

Page 1
ARM Cortex-A8 CPU Module Family
ULTRA Line
HARDWARE MANUAL
DAVE Embedded Systems
www.dave.eu
info@dave.eu
Page 2

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
<Page intentionally left blank>
August, 2014 2/78
Page 3

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Table of Contents
1 Preface.....................................................................................................................................6
1.1 About this manual.............................................................................................................6
1.2 Copyrights/Trademarks.....................................................................................................6
1.3 Standards..........................................................................................................................6
1.4 Disclaimers.......................................................................................................................6
1.5 Warranty............................................................................................................................6
1.6 Technical Support.............................................................................................................7
1.7 Related documents...........................................................................................................8
1.8 Conventions, Abbreviations, Acronyms............................................................................8
2 Introduction.............................................................................................................................11
2.1 Product Highlights...........................................................................................................12
2.2 Block DiagramBlock Diagram.........................................................................................13
2.3 Feature Summary...........................................................................................................14
3 Design overview.....................................................................................................................16
3.1 “DaVinci” DM814x / “Sitara” AM387x CPU.....................................................................16
3.2 DDR3 memory bank.......................................................................................................18
3.3 NOR flash bank...............................................................................................................18
3.4 NAND flash bank............................................................................................................18
3.5 Memory Map...................................................................................................................19
3.6 Power supply unit...........................................................................................................19
3.7 CPU module connectors.................................................................................................19
4 Mechanical specifications......................................................................................................21
4.1 Board Layout...................................................................................................................21
4.2 Connectors......................................................................................................................23
5 System Logic..........................................................................................................................24
5.1 Power..............................................................................................................................24
5.2 PMIC...............................................................................................................................24
5.3 Reset...............................................................................................................................24
5.3.1 MRST (J2.102)........................................................................................................24
5.3.2 PORSTn (J2.109)....................................................................................................24
5.3.3 RSTOUTn (J2.91)....................................................................................................25
5.3.4 CPU_RESETn (J2.15).............................................................................................25
5.3.5 JTAG_TRSTn (J2.100)............................................................................................25
5.4 Voltage monitor...............................................................................................................25
5.5 Boot options....................................................................................................................25
5.5.1 Default boot configuration.......................................................................................26
5.5.2 Boot sequence customization.................................................................................27
5.6 Clock scheme.................................................................................................................27
5.7 Recovery.........................................................................................................................27
5.7.1 JTAG Recovery.......................................................................................................27
5.7.2 UART Recovery.......................................................................................................28
August, 2014 3/78
Page 4

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
5.7.3 SD/MMC Recovery..................................................................................................28
5.8 Multiplexing.....................................................................................................................28
5.9 RTC.................................................................................................................................29
6 Pinout table............................................................................................................................30
6.1 Carrier board mating connector J1.................................................................................32
6.2 Carrier board mating connector J2.................................................................................38
6.3 CPU module mount options............................................................................................45
6.4 Additional notes...............................................................................................................46
6.4.1 EN_BCK_LS............................................................................................................46
7 Peripheral interfaces..............................................................................................................47
7.1 Digital Video Output (DVO).............................................................................................47
7.1.1 VOUT0.....................................................................................................................47
7.1.2 VOUT1.....................................................................................................................48
7.2 HDMI...............................................................................................................................49
7.3 Analog SDTV out............................................................................................................50
7.4 Digital Video Input ports..................................................................................................51
7.4.1 VIN0.........................................................................................................................52
7.4.2 VIN1.........................................................................................................................54
7.5 Ethernet ports.................................................................................................................55
7.5.1 EMAC_RMREFCLK................................................................................................56
7.5.2 Ethernet 10/100.......................................................................................................56
7.5.3 Gigabit EMAC..........................................................................................................57
7.6 CAN ports.......................................................................................................................58
7.6.1 DCAN0.....................................................................................................................58
7.6.2 DCAN1.....................................................................................................................58
7.7 UARTs.............................................................................................................................59
7.7.1 UART0.....................................................................................................................59
7.7.2 UART3.....................................................................................................................60
7.7.3 UART5.....................................................................................................................60
7.8 MMC/SD channels..........................................................................................................61
7.8.1 MMC/SD/SDIO0......................................................................................................61
7.8.2 MMC/SD/SDIO1......................................................................................................62
7.8.3 MMC/SD/SDIO2......................................................................................................63
7.9 USB ports........................................................................................................................63
7.9.1 USB0.......................................................................................................................63
7.9.2 USB1.......................................................................................................................64
7.9.3 USB2.......................................................................................................................64
7.9.4 Other USB signals...................................................................................................64
7.10 Touchscreen..................................................................................................................65
7.11 EEPROM.......................................................................................................................65
7.12 Keypad controller..........................................................................................................65
7.13 PCI Express..................................................................................................................66
7.14 SPI buses......................................................................................................................67
August, 2014 4/78
Page 5

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
7.14.1 SPI1.......................................................................................................................67
7.14.2 SPI2.......................................................................................................................68
7.14.3 SPI3.......................................................................................................................68
7.15 I2C buses......................................................................................................................69
7.15.1 I2C2.......................................................................................................................69
7.15.2 I2C3.......................................................................................................................69
7.16 SATA.............................................................................................................................70
7.17 Audio interfaces............................................................................................................70
7.17.1 McASP2.................................................................................................................71
7.18 GPIOs...........................................................................................................................71
7.19 Local Bus......................................................................................................................71
8 Operational characteristics....................................................................................................75
8.1 Maximum ratings.............................................................................................................75
8.2 Recommended ratings....................................................................................................75
8.3 Power consumption........................................................................................................75
8.3.1 Set 1........................................................................................................................76
8.3.2 Use cases................................................................................................................76
8.4 Heat Dissipation..............................................................................................................77
9 Application notes....................................................................................................................78
Index of Tables
Tab. 1: Related documents........................................................................................................8
Tab. 2: Abbreviations and acronyms used in this manual..........................................................9
Tab. 3: CPU, Memories, Busses..............................................................................................14
Tab. 4: Peripherals...................................................................................................................15
Tab. 5: Electrical, Mechanical and Environmental Specifications............................................15
Tab. 6: DM814x/AM387x comparison......................................................................................18
Tab. 7: DDR2 specifications.....................................................................................................18
Tab. 8: NOR flash specifications..............................................................................................18
Tab. 9: NAND flash specifications............................................................................................19
Tab. 10: ZFF form factor – example of pinout differences.......................................................20
Illustration Index
Fig. 1: DIDO CPU module.........................................................................................................11
Fig. 2: DIDO (top-right), NAON (top-left) and MAYA (bottom)...................................................11
Fig. 3: DIDO SOM (top view)....................................................................................................12
Fig. 4: Board layout - top view..................................................................................................21
Fig. 5: Board layout - size view.................................................................................................22
Fig. 6: Connectors layout..........................................................................................................23
Fig. 7: Simplified schematics of EN_BCK2_LS internal pin configuration................................46
August, 2014 5/78
Page 6

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
1 Preface
1.1 About this manual
This Hardware Manual describes the DIDO CPU modules
family design and functions.
Precise specifications for the Texas Instruments DM814x and
AM387x processors can be found in the CPU datasheets and/or
reference manuals.
1.2 Copyrights/Trademarks
Ethernet® is a registered trademark of XEROX Corporation.
All other products and trademarks mentioned in this manual
are property of their respective owners.
All rights reserved. Specifications may change any time without
notification.
1.3 Standards
DAVE Embedded Systems Srl is certified to ISO 9001
standards.
1.4 Disclaimers
DAVE Embedded Systems does not assume any responsibility
about availability, supplying and support regarding all the
products mentioned in this manual that are not strictly part of
the DIDO CPU module.
DIDO CPU Modules are not designed for use in life support
appliances, devices, or systems where malfunction of these
products can reasonably be expected to result in personal
injury. DAVE Embedded Systems customers who are using or
selling these products for use in such applications do so at their
own risk and agree to fully indemnify DAVE Embedded
Systems for any damage resulting from such improper use or
sale.
1.5 Warranty
DIDO is warranted against defects in material and
August, 2014 6/78
Page 7
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
workmanship for the warranty period from the date of
shipment. During the warranty period, DAVE Embedded
Systems will at its discretion decide to repair or replace
defective products. Within the warranty period, the repair of
products is free of charge as long as warranty conditions are
observed.
The warranty does not apply to defects resulting from improper
or inadequate maintenance or handling by the buyer,
unauthorized modification or misuse, operation outside of the
product’s environmental specifications or improper installation
or maintenance.
DAVE Embedded Systems will not be responsible for any
defects or damages to other products not supplied by DAVE
Embedded Systems that are caused by a faulty DIDO module.
1.6 Technical Support
We are committed to making our product easy to use and will
help customers use our CPU modules in their systems.
Technical support is delivered through email to our valued
customers. Support requests can be sent to
support-dido@dave.eu.
Software upgrades are available for download in the restricted
access download area of DAVE Embedded Systems web site:
http://www.dave.eu/reserved-area. An account is required to
access this area and is provided to customers who purchase the
development kit (please contact support-dido@dave.eu for
account requests)..
Please refer to our Web site at
http://www.dave.eu/dave-cpu-module-dm814x-dido.html for the
latest product documentation, utilities, drivers, Product
Change Notifications, Board Support Packages, Application
Notes, mechanical drawings and additional tools and software.
August, 2014 7/78
Page 8
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
1.7 Related documents
Document Location
DAVE Embedded
Systems
Developers Wiki
TMS320DM814x
DaVinci
Technical
Reference Manual
DM814x Overview
(on TI Embedded
Processors Wiki )
Integration guide
(on DAVE
Embedded
Systems
Developers Wiki)
Tab. 1: Related documents
http://wiki.dave.eu/index.php/Main_Pa
ge
http://www.ti.com/litv/pdf/sprugz8d
http://processors.wiki.ti.com/index.ph
p/DM814x_Overview
http://wiki.dave.eu/index.php/Integrati
on_guide_%28Dido%29
1.8 Conventions, Abbreviations, Acronyms
Abbreviation Definition
BTN Button
DSP Digital Signal Processor
DVO Digital Video Output
GPI General purpose input
GPIO General purpose input and output
GPO General purpose output
HDVPSS HD Video Processing Subsystems
HDVCIP HD Video Image Coprocessing
NELK NAON Embedded Linux Kit
PCB Printed circuit board
August, 2014 8/78
Page 9
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Abbreviation Definition
RTC Real time clock
SOM System on module
VIP Video Input Port
PMIC Power Management Integrated Circuit
ZFF Z Form Factor
Tab. 2: Abbreviations and acronyms used in this manual
August, 2014 9/78
Page 10
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Revision History
Version Date Notes
0.9.0 March 2013 First Draft
0.9.1 March 2013 First Release
0.9.2 March 2013 First Release with DIDO
development kit
Minor fixes
1.0.0 April 2013 Released with NELK 4.0.0
Minor fixes
1.0.1 May 2013 Added information on
EMAC_RMREFCLK signal
Minor fixes
1.0.2 December 2013 Fixed JTAG_TDO and JTAG_TCK
pinout table entries
1.0.3 January 2014 Updated pin J2.97 information
Minor fixes
1.0.4 April 2014 SPI2: removed J2.36 from the
muxable signals
Added HDMI CEC and HPDET
information
1.0.5 August 2014 Added EMAC_RMREFCLK
termination resistors information
Updated block diagram
Minor fixes
August, 2014 10/78
Page 11
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
2 Introduction
DIDO is a ready-to-use CPU module/SOM family, based on
Texas Instruments
Cortex-A8 high performance
application processor from
DM814x (“DaVinci”) and
AM387x (“Sitara”) models.
DIDO is is the cutting edge
solution for a high range of
applications, including video
surveillance cameras,
medical video analysis,
smart home controllers,
security systems,
automation and point of
service.
Fig. 1: DIDO CPU module
Fig. 2: DIDO (top-right), NAON
(top-left) and MAYA (bottom)
DIDO is the first
product of DAVE
Embedded Systems
ULTRA Line CPU
modules class, which
includes best-in-class
solutions and
full-featured SOMs.
DIDO shares the same
DM814x processor
with MAYA (LITE Line)
and NAON (ESATTA
Line) and is built with
the same connectors
format (ZFF) as NAON
and LIZARD (ESATTA
Line).
August, 2014 11/78
Page 12
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
2.1 Product Highlights
● Top class CPU module family based on Texas
Instruments DM814x/AM387x processors models.
● ARM Cortex-A8 architecture @ up to 1 GHz
● Up to 2 GB DDR3 @ 533 MHz SDRAM
● HD Video Encoding/Decoding Capabilities
(High-Definition Video Image Coprocessing – HDVICP v2
engine)
● Multiple video input and output channels
● C674x DSP engine (available on DM8148)
● NEON Multimedia co-processor and PowerVR® SGX
530 Vector/3D Graphics Engine
● On-board flash (NOR and NAND) storage
● Small form factor
● Rich interfaces set including PCI Express, dual CAN,
dual Ethernet, SATA and native 3.3V I/O
● NAON and LIZARD (ESATTA Line) pinout compatible
Fig. 3: DIDO SOM (top view)
August, 2014 12/78
Page 13
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
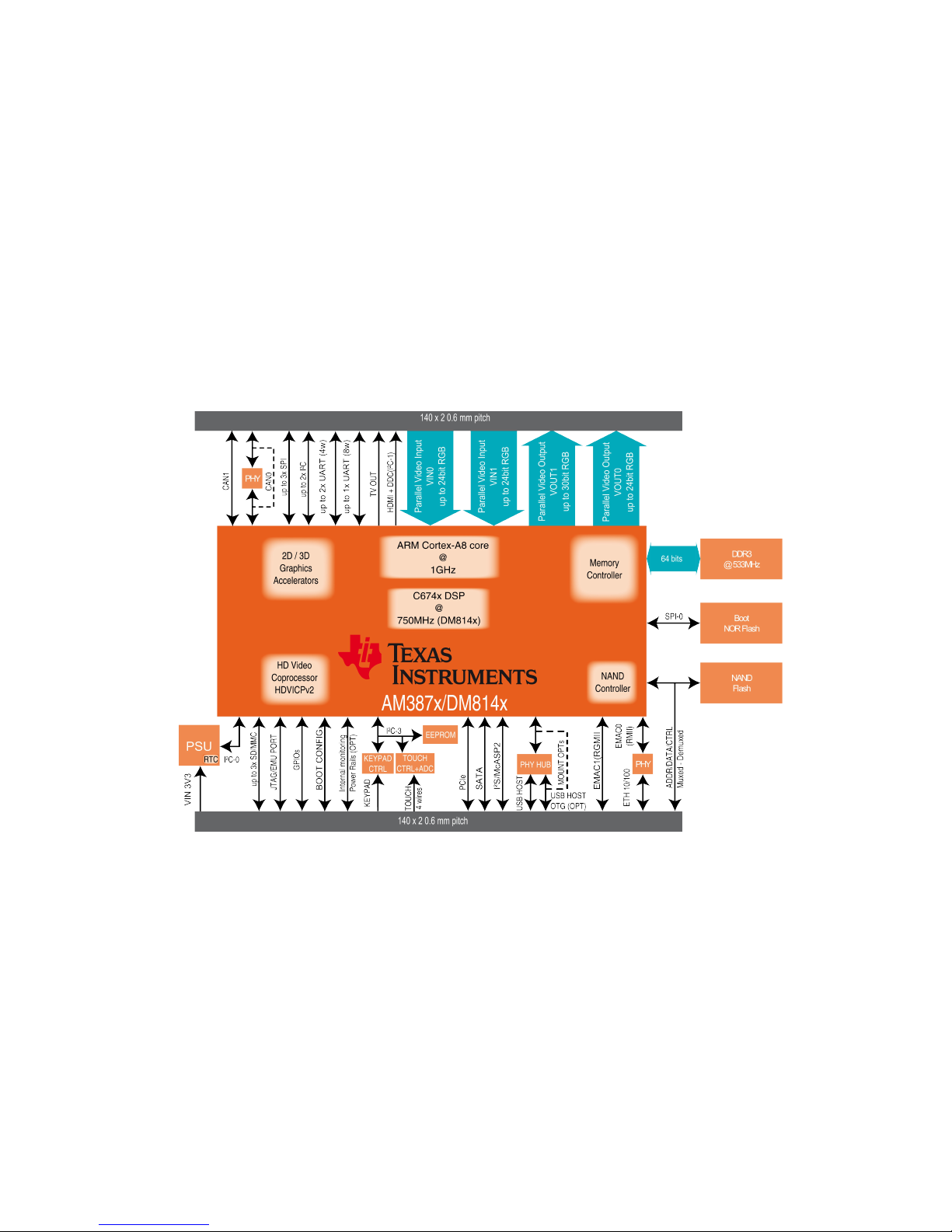
2.2 Block DiagramBlock Diagram
August, 2014 13/78
Page 14
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
2.3 Feature Summary
Feature Specifications Options
CPU “DaVinci” DM814x
“Sitara” AM387x
ARM v7 architecture
Up to 1 GHz
RAM DDR3 SDRAM @ 533 MHz
Up to 2 GB
Storage Flash NOR SPI
Flash NAND on Local bus
I²C 32 kbit EEPROM
External local
bus
Expansion bus One PCI Express 2.0 Port With Integrated
16 bit GPMC
PHY (5.0 GT/s Endpoint/Root Complex
port)
Tab. 3: CPU, Memories, Busses
Feature Specifications Options
Graphics
Controller
2D/3D Engines NEON Multimedia SIMD coprocessor
Coprocessors Up to 750 MHz C674x VLIW DSP
Video capture 2x HD Video Input port
HD Video Processing Subsystem
(HDVPSS)
1x up to 24 bit HD Video Output port
1x up to 18 bit HD Video Output port
1x HDMI 1.3 channel + DDC
Analog TV output
TFT/RGB support
PowerVR SGX 530 3D Accelerator
HD Video Coprocessor HDVICP v2
USB 2x USB Host 2.0, 480 Mbps, with PHY
UARTs 3x UARTs
GPIO Up to 128 lines, shared with other
Input
interfaces
1x USB OTG, 480 Mbps (integrated PHY)
functions (interrupts available)
TSC2003 4-wire resistive touch screen
controller
August, 2014 14/78
Page 15
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Feature Specifications Options
Available ADC channel
Up to 8x8 keypad controller
Networks 1x Fast Ethernet with PHY
1x GRMII 10/100/1000 Mbps interface
High-end Dual CAN controller
Storage Serial ATA 3.0 Gbps with integrated PHY
SD/MMC Up to 3x MMC/SD/SDIO Serial interfaces
(up to 48 MHz)
Serial buses 2x I²C, 3x SPI
Audio 1x McASP channel
Timers Up to 6 programmable general purpose
timers (PWM function available)
RTC On board (provided by TPS659113
PMIC), external battery powered
Debug JTAG
EMU port
Tab. 4: Peripherals
Feature Specifications Options
Supply
Voltage
Active power
consumption
Dimensions 68.6 mm x 59.7 mm
Weight <tbd>
MTBF <tbd>
Operation
temperature
Shock <tbd>
Vibration 100 G resistance
Connectors 2x 140 pin
Connectors
insertion/remo
val
+3.3V
See section 8.3 - Power consumption
0..70 °C
-40..+85 °C
<tbd>
Tab. 5: Electrical, Mechanical and Environmental Specifications
August, 2014 15/78
Page 16

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
3 Design overview
The heart of DIDO module is composed by the following
components:
● Texas Instruments DM814x/AM387x processor
● Power supply unit
● DDR3 memory banks
● NOR and NAND flash banks
● 2x 140 pin connectors with interfaces signals
This chapter shortly describes the main DIDO components.
3.1 “DaVinci” DM814x / “Sitara” AM387x CPU
DM814x DaVinci™ and AM387x Sitara™ are highly-integrated,
scalable and programmable CPU families from Texas
Instruments.
DaVinci™ digital media processor solutions are tailored for
digital audio, video, imaging, and vision applications.
Sitara™ ARM microprocessors (MPUs) are designed to
optimize performance and peripheral support for customers in
a variety of markets.
The architecture is designed to provide video, image, graphics
and processing power sufficient to support the following:
● Home and Industrial automation
● Test and measurement
● Digital Signage
● Medical instrumentation
● Remote monitoring
● Motion control
● Point-of-Sale
● Single Board Computers
The following subsystems are part of the device:
● Microprocessor unit (MPU) subsystem based on the ARM®
Cortex™-A8 architecture:
August, 2014 16/78
Page 17

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
ARM Cortex-A8 RISC processor, with Neon™
Floating-Point Unit, 32KB L1 Instruction Cache, 32KB L1
Data Cache and 512KB L2 Cache
CoreSight Embedded Trace Module (ETM)
ARM Cortex-A8 Interrupt Controller (AINTC)
Embedded PLL Controller (PLL_ARM)
● PowerVR SGX 530 subsystem for vector/3D graphics
acceleration to support display and gaming effects
● The HDVICP2 is a Video Encoder/Decoder hardware
accelerator supporting a range of encode, decode, and
transcode operations for most major video codec standards.
The main video Codec standards supported in hardware are
MPEG1/2/4 ASP/SP, H.264 BL/MP/HP, VC-1 SP/MP/AP,
RV9/10, AVS-1.0, and ON2 VP6.2/VP7.
● The C674x DSP core is the high-performance floating-point
DSP generation in the TMS320C6000™ DSP platform and is
code-compatible with previous generation C64x Fixed-Point
and C67x Floating-Point DSP generation. The C674x
Floating-Point DSP processor uses 32KB of L1 program
memory with EDC and 32KB of L1 data memory. The DSP
has 256KB of L2 RAM with ECC, which can be defined as
SRAM, L2 cache, or a combination of both.
● The high definition video processing subsystem (HDVPSS)
includes video/graphics display and capture processing
using the latest TI developed algorithms, flexible
compositing and blending engine, and a full range of
external video interfaces in order to deliver high quality
video contents to the end devices.
The following table shows a comparison between the devices,
highlighting the differences:
Processor DSP 3D HDVICP HDVPSS Max clock
speed
DM8148 Yes Yes Yes Yes 1 GHz
DM8147 Yes n.a. Yes Yes 1 GHz
August, 2014 17/78
Page 18
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Processor DSP 3D HDVICP HDVPSS Max clock
speed
AM3874 n.a. Yes n.a. Yes 1 GHz
AM3872 n.a. n.a. n.a. Yes 1 GHz
AM3871 n.a. n.a. n.a. n.a. 1 GHz
Tab. 6: DM814x/AM387x comparison
3.2 DDR3 memory bank
DDR3 SDRAM memory bank is composed by 4x 16-bit width
chips resulting in 2x 32-bit combined width banks.
The following table reports the SDRAM specifications:
CPU connection SDRAM bus
Size min 128 MB
Size max 2 GB
Width 32 bit
Speed 533 MHz
Tab. 7: DDR2 specifications
3.3 NOR flash bank
NOR flash is a Serial Peripheral Interface (SPI) device. By
default this device is connected to SPI channel 0 and acts as
boot memory.
The following table reports the NOR flash specifications:
CPU connection SPI channel 0
Size min 4 MByte
Size max 128 MByte
Bootable Yes
Tab. 8: NOR flash specifications
3.4 NAND flash bank
On board main storage memory is a 8-bit wide NAND flash. By
default it is connected to GPMC_NCS0 chip select. Optionally it
August, 2014 18/78
Page 19
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
can be connected to GPMC_NCS7.
CPU connection GPMC bus
Page size 512 byte, 2 kbyte or 4 kbyte
Size min 32 MByte
Size max 2 GByte
Width 8 bit
Bootable Yes
Tab. 9: NAND flash specifications
3.5 Memory Map
The total system memory is divided across various
processors/subsystems. Due to this “multiprocessor” nature,
Memory Mapping for DIDO Module is quite complex, since it
involves the Cortex-A8 core, the two Media Controllers
(Cortex-M3, that take care of the HDVPSS and HDVCIP
subsystems) and the DSP. NELK Memory Map is described in
detail on the dedicated page on the Developer's Wiki:
http://wiki.dave.eu/index.php/Memory_organization_%28Dido
%29
3.6 Power supply unit
DIDO, as the other Performance Line CPU modules, embeds all
the elements required for powering the unit, therefore power
sequencing is self-contained and simplified. Nevertheless,
power must be provided from carrier board, and therefore
users should be aware of the ranges power supply can assume
as well as all other parameters. For detailed information,
please refer to Section 5.1.
3.7 CPU module connectors
All interface signals DIDO provides are routed through two 140
pin 0.6mm pitch stacking connectors (named J1 and J2). The
host board must mount the mating connectors and connect the
desired peripheral interfaces according to DIDO pinout
specifications.
DIDO modules belongs to the ULTRA Line product class, but
August, 2014 19/78
Page 20
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
the basic connectors pinout (called ZFF, Z Form Factor) is
compatible with NAON and LIZARD SOMs. This means that the
interfaces that are in common with the modules of the same
class are routed on the same connector pins: for example, USB
ports (which are implemented on each module) can be found on
the same J1 and J2 pins. On the contrary, specific interfaces
that are available only on one module are replaced with
different interfaces on the other modules. As an example, the
following table reports the three configuration of pin J2.33:
Module LIZARD NAON DIDO
Pin J2.33 J2.33 J2.33
Interface LATCH VOUT0 -
Pin name LATCHED_A2 VOUT0_FLD/CA
M_PCLK/GPMC_
A12/GP2_02
Function Latched
address bit 2
Digital Video
Output Field ID
output
DGND
Ground
Tab. 10: ZFF form factor – example of pinout differences
For mechanical information, please refer to Section 4
(Mechanical specifications). For pinout and peripherals
information, please refer to Sections 6 (Pinout table) and 7
(Peripheral interfaces).
August, 2014 20/78
Page 21
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
4 Mechanical specifications
This chapter describes the mechanical characteristics of the
DIDO module.
Mechanical drawings are available in DXF format from
the DIDO page on DAVE Embedded Systems website
(http://www.dave.eu/dave-cpu-module-am387x-dm814x-d
ido.html).
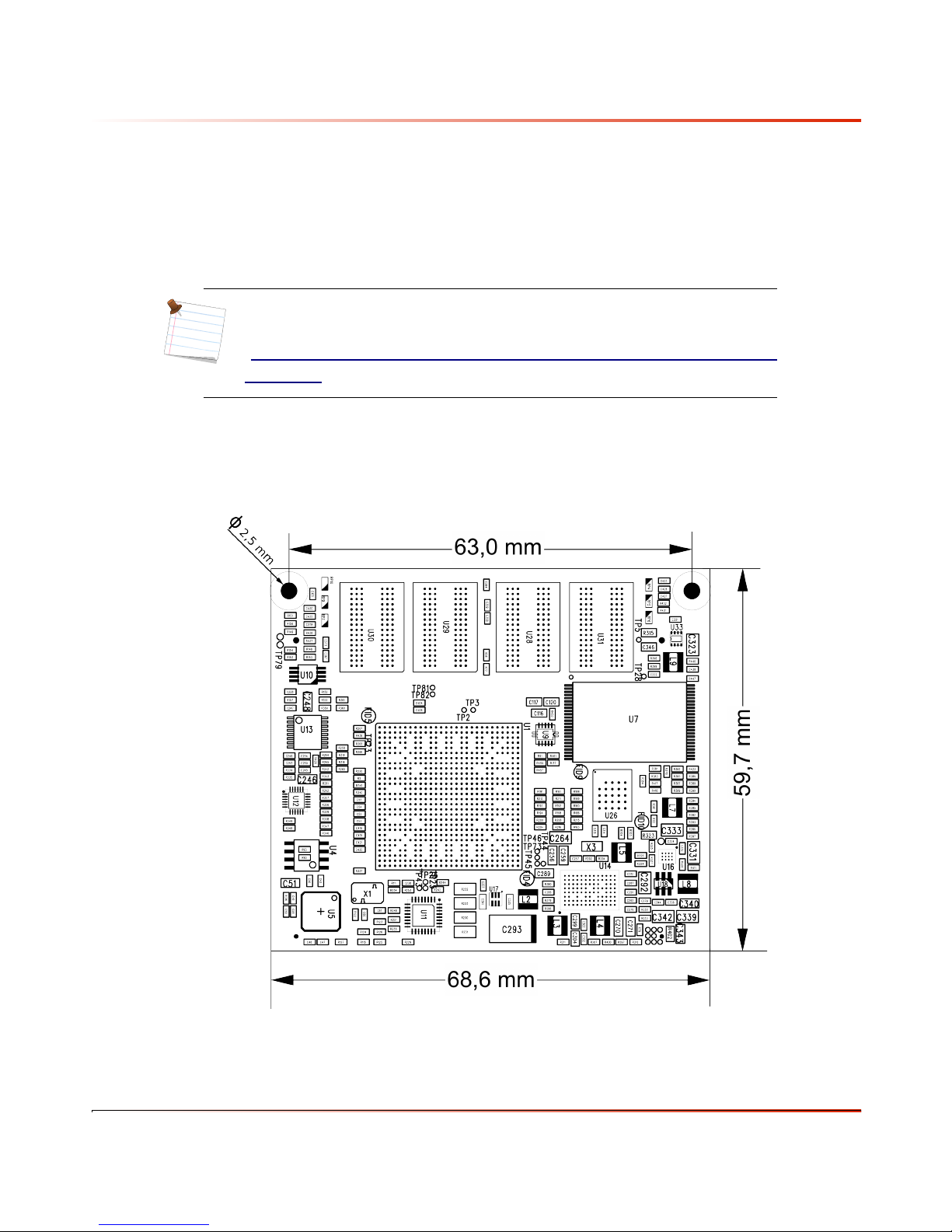
4.1 Board Layout
The following figure shows the physical dimensions of the DIDO
module:
Fig. 4: Board layout - top view
August, 2014 21/78
Page 22
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
● Board height: 59.7 mm
● Board width: 68.6 mm
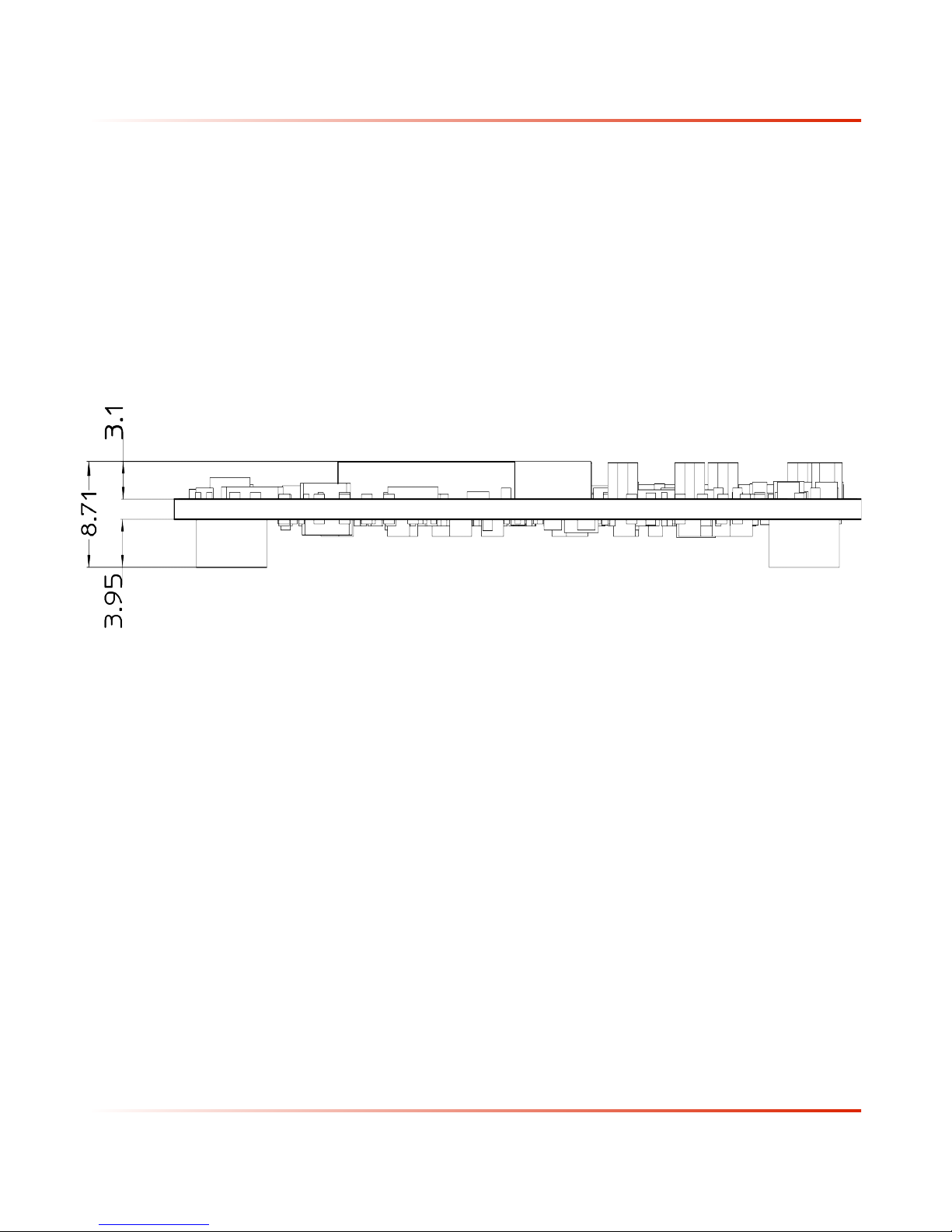
● Maximum components height is 3.1 mm.
● PCB thickness is 1.8 mm.
The following figure highlights the maximum components'
heights on DIDO module:
Fig. 5: Board layout - size view
August, 2014 22/78
Page 23
D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
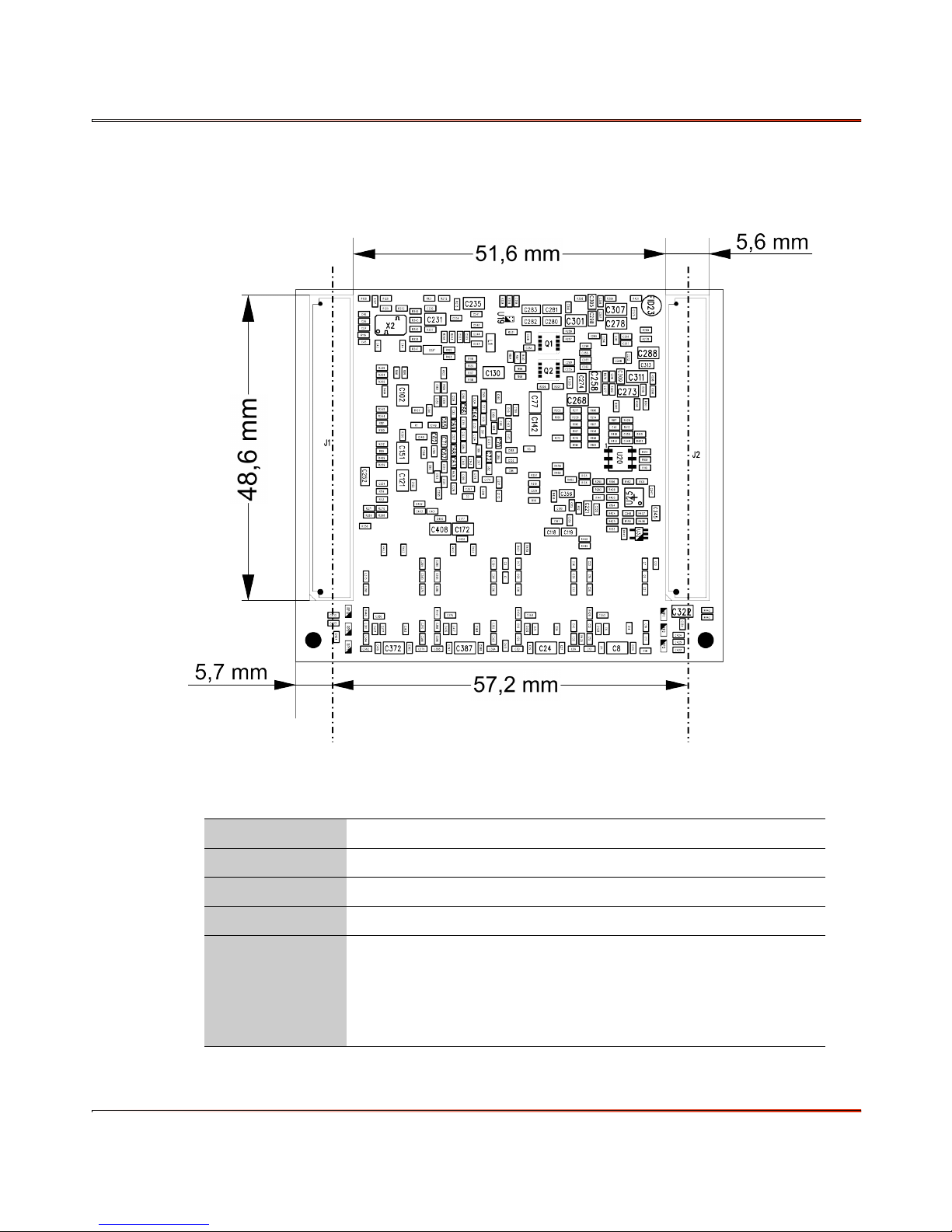
4.2 Connectors
The following figure shows the DIDO connectors layout:
Fig. 6: Connectors layout
The following table reports connectors specifications:
Part number Hirose FX8C-140S-SV
Height 5.6 mm
Length 48.6 mm
Depth 3.95 mm
Mating
connectors
Hirose FX8C-140P-SV (5 mm board-to-board height)
Hirose FX8C-140P-SV1 (6 mm board-to-board height)
Hirose FX8C-140P-SV2 (7 mm board-to-board height)
Hirose FX8C-140P-SV4 (9 mm board-to-board height)
Hirose FX8C-140P-SV6 (11 mm board-to-board height)
August, 2014 23/78
Page 24

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
5 System Logic
5.1 Power
Implementing correct power-up sequence for AM387x/DM814x
processor is not a trivial task because several power rails are
involved. DIDO hides this complexity because it embeds most
of the circuitry required.
In typical applications AM387x/DM814x processor interfaces
directly to 3.3V-powered devices that are hosted on carrier
board. In order to be compliant with AM387x/DM814x
power-up requirements, these devices should be turned on at a
specific time during power-up sequence. To achieve this, DIDO
provides EN_BCK2_LS signal. When DIDO is powered, this
signal is low: this means that carrier board 3.3V-powered
devices have to be powered off. During power-up sequence this
signal shall be raised by DIDO circuitry, indicating carrier
board 3.3V-powered devices have to be turned on. After this
rising edge, EN_BCK2_LS shall be kept high.
5.2 PMIC
This section will be completed in a future version of this
manual.
5.3 Reset
Five different signals are provided by DIDO SOM. Following
sections describes in more detail each one.
5.3.1 MRST (J2.102)
This pin is connected to HDRST signal (cold reset) of PMIC
TPS659113. When high, this signals keeps PMIC in off mode
and resets TPS659113 to default settings. MRST has a weak
internal pulldown.
5.3.2 PORSTn (J2.109)
PORSTn is a bidirectional open-drain signal. It is connected to:
August, 2014 24/78
Page 25

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
● PORn input (Power-on Reset) of DM8148 processor
● output of voltage monitor (see Section 5.4)
● NRESPWRON2 output of PMIC.
Internal pullup is 10kOhm.
5.3.3 RSTOUTn (J2.91)
This output signal is asserted by DM8148 processor until it
gets out of reset. It is usually used to reset external memories
and peripherals connected to processor. It is connected to:
● RSTOUT_WD_OUTn pad of DM8148 processor
● 2k2 pull down resistor
● peripherals and memories.
In case it is used to reset devices on carrier board, its driving
capability has to be taken into account.
5.3.4 CPU_RESETn (J2.15)
This input signal acts as External Warm Reset. It is connected
to processor's RESETn pad. Internal pullup is 2.2kOhm.
5.3.5 JTAG_TRSTn (J2.100)
This input signal acts as Emulation Warm Reset. It is connected
to processor's TRSTn pad. Internal pulldown is 4.7kOhm
5.4 Voltage monitor
DIDO SOM is equipped with a multiple-input voltage monitor
whose reset output is connected to PORSTn. Monitored voltage
rails include 3.3V provided by carrier board.
5.5 Boot options
Thanks to the versatility of internal BootROM,
DM814x/AM387x processors provide a rich set of boot options
and different configurations selectable via BTMODE[15:0]
bootstrap pins. For a detailed explanation on the boot process
for DM814x/AM387x processors, please refer to the Technical
Reference Manual (available from TI website) at section ROM
August, 2014 25/78
Page 26

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Code Memory and Peripheral Booting. In order to fully
understand how boot work on DIDO platform, please refer to
Section 3.5 (Memory Map).
By default, DIDO provides the following configuration:
SYS_BOOT
pin
BTMODE[15] 0 GPMC CS0 Wait enable NO
BTMODE[14:13] 10 GPMC CS0
BTMODE[12] 1 GPMC CS0 bus width NO
BTMODE[11] 0 RSTOUT_WD_OUT
BTMODE[10] 0 XIP (on GPMC) Boot
BTMODE[9:8] 01 Ethernet PHY Mode
BTMODE[7:5] 000 Reserved NO
BTMODE[4:0] 10111 Boot Mode Order YES
Default
Value
Function Configurable
NO
Address/Data
multiplexing mode
NO
Configuration
NO
Options
NO
Selection
Bootstrap pins BTMODE[4:0] are routed to main connectors in
order to allow to change bootstrap strategy in user's
application by optional external circuitry.
5.5.1 Default boot configuration
With the default configuration, the boot sequence is:
1. MMC
2. SPI
3. UART
4. EMAC
The internal BootROM tries each boot mode in sequence and
stops when it find a valid boot code. For example, assuming
that:
1. default configuration is not changed,
2. no boot MMC card is connected to processor's MMC1
interface,
August, 2014 26/78
Page 27

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
3. and there's a valid boot code programmed in SPI memory
the boot sequence performed by ARM core will be:
1. execute bootrom from internal ROM code memory
2. launch 1st stage bootloader
• copied from on-board NOR flash memory connected to
SPI0 port to on-chip SRAM by bootrom
• executed from on-chip SRAM
3. launch 2nd stage bootloader
• copied by 1st stage bootloader from NOR flash memory
connected to SPI0 port to SDRAM
• executed from SDRAM
If no boot code is available in SPI NOR flash (for the bootrom
this means that the first sector read returns 0xFFFFFFFF) the
bootrom tries UART (please see also Section 5.7) and EMAC
peripheral booting.
5.5.2 Boot sequence customization
The following reference schematic shows a simple resistor
network that can be implemented on carrier board hosting
DIDO module. For each BTMODE[4:0] pin it is possible to
populate upper or lower side resistor in order to change default
value that is set on module itself. The available boot mode
orders are reported in Table 4-8. “BTMODE[4-0] Configuration
Pins” in Section 4 “ROM Code Memory and Peripheral Booting”
of the DM814x/AM387x Technical Reference Manual.
5.6 Clock scheme
This section will be completed in a future version of this
manual.
5.7 Recovery
For different reason, starting from image corruption due power
loss during upgrade or unrecoverable bug while developing a
new U-Boot feature, the user will need, sooner or later, to
recover (bare-metal restore) the DIDO SOM without using the
bootloader itself. The following paragraphs introduce the
August, 2014 27/78
Page 28

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
available options. For further information, please refer to DAVE
Embedded Systems Developers Wiki or contact the Technical
Support Team.
5.7.1 JTAG Recovery
JTAG recovery, though very useful (especially in development
or production environment), requires dedicated hardware and
software tools. DIDO provides the JTAG interface, which,
besides the debug purpose, can be used for programming and
recovery operations. For further information on how to use the
JTAG interface, please contact the Technical Support Team.
5.7.2 UART Recovery
UART recovery does not requires any specialized hardware,
apart a PC and a DB9 serial cross cable. The boot sequence
must include the UART option and a way to enable it. Then a
simple procedure allow to load the 1
from the serial line. When the 2nd stage bootloader is running,
reprogramming the flash memory is straightforward.
st
and 2nd stage bootloader
The UART boot uses UART0 interface.
5.7.3 SD/MMC Recovery
MMC recovery is a valuable options that requires no special
hardware at all, apart a properly formatted MMC. The boot
sequence must include the SD/MMC option and a way to enable
it. When SD/MMC boot option is selected, bootrom looks for a
valid boot sector on SD/MMC1. Once the board is running after
booting from SD, reprogramming the flash memory is
straightforward.
5.8 Multiplexing
DM814x/AM387x pins can have up to seven alternate function
modes. The I/O pins can be internally routed to/from one of
several peripheral modules within the device: this routing is
referred to as Pin Multiplexing. Pin Multiplexing allows
software to choose the subset of internal signals which will be
August, 2014 28/78
Page 29

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
mapped to balls of the device for a given application. Pin
multiplexing selects which one of several peripheral pin
functions controls the pin's I/O buffer output data values.
Please note that pin mux configuration is a very critical
step. Wrong configuration may lead to system instability,
side effects or even damage the hardware permanently
Pin multiplexing configuration is quite complex in DIDO but a
tool from TI, the Pin Mux Utility, can help to perform this
operation. Software installation and generic usage
documentation is available on this page of the TI Embedded
Processors Wiki:
http://processors.wiki.ti.com/index.php/Pin_Mux_Utility_for_AR
M_MPU_Processors
5.9 RTC
The TPS659113 PMIC provides a real-time clock (RTC)
resource with
● Oscillator for 32.768-kHz crystal
● Date, time and calendar
● Alarm capability
● Backup power from external battery
Backup power is provided through the VBAT (J1.9) signal. If not
used, VBAT must be externally connected to GND.
August, 2014 29/78
Page 30

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
6 Pinout table
This chapter contains the pinout description of the DIDO
module, grouped in four tables (two – odd and even pins – for
each connector) that report the pin mapping of the two 140 pin
DIDO connectors.
Each row in the pinout tables contains the following
information:
Pin Reference to the connector pin
Pin Name Pin (signal) name on the DIDO connectors
Internal
Connections
Ball/pin # Component ball/pin number connected to signal
Supply Group Power Supply Group
Type Pin type: I = Input, O = Output, D= Differential, Z =
Voltage I/O voltage
Connections to the DIDO components:
CPU.<x> : pin connected to CPU pad named <x>
KEY.<x>: pin connected to the key switch controller
TSC.<x> : pin connected to the touchscreen
controller
EEPROM.<x> : pin connected to the EEPROM
CAN.<x> : pin connected to the CAN transceiver
PMIC.<x> : pin connected to the Power Manager IC
LAN.<x> : pin connected to the LAN PHY
USB.<x> : pin connected to the USB transceiver
SV.<x>: pin connected to voltage supervisor
MTR: pin connected to voltage monitors
High impedance, S = Supply voltage, G = Ground, A
= Analog signal
The Internal connection column reports the name of the
microprocessor signal, which in turn contains references to all
the peripheral functions that can be associated to that pin. For
example, the following pin name
CPU.VOUT[1]_B_CB_C[4]/EMAC[1]_MRXD[0]/VIN[1]A_D[1]/UA
RT4_RXD/GP3[1]
means that the pin can be used as:
● VOUT[1]_B_CB_C[4]: Video output data, port 1, B/CB/C
color bit 4
August, 2014 30/78
Page 31

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
● EMAC[1]_MRXD[0]: Ethernet MAC, port 1, [G]MII Receive
Data, bit 0
● VIN[1]A_D[1]: Video input channel 1, port A data input bit 1
● UART[4]_RXD: UART port 4, receive data input
● GP3[1]: General Purpose I/O port 3, channel 1
The following table reports all the function names that can be
found on the Internal connection and the associated
description.
Function
Description
name
VOUT[x] Digital video output. “x” represents the port number (0 or
1).
VIN[x]A/B Digital video input. “x” represents the capture number (0
or 1). Each capture has two ports (A and B)
EMAC[x] Ethernet MAC. “x” represents the port number (0 or 1)
UART[x] UART port. “x” represents the port number (0 to 5)
GPx[y] General Purpose I/O port. “x” represents the port number
(0 to 3)
CAM Camera Interface
SPI[x] SPI channel. “x” represents the channel number (0 to 3)
DCAN[x] Controller Area Network module. “x” represents the
module number (0 to 1)
HDMI High-Definition Multimedia Interface
SD[x] MMC/SD/SDIO interfaces. “x” represents the interface
number (0 to 2)
GPMC General Purpose Memory Controller (local bus)
MD Management Data I/O module
MCA[x] Multi-Channel Audio Serial Port (McASP). “x” represents
the port number (0 to 5)
I2C[x] I2C channel. “x” represents the channel number (0 to 3)
AUD Audio Reference Clock
TIMx General purpose timer. “x” represents the terminal
number (0 to 7)
August, 2014 31/78
Page 32

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
6.1 Carrier board mating connector J1
J1 – ODD [1 - 139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
J1.1 DGND DGND - G
J1.3 DGND DGND - G
J1.5 USB0_DM CPU.USB0_DM AH11 D, I/O
J1.7 UART0_RXD CPU.UART0_RXD AH5 I
J1.9 VBAT PMIC.VBACKUP D7 S If not used, VBAT must be externally
connected to GND.
J1.11
MDIO_MDCLK CPU.MDCLK/GP1[11] H28 I/O
Module mount option
UART4_RXD/GP3_1
CPU.VOUT[1]_B_CB_C[4]/EMAC[1]_MRXD[
0]/VIN[1]A_D[1]/UART4_RXD/GP3[1]
AG25 I/O
J1.13 ADC_GND DGND - G
J1.15 ADC0_IN TSC.IN1 16 A
J1.17 USB0_ID CPU.USB0_ID AG10 A I
J1.19 UART0_RTSn/DCAN1_RX CPU.UART0_RTSn/UART4_TXD/DCAN1_RX/
SPI[1]_SCS[2]n/SD2_SDCD
AF5 I/O
J1.21 UART0_CTSn/DCAN1_TX CPU.UART0_RTSn/UART4_RXD/DCAN1_TX/
SPI[1]_SCS[3]n/SD0_SDCD
AE6 I/O
J1.23 VIN0A_D16/CAM_D8 CPU.VIN[0]A_D[16]/CAM_D[8]/I2C[2]_SCL/
GP0[10]
AA21 I/O
J1.25 VIN0A_D17/CAM_D9 CPU.VIN[0]A_D[17]/CAM_D[9]/EMAC[1]_R
MRXER/GP0[11]
AB21 I/O
J1.27 VIN0A_D18/CAM_D10 CPU.VIN[0]A_D[18]/CAM_D[10]/EMAC[1]_
RMRXD[1]/I2C3[3]_SCL/GP0[12]
AF20 I/O
J1.29 VIN0A_D19/CAM_D11 CPU.VIN[0]A_D[19]/CAM_D[11]/EMAC[1]_
RMRXD[0]/I2C3[3]_SDA/GP0[13]
AF21 I/O
J1.31 VIN0A_D20/CAM_D12 CPU.VIN[0]A_D[20]/CAM_D[12]/EMAC[1]_
RMCRSDV/SPI[3]_SCS[0]n/GP0[14]
AC17 I/O
J1.33 VIN0A_D21/CAM_D13 CPU.VIN[0]A_D[21]/CAM_D[13]/EMAC[1]_
RMTXD[0]/SPI[3]_SCLK/GP0[15]
AE18 I/O
J1.35 DGND DGND - G
J1.37 SPI1_D0/GP1_26 CPU.SPI[1]_D[0]/GP1[26] AA6 I/O
J1.39 TSC_XP TSC.X+ 2 I Please consider the use of ESD
August, 2014 32/78
Page 33

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J1 – ODD [1 - 139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
protection devices on carrier board
when these pins are connected to
actual touch screen.
J1.41 TSC_XM TSC.X- 4 I
J1.43 TSC_YP TSC.Y+ 3 I
J1.45 TSC_YM TSC.Y- 5 I
J1.47 VOUT0_R_CR9 CPU.VOUT[0]_R_CR[9] AC13 O RGB mode: red
YUV444 mode: Cr
J1.49 VOUT0_R_CR7 CPU.VOUT[0]_R_CR[7] AF12 O RGB mode: red
YUV444 mode: Cr
J1.51 VOUT0_R_CR5 CPU.VOUT[0]_R_CR[5] AF8 O RGB mode: red
YUV444 mode: Cr
J1.53 VOUT0_G_Y_YC9 CPU.VOUT[0]_G_Y_YC[9] AF14 O RGB mode: green
YUV444 mode: Y
Y/C mode: Y
J1.55 VOUT0_G_Y_YC7 CPU.VOUT[0]_G_Y_YC[7] AD14 O RGB mode: green
YUV444 mode: Y
Y/C mode: Y
J1.57 VOUT0_G_Y_YC5 CPU.VOUT[0]_G_Y_YC[5] AB12 O RGB mode: green
YUV444 mode: Y
Y/C mode: Y
J1.59 VOUT0_B_CB_C9 CPU.VOUT[0]_B_CB_C[9] AG15 O RGB mode: blue
YUV444 mode: Cb
Y/C mode: muxed Cb/Cr
J1.61 VOUT0_B_CB_C7 CPU.VOUT[0]_B_CB_C[7] AB10 O RGB mode: blue
YUV444 mode: Cb
Y/C mode: muxed Cb/Cr
J1.63 DGND DGND - G
J1.65 VOUT0_B_CB_C5 CPU.VOUT[0]_B_CB_C[5] AD15 O RGB mode: blue
YUV444 mode: Cb
Y/C mode: muxed Cb/Cr
J1.67 TIM2_IO/GP0_8 CPU.AUD_CLKIN1/MCA[0]_AXR[8]/MCA[1]_
AHCLKX/MCA[4]_AHCLKX/ATL_CLKOUT2/E
DMA_EVT3/TIM2_IO/GP0[8]
R5 I/O
J1.69 VOUT0_VSYNC CPU.VOUT[0]_VSYNC AB13 O
J1.71 VOUT0_CLK CPU.VOUT[0]_CLK AD12 O
J1.73 KP_ROW1 KEY.ROW1 24 I
J1.75 KP_ROW3 KEY.ROW3 2 I
J1.77 EMAC1_RGMII_TXD2 CPU.EMAC[0]_MTXD[4]/EMAC[1]_RMRXER G23 I/O Module mount option
August, 2014 33/78
Page 34

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J1 – ODD [1 - 139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
/GPMC_A[11]/UART4_RTSn
KP_ROW7 KEY.ROW7 8 I
J1.79
EMAC1_RGMII_TXD1 CPU.EMAC[0]_MTXD[1]/GPMC_A[8]/UART4
_RXD
H25 I/O
Module mount option
KP_COL4 KEY.COL4 4 I
J1.81 KP_COL1 KEY.COL1 12 I
J1.83 KP_COL3 KEY.COL3 3 I
J1.85
EMAC1_RGMII_TXD0 CPU.EMAC[0]_MTXD[3]/EMAC[1]_RMRXD[
1]/GPMC_A[10]/UART4_CTSn
H23 I/O
Module mount option
KP_COL6 KEY.COL6 9 I
J1.87
EMAC1_RGMII_TXC CPU.EMAC[0]_MTXD[5]/EMAC[1]_RMCRSD
V/GPMC_A[12]/UART1_RXD
F27 I/O
Module mount option
SPI1_SCS0N/GP1_16 CPU.SPI[1]_SCS[0]n/GP1[16] AD3 I/O
J1.89 DGND DGND G
J1.91 EMAC_REFCLK CPU.EMAC_RMREFCLK/TIM2_IO/GP1[10] J27 I/O Available on request (module mount
option). Please refer to section 7.5.1
J1.93 USB0_DRVVBUS CPU.USB0_DRVVBUS/GP0[7] AF11 I/O
J1.95 USB1.VBUS CPU.USB1_VBUSIN AG14 A, I
J1.97 HDMI_DP2 CPU.HDMI_DP2 AG21 O
J1.99 HDMI_DN2 CPU.HDMI_DN2 AH21 O
J1.101 HDMI_DP1 CPU.HDMI_DP1 AG20 O
J1.103 HDMI_DN1 CPU.HDMI_DN1 AH20 O
J1.105 HDMI_DP0 CPU.HDMI_DP0 AG19 O
J1.107 HDMI_DN0 CPU.HDMI_DN0 AH19 O
J1.109 HDMI_CLKP CPU.HDMI_CLKP AG18 O
J1.111 HDMI_CLKN CPU.HDMI_CLKN AH18 O
J1.113 DGND DGND G
J1.115 TIM5_IO/GP0_19 CPU.MCA[3]_AXR[1]/TSI[0]_PACVAL/TIM5_I
O/GP0[19]
G2 I/O
J1.117 VIN1A_HSYNC/GP2_28 CPU.VOUT[1]_CLK/EMAC[1]_MTCLK/VIN[1]
A_HSYNC/PATA_HDDIR/GP2[28]
AE24 I/O
J1.119 SD1_DAT0 CPU.SD1_DAT[0] P1 I/O
J1.121 SD1_DAT1 CPU.SD1_DAT[1]_SDIRQn P5 I/O
J1.123 SD1_DAT2 CPU.SD1_DAT[2]_SDRWn P4 I/O
J1.125 SD1_DAT3 CPU.SD1_DAT[3] P6 I/O
August, 2014 34/78
Page 35

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J1 – ODD [1 - 139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
J1.127 SD1_DAT4 CPU.SD0_DAT[0]/SD1_DAT[4]/SC1_DATA/G
P0[3]
R7 I/O
J1.129 SD1_DAT5 CPU.SD0_DAT[1]_SDIRQn/SD1_DAT[5]/SC1
_CLK/GP0[4]
Y5 I/O
J1.131 TV_OUT1 CPU.TV_OUT0 AH24 O
J1.133 TV_OUT2 CPU.TV_OUT1 AH22 O
J1.135 SD1_CMD CPU.SD1_CMD/GP0[0] P2 I/O
J1.137 SD1_CLK CPU.SD1_CLK P3 O
J1.139 DGND DGND - G
J1 – EVEN [2 - 140]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
J1.2 DGND DGND - G
J1.4 DGND DGND - G
J1.6 USB0_DP CPU.USB0_DP AG11 D, I/O
J1.8 UART0_TXD CPU.UART0_TXD AG5 O 1.8V/3.3V
J1.10 EEPROM_A0 EEPROM.A1 A1 O
J1.12 EEPROM_A1 EEPROM.A2 A2 I/O
J1.14
MDIO_MDIO CPU.MDIO/GP1[12] P24 I/O
Module mount option
UART4_TXD_GP3_2 CPU.VOUT[1]_B_CB_C[5]/EMAC[1]_MRXD
[1]/VIN[1]A_D[2]/UART4_TXD/GP3[2]
AF25 I/O
J1.16 USB0_VBUS CPU.USB0_VBUSIN AG12 A, I 3.3V
J1.18 VIN0A_D13_BD5/CAM_RE
SET
CPU.VIN[0]A_D[13]_BD[5]/CAM_RESET/G
P2[18]
AF17 I/O 1.8V/3.3V
J1.20 VIN0A_D14_BD6/CAM_ST
ROBE
CPU.VIN[0]A_D[14]_BD[6]/CAM_STROBE/
GP2[19]
AC12 I/O 1.8V/3.3V
J1.22 VIN0A_D11_BD3/CAM_WEnCPU.VIN[0]A_D[11]_BD[3]/CAM_WEn/GP
2[16]
AH17 I/O 1.8V/3.3V
J1.24 VIN0A_D15_BD7/CAM_SH
UTTER
CPU.VIN[0]A_D[15]_BD[7]/CAM_SHUTTE
R/GP2[20]
AC14 I/O 1.8V/3.3V
J1.26 VIN0A_CLK/GP2_2 CPU.VIN[0]A_CLK/GP2[2] AB20 I/O 1.8V/3.3V
J1.28 DGND DGND - G
August, 2014 35/78
Page 36

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J1 – EVEN [2 - 140]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
J1.30 VIN0A_D0/GP1_11 CPU.VIN[0]A_D[0]/GP1[11] AF9 I/O 1.8V/3.3V
J1.32 VIN0A_D1/GP1_12 CPU.VIN[0]A_D[1]/GP1[12] AB11 I/O 1.8V/3.3V
J1.34 SPI1_SCLK/GP1_17 CPU.SPI[1]_SCLK/GP1[17] AC3 I/O 1.8V/3.3V
J1.36 VIN0A_D2/GP2_7 CPU.VIN[0]A_D[2]/GP2[7] AC9 I/O 1.8V/3.3V
J1.38 CAM_D4 CPU.VIN[0]B_FLD/CAM_D[4]/PATA_DIOWn
/GP0[21]
AD17 I/O 1.8V/3.3V
J1.40 VIN0A_FLD/CAM_D5 CPU.VIN[0]A_FLD/CAM_D[5]/PATA_CS[0]n
/GP0[20]
AC22 I/O 1.8V/3.3V
J1.42 CAM_D6 CPU.VIN[0]B_DE/CAM_D[6]/GP0[19] AC15 I/O 1.8V/3.3V
J1.44 VIN0A_DE/CAM_D7 CPU.VIN[0]A_DE/CAM_D[7]/GP0[18] AB17 I/O 1.8V/3.3V
J1.46 VOUT0_R_CR8 CPU.VOUT[0]_R_CR[8] AE8 O 1.8V/3.3V
J1.48 VOUT0_R_CR6 CPU.VOUT[0]_R_CR[6] AF6 O 1.8V/3.3V
J1.50 VOUT0_R_CR4 CPU.VOUT[0]_R_CR[4] AA9 O 1.8V/3.3V
J1.52 DGND DGND - G
J1.54 VOUT0_G_Y_YC8 CPU.VOUT[0]_G_Y_YC[8] AE14 O 1.8V/3.3V
J1.56 VOUT0_G_Y_YC6 CPU.VOUT[0]_G_Y_YC[6] AA8 O 1.8V/3.3V
J1.58 VOUT0_G_Y_YC4 CPU.VOUT[0]_G_Y_YC[4] AB8 O 1.8V/3.3V
J1.60 VOUT0_B_CB_C8 CPU.VOUT[0]_B_CB_C[8] AF15 O 1.8V/3.3V RGB mode: blue
YUV444 mode: Cb
Y/C mode: muxed Cb/Cr
J1.62 VOUT0_B_CB_C6 CPU.VOUT[0]_B_CB_C[6] AC10 O 1.8V/3.3V RGB mode: blue
YUV444 mode: Cb
Y/C mode: muxed Cb/Cr
J1.64 VOUT0_B_CB_C4 CPU.VOUT[0]_B_CB_C[4] AD11 O 1.8V/3.3V RGB mode: blue
YUV444 mode: Cb
Y/C mode: muxed Cb/Cr
J1.66 VOUT0_AVID/VOUT0_FLD
/GP2_21
CPU.VOUT[0]_AVID/VOUT[0]_FLD/SPI[3]_
SCLK/TIM7_IO/GP2[21]
AA10 O 1.8V/3.3V
J1.68 VOUT0_HSYNC CPU.VOUT[0]_HSYNC AC11 O 1.8V/3.3V
J1.70 TIM4_IO/GP0_18 CPU.MCA[3]_AXR[0]/TSI[0]_DATA/TIM4_I
O/GP0[18]
G1 I/O 1.8V/3.3V
J1.72 KP_ROW0 KEY.ROW0 23 I
J1.74 KP_ROW2 KEY.ROW2 1 I
J1.76 DGND DGND - G
J1.78 EMAC1_RGMII_RXC CPU.EMAC[0]_GMTCLK/GPMC_A[6]/SPI[2]
_D[1]
K23 I/O Module mount option
August, 2014 36/78
Page 37

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J1 – EVEN [2 - 140]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
KP_ROW5 KEY.ROW5 6 I
J1.80
EMAC1_RGMII_RXD3 CPU.EMAC[0]_MTXD[0]/GPMC_A[7]/SPI[2
]_D[0]
J24 I/O
Module mount option
KP_ROW4 KEY.ROW4 5 I
J1.82 KP_COL0 KEY.COL0 13 I
J1.84 KP_COL2 KEY.COL2 11 I
J1.86
EMAC1_RGMII_RXD2 CPU.EMAC[0]_MTXEN/EMAC[1]_RMTXEN/
GPMC_A[15]/UART1_RTSn
J23 I/O
Module mount option
KP_ROW6 KEY.ROW6 7 I
J1.88
EMAC1_RGMII_RXD1 CPU.EMAC[0]_MRXDV/GPMC_A[5]/SPI[2]_
SCLK
K22 I/O
Module mount option
KP_COL5 KEY.COL5 10 I
J1.90 SPI1_D1/GP1_18 CPU.SPI[1]_D[1]/GP1[18] AA3 I/O 1.8V/3.3V
J1.92 VIN0A_D22/CAM_D14 CPU.VIN[0]A_D[22]/CAM_D[14]/EMAC[1]_
RMTXD[1]/SPI[3]_D[1]/GP0[16]
AC21 I/O
J1.94 VIN0A_D23/CAM_D15 CPU.VIN[0]A_D[23]/CAM_D[15]/EMAC[1]_
RMTXEN/SPI[3]_D[0]/GP0[17]
AC16 I/O
J1.96 CAN_H CPU.DCAN0_TX/UART2_TXD/I2C[3]_SDA/
GP1[0]
AH6 I/O
J1.98 CAN_L CPU.DCAN0_RX/UART2_RXD/I2C[3]_SCL/
GP1[1]
AG6 I/O
J1.100 DGND DGND - G
J1.102 SD1_DAT6 CPU.SD0_DAT[2]_SDRWn/SD1_DAT[6]/SC
1_RST/GP0[5]
Y3 I/O 1.8V/3.3V
J1.104 SD1_DAT7 CPU.SD0_DAT[3]/SD1_DAT[7]/SC1_VCCE
N/GP0[6]
Y4 I/O 1.8V/3.3V
J1.106
EMAC1_RGMII_RXD0 CPU.EMAC[0]_MTXD[6]/EMAC[1]_RMTXD
[0]/GPMC_A[13]/UART1_TXD
J22 I/O
Module mount option
KP_COL7 KEY.COL7 I
J1.108 EMAC1_RGMII_RXCTL CPU.EMAC[0]_MRXD[3]/GPMC_A[27]/GP
MC_A[26]/GPMC_A[0]/UART5_RXD
J25 I/O
J1.110 EMAC1_RGMII_TXCTL CPU.EMAC[0]_MTXD[2]/EMAC[1]_RMRXD
[0]/GPMC_A[9]/UART4_TXD
H22 I/O
J1.112 EMAC1_RGMII_TXD3 CPU.EMAC[0]_MTXD[7]/EMAC[1]_RMTXD
[1]/GPMC_A[14]/UART1_CTSn
H24 I/O 1.8V/3.3V Module mount option
August, 2014 37/78
Page 38

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J1 – EVEN [2 - 140]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
TCLKIN/GP0_30 CPU.MLB_DAT/TCLKIN/GP0[30] T2 I/O 1.8V/3.3V
J1.114 TIM6_IO/GP0_24 CPU.MCA[4]_AXR[1]/TSI[2]_PACVAL/TIM6
_IO/GP0[24]
J4 I/O 1.8V/3.3V
J1.116 VIN0A_D3/GP2_8 CPU.VIN[0]A_D[3]/GP2[8] AE12 I/O 1.8V/3.3V
J1.118 USB1_DRVVBUS CPU.AUD_CLKIN0/MCA[0]_AXR[7]/MCA[0
]_AHCLKX/MCA[3]_AHCLKX/ATL_CLKOUT
1/ATL_CLKOUT0/VCX_VIC[0]/USB1_DRVV
BUS
L5 I/O 1.8V/3.3V
J1.120 VIN0A_D4/GP2_9 CPU.VIN[0]A_D[4]/GP2[9] AH8 I/O 1.8V/3.3V
J1.122 VIN0A_D5/GP2_10 CPU.VIN[0]A_D[5]/GP2[10] AG16 I/O 1.8V/3.3V
J1.124 SD0_CLK CPU.SD0_CLK/GP0[1] Y6 I/O 1.8V/3.3V
J1.126 DGND DGND - G
J1.128 SD2_SCLK CPU.SD2_SCLK/GP1[15] M23 I/O 1.8V/3.3V
J1.130 SD0_CMD CPU.SD0_CMD/SD1_CMD/GP0[2] N1 I/O 1.8V/3.3V
J1.132 VIN1A_D0/GP3_0 CPU.VOUT[1]_B_CB_C[3]/EMAC[1]_MRCL
K/VIN[1]A_D[0]/UART4_CTSN/GP3[0]
AH25 I/O 1.8V/3.3V
J1.134 VIN1A_CLK/GP2_31 CPU.VOUT[1]_AVID/EMAC[1]_MRXER/VIN
[1]A_CLK/UART4_RTSn/TIM6_IO/GP2[31]
Y22 I/O 1.8V/3.3V
J1.136 HDMI_I2C_SCL CPU.I2C[1]_SCL/HDMI_SCL AF24 I/O 1.8V/3.3V
J1.138 HDMI_I2C_SDA CPU.I2C[1]_SDA/HDMI_SDA AG24 I/O 1.8V/3.3V
J1.140 DGND DGND - G
6.2 Carrier board mating connector J2
J2 – ODD [1-139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
J2.1 3.3V +3V3 - S
J2.3 DGND DGND - G
J2.5 GPMC_D0 CPU.GPMC_D[0]/BTMODE[0] U26 I/O 1.8V/3.3V
J2.7 GPMC_D2 CPU.GPMC_D[2]/BTMODE[2] V27 I/O 1.8V/3.3V
J2.9 GPMC_D4 CPU.GPMC_D[4]/BTMODE[4] V26 I/O 1.8V/3.3V
J2.11 GPMC_D6 CPU.GPMC_D[6]/BTMODE[6] U25 I/O 1.8V/3.3V
August, 2014 38/78
Page 39

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J2 – ODD [1-139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
J2.13 CPU_NMIn CPU.NMIn H7 I 1.8V/3.3V
J2.15 CPU_RESETn CPU.RESETn J5 I 1.8V/3.3V
J2.17 VOUT1_G_Y_YC4/GP3_8 CPU.VOUT[1]_G_Y_YC[4]/EMAC[1]_MR
XD[7]/VIN[1]A_D[9]/PATA_D[1]/GP3[8]
W22 I/O 1.8V/3.3V
J2.19 SPI0_SCS1n/SD1_SDCD/SAT
A_ACT0_LED
CPU.SPI[0]_SCS[1]n/SD1_SDCD/SATA_
ACT0_LED/EDMA_EVT1/TIM4_IO/GP1[
6]
AE5 I/O 1.8V/3.3V
J2.21 GPMC_A0 CPU.VOUT1_B_CB_C[2]/GPMC_A[0]/VI
N[1]A_D[7]/HDMI_CEC/SPI[2]_D[0]/GP
3[30]
AF28 I/O 3.3V
J2.23 GPMC_A2/SD2_DAT2 CPU.SD2_DAT[2]_SDRWn/GPMC_A[2]/
GP2[6]
K27 I/O 1.8V/3.3V
J2.25 GPMC_A4/SD2_DAT0 CPU.SD2_DAT[0]/GPMC_A[4]/GP1[14] L26 I/O 1.8V/3.3V
J2.27 DGND DGND - G 1.8V/3.3V
J2.29 PCIE_TXP0 CPU.PCIE_TXP0 AD2 O 1.8V
J2.31 PCIE_TXN0 CPU.PCIE_TXN0 AD1 O 1.8V
J2.33 DGND DGND - G 3.3V
J2.35 3.3V +3V3 - S
J2.37 DGND DGND - G
J2.39 GPMC_A14/I2C2_SDA CPU.VOUT[1]_R_CR[3]/GPMC_A[14]/VI
N[1]A_D[22]/HDMI_SDA/SPI[2]_SCLK/I
2C[2]_SDA/GP3[21]
AG28 I/O 3.3V
J2.41 3.3V +3V3 - S 3.3V
J2.43 3.3V +3V3 - S 3.3V
J2.45 GPMC_A20 CPU.GPMC_A[20]/SPI[2]_SCS[1]n/GP1[
15]
AD28 I/O 3.3V
J2.47 GPMC_A22 CPU.GPMC_A[22]/SPI[2]_D[1]/HDMI_C
EC/TIM4_IO/GP1[17]
AB27 I/O 3.3V
J2.49 VOUT1_G_Y_YC6/GP3_10 CPU.VOUT[1]_G_Y_YC[6]/EMAC[1]_GM
TCLK/VIN[1]A_D[11]/PATA_D[3]/GP3[1
0]
AH27 I/O 3.3V
J2.51 GPMC_CS0n CPU.GPMC_CS[0]n/GP1[23] T28 I/O 1.8V/3.3V
J2.53 GPMC_CS2n CPU.GPMC_CS[2]n/GPMC_A[24]/GP1[25]M25 I/O 1.8V/3.3V
J2.55 GPMC_CS4n CPU.GPMC_CS[4]n/SD2_CMD/GP1[8] P25 I/O 1.8V/3.3V
J2.57 GPMC_WEn CPU.GPMC_WEn U28 O 1.8V/3.3V
J2.59 GPMC_ADVn_ALE/GPMC_CS CPU.GPMC_ADVn_ALE/GPMC_CS[6]n/T M26 I/O 1.8V/3.3V
August, 2014 39/78
Page 40

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J2 – ODD [1-139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
6n IM5_IO/GP1[28]
J2.61 GPMC_CLK/GPMC_CS5n/GP
MC_WAIT1/CLKOUT1
CPU.GPMC_CLK/GPMC_CS[5]n/GPMC_
WAIT[1]/CLKOUT1/EDMA_EVT3/TIM4_I
O/GP1[27]
R26 I/O 1.8V/3.3V
J2.63 VOUT1_G_Y_YC8/GP3_12 CPU.VOUT[1]_G_Y_YC[8]/EMAC[1]_MT
XD[1]/VIN[1]A_D[13]/PATA_D[5]/GP3[1
2]
AE26 I/O 1.8V/3.3V
J2.65 3.3V +3V3 - S
J2.67 DGND DGND - G
J2.69 VOUT1_G_Y_YC9/GP3_13 CPU.VOUT[1]_G_Y_YC[9]/EMAC[1]_MT
XD[2]/VIN[1]A_D[14]/PATA_D[6]/GP3[1
3]
AD26 I/O 1.8V/3.3V
J2.71 VOUT1_R_CR8/GP3_18 CPU.VOUT[1]_R_CR[8]/EMAC[1]_MTX
D[7]/VIN[1]A_D[19]/PATA_D[11]/UART
5_RXD/GP3[18]
W23 I/O 1.8V/3.3V
J2.73 VIN0A_D6/GP2_11 CPU.VIN[0]A_D[6]/GP2[11] AH16 I/O 1.8V/3.3V
J2.75 VIN0A_D7/GP2_12 CPU.VIN[0]A_D[7]/GP2[12] AA11 I/O 1.8V/3.3V
J2.77 VIN0A_D8_BD0/GP2_13 CPU.VIN[0]A_D[8]_BD[0]/GP2[13] AB15 I/O 1.8V/3.3V
J2.79 VIN0A_D9_BD1/GP2_14 CPU.VIN[0]A_D[9]_BD[1]/GP2[14] AG9 I/O 1.8V/3.3V
J2.81 VIN0A_D10_BD2/GP2_15 CPU.VIN[0]A_D[10]_BD[2]/GP2[15] AH9 I/O
J2.83 VIN0A_D12_BD4/GP2_17 CPU.VIN[0]A_D[12]_BD[4]/CLKOUT1/G
P2[17]
AG17 I/O 1.8V/3.3V
J2.85 GPMC_BE1n/GPMC_A24/ED
MA_EVT1/TIM7_IO/GP1_30
CPU.GPMC_BE[1]n/GPMC_A[24]/EDMA
_EVT1/TIM7_IO/GP1[30]
V28 I/O
J2.87 SPI3_D1/GP3_16 CPU.VOUT[1]_R_CR[6]/EMAC[1]_MTX
D[5]/VIN[1]A_D[17]/PATA_D[9]/SPI[3]_
D[1]/GP3[16]
AA25 I/O 1.8V/3.3V
J2.89 SPI3_D0/GP3_17 CPU.VOUT[1]_R_CR[7]/EMAC[1]_MTX
D[6]/VIN[1]A_D[18]/PATA_D[10]/SPI[3]
_D[0]/GP3[17]
V22 I 1.8V/3.3V
J2.91 RSTOUTn CPU.RSTOUTn_WD_OUTn K6 O 1.8V/3.3V
J2.93 VIN0A_HSYNC/UART5_RTS CPU.VIN[0]A_HSYNC/UART5_RTSn/GP
2[3]
AC20 I/O 1.8V/3.3V
J2.95 TIM7_IO/GP0_28 CPU.MCA[5]_AXR[1]/MCA[4]_AXR[3]/T
IM7_IO/GP0[28]
L6 I/O 1.8V/3.3V
J2.97 EN_BCK2_LS PMIC.GPIO0 L5 O 1.8V/3.3V 3.3V I/O Power Rail Enable. This pin
is a 5V push-pull signal connected to
August, 2014 40/78
Page 41

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J2 – ODD [1-139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
a voltage divider circuit via 5K6 /10K
resistor, thus providing the 3V3
logical voltage output. Please refer to
6.4.1.
J2.99 SPI3_SCLKGP3_15 CPU.VOUT[1]_R_CR[5]/EMAC[1]_MTX
D[4]/VIN[1]A_D[16]/PATA_D[8]/SPI[3]_
SCLK/GP3[15]
AC26 I/O 1.8V/3.3V
J2.101 3.3V +3V3 - S
J2.103 DGND DGND - G
J2.105 JTAG_TDI CPU.TDI Y7 I 1.8V/3.3V
J2.107 JTAG_TMS CPU.TMS A A7 I/O 1.8V/3.3V
J2.109 PORSTn CPU.PORn F1 I 1.8V/3.3V
J2.111 SPI3_SCS1n/GP3_14 CPU.VOUT[1]_R_CR[4]/EMAC[1]_MTX
D[3]/VIN[1]A_D[15]/SPI[3]_SCS[1]n/G
P3[14]
AG27 I/O
J2.113 SPI3_D1/UART3_RTSn/GP2_29CPU.VOUT[1]_HSYNC/EMAC[1]_MCOL/
VIN[1]A_VSYNC/PATA_HDDIR/SPI[3]_D[
1]/UART3_RTSn/GP2[29
AC24 I/O
J2.115 EMAC0_PHY_LED_LINK/ACT LAN.LED1 3
J2.117 EMAC0_PHY_LED_SPEED LAN.LED2 2
J2.119 SPI3_D0/UART3_CTSn/GP2_30CPU.VOUT[1]_VSYNC/EMAC[1]_MCRS/
VIN[1]A_FLD/VIN[1]A_DE/SPI[3]_D[0]/
UART3_CTSn/GP2[30]
AA23 I/O
J2.121 UART3_TXD/SD1_SDWP CPU.UART0_DSRn/UART3_TXD/SPI[0]_
SCS[2]n/I2C[2]_SDA/SD1_SDWP/GP1[
3]
AG4 I/O 1.8V/3.3V
J2.123 UART3_RTSn CPU.UART0_RIN/UART3_RTSn/UART1_
RXD/GP1[5]
AF4 I/O 1.8V/3.3V
J2.125 VIN1A_D3/GP3_3 CPU.VOUT[1]_B_CB_C[6]/EMAC[1]_MR
XD[2]/VIN[1]A_D[3]/UART3_RXD/GP3[
3]
AD25 I/O 1.8V/3.3V
J2.127 ETH_CT TD - J2.129 ETH_TX- LAN.TXN 28
J2.131 ETH_TX+ LAN.TXP 29
J2.133 ETH_RX+ LAN.RXP 31
J2.135 ETH_RX- LAN.RXN 30
J2.137 ETH_CTRD - -
August, 2014 41/78
Page 42

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J2 – ODD [1-139]
Pin Pin Name Internal Connections Ball/
pin #
Supply
Group
Type Voltage Note
J2.139 DGND DGND - G
J2 – EVEN [2-140]
Pin Pin Name Internal Connections Ball/pi
n #
Supply
Group
Type Voltage Note
J2.2 DGND DGND - G
J2.4 GPMC_D1 CPU.GPMC_D[1]/BTMODE[1] Y28 I/O 1.8V/3.3V
J2.6 GPMC_D3 CPU.GPMC_D[3]/BTMODE[3] W27 I/O 1.8V/3.3V
J2.8 GPMC_D5 CPU.GPMC_D[5]/BTMODE[5] AA28 I/O 1.8V/3.3V
J2.10 GPMC_D7 CPU.GPMC_D[7]/BTMODE[7] V25 I/O 1.8V/3.3V
J2.12 SATA_TXP CPU.SATA_TXP0 AB2 O 1.8V/3.3V
J2.14 SATA_TXN CPU.SATA_TXN0 AB1 O 1.8V/3.3V
J2.16 SATA_RXP CPU.SATA_RXP0 AA1 I 1.8V/3.3V
J2.18 SATA_RXN CPU.SATA_RXN0 AA2 I 1.8V/3.3V
J2.20 DGND DGND - G
J2.22 GPMC_A1/SD2_DAT3 CPU.SD2_DAT[3]/GPMC_A[1]/GP2[5] J28 I/O 1.8V/3.3V
J2.24 GPMC_A3/SD2_DAT1 CPU.SD2_DAT[1]_SDIRQn/GPMC_A[3]/
GP1[13]
M24 I/O 1.8V/3.3V
J2.26 DGND DGND - G
J2.28 PCIE_RXP0 CPU.PCIE_RXP0 AC2 I 1.8V
J2.30 PCIE_RXN0 CPU.PCIE_RXN0 AC1 I 1.8V
J2.32 DGND DGND - G
J2.34 GPMC_A13/I2C2_SCL CPU.VOUT[1]_G_Y_YC[2]/GPMC_A[13]/
VIN[1]A_D[21]/HDMI_SCL/SPI[2]_SCS[
2]n/I2C[2]_SCL/GP3[20]
AF27 I/O 3.3V
J2.36 SERDES_CLKP CPU.SERDES_CLKP AF1 I J2.38 SERDES_CLKN CPU.SERDES_CLKN AF2 I J2.40 DGND DGND - G
J2.42 GPMC_A21 CPU.GPMC_A[21]/SPI[2]_D[0]/GP1[16] AC28 I/O 3.3V
J2.44 GPMC_A23 CPU.GPMC_A[23]/SPI[2]_SCLK/HDMI_
HPDET/TIM5_IO/GP1[18]
AA26 I/O 3.3V
J2.46 VOUT1_G_Y_YC5/GP3_9 CPU.VOUT[1]_G_Y_YC[5]/EMAC[1]_MR
XDV/VIN[1]A_D[10]/PATA_D[2]/GP3[9]
AG26 I/O 3.3V
J2.48 GPMC_CS1n CPU.GPMC_CS[1]n/GPMC_A[25]/GP1[24]K28 I/O 1.8V/3.3V
August, 2014 42/78
Page 43

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J2 – EVEN [2-140]
Pin Pin Name Internal Connections Ball/pi
n #
Supply
Group
Type Voltage Note
J2.50 GPMC_CS3n CPU.GPMC_CS[3]n/VIN[1]B_CLK/SPI[2]
_SCS[0]n/GP1[26]
P26 I/O 1.8V/3.3V
J2.52 VOUT1_G_Y_YC7/GP3_11 CPU.VOUT[1]_G_Y_YC[7]/EMAC[1]_MT
XD[0]/VIN[1]A_D[12]/PATA_D[4]/GP3[
11]
AF26 I/O 1.8V/3.3V
J2.54 DGND DGND - G
J2.56 GPMC_OEn_REn CPU.GPMC_OEn_REn T27 O 1.8V/3.3V
J2.58 GPMC_BE0n_CLE/GPMC_A25
/EDMA_EVT2/TIM6_IO/GP1_2
9
CPU.GPMC_BE[0]n_CLE/GPMC_A[25]/E
DMA_EVT2/TIM6_IO/GP1[29]
U27 I/O 1.8V/3.3V
J2.60
VIN[0]B_CLK/GP1[9] CPU.VIN[0]B_CLK/CLKOUT0/GP1[9] AE17 I/O 1.8V/3.3V
Module mount option
VRTC MTR - O
J2.62
VOUT0_R_CR2/GP2_26 CPU.VOUT[0]_R_CR[2]/EMU4/GP2[26] AD9 I/O 1.8V/3.3V
Module mount option
PLL_1V8 MTR - O
J2.64
VOUT0_R_CR3/GP2_27 CPU.VOUT[0]_R_CR[3]/GP2[27] AB9 I/O 1.8V/3.3V
Module mount option
CORE_VDD MTR - O
J2.66
VOUT1_G_Y_YC3/GP3_7
GP3_23
CPU.VOUT[1]_G_Y_YC[3]/EMAC[1]_MR
XD[6]/VIN[1]A_D[8]/GP3[7] (Y23)
EMAC[0]_MTCLK/VIN[1]B_D[0]/SPI[3]_
SCS[3]n/I2C[2]_SDA/GP3[23]
Y23
L24
I/O 1.8V/3.3V
Module mount option
CVDD_ARM MTR - O
J2.68 VOUT1_R_CR9/GP3_19 CPU.VOUT[1]_R_CR[9]/EMAC[1]_MTXE
N/VIN[1]A_D[20]/PATA_D[12]/UART5_T
XD/GP3[19]
Y24 I/O
J2.70 VOUT0_G_Y_YC2/GP2_24 CPU.VOUT[0]_G_Y_YC[2]/EMU3/GP2[24]AH7 I/O 1.8V/3.3V
J2.72 VOUT0_G_Y_YC3/GP2_25 CPU.VOUT[0]_G_Y_YC[3]GP2[25] AH15 I/O
J2.74 VOUT0_B_CB_C2/GP2_22 CPU.VOUT[0]_B_CB_C[2]/EMU2/GP2[22]AG7 I/O 1.8V/3.3V
J2.76 VOUT0_B_CB_C3/GP2_23 CPU.VOUT[0]_B_CB_C[3]/GP2[23] AE15 I/O
J2.78
MCA2_AFSX/GP0_11 CPU.MCA[2]_AFSX/GP0[11] AA5 I/O
Module mount option
CVDD_DSP MTR - O
J2.80
MCA2_ACLKX/GP0_10 CPU.MCA[2]_ACLKX/GP0[10] U6 I/O 1.8V/3.3V
Module mount option
VDDQ_1V8 MTR - O
J2.82 DGND DGND - G Module mount option
August, 2014 43/78
Page 44

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J2 – EVEN [2-140]
Pin Pin Name Internal Connections Ball/pi
n #
Supply
Group
Type Voltage Note
J2.84
MCA2_AHCLKX/GP0_9 CPU.AUD_CLKIN2/MCA[0]_AXR[9]/MC
A[2]_AHCLKX/MCA[5]_AHCLKX/ATL_CL
KOUT3/EDMA_EVT2/TIM3_IO/GP0[9]
H1 I/O 1.8V/3.3V
Module mount option
CVDD_HDVICP MTR - O
J2.86
MCA2_AXR0/GP0_12 CPU.MCA[2]_AXR[0]/SD0_DAT[6]/UAR
T5_RXD/GP0[12]
N2 I/O 1.8V/3.3V
Module mount option
DVDD MTR - O
J2.88
MCA2_AXR1/GP0_13 CPU.MCA[2]_AXR[1]/SD0_DAT[7]/UAR
T5_TXD/GP0[13]
V6 I/O 1.8V/3.3V
Module mount option
DVDD_M MTR - O
J2.90 MCA2_AXR2/GP0_14 CPU.MCA[2]_AXR[2]/MCA[1]_AXR[6]/S
C0_VPPEN/TIM2_IO/GP0[14]
V5 I/O 1.8V/3.3V
J2.92 MCA2_AXR3/GP0_15 CPU.MCA[2]_AXR[3]/MCA[1]_AXR[7]/T
IM3_IO/GP0[15]
H2 I/O 1.8V/3.3V
J2.94 JTAG_RTCK CPU.RTCK AD4 I 1.8V/3.3V
J2.96 JTAG_TDO CPU.TDO AC5 O 1.8V/3.3V
J2.98 JTAG_TCK CPU.TCK W7 I 1.8V/3.3V
J2.100 JTAG_TRSTn CPU.TRSTn AA4 I 1.8V/3.3V
J2.102 MRST SV.MR
PMIC.HDRST
6
L6
I
I
J2.104 VIN0A_VSYNC/UART5_CTS CPU.VIN[0]A_VSYNC/UART5_CTSn/GP
2[4]
AD20 I/O 1.8V/3.3V
J2.106 I2C3_SCL CPU.VOUT[1]_B_CB_C[8]/EMAC[1]_MR
XD[4]/VIN[1]A_D[5]/I2C[3]_SCL/GP3[5
]
AH26 I/O 1.8V/3.3V
J2.108 I2C3_SDA CPU.VOUT[1]_B_CB_C[9]/EMAC[1]_MR
XD[5]/VIN[1]A_D[6]/I2C[3]_SDA/GP3[6
]
AA24 I/O 1.8V/3.3V
J2.110 EMU0 CPU.EMU0 AG8 I/O 1.8V/3.3V
J2.112 DEVOSC_WAKE/TIM5_IO/GP
1_7
CPU.DEVOSC_WAKE/SPI[1]_SCS[1]n/TI
M5_IO/GP1[7]
W6 I/O 1.8V/3.3V
J2.114 EEPROM_WP EEPROM.WP 7 I/O
J2.116 DGND DGND - G
J2.118 EMU1 CPU.EMU1 AE11 I/O 1.8V/3.3V
J2.120 VIN0A_DE/UART5_TXD CPU.VIN[0]A_DE/VIN[0]B_HSYNC/UAR
T5_TXD/I2C[2]_SDA/GP2[0]
AE21 I/O 1.8V/3.3V
August, 2014 44/78
Page 45

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
J2 – EVEN [2-140]
Pin Pin Name Internal Connections Ball/pi
n #
Supply
Group
Type Voltage Note
J2.122 VIN0A_FLD/UART5_RXD CPU.VIN[0]A_FLD/VIN[0]B_VSYNC/UAR
T5_RXD/I2C[2]_SCL/GP2[1]
AA20 I/O 1.8V/3.3V
J2.124 USBP1 USB1.D+ D, I/O
J2.126 USBM1 USB1.D- D, I/O
J2.128 UART3_RXD/SD1_POW CPU.UART0_DCDn/UART3_RXD/SPI[0]
_SCS[3]n/I2C[2]_SCL/SD1_POW/GP1[2
]
AH4 I/O 1.8V/3.3V
J2.130 UART3_CTSn CPU.UART0_DTRn/UART3_CTSn/UART
1_TXD/GP1[4]
AG2 I/O 1.8V/3.3V
J2.132 VIN1A_D4/GP3_4 CPU.VOUT[1]_B_CB_C[7]/EMAC[1]_MR
XD[3]/VIN[1]A_D[4]/UART3_TXD/GP3[
4]
AC25 I/O 1.8V/3.3V
J2.134 USBP2 USB2.D+ D, I/O
J2.136 USBM2 USB2.D- D, I/O
J2.138 3.3V +3V3 - S
J2.140 DGND DGND - G
6.3 CPU module mount options
Some pins can be configured for different functions through mounting options. The rows into
the table appear as the following:
J2.78
MCA2_AFSX/GP0_11 CPU.MCA[2]_AFSX/GP0[11] AA5 I/O
Module mount option
CVDD_DSP MTR - O
The row content is split in two: the default pin configuration is the upper one (eg
TPS_PWRON); the optional pin configuration is the lower one (eg EMU1).
August, 2014 45/78
Page 46

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
6.4 Additional notes
6.4.1 EN_BCK_LS
J2.97 pin is connected to PMIC GPIO0. This pin is a 5V push-pull signal connected to a
voltage divider circuit via 5K6 /10K resistor, thus providing the 3V3 logical voltage output as
depicted below:
August, 2014 46/78
Fig. 7: Simplified schematics of EN_BCK2_LS internal
pin configuration
Page 47

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
7 Peripheral interfaces
DIDO modules implement a number of peripheral interfaces
through the J1 and J2 connectors. The following notes apply to
those interfaces:
● Some interfaces/signals are available only with/without
certain configuration options of the DIDO module. Each
signal’s availability is noted in the “Notes” column on the
table of each interface.
The signals for each interface are described in the related
tables. The following notes summarize the column headers for
these tables:
● “Pin name” – The symbolic name of each signal
● “Conn. Pin” – The pin number on the module connectors
● “Function” – Signal description
● “Notes” – This column summarizes configuration
requirements and recommendations for each signal.
7.1 Digital Video Output (DVO)
DIDO provides two Digital Video Output interfaces, VOUT0 (up
to 24 bit) and VOUT1 (up to 18 bit), with support to YCbCr/RGB
formats at 1080p@60.
7.1.1 VOUT0
The following table describes the interface signals:
Pin name Conn.
Pin
VOUT[0]_VSYNC J1.69 Vertical Sync output
VOUT[0]_CLK J1.71 Clock output
VOUT[0]_AVID J1.66 Active video output Field ID output
VOUT[0]_HSYNC J1.68 Horizontal Sync
VOUT[0]_B_CB_C[2] J2.74 Video Output Data. These signals
VOUT[0]_B_CB_C[3] J2.76
Function Notes
output
represent the 8 MSBs of B/CB/C video
August, 2014 47/78
Page 48

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Pin
VOUT[0]_B_CB_C[4] J1.64
VOUT[0]_B_CB_C[5] J1.65
VOUT[0]_B_CB_C[6] J1.62
VOUT[0]_B_CB_C[7] J1.61
VOUT[0]_B_CB_C[8] J1.60
VOUT[0]_B_CB_C[9] J1.59
VOUT[0]_G_Y_YC[2] J2.70
VOUT[0]_G_Y_YC[3] J2.72
VOUT[0]_G_Y_YC[4] J1.58
VOUT[0]_G_Y_YC[5] J1.57
VOUT[0]_G_Y_YC[6] J1.56
VOUT[0]_G_Y_YC[7] J1.55
VOUT[0]_G_Y_YC[8] J1.54
VOUT[0]_G_Y_YC[9] J1.53
VOUT[0]_R_CR[2] J2.62
Function Notes
data. For RGB mode they are blue data
bits, for YUV444 mode they are Cb
(Chroma) data bits, for Y/C mode they
are multiplexed Cb/Cr (Chroma) data bits
and for BT.656 mode they are unused.
Video Output Data. These signals
represent the 8 MSBs of G/Y/YC video
data. For RGB mode they are green data
bits, for YUV444 mode they are Y data
bits, for Y/C mode they are Y (Luma) data
bits and for BT.656 mode they are
multiplexed Y/Cb/Cr (Luma and Chroma)
data bits.
VOUT[0]_R_CR[3] J2.64
VOUT[0]_R_CR[4] J1.50
VOUT[0]_R_CR[5] J1.51
VOUT[0]_R_CR[6] J1.48
VOUT[0]_R_CR[7] J1.49
VOUT[0]_R_CR[8] J1.46
VOUT[0]_R_CR[9] J1.47
7.1.2 VOUT1
The following table describes the interface signals:
Pin name Conn.
VOUT[1]_CLK J1.117 Clock output
VOUT[1]_AVID J1.134 Active video
VOUT[1]_VSYNC J2.119 Vertical Sync
Video Output Data. These signals
represent the 8 MSBs of R/CR video data.
For RGB mode they are red data bits, for
YUV444 mode they are Cr (Chroma) data
bits, for Y/C mode and BT.656 modes
they are unused.
Function Notes
Pin
output
August, 2014 48/78
Page 49

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Function Notes
Pin
VOUT[1]_HSYNC J2.113 Horizontal Sync
output
VOUT[1]_B_CB_C[4] J1.11
VOUT[1]_B_CB_C[5] J1.14
VOUT[1]_B_CB_C[6] J2.125
VOUT[1]_B_CB_C[7] J2.132
VOUT[1]_B_CB_C[8] J2.106
VOUT[1]_B_CB_C[9] J2.108
VOUT[1]_G_Y_YC[4] J2.17
VOUT[1]_G_Y_YC[5] J2.46
VOUT[1]_G_Y_YC[6] J2.49
VOUT[1]_G_Y_YC[7] J2.52
VOUT[1]_G_Y_YC[8] J2.63
VOUT[1]_G_Y_YC[9] J2.69
VOUT[1]_R_CR[4] J2.111
VOUT[1]_R_CR[5] J2.99
VOUT[1]_R_CR[6] J2.87
VOUT[1]_R_CR[7] J2.89
VOUT[1]_R_CR[8] J2.71
VOUT[1]_R_CR[9] J2.68
Video Output Data. These signals
represent the 6 MSBs of B/CB/C video
data. For RGB mode they are blue data
bits, for YUV444 mode they are Cb
(Chroma) data bits, for Y/C mode they
are multiplexed Cb/Cr (Luma) data bits,
and for BT.656 mode they are not used.
Video Output Data. These signals
represent the 6 MSBs of G/Y/YC video
data. For RGB mode they are green data
bits, for YUV444 mode they are Y data
bits, for Y/C mode they are Y (Luma) data
bits and for BT.656 mode they are
multiplexed Y/Cb/Cr (Luma and Chroma)
data bits.
Video Output Data. These signals
represent the 6 MSBs of R/CR video data.
For RGB mode they are red data bits, for
YUV444 mode they are Cr (Chroma) data
bits, for Y/C mode and BT.656 mode they
are not used.
7.2 HDMI
DIDO includes an High Definition Multimedia Interface 1.3a
compliant transmitter for digital audio and video, with
integrated HDCP (High-bandwidth Digital Content Protection)
and 1080p60 support. The HDMI interface consists of a digital
HDMI transmitter core with TMDS encoder, a core wrapper
with interface logic and control registers, and a transmit PHY.
HDMI shares the digital video chain with the VOUT1 port, so
when both interfaces are enabled, the same content is
reproduced.
The following table describes the interface signals:
August, 2014 49/78
Page 50

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Function Notes
Pin
HDMI_DP2 J1.97 Transmit data lane
2 – TMDS serial
output 2+
HDMI_DN2 J1.99 Transmit data lane
2 – TMDS serial
output 2-
HDMI_DP1 J1.101 Transmit data lane
1 – TMDS serial
output 1+
HDMI_DN1 J1.103 Transmit data lane
1 – TMDS serial
output 1-
HDMI_DP0 J1.105 Transmit data lane
0 – TMDS serial
output 0+
HDMI_DN0 J1.107 Transmit data lane
0 – TMDS serial
output 0-
HDMI_CLKP J1.109 Transmit clock
lane – TMDS clock
output+
HDMI_CLKN J1.111 Transmit clock
HDMI_SDA J1.138
J2.39
HDMI_SCL J1.136
J2.34
HDMI_CEC J2.21
J2.47
HDMI_HPDET J2.44 HDMI Hot Plug
7.3 Analog SDTV out
DIDO provides a standard definition
Composite/S-video(NTSC/PAL) TV out channel. The signal
meets all requirements defined in ITU-R BT 470.6.
The following table describes the interface signals:
lane – TMDS clock
output-
HDMI I2C Serial
Data I/O
HDMI I2C Serial
Clock output
HDMI Consumer
Electronics Control
I/O
Detect Input
August, 2014 50/78
Page 51

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Function Notes
Pin
TV_OUT1 J1.131 Composite/S-Video
(Luminance)
Amplifier Output
TV_OUT2 J1.133 S-Video
(Chrominance)
Amplifier Output
7.4 Digital Video Input ports
The HD Video Processing Subsystem supports two
independently configurable external video input capture ports
(VIP) up to 165MHz. Each video capture port supports one
scaler capable of both up and down scaling of one
non-multiplexed input stream; each video capture port supports
one programmable color space conversion to convert between
24-bit RGB data and YCbCr data. The VIP supports data
storage in RGB, 422, and 420 formats and each video capture
port channel supports chroma down-sampling (422 to 420) for
any non-multiplexed input data. The chroma down-sampling for
multiplexed streams is done as memory to memory operations
outside of HDVPSS on an individual frame data. Two VIP
instances are not identical from chip level. VIP instance 0 is a
24-bit interface and VIP instance 1 is a 16-bit interface. The
HDVPSS supports two independent pixel clock input domains
for each VIP, called Port A and Port B. Port A supports a single
up to 24 bit data bus at the instance level and Port B supports a
single 8 bit data bus at the instance level. The configuration for
each device input port is described in the following table:
Configured as
“Normal mode”
(internal amplifier
used). This pin drives
the 75- TVΩ
load.
Configured as
“Normal mode”
(internal amplifier
used). This pin drives
the 75- TVΩ
load.
Port A Port B
8 bit Off
16 bit Off
24 bit Off
8 bit 8 bit
August, 2014 51/78
Page 52

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Port A Port B
Off 8 bit
7.4.1 VIN0
The following table describes the interface signals:
Pin name Conn.
Function Notes
Pin
VIN[0]B_CLK J2.60 Input clock for 8-bit
Port B video capture.
VIN[0]A_CLK J1.26 Input clock for 8-bit,
16-bit, or 24-bit Port A
video capture.
VIN[0]B_FLD J1.38 Discrete field
identification signal
for Port B 8-bit YCbCr
capture without
embedded syncs
(“BT.601” modes).
VIN[0]A_FLD J1.40
J2.122
VIN[0]A_HSYNC J2.93 Discrete horizontal
Discrete field
identification signal
for Port A RGB
capture mode or
YCbCr capture without
embedded syncs
(“BT.601” modes).
synchronization signal
for Port A RGB
capture mode or
YCbCr capture without
embedded syncs
(“BT.601” modes).
Not used in 16-bit
and 24-bit
capture modes.
Not used in RGB
or 16-bit YCbCr
capture modes.
VIN[0]B_HSYNC J2.120 Discrete horizontal
VIN[0]A_VSYNC J2.93 Discrete vertical
synchronization signal
for Port B RGB
capture mode or
YCbCr capture without
embedded syncs
(“BT.601” modes).
synchronization signal
for Port A RGB
August, 2014 52/78
Page 53

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Function Notes
Pin
capture mode or
YCbCr capture without
embedded syncs
(“BT.601” modes).
VIN[0]B_VSYNC J2.122 Discrete vertical
synchronization signal
for Port B RGB
capture mode or
YCbCr capture without
embedded syncs
(“BT.601” modes).
VIN[0]B_DE J1.42 Discrete data valid
signal for Port B RGB
capture mode or
capture without
embedded syncs
(“BT.601” modes).
VIN[0]A_DE J1.44
J2.120
Discrete data valid
signal for Port A RGB
capture mode or
YcbCr capture without
embedded syncs
("BT.601" modes).
VIN[0]A_D[0] J1.30 Data inputs. For 16-bit capture, D[7:0]
VIN[0]A_D[1] J1.32
VIN[0]A_D[2] J1.36
VIN[0]A_D[3] J1.116
VIN[0]A_D[4] J1.120
VIN[0]A_D[5] J1.122
VIN[0]A_D[6] J2.73
VIN[0]A_D[7] J2.75
VIN[0]A_D[8]_BD[0] J2.77
VIN[0]A_D[9]_BD[1] J2.79
VIN[0]A_D[10]_BD[2] J2.81
VIN[0]A_D[11]_BD[3] J1.22
VIN[0]A_D[12]_BD[4] J2.83
VIN[0]A_D[13]_BD[5] J1.18
are Cb/Cr and [15:8] are Y Port A inputs.
For 8-bit capture, D[7:0] are Port A YCbCr
data inputs and D[15:8] are Port B YCbCr
data inputs. For RGB capture, D[23:16]
are R, D[15:8] are G, and BD[7:0] are B
data inputs.
August, 2014 53/78
Page 54

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
VIN[0]A_D[14]_BD[6] J1.20
VIN[0]A_D[15]_BD[7] J1.24
VIN[0]A_D[16] J1.23
VIN[0]A_D[17] J1.25
VIN[0]A_D[18] J1.27
VIN[0]A_D[19] J1.29
VIN[0]A_D[20] J1.31
VIN[0]A_D[21] J1.33
VIN[0]A_D[22] J1.92
VIN[0]A_D[23] J1.94
7.4.2 VIN1
The following table describes the interface signals:
Pin name Conn.
Function Notes
Pin
Function Notes
Pin
VIN[1]A_CLK J1.134 Input clock for
8-bit, 16-bit, or
24-bit Port A video
capture.
VIN[1]A_VSYNC J2.113 Discrete vertical
synchronization
signal for Port A
YCbCr capture
modes without
embedded syncs
(“BT.601” modes).
VIN[1]A_HSYNK J1.117 Discrete horizontal
synchronization
signal forPort A
YCbCr capture
modes without
embedded syncs
(“BT.601” modes).
VIN[1]A_DE J2.119 Discrete data valid
signal for Port A
RGB capture mode
Input data is
sampled on the
CLK0 edge.
August, 2014 54/78
Page 55

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Function Notes
Pin
or YcbCr capture
without embedded
syncs ("BT.601"
modes).
VIN[1]A_FLD J2.119 Discrete field
identification
signal for Port A
YCbCr capture
modes without
embedded syncs
(“BT.601” modes).
VIN[1]A_D[0] J1.132 Video Input 1 Data inputs. For 16-bit
VIN[1]A_D[1] J1.11
VIN[1]A_D[2] J1.14
VIN[1]A_D[3] J2.125
VIN[1]A_D[4] J2.132
VIN[1]A_D[5] J2.106
VIN[1]A_D[6] J2.108
capture, D[7:0] are Cb/Cr and [15:8] are
Y Port A inputs. For 8-bit capture, are
Port A YCbCr data inputs. For RGB
capture, D[23:16] are R, D[15:8] are G,
and D[7:0] are B Port A data inputs.
VIN[1]A_D[7] J2.21
Please note that, in order to use this port
● I2C3 bus must be disabled. As a consequence keypad
controller, EEPROM and touch screen controller are not
available.
● Gigabit Ethernet must be disabled. As a consequence
only FastEthernet Interface is available and Ethernet
Switch is working with only one port.
● HDMI CEC must be disabled. Please note that CEC is
optional on HDMI interface and is currently used only in
consumer devices.
7.5 Ethernet ports
The DM814x/AM387x 3PSW (Three Port Switch) Ethernet
Subsystem provides ethernet packet communication and can be
configured as an ethernet switch. It provides the gigabit media
August, 2014 55/78
Page 56

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
independent interface (G/MII), reduced gigabit media
independent interface (RGMII), reduced media independent
interface (RMII), the management data input output (MDIO) for
physical layer device (PHY) management. DIDO provides two
ethernet ports, one Fast Ethernet with on-board PHY, and one
Gigabit Ethernet (GRMII only).
7.5.1 EMAC_RMREFCLK
EMAC_REFCLK signal is the reference clock for the internal
PHY (SMSC LAN8710) connected to EMAC[0] configured in
RMII mode. This signal is driven by the CPU and can be
optionally routed to J1.91 through a mount option. The
CPU.EMAC_RMREFCLK signal is internally split in two lines,
one connected to the internal PHY and the other routed to the
J1 connector; both lines are terminated with 22 Ω resistors. For
more flexibility on using both EMAC[0] and EMAC[1]
interfaces, this signal has been routed to the J1 connector
providing the following configuration options:
● generated internally (default configuration) and routed
externally for driving an external RMII PHY on the second
MAC (EMAC[1]) at 10/100 Mbit. In this case it is possible to
avoid the cost of an external crystal or oscillator.
● generated by an external PHY mounted on the carrier board
(connected to EMAC[1]) and routed internally to the internal
PHY and CPU. In some cases this configuration could be
preferred.
7.5.2 Ethernet 10/100
On-board Ethernet PHY provides interface signals required to
implement the 10/100 Ethernet port. It is connected to
processor EMAC0 controller through RMII interface.
The following table describes the interface signals:
Pin name Conn.
EMAC0_PHY_LED_LINK/ACTJ2.115 Link activity LED
Pin
Function Notes
This pin is driven
Indication.
active when a valid
link is detected and
blinks when activity
is detected.
August, 2014 56/78
Page 57

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Function Notes
Pin
EMAC0_PHY_LED_SPEED J2.117 Link Speed LED
Indication.
ETH_CTTD J2.127 Tx Center Tap
ETH_CTRD J2.137 Rx Center Tap
ETH_TX- J2.129 Transmit Negative
Channel
ETH_TX+ J2.131 Transmit Positive
Channel
ETH_RX- J2.135 Receive Negative
Channel
ETH_RX+ J2.133 Receive Positive
Channel
EMAC_RMREFCLK J1.91 RMII Reference
Clock
This pin is driven
active when the
operating speed is
100Mbps. It is
inactive when the
operating speed is
10Mbps or during
line isolation.
7.5.3 Gigabit EMAC
DIDO provides a Gigabit Ethernet interface connected to
processor EMAC1 controller through GRMII interface. When
required, an external PHY must be mounted on the carrier
board.
The following table describes the interface signals:
Pin name Conn.
EMAC[1]_RGRXC J1.78 RGMII Receive
EMAC[1]_RGRXCTL J1.108 RGMII Receive
EMAC[1]_RGRXD[3] J1.80 RGMII Receive Data [3:0]
EMAC[1]_RGRXD[2] J1.86
EMAC[1]_RGRXD[1] J1.88
Function Notes
Pin
Clock
Control
August, 2014 57/78
Page 58

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
EMAC[1]_RGRXD[0] J1.106
EMAC[1]_RGTXC J1.87 RGMII Transmit
EMAC[1]_RGTXCTL J1.110 RGMII Transmit
EMAC[1]_RGTXD[3] J1.112 RGMII Transmit Data [3:0]
EMAC[1]_RGTXD[2] J1.77
EMAC[1]_RGTXD[1] J1.79
EMAC[1]_RGTXD[0] J1.85
EMAC_RMREFCLK J1.91 RMII Reference Clock
7.6 CAN ports
DIDO provides two DCAN interfaces (DCAN0 and DCAN1) for
supporting distributed realtime control with a high level of
security. The DCAN interfaces implement the CAN protocol
version 2.0 part A, B and supports bit rates up to 1 Mbit/s.
Function Notes
Pin
Clock
Enable
7.6.1 DCAN0
DCAN0 port is connected to on-board transceiver which
converts the single-ended CAN signals of the controller to the
differential signals of the physical layer.
The following table describes the interface signals:
Pin name Conn.
CAN_H J1.96 High bus output
CAN_L J1.98 Low bus output
7.6.2 DCAN1
When required, DCAN1 must be connected to an external PHY.
The following table describes the interface signals:
Function Notes
Pin
August, 2014 58/78
Page 59

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
DCAN1_RX J1.19 Receive data pin
DCAN1_TX J1.21 Transmit data pin
7.7 UARTs
Three UART ports are routed to DIDO connectors. UART0
provides full Modem Control Signals, while UART3 and UART5
are 4-wire interfaces. Each port can be programmed separately
and can operate in UART, IrDA or CIR modes.
7.7.1 UART0
The following table describes the interface signals:
Pin name Conn.
UART0_RXD J1.7 Receive Data Functions as IrDA
Function Notes
Pin
Function Note
Pin
receive input in IrDA
modes and CIR
receive input in CIR
mode
UART0_TXD J1.8 Transmit Data Functions as CIR
transmit in CIR mode
UART0_RTSn J1.19 Request To Send Functions as transmit
data output in IrDA
modes
UART0_CTSn J1.21 Clear To Send Functions as SD
transceiver control
output in IrDA and
CIR modes
UART0_DTRn J2.130 Data Terminal
Ready
UART0_DSRn J2.121 Data Set Ready
UART0_DCDn J2.128 Data Carrier
Detect
UART0_RIN J2.123 Ring indicator
August, 2014 59/78
Page 60

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
7.7.2 UART3
The following table describes the interface signals:
Pin name Conn.
Function Notes
Pin
UART3_RXD J2.128 Receive Data Also available as
alternative function
on pin J2.125.
Functions as IrDA
receive input in IrDA
modes and CIR
receive input in CIR
mode.
UART3_TXD J2.121 Transmit Data Also available as
alternative function
on pin J2.132.
Functions as CIR
transmit in CIR
mode.
UART3_RTSn J2.123 Request To Send Also available as
alternative function
on pin J1.113.
Functions as transmit
data output in IrDA
modes
UART3_CTSn J2.130 Clear To Send Also available as
alternative function
on pin J1.119.
Functions as SD
transceiver control
output in IrDA and
CIR modes.
7.7.3 UART5
The following table describes the interface signals:
Pin name Conn.
UART5_RXD J2.122 Receive Data Also available as
Function Notes
Pin
alternative function
on pin J2.86.
Functions as IrDA
receive input in IrDA
August, 2014 60/78
Page 61

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
Pin
UART5_TXD J2.120 Transmit Data Also available as
UART5_RTSn J1.93 Request To Send Functions as transmit
UART5_CTSn J2.104 Clear To Send Functions as SD
7.8 MMC/SD channels
Function Notes
modes and CIR
receive input in CIR
mode.
alternative function
on pin J2.88.
Functions as CIR
transmit in CIR
mode.
data output in IrDA
modes
transceiver control
output in IrDA and
CIR modes.
Three standard MMC/SD/SDIO interfaces are available on
DIDO module. The processor includes 3 MMC/SD/SDIO
Controllers which are compliant with MMC V4.3, Secure
Digital Part 1 Physical Layer Specification V2.00 and Secure
Digital Input Output (SDIO) V2.00 specifications. High capacity
SD cards (SDHC) are supported.
7.8.1 MMC/SD/SDIO0
MMC/SD0 can be configured as 1-bit or 4-bit mode. When
using this channel, MMC/SD0 can't be configured as 8-bit
mode.
The following table describes the interface signals:
Pin name Conn.
SD0_CLK J1.124 Clock output
SD0_CMD J1.130 Command output
SD0_DAT[0] J1.127 Data bit 0 Functions as single
Function Notes
Pin
data bit for 1-bit SD
mode.
August, 2014 61/78
Page 62

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
SD0_DAT[1] J1.129 Data bit 1 Functions as an IRQ
SD0_DAT[2] J1.102 Data bit 2 Functions as a Read
SD0_DAT[3] J1.104 Data bit 3
7.8.2 MMC/SD/SDIO1
MMC/SD1 can be configured as 1-bit, 4-bit or 8-bit mode.
Please note that 8-bit mode can be used only when MMC/SD0
is not enabled.
The following table describes the interface signals:
Pin name Conn.
SD1_CLK J1.137 Clock output
Function Notes
Pin
input for 1-bit SD
mode.
Wait input for 1-bit
SD mode.
Function Notes
Pin
SD1_CMD J1.135 Command output Also available as
alternative function
on pin J1.130.
SD1_DAT[0] J1.119 Data bit 0 Functions as single
data bit for 1-bit SD
mode.
SD1_DAT[1] J1.121 Data bit 1 Functions as an IRQ
input for 1-bit SD
mode.
SD1_DAT[2] J1.123 Data bit 2 Functions as a Read
Wait input for 1-bit
SD mode.
SD1_DAT[3] J1.125 Data bit 3
SD1_DAT[4] J1.127 Data bit 4
SD1_DAT[5] J1.129 Data bit 5
SD1_DAT[6] J1.102 Data bit 6
SD1_DAT[7] J1.104 Data bit 7
August, 2014 62/78
Page 63

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
7.8.3 MMC/SD/SDIO2
The following table describes the interface signals:
Pin name Conn.
SD2_SCLK J1.128 Clock output
SD2_CMD J2.55 Command output
SD2_DAT[0] J2.25 Data bit 0 Functions as single
SD2_DAT[1] J2.24 Data bit 1 Functions as an IRQ
SD2_DAT[2] J2.23 Data bit 2 Functions as a Read
SD2_DAT[3] J2.22 Data bit 3
7.9 USB ports
DIDO provides three USB 2.0 ports with integrated PHY. USB0
is a OTG 2.0 port, USB1 is a Host/OTG 2.0 port and USB2 is a
2.0 Host port. USB1 can be configured through dedicated
mount options. USB1 and USB2 are the downstreams of a USB
hub connected to the second USB controller provided by the
processor.
Function Notes
Pin
data bit for 1-bit SD
mode.
input for 1-bit SD
mode.
Wait input for 1-bit
SD mode.
7.9.1 USB0
The following table describes the interface signals:
Pin name Conn.
USB0_DP J1.6 Bidirectional data
USB0_DM J1.5
USB0_ID J1.17 OTG identification
USB0_VBUSIN J1.16 5-V VBUS
Function Notes
Pin
differential signal
pair (plus/minus)
input.
Senses the level of
comparator input.
the USB VBUS.
Should connect
directly to the USB
VBUS voltage.
August, 2014 63/78
Page 64

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Pin name Conn.
USB0_DRVVBUS J1.93 Used by the USB0
7.9.2 USB1
The following table describes the interface signals:
Pin name Conn.
USBP1 J2.124 Bidirectional data
USBM1 J2.126
7.9.3 USB2
The following table describes the interface signals:
Pin name Conn.
Function Notes
Pin
Controller to
enable the
external VBUS
charge pump.
Function Notes
Pin
differential signal
pair (plus/minus)
Function Notes
Pin
USBP2 J2.134 Bidirectional data
USBM2 J2.136
7.9.4 Other USB signals
The following table describes the interface signals:
Pin name Conn.
USB1_VBUS J1.95 5-V VBUS
USB1_DRVVBUS J1.118 Used by the USB1
Pin
differential signal
pair (plus/minus)
Function Notes
Senses the level
comparator input.
Controller to enable
the external VBUS
charge pump.
of the USB VBUS.
Should connect
directly to the
USB VBUS
voltage.
August, 2014 64/78
Page 65

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
7.10 Touchscreen
The touch screen controller is a TSC2003 resistive 4-wire
controller connected to the I2C-3 bus. It also provides an
auxiliary 12-bit A/D converter channel.
Device address is 1001000b.
The following table describes the interface signals:
Connector Pin Pin
TSC_XP J1.39 X+ Position Input Please consider
TSC_XM J1.41 X- Position Input
TSC_YP J1.43 Y+ Position Input
TSC_YM J1.45 Y- Position Input
7.11 EEPROM
One EEPROM is available to provide additional non-volatile
storage area for user-specific usage. It is connected to the
I2C-3 bus. A1 and A0 bits of address can be configured at
carrier board level
Device address is 10100[A1][A0]b.
The following table describes the interface signals:
Connector Pin Pin
Function Notes
name
the use of ESD
protection
devices on carrier
board when these
pins are
connected to
actual touch
screen.
Function Notes
name
EEPROM_A0 J1.10 I²C Address pins A1 and A0 bits of
EEPROM_A1 J1.12
EEPROM_WP J2.114 Active high
7.12 Keypad controller
DIDO provides a 8x8 keypad interface that is implemented in a
dedicated MAX7359ETG+ controller connected to the I2C-3
bus.
Device address is 0111000b.
address can be
configured at
carrier board
level
August, 2014 65/78
Page 66

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
The following table describes the interface signals:
Connector Pin Pin
Function Notes
name
KP_ROW0 J1.72 Keypad row 0
KP_ROW1 J1.73 Keypad row 1
KP_ROW2 J1.74 Keypad row 2
KP_ROW3 J1.75 Keypad row 3
KP_ROW4 J1.80 Keypad row 4
KP_ROW5 J1.78 Keypad row 5
KP_ROW6 J1.86 Keypad row 6
KP_ROW7 J1.77 Keypad row 7
KP_COL0 J1.82 Keypad column 0
KP_COL1 J1.81 Keypad column 1
KP_COL2 J1.84 Keypad column 2
KP_COL3 J1.83 Keypad column 3
KP_COL4 J1.79 Keypad column 4
KP_COL5 J1.88 Keypad column 5
KP_COL6 J1.85 Keypad column 6
KP_COL7 J1.106 Keypad column 7
7.13 PCI Express
The device supports connections to PCIe-compliant devices via
the integrated PCIe master/slave bus interface. The PCIe
module is comprised of a dual-mode PCIe core and a SerDes
PHY. The device implements a single one-lane PCIe 2.0 (5.0
GT/s) Endpoint/Root Complex port. Please note that AC
decoupling capacitors are integrated on DIDO, with the
following configuration:
● 100 nF in series with the TX pair lines
● 270 pF in series with the SERDES_CLK pair lines
The following table describes the interface signals:
August, 2014 66/78
Page 67

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Connector Pin Pin
PCIE_TXP0 J2.29
PCIE_TXN0 J2.31
PCIE_RXP0 J2.28
PCIE_RXN0 J2.30
SERDES_CLKP J2.36
SERDES_CLKN J2.38
7.14 SPI buses
name
Function Notes
When the PCIe
PCIE Transmit
Data Lane 0
PCIE Receive
Data Lane 0.
PCIE Serdes
Reference Clock
Inputs and
optional SATA
Reference Clock
Inputs.
SERDES are powered
down, these pins
should be left
unconnected.
When the PCIe
SERDES are powered
down, these pins
should be left
unconnected
When PCI Express
is not used, and
these pins are not
used as optional
SATA
these pins can be
left unconnected
Three SPI channels are available on DIDO. Each port has a
maximum supported frequency of 48 MHz and provides up to 4
chip selects. Communication parameters (frequency, polarity,
phase) are programmable. SPI-0 is connected to the SPI NOR
flash, as described in Section 3.3.
7.14.1 SPI1
SPI2 provides 4 chip select signals. The following table
describes the interface signals:
Connector Pin Pin
SPI[1]_SCLK J1.34 SPI clock
SPI[1]_SCS[3] J1.21
SPI[1]_SCS[2] J1.19
SPI[1]_SCS[1] J2.112
SPI[1]_SCS[0] J1.87
SPI[1]_D[1] J1.90 SPI Data I/O. Can be
Function Notes
name
SPI chip selects
August, 2014 67/78
Page 68

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Connector Pin Pin
SPI[1]_D[0] J1.37
7.14.2 SPI2
SPI2 provides 3 chip select signals. The following table
describes the interface signals:
Connector Pin Pin
SPI[2]_SCLK J1.88
SPI[2]_SCS[2] J2.34 SPI chip selects
SPI[2]_SCS[1] J2.45
SPI[2]_SCS[0] J2.50
SPI[2]_D[1] J1.78
SPI[2]_D[0] J1.80
name
name
J2.39
J2.44
J2.47
J2.21
J2.42
Function Notes
configured as either
MISO or MOSI.
Function Notes
SPI clock
SPI Data I/O. Can be
configured as either
MISO or MOSI.
7.14.3 SPI3
SPI3 provides 3 chip select signals. The following table
describes the interface signals:
Connector Pin Pin
SPI[3]_SCLK J1.33
SPI[1]_SCS[3] J2.66 SPI chip selects
SPI[1]_SCS[1] J2.111
SPI[1]_SCS[0] J1.31
SPI[1]_D[1] J1.92
SPI[1]_D[0] J1.94
Function Notes
name
SPI clock
J1.66
J2.99
SPI Data I/O. Can be
J2.87
J2.113
J2.89
configured as either
MISO or MOSI.
August, 2014 68/78
Page 69

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Connector Pin Pin
7.15 I2C buses
Two I2C channels are available on DIDO to provide an interface
to other devices compliant with Philips Semiconductors Inter-IC
bus (I2C-bus™) specification version 2.1. External components
attached to this 2-wire serial bus can transmit/receive 8-bit
data to/from the device through the I2C module. The I2C ports
support standard and fast modes from 10 - 400 Kbps (no
fail-safe I/O buffers).
A third I2C channel (I2C0) is used for the internal connection
between CPU and PMIC (please refer to Section 5.2).
7.15.1 I2C2
The following table describes the interface signals:
Connector Pin Pin
Function Notes
name
J2.119
Function Notes
name
I2C[2]_SCL J1.23
I2C[2]_SDA J2.39
7.15.2 I2C3
The following table describes the interface signals:
Connector Pin Pin
I2C[3]_SCL J2.106
J2.122
J2.128
J2.66
J2.120
J2.121
name
J1.27
I2C2 Clock For proper device
operation in I2C
mode, this pin
must be pulled
up via
external resistor.
I2C2 Data I/O For proper device
operation in I2C
mode, this pin
must be pulled
up via
external resistor.
Function Notes
I2C3 Clock J2.106 line is
internally
August, 2014 69/78
Page 70

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Connector Pin Pin
I2C[3]_SDA J2.108
7.16 SATA
Function Notes
name
J1.98 connected to
pull-up resistor;
when using
multiplexed lines
(J1.27, J1.98), the
signal must be
pulled up via
external resistor.
I2C3 Data I/O J2.106 line is
J1.29
J1.96
internally
connected to
pull-up resistor;
when using
multiplexed lines
(J1.27, J1.98), the
signal must be
pulled up via
external resistor.
DIDO provides a Serial ATA (SATA) 3.0 Gbps controller with
integrated PHY, which supports all SATA power management
features, port multiplier with command-based switching and
activity LEDs. It also provides hardware-assisted native
command queuing (NCQ) for up to 32 entries.
The following table describes the interface signals:
Connector Pin Pin
name
SATA_TXN0 J2.14 Serial ATA data
SATA_TXP0 J2.12
SATA_RXN0 J2.18 Serial ATA data
SATA_RXP0 J2.16
SATA_ACT0_LED J2.19 Serial ATA disk 0
7.17 Audio interfaces
The multichannel audio serial port (McASP) functions as a
Function Notes
transmit
receive
Activity LED output
August, 2014 70/78
Page 71

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
general-purpose audio serial port optimized for the needs of
multichannel audio applications. The McASP is useful for
time-division multiplexed (TDM) stream, Inter-Integrated
Sound (I2S) protocols, and inter-component digital audio
interface transmission (DIT). DIDO provides one McASP
interfaces with up to 4 serial data pins.
7.17.1 McASP2
The following table describes the interface signals:
Connector Pin Pin
MCA[2]_ACLKX J2.80 McASP1 Transmit Bit
MCA[2]_AFSX J2.78 McASP1 Transmit
MCA[2]_AXR[0] J2.86 McASP1
MCA[2]_AXR[1] J2.88
MCA[2]_AXR[2] J2.90
MCA[2]_AXR[3] J2.92
7.18 GPIOs
The GPIO peripheral provides general-purpose pins that can be
configured as either inputs or outputs, for connections to
external devices. In addition, the GPIO peripheral can produce
CPU interrupts in different interrupt generation modes. The
device contains four GPIO modules and each GPIO module is
made up of 32 identical channels.
The device GPIO peripheral supports up to 128 1.8-V/3.3-V
GPIO pins, GP0[0:31], GP1[0:31], GP2[0:31], and GP3[0:31].
Each channel must be properly configured, since GPIO signals
are multiplexed with other interfaces signals. For more
information on how to configure and use GPIOs, please refer to
section 5.8.
Function Notes
name
Clock I/O
Frame Sync I/O
Transmit/Receive
Data I/Os
7.19 Local Bus
The general-purpose memory controller (GPMC) is an unified
memory controller dedicated to interfacing external memory
devices:
August, 2014 71/78
Page 72

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
● Asynchronous SRAM-like memories and application-specific
integrated circuit (ASIC) devices
● Asynchronous, synchronous, and page mode (only available
in non-multiplexed mode) burst NOR flash devices
● NAND Flash (with BCH and Hamming Error Code
Detection)
● Pseudo-SRAM devices
● The GPMC includes flexible asynchronous protocol control to
interface to SRAM-like memories and custom logic (FPGA,
CPLD, ASICs, etc.).
● Other supported features include:
● 8/16-bit wide multiplexed address/data bus
● 512 MBytes maximum addressing capability divided among
up to eight chip selects (seven available on DIDO
connectors – GPMC_CS[7] is reserved for on-board NAND
memory).
● Non-multiplexed address/data mode
● Pre-fetch and write posting engine associated with system
DMA to get full performance from NAND device with
minimum impact on NOR/SRAM concurrent access.
DIDO provides up to 8-bit for data and 16 bit for addresses.
Please note that, when enabling the EMAC1 interface (see
7.5.3) the address bus is limited to bits GPMC_A[0] to
GPMC_A[4].
The following table describes the interface signals:
Connector Pin Pin
Function Notes
name
GPMC_CLK J2.61 GPMC Clock
GPMC_CS[6] J2.59 GPMC Chip Select #6
GPMC_CS[5] J2.61 GPMC Chip Select #5
GPMC_CS[4] J2.53 GPMC Chip Select #4
GPMC_CS[3] J2.50 GPMC Chip Select #3
GPMC_CS[2] J2.53 GPMC Chip Select #2
GPMC_CS[1] J2.48 GPMC Chip Select #1
GPMC_CS[0] J2.51 GPMC Chip Select #0
GPMC_WE J2.57 GPMC Write Enable
GPMC_OE_RE J2.56 GPMC Output Enable
August, 2014 72/78
Page 73

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Connector Pin Pin
Function Notes
name
GPMC_BE[1] J2.85 GPMC Upper Byte
Enable
GPMC_BE[0]_CLE J2.58 GPMC Lower Byte
Enable or Command
Latch Enable
GPMC_ADV_ALE J2.59 GPMC Address Valid
or Address Latch
Enable
GPMC_WAIT[1] J2.61 GPMC Wait 1
GPMC_A[15] J1.86
GPMC_A[14] J1.112
J2.39
GPMC_A[13] J1.106
J2.34
GPMC_A[12] J1.87
GPMC_A[11] J1.77
GPMC_A[10] J1.85
GPMC_A[9] J1.110
GPMC_A[8] J1.79
GPMC_A[7] J1.80
GPMC_A[6] J1.78
GPMC_A[5] J1.88
GPMC_A[4] J2.25
GPMC_A[3] J2.24
GPMC_A[2] J2.23
GPMC_A[1] J2.22
GPMC_A[0] J1.108
J2.21
GPMC_D[7] J2.10 GPMC Multiplexed
GPMC_D[6] J2.11
GPMC_D[5] J2.8
GPMC_D[4] J2.9
GPMC_D[3] J2.6
GPMC_D[2] J2.7
GPMC Address lines
Data/Address I/Os.
August, 2014 73/78
Page 74

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
Connector Pin Pin
name
GPMC_D[1] J2.4
GPMC_D[0] J2.5
Function Notes
August, 2014 74/78
Page 75

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
8 Operational characteristics
8.1 Maximum ratings
This section will be completed in a future version of this
manual.
Parameter Min Typ Max Unit
Main power supply voltage 3.1 3.3 V
8.2 Recommended ratings
This section will be completed in a future version of this
manual.
Parameter Min Typ Max Unit
Main power supply voltage - 3.3 - V
8.3 Power consumption
Providing theoretical maximum power consumption value
would be useless for the majority of system designers building
their application upon DIDO module because, in most cases,
this would lead to an over-sized power supply unit.
Several configurations have been tested in order to provide
figures that are measured on real-world use cases instead.
Please note that DIDO platform is so flexible that it is virtually
impossible to test for all possible configurations and
applications on the market. The use cases here presented
should cover most of real-world scenarios. However actual
customer application might require more power than values
reported here. Generally speaking, application specific
requirements have to be taken into consideration in order to
size power supply unit and to implement thermal management
properly.
August, 2014 75/78
Page 76

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
8.3.1 Set 1
Measurements have been performed on the following platform:
● NAON SOM (DM8148 model)
● carrier board: NAONEVB-Lite
● System software: NELK 1.0.0
● Power monitor: INA226 (reference U20 of [[NAONEVB-Lite]]
schematics).
● ARM Cortex-A8 frequency: 600 MHz
● SDRAM size: 512 MByte
● SDRAM frequency: 400 MHz
● HDVICP2 frequency: 306 MHz
8.3.2 Use cases
Checkpoint Input
Voltage
Linux prompt
(M3 unloaded)
Linux prompt
(M3 loaded)
cpuBurnA8 (M3
Loaded)
decode &
display H264
1080p60 on
HDMI
decode &
display H264
1080p60 +
cpuBurnA8
3266 mV 8 mV 779 mA 2550 mW
3261 mV 10 mV 1040 mA 3400 mW
3258 mV 12 mV 1235 mA 3900 mW
3258 mV 12 mV 1219 mA 3975 mW
3255 mV 14 mV 1352 mA 4450 mW
Shunt
Voltage
Current Power
Consumpion
Additional notes and reference:
● M3 Unloaded means that the two Cortex-M3 firmware has
not yet been started.
● For decode/display test the sample application included in
the TI EZSDK has been used.
● Cpuburn heavily uses Cortex-A8 and Neon to maximize
August, 2014 76/78
Page 77

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
power consumption and heat spreading. See the debian
package information (burnCortexA8.s) for further
information.
● Please note that shunt voltage value is rounded.
● Please note that, although the NAON module has been used
during these tests, usage of the DIDO module would lead to
comparable results.
8.4 Heat Dissipation
This section will be completed in a future version of this
manual.
August, 2014 77/78
Page 78

D i d o H a r d w a r e M a n u a l v . 1 . 0 . 5
9 Application notes
Please refer to the following documents available on DAVE
Embedded Systems Developers Wiki:
Document Location
Integration Guide http://wiki.dave.eu/index.php/Inte
gration_guide_%28Dido%29
Carrier board design
guidelines
http://wiki.dave.eu/index.php/Carr
ier_board_design_guidelines_
%28SOM%29
August, 2014 78/78
Page 79

Mouser Electronics
Authorized Distributor
Click to View Pricing, Inventory, Delivery & Lifecycle Information:
DAVE Embedded Systems:
DOH5210D
 Loading...
Loading...