

Datasheet UPD70433R-12, UPD70433R-16, UPD70433GJ-16-3EB, UPD70433GJ-12-3EB, UPD70433GD-16-5BB Datasheet (NEC)
...Page 1
DATA SHEET
MOS INTEGRATED CIRCUIT
µ
PD70433
V55PI
TM
16-BIT MICROPROCESSOR
DESCRIPTION
The µPD70433 (V55PI) is a microprocessor in which a 16-bit CPU, RAM, serial interface, parallel interface, A/D
converter, timers, DMA controller, interrupt controller, etc., are integrated in a single chip.
The V55PI is software-compatible with the µPD70320 and 70330 (V25TM and V35TM) single-chip microcontrollers. The
V55PI provides a migration path from the V25. It offers higher-level functions and higher performance, and is particularly
suitable for control of data processing systems associated with mechanical control, including printer and facsimile.
Detailed functions are described in the following user’s manuals, which should be read when carrying out
design work.
• V55PI User’s Manual Hardware : U10514E
• V55PI User’s Manual Instruction : U10231E
FEATURES
• Internal 16-bit architecture, selectable external data bus width (16/8 bits)
TM
• Software compatible with V20
• Minimum instruction cycle: 160 ns/12.5 MHz (external 25 MHz)
• Address space: 16M bytes: 1-Mbyte basic memory space
• Register file space (in on-chip RAM) : 512 bytes/16 register banks
• I/O space : 64K bytes
• Automatic wait control with memory space divided in variable sizes (max. 6 blocks)
• I/O line (input ports: 11 bits, input/output ports: 42 bits)
• DMA controller (DMAC): Max. 4-channel configuration possible
• Four DMA transfer modes (single transfer, demand release, single step, burst)
• Intelligent DMA modes 1 and 2
• Serial interface: 2 channels
• Asynchronous mode (UART) or clocked mode (CSI) selectable
• Parallel interface: 8 bits
• Centronics data input/output and general-purpose data input/output
• A/D converter (8 bits): 4 channels
• Real-time output port: 4 bits × 2 channels or 8 bits × 1 channel
• PMW (Pulse Width Modulation) output function : 8 bits
and V30TM (native mode) and V25 and V35 (includes additional instructions)
125 ns/16 MHz (external 32 MHz)
16-Mbyte extended memory space
Document No. U11775EJ4V0DS00 (4th edition)
Previous No. IC-8257
Date Published November 1996 P
Printed in Japan
The information in this document is subject to change without notice.
The mark shows major revised points.
©
1995
Page 2
• Interrupt controller
• Programmable priority (4 levels)
• Three interrupt servicing methods
Vectored interrupt function, register bank switching function, macro service function
• 16-bit timer: 4 channels
• Watchdog timer function
• Software interval timer (16 bits)
• Address field wait insertion function and RAS/CAS switchover timing generation function
• DRAM and pseudo-SRAM refresh functions
• Standby functions (STOP mode, HALT mode)
• On-chip clock generator
APPLICATIONS
• Control of data processing systems using serial or parallel communication
(Data processing terminals, printer, G3 facsimile, etc.)
ORDERING INFORMATION
µ
PD70433
Part Number Package
µ
PD70433GD-12-5BB 120-pin plastic QFP (28 × 28 mm) 12.5
µ
PD70433GD-16-5BB 120-pin plastic QFP (28 × 28 mm) 16
µ
PD70433R-12 132-pin ceramic PGA 12.5
µ
PD70433R-16 132-pin ceramic PGA 16
µ
PD70433GJ-12-3EB 120-pin plastic QFP (fine pitch) (20 × 20 mm) 12.5
µ
PD70433GJ-16-3EB 120-pin plastic QFP (fine pitch) (20 × 20 mm) 16
Maximum Operating
Frequency (MHz)
2
Page 3
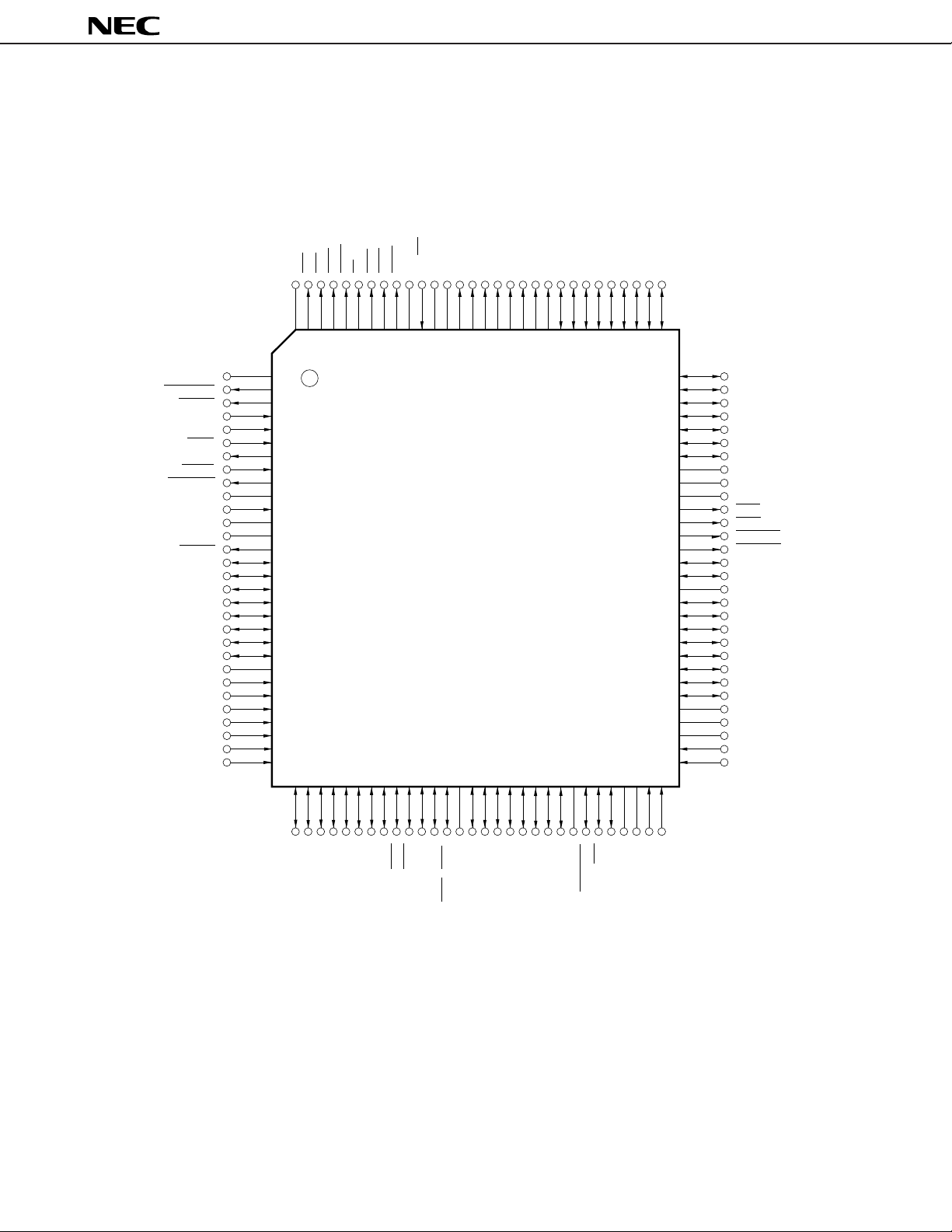
PIN CONFIGURATION (TOP VIEW)
(1) 120-Pin Plastic QFP (28 × 28 mm), 120-pin plastic QFP (fine pitch) (20 × 20 mm)
µ
PD70433GD-xx-5BB
µ
PD70433GJ-xx-3EB
OPEN
DEX
RAS
IORD
IOWRRDWRL
WRH
ASTB
IC (L)
D8/D16
GND
VDDA23
A22
A21
A20
A19
A18
A17
A16
AD15
AD14
AD13
AD12
AD11
AD10
AD9
AD8
AD7
µ
PD70433
V
BUSLOCK
HLDAK
HLDRQ
READY
POLL
CLKOUT
RESET
WDTOUT
V
X1
X2
GND
REFRQ
P00
P01
P02
P03
P04
P05
P06
P07
GND
P10/NMI
P11/INTP0
P12/INTP1
P13/INTP2
P14/INTP3/TI
P15/INTP4
P16/INTP5
119
117
115
113
111
109
107
105
103
120
118
116
114
112
110
108
106
DD
DD
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
313233343536373839404142434445464748495051525354555657585960
104
101
102
1009998979695949392
91
90
89
88
87
86
85
84
83
82
81
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
AD6
AD5
AD4
AD3
AD2
AD1
AD0
IC (H)
GND
V
DD
TCE1
TCE0
DMAAK1
DMAAK0
P81/DMARQ1
P80/DMARQ0
V
DD
P77/RTPT7
P76/RTPT6
P75/RTPT5
P74/RTPT4
P73/RTPT3
P72/RTPT2
P71/RTPT1
P70/RTPT0
GND
AV
DD
AV
REF
P63/ANI3
P62/ANI2
SS
DD
V
AV
P51/ACK
P52/BUSY
P50/DATASTB
P60/ANI0
P61/ANI1
P20/PWM
P21/TO00
P22/TO01
P23/TO20
P24/TO21
P25/TO30
C/SCK0
X
P33/CTS0
D0/SB1/SI0
X
D0/SB0/SO0
X
P32/T
P31/R
P30/T
DD
V
D1/SI1
X
D1/SO1
X
P35/R
P34/T
P36/SCK1/CTS1
P40/PD0
P41/PD1
P42/PD2
P43/PD3
P44/PD4
P45/PD5
GND
P46/PD6
P47/PD7
Remark IC: Internally Connected
Notes 1. The IC (H) pin should be connected to VDD with an external resistor (1 to 10 kΩ).
2. The IC (L) pin should be connected to GND with an external resistor (1 to 10 k
Ω).
3. No connection should be made to the OPEN pin.
3
Page 4
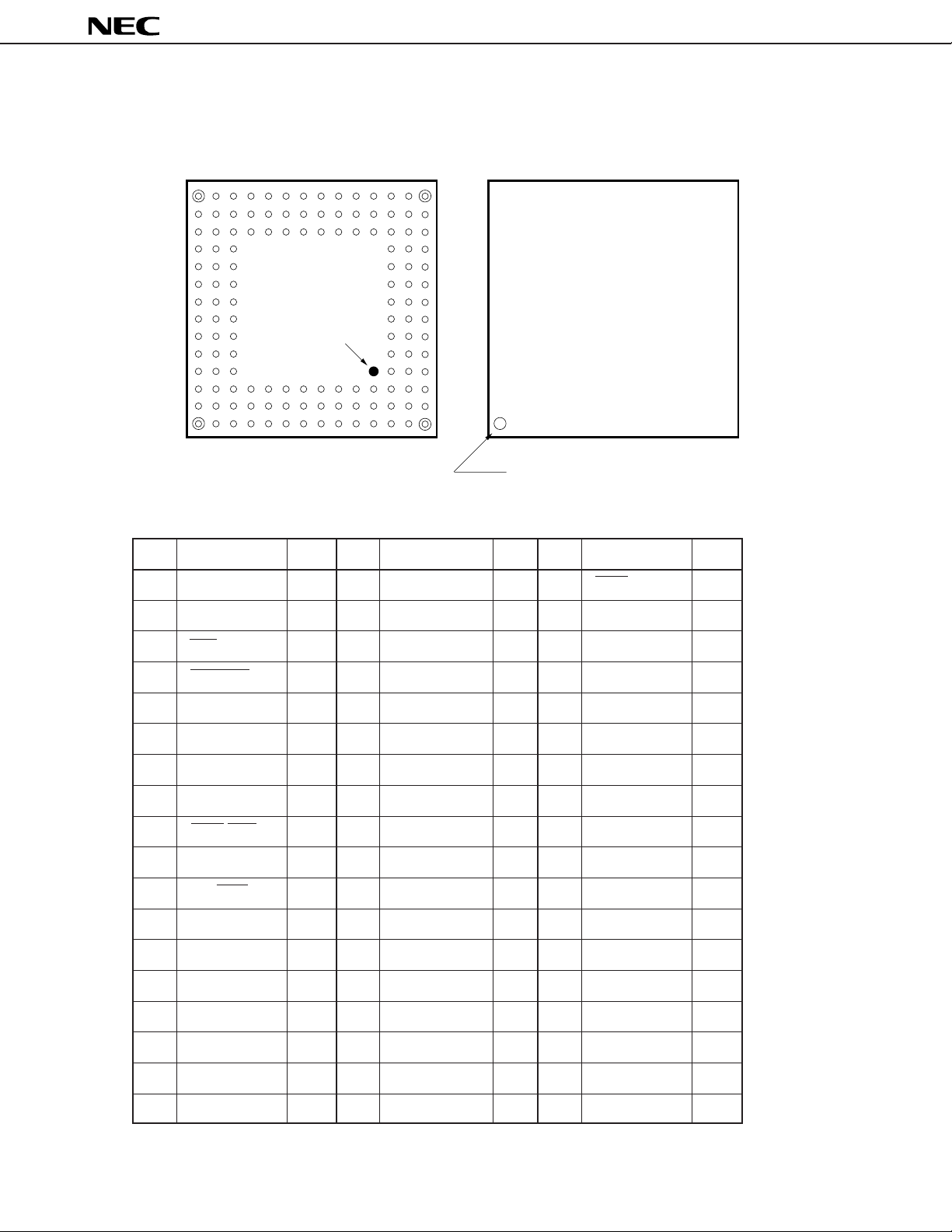
(2) 132-Pin Ceramic PGA
µ
PD70433R-xx
Bottom View
Locator Pin
µ
PD70433
Top View
14
13
12
11
10
9
8
7
6
5
4
3
2
1
ABCDEFGHJKLMNP
Index Mark
PNMLKJHGFEDCBA
Remark The locator pin is not included in the pin count.
No. Signal Nane Port No. Signal Name Port No. Signal Name Port
A1 ANI1 P61 B5 PD7 P47 C9 CTS0 P33
A2 AVSS –– B6 PD5 P45 C10 TO30 P25
A3 ACK P51 B7 PD2 P42 C11 TO00 P21
A4 DATASTB P50 B8 PD0 P40 C12 NC ––
A5 PD6 P46 B9 RXD1/SI1 P35 C13 INTP4 P15
A6 PD4 P44 B10 RXD0/SB1/SI0 P31 C14 INTP0 P11
A7 PD1 P41 B11 TO21 P24 D1 RTPT2 P72
A8 NC –– B12 TO01 P22 D2 GND ––
A9 SCK1/CTS1 P36 B13 NC –– D3 ANI3 P63
A10 TXD1/SO1 P34 B14 INTP3/TI P14 D12 INTP5 P16
A11 TXC/SCK0 P32 C1 RTPT1 P71 D13 INTP2 P13
A12 TXD0/SB0/SO0 P30 C2 AVREF –– D14 NMI P10
A13 TO20 P23 C3 NC –– E1 RTPT5 P75
A14 PWM P20 C4 NC –– E2 RTPT3 P73
B1 AVDD –– C5 VDD –– E3 RTPT0 P70
B2 ANI2 P62 C6 GND –– E12 INTP1 P12
B3 ANI0 P60 C7 PD3 P43 E13 GND ––
B4 BUSY P52 C8 VDD –– E14 –– P06
4
Page 5
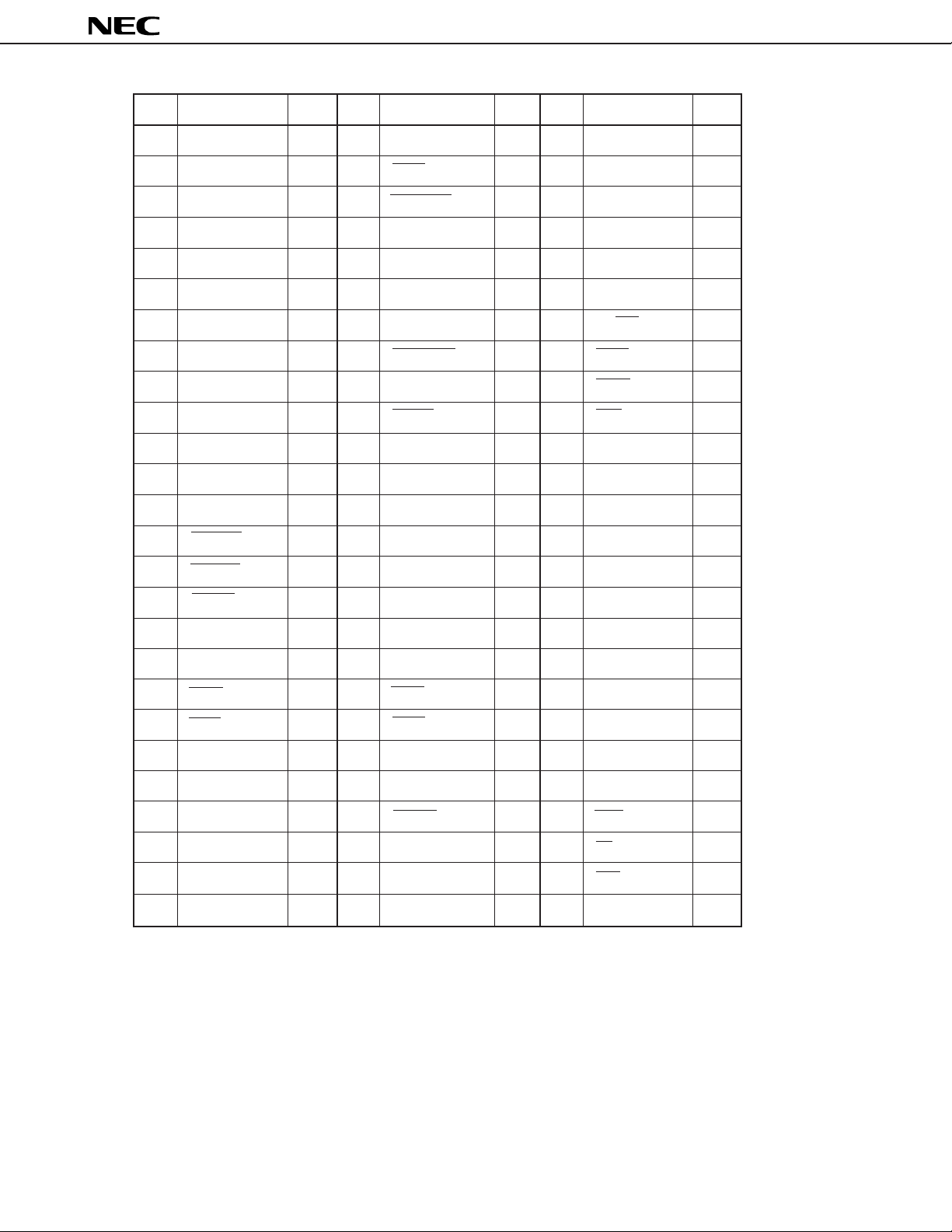
No. Signal Nane Port No. Signal Name Port No. Signal Name Port
F1 RTPT7 P77 K3 AD2 ––– N3 AD9 –––
F2 RTPT6 P76 K12 POLL ––– N4 AD11 –––
F3 RTPT4 P74 K13 WDTOUT ––– N5 AD14 –––
F12 ––– P07 K14 X1 ––– N6 A18 –––
F13 ––– P05 L1 AD0 ––– N7 A21 –––
F14 ––– P04 L2 AD3 ––– N8 A23 –––
G1 NC ––– L3 AD6 ––– N9 D8/D16 –––
G2 DMARQ0 P80 L12 BUSLOCK ––– N10 ASTB –––
G3 VDD ––– L13 READY ––– N11 IOWR –––
G12 ––– P03 L14 RESET ––– N12 DEX –––
G13 ––– P02 M1 AD1 ––– N13 VDD –––
G14 ––– P01 M2 AD5 ––– N14 HLDRQ –––
µ
PD70433
H1 DMARQ1 P81 M3 NC ––– P1 AD7 –––
H2 DMAAK0 ––– M4 AD8 ––– P2 AD10 –––
H3 DMAAK1 ––– M5 AD12 ––– P3 AD13 –––
H12 REFRQ ––– M6 A16 ––– P4 AD15 –––
H13 ––– P00 M7 A20 ––– P5 A17 –––
H14 NC ––– M8 V DD ––– P6 A19 –––
J1 TCE0 ––– M9 WRH ––– P7 NC –––
J2 TCE1 ––– M10 IORD ––– P8 A22 –––
J3 GND ––– M11 NC ––– P9 GND –––
J12 VDD ––– M12 NC ––– P10 IC (L) –––
J13 X2 ––– M13 HLDAK ––– P11 WRL –––
J14 GND ––– M14 CLKOUT ––– P12 RD –––
K1 VDD ––– N1 AD4 ––– P13 RAS –––
K2 IC (H) ––– N2 NC ––– P14 OPEN –––
Remark IC: Internally Connected
NC: Non-Connection
Notes 1. The IC (H) pin should be connected to V
2. The IC (L) pin should be connected to GND with an external resistor (1 to 10 k
3. No connection should be made to the OPEN pin.
DD with an external resistor (1 to 10 kΩ).
Ω).
5
Page 6
6
T
R
X
D0/SB0/SO0
V
DD
GND
GENERAL
REGISTERS
&
DATA MEMORY
512 BYTES
ALU
EXU
X
D0/SB1/SI0
T
X
C/SCK0
CTS0
R
X
D1/SI1
CTS1/SCK1
T
X
D1/SO1
PD0–PD7
DATASTB
8
ACK
BUSY
ANI0–ANI3
AV
AV
DD
SS
4
AV
REF
X2
X1
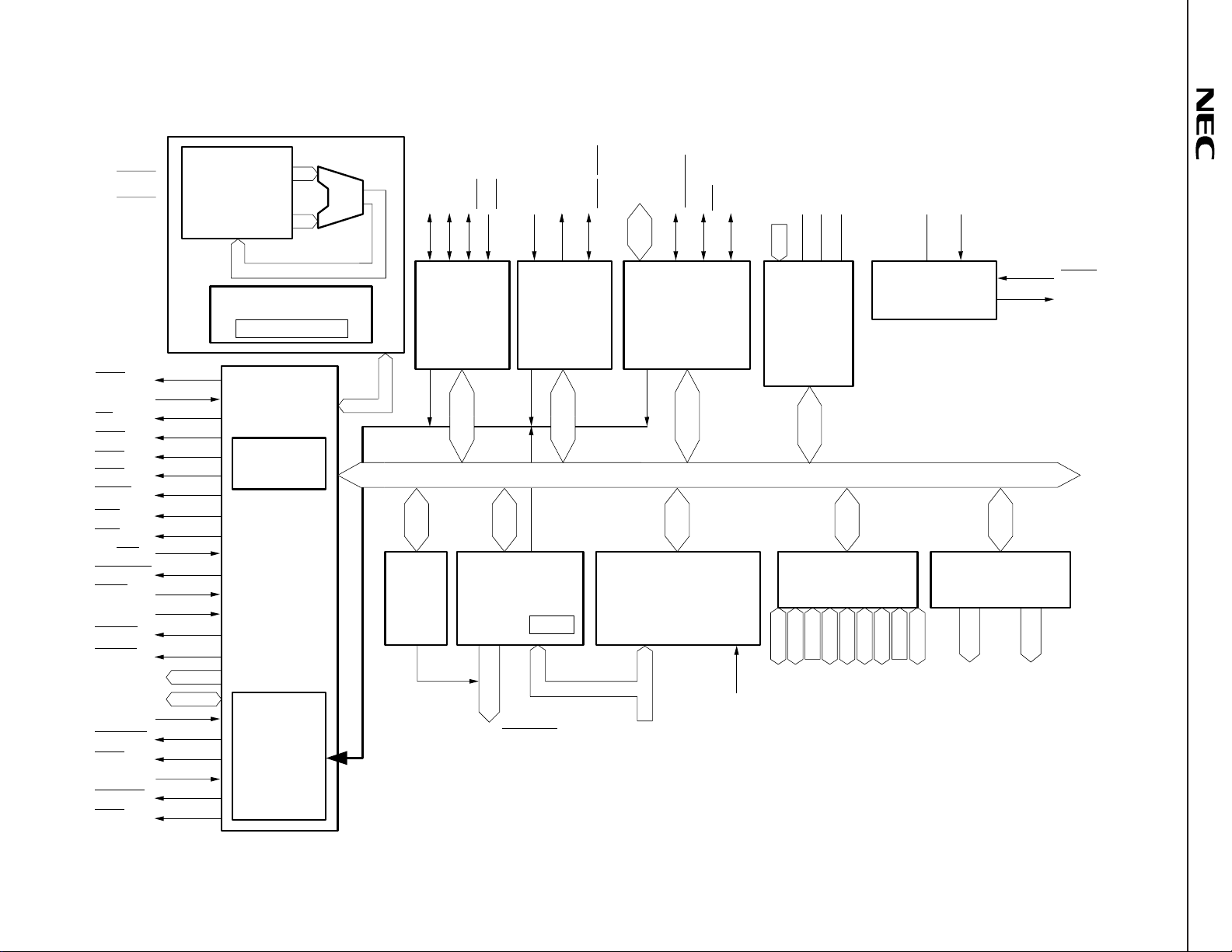
INTERNAL BLOCK DIAGRAM
ASTB
READY
RD
WRH
WRL
IORD
IOWR
RAS
DEX
D8/D16
BUSLOCK
POLL
HLDRQ
HLDAK
REFRQ
A16–A23
AD0–AD15
DMARQ0
DMAAK0
TCE0
DMARQ1
DMAAK1
TCE1
MICRO SEQUENCE
CONTROL
MICRO ROM
BCU
PREFETCH
QUEUE
6 BYTES
BUS
CONTROL
&
PREFETCH
CONTROL
DMAC
DMA
request
PWM
UNIT
• PWM
• TO00
• TO20
• TO03
TIMER/
COUNTER
UNIT
WDT
• WDTOUT
• TO01
• TO21
PIUUART/CSIUART/CSI
PROGRAMMABLE
INTERRUPT
CONTROLLER
64
• INTP0
• INTP1
• INTP2
• INTP3/TI
• INTP4
• INTP5
NMI
8-BIT
A/D
PORT7
PORT8
SYSTEM
CONTROL
PORT RTOP
PORT0
PORT1
PORT2
PORT3
PORT4
PORT5
PORT6
RTP4–RTP7
RESET
CLKOUT
44876783482
RTP0–RTP3
µ
PD70433
Page 7
µ
PD70433
CONTENTS
1. PIN FUNCTIONS ....................................................................................................................................... 1 0
1.1 LIST OF PIN FUNCTION .................................................................................................................................... 10
1.1.1 Port Pins ................................................................................................................................................ 10
1.1.2 Non-Port Pins........................................................................................................................................11
2. BLOCK CONFIGURATION....................................................................................................................... 14
2.1 BUS CONTROL UNIT (BCU) ............................................................................................................................. 14
2.2 EXECUTION UNIT (EXU)...................................................................................................................................14
2.3 INTERRUPT CONTROLLER (INTC) .................................................................................................................1 4
2.4 DMA CONTROLLER (DMAC) ........................................................................................................................... 14
2.5 UART/CLOCKED SERIAL INTERFACE (UART/CSI)......................................................................................1 4
2.6 PARALLEL INTERFACE UNIT (PIU)................................................................................................................14
2.7 A/D CONVERTER UNIT (8-BIT A/D) ................................................................................................................ 14
2.8 TIMER/COUNTER UNIT (TCU) .........................................................................................................................14
2.9 PWM (PULSE WIDTH MODULATION) UNIT (PWM).......................................................................................14
2.10 WATCHDOG TIMER (WDT) ..............................................................................................................................14
2.11 PORTS (PORT)................................................................................................................................................... 14
2.12 REAL-TIME OUTPUT PORT (RTOP)................................................................................................................ 14
2.13 CLOCK GENERATOR (CG) .............................................................................................................................. 15
2.14 SOFTWARE INTERVAL TIMER (SIT) ..............................................................................................................15
3. CPU FUNCTIONS....................................................................................................................................... 16
3.1 FEATURES .......................................................................................................................................................... 16
3.2 REGISTERS .........................................................................................................................................................17
3.2.1 Register Banks ...................................................................................................................................... 17
3.2.2 General Registers (AW, BW, CW, DW) .............................................................................................. 19
3.2.3 Pointers (SP, BP) and Index Registers (IX, IY) ................................................................................. 20
3.2.4 Segment Registers (PS, SS, DS0, DS1) ............................................................................................. 20
3.2.5 Extended Segment Registers (DS2, DS3) .........................................................................................21
3.2.6 Special Function Registers (SFR)......................................................................................................22
3.3 PROGRAM COUNTER (PC) ..............................................................................................................................23
3.4 PROGRAM STATUS WORDS (PSW) ...............................................................................................................23
3.5 MEMORY SPACE ...............................................................................................................................................2 4
3.5.1 Basic Memory Space ...........................................................................................................................24
3.5.2 Extended Memory Space..................................................................................................................... 25
3.5.3 Special Function Register Area .......................................................................................................... 26
3.5.4 Vector Table Area.................................................................................................................................34
3.6 REGISTER FILE SPACE ..................................................................................................................................... 36
3.7 I/O SPACE .......................................................................................................................................................... 38
4. BUS CONTROL FUNCTIONS ....................................................................................................................39
4.1 WAIT FUNCTION ............................................................................................................................................... 39
4.2 REFRESH FUNCTION ........................................................................................................................................ 41
4.2.1 Refresh Mode Register (RFM) ............................................................................................................. 41
4.2.2 Wait Control in Refresh Cycle ............................................................................................................41
4.2.3 Refresh Address ...................................................................................................................................4 1
7
Page 8

µ
PD70433
5. INTERRUPT FUNCTIONS ......................................................................................................................... 42
5.1 FEATURES .........................................................................................................................................................42
5.2 INTERRUPT RESPONSE METHODS ...............................................................................................................45
5.2.1 Vectored Interrupts ..............................................................................................................................4 5
5.2.2 Register Bank Switching Function ....................................................................................................4 6
5.2.3 Macro Service Function....................................................................................................................... 47
6. DMA FUNCTION (DMA CONTROLLER) .................................................................................................. 48
6.1 FEATURES .......................................................................................................................................................... 48
7. SERIAL INTERFACE FUNCTIONS ...........................................................................................................50
7.1 FEATURES .......................................................................................................................................................... 50
7.2 PROTOCOLS .......................................................................................................................................................50
7.3 UART ...................................................................................................................................................................51
7.3.1 Features ................................................................................................................................................. 51
7.4 CLOCKED SERIAL INTERFACE (CSI) ............................................................................................................... 52
7.4.1 Features ................................................................................................................................................. 52
8. PARALLEL INTERFACE FUNCTIONS..................................................................................................... 5 3
8.1 FEATURES .......................................................................................................................................................... 53
9. TIMER FUNCTION ..................................................................................................................................... 55
9.1 FEATURES ..........................................................................................................................................................55
9.2 TIMER UNIT CONFIGURATION ....................................................................................................................... 55
9.3 REAL-TIME OUTPUT PORT FUNCTION .......................................................................................................... 57
9.3.1 Real-Time Output Port Configuration................................................................................................ 57
9.3.2 Real-Time Output Port Operation ...................................................................................................... 59
10. PWM UNIT .................................................................................................................................................. 61
10.1 FEATURES ..........................................................................................................................................................61
10.2 PWM UNIT CONFIGURATION ......................................................................................................................... 61
11. WATCHDOG TIMER FUNCTION ..............................................................................................................6 3
11.1 FEATURES ..........................................................................................................................................................63
11.2 WATCHDOG TIMER CONFIGURATION AND OPERATION .......................................................................... 63
12. A/D CONVERTER FUNCTION ..................................................................................................................64
12.1 FEATURES ..........................................................................................................................................................64
13. STANDBY FUNCTION ...............................................................................................................................66
13.1 HALT MODE ....................................................................................................................................................... 66
13.2 STOP MODE .......................................................................................................................................................67
14. CLOCK GENERATOR ...............................................................................................................................68
14.1 CLOCK GENERATOR CONFIGURATION AND OPERATION......................................................................... 68
8
Page 9

µ
PD70433
15. SOFTWARE INTERVAL TIMER FUNCTION........................................................................................... 7 0
15.1 SOFTWARE INTERVAL TIMER CONFIGURATION ........................................................................................ 70
16. CODEC INSTRUCTION..............................................................................................................................71
16.1 FEATURES ..........................................................................................................................................................71
16.2 MEMORY MAP................................................................................................................................................... 74
16.3 PROCESSING FLOW ......................................................................................................................................... 76
17. INSTRUCTION SET.................................................................................................................................... 78
17.1 INSTRUCTIONS NEWLY ADDED TO V20/V30 AND V25/V35..................................................................... 78
17.2 INSTRUCTION SET OPERATIONS................................................................................................................... 80
17.3 INSTRUCTION SET TABLE ............................................................................................................................. 105
18. ELECTRICAL SPECIFICATIONS ............................................................................................................1 28
19. CHARACTERISTIC CURVES (FOR REFERENCE ONLY) ................................................................... 158
20. PACKAGE DRAWINGS ...........................................................................................................................159
21. RECOMMENDED SOLDERING CONDITIONS ...................................................................................... 162
9
Page 10
µ
PD70433
1. PIN FUNCTIONS
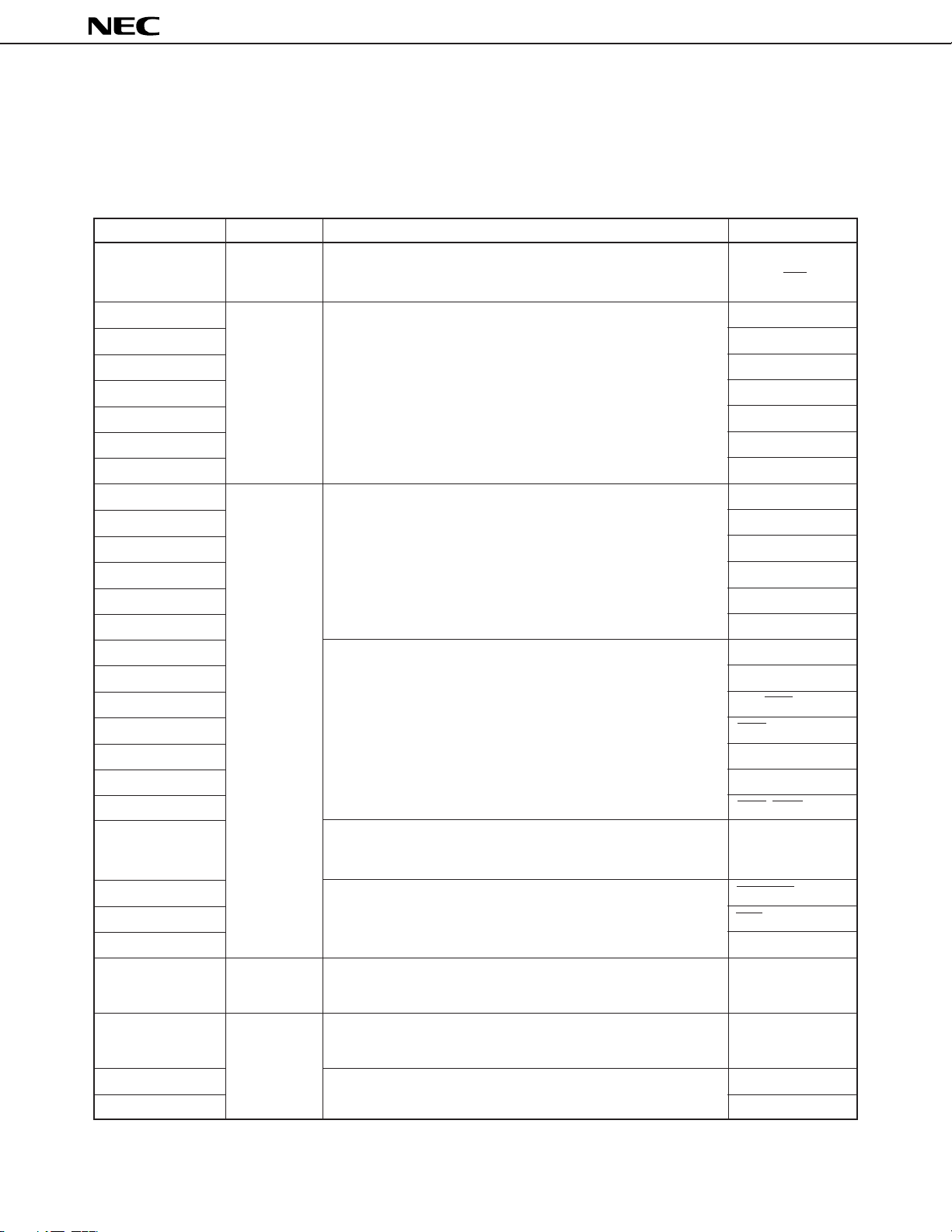
1.1 LIST OF PIN FUNCTIONS
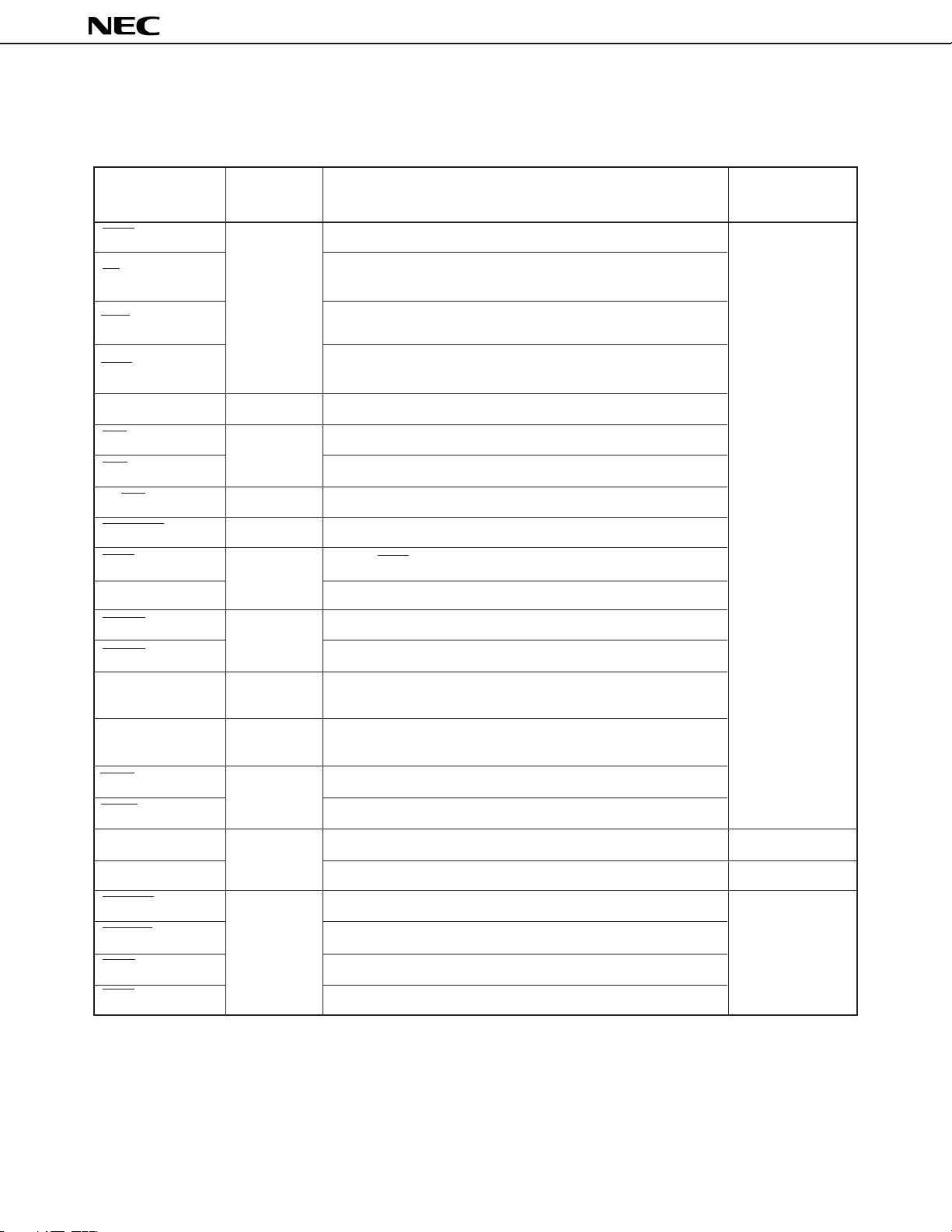
1.1.1 Port Pins
Pin Name Input/Output Function Alternate Function
Port 0
P00 to P07 Input/output
P10* NMI
P11 INTP0
P12 INTP1
P13 INTP2
P14 INTP3/TI
P15 INTP4
P16 INTP5
P20 PWM
P21 TO00
P22 TO01
P23 TO20
P24 TO21
P25 TO30
P30 TxD0/SB0/SO0
P31 RxD0/SB1/SI0
P32 TxC/SCK0
P33 CTS0
P34 TxD1/SO1
P35 RxD1/SI1
P36 CTS1/SCK1
P40 to P47 PD0 to PD7
Input
Input/output
Input/output specifiable bit-wise
8-bit input/output port
Port 1
7-bit input port
Port 2
Input/output specifiable bit-wise
6-bit input/output port
Port 3
Input/output specifiable bit-wise
7-bit input/output port
Port 4
Input/output specifiable bit-wise
8-bit input/output port
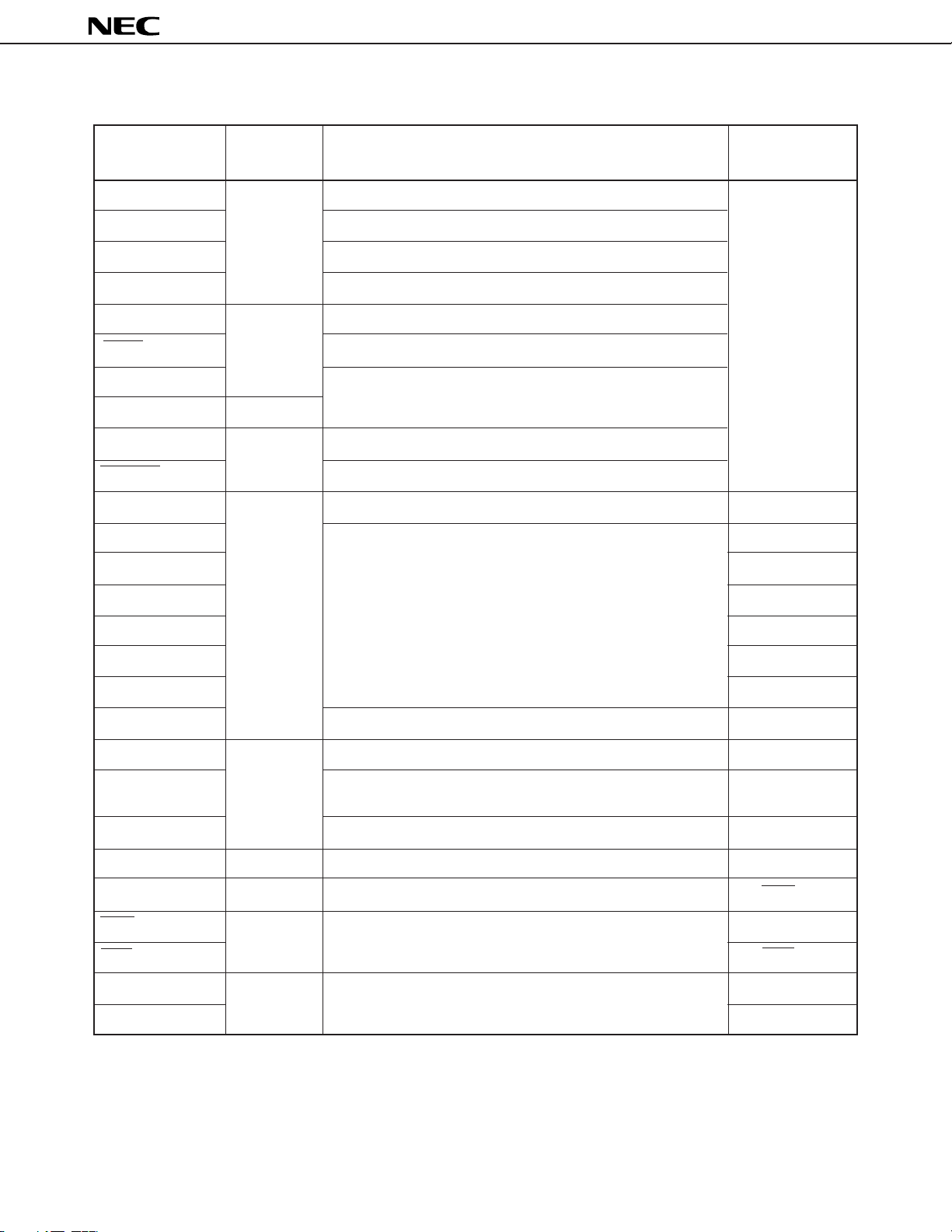
P50 DATASTB
P51 ACK
P52 BUSY
P60 to P63 ANI0 to ANI3
P70 to P77 RTP0 to RTP7
P80 DMARQ0
P81 DMARQ1
Input
Input/output
Port 5
Input/output specifiable bit-wise
3-bit input/output port
Port 6
Input/output specifiable bit-wise
4-bit input/output port
Port 7
Input/output specifiable bit-wise
8-bit input/output port
Port 8
Input/output specifiable bit-wise
2-bit input/output port
* Unusable as general-purpose port (non-maskable interrupt)
10
Page 11
1.1.2 Non-Port Pins
(1) Bus control pins
µ
PD70433
Pin Name Function
ASTB External bus cycle address strobe signal output in external bus
RD
WRL
WRH
READY Input External bus cycle ready signal input in external bus
DEX External bus cycle upper byte data enable signal output
RAS DRAM low address latch timing signal output
D8/D16 Input External bus data bus width selection signal input
BUSLOCK Output External bus bus lock signal output
POLL Input of POLL signal (sampled in POLL instruction execution)
HLDRQ External bus hold request signal input
HLDAK External bus hold acknowledge signal output
REFRQ Refresh pulse signal output
Input/ Alternate
Output Function
External memory cycle data read strobe signal output in
external bus
Output
Output
Input
Output
External memory cycle lower byte data write strobe signal
output in external bus
External memory cycle upper byte data write strobe signal
output in external bus
–––
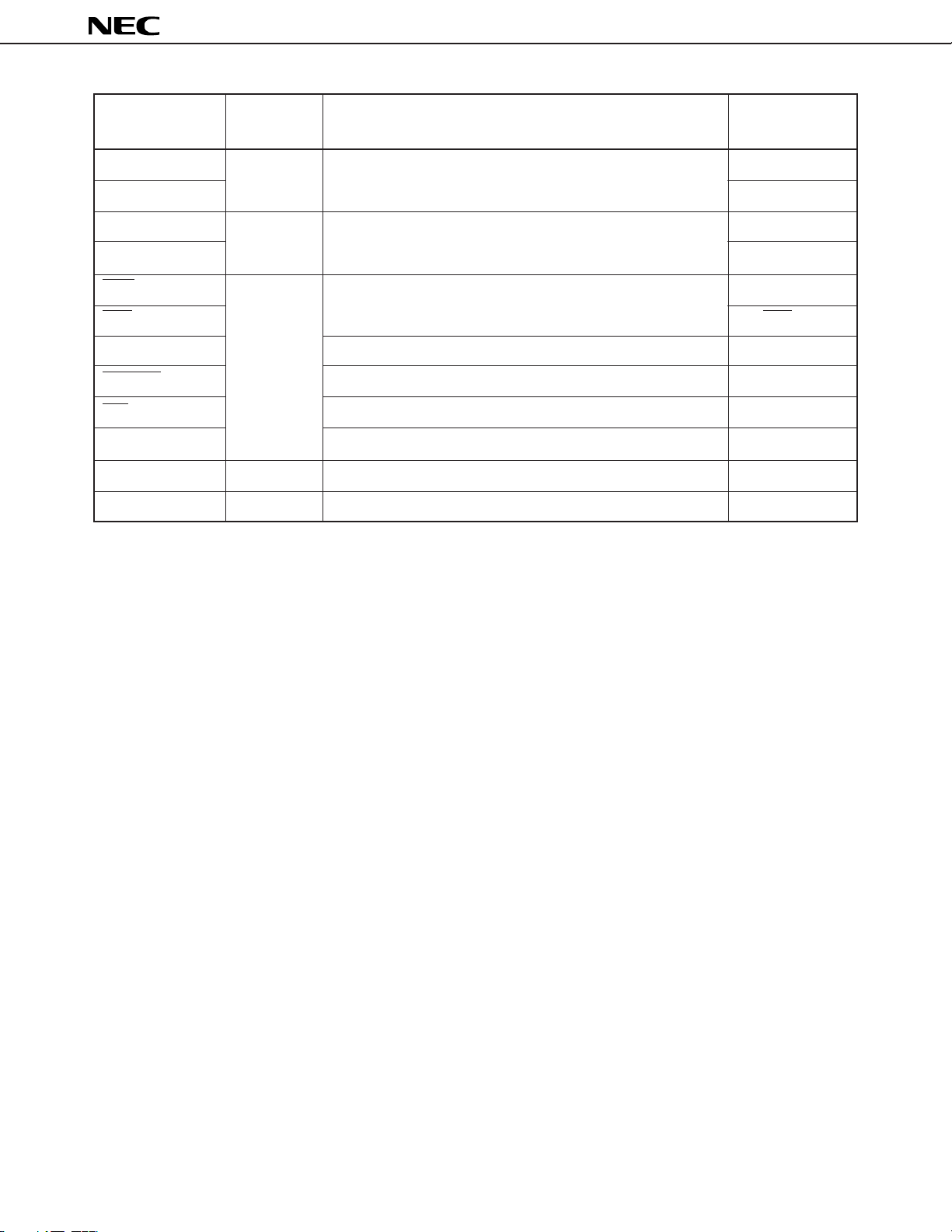
AD0 to AD15
A16 to A23 External bus cycle address signal output in external bus
IORD External I/O cycle data read strobe signal output
IOWR External I/O cycle data write strobe signal output
DMARQ0 DMA request signal input (channel 0) P80
DMARQ1 DMA request signal input (channel 1) P81
DMAAK0 DMA acknowledge signal output (channel 0)
DMAAK1 DMA acknowledge signal output (channel 1)
TCE0 DMA termination signal output (channel 0)
TCE1 DMA termination signal output (channel 1)
3–state External bus cycle address/data multiplex signal input/output
input/output in external bus
3–state
output
Output
Input
Output –––
11
Page 12
(2) Other pins
µ
PD70433
Pin Name Function
GND GND potential
VDD Positive power supply
AVSS A/D converter GND potential
AVDD A/D converter analog power supply
AVREF A/D converter reference voltage input
RESET Input System reset signal input
X1 Connection pins of crystal resonator/ceramic resonator for
X2 ––– to X1 and leave X2 open.
CLKOUT Internal system clock ø output
WDTOUT Watchdog timer overflow signal output
NMI Non-maskable interrupt request input *1 P10
INTP0 P11
INTP1 P12
Input/ Alternate
Output Function
–––
system clock generation. In case of external clock supply, input
Output
–––
INTP2 P13
INTP3 P14/TI
INTP4 P15
INTP5 P16
TI External event clock input P14/INTP3
PWM PWM output P20
TO00, TO01, TO20,
TO21, TO30
TXD0 UART transmission data output P30/SB0/SO0
RXD0 Input UART reception data input P31/SB1/SI0
TXC Output UART transmission clock output P32/SCK0
CTS0 P33
CTS1 P36/SCK1
SB0 P30/TXD0/SO0
SB1 P31/RXD0/SI0
Input External interrupt request input *2
Output Timer unit output P21 to P25
Input UART transmission enable signal input
Input/output SBI transmission/reception data input/output
*1.Because NMI interrupt is unmaskable, NMI interrupt is always initiated by detecting a valid edge (when reading from
port 1, the pin level is read).
2. By masking or disabling (IE = 0) these interrupts, these pins can be used as general–purpose input/output ports,
respectively.
12
Page 13
µ
PD70433
Pin Name Function
SO0 P30/TXD0/SB0
SO1 P34/TXD1
SI0 P31/RXD0/SB1
SI1 P35/RXD1
SCK0 P32/TXC
SCK1 P36/CTS1
PD0 to PD7 Parallel interface — Data input/output P40 to P47
DATASTB Parallel interface — Data strobe signal P50
ACK Parallel interface — Acknowledge signal P51
BUSY Parallel interface — Busy signal P52
ANI0 to ANI3 Input Analog input signal to A/D converter P60 to P63
RTP0 to RTP7 Output Real-time output port P70 to P77
Input/ Alternate
Output Function
Output CSI transmission data output
Input CSI reception data input
CSI serial clock input/output
Input/output
13
Page 14

µ
PD70433
2. BLOCK CONFIGURATION
2.1 BUS CONTROL UNIT (BCU)
The BCU performs control of the main bus. The BCU starts the necessary internal/external bus cycle on the basis of
the physical address obtained from the execution unit (EXU).
2.2 EXECUTION UNIT (EXU)
The EXU controls address calculation, arithmetic and logical operations, data transfer, etc., by means of a microprogram
(firmware for controlling the microsequencer on the basis of decoded op code). The EXU contains 512 bytes of RAM
(corresponding to the register file space).
2.3 INTERRUPT CONTROLLER (INTC)
The INTC services hardware interrupt requests generated by on-chip peripheral hardware and interrupt requests
generated externally with vectored interrupts, bank switching, or macro service. It can also control the programmable 4level interrupt priority order, and can also perform multiprocessing control for interrupt.
2.4 DMA CONTROLLER (DMAC)
The DMAC is a general-purpose DMA controller, capable of handling the 16M-byte memory space in a linear fashion.
Operating modes comprise memory-to-memory transfer mode, intelligent DMA (ring buffer method and counter control
method) mode, next address specification mode, and 2-channel operation.
2.5 UART/CLOCKED SERIAL INTERFACE (UART/CSI)
This block supports the asynchronous interface (UART) in which data synchronization is achieved by means of start/
stop bits, and the clocked serial interface (CSI), allowing either to be used.
For the clocked serial interface there is a further choice of serial bus interface mode (SBI) or 3-wire serial I/O mode.
2.6 PARALLEL INTERFACE UNIT (PIU)
This performs input/output using strobe signal synchronization in 8-bit units, and supports the Centronics interface and
general-purpose parallel data communication functions.
2.7 A/D CONVERTER UNIT (8-BIT A/D)
This is an A/D converter with 4 analog inputs, and provided with 4 A/D conversion result registers.
2.8 TIMER/COUNTER UNIT (TCU)
The timer/counter unit incorporates a 16-bit timer/counter, and can be used as an interval timer, free-running counter,
or event counter.
2.9 PWM (PULSE WIDTH MODULATION) UNIT (PWM)
An 8-bit precision PWM (pulse width modulation) signal output function.
2.10 WATCHDOG TIMER (WDT)
The WDT incorporates an 8-bit watchdog timer for detection of inadvertent program looping, system errors, etc. The
WDTOUT pin is provided to give external notification of the generation of watchdog timer interrupts.
2.11 PORTS (PORT)
53 port pins are provided, allowing port pin and control pin functions to be selected.
2.12 REAL-TIME OUTPUT PORT (RTOP)
This is a real-time output port which uses an interrupt from timer 0 as a trigger. It can output the contents of the 8-bit
buffer register at programmable intervals in 4-bit or 8-bit units.
14
Page 15

µ
PD70433
2.13 CLOCK GENERATOR (CG)
The CG generates a clock at a frequency of 1/2, 1/4, 1/8 or 1/16 that of the crystal and oscillator connected to the X1
and X2 pins and supplies it as the CPU operating clock.
2.14 SOFTWARE INTERVAL TIMER (SIT)
The SIT incorporates a 16-bit software interval timer as a software timer function and watch function timer. Interval
interrupts can be set by input clock (count clock) selection and software timer/counter compare register setting.
15
Page 16
µ
PD70433
3. CPU FUNCTIONS
The CPU of the V55PI is software upword compatible with the V20 and V30 (native mode), and the V25 and V35.
3.1 FEATURES
• Software upward compatible with V20 & V30 (native mode) and V25 & V35 (includes additional instructions)
• Minimum instruction cycle: 160 ns/12.5 MHz (external 25 MHz clock)
125 ns/16 MHz (external 32 MHz clock)
• Address space: 16M bytes 1M-byte basic memory (program) space
16M-byte extended memory (data) space
• Register file space (in on-chip RAM): 512 bytes/16 register banks
• I/O space: 64K bytes
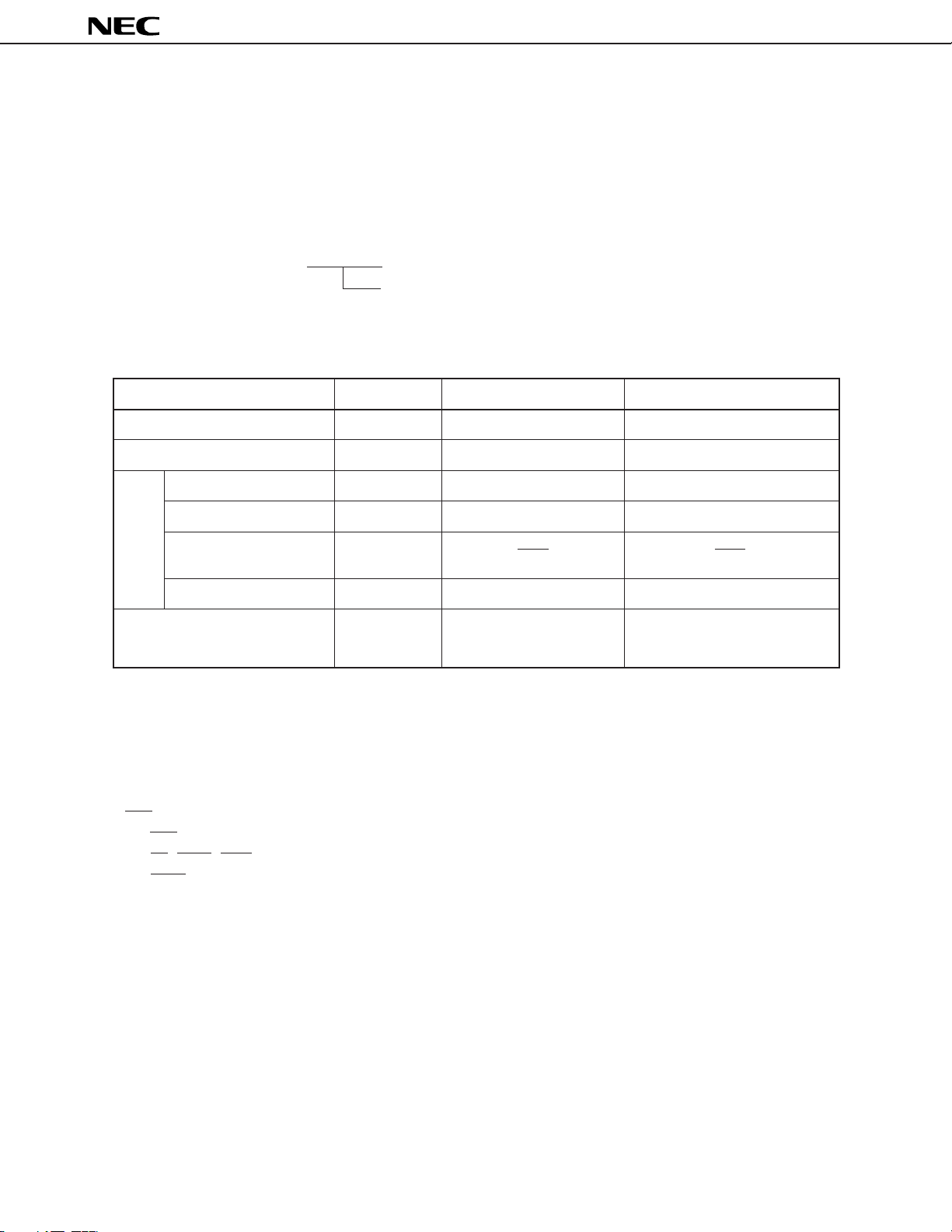
• Register configuration (compared with V20/V30 and V25/V35)
Item V20, V30 V25, V35 V55PI
Extended segment register None None DS2, DS3
Register bank None 8 banks (in memory space) 16 banks (in register file space)
Mode flag MD None None
Register bank flags None RB0 to RB2 RB0 to RB3
PSW
Special function register area None (memory mapping onto (memory mapping onto
Input/output instruction
trap flag
User flag None F0, F1 None
None IBRK IBRK
240 bytes 496 bytes
FFF00H to FFFEFH) FFE00H to FFFEFH)
• Internal 16-bit architecture, switchable external data bus width (16/8 bits)
• Automatic wait control with memory divided in variable sizes (max. 6 blocks)
• Programmable wait function
• Wait function using READY pin
• Refresh function
• Automatic generation of refresh cycle (RAS only)
• RAS pin functions
RAS pin → DRAM RAS timing
RD, WRH, WRL pins → DRAM CAS timing
ASTB pin → DRAM row/column address switching timing
16
Page 17

µ
PD70433
3.2 REGISTERS
The V55PI CPU has general register sets compatible with the V20 and V30 (native mode), and the V25 and V35. The
general register sets are mapped onto the register file space. These general register sets are also used as on-chip RAM,
and there can be a maximum of 16 register sets in bank form.
In addition, the V55PI has various special function registers for controlling on-chip peripheral hardware. These special
function registers are mapped onto memory space addresses 0FFE00H to 0FFFEFH.
3.2.1 Register Banks
The general register sets are mapped onto the register file space (in on-chip RAM). The general register sets are used
in a bank arrangement; each bank consists of 32 bytes and up to 16 banks can be set.
The CPU normally uses register bank 15 for program execution, and it is possible to switch to another bank automatically
by means of maskable hardware interrupt or software interrupt (BRKCS instruction). It is possible to return from the switchedto register bank to the original register bank by means of the instruction for returning from an interrupt (RETRBI).
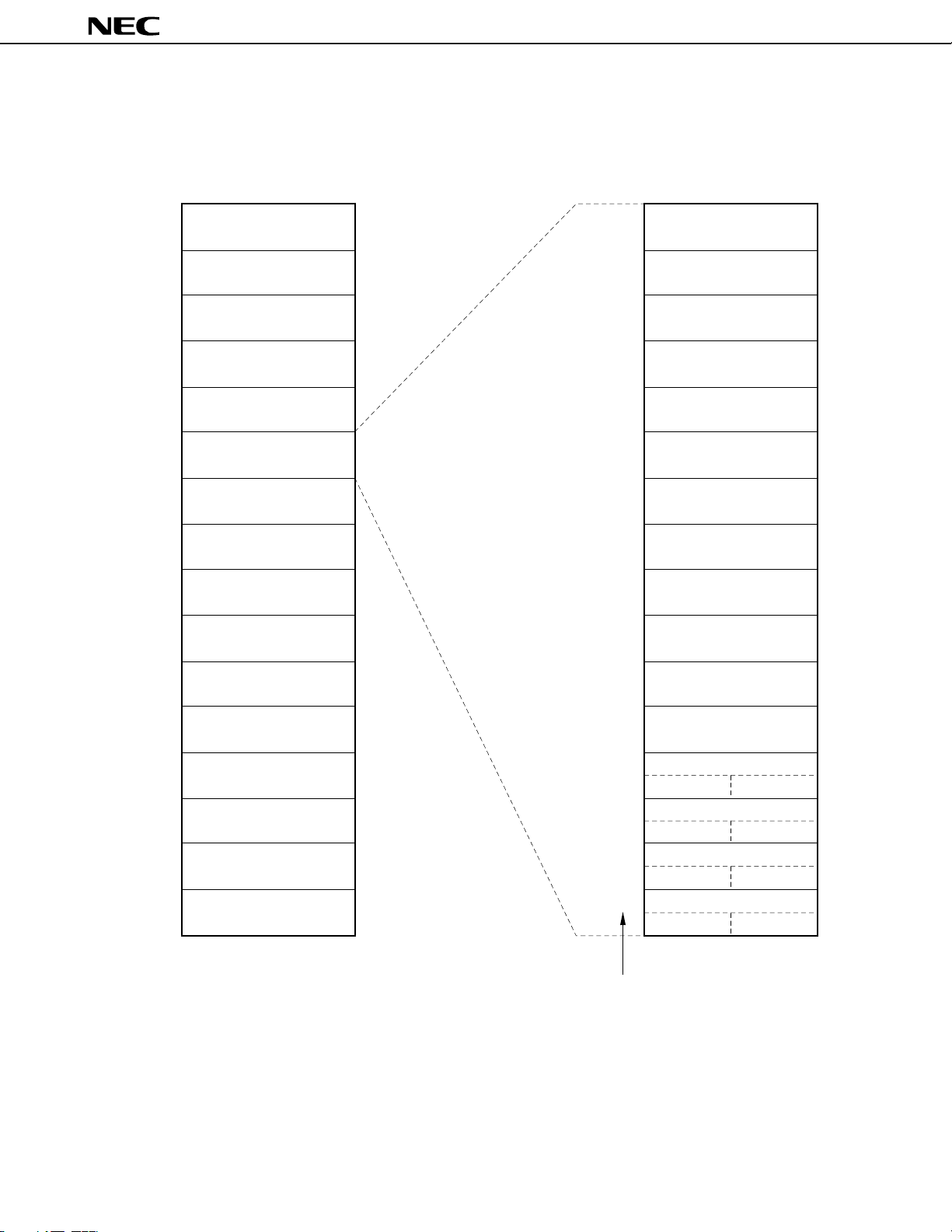
The register bank configuration is shown in Figure 3-1. The general register sets are mapped onto the area with an offset
of (+08H) to (+1FH) from the start address of each register bank. The word address from the start in a register bank is the
extended segment register (DS2) area. The vector PC/DS3 area is used to set the value to be loaded into the PC when
the register bank is switched, that is, the offset value of the start address of the interrupt service routine. This area is also
used as the extended segment register (DS3) area. The PSW save area is used to save the PSW when the register bank
is switched, and the PC save area is used to save the PC when the register bank is switched.
After a reset, register bank 15 is selected automatically. Also, segment register initialization after a reset is performed
for register bank 15 only.
The register file space onto which these general register sets are mapped can also be accessed as data memory by
addition of a special prefix instruction (IRAM:) to a memory manipulation instruction.
Of the 16 set register banks, banks 0 and 1 have macro service channels (parameter and work area for macro service)
allocated in duplicate.
17
Page 18
000H
020H
040H
060H
080H
0A0H
0C0H
0E0H
100H
120H
140H
160H
180H
1A0H
1C0H
1E0H
1FFH
Register Bank 0
10
11
12
13
14
15
Figure 3-1. Register Bank Configuration
Register File Space (512 bytes)
+00H 15 87 0
1
2
3
4
5
6
7
8
9
+02H
+04H
+06H
+08H
+0AH
+0CH
+0EH
+10H
+12H
+14H
+16H
+18H
+1AH
+1CH
+1EH
DS2
Vector PC/DS3
PSW Save
PC Save
DS0
SS
PS
DS1
IY
IX
BP
SP
BW
BH
DW
DH
CW
CH
AW
AH
µ
PD70433
BL
DL
CL
AL
18
(Offset from the starting address of each register bank)
Page 19

µ
PD70433
3.2.2 General Registers (AW, BW, CW, DW)
There are four 16-bit general registers. In addition to being accessed as 16-bit registers, these registers can also be
accessed as 8-bit registers by dividing each register into upper and lower 8-bit halves (AH, AL, BH, BL, CH, CL, DH, DL).
These registers are used as 8-bit or 16-bit registers with a wide range of instructions including transfer, arithmetic and
logical operation instructions.
Each register is also used as the default register for specific instruction processing, as shown below.
AW : Word multiplication/division, word input/output, data conversion
AL : Byte multiplication/division, byte input/output, BCD rotation, data conversion
AH : Byte multiplication/division
BW : Data conversion
CW : Loop control branch, repeat prefix
CL : Shift instructions, rotate instructions, BCD operations
DW : Word multiplication/division, indirect addressing input/output
These registers are mapped onto the register file space (in on-chip RAM). The address is the value obtained by adding
the offset for each register to (register bank number × 32).
Table 3-1. General Register Offsets
Register Offset Register Offset
AW 1EH
BW 18H
CW 1CH
DW 1AH
AL 1EH
AH 1FH
BL 18H
BH 19H
CL 1CH
CH 1DH
DL 1AH
DH 1BH
19
Page 20
µ
PD70433
3.2.3 Pointers (SP, BP) and Index Registers (IX, IY)
These are 16-bit registers used as base pointers or index registers in memory accesses using based addressing (BP),
indexed addressing (IX, IY), based indexed addressing (BP, IX, IY), etc. The SP is also used as the pointer in stack
operations. As with general registers, these are used with transfer instructions, arithmetic operation instructions, etc., but
in this case they cannot be used as 8-bit registers. Each register is also used as the fixed address pointer for specific
instruction processing, as shown below.
SP : Stack manipulation
IX : Block transfers, BCD operation source side address specification
IY : Block transfers, BCD operation destination side address specification
These registers are mapped onto the register file space (in on-chip RAM). The address is the value obtained by adding
the offset for each register to (register bank number × 32).
Table 3-2. Pointer and Index Register Offsets
Register Offset
SP 16H
BP 14H
IX 12H
IY 10H
3.2.4 Segment Registers (PS, SS, DS0, DS1)
The CPU manages the 1M-byte basic memory space by dividing it into 64K-byte units. The CPU specifies the start
address of each segment with a segment register, and uses another register or effective address for the specification of
phyiscal address, with the relative address from the start address as the offset.
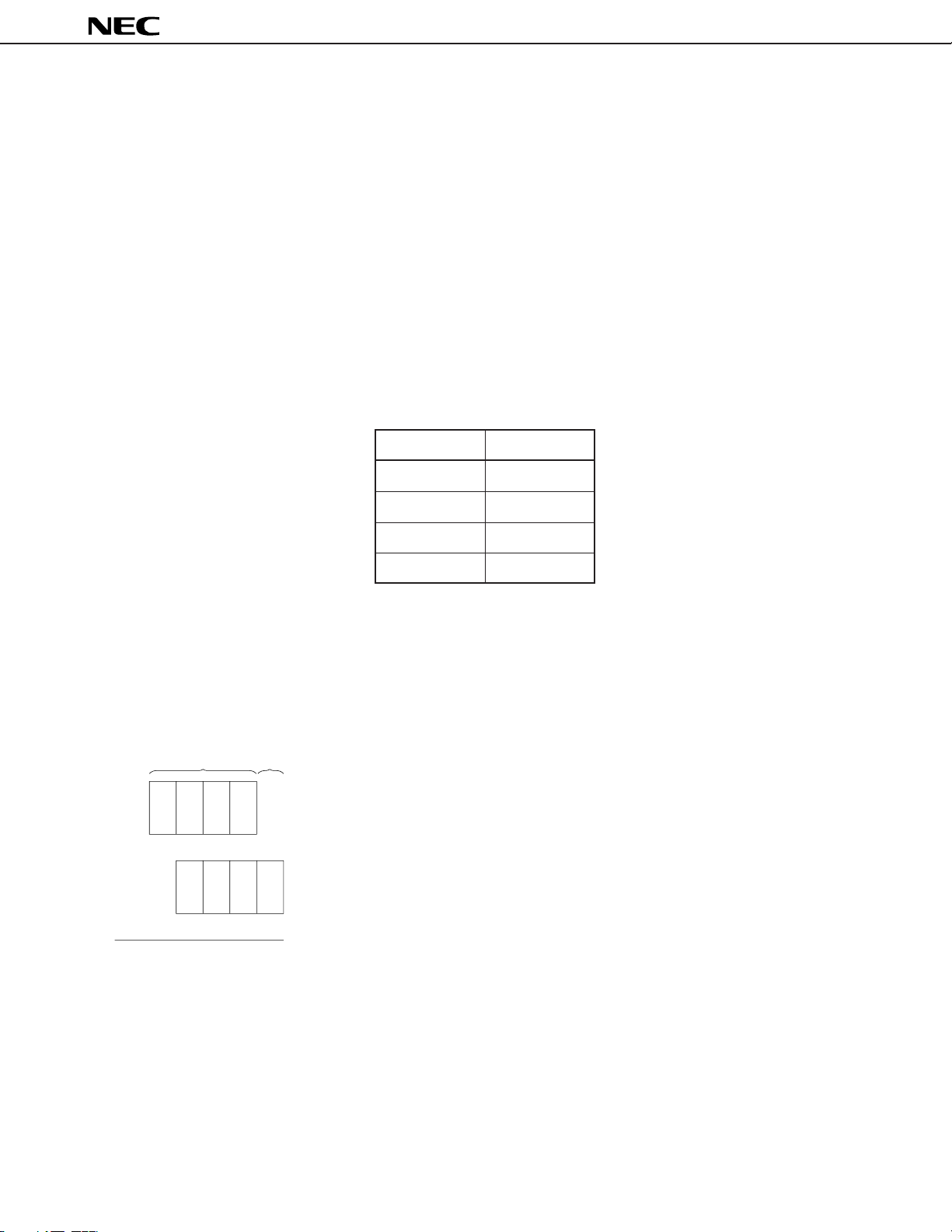
The physical address is created as shown below.
Segment Register 4-Bit Fixed
xxxx0H
0xxxxH
+
.... Segment Start Address
.... Offset Value
xxxxxH
There are four segment registers: PS (Program Segment), SS (Stack Segment), DS0 (Data Segment 0), and DS1 (Data
Segment 1). The respective segments are used in the following cases.
PS : Program fetch
SS : Stack manipulation instructions, addressing using BP as base register
DS0 : General variable accesses, source block data accesses such as block transfer instructions, etc.
DS1 : Destination block data accesses such as block transfer instructions, etc.
..... Physical Address (20 Bits)
20
Page 21
µ
PD70433
However, using a segment override prefix instruction makes it possible for access of general variables to change from
DS0 to another segment register. Also, in addressing which uses BP as the base register, another segment register can
be used instead of SS.
Example MOV AW, 1000H
MOV DS1 : AW
MOV BL, DS1, BYTE PTR [IX]; DSI : Byte data read from IX
When a reset is performed, PS of register bank 15 is initialized to FFFFH, and SS, DS0 and DS1 are initialized to 0000H.
These registers are mapped onto the register file space (in on-chip RAM). The address is the value obtained by adding
the offset for each register to (register bank number × 32).
Table 3-3. Segment Register Offsets
Register Offset
DS0 08H
DS1 0EH
SS 0AH
PS 0CH
3.2.5 Extended Segment Registers (DS2, DS3)
In addition to the segment registers for accessing the 1M-byte basic memory space, the V55PI is provided with extended
segment registers which specify the start address of each 64K-byte segment of the 16M-byte extended memory space.
There are two extended segment registers, DS2 (Data Segment 2) and DS3 (Data Segment 3), which are used as shown
below.
DS2: Extended memory space general variable accesses (by segment override prefix instructions), source block
data accesses in extended memory space block transfer instructions, etc.
DS3: Extended memory space general variable accesses (by segment override prefix instructions), destination
block data accesses in extended memory space block transfer instructions, etc.
The data access using an extended semgnet register is performed by using the segment override prefix. Especially, in
the block transfer instruction, DS2 and DS3 can be specified simultaneously by segment override prefix. (In this case, the
order for DS2 and DS3 is optional.)
Example REP
DS2:
DS3: MOVBKW ; Word memory block transfer from DS2 : IX to DS3 : IY.
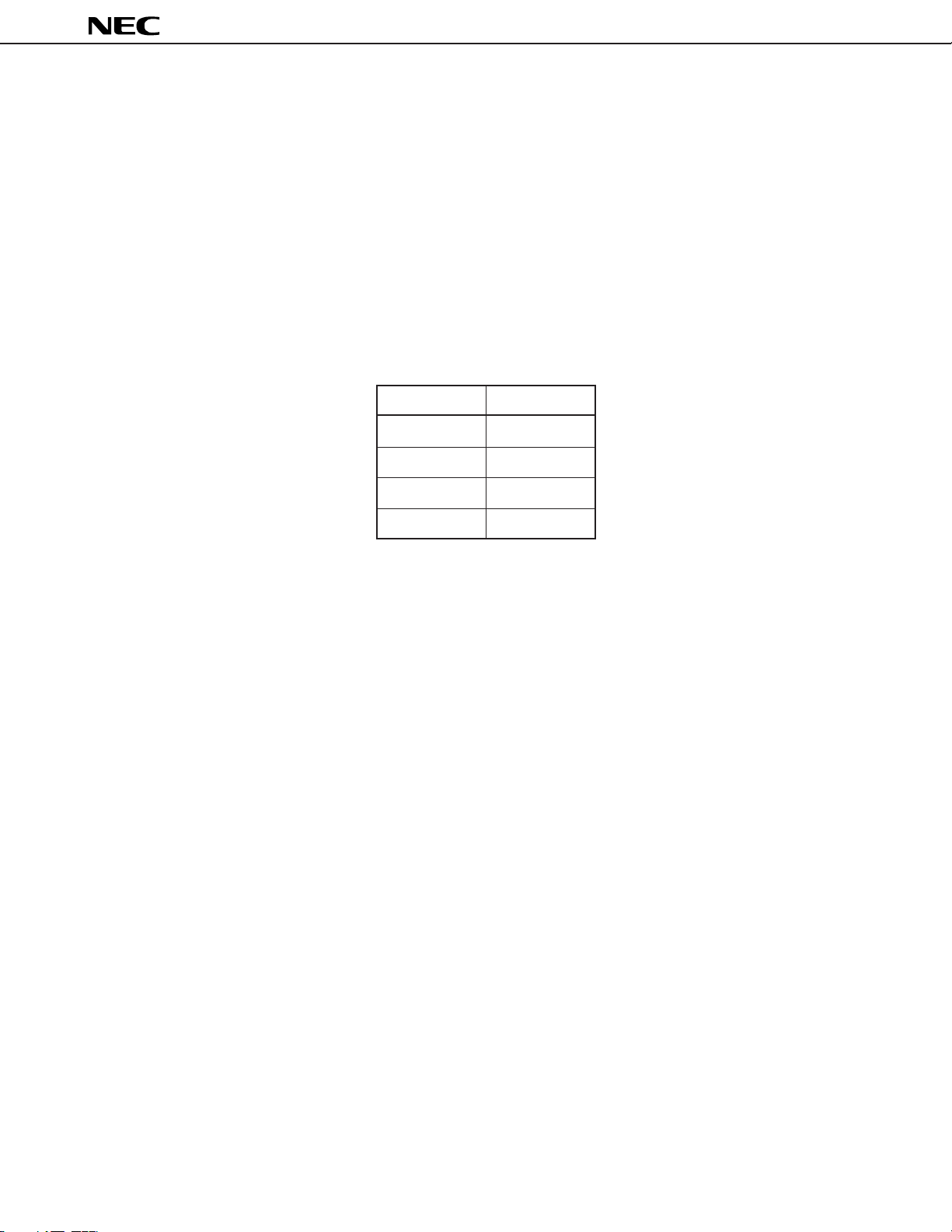
The CPU specifies the start address of each segment with an extended segment register, and performs an access by
using another register or effective address for the specification of physical address, with the relative address from the start
address as the offset value.
The physical address is created as shown in the next page.
21
Page 22
Extended Segment Register 8-Bit Fixed
µ
PD70433
xxxx00H
00xxxxH
+
xxxxxxH
When a reset is performed, DS2 and DS3 of register bank 15 are initialized to 0000H.
These registers are mapped onto the register file space (in on-chip RAM). The address is the value obtained by adding the
offset for each register to (register bank number × 32).
Table 3-4. Extended Segment Register Offsets
Register Offset
... Segment Start Address
... Offset Value
... Physical Address (24 Bits)
DS2 00H
DS3 02H (Also used as vectored PC)
3.2.6 Special Function Registers (SFR)
The V55PI has a group of registers with the function of controlling on-chip peripheral hardware.
A number of registers are provided according to the type of cotrol for each peripheral hardware unit, and the actual
operation can be set using the individual bits in the registers. These registers are mapped onto the memory space, and
are read and written to using the same method as for ordinary memory (see 3.5.3 "Special Function Register Area").
Example MOV AW, 0FFE0H
MOV DS1, AW
MOV BL, DS1 : BYTE PTR [1EFH]; 0FFE0H : 1EFH (PRC register) Read
There are also two instructions, BTCLR and BTCLRL, which are only valid for special function registers. Of these,
BTCLRL is an instruction newly provided in the V25 or V35.
The BTCLR instruction is valid for registers in the upper 240 bytes (0FFF00H to 0FFFEFH) of the special function register
area, and the BTCLRL instruction is valid for registers in the lower 256 bytes (0FFE00H to 0FFEFFH).
22
Page 23
µ
PD70433
3.3 PROGRAM COUNTER (PC)
This is a 16-bit binary counter which holds the offset value of the program memory address on which the CPU is to perform
execution.
The PC is incremented each time an instruction code is fetched from the instruction queue, and is also loaded with the
new location address value when a branch, call, return or break instruction is executed.
When a reset is performed, 0000H is loaded into the PC. Because the PS register is initialized to FFFFH in a reset, after
a reset the CPU begins execution at physical address 0FFFF0H.
3.4 PROGRAM STATUS WORDS (PSW)
The PSW consists of 6 status flags and 5 control flags.
• Status flags
•V (Overflow) ...Overflow detection flag
•S (Sign) ...Sign bit detection flag
•Z (Zero) ...All zero detection flag
•AC (Auxiliary Carry) ...4-bit carry/borrow detection flag
•P (Parity) ...Parity detection flag
•CY (Carry) ... Carry/borrow detection flag
• Control flags
•RB0 to RB3 (Register Banks 0 to 3) ...Register bankspecification flags
•DIR (Direction) ...Block transfer/input/output instruction direction control flag
•IE (Interrupt Enable) ...Interrupt enabled state control flag
•BRK (Break) ...Single-step interrupt control flag
•IBRK (I/O Break) ...Input/output instruction trap control flag
The status flags are set (1) or reset (0) automatically according to the result (data value) of execution of various kinds
of instructions. The CY flag can be directly set, reset or inverted by an instruction.
The control flags are set or reset by instructions, and control the operation of the CPU. The IE and BRK flags are always
reset when interrupt servicing is initiated.
The contents of the PSW can be saved to and restored from the stack by the PUSH and POP instructions. However,
when the contents are restored by the POP PSW instruction, bits 12 to 15 (RB0 to RB3) are not returned to the PSW.
The low-order 8 bits of the PSW can also be saved to or restored from the AH register by an MOV instruction.
The PSW bit configuration is shown below.
151413121110987654 3210
RB3 RB2 RB1 RB0 Y DIR IE BRK S Z 0 AC 0 P IBRK CY
23
Page 24
µ
PD70433
3.5 MEMORY SPACE
The V55PI has a 16M-byte memory space. Of this, using lowest 1M bytes (000000H to 0FFFFFH) as the basic memory
space, the 16M bytes including the basic memory space (000000H to FFFFFFH) can be accessed as the extended memory
space. The basic memory space can be accessed using the segment registers (PS, SS, DS0, DS1) in the same way as
in the V25 and V35. The extended memory space can be accessed using the extended segment registers (DS2, DS3), and
has the basic memory space mapped onto the lowest 1M bytes. See 3.2.4 "Segment Registers (PS, SS, DS0, DS1)" and
3.2.5 "Extended Segment Registers (DS2, DS3)" for the physical addresses.
The 496-byte space 0FFE00H to 0FFFEFH has mapped onto it a group of registers to which specific functions are
allocated such as on-chip peripheral hardware registers, control registers, etc., and these are manipulated by memory
accesses.
In addition, independent of these, there is a 512-byte register file space (in on-chip RAM). In addition to being accessed
by using register manipulation instructions as in the V25 and V35, the register file space can also be accessed as data
memory by adding a special prefix instruction (IRAM:) to a memory manipulation in.
Figure 3-2. Memory Space
000000H
Vector Area
003FFH
Basic Memory
Space
(1M Bytes)
0FFFFFH
100000H
Special Function
Register Area
(On-Chip Area)
FFFFFFH
FFE00H
FFFEFH
Extended Memory
Space (16M Bytes)
3.5.1 Basic Memory Space
The memory space comprises a 1M-byte basic memory space and 16M-byte extended memory space. The basic memory
space is mapped onto the lowest 1M bytes (000000H to 0FFFFFH) of the extended memory space.
The 1M-byte basic memory space is shown in Figure 3-3.
Conditions for accessing the basic memory space by software are the same as for the V20/V30 and V25/V35.
A basic memory space physical address is specified by the segment start address indicated by the segment register (PS,
SS, DS0, DS1) and the offset value from the segment start position indicated by another register or immediate data.
The basic memory space has the vectored interrupt vector area and special function register area mapped onto it. For
an area in which special function registers are mapped, data accesses cannot be made to external memory (program fetches
are possible.)
24
Page 25
Figure 3-3. Basic Memory Space
µ
PD70433
000000H
Vector Area
1M Bytes
Spaecial Function Register Area
(Internal Area)
0FFFFFH
0FFF0H to 0FFFFFH is a program area used for the system boot, and PS and PC become 0FFFH and 0H, respectively,
therefore the program execution starts from 0FFFF0H.
3.5.2 Extended Memory Space
The 16M-byte extended memory space is shown in Figure 3-4.
The only accesses that can be performed on the extended memory space are data accesses.
The basic memory space is mapped onto the lowest 1M bytes (000000H to 0FFFFFH) of the extended memory space,
and can be accessed using the segment registers PS, SS, DS0 and DS1.
Data accesses can be performed in the extended memory space using the extended segment registers DS2 and DS3.
With DS2 and DS3 it is possible to use a specification as a segment override prefix instruction added to a memory
manipulation instruction.
An extended memory space physical address is specified by the segment start address indicated by the extended
segment register and the offset value from the segment start position indicated by another register or immediate data. If
the generated address indicates the lowest 1M-byte area (000000H to 0FFFFFH), the basic memory space is accessed.
00000H
003FFH
FFE00H
FFFEFH
25
Page 26
Figure 3-4. Extended Memory Space
µ
PD70433
000000H
0FFFFFH
100000H
FFFFFFH
16M Bytes
Vector Area
1M Bytes
Spaecial Function
Register Area
(Internal Area)
00000H
003FFH
FFE00H
FFFEFH
3.5.3 Special Function Register Area
The 496-byte space 0FFE00H to 0FFFEFH has mapped onto it a group of registers to which functions such as
on-chip peripheral hardware operation specification, status monitoring, etc., are assigned.
Program fetches cannot be performed from these areas.
Special function register manipulation is performed by accesses by means of memory manipulation instructions.
If the special function register area is accessed, RD, WRH, WRL, IORD, IOWR and other control signals do not become
active.
A list of special function registers is given in Table 3-5. The meaning of the items in the table is explained below.
• Symbol............................ The symbol used to indicate the special function register name. Corresponds to the
operand description format (symbol name) in a memory manipulation instruction.
• R/ W ................................. Indicates whether this special function register is read/write enabled.
R/W : Read/write enabled
R : Read only
W : Write only
• Manipulation Method ..... Indicates which of the following can be used on the register: bit manipulation,
8-bit manipulation, 16-bit manipulation, 32-bit manipulation.
• RESET............................ Indicates the status of the register after RESET input.
Note Addresses which are not listed are the reserved area, therefore, they should not be accessed by the user
program.
26
Page 27
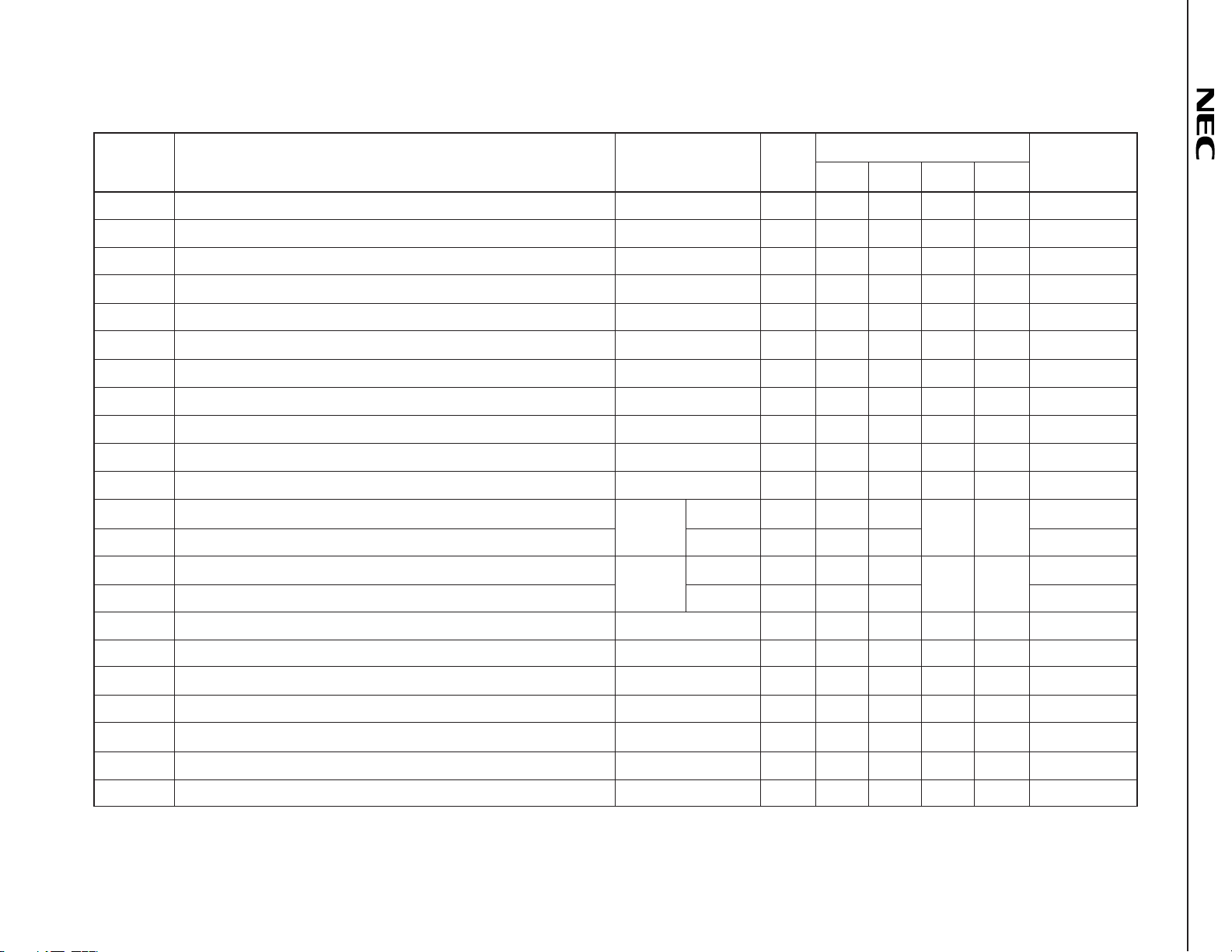
Table 3-5. Special Function Registers (1/7)
27
Address Special Function Register Name Symbol R/W After Reset
0FFE00H A/D conversion result register 0 ADCR0 R
0FFE02H A/D conversion result register 1 ADCR1 R
0FFE04H A/D conversion result register 2 ADCR2 R
0FFE06H A/D conversion result register 3 ADCR3 R
0FFE10H Parallel interface buffer PAD R/W *1
0FFE18H Parallel interface control register 0 PAC0 R/W
0FFE19H Parallel interface control register 1 PAC1 R/W
0FFE1AH Parallel interface status register PAS R/W *2
0FFE1CH Parallel interface acknowledge interval register 1 PAI1 W
0FFE1DH Parallel interface acknowledge interval register 2 PAI2 W
0FFE20H A/D converter mode register ADM R/W
0FFEC0H Interrupt mask flag register 0 (low) MK0L R/W
0FFEC1H Interrupt mask flag register 0 (high) MK0H R/W
0FFEC2H Interrupt mask flag register 1 (low) MK1L R/W
0FFEC3H Interrupt mask flag register 1 (high) MK1H R/W
0FFEC4H In-service priority register ISPR R
0FFEC5H Interrupt mode control register IMC R/W
0FFEC9H Interrupt request control register 09 IC09 R/W
0FFECAH Interrupt request control register 10 IC10 R/W
0FFECBH Interrupt request control register 11 IC11 R/W
0FFECCH Interrupt request control register 12 IC12 R/W
0FFECDH Interrupt request control register 13 IC13 R/W
*1.Varies according to input/output mode.
2. Some bits R, others R/W (possible).
MK0
MK1
Manipulable Bit Units
1 Bit 8 Bits 16 Bits 32 Bits
•
•
•
•
•
••
••
•
•
•
••
••
•
••
••
•
••
••
•
••
••
••
••
••
Undefined
Undefined
Undefined
Undefined
Undefined
90H
03H
40H
Undefined
Undefined
00H
FFH
FFH
FFH
FFH
00H
80H
43H
43H
43H
43H
43H
µ
PD70433
Page 28
28
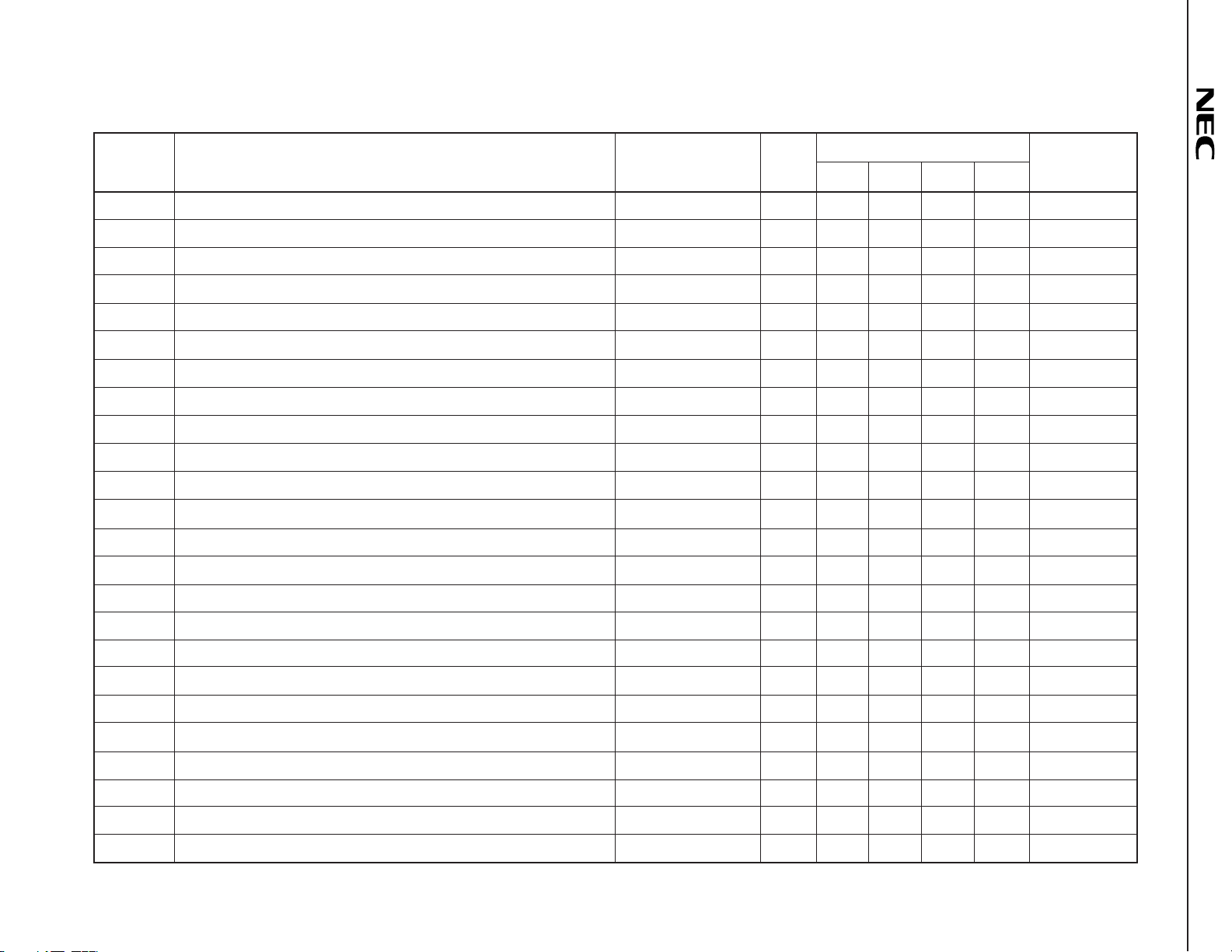
Table 3-5. Special Function Registers (2/7)
Address Special Function Register Name Symbol R/W After Reset
0FFECEH Interrupt request control register 14 IC14 R/W
0FFED0H Interrupt request control register 16 IC16 R/W
0FFED1H Interrupt request control register 17 IC17 R/W
0FFED2H Interrupt request control register 18 IC18 R/W
0FFED3H Interrupt request control register 19 IC19 R/W
0FFED4H Interrupt request control register 20 IC20 R/W
0FFED5H Interrupt request control register 21 IC21 R/W
0FFED6H Interrupt request control register 22 IC22 R/W
0FFED7H Interrupt request control register 23 IC23 R/W
0FFED8H Interrupt request control register 24 IC24 R/W
0FFED9H Interrupt request control register 25 IC25 R/W
0FFEDAH Interrupt request control register 26 IC26 R/W
0FFEDBH Interrupt request control register 27 IC27 R/W
0FFEDCH Interrupt request control register 28 IC28 R/W
0FFEDDH Interrupt request control register 29 IC29 R/W
0FFEDEH Interrupt request control register 30 IC30 R/W
0FFEDFH Interrupt request control register 31 IC31 R/W
0FFEE0H Interrupt request control register 32 IC32 R/W
0FFEE4H Interrupt request control register 36 IC36 R/W
0FFEE5H Interrupt request control register 37 IC37 R/W
0FFF00H Port 0 P0 R/W
0FFF01H Port 1 P1 R
0FFF02H Port 2 P2 R/W
0FFF03H Port 3 P3 R/W
Manipulable Bit Units
1 Bit 8 Bits 16 Bits 32 Bits
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
43H
Undefined
Undefined
Undefined
Undefined
µ
PD70433
Page 29
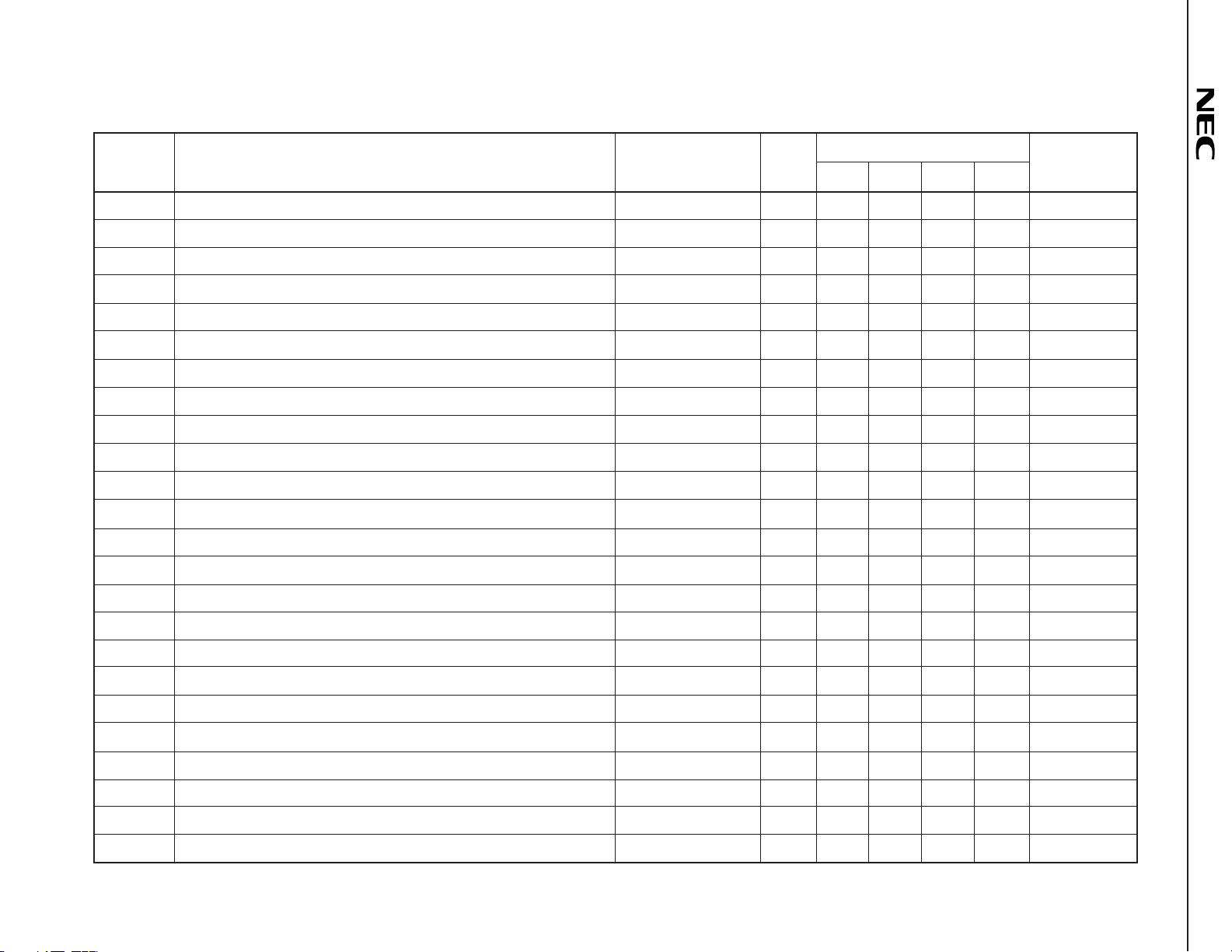
Table 3–5. Special Function Registers (3/7)
29
Address Special Function Register Name Symbol R/W After Reset
0FFF04H Port 4 P4 R/W
0FFF05H Port 5 P5 R/W
0FFF06H Port 6 P6 R
0FFF07H Port 7 P7 R/W
0FFF08H Port 8 P8 R/W
0FFF0CH Port read control register PRDC R/W
0FFF0EH Real–time output port RTP R/W
0FFF10H Port 0 mode register PM0 R/W
0FFF12H Port 2 mode register PM2 R/W
0FFF13H Port 3 mode register PM3 R/W
0FFF14H Port 4 mode register PM4 R/W
0FFF15H Port 5 mode register PM5 R/W
0FFF17H Port 7 mode register PM7 R/W
0FFF18H Port 8 mode register PM8 R/W
0FFF22H Port 2 mode conrol register PMC2 R/W
0FFF23H Port 3 mode control register PMC3 R/W
0FFF24H Port 4 mode control register PMC4 R/W
0FFF25H Port 5 mode control register PMC5 R/W
0FFF27H Port 7 mode control register PMC7 R/W
0FFF28H Port 8 mode control register PMC8 R/W
0FFF2CH Real–time output port control register RTPC R/W
0FFF2DH Real–time output port delay specification register RTPD R/W
0FFF2EH Port 7 buffer (low) P7L R/W
0FFF2FH Port 7 buffer (high) P7H R/W
Manipulable Bit Units
1 Bit 8 Bits 16 Bits 32 Bits
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
••
Undefined
Undefined
Undefined
Undefined
Undefined
00H
Undefined
FFH
FFH
FFH
FFH
FFH
FFH
FFH
00H
00H
00H
00H
00H
00H
40H
Undefined
Undefined
Undefined
µ
PD70433
Page 30
30
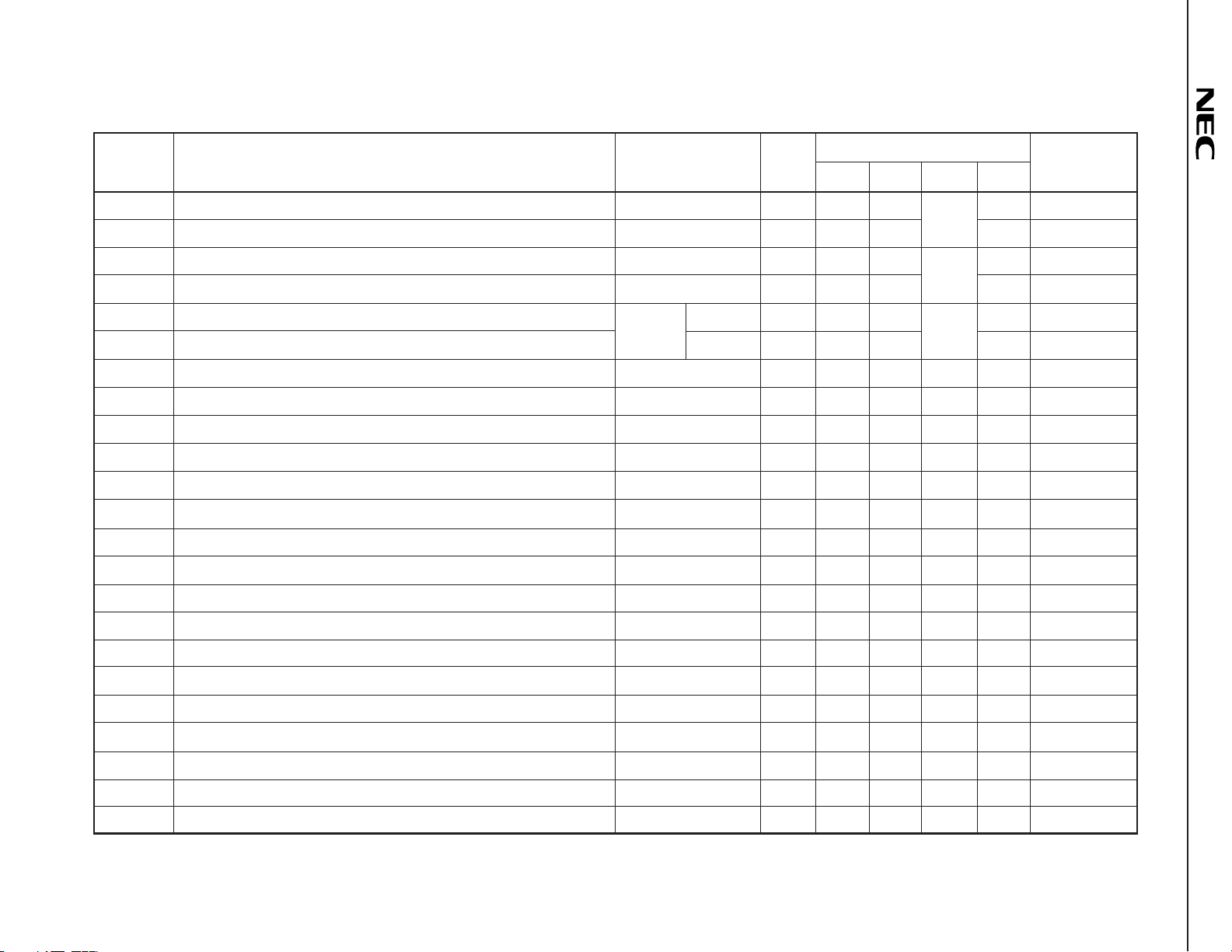
Table 3-5. Special Function Registers (4/7)
Address Special Function Register Name Symbol R/W After Reset
0FFF30H Timer control register 0 TMC0 R/W
0FFF31H Timer control register 1 TMC1 R/W
0FFF32H Timer output control register 0 TOC0 R/W
0FFF33H Timer output control register 1 TOC1 R/W
0FFF34H External interrupt mode register 0 INTM0 R/W
INTM
0FFF35H External interrupt mode register 1 INTM1 R/W
0FFF40H Timer register 0 TM0 R/W
0FFF42H Timer register 1 TM1 R/W
0FFF44H Timer register 2 TM2 R/W
0FFF46H Timer register 3 TM3 R/W
0FFF48H Timer capture register 00 CT00 R/W
0FFF4AH Timer capture register 01 CT01 R/W
0FFF4CH Timer compare register 00 CM00 R/W
0FFF4EH Timer compare register 01 CM01 R/W
0FFF50H Timer capture register 10 CT10 R/W
0FFF52H Timer compare register 10 CM10 R/W
0FFF54H Timer compare register 11 CM11 R/W
0FFF58H Timer compare register 20 CM20 R/W
0FFF5AH Timer compare register 21 CM21 R/W
0FFF5CH Timer compare register 22 CM22 R/W
0FFF5EH Timer compare register 23 CM23 R/W
0FFF60H Watchdog timer mode register WDM R/W*
0FFF64H Timer compare register 30 CM30 R/W
* WDT can only be written to by the RSTWDT instruction (8-bit unit only).
Manipulable Bit Units
1 Bit 8 Bits 16 Bits 32 Bits
••
•
••
••
•
••
••
•
••
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
••
•
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
00H
00H
00H
00H
00H
00H
00H
00H
00H
00H
µ
PD70433
00H
Page 31

Table 3-5. Special Function Registers (5/7)
Address Special Function Register Name Symbol R/W After Reset
0FFF66H Timer compare register 31 CM31 R/W
0FFF6CH PWM register PWM R/W
0FFF6DH PWM control register PWMC R/W
0FFF70H Transmit baud rate generator register 0 T
0FFF71H Receive baud rate generator register 0 R
0FFF72H Prescaler register 0 PRS0 R/W
0FFF73H UART mode register 0 / clocked serial interface mode register 0 UARTM0/CSIM0 R/W
0FFF74H UART status register 0 / SBI control register 0 UARTS0/SBIC0 *1/*2
0FFF75H UART transmit buffer 0 / clocked serial I/O shift register 0 T
0FFF76H Receive buffer 0 R
0FFF78H Transmit baud rate generator register 1 T
0FFF79H Receive baud rate generator register 1 R
0FFF7AH Prescaler register 1 PRS1 R/W
0FFF7BH UART mode register 1 / clocked serial interface mode register 1 UARTM1/CSIM1 R/W
0FFF7CH UART status register 1 UARTS1 *1/*2
0FFF7DH UART transmit buffer 1 / clocked serial I/O shift register 1 T
0FFF7EH Receive buffer 1 R
0FFF7FH Protocol selection register ASP R/W
0FFF80H Terminal counter 0 (low) TC0L R/W
0FFF82H Terminal counter 0 (high) TC0H R/W
*1.Some bits R, others R/W.
2. R or W in bit units.
XBRG0 R/W
XBRG0 R/W
XB0/SIO0 W
XB0 R
XBRG1 R/W
XBRG1 R/W
XB1/SIO1 W
XB1 R
TC0
Manipulable Bit Units
1 Bits 8 Bits 16 Bits 32 Bits
•
••
••
••
••
••
)
(
•
(
•
•
)
•
•
•
••
••
••
)
(
•
(
•
•
)
•
•
•
••
•
•
••
Undefined
00H
00H
Undefined
Undefined
00H
00H
00H
Undefined
Undefined
Undefined
Undefined
00H
00H
00H
Undefined
Undefined
00H
Undefined
Undefined
µ
PD70433
31
Remark ( ): Depends on the mode.
Page 32

32
Table 3-5. Special Function Registers (6/7)
Address Special Function Register Name Symbol R/W After Reset
0FFF84H Terminal counter modulo register 0 (low) TCM0L R/W
TCM0
0FFF86H Terminal counter modulo register 0 (high) TCM0H R/W
0FFF88H DMA up/down counter 0 (low) UDC0L R/W
UDC0
0FFF8AH DMA up/down counter 0 (high) UDC0H R/W
0FFF8CH DMA compare register 0 (low) DCM0L R/W
DCM0
0FFF8EH DMA compare register 0 (high) DCM0H R/W
0FFF90H DMA memory address register 0 (low) MAR0L R/W
MAR0
0FFF92H DMA memory address register 0 (high) MAR0H R/W
0FFF94H DMA read/write pointer 0 (low) DPTC0L R/W
DPTC0
0FFF96H DMA read/write pointer 0 (high) DPTC0H R/W
0FFF9CH DMA mode register 0 DMAM0 R/W
0FFF9DH DMA control register 0 DMAC0 R/W
0FFF9EH DMA status register DMAS R/W
0FFFA0H Terminal counter 1 (low) TC1L R/W
TC1
0FFFA2H Terminal counter 1 (high) TC1H R/W
0FFFA4H Terminal counter modulo register 1 (low) TCM1L R/W
TCM1
0FFFA6H Terminal counter modulo register 1 (high) TCM1H R/W
0FFFA8H DMA up/down counter 1 (low) UDC1L R/W
UDC1
0FFFAAH DMA up/down counter 1 (high) UDC1H R/W
0FFFACH DMA compare register 1 (low) DCM1L R/W
DCM1
0FFFAEH DMA compare register 1 (high) DCM1H R/W
0FFFB0H DMA memory address register 1 (low) MAR1L R/W
MAR1
0FFFB2H DMA memory address register 1 (high) MAR1H R/W
* Bit clear operation possible.
Manipulable Bit Units
1 Bit 8 Bits 16 Bits 32 Bits
•
•
••
•
•
••
•
•
••
•
•
••
•
•
••
••
••
*
•
•
•
•
••
•
•
••
•
•
••
•
•
••
•
•
••
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
E0H
00H
00H
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
Undefined
µ
PD70433
Page 33

Table 3-5. Special Function Registers (7/7)
Address Special Function Register Name Symbol R/W After Reset
0FFFB4H DMA read/write pointer 1 (low) DPTC1L R/W
DPTC1
0FFFB6H DMA read/write pointer 1 (high) DPTC1H R/W
0FFFBCH DMA mode register 1 DMAM1 R/W
0FFFBDH DMA control register 1 DMAC1 R/W
0FFFE0H Software timer/counter STC R
0FFFE2H Software timer/counter compare register STMC R/W
0FFFE8H Programmable wait control register 0 PWC0 R/W
0FFFE9H Programmable wait control register 1 PWC1 R/W
0FFFEAH Memory block control register MBC R/W
0FFFECH Refresh mode register RFM R/W
0FFFEEH Standby control register STBC R/W *1
0FFFEFH Processor control register PRC R/W
*1 The SFB bit of the standby control register can be set (1) by instruction, but cannot be cleared (0). (Only '1' can be written.)
*2 After power-on reset: 00H, otherwise: no change
Manipulable Bit Units
1 Bit 8 Bits 16 Bits 32 Bits
•
•
••
••
••
•
•
••
••
••
••
••
••
Undefined
Undefined
E0H
00H
Undefined
FFFFH
EAH
AAH
FCH
77H
Undefined *2
EEH
33
µ
PD70433
Page 34

µ
PD70433
3.5.4 Vector Table Area
The 1K–byte area 00000H to 003FFH in the memory space holds 256 vectors (4 bytes used per vector) for the start
addresses of interrupt routines initiated by interrupt requests, break instructions, etc.
In the initial state, vectors 0 to 47 are reserved as V55PI family dedicated on-chip peripheral and software interrupt
vectors. For vectors 8 to 47, the vector address of hardware interrupts except NMI can be changed by means of bits V0
and V1 of the interrupt mode control register (IMC).
Vector 0 (00000H) : Divide error
Vector 1 (00004H) : Single step
Vector 2 (00008H) : NMI instruction
Vector 3 (0000CH) : BRK 3 instruction
Vector 4 (00010H) : BRKV instruction
Vector 5 (00014H) : CHKIND instruction
Vector 6 (00018H) : Input/output instruction
Vector 7 (0001CH) : FPO instruction/exception trap
When V1 = V0 = 0 :
Vector 8 (00020H) : INTWDT
Vector 9 (00024H) : INTP0
Vector 10 (00028H) : INTP1
Vector 11 (0002CH) : INTP2
Vector 12 (00030H) : INTP3
Vector 13 (00034H) : INTP4
Vector 14 (00038H) : INTP5
Vector 15 (0003CH) : System reserved
Vector 16 (00040H) : INTCM00
Vector 17 (00044H) : INTCM01
Vector 18 (00048H) : INTCM10
Vector 19 (0004CH) : INTCM11
Vector 20 (00050H) : INTCM21
Vector 21 (00054H) : INTCM31
Vector 22 (00058H) : INTD0 DMA#0_MAIN
Vector 23 (0005CH) : INTD0S DMA#0_SUB
Vector 24 (00060H) : INTD1 DMA#1_MAIN
Vector 25 (00064H) : INTD1S DMA#1_SUB
Vector 26 (00068H) : INTSER0
Vector 27 (0006CH) : INTSER1
Vector 28 (00070H) : INTSR0/INTCSI0
Vector 29 (00074H) : INTSR1/INTCSI1
Vector 30 (00078H) : INTST0
Vector 31 (0007CH) : INTST1
Vector 32 (00080H) : INTSIT
Vector 33 (00084H) : System reserved
Vector 34 (00088H) : System reserved
Vector 35 (0008CH) : System reserved
Vector 36 (00090H) : INTPAI
Vector 37 (00094H) : INTAD
Vector 38 (00098H) : System reserved
Vector 39 (0009CH) : System reserved
34
Page 35

Vector 40 (000A0H) : System reserved
Vector 41 (000A4H) : System reserved
Vector 42 (000A8H) : System reserved
Vector 43 (000ACH) : System reserved
Vector 44 (000B0H) : System reserved
Vector 45 (000B4H) : System reserved
Vector 46 (000B8H) : System reserved
Vector 47 (000BCH) : System reserved
When V1 = 0, V0 = 1 :
Vector 72 (00120H) : INTWDT
Vector 73 (00124H) : INTP0
•• •
•• •
•• •
Vector 110 (001B8H) : System reserved
Vector 111 (001BCH) : System reserved
When V1 = 1, V0 = 0 :
Vector 136 (00220H) : INTWDT
Vector 137 (00224H) : INTP0
•• •
•• •
•• •
Vector 174 (002B8H) : System reserved
Vector 175 (002BCH) : System reserved
µ
PD70433
When V1 = 1, V0 = 1 :
Vector 200 (00320H) : INTWDT
Vector 201 (00324H) : INTP0
•• •
•• •
•• •
Vector 238 (003B8H) : System reserved
Vector 239 (003BCH) : System reserved
35
Page 36

µ
PD70433
3.6 REGISTER FILE SPACE
The register file space is shown in Figure 3-5.
The size of the register file space is 512 bytes, and a maximum 16-bank register set can be set.
The register file space is separate from the memory space, and in addition to accesses using a register manipulation
instruction as with the V25 and V35, the register file space can be accessed as data memory by adding a special prefix
instruction (IRAM:) to a memory manipulation instruction. (Access is performed asynchronously independently of the
external bus cycle.
When the IRAM: prefix instruction is added to a memory manipulation instruction, the CPU performs a data access with
the low–order 9 bits of the memory address offset value as the register file address. In this case, segment register and
physical address addition is not performed, and an external bus cycle is not initiated.
Example
Label1: MOV IRAM : [0024H], AW
MOV [0056H], BW
<1> This shows the case where data is transferred to the register file space using an "IRAM:" prefix
instruction. The AW register value is stored in address 24H of the register file.
<2> This shows the case where an instruction for data transfer to the memory space is used.
If the IRAM prefix instruction is added to the primitive block transfer instruction and BCD operation instruction, which
specify the source block and destination block, it becomes effective for the destination block.
Also, the macro service conrol word area (008H to 03FH), the macro service work area (000H to 007H), and the area
used by the macro service channel (008H to 0FFH) are allocated in overlapping fashion in the file space. If a specific macro
service which requires work area (RTOPTRN) is not used, these work areas can be used as data space.
.....
.....
<1>
<2>
36
Page 37

(
)
0
0H
0
2
0H
0
4
0H
0
6
0H
0
8
0H
0
A
0H
0
C
0H
0
E
0H
0
0
0H
1
2
0H
1
4
0H
1
6
0H
1
8
0H
1
A
0H
1
C
0H
1
E
0H
1
1FFH
Register Bank 0
10
11
12
13
14
15
Figure 3-5. Register File Space
Macro Service Work Area
Macro Service Control
Word Area
1
2
3
4
5
6
7
8
9
Macro Service
Channel Area
000H
008H
03FH
0FFH
+00H
+02H
+04H
+06H
+08H
+0AH
+0CH
+0EH
+10H
+12H
+14H
+16H
+18H
+1AH
+1CH
+1EH
µ
PD70433
15 87 0
DS2
Vector PC/DS3
PSW Save
PC Save
DS0
SS
PS
DS1
IY
IX
BP
SP
BW
BH
DH
CH
AH
BL
DW
DL
CW
CL
AW
AL
Offset from the starting address of each register bank
37
Page 38

µ
PD70433
3.7 I/O SPACE
The V55PI has a 64K-byte I/O space.
The I/O space map is shown in Figure 3-6.
The I/O space is accessed using address bus/data bus and control signals (IORD, IOWR, etc).
0 is output from the unused high-order 8 bits of the address bus.
Wait cycles can be inserted in an I/O cycle by software and the READY pin.
The area FF80H to FFFFH of the I/O space is a reserved area, in which two V55PI on-chip peripheral DMA input/output
read/write pointers (IOP) are allocated. The address of IOP0 is FF94H, and the address of IOP1 is FFB4H.
When the CPU executes an input/output instruction with an IOP address as an operand, the DMA controller performs
a read/write of data in the DMA controller transfer buffer, with the IOP contents as the address value, and increments (or
decrements) the IOP value automatically in accordance with the contents of the DMA control register. Therefore, data written
by the DMA controller can be referenced by an input/output instruction, and conversely, data written by an input/output
instruction can be transferred by the DMA controller.
Figure 3-6. I/O Map (64K Bytes)
0000H
FF80H
FF94H
FFB4H
FFFFH
Remark IOPn corresponds to the DMA read/write pointer (DPTCn).
IOP 0
:
IOP 1
:
Reserved Area
38
Page 39

µ
PD70433
4. BUS CONTROL FUNCTIONS
With the V55PI pin, refer to 1.1.2 (1) "Pin function for bus control".
As regards pins which have an alternate function as port pins, when that function is used, the corresponding function
must be selected by means of the port mode control register (PMCn).
4.1 WAIT FUNCTION
The V55PI divides the basic memory space (000000H to 0FFFFFH) into a maximum of 4 blocks with a variable memory
size, divides the uppermost extended memory space area (100000H to FFFFFFH) into two areas with a variable memory
size, and performs wait control for each block. The memory size of each block in the basic memory space is specified by
the memory block control register (MBC).
Figure 4-1 shows the memory block configuration when A9H has been set for the MBC register value.
Figure 4-1. Partitioned Memory Control
MBC
1
MB300MB211MB200MB111MB101MB010MB00
MB31
00
01
00
01
10
11
00
01
10
11
10
11
00
01
10
11
1
Main Memory Space
Block 0
Block 1
Block 2
Block 3
Block 4
128K Bytes
256K Bytes
512K Bytes
640K Bytes
768K Bytes
896K Bytes
1M Bytes
2M Bytes
4M Bytes
6M Bytes
8M Bytes
Block 5
16M Bytes
39
Page 40

Figure 4-2. Memory Wait Control
76543210
µ
PD70433
PWC1
PWC0
(BLOCK3) (BLOCK2) (BLOCK1) (BLOCK0)
DW31 DW30 DW21 DW20 DW11 DW10 DW01 DW00
76543210
(BLOCK4) (BLOCK1) (I/O Space) (BLOCK5) (BLOCK4)
AW1 AW0 IOW1 IOW0 DW51 DW50 DW41 DW40
Data Wait (DW, IOW)
DWn1/IOW1 DWn0/IOW0 Wait State
000 *1
011 *2
102 *2
113 *2
*1.READY signal is ignored.
2. Additional control by means of READY signal is also possible.
Address Wait (AW)
AWn Wait State
AW0
AW1
0 Not inserted (block 1)
1 Inserted (block 1)
0 Not inserted (block 4)
1 Inserted (block 4)
40
Page 41

µ
PD70433
4.2 REFRESH FUNCTION
The following functions are provided to refresh DRAM and pseudo-SRAM.
• Function to insert periodically a refresh cycle in a series of bus cycles
• Refresh address output function to refresh DRAM and pseudo-SRAM
• Function to generate a refresh cycle in hold mode and HALT mode.
• Function to insert a wait state in a refresh cycle
4.2.1 Refresh Mode Register (RFM)
The RFM register is an 8-bit register to control refresh operation.
A refresh cycle can be selected from the time base counter output tap.
While a refresh request is held by another bus cycle if the next refresh request is generated, only the latter is valid.
The RFM register value after a reset is 77H.
4.2.2 Wait Control in Refresh Cycle
A wait state can be inserted in a refresh cycle. The specified number of wait states is inserted for memory block 4 by
the programmable wait control register (PWC0) or READY pin.
4.2.3 Refresh Address
Bus pins AD0 to AD15 and A16 to A19 are activated in a refresh cycle.
For each refresh cycle, the count is performed in one-address increments from x00000 to x1FFFFF in the case of the
external 8-bit bus width, and in two-address increments from x00001H to xFFFFF in the case of the external 16-bit bus width
(the minimum address is returned to after the maximum address).
After initialization by a reset, count-up is started from x00000H in the case of the external 8-bit bus width and x00001H
in the case of the external 16-bit bus width.
In the case of the external 16-bit bus width, the refresh address minimum address bit (A0) is fixed at “1” and the DEX
pin output is also fixed at “1”.
A20 to A23 are undefined in a refresh cycle.
41
Page 42

µ
PD70433
5. INTERRUPT FUNCTIONS
The V55PI incorporates a powerful interrupt controller (INTC) which controls multiple-interrupt servicing for a total of 25
maskable hardware interrupt requests: 19 internal and 6 external. The interrupt controller controls multiple-interrupt
servicing based on programmable priority.
The following functions are provided as interrupt servicing modes: vectored interrupt function, macro service function,
register bank switching function.
5.1 FEATURES
V55PI interrupt functions offer the following features:
• Comprehensive servicing states for interrupt requests
• Vectored interrupt function : Branch to interrupt service routine specified by vector table
• Register bank switching function : High-speed interrupt response by automatic register bank switching
• Macro service function : High-speed interrupt servicing by microprogram (firmware)
• 4-level programmable priority order control
• Interrupt multiprocessing control according to the priority
• Rich variety of macro service functions (following 7 modes) closely tied to V55PI on-chip peripheral hardware
EVTCNT : Event count processing
BLKTRS : Data transfer between special function register and external memory buffer
BLKTRS-C : Data transfer between special function register and external memory buffer (with transfer data
detection function)
DTACMP : Special function register status detection
DTADIF : Time measurement by timer capture function
RTOPTRN : Automatic control of real-time output port
DTACMP-M : Data transfer between external I/O and memory
• 7 external interrupt request inputs (NMI, INTP0 to INTP5)
• Maskable interrupt requests are individually maskable.
A list of interrupt sources is given in Table 5-1.
42
Page 43

Table 5-1. Interrupt Sources (1/2)
Interrupt Default Vector Vectored Macro
Classification Priority Generating Generating Table Address Service
Nonmaskable –– ––
10 INTCM01 IC17 CM01 match detection 17 00×44H Yes Yes 022H
Maskable
11 INTCM10 IC18 CM10 match detection 18 00×48H Yes Yes 024H
12 INTCM11 IC19 CM11 match detection 19 00×4CH Yes Yes 026H
13 INTCM21 IC20 CM21 match detection 20 00×50H Yes Yes 028H
14 INTCM31 IC21 CM31 match detection 21 00×54H Yes Yes 02AH
Interrupt Register Macro Service
Request Bank Control Word
Signal Switching Address
1 NMI NMI pin input ––– 2 00008H No No
2 WDT Watchdog timer overflow WDT 8 00×20H No No
3 INTP0 IC9 INTP0 pin input 9 00×24H Yes Yes 012H
4 INTP1 IC10 INTP1 pin input 10 00×28H Yes Yes 014H
5 INTP2 IC11 INTP2 pin input 11 00×2CH Yes Yes 016H
6 INTP3 IC12 INTP3 pin input 12 00×30H Yes Yes 018H
7 INTP4 IC13 INTP4 pininput 13 00×34H Yes Yes 01AH
8 INTP5 IC14 INTP5 pin input 14 00×38H Yes Yes 01CH
9 INTCM00 IC16 CM00 match detection 16 00×40H Yes Yes 020H
Interrupt Request
Control Register
Interrupt Source Default
Source Unit Number
External
Timer
43
15 INTD0 IC22 DMA channel 0_main 22 00×58H Yes Yes 02CH
16 INTD0S IC23 DMA channel 0_sub 23 00×5CH Yes Yes 02EH
DMA
17 INTD1 IC24 DMA channel 1_main 24 00×60H Yes Yes 030H
18 INTD1S IC25 DMA channel 1_sub 25 00×64H Yes Yes 032H
µ
PD70433
Page 44

44
Table 5-1. Interrupt Sources (2/2)
Interrupt Default Vector Vectored Macro
Classification Priority Generating Generating Table Address Service
19 INTSER0 IC26 UART reception error (ch0) 26 00×68H No Yes 034H
20 INTSER1 IC27 UART reception error (ch1) 27 00×6CH No Yes 036H
21 IC28 28 00×70H 038H
22 IC29 29 00×74H 03AH
Maskable INTCSI1 LDMA channel 5 Yes Yes
23 INTST0 IC30 UART transmission (ch0) 30 00×78H Yes Yes 03CH
24 INTST1 IC31 UART transmission (ch1) 31 00×7CH Yes Yes 03EH
25 INTSIT IC32 STM match detection SIT 32 00×80H No Yes ––
26 INTPAI IC36 Parallel I/F Parallel I/F 36 00×90H Yes Yes ––
27 INTAD IC37 A/D converter
Interrupt Register Macro Service
Request Bank Control Word
Signal Switching Address
INTSR0/ UART reception (ch0)/
INTCSI0 Serial transmission/reception (ch0) Yes Yes
INTSR1/ UART reception (ch1)/ Yes Yes
Interrupt Request
Control Register
Divide error 0 00000H No No
BRK flag (single-step) 1 00004H No No
Interrupt Sourse Default
Source Unit Number
Serial I/F
A/D converter
37 00×94H Yes Yes 008H
Yes Yes
BRK3 instruction 3 0000CH No No
BRKV instruction 4 00010H No No
Software
CHKIND instruction 5 00014H No No
–– –– –– –– ––
Input/output instruction (IBRK flag) 6 00018H No No
BRK imm8 * 00×*HNo No
BRKCS instruction –– –– No Yes
FP0 instruction/
Exception 7 0001CH No No
trap Exception trap
* Indicates that the value is variable in the range 0 to 255 (0 to FFH).
Remarks "×" indicates that the value is determined by the V0 and V1 bits of the IMC register.
µ
PD70433
Page 45

µ
PD70433
5.2 INTERRUPT RESPONSE METHODS
The V55PI has three interrupt response methods: a vectored interrupt function, register bank switching function, and
macro service function. In the case of a maskable interrupt request, one of these functions can be selected by means of
the interrupt request control register (IC××) for each interrupt source according to the purpose of the interrupt. The on-chip
interrupt controller handles interrupt requests according to the set response method.
5.2.1 Vectored Interrupts
A vectored interrupt can only be acknowledged in the interrupt enabled state (EI state). When a vectored interrupt is
acknowledged, the CPU enters the interrupt disabled state (DI state), and the current PSW contents and PC and PS contents
are saved to the stack. Then the corresponding vector is selected from the vector table, and the interrupt service routine
is started at the address indicated by that vector. Vector numbers are fixed for each interrupt source. In the DI state, interrupts
are held pending, and are acknowledged when the EI state is set again.
The return from the interrupt is performed by an RETI instruction. In the case of a hardware interrupt other than a nonmaskable interrupt, an FINT instruction must be executed before the return instruction. When a return is made from an
interrupt, the PC, PS and PSW are restored from the stack.
Figure 5-1. Interrupt Acknowledge Operation (Performed in Sequence <1> → <4>)
n × 4
n × 4 + 2
Vector Table Stack
n: Vector Number
<4>
<2>
PC
<1>
PS
PSW
IE = 0
<3>
BRK = 0
SP – 6
SP – 4
SP – 2
SP ← SP – 6
45
Page 46

µ
PD70433
5.2.2 Register Bank Switching Function
In the V55PI, general register sets are mapped onto on-chip RAM, and register sets can be held in up to 16 banks. Interrupt
servicing is performed by automatically switching the register bank when a BRKCS or TSKSW instruction is executed or
when an interrupt is responded to. Because saving of registers to the stack previously performed by software is not required,
high-speed switching of the program execution environment is possible.
The register bank switching sequence is performed as follows (See Figure 5-2).
<1> The contents of PSW is saved to temporary register.
<2> The register bank is switched.
<3> IE and BRK are set to 0.
<4> The contents of PSW which is saved to the PC and the temporary register are saved to the saving area, respectively.
<5> The interrupt service routine start address offset value is loaded from the vector PC area in the register bank to
PC.
Figure 5-2. Register Bank Switching Sequence
(In Case of Register Bank Switching by Interrupt)
New Register Bank
Old Register Bank
AW
for Interrupt Servicing
AW
CW
DW
BW
SP
BP
IX
IY
DS1
PS
SS
DS0
PC Save
PSW Save
Vector PC/DS3
DS2
PSW
PC
<1>
<5>
Temporary Register
<4>
<4>
CW
DW
BW
SP
BP
IX
IY
DS1
PS
SS
DS0
PC Save
PSW Save
Vector PC/DS3
DS2
46
<2> Register Bank Switching
<3> IE = 0, BRK = 0
Page 47

µ
PD70433
5.2.3 Macro Service Function
The macro service function performs processing of simple data transfers, etc., by means of a microprogram (CPU internal
dedicated firmware) started by generation of an interrupt request. The simple, standardized interrupt servicing which was
coded and executed by a user program is performed automatically.
Macro service processing is caused by an interrupt request and is performed. Macro service is designed to minimize
as far as possible the frequency of generation of interrupts consisting mainly of software processing, hold down the software
overhead due to a series of processes used in an interrupt (register saving, initialization, register restoration, return from
the interrupt routine), and improve the CPU efficiency.
Processing performed by the macro service is transparent in terms of software, and it is possible to process as a single
mass of data what was previously processed by software byte by byte, allowing more efficient programming.
The V55PI macro service supports not only the simple data transfers used in the V25 and V35, but also various operating
modes closely linked to the on-chip V55PI peripheral hardware, as shown below.
(a) EVTCNT (EVENT COUNTER)
The counter is updated each time the macro service are generated, and when the counter reaches 0 the macro service
for the corresponding interrupt source is terminated and a vectored interrupt or a register bank switching is generated.
(b) DTACMP (DATA COMPARE)
The interrupt source specific SFR and preset byte data are compared, and if they match, the macro service for the
corresponding interrupt source is terminated and a vectored interrupt or register bank switching is generated.
(c) DTADIF (DATA DIFFERENCE)
The difference in using the timer/counter unit capture register is calculated. This is initiated by a timer interrupt: the
value of the capture register latched last time is subtracted from the value of the capture register latched this time, and
the result is stored in the previously specified memory buffer.
When processing has been performed the previously set number of times, the corresponding interrupt source macro
service is terminated, and a vectored interrupt or register bank switching is generated.
(d) BLKTRS (BLOCK TRANSFER)
A data transfer is performed between the previously specified memory buffer and SFR.
When the previously set number of data transfers have been performed, the corresponding interrupt source macro
service is terminated, and a vectored interrupt or register bank switching is generated.
(e) BLKTRS–C (BLOCK TRANSFER WITH CHARACTER SEARCH)
A data transfer is performed between the previously specified memory buffer and SFR. When the previously set
number of data transfers have been completed, or when the transfer data matches the previously set character data,
the corresponding interrupt source macro service is terminated, and a vectored interrupt or register bank switching is
generated.
(f) RTOPRTN (RTOP TRANSFER)
Data to be output to the real-time output port is transferred to the port 7 buffer (P7H, P7L), and data which specifies
interval for output to the real-time output port is transferred to the timer compare register (CM00, CM01).
(g) DTACMP-M (DATA COMPARE WITH CHARACTER MASK)
The logical product of the status data read from the external I/O and the previously set mask data is performed. The
previously set byte data is compared with the result. If it matches, a data transfer is performed between the external I/
O and memory. If it does not match, or if the previously set number of data transfers have been performed, the
corresponding interrupt source macro service is terminated, and a vectored interrupt or register bank switching is
generated.
47
Page 48

µ
PD70433
6. DMA FUNCTION (DMA CONTROLLER)
The V55PI incorporates a 2-channel DMA controller which controls execution of memory-to-I/O or memory-to-memory
DMA transfers on the basis of DMA requests generated by an on-chip peripheral hardware (serial interface, parallel interface,
or timer), the external DMARQ pin or a software trigger.
Each channel of the DMA controller further comprises a main channel and a sub-channel: the operating mode determines
whether the main channel and sub-channel are used as a single channel or as separate channels. When used as separate
channels, function for a maximum of 4 channels can be constructed.
6.1 FEATURES
• Two independent DMA channels (max. 4-channel configuration possible)
• Four transfer modes
• Single transfer mode ... One DMA transfer cycle is executed in response to one DMA request.
• Demand release mode ... Consecutive DMA transfer cycles are executed while DMA request is active.
• Single-step mode ... DMA transfer cycles and CPU bus cycles are executed alternately after DMA
request generation.
• Burst mode ... For each DMA request, the specified number of DMA transfer cycles are executed
consecutively.
• Five operating modes
• Intelligent DMA mode–1 (ring buffer system) ... DMA transfers to ring buffer are controlled.
• Intelligent DMA mode–2 (counter control system) ... Transfer data is transferred consecutively, divided into
an arbitrary number of bytes.
• Next address specification mode ... Consecutive transfers are possible between different
transfer buffers.
• 2-channel operating mode ... Main channel and subchannel are used as independent
channels.
• Memory-to-memory transfer mode ... Two bus cycles are started for one DMA transfer cycle,
and memory-to-memory transfer is executed.
• 3 clocks/1 bus cycle (no wait case)
• Transfer objects
• External I/O ←→ memory ... 1 DMA transfer cycle/1 bus cycle
• SFR (internal I/O) ←→ memory ... 1 DMA transfer cycle/1 bus cycle
• Memory ←→ memory (memory includes SFR) ... 1 DMA transfer cycle/2 bus cycles
• Byte transfer/word transfer selectable
• Transfer address increment/decrement/non-update selectable
• DMA transfer end signal (TCE0, TCE1) output
• 24-bit DMA memory address registers (MAR0, MAR1)
• 21-bit terminal counters (TC0, TC1)
• External DMA request signal input pins (DMARQ0, DMARQ1: alternate function as port P80 and P81 pins)
• External DMA acknowledge signal output pins (DMAAK0, DMAAK1)
48
Page 49

DMA Start Source
Transfer
Mode On–Chip Software
Peripheral Trigger
Table 6-1. Transfer Modes
DMARQ Pin
µ
PD70433
STOP Method Interrupt
Single
transfer Available Available Available
mode
Demand
release
mode
Single
step Available* Available Available
mode
Burst None (stop disabled during the
mode transfer)
Not Available Not Available Available
Available* Available Available
Reset of EDMA bit of DMAMn
register
Stops when the DMARQ pin is Not acknowledged
driven low during the transfer. during transfer.
Reset of EDMA bit of DMAMn Acknowledged at
register other times.
Reset of EDMA bit of DMAMn
Acknowledged
Acknowledged
register
Not acknowledged
* The DMA start source is an on-chip timer interrupt, and transfer is possible only when the transfer I/O specification is
external.
Table 6-2. Correspondence Between Operating Modes and Transfer Modes
Possible Transfer Modes*
Operating Mode Transfer Type
<1> <2> <3> <4>
Intelligent DMA mode–1 I/O (SFR) → Memory
(ring buffer method)
Yes Yes No No
Intelligent DMA mode–2 Memory → I/O (SFR)
(counter control method)
Next address specification mode I/O (SFR) ←→ Memory Yes Yes No No
2–channel
operating mode
Memory–memory
transfer mode
(Stop at end) I/O ←→ Memory Yes Yes Yes Yes
(Repetition) I/O ←→ Memory Yes Yes Yes No
(Stop at end) Memory ←→ Memory Yes No Yes Yes
(Repetition) Memory ←→ Memory Yes No Yes No
No No Yes Yes
* Transfer modes
<1> Single transfer mode
<2> Demand release mode
<3> Single step mode
<4> Burst mode
49
Page 50

µ
PD70433
7. SERIAL INTERFACE FUNCTIONS
The V55PI is equipped with a 2-channel serial interface unit (ch0, ch1).
The two communication protocols supported by the V55PI are as follows:
(1) Asynchronous UART
(2) Clocked CSI SBI: 2-wire serial bus interface
IOE: I/O expansion 3-wire serial interface
7.1 FEATURES
• Two communication protocols supported
• Two serial channels
• Wake-up function
• On-chip dedicated baud rate generator
• DMA request generated by completion of transmission/reception (transmit/receive data DMA transfer is
capable)
7.2 PROTOCOLS
The UART is an asynchronous serial interface which achieves data synchronization by means of start/stop bits, and is
functionally enhanced UART functions compared with previous single-chip microcontroller.
The CSI (clocked serial interface) is a clocked serial interface which achieves synchronization by transmission/reception
of a clock. The CSI is a subset of the standard serial bus interface specification for NEC single-chip microcontrollers, and
I2C functions are not supported. The wake-up release function is implemented by using macro service.
Table 7-1. Supported Protocols
Supported Protocols
Serial Interface Unit Clocked (CSI) Asynchronous
SBI IOE (UART)
Channel 0 Yes Yes Yes
Channel 1 No Yes Yes
The UART function or CSI function can be programmably selected for each channel. Protocol selection is performed by
means of the protocol selection register (ASP).
50
Page 51

7.3 UART
7.3.1 Features
• Transfer rate: 95 to 390 Kbps (with 12.5 MHz system clock
123 to 500 Kbps (with 16 MHz system clock
φ
φ
)
• Full-duplex operation capability
• On-chip dedicated (transmission and reception) baud rate generators
• Wake-up function
• Zero parity function
• Parity error detection
• Framing error detection
• Overrun error detection
• Three dedicated UART interrupt sources
• UART receive error interrupts (INTSER0, INTSER1)
• UART reception interrupts (INTSR0, INTSR1)
• UART transmisstion interrupts (INTST0, INTST1)
• Macro service function
• UART reception interrupts (INTSR0, INTSR1)
• UART transmission interrupts (INTST0, INTST1)
µ
PD70433
)
R×D
T×C*
n
INTSR
n
External
Clock
Control
Figure 7–1. UART Block Diagram
R×B
Shift Register UARTS Shift Register
Reception
Control Parity
Check
ERP
ERF
ERO
INTSER
AS
n
T×B
Transmission
Control Parity
Addition
INTST
n
UARTM
T×D
CTS
Transmit Serial Clock
Receive Serial Clock
n
* Channel 0 only
51
Page 52

µ
PD70433
7.4 CLOCKED SERIAL INTERFACE (CSI)
7.4.1 Features
• Transfer speed: Max. 3.125 Mbps (with 12.5 MHz system clock
Max. 4.0 Mbps (with 16 MHz system clock
• Half-duplex communication
• Data length: 8-bit unit
• External/internal clock selection function
• Data MSB-first/LSB-first selection function
• SBI mode (2-wire NEC type serial bus) ... ch0 only
• Address/command/data identification function
• Function for chip selection by address
• Wake-up function
• Acknowledge signal (ACK) control function
• Busy signal (BUSY) control function
The V55PI clocked serial interface has the following two operating modes.
(1) 3–wire serial I/O mode (IOE mode)
In this mode, 8-bit data transfer is performed using three lines: the serial clock (SCK), and serial data input and output
(SI, SO). This mode is useful when connecting an I/O device, display controller, etc., which incorporates a conventional
clocked serial interface.
The functions of the V25 and V25+ have been enhanced, and data MSB-first/LSB-first selection is possible.
φ
)
φ
)
(2) Serial bus interface mode (SBI mode)
In the SBI mode, communication is performed with multiple devices by means of two lines: the serial clock (SCK)
and the serial bus interface (SB0 or SB1).
This mode conforms to the NEC serial bus format.
In the SBI mode, the sender can output to the serial data bus an address to select the target device for serial
communication, a command which gives a directive to the target device, and actual data. Thus there is no need for
the line for handshaking required when multiple devices are connected with a conventional clocked serial interface,
allowing input/output ports to be used efficiently.
In addition, wake-up release is performed using macro service.
52
Page 53

µ
PD70433
8. PARALLEL INTERFACE FUNCTIONS
The V55PI incorporates a parallel interface unit for data input on a Centronics specification interface, and general data
input/output.
8.1 FEATURES
The following features are provided as parallel interface functions:
• Centronics specification interface compatibility
• Input/output mode switchable by software
• BUSY signal manipulable by software
• BUSY signal and ACK signal output timing settable
• Initialization by external interrupt
• Dedicated parallel interface interrupt source
• Parallel interface interrupt (INTPAI)
• DMA request signal generation in parallel transmission/reception
• INTPAI functions as a DMA start trigger.
• Signal pin input/output characteristic is TTL level (Centronics specification interface)
53
Page 54

(a) Input mode
Figure 8-1. Parallel Interface Block Diagram
Input
Data
Latch
OE
PD0–PD7
µ
PD70433
(b) Output mode
Internal BusInternal Bus
DATA
RD
RESET
DATA
WR
IBF
S
Q
R
MB0, 1
DMA
Request
PAI Timer
Counter
IBSY
S
R
ACK
Timing
Control
BUSY
Control
Circuit
ACK
Control
Circuit
Output
Data
Latch
WR
DATASTB
BUSY
ACK
INTP5
PD0–PD7
54
DMA
Request
INTPAI Request
INT/
DMA
Request
Control
PAI Timer
DATASTB
Counter
BUSY
ACK
Page 55

µ
PD70433
9. TIMER FUNCTION
The V55PI timer unit can be used as an interval timer, free-running timer and event counter. It is also possible to
manipulate P7 as a real-time output port, synchronized with interrupt requests generated by the timer. The normal timer
function and real-time output port function are described here.
9.1 FEATURES
The timer function offers the following features.
• 16-bit timer × 4
• Two count clock sources are selectable
• System clock scaled output selectable (φ/8, φ/32: system clock φ)
• External input pulses from TI pin
• External count output signal (TOn output)
• Three 16-bit capture registers on chip (external interrupt input signals INTP0 to INTP2 as triggers)
• Six dedicated timer unit interrupt source (INTCM00, INTCM01, INTCM10, INTCM11, INTCM21, INTCM31)
• Real-time output port function synchronized with timer interrupts
9.2 TIMER UNIT CONFIGURATION
The timer unit configuration is shown in Figure 9-1, and the function of each timer in Table 9-1.
Count function Available Available Available Available
Capture function Available Available Not Available Not Available
Compare function Available Available Available Available
Function Toggle
Timer output
output
function Set/reset
output
Cascading Not Available Not Available Available
Table 9-1. Timer Functions
Timer 0 Timer 1 Timer 2 Timer 3
Available Not Available Available Not Available
Not Available Not Available Available Available
55
Page 56

56
Figure 9-1. Timer Unit Block Diagram
φ
INTP0
INTP1
φ
φ
/32
Timer 0
TO00
TO01
TI
φ
/8
INTP2
φ
φ
/32
TO20
/8
/8
16–Bit Free Running Timer (TM0)
Capture Register (CT00)
Capture Register (CT01)
Compare Register (CM00)
Compare Register (CM01)
Timer 2
16–Bit Timer Register 2 (TM2)
Compare Register (CM20)
Clear
OVF
INTCM00
INTCM01
T
T
To Real–Time
Output Port
INTCM21
SRQ
16–Bit Timer Register/Event Counter 1
Capture Register (CT10)
Compare Register (CM10)
Compare Register (CM11)
/8
Clear, Count Enable
Timer 1
(TM1)
Timer 3
16–Bit Timer Register 3 (TM3)
Compare Register (CM30)
Clear
Clear
OVF
INTCM10
INTCM11
INTCM31
SRQ
TO30
Compare Register (CM21)
Compare Register (CM22)
Compare Register (CM23)
SRQ
T
To DMA
Controller
Compare Register (CM31)
TO21
µ
PD70433
Page 57

µ
PD70433
9.3 REAL-TIME OUTPUT PORT FUNCTION
Port 7 of the V55PI incorporates a real-time output port function, and can output the contents of the port 7 buffer (P7H,
P7L) at programmable intervals from timer 0 bit-wise.
9.3.1 Real-Time Output Port Configuration
The real-time output port configuration is shown in Figure 9-2. It comprises the following buffer registers, output and
control registers.
(1) Port 7 buffer (P7H, P7L)
The buffer registers hold the data to be output next when port 7 is set to the real-time output port mode.
The port 7 buffer contents are not affected by reset input.
(2) Real-time output port (RTP)
Real-time output port output data is held in this port after being taken from the port 7 buffer, and output from the
pins.
RTP can be read or written to by an 8-bit or single-bit manipulation instruction (unlike the port 7 output port).
(3) Real-time output port delay specification regiser (RTPD) and delay counter
This register is set and used when using the mode in which a delay time is inserted in the timing for output from
the real-time output port (RTP) to the output pins.
If the P7L bit is set to "0", "0" is output to the corresponding output pin bit after the elapse of the delay time equivalent
to the count clock cycle time set in the real-time output port delay specification register after the time at which the transfer
trigger is generated. The delay time in this case is counted by the delay counter.
(4) Real-time output port control register (RTPC)
RTPC specifies the operating mode of the real-time output port. It is possible to specify whether or not a delay is
to be inserted when data is output, the timing for transferring data to the port 7 buffer, the transfer timing trigger, and
so on.
57
Page 58

58
Figure 9–2. Real–Time Output Port Operation
RTPC
P7H
Port 7 Buffer
Real–Time Output
Port Control Register
8
Internal Bus
Output
Latch
RTP Bit 3
S
R
Q
TRG, BYTE
DLY
P7L
Port 7 Buffer
Delay
Bor-
row
No Delay
Delay Counter
Preset
Delay Specification
Register
Selector
RTPD
INTCM00
(Timer 0)
INTCM01
(Timer 1)
φ
/2
To Port 7
Output Latches
RTP7 to RTP4
P77 P76 P75 P74 P73 P72 P71 P70
Control Output Signals
µ
PD70433
Page 59

µ
PD70433
9.3.2 Real-Time Output Port Operation
Real-time output port specification is performed bit-wise by the port 7 mode control register (PCM7).
Port 7 (P7), the port 7 buffer (P7H, P7L) and the real-time output port can be accessed as real-time output ports.
Data output is performed as described below.
When output data is written in the port 7 buffer (P7H, P7L), the port 7 buffer contents are transferred to the real-time
output port (RTP) and output to the pins in synchronization with the timing of an interrupt request from timer 0 (INTCM00,
INTCM01), or a write to the TRG bit in the control register (RTPC).
An example of the direct control of the output pattern for a real-time output port and the output interval is shown in Figure
9-3.
Update data is transferred from the two data storage areas set beforehand in the external memory space to the realtime output function buffer registers (P7H, P7L) and compare registers (CM00, CM01).
Figure 9-3. Real-Time Output Port Stepping Motor Control
Register File Space
Output Data Area
Output Timing Data Area
Compare Register
CLK
/8
f
Free Running Timer
CM00 or CM01
TM0
External Memory Space
D1
D2
D3
D4
T1
T2
T3
T4
Timer 0
Interrupt
Request
Match
Macro Service
Processing
Real-Time Output Trigger/
Macro Service Activation
TransferTransfer or Addition
INTCM00
or
INTCM01
Output Data Pointer
Buffer Register Address
Compare Register Address
Output Timing Data Pointer
RC Initial Value
Real–Time Output Counter (RC)
Macro Service Counter
Mode Register
Channel Pointer
Internal Bus
Real-Time Output Port
Buffer Register
P7H, P7L
+1
–1
–1
Macro Service
Control Word
RTP
Output Latch
Stepping Motor
59
Page 60

µ
PD70433
In particular, it is possible to insert a delay time in the timing for output by setting the real-time output port delay
specification register (RTPD) pins. If the P7L bit is changed from "1" to "0", it is possible to perform output after inserting
a delay time of 2 × the system clock set in the RTPD from the timing at which the transfer trigger is generated. In this case,
"0" is output from the corresponding output pin. This delay is counted by the delay counter.
60
Page 61

µ
PD70433
10. PWM UNIT
The V55PI is provided with an 8-bit precision PWM (pulse width modulation) signal output function.
PWM output can be used as a digital-to-analog conversion output by connecting a low-pass filter, etc., externally. This
is ideal for the actuator control signal for motors, etc.
10.1 FEATURES
The PWM unit offers the following features:
• PWM output pulse active level selectable
φ
• Frequency: 25 MHz (with 12.5 MHz system clock
→ PWM cycle: 40.96
: 32 MHz (with 16 MHz system clock
→ PWM cycle: 32.00
• Output pulse width (duty): 0, 1/256, ....., 255/256
→ Resolution: 160 ns (with 12.5 MHz system clock φ)
10.2 PWM UNIT CONFIGURATION
The configuration of the PWM unit is shown in Figure 10-1.
The PWM unit consists of the PWM register (PWM) and PWM control register (PWMC), and an 8-bit counter.
The PWM register controls the pulse width (duty) in the PWM output mode. The 8–bit counter is set to 00H by reset input.
The PWM register is not affected by reset input.
µ
s
µ
s
125 ns (with 16 MHz system clock
)
φ
)
φ
)
61
Page 62

62
Figure 10-1. PWM Unit Block Diagram
8-Bit Counter
Comparator
PWM Slave Latch
Preset
PWM Register
Overflow
Match Detection
Signal
Internal Bus
S
Q
R
Q
000000CE ALV
Active
Level
Control
PWM Control
Register
PWM
Output
µ
PD70433
Page 63

µ
PD70433
11. WATCHDOG TIMER FUNCTION
The watchdog timer is a function for preventing inadvertent program looping and deadlocks.
11.1 FEATURES
φ
• Three overflow times settable (8.1, 32.7, 131.0 [ms]: system clock
clock
φ
= 12.5 MHz)
• Output pin provided (WDTOUT pin) which can be directly connected to the RESET pin
11.2 WATCHDOG TIMER CONFIGURATION AND OPERATION
Non-generation of a watchdog timer interrupt enables normal operation of the program or system to be confirmed. To
use the watchdog function, an instruction (RSTWDT) to clear the watchdog timer (start the count) must be included in at
fixed intervals in the program execution time, at the start of a subroutine, etc.
If the instruction which clears the watchdog timer is not executed within the set time and the watchdog timer overflows,
a watchdog timer interrupt (INTWDT) is generated and the low-level signal is output to the WDTOUT pin to report a program
error.
The watchdog timer configuration is shown in Figure 11-1.
= 16 MHz) (10.4, 41.9, 167.7 [ms]: system
Figure 11-1. Watchdog Timer Configuration Diagram
9
φ
/2
*1
φ
Frequency
Divider
WDTCLR
RESET
STOP
11
φ
/2
13
φ
/2
*2
Watchdog
Timer
(8 bits)
Clear
Overflow
WDTOUT
Active Timer
(5 bits)
INTWDT
Oscillation
Stabilizing
Time Control
Circuit
OVF
SQ
R
WDTOUT
*1.
φ
: System clock
2. WDTCLR: Watchdog timer clearance by instruction
63
Page 64

µ
PD70433
12. A/D CONVERTER FUNCTION
The V55PI incorporates a high-speed, high-precision 8-bit analog/digital (A/D) converter with four analog inputs (ANI0
to ANI3). The A/D converter uses the successive approximation method, and is provided with four A/D conversion result
registers (ADCR0 to ADCR3) which hold the conversion results.
12.1 FEATURES
The A/D converter offers the following features:
• Incorporates four 8-bit A/D conversion result registers.
• Four analog input pins (ANI0 to ANI3)
• Two A/D converter conversion operating modes
• Scan mode : Performs conversion by selecting multiple analog inputs in sequence.
• Select mode : Performs continuous conversion with only one pin used as the analog input.
• Two conversion start methods
• Hardware start : Started by trigger input (INTP4)
• Software start : Started by A/D converter mode register (ADM) bit setting
• Generation of conversion end interrupt request (INTAD)
64
Page 65

Figure 12-1. A/D Converter Block Diagram
Series Resistance String
ANI0
ANI1
ANI2
ANI3
P15/INTP4
External Trigger
A/D Converter Mode Register (ADM)
Input
Circuit
8
Internal Bus
Sample & Hold Circuit
Control
Comparator
Successive Approxi-
mation Register (SAR)
8
A/D Conversion Result Register 0 (ADCR0)
A/D Conversion Result Register 1 (ADCR1)
A/D Conversion Result Register 2 (ADCR2)
A/D Conversion Result Register 3 (ADCR3)
8
R/2
Tap Decoder
R
R/2
AV
REF
AV
SS
AV
DD
INTAD
65
µ
PD70433
Internal Bus
Page 66

µ
PD70433
13. STANDBY FUNCTIONS
The V55PI has two methods for controlling the operating clock as standby functions designed to reduce power dissipation.
Transition to either of these standby modes is possible by means of a dedicated instruction.
Table 13-1. HALT/STOP Mode Operating Status
Parameter HALT Mode STOP Mode
Clock generator Operating
Internal system clock Stopped
16–bit timer
Watchdog timer
Hold circuit
Serial interface
Parallel interface
A/D Converter
Interrupt request controller
DMA controller
IORD, IOWR High level High level
AD0 to AD15
Bus lines Retained
A16 to A23
R/W output High level High level
Refresh operation Operating Stopped
Data retention
Release method
Operating
Change accordng to DMAC operating
status
All internal data retained (CPU status, All internal data retained (CPU status,
RAM contents, etc.) RAM contents, etc.)
• NMI
• INTWDT • NMI
• Maskable interrupt request • RESET input
• RESET input
Stopped
13.1 HALT MODE
In this mode, the CPU operating clock is halted.
Setting the CPU idle time to the HALT mode enables overall system power dissipation to be reduced. The HALT mode
is entered by executing the HALT instruction.
In the HALT mode the CPU clock and program execution are stopped, and all register and on-chip RAM contents
immediately prior to the stoppage are retained. The status of each hardware unit is shown in Table 13-1.
When the HALT instruction is executed during a DMA transfer, transition to the HALT mode is deferred until the transfer
bus cycle for one DMA request is completed.
66
Page 67

µ
PD70433
13.2 STOP MODE
In this mode, clock oscillation is stopped.
This is effective when the entire application system is stopped, and offers extremely low power dissipation. The STOP
mode is entered by executing the STOP instruction. In this mode all clocks are stopped. Program execution is stopped, and
all register and on-chip RAM contents immediately prior to the stoppage are retained. The status of each hardware unit is
shown in Table 13-1.
When the STOP instruction is executed during a DMA transfer, transition to the STOP mode is deferred until the transfer
bus cycle for one DMA request is completed. If there is contention between a refresh cycle and STOP instruction execution,
transition to the STOP mode is deferred until the refresh cycle is completed.
67
Page 68

µ
PD70433
14. CLOCK GENERATOR
The clock generator supplies various clocks to the CPU and peripheral hardware, and controls the CPU operating mode.
14.1 CLOCK GENERATOR CONFIGURATION AND OPERATION
The clock generator is configured as shown in Figure 14-1.
The clock generator clock is generated by a crystal resonator or ceramic resonator connected to the X1 and X2 pins.
The clock generator output is subjected to waveform shaping (dividing frequency by 2) and selection of the scaling factor
by means of the processor control register (PRC), and is then used as the system clock φ.
The system clock
1/2, 1/4, 1/8 or 1/16 the oscillator frequency (f
Selecting a low-speed system clock
of a battery-driven system even when the voltage drops.
An external clock can be input. In this case, the clock signal should be input to the X1 pin, and leave the X2 pin open.
φ
scaling factor is specified by the PCK1 and PCK0 bits of the PRC register, and can be selected as
XX).
φ
reduces the current consumption of internal circuit, allowing extended operation
Figure 14-1. Clock Generator
Waveform
Shaping
Frequency
X1
Clock
Oscillator
X2
8
Internal Bus
PRC
PCK0
PCK1
TB0
TB1
0
ENCLK
1
1
Dividers
f
XX
1/2 1/2
1/2
1/2
1
f
XX
16
φ
)
(=f
1
f
XX
8
1
f
XX
4
1
f
XX
2
X
Selector
Time Base
Counter
Software Interval Timer
Refresh Cycle Generator
PWM
Baud Rate Generator
Watchdog Timer
System Clock
CLKOUT
68
fXX : Oscillator frequency
φ
: System clock
PRC: Processor control register
Page 69

µ
PD70433
In the V55PI, the frequency divider (time base counter: TBC) which divides the internal system clock φ is shared by each
timer unit.
The TBC cannot be read or written to by an instruction.
The TBC tap output (divide-by-2
n
clock) is supplied to the units shown below as a count clock.
(1) Refresh cycle generator
(2) Software interval timer
(3) PWM unit
(4) Baud rate generator
The TBC is cleared to 00H only by reset input, after which it is constantly incremented. TBC operation is stopped in the
STOP mode. The configuration of the TBC is shown in Figure 14-2.
Figure 14-2. Frequency Divider (Time Base Counter, TBC) Configuration
φ
φ
/2
to
φ
/2
PWM
9
φ
/2
φ
/2
Baud Rate
Generator
TBC
3
φ
to
8
/2
to
9
φ
/2
Refresh Cycle
Generator
Software Interval
φ
/2
and
φ
/2
Timer
2
7
69
Page 70

µ
PD70433
15. SOFTWARE INTERVAL TIMER FUNCTION
The V55PI incorporates a 16-bit software interval timer as a timer for software timer functions and watch functions.
15.1 SOFTWARE INTERVAL TIMER CONFIGURATION
The configuration of the software interval timer is shown in Figure 15-1.
Figure 15-1. Software Interval Timer Configuration
φ
φ
/4
Software Timer Counter (STC)
/128
Clear
Software Timer Counter Compare Register (STMC)
INTSIT
Match Detection
70
Page 71

µ
PD70433
16. CODEC INSTRUCTIONS
The V55PI has 9 codec instructions.
Using these special instructions on the V55PI enables not only image information MH encoding but also MR encoding
which previously required the use of a special device such as an ACEE (advanced compression/expansion engine) to be
implemented by means of a small-scale, high-speed codec.
16.1 FEATURES
The V55PI has the following 9 codec instructions (4 for compression, 5 for expansion):
• Compression instructions
(1) Change point table creation instruction: COLTRP
(2) Data transmission instruction (transmission of EOL *1, FILL, RTC *2, etc.): ALBIT
(3) MH encoding instruction: MHENC
(4) MR encoding instruction: MRENC
• Expansion instructions
(5) EOL detection instruction: SCHEOL
(6) 1-bit (tag) detection instruction: GETBIT
(7) MH decoding change point table creation instruction: MHDEC
(8) MR decoding change point table creation instruction: MRDEC
(9) Pixel data creation instruction: CNVTRP
MH/MR encoding and MH/MR decoding using these instructions are performed as shown in Figures 16-1 and
16-2.
*1. EOL: End Of Line
2. RTC: Return To Control
Note When compression/expansion processing is performed using the V55PI codec instructions, the following
should be specified as preconditions.
• Compression/expansion is to be performed line by line.
• Consideration must be given to task switching and interrupt generation during compression processing.
• The number of bits processed per line must not be changed during processing of one page.
• The segment value must be changed for data over 64 Kbytes that straddles segments during processing.
71
Page 72

Figure 16-1. MH/MR Encoding Processing Flow
Start
K = 0
L = Number of lines
µ
PD70433
K = 0
Yes
Data transmission
instruction (EOL + tag
bit "1" transmission)
Change point table
creation instruction
MH encoding
instruction
K = K factor – 1 K = K – 1
Data transmission
instruction
(FILL transmission)
L = L – 1
No
Data transmission
instruction (EOL + tag
bit "0" transmission)
Change point table
creation instruction
MR encoding
instruction
72
No
Data transmission
instruction
(RTC transmission)
L = 0
Yes
End
Page 73

Figure 16-2. MH and MR Decoding Processing Flow
Start
EOL detection
instruction
µ
PD70433
Error detection To Error Processing
No
1–bit detection
instruction (tag
bit detection)
Tag = 1
Yes
MH decoding
instruction
Yes
End Error detection End
EOL detection
at start
No
Error detection
No
Yes
No
Yes
To Error Processing
Yes
MR decoding
instruction
EOL detection
at start
No
No
*
Yes
Pixel data creation
instruction
* RTC is detected by two EOLs.
Pixel data creation
instruction
73
Page 74

16.2 MEMORY MAP
The data memory areas required by the V55PI's codec instructions are shown below.
(1) Register file space
This is the register bank for parameter setting.
(2) User RAM
Encoding line change point table : Storage area for change point information required for performing encoding
In the case of n bit/lines, a maximum area of 2n + 4 bytes is required.
Reference line table : Reference line change point information storage area
Image data buffer : Storage area for pixel data read from scanner in encoding, or encoding data
received from modem in decoding
Transmit/receive buffer : Buffer for transferring encoded data to modem/scanner
Print buffer : Buffer for transferring decoded pixel data to recording system
(3) User ROM
Encoding conversion table : Conversion table for MH/MR encoding
Decoding conversion table : Conversion table for MH/MR decoding
µ
PD70433
(4) Access to Expanded Memory Space
The 16-Mbyte expanded memory space can be accessed by using the expanded segment override prefix
instruction (DS2: or DS3:).
However, the segment registers DS2 and DS3 that are used during instruction execution are DS2 and DS3
in the parameter setting register banks of each instruction.
Table 16-1. Instructions to which Expanded Segment Override Prefix Can Be Attached
DS2: DS3: CODEC Instruction
Yes Yes COLTRP
Yes No MHENC
Yes Yes MHDEC
Yes No MRENC
Yes Yes MRDEC
Yes No SCHEOL
Yes No GETBIT
Yes Yes CNVTRP
Example
DS2 : DS3 : COLTRP
DS2 : SCHEOL
The relationship between encoding instructions and data in memory is shown in Figure 16-3, and the relationship between
decoding instruction and data in memory is shown in Figure 16-4.
74
Page 75

Figure 16-3. Encoding Instructions and Data in Memory
DMA
µ
PD70433
Register File
Parameter
Frame
User ROM
Encoding Conversion
Table (512 Bytes) *
* In case of MH/MR encoding instructions
Figure 16-4. Decoding Instruction and Data in Memory
Software User RAM
Data Output Instruction
Change Point Table
Creation Instruction
MH/MR Encoding
Instruction
Image Data (1 Line)
Work (Change Points)
Coding Data (1 Line)
DMA
Register File
Parameter
Frame
User ROM
Decoding Conversion
Table (2304 Bytes)*
* In case of MH/MR decoding instructions
Software User RAM
EOL Detection Instruction
1–Bit Detection Instruction
MH/MR Decoding
Instruction
Image Data Creation
Instruction
Coding Data
Work (Change Points)
Image Data (1 Line)
75
Page 76

µ
PD70433
16.3 PROCESSING FLOW
The instructions shown in 16.1 "Features" are used in the order shown in Figures 16-5 and 16-6 in encoding/decoding
procesing.
Figure 16-5. Processing Flow for Encoding of One Line
Start
Data transmission instruction
(ALBIT)
Transmission of EOL and tag
Change point table
creation instruction
(COLTRP)
Change point information for
1 line created, and stored in
prescribed storage area
(change point table)
MH/MR encoding instruction
(MHENC/MRENC)
(Pixel Data)
Input
Output
(Change Point Table)
Black
White
02113116
1 Word
Input
White
Black
White
Black
.....
Black
White
.....
76
MH/MR encoding for 1 line
Encoded Data → Transmision Buffer
Fill transmission
End
Page 77

Figure 16-6. Processing Flow for Decoding of One Line
Start
EOL detection instruction
(SCHEOL)
EOL (000000000001) is detected
1 bit detection instruction
(GETBIT)
Tag (1 bit) is detected
Encoded Data ← Printer Buffer
µ
PD70433
MH/MR decoding instruction
(MHDEC/MRDEC)
MH/MR decoding change point
information for 1 line is generated
and stored in specified area
(change point table)
Pixel data creation instruction
(CNVTRP)
Pixel data for 1 line is created
End
Input
Output
(Change Point Table)
Black
White
02113116
Input
Output
(Pixel Data)
White
1 Word
Black
White
Black
Black
White
.....
.....
77
Page 78

µ
PD70433
17. INSTRUCTION SET
The V55PI instruction set is upward compatible with the V20/V30 (native mode) and V25/V35 instruction sets.
17.1 INSTRUCTIONS NEWLY ADDED TO V20/V30 AND V25/V35
Instructions which have been added to the V20/V30 and V25/V35 instruction sets, and instructions whose application
range has been extended, are shown below.
(1) Instructions added to V20/V30.
Mnemonic Operand Instruction Group
BRKCS reg 16
TSKSW reg 16
MOVSPA None
MOVSPB reg 16
BTCLR sfr, imm3, short-label Conditional branch instruction
RETRBI None
FINT None
STOP None CPU control instruction
Register bank switching instruction
Data transfer instruction
Interrupt instruction
78
Page 79

(2) Instructions added to V25/V35.
Mnemonic Operand Instruction Group
IRAM None Register file space access override prefix instrution
µ
PD70433
DS2 None
DS3 None
DS2, reg16, mem32
DS3, reg16, mem32
MOV
PUSH
POP
RSTWDT imm8, imm8’ Watchdog timer manipulation instruction
BTCLRL sfrl, imm3, short-label Conditional branch instruction
BSCH
xsreg, reg16
xsreg, mem16
reg16, xsreg
mem16, xsreg
DS2
DS3/VPC
DS2
DS3/VPC
reg8
mem8
reg16
Extended segment override prefix instruction
Data transfer instruction
Stack manipulation instruction
Bit manipulation instruction
mem16
QHOUT imm16
QOUT imm16 Queue manipulation instruction
QTIN imm16
ALBIT None
COLTRP None
MHENC None
MRENC None
SCHEOL None Dedicated FAX instruction
GETBIT None
MHDEC None
MRDEC None
CNVTRP None
Remark VPC: Vector PC
79
Page 80

µ
PD70433
17.2 INSTRUCTION SET OPERATIONS
Table 17-1. Operand Type Legend
Identifier Description
reg, 8/16-bit general register
(Destination register in an instruction using two 8/16-bit general registers)
reg’ Source register in an instruction using two 8/16-bit general registers
reg8, 8-bit general register
(Destination register in an instruction using two 8-bit general registers)
reg8' Source register in an instruction using two 8-bit general registers
reg16, 16-bit general register
(Destination register in an instruction using two 16-bit general registers)
reg16' Source register in an instruction using two 16-bit general registers
mem 8/16-bit memory address
mem8 8-bit memory address
mem16 16-bit memory address
mem32 32-bit memory address
sfr Special function register location: FFF00H to FFFEFH
sfrl Special function register location: FFE00H to FFEFFH
dmem 16-bit direct memory address
imm 8/16-bit immediate data
imm3 3-bit immediate data
imm4 4-bit immediate data
imm8 8-bit immediate data
imm8' 8-bit immediate date (1’s compliment of imm8)
imm16 16-bit immediate data
acc Accumulator AW or AL
sreg Segment register
xsreg Extended segment register
src-table Name of 256-byte conversion table
src-block Name of source block addressed by register IX
dst-block Name of destination block addressed by register IY
src-string Name of source string addressed by register IX
dst-string Name of destination string addressed by register IY
near-proc Procedure start address in current program segment
far-proc Procedure start address in a different program segment
near-label Absolute address in current program segment
short-label Relative address of memory in range –128 to +127 bytes from end of instruction
far-label Absolute address in a different program segment
regptr16 16-bit general register holding call address offset in current program segment
memptr16 16-bit memory address holding call address offset in current program segment
memptr32 32-bit memory address holding call address offset and segment data in a different program segment
pop-value Number of bytes removed from stack (0 to 64K, normally an even number)
fp-op Immediate value which identifies external floating point operation coprocessor operation code
repeat Repeat prefix instruction
IRAM : Register file space access override prefix instruction
R Register set (AW, BW, CW, DW, SP, BP, IX, IY)
( ) Omissible
or, / Or
80
Page 81

µ
PD70433
Table 17-2. Operation Code Legend
Identifier Description
W Word/byte specification bit (1: word, 0: byte). However, when s = 1, sign extension byte data is
specified as 16-bit operand even if W = 1.
reg, reg’ 8/16-bit general register specification bits (000 to 111)
mod, mem Memory addressing specification bits (mod: 00 to 10, mem: 000 to 111)
(disp-low) Optional 16-bit displacement low byte
(disp-high) Optional 16-bit displacement high byte
disp-low 16-bit displacement low byte for PC relative addition
disp-high 16-bit displacement high byte for PC relative addition
imm3 3-bit immediate data
imm4 4-bit immediate data
imm8 8-bit immediate data
imm8' 8-bit immediate data (1's complement of imm8)
imm16-low 16-bit immediate data low byte
imm16-high 16-bit immediate data high byte
addr-low 16-bit direct address low byte
addr-high 16-bit direct address high byte
sreg Segment register specification bits (00 to 11)
xsreg Extended segment register specification bits (10 to 11)
s Sign extension specification bit (1: sign extension, 0: no sign extension)
offset-low Low byte of 16-bit offset data to be loaded in PC
offset-high High byte of 16-bit offset data to be loaded in PC
seg-low Low byte of 16-bit segment data to be loaded in PS
seg-high High byte of 16-bit segment data to be loaded in PS
pop-value-low Low byte of 16-bit data which specifies number of bytes to be removed from stack
pop-value-high High byte of 16-bit data which specifies number of bytes to be removed from stack
disp8 8-bit displacement for relative addition to PC
X
XXX
YYY
ZZZ
Operation code of an external floating point operation coprocessor
81
Page 82

Table 17-3. Operation Description Legend
Identifier Description
AW Accumulator (16 bits)
AH Accumulator (high byte)
AL Accumulator (low byte)
BW Register BW (16 bits)
CW Register CW (16 bits)
CL Register CL (low byte)
DW Register DW
SP Stack pointer (16 bits)
BP Base Pointer (16 bits)
PC Program counter (16 bits)
PSW Program status word (16 bits)
IX Index register (source) (16 bits)
IY Index register (destination) (16 bits)
PS Program segment register (16 bits)
DS3 Extended data segment 3 register (16 bits)
DS2 Extended data segment 2 register (16 bits)
DS1 Data segment 1 register (16 bits)
DS0 Data segment 0 register (16 bits)
SS Stack segment register (16 bits)
AC Auxiliary carry flag
CY Carry flag
P Parity flag
S Sign flag
Z Direction flag
IE Interrupt enable flag
V Overflow flag
IBRK I/O break flag
BRK Break flag
RB0 Register bank 0 flag
RB1 Register bank 1 flag
RB2 Register bank 2 flag
RB3 Register bank 3 flag
VPC Vector PC
(...) Contents of memory indicated by contents of in parenthesis
disp Displacement (8/16-bit)
temp Temporary register (8/16/32 bits)
ext–disp8 16 bits with 8-bit displacement sign-extended
seg Immediate segment data (16 bits)
offset Immediate offset data (16 bits)
← Transfer direction
+ Addition
− Subtraction
× Multiplication
÷ Division
% Modulo
∧ Logical product (AND)
∨ Logical sum (OR)
V Exclusive logical sum (exclusive OR)
××H 2-digit hexadecimal number
××××H 4-digit hexadecimal number
/ Alternate function, or
µ
PD70433
82
Page 83

Table 17-4. Flag Operation Legend
Identifier Description
(Blank) No change
0 Cleared to 0
1 Set to 1
× Set or cleared depending on result
U Undefined
R Previously saved value is restored
Table 17-5. Memory Addressing
µ
PD70433
mem
mod
000 BW + IX BW + IX + disp8 BW + IX + disp16
001 BW + IY BW + IY + disp8 BW + IY + disp16
010 BP + IX BP + IX + disp8 BP + IX + disp16
011 BP + IY BP + IY + disp8 BP + IY + disp16
100 IX IX + disp8 IX + disp16
101 IY IY + disp8 IY + disp16
110 Direct address BP + disp8 BP + disp16
111 BW BW + disp8 BW + disp16
00 01 10
Note When BP is used in memory addressing other than in a primitive instruction, the default segment register
is SS. When BP is not used, the default segment register is DS0.
In primitive instruction memory addressing, the destination block default segment register is DS1. In
memory addressing, the source block default segment register is DS0.
Table 17-6. 8/16-Bit General Register Selection Table 17-7. Segment Register Selection
reg W = 0 W = 1 sreg
000 AL AW 00 DS1
001 CL CW 01 PS
010 DL DW 10 SS
011 BL BW 11 DS0
100 AH SP
101 CH BP
110 DH IX
111 BH IY xsreg
Table 17-8. Extended Segment Register Selection
10 DS3/VPC
11 DS2
83
Page 84

µ
PD70433
Number of Clock Cycles
In the case of a memory operand the number of clock cycles depends on the addressing mode. The following numbers
should be used for “EA” in Table 17-9 “Number of Clock Cycles”.
mod
mem Cycles Cycles Cycles
000 BW + IX 3 BW + IX + disp8 3 BW + IX + disp16 3
001 BW + IY 3 BW + IY + disp8 3 BW + IY + disp16 3
010 BP + IX 3 BP + IX + disp8 3 BP + IX + disp16 3
011 BP + IY 3 BP + IY + disp8 3 BP + IY + disp16 3
100 IX 2 IX + disp8 2 IX + disp16 2
101 IY 2 IY + disp8 2 IY + disp16 2
110 Direct address 2 BP + disp8 2 BP + disp16 2
111 BW 2 BW + disp8 2 BW + disp16 2
“T” indicates the number of wait states. Any number of wait states from "0" (no wait) up can be used.
00 Clock 01 Clock 10 Clock
84
Page 85

Mnemonic Operands
Group
Instruction
reg, reg' –– 2 2 2 2
mem, reg –– EA + 2 EA + 3 EA + 2 EA + 3
Table 17-9. Number of Clock Cycles (1/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
reg, mem EA + 2 EA + 5 + T EA + 2
mem, imm –– EA + 2 EA + 3 EA + 2 EA + 3
reg, imm –– 2 2 2 2
acc, dmem 4 7 + T 4
dmem, acc –– 4 5 4 5
sreg, reg16 –– –– –– 2 2
xsreg, reg16
VPC, reg16
MOV sreg, mem16 –– –– EA + 2
xsreg,mem16/
Data transfer instructions
VPC, mem16
reg16, sreg –– –– –– 2 2
8 EA + 8 + 2T
16 EA + 5 + T
8 10 + 2T
16 7 + T
8
–– –– 2 2
16
8 EA + 8 + 2T
16 EA + 5 + T
8 EA + 8 + 2T
–– –– EA + 2
16 EA + 5 + T
reg16, xsreg/
reg16, VPC
mem16, sreg –– –– –– EA + 2 EA + 3
mem16, xsreg/
mem16, VPC
DS0,
reg16, mem32
DS2,
reg16, mem32
DS1,
reg16, mem32
DS3,
reg16, mem32
8
–– –– 2 2
16
8
–– –– EA + 2 EA + 3
16
8 EA + 17 + 4T
–– –– EA + 5
16 EA + 11 + 2T
8 EA + 17 + 4T
–– –– EA + 5
16 EA + 11 + 2T
8 EA + 17 + 4T
–– –– EA + 5
16 EA + 11 + 2T
8 EA + 17 + 4T
–– –– EA + 5
16 EA + 11 + 2T
* 8 : 8-bit width 16 : 16-bit width –– : Both 8-bit and 16-bit bus width
85
Page 86

Mnemonic Operands
Group
Instruction
AH, PSW –– 2 2 –– ––
Table 17-9. Number of Clock Cycles (2/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
MOV 8 3 3
LDEA reg16, mem16 –– –– –– EA + 2 EA + 2
TRANS/
TRANSB
XCH
Data transfer instructions
MOVSPA –– –– –– 8 8
MOVSPB reg16 –– –– –– 9 9
REPC –– 0 to 1 0 to 1 0 to 1 0 to 1
REPNC –– 0 to 1 0 to 1 0 to 1 0 to 1
REP/
REPE/ –– 0 to 1 0 to 1 0 to 1 0 to 1
REPZ
Repeat prefixes
REPNE/
REPNZ
MOVBK
PSW, AH –– ––
src-table –– 6 9 + T –– ––
reg, reg' –– 4 4 4 4
mem, reg/
reg, mem
AW, reg16/
reg16, AW
dst-block,
src-block
16 2 2
EA + 10 + 2T
EA + 4 EA + 7 + T EA + 4
EA + 7 + T
–– –– –– 4 4
–– 0 to 1 0 to 1 0 to 1 0 to 1
21 + 2T 22 + 2T
18 + T 19 + T
8 9 + (14 + 2T)n 9 + (18 + 4T)n
MOVBKB/
MOVBKW
CMPBK
Primitive block transfer instructions
CMPBKB/
CMPBKW
src-block,
dst-block
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
Remark n: Number of repetitions
86
(rep)
9 + (11 + T)n 9 + (12 + 2T)n
16 9 + (11 + T)n 9 + (12 + 2T)n
16 9 + (13 + T)n 9 + (15 + 2T)n
(rep CW = 0)
55
20 + T 22 + 2T
8 9 + (16 + 2T)n 9 + (21 + 4T)n
(rep)
9 + (13 + T)n 9 + (15 + 2T)n
(rep CW = 0)
55
55
18 + T 19 + T
55
23 + 2T 28 + 4T
55
20 + T 22 + 2T
55
Page 87

Mnemonic Operands
Group
Instruction
Table 17-9. Number of Clock Cycles (3/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
CMPM dst-block 20 + T
8 10 + (12 + 2T)n
CMPMB/
CMPMW
16 10 + (9 + T)n
LDM src-block 16 + T
8 9 + (9 + 2T)n
LDMB/
LDMW
16 9 + (6 + T)n
Primitive block transfer instructions
STM dst-block 13
8 9 + (9 + 2T)n
STMB/
STMW
16 9 + (6 + T)n
15 17 + T 15
(rep)
10 + 7n 10 + (9 + T)n 10 + 7n
(rep CW = 0)
555
10 13 + T 10
(rep)
9 + 3n 9 + (6 + T)n 9 + 3n
(rep CW = 0)
555
12 13 12
(rep)
9 + 5n 9 + (6 + T)n 9 + 5n
(rep CW = 0)
555
5
17 + T
5
5
13 + T
5
5
13
5
reg8, reg8' –– –– 22 to 63
INS
reg8, imm4 –– –– 22 to 63
reg8, reg8' –– –– 19 to 41
EXT
Bit field manipulation instructions
reg8, imm4 –– –– 19 to 41
8 31 to 72
16 23 to 64
8 31 to 72
16 23 to 64
8 19 + 2T to 48 + 4T
16 19 to 42 + 2T
8 19 + 2T to 48 + 4T
16 19 to 42 + 2T
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
Remark n: Number of repetitions
87
Page 88

Table 17-9. Number of Clock Cycles (4/20)
µ
PD70433
Mnemonic Operands
Group
Instruction
acc8, imm8
IN*2
acc, DW
imm8, acc
OUT*2
Input/output instructions
DW, acc
INM*2
dst-block, DW
*1
RAM Access Access RAM Access Access
Bus Width
8 10 + 2T
16 7 + T
8 10 + 2T
16 7 + T
8
16
8
16
8 9 + (13 + 2T)n 9 + (17 + 4T)n
(rep)
9 + (10 + T)n 9 + (11 + 2T)n
16 9 + (10 + T)n 9 + (11 + 2T)n
(rep CW = 0)
Byte Processing Word Processing
On-Chip Other On-Chip Other
–– 7 + T ––
–– 7 + T ––
–– 5 –– 5
–– 5 –– 5
17 + T 18 + T
55
20 + 2T 21 + 2T
55
17 + T 18 + T
55
14 + T 17 + 2T
(rep)
9 + (7 + T)n 9 + (10 + 2T)n
(rep CW = 0)
55
Primitive input/output instructions
OUTM*2
DW, src-block
8 9 + (10 + 2T)n 9 + (16 + 4T)n
16 9 + (7 + T)n 9 + (10 + 2T)n
*1. 8 : 8-bit width
16 : 16-bit width
2. When IBRK = 1. As shown in the next page when IBRK = 0.
Remark n: Number of repetitions
17 + 2T 23 + 4T
55
14 + T 17 + 2T
55
88
Page 89

Mnemonic Operands
Group
Instruction
Table 17-9. Number of Clock Cycles (5/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
IN
OUT
Input/output instructions
Primitive input/
output instructions
* 8 : 8-bit width
16 : 16-bit width
acc8, imm8
acc, DW
imm8, acc
DW, acc
dst-block, DWINM
DW, src-blockOUTM
8 60 + 10T 60 + 10T
–– ––
16 40 + 5T 40 + 5T
8 60 + 10T 60 + 10T
–– ––
16 40 + 5T 40 + 5T
8 60 + 10T 60 + 10T
–– ––
16 40 + 5T 40 + 5T
8 60 + 10T 60 + 10T
–– ––
16 40 + 5T 40 + 5T
8 60 + 10T 60 + 10T
–– ––
16 40 + 5T 40 + 5T
8 60 + 10T 60 + 10T
–– ––
16 40 + 5T 40 + 5T
89
Page 90

Mnemonic Operands
Group
Instruction
reg, reg' –– 3 3 3 3
Table 17-9. Number of Clock Cycles (6/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem, reg EA + 4 EA + 7 + T EA + 4
ADD
ADDC
Addition/subtraction instructions
reg, mem EA + 2 EA + 6 + T EA + 2
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 7 + T EA + 4
acc, imm –– 2 2 2 2
reg, reg' –– 3 3 3 3
mem, reg EA + 4 EA + 7 + T EA + 4
reg, mem EA + 2 EA + 6 + T EA + 2
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 7 + T EA + 4
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 10 + 2T
16 EA + 7 + T
acc, imm –– 2 2 2 2
reg, reg' –– 3 3 3 3
mem, reg EA + 4 EA + 7 + T EA + 4
SUB
reg, mem EA + 2 EA + 6 + T EA + 2
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 7 + T EA + 4
acc, imm –– 2 2 2 2
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
90
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 10 + 2T
16 EA + 7 + T
Page 91

Mnemonic Operands
Group
Instruction
reg, reg' –– 3 3 3 3
Table 17-9. Number of Clock Cycles (7/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem, reg EA + 4 EA + 7 + T EA + 4
reg, mem EA + 2 EA + 6 + T EA + 2
SUBC
reg, imm –– 2 2 2 2
Addition/subtraction instructions
ADD4S
SUB4S
CMP4S
ROL4
BCD operation instructions
mem, imm EA + 4 EA + 7 + T EA + 4
acc, imm –– 2 2 2 2
dst-string,
src-string
dst-string,
src-string
dst-string,
src-string
reg8 8 5 5 –– ––
mem8 16 EA + 5 EA + 8 + T –– ––
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 10 + 2T
16 EA + 7 + T
8
6 + (15 + T)n 6 + (19 + 3T)n –– ––
16
8
6 + (16 + T)n 6 + (20 + 3T)n –– ––
16
8
6 + (15 + T)n 6 + (18 + 2T)n –– ––
16
ROR4
INC
DEC
Increment/decrement instructions
reg8 8 5 5 –– ––
mem8 16 EA + 5 EA + 8 + T –– ––
reg8 –– 2 2 –– ––
8 EA + 10 + 2T
mem EA + 3 EA + 7 + T EA + 3
16 EA + 7 + T
reg16 –– –– –– 2 2
reg8 –– 2 2 –– ––
8 EA + 10 + 2T
mem EA + 3 EA + 7 + T EA + 3
16 EA + 7 + T
reg16 –– –– –– 2 2
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
Remark n: Half of number of BCD digits
91
Page 92

Mnemonic Operands
Group
Instruction
reg8 –– 11 11 15 15
Table 17-9. Number of Clock Cycles (8/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem8 EA + 12 EA + 14 + T EA + 16
MULU
reg16 –– 11 11 15 15
mem16 EA + 12 EA + 14 + T EA + 16
reg8 –– 10 10 14 14
mem8 EA + 11 EA + 13 + T EA + 15
reg16 –– 10 10 14 14
Multiplication instructions
MUL
mem16 EA + 11 EA + 13 + T EA + 15
reg16, reg16',
imm8/reg16, –– –– –– 14 14
imm8
reg16, 8 EA + 20 + 2T
mem16, –– –– EA + 15
imm8 16 EA + 17 + T
8 EA + 21 + 2T
16 EA + 18 + T
8 EA + 21 + 2T
16 EA + 18 + T
8 EA + 20 + 2T
16 EA + 17 + T
8 EA + 20 + 2T
16 EA + 17 + T
reg16, reg16',
imm16/reg16, –– –– –– 14 14
imm16
reg16, 8 EA + 20 + 2T
mem16, –– –– EA + 15
imm1616 EA + 17 + T
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
92
Page 93

Mnemonic Operands
Group
Instruction
Table 17-9. Number of Clock Cycles (9/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
reg8
mem8
DIVU
reg16
mem16
reg8
Division instructions
mem8
DIV
reg16
mem16
8 15/62 + 10T 15/62 + 10T 23/57 + 10T 23/57 + 10T
16 15/42 + 5T 15/42 + 5T 23/42 + 5T 23/42 + 5T
8 EA + 16/63 + 10T
16 EA + 16/43 + 5T
8 15/62 + 10T 15/62 + 10T 23/57 + 10T 23/57 + 10T
16 15/42 + 5T 15/42 + 5T 23/42 + 5T 23/42 + 5T
8 EA + 16/63 + 10T
16 EA + 16/43 + 5T EA + 18 + T/43 + 5T EA + 24/43 + 5T EA + 26 + T/43 + 5T
8 17/64 + 10T 17/64 + 10T 25/59 + 10T 25/59 + 10T
16 17/44 + 5T 17/44 + 5T 25/44 + 5T 25/44 + 5T
8 EA + 18/65 + 10T
16 EA + 18/45 + 5T EA + 20 + T/45 + 5T EA + 26/45 + 5T EA + 28 + T/45 + 5T
8 17/64 + 10T 17/64 + 10T 25/59 + 10T 25/59 + 10T
16 17/44 + 5T 17/44 + 5T 25/44 + 5T 25/44 + 5T
8 EA + 18/65 + 10T
16 EA + 18/45 + 5T EA + 20 + T/45 + 5T EA + 26/45 + 5T EA + 28 + T/45 + 5T
EA + 18 + T/63 + 10T
EA + 18 + T/63 + 5T
EA + 18 + T/63 + 10T
EA + 20 + T/65 + 10T
EA + 20 + T/65 + 10T
EA + 24/58 + 10T
EA + 24/43 + 5T EA + 26 + T/43 + 5T
EA + 24/58 + 10T
EA + 26/60 + 10T
EA + 26/60 + 10T
EA + 30 + 2T/58 + 10T
EA + 30 + 2T/58 + 10T
EA + 31 + 2T/60 + 10T
EA + 31 + 2T/60 + 10T
86
ADJBA
ADJ4A –– 3 3 –– ––
ADJBS
BCD adjustment instructions
ADJ4S –– 3 3 –– ––
CVTBD –– 18 18 –– ––
CVTDB –– 8 8 –– ––
CVTBW –– 3 3 –– ––
instructions
Data conversion
CVTWL –– –– –– 3 3
16 9
86 6
16 9 9
9––––
–– ––
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
Remark Figures on right of / (slash) apply in case of a divide error.
93
Page 94

Mnemonic Operands
Group
Instruction
reg, reg' –– 3 3 3 3
Table 17-9. Number of Clock Cycles (10/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem, reg EA + 4 EA + 6 + T EA + 4
CMP
Comparison instructions
NOT
instructions
NEG
Complement operation
reg, mem EA + 2 EA + 6 + T EA + 2
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 6 + T EA + 4
acc, imm –– 2 2 2 2
reg –– 2 2 2 2
mem EA + 3 EA + 7 + T EA + 3
reg –– 2 2 2 2
mem EA + 3 EA + 7 + T EA + 3
reg, reg' –– 3 3 3 3
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
mem, reg/
reg, mem
TEST
Logical operation instructions
AND
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 6 + T EA + 4
acc, imm –– 2 2 2 2
reg, reg' –– 3 3 3 3
mem, reg EA + 4 EA + 7 + T EA + 4
reg, mem EA + 2 EA + 6 + T EA + 2
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 7 + T EA + 4
acc, imm –– 2 2 2 2
8 EA + 9 + 2T
EA + 4 EA + 6 + T EA + 4
16 EA + 6 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 10 + 2T
16 EA + 7 + T
* 8 : 8-bit width 16 : 16-bit width –– : Both 8-bit and 16-bit bus width
94
Page 95

Mnemonic Operands
Group
Instruction
reg, reg' –– 3 3 3 3
Table 17-9. Number of Clock Cycles (11/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem, reg EA + 4 EA + 7 + T EA + 4
reg, mem EA + 2 EA + 6 + T EA + 2
OR 16 EA + 6 + T
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 7 + T EA + 4
acc, imm –– 2 2 2 2
reg, reg' –– 3 3 3 3
mem, reg EA + 4 EA + 7 + T EA + 4
Logical operation instructions
reg, mem EA + 2 EA + 6 + T EA + 2
XOR 16 EA + 6 + T
reg, imm –– 2 2 2 2
mem, imm EA + 4 EA + 7 + T EA + 4
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 9 + 2T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 9 + 2T
8 EA + 10 + 2T
16 EA + 7 + T
acc, imm –– 2 2 2 2
reg8, CL –– 3 3 3 3
mem8, CL EA + 4 EA + 6 + T EA + 4
reg16, CL –– 3 3 3 3
mem16, CL EA + 4 EA + 6 + T EA + 4
TEST1
reg8, imm3 –– 2 2 2 2
mem8, imm3 EA + 4 EA + 6 + T EA + 4
Bit manipulation instructions
reg16, imm4 –– 2 2 2 2
mem16, imm4 EA + 4 EA + 6 + T EA + 4
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 9 + 2T
16 EA + 6 + T
8 EA + 9 + 2T
16 EA + 6 + T
* 8 : 8-bit width 16 : 16-bit width –– : Both 8-bit and 16-bit bus width
95
Page 96

Mnemonic Operands
Group
Instruction
reg8, CL –– 3 3 3 3
Table 17-9. Number of Clock Cycles (12/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem8, CL EA + 4 EA + 7 + T EA + 4
reg16, CL –– 3 3 3 3
mem16, CL EA + 4 EA + 7 + T EA + 4
NOT1 reg8, imm3 –– 2 2 2 2
mem8, imm3 EA + 4 EA + 7 + T EA + 4
reg16, imm4 –– 2 2 2 2
mem16, imm4
CY––2222
reg8, CL –– 3 3 3 3
Bit manipulation instructions
mem8, CL EA + 4 EA + 7 + T EA + 4
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
EA + 4 EA + 7 + T EA + 4
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
reg16, CL –– 3 3 3 3
mem16, CL EA + 4 EA + 7 + T EA + 4
CLR1 reg8, imm3 –– 2 2 2 2
mem8, imm3 EA + 4 EA + 7 + T EA + 4
reg16, imm4 –– 2 2 2 2
mem16, imm4
CY––2222
DIR –– 2 2 2 2
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
EA + 4 EA + 7 + T EA + 4
16 EA + 7 + T
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
96
Page 97

Mnemonic Operands
Group
Instruction
reg8, CL –– 3 3 3 3
Table 17-9. Number of Clock Cycles (13/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem8, CL EA + 4 EA + 7 + T EA + 4
reg16, CL –– 3 3 3 3
mem16, CL EA + 4 EA + 7 + T EA + 4
reg8, imm3 –– 2 2 2 2
SET1
mem8, imm3 EA + 4 EA + 7 + T EA + 4
reg16, imm4 –– 2 2 2 2
Bit manipulation instructions
mem16, imm4
CY––2222
DIR –– 2 2 2 2
mem
BSCH 16 EA + 8 + 3n + T EA + 8 + 3n + T EA + 8 + 3n + T EA + 8 + 3n + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
16 EA + 7 + T
8 EA + 10 + 2T
EA + 4 EA + 7 + T EA + 4
16 EA + 7 + T
8 EA + 8 + 3n + T EA + 8 + 3n + T EA + 11 + 3n + 2T EA + 11 + 3n + 2T
reg –– 4 + 3n 4 + 3n 4 + 3n 4 + 3n
reg, 1 –– 3 3 3 3
mem, 1 EA + 3 EA + 7 + T EA + 3
reg, CL –– 5 + n 5 + n 5 + n 5 + n
SHL 8 EA + 11 + 2T + n
mem, CL EA + 5 + n EA + 8 + T + n EA + 6 + n
Shift instructions
reg, imm8 –– 5 + n 5 + n 5 + n 5 + n
mem, imm8 EA + 6 + n EA + 8 + T + n EA + 6 + n
8 EA + 10 + 2T
16 EA + 7 + T
16 EA + 8 + T + n
8 EA + 11 + 2T + n
16 EA + 8 + T + n
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
Remark Number of shifts (n in a bit manipulation instruction indicates the bit number searched for)
97
Page 98

Mnemonic Operands
Group
Instruction
reg, 1 –– 3 3 3 3
Table 17-9. Number of Clock Cycles (14/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem, 1 EA + 3 EA + 7 + T EA + 3
reg, CL –– 5 + n 5 + n 5 + n 5 + n
SHR 8 EA + 11 + 2T + n
mem, CL EA + 5 + n EA + 8 + T + n EA + 6 + n
reg, imm8 –– 5 + n 5 + n 5 + n 5 + n
mem, imm8 EA + 6 + n EA + 8 + T + n EA + 6 + n
reg, 1 –– 3 3 3 3
Shift instructions
mem, 1 EA + 3 EA + 7 + T EA + 3
reg, CL –– 5 + n 5 + n 5 + n 5 + n
SHRA 8 EA + 11 + 2T + n
mem, CL EA + 5 + n EA + 8 + T + n EA + 6 + n
reg, imm8 –– 5 + n 5 + n 5 + n 5 + n
8 EA + 10 + 2T
16 EA + 7 + T
16 EA + 8 + T + n
8 EA + 11 + 2T + n
16 EA + 8 + T + n
8 EA + 10 + 2T
16 EA + 7 + T
16 EA + 8 + T + n
mem, imm8 EA + 6 + n EA + 8 + T + n EA + 6 + n
reg, 1 –– 3 3 3 3
mem, 1 EA + 3 EA + 7 + T EA + 3
reg, CL –– 5 + n 5 + n 5 + n 5 + n
ROL 8 EA + 11 + 2T + n
mem, CL EA + 5 + n EA + 8 + T + n EA + 6 + n
Rotate instructions
reg, imm8 –– 5 + n 5 + n 5 + n 5 + n
mem, imm8 EA + 6 + n EA + 8 + T + n EA + 6 + n
8 EA + 11 + 2T + n
16 EA + 8 + T + n
8 EA + 10 + 2T
16 EA + 7 + T
16 EA + 8 + T + n
8 EA + 11 + 2T + n
16 EA + 8 + T + n
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
Remark Number of shifts (n in a bit manipulation instruction indicates the bit number searched for)
98
Page 99

Mnemonic Operands
Group
Instruction
reg, 1 –– 3 3 3 3
Table 17-9. Number of Clock Cycles (15/20)
Byte Processing Word Processing
On-Chip Other On-Chip Other
RAM Access Access RAM Access Access
Bus Width*
µ
PD70433
mem, 1 EA + 3 EA + 7 + T EA + 3
reg, CL –– 5 + n 5 + n 5 + n 5 + n
ROR 8 EA + 11 + 2T + n
mem, CL EA + 5 + n EA + 8 + T + n EA + 6 + n
reg, imm8 –– 5 + n 5 + n 5 + n 5 + n
mem, imm8 EA + 6 + n EA + 8 + T + n EA + 6 + n
reg, 1 –– 3 3 3 3
mem, 1 EA + 3 EA + 7 + T EA + 3
reg, CL –– 5 + n 5 + n 5 + n 5 + n
ROLC 8 EA + 11 + 2T + n
mem, CL EA + 5 + n EA + 8 + T + n EA + 6 + n
Rotate instructions
reg, imm8 –– 5 + n 5 + n 5 + n 5 + n
8 EA + 10 + 2T
16 EA + 7 + T
16 EA + 8 + T + n
8 EA + 11 + 2T + n
16 EA + 8 + T + n
8 EA + 10 + 2T
16 EA + 7 + T
16 EA + 8 + T + n
mem, imm8 EA + 6 + n EA + 8 + T + n EA + 6 + n
reg, 1 –– 3 3 3 3
mem, 1 EA + 3 EA + 7 + T EA + 3
reg, CL –– 5 + n 5 + n 5 + n 5 + n
RORC 8 EA + 11 + 2T + n
mem, CL EA + 5 + n EA + 8 + T + n EA + 6 + n
reg, imm8 –– 5 + n 5 + n 5 + n 5 + n
mem, imm8 EA + 6 + n EA + 8 + T + n EA + 6 + n
8 EA + 11 + 2T + n
16 EA + 8 + T + n
8 EA + 10 + 2T
16 EA + 7 + T
16 EA + 8 + T + n
8 EA + 11 + 2T + n
16 EA + 8 + T + n
* 8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
Remark Number of shifts
99
Page 100

Mnemonic Operands
Group
Instruction
near-proc –– –– ––
µ
PD70433
Table 17-9. Number of Clock Cycles (16/20)
*1
RAM Access Access RAM Access Access
Bus Width
8 19 + 2T
16 16 + T
Byte Processing Word Processing
On-Chip Other On-Chip Other
regptr16 –– –– ––
CALL memptr16 –– ––
far-proc –– –– ––
memptr32 –– ––
Subroutine control instructions
pop-value –– –– ––
RET
*2 –– –– ––
pop-value*2 –– –– ––
8 18 + 2T
16 15 + T
8 EA + 19 + 2T EA + 24 + 4T
16 EA + 16 + T EA + 18 + 2T
8 29 + 4T
16 23 + 2T
8 EA + 32 + 4T EA + 44 + 8T
16 EA + 26 + 2T EA + 32 + 4T
8 18 + 2T
–– –– ––
16 15 + T
8 19 + 2T
16 16 + T
8 26 + 4T
16 20 + 2T
8 27 + 4T
16 21 + 2T
mem16 –– –– EA + 7
reg16 –– –– –– –– 7
sreg –– –– –– –– 7
xsreg/VPC –– –– –– –– 7
PUSH
PSW –– –– –– –– 6
R––––––
Stack manipulation instructions
imm8 –– –– –– –– 6
imm16 –– –– –– –– 6
*1.8 : 8-bit width
16 : 16-bit width
–– : Both 8-bit and 16-bit bus width
2. Segment-external
Remark n: Number of shifts
100
8 EA + 13 + 2T
16 EA + 10 + T
8 57 + 14T
16 36 + 7T
 Loading...
Loading...