

Page 1
8-bit Atmel XMEGA B Microcontroller
XMEGA B MANUAL
This document contains complete and detailed description of all modules included in the
®
AVR®XMEGA® B microcontroller family. The Atmel AVR XMEGA B is a family of low-
Atmel
power, high-performance, and peripheral-rich CMOS 8/16-bit microcontrollers based on the
AVR enhanced RISC architecture with integrated LCD controller. The available Atmel AVR
XMEGA B modules described in this manual are:
Atmel AVR CPU
Memories
DMAC - Direct memory access controller
Event system
System clock and clock options
Power management and sleep modes
System control and reset
WDT - Watchdog timer
Interrupts and programmable multilevel interrupt controller
PORT - I/O ports
TC - 16-bit timer/counters
AWeX - Advanced waveform extension
Hi-Res - High resolution extension
RTC - Real-time counter
USB - Universal serial bus interface
TWI - Two-wire serial interface
SPI - Serial peripheral interface
USART - Universal synchronous and asynchronous serial receiver and transmitter
IRCOM - Infrared communication module
AES and DES cryptographic engine
CRC - Cyclic redundancy check
LCD - Liquid Crystal Display controller
ADC - Analog-to-digital converter
AC - Analog comparator
IEEE 1149.1 JTAG interface
PDI - Program and debug interface
Memory programming
Peripheral address map
Register summary
Interrupt vector summary
Instruction set summary
8291B- AVR-01/2013
8291B–AVR–01/2013
Page 2

1. About the Manual
This document contains in-depth documentation of all peripherals and modules available for the Atmel AVR XMEGA B
microcontroller family. All features are documented on a functional level and described in a general sense. All peripherals
and modules described in this manual may not be present in all Atmel AVR XMEGA B devices.
For all device-specific information such as characterization data, memory sizes, modules, peripherals available and their
absolute memory addresses, refer to the device datasheets. When several instances of a peripheral exists in one device,
each instance will have a unique name. For example each port module (PORT) have unique name, such as PORTA,
PORTB, etc. Register and bit names are unique within one module instance.
For more details on applied use and code examples for peripherals and modules, refer to the Atmel AVR XMEGA
specific application notes available from http://www.atmel.com/avr.
1.1 Reading the Manual
The main sections describe the various modules and peripherals. Each section contains a short feature list and overview
describing the module. The remaining section describes the features and functions in more detail.
The register description sections list all registers and describe each register, bit and flag with their function. This includes
details on how to set up and enable various features in the module. When multiple bits are needed for a configuration
setting, these are grouped together in a bit group. The possible bit group configurations are listed for all bit groups
together with their associated Group Configuration and a short description. The Group Configuration refers to the defined
configuration name used in the Atmel AVR XMEGA assembler header files and application note source code.
The register summary sections list the internal register map for each module type.
The interrupt vector summary sections list the interrupt vectors and offset address for each module type.
1.2 Resources
A comprehensive set of development tools, application notes, and datasheets are available for download from
http://www.atmel.com/avr.
1.3 Recommended Reading
Atmel AVR XMEGA B device datasheets
AVR XMEGA application notes
This manual contains general modules and peripheral descriptions. The AVR XMEGA B device datasheets contains the device-specific information. The XMEGA application notes and Atmel Software Framework contain example code and show applied use of the modules and peripherals.
For new users, it is recommended to read the AVR1000 - Getting Started Writing C Code for Atmel XMEGA.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
2
Page 3

2. Overview
The AVR XMEGA B microcontrollers is a family of low-power, high-performance, and peripheral-rich CMOS 8/16-bit
microcontrollers based on the AVR enhanced RISC architecture. By executing powerful instructions in a single clock
cycle, the Atmel AVR XMEGA B devices achieve throughputs approaching one million instructions per second (MIPS)
per megahertz, allowing the system designer to optimize power consumption versus processing speed.
The AVR CPU combines a rich instruction set with 32 general purpose working registers. All 32 registers are directly
connected to the arithmetic logic unit (ALU), allowing two independent registers to be accessed in a single instruction,
executed in one clock cycle. The resulting architecture is more code efficient while achieving throughputs many times
faster than conventional single-accumulator or CISC based microcontrollers.
The Atmel AVR XMEGA B devices provide the following features: in-system programmable flash with read-while-write
capabilities; internal EEPROM and SRAM; two-channel DMA controller; four-channel event system and programmable
multilevel interrupt controller; up to 53 general purpose I/O lines; 16-bit real-time counter (RTC); up to three flexible 16-bit
timer/counters with capture, compare and PWM modes; up to two USARTs; one I
serial interface (TWI); one full-speed USB 2.0 interface; one serial peripheral interface (SPI); one LCD controller
supporting display capacity up to 4 Common and up to 40 Segment terminals; CRC module; AES and DES cryptographic
engine; up to two 8-channel, 12-bit ADCs with programmable gain; up to four analog comparators with window mode;
programmable watchdog timer with separate internal oscillator; accurate internal oscillators with PLL and prescaler; and
programmable brown-out detection.
The program and debug interface (PDI), a fast, two-pin interface for programming and debugging, is available. Selected
devices also have an IEEE std. 1149.1 compliant JTAG interface, and this can also be used for on-chip debug and
programming.
The Atmel AVR XMEGA devices have five software selectable power saving modes. The idle mode stops the CPU while
allowing the SRAM, DMA controller, event system, interrupt controller, and all peripherals to continue functioning. The
power-down mode saves the SRAM and register contents, but stops the oscillators, disabling all other functions until the
next TWI, USB resume, or pin-change interrupt, or reset. In power-save mode, the asynchronous real-time counter
continues to run, allowing the application to maintain a timer base while the rest of the device is sleeping. In this mode,
the LCD controller is allowed to refresh data to the panel. In standby mode, the external crystal oscillator keeps running
while the rest of the device is sleeping. This allows very fast startup from the external crystal, combined with low power
consumption. In extended standby mode, both the main oscillator and the asynchronous timer continue to run. In this
mode, the LCD controller is allowed to refresh data to the panel. To further reduce power consumption, the peripheral
clock to each individual peripheral can optionally be stopped in active mode and idle sleep mode.
The devices are manufactured using Atmel high-density, nonvolatile memory technology. The program flash memory can
be reprogrammed in-system through the PDI or JTAG interfaces. A boot loader running in the device can use any
interface to download the application program to the flash memory. The boot loader software in the boot flash section will
continue to run while the application flash section is updated, providing true read-while-write operation. By combining an
8/16-bit RISC CPU with In-system, self-programmable flash, the Atmel AVR XMEGA is a powerful microcontroller family
that provides a highly flexible and cost effective solution for many embedded applications.
The Atmel AVR XMEGA B devices are supported with a full suite of program and system development tools, including C
compilers, macro assemblers, program debugger/simulators, programmers, and evaluation kits.
2
C and SMBUS compatible two-wire
XMEGA B [DATASHEET]
8291B–AVR–01/2013
3
Page 4
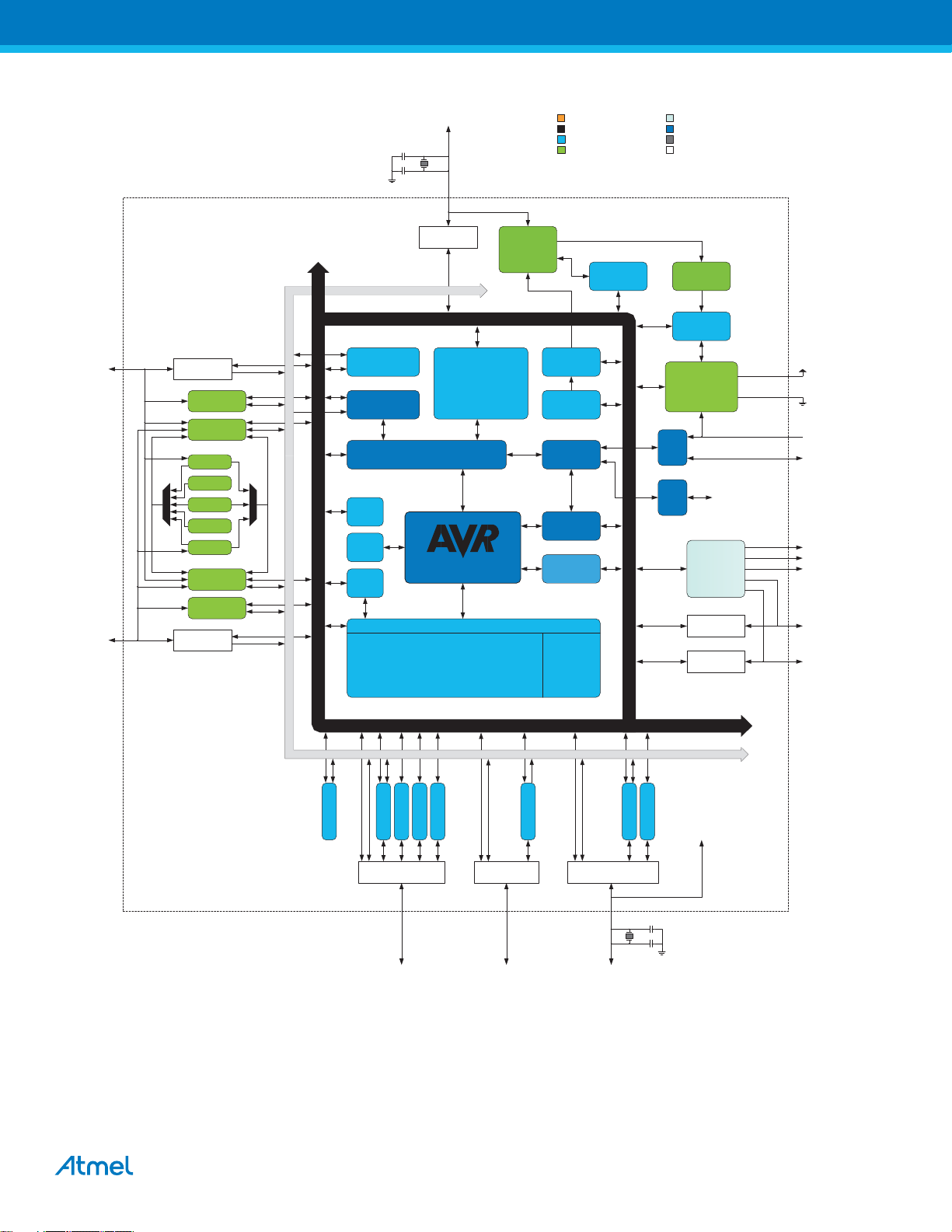
Figure 2-1. Atmel AVR XMEGA B block diagram.
XTAL1 /
TOSC1
XTAL2 /
TOSC2
PR[0..1]
Ground
Digital function
Analog function / Oscillators
LCDPower
Programming, debug, test
External clock / Crystal pins
General Purpose I/O
PA[0..7]
PB[0..7]/
JTAG
PORT A (8)
ACA
ADCA
AREFA
VCC/10
Int. Refs.
Tempref
AREFB
ADCB
ACB
PORT B (8)
PORT R (2)
EVENT ROUTING NETWORK
Event System
Controller
DMA
Controller
BUS Matrix
AES
DES
CRC
Oscillator
Circuits/
Clock
Generation
DATA BUS
Oscillator
Control
SRAM
Sleep
Controller
Prog/Debug
Controller
OCD
CPU
NVM Controller
Flash EEPROM
Interrupt
Controller
Real Time
Counter
Watchdog
Oscillator
Watchdog
Supervision
POR/BOD &
PDI
JTAG
Timer
Power
RESET
PORT B
LCD
PORT M (8)
PORT G (8)
VCC
GND
RESET /
PDI_CLK
PDI_DATA
LCD POWER[0..4]
COM[0..3]
SEG[0..23]
SEG[31..24] /
PM[0..7]
SEG[39..32] /
PG[0..7]
DATA BUS
EVENT ROUTING NETWORK
IRCOM
TCC0:1
USARTC0
PORT C (8)
PC[0..7]
SPIC
TWIC
PORT D (3)
USB
PORT E (8)
PD[0..2] PE[0..7]
TCE0
TOSC1
TOSC2
USARTE0
(Alternate)
To Clock
Generator
In Table 2-1 on page 5 a feature summary for the XMEGA B family is shown, split into one feature summary column for
each sub-family. Each sub-family has identical feature set, but different memory options, refer to their device datasheet
for ordering codes and memory options.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
4
Page 5
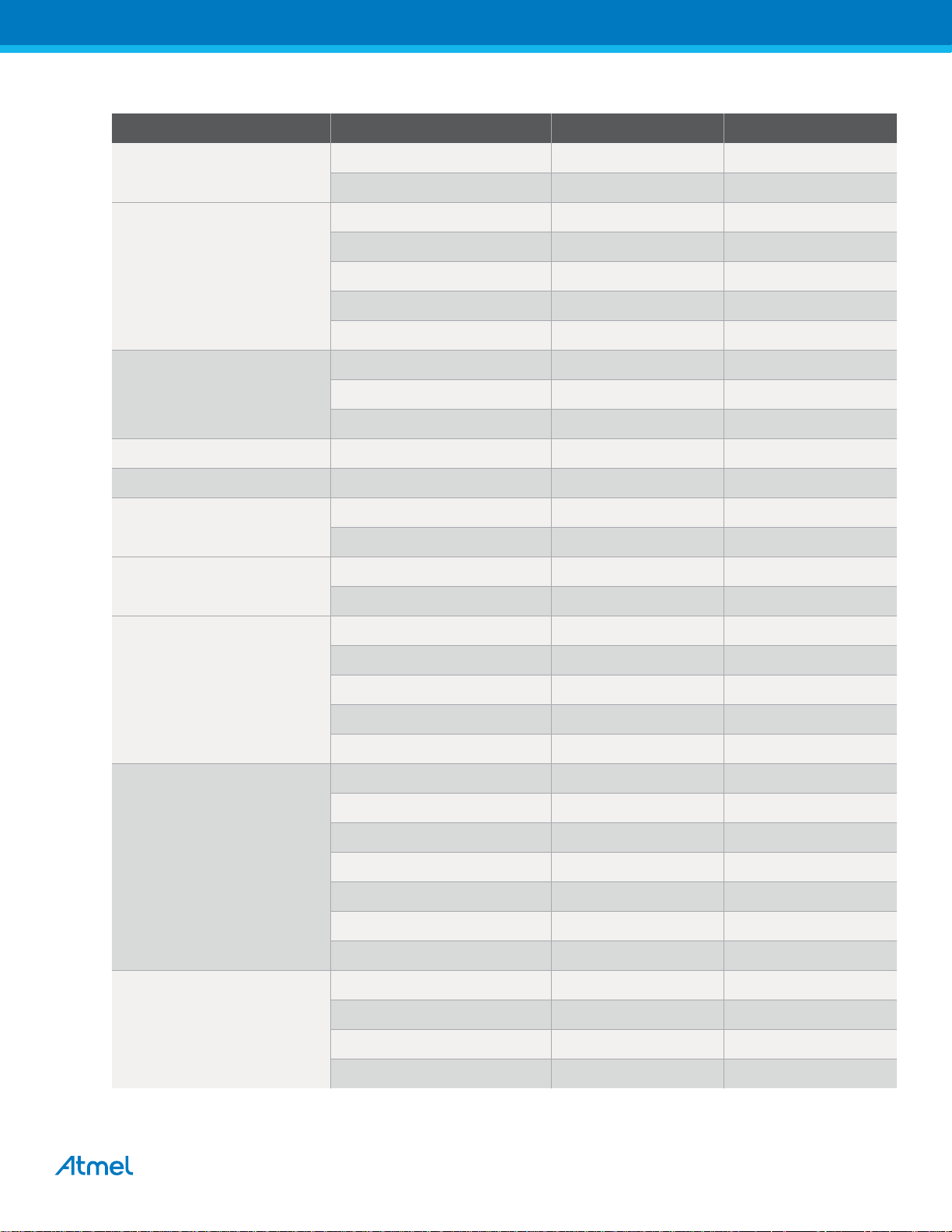
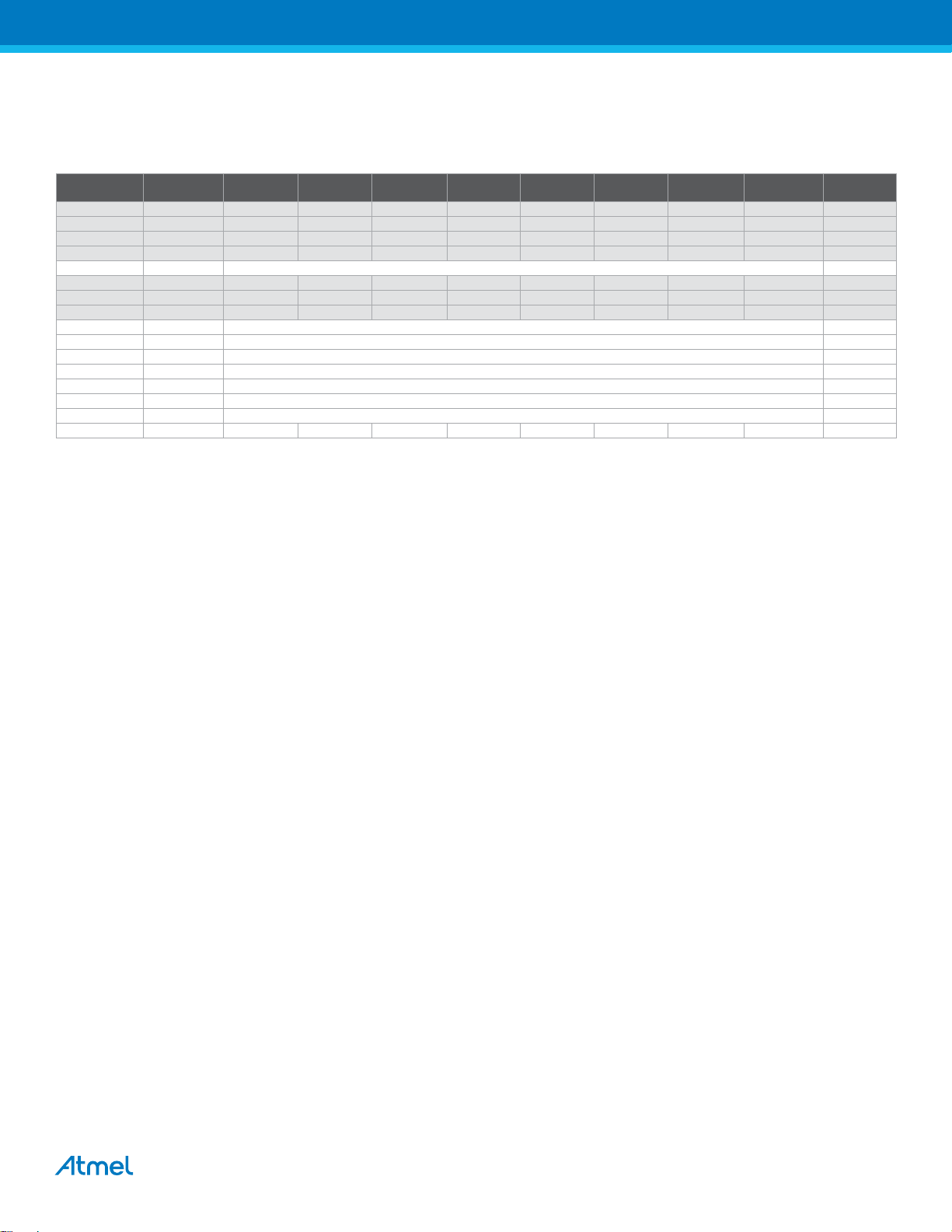
Table 2-1. XMEGA B feature summary overview.
Feature Details / sub-family B1 B3
Pins, I/O
Total 100 64
Programmable I/O pins 53 36
Program memory (KB) 64 - 128 64 - 128
Boot memory (KB) 4 - 8 4 - 8
Memory
SRAM (KB) 4 - 8 4 - 8
EEPROM 2 2 - 4
General purpose registers 16 16
TQFP 100A 64A
Package
QFN /VQFN – 64M2
BGA 100C1/100C2 –
QTouch Sense channels 56 56
DMA Controller Channels 2 2
Channels 4 4
Event System
QDEC 1 1
0.4 - 16MHz XOSC Yes Ye s
Crystal Oscillator
32.768 kHz TOSC Yes Yes
Internal Oscillator
Timer / Counter
Serial Communication
2MHz calibrated Yes Yes
32MHz calibrated Yes Yes
128MHz PLL Yes Yes
32.768kHz calibrated Yes Ye s
32kHz ULP Yes Yes
TC0 - 16-bit, 4 CC 2 1
TC1 - 16-bit, 2 CC 1 1
TC2 - 2x 8-bit 2 1
Hi-Res 1 1
AWeX 1 1
RTC 1 1
RTC32
USB full-speed device 1 1
USART 2 1
SPI 1 1
TWI 1 1
XMEGA B [DATASHEET]
8291B–AVR–01/2013
5
Page 6
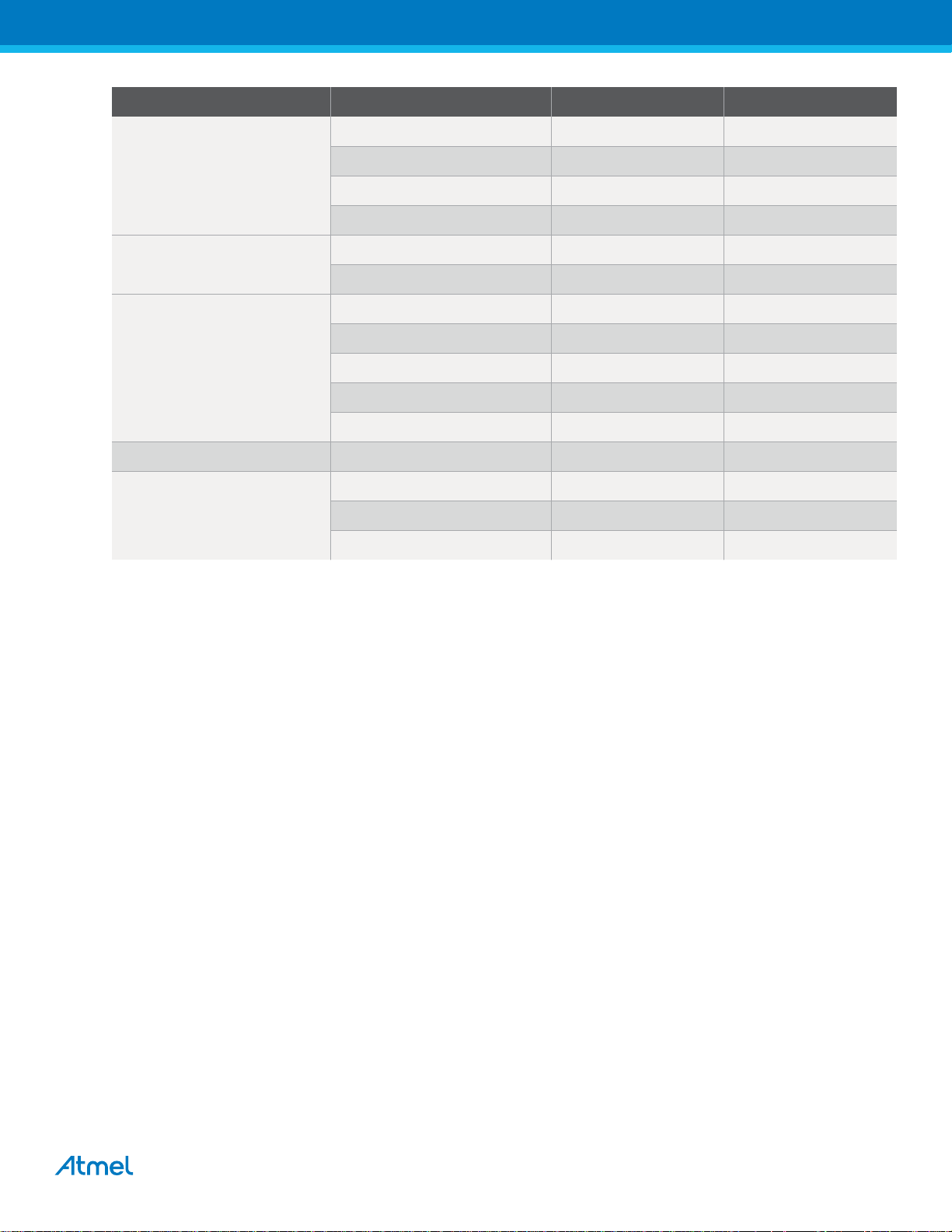
Feature Details / sub-family B1 B3
AES-128 Yes Yes
Crypto /CRC
DES Yes Yes
CRC-16 Ye s Yes
CRC-32 Ye s Yes
Liquid Crystal Display
Controller (LCD)
Segments 40 25
Common terminals 4 4
2 1
Resolution (bits) 12 12
Analog to Digital Converter
(ADC)
Sampling speed (kbps) 300 300
Input channels per ADC 16 8
Conversion channels 1 1
Analog Comparator (AC) 4 2
PDI Yes Yes
Program and Debug Interface
JTAG Ye s Ye s
Boundary scan Yes Yes
XMEGA B [DATASHEET]
8291B–AVR–01/2013
6
Page 7
3. Atmel AVR CPU
3.1 Features
8/16-bit, high-performance Atmel AVR RISC CPU
142 instructions
Hardware multiplier
32x8-bit registers directly connected to the ALU
Stack in RAM
Stack pointer accessible in I/O memory space
Direct addressing of up to 16MB of program memory and 16MB of data memory
True 16/24-bit access to 16/24-bit I/O registers
Efficient support for 8-, 16-, and 32-bit arithmetic
Configuration change protection of system-critical features
3.2 Overview
All Atmel AVR XMEGA devices use the 8/16-bit AVR CPU. The main function of the CPU is to execute the code and
perform all calculations. The CPU is able to access memories, perform calculations, control peripherals, and execute the
program in the flash memory. Interrupt handling is described in a separate section, “Interrupts and Programmable
Multilevel Interrupt Controller” on page 118.
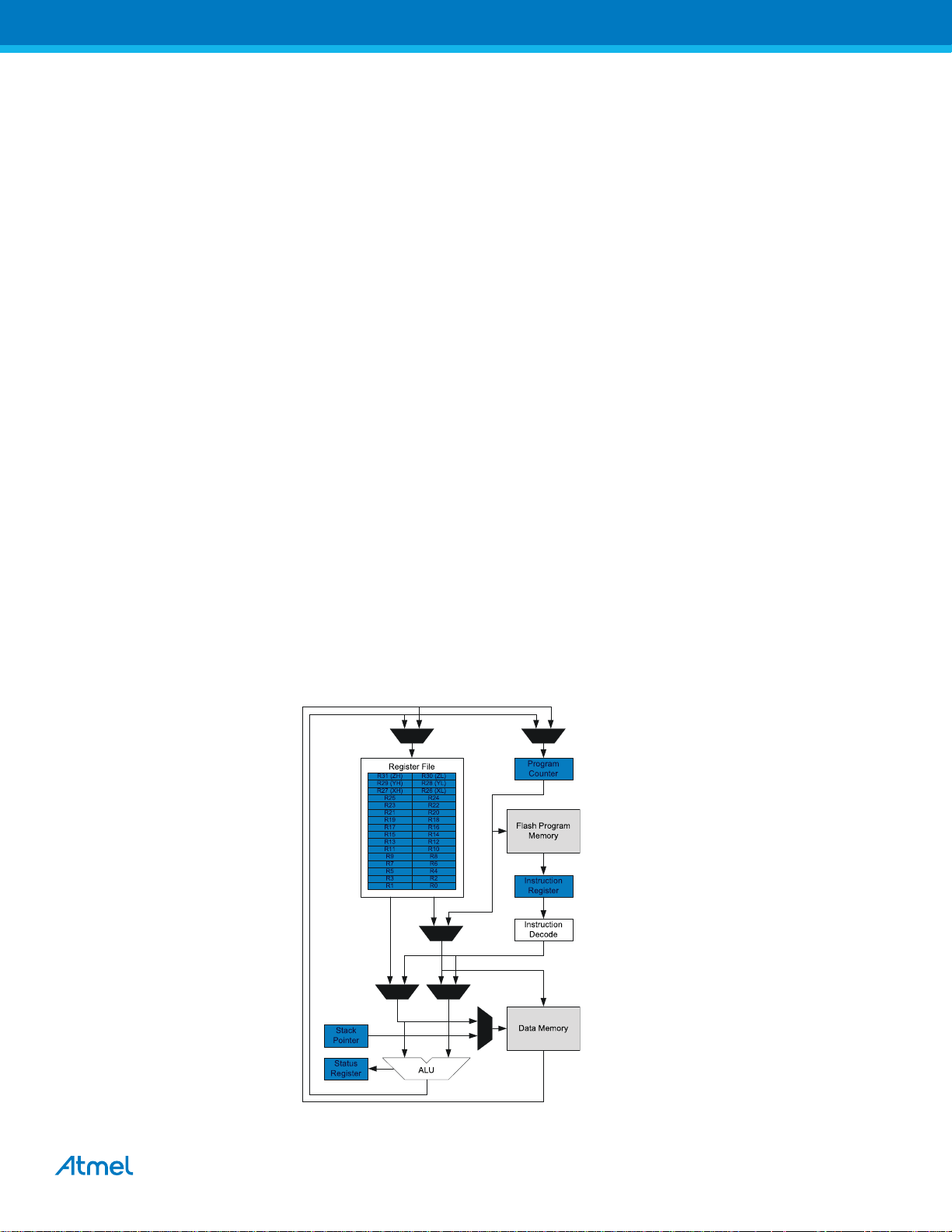
3.3 Architectural Overview
In order to maximize performance and parallelism, the AVR CPU uses a Harvard architecture with separate memories
and buses for program and data. Instructions in the program memory are executed with single-level pipelining. While one
instruction is being executed, the next instruction is pre-fetched from the program memory. This enables instructions to
be executed on every clock cycle. For a summary of all AVR instructions, refer to “Instruction Set Summary” on page
397. For details of all AVR instructions, refer to http://www.atmel.com/avr.
Figure 3-1. Block diagram of the AVR CPU architecture.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
7
Page 8

The arithmetic logic unit (ALU) supports arithmetic and logic operations between registers or between a constant and a
register. Single-register operations can also be executed in the ALU. After an arithmetic operation, the status register is
updated to reflect information about the result of the operation.
The ALU is directly connected to the fast-access register file. The 32 x 8-bit general purpose working registers all have
single clock cycle access time allowing single-cycle arithmetic logic unit operation between registers or between a
register and an immediate. Six of the 32 registers can be used as three 16-bit address pointers for program and data
space addressing, enabling efficient address calculations.
The memory spaces are linear. The data memory space and the program memory space are two different memory
spaces.
The data memory space is divided into I/O registers, SRAM, and external RAM. In addition, the EEPROM can be
memory mapped in the data memory.
All I/O status and control registers reside in the lowest 4KB addresses of the data memory. This is referred to as the I/O
memory space. The lowest 64 addresses can be accessed directly, or as the data space locations from 0x00 to 0x3F.
The rest is the extended I/O memory space, ranging from 0x0040 to 0x0FFF. I/O registers here must be accessed as
data space locations using load (LD/LDS/LDD) and store (ST/STS/STD) instructions.
The SRAM holds data. Code execution from SRAM is not supported. It can easily be accessed through the five different
addressing modes supported in the AVR architecture. The first SRAM address is 0x2000.
Data addresses 0x1000 to 0x1FFF are reserved for memory mapping of EEPROM.
The program memory is divided in two sections, the application program section and the boot program section. Both
sections have dedicated lock bits for write and read/write protection. The SPM instruction that is used for selfprogramming of the application flash memory must reside in the boot program section. The application section contains
an application table section with separate lock bits for write and read/write protection. The application table section can
be used for save storing of nonvolatile data in the program memory.
3.4 ALU - Arithmetic Logic Unit
The arithmetic logic unit supports arithmetic and logic operations between registers or between a constant and a register.
Single-register operations can also be executed. The ALU operates in direct connection with all 32 general purpose
registers. In a single clock cycle, arithmetic operations between general purpose registers or between a register and an
immediate are executed and the result is stored in the register file. After an arithmetic or logic operation, the status
register is updated to reflect information about the result of the operation.
ALU operations are divided into three main categories – arithmetic, logical, and bit functions. Both 8- and 16-bit
arithmetic is supported, and the instruction set allows for efficient implementation of 32-bit arithmetic. The hardware
multiplier supports signed and unsigned multiplication and fractional format.
3.4.1 Hardware Multiplier
The multiplier is capable of multiplying two 8-bit numbers into a 16-bit result. The hardware multiplier supports different
variations of signed and unsigned integer and fractional numbers:
Multiplication of unsigned integers
Multiplication of signed integers
Multiplication of a signed integer with an unsigned integer
Multiplication of unsigned fractional numbers
Multiplication of signed fractional numbers
Multiplication of a signed fractional number with an unsigned one
A multiplication takes two CPU clock cycles.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
8
Page 9
3.5 Program Flow
2
4th Instruction Fetch
T1 T2 T3 T4
After reset, the CPU starts to execute instructions from the lowest address in the flash program memory ‘0.’ The program
counter (PC) addresses the next instruction to be fetched.
Program flow is provided by conditional and unconditional jump and call instructions capable of addressing the whole
address space directly. Most AVR instructions use a 16-bit word format, while a limited number use a 32-bit format.
During interrupts and subroutine calls, the return address PC is stored on the stack. The stack is allocated in the general
data SRAM, and consequently the stack size is only limited by the total SRAM size and the usage of the SRAM. After
reset, the stack pointer (SP) points to the highest address in the internal SRAM. The SP is read/write accessible in the
I/O memory space, enabling easy implementation of multiple stacks or stack areas. The data SRAM can easily be
accessed through the five different addressing modes supported in the AVR CPU.
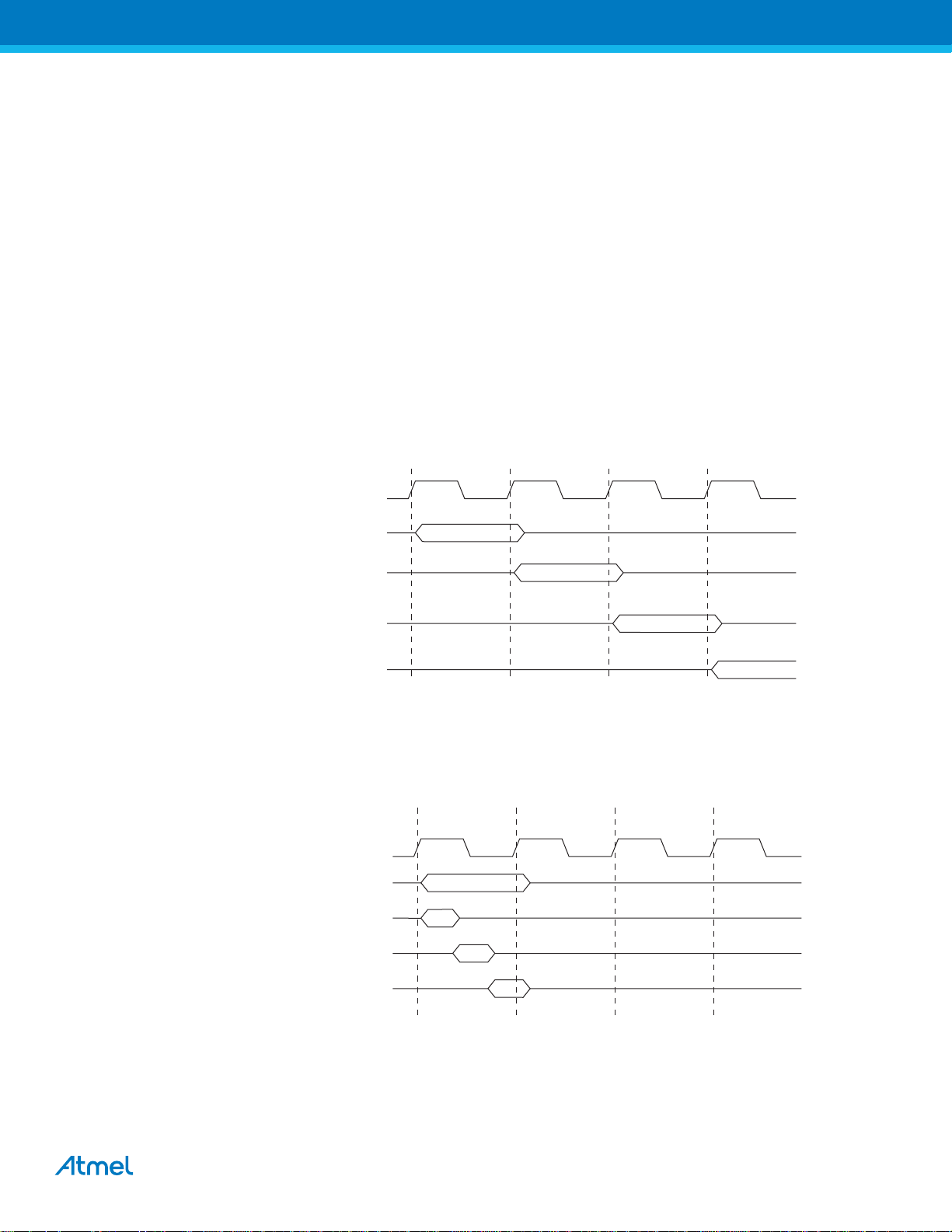
3.6 Instruction Execution Timing
The AVR CPU is clocked by the CPU clock, clk
. No internal clock division is used. Figure 3-2 on page 9 shows the
CPU
parallel instruction fetches and instruction executions enabled by the Harvard architecture and the fast-access register
file concept. This is the basic pipelining concept used to obtain up to 1MIPS/MHz performance with high power efficiency.
Figure 3-2. The parallel instruction fetches and instruction executions.
clk
CPU
1st Instruction Fetch
1st Instruction Execute
2nd Instruction Fetch
nd Instruction Execute
3rd Instruction Fetch
3rd Instruction Execute
Figure 3-3 on page 9 shows the internal timing concept for the register file. In a single clock cycle, an ALU operation
using two register operands is executed and the result is stored back to the destination register.
Figure 3-3. Single Cycle ALU Operation
T1 T2 T3 T4
clk
CPU
Total Execution Time
Register Operands Fetch
ALU Operation Execute
Result Write Back
XMEGA B [DATASHEET]
8291B–AVR–01/2013
9
Page 10

3.7 Status Register
The status register (SREG) contains information about the result of the most recently executed arithmetic or logic
instruction. This information can be used for altering program flow in order to perform conditional operations. Note that
the status register is updated after all ALU operations, as specified in the instruction set reference. This will in many
cases remove the need for using the dedicated compare instructions, resulting in faster and more compact code.
The status register is not automatically stored when entering an interrupt routine nor restored when returning from an
interrupt. This must be handled by software.
The status register is accessible in the I/O memory space.
3.8 Stack and Stack Pointer
The stack is used for storing return addresses after interrupts and subroutine calls. It can also be used for storing
temporary data. The stack pointer (SP) register always points to the top of the stack. It is implemented as two 8-bit
registers that are accessible in the I/O memory space. Data are pushed and popped from the stack using the PUSH and
POP instructions. The stack grows from a higher memory location to a lower memory location. This implies that pushing
data onto the stack decreases the SP, and popping data off the stack increases the SP. The SP is automatically loaded
after reset, and the initial value is the highest address of the internal SRAM. If the SP is changed, it must be set to point
above address 0x2000, and it must be defined before any subroutine calls are executed or before interrupts are enabled.
During interrupts or subroutine calls, the return address is automatically pushed on the stack. The return address can be
two or three bytes, depending on program memory size of the device. For devices with 128KB or less of program
memory, the return address is two bytes, and hence the stack pointer is decremented/incremented by two. For devices
with more than 128KB of program memory, the return address is three bytes, and hence the SP is
decremented/incremented by three. The return address is popped off the stack when returning from interrupts using the
RETI instruction, and from subroutine calls using the RET instruction.
The SP is decremented by one when data are pushed on the stack with the PUSH instruction, and incremented by one
when data is popped off the stack using the POP instruction.
To prevent corruption when updating the stack pointer from software, a write to SPL will automatically disable interrupts
for up to four instructions or until the next I/O memory write.
3.9 Register File
The register file consists of 32 x 8-bit general purpose working registers with single clock cycle access time. The register
file supports the following input/output schemes:
One 8-bit output operand and one 8-bit result input
Two 8-bit output operands and one 8-bit result input
Two 8-bit output operands and one 16-bit result input
One 16-bit output operand and one 16-bit result input
Six of the 32 registers can be used as three 16-bit address register pointers for data space addressing, enabling efficient
address calculations. One of these address pointers can also be used as an address pointer for lookup tables in flash
program memory.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
10
Page 11
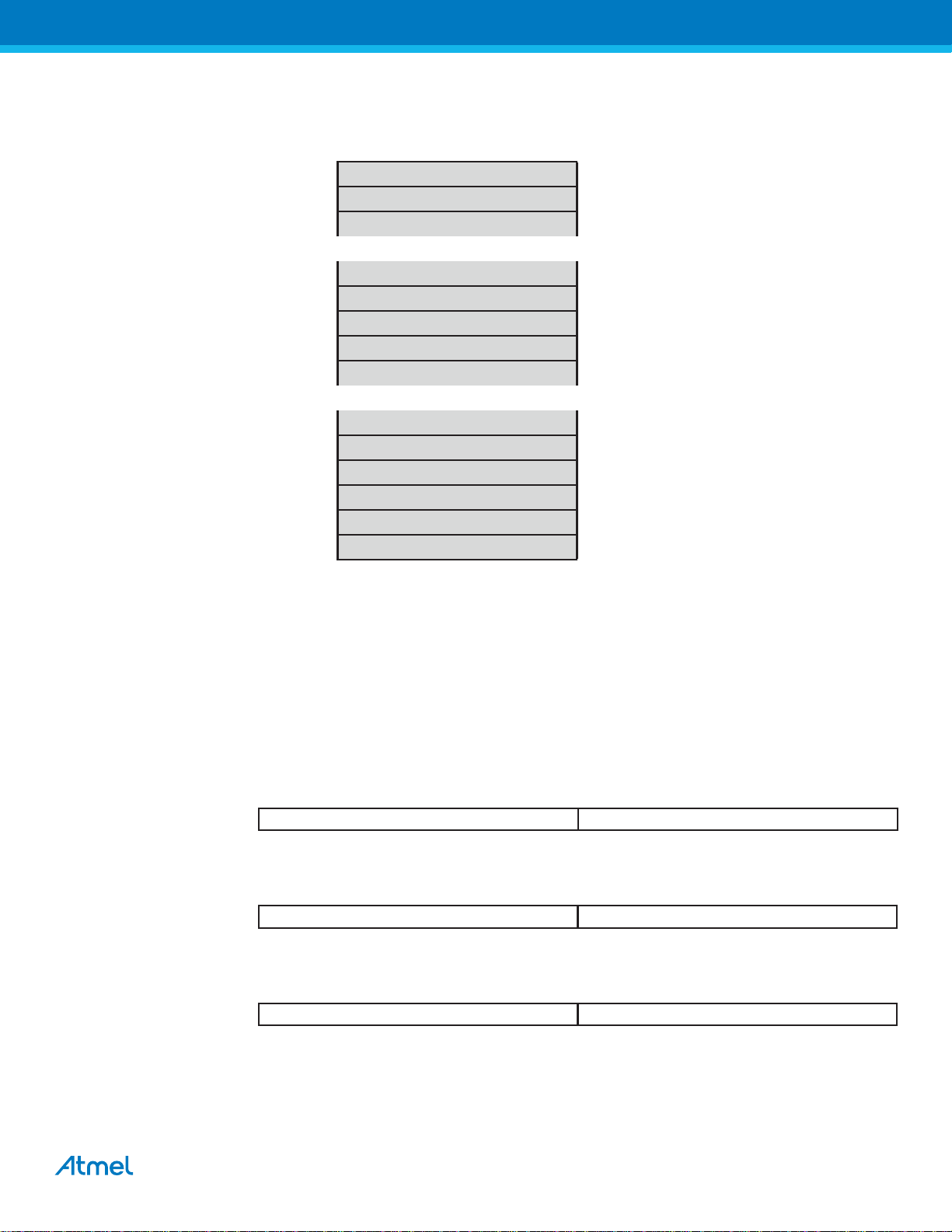
Figure 3-4. AVR CPU general purpose working registers.
7 0 Addr.
R0 0x00
R1 0x01
R2 0x02
…
R13 0x0D
General R14 0x0E
Purpose R15 0x0F
Working R16 0x10
Registers R17 0x11
…
R26 0x1A X-register Low Byte
R27 0x1B X-register High Byte
R28 0x1C Y-register Low Byte
R29 0x1D Y-register High Byte
R30 0x1E Z-register Low Byte
R31 0x1F Z-register High Byte
The register file is located in a separate address space, and so the registers are not accessible as data memory.
3.9.1 The X-, Y-, and Z- Registers
Registers R26..R31 have added functions besides their general-purpose usage.
These registers can form 16-bit address pointers for addressing data memory. These three address registers are called
the X-register, Y-register, and Z-register. The Z-register can also be used as an address pointer to read from and/or write
to the flash program memory, signature rows, fuses, and lock bits.
Figure 3-5. The X-, Y- and Z-registers.
Bit (individually) 7 R27 0 7 R26 0
X-register XH XL
Bit (X-register) 15 8 7 0
Bit (individually) 7 R29 0 7 R28 0
Y-register YH YL
Bit (Y-register) 15 8 7 0
Bit (individually) 7 R31 0 7 R30 0
Z-register ZH ZL
Bit (Z-register) 15 8 7 0
XMEGA B [DATASHEET]
8291B–AVR–01/2013
11
Page 12

The lowest register address holds the least-significant byte (LSB), and the highest register address holds the mostsignificant byte (MSB). In the different addressing modes, these address registers function as fixed displacement,
automatic increment, and automatic decrement (see the instruction set reference for details).
3.10 RAMP and Extended Indirect Registers
In order to access program memory or data memory above 64KB, the address pointer must be larger than 16 bits. This is
done by concatenating one register to one of the X-, Y-, or Z-registers. This register then holds the most-significant byte
(MSB) in a 24-bit address or address pointer.
These registers are available only on devices with external bus interface and/or more than 64KB of program or data
memory space. For these devices, only the number of bits required to address the whole program and data memory
space in the device is implemented in the registers.
3.10.1 RAMPX, RAMPY and RAMPZ Registers
The RAMPX, RAMPY and RAMPZ registers are concatenated with the X-, Y-, and Z-registers, respectively, to enable
indirect addressing of the whole data memory space above 64KB and up to 16MB.
Figure 3-6. The combined RAMPX + X, RAMPY + Y and RAMPZ + Z registers.
Bit (Individually) 7 0 7 0 7 0
RAMPX XH XL
Bit (X-pointer) 23 16 15 8 7 0
Bit (Individually) 7 0 7 0 7 0
Bit (Y-pointer) 23 16 15 8 7 0
Bit (Individually) 7 0 7
Bit (Z-pointer) 23 16 15 8 7 0
When reading (ELPM) and writing (SPM) program memory locations above the first 128KB of the program memory,
RAMPZ is concatenated with the Z-register to form the 24-bit address. LPM is not affected by the RAMPZ setting.
3.10.2 RAMPD Register
This register is concatenated with the operand to enable direct addressing of the whole data memory space above 64KB.
Together, RAMPD and the operand will form a 24-bit address.
Figure 3-7. The combined RAMPD + K register.
Bit (Individually) 7 0 15 0
Bit (D-pointer) 23 16 15 0
RAMPY YH YL
70
0
RAMPZ ZH ZL
RAMPD K
XMEGA B [DATASHEET]
8291B–AVR–01/2013
12
Page 13
3.10.3 EIND - Extended Indirect Register
EIND is concatenated with the Z-register to enable indirect jump and call to locations above the first 128KB (64K words)
of the program memory.
Figure 3-8. The combined EIND + Z register.
Bit (Individually) 7 0 7
EIND ZH ZL
Bit (D-pointer) 23 16 15 8 7 0
3.11 Accessing 16-bit Registers
The AVR data bus is 8 bits wide, and so accessing 16-bit registers requires atomic operations. These registers must be
byte-accessed using two read or write operations. 16-bit registers are connected to the 8-bit bus and a temporary register
using a 16-bit bus.
For a write operation, the low byte of the 16-bit register must be written before the high byte. The low byte is then written
into the temporary register. When the high byte of the 16-bit register is written, the temporary register is copied into the
low byte of the 16-bit register in the same clock cycle.
For a read operation, the low byte of the 16-bit register must be read before the high byte. When the low byte register is
read by the CPU, the high byte of the 16-bit register is copied into the temporary register in the same clock cycle as the
low byte is read. When the high byte is read, it is then read from the temporary register.
This ensures that the low and high bytes of 16-bit registers are always accessed simultaneously when reading or writing
the register.
Interrupts can corrupt the timed sequence if an interrupt is triggered and accesses the same 16-bit register during an
atomic 16-bit read/write operation. To prevent this, interrupts can be disabled when writing or reading 16-bit registers.
The temporary registers can also be read and written directly from user software.
3.11.1 Accessing 24- and 32-bit Registers
70
0
For 24- and 32-bit registers, the read and write access is done in the same way as described for 16-bit registers, except
there are two temporary registers for 24-bit registers and three for 32-bit registers. The least-significant byte must be
written first when doing a write, and read first when doing a read.
3.12 Configuration Change Protection
System critical I/O register settings are protected from accidental modification. The SPM instruction is protected from
accidental execution, and the LPM instruction is protected when reading the fuses and signature row. This is handled
globally by the configuration change protection (CCP) register. Changes to the protected I/O registers or bits, or
execution of protected instructions, are only possible after the CPU writes a signature to the CCP register. The different
signatures are described in the register description.
There are two modes of operation: one for protected I/O registers, and one for the protected instructions, SPM/LPM.
3.12.1 Sequence for write operation to protected I/O registers
1. The application code writes the signature that enable change of protected I/O registers to the CCP register.
2. Within four instruction cycles, the application code must write the appropriate data to the protected register. Most
protected registers also contain a write enable/change enable bit. This bit must be written to one in the same operation as the data are written. The protected change is immediately disabled if the CPU performs write operations to
the I/O register or data memory or if the SPM, LPM, or SLEEP instruction is executed.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
13
Page 14

3.12.2 Sequence for execution of protected SPM/LPM
1. The application code writes the signature for the execution of protected SPM/LPM to the CCP register.
2. Within four instruction cycles, the application code must execute the appropriate instruction. The protected change
is immediately disabled if the CPU performs write operations to the data memory or if the SLEEP instruction is
executed.
Once the correct signature is written by the CPU, interrupts will be ignored for the duration of the configuration change
enable period. Any interrupt request (including non-maskable interrupts) during the CCP period will set the
corresponding interrupt flag as normal, and the request is kept pending. After the CCP period is completed, any pending
interrupts are executed according to their level and priority. DMA requests are still handled, but do not influence the
protected configuration change enable period. A signature written by DMA is ignored.
3.13 Fuse Lock
For some system-critical features, it is possible to program a fuse to disable all changes to the associated I/O control
registers. If this is done, it will not be possible to change the registers from the user software, and the fuse can only be
reprogrammed using an external programmer. Details on this are described in the datasheet module where this feature is
available.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
14
Page 15
3.14 Register Descriptions
3.14.1 CCP – Configuration Change Protection register
Bit 76543210
+0x04 CCP[7:0]
Read/Write W W W W W W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – CCP[7:0]: Configuration Change Protection
The CCP register must be written with the correct signature to enable change of the protected I/O register or execution of
the protected instruction for a maximum period of four CPU instruction cycles. All interrupts are ignored during these
cycles. After these cycles, interrupts will automatically be handled again by the CPU, and any pending interrupts will be
executed according to their level and priority. When the protected I/O register signature is written, CCP[0] will read as
one as long as the protected feature is enabled. Similarly when the protected SPM/LPM signature is written, CCP[1] will
read as one as long as the protected feature is enabled. CCP[7:2] will always read as zero. Table 3-1 shows the
signature for the various modes.
Table 3-1. Modes of CPU change protection.
Signature Group Configuration Description
0x9D SPM Protected SPM/LPM
0xD8 IOREG Protected IO register
3.14.2 RAMPD – Extended Direct Addressing register
This register is concatenated with the operand for direct addressing (LDS/STS) of the whole data memory space on
devices with more than 64KB of data memory. This register is not available if the data memory, including external
memory, is less than 64KB.
Bit 76543210
+0x08 RAMPD[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – RAMPD[7:0]: Extended Direct Addressing bits
These bits hold the MSB of the 24-bit address created by RAMPD and the 16-bit operand. Only the number of bits
required to address the available data memory is implemented for each device. Unused bits will always read as zero.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
15
Page 16
3.14.3 RAMPX – Extended X-Pointer register
This register is concatenated with the X-register for indirect addressing (LD/LDD/ST/STD) of the whole data memory
space on devices with more than 64KB of data memory. This register is not available if the data memory, including
external memory, is less than 64KB.
Bit 76543210
+0x09 RAMPX[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – RAMPX[7:0]: Extended X-pointer Address bits
These bits hold the MSB of the 24-bit address created by RAMPX and the 16-bit X-register. Only the number of bits
required to address the available data memory is implemented for each device. Unused bits will always read as zero.
3.14.4 RAMPY – Extended Y-Pointer register
This register is concatenated with the Y-register for indirect addressing (LD/LDD/ST/STD) of the whole data memory
space on devices with more than 64KB of data memory. This register is not available if the data memory, including
external memory, is less than 64KB.
Bit 76543210
+0x0A RAMPY[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 000000
Bit 7:0 – RAMPY[7:0]: Extended Y-pointer Address bits
These bits hold the MSB of the 24-bit address created by RAMPY and the 16-bit Y-register. Only the number of bits
required to address the available data memory is implemented for each device. Unused bits will always read as zero.
3.14.5 RAMPZ – Extended Z-Pointer register
This register is concatenated with the Z-register for indirect addressing (LD/LDD/ST/STD) of the whole data memory
space on devices with more than 64KB of data memory. RAMPZ is concatenated with the Z-register when reading
(ELPM) program memory locations above the first 64KB and writing (SPM) program memory locations above the first
128KB of the program memory.
This register is not available if the data memory, including external memory and program memory in the device, is less
than 64KB.
Bit 76543210
+0x0B RAMPZ[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
Bit 7:0 – RAMPZ[7:0]: Extended Z-pointer Address bits
These bits hold the MSB of the 24-bit address created by RAMPZ and the 16-bit Z-register. Only the number of bits
required to address the available data and program memory is implemented for each device. Unused bits will always
read as zero.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
16
Page 17
3.14.6 EIND – Extended Indirect register
This register is concatenated with the Z-register for enabling extended indirect jump (EIJMP) and call (EICALL) to the
whole program memory space on devices with more than 128KB of program memory. The register should be used for
jumps to addresses below 128KB if ECALL/EIJMP are used, and it will not be used if CALL and IJMP commands are
used. For jump or call to addresses below 128KB, this register is not used. This register is not available if the program
memory in the device is less than 128KB.
Bit 76543210
+0x0C EIND[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – EIND[7:0]: Extended Indirect Address bits
These bits hold the MSB of the 24-bit address created by EIND and the 16-bit Z-register. Only the number of bits
required to access the available program memory is implemented for each device. Unused bits will always read as zero.
3.14.7 SPL – Stack Pointer Register Low
The SPH and SPL register pair represent the 16-bit SP value. The SP holds the stack pointer that points to the top of the
stack. After reset, the stack pointer points to the highest internal SRAM address. To prevent corruption when updating
the stack pointer from software, a write to SPL will automatically disable interrupts for the next four instructions or until
the next I/O memory write.
Only the number of bits required to address the available data memory, including external memory, up to 64KB is
implemented for each device. Unused bits will always read as zero.
Bit 76543210
+0x0D SP[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value
Note: 1. Refer to specific device datasheets for exact initial values.
Bit 7:0 – SP[7:0]: Stack Pointer Register Low
(1)
0/1 0/1 0/1 0/1 0/1 0/1 0/1 0/1
These bits hold the LSB of the 16-bit stack pointer (SP).
3.14.8 SPH – Stack Pointer Register High
Bit 76543210
+0x0E SP[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value
Note: 1. Refer to specific device datasheets for exact initial values.
Bit 7:0 – SP[15:8]: Stack Pointer Register High
(1)
0/1 0/1 0/1 0/1 0/1 0/1 0/1 0/1
These bits hold the MSB of the 16-bit stack pointer (SP).
XMEGA B [DATASHEET]
8291B–AVR–01/2013
17
Page 18
3.14.9 SREG – Status Register
The status register (SREG) contains information about the result of the most recently executed arithmetic or logic
instruction.
Bit 76543210
+0x0F ITHSVNZC
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7 – I: Global Interrupt Enable
The global interrupt enable bit must be set for interrupts to be enabled. If the global interrupt enable register is cleared,
none of the interrupts are enabled independent of the individual interrupt enable settings. This bit is not cleared by
hardware after an interrupt has occurred. This bit can be set and cleared by the application with the SEI and CLI
instructions, as described in “Instruction Set Description.” Changing the I flag through the I/O-register result in a onecycle wait state on the access.
Bit 6 – T: Bit Copy Storage
The bit copy instructions bit load (BLD) and bit store (BST) use the T bit as source or destination for the operated bit. A bit
from a register in the register file can be copied into this bit by the BST instruction, and this bit can be copied into a bit in
a register in the register file by the BLD instruction.
Bit 5 – H: Half Carry Flag
The half carry flag (H) indicates a half carry in some arithmetic operations. Half carry Is useful in BCD arithmetic. See
“Instruction Set Description” for detailed information.
Bit 4 – S: Sign Bit, S = N V
The sign bit is always an exclusive or between the negative flag, N, and the two’s complement overflow flag, V. See
“Instruction Set Description” for detailed information.
Bit 3 – V: Two’s Complement Overflow Flag
The two’s complement overflow flag (V) supports two’s complement arithmetic. See “Instruction Set Description” for
detailed information.
Bit 2 – N: Negative Flag
The negative flag (N) indicates a negative result in an arithmetic or logic operation. See “Instruction Set Description” for
detailed information.
Bit 1 – Z: Zero Flag
The zero flag (Z) indicates a zero result in an arithmetic or logic operation. See “Instruction Set Description” for detailed
information.
Bit 0 – C: Carry Flag
The carry flag (C) indicates a carry in an arithmetic or logic operation. See “Instruction Set Description” for detailed
information.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
18
Page 19
3.15 Register Summary
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00 Reserved – – – – – – – –
+0x01 Reserved – – – – – – – –
+0x02 Reserved – – – – – – – –
+0x03 Reserved – – – – – – – –
+0x04 CCP CCP[7:0] 15
+0x05 Reserved – – – – – – – –
+0x06 Reserved – – – – – – – –
+0x07 Reserved – – – – – – – –
+0x08 RAMPD RAMPD[7:0] 15
+0x09 RAMPX RAMPX[7:0] 16
+0x0A RAMPY RAMPY[7:0] 16
+0x0B RAMPZ RAMPZ[7:0] 16
+0x0C EIND EIND[7:0] 17
+0x0D SPL SPL[7:0] 17
+0x0E SPH SPH[7:0] 17
+0x0F SREG I T H S V N Z C 18
XMEGA B [DATASHEET]
8291B–AVR–01/2013
19
Page 20

4. Memories
4.1 Features
Flash program memory
One linear address space
In-system programmable
Self-programming and boot loader support
Application section for application code
Application table section for application code or data storage
Boot section for application code or bootloader code
Separate read/write protection lock bits for all sections
Built in fast CRC check of a selectable flash program memory section
Data memory
One linear address space
Single-cycle access from CPU
SRAM
EEPROM
Byte and page accessible
Optional memory mapping for direct load and store
I/O memory
Configuration and status registers for all peripherals and modules
16 bit-accessible general purpose registers for global variables or flags
Bus arbitration
Safe and deterministic handling of priority between CPU, DMA controller, and other bus masters
Separate buses for SRAM, EEPROM and I/O memory access
Simultaneous bus access for CPU and DMA controller
Production signature row memory for factory programmed data
ID for each microcontroller device type
Serial number for each device
Calibration bytes for factory calibrated peripherals
User signature row
One flash page in size
Can be read and written from software
Content is kept after chip erase
4.2 Overview
This section describes the different memory sections. The AVR architecture has two main memory spaces, the program
memory and the data memory. Executable code can reside only in the program memory, while data can be stored in the
program memory and the data memory. The data memory includes the internal SRAM, and as well as EEPROM for
nonvolatile data storage. All memory spaces are linear and require no memory bank switching. Nonvolatile memory
(NVM) spaces can be locked for further write and read/write operations. This prevents unrestricted access to the
application software.
A separate memory section contains the fuse bytes. These are used for configuring important system functions, and can
only be written by an external programmer.
4.3 Flash Program Memory
All XMEGA devices contain on-chip, in-system reprogrammable flash memory for program storage. The flash memory
can be accessed for read and write from an external programmer through the PDI or from application software running in
the device.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
20
Page 21
All AVR CPU instructions are 16 or 32 bits wide, and each flash location is 16 bits wide. The flash memory is organized
in two main sections, the application section and the boot loader section, as shown in Figure 4-1 on page 21. The sizes
of the different sections are fixed, but device-dependent. These two sections have separate lock bits, and can have
different levels of protection. The store program memory (SPM) instruction, which is used to write to the flash from the
application software, will only operate when executed from the boot loader section.
The application section contains an application table section with separate lock settings. This enables safe storage of
nonvolatile data in the program memory.
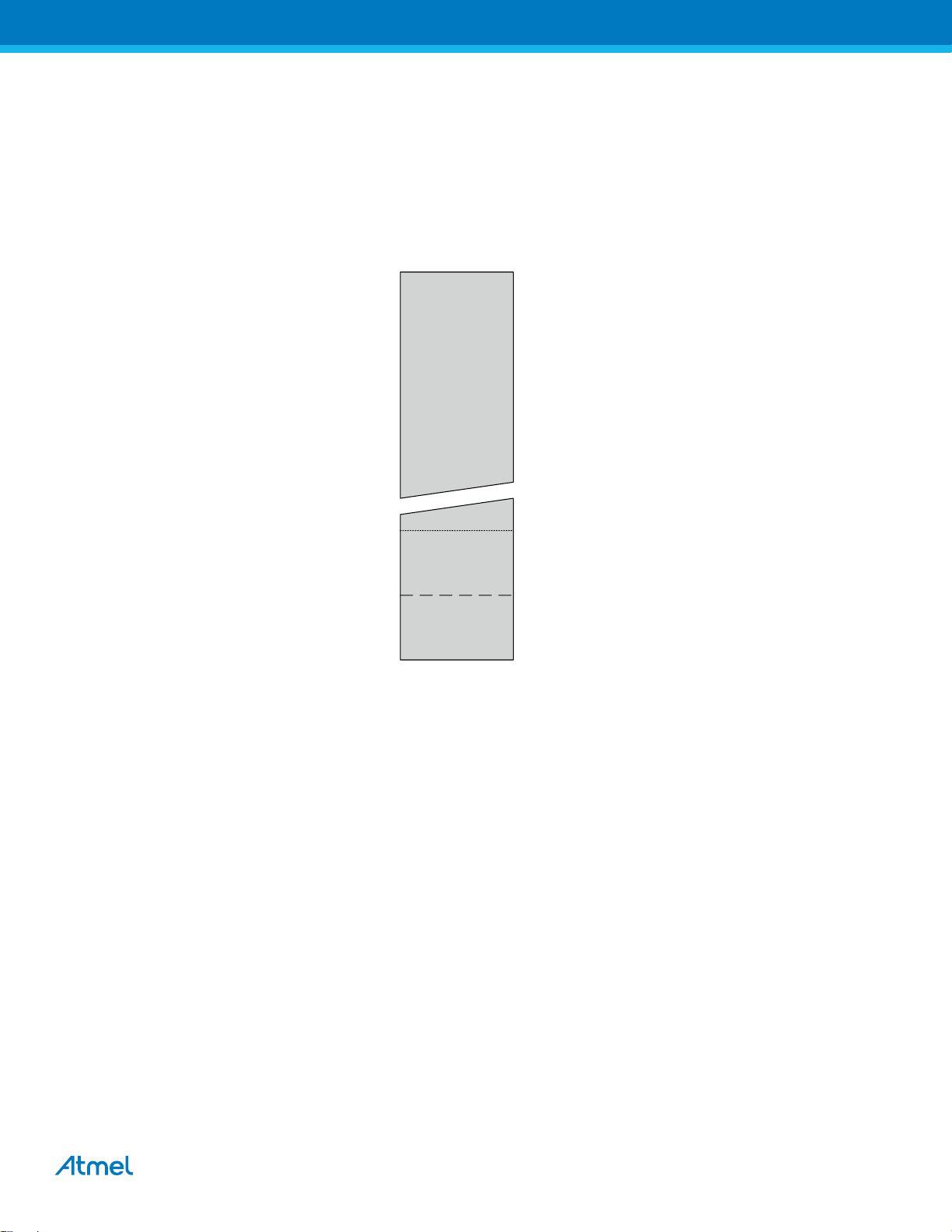
Figure 4-1. Flash memory sections.
0x000000
Application Flash
Section
4.3.1 Application Section
The Application section is the section of the flash that is used for storing the executable application code. The protection
level for the application section can be selected by the boot lock bits for this section. The application section can not store
any boot loader code since the SPM instruction cannot be executed from the application section.
4.3.2 Application Table Section
The application table section is a part of the application section of the flash memory that can be used for storing data.
The size is identical to the boot loader section. The protection level for the application table section can be selected by
the boot lock bits for this section. The possibilities for different protection levels on the application section and the
application table section enable safe parameter storage in the program memory. If this section is not used for data,
application code can reside here.
4.3.3 Boot Loader Section
While the application section is used for storing the application code, the boot loader software must be located in the boot
loader section because the SPM instruction can only initiate programming when executing from this section. The SPM
instruction can access the entire flash, including the boot loader section itself. The protection level for the boot loader
section can be selected by the boot loader lock bits. If this section is not used for boot loader software, application code
can be stored here.
Application Table
Flash Section
End Application
Start Boot Loader
Boot Loader Flash
Section
Flashend
XMEGA B [DATASHEET]
8291B–AVR–01/2013
21
Page 22

4.3.4 Production Signature Row
The production signature row is a separate memory section for factory programmed data. It contains calibration data for
functions such as oscillators and analog modules. Some of the calibration values will be automatically loaded to the
corresponding module or peripheral unit during reset. Other values must be loaded from the signature row and written to
the corresponding peripheral registers from software. For details on calibration conditions such as temperature, voltage
references, etc., refer to the device datasheet.
The production signature row also contains an ID that identifies each microcontroller device type and a serial number for
each manufactured device. The serial number consists of the production lot number, wafer number, and wafer
coordinates for the device.
The production signature row cannot be written or erased, but it can be read from application software and external
programmers.
For accessing the production signature row, refer to “NVM Flash Commands” on page 382.
4.3.5 User Signature Row
The user signature row is a separate memory section that is fully accessible (read and write) from application software
and external programmers. It is one flash page in size, and is meant for static user parameter storage, such as calibration
data, custom serial number, identification numbers, random number seeds, etc. This section is not erased by chip erase
commands that erase the flash, and requires a dedicated erase command. This ensures parameter storage during
multiple program/erase operations and on-chip debug sessions.
4.4 Fuses and Lockbits
The fuses are used to configure important system functions, and can only be written from an external programmer. The
application software can read the fuses. The fuses are used to configure reset sources such as brownout detector and
watchdog, startup configuration, JTAG enable, and JTAG user ID.
The lock bits are used to set protection levels for the different flash sections (i.e., if read and/or write access should be
blocked). Lock bits can be written by external programmers and application software, but only to stricter protection levels.
Chip erase is the only way to erase the lock bits. To ensure that flash contents are protected even during chip erase, the
lock bits are erased after the rest of the flash memory has been erased.
An unprogrammed fuse or lock bit will have the value one, while a programmed fuse or lock bit will have the value zero.
Both fuses and lock bits are reprogrammable like the flash program memory.
4.5 Data Memory
The data memory contains the I/O memory, internal SRAM and optionally memory mapped EEPROM. The data memory
is organized as one continuous memory section, as shown in Figure 4-2 on page 23.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
22
Page 23
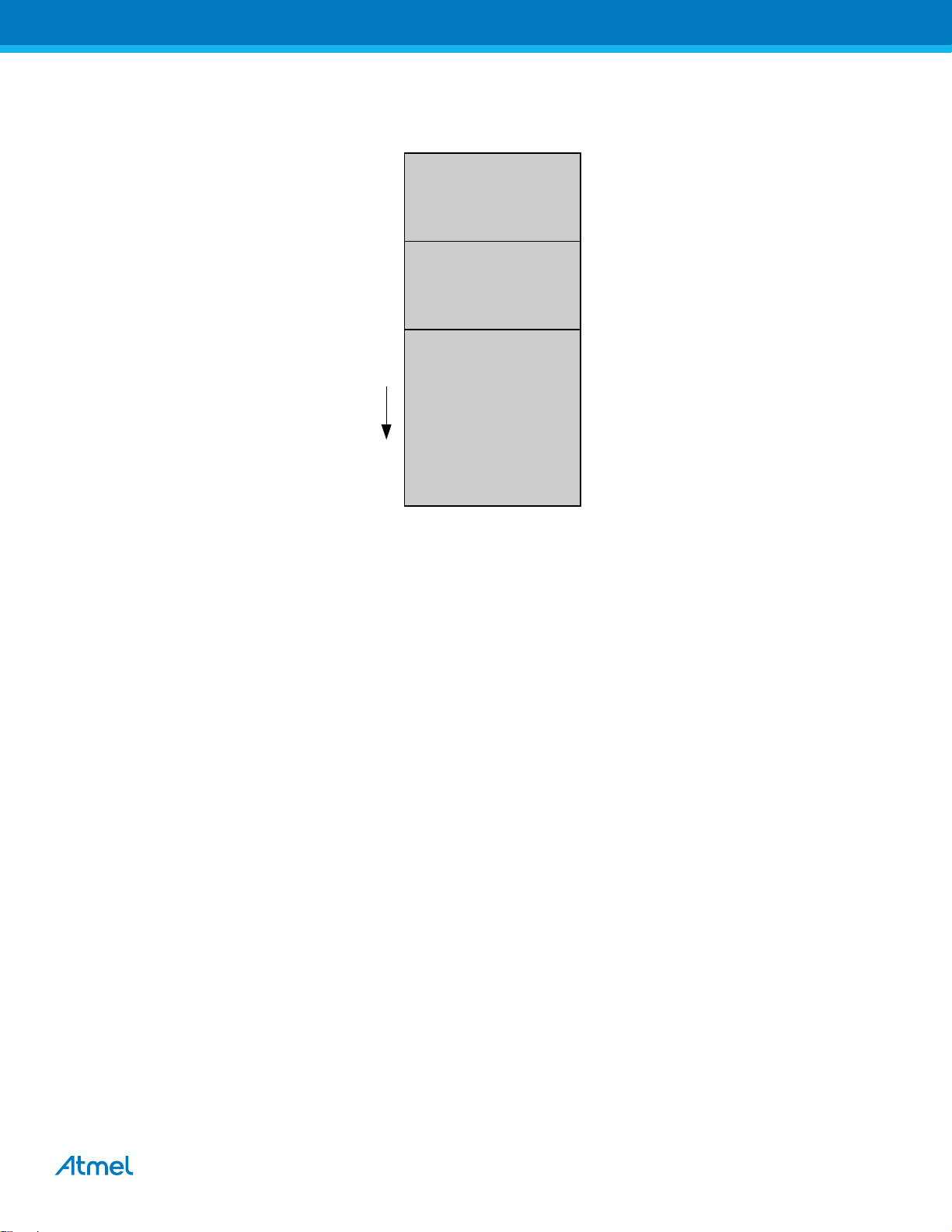
Figure 4-2. Data memory map.
Start/End Address Data Memory
0x0000
I/O Memory
(Up to 4 KB)
0x1000
EEPROM
(Up to 4 KB)
0x2000
Internal SRAM
(Up to 8 KB)
I/O memory, EEPROM, and SRAM will always have the same start addresses for all XMEGA devices.
4.6 Internal SRAM
The internal SRAM always starts at hexadecimal address 0x2000. SRAM is accessed by the CPU using the load
(LD/LDS/LDD) and store (ST/STS/STD) instructions.
4.7 EEPROM
XMEGA devices have EEPROM for nonvolatile data storage. It is either addressable in a separate data space (default)
or memory mapped and accessed in normal data space. The EEPROM supports both byte and page access. Memory
mapped EEPROM allows highly efficient EEPROM reading and EEPROM buffer loading. When doing this, EEPROM is
accessible using load and store instructions. Memory mapped EEPROM will always start at hexadecimal address
0x1000.
4.8 I/O Memory
The status and configuration registers for peripherals and modules, including the CPU, are addressable through I/O
memory locations. All I/O locations can be accessed by the load (LD/LDS/LDD) and store (ST/STS/STD) instructions,
which are used to transfer data between the 32 registers in the register file and the I/O memory. The IN and OUT
instructions can address I/O memory locations in the range of 0x00 to 0x3F directly. In the address range 0x00 - 0x1F,
single-cycle instructions for manipulation and checking of individual bits are available.
4.8.1 General Purpose I/O Registers
The lowest 4 I/O memory addresses are reserved as general purpose I/O registers. These registers can be used for
storing global variables and flags, as they are directly bit-accessible using the SBI, CBI, SBIS, and SBIC instructions.
4.9 Data Memory and Bus Arbitration
Since the data memory is organized as four separate sets of memories, the different bus masters (CPU, DMA controller
read and DMA controller write, etc.) can access different memories at the same time. As Figure 4-3 on page 24 shows,
XMEGA B [DATASHEET]
8291B–AVR–01/2013
23
Page 24
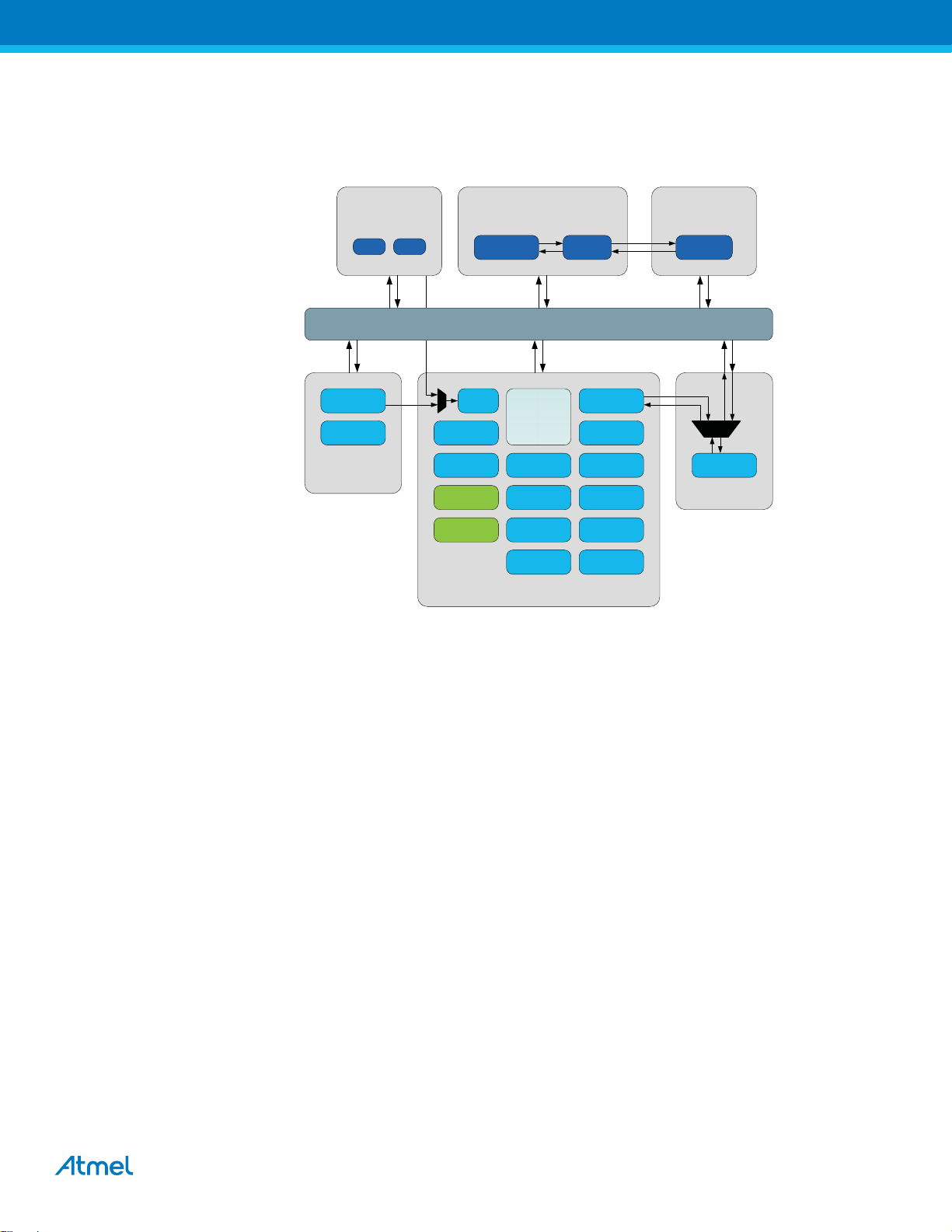
the CPU can access the EEPROM memory while the DMA controller is transferring data from internal SRAM to I/O
memory. The USB module acts as a bus master, and is connected directly to internal SRAM through a pseudo-dual-port
(PDP) interface.
Figure 4-3. Bus access.
4.9.1 Bus Priority
DMA
CH0 CH1
Flash
EEPROM
Non-Volatile
Memory
CPU
AVR core
OCD
Bus matrix
CRC
Crypto
Modules
Power
Management
AC
ADC
LCD
Event
System
USART
SPI
TWI
USB
Interrupt
Controller
Oscillator
Control
Timer /
Counter
Real Time
Counter
I/O
Peripherals and system modules
External
Programming
PDI
SRAM
RAM
When several masters request access to the same bus, the bus priority is in the following order (from higher to lower
priority):
1. Bus Master with ongoing access.
2. Bus Master with ongoing burst.
1. Alternating DMA controller read and DMA controller write when they access the same data memory section.
3. Bus Master requesting burst access.
1. CPU has priority.
4. Bus Master requesting bus access.
1. CPU has priority.
4.10 Memory Timing
Read and write access to the I/O memory takes one CPU clock cycle. A write to SRAM takes one cycle, and a read from
SRAM takes two cycles. For burst read (DMA), new data are available every cycle. EEPROM page load (write) takes one
cycle, and three cycles are required for read. For burst read, new data are available every second cycle. Refer to the
instruction summary for more details on instructions and instruction timing.
4.11 Device ID and Revision
Each device has a three-byte device ID. This ID identifies Atmel as the manufacturer of the device and the device type. A
separate register contains the revision number of the device.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
24
Page 25

4.12 JTAG Disable
It is possible to disable the JTAG interface from the application software. This will prevent all external JTAG access to the
device until the next device reset or until JTAG is enabled again from the application software. As long as JTAG is
disabled, the I/O pins required for JTAG can be used as normal I/O pins.
4.13 I/O Memory Protection
Some features in the device are regarded as critical for safety in some applications. Due to this, it is possible to lock the
I/O register related to the clock system, the event system, and the advanced waveform extensions. As long as the lock is
enabled, all related I/O registers are locked and they can not be written from the application software. The lock registers
themselves are protected by the configuration change protection mechanism. For details, refer to “Configuration Change
Protection” on page 14.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
25
Page 26

4.14 Register Description – NVM Controller
4.14.1 ADDR0 – Address register 0
The ADDR0, ADDR1, and ADDR2 registers represent the 24-bit value, ADDR. This is used for addressing all NVM
sections for read, write, and CRC operations.
Bit 76543210
+0x00 ADDR[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – ADDR[7:0]: Register Byte 0
This register gives the address low byte when accessing NVM locations.
4.14.2 ADDR1 – Address register 1
Bit 76543210
+0x01 ADDR[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – ADDR[15:8]: Address Register Byte 1
This register gives the address high byte when accessing NVM locations.
4.14.3 ADDR2 – Address register 2
Bit 76543210
+0x02 ADDR[23:16]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – ADDR[23:16]: Address Register Byte 2
This register gives the address extended byte when accessing NVM locations.
4.14.4 DATA0 – Data register 0
The DATA0, DATA1, and DATA registers represent the 24-bit value, DATA. This holds data during NVM read, write, and
CRC access.
Bit 76543210
+0x04 DATA[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – DATA[7:0]: Data Register Byte 0
This register gives the data value byte 0 when accessing NVM locations.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
26
Page 27
4.14.5 DATA1 – Data register 1
Bit 76543210
+0x05 DATA[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – DATA[15:8]: Data Register Byte 1
This register gives the data value byte 1 when accessing NVM locations.
4.14.6 DATA2 – Data register 2
Bit 76543210
+0x06 DATA[23:16]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – DATA[23:16]: Data Register Byte 2
This register gives the data value byte 2 when accessing NVM locations.
4.14.7 CMD – Command register
Bit 76543210
+0x0A
Read/Write R R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
– CMD[6:0]
Bit 7 – Reserved
This bit is unused and reserved for future use. For compatibility with future devices, always write this bit to zero when this
register is written.
Bit 6:0 -CMD[6:0]: Command
These bits define the programming commands for the flash. Bit 6 is only set for external programming commands. See
“Memory Programming” on page 385” for programming commands.
4.14.8 CTRLA – Control register A
Bit 76543210
+0x0B
Read/Write RRRRRRRS
Initial Value 00000000
Bit 7:1 – Reserved
– – – – – – – CMDEX
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 0 – CMDEX: Command Execute
Setting this bit will execute the command in the CMD register. This bit is protected by the configuration change protection
(CCP) mechanism. Refer to “Configuration Change Protection” on page 14 for details on the CCP.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
27
Page 28

4.14.9 CTRLB – Control register B
Bit 7 6 5 4 3 2 1 0
+0x0C
Read/Write R R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:4 – Reserved
– – – – EEMAPEN FPRM EPRM SPMLOCK
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 3 – EEMAPEN: EEPROM Data Memory Mapping Enable
Setting this bit enables data memory mapping of the EEPROM section. The EEPROM can then be accessed using load
and store instructions.
Bit 2 – FPRM: Flash Power Reduction Mode
Setting this bit enables power saving for the flash memory. If code is running from the application section, the boot loader
section will be turned off, and vice versa. If access to the section that is turned off is required, the CPU will be halted for
a time equal to the start-up time from the idle sleep mode.
Bit 1 – EPRM: EEPROM Power Reduction Mode
Setting this bit enables power saving for the EEPROM. The EEPROM will then be turned off in a manner equivalent to
entering sleep mode. If access is required, the bus master will be halted for a time equal to the start-up time from idle
sleep mode.
Bit 0 – SPMLOCK: SPM Locked
This bit can be written to prevent all further self-programming. The bit is cleared at reset, and cannot be cleared from
software. This bit is protected by the configuration change protection (CCP) mechanism.Refer to “Configuration Change
Protection” on page 14 for details on the CCP.
4.14.10 INTCTRL – Interrupt Control register
Bit 76543210
+0x0D
Read/Write R R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:4 – Reserved
– – – – SPMLVL[1:0] EELVL[1:0]
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 3:2 – SPMLVL[1:0]: SPM Ready Interrupt Level
These bits enable the interrupt and select the interrupt level, as described in “Interrupts and Programmable Multilevel
Interrupt Controller” on page 121. This is a level interrupt that will be triggered only when the NVMBUSY flag in the
STATUS register is set to zero. Thus, the interrupt should not be enabled before triggering an NVM command, as the
NVMBUSY flag will not be set before the NVM command is triggered. The interrupt should be disabled in the interrupt
handler.
Bit 1:0 – EELVL[1:0]: EEPROM Ready Interrupt Level
These bits enable the EEPROM ready interrupt and select the interrupt level, as described in “Interrupts and
Programmable Multilevel Interrupt Controller” on page 121. This is a level interrupt that will be triggered only when the
NVMBUSY flag in the STATUS register is set to zerozero. Thus, the interrupt should not be enabled before triggering an
NVM command, as the NVMBUSY flag won’t be set before the NVM command is triggered. The interrupt should be
disabled in the interrupt handler.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
28
Page 29
4.14.11 STATUS – Status register
Bit 7 6 5432 1 0
+0x04 NVMBUSY FBUSY
Read/Write R R R R R R R R
Initial Value 0 0 0 0 0 0 0 0
Bit 7 – NVMBUSY: Nonvolatile Memory Busy
The NVMBUSY flag indicates if the NVM (Flash, EEPROM, lock bit) is being programmed. Once an operation is started,
this flag is set and remains set until the operation is completed. The NVMBUSY flag is automatically cleared when the
operation is finished.
Bit 7 - NVMBUSY: Nonvolatile Memory Busy
Bit 6 – FBUSY: Flash Busy
The FBUSY flag indicates if a flash programming operation is initiated. Once an operation is started, the FBUSY flag is
set and the application section cannot be accessed. The FBUSY flag is automatically cleared when the operation is
finished.
Bit 5:2 – Reserved
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 1 – EELOAD: EEPROM Page Buffer Active Loading
The EELOAD flag indicates that the temporary EEPROM page buffer has been loaded with one or more data bytes. It
remains set until an EEPROM page write or a page buffer flush operation is executed. For more details, see “Flash and
EEPROM Programming Sequences” on page 388.
Bit 0 – FLOAD: Flash Page Buffer Active Loading
The FLOAD flag indicates that the temporary flash page buffer has been loaded with one or more data bytes. It remains
set until an application, boot page write, or page buffer flush operation is executed. For more details, see “Flash and
EEPROM Programming Sequences” on page 388.
– – – – EELOAD FLOAD
XMEGA B [DATASHEET]
8291B–AVR–01/2013
29
Page 30

4.14.12 LOCKBITS – Lock Bits register
Bit 76543210
+0x07 BLBB[1:0] BLBA[1:0] BLBAT[1:0] LB[1:0]
Read/Write R R R R R R R R
Initial Value 1 1 1 1 1 1 1 1
This register is a mapping of the NVM lock bits into the I/O memory space, which enables direct read access from the
application software. Refer to “LOCKBITS – Lock Bits register” on page 34 for a description.
4.15 Register Descriptions – Fuses and Lock Bits
4.15.1 FUSEBYTE0 – Fuse Byte 0
Bit 7 6543210
+0x00 JTAGUID[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7 – JTAGUID[7:0]: JTAG USER ID
These fuses can be used to set the default JTAG user ID for the device. During reset, the JTAGUID fuse bits will be
loaded into the MCU JTAG user ID register.
4.15.2 FUSEBYTE1 – Fuse Byte1
Bit 7 6543210
+0x01 WDWPER[3:0] WDPER[3:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:4 – WDWPER[3:0]: Watchdog Window Timeout Period
These fuse bits are used to set initial value of the closed window for the Watchdog Timer in Window Mode. During reset
these fuse bits are automatically written to the WPER bits Watchdog Window Mode Control Register, refer to “WINCTRL
– Window Mode Control register” on page 118 for details.
Bit 3:0 – WDPER[3:0]: Watchdog Timeout Period
These fuse bits are used to set the initial value of the watchdog timeout period. During reset, these fuse bits are
automatically written to the PER bits in the watchdog control register. .RRefer to “CTRL – Control register” on page 117
for details.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
30
Page 31

4.15.3 FUSEBYTE2 – Fuse Byte 2
Bit 7 6 5 4 3 2 1 0
+0x02
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 1 1 1 1 1 1 1 1
Bit 7 – Reserved
– BOOTRST TOSCSEL – – – BODPD[1:0]
This fuse bit is reserved. For compatibility with future devices, always write this bit to one when this register is written.
Bit 6 – BOOTRST: Boot Loader Section Reset Vector
This fuse can be programmed so the reset vector is pointing to the first address in the boot loader flash section. The
device will then start executing from the boot loader flash section after reset.
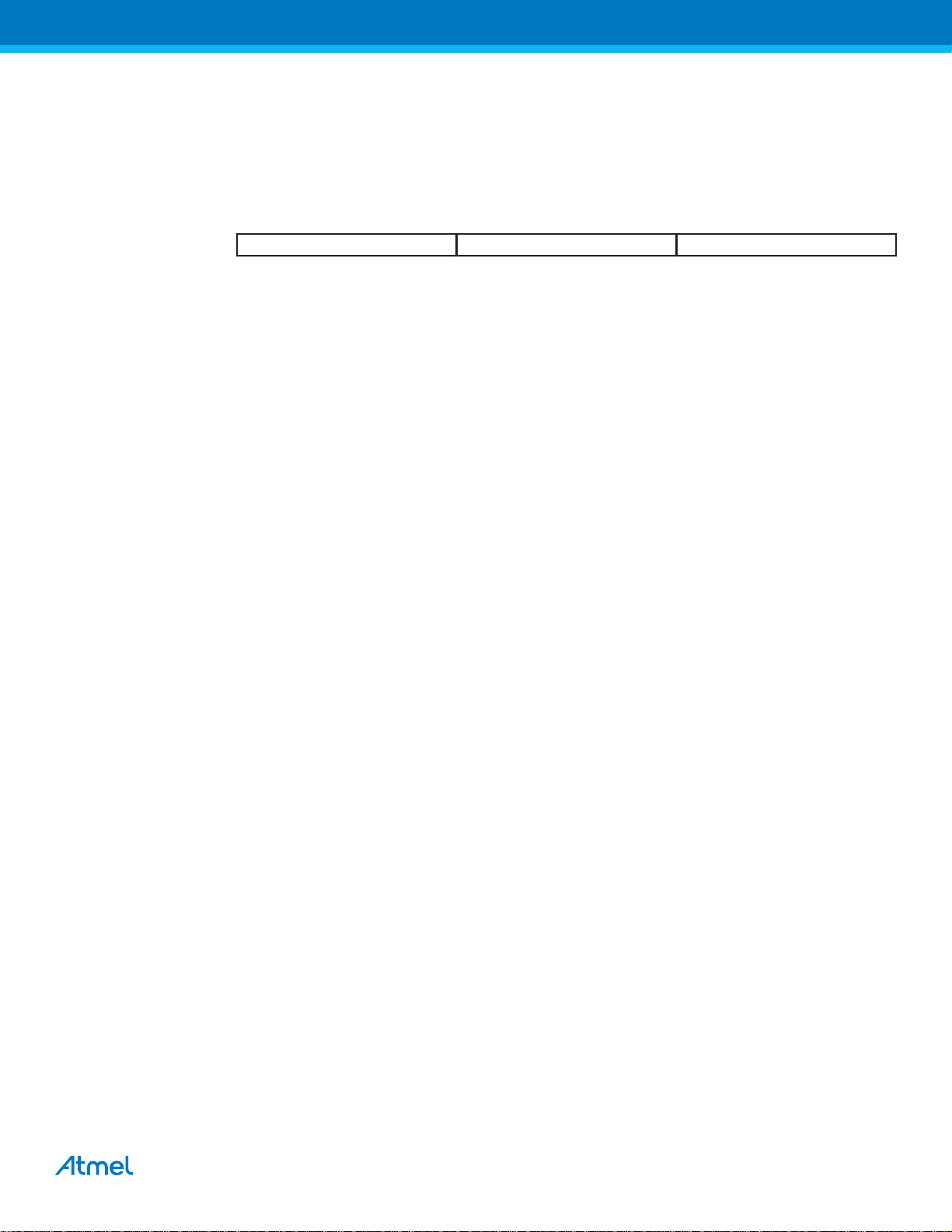
Table 4-1. Boot reset fuse.
BOOTRST Reset address
0 Reset vector = Boot loader reset
1 Reset vector = Application reset (address 0x0000)
Bit 5 – TOSCSEL: 32.768kHz Timer Oscillator Pin Selection
This fuse is used to select the pin location for the 32.768kHz timer oscillator (TOSC). This fuse is available only on
devices where XTAL and TOSC pins by default are shared.
Table 4-2. TOSCSEL fuse.
TOSCSEL Group configuration Description
0 ALTERNATE
(1)
TOSC1/2 on separate pins
1 XTAL TOSC1/2 shared with XTAL
Note: 1. See the device datasheet for alternate TOSC position.
Bit 4:2 – Reserved
These fuse bits are reserved. For compatibility with future devices, always write these bits to one when this register is
written.
Bit 1:0 – BODPD[1:0]: BOD Operation in Power-down Mode
These fuse bits set the BOD operation mode in all sleep modes except idle mode. For details on the BOD and BOD
operation modes, refer to “Brownout Detection” on page 109.
Table 4-3. BOD operation modes in sleep modes.
BODPD[1:0] Description
00 Reserved
01 BOD enabled in sampled mode
10 BOD enabled continuously
11 BOD disabled
XMEGA B [DATASHEET]
8291B–AVR–01/2013
31
Page 32

4.15.4 FUSEBYTE4 – Fuse Byte 4
Bit 7 6 5 4 3 2 1 0
+0x04
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 1 1 1 1 1 1 1 0
Bit 7:5 – Reserved
– – – RSTDISBL STARTUPTIME[1:0] WDLOCK JTAGEN
These fuse bits are reserved. For compatibility with future devices, always write these bits to one when this register is
written.
Bit: 4 – RSTDISBL: External Reset Disable
This fuse can be programmed to disable the external reset pin functionality. When this is done, pulling the reset pin low
will not cause an external reset. A reset is required before this bit will be read correctly after it is changed.
Bit 3:2 – STARTUPTIME[1:0]: Start-up time
These fuse bits can be used to set at a programmable timeout period from when all reset sources are released until the
internal reset is released from the delay counter. A reset is required before these bits will be read correctly after they are
changed.
The delay is timed from the 1kHz output of the ULP oscillator. Refer to “Reset Sequence” on page 108 for details.
Table 4-4. Start-up time.
STARTUPTIME[1:0] 1kHz ULP oscillator cycles
00 64
01 4
10 Reserved
11 0
Bit 1 – WDLOCK: Watchdog Timer Lock
The WDLOCK fuse can be programmed to lock the watchdog timer configuration. When this fuse is programmed, the
watchdog timer configuration cannot be changed, and the ENABLE bit in the watchdog CTRL register is automatically set
at reset and cannot be cleared from the application software. The WEN bit in the watchdog WINCTRL register is not set
automatically, and needs to be set from software. A reset is required before this bit will be read correctly after it is
changed.
Table 4-5. Watchdog timer lock.
WDLOCK Description
0 Watchdog timer locked for modifications
1 Watchdog timer not locked
Bit 0 – JTAGEN: JTAG Enabled
This fuse controls whether or not the JTAG interface is enabled.
When the JTAG interface is disabled, all access through JTAG is prohibited, and the device can be accessed using only
the program and debug interface (PDI). The JTAGEN fuse is available only on devices with JTAG interface. A reset is
required before this bit will be read correctly after it is changed.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
32
Page 33

Table 4-6. JTAG Enabled
JTAGEN Description
0 JTAG enabled
1 JTAG disabled
4.15.5 FUSEBYTE5 – Fuse Byte 5
Bit 7 6 5 4 3 2 1 0
+0x05
Read/Write R/W R/W R R R/W R/W R/W R/W
Initial Value 1 1 – – – – – –
Bit 7:6 – Reserved
– – BODACT[1:0] EESAVE BODLEVEL[2:0]
These bits are reserved. For compatibility with future devices, always write these bits to one when this register is written.
Bit 5:4 – BODACT[1:0]: BOD Operation in Active Mode
These fuse bits set the BOD operation mode when the device is in active and idle modes. For details on the BOD and
BOD operation modes, refer to “Brownout Detection” on page 109.
Table 4-7. BOD operation modes in active and idle mode.
BODACT[1:0] Description
00 Reserved
01 BOD enabled in sampled mode
10 BOD enabled continuously
11 BOD disabled
Bit 3 – EESAVE: EEPROM is Preserved through the Chip Erase
A chip erase command will normally erase the flash, EEPROM, and internal SRAM. If this fuse is programmed, the
EEPROM is not erased during chip erase. This is useful if EEPROM is used to store data independently of the software
revision.
Table 4-8. EEPROM preserved through chip erase.
EESAVR Description
0 EEPROM is preserved during chip erase
1 EEPROM is erased during chip erase
Changes to the EESAVE fuse bit take effect immediately after the write timeout elapses. Hence, it is possible to update
EESAVE and perform a chip erase according to the new setting of EESAVE without leaving and reentering programming
mode.
Bit 2:0 – BODLEVEL[2:0]: Brownout Detection Voltage Level
These fuse bits sets the BOD voltage level. R ,,evenor.Refer to “Reset System” on page 107 for details. For BOD level
nominal values, see Table 9-2 on page 110.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
33
Page 34

4.15.6 LOCKBITS – Lock Bits register
Bit 76543210
+0x07 BLBB[1:0] BLBA[1:0] BLBAT[1:0] LB[1:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 11111111
Bit 7:6 – BLBB[1:0]: Boot Lock Bit Boot Loader Section
These lock bits control the software security level for accessing the boot loader section. The BLBB bits can only be
written to a more strict locking. Resetting the BLBB bits is possible only by executing a chip erase command.
Table 4-9. Boot lock bit for the boot loader section.
BLBB[1:0] Group Configuration Description
11 NOLOCK
No lock – no restrictions for SPM and (E)LPM accessing the boot
loader section.
10 WLOCK Write lock – SPM is not allowed to write the boot loader section.
Read lock – (E)LPM executing from the application section is not
allowed to read from the boot loader section.
01 RLOCK
If the interrupt vectors are placed in the application section,
interrupts are disabled while executing from the boot loader
section.
Read and write lock – SPM is not allowed to write to the boot loader
section, and (E)LPM executing from the application section is not
00 RWLOCK
allowed to read from the boot loader section.
If the interrupt vectors are placed in the application section,
interrupts are disabled while executing from the boot loader
section.
Bit 5:4 – BLBA[1:0]: Boot Lock Bit Application Section
These lock bits control the software security level for accessing the application section. The BLBA bits can only be
written to a more strict locking. Resetting the BLBA bits is possible only by executing a chip erase command.
Table 4-10. Boot lock bit for the application section.
BLBA[1:0] Group Configuration Description
11 NOLOCK
No Lock - no restrictions for SPM and (E)LPM accessing the
application section.
10 WLOCK Write lock – SPM is not allowed to write the application section.
Read lock – (E)LPM executing from the boot loader section is not
01 RLOCK
allowed to read from the application section.
If the interrupt vectors are placed in the boot loader section,
interrupts are disabled while executing from the application section.
Read and write lock – SPM is not allowed to write to the application
section, and (E)LPM executing from the boot loader section is not
00 RWLOCK
allowed to read from the application section.
If the interrupt vectors are placed in the boot loader section,
interrupts are disabled while executing from the application section.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
34
Page 35

Bit 3:2 – BLBAT[1:0]: Boot Lock Bit Application Table Section
These lock bits control the software security level for accessing the application table section for software access. The
BLBAT bits can only be written to a more strict locking. Resetting the BLBAT bits is possible only by executing a chip
erase command.
Table 4-11. Boot lock bit for the application table section.
BLBAT[1:0] Group Configuration Description
11 NOLOCK
No lock – no restrictions for SPM and (E)LPM accessing the
application table section.
10 WLOCK Write lock – SPM is not allowed to write the application table
Read lock – (E)LPM executing from the boot loader section is not
01 RLOCK
allowed to read from the application table section.
If the interrupt vectors are placed in the boot loader section,
interrupts are disabled while executing from the application section.
Read and write lock – SPM is not allowed to write to the application
table section, and (E)LPM executing from the boot loader section is
00 RWLOCK
not allowed to read from the application table section.
If the interrupt vectors are placed in the boot loader section,
interrupts are disabled while executing from the application section.
Bit 1:0 – LB[1:0]: Lock Bits
(1)
These lock bits control the security level for the flash and EEPROM during external programming. These bits are writable
only through an external programming interface. Resetting the lock bits is possible only by executing a chip erase
command. All other access; using the TIF and OCD, is blocked if any of the Lock Bits are written to 0. These bits do not
block any software access to the memory.
Table 4-12. Lock bit protection mode.
LB[1:0] Group Configuration Description
11 NOLOCK3 No lock – no memory locks enabled.
Write lock – programming of the flash and EEPROM is disabled for
10 WLOCK
the programming interface. Fuse bits are locked for write from the
programming interface.
Read and write lock – programming and read/verification of the
00 RWLOCK
flash and EEPROM are disabled for the programming interface.
The lock bits and fuses are locked for read and write from the
programming interface.
Note: 1. Program the Fuse Bits and Boot Lock Bits before programming the Lock Bits.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
35
Page 36

4.16 Register Description – Production Signature Row
4.16.1 RCOSC2M – Internal 2MHz Oscillator Calibration register
Bit 7 6 5 4 3 2 1 0
+0x00 RCOSC2M[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – RCOSC2M[7:0]: Internal 2MHz Oscillator Calibration Value
This byte contains the oscillator calibration value for the internal 2MHz oscillator. Calibration of the oscillator is performed
during production testing of the device. During reset, this value is automatically loaded into calibration register B for the
2MHz DFLL. Refer to “CALB – Calibration register B” on page 94 for more details.
4.16.2 RCOSC2MA – Internal 2MHz Oscillator Calibration register
Bit 7 6 5 4 3 2 1 0
+0x01 RCOSC2MA[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – RCOSC2MA[7:0]: Internal 2MHz Oscillator Calibration Value
This byte contains the oscillator calibration value for the internal 2MHz oscillator. Calibration of the oscillator is performed
during production testing of the device. During reset, this value is automatically loaded into calibration register A for the
2MHz DFLL. Refer to “CALA – Calibration register A” on page 93 for more details.
4.16.3 RCOSC32K – Internal 32.768kHz Oscillator Calibration register
Bit 7 6 5 4 3 2 1 0
+0x02 RCOSC32K[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – RCOSC32K[7:0]: Internal 32.768kHz Oscillator Calibration Value
This byte contains the oscillator calibration value for the internal 32.768kHz oscillator. Calibration of the oscillator is
performed during production testing of the device. During reset, this value is automatically loaded into the calibration
register for the 32.768kHz oscillator. Refer to “RC32KCAL – 32kHz Oscillator Calibration register” on page 92 for more
details.
4.16.4 RCOSC32M – Internal 32MHz Oscillator Calibration register
Bit 7 6 5 4 3 2 1 0
+0x03 RCOSC32M[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – RCOSC32M[7:0]: Internal 32MHz Oscillator Calibration Value
This byte contains the oscillator calibration value for the internal 32MHz oscillator. Calibration of the oscillator is
performed during production testing of the device. During reset, this value is automatically loaded into calibration register
B for the 32MHz DFLL. Refer to “CALB – Calibration register B” on page 94 for more details.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
36
Page 37

4.16.5 RCOSC32MA – Internal 32MHz RC Oscillator Calibration register
Bit 7 6 5 4 3 2 1 0
+0x04 RCOSC32MA[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – RCOSC32MA[7:0]: Internal 32MHz Oscillator Calibration Value
This byte contains the oscillator calibration value for the internal 32MHz oscillator. Calibration of the oscillator is
performed during production testing of the device. During reset, this value is automatically loaded into calibration register
A for the 32MHz DFLL. Refer to “CALA – Calibration register A” on page 93 for more details.
4.16.6 LOTNUM0 – Lot Number register 0
LOTNUM0, LOTNUM1, LOTNUM2, LOTNUM3, LOTNUM4, and LOTNUM5 contain the lot number for each device.
Together with the wafer number and wafer coordinates, this gives a serial number for the device.
Bit 7 6 5 4 3 2 1 0
+0x08 LOTNUM0[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – LOTNUM0[7:0]: Lot Number Byte 0
This byte contains byte 0 of the lot number for the device.
4.16.7 LOTNUM1 – Lot Number register 1
Bit 7 6 5 4 3 2 1 0
+0x09 LOTNUM1[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – LOTNUM1[7:0]: Lot Number Byte 1
This byte contains byte 1 of the lot number for the device.
4.16.8 LOTNUM2 – Lot Number register 2
Bit 7 6 5 4 3 2 1 0
+0x0A LOTNUM2[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – LOTNUM2[7:0]: Lot Number Byte 2
This byte contains byte 2 of the lot number for the device.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
37
Page 38

4.16.9 LOTNUM3- Lot Number register 3
Bit 7 6 5 4 3 2 1 0
+0x0B LOTNUM3[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – LOTNUM3[7:0]: Lot Number Byte 3
This byte contains byte 3 of the lot number for the device.
4.16.10 LOTNUM4 – Lot Number register 4
Bit 7 6 5 4 3 2 1 0
+0x0C LOTNUM4[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – LOTNUM4[7:0]: Lot Number Byte 4
This byte contains byte 4 of the lot number for the device.
4.16.11 LOTNUM5 – Lot Number register 5
Bit 7654 3 2 1 0
+0x0D LOTNUM5[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – LOTNUM5[7:0]: Lot Number Byte 5
This byte contains byte 5 of the lot number for the device.
4.16.12 WAFNUM – Wafer Number register
Bit 7 6 5 4 3 2 1 0
+0x10 WAFNUM[7:0]
Read/Write R R R R R R R R
Initial Value 0 0 0 x x x x x
Bit 7:0 – WAFNUM[7:0]: Wafer Number
This byte contains the wafer number for each device. Together with the lot number and wafer coordinates, this gives a
serial number for the device.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
38
Page 39

4.16.13 COORDX0 – Wafer Coordinate X register 0
COORDX0, COORDX1, COORDY0, and COORDY1 contain the wafer X and Y coordinates for each device. Together
with the lot number and wafer number, this gives a serial number for each device.
Bit 7654 3 2 1 0
+0x12 COORDX0[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – COORDX0[7:0]: Wafer Coordinate X Byte 0
This byte contains byte 0 of wafer coordinate X for the device.
4.16.14 COORDX1 – Wafer Coordinate X register 1
Bit 7 6 5 4 3 2 1 0
+0x13 COORDX1[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – COORDX0[7:0]: Wafer Coordinate X Byte 1
This byte contains byte 1 of wafer coordinate X for the device.
4.16.15 COORDY0 – Wafer Coordinate Y register 0
Bit 7 6 5 4 3 2 1 0
+0x14 COORDY0[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – COORDY0[7:0]: Wafer Coordinate Y Byte 0
This byte contains byte 0 of wafer coordinate Y for the device.
4.16.16 COORDY1 – Wafer Coordinate Y register 1
Bit 7 6 5 4 3 2 1 0
+0x15 COORDY1[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – COORDY1[7:0]: Wafer Coordinate Y Byte 1
This byte contains byte 1 of wafer coordinate Y for the device.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
39
Page 40

4.16.17 USBCAL0 – USB Calibration register 0
USBCAL0 and USBCAL1 contain the calibration value for the USB pins. Calibration is done during production to enable
operation without requiring external components on the USB lines for the device. The calibration bytes are not loaded
automatically into the USB calibration registers, and so this must be done from software.
Bit 7 6 5 4 3 2 1 0
+0x1A USBCAL0[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – USBCAL0[7:0]: USB Pad Calibration Byte 0
This byte contains byte 0 of the USB pin calibration data, and must be loaded into the USB CALL register.
4.16.18 USBCAL1 – USB Pad Calibration register 1
Bit 7 6 5 4 3 2 1 0
+0x1B USBCAL1[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – USBCAL1[7:0]: USB Pad Calibration Byte 1
This byte contains byte 1 of the USB pin calibration data, and must be loaded into the USB CALH register.
4.16.19 RCOSC48M – USB RCOSC Calibration
Bit 7 6 5 4 3 2 1 0
+0x1C RCOSC48M[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – RCOSC48M[7:0]: 48MHz RSCOSC Calibration
This byte contains a 48MHz calibration value for the internal 32MHz oscillator. When this calibration value is written to
calibration register B for the 32MHz DFLL, the oscillator is calibrated to 48MHz to enable full-speed USB operation from
internal oscillator.
Note: The COMP2 and COMP1 registers inside the DFLL32M must be set to B71B.
4.16.20 ADCACAL0 – ADCA Calibration register 0
ADCACAL0 and ADCACAL1 contain the calibration value for the analog-to-digital converter A (ADCA). Calibration is
done during production testing of the device. The calibration bytes are not loaded automatically into the ADC calibration
registers, and so this must be done from software.
Bit 7 6 5 4 3 2 1 0
+0x20 ADCACAL0[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – ADCACAL0[7:0]: ADCA Calibration Byte 0
This byte contains byte 0 of the ADCA calibration data, and must be loaded into the ADCA CALL register.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
40
Page 41

4.16.21 ADCACAL1 – ADCA Calibration register 1
Bit 7 6 5 4 3 2 1 0
+0x21 ADCACAL1[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – ADCACAL1[7:0]: ADCA Calibration Byte 1
This byte contains byte 1 of the ADCA calibration data, and must be loaded into the ADCA CALH register.
4.16.22 ADCBCAL0 – ADCB Calibration register 0
ADCBCAL0 and ADCBCAL1 contains the calibration value for the analog-to-digital converter B (ADCB). Calibration is
done during production testing of the device. The calibration bytes are not loaded automatically into the ADC calibration
registers, and so this must be done from software.
Bit 7 6 5 4 3 2 1 0
+0x24 ADCBCAL0[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – ADCBCAL0[7:0]: ADCB Calibration Byte 0
This byte contains byte 0 of the ADCB calibration data, and must be loaded into the ADCB CALL register.
4.16.23 ADCBCAL1 – ADCB Calibration register 1
Bit 7654 3 2 1 0
+0x25 ADCBCAL1[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – ADCBCAL0[7:0]: ADCB Calibration Byte 1
This byte contains byte 1 of the ADCB calibration data, and must be loaded into the ADCB CALH register.
4.16.24 TEMPSENSE0 – Temperature Sensor Calibration register 0
TEMPSENSE0 and TEMPSENSE1 contain the 12-bit ADCA value from a temperature measurement done with the
internal temperature sensor. The measurement is done in production testing at 85C, and can be used for single- or
multi-point temperature sensor calibration.
Bit 7 6 5 4 3 2 1 0
+0x2E TEMPSENSE0[7:0]
Read/Write R R R R R R R R
Initial Value x x x x x x x x
Bit 7:0 – TEMPSENSE0[7:0]: Temperature Sensor Calibration Byte 0
This byte contains the byte 0 of the temperature measurement.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
41
Page 42

4.16.25 TEMPSENSE1 – Temperature Sensor Calibration Register 1
Bit 7 6 5 4 3 2 1 0
+0x2F TEMPSENSE1[7:0]
Read/Write R R R R R R R R
Initial Value 0 0 0 0 x x x x
Bit 7:0 – TEMPSENSE1[7:0]: Temperature Sensor Calibration Byte 1
This byte contains byte 1 of the temperature measurement.
4.17 Register Description – General Purpose I/O Memory
4.17.1 GPIORn – General Purpose I/O Register n
Bit 76543210
+n GPIORn[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
These are general purpose registers that can be used to store data, such as global variables and flags, in the bitaccessible I/O memory space.
4.18 Register Descriptions – MCU Control
4.18.1 DEVID0 – Device ID register 0
DEVID0, DEVID1, and DEVID2 contain the three-byte identification that identifies each microcontroller device type. For
details on the actual ID, refer to the device datasheet.
Bit 76543210
+0x00 DEVID0[7:0]
Read/Write R R R R R R R R
Initial Value 0 0 0 1 1 1 1 0
Bit 7:0 – DEVID0[7:0]: Device ID Byte 0
Byte 0 of the device ID. This byte will always be read as 0x1E. This indicates that the device is manufactured by Atmel.
4.18.2 DEVID1 – Device ID register 1
Bit 76543210
+0x01 DEVID1[7:0]
Read/Write R R R R R R R R
Initial Value 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0
Bit 7:0 – DEVID[7:0]: Device ID Byte 1
Byte 1 of the device ID indicates the flash size of the device.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
42
Page 43

4.18.3 DEVID2 – Device ID register 2
Bit 76543210
+0x02 DEVID2[7:0]
Read/Write R R R R R R R R
Initial Value 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0
Bit 7:0 – DEVID2[7:0]: Device ID Byte 2
Byte 2 of the device ID indicates the device number.
4.18.4 REVID – Revision ID
Bit 76543210
+0x03
Read/Write R R R R R R R R
Initial Value 0 0 0 0 1/0 1/0 1/0 1/0
Bit 7:4 – Reserved
– – – – REVID[3:0]
These bits are unused and reserved for future use.
Bit 3:0 – REVID[3:0]: Revision ID
These bits contains the device revision. 0 = A, 1 = B, and so on.
4.18.5 JTAGUID – JTAG User ID register
Bit 76543210
+0x04 JTAGUID[7:0]
Read/Write R R R R R R R R
Initial Value 1/0 1/0 1/0 1/0 1/0 1/0 1/0 1/0
Bit 7:0 – JTAGUID[7:0]: JTAG User ID
The JTAGUID can be used to identify two devices with identical device IDs in a JTAG scan chain. The JTAGUID will
automatically be loaded from flash during reset and placed in these registers.
4.18.6 MCUCR – MCU Control register
Bit 76543210
+0x06
Read/Write R R R R R R R R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:1 – Reserved
– – – – – – – JTAGD
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 0 – JTAGD: JTAG Disable
Setting this bit will disable the JTAG interface. This bit is protected by the configuration change protection mechanism.
For details, refer to “Configuration Change Protection” on page 14.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
43
Page 44

4.18.7 ANAINIT – Analog Initialization register
Bit 76543210
+0x07
Read/Write R R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:4 – Reserved
– – – – STARTUPDLYB[1:0] STARTUPDLYA[1:0]
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 3:2 / 1:0 – STARTUPDLYx: Start-Up Delay
Setting these bits enables sequential start of the internal components used for the ADC, DAC, and analog comparator
with the main input/output connected to that port. When this is done, the internal components, such as voltage reference
and bias currents, are started sequentially when the module is enabled. This reduces the peak current consumption
during startup of the module. For maximum effect, the start-up delay should be set so that it is larger than 0.5μs.
Table 4-13. Analog start-up delay.
STARTUPDLYx Group Configuration Description
00 NONE Direct startup
11 2CLK 2 * CLK
10 8CLK 8 * CLK
11 32CLK 32 * CLK
4.18.8 EVSYSLOCK – Event System Lock register
Bit 7 6 5 4 3 2 1 0
+0x08
Read/Write R R R R R R R R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:1 – Reserved
– – – – – – – EVSYS0LOCK
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 0 – EVSYS0LOCK:
Setting this bit will lock all registers in the event system related to event channels 0 to 3 for further modification. The
following registers in the event system are locked: CH0MUX, CH0CTRL, CH1MUX, CH1CTRL, CH2MUX, CH2CTRL,
CH3MUX, and CH3CTRL. This bit is protected by the configuration change protection mechanism. For details, refer to
“Configuration Change Protection” on page 14.
PER
PER
PER
XMEGA B [DATASHEET]
8291B–AVR–01/2013
44
Page 45

4.18.9 AWEXLOCK – Advanced Waveform Extension Lock register
Bit 7 6 5 4 3 2 1 0
+0x09
Read/Write R R R R R R R R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:1 – Reserved
– – – – – – – AWEXCLOCK
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 0 – AWEXCLOCK: Advanced Waveform Extension Lock for TCC0
Setting this bit will lock all registers in the AWEXC module for Timer/Counter C0 foragainst further modification. This bit is
protected by the configuration change protection mechanism. For details, refer to “Configuration Change Protection” on
page 14.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
45
Page 46

4.19 Register Summary - NVM Controller
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00 ADDR0 Address Byte 0 25
+0x01 ADDR1 Address Byte 1 25
+0x02 ADDR2 Address Byte 2 25
+0x03 Reserved – – – – – – – –
+0x04 DATA0 Data Byte 0 26
+0x05 DATA1 Data Byte 1 26
+0x06 DATA2 Data Byte 2 26
+0x07 Reserved – – – – – – – –
+0x08 Reserved – – – – – – – –
+0x09 Reserved – – – – – – – –
+0x0A CMD – CMD[6:0] 26
+0x0B CTRLA
+0x0C CTRLB
+0x0D INTCTRL
+0x0E Reserved – – – – – – – –
+0x0F STATUS NVMBUSY FBUSY – – – – EELOAD FLOAD 28
+0x10 LOCKBITS BLBB[1:0] BLBA[1:0] BLBAT[1:0] LB[1:0] 29
– – – – – – – CMDEX 27
– – – – EEMAPEN FPRM EPRM SPMLOCK 27
– – – – SPMLVL[1:0] EELVL[1:0] 28
4.20 Register Summary - Fuses and Lock Bits
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00 FUSEBYTE JTAGUID 30
+0x01 FUSEBYTE WDWPER3:0] WDPER[3:0] 30
+0x02 FUSEBYTE
+0x03 Reserved – – – – – – – –
+0x04 FUSEBYTE – – – RSTDISBL STARTUPTIME[1:0] WDLOCK JTAGEN 31
+0x05 FUSEBYTE
+0x06 Reserved – – – – – – – –
+0x07 LOCKBITS BLBB[1:0] BLBA[1:0] BLBAT[1:0] LB[1:0] 34
– BOOTRST TOSCSEL – – – BODPD[1:0] 30
– – BODACT[1:0] EESAVE BODLEVEL[2:0] 32
XMEGA B [DATASHEET]
8291B–AVR–01/2013
46
Page 47

4.21 Register Summary - Production Signature Row
Address Auto Load Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00
+0x01
+0x02
+0x03
+0x04
+0x05
+0x06
+0x07
+0x08
+0x09
+0x0A
+0x0B
+0x0C
+0x0D
+0x0E
+0x0F
+0x10
+0x11
+0x12
+0x13
+0x14
+0x15
+0x16
+0x17
+0x18
+0x19
+0x1A
+0x1B
+0x1C
+0x1D
+0x0E
+0x1E
+0x20
+0x21
+0x22
+0x23
+0x24
+0x25
+0x26
+0x27
+0x28
+0x29
+0x2A
+0x2B
+0x2C
+0x2D
+0x2E
+0x2F
+0x30
+0x31
+0x32
+0x33
+0x34
+0x35
+0x36
+0x37
+0x38
+0x39
0x3A
+0x3B
+0x3C
+0x3D
+0x3E
YES RCOSC2M RCOSC2M[7:0]
YES RCOSC2MA RCOSC2MA[7:0]
YES RCOSC32K RCOSC32K[7:0] 36
YES RCOSC32M RCOSC32M[7:0] 36
YES RCOSC32MA RCOSC32MA[7:0] 37
NO LOTNUM0 LOTNUM0[7:0] 37
NO LOTNUM1 LOTNUM1[7:0] 37
NO LOTNUM2 LOTNUM2[7:0] 37
NO LOTNUM3 LOTNUM3[7:0] 38
NO LOTNUM4 LOTNUM4[7:0] 38
NO LOTNUM5 LOTNUM5[7:0] 38
NO WAFNUM WAFNUM[7:0] 38
NO COORDX0 COORDX0[7:0] 39
NO COORDX1 COORDX1[7:0] 39
NO COORDY0 COORDY0[7:0] 39
NO COORDY1 COORDY1[7:0] 39
NO ADCACAL0 ADCACAL0[7:0] 40
NO ADCACAL1 ADCACAL1{7:0] 41
NO ADCBCAL0 ADCBCAL0[7:0] 41
NO ADCBCAL1 ADCBCAL1[7:0] 41
NO TEMPSENSE0 TEMPSENSE0[7:0] 41
NO TEMPSENSE1
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
USBCAL0 USBCAL0[7:0] 40
USBCAL1 USBCAL1[7:0] 40
RCOSC48M RCOSC48M[7:0] 40
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
– – – – TEMPSENSE1[11:8] 42
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
36
37
XMEGA B [DATASHEET]
8291B–AVR–01/2013
47
Page 48

4.22 Register Summary - General Purpose I/O Registers
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00
+0x01
+0x02
+0x03
+0x04
+0x05
+0x06
+0x07
+0x08
+0x09
+0x0A
+0x0B
+0x0C
+0x0D
+0x0E
+0x0F
GPIOR0 GPIOR[7:0]
GPIOR1 GPIOR[7:0]
GPIOR2 GPIOR[7:0]
GPIOR3 GPIOR[7:0]
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
Reserved – – – – – – – –
4.23 Register Summary - MCU Control
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00
+0x01
+0x02
+0x03
+0x04
+0x05
+0x06
+0x07
+0x08
+0x09
+0x0A
+0x0B
DEVID0 DEVID0[7:0]
DEVID1 DEVID1[7:0]
DEVID2 DEVID2[7:0]
REVID
JTAGUID JTAGUID[7:0]
Reserved – – – – – – – –
MCUCR
ANAINIT
EVSYSLOCK
AWEXLOCK
Reserved – – – – – – – –
Reserved – – – – – – – –
– – – – REVID[3:0]
– – – – – – – JTAGD
– – – – STARTUPDLYB[1:0] STARTUPDLYA[1:0] 44
– – – – – – – EVSYS0LOC 44
– – – – – – – AWEXCLOCK 45
42
42
42
42
42
42
43
43
43
43
4.24 Interrupt Vector Summary - NVM Controller
Offset Source Interrupt Description
0x00 EE_vect Nonvolatile memory EEPROM interrupt vector
0x02 SPM_vect Nonvolatile memory SPM interrupt vector
XMEGA B [DATASHEET]
8291B–AVR–01/2013
48
Page 49

5. DMAC - Direct Memory Access Controller
5.1 Features
Allows high speed data transfers with minimal CPU intervention
from data memory to data memory
from data memory to peripheral
from peripheral to data memory
from peripheral to peripheral
Two DMA channels with separate
transfer triggers
interrupt vectors
addressing modes
Programmable channel priority
From 1 byte to 16MB of data in a single transaction
Up to 64KB block transfers with repeat
1, 2, 4, or 8 byte burst transfers
Multiple addressing modes
Static
Incremental
Decremental
Optional reload of source and destination addresses at the end of each
Burst
Block
Transaction
Optional interrupt on end of transaction
Optional connection to CRC generator for CRC on DMA data
5.2 Overview
The two-channel direct memory access (DMA) controller can transfer data between memories and peripherals, and thus
offload these tasks from the CPU. It enables high data transfer rates with minimum CPU intervention, and frees up CPU
time. The two DMA channels enable up to two independent and parallel transfers.
The DMA controller can move data between SRAM and peripherals, between SRAM locations and directly between
peripheral registers. With access to all peripherals, the DMA controller can handle automatic transfer of data to/from
communication modules. The DMA controller can also read from memory mapped EEPROM.
Data transfers are done in continuous bursts of 1, 2, 4, or 8 bytes. They build block transfers of configurable size from 1
byte to 64KB. A repeat counter can be used to repeat each block transfer for single transactions up to 16MB. Source and
destination addressing can be static, incremental or decremental. Automatic reload of source and/or destination
addresses can be done after each burst or block transfer, or when a transaction is complete. Application software,
peripherals, and events can trigger DMA transfers.
The two DMA channels have individual configuration and control settings. This include source, destination, transfer
triggers, and transaction sizes. They have individual interrupt settings. Interrupt requests can be generated when a
transaction is complete or when the DMA controller detects an error on a DMA channel.
To allow for continuous transfers, two channels can be interlinked so that the second takes over the transfer when the
first is finished, and vice versa.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
49
Page 50

Figure 5-1. DMA Overview.
DMA Channel 0
CTRLA
CTRLB
Enable
Burst
TRFCNT
REPCNT
DMA Channel 1
5.3 DMA Transaction
A complete DMA read and write operation between memories and/or peripherals is called a DMA transaction. A
transaction is done in data blocks, and the size of the transaction (number of bytes to transfer) is selectable from
software and controlled by the block size and repeat counter settings. Each block transfer is divided into smaller bursts.
5.3.1 Block Transfer and Repeat
Control Logic
TRIGSRC
DESTADDR
SRCADDR
DMA trigger /
Event
Arbitration
Arbiter
CTRL
BUF
R/W Master port
Read
Write
Slave port
Read /
Write
Bus
matrix
The size of the block transfer is set by the block transfer count register, and can be anything from 1 byte to 64KB.
A repeat counter can be enabled to set a number of repeated block transfers before a transaction is complete. The
repeat is from 1 to 255, and an unlimited repeat count can be achieved by setting the repeat count to zero.
5.3.2 Burst Transfer
Since the AVR CPU and DMA controller use the same data buses, a block transfer is divided into smaller burst transfers.
The burst transfer is selectable to 1, 2, 4, or 8 bytes. This means that if the DMA acquires the data bus and a transfer
request is pending, it will occupy the bus until all bytes in the burst are transferred.
A bus arbiter controls when the DMA controller and the AVR CPU can use the bus. The CPU always has priority, and so
as long as the CPU requests access to the bus, any pending burst transfer must wait. The CPU requests bus access
when it executes an instruction that writes or reads data to SRAM, I/O memory, EEPROM or the external bus interface.
For more details on memory access bus arbitration, refer to “Data Memory” on page 22.
Figure 5-2. DMA transaction.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
50
Page 51

5.4 Transfer Triggers
DMA transfers can be started only when a DMA transfer request is detected. A transfer request can be triggered from
software, from an external trigger source (peripheral), or from an event. There are dedicated source trigger selections for
each DMA channel. The available trigger sources may vary from device to device, depending on the modules or
peripherals that exist in the device. Using a transfer trigger for a module or peripherals that does not exist will have no
effect. For a list of all transfer triggers, refer to “TRIGSRC – Trigger Source” on page 59.
By default, a trigger starts a block transfer operation. When the block transfer is complete, the channel is automatically
disabled. When enabled again, the channel will wait for the next block transfer trigger. It is possible to select the trigger to
start a burst transfer instead of a block transfer. This is called a single-shot transfer, and for each trigger only one burst is
transferred. When repeat mode is enabled, the next block transfer does not require a transfer trigger. It will start as soon
as the previous block is done.
If the trigger source generates a transfer request during an ongoing transfer, this will be kept pending, and the transfer
can start when the ongoing one is done. Only one pending transfer can be kept, and so if the trigger source generates
more transfer requests when one is already pending, these will be lost.
5.5 Addressing
The source and destination address for a DMA transfer can either be static or automatically incremented or
decremented, with individual selections for source and destination. When address increment or decrement is used, the
default behaviour is to update the address after each access. The original source and destination addresses are stored
by the DMA controller, and so the source and destination addresses can be individually configured to be reloaded at the
following points:
End of each burst transfer
End of each block transfer
End of transaction
Never reloaded
5.6 Priority Between Channels
If several channels request a data transfer at the same time, a priority scheme is available to determine which channel is
allowed to transfer data. Application software can decide whether one or more channels should have a fixed priority or if
a round robin scheme should be used. A round robin scheme means that the channel that last transferred data will have
the lowest priority.
5.7 Double Buffering
To allow for continuous transfer, two channels can be interlinked so that the second takes over the transfer when the first
is finished, and vice versa. This leaves time for the application to process the data transferred by the first channel,
prepare fresh data buffers, and set up the channel registers again while the second channel is working. This is referred to
as double buffering or chained transfers.
When double buffering is enabled for a channel pair, it is important that the two channels are configured with the same
repeat count. The block sizes need not be equal, but for most applications they should be, along with the rest of the
channel’s operation mode settings.
Note that the double buffering channel pairs are limited to channels 0 and 1 as the first pair and channels 2 and 3 as the
second pair. However, it is possible to have one pair operate in double buffered mode while the other is left unused or
operating independently.
5.8 Transfer Buffers
To avoid unnecessary bus loading when doing data transfer between memories with different access timing (for
example, I/O register and external memory), the DMA controller has a four-byte buffer. Two bytes will be read from the
source address and written to this buffer before a write to the destination is started.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
51
Page 52

5.9 Error detection
The DMA controller can detect erroneous operation. Error conditions are detected individually for each DMA channel,
and the error conditions are:
Write to memory mapped EEPROM locations
Reading EEPROM when the EEPROM is off (sleep entered)
DMA controller or a busy channel is disabled in software during a transfer
5.10 Software Reset
Both the DMA controller and a DMA channel can be reset from the user software. When the DMA controller is reset, all
registers associated with the DMA controller, including channels, are cleared. A software reset can be done only when
the DMA controller is disabled.
When a DMA channel is reset, all registers associated with the DMA channel are cleared. A software reset can be done
only when the DMA channel is disabled.
5.11 Protection
In order to ensure safe operation, some of the channel registers are protected during a transaction. When the DMA
channel busy flag (CHnBUSY) is set for a channel, the user can modify only the following registers and bits:
CTRL register
INTFLAGS register
TEMP registers
CHEN, CHRST, TRFREQ, and REPEAT bits of the channel CTRL register
TRIGSRC register
5.12 Interrupts
The DMA controller can generate interrupts when an error is detected on a DMA channel or when a transaction is
complete for a DMA channel. Each DMA channel has a separate interrupt vector, and there are different interrupt flags
for error and transaction complete.
If repeat is not enabled, the transaction complete flag is set at the end of the block transfer. If unlimited repeat is enabled,
the transaction complete flag is also set at the end of each block transfer.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
52
Page 53

5.13 Register Description – DMA Controller
5.13.1 CTRL – Control register
Bit 7654 3 2 10
+0x00 ENABLE RESET
Read/Write R/W R/W R R R R/W R R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7 – ENABLE: Enable
Setting this bit enables the DMA controller. If the DMA controller is enabled and this bit is written to zero, the ENABLE bit
is not cleared before the internal transfer buffer is empty, and the DMA data transfer is aborted.
Bit 6 – RESET: Software Reset
Writing a one to RESET will be ignored as long as DMA is enabled (ENABLE = 1). This bit can be set only when the DMA
controller is disabled (ENABLE = 0).
Bit 5:3 – Reserved
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 2 – DBUFMODE: Double Buffer Mode
This bit enables the double buffer mode.
Bit 1 – Reserved
This bit is unused and reserved for future use. For compatibility with future devices, always write this bits to zero when
this register is written.
Bit 0 – PRIMODE: Channel Priority Mode
This bit determines the internal channel priority according to Table 5-1.
– – – DBUFMODE – PRIMODE
Table 5-1. Channel priority settings
PRIMODE Group Configuration Description
0 RR01 Round robin
1 CH01 Channel0 has priority
5.13.2 INTFLAGS – Interrupt Status register
Bit 7654 3 2 1 0
+0x03
Read/Write R R R/W R/W R R R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:6 – Reserved
– – CH1ERRIF CH0ERRIF – – CH1TRNFIF CH0TRNFIF
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
53
Page 54

Bit 5:4 – CHnERRIF[1:0]: Channel n Error Interrupt Flag
If an error condition is detected on DMA channel n, the CHnERRIF flag will be set. Writing a one to this bit location will
clear the flag.
Bit 3:2 – Reserved
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 1:0 – CHnTRNFIF[1:0]: Channel n Transaction Complete Interrupt Flag
When a transaction on channel n has been completed, the CHnTRFIF flag will be set. If unlimited repeat count is
enabled, this flag is read as one after each block transfer. Writing a one to this bit location will clear the flag.
5.13.3 STATUS – Status register
Bit 76543210
+0x04
Read/Write R R R R R R R R
Initial Value 0 0 0 0 0 0 0 0
Bit 7:6 – Reserved
– – CH1BUSY CH0BUSY – – CH1PEND CH0PEND
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 5:4 – CHnBUSY[1:0]: Channel Busy
When channel n starts a DMA transaction, the CHnBUSY flag will be read as one. This flag is automatically cleared when
the DMA channel is disabled, when the channel n transaction complete interrupt flag is set, or if the DMA channel n error
interrupt flag is set.
Bit 3:2 – Reserved
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written
Bit 1:0 – CHnPEND[1:0]: Channel Pending
If a block transfer is pending on DMA channel n, the CHnPEND flag will be read as one. This flag is automatically cleared
when the block transfer starts or if the transfer is aborted.
5.13.4 TEMPL – Temporary register Low
Bit 76543210
+0x06 TEMP[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – TEMP[7:0]: Temporary register 0
This register is used when reading 16- and 24-bit registers in the DMA controller. Byte 1 of the 16/24-bit register is stored
here when it is written by the CPU. Byte 1 of the 16/24-bit register is stored when byte 0 is read by the CPU. This register
can also be read and written from the user software.
Reading and writing 16- and 24-bit registers requires special attention. For details, refer to “Accessing 16-bit Registers”
on page 13.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
54
Page 55

5.13.5 TEMPH – Temporary Register High
Bit 76543210
+0x07 TEMP[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
Bit 7:0 – TEMP[15:8]: Temporary Register
This register is used when reading and writing 24-bit registers in the DMA controller. Byte 2 of the 24-bit register is stored
when it is written by the CPU. Byte 2 of the 24-bit register is stored here when byte 1 is read by the CPU. This register
can also be read and written from the user software.
Reading and writing 24-bit registers requires special attention. For details, refer to “Accessing 16-bit Registers” on page
13.
5.14 Register Description – DMA Channel
5.14.1 CTRLA – Control register A
Bit 76543210
+0x00 ENABLE RESET REPEAT TRFREQ
Read/Write R/W R/W R/W R/W R R/W R/W R/W
Initial Value 0 0 000000
– SINGLE BURSTLEN[1:0]
Bit 7 – ENABLE: Channel Enable
Setting this bit enables the DMA channel. This bit is automatically cleared when the transaction is completed. If the DMA
channel is enabled and this bit is written to zero, the CHEN bit is not cleared until the internal transfer buffer is empty and
the DMA transfer is aborted.
Bit 6 – RESET: Software Reset
Setting this bit will reset the DMA channel. It can only be set when the DMA channel is disabled (CHEN = 0). Writing a
one to this bit will be ignored as long as the channel is enabled (CHEN=1). This bit is automatically cleared when reset is
completed.
Bit 5 – REPEAT: Repeat Mode
Setting this bit enables the repeat mode. In repeat mode, this bit is cleared by hardware at the beginning of the last block
transfer. The REPCNT register should be configured before setting the REPEAT bit.
Bit 4 – TRFREQ: Transfer Request
Setting this bit requests a data transfer on the DMA channel. This bit is automatically cleared at the beginning of the data
transfer. Writing this bit does not have any effect unless the channel is enabled.
Bit 3 – Reserved
This bit is unused and reserved for future use. For compatibility with future devices, always write this bit to zero when this
register is written.
Bit 2 – SINGLE: Single-Shot Data transfer
Setting this bit enables the single-shot mode. The channel will then do a burst transfer of BURSTLEN bytes on the
transfer trigger. A write to this bit will be ignored while the channel is enabled.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
55
Page 56

Bit 1:0 – BURSTLEN[1:0]: Burst Mode
These bits decide the DMA channel burst mode according to Table 5-2 on page 56. These bits cannot be changed if the
channel is busy.
Table 5-2. DMA channel burst mode
BURSTLEN[1:0] Group Configuration Description
00 1BYTE 1 byte burst mode
01 2BYTE 2 bytes burst mode
10 4BYTE 4 bytes burst mode
11 8BYTE 8 bytes burst mode
Table 5-3. Summary of triggers, transaction complete flag and channel disable according to DMA channel
configuration.
REPEAT SINGLE REPCNT Trigger Flag Set After Channel Disabled After
0 0 0 Block 1 block 1 block
0 0 1 Block 1 block 1 block
0 0 n > 1 Block 1 block 1 block
0 1 0 BURSTLEN 1 block 1 block
0 1 1 BURSTLEN 1 block 1 block
0 1 n > 1 BURSTLEN 1 block 1 block
1 0 0 Block Each block Each block
1 0 1 Transaction 1 block 1 block
1 0 n > 1 Transaction n blocks n blocks
1 1 0 BURSTLEN Each block Never
1 1 1 BURSTLEN 1 block 1 block
1 1 n > 1 BURSTLEN n blocks n blocks
5.14.2 CTRLB – Control register B
Bit 76543210
+0x01 CHBUSY CHPEND ERRIF TRNIF ERRINTLVL[1:0] TRNINTLVL[1:0]
Read/Write R R R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7 – CHBUSY: Channel Busy
When the DMA channel starts a DMA transaction, the CHBUSY flag will be read as one. This flag is automatically
cleared when the DMA channel is disabled, when the channel transaction complete interrupt flag is set or when the
channel error interrupt flag is set.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
56
Page 57

Bit 6 – CHPEND: Channel Pending
If a block transfer is pending on the DMA channel, the CHPEND flag will be read as one. This flag is automatically
cleared when the transfer starts or if the transfer is aborted.
Bit 5 – ERRIF: Error Interrupt Flag
If an error condition is detected on the DMA channel, the ERRIF flag will be set and the optional interrupt is generated.
Since the DMA channel error interrupt shares the interrupt address with the DMA channel n transaction complete
interrupt, ERRIF will not be cleared when the interrupt vector is executed. This flag is cleared by writing a one to this
location.
Bit 4 – TRNIF: Channel n Transaction Complete Interrupt Flag
When a transaction on the DMA channel has been completed, the TRNIF flag will be set and the optional interrupt is
generated. When repeat is not enabled, the transaction is complete and TRNIFR is set after the block transfer. When
unlimited repeat is enabled, TRNIF is also set after each block transfer.
Since the DMA channel transaction n complete interrupt shares the interrupt address with the DMA channel error
interrupt, TRNIF will not be cleared when the interrupt vector is executed. This flag is cleared by writing a one to this
location.
Bit 3:2 – ERRINTLVL[1:0]: Channel Error Interrupt Level
These bits enable the interrupt for DMA channel transfer errors and select the interrupt level, as described in “Interrupts
and Programmable Multilevel Interrupt Controller” on page 118. The enabled interrupt will trigger for the conditions when
ERRIF is set.
Bit 1:0 – TRNINTLVL[1:0]: Channel Transaction Complete Interrupt Level
These bits enable the interrupt for DMA channel transaction completes and select the interrupt level, as described in
“Interrupts and Programmable Multilevel Interrupt Controller” on page 118. The enabled interrupt will trigger for the
conditions when TRNIF is set.
5.14.3 ADDRCTRL – Address Control register
Bit 76543210
+0x02 SRCRELOAD[1:0] SRCDIR[1:0] DESTRELOAD[1:0] DESTDIR[1:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0000000
Bit 7:6 – SRCRELOAD[1:0]: Channel Source Address Reload
These bits decide the DMA channel source address reload according to Table 5-4. A write to these bits is ignored while
the channel is busy.
Table 5-4. DMA channel source address reload settings
SRCRELOAD[1:0] Group Configuration Description
00 NONE No reload performed.
01 BLOCK
10 BURST
11 TRANSACTION
DMA source address register is reloaded with initial value at end
of each block transfer.
DMA source address register is reloaded with initial value at end
of each burst transfer.
DMA source address register is reloaded with initial value at end
of each transaction.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
57
Page 58

Bit 5:4 – SRCDIR[1:0]: Channel Source Address Mode
These bits decide the DMA channel source address mode according to Table 5-5. These bits cannot be changed if the
channel is busy.
Table 5-5. DMA channel source address mode settings.
SRCDIR[1:0] Group Configuration Description
00 FIXED Fixed
01 INC Increment
10 DEC Decrement
11 - Reserved
Bit 3:2 – DESTRELOAD[1:0]: Channel Destination Address Reload
These bits decide the DMA channel destination address reload according to Table 5-6. These bits cannot be changed if
the channel is busy.
Table 5-6. DMA channel destination address reload settings
DESTRELOAD[1:0] Group Configuration Description
00 NONE No reload performed.
01 BLOCK
10 BURST
11 TRANSACTION
Bit 1:0 – DESTDIR[1:0]: Channel Destination Address Mode
DMA channel destination address register is reloaded with
initial value at end of each block transfer.
DMA channel destination address register is reloaded with
initial value at end of each burst transfer.
DMA channel destination address register is reloaded with
initial value at end of each transaction.
These bits decide the DMA channel destination address mode according to Table 5-7. These bits cannot be changed if
the channel is busy.
Table 5-7. DMA channel destination address mode settings
DESTDIR[1:0] Group Configuration Description
00 FIXED Fixed
01 INC Increment
10 DEC Decrement
11 - Reserved
XMEGA B [DATASHEET]
8291B–AVR–01/2013
58
Page 59

5.14.4 TRIGSRC – Trigger Source
Bit 76543210
+0x03 TRIGSRC[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – TRIGSRC[7:0]: Channel Trigger Source Select
These bits select which trigger source is used for triggering a transfer on the DMA channel. A zero value means that the
trigger source is disabled. For each trigger source, the value to put in the TRIGSRC register is the sum of the module’s or
peripheral’s base value and the offset value for the trigger source in the module or peripheral. Table 5-8 on page 59
shows the base value for all modules and peripherals. Table 5-9 on page 60 to Table 5-11 on page 60 shows the offset
value for the trigger sources in the different modules and peripheral types. For modules or peripherals which do not exist
for a device, the transfer trigger does not exist. Refer to the device datasheet for the list of peripherals available.
If the interrupt flag related to the trigger source is cleared or the interrupt level enabled so that an interrupt is triggered,
the DMA request will be lost. Since a DMA request can clear the interrupt flag, interrupts can be lost.
Note: For most trigger sources, the request is cleared by accessing a register belonging to the peripheral with the request. Refer to the dif-
ferent peripheral chapters for how requests are generated and cleared.
Table 5-8. DMA trigger source base values for all modules and peripherals.
TRIGSRC Base Value Group Configuration Description
0x00 OFF Software triggers only
0x01 SYS Event system DMA triggers base value
0x04 AES AES DMA trigger value
0x10 ADCA ADCA DMA trigger value
0x40 TCC0 Timer/counter C0 DMA triggers base value
0x46 TCC1 Timer/counter C1 triggers base value
0x4A SPIC SPI C DMA trigger value
0x4B USARTC0 USART C0 DMA triggers base value
0x60 TCD0 Timer/counter D0 DMA triggers base value
0x6A SPID SPI D DMA triggers value
0x6B USARTD0 USART D0 DMA triggers base value
0x80 TCE0 Timer/counter E0 DMA triggers base value
0x8B USARTE0 USART E0 DMA triggers base value
0xA0 TCF0 Timer/counter F0 DMA triggers base value
0xAB USARTF0 USART F0 DMA triggers base value
XMEGA B [DATASHEET]
8291B–AVR–01/2013
59
Page 60

Table 5-9. DMA trigger source offset values for event system triggers.
TRGSRC Offset Value Group Configuration Description
+0x00 CH0 Event channel 0
+0x01 CH1 Event channel 1
+0x02 CH2 Event channel 2
Table 5-10. DMA trigger source offset values for timer/ counter triggers.
TRGSRC Offset Value Group Configuration Description
+0x00 OVF Overflow/underflow
+0x01 ERR Error
+0x02 CCA Compare or capture channel A
+0x03 CCB Compare or capture channel B
+0x04 CCC
+0x05 CCD
Note: 1. CC channel C and D triggers are available only for timer/counters 0.
(1)
(1)
Compare or capture channel C
Compare or capture channel D
Table 5-11. DMA trigger source offset values for USART triggers.
TRGSRC Offset Value Group Configuration Description
0x00 RXC Receive complete
0x01 DRE Data register empty
The group configuration is the “base_offset;” for example, TCC1_CCA for the timer/counter C1 CC channel A the transfer
trigger.
5.14.5 TRFCNTL – Channel Block Transfer Count register Low
The TRFCNTH and TRFCNTL register pair represents the 16-bit value TRFCNT. TRFCNT defines the number of bytes
in a block transfer. The value of TRFCNT is decremented after each byte read by the DMA channel. When TRFCNT
reaches zero, the register is reloaded with the last value written to it.
Bit 76543210
+0x04 TRFCNT[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
Bit 7:0 – TRFCNT[7:0]: Channel n Block Transfer Count low byte
These bits hold the LSB of the 16-bit block transfer count.
The default value of this register is 0x1. If a user writes 0x0 to this register and fires a DMA trigger, DMA will be doing
0xFFFF transfers.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
60
Page 61

5.14.6 TRFCNTH – Channel Block Transfer Count register High
Reading and writing 16-bit values requires special attention. For details, refer to “Accessing 16-bit Registers” on page 13.
Bit 76543210
+0x05 TRFCNT[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 00000
Bit 7:0 – TRFCNT[15:8]: Channel n Block Transfer Count high byte
These bits hold the MSB of the 16-bit block transfer count.
The default value of this register is 0x1. If a user writes 0x0 to this register and fires a DMA trigger, DMA will be doing
0xFFFF transfers.
5.14.7 REPCNT – Repeat Counter register
Bit 76543210
+0x06 REPCNT[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 000000
REPCNT counts how many times a block transfer is performed. For each block transfer, this register will be
decremented.
When repeat mode is enabled (see REPEAT bit in “ADDRCTRL – Address Control register” on page 57), this register is
used to control when the transaction is complete. The counter is decremented after each block transfer if the DMA has to
serve a limited number of repeated block transfers. When repeat mode is enabled, the channel is disabled when
REPCNT reaches zero and the last block transfer is completed. Unlimited repeat is achieved by setting this register to
zero.
5.14.8 SRCADDR0 – Source Address 0
SRCADDR0, SRCADDR1, and SRCADDR2 represent the 24-bit value SRCADDR, which is the DMA channel source
address. SRCADDR2 is the most significant byte in the register. SRCADDR may be automatically incremented or
decremented based on settings in the SRCDIR bits in “ADDRCTRL – Address Control register” on page 57.
Bit 76543210
+0x08 SRCADDR[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – SRCADDR[7:0]: Channel Source Address byte 0
These bits hold byte 0 of the 24-bit source address.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
61
Page 62

5.14.9 SRCADDR1 – Channel Source Address 1
Bit 76543210
+0x09 SRCADDR[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 00000
Bit 7:0 – SRCADDR[15:8]: Channel Source Address byte 1
These bits hold byte 1 of the 24-bit source address.
5.14.10 SRCADDR2 – Channel Source Address 2
Reading and writing 24-bit values require special attention. For details, refer to “Accessing 24- and 32-bit Registers” on
page 13.
Bit 76543210
+0x0A SRCADDR[23:16]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – SRCADDR[23:16]: Channel Source Address byte 2
These bits hold byte 2 of the 24-bit source address.
5.14.11 DESTADDR0 – Channel Destination Address 0
DESTADDR0, DESTADDR1, and DESTADDR2 represent the 24-bit value DESTADDR, which is the DMA channel
destination address. DESTADDR2 holds the most significant byte in the register. DESTADDR may be automatically
incremented or decremented based on settings in the DESTDIR bits in “ADDRCTRL – Address Control register” on page
57.
Bit 76543210
+0x0C DESTADDR[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
Bit 7:0 – DESTADDR[7:0]: Channel Destination Address byte 0
These bits hold byte 0 of the 24-bit source address.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
62
Page 63

5.14.12 DESTADDR1 – Channel Destination Address 1
Bit 76543210
+0x0D DESTADDR[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – DESTADDR[15:8]: Channel Destination Address byte 1
These bits hold byte 1 of the 24-bit source address.
5.14.13 DESTADDR2 – Channel Destination Address 2
Reading and writing 24-bit values require special attention. For details, refer to “Accessing 24- and 32-bit Registers” on
page 13.
Bit 76543210
+0x0E DESTADDR[23:16]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:0 – DESTADDR[23:16]: Channel Destination Address byte 2
These bits hold byte 2 of the 24-bit source address.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
63
Page 64

5.15 Register Summary – DMA Controller
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00
+0x01
+0x02
+0x03
+0x04
+0x05
+0x06
+0x07
+0x10
+0x20
+0x30
+0x40
CTRL ENABLE RESET – – – DBUFMODE – PRIMODE
Reserved – – – – – – – –
Reserved – – – – – – – –
INTFLAGS – – CH1ERRIF CH0ERRIF – – CH1TRNFIF CH0TRNFIF 53
STATUS – – CH1BUSY CH0BUSY – – CH1PEND CH0PEND 54
Reserved – – – – – – – –
TEMPL TEMP[7:0] 54
TEMPH TEMP[15:8] 55
CH0 Offset Offset address for DMA Channel 0
CH1 Offset Offset address for DMA Channel 1
Reserved – – – – – – – –
Reserved – – – – – – – –
5.16 Register Summary – DMA Channel
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00
+0x01
+0x02
+0x03
+0x04
+0x05
+0x06
+0x07
+0x08
+0x09
+0x0A
+0x0B
+0x0C
+0x0D
+0x0E
+0x0F
CTRLA ENABLE RESET REPEAT TRFREQ – SINGLE BURSTLEN[1:0] 55
CTRLB CHBUSY CHPEND ERRIF TRNIF ERRINTLVL[1:0] TRNINTLVL[1:0] 56
ADDCTRL SRCRELOAD[1:0] SRCDIR[1:0] DESTRELOAD[1:0] DESTDIR[1:0] 57
TRIGSRC TRIGSRC[7:0] 59
TRFCNTL TRFCNT[7:0] 60
TRFCNTH TRFCNT[15:8] 61
REPCNT REPCNT[7:0] 61
Reserved – – – – – – – –
SRCADDR0 SRCADDR[7:0] 61
SRCADDR1 SRCADDR[15:8] 62
SRCADDR2 SRCADDR[23:16] 62
Reserved – – – – – – – –
DESTADDR0 DESTADDR[7:0] 62
DESTADDR1 DESTADDR[15:8] 63
DESTADDR2 DESTADDR[23:16] 63
Reserved – – – – – – – –
53
5.17 DMA Interrupt Vector Summary
Offset Source Interrupt Description
0x00 CH0_vect DMA controller channel 0 interrupt vector
0x02 CH1_vect DMA controller channel 1 interrupt vector
XMEGA B [DATASHEET]
8291B–AVR–01/2013
64
Page 65

6. Event System
6.1 Features
System for direct peripheral-to-peripheral communication and signaling
Peripherals can directly send, receive, and react to peripheral events
CPU and DMA controller independent operation
100% predictable signal timing
Short and guaranteed response time
Four event channels for up to eight different and parallel signal routings and configurations
Events can be sent and/or used by most peripherals, clock system, and software
Additional functions include
Quadrature decoders
Digital filtering of I/O pin state
Works in active mode and idle sleep mode
6.2 Overview
The event system enables direct peripheral-to-peripheral communication and signaling. It allows a change in one
peripheral’s state to automatically trigger actions in other peripherals. It is designed to provide a predictable system for
short and predictable response times between peripherals. It allows for autonomous peripheral control and interaction
without the use of interrupts CPU or DMA controller resources, and is thus a powerful tool for reducing the complexity,
size and execution time of application code. It also allows for synchronized timing of actions in several peripheral
modules.
A change in a peripheral’s state is referred to as an event, and usually corresponds to the peripheral’s interrupt
conditions. Events can be directly passed to other peripherals using a dedicated routing network called the event routing
network. How events are routed and used by the peripherals is configured in software.
Figure 6-1 on page 66 shows a basic diagram of all connected peripherals. The event system can directly connect
together analog converters, analog comparators, I/O port pins, the real-time counter, timer/counters, IR communication
module (IRCOM) and USB interface. It can also be used to trigger DMA transactions (DMA controller). Events can also
be generated from software and the peripheral clock.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
65
Page 66

Figure 6-1. Event system overview and connected peripherals.
ADC
AC
CPU /
Software
Port pins
DMA
Controller
Event Routing Network
Event
System
Controller
IRCOM
clk
PER
Prescaler
Real Time
Counter
Timer /
Counters
USB
The event routing network consists of four software-configurable multiplexers that control how events are routed and
used. These are called event channels, and allow for up to four parallel event configurations and routings. The maximum
routing latency is two peripheral clock cycles. The event system works in both active mode and idle sleep mode.
6.3 Events
In the context of the event system, an indication that a change of state within a peripheral has occurred is called an
event. There are two main types of events: signaling events and data events. Signaling events only indicate a change of
state while data events contain additional information about the event.
The peripheral from which the event originates is called the event generator. Within each peripheral (for example, a
timer/counter), there can be several event sources, such as a timer compare match or timer overflow. The peripheral
using the event is called the event user, and the action that is triggered is called the event action.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
66
Page 67

Figure 6-2. Example of event source, generator, user, and action.
Events can also be generated manually in software.
6.3.1 Signaling Events
Signaling events are the most basic type of event. A signaling event does not contain any information apart from the
indication of a change in a peripheral. Most peripherals can only generate and use signaling events. Unless otherwise
stated, all occurrences of the word ”event” are to be understood as meaning signaling events.
Event Generator
Timer/Counter
Compare Match
Over-/Underflow
|
Error
Event Source
Event
Routing
Network
Event User
Event Action Selection
Event Action
ADC
Syncsweep
Single
Conversion
6.3.2 Data Events
Data events differ from signaling events in that they contain information that event users can decode to decide event
actions based on the receiver information.
Although the event routing network can route all events to all event users, those that are only meant to use signaling
events do not have decoding capabilities needed to utilize data events. How event users decode data events is shown in
Table 6-1 on page 68.
Event users that can utilize data events can also use signaling events. This is configurable, and is described in the
datasheet module for each peripheral.
6.3.3 Peripheral Clock Events
Each event channel includes a peripheral clock prescaler with a range from 1 (no prescaling) to 32768. This enables
configurable periodic event generation based on the peripheral clock. It is possible to periodically trigger events in a
peripheral or to periodically trigger synchronized events in several peripherals. Since each event channel include a
prescaler, different peripherals can receive triggers with different intervals.
6.3.4 Software Events
Events can be generated from software by writing the DATA and STROBE registers. The DATA register must be written
first, since writing the STROBE register triggers the operation. The DATA and STROBE registers contain one bit for each
event channel. Bit n corresponds to event channel n. It is possible to generate events on several channels at the same
time by writing to several bit locations at once.
Software-generated events last for one clock cycle and will overwrite events from other event generators on that event
channel during that clock cycle.
Table 6-1 on page 68 shows the different events, how they can be manually generated, and how they are decoded.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
67
Page 68

Table 6-1. Manually generated events and decoding of events.
STROBE DATA Data Event User Signaling Event User
0 0 No event No event
0 1 Data event 01 No event
1 0 Data event 02 Signaling event
1 1 Data event 03 Signaling event
6.4 Event Routing Network
The event routing network routes the events between peripherals. It consists of eight multiplexers (CHnMUX), which can
each be configured to route any event source to any event users. The output from a multiplexer is referred to as an event
channel. For each peripheral, it is selectable if and how incoming events should trigger event actions. Details on
configurations can be found in the datasheet for each peripheral. The event routing network is shown in Figure 6-3 on
page 69.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
68
Page 69

Figure 6-3. Event routing network.
Event Channel 3
Event Channel 2
Event Channel 1
Event Channel 0
(4)
TCC0
TCC1
(4)
(4)
(4)
(4)
TCD0
TCE0
TCF0
ADCA
USB
ACA
(6)
(4)
(6)
(6)
(6)
(4)
(4)
(3)
(10)
CH0CTRL[7:0]
CH0MUX[7:0]
CH1CTRL[7:0]
CH1MUX[7:0]
(29)
CH2CTRL[7:0]
CH2MUX[7:0]
Four multiplexers means that it is possible to route up to four events at the same time. It is also possible to route one
event through several multiplexers.
Not all XMEGA devices contain all peripherals. This only means that a peripheral is not available for generating or using
events. The network configuration itself is compatible between all devices.
6.5 Event Timing
An event normally lasts for one peripheral clock cycle, but some event sources, such as a low level on an I/O pin, will
generate events continuously. Details on this are described in the datasheet for each peripheral, but unless otherwise
stated, an event lasts for one peripheral clock cycle.
RTC
Clk
PER
PORTA
PORTB
PORTC
PORTD
PORTE
PORTF
(2)
(16)
(8)
(8)
(8)
(8)
(8)
(8)
(48)
CH3CTRL[7:0]
CH3MUX[7:0]
XMEGA B [DATASHEET]
8291B–AVR–01/2013
69
Page 70

It takes a maximum of two peripheral clock cycles from when an event is generated until the event actions in other
peripherals are triggered. This ensures short and 100% predictable response times, independent of CPU or DMA
controller load or software revisions.
6.6 Filtering
Each event channel includes a digital filter. When this is enabled, an event must be sampled with the same value for a
configurable number of system clock cycles before it is accepted. This is primarily intended for pin change events.
6.7 Quadrature Decoder
The event system includes one quadrature decoder (QDEC), which enable the device to decode quadrature input on I/O
pins and send data events that a timer/counter can decode to count up, count down, or index/reset. Table 6-2
summarizes which quadrature decoder data events are available, how they are decoded, and how they can be
generated. The QDEC and related features, control and status registers are available for event channel 0.
Table 6-2. Quadrature decoder data events.
STROBE DATA Data Event User Signaling Event User
0 0 No event No event
0 1 Index/reset No event
1 0 Count down Signaling event
1 1 Count up Signaling event
6.7.1 Quadrature Operation
A quadrature signal is characterized by having two square waves that are phase shifted 90 degrees relative to each
other. Rotational movement can be measured by counting the edges of the two waveforms. The phase relationship
between the two square waves determines the direction of rotation.
Figure 6-4. Quadrature signals from a rotary encoder.
Figure 6-4 shows typical quadrature signals from a rotary encoder. The signals QDPH0 and QDPH90 are the two
quadrature signals. When QDPH90 leads QDPH0, the rotation is defined as positive or forward. When QDPH0 leads
QDPH90, the rotation is defined as negative or reverse. The concatenation of the two phase signals is called the
quadrature state or the phase state.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
70
Page 71

In order to know the absolute rotary displacement, a third index signal (QINDX) can be used. This gives an indication
once per revolution.
6.7.2 QDEC Setup
For a full QDEC setup, the following is required:
Tho or three I/O port pins for quadrature signal input
Two event system channels for quadrature decoding
One timer/counter for up, down, and optional index count
The following procedure should be used for QDEC setup:
1. Choose two successive pins on a port as QDEC phase inputs.
2. Set the pin direction for QDPH0 and QDPH90 as input.
3. Set the pin configuration for QDPH0 and QDPH90 to low level sense.
4. Select the QDPH0 pin as a multiplexer input for an event channel, n.
5. Enable quadrature decoding and digital filtering in the event channel.
6. Optional:
1. Set up a QDEC index (QINDX).
2. Select a third pin for QINDX input.
3. Set the pin direction for QINDX as input.
4. Set the pin configuration for QINDX to sense both edges.
5. Select QINDX as a multiplexer input for event channel n+1
6. Set the quadrature index enable bit in event channel n+1.
7. Select the index recognition mode for event channel n+1.
7. Set quadrature decoding as the event action for a timer/counter.
8. Select event channel n as the event source for the timer/counter.
Set the period register of the timer/counter to ('line count' * 4 - 1), the line count of the quadrature encoder.
Enable the timer/counter without clock prescaling.
The angle of a quadrature encoder attached to QDPH0, QDPH90 (and QINDX) can now be read directly from the
timer/counter count register. If the count register is different from BOTTOM when the index is recognized, the
timer/counter error flag is set. Similarly, the error flag is set if the position counter passes BOTTOM without the
recognition of the index.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
71
Page 72

6.8 Register Description
6.8.1 CHnMUX – Event Channel n Multiplexer register
Bit 76543210
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
Bit 7:0 – CHnMUX[7:0]: Channel Multiplexer
These bits select the event source according to Table 6-3. This table is valid for all XMEGA devices regardless of
whether the peripheral is present or not. Selecting event sources from peripherals that are not present will give the same
result as when this register is zero. When this register is zero, no events are routed through. Manually generated events
will override CHnMUX and be routed to the event channel even if this register is zero.
Table 6-3. CHnMUX[7:0] bit settings.
CHnMUX[7:4] CHnMUX[3:0] Group Configuration Event Source
0000 0 0 0 0 None (manually generated events only)
0000 0 0 0 1 (Reserved)
CHnMUX[7:0]
0000 0 0 1 X (Reserved)
0000 0 1 X X (Reserved)
0000 1 0 0 0 RTC_OVF RTC overflow
0000 1 0 0 1 RTC_CMP RTC compare match
0000 1 0 1 0
USB start of frame on CH0
USB error on CH1
USB overflow on CH2
(2)
USB setup on CH3
0000 1 0 1 X (Reserved)
0000 1 1 X X (Reserved)
0001 0 0 0 0 ACA_CH0 ACA channel 0
0001 0 0 0 1 ACA_CH1 ACA channel 1
0001 0 0 1 0 ACA_WIN ACA window
0001 0 0 1 1 (Reserved)
0001 0 1 X X (Reserved)
0001 1 X X X (Reserved)
0010 0 0 0 0 ADCA_CH0 ADCA
(2)
(2)
(2)
0010 0 0 0 1 (Reserved)
0010 0 0 1 X (Reserved)
0010 0 1 X X (Reserved)
XMEGA B [DATASHEET]
72
8291B–AVR–01/2013
Page 73

CHnMUX[7:4] CHnMUX[3:0] Group Configuration Event Source
0010 1 X X X (Reserved)
0011 X X X X (Reserved)
0100 X X X X (Reserved)
0101 0 n PORTA_PINn
0101 1 n PORTB_PINn
0110 0 n PORTC_PINn
0110 1 n PORTD_PINn
0111 0 n PORTE_PINn
0111 1 n PORTF_PINn
(1)
(1)
(1)
(1)
(1)
(1)
PORTA pin n (n= 0, 1, 2 ... or 7)
PORTB pin n (n= 0, 1, 2 ... or 7)
PORTC pin n (n= 0, 1, 2 ... or 7)
PORTD pin n (n= 0, 1, 2 ... or 7)
PORTE pin n (n= 0, 1, 2 ... or 7)
PORTF pin n (n= 0, 1, 2 ... or 7)
1000 M PRESCALER_M Clk
1001 X X X X (Reserved)
1010 X X X X (Reserved)
1011 X X X X (Reserved)
1100 0 E See Table 6-4 Timer/counter C0 event type E
1100 1 E See Table 6-4 Timer/counter C1 event type E
1101 0 E See Table 6-4 Timer/counter D0 event type E
1111 1 X X X (Reserved)
1110 0 E See Table 6-4 Timer/counter E0 event type E
1111 1 X X X (Reserved)
1111 0 E See Table 6-4 Timer/counter F0 event type E
1111 1 X X X (Reserved)
Notes: 1. The description of how the ports generate events is described in “Port Event” on page 133.
2. The different USB events can be selected for only event channel, 0 to 3.
Table 6-4. Timer/counter events
divide by 2M (M=0 to 15)
PER
T/C Event E Group Configuration Event Type
0 0 0 TCxn_OVF Over/Underflow (x = C, D, E or F) (n= 0 or 1)
0 0 1 TCxn_ERR Error (x = C, D, E or F) (n= 0 or 1)
0 1 X – (Reserved)
1 0 0 TCxn_CCA Capture or compare A (x = C, D, E or F) (n= 0 or 1)
1 0 1 TCxn_CCB Capture or compare B (x = C, D, E or F) (n= 0 or 1)
1 1 0 TCxn_CCC Capture or compare C (x = C, D, E or F) (n= 0)
1 1 1 TCxn_CCD Capture or compare D (x = C, D, E or F) (n= 0)
XMEGA B [DATASHEET]
8291B–AVR–01/2013
73
Page 74

6.8.2 CHnCTRL – Event Channel n Control register
Bit 76543210
– QDIRM[1:0]
– – – – – DIGFILT[2:0]
Read/Write R R/W R/W R/W R/W R/W R/W R
Initial Value 0 0 0 0 0 0 0 0
Note: 1. Only available for CH0CTRL and CH2CTRL. These bits are reserved in CH1CTRL and CH3CTRL.
Bit 7 – Reserved
(1)
This bit is reserved and will always be read as zero. For compatibility with future devices, always write this bit to zero
when this register is written.
Bit 6:5 – QDIRM[1:0]: Quadrature Decode Index Recognition Mode
These bits determine the quadrature state for the QDPH0 and QDPH90 signals, where a valid index signal is recognized
and the counter index data event is given according to Table 6-5. These bits should only be set when a quadrature
encoder with a connected index signal is used.These bits are available only for CH0CTRL and CH2CTRL.
Table 6-5. QDIRM bit settings.
QDIRM[1:0] Index Recognition State
QDIEN
(1)
QDEN
(1)
DIGFILT[2:0]
0 0 {QDPH0, QDPH90} = 0b00
0 1 {QDPH0, QDPH90} = 0b01
1 0 {QDPH0, QDPH90} = 0b10
1 1 {QDPH0, QDPH90} = 0b11
Bit 4 – QDIEN: Quadrature Decode Index Enable
When this bit is set, the event channel will be used as a QDEC index source, and the index data event will be enabled.
This bit is available only for CH0CTRL and CH2CTRL.
Bit 3 – QDEN: Quadrature Decode Enable
Setting this bit enables QDEC operation.
This bit is available only for CH0CTRL and CH2CTRL.
Bit 2:0 – DIGFILT[2:0]: Digital Filter Coefficient
These bits define the length of digital filtering used, according to Table 6-6 on page 74. Events will be passed through to
the event channel only when the event source has been active and sampled with the same level for the number of
peripheral clock cycles defined by DIGFILT.
Table 6-6. Digital filter coefficient values .
DIGFILT[2:0] Group Configuration Description
000 1SAMPLE One sample
001 2SAMPLES Two samples
010 3SAMPLES Three samples
XMEGA B [DATASHEET]
8291B–AVR–01/2013
74
Page 75

Table 6-6. Digital filter coefficient values (Continued).
DIGFILT[2:0] Group Configuration Description
011 4SAMPLES Four samples
100 5SAMPLES Five samples
101 6SAMPLES Six samples
110 7SAMPLES Seven samples
111 8SAMPLES Eight samples
6.8.3 STROBE – Strobe register
If the STROBE register location is written, each event channel will be set according to the STROBE[n] and corresponding
DATA[n] bit settings, if any are unequal to zero.
A single event lasting for one peripheral clock cycle will be generated.
Bit 7 6 5 4 3 2 1 0
+0x10 STROBE[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
6.8.4 DATA – Data register
This register contains the data value when manually generating a data event. This register must be written before the
STROBE register. For details, See ”STROBE – Strobe register” on page 75.
Bit 76543210
+0x11 DATA[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
XMEGA B [DATASHEET]
8291B–AVR–01/2013
75
Page 76

6.9 Register Summary
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00 CH0MUX CH0MUX[7:0] 72
+0x01 CH1MUX CH1MUX[7:0] 72
+0x02 CH2MUX CH2MUX[7:0] 72
+0x03 CH3MUX CH3MUX[7:0] 72
+0x04 Reserved – – – – – – – –
+0x05 Reserved – – – – – – – –
+0x06 Reserved – – – – – – – –
+0x07 Reserved – – – – – – – –
+0x08 CH0CTRL – QDIRM[1:0] QDIEN QDEN DIGFILT[2:0] 74
+0x09 CH1CTRL – – – – – DIGFILT[2:0] 74
+0x0A CH2CTRL – QDIRM[1:0] QDIEN QDEN DIGFILT[2:0] 74
+0x0B CH3CTRL – – – – – DIGFILT[2:0] 74
+0x0C Reserved – – – – – – – –
+0x0D Reserved – – – – – – – –
+0x0E Reserved – – – – – – – –
+0x0F Reserved – – – – – – – –
+0x10 STROBE STROBE[7:0] 75
+0x11 DATA DATA[7:0] 75
XMEGA B [DATASHEET]
8291B–AVR–01/2013
76
Page 77

7. System Clock and Clock Options
7.1 Features
Fast start-up time
Safe run-time clock switching
Internal oscillators:
32MHz run-time calibrated oscillator
2MHz run-time calibrated oscillator
32.768kHz calibrated oscillator
32kHz ultra low power (ULP) oscillator with 1kHz output
External clock options
0.4MHz - 16MHz crystal oscillator
32.768kHz crystal oscillator
External clock
PLL with 20MHz - 128MHz output frequency
Internal and external clock options and 1x to 31x multiplication
Lock detector
Clock prescalers with 1x to 2048x division
Fast peripheral clocks running at 2 and 4 times the CPU clock
Automatic run-time calibration of internal oscillators
External oscillator and PLL lock failure detection with optional non-maskable interrupt
7.2 Overview
XMEGA devices have a flexible clock system supporting a large number of clock sources. It incorporates both accurate
internal oscillators and external crystal oscillator and resonator support. A high-frequency phase locked loop (PLL) and
clock prescalers can be used to generate a wide range of clock frequencies. A calibration feature (DFLL) is available,
and can be used for automatic run-time calibration of the internal oscillators to remove frequency drift over voltage and
temperature. An oscillator failure monitor can be enabled to issue a non-maskable interrupt and switch to the internal
oscillator if the external oscillator or PLL fails.
When a reset occurs, all clock sources except the 32kHz ultra low power oscillator are disabled. After reset, the device
will always start up running from the 2MHz internal oscillator. During normal operation, the system clock source and
prescalers can be changed from software at any time.
Figure 7-1 on page 78 presents the principal clock system in the XMEGA family of devices. Not all of the clocks need to
be active at a given time. The clocks for the CPU and peripherals can be stopped using sleep modes and power
reduction registers, as described in “Power Management and Sleep Modes” on page 97.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
77
Page 78

Figure 7-1. The clock system, clock sources, and clock distribution.
LCD
clk
Brown-out
Detector
LCD
Watchdog
Timer
DIV32
Real Time
Counter
clk
RTC
RTCSRC
DIV32
Peripherals RAM AVR CPU
clk
PER
clk
PER2
clk
PER4
System Clock Prescalers
clk
SYS
System Clock Multiplexer
(SCLKSEL)
PLL
DIV32
clk
CPU
Non-Volatile
Memory
USB
clk
USB
Prescaler
USBSRC
32 kHz
Int. ULP
32.768 kHz
Int. OSC
32.768 kHz
TOSC
TOSC1
XOSCSEL
TOSC2
0.4 – 16 MHz
XTAL
TAL1
X
XTAL2
PLLSRC
DIV4
32 MHz
Int. Osc
PC[7:0]
2MHz
Int. Osc
XMEGA B [DATASHEET]
8291B–AVR–01/2013
78
Page 79

7.3 Clock Distribution
Figure 7-1 on page 78 presents the principal clock distribution system used in XMEGA devices.
7.3.1 System Clock - Clk
SYS
The system clock is the output from the main system clock selection. This is fed into the prescalers that are used to
generate all internal clocks except the asynchronous and USB clocks.
7.3.2 CPU Clock - Clk
CPU
The CPU clock is routed to the CPU and nonvolatile memory. Halting the CPU clock inhibits the CPU from executing
instructions.
7.3.3 Peripheral Clock - Clk
PER
The majority of peripherals and system modules use the peripheral clock. This includes the DMA controller, event
system, interrupt controller, external bus interface and RAM. This clock is always synchronous to the CPU clock, but may
run even when the CPU clock is turned off.
7.3.4 Peripheral 2x/4x Clocks - Clk
Modules that can run at two or four times the CPU clock frequency can use the peripheral 2x and peripheral 4x clocks.
7.3.5 Asynchronous Clock - Clk
RTC
The asynchronous clock allows the real-time counter (RTC) and LCD to be clocked directly from an external 32.768kHz
crystal oscillator or from the internal 32.768kHz oscillator or ULP oscillator. The dedicated clock domain allows operation
of these peripherals even when the device is in sleep mode and the rest of the clocks are stopped.
7.3.6 USB Clock - Clk
USB
The USB device module requires a 12MHz or 48MHz clock. It has a separate clock source selection in order to avoid
system clock source limitations when USB is used.
PER2
/Clk
/Clk
LCD
PER4
7.4 Clock Sources
The clock sources are divided in two main groups: internal oscillators and external clock sources. Most of the clock
sources can be directly enabled and disabled from software, while others are automatically enabled or disabled,
depending on peripheral settings. After reset, the device starts up running from the 2MHz internal oscillator. The other
clock sources, DFLLs and PLL, are turned off by default.
7.4.1 Internal Oscillators
The internal oscillators do not require any external components to run. For details on characteristics and accuracy of the
internal oscillators, refer to the device datasheet.
7.4.1.1 32kHz Ultra Low Power Oscillator
This oscillator provides an approximate 32kHz clock. The 32kHz ultra low power (ULP) internal oscillator is a very low
power clock source, and it is not designed for high accuracy.The oscillator employs a built-in prescaler that provides a
1kHz output for the RTC. The oscillator is automatically enabled/disabled when it is used as clock source for any part of
the device. This oscillator can be selected as the clock source for the RTC and for the LCD.
7.4.1.2 32.768kHz Calibrated Oscillator
This oscillator provides an approximate 32.768kHz clock. It is calibrated during production to provide a default frequency
close to its nominal frequency. The calibration register can also be written from software for run-time calibration of the
oscillator frequency. The oscillator employs a built-in prescaler, which provides both a 32.768kHz output and a 1.024kHz
output.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
79
Page 80

7.4.1.3 32MHz Run-time Calibrated Oscillator
The 32MHz run-time calibrated internal oscillator is a high-requency oscillator. It is calibrated during production to
provide a default frequency close to its nominal frequency. A digital frequency looked loop (DFLL) can be enabled for
automatic run-time calibration of the oscillator to compensate for temperature and voltage drift and optimize the oscillator
accuracy. This oscillator can also be adjusted and calibrated to any frequency between 30MHz and 55MHz. The
production signature row contains 48MHz calibration values intended used when the oscillator is used a full-speed USB
clock source.
7.4.1.4 2MHz Run-time Calibrated Oscillator
The 2MHz run-time calibrated internal oscillator is the default system clock source after reset. It is calibrated during
production to provide a default frequency close to its nominal frequency. A DFLL can be enabled for automatic run-time
calibration of the oscillator to compensate for temperature and voltage drift and optimize the oscillator accuracy.
7.4.2 External Clock Sources
The XTAL1 and XTAL2 pins can be used to drive an external oscillator, either a quartz crystal or a ceramic resonator.
XTAL1 can be used as input for an external clock signal. The TOSC1 and TOSC2 pins is dedicated to driving a
32.768kHz crystal oscillator.
7.4.2.1 0.4MHz - 16MHz Crystal Oscillator
This oscillator can operate in four different modes optimized for different frequency ranges, all within 0.4MHz - 16MHz.
Figure 7-2 shows a typical connection of a crystal oscillator or resonator.
Figure 7-2. Crystal oscillator connection.
Two capacitors, C1 and C2, may be added to match the required load capacitance for the connected crystal.
7.4.2.2 External Clock Input
To drive the device from an external clock source, XTAL1 pin or any pin of PORTC can be used. XTAL1 must be driven
as shown in Figure 7-3 on page 80. In this mode, XTAL2 can be used as a general I/O pin.
Figure 7-3. External clock drive configuration.
C2
C1
General
Purpose
I/O
External
Clock
Signal
XTAL2
XTAL1
GND
XTAL2
XTAL1
XMEGA B [DATASHEET]
8291B–AVR–01/2013
80
Page 81

7.4.2.3 32.768kHz Crystal Oscillator
A 32.768kHz crystal oscillator can be connected between the TOSC1 and TOSC2 pins and enables a dedicated low
frequency oscillator input circuit. A typical connection is shown in Figure 7-4 on page 81. A low power mode with reduced
voltage swing on TOSC2 is available. This oscillator can be used as a clock source for the system clock, RTC and LCD,
and as the DFLL reference clock.
Figure 7-4. 32.768kHz crystal oscillator connection.
C2
C1
Two capacitors, C1 and C2, may be added to match the required load capacitance for the connected crystal. For details
on recommened TOSC characteristics and capacitor laod, refer to device datasheets.
7.5 System Clock Selection and Prescalers
All the calibrated internal oscillators, the external clock sources (XOSC), and the PLL output can be used as the system
clock source. The system clock source is selectable from software, and can be changed during normal operation. Built-in
hardware protection prevents unsafe clock switching. It is not possible to select a non-stable or disabled oscillator as the
clock source, or to disable the oscillator currently used as the system clock source. Each oscillator option has a status
flag that can be read from software to check that the oscillator is ready.
The system clock is fed into a prescaler block that can divide the clock signal by a factor from 1 to 2048 before it is routed
to the CPU and peripherals. The prescaler settings can be changed from software during normal operation. The first
stage, prescaler A, can divide by a factor of from 1 to 512. Then, prescalers B and C can be individually configured to
either pass the clock through or combine divide it by a factor from 1 to 4. The prescaler guarantees that derived clocks
are always in phase, and that no glitches or intermediate frequencies occur when changing the prescaler setting. The
prescaler settings are updated in accordance with the rising edge of the slowest clock.
TOSC2
TOSC1
GND
Figure 7-5. System clock selection and prescalers.
Clock Selection
Internal 32.768kHz Osc.
Internal 2MHz Osc.
Internal 32MHz Osc.
Internal PLL.
External Oscillator or Clock.
Clk
SYS
Prescaler A
1, 2, 4, ... , 512
Prescaler A divides the system clock, and the resulting clock is clk
clock speed further to enable peripheral modules to run at twice or four times the CPU clock frequency. If Prescalers B
and C are not used, all the clocks will run at the same frequency as the output from Prescaler A.
The system clock selection and prescaler registers are protected by the configuration change protection mechanism,
employing a timed write procedure for changing the system clock and prescaler settings. For details, refer to
“Configuration Change Protection” on page 14.
Clk
PER4
Prescaler B
1, 2, 4
Clk
PER2
Clk
Prescaler C
1, 2
. Prescalers B and C can be enabled to divide the
PER4
Clk
CPU
PER
XMEGA B [DATASHEET]
8291B–AVR–01/2013
81
Page 82

7.6 PLL with 1x-31x Multiplication Factor
The built-in phase locked loop (PLL) can be used to generate a high-frequency system clock. The PLL has a userselectable multiplication factor of from 1 to 31. The output frequency, f
by the multiplication factor, PLL_FAC.
, is given by the input frequency, fIN, multiplied
OUT
Four different clock sources can be chosen as input to the PLL:
2MHz internal oscillator
32MHz internal oscillator divided by 4
0.4MHz - 16MHz crystal oscillator
External clock
To enable the PLL, the following procedure must be followed:
1. Enable reference clock source.
2. Set the multiplication factor and select the clock reference for the PLL.
3. Wait until the clock reference source is stable.
4. Enable the PLL.
Hardware ensures that the PLL configuration cannot be changed when the PLL is in use. The PLL must be disabled
before a new configuration can be written.
It is not possible to use the PLL before the selected clock source is stable and the PLL has locked.
The reference clock source cannot be disabled while the PLL is running.
7.7 DFLL 2MHz and DFLL 32MHz
Two built-in digital frequency locked loops (DFLLs) can be used to improve the accuracy of the 2MHz and 32MHz
internal oscillators. The DFLL compares the oscillator frequency with a more accurate reference clock to do automatic
run-time calibration of the oscillator and compensate for temperature and voltage drift. The choices for the reference
clock sources are:
32.768kHz calibrated internal oscillator
32.768kHz crystal oscillator connected to the TOSC pins
External clock
USB start of frame
The DFLLs divide the oscillator reference clock by 32 to use a 1.024kHz reference. The reference clock is individually
selected for each DFLL, as shown on Figure 7-6 on page 83.
f
OUT
fINPLL_FAC=
XMEGA B [DATASHEET]
8291B–AVR–01/2013
82
Page 83

Figure 7-6. DFLL reference clock selection.
XOSCSEL
TOSC1
TOSC2
XTAL1
PC[7:0]
32.768 kHz Crystal Osc
External Clock
32.768 kHz Int. Osc
USB Start of Frame
DFLL32M
32 MHz Int. RCOSC
DFLL2M
2 MHz Int. RCOSC
clk
RC32MCREF
DIV32DIV32
clk
RC2MCREF
The ideal counter value representing the frequency ratio between the internal oscillator and a 1.024kHz reference clock
is loaded into the DFLL oscillator compare register (COMP) during reset. For the 32MHz oscillator, this register can be
written from software to make the oscillator run at a different frequency or when the ratio between the reference clock
and the oscillator is different (for example when the USB start of frame is used). The 48MHz calibration values must be
read from the production signature row and written to the 32MHz CAL register before the DFLL is enabled with USB SOF
as reference source.
The value that should be written to the COMP register is given by the following formula:
When the DFLL is enabled, it controls the ratio between the reference clock frequency and the oscillator frequency. If the
internal oscillator runs too fast or too slow, the DFLL will decrement or increment its calibration register value by one to
adjust the oscillator frequency. The oscillator is considered running too fast or too slow when the error is more than a half
calibration step size.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
83
Page 84

Figure 7-7. Automatic run-time calibration.
clk
RCnCREF
DFLL CNT
COMP
0
t
RCnCREF
Frequency
OK
CALA decremented
The DFLL will stop when entering a sleep mode where the oscillators are stopped. After wake up, the DFLL will continue
with the calibration value found before entering sleep. The reset value of the DFLL calibration register can be read from
the production signature row.
When the DFLL is disabled, the DFLL calibration register can be written from software for manual run-time calibration of
the oscillator.
7.8 PLL and External Clock Source Failure Monitor
A built-in failure monitor is available for the PLL and external clock source. If the failure monitor is enabled for the PLL
and/or the external clock source, and this clock source fails (the PLL looses lock or the external clock source stops) while
being used as the system clock, the device will:
Switch to run the system clock from the 2MHz internal oscillator
Reset the oscillator control register and system clock selection register to their default values
Set the failure detection interrupt flag for the failing clock source (PLL or external clock)
Issue a non-maskable interrupt (NMI)
If the PLL or external clock source fails when not being used for the system clock, it is automatically disabled, and the
system clock will continue to operate normally. No NMI is issued. The failure monitor is meant for external clock sources
above 32kHz. It cannot be used for slower external clocks.
When the failure monitor is enabled, it will not be disabled until the next reset.
The failure monitor is stopped in all sleep modes where the PLL or external clock source are stopped. During wake up
from sleep, it is automatically restarted.
The PLL and external clock source failure monitor settings are protected by the configuration change protection
mechanism, employing a timed write procedure for changing the settings. For details, refer to “Configuration Change
Protection” on page 14.
RCOSC fast,
RCOSC slow,
CALA incremented
XMEGA B [DATASHEET]
8291B–AVR–01/2013
84
Page 85

7.9 Register Description – Clock
7.9.1 CTRL – Control register
Bit 76543210
+0x00
Read/Write R R R R R R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:3 – Reserved
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 2:0 – SCLKSEL[2:0]: System Clock Selection
These bits are used to select the source for the system clock. See Table 7-1 for the different selections. Changing the
system clock source will take two clock cycles on the old clock source and two more clock cycles on the new clock
source. These bits are protected by the configuration change protection mechanism. For details, refer to “Configuration
Change Protection” on page 14.
SCLKSEL cannot be changed if the new clock source is not stable. The old clock can not be disabled until the clock
switching is completed.
Table 7-1. System clock selection.
SCLKSEL[2:0] Group configuration Description
– – – – – SCLKSEL[2:0]
000 RC2MHZ 2MHz internal oscillator
001 RC32MHZ 32MHz internal oscillator
010 RC32KHZ 32.768kHz internal oscillator
011 XOSC External oscillator or clock
100 PLL Phase locked loop
101 — Reserved
110 — Reserved
111 — Reserved
7.9.2 PSCTRL – Prescaler Control register
This register is protected by the configuration change protection mechanism. For details, refer to “Configuration Change
Protection” on page 14.
Bit 76543210
+0x01
Read/Write R R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0000000
Bit 7 – Reserved
– PSADIV[4:0] PSBCDIV
This bit is unused and reserved for future use. For compatibility with future devices, always write this bit to zero when this
register is written.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
85
Page 86

Bit 6:2 – PSADIV[4:0]: Prescaler A Division Factor
These bits define the division ratio of the clock prescaler A according to Table 7-2. These bits can be written at run-time
to change the frequency of the Clk
clock relative to the system clock, Clk
PER4
SYS
.
Table 7-2. Prescaler A division factor.
PSADIV[4:0] Group configuration Description
00000 1 No division
00001 2 Divide by 2
00011 4 Divide by 4
00101 8 Divide by 8
00111 16 Divide by 16
01001 32 Divide by 32
01011 64 Divide by 64
01101 128 Divide by 128
01111 256 Divide by 256
10001 512 Divide by 512
10101 – Reserved
10111 – Reserved
11001 – Reserved
11011 – Reserved
11101 – Reserved
11111 – Reserved
Bit 1:0 – PSBCDIV: Prescaler B and C Division Factors
These bits define the division ratio of the clock prescalers B and C according to Table 7-3. Prescaler B will set the clock
frequency for the Clk
clocks relative to the Clk
Clk
CPU
clock relative to the Clk
PER2
clock. Refer to Figure 7-5 on page 81 fore more details.
PER2
clock. Prescaler C will set the clock frequency for the Clk
PER4
PER
and
Table 7-3. Prescaler B and C division factors.
PSBCDIV[1:0] Group configuration Prescaler B division Prescaler C division
00 1_1 No division No division
01 1_2 No division Divide by 2
10 4_1 Divide by 4 No division
11 2_2 Divide by 2 Divide by 2
XMEGA B [DATASHEET]
8291B–AVR–01/2013
86
Page 87

7.9.3 LOCK – Lock register
Bit 76543210
+0x02
Read/Write RRRRRRRR/W
Initial Value 0 0 0 00000
Bit 7:1 – Reserved
– – – – – – – LOCK
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 0 – LOCK: Clock System Lock
When this bit is written to one, the CTRL and PSCTRL registers cannot be changed, and the system clock selection and
prescaler settings are protected against all further updates until after the next reset. This bit is protected by the
configuration change protection mechanism. For details, refer to “Configuration Change Protection” on page 14.
The LOCK bit can be cleared only by a reset.
7.9.4 RTCCTRL – RTC Control register
Bit 7 6 5 4 3 2 1 0
+0x03
Read/Write R R R R R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
– – – – RTCSRC[2:0] RTCEN
Bit 7:4 – Reserved
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 3:1 – RTCSRC[2:0]: RTC and LCD Clock Source
These bits select the clock source for the Real-Time Counter (RTC) and LCD according to Table 7-4.
Table 7-4. RTC clock source selection.
RTCSRC[2:0] Group Configuration Description
000 ULP 1kHz from 32kHz internal ULP oscillator
001 TOSC 1.024kHz from 32.768kHz crystal oscillator on TOSC
010 RCOSC 1.024kHz from 32.768kHz internal oscillator
(1)
(1)
(1)
011 — Reserved
100 — Reserved
101 TOSC32 32.768kHz from 32.768kHz crystal oscillator on TOSC
110 RCOSC32 32.768kHz from 32.768kHz internal oscillator
111 EXTCLK External clock from TOSC1
Note: 1. The LCD will always use the non-prescaled 32kHz oscillator output as clock source.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
87
Page 88

Bit 0 – RTCEN: RTC and LCD Clock Source Enable
Setting the RTCEN bit enables the selected clock source for the real-time counter (RTC) and LCD.
7.9.5 USBSCTRL – USB Control register
Bit 7 6 5 4 3 2 1 0
+0x04
Read/Write R R R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:6 – Reserved
– – USBPSDIV[2:0] USBSRC[1:0] USBSEN
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 5:3 – USBPSDIV[2:0]: USB Prescaler Division Factor
These bits define the division ratio of the USB clock prescaler according to Table 7-5. These bits are locked as long as
the USB clock source is enabled.
Table 7-5. USB prescaler division factor.
USBPSDIV[2:0] Group configuration Description
000 1 No division
001 2 Divide by 2
010 4 Divide by 4
011 8 Divide by 8
100 16 Divide by 16
101 32 Divide by 32
110 — Reserved
111 — Reserved
Bit 2:1 – USBSRC[1:0]: USB Clock Source
These bits select the clock source for the USB module according to Table 7-6.
Table 7-6. USB clock source.
USBSRC[1:0] Group configuration Description
00 PLL PLL
01 RC32M 32MHz internal oscillator
Note: 1. The 32MHz internal oscillator must be calibrated to 48MHz before selecting this as source for the USB device module. Refer to “DFLL 2MHz and
DFLL 32MHz” on page 82.
Bit 0 – USBSEN: USB Clock Source Enable
(1)
Setting this bit enables the selected clock source for the USB device module.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
88
Page 89

7.10 Register Description – Oscillator
7.10.1 CTRL – Control register
Bit 76543210
+0x00
Read/Write R R R R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 1
Bit 7:5 – Reserved
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 4 – PLLEN: PLL Enable
Setting this bit enables the PLL. Before the PLL is enabled, it must be configured with the desired multiplication factor
and clock source. See ”STATUS – Status register” on page 89..
Bit 3 – XOSCEN: External Oscillator Enable
Setting this bit enables the selected external clock source. Refer to “XOSCCTRL – XOSC Control register” on page 90
for details on how to select the external clock source. The external clock source should be allowed time to stabilize
before it is selected as the source for the system clock. See ”STATUS – Status register” on page 89.
Bit 2 – RC32KEN: 32.768kHz Internal Oscillator Enable
Setting this bit enables the 32.768kHz internal oscillator. The oscillator must be stable before it is selected as the source
for the system clock. See ”STATUS – Status register” on page 89.
Bit 1 – RC32MEN: 32MHz Internal Oscillator Enable
Setting this bit will enable the 32MHz internal oscillator. The oscillator must be stable before it is selected as the source
for the system clock. See ”STATUS – Status register” on page 89.
Bit 0 – RC2MEN: 2MHz Internal Oscillator Enable
Setting this bit enables the 2MHz internal oscillator. The oscillator must be stable before it is selected as the source for
the system clock. See ”STATUS – Status register” on page 89.
By default, the 2MHz internal oscillator is enabled and this bit is set.
– – – PLLEN XOSCEN RC32KEN RC32MEN RC2MEN
7.10.2 STATUS – Status register
Bit 7 6 5 4 3 2 1 0
+0x01
Read/Write R R R R R R R R
Initial Value 0 0 0 0 0 0 0 0
Bit 7:5 – Reserved
– – – PLLRDY XOSCRDY RC32KRDY RC32MRDY RC2MRDY
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 4 – PLLRDY: PLL Ready
This flag is set when the PLL has locked on the selected frequency and is ready to be used as the system clock source.
Bit 3 – XOSCRDY: External Clock Source Ready
This flag is set when the external clock source is stable and is ready to be used as the system clock source.
Bit 2 – RC32KRDY: 32.768kHz Internal Oscillator Ready
This flag is set when the 32.768kHz internal oscillator is stable and is ready to be used as the system clock source.
Bit 1 – RC32MRDY: 32MHz Internal Oscillator Ready
This flag is set when the 32MHz internal oscillator is stable and is ready to be used as the system clock source.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
89
Page 90

Bit 0 – RC2MRDY: 2MHz Internal Oscillator Ready
This flag is set when the 2MHz internal oscillator is stable and is ready to be used as the system clock source.
7.10.3 XOSCCTRL – XOSC Control register
Bit 7 6 5 4 3 2 1 0
+0x02 FRQRANGE[1:0] X32KLPM
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:6 – FRQRANGE[1:0]: 0.4 - 16MHz Crystal Oscillator Frequency Range Select
These bits select the frequency range for the connected crystal oscillator according to Table 7-7.
Table 7-7. 16MHz crystal oscillator frequency range selection.
XOSCPWR
XOSCSEL[4]
XOSCSEL[3:0]
FRQRANGE[1:0] Group configuration
Typical frequency
range
Recommended range for
capacitors C1 and C2 (pF)
00 04TO2 0.4MHz - 2MHz 100-300
01 2TO9 2MHz - 9MHz 10-40
10 9TO12 9MHz - 12MHz 10-40
11 12TO16 12MHz - 16MHz 10-30
Bit 5 – X32KLPM: Crystal Oscillator 32.768kHz Low Power Mode
Setting this bit enables the low power mode for the 32.768kHz crystal oscillator. This will reduce the swing on the TOSC2
pin.
Bit 4 – XOSCPWR: Crystal Oscillator Drive
Setting this bit will increase the current in the 0.4MHz - 16MHz crystal oscillator and increase the swing on the XTAL2
pin. This allows for driving crystals with higher load or higher frequency than specified by the FRQRANGE bits.
This function is enabled if the
Bit 4:0 – XOSCSEL[4:0]: Crystal Oscillator Selection
0.4 - 16MHz Crystal Oscillator is selected.
These bits select the type and start-up time for the crystal or resonator that is connected to the XTAL or TOSC pins. See
Table 7-8 on page 91 for crystal selections. If an external clock or external oscillator is selected as the source for the
system clock, see “CTRL – Control register” on page 89. This configuration cannot be changed.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
90
Page 91

Table 7-8. External oscillator selection and start-up time.
XOSCSEL[4:0] Group configuration Selected clock source Start-up time
00000 EXTCLK
nnn 01 EXTCLK_Cn
00010 32KHZ
(4)
x
0011 XTAL_256CLK
(4)
x
0111 XTAL_1KCLK
(4)
x
1011 XTAL_16KCLK 0.4MHz - 16MHz XTAL 16K CLK
Notes: 1. This option should be used only when frequency stability at startup is not important for the application. The option is not suitable for crystals.
2. This option is intended for use with ceramic resonators. It can also be used when the frequency stability at startup is not important for the
application.
3. When the external oscillator is used as the reference for a DFLL, only EXTCLK and 32KHZ can be selected.
4. When the 0.4 - 16 MHz crystal oscillators selected, the MSB is then XOSCPWR.
(3)
(3)
(3)
(1)
(2)
7.10.4 XOSCFAIL – XOSC Failure Detection register
Bit 765432 1 0
+0x03
Read/Write RRRRR/WR/WR/WR/W
Initial Value 0 0 0 0 0 0 0 0
– – – – PLLFDIF PLLFDEN XOSCFDIF XOSCFDEN
External Clock from XTAL1 pin 6 CLK
External Clock from Port C pin n 6 CLK
32.768kHz TOSC 16K CLK
0.4MHz - 16MHz XTAL 256 CLK
0.4MHz - 16MHz XTAL 1K CLK
Bit 7:4 – Reserved
These bits are reserved and will always be read as zero. For compatibility with future devices, always write these bits to
zero when this register is written.
Bit 3 – PLLFDIF: PLL Fault Detection Flag
If PLL failure detection is enabled, PLLFDIF is set when the PLL looses lock. Writing logic one to this location will clear
PLLFDIF.
Bit 2 – PLLFDEN: PLL Fault Detection Enable
Setting this bit will enable PLL failure detection. A non-maskable interrupt will be issued when PLLFDIF is set.
This bit is protected by the configuration change protection mechanism. Refer to “Configuration Change Protection” on
page 14 for details.
Bit 1 – XOSCFDIF: Failure Detection Interrupt Flag
If the external clock source oscillator failure monitor is enabled, XOSCFDIF is set when a failure is detected. Writing logic
one to this location will clear XOSCFDIF.
Bit 0 – XOSCFDEN: Failure Detection Enable
Setting this bit will enable the failure detection monitor, and a non-maskable interrupt will be issued when XOSCFDIF is
set.
This bit is protected by the configuration change protection mechanism. Refer to “Configuration Change Protection” on
page 14 for details. Once enabled, failure detection can only be disabled by a reset.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
91
Page 92

7.10.5 RC32KCAL – 32kHz Oscillator Calibration register
Bit 76543210
+0x04 RC32KCAL[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value x x x x x x x x
Bit 7:0 – RC32KCAL[7:0]: 32.768kHz Internal Oscillator Calibration byte
This register is used to calibrate the 32.768kHz internal oscillator. A factory-calibrated value is loaded from the signature
row of the device and written to this register during reset, giving an oscillator frequency close to 32.768kHz. The register
can also be written from software to calibrate the oscillator frequency during normal operation.
7.10.6 PLLCTRL – PLL Control register
Bit 76543210
+0x05 PLLSRC[1:0] PLLDIV PLLFAC[4:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:6 – PLLSRC[1:0]: Clock Source
The PLLSRC bits select the input source for the PLL according to Table 7-9.
Table 7-9. PLL clock source selection.
PLLSRC[1:0] Group Configuration PLL Input Source
00 RC2M 2MHz internal oscillator
01 — Reserved
10 RC32M 32MHz internal oscillator
11 XOSC External clock source
Notes: 1. The 32.768kHz TOSC cannot be selected as the source for the PLL. An external clock must be a minimum 0.4MHz to be used as the source clock.
Bit 5 – PLLDIV: PLL Divided Output Enable
Setting this bit will divide the output from the PLL by 2.
Bit 4:0 – PLLFAC[4:0]: Multiplication Factor
These bits select the multiplication factor for the PLL. The multiplication factor can be in the range of from 1x to 31x.
7.10.7 DFLLCTRL – DFLL Control register
Bit 765432 1 0
+0x06
Read/Write R RRRRR/WR/WR/W
Initial Value 0 0 0000 0 0
Bit 7:3 – Reserved
– – – – – RC32MCREF[1:0] RC2MCREF
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
(1)
XMEGA B [DATASHEET]
8291B–AVR–01/2013
92
Page 93

Bit 2:1 – RC32MCREF[1:0]: 32MHz Oscillator Calibration Reference
These bits are used to select the calibration source for the 32MHz DFLL according to the Table 7-10. These bits will
select only which calibration source to use for the DFLL. In addition, the actual clock source that is selected must enabled
and configured for the calibration to function.
Table 7-10. 32MHz oscillator reference design.
RC32MCREF[1:0] Group Configuration Description
00 RC32K 32.768kHz internal oscillator
01 XOSC32 32.768kHz crystal oscillator on TOSC
10 USBSOF USB start of frame
11 — Reserved
Bit 0 – RC2MCREF: 2MHz Oscillator Calibration Reference
This bit is used to select the calibration source for the 2MHz DFLL. By default, this bit is zero and the 32.768kHz internal
oscillator is selected. If this bit is set to one, the 32.768kHz crystal oscillator on TOSC is selected as the reference. This
bit will select only which calibration source to use for the DFLL. In addition, the actual clock source that is selected must
enabled and configured for the calibration to function.
7.11 Register Description – DFLL32M/DFLL2M
7.11.1 CTRL – Control register
Bit 7 6 5 4 3 2 1 0
+0x00
Read/Write R R R R R R R R/W
Initial Value 0 0 0 0 0 0 0 0
Bit 7:1 – Reserved
– – – – – – – ENABLE
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 0 – ENABLE: Enable
Setting this bit enables the DFLL and auto-calibration of the internal oscillator. The reference clock must be enabled and
stable before the DFLL is enabled.
After disabling the DFLL, the reference clock can not be disabled before the ENABLE bit is read as zero.
7.11.2 CALA – Calibration register A
The CALA and CALB registers hold the 13-bit DFLL calibration value that is used for automatic run-time calibration of the
internal oscillator. When the DFLL is disabled, the calibration registers can be written by software for manual run-time
calibration of the oscillator. The oscillators will also be calibrated according to the calibration value in these registers
when the DFLL is disabled.
Bit 7 6 5 4 3 2 1 0
+0x02
Read/Write R R/W R/W R/W R/W R/W R/W R/W
Initial Value 0 x x x x x x x
– CALA[6:0]
XMEGA B [DATASHEET]
8291B–AVR–01/2013
93
Page 94

Bit 7 – Reserved
This bit is unused and reserved for future use. For compatibility with future devices, always write this bit to zero when this
register is written.
Bit 6:0 – CALA[6:0]: DFLL Calibration bits
These bits hold the part of the oscillator calibration value that is used for automatic runtime calibration. A factorycalibrated value is loaded from the signature row of the device and written to this register during reset, giving an oscillator
frequency approximate to the nominal frequency for the oscillator. The bits cannot be written when the DFLL is enabled.
7.11.3 CALB – Calibration register B
Bit 7 6 5 4 3 2 1 0
+0x03
Read/Write R R R/W R/W R/W R/W R/W R/W
Initial Value 0 0 x x x x x x
Bit 7:6 – Reserved
– – CALB[5:0]
These bits are unused and reserved for future use. For compatibility with future devices, always write these bits to zero
when this register is written.
Bit 5:0 – CALB[5:0]: DFLL Calibration bits
These bits hold the part of the oscillator calibration value that is used to select the oscillator frequency. A factorycalibrated value is loaded from the signature row of the device and written to this register during reset, giving an oscillator
frequency approximate to the nominal frequency for the oscillator. These bits are not changed during automatic run-time
calibration of the oscillator. The bits cannot be written when the DFLL is enabled. When calibrating to a frequency
different from the default, the CALA bits should be set to a middle value to maximize the range for the DFLL.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
94
Page 95

7.11.4 COMP1 – Compare register byte 1
The COMP1 and COMP2 register pair represent the frequency ratio between the oscillator and the reference clock. The
initial value for these registers is the ratio between the internal oscillator frequency and a 1.024kHz reference.
Bit 76543210
+0x05 COMP[7:0]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
Bit 7:0 – COMP1[7:0]: Compare register byte 1
These bits hold byte 1 of the 16-bit compare register.
7.11.5 COMP2 – Compare register byte 2
Bit 76543210
+0x06 COMP[15:8]
Read/Write R/W R/W R/W R/W R/W R/W R/W R/W
Initial Value 00000000
Bit 7:0 – COMP2[15:8]: Compare Register Byte 2
These bits hold byte 2 of the 16-bit compare register.
Table 7-11. Nominal DFLL32M COMP values for different output frequencies.
Oscillator frequency (MHz) COMP value (Clk
30.0 0x7270
32.0 0x7A12
34.0 0x81B3
36.0 0x8954
38.0 0x90F5
40.0 0x9896
42.0 0xA037
44.0 0xA7D8
46.0 0xAF79
48.0 0xB71B
50.0 0xBEBC
52.0 0xC65D
54.0 0xCDFE
RCnCREF
= 1.024kHz)
XMEGA B [DATASHEET]
8291B–AVR–01/2013
95
Page 96

7.12 Register Summary – Clock
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00 CTRL – – – – – SCLKSEL[2:0] 85
+0x01 PSCTRL
+0x02 LOCK
+0x03 RTCCTRL
+0x04 USBSCTRL
+0x05 Reserved – – – – – – – –
+0x06 Reserved – – – – – – – –
+0x07 Reserved – – – – – – – –
– PSADIV[4:0] PSBCDIV[1:0] 85
– – – – – – – LOCK 87
– – – – RTCSRC[2:0] RTCEN 87
– – USBPSDIV[2:0] USBSRC[1:0] USBSEN 87
7.13 Register Summary – Oscillator
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00 CTRL – – – PLLEN XOSCEN RC32KEN R32MEN RC2MEN 89
+0x01 STATUS
+0x02 XOSCCTRL FRQRANGE[1:0] X32KLPM XOSCPW XOSCSEL[3:0] 90
+0x03 XOSCFAIL
+0x04 RC32KCAL RC32KCAL[7:0] 92
+0x05 PLLCTRL PLLSRC[1:0]
+0x06 DFLLCTRL
+0x07 Reserved – – – – – – – –
– – – PLLRDY XOSCRDY RC32KRD R32MRDY RC2MRDY 89
XOSCSEL
– – – – PLLFDIF PLLFDEN XOSCFDIF XOSCFDEN 91
– PLLFAC[4:0] 92
– – – – – RC32MCREF[1:0] RC2MCREF 92
7.14 Register Summary – DFLL32M/DFLL2M
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Page
+0x00 CTRL – – – – – – – ENABLE 93
+0x01 Reserved – – – – – – – –
+0x02 CALA – CALA[6:0] 93
+0x03 CALB
+0x04 Reserved – – – – – – – –
+0x05 COMP1 COMP[7:0] 95
+0x06 COMP2 COMP[15:8] 95
+0x07 Reserved – – – – – – – –
– – CALB[5:0] 94
7.15 Oscillator Failure Interrupt Vector Summary
Offset Source Interrupt Description
0x00 OSCF_vect PLL and external oscillator failure interrupt vector (NMI)
XMEGA B [DATASHEET]
8291B–AVR–01/2013
96
Page 97

8. Power Management and Sleep Modes
8.1 Features
Power management for adjusting power consumption and functions
Five sleep modes
Idle
Power down
Power save
Standby
Extended standby
Power reduction register to disable clock and turn off unused peripherals in active and idle modes
8.2 Overview
Various sleep modes and clock gating are provided in order to tailor power consumption to application requirements.
This enables the XMEGA microcontroller to stop unused modules to save power.
All sleep modes are available and can be entered from active mode. In active mode, the CPU is executing application
code. When the device enters sleep mode, program execution is stopped and interrupts or a reset is used to wake the
device again. The application code decides which sleep mode to enter and when. Interrupts from enabled peripherals
and all enabled reset sources can restore the microcontroller from sleep to active mode.
In addition, power reduction registers provide a method to stop the clock to individual peripherals from software. When
this is done, the current state of the peripheral is frozen, and there is no power consumption from that peripheral. This
reduces the power consumption in active mode and idle sleep modes and enables much more fine-tuned power
management than sleep modes alone.
8.3 Sleep Modes
Sleep modes are used to shut down modules and clock domains in the microcontroller in order to save power. XMEGA
microcontrollers have five different sleep modes tuned to match the typical functional stages during application
execution. A dedicated sleep instruction (SLEEP) is available to enter sleep mode. Interrupts are used to wake the
device from sleep, and the available interrupt wake-up sources are dependent on the configured sleep mode. When an
enabled interrupt occurs, the device will wake up and execute the interrupt service routine before continuing normal
program execution from the first instruction after the SLEEP instruction. If other, higher priority interrupts are pending
when the wake-up occurs, their interrupt service routines will be executed according to their priority before the interrupt
service routine for the wake-up interrupt is executed. After wake-up, the CPU is halted for four cycles before execution
starts.
Table 8-1 on page 98 shows the different sleep modes and the active clock domains, oscillators, and wake-up sources.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
97
Page 98

Table 8-1. Active clock domains and wake-up sources in the different sleep modes.
Active Clock Domain Oscillators Wake-up Sources
Sleep Modes
Idle X X X X X X X X X
Power down X X X
Power save X X X X X X
Standby X X X X
Extended standby X X X X X X X
The wake-up time for the device is dependent on the sleep mode and the main clock source. The startup time for the
system clock source must be added to the wake-up time for sleep modes where the system clock source is not kept
running. For details on the startup time for the different oscillator options, refer to “System Clock and Clock Options” on
page 77.
The content of the register file, SRAM and registers are kept during sleep. If a reset occurs during sleep, the device will
reset, start up, and execute from the reset vector.
8.3.1 Idle Mode
In idle mode the CPU and nonvolatile memory are stopped (note that any ongoing programming will be completed), but
all peripherals, including the interrupt controller, event system and DMA controller are kept running. Any enabled
interrupt will wake the device.
8.3.2 Power-down Mode
CPU Clock
Peripheral and USB Clock
RTC and LCD Clock
System Clock Source
RTC Clock Source
USB Resume
Asynchronous Port Interrupts
TWI Address Match Interrupts
RTC and LCD Clock Interrupts
All Interrupts
In power-down mode, all clocks, including the real-time counter clock source, are stopped. This allows operation only of
asynchronous modules that do not require a running clock. The only interrupts that can wake up the MCU are the twowire interface address match interrupt, asynchronous port interrupts, and the USB resume interrupt.
8.3.3 Power-save Mode
Power-save mode is identical to power down, with two exceptions:
1. If the real-time counter (RTC) is enabled, it will keep running during sleep, and the device can also wake up from
either an RTC overflow or compare match interrupt.
2. If the LCD is enabled, it will keep running during sleep, and the device can wake up from LCD frame completed
interrupt.
8.3.4 Standby Mode
Standby mode is identical to power down, with the exception that the enabled system clock sources are kept running
while the CPU, peripheral, and RTC/LCD clocks are stopped. This reduces the wake-up time.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
98
Page 99

8.3.5 Extended Standby Mode
Extended standby mode is identical to power-save mode, with the exception that the enabled system clock sources are
kept running while the CPU and peripheral clocks are stopped. This reduces the wake-up time.
8.4 Power Reduction Registers
The power reduction (PR) registers provide a method to stop the clock to individual peripherals. When this is done, the
current state of the peripheral is frozen and the associated I/O registers cannot be read or written. Resources used by the
peripheral will remain occupied; hence, the peripheral should be disabled before stopping the clock. Enabling the clock to
a peripheral again puts the peripheral in the same state as before it was stopped. This can be used in idle mode and
active modes to reduce the overall power consumption. In all other sleep modes, the peripheral clock is already stopped.
Not all devices have all the peripherals associated with a bit in the power reduction registers. Setting a power reduction
bit for a peripheral that is not available will have no effect.
8.5 Minimizing Power Consumption
There are several possibilities to consider when trying to minimize the power consumption in an AVR MCU controlled
system. In general, correct sleep modes should be selected and used to ensure that only the modules required for the
application are operating.
All unneeded functions should be disabled. In particular, the following modules may need special consideration when
trying to achieve the lowest possible power consumption.
8.5.1 Analog-to-Digital Converter - ADC
When entering idle mode, the ADC should be disabled if not used. In other sleep modes, the ADC is automatically
disabled. When the ADC is turned off and on again, the next conversion will be an extended conversion. Refer to “ADC –
Analog-to-Digital Converter” on page 326 for details on ADC operation.
8.5.2 Analog Comparator - AC
When entering idle mode, the analog comparator should be disabled if not used. In other sleep modes, the analog
comparator is automatically disabled. However, if the analog comparator is set up to use the internal voltage reference as
input, the analog comparator should be disabled in all sleep modes. Otherwise, the internal voltage reference will be
enabled, irrespective of sleep mode. Refer to “AC – Analog Comparator” on page 352 for details on how to configure the
analog comparator.
8.5.3 Brownout Detector
If the brownout detector is not needed by the application, this module should be turned off. If the brownout detector is
enabled by the BODLEVEL fuses, it will be enabled in all sleep modes, and always consume power. In the deeper sleep
modes, it can be turned off and set in sampled mode to reduce current consumption. Refer to “Brownout Detection” on
page 109 for details on how to configure the brownout detector.
8.5.4 Watchdog Timer
If the watchdog timer is not needed in the application, the module should be turned off. If the watchdog timer is enabled,
it will be enabled in all sleep modes and, hence, always consume power. Refer to “WDT – Watchdog Timer” on page 115
for details on how to configure the watchdog timer.
8.5.5 Port Pins
When entering a sleep mode, all port pins should be configured to use minimum power. Most important is to ensure that
no pins drive resistive loads. In sleep modes where the Peripheral Clock (Clk
device will be disabled. This ensures that no power is consumed by the input logic when not needed.
) is stopped, the input buffers of the
PER
XMEGA B [DATASHEET]
8291B–AVR–01/2013
99
Page 100

8.5.6 On-chip Debug Systems
If the On-chip debug system is enabled and the chip enters sleep mode, the main clock source is enabled and hence
always consumes power. In the deeper sleep modes, this will contribute significantly to the total current consumption.
XMEGA B [DATASHEET]
8291B–AVR–01/2013
100
 Loading...
Loading...