

Page 1
Precaution
DANGER! Caution! Electric Shock!
1. Do not touch the AC terminals while the power is supplied to the controller to prevent an electric shock.
2. Make sure power is disconnected while checking the unit inside.
WARNING!
This controller is an open-type temperature controller. Make sure to evaluate any dangerous application in which a
serious human injury or serious property damage may occur.
1. Always use recommended solder-less terminals: Fork terminal with isolation. (M3 screw, width is 6.0mm)
2. Do not allow dust or foreign objects to fall inside the controller to prevent it from malfunctioning.
3. Never modify or disassemble the controller.
4. Do not connect anything to the “No used” terminals.
5. Make sure all wires are connected to the correct polarity of terminals.
6. Do not install and/or use the controller in places subject to:
y Dust or corrosive gases and liquid y High humidity and high radiation
y Vibration and shock
7. Must turn power off when wiring and changing a temperature sensor.
8. Be sure to use compensating wires that match the thermocouple types when extending or connecting the thermocouple wires.
9. Please use wires with resistance when extending or connecting a platinum resistance thermometer (RTD).
10. Please keep the wire as short as possible when wiring a platinum resistance thermometer (RTD) to the controller and please
route power wires as far as possible from load wires to prevent interference and induced noise.
11. This controller is an open-type unit and must be placed in an enclosure away from high temperature, humidity, dripping water,
corrosive materials, airborne dust and electric shock or vibration.
12. Please make sure power cables and signals from instruments are all installed properly before energizing the controller,
otherwise serious damage may occur.
13. Please do not touch the terminals in the controller or try to repair the controller when power is applied to prevent an electric
shock.
14. Wait at least one minute after power is disconnected to allow capacitors to discharge, and please do not touch any internal
circuit within this period.
15. Do not use acid or alkaline liquids for cleaning. Please use a soft, dry cloth to clean the controller.
Display, LED & Pushbuttons
DT3 Series Temperature Controller Instruction Sheet
y High voltage and high frequency
Odering Information
DT3 Series DT3: Delta 3 Series Temperature Controller
Panel Size (W×H)
1st output group selection
Power supply
2nd output group selection
20: 4848 1/16 DIN W48 × H48mm
30: 7272 W72 × H72mm
R: Relay Output, 250 VAC, 5A
V: Voltage Pulse Output, 12V ±10%
C: DC Current Output, 4 ~ 20 mA
L: Linear Voltage Ouptut 0 ~ 10 VDC
A: AC 80 ~ 260 V
D: DC 24 VDC
0: None
R: Relay Outupt,250 VAC, 5A
1
40: 4896 1/8 DIN W48 × H96mm
60: 9696 1/4 DIN W96 × H96mm
Page 2
V: Voltage Pulse Output, 12V ±10%
C: DC Current Output 4 ~ 20 m A
L: Linear Voltage Ouptut 0 ~ 10 VDC
EVENT inputs/ CT function (optional) 1
EVENT inputs/ CT function (optional) 2
EVENT inputs/ CT function (optional) 3
0: None, 1: Event Input3, 2: RS-485 Communication
0: None, 1: Event Input2, 2: CT measure input2, 3: Retransmission Output
0: None, 1: Event Input1, 2: CT measure input1, 3: Remote Setpoint input
Specifications
Input Voltage AC 80 ~ 260 V, 50/60Hz; DC24 VDC ±10%
Power Consumption 5VA max.
Display Method LCD display. Process value (PV): Yellow color, Set point (SV): Green color
Thermocouple: K, J, T, E, N, R, S, B, L, U, TXK
Sensor Type
Control Mode
Control Output
Warning Output Type Relay output: Max. load 250VAC, 3A resistive load
Display Accuracy 0 or 1 digit to the right of the decimal point (selectable)
Sampling Rate Analog input: 0.1 sec/ per scan; Thermocouple or Platinum RTD: 0.1 sec/per scan
Vibration Resistance
Shock Resistance
Ambient Temperature
Storage Temperature
Altitude
Relative Humidity 35% ~ 80% RH(non-condensing)
3-wire Platinum RTD: Pt100, JPt100
Analog input: 0 ~ 5 V, 0 ~ 10 V, 0 ~ 20 m A, 4 ~ 20 mA, 0 ~ 50 mV
PID, PID program control (Ramp/Soak control), FUZZY, Self-tuning, Manual and On/FF
Relay output: Max. load 250VAC, 5A resistive load
Voltage pulse output: DC 12V, Max. output current 40mA
Current output: DC 4 ~ 20m A output (Load resistance: Max. 500Ω)
Analog voltage output: 0 ~ 10V
10 to 55Hz, 10m/s
Max. 300m/ s
0°C ~ +50°C
-20°C ~ +65°C
Max. 2000m
2
for 10min, each in X, Y and Z directions
2
, 3 times in each 3 axes, 6 directions
Operation
There are three modes of operation: operation, regulation and initial setting. When power is applied, controller gets into the operation
mode. Press the
initial setting mode. Pressing the
operation mode..
PV/SV: Sets the temperature set point and displays the temperature process value. Use
point.
Setting method: While in any function mode, press the
settings. Press
The flow chart below shows how to switch the settings and internal functions:
Regulation Mode Operation Mode
【Operation Mode】Parameter Setting:
Display
key to switch to regulation mode. If the key is pressed for more than 3 seconds, controller will switch to the
key while in the regulation mode or initial setting mode, forces the controller to return to the
keys to set the temperature set
key to select the desired function and use keys to change
key to save the changes.
Pre ss ke y less t ha n 3 sec
Pre ss ke y
Description
Use
RUN/STOP: Control setting RUN or STOP
PATTERN: Start pattern setting (set control mode to PROG mode)
STEP: Start step setting (set control mode to PROG mode)
SELECT POINT: Decimal point setting (0: integral ; 1: one decimal point)
LOCK: Setting lock mode (LOCK1: all; LOCK2: onlySV and F1/F2 key is allowed)
ALARM1 HIGH: Upper limit alarm 1 (display according to the setting in ALARM mode)
to set temperature set point, use to switch between the display parameter
Pre ss ke y mo re t ha n 3 se c
Pre ss ke y
Initial Setting Mode
Factory Setting
RUN
0
0
1
OFF
4.0
2
Page 3
ALARM1 LOW: Lower limit alarm 1 (display according to the setting in ALARM mode)
ALARM2 HIGH: Upper limit alarm 2 (display according to the setting in ALARM mode)
ALARM2 LOW: Lower limit alarm 2 (display according to the setting in ALARM mode)
ALARM3 HIGH: Upper limit alarm 3 (set OUT2 to ALARM mode and it will display according to the
setting in ALARM mode)
ALARM3 LOW: Lower limit alarm 3 (set OUT2 to ALARM mode and it will display according to the
setting in ALARM mode)
ALARM1 HIGH PEAK: High peak value 1
ALARM1 LOW PEAK: Low peak value 1
ALARM2 HIGH PEAK: High peak value 2
ALARM2 LOW PEAK: Low peak value 2
ALARM3 HIGH PEAK: High peak value 3 (display when OUT2 is set to alarm mode)
ALARM3 LOW PEAK: Low peak value 3 (display when OUT2 is set to alarm mode)
OUT1: Display and adjust output value of 1
OUT2: Display and adjust output value of 2
Heating/Cooling Mode)
OUT1 MAX: Upper limit % of 1
OUT1 MIN.: Lower limit % of 1
OUT2 MAX: Upper limit % of 2
OUT2 MIN: Lower limit % of 2
CT1: Display CT1 current (display when external CT is connected to CT1)
st
output group (perform linear calculation again)
st
output group
nd
output group (display when OUT2 is set to Heating/Cooling Mode)
nd
output group (display when OUT2 is set to Heating/Cooling Mode)
st
output group
nd
output group (display when OUT2 is set to
100.0
100.0
CT2: Display CT2 current (display when external CT is connected to CT2)
press
to return to target temperature setting.
【Initial Setting Mode】Parameter Settings:
Display Description Factory Setting
INPUT: Set input type (refer to “Temperature Sensor Type & Temperature Range Chart” for the
selection of Thermocouple or Platinum Resistance types.)
TEMP. UNIT: Set temperature unit /℃ ℉(it wil not be displayed when in analog input mode) ℃
TEMP. HIGH: Set up upper temperature limit (the upper limit setting is different for different types of
sensor)
TEMP. LOW: Set up lower temperature limit (the lower limit setting is different for different types of
sensor)
CONTROL: Select control modes ( 4 different modes: ON-OFF, PID, MANUAL, and FUZZY) PID
CONTROL SV provides 4 different options: CONS; PROG; SLOP; and REMO. REMO mode is
available when REMOTE function is added.
WAIT SV: Set up waiting temperature (display when in programmable control)
WAIT TIME: Set up waiting time(display when in programmable control)
SLOP: Set up start slope (display when in programmable control)
PATTERN: Select pattern to be edited (display when in programmable control, there are 16 patterns
and each pattern includes 16 steps. Setting parameters are OFF, SAVE, 0~F.)
TUNE: Select AT or ST (display when in PID control mode) AT
SELECT HEAT/COOL: Select heating, cooling or dual output heating and cooling H1H2
ALARM1 SET: Set up Alarm 1 mode (refer to “Alarm Output” for more setting on modes)
ALARM1 OPTION:
ALARM1 DELAY: Set up Alarm 1 delay (refer to “Alarm Output” for more setting on modes) 0
ALARM2 SET: Set up Alarm 2 mode (refer to "Alarm Outputs") 0
ALARM2 OPTION: Set up Alarm 2 options (refer to “Alarm Outputs” ) 0
ALARM2 DELAY: Set up Alarm 2 delay (refer to “Alarm Outputs” ) 0
ALARM3 SET: Set up Alarm 3 mode (refer to "Alarm Output")(display when OUT2 is set to ALARM
mode)
ALARM3 OPTION: Set up Alarm 3 options (refer to "Alarm Output") (display when OUT2 is set to 0
Set up Alarm 1 options (refer to “Alarm Output” for more setting on modes) 0
850.0
-200.0
CONS
4.0
4.0
4.0
4.0
4.0
0.0
0.0
0.0
0.0
PT
OFF
0
0
3
Page 4
ALARM mode)
ALARM3 DELAY: Set up Alarm 3 delay (refer to “Alarm Outputs” ) (display when OUT2 is set to
ALARM mode)
PV Color Change Function: Select the alarm to change PV display color. (refer to "Alarm Outputs") OFF
OUT INVERT: Set up reverse alarm output (the last digit on the right indicates: OUT1 reverse; the
2nd last digit on the right indicates: OUT2 reverse)
REMOTE TYPE: Set up Remote type (display when
(V0:0~5V; V1:1~5V; V10:0~10V; MA0:0~20mA; MA4:4~20mA)
Select auxiliary function (refer to SV Control Mode Setting) 0
COMMUNICATION WRITE: Enable/disable communication write-in OFF
COMMUNICATION SELECT: Select ASCII or RTU format ASCII
COMMUNICATION NO.: Set up communication address 1
BPS: Set up baudrate 9600
LENGTH: Set up data length 7
STOP: Set up stop bit
PARITY: Set up parity bit
【Regulation Mode】Parameter Settings:
Display Description Factory Setting
AT: Auto-tuning Switch(display when setting Ctrl = PID/FUZZY, TUNE = AT, R-S=RUN)
ST: SELF-TUNING Switch (display when setting Ctrl = PID, TUNE = ST) OFF
PID NO.: Select the n
setting Ctrl=PID)
PID SV NO.: Accordinig to the selection of PID No. (n=0~5), set SV value accordingly. It will allow
~
the system perform auto selection when it’s set to AUTO mode. (Display when Ctrl = PID/FUZZY).
P : Proportional Setting (display when setting Ctrl = PID/FUZZY and TUNE = AT)
~
Set P value according to the selection of PID No. (n=0~5). When P is set to AUTO, the system will
select P value accordingly.
I: Integral Time Setting (display when Crtl=PID/FUZZY; this parameter is set automatically when
TUNE=AT.)
~
Set I value according to the selection of PID No. (n=0~5). When I is set to AUTO, the system will
select I value accordingly.
D: Deviation Time SEtting: (display when Crtl=PID/FUZZY; this parameter is set automatically
when TUNE=AT.)
~
Set D value according to the selection of PID No. (n=0~5). When D is set to AUTO, the system will
select D value accordingly.
I OFFSET: Integral deviation setting, when Integral is not 0. (display when Crtl=PID/FUZZY; this
parameter is set automatically when TUNE=AT.)
~
Set IOF value according to the selection of PID No. (n=0~5). When IOF is set to AUTO, the
system will select IOF value accordingly.
PD OFFSET: PD offset when Integral=0 to eliminate a consistent deviation. 0
Set up Fuzzy gain value (when Ctrl=FUZZY) 4
Set up Fuzzy Deadband (when Ctrl=FUZZY) 0
OUT1 HYSTERESIS: Adjust Output 1 hysteresis (when in ON/OFF control) 0
OUT2 HYSTERESIS: Adjust Output 2 hysteresis (when in ON/OFF control) 0
OUT1 HEAT: Heating control cycle for Output 1 ( when Ctrl= PID/FUZZY/MANUAL)
OUT1 COOL: Cooling control cycle for Output 1 (when Ctrl= PID/FUZZY/MANUAL)
OUT2 HEAT: Heating control cycle for Output 2 ( when Ctrl= PID/FUZZY/MANUAL)
OUT2 COOL: Cooling control cycle for Output 2 (when Ctrl= PID/FUZZY/MANUAL)
COEF: Ratio of Output 1 against Output 2 (when Ctrl= PID/FUZZY and when in dual output
control)
DEAD: Set up deadband (when Ctrl is not set to MANUAL and when in dual output) 0
PV FILTER: Set up input filter factor of PV 8
PV RANGE: Set up input filter range of PV 1.00
PV OFFSET: Adjust input compensation of PV 0.0
PV GAIN: Adjust input gain of PV 0.000
is set to REMO mode)
Press
th
(n=0~5) PID. When set in AUTO, PID is auto-selected. (display when
to return to input type setting
Press
V
0
0
MA4
1
E
OFF
0
0
47.6
260
41
0
Output
selection:
C; V; S: 5sec.
R: 20sec.
1.00
4
Page 5
SV SLOPE: Set up rising slope (when CRTS = SLOP)
ANALOG OUT1 MAX.: Adjust upper limit compensation for analog Output 1 (1scale = 1μA; 1scale
= 1mV)
ANALOG OUT1 MIN.: Adjust lower limit compensation for analog Output 1* (1 scale = 1μA; 1scale
= 1mV)
ANALOG OUT2 MAX.: Adjust upper limit compensation for analog Output 2* (1scale = 1μA;
1scale = 1mV)
ANALOG OUT2 MIN.: Adjust lower limit compensation for analog Output 2* (1scale = 1μA; 1scale
= 1mV)
RETRANSMISSION MAX.: Adjust upper limit compensation for Retransmission* (1scale = 1μA;
1scale = 1mV) (display when a Retransmission Card is connected to DT3)
RETRANSMISSION MIN.: Adjust lower limit compensation for Retransmission* (1scale = 1μA;
1scale = 1mV) (display when a Retransmission Card is connected to DT3)
REMOTE GAIN: Adjust Remote gain (When CRTS = REMO) 0
REMOTE GAIN: Adjust Remote compensation (When CRTS = REMO)
REMOTE LOW: Remote lower limit (When CRTS=REMO) 0
REMOTE HIGH: Remote higher limit (When CRTS=REMO) 100
EVENT1: Set up EVENT1 function (display when a Event Card is connected to EVENT1) 0
EVENT2: Set up EVENT2 function (display when a Event Card is connected to EVENT2)
EVENT3: Set up EVENT3 function (display when a Event Card is connected to EVENT3) 0
PID mode: Any of the 6 PID groups can be selected. When set to AUTO mode, the program will automatically select the PID group that is
the closest to the target temperature.
Select 0~5 group of PID and execute AT function, the system will automatically load P; I; D and IOF parameters into the selected PID
group.
Select the n
Set up the 0th PID temperature value
Set up the 0th proportional band value
Set up the 0th Ti value
Set up the 0th Td value
Set up the 0th PID integral deviation
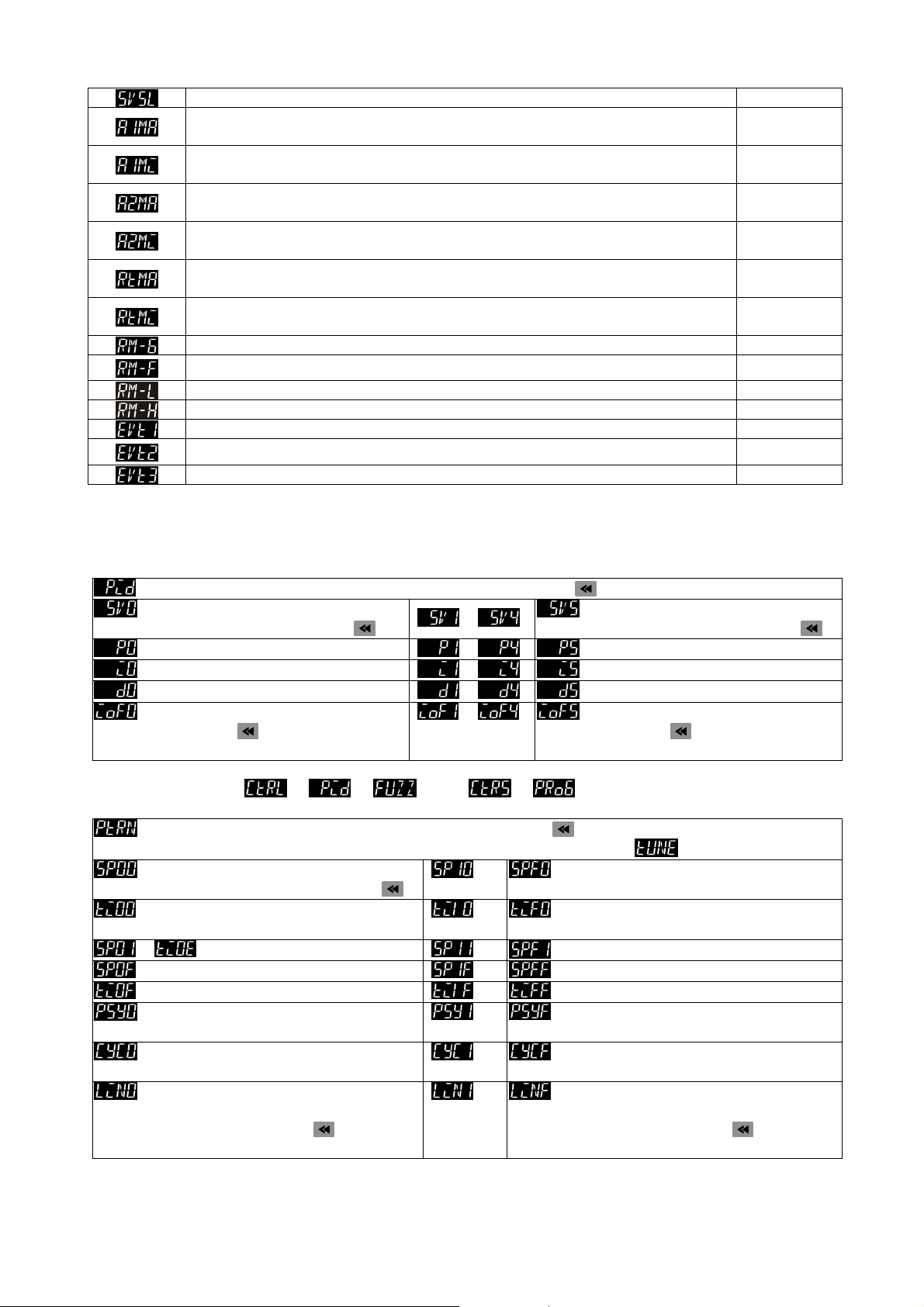
Programmable Editing: set
Select desired editing pattern number 0~F press to set the desired editing pattern number 0~F
Edit the temperature of step No.0 of pattern No. 0
Edit the time of step No.0 of pattern No. 0 (time unit:
hh, mm)
~ Set up step 0~15 in order
Edit the temperature of step No.15 of pattern No.0
Edit the time of step No.15 of pattern No.0
Seelect the actual required steps for executing
pattern No.0
Set up the additional cycle (0~199) for pattern No.
0 execution
Set up the link pattern of pattern No.0 (0~F;
END; STOP)
th
PID (n = 0 ~ 5) press to set 0 ~ 5th PID parameters
Set up the 5th PID temperature value
Set up the 5th proportional band value
Set up the 5th Ti value
Set up the 5th Td value
Set up the 5th PID integral deviation
Press
Edit the temperature of step No.0 of pattern No. 15
selection of desire editing pattern and number
press
Press
selection of desire editing pattern and number.
to set the parameters in
“Regulation Mode”
to or and set to .
If the setting is OFF, leave the editing pattern page and go to
press
Press
V
V
to return to the
~
~
~
~
~
~
~ Edit the time of step No.0 of pattern No.15 (time unit:
hh, mm)
~
~ Edit the temperature of step No.15 of pattern No.15
~ Edit the time of step No.15 of pattern No.15
~ Seelect the actual required steps for executing
pattern No.15
~ Set up the additional cycle (0~199) for pattern No.
15 execution
~ Set up the link pattern of pattern No.15 (0~F;
END; STOP)
press
to set the parameters in
“Regulation Mode”
to continue with the setting.
Press
0
0
0
0
0
0
0
0
V
to return to the
5
Page 6
Initial Start-up Setting
1. When setting up DT3 for the first time, press key for more than 3 seconds till the screen display and select according
to your temperature sensor type. Please be aware that a selection of wrong model would cause PV temperature display error. (Refer
to the chart below)
2. When setting up the temperature sensor type by using RS-485, write your value (range 0~19) into register 1004H.
3. When setting up the current input method, remove the temperature controller cover and set JP8 to short. (Refer to the chart below)
z Temperature Sensor Type & Temperature Range Chart
Input Temperature
Sensor Type
Thermocouple K type 0 -200 ~ 1300°C Thermocouple TXK type 10 -200 ~ 800°C
Thermocouple J type 1 -100 ~ 1200°C Platinum Resistance (JPt100) 11 -20 ~ 400°C
Thermocouple T type 2 -200 ~ 400°C Platinum Resistance (Pt100) 12 -200 ~ 850°C
Thermocouple E type 3 0 ~ 600°C Platinum Resistance (Ni120) 13 -80 ~ 300°C
Thermocouple N type 4 -200 ~ 1300°C Platinum Resistance (Cu50) 14 -50 ~ 150°C
Thermocouple R type 5 0 ~ 1700°C Analog Voltage Input (0~5V) 15 -999~9999
Thermocouple S type 6 0 ~ 1700°C Analog Voltage Input (0~10V) 16 -999~9999
Thermocouple B type 7 100 ~ 1800°C Analog Voltage Input (0~20m A) 17 -999~9999
Thermocouple L type 8 -200 ~ 850°C Analog Voltage Input (4~20m A) 18 -999~9999
Thermocouple U type 9 -200 ~ 500°C Analog Voltage Input (0~50m V) 19 -999~9999
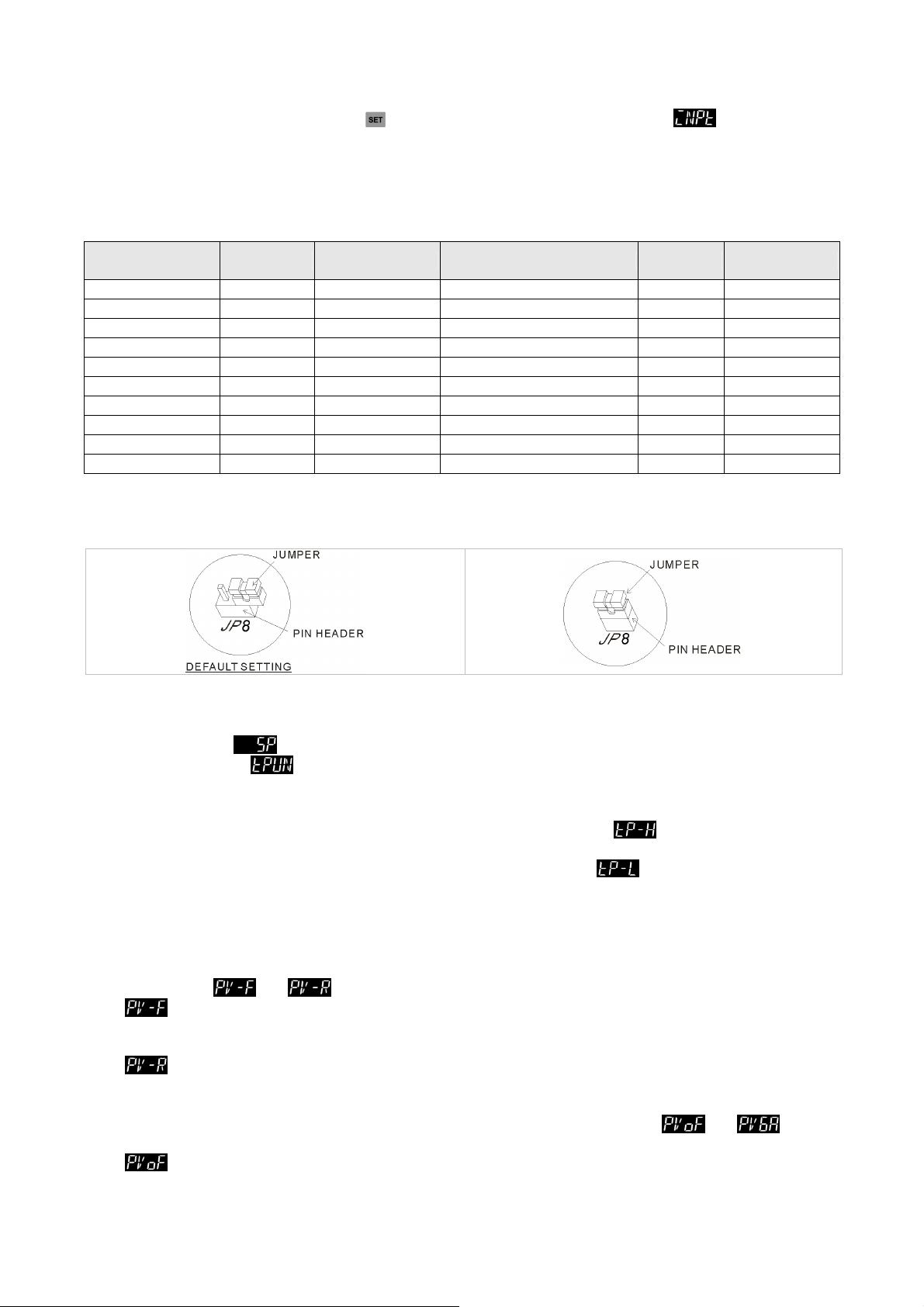
z How to Set Up Current Input
Remove the temperature controller cover and set JP8 to short. JP8 jumper locates near the sensor input area on PCB board.
Normal Iniput (Factory Setting) Current Input (4 ~ 20mA, 0 ~ 20mA)
Register Value Temperature Range Input Temperature Sensor Type Register Value Temperature Range
Display Unit Setting
Use following parameter to change the PV and SV display unit, select decimal point and switch between ℃/F.
¾ In Operation Mode
¾ In Initial Setting Mode
: SP=1 displays decimal place (ex: 25.5 degree); SP=0 displays integral number (ex: 25 degree).
: Select temperature display unit ℃/℉. (℉=℃* 9 / 5 + 32)
Set Value and the Upper/Lower Limit of Input Value Setting
¾ Set the Upper Limit of Input Value: This parameter can be set in the Initial Setting Mode , the upper limit input value must
be set within the range shown in the chart “Temperature Sensor Type & Temperature Range”.
¾ Set the Lower Limit of Input Value: This parameter can be set in Initial Setting Mode
set within the range shown in the chart “Temperature Sensor Type & Temperature Range”.
¾ Set the SV: This parameter can be set in Operation Mode, SV value must be set within the range of upper/lower limit input value.
SV can not be set in In “Program Mode” or in “Remote Mode”.
, the lower limit input value must be
Digital Filter and Linear Compensation Setting
In “Regulation Mode”, and parameters can be used to ajust the filter status and to avoid interferences on input signal.
¾
¾
When PV display value is different than user’s expectation, Linear Compensation function can be set by
parameters in“Regulation Mode”.
¾
: Filter Factors (setting range=0~50; factory setting=8). Digital Filter Calculation equation: PV=(Last displayed PV * n +
Measure Value)/ (n+1). When the parameter value is small, the PV display is close to the Measured Value. When the parameter
value is large, the PV response is slow.
: Filter Range (setting range=0.10~10.00℃/℉). If factory setting = 1, it means the controller will begin Digital Filter
Calcaulation when the Measure Value lies within the range of “Last displayed PV + / - 1.00℃/℉”. Therefore, it is recommended to
set a larger value when noise interferences is serious.
and
: Linear Compensation Value (setting range= -99.9 ~ +99.9). Linear Compensation Calculation equation: PV = Measure
Value + Compensation Value.
6
Page 7
For example: Measure Value=25.0; Compensation = 1.2. After applying to the Compensation equation PV=26.2.
¾
If temperature deviation is the same in every temperature, settting linear compensation value can solve deviation problem. If temperature
deviation varies upon different temperatures, calculate the linear deviation error and adjusts the temperature by setting Gain and
Compensation value.
Linear Compensation Gain (setting range = 0~0.999). Linear Compensation Gain Calculation equation: PV = Measure
Value* (1 + Gain/1.000) + Compensation.
For example: Measure Value=25.0; Gain= 0.100. After applying to the Gain calculation equation PV= 25.0 * (1 + 0.100 / 1.000) =
27.5。
Applications of Analog Voltage & Current Input
The input range of analog voltage and current are used as the uppler/lower limit of the controller’s voltage and current setting. When
setting up the desire voltage or current, it must lies within the range of upper/lower limit. For example: If the range of analog input voltage
is 0~5V, the upper limit setting will be 5000 and lower limit setting will be 0. If the decimal setting is set to 3 decimal place, a input voltage
of 2.5V will displays as 2.500. The equation of Display Value = (Upper limit setting of controller– Lower limit setting of controller)*(Input
voltage- Analog lower limit)/(Analog upper limit– analog lower limit) + Lower limit setting of controller.
Disable the Cold Junction Function
The cold conjunction function of a thermocouple is set to ENABLE, but in some cases, we can set it to DISABLE.
¾ In Initial Setting Mode,
is used to set the first digit (Y) of Yxxx, (when Y=0, Enable; when Y=1, Disable).
Analog Output Compensation
When the output mode is set to analog current output (4~20mA) or linear voltage output (0~10V), user’s desire output value can be
attained by using compensation function. For example, the analog output 1 can be adjusted in
“Regulation Mode”. The output value can be positive or negative (+/-) and it can be changed by pressing the Up/Down key on the
temperature controller. The scale of each pressing is an increase or decrease of 1uA and 1mV.
For example: To change the current output range from 4~20mA to 3.9~20.5mA, set
and set
¾ To control the output manually: Set parameter
¾ To set output to 0%: Set parameter
¾ To adjust the lower limit of analog output: Input a desire value and check the meter to adjust the analog input value to desire value
(For example: 4~20 m A, adjusting analog value will be 20 m A). Set parameter
desire value in 【Regulation Mode】.
¾ To set output to 100%: Set parameter
¾ To adjust the lower limit of analog output: Input a desire value and adjust the analog input value to your desire value (For example:
4~20 m A, adjusting analog value will be 20 m A). Set
【Regulation Mode】.
to -100 (3.9-4=-0.1mA; -0.1mA/1uA=-100).
to in【Initial Setting Mode】.
to or to in【Operation Mode】.
(Output 1) = or (Output 2) = in 【Operation Mode】.
(Output 1) or (Output 2) to your desire value in
to 500 (20.5-20=0.5mA; 0.5mA/1uA= 500).
(Output 1) or (Output 2) to your
and parameters in
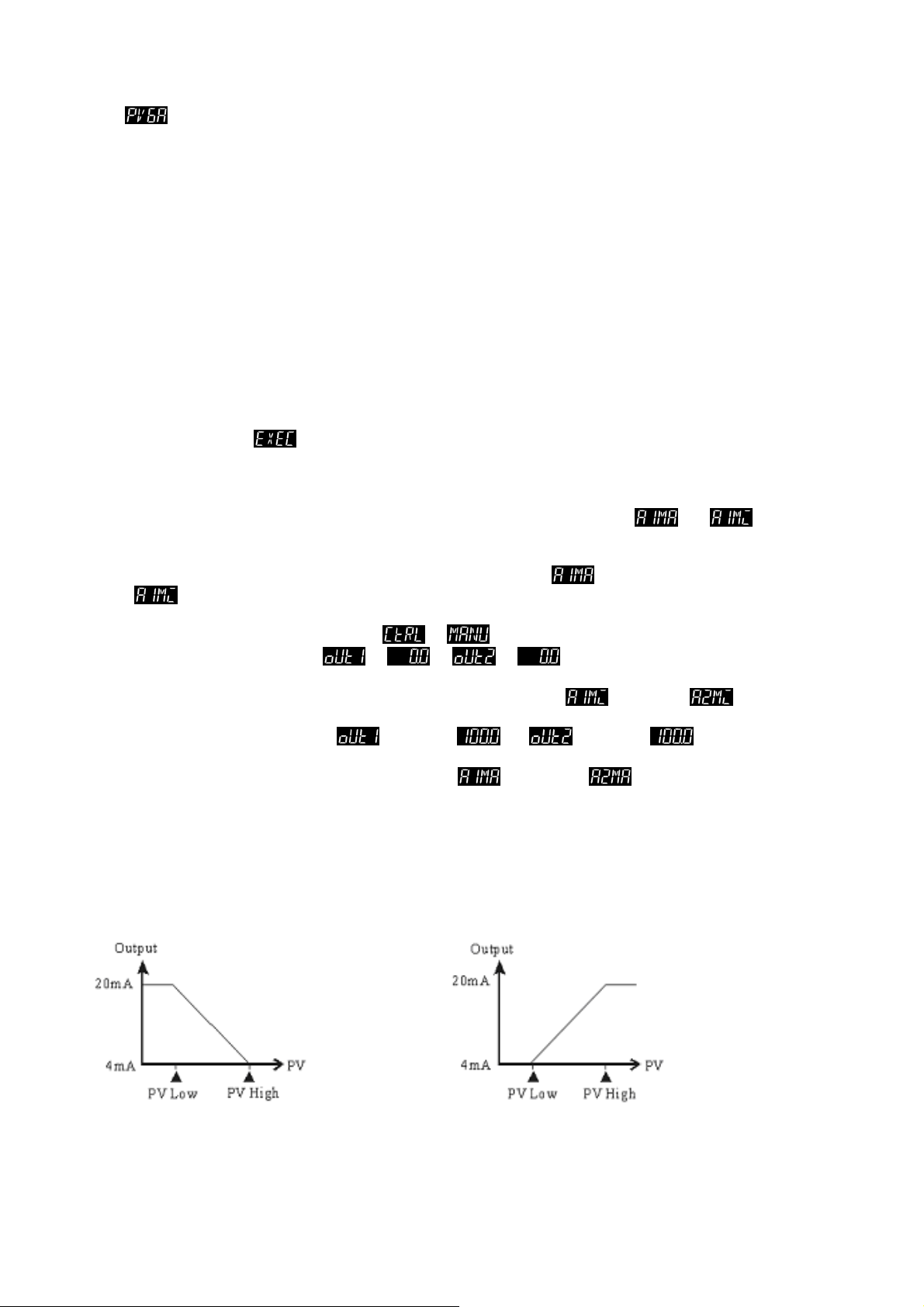
Retransmission and Compensation Adjusting
When the input value changes, the retransmission output will also be changed correspondingly. For example: If retransmission =
4~20mA ; uppler/lower limit = 100.0 ~ 0. Wen the controller reads 0, it outputs 4mA; when the controller reads 100, it outputs 20mA. The
value can also be a negative number to generate a negative slope. For negative slope, sets upper/lower limit = 0~100.0. In this case,
when the controller reads 0, it outputs 20mA; when the controller reads 100, it outputs 4mA. Refer to the slope diagram below.
Output =
Negative Slope
(Figure 1: Propotional Output Diagram)
Output =
Positive Slope
7
Page 8

¾ To set Retransmission to positive/negative slopes (a Retransmission board must be installed first): In 【Initial Setting Mode】 set
the
parameter, the last digit (Y) of xxxY indicates when Y=0 positive slope; when Y=1 negative slope.
¾ To adjust the lower limit of Retransmission:
a、 Make sure the slope of Retransmission is positive.
b、 Set lower limit value larger than the display value: In【Initial Setting Mode】set the value in
larger than the display value
(PV).
c、 Input the analog value to meter, check the meter and adjust the analog input value: In 【Regulation Mode】, enter the new value
into
. For example, if the range is 4~20mA, the new value will be 4mA.
¾ To adjust the upper limit Retransmission:
a、 Make sure the slope of Retransmission is positive.
b、 Set upper limit value smaller than the display value: In【Initial Setting Mode】set the value in
smaller than the display
value (PV).
d、 Input the analog value to meter,check the meter and adjust the analog input value: In 【Regulation Mode】, enter the new value
into
. For example, if the range is 4~20mA, the new value will be 4mA.
Check the Firmware Version and Output Type
When the temperature controller is ON, the PV and SV display will shows firmware version, output type and accessory functions in first 3
seconds.
¾ PV (first 3 digits) indicates the firmware version. Ex: 110 indicates firmware version V1.10.
¾ PV (4
th
digit) indicates the function of accessory 1.
C: RS485 Communication E: EVENT3 Input
¾ SV (frist 2 digits) indicates the output type of OUT1 and OUT2.
N: No function V: Voltage pulse output R: Relay output C: Current output
L: Linear voltage output S: SSR output
rd
¾ SV (3
¾ SV (4
digit) indicates the function of accessory 2.
N: No function C: CT measure E: EVENT1 input R: REMOTE input
th
digit) indicates the function of accessory 3.
N: No function C: CT measure E: EVENT2 input R: RETRANSMISSION output
Selection for Heating/Cooling/Alarm/Dual Loop Output Control
DT3 series offers 1 set of Output Control (OUT1) that is built-in internally and 2 sets of Alarm Output(ALARM1 及 ALARM2). User can also
purchase a 2
z Using 1 set of Output Control :
In【Initial Setting Mode】, sets
z Using 2
¾ When the 2
¾ When the 2
Output of
nd
set of Output Control (OUT2) or a 3rd set of Alarm Output (ALARM3).
to Heating (H1) or Cooling(C1) mode.
nd
set of Output Control:
nd
set of output control (OUT2) is used as a 3rd set of arlarm (ALARM3), set to Heating + Alarm 3(H1A2) or
Cooling + Alarm 3(C1A2) in 【Initial Setting Mode】.
OUT2 output types in relay, voltage pulse, analog current, linear voltage and SSR output can all be used for ALARM ON-OFF. For
example, OUT2 is set to analog current output. It outputs 4mA when alarm is OFF and outputs 20mA when alarm is ON.
nd
set of output control (OUT2) is used as dual output control, set to heating (H1H2); cooling (C1C2);
Heating/Cooling(H1C2) or Cooling/Heating (C1H2) control mode in【Initial Setting Mode】.
The Dead Band parameter
is automatically enabled when the temperature controller is in dual output control. As shown
in the diagram follow. The purpose of Dead Band function is to reduce the energy wastage of frequent heating/cooling actions. For
example, if SV = 100 degree and
= 2.0, there will be no output when the temperature is between 99~101°C..
when in ON-OFF control mode (Ctrl=ON-OFF control):
Adjust heating hysteresis
Adjust cooling hysteresis
Heating
Cooling
Set Point
8
Page 9

Output of
Heating
When the controller is in PID control and dual loop output mode,
is generated when TUNE= AT, but user can also manually sets the PID value. The P value of th 2nd set of PID = the P value of 1st
set of PID x
when in PID control mode (Ctrl=PID):
Cooling
Set Point
. The I and D value of the 2nd set of PID remains the same as the 1st set of PID.
Heating
Set Point
sets the P value of the 2nd set of PID. The 1st set of PID
Cooling
SV Control Mode Setting
There are 4 methods for setting SV of the temperature setting; they are Fixed, Slope, Program and Remote.
z Fixed SV Mode: controls the temperature to directly rise to a fixed setting value
¾ Set parameter
¾ Set the target temperature: set SV value by a parameter in 【Operation Mode】
z Slope SV Mode: Control temperature rises at a slope (unit: ℃/min.) to a fixed value, i.e., the temperature can be set to rise in a
set slope (unit: ℃/min.). E.G., Set a slope of 0.5 and set SV to 200.0℃; this means the temperature rises 0.5℃ every minute from
Room Temperature up to 200.0℃.
¾ Set parameter
¾ Set rising slope (unit: ℃/min. or ℃/s): set rising slope by parameter
¾ Set target temperature: set SV value by a parameter in 【Operation Mode】
¾ Set unit for rising slope (unit: ℃/min. or ℃/s): for parameter
position value to xxYx (Y can be 0 or 1; Y= 0: ℃/min.; Y=1: ℃/s).
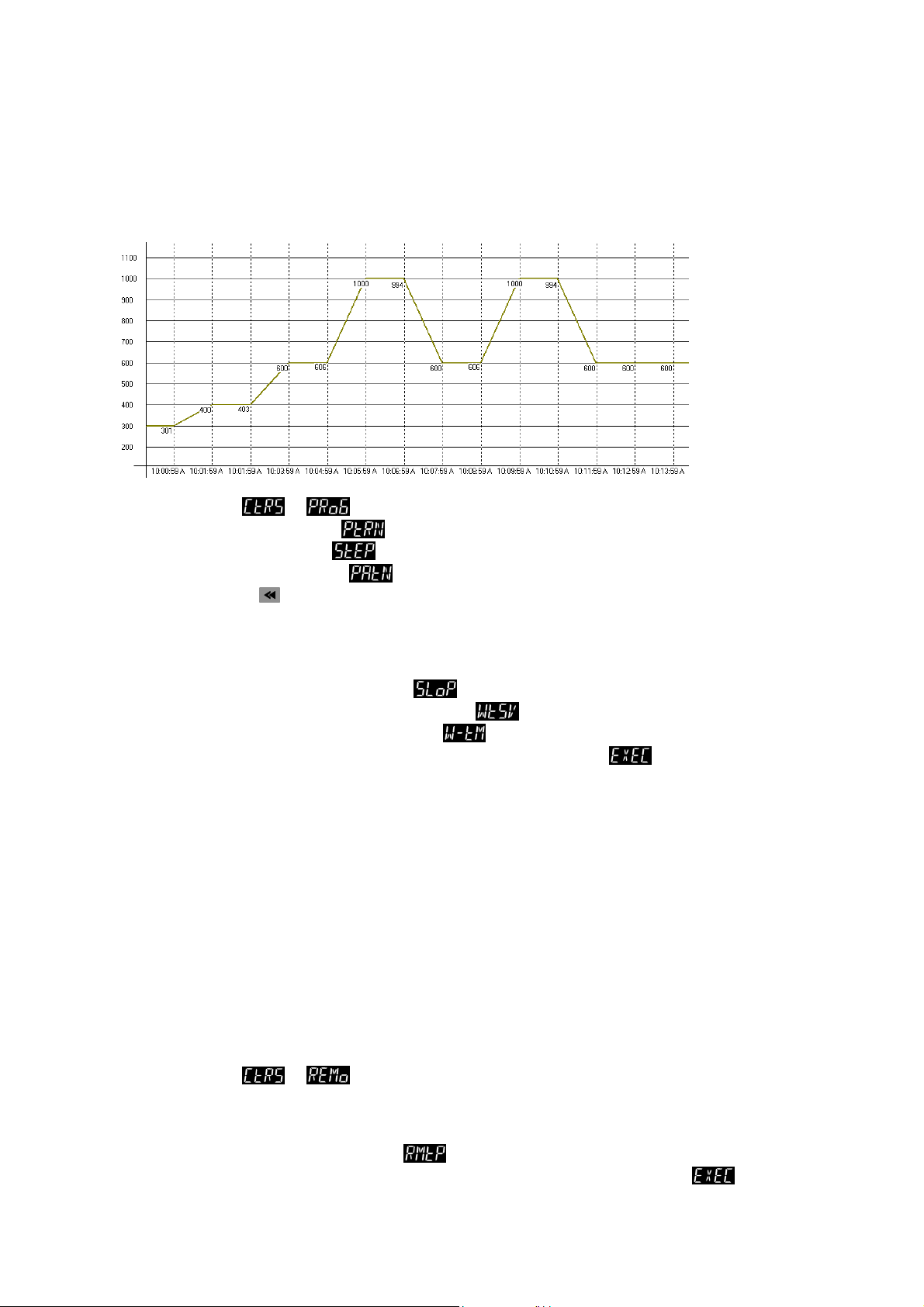
z Program SV mode: This means the temperature setting value is not a fixed value but a setting curve defined by the user
according to his-her requirements. By way of PID control, the temperature input rises along with the defined temperature curve. As
to how to input the temperature setting curve, the machine provides 16 patterns with 16 steps each, together with a linking
parameter, a loop parameter, and a number of executions. Each step has 2 parameters (temperature setting value and time). If the
initial step has a time parameter set to 0, temperature will rise from room temperature at the initial slope up to the target
temperature. After setting these parameters, each temperature controller will have its own set of initial pattern and initial step for
creating its own temperature setting curve. Some of the terms are explained as follows:
a、 Initial pattern: set the program to start running at a sequential number of patterns
b、 Initial Step: set the program to start running at a sequential number of steps
c、 Initial Slope: If the time setting of the initial step of the initial pattern is set to 0, an initial slope shall be set to allow the
temperature to rise from room temperature to the setting value.
d、 Step: includes 2 parameter settings: a setting point X and an executing time T, representing the setting value (SV) to rise
to X after time T. If the setting point X is identical to the previous setting, this process is called a Soak, otherwise a Ramp,
therefore this control procedure is also called a Ramp Soak control. The first running procedure is preset as a Soak
control, to set the temperature control to setting point X in advance and maintain the temperature at X, at a duration of T.
e、 Link Parameter: the number of the subsequent pattern to be linked after executing this pattern. If set to END, the program
mode will end but maintain the last setting value; if set to STOP, all the program controls will end with the output switched
off.
f、 Number of loops: Number of extra loops to be carried out for the pattern. If set to 1, the pattern will be carried out 2 times.
g、 Executing step: Number of steps executed for each pattern.
h、 Wait time, wait temperature: After reaching the program temperature value, a wait time and wait temperature can be set; if
the current temperature is not within the range of (temperature setting value ± wait temperature), the set wait time will start
to count down until the currently measured temperature reaches the range of (temperature setting value ± wait
temperature) of each step before proceeding to the subsequent step. An alarm will be issued if the range of (temperature
setting value ± wait temperature) is not reached when the count down reaches 0.
i、 Execution:
to in 【Initial Setting Mode】
to in 【Initial Setting Mode】
in 【Regulation Mode】
in 【Initial Setting Mode】, set the corresponding Y
9
Page 10
If the setting control is in running mode, the program will start running from the initial pattern and initial step, and carry out
commands one by one.
When the setting control is in end mode, the program will stop running and give out an output disable.
When setting control is in stop control and temperature is controlled at the setting value before the stop, by re-selecting
the start status, the program will start running from the initial pattern and initial step.
When setting control is in pause control and temperature is controlled at the setting value before the stop, by re-selecting
the start status, the program will start running from the step where the program was paused and carry out the remaining
part.
¾ Set parameter to In 【Initial Setting Mode】
¾ Set initial pattern: Set parameter
¾ Set initial step: Set parameter
¾ Select edit pattern: Set parameter
Press
“SP‘x’F”, ”tM‘x’F”, ”PSY‘x’ ”, ”CYC‘x’ ”, ”LiN‘x’ ”, where ‘x’ is the selected pattern, which can be 0, 1, …, E,
F. ”SP‘x’0”、 ”SP‘x’1”、…”SP‘x’F” are temperature settings of this step; ” tM‘x’0” 、” tM‘x’1”、 … ” tM‘x’F” are time
settings of this step; ”PSY‘x’ ” is the maximum effective procedure; ”CYC‘x’ ” is the number of loops for executing
the loop, ”LiN‘x’” is the number of the subsequent patterns to be linked after executing this pattern.
¾ Set initial slope: Set initial slope by parameter
¾ Set wait temperature: Set wait temperature by parameter
¾ Set wait time: Unit min., set wait time by parameter
¾ Set unit of program edit time: Set value corresponding to Y position of parameter
xxYx (Y is 0 or 1; 0:℃/min., 1:℃/s)。
z Remote Mode: Input of setting value can be dynamic, an analog value (voltage or current) can be converted into a dynamic input
value. Two methods can be used for the conversion: positive slope or negative slope, they are depicted as follows:
a、 Positive slope Remote setting: Display of Remote analog input is in positive proportion with setting input, e.g.: Remote input
type is selected as 1~5 V analog voltage, Remote higher limit of input is set as 5000, Remote lower limit of input is 1000,
decimal display is set as 0; when Remote input is 5V, the screen shows 5000; when Remote input is 2V, the screen show
2000; this is the dynamic setting of the screen display. (Dynamic setting value =(Remote higher limit of input – Remote lower
limit of input)*(Remote input value - lower limit of Remote input)/( higher limit of Remote input - lower limit of Remote input)+
Remote lower limit of input)
b、 Negative Slope Remote setting: Display of Remote analog input is in negative proportion with setting input, e.g.: Remote
input type is selected as 1~5 V analog voltage, Remote higher limit of input is set as 5000, Remote lower limit of input is 1000,
decimal display is set as 0; when Remote input is 5V, the screen shows 1000; when Remote input is 2V, the screen show
4000; this is the dynamic setting of the screen display. (Dynamic setting value =(Remote higher limit of input – Remote lower
limit of input)*(Remote input value - lower limit of Remote input)/( higher limit of Remote input - lower limit of Remote input) –
Remote lower limit of input)
¾ Set parameter
Note: This option is only available when a Remote board is inserted. If the Remote type is of analog current, the JP in the
Remote board must be shorted (using a short cap). If the Remote type is of analog voltage, ensure the JP is open.
¾ Remote type setting: Set type of the Remote input (including analog current 0~20 m A,4~20m A; analog voltage 0~5V, 1~5V,
0~10V)Set Remote input type by parameter
¾ Remote positive/negative slope setting: Set corresponding value of Y position by parameter
Mode】, e.g.: xYxx (Y can be 0 or 1; 0: positive; 1: negative).
key to select the patterns including “SP‘x’0”, ”tM‘x’0”, ”SP‘x’1”, ”tM‘x’1”…
to in 【Initial Setting Mode】
to initial pattern in 【Operation Mode】.
to initial step in【Operation Mode】
in 【Initial Setting Mode】 to set the pre-edit pattern, assume selection is ‘x’.
in 【Initial Setting Mode】(unit: 0.1℃/min. or 0.1℃/s)
in 【Initial Setting Mode】.
in 【Initial Setting Mode】.
in 【Initial Setting Mode】, e.g.,
in 【Initial Setting Mode】
in【Initial Setting
10
Page 11
¾ Remote compensation adjustment: input corresponding lower limit of analog signal at the Remote end, set Remote
compensation adjustment by parameter
¾ Remote gain adjustment: input corresponding upper limit of analog signal at the Remote end, set Remote compensation
adjustment by parameter
¾ Remote lower limit: Setting Remote lower limit by parameter
¾ Remote higher limit: Setting Remote higher limit by parameter
in【Regulation Mode】
in【Regulation Mode】
in【Regulation Mode】
in【Regulation Mode】
Control Mode Setting
There are 4 control modes; ON-OFF, PID, FUZZY and MANUAL.
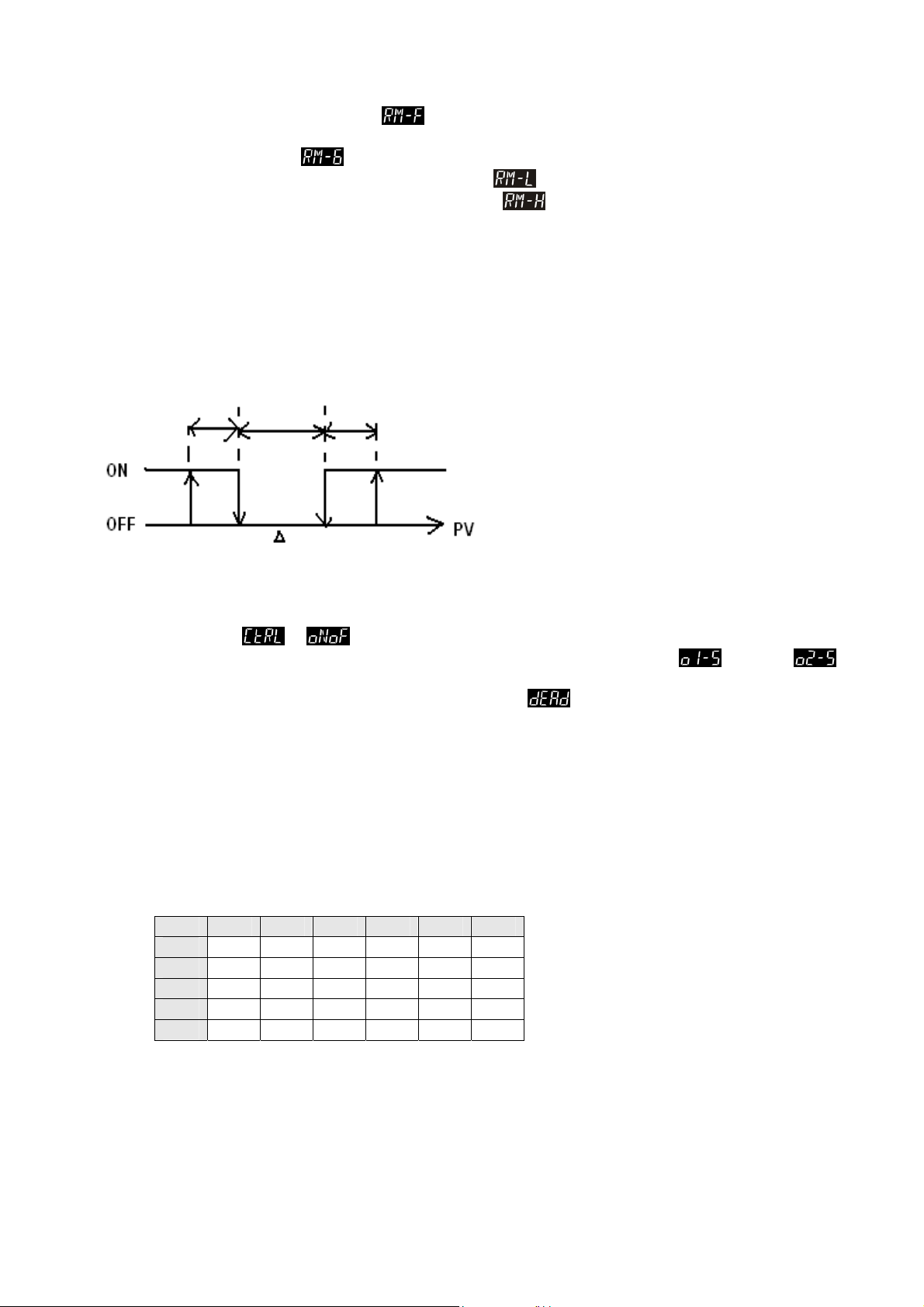
z ON-OFF Mode: For heating output, the output is off when input is greater than the setting value; output is on when input is smaller
than (setting value – adjustment sensitivity setting value). For cooling output, the output is on when the input is greater than
(setting value + adjustment sensitivity setting value); output is off when input is smaller than the setting value. If one of 2 outputs is
set for heating and the other for cooling, a non-action zone can be set as follows.
Heating sensitivity
adjustment
DeadBand
Heating
¾ Set parameter
¾ Set adjustment sensitivity: Set adjustment sensitivity by parameter【Regulation Mode】 to
¾ Setting of DeadBand of both outputs: Set DeadBand by parameter
z PID Mode: When set for heating or cooling, the program performs PID operation via input temperature and setting temperature,
with the operation result output for the temperature control. A PID parameter and control period must be set for this function; these
parameters can also be generated automatically via auto-tuning (AT).
a、 A total of six sets of PID parameters are available, one of which can be selected for carrying out PID, and the program may
b、 Set PID parameters and the control period: in which PID parameters can be adjusted manually according to system
(Output ON-OFF control of both actions)
(output 2)
automatically select a set of PID that is most close to the input value. In order to achieve this, each set of PID parameters has
a reference input setting value which allows the user to set for manual setting or for auto-tuning (AT). E.G., for the six sets of
PID parameters as shown below, SV is reference input setting. Let us select the 4
P=40, I=220, D=55, IOF=30%. If we select AT to find the set closest to the setting value with a setting input of 230, the
program will automatically find the second set as the running parameter for PID operation.
0 1 2 3 4 5
SV 80 160 240 320 400 480
P 120 46 70 60 40 50
I 100 140 180 200 220 240
D 25 35 45 50 55 60
IOF 20 10 30 20 30 21
characteristics or created automatically by AT, the pre-set integral value is set as I parameter ≠0, allowing for promptly
achieving the setting value; unit is % output; proportional error compensation is: when I parameter is set to =0, for the
adjustment of reduced time to reach the temperature. The Control Period is the period of PID operation, if the control period is
10s, it means a PID operation is carried out every 10s. The result is then output to control the temperature. If the system
heats up quickly, the control period shall not be set too long. For relay output, the lifespan of the relay shall be considered; a
short period will shorten the lifespan of relay.
Set value
Cooling sensitivity
adjustment
Cooling
to in 【Initial Setting Mode】
(Output 1),
in 【Regulation Mode】
th
set as the PID running parameter: i.e.,
11
Page 12
c、 Coef and DeadBand are added in the PID parameter for double output (one for heating and one for cooling). Coef refers to
the ratio between the first and second portions of output (P parameter of second group =Coef*P, Coef= 0.01~99.99);
DeadBand is the overlapping temperature of the P output of the first group and the second group.
¾ Set parameter
¾ To set for heating or cooling control: Select desired output control by parameter
board is inserted in Output2, selection items are: H1, C1 (H for heating, C for cooling, 1 for output 1). If a board is inserted in
Output 2, selection items are: H1H2, C1H2… H1A2(H for heating, C for cooling, 1 for output 1, 2 for output 2, A for Alarm 3 )
¾ Select number of PID sets as running parameter and set PID parameter: Select 0~5,
【Regulation Mode】, then press
where ‘x’ is the pre-selected set as the PID running parameter, which can be 0~5. “SV‘x’” is the reference temperature
setting value; “P‘x’”, ”I‘x’”, ”d‘x’”, ”ioF‘x’” correspond to P, I, D, and IOF.
¾ Set the control period: in parameter【Regulation Mode】, PV displays “o‘x’-‘y’”, ‘x’ is 1(output 1) or 2 (output 2), ‘y’ is H(Heating)
or C (Cooling)
¾ Set double output Coef: Set Coef value by parameter
¾ Set DeadBand of double output: Set DeadBand zone by parameter
¾ Set control to running mode: Set parameter
¾ Set AT: Set parameter
automatically. After that, a pre-set parameter of integrated PID value will be created automatically and the display will
automatically alter into
Note: When performing AT, the entire system must complete setting; i.e. the input Sensor must be wired and correctly set, and the
output must be connected to a heater or cooler pipe.
z MANUAL Mode: Manual control function, may force output of a fixed value; normally operated by combining switchover of PID
control.
a、 Switch from PID control to manual control: Control output will maintain the original control output before switching over to
manual control. E.g., if the control output before the PID calculation is 20%, then the control output after switching to manual
control is 20%. You may force a fixed output value after a switchover, for example: controlling the output to be 40%.
b、 Switch from manual control to PID control: if manual control before switching-over to PID control is 40%, the program will
take 40% as the initial value for calculating the PID value and output the new control.
Note: If power of machine is switched off in manual control mood, the output % will be maintained when the power is switched on
again.
¾ Set parameter
¾ Set control period: in parameter 【Regulation Mode】, PV displays “o‘x’-‘y’”, ‘x’ is 1 (output 1) or 2 (output 2), ‘y’ is H (Heating)
or C (Cooling)
¾ Set output %: in parameter 【Operation Mode】, PV screen displays “oUt‘x’”, ‘x’ is 1 (output 1) or 2 (output 2)
z FUZZY Mode: This comprises 2 parts: PID parameters and Fuzzy exclusive parameters. Since Fuzzy control is calculated based
on P.I.D values of PID control, the user must first set P.I.D parameters or perform auto tuning (AT) to produce these parameters. In
addition, Fuzzy control includes the following 2 exclusive parameters.
a、 Fuzzy Gain Setting: altering this value will directly affect the calculation of Fuzzy gain. Increasing this value will directly
enhance the Fuzzy control; decreasing this value will weaken the Fuzzy control. It is recommended that this value shall be
decreased for systems with slow reaction to heating/cooling. This value may be increased for systems with quick reaction to
heating/ cooling.
b、 Set Fuzzy DeadBand: The effective bandwidth of Fuzzy control, when PV value enters into the range of SV-FZDB
<PV<SV+FZDB, Fuzzy control will stop calculation. I.e., when the PV is within this temperature range, its Fuzzy control is
fixed.
¾ Set parameter
¾ Set Fuzzy Gain: Set value of Fuzzy Gain by parameter
¾ Set Fuzzy DeadBand: Set value of Fuzzy DeadBand by
to in 【Initial Setting Mode】
in 【Initial Setting Mode】. If no
, by parameter in
key to set the selected PID parameter including “SV‘x’”, ”P‘x’”, ”I‘x’”, ”d‘x’”, and ”ioF‘x’”,
in 【Regulation Mode】
in 【Regulation Mode】
in 【Operation Mode】 to .
to in 【 Regulation Mode 】 . The selected number of PID will be adjusted
.
to in 【Initial Setting Mode】
to in 【Initial Setting Mode】
in 【Regulation Mode】.
parameter in 【Regulation Mode】.
Setting of multiple PID sets
When PID control is selected, the system provides 6 sets (PID 0~5) PID parameter sets (P, I, D and IOF parameter) to be selected by the
user. In general conditions, one set of PID (P0) is adequate. For different setting values (SV), when the same PID value is not adequate
to control the precision, the user may set up multiple sets of PID parameters for the system to automatically switch-over to an applicable
PID set.
¾ Set only one PID set:
Set parameter
to 0 (PID 0, the first set) in【Regulation Mode】, set parameter to ON; at this time, the System starts to
12
Page 13

Auto Fine-tune the PID value. During the calculation, AT LED lights up in the display panel. When the PV value generates 2 curves of
temperature oscillation based on the SV value, the AT process is completed and the AT LED in the panel goes out. The calculated PID
parameters are displayed in
¾ Automatic switching-over Multiple PID sets:
Set parameter
as ON; on completion of auto fine-tuning, the system fills in parameters =100, , , and
automatically, their content can be revised by the user.
Set parameter
completion of auto fine-tuning, the system fills in parameters
Set parameter
and load the corresponding PID set automatically. E.g., if SV=110, system will load
parameters.
If more SV groups are required, PID2~PID5 can be set up with the same sequence as described above.
to 0 (PID 0, the first set) in【Regulation Mode】, set the required SV value (e.g. 100 degree), set parameter
to 1 (PID 1, the second set), set the required SV value (e.g. 150 degree), set parameter as ON; on
to AUTO, System will verify on its own whether the current SV value is closer to parameter or ,
, , , and , of which their content can be revised by the user.
=150, , , and automatically.
parameters. If SV=140, system will load
Tune Function
This machine provides 2 tuning methods (Auto_Tuning and Self_Tuning) for automatic generation of PID parameters (only applicable
when control mode is set to PID control).
z Auto_Tuning: by full output of heating or cooling, temperature is allowed to oscillate up and down. Attain parameters of the
magnitude and period, calculate P, I, D, IOF parameters; in addition, save the temperature setting value for performing AT, for the
use of PID control. After Auto_Tuning, PID control will be carried out automatically.
¾ Set parameter
¾ AT setting: Set parameter
to in 【Initial Setting Mode】
to in 【Regulation Mode】
z Self_Tuning: By full output of heating or cooling, max. slope of temperature alteration and system delay can be attained from the
Temperature-Time Curve, and P, I, D, IOF parameters can be calculated. Self tuning can be carried out in RUN mode and in STOP
mode. In the RUN mode, PID parameters are allowed to be updated when the machine is running; in the STOP mode, PID
parameters for the SV value can be attained.
¾ Set parameter
¾ ST Setting: set parameter
to in【Initial Setting Mode】
to in 【Regulation Mode】
Set Reverse Output
¾ output 1 reverse setting: Set a value corresponding to Y position by parameter in 【Initial Setting Mode】, such as xxxY (Y
can be 0 or 1; 0: forward; 1: reverse)
¾ output 2 reverse setting: Set a value corresponding to Y position by parameter
can be 0 or 1; 0: forward; 1: reverse)
in 【Initial Setting Mode】, such as xxYx (Y
Limits controlling the output range
Maximum and minimum output can be limited; if the original maximum control output is 100% and the minimum control output is 0%, you
may set the maximum control output to 80% and the minimum control output to 20%.
¾ Setting the upper limit of control output: Set values for parameters
¾ Setting the lower limit of control output: Set values for parameters
(output 1), (output 2) in【Operation Mode】.
(output 1), (output 2) in【Operation Mode】.
CT Function
This controller provides maximum 2 CTs (CT1 and CT2) for measuring current values of output 1 and output 2; when the corresponding
output is ON, use CT to measure the corresponding current. An alarm will be activated (ON) when the current exceeds the setting range
of alarm. (A hardware PCB is required.)
¾ Insert CT1, CT2 PCBs to Option1, Option2
¾ Set the corresponding alarm to CT Alarm: Please refer to “Alarm Output Setting”.
¾ Set the upper limit of CT alarm output (unit: 0.1A): Please refer to “Alarm Output Setting”.
¾ Set the lower limit of CT alarm output (unit: 0.1A): Please refer to “Alarm Output Setting”.
¾ Read current values of CT1, CT2: Read current values by parameters
, in 【Operation Mode】.
13
Page 14

EVENT Function
This controller provides a maximum of 3 EVENTs (EV1~EV3) for respectively setting EV functions as shown in the following Table <1>.
For example, if EV1 is used for Run/Stop selection, when the controller is set to RUN status, if terminals in the Option1 slot are open, the
controller is in RUN status; if terminals in the Option1 slot are shorted, the controller
Function setting 0 1 2 3 4
Function Disable Run/Stop SV 1/ SV 2
Table <1> EVT function setting
Auto/
Manual
Run/ Hold
switches to STOP status.
Run/Stop: This function switches the controller between RUN and STOP status.
SV 1/SV 2: This function selects SV 1 or SV 2 as the active setpoint.
Auto/Manual: This function selects PID and Manual control.
Run/Hold: This function switches controller between run and hold status when in program control.
¾ Insert EV1, EV2 PCB to Option1 or Option2, or insert hardware with a built-in EV3 function
¾ Set EV functions as listed in Table <1> EVT Function Setting by parameters
Note: Selection of “Evt‘x’” items must match with the inserted PCB; if only Option1 is inserted, then only “Evt1” will be displayed.
, , in【Regulation Mode】.
Limits of temperature ranges
Different input sensors have different application ranges (e.g.: J type factory setting is -100 ~ 1200℃), adjust parameters (upper
limit) /
If lower limit is altered to 0 and upper limit is altered to 200, the limit function will be enabled in the following conditions:
¾ When setting the SV value, the limits may set for 0~200℃
¾ In ON-OFF, PID, FUZZY and Self-Tuning control conditions, the control output will be forced to shut off if the PV value exceeds the
(lower limit) in Initial Setting Mode.
upper/lower limit. (Alarm output is still normal)
User Setting of F1, F2 function keys
In the Operation Mode, (PV/SV display mode), pressing a function key more than 3 seconds will prompt you to the setting of the following
functions; press
Function Description
MENU
AT Selecting this function, F1 / F2 button can be used for quick ON / OFF operation of AT function
R-S Selecting this function, F1 / F2 button can be used to switch between RUN/STOP status.
PROG Selecting this function, F1 / F2 button can be used to switch between RUN/HOLD status.
ATMT Selecting this function, F1 / F2 button can be used to switch between PID and MANUAL control mode
For disabling F1/F2 function, please select 【MENU】 without saving any menu screen.
keys to make a selection.
When in a screen other than the PV/SV display mode, pressing F1/F2 key continuously may save the setting, to quickly
switch the menu screen
(When the screen shows KEY SAVE, the menu screen is saved)
Edit a self-defined Menu Screen
Hidden MENU setting: Lock all buttons by adjusting parameter to in 【Operation Mode】. At the same time press
and
table for details. Select “Hide” to hide the Menu.
Menu Layer setting: Lock all buttons by adjusting parameter
and
table for details. Selectable items are NOR= display layers; ADJ= adjust layers; SET= set layers.
Menu layer reset: Lock all buttons by adjusting parameter
keys for 3 seconds to display , and enter Password-1. The screen will show menu number , see the following
to in 【Operation Mode】. At the same time press
keys for 3 seconds to display , and enter Password-2. The screen will show menu number , see the following
to in 【Operation Mode】. At the same time press and
keys for 3 seconds to display , and enter Password-3. The screen displays (Level reset) parameters, select
to reset all menu layers to default setting.
RUN layer Adjust layer Setting layer
Menu No. Corresponding menu Menu No. Corresponding menu Menu No. Corresponding menu
M101
M102
M201
M202
M301
M302
14
Page 15

M103
M104
M105
M106
M107
M108
M109
M110
M111
M112
M113
M114
M115
M116
M117
M118
M119
M120
M121
M122
M123
M124
M125
M126
M203
M204
M205
M206
M207
M208
M209
M210
M211
M212
M213
M214
M215
M216
M217
M218
M219
M220
M221
M222
M223
M224
M225
M226
M227
M228
M229
M230
M231
M232
M233
M234
M235
M303
M304
M305
M306
M307
M308
M309
M310
M311
M312
M313
M314
M315
M316
M317
M318
M319
M320
M321
M322
M323
M324
M325
M326
M327
M328
M329
M330
M331
M332
Restore Factory Settings
Lock all buttons by adjusting parameter to in 【Operation Mode】. At the same time press and keys for 3
seconds to display
overwrite all user settings with factory settings.
, and enter Password-1357. The screen displays (Parameter reset), selecting will
Key Lock Function
Adjusting parameter to in 【Operation Mode】will lock all keys; adjusting the parameter to allows adjustment
of SV setting values and F1/F2 function keys.
¾ Unlock the key:
Press
password is 0000.
¾ For altering key-lock password:
and keys at the same time in LOCK mode to display parameter, enter the password to unlock the key. Default
1. Press
2. Enter the current password in
key in screen to enter change-password screen .
screen. If the password is correct, you will be prompted to Set-New-Password
15
Page 16
H
screen . If the password is incorrect, the screen will return to PV/SV display mode.
3. Enter the new password two times in the
screen. The screen will return to PV/SV display mode with the keys
unlocked. If the two entries of password are not the same, the screen will go back to the state of step 2.
¾ Cannot remember the password:
Restore factory settings to release the locking.
Alarm Outputs
Two alarm outputs are provided in the machine, a maximum of 3 alarm outputs can be expanded. A total of 19 Independent alarm settings
can be made as listed in the table. Additional settings are provided, such as alarm delay, alarm standby, alarm output hold, alarm reverse
output, and alarm peak record, as described as follows:
a、 Alarm Delay Setting: Sets alarm delay time. When the movement conforms to the alarm setting mode, controller will delay the
generation of an alarm signal; an alarm will only be activated when the alarm conditions remains confirmed within the delayed period
of time.
b、 Alarm Standby Setting: An alarm detection will only be activated when the measured value falls within the ±5 range of the specified
input value, so as to prevent an alarm activation on the start-up if the condition conforms to the alarm setting.
c、 Alarm Output Hold Setting: The alarm message will be held when the alarm activates, unless the control switches off the alarm.
d、 Alarm Reverse Output Setting: An alarm output can be set for NC( Normal close) or NO(Normal Open).
e、 Alarm Peak Record Setting: For recording the peak value of the alarm signal.
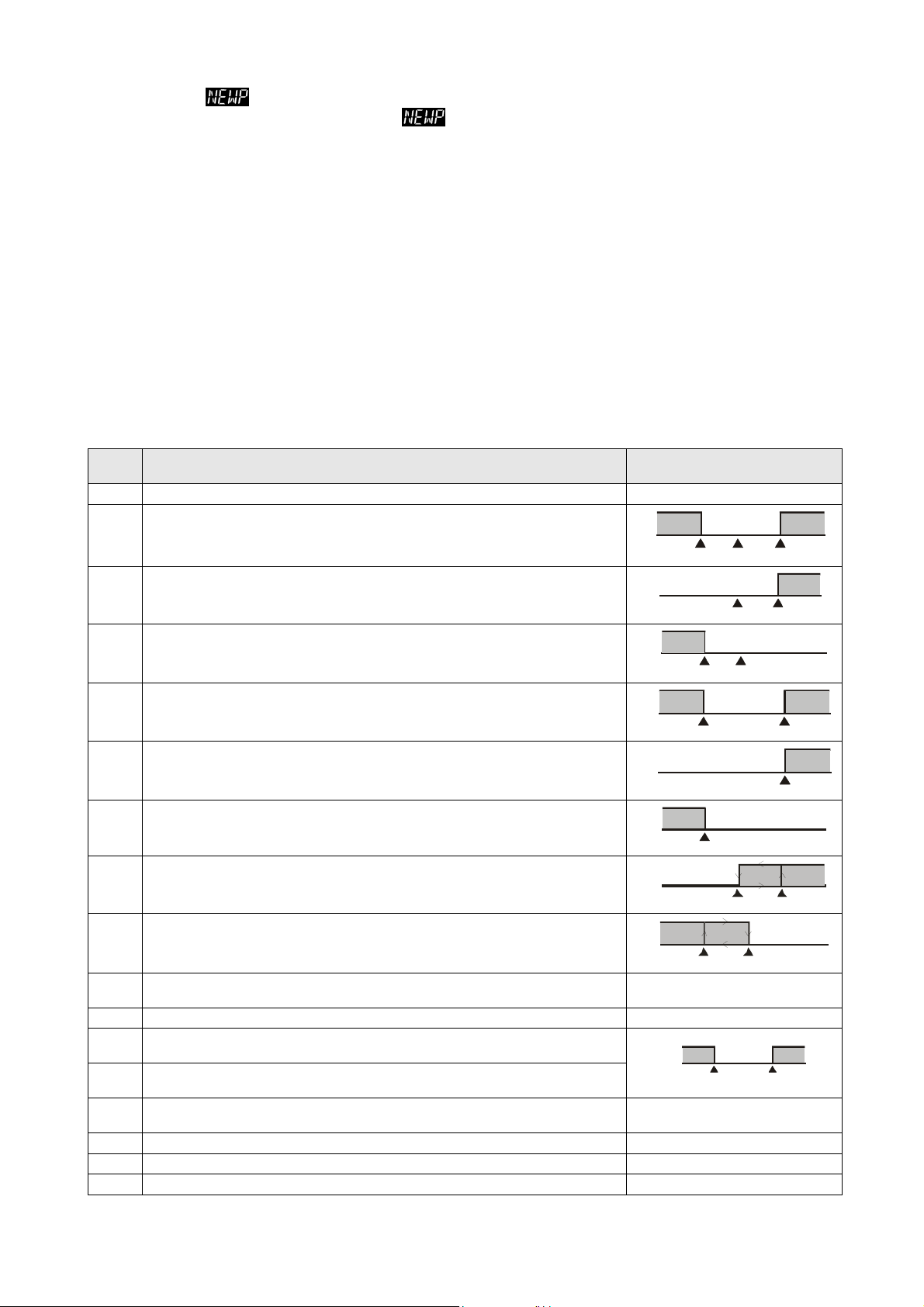
Set
Value
0 Alarm function disabled
Deviation upper- and lower-limit:
1
This alarm output operates when PV value is higher than the setting value SV+(AL-H)
or lower than the setting value SV-(AL-L).
Deviation upper-limit:
2
This alarm output operates when PV value is higher than the setting value SV+(AL-H).
Deviation lower-limit:
3
This alarm output operates when PV value is lower than the setting value SV-(AL-L).
Absolute value upper- and lower-limit:
4
This alarm output operates when PV value is higher than the setting value AL-H or
lower than the setting value AL-L.
Absolute value upper-limit:
5
This alarm output operates when PV value is higher than the setting value AL-H.
Absolute value lower-limit:
6
This alarm output operates when PV value is lower than the setting value AL-L.
Hysteresis upper-limit alarm output:
7
This alarm output operates if PV value is higher than the setting value SV+(AL-H). This
alarm output is OFF when PV value is lower than the setting value SV+(AL-L).
Hysteresis lower-limit alarm output:
8
This alarm output operates if PV value is lower than the setting value SV-(AL-H). This
alarm output is OFF when PV value is higher than the setting value SV-(AL-L).
Disconnection Alarm: This alarm output operates if the sensor connection is incorrect
9
or has been disconnected.
10 Time Counter Alarm
CT1 Alarm: CT1 is ON if the value of CT1 is lower than the value of AL-L or higher than
11
AL-H.
CT2 Alarm: CT2 is ON if the value of CT2 is lower than the value of AL-L or higher than
12
AL-H.
When SOAK status (temperature hold) happens to PID program control, alarm output
13
is ON.
14 When RAMP UP status happens to PID program control, alarm output is ON.
15 When RAMP DOWN status happens to PID program control, alarm output is ON.
16 When RUN status happens to PID program control, alarm output is ON.
Alarm Type Alarm Output Operation
ON
OFF
SV-(AL-L)
ON
OFF
ON
OFF
SV-(AL-L)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
SV
SV SV+(AL-H)
SV
AL-L AL-H
AL-L
AL-L AL-H
AL-H
AL-L
ON
OFF
AL-L
SV+(AL-H)
AL-H
AL-
16
Page 17
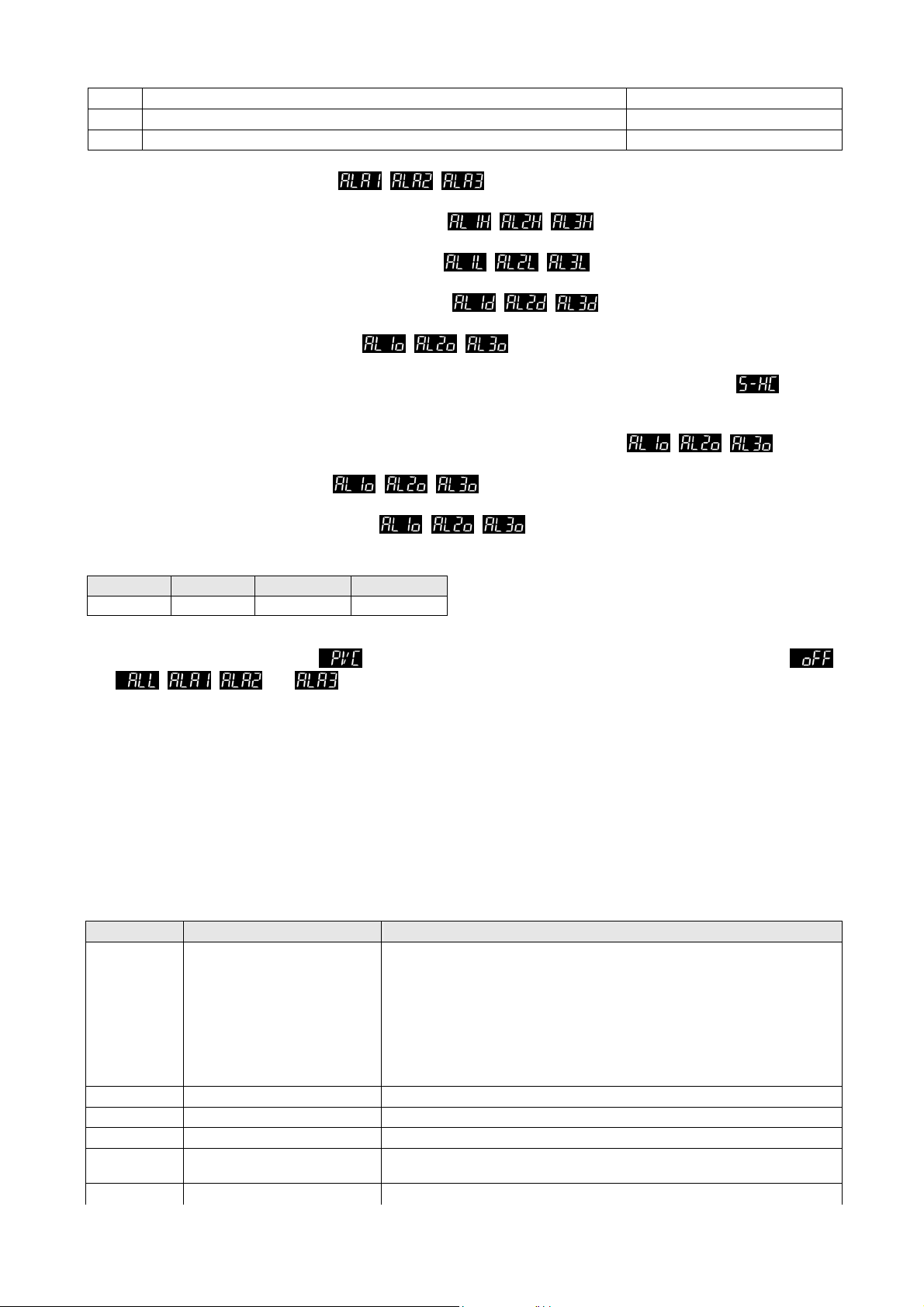
17 When HOLD status happens to PID program control, alarm output is ON.
18 When STOP status happens to PID program control, alarm output is ON.
19 When END status happens to PID program control, alarm output is ON.
¾ To set Alarm Mode: Use the parameters , , in 【Initial Setting Mode】 to select the alarm mode. There are
in total of 19 different modes (as listed in the table above).
¾ To set Deviation Upper Limit of Alarm: Use the parameters
upper limit.
¾ To set Deviation Lower Limit of Alarm: Use the parameters
lower limit.
¾ To set Alarm Delay Time(Unit: seconds): Use the parameters
delay time.
¾ To set Reverse Alarm: Use the parameters
(When Y=0: reverse, Y=1: forward)
¾ To set Alarm 3: Alarm 3 function is available when an output board is connected to Output 2. Use the parameter
Setting Mode】, press the key ▲ or ▼ to select for the following control output items: H1H2, C1H2… H1A2(H defines heating, C
defines cooling, 1 indicates Output1, 2 indicates Output2 , A indicates Alarm3).
¾ Select x1A2( set x to H or C) to operates Alarm3. To set Standby Alarm: Use the parameters
Setting Mode】 to set the digit Y of value xxxY (When Y=0: normal opeartion, Y=1: standby).
¾ To set Hold Alarm: Use the parameters
Y=0: normal operation, Y=1: Hold).
¾ To set Peak Alarm Signal: Use the parameters
(when Y=0: normal operation, Y=1: peak signal).
Note: Refer to the table
Bit3 Bit2 Bit1 Bit0
Peak Alarm Hold Alarm Reverse Alarm Standby Alarm
¾ PV Color Change Function: This controller provides PV color change function. The PV display color will be changed if the selected
alarm energized. Use the parameter
, , and .
, , in【Initial Setting Mode】 to set the digit Y of value xxYx
, , in【Initial Setting Mode】 to set the digit Y of value xYxx ( When
, , in【Initial Setting Mode】 to set the digit Y of value Yxxx
(PV color) in 【Initial Setting Mode】 to select the alarm, selectable items are ,
, , in 【Operation Mode】to set the deviation
, , in 【Operation Mode】 to set the deviation
, , in 【Initial Setting Mode】 to set the alarm
, , in 【Initial
RS-485 Communication
1. Supporting transmission speed: 2,400, 4,800, 9,600, 19,200, 38,400bps
in【Initial
2. Non-supported formats: 7, N, 1 or 8, O, 2 or 8, E, 2
3. Communication protocol: Modbus (ASCII or RTU)
4. Function code: 03H to read the contents of register (Max. 8 words). 06H to write 1 (one) word into register. 02H to read the bits
data (Max.16 bits). 05H to write 1 (one) bit into register.
5. Address and Content of Data Register:
Address Content Definition
1000H Present value (PV)
1001H Set point (SV) Unit is 0.1, oC or oF
1002H Upper-limit of temperature range The data content should not be higher than the temperature range
1003H Lower-limit of temperature range The data content should not be lower than the temperature range
1004H
1005H Control method 0: PID, 1: ON/OFF, 2: manual tuning, 3: FUZZY
Input temperature sensor type
Measuring unit is 0.1, updated one time in 0.1 second
The following reading value display indicates error occurs:
8002H : Initial process (Temperature value is not got yet)
8003H : Temperature sensor is not connected
8004H : Temperature sensor input error
8006H : Cannot get temperature value, ADC input error
8007H : Memory read/write error
Please refer to the contents of the “Temperature Sensor Type and Temperature
Range” for detail
17
Page 18

1006H Heating/Cooling control selection Refer to Ouputput Mode Selection
1007H 1st group of Heating/Cooling
1008H 2nd group of Heating/Cooling
1009H PB Proportional band 0.1 ~ 999.9
100AH Ti Integral time 0~9,999
100BH Td Derivative time 0~9,999
100CH Integration default 0 ~ 100%, unit is 0.1%
100DH Proportional control offset error
100EH The setting of COEF when Dual
100FH The setting of Dead Band when
1010H Hysteresis setting value of the
1011H Hysteresis setting value of the
1012H Output value read and write of
1013H Output value read and write of
1016H Temperature regulation value -99.9 ~ +99.9. Unit is 0.1
1017H Analog decimal setting 0 ~ 3
101CH PID parameter selection 0~5/AUTO
101DH SV value corresponded to PID
1020H Alarm 1 type Please refer to the contents of the “Alarm Outputs” for detail
1021H Alarm 2 type Please refer to the contents of the “Alarm Outputs” for detail
1022H Alarm 3 type Please refer to the contents of the “Alarm Outputs” for detail
1024H Upper-limit alarm 1 Please refer to the contents of the “Alarm Outputs” for detail
1025H Lower-limit alarm 1 Please refer to the contents of the “Alarm Outputs” for detail
1026H Upper-limit alarm 2 Please refer to the contents of the “Alarm Outputs” for detail
1027H Lower-limit alarm 2 Please refer to the contents of the “Alarm Outputs” for detail
1028H Upper-limit alarm 3 Please refer to the contents of the “Alarm Outputs” for detail
1029H Lower-limit alarm 3 Please refer to the contents of the “Alarm Outputs” for detail
102AH Read LED Status b0: ALM3, b1: ALM2, b2: , b3: , b4: ALM1, b5: OUT2, b6:OUT1, b7: AT℉℃
102BH Read Pushbutton Status b1: F2, b2: Up, b3: Loop, b5: F1, b6: Down, b7: Set, 0: press down key
102CH Setting lock status
102FH Software version V1.00 indicates 0x100
1030H Start pattern number 0 ~ 15
1200H~13FFH
1400H~140FH
1410H~141FH
1420H~142FH
Address Content Definition
1100H Adjust Temperature Gain
1101H Temperature Filter Range Range of temperature filter: 10~1000, unit: 0.01 ℃, default: 100(1.0℃)
1102H Temperature Filter Factor Setting range: 0~50, default: 8
control cycle
control cycle
value, when Ti=0
Loop output control are used
Dual Loop output control are
used
1st output group
2nd output group
Output 1
Output 2
value
Pattern 0~15 temperature set
point setting (Even number)
Pattern 0~15 execution time
setting (Odd number)
Actual number of step setting
inside the corresponding pattern
Cycle number for repeating the
execution of the correspond
pattern
Link pattern number setting of
the correspond pattern
1~990, unit is 0.1 second. When the output setting = realy, the minimum control
cycle is 5 second
1~990, unit is 0.1 second. When the output setting = realy, the minimum control
cycle is 5 second 1~990
0 ~ 100%, unit is 0.1%
0.01 ~99.99, unit is 0.01
-999 ~ 9,999
0~9,999
0~9,999
Unit is 0.1%, write operation is valid under manual tuning mode only.
Unit is 0.1%, write operation is valid under manual tuning mode only.
Only valid within available range, unit: 0.1 scale
-999 ~ 9999
Time: 0 ~ 900(1 minute per scale)
0 ~ 15 = N, indicate that this pattern is executed from step 0 to step N
0 ~ 99 indicate that this pattern has been executed for 1 ~ 100 times
0 ~ 15, 16 indicates the program end and keep in present step. 17 indicates the
program end and execution end. 0~15 indicates the next execution pattern
number after executing the current pattern
18
Page 19
1103H Reverse Output Bit1: output 2, Bit0: output 1
1104H Slope of Temperature Increase Unit: 0.1 /℃ min or 0.1℃/sec (refer to CommunicationAddress 1124H)
1105H Remote Input Type Selection 0: 0~20m A , 1: 4~20m A, 2: 0~5V, 3: 1~5V, 4: 0~10V
1106H AT Control 0: AT(Auto-tune), 1: ST(Self-tune)
1107H Remote Input Reverse Setting 0: forward, 1: reverse
1108H Alarm 1 Function Selection Bit3: Peak Record, Bit2: Hold Enable, Bit1: Output Reverse, Bit0: Standby Enable
1109H Alarm 2 Function Selection Bit3: Peak Record, Bit2: Hold Enable, Bit1: Output Reverse, Bit0: Standby Enable
110AH Alarm 3 Function Selection Bit3: Peak Record, Bit2: Hold Enable, Bit1: Output Reverse, Bit0: Standby Enable
110BH Alarm 1 Output Delay Time Unit: second. Setting range: 0~100sec
110CH Alarm 2 Output Delay Time Unit: second. Setting range: 0~100sec
110DH Alarm 3 Output Delay Time Unit: second. Setting range: 0~100sec
110EH Upper Limit of Control Output 1 Range: lower limit of control output ~100%, unit is 0.1%
110FH Lower Limit of Control Output 1 Range: 0~upper limit of control output, unit is 0.1%
1110H Upper Limit of Control Output 2 Range: lower limit of control output~100%, unit is 0.1%
1111H Lower Limit of Control Output 2 Range: 0~upper limit of control output, unit is 0.1%
1112H Programmable Waiting
Temeprature
1113H Programmable Waiting Time Unit: min. Setting range: 0~900
1114H Programmable Slope Increase Unit: 0.1℃/min or 0.1℃/sec--- (refer to Communication Address 1124H) Setting
1115H Testing Mode
1116H Adjust Upper Limit of Analog
Linear Output 1
1117H Adjust Lower Limit of Analog
Linear Output 1
1118H Adjust Upper Limit of Analog
Linear Output 2
1119H Adjust Lower Limit of Analog
Linear Output 2
111AH Adjust Retransmission Upper
Limit
111BH Adjust Retransmission Lower
Limit
111CH Event 1 Selection 0: OFF, 1: Run/Stop, 2: Change SV value, 3: PID/Manual control, 4: Switch to
111DH Event 2 Selection 0: OFF, 1: Run/Stop, 2: Change SV value, 3: PID/Manual control, 4: Switch to
111EH Event 3 Selection 0: OFF, 1: Run/Stop, 2: Change SV value, 3: PID/Manual control, 4: Switch to
111FH PV Control Mode Selection 0: PID, 1: ON/OFF, 2: Manual control, 3: Fuzzy
1120H SV Control Mode Selection 0: Constant, 1: Slope increase, 2: Programmable input, 3: Remote Input
1121H Adjust Remote Compensation Setting range: -999~999
1122H Adjust Remote Gain Setting range: -999~999
1123H Positive/Negative Selection for
Remote
1124H Switch Slope Time Unit 0: min, 1: sec
1125H Cold Junction Compensation 0: ON, 1: OFF
1126H Reserve the Programmable
Running Status when Power OFF
1127H Fuzzy Gain Setting range: 1~10
1128H Fuzzy Dead Band Setting range: 0.0~PB
1129H Save Programmable Settings
into Memory
1182H CT1 Read Value Unit: 0.1A
1183H CT2 Read Value Unit: 0.1A
1. Address and Content of Bit Register: First bit of reading will put into LSB. Write data= FF00H for bit set, 0000H for bit clear.
0810H Read AT LED status 0: OFF(default), 1: ON
0811H Temperature unit display 0: , 1: / ℉℃linear input (default)
Setting range: 0~1000(100.0 )℃
range: 0~1000
Adjust current: 1scale=1μA, Adjust voltage: 1scale=1mV
Adjust current: 1scale=1μA, Adjust voltage: 1scale=1mV
Adjust current: 1scale=1μA, Adjust voltage: 1scale=1mV
Adjust current: 1scale=1μA, Adjust voltage: 1scale=1mV
Adjust current: 1scale=1μA
Adjust current: 1scale=1μA
Programmable Hold mode
Programmable Hold mode
Programmable Hold mode
0: Positive, 1: Negative
0: None, 1: Running status is saved and will continue by the previous status when
power ON.
0:None, 1: Saves the programmable settings into memory
19
Page 20
selection
0812H Decimal point position selection
0813H AT setting OFF: 0 (default), ON : 1
0814H Control RUN/STOP setting 0: STOP, 1: RUN (default)
0815H
0816H
2. Communication Transmission Format: Command Code: 02: read bits, 05: write bit, 03: read words, 06: write 1 word
ASCII Mode
Read Command Read Command Response Write Command Write Command Response
STX ’: ’ ’: ’ STX ’: ’ ’: ’ STX ’: ’ ’: ’ STX ’: ’ ’: ’
ADR 1 ‘0’ ‘0’ ADR 1 ‘0’ ‘0’ ADR 1 ‘0’ ‘0’ ADR 1 ‘0’ ‘0’
ADR 0 ‘1’ ‘1’ ADR 0 ‘1’ ‘1’ ADR 0 ‘1’ ‘1’ ADR 0 ‘1’ ‘1’
CMD 1 ‘0’ ‘0’ CMD 1 ‘0’ ‘0’ CMD 1 ‘0’ ‘0’ CMD 1 ‘0’ ‘0’
CMD 0 ‘3’ ‘2’ CMD 0 ‘3’ ‘2’ CMD 0 ‘6’ ‘5’ CMD 0 ‘6’ ‘5’
Starting data
address
Number of data
(word/Bit)
LRC 1 ‘E’ ‘D’ ‘0’ LRC1 ‘F’ ‘E’ LRC1 ‘F’ ‘E’
LRC 0 ‘A’ ‘C’
END 1 CR CR LRC 1 ‘0’ ‘E’ END 1 CR CR END 1 CR CR
END 0 LF LF LRC 0 ‘3’ ‘3’ END 0 LF LF END 0 LF LF
END 1 CR CR
END 0 LF LF
LRC checksum:
LRC check is the added sum from “Address” to “Data content”. For example, 01H + 03H + 10+ 00H + 00H + 02H = 16H, then take the
complementary of 2, EAH.
RTU Mode
Read Command Read Command Response Write Command Write Command Response
ADR 01H 01H ADR 01H 01H ADR 01H 01H ADR 01H 01H
CMD 03H 02H CMD 03H 02H CMD 06H 05H CMD 06H 05H
Starting data
address
Number of data
(word/Bit)
CRC 1 C0H BBH 03H CRC 1 DDH 8FH CRC 1 DDH 8FH
CRC 0 CBH A9H
CRC 1 BBH 77H
CRC 0 15H 88H
CRC (Cyclical Redundancy Check) is obtained by the following steps.
1. Load in a 16-bit register FFFFH as the CRC register.
2. Do an exclusive OR operation of the first byte of the data and low byte of CRC register, and place the operation result back to
3. Right shift the bits in the CRC register and fill the high bits with “0”. Check the removed lowest bit.
4. If the removed lowest bit is “0”, repeat step 3. Otherwise, do an exclusive OR operation of the CRC register and the value
5. Repeat step 3 and 4 until the 8 bits (1 byte) are all right shifted.
6. Repeat step 2 and 5 and calcualte all the bits to obtain CRC check.
Please be aware of the high/low byte transmission order in the CRC register.
STOP setting for PID program
control
Temporarily STOP for PID program
control
‘1’ ‘0’ ‘0’ ‘0’ ‘1’ ‘0’ ‘1’ ‘0’
‘0’ ‘8’
‘0’ ‘1’ ‘0’ ‘1’ ‘0’ ‘1’ ‘0’ ‘1’
‘0’ ‘0’ ‘1’ ‘7’
‘0’ ‘0’ ‘F’ ‘0’ ‘0’ ‘F’ ‘0’ ‘F’
‘0’ ‘0’
‘0’ ‘0’ ‘0’ ‘E’ ‘0’ ‘E’ ‘0’
‘2’ ‘9’ ‘0’
10H 08H 10H 08H 10H 08H
00H 10H
00H 00H 01H 17H 03H FFH 03H FFH
02H 09H
the CRC register.
A001H and place the operation result back to the CRC register.
Number of data
(count by byte)
Start address
data
1000H/081xH
Address data
1001H
Number of data
(count by byte)
Start address
data
1000H/081xH
Address
data1001H
0: No decimal place 1: decimal place. (Except for the thermocouple B,S,R type,
all other thermocouple type are valid.)
0: RUN (default), 1: STOP
0: RUN (default), 1: Temporarily STOP
‘4’ ‘2’ ‘0’ ‘8’ ‘0’ ‘8’
‘4’ ‘1’ ‘3’ ‘F’ ‘3’ ‘F’
‘0’ LRC 0 ‘D’ ‘3’ LRC 0 ‘D’ ‘3’
04H 02H
F4H 01H
20H CRC 0 E2H 9FH CRC 0 E2H 9FH
Starting data
address
Data content
Starting data
address
Data content
‘1’ ‘0’
‘8’ ‘0’
01H 10H
20H 00H
Starting data
address
Data content
Starting data
address
Data content
‘1’ ‘0’
‘8’ ‘0’
01H 10H
20H 00H
20
Page 21

Panel Cutout
Pattern Panel Cutout ( W * H ) Model Panel Cutout ( W * H )
4848 (DT320) 45mm * 45mm 7272 (DT330) 68mm * 68mm
4896 (DT340) 44.5mm * 91.5mm 9696 (DT360) 91mm * 91mm
21
 Loading...
Loading...