are any loose screws Tighten the screws
If any part is deformed or damaged Visual inspection
If there is any color change by overheating Visual inspection
If there is any dust or dirt Visual inspection
Visual and aural
inspection
Daily Half
Main Circuit Part
Period of inspection
Check Items Method of Inspection
Have any bolts become loose or missing? Tighten ○
Is there any distortion, cracking, breaking of
machine and insulation or discoloration due to
overheating and aging?
Are there any dust or stains? Visual inspection
Visual inspection
Daily Half
One
year
year
Year
○
○
○
○
○
One
Year
○
○
Main Circuit ~Terminals & Wiring
Period of inspection
Check Items Method of Inspection
Is there any discoloration and distortion of terminals
and copper plate due to overheating?
Is there any breaking and discoloration of the
protection layer of wires?
Visual inspection
Visual inspection
Daily Half
Main Circuit~Terminal Unit
Period of inspection
Check Items Method of Inspection
Is there any damage? Visual inspection ○
Daily Half
Main Circuit ~Filter Capacitor
Period of inspection
Check Items Method of Inspection
Is there any leakage, discoloration, crack, and
buckling of exterior cover?
Is the safety valve out? Is there any obvious
expansion of the valve?
Measure the electrostatic capacity according to the
actual requirements
Visual inspection ○
Visual inspection ○
○
Daily Half
One
year
year
year
Year
○
○
One
Year
One
Year
Main Circuit ~Resistor
Period of inspection
Check Items Method of Inspection
Is there any odor from overheating and breaking of
insulation?
Is there any open circuit? Visual inspection ○
Is there any damage of the connection end? Measure by hand-held ○
6-3
Visual inspection and
listening
Daily Half
○
year
One
Year
Page 94

Chapter 6 Maintenance|HES Series
multimeter
Main Circuit ~Transformer & Reactor
Check Items Method of Inspection
Any unusual vibration and odor? Visual inspection and
listening
Main Circuit ~Electromagnetic Contactor & Relay
Check Items Method of Inspection
Is there any sound of vibration while running? Aural inspection ○
Is the connection contact is good? Visual inspection ○
Control Circuit ~Control Printed Circuit & Connector
Check Items Method of Inspection
Has the screw and connector become loose? Tighten
Is there any unusual odor and discoloration? By smelling and visual
Are there any cracks, breaking, distortion, and
apparent rust?
Are there any leaks and signs of distortion of the
capacitor?
Visual inspection
Visual inspection
Period of inspection
Daily Half
year
○
Period of inspection
Daily Half
year
Period of inspection
Daily Half
year
One
Year
One
Year
One
Year
○
○
○
○
Cooling fan of cooling system
Period of inspection
Check Items Method of Inspection
Visual, aural inspection
and turn the fan with hand
Is there any unusual sound and vibration?
Have any bolts become loose? Tighten
Is there any discoloration due to overheating? Visual inspection
(turn off the power before
operation) to see if it
rotates smoothly
Daily Half
year
○
○
○
Cooling System ~Air Duct
Period of inspection
Check Items Method of Inspection
Is the heatsink, the inlet and exhaust unclogged
and free of foreign objects?
NOTE
To treat the contaminated spots, please wipe clean with cloths that is chemically neutral. Use air purifier to remove the
dust.
Aural inspection ○
Daily Half
year
One
Year
One
Year
6-4
Page 95

Appendix A. Instructions of Product Packagin g|HES Series
Appendix A. Instructions of Product
A-1 Descriptions of Product packaging
A-2 Detailed List of Product Packaging
; This product is made by a manufacturing process with strict quality control. If the
Packaging
product is damaged in the delivery by external force or crushing, please contact
your local agents.
A-1
Page 96

Appendix A. Instructions of Product Packagin g|HES Series
A-1 Descriptions of Product Packaging
Remove the packaging of the external box
Models:
HES063H23A; HES080G23A; HES080H23A;
HES100G23A; HES100H23A;
HES063G43A;HES063H43A; HES080G43A;
HES080H43A; HES100G43A; HES100H43A;
Models:
HES125H23A; HES160G23A;
Models:
HES125G23A; HES125G43A;
HES125H43A; HES160G43A; HES160H43A; HES200G43A
A-2
Page 97

Appendix A. Instructions of Product Packagin g|HES Series
A-2 Detailed List of Product Packaging
HES063H23A
1 Servo controller VFD110VL23A06HA
W
H
H1
DW1
Unit: mm[inch]
Frame W W1 H H1 D S1
C
235.0 [9.25] 204.0 [8.03] 350.0 [13.78] 337.0 [13.27] 146.0 [5.75] 6.5 [0.26]
2 Servo oil pump HSP-025-110-23A
S1S1
Component Model Number Quantity
Motor ECMA-ER181BP3 1
Oil pump EIPC3-025RK23 1
Pressure sensor WIKA A-10 1
A-3
Page 98

Appendix A. Instructions of Product Packagin g|HES Series
3 Accessories Kit HESP-063-H-N-23
Component Model Number Quantity
PG card EMVJ-PG02R 1
※ Braking resistor
BR1K0W8P3 1
Coding device cable 5m
Magnetic ring of power
cable
Sensor clamp
1
1
1
※ Braking resistor 1000W 8.3Ω Unit: min
A-4
Page 99

HES080G23A
1 Servo controller VFD110VL23A08GA
Appendix A. Instructions of Product Packagin g|HES Series
W
H
H1
DW1
Unit: mm[inch]
Frame W W1 H H1 D S1
C
235.0 [9.25] 204.0 [8.03] 350.0 [13.78] 337.0 [13.27] 146.0 [5.75] 6.5 [0.26]
2 Servo oil pump HSP-032-110-23A
S1S1
Component Model Number Quantity
Motor ECMA-ER181BP3 1
Oil pump EIPC3-032RK23 1
Pressure sensor WIKA A-10 1
A-5
Page 100

Appendix A. Instructions of Product Packagin g|HES Series
3 Accessories Kit HESP-080-G-N-23
Component Model Number Quantity
PG card EMVJ-PG02R 1
※ Braking resistor
Coding device cable 5m
Magnetic ring of power
cable
Sensor clamp
BR1K0W8P3 1
1
1
1
※ Braking resistor 1000W 8.3Ω Unit: min
A-6
 Loading...
Loading...