

Page 1
DATA SHEET
MOS INTEGRATED CIRCUIT
µ
PD61P24
4-BIT SINGLE-CHIP MICROCONTROLLER
FOR REMOTE CONTROL TRANSMISSION
DESCRIPTION
The µPD61P24 is a 4-bit single-chip microcontroller for infrared remote controllers for TVs, VCRs, stereos, cassette
decks, air conditioners, etc.
µ
As the
and for small-scale production of such systems.
The functions of the
manual before designing your system.
PD61P24 is user-programmable, it is ideal for evaluation of programs running in a µPD6124A or 6600A,
µ
PD61P24 are described in detail in the following User’s Manual. Be sure to read this
µ
PD612X Series User’s Manual: IEP-1083
FEATURES
•Transmitter for programmable infrared remote controller
•19 types of instructions
µ
•Instruction execution time: 17.6
ramic resonator)
•On-chip one-time PROM: 1002 × 10 bits
•Data memory (RAM) capacity : 32 × 5 bits
•9-bit programmable timer: 1 channel
•I/O pins (K
•Input pins (K
CautionTo use the NEC transmission format, ask NEC to supply the custom code.
I/O): 8 pins
I): 4 pins
Do no use R0 when using a register as an operand of the branch instruction.
s (with 455-kHz ce-
•Serial input pins (S-IN): 1 pin
•Transmission-in-progress indication pin (S-OUT): 1
pin
•Transmit carrier frequency (REM)
OSC/12, fOSC/8
f
•Standby operation (HALT/STOP mode)
•Low power consumption
•Current consumption in STOP mode (T
1 µA MAX.
•Low-voltage operation: VDD = 2.2 to 5.5 V
A = 25°C)
DocumentNo. U12629EJ4V0DS00 (4th edition)
Previous No. IC-2876
Date Published July 1997 N
Printed in Japan
The information in this document is subject to change without notice.
The mark shows major revised points.
©
1997
Page 2
ORDERING INFORMATION
Part Number Package
µ
PD61P24CS 20-pin plastic shrink DIP (300 mil)
µ
PD61P24GS 20-pin plastic SOP (300 mil)
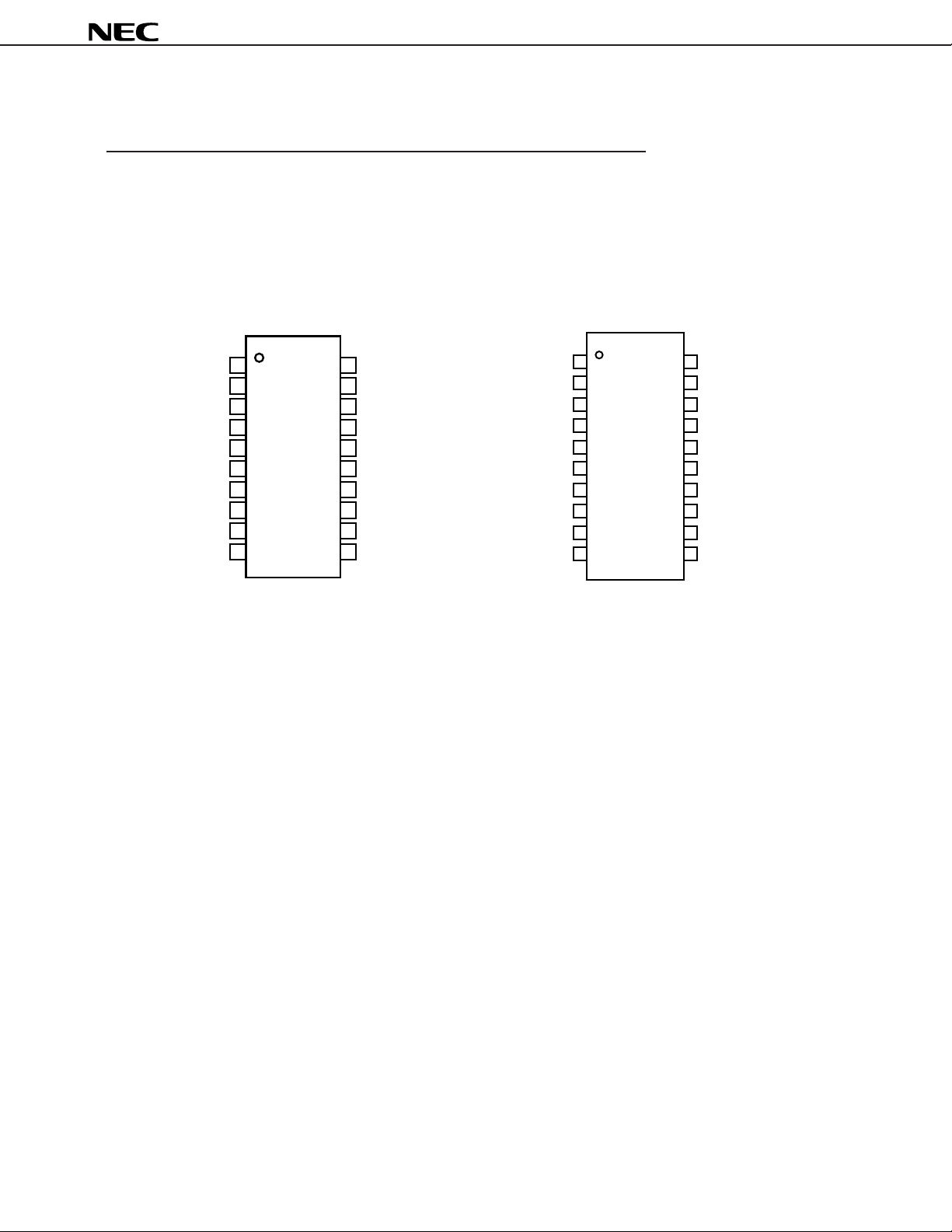
PIN CONFIGURATION (Top View)
(1) Normal operating mode (2) PROM programming mode
µ
PD61P24
K
I/O1
K
I/O0
S-IN
S-OUT
REM
V
DD
OSC-OUT
OSC-IN
V
SS
AC
10
1
2
3
4
5
6
7
8
9
20
K
I/O2
19
K
I/O3
18
K
I/O4
17
K
I/O5
16
K
I/O6
15
K
I/O7
14
K
I0
13
K
I1
12
K
I2
11
K
I3
(Open)
(Open)
(Open)
1
D0
2
V
3
PP
4
5
6
V
DD
7
8
CLK
9V
SS
10(L) 11 MD3
20
19
18
17
16
15
14
13
12 MD2
D1
Caution Round brackets ( ) indicate the pins not used in the PROM programming mode.
L : Connect each of these pins to GND via a resistor (470 Ω).
Open: Leave these pins open.
D2
D3
D4
D5
D6
D7
MD0
MD1
2
Page 3
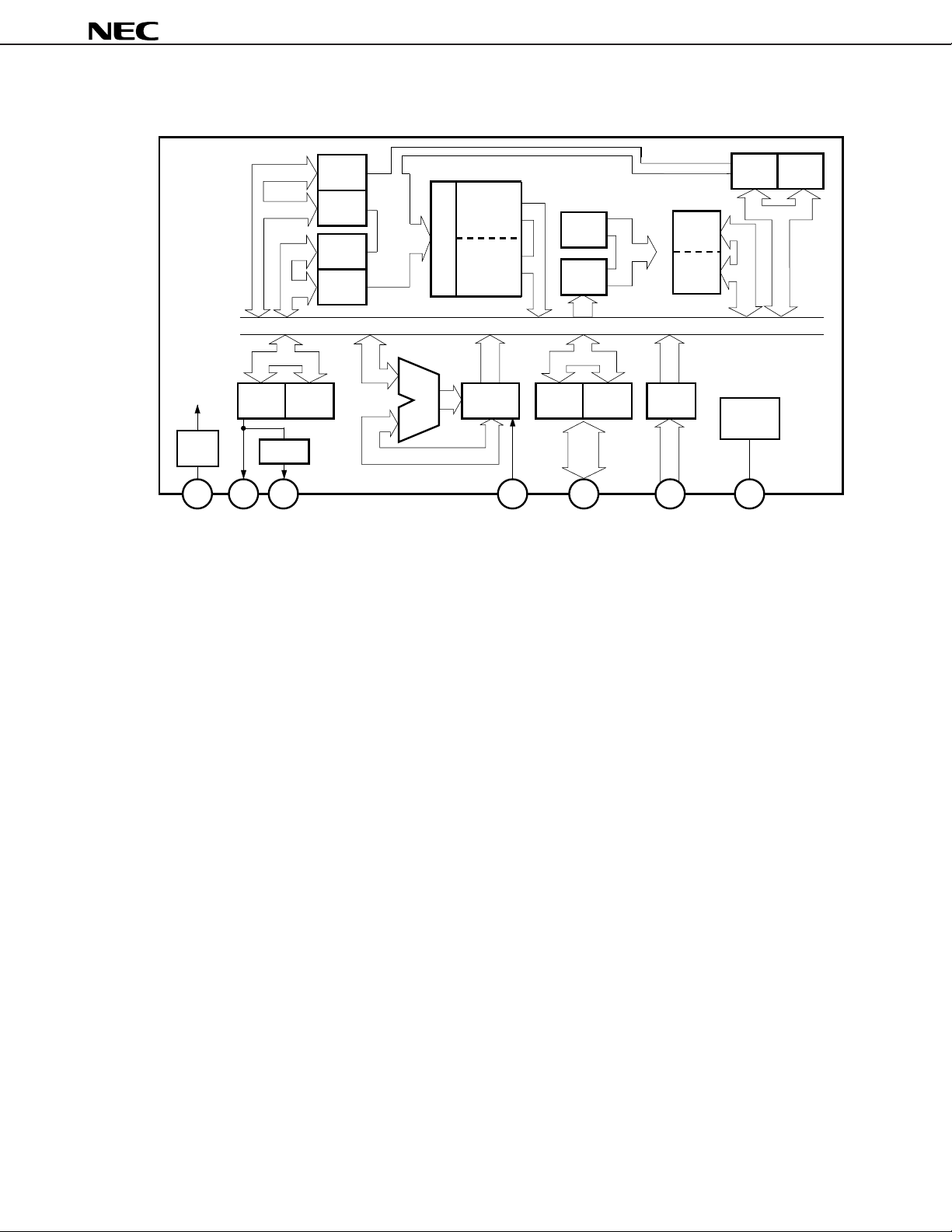
BLOCK DIAGRAM
µ
PD61P24
OSC
OSC-OUT
TIMER
(L)
MOD
TIMER
(H)
10 bits
ROM
D.P.
ROM
D.P.
PC(L)
PC(H)
CNTL
L
H
1002 × 10 bits
M
P
X
ALU
One-Time
PROM
(L)
One-Time
PROM
(H)
ACC
S-INREMS-OUTOSC-IN
KEY
OUT(L)
SP
ADD
DEC
KEY
OUT(H)
I/O0-KI/O7
32 × 5 bits
RAM
M
P
X
RAM
KEY
IN
K -K
I0 I3
CNTL
(L)
Watchdog
timer
function
ACK
(H)
3
Page 4
µ
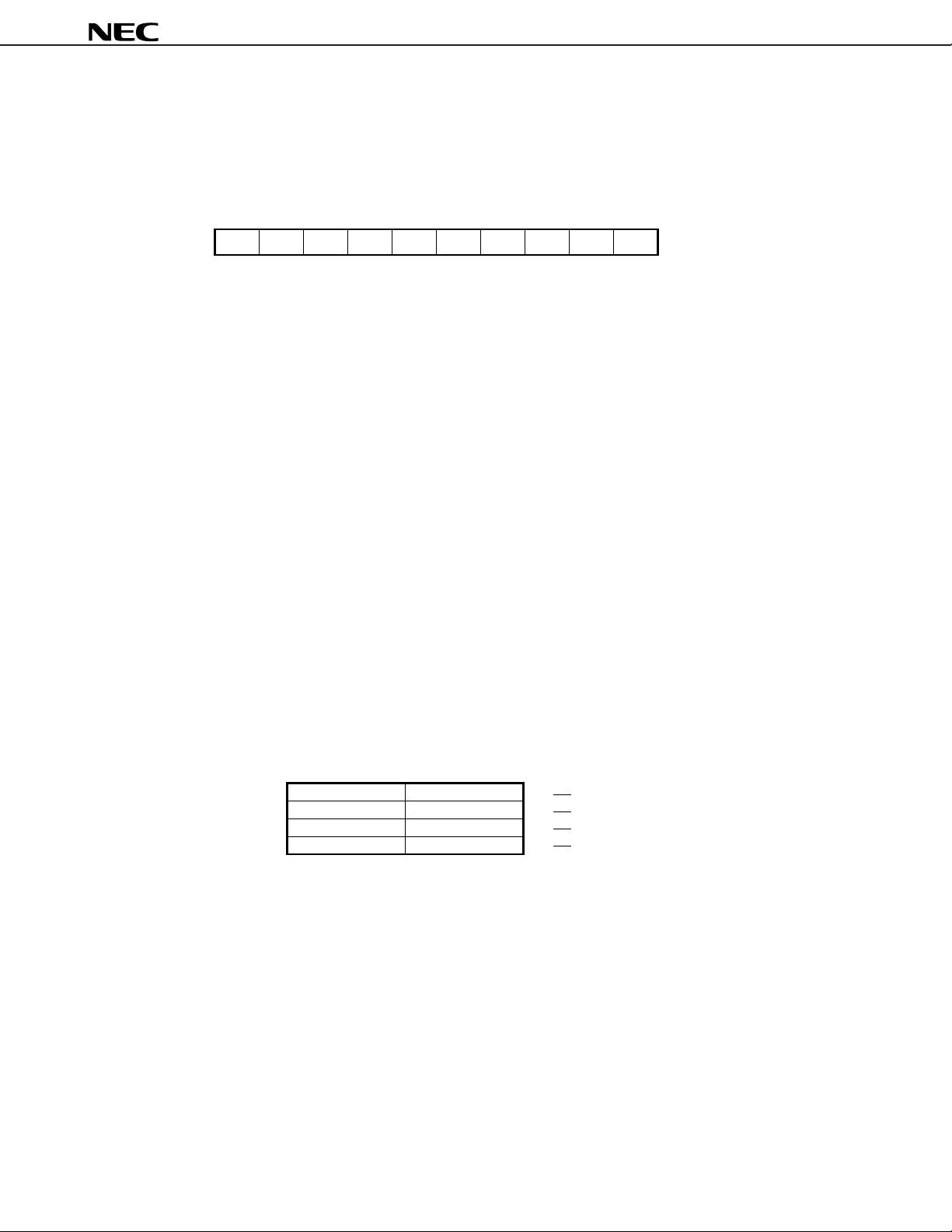
1. PROGRAM COUNTER (PC) ……… 10 BITS
The program counter (PC) is a binary counter, which holds the address information for the program memory.
Figure 1-1. Program Counter Organization
PD61P24
PC
PC7PC6PC5PC4PC3PC2PC1PC
PC
8
9
PC
0
Normally, the program counter contents are automatically incremented each time an instruction is executed,
according to the number of instruction bytes.
When executing a jump instruction (JMP0, JC, JF), the program counter indicates the jump destination.
Immediate data or the data memory contents are loaded to all or some bits of the PC.
When executing the call instruction (CALL0), the PC contents are incremented (+1) and saved into the stack
memory. Then, a value needed for each jump instruction will be loaded.
When executing the return instruction (RET), the stack memory contents are double incremented (+2) and loaded
into the PC.
When “all clear” is input or on reset, the PC contents are cleared to “000H”.
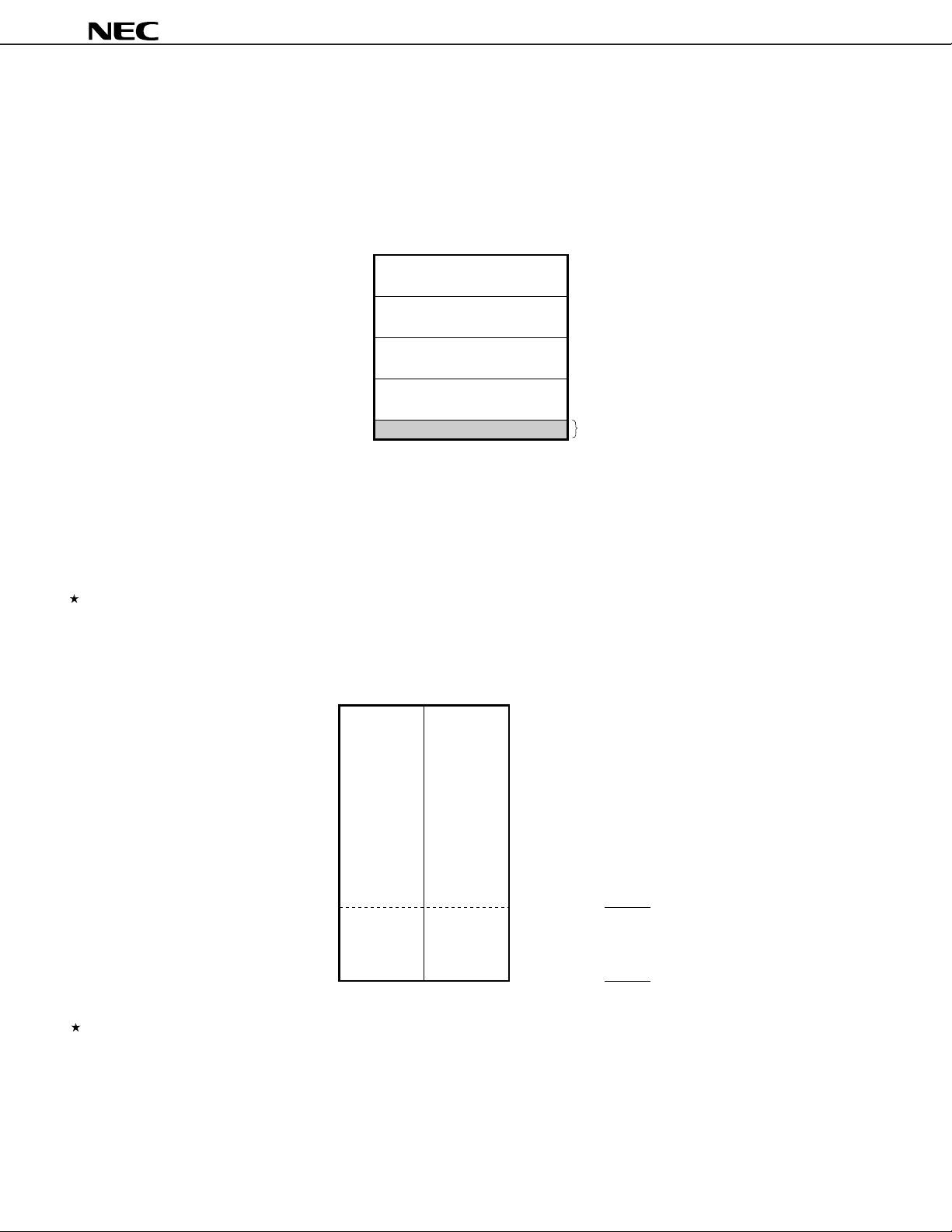
2. STACK POINTER (SP) ……… 2 BITS
This 2-bit register holds the start address information for the stack area. The stack area is shared with the data
memory.
The SP contents are incremented, when the call instruction (CALL0) is executed. They are decremented, when
the return instruction (RET) is executed.
The stack pointer is cleared to “00B” after reset or “all clear” is input, and indicates the highest address FH for
the data memory as the stack area.
The figure below shows the relationship for the stack pointer and the data memory area.
Data memory
RC
R
RE
RF
(SP)
11B
10B
D
01B
00B
If the stack pointer overflows or underflows, it is determined that the CPU overflows, and the PC internal reset
signal will be generated.
4
Page 5
µ
3. PROGRAM MEMORY (ROM) ……… 1002 STEPS × 10 BITS
The program memory (ROM) is configured in 10 bits steps. It is addressed by the program counter.
Program and table data are stored in the program memory.
Figure 3-1. Program Memory Map
000H
0FFH
100H
1FFH
200H
2FFH
300H
3E9H
3EAH
3FFH
Test program
area
PD61P24
4. DATA MEMORY (RAM) ……… 32 WORDS × 5 BITS
The data memory is a RAM of 32 words × 5 bits. The data memory stores processing data. In some cases, the
data memory is processed in 8-bit units. R0 may be used as the data pointer for the ROM.
After power application, the RAM will be undefined. The RAM retains the previous data on reset.
Figure 4-1. Data Memory Organization
1
0
R
0
.
.
.
R
B
R
C
.
.
.
F
R
SP–3
SP–2
SP–1
SP–0
Caution Avoid using the RAM areas RD, RE, and RF in a CALL routine as much as possible because these
areas are also used as stack memory areas (to prevent program hang-up in case the value of the
SP is destroyed due to some reason such as noise).
When using these RAM areas as general-purpose RAM areas, be sure to include stack pointer
checking in the main routine.
5
Page 6
µ
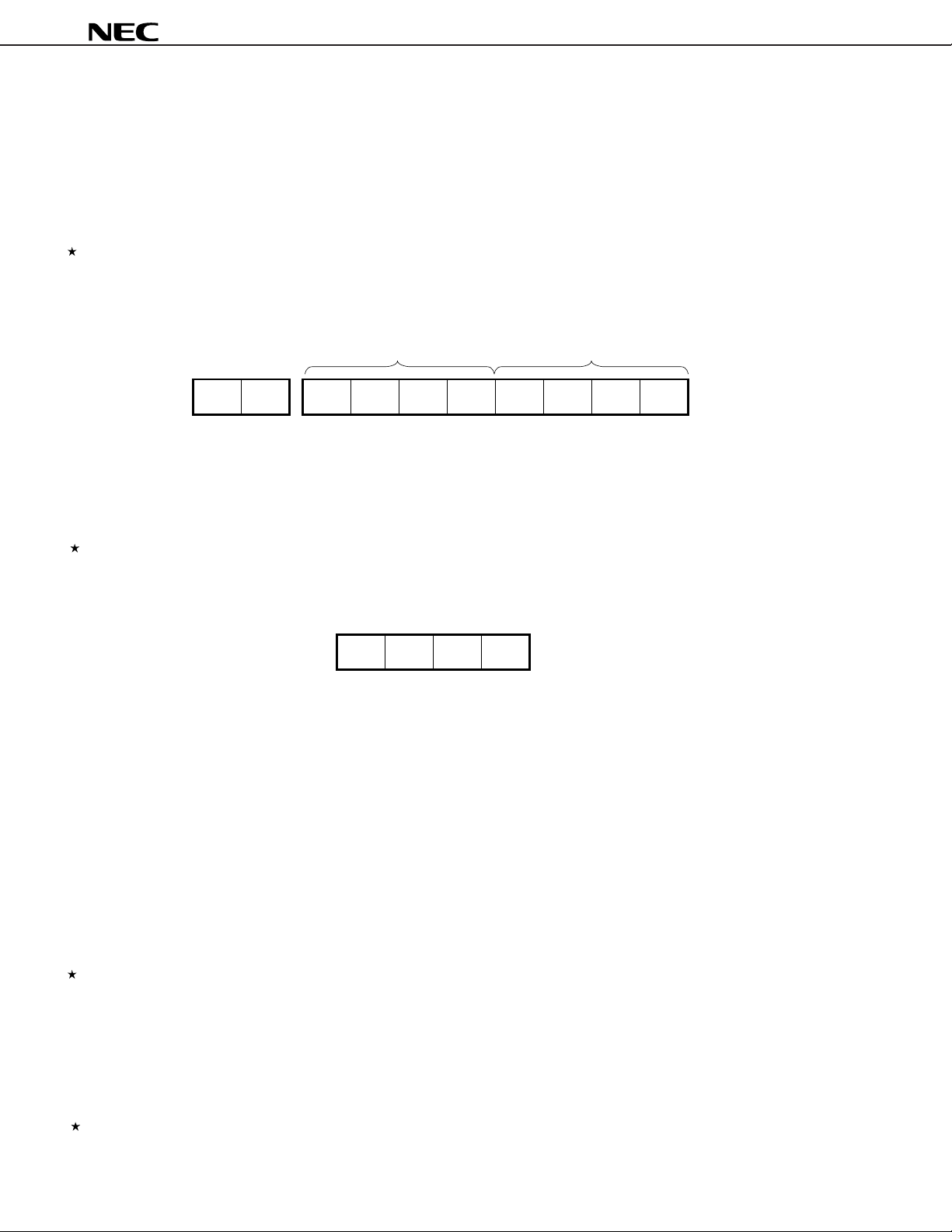
5. DATA POINTER (R0)
R0 (R10, R00) for the data memory can serve as the data pointer for the ROM.
R0 specifies the low-order 8 bits in the ROM address. The high-order 2 bits in the ROM address are specified
by the control register.
Table referencing for ROM data can be easily executed by calling the ROM contents by setting the ROM address
to the data pointer.
On reset or “all clear” is input, it becomes undefined.
Figure 5-1. Data Pointer Organization
PD61P24
Control registers
(P )
1
AD
9
AD
8
AD
7
AD
R
10
AD
AD
AD
6
4
5
3
AD
R
00
AD
AD
2
0
1
R
0
6. ACCUMULATOR (A) ……… 4 BITS
The accumulator (A) is a 4-bit register. The accumulator plays a major role in each operation.
On reset or “all clear” is input, it becomes undefined.
Figure 6-1. Accumulator Organization
A
A
A
3
A
2
0
1
A
7. ARITHMETIC LOGIC UNIT (ALU) ……… 4 BITS
The arithmetic logic unit (ALU) is a 4-bit operation circuit, and executes simple operations, such as arithmetic
operations.
8. FLAGS
(1) Status flag
When the status for each pin is checked by the STTS instruction, if the condition coincides with the condition
specified by the STTS instruction, the status flag (F) is set (to 1).
On reset or “all clear” is input, it becomes undefined.
(2) Carry flag
When the INC (increment) instruction or the RL (rotate left) instruction is executed, if a carry is generated from
the MSB for the accumulator, the carry flag (C) is set (to 1).
The carry flag (C) is also set (to 1), if the contents for the accumulator are “FH”, when the SCAF instruction
is executed.
On reset or “all clear” is input, it becomes undefined.
6
Page 7
µ
PD61P24
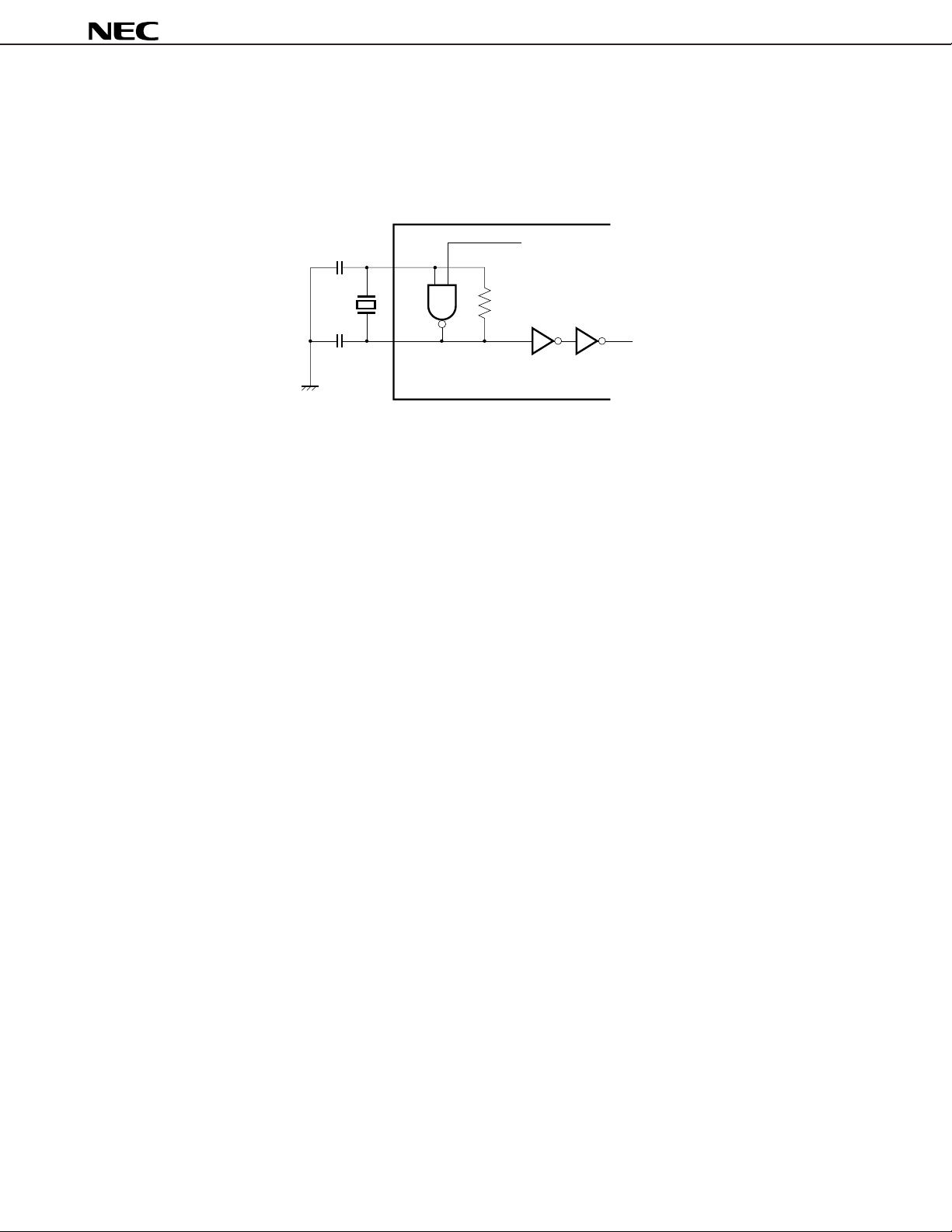
9. SYSTEM CLOCK GENERATOR
The system clock generator consists of a resonator, which uses a ceramic resonator (400kHz to 500kHz).
Figure 9-1. System Clock Generator
OSC-IN
OSC-OUT
In the STOP mode (oscillation stop HALT instruction), the oscillator in the system clock generator stops its
operation, and the system clock ø is stopped.
STOP mode
ø
System clock
7
Page 8
µ
PD61P24
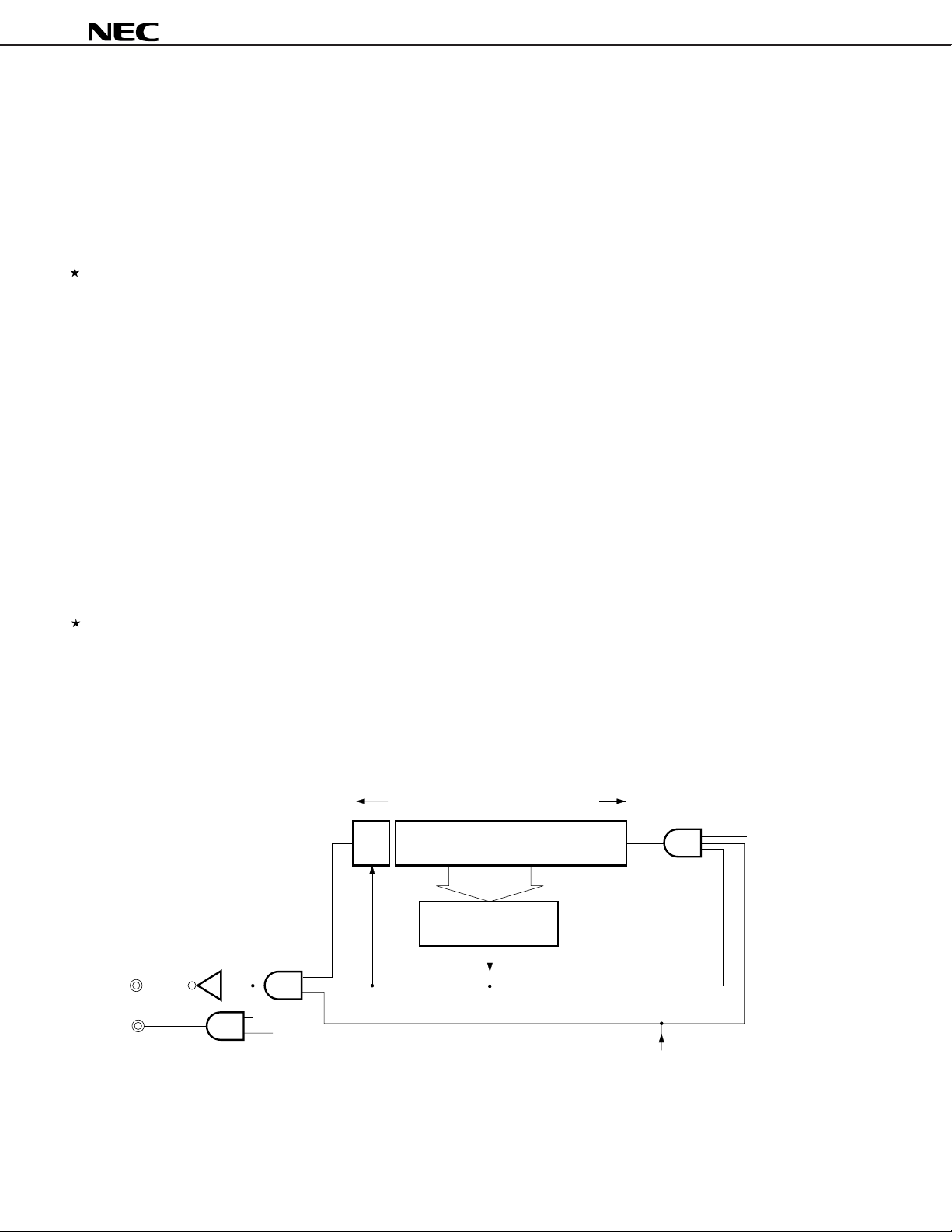
10. TIMER
The timer block determines the transmission output pattern. The timer consists of 10 bits, of which 9 bits serve
as the 9-bit down counter and the remaining 1 bit serves as the 1-bit latch, which determines the carrier output
validity.
The 9-bit down counter is decremented (–1) every 8/f
starting down count operation. Down counting stops after all of the 9 bits become 0. When down counting is stopped,
the signal indicating that the timer operation has stopped, is output. If the CPU is at standby (HALT TIMER) for
the timer operation completion, the standby (HALT) condition is released and the next instruction will be executed.
If the next instruction again sets the value of the down counter, down counting continues without any error (the carrier
output of the REM pin is not affected).
Set the down count time according to the following calculation; (set value (HEX) + 1) × 8/f
to the timer is done by the timer manipulation instruction.
When the down counter is operating, the remote control transmission carrier can be output to the REM pin.
Whether or not to output the carrier can be selected by the MSB for the timer register block. Set “1”, when outputting
the carrier, or “0”, when not outputting the carrier.
If all the down counter bits become “0”, when outputting the carrier, the carrier output will be stopped. When
not outputting the carrier, the REM pin output will become low level.
A signal in synchronization with the REM output is output to the S-OUT pin. However, the waveform for the SOUT pin is low, when the carrier is being output to the REM pin, or it is high, when the carrier is not being output
to the REM pin.
If the HALT instruction, which initiates the oscillation stop mode, is executed when the down counter is operating,
the oscillation stop mode is initiated after down counting is stopped (after 0).
Timer operation STOP/RUN is controlled by the control register (P
At reset (all clear) time, the REM pin goes low and S-OUT pin goes high. All 10 bits of the timer are cleared to
000H.
OSC(s) in synchronization with the machine cycle, after
OSC. Setting the value
1). (Refer to 13. CONTROL REGISTER (P1).)
Caution Because the timer clock is not synchronized with the carrier output, the pulse width may be
shortened at the beginning and end of the carrier output.
Figure 10-1. Timer Block Organization
Set by timer mainpulation instruction
MSB
fosc/8
S-OUT
REM
1/0
Clear
Carrier
(fosc/12, fosc/8)
Selected by control register
9-bit down counter
Zero detection circuit
21
D of control register P
(Timer RUN/STOP)
8
Page 9
µ
PD61P24
11. PIN FUNCTIONS
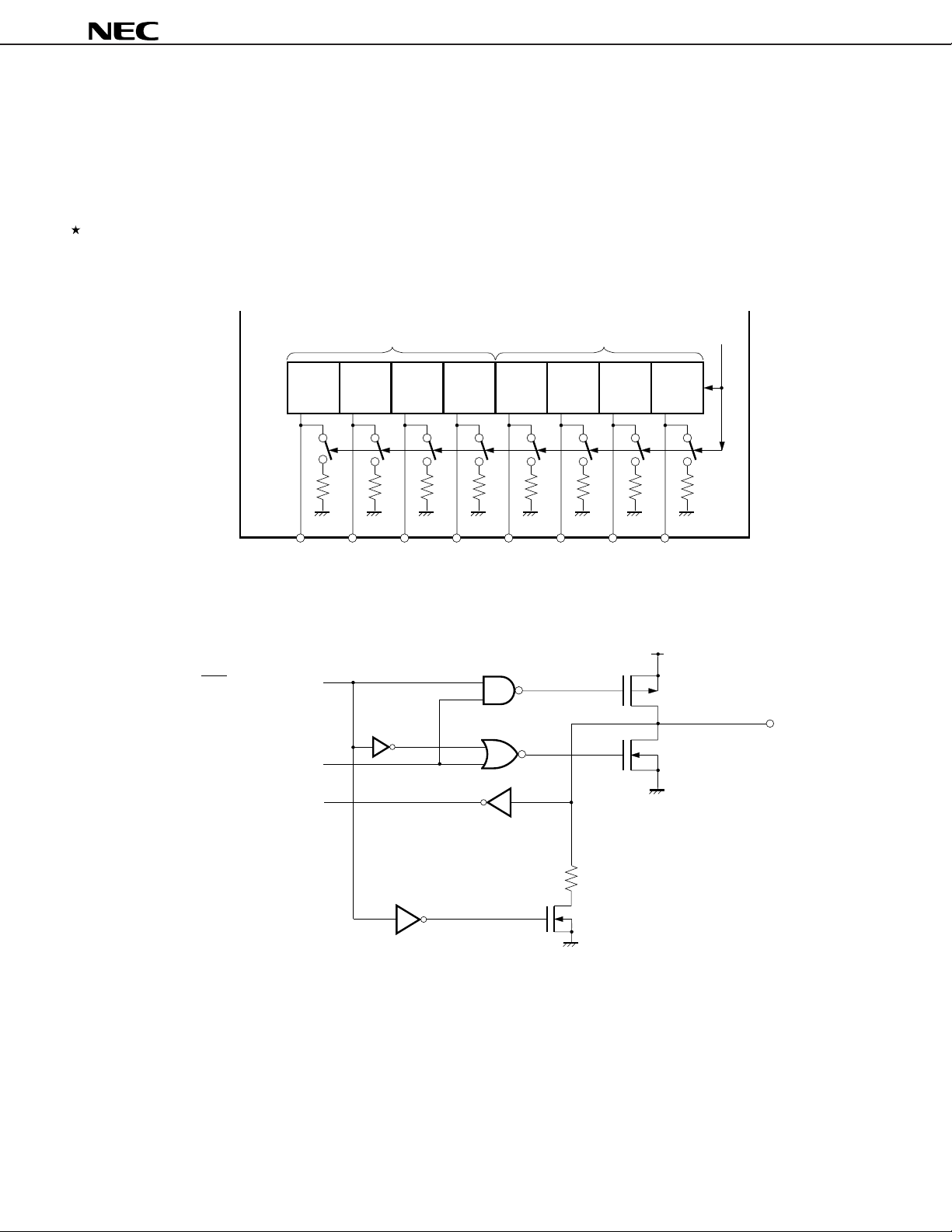
11.1 KI/O Pin (P0)
This is the 8-bit I/O pin for key-scan output. When the control register (P1) is set for the input port, the port can
be used as an 8-bit input pin. When the port is set for the input mode, all of these pins are pulled down to the VSS
level inside the LSI.
At reset (all cleared), the value of I/O mode and output latch becomes undefined.
Figure 11-1. K
P
10
K
I/O7
K
I/O6
K
P
0
I/O5
11.2 KI/O Pull-Down Resistor Configuration
Input/output selection
I/O Pin Organization
K
I/O4
K
I/O3
(P )
1
K
I/O1
Control register
K
I/O0
V
DD
P
00
K
I/O2
P-ch
Pin
Output signal
Input signal
CMOS
R
Pull-down resistor
N-ch
When KI/O is set to the input mode, pull-down resistor R is turned on.
N-ch
V
SS
9
Page 10
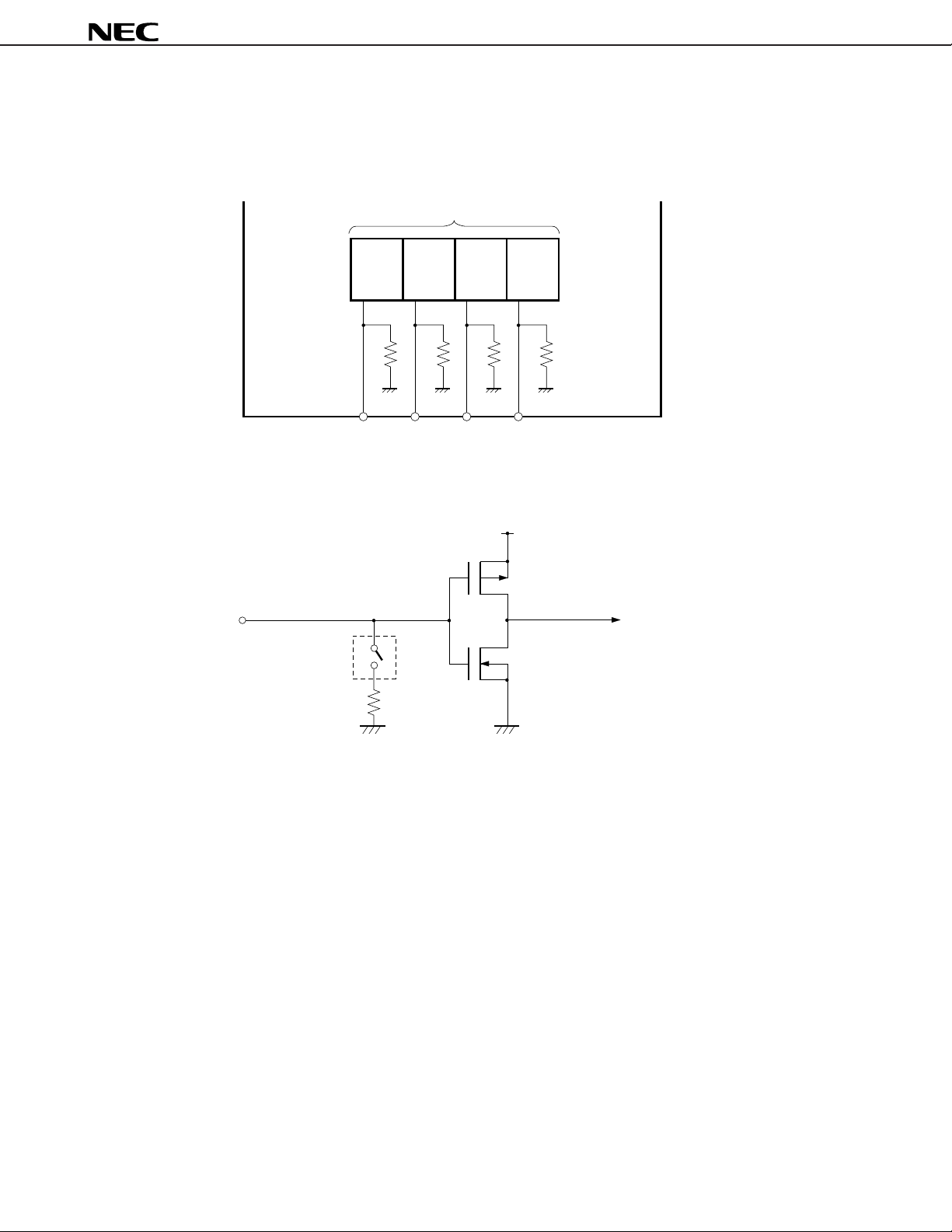
11.3 KI Pin (P12)
This is the 4-bit pin for key input. All of these pins are pulled down to the VSS level by PLA data.
µ
PD61P24
Figure 11-2. K
K
P
I3
2
11.4 KI Pull-Down Resistor Configuration
I Pin Organization
K
I2
K
I1
V
DD
K
P-ch
I0
Pin Input signal
PLA KI pull-down
resistor switch
N-ch
Pull-down
resistor
V
V
SS
SS
When the pull-down resistor switch is turned on (set 1) by PLA data, pull-down resistor R is turned on.
10
Page 11
µ
PD61P24
11.5 S-OUT Pin
By going low whenever the carrier frequency is output from the REM pin, the S-OUT pin indicates that
communication is in progress.
The S-OUT pin is CMOS output.
The S-OUT pin goes high on reset.
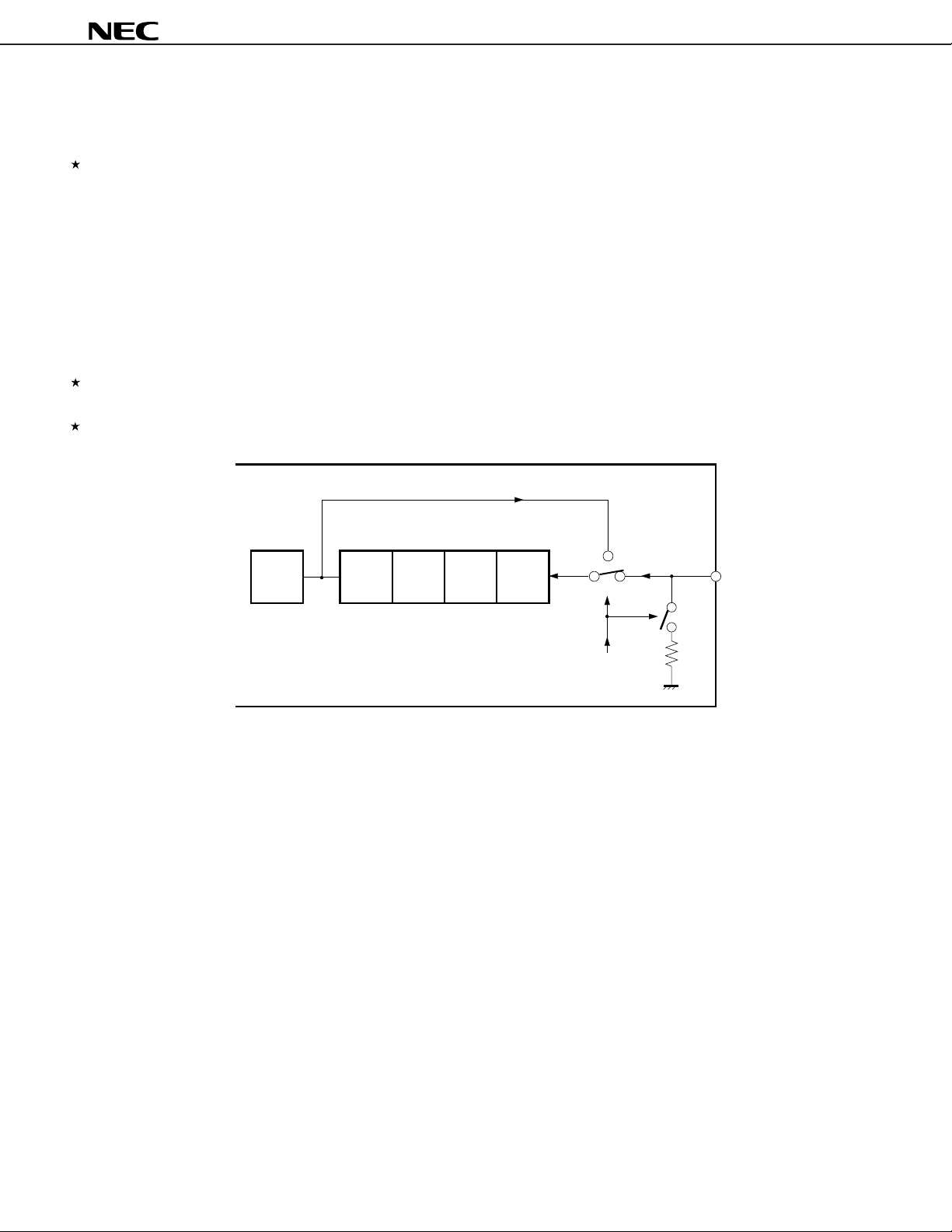
11.6 S-IN Pin (D
0 bit of P1)
To input serial data, use the S-IN pin. When control register (P1) is set to serial input mode, the S-IN pin is
connected as an input to the LSB of the accumulator; the S-IN pin is pulled down to the V
SS level within the LSI.
In this state, if the rotate-left accumulator instruction (RL A) is executed, the data on the S-IN pin is copied to the
LSB of the accumulator.
If the control register is released from serial input mode, the S-IN pin goes into a high-impedance state, but no
through current flows internally. When the RL A instruction is executed, the MSB is copied to the LSB.
At reset (all cleared), the S-IN pin goes into a high-impedance state.
Figure 11-3. Configuration of the S-IN Pin
CY
A
3
A
A
1
A
2
0
Control register
S-IN
11
Page 12

12. PORT REGISTER (P×)
KI/O, KI, and the control register are handled as port registers.
The table below shows the relations between the port registers and pins.
Table 12-1. Relations between Port Registers and Pins
µ
PD61P24
Pin
Name Read Write Read Write
KI/O Pin status Output latch Pin status Output latch Undefined [input mode, output latch]
KI Pin status – – – Input mode
S-IN Pin status is read by RL A instruction when D0 of P1 register = 1. High impedance (D0 of P1 register = 0)
Input Mode Output Mode
P1× (H)
P 10
P11
P12
KI/O7-4 KI/O3-0
Control register (H) Control register (L)
K
I3-0
P00
P01
P02
P
On Reset
0× (L)
P0
P1
P2
12
Page 13

13. CONTROL REGISTER (P1)
The control register contains of 10 bits. The controllable items are shown in Table 13-1.
Table 13-1. Control Register (P1)
µ
PD61P24
Bit D
9
Name Test mode –
0
Set
Value
1
D
8
Be sure to set 0.
D
7
D
6
HALT
OSC
STOP
D
D.P.
AD
9
9
5
9
D
4
D.P.
AD
8
AD =0
8 OSC
AD =1
8 OSC
D
3
MOD K
D
2
Timer
STOPNOP f /8AD =0
f /12AD =1
RUN
D
IN
OUT
1
I/O
D0 .......................... Specifies data to be input to A0 when the accumulator is shifted to the left.
0: A3, 1:S-IN
1 .......................... Specifies the status of KI/O, as follows:
D
0: input mode, 1: output mode
D2 .......................... Specifies the status of the timer, as follows:
0: Count stop, 1: Count execution
3 .......................... Specifies the carrier frequency output from the REM pin.
D
0: fOSC/8, 1: fOSC/12
4, D5 ................. Specify the high-order 2 bits of the ROM data pointer.
D
D6 .......................... Determines what happen to the oscillation circuit when the HALT instruction is executed.
0: Oscillation does not stop
1: Oscillation stops (STOP mode)
7 .......................... Be sure to set this bit to 0.
D
D8, D9 ................. These bits specify test modes. Be sure to set them to 0.
D
0
RL A
A
0
A
3
S-IN
CC
←
Remark D
0 = D8 = D9 = 0 on reset, and the other bits are undefined.
13
Page 14

µ
14. STANDBY FUNCTION (HALT INSTRUCTION)
The µPD6600A is provided with the standby mode (HALT instruction), in order to reduce the power consumption,
when not executing the program. Clock oscillation can be stopped in the standby mode (STOP mode).
In the standby mode, the program execution stops. However, the contents of the internal registers and the data
memory are all retained.
14.1 STOP Mode (Oscillation stop HALT instruction)
In the STOP mode, the operation of the system clock generator (ceramic resonator oscillation circuit) stops.
Therefore, operations requiring the system clock will stop.
If the HALT instruction is executed during timer operation, the program counter stops. The oscillation stop mode
will be initiated, after the timer count down operation is completed.
14.2 HALT Mode (Oscillation continue HALT instruction)
The CPU stops its operation, until the HALT release condition is satisfied.
The system clock operation continues in this mode.
14.3 Standby Release Conditions
(1) S-IN input
I/O input
(2) K
I input
(3) K
(4) Timer count down operation completion
PD61P24
Remark Either high level or low level can be specified for setting a release condition by input.
Table 14-1. Standby Mode Releasing Condition
D
3
2
D1D
D
0 0 S-IN
00 K
0/1
01
0
0 1 Timer
Releasing condition:
0
0
1
0
1
Releasing
Condition
I/O
K
I
“0”···Low level detection
“1”···High level detection
Remarks
When RL A is selected, the standby mode is
always released.
Valid only in the IN mode.
Released when 0.
←
3
14
Page 15

µ
V
DD
0.1 F
µ
0.1 F
µ
V
V
DD
V
thL
t
Charge mode
Charge start instruction
Execute HALT instruction
immediately before NOP.
(Charge for 0.4 ms or more)
Discharge mode
Charge-discharge
pattern
Discharge start instruction
Discharge starts after the NOP
instruction execution.
(Discharge time is about 5 ms from V
DD
to V
thL
)
The pattern must be
controlled by the program,
in such a manner that
the C charge level will not
go below V
thL
.
PD61P24
15. AC PIN (ALL CLEAR PIN)
Internal part of the CPU including the program counter can be reset by setting the AC pin to the low level.
Watchdog Timer Function
A power-on reset function and a CR watchdog timer function, that can be controlled by program, can be realized
µ
by connecting a 0.1
F capacitor across the AC pin and the VSS.
Caution When the watchdog timer function is not used, switch to charging mode by executing a NOP
instruction immediately before a HALT instruction at the beginning of the program. (Be sure to
connect the capacitor.)
15
Page 16

16. MASK OPTIONS (PLA DATA)
The following items are fixed by mask option:
I, S-IN pin pull-down resistor provided
•K
• Carrier duty selection (1/3) at fOSC/12
• Hang-up detection provided
I/O ALL
<1> K
The system is reset when the hang-up detection KI/O ALL switch is set to ON (“1”) by PLA data and if the
I/O pins are in the input mode in the oscillation stop HALT mode or if even one of the KI/O pins is low.
K
To use a pin as a key source of the switch, turn ON the switch with PLA data.
µ
PD61P24
Figure 16-1. Hang-up Detection K
I/O0
K output signal
K output signal
I/O1
K output signal
I/O2
K output signal
I/O3
K output signal
I/O4
K output signal
I/O5
K output signal
I/O6
K output signal
I/O7
K input/output selection
I/O
I/O ALL Configuration Diagram
V
DD
PLA hang-up
detection
K
I/O
ALL switch
To RESET circuit
<2> HALT release condition specification (S-IN, KI/O, KI)
The system is reset if S-IN and KI/O are used in the HALT mode when S-IN and KI/O are specified by PLA data
not to be used (“1”). K
I is used (“0”).
16
Page 17

BIT Assignment by Switch Selection
µ
PD61P24
Address
KI
0
pull-down resistor
Duty
1
S-IN
2
Hang-up detection
Corresponding
Portion
Note
MSB
7654
K
I3
1
(Provided)1(Provided)1(Provided)
0
K
I2
K
I1
K
I0
1
(Provided)
0
0
Duty
1
(1/3 duty)
I/O
ALL
K
1
(Detection
provided)
HALT
S-IN
1
(Unused)
HALT
I/O
K
1
(Unused)
HALT
K
I
0
(Used)
321
0
00
S-IN
pull-down
resistor
1
(Provided)
0
LSB
0
0
17
Page 18

µ
17. WRITING, READING, AND VERIFYING ONE-TIME PROM (PROGRAM MEMORY)
To write, read, or verify the PROM, set the PROM mode and use the pins shown in Table 17-1. No address input
pin is used. To update the address, the clock signal input from the CLK pin is used.
Table 17-1. Pins Used to Write, Read, and Verify Program Memory
Symbol Function
VPP Applies program voltage (12.5 V)
CLK Inputs clock to update address
MD0-MD3 Selects operation mode
D0-D7 Inputs/outputs 8-bit data
VDD Applies supply voltage (6 V)
17.1 Operation Mode When Writing, Reading, and Verifying Program Memory
µ
PD61P24 enters the program memory write, read, or verify mode if +6 V is applied to the VDD pin and +12.5
The
V is applied to the VPP pin after the reset status has been held a certain time (VDD = 5 V, AC = low level).
In this mode, the operation modes listed in Table 17-2 can be selected by using the MD0 through MD3 pins.
Any input pins not used for writing, reading, or verifying the program memory must be open or connected to GND
via a pull-down resistor (470 Ω).
PD61P24
Table 17-2. Operating Mode When Writing, Reading, and Verifying Program Memory
Specifies Operation Mode Operation Mode
VPP VDD MD0 MD1 MD2 MD3
+12.5 V +6 V H L H L Clears program memory address to 0
L H H H Write mode
L L H H Read and verify modes
H × H H Program inhibit mode
×: don’t care (L or H)
18
Page 19

µ
PD61P24
17.2 Program Memory Writing Procedure
The program memory is written at high speed in the following procedure.
(1) Pull down the pins not used to GND via resistor. Keep the CLK pin low.
(2) Supply 5 V to the V
(3) Wait for 10
µ
DD pin. Keep the VPP pin low.
s, and supply 5 V to the VPP pin.
(4) Set the mode in which the program memory address is cleared to 0, by using the mode setting pins.
(5) Supply 6 V to VDD and 12.5 V to VPP.
(6) Set the program inhibit mode.
(7) Write data in the 1-ms write mode.
(8) Set the program inhibit mode.
(9) Set the verify mode. If the data has been correctly written, proceed to (10). If not, repeat (7) through (9).
(10) Additional writing of (Number of times data has been written in (7) through (9): X) × 1 ms
(11) Set the program inhibit mode.
(12) Input a pulse four times to the CLK pin to update the program memory address (+1).
(13) Repeat (7) through (12) until the data is written to the last address.
(14) Set the mode in which the program memory address is cleared to 0.
(15) Change the voltage on the V
DD and VPP pins to 5 V.
(16) Turn off power supply.
Program memory writing steps (2) through (12) are illustrated below.
Repeat X times
Reset
Write
V
PP
DD
V
V
PP
GND
VDD+1
V
DD
GND
CLK
D0-D7
MD0
MD1
DD
Hi-Z Hi-Z Hi-Z Hi-Z
Data input
V
Verify
Data output
Additional write
Data input
Address
increment
MD2
MD3
19
Page 20

µ
17.3 Program Memory Reading Procedure
(1) Pull down the pins not used to GND via resistor. Keep the CLK pin low.
(2) Supply 5 V to the V
(3) Wait for 10 µs, and supply 5 V to the VPP pin.
(4) Set the mode in which the program memory address is cleared to 0, by using the mode setting pins.
(5) Supply 6 V to V
(6) Set the program inhibit mode.
(7) Set the verify mode. If a clock pulse is input to the CLK pin, the data of one address is output each time the
pulse has been input to the CLK pin four times.
(8) Set the program inhibit mode.
(9) Set the mode in which the program memory address is cleared to 0.
(10) Change the voltage on the V
(11) Turn off power supply.
Program memory reading steps (2) through (9) are illustrated below.
Reset
DD pin. Keep the VPP pin low.
DD and 12.5 V to VPP.
DD and VPP pins to 5 V.
PD61P24
V
PP
DD
V
GND
DD
+1
V
V
GND
CLK
D0-D7
MD0
MD1
MD2
PP
DD
DD
Hi-Z Hi-Z
“ L ”
Data output Data output
V
V
20
MD3
Page 21

18. INSTRUCTION SET
Accumulator Manipulation Instructions
R
10
D00
E00
A00
ANL
ANL
ANL
ANL
ORL
ORL
ORL
ORL
XRL
XRL
XRL
XRL
INC
RL
A, R
r
A, @R0H
A, @R0L
A, #data
A, R
r
A, @R0H
A, @R0L
A, #data
A, R
r
A, @R0H
A, @R0L
A, #data
A
A
R
r
–
D10
D30
D31
E10
E30
E31
A10
A30
A31
A13
F13
R
D01
E01
A01
µ
PD61P24
11
R
12
D02
E02
A02
R
1F
D0F
E0F
A0F
R
D20
E20
A20
00
R
01
D21
E21
A21
R
D2F
E2F
A2F
0F
Input/Output Instructions
P
P
10
P
A,
IN
OUT
ANL
ORL
XRL
OUT
P ,
A,
A,
A,
P
P
P
P
P
A
P
P
P
P
P
P
#data
F18
218
D18
E18
A18
P
P
0
P
318
P1P and P0P operate in pair format
Data Transfer Instructions
MOV
MOV
MOV F30A, @R H0
MOV F31A, #data
MOV R , A
r
A, @R H
0
r 200 201 202 20F 220 221 22F
F10
P
F19
219
D19
E19
A19
P
319
R10 R11 R12 R1F R00 R01 R0FRr
F00
P
11
1
12
F1A
21A
D1A
E1A
A1Z
P
2
P
F38
238
D38
E38
A38
00
P
F39
239
D39
E39
A39
P
01
02
F3A
23A
D3A
E3A
A3A
31A
F01 F02 F0F F20 F21 F2FA, R
R0 R1 R2 RFRr
MOV
MOV
r
R , @R
r
0
300 301 302 30FR , #data
320 321 322 32F
R1r and R0r operate in pair format
21
Page 22

Branch Instructions
µ
PD61P24
R
r
JMP0
JMP0 Rr
JC
JC
JNC
JNC
JF
JF
JNF
JNF
addr
Note
addr
Note
Rr
addr
Note
Rr
addr
Note
Rr
addr
Note
Rr
Note r = 1 through F
r = 0 canot be used.
Subroutine Instructions
P
P
CALL0
RET
addr
R
0
R
1
R
–
2
411
– – 401 402 40F
611
–
–
601
602
631
–
621
–
622
711
–
–
701
702
731
P
312
–
0
P
411
–
721
1
722
412
R
60F
62F
70F
72F
F
←
Pair register
Timer/Counter Manipulation Instructions
T
0-1
1
F1F
21F
T
F3F
23F
MOV
MOV
MOV
MOV
A,
T ,
T,
T,
t
T
t
A
#data
@R
0
T
T
t
–
31F
33F
Other Instructions
00
R
HALT #data
STTS R
0r
STTS #data
SCAF
NOP
111
120 121 122 12F
131
D13
000
0
01
R
02
R
0F
R
22
Page 23

19. APPLICATION CIRCUIT EXAMPLE
V
DD
V
DD
Key matrix
Mode select switch
Infrared LED
SE303 series
SE313
SE307-C
SE1003-C
Transmission
indication
2SC3616, 3618
2SD1615, 1616
2SC2001
3.0 V
47 F
µ
+
100 pF
100 pF
0.1 F
µ
K
I/O1
K
I/O0
S-IN
1
2
3
4
5
6
7
8
9
10
K
I/O2
K
I/O3
S-OUT
REM
V
DD
OSC-OUT
OSC-IN
V
SS
AC
K
I/O4
K
I/O5
K
I/O6
K
I/O7
K
I0
K
I1
K
I2
K
I3
PD61P24
µ
20
19
18
17
16
15
14
13
12
11
µ
PD61P24
Caution The ceramic resonator start up capacitor value must be determined, by taking the voltage level and
the oscillation start up characteristics for the ceramic resonator into consideration.
23
Page 24

µ
PD61P24
20. ELECTRICAL SPECIFICATIONS
Absolute Maximum Ratings (TA =25°C)
Parameter Symbol Ratings Unit
Supply Voltage VDD 7.0 V
Input Voltage VIN –0.3 to VDD + 0.3 V
Operating Ambient Temperature TA –20 to +75 °C
Storage Temperature Tstg –40 to +125 °C
Caution Even if one of the parameters exceeds its absolute maximum rating even momentarily, the quality
of the product may be degraded. The absolute maximum rating therefore specifies the upper or
lower limit of the value at which the product can be used without physical damages. Be sure to
use the product(s) within the ratings.
Recommended Operating Range (T
Parameter Symbol MIN. TYP. MAX. Unit
Supply Voltage VDD 2.2 5.5 V
Oscillation Frequency fOSC 400 500 kHz
A =25°C)
24
Page 25

µ
PD61P24
DC Characteristics (VDD = 3.0 V, fOSC = 455 kHz, TA =25°C)
Parameter Symbol Conditions MIN. TYP. MAX. Unit
Supply Voltage VDD 2.2 5.5 V
Current Consumption 1 IDD1 fOSC = 455 kHz 0.3 1.5 mA
Current Consumption 2 IDD2 fOSC = STOP 1.0
REM High Level Output Current IOH1 VO = 1.0 V –5 –8 –15 mA
REM Low Level Output Current IOL1 VO = 0.3 V 0.5 1.5 2.5 mA
S-OUT High Level Output Current IOH2 VO = 2.7 V –0.3 –1.0 –2.0 mA
S-OUT Low Level Output Current IOL2 VO = 0.3 V 1 1.5 2.5 mA
KI High Level Input Current IIH1 VI = 3.0 V 10 30
KI High Level Input Current IIH1' VI = 3.0 V, without pull-down resistor 0.2
KI Low Level Input Current IIL1 VI = 0 V –0.2
KI/O High Level Input Current I IH2 VI = 3.0 V 10 30
KI/O High Level Input Current IIH2' VI = 3.0 V, without pull-down resistor 0.2
KI/O Low Level Input Current IIL2 VI = 0 V –0.2
KI/O High Level Output Current IOH3 V0 = 2.5 V –1.5 –2.0 –4.0 mA
KI/O Low Level Output Current IOL3 V0 = 2.1 V 25 50 100
S-IN High Level Input Current I IH3 VI = 3.0 V 6 15
S-IN High Level Input Current IIH3' VI = 3.0 V, without pull-down resistor 0.2
S-IN Low Level Input Current IIL3 VI = 0 V –0.2
KI High Level Input Voltage VIH1 2.1 3.0 V
KI Low Level Input Voltage VIL1 VI = 3.0 V 0 0.9 V
KI/O High Level Input Voltage VIH2 1.3 3.0 V
KI/O Low Level Input Voltage VIL2 0 0.4 V
S-IN High Level Input Voltage IIH3 1.1 3.0 V
S-IN Low Level Input Voltage IIL3 0 0.4 V
AC Pull-Up Resistor R1 VI = 0 V 0.3 3.0 kΩ
AC Pull-Down Resistor R2 VI = 2.7 V 150 400 1500 kΩ
AC High Level Input Voltage VIH4 1.8 3.0 V
AC Low Level Input Voltage VIL4 0 1.2 V
µ
A
µ
A
µ
A
µ
A
µ
A
µ
A
µ
A
µ
A
µ
A
µ
A
µ
A
25
Page 26

µ
PD61P24
DC Programming Characteristics (TA = 25±5
Parameter Symbol Conditions MIN. TYP. MAX. Unit
High-level input voltage VIH1 Other than CLK 0.7 VDD VDD V
VIH2 CLK VDD–0.5 VDD V
Low-level input voltage VIL1 Other than CLK 0 0.3 VDD V
VIL2 CLK 0 0.4 V
Input leakage current ILI VIN = VIL or VIH 10
High-level output voltage VOH IOH = –1 mA VDD–1.0 V
Low-level output voltage VOL IOL = 1.6 mA 0.4 V
VDD supply current IDD 30 mA
VPP supply current IPP MD0 = VIL, MD1 = VIH 30 mA
°C, VDD = 6.0±0.25 V, VPP = 12.5±0.5 V)
µ
A
Cautions 1. Keep V PP to within +13.5 V including the overshoot.
2. Apply V
AC Programming Characteristics (TA = 25±5
Parameter Symbol Note 1 Conditions MIN. TYP. MAX. Unit
Address setup time
MD1 setup time (vs. MD0↓)tM1S tOES 2
Data setup time (vs. MD0↓)tDS tDS 2
Address hold time
Data hold time (vs. MD0↑)tDH tDH 2
MD0↑→ data output float delay time tDF tDF 0 130 ns
VPP setup time (vs. MD3↑)tVPS tVPS 2
VDD setup time (vs. MD3↑)tVDS tVCS 2
Initial program pulse width tPW tPW 0.95 1.0 1.05 ms
Additional program pulse width tOPW t OPW 0.95 21.0 ms
MD0 setup time (vs. MD1↑)tM0S tCES 2
MD0 ↓→ data output delay time tDV tDV MD0 = MD1 = VIL 1
MD1 hold time (vs. MD0↑)tM1H tOEH tM1H + tM1R ≥ 50 µs2
MD1 recovery time (vs. MD0↓)tM1R tOR 2
Program counter reset time tPCR —10
CLK input high-, low-level widths tXH, tXL — 0.125
CLK input frequency fX — 4.19 MHz
Initial mode set time tI —2
MD3 setup time (vs. MD1↑)tM3S —2
MD3 hold time (vs. MD1↓)tM3H —2
MD3 setup time (vs. MD0↓)tM3SR — On reading program memory 2
Address
Address
MD3 hold time (vs. MD0↑)tM3HR — On reading program memory 2
MD3 ↓→ data output float delay time tDFR — On reading program memory 2
Reset setup time tRES 10
Note 2
→ data output delay time tDAD tACC On reading program memory 2
Note 2
→ data output hold time tHAD tOH On reading program memory 0 130 ns
DD before VPP, and turn it off after VPP.
°C, VDD = 6.0±0.25 V, VPP = 12.5±0.5 V)
Note 2
(vs. MD0↓)tAS tAS 2
Note 2
(vs. MD0↑)tAH tAH 2
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
µ
s
Notes 1. Corresponding symbols of µPD27C256A (the µPD27C256A is a maintenance product).
2. The internal address signal is incremented by one at the falling edge of CLK input at the third clock.
26
Page 27

PROGRAM MEMORY WRITE TIMING
t
t
PCR
t
M3S
t
VPS
VDS
Data input
t
DS
t
PW
t
M1S
t
t
RES
V
PP
V
V
DD
PP
GND
DD
+1
V
DD
V
V
DD
GND
CLK
D0-D7
Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z
t
I
MD0
MD1
MD2
MD3
t
OH
M1H
t
M1R
Data output
t
DV
µ
PD61P24
t
XH
t
XL
Data input Data input
t
t
t
DF
t
M0S
DS
t
OPW
DH
t
AH
t
AS
t
M3H
PROGRAM MEMORY READ TIMING
t
RES
V
V
PP
PP
V
DD
GND
DD
+1
V
DD
V
V
DD
GND
CLK
D0-D7
t
I
MD0
MD1
t
t
VPS
t
VDS
Hi-Z Hi-Z
PCR
t
XH
t
XL
Data output Data output
t
DV
“ L ”
t
t
HAD
DAD
t
M3HR
t
DFR
MD2
MD3
t
M3SR
27
Page 28

21. PACKAGE DRAWINGS
20 PIN PLASTIC SOP (300 mil)
110
µ
PD61P24
1120
detail of lead end
P
A
G
F
E
C
D
NOTE
Each lead centerline is located within 0.12 mm (0.005 inch) of
its true position (T.P.) at maximum material condition.
N
M
M
H
I
J
K
B
L
ITEM MILLIMETERS INCHES
A
13.00 MAX.
B
0.78 MAX.
C
1.27 (T.P.)
D 0.40 0.016
E
F
G
H
I
J
K 0.20
L 0.6±0.2 0.024
M
N
P3°
+0.10
–0.05
0.1±0.1
1.8 MAX.
1.55
7.7±0.3
5.6
1.1
+0.10
–0.05
0.12
0.10
+7°
–3°
0.512 MAX.
0.031 MAX.
0.050 (T.P.)
+0.004
–0.003
0.004±0.004
0.071 MAX.
0.061
0.303±0.012
0.220
0.043
+0.004
0.008
–0.002
+0.008
–0.009
0.005
0.004
+7°
3°
–3°
P20GM-50-300B, C-4
28
Page 29

20PIN PLASTIC SHRINK DIP (300 mil)
20 11
110
µ
PD61P24
A
I
J
H
G
F
DN
NOTES
1) Each lead centerline is located within 0.17 mm (0.007 inch) of
its true position (T.P.) at maximum material condition.
2) ltem "K" to center of leads when formed parallel.
M
C
B
K
L
M
R
ITEM MILLIMETERS INCHES
A 19.57 MAX. 0.771 MAX.
B 1.78 MAX. 0.070 MAX.
C 1.778 (T.P.) 0.070 (T.P.)
D 0.50±0.10 0.020
F 0.85 MIN. 0.033 MIN.
G 3.2±0.3 0.126±0.012
H 0.51 MIN. 0.020 MIN.
I 4.31 MAX. 0.170 MAX.
J 5.08 MAX. 0.200 MAX.
K 7.62 (T.P.) 0.300 (T.P.)
L 6.5 0.256
M 0.25 0.010
N 0.17
R 0~15° 0~15°
+0.10
–0.05
+0.004
–0.005
+0.004
–0.003
0.007
P20C-70-300B-1
29
Page 30

µ
22. RECOMMENDED SOLDERING CONDITIONS
It is recommended that µPD6124A and 6600A be soldered under the following conditions.
For details on the recommended soldering conditions, refer to Information Document, Semiconductor Device
Mounting Technology Manual (C10535E).
For other soldering methods and conditions, consult NEC.
Table 22-1. Soldering Conditions of Surface-Mount Type
µ
PD61P24GS: 20-pin plastic SOP (300 mil)
Soldering Method Soldering Conditions
Partial Heating Pin temperature: 300°C max., time: 3 seconds max. (per device side)
Table 22-2. Soldering Conditions of Through-Hole Type
µ
PD61P24CS: 20-pin plastic shrink DIP (300 mil)
Soldering Method Soldering Conditions
Wave Soldering (Only for pin part) Solder bath temperature: 260°C max., time: 10 seconds max.
Partial Heating Pin temperature: 300°C max., time: 3 seconds max. (per pin)
PD61P24
Caution When soldering this product using of wave soldering, exercise care that the solder does not come
in direct contact with the package.
30
Page 31

APPENDIX A. µPD612× SERIES PRODUCT LIST
µ
PD61P24
Item
Part Number
ROM capacity 1002 × 10 bits 512 × 10 bits 1002 × 10 bits 1002 × 10 bits
RAM capacity 32 × 5 bits
I/O pin 8 pins (KI/O0-7) 12 pins 16 pins (KI/O0-7,
S-IN pin Provided
Current consumption 2 µA1
(fOSC = STOP) (MAX.)
S-IN high-level input 30 µA 15 µA
current (MAX.)
Transmission carrier frequency
Low-voltage detection Provided None
(reset) function
Mask option Provided None (fixed) Provided
Supply voltage VDD = 2.2 to 5.5 V V DD = 2.2 to 3.6 V VDD = 2.2 to 5.5 V VDD = 2.0 to 6.0 V
Package • 20-pin plastic SOP (300 mil) • 24-pin plastic • 28-pin plastic
µ
PD6124A
(mask ROM) (mask ROM) (one-time PROM) (mask ROM)
fOSC/12, fOSC/8
• 20-pin plastic shrink DIP (300 mil) SOP (300 mil) SOP (375 mil)
µ
PD6600A
µ
PD61P24
µ
A
µ
PD6125A
(KI/O0-7, I/O00-03) I/O00-03, I/O10-13)
• 24-pin plastic
shrink DIP
(300 mil)
µ
PD6126A
31
Page 32

APPENDIX B. DEVELOPMENT TOOLS
The following tools are available for program development using the µPD61P24.
Document Document No.
µ
PS612X Series Emulator —
µ
PS61P24 Assembler —
PROM Programmer AF-9703
AF-9704
AF-9705
AF-9706
µ
PD61P24 Program Adapter AF9807B
Notes 1. These are products from I.C Corp. For details, consult I.C Corp.
I.C Corp.
6th Barnet Gotanda Bldg.
1-9-5 Higashi-Gotanda, Shinagawa-ku, Tokyo 141
Tel. 03-3447-3793
Fax. 03-3440-5606
Note 1
Note 1
Note 2, 3
Note 2, 3
Note 3
Note 3
Note 3
µ
PD61P24
2. Not available.
3. These are products from Ando Electric Co., Ltd. For details, consult Ando Electric Co., Ltd.
Ando Electric Co., Ltd.
4-19-7 Kamata, Ota-ku, Tokyo 144
Tel. 0120-40-0211(toll-free)
Caution Use a writing program after assembling the program, convert the HEX file to a ROM file by using
the PROM utility program “UPDPROM” (refer to AS612X Assembler User’s Manual(IEM-1016)).
32
Page 33

[MEMO]
µ
PD61P24
33
Page 34

NOTES FOR CMOS DEVICES
1 PRECAUTION AGAINST ESD FOR SEMICONDUCTORS
Note: Strong electric field, when exposed to a MOS device, can cause destruction
of the gate oxide and ultimately degrade the device operation. Steps must
be taken to stop generation of static electricity as much as possible, and
quickly dissipate it once, when it has occurred. Environmental control must
be adequate. When it is dry, humidifier should be used. It is recommended
to avoid using insulators that easily build static electricity. Semiconductor
devices must be stored and transported in an anti-static container, static
shielding bag or conductive material. All test and measurement tools
including work bench and floor should be grounded. The operator should
be grounded using wrist strap. Semiconductor devices must not be touched
with bare hands. Similar precautions need to be taken for PW boards with
semiconductor devices on it.
µ
PD61P24
2 HANDLING OF UNUSED INPUT PINS FOR CMOS
Note: No connection for CMOS device inputs can be cause of malfunction. If no
connection is provided to the input pins, it is possible that an internal input
level may be generated due to noise, etc., hence causing malfunction. CMOS
device behave differently than Bipolar or NMOS devices. Input levels of
CMOS devices must be fixed high or low by using a pull-up or pull-down
circuitry. Each unused pin should be connected to VDD or GND with a
resistor, if it is considered to have a possibility of being an output pin. All
handling related to the unused pins must be judged device by device and
related specifications governing the devices.
3 STATUS BEFORE INITIALIZATION OF MOS DEVICES
Note: Power-on does not necessarily define initial status of MOS device. Produc-
tion process of MOS does not define the initial operation status of the device.
Immediately after the power source is turned ON, the devices with reset
function have not yet been initialized. Hence, power-on does not guarantee
out-pin levels, I/O settings or contents of registers. Device is not initialized
until the reset signal is received. Reset operation must be executed immediately after power-on for devices having reset function.
34
Page 35

µ
PD61P24
Regional Information
Some information contained in this document may vary from country to country. Before using any NEC
product in your application, please contact the NEC office in your country to obtain a list of authorized
representatives and distributors. They will verify:
• Device availability
• Ordering information
• Product release schedule
• Availability of related technical literature
• Development environment specifications (for example, specifications for third-party tools and
components, host computers, power plugs, AC supply voltages, and so forth)
• Network requirements
In addition, trademarks, registered trademarks, export restrictions, and other legal issues may also vary
from country to country.
NEC Electronics Inc. (U.S.)
Santa Clara, California
Tel: 800-366-9782
Fax: 800-729-9288
NEC Electronics (Germany) GmbH
Duesseldorf, Germany
Tel: 0211-65 03 02
Fax: 0211-65 03 490
NEC Electronics (Germany) GmbH
Benelux Office
Eindhoven, The Netherlands
Tel:040-2445845
Fax: 040-2444580
NEC Electronics (France) S.A.
Velizy-Villacoublay, France
Tel:01-30-67 58 00
Fax: 01-30-67 58 99
NEC Electronics Hong Kong Ltd.
Hong Kong
Tel:2886-9318
Fax: 2886-9022/9044
NEC Electronics Hong Kong Ltd.
Seoul Branch
Seoul, Korea
Tel: 02-528-0303
Fax: 02-528-4411
NEC Electronics (UK) Ltd.
Milton Keynes, UK
Tel: 01908-691-133
Fax: 01908-670-290
NEC Electronics Italiana s.r.1.
Milano, Italy
Tel: 02-66 75 41
Fax: 02-66 75 42 99
NEC Electronics (France) S.A.
Spain Office
Madrid, Spain
Tel: 01-504-2787
Fax: 01-504-2860
NEC Electronics (Germany) GmbH
Scandinavia Office
Taeby, Sweden
Tel: 08-63 80 820
Fax: 08-63 80 388
NEC Electronics Singapore Pte. Ltd.
United Square, Singapore 1130
Tel:253-8311
Fax: 250-3583
NEC Electronics Taiwan Ltd.
Taipei, Taiwan
Tel: 02-719-2377
Fax: 02-719-5951
NEC do Brasil S.A.
Sao Paulo-SP, Brasil
Tel: 011-889-1680
Fax: 011-889-1689
J96. 8
35
Page 36

µ
PD61P24
[MEMO]
The export of this product from Japan is regulated by the Japanese government. To export this product may be prohibited
without governmental license, the need for which must be judged by the customer. The export or re-export of this product
from a country other than Japan may also be prohibited without a license from that country. Please call an NEC sales
representative.
The application circuits and their parameters are for reference only and are not intended for use in actual design-ins.
No part of this document may be copied or reproduced in any form or by any means without the prior written
consent of NEC Corporation. NEC Corporation assumes no responsibility for any errors which may appear in
this document.
NEC Corporation does not assume any liability for infringement of patents, copyrights or other intellectual property
rights of third parties by or arising from use of a device described herein or any other liability arising from use
of such device. No license, either express, implied or otherwise, is granted under any patents, copyrights or other
intellectual property rights of NEC Corporation or others.
While NEC Corporation has been making continuous effort to enhance the reliability of its semiconductor devices,
the possibility of defects cannot be eliminated entirely. To minimize risks of damage or injury to persons or
property arising from a defect in an NEC semiconductor device, customers must incorporate sufficient safety
measures in its design, such as redundancy, fire-containment, and anti-failure features.
NEC devices are classified into the following three quality grades:
"Standard", "Special", and "Specific". The Specific quality grade applies only to devices developed based on a
customer designated "quality assurance program" for a specific application. The recommended applications of
a device depend on its quality grade, as indicated below. Customers must check the quality grade of each device
before using it in a particular application.
Standard: Computers, office equipment, communications equipment, test and measurement equipment,
audio and visual equipment, home electronic appliances, machine tools, personal electronic
equipment and industrial robots
Special: Transportation equipment (automobiles, trains, ships, etc.), traffic control systems, anti-disaster
systems, anti-crime systems, safety equipment and medical equipment (not specifically designed
for life support)
Specific: Aircrafts, aerospace equipment, submersible repeaters, nuclear reactor control systems, life
support systems or medical equipment for life support, etc.
The quality grade of NEC devices is "Standard" unless otherwise specified in NEC's Data Sheets or Data Books.
If customers intend to use NEC devices for applications other than those specified for Standard quality grade,
they should contact an NEC sales representative in advance.
Anti-radioactive design is not implemented in this product.
36
M4 96.5
 Loading...
Loading...