

DATASONICS SIS-1500 System Manual
DATASONICS
SIS-1500
Seafloor Imaging System
System Manual
June 1998
Datasonics, Inc.
1400 Route 28A
Cataumet, MA 02534
U.S.A.
Tel: (01) 508-563-5511
Fax: (01) 508-563-9312

ii DATASONICS
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System iii
Notices
Proprietary Information
The information, descriptions, photos and illustrations in this manual are the
property of Datasonics, Inc. Materials may not be reproduced or
disseminated without the prior written consent of Datasonics.
Warranty
On standard catalog products, Seller warrants the products delivered under
this contract to be free from defects in material and workmanship at the time
of delivery to the F.O.B. point specified in the order, its liability under this
warranty being limited to repairing or replacing, at Seller’s option, items which
are returned to it FREIGHT PREPAID within one (1) year from delivery to the
Buyer and found to Seller’s satisfaction, to have been so defective. Items
shall be returned to the Buyer FREIGHT PREPAID.
On services, Seller warrants that all work performed by the employees will be
done in a workmanlike manner. Seller’s liability under this warranty is limited
to remedying at its expense any work found to Seller’s satisfaction not so
performed, provided however, Seller is notified of any claims within three (3)
months from the date the work is performed.
In no event shall Seller be liable for consequential damages. NO PRODUCT
IS WARRANTED AS BEING FIT FOR A PARTICULAR PURPOSE AND
THERE IS NO WARRANTY OF MERCHANTABILITY. This warranty applies
only if: (i) the items are used solely under the operating conditions and in the
manner recommended in Seller’s instruction manual, specifications, or other
literature; (ii) the items have not been missed or abused in any manner or
repairs attempted thereon; (iii) written notice of the failure within the warranty
period is forwarded to Seller and the directions for properly identifying items
returned under warranty are followed; and (iv) with return notice authorizing
Seller to examine and disassemble returned products to the extent Seller
deems necessary to ascertain the cause of failure. The warranties stated
herein are exclusive. THERE ARE NO OTHER WARRANTIES, EITHER
EXPRESSSED OR IMPLIED, BEYOND THOSE SET FORTH HEREIN, and
Seller does not assume any other obligation or liability in connection with the
sale or use of said products.
Any product or service repaired or replaced under this warranty shall be
warranted for the unexpired portion of the original warranty period only.
Notices

iv DATASONICS
Liability
Datasonics assumes no liability for damages, losses or costs incurred
consequentially through operation or malfunction of Datasonics products.
Title
Title shall pass to the Buyer on delivery to the carrier at Cataumet,
Massachusetts, U.S.A. Risk of damage or loss following such delivery shall
be the Buyer's, and Datasonics shall in no way be responsible for safe arrival
of the shipment. Title shall so pass to the Buyer regardless of any provision
for payment of freight or insurance by Datasonics, and regardless of the form
of the shipping documents. If shipment is consigned to Datasonics, it shall be
for the purpose of securing the Buyer's obligations under contract.
Changes
Datasonics reserves the right to make changes in design or specifications at
any time without incurring any obligation to modify previously installed units.
This manual is provided for informational and reference purpose only and is
subject to change without notice.
Volume ISystem Manual June 1998
SIS-1500 Seafloor Imaging System v
Preface
Congratulations on your purchase of the SIS-1500 Seafloor Imaging System!
The SIS-1500 delivers high resolution sidescan imagery using advanced
Chirp technology.
This manual is divided into six sections:
Section 1 - Overview describes the major system components and
explains Chirp sonar technology.
Section 2 - Specifications lists the specifications for the shipboard and
subsea components of the system.
Section 3 - Setup and Deployment covers the unpacking and setup of
the hardware, configuration of system parameters, and a system startup
procedure that includes predeployment checks and tow vehicle
deployment.
Section 4 - Theory of Operation describes the circuit functions and
signal flows for both the shipboard and subsea components of the
system.
Section 5 - Maintenance covers routine maintenance and includes
troubleshooting guides, recommended test equipment, test and
calibration procedures, and tables of downlink commands and uplink
data.
Section 6 - Drawings includes the circuit board assembly drawings and
the wiring diagrams for the shipboard and subsea hardware components
of the system.
Notes and Warnings
Where applicable, special notes and warnings are presented as follows:
NOTE A referral to another part of this manual or to another reference; a
recommendation to check that certain criteria are met before proceeding
further in a step or sequence; or general information applicable to the setup
and operation of the SIS-1500 Seafloor Imaging System.
Preface
vi DATASONICS
WARNING A reminder that dangerous or damaging consequences could
result if certain recommended procedures are not followed.
Comments
We welcome your comments and suggestions for improving our products and
documentation as well as developing better ways of serving you with acoustic
technology. Therefore, please contact Customer Service should you have
any comments or suggestions about this manual or the SIS-1500 Seafloor
Imaging System, or if you require service or support.
Please contact us at:
DATASONICS, INC.
Attention: Customer Service
1400 Route 28A
Cataumet, MA 02534
U.S.A.
Telephone: (01) 508-563-5511
FAX: (01) 508-563-9312
E-mail: sales@datasonics.com
http:\\www.datasonics.com
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System vii
Contents
Notices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iii
Proprietary Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iii
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iii
Liability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iv
Title . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iv
Changes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .iv
Preface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Notes and Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
Comments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .vi
Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xi
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .xiii
SECTION 1
SIS-1500 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
Main System Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-3
Advantages of Chirp Sonar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-6
SIP-150 Sonar Image Processor . . . . . . . . . . . . . . . . . . . . . . . . . . .1-6
SIP-150 Sonar Image Processor Workstation . . . . . . . . . . . . . . . . . .1-7
Chirpscan3 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-8
Data Fusion and Storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-8
Realtime Display and Image Processing . . . . . . . . . . . . . . . . . . . .1-8
Post-Processing of Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
Chirplink II Digital Multiplexer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
TTV-195 Tow Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-9
Sidescan Sonar Transducer Arrays . . . . . . . . . . . . . . . . . . . . . . . . .1-10
Sonar Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-12
Optional Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-12
Chirp Technology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-12
Across-Track Resolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-12
Along-Track Resolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-13
Signal-to-Noise Ratio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-13
Chirp Pulse Transmission and Reception . . . . . . . . . . . . . . . . . . . .1-14
Contents

viii DATASONICS
SECTION 2
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
SIP-150 Sonar Image Processor . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Physical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Computer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3
Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Power Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Input/Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
Output Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Downlink Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Downlink Responder Key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Downlink Sonar Key . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Uplink Vehicle Status and Sensor Data . . . . . . . . . . . . . . . . . . . . . . 2-6
Uplink Sonar Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
TTV-195 Tow Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
Physical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6
Sidescan Sonar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-7
SECTION 3
Setup and Deployment . . . . . . . . . . . . . . . . . . . . . . . . . 3-1
Unpacking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
Processor Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-5
Processor Hardware Connections . . . . . . . . . . . . . . . . . . . . . . . . 3-6
Workstation Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-6
Digital Multiplexer Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-7
Connecting the Processor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
Processor Operator Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
Workstation Operator Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
Digital Multiplexer Operator Functions . . . . . . . . . . . . . . . . . . . . . 3-11
Tow Vehicle Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
Installing the Tail Fins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-13
Connecting the Tow Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-15
Adjusting the Down-Look Angle . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-16
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System ix
System Startup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-17
Starting Chirpscan3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-17
Parameter Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-18
Configuring the Navigation Parameter Settings . . . . . . . . . . . . .3-19
Configuring the Sonar Parameter Settings . . . . . . . . . . . . . . . . .3-20
Configuring the Display Parameter Settings . . . . . . . . . . . . . . .3-22
Saving Setup Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-23
Loading Setup Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-24
Activating the Tow Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-24
Predeployment Checks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-26
Rub Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-26
Chirp Pattern Diagnostics Test . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-27
Data Telemetry and Sensor Tests . . . . . . . . . . . . . . . . . . . . . . . . . .3-29
Launching the Tow Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-30
SECTION 4
Theory of Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
Topside Processor Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-3
Workstation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-5
Digital Multiplexer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-6
Subsea Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-8
Sonar Electronics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-10
Transducer Arrays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-14
Standard and Optional Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-14
SECTION 5
Maintenance and Troubleshooting . . . . . . . . . . . . . . . . 5-1
Processor Periodic Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . .5-3
Air Filter Cleaning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-3
Backups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-3
Hard Disk Maintenance Utilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-4
Tow Vehicle Periodic Maintenance . . . . . . . . . . . . . . . . . . . . . . . .5-4
Cleaning and Inspection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-4
Tow Vehicle Disassembly and Reassembly . . . . . . . . . . . . . . . . . . .5-5
Electronics Housing Disassembly . . . . . . . . . . . . . . . . . . . . . . . . .5-5
Electronics Housing Reassembly . . . . . . . . . . . . . . . . . . . . . . . . .5-7
Sonar Transducer Housing Disassembly . . . . . . . . . . . . . . . . . . .5-7
Sonar Transducer Housing Reassembly . . . . . . . . . . . . . . . . . . . .5-8
Contents

x DATASONICS
System Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-9
Recommended Test Equipment . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-9
Troubleshooting Guides . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
Cable Checks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-19
Arcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-19
Continuity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-19
Short Circuit Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-19
Transducer Checks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-19
Arcing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
Tap Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
Short Circuit Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
Transmit Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
Heading Sensor Calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-20
Downlink Commands . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-21
Range Command (TLF x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-22
Receiver Gain Command (G x y) . . . . . . . . . . . . . . . . . . . . . . . . . 5-22
Power ON/OFF Command (Pxy) . . . . . . . . . . . . . . . . . . . . . . . . . 5-22
Chirp Pattern Diagnostics Enable/Disable Command (D x) . . . 5-22
Trigger Mode Command (TRIGx) . . . . . . . . . . . . . . . . . . . . . . . . 5-22
Uplink Vehicle Status and Sensor Data . . . . . . . . . . . . . . . . . . . . . 5-23
SECTION 6
Drawings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
Topside Processor Electronics Drawings . . . . . . . . . . . . . . . . . 6-3
Sonar Electronics Drawings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-3
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System xi
List of Figures
Figure 1-1 SIP-150 Sonar Image Processor . . . . . . . . . . . . . . . . . . . . . . 1-4
Figure 1-2 TTV-195 Tow Vehicle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
Figure 1-3 TTV-195 Tow Vehicle Breaking Away from Obstruction . . 1-11
Figure 3-1 SIP-150 Sonar Image Processor Recommended Setup . . . 3-5
Figure 3-2 SIP-150 Sonar Image Processor Operator Functions . . . . 3-11
Figure 3-3 Tow Vehicle Tail Fin Retaining Screw Locations . . . . . . . . 3-13
Figure 3-4 Installing the Tow Vehicle Tail Fins . . . . . . . . . . . . . . . . . . 3-14
Figure 3-5 Tow Vehicle Connections . . . . . . . . . . . . . . . . . . . . . . . . . . 3-15
Figure 3-6 Transducer Array Down-Look Angle Adjustment . . . . . . . 3-16
Figure 3-7 The Main Window . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-18
Figure 3-8 The Setup Dialog Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-19
Figure 3-9 The Comm Setup Dialog Box . . . . . . . . . . . . . . . . . . . . . . . . 3-20
Figure 3-10 The Sonar Setup Dialog Box . . . . . . . . . . . . . . . . . . . . . . . 3-21
Figure 3-11 The Attitude Dialog Box . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-22
Figure 3-12 The Save As Dialog Box . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23
Figure 3-13 The Open Dialog Box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-24
Figure 3-14 Pitch/Roll, Heading/Course, Altitude,
and Sonar Displays . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-25
Figure 3-15 Location of the Port and Starboard Transducer Arrays . 3-26
Figure 3-16 Rub Test Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-27
Figure 3-17 The Sonar Diagnostics Box . . . . . . . . . . . . . . . . . . . . . . . . 3-27
Figure 3-18 Chirp Pattern Test Display . . . . . . . . . . . . . . . . . . . . . . . . . 3-28
Figure 3-19 Displayed Pitch and Roll Data . . . . . . . . . . . . . . . . . . . . . . 3-29
Figure 3-20 Displayed Heading and Course Data . . . . . . . . . . . . . . . . 3-30
Figure 3-21 Example of SIS-1500 Sonar Images . . . . . . . . . . . . . . . . . 3-31
Figure 4-1 Topside Processor Electronics Block Diagram . . . . . . . . . . 4-4
List of Figures

xii DATASONICS
Figure 4-2 Chirplink II Digital Multiplexer Chassis . . . . . . . . . . . . . . . . . 4-7
Figure 4-3 Subsea Electronics Block Diagram . . . . . . . . . . . . . . . . . . . . 4-9
Figure 4-4 Sonar Electronics Chassis . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
Figure 5-1 Tow Vehicle Disassembly . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-6
Volume ISystem Manual June 1998
SIS-1500 Seafloor Imaging System xiii
List of Tables
Table 5-1 Processor Startup Problems . . . . . . . . . . . . . . . . . . . . . . . . . 5-10
Table 5-2 Tow Vehicle Activation Problems . . . . . . . . . . . . . . . . . . . . . 5-11
Table 5-3 Predeployment Checks Problems . . . . . . . . . . . . . . . . . . . . . 5-16
Table 5-4 Operation Problems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-17
Table 5-5 Uplink Telemetry Data Format . . . . . . . . . . . . . . . . . . . . . . . . 5-23
List of Tables

xiv DATASONICS
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System 1-1
SECTION 1
SIS-1500 Overview
SECTION 1 SIS-1500 Overview

1-2 DATASONICS
Volume ISystem Manual June 1998
SIS-1500 Seafloor Imaging System 1-3
T
he Datasonics SIS-1500 Seafloor Imaging System is a fully
integrated sonar system that uses advanced Chirp technology to
produce high resolution sidescan sonar images. The system consists
of two main components: the Datasonics SIP-150 Sonar Image Processor
shown in Figure 1-1 and the Datasonics TTV-195 Tow Vehicle shown in
Figure 1-2. This section provides a general description of the system and
identifies some of its important features. A review of Chirp technology is also
presented and how the system makes use of its important advantages.
Main System Components
The SIP-150 Sonar Image Processor is the shipboard component of the
system and includes the following:
the Datasonics SIP-150 Sonar Image Processing Workstation that
processes, displays, and archives sidescan sonar data and monitors and
controls system performance;
the Datasonics Chirpscan3 software for Windows with matched-filter
digital signal processing that generates multiple views of the sidescan
sonar data as the information is collected and recorded on high density
storage media; and
the Datasonics Chirplink II Digital Multiplexer, an advanced digital
telemetry system that multiplexes tow vehicle power and data over
industry-standard coaxial cable.
The TTV-195 Tow Vehicle is the subsea component of the system and is
equipped with the following sensors and electronics:
sidescan sonar transducer arrays capable of operating at depths up to
1000 meters;
advanced sonar electronics that controls the performance of the sonar
equipment and sensors, and includes pitch, roll and heading sensors;
and
optional sensor analog and digital inputs for the addition of optional
oceanographic sensors, including a cesium magnetometer, a water
temperature sensor, a pressure sensor, and a responder.
SECTION 1 SIS-1500 Overview Main System Components

1-4 DATASONICS
Figure 1-1 SIP-150 Sonar Image Processor
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System 1-5
SECTION 1 SIS-1500 Overview Main System Components
Figure 1-2 TTV-195 Tow Vehicle
1-6 DATASONICS
Advantages of Chirp Sonar
Chirp sonar technology employs swept FM transmitted signals along with
digital signal processing for matched-filter processing of reflected energy.
This delivers the following performance advantages:
a greater dynamic range is attained as long FM pulses provide an
additional 20 dB to 30 dB of dynamic range over conventional sidescan
sonar systems;
enhanced resolution is achieved with matched-filter processing, as
compared to systems using standard processing in the same frequency
band, by correlating the return signals with a replica of the outgoing
pulse;
transmitted waveforms are repeatable from pulse to pulse;
the temporal resolution is constant throughout the entire range;
the pulse characteristics are programmable, as the pulse length,
span of frequency sweep and phase/amplitude calibration of the transmit
waveform can be varied without hardware changes; and
the sidescan sonar data can be stored for off-line processing, on a
hard disk, a magneto-optical disk, or an Exabyte 8 mm cartridge tape.
SIP-150 Sonar Image Processor
The SIP-150 Sonar Image Processor comprises the SIP-150 Sonar Image
Processor Workstation, which includes the Chirpscan3 software, and the
Chirplink II Digital Multiplexer. Together the workstation, the Chirpscan3
software and the digital multiplexer serve to process, display and store the
sonar data, the tow vehicle status information and the sensor data that are
received from the tow vehicle. In addition, they monitor and control the tow
vehicle’s functions while sending commands and the sonar and responder
keys to the tow vehicle.
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System 1-7
SIP-150 Sonar Image Processor Workstation
The SIP-150 Sonar Image Processor Workstation, which runs the Datasonics
Windows based Chirpscan3 software, serves as the operator interface for
monitoring and controlling the system. The workstation includes a Pentium
based processor, Windows 95/NT and the following components:
• 1280 X 1024 high resolution color monitor
• Dual channel digital signal processor
• Graphics processor
• Hard drive with a SCSI interface
• Optional magneto-optical drive or Exabyte 8 mm
cartridge tape drive
• CD ROM drive
• 1.44 megabyte floppy drive
• Drawer type integrated keyboard and pointing device
The workstation displays the port and starboard sidescan sonar data and the
pitch, roll, heading, course, and altitude data in separate display windows in
the Display area of the Main window. Also within the Main window is the
Parameter display, the Status display, the Sonar Controls box, and the
Auxiliary Controls box.
As the sonar data are received, the workstation processes the data using
matched-filter digital signal processing, applying continuous Short Time
Fourier Transforms (STFT) for each sweep or transmit cycle. In addition, the
full dynamic range of the processed data is recorded on digital storage media
while being displayed on a high resolution 1280 X 1024 monitor. An optional
printer or graphic recorder can be connected to print either the data currently
being recorded or previously recorded data.
In addition to the sonar data, the workstation integrates the tow vehicle status
information, the sensor data and the navigation data, if available, into the
sidescan sonar data records. The status information also includes various
tow vehicle hardware settings. The sensor data are input from the tow
vehicle’s pitch, roll, heading, and optional sensors, and the navigation data
are input from the ship’s navigation system.
SECTION 1 SIS-1500 Overview SIP-150 Sonar Image Processor

1-8 DATASONICS
Chirpscan3 Software
The Chirpscan3 software has enabled the development of compact, low cost,
modular shipboard data acquisition and image processing systems.
Chirpscan3 supports the acquisition, processing and storage of multiple
channels of sidescan sonar data and also manages the acquisition and
storage of navigation, magnetic and environmental data. And as Chirpscan3
runs under Windows, it allows independent control of the processing. In
addition, a graphics engine drives the high resolution 1280 x 1024 color
monitor. The sonar records are stored on a hard disk, a magneto-optical disk,
or an Exabyte 8 mm cartridge tape.
Data Fusion and Storage
While sidescan sonar imagery are acquired and processed, other types of
data can be input to the workstation’s serial ports. For example, a navigation
device or an integrated navigation computer can be connected to a serial
port. Navigation data are merged into the standard data format in the
workstation and combined with the sonar data before being displayed and
recorded on the magneto-optical disk or the Exabyte 8 mm cartridge tape.
Although the sonar data can be saved to the workstation’s hard drive, the
higher density magneto-optical disk or tape cartridge is more appropriate for
storing the large files that are generated by the SIS-1500 Seafloor Imaging
System.
Realtime Display and Image Processing
Chirpscan3 runs under Windows 95/NT, which facilitates a standard and
familiar graphic user interface. The Windows environment also allows for
independent control of a number of data display windows. Several different
types of data display windows are available, each suited to a specific data
type. Windows also allows multiple applications of the software to run
simultaneously. This enables the viewing of a previously recorded file while
recording data in a new file.
The flexibility of the image processing features is a major advantage over
simple sonar video displays. These tools greatly enhance the power of the
workstation and the capabilities for manipulating and interpreting data.
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System 1-9
Post-Processing of Data
Chirpscan3 enables both a record mode for data acquisition and real-time
image processing, and a playback mode for image processing and data
analysis after the sidescan sonar records have been collected and
processed. All the real-time image processing tools available with operation
in record mode are also available in playback mode.
Chirplink II Digital Multiplexer
The Chirplink II Digital Multiplexer is the communications interface between
the workstation and the tow vehicle. It provides full duplex communications
with the tow vehicle, allowing the workstation to send commands to the tow
vehicle while simultaneously receiving sonar data, tow vehicle status
information, and sensor data from the tow vehicle. In addition, the digital
multiplexer supplies power to the tow vehicle. Using a combination of
frequency division and time division multiplexing, the digital multiplexer
allows both the data and the power to be carried on a single coaxial cable,
which connects the digital multiplexer to the tow vehicle. Frequency division
multiplexing is used for transmitting all the downlink commands and uplink
vehicle status information and sensor data at a frequency of 9600 baud.
T1 telecommunications technology, an industry standard, is used for
transmitting all the sonar data at a data communications rate of
1.544 Mbits/sec. The digital multiplexer also contains the system’s main
power switch, and includes a front panel voltmeter and ammeter for
monitoring the power transmitted to the tow vehicle.
TTV-195 Tow Vehicle
The TTV-195 Tow Vehicle contains the sidescan sonar transducer arrays,
the sonar electronics and the standard pitch, roll and heading sensors.
Available optional sensors include temperature and pressure sensors, a
cesium magnetometer and a responder. The tow vehicle, which is 4.5 inches
in diameter and 70 inches long, is constructed of 316 stainless steel and is
specifically designed to operate at depths up to 1000 meters. The nose of the
tow vehicle contains the optional temperature sensor and the optional
responder transducer, where both are encapsulated in a single urethane
mold. The temperature sensor is in direct contact with the water at all times,
providing a fast thermal time constant and a means of correlating any
observed anomalies in the sonar data with changes in sound velocity that are
due to temperature gradients. The responder transducer is positioned to
SECTION 1 SIS-1500 Overview TTV-195 Tow Vehicle

1-10 DATASONICS
provide the optimum beam pattern for tracking the tow vehicle with an
acoustic positioning system. The optional pressure sensor is contained within
the end cap and is exposed to ambient pressure through a port on the rim of
the end cap.
The nose is attached to the forward end of a pressure housing, the
electronics housing, which contains the sonar electronics. An end cap both
seals the opposite end of the housing and attaches to another housing, the
sonar transducer housing, which is free flooding and contains the sonar
transducers. The nose and end cap are secured to the electronics housing
with a closure bolt in the nose. The electronics housing also contains the
vehicle’s tow point, and the sonar transducer housing contains the vehicle’s
tail fin.
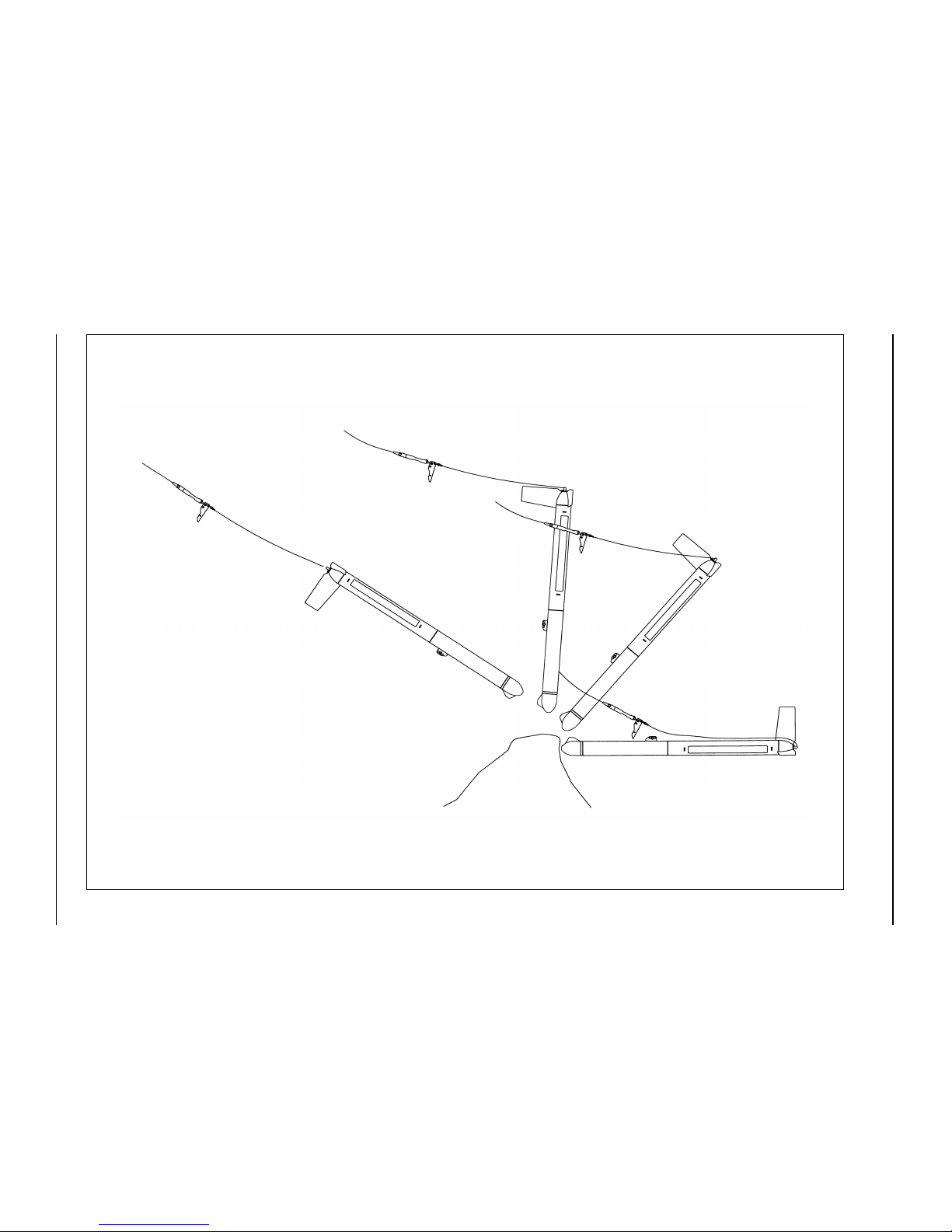
The tow vehicle’s towing arm, which is designed for rapid attachment and
detachment, contains a shear pin release mechanism, which is designed to
cause the towing arm to break away from the tow point should a collision
occur or should the tow vehicle become snagged. However, one end of a
recovery cable is attached to the towing arm. The cable runs back along the
top of the vehicle to its stern. Should an obstruction cause the tension on the
towing arm to exceed 200 lbs, the towing arm will break away and the tow
vehicle will cartwheel one-half of a revolution, with the nose moving
downward and then backward, clearing the tow vehicle from the obstruction.
This is shown in Figure 1-3. As the recovery cable remains attached, the tow
vehicle can be safely recovered. The tail fin will also break away should it
collide with an obstruction—and it is easily replaced.
Sidescan Sonar Transducer Arrays
The sidescan sonar, which operates in the 190 to 210 kHz band, utilizes two
transducer line arrays that are installed in the free flooding transducer
housing. The arrays are aligned end to end, with one along each side of the
tow vehicle. This arrangement provides a one-way horizontal beam width of
1° and a vertical beam width of 50°. In addition, the down-look angle of each
transducer array is adjustable from 0° to 20° in 10° increments.
Volume ISystem Manual June 1998
SIS-1500 Seafloor Imaging System 1-11
SECTION 1 SIS-1500 Overview TTV-195 Tow Vehicle
Figure 1-3 TTV-195 Tow Vehicle Breaking Away from Obstruction

1-12 DATASONICS
Sonar Electronics
Contained within the electronics housing in the tow vehicle is the sonar
electronics, which controls the tow vehicle’s functions, generates and
transmits the Chirp waveforms, and processes the received signals. Included
with the sonar electronics in the electronics housing are the pitch, roll, and
heading sensors. The sonar electronics receives power, downlink
commands, and the sonar and responder keys from the Chirplink II Digital
Multiplexer, and transmits the sonar data, the tow vehicle status information,
and the sensor data to the digital multiplexer.
Optional Sensors
Spare RS-232 and analog inputs are available for connecting optional
sensors and oceanographic instruments, including a temperature sensor, a
pressure sensor, and a cesium magnetometer. In addition, a responder input
is included, which allows for the installation of a responder for tow vehicle
positioning.
Chirp Technology
Chirp technology uses digitally produced linear FM acoustic transmissions to
produce high resolution images of seafloor contours. In all sonar systems,
higher frequency content is invariably associated with an increase in
resolution, and in the case of a sidescan sonar, a decrease in range. Chirp
technology, as implemented in the SIS-1500 Seafloor Imaging System,
reduces this trade-off, providing both high resolution and extended range.
Across-Track Resolution
The resolution of a sidescan sonar is measured by its ability to discern closely
spaced objects that lie in the direction that is 90 degrees to the path of the
tow vehicle. This resolution is referred to as the across-track resolution. A
sidescan sonar system with an across-track resolution of 10 cm will detect
individual objects that are at least 10 cm apart. Objects spaced closer than
10 cm will be resolved by the sonar as a single object. In a conventional
sidescan sonar system, the limit of its resolution is determined by the pulse
length of the transmitted waveform. In the SIS-1500 Seafloor Imaging
System, which is a Chirp sidescan sonar system, it is the bandwidth of the
transmitted pulse that sets the system's theoretical resolution. The theoretical
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System 1-13
across-track resolution of a conventional system is calculated by multiplying
the length of the pulse by the speed of sound, and then dividing the product
by 2 to account for the pulse’s round trip.
across-track resolution = pulse length x speed of sound / 2
In comparison the pulse length equivalent of a de-Chirped swept frequency
pulse equals the inverse of the bandwidth.
pulse length = 1 / bandwidth
For example, the duration of a pulse with a bandwidth of 20 kHz, which is the
bandwidth of a system configured to operate between 190 and 210 kHz, is
approximately 50 µs (1/20000 Hz = 0.00005 sec). Travelling at about
1500 m/sec, the sound will traverse approximately 7.5 cm in 50 µs. Allowing
for the round trip, this results is a one-way distance of 3.75 cm, which is the
across-track resolution.
Along-Track Resolution
In addition to the frequency and bandwidth of the transmitted sonar beam,
which affect the across-track resolution, the horizontal width of the beam
affects the sidescan sonar’s resolution in the direction that is parallel to the
path of the tow vehicle. This resolution is referred to as the along-track
resolution. To attain a high along-track resolution, narrow beam widths are
required. However, narrow beams produce side lobes, which contain energy
that produces undesired echoes from reflections not located in the primary
beam. In conventional sidescan sonar systems resolution is lost due to the
presence of these echoes. With Chirp technology the side lobes are greatly
reduced through matched-filter correlation processing, which attenuates
echoes that do not correlate well with the transmitted pulse.
Signal-to-Noise Ratio
Another factor that affects the image quality is the signal-to-noise ratio. As the
transmitted pulse travels through the water, its amplitude becomes
attenuated and falls below the noise level. The matched-filter correlation
processing used in the SIS-1500 Seafloor Imaging System improves the
signal-to-noise ratio, and hence the quality of the sonar images.
SECTION 1 SIS-1500 Overview Chirp Technology

1-14 DATASONICS
Chirp Pulse Transmission and Reception
The sequence of steps in the transmission and reception of the Chirp pulses
are summarized as follows:
1. A linear FM pulse is generated at fixed intervals.
2. The signal is sent to power amplifiers that drive the two sidescan sonar
transducer arrays. The sidescan’s port transducer array sweeps from a
low to a high frequency, while the starboard array sweeps from a high to
a low frequency. The counter-directional sweeps minimize cross-talk
between the sidescan channels.
3. The sidescan sonar transducer arrays transmit the pulse and the same
transducer arrays detect the reflected energy.
4. Reflections at the receiver array are amplified by a computer-controlled
amplifier and a user-programmable gain stage. In addition, the sidescan
receiver applies time varying gain to enhance attenuated signals
returning from greater distances.
5. The received sonar signals are digitized with a 16-bit A/D converter.
6. On the surface a dual channel digital signal processor in the workstation
de-Chirps (compresses the FM reflections using the matched-filter) the
return signals from the sidescan sonar. This correlates the received
reflections with a compensated replica of the outgoing pulse. Signals that
do not resemble the outgoing pulses are attenuated by this type of
processing. Compressed returns are further processed to correct for
amplitude losses from attenuation and absorption by the water.
Volume ISystem Manual June 1998

SIS-1500 Seafloor Imaging System 2-1
SECTION 2
Specifications
SECTION 2 Specifications

2-2 DATASONICS
Volume ISystem Manual June 1998
 Loading...
Loading...