

Page 1
查询TDA9330供应商
INTEGRATED CIRCUITS
DATA SH EET
TDA933xH series
2
I
C-bus controlled TV display
processors
Preliminary specification
Supersedes data of 1998 Oct 22
File under Integrated Circuits, IC02
2000 May 08
Page 2
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
FEATURES
Available in all ICs:
• Can be used in both single scan (50 or 60 Hz) and
double scan (100 or 120 Hz) applications
• YUV input and linear RGB input with fast blanking
• Separate OSD/text input with fast blanking or blending
• Black stretching of non-standard luminance signals
• Switchable matrix for the colour difference signals
• RGBcontrolcircuitwithContinuousCathodeCalibration
(CCC), plus white point and black level offset
adjustment
• Blue stretch circuit which offsets colours near white
towards blue
• Internal clock generation for the deflection processing,
which is synchronized by a 12 MHz ceramic resonator
oscillator
• Horizontal synchronization with two control loops and
alignment-free horizontal oscillator
• Slow start and slow stop of the horizontal drive pulses
• Low-power start-up option for the horizontal drive circuit
• Vertical count-down circuit
• Vertical driver optimized for DC-coupled vertical output
stages
• Vertical and horizontal geometry processing
• Horizontal and vertical zoom possibility and vertical
scroll function for application with 16 : 9 picture tubes
• Horizontal parallelogram and bow correction
• I2C-bus control of various functions
• Low dissipation.
GENERAL DESCRIPTION
The TDA933xH series are display processors for
‘High-end’ television receivers which contain the following
functions:
• RGB control processor with Y, U and V inputs, a linear
• Programmable deflection processor with internal clock
• Thecircuitcan be used in both singlescan(50 or 60 Hz)
In addition to these functions, the TDA9331H and
TDA9332H have a multi-sync function for the horizontal
PLL, with a frequencyrange from 30 to 50 kHz(2fHmode)
or 15 to 25 kHz (1fHmode), so that the ICs can also be
used to display SVGA signals.
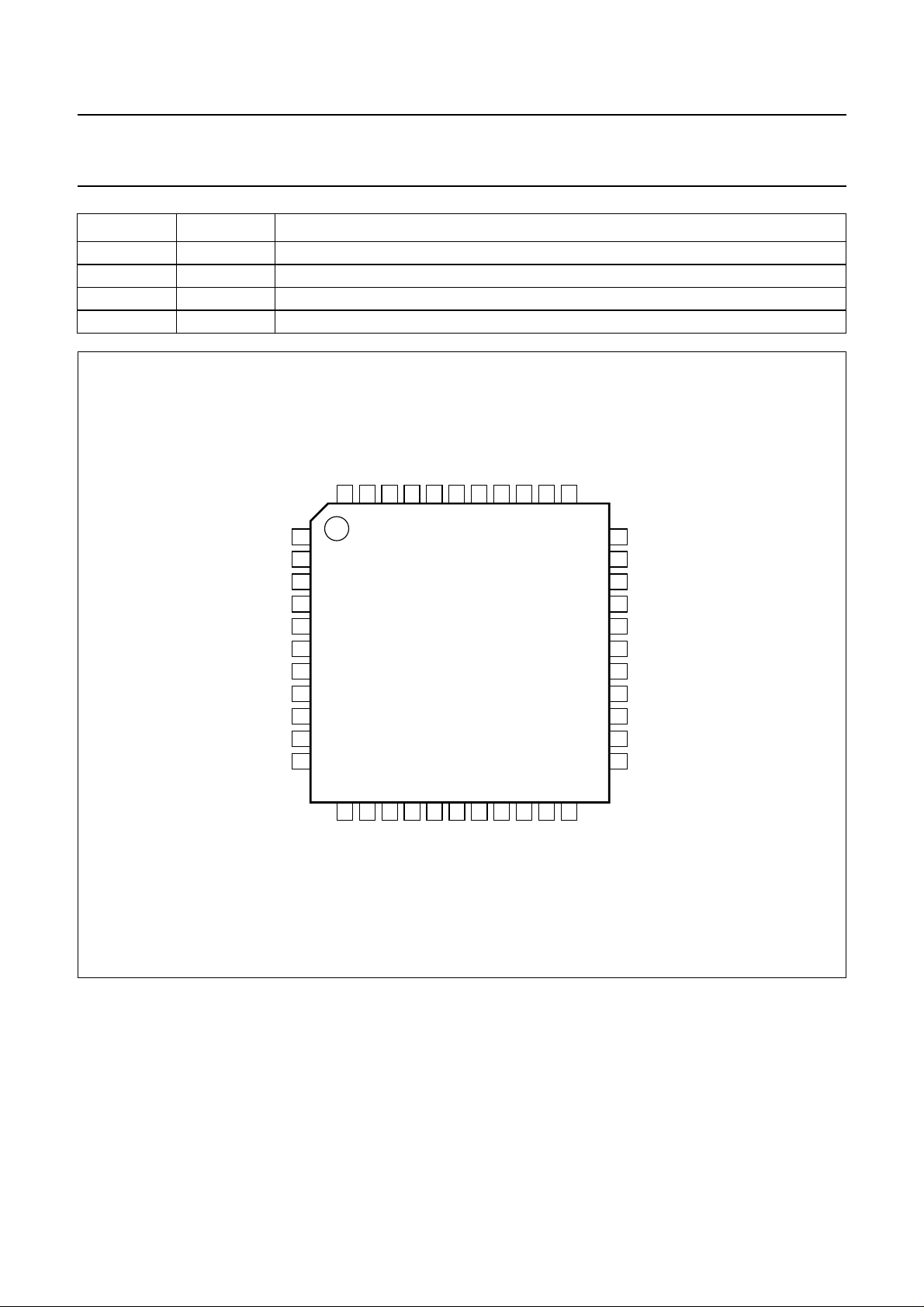
The supply voltage of the ICs is 8 V. They are each
contained in a 44-pin QFP package.
TDA933xH series
RGBinput for SCART orVGA signals with fastblanking,
a linear RGB input for OSD and text signals with a fast
blanking or blending option and an RGB output stage
withblack current stabilization, which isrealizedwith the
CCC (2-point black current measurement) system.
generation, which generates the drive signals for the
horizontal, East-West (E-W) and vertical deflection.
The circuithasvariousfeaturesthatareattractiveforthe
application of 16 : 9 picture tubes.
and double scan (100 or 120 Hz) applications.
ORDERING INFORMATION
TYPE
NUMBER
TDA9330H QFP44 plastic quad flat package; 44 leads (lead length 1.3 mm);
TDA9331H
TDA9332H
2000 May 08 2
NAME DESCRIPTION VERSION
body 10 × 10 × 1.75 mm
PACKAGE
SOT307-2
Page 3
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
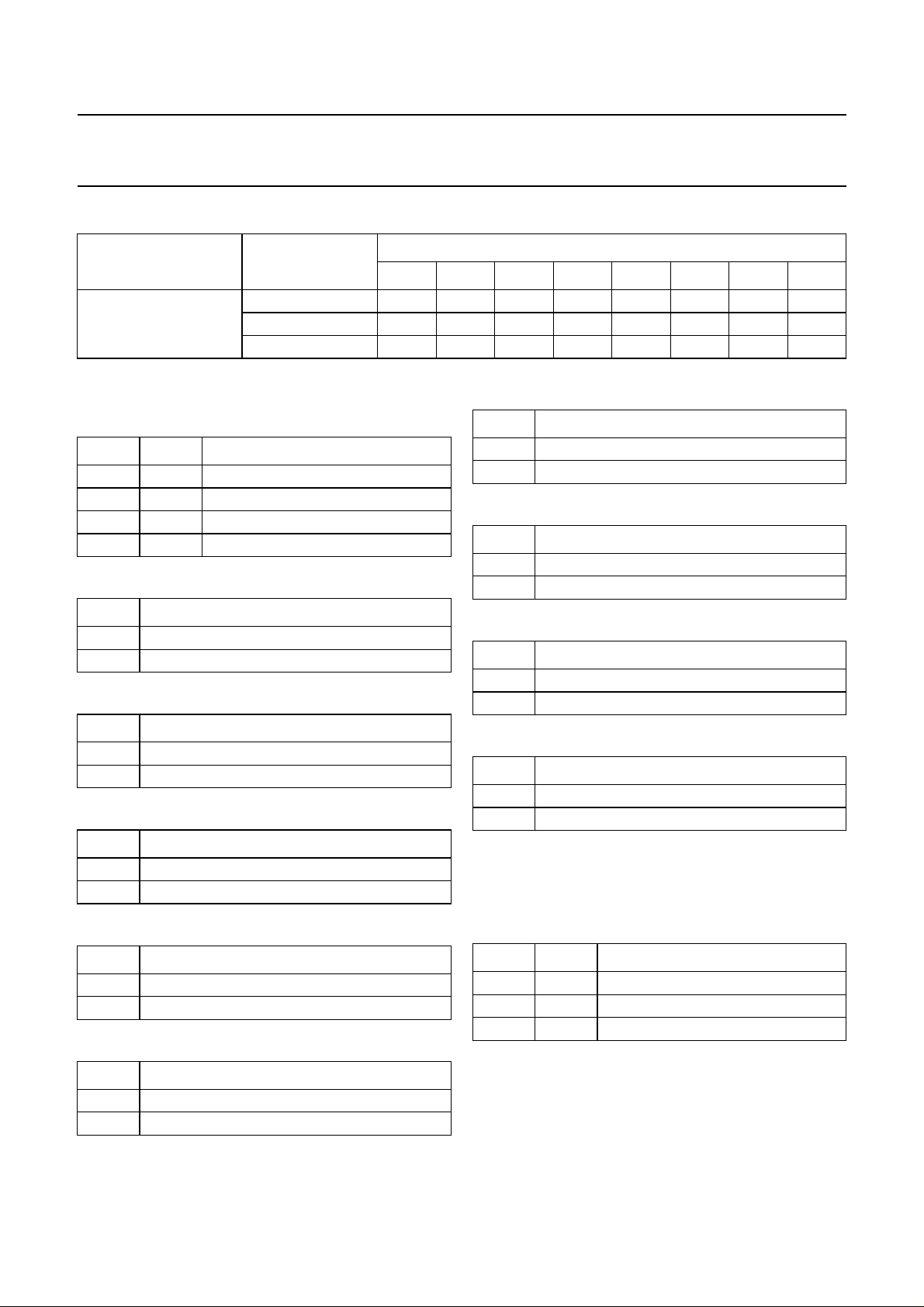
SURVEY OF IC TYPES
IC VERSION VGA MODE DAC OUTPUT
TDA9330H no I
2
C-bus controlled
TDA9331H yes proportional to VGA frequency
TDA9332H yes I
2
C-bus controlled
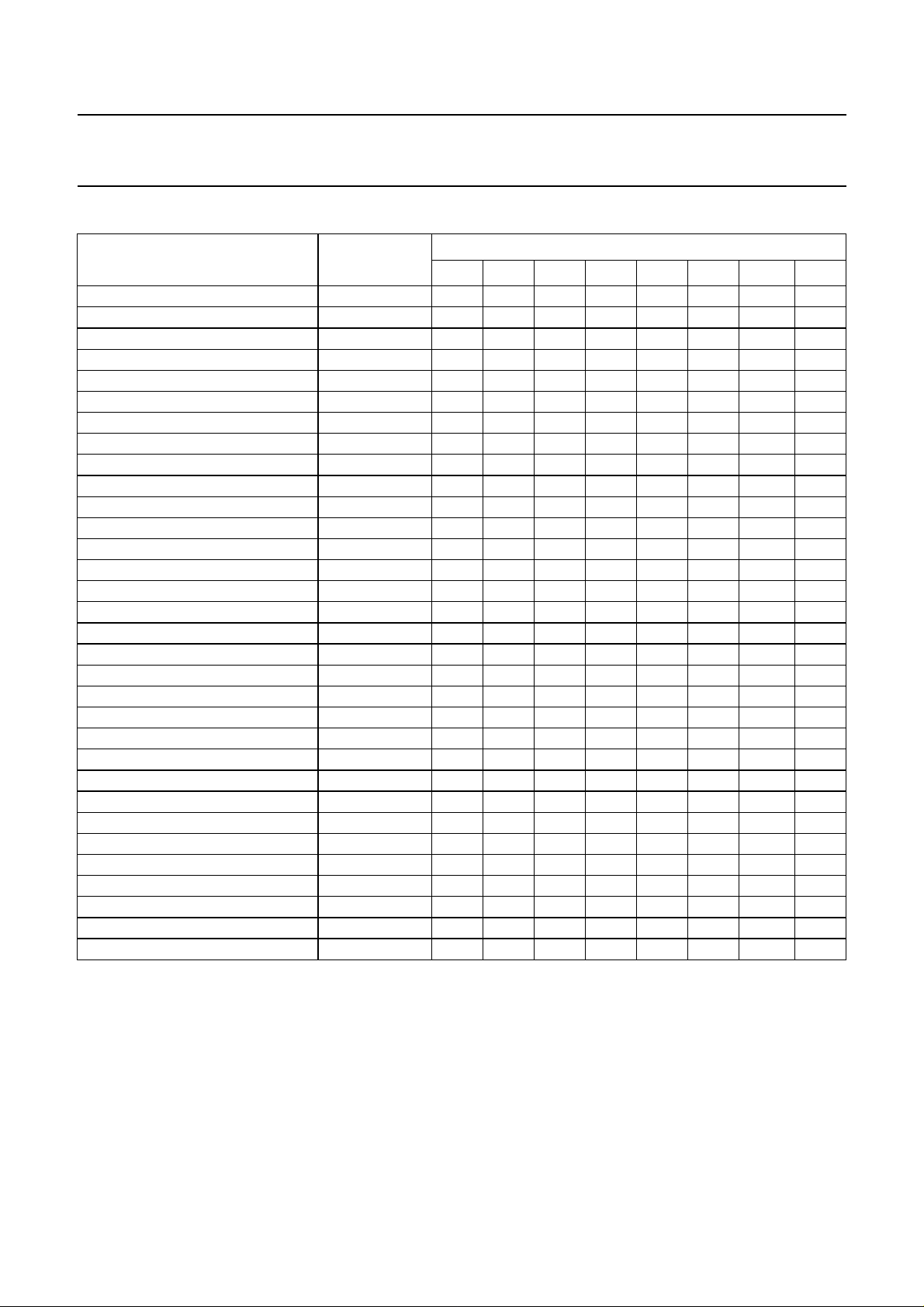
QUICK REFERENCE DATA
SYMBOL PARAMETER MIN. TYP. MAX. UNIT
Supply
V
P
I
P
supply voltage − 8.0 − V
supply current (VP1plus VP2) − 50 − mA
Input voltages
V
i(Y)(b-w)
V
i(U)(p-p)
V
i(V)(p-p)
V
i(RGB)(b-w)
V
i(Hsync)
V
i(Vsync)
V
i(IIC)
luminance input signal (black-to-white value) − 1.0/0.315 − V
U input signal (peak-to-peak value) − 1.33 − V
V input signal (peak-to-peak value) − 1.05 − V
RGB input signal (black-to-white value) − 0.7 − V
horizontal sync input (HD) − TTL − V
vertical sync input (VD) − TTL − V
I2C-bus inputs (SDA and SCL) − CMOS 5 V − V
Output signals
V
o(RGB)(b-w)
I
o(hor)
I
o(ver)(p-p)
I
o(EW)
RGB output signal amplitude (black-to-whitevalue) − 2.0 − V
horizontal output current −− 10 mA
vertical output current (peak-to-peak value) − 0.95 − mA
E-W drive output current −− 1.2 mA
2000 May 08 3
Page 4
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
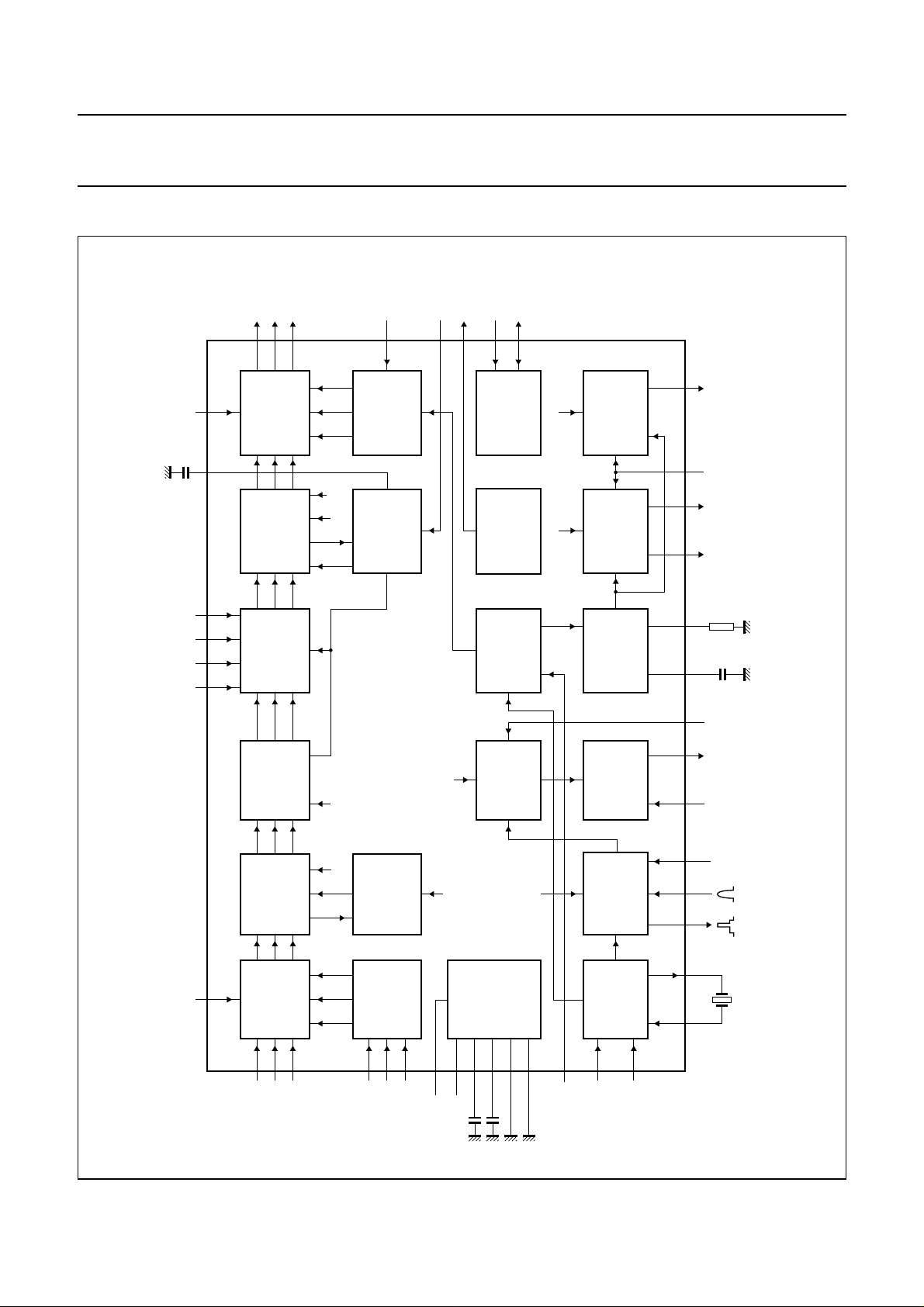
BLOCK DIAGRAM
BCL
431125
CALIBRATION
LIMITER
CURRENT
FBCSO
PWL
BL2GI2RI2
BI2
29
34
38373635
BO
GO
RO
404142
AND
BUFFER
OUTPUT
AMPLIFIER
BLUE STRETCH
R
B
white
BRI
AND
CONTROL
BRIGHTNESS
WHITE POINT
R
GG
B
RGB
INSERTION
point
PWL
BLKIN
44
CATHODE
CONTINUOUS
AND
BEAM
DACOUT
SCL
10
SDA
C-BUS
2
I
TRANSCEIVER
2 × 4-BIT DACs
19 × 6-BIT DACs
H/V DIVIDER
TDA933xH series
E-W
GEOMETRY
GEOMETRY CONTROL
VERTICAL
GEOMETRY
RAMP
GENERATOR
MGR445
3
VDOB EWOEHTIN
1 24
VDOA
ref
15 16
VSC I
handbook, full pagewidth
BL1
33
RGB
CONTROL
CONTRAST
RGB
MATRIX
COLOUR
CONTROL
DIFFERENCE
SATURATION
Y
U
V
SWITCH
282726
YIN
VIN
UIN
CONTR
SAT
U V
Y
303132
BLACK
RGB-YUV
RI1
GI1
TDA933xH
STRETCH
MATRIX
39
P2
V
BI1
LPSU
HOUT
SOFT
START-UP
START/STOP
LOW-POWER
H-SHIFT
SUPPLY
7
18619
17
P1
VD
BG
V
DEC
DEC
GND1
GND2
23
D
V
OUTPUT
HORIZONTAL
LOOP
PHASE-2
AND
CLOCK
GENERATION
24
D
H
12
1st LOOP
HSEL
589
FLASH
HFB
SCO
21 13 14 22
XTALO
20
XTALI
DPC
Fig.1 Block diagram.
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
2000 May 08 4
Page 5
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
PINNING
SYMBOL PIN DESCRIPTION
VDOA 1 vertical drive output A
VDOB 2 vertical drive output B
EWO 3 E-W output
EHTIN 4 EHT compensation input
FLASH 5 flash detection input
GND1 6 ground 1
DEC
VD
HOUT 8 horizontal output
SCO 9 sandcastle pulse output
SCL 10 serial clock input
SDA 11 serial data input/output
HSEL 12 selection of horizontal frequency
HFB 13 horizontal flyback pulse input
DPC 14 dynamic phase compensation
VSC 15 vertical sawtooth capacitor
I
ref
V
P1
DEC
BG
GND2 19 ground 2
XTALI 20 crystal input
XTALO 21 crystal output
LPSU 22 low-power start-up supply
V
D
H
D
DACOUT 25 DAC output
VIN 26 V-signal input
UIN 27 U-signal input
YIN 28 luminance input
FBCSO 29 fixed beam current switch-off input
RI1 30 red 1 input for insertion
GI1 31 green 1 input for insertion
BI1 32 blue 1 input for insertion
BL1 33 fast blanking input for RGB-1
PWL 34 peak white limiting decoupling
RI2 35 red 2 input for insertion
GI2 36 green 2 input for insertion
BI2 37 blue 2 input for insertion
BL2 38 fast blanking/blending input for RGB-2
V
P2
RO 40 red output
7 digital supply decoupling
16 reference current input
17 positive supply 1 (+8 V)
18 band gap decoupling
23 vertical sync input
24 horizontal sync input
39 positive supply 2 (+8 V)
TDA933xH series
2000 May 08 5
Page 6
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
SYMBOL PIN DESCRIPTION
GO 41 green output
BO 42 blue output
BCL 43 beam current limiting input
BLKIN 44 black current input
handbook, full pagewidth
VDOA
VDOB
EWO
EHTIN
FLASH
GND1
DEC
HOUT
SCO
SCL
SDA
VD
BO
BCL
43
GO
42
41
BLKIN
44
1
2
3
4
5
6
7
8
9
10
11
P2
RO
V
40
39
TDA933xH
BL2
38
BI2
37
GI2
36
RI2
35
PWL
34
TDA933xH series
33
BL1
BI1
32
31
GI1
30
RI1
FBCSO
29
28
YIN
UIN
27
VIN
26
DACOUT
25
H
24
D
V
23
D
12
13
14
15
16
ref
I
VSC
DPC
HFB
HSEL
Fig.2 Pin configuration.
2000 May 08 6
21
17
18
19
P1
BG
V
GND2
DEC
20
XTALI
22
LPSU
XTALO
MGR446
Page 7

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
FUNCTIONAL DESCRIPTION
RGB control circuit
INPUT SIGNALS
The RGB control circuit of the TDA933xH contains three
sets of input signals:
• YUV input signals, which are supplied by the input
processor or the feature box. Bit GAI can be used to
switch the luminance input signal sensitivity between
0.45 V (p-p) and 1.0 V (b-w). The nominal input signals
for U and V are 1.33 V (p-p) and 1.05 V (p-p),
respectively. These input signals are controlled on
contrast, saturation and brightness.
• The first RGB input is intended for external signals
(SCARTin 1fHandVGA in 2fHapplications),which have
an amplitude of 0.7 V (p-p) typical. This input is also
controlled on contrast, saturation and brightness.
• The second RGB input is intended for OSD and teletext
signals. The required input signals havean amplitude of
0.7 V (p-p). The switching between the internal signal
and the OSD signal can be realized via a blending
function or via fast blanking. This input is only controlled
on brightness.
Switchingbetween the various sources canberealized via
the I2C-bus and by fast insertion switches. The fast
insertion switches can be enabled via the I2C-bus.
The circuit contains switchable matrix circuits for the
colour difference signals so that the colour reproduction
can be adapted for PAL/SECAM and NTSC. For NTSC,
two different matrices can be chosen. In addition, a matrix
for high-definition ATSC signals is available.
OUTPUT AMPLIFIER
The output signal has an amplitude of approximately
2 V (b-w) at nominal input signals and nominal settings of
the controls. The required ‘white point setting’ of the
picture tube can be realized by means of three separate
gain settings for the RGB channels.
To obtain an accurate biasing of the picture tube, a CCC
circuit has been developed. This function is realized by a
2-point black level stabilization circuit.
Byinsertingtwotestlevelsforeachgunandcomparing the
resulting cathode currents with two different reference
currents,the influence of thepicture tube parameters such
as the spread in cut-off voltage can be eliminated.
TDA933xH series
This 2-point stabilization is based on the principle that the
ratio between the cathode currents is coupled to the ratio
γ
k1
k2
=
V
dr1
-----------
V
dr1
between the drive voltages according to:
I
------ I
The feedback loop makes the ratio between cathode
currents I
and Ik2 equal to the ratio between the
k1
reference currents (which are internally fixed)by changing
the (black) level and the amplitude of the RGB output
signals via two converging loops. The system operates in
such a way that the black level of the drive signal is
controlled to thecut-off point of the gun. In this way, a very
good grey scale tracking is obtained. The accuracy of the
adjustmentof the black level isonly dependent on the ratio
ofinternalcurrents and these can be madeveryaccurately
in integrated circuits. An additional advantage of the
2-point measurement is that the control system makes the
absolute value of Ik1 and Ik2 identical to the internal
reference currents. Because this adjustment is obtained
by adapting the gain of the RGB control stage, this control
stabilizes the gain of the complete channel (RGB output
stage and cathode characteristic). As a result, this 2-point
loop compensates for variations in the gain figures during
life.
An important property ofthe 2-point stabilizationis that the
offset and the gain of the RGB path are adjusted by the
feedback loop. Hence, the maximum drive voltage for the
cathode is fixed by the relationship between the test
pulses, the reference current and the relative gain setting
of the three channels. Consequently, the drive level of the
CRT cannot be adjusted by adapting the gain of the RGB
output stage. Because different picture tubes may require
different drive levels, the typical ‘cathode drive level’
amplitudecan be adjusted bymeans of an I2C-bussetting.
Depending on the selected cathode drive level, the typical
gain of the RGB output stages can be fixed, taking into
account the drive capability of the RGB outputs
(pins 40 to 42). More details about the design are given in
the application report (see also Chapter “Characteristics”;
note 11).
The measurement of the high and the low currents of the
2-point stabilization circuit isperformed in two consecutive
fields. The leakage current is measured in each field. The
maximum allowable leakage current is 100 µA.
For extra flexibility, it also possible to switch the CCC
circuit to 1-point stabilization with the OPC bit. In this
mode, only the blacklevel at theRGB outputs is controlled
by the loop. The cathode drive level setting has no
influence on the gain in thismode. This level should be set
to the nominal value to get the correct amplitude of the
measuring pulses.
2000 May 08 7
Page 8

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
Via the I2C-bus, an adjustable offset can be made on the
black level of red and green channels with respect to the
level that is generated by the black current control loop.
These controls can be used to adjust the colour
temperature of the dark part of the picture, independent of
the white point adjustment.
When the TV receiver is switched on, the black current
stabilization circuit is directly activated and the RGB
outputs are blanked. The blanking is switched off as soon
as the loop has stabilized (e.g. the first time that bit BCF
changes from 1 to 0, see also Chapter “Characteristics”;
note 15). This ensures that the switch-on time is reduced
to a minimum and is only dependent on the warm-up time
of the picture tube.
The black current stabilization system checks the output
levelof the three channels andindicateswhether the black
level of the lowest RGB output of the IC is in a certain
window (WBC bit), below or above this window (HBC bit).
This indication can be read from the I2C-bus and can be
used for automatic adjustment of voltage Vg2 during the
production of the TV receiver.
TDA933xH series
Synchronization and deflection processing
HORIZONTAL SYNCHRONIZATION AND DRIVE CIRCUIT
The horizontal drive signal is obtained from an internal
VCO which runs at a frequency of 440 times (2fHmode) or
880 times (1fHmode) the frequency of the incoming H
signal. The free-running frequency of this VCO is
calibrated by a crystal oscillator which needs an external
12 MHz crystal or ceramic resonator as a reference. It is
also possible to supply an external reference signal to the
IC (in this case, the external resonator should be
removed).
The VCO is synchronized to the incoming horizontal H
pulse (applied from the feature box or the input processor)
by a PLL with an internal time constant. The frequency of
thehorizontaldrive signal (1fHor2fH)isselected by means
of a switching pin, which must be connected to ground or
left open circuit.
For HDTV applications, it is possible to change the
free-running frequency of the horizontal drive output from
31.2 kHz to 33.7 kHz by means of bit HDTV.
D
D
When a failure occurs in theblack current loop (e.g. due to
an open circuit), statusbit BCF is set.This information can
be used to blank the picture tube to avoid damage to the
screen.
The control circuit contains an average beam current
limiting circuit and a peak white level (PWL) circuit. The
PWL detects small white areas in the picture that are not
detected by the average beam current limiter. The PWL
can be adjusted via the I2C-bus. A low-pass filter is placed
in front of the peak detector to prevent it from reacting to
short transients in the video signal. The capacitor of the
low-pass filter is connected externally so that the set
maker can adapt the time constant as required. The IC
also contains a soft clipper that limits the amplitude of the
shorttransientsintheRGBoutputsignals.Inthisway,spot
blooming on, for instance, subtitles is prevented. The
differencebetween the PWL and thesoftclipping level can
be adjusted via the I2C-bus in a few steps.
The vertical blanking is adapted to the vertical frequency
of the incoming signal (50 or 100 Hz or, 60 or 120 Hz).
When the flyback time of the vertical output stage is
greater than the 60 Hz blanking time, the blanking can be
increased to the same value as that of the 50 Hz blanking.
This can be set by means of bit LBM.
When no video is available, it is possible to insert a blue
background. This feature can be activated via bit EBB.
For safety reasons, switching between 1fH and 2f
modes is only possible when the IC is in the standby
mode.
For the TDA9331H and TDA9332H, it is also possible to
set the horizontal PLL to a ‘multi-sync’ mode by means of
bit VGA. In this mode, the circuit detects the frequency of
theincomingsyncpulses and adjusts the centre frequency
of the VCO accordingly by means of an internal
Digital-to-Analog-Converter (DAC). The frequency range
in this mode is 30 to 50 kHz at the output.
The polarities of the incoming HD and VD pulses are
detected internally. The detected polarity can be read out
via status bits HPOL and VPOL.
The horizontal drive signal is generated by a second
control loop which compares the phase of the reference
signal (applied from the internal VCO) with the flyback
pulse. The time constant of this loop is set internally. The
IC has a dynamic horizontal phase correction input, which
can be used to compensate phase shifts that are caused
by beam current variations. Additional settings of the
horizontal deflection (which are realized via the second
loop) are the horizontal shift and horizontal parallelogram
and bow corrections (see Chapter “Characteristics”;
Fig.16). The adjustments are realized via the I2C-bus.
When no horizontal flyback pulse is detected during three
consecutive line periods, status bit NHF is set (output
status byte 01-D3; see Table 3).
H
2000 May 08 8
Page 9

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
The horizontal drive signal is switched on and off via the
so-called slow-start/slow-stop procedure. This function is
realizedby varying the tonof the horizontal drive pulse. For
EHT generators without a bleeder, the IC can be set to a
‘fixed beam current mode’ via bit FBC. In this case, the
picture tube capacitance is discharged with a current of
approximately 1 mA. The magnitude of the discharge
current is controlled via the black current feedback loop.
If necessary, the discharge current can be enlarged with
the aid of an external currentdivision circuit. With the fixed
beam current option activated, it is still possible to have a
black screen during switch-off. This can be realized by
placing the vertical deflectionin an overscan position. This
mode is activated via bit OSO.
An additional mode of the IC is the ‘low-power start-up’
mode.This mode is activated when asupplyvoltageof 5 V
is supplied to the start-up pin.
The required current for this mode is 3 mA (typ.). In this
condition, the horizontal drive signal has the nominal t
and the ton grows gradually from zero to approximately
30% of the nominal value. This results in a line frequency
of approximately 50 kHz (2fH) or 25 kHz (1fH). The output
signal remains unchanged until the main supply voltage is
switched on and the I2C-bus data has been received. The
horizontal drive then gradually changes to the nominal
frequency and duty cycle via the slow-start procedure.
TheICcanonlybeswitched on and to standby mode when
both standby bits (STB0 and STB1) are changed. The
circuit will not react when only one bit changes polarity.
The IC has a general purpose bus controlled DAC output
with a 6-bit resolution and with an output voltage range
between 0.2 to 4 V. In the TDA9331H, the DC voltage on
this output is proportional to the horizontal line frequency
(only in VGA mode). This voltage can be used to control
the supply voltage of the horizontal deflection stage, to
maintain constant picture width for higher line frequencies.
VERTICAL DEFLECTION AND GEOMETRY CONTROL
The drive signals for the vertical and E-W deflection
circuits are generated by a vertical divider, which derives
its clock signal from the line oscillator. The divider is
synchronized by the incoming VDpulse, generated by the
input processor or the feature box. The vertical ramp
generator requires an external resistor and capacitor; the
tolerances for these components must be small. In the
normal mode, the vertical deflection operates in constant
slope and adapts its amplitude, depending on the
frequency of the incoming signal (50 or 60 Hz, or
100 or 120 Hz). When the TDA933xH is switched to the
VGA mode, the amplitude of the vertical scan is stabilized
off
TDA933xH series
andindependent of the incomingvertical frequency. In this
mode, the E-W drive amplitude is proportional to the
horizontalfrequency so that the correctiononthe screen is
not affected.
The vertical drive is realized by a differential output
current. The outputs must be DC-coupled to the vertical
output stage (e.g. TDA8354).
The vertical geometry can be adjusted via the I2C-bus.
Controls are possible for the following parameters:
• Vertical amplitude
• S-correction
• Vertical slope
• Vertical shift (only for compensation of offsets in output
stage or picture tube)
• Vertical zoom
• Verticalscroll (shifting the picture inthevertical direction
when the vertical scan is expanded)
• Vertical wait, an adjustable delay for the start of the
vertical scan.
Withregardtothevertical wait, the following conditions are
valid:
• In the 1fHTV mode, the start of the vertical scan is fixed
and cannot be adjusted with the vertical wait
• In the 2fH TV mode, the start of the vertical scan
depends on the value of the Vertical Scan Reference
(VSR) bus bit. If VSR = 0, the start of the vertical scan is
related to the end of the incoming VDpulse. If VSR = 1,
it is related to the start. In both cases, the start of the
scan can be adjusted with the vertical wait setting
• In the multi-sync mode (TDA9331H and TDA9332H
both in 1fHmode and 2fHmode), the start of the vertical
scan is related to the start of the incoming VDpulse and
can be adjusted with the vertical wait setting.
The minimum value for the vertical wait setting is 8 line
periods. If the setting is lower than 8, the wait period will
remain at 8 line periods.
The E-W drive circuit has a single-ended output. The E-W
geometry can be adjusted on the following parameters:
• Horizontal width with increased range because of the
‘zoom’ feature
• E-W parabola/width ratio
• E-W upper corner/parabola ratio
• E-W lower corner/parabola ratio
• E-W trapezium.
2000 May 08 9
Page 10

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
The IC has an EHT compensation input which controls
both the vertical and the E-W output signals. The relative
control effect on both outputs can be adjusted via the
I2C-bus (sensitivity of vertical correction is fixed; E-W
correction variable).
Toavoiddamagetothe picture tube in the event of missing
or malfunctioning vertical deflection, a vertical guard
function is available at the sandcastle pin (pin SCO). The
vertical guard pulse from the vertical output stage
(TDA835x) should be connected to the sandcastle pin,
which acts as a current sense input. If the guard pulse is
missing or lasts too long, bit NDF is set in the status
register and the RGB outputs are blanked. If the guard
function is disabled via bit EVG, only NDF status bit NHF
is set.
TheICalsohasinputsforflashandovervoltageprotection.
More details about these functions are given in Chapter
“Characteristics”; note 43.
TDA933xH series
2
C-BUS SPECIFICATION
I
The slave address of the IC is given in Table 1. The circuit
operates up to clock frequencies of 400 kHz. Valid
subaddresses: 00 to 1F, subaddress FE is reserved for
test purposes. The auto-increment mode is available for
subaddresses.
Table 1 Slave address (8C)
A6 A5 A4 A3 A2 A1 A0 R/W
10001101/0
2000 May 08 10
Page 11
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
Table 2 Input control bits
FUNCTION
SUBADDRESS
(HEX)
D7 D6 D5 D4 D3 D2 D1 D0
DATA BYTE
RGB processing-1 00 MAT EBB SBL RBL BLS BKS IE1 IE2
RGB processing-2 01 MUS FBC OBL AKB CL3 CL2 CL1 CL0
Wide horizontal blanking 02 HBL TFBC GAI STB0 HB3 HB2 HB1 HB0
Horizontal deflection 03 HDTV VSR 0 STB1 POC PRD VGA
(3)
ESS
Vertical deflection 04 OPC VFF LBM DIP OSO SVF EVG DL
Brightness 05 0 0 A5 A4 A3 A2 A1 A0
Saturation 06 0 0 A5 A4 A3 A2 A1 A0
Contrast 07 0 0 A5 A4 A3 A2 A1 A0
White point R 08 0 0 A5 A4 A3 A2 A1 A0
White point G 09 0 0 A5 A4 A3 A2 A1 A0
White point B 0A 0 0 A5 A4 A3 A2 A1 A0
Peak white limiting 0B 0 0 SC1 SC0 A3 A2 A1 A0
Horizontal shift 0C 0 0 A5 A4 A3 A2 A1 A0
Horizontal parallelogram
(1)
0D 0000A3A2A1A0
E-W width 0E 0 0 A5 A4 A3 A2 A1 A0
E-W parabola/width 0F 0 0 A5 A4 A3 A2 A1 A0
E-W upper corner/parabola 10 0 0 A5 A4 A3 A2 A1 A0
E-W trapezium 11 0 0 A5 A4 A3 A2 A1 A0
E-W EHT compensation sensitivity 12 0 0 A5 A4 A3 A2 A1 A0
Vertical slope 13 0 0 A5 A4 A3 A2 A1 A0
Vertical amplitude 14 0 0 A5 A4 A3 A2 A1 A0
S-correction 15 0 0 A5 A4 A3 A2 A1 A0
Vertical shift 16 0 0 A5 A4 A3 A2 A1 A0
Vertical zoom 17 0 0 A5 A4 A3 A2 A1 A0
Vertical scroll 18 0 0 A5 A4 A3 A2 A1 A0
Vertical wait 19 0 0 0 A4 A3 A2 A1 A0
DAC output
(2)
1A 0 0 A5 A4 A3 A2 A1 A0
Black level offset R 1B 0000A3A2A1A0
Black level offset G 1C 0000A3A2A1A0
Horizontal timing 1D 0 0 0 HDCL LBL3 LBL2 LBL1 LBL0
E-W lower corner/parabola 1E 0 0 A5 A4 A3 A2 A1 A0
Horizontal bow
(1)
1F 0000A3A2A1A0
Notes
1. For zero parallelogram and bow correction use register value 7 DEC.
2. See Chapter “Characteristics”; note 47.
3. Bit VGA is not available in the TDA9330H.
2000 May 08 11
Page 12
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
Table 3 Output status bits
FUNCTION
Output status bytes 00 POR FSI SL XPR NDF IN1 IN2 WBC
Input control bits
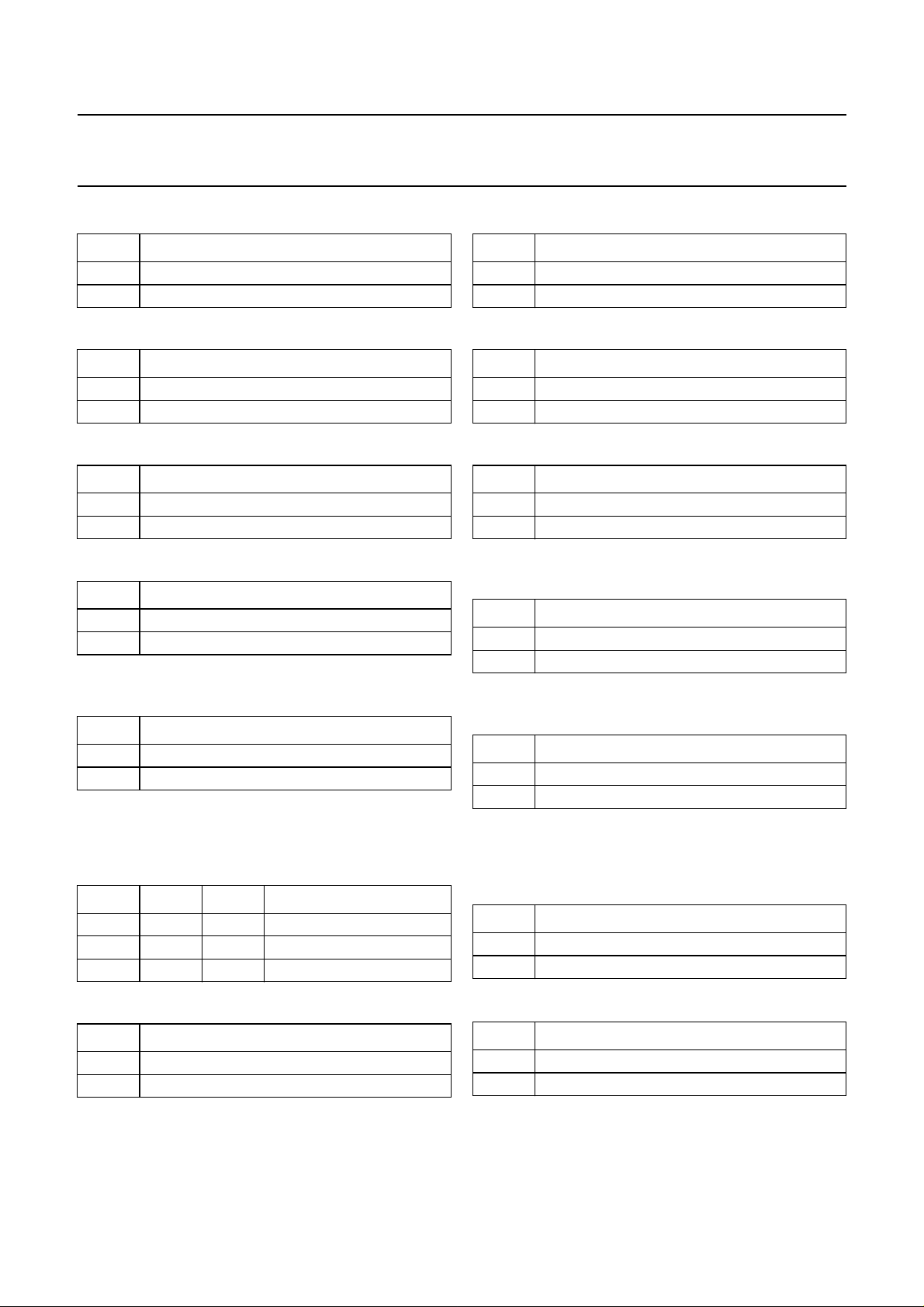
Table 4 Colour difference matrix
MAT MUS MATRIX POSITION
00 PAL
0 1 ATSC
1 0 NTSC Japan
1 1 NTSC USA
Table 5 Enable ‘blue-back’
EBB MODE
0 blue-black switched off
1 blue-black switched on
Table 6 Service blanking
SBL SERVICE BLANKING MODE
0 off
1on
Table 7 RGB blanking
RBL RGB BLANKING
0 not active
1 active
SUBADDRESS
(HEX)
01 N2 ID2 ID1 ID0 NHF BCF FLS NRF
02 X X X X X HPOL VPOL HBC
D7 D6 D5 D4 D3 D2 D1 D0
Table 10 Enable fast blanking RGB-1
IE1 FAST BLANKING
0 not active
1 active
Table 11 Enable fast blanking RGB-2
IE2 FAST BLANKING
0 not active
1 active
Table 12 Fixed beam current switch-off
FBC MODE
0 switch-off with blanked RGB outputs
1 switch-off with fixed beam current
Table 13 Blending function on OSD; note 1
OBL MODE
0 OSD via fast blanking
1 OSD via blending function
Note
1. When bit OBL is set to 1, the blending function is
always activated, independent of the setting of bit IE2.
DATA BYTE
TDA933xH series
Table 8 Blue stretch
BLS BLUE STRETCH MODE
0 off
1on
Table 9 Black stretch
BKS BLACK STRETCH MODE
0 off
1on
2000 May 08 12
Table 14 Black current stabilization
AKB OPC MODE
0 0 2-point control
0 1 1-point control
1 − not active
Page 13
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
Table 15 Cathode drive level (15 steps; 3.6 V/step)
CL3 CL2 CL1 CL0
0000 41V(b-w)
1000 70V(b-w)
1111 95V(b-w)
Note
1. The given values are valid for the following conditions:
a) Nominal CVBS input signal.
b) Settings for contrast and white point nominal.
c) Black and blue stretch switched off.
d) Gain of output stage such that no clipping occurs.
e) Beam current limiting not active.
f) Gamma of picture tube is 2.25.
g) The tolerance on these values is approximately
±3V.
Table 16 RGB blanking mode
HBL MODE
0 normal blanking (horizontal flyback)
1 wide blanking
SETTING OF CATHODE
DRIVE AMPLITUDE
(1)
TDA933xH series
Table 20 Position of wide blanking (14 steps; 1f
0.29 µs/step; 2f
mode 0.145 µs/step)
H
TIMING OF BLANKING
HB3 HB2 HB1 HB0
1fH MODE 2fH MODE
0000−2.03 µs −1.015 µs
0111 0µs0µs
111−2.03 µs 1.015 µs
Note
1. See Chapter “Characteristics”; note 13.
Table 21 Horizontal free-running frequency in TV mode
FREQUENCY
HDTV
MODE 2fH MODE
1f
H
0 15.65 kHz 31.3 kHz
1 16.85 kHz 33.7 kHz
Table 22 Vertical scan reference in 2f
TV mode
H
VSR VERTICAL SCAN REFERENCE
0 end of V
1 start of V
pulse
D
pulse
D
mode
H
(1)
Table 17 Picture tube discharge time
TFBC MODE
0 18.6 ms
1 25 ms
Note
1. See Chapter “Characteristics”; Fig.15
Table 18 Gain of luminance channel
GAI MODE
0 normal gain [V
1 high gain [V
= 1 V (b-w)]
28
= 0.45 V (p-p)]
28
Table 19 Standby
STB0 STB1 CONDITION
0 0 horizontal drive off
0 1 no action
1 0 no action
1 1 horizontal drive on
Table 23 Synchronization mode
POC MODE
0 synchronization active
1 synchronization not active
Table 24 Overvoltage input mode
PRD OVERVOLTAGE MODE
0 detection mode
1 protection mode
Table 25 Multi-sync mode
VGA MODE
0
horizontal frequency fixed by internal
reference
1 multi-sync function switched on
Table 26 Extended slow start mode
ESS EXTENDED SLOW START MODE
0 not active
1 active
2000 May 08 13
Page 14

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
Table 27 Long blanking mode
LBM BLANKING MODE
0 adapted to standard (50 or 60 Hz)
1 fixed in accordance with 50 Hz standard
Table 28 Vertical free-running frequency in TV mode
VFF FREQUENCY
0 50 Hz (SVF = 0) or 100 Hz (SVF = 1)
1 60 Hz (SVF = 0) or 120 Hz (SVF = 1)
Table 29 De-interlace phase
DIP PHASE
0
delay of 1st field (start of synchronized V
pulse coincides with H-flyback) with 0.5 H
1 delay of 2nd field with 0.5 H
Table 30 Switch-off in vertical overscan
OSO MODE
0 switch-off undefined
1 switch-off in vertical overscan
Table 31 Select vertical frequency
SVF MODE
0 vertical frequency is 50 or 60 Hz
1 vertical frequency is 100 or 120 Hz
D
TDA933xH series
Table 34 Soft clipping level
VOLTAGE DIFFERENCE
SC1 SC0
0 0 0% above PWL
0 1 5% above PWL
1 0 10% above PWL
1 1 soft clipping off
Table 35 Clamp pulse timing
HDCL MODE
0 normal timing
1 HDTV timing
Note
1. See Chapter “Characteristics”; note 13.
Table 36 Start line blanking (15 steps; 2 line locked clock
period per step; 1 line period is 440 LLC pulses)
LBL3 LBL2 LBL1 LBL0
0000 +14 LLC
0111 normal
1111 −16 LLC
Note
1. See Chapter “Characteristics”; note 13.
BETWEEN SOFT CLIPPING AND
PWL
(1)
START LINE
BLANKING
(1)
Table 32 Enable vertical guard (RGB blanking)
EVG VERTICAL GUARD MODE
0 not active
1 active
Table 33 Interlace
DL STATUS
0 interlace
1 de-interlace
2000 May 08 14
Output status bits
Table 37 Power-on reset
POR MODE
0 normal
1 power-down
Table 38 Field frequency indication
FSI FREQUENCY
0 50 or 100 Hz
1 60 or 120 Hz
Table 39 Phase 1 (ϕ
) lock indication
1
SL INDICATION
0 not locked
1 locked
Page 15
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
Table 40 X-ray protection
XPR OVERVOLTAGE
0 no overvoltage detected
1 overvoltage detected
Table 41 Output of vertical guard
NDF VERTICAL OUTPUT STAGE
0OK
1 failure
Table 42 Indication of RGB-1 insertion
IN1 RGB INSERTION
0no
1yes
Table 43 Indication of RGB-2 insertion
IN2 RGB INSERTION
0no
1yes
Table 44 Indication of output black level inside/outside
Vg2 alignment window
WBC CONDITION
0 black current stabilization outside window
1 black current stabilization inside window
Note
1. See Chapter “Characteristics”; note 16.
Table 45 IC identification
ID2 ID1 ID0 IC VERSION
0 0 0 TDA9330H
0 0 1 TDA9332H
0 1 1 TDA9331H
(1)
TDA933xH series
Table 47 Condition of horizontal flyback
NHF CONDITION
0 flyback pulse present
1 flyback pulse not present
Table 48 Indication of failure in black current circuit
BCF CONDITION
0 normal operation
1 failure in black current stabilization circuit
Table 49 Indication of flash detection
FLS CONDITION
0 no flash-over detected
1 flash-over detected
Table 50 Locking of reference oscillator to crystal
oscillator
NRF CONDITION
0 reference oscillator is locked
1 reference oscillator is not locked
Table 51 Indication of output black level below or above
the middle of Vg2 alignment window
HBC CONDITION
0 black current stabilization below window
1 black current stabilization above window
Note
1. See Chapter “Characteristics”; note 16.
Table 52 Polarity of H
input pulse
D
HPOL POLARITY
0 positive
1 negative
(1)
Table 46 Mask version indication
N2 MASK VERSION
0 N1 version
1 N2 version
2000 May 08 15
Table 53 Polarity of V
input pulse
D
VPOL POLARITY
0 positive
1 negative
Page 16
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
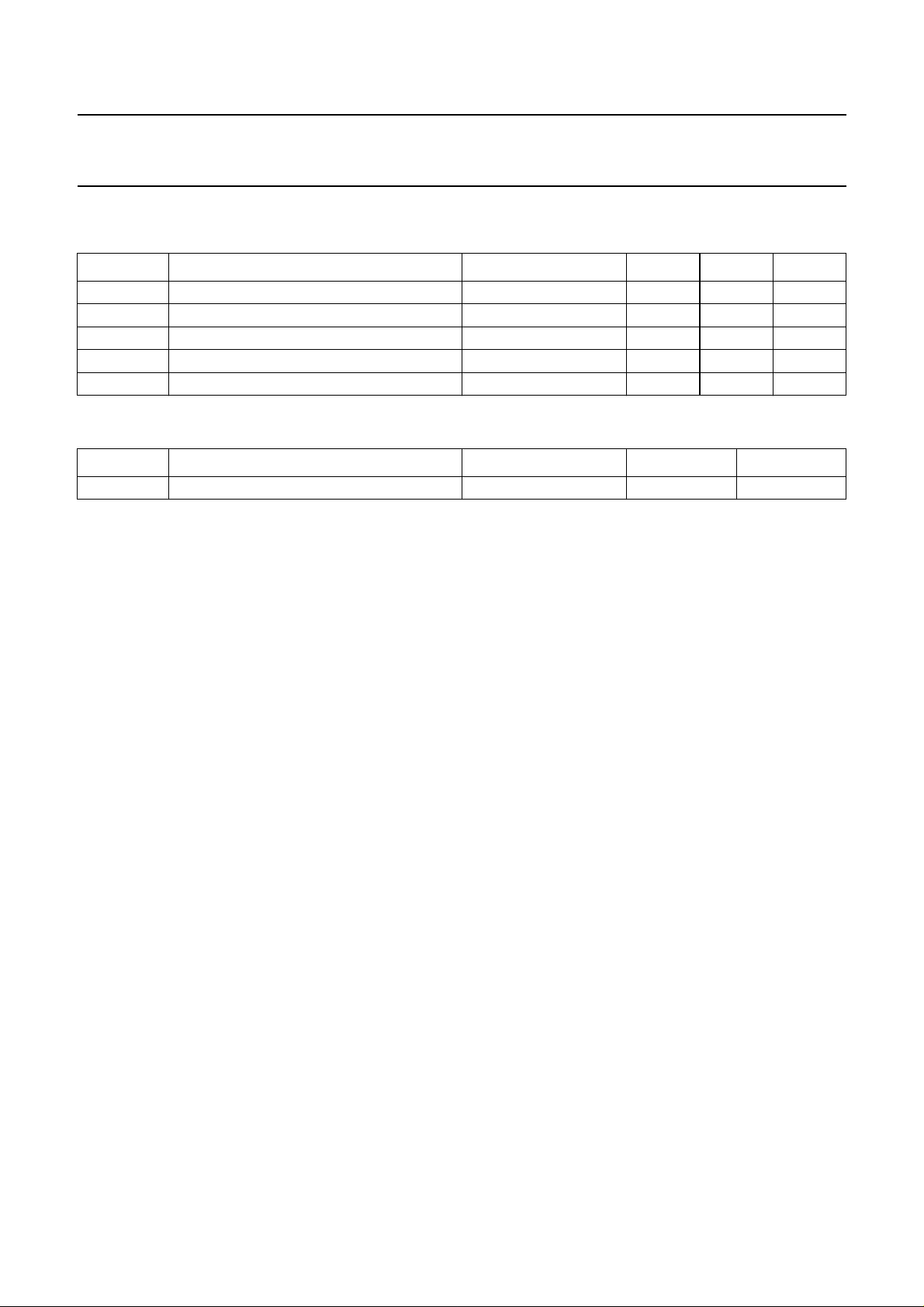
LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 60134).
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
P
T
stg
T
amb
T
sol
T
j
supply voltage − 9.0 V
storage temperature −25 +150 °C
ambient temperature 0 70 °C
soldering temperature for 5 s − 260 °C
junction temperature − 150 °C
THERMAL CHARACTERISTICS
SYMBOL PARAMETER CONDITIONS VALUE UNIT
R
th(j-a)
QUALITY SPECIFICATION
In accordance with
thermal resistance from junction to ambient in free air 60 K/W
Latch-up performance
“SNW-FQ-611E-part E”
.
At an ambient temperature of 50 °C all pins meet the
following specification:
ESD protection
All pins are protected against ESD by internal protection
diodes, and meet the following specification:
• Human body model (R = 1.5 kΩ; C = 100 pF):
all pins > ±3000 V
• Machine model (R = 0 Ω; C = 200 pF):
all pins > ±300V.
• Positive stress test: I
or V
≥ 1.5 × V
pin
CC(max)
• Negative stress test: I
or V
≤−0.5 × V
pin
CC(max)
trigger
trigger
≥ 100 mA
≤−100 mA
.
At an ambient temperature of 70 °C, all pins meet the
specification as mentioned above, with the exception of
pin 32, which can withstand a negative stress current of at
least 50 mA.
2000 May 08 16
Page 17
Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
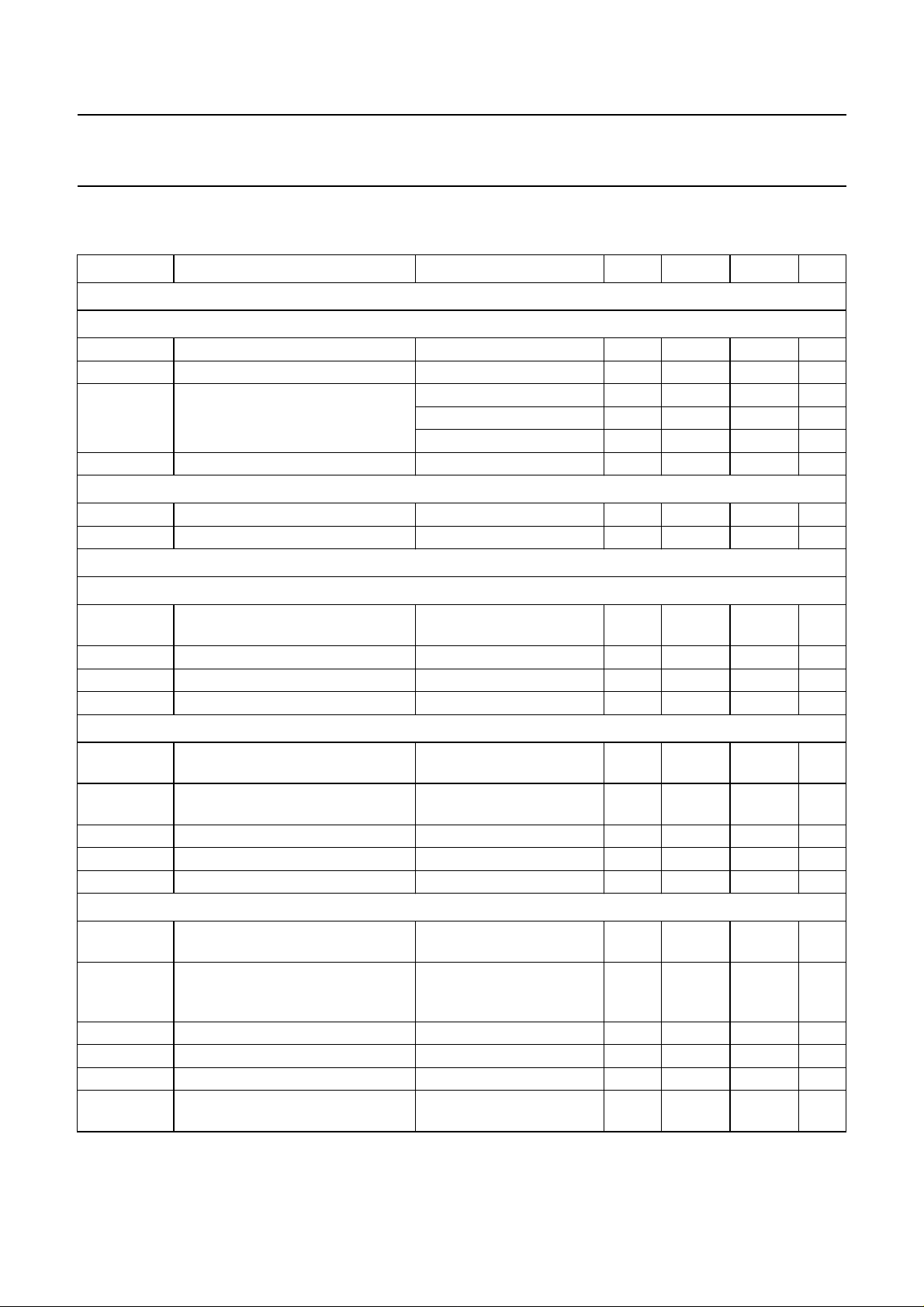
CHARACTERISTICS
VP=8V; T
=25°C; unless otherwise specified.
amb
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Supplies
M
AIN SUPPLY; PINS 17 AND 39
V
V
I
P1
POR
P1
supply voltage 7.2 8.0 8.8 V
power-on reset voltage level note 1 5.8 6.1 6.5 V
supply current pin 17 plus pin 39 44 50 58 mA
pin 17 − 22 − mA
pin 39 − 28 − mA
P
tot
OW-POWER START-UP; PIN 22
L
V
P2
I
P2
total power dissipation − 400 − mW
supply voltage note 2 4.5 5.0 5.5 V
supply current − 3.0 4.5 mA
RGB control circuit
LUMINANCE INPUT; PIN 28
V
i(Y)(b-w)
luminance input voltage
GAI = 0 − 1.0 1.5 V
(black-to-white value)
Z
i
C
i
I
i(Y)(clamp)
input impedance 10 −−MΩ
input capacitance −− 5pF
input current during clamping −25 0 +25 µA
U/V INPUTS; PINS 27 AND 26
V
i(U)(p-p)
U input signal amplitude
− 1.33 2.0 V
(peak-to-peak value)
V
i(V)(p-p)
V input signal amplitude
− 1.05 1.6 V
(peak-to-peak value)
Z
i
C
i
I
i(UV)(clamp)
input impedance 10 −−MΩ
input capacitance −− 5pF
input current during clamping −20 0 +25 µA
RGB-1 INPUT (SCART/VGA);PINS 30 TO 32; note 3
V
i(b-w)
input signal amplitude
− 0.7 1.0 V
(black-to-white value)
∆V
o
difference between black level of
−− 10 mV
YUV and RGB-1 signals at the
outputs
Z
i
C
i
I
i(clamp)
∆t
d
input impedance 10 −−MΩ
input capacitance −− 5pF
input current during clamping −25 0 +25 µA
delay difference for the three
note 5 − 0 − ns
channels
2000 May 08 17
Page 18

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
FAST BLANKING INPUT (RGB-1); PIN 33
V
i(BL1)
input voltage no data insertion 0 − 0.45 V
data insertion 0.9 − 3.0 V
∆t
d
delay difference between insertion
data insertion; note 5 − 10 20 ns
to RGB out and RGB in to RGB out
I
i(BL1)
SS
SS
int
ext
input current source current; note 6 −−0.12 −0.2 mA
suppression of internal RGB
signals
suppression of external RGB
signals
insertion; fi= 0 to 10 MHz;
notes 5 and 7
no insertion;
fi= 0 to 10 MHz;
50 55 − dB
50 55 − dB
notes 5 and 7
RGB-2 INPUT (OSD/TEXT); PINS 35 TO 37
V
i(b-w)
input signal amplitude
− 0.7 1.0 V
(black-to-white value)
∆V
o
difference between black level of
−− tbf mV
YUV/RGB-1 and RGB-2 signals at
the outputs
Z
i
C
i
I
i(clamp)
∆t
d
input impedance 10 −−MΩ
input capacitance −− 5pF
input current during clamping −40 0 +40 µA
delay difference for the three
note 5 − 0 − ns
channels
BLENDING (FAST BLANKING) INPUT (RGB-2); PIN 38; note 8
Blending function (OBL = 1)
V
i(BL2)(1)
input voltage no data insertion 0 − 0.05 V
50% insertion 0.69 0.725 0.76 V
100% insertion 1.42 1.47 3.0 V
active blending range 0.31 − 1.14 V
Ins
(osd)
percentage of data insertion Vi= 0.31 V 0 1 4 %
V
= 0.725 V 45 50 55 %
i
V
= 1.14 V 96 99 100 %
i
internal signal is 50% 48 50 52 %
V
i(max)
slope of blending curve 50% insertion − 160 − %/V
Fast blanking function (OBL = 0)
V
i(BL2)(0)
input voltage no data insertion 0 − 0.3 V
data insertion 0.9 − 3.0 V
2000 May 08 18
Page 19

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
General
∆t
d
delay difference between insertion
data insertion; note 5 − 20 26 ns
to RGB out and RGB in to RGB out
I
i(BL2)
SS
SS
int
ext
input current source current; note 6 −−1−5 µA
suppression of internal RGB
signals
suppression of external RGB
signals
insertion; fi= 0 to 10 MHz;
notes 5 and 7
no insertion;
fi= 0 to 10 MHz;
50 55 − dB
50 55 − dB
notes 5 and 7
COLOUR DIFFERENCE MATRICES; note 3
PAL/SECAM mode; the matrix results in the following signal
G − YG−Y −0.51 (R − Y) − 0.19 (B − Y)
ATSC mode; the matrix results in the following signal; note
4
G − YG−Y −0.30 (R − Y) − 0.10 (B − Y)
NTSC mode; the matrix results in the following modified colour difference signals
MUS bit = 0 (Japan)
R − Y(R−Y)* 1.39 (R − Y) − 0.07 (B − Y)
G − Y(G−Y)* − 0.46 (R − Y) − 0.15 (B − Y)
B − Y(B−Y)* B − Y
MUS bit = 1 (USA)
R − Y(R−Y)* 1.32 (R − Y) − 0.12 (B − Y)
G − Y(G−Y)* − 0.42 (R − Y) − 0.25 (B − Y)
B − Y(B−Y)* − 0.03 (R − Y) +1.08 (B − Y)
C
ONTROLS
Saturation control; note
CR
sat
saturation control range small signal gain; 63 steps;
9
see Fig.5
CR
sat(nom)
I2C-bus setting for nominal
YUV input signal − 20 DEC −
saturation
CR
sat(min)
Contrast control; note
CR
contr
minimum saturation I2C-bus setting 0 −−50 − dB
9
contrast control range 63 steps; see Fig.6 − 18 − dB
tracking between the three
channels over a control range of
10 dB
Brightness control; note
CR
bri
brightness control range 63 steps; see Fig.7 −±1.1 − V
9
2000 May 08 19
0 − 300 %
−− 0.5 dB
Page 20

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
BLACK LEVEL STRETCHER; note 10
∆V
∆V
bl(max)
bl
maximum black level shift A-to-A; see Fig.8 15 21 27 IRE
black level shift at 100% peak white −10 +1 IRE
at 50% peak white −1 −+3 IRE
at 15% peak white 6 8 10 IRE
RGB AMPLIFIER OUTPUTS: PINS 40 TO 42
V
40-42(b-w)
output signal amplitude
(black-to-white value)
at nominal luminance input
signal and nominal
− 2.0 − V
contrast, cathode drive
level and white-point
adjustment; note 11
V
o
Z
o
I
sink
V
o(RED)(p-p)
output voltage range 1 − VCC− 2V
output impedance note 12 − 120 150 Ω
sink current emitter follower output − 2 − mA
output signal amplitude for the ‘red’
channel (peak-to-peak value)
at nominal settings for
contrast and saturation
− 2.1 − V
control and no luminance
signal at the input (R−Y,
PAL); note 11
V
bl(nom)
V
bl
nominal black level voltage − 2.5 − V
black level voltage when black level
− 2.5 − V
stabilization is switched off
(via AKB bit)
t
W(blank)
CR
bl
width of video blanking pulse with
bit HBL active
control range of the black current
at 1fH; note 13 14.4 14.7 15.0 µs
at 2f
; note 13 7.2 7.35 7.5 µs
H
notes 15 and 16 −±1 − V
stabilization
V
blank
V
blank(leak)
blanking voltage level difference with black level;
blanking voltage level during
note 11
−0.4 −0.5 −0.6 V
−−0.1 − V
leakage measurement
V
blank(l)
blanking voltage level during low
− 0.25 − V
measuring pulse
V
blank(h)
blanking voltage level during high
− 0.38 − V
measuring pulse
∆V
(RGB)(mp)
adjustment range of the ratio
note 11 −±6− dB
between the amplitudes of the
RGB drive voltage and the
measuring pulses
V
bl(WBC)
∆bl/∆T variation of black level with
black level at the output at which
bit WBC is set to 1
nominal value 2.4 2.5 2.6 V
window; note 16 −±100 − mV
note 5 − 1.0 − mV/K
temperature
CR
bl
black level offset adjustment range
15 steps; 10 mV/step ± 70 ± 75 ± 80 mV
on red and green channels
2000 May 08 20
Page 21

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
∆V
bl
relative variation in black level
note 5
between the three channels during
variations of
supply voltage (±10%) nominal controls −− 20 mV
saturation (50 dB) nominal contrast −− 20 mV
contrast (20 dB) nominal saturation −− 20 mV
brightness (±0.5 V) nominal controls −− 20 mV
temperature (range 40 °C) −− 20 mV
S/N signal-to-noise ratio of the output
notes 5 and 17 60 −−dB
signals
B
o(Y)(10pF)
luminance bandwidth of output
signals
with 10pF load
capacitance; note 12
RGB-1 input; at −3dB 22 25 − MHz
RGB-2 input; at −3dB 29 33 − MHz
luminance input; at −3dB 23 26 − MHz
B
o(Y)(25pF)
luminance bandwidth of output
signals
with 25pF load capacitance
RGB-1 input; at −3dB 20 23 − MHz
RGB-2 input; at −3dB 23 26 − MHz
luminance input; at −3dB 21 24 − MHz
W
HITE-POINT ADJUSTMENT
I2C
∆G
∆G
nom
RGB
v
I2C-bus setting for nominal gain − 32 DEC −
adjustment range of RGB drive
levels
gain control range to compensate
CL control bits; see
±3.2 ±3.6 ±4.0 dB
Table 15
white point controls −±3− dB
spreads in picture tube
characteristics
2-POINT BLACK CURRENT STABILIZATION; INPUT PIN 44; note 18
I
ref(l)
I
ref(h)
I
L
V
Iref
I
scan(max)
amplitude of low reference current − 8 −µA
amplitude of high reference current − 20 −µA
acceptable leakage current −±100 −µA
voltage on measurement pin pin 44; loop closed 3.15 3.3 3.45 V
maximum current during scan pin 44; loop open circuit
−− −
note 18
2000 May 08 21
Page 22

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
BEAM CURRENT LIMITING; INPUT PIN 43
V
bias
V
CR
V
dif(CR)
internal bias voltage 3.5 3.6 3.7 V
contrast reduction starting voltage 3.1 3.3 3.5 V
voltage difference for full contrast
2.0 2.2 2.4 V
reduction
V
bri
brightness reduction starting
1.6 1.8 2.0 V
voltage
V
dif(BR)
voltagedifference for full brightness
− 1 − V
reduction
I
ch(int)
I
dch(max)
internal charge current 1.5 2.0 2.5 µA
maximum discharge current when
3.5 4.0 4.5 mA
the PWL is active
PEAK WHITE LIMITER; note 19
I
ch(PWL)
I
dch(PWL)
V
i(Y)(b-w)
charge current PWL filter pin pin 34; 1fV mode 13 16 19 µA
pin 34; 2f
mode 26 32 38 µA
V
discharge current PWL filter pin pin 34; 1fVmode 52 64 76 µA
mode 100 120 140 µA
V
0.65 − 1.0 V
Y-input signal amplitude at which
peak white limiter is activated
pin 34; 2f
PWL range, 15 steps; at
maximum contrast
(black-to-white value)
V
o(RGB)(b-w)
RGB output signal amplitude at
which peak white limiter is activated
(black-to-white value)
PWL range, 15 steps;
nominal setting of white
point controls; note 20
2.2 − 3.4 V
SOFT CLIPPER; note 21
∆G
v(sc)
soft clipper gain reduction at maximum contrast;
− 15 − dB
see Fig.9
V
o(clip-pwl)
output level compared to PWL for
(A+B)/A; see Fig.9 − 118 − %
100 IRE peak signal
BLUE STRETCH; note 22
∆G
RG
decrease of small signal gain for
− 17 − %
red and green channels
FIXED BEAM CURRENT SWITCH-OFF; notes 23, 24 and 25
V
FBCSO
V
i(FBCSO)(max)
I
dch
detection level 1 1.5 2 V
maximum input voltage −− 5.5 V
discharge current when the fixed
sink current pin 44; note 26 0.85 1.0 1.15 mA
beam current function is activated
V
o(max)
maximum output voltage at the
RGB outputs
2-point stabilization;
note 26
1-point stabilization;
− 6.0 − V
− 5.6 − V
note 26
t
dch
discharge time of picture tube when
switching to standby
TFBC = 0; see Fig.15 − 18.6 − ms
TFBC = 1; see Fig.15 − 25 − ms
2000 May 08 22
Page 23

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Horizontal synchronization and deflection
H
INPUT SIGNAL; PIN 24
D
V
IL
V
IH
I
i(HD)
t
r(HD)
t
f(HD)
t
W(HD)
LOW-level of input voltage note 27 −− 0.8 V
HIGH-level of input voltage note 27 2.0 − 5.5 V
input current −10 − +10 µA
rise time −− 100 ns
fall time −− 100 ns
pulse width 200 ns − 1/4 line
INTERNAL REFERENCE SIGNAL; CRYSTAL OR RESONATOR CONNECTED TO PINS 20 AND 21; note 28
f
xtal
R
s(xtal)
V
i(stab)(p-p)
resonator frequency − 12 − MHz
resonator series resistance CL=60pF −− 30 Ω
stabilized input signal
0.5 0.8 1.0 V
(peak-to-peak value)
g
m(max)
Z
i
C
i
C
o
maximum transconductance 4 5 − mA/V
input impedance 50 −−kΩ
input capacitance −− 10 pF
output capacitance −− 5pF
EXTERNAL REFERENCE SIGNAL; INPUT PIN 20
f
XTALI
V
i(XTALI)(p-p)
input signal frequency − 12 − MHz
input signal amplitude
AC coupled 0.8 − 2V
(peak-to-peak value)
FIRST CONTROL LOOP; note 29
f
o(nom)
free-running frequency 1fH mode; note 30 − 15.65 − kHz
2f
mode; note 30 − 31.3 − kHz
H
2f
mode; HDTV = 1;
H
− 33.7 − kHz
note 30
∆f
nom
tolerance on free-running
note 30 −− ±1%
frequency
f
h/cr
∆t
line
f
contr
∆f
corr
holding/catching range of PLL 1fH mode ±0.75 ±0.8 ±0.85 kHz
2f
mode ±1.5 ±1.6 ±1.7 kHz
H
maximum line time difference per
line
frequency control range in
multi-sync mode
maximum speed of frequency
1fH mode −2 − +2 µs
2f
mode −1 − +1 µs
H
1fH mode 15 − 25 kHz
mode 30 − 50 kHz
2f
H
−− 100 kHz/s
correction in multi-sync mode
V
HSEL
voltage on pin HSEL 1fH mode 0 − 1V
2f
mode; pin must be left
H
4 5 5.5 V
open circuit
2000 May 08 23
Page 24

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
SECOND CONTROL LOOP; PIN 14
/∆ϕ
∆ϕ
i
o
k
cor
t
contr
t
H(shift)
∆ϕ control sensitivity for dynamic
V
i(DP)(comp)
control sensitivity (loop gain) ∆ti/∆t
0
500 −−µs/µs
correction factor k note 31 − 0.5 −
control range from start of
horizontal output to mid flyback
1fH mode; note 32 0 − 23.6 µs
mode; note 32 0 − 11.8 µs
2f
H
horizontal shift range 1fH mode; 63 steps −±4.5 −µs
2f
mode; 63 steps −±2.25 −µs
H
mode − 0.4 −µs/V
1f
H
phase compensation
input voltage range for dynamic
2f
mode − 0.2 −µs/V
H
pin 14; note 33 1.5 4 6.5 V
phase compensation
Z
i
t
par(cor)(max)
input impedance pin 14; note 33 100 kΩ
maximum range of parallelogram
correction
1fH mode; end of field;
flyback width 11 µs;
±0.48 ±0.54 ±0.60 µs
note 34
mode; end of field;
2f
H
±0.24 ±0.27 ±0.30 µs
flyback width 5.5 µs;
note 34
t
bow(cor)(max)
maximum range of bow correction 1fH mode; end of field;
±0.48 ±0.54 ±0.60 µs
flyback width 11 µs;
note 34
2f
mode; end of field;
H
±0.24 ±0.27 ±0.30 µs
flyback width 5.5 µs;
note 34
HORIZONTAL FLYBACK INPUT; PIN 13
V
sw(HBLNK)
switching level for horizontal
0.2 0.3 0.4 V
blanking
V
sw(p2)
V
i(HFB)(max)
Z
i
switching level for phase detection 3.8 4.0 4.2 V
maximum input voltage −− V
P
V
input impedance 10 −−MΩ
HORIZONTAL OUTPUT; PIN 8, OPEN COLLECTOR; note 35
V
OL
I
o(hor)
V
o(max)
δ duty factor V
t
on
t
off
t
on(ess)
LOW-level output voltage Io=10mA −− 0.3 V
maximum allowed output current −− 10 mA
maximum allowed output voltage −− V
= LOW (ton) 51.6 51.8 52.0 %
o
switch-on time of horizontal drive
pulse
switch-off time of horizontal drive
pulse
switch-on time for extended slow
start
TV mode, HDTV = 0,
ESS = 0
TV mode, HDTV = 0,
ESS = 0
TV mode, HDTV = 0,
ESS = 1
155 159 163 ms
48 50 52 ms
1150 1175 1200 ms
P
V
2000 May 08 24
Page 25

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
∆t jitter (σ)1f
mode; note 36 − 1.4 − ns
H
2f
mode; note 36 − 1.0 − ns
H
SANDCASTLE OUTPUT; PIN 9; note 37
V
SCO(0)
I
sink
V
o(SCO)
zero level 0 0.5 1.0 V
sink current 0.5 0.7 0.9 mA
output voltage during clamp pulse 4.2 4.5 4.8 V
during blanking 2.3 2.5 2.7 V
I
source
I
i(grd)
source current 0.5 0.7 0.9 mA
guard pulse input current required
note 38 1.0 − 3.5 mA
to stop the blanking after a vertical
blanking period
t
W(1)
pulse width in 1fHmode clamp pulse, 22 LLC
− 3.2 −µs
pulses
vertical blanking (50/60 Hz) − 22/17 − lines
t
W(2)
pulse width in 2fHmode clamp pulse, 22 LLC
− 1.6 −µs
pulses
clamp pulse, HDTV = 1,
− 1.22 −µs
HDCL = 1, 18 LLC; see
Fig.11
vertical blanking;
−−
depends onVWAITsetting;
see Fig.13
t
d(bk-HD)
delay between start HD pulse and
start of clamp pulse
1fH mode, 37 LLC pulses − 5.4 −µs
2f
mode, 37 LLC pulses − 2.7 −µs
H
mode, HDCL = 1,
2f
H
− 0.94 −µs
14 LLC pulses, see Fig.11
Vertical synchronization and geometry processing
V
INPUT SIGNAL; PIN 23
D
V
IL
V
IH
I
i(VD)
t
r(VD)
t
f(VD)
t
W(VD)
LOW-level of input voltage −− 0.8 V
HIGH-level of input voltage 2.0 − 5.5 V
input current −10 − +10 µA
rise time −− 100 ns
fall time −− 100 ns
pulse width 0.5 − 63.5 lines
VERTICAL DIVIDER AND RAMP GENERATOR; PINS 15 AND 16; note 39
N
h
number of lines per field
(VGA mode is valid only for
TDA9331H and TDA9332H)
1fH TV mode 244 − 511.5 lines
VGA mode 175 − 450 lines
1f
H
2f
; 2fV; TV mode 244 − 511.5 lines
H
2f
; 1fV; TV mode 488 − 1023.5 lines
H
VGA mode 350 − 900 lines
2f
H
2000 May 08 25
Page 26

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
N
h(nom)
V
saw(p-p)
I
dch
I
ch(ext)(R)
divider value when not locked
(number of lines per field)
(VGA mode is valid only for
TDA9331H and TDA9332H)
sawtooth amplitude
(peak-to-peak value)
1fH or 2fH; 2fV; TV mode;
− 312.5 − lines
VFF = 0
1f
or 2fH; 2fV; TV mode;
H
− 262.5 − lines
VFF = 1
; 1fV; TV mode; VFF = 0 − 625 − lines
2f
H
2f
; 1fV; TV mode; VFF = 1 − 525 − lines
H
1f
; VGA mode − 288 − lines
H
; VGA mode − 576 − lines
2f
H
VS = 1FH;
− 3.0 − V
C = 100 nF; R = 39 kΩ
discharge current − 1.2 − mA
charge current set by external
resistor
R = 39 kΩ; VS = 1FH;
SVF=0
R = 39 kΩ; VS = 1FH;
− 16 −µA
− 32 −µA
SVF=1
Slope
∆I
ch
V
rampL
vert
vertical slope control range (63 steps) −20 − +20 %
charge current increase 60/50 Hz or 120/100 Hz 18.0 19.0 20.0 %
LOW-voltage level of ramp − 2.3 − V
VERTICAL DRIVE OUTPUTS; PINS 1 AND 2
I
o(ver)(p-p)
differential output current
VA = 1FH 0.88 0.95 1.02 mA
(peak-to-peak value)
I
CM
V
o(VDO)
Lin
vert
common mode current 360 400 440 µA
output voltage range 0 − 4.0 V
vertical linearity upper/lower ratio; note 40 0.99 1.01 1.03
DE-INTERLACE
D
1stfld
first field delay DIP = 0; note 41 − 0.5H −
E-W WIDTH; note 42
CR control range 63 steps 100 − 65 %
I
o(eq)
V
o(EW)
I
o(EW)
equivalent output current VGA = 0; note 42 0 − 700 µA
E-W output voltage range 1.0 − 8.0 V
E-W output current range 0 − 1200 µA
E-W PARABOLA/WIDTH
CR control range 63 steps 0 − 22 %
I
o(eq)
equivalent output current E-W= 3FH 0 − 440 µA
E-W CORNER/PARABOLA
CR control range 63 steps −43 − 0%
I
o(eq)
equivalent output current PW= 3FH; E-W = 3FH −190 − 0 µA
E-W TRAPEZIUM
CR control range 63 steps −5 − +5 %
I
o(eq)
equivalent output current −100 − +100 µA
2000 May 08 26
Page 27

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
E-W EHT TRACKING
V
i(EHTIN)
m
scan
ϕ
EW
input voltage 1.2 − 2.8 V
scan modulation range −7 − +7 %
sensitivity 63 steps 0 − 9 %/V
VERTICAL AMPLITUDE
CR control range 63 steps; SC = 00H 80 − 120 %
I
o(eq)(diff)(p-p)
equivalent differential vertical drive
SC = 00H 760 − 1140 µA
output current (peak-to-peak value)
VERTICAL SHIFT
CR control range 63 steps −5 − +5 %
I
o(eq)(diff)(p-p)
equivalent differential vertical drive
−50 − +50 µA
output current (peak-to-peak value)
S-CORRECTION
CR control range 63 steps 0 − 30 %
VERTICAL EHT TRACKING/OVERVOLTAGE PROTECTION
V
i
m
scan
ϕ
vert
I
o(eq)(EW)
V
ov(det)
input voltage 1.2 − 2.8 V
scan modulation range ±4.5 ±5 ±5.5 %
vertical sensitivity 5.7 6.3 6.9 %/V
EW equivalent output current +100 −−100 µA
overvoltage detection level note 43 3.7 3.9 4.1 V
VERTICAL ZOOM MODE (OUTPUT CURRENT VARIATION WITH RESPECT TO NOMINAL SCAN); note 44
F
F
zoom
lim
vertical zoom factor 63 steps 0.75 − 1.38
output current limiting and RGB
1.01 1.05 1.08
blanking
VERTICAL SCROLL; note 45
CR control range (percentage of
63 steps −18 − +19 %
nominal picture amplitude)
V
ERTICAL WAIT; note 46
t
d(scan)
delay of start vertical scan 23 steps 8 − 31 lines
FLASH DETECTION INPUT; PIN 5; note 43
V
i(FLASH)
V
FLASH(det)
V
det(hys)
t
W(FLASH)
input voltage range 0 − V
P
voltage detection level − 2 − V
detection level hysteresis − 0.2 − V
pulse width 200 −−ns
V
2000 May 08 27
Page 28

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
2
I
C-bus control inputs/outputs; pins 10 and 11
V
IL
V
IH
I
IL
I
IH
V
OL
LOW-level input voltage −− 1.5 V
HIGH-level input voltage 3.5 − 5.5 V
LOW-level input current VIL=0V − 0 −µA
HIGH-level input current VIH= 5.5 V − 0 −µA
LOW-level output voltage SDA; IOL=6mA −− 0.6 V
DAC OUTPUT; PIN 25; note 47
V
o(min)
V
o(max)
Z
o
I
o
minimum output voltage 0.15 0.3 0.4 V
maximum output voltage 3.7 4.0 4.3
output impedance note 47 0.3 − 10 kΩ
output current −− 2mA
Notes
1. The normal operation of the IC is guaranteed for a supply voltage between 7.2 and 8.8 V. When the supply voltage
drops below the POR level, status bit POR is set and the horizontal output is switched off. When the supply voltage
is between 7.2 V and the POR level, the horizontal frequency is kept in the specified holding range.
2. For the low power start-up mode, a voltage of 5 V has to be supplied to pin 22. The current that is required for this
function is about 3.0 mA. After the start-up voltage is applied, the signal at the horizontal drive output will have
nominal t
, while ton grows gradually from zero to about 30% of the nominal value, resulting in a line frequency of
off
approximately 50 kHz (2fH) or 25 kHz (1fH). The start-up mode is continued as soon as the main supply voltage is
switched on and the I2C-bus data has been received. After status bit POR has been read out, bits STB must be set
to 1 within 24 ms, to continue slow start. If bits STB are not sent within 24 ms, the horizontal output will be
automatically switched off via slow stop. It is also possible to first set bits STB to 1, before reading bit POR. Start-up
of the horizontal output will then continue 24 ms after bit POR is read. When the main supply is present, the 5 V
supply on pin 22 can be removed. If low power start-up is not used, pin 22 should be connected to ground. More
information can be found in the application report.
3. The RGB to YUV matrix on the RGB-1 input is the inverse of the YUV to RGB matrix for PAL. For a one-on-one
transfer of all three channels from the RGB-1 input to the RGB output, the PAL colour difference matrix should be
selected (MAT = 0, MUS = 0).
4. The colorimetry that is used for high definition ATSC signals is described in document ANSI/SMPTE 274M-1995.
The formula to compute the luminance signalfrom the RGBprimary components differsfrom the formulathat is used
for the PAL system. The consequence is that a different matrix is needed to calculate the internal G − Y signal from
the R − Y and B − Y signals, see the formulas below:
Y 0.2126R 0.7152G 0.0722B++=
RY– 0.7874R 0.7152G– 0.0722B 1.575 maximum amplitude()–=
BY– 0.2126R– 0.7152G– 0.9278B 1.856 maximum amplitude()+=
The G − Y signal can be derived from the formula for Y:
GY– 0.2973– RY–()0.1010 B Y–()–=
2000 May 08 28
Page 29

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
ATSC signals are transmitted as YPBPR signals. The colour-difference components PB and PR are amplitude
corrected versions of B − Y and R − Y:
0.5 B Y–()
==
P
---------------------------
B
1 0.0722–
0.5 R Y–()
P
==
--------------------------- -
R
1 0.2126–
BY–()
------------------
1.856
RY–()
------------------ -
1.575
Note that the “YUV” input ofthe TDA933xH is actually a Y, −(R − Y)and −(B − Y) input. When the TV set has an input
for a YPBPR signal with amplitudes of 0.7 V for all three components, the signals should be amplified to Y, −(B − Y)
and −(R − Y) signals as follows:
Y
in,IC
BY–()–
in,IC
RY–()–
in,IC
==
==
Y
------- -
in,TV
0.7
1.856
× 2.65– P
-------------- -
1.575
-------------- -
P
0.7
0.7
Bin TV,
× 2.25– P
P
Rin TV,
in,TV
B in,TV
R in,TV
1
× 1.43Y
==
5. This parameter is not tested during production but is guaranteed by the design and qualified by means of matrix
batches which are made in the pilot production period.
6. The inputs for RGB-1 and RGB-2 insertion (pins 33 and 38) both supply a small source currentto the pins. If the pins
are left open circuit, the input voltage will rise above the insertion switching level.
7. This parameter is measured at nominal settings of the various controls.
2
8. The switching of the OSD (RGB-2) input has two modes, which can be selected via the I
C-bus:
a) Fast switching between the OSD signal and the internal RGB signals.
b) Blending (fading) function between the OSD signal and the internal RGB signals. The blending control curve is
given in Fig.4. The blender input is optimized for the blender output of the SAA5800 (ArtistIC).
9. The saturation, contrast and brightness controls are active on the YUV signals and on the first RGB input signals.
Nominal contrast is specified with the contrast DAC in position 32 DEC, nominal saturation with the saturation DAC
in position 22 DEC. The second RGB input (which is intended to be used for OSD and teletext display) can only be
controlled on brightness.
10. For video signals with a black level that deviates from the back-porch blanking level, the signal is ‘stretched’ to the
blanking level. The amount of correction depends on the IRE value of the signal (see Fig.8). The black level is
detected by means of an internal capacitor. The black level stretcher can be switched on and off via bit BKS in the
I2C-bus. The values given in the specification are valid only when the luminance input signal has an amplitude of
1 V (b-w).
11. Because of the 2-point black current stabilization circuit, both the black level and the amplitude of the RGB output
signals depend on the drive characteristic of the picture tube. The system checks whether the returning measuring
currents meet the requirement and adapts the output level and gain ofthe circuit asnecessary. Therefore, the typical
values of the black level and amplitude at the output are just given as an indication for the design of the RGB output
stage.
a) The 2-point black level system adapts the drive voltage for each cathode such that the two measuring currents
have the right value. The consequence is that a change in the gain of the output stage will be compensated by a
gain change of the RGB control circuit. Because different picture tubes may require different drive voltage
amplitudes, the ratio between the output signal amplitude and the inserted measuring pulses can be adapted via
the I2C-bus. This is indicated in the parameter ‘Adjustment range of RGB drive levels’.
b) Because of the dependence of the output signal amplitude on the application, the peak-white and soft-clipping
limiting levels have been related to the input signal amplitude.
2000 May 08 29
Page 30

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
c) The signal amplitude at the RGB outputs of the TDA933xH depends on the gain of the RGB amplifiers. The gain
of the RGB amplifiers should be 35 to get the nominal signal amplitude of 2 V (b-w) at the RGB outputs for a
cathode drive level of 70 V (b-w) and the nominal setting of the drive level bits (CL
12. The bandwidth of the video channels depends on the capacitive load at the RGB outputs. For 2fH or VGA
applications, external (PNP) emitter followers on the RGB outputs of the TDA933xH are required, to avoid reduction
of the bandwidth by the capacitance of the wiring between the TDA933xH and the RGB power amplifiers on the
picture tube panel. If emitter followers are used, it should be possible to obtain the bandwidth figures that are
mentioned for 10 pF load capacitance.
13. The timing of the horizontal blanking pulse on the RGB outputs is illustrated in Fig.10.
a) The start of the blanking pulse is determined by an internal counter blanking that starts 40 LLC (line locked clock)
pulses before the centre of the horizontal flyback pulse. This is 5.8 µs for 1fH and 2.9 µs for 2fH TV mode. The
end of the blanking is determined by the trailing edge of the flyback pulse. If required, the start of the counter
blanking can be adjusted in 15 steps with bus bits LBL3 to LBL0. This can be useful when HDTV or VGA signals
are applied to the IC.
b) When the reproduction of 4 : 3 pictures on a 16 : 9 picture tube is realized by reducing the horizontal scan
amplitude,the edges of the picturemay be slightly disturbed. Thiseffectcan be prevented by addingan additional
blanking pulse to the RGB signals. This blanking pulse is derived from the horizontal oscillator and is directly
related to the incoming HD pulse (independent of the flyback pulse). The additional blanking pulse overlaps the
normal blanking signal by approximately 1 µs (1fH) or 0.5 µs (2fH) on both sides. This wide blanking is activated
by bit HBL. The phase of this blanking can be controlled in 15 steps by bits HB3 to HB0.
14. When a YUV or RGB signal is applied to the IC and no separate horizontal or vertical timing pulses are available, an
external sync separator circuit is needed. The TDA933xH has an edge triggered phase detector circuit on the H
input that uses the start of the HD pulse as timing reference. To avoid horizontal phase disturbances during the
vertical blanking period, it is important that the sync separator does not generate extra horizontal sync pulses during
the vertical sync pulse on the video signal.
15. Start-up behaviour of the CCCloop. After the horizontaloutput is released via bits STB,the RGB outputs areblanked
and the CCC loop is activated. Because the picture tube is cold, the measured cathode currents are too small, and
both gain and offset are set at the maximum value so that the CCC loop gets out of range and status bit BCF is set
to 1. Once the picture tube is warm, the loop comes within range and the set signal for bit BCF is removed. Status
bit BCF is set if the voltage of at least one of the cut-off measurement lines at the RGB outputs is lower than 1.5 V
or higher than 3.5 V. The RGB outputs are unblanked as soon as bit BCF changes from 1 to 0. To avoid a bright
picture after switch-on with a warm picture tube, reset of bit BCF is disabled for 0.5 s after switch-on of the horizontal
output. If required, the blanking period of the RGB outputs can be increased by forcing the blanking level at the RGB
outputs via RBL = 1. When status bit BCF changes from 1 to 0, bit RBL can be set to 0 after a certain waiting period.
16. Voltage Vg2of the picture tube can be aligned with the help of status bits WBC and HBC. Bit WBC becomes 1 if the
lowest of the three RGB output voltages during the cut-off measurement lines is within the alignment window of
±0.1 V around 2.5 V. Bit HBC is 0 if the lowest cut-off level is below 2.6 V, and 1 if this level is above 2.6 V.
a) Voltage Vg2should be aligned such that bit WBC becomes 1. If bit WBC is 0, bit HBC indicates in which direction
voltage Vg2 should be adjusted. If bit HBC = 0, the DC level at the RGB outputs of the IC is too low and voltage
Vg2shouldbe adjusted lower until bit WBC becomes1. If HBC = 1, the DC levelistoo high and voltage Vg2should
be adjusted higher until bit WBC becomes 1.
b) It should be noted that bit WBC is onlymeant for factory alignmentof voltage Vg2. If the value of bit WBC depends
on the video content, this is not a problem. Correct operation of the black current loop is guaranteed as long as
status bit BCF = 0, meaning that the DC level of the measurement lines at the RGB outputs of the IC is between
1.5 and 3.5 V.
17. Signal-to-noise ratio (S/N) is specified as a peak-to-peak signal with respect to RMS noise (bandwidth 10 MHz).
18. This is a current input.When the black current feedbackloop is closed (only duringmeasurement lines or during fixed
beam current switch off), the voltage at this pin is clamped at 3.3 V. When the loop is open circuit, the input is not
TDA933xH series
= 1000, see Table 15).
3210
D
2000 May 08 30
Page 31

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
clamped and the maximum sink current is approximately 100 µA. The voltage on the pin must not exceed the supply
voltage.
19. The control circuit contains a PWL circuit and a soft clipper.
a) The detection level of the PWL can be adjusted via the I2C-bus in a control range between 0.65 and 1.0 V (b-w).
This amplitude is related to the Y input signal, typical amplitude 1 V (b-w), at maximum contrast setting. The
detector measures the amplitude of the RGB signals after the contrast control. The output signal of the PWL
detector is filtered by an external capacitor, so that short transients in the video signal do not activate the limiting
action. Because the capacitor is externally available at pin 34, the set maker can adapt the filter time constant as
required. The contrast reduction of the PWL is obtained by discharging theexternal capacitor atthe beam current
limiting input (pin 43). To avoid the PWL circuit from reducing the contrast of the main picture when the amplitude
of the inserted RGB2 signal is too high, the output current of the PWL detector is disabled when the fast blanking
input (pin 38) is high. In blending mode (OBL = 1), the PWL detector is disabled when the blending voltage is
above the 50% insertion level. The soft clipper circuit will still limit the peak voltage at the RGB outputs.
b) In addition to the PWL circuit, the IC contains a soft clipper function which limits short transients that exceed the
PWL. The difference between the PWL and the soft clipping level can be adjusted between 0 and 10% in
three steps via the I2C-bus, with bus bits SC1 and SC0 (soft clipping level equal or higher than the PWL). It is
also possible to switch off the soft clipping function.
20. The above-mentioned output amplitude range at which the PWL detector is activated is valid for nominal settings of
the white point controls, and when the CCC loop is switched off or set to 1-point stabilization mode. In 2-point
stabilization mode, the mentioned range is only valid when the gain of the RGB output stages is dimensioned such
that the RGB output amplitudes are 2 V (b-w) for nominal contrast setting, see also note 11.
21. The soft clipper gain reduction is measured by applying a sawtooth signal with rising slope and 1 V (b-w) at the
luminance input. To prevent the beam current limiter fromoperating, a DCvoltage of 3.5 V must be applied to pin 43.
The contrast is set at the maximum value, the PWL at the minimum value, and the soft clipping level is set at 0%
above the PWL (SC10= 00). The tangents of the sawtooth waveform at one of the RGB outputs is now determined
at the beginning and end of the sawtooth. The soft clipper gain reduction is defined as the ratio of the slopes of the
tangents for black and white, see Fig.9.
22. When the blue stretch function is activated (via I2C-bus bit BLS), the gain of the red and green channels is reduced
for input signals that exceed a value of 80% of the nominal amplitude. The result is that the white point is shifted to
a higher colour temperature.
23. Switch-off behaviour of TDA933xH. For applications with an EHT generator without bleeder resistor, the picture tube
capacitance can be discharged with a fixed beam current when the set is switched off. The magnitude of the
dischargecurrent is controlled via theblack current loop. The fixedbeamcurrent mode can be activatedwith bit FBC.
With the fixed beam current option activated, it is still possible to have a black screen during switch-off. This is
realized by placing the vertical deflection in the overscan position. This mode is activated by bit OSO. There are two
possible situations for switch-off (see notes 24 and 25).
24. The set is switched to standby via the I2C-bus. In this situation, the procedure is as follows:
a) Vertical scan is completed.
b) Vertical flyback is completed.
c) Slow stop of the horizontal output is started, by gradually reducing the ‘on-time’ at the horizontal output from
nominal to zero.
d) At the same moment, the fixed beam current is forced via the black current loop (if FBC = 1).
e) If OSO = 1, the vertical deflection stays in overscan position; if OSO = 0, the vertical deflection keeps running.
f) The slow stop time is approximately 50 ms, the fixed beam current flows for 18.6 ms or 25 ms, depending on the
value of bit TFBC, see Fig.15.
25. The set is switched off via the mains power switch. When the mains supply is switched off, the supply voltage of the
line deflection circuit of the TV set will decrease. A detection circuit must be made that monitors this supply voltage.
TDA933xH series
2000 May 08 31
Page 32

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
When the supply voltage suddenly decreases, pin FBCSO (fixed beam current switch-off) of the TDA933xH must be
pulled high. In this situation, the procedure is as follows:
a) Vertical scan is completed.
b) Vertical flyback is completed.
c) The fixed beam current is forced via the black current loop (if FBC = 1). The horizontal output keeps running.
As the supply voltage for the line transformer decreases, the EHT voltage will also decrease.
d) If OSO = 1, the vertical deflection stays in overscan position; if OSO = 0, the vertical deflection keeps running.
e) When the supply voltage of the TDA933xH drops below the POR level, horizontal output and fixed beam current
are stopped.
26. The discharge current for the picture tube can be increased with an external current division circuit on the black
current input (pin 44). The current division should only be active for high cathode currents, so that the operation of
the black current stabilization loop is not affected. When the feedback current supplied to pin 44 is less than 1mA,
the DC level at the RGB outputs will go to the maximum value of 6.0 V (2-point black current stabilization) or 5.6 V
(1-point or no black current stabilization).
27. A stable switching of the HD input is realized by using a Schmitt trigger input.
28. The simplified circuit diagram of the oscillator is given in Fig.3. To ensure that the oscillator will start-up, the ceramic
resonator must fulfil the following condition: .
2
C
L
Ri1.1≤× 10
19–
×
Example: When the resonator is loaded with 60 pF (this is a typical value for a 12 MHz resonator), the series
resistance of the resonator must be smaller than 30 Ω.
A suitable ceramic resonator for use with the TDA933xH is the Murata CST12.0MT, which has built-in load
capacitances Ca and Cb. For higher accuracy, it is also possible to use a quartz crystal, which is even less critical
with respect to start-up because of its lower load capacitance.
29. Pin HSEL must be connected to ground in a 1f
application; it must be left open circuit for a 2fH application. The
H
TDA9331H and TDA9332H can be switched to a multi-sync mode, in which the horizontal frequency can vary
between 15 and 25 kHz (1fH mode) or 30 and 50 kHz (2fH mode).
30. The indicated tolerance on the free-running frequency is only valid when an accurate reference frequency (obtained
with an accurate 12 MHz crystal) is used. The tolerance of the reference resonator must be added to obtain the real
tolerance on the free-running frequency.
31. The correction factor k of the phase-2 loop is defined as the amount of correction per line period of a phase error
between the horizontal flyback pulse and the internal phase-2 reference pulse. When k = 0.5, the phase error
between the flyback pulse and the internal reference is halved each line period.
32. The control range of the second control loop depends on the line frequency. The maximum control range from the
rising edge of HOUT to the centre of the flyback pulse is always 37% of one line period, for the centre position of the
dynamic phase compensation (4.0 V at pin 14).
33. The dynamic phase compensation input (pin 14) is connected to an internal reference voltage of 4.0 V via a resistor
of 100 kΩ. If dynamic phase compensation is not used, this pin should be decoupled to ground (pin 19) via a
capacitor of 100 nF.
34. The range of parallelogram and bow correction is proportional to the width of the horizontal flyback pulse. For zero
correction, use DAC setting 7 DEC or 0111 (bin). The effect of the corrections is shown in Fig.16.
35. For safe operation of the horizontal output transistor and to obtain a controlled switch-on time of the EHT, the
horizontal drive starts up in a slow start mode. The horizontal drive starts with a very short ‘on-time’ of the horizontal
outputtransistor (line locked clock pulse, i.e. 72 ns),the‘off-time’ of the transistor is identicaltothe ‘off-time’ in normal
operation. The starting frequency during switch-on is therefore approximately twice the normal value. The ton is
slowlyincreased to the nominal valueinapproximately 160 ms (see Fig.15). Whenthenominal frequency is reached,
the PLL is closed such that only very small phase corrections are necessary. This ensures safe operation of the
output stage.
2000 May 08 32
Page 33

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
a) For picture tubes with Dynamic Astigmatic Focusing (DAF) guns, the rise of the EHT voltage between
75 and 100% is preferred to be even slower than the rise time from 0 to 75%. This can be realized by activating
bit ESS, at which the total switch-on time of the horizontal output pulse is approximately 1175 ms.
b) During switch-off, the slow-stop function is active. This is realized by decreasing the ton of the output transistor
complementary to the start-up behaviour. The switch-off time is approximately 50 ms. The slow-stop procedure
is synchronized to the start of the first new vertical field after reception of the switch-off command. During the
slow-stop period, the fixed beam current switch-off can be activated (see also note 23). This current is active
during a part of the slow stop period, see Fig.15.
c) The horizontal output is gated with the flyback pulse so that the horizontal output transistor cannot be switched
on during the flyback pulse. This protection is not active during the switch-on or switch-off period.
36. This parameter is not tested during production and is just given as application information for the designer of the
television receiver.
37. The rise and fall times of the blanking pulse and clamping pulse at the sandcastle output (pin 9) depend on the
capacitive load. The value of the source current during the rising edge or sink current during the falling edge is
0.7 mA (typical value).
38. The vertical guard pulse from the vertical output stage should fall within the vertical blanking period
(see Figs 12 and 13) and should have awidth of at least oneline period. For the detectionof a missing pulse, aguard
currentvalue of 1 mA during normaloperationis sufficient. If the RGBoutputsmust also be blanked ifthe guard pulse
lasts longer than the vertical blanking period, the guard current must have a value between 2.6 mA and 3.5 mA.
39. Switching between the 1fV or the 2fV mode is realized via bit SVF.
40. The vertical linearity is measured on the differential output current at the vertical drive output (pins 1 and 2) for zero
S-correction. The linearity is defined as the ratio of the upper and lower half amplitudes at the vertical output. The
upper amplitude is measured between lines 27 and 167, the lower amplitude between lines 167 and 307 for a 50 Hz
video signal.
41. The field detection mechanism is explained in Fig.17.
a) The incoming VD pulse is synchronized with the internal clock signal CK2H that is locked to the incoming H
pulse. If the synchronized VD pulse of a field coincides with the internally generated horizontal blanking signal
HBLNK,thenthis is field 1. If the synchronized VDpulsedoesnot coincide with HBLNK, then this isfield 2.Signals
CK2H and HBLNK are both output signals of the horizontal divider circuit that is part of the line-locked clock
generator. A reliable fielddetection is important forcorrect interlacing and de-interlacing and for thecorrect timing
of the measurement lines of the black current loop. For the best noise margin, the edges of the VDpulse should
be on approximately1⁄4and3⁄4 of the line, referred to the rising edges of the HD input signal.
b) If bus bit VSR = 0, the end of the VDpulse is used as reference for both field detection and start of vertical scan.
If VSR = 1, the starting edge is used.
42. Output range percentages mentioned for E-W control parameters are based on the assumption that the E-W
modulator is dimensioned such that 400 µA variation in E-W output current of the IC is equivalent to 20% variation
in picture width. In VGA mode, the E-W output current is proportional to the applied line frequency.
43. The IC has protection inputs for flash protection and overvoltage protection.
a) The flash protection input is used to switch the horizontal drive output off immediately if a picture tube flashover
occurs, to protect the line output transistor. An external flash detection circuit is needed. When the flash input is
pulled HIGH, the horizontal output is switched off and status bit FLS is set. When the input turns LOW again, the
horizontal output is switched on immediately without I2C-bus intervention via the slow start procedure.
b) The overvoltage (X-ray) protection is combined with the EHT compensation input. When this protection is
activated, the horizontal drive can be directly switched off (via the slow stop procedure). It is also possible to
continue the horizontal drive and onlyset status bit XPR in output byte 01 of the I2C-bus. The choice between the
two modes of operation is made via bit PRD.
44. The ICs have a zoom adjustment possibility for the horizontal and vertical deflection. For this reason, an extra DAC
is included in the vertical amplitude control, which controls the vertical scan amplitude between 0.75 and 1.38 of the
TDA933xH series
D
2000 May 08 33
Page 34

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
nominal scan. At an amplitude of 1.05 times the nominal scan, the output current is limited and the blanking of the
RGBoutputs is activated, see Fig.14. In addition to the variation of the vertical amplitude, the picture can be vertically
shiftedon the screen via the‘scroll’function. The nominal scan heightmustbe adjusted at a positionof 19H (25 DEC)
of the vertical ‘zoom’ DAC and 1FH (31 DEC) for the vertical ‘scroll’ DAC.
45. The vertical scroll function is active only in the expand mode of the vertical zoom, i.e. at a DAC position larger
than 10H (16 DEC).
46. With the vertical wait function, the start of the vertical scan can be delayed with respect to the incoming vertical sync
pulse. The operation is different for the various scan modes, see Table 54 and Figs 12 and 13. The minimum value
for the vertical wait is 8 line periods. If the setting is lower than 8, the wait period will remain 8 line periods.
47. In the TDA9330H and TDA9332H, the DAC output is I2C-bus controlled. In the TDA9331H, the DAC output voltage
is proportional to the centre frequency of the line-oscillator. In TV mode, the output voltage will always be at the
minimum value. In VGA mode, the output is at the minimum value for the lowest centre frequency (32 kHz) and at
the maximum value for the highest centre frequency (48 kHz). The output impedance of the DAC output depends on
the output voltage. The output consists of an emitter follower with an internal resistor of 50 kΩ to ground.
Table 54 Operation of the vertical wait function
MODE START OF VERTICAL SCAN
1f
; TV mode fixed; see Fig.12
H
2f
; TV mode; VSR = 0 end of VD plus vertical wait setting
H
2f
; TV mode; VSR = 1 start of VD plus vertical wait setting
H
1f
; multi sync mode start of VD plus vertical wait setting
H
2f
; multi sync mode start of VD plus vertical wait setting
H
2000 May 08 34
Page 35

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
g
L
100 kΩ
i
C
m
C
C
i
i
p
handbook, halfpage
XTALI XTALO
C
a
TDA933xH series
f
osc
CLC
R
i
crystal
or
ceramic
resonator
C
b
MGR447
Requirement for start-up:
2
C
L
1
=
-------------------------------------
×
L
2 π
i
CaCb×
+=
--------------------
p
C
aCb
Ri1.1 10
CiCL×
------------------ -
+
C
iCL
+
×≤×
19–
100
handbook, full pagewidth
blending
(%)
80
60
40
20
0
0 1.0 1.40.4
0.31
Fig.3 Simplified diagram of crystal oscillator.
external
internal
0.6
0.8 1.20.2
0.725 1.14
V
insert
MGR448
(V)
Fig.4 Blending characteristic (typical curve and minimum/maximum limits).
2000 May 08 35
Page 36

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
300
handbook, halfpage
(%)
200
100
0
02040 8060
DAC (decimal value)
MGS892
200
handbook, halfpage
(%)
160
120
80
40
0
02040 80
TDA933xH series
MGS893
60
DAC (decimal value)
Fig.5 Saturation control curve.
handbook, halfpage
1
(V)
0.5
0
−0.5
−1
02040 80
Conditions: settings for cathode drive and white point nominal;
gain of RGB amplifiers such that the amplitude at the RGB
outputs is 2 V (b-w); relative to cutoff level.
60
DAC (decimal value)
MGS894
Fig.6 Contrast control curve.
100
handbook, halfpage
output
(IRE)
80
60
40
20
B
0
B
A
A
−20
0 40 80 120
A-to-A: maximum black level shift.
B-to-B: level shift at 15% of peak white.
MGR452
input (IRE)
Fig.7 Brightness control curve.
2000 May 08 36
Fig.8 I/O relation of black level stretch circuit.
Page 37

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
handbook, full pagewidth
V
o(RGB)(b-w)
4
(V)
3
tangent
2
clipper off
clipper on
TDA933xH series
MGS895
B
PWL
output level
1
0
0
20
40 60 80
input level
Fig.9 Soft clipper characteristic.
PWL
A
100
YIN (IRE)
2000 May 08 37
Page 38

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
handbook, full pagewidth
HD input pulse
(1)
wide blanking
(if HBL = 1)
reference phi1
101 LLC
HSHIFT
0 to 63 LLC
TDA933xH series
horizontal
flyback pulse
flyback blanking
(2)
counter blanking
40 LLC
video blanking
1) Position of wide blanking can be adjusted with bus bits HB3 to HB0.
2) Start of line blanking can be adjusted with bus bits LBL3 to LBL0.
phase slicing level (4 V)
blanking slicing level (0.3 V)
MGS896
reference phi2
Fig.10 Timing of horizontal blanking (1 line period is 440 LLC pulses).
2000 May 08 38
Page 39

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
handbook, full pagewidth
2fH NTSC
signal
(fH = 31.47 kHz)
HD input
CLP pulse
counter
blanking
− 16 LLC
0.75 µs
HSHIFT
37 LLC = 2.67 µs
40 LLC = 2.89 µs
+ 14 LLC
2.35 µs
TDA933xH series
5.5 µs
2.40 µs
mid blank = mid flyback
22 LLC = 1.59 µs
HDTV
signal
(fH = 33.75 kHz)
HD input
CLP pulse
counter
blanking
− 16 LLC
(a) Timing in 2fH TV mode (HDTV = 0, HDCL = 0)
3.784 µs
0.592 µs
0.606 µs
50 ns
40 LLC = 2.69 µs
+ 14 LLC
(b) Timing in HDTV mode (HDTV = 1, HDCL = 1)
0.592 µs
mid blank = mid flyback
HSHIFT
15 LLC = 1.01 µs
1.993 µs
18 LLC = 1.22 µs
MGS897
Video signals are shown as illustration only. All horizontal timing signals in the IC are solely related to the start of the HDpulse
that is applied to the IC.
All horizontal timingsignals are generated with the help of the internallinelocked clock (LLC). One line period is always divided
into 440 line locked clock pulses. Time periods depicted in the figure are only valid for line frequencies mentioned.
Fig.11 Timing of clamp pulse and line blanking in 2fH TV mode and HDTV mode.
2000 May 08 39
Page 40

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
1st
field
23
B
G
LR
336
2nd
field
B
G
LR
1st
field
B
G
LR
TDA933xH series
2nd
field
MGR453
B
G
LR
ndbook, full pagewidth
RESET LINE COUNTER
625
312
50 Hz
TV mode.
H
60 Hz
Fig.12 Vertical timing pulses for 1f
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
2000 May 08 40
Video from
HIP
= V
V
A
A
= H
clock
H
D
D
H
Internal
2f
Vertical
blank
AKB pulses
Video from
Reset vertical
sawtooth
HIP
= V
V
A
A
= H
D
D
H
AKB pulses
Vertical
blank
D
V
clock
H
D
H
Internal
2f
AKB pulses
Vertical
blank
Reset vertical
sawtooth
D
D
H
V
Vertical
blank
AKB pulses
Page 41

Philips Semiconductors Preliminary specification
h
I2C-bus controlled TV display processors
1st
field
B
G
LR
2nd
field
B
G
LR
TDA933xH series
MGR454
B
G
LR
TV mode and VGA mode.
andbook, full pagewidth
REFERENCE VWAIT
VWAIT = 12
TV mode (VSR = 0)
H
2f
VWAIT = 18
VGA mode
H
2f
H
Fig.13 Vertical timing pulses for 2f
RESET LINE COUNTER
RESET LINE COUNTER = REFERENCE VWAIT
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
2000 May 08 41
clock
D
H
V
Internal
2f
Vertical
blank
AKB pulses
H
D
D
V
Reset vertical
sawtooth
D
H
AKB pulses
Vertical
blank
D
V
clock
H
D
H
Internal
2f
Vertical
blank
AKB pulses
Reset vertical
sawtooth
Vertical sawtooth
measure pulse
Page 42

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
handbook, full pagewidth
vertical
position
(%)
70
60
50
40
30
20
10
−10
−20
−30
−40
−50
−60
top
picture
138%
100%
75%
0
bottom
picture
1/2 t
TDA933xH series
MGL475
t
time
blanking for zoom 138%
Fig.14 Vertical drive waveform and blanking pulse for different zoom factors.
2000 May 08 42
Page 43

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
handbook, full pagewidth
T
(% of nominal value)
100
on
50
12
57 ms
normal
slow start
ESS = 1
102 ms
32 ms
(1000 lines)
16 ms
TDA933xH series
MGS898
slow stop
18 ms
t (ms)
discharge
18.6 ms
25 ms
TFBC = 0
TFBC = 1
Fig.15 Slow start behaviour of horizontal output, and slow stop behaviour and timing of picture tube discharge
pulse when IC is switched to standby via I2C-bus.
handbook, full pagewidth
MGS899
0.54
0.54
µs
µs
(a) Parallelogram correction. (b) Bow correction.
0.54
µs
0.54
µs
Fig.16 Horizontal parallelogram and bow correction (figures for 1fHmode).
2000 May 08 43
Page 44

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
handbook, full pagewidth
V
D
H
D
CLK
2H
HBLNK
V
D
H
D
CLK
HBLNK
TDA933xH series
MGS900
2H
V
D
H
D
CLK
HBLNK
2H
(a) End of VD pulse is reference (VSR = 0)
field 1 detection
field 2 detection
V
D
H
D
CLK
HBLNK
2H
(b) Start of V
field 1 detection
field 2 detection
pulse is reference (VSR = 1)
D
See also Chapter “Characteristics”; note 41.
Fig.17 Field detection mechanism.
2000 May 08 44
Page 45

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TEST AND APPLICATION INFORMATION
handbook, full pagewidth
TUNER AGC
IF
CVBS-1
CVBS-2
CVBS/Y-3
CVBS/Y-4
SAW
FILTER
AV-1
AV-2
C-3
C-4
RGB-1 RGB-2
TDA932xH
H
A
V
A
FEATURE
BOX
TDA933xH series
RGB-3 RGB-4
YINY
UINU
VINV
TDA933xH
H
D
V
D
RO
GO
BO
BCL
BLKIN
VDOA
VDOB
EWO
HOUT
HFB
YC
CVBS(TXT)
CVBS(PIP)
CVBS
COMB FILTER
Fig.18 Application diagram.
2000 May 08 45
MGR462
Page 46

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
600
handbook, halfpage
I
(µA)
vert
400
(3)
(2)
(1)
200
0
−200
−400
−600
0t
VSH = 31; SC = 0; I
(1) VA = 0.
(2) VA = 31.
(3) VA = 63.
VERT=I2(VDOB)
0.5 t
− I
1(VDOA)
.
MGL483
time
800
handbook, halfpage
I
vert
(µA)
400
0
−400
−800
0
VA = 31; VHS = 31; SC = 0.
(1) VS = 0.
(2) VS = 31.
(3) VS = 63.
TDA933xH series
MGL484
(1)
(2)
(3)
0.5 t
time
t
Fig.19 Control range of vertical amplitude.
600
handbook, halfpage
I
vert
(µA)
400
(1)
200
−200
−400
−600
VA = 31; SC = 0.
(1) VSH = 0.
(2) VSH = 31.
(3) VSH = 63.
(2)
(3)
0
0t
0.5 t
time
MGL485
Fig.20 Control range of vertical slope.
600
handbook, halfpage
I
vert
(µA)
400
200
0
−200
−400
−600
0t
VA = 31; VHS = 31.
(1) SC = 0.
(2) SC = 31.
(3) SC = 63.
MGL486
(3)
(2)
(1)
0.5 t
time
Fig.21 Control range of vertical shift.
2000 May 08 46
Fig.22 Control range of S-correction.
Page 47

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
time
MGL489
t
1200
handbook, halfpage
I
EW
(µA)
1000
800
600
400
200
0
0
PW = 31; CP = 31.
(1) EW = 0.
(2) EW = 31.
(3) EW = 63.
(1)
(2)
(3)
0.5 t
900
handbook, halfpage
I
EW
(µA)
800
700
600
500
400
300
0t
EW = 31; CP = 31.
(1) PW = 0.
(2) PW = 31.
(3) PW = 63.
TDA933xH series
MGL488
(3)
(2)
(1)
0.5 t
time
Fig.23 Control range of E-W width.
900
handbook, halfpage
I
EW
(µA)
EW = 31; PW = 63.
(1) CP = 0.
(2) CP = 31.
(3) CP = 63.
(1)
800
(2)
700
(3)
600
500
400
300
0t
0.5 t
time
MGL487
Fig.24 Control range of E-W parabola/width ratio.
time
MGL490
(1)
(2)
(3)
1000
handbook, halfpage
I
EW
(µA)
800
600
400
200
0t
EW = 31; PW = 31.
(1) TC = 0.
(2) TC = 31.
(3) TC = 63.
(3)
(2)
(1)
0.5 t
Fig.25 Control range of E-W corner/parabola ratio.
2000 May 08 47
Fig.26 Control range of E-W trapezium correction.
Page 48

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
Adjustment of geometry control parameters
The deflection processor of the TDA933xH offers
15 control parameters for picture alignment, as follows:
For the vertical picture alignment;
• S-correction
• Vertical amplitude
• Vertical slope
• Vertical shift
• Vertical zoom
• Vertical scroll
• Vertical wait.
For the horizontal picture alignment;
• Horizontal shift
• Horizontal parallelogram
• Horizontal bow
• E-W width with extended range for the zoom function
• E-W parabola/width ratio
• E-W upper corner/parabola ratio
• E-W lower corner/parabola ratio
• E-W trapezium correction.
It is important to notice that the ICs are designed for use
with a DC-coupled vertical deflection stage. This is why
a vertical linearity alignment is not necessary (and
therefore not available).
For a particular combination of picture tube type, vertical
outputstage and E-W output stage,therequired values for
the settings of S-correction and E-W corner/parabola ratio
must be determined. These parameters can be preset via
the I2C-bus and do not need any additional adjustment.
Therest of the parameters arepreset with the mid-value of
their control range, i.e.1FH, or withthe values obtained by
previously-adjusted TV sets on the production line.
TDA933xH series
Toadjust the vertical shift and verticalslopeindependently
of each other, a special service blanking mode can be
entered by setting bit SBL HIGH. In this mode, the RGB
outputs are blanked during the second half of the picture.
There are two different methods for alignment of the
picture in the vertical direction. Both methods use the
service blanking mode.
The first method is recommended for picture tubes that
have a marking for the middle of the screen. With the
vertical shift control, the last line of the visible picture is
positioned exactly in the middle of the screen. After this
adjustment, the vertical shift should not be changed any
more. The top of the picture is positioned by adjusting the
vertical amplitude, and the bottom byadjusting the vertical
slope.
Thesecond method is recommended for picturetubesthat
have no marking for the middle of the screen. For this
method, a video signal is required in which the middle of
the picture is indicated (e.g. the white line in the circle test
pattern). The beginning of the blanking is positioned
exactly on the middleof the pictureusing the vertical slope
control. The top and bottom of the picture are then
positioned symmetrically with respect to the middle of the
screen by adjusting the vertical amplitude and vertical
shift.After this adjustment, thevertical shift has thecorrect
setting and should not be changed any more.
If the vertical shift alignment is not required, VSH should
be set to its mid-value, i.e. VSH = 1FH (31 DEC). The top
of the picture is then positioned by adjusting the vertical
amplitude and the bottom of the picture by adjusting the
vertical slope.
After the vertical picture alignment, the picture is
positioned in the horizontal direction by adjusting the E-W
width,E-Wparabola/widthratioandhorizontalshift.Finally
(if necessary), the left and right-hand sides of the picture
are aligned in parallel by adjusting the E-W trapezium
control.
The vertical shift control is intendedto compensate offsets
in the external vertical output stage or in the picture tube.
It can be shown that, without compensation, these offsets
will result in a certain linearity error, especially with picture
tubes that need large S-correction. In 1st-order
approximation,the total linearity erroris proportional to the
value of the offset and to the square of the S-correction
that is needed. The necessity to use the vertical shift
alignment depends on the expected offsets in the vertical
output stage and picture tube, on the required value of the
S-correction and on the demands upon vertical linearity.
2000 May 08 48
Additional horizontal corrections are possible using the
parallelogram and bow controls.
To obtain the correct range of the vertical zoom function,
the vertical geometry should be adjusted at a nominal
setting of the zoomDAC at position 19H(25 DEC) and the
vertical scroll DAC at 1FH (31 DEC).
Page 49

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
PACKAGE OUTLINE
QFP44: plastic quad flat package; 44 leads (lead length 1.3 mm); body 10 x 10 x 1.75 mm
c
y
X
A
33 23
34
pin 1 index
44
1
22
Z
E
e
H
E
E
w M
b
p
12
11
A
2
A
A
1
detail X
SOT307-2
(A )
3
θ
L
p
L
w M
b
e
DIMENSIONS (mm are the original dimensions)
mm
OUTLINE
VERSION
SOT307-2
A
max.
2.10
0.25
0.05
1.85
1.65
UNIT A1A2A3bpcE
Note
1. Plastic or metal protrusions of 0.25 mm maximum per side are not included.
p
D
H
D
0.40
0.20
0.25
0.14
0.25
IEC JEDEC EIAJ
Z
D
B
0 2.5 5 mm
scale
(1)
(1) (1)(1)
D
10.1
9.9
REFERENCES
eH
H
10.1
9.9
12.9
0.8 1.3
12.3
2000 May 08 49
v M
D
v M
A
B
E
12.9
12.3
LL
p
0.95
0.55
0.15 0.10.15
EUROPEAN
PROJECTION
Z
D
1.2
0.8
Zywv θ
E
1.2
0.8
o
10
o
0
ISSUE DATE
95-02-04
97-08-01
Page 50

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
SOLDERING
Introduction to soldering surface mount packages
Thistextgivesa very brief insight to a complex technology.
A more in-depth account of soldering ICs can be found in
our
“Data Handbook IC26; Integrated Circuit Packages”
(document order number 9398 652 90011).
There is no soldering method that is ideal for all surface
mount IC packages. Wavesoldering is not always suitable
for surface mount ICs, or for printed-circuit boards with
high population densities. In these situations reflow
soldering is often used.
Reflow soldering
Reflow soldering requires solder paste (a suspension of
fine solder particles, flux and binding agent) to be applied
tothe printed-circuit board by screen printing,stencilling or
pressure-syringe dispensing before package placement.
Several methods exist for reflowing; for example,
infrared/convection heating in a conveyor type oven.
Throughput times (preheating, soldering and cooling)vary
between 100 and 200 seconds depending on heating
method.
Typical reflow peak temperatures range from
215 to 250 °C. The top-surface temperature of the
packages should preferable be kept below 230 °C.
Wave soldering
Conventional single wave soldering is not recommended
forsurfacemountdevices(SMDs) or printed-circuit boards
with a high component density, as solder bridging and
non-wetting can present major problems.
To overcome these problems the double-wave soldering
method was specifically developed.
TDA933xH series
If wave soldering is used the following conditions must be
observed for optimal results:
• Use a double-wave soldering method comprising a
turbulent wave with high upward pressure followed by a
smooth laminar wave.
• For packages with leads on two sides and a pitch (e):
– larger than or equal to 1.27 mm, the footprint
longitudinal axis is preferred to be parallel to the
transport direction of the printed-circuit board;
– smaller than 1.27 mm, the footprint longitudinal axis
must be parallel to the transport direction of the
printed-circuit board.
The footprint must incorporate solder thieves at the
downstream end.
• Forpackageswithleadson four sides, the footprint must
be placed at a 45° angle to the transport direction of the
printed-circuit board. The footprint must incorporate
solder thieves downstream and at the side corners.
During placement and before soldering, thepackage must
be fixed with a droplet of adhesive. The adhesive can be
applied by screen printing, pin transfer or syringe
dispensing. The package can be soldered after the
adhesive is cured.
Typical dwell time is 4 seconds at 250 °C.
A mildly-activated flux will eliminate the need for removal
of corrosive residues in most applications.
Manual soldering
Fix the component by first soldering two
diagonally-opposite end leads. Use a low voltage (24 V or
less) soldering iron applied to the flat part of the lead.
Contact time must be limited to 10 seconds at up to
300 °C.
When using a dedicated tool, all other leads can be
soldered in one operation within 2 to 5 seconds between
270 and 320 °C.
2000 May 08 50
Page 51

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
TDA933xH series
Suitability of surface mount IC packages for wave and reflow soldering methods
SOLDERING METHOD
PACKAGE
WAVE REFLOW
(1)
BGA, LFBGA, SQFP, TFBGA not suitable suitable
HBCC, HLQFP, HSQFP, HSOP, HTQFP, HTSSOP, SMS not suitable
(3)
PLCC
, SO, SOJ suitable suitable
LQFP, QFP, TQFP not recommended
SSOP, TSSOP, VSO not recommended
(2)
(3)(4)
(5)
suitable
suitable
suitable
Notes
1. All surface mount (SMD) packages are moisture sensitive. Depending upon the moisture content, the maximum
temperature (with respect to time) and body size of the package, there is a risk that internal or external package
cracks may occur due to vaporization of the moisture in them (the so called popcorn effect). For details, refer to the
Drypack information in the
“Data Handbook IC26; Integrated Circuit Packages; Section: Packing Methods”
.
2. These packages are not suitable for wave soldering as a solder joint between the printed-circuit board and heatsink
(at bottom version) can not be achieved, and as solder may stick to the heatsink (on top version).
3. If wave soldering is considered, then the package must be placed at a 45° angle to the solder wave direction.
The package footprint must incorporate solder thieves downstream and at the side corners.
4. Wave soldering is only suitable for LQFP, TQFP and QFP packages with a pitch (e) equal to or larger than 0.8 mm;
it is definitely not suitable for packages with a pitch (e) equal to or smaller than 0.65 mm.
5. Wave soldering is only suitable for SSOP and TSSOP packages with a pitch (e) equal to or larger than 0.65 mm; it is
definitely not suitable for packages with a pitch (e) equal to or smaller than 0.5 mm.
2000 May 08 51
Page 52

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
DATA SHEET STATUS
DATA SHEET STATUS
Objective specification Development This data sheet contains the design target or goal specifications for
Preliminary specification Qualification This data sheet contains preliminary data, and supplementary data will be
Product specification Production This data sheet contains final specifications. Philips Semiconductors
Note
1. Please consult the most recently issued data sheet before initiating or completing a design.
DEFINITIONS
Short-form specification The data in a short-form
specification is extracted from a full data sheet with the
same type number and title. For detailed information see
the relevant data sheet or data handbook.
Limiting values definition Limiting values given are in
accordance with the Absolute Maximum Rating System
(IEC 60134). Stress above one or more of the limiting
values may cause permanent damage to the device.
These are stress ratings only and operation of the device
attheseor at any other conditions above thosegiveninthe
Characteristics sections of the specification is not implied.
Exposure to limiting values for extended periods may
affect device reliability.
Application information Applications that are
described herein for any of these products are for
illustrative purposes only. Philips Semiconductors make
norepresentationorwarrantythatsuchapplicationswillbe
suitable for the specified use without further testing or
modification.
PRODUCT
STATUS
DEFINITIONS
product development. Specification may change in any manner without
notice.
published at a later date. Philips Semiconductors reserves the right to
make changes at any time without notice in order to improve design and
supply the best possible product.
reserves the right to make changes at any time without notice in order to
improve design and supply the best possible product.
DISCLAIMERS
Life support applications These products are not
designed for use in life support appliances, devices, or
systems where malfunction of these products can
reasonably be expected toresult in personal injury. Philips
Semiconductorscustomersusingorsellingtheseproducts
for use in such applications do so at their own risk and
agree to fully indemnify Philips Semiconductors for any
damages resulting from such application.
Right to make changes Philips Semiconductors
reserves the right to make changes, without notice, in the
products, including circuits, standard cells, and/or
software, described or contained herein in order to
improve design and/or performance. Philips
Semiconductors assumes no responsibility or liability for
theuseofanyof these products, conveys no licence or title
under any patent, copyright, or mask work right to these
products,and makes no representations or warranties that
these products are free from patent, copyright, or mask
work right infringement, unless otherwise specified.
TDA933xH series
(1)
2
PURCHASE OF PHILIPS I
2000 May 08 52
C COMPONENTS
Purchase of Philips I2C components conveys a license under the Philips’ I2C patent to use the
components in the I2C system provided the system conforms to the I2C specification defined by
Philips. This specification can be ordered using the code 9398 393 40011.
Page 53

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
NOTES
TDA933xH series
2000 May 08 53
Page 54

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
NOTES
TDA933xH series
2000 May 08 54
Page 55

Philips Semiconductors Preliminary specification
I2C-bus controlled TV display processors
NOTES
TDA933xH series
2000 May 08 55
Page 56

Philips Semiconductors – a w orldwide compan y
Argentina: see South America
Australia: 3 Figtree Drive, HOMEBUSH, NSW 2140,
Tel. +61 2 9704 8141, Fax. +61 2 9704 8139
Austria: Computerstr. 6, A-1101 WIEN, P.O. Box 213,
Tel. +43 1 60 101 1248, Fax. +43 1 60 101 1210
Belarus: Hotel Minsk Business Center, Bld. 3, r. 1211, Volodarski Str. 6,
220050 MINSK, Tel. +375 172 20 0733, Fax. +375 172 20 0773
Belgium: see The Netherlands
Brazil: see South America
Bulgaria: Philips Bulgaria Ltd., Energoproject, 15th floor,
51 James Bourchier Blvd., 1407 SOFIA,
Tel. +359 2 68 9211, Fax. +359 2 68 9102
Canada: PHILIPS SEMICONDUCTORS/COMPONENTS,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
China/Hong Kong: 501 Hong Kong Industrial Technology Centre,
72 Tat Chee Avenue, Kowloon Tong, HONG KONG,
Tel. +852 2319 7888, Fax. +852 2319 7700
Colombia: see South America
Czech Republic: see Austria
Denmark: Sydhavnsgade 23, 1780 COPENHAGEN V,
Tel. +45 33 29 3333, Fax. +45 33 29 3905
Finland: Sinikalliontie 3, FIN-02630 ESPOO,
Tel. +358 9 615 800, Fax. +358 9 6158 0920
France: 51 Rue Carnot, BP317, 92156 SURESNES Cedex,
Tel. +33 1 4099 6161, Fax. +33 1 4099 6427
Germany: Hammerbrookstraße 69, D-20097 HAMBURG,
Tel. +49 40 2353 60, Fax. +49 40 2353 6300
Hungary: see Austria
India: Philips INDIA Ltd, Band Box Building, 2nd floor,
254-D, Dr. Annie Besant Road, Worli, MUMBAI 400 025,
Tel. +91 22 493 8541, Fax. +91 22 493 0966
Indonesia: PT Philips DevelopmentCorporation, Semiconductors Division,
Gedung Philips, Jl. Buncit Raya Kav.99-100, JAKARTA 12510,
Tel. +62 21 794 0040 ext. 2501, Fax. +62 21 794 0080
Ireland: Newstead, Clonskeagh, DUBLIN 14,
Tel. +353 1 7640 000, Fax. +353 1 7640 200
Israel: RAPAC Electronics, 7 Kehilat Saloniki St, PO Box 18053,
TEL AVIV 61180, Tel. +972 3 645 0444, Fax. +972 3 649 1007
Italy: PHILIPS SEMICONDUCTORS, Via Casati,23 - 20052 MONZA (MI),
Tel. +39 039 203 6838, Fax +39 039 203 6800
Japan: Philips Bldg 13-37, Kohnan 2-chome, Minato-ku,
TOKYO 108-8507, Tel. +81 3 3740 5130, Fax. +81 3 3740 5057
Korea: Philips House, 260-199 Itaewon-dong, Yongsan-ku, SEOUL,
Tel. +82 2 709 1412, Fax. +82 2 709 1415
Malaysia: No. 76 Jalan Universiti, 46200 PETALING JAYA, SELANGOR,
Tel. +60 3 750 5214, Fax. +60 3 757 4880
Mexico: 5900 Gateway East, Suite 200, EL PASO, TEXAS 79905,
Tel. +9-5 800 234 7381, Fax +9-5 800 943 0087
Middle East: see Italy
Netherlands: Postbus 90050, 5600 PB EINDHOVEN, Bldg. VB,
Tel. +31 40 27 82785, Fax. +31 40 27 88399
New Zealand: 2 Wagener Place, C.P.O. Box 1041, AUCKLAND,
Tel. +64 9 849 4160, Fax. +64 9 849 7811
Norway: Box 1, Manglerud 0612, OSLO,
Tel. +47 22 74 8000, Fax. +47 22 74 8341
Pakistan: see Singapore
Philippines: Philips Semiconductors Philippines Inc.,
106 Valero St. Salcedo Village, P.O. Box 2108 MCC, MAKATI,
Metro MANILA, Tel. +63 2 816 6380, Fax. +63 2 817 3474
Poland: Al.Jerozolimskie 195 B, 02-222 WARSAW,
Tel. +48 22 5710 000, Fax. +48 22 5710 001
Portugal: see Spain
Romania: see Italy
Russia: Philips Russia, Ul. Usatcheva 35A, 119048 MOSCOW,
Tel. +7 095 755 6918, Fax. +7 095 755 6919
Singapore: Lorong 1, Toa Payoh, SINGAPORE 319762,
Tel. +65 350 2538, Fax. +65 251 6500
Slovakia: see Austria
Slovenia: see Italy
South Africa: S.A. PHILIPS Pty Ltd., 195-215 Main Road Martindale,
2092 JOHANNESBURG, P.O. Box 58088 Newville 2114,
Tel. +27 11 471 5401, Fax. +27 11 471 5398
South America: Al. Vicente Pinzon, 173, 6th floor,
04547-130 SÃO PAULO, SP, Brazil,
Tel. +55 11 821 2333, Fax. +55 11 821 2382
Spain: Balmes 22, 08007 BARCELONA,
Tel. +34 93 301 6312, Fax. +34 93 301 4107
Sweden: Kottbygatan 7, Akalla, S-16485 STOCKHOLM,
Tel. +46 8 5985 2000, Fax. +46 8 5985 2745
Switzerland: Allmendstrasse 140, CH-8027 ZÜRICH,
Tel. +41 1 488 2741 Fax. +41 1 488 3263
Taiwan: Philips Semiconductors, 6F, No. 96, Chien Kuo N. Rd., Sec. 1,
TAIPEI, Taiwan Tel. +886 2 2134 2886, Fax. +886 2 2134 2874
Thailand: PHILIPS ELECTRONICS (THAILAND) Ltd.,
209/2 Sanpavuth-Bangna Road Prakanong, BANGKOK 10260,
Tel. +66 2 745 4090, Fax. +66 2 398 0793
Turkey: Yukari Dudullu, Org. San. Blg., 2.Cad. Nr. 28 81260 Umraniye,
ISTANBUL, Tel. +90 216 522 1500, Fax. +90 216 522 1813
Ukraine: PHILIPS UKRAINE, 4 Patrice Lumumba str., Building B, Floor 7,
252042 KIEV, Tel. +380 44 264 2776, Fax. +380 44 268 0461
United Kingdom: Philips Semiconductors Ltd., 276 Bath Road, Hayes,
MIDDLESEX UB3 5BX, Tel. +44 208 730 5000, Fax. +44 208 754 8421
United States: 811 East Arques Avenue, SUNNYVALE, CA 94088-3409,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
Uruguay: see South America
Vietnam: see Singapore
Yugoslavia: PHILIPS, Trg N. Pasica 5/v, 11000 BEOGRAD,
Tel. +381 11 3341 299, Fax.+381 11 3342 553
For all other countries apply to: Philips Semiconductors,
International Marketing & Sales Communications, Building BE-p, P.O. Box 218,
5600 MD EINDHOVEN, The Netherlands, Fax. +31 40 27 24825
© Philips Electronics N.V. SCA
All rights are reserved. Reproduction in whole or in part is prohibited without the prior written consent of the copyright owner.
The information presented in this document does not form part of any quotation or contract, is believed to be accurate and reliable and may be changed
without notice. No liability will be accepted by the publisher for any consequence of its use. Publication thereof does not convey nor imply any license
under patent- or other industrial or intellectual property rights.
2000
Internet: http://www.semiconductors.philips.com
69
Printed in The Netherlands 753504/02/pp56 Date of release: 2000 May 08 Document order number: 9397 750 06406
 Loading...
Loading...