

Page 1

RO-INTERFACE-ETH
Hardware-Beschreibung
2010
September
Page 2

INDEX
1. Einleitung 5
1.1. Vorwort 5
1.2. Kundenzufriedenheit 5
1.3. Kundenresonanz 5
2. Hardware Beschreibung 7
2.1. Übersichtsbild 7
2.2. Technische Daten 8
2.3. Steckverbinder auf dem Modul 9
2.3.1. Spannungsversorgung
2.3.2. Ethernet Interface
2.4. Taster auf dem Modul 10
2.5. Kontroll LED’s 11
2.5.1. Definition der LEDs
11
3. Konfiguration des Moduls 13
3.1. Konfiguration über das DELIB Configuration Utility 13
3.2. Konfiguration über den internen Web-Server des Moduls 18
3.3. Auslieferungszustand 19
4. Firmware Update 21
4.1. DEDITEC Flasher 21
4.2. WEB-Oberfläche 22
9
9
5. Grundkonfiguration wiederherstellen 25
5.1. IP Adresse zurücksetzen 25
Index | 2Seite
Page 3

INDEX
5.2. Firmware zurücksetzen 25
6. Software 27
6.1. Benutzung unserer Produkte 27
6.1.1. Ansteuerung über grafische Anwendungen
6.1.2. Ansteuerung über unsere DELIB Treiberbibliothek
6.1.3. Ansteuerung auf Protokollebene
6.1.4. Ansteuerung über mitgelieferte Testprogramme
27
27
27
28
6.2. DELIB Treiberbibliothek 29
6.2.1. Übersicht
6.2.2. Unterstützte Betriebssysteme
6.2.3. Unterstützte Programmiersprachen
6.2.4. Installation DELIB-Treiberbibliothek
6.2.5. DELIB Configuration Utility
29
31
31
32
34
6.3. Testprogramme 35
6.3.1. Digital Input-Output Demo
6.3.2. Analog Input-Output Demo
6.3.3. Stepper Demo
35
36
37
7. Anhang 39
7.1. Revisionen 39
7.2. Urheberrechte und Marken 40
Index | 3Seite
Page 4
Einleitung
I
Einleitung | Seite 4
Page 5

1. Einleitung
1.1. Vorwort
Zuerst einmal beglückwünschen wir Sie zum Kauf eines hochwertigen
DEDITEC Produktes!
Unsere Produkte werden von unseren Ingenieuren nach den heutigen
geforderten Qualitätsanforderungen entwickelt. Wir achten bereits bei der
Entwicklung auf flexible Erweiterbarkeit und lange Verfügbarkeit.
Wir entwickeln modular!
Durch eine modulare Entwicklung verkürzt sich bei uns die Entwicklungszeit
und - was natürlich dem Kunden zu Gute kommt - ein fairer Preis!
Wir sorgen für eine lange Lieferverfügbarkeit!
Sollten verwendete Halbleiter nicht mehr verfügbar sein, so können wir
schneller reagieren. Bei uns müssen meistens nur Module redesigned werden
und nicht das gesamte Produkt. Dies erhöht die Lieferverfügbarkeit.
1.2. Kundenzufriedenheit
Ein zufriedener Kunde steht bei uns an erster Stelle!
Sollte mal etwas nicht zu Ihrer Zufriedenheit sein, wenden Sie sich einfach per
Telefon oder mail an uns.
Wir kümmern uns darum!
1.3. Kundenresonanz
Die besten Produkte wachsen mit unseren Kunden. Für Anregungen oder
Vorschläge sind wir jederzeit dankbar.
Einleitung | Seite 5
Page 6

Hardware Beschreibung
II
Hardware Beschreibung |Seite 6
Page 7
2. Hardware Beschreibung
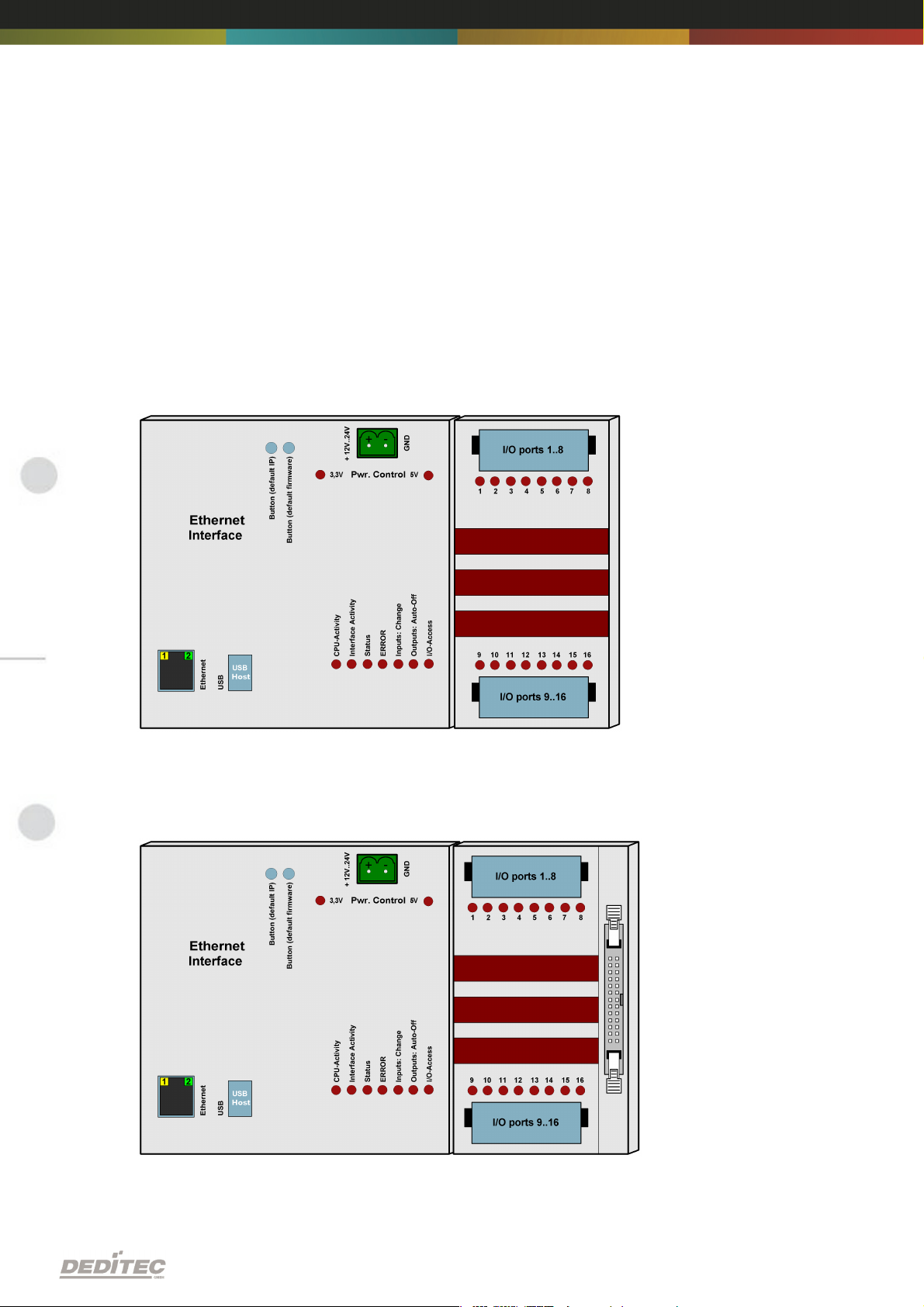
2.1. Übersichtsbild
Die Abbildung zeigt das Steuermodul mit Ethernet Interface (links) in
Kombination mit einem Ein- /Ausgabemodul (rechts).
Die Abbildung zeigt das Steuermodul mit Ethernet Interface (links) in
Kombination mit einem I/O-Modul des flexiblen Steckverbindersystems (rechts).
Hardware Beschreibung |Seite 7
Page 8

2.2. Technische Daten
Single Spannungsversorgung +7V..+24V DC
10/100 Mbit/sec Ethernet Interface
Zugriff auf Ein-/Ausgänge über TCP/IP
WEB Interface
Über Web-Interface einfach konfigurierbar
9 Kontroll LED‘s
Anschluss über RJ45 Buchse
Die Timeout Funktion bietet die Möglichkeit, die Ausgänge z.B. aus
Sicherheitsgründen abzuschalten.
In 16 facher Abstufung erweiterbar
Kann problemlos mit anderen I/O Modulen der RO Serie kombiniert werden
Windows Treiber Bibliothek DELIB
Hardware Beschreibung |Seite 8
Page 9

2.3. Steckverbinder auf dem Modul
LED
1
Activity
2
10/100 Mbit
2.3.1. Spannungsversorgung
Der Eingangsspannungsbereich kann zwischen +7V und +24V DC betragen. Ein
passender Steckverbinder liegt jedem Modul bei.
2.3.2. Ethernet Interface
Der Netzwerkanschluss erfolgt über eine RJ45 Buchse.
Hardware Beschreibung |Seite 9
Page 10

2.4. Taster auf dem Modul
Linker Taster:
IP Adresse auf Default Werte zurücksetzen
(Näheres siehe Kapitel 3.8.1)
Rechter Taster:
Firmware in den Auslieferungszustand zurücksetzen
(Näheres siehe Kapitel 3.8.2)
Hardware Beschreibung |Seite 10
Page 11

2.5. Kontroll LED’s
LED
Bezeichnung
Erklärung
oben
3,3V
Interne 3,3V Versorgungsspannung vorhanden.
oben
5V
Interne 5V Versorgungsspannung vorhanden.
1
CPU Activity
2x blinken + lange Pause. Betriebssystem meldet: Status
OK
2
Interface
Activity
Kommunikation über Ethernet aktiv.
3
Status
LED leuchtet -> Modul ist betriebsbereit
4
ERROR
Fehler bei der ETH Übertragung (näheres siehe Dokument
“ETH Protokoll”).
5
Inputs: Change
Zustandswechsel zwischen 2 Auslesetakten wurde
erfasst.
6
Outputs: AutoOff
Sämtliche Ausgänge wurden auf Grund des Timeout
sicherheitshalber abgeschaltet.
7
I/O Access
Zugriff der CPU auf Ein- und Ausgänge der
angeschlossenen Module.
Auf dem RO-ETH Modul befinden sich eine Reihe von Kontroll LED’s. Sie
dienen zur einfachen optischen Zustandsanzeige von diversen Funktionen.
Nach dem Einschalten des Moduls muss folgende Blinksequenz im
Normalbetrieb auftreten:
ca. 20 Sek nach Einschalten des Moduls blinken LED 1 und 2 zweimal kurz
hintereinander auf. -> Betriebssystem erfolgreich geladen.
Anschließend leuchtet die 3. LED dauerhaft und LED 1 blinkt. -> Modul ist
betriebsbereit.
2.5.1. Definition der LEDs
Hardware Beschreibung |Seite 11
Page 12

Konfiguration des Moduls
III
Konfiguration des Moduls |Seite 12
Page 13
3. Konfiguration des Moduls
3.1. Konfiguration über das DELIB Configuration Utility
Diese Methode ermöglicht eine einfache Konfiguration des Produkts. Folgende
Grundwerte können hiermit verändert werden.
Modulname
IP-Adresse
Netz-Maske
Standard-Gateway
DNS-Server
Außerdem lassen sich mit diesem Tool alle DEDITEC Ethernet-Geräte im
Netzwerk anzeigen.
Wie das geht, sehen Sie auf den folgenden Seiten...
Konfiguration des Moduls |Seite 13
Page 14
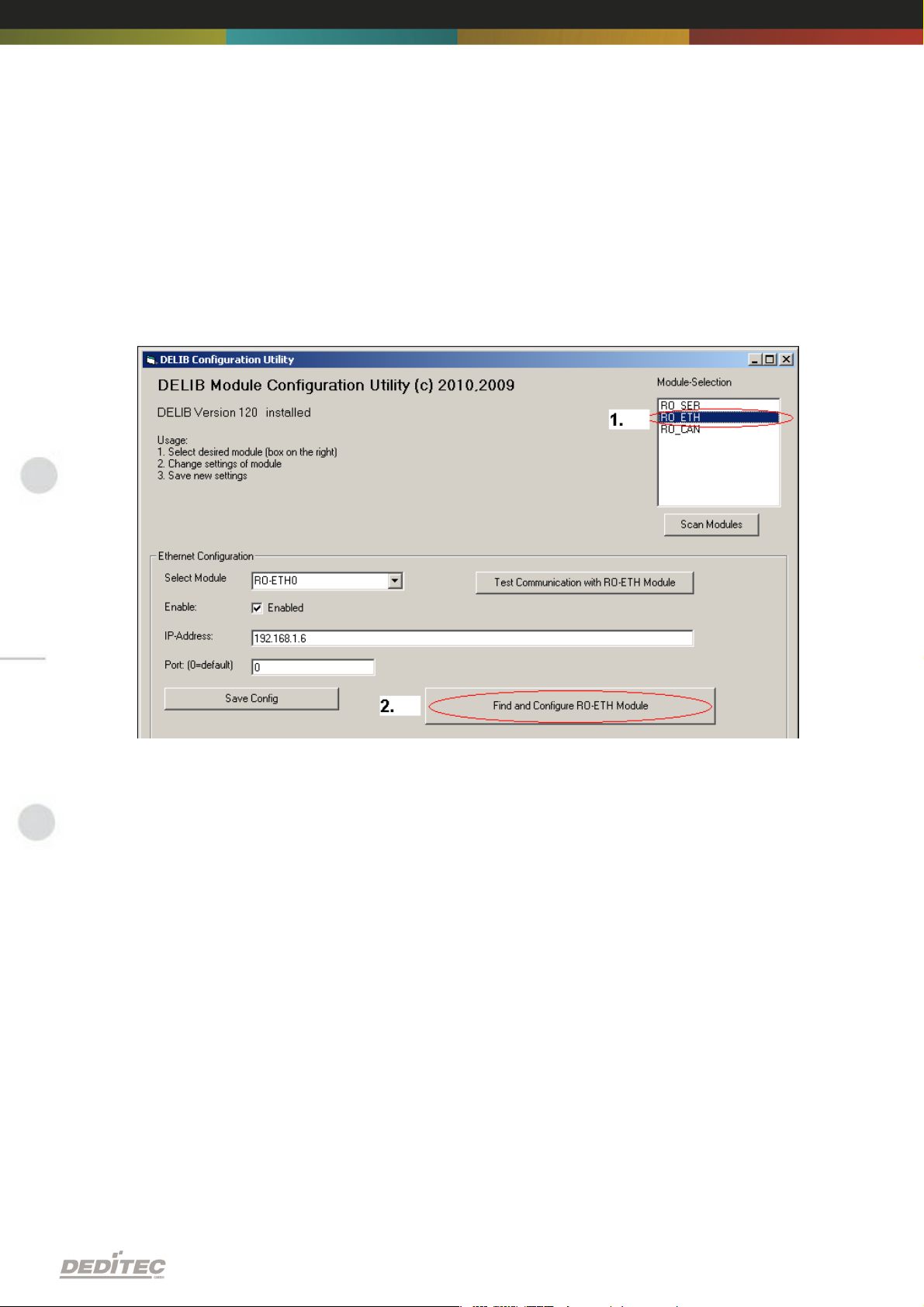
Starten Sie das DELIB Configuration Utility:
Zu finden unter: Start -> Programme -> DEDITEC -> DELIB -> DELIB
Configuration Utility
1.
Module Selection: RO-ETH auswählen
2.
Find and configure RO-ETH Module
Konfiguration des Moduls |Seite 14
Page 15

1.
Scan RO-ETH Modules: Somit finden Sie alle DEDITEC ETH Module am
lokalen Ethernet Strang. Hierbei benutzen wir ein Ethernet Protokoll, welches
nicht geroutet wird. Deshalb sind nur Module zu konfigurieren, die am Bus
angeschlossen sind. Vorteil dieser Methode ist, dass auch Module gefunden
werden, die nicht im gleichen Sub-Netz des Rechners liegen, von dem aus
konfiguriert wird.
2.
Klicken Sie auf das Modul, welches Sie konfigurieren wollen
Konfiguration des Moduls |Seite 15
Page 16

Hier lässt sich der Modulname nach Ihren Wünschen ändern
1.
Hier können Modulname, IP-Adresse, Netz-Maske, Standard-Gateway und
DNS-Server verändert werden.
2.
Write new Values to Module. Hiermit wird die Konfiguration ins Modul
geschrieben.
Konfiguration des Moduls |Seite 16
Page 17

Hinweis:
Bei der Konfiguration des RO-ETH Moduls ist zu beachten, dass die von Ihnen
ausgewählte IP-Adresse im gleichen IP-Segment liegt, wie der Steuer-PC.
Natürlich darf auch keine bereits belegte IP-Adresse benutzt werden.
Wenn die Standard-IP-Adresse des Moduls nicht aus dem Adressbereich des
Netzwerks stammt, dann ist das Modul vorerst nicht über TCP/IP erreichbar.
Erreichbarkeitsprobleme treten auch auf, wenn diese IP-Adresse bereits belegt
ist. Anhand des sehr einfach zu bedienenden Utilities können die IP-Adresse
und die Netzmaske des Ethernet-Moduls dennoch konfiguriert werden.
Alternativ kann das Modul auch direkt am PC angeschlossen werden um auf
direktem Wege die IP-Adresse und die Netzmaske einzustellen. Nachdem die
Erreichbarkeit gegeben ist, erfolgt die weitere Konfiguration bequem über ein
Browser auf dem integrierten Web-Server des Ethernet-Moduls.
Fragen Sie hierzu Ihren System Administrator.
Konfiguration des Moduls |Seite 17
Page 18
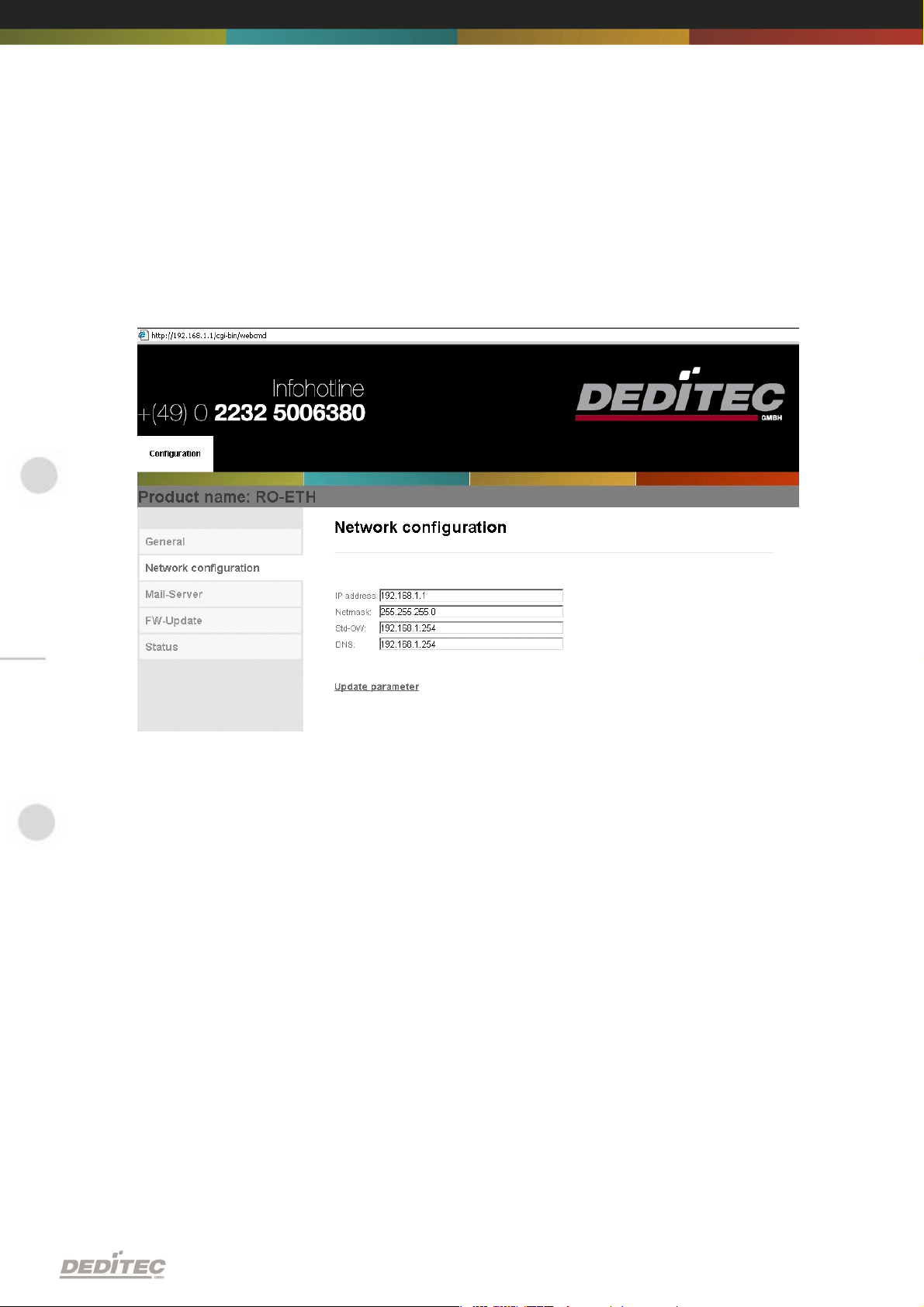
3.2. Konfiguration über den internen Web-Server des Moduls
Das RO-ETH-Modul hat einen eigenen Web-Server über den die Konfiguration
ebenfalls vorgenommen werden kann.
Konfiguration des Moduls |Seite 18
Page 19

3.3. Auslieferungszustand
Im Auslieferungszustand hat das Ethernet Modul folgende Einstellungen:
IP Adresse: 192.168.1.1
Der Auslieferungszustand kann jederzeit durch Betätigen des linken Tasters
wiederhergestellt werden. -> Siehe Kap. 3.8.2
IP Adresse 192.168.1.1
Subnetz Maske 255.255.255.0
Standard Gateway 192.168.1.254
Konfiguration des Moduls |Seite 19
Page 20

Firmware Update
IV
Firmware Update | Seite 20
Page 21

4. Firmware Update
4.1. DEDITEC Flasher
Vorgehensweise:
Entpacken Sie alle Dateien auf Ihrem Rechner in einem Ordner.
Starten Sie die Anwendung deditec-flasher.exe
1.
Wählen Sie zunächst das Interface aus. Für Ethernet drücken Sie Taste “E”
2.
Wählen Sie aus, welches Modul sie updaten wollen. Drücken Sie Taste “M”
für das CPU Interface.
3.
Nach erfolgreichem Flashen erscheint in der Eingabeaufforderung: Flash OK!
Firmware Update | Seite 21
Page 22

4.2. WEB-Oberfläche
Vorgehensweise:
1.
Geben Sie die IP-Adresse ihres Moduls in den Browser ein.
Firmware Update | Seite 22
Page 23

1.
Klicken Sie auf FW-Update
2.
Wählen Sie die Datei “ro_cpu_eth_fw.dfw” aus.
3.
Klicken Sie auf Firmware update
Firmware Update | Seite 23
Page 24

Grundkonfiguration wiederherstellen
V
Grundkonfiguration wiederherstellen | Seite 24
Page 25

5. Grundkonfiguration wiederherstellen
5.1. IP Adresse zurücksetzen
Als Default Wert wird folgende IP Adresse verwendet: 192.168.1.1
Linker Taster: IP Adresse auf Default Werte zurücksetzen (192.168.1.1):
Um die IP Adresse zurückzusetzen, gehen Sie wie folgt vor:
Taster mindestens. 5 Sek lang drücken
Danach müssen die linken beiden LED‘s “CPU Activity” und “Interface
Activity” viermal hintereinander aufblinken (Übernahmebestätigung)
anschließend hat das Modul folgende Einstellungen:
IP Adresse 192.168.1.1
Subnetz Maske 255.255.255.0
Standard Gateway 192.168.1.254
5.2. Firmware zurücksetzen
Um die Firmware auf den Default Wert zurückzusetzen, gehen Sie wie folgt vor:
Rechter Taster: Firmware in den Auslieferungszustand zurücksetzen
Um die Firmware in den Auslieferungszustand zurückzusetzen, gehen Sie wie
folgt vor:
Taster mindestens 10 Sek lang drücken
Danach müssen die linken drei LED‘s “CPU Activity”, “Interface Activity” und
“Status” viermal hintereinander aufblinken (Übernahmebestätigung)
Anschließend startet das Modul neu.
Die Firmware und Konfiguration des Auslieferzustandes, sind jetzt wieder aktiv!
Grundkonfiguration wiederherstellen | Seite 25
Page 26

Software
VI
Software | Seite 26
Page 27

6. Software
6.1. Benutzung unserer Produkte
6.1.1. Ansteuerung über grafische Anwendungen
Wir stellen Treiberinterfaces z.B. für LabVIEW und ProfiLab zur Verfügung. Als
Basis dient die DELIB Treiberbibliothek, die von ProfiLab direkt angesteuert
werden kann.
Für LabVIEW bieten wir eine einfache Treiberanbindung mit Beispielen an!
6.1.2. Ansteuerung über unsere DELIB Treiberbibliothek
Im Anhang befindet sich die komplette Funktionsreferenz für das Integrieren
unserer API-Funktionen in Ihre Software. Des Weiteren bieten wir passende
Beispiele für folgende Programmiersprachen:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
6.1.3. Ansteuerung auf Protokollebene
Das Protokoll für die Ansteuerung unserer Produkte legen wir komplett offen. So
können Sie auch auf Systemen ohne Windows oder Linux unsere Produkte
einsetzen!
Software | Seite 27
Page 28

6.1.4. Ansteuerung über mitgelieferte Testprogramme
Für die wichtigsten Funktionen unserer Produkte stellen wir einfach zu
bedienende Testprogramme zur Verfügung,. Diese werden bei der Installation
der DELIB Treiberbibliothek direkt mit installiert.
So können z.B. Relais direkt getestet werden oder Spannungen am A/D Wandler
direkt überprüft werden.
Software | Seite 28
Page 29
6.2. DELIB Treiberbibliothek
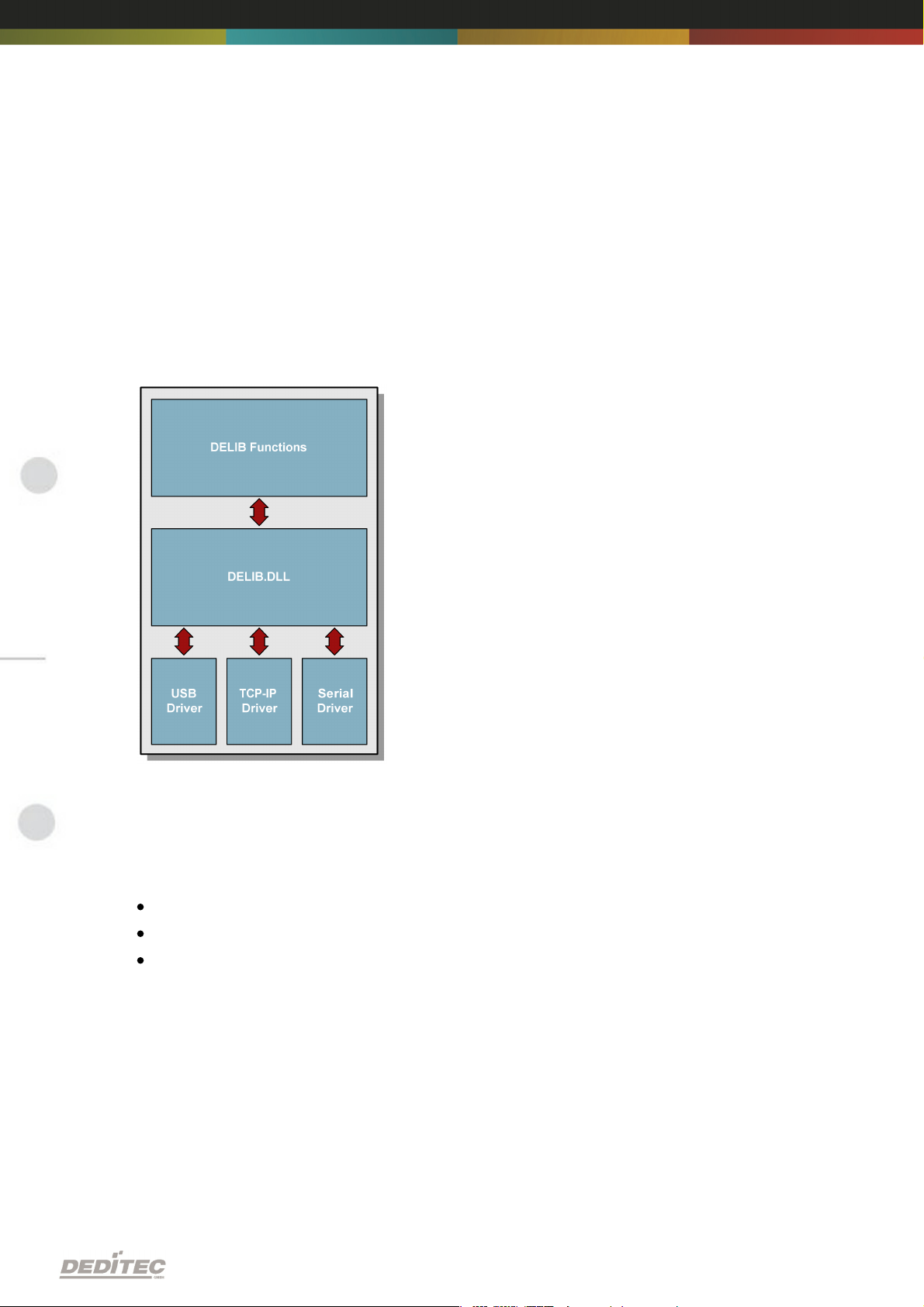
6.2.1. Übersicht
Die folgende Abbildung erläutert den Aufbau der DELIB Treiberbibliothek
Die DELIB Treiberbibliothek ermöglicht ein einheitliches Ansprechen von
DEDITEC Hardware, mit der besonderen Berücksichtigung folgender
Gesichtspunkte:
Betriebssystem unabhängig
Programmiersprachen unabhängig
Produkt unabhängig
Programmieren unter diversen Betriebssystemen
Die DELIB Treiberbibliothek ermöglicht ein einheitliches Ansprechen unserer
Produkte auf diversen Betriebssystemen.
Wir haben dafür gesorgt, dass mit wenigen Befehlen alle unsere Produkte
angesprochen werden können.
Dabei spielt es keine Rolle, welches Betriebssystem Sie verwenden. - Dafür
sorgt die DELIB !
Software | Seite 29
Page 30

Programmieren mit diversen Programmiersprachen
Für das Erstellen eigener Anwendungen stellen wir Ihnen einheitliche Befehle
zur Verfügung. Dies wird über die DELIB Treiberbibliothek gelöst.
Sie wählen die Programmiersprache !
So können leicht Anwendung unter C++, C, Visual Basic, Delphi oder
LabVIEW® entwickelt werden.
Schnittstellenunabhängiges programmieren
Schreiben Sie Ihre Anwendung schnittstellenunabhängig !
Programmieren Sie eine Anwendung für ein USB-Produkt von uns. - Es wird
auch mit einem Ethernet oder RS-232 Produkt von uns laufen !
SDK-Kit für Programmierer
Integrieren Sie die DELIB in Ihre Anwendung. Auf Anfrage erhalten Sie von uns
kostenlos Installationsskripte, die es ermöglichen, die DELIB Installation in Ihre
Anwendung mit einzubinden.
Software | Seite 30
Page 31

6.2.2. Unterstützte Betriebssysteme
Unsere Produkte unterstützen folgende Betriebssysteme:
Windows 2000
Windows XP
Windows Vista
Windows 7
Linux
6.2.3. Unterstützte Programmiersprachen
Unsere Produkte sind über folgende Programmiersprachen ansprechbar:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
Software | Seite 31
Page 32

6.2.4. Installation DELIB-Treiberbibliothek
Legen Sie die DEDITEC driver CD in das Laufwerk und starten Sie
“delib_install.exe”. Die DELIB-Treiberbibliothek ist auch unter http://www.
deditec.de/delib erhältlich.
Drücken Sie auf “Install”.
Software | Seite 32
Page 33

Die Treiber werden nun installiert.
Die DELIB Treiberbibliothek wurde nun Installiert. Drücken sie auf “Close” um
die Installation zu beenden.
Mit dem “DELIB Configuration Utility” (nächstes Kapitel) können Sie Ihr Modul
konfigurieren (dies ist nur nötig, wenn Sie mehr als ein Modul ansprechen
möchten).
Software | Seite 33
Page 34

6.2.5. DELIB Configuration Utility
“DELIB Configuration Utility” wird auf dem folgendem Weg gestartet:
Start Programme DEDITEC DELIB DELIB Configuration Utility.
Das “DELIB Configuration Utility” ist ein Programm zur Konfiguration und
Unterteilung Identischer USB-Module im System. Dies ist aber nicht nötig falls
nur ein Modul vorhanden ist.
Weiteres zum Inhalt der “DELIB Installation”, siehe “Manual für DELIB
Treiberbibliothek”
Software | Seite 34
Page 35

6.3. Testprogramme
6.3.1. Digital Input-Output Demo
“Digital Input-Output Demo” wird auf dem folgendem Weg gestartet:
Start Programme DEDITEC DELIB Digital Input-Output Demo.
Diese Grafik zeigt einen Test des RO-USB-O64-R64. Oben links kann man die
Konfiguration des Moduls ablesen (64 Eingänge und 64 Ausgänge).
Software | Seite 35
Page 36

6.3.2. Analog Input-Output Demo
“Analog Input-Output Demo” wird auf dem folgendem Weg gestartet:
Start Programme DEDITEC DELIB Analog Input-Output Demo.
Diese Grafik zeigt einen Test des RO-USB-AD16-DA4. Oben links kann man
die Konfiguration des Moduls ablesen (16 A/D-Eingänge und 4 D/A-Ausgänge).
Software | Seite 36
Page 37

6.3.3. Stepper Demo
“Stepper Demo” wird auf dem folgendem Weg gestartet:
Start Programme DEDITEC DELIB Stepper Demo.
Diese Grafik zeigt einen Test des RO-USB-STEPPER2. Oben links kann man
die Konfiguration des Moduls ablesen (2 Stepper).
Software | Seite 37
Page 38

Anhang
VII
Anhang | Seite 38
Page 39

7. Anhang
7.1. Revisionen
Rev 1.00 Erste DEDITEC Anleitung
Rev 2.00 Designänderung
Anhang | Seite 39
Page 40

7.2. Urheberrechte und Marken
Linux ist eine registrierte Marke von Linus Torvalds.
Windows CE ist eine registrierte Marke von Microsoft Corporation.
USB ist eine registrierte Marke von USB Implementers Forum Inc.
LabVIEW ist eine registrierte Marke von National Instruments.
Intel ist eine registrierte Marke von Intel Corporation
AMD ist eine registrierte Marke von Advanced Micro Devices, Inc.
Anhang | Seite 40
Page 41

RO-ANALOG-IN-OUT
Hardware-Beschreibung
2010
Oktober
Page 42
INDEX
1. Einleitung 6
1.1. Vorwort 6
1.2. Kundenzufriedenheit 6
1.3. Kundenresonanz 6
2. Hardware Beschreibung 8
2.1. RO-AD16-DA4 8
2.1.1. Übersichtsbild
2.1.2. Technische Daten
2.1.3. Timeout-Schutz
2.1.4. Pinbelegung
2.1.4.1. A/D Steckverbinder (18pol)
2.1.4.2. D/A Steckverbinder (10pol)
10
11
12
12
12
2.2. RO-AD16 13
2.2.1. Übersichtsbild
2.2.2. Technische Daten
2.2.3. Pinbelegung
2.2.3.1. A/D Steckverbinder (18pol)
13
14
15
15
2.3. RO-AD16_ISO 16
2.3.1. Übersichtsbild
2.3.2. Technische Daten
2.3.3. Pinbelegung
2.3.3.1. A/D Steckverbinder (18pol)
16
17
18
18
2.4. RO-DA4 19
9
2.4.1. Übersichtsbild
2.4.2. Technische Daten
2.4.3. Timeout-Schutz
2.4.4. Pinbelegung
2.4.4.1. D/A Steckverbinder (10pol)
19
20
21
21
21
2.5. RO-DA2_ISO 22
2.5.1. Übersichtsbild
2.5.2. Technische Daten
22
23
Index | 2Seite
Page 43

INDEX
2.5.3. Timeout-Schutz
2.5.4. Pinbelegung
2.5.4.1. D/A Steckverbinder (10pol)
24
25
25
3. Software 27
3.1. Benutzung unserer Produkte 27
3.1.1. Ansteuerung über grafische Anwendungen
3.1.2. Ansteuerung über unsere DELIB Treiberbibliothek
3.1.3. Ansteuerung auf Protokollebene
3.1.4. Ansteuerung über mitgelieferte Testprogramme
3.2. DELIB Treiberbibliothek 29
3.2.1. Übersicht
3.2.2. Unterstützte Betriebssysteme
3.2.3. Unterstützte Programmiersprachen
3.2.4. Installation DELIB-Treiberbibliothek
3.2.5. DELIB Configuration Utility
3.3. Testprogramme 35
27
27
27
28
29
31
31
32
34
3.3.1. Analog Input-Output Demo
35
4. DELIB API Referenz 38
4.1. Verwaltungsfunktionen 38
4.1.1. DapiOpenModule
4.1.2. DapiCloseModule
4.2. Fehlerbehandlung 40
4.2.1. DapiGetLastError
4.2.2. DapiGetLastErrorText
4.3. A/D Wandler Funktionen 42
4.3.1. DapiADSetMode
4.3.2. DapiADGetMode
4.3.3. DapiADGet
4.3.4. DapiADGetVolt
4.3.5. DapiADGetmA
4.4. D/A Ausgänge verwalten 48
38
39
40
41
42
44
45
46
47
4.4.1. DapiDASetMode
48
Index | 3Seite
Page 44

INDEX
4.4.2. DapiDAGetMode
4.4.3. DapiDASet
4.4.4. DapiDASetVolt
4.4.5. DapiDASetmA
4.4.6. DapiSpecialCmd_DA
50
51
52
53
54
4.5. Ausgabe-Timeout verwalten 56
4.5.1. DapiSpecialCMDTimeout
4.5.2. DapiSpecialCMDTimeoutGetStatus
56
57
4.6. Testfunktionen 58
4.6.1. DapiPing
58
4.7. Programmier-Beispiel 59
5. Anhang 62
5.1. Revisionen 62
5.2. Urheberrechte und Marken 63
Index | 4Seite
Page 45

Einleitung
I
Einleitung | Seite 5
Page 46

1. Einleitung
1.1. Vorwort
Wir beglückwünschen Sie zum Kauf eines hochwertigen DEDITEC Produktes!
Unsere Produkte werden von unseren Ingenieuren nach den heutigen
geforderten Qualitätsanforderungen entwickelt. Wir achten bereits bei der
Entwicklung auf flexible Erweiterbarkeit und lange Verfügbarkeit.
Wir entwickeln modular!
Durch eine modulare Entwicklung verkürzt sich bei uns die Entwicklungszeit
und - was natürlich dem Kunden zu Gute kommt - ein fairer Preis!
Wir sorgen für eine lange Lieferverfügbarkeit!
Sollten verwendete Halbleiter nicht mehr verfügbar sein, so können wir
schneller reagieren. Bei uns müssen meistens nur Module redesigned werden
und nicht das gesamte Produkt. Dies erhöht die Lieferverfügbarkeit.
1.2. Kundenzufriedenheit
Ein zufriedener Kunde steht bei uns an erster Stelle!
Sollte mal etwas nicht zu Ihrer Zufriedenheit sein, wenden Sie sich einfach per
Telefon oder mail an uns.
Wir kümmern uns darum!
1.3. Kundenresonanz
Die besten Produkte wachsen mit unseren Kunden. Für Anregungen oder
Vorschläge sind wir jederzeit dankbar.
Einleitung | Seite 6
Page 47
Hardware Beschreibung
II
Hardware Beschreibung |Seite 7
Page 48

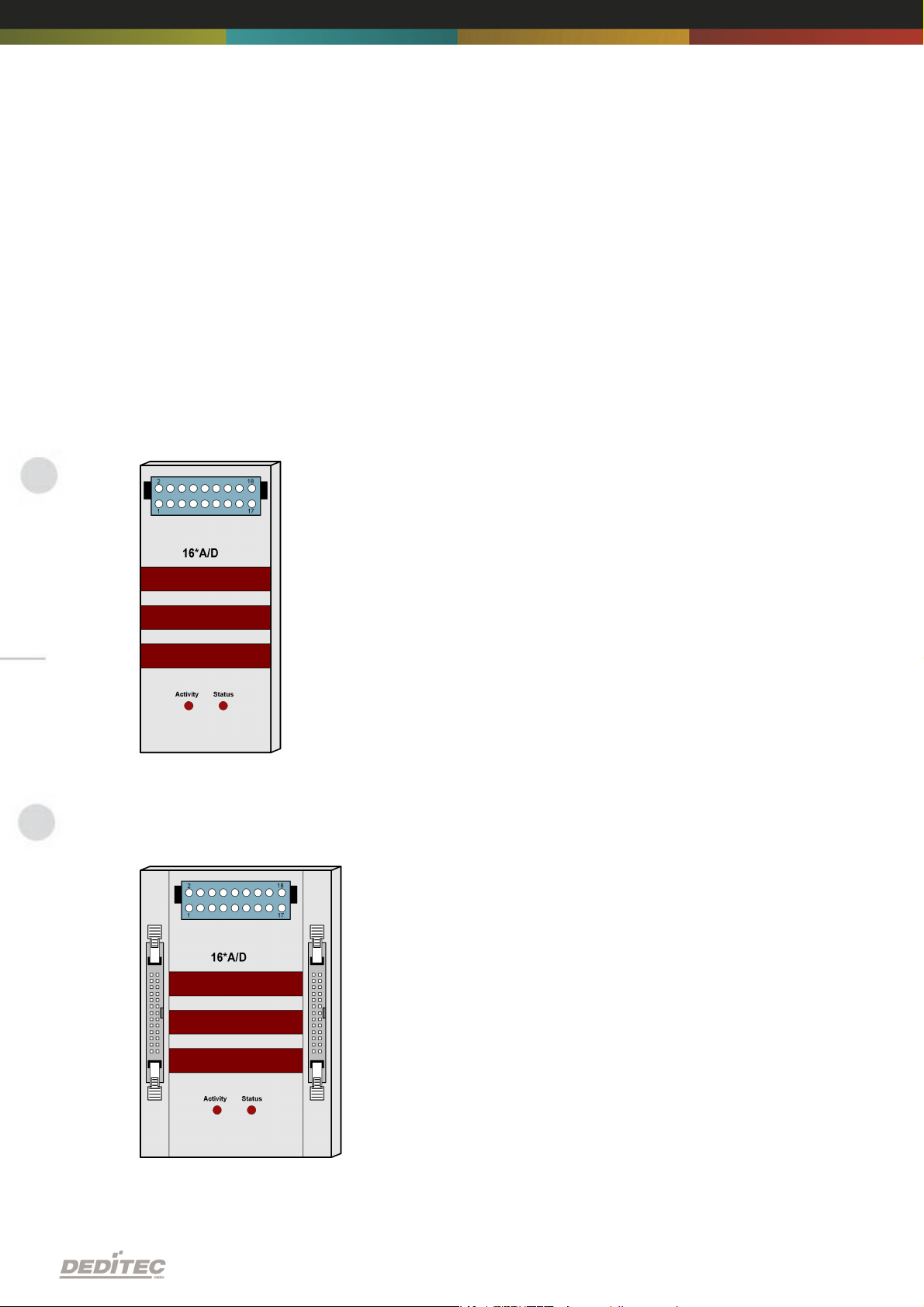
2. Hardware Beschreibung
2.1. RO-AD16-DA4
Mit 16 A/D Eingängen stellt dieses Modul eine gute Basis zur Umwandlung von
Spannungen in digitale Werte dar. Zusätzlich dank der 4 D/A Ausgänge ist es
möglich digitale Werte in Spannungen umzuwandeln.
Hardware Beschreibung |Seite 8
Page 49

2.1.1. Übersichtsbild
Die Abbildung zeigt ein Modul mit entsprechender Durchnummerierung der
Anschlussklemmen.
Die Abbildung zeigt ein A/D-Modul des flexiblen Steckverbindersystems mit
entsprechender Durchnummerierung der Anschlussklemmen.
Hardware Beschreibung |Seite 9
Page 50

2.1.2. Technische Daten
Timeout-Schutz
Komfortables Steckverbindersystem mit Auswerfmechanik
Kann problemlos mit anderen Modulen der RO Serie kombiniert werden
A/D Eingänge
Modus U: (Spannung)
Unipolar: 0-5V, 0-10V
Bipolar: +5V, +10V
Modus I: (Strom)
Bereich: 0-20mA (optional)
D/A Ausgänge
Timeout Schutz
Modus U: (Spannung)
Unipolar: 0-5V, 0-10V
Bipolar: +5V, +10V
Hardware Beschreibung |Seite 10
Page 51

2.1.3. Timeout-Schutz
Der Timeout-Schutz muss per Software separat aktiviert werden. Der TimeoutSchutz bietet die Möglichkeit die Ausgänge selbstständig abzuschalten. Dies
geschieht immer dann, wenn in einem vorher definierten Zeitfenster keine
Nachrichten mehr vom Modul empfangen werden. Gründe können sein:
Leitungsunterbrechung, PC / Serverabsturz usw. Dadurch können
Steuerungsschäden, Überlastung der angeschlossenen Anlagen und
Unfallgefahren verhindert werden. Das Abschalten der Ausgänge wird durch
eine LED signalisiert.
Hardware Beschreibung |Seite 11
Page 52
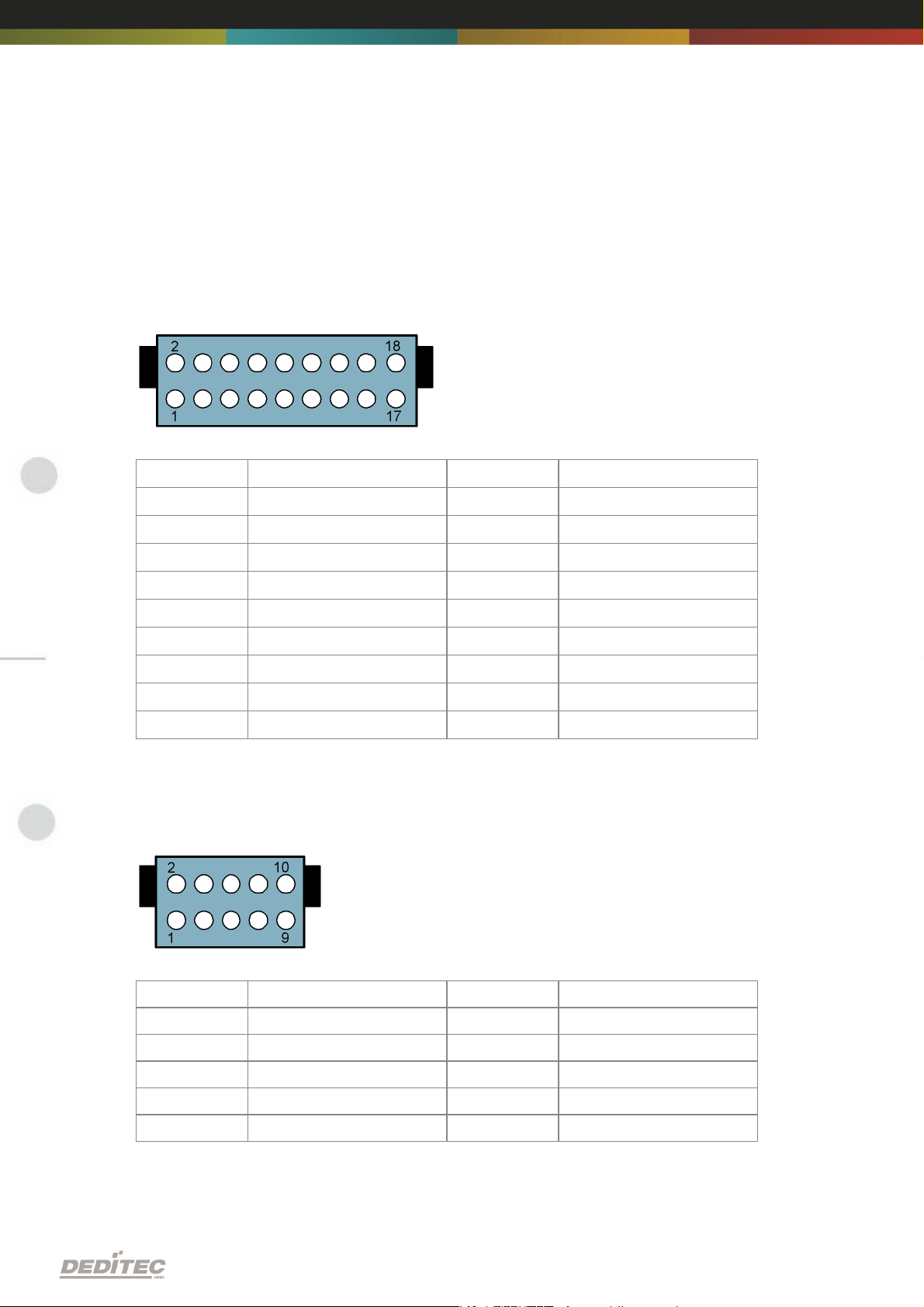
2.1.4. Pinbelegung
Pin
Pin1AGND
2
AGND
3
AD1
4
AD0
5
AD3
6
AD2
7
AD5
8
AD4
9
AD7
10
AD6
11
AD9
12
AD8
13
AD11
14
AD10
15
AD13
16
AD12
17
AD15
18
AD14
Pin
Pin1AGND
2
DA0
3
AGND
4
DA1
5
AGND
6
DA2
7
AGND
8
DA3
9
AGND
10
AGND
2.1.4.1. A/D Steckverbinder (18pol)
2.1.4.2. D/A Steckverbinder (10pol)
Hardware Beschreibung |Seite 12
Page 53
2.2. RO-AD16
Mit 16 A/D Eingangs-Kanäle stellt dieses Modul eine gute Basis zur
Umwandlung von Spannungen in digitale Werte dar.
2.2.1. Übersichtsbild
Die Abbildung zeigt ein Modul mit entsprechender Durchnummerierung der
Anschlussklemmen.
Die Abbildung zeigt ein I/O-Modul des flexiblen Steckverbindersystems mit
entsprechender Durchnummerierung der Anschlussklemmen.
Hardware Beschreibung |Seite 13
Page 54

2.2.2. Technische Daten
Komfortables Steckverbindersystem mit Auswerfmechanik
Kann problemlos mit anderen Modulen der RO Serie kombiniert werden
A/D Eingangs-Kanäle
Modus U: (Spannung)
Unipolar: 0-5V, 0-10V
Bipolar: +5V, +10V
Modus I: (Strom)
Bereich: 0-20mA (optional)
Hardware Beschreibung |Seite 14
Page 55

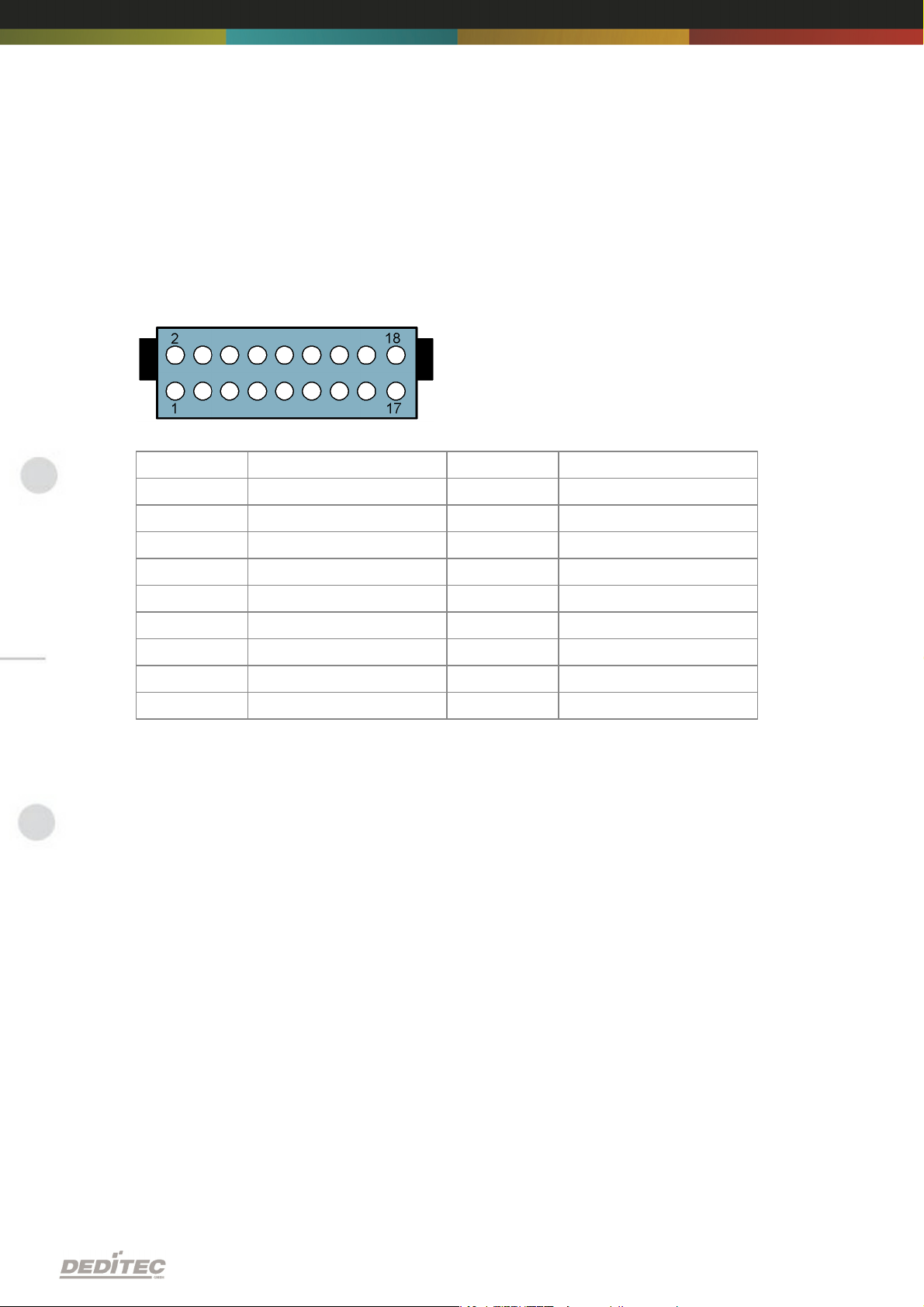
2.2.3. Pinbelegung
Pin
Pin1AGND
2
AGND
3
AD1
4
AD0
5
AD3
6
AD2
7
AD5
8
AD4
9
AD7
10
AD6
11
AD9
12
AD8
13
AD11
14
AD10
15
AD13
16
AD12
17
AD15
18
AD14
2.2.3.1. A/D Steckverbinder (18pol)
Hardware Beschreibung |Seite 15
Page 56

2.3. RO-AD16_ISO
Mit 16 A/D Eingangs-Kanälen (galvanisch getrennt) stellt dieses Modul eine
gute Basis zur Umwandlung von Spannungen in digitale Werte dar.
2.3.1. Übersichtsbild
Die Abbildung zeigt ein Modul mit entsprechender Durchnummerierung der
Anschlussklemmen.
Die Abbildung zeigt ein I/O-Modul des flexiblen Steckverbindersystems mit
entsprechender Durchnummerierung der Anschlussklemmen.
Hardware Beschreibung |Seite 16
Page 57

2.3.2. Technische Daten
Komfortables Steckverbindersystem mit Auswerfmechanik
Kann problemlos mit anderen Modulen der RO Serie kombiniert werden
A/D Eingangs-Kanäle
Galvanisch getrennnt
Modus U: (Spannung)
Unipolar: 0-5V, 0-10V
Bipolar: +5V, +10V
Modus I: (Strom)
Bereich: 0-20mA (optional)
Hardware Beschreibung |Seite 17
Page 58
2.3.3. Pinbelegung
Pin
Pin1AGND
2
AGND
3
AD1
4
AD0
5
AD3
6
AD2
7
AD5
8
AD4
9
AD7
10
AD6
11
AD9
12
AD8
13
AD11
14
AD10
15
AD13
16
AD12
17
AD15
18
AD14
2.3.3.1. A/D Steckverbinder (18pol)
Hardware Beschreibung |Seite 18
Page 59

2.4. RO-DA4
Mit 4 D/A Ausgängen stellt dieses Modul eine gute Basis zur Umwandlung von
digitalen Werten in Spannungen dar.
2.4.1. Übersichtsbild
Die Abbildung zeigt ein Modul mit entsprechender Durchnummerierung der
Anschlussklemmen.
Die Abbildung zeigt ein I/O-Modul des flexiblen Steckverbindersystems mit
entsprechender Durchnummerierung der Anschlussklemmen.
Hardware Beschreibung |Seite 19
Page 60

2.4.2. Technische Daten
Timeout-Schutz
Komfortables Steckverbindersystem mit Auswerfmechanik
Kann problemlos mit anderen Modulen der RO Serie kombiniert werden
D/A Ausgänge
Unipolar: 0-5V, 0-10V
Bipolar: +5V, +10V
Timeout Schutz
Hardware Beschreibung |Seite 20
Page 61

2.4.3. Timeout-Schutz
Pin
Pin1AGND
2
DA0
3
AGND
4
DA1
5
AGND
6
DA2
7
AGND
8
DA3
9
AGND
10
AGND
Der Timeout-Schutz muss per Software separat aktiviert werden. Der TimeoutSchutz bietet die Möglichkeit die Ausgänge selbstständig abzuschalten. Dies
geschieht immer dann, wenn in einem vorher definierten Zeitfenster keine
Nachrichten mehr vom Modul empfangen werden. Gründe können sein:
Leitungsunterbrechung, PC / Serverabsturz usw. Dadurch können
Steuerungsschäden, Überlastung der angeschlossenen Anlagen und
Unfallgefahren verhindert werden. Das Abschalten der Ausgänge wird durch
eine LED signalisiert.
2.4.4. Pinbelegung
2.4.4.1. D/A Steckverbinder (10pol)
Hardware Beschreibung |Seite 21
Page 62

2.5. RO-DA2_ISO
Mit 2 galvanisch getrennten D/A Ausgängen stellt dieses Modul eine gute Basis
zur Umwandlung von digitalen Werten in Spannungen dar.
2.5.1. Übersichtsbild
Die Abbildung zeigt ein Modul mit entsprechender Durchnummerierung der
Anschlussklemmen.
Die Abbildung zeigt ein I/O-Modul des flexiblen Steckverbindersystems mit
entsprechender Durchnummerierung der Anschlussklemmen.
Hardware Beschreibung |Seite 22
Page 63

2.5.2. Technische Daten
Timeout-Schutz
Komfortables Steckverbindersystem mit Auswerfmechanik
Kann problemlos mit anderen Modulen der RO Serie kombiniert werden
D/A Ausgänge
Timeout Schutz
Modus U: (Spannung)
Unipolar: 0V-5V, 0V-10V
Bipolar: +5V, +10V
Modus I: (Strom)
0-20mA, 4-20mA, 0-24mA
Hardware Beschreibung |Seite 23
Page 64

2.5.3. Timeout-Schutz
Der Timeout-Schutz muss per Software separat aktiviert werden. Der TimeoutSchutz bietet die Möglichkeit die Ausgänge selbstständig abzuschalten. Dies
geschieht immer dann, wenn in einem vorher definierten Zeitfenster keine
Nachrichten mehr vom Modul empfangen werden. Gründe können sein:
Leitungsunterbrechung, PC / Serverabsturz usw. Dadurch können
Steuerungsschäden, Überlastung der angeschlossenen Anlagen und
Unfallgefahren verhindert werden. Das Abschalten der Ausgänge wird durch
eine LED signalisiert.
Hardware Beschreibung |Seite 24
Page 65

2.5.4. Pinbelegung
Pin
Pin1VOUT_A
2
+Vsense_A
3
VOUT_A
4
+Vsense_A
5
AGND
6
-Vsense_A
7
AGND
8
-Vsense_A
9
AGND
10
IOUT_A
Pin
Pin1VOUT_B
2
+Vsense_B
3
VOUT_B
4
+Vsense_B
5
AGND
6
-Vsense_B
7
AGND
8
-Vsense_B
9
AGND
10
IOUT_B
2.5.4.1. D/A Steckverbinder (10pol)
Steckverbinder oben:
Steckverbinder unten:
Hardware Beschreibung |Seite 25
Page 66

Software
III
Software | Seite 26
Page 67
3. Software
3.1. Benutzung unserer Produkte
3.1.1. Ansteuerung über grafische Anwendungen
Wir stellen Treiberinterfaces z.B. für LabVIEW und ProfiLab zur Verfügung. Als
Basis dient die DELIB Treiberbibliothek, die von ProfiLab direkt angesteuert
werden kann.
Für LabVIEW bieten wir eine einfache Treiberanbindung mit Beispielen an!
3.1.2. Ansteuerung über unsere DELIB Treiberbibliothek
Im Anhang befindet sich die komplette Funktionsreferenz für das Integrieren
unserer API-Funktionen in Ihre Software. Des Weiteren bieten wir passende
Beispiele für folgende Programmiersprachen:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
3.1.3. Ansteuerung auf Protokollebene
Das Protokoll für die Ansteuerung unserer Produkte legen wir komplett offen. So
können Sie auch auf Systemen ohne Windows oder Linux unsere Produkte
einsetzen!
Software | Seite 27
Page 68

3.1.4. Ansteuerung über mitgelieferte Testprogramme
Für die wichtigsten Funktionen unserer Produkte stellen wir einfach zu
bedienende Testprogramme zur Verfügung,. Diese werden bei der Installation
der DELIB Treiberbibliothek direkt mit installiert.
So können z.B. Relais direkt getestet werden oder Spannungen am A/D Wandler
direkt überprüft werden.
Software | Seite 28
Page 69

3.2. DELIB Treiberbibliothek
3.2.1. Übersicht
Die folgende Abbildung erläutert den Aufbau der DELIB Treiberbibliothek
Die DELIB Treiberbibliothek ermöglicht ein einheitliches Ansprechen von
DEDITEC Hardware, mit der besonderen Berücksichtigung folgender
Gesichtspunkte:
Betriebssystem unabhängig
Programmiersprachen unabhängig
Produkt unabhängig
Programmieren unter diversen Betriebssystemen
Die DELIB Treiberbibliothek ermöglicht ein einheitliches Ansprechen unserer
Produkte auf diversen Betriebssystemen.
Wir haben dafür gesorgt, dass mit wenigen Befehlen alle unsere Produkte
angesprochen werden können.
Dabei spielt es keine Rolle, welches Betriebssystem Sie verwenden. - Dafür
sorgt die DELIB !
Software | Seite 29
Page 70

Programmieren mit diversen Programmiersprachen
Für das Erstellen eigener Anwendungen stellen wir Ihnen einheitliche Befehle
zur Verfügung. Dies wird über die DELIB Treiberbibliothek gelöst.
Sie wählen die Programmiersprache !
So können leicht Anwendung unter C++, C, Visual Basic, Delphi oder
LabVIEW® entwickelt werden.
Schnittstellenunabhängiges programmieren
Schreiben Sie Ihre Anwendung schnittstellenunabhängig !
Programmieren Sie eine Anwendung für ein USB-Produkt von uns. - Es wird
auch mit einem Ethernet oder RS-232 Produkt von uns laufen !
SDK-Kit für Programmierer
Integrieren Sie die DELIB in Ihre Anwendung. Auf Anfrage erhalten Sie von uns
kostenlos Installationsskripte, die es ermöglichen, die DELIB Installation in Ihre
Anwendung mit einzubinden.
Software | Seite 30
Page 71

3.2.2. Unterstützte Betriebssysteme
Unsere Produkte unterstützen folgende Betriebssysteme:
Windows 2000
Windows XP
Windows Vista
Windows 7
Linux
3.2.3. Unterstützte Programmiersprachen
Unsere Produkte sind über folgende Programmiersprachen ansprechbar:
C
C++
C#
Delphi
VisualBasic
VB.NET
MS-Office
Software | Seite 31
Page 72

3.2.4. Installation DELIB-Treiberbibliothek
Legen Sie die DEDITEC driver CD in das Laufwerk und starten Sie
“delib_install.exe”. Die DELIB-Treiberbibliothek ist auch unter http://www.
deditec.de/delib erhältlich.
Drücken Sie auf “Install”.
Software | Seite 32
Page 73

Die Treiber werden nun installiert.
Die DELIB Treiberbibliothek wurde nun Installiert. Drücken sie auf “Close” um
die Installation zu beenden.
Mit dem “DELIB Configuration Utility” (nächstes Kapitel) können Sie Ihr Modul
konfigurieren (dies ist nur nötig, wenn Sie mehr als ein Modul ansprechen
möchten).
Software | Seite 33
Page 74

3.2.5. DELIB Configuration Utility
“DELIB Configuration Utility” wird auf dem folgendem Weg gestartet:
Start Programme DEDITEC DELIB DELIB Configuration Utility.
Das “DELIB Configuration Utility” ist ein Programm zur Konfiguration und
Unterteilung Identischer USB-Module im System. Dies ist aber nicht nötig falls
nur ein Modul vorhanden ist.
Weiteres zum Inhalt der “DELIB Installation”, siehe “Manual für DELIB
Treiberbibliothek”
Software | Seite 34
Page 75

3.3. Testprogramme
3.3.1. Analog Input-Output Demo
“Analog Input-Output Demo” wird auf dem folgendem Weg gestartet:
Start Programme DEDITEC DELIB Analog Input-Output Demo.
Diese Grafik zeigt einen Test des RO-USB-AD16-DA4. Oben links kann man
die Konfiguration des Moduls ablesen (16 A/D-Eingänge und 4 D/A-Ausgänge).
Software | Seite 35
Page 76

Software | Seite 36
Page 77

DELIB API Referenz
IV
DELIB API Referenz | Seite 37
Page 78

4. DELIB API Referenz
// USB-Modul öffnen
handle = DapiOpenModule(RO_USB1, 0);
printf("handle = %x\n", handle);
if (handle==0)
{
// USB Modul wurde nicht gefunden
printf("Modul konnte nicht geöffnet werden\n");
return;
}
4.1. Verwaltungsfunktionen
4.1.1. DapiOpenModule
Beschreibung
Diese Funktion öffnet ein bestimmtes Modul.
Definition
ULONG DapiOpenModule(ULONG moduleID, ULONG nr);
Parameter
moduleID=Gibt das Modul an, welches geöffnet werden soll (siehe delib.h)
nr=Gibt an, welches (bei mehreren Modulen) geöffnet werden soll.
nr=0 -> 1. Modul
nr=1 -> 2. Modul
Return-Wert
handle=Entsprechender Handle für das Modul
handle=0 -> Modul wurde nicht gefunden
Bemerkung
Der von dieser Funktion zurückgegebene Handle wird zur Identifikation des
Moduls für alle anderen Funktionen benötigt.
Programmierbeispiel
DELIB API Referenz | Seite 38
Page 79

4.1.2. DapiCloseModule
// Modul schliessen
DapiCloseModule(handle);
Beschreibung
Dieser Befehl schliesst ein geöffnetes Modul.
Definition
ULONG DapiCloseModule(ULONG handle);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
Return-Wert
Keiner
Programmierbeispiel
DELIB API Referenz | Seite 39
Page 80

4.2. Fehlerbehandlung
ULONG error;
error=DapiGetLastError();
if(error==0) return FALSE;
printf("ERROR = %d”, error);
4.2.1. DapiGetLastError
Beschreibung
Diese Funktion liefert den letzten erfassten Fehler.
Definition
ULONG DapiGetLastError();
Parameter
Keine
Return-Wert
Fehler Code
0=kein Fehler. (siehe delib.h)
Programmierbeispiel
DELIB API Referenz | Seite 40
Page 81

4.2.2. DapiGetLastErrorText
BOOL IsError ()
{
if (DapiGetLastError () != DAPI_ERR_NONE)
{
unsigned char msg[500];
DapiGetLastErrorText((unsigned char*) msg, sizeof(msg));
printf ("Error Code = %x * Message = %s\n", 0, msg);
return TRUE;
}
return FALSE;
}
Beschreibung
Diese Funktion liest den Text des letzten erfassten Fehlers.
Definition
extern ULONG __stdcall DapiGetLastErrorText(unsigned char * msg, unsigned long
msg_length);
Parameter
msg = Buffer für den zu empfangenden Text
msg_length = Länge des Text Buffers
Programmierbeispiel
DELIB API Referenz | Seite 41
Page 82

4.3. A/D Wandler Funktionen
4.3.1. DapiADSetMode
Beschreibung
Dieser Befehl konfiguriert den Spannungsbereich für einen A/D Wandler.
Definition
void DapiADSetMode(ULONG handle, ULONG ch, ULONG mode);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des A/D Wandlers an (0 .. )
mode=Gibt den Modus für den Kanal an
Return-Wert
keiner
Bemerkung
Folgende Modi werden unterstützt:
(diese sind abhängig von dem verwendeten A/D-Modul)
Unipolare Spannungen:
ADDA_MODE_UNIPOL_10V
ADDA_MODE_UNIPOL_5V
ADDA_MODE_UNIPOL_2V5
Bipolare Spannungen:
ADDA_MODE_BIPOL_10V
ADDA_MODE_BIPOL_5V
ADDA_MODE_BIPOL_2V5
DELIB API Referenz | Seite 42
Page 83

Ströme:
ADDA_MODE_0_20mA
ADDA_MODE_4_20mA
ADDA_MODE_0_24mA
ADDA_MODE_0_25mA
ADDA_MODE_0_50mA
DELIB API Referenz | Seite 43
Page 84

4.3.2. DapiADGetMode
Beschreibung
Dieser Befehl liest den eingestellten Modus eines A/D Wandlers zurück.
Modus-Beschreibung siehe DapiADSetMode.
Definition
ULONG DapiADGetMode(ULONG handle, ULONG ch);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des A/D Wandlers an (0 .. )
Return-Wert
Modus des A/D Wandlers
DELIB API Referenz | Seite 44
Page 85

4.3.3. DapiADGet
Beschreibung
Dieser Befehl liest einen Datenwert von einen Kanal eines A/D Wandlers.
Definition
ULONG DapiADGet(ULONG handle, ULONG ch);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des A/D Wandlers an (0 .. )
Return-Wert
Wert vom A/D Wandler in Digits
DELIB API Referenz | Seite 45
Page 86

4.3.4. DapiADGetVolt
Beschreibung
Dieser Befehl liest einen Datenwert von einen Kanal eines A/D Wandlers in Volt.
Definition
float DapiADGetVolt(ULONG handle, ULONG ch);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des A/D Wandlers an (0 .. )
Return-Wert
Wert vom A/D Wandler in Volt
DELIB API Referenz | Seite 46
Page 87

4.3.5. DapiADGetmA
Beschreibung
Dieser Befehl liest einen Datenwert von einen Kanal eines A/D Wandlers in mA.
Definition
float DapiADGetmA(ULONG handle, ULONG ch);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des A/D Wandlers an (0 .. )
Return-Wert
Wert vom A/D Wandler in mA.
Bemerkung
Dieser Befehl ist Modul abhängig. Er funktioniert natürlich nur, wenn das Modul
auch den Strom-Modus unterstützt.
DELIB API Referenz | Seite 47
Page 88

4.4. D/A Ausgänge verwalten
4.4.1. DapiDASetMode
Beschreibung
Dieser Befehl setzt den Modus für einen D/A Wandler.
Definition
void DapiDASetMode(ULONG handle, ULONG ch, ULONG mode);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des D/A Wandlers an (0 .. )
mode=Gibt den Modus für den D/A Wandler an
Return-Wert
Keiner
Bemerkung
Folgende Modi werden unterstützt:
(diese sind abhängig von dem verwendeten D/A-Modul)
Unipolare Spannungen:
ADDA_MODE_UNIPOL_10V
ADDA_MODE_UNIPOL_5V
ADDA_MODE_UNIPOL_2V5
Bipolare Spannungen:
ADDA_MODE_BIPOL_10V
ADDA_MODE_BIPOL_5V
ADDA_MODE_BIPOL_2V5
DELIB API Referenz | Seite 48
Page 89

Ströme:
ADDA_MODE_0_20mA
ADDA_MODE_4_20mA
ADDA_MODE_0_24mA
ADDA_MODE_0_25mA
ADDA_MODE_0_50mA
DELIB API Referenz | Seite 49
Page 90

4.4.2. DapiDAGetMode
Beschreibung
Dieser Befehl liest den eingestellten Modus eines D/A Wandlers zurück.
Definition
ULONG DapiDAGetMode(ULONG handle, ULONG ch);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des D/A Wandlers an (0 .. )
Return-Wert
Modus des D/A Wandlers
DELIB API Referenz | Seite 50
Page 91

4.4.3. DapiDASet
Beschreibung
Dieser Befehl übergibt ein Datenwert an einen Kanal eines D/A Wandlers.
Definition
void DapiDASet(ULONG handle, ULONG ch, ULONG data);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des D/A Wandlers an (0 .. )
data=Gibt den Datenwert an, der geschrieben wird
Return-Wert
Keiner
DELIB API Referenz | Seite 51
Page 92

4.4.4. DapiDASetVolt
Beschreibung
Dieser Befehl setzt eine Spannung an einen Kanal eines D/A Wandlers.
Definition
void DapiDASetVolt(ULONG handle, ULONG ch, float data);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des D/A Wandlers an (0 .. )
data=Gibt die Spannung an, die eingestellt werden soll [V]
Return-Wert
Keiner
DELIB API Referenz | Seite 52
Page 93

4.4.5. DapiDASetmA
Beschreibung
Dieser Befehl setzt einen Strom an einen Kanal eines D/A Wandlers.
Definition
void DapiDASetmA(ULONG handle, ULONG ch, float data);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des D/A Wandlers an (0 .. )
data=Gibt den Strom an, der geschrieben wird [mA]
Return-Wert
Keiner
Bemerkung
Dieser Befehl ist Modul abhängig. Er funktioniert natürlich nur, wenn das Modul
auch den Strom-Modus unterstützt.
DELIB API Referenz | Seite 53
Page 94

4.4.6. DapiSpecialCmd_DA
Beschreibung
Dieser Befehl setzt die Spannungswerte bei einem Kanal beim Einschalten bzw.
nach einem Timeout eines D/A Wandlers (EEPROM-Konfiguration).
Definition
void DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_DA, cmd, ch, 0);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
ch=Gibt den Kanal des D/A Wandlers an (0, 1, 2, ..)
Zurücksetzen der Einstellungen auf Default Konfiguration
cmd=DAPI_SPECIAL_DA_PAR_DA_LOAD_DEFAULT
Speichern der Konfiguration in das EEPROM
cmd=DAPI_SPECIAL_DA_PAR_DA_SAVE_EEPROM_CONFIG
Laden der Konfiguration aus dem EEPROM
cmd=DAPI_SPECIAL_DA_PAR_DA_LOAD_EEPROM_CONFIG
Return-Wert
Keiner
Bemerkung
DAPI_SPECIAL_CMD_DA_PAR_DA_LOAD_DEFAULT
Mit diesem Befehl wird die Default Konfiguration eines D/A Wandlers geladen.
Der D/A Wandler hat jetzt als Ausgabespannung 0V.
DAPI_SPECIAL_DA_PAR_DA_SAVE_EEPROM_CONFIG
Mit diesem Befehl wird die aktuelle D/A Wandler Einstellung (Spannung/StromWert, Enable/Disable und D/A Wandler Modus) in das EEPROM gespeichert.
DAPI_SPECIAL_DA_PAR_DA_LOAD_EEPROM_CONFIG
Mit diesem Befehl wird der D/A Wandler, mit der im EEPROM gespeicherten
Konfiguration, gesetzt.
DELIB API Referenz | Seite 54
Page 95

Programmierbeispiel
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_DA,
DAPI_SPECIAL_DA_PAR_DA_LOAD_DEFAULT, 1, 0);
//Zurücksetzen der EEPROM-Konfiguration auf Default Konfiguration bei Kanal 1.
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_DA,
DAPI_SPECIAL_DA_PAR_DA_SAVE_EEPROM_CONFIG, 3, 0);
//Speichern der D/A Wandler Einstellungen in das EEPROM bei Kanal 3.
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_DA,
DAPI_SPECIAL_DA_PAR_DA_LOAD_EEPROM_CONFIG, 2, 0);
//Setzen des D/A Wandlers, mit der im EEPROM gespeicherten Konfiguration bei
Kanal 2.
DELIB API Referenz | Seite 55
Page 96

4.5. Ausgabe-Timeout verwalten
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_SET_VALUE_SEC, 3, 7);
//Die Zeit des Timeouts wird auf 3,7sek gesetzt.
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_ACTIVATE, 0, 0);
//Der Timeout wird aktiviert.
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_DEACTIVATE, 0, 0);
//Der Timeout wird deaktiviert.
4.5.1. DapiSpecialCMDTimeout
Beschreibung
Dieser Befehl dient zum Setzen der Timeout-Zeit
Definition
DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT, cmd, par1, par2);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
Timeout-Zeit setzen
cmd=DAPI_SPECIAL_CMD_TIMEOUT_SET_VALUE_SEC
par1=Sekunden [s]
par2=Millisekunden [100ms] (Wert 6 bedeutet 600ms)
Timeout aktivieren setzen
cmd=DAPI_SPECIAL_CMD_TIMEOUT_ACTIVATE
Timeout deaktivieren setzen
cmd=DAPI_SPECIAL_CMD_TIMEOUT_DEACTIVATE
Return-Wert
Keiner
Programmierbeispiel
DELIB API Referenz | Seite 56
Page 97

4.5.2. DapiSpecialCMDTimeoutGetStatus
status = DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_GET_STATUS, 0, 0);
//Abfrage des Timeout-Status.
Beschreibung
Dieser Befehl dient zum Auslesen des Timeout-Status.
Definition
ULONG DapiSpecialCommand(handle, DAPI_SPECIAL_CMD_TIMEOUT,
DAPI_SPECIAL_TIMEOUT_GET_STATUS, 0, 0);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
Return-Wert
Return=0 (Timeout ist deaktivert)
Return=1 (Timeout ist aktiviert)
Return=2 (Timeout hat stattgefunden)
Programmierbeispiel
DELIB API Referenz | Seite 57
Page 98

4.6. Testfunktionen
4.6.1. DapiPing
Beschreibung
Dieser Befehl prüft die Verbindung zu einem geöffneten Modul.
Definition
ULONG DapiPing(ULONG handle, ULONG value);
Parameter
handle=Dies ist das Handle eines geöffneten Moduls
value=Übergebener Testwert an das Modul
Return-Wert
Hier muß der mit value übergebene Testwert zurückkommen
DELIB API Referenz | Seite 58
Page 99

4.7. Programmier-Beispiel
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
//
// (c) DEDITEC GmbH, 2009
//
// web: http://www.deditec.de
//
// mail: vertrieb@deditec.de
//
//
//
// dtapi_prog_beispiel_input_output.cpp
//
//
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
// ****************************************************************************
//
//
// Folgende Bibliotheken beim Linken mit einbinden: delib.lib
// Dies bitte in den Projekteinstellungen (Projekt/Einstellungen/Linker(ObjektBibliothek-Module) .. letzter Eintrag konfigurieren
#include <windows.h>
#include <stdio.h>
#include "conio.h"
#include "delib.h"
// ---------------------------------------------------------------------------// ---------------------------------------------------------------------------// ---------------------------------------------------------------------------// ---------------------------------------------------------------------------// ----------------------------------------------------------------------------
void main(void)
{
unsigned long handle;
unsigned long data;
unsigned long anz;
unsigned long i;
unsigned long chan;
// ---------------------------------------------------// USB-Modul öffnen
handle = DapiOpenModule(USB_Interface8,0);
printf("USB_Interface8 handle = %x\n", handle);
if (handle==0)
{
// USB Modul wurde nicht gefunden
printf("Modul konnte nicht geöffnet werden\n");
printf("TASTE für weiter\n");
getch();
DELIB API Referenz | Seite 59
Page 100
return;
}
// Zum Testen - ein Ping senden
// ---------------------------------------------------printf("PING\n");
anz=10;
for(i=0;i!=anz;++i)
{
data=DapiPing(handle, i);
if(i==data)
{
// OK
printf(".");
}
else
{
// No answer
printf("E");
}
}
printf("\n");
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 255;
DapiWriteByte(handle, 0, data);
printf("Schreibe auf Adresse=0 daten=0x%x\n", data);
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 255;
DapiWriteByte(handle, 1, data);
printf("Schreibe auf Adresse=0 daten=0x%x\n", data);
// ---------------------------------------------------// Einen Wert auf die Ausgänge schreiben
data = 255;
DapiWriteByte(handle, 2, data);
printf("Schreibe auf Adresse=2 daten=0x%x\n", data);
// ---------------------------------------------------// Einen Wert von den Eingängen lesen
data = (unsigned long) DapiReadByte(handle, 0);
printf("Gelesene Daten = 0x%x\n", data);
// ---------------------------------------------------// Einen A/D Wert lesen
chan=11; // read chan. 11
data = DapiReadWord(handle, 0xff010000 + chan*2);
printf("Adress=%x, ret=%x volt=%f\n", chan, data, ((float) data) / 1024*5);//
Bei 5 Volt Ref
// ---------------------------------------------------// Modul wieder schliessen
DapiCloseModule(handle);
printf("TASTE für weiter\n");
getch();
return ;
}
DELIB API Referenz | Seite 60
 Loading...
Loading...