

Page 1
DATA SHEET
MOS INTEGRATED CIRCUIT
µµµµ
PD77113A, 77114
16-BIT FIXED-POINT DIGITAL SIGNAL PROCESSORS
DESCRIPTION
The µPD77113A and 77114 are 16-bit fixed-point digital signal processors (DSPs).
Compared with the µPD77016 family, these DSPs have improved power consumption and are ideal for battery-
powered mobile terminals such as PDAs and cellular phones.
Both mask ROM and RAM models are available.
For details of the functions of these DSPs, refer to the following User’s Manuals:
PD77111 Family User’s Manual : U14623E
µ
PD77016 Family User’s Manual - Instructions: U13116E
µ
FEATURES
Instruction cycle (operating clock)
z
PD77113A : 13.3 ns MIN (75 MHz MAX)
µ
PD77114 : 13.3 ns MIN (75 MHz MAX)
µ
Memory
z
• Internal instruction memory
PD77113A : RAM 3.5K words × 32 bits
µ
Mask ROM 48K words × 32 bits
PD77114 : RAM 3.5K words × 32 bits
µ
Mask ROM 48K words × 32 bits
• Data memory
PD77113A : RAM 16K words × 16 bits × 2 banks
µ
Mask ROM 32K words × 16 bits × 2 banks
PD77114 : RAM 16K words × 16 bits × 2 banks
µ
Mask ROM 32K words × 16 bits × 2 banks
External memory space 8K words × 16 bits × 2 banks
ORDERING INFORMATION
Part Number Package
PD77113AF1-xxx-CN1 80-pin plastic fine-pitch BGA (9 × 9)
µ
PD77114GC-xxx-9EU 100-pin plastic TQFP (fine pitch) (14 × 14)
µ
Remark
Document No. U14373EJ3V0DS00 (3rd edition)
Date Published February 2001 N CP(K)
Printed in Japan
xxx indicates ROM code suffix.
The information in this document is subject to change without notice. Before using this document, please
confirm that this is the latest version.
Not all devices/types available in every country. Please check with local NEC representative for
availability and additional information.
The mark shows major revised points.
©
1999
Page 2
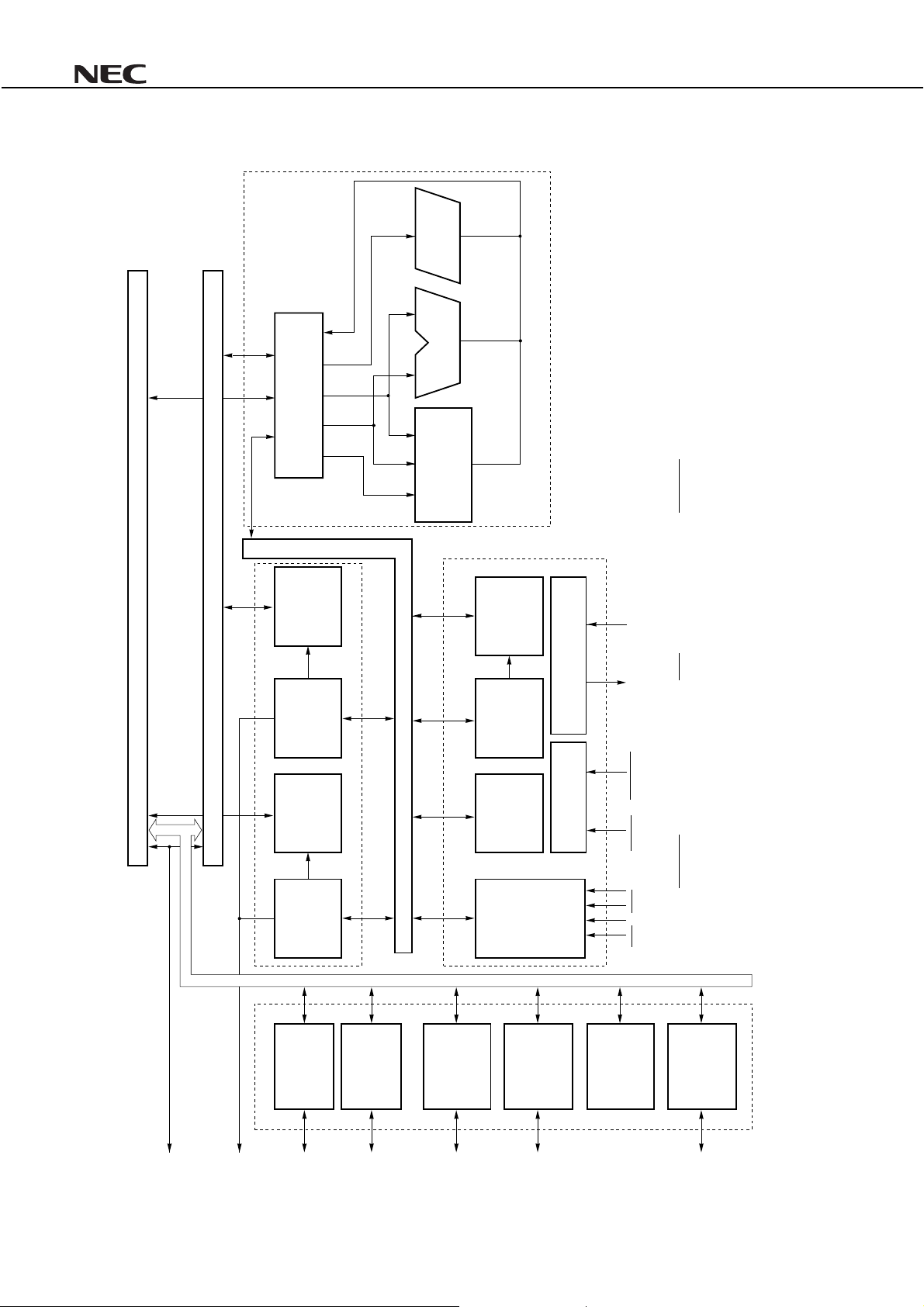
BLOCK DIAGRAM
BSFT
µµµµ
PD77113A, 77114
X bus
Y bus
R0 - R7
Y memory
data
addressing
unit
Main bus
ALU (40)
MAC
16 × 16 + 40 → 40
Program
control unit
Operation unit
Instruction
memory
PC stack
PLL
CLKOUT CLKIN
Note
WAKEUP
Interrupt
control
Host I/O
CPU control
Wait
RESET
Note
INT1 - INT4
controller
option.
Note The WAKEUP pin is multiplexed with the INT4 pin. The function of the WAKEUP pin can be activated or deactivated by mask
IE
I/O
X memory Y memory
Data memory unit
X memory
data
addressing
unit
Serial
I/O #1
Peripheral units
External memory
2
Serial
I/O #2
Data Sheet U14373EJ3V0DS
Port
Loop control
stack
Page 3
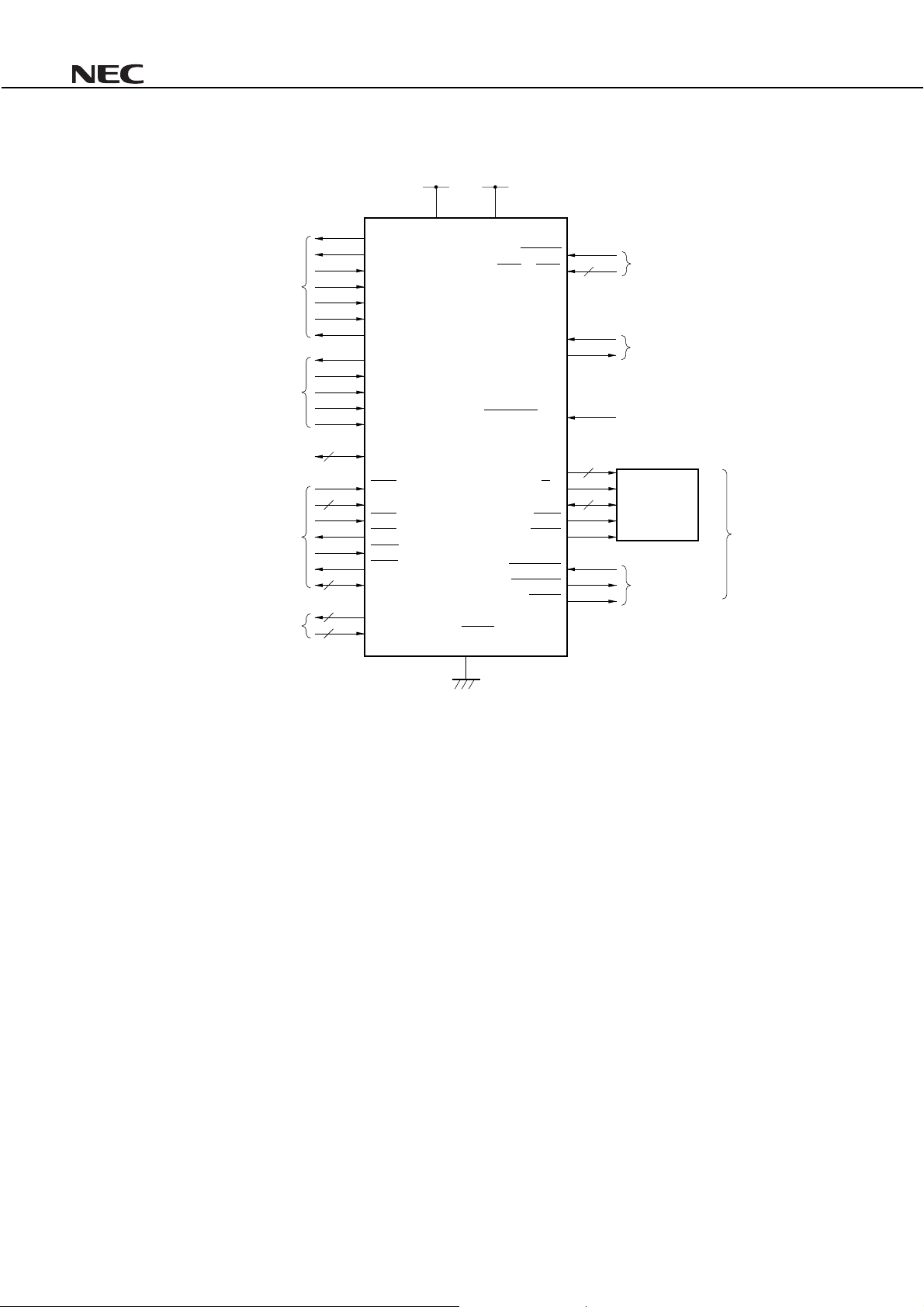
PIN CONFIGURATION
Serial interface #1
Serial interface #2
SO1
SORQ1
SOEN1
SCK1
SI1
SIEN1
SIAK1
SO2
SOEN2
SCK2
SI2
SIEN2
+2.5 V +3 V
IV
DD
EV
WAKEUP
DD
RESET
INT1 - INT4
CLKIN
CLKOUT
Note 1
(4)
µµµµ
PD77113A, 77114
Reset, interrupt
Clock
System control
Notes 1.
Port
Host interface
For debugging
P0 - P3
(4)
HCS
HA0, HA1
(2)
HRD
HRE
HWR
HWE
HD0 - HD7
(8)
TDO, TICE
(2)
TCK, TDI, TMS, TRST
(4)
GND
DA0 - DA12
X/Y
D0 - D15
MRD
MWR
HOLDRQ
HOLDAK
BSTB
(13)
(16)
The function of this pin can be activated or deactivated by mask option.
An external data memory interface is not provided on the
2.
PD77113A.
µ
External data
memory
Note 2
Data bus
control
Data Sheet U14373EJ3V0DS
3
Page 4
4
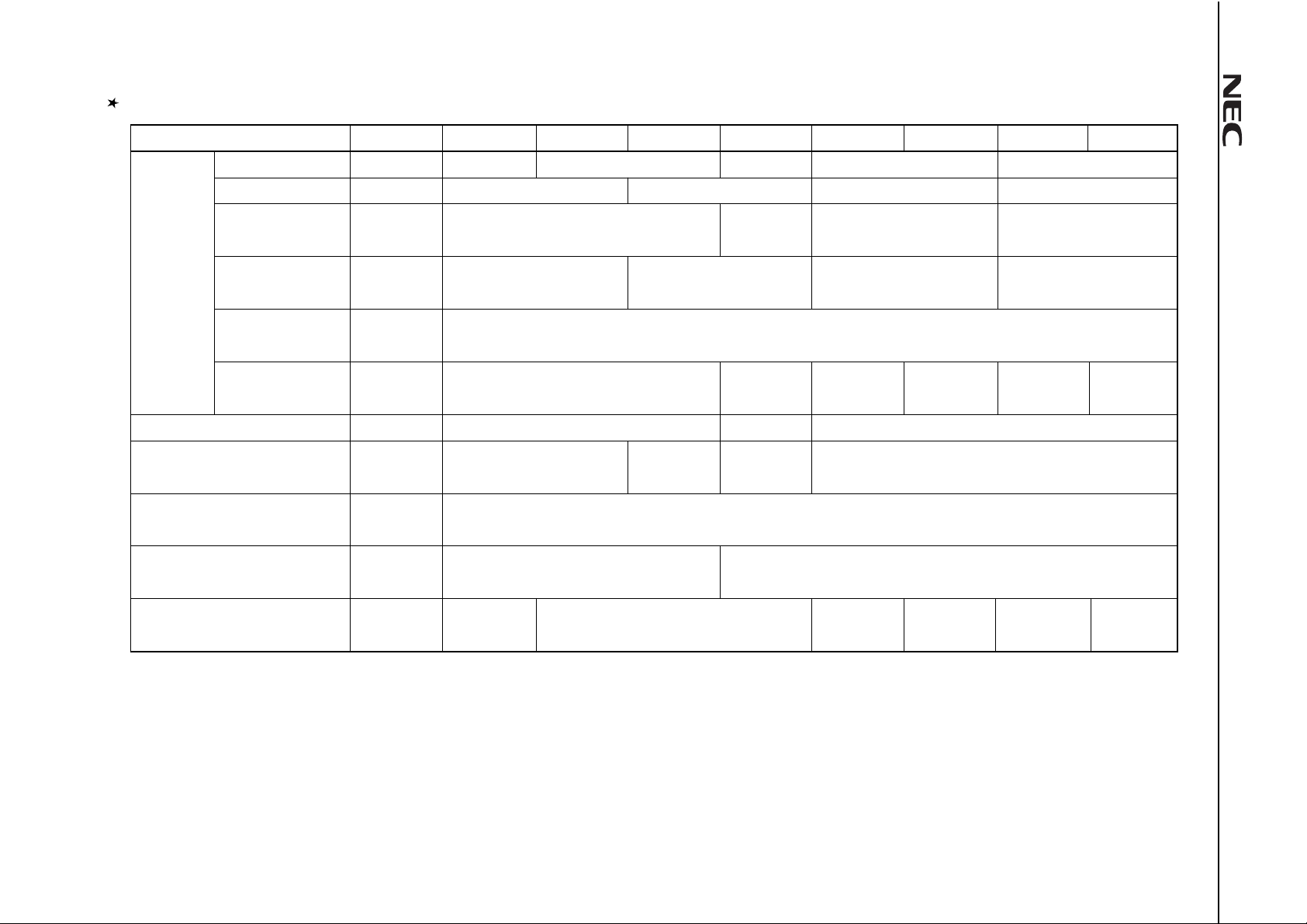
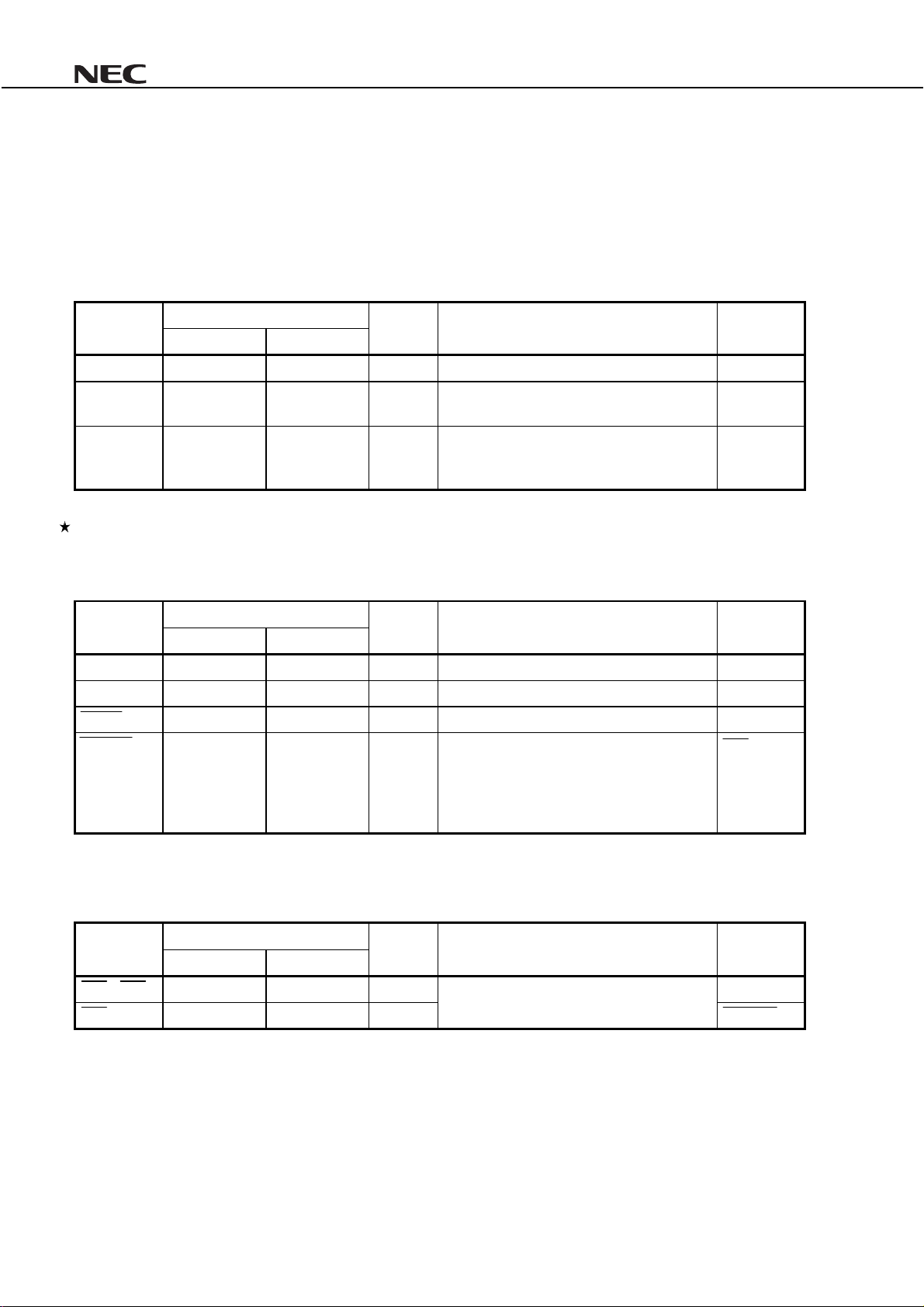
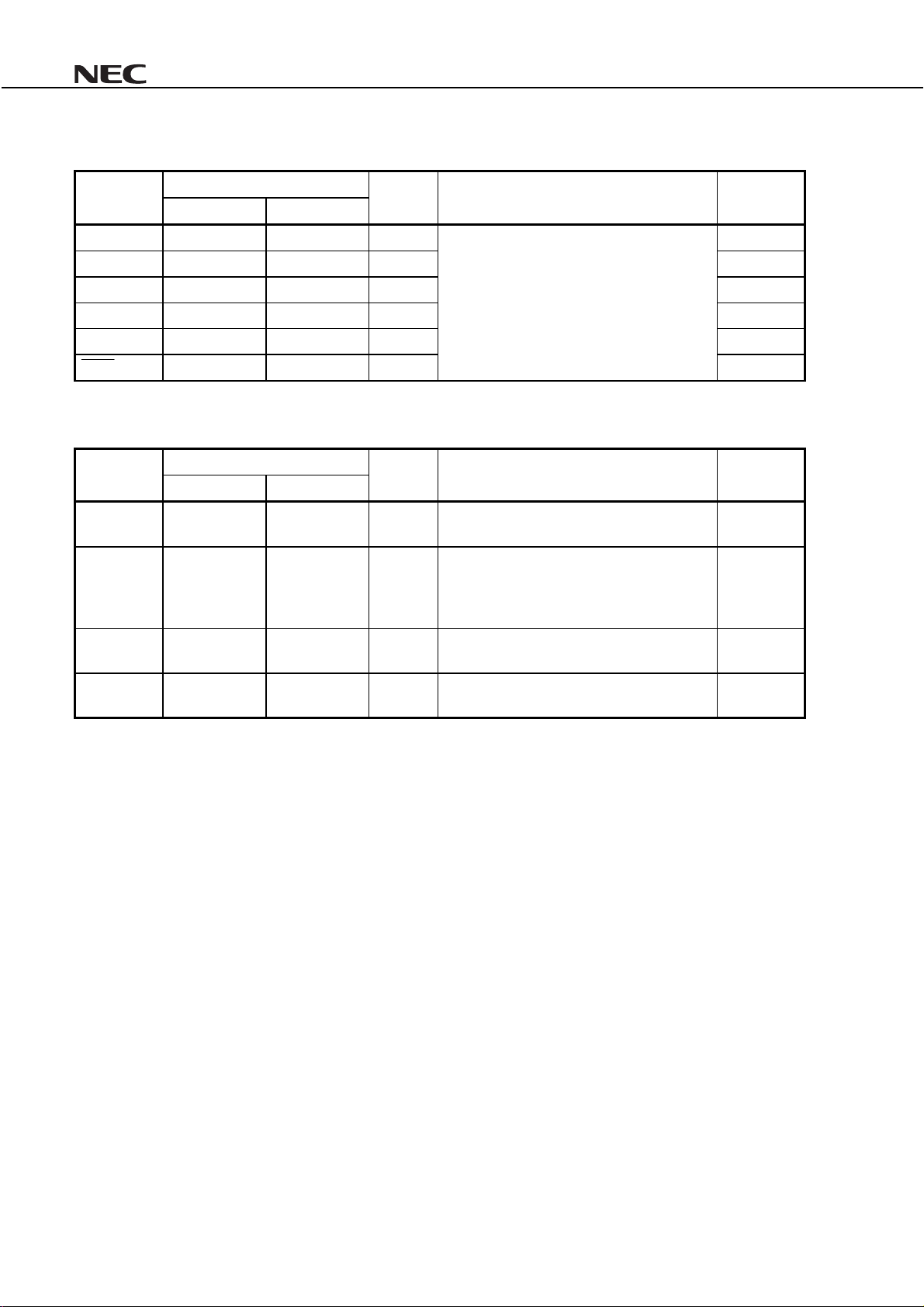
DSP FUNCTION LIST
Item PD77016
Memory space
(words × bits)
Data Sheet U14373EJ3V0DS
Instruction cycle (at maximum speed)
Multiple
Serial interface (two channels)
Supply voltage
Internal instruction RAM
Internal instruction ROM
Data RAM
(X/Y memory)
Data ROM
(X/Y memory)
External instruction
memory
External data memory
(X/Y memory)
µµµµµ µ µ
1.5K × 32 256 × 32 4K × 32 1K × 32
None
2K × 16 each 3K × 16 each 3K × 16 each
None 12K × 16 each 16K × 16 each
48K × 32
48K × 16 each 16K × 16 each None 16K × 16 each
30 ns (33 MHz)
–
Channels 1 and 2
have same function.
5 V 3 V DSP core: 2.5 V
×1, 2, 3, 4, 8 (mask option) Fixed to ×4 Integer of ×1 to 16 (mask option)
Channel 1 has same function as PD77016. Channel 2 does not have SORQ2 and SIAK2 pins (for connection of codec).
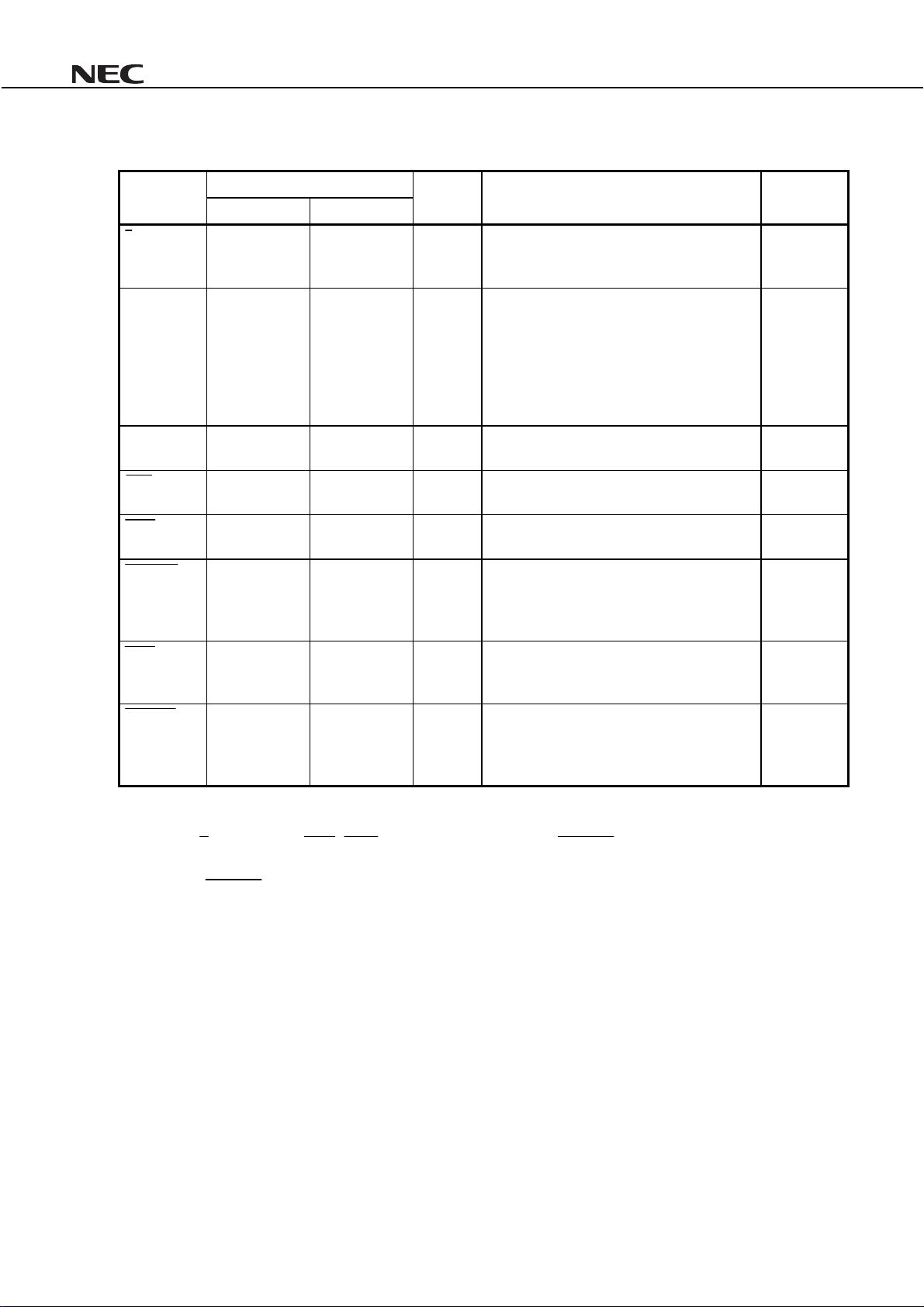
PD77019 PD77018A PD77019-013 PD77111 PD77112
24K × 32 None
16.6 ns (60 MHz) 13.3 ns (75 MHz)
µ
PD77110
35.5K × 32
24K × 16 each
None
32K × 16 each
15.3 ns (65 MHz)
Integer of ×1 to 8
(external pin)
31.75K × 32
None
I/O pins : 3 V
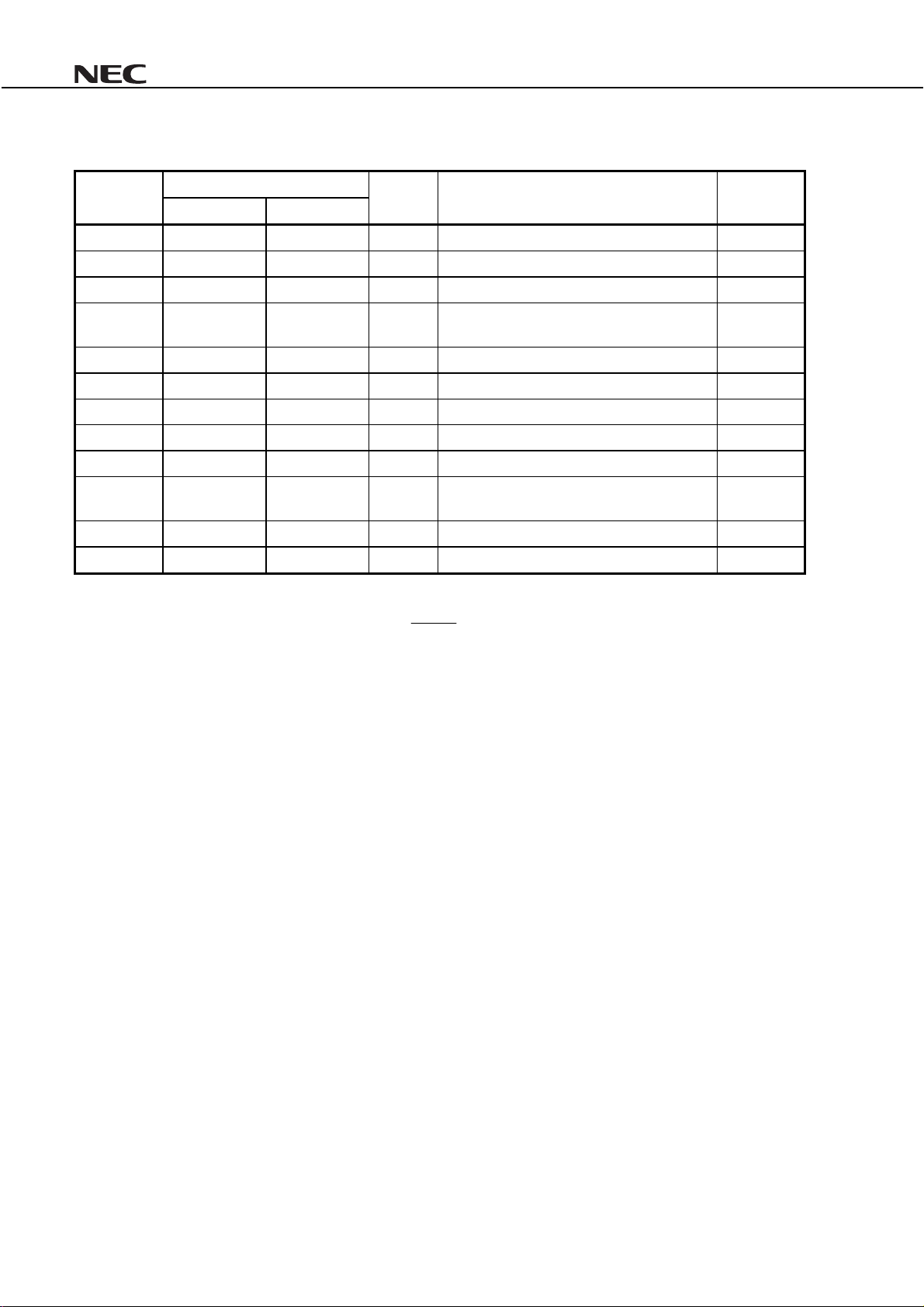
µµ
PD77113A PD77114
3.5K × 32
48K × 32
16K × 16 each
32K × 16 each
None 8K × 16 each
Package
160-pin QFP
116-pin BGA
100-pin TQFP 80-pin TQFP
80-pin FBGA
100-pin TQFP100-pin TQFP
80-pin FBGA 100-pin TQFP
µµ
µ
µ
PD77113A, 77114
Page 5
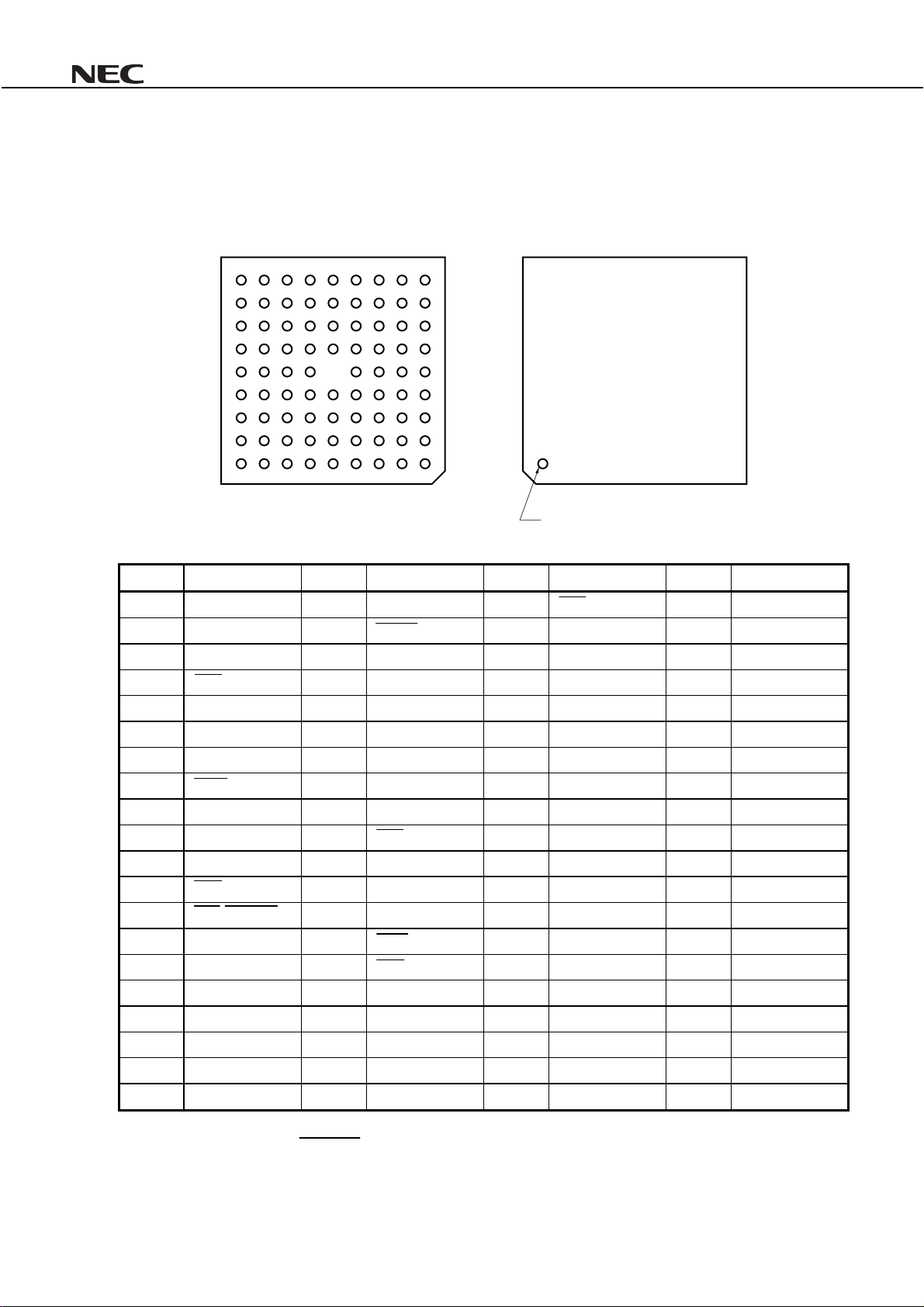
PIN CONFIGURATION
µµµµ
PD77113A, 77114
80-pin plastic fine-pitch BGA (9
PD77113AF1-xxx-CN1
µµµµ
9)
××××
(Bottom View) (Top View)
9
8
7
6
5
4
3
2
1
JHGFEDCBA ABCDEFGHJ
Index mark
Pin No. Pin Name Pin No. Pin Nam e Pin No. Pin Name Pin No. Pin Nam e
A1
−
C3 NU E6 HCS G8 P1
A2 NU C4 RESET E7 GND G9 GND
A3 EV
DD
C5 TDI E8 HD1 H1 NU
A4 INT3 C6 TDO E9 HD2 H2 NU
A5 GND C7 CLKIN F1 NU H3 SCK1
A6 TMS C8 HA0 F2 NU H4 SOEN2
A7 GND C9 EV
A8 TRST D1 EV
A9
−
D2 NU F5 HD0 H7 P0
DD
DD
F3 SOEN1 H5 SIEN2
F4 GND H6 P3
B1 NU D3 INT2 F6 SI2 H8 HD7
B2 NU D4 NU F7 HD3 H9 NU
B3 INT1 D5 TCK F8 HD6 J1
B4
B5 IV
INT4/WAKEUP
DD
Note
D6 GND F9 HD5 J2 NU
D7 HWR G1 EV
DD
J3 SI1
−
B6 TICE D8 HRD G2 GND J4 SORQ1
B7 IV
DD
D9 EV
DD
G3 SIEN1 J5 SO2
B8 HA1 E1 NU G4 SO1 J6 SCK2
B9 CLKOUT E2 GND G5 IV
DD
J7 EV
DD
C1 GND E3 SIAK1 G6 HD4 J8 NU
C2 NU E4 NU G7 P2 J9
−
The function of the WAKEUP pin can be activated or deactivated by a mask option.
Note
Data Sheet U14373EJ3V0DS
5
Page 6
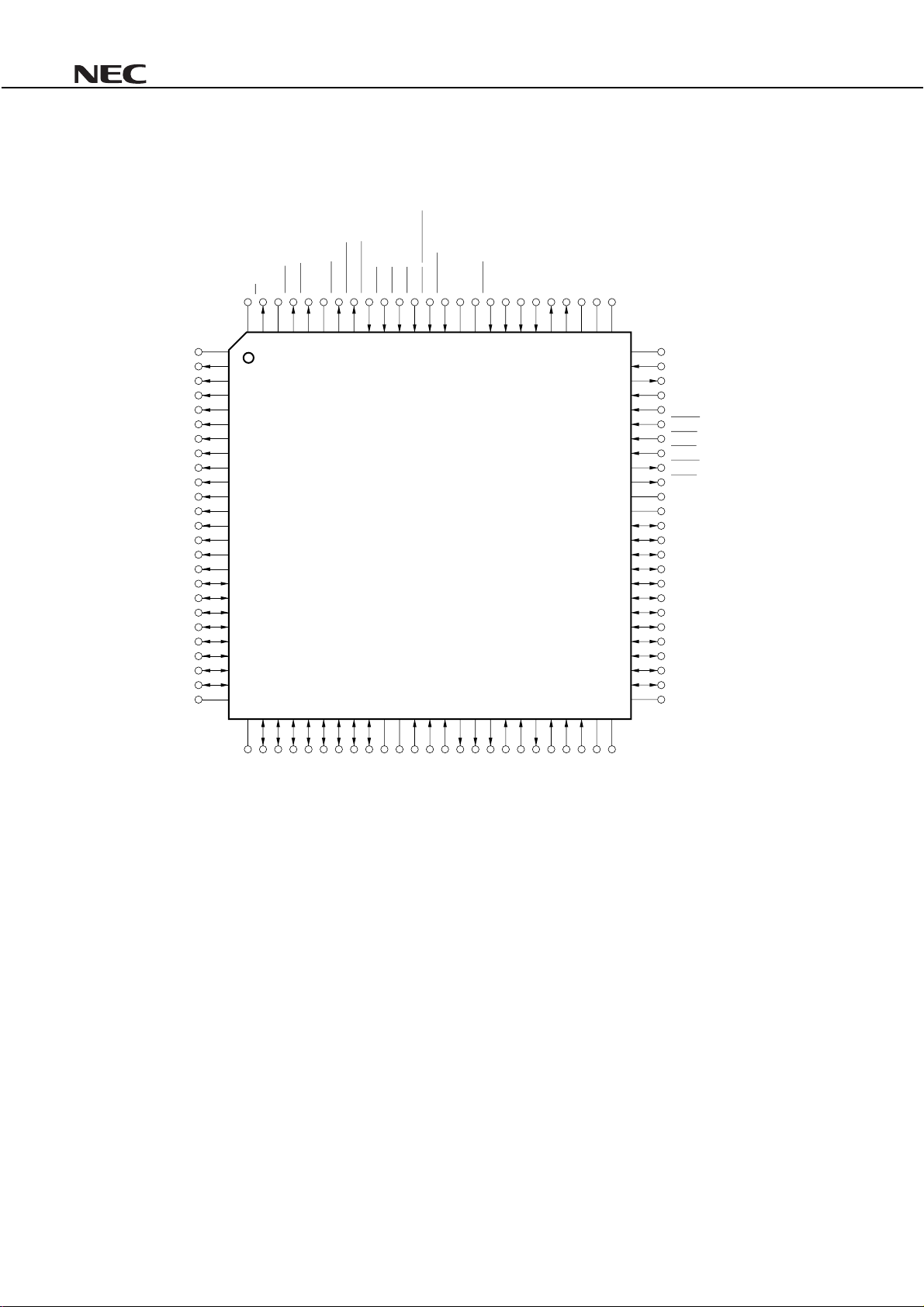
µµµµ
PD77113A, 77114
100-pin plastic TQFP (fine-pitch) (14
PD77114GC-xxx-9EU
µµµµ
EVDDX/Y
I.C.
MRD
100
999897969594939291908988878685848382818079787776
GND
NC
NC
DA12
DA11
DA10
DA9
DA8
DA7
DA6
DA5
DA4
DA3
DA2
DA1
DA0
D15
D14
D13
D12
D11
D10
D9
D8
EV
DD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26272829303132333435363738394041424344454647484950
14) (Top View)
××××
MWRNCBSTB
HOLDAK
HOLDRQ
INT1
INT2
Note
INT3
INT4/WAKEUP
RESET
GND
IVDDTRST
TMS
TDI
TCK
TICE
TDO
GND
IVDDGND
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
EV
DD
CLKIN
CLKOUT
HA1
HA0
HWR
HRD
HCS
HWE
HRE
GND
DD
EV
HD0
HD1
HD2
HD3
HD4
HD5
HD6
HD7
P0
P1
P2
P3
GND
D7D6D5D4D3D2D1
GND
The functions can be activated or deactivated by a mask option.
Note
D0
DD
SI1
IV
GND
SIEN1
SCK1
SIAK1
SO1
SOEN1
SOEN2
SORQ1
SO2
SCK2
SIEN2
SI2
NC
DD
EV
6
Data Sheet U14373EJ3V0DS
Page 7
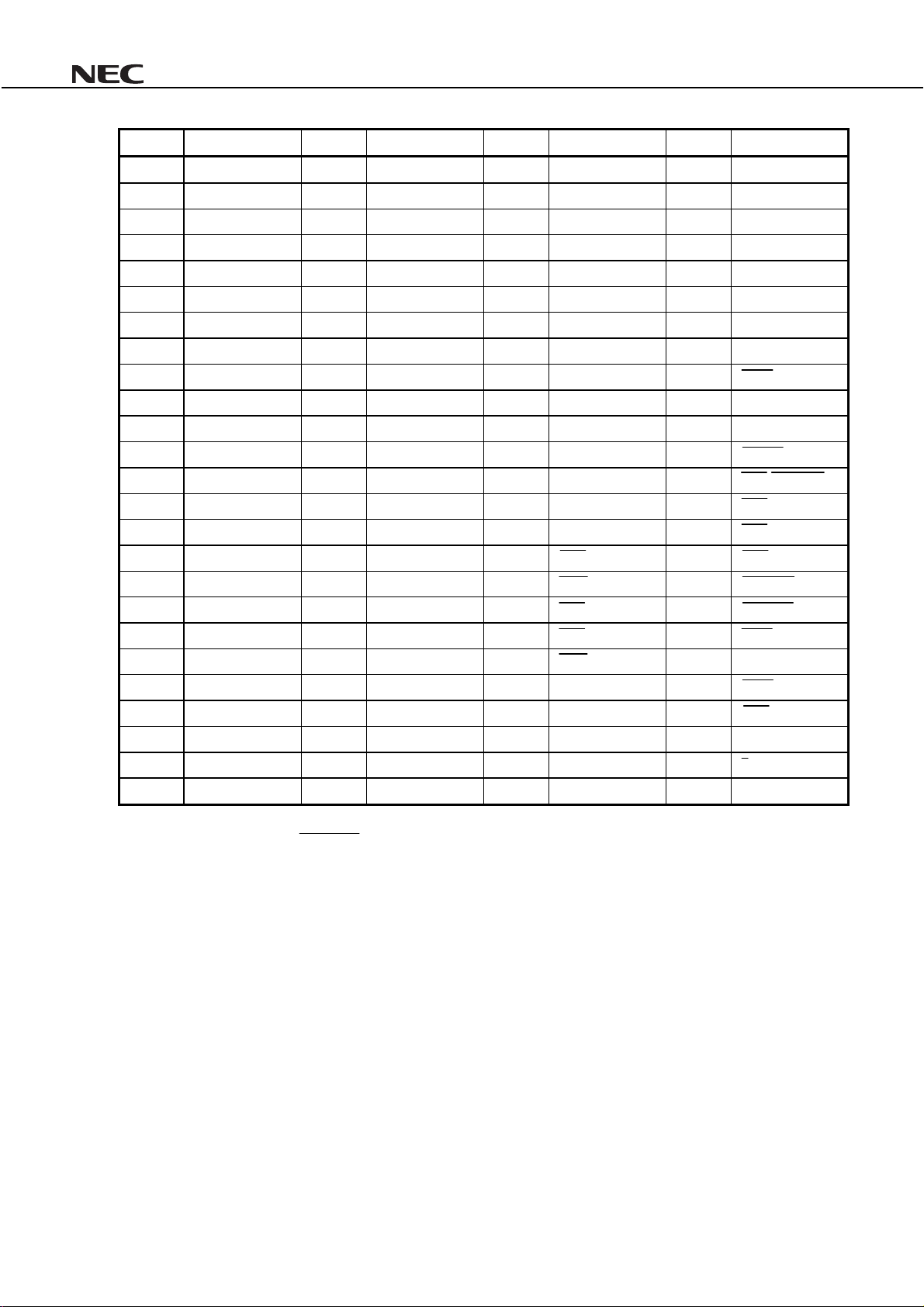
µµµµ
PD77113A, 77114
Pin No. Pin Name Pin No. Pin Nam e Pin No. Pin Name Pin No. Pin Nam e
1 GND 26 GND 51 GND 76 GND
2 NC 27D7 52P3 77IV
DD
3 NC 28D6 53P2 78GND
4 DA12 29D5 54P1 79TDO
5 DA11 30D4 55P0 80TICE
6 DA10 31D3 56HD7 81TCK
7 DA9 32 D2 57 HD6 82 TD1
8 DA8 33 D1 58 HD5 83 TMS
9 DA7 34 D0 59 HD4 84 TRST
10 DA6 35 I V
DD
60 HD3 85 IV
DD
11 DA5 36 GND 61 HD2 86 GND
12 DA4 37 SI1 62 HD1 87 RESET
13 DA3 38 S IEN1 63 HD0 88
14 DA2 39 S CK1 64 EV
DD
89 INT3
INT4/WAKEUP
15 DA1 40 SIAK1 65 GND 90 INT2
16 DA0 41 SO1 66 HRE 91 INT1
17 D15 42 S ORQ1 67 HWE 92 HOLDRQ
18 D14 43 S OEN1 68 HCS 93 HOLDAK
19 D13 44 S OEN2 69 HRD 94 BSTB
20 D12 45 S O2 70 HWR 95 NC
21 D11 46 S CK2 71 HA0 96 MWR
22 D10 47 S IEN2 72 HA1 97 MRD
23 D9 48 SI2 73 CLKOUT 98 I.C.
24 D8 49 NC 74 CLKIN 99 X/Y
25 EV
DD
50 E V
DD
75 E V
DD
100 EV
DD
Note
The function of the WAKEUP pin can be activated or deactivated by a mask option.
Note
Data Sheet U14373EJ3V0DS
7
Page 8
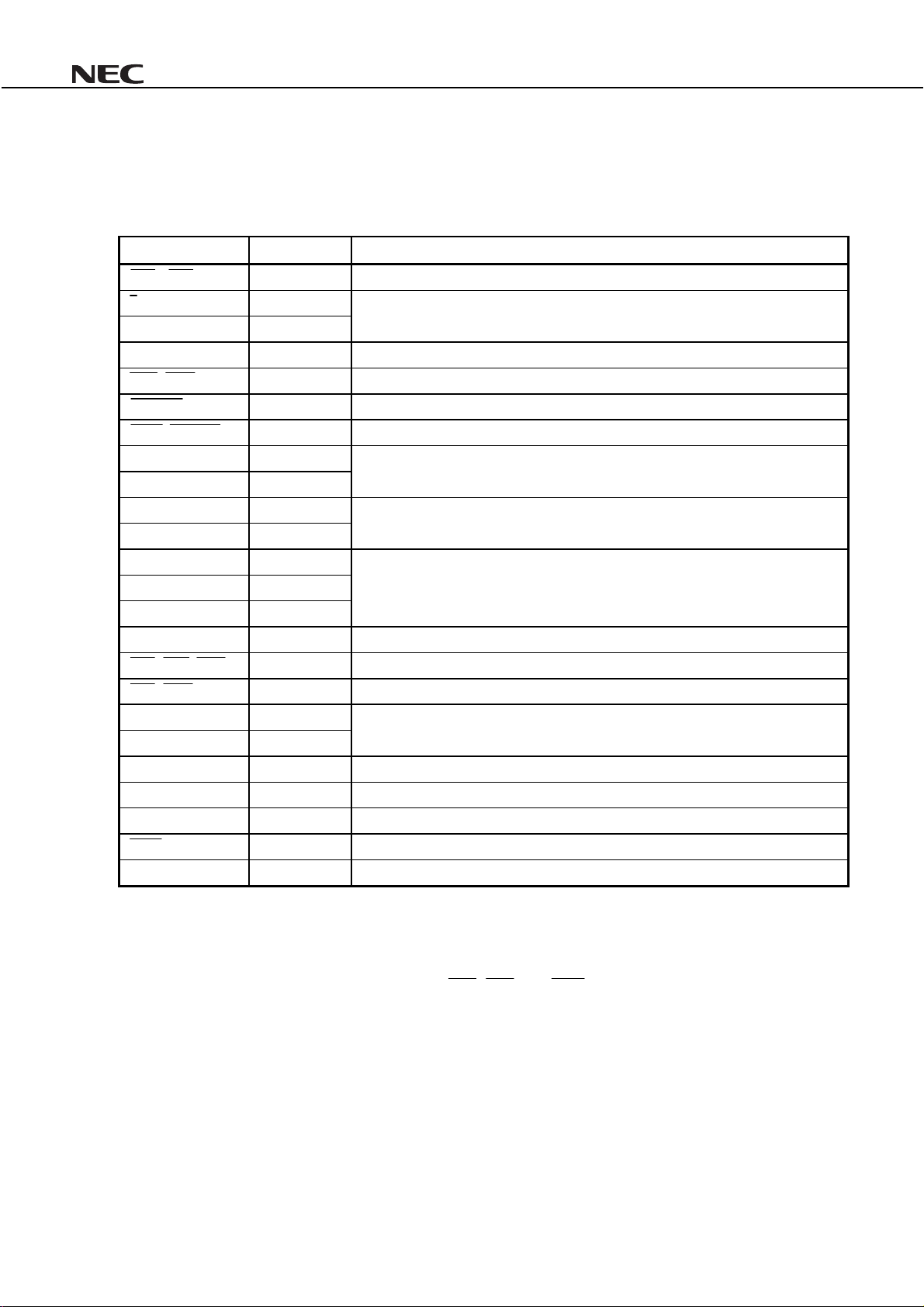
PIN NAME
BSTB : Bus Strobe
CLKIN : Clock Input
CLKOUT : Clock Output
D0 - D15 : 16-bit Data Bu s
DA0 - DA12 : External Data Memory Address Bus
DD
EV
GND : Ground
HA0, HA1 : Host Data Access
HCS : Host Chip Select
HD0 - HD7 : Host Data Bus
HOLDAK : Hold Acknowledge
HOLDRQ : Hold Request
HRD : Host Read
HRE : Host Read Enable
HWE : Host Write Enable
HWR : Host Write
I.C. : Internally Connected
INT1 - INT4 : Interrupt
DD
IV
MRD : Memory Read Output
MWR : Memory Wri te Output
NC : Non-Connection
NU : Not Used
P0 - P3 : Port
RESET : Reset
SCK1, SCK2 : Serial Clock Input
SI1, SI2 : Serial Data Input
SIAK1 : Serial Input Acknowledge
SIEN1, SIEN2 : Serial Input Enable
SO1, SO2 : Serial Data Output
SOEN1, SOEN2: Serial Output Enable
SORQ1 : Serial Output Request
TCK : Test Clock Input
TDI : Test Data Input
TDO : Test Data Output
TICE : Test In-Circuit Emulator
TMS : Test Mode Select
TRST : Test Reset
WAKEUP : Wakeup from STOP Mode
X/Y : X/Y Memory Select
: Power Supply for I/O Pins
: Power Supply for DSP Core
µµµµ
PD77113A, 77114
8
Data Sheet U14373EJ3V0DS
Page 9

µµµµ
PD77113A, 77114
CONTENTS
1. PIN FUNCTION................................................................................................................................. 10
1.1 Pin Function Description.......................................................................................................... 10
1.2 Connection of Unused Pins ..................................................................................................... 15
2. FUNCTION OUTLINE....................................................................................................................... 17
2.1 Program Control Unit................................................................................................................ 17
2.2 Arithmetic Unit........................................................................................................................... 18
2.3 Data Memory Unit...................................................................................................................... 19
2.4 Peripheral Units......................................................................................................................... 19
3. CLOCK GENERATOR...................................................................................................................... 20
4. RESET FUNCTION........................................................................................................................... 20
4.1 Hardware Reset ......................................................................................................................... 20
4.2 Initializing PLL........................................................................................................................... 21
5. FUNCTIONS OF BOOT-UP ROM...................................................................................................21
5.1 Boot at Reset ............................................................................................................................. 21
5.2 Reboot ........................................................................................................................................ 22
5.3 Signature Operation.................................................................................................................. 23
5.4 Instruction ROM Modification.................................................................................................. 23
6. STANDBY MODES........................................................................................................................... 24
6.1 HALT Mode................................................................................................................................. 24
6.2 STOP Mode ................................................................................................................................ 24
7. MEMORY MAP.................................................................................................................................. 25
7.1 Instruction Memory ................................................................................................................... 25
7.2 Data Memory.............................................................................................................................. 27
8. MASK OPTION ................................................................................................................................. 28
8.1 Clock Control Options.............................................................................................................. 28
8.2 WAKEUP Function .................................................................................................................... 29
9. INSTRUCTIONS................................................................................................................................. 30
9.1 Outline of Instructions.............................................................................................................. 30
9.2 Instruction Set and Operation.................................................................................................. 31
10. ELECTRICAL SPECIFICATIONS..................................................................................................... 37
11. PACKAGE DRAWINGS.................................................................................................................... 56
12. RECOMMENDED SOLDERING CONDITIONS............................................................................... 58
Data Sheet U14373EJ3V0DS
9
Page 10
µµµµ
PD77113A, 77114
1. PIN FUNCTION
Because the pin numbers differ depending on the package, refer to the diagram of the package to be used.
1.1 Pin Function Description
• Power supply
Pin Name
DD
IV
DD
EV
GND 1, 26, 36, 51,
Remark
100-pin TQFP 80-pin BGA
35, 77, 85 B5, B7, G5
25, 50, 64, 75,
100
65, 76, 78, 86
Please supply voltage to the IV
Pin No.
A3, C9, D1, D9,
G1, J7
A5, A7, C1, D6,
E2, E7, F4, G2,
G9
I/O Function Shared by:
Power to DSP core (+2.5 V)
−
Power to I/O pins (+3 V)
−
Ground
−
DD
and EVDD pins simultaneously.
• System control
Pin Name
100-pin TQFP 80-pin BGA
CLKIN 74 C7 Input System clock i nput
CLKOUT 73 B9 Output Internal system clock output
RESET 87 C4 Input Internal system reset signal input
WAKEUP 88 B4 Input St op mode releas e signal input.
Pin No.
I/O Function Shared by:
• When this pin is asserted active, the stop
mode is released. The functi on of this pin
can be activated or deacti vated by a mask
option.
−
−
−
−
−
INT4
• Interrupt
Pin Name
100-pin TQFP 80-pin BGA
INT1 - INT3 91 - 89 B3, D3, A4 Input
INT4 88 B4 Input
10
Pin No.
Data Sheet U14373EJ3V0DS
I/O Function Shared by:
External maskable int errupt input.
• Detected at the fall i ng edge.
−
WAKEUP
Page 11
µµµµ
PD77113A, 77114
• External data memory interface (
Pin No.
Pin Name
100-pin TQFP 80-pin BGA
X/Y 99
DA0 - DA12 16 - 4
D0 - D15 34 - 27, 24 - 17
MRD 97
MWR 96
HOLDRQ 92
BSTB 94
HOLDAK 93
PD77114 only)
µµµµ
−
−
−
−
−
−
−
−
I/O Function Shared by:
Output
(3S)
Output
(3S)
I/O
(3S)
Output
(3S)
Output
(3S)
Input Hold request signal
Output Bus strobe si gnal
Output Hold acknowledge signal
Memory select signal output.
0: Uses X memory.
1: Uses Y memory.
Address bus of external data memory.
• Accesses the external memory.
• Continuously outputs the external memory
address accessed las t when the external
memory is not being accessed. Kept low
(0x000) if the external memory is never
accessed after reset.
16-bit data bus.
• Accesses the external memory.
Read output
• External memory read
Write output
• External memory write
• Input a low level to t hi s pin when the external
device uses the external data memory bus of
the
PD77114.
µ
• This pin goes l ow when the
the external data memory bus .
• This pin goes low when the ex t ernal device
is enabled to use the external data memory
bus of the
PD77114.
µ
PD77114 uses
µ
−
−
−
−
−
−
−
−
Remark
Pins marked “3S” under the heading “I/O” go into a high-impedance state in the following conditions:
X/Y, DA0-DA12, MRD, MWR: When the bus is released (HOLDAK = low level)
D0-D15: When the external data memory is not being accessed and when the bus is released
(HOLDAK = low level)
Data Sheet U14373EJ3V0DS
11
Page 12
• Serial interface
µµµµ
PD77113A, 77114
Pin Name
SCK1 39 H3 Input Serial 1 cloc k input
SORQ1 42 J4 Output Serial output 1 request
SOEN1 43 F3 Input Serial output 1 enable
SO1 41 G4 Output
SIEN1 38 G3 Input Serial input 1 enable
SI1 37 J3 Input Serial data input 1
SIAK1 40 E3 Output Serial i nput 1 acknowledge
SCK2 46 J6 Input Serial 2 clock input
SOEN2 44 H4 Input Serial output 2 enable
SO2 45 J5 Output
SIEN2 47 H5 Input Serial input 2 enable
SI2 48 F6 Input Serial data input 2
Remark
100-pin TQFP 80-pin BGA
The pins marked “3S” under the heading “I/O” go into a high-impedance state on completion of data
Pin No.
I/O Function Shared by:
Serial data output 1
(3S)
Serial data output 2
(3S)
transfer and input of the hardware reset (RESET) signal.
−
−
−
−
−
−
−
−
−
−
−
−
12
Data Sheet U14373EJ3V0DS
Page 13
• Host interface
µµµµ
PD77113A, 77114
Pin Name
100-pin TQFP 80-pin BGA
HA1 72 B8 Input Spec i fies the register to be accessed by HD7
HA0 71 C8 Input Spec i fies the register to be accessed by HD7
HCS 68 E6 Input Chip select input
HRD 69 D8 Input Host read input
HWR 70 D7 Input Host write input
HRE 66
HWE 67
HD0 - HD7 63 - 56 F5, E8, E9, F7,
Pin No.
G6, F9, F8, H8
I/O Function Shared by:
through HD0.
• 1: Accesses the hos t i nterface status
register (HST).
• 0: Accesses the hos t transmit data register
(HDT (out)) when read (HRD = 0), and
host receive data regist er (HDT (i n))
when written (HWR = 0).
through HD0.
• 1: Accesses bits 15 through 8 of HST, HDT
(in), and HDT (out).
• 0: Accesses bits 7 through 0 of HST, HDT
(in), and HDT (out).
−
−
Output Host read enable output
Output Host write enable output
I/O
(3S)
8-bit host data bus
−
−
−
−
−
−
−
−
Remark
The pins marked “3S” under the heading “I/O” go into a high-impedance state when the host interface is
not being accessed.
• I/O ports
Pin Name
100-pin TQFP 80-pin BGA
P0 55 H7 I/O
P1 54 G8 I/O
P2 53 G7 I/O
P3 52 H6 I/O
Pin No.
I/O Function Shared by:
General-purpose I/O port
−
−
−
−
Data Sheet U14373EJ3V0DS
13
Page 14
• Debugging interface
µµµµ
PD77113A, 77114
Pin Name
100-pin TQFP 80-pin BGA
TDO 79 C6 Output
TICE 80 B6 Output
TCK 81 D5 Input
TDI 82 C5 Input
TMS 83 A6 Input
TRST 84 A8 Input
Pin No.
I/O Function Shared by:
• Others
Pin Name
100-pin TQFP 80-pin BGA
I.C. 98
NU
NC 2, 3, 49, 95
−−
Pin No.
−−
−
A2, B1, B2, C2,
C3, D2, D4, E1,
E4, F1, F2, H1,
H2, H9, J2, J8
−−
A1, A9, J1, J9
I/O Function Shared by:
For debugging
Internally connected. Leave this pin
unconnected.
No function pins. Connect to EV
−
resistor, or connect to GND via pull-down
resistor.
No-connect pins. Leave these pins
unconnected.
Pins to strengthen sol deri ng. Connect these
−
pins to the board as necessary.
DD
via pull-up
−
−
−
−
−
−
−
−
−
−
Caution If any signal is input to these pins or if an attempt is made to read these pins, the normal
operation of the
PD77113A and 77114 is not guaranteed.
µµµµ
14
Data Sheet U14373EJ3V0DS
Page 15
1.2 Connection of Unused Pins
1.2.1 Connection of Function Pins
When mounting, connect unused pins as follows:
Pin I/O Recommended Connection
INT1 - INT4 Input Connect to EVDD.
X/Y Output
DA0 - DA12 Output
D0 - D15
MRD, MWR Output Leave unconnected.
HOLDRQ Input Leave unconnected. (i nternally pulled up).
BSTB, HOLDAK Output Leave unconnected.
SCK1, SCK2 Input
SI1, SI2 Input
SIEN1, SIEN2 Input
SOEN1, SOEN2 Input
SORQ1 Output
SO1, SO2 Output
SIAK1 Output
HA0, HA1 Input Connect to EVDD or GND.
HCS, HRD, HWR Input Connec t to EVDD.
HRE, HWE Output Leave unconnected.
HD0 - HD7
P0 - P3 I/O
TCK Input Connect to GND via pull-down resistor.
TDO, TICE Out put Leave unconnected.
TMS, TDI Input Leave unconnected. (internally pulled up).
TRST Input Leave unconnected. (internal l y pul l ed down).
CLKOUT Output Leave unconnected.
Note 1
Note 2
I/O Connect to E VDD via pull-up resistor, or c onnect to GND via pull-down resistor.
I/O
Leave unconnected.
DD
Connect to EV
Connect to GND.
Leave unconnected.
Connect to EV
or GND.
DD
via pull-up resistor, or c onnect to GND via pull-down resistor.
µµµµ
PD77113A, 77114
Notes 1.
These pins may be left unconnected if the external data memory is not accessed in the program.
However, connect these pins as recommended in the halt and stop modes when the power
consumption must be lowered.
These pins may be left unconnected if HCS, HRD, and HWR are fixed to the high level.
2.
However, connect these pins as recommended in the halt and stop modes when the power
consumption must be lowered.
Data Sheet U14373EJ3V0DS
15
Page 16
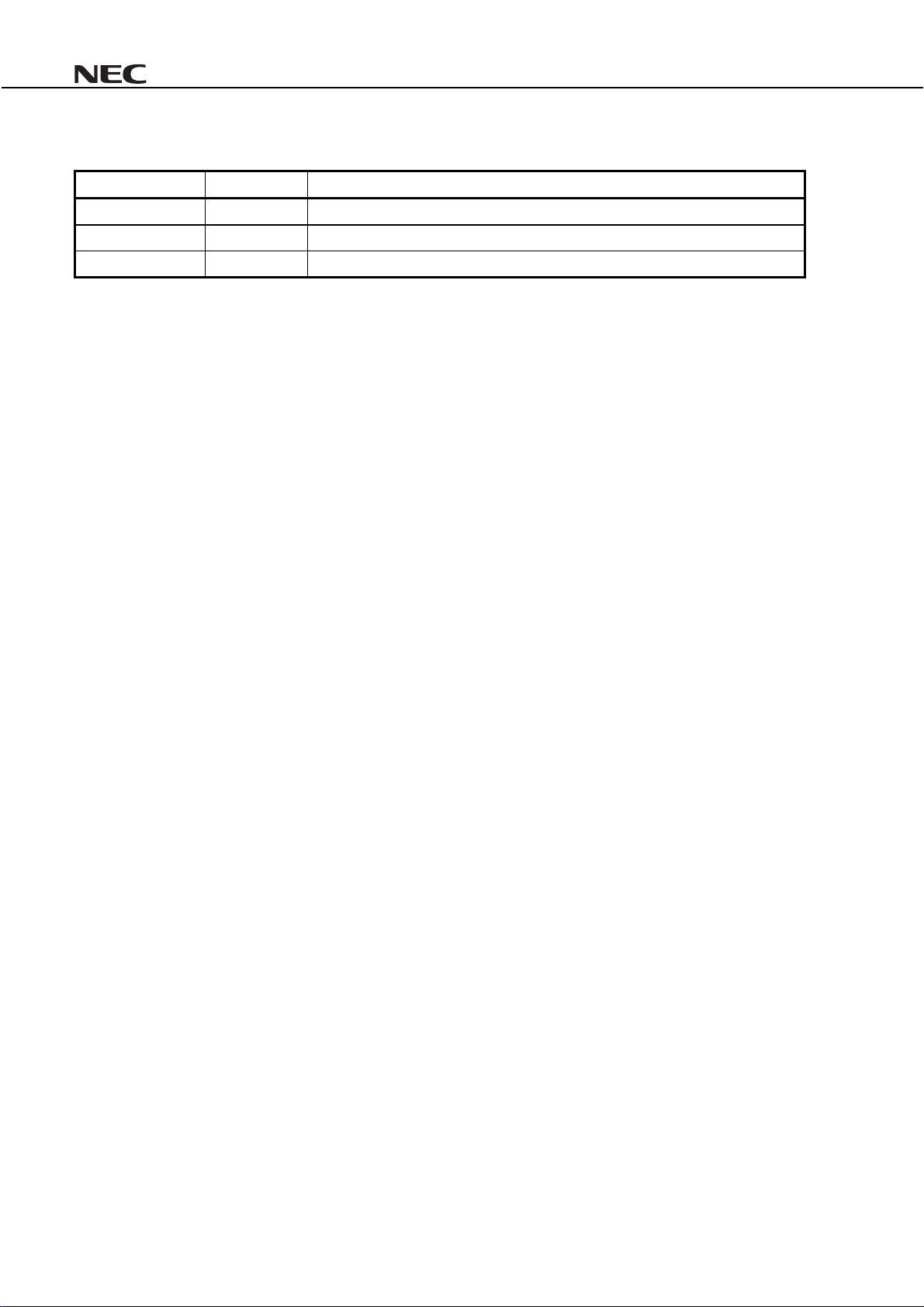
1.2.2 Connection of no-function pins
Pin I/O Recommended Connection
µµµµ
PD77113A, 77114
I.C.
NU
NC
−
−
−
Leave unconnected.
Connect to EVDD via pull-up resistor, or c onnect to GND via pull-down resistor.
Leave unconnected.
16
Data Sheet U14373EJ3V0DS
Page 17
µµµµ
PD77113A, 77114
2. FUNCTION OUTLINE
2.1 Program Control Unit
This unit is used to execute instructions, and control branching, loops, interrupts, the clock, and the standby mode
of the DSP.
2.1.1 CPU control
A three-stage pipeline architecture is employed and almost all the instructions, except some instructions such as
branch instructions, are executed in one system clock.
2.1.2 Interrupt control
Interrupt requests input from external pins (INT1 through INT4) or generated by the internal peripherals (serial
interface and host interface) are serviced. The interrupt of each interrupt source can be enabled or disabled.
Multiple interrupts are also supported.
2.1.3 Loop control task
A loop function without any hardware overhead is provided. A loop stack with four levels is provided to support
multiple loops.
2.1.4 PC stack
A 15-level PC stack that stores the program counter supports multiple interrupts and subroutine calls.
2.1.5 PLL
A PLL is provided as a clock generator that can multiply or divide an external clock input to supply an operating
clock to the DSP. A multiple of ×1 to ×16 or a division ratio of 1/1 to 1/16 can be set by a mask option.
Two standby modes are available for lowering the power consumption while the DSP is not in use.
• HALT mode : Set by execution of the HALT instruction. The current consumption drops to several mA. The
normal operation mode is recovered by an interrupt or hardware reset.
• STOP mode: Set by execution of the STOP instruction. The current consumption drops to several 10 µA. The
normal operation mode is recovered by hardware reset or WAKEUP pin
If the WAKEUP function is activated by mask option
Note
2.1.6 Instruction memory
The capacity and type of the memory differ depending on the model of the DSP.
64 words of the instruction RAM are allocated to interrupt vectors.
A boot-up ROM that boots up the instruction RAM is provided, and the instruction RAM can be initialized or
rewritten by self boot (boot from the internal data ROM or external data space) or host boot (boot via host interface).
The µPD77113A and 77114 have 3.5K-word instruction RAM and 48K-word instruction ROM.
Note
.
Data Sheet U14373EJ3V0DS
17
Page 18

µµµµ
PD77113A, 77114
2.2 Arithmetic Unit
This unit performs multiplication, addition, logical operations, and shift, and consists of a 40-bit multiply
accumulator, 40-bit data ALU, 40-bit barrel shifter, and eight 40-bit general-purpose registers.
2.2.1 General-purpose registers (R0 through R7)
These eight 40-bit registers are used to input/output data for arithmetic operations, and load or store data from/to
data memory.
A general-purpose register (R0 to R7) is made up of three parts: R0L through R7L (bits 15 through 0), R0H
through R7H (bits 31 through 16), and R0E through R7E (bits 39 through 32). Depending on the type of operation,
RnL, RnH, and RnE are used as one register or in different combinations.
2.2.2 Multiply accumulator (MAC)
The MAC multiplies two 16-bit values, and adds or subtracts the multiplication result from one 40-bit value, and
outputs a 40-bit value.
The MAC is provided with a shifter (MSFT: MAC ShiFTer) at the stage preceding the input stage. This shifter can
arithmetically shift the 40-bit value to be added to or subtracted from the multiplication result 1 or 16 bits to the right .
2.2.3 Arithmetic logic unit (ALU)
This unit inputs one or two 40-bit values, executes an arithmetic or logical operation, and outputs a 40-bit value.
2.2.4 Barrel shifter (BSFT: Barrel ShiFTer)
The barrel shifter inputs a 40-bit value, shifts it to the left or right by any number of bits, and outputs a 40-bit value.
The data may be arithmetically shifted to the right shifted to the right, in which case the data is sign-extended, or
logically shifted to the right, in which case 0 is inserted from the MSB.
18
Data Sheet U14373EJ3V0DS
Page 19

µµµµ
PD77113A, 77114
2.3 Data Memory Unit
The data memory unit consists of two banks of data memory and two data addressing units.
2.3.1 Data memory
The capacity and type of the memory differ depending on the model of the DSP. All DSPs have two banks of data
memory (X data memory and Y data memory). A 64-word peripheral area is assigned in the data memory space.
The µPD77113A and 77114 have 16K words × 2 banks data RAM and 32K words × 2 banks data ROM.
In addition, the µPD77114 has an external data memory interface so that the external memory can be expanded
to 8K words × 2 banks.
2.3.2 Data addressing unit
An independent data addressing unit is provided for each of the X data memory and Y data memory spaces.
Each data addressing unit has four data pointers (DPn), four index registers (DNn), one modulo register (DMX or
DMY), and an address ALU.
2.4 Peripheral Units
A serial interface, host interface, general-purpose I/O port, and wait cycle register are provided. All these internal
peripherals are mapped to the X data memory and Y data memory spaces, and are accessed from program as
memory-mapped I/Os.
2.4.1 Serial interface (SIO)
Two serial interfaces are provided. These serial interfaces have the following features:
• Serial clock : Supplied from external source to each interface. The same clock is used for input and output
on the interface.
• Frame length: 8 or 16 bits, and MSB or LSB first selectable for each interface and input or output
• Handshake : Handshaking with external devices is implemented with a dedicated status signal. With the
internal units, polling, wait, or interrupt are used.
2.4.2 Host interface (HIO)
This is an 8-bit parallel port that inputs data from or outputs data to an external host CPU or DMA controller. In
the DSP, a 16-bit register is mapped to memory for input data, output data, and status. Handshaking with an external
device is implemented by using a dedicated status signal. Handshaking with internal units is achieved by means of
polling, wait, or interrupts.
2.4.3 General-purpose I/O port (PIO)
This is a 4-bit I/O port that can be set in the input or output mode in 1-bit units.
2.4.4 Wait cycle register
The number of wait cycles to be inserted when the external data memory area is accessed can be specified in
advance by using a register (DWTR)
This function is not available on the µPD77113A because this DSP does not have an external data area.
Note
Note
. The number of wait cycles that can be set is 1, 3, or 7.
Data Sheet U14373EJ3V0DS
19
Page 20

µµµµ
PD77113A, 77114
3. CLOCK GENERATOR
The clock generator generates an internal system clock based on the external clock input from the CLKIN pin and
supplies the generated clock to the internal units of the DSP.
For details of how to set the PLL multiple, refer to
4.2 Initializing PLL
, and
8.1 Clock Control Options
.
Halt mode
CLKIN
CLKOUT
Stop mode
PLL control circuit
×m
Output divider Halt divider
÷n ÷l
4. RESET FUNCTION
When a low level of a specified width is input to the RESET pin, the device is initialized.
4.1 Hardware Reset
Internal
system clock
If the RESET pin is asserted active (low level) for a specified period, the internal circuitry of the DSP is initialized.
If the RESET pin is then deasserted inactive (high level), boot processing of the instruction RAM is performed
according to the status of the port pins (P0 and P1). After boot processing, processing is executed starting from the
instruction at address 0x200 of instruction memory (reset entry). In addition, a self-check is performed by the internal
data RAM at the same time as the boot processing. This check takes about 20 ms (at 50 MHz operation, the length
of this period is in inverse proportion to the operating frequency.)
On power application, the RESET pin must be asserted active (low level) after 4 input clocks have been input with
the RESET pin in the inactive status (high level), after the supply voltage has reached the level of the operating
voltage. In other words, no power-ON reset function is available. On power application, the PLL must be initialized.
20
Data Sheet U14373EJ3V0DS
Page 21

µµµµ
PD77113A, 77114
4.2 Initializing PLL
Initializing the PLL starts from the 1024th input clock after the RESET pin has been asserted active (low level).
Initialization takes 1024 clocks and it takes the PLL 100 µs to be locked.
After that, the DSP operates with the set value of the PLL specified by a mask option when the RESET pin is
deasserted inactive (high level).
After initializing the PLL, be sure to execute boot-up processing to re-initialize the internal RAM. To initialize the
PLL, the internal memory contents and register status of the DSP are not retained.
If the RESET pin is deasserted inactive before the PLL initialization mode is set, the DSP is normally reset (the
PLL is not initialized).
CLKIN
10241 2048
RESET
PLL initialization
(internal status)
Approx. 100 s
PLL lock time
PLL initialization
mode
µ
Caution Do not deassert the RESET signal inactive in the PLL initialization mode and during PLL lock
period.
5. FUNCTIONS OF BOOT-UP ROM
To rewrite the contents of the instruction memory on power application or from program, boot up the instruction
RAM by using the internal boot-up ROM.
The µPD77113A and 77114 have a function to verify the contents of the internal instruction RAM and a function to
modify the instruction ROM in the boot-up ROM.
5.1 Boot at Reset
After hardware reset has been cleared, the boot program first reads the general-purpose I/O ports P0 and P1 and,
depending on their bit pattern, determines the boot mode (self boot or host boot). After boot processing, processing
is executed starting from the instruction at address 0x200 (reset entry) of the instruction memory.
The pins (P0 and P1) that specify the boot mode must be kept stable for the duration of 3 clocks before and for
the duration of 12 clocks after reset has been cleared (the clock is input from CLKIN).
If host boot or self boot is specified, a self-check of the internal data RAM is performed at the same time as boot
processing.
P1 P0 Boot Mode
Note
00
0 1 Ex ecutes host boot and then branches to address 0x200.
1 1 Ex ecutes self boot and then branches to address 0x200.
1 0 Set ting prohibited
Does not execute boot but branc hes to address 0x200
.
This setting is used when the DSP must be reset to recover from the standby mode after reset boot has
Note
been executed once.
Data Sheet U14373EJ3V0DS
21
Page 22

µµµµ
PD77113A, 77114
5.1.1 Self boot
The boot-up ROM transfers the instruction code stored in the data memory space to the instruction RAM, based
on the boot parameter written to address 0x4000 of the Y data memory. Generally, with a mask ROM model, this
function is implemented by storing the instructions to be booted in the data ROM.
In addition, the instructions to be booted can be also stored in an external data area in the form of flash ROM, and
self boot can be executed from this external data area.
5.1.2 Host boot
In this boot mode, a boot parameter and instruction code are obtained via the host interface, and transferred to the
instruction RAM.
5.2 Reboot
By calling the next reboot entry from the program, the contents of the instruction RAM can be rewritten.
Reboot Mode Entry Address
Self boot
Y memory
Host boot Host reboot 0x5
5.2.1 Self reboot
The instruction codes stored in the data memory are transferred to the instruction RAM.
Set the following parameters and call the entry address of the corresponding reboot mode to execute self reboot.
• R7L: Number of instruction steps for rebooting
• DP3: First address of X memory in which instruction codes are stored (in the case of reboot from X memory),
or first address of the instruction memory to be loaded (in the case of reboot from Y memory)
• DP7: First address of instruction memory to be loaded (in the case of reboot from X memory), or first address
of X memory in which instruction codes are stored (in the case of reboot from Y memory)
5.2.2 Host reboot
An instruction code is obtained via the host interface and transferred to the instruction RAM.
The entry address of is 0x5. Host reboot is executed by calling this address after setting the following parameter:
Word reboot 0x2X memory
Byte reboot 0x4
Word reboot 0x1
Byte reboot 0x3
• R7L: Number of instruction steps for rebooting
• DP3: First address of instruction memory to be loaded
22
Data Sheet U14373EJ3V0DS
Page 23

µµµµ
PD77113A, 77114
5.3 Signature Operation
The µPD77113A and 77114 have a signature operation function so that the contents of the internal instruction
RAM can be verified. The signature operation performs a specific arithmetic operation on the data in the instruction
RAM booted up, and returns the result to a register. Perform the signature operation in advance on the device when
it is operating normally, and repeat the signature operation later to check whether the data in RAM is correct by
comparing the operation result with the previous result. If the results are identical, there is no problem.
The entry address is 0x9. Execute the operation by calling this address after setting the following parameter. The
operation result is stored in register R7.
• R7L: Number of instruction steps for operation
• DP3: First address of instruction memory for operation
5.4 Instruction ROM Modification
The µPD77113A and 77114 have a function to modify the contents of the internal instruction mask ROM.
Instructions at up to four addresses can be modified.
The entry address is 0x10D. By calling this address with the following parameters, modification is performed.
R7L : Address of instruction ROM to be modified
R6H, R6L : Instruction code (32 bits)
Data Sheet U14373EJ3V0DS
23
Page 24

µµµµ
PD77113A, 77114
6. STANDBY MODES
Two standby modes are available. By executing the corresponding instruction, each mode is set and the power
consumption can be reduced.
6.1 HALT Mode
To set this mode, execute the HALT instruction. In this mode, functions other than clock circuit and PLL are
stopped to reduce the current consumption.
To release the HALT mode, use an interrupt or hardware reset. When releasing the HALT mode using an
interrupt, the contents of the internal registers and memory are retained. It takes several 10 system clocks to release
the HALT mode when the HALT mode is released using an interrupt.
In the HALT Mode, the clock circuit of the µPD77111 family supplies the following clock as the internal system
clock. The clock output from the CLKOUT pin is also as follows.
The clock output from the CLKOUT pin, however, has a high-level width that is equivalent to 1 cycle of the normal
operation (i.e., the duty factor is not 50%).
PD77113A, 77114: 1/l of internal system clock (l = integer from 1 to 16, specified by mask option)
•
µ
6.2 STOP Mode
To set this mode, execute the STOP instruction. In this mode, all the functions, including the clock circuit and
PLL, are stopped and the power consumption is minimized with only leakage current flowing.
To release the STOP mode, use hardware reset or WAKEUP pin.
When releasing the STOP mode by using the WAKEUP pin, the contents of the internal registers and memory are
retained, but it takes several 100 µs to release the mode.
The WAKEUP pin is multiplexed with the INT4 pin. Usually, this pin functions as an interrupt pin, but functions as
the WAKEUP pin when it is asserted active in the STOP mode. Whether the WAKEUP pin is used to release the
STOP mode is selected by mask option. For details, refer to
8.2 WAKEUP Function
.
24
Data Sheet U14373EJ3V0DS
Page 25

µµµµ
PD77113A, 77114
7. MEMORY MAP
A Harvard architecture, in which the instruction memory space and data memory space are separated is
employed.
7.1 Instruction Memory
7.1.1 Instruction memory map
The instruction memory space consists of 64K words × 32 bits, and the capacity and type of the memory differ
depending on the product.
µ
PD77113A, 77114
0x FFFF
Internal instruction
ROM
(48K words)
00xx430
0F0
F
F
00xx100F0F0
F
00xx0022430
F
00xx00210F0
F
00xx00100F0
F
0x0000
System
Internal instruction RAM
(3.5K words)
Vector area (64 words)
System
Boot-up ROM
(256 words)
Caution Programs and data cannot be placed at addresses reserved for the system, nor can these
addresses be accessed. If these addresses are accessed, the normal operation of the device
cannot be guaranteed.
Data Sheet U14373EJ3V0DS
25
Page 26

µµµµ
PD77113A, 77114
7.1.2 Interrupt vector table
Addresses 0x200 through 0x23F of the instruction memory are entry points (vectors) of interrupts. Four
instruction addresses are assigned to each interrupt source.
Vector Interrupt Source
0x200 Reset
0x204
0x208
0x20C
0x210 INT1
0x214 INT2
0x218 INT3
0x21C INT4
0x220 SI1 input
0x224 SO1 output
0x228 SI2 input
0x22C SO2 output
0x230 HI input
0x234 HO output
0x238
0x23C
Reserved
Reserved
Cautions 1. Although reset is not an interrupt, it is handled like an interrupt as an entry to a vector.
2. It is recommended that unused interrupt source vectors be used to branch an error
processing routine.
3. Because a vector area also exists in the internal RAM area of the mask ROM model, this
area must be booted up. In addition, because the entry address after reset is 0x200,
address 0x200 must be booted up even when the internal instruction RAM and interrupts are
not used.
26
Data Sheet U14373EJ3V0DS
Page 27

µµµµ
PD77113A, 77114
7.2 Data Memory
7.2.1 Data memory map
The data memory space consists of an X memory space and a Y memory space of 64K words × 16 bits each, and
the memory capacity and memory type differ depending on the product.
µ
0x FFFF
00xxED0
0F0
F
00xxCB0F0F0
F
F
PD77113A
Data RAM
(8K words)
System
µ
PD77114
Data RAM
(8K words)
External data
memory
(8K words)
00xx430F0F0
00xx3388430
00xx33870F0
00xx320F0F0
00xx210F0F0
00xx100F0F0
0x0000
F
F
F
F
F
F
Data ROM
(32K words)
System
Peripheral
(64 words)
System
Data RAM
(4K words)
System
Data RAM
(4K words)
Data ROM
(32K words)
System
Peripheral
(64 words)
System
Data RAM
(4K words)
System
Data RAM
(4K words)
Caution Programs and data cannot be placed at addresses reserved for the system, nor can these
addresses be accessed. If these addresses are accessed, the normal operation of the device
cannot be guaranteed.
Data Sheet U14373EJ3V0DS
27
Page 28

µµµµ
PD77113A, 77114
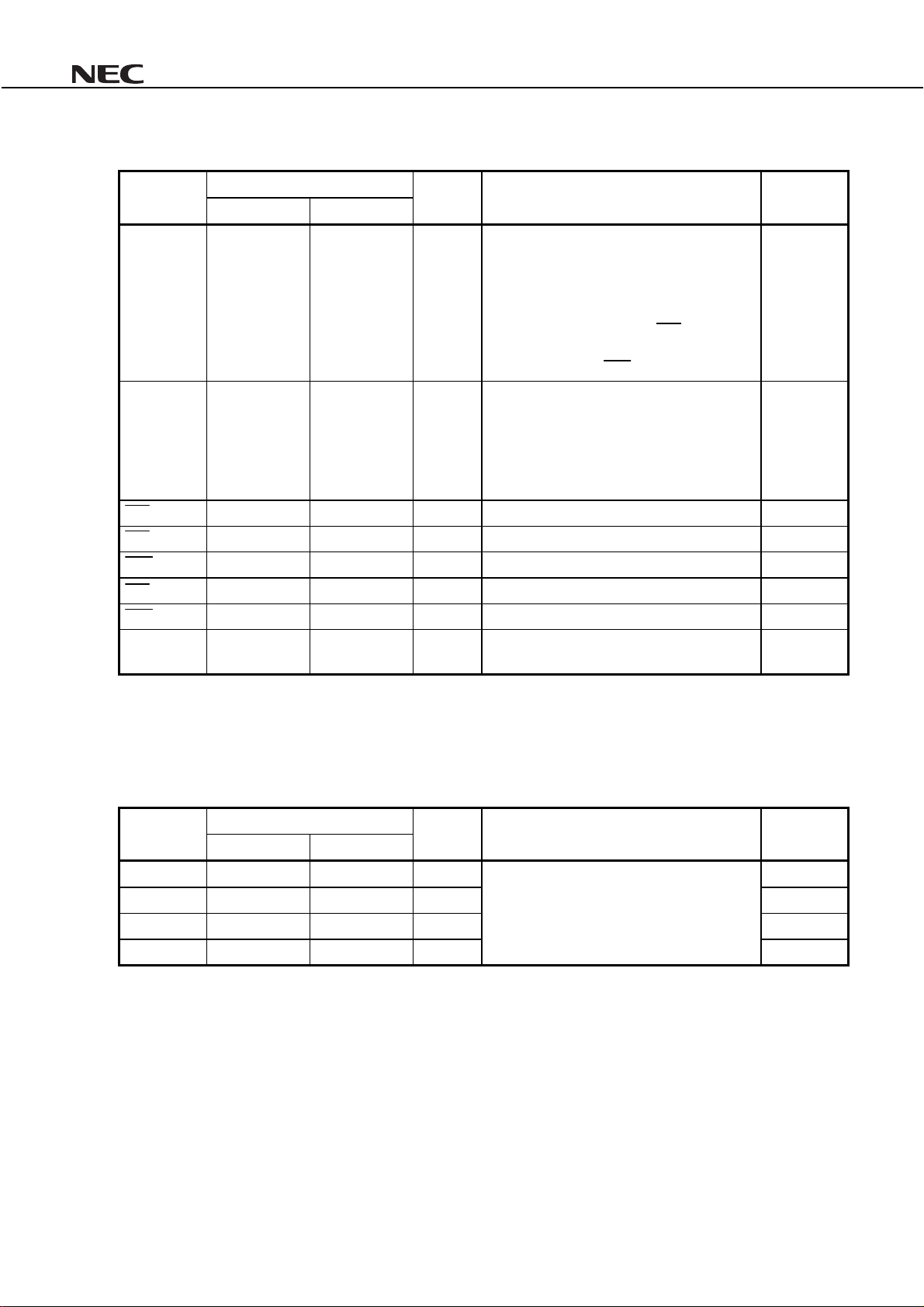
7.2.2 Internal peripherals
The internal peripherals are mapped to the internal data memory space.
X/Y Memory Address Register Name Function Peripheral Name
0x3800 SDT1 First serial data register
0x3801 SST1 Firs t serial status register
0x3802 SDT2 Second serial data regist er
0x3803 SST2 Sec ond serial status register
0x3804 PDT Port data register
0x3805 PCD Port command regis ter
0x3806 HDT Host data register
0x3807 HST Host status register
0x3808 DWTR Data memory wait cycle register WTR
0x3809 - 0x383F Reserved area
Caution Do not access this area.
SIO
PIO
HIO
−
Cautions 1. The register names listed in this table are not reserved words of the assembler or the C
language. Therefore, when using these names in assembler or C, the user must define
them.
2. The same register is accessed, as long as the address is the same, regardless of whether
the X memory space or Y memory space is accessed.
3. Even different registers cannot be accessed at the same time from both the X and Y memory
spaces.
8. MASK OPTION
The µPD77113A and 77114 have mask options that must be specified when an order for a ROM is placed. This
section explains these mask options. The mask options are specified in the Workbench (WB77016) development
tool. To order a mask ROM, output a mask ROM ordering file format (.msk file) using WB77016.
8.1 Clock Control Options
The following four clock related options must be specified.
• PLL multiple
• Output division ratio
• HALT division ratio
• Validity of CLKOUT pin
28
Data Sheet U14373EJ3V0DS
Page 29

µµµµ
PD77113A, 77114
When the PLL multiple is m, output division ratio is n, and halt division ratio is l, the relationship between each
operation mode and operating clock is as follows:
Operation Mode Clock S uppl i ed Inside DSP
Normal operation mode m/n times external input cl ock
HALT mode m/n/l times ex t ernal i nput clock
STOP mode S topped
The PLL control circuit multiplies the input clock by an integer from 1 to 16. Specify the mask option of the PLL
multiple so that the multiplied frequency falls within the specified PLL lock frequency range.
The output divider divides the clock multiplied by the PLL by an integer from 1 to 16. Specify the mask option of
the output division ratio so that the frequency m/n times the external input clock supplied to the DSP falls within the
specified operating frequency range of the DSP.
The HALT divider functions only in the HALT mode. It divides the clock of the output divider by an integer from 1
to 16 and supplies the divided clock to the internal circuitry. Specify the mask option of the HALT division ratio so
that necessary division can be performed.
Whether the clock supplied to the internal circuitry of the DSP (internal system clock) is “output” or “not output”
from the CLKOUT pin can be specified. Specify the mask option as necessary.
If an odd value (other than 1) is specified as the output division ratio, the high-level width of the clock output from
the CLKOUT pin is equal to one cycle during normal operation (i.e., the clock does not have a duty factor of 50%).
8.2 WAKEUP Function
The WAKEUP pin can be used to release the STOP mode as well as a hardware reset.
If the STOP mode is released by means of a hardware reset, the status before the STOP mode was set cannot be
restored after the STOP mode has been released. If the WAKEUP pin is used, however, the status before the STOP
mode is set can be retained and program execution can be resumed starting from the instruction after the STOP
instruction.
Whether the WAKEUP pin is used to release the STOP mode can be specified by a mask option.
When the WAKEUP function is specified valid, the WAKEUP pin is multiplexed with the INT4 pin and it usually
functions as an interrupt pin. The pin functions as the WAKEUP pin only in the STOP mode (if this pin is asserted
active in the STOP mode, it is used only to release the STOP mode, and execution does not branch to an interrupt
vector).
Data Sheet U14373EJ3V0DS
29
Page 30

µµµµ
PD77113A, 77114
9. INSTRUCTIONS
9.1 Outline of Instructions
An instruction consists of 32 bits. Almost all the instructions, except some such as branch instructions, are
executed with one system clock. The maximum instruction cycle of the µPD77113A and 77114 is 13.3 ns. The
following nine types of instructions are available:
(1) Trinomial operation instructions
These instructions specify an operation by the MAC. As the operands, three general-purpose registers can be
specified.
(2) Binomial operation instructions
These instructions specify an operation by the MAC, ALU, or BSFT. As the operands, two general-purpose
registers can be specified. An immediate value can be specified for some of these instructions, instead of a
general-purpose register, for one input.
(3) Uninominal operation instructions
These instructions specify an operation by the ALU. As the operands, one general-purpose register can be
specified.
(4) Load/store instructions
These instructions transfer 16-bit values between memory and a general-purpose register. Any general-purpose
register can be specified as the transfer source or destination.
(5) Register-to-register transfer instructions
These instructions transfer data from one general-purpose register to another.
(6) Immediate value setting instructions
These instructions write an immediate value to a general-purpose register and the registers of the address
operation unit.
(7) Branch instructions
These instruction specify branching of program execution.
(8) Hardware loop instructions
These instruction specify repetitive execution of an instruction.
(9) Control instructions
These instructions are used to control the program.
30
Data Sheet U14373EJ3V0DS
Page 31

µµµµ
PD77113A, 77114
9.2 Instruction Set and Operation
An operation is written in the operation field for each instruction in accordance with the operation representation
format of that instruction. If two or more parameters can be written, select one of them.
(a) Representation formats and selectable registers
The following table shows the representation formats and selectable registers.
Representation Format Selectable Register
r0, r0′, r0
rI, rI
rh, rh
re R0E - R7E
reh R0EH - R7EH
dp DP0 - DP7
dn DN0 - DN7
dm DMX, DMY
dpx DP0 - DP3
dpy DP4 - DP7
dpx_mod DPn, DPn++, DPn−−, DPn##, DPn%%, !DPn## (n = 0 - 3)
dpy_mod DPn, DPn++, DPn−−, DPn##, DPn%%, !DPn## (n = 4 - 7)
dp_imm DPn##imm (n = 0 - 7)
*xxx Contents of memory with address xxx
″
′
′
R0 - R7
R0L - R7L
R0H - R7H
<Example> I f the contents of the DP0 register are 1000, *DP 0 i ndi c ates the contents of
address 1000 of the memory.
Data Sheet U14373EJ3V0DS
31
Page 32

µµµµ
PD77113A, 77114
(b) Modifying data pointer
The data pointer is modified after the memory has been accessed. The result of modification becomes valid
starting from the instruction that immediately follows. The data pointer cannot be modified.
Example Operation
DPn Nothing is done (value of DPn is not changed.)
DPn++ DPn ← DPn + 1
DPn
−−
DPn## DPn ← DPn + DNn
DPn%%
!DPn## Reverses bits of DPn and t hen ac cesses memory.
DPn##imm DPn ← DPn + imm
DPn ← DPn − 1
(Adds value of correspondi ng DN0 to DN7 to DP0 to DP7.)
Example: DP0 ← DP0 + DN0
(n = 0 - 3) DPn = ((DPL + DNn) mod (DMX + 1)) + DP
(n = 4 - 7) DPn = ((DP
After memory access, DPn ← DPn + DNn
L
+ DNn) mod (DMY + 1)) + DP
H
H
(c) Instructions that can be simultaneously written
Instructions that can be simultaneously written are indicated by √.
(d) Status of overflow flag (OV)
The status of the overflow flag is indicated by the following symbol:
: Not affected
z
: Set to 1 when overflow occurs
Caution If an overflow does not occur as a result of an operation, the overflow flag is not reset but
retains the status before the operation.
32
Data Sheet U14373EJ3V0DS
Page 33

Instruction Set
Instruction
Instruction
Name
Mnemonic Operation
µµµµ
PD77113A, 77114
Instructions Si m ul taneously Written Flag
Trinomial
Binomial
Uninominal
Load/
store
Transfer
Immediatevalue
Branch
Loop
Control
OV
Trinomial
operation
Binomial
operation
Multiply add ro = ro + rh * rh
Multiply sub ro = ro − rh * rh
Sign unsign
multiply add
ro = ro + rh * rl
(rl is in positive integer
′
′
ro ← ro + rh * rh
ro ← ro − rh * rh
ro ← ro + rh * rl
format.)
Unsign unsign
multiply add
ro = ro + rl * rl
′
(rl and rl’ are in positive
ro ← ro + rl * rl
integer format.)
ro
+ rh * rh
1-bit shift
ro = (ro>>1) + rh * rh
ro ←
′
2
multiply add
ro
+ rh * rh
ro ←
16-bit shift
ro = (ro>>16) + rh * rh
′
16
2
multiply add
Multiply ro = rh * rh
Add ro″ = ro + ro
′
′
ro ← rh * rh
ro″ ← ro + ro
′√
Immediate add ro′ = ro + imm ro′ ← ro + imm
(where imm ≠ 1)
Sub ro″ = ro − ro
′
ro″ ← ro − ro
Immediate sub ro′ = ro − imm ro ← ro − imm
(where imm ≠ 1)
Arithmetic right
ro′ = ro SRA rl ro′ ← ro >> rl
shift
Immediate
ro′ = ro SRA imm ro′ ← ro >> imm
arithmetic right
shift
Logical right
ro′ = ro SRL rl ro′ ← ro >> rl
shift
Immediate
ro′ = ro SRL imm ro′ ← ro >> imm
logical right
shift
Logical left shift ro′ = ro SLL rl ro′ ← ro << rl
Immediate
ro′ = ro SLL imm ro′ ← ro << imm
logical left shift
AND ro″ = ro & ro
Immediate
ro′ = ro & imm ro′ ← ro & imm
′
ro″ ← ro & ro
AND
OR ro″ = ro ro
′
ro″ ← ro ro
Immediate OR ro′ = ro imm ro′ ← ro imm
Exclusive OR ro″ = ro ∧ ro
Immediate
ro′ = ro ∧ imm ro′ ← ro ∧ imm
′
ro″ ← ro ∧ ro
exclusive OR
′√
′√
√
′√
′
′
√
√
′√
′√
√
√
√
′√
′√
′√
z
z
z
z
z
z
z
z
z
z
z
z
z
z
Data Sheet U14373EJ3V0DS
33
Page 34

Instruction
Binomial
operation
Uninominal
operation
Instruction
Name
Less than ro″ = LT (ro, ro′)
Clear CLR (ro)
Mnemonic Operation
if (ro < ro′)
″ ←
{ro
0x0000000001}
″ ←
else {ro
0x0000000000}
ro ← 0x0000000000
Increment ro′ = ro + 1 ro′ ← ro + 1
Decrement ro′ = ro − 1ro
′ ←
ro − 1
Absolute value ro′ = ABS (ro) if (ro < 0)
{ro′ ← −ro}
else {ro′ ← ro}
1’s
ro′ = ~ro ro′ ← ~ro
complement
2’s
ro′ = −ro ro′ ← −ro
complement
Clip ro′ = CLIP (ro)
if ( ro > 0x007FFFFFFF)
′ ←
{ro
0x007FFFFFFF}
elseif {ro < 0xFF80000000}
{ro′ ← 0xFF80000000}
′ ←
else {ro
ro}
µµµµ
PD77113A, 77114
Instructions Si m ul taneously Written Flag
Trinomial
Binomial
Uninominal
Load/
store
Transfer
Immediatevalue
Branch
√
√√
√√
√√
√√
√√
√√
√√
Loop
Control
OV
z
z
z
z
Round ro′ = ROUND (ro)
if (ro > 0x007FFF0000)
′ ←
{ro
0x007FFF0000}
elseif {ro < 0xFF80000000}
{ro′ ← 0xFF80000000}
′ ←
else {ro
& 0xFFFFFF0000}
Exponent ro′ = EXP (ro)
ro′ ← log
Substitution ro′ = ro ro′ ← ro
Accumulated
ro′ + = ro ro′ ← ro′ + ro
addition
Accumulated
ro′ − = ro ro′ ← ro′ − ro
subtraction
Division ro′ / = ro
if (sign (ro′) == sign (ro))
′ ←
{ro
(ro′ − ro) << 1}
else
′ ←
{ro
(ro′ + ro)<<1}
if (sign (ro
′ ←
{ro
ro′ + 1}
(ro + 0x8000)
1
2
(
)
ro
′
)==0)
√√
√√
√√
z
z
z
√√
√√
√√
34
Data Sheet U14373EJ3V0DS
Page 35

Instruction
Load/
store
Registerto-register
transfer
Immediate
value
setting
Instruction
Name
Parallel
load/store
Partial load/
store
addressing
load/store
Notes 1, 2
Notes 1, 2, 3
Note 4
Immediate
value index
load/store
Note 5
Register-toregister
Note 6
transfer
Immediate
value setting
Mnemonic Operation
ro = *dpx_mod ro′ =
ro ← *dpx, ro′ ← *dpy
*dpy_mod
ro = *dpx_mod
ro ← *dpx, *dpy ←rh
*dpy_mod = rh
*dpx_mod = rh ro =
*dpx ← rh, ro ← *dpy
*dpy_mod
*dpx_mod = rh
*dpy_mod = rh
′
dest = *dpx_mod
dest′ = *dpy_mod
dest = *dpx_mod
*dpy_mod = source
*dpx_mod = source
dest = *dpy_mod
*dpx_mod = source
*dpy_mod = source
*dpx ← rh, *dpy ← rh
dest ← *dpx,
dest′ ← *dpy
dest ← *dpx,
*dpy ← source
*dpx ← source,
dest ← *dpy
*dpx ← source,
*dpy ← source
′
dest = *addr dest ← *addrDirect
*addr = source *addr ← source
dest = *dp_imm dest ← *dp
*dp_imm = source *dp ← source
dest = rl dest ← rl
rl = source rl ← source
rl = imm
rl ← imm
(where imm = 0 to 0xFFFF)
dp = imm
dp ← imm
(where imm = 0 to 0xFFFF)
dn = imm
dn ← imm
(where imm = 0 to 0xFFFF)
dm = imm
dm ← imm
(where imm = 1 to 0xFFFF)
µµµµ
PD77113A, 77114
Instructions Si m ul taneously Written Flag
Trino-
Bino-
Unino-
mial
mial
minal
√√√
Load/
store
Transfer
Immediatevalue
Branch
Loop
Control
OV
z
′
z
′
z
z
√
z
z
Notes 1.
Of the two mnemonics, either one of them or both can be written.
After transfer, modification specified by mod is performed.
2.
Select any of dest, dest’ = {ro, reh, re, rh, rl}, source, source’ = {re, rh, rl}.
3.
Select any of dest = {ro, reh, re, rh, rl}, source = {re, rh, rl},
4.
Select any of dest = {ro, reh, re, rh, rl}, source = {re, rh, rl}.
5.
Select any register other than general-purpose registers as dest and source.
6.
Data Sheet U14373EJ3V0DS
addr =
0: X-0xFFF
0: Y-0xFFFF
: X (X memory)
: Y (Y memory)
.
35
Page 36

Instruction
Instruction
Name
Mnemonic Operation
µµµµ
PD77113A, 77114
Instructions Si m ul taneously Written Flag
Trinomial
Binomial
Uninominal
Load/
store
Transfer
Immediatevalue
Branch
Loop
Control
OV
Branch
Hardware
loop
Jump JMP imm PC ← imm
Register
JMP dp PC ← dp
indirect jump
Subroutine call CALL imm SP ← SP + 1
STK ← PC + 1
PC ← imm
Register
indirect
subroutine call
CALL dp SP ← SP + 1
STK ← PC + 1
PC ← dp
Return RET PC ← STK
SP ← SP − 1
Interrupt return RETI PC ← STK
STK ← SP − 1
Recovery of interrupt
enable flag
Repeat REP count
Start RC ← count
During repeat PC
End PC
Loop LOOP count
Start RC ← count
(instruction of two or
more lines)
During repeat PC
End PC
RF
RC
RF
RF
RC
RF
←
←
←
←
←
←
←
←
←
←
0
PC
RC − 1
PC + 1
1
0
PC
RC − 1
PC + 1
1
√
z
√
z
√
z
√
z
√
z
√
z
z
z
Control
36
Loop hop LPOP LC ← LSR3
LE ← LSR2
LS ← LSR1
LSP ← LSP − 1
No operation NOP PC ← PC + 1
Halt HALT CPU stops.
Stop STOP CPU, PLL, and
OSC stop.
Condition IF (ro cond) Condition test
Forget interrupt FINT Discard interrupt
request
Data Sheet U14373EJ3V0DS
√√√
z
z
z
z
z
z
Page 37

10. ELECTRICAL SPECIFICATIONS
µµµµ
PD77113A, 77114
Absolute Maximum Ratings (TA = +25
C)
°°°°
Parameter Symbol Condition Rating Unit
DD
IV
EV
Input voltage V
Output voltage V
Storage temperature T
Operating temperature T
O
stg
A
DD
I
For DSP core
For I/O pins
VI < EVDD + 0.5 V
0.5 to +3.6 VSupply voltage
−
0.5 to +4.6 V
−
0.5 to +4.1 V
−
0.5 to +4.1 V
−
65 to +150
−
40 to +85
−
Caution Product quality may suffer if the absolute maximum rating is exceeded even momentarily for any
parameter. That is, the absolute maximum ratings are rated values at which the product is on
the verge of suffering physical damage, and therefore the product must be used unber
conditions that ensure that the absolute maximum ratings are not exceeded.
Recommended Operating Conditions
Parameter Symbol Condition MIN. TYP. MAX. Unit
DD
Operating voltage
IV
EV
Input voltage V
For DSP core 1.8 2.7 V
DD
For I/O
pins
I
IVDD = 1.8 to 2.7 V 3.3
DD
IV
= 2.3 to 2.7 V
2.7
0EV
3.6
DD
C
°
C
°
V
V
Capacitance (TA = +25
C, IVDD = 0 V, EVDD = 0 V)
°°°°
Parameter Symbol Condition MIN. TYP. MAX. Unit
Input capacitance C
Output capacitance C
I/O capacitance C
I
f = 1 MHz,
Pins other than those
O
IO
tested: 0 V
10 pF
10 pF
10 pF
Data Sheet U14373EJ3V0DS
37
Page 38

µµµµ
PD77113A, 77114
DC Characteristics (Unless otherwise specified, TA =
operating condition range)
Parameter Symbol Condition MIN. TYP. MAX. Unit
IHN
High-level input voltage
Low-level output voltage V
High-level input leakage
current
Low-level input leakage
current
Pull-up pin current I
Pull-down pin current I
Internal supply current
IHN
[V
IHS
= V
= EVDD, VIL = 0 V,
I
no load]
V
V
V
DD
I
I
V
V
I
I
DDH
DDS
LH
PUI
PDI
Pins other than below 0.7 EV
IHS
CLKIN, RESET,
INT1 - INT4, SCK1, SIEN1,
SOEN1, SCK2, SIEN2, SOEN2
IHC
CLKIN 0.5 EV
IL
Pins other than below 0 0.2 EV
IC
CLKIN 0 0.5 EV
OH
IOH = −2.0 mA 0.7 EV
IOH = −100 µA 0.8 EV
OL
IOL = 2.0 mA 0.2 EV
Other than TDI, TMS, and TRST
I
DD
V
= EV
LL
Other than TDI, TMS, and TRST
I
V
= 0 V
TDI, TMS, 0 V ≤ VI ≤ EV
TRST, 0 V ≤ VI ≤ EV
Note
During operating, 30 ns, IVDD =
2.7 V
In halt mode, tcC = 30 ns,
divided by eight, IV
In stop mode, 0°C < TA < 60°C 100
40 to +85
−−−−
DD
DD
DD
= 2.7 V
C, with IVDD and EVDD within recommended
°°°°
0.8 EV
DD
DD
DD
EV
EV
EV
DD
DD
DD
V
V
V
+0.25
DD
DD
VLow-level input voltage
V
–0.25
DD
DD
DD
010
10 0
−
250 0
−
0 250
VHigh-level output voltage V
V
V
A
µ
A
µ
A
µ
A
µ
TBD 75 mA
TBD 10 mA
A
µ
38
The TYP. values are when an ordinary program is executed.
Note
The MAX. values are when a special program that brings about frequent switching inside the device is
executed.
Data Sheet U14373EJ3V0DS
Page 39

Common Test Criteria of Switching Characteristics
CLKIN, RESET, INT1 - INT4,
SCK1, SIEN1, SOEN1, SCK2,
SIEN2, SOEN2
Input
(other than above)
0.8 EV
0.5 EV
0.2 EV
0.7 EV
0.5 EV
0.2 EV
0.5 EV
µµµµ
PD77113A, 77114
DD
DD
DD
DD
DD
DD
DD
Test points
Test points
Test pointsOutput
0.8 EV
0.5 EV
0.2 EV
0.7 EV
0.5 EV
0.2 EV
0.5 EV
DD
DD
DD
DD
DD
DD
DD
Data Sheet U14373EJ3V0DS
39
Page 40

µ
PD77113A, 77114
A
=
AC Characteristics (T
40 to +85
−−−−
Clock
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
CLKIN cycle time
CLKIN high-level width t
CLKIN low-level width t
CLKIN rise/fall time t
requirements
Note 1
Note 3
µµµµ
PD77113A, 77114
C, with IVDD and EVDD within recommended operating condition range)
°°°°
cCX
t
Note 2
IVDD = 1.8
to 2.7 V
PLL lock
range
IVDD = 2.3
25 ns
25 × m 50 × mns
10 × m 50 × mns
to 2.7 V
wCXH
wCXL
rfCX
cC (R)
t
IVDD = 1.8 to 2.7 V 25 nsInternal clock cycle time
12.5 ns
12.5 ns
5ns
IVDD = 2.3 to 2.7 V 13.3 ns
Notes 1.
m: Multiple, n: Division ratio
This is the range in which the PLL is locked (stably oscillates). Input t
2.
cCX
3.
Input t
so that the value of (t
Switching characteristics
Parameter Symbol Condition MIN. TYP. MAX. Unit
Internal clock cycle
CLKOUT cycle time t
CLKOUT width t
CLKOUT rise/fall time t
m: Multiple, n: Division ratio, l: HALT division ratio
Note
Note
cC
t
cCO
wCO
rfCO
dCO
cCX
within this range.
cCX
÷ m × n) satisfies this condition.
During normal operation t
In HALT mode
During
normal
operation
n = 1, or even number
n = odd number
(other than 1)
In HALT mode
tcC ÷ 2 − 3ns
cC
÷ n ÷ 2 − 3
t
tcC ÷ n ÷ 2 − 3
cCX
× n ÷ mns
cCX
t
× n ÷ m × l
cC
t
5ns
IVDD = 1.8 to 2.7 V 20 nsCLK OUT del ay time t
IVDD = 2.3 to 2.7 V 15 ns
ns
ns
ns
ns
40
Data Sheet U14373EJ3V0DS
Page 41

µ
Clock I/O timing
CLKIN
Internal clock
µµµµ
PD77113A, 77114
PD77113A, 77114
t
cCX
t
t
wCXH
t
dCO
t
wCO
t
cC, tcC(R)
t
cCO
t
wCXL
t
wCO
rfCX
t
rfCO
t
rfCX
t
rfCO
CLKOUT
Data Sheet U14373EJ3V0DS
41
Page 42

µ
PD77113A, 77114
Reset, Interrupt
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
WAKEUP low-level width t
INT1 - INT4 low-level width t
INT1 - INT4 recovery time t
Notes 1.
The value on power application is the time from when the supply voltages have reached IV
and EVDD = 2.7 V. A stable clock input is also required.
Note that tcC is I (I = integer of 1 to 16) times that during normal operation in the HALT mode.
2.
If the low-level width of RESET is greater than 1024tcC, the PLL initialization mode is triggered. If there
3.
is no need to use the PLL initialization mode, set the width to less than 1024tcC.
When the power is turned on, a recovery period of 4t
4.
w (RL)
rec (R)
w (WAKEUPL)
w (INTL)
rec (INT)
On power application
Note 1
in STOP mode
During normal operation,
in HALT mode
On power application
Note 4
µµµµ
PD77113A, 77114
,
100 +
2048t
cC
4t
4t
cC
4t
cCX
Note 2
Note 2
cCX
Note 3
100
Note 2
cC
3t
cC
3t
cCX
is necessary before inputting RESET.
µ
ns
nsRESET recovery time t
ns
µ
ns
ns
DD
= 1.8 V
sRESET low-level width t
s
Reset timing
RESET
WAKEUP timing
WAKEUP
Interrupt timing
INT1 - INT4
t
w(RL)
t
w (WAKEUPL)
t
w(INTL)
t
rec(R)
t
rec(INT)
42
Data Sheet U14373EJ3V0DS
Page 43

µµµµ
µ
PD77113A, 77114
PD77113A, 77114
External Data Memory Access (
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
Read data setup time t
Read data hold time t
Switching characteristics
Parameter Symbol Condition MIN. TYP. MAX. Unit
Address cycle time t
Address output hold time t
MRD output delay time t
Write data output valid ti m e t
Write data output hold time t
MWR output delay time t
MWR output hold time t
MWR low-level width t
MWR high-level width t
PD77114 only)
µµµµ
suDDRD
hDDRD
rcDA
hDA
dDR
vDDWD
hDDWD
dDW
hDA
wDWL
wDWH
18 ns
0ns
Note
cDW
tcC + (tcC × t
)
ns
0ns
5ns
5ns
0ns
0 0.5 t
cC
ns
0ns
cDW
tcC × t
− 3
ns
0.5 tcC − 3ns
Note
cDW
: Number of data wait cycles
t
Data Sheet U14373EJ3V0DS
43
Page 44

µ
PD77113A, 77114
External data memory access timing (read)
DA0 - DA12
X/Y
t
dDR
MRD
D0 - D15
External data memory access timing (write)
DA0 - DA12
t
rcDA
t
suDDRD
µµµµ
PD77113A, 77114
t
dDR
t
hDDRD
X/Y
MWR
D0 - D15
t
t
t
vDDWD
dDW
t
wDWL
rcDA
t
wDWH
t
dDW
t
vDDWD
t
hDA
t
hDDWD
Hi-Z Hi-Z
44
Data Sheet U14373EJ3V0DS
Page 45

µµµµ
µ
PD77113A, 77114
PD77113A, 77114
Bus Arbitration (
PD77114 only)
µµµµ
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
HOLDRQ setup time t
HOLDRQ hold time t
Switching characteristics
Parameter Symbol Condition MIN. TYP. MAX. Unit
BSTB hold time t
BSTB output delay ti m e t
HOLDAK output delay time t
Data hold time during bus
arbitration
Data valid time during bus
arbitration
suHRQ
hHRQ
hBS
dBS
dHAK
h (BS-D)
t
v (BS-D)
t
0ns
0ns
0ns
20 ns
18 ns
25 ns
25 ns
Data Sheet U14373EJ3V0DS
45
Page 46

µ
PD77113A, 77114
Bus arbitration timing (when bus is idle)
CLKIN
µµµµ
PD77113A, 77114
(Bus busy) Bus idle
t
hBS
BSTB
suHRQ
t
HOLDRQ
HOLDAK
X/Y, DA0 - DA12,
MRD, MWR
Bus arbitration timing (when bus is busy)
CLKIN
(Bus busy) Bus busy
Bus release Bus idle (Bus busy)
dBS
t
t
t
dHAK
t
h (BS-D)
hHRQ
t
suHRQ
Hi-Z
Bus idle Bus idle (Bus busy)
t
hBS
Bus release
t
dBS
t
dHAK
t
v (BS-D)
t
hHRQ
BSTB
HOLDRQ
HOLDAK
X/Y, DA0 - DA12,
MRD, MWR
t
suHRQ
t
hHRQ
t
dHAK
t
h (BS-D)
Hi-Z
t
suHRQ
t
dHAK
t
v (BS-D)
t
hHRQ
46
Data Sheet U14373EJ3V0DS
Page 47

µ
Serial Interface
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
µµµµ
PD77113A, 77114
PD77113A, 77114
SCK cycle time t
SCK high-/low-level widt h t
SCK rise/fall time t
Switching characteristics
cSC
wSC
rfSC
suSOE
hSOE
suSIE
hSIE
suSI
hSI
60 ns
25 ns
20 ns
IVDD = 1.8 to 2.7 V
10
nsSOEN setup time t
IVDD = 2.3 to 2.7 V 5 ns
IVDD = 1.8 to 2.7 V 15 nsSOEN hold time t
IVDD = 2.3 to 2.7 V 10 ns
IVDD = 1.8 to 2.7 V 10 nsSIEN setup time t
IVDD = 2.3 to 2.7 V 5 ns
IVDD = 1.8 to 2.7 V 15 nsSIEN hold time t
IVDD = 2.3 to 2.7 V 10 ns
IVDD = 1.8 to 2.7 V 10 nsSI setup time t
IVDD = 2.3 to 2.7 V 5 ns
IVDD = 1.8 to 2.7 V 15 nsSI hold time t
IVDD = 2.3 to 2.7 V 10 ns
Parameter Symbol Condition MIN. TYP. MAX. Unit
SORQ hold time t
SO hold time t
SIAK hold time t
dSOR
hSOR
dSO
hSO
dSIA
hSIA
IVDD = 1.8 to 2.7 V 30 nsS ORQ output delay time t
IVDD = 2.3 to 2.7 V 25 ns
0ns
IVDD = 1.8 to 2.7 V 30 nsS O output delay time t
IVDD = 2.3 to 2.7 V 25 ns
0ns
IVDD = 1.8 to 2.7 V 30 nsS I AK output delay time t
IVDD = 2.3 to 2.7 V 25 ns
0ns
Data Sheet U14373EJ3V0DS
47
Page 48

µµµµ
µ
PD77113A, 77114
PD77113A, 77114
Caution If noise is superimposed on the serial clock, the serial interface may be deadlocked. Bear in
mind the following points when designing your system:
• Reinforce the wiring for power supply and ground (if noise is superimposed on the power and
ground lines, it has the same effect as if noise were superimposed on the serial clock).
• Shorten the wiring between the device's SCK1 and SCK2 pins, and clock supply source.
• Do not cross the signal lines of the serial clock with any other signal lines. Do not route the
serial clock line in the vicinity of a line through which a high alternating current flows.
• Supply the clock to the SCK1 and SCK2 pins of the device from the clock source on a one-toone basis. Do not supply clock to several devices from one clock source.
• Exercise care that the serial clock does not overshoot or undershoot. In particular, make sure
that the rising and falling of the serial clock waveform are clear.
××
Make sure that the serial clock
rises and falls linearly.
The serial clock must not bound. Noise
must not be superimposed on the serial clock.
The serial clock must not rise or
fall step-wise.
48
Data Sheet U14373EJ3V0DS
Page 49

µ
Serial output timing 1
t
wSC
SCK1,
SCK2
t
dSOR
t
cSC
t
wSC
t
hSOR
µµµµ
PD77113A, 77114
PD77113A, 77114
t
rfSC
t
rfSC
SORQ1
t
t
suSOE
t
hSOE
suSOE
t
hSOE
SOEN1,
SOEN2
t
SO1,
Hi-Z
SO2
Serial output timing 2 (during successive output)
t
cSC
t
wSC
SCK1,
SCK2
SORQ1
SOEN1,
SOEN2
t
wSC
t
dSOR
t
suSOE
t
hSOE
dSO
t
hSOR
t
dSO
1st Last
t
rfSC
t
rfSC
t
hSO
SO1,
SO2
t
dSO
Last
Data Sheet U14373EJ3V0DS
1st Last
t
hSO
49
Page 50

µ
PD77113A, 77114
Serial input timing 1
SCK1,
SCK2
SIAK1
SIEN1,
SIEN2
t
dSIA
t
wSC
t
suSIE
µµµµ
PD77113A, 77114
t
cSC
t
wSC
t
hSIA
t
suSIE
t
hSIE
t
hSIE
t
suSI
t
hSI
t
rfSC
t
rfSC
SI1,
SI2
Serial input timing 2 (during successive input)
t
cSC
t
wSC
SCK1,
SCK2
SIAK1
SIEN1,
SIEN2
SI1,
SI2
t
wSC
t
dSIA
t
suSIE
LastLast–1 2nd
1st
t
hSIA
t
hSIE
t
suSI
t
hSI
2nd
rfSC
t
1st
3rd
t
rfSC
3rd
50
Data Sheet U14373EJ3V0DS
Page 51

µ
Host Interface
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
µµµµ
PD77113A, 77114
PD77113A, 77114
HRD width t
HCS, HA0, HA1, read hold
time
HCS, HA0, HA1 write hold time t
HRD, HWR recovery time t
HWR width t
HWR hold time t
Switching characteristics
Parameter Symbol Condition MIN. TYP. MAX. Unit
HRD hold time t
dHR
wHR
hHCAR
t
hHCAW
recHS
dHW
wHW
hHDW
suHDW
dHE
hHE
vHDR
hHDR
IVDD = 1.8 to 2.7 V 15 nsHRD delay time t
IVDD = 2.3 to 2.7 V 10 ns
60 ns
0ns
0ns
60 ns
IVDD = 1.8 to 2.7 V 15 nsHWR delay time t
IVDD = 2.3 to 2.7 V 10 ns
60 ns
0
ns
IVDD = 1.8 to 2.7 V 15 nsHWR setup time t
IVDD = 2.3 to 2.7 V 10 ns
IVDD = 1.8 to 2.7 V 30 nsHRE , HWE output delay time t
IVDD = 2.3 to 2.7 V 25 ns
IVDD = 1.8 to 2.7 V 30 nsHRE , HWE hold time t
IVDD = 2.3 to 2.7 V 25 ns
IVDD = 1.8 to 2.7 V 30 nsHRD v a l i d time t
IVDD = 2.3 to 2.7 V 25 ns
0ns
Data Sheet U14373EJ3V0DS
51
Page 52

µ
PD77113A, 77114
Host read interface timing
CLKIN
HCS, HA0, HA1
HRD
HD0 - HD7
HRE
µµµµ
PD77113A, 77114
t
hHCAR
t
dHR
t
dHE
t
hHE
t
vHDR
t
wHR
t
hHDR
t
recHS
Hi-ZHi-Z
Host write interface timing
CLKIN
HCS, HA0, HA1
HWR
HD0 - HD7
HWE
t
hHCAW
t
dHW
t
dHE
t
hHE
t
wHW
t
suHDW
t
hHDW
t
recHS
52
Data Sheet U14373EJ3V0DS
Page 53

µ
General-purpose I/O Port
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
µµµµ
PD77113A, 77114
PD77113A, 77114
Port input setup time t
Switching characteristics
Parameter Symbol Condition MIN. TYP. MAX. Unit
General-purpose I/O port timing
CLKIN
P0 - P3
(Output)
suPI
hPI
dPO
0ns
IVDD = 1.8 to 2.7 V 15 nsPort input hold time t
IVDD = 2.3 to 2.7 V 10 ns
IVDD = 1.8 to 2.7 V 30 nsP ort output delay time t
IVDD = 2.3 to 2.7 V 25 ns
t
dPO
P0 - P3
(Input)
t
suPI
t
hPI
Data Sheet U14373EJ3V0DS
53
Page 54

µ
PD77113A, 77114
Debugging Interface (JTAG)
Timing requirements
Parameter Symbol Condition MIN. TYP. MAX. Unit
µµµµ
PD77113A, 77114
TCK cycle time t
TCK high-/low-level width t
TCK rise/fall time t
TRST setup time t
Switching characteristics
Parameter Symbol Condition MIN. TYP. MAX. Unit
cTCK
wTCK
rfTCK
suDI
hDI
suJIN
hJIN
suTRST
dDO
dJOUT
120 ns
50 ns
20 ns
IVDD = 1.8 to 2.7 V 25 nsTMS, TDI setup time t
IVDD = 2.3 to 2.7 V 20 ns
IVDD = 1.8 to 2.7 V 25 nsTMS, TDI hold time t
IVDD = 2.3 to 2.7 V 20 ns
IVDD = 1.8 to 2.7 V 25 nsInput pin setup time t
IVDD = 2.3 to 2.7 V 20 ns
IVDD = 1.8 to 2.7 V 25 nsInput pin hold time t
IVDD = 2.3 to 2.7 V 20 ns
100 ns
IVDD = 1.8 to 2.7 V 25 nsTDO out put del ay time t
IVDD = 2.3 to 2.7 V 20 ns
IVDD = 1.8 to 2.7 V 25 nsOut put pi n output delay time t
IVDD = 2.3 to 2.7 V 20 ns
54
Data Sheet U14373EJ3V0DS
Page 55

µ
Debugging interface timing
t
cTCK
t
wTCK
t
wTCK
TCK
t
suTRST
TRST
µµµµ
PD77113A, 77114
PD77113A, 77114
t
rfTCK
t
suDI
t
hDI
t
rfTCK
TMS, TDI
TDO
Capture state
Update state
Remark
For details of JTAG, refer to
Valid
t
dDO
IEEE1149.1
Valid Valid
Valid
dJOUT
t
.
t
suJIN
t
hJIN
Data Sheet U14373EJ3V0DS
55
Page 56

11. PACKAGE DRAWINGS
80-PIN PLASTIC FBGA (9x9)
µµµµ
PD77113A, 77114
Q
S
R
KS
A
WSB
B
D
C
PIndex mark
WSA
J
I
Y1 S
H
FEG
M
φ
SML
AB
B
9
8
A
7
6
5
4
3
2
1
JABCDEFGH
ITEM MILLIMETERS
A 9.00±0.10
B
8.40
C 8.40
D 9.00±0.10
E
1.30
F 0.8 (T.P.)
G 0.35±0.1
H
0.36
0.96
I
J 1.31±0.15
K 0.10
+0.05
L
M 0.08
P
Q R0.3
R25°
W
Y1 0.20
0.50
φ
–0.10
C1.0
0.20
S80F1-80-CN1-1
56
Data Sheet U14373EJ3V0DS
Page 57

100-PIN PLASTIC TQFP (FINE PITCH) (14x14)
A
B
µµµµ
PD77113A, 77114
75
76
100
1
51
25
50
26
F
G
M
H
I
P
SN
NOTE
Each lead centerline is located within 0.10 mm of
its true position (T.P.) at maximum material condition.
J
K
L
M
C D
detail of lead end
S
Q
R
ITEM MILLIMETERS
A
16.0±0.2
B
14.0±0.2
C 14.0±0.2
D
16.0±0.2
F 1.0
G
1.0
H 0.22
I 0.10
J
K
L
M 0.145
N
P
Q
R3°
S 1.27 MAX.
+0.05
−0.04
0.5 (T.P.)
1.0±0.2
0.5±0.2
+0.055
−0.045
0.10
1.0±0.1
0.1±0.05
+7°
−3°
S100GC-50-9EU-2
Data Sheet U14373EJ3V0DS
57
Page 58

µµµµ
PD77113A, 77114
12. RECOMMENDED SOLDERING CONDITIONS
It is recommended to solder this product under the following recommended conditions.
For the details of the recommended soldering conditions, refer to the document
Mounting Technology Manual (C10535E)
.
For soldering methods and conditions other than those recommended below, contact your NEC sales
representative.
Surface mount type
PD77113AF1-xxx-CN1: 80-pin plastic fine-pitch BGA (9 x 9)
µµµµ
Semiconductor Device
Soldering
Method
Infrared reflow Package peak temperature: 230°C, Time: 30 sec. Max. (at 210°C or higher).
Count: two times or less
Exposure limit: 3 day s
After opening the dry pack, store it at 25°C or less and 65% RH or less for the allowable storage period.
Note
PD77114GC-xxx-9EU: 100-pin plastic TQFP (fine-pitch) (14 x 14)
µµµµ
Soldering
Method
Infrared reflow Package peak temperature: 235°C, Time: 30 sec. Max. (at 210°C or higher).
Count: two times or less
Exposure limit: 3 day s
VPS Package peak temperature: 215°C, Time: 40 sec. Max. (at 200°C or higher).
Count: two times or less
Exposure limit: 3 day s
Partial heating Pin temperature: 300°C Max., Time: 3 sec . M ax. (per pin row) –
Note
Note
Note
Soldering Conditions Recommended
Condition Symbol
IR30-103-2
(after that prebake at 125°C for 10 hours)
Soldering Conditions Recommended
Condition Symbol
IR35-103-2
(after that prebake at 125°C for 10 hours)
VP15-103-2
(after that prebake at 125°C for 10 hours)
After opening the dry pack, store is at 25°C or less and 65% RH or less for the allowable storage period.
Note
Caution Do not use different soldering methods together (except for partial heating for pins).
58
Data Sheet U14373EJ3V0DS
Page 59

[MEMO]
µµµµ
PD77113A, 77114
Data Sheet U14373EJ3V0DS
59
Page 60

µµµµ
PD77113A, 77114
NOTES FOR CMOS DEVICES
1 PRECAUTION AGAINST ESD FOR SEMICONDUCTORS
Note:
Strong electric field, when exposed to a MOS device, can cause destruction of the gate oxide and
ultimately degrade the device operation. Steps must be taken to stop generation of static electricity
as much as possible, and quickly dissipate it once, when it has occurred. Environmental control
must be adequate. When it is dry, humidifier should be used. It is recommended to avoid using
insulators that easily build static electricity. Semiconductor devices must be stored and transported
in an anti-static container, static shielding bag or conductive material. All test and measurement
tools including work bench and floor should be grounded. The operator should be grounded using
wrist strap. Semiconductor devices must not be touched with bare hands. Similar precautions need
to be taken for PW boards with semiconductor devices on it.
2 HANDLING OF UNUSED INPUT PINS FOR CMOS
Note:
No connection for CMOS device inputs can be cause of malfunction. If no connection is provided
to the input pins, it is possible that an internal input level may be generated due to noise, etc., hence
causing malfunction. CMOS devices behave differently than Bipolar or NMOS devices. Input levels
of CMOS devices must be fixed high or low by using a pull-up or pull-down circuitry. Each unused
DD
pin should be connected to V
being an output pin. All handling related to the unused pins must be judged device by device and
related specifications governing the devices.
or GND with a resistor, if it is considered to have a possibility of
3 STATUS BEFORE INITIALIZATION OF MOS DEVICES
Note:
Power-on does not necessarily define initial status of MOS device. Production process of MOS
does not define the initial operation status of the device. Immediately after the power source is
turned ON, the devices with reset function have not yet been initialized. Hence, power-on does
not guarantee out-pin levels, I/O settings or contents of registers. Device is not initialized until the
reset signal is received. Reset operation must be executed immediately after power-on for devices
having reset function.
60
Data Sheet U14373EJ3V0DS
Page 61

µµµµ
PD77113A, 77114
Regional Information
Some information contained in this document may vary from country to country. Before using any NEC
product in your application, pIease contact the NEC office in your country to obtain a list of authorized
representatives and distributors. They will verify:
•
Device availability
•
Ordering information
•
Product release schedule
•
Availability of related technical literature
•
Development environment specifications (for example, specifications for third-party tools and
components, host computers, power plugs, AC supply voltages, and so forth)
•
Network requirements
In addition, trademarks, registered trademarks, export restrictions, and other legal issues may also vary
from country to country.
NEC Electronics Inc. (U.S.)
Santa Clara, California
Tel: 408-588-6000
800-366-9782
Fax: 408-588-6130
800-729-9288
NEC Electronics (Germany) GmbH
Duesseldorf, Germany
Tel: 0211-65 03 02
Fax: 0211-65 03 490
NEC Electronics (UK) Ltd.
Milton Keynes, UK
Tel: 01908-691-133
Fax: 01908-670-290
NEC Electronics Italiana s.r.l.
Milano, Italy
Tel: 02-66 75 41
Fax: 02-66 75 42 99
NEC Electronics (Germany) GmbH
Benelux Office
Eindhoven, The Netherlands
Tel: 040-2445845
Fax: 040-2444580
NEC Electronics (France) S.A.
Velizy-Villacoublay, France
Tel: 01-30-67 58 00
Fax: 01-30-67 58 99
NEC Electronics (France) S.A.
Madrid Office
Madrid, Spain
Tel: 91-504-2787
Fax: 91-504-2860
NEC Electronics (Germany) GmbH
Scandinavia Office
Taeby, Sweden
Tel: 08-63 80 820
Fax: 08-63 80 388
NEC Electronics Hong Kong Ltd.
Hong Kong
Tel: 2886-9318
Fax: 2886-9022/9044
NEC Electronics Hong Kong Ltd.
Seoul Branch
Seoul, Korea
Tel: 02-528-0303
Fax: 02-528-4411
NEC Electronics Singapore Pte. Ltd.
United Square, Singapore
Tel: 65-253-8311
Fax: 65-250-3583
NEC Electronics Taiwan Ltd.
Taipei, Taiwan
Tel: 02-2719-2377
Fax: 02-2719-5951
NEC do Brasil S.A.
Electron Devices Division
Guarulhos-SP Brasil
Tel: 55-11-6462-6810
Fax: 55-11-6462-6829
Data Sheet U14373EJ3V0DS
J00.7
61
Page 62

µµµµ
PD77113A, 77114
The export of this product from Japan is regulated by the Japanese government. To export this product may be prohibited
without governmental license, the need for which must be judged by the customer. The export or re-export of this product
from a country other than Japan may also be prohibited without a license from that country. Please call an NEC sales
representative.
•
The information in this document is current as of January, 2001. The information is subject to
change without notice. For actual design-in, refer to the latest publications of NEC's data sheets or
data books, etc., for the most up-to-date specifications of NEC semiconductor products. Not all
products and/or types are available in every country. Please check with an NEC sales representative
for availability and additional information.
•
No part of this document may be copied or reproduced in any form or by any means without prior
written consent of NEC. NEC assumes no responsibility for any errors that may appear in this document.
•
NEC does not assume any liability for infringement of patents, copyrights or other intellectual property rights of
third parties by or arising from the use of NEC semiconductor products listed in this document or any other
liability arising from the use of such products. No license, express, implied or otherwise, is granted under any
patents, copyrights or other intellectual property rights of NEC or others.
•
Descriptions of circuits, software and other related information in this document are provided for illustrative
purposes in semiconductor product operation and application examples. The incorporation of these
circuits, software and information in the design of customer's equipment shall be done under the full
responsibility of customer. NEC assumes no responsibility for any losses incurred by customers or third
parties arising from the use of these circuits, software and information.
•
While NEC endeavours to enhance the quality, reliability and safety of NEC semiconductor products, customers
agree and acknowledge that the possibility of defects thereof cannot be eliminated entirely. To minimize
risks of damage to property or injury (including death) to persons arising from defects in NEC
semiconductor products, customers must incorporate sufficient safety measures in their design, such as
redundancy, fire-containment, and anti-failure features.
•
NEC semiconductor products are classified into the following three quality grades:
"Standard", "Special" and "Specific". The "Specific" quality grade applies only to semiconductor products
developed based on a customer-designated "quality assurance program" for a specific application. The
recommended applications of a semiconductor product depend on its quality grade, as indicated below.
Customers must check the quality grade of each semiconductor product before using it in a particular
application.
"Standard": Computers, office equipment, communications equipment, test and measurement equipment, audio
and visual equipment, home electronic appliances, machine tools, personal electronic equipment
and industrial robots
"Special": Transportation equipment (automobiles, trains, ships, etc.), traffic control systems, anti-disaster
systems, anti-crime systems, safety equipment and medical equipment (not specifically designed
for life support)
"Specific": Aircraft, aerospace equipment, submersible repeaters, nuclear reactor control systems, life
support systems and medical equipment for life support, etc.
The quality grade of NEC semiconductor products is "Standard" unless otherwise expressly specified in NEC's
data sheets or data books, etc. If customers wish to use NEC semiconductor products in applications not
intended by NEC, they must contact an NEC sales representative in advance to determine NEC's willingness
to support a given application.
(Note)
(1) "NEC" as used in this statement means NEC Corporation and also includes its majority-owned subsidiaries.
(2) "NEC semiconductor products" means any semiconductor product developed or manufactured by or for
NEC (as defined above).
M8E 00. 4
 Loading...
Loading...