

Page 1
ᛷăරёϯ፶
ĈᛋಡᏮϯ፶
1
5
非常感谢您选用台达产品,请在使用前,详细阅读本使用说明书,并将手册放置于易拿处以便参考。
րЕޘଠטጡፆүΊ!
!ڦຍְี!
注意!电击危险!当电源上电时,请勿触摸 AC 接线端,以免遭致电击。检查输入电源时,请确认电源是关闭的。
本机为开放型装置,因此当要使用于危险的应用场合,如:会造成人员严重伤害及其它设备损坏,请确认将其安装至自动故障安全防
护装置设备上。
1. 请使用适合 M3 螺丝的压着端子(最大宽度 7.2mm) 48*24 为 6.0mm,端子螺丝在锁紧时请勿过度用力。确认配线接到正确适当的端子。
2. 如果有尘土或金属残渣掉入机身,可能会造成误动作。请勿修改或擅自拆卸本温控器。空余端子请勿使用。
3. 安装时离开高电压及具有强高周波噪声的地方防止干扰。在以下情况会发生的场所避免使用此温控器:
(a) 灰尘过多及有腐蚀性气体; (b)高湿度及高辐射; (c)震动及冲击;
4. 实施配线时及更换温度传感器时,务必关闭电源。
5. 热电对的引线要延长时或有结线的场合请依热电对的种类务必使用补偿导线。
6. 白金测温阻抗体的引线延长时或有结线的场合,请使用阻抗体的物体。
7. 由测温体到温调本体的配线路请用最短距离配线,为了避免噪声及诱导的影响尽可能将电源线和负载配线分开。
8. 本机器为开放型机壳,必须安装于具防尘、防潮及免于电击/冲击之外壳配电箱内。
9. 上电前请确认电源/信号装配是否正确,否则可能造成严重损坏。
10. 上电时请勿接触机体端子或进行维修,否则可能遭致电击。
11. 切断电源一分钟之内,线路未完全放电,请勿接触内部线路。
12. 请使用干布清洁本机器,勿使用含有酸、碱的液体清洁。
யݡొҜЩჍ
Ᏼᔉྤ!
DTB
系列名称 DTB:台达 B 系列温控器
2 3 4
面板尺寸(W×H)
6
7
8
第一组输出选项
第二组输出选项
选购配备
供电种类
4824:1/32 DIN W48 ×H24mm
4848:1/16 DIN W48 ×H48mm
R:继电器输出 SPDT (SPST 48x48/48x24), 250VAC, 5A
V:电压脉冲输出 14V +10% ~ 20%
C:DC 电流输出 4 ~ 20m A L:线性电压输出 0 ~ 10VDC
R:继电器输出 SPDT (SPST 48x48/48x24), 250VAC, 5A
V:电压脉冲输出 14V +10% ~ 20%
无:无 CT,无 EVENT 输入
T:有 CT,无 EVENT 输入
无:交流电源 100 ~ 240V 供电
D:直流电源 DC24V 供电
ޘពϯࣃ
PV
Ĉ
ޘనؠࣃ
SV
Ĉ
ҋજአᏘϯ፶
AT
Ĉ
OUT1/OUT2
Ĉ
ă
:
CF
ALM1 ~ ALM3
Ĉ
Ꮾϯ፶
Ĉ
Ᏼፄనؠᔣ
ᇴфአፋต
1 2 3 4 5 6 7 8
4896:1/8 DIN W48 ×H96mm
9696:1/4 DIN W96 ×H96mm
E:无 CT,有 EVENT 输入
V:阀位控制
- 1 -
Page 2
న
DTB4824 无选购配备,无额外警报输出,可设定第二组输出为警报输出。
DTB4848 选购配备时只有一组警报输出,若需要有第二组时,可设定第二组输出为第二组警报输出。
DTB9696、DTB4896 可选择阀位控制,其选购代码为 DTB9696RRV、DTB4896RRV。
ঈఢ!
输入电源 交流电 100 ~ 240V,50/60Hz;直流电 DC24V ±10%
操作电压范围 交流额定电压 85% ~ 110%;直流额定电压 90% ~ 110%
电源消耗功率 低于 5VA
显示方法 双排七段 LED 显示, 可显示四位。 目前温度值:红色,设定温度值:绿色
热电偶对:K, J, T, E, N, R, S, B,L,U,TXK
输入传感器
控制方法 PID,PID 可编程,手动或 ON/OFF
控制输出种类
显示刻度 可选择小数点一位或无小数点
取样频率 模拟输入:0.15 秒 热电偶或白金电阻:0.4 秒
耐震动 10 ~ 55Hz 10m/s
耐冲击 最大 300m/ s2 3轴 6 方向 各 3 次
操作环境温度 0°C ~ +50°C
存放环境温度 -20°C ~ +65°C
操作高度 低于 2,000 公尺
操作环境湿度 35% ~ 80% RH(无结露)
面板防护等级 IP65
白金测温电阻:Pt100, JPt100
模拟输入:0 ~ 5V,0 ~ 10V, 0 ~ 20mA, 4 ~ 20mA, 0 ~ 50mV
继电器输出,单刀双闸(48x48/48x24 单刀单闸),最大负载为交流 250V,5A 的电阻性负载
电压脉冲输出,直流 14V,最大输出电流 40mA
电流输出,直流 4 ~ 20mA 输出(负载阻抗需小于 600Ω)
仿真电压输出 0 ~ 10V
2
3轴方向 10min
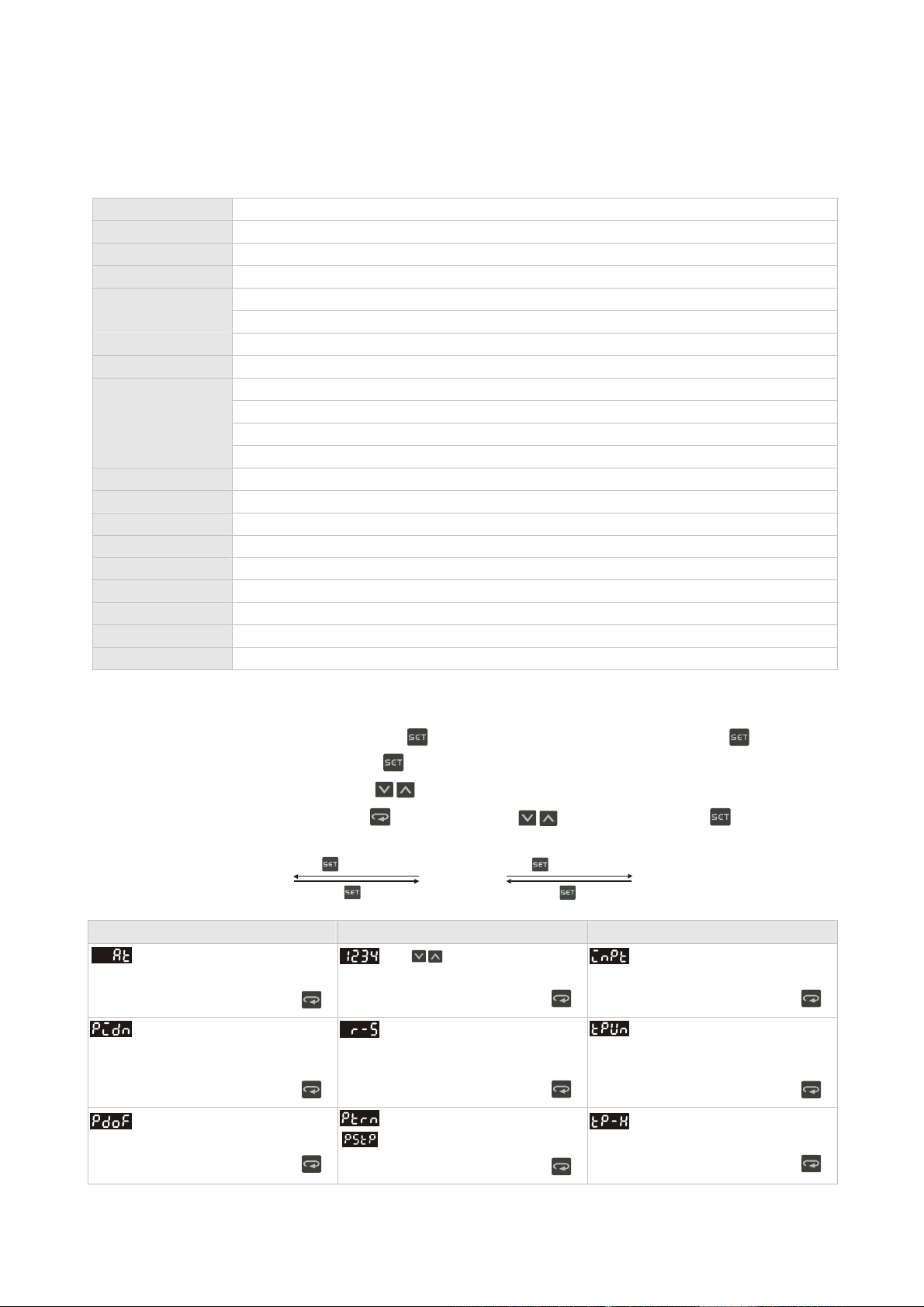
!ણᇴనؠፆүᄲځ!
模式切换按键操作方式:开机设定于运转模式,按一次 可由运转模式切至第二层调整模式,在运转模式下按 超过三秒,可
切至第三层设定模式,在调整模式或设定模式下按
PV/SV:设定目标温度及显示目前温度值,利用
设定方法:在运转模式、调整模式及设定模式按
模式切换及内部选项:
!!!!ᔣҲٺˬࡋ
አፋሀё
!!!!ᔣ
调ፋሀё! 运转ሀё! 设ؠሀё!
自动调谐开关
(PID 控制及 RUN 时设定)
按
选择第 n (0~4)组 PID
(PID 控制时,可选择 4 组 PID;n=4 时为自
动选择 PID 组,详见下表)
按
PD 控制偏差设定
按
一次,可切回至运转模式。
改变目标温度。
选择设定项目,利用 更改设定,完成更改后按 储存设定。
ྻᖼሀё
利用 设定目标温度
控制回路执行∕停止
开始样式设定(PID 程序控制及
时设定)
!!!!ᔣ࿅ˬࡋ
!!!!ᔣ
按
(模拟输入时不显示)
按
按
ؠሀё
设定输入类型
设定温度单位
设定温度范围上限
按
按
按
- 2 -
Page 3
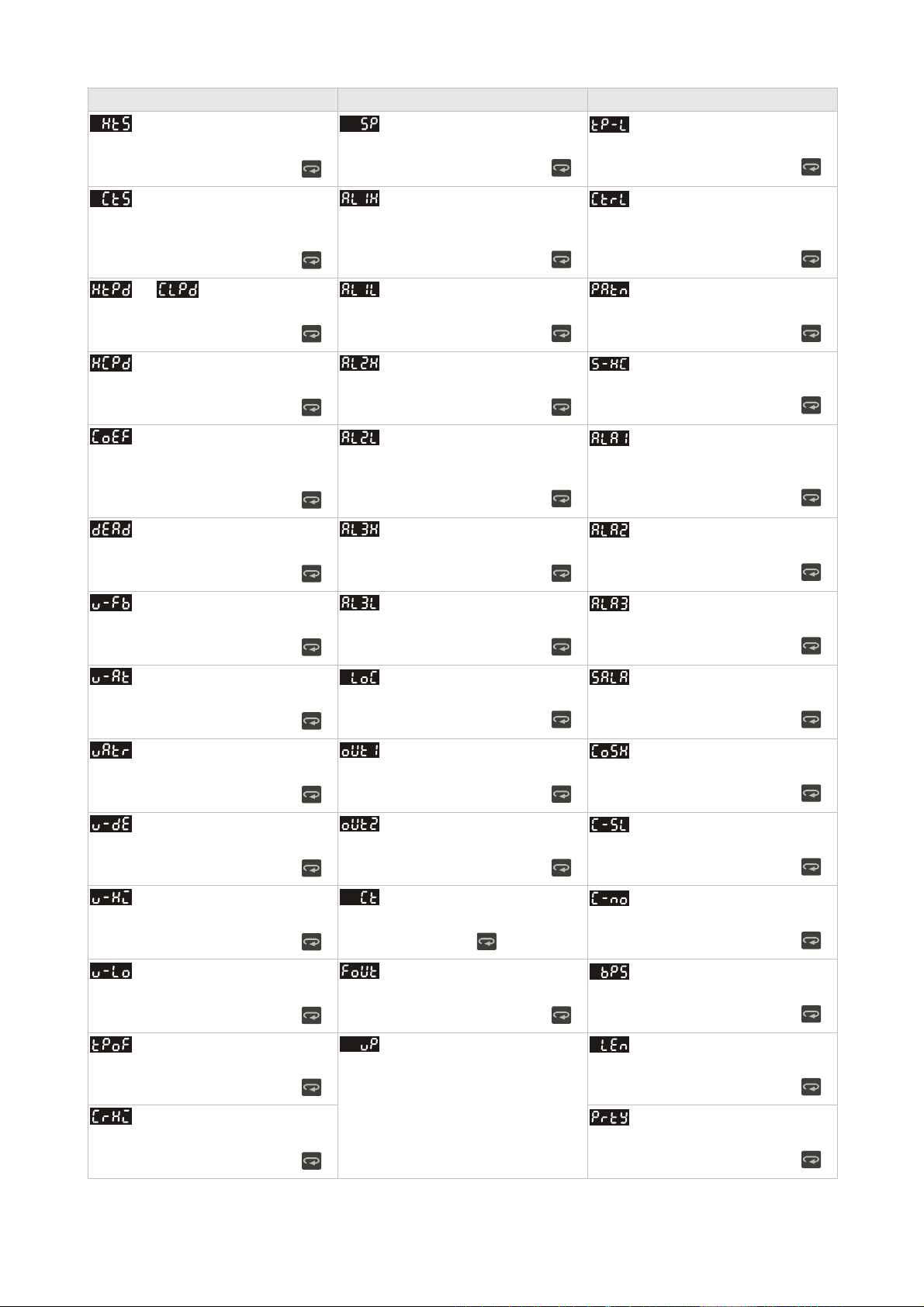
调ፋሀё! 运转ሀё! 设ؠሀё!
加热调节感度设定
(ON-OFF 控制时设定)
冷却调节感度设定
(ON-OFF 控制时设定)
或 设定热∕冷控制周期
(PID 控制时设定)
第二组输出控制周期设定
(PID 控制且双输出时设定)
双输出控制时,输出一与输出二比值
比例带 2=比例带 1xCOEF
(PID 控制且双输出时设定)
双输出重迭区域设定
(Deadband)(双输出时设定)
按
小数点位数设定
(除热电偶型 R, S, B 外皆可设定)
按
警报 1 上限设定
(ALA1 设定警报 1 上限有效时可调)
按
警报 1 下限设定
(ALA1 设定警报 1 下限有效时可调)
警报 2 上限设定
(ALA2 设定警报 2 上限有效时可调)
按
警报 2 下限设定
(ALA2 设定警报 2 下限有效时可调)
按
警报 3 上限设定
(ALA3 设定警报 3 上限有效时可调)
按
按
按
按
按
设定温度范围下限
按
选择控制型式
(选择 PID 程序控制时,进入步骤编辑选项,
详见下表。)
按
选择欲编辑样式
(编号详见下表)
按
选择加热∕冷却或双输出加热冷却
按
警报 1 模式设定
按
警报 2 模式设定
阀位回授设定开关
(有阀位功能时显示)
自动调整回授值
(有阀位回授功能及 STOP 时显示)
阀位全关到全开设定时间
(有阀位功能时显示)
阀位 Deadband 设定
(有阀位功能时显示)
有回授输出上限调整
(有阀位回授功能时显示)
有回授输出下限调整
(有阀位回授功能时显示)
测量温度误差调整
模拟输出上限值调整 ※
(模拟输出时设定显示)
按
按
警报 3 下限设定
(ALA3 设定警报 3 下限有效时可调)
按
按键锁定功能
按
第一组输出输出量显示及调整
(PID 及手动控制 RUN 时显示)
按
第二组输出输出量显示及调整
(双输出 PID 及手动控制 RUN 时显示)
按
显示目前 CT 所测得电流值
(CT 配备时显示)
按
阀位回授输出量
(有阀位回授时显示)
按
阀位回授 D/A 值
(有阀位回授时显示)
按
按
按
按
按
按
按
按
回设定目标温度
按
警报 3 模式设定
设定系统警报
通讯写许可∕禁止
ASCII, RTU 通讯格式选择
通讯地址设定
通讯波特率设定
位长度设定
同位设定
按
按
按
按
按
按
按
按
- 3 -
Page 4
ᗕᏮ ଠטᏮજүဦϯ
调ፋሀё! 运转ሀё! 设ؠሀё!
模拟输出下限调整 ※
(模拟输出时设定显示)
回自动调谐设定
按
※ 1 刻度 = 2.8μA;1 刻度 = 1.3mV
PID 选项:可选择 4 组 PID 任一组,当 n=4 时程序会自动选取最靠近温度设定值的一组 PID。
选择第 n (0~4)组 PID
按
0~3 组 PID
按
设定第 0 组 PID 温度设定值
设定第 0 组比例带设定值
设定第 0 组 Ti 值
设定第 0 组 Td 值
PID 第 0 组积分偏差设定,
AT 自动设定
按
回 PID 控制偏差设定
回设定目标温度
停止位设定
按
回设定输入类型
设定第 3 组 PID 温度设定值
按
设定第 3 组比例带设定值
按
设定第 3 组 Ti 值
按
设定第 3 组 Td 值
按
PID 第 3 组积分偏差设定,
AT 自动设定
按
回 PID 控制偏差设定
按
按
按
按
样式步骤编辑选项: 选项选择 时编辑,以下显示以样式 0 为例。
选择欲编辑样式编号
选择编号
选择 OFF
按
离开样式及步骤编辑选项,跳至 继
续设定
编辑步骤 0 温度
编辑步骤 0(时间单位:时、分)
步骤由 0 ~ 7 依次设定
编辑步骤 7 温度
编辑步骤 7(时间单位:时、分)
按
按
按
按
实际步骤数目设定
选择程序执行时实际步骤数目
设定样式额外执行回圈数(0~99)
设定连结样式,OFF 为程序结束
回编辑样式编号选项
按
按
按
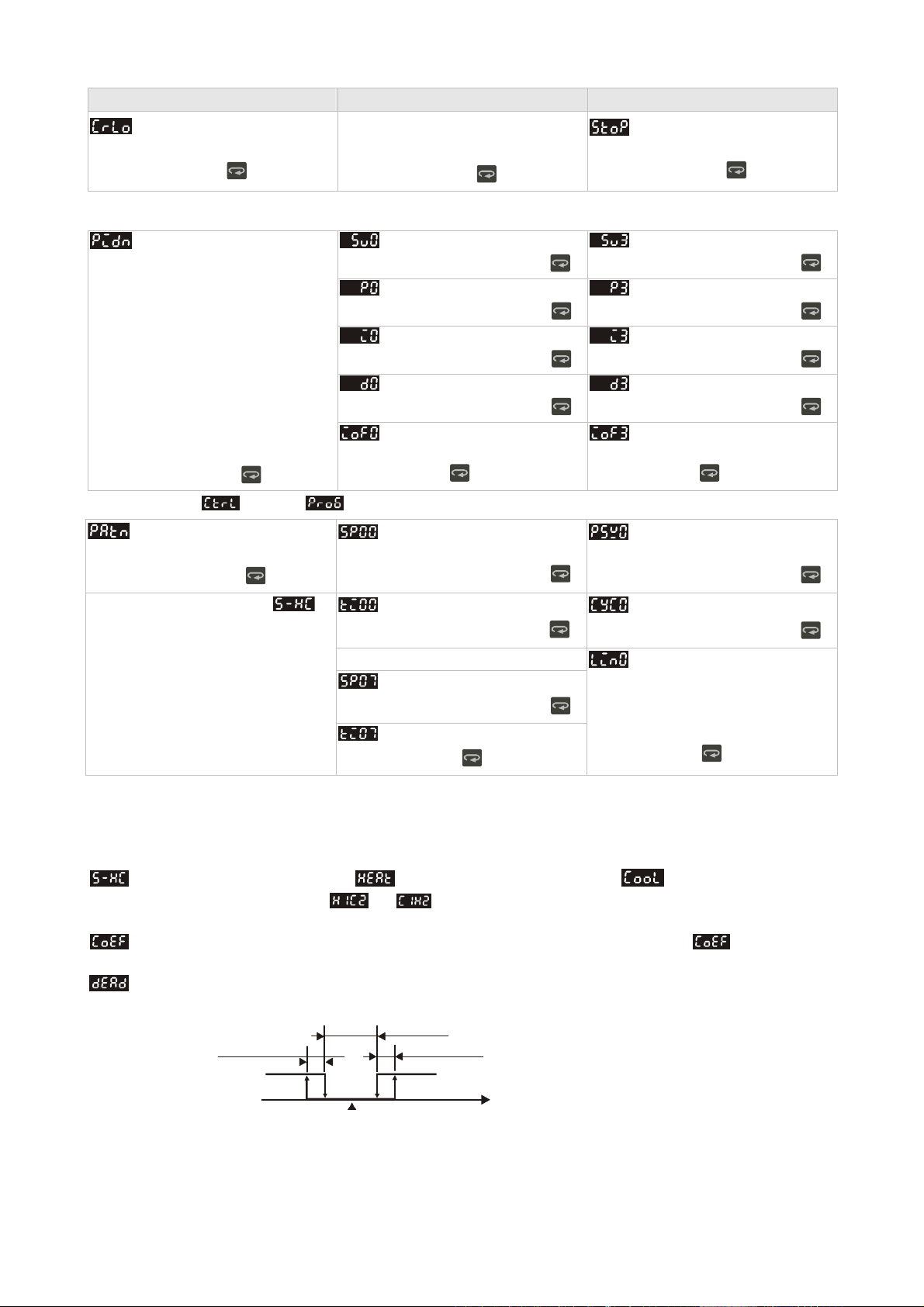
!ᗕᏮଠטΑ!
本机型可同时选择加热和冷却亦可仅选择加热或冷却操作。当选择同时加热冷却时,会有两组控制输出需接至加热及冷却装置,其动作方
式如下:
选择输出为加热控制或冷却控制,选择 时第一组输出为逆动作加热控制,选择 时第一组输出为正动作冷却控
制,此时第二组输出皆当成警报使用,选择
作。
当为双输出 PID 控制时,第一组输出的 P、I、D 值可直接设定。第二组的 P 值为(第一组的 P 值)x ,I、D 的值则与第
一组相同。
Dead Band:如图 <一>、<二>、<三> 所示,此设定值为双输出控制时加热和冷却的输出皆为零的区域。
或 时为双输出控制,输出一二分别为逆正(加热冷却)/正逆(冷却加热)动
- 4 -
Dead band
ΐሤአ༼ຏޘ ҽݒአ༼ຏޘ
ON
ΐሤ
OFF
నؠᕇ
ҽݒ
PV
ဦ˘
<>
ON-OFF
Page 5

Output
ΐሤ
0
ဦ ˟ ଠטĂ ࠎϒࣃ
< >PID Dead band
Dead band: dead
band width=positive
నؠᕇ
ҽݒ
PV
Output
ΐሤ
0
ဦˬ ଠטĂ ࠎࣃ
< >PID Dead band
Dead band: dead
band width=negative
నؠᕇ
ҽݒ
PV
ࢬڕᔣᗆؠΑ :
:面板按键全部锁定
:除设定值 SV 可变更外,其余选项将无法变更。
同时按下
及 解除面板按键锁定模式
ޘຏീጡᙷޘቑಛ!
输入传感器类型 通讯寄存器数值 显示 范围
0 ~ 50mV 模拟输入 17
4 ~ 20mA 模拟输入 16
0 ~ 20mA 模拟输入 15
0V ~ 10V 模拟输入 14
0V ~ 5V 模拟输入 13
白金测温电阻 (Pt100) 12
白金测温电阻 (JPt100) 11
热电偶对 TXK type 10
热电偶对 U type 9
热电偶对 L type 8
热电偶对 B type 7
热电偶对 S type 6
热电偶对 R type 5
热电偶对 N type 4
热电偶对 E type 3
热电偶对 T type 2
热电偶对 J type 1
热电偶对 K type 0
注一:电流输入已内建 249 奥姆精密电阻,请参考如何设定电流输入。
注二:若需切换显示小数点则必须设定
(在执行模式内选项),除热电对 B、S、R 以外,其余皆可设小数点。
模拟输入范围预设为-999 到 9,999,以 0 ~ 20mA 输入为例子,-999 代表 0mA 输入,9,999 代表 20mA 输入。如果更改输入范围为 0 到
2,000,0 代表 0mA 输入,2,000 代表 20mA 输入,一个显示刻度等于 0.01mA。
-999 ~ 9,999
-999 ~ 9,999
-999 ~ 9,999
-999 ~ 9,999
-999 ~ 9,999
-200 ~ 600°C
-20 ~ 400°C
-200 ~ 800°C
-200 ~ 500°C
-200 ~ 850°C
100 ~ 1,800°C
0 ~ 1,700°C
0 ~ 1,700°C
-200 ~ 1,300°C
0 ~ 600°C
-200 ~ 400°C
-100 ~ 1,200°C
-200 ~ 1,300°C
ᛋಡᏮ!
本机提供最多三组警报输出,每一组警报输出可以在设定模式下选择十八种警报模式,当目标温度高于或低于设定值,警报输出动作,下
表为十八种警报输出模式:
设定值 警报种类 警报输出功能
0 无警报功能 输出 OFF
ON
1 上下限警报动作:当 PV 值超过 SV + AL-H 或低于 SV -AL-L 的值时,对应警报动作
2 上限警报动作:当 PV 值超过 SV + AL-H 的值时,对应警报动作
3 下限警报动作:当 PV 值低于 SV -AL-L 的值时,对应警报动作
4 上下限警报逆动作:当 PV 值在 SV + AL-H 与 SV -AL-L 之间时,对应警报动作
- 5 -
OFF
ON
OFF
ON
OFF
ON
OFF
AL-L
AL-L
AL-L
SV
SV
SV
SV
AL-H
AL-H
AL-H
Page 6

设定值 警报种类 警报输出功能
5 绝对值上下限警报动作:当 PV 值超过 AL-H 或低于 AL-L 的值时,对应警报动作
6 绝对值上限警报动作:当 PV 值超过 AL-H 的值时,对应警报动作
7 绝对值下限警报动作:当 PV 值低于 AL-L 的值时,对应警报动作
待机上下限警报动作:当 PV 值到达设定值后,温度超过 SV + AL-H 或低于 SV -AL-L 的
8
值时,对应警报动作
9 待机上限警报动作:当 PV 值到达设定值后,温度超过 SV + AL-H 的值时,对应警报动作
10 待机下限警报动作:当 PV 值到达设定值后,温度低于 SV -AL-L 的值时,对应警报动作
迟滞上限警报动作:当 PV 值高于 SV+AL-H 的值时,对应警报动作。当 PV 值低于 SV+
11
AL-L 时,对应警报消失
迟滞下限警报动作:当 PV 值低于 SV-AL-H 的值时,对应警报动作。当 PV 值高于 SV-
12
AL-L 时,对应警报消失
CT 警报动作:当 CT 值低于 AL-L 或高于 AL-H 的值时,对应警报动作。(只用于有 CT 功能
13
者)
14 可程序 STOP 动作:执行可过程控制,于 STOP 状态对应警报动作。
15 可程序 RAMP UP 动作:执行可过程控制,于 RAMP UP 状态对应警报动作。
16 可程序 RAMP DOWN 动作:执行可过程控制,于 RAMP DOWN 状态时对应警报动作。
17 可程序 SOAK 动作:执行可过程控制,于 SOAK 状态时对应警报动作。
18 可程序 RUN 动作:执行可过程控制,于 RUN 状态时对应警报动作。
注意:AL-H 及 AL-L 包括 AL1H、AL2H、AL3H 及 AL1L、AL2L、AL3L
OFF
OFF
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
ON
ON
AL-L
AL-L
AL-L
AL-L
AL-L
SV
SV
SV
AL-H
AL-H
AL-H
AL-H
AL-H
!CT ֹϡё!
使用 CT 功能时,将对应警报输出模式更改为模式 13,再到运转模式设定电流上下限,可设定电流警报范围 0.5A~30A,分辨率为 0.1A,
误差为±0.5A。CT 仅侦测 OUT1 控制之电流,当 OUT1 有输出时,CT 值才会有变化。
EVENT ְІᏮˢĞᏴᔉΑğ
EVENT 有两个事件触发条件(EVENT1、EVENT2)
EVENT1:温控器的执行与停止,可由面板或通信操作,亦可由 EVENT1 操作,当 EVENT1 开路且温控器本身是设为执行状态则控制输出
为执行状态,否则当 EVENT1 短路或按键设定为停止状态时则温控器停止输出。
EVENT2:可允许两个温度设定值切换,且分别拥有各自的 PID 及 ON-OFF 参数设定,当 EVENT2 开路则使用第一组温度设定,当 EVENT2
短路则使用第二组温度设定。
PID Ξё۞ଠטĞPID Program Controlğ
Αણᇴనؠೡ!
PID 可程序化的控制共可分成 8 个样式(Pattern0~7)。每一个样式有 8 步骤(Step 0~7),以及各一个连结参数(Link Pattern)、循环参
数(Cycle)、执行步骤数(Max Step)。
ؕᇹёĈ
Վូ(Step)Ĉ包括设定点 X 及执行时间 T 两个参数设定,代表设定温度(SV)在 T 时间后,要升到 X 温度。如果设定点 X 与前次设定相
同,则此过程称之为 Soak,否则此过程称之为 Ramp,故过程控制又称 Ramp Soak 控制。
第一个执行步骤程序预设为 Soak 控制,先将温度控制到设定点 X,再将温度保持在 X,全部过程时间为 T。
ాඕણᇴĈ例如
步骤的设定温上。
ણᇴĈ此样式额外执行的循环次数。例如
ેҖՎូĈ每一个样式执行的步骤数目(可设定为 0~7)。例 如
ેҖĈ!
当
选项在运转阶层设定,设定过程控制由第几个样式开始执行(此选项只在停止状态出现)。
项设为 2,代表样式 0 执行后将接着样式 2 执行,如果设为 执行完此样式后程序结束,温度维持在最后
项设为 2,代表样式 4 须额外执行 2 次,连原来执行的一次,总共需重复执行 3 次。
项设为 2,代表 样式 7 将执行步骤 0~步骤 2,其余步骤将不执行。
设定为 时,程序由起始样式的步骤 0 开始执行,并依序执行。
- 6 -
Page 7

当 设定为 时,程序停止并且控制输出禁能。
当 设定为 时,程序停止,温度控制在停止前的设定值上,重新选择 时,会由起始样式的步骤 0 重新开始执行。
当
行。
设定为 时,程序停止,温度控制在停止前的设定值上,重新选择 时,会接续停止前的步骤及剩余时间开始执
ពϯĈPID 可过程控制时,SV 部分预设为显示 P-XX,P 为目前执行的样式,XX 为目前执行的步骤。按
选择
选择
项目后按 设定,则 SV 可看到目前执行步骤的目标温度值。
项目后按 设定,则 SV 可看到目前执行步骤的剩余时间。
则可变更显示项目。
!PID ଠטĞPID Controlğ
PID 控制时,可选择 4 组 PID 参数(P、I、D、IOF)任何一组。当 AT 后,会把 PID 值以及温度设定值存到选择的一组 PID 参数内。
~ :PIDn n 可为 0 ~ 4 其中 0 ~ 3 为对应选择的 PID 参数, 为自动选择 PID,程序会自动比较目前的温度设定值
与选择的一组参数的温度设定值最接近的参数。SV 显示的值即是对应的
~ :是对应于选择的一组 PID 参数的温度设定值。可让使用者设定亦可 AT 自动产生。
~
!ᅧҜଠט!
当控制输出设定为阀位控制时,两个控制输出皆为继电器(Relay)输出,作为控制电机正反转以驱使阀门开关。控制输出 1 控制阀门开,控
制输出 2 控制阀门关。藉控制阀门开关以便调整阀门的位置。为了知道阀的位置通常有回授信号与没有回授两种。没有回授信号时,若阀
门全开,控制输出 1 会一直输出。若阀门全关,控制输出 2 会一直输出。设定有回授信号,但若回授有问题,则程序会以没有回授的设定
执行。为了让阀位正常工作,必须设定以下参数:
:阀门全关到全开所需时间。
:设定阀的 DeadBand 值。表示(阀的输出量-前一个输出量)必须大于 DeadBand 值,阀才会动作。
:设定是否有回授信号。设定为:ON,表示有回授信号;设定为:OFF,表示没有回授信号。
当
设定为” 1” 时,表示有回授信号。则会显示下面选项:
:自动调整阀门回授上、下限值的开关。必须在 设定为 时,才会显示此项。
:设定阀全开时回授信号 D/A 值,可由 设成”1”时,自动设定;设成”0”时,手动调整。
:设定阀全关时回授信号 D/A 值,可由 设成”1”时,自动设定;设成”0”时,手动调整。
!RS-485 ఼!
1. 支持传输速度 2400, 4800, 9600, 19200, 38400bps; 不支援 7, N, 1/8, E, 2/8, O, 2 通讯格式; 使用 Mod bus(ASCII 或 RTU)通讯
协议;功能码 (Function):03H 读出寄存器内容,最多 8 个 word。 06H 写入一个 word 至寄存器,02H 读出位数据,最多 16 bits。
05H 写入一个 bit 至寄存器。
2. 数据寄存器地址及内容:
地址 名称 说明
以目前温度表示 0.1 刻度为计量单位,0.4 秒更新一次。
下列读值表示错误发生:
8002H 尚未取得温度
1000H PV 目前温度值
1001H
1002H
1003H
1004H
1005H
1006H
1007H
1008H
SV 温度设定值 以目前温度表示 0.1 刻度为计量单位。
温度侦测范围最高值 超过默认值禁止。
温度侦测范围最低值 低于默认值禁止。
输入感温器类型 对照值见温度传感器种类及温度范围表
控制方式 0:PID。1:ON/OFF。2:手动控制。3:PID 过程控制
加热/冷却控制选择 0:加热,1:冷却,2:加热/冷却,3:冷却/加热
第一组加热/冷却控制周期 0 ~ 99 秒 ( 0 为 0.5 秒)
第二组加热/冷却控制周期 0 ~ 99 秒 ( 0 为 0.5 秒)
8003H 未接传感器
8004H 传感器型式错误
8006H 温度值无法取得,输入 ADC 错误
8007H 内存无法读写
- 7 -
Page 8

地址 名称 说明
1009H
100AH
100BH
100CH
100DH
100EH
100FH
1010H
1011H
1012H
1013H
1014H
1015H
1016H
1017H
1018H
1019H
101AH
101BH
101CH
101DH
1020H
1021H
1022H
1023H
1024H
1025H
1026H
1027H
1028H
1029H
102AH 读写 LED 状态
102BH
102CH
102DH CT 读值 单位:0.1A
102FH
1030H
1032H 读取过程控制剩余时间(秒)
1033H 读取过程控制剩余时间(分)
1034H 读取过程控制目前执行步骤号码
1035H 读取过程控制目前执行样式号码
1036H 读取过程控制动态设定值
1040H ~
1047H
1050H ~
1057H
1060H ~
1067H
2000H ~
203FH
PB 比例带设定值
Ti 积分控制常数设定值
Td 微分控制常数设定值
积分量默认值 0 ~ 100%,单位为 0.1%
比例控制误差补偿值,Ti = 0 时 0 ~ 100%,单位为 0.1%
双输出时 COEF 的设定 0.01 ~99.99,单位为 0.01
双输出时 Dead band 的设定
第一组输出磁滞设定值
第二组输出磁滞设定值
输出 1 输出量读取及写入 单位为 0.1%,写入只在手动控制模式下有效
输出 2 输出量读取及写入 单位为 0.1%,写入只在手动控制模式下有效
仿真线性输出上限调整 1刻度 = 2.8μA = 1.3mV
仿真线性输出下限调整 1刻度=2.8μA = 1.3mV
温度误差调整值 -99.9 ~ +99.9。单位:0.1
设定模拟小数点
阀位全关至全开所需时间
阀位 DeadBand 的设定 0 ~ 100%,单位为 0.1%
阀位设定回授信号上限值
阀位设定回授信号下限值
PID 参数选择
对应 PID 参数的 SV 值 量测范围内有效,单位为 0.1 刻度
警报 1 输出模式 详见「警报输出模式选择」
警报 2 输出模式 详见「警报输出模式选择」
警报 3 输出模式 详见「警报输出模式选择」
系统警报设定 0:无(预设),1 ~ 3:设定警报一~警报三动作
警报输出 1 上限警报值 详见「警报输出」说明
警报输出 1 下限警报值 详见「警报输出」说明
警报输出 2 上限警报值 详见「警报输出」说明
警报输出 2 下限警报值 详见「警报输出」说明
警报输出 3 上限警报值 详见「警报输出」说明
警报输出 3 下限警报值 详见「警报输出」说明
读写按键状态 b0:Set,b1:Select,b2:Up,b3:Down。0 为按下
面板锁定功能状态 0:正常,1:全锁定,11:设定值可调。
软件版本 V1.00 表示为 0x100
开始执行的样式编号
样式内执行步骤数设定 0 ~ 7 = N,表示此样式由步骤 0 执行到步骤 N 为止
重复执行目前样式循环次数 0 ~ 99 代表此样式执行 1 ~ 100 次
目前样式连接样式编号设定 0 ~ 8,8 代表程序结束,0~7 表示此样式结束后所要执行的下一样式号码
样式 0~7 目标温度设定
样式 0 温度设于 2000H~2007H
0.1 ~ 999.9
0 ~ 9999
0 ~ 9999
-999 ~ 9,999
0 ~ 9,999
0 ~ 9,999
0 ~ 3
0.1 ~ 999.9
0 ~ 1024
0 ~ 1024
0 ~ 4
b0: ALM3, b1: ALM2, b2: °F, b3: °C, b4: ALM1, b5: OUT2, b6:OUT1, b7: AT
0 ~ 7
-999 ~ 9999
- 8 -
Page 9

地址 名称 说明
2080H ~
20BFH
3. 位寄存器地址及内容(读出位由 LSB 开始存放,写入数据为 FF00H,将位值设’1’。0000H 将位数据设为’0’。)
地址 名称 说明
0800H
0801H
0802H
0803H
0804H
0805H
0806H
0807H
0808H
0809H
080AH
080BH
080CH
080DH
080EH
0810H
0811H
0812H 小数点选择 0:无小数显示,1:有小数显示。除了 Type B、S、R 以外皆有效
0813H
0814H
0815H
0816H
0817H
0818H
4. 通讯传输格式:功能命令 02:位读取, 05:位写入, 03:字符读取, 06:字符写入
ASCII ሀё
起始字符 ’:’ ’:’ 起始字符 ’:’’:’ 起始字符 ’:’’:’ 起始字符 ’:’’:’
机器地址 1
机器地址 0
功能命令 1
功能命令 0
读取数据/位开始
地址
读取数据长度
/位长度
(word/Bit)
LRC1 检查码
LRC 0 检查码
结束字符 1
结束字符 0
样式 0~7 执行时间度设定
样式 0 时间设于 2080H~2087H
读取 AT LED 状态 0:OFF,1:ON
读取输出一 LED 状态 0:OFF,1:ON
读取输出二 LED 状态 0:OFF,1:ON
读取警报一 LED 状态 0:OFF,1:ON
读取 LED℉ 状态 0:OFF,1:ON
读取 LED℃ 状态 0:OFF,1:ON
读取警报二 LED 状态 0:OFF,1:ON
读取警报三 LED 状态 0:OFF,1:ON
读取 SET 按键状态 0:按下
读取 FUNCTION 按键状态 0:按下
读取 UP 按键状态 0:按下
读取 DOWN 按键状态 0:按下
读取外部触发条件 1 状态 1:触发
读取外部触发条件 2 状态 1:触发
读取系统错误警报状态 1:警报动作
通讯写入选择 0:(预设)通讯写入禁止,1:通讯写入允许
温度单位显示选择 0:°F,1:°C / 线性输入(预设)
读写自动调谐状态 0:自动调谐停止(预设),1:自动调谐开始
控制执行/停止设定 0:停止, 1:执行(预设)
可过程控制执行结束设定 0:执行(预设),1:结束
可过程控制执行暂停设定 0:执行(预设),1:暂停
读写阀位设定回授状态 0:没有回授(预设),1:有回授
读写阀位回授自动调谐状态 0:自动调谐停止(预设),1:自动调谐开始
读取指令: 读取回复字符串 写入指令 写入回复字符串
‘0’ ‘0’
‘1’ ‘1’
‘0’ ‘0’
‘3’ ‘2’
‘1’ ‘0’ ‘0’ ‘0’ ‘1’ ‘0’ ‘1’ ‘0’
‘0’ ‘8’
‘0’ ‘1’ ‘0’ ‘1’ ‘0’ ‘1’ ‘0’ ‘1’
‘0’ ‘0’ ‘1’ ‘7’
‘0’ ‘0’ ‘F’ ‘0’ ‘0’ ‘F’ ‘0’ ‘F’
‘0’ ‘0’
‘0’ ‘0’ ‘0’ ‘E’ ‘0’ ‘E’ ‘0’
‘2’ ‘9’ ‘0’
‘E’ ‘D’ ‘0’ LRC1 ‘F’ ‘E’ LRC1 ‘F’ ‘E’
‘A’ ‘C’
CR CR
LF LF
机器地址 1
机器地址 0
功能命令 1
功能命令 0
回复数据长度
(byte)
地址
1000H/081xH
数据内容
地址 1001H
数据内容
LRC1 检查码
LRC 0 检查码
结束字符 1
结束字符 0
时间 0 ~ 900(每一刻度 1 分)
‘0’ ‘0’
‘1’ ‘1’
‘0’ ‘0’
‘3’ ‘2’
‘4’ ‘2’ ‘0’ ‘8’ ‘0’ ‘8’
‘4’ ‘1’ ‘3’ ‘F’ ‘3’ ‘F’
‘0’ LRC 0 ‘D’ ‘3’ LRC 0 ‘D’ ‘3’
‘0’ ‘E’
‘3’ ‘3’
CR CR
LF LF
机器地址 1
机器地址 0
功能命令 1
功能命令 0
写入数据地址
写入数据内容
结束字符 1
结束字符 0
‘0’ ‘0’
‘1’ ‘1’
‘0’ ‘0’
‘6’ ‘5’
‘1’ ‘0’
‘8’ ‘0’
CR CR
LF LF
机器地址 1
机器地址 0
功能命令 1
功能命令 0
写入数据地址
写入数据内容
结束字符 1
结束字符 0
‘0’ ‘0’
‘1’ ‘1’
‘0’ ‘0’
‘6’ ‘5’
‘1’ ‘0’
‘8’ ‘0’
CR CR
LF LF
- 9 -
Page 10

LRC 检查码:
LRC 检查码是由 “机器地址” 加到 “数据内容”。例如:01H + 03H + 10+ 00H + 00H + 02H = 16H 取 2 的补码得到 EA
RTU ሀё
读取指令: 读取回复字符串 写入指令 写入回复字符串
机器地址
功能命令
读取数据开始地
址
读取数据长度
(位/字符)
CRC 低位
CRC 高位
CRC 检查码:CRC(Cyclical Redundancy Check)检查码是由以下方法计算得出
步骤一:加载一值为 FFFFH 的 16 位寄存器,称为 CRC 寄存器。
步骤二:数据的第一字节和 CRC 寄存器的低位作互斥或门运算,并将运算结果放回 CRC 寄存器。
步骤三:将 CRC 寄存器位右移并将最高位填零,并检查移出之最低位。
步骤四:如果移出之最低位为 0 重复步骤三,否则将 CRC 寄存器与值 A001H 作互斥或门运算,并将运算结果放回 CRC 寄存器。
步骤五:重复步骤三及四,直到 8 个位皆完成右移。如此一个字节便完成。
步骤六:重复步骤二及五,将数据内所有字节计算一次便可得
请特别注意传收数据格式中 CRC 寄存器的高、低字节传送顺序。
01H 01H
03H 02H
10H 08H 10H 08H 10H 08H
00H 10H
00H 00H 01H 17H 03H FFH 03H FFH
02H 09H
C0H BBH 03H
CBH A9H
机器地址
功能命令
回复数据长度
(字节)
数据内容 1
数据内容 2
CRC 低位
CRC 高位
01H 01H
03H 02H
04H 02H 写入数据地址
F4H 01H
20H
BBH 77H
15H 88H
机器地址
功能命令
写入数据内容
CRC 低位
CRC 高位
01H 01H
06H 05H
01H 10H
20H 00H
DDH 8FH
E2H 9FH
出 CRC 检查码。
机器地址
功能命令
写入数据地址
写入数据内容
CRC 低位
CRC 高位
01H 01H
06H 05H
01H 10H
20H 00H
DDH 8FH
E2H 9FH
఼аᖬᇄనؠ
首先对缓存器位置 472AH 写入十六进制值 1234,再接着对缓存器位置 474EH 写入十六进制值 1234,重新送电开机即完成出厂设定。
щ྅ڱ!
1. 将 DTB 温控器放入机箱开孔内
2. 将固定安装附件装于温控器滑槽内
3. 往面板方向推固定附件使夹紧机箱外壳
4. 锁紧螺丝
固定配件安装方法:
!γ៍!
ฟ! ాତბ!
DTB4824
DTB4824 DC直流电源 AC 交流电源
- 10 -
Page 11

DTB4848
DTB4896 DTB4896/DTB9696
DTB4848
DTB9696 DTB9696RRV
!тңనؠ߹Ꮾˢ!
一般输入 电流输入 (4 ~ 20mA, 0 ~ 20mA)
!
- 11 -
 Loading...
Loading...