

Page 1
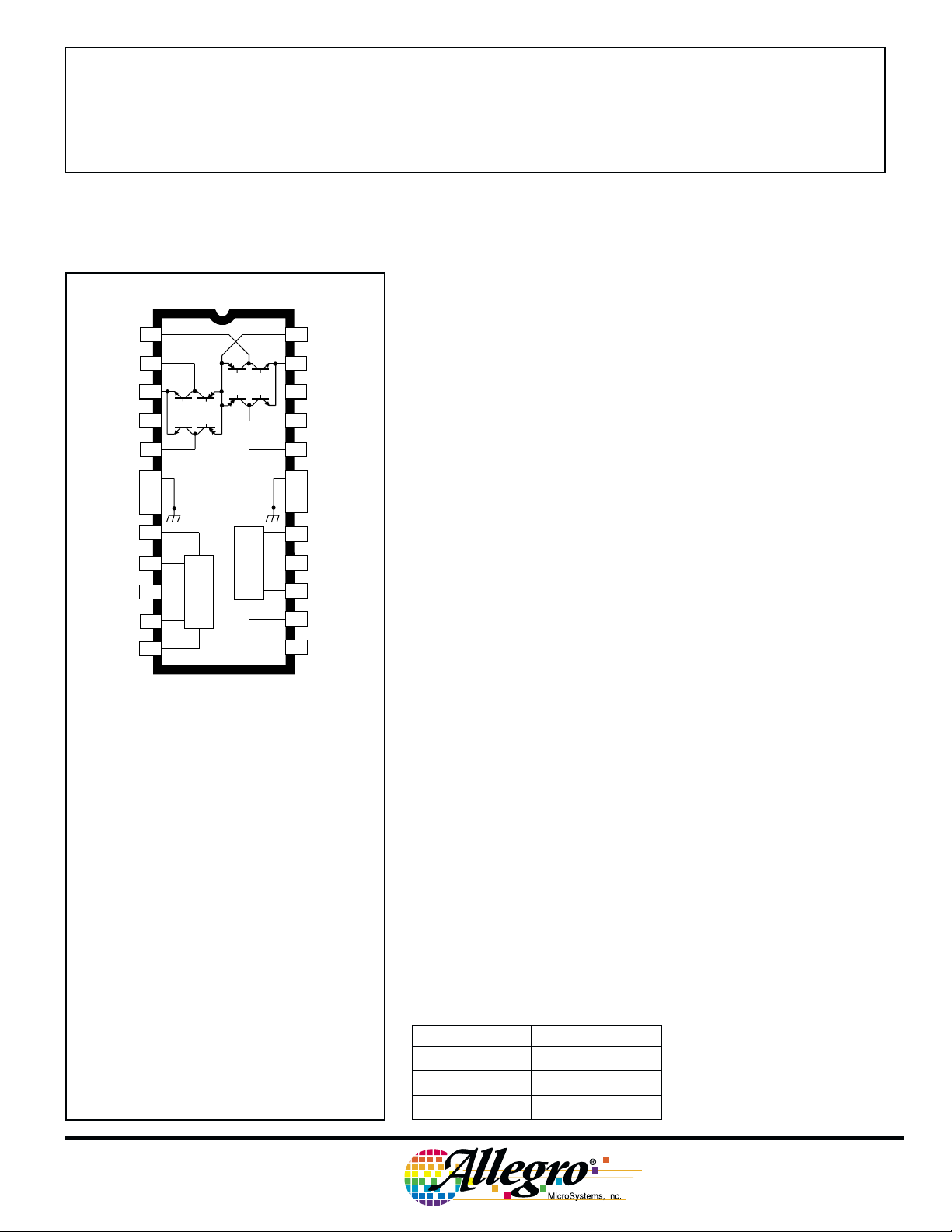
UDN2916B
OUT
OUT
SENSE
OUT
GROUND
GROUND
I
I
PHASE
V
REF 2
RC
1
1A
2
2A
3
E
2
2
4
2
5
2B
6
7
8
02
9
9
12
10
θ
2
2
2
PWM 2
11
12
BB
1
PWM 1
θ
V
CC
LOAD
24
SUPPLY
E
23
1
SENSE
22
21
OUT
1B
20
I
01
GROUND
19
18
GROUND
17
I
11
16
PHASE
1
15
V
REF 1
14
RC
1
LOGIC
13
SUPPLY
Dwg. PP-005
V
ABSOLUTE MAXIMUM RATINGS
at T
150°C
J ≤
Motor Supply Voltage, VBB.................... 45 V
Output Current, I
(Peak) ........................................ +1.0 A
(Continuous) .......................... +750 mA
Logic Supply Voltage, V
Logic Input Voltage Range,
V
............................... -0.3 V to +7.0 V
IN
Output Emitter Voltage, V
Package Power Dissipation,
P
........................................................ See Graph
D
Operating Temperature Range,
T
................................. -20°C to +85°C
A
Storage Temperature Range,
T
............................... -55°C to +150°C
S
Output current rating may be limited by duty
cycle, ambient temperature, and heat sinking.
Under any set of conditions, do not exceed the
specified peak current rating or a junction
temperature of +150°C.
OUT
................... 7.0 V
CC
................... 1.5 V
E
Data Sheet
29319.20C
2916
DUAL FULL-BRIDGE
PWM MOTOR DRIVER
The UDN2916B, UDN2916EB, and UDN2916LB motor drivers are
designed to drive both windings of a bipolar stepper motor or
bidirectionally control two dc motors. Both bridges are capable of
sustaining 45 V and include internal pulse-width modulation (PWM)
control of the output current to 750 mA. The outputs have been
optimized for a low output saturation voltage drop (less than 1.8 V
1
1
total source plus sink at 500 mA).
For PWM current control, the maximum output current is determined by the user’s selection of a reference voltage and sensing
resistor. Two logic-level inputs select output current limits of 0, 33,
67, or 100% of the maximum level. A PHASE input to each bridge
determines load current direction.
The bridges include both ground clamp and flyback diodes for
protection against inductive transients. Internally generated delays
prevent cross-over currents when switching current direction. Special
power-up sequencing is not required. Thermal protection circuitry
disables the outputs if the chip temperature exceeds safe operating
limits.
The UDN2916B is supplied in a 24-pin dual in-line plastic batwing
package with a copper lead-frame and heat sinkable tabs for improved
power dissipation capabilities. The UDN2916EB is supplied in a 44lead power PLCC for surface mount applications. The UDN2916LB is
supplied in a 24-lead surface-mountable SOIC. Their batwing construction provides for maximum package power dissipation in the
smallest possible construction. The UDN2916B/EB/LB are available for
operation from -40°C to +85°C. To order, change the prefix from 'UDN'
to 'UDQ'. These devices are also available on special order for operation to +105°C.
FEATURES
■ 750 mA Continuous Output Current
■ 45 V Output Sustaining Voltage
■ Internal Clamp Diodes
■ Internal PWM Current Control
■ Low Output Saturation Voltage
■ Internal Thermal Shutdown Circuitry
■ Similar to Dual PBL3717, UC3770
Always order by complete part number:
Part Number Package
UDN2916B 24-Pin DIP
UDN2916EB 44-Lead PLCC
UDN2916LB 24-Lead SOIC
Page 2
2916
DUAL FULL-BRIDGE
MOTOR DRIVER
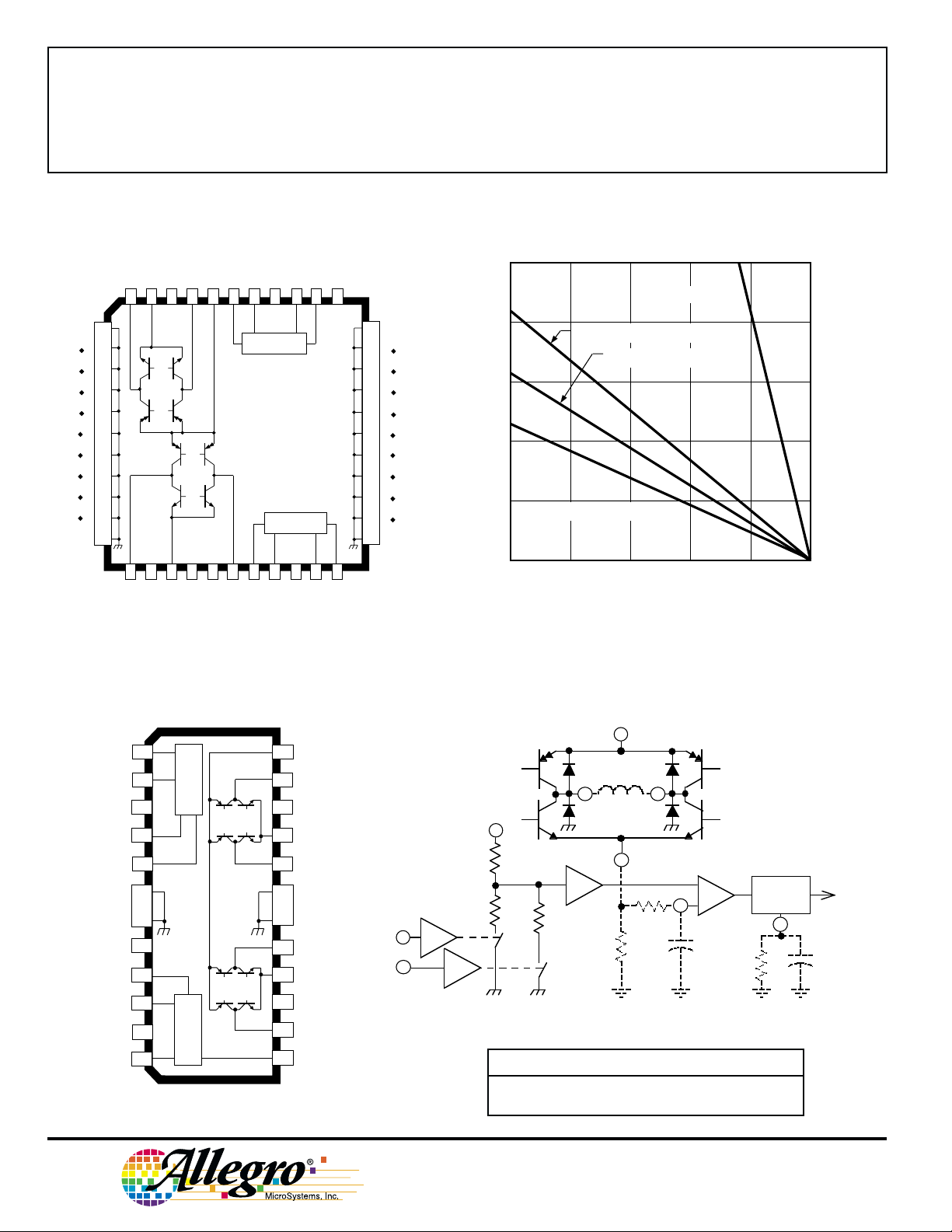
UDN2916EB
1
1A
OUT
6
GND
7
8
9
10
11
12
13
14
15
16
GND
17 29
NC NC
18
2A
OUT
1B
1
OUT
E
SENSE
3
4
5
1
2
19
21
20
2
2
E
SENSE
NO CONNECTION
LOAD SUPPLY
2
BB
V
22
NO CONNECTION
1
23
OUT
1
REF 1
11
01
I
2B
I
44
24
02
I
PWM 1
PHASE
43
θ
1
25
12
I
PWM 2
θ
V
42
2
26
2
PHASE
UDN2916LB
RC
41
27
REF 2
V
1
V
LOGIC SUPPLY
40
CC
39
38
37
36
35
34
33
32
31
30
28
2
RC
Dwg. PP-006A
GND
GND
5
R = 6.0°C/W
θJT
4
SUFFIX 'EB', R = 30°C/W
θJA
SUFFIX 'B', R = 40°C/W
θJA
3
2
1
SUFFIX 'LB', R = 55°C/W
θJA
0
25
ALLOWABLE PACKAGE POWER DISSIPATION IN WATTS
50 75 100 125 150
TEMPERATURE IN °C
Dwg. GP-035A
PWM CURRENT-CONTROL CIRCUITRY
I
I
PHASE
V
REF 2
RC
GROUND
GROUND
LOGIC SUPPLY
RC
V
REF 1
PHASE
I
'B' PACKAGE,
CHANNEL 1
PIN NUMBERS
1
02
2
12
3
2
PWM 2
θ
2
4
5
2
6
BB
7
8
V
9
9
1
V
CC
10
11
θ
1
1
12
11
PWM 1
24
LOAD SUPPLY
OUT
23
2B
SENSE
22
2
21
20
19
18
17
16
1
15
14
13
E
2
OUT
2A
GROUND
GROUND
OUT
1A
E
1
SENSE
OUT
1B
I
01
Dwg. PP-047
2
1
SHOWN.
20
I
0
17
I
1
V
REF
40 kΩ
15
20 kΩ
10 kΩ
PHASE OUT
HHL
LLH
V
BB
24
OUT
B
21
23
E
SENSE
22
R
C
÷10
1
OUT
A
R
S
TRUTH TABLE
A
R
T
OUT
SHOT
B
ONE
14
RC
C
T
SOURCE
DISABLE
Dwg. EP-007B
–
+
C
C
115 Northeast Cutoff, Box 15036
W
Worcester, Massachusetts 01615-0036 (508) 853-5000
Copyright © 1994, 1998 Allegro MicroSystems, Inc.
Page 3
2916
DUAL FULL-BRIDGE
MOTOR DRIVER
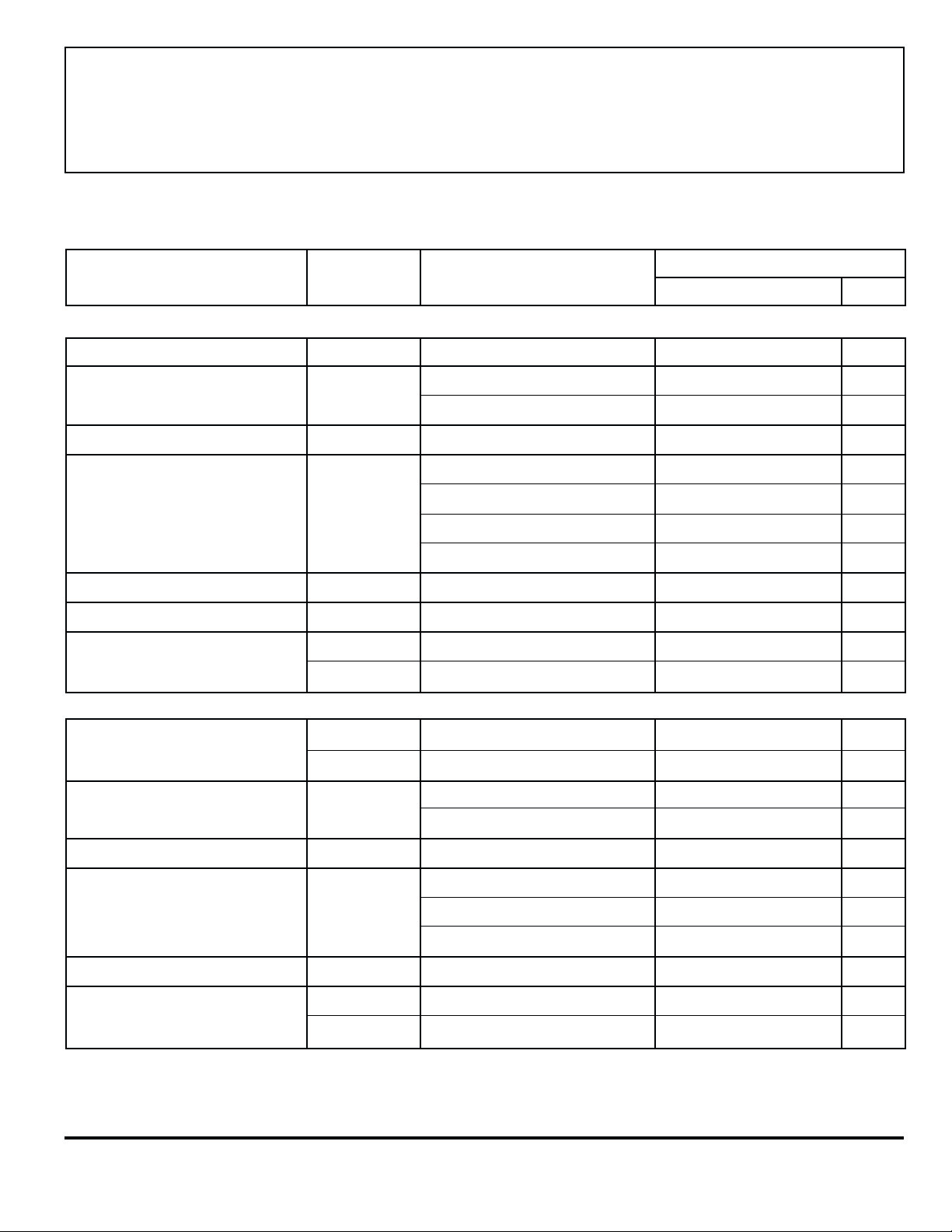
ELECTRICAL CHARACTERISTICS at TA = +25°C, TJ ≤ 150°C, VBB = 45 V, VCC = 4.75 V to 5.25 V,
V
= 5.0 V (unless otherwise noted).
REF
Limits
Characteristic Symbol Test Conditions Min. Typ. Max. Units
Output Drivers (OUT
or OUTB)
A
Motor Supply Range V
Output Leakage Current I
Output Sustaining Voltage V
Output Saturation Voltage V
CE(sus)
CE(SAT)
Clamp Diode Leakage Current I
Clamp Diode Forward Voltage V
Driver Supply Current I
BB(ON)
I
BB(OFF)
Control Logic
Input Voltage V
V
Input Current I
Reference Voltage Range V
Current Limit Threshold V
(at trip point)
REF/VSENSE
BB
CEX
R
IN(1)
IN(0)
IN(1)
REF
10 — 45 V
V
= V
OUT
V
OUT
I
OUT
Sink Driver, I
Sink Driver, I
Source Driver, I
Source Driver, I
BB
= 0 — <-1.0 -50 µA
= ±750 mA, L = 3.0 mH 45 —— V
= +500 mA — 0.4 0.6 V
OUT
= +750 mA — 1.0 1.2 V
OUT
= -500 mA — 1.0 1.2 V
OUT
= -750 mA — 1.3 1.5 V
OUT
— < 1.0 50 µA
VR = 45 V — < 1.0 50 µA
F
IF = 750 mA — 1.6 2.0 V
Both Bridges ON, No Load — 20 25 mA
Both Bridges OFF — 5.0 10 mA
All inputs 2.4 —— V
All inputs ——0.8 V
VIN = 2.4 V — <1.0 20 µA
= 0.8 V — - 3.0 -200 µA
V
IN
Operating 1.5 — 7.5 V
I0 = I1 = 0.8 V 9.5 10 10.5 —
= 2.4 V, I1 = 0.8 V 13.5 15 16.5 —
I
0
I0 = 0.8 V, I1 = 2.4 V 25.5 30 34.5 —
Thermal Shutdown Temperature T
Total Logic Supply Current I
CC(ON)
I
CC(OFF)
J
— 170 — °C
I0 = I1 = 0.8 V, No Load — 40 50 mA
I0 = I1 = 2.4 V, No Load — 10 12 mA
Page 4

2916
DUAL FULL-BRIDGE
MOTOR DRIVER
APPLICATIONS INFORMATION
PWM CURRENT CONTROL
The UDN2916B/EB/LB dual bridges are
designed to drive both windings of a bipolar
stepper motor. Output current is sensed and
controlled independently in each bridge by
an external sense resistor (R
comparator, and monostable multivibrator.
When the bridge is turned ON, current
increases in the motor winding and it is
sensed by the external sense resistor until
the sense voltage (V
set at the comparator’s input:
I
TRIP
= V
REF
SENSE
/10 R
The comparator then triggers the
monostable which turns OFF the source
driver of the bridge. The actual load current
peak will be slightly higher than the trip point
(especially for low-inductance loads) because of the internal logic and switching
delays. This delay (td) is typically 2 µs. After
turn-off, the motor current decays, circulating
through the ground-clamp diode and sink
transistor. The source driver’s OFF time
(and therefore the magnitude of the current
decrease) is determined by the monostable’s
external RC timing components, where
t
= RTCT within the range of 20 kΩ to
off
100 kΩ and 100 pF to 1000 pF.
), internal
S
) reaches the level
S
V
I
OUT
PHASE
PWM OUTPUT CURRENT WAVE FORM
+
0
–
I
TRIP
t
d
t
off
LOAD CURRENT PATHS
V
BB
Dwg. WM-003-1A
When the source driver is re-enabled,
the winding current (the sense voltage) is
again allowed to rise to the comparator’s
threshold. This cycle repeats itself, maintaining the average motor winding current at the
desired level.
Loads with high distributed capacitances may result in high turn-ON current
peaks. This peak (appearing across RS)
will attempt to trip the comparator, resulting
in erroneous current control or high-frequency oscillations. An external RCCC time
delay should be used to further delay the
action of the comparator. Depending on load
type, many applications will not require these
external components (SENSE connected to
E).
R
S
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
BRIDGE ON
SOURCE OFF
ALL OFF
Dwg. EP-006-1
Page 5

LOGIC CONTROL OF OUTPUT CURRENT
2916
DUAL FULL-BRIDGE
MOTOR DRIVER
Two logic level inputs (l0 and I1) allow digital selection of the motor
winding current at 100%, 67%, 33%, or 0% of the maximum level per
the table. The 0% output current condition turns OFF all drivers in the
bridge and can be used as an OUTPUT ENABLE function.
CURRENT-CONTROL TRUTH TABLE
l
0
LL V
HLV
LHV
HH 0
These logic level inputs greatly enhance the implementation of
µP-controlled drive formats.
During half-step operations, the l0 and l
motor at a constant torque between all positions in an eight-step
I
1
Output Current
/10 RS = I
REF
/15 RS = 2/3 I
REF
/30 RS = 1/3 I
REF
allow the µP to control the
1
TRIP
TRIP
TRIP
TYPICAL APPLICATION
STEPPER
MOTOR
V
+
R
T
Dwg. EP-008B
BB
FROM
R
V
1
R
S
C
µP
V
REF
T
2
3
R
C
C
10
11
C
T
2
4
5
6
7
8
9
9
θ
2
PWM 2
BB
1
PWM 1
24
R
23
22
21
20
19
18
17
16
θ
1
15
14
1312
V
CC
S
R
C
C
C
FROM
µP
V
REF
C
+5 V
T
sequence. This is accomplished by digitally
selecting 100% drive current when only one
phase is ON and 67% drive current when two
phases are ON. Logic highs on both l0 and l
turn OFF all drivers to allow rapid current
1
decay when switching phases. This helps to
ensure proper motor operation at high step
rates.
The logic control inputs can also be
used to select a reduced current level (and
reduced power dissipation) for ‘hold’ conditions and/or increased current (and available
torque) for start-up conditions.
GENERAL
The PHASE input to each bridge
determines the direction motor winding
current flows. An internally generated
deadtime (approximately 2 µs) prevents
crossover currents that can occur when
switching the PHASE input.
All four drivers in the bridge output can
be turned OFF between steps (l
resulting in a fast current decay through the
0
= l
≥ 2.4 V)
1
internal output clamp and flyback diodes. The
fast current decay is desirable in half-step and
high-speed applications. The PHASE, l0,and I
inputs float high.
Varying the reference voltage (V
provides continuous control of the peak load
REF
)
current for micro-stepping applications.
Thermal protection circuitry turns OFF
all drivers when the junction temperature
reaches +170°C. It is only intended to protect
the device from failures due to excessive
junction temperature and should not imply
that output short circuits are permitted. The
output drivers are re-enabled when the
junction temperature cools to +145°C.
The UDN2916B/EB/LB output drivers
are optimized for low output saturation
voltages—less than 1.8 V total (source plus
sink) at 500 mA. Under normal operating
conditions, when combined with the excellent
thermal properties of the batwing package
design, this allows continuous operation of
both bridges simultaneously at 500 mA.
1
Page 6

2916
DUAL FULL-BRIDGE
MOTOR DRIVER
24
0.280
0.240
NOTE 1
UDN2916B
Dimensions in Inches
(controlling dimensions)
13
0.014
0.008
0.300
BSC
0.430
MAX
0.210
MAX
7.11
6.10
0.015
MIN
16
0.070
0.045
0.022
0.014
24
1
1.77
1.15
7
NOTE 1
67
0.100
1.280
1.230
BSC
Dimensions in Millimeters
(for reference only)
2.54
32.51
31.24
BSC
13
12
12
0.005
0.150
0.115
0.13
MIN
MIN
0.355
0.204
Dwg. MA-001-25A in
10.92
MAX
7.62
BSC
5.33
MAX
0.39
MIN
0.558
0.356
NOTES:1. Webbed lead frame. Leads 6, 7, 18, and 19 are internally one piece.
2. Lead thickness is measured at seating plane or below.
3. Lead spacing tolerance is non-cumulative.
4. Exact body and lead configuration at vendor’s option within limits shown.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
3.81
2.93
Dwg. MA-001-25A mm
Page 7

UDN2916EB
Dimensions in Inches
(controlling dimensions)
28
2916
DUAL FULL-BRIDGE
MOTOR DRIVER
18
0.319
0.291
0.319
0.291
8.10
7.39
8.10
7.39
0.021
0.013
0.050
BSC
0.533
0.331
1.27
BSC
0.020
MIN
0.180
0.165
29
0.032
0.026
0.695
0.685
0.656
0.650
39
40
Dimensions in Millimeters
(for reference only)
28
29
0.812
0.661
17.65
17.40
16.662
16.510
0.656
0.650
144
0.695
0.685
INDEX AREA
2
INDEX AREA
17
7
6
Dwg. MA-005-44A in
18
17
0.51
MIN
4.57
4.20
39
144
17.65
17.40
2
6
40
16.662
16.510
7
Dwg. MA-005-44A mm
NOTES:1. MO-047AC except for terminal shoulder height. Intended to meet new JEDEC Standard when that is approved.
2. Webbed lead frame. Leads 7-17 and 29-39 are internally one piece.
3. Lead spacing tolerance is non-cumulative.
4. Exact body and lead configuration at vendor’s option within limits shown.
Page 8

2916
°
°
DUAL FULL-BRIDGE
MOTOR DRIVER
UDN2916LB
Dimensions in Inches
(for reference only)
24 13
0.0125
0.0091
0.2992
0.2914
0.020
0.013
0.0926
0.1043
7.60
7.40
1 2
3
0.6141
0.5985
0.0040
MIN
.
Dimensions in Millimeters
(controlling dimensions)
24 13
0.050
BSC
NOTE 1
NOTE 3
0.491
0.394
0.050
0.016
0° TO 8
Dwg. MA-008-25 in
0.32
0.23
10.65
10.00
1.27
0.40
1 2
0.51
0.33
2.65
2.35
0.10 MIN
Allegro MicroSystems, Inc. reserves the right to
make, from time to time, such departures from the detail
specifications as may be required to permit improvements in the design of its products.
The information included herein is believed to be
accurate and reliable. However, Allegro
MicroSystems, Inc. assumes no responsibility for its
use; nor for any infringements of patents or other rights
of third parties which may result from its use.
3
15.60
15.20
.
1.27
BSC
NOTE 1
NOTE 3
0° TO 8
Dwg. MA-008-25A mm
NOTES:1. Webbed lead frame. Leads indicated are internally one piece.
2. Lead spacing tolerance is non-cumulative.
3. Exact body and lead configuration at vendor’s option
within limits shown.
115 Northeast Cutoff, Box 15036
Worcester, Massachusetts 01615-0036 (508) 853-5000
 Loading...
Loading...