

Page 1

DEC 7000 AXP System
VAX 7000
Operations Manual
Order Number EK–7000B–OP.002
This manual is intended for the system manager or system operator and
covers the basic operations of a DEC 7000 AXP system or VAX 7000
system.
digital equipment corporation
maynard, massachusetts
Page 2
First Printing, November 1992
The information in this document is subject to change without notice and should
not be construed as a commitment by Digital Equipment Corporation.
Digital Equipment Corporation assumes no responsibility for any errors that may
appear in this document.
The software, if any, described in this document is furnished under a license and
may be used or copied only in accordance with the terms of such license. No responsibility is assumed for the use or reliability of software or equipment that is
not supplied by Digital Equipment Corporation or its affiliated companies.
Copyright © 1992 by Digital Equipment Corporation.
All Rights Reserved.
Printed in U.S.A.
The following are trademarks of Digital Equipment Corporation:
Alpha AXP DECUS VAXBI
AXP DWMVA VAXELN
DEC OpenVMS VMScluster
DECchip ULTRIX XMI
DEC LANcontroller UNIBUS The AXP logo
DECnet VAX
d
OSF/1 is a registered trademark of the Open Software Foundation, Inc.
FCC NOTICE: The equipment described in this manual generates, uses, and may
emit radio frequency energy. The equipment has been type tested and found to
comply with the limits for a Class A computing device pursuant to Subpart J of
Part 15 of FCC Rules, which are designed to provide reasonable protection against
such radio frequency interference when operated in a commercial environment.
Operation of this equipment in a residential area may cause interference, in which
case the user at his own expense may be required to take measures to correct the
interference.
Page 3
Contents
Preface ..................................................................................................... vii
Chapter 1 DEC 7000 AXP System and VAX 7000
System
1.1 System Characteristics ..........................................................1-2
1.2 System Architecture .............................................................. 1-4
1.3 Sample System....................................................................... 1-6
1.4 System Front View................................................................. 1-8
1.5 System Rear View ................................................................ 1-10
Chapter 2 System Components
2.1 Console Load Devices............................................................. 2-2
2.2 In-Cabinet Tape Drives ......................................................... 2-4
2.3 Power System ......................................................................... 2-6
2.4 LSB Card Cage....................................................................... 2-8
2.5 Control/Status and I/O Connections ................................... 2-10
2.6 Cooling System..................................................................... 2-12
2.7 System Options .................................................................... 2-14
Chapter 3 Controls and Indicators
3.1 Control Panel Keyswitch ...................................................... 3-2
3.2 Control Panel Indicator Lights.............................................. 3-4
3.3 Circuit Breaker and AC Power Indicators............................ 3-6
Chapter 4 Booting
4.1 Boot Devices ........................................................................... 4-2
iii
Page 4

4.2 Booting Overview ................................................................... 4-4
4.3 Boot Command Syntax .......................................................... 4-6
4.3.1 Console Environment Variables ................................... 4-10
4.3.2 Set Commands for Booting .......................................... 4-12
4.4 Booting Concepts.................................................................. 4-14
4.4.1 How Bootblock Booting Works...................................... 4-14
4.4.2 Boot Processor Selection ............................................... 4-16
4.5 Booting from a Local Device ................................................ 4-18
4.5.1 Local Device Booting Concepts ..................................... 4-18
4.5.2 CD-ROM OpenVMS Alpha AXP Booting ..................... 4-20
4.5.3 CD-ROM OSF/1 Booting .............................................. 4-22
4.5.4 Local Device Booting Examples.................................... 4-24
4.6 Booting from an InfoServer ................................................. 4-26
4.6.1 InfoServer Concepts ...................................................... 4-26
4.6.2 InfoServer OpenVMS VAX Booting ............................. 4-28
4.6.3 Selecting an Ethernet Service....................................... 4-30
4.7 Booting from a VMScluster ................................................. 4-32
4.7.1 VMScluster Concepts .................................................... 4-32
4.7.2 CI OpenVMS Alpha AXP Booting................................. 4-34
4.7.3 CI OSF/1 Booting.......................................................... 4-36
4.7.4 CI OpenVMS VAX Booting ........................................... 4-38
4.7.5 Shadow Set OpenVMS VAX Booting ........................... 4-40
4.7.6 DSSI OpenVMS VAX Booting ..................................... 4-42
Appendix A Console Commands
Appendix B Boot Options
Appendix C Updating Firmware
C.1 Booting LFU on a DEC 7000 System....................................C-2
C.2 Booting LFU on a VAX 7000 System ....................................C-4
C.3 Show .......................................................................................C-6
C.4 List ..........................................................................................C-8
C.5 Update ..................................................................................C-10
C.6 Exit .......................................................................................C-12
C.7 Display and Verify Commands............................................C-14
iv
Page 5

Glossary
Examples
4-1 Set Boot Commands............................................................. 4-12
4-2 CD-ROM OpenVMS Alpha AXP Boot ................................ 4-20
4-3 CD-ROM OSF/1 Boot .......................................................... 4-22
4-4 Sample Local Device Boots .................................................. 4-24
4-5 InfoServer OpenVMS VAX Boot ......................................... 4-28
4-6 Selecting an Ethernet Service ............................................. 4-30
4-7 CI OpenVMS Alpha AXP Boot ............................................ 4-34
4-8 CI OSF/1 Boot...................................................................... 4-36
4-9 CI OpenVMS VAX Boot ...................................................... 4-38
4-10 DSSI OpenVMS VAX Boot .................................................. 4-42
C-1 RRD42 LFU Booting ..............................................................C-2
C-2 Booting LFU ..........................................................................C-4
C-3 Show Command......................................................................C-6
C-4 List Command ........................................................................C-8
C-5 Update Command ................................................................C-10
C-6 Exit Command......................................................................C-12
C-7 Display and Verify Commands............................................C-14
Figures
1-1 Sample System Footprint ...................................................... 1-2
1-2 Sample System Architecture ................................................. 1-4
1-3 Sample System ....................................................................... 1-6
1-4 System Front View................................................................. 1-8
1-5 System Rear View ................................................................ 1-10
2-1 Accessing the Console Load Device....................................... 2-2
2-2 Accessing the In-Cabinet Tape Drive.................................... 2-4
2-3 Power System ......................................................................... 2-6
2-4 LSB Card Cage....................................................................... 2-8
2-5 Control/Status and I/O Connections ................................... 2-10
2-6 Airflow .................................................................................. 2-12
2-7 System Options .................................................................... 2-14
3-1 Control Panel Keyswitch ....................................................... 3-2
3-2 Control Panel Indicator Lights.............................................. 3-4
3-3 Circuit Breaker and AC Power Indicators............................ 3-6
4-1 Boot Devices ........................................................................... 4-2
4-2 Device Boot Commands ......................................................... 4-4
4-3 Boot Command ....................................................................... 4-6
v
Page 6

4-4 Boot Procedure ..................................................................... 4-14
4-5 Determining the Boot Processor.......................................... 4-16
4-6 Local Device Booting............................................................ 4-18
4-7 InfoServer Selection Flowchart ........................................... 4-26
4-8 InfoServer Configuration..................................................... 4-27
4-9 Booting from CI and DSSI VMSclusters............................. 4-32
4-10 Shadow Set Open VMS VAX Booting ................................. 4-40
Tables
1 DEC 7000/VAX 7000 Documentation ..................................... ix
2 Related Documents .................................................................. xi
1-1 Electrical Characteristics ...................................................... 1-3
1-2 Environmental Characteristics ............................................. 1-3
3-1 Keyswitch Positions ............................................................... 3-3
3-2 Control Panel Indicator Lights.............................................. 3-5
4-1 Boot Devices ........................................................................... 4-3
4-2 Sample Boot Commands........................................................ 4-5
4-3 Device Names ......................................................................... 4-7
4-4 Environment Variables........................................................ 4-10
A-1 Console Commands ................................................................A-1
B-1 OpenVMS Alpha AXP Boot Options .....................................B-2
B-2 OSF/1 Boot Options................................................................B-3
B-3 VMB Boot Options .................................................................B-4
vi
Page 7
Preface
Intended Audience
This manual is written for the system manager or system operator who
has training in systems management and is running a DEC 7000 AXP system or a VAX 7000 system.
Document Structure
This manual uses a structured documentation design. Topics are organized
into small sections for efficient on-line and printed reference. Each topic
begins with an abstract. You can quickly gain a comprehensive overview
by reading only the abstracts. Next is an illustration or example, which
also provides quick reference. Last in the structure are descriptive text
and syntax definitions.
This manual has four chapters and three appendixes, as follows:
• Chapter 1, DEC 7000 AXP System and VAX 7000 Systems, and
Chapter 2, System Components, give a basic introduction to your
system and its parts.
• Chapter 3, Controls and Indicators, describes how the system pre-
sents information and how you use the switches.
• Chapter 4, Booting, explains how you turn on the system and get it
running.
• Appendix A, Console Commands, lists the console commands with
a brief explanation of each command.
• Appendix B, Boot Options, lists options used with the boot com-
mand to control various phases of booting.
• Appendix C, Updating Firmware, explains how to run the Loadable
Firmware Update (LFU) Utility.
• A Glossary and Index provide additional reference support.
vii
Page 8
Conventions Used in This Document
C
0
P
t
e
Terminology. Unless specified otherwise, the use of "system" refers to
either a DEC 7000 AXP or VAX 7000 system. The DEC 7000 AXP systems
use the Alpha AXP architecture. References in text use DEC 7000 to refer
to DEC 7000 AXP
When a discussion applies to only one system, an icon is used to highlight
that system. Otherwise, the discussion applies to both systems. Thus, the
abstract for a module that applies only to DEC 7000 systems would look
like this:
systems.
DE
700
Book titles. In text, if a book is cited without a product name, that book is
part of the hardware documentation. It is listed in Table 1 along with its
order number.
Icons. The icons shown below are used in illustrations for designating part
placement in the system described. A shaded area in the icon shows the
location of the component or part being discussed.
This section shows a sample boot of OpenVMS Alpha AX
from the RRD42 CD drive for DEC 7000 systems. The firs
step is issuing the show device command to determine th
location of the RRD42.
Front
Rear
Documentation Titles
Table 1 lists the books in the DEC 7000 and VAX 7000 documentation set.
Table 2 lists other documents that you may find useful.
viii
Page 9
Table 1 DEC 7000/VAX 7000 Documentation
Title Order Number
Installation Kit
Site Preparation Guide
Installation Guide
Hardware User Information Kit
Operations Manual
Basic Troubleshooting
Service Information Kit—VAX 7000
Platform Service Manual
System Service Manual
Pocket Service Guide
Advanced Troubleshooting
Service Information Kit—DEC 7000
Platform Service Manual
System Service Manual
Pocket Service Guide
Advanced Troubleshooting
EK–7000B–DK
EK–7000B–SP
EK–700EB–IN
EK–7001B–DK
EK–7000B–OP
EK–7000B–TS
EK–7002A–DK
EK–7000A–SV
EK–7002A–SV
EK–7000A–PG
EK–7001A–TS
EK–7002B–DK
EK–7000A–SV
EK–7002B–SV
EK–7700A–PG
EK–7701A–TS
ix
Page 10
Table 1 DEC 7000/VAX 7000 Documentation (Continued)
Title Order Number
Reference Manuals
Console Reference Manual
KA7AA CPU Technical Manual
KN7AA CPU Technical Manual
MS7AA Memory Technical Manual
I/O System Technical Manual
EK–70C0B–TM
EK–KA7AA–TM
EK–KN7AA–TM
EK–MS7AA–TM
EK–70I0A–TM
Platform Technical Manual
Upgrade Manuals
KA7AA CPU Installation Guide
KN7AA CPU Installation Guide
MS7AA Memory Installation Guide
KZMSA Adapter Installation Guide
DWLMA XMI PIU Installation Guide
DWMBB VAXBI PIU Installation Guide
H7237 Battery PIU Installation Guide
H7263 Power Regulator Installation Guide
BA654 DSSI Disk PIU Installation Guide
BA655 SCSI Disk and Tape PIU
Installation Guide
Removable Media Installation Guide
EK–7000A–TM
EK–KA7AA–IN
EK–KN7AA–IN
EK–MS7AA–IN
EK–KXMSX–IN
EK–DWLMA–IN
EK–DWMBB–IN
EK–H7237–IN
EK–H7263–IN
EK–BA654–IN
EK–BA655–IN
EK–TFRRD–IN
x
Page 11
Table 2 Related Documents
Title Order Number
General Site Preparation
Site Environmental Preparation Guide
System I/O Options
BA350 DECstor/me Modular Storage Shelf
Subsystem Configuration Guide
BA350 DECstor/me Modular Storage Shelf
Subsystem User’s Guide
BA350-LA DECstor/me Modular Storage Shelf
User’s Guide
CIXCD Interface User Guide
EK–CSEPG–MA
EK–BA350–CG
EK–BA350–UG
EK–350LA–UG
EK–CIXCD–UG
DEC FDDIcontroller 400 Installation/Problem
Solving
DEC LANcontroller 400 Installation Guide
DEC LANcontroller 400 Technical Manual
DSSI VAXcluster Installation and Troubleshooting
Manual
InfoServer 150 Installation and Owner’s Guide
KDM70 Controller User Guide
KFMSA Module Installation and User Manual
KFMSA Module Service Guide
RRD42 Disc Drive Owner’s Manual
RF Series Integrated Storage Element User Guide
TF85 Cartridge Tape Subsystem Owner’s Manual
TLZ06 Cassette Tape Drive Owner’s Manual
EK–DEMFA–IP
EK–DEMNA–IN
EK–DEMNA–TM
EK–410AA–MG
EK–INFSV–OM
EK–KDM70–UG
EK–KFMSA–IM
EK–KFMSA–SV
EK–RRD42–OM
EK–RF72D–UG
EK–OTF85–OM
EK–TLZ06–OM
xi
Page 12
Table 2 Related Documents (Continued)
Title Order Number
Operating System Manuals
Alpha Architecture Reference Manual
DEC OSF/1 Guide to System Administration
EY–L520E–DP
AA–PJU7A–TE
DECnet for OpenVMS Network Management Utilities
Guide to Installing DEC OSF/1
OpenVMS Alpha Version 1.0 Upgrade and
Installation Manual
VMS Upgrade and Installation Supplement:
VAX 7000–600 and VAX 10000–600 Series
VMS Network Control Program Manual
VMSclusters and Networking
HSC Installation Manual
SC008 Star Coupler User’s Guide
VAX Volume Shadowing Manual
Peripherals
Installing and Using the VT420 Video Terminal
LA75 Companion Printer Installation and User Guide
AA–PQYAA–TK
AA–PS2DA–TE
AA–PQYSA–TE
AA–PRAHA–TE
AA–LA50A–TE
EK–HSCMN–IN
EK–SC008–UG
AA–PBTVA–TE
EK–VT420–UG
EK–LA75X–UG
xii
Page 13
Chapter 1
DEC 7000 AXP System and
VAX 7000 System
The DEC 7000 AXP system and VAX 7000 systems are designed for
growth offering configuration flexibility, an outstanding I/O subsystem,
and expansion capability in a single or multicabinet environment. The
DEC 7000 system or VAX 7000 system can support many users in a timesharing environment. These systems do the following:
• Support the full range of system applications of OpenVMS Alpha AXP
or OSF/1 for DEC 7000 systems and OpenVMS VAX for VAX 7000 systems
• Allow for expansion of processors, memory, and I/O
• Use a high-speed system interconnect bus (LSB bus), which has an ef-
fective bandwidth of 640 Mbytes/sec.
• Support up to 3.5 Gbytes of physical memory
• Provide optional self-contained uninterruptible power system (UPS)
capability that supports the system in case of power failure
• Perform automatic self-test on power-up, reset, reboot, or system initialization
• Operate as a standalone system, a member of a cluster, or as a boot
node of a local area cluster
The chapter describes the system package and introduces the location of
components in the cabinet—both front and rear views. Sections include:
• System Characteristics
• System Architecture
• Sample System
• System Front View
• System Rear View
DEC 7000 AXP System and VAX 7000 System 1-1
Page 14
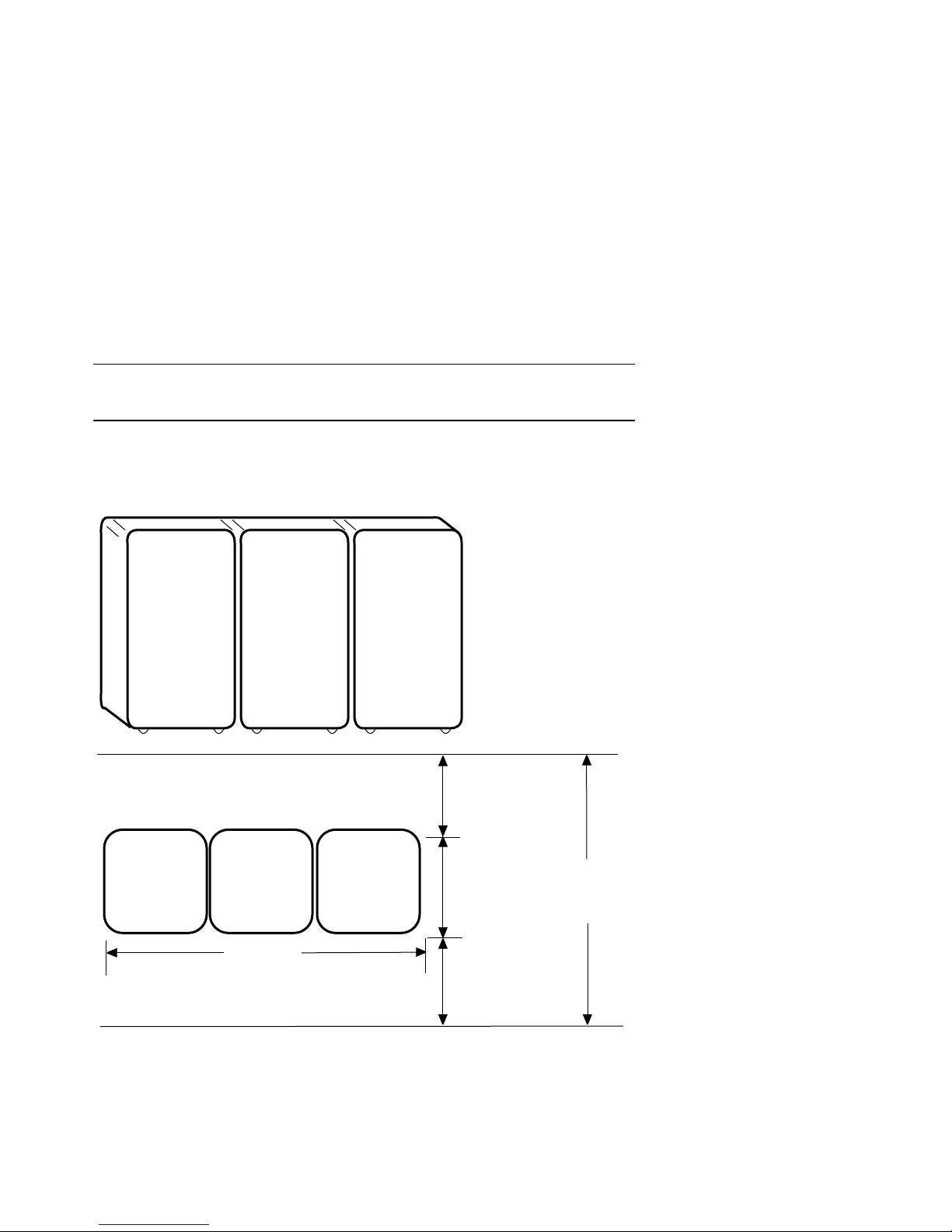
1.1 System Characteristics
DEC 7000 and VAX 7000 systems share characteristics as shown in
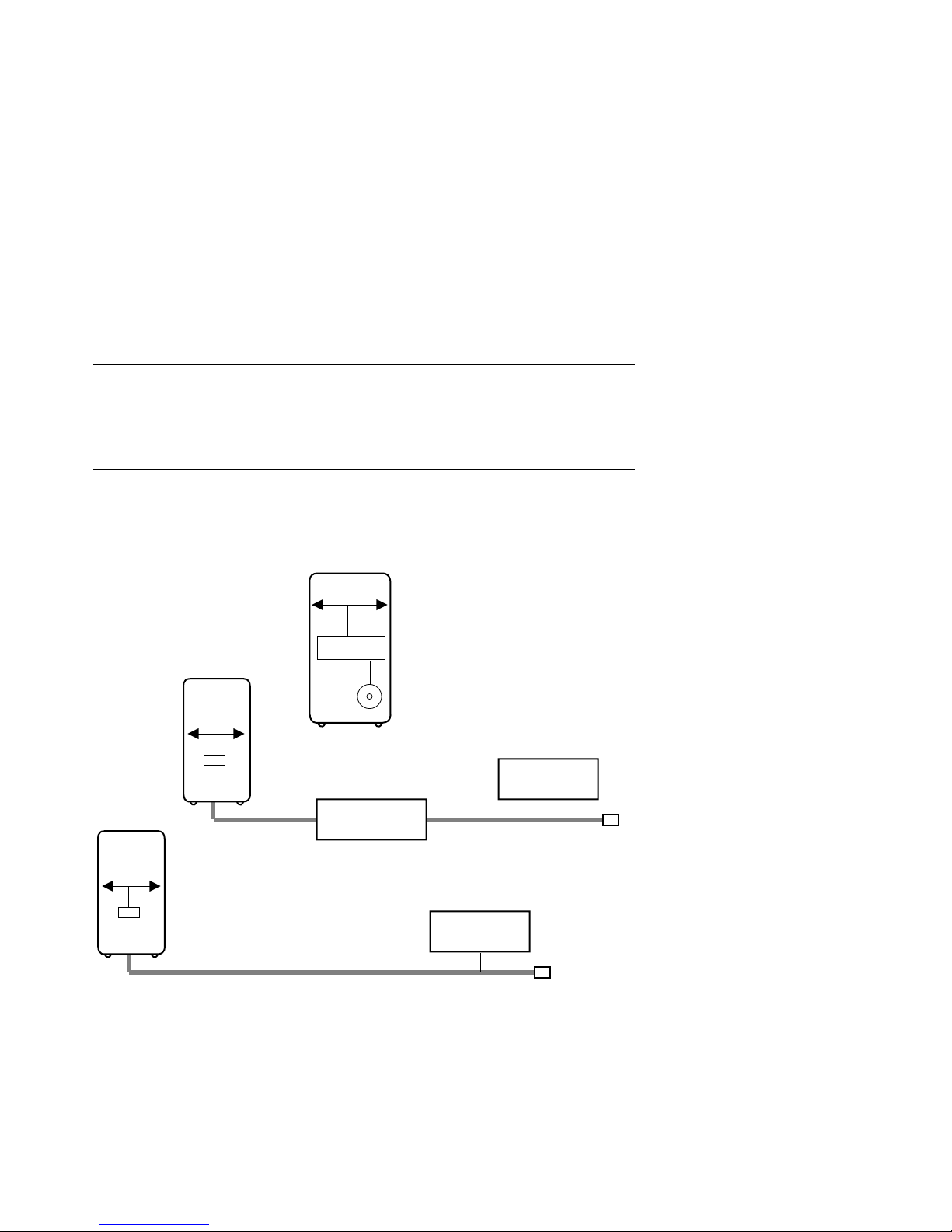
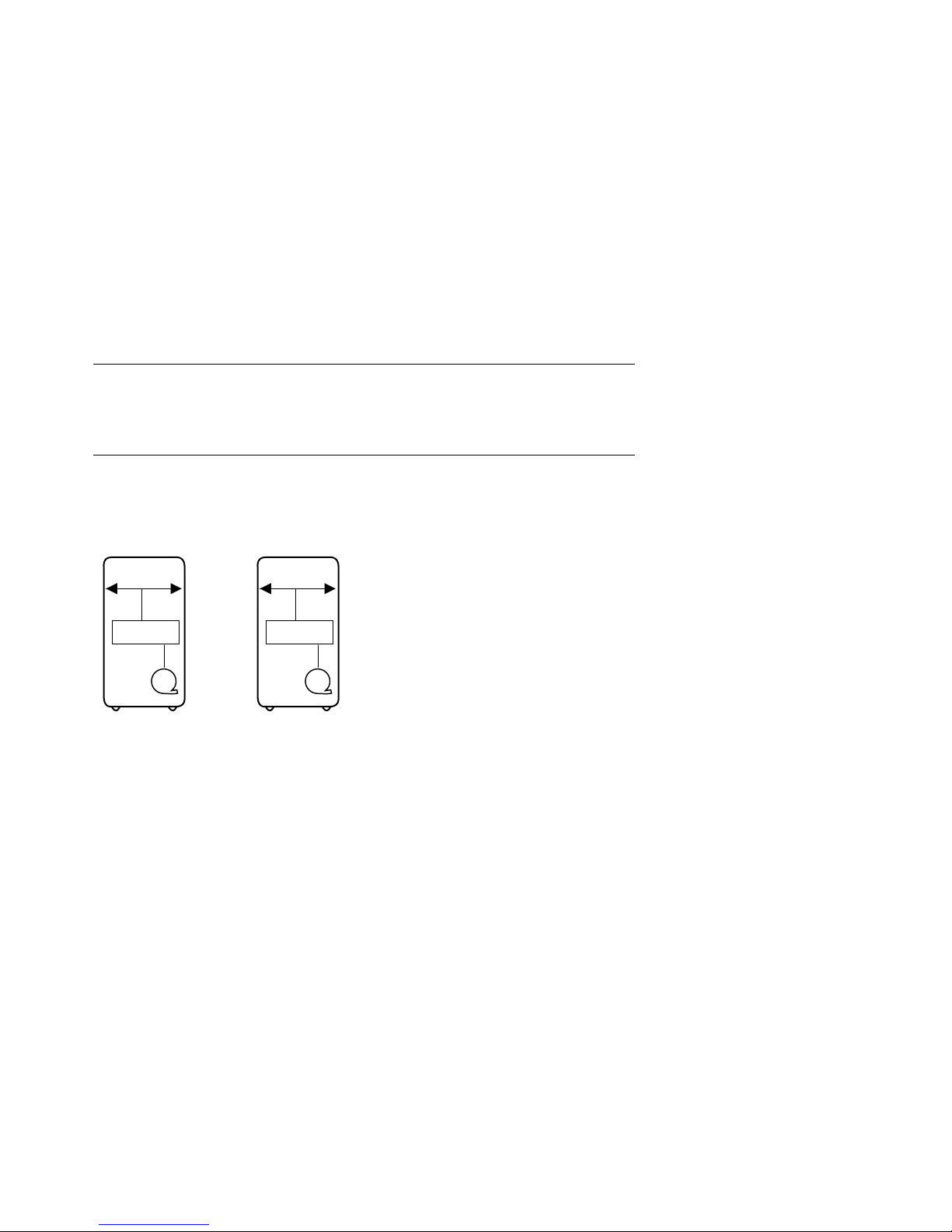
the tables. Figure 1-1 shows a system footprint.
Figure 1-1 Sample System Footprint
Expander
Cabinet
170 cm (67 in)
80 cm (31.5 in)
Expander
Cabinet
System
Cabinet
170 cm (67 in)
80 cm (31.5 in) 80 cm (31.5 in)
System
Cabinet
Width
240 cm (94.5 in)
170 cm (67 in)
Expander
Cabinet
Expander
Cabinet
Rear
Clearance
100 cm (39 in)
87.5 cm
(34.5 in)
Front
Clearance
150 cm (59 in)
Depth
337.5 cm
(132.5 in)
1-2 DEC 7000 AXP System and VAX 7000 System
BXB-0001-92
Page 15
The values in Table 1-1 apply to the system cabinet only. The values are
configuration dependent. Additional options will increase electrical requirements so that an additional power regulator may be needed.
Table 1-1 Electrical Characteristics
Electrical Specification
3-phase AC input
voltage
202 V RMS
120/208 V RMS
380–415 V RMS
Nominal frequency
AC current, nominal,
(per phase)
50–60 Hz
24 A (202 V)
24 A (120/208 V)
12.8 A (380–415 V)
Maximum current
(per phase)
30 A (202 V)
30 A (120/208 V)
16 A (380–415 V)
AC power consumption
(maximum)
5.2 KVA
5.2 KW
Table 1-2 Environmental Characteristics
Environmental Operating Storage
Heat dissipation
17,700 Btu/hr (max) –
Temperature
1
Relative humidity
Altitude
1
Recommended operating temperature is 18°–24° C (65°–75° F) and 40–60% relative hu-
midity.
15°–28° C (59°–82° F) -40°–66° C (-40°–151° F)
1
20–80% 10–95%
0–2.4 km (0–8000 ft) 0–9.1 km (0–30,000 ft)
DEC 7000 AXP System and VAX 7000 System 1-3
Page 16
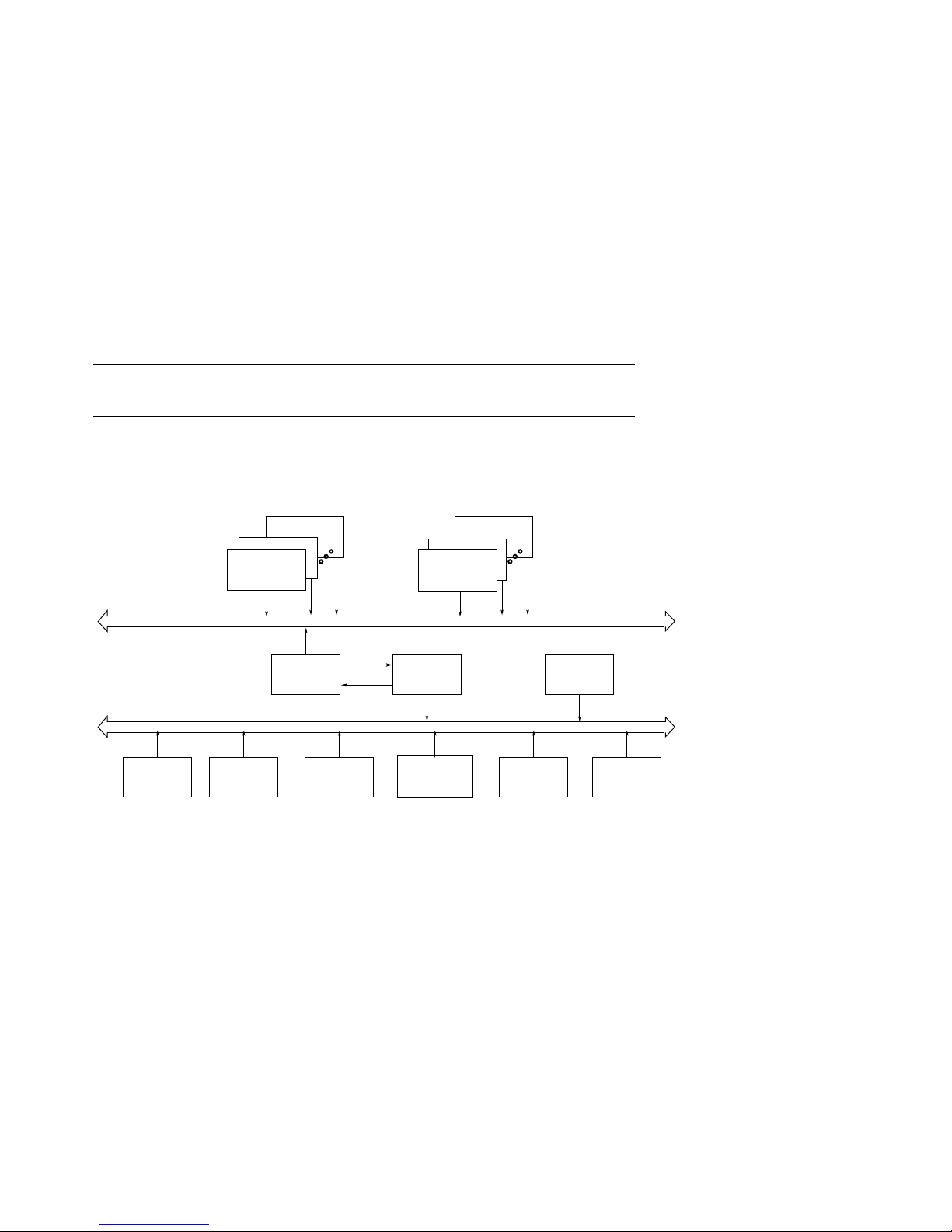
1.2 System Architecture
The high-speed LSB bus is used to interconnect processors, memory modules, and the IOP module.
Figure 1-2 Sample System Architecture
Processors
Memory
LSB
IOP
DWLMA
CLOCK
XMI
DEMNA DEMFA CIXCD KFMSA KZMSA
KDM70
BXB-0054B-92
1-4 DEC 7000 AXP System and VAX 7000 System
Page 17

The LSB bus is a synchronous 128-bit system bus that interconnects the
processors, memory modules, and the I/O port (IOP) module. The IOP
module connects the LSB bus to I/O buses through separate I/O adapter
modules.
The LSB bus uses the concept of a node. The LSB bus has three types of
nodes: processors, memories, and an I/O port controller.
A processor node is a single-module scalar processor. It consists of a
CPU chip, the LSB bus interface, cache, and support logic. DEC 7000 systems use the KN7AA processor, and VAX 7000 systems use the KA7AA
processor.
In a multiprocessing system, one processor becomes the boot processor during power-up, and that boot processor loads the operating system and handles communication with the operator console. The other processors become secondary processors and receive system information from the boot
processor.
A memory node is one memory module. Memory is a global resource
equally accessible by all processors on the LSB. Memory modules can have
64, 128, 256, or 512 Mbytes of memory with ECC and associated control
logic. The memories are automatically interleaved when the system is configured with multiple memory banks. The system supports up to seven
memory modules.
The I/O port controller is the IOP module, which serves as the interface
between the LSB bus and up to four I/O buses. In Figure 1-2 the DWLMA
module is the I/O bus adapter module that connects the XMI I/O channel
to the IOP module.
The XMI I/O channel also has I/O bus adapter modules that connect to
various interconnects such as CI, DSSI (for VAX 7000 systems only),
SDI/STI, SCSI (for DEC 7000 systems only), FDDI, and Ethernet.
DEC 7000 AXP System and VAX 7000 System 1-5
Page 18
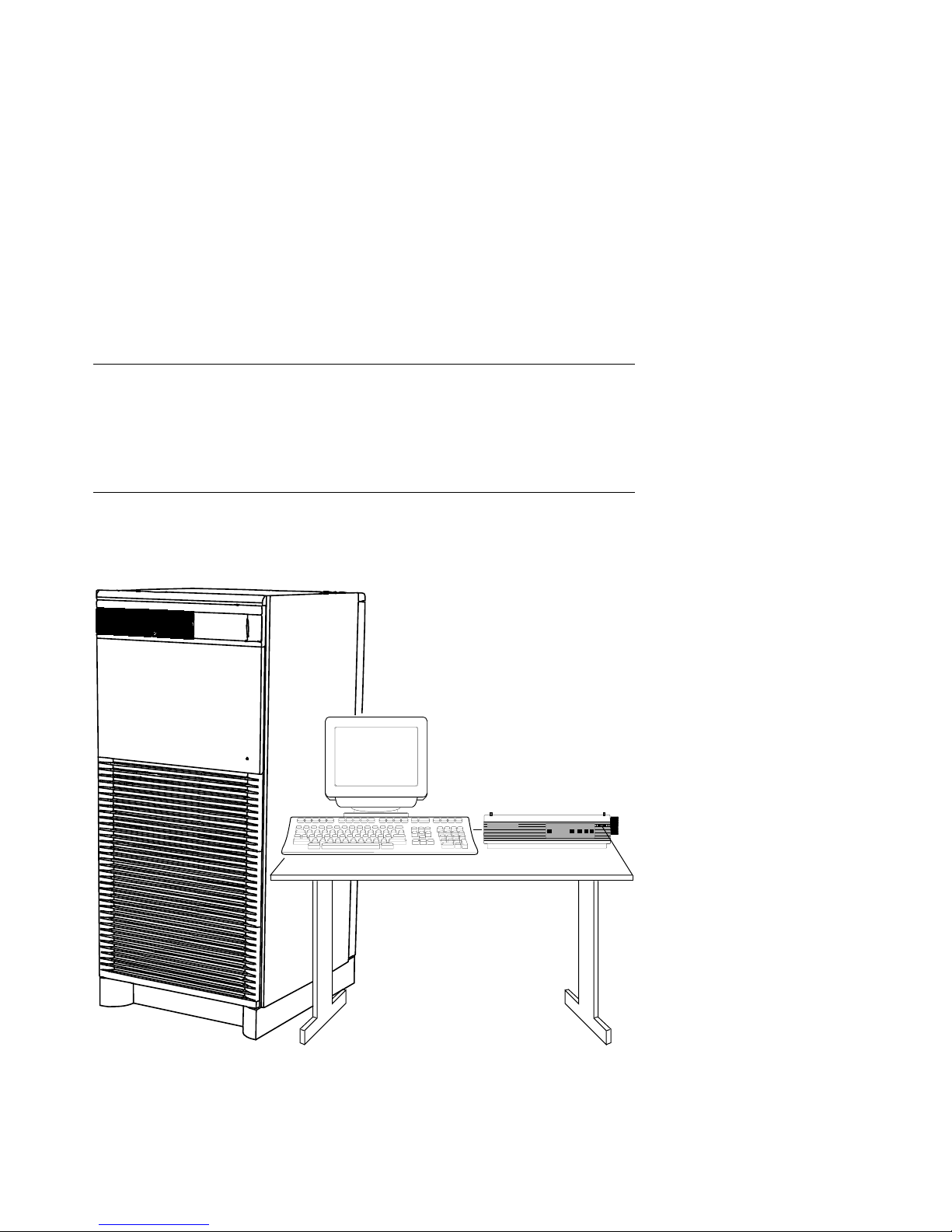
1.3 Sample System
Figure 1-3 shows a sample system. The system includes a console
terminal and printer, an accessories kit, and a documentation set,
which includes this manual. The system can have up to two optional expander cabinets, an in-cabinet tape drive, disk drives,
an RRD42 CD drive for DEC 7000 systems, or a battery plug-in unit
(PIU).
Figure 1-3 Sample System
1-6 DEC 7000 AXP System and VAX 7000 System
LA75
Companion Printer
digital
BXB-0023-92
Page 19

Your Digital customer service engineer has installed your system and
verified that it is running properly. Before you turn on the system, familiarize yourself with its components:
• The system cabinet houses the LSB card cage, power system, cooling
system, and the control panel with status indicators. Optional hardware includes an in-cabinet tape drive, in-cabinet CD-ROM, disk plugin units (PIUs), battery PIUs, and I/O PIUs.
• The console load device is used for installing operating systems and
software.
• The console terminal is used for booting and for system management
operations.
NOTE: The console terminal is not to be used as the primary user interface
for text editing.
• The console printer provides a hardcopy record of system operations.
• Optional PIUs include the XMI PIU, DSSI PIU (for VAX 7000 sys-
tems), and the battery PIU. These plug-in units are installed in the
system or expander cabinets to provide space for I/O, disk, and battery
options.
• Optional expander cabinets provide additional space for I/O de-
vices, disk drives, and a battery option.
• A system documentation kit
DEC 7000 AXP System and VAX 7000 System 1-7
Page 20
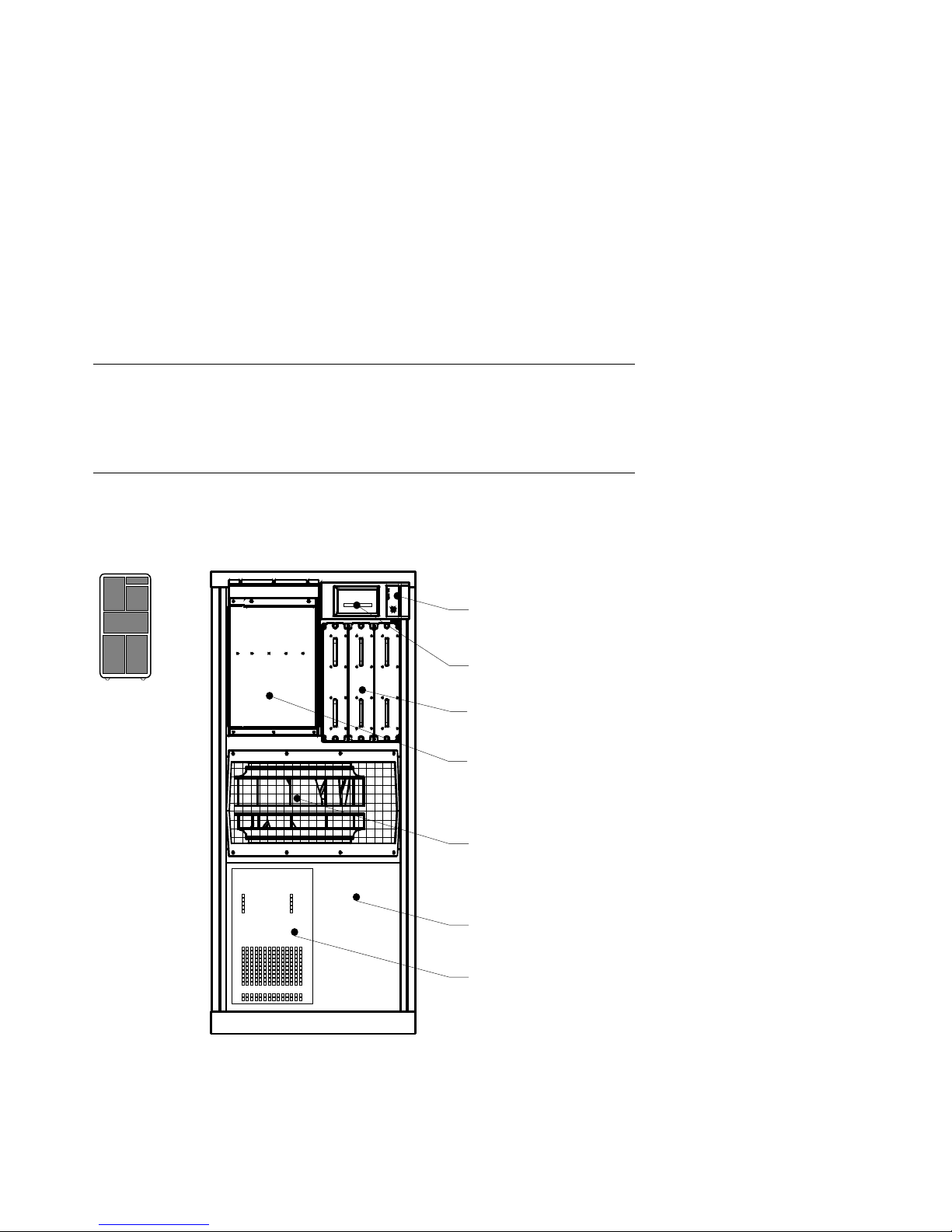
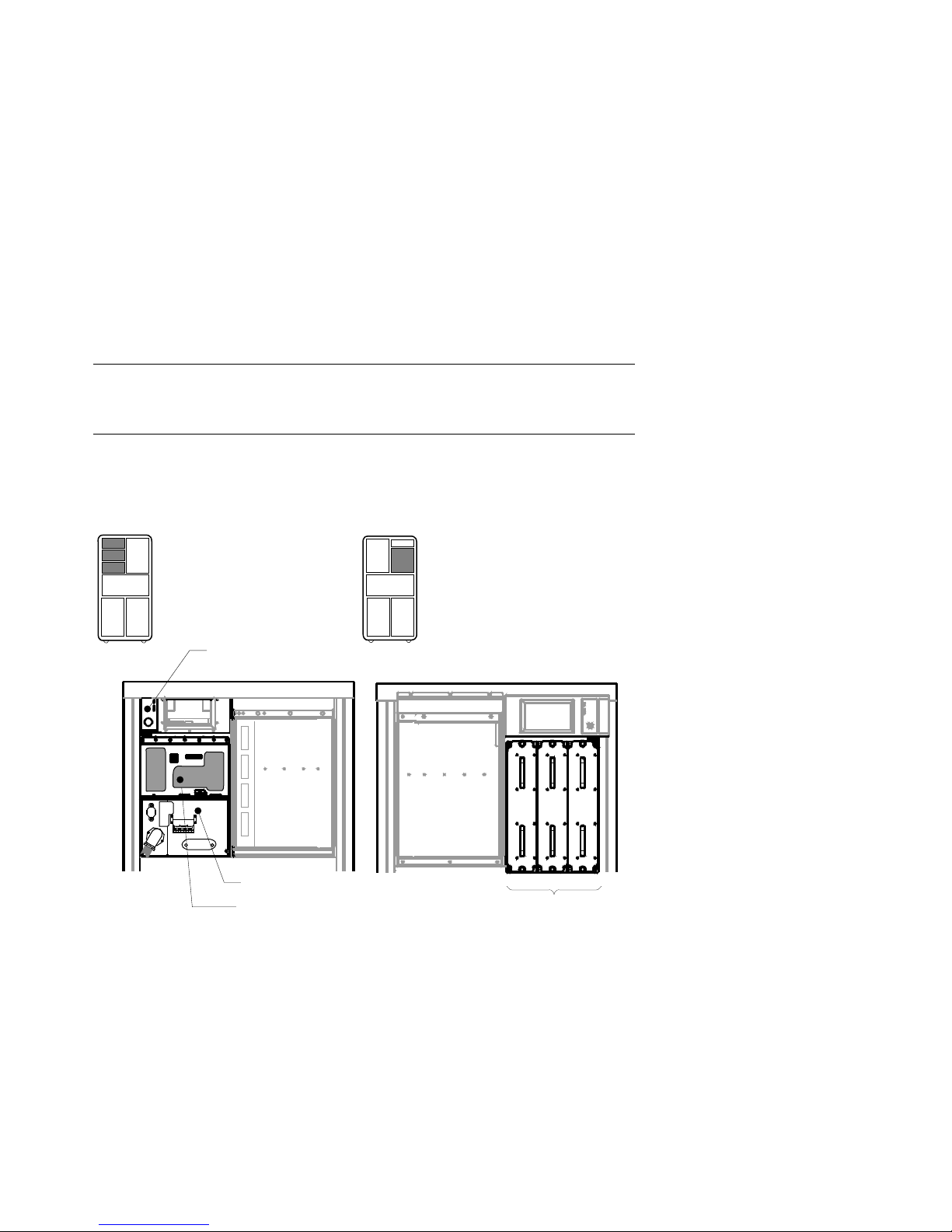
1.4 System Front View
The control panel, plug-in unit panels, and in-cabinet CD drive or
optional tape drive are on the front of the system cabinet. With the
front door open, Digital customer service engineers can access the
LSB card cage, power regulators, cooling system, and optional
plug-in units.
Figure 1-4 System Front View
Control
Panel
RRD42 CD-ROM
or TF85 Tape Drive
Front
Power
Regulators
LSB
Card Cage
Blower
Optional
PIU
XMI PIU
BXB-0021J-92
1-8 DEC 7000 AXP System and VAX 7000 System
Page 21
These components are visible from the inside front of the cabinet (see Fig-
C
0
X
0
C
0
X
0
ure 1-4 for their location):
• Control panel
• Power regulators (48 VDC )
• LSB card cage (holds CPU/memory; slots 0–3)
• Cooling system (blower)
Optional components visible from the inside front include:
• In-cabinet I/O devices
DE
RRD42 compact disk drive
700
VA
TF85 in-cabinet tape drive
700
• I/O plug-in unit (PIU)
DE
Small Computer System Interface (SCSI) disk and tape PIU
700
VA
Digital Storage Systems Interconnect (DSSI) disk PIU
700
• Battery PIU
DEC 7000 AXP System and VAX 7000 System 1-9
Page 22
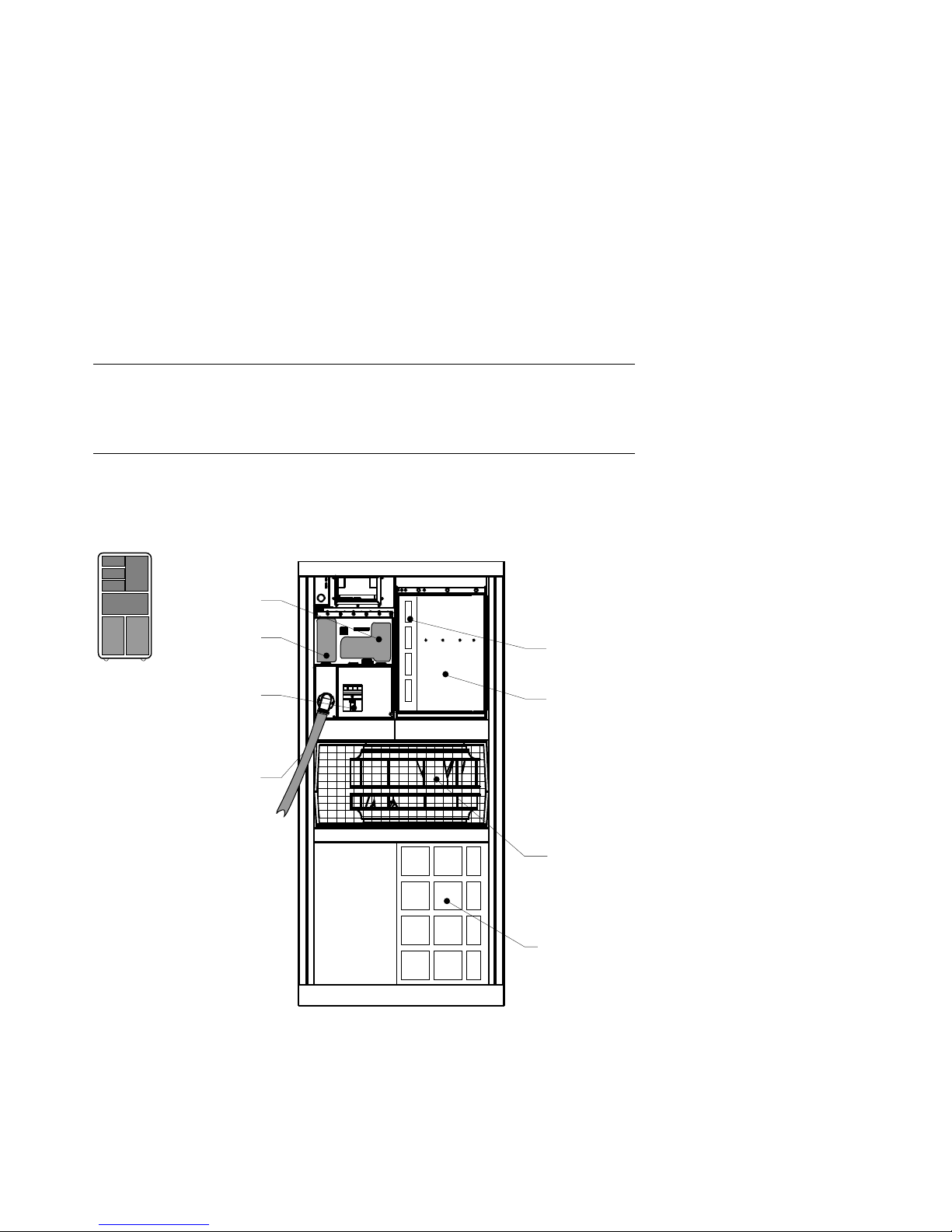
1.5 System Rear View
With the rear door open, Digital customer service engineers can
access the LSB card cage, DC distribution box, battery connections, AC power cord, circuit breaker, blower, and I/O bulkhead
area.
Figure 1-5 System Rear View
DC
Distribution
Rear
Battery
Connections
Circuit
Breaker
AC
Power Cord
IOP Module
LSB
Card Cage
Blower
Optional I/O
Bulkhead
BXB-0032A-92
1-10 DEC 7000 AXP System and VAX 7000 System
Page 23
The following components are visible from the rear of the cabinet (see Fig-
C
0
X
0
ure 1-5):
• LSB card cage (slots 4–8)
• IOP module (slot 8)
• DC distribution box
• Battery PIU connections
• AC power cord and connector
• Circuit breaker
• Blower
• I/O bulkhead area
Optional components visible from the inside rear include:
• I/O bulkhead
DE
SCSI PIU
700
VA
DSSI PIU
700
• Battery PIU
DEC 7000 AXP System and VAX 7000 System 1-11
Page 24

Page 25
Chapter 2
System Components
This chapter describes system components, their locations, and functions.
Sections include:
• Console Load Devices
• In-Cabinet Tape Drives
• Power System
• LSB Card Cage
• Control/Status and I/O Connections
• Cooling System
• System Options
System Components 2-1
Page 26
2.1 Console Load Devices
The RRD42 compact disk (CD) drive is the in-cabinet console load
device for DEC 7000 systems. The InfoServer is the console load
device for VAX 7000 systems. During system installation the console load device is used to boot standalone backup. It is also used
to boot the Loadable Firmware Update (LFU) Utility.
Figure 2-1 Accessing the Console Load Device
XMI
KZMSA
RRD42
XMI
DEMFA
FDDI
XMI
DEMNA
2-2 System Components
DECbridge 500
Ethernet
InfoServer
Ethernet
InfoServer
BXB-0005E-92
Page 27
The console load device is used for:
C
0
X
0
t
e
• Installing or updating software
• Loading the standalone backup program
• Interchanging user data
• Updating module firmware
DE
700
VA
700
The RRD42 compact disk (CD) drive is the console load device for
DEC 7000 systems. It is installed in the system cabinet and used
to access software and on-line documentation. The KZMSA
adapter is installed in the XMI card cage and provides access to
the RRD42.
The InfoServer is the console load device for VAX 7000 systems. I
is an Ethernet-based compact disk (CD) drive, which is part of a
local area network. The InfoServer is used to access CD-ROMs for
software installation and for on-line documentation on VAX 7000
systems.
The DEMNA and DEMFA adapters are interfaces that allow access to the InfoServer. These adapters are modules installed in th
XMI card cage. A bulkhead connector, which connects to the Ethernet, mounts on the rear of the XMI PIU bulkhead panel. Figure
2-1 shows how the DEMFA provides access to the FDDI (Fiber
Distributed Data Interface) network, which requires a DECbridge
500 for connection to the Ethernet. Section 4.6.2 describes how to
boot OpenVMS VAX over the Ethernet using the InfoServer.
For more information:
RRD42 Disc Drive Owner’s Manual
InfoServer 150 Installation and Owner’s Guide
System Components 2-3
Page 28
2.2 In-Cabinet Tape Drives
The TLZ06 tape drive is mounted in the SCSI PIU for use in DEC
7000 systems. The TF85 tape drive is located in the front of the system cabinet in the upper right corner for use in VAX 7000 systems.
User applications can use the tape drive as an I/O device.
Figure 2-2 Accessing the In-Cabinet Tape Drive
XMI XMI
KZMSA KFMSA/B
TLZ06
TF85
BXB-0005F-92
2-4 System Components
Page 29
Tape drives are used as backup storage devices.
C
0
X
0
DE
700
VA
700
The TLZ06 (a SCSI device) is connected to the DEC 7000 system
through the KZMSA adapter in the XMI card cage.
The TF85 (a DSSI device) is connected to the VAX 7000 system
through the KFMSA-BA adapter in the XMI card cage.
For more information:
TLZ06 Cassette Tape Drive Owner’s Manual
TF85 Cartridge Tape Subsystem Owner’s Manual
System Components 2-5
Page 30
2.3 Power System
The power system includes an AC input box, DC distribution box,
power regulators, cabinet control logic module, optional battery
PIU, power distribution cables, and signal interconnect cables.
Figure 2-3 Power System
Rear
CCL Module
AC Input Box
DC Distribution Box
Front
Power
Regulators
BXB-0052-92
2-6 System Components
Page 31

The DC distribution box and AC input box are located on the upper left of
the system cabinet (when viewing the system cabinet from the rear). The
48 VDC power regulators are located at the upper right side (when
viewing the system cabinet from the front).
The AC input box provides the interface for the system to the AC utility
power. The main input circuit breaker, on the AC input box, contains a
circuit breaker trip indicator to indicate an open circuit breaker. The DC
distribution box connects the AC input box and power regulators. It distributes the 48 VDC power.
The system can have up to three power regulators. These regulators are
used in parallel, one or two for the required load plus an additional regulator for backup in case of failure. Power regulator filler modules are used in
unused slots to help direct airflow.
NOTE: Additional options can increase the power requirements so that an
additional power regulator may be needed.
The cabinet control logic (CCL) module has a yellow power LED. When
this LED is on, the CCL module is receiving 48 VDC power from the
power regulators.
Uninterruptible power system (UPS) capability can be provided by the addition of the optional battery PIU. The battery PIU is mounted in the
bottom of the system cabinet and provides a minimum of 8 minutes of operating time. Nominal full system operating time is 11 minutes.
For more information:
Basic Troubleshooting
System Components 2-7
Page 32

2.4 LSB Card Cage
The LSB card cage is a 9-slot card cage that contains slots for up to
six CPU modules, up to seven memory array modules, and one IOP
module. The LSB bus interconnects the CPU, memory, and IOP
modules.
Figure 2-4 LSB Card Cage
LSB
Card Cage
System
Cabinet
Rear
Power Filter
Additional CPUs
or Memories
First CPU
Front Rear
4
3
2
1
0
Centerplane
5
6
7
8
IOP Module
Additional
Memory
First Memory
IOP Module
BXB-0055B-92
Additional
CPUs
2-8 System Components
Page 33

The 9-slot LSB card cage is located in the upper left (front and rear) of
the system cabinet, as viewed from the front. The LSB card cage must
contain one IOP module, which is always installed in slot 8. The other
eight slots contain a combination of memory and CPU modules. Unused
slots contain filler modules, which manage the airflow through the cabinet.
The LSB card cage slots are numbered 0 through 3 from right to left in the
front of the cabinet and slots 4 through 8 right to left in the rear of the
cabinet.
System Components 2-9
Page 34

2.5 Control/Status and I/O Connections
Console terminal I/O and expander cabinet remote power control/status connections are located to the right of the control
panel. Ethernet and other I/O connections are located on the I/O
bulkhead in the lower rear of the cabinet.
Figure 2-5 Control/Status and I/O Connections
Front
Rear
Disable
Key On
Run
Fault
Secure
Enable
Restart
Left Expander
Right Expander
Console
Left
Expander
Right
Expander
Console
Terminal
Remote
Power
Control/Status
I/O Bulkhead
2-10 System Components
BXB-0053-92
Page 35

Console terminal I/O and expander cabinet remote power control/status
connections are located to the right of the control panel. These three modular jacks, allow power control/status connections to the left expander cabinet, right expander cabinet, and I/O connections to the console terminal.
The console terminal modified modular jack is keyed so that an expander
cabinet connector cannot be plugged into its jack.
The system cabinet has four quadrants in the bottom of the cabinet. The
XMI PIU can be installed in two quadrants and the other two quadrants
are used for expansion bays. These expansion bays can contain another
XMI PIU, a SCSI PIU (for DEC 7000 systems), a DSSI PIU (for VAX 7000
systems), or a battery PIU. The number of expansion bays used by each
PIU varies depending on the type of PIU.
A PIU contains an I/O bulkhead, which houses the I/O connections for the
devices in the PIU (such as adapter modules and disk drives). These I/O
connections are located on a panel that is installed on the I/O bulkhead.
The I/O bulkhead can have single, dual, quad, and octal panels.
The XMI PIU occupies two expansion bays and is designed to accommodate
a variety of I/O connectors (depending on the adapter used). The standard
Ethernet port is a 15-pin connector that is installed in a single panel. The
connector contains a red LED that is on when 13.5 VDC power is applied
to the Ethernet transceiver.
System Components 2-11
Page 36

2.6 Cooling System
The cooling system cools the power system, the LSB card cage,
control logic, and PIUs.
Figure 2-6 Airflow
BXB-0056-92
2-12 System Components
Page 37

The cooling system is designed to keep system components at an optimal
operating temperature. It is important to keep the front and rear doors
free of obstructions, leaving a minimum clear space of 1.5 meters (59
inches) in the front and 1 meter (39 inches) in the rear between cabinets to
maximize airflow (see Figure 1-1).
The blower, located in the center of the cabinet, draws air downward
through the power regulators and LSB card cage. It draws air upward
through the PIUs. Filler modules, located in the LSB card cage, help to
direct airflow. Air is exhausted at the middle of the cabinet front and
rear. The blower speed varies based on the system’s ambient temperature.
The cooling system has safety detectors: static air pressure sensors and a
temperature sensor. The static air pressure sensors measure the air pressure across the LSB card cage. If air pressure drops below a certain level
across these units, DC power is disabled. The temperature sensor measures the ambient air temperature of the system. If the temperature sensor
is tripped, the system could shut down. If either condition occurs, call your
Digital customer service engineer.
CAUTION: Anything placed on top of the cabinet could restrict airflow.
This will cause the system to power down.
For more information:
Basic Troubleshooting
System Components 2-13
Page 38

2.7 System Options
System options include additional power regulators and additional PIUs for I/O, disks, tapes, and batteries.
Figure 2-7 System Options
Front
Additional Power
Regulators
XMI PIU
Space for
Additional PIUs
BXB-0021B-92
2-14 System Components
Page 39

XMI PIUs
C
0
X
0
A maximum of two XMI PIUs can be installed in the system cabinet. Each
XMI PIU has 14 slots. Twelve slots can contain the following modules:
CIXCD, DEMFA, DEMNA, KDM70, KFMSA (for VAX 7000 systems), and
KZMSA (for DEC 7000 systems). One module must be installed in slots 1
or 14. Slot 7 contains the clock module, and slot 8 contains the DWLMA
module.
SCSI PIU
DE
700
Up to two SCSI PIUs can be installed in the DEC 7000 system
cabinet (along with the XMI PIU). A SCSI PIU can have two
shelves. Each shelf holds up to seven SCSI disks or tapes: RZ26,
RZ73, and TLZ06.
DSSI PIU
VA
700
Up to two DSSI PIUs can be installed in the VAX 7000 system
cabinet (along with the XMI PIU). A DSSI PIU contains up to
three storage array building blocks (SABB). Each SABB can contain two RF73 disks.
Battery PIUs
The system can be equipped with an optional battery PIU to provide uninterrupted power in case of a power failure. Each regulator requires a battery pack that is mounted in the bottom of the system cabinet. The battery
PIUs provide a minimum of 8 minutes of full system operation when fully
charged and nominally provide 11 minutes of full system operation.
In-Cabinet Tape Drive
A TLZ06 tape drive can be installed in the SCSI PIU in the DEC 7000 system cabinet. A TF85 tape drive can be installed in the VAX 7000 system
cabinet. The tape drive can be used as a backup storage device or as an I/O
device for user applications.
System Components 2-15
Page 40

Console Load Device
C
0
DE
700
An RRD42 CD drive is required in the DEC 7000 system cabinet
to be used as a console load device. It is used to load software and
on-line documentation.
Additional Power Regulators
A system requires one or two power regulators (dependent on the system
configuration); however, an optional second or third power regulator can
be installed as a backup.
2-16 System Components
Page 41

Chapter 3
Controls and Indicators
This chapter introduces the system controls and indicators. Sections include:
• Control Panel Keyswitch
• Control Panel Indicator Lights
• Circuit Breaker and AC Power Indicators
Controls and Indicators 3-1
Page 42

3.1 Control Panel Keyswitch
The system control panel, located in the upper right front of the
cabinet, contains a keyswitch and status lights. The keyswitch
regulates power going into the system, determines the use of the
console terminal, and controls system operation. The four switch
positions are Disable, Secure, Enable, and Restart. See Figure 3-1.
Figure 3-1 Control Panel Keyswitch
Front
O
Disable
Secure
Enable
Restart
Key On
Run
Fault
BXB-0015E-92
3-2 Controls and Indicators
Page 43

The keyswitch labels can be in English or international versions as shown
in Figure 3-1.
Table 3-1 Keyswitch Positions
Position Effect
Disable
Secure
Enable
Restart
Removes 48 VDC power from the system. Power is still supplied to the CCL module.
Prevents entry into console mode; position used while machine executes programs.
Allows entry into console mode; position used while machine executes programs.
A momentary switch position, used to reinitialize the system; causes self-test to start running.
Controls and Indicators 3-3
Page 44

3.2 Control Panel Indicator Lights
The control panel has three status indicator lights: Key On, Run,
and Fault. These lights indicate the operating status of the system.
Figure 3-2 Control Panel Indicator Lights
Front
O
Disable
Secure
Enable
Restart
Key On
Run
Fault
BXB-0015F-92
3-4 Controls and Indicators
Page 45
Three status indicator lights (see Figure 3-2 ) show the state of the system: (Key On) DC power supplied, (Run) execution, and (Fault) errors.
Table 3-2 describes the conditions indicated by the lights.
Table 3-2 Control Panel Indicator Lights
Light Color State Meaning
Key On
Run
Fault
Green On Power is supplied to entire system; the
blower is running.
Off Power is supplied only to the cabinet
control logic module.
Green On System is executing operating programs
or certain power-up tests.
Ctrl/P
halts
the execution of operating system programs when the keyswitch is in the Enable position.
Off System is in console mode, operating
system is not running, or the system is
turned off.
Yellow On Fault on LSB or system I/O bus.
Slow
Flash
Fast
Flash
Power sequencing is in progress or airflow error is detected.
Power system error, airflow error, or
keyswitch in Disable position transition
detected.
Off No faults were found.
Controls and Indicators 3-5
Page 46

3.3 Circuit Breaker and AC Power Indicators
The circuit breaker is located on the left side of the rear of the system cabinet, just above the blower assembly. The circuit breaker
can be secured in the off position with a lock.
Figure 3-3 Circuit Breaker and AC Power Indicators
Rear
Breaker
Indicator
3-6 Controls and Indicators
A - Regulator slot A
B - Regulator slot B
C - Regulator slot C
S - Sensor circuit
CB AS
BXB-0049E-92
Page 47

The circuit breaker and power indicators are at the rear of the cabinet.
Circuit Breaker
The circuit breaker controls power to the entire system, including the
power regulators, blower, battery backup, and in-cabinet options. Current
overload causes the breaker to trip to the off position, so that power to the
system is turned off.
For normal operation, the circuit breaker must be in the on position, in
which the handle is pushed up. To shut the circuit breaker off, push the
handle down.
AC Power Indicators
The power indicators are located below the circuit breaker handle. When
the system is powered on, the power indicators are red. When the circuit
breaker is off, tripped, or open, the power indicators change to green.
When one phase has tripped, the power indicator for that phase will
change to green.
NOTE: The power indicators in the 202V version are different. If one phase
trips, all power indicators trip, so that all indicators are green.
Circuit Breaker Lockout
The circuit breaker lockout secures the circuit breaker in the off position.
The lockout consists of a hinged plate that is placed over the circuit
breaker handle. A padlock can be placed on the right or left side of the
lockout, so that no one can turn the power on.
Controls and Indicators 3-7
Page 48

Page 49

Chapter 4
Booting
This chapter describes how to boot the system. Sections include:
• Boot Devices
• Booting Overview
• Boot Command Syntax
— Console Environment Variables
— Set Commands for Booting
• Booting Concepts
— How Bootblock Booting Works
— Boot Processor Selection
• Booting from a Local Device
— Local Device Booting Concepts
— CD-ROM OpenVMS Alpha AXP Booting
— CD-ROM OSF/1 Booting
— Local Device Booting Examples
— CD-ROM Booting
• Booting from an InfoServer
— InfoServer Concepts
— InfoServer OpenVMS VAX Booting
— Selecting an Ethernet Service
• Booting from a VMScluster
— VMScluster Concepts
— CI Booting
— Shadow Set OpenVMS VAX Booting
— DSSI OpenVMS VAX Booting
Booting 4-1
Page 50

4.1 Boot Devices
The operating system can be loaded from a number of boot de-
vices: a local system disk, a disk connected to the system through
a CIXCD adapter, by Ethernet from a remote disk on another system, through an InfoServer, or an RRD42 CD drive.
Figure 4-1 Boot Devices
XMI Bus
Local
HSC
Device
Disk
1
DEC 10000 systems only
2
VAX 10000 systems only
KZMSA
RRD42
EthernetCI
Console
Load Device
VAX
1
InfoServer
2
Disk
BXB-0006A-92
4-2 Booting
Page 51

Table 4-1 Boot Devices
Device Location
Local
device
CI disk
Remote
disk
InfoServer
RRD42
Disk connected to the system through a KDM70,
KFMSA (for VAX 7000 systems), KZMSA (for DEC 7000
systems) adapter on the XMI bus.
Disk located on the system’s HSC controller connected to
the system by a CIXCD adapter on the XMI bus.
Disk connected to another system on the Ethernet,
through the DEMNA Ethernet port interface or the
DEMFA adapter. For VAX 7000 systems only.
A network-based server used for booting standalone
backup or the Loadable Firmware Update (LFU) Utility.
See Appendix C.
In-cabinet compact disk drive connected to the DEC 7000
system through a KZMSA adapter on the XMI bus.
Booting 4-3
Page 52

4.2 Booting Overview
You can boot files in a number of ways such as through an RRD42
CD drive, an InfoServer, an HSC disk, a local disk, or over the
Ethernet. The boot command syntax is shown in Figure 4-2.
Figure 4-2 Device Boot Commands
du
CIXCD,
b[oot] -fl[ags]
Shadow set value
System root
Booting option
NNNN*, M, PPPP
**** **
DEMNA
DEMFA
*Not supported on DEC 7000 systems
** Not used with OSF/1 operating systems
KDM70,
KFMSA/B
KZMSA
ex
RRSSSS.AAA.B.CC.D -FILE FILENAME
fx
RRSSSS.AAA.B.CC.D -FILE FILENAME
RRSSSS.AAA.B.CC.D
dk
RRSSSS.AAA.B.CC.D
BXB-0099A-92
4-4 Booting
Page 53

Table 4-2 Sample Boot Commands
Boot Command Boot From
Procedure
Section
boot dua2.2.0.1.0
boot -flags 0,0,0 dka100.1.0.1.0
boot exa0 -flags 0,0,0
-file ISL_LVAX_BL10
2
boot fxa0 -file ISL_LVAX_BL10
1
Local device 4.5.4
RRD42 4.5.2, 4.5.3
InfoServer on
Ethernet
2
InfoServer on
4.6.2
4.6.2
FDDI
boot -fl 0,4,0 dua20.14.0.2.0
2
CI VMScluster 4.7.2, 4.7.3,
4.7.4
b -fl 8DAC,2,0 dua3500.14.0.12.1,\
dua63.14.0.12.1
2
boot -flags 0,3,0 dub1.1.0.6.0
Shadow set 4.7.5
DSSI
4.7.6
VMScluster
1For DEC 7000 systems only.
2For VAX 7000 systems only.
NOTE: Boot device names can be found using the show device and show
network commands (see Sections 4.5.2 and 4.6.2).
For more information:
OpenVMS Alpha Version 1.0 Upgrade and Installation Manual
DEC OSF/1 Guide to System Administration
Booting 4-5
Page 54

4.3 Boot Command Syntax
With the system in console mode, you can issue a boot command.
You must give a complete specification in which the parameters
determine the boot device. (These parameters can be defined and
stored as a nickname used for future booting.)
Figure 4-3 Boot Command
b[oot] -fl[ags]
Invokes boot
command
Allows
Options N,M,P
Shadow set value (hex)
System root (0-F hex)
Device code (dk, du, ex, fx, mk)
NNNN, M, PPPP QQ RR SSSS.AAA.B.CC.D -FILE FILENAME
Booting options
Device controller (a-zz)
Device unit number
Device node number (0-255)
Device channel number (0,1)
Device XMI slot number (1-14)
I/O channel number (0-3)
File name for MOP booting
= Optional depending on command;
N, M, P qualifiers not used with OSF/1 operating system.
1
DEC 10000 systems only
2
VAX 10000 systems only
BXB-0303A-92
NOTE: The boot command can be shortened to b, the -file parameter to fi,
and the -flags parameter to -fl.
Figure 4-3 shows the components of the boot command. The -flags parameter allows the use of additional boot command parameters. Not all
parameters are required; some are optional. These parameters are not
used with the OSF/1 operating system. The parameters are:
4-6 Booting
Page 55

VA
X
0
l
700
NNNN is the shadow set value which is dependent on the system
configuration, and is used with OpenVMS VAX. This optional parameter (up to 4 hex digits) is deposited into bits 16–31 of Genera
Purpose Register R3. This parameter is not used on DEC 7000
systems.
• M is the system root of the boot device in hex which is dependent on
the system configuration. This value can be between 0 and F. This parameter is deposited into bits 28–31 of General Purpose Register R5 for
VAX 7000 systems. For DEC 7000 systems, it is deposited using the
console environment variable booted_osflags.
• PPPP is the hex value for the Alpha primary boot program (APB) as
listed in Appendix B. It is also used with the virtual memory boot program (VMB) options as listed in Appendix B. This parameter is deposited into bits 0–27 of General Purpose Register R5.
• QQ is part of the device name indicating the device type as shown in
Table 4-3.
Table 4-3 Device Names
Device Type Name Device Adapter
Disk (MSCP)
Disk (SCSI), CD-ROM
InfoServer (Ethernet)
InfoServer (FDDI)
1For DEC 7000 systems only.
2For VAX 7000 systems only.
1
2
2
duRRSSSS.A.B.C.D CIXCD, KDM70,
KFMSA
dkRRSSSS.A.B.C.D KZMSA
exRRSSSS.A.B.C.D DEMNA
fxRRSSSS.A.B.C.D DEMFA
Booting 4-7
Page 56

• RR is the device controller designation determined by the location of
X
0
the I/O adapter module in the backplane. Controller designators are
assigned from low to high XMI slots, and from low to high I/O channel
numbers.
• SSSS is the device unit number. It is 0 for DEMFA and DEMNA, but
for other devices it can be up to 4 decimal digits long.
• AAA is the device node number. The device node number can be up to
3 hex digits long. Its decimal values are:
— 0 for DEMFA, DEMNA, and KDM70
— Node number of the disk drive for KFMSA,and KZMSA
— CI node number of the HSC for CIXCD
• B is the device channel number. It is a decimal number (0 or 1) for
KFMSA and KZMSA each with two channels. It supports two DSSI
buses from a single adapter; otherwise it is 0.
• CC is the XMI slot number in which the I/O adapter is located. This is
a two-digit decimal value between 1–14.
• D is the XMI I/O channel number which is a decimal number between
0 and 3.
VA
700
FILENAME is the name of the maintenance operations protocol
(MOP) file used in booting the system. The file name must be in
uppercase letters. This parameter is used on VAX 7000 systems
only.
4-8 Booting
Page 57

Boot command flag parameters can be shortened, since values zero or
commas (which can be used as placeholders), do not have to be specified.
These parameters are read from right to left (PPPP, M, NNNN). For example, boot -fl 0,0,100 or boot -fl ,,100 are the same as boot -fl 100 where
100 is the value of the PPPP option.
NOTE: The console prompt for a uniprocessor system is >>>, which is used
throughout this document. For a multiprocessor system, the console
prompt is P0n>>>, where n is dependent on where the primary
processor is installed in the LSB. The P0n>>> is not used with the
OSF/1 operating system.
For more information:
Console Reference Manual
Booting 4-9
Page 58

4.3.1 Console Environment Variables
Console environment variables are used in booting to modify how
the console commands function.
Environment variables consist of a name and value which are maintained
by the console program. The name is usually made up of characters that
describe the operation, and value is an ASCII string up to 128 characters
in length or an integer.
The environment variable values can be created, modified, displayed, or
deleted using create, set, show, and clear commands. Environment
variables used for system installation and basic operations are listed in Table 4-4.
Table 4-4 Environment Variables
Environment Variable Function
auto_action
baud
bootdef_dev
boot_file
boot_osflags
Specifies the action that the console takes after an error halt. Auto_action can be used
for restarting, booting, and halting the system. Set auto_action to automatically restart after an error halt using the default
boot device defined by bootdef_dev.
Sets the console terminal port baud rate to
300, 600, 1200, 2400, 4800, or 9600, with the
default being 9600.
Specifies the default device or device list from
which booting is attempted when the boot
command does not specify a device name.
The default file used by the primary bootstrap when a file name is not specified by the
boot command.
Additional parameters passed to the system
during booting if none are specified by the
boot command with the -flags qualifier.
4-10 Booting
Page 59

Table 4-4 Environment Variables (Continued)
Environment Variable Function
boot_reset
Initializes the system before booting and selftest is displayed, if set to on.
cpu
cpu_enabled
Selects the current boot processor.
Indicates which processors are enabled to run.
If not defined, all processors are considered
enabled.
cpu_primary
Indicates which processors are enabled to become the next boot processor following the
next reset. If not defined, all processors are
considered enabled.
dump_dev
1
Complete device specification of the device to
which operating system dumps are written.
The default value when the system is shipped
is a valid device.
enable_audit
Allows audit trail messages to be displayed
during booting, if set to on.
interleave
The memory interleave specification. The
value must be default, none, or an explicit interleave list. The default value is default.
language
Determines whether the system displays message numbers or message text in English (default).
1
For DEC 7000 systems using OpenVMS Alpha AXP only.
For more information:
Console Reference Manual
Booting 4-11
Page 60

4.3.2 Set Commands for Booting
Use the set command to define a default boot device or issue a
nickname as shown in Example 4-1.
Example 4-1 Set Boot Commands
>>> set boot_reset on
>>> set bootdef_dev dua2.4.0.2.0
>>> set boot_osflags "0,6,7"
>>> boot
1
2
3
4
[the system now initializes and boots]
>>> create -nv work
5
>>> set work "-flags 0,6,7 dua6.14.0.12.1"
>>> set auto_action restart
>>> boot work
7
8
[the system now initializes and boots]
6
4-12 Booting
Page 61

Set boot_reset on to initialize the system before booting.
f
1‘
2
If you boot from the same boot device each time, you can store the disk
name by defining the default boot device. This is done by using the set
bootdef_ dev command. The default boot device is used for booting
during power-up and auto restarts.
3
Use set boot_osflags to define the boot command flag parameters of
0, 6, and 7. The APB/VMB option of 7 is made up of the combination o
bits 0, 1, and 2 as shown in Appendix B. The flags can also be specified
as done in step 6.
4
Booting can now be done from that device by typing boot or just b.
Use the create command to create the environment variable work.
5
The -nv option stores the environment variable work in a nonvolatile
EEPROM.
6
This is an example of booting from a system that is part of a VMScluster. To boot from the cluster system disk, a nickname is created by
equating the boot parameters to an environment variable as shown. A
nickname is used so boot parameters do not have to be entered each
time the system is booted.
7
Used to set the auto_action environment variable so the system will
restart after an error halt.
Booting can now be done from that device by typing boot work.
8
For more information:
Console Reference Manual
Booting 4-13
Page 62

4.4 Booting Concepts
4.4.1 How Bootblock Booting Works
The boot program reads the primary bootstrap program from the
boot device. The primary bootstrap in turn boots the operating
system.
Figure 4-4 Boot Procedure
Enter boot command
at the
console prompt
Boot command specifies boot
device and path to reach it.
System may reinitialize
and self-test
is performed
Boot driver on the
primary processor reads
bootblock from boot device
Bootblock with boot
driver loads primary
bootstrap into memory
Primary bootstrap
continues booting the
operating system
Self-test executes and prints if
boot_reset is set on.
Boot driver invoked from console
running on boot processor.
Bootblock contains pointer
to primary bootstrap.
Primary bootstrap loaded into
memory; console transfers
control to primary bootstrap.
BXB-0026B-92
4-14 Booting
Page 63

Boot driver
The console firmware provides a boot driver for each supported boot device.
During booting, the boot driver reads the bootblock from the specified boot
device and then loads the primary bootstrap or OSF/1 image into memory.
Upon completion of the load, the boot driver passes control to either program which then starts executing.
Boot device
The boot device contains the bootblock and typically also contains the primary bootstrap. OpenVMS Alpha AXP or OpenVMS VAX can be booted
from standalone backup. Not used with the OSF/1 operating system.
Bootblock
The bootblock is logical block zero on the system disk; it contains the block
number where the primary bootstrap program is located on the system
disk. The console reads the primary bootstrap from the system load device
to memory.
Primary bootstrap
The primary bootstrap, which is stored on the boot device, boots the operating system. The goal of booting is to read the primary bootstrap from the
boot device and load the operating system. The primary bootstrap loads
the operating system into memory and passes control to memory.
Booting 4-15
Page 64

4.4.2 Boot Processor Selection
One processor is selected as the boot processor, and all other processors become secondary processors. This determination is made
by the system at power-up or initialization, and can be altered using console commands.
Figure 4-5 Determining the Boot Processor
Secondary Processors
Boot
Processor
LSB Bus
4-16 Booting
BXB-0007A-92
Page 65

One processor is designated as the boot processor (or primary processor)
and becomes the primary communicator to the console terminal.
At power-up or initialization of the system, the console program in each
processor begins parallel execution. Each processor performs self-test and
then checks with the other processors to determine which processor becomes the boot processor. The default boot processor is the processor with
the lowest node ID number, passing self-test, that is eligible to become the
boot processor. Once the boot processor has been determined, all other
processors on the system wait for commands from the boot processor.
Console commands can be used to select the boot processor. The set
cpu_primary command is used to select the primary (or boot) processor.
This command is not stored in the EEPROM, so its parameters are not
saved during a reset. The set cpu_enable command is used to disable selected processors, so they are not eligible to become the boot processor.
For more information:
Console Reference Manual
Booting 4-17
Page 66

4.5 Booting from a Local Device
4.5.1 Local Device Booting Concepts
Figure 4.5.4 shows system booting through a local device.
Figure 4-6 Local Device Booting
Expander
Cabinet
boot dud3.
Where: dk, du = device name
A.B.C.D
a, c, d = controller
1, 2, 3, 100 = unit number
A
B
C
= XMI node number
D
= I/O channel number
System
Cabinet
boot dua2.
= device node number
= device channel number
A.B.C.D
External RA
Disk Cabinet
boot duc1.
A.B.C.D
In-Cabinet
RRD42 CD
boot dka100.
A.B.C.D
BXB-0305B-92
4-18 Booting
Page 67
Figure 4.5.4 shows the locations of local devices that can be used to boot
C
0
X
0
the operating system.
DE
700
Local devices can be installed in the DEC 7000 system. The DEC
7000 system cabinet can contain up to two SCSI PIUs, the expander cabinet can contain up to six SCSI PIUs, and the external
RA disk cabinet can contain RA disks.
VA
700
Local devices can be installed in the VAX 7000 system. The VAX
7000 system cabinet can contain up to two DSSI PIUs, the expander cabinet can contain up to six DSSI PIUs, and the external
RA disk cabinet can contain RA disks.
NOTE: To boot from a local device, the operating system must already be
installed on that device. Otherwise, booting must be done from another source.
Booting 4-19
Page 68

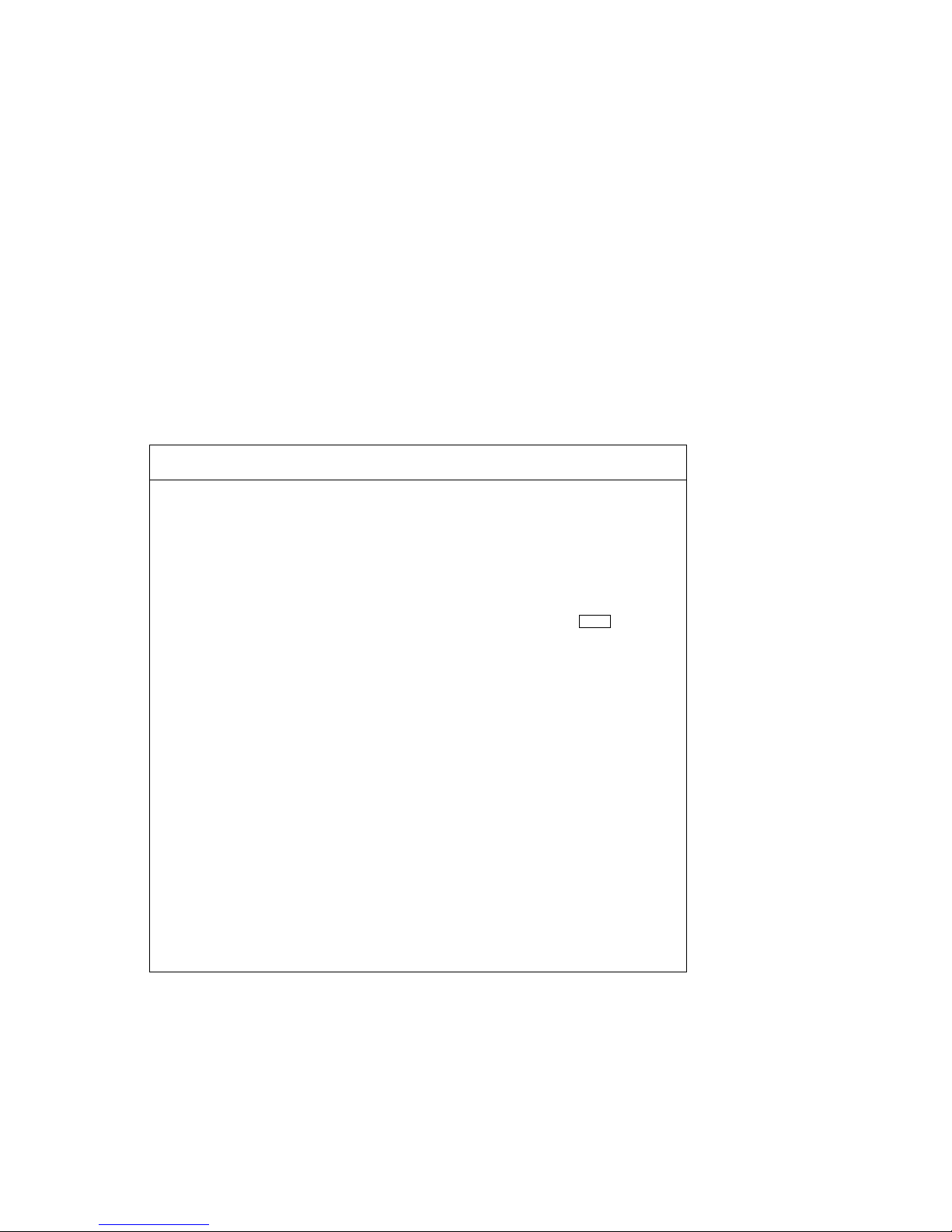
4.5.2 CD-ROM OpenVMS Alpha AXP Booting
C
0
P
t
e
DE
700
This section shows a sample boot of OpenVMS Alpha AX
from the RRD42 CD drive for DEC 7000 systems. The firs
step is issuing the show device command to determine th
location of the RRD42.
Example 4-2 CD-ROM OpenVMS Alpha AXP Boot
>>> show device
polling for units on kzmsa0, slot 1, xmi0...
dka100.1.0.1.0 dka100 RRD42
polling for units on kdm700, slot 6, xmi0...
dub1.1.0.6.0 R2TDYC$DIA1 RF73
dub2.2.0.6.0 R2TDYC$DIA2 RF73
>>> boot -flags 0,0 dka100.1.0.1.0
Booting...
Connecting to boot device dka100
initializing HWRPB at 2000
initializing page table at 1ee000
initializing machine state
jumping to bootstrap at 1fa000
OpenVMS AXP (TM) Operating System, Version V1.0
1
2
3
4
4-20 Booting
Page 69

1
Show device displays information about each I/O device. Polling
checks the XMI bus for device configurations. The next line contains
three columns. The first column contains the device type and unit
number, node number, device channel number, XMI node number, and
I/O channel number, separated by periods. The second column displays
the name of the device given by the device controller. The third column
shows the device type.
2
In the boot command, -flags indicates that additional command parameters follow, 0 is the system root of the boot device, 0 is the bootstrap option, dk is the device code of the boot device, a is the boot
device controller designation, and 1 specifies the hexadecimal unit
number of the boot device. The 1 is the node number, 0 is the channel
number, 1 is the XMI node number, and 0 is the I/O channel number.
3
The system boots standalone backup from the RRD42.
The operating system banner appears.
4
For more information:
OpenVMS Alpha Version 1.0 Upgrade and Installation Manual
Booting 4-21
Page 70

4.5.3 CD-ROM OSF/1 Booting
C
0
2
g
e
DE
700
This section shows a sample boot of OSF/1 from the RRD4
CD drive for DEC 7000 systems. The first step is issuin
the show device command to determine the location of th
RRD42.
Example 4-3 CD-ROM OSF/1 Boot
>>> show device
polling for units on kzmsa0, slot 2, xmi0...
dka100.1.0.2.0 dka100 RRD42
polling for units on kdm700, slot 6, xmi0...
dub1.1.0.6.0 R2TDYC$DIA1 RF73
dub2.2.0.6.0 R2TDYC$DIA2 RF73
>>> boot dka100.1.0.2.0
Booting...
Connecting to boot device dka100.1.0.2.0
Created boot device: dka100.1.0.2.0
block 0 of dka100.1.0.2.0 is a valid boot block
reading 16 blocks from dka100.1.0.2.0
bootstrap code read in
base = 1fe000, start = 0
initializing HWRPB at 2000
initializing page table at 1f2000
initializing machine state
jumping to bootstrap at 1fe000
Resetting IO subysystem...
4
[I/O subsystem reset information, memory information
displayed, I/O bus adapters displayed, configured devices
displayed, network configuration information displayed]
1
2
3
The system is ready.
DEC OSF/1 Version 1.2 console
4-22 Booting
5
Page 71

1
l
Show device displays information about each I/O device. Polling
checks the XMI bus for device configurations. The next line contains
three columns. The first column contains the device type and unit
number, node number, device channel number, XMI node number, and
I/O channel number, separated by periods. The second column displays
the name of the device given by the device controller. The third column
shows the device type.
2
In the boot command, dk is the device code of the boot device, a is
the boot device controller designation, and 100 specifies the hexadecimal unit number of the boot device. The 1 is the node number, 0 is the
channel number, 2 is the XMI node number, and 0 is the I/O channe
number.
3
The system boots from the RRD42.
The system displays information about the I/O subsystem reset,
4
memory, I/O bus adapters, configured devices, and network
configurations.
The operating system banner appears.
5
For more information:
DEC OSF/1 Guide to System Administration
Booting 4-23
Page 72

4.5.4 Local Device Booting Examples
This section shows sample boot procedures from local disks installed in system cabinets, expander cabinets, and external RA
disk drive cabinets. The first step is issuing the show device command which is used to determine the location of the boot device.
Example 4-4 Sample Local Device Boots
>>> show device
1
polling for units on kfmsa0, slot 1, xmi0...
dua2.2.0.1.0 R2TDYC$DIA2 RF73
dua3.3.0.1.0 R2TDYC$DIA3 RF73
polling for units on kdm700, slot 2, xmi0...
duc1.0.0.2.0 DUA1 RA92
polling for units on kfmsa1, slot 1, xmi1...
dud3.3.0.1.1 XYZ$DIA3 RF73
>>> boot dua2.2.0.1.0
>>> boot duc1.0.0.2.0
>>> boot dud3.3.0.1.1
3
4
5
2
4-24 Booting
Page 73

1
r
t
Show device displays information about each I/O device. Polling
checks the XMI bus for device configurations. The next line contains
three columns. The first column contains the assigned console device
name. The second column displays the name of the device given by the
device controller. The third column shows the device type.
2
Polling sizes the XMI bus for devices connected to <device>. The <device> is the name the console assigns to an I/O adapter or device in the
system (such as kfmsa0). A list of installed adapters is given in the
show configuration command display. Refer to the Basic Trouble-
shooting or Console Reference manuals for details on the show con-
figuration command.
3
In this example, this is a boot from a disk in the system cabinet,
since the last digit in the first column of the show device command is
0. The zero indicates I/O channel 0 which connects to devices in the
system cabinet.
The device code of the boot device is du, a is the boot device controlle
designation, and 2 specifies the unit number of the boot device. The
next 2 is the node number, 0 is the device channel number, 1 is the
XMI node number, and 0 is the I/O channel number.
4
This is a boot from a disk in an external RA disk cabinet, since the las
column of the show device command is RA92. This indicates an RA92
disk in an external RA disk cabinet. The device code of the boot device
is du, c is the boot device controller designation, and 1 specifies the
unit number of the boot device. The 0 is the node number, 0 is the
device channel number, 2 is the XMI node number, and 0 is the I/O
channel number.
5
This is a boot from a disk in the expander cabinet, since the last digit
in the first column of the show device command is 1. The 1 indicates
I/O channel 1 which connects to devices in the expander cabinet. The
device code of the boot device is du, d is the boot device controller
designation, and 3 specifies the unit number of the boot device. The
next 3 is the node number, 0 is the device channel number, 1 is the
XMI node number, and 1 is the I/O channel number.
For more information:
Basic Troubleshooting
Console Reference Manual
Booting 4-25
Page 74

4.6 Booting from an InfoServer
X
0
)
X
d
4.6.1 InfoServer Concepts
VA
700
The InfoServer is an Ethernet-based compact disk (CD
server used to first load the operating system for the VA
7000. First, find the available InfoServer services an
then select one of them.
Figure 4-7 InfoServer Selection Flowchart
Place CD
in CD drive
Find
Ethernet controllers
Boot initial system
load function ISL_LVAX
show network
boot
command
command
Enter function ID
to
Choose Service
Enter Option ID
to
Find Services
Enter Service Number
to boot service
4-26 Booting
BXB-0026A-92
Page 75

Some systems use Ethernet-based CD servers to load the operating system. The InfoServer consists of one or two CD drives and connects to standard Ethernet or ThinWire groups or networks.
Before loading the operating system during system installation, a number
of steps are needed to find and connect to an InfoServer. Figure 4-7 illustrates these steps. See Section 4.6.2 for information on show network
and boot commands.
Each InfoServer drive has its own address, so either drive can contain the
CD needed to load the operating system. In large system configurations, a
number of InfoServers can be connected to the system. Figure 4-8 shows a
configuration of systems and InfoServers.
Figure 4-8 InfoServer Configuration
System to
be Booted
LSB
XMI
XMI
DEMFA
DEMNA
FDDI
CD
Server
DECbridge 500
VAX
Ethernet
CD
Server
Ethernet
BXB-0304-92
Booting 4-27
Page 76

4.6.2 InfoServer OpenVMS VAX Booting
X
0
g
VA
700
This section shows a sample boot of OpenVMS VAX from
an InfoServer using the Ethernet. The first step is issuin
the show network command.
Example 4-5 InfoServer OpenVMS VAX Boot
>>> show network
polling for units on demna0, slot 3, xmi0...
exa0.0.0.3.0 08-00-2B-0B-BB-ED
>>> boot exa0 -flags 0,0,0 -file ISL_LVAX_BL10
Initializing...
F E D C B A 9 8 7 6 5 4 3 2 1 0 NODE #
A M . . . . . P P TYP
o + . . . . . + + ST1
. . . . . . . E B BPD
o + . . . . . + + ST2
. . . . . . . E B BPD
+ + . . . . . + + ST3
. . . . . . . E B BPD
. . . . + . + . . . . + . + C0 XMI +
. . . . . . . . . . . . . . C1
. . . . . . . . . . . . . . C2
. . . . . . . . . . . . . . C3
1
2
3
. A0 . . . . . . . ILV
.128 . . . . . . . 128Mb
Firmware Rev = V1.0-1625 SROM Rev = V1.0-0 SYS SN = GAO1234567
Booting...
Connecting to boot device exa0 -flags 0,0,0
-file ISL_LVAX_BL10
Created boot device: exa0.0.0.3.0
Resulting file is mopdl:ISL_LVAX_BL10/exa0.0.0.3.0
.....
Load complete !
4-28 Booting
Page 77

1
e
Show network displays information about Ethernet controllers.
Polling checks the XMI bus for device configurations. Show net-
work includes information such as the console device name of the
network device with path information (exa0.0.0.3.0) and the Ethernet controller’s hardware address in hex (08-00-2B-0B-BB-ED).
2
Boot standalone backup across the Ethernet by specifying the consol
device name of the network device exa0, additional command parameters -flags 0,0,0, the Initial System Load (ISL) file name
ISL_LVAX_ and its version number BL10. To boot over the FDDI,
the device mnemonic is fx rather than ex.
3
System self-test results are displayed if the environment variable
boot_reset is set on.
1
NOTE: The ISL file name must be specified in uppercase letters.
For more information:
Console Reference Manual
VMS Upgrade and Installation Supplement:
VAX 7000-600 and VAX 10000-600 Series
Booting 4-29
Page 78

4.6.3 Selecting an Ethernet Service
X
0
-
r
VA
700
The second step of booting over the Ethernet with an Info
Server is selecting the service that boots OpenVMS VAX fo
VAX 7000 systems.
Example 4-6 Selecting an Ethernet Service
Network Initial System Load Function 1
Version 1.1
FUNCTION FUNCTION
ID
1 - Display Menu
2 - Help
3 - Choose Service
4 - Select Options
5 - Stop
Enter a function ID value: 3
OPTION OPTION
ID
1 - Find Services
2 - Enter known Service Name
Enter an Option ID value: 1
Working
Servers found: 2
Service Name Format:
Service Number
Service Name
Server Name
Ethernet ID
#1
VMS054
ESS_08002B0BBBED
08-00-2B-0B-BB-ED
#2
CD_BIN_83371
ESS_08002B0BBBED
08-00-2B-0B-BB-ED
2
3
4
4-30 Booting
Page 79

#1
INFO3$RZ57
INFO3
08-00-2B-26-A6-98
#2
CD_DOC_0050
INFO3
08-00-2B-16-04-98
Enter a Service number or <CR> for more: 1 5
[operating system banner appears]
1
The Network Initial System Load Function menu is displayed.
2
The system prompts you for a function ID value. Enter a 3 to select the
Choose Service function.
3
The Service options menu is displayed. Enter 1 to display the available
Ethernet servers and services. In this example two servers are found
on the Ethernet.
Each server has two services, 1 and 2. The service names are listed
4
(such as INFO3$RZ57) followed by the InfoServer names (such as
INFO3), and the Ethernet ID (such as 08-00-2B-26-A6-98). In this example, service #1 of server #1 VMS054, is used to boot OpenVMS
VAX.
Enter 1 to select service #1.
5
For more information:
InfoServer 150 Installation and Owner’s Guide
VMS Upgrade and Installation Supplement:
VAX 7000-600 and VAX 10000-600 Series
Booting 4-31
Page 80

4.7 Booting from a VMScluster
4.7.1 VMScluster Concepts
You can boot from a VMScluster using a CI configuration with a
Star Coupler and HSC disk controller or a DSSI configuration
with a KFMSA and controller as shown in Figure 4-9.
Figure 4-9 Booting from CI and DSSI VMSclusters
NI -- Ethernet
System
NI
Adapter
CI
Adapter
Disk Disk
HSC
02
HSC
03
System
NI
Adapter
CI
Adapter
System
NI
Adapter
KFMSA
Controller
Disk
DSSI
System
NI
Adapter
KFMSA
Controller
Disk
BXB-0070D-92
4-32 Booting
Page 81

When you boot from a VMScluster, the minimum boot command options
include the boot device, the device type, and its unit number. This is allowed if options such as shadow set value, system root, and optional APB
or VMB parameters are zero.
Figure 4-9 shows sample VMScluster configurations. Logically, each DSSI
bus is equivalent to a small CI with a Star Coupler. The RF devices on the
DSSI are functionally equivalent to a combination of HSC and RA devices
on the CI. Sections 4.7.2–4.7.4 discuss sample CI boots, Section 4.7.5 discusses shadow set booting, and Sections 4.7.6–4.7.8 discuss sample DSSI
boots.
2
3
Booting 4-33
Page 82

4.7.2 CI OpenVMS Alpha AXP Booting
C
0
P
DE
700
This section shows a sample boot of OpenVMS Alpha AX
for a system in the CI configuration shown in Figure 4-9.
Example 4-7 CI OpenVMS Alpha AXP Boot
>>> show device
polling for units on cixcd0, slot 2, xmi0...
dua20.14.0.2.0 $100$DUA20 RA82
dua31.14.0.2.0 $100$DUA31 RA82
dua80.15.0.2.0 $100$DUA80 RA90
>>> boot -fl 4,0 dua20.14.0.2.0
Booting...
Connecting to boot device dua20
initializing HWRPB at 2000
initializing page table at 1ee000
initializing machine state
jumping to bootstrap at 1fa000
OpenVMS AXP (TM) Operating System, Version V1.0
1
2
3
4
4-34 Booting
Page 83

1
-
Show device displays information about each I/O device. Polling
checks the XMI bus for device configurations. The next line contains
three columns. The first column contains the console device name. The
second column displays the name of the device given by the device controller. The third column shows the device type.
2
In the boot command, -fl indicates that additional command parame
ters follow, 4 is the booting system root on the cluster system disk, 0
is the bootstrap option, du is the device code of the boot device, a is
the boot device controller designation, and 20 specifies the unit number of the boot device. The 14 is the HSC controller node number
that the boot device is connected to, 0 is the channel number, 2 is the
XMI node number, and 0 is the I/O channel number.
3
The system boots standalone backup.
The operating system banner appears.
4
For more information:
OpenVMS Alpha Version 1.0 Upgrade and Installation Manual
Booting 4-35
Page 84

4.7.3 CI OSF/1 Booting
C
0
n
DE
700
This section shows a sample boot of OSF/1 for a system i
the CI configuration shown in Figure 4-9.
Example 4-8 CI OSF/1 Boot
>>> show device
polling for units on cixcd0, slot 2, xmi0...
dua20.14.0.2.0 $100$DUA20 RA82
dua31.14.0.2.0 $100$DUA31 RA82
dua80.15.0.2.0 $100$DUA80 RA90
>>> boot dua31.14.0.2.0
Booting...
Connecting to boot device dua31.14.0.2.0
Connecting to boot device dua31.14.0.2.0
Created boot device: dua31.14.0.2.0
block 0 of dua31.14.0.2.0 is a valid boot block
reading 16 blocks from dua31.14.0.2.0
bootstrap code read in
base = 1fe000, start = 0
initializing HWRPB at 2000
initializing page table at 1f2000
initializing machine state
jumping to bootstrap at 1fe000
Resetting IO subysystem...
[I/O subsystem reset information, memory information
displayed, I/O bus adapters displayed, configured devices
displayed, network configuration information displayed]
1
2
3
4
The system is ready.
DEC OSF/1 Version 1.2 console
4-36 Booting
5
Page 85

1
Show device displays information about each I/O device. Polling
checks the XMI bus for device configurations. The next line contains
three columns. The first column contains the console device name. The
second column displays the name of the device given by the device controller. The third column shows the device type.
2
In the boot command, du is the device code of the boot device, a is
the boot device controller designation, and 31 specifies the unit number of the boot device. The 14 is the HSC controller node number that
the boot device is connected to, 0 is the channel number, 2 is the XMI
node number, and 0 is the I/O channel number.
3
The system boots the OSF/1 operating system.
The system displays information about the I/O subsystem reset,
4
memory, I/O bus adapters, configured devices, and network
configurations.
The operating system banner appears.
5
For more information:
DEC OSF/1 Guide to System Administration
Booting 4-37
Page 86

4.7.4 CI OpenVMS VAX Booting
C
0
a
DE
700
This section shows a sample boot of OpenVMS VAX for
system in the CI configuration shown in Figure 4-9.
Example 4-9 CI OpenVMS VAX Boot
>>> show device
polling for units on cixcd0, slot 2, xmi0...
dua20.13.0.2.0 $100$DUA20 RA82
dua31.14.0.2.0 $100$DUA31 RA82
dua80.15.0.2.0 $100$DUA80 RA90
>>> boot -fl 0,4,0 dua20.13.0.2.0
Booting...
Connecting to boot device dua20
block 0 of dua20 is a valid boot block
reading 85 blocks from dua20
bootstrap code read in
base = 116000, start = 200
boot device name = dua20.14.0.2.0
boot flags 0,4,0
boot device type = 2b
controller letter = A
unit number = 20
node ID = 13
channel = 0
slot = 2
hose = 0
jumping to bootstrap at 116200
1
2
3
4-38 Booting
Page 87

1
-
-
Show device displays information about each I/O device. Polling
checks the XMI bus for device configurations. The next line contains
three columns. The first column contains the console device name. The
second column displays the name of the device given by the device controller. The third column shows the device type.
2
In the boot command, -fl indicates that additional command parame
ters follow, 0 indicates no shadow set, 4 is the booting system root on
the cluster system disk, 0 is the VMB option, du is the device code of
the boot device, a is the boot device controller designation, and 20
specifies the unit number of the boot device. The 13 is the HSC controller node number that the boot device is connected to, 0 is the chan
nel number, 2 is the XMI node number, and 0 is the I/O channel
number.
3
With the set enable_audit environment variable on, audit trail
messages appear during booting.
For more information:
VMS Upgrade and Installation Supplement:
VAX 7000-600 and VAX 10000-600 Series
Booting 4-39
Page 88

4.7.5 Shadow Set OpenVMS VAX Booting
X
0
t
VA
700
Shadow set booting is used with OpenVMS VAX to boo
from a virtual disk that is set up by the console.
Figure 4-10 Shadow Set Open VMS VAX Booting
boot -fl[ags] 8DAC
Virtual unit number
of load device
System root
VMB Option
XMI node number
I/O channel number
,2,0
Virtual device
Device node
Device channel
dua3500.14.0.12.1,dua63.14.0.12.1
Physical device
parameters
BXB-0303B-92
4-40 Booting
Page 89

1
The virtual unit number of the load device is 8DAC, where 8 indicates
shadow set booting is used, and DAC is the hexadecimal value of the
virtual device unit number of 3500 (decimal). This value is passed to
bits 16–31 of General Purpose Register R3.
2
The system root is 2, which are bits 28–31 of General Purpose Register
R3.
3
The VMB option is 0 as listed in Appendix B, which are bits 0–27 of
General Purpose Register 5.
The device search list contains dua3500, which is the virtual device,
4
and dua63, which is the physical device. The console first attempts to
boot from the virtual device followed by the physical device.
The device node is 14. The path through HSC 14 will be tried first.
5
The device channel number is 0.
6
The XMI node number for the I/O adapter module is 12.
7
The I/O channel number is 1.
8
The parameters for the physical device are the same as the virtual de-
9
vice except that the device unit number is 63.
For more information:
VAX Volume Shadowing Manual
VMS Upgrade and Installation Supplement:
VAX 7000-600 and VAX 10000-600 Series
Booting 4-41
Page 90

4.7.6 DSSI OpenVMS VAX Booting
X
0
a
VA
700
This section shows a sample boot of OpenVMS VAX for
system in the DSSI configuration shown in Figure 4-9.
Example 4-10 DSSI OpenVMS VAX Boot
>>> show device
polling for units on kdm700, slot 1, xmi0...
dua1.1.0.1.0 DUA1 RA92
polling for units on kfmsa0, slot 6, xmi0...
dub1.1.0.6.0 R2TDYC$DIA1 RF73
dub2.2.0.6.0 R2TDYC$DIA2 RF73
>>> boot -flags 0,3,0 dub1.1.0.6.0
Initializing...
F E D C B A 9 8 7 6 5 4 3 2 1 0 NODE #
A M . . . . . P P TYP
o + . . . . . + + ST1
. . . . . . . E B BPD
o + . . . . . + + ST2
. . . . . . . E B BPD
+ + . . . . . + + ST3
. . . . . . . E B BPD
1
2
3
. . . . + . + . + . . . . + C0 XMI +
. . . . . . . . . . . . . . C1
. . . . . . . . . . . . . . C2
. . . . . . . . . . . . . . C3
. A0 . . . . . . . ILV
.128 . . . . . . . 128Mb
Firmware Rev = V1.0-1625 SROM Rev = V1.0-0 SYS SN = GAO1234567
4-42 Booting
Page 91

1
Show device displays information about each I/O device. Polling
checks the XMI bus for device configurations. The next line contains
three columns. The first column contains the device type and unit
number, node number, device channel number, XMI node number, and
I/O channel number, separated by periods. The second column displays
the name of the device given by the device controller. The third column
shows the device type.
2
In the boot command, -flags indicates that additional command parameters follow, 0 is the shadow set unit, 3 is the system root of the
boot device, 0 is the VMB option, du is the device code of the boot device, b is the boot device controller designation, and 1 specifies the
hexadecimal unit number of the boot device. The 1 is the node number, 0 is the channel number, 6 is the XMI node number, and 0 is
the I/O channel number.
3
System self-test results are displayed if the environment variable
boot_reset is set on.
For more information:
VMS Upgrade and Installation Supplement:
VAX 7000-600 and VAX 10000-600 Series
Booting 4-43
Page 92

Page 93

Appendix A
Console Commands
Table A-1 lists the console commands. Commands such as clear, create,
set, and show use environment variables. These variables control various
console features and pass console information to the operating system.
Table A-1 Console Commands
Command Function
boot
build eeprom
cdp
1
clear
continue
create
deposit
examine
help
initialize
1
1
These commands use environment variables.
Initializes the system causing a self-test and begins
the boot program.
Creates a new EEPROM image or restores a corrupted one.
Configures DSSI devices.
Removes an environment variable.
Resumes processing at the point where it was inter-
rupted by a
Creates a new environment variable.
Stores data in a specified location.
Displays the contents of a memory location, register,
device, or a file.
Provides basic information on the console commands.
Performs a reset on the system or specified node.
Ctrl/P
or halt command.
Console Commands A-1
Page 94

Table A-1 Console Commands (Continued)
Command Function
repeat
1
set
show
start
1
Reexecutes a command.
Changes an option or environment variable.
Displays an option or environment variable.
Starts the execution of instructions at the specified ad-
dress.
stop
test
update
Stops a secondary CPU.
Tests the system, a subsystem, or a specified option.
Copies the contents of the boot processor’s EEPROM to
the EEPROM of the specified processor.
#
Introduces a comment. Used on DEC 7000 and VAX
7000 systems.
!
Introduces a comment. Used only on VAX 7000 systems.
1
These commands use environment variables.
Environment variables such as baud, bootdef_dev, boot_file,
boot_reset, and term are used by the system operator. The EEPROM
contents can be manipulated with the clear, set, and show commands.
For more information:
Console Reference Manual
A-2 Console Commands
Page 95

Appendix B
Boot Options
Table B-1 lists the Alpha primary boot (APB) options used with the boot
command for OpenVMS Alpha AXP. Table B-2 lists the OSF/1 options used
with the boot command. Table B-3 lists the virtual memory boot (VMB)
options used with the boot command for OpenVMS VAX. These options allow you to control various phases of booting. The VMB options set bits in
General Purpose Register R5.
Boot Options B-1
Page 96

Table B-1 OpenVMS Alpha AXP Boot Options
Hexadecimal Value Function
1
2
4
8
10
20
40
80
100
2000
10000
20000
Allows a conversational boot.
Maps XDELTA to a running system.
Stops the boot procedure at the initial system
breakpoint.
Performs a diagnostic bootstrap.
Stops the boot procedure at the bootstrap breakpoints.
Omits the header from the secondary bootstrap
image.
Inhibits memory testing.
Prompts for the name of the secondary boot-
strap file.
Halts the system before the secondary boot-
strap.
Marks corrected read data error pages as bad.
Enables debug messages in the APB.EXE, SYS-
BOOT.EXE, and EXEC_INIT.EXE files.
Enables user messages in the APB.EXE,
BOOT.EXE, and EXEC_INIT.EXE files.
The OpenVMS Alpha AXP options are used as qualifiers in the set
boot_osflags command.
B-2 Boot Options
Page 97

Table B-2 OSF/1 Boot Options
Option Function
-a
-d
-i
-s
Boots the system disk to multiuser mode.
Do full clumps.
Boot to interactive mode plus options.
Default boot option.
Boot Options B-3
Page 98

Table B-3 VMB Boot Options
Bit Function
0
Conversational boot. The secondary bootstrap program, SYSBOOT, prompts you for system parameters at the console
terminal.
1
Debug. If this bit is set, the operating system maps the code
for the XDELTA debugger into the system page tables of the
running operating system.
2
Initial breakpoint. If this bit is set, the operating system executes a breakpoint (BPT) instruction early in the bootstrap
program.
3
Secondary boot from bootblock. The secondary boot is a single 512-byte block whose logical block number is specified in
the General Purpose Register R4.
4
5
Not used.
Boot breakpoint. This stops the primary and secondary load-
ers with a breakpoint (BPT) instruction before testing mem-
ory.
6
Image header. The transfer address of the secondary loader
image comes from the image header for that file. If this bit is
not set, control shifts to the first byte of the secondary
loader.
8
File name. APB or VMB prompts for the name of a secon-
dary loader.
9
Halt before transfer. APB or VMB executes a HALT instruc-
tion before transferring control to the secondary loader.
13
15
16
31:28
B-4 Boot Options
No effect, since console program tests memory.
Not used.
Do not discard CRD pages.
Specifies the top-level directory number for system disks.
Page 99

Appendix C
Updating Firmware
Use the Loadable Firmware Update (LFU) Utility to update system firmware. LFU runs without any operating system and can update the firmware on any system module. LFU handles modules on the LSB bus (for example, the CPU) as well as modules on the I/O buses (for example, a CI
controller on the XMI bus). You are not required to specify any hardware
path information, and the update process is highly automated.
Both the LFU program and the firmware microcode images it writes are
supplied on a CD-ROM. You start LFU on DEC 7000 systems by booting
the RRD42. On VAX 7000 systems you start LFU by booting the InfoServer on your Ethernet.
A typical update procedure is:
1. Boot the LFU CD-ROM.
2. Use the LFU show command to indicate modules whose firmware
needs to be updated.
3. Use the LFU list command if you want to check the firmware version
numbers on the CD-ROM.
4. Use the LFU update command to write the new firmware.
5. Exit.
Updating Firmware C-1
Page 100

C.1 Booting LFU on a DEC 7000 System
C
0
-
r
is
DE
700
LFU is supplied on the DEC 7000/10000 AXP Console CD
ROM (Part Number AG-PQW3*-RE, where * is the lette
that denotes the disk revision). Make sure this CD-ROM
mounted in the RRD42 in-cabinet CD drive. Boot LFU from
the CD-ROM.
Example C-1 RRD42 LFU Booting
>>> show device
polling for units on kzmsa, slot 1, xmi0...
dka100.1.0.1.0 dka100 RRD42
polling for units on kdm70, slot 6, xmi0...
dub1.1.0.6.0 R2TDYC$DIA1 RF73
dub2.2.0.6.0 R2TDYC$DIA2 RF73
>>> boot dka100 2
Booting...
Copyright Digital Equipment Corporation
1992
All Rights Reserved.
Loadable Environment Rev: V1.0-1625 Jul 12 1992 10:50:56
***** Loadable Firmware Update Utility *****
Version 2.01 16-jun-1992
1
------------------------------------------------------------------ Function Description
------------------------------------------------------------------ Display Displays the system’s configuration table.
Exit Return to loadable offline operating environment.
List Lists the device types and firmware revisions
supported by this revision of LFU.
Modify Modifies port parameters and device attributes.
Show Displays device mnemonic, hardware and firmware
revisions.
Update Replaces current firmware with loadable data
image.
Verify Compares loadable and device images.
? or Help Scrolls the function table.
-------------------------------------------------------------------
Function?
C-2 Updating Firmware
3
 Loading...
Loading...