

Page 1
8-BIT OTP/EPROM MCUs WITH A/D CONVERTER,
SAFE RESET, AUTO-RELOAD TIMER AND EEPROM
■ 3.0 to 6.0V Supply Operating Range
■ 8 MHzMaximum Clock Frequency
■ -40 to+125°C Operating TemperatureRange
■ Run, Wait and Stop Modes
■ 5 InterruptVectors
■ Look-up Table capability in Program Memory
■ Data Storage in Program Memory:
User selectable size
■ Data RAM: 128 bytes
■ DataEEPROM: 64 bytes(noneonST62T52C)
■ User Programmable Options
■ 9 I/Opins, fully programmable as:
– Input with pull-up resistor
– Input without pull-up resistor
– Input with interrupt generation
– Open-drain or push-pull output
– Analog Input
■ 5 I/Olines can sinkupto30mA todriveLEDs or
TRIACs directly
■ 8-bit Timer/Counter with 7-bit programmable
prescaler
■ 8-bit Auto-reload Timerwith 7-bit programmable
prescaler (AR Timer)
■ Digital Watchdog
■ Oscillator SafeGuard
■ Low Voltage Detector for Safe Reset
■ 8-bit A/D Converter with 4 analog inputs
■ On-chip Clockoscillator canbe drivenbyQuartz
Crystal Ceramic resonator or RCnetwork
■ User configurable Power-on Reset
■ One external Non-Maskable Interrupt
■ ST626x-EMU2 Emulation and Development
System (connects to an MS-DOS PC via a
parallel port)
ST62T52C
ST62T62C/E62C
PDIP16
PSO16
SSOP16
CDIP16W
(See end of Datasheet for Ordering Information)
DEVICE SUMMARY
DEVICE
ST62T52C 1836 ST62T62C 1836 64
ST62E62C 1836 64
EPROM
(Bytes)
OTP
(Bytes)
EEPROM
Rev. 2.7
November 1999 1/78
1
Page 2

Table of Contents
Document
Page
ST62T52C/ST62T62C/E62C ............................1
1 GENERAL DESCRIPTION . .. . . . ................................................ 5
1.1 INTRODUCTION . . . . . .. . . . . . . ............................................ 5
1.2 PIN DESCRIPTIONS . . . . . . ................................................6
1.3 MEMORY MAP . . . . . . . . . . ................................................7
1.3.1 Introduction . . . ..................................................... 7
1.3.2 Program Space . . . . . . . . . . . . . . . . . . . .................................. 8
1.3.3 Data Space . . . . . . . . . . . . . . . . . . . . . . . . ................................ 9
1.3.4 Stack Space . . . . . . . . . . . . ............................................9
1.3.5 Data Window Register (DWR) . ........................................10
1.3.6 Data RAM/EEPROM Bank Register (DRBR) . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.7 EEPROM Description . . . . . . . . . . . . . . .. . . . . ........................... 12
1.4 PROGRAMMING MODES . . . . . .. . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4.1 Option Bytes . . . . . . . . . . . . . . .. . . . . . . . . .............................. 14
1.4.2 Program Memory . . . ................................................ 14
1.4.3 . EEPROM Data Memory . . . . ......................................... 15
2 CENTRAL PROCESSING UNIT . . ............................................... 16
2.1 INTRODUCTION . . . . . .. . . . . . . ........................................... 16
2.2 CPU REGISTERS . . . .................................................... 16
3 CLOCKS, RESET, INTERRUPTS AND POWERSAVING MODES . . ...................18
3.1 CLOCK SYSTEM . . . . . . . . . . . . . ........................................... 18
3.1.1 Main Oscillator . .. . . . . . . .. . . . . . . . . . ................................. 18
3.1.2 Low Frequency Auxiliary Oscillator (LFAO) . . . . . . . . . . . . . . .. . . . . . . . . . .. . . . . 19
3.1.3 Oscillator Safe Guard . . . . . ...........................................19
3.2 RESETS . . . . . . . . .. . .. . . . . . . . . .. . . . . . . . . . .. . . . .. . . . .. . . . .. . . . . . . .. . . . . . . 22
3.2.1 RESET Input . . .................................................... 22
3.2.2 Power-on Reset .................................................... 22
3.2.3 Watchdog Reset . . . . . . . . . . . . . . . . .. ................................. 23
3.2.4 LVD Reset . . . . .. . . . ............................................... 23
3.2.5 Application Notes . . . ................................................23
3.2.6 MCU Initialization Sequence . . . . . . . . ..................................24
3.3 DIGITAL WATCHDOG . . . . . . . . . . .. . . . . . . .................................. 26
3.3.1 Digital Watchdog Register (DWDR) . . . . . . .. .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.2 Application Notes . . . ................................................28
3.4 INTERRUPTS . . . . . . . . . . .. . . . . . . . . . .. . . . . . . . . . .. . . . . . . . . .. . . . . . . .. .. . . . . 30
3.4.1 Interrupt request . ...................................................30
3.4.2 Interrupt Procedure . . . . . . . . . . . . . . .. ................................. 31
3.4.3 Interrupt Option Register(IOR) . . . . . . . . . . . . . . . . . . . .. . . . . ............... 32
3.4.4 Interrupt Sources . . . .. . . . . . . .. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . .. . . . . 32
3.5 POWER SAVING MODES . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ........ 34
3.5.1 WAIT Mode ....................................................... 34
3.5.2 STOP Mode . .. . . . . . ...............................................34
3.5.3 Exit from WAIT and STOP Modes . . . . ..................................35
78
2/78
2
Page 3

Table of Contents
4 ON-CHIP PERIPHERALS . . . .. . . . . . . ...........................................36
4.1 I/O PORTS . . . . . . .. . . . . . . . . . ............................................ 36
4.1.1 Operating Modes . . . . . . .. . . . .. . . . .. . . . . . . ........................... 37
4.1.2 Safe I/O State Switching Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 38
4.1.3 ARTimer alternate functions . . . . .. . . . . . . . . . ........................... 40
4.2 TIMER . . . . . . . . . . . . .. . . . . . . .. .. . . . . . . . ................................. 41
4.2.1 Timer Operation . . . . . . . .. . . . . . . . . . . . . . .............................. 42
4.2.2 Timer Interrupt . . . . . . . . . . . . . . . . . . . . . ................................ 42
4.2.3 Application Notes . . . ................................................42
4.2.4 Timer Registers . . . . . ...............................................43
4.3 AUTO-RELOAD TIMER . . . . . . . . . . . . . . . . . . . . . .............................. 44
4.3.1 AR Timer Description . . . . . . . . ........................................44
4.3.2 Timer Operating Modes . . .. . . . .. . . . .................................. 44
4.3.3 AR Timer Registers . . . . . . . . . . . . . . . . ................................. 48
4.4 A/D CONVERTER (ADC) . . ............................................... 50
4.4.1 Application Notes . . . ................................................50
5 SOFTWARE . . . . . . . . . . . . . . . . . ............................................... 52
5.1 ST6 ARCHITECTURE . ................................................... 52
5.2 ADDRESSING MODES . . . . . . . . . . . . . . . . . .................................. 52
5.3 INSTRUCTION SET . . . . . . . ............................................... 53
6 ELECTRICAL CHARACTERISTICS . .. . . . . . . . . . . . . . .............................. 58
6.1 ABSOLUTE MAXIMUM RATINGS . . . ........................................58
6.2 RECOMMENDED OPERATING CONDITIONS . . . .............................. 59
6.3 DC ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . ...........60
6.4 AC ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 61
6.5 A/D CONVERTERCHARACTERISTICS . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 62
6.6 TIMER CHARACTERISTICS . . . . ........................................... 62
6.7 SPI CHARACTERISTICS . . ...............................................62
6.8 ARTIMER ELECTRICAL CHARACTERISTICS . . . . . . ........................... 62
7 GENERAL INFORMATION . . .. . . . . . . ...........................................68
7.1 PACKAGE MECHANICALDATA . . . . . . . . . . . . . . . . . ........................... 68
7.2 ORDERING INFORMATION . . . . . . . . . . . . . .................................. 70
Document
Page
ST62P52C/ST62P62C . . . . ............................71
1 GENERAL DESCRIPTION . .. . . . ............................................... 72
1.1 INTRODUCTION . . . . . .. . . . . . . ........................................... 72
1.2 ORDERING INFORMATION . . . . . . . . . . . . . .................................. 72
1.2.1 Transfer of Customer Code . . . . . . . . . . ................................. 72
1.2.2 Listing Generation and Verification . . . . ................................. 72
3/78
3
Page 4

Table of Contents
Document
Page
ST6252C/ST6262B . . . . ..............................75
1 GENERAL DESCRIPTION . .. . . . ............................................... 76
1.1 INTRODUCTION . . . . . .. . . . . . . ........................................... 76
1.2 ROM READOUT PROTECTION .. . . . .. . . . . . ................................76
1.3 ORDERING INFORMATION . . . . . . . . . . . . . .................................. 78
1.3.1 Transfer of Customer Code . . . . . . . . . . ................................. 78
1.3.2 Listing Generation and Verification . . . . ................................. 78
4/78
1
78
Page 5
1 GENERAL DESCRIPTION
1.1 INTRODUCTION
ST62T52C ST62T62C/E62C
The ST62T52C and ST62T62C devicesis lowcost
members of theST62xx 8-bitHCMOSfamily ofmicrocontrollers, which is targeted at low to medium
complexity applications. All ST62xx devices are
based on a building block approach: a common
core issurroundedby a numberof on-chip peripherals.
The ST62E62C isthe erasable EPROM version of
the ST62T62C device, which may be used to emulate the ST62T52C and ST62T62C devices as
well as the ST6252C and ST6262B ROMdevices.
OTP and EPROM devices are functionally identical. The ROM basedversions offer the same functionality selecting as ROM options the options de-
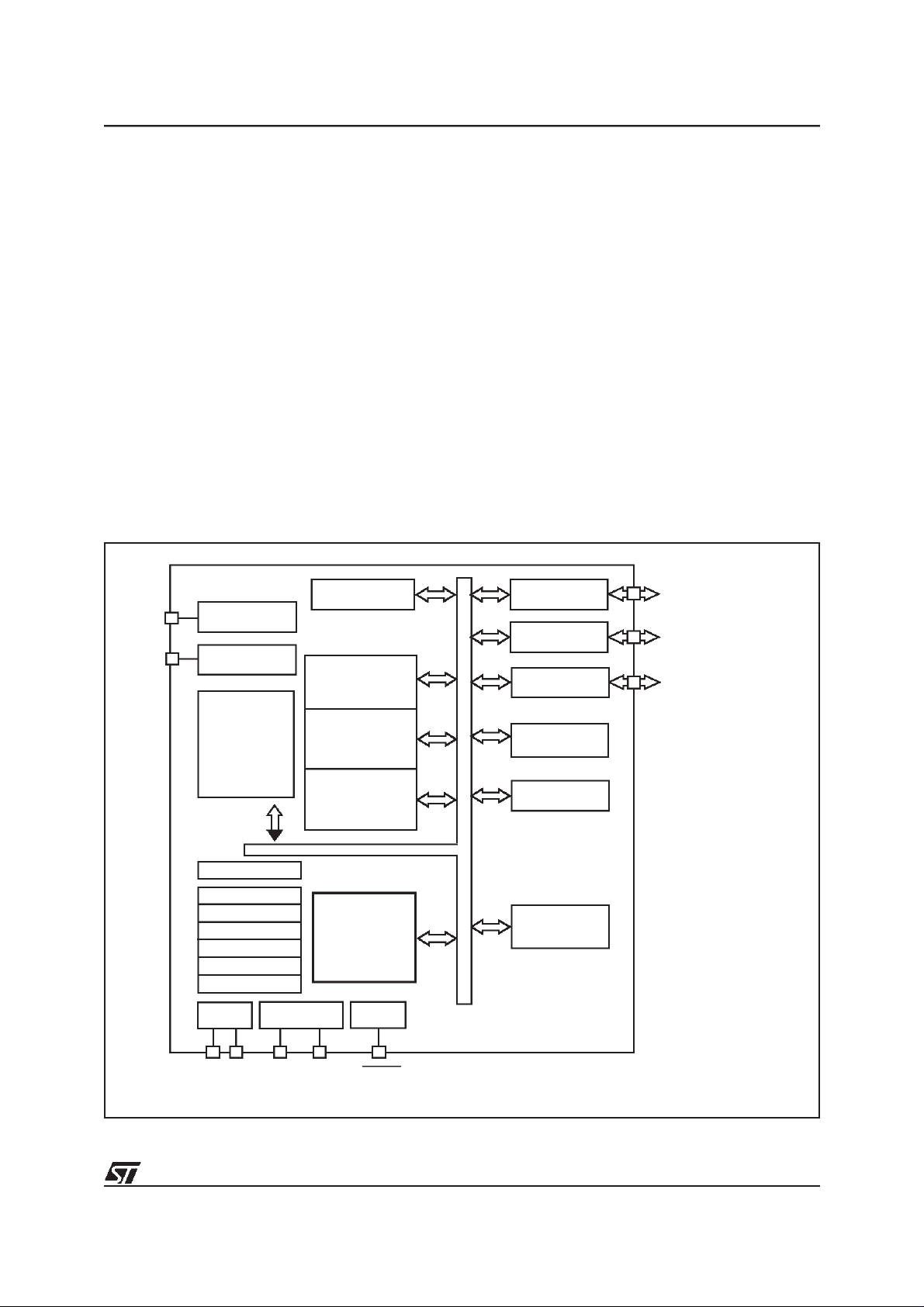
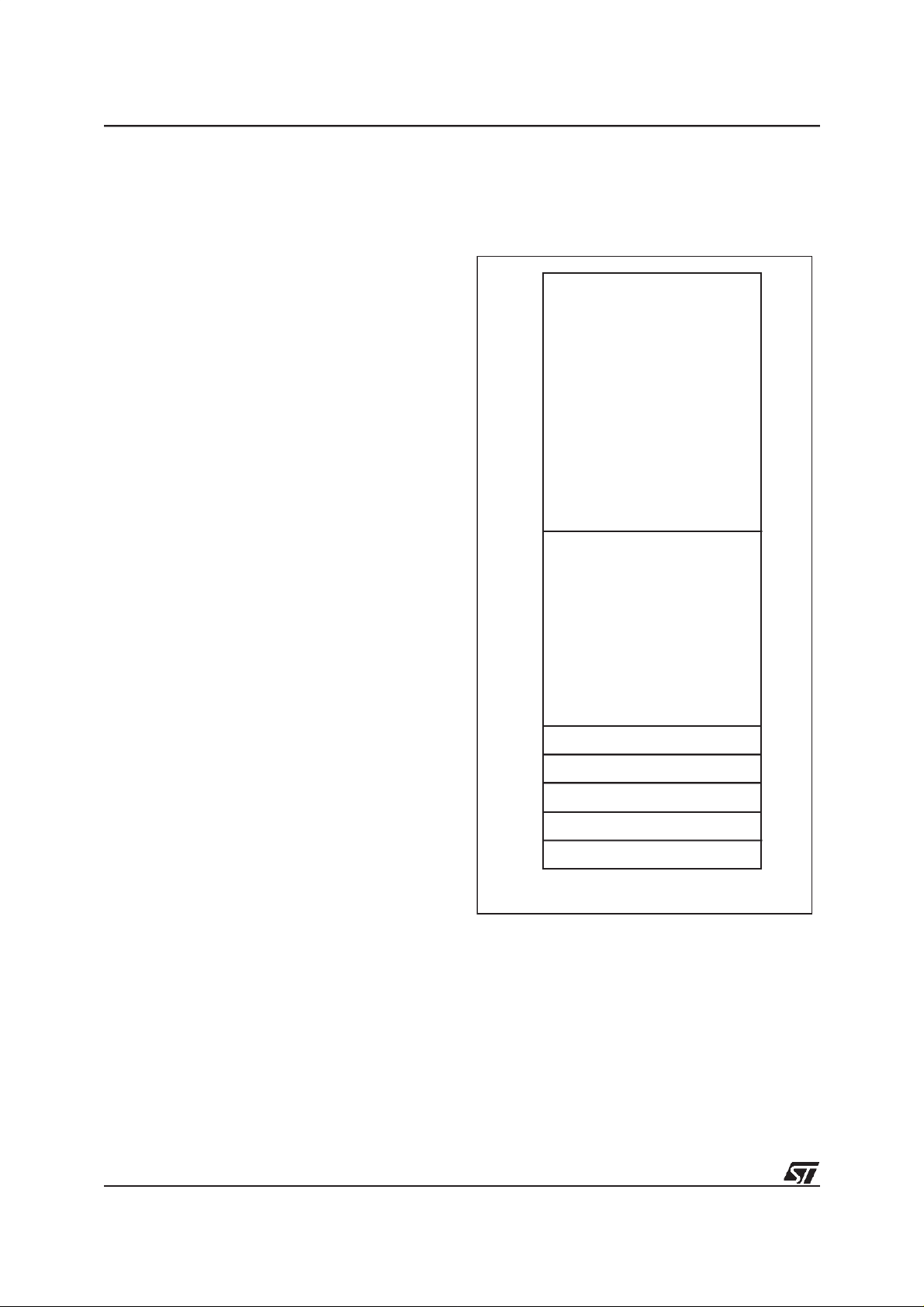
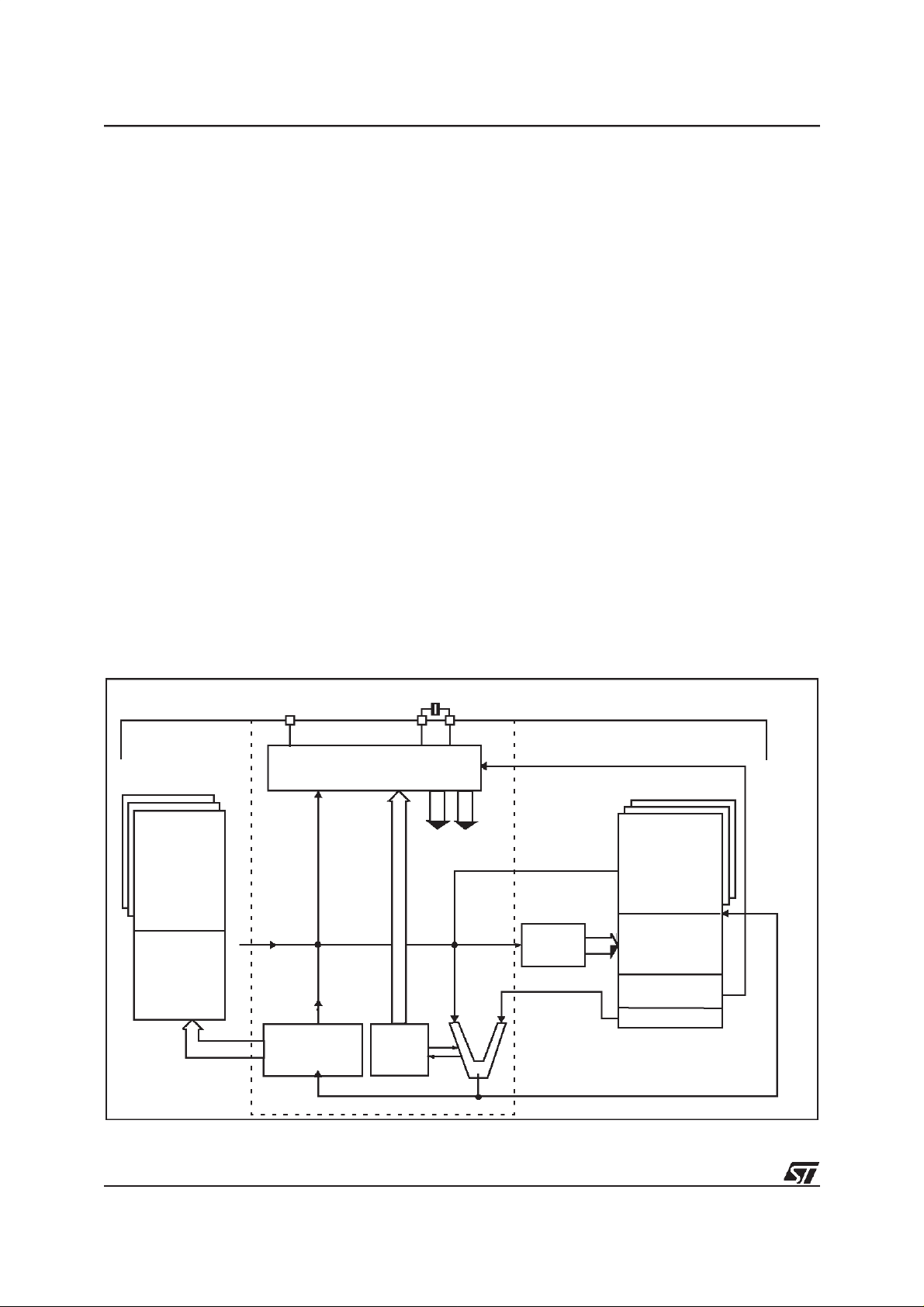
Figure 1. Block Diagram
8-BIT
TEST/V
PP
NMI INTERRUPT
TEST
PROGRAM
MEMORY
1836 bytes OTP
(ST62T52C, T62C)
1836 bytes EPROM
(ST62E62C)
A/D CONVERTER
DATA ROM
USER
SELECTABLE
DATA RAM
128 Bytes
DATA EEPROM
64 Bytes
(ST62T62C/E62C)
fined in the programmable option byte of the
OTP/EPROM versions.
OTP devices offer all the advantages of user programmability at low cost, which make them the
ideal choicein a wide range of applications where
frequent code changes, multiple code versions or
last minute programmability are required.
These compact low-cost devices feature a Timer
comprising an 8-bit counter and a 7-bit programmable prescaler, an 8-bit Auto-Reload Timer,
EEPROM data capability (except ST62T52C), an
8-bit A/D Converter with4 analoginputsanda Digital Watchdog timer, making them well suited for a
wide range of automotive, appliance and industrial
applications.
PORT A
PORT B
PORT C PC2..PC3 / Ain
AUTORELOAD
TIMER
TIMER
PA4..PA5/ Ain
PB0, PB2..PB3 / 30 mA Sink
PB6 / ARTimin / 20 mA Sink
PB7 / ARTimout/ 20 mA Sink
PC
STACK LEVEL 1
STACK LEVEL 2
STACK LEVEL 3
STACK LEVEL 4
STACK LEVEL 5
STACK LEVEL 6
POWER
SUPPLY
V
DDVSS
OSCILLATOR
OSCin OSCout RESET
8 BIT CORE
RESET
DIGITAL
WATCHDOG
5/78
4
Page 6
ST62T52C ST62T62C/E62C
1.2 PIN DESCRIPTIONS
VDDand VSS. Power is supplied to the MCU via
these two pins. VDDis the power connection and
VSSis the ground connection.
OSCin and OSCout. These pins are internally
connected tothe on-chip oscillator circuit. A quartz
crystal, a ceramic resonator or an external clock
signal can be connected between these two pins.
The OSCin pin is the input pin, the OSCout pin is
the output pin.
RESET. The active-low RESET pin is used to restart themicrocontroller.
TEST/VPP. TheTEST must be held at VSSfor nor-
mal operation. If TEST pin is connected to a
+12.5V level during the reset phase, the
EPROM/OTP programmingMode is entered.
NMI. TheNMI pin provides the capability for asynchronous interruption,byapplying an external non
maskable interrupt to the MCU. The NMI input is
falling edge sensitive. It is providedwith anon-chip
pullup resistor (if option has been enabled), and
Schmitt triggercharacteristics.
PA4-PA5. These 2 lines are organized as one I/O
port (A). Each line may be configured under software controlas inputs withor without internal pullup resistors, interrupt generating inputs with pullup resistors, open-drain or push-pulloutputs, analog inputs for the A/D converter.
PB0, PB2-PB3, PB6-PB7. These 5 lines are organized as one I/O port (B).Each linemaybe configured under software control as inputs with or
without internal pull-up resistors, interrupt generating inputs with pull-up resistors, open-drain or
push-pull outputs. PB6/ARTIMin and PB7/ARTI-
Mout are either Port B I/O bits or the Input and
Output pins of the ARTimer.
Reset state of PB2-PB3pins canbedefinedbyoption either with pull-up or high impedance.
PB0, PB2-PB3, PB6-PB7 scan also sink30mA for
direct LED driving.
PC2-PC3. These 2 lines are organized as one I/O
port (C). Each line may be configured under software control as input with or without internal pullup resistor, interrupt generating input with pull-up
resistor, analog input for the A/D converter, opendrain or push-pull output.
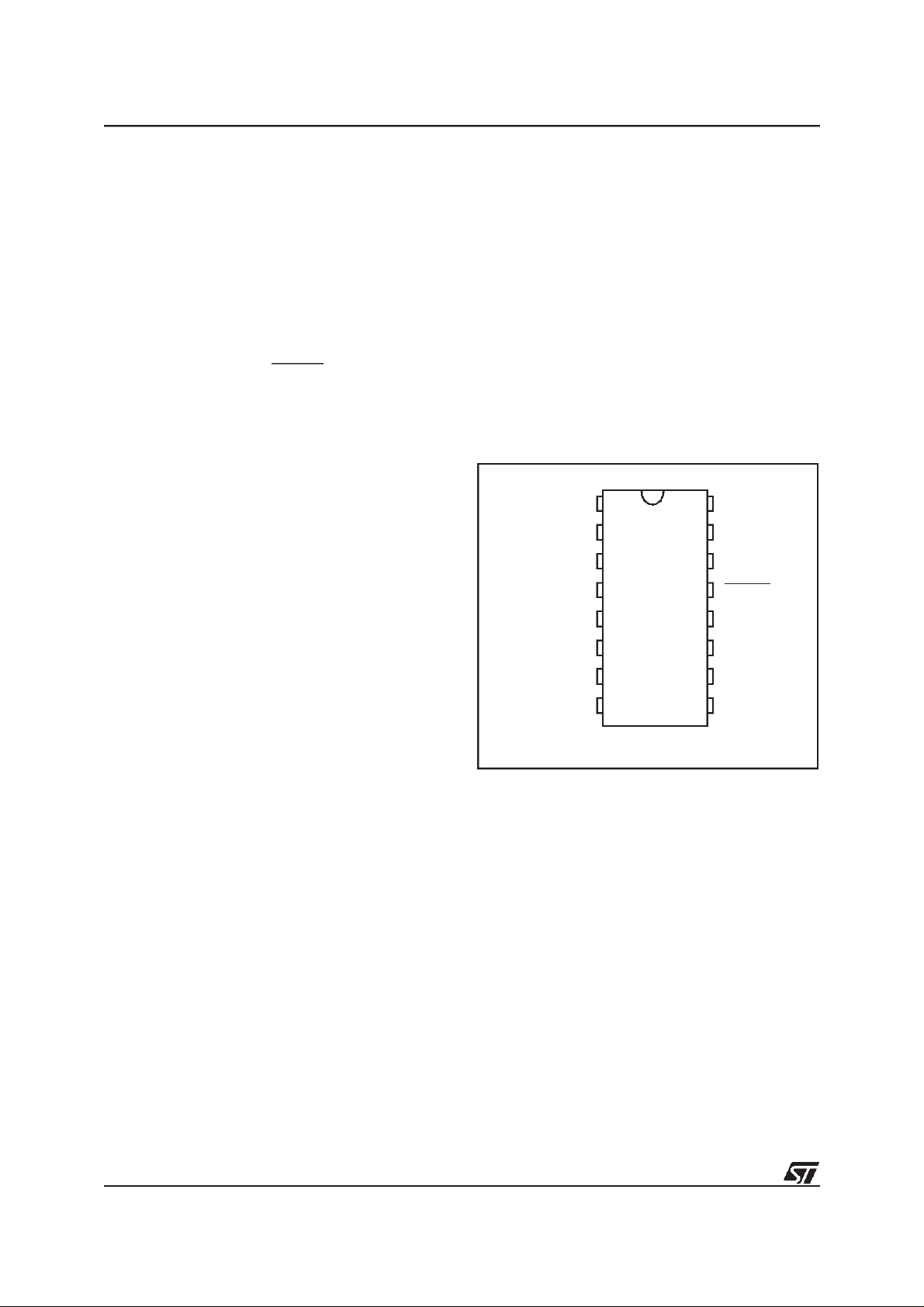
Figure 2. ST62T52C, E62C and T62C Pin
Configuration
PB0
/TEST
V
PP
PB2
PB3
ARTIMin/PB6
ARTIMout/PB7
V
DD
V
SS
1
2
3
4
5
6
7
89
16
15
14
13
12
10
11
PC2/Ain
PC3/Ain
NMI
RESET
OSCout
OSCin
PA5/Ain
PA4/Ain
6/78
5
Page 7
1.3 MEMORY MAP
ST62T52C ST62T62C/E62C
1.3.1 Introduction
The MCU operates in three separate memory
spaces: Program space, Data space, and Stack
space. Operation in thesethreememory spaces is
described in the following paragraphs.
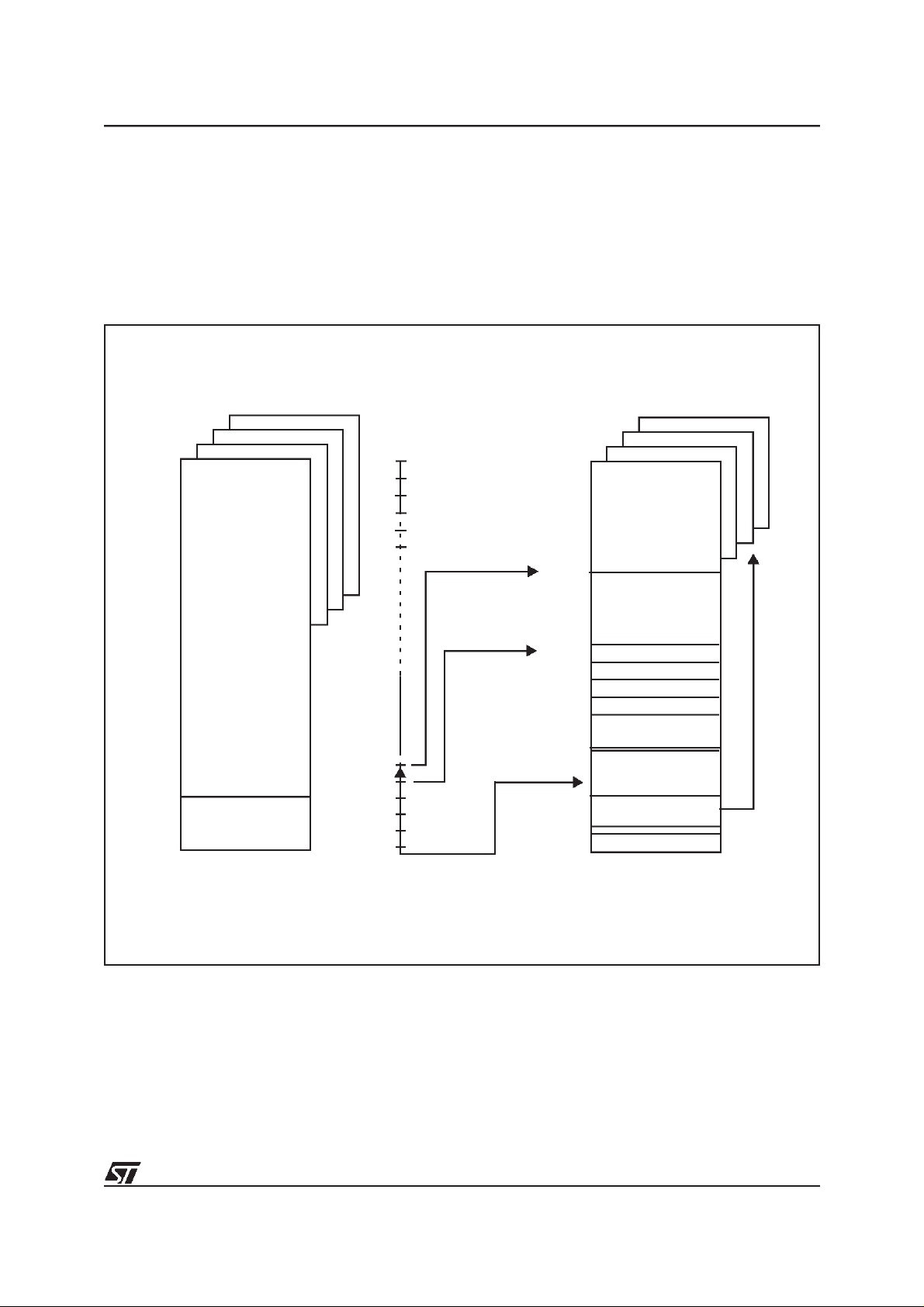
Figure 3. Memory Addressing Diagram
PROGRAM SPACE
0000h
0-63
PROGRAM
MEMORY
Briefly, Program space contains user program
code in OTP and user vectors; Data space contains user data in RAM and in OTP, and Stack
space accommodates six levels of stack for subroutine and interrupt service routine nesting.
DATA SPACE
000h
RAM / EEPROM
BANKING AREA
03Fh
040h
DATA READ-ONLY
07Fh
080h
081h
082h
083h
084h
MEMORY
X REGISTER
Y REGISTER
V REGISTER
W REGISTER
WINDOW
RAM
0FF0h
0FFFh
INTERRUPT &
RESET VECTORS
0C0h
0FFh
DATA READ-ONLY
MEMORY
WINDOW SELECT
DATA RAM
BANK SELECT
ACCUMULATOR
7/78
6
Page 8
ST62T52C ST62T62C/E62C
MEMORY MAP(Cont’d)
1.3.2 Program Space
Program Space comprises the instructions to be
executed, the data required for immediate addressing mode instructions, the reserved factory
test area and the user vectors. Program Space is
addressed viathe12-bit ProgramCounter register
(PC register).
1.3.2.1 Program Memory Protection
The Program Memory in OTP or EPROM devices
can be protected against external readout of memory by selecting the READOUT PROTECTION option in the option byte.
In the EPROM parts, READOUT PROTECTION
option can be disactivated only by U.V. erasure
that also results into the whole EPROM context
erasure.
Note: Oncethe Readout Protection is activated, it
is no longer possible, even for STMicroelectronics,
to gain access to the OTP contents. Returned
parts with aprotectionset can therefore not be accepted.
Figure 4. ST62T52C/T62C Program
Memory Map
0000h
RESERVED
087Fh
0880h
USER
PROGRAM MEMORY
1836 BYTES
(OTP/EPROM)
*
0F9Fh
0FA0h
0FEFh
0FF0h
0FF7h
0FF8h
0FFBh
0FFCh
0FFDh
0FFEh
0FFFh
RESERVED
INTERRUPT VECTORS
RESERVED
NMI VECTOR
USER RESET VECTOR
*
(*) Reserved areas should be filled with 0FFh
8/78
7
Page 9
MEMORY MAP(Cont’d)
1.3.3 Data Space
Data Spaceaccommodates all the datanecessary
for processingthe user program. This space comprises the RAM resource, the processor core and
peripheral registers, as well as read-only data
such as constants and look-up tables in
OTP/EPROM.
1.3.3.1 Data ROM
All read-only data is physically stored in program
memory, which also accommodates the Program
Space. The program memory consequently contains the program code to be executed, as well as
the constants and look-up tables required by the
application.
The Data Space locations in which the different
constants and look-up tables are addressed by the
processor core may be thought of as a 64-byte
window through which it is possible to access the
read-only data stored in OTP/EPROM.
1.3.3.2 Data RAM/EEPROM
In ST62T52C, T62C and ST62E62C devices, the
data space includes 60 bytes of RAM, the accumulator (A), the indirect registers (X), (Y), the short
direct registers (V), (W), the I/Oport registers, the
peripheral data and control registers, the interrupt
option register and theDataROM Window register
(DRW register).
Additional RAM and EEPROM pages can also be
addressed using banks of 64 bytes located between addresses00h and 3Fh.
1.3.4 Stack Space
Stack space consists of six 12-bit registers which
are used to stack subroutine and interrupt return
addresses, as wellas the current program counter
contents.
Table 1. Additional RAM / EEPROM Banks
Device RAM EEPROM
ST62T52C 1 x 64 bytes ST62T62C 1 x 64 bytes 1 x 64bytes
ST62T52C ST62T62C/E62C
Table 2. ST62T52C, T62C and ST62E62C Data
Memory Space
RAM / EEPROM banks
DATA ROM WINDOW AREA
X REGISTER 080h
Y REGISTER 081h
V REGISTER 082h
W REGISTER 083h
DATA RAM 60 BYTES
PORT A DATA REGISTER 0C0h
PORT B DATA REGISTER 0C1h
PORT C DATA REGISTER 0C2h
RESERVED 0C3h
PORT A DIRECTION REGISTER 0C4h
PORT B DIRECTION REGISTER 0C5h
PORT C DIRECTIONREGISTER 0C6h
RESERVED 0C7h
INTERRUPT OPTIONREGISTER 0C8h*
DATA ROM WINDOW REGISTER 0C9h*
RESERVED
PORT A OPTION REGISTER 0CCh
PORT B OPTION REGISTER 0CDh
PORT C OPTION REGISTER 0CEh
RESERVED 0CFh
A/D DATA REGISTER 0D0h
A/D CONTROL REGISTER 0D1h
TIMER PRESCALERREGISTER 0D2h
TIMER COUNTERREGISTER 0D3h
TIMER STATUS CONTROL REGISTER 0D4h
AR TIMER MODE CONTROL REGISTER 0D5h
AR TIMERSTATUS/CONTROLREGISTER1 0D6h
AR TIMERSTATUS/CONTROLREGISTER2 0D7h
WATCHDOG REGISTER 0D8h
AR TIMERRELOAD/CAPTURE REGISTER 0D9h
AR TIMERCOMPARE REGISTER 0DAh
AR TIMER LOAD REGISTER 0DBh
OSCILLATOR CONTROL REGISTER 0DCh*
MISCELLANEOUS 0DDh
RESERVED
DATA RAM/EEPROM REGISTER 0E8h*
RESERVED 0E9h
EEPROMCONTROL REGISTER 0EAh
RESERVED
ACCUMULATOR 0FFh
* WRITE ONLY REGISTER
000h
03Fh
040h
07Fh
084h
0BFh
0CAh
0CBh
0DEh
0E7h
0EBh
0FEh
9/78
8
Page 10
ST62T52C ST62T62C/E62C
MEMORY MAP(Cont’d)
1.3.5 Data Window Register (DWR)
Data Window Register (DWR)
TheDataread-only memorywindowislocatedfrom
address 0040h toaddress 007Fh in Data space. It
allows directreadingof64 consecutive bytes located anywhere in program memory, between address 0000h and 0FFFh (top memory address depends on the specific device). All the program
memory can therefore be used to store either instructions or read-only data. Indeed, the window
can be moved in steps of 64 bytes along the program memoryby writingtheappropriatecodeinthe
Data Window Register (DWR).
The DWR can beaddressedlike anyRAMlocation
in theData Space, it is howevera write-only register andtherefore cannotbe accessedusingsinglebit operations. This register is used to position the
64-byte read-onlydata window(from address 40h
to address 7Fh of the Data space) in program
memory in 64-byte steps. The effective address of
the byte to be read as data in program memory is
obtained by concatenating the 6 least significant
bits of the registeraddress given in the instruction
(as least significant bits) and the content of the
DWR register (asmost significant bits),as illustrated in Figure 5 below. For instance, when addressing location 0040h of the Data Space, with 0 loaded in the DWR register, the physical location addressed in program memory is 00h. The DWR register is not cleared on reset, therefore it must be
written to prior to the first access to the Data readonly memory window area.
Address: 0C9h — Write Only
70
- - DWR5 DWR4 DWR3 DWR2 DWR1 DWR0
Bits 6, 7= Not used.
Bit 5-0 = DWR5-DWR0:
Window Register Bits.
Data read-only memory
These are the Data readonly memory Window bits that correspond to the
upper bits of the dataread-only memory space.
Caution:
This register is undefined on reset. Neither read nor single bit instructionsmay be used to
address this register.
Note: Care is required when handling the DWR
register as it is write only. For this reason, the
DWR contents should not be changed while executing an interrupt service routine, as the service
routine cannot saveand thenrestoretheregister’s
previous contents. If it is impossible to avoid writing to the DWRduring the interrupt service routine,
an image of the register must be saved in a RAM
location, and each time the program writes to the
DWR, it must also writeto theimage register. The
image register must be written first so that, if an interrupt occurs between the two instructions, the
DWR is not affected.
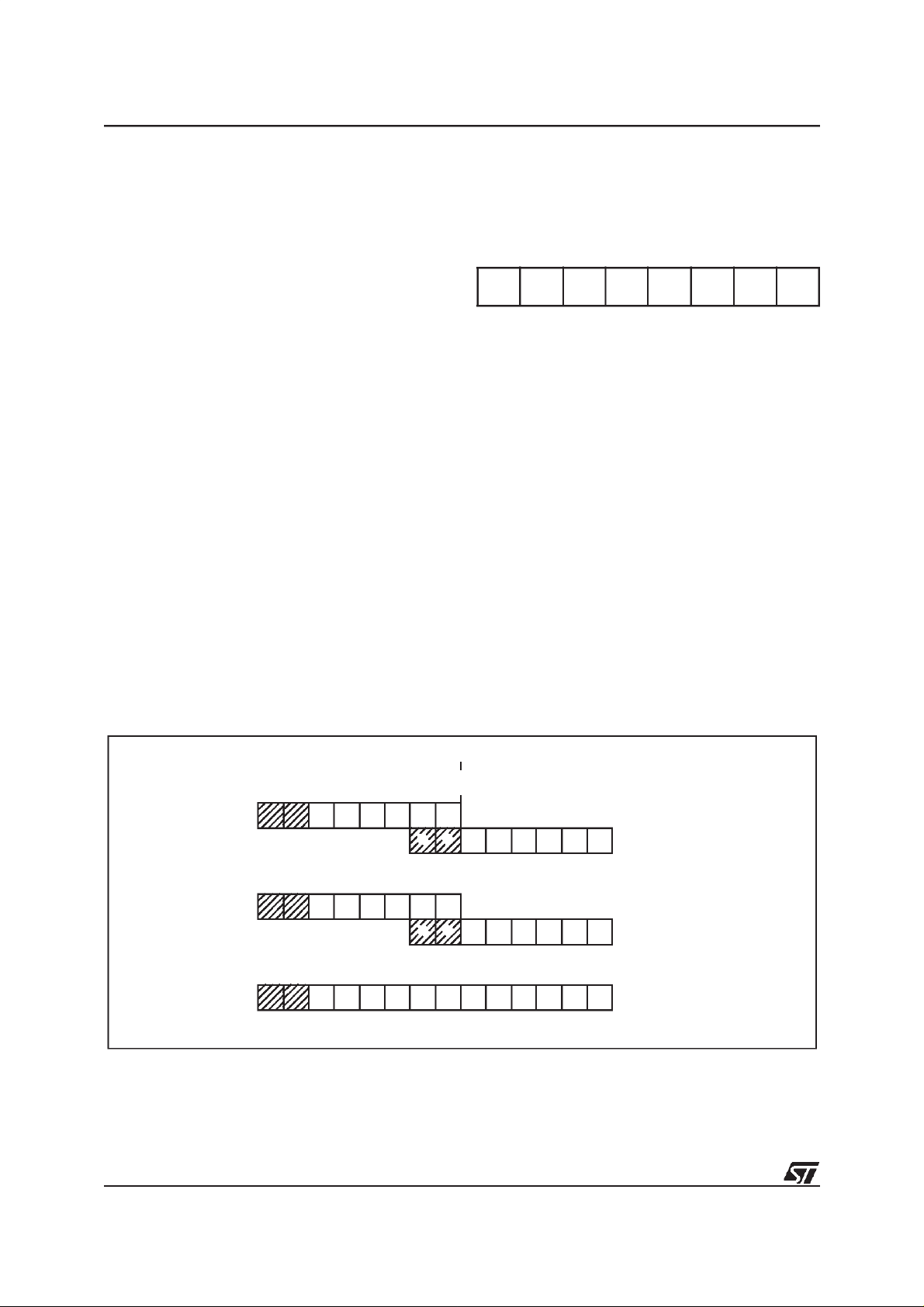
Figure 5. Data read-only memory Window Memory Addressing
543210
DATA ROM
WINDOW REGISTER
CONTENTS
(DWR)
Example:
DWR=28h
ROM
ADDRESS:A19h
12
13
765432 0
11
1100000001
67891011
1
543210
0
1
0
000
0
1
1
01001
11
PROGRAM SPACE ADDRESS
READ
DATA SPACE ADDRESS
40h-7Fh
IN INSTRUCTION
DATA SPACE ADDRESS
59h
:
:
VR01573C
10/78
9
Page 11

ST62T52C ST62T62C/E62C
MEMORY MAP(Cont’d)
1.3.6 Data RAM/EEPROM Bank Register
(DRBR)
Address: E8h — Write only
70
---
DRBR
---
4
DRBR
0
Bit 7-5= These bits are not used
Bit 4 - DRBR4. This bit, when set, selects RAM
Page 2.
Bit 3-1. Not used
Bit 0. DRBR0. This bit, when set, selects EEP-
ROM page 0.
The selection of the bank is made byprogramming
the Data RAM Bank Switch register (DRBR register) located at address E8h of the Data Space according to Table 1.No more than one bank should
be setat a time.
The DRBR register can be addressed like a RAM
Data Space at the address E8h; nevertheless it is
a write only register that cannot be accessed with
single-bit operations. This register isused toselect
the desired 64-byte RAM bank of the Data Space.
The bank number has to be loaded in the DRBR
register and the instruction has to point to the selected location as if it was in bank 0 (from 00h address to 3Fh address).
This registeris not cleared during the MCU initialization, therefore it must be written before the first
access to the Data Space bank region. Refer to
the Data Space description for additional informa-
tion. The DRBR register is not modified when an
interrupt or a subroutine occurs.
Notes :
Care is requiredwhen handling the DRBR register
as it is write only. For this reason, it is not allowed
to change the DRBR contents while executing interrupt service routine, as the service routine cannot save and then restore its previous content. If it
is impossible to avoid the writing of thisregister in
interrupt service routine, an image of this register
must be saved in a RAM location, and each time
the program writes to DRBR it must write also to
the image register. The image register must be
written first, so if an interrupt occurs between the
two instructions the DRBR is not affected.
In DRBR Register, only 1 bit must be set. Otherwise two or more pages are enabled in parallel,
producing errors.
Care must also be taken not to change the
E
PROM page (when available) when the parallel
writing mode is set for theE PROM, as defined in
EECTL register.
Table 3. Data RAM Bank Register Set-up
DRBR ST62T52C ST62T62C
00 None None
01 Not available EEPROM page 0
02 Not Available Not Available
08 Not available Not available
10h RAM Page 2 RAM Page 2
other Reserved Reserved
10
11/78
Page 12
ST62T52C ST62T62C/E62C
MEMORY MAP(Cont’d)
1.3.7 EEPROM Description
EEPROM memory is located in 64-byte pages in
data space. This memory may be used by the user
program for non-volatile data storage.
Data spacefrom 00h to3Fh ispagedas described
in Table 4 . EEPROM locations are accessed directly by addressing these paged sections of data
space.
The EEPROM does notrequire dedicated instructions forread orwrite access.Onceselectedviathe
Data RAM Bank Register, the active EEPROM
page is controlledby theEEPROM Control Register (EECTL),which is described below.
Bit E20FFoftheEECTL registermust bereset prior
to any write or read access to the EEPROM. If no
bank hasbeenselected, orif E2OFFisset,any access is meaningless.
Programming must be enabled by setting the
E2ENA bitof the EECTL register.
The E2BUSY bit of the EECTL register is setwhen
the EEPROM is performing a programming cycle.
Any access to the EEPROM when E2BUSY is set
is meaningless.
Provided E2OFFand E2BUSY arereset, an EEPROM location is readjust like any other data location, alsoin terms of access time.
Writing to the EEPROM may be carried out in two
modes: Byte Mode (BMODE) and Parallel Mode
(PMODE). In BMODE, one byte is accessed at a
time, while in PMODE up to 8 bytes in the same
row are programmed simultaneously (with consequent speed andpower consumption advantages,
the latter being particularly important in battery
powered circuits).
General Notes:
Data should be writtendirectly to the intended ad-
dress in EEPROM space.There is no buffer memory between data RAM andthe EEPROM space.
When the EEPROM is busy (E2BUSY = “1”)
EECTL cannot be accessed in write mode, it is
only possible to read the status of E2BUSY. This
implies that as long as the EEPROM is busy, it is
not possible to change the status of the EEPROM
Control Register. EECTL bits 4 and 5 are reserved
and must never be set.
Care is required whendealing with the EECTL register, as some bits are write only. For this reason,
the EECTL contents must not be altered while executing an interrupt service routine.
If it is impossible to avoid writing to this register
within an interrupt service routine, animage of the
register must be saved in a RAM location, and
each time the program writes to EECTL it must
also write to the image register. The image register
must be written to first so that, if an interrupt occurs between the two instructions, the EECTL will
not be affected.
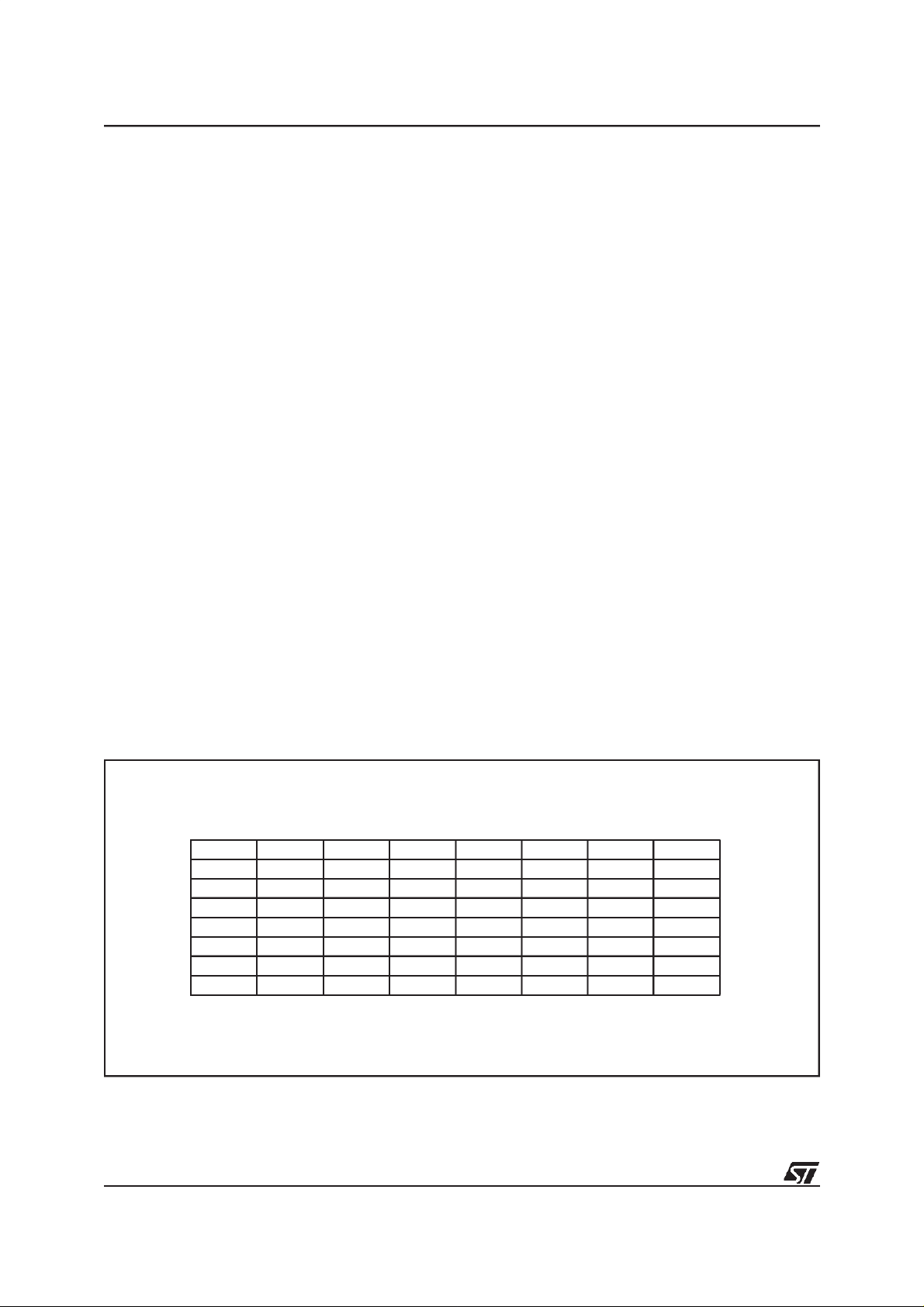
Table 4. Row Arrangement for Parallel Writing of EEPROM Locations
Dataspace
addresses.
Banks 0 and 1.
Byte 0 1234567
ROW7 38h-3Fh
ROW6 30h-37h
ROW5 28h-2Fh
ROW4 20h-27h
ROW3 18h-1Fh
ROW2 10h-17h
ROW1 08h-0Fh
ROW0 00h-07h
Up to8 bytes in each row may be programmed simultaneously in Parallel Write mode.
The number of available 64-byte banks (1 or 2) is device dependent.
Note: The EEPROM is disabled as soon as STOP instruction is executed in order to achieve the lowest
power-consumption.
12/78
11
Page 13
MEMORY MAP(Cont’d)
Additional Notes on Parallel Mode:
If the user wishes to perform parallel programming, the first step should be to set the E2PAR2
bit. From this time on, the EEPROM will be addressed in write mode, the ROW address will be
latched and it will be possible to change it only at
the end of the programming cycle, or by resetting
E2PAR2 without programming the EEPROM. After the ROW addressis latched,the MCUcanonly
“see” the selected EEPROM row and any attempt
to write or read other rows will produce errors.
The EEPROM should not be read while E2PAR2
is set.
As soon as the E2PAR2 bit is set, the 8 volatile
ROW latches are cleared. From this moment on,
the user can load data in allor inpart ofthe ROW.
Setting E2PAR1 will modify the EEPROM registers corresponding to the ROW latches accessed
after E2PAR2. For example, if the software sets
E2PAR2 andaccesses the EEPROM by writing to
addresses 18h, 1Ah and 1Bh, and then sets
E2PAR1, these three registers will be modified simultaneously; the remaining bytes in the row will
be unaffected.
Note that E2PAR2 is internally reset at the end of
the programming cycle. This implies that the user
must setthe E2PAR2bit betweentwo parallel programming cycles. Note that if the user tries to set
E2PAR1 while E2PAR2 is not set, there will be no
programming cycleand the E2PAR1 bit will be unaffected. Consequently, the E2PAR1 bit cannot be
set if E2ENA is low.The E2PAR1 bit can be setby
the user, only if the E2ENA and E2PAR2 bits are
also set.
Notes: The EEPROM page shall not be changed
through the DRBR register when the E2PAR2 bit
is set.
ST62T52C ST62T62C/E62C
EEPROM Control Register (EECTL)
Address: EAh — Read/Write
Reset status: 00h
70
E2O
D7
Bit 7 =D7:
Bit6=E2OFF:
FF
D5 D4
Unused.
Stand-byEnableBit.
Ifthisbitis settheEEPROM isdisabled(anyaccess
will bemeaningless) andthepower consumptionof
the EEPROM is reduced to its lowest value.
Bit 5-4 = D5-D4:
Reserved.
Bit 3 =E2PAR1:
OnceinParallelMode,as soonastheusersoftware
sets the E2PAR1 bit, parallel writing of the 8 adjacent registers will start. Thisbitisinternally reset at
the end of the programming procedure. Note that
less than 8 bytescan bewritten if required, the undefined bytes being unaffected by the parallelprogrammingcycle;thisisexplainedingreater detailin
the Additional Notes on Parallel Mode overleaf.
Bit 2 = E2PAR2:
ONLY. This bitmust be set by the user program in
order to perform parallel programming. If E2PAR2
is set and the parallel start bit (E2PAR1) is reset,
up to 8 adjacent bytes can be written simultaneously. These 8 adjacent bytesareconsidered as a
row, whose address lines A7, A6, A5, A4, A3 are
fixed while A2, A1 and A0 arethechangingbits, as
illustrated in Table 4. E2PAR2 is automatically reset at the end of any parallel programming procedure. It can be reset by the user software before
starting the programming procedure, thus leaving
the EEPROM registers unchanged.
Bit 1 = E2BUSY:
LY. This bit is automatically set by the EEPROM
control logic when the EEPROM is in programming mode. The userprogram should test it before
any EEPROM read orwriteoperation;any attempt
to access the EEPROM while the busy bit is set
will be aborted and the writing procedure in
progress will be completed.
Bit 0 =E2ENA:
EEPROM Enable Bit.
LY. This bit enables programming of the EEPROM
cells. It must be set before any write to the EEPROM register. Any attempt to write to the EEPROM when E2ENA is low is meaningless and will
not trigger a write cycle.
E2PAR1E2PAR2E2BUSYE2E
WRITE ONLY.
MUST bekept reset.
Parallel Start Bit.
WRITE ONLY.
Parallel Mode En. Bit.
EEPROM Busy Bit.
NA
WRITE
READ ON-
WRITE ON-
12
13/78
Page 14
ST62T52C ST62T62C/E62C
1.4 PROGRAMMING MODES
1.4.1 Option Bytes
The two Option Bytes allow configurationcapability to the MCUs. Option byte’s content is automatically read, and the selected options enabled,when
the chipreset is activated.
It can only be accessed during the programming
mode. This access is made either automatically
(copy from a master device) or by selecting the
OPTION BYTE PROGRAMMING modeoftheprogrammer.
The option bytes are located in a non-user map.
No address has to bespecified.
EXTCNTL is low, STOP mode is not available with
the watchdog active.
PB2-3 PULL. When set this bit removespull-up at
reset on PB2-PB3 pins. When cleared PB2-PB3
pins have an internal pull-up resistor at reset.
D4. Reserved.Must be cleared to 0.
WDACT. This bit controls the watchdog activation.
When it is high, hardware activation is selected.
The software activation is selected when WDACT
is low.
DELAY. This bit enables the selection of the delay
internally generated after the internal reset (external pin, LVD, or watchdog activated) is released.
EPROM Code Option Byte (LSB)
70
PRO-
EXTC-
TECT
NTL
PB2-3
PULL
- WDACT
DE-
LAY
OSCIL OSGEN
When DELAY is low, the delay is 2048 cycles of
the oscillator, it is of 32768 cycles when DELAY is
high.
OSCIL.
Oscillator selection
. When this bit is low,
the oscillator must be controlled by a quartz crystal, a ceramic resonator or an external frequency.
When it is high, the oscillator must be controlled by
EPROM Code Option Byte (MSB)
15 8
---
SYNCHRO
ADC
--
NMI
PULL
LVD
an RC network, with only the resistor having to be
externally provided.
OSGEN.
Oscillator Safe Guard
set high to enable the Oscillator Safe Guard.
When this bit is low, the OSG is disabled.
The Option byte is written during programming ei-
D15-D13. Reserved. Must becleared.
ADC SYNCHRO.When set, an A/D conversion is
started upon WAIT instruction execution, in order
ther by using the PC menu (PC driven Mode) or
automatically (stand-alone mode).
1.4.2 Program Memory
to reduce supply noise. When this bit is low, an
A/D conversion isstartedassoon astheSTAbit of
the A/D Converter Control Registeris set.
D11. Reserved,must be set to one.
D10. Reserved,must be cleared.
NMI PULL.
NMI Pull-Up
. This bit must be set high
to configure the NMI pin with a pull-up resistor.
When itis low, no pull-up is provided.
LVD.
LVD RESETenable.
When this bitisset,safe
RESET is performed by MCU when the supply
voltage is too low. When this bit is cleared, only
power-on reset or external RESET are active.
PROTECT.
Readout Protection.
Thisbitallows the
protection of the softwarecontents against piracy.
When the bit PROTECT is sethigh, readout of the
OTP contents is prevented by hardware.. When
this bit is low, the user program can be read.
EXTCNTL.
External STOP MODE control.
. When
EPROM/OTP programming mode is set by a
+12.5V voltage applied to the TEST/VPPpin. The
programming flow of the ST62T62C is described
in the User Manual of the EPROM Programming
Board.
The MCUs can be programmed with the
ST62E6xB EPROM programming tools available
from STMicroelectronics.
Table 5. ST62T52C/T62C Program MemoryMap
Device Address Description
0000h-087Fh
0880h-0F9Fh
0FA0h-0FEFh
0FF0h-0FF7h
0FF8h-0FFBh
0FFCh-0FFDh
0FFEh-0FFFh
NMI Interrupt Vector
EXTCNTL is high, STOP mode is available with
watchdog active by setting NMI pin to one. When
Note: OTP/EPROM devices can be programmed
with the development tools available from STMicroelectronics (ST62E6X-EPB or ST626X-KIT).
. This bit must be
Reserved
User ROM
Reserved
Interrupt Vectors
Reserved
Reset Vector
14/78
13
Page 15

PROGRAMMING MODES (Cont’d)
1.4.3 . EEPROM Data Memory
EEPROM data pages are supplied in the virgin
state FFh. Partial or total programming of EEPROM data memory can be performed either
through theapplication software or through an ex-
ST62T52C ST62T62C/E62C
ternal programmer. Any STMicroelectronics tool
used for the program memory (OTP/EPROM) can
also be used to program the EEPROM data memory.
14
15/78
Page 16
ST62T52C ST62T62C/E62C
2 CENTRAL PROCESSING UNIT
2.1 INTRODUCTION
The CPUCoreofST6 devicesisindependentof the
I/O or Memory configuration. As such, it may be
thought of as an independent central processor
communicating with on-chip I/O, Memory and Peripherals via internal address, data, and control
buses. In-core communication is arranged as
shown in Figure 6; the controller being externally
linked to both the Reset and Oscillator circuits,
while thecore islinked tothededicated on-chip peripherals via the serial data bus and indirectly, for
interrupt purposes, through the control registers.
2.2 CPU REGISTERS
TheST6FamilyCPUcorefeaturessixregistersand
three pairs of flags available to the programmer.
These are described in the following paragraphs.
Accumulator (A). The accumulator is an 8-bit
general purpose register used in all arithmetic calculations, logical operations, and data manipulations. The accumulator can be addressed in Data
space as a RAM location at address FFh. Thus the
ST6 can manipulate the accumulator just like any
other register in Data space.
Figure 6ST6 Core Block Diagram
0,01 TO 8MHz
RESET
OSCin
Indirect Registers (X, Y). These two indirect registers are used as pointers to memory locations in
Data space. They are used in the register-indirect
addressing mode. These registers can be addressed in the data space as RAM locations at addresses 80h (X) and 81h(Y). They canalso beaccessed with the direct, shortdirect, orbit direct addressing modes. Accordingly, the ST6 instruction
set can usethe indirect registers asanyother register of the data space.
Short Direct Registers (V, W). These two registers are used to save a byte in short direct addressing mode. They can be addressed in Data
space as RAM locationsat addresses 82h (V)and
83h (W). They can also be accessed using the direct and bit direct addressing modes. Thus, the
ST6 instruction set can use the short direct registers as any other register of the data space.
Program Counter (PC). The program counter is a
12-bit register which contains the address of the
next ROM location to be processed by the core.
This ROM location may be an opcode, an operand, or the address of an operand. The 12-bit
length allows the direct addressing of 4096 bytes
in Program space.
OSCout
16/78
PROGRAM
ROM/EPROM
15
12
CONTROLLER
OPCODE
Program Counter
and
6 LAYER STACK
FLAG
VALUES
2
FLAGS
CONTROL
SIGNALS
A-DATA
ADDRESS/READ LINE
ADDRESS
DECODER
B-DATA
ALU
RESULTS TO DATASPACE (WRITE LINE)
INTERRUPTS
256
DATA SPACE
DATA
RAM/EEPROM
DATA
ROM/EPROM
DEDICATIONS
ACCUMULATOR
VR01811
Page 17

CPU REGISTERS (Cont’d)
ST62T52C ST62T62C/E62C
However, if theprogram space contains morethan
4096 bytes, the additional memory in program
space can be addressed by using the Program
Bank Switch register.
The PC value is incrementedafter reading the address of the current instruction. Toexecuterelative
jumps, the PC and the offset are shifted through
the ALU, where they are added; the result is then
shifted back into the PC.The programcounter can
be changedin the following ways:
- JP (Jump) instructionPC=Jump address
- CALL instructionPC= Call address
- Relative Branch Instruction.PC= PC +/- offset
- InterruptPC=Interrupt vector
- ResetPC= Reset vector
- RET& RETI instructionsPC= Pop (stack)
- NormalinstructionPC= PC + 1
Flags (C, Z). TheST6 CPU includes three pairsof
flags (CarryandZero), each pair being associated
with one of the three normal modes of operation:
Normal mode, Interrupt mode and Non Maskable
Interrupt mode. Each pair consists of a CARRY
flag and a ZERO flag. One pair (CN, ZN) is used
during Normal operation,another pair is used during Interrupt mode (CI, ZI), anda third pairisused
in the Non Maskable Interrupt mode (CNMI, ZNMI).
The ST6 CPU uses the pair of flags associated
with the current mode: as soon as an interrupt (or
a Non Maskable Interrupt) is generated, the ST6
CPU uses the Interrupt flags (resp. the NMI flags)
instead of the Normal flags. When the RETI instruction is executed, the previously used set of
flags is restored. It should be noted that each flag
set can only be addressed in its own context (Non
Maskable Interrupt, Normal Interrupt or Main routine). The flags are not cleared during context
switching andthus retain their status.
The Carry flag is set when a carry or a borrow occurs during arithmetic operations; otherwise it is
cleared. The Carry flag is also set to the value of
the bit tested in a bit test instruction;it also participates inthe rotate left instruction.
The Zero flag isset if the result of the last arithmetic or logical operation was equal to zero; otherwise itis cleared.
Switching between the three sets of flags is performed automatically when an NMI, an interruptor
a RETI instructions occurs. As the NMI mode is
automatically selected after the reset of the MCU,
the ST6 core uses at first the NMI flags.
Stack. The ST6 CPU includes a true LIFO hardware stack which eliminates the need for a stack
pointer. The stack consists of six separate 12-bit
RAM locations that do not belong to the data
space RAM area. When asubroutine call (orinterrupt request)occurs, the contentsof eachlevelare
shifted into the next higher level, while the content
of the PC is shifted into the first level (the original
contents of the sixth stack level are lost). When a
subroutine or interrupt return occurs (RET or RETI
instructions), the first level register is shifted back
into the PC and the value of each level is popped
back into the previous level. Since the accumulator, in common with all other data space registers,
is not stored in this stack, management of these
registers should be performed within the subroutine. The stack will remain in its “deepest” position
if morethan 6 nested calls orinterrupts are executed, and consequently the last return address will
be lost. It will also remain in its highest position if
the stack is empty and a RET orRETI isexecuted.
In this case the nextinstruction will be executed.
Figure 7ST6 CPU Programming Mode
l
INDEX
REGISTER
INTERRUPTFLAGS
NMI FLAGS
b7
b7
b7
b7
b7
PROGRAMCOUNTER
SIX LEVELS
STACKREGISTER
X REG. PO INTER
Y REG. PO INTER
VREGISTER
W REGISTER
ACCUM ULATO R
b0
b0
b0
b0
b0
b0b11
CZNORMAL FLAGS
CZ
CZ
SHORT
DIRECT
ADDRESSING
MODE
VA000 4 23
16
17/78
Page 18

ST62T52C ST62T62C/E62C
3 CLOCKS, RESET, INTERRUPTS AND POWERSAVING MODES
3.1 CLOCK SYSTEM
The MCU features a Main Oscillatorwhich can be
driven byan external clock, orused in conjunction
with an AT-cut parallel resonant crystal or a suitable ceramic resonator, or with an external resistor
(R
). In addition, a Low FrequencyAuxiliary Os-
NET
cillator (LFAO)canbe switched in for security reasons, to reduce powerconsumption, orto offer the
benefits of a back-up clock system.
The Oscillator Safeguard (OSG) option filters
spikes from the oscillator lines, provides access to
the LFAO to provide a backup oscillator in the
event of main oscillator failure and also automatically limits the internal clock frequency (f
INT
)asa
function of VDD, inorder toguarantee correctoperation. These functions are illustrated in Figure 9.,
Figure 10., Figure 11. and Figure 12..
Figure 8.illustrates various possible oscillator configurations using anexternal crystal orceramicresonator, an external clock input, anexternal resistor
(R
), or the lowest cost solution using only the
NET
LFAO. CL1anCL2shouldhave acapacitance inthe
range 12 tST6_CLK1o 22 pF for an oscillator frequency in the 4-8 MHz range.
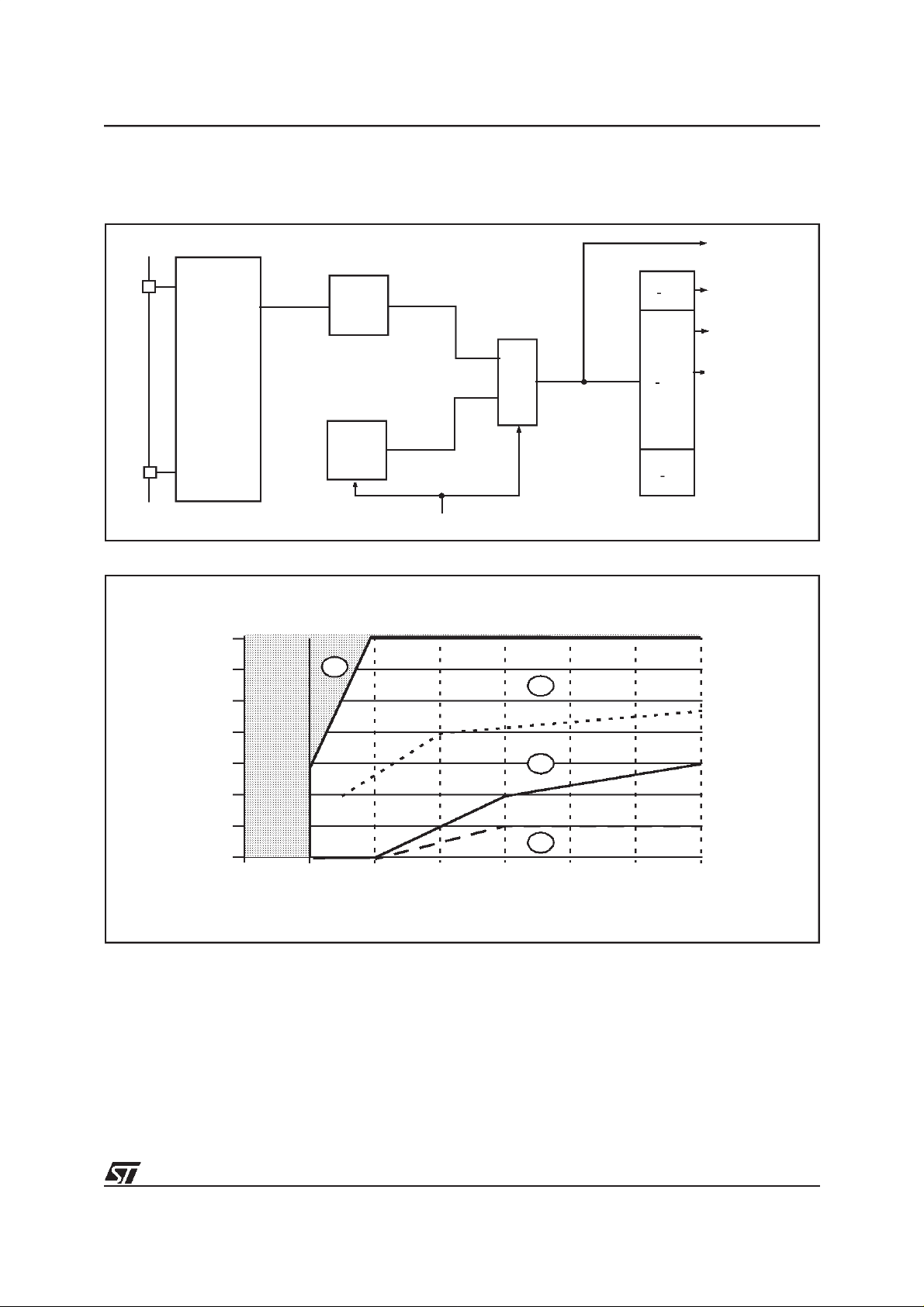
The internal MCU clock frequency (f
by 12to drive the Timer,theA/D converter andthe
) is divided
INT
Watchdog timer, and by 13 to drive the CPU core,
as may be seen in Figure 11..
With an 8MHz oscillator frequency, thefastestmachine cycle is therefore 1.625µs.
A machine cycleisthesmallest unit of timeneeded
to executeanyoperation(for instance,to increment
the Program Counter). An instruction may require
two, four, or five machine cycles forexecution.
3.1.1 Main Oscillator
The oscillatorconfiguration maybe specifiedbyselecting the appropriate option. When the CRYSTAL/RESONATOR option is selected, it must be
usedwithaquartzcrystal,aceramicresonatororan
externalsignalprovidedonthe OSCinpin.Whenthe
RC NETWORKoptionisselected,thesystem clock
is generated by an external resistor.
The main oscillator can be turned off (when the
OSG ENABLED option isselected) by setting the
OSCOFF bit of the ADC Control Register. The
Low Frequency Auxiliary Oscillator isautomatically started.
Figure 8. Oscillator Configurations
CRYSTAL/RESONATOR CLOCK
CRYSTAL/RESONATOR option
ST6xxx
in
ST6xxx
in
ST6xxx
in
ST6xxx
in
OSC
OSC
NC
OSC
OSC
out
out
out
out
C
L2
R
NET
OSC
C
L1n
EXTERNAL CLOCK
CRYSTAL/RESONATOR option
OSC
RC NETWORK
RC NETWORK option
OSC
NC
INTEGRATED CLOCK
CRYSTAL/RESONATOR option
OSG ENABLED option
OSC
18/78
NC
17
Page 19

ST62T52C ST62T62C/E62C
CLOCK SYSTEM (Cont’d)
Turning on the main oscillator is achieved by resetting the OSCOFF bit of the A/DConverterControl Register or by resetting the MCU. Restarting
the main oscillator implies a delay comprising the
oscillator start up delay period plus the duration of
the softwareinstruction at f
clock frequency.
LFAO
3.1.2 Low Frequency Auxiliary Oscillator
(LFAO)
The Low Frequency Auxiliary Oscillator has three
main purposes. Firstly, it can be used to reduce
power consumption in non timing critical routines.
Secondly, it offers a fully integrated system clock,
without anyexternal components.Lastly, itactsas
a safetyoscillatorin case of main oscillator failure.
This oscillator is available when the OSG ENABLED option is selected. In this case, it automatically startsone of itsperiods after the first missing
edge from the main oscillator, whateverthereason
(main oscillatordefective, noclock circuitryprovided, main oscillator switched off...).
User code,normal interrupts, WAIT and STOP instructions, are processed as normal, at the reduced f
cy is decreased, since the internal frequency is be-
frequency.TheA/Dconverter accura-
LFAO
low 1MHz.
At power on, the Low Frequency Auxiliary Oscilla-
tor starts faster than the Main Oscillator. It therefore feeds the on-chip counter generating the POR
delay untilthe Main Oscillator runs.
The Low Frequency Auxiliary Oscillator is automatically switched off as soon as the main oscillator starts.
ADCR
Address: 0D1h — Read/Write
70
ADCR7ADCR6ADCR5ADCR4ADCR3OSC
OFF
ADCR1ADCR
0
Bit 7-3, 1-0= ADCR7-ADCR3, ADCR1-ADCR0:
ADC ControlRegister
. These bits are not used.
Bit 2 = OSCOFF. When low, thisbit enables main
oscillator torun. The mainoscillator is switched off
when OSCOFF is high.
3.1.3 Oscillator Safe Guard
The Oscillator Safe Guard (OSG) affordsdrastically increasedoperational integrity in ST62xx devices. The OSG circuit provides three basic func-
tions: it filtersspikes from the oscillator lines which
would result inover frequency to the ST62 CPU; it
gives access to the Low Frequency Auxiliary Oscillator (LFAO), used to ensure minimum processing in case of main oscillator failure, to offer reduced power consumptionortoprovide afixed frequency low cost oscillator; finally, it automatically
limits the internal clock frequency as a function of
supply voltage, in order to ensure correct operation even if the power supply should drop.
The OSG is enabled or disabled by choosing the
relevant OSG option. It may be viewedas a filter
whose cross-over frequency is device dependent.
Spikes on the oscillatorlinesresultinan effectively
increased internal clock frequency.Inthe absence
of an OSG circuit, this may lead to an over frequency for a given power supply voltage. The
OSG filters out such spikes (as illustrated in Figure
9.).In all cases,when the OSG is active, the maximum internal clock frequency, f
f
, which is supply voltage dependent. This re-
OSG
lationship is illustrated in Figure 12..
When the OSG is enabled, the Low Frequency
Auxiliary Oscillator maybe accessed. This oscillator starts operating after the first missing edge of
the main oscillator (see Figure 10.).
Over-frequency, at a given power supply level, is
seen by the OSG as spikes; it therefore filters out
some cycles in order that the internal clock frequency of the device is kept within the range the
particular device can stand (depending on VDD),
and below f
cy with OSG enabled.
: the maximum authorised frequen-
OSG
Note. The OSG should beusedwherever possible
as it provides maximumsafety. Care must be taken, however, as it can increase power consumption and reduce the maximum operating frequency
to f
OSG
.
Warning: Care has to be taken when using the
OSG, as the internal frequency is defined between
a minimum and amaximumvalue and is not accurate.
For precise timing measurements, it is not recommended to use the OSG and it should not be enabled in applications that use the SPI or the UART.
It should also be noted that power consumption in
Stop mode is higher when the OSG is enabled
(around 50µA at nominal conditions and room
temperature).
, is limited to
INT
18
19/78
Page 20
ST62T52C ST62T62C/E62C
CLOCK SYSTEM (Cont’d)
Figure 9. OSG Filtering Principle
(1)
(2)
(3)
(4)
(1)
Maximum Frequency for the device to work correctly
(2)
Actual Quartz Crystal Frequency at OSCinpin
(3)
Noise from OSCin
(4)
Resulting Internal Frequency
Figure 10. OSG Emergency Oscillator Principle
Main
Oscillator
Emergency
Oscillator
Internal
Frequency
VR001932
20/78
VR001933
19
Page 21
CLOCK SYSTEM (Cont’d)
Figure 11. Clock Circuit Block Diagram
ST62T52C ST62T62C/E62C
POR
OSG
MAIN
OSCILLATOR
LFAO
Main Oscillator off
Figure 12. Maximum Operating Frequency (f
Maximum FREQUENCY (MHz)
8
7
6
5
4
3
2
1
GUARANTEED
FUNCTIONALITY IS NOT
2.5 3.6 4 4.5 5 5.5 6
4
IN THIS AREA
3
M
U
X
) versus Supply Voltage (VDD)
MAX
3
2
1
f
INT
f
OSG
f
Min (at 85°C)
OSG
Min (at 125°C)
f
OSG
:13
:12
:1
Core
TIMER 1
Watchdog
SUPPLY VOLTAGE (V
Notes:
1. In this area, operation is guaranteed at the
quartz crystal frequency.
2. When the OSG is disabled, operation in this
area isguaranteedat the crystal frequency. When
the OSGisenabled, operation in this area is guaranteed at a frequency of at least f
OSG Min.
3. When the OSG is disabled, operation in this
)
DD
VR01807J
area is guaranteed at the quartz crystalfrequency.
When the OSG is enabled, access to this area is
prevented. The internal frequency is kept a f
OSG.
4. When the OSG is disabled, operation in this
area is not guaranteed
When the OSG is enabled, access to this area is
prevented. The internal frequency is kept at f
OSG.
21/78
20
Page 22
ST62T52C ST62T62C/E62C
3.2 RESETS
The MCU can be reset in four ways:
– by the external Reset input being pulled low;
– by Power-onReset;
– by the digital Watchdog peripheral timing out.
– by LowVoltage Detection (LVD)
3.2.1 RESET Input
The RESET pin may be connected to a device of
the application board in order to reset the MCU if
required. The RESET pin may be pulled low in
RUN, WAIT or STOP mode. This input can be
used toreset the MCU internal state andensure a
correct start-up procedure. The pin is active low
and features a Schmitt trigger input. The internal
Reset signalis generated by adding a delay to the
external signal. Therefore even short pulses on
the RESET pin are acceptable, provided VDDhas
completed its rising phase and that theoscillatoris
running correctly (normal RUN or WAIT modes).
The MCU is keptin the Reset state as long as the
RESET pin is held low.
If RESET activation occurs in the RUN or WAIT
modes, processing of the user program is stopped
(RUN modeonly), theInputsandOutputsare configured as inputs with pull-up resistors and the
main Oscillator is restarted. When the level on the
RESET pin then goes high, the initialization sequence is executed following expiry of the internal
delay period.
If RESET pinactivation occurs in the STOP mode,
the oscillator starts up and all Inputs and Outputs
are configured as inputs with pull-up resistors.
When the level of the RESET pin then goes high,
the initialization sequence is executed following
expiry of the internal delay period.
3.2.2 Power-on Reset
The function of the POR circuit consists in waking
up the MCU by detecting around 2V a dynamic
(rising edge) variation of the VDD Supply. At the
beginning of this sequence, the MCU is configured
in the Reset state: all I/O ports are configured as
inputs with pull-up resistors and no instruction is
executed. When the power supply voltage rises to
a sufficient level, the oscillator starts to operate,
whereupon aninternal delay is initiated, inorder to
allow the oscillator to fully stabilize before executing the first instruction. The initialization sequence
is executed immediately following the internal delay.
To ensure correct start-up, the user should take
care that the VDD Supply is stabilized at a sufficient level for the chosen frequency (see recommended operation) before the reset signal is released. In addition, supply rising must start from
0V.
As a consequence, the POR does not allow to supervise static, slowly rising, or falling, or noisy
(presenting oscillation) VDD supplies.
An external RC network connected to the RESET
pin, or the LVD reset can be used instead to get
the best performances.
Figure 13. Reset and Interrupt Processing
RESET
NMI MASKSET
INT LATCH CLEARED
( IFPRESENT )
SELECT
NMI MODE FLAGS
PUT FFEH
ON ADDRESSBUS
YES
IS RESETSTILL
PRESENT?
NO
LOAD PC
FROM RESETLOCATIONS
FFE/FFF
FETCH INSTRUCTION
VA000427
22/78
21
Page 23
RESETS (Cont’d)
3.2.3 Watchdog Reset
The MCU provides a Watchdog timer function in
order to ensure graceful recovery from software
upsets. If the Watchdog register is not refreshed
before an end-of-count condition is reached, the
internal reset will be activated. This, amongst other things, resets the watchdog counter.
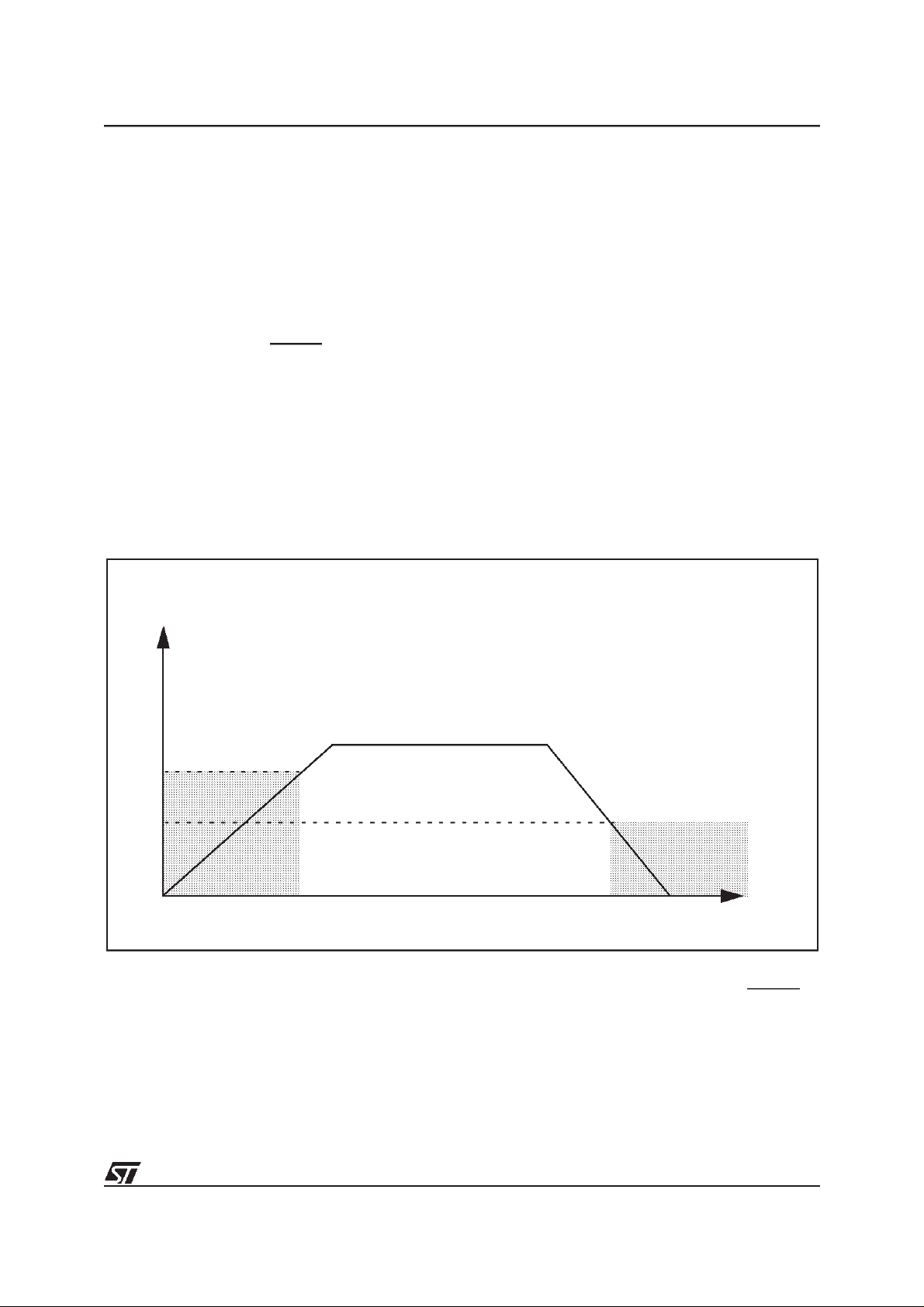
ues, allowing hysteresiseffect. Reference value in
case of voltage drop has been set lower than the
reference value for power-on in order to avoid any
parasitic Reset when MCU start’s running and
sinking current on the supply.
As long as the supply voltage is below the reference value, there is a internal and static RESET
command. The MCU can start only when the sup-
The MCU restarts just as though the Reset had
been generated by the RESET pin, including the
built-in stabilisation delay period.
3.2.4 LVD Reset
The on-chip Low Voltage Detector, selectable as
user option, features static Reset when supply
voltage is below a reference value. Thanks to this
feature, external reset circuit can be removed
while keeping the application safety. This SAFE
RESET is effective as well in Power-on phase as
ply voltage rises over the reference value. Therefore, only two operating mode exist for the MCU:
RESET active below the voltage reference, and
running mode over the voltage reference as
shown on the Figure 14., that represents a powerup, power-down sequence.
Note: When the RESET state is controlled by one
of the internal RESET sources (Low Voltage Detector, Watchdog, Power on Reset), the RESET
pin is tied to low logic level.
in power supply drop with different reference val-
Figure 14. LVD Reset on Power-on and Power-down (Brown-out)
ST62T52C ST62T62C/E62C
V
DD
V
Up
V
dn
RESET
3.2.5 Application Notes
No external resistor is required between VDDand
the Reset pin, thanks to the built-in pull-up device.
RESET
time
VR02106A
Direct external connection of the pin RESET to
VDDmust be avoided in order to ensure safe behaviour of the internal reset sources (AND.Wired
structure).
22
23/78
Page 24
ST62T52C ST62T62C/E62C
RESETS (Cont’d)
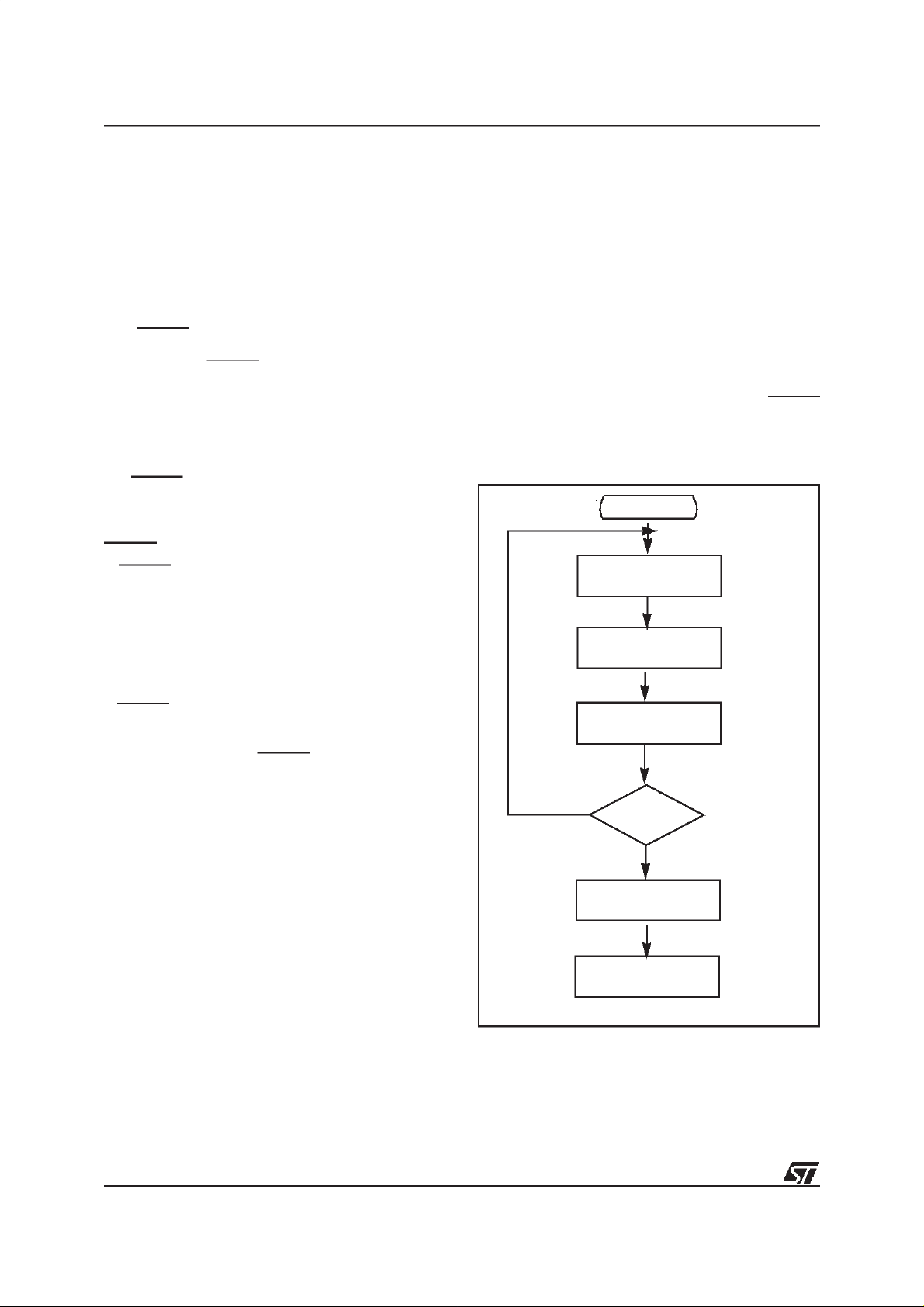
3.2.6 MCU Initialization Sequence
When a reset occurs the stack is reset, the PC is
loaded with the address of the Reset Vector (located in programROM starting at address 0FFEh). A
jump tothe beginning oftheuser programmustbe
coded at this address. Following a Reset, the Interrupt flag is automatically set, so that the CPU is
in NonMaskable Interrupt mode; this prevents the
initialisation routinefrom being interrupted. The initialisation routine should therefore be terminated
by a RETI instruction, in order to revert to normal
mode and enable interrupts. If nopendinginterrupt
is present at the endof theinitialisationroutine,the
MCU will continue by processing the instruction
immediately following the RETIinstruction.If,however, a pending interrupt is present, it will be serviced.
Figure 16. Reset Block Diagram
Figure 15. Reset and Interrupt Processing
RESET
JP:2 BYTES/4 CYCLES
RESET
VECTOR
INITIALIZATION
ROUTINE
JP
RETI: 1 BYTE/2 CYCLES
RETI
VA00181
V
DD
R
PU
R
RESET
POWER
WATCHDOGRESET
LVD RESET
1) Resistive ESD protection. Value not guaranteed.
ESD
ON RESET
f
OSC
1)
AND. Wired
RESET
CK
COUNTER
RESET
ST6
INTERNAL
RESET
VR02107A
24/78
23
Page 25

RESETS (Cont’d)
Table 6. Register Reset Status
Register Address(es) Status Comment
Oscillator Control Register
EEPROM Control Register
Port Data Registers
Port Direction Register
Port Option Register
Interrupt Option Register
TIMER Status/Control
0DCh
0EAh
0C0h to0C2h
0C4h to0C6h
0CCh to 0CEh
0C8h
0D4h
00h
ST62T52C ST62T62C/E62C
f
INT=fOSC
EEPROM enabled (if available)
I/O are Input with pull-up
I/O are Input with pull-up
I/O are Input with pull-up
Interrupt disabled
TIMER disabled
; user must set bit3 to 1
AR TIMER Mode Control Register
AR TIMER Status/Control 1 Register
AR TIMER Status/Control 2Register
AR TIMER Compare Register
Miscellaneous Register
X, Y,V, W, Register
Accumulator
Data RAM
Data RAM Page REgister
Data ROM Window Register
EEPROM
A/D Result Register
AR TIMER Load Register
AR TIMER Reload/Capture Register
TIMER Counter Register
TIMER Prescaler Register
Watchdog Counter Register
A/D Control Register
0D5h
0D6h
0D7h
0DAh
0DDh
080H TO083H
0FFh
084h to0BFh
0E8h
0C9h
00h to F3h
0D0h
0DBh
0D9h
0D3h
0D2h
0D8h
0D1h
Undefined
FFh
7Fh
FEh
40h
AR TIMER stopped
As written if programmed
Max countloaded
A/D in Standby
24
25/78
Page 26

ST62T52C ST62T62C/E62C
3.3 DIGITAL WATCHDOG
The digital Watchdog consists of a reloadable
downcounter timer which can be used to provide
controlled recoveryfrom software upsets.
The Watchdog circuitgenerates a Resetwhen the
downcounter reaches zero. User software can
prevent this reset by reloading the counter, and
should therefore be written so that the counter is
regularly reloaded while the user program runs
correctly. Inthe event of a software mishap (usually caused by externally generated interference),
the userprogram willno longer behave in its usual
fashion and the timer register will thus not be reloaded periodically. Consequently the timer will
decrement down to 00h and reset the MCU. In order to maximise the effectiveness of the Watchdog
function, user software must be written with this
concept in mind.
Watchdog behaviour is governed by two options,
known as “WATCHDOG ACTIVATION” (i.e.
HARDWARE or SOFTWARE) and “EXTERNAL
STOP MODE CONTROL” (see Table7 ).
In the SOFTWARE option, the Watchdog is disabled until bit Cof theDWDR register has been set.
Table 7. Recommended Option Choices
Functions Required Recommended Options
Stop Mode & Watchdog “EXTERNAL STOPMODE” &“HARDWARE WATCHDOG”
Stop Mode “SOFTWARE WATCHDOG”
Watchdog “HARDWARE WATCHDOG”
When the Watchdog is disabled, low power Stop
mode is available. Once activated, the Watchdog
cannot be disabled, except by resetting the MCU.
In the HARDWARE option, the Watchdog is permanently enabled. Sincethe oscillatorwillrun continuously, low power mode is not available. The
STOP instruction is interpreted as a WAIT instruction, and the Watchdog continuesto countdown.
However, when the EXTERNAL STOP MODE
CONTROL option has been selected low power
consumption may be achieved in Stop Mode.
Execution of the STOP instruction is then governed by a secondary function associated with the
NMI pin. If a STOP instruction is encountered
when the NMI pin is low, it is interpreted as WAIT,
as described above. If, however, the STOP instruction is encountered when the NMIpin is high,
the Watchdog counter is frozen and the CPU enters STOP mode.
When the MCU exits STOPmode(i.e. when an interrupt is generated), the Watchdog resumes its
activity.
26/78
25
Page 27

DIGITAL WATCHDOG (Cont’d)
The Watchdog is associated with a Data space
register (Digital WatchDog Register, DWDR, location 0D8h) which is described in greater detail in
Section 3.3.1Digital Watchdog Register (DWDR).
This register is set to 0FEh on Reset: bit C is
cleared to “0”, which disables the Watchdog; the
timer downcounter bits, T0 to T5, and the SR bit
are allset to “1”, thus selectingthe longest Watchdog timer period. This time period can be set to the
user’s requirements by setting theappropriatevalue for bits T0 to T5 in the DWDR register. The SR
bit mustbe set to “1”, since it is this bit which generates the Reset signal when it changes to “0”;
clearing this bit would generate an immediate Reset.
It should be noted that the order of the bits in the
DWDR register is inverted with respect to the associated bits in the down counter: bit 7 of the
DWDR register corresponds, in fact, to T0 and bit
2 toT5. The usershould bear inmind the fact that
these bits are inverted and shifted with respect to
the physicalcounter bitswhen writing to this register. The relationship between the DWDR register
bits and the physical implementation of the Watchdog timerdowncounter is illustrated in Figure 17..
Only the 6 most significant bitsmaybe used to define the time period, since it is bit 6 which triggers
the Reset when it changes to “0”. This offers the
user a choice of 64 timed periods ranging from
3,072 to 196,608 clock cycles (with an oscillator
frequency of8MHz, thisisequivalenttotimer periods ranging from 384µs to 24.576ms).
ST62T52C ST62T62C/E62C
Figure 17. Watchdog Counter Control
D0
D1
D2
D3
D4
D5
D6
WATCHDOG CONTROL REGISTER
D7
C
SR
T5
T4
T3
WATCHDOG COUNTER
T2
T1
T0
8
÷2
RESET
OSC÷12
VR02068A
26
27/78
Page 28

ST62T52C ST62T62C/E62C
DIGITAL WATCHDOG (Cont’d)
3.3.1 Digital Watchdog Register (DWDR)
Address: 0D8h — Read/Write
Reset status:1111 1110b
70
T0 T1 T2 T3 T4 T5 SR C
Bit 0 = C:
Watchdog Control bit
If thehardware option is selected,this bit is forced
high andthe user cannotchange it (the Watchdog
is always active). When the software option is selected, the Watchdog function is activated by setting bit C to 1, and cannot then be disabled (save
by resetting the MCU).
When C is kept low the counter can be used as a
7-bit timer.
This bitis cleared to “0” on Reset.
Bit 1 = SR:
Software Reset bit
This bittriggers a Resetwhen cleared.
When C =“0”(Watchdog disabled)it is the MSB of
the 7-bit timer.
This bitis set to “1” on Reset.
Bits 2-7= T5-T0:
Downcounter bits
It should be noted that the register bits are reversed and shifted with respect to the physical
counter: bit-7 (T0) is the LSB of the Watchdog
downcounter and bit-2 (T5) is the MSB.
These bits are set to “1” on Reset.
3.3.2 Application Notes
The Watchdog plays an important supporting role
in the highnoise immunity of ST62xx devices, and
should be used wherever possible. Watchdog related options should be selected on the basis of a
trade-off between application security and STOP
mode availability.
When STOP mode is not required, hardware activation without EXTERNAL STOP MODE CONTROL should be preferred, as it provides maximum security,especially during power-on.
When STOP mode is required, hardware activation and EXTERNAL STOP MODE CONTROL
should be chosen. NMI should be high by default,
to allow STOP modeto be entered when theMCU
is idle.
The NMI pin can be connected to an I/O line (see
Figure 18.) to allow its state to be controlled by
software. The I/O line can then be used to keep
NMI low while Watchdogprotection is required, or
to avoid noise or key bounce. When no more
processing is required, the I/O line is released and
the device placed in STOP mode for lowest power
consumption.
When software activation is selected and the
Watchdog is not activated, the downcounter may
be used as a simple 7-bit timer (remember thatthe
bits are in reverse order).
The software activation option should be chosen
only when the Watchdog counter is to be used as
a timer. To ensure theWatchdoghasnot been unexpectedly activated, the following instructions
should be executed within the first 27 instructions:
jrr 0, WD, #+3
ldi WD, 0FDH
28/78
27
Page 29

DIGITAL WATCHDOG (Cont’d)
These instructions test the C bit and Reset the
MCU (i.e. disable the Watchdog) if the bit is set
(i.e. if the Watchdog is active), thus disabling the
Watchdog.
In all modes, a minimum of 28 instructions are executed after activation, before the Watchdog can
generate a Reset. Consequently, user software
should load the watchdog counter within the first
27 instructions following Watchdog activation
(software mode), or within the first 27 instructions
executed followinga Reset (hardwareactivation).
It shouldbe noted that when the GENbit islow (interrupts disabled), the NMI interrupt is active but
cannot cause a wake up fromSTOP/WAIT modes.
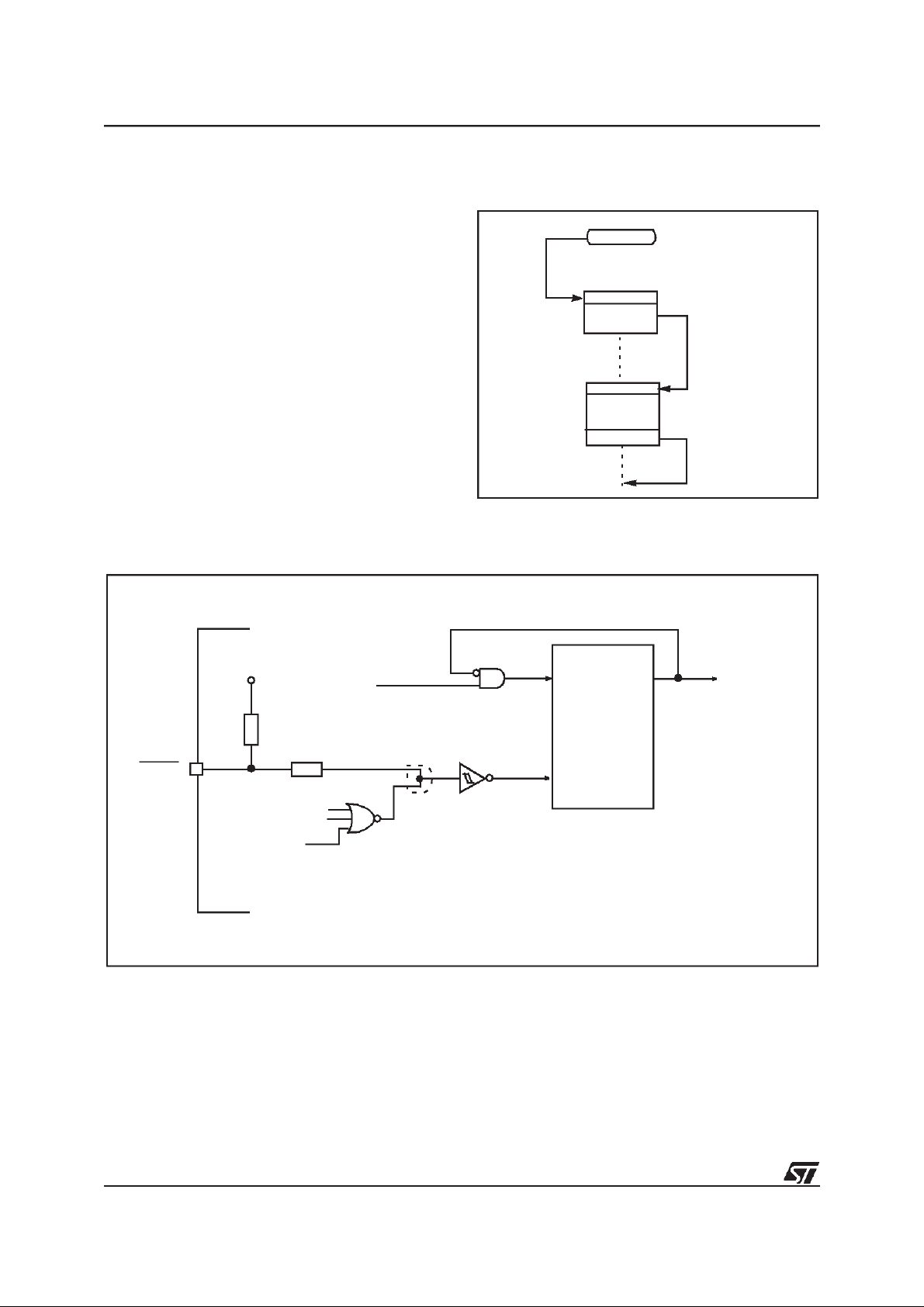
Figure 19. Digital Watchdog Block Diagram
ST62T52C ST62T62C/E62C
Figure 18. A typical circuit making use of the
EXERNAL STOP MODE CONTROL feature
SWITCH
NMI
I/O
VR02002
RESET
RSFF
S
Q
R
DB0
7
-2
DB1.7 SETLOAD
8
WRITE
DATA BUS
RESET
-2
SET
8
-12
OSCILLATOR
CLOCK
VA00010
28
29/78
Page 30

ST62T52C ST62T62C/E62C
3.4 INTERRUPTS
The CPU can manage four Maskable Interrupt
sources, in addition to a Non Maskable Interrupt
source (top priority interrupt). Each source is associated with a specific Interrupt Vector which contains aJump instruction totheassociated interrupt
service routine. These vectors are located in Program space(see Table 8 ).
When an interrupt source generates an interrupt
request, and interrupt processing is enabled, the
PC registeris loaded with the address of theinterrupt vector (i.e. of the Jump instruction), which
then causes a Jumpto the relevant interrupt service routine, thus servicing the interrupt.
Interrupt sourcesare linked to events either on external pins, or on chip peripherals. Several events
can be ORed on the same interrupt source, and
relevant flags are available to determine which
event triggeredthe interrupt.
The Non Maskable Interrupt requesthas the highest priority and can interrupt any interrupt routine
at any time; the other four interrupts cannot interrupt each other. If more than one interrupt request
is pending, these are processed by the processor
core according to their priority level: source #1 has
the higher priority while source #4 the lower. The
priority ofeach interrupt source is fixed.
Table 8. Interrupt Vector Map
Interrupt Source Priority Vector Address
Interrupt source #0 1 (FFCh-FFDh)
Interrupt source #1 2 (FF6h-FF7h)
Interrupt source #2 3 (FF4h-FF5h)
Interrupt source #3 4 (FF2h-FF3h)
Interrupt source #4 5 (FF0h-FF1h)
3.4.1 Interrupt request
All interrupt sources but the Non Maskable Interrupt source canbe disabled by setting accordingly
the GEN bitof the Interrupt OptionRegister (IOR).
This GEN bitalso defines if aninterrupt source, including the Non Maskable Interrupt source, canrestart theMCU from STOP/WAIT modes.
Interrupt request from the Non Maskable Interrupt
source #0 is latched by a flip flop which is automat-
ically resetby the coreatthe beginning of the nonmaskable interrupt service routine.
Interrupt request from source #1 can be configured either as edge or level sensitivebysetting accordingly the LES bit of the InterruptOption Register (IOR).
Interrupt request from source #2 are always edge
sensitive. The edge polarity can be configured by
setting accordingly theESBbit ofthe Interrupt Option Register (IOR).
Interrupt request from sources #3 & #4 are level
sensitive.
In edge sensitive mode, alatch issetwhen a edge
occurs on the interrupt source line and is cleared
when the associated interrupt routine is started.
So, the occurrence of an interrupt can be stored,
until completion of the running interrupt routine before being processed. If several interrupt requests
occurs before completion of the running interrupt
routine, only the first request is stored.
Storage of interruptrequests is notavailable in level sensitive mode. To be taken into account, the
low level must bepresentonthe interrupt pin when
the MCU samples the line after instruction execution.
At the end of every instruction, the MCUtests the
interrupt lines: if there is an interrupt request the
next instruction is not executed and the appropriate interrupt service routine is executed instead.
Table 9. Interrupt Option Register Description
GEN
ESB
LES
OTHERS NOT USED
SET Enable all interrupts
CLEARED Disable all interrupts
SET
CLEARED
SET
CLEARED
Rising edge mode oninterrupt source #2
Falling edge mode on interrupt source #2
Level-sensitive mode on interrupt source #1
Falling edge mode on interrupt source #1
30/78
29
Page 31

INTERRUPTS (Cont’d)
3.4.2 Interrupt Procedure
The interrupt procedure is very similartoa callprocedure, indeed the user can consider the interrupt
as an asynchronous call procedure. As this is an
asynchronous event, the user cannot know the
context and the time at which it occurred. As a result, the user should save all Data space registers
which may be used within the interrupt routines.
There are separate setsof processor flags for normal, interrupt and non-maskable interrupt modes,
which are automatically switched and so do not
need to be saved.
The following list summarizes the interrupt procedure:
MCU
– The interrupt is detected.
– The C and Z flags are replaced by the interrupt
flags (orby the NMI flags).
– The PC contents are stored in the first level of
the stack.
– The normalinterrupt lines are inhibited (NMIstill
active).
– The first internal latch is cleared.
– TheassociatedinterruptvectorisloadedinthePC.
WARNING: In some circumstances, when a
maskable interruptoccurs while the ST6 core is in
NORMAL mode and especially during the execution of an ”ldi IOR, 00h” instruction (disabling all
maskable interrupts):if theinterrupt arrives during
the first 3 cycles of the ”ldi” instruction (which is a
4-cycle instruction) the corewill switch to interrupt
mode BUTtheflagsCN and ZN will NOT switch to
the interruptpair CI and ZI.
User
– User selected registers are saved within the in-
terrupt service routine (normally on a software
stack).
– Thesource of the interruptis found bypollingthe
interrupt flags (if more than onesource is associ-
ated with the same vector).
– The interrupt is serviced.
– Return from interrupt (RETI)
ST62T52C ST62T62C/E62C
MCU
– AutomaticallytheMCU switches back tothe nor-
mal flagset (or the interrupt flag set) and pops
the previous PC value from the stack.
The interrupt routine usually begins by the identifying the device which generated the interrupt request (by polling). Theuser shouldsave the registers which are usedwithin theinterrupt routine in a
software stack. After the RETI instruction is executed, the MCU returns tothe main routine.
Figure 20. Interrupt Processing Flow Chart
INSTRU CTION
FETCH
INSTRU CTION
EXECUT E
INSTRUCTION
LOAD PC FROM
INTERR UPTVEC TOR
(FFC/FFD)
SET
INTERRUPT MASK
PUSH THE
PC INTO THE STACK
SELECT
INTER NAL MODE FLAG
VA000014
THE INSTRUCTION
YES
INTERR UPTMASK
PROGRAM FLAGS
THE STACKED PC
NO
WAS
ARETI
CLEAR
SELECT
”POP”
?
YES
?
NO
?
YES
NO
IS THE CORE
ALREADY IN
NORMAL MODE?
CHEC K IF THERE IS
AN IN TERRUP T REQUEST
AND INTERRU PTMASK
30
31/78
Page 32

ST62T52C ST62T62C/E62C
INTERRUPTS (Cont’d)
3.4.3 Interrupt Option Register(IOR)
The Interrupt Option Register (IOR) is used to enable/disable theindividual interrupt sources and to
select the operating mode of the external interrupt
inputs. This register is write-only and cannot be
accessed by single-bit operations.
Address: 0C8h — Write Only
Reset status:00h
70
- LES ESB GEN - - - -
Bit 5 =ESB:
Edge Selection bit
The bit ESB selects the polarity of the interrupt
source #2.
Bit 4= GEN:
Global Enable Interrupt
is set to one, all interrupts are enabled.When this
bit is cleared to zero all the interrupts (excluding
NMI) are disabled.
When the GEN bit is low, the NMI interrupt is active but cannot cause a wakeupfrom STOP/WAIT
modes.
This register is cleared on reset.
3.4.4 Interrupt Sources
.
. When this bit
Bit 7, Bits 3-0 =
Bit 6 = LES:
Unused
.
Level/Edge Selection bit
.
When this bit is set to one, the interrupt source #1
Interrupt sources available on the
ST62E62C/T62C are summarized in the Table 10
with associated mask bit to enable/disable the in-
terrupt request.
is level sensitive. When cleared to zero the edge
sensitive modefor interrupt request is selected.
Table 10. Interrupt Requestsand Mask Bits
Peripheral Register
GENERAL IOR C8h GEN
TIMER TSCR1 D4h ETI TMZ: TIMER Overflow Vector 4
A/D CONVERTER ADCR D1h EAI EOC: End of Conversion Vector 4
AR TIMER ARMC D5h
Port PAn ORPA-DRPA C0h-C4h ORPAn-DRPAn PAn pin Vector 1
Port PBn ORPB-DRPB C1h-C5h ORPBn-DRPBn PBn pin Vector 1
Port PCn ORPC-DRPC C2h-C6h ORPCn-DRPCn PCn pin Vector 2
Address
Register
Mask bit Masked Interrupt Source
All Interrupts, excluding NMI
OVIE
CPIE
EIE
OVF: AR TIMER Overflow
CPF: Successful compare
EF: Active edge on ARTIMin
Interrupt
vector
Vector 3
32/78
31
Page 33

INTERRUPTS (Cont’d)
Figure 21. Interrupt Block Diagram
FROM REGISTER PORT A,B,C
SINGLE BIT ENABLE
PBE
V
DD
ST62T52C ST62T62C/E62C
PORT A
PORT B
Bits
PORT C
Bits
PBE
PBE
SPIDIV Register
SPINT bit
SPIE bit
SPIMOD Register
AR TIMER
V
DD
TIMER1
ADC
FF
QCLK
CLR
IOR REG. C8H, bit 5
OVF
OVIE
CPF
CPIE
EF
EIE
TMZ
ETI
EOC
EAI
0
MUX
Start
I
1
1
IOR REG. C8H, bit 6
FF
CLK Q
CLR
I
Start
2
INT #1 (FF6,7)
RESTART FROM
STOP/WAIT
INT #2 (FF4,5)
INT #3 (FF2,3)
INT #4 (FF0,1)
NMI
FF
QCLK
CLR
I
Start
0
Bit GEN (IOR Register)
NMI (FFC,D)
VA0426K
33/78
32
Page 34

ST62T52C ST62T62C/E62C
3.5 POWER SAVING MODES
The WAIT and STOP modes have been implemented in the ST62xx family of MCUs in order to
reduce the product’s electrical consumption during
idle periods. These two power saving modes are
described in the following paragraphs.
3.5.1 WAIT Mode
The MCU goes into WAIT mode as soon as the
WAIT instruction is executed. The microcontroller
can be considered as being in a “software frozen”
state where the core stops processing the program instructions, the RAM contents and peripheral registers are preserved as long as the power
supply voltage is higher than the RAM retention
voltage. In this mode the peripherals are still active.
WAIT mode can be used when the user wants to
reduce the MCU power consumption during idle
periods, whilenot losing track of time or the capability of monitoring external events. The active oscillator is not stopped in order to provide a clock
signal to the peripherals. Timer counting may be
enabled as well as the Timer interrupt, before entering theWAIT mode: this allows the WAIT mode
to be exited when a Timer interrupt occurs. The
same applies to other peripherals which use the
clock signal.
If the WAIT mode is exited due to a Reset (either
by activating the external pin or generated by the
Watchdog), theMCU enters a normal reset procedure. If an interrupt is generated during WAIT
mode, the MCU’s behaviour depends on thestate
of the processor coreprior to theWAIT instruction,
but also on the kind of interrupt request which is
generated. This is described in the following para-
graphs. The processor core does not generate a
delay following the occurrence of the interrupt, be-
cause the oscillator clock is still available and no
stabilisation period is necessary.
3.5.2 STOP Mode
If the Watchdog is disabled,STOP mode is availa-
ble. When in STOP mode, the MCU is placed in
the lowest power consumption mode. In this oper-
ating mode, the microcontrollercan be considered
as being “frozen”, no instruction is executed, the
oscillator is stopped, the RAM contents and pe-
ripheral registers are preserved as long as the
power supply voltage is higher than the RAM re-
tention voltage, and the ST62xx core waits for the
occurrence of an external interrupt request or a
Reset to exitthe STOP state.
If the STOP state is exited dueto a Reset (byacti-
vating the external pin) the MCU will enter a nor-
mal reset procedure. Behaviour in response to in-
terrupts depends on the state of the processor
core prior to issuing the STOP instruction, and
also on the kind of interrupt request that is gener-
ated.
This case will be described in the following para-
graphs. The processor core generates a delay af-
ter occurrence ofthe interrupt request, in order to
wait for complete stabilisation ofthe oscillator, be-
fore executing the first instruction.
34/78
33
Page 35

POWER SAVING MODE (Cont’d)
3.5.3 Exit from WAIT and STOP Modes
The following paragraphs describe how the MCU
exits from WAIT and STOP modes, whenan interrupt occurs (not a Reset). It should be noted that
the restartsequencedepends on the original state
of the MCU (normal, interrupt or non-maskable interrupt mode) prior to entering WAIT or STOP
mode, as well as on the interrupt type.
Interrupts do not affect the oscillator selection.
3.5.3.1 Normal Mode
If the MCU was in the main routine when the WAIT
or STOP instruction was executed, exit from Stop
or Waitmode will occuras soonasaninterrupt occurs; the related interrupt routine is executed and,
on completion, the instruction which follows the
STOP or WAIT instruction is then executed, providing noother interrupts are pending.
3.5.3.2 Non Maskable Interrupt Mode
If the STOP or WAIT instruction has been executed during execution of the non-maskable interrupt
routine, theMCU exits from the Stop orWaitmode
as soon as an interrupt occurs: the instruction
which followsthe STOP or WAIT instruction is executed, and the MCU remains innon-maskable interrupt mode, even if another interrupt has been
generated.
3.5.3.3 Normal Interrupt Mode
If theMCU was in interrupt modebeforetheSTOP
or WAIT instruction was executed, it exits from
STOP or WAIT mode as soon as an interrupt occurs. Nevertheless, two cases must be considered:
– If theinterrupt is a normal one, the interrupt rou-
tine in which the WAIT or STOP mode was en-
ST62T52C ST62T62C/E62C
tered will be completed, starting with the
execution of the instruction which follows the
STOP or the WAIT instruction, and the MCU is
still in the interrupt mode. At the end of this routine pendinginterruptswillbe serviced in accordance with their priority.
– In the event of a non-maskable interrupt, the
non-maskable interrupt service routine is processed first, then the routine in which the WAIT or
STOP mode was entered will be completed by
executing the instruction following the STOP or
WAIT instruction. The MCU remains in normal
interrupt mode.
Notes:
To achieve the lowest power consumption during
RUN or WAITmodes, the user program must take
care of:
– configuringunused I/Os as inputs without pull-up
(these should be externally tied to well defined
logic levels);
– placing all peripherals in their power down
modes before entering STOP mode;
When the hardware activated Watchdog is select-
ed, or whenthesoftware Watchdogisenabled,the
STOP instruction is disabled and a WAIT instruc-
tion will beexecuted in its place.
If all interrupt sources are disabled (GEN low),the
MCU can only be restarted by a Reset. Although
setting GEN low does not mask the NMI as an in-
terrupt, it will stop it generating a wake-upsignal.
The WAIT and STOP instructions are not execut-
ed if an enabled interrupt request is pending.
34
35/78
Page 36

ST62T52C ST62T62C/E62C
4 ON-CHIP PERIPHERALS
4.1 I/O PORTS
The MCU features Input/Output lines which may
be individually programmed as any of the following
input or output configurations:
– Input withoutpull-up or interrupt
– Input withpull-up and interrupt
– Input withpull-up, but without interrupt
– Analog input
– Push-pull output
– Open drain output
The lines are organised as bytewise Ports.
Each port is associated with 3 registers in Data
space. Each bit of these registers is associated
with a particular line (for instance, bits 0 of Port A
Data, Direction and Option registers are associated with the PA0 line of Port A).
The DATA registers (DRx), are used to read the
voltage level values of the lines which have been
configured as inputs, or to write the logic value of
the signal to be output on the lines configured as
outputs. The port data registers can be readto get
the effective logic levels of the pins, but they can
Figure 22. I/O PortBlock Diagram
S
CONTROLS
IN
RESET
be also written by user software, in conjunction
with the related option registers, to select the dif-
ferent input mode options.
Single-bit operations on I/O registers are possible
but care is necessary because reading in input
mode is done from I/O pins while writing will direct-
ly affect the Port data register causing an unde-
sired change of the input configuration.
The Data Direction registers (DDRx) allow the
data direction (input or output) of each pin to be
set.
The Option registers (ORx) are used to select the
different port options available both in input and in
output mode.
All I/O registers can be read or written to just as
any other RAMlocationinData space, so no extra
RAM cells are needed for port data storage and
manipulation. During MCU initialization,all I/Oreg-
isters are cleared andthe inputmode withpull-ups
and no interrupt generation is selected for all the
pins, thus avoiding pin conflicts.
V
DD
36/78
SHIFT
REGISTER
S
OUT
35
TO INTERRUPT
TO ADC
DATA
DIRECTION
REGISTER
DATA
REGISTER
OPTION
REGISTER
V
DD
INPUT/OUTPUT
VA00413
Page 37

ST62T52C ST62T62C/E62C
I/O PORTS (Cont’d)
4.1.1 Operating Modes
Each pinmay be individually programmed as input
or output with various configurations.
This is achieved by writing the relevant bit in the
Data (DR), Data Direction (DDR) and Option registers (OR). Table 11 illustrates the various port
configurations which can be selected byuser software.
4.1.1.1 Input Options
Pull-up, High Impedance Option. All input lines
can be individually programmed with or withoutan
internal pull-up by programming the OR and DR
registers accordingly. If the pull-up option is not
selected, the input pin will be in the high-impedance state.
Table 11. I/O Port Option Selection
DDR OR DR Mode Option
0 0 0 Input With pull-up, no interrupt
0 0 1 Input No pull-up, no interrupt
0 1 0 Input With pull-up and with interrupt
0 1 1 Input Analog input (when available)
1 0 X Output Open-drain output (20mA sink when available)
1 1 X Output Push-pull output (20mA sink when available)
4.1.1.2 Interrupt Options
All input lines can be individually connected by
software to the interrupt system by programming
the OR and DR registers accordingly. The inter-
rupt trigger modes (falling edge, rising edge and
low level) can be configured by software as de-
scribed in the Interrupt Chapter for each port.
4.1.1.3 Analog Input Options
Some pins can be configured as analog inputs by
programming the OR and DR registers according-
ly. These analog inputs are connected to the on-
chip 8-bit Analog to Digital Converter.
pin should be programmed as an analog input at
any time, since by selecting more than one input
simultaneously their pins will be effectively short-
ed.
ONLY ONE
Note: X= Don’t care
36
37/78
Page 38

ST62T52C ST62T62C/E62C
I/O PORTS (Cont’d)
4.1.2 Safe I/O State Switching Sequence
Switching the I/O ports from one state to another
should be done in a sequence which ensures that
no unwanted side effects can occur. The recommended safe transitions are illustrated in Figure
23.. All other transitions are potentially risky and
should be avoided when changing the I/O operating mode, as itis most likely that undesirablesideeffects will be experienced, such asspurious interrupt generation or two pins shorted together by the
analog multiplexer.
Single bit instructions (SET, RES, INC and DEC)
should be used with great caution on Ports Data
registers, since theseinstructions make an implicit
read and write back of the entire register. In port
input mode,however, the data registerreads from
the inputpins directly, and not from the data register latches. Sincedata registerinformation in input
mode isused toset the characteristics of the input
pin (interrupt, pull-up, analog input), these maybe
unintentionally reprogrammed depending on the
state of the input pins. As a general rule, itis better
to limit the use of single bit instructions on data
registers to when the whole (8-bit)port is in output
mode. In the case ofinputs or ofmixed inputs and
outputs, it is advisable to keep a copy of the data
register in RAM. Single bit instructions may then
be used on the RAM copy, after which the whole
copy register can be writtento the port data regis-
ter:
SET bit, datacopy
LD a, datacopy
LD DRA, a
Warning: Care must also be taken to not use in-
structions that act on a whole port register (INC,
DEC, or read operations) when all 8 bits are not
available on the device. Unavailable bits must be
masked by software (AND instruction).
The WAIT and STOP instructions allow the
ST62xx to be used in situations where low power
consumption is needed. The lowest power con-
sumption is achieved by configuring I/Os in input
mode with well-defined logic levels.
The user must takecare not toswitch outputs with
heavy loads during the conversion of one of the
analog inputs in order to avoid any disturbance to
the conversion.
Figure 23. Diagram showingSafe I/O State Transitions
Interrupt
pull-up
010*
Input
pull-up (Reset
000
state)
Output
Open Drain
Output
Push-pull
100
110
Note *. xxx = DDR, OR, DR Bits respectively
011
001
101
111
Input
Analog
Input
Output
Open Drain
Output
Push-pull
38/78
37
Page 39

I/O PORTS (Cont’d)
Table 12. I/O PortOption Selections
ST62T52C ST62T62C/E62C
MODE AVAILABLE ON
Input
Reset state(
Reset stateif PULL-UP
option disabled
Input
Reset state
Reset stateif PULL-UP
option enabled
Input
with pull up
with interrupt
(1)
PA4-PA5
PB0, PB6-PB7
PC2-PC3
PB2-PB3,
PA4-PA5
PB0,,PB6-PB7
PC2-PC3
PB2-PB3
PA4-PA5
PB0, PB2-PB3,PB6-PB7
PC2-PC3
SCHEMATIC
Data in
Interrupt
Data in
Interrupt
Data in
Interrupt
Analog Input
Open drain output
5mA
Open drain output
30mA
Push-pull output
5mA
Push-pull output
30mA
Note 1. Provided the correct configuration hasbeen selected.
PA4-PA5
PC2-PC3
PA4-PA5
PC2-PC3
PB0, PB2-PB3,PB6-PB7
PA4-PA5
PC2-PC3
PB0, PB2-PB3,PB6-PB7
ADC
Data out
Data out
38
39/78
Page 40

ST62T52C ST62T62C/E62C
I/O PORTS (Cont’d)
4.1.3 ARTimer alternate functions
When bit PWMOE of register ARMC is low, pin
ARTIMout/PB7 is configured as any standard pin
of port B through the port registers. When PWMOE is high,ARTMout/PB7is thePWM output, independently ofthe port registers configuration.
Figure 24. Peripheral Interface Configuration of AR Timer
ARTIMin/PB6 is connected to the AR Timer input.
It is configured through the port registers as any
standard pin of port B. To use ARTIMin/PB6 asAR
Timer input, it mustbeconfigured as input through
DDRB.
PID
ARTIMin
ARTIMin
ARTIMout
PID
DR
MUX
AR TIMER
OR
1
0
DR
PWMOE
ARTIMout
VR01661G
40/78
39
Page 41

4.2 TIMER
ST62T52C ST62T62C/E62C
The MCU features an on-chip Timer peripheral,
consisting ofan 8-bit counter with a 7-bit programmable prescaler,giving a maximum count of 215.
Figure 25. shows the Timer Block Diagram. The
content of the 8-bit counter can be read/written in
the Timer/Counterregister, TCR, which can be addressed in Data space as a RAM location at address 0D3h. The state of the 7-bitprescaler canbe
read in the PSC register at address 0D2h. The
control logic device is managed in the TSCR register asdescribed in thefollowing paragraphs.
The 8-bit counter is decrement by the output (rising edge) coming from the7-bit prescalerand can
be loaded and read under program control. When
it decrements to zero then the TMZ (Timer Zero)bit
in the TSCR is set. If the ETI (Enable TimerInterrupt) bit in the TSCR is also set, an interrupt request is generated. The Timer interrupt can be
used toexit the MCU from WAIT mode.
Figure 25. Timer Block Diagram
The prescaler input is the internal frequency (f
divided by 12. The prescaler decrements on the
rising edge. Depending on the division factor pro-
grammed by PS2, PS1 and PS0 bits in the TSCR
(see Table 13.), the clock input of the timer/coun-
ter register is multiplexed to different sources. For
division factor1, the clock input of the prescaler is
also that of timer/counter; for factor 2, bit 0 of the
prescaler registerisconnectedtotheclock input of
TCR. This bit changesitsstate at half the frequen-
cy of the prescaler input clock.For factor 4, bit 1of
the PSC is connected to the clock input of TCR,
and so forth. The prescaler initializebit, PSI, in the
TSCR register must be set to allow the prescaler
(and hence the counter) to start. If it is cleared, all
the prescaler bits are set and the counter is inhib-
ited from counting. The prescaler can be loaded
with any value between0and 7Fh, if bitPSI is set.
The prescaler tap is selected by means of the
PS2/PS1/PS0 bits in the control register.
Figure 26. illustrates theTimer’s working principle.
DATA BUS
INT
)
f
INT
12
PSC
8
6
5
4
3
2
1
0
SELECT
1OF7
8
8-BIT
COUNTER
3
b7 b6 b5 b4 b3 b2 b1 b0
STATUS/CONTROL
TMZ ETI D5 D4 PSI PS2 PS1 PS0
8
REGISTER
INTERRUPT
LINE
VR02070A
40
41/78
Page 42

ST62T52C ST62T62C/E62C
TIMER (Cont’d)
4.2.1 Timer Operation
The Timer prescaler is clocked by the prescaler
clock input(f
The user can select the desired prescaler division
ratio through the PS2, PS1, PS0 bits. When the
TCR count reaches 0, it sets the TMZ bit in the
TSCR. The TMZ bit can be tested under program
control to perform a timer function whenever it
goes high.
4.2.2 Timer Interrupt
When the counter register decrements to zero with
the ETI (Enable Timer Interrupt) bit set to one, an
interrupt request associated with Interrupt Vector
#3 is generated. When the counter decrements to
Figure 26. Timer Working Principle
CLOCK
÷ 12).
INT
7-BIT PRESCALER
BIT0 BIT1 BIT2 BIT3 BIT6BIT5BIT4
zero, the TMZ bit in the TSCR register is set to
one.
4.2.3 Application Notes
TMZ is set when the counter reaches zero;howev-
er, it may also be set by writing 00h in the TCR
register or by setting bit 7 of the TSCR register.
The TMZ bit must be cleared by user software
when servicing the timer interrupt to avoid unde-
sired interrupts when leaving the interrupt service
routine. After reset, the 8-bit counter register is
loaded with 0FFh, while the7-bit prescaler is load-
ed with 07Fh, and the TSCR register is cleared.
This means that the Timer is stopped (PSI=“0”)
and the timer interrupt is disabled.
10234
8-1 MULTIPLEXER
BIT0 BIT1
BIT2
BIT3 BIT4 BIT5
8-BIT COUNTER
5
67
BIT6
BIT7
PS0
PS1
PS2
VA00186
42/78
41
Page 43

ST62T52C ST62T62C/E62C
TIMER (Cont’d)
A write to the TCR register will predominate over
the 8-bit counterdecrementto00h function, i.e.if a
write and a TCR register decrement to 00h occur
simultaneously, the write will take precedence,
and the TMZ bit is not set until the 8-bit counter
reaches 00h again. The values of the TCR and the
PSC registers can be read accurately at anytime.
4.2.4 Timer Registers
Timer Status Control Register (TSCR)
Address: 0D4h — Read/Write
70
TMZ ETI D5 D4 PSI PS2 PS1 PS0
Bit 7 = TMZ:
Timer Zero bit
A low-to-high transition indicates that the timer
count register has decrement to zero. This bit
must becleared by user software before starting a
new count.
Bit 6 = ETI:
Enable Timer Interrup
When set, enables the timer interrupt request
(vector #3). If ETI=0 the timer interrupt isdisabled.
If ETI=1 and TMZ=1 an interrupt request is generated.
Bit 5 = D5:
Reserved
Must be set to “1”.
Bit 4 = D4
Do not care.
Bit 3 = PSI:
Prescaler Initialize Bit
Used to initialize the prescalerand inhibit its counting. When PSI=“0” the prescaler is set to 7Fh and
the counteris inhibited. When PSI=“1”the prescaler is enabled to count downwards. As long as
PSI=“0” both counter and prescaler are not run-
ning.
Bit 2, 1, 0 = PS2, PS1, PS0:
lect.
These bits select the division ratio of the pres-
caler register.
Table 13. Prescaler Division Factors
PS2 PS1 PS0 Divided by
0001
0012
0104
0118
10016
10132
11064
1 1 1 128
Timer Counter Register (TCR)
Address: 0D3h — Read/Write
70
D7 D6 D5 D4 D3 D2 D1 D0
Bit 7-0 = D7-D0:
Counter Bits.
Prescaler Register PSC
Address: 0D2h — Read/Write
70
D7 D6 D5 D4 D3 D2 D1 D0
Bit 7 =D7: Always read as ”0”.
Bit 6-0 = D6-D0: PrescalerBits.
Prescaler Mux. Se-
42
43/78
Page 44

ST62T52C ST62T62C/E62C
4.3 AUTO-RELOAD TIMER
The Auto-Reload Timer (AR Timer) on-chip peripheral consists of an 8-bit timer/counter with
compare and capture/reload capabilities and of a
7-bit prescaler with a clock multiplexer, enabling
the clock input to be selected as f
INT,fINT/3
or an
external clock source. A Mode Control Register,
ARMC, two Status Control Registers, ARSC0 and
ARSC1, an output pin, ARTIMout, and an input
pin, ARTIMin, allow the Auto-Reload Timer to be
used in4 modes:
– Auto-reload (PWMgeneration),
– Output compareand reload on external event
(PLL),
– Inputcapture and output compare fortime meas-
urement.
– Input captureand output compare for period
measurement.
The AR Timer can be usedto wake the MCU from
WAIT mode either with an internal or with an external clock. It also can be used to wake the MCU
from STOP mode, if used with an external clock
signal connected to the ARTIMin pin. A Load register allows the program to read and write the
counter onthe fly.
4.3.1 AR Timer Description
The AR COUNTER is an 8-bit up-counter incremented onthe input clock’s rising edge. The counter is loaded from the ReLoad/Capture Register,
ARRC, for auto-reload or capture operations, as
well as for initialization. Direct access to the AR
counter is not possible; however, by reading or
writing the ARLR load register, it is possible to
read or write the counter’s contents on the fly.
The AR Timer’s input clock can beeither the internal clock (from the Oscillator Divider), the internal
clock divided by 3, or the clock signal connected to
the ARTIMin pin. Selection between these clock
sources is effected by suitably programming bits
CC0-CC1 of theARSC1 register. The output of the
AR Multiplexer feeds the 7-bit programmable AR
Prescaler, ARPSC, which selects one of the 8
available taps of the prescaler, as defined by
PSC0-PSC2 in the AR Mode Control Register.
Thus the division factor ofthe prescaler can be set
to 2n (where n = 0, 1,..7).
The clock input tothe ARcounterisenabled bythe
TEN (Timer Enable) bit in the ARMC register.
When TEN isreset, the AR counterisstopped and
the prescaler and counter contents are frozen.
When TEN is set, the AR counter runs at the rate
of the selected clock source. The counter is
cleared on system reset.
The AR counter may also be initialized by writing
to the ARLR load register, which also causes an
immediate copy of the value tobeplacedinthe AR
counter, regardless of whether the counter is running or not. Initialization of the counter, by either
method, will also cleartheARPSC register,whereupon counting will start from a known value.
4.3.2 Timer Operating Modes
Four different operating modes are available for
the AR Timer:
Auto-reload Mode with PWM Generation. This
mode allows a Pulse Width Modulated signal to be
generated on the ARTIMout pin with minimum
Core processing overhead.
The free running 8-bit counter is fed by the prescaler’s output, and is incremented on every rising
edge of the clock signal.
When a counter overflow occurs, the counter is
automatically reloadedwith thecontents oftheReload/Capture Register, ARCC, and ARTIMout is
set. When the counter reaches the value contained in the compare register (ARCP), ARTIMout
is reset.
On overflow, the OVF flag of the ARSC0 registeris
set and an overflow interrupt request is generated
if the overflow interrupt enable bit, OVIE, in the
Mode Control Register (ARMC), is set. The OVF
flag must be reset by the user software.
When the counterreaches the compare value,the
CPF flag of the ARSC0 register is set and a compare interrupt request isgenerated, if the Compare
Interrupt enable bit, CPIE, in the Mode Control
Register (ARMC), is set. Theinterrupt service routine may then adjust thePWM period by loading a
new value intoARCP. The CPF flag must be reset
by user software.
The PWM signal is generated on the ARTIMout
pin (refer to the Block Diagram). The frequency of
this signal is controlled by the prescaler setting
and by the auto-reload value present in the Reload/Capture register, ARRC. The duty cycle of
the PWM signal is controlledby the Compare Register, ARCP.
44/78
43
Page 45

AUTO-RELOAD TIMER (Cont’d)
Figure 27. AR Timer Block Diagram
ST62T52C ST62T62C/E62C
f
f
INT
INT
/3
M
U
X
CC0-CC1
7-Bit
AR PRESCALER
PS0-PS2
DATA BUS
8
AR COMPARE
REGISTER
8
COMPARE
8
8-Bit
AR COUNTER
8
CPF
OVF
LOAD
DRB7
DDRB7
PB7/
ARTIMout
R
S
PWMOE
OVF
OVIE
TCLD
EIE
EF
CPF
CPIE
AR TIMER
INTERRUPT
PB6/
ARTIMin
SL0-SL1
SYNCHRO
EF
88
AR
RELOAD/CAPTURE
REGISTER
88
AR
LOAD
REGISTER
DATA BUS
VR01660A
45/78
44
Page 46

ST62T52C ST62T62C/E62C
AUTO-RELOAD TIMER (Cont’d)
It should be noted that the reload values will also
affect the value and the resolution of the duty cycle
of PWM output signal. To obtain a signal on ARTIMout, the contents of the ARCP register must be
greater thanthe contents of the ARRC register.
The maximum available resolution for the ARTIMout duty cycle is:
Resolution = 1/[255-(ARRC)]
Where ARRC is the content of the Reload/Capture
register. The compare value loaded in the Compare Register, ARCP, must be in the range from
(ARRC) to 255.
Figure 28. Auto-reload Timer PWM Function
COUNTER
255
COMPARE
VALUE
The ARTC counter is initialized by writing to the
ARRC register and by then setting the TCLD (Timer Load) andthe TEN (TimerClock Enable) bits in
the Mode Control register, ARMC.
Enabling and selection of the clock source is controlled by the CC0, CC1, SL0 and SL1 bits in the
Status Control Register, ARSC1. Theprescaler division ratio is selected by the PS0, PS1 and PS2
bits in the ARSC1 register.
In Auto-reload Mode, any of the three available
clock sources can be selected: Internal Clock, Internal Clock divided by 3 or the clock signal
present on the ARTIMin pin.
RELOAD
REGISTER
PWM OUTPUT
000
t
t
VR001852
46/78
45
Page 47

AUTO-RELOAD TIMER (Cont’d)
Capture Mode with PWM Generation.Inthis
mode, the AR counter operates as a free running
8-bit counter fed by the prescaler output. The
counter isincremented on everyclock rising edge.
An 8-bit capture operation from the counter to the
ARRC register is performed on every active edge
on the ARTIMin pin, when enabled by Edge Control bits SL0, SL1 in the ARSC1 register. At the
same time, the External Flag, EF, in the ARSC0
register is set and an external interrupt request is
generated if the External Interrupt Enable bit, EIE,
in the ARMC register, is set. The EF flag must be
reset by user software.
Each ARTC overflow sets ARTIMout, while a
match between the counter and ARCP (Compare
Register) resets ARTIMout and sets the compare
flag, CPF.A compare interrupt request is generated if the related compare interrupt enable bit,
CPIE, isset. A PWM signal is generated on ARTIMout. The CPF flag must be reset by user software.
The frequency of the generated signal is determined by the prescaler setting. The duty cycle is
determined by the ARCP register.
Initialization and reading of thecounter are identical tothe auto-reload mode(see previousdescription).
Enabling andselection of clock sources is controlled by the CC0 and CC1 bits in the AR StatusControl Register, ARSC1.
The prescaler division ratio is selected by programming the PS0, PS1 and PS2 bits in the
ARSC1 Register.
In Capture mode, the allowed clock sources are
the internalclock and the internal clock divided by
3; the external ARTIMin input pin should not be
used asa clock source.
Capture Mode with Reset of counter and prescaler, and PWM Generation. This mode isidenti-
cal to the previous one, with the difference that a
capture condition also resets the counter and the
prescaler, thus allowing easy measurement of the
time between two captures (for input period measurement on the ARTIMin pin).
Load on External Input. The counter operates as
a free running 8-bit counter fed by the prescaler.
ST62T52C ST62T62C/E62C
the count is incremented on every clock rising
edge.
Each counter overflow sets the ARTIMout pin. A
match between the counter and ARCP (Compare
Register) resets the ARTIMout pin and sets the
compare flag, CPF. A compareinterrupt request is
generated if the related compare interrupt enable
bit, CPIE, is set. A PWM signal is generated on
ARTIMout. The CPF flag must be reset by user
software.
Initialization of the counter is as described in the
previous paragraph. In addition, ifthe external ARTIMin input is enabled,an activeedge onthe input
pin will copy the contents of the ARRC registerinto
the counter, whether the counter is running or not.
Notes:
The allowed AR Timer clock sources are the fol-
lowing:
AR Timer Mode Clock Sources
Auto-reload mode f
Capture mode f
Capture/Reset mode f
External Load mode f
INT,fINT/3
INT,fINT/3
INT,fINT/3
INT,fINT/3
The clock frequency should not be modified while
the counter is counting, since the counter may be
set to an unpredictable value. For instance, the
multiplexer setting should not be modified while
the counter is counting.
Loading of the counter by any means (by auto-reload, through ARLR, ARRC or by the Core) resets
the prescaler at the same time.
Care should be taken when boththeCapture interrupt and the Overflow interrupt are used. Capture
and overflow are asynchronous. If the capture occurs when the Overflow Interrupt Flag, OVF, is
high (between counteroverflow and the flag being
reset by software, in the interruptroutine), the External Interrupt Flag, EF, may be cleared simultaneusly without the interrupt being taken into account.
The solution consists in resetting the OVF flag by
writing 06h in the ARSC0 register. Thevalue ofEF
is not affectedby this operation. If an interrupt has
occured, it will be processed when the MCU exits
from the interrupt routine (the second interrupt is
latched).
, ARTIMin
46
47/78
Page 48

ST62T52C ST62T62C/E62C
AUTO-RELOAD TIMER (Cont’d)
4.3.3 AR Timer Registers
AR Mode Control Register (ARMC)
Address: D5h — Read/Write
Reset status:00h
70
TCLD T EN PWMOE EI E CPIE OVIE ARMC1 ARMC0
The AR Mode Control Register ARMC is used to
program the different operating modes of the AR
Timer, to enable the clock and to initialize the
counter. It can be read and written to by the Core
and it is cleared on system reset (the AR Timer is
disabled).
ARSC0 register is also set, an interrupt request is
generated.
Bit 1-0= ARMC1-ARMC0:
Mode Control Bits 1-0
These are the operating mode control bits. The following bit combinations will select the various operating modes:
ARMC1 ARMC0 Operating Mode
0 0 Auto-reload Mode
0 1 Capture Mode
10
11
Capture Mode with Reset
of ARTC and ARPSC
Load on External Edge
Mode
.
Bit 7 = TLCD:
Timer Load Bit.
This bit, when set,
will cause the contents of ARRC register to be
loaded into the counter and the contents of the
prescaler register,ARPSC, are cleared in orderto
initialize the timer before starting to count. This bit
is write-only and any attempt to read it will yield a
logical zero.
Bit 6 = TEN
: Timer Clock Enable.
This bit, when
set, allows the timer to count. When cleared, it will
stop the timer and freeze ARPSC and ARTSC.
Bit 5 = PWMOE:
PWM Output Enable.
This bit,
when set, enables the PWM output on the ARTIMout pin. When reset, thePWM outputisdisabled.
Bit 4 = EIE:
External Interrupt Enable.
This bit,
when set, enables the external interrupt request.
When reset, the external interrupt request is
masked. If EIE is set and the related flag, EF, in
the ARSC0 register is also set, an interrupt request is generated.
Bit 3 = CPIE:
Compare Interrupt Enable.
This bit,
when set, enables the compare interrupt request.
If CPIE is reset, the compare interrupt request is
masked. If CPIE is set and the related flag, CPF,in
the ARSC0 register is also set, an interrupt request is generated.
Bit 2 = OVIE:
Overflow Interrupt
. This bit, when
set, enables the overflow interrupt request. If OVIE
is reset, the compare interrupt request is masked.
If OVIE is set and the related flag, OVF in the
AR Timer Status/Control Registers ARSC0 &
ARSC1. Theseregisterscontain theAR Timer sta-
tus information bits and also allow the programming of clock sources, active edge and prescaler
multiplexer setting.
ARSC0 register bits 0,1 and 2 containthe interrupt
flags of theAR Timer. These bits are read normally. Each one may be reset by software. Writing a
one does not affect thebit value.
AR Status Control Register 0 (ARSC0)
Address: D6h — Read/Clear
70
D7 D6 D5 D4 D3 EF CPF OVF
Bits 7-3 = D7-D3:
Bit 2=EF:
External Interrupt Flag.
Unused
This bit is set by
any active edge on the external ARTIMin input pin.
The flag is cleared bywriting a zero to theEF bit.
Bit 1 = CPF:
Compare Interrupt Flag.
This bit is set
if the contents of the counter and the ARCP register areequal. The flag is cleared by writing a zero
to the CPF bit.
Bit 0 = OVF:
Overflow InterruptFlag.
This bitis set
by a transition of the counter from FFh to 00h
(overflow). The flag is cleared by writing a zero to
the OVF bit.
48/78
47
Page 49

ST62T52C ST62T62C/E62C
AUTO-RELOAD TIMER (Cont’d)
AR Status Control Register 1(ARSC1)
Address: D7h — Read/Write
70
PS2 PS1 PS0 D4 SL1 SL0 CC1 CC0
AR Load Register ARLR. The ARLR loadregister
is used to read or write the ARTC counter register
“on the fly” (while it is counting). The ARLR register is not affected by system reset.
AR Load Register (ARLR)
Address: DBh — Read/Write
Bist 7-5 = PS2-PS0:
Bits 2-0.
These bits determine the Prescaler divi-
Prescaler Division Selection
sion ratio. The prescaler itself is not affected by
these bits.Theprescalerdivision ratioislisted inthe
following table:
Table 14. Prescaler Division Ratio Selection
PS2 PS1 PS0 ARPSC Division Ratio
0
0
0
0
1
1
1
1
Bit 4 = D4:
Bit 3-2= SL1-SL0:
0.
These bits control theedgefunctionof theTimer
0
0
1
1
0
0
1
1
Reserved
Timer InputEdgeControl Bits1-
0
1
0
1
0
1
0
1
1
2
4
8
16
32
64
128
. Mustbe kept reset.
inputpinfor externalsynchronization.IfbitSL0isreset, edgedetectionis disabled;ifsetedge detection
is enabled.If bitSL1is reset,theARTimer inputpin
is rising edge sensitive; if set,itis falling edge sensitive.
SL1 SL0 Edge Detection
X 0 Disabled
0 1 Rising Edge
1 1 Falling Edge
Bit 1-0 = CC1-CC0:
Clock Source Select Bit 1-0.
These bits select theclocksource for theARTimer
through the AR Multiplexer. The programming of
the clocksourcesisexplainedin thefollowingTable
15 :
70
D7 D6 D5 D4 D3 D2 D1 D0
Bit 7-0 = D7-D0:
Load Register Data Bits.
These
are the load register data bits.
AR Reload/Capture Register. The ARRC reload/capture register is used to hold the auto-reload value which is automatically loaded into the
counter when overflow occurs.
AR Reload/Capture (ARRC)
Address: D9h — Read/Write
70
D7 D6 D5 D4 D3 D2 D1 D0
Bit 7-0 = D7-D0:
Reload/Capture Data Bits
. These
are the Reload/Capture register data bits.
AR Compare Register. The CP compare register
is used to holdthe compare value for the compare
function.
AR Compare Register (ARCP)
Address: DAh — Read/Write
70
D7 D6 D5 D4 D3 D2 D1 D0
Bit 7-0 = D7-D0:
Compare Data Bits
. These are
the Compare register data bits.
Table 15. Clock Source Selection.
CC1 CC0 Clock Source
00F
01F
1 0 ARTIMin Input Clock
1 1 Reserved
int
Divided by 3
int
49/78
48
Page 50

ST62T52C ST62T62C/E62C
4.4 A/D CONVERTER (ADC)
The A/D converter peripheral is an 8-bit analog to
digital converter with analoginputs asalternateI/O
functions (the number of which is device dependent), offering 8-bit resolution with a typical conversion time of 70us (at an oscillator clock frequency
of 8MHz).
The ADC converts the input voltage by a process
of successive approximations, using a clock frequency derived from the oscillator with a division
factor oftwelve. With an oscillator clock frequency
less than 1.2MHz, conversion accuracy is decreased.
Selection of the input pin is done by configuring
the related I/O line as an analog input via the Option and Data registers (refer to I/O ports description for additional information). Only one I/O line
must be configured as an analog input at any time.
The user must avoid any situation in which more
than one I/O pin is selected as an analog input simultaneously, toavoid device malfunction.
The ADC uses two registers in the data space:the
ADC data conversion register, ADR, which stores
the conversion result, and the ADC control register, ADCR,used to program the ADC functions.
A conversionis started by writinga “1”to the Start
bit (STA) in the ADC control register. This automatically clears (resets to “0”) the End Of Conversion Bit (EOC). When a conversion is complete,
the EOC bit is automatically set to “1”, in order to
flag that conversion is complete and that the data
in the ADC data conversion registeris valid. Each
conversion has to be separately initiated bywriting
to the STA bit.
The STA bit is continuously scanned so that, ifthe
user sets it to “1” while a previous conversion is in
progress, a new conversion is started before completing the previous one. The start bit (STA) is a
write onlybit, any attempt to read it will show a logical “0”.
The A/D converter features a maskable interrupt
associated with the end of conversion. This interrupt is associated with interrupt vector #4 and occurs when the EOC bit is set (i.e. when a conversion is completed). The interrupt is masked using
the EAI(interrupt mask) bit in the control register.
The power consumption of the device can be reduced by turning off the ADC peripheral. This is
done by setting the PDS bit in the ADC control register to “0”. If PDS=“1”, the A/D is powered andenabled for conversion. This bit must be set at least
one instruction before the beginningofthe conver-
sion to allow stabilisation of the A/D converter.
This action is also needed before entering WAIT
mode, since the A/D comparator is not automatically disabled in WAIT mode.
During Reset, any conversion in progress is
stopped, thecontrolregisterisresetto 40h and the
ADC interrupt is masked (EAI=0).
Figure 29. ADC Block Diagram
INTERRUPT
Ain
CONTROL REGISTER
CONTROL SIGNALS
CONVERTER
8
CORE
RESULT REGISTER
CLOCK
RESET
AV
AV
8
CORE
SS
DD
VA00418
4.4.1 Application Notes
The A/D converter does not feature a sample and
hold circuit. The analog voltage to be measured
should therefore be stable during the entire conversion cycle. Voltage variation should not exceed
±1/2 LSB for the optimum conversion accuracy. A
low pass filter may be used at the analog input
pins to reduce input voltage variation during conversion.
When selected asan analog channel, the input pin
is internally connected to a capacitor Cadof typically 12pF. For maximum accuracy, this capacitor
must be fully charged at the beginning of conversion. In the worst case, conversion starts one instruction (6.5 µs) after the channel has been selected. In worst case conditions, the impedance,
ASI, of the analog voltage sourceis calculated using the following formula:
6.5µs=9xCadx ASI
(capacitor charged to over 99.9%), i.e. 30 kΩ including a 50% guardband. ASI can behigher ifC
has been charged for a longer period by adding in-
ad
structions before the start of conversion (adding
more than 26 CPU cycles is pointless).
50/78
49
Page 51

A/D CONVERTER (Cont’d)
Since the ADC is on the same chip as the micro-
processor, the user shouldnotswitch heavily loaded output signals during conversion, if high precision is required.Such switchingwill affect the supply voltages used as analog references.
The accuracy of the conversion depends on the
quality of the power supplies (VDDand VSS). The
user musttake special care to ensure a well regulated reference voltage is present on the VDDand
VSSpins (power supply voltage variations mustbe
less than5V/ms). This implies,in particular, that a
suitable decoupling capacitor is used at the V
DD
pin.
The converter resolution is given by::
ST62T52C ST62T62C/E62C
the noise during the conversion. But the first conversion step is performed before the execution of
the WAIT when most of clocks signals are still enabled . The key is to synchronize the ADC start
with the effective execution of the WAIT. This is
achieved by setting ADC SYNC option. This way,
ADC conversion starts in effective WAIT for maximum accuracy.
Note: With this extra option, it ismandatory to execute WAIT instruction just after ADCstart instruction. Insertion of any extra instruction may cause
spurious interrupt request at ADC interrupt vector.
A/D Converter Control Register (ADCR)
Address: 0D1h — Read/Write
V
–
DDVSS
---------------------------256
The Input voltage (Ain) which is to be converted
must be constant for 1µs before conversion and
remain constant during conversion.
Conversion resolution canbeimproved if the power supply voltage (VDD) to the microcontroller is
lowered.
In orderto optimise conversion resolution,theuser
can configure the microcontroller in WAIT mode,
because this mode minimises noise disturbances
and power supply variations due to output switching. Nevertheless, the WAIT instruction should be
executed as soon as possible after the beginning
of the conversion, because execution of theWAIT
instruction may cause a small variation of the V
DD
voltage. The negative effectofthisvariationisminimized at the beginning oftheconversion whenthe
converter is less sensitive, rather than at the end
of conversion, when the less significant bits are
determined.
The best configuration, from an accuracy standpoint, is WAIT mode with the Timer stopped. Indeed, only the ADC peripheral and the oscillator
are thenstillworking. The MCU must be woken up
from WAIT mode by the ADC interrupt at the end
of the conversion. It should be noted that waking
up the microcontroller could also be done using
the Timer interrupt, but in this case the Timer will
be working and the resulting noise could affect
conversion accuracy.
One extra feature is available in the ADC to get a
better accuracy. Infact, each ADC conversion has
to be followed by a WAIT instruction to minimize
70
EAI EOC STA PDS D3 D2 D1 D0
Bit 7 = EAI:
Enable A/D Interrupt.
If this bit is setto
“1” the A/D interrupt is enabled, when EAI=0 the
interrupt is disabled.
Bit 6 = EOC:
End of conversion. Read Only
. This
read only bit indicates when a conversion has
been completed. This bit is automatically reset to
“0” when the STA bit is written.If the user is using
the interrupt optionthen this bit can be used as an
interrupt pending bit. Data in the data conversion
register are valid only whenthis bit is set to“1”.
Bit 5 =STA
: Startof Conversion. Write Only
. Writing a “1” to this bitwill start aconversion on the selected channel and automatically reset to “0” the
EOC bit. If the bit is set again when a conversion is
in progress, the present conversion is stopped and
a new one will take place. This bit is write only, any
attempt to read it will show a logical zero.
Bit 4 = PDS
: Power Down Selection.
This bit activates the A/D converter if set to “1”. Writing a “0” to
this bit will put the ADC in power down mode (idle
mode).
Bit 3-0 = D3-D0. Not used
A/D Converter Data Register (ADR)
Address: 0D0h — Read only
70
D7 D6 D5 D4 D3 D2 D1 D0
Bit 7-0 = D7-D0
: 8Bit A/D Conversion Result.
50
51/78
Page 52

ST62T52C ST62T62C/E62C
5 SOFTWARE
5.1 ST6 ARCHITECTURE
The ST6 software has been designed to fully use
the hardware in the most efficient way possible
while keeping byte usage to a minimum; in short,
to provide byte efficient programming capability.
The ST6 core has the ability to set or clear any
register or RAM location bit of the Data space with
a single instruction. Furthermore, the program
may branch to a selected address depending on
the status of any bit of the Data space. The carry
bit isstored with thevalue of the bitwhen the SET
or RES instruction is processed.
5.2 ADDRESSING MODES
The ST6 core offers nine addressing modes,
which are described in the following paragraphs.
Three different address spacesare available: Program space, Data space, and Stack space. Program space contains the instructions which are to
be executed, plusthe data for immediate modeinstructions. Data space contains the Accumulator,
the X,Y,V and W registers, peripheral and Input/Output registers, the RAM locations and Data
ROM locations (for storage of tables and constants). Stack space containssix 12-bit RAMcells
used tostack the return addresses for subroutines
and interrupts.
Immediate. In the immediate addressing mode,
the operand of the instruction follows the opcode
location. Asthe operand is a ROM byte, theimmediate addressing mode is used to access constants which donot changeduringprogramexecution (e.g., a constant used to initialize a loop counter).
Direct. In the direct addressing mode, the address
of the byte which is processed bythe instruction is
stored in the location which follows the opcode. Direct addressing allowsthe user to directly address
the 256bytesin Data Space memorywith a single
two-byte instruction.
Short Direct. The core can address the four RAM
registers X,Y,V,W (locations 80h, 81h,82h,83h) in
the short-directaddressingmode. In this case, the
instruction is only one byte and theselection of the
location to be processed is contained in the opcode. Shortdirectaddressing is a subset of the direct addressing mode. (Note that 80h and 81h are
also indirect registers).
Extended. In the extended addressing mode, the
12-bit address needed to define the instruction is
obtained byconcatenating the four less significant
bits of the opcode with the byte following the opcode. The instructions (JP, CALL) which use the
extended addressing mode are able to branch to
any address of the 4K bytes Program space.
An extended addressing mode instruction is twobyte long.
Program Counter Relative. The relative addressing mode is only used in conditional branch instructions. The instruction is used to perform a test
and, if the condition is true, a branch with a span of
-15 to +16locations around the address of therelative instruction. If the condition is not true, the instruction which follows the relative instruction is
executed. The relative addressing mode instruction is one-byte long. The opcode is obtained in
adding the three most significant bits which characterize the kind of the test, one bit which determines whether the branch is a forward (when it is
0) or backward (when it is 1) branch and the four
less significant bits which give the span of the
branch (0h to Fh) which must be added or subtracted to the address of the relative instruction to
obtain the address of thebranch.
Bit Direct. In the bit direct addressing mode, the
bit to be set or cleared is part of the opcode, and
the byte following the opcode points to the address of the bytein whichthe specified bit mustbe
set or cleared. Thus,any bitin the 256 locations of
Data space memory can beset or cleared.
Bit Test & Branch. The bit test and branch addressing mode is a combination of direct addressing and relative addressing. The bit test and
branch instruction is three-byte long. The bit identification and the tested condition are included in
the opcode byte. The address of the byte to be
tested follows immediately the opcode in the Program space. The third byte is the jump displacement, which is in the range of -127 to +128. This
displacement can be determined using a label,
which is converted by theassembler.
Indirect. In the indirect addressingmode, the byte
processed by the register-indirect instruction is at
the address pointed by the content ofone oftheindirect registers, XorY (80h,81h). Theindirect register is selected by thebit4 of the opcode. A register indirect instruction is one byte long.
Inherent. In the inherent addressing mode, all the
information necessary toexecute the instruction is
contained in the opcode. These instructions are
one byte long.
52/78
51
Page 53

5.3 INSTRUCTION SET
ST62T52C ST62T62C/E62C
The ST6 core offers a set of 40 basic instructions
which, when combined with nine addressing
modes, yield 244 usable opcodes. They can be divided into six different types: load/store, arithmetic/logic, conditional branch, control instructions,
jump/call, and bit manipulation. The following paragraphs describethe different types.
All the instructions belonging to a given type are
Load & Store. These instructionsuse one,two or
three bytes in relation with the addressing mode.
One operand is the Accumulator for LOAD and the
other operand is obtained from data memory using
one of the addressing modes.
For Load Immediate one operand can be any of
the 256 data spacebyteswhile the other is always
immediate data.
presented in individual tables.
Table 16. Load & Store Instructions
Instruction Addressing Mode Bytes Cycles
LD A, X Short Direct 1 4 ∆ *
LD A, Y Short Direct 1 4 ∆ *
LD A, V Short Direct 1 4 ∆ *
LD A, W Short Direct 1 4 ∆ *
LD X, A Short Direct 1 4 ∆ *
LD Y,A Short Direct 1 4 ∆ *
LD V,A Short Direct 1 4 ∆ *
LD W,A Short Direct 1 4 ∆ *
LD A, rr Direct 2 4 ∆ *
LD rr, A Direct 2 4 ∆ *
LD A, (X) Indirect 1 4 ∆ *
LD A, (Y) Indirect 1 4 ∆ *
LD (X), A Indirect 1 4 ∆ *
LD (Y), A Indirect 1 4 ∆ *
LDI A, #N Immediate 2 4 ∆ *
LDI rr, #N Immediate 3 4 * *
Flags
ZC
Notes:
X,Y. Indirect Register Pointers, V & W Short Direct Registers
# . Immediate data (stored in ROM memory)
rr. Data space register
∆. Affected
* . Not Affected
53/78
52
Page 54

ST62T52C ST62T62C/E62C
INSTRUCTION SET (Cont’d)
Arithmetic and Logic. These instructions are
used to perform the arithmetic calculations and
logic operations. In AND, ADD, CP, SUB instructions oneoperand is alwaystheaccumulator while
the other can be either a data space memorycon-
tent or an immediate value in relation with the addressing mode. InCLR, DEC, INC instructionsthe
operand can be any of the 256 data space addresses. In COM, RLC,SLA the operand is always
the accumulator.
Table 17. Arithmetic & Logic Instructions
Instruction Addressing Mode Bytes Cycles
ADD A, (X) Indirect 1 4 ∆∆
ADD A, (Y) Indirect 1 4 ∆∆
ADD A, rr Direct 2 4 ∆∆
ADDI A, #N Immediate 2 4 ∆∆
AND A, (X) Indirect 1 4 ∆∆
AND A, (Y) Indirect 1 4 ∆∆
AND A, rr Direct 2 4 ∆∆
ANDI A, #N Immediate 2 4 ∆∆
CLR A Short Direct 2 4 ∆∆
CLR r Direct 3 4 * *
COM A Inherent 1 4 ∆∆
CP A,(X) Indirect 1 4 ∆∆
CP A,(Y) Indirect 1 4 ∆∆
CP A,rr Direct 2 4 ∆∆
CPI A, #N Immediate 2 4 ∆∆
DEC X Short Direct 1 4 ∆ *
DEC Y Short Direct 1 4 ∆ *
DEC V Short Direct 1 4 ∆ *
DEC W Short Direct 1 4 ∆ *
DEC A Direct 2 4 ∆ *
DEC rr Direct 2 4 ∆ *
DEC (X) Indirect 1 4 ∆ *
DEC (Y) Indirect 1 4 ∆ *
INC X Short Direct 1 4 ∆ *
INC Y Short Direct 1 4 ∆ *
INC V Short Direct 1 4 ∆ *
INC W Short Direct 1 4 ∆ *
INC A Direct 2 4 ∆ *
INC rr Direct 2 4 ∆ *
INC (X) Indirect 1 4 ∆ *
INC (Y) Indirect 1 4 ∆ *
RLC A Inherent 1 4 ∆∆
SLA A Inherent 2 4 ∆∆
SUB A, (X) Indirect 1 4 ∆∆
SUB A, (Y) Indirect 1 4 ∆∆
SUB A, rr Direct 2 4 ∆∆
SUBI A, #N Immediate 2 4 ∆∆
Notes:
X,Y.Indirect Register Pointers, V & W Short Direct RegistersD. Affected
# . Immediate data (stored in ROM memory)* . Not Affected
rr. Data space register
Flags
ZC
54/78
53
Page 55

INSTRUCTION SET (Cont’d)
ST62T52C ST62T62C/E62C
Conditional Branch. The branch instructions
achieve a branch in the program when the selected conditionis met.
Bit Manipulation Instructions. These instructions can handle any bit in data space memory.
One group either sets or clears. The other group
Control Instructions. The control instructions
control the MCU operations during program execution.
Jump and Call. These two instructions are used
to perform long (12-bit) jumps or subroutines call
inside the whole program space.
(see Conditional Branch) performs the bit test
branch operations.
Table 18. Conditional Branch Instructions
Instruction Branch If Bytes Cycles
JRCe C=1 1 2 * *
JRNC e C = 0 1 2 * *
JRZe Z=1 1 2 * *
JRNZ e Z = 0 1 2 * *
JRR b,rr, ee Bit = 0 3 5 * ∆
JRS b, rr, ee Bit = 1 3 5 * ∆
Notes:
b. 3-bit address rr. Data space register
e. 5 bitsigneddisplacement in the range -15 to +16<F128M> ∆ . Affected. The tested bit is shifted into carry.
ee. 8 bit signed displacement inthe range -126 to +129 * . Not Affected
Flags
ZC
Table 19. Bit Manipulation Instructions
Instruction Addressing Mode Bytes Cycles
SET b,rr Bit Direct 2 4 * *
RES b,rr Bit Direct 2 4 * *
Notes:
b. 3-bit address; * . Not<M> Affected
rr. Data space register;
Flags
ZC
Table 20. Control Instructions
Instruction Addressing Mode Bytes Cycles
NOP Inherent 1 2 * *
RET Inherent 1 2 * *
RETI Inherent 1 2 ∆∆
STOP (1) Inherent 1 2 * *
WAIT Inherent 1 2 * *
Notes:
1. This instruction is deactivated<N>and a WAIT is automatically executed instead of a STOP if the watchdog function is selected.
∆ . Affected
*. Not Affected
Flags
ZC
Table 21. Jump & Call Instructions
Instruction
CALL abc Extended 2 4 * *
JP abc Extended 2 4 * *
Notes:
abc. 12-bit address;
* . Not Affected
Addressing Mode Bytes Cycles
Flags
ZC
54
55/78
Page 56

ST62T52C ST62T62C/E62C
Opcode Map Summary. The following table contains an opcode map for the instructionsusedbytheST6
LOW
HI HI
0
0000
1
0001
2
0010
3
0011
4
0100
5
0101
6
0110
7
0111
8
1000
9
1001
A
1010
B
1011
C
1100
D
1101
E
1110
F
1111
0
0000
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 LD
e abc e b0,rr,ee e # e a,(x)
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 JRNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 INC 2 JRC 4 LDI
e abc e b0,rr,ee e x e a,nn
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc 2 imm
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 CP
e abc e b4,rr,ee e # e a,(x)
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 JRNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 LD 2 JRC 4 CPI
e abc e b4,rr,ee e a,x e a,nn
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc 2 imm
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 ADD
e abc e b2,rr,ee e # e a,(x)
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 JRNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 INC 2 JRC 4 ADDI
e abc e b2,rr,ee e y e a,nn
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc 2 imm
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 INC
e abc e b6,rr,ee e # e (x)
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 JRNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 LD 2 JRC
e abc e b6,rr,ee e a,y e #
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 LD
e abc e b1,rr,ee e # e (x),a
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 RNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 INC 2 JRC
e abc e b1,rr,ee e v e #
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 AND
e abc e b5,rr,ee e # e a,(x)
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 JRNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 LD 2 JRC 4 ANDI
e abc e b5,rr,ee e a,v e a,nn
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc 2 imm
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 SUB
e abc e b3,rr,ee e # e a,(x)
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 JRNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 INC 2 JRC 4 SUBI
e abc e b3,rr,ee e w e a,nn
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc 2 imm
2 JRNZ 4 CALL 2 JRNC 5 JRR 2 JRZ 2 JRC 4 DEC
e abc e b7,rr,ee e # e (x)
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 prc 1 ind
2 JRNZ 4 CALL 2 JRNC 5 JRS 2 JRZ 4 LD 2 JRC
e abc e b7,rr,ee e a,w e #
1 pcr 2 ext 1 pcr 3 bt 1 pcr 1 sd 1 prc
1
0001
2
0010
3
0011
4
0100
5
0101
6
0110
0111
LOW
7
0
0000
1
0001
2
0010
3
0011
4
0100
5
0101
6
0110
7
0111
8
1000
9
1001
A
1010
B
1011
C
1100
D
1101
E
1110
F
1111
Abbreviationsfor Addressing Modes: Legend:
dir Direct # Indicates Illegal Instructions
sd Short Direct e 5 Bit Displacement
imm Immediate b 3 Bit Address
inh Inherent rr 1bytedataspace address
ext Extended nn 1 byte immediate data
b.d Bit Direct abc 12 bit address
bt Bit Test ee 8 bit Displacement
pcr Program Counter Relative
ind Indirect
56/78
55
Cycle
Operand
Bytes
Addressing Mode
2
JRC
e
1 prc
Mnemonic
Page 57

ST62T52C ST62T62C/E62C
Opcode Map Summary (Continued)
LOW
HI HI
0
0000
1
0001
2
0010
3
0011
4
0100
5
0101
6
0110
7
0111
8
1000
9
1001
A
1010
B
1011
C
1100
D
1101
E
1110
F
1111
8
1000
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 4 LDI 2 JRC 4 LD
e abc e b0,rr e rr,nn e a,(y)
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 3 imm 1 prc 1 ind
2 JRNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 DEC 2 JRC 4 LD
e abc e b0,rr e x e a,rr
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 4 COM 2 JRC 4 CP
e abc e b4,rr e a e a,(y)
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 prc 1 ind
2 JRNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 LD 2 JRC 4 CP
e abc e b4,rr e x,a e a,rr
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 2 RETI 2 JRC 4 ADD
e abc e b2,rr e e a,(y)
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 inh 1 prc 1 ind
2 JRNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 DEC 2 JRC 4 ADD
e abc e b2,rr e y e a,rr
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 2 STOP 2 JRC 4 INC
e abc e b6,rr e e (y)
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 inh 1 prc 1 ind
2 JRNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 LD 2 JRC 4 INC
e abc e b6,rr e y,a e rr
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 2 JRC 4 LD
e abc e b1,rr e # e (y),a
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 prc 1 ind
2 RNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 DEC 2 JRC 4 LD
e abc e b1,rr e v e rr,a
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 4 RCL 2 JRC 4 AND
e abc e b5,rr e a e a,(y)
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 inh 1 prc 1 ind
2 JRNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 LD 2 JRC 4 AND
e abc e b5,rr e v,a e a,rr
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 2 RET 2 JRC 4 SUB
e abc e b3,rr e e a,(y)
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 inh 1 prc 1 ind
2 JRNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 DEC 2 JRC 4 SUB
e abc e b3,rr e w e a,rr
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
2 JRNZ 4 JP 2 JRNC 4 RES 2 JRZ 2 WAIT 2 JRC 4 DEC
e abc e b7,rr e e (y)
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 inh 1 prc 1 ind
2 JRNZ 4 JP 2 JRNC 4 SET 2 JRZ 4 LD 2 JRC 4 DEC
e abc e b7,rr e w,a e rr
1 pcr 2 ext 1 pcr 2 b.d 1 pcr 1 sd 1 prc 2 dir
9
1001
A
1010
B
1011
C
1100
D
1101
E
1110
1111
LOW
F
0
0000
1
0001
2
0010
3
0011
4
0100
5
0101
6
0110
7
0111
8
1000
9
1001
A
1010
B
1011
C
1100
D
1101
E
1110
F
1111
Abbreviationsfor Addressing Modes: Legend:
dir Direct # Indicates Illegal Instructions
sd Short Direct e 5 Bit Displacement
imm Immediate b 3 Bit Address
inh Inherent rr 1bytedataspace address
ext Extended nn 1 byte immediate data
b.d Bit Direct abc 12 bit address
bt Bit Test ee 8 bit Displacement
pcr Program Counter Relative
ind Indirect
Cycle
Operand
Bytes
Addressing Mode
2
JRC
e
1 prc
Mnemonic
57/78
56
Page 58

ST62T52C ST62T62C/E62C
6 ELECTRICAL CHARACTERISTICS
6.1 ABSOLUTE MAXIMUM RATINGS
This product containsdevicesto protect the inputs
against damage due to high static voltages, however it is advisable to take normal precaution to
avoid application of any voltage higher than the
specified maximum rated voltages.
Power Considerations.The average chip-junction temperature, Tj, in Celsius can be obtained
from:
Tj=TA + PD x RthJA
Where:TA = Ambient Temperature.
For proper operation it is recommended that V
and VObe higher than VSSand lower than VDD.
Reliability is enhanced if unused inputs are connected to an appropriate logic voltage level (V
or VSS).
DD
I
RthJA =Package thermal resistance (junc-
tion-to ambient).
PD = Pint + Pport.
Pint =IDD x VDD (chip internal power).
Pport =Portpower dissipation (determined
by the user).
Symbol Parameter Value Unit
V
DD
V
I
V
O
IV
DD
IV
SS
Tj Junction Temperature 150 °C
T
STG
Notes:
- Stresses above thoselistedas “absolute maximum ratings” may cause permanent damage to the device. This is a stress rating only and
functional operation of thedevice at these conditions is not implied. Exposure to maximum rating conditions for extended periods may
affect device reliability.
- (1)Within these limits,clamping diodes are guarantee tobenot conductive. Voltages outside these limits are authorised aslong as injection
current is kept withinthe specification.
Supply Voltage -0.3 to7.0 V
Input Voltage VSS- 0.3 toVDD+ 0.3
Output Voltage VSS- 0.3 toVDD+ 0.3
TotalCurrent into VDD(source) 80 mA
TotalCurrent out of VSS(sink) 100 mA
Storage Temperature -60 to150 °C
(1)
(1)
V
V
58/78
57
Page 59

6.2 RECOMMENDED OPERATING CONDITIONS
ST62T52C ST62T62C/E62C
Symbol Parameter Test Conditions
6 Suffix Version
T
V
Operating Temperature
A
Operating Supply Voltage
(Except ST626xB ROM devices)
DD
Operating Supply Voltage
(ST626xB ROM devices)
1 Suffix Version
3 Suffix Version
=4MHz, 1 & 6 Suffix
f
OSC
f
=4MHz, 3 Suffix
OSC
fosc= 8MHz ,1 & 6 Suffix
fosc= 8MHz ,3 Suffix
f
=4MHz, 1 & 6 Suffix
OSC
f
=4MHz, 3 Suffix
OSC
fosc= 8MHz ,1 & 6 Suffix
fosc= 8MHz ,3 Suffix
V
= 3.0V,1 & 6 Suffix
Oscillator Frequency
2)
(Except ST626xB ROM devices)
f
OSC
Oscillator Frequency
2)
(ST626xB ROM devices)
I
INJ+
I
Notes:
1. Care must betaken incase ofnegative current injection, where adaptedimpedance must be respected onanalog sources to not affectthe
A/D conversion. For a -1mA injection, a maximum 10 KΩ is recommended.
2.An oscillator frequency above1MHz is recommended for reliable A/D results
Pin Injection Current (positive) VDD= 4.5 to 5.5V +5 mA
Pin Injection Current (negative) VDD= 4.5 to 5.5V -5 mA
INJ-
DD
V
= 3.0V , 3 Suffix
DD
V
= 3.6V , 1 & 6 Suffix
DD
V
= 3.6V , 3 Suffix
DD
= 3.0V,1 & 6 Suffix
V
DD
V
= 3.0V , 3 Suffix
DD
V
= 4.0V , 1 & 6 Suffix
DD
V
= 4.0V , 3 Suffix
DD
Min. Typ. Max.
-40
0
-40
3.0
3.0
3.6
4.5
3.0
3.0
4.0
4.5
0
0
0
0
0
0
0
0
Value
85
70
125
6.0
6.0
6.0
6.0
6.0
6.0
6.0
6.0
4.0
4.0
8.0
4.0
4.0
4.0
8.0
4.0
Unit
°C
V
V
MHz
MHz
Figure 30. Maximum Operating FREQUENCY (Fmax) Versus SUPPLY VOLTAGE (VDD)
Maximum FREQUENCY (MHz)
8
FUNCTIONALITY IS NOT
GUARANTEED IN
7
THIS AREA
6
5
4
3
2
1
2.5 3 4 4.5 5 5.5 6
1 & 6 Suffix version
1 & 6 Suffix
version
3.6
3 Suffix version
3 Suffix version
SUPPLY VOLTAGE (VDD)
All devices except ST626xB ROM devices
ST626xB ROM devices
The shaded area is outside the recommended operating range; device functionality is not guaranteed under these conditions.
59/78
58
Page 60

ST62T52C ST62T62C/E62C
6.3 DC ELECTRICAL CHARACTERISTICS
(TA= -40 to +125°C unless otherwise specified)
Symbol Parameter Test Conditions
V
V
V
V
V
V
V
R
I
I
I
DD
Retention EPROM Data Retention T
Input Low Level Voltage
IL
All Input pins
Input High LevelVoltage
IH
All Input pins
(2)
(1)
=5V
V
DD
V
=3V
DD
VDD= 5.0V; IOL= +10µA
V
= 5.0V; IOL= + 3mA
DD
= 5.0V; IOL= +10µA
V
DD
V
= 5.0V; IOL= +7mA
DD
V
= 5.0V; IOL= +15mA
DD
VDD= 5.0V; IOH= -10µA
V
= 5.0V; IOH= -3.0mA
DD
All Input pins 40 100 350
RESET pin 150 350 900
VIN=VSS(No Pull-Up configured)
V
IN=VDD
V
IN=VSS
VIN=V
DD
V
RESET=VSS
f
=8MHz
OSC
VDD=5.0V f
VDD=5.0V f
I
(3)
V
I
(3)
V
=0mA
LOAD
=5.0V
DD
=0mA
LOAD
=5.0V
DD
=55°C 10 years
A
=8MHz 7 mA
INT
=8MHz 2.5 mA
INT
Hysteresis Voltage
Hys
All Input pins
LVD Threshold in power-on 4.1 4.3
up
LVD threshold inpowerdown 3.5 3.8
dn
Low Level Output Voltage
All Output pins
OL
Low Level Output Voltage
30 mA Sink I/O pins
High Level Output Voltage
OH
All Output pins
Pull-up Resistance
PU
Input Leakage Current
All Input pins but RESET
IL
Input Leakage Current
IH
RESET pin
Supply Current in RESET
Mode
Supply Current in
RUN Mode
Supply Current in WAIT
(3)
Mode
Supply Current in STOP
Mode, with LVD disabled
Supply Current in STOP
Mode, with LVD enabled
Value
Min. Typ. Max.
V
DD
V
x 0.7 V
DD
0.2
0.2
0.1
0.8
0.1
0.8
1.3
4.9
3.5
0.1 1.0
-8 -16 -30
10
7mA
20 µA
500
Unit
x 0.3 V
V
V
V
ΚΩ
µA
Notes:
(1) Hysteresis voltage between switching levels
(2) All peripherals running
(3) All peripherals in stand-by
60/78
59
Page 61

DC ELECTRICAL CHARACTERISTICS (Cont’d)
(TA= -40 to +85°C unless otherwise specified))
ST62T52C ST62T62C/E62C
Symbol Parameter Test Conditions
V
V
V
V
I
DD
Note:
(*) All Peripherals in stand-by.
LVD Threshold in power-on Vdn+50 mV 4.1 4.3 V
up
LVD threshold inpowerdown 3.6 3.8 Vup-50 mV V
dn
= 5.0V; IOL= +10µA
V
Low Level Output Voltage
All Output pins
OL
Low Level Output Voltage
30 mA Sink I/O pins
High Level Output Voltage
OH
All Output pins
Supply Current in STOP
Mode, with LVD disabled
DD
V
= 5.0V; IOL= + 5mA
DD
V
= 5.0V; IOL= + 10mAv
DD
= 5.0V; IOL= +10µA
V
DD
V
= 5.0V; IOL= +10mA
DD
V
= 5.0V; IOL= +20mA
DD
V
= 5.0V; IOL= +30mA
DD
VDD= 5.0V; IOH= -10µA
V
= 5.0V; IOH= -5.0mA
DD
I
=0mA
LOAD
(*)
V
=5.0V
DD
6.4 AC ELECTRICAL CHARACTERISTICS
(TA= -40 to +125°C unless otherwise specified)
Symbol Parameter Test Conditions
2) 3)
(1)
=25°C
T
A
T
=85°C
A
T
=125°C
A
=55°C 10 years
A
VDD=3V
V
= 3.6V
DD
V
= 4.5V
DD
V
=6V
DD
VDD=5.0V (Except 626xB ROM)
R=47kΩ
R=100kΩ
R=470kΩ
VDD=5.0V (626xB ROM)
R=10kΩ
R=27kΩ
R=100kΩ
t
REC
T
WEE
Endurance
(2)
Supply Recovery Time
EEPROM Write Time
EEPROM WRITE/ERASE Cycle QALOTAcceptance (25°C) 300,000 1 million cycles
Retention EEPROM Data Retention T
f
LFAO
f
OSG
f
C
C
RC
OUT
Internal frequency with LFAO active 200 400 800 kHz
Internal Frequency with OSG
enabled
2)
Internal frequency with RC oscillator and OSG disabled
Input Capacitance All Inputs Pins 10 pF
IN
Output Capacitance All Outputs Pins 10 pF
Value
Min. Typ. Max.
0.1
0.8
1.2
0.1
0.8
1.3
2.0
4.9
3.5
10 µA
Value
Min. Typ. Max.
100 ms
5
10
20
1
1
2
2
4
2.7
800
2.4
1.8
800
5
3.2
850
3.1
2.2
980
10
20
30
f
OSC
5.8
3.5
900
3.8
2.5
1200
Unit
V
V
Unit
ms
MHz
MHz
MHz
kHz
MHz
MHz
kHz
Notes:
1. Period for which V
2 An oscillator frequency above 1MHz is recommended forreliable A/D results.
3. Measure performed with OSCin pin soldered on PCB, with anaround 2pF equivalent capacitance.
has to be connected at 0V to allow internal Reset function at next power-up.
DD
61/78
60
Page 62

ST62T52C ST62T62C/E62C
6.5 A/D CONVERTER CHARACTERISTICS
(TA= -40 to +125°C unless otherwise specified)
Symbol Parameter Test Conditions
Min. Typ. Max.
Res Resolution 8 Bit
f
A
TOT
t
C
TotalAccuracy
Conversion Time
(1) (2)
ZIR Zero Input Reading
FSR Full Scale Reading
AD
AC
Notes:
1. Noise at VDD, VSS <10mV
2. With oscillator frequencies less than 1MHz, the A/D Converter accuracy is decreased.
Analog Input CurrentDuring
I
Conversion
Analog Input Capacitance 2 5 pF
IN
> 1.2MHz
OSC
f
> 32kHz
OSC
= 8MHz (TA<85°C)
f
OSC
f
= 4 MHz
OSC
Conversion result when
V
IN=VSS
00 Hex
Conversion result when
V
IN=VDD
V
= 4.5V 1.0 µA
DD
6.6 TIMER CHARACTERISTICS
Value
±2
±4
70
140
FF Hex
Unit
LSB
µs
(TA= -40 to +125°C unless otherwise specified)
Symbol Parameter Test Conditions
f
IN
t
W
Input Frequency on TIMER Pin MHz
= 3.0V
V
Pulse Width at TIMER Pin
DD
V
>4.5V
DD
6.7 SPI CHARACTERISTICS
(TA= -40 to +125°C unless otherwise specified)
6.8 ARTIMER ELECTRICAL CHARACTERISTICS
(TA= -40 to +125°C unless otherwise specified)
Value
Min. Typ. Max.
IINT
---------4
1
125
Unit
µs
ns
62/78
Page 63

Figure 31. Vol versus Iol on all I/O port at Vdd=5V
8
ST62T52C ST62T62C/E62C
6
4
Vol (V)
2
0
010203040
Iol (mA)
This curves represents typical variations and is given for guidance only
Figure 32. Vol versus Iol on all I/O port atT=25°C
8
6
4
Vol (V)
2
0
010203040
Iol (mA)
T=-40°C
T=25°C
T=95°C
T = 125°C
Vdd = 3.0V
Vdd = 4.0V
Vdd = 5.0V
Vdd = 6.0V
This curves represents typical variations and is given for guidance only
Figure 33. Vol versus Iol for High sink (30mA) I/Oports at T=25°C
5
4
3
2
Vol (V)
1
0
0 10203040
Iol (mA)
This curves represents typical variations and is given for guidance only
Vdd = 3.0V
Vdd = 4.0V
Vdd = 5.0V
Vdd = 6.0V
63/78
62
Page 64

ST62T52C ST62T62C/E62C
Figure 34. Vol versus Iol for High sink (30mA) I/O ports at Vdd=5V
5
4
3
2
Vol (V)
1
0
0 10203040
Iol (mA)
This curves represents typical variations and is given for guidance only
Figure 35. Voh versus Ioh on all I/O port at 25°C
6
4
2
Voh (V)
0
-2
0 10203040
Ioh (mA)
T = -40°C
T=25°C
T=95°C
T = 125°C
Vdd = 3.0V
Vdd = 4.0V
Vdd = 5.0V
Vdd = 6.0V
This curvesrepresents typical variations and is given for guidance only
Figure 36. Voh versus Ioh on all I/O port at Vdd=5V
6
4
2
Voh (V)
0
-2
0 10203040
Ioh (mA)
This curves represents typical variations and is given for guidance only
64/78
63
T = -40°C
T=25°C
T=95°C
T = 125°C
Page 65

Figure 37. Idd WAIT versus Vcc at 8 Mhz for OTP devices
2.5
2
1.5
1
0.5
Idd WAIT(mA)
0
3V 4V 5V 6V
Vdd
This curves represents typical variations and is given for guidance only
Figure 38. Idd STOP versus Vcc for OTP devices
8
6
4
2
0
Idd STOP(µA)
-2
3V 4V 5V 6V
Vdd
ST62T52C ST62T62C/E62C
T=-40°C
T=25°C
T=95°C
T = 125°C
T = -40°C
T=25°C
T=95°C
T = 125°C
This curves represents typical variations and is given for guidance only
Figure 39. Idd STOP versus Vcc for ROM devices
2
1.5
1
0.5
Idd STOP(µA)
0
-0.5
3V 4V 5V 6V
Vdd
This curves represents typical variations and is given for guidance only
T = -40°C
T=25°C
T=95°C
T = 125°C
64
65/78
Page 66

ST62T52C ST62T62C/E62C
Figure 40. Idd WAIT versus Vcc at 8Mhz for ROM devices
2.5
2
1.5
1
0.5
Idd WAIT(mA)
0
3V 4V 5V 6V
Vdd
This curves represents typical variations and is given for guidanceonly
Figure 41. Idd RUN versus Vcc at8 Mhz for ROM and OTP devices
8
6
4
Idd RUN (mA)
2
0
3V 4V 5V 6V
Vdd
This curves represents typical variations and is given for guidance only
T = -40°C
T=25°C
T=95°C
T = 125°C
T=-40°C
T=25°C
T=95°C
T = 125°C
Figure 42. LVD thresholds versus temperature
4.2
4.1
4
3.9
Vthresh.
3.8
3.7
-40°C25°C95°C125°C
Temp
This curves represents typical variations and is given for guidance only
66/78
65
Vup
Vdn
Page 67

Figure 43. RC frequency versus Vcc for ROM ST626xB only
10
ST62T52C ST62T62C/E62C
1
MHz
Frequency
0.1
3 3.5 4 4.5 5 5.5 6
VDD (volts)
This curves represents typical variations and is given for guidance only
Figure 44. RC frequency versus Vcc (Except for ST626xB ROM devices)
10
1
MHz
Frequency
R=10K
R=27K
R=100K
R=47K
R=100K
R=470K
0.1
3 3.5 4 4.5 5 5.5 6
VDD (volts)
This curves represents typical variations and is given for guidance only
67/78
66
Page 68

ST62T52C ST62T62C/E62C
7 GENERAL INFORMATION
7.1 PACKAGE MECHANICAL DATA
Figure 45. 16-Pin Plastic Dual In Line Package (B), 300-mil Width
PDIP16
Figure 46. 16-Pin Ceramic Side-Brazed Dual In-Line Package
CDIP16W
Dim.
A 5.33 0.210
A1 0.38 0.015
A2 2.92 3.30 4.95 0.115 0.130 0.195
b 0.36 0.56 0.014 0.022
b2 1.52 1.78 0.060 0.070
c 0.20 0.25 0.36 0.008 0.010 0.014
D 18.67 19.18 19.69 0.735 0.755 0.775
e 2.54 0.100
E1 6.10 6.35 7.11 0.240 0.250 0.280
L 2.92 3.30 3.81 0.115 0.130 0.150
N 16
Dim.
A 3.78 0.149
A1 0.38 0.015
B 0.36 0.46 0.56 0.014 0.018 0.022
B1 1.14 1.37 1.78 0.045 0.054 0.070
C 0.20 0.25 0.36 0.008 0.010 0.014
D 19.86 20.32 20.78 0.782 0.800 0.818
D1 17.78 0.700
E1 7.04 7.49 7.95 0.277 0.295 0.313
e 2.54 0.100
G 6.35 6.60 6.86 0.250 0.260 0.270
G1 9.47 9.73 9.98 0.373 0.383 0.393
G2 1.02 0.040
L 2.92 3.30 3.81 0.115 0.130 0.150
S 1.27 0.050
Ø 4.22 0.166
N16
mm inches
Min Typ Max Min Typ Max
Number of Pins
mm inches
Min Typ Max Min Typ Max
Number of Pins
68/78
67
Page 69

PACKAGE MECHANICAL DATA (Cont’d)
Figure 47. 16-Pin Plastic Small Outline Package (M), 300-mil Width
ST62T52C ST62T62C/E62C
Dim.
A 2.35 2.65 0.0926 0.1043
A1 0.10 0.0040
B 0.33 0.51 0.013 0.020
C 0.32 0.0125
D 10.10 10.50 0.3977 0.4133
E 7.40 7.60 0.2914 0.2992
e 1.27 0.050
H 10.01 10.64 0.394 0.419
h 0.25 0.74 0.010 0.029
K 0° 8° 0° 8°
L 0.41 1.27 0.016 0.050
SO16
G 0.10 0.004
N16
Figure 1. 16-Pin Plastic Shrink Small Outline Package, 0.209” Width
Dim.
A 1.73 1.86 1.99 0.068 0.073 0.078
A1 0.05 0.13 0.21 0.002 0.005 0.008
B 0.25 0.38 0.010 0.015
C 0.09 0.20 0.004 0.008
D 6.07 6.20 6.33 0.239 0.244 0.249
E 7.65 7.80 7.90 0.301 0.307 0.311
E1 5.20 5.30 5.38 0.205 0.209 0.212
e 0.65 0.026
G 0.076 0.003
K 0° 4° 8° 0° 4° 8°
L 0.63 0.75 0.95 0.025 0.030 0.037
SSOP16
N16
mm inches
Min Typ Max Min Typ Max
Number of Pins
mm inches
Min Typ Max Min Typ Max
Number of Pins
THERMAL CHARACTERISTIC
Symbol Parameter Test Conditions
RthJA Thermal Resistance
PDIP16 55
PSO16 75
Value
Min. Typ. Max.
Unit
°C/W
69/78
68
Page 70

ST62T52C ST62T62C/E62C
7.2 ORDERING INFORMATION
Table 22. OTP/EPROM VERSION ORDERING INFORMATION
Sales Type
ST62E62CF1 1836 EPROM 64 0 to +70°C CDIP16W
ST62T52CM6
ST62T52CM3
ST62T62CM6
ST62T62CM3
ST62T52CB6
ST62T52CB3
ST62T62CB6
ST62T62CB3
ST62T52CN6
ST62T52CN3
ST62T62CN6
ST62T62CN3
Program
Memory (Bytes)
1836 OTP None
1836 OTP 64
1836 OTP None
1836 OTP 64
1836 OTP None
1836 OTP 64
EEPROM (Bytes) Temperature Range Package
-40 to+ 85°C
-40 to + 125°C
-40 to+ 85°C
-40 to + 125°C
-40 to+ 85°C
-40 to + 125°C
-40 to+ 85°C
-40 to + 125°C
-40 to+ 85°C
-40 to + 125°C
-40 to+ 85°C
-40 to + 125°C
PSO16
PSO16
PDIP16
PDIP16
SSOP16
SSOP16
70/78
69
Page 71

8-BIT FASTROM MCUs WITH A/D CONVERTER,
SAFE RESET, AUTO-RELOAD TIMER AND EEPROM
■ 3.0 to 6.0V Supply Operating Range
■ 8 MHzMaximum Clock Frequency
■ -40 to+125°C Operating TemperatureRange
■ Run, Wait and Stop Modes
■ 5 InterruptVectors
■ Look-up Table capability in Program Memory
■ Data Storage in Program Memory:
User selectable size
■ Data RAM: 128 bytes
■ DataEEPROM: 64 bytes(none on ST62T52C)
■ 9 I/Opins, fully programmable as:
– Input with pull-up resistor
– Input without pull-up resistor
– Input with interrupt generation
– Open-drain or push-pull output
– Analog Input
■ 5 I/Olines can sinkupto30mA todriveLEDs or
TRIACs directly
■ 8-bit Timer/Counter with 7-bit programmable
prescaler
■ 8-bit Auto-reload Timerwith 7-bit programmable
prescaler (AR Timer)
■ Digital Watchdog
■ Oscillator SafeGuard
■ Low Voltage Detector for Safe Reset
■ 8-bit A/D Converter with 4 analog inputs
■ On-chip Clockoscillator canbe drivenbyQuartz
Crystal Ceramic resonator or RCnetwork
■ User configurable Power-on Reset
■ One external Non-Maskable Interrupt
■ ST626x-EMU2 Emulation and Development
System (connects to an MS-DOS PC via a
parallel port)
ST62P52C
ST62P62C
PDIP16
PSO16
SSOP16
(See end of Datasheet for Ordering Information)
DEVICE SUMMARY
DEVICE
ST62P52C 1836 ST62P62C 1836 64
ROM
(Bytes)
EEPROM
Rev. 2.7
November 1999 71/78
70
Page 72

ST62P52C ST62P62C
1 GENERAL DESCRIPTION
1.1 INTRODUCTION
The ST62P52C and ST62P62C are the Factory
Advanced Service Technique ROM (FASTROM)
version of ST62T52C and ST62T62C OTP devices.
They offer the same functionality as OTPdevices,
selecting as FASTROM options the options defined in the programmable option byte of the OTP
version.
1.2.2 Listing Generation and Verification
When STMicroelectronics receives the user’s
ROM contents, a computer listing is generated
from it. This listing refers exactly to the ROM contents and options which will be used to produce
the specified MCU. The listing is then returned to
the customer who must thoroughly check, complete, sign and return it to STMicroelectronics. The
signed listingforms apartofthecontractual agreement for the production of the specific customer
1.2 ORDERING INFORMATION
The following section deals with the procedure for
transfer ofcustomer codes to STMicroelectronics.
1.2.1 Transfer of Customer Code
MCU.
The STMicroelectronics Sales Organization will be
pleased to provide detailed information on contractual points.
Customer code is made up of the ROM contents
and the list of the selected FASTROM options.
Table 1. ROM Memory Map for ST62P52C/P62C
The ROM contents are to be sent on diskette, or
by electronic means, with the hexadecimal file
generated by the development tool. All unused
bytes mustbe set to FFh.
The selected options are communicated to STMicroelectronics using the correctly filled OPTION
LIST appended.
Device Address Description
0000h-087Fh
0880h-0F9Fh
0FA0h-0FEFh
0FF0h-0FF7h
0FF8h-0FFBh
0FFCh-0FFDh
0FFEh-0FFFh
Table 2. FASTROM version Ordering Information
Sales Type ROM EEPROM (Bytes) Temperature Range Package
ST62P52CM1/XXX
ST62P52CM6/XXX
ST62P52CM3/XXX (*)
ST62P62CM1/XXX
ST62P62CM6/XXX
ST62P62CM3/XXX (*)
ST62P52CB1/XXX
ST62P52CB6/XXX
ST62P52CB3/XXX (*)
ST62P62CB1/XXX
ST62P62CB6/XXX
ST62P62CB3/XXX (*)
ST62P52CN1/XXX
ST62P52CN6/XXX
ST62P52CN3/XXX (*)
ST62P62CN1/XXX
ST62P62CN6/XXX
ST62P62CN3/XXX (*)
1836 Bytes None
1836 Bytes 64
1836 Bytes None
1836 Bytes 64
1836 Bytes None
1836 Bytes 64
0to+70°C
-40 to + 85°C
-40 to + 125°C
0to+70°C
-40 to + 85°C
-40 to + 125°C
0to+70°C
-40 to + 85°C
-40 to + 125°C
0to+70°C
-40 to + 85°C
-40 to + 125°C
0to+70°C
-40 to + 85°C
-40 to + 125°C
0to+70°C
-40 to + 85°C
-40 to + 125°C
Reserved
User ROM
Reserved
Interrupt Vectors
Reserved
NMI Interrupt Vector
Reset Vector
PSO16
PDIP16
SSOP16
(*) Advanced information
72/78
71
Page 73

ST62P52C ST62P62C
ST62P52C and ST62P62C FASTROMMICROCONTROLLER OPTION LIST
Customer . . . . . ....................
Address . . . . . ....................
.........................
Contact . . . . . ....................
Phone No . . . . . ....................
Reference . . . . . ....................
STMicroelectronics references
Device: [ ] ST62P52C [ ] ST62P62C
Package: [ ] Dual in Line Plastic [ ] SmallOutline Plasticwith condionning:
[ ] Standard (Stick)
[ ] Tape & Reel
[ ]Shrink Small Outline Plastic
Temperature Range: [ ] 0°Cto+70°C[]-40°Cto+85°C[]-40°C to + 125°C
Oscillator Source Selection: [ ] Crystal Quartz/Ceramic resonator
[ ] RC Network
Watchdog Selection: [ ] Software Activation
[ ] Hardware Activation
Power on Reset Delay [ ] 32768cycle delay
[ ] 2048 cycle delay
Readout Protection: [ ] Disabled
[ ] Enabled
External STOP Mode Control [ ] Enabled
[ ] Disabled
PB2-PB3 Pull-Up at RESET [ ] Enabled
[ ] Disabled
LVD Reset [ ] Enabled
[ ] Disabled
ADC Synchro [ ] Enabled
[ ] Disabled
Oscillator Safe Guard [ ] Enabled
[ ] Disabled
Comments : Supply Operating Range in the application:
Oscillator Fequency in the application:
Notes . . . . . ....................
Signature . . .. . ....................
Date . . . . . ....................
73/78
72
Page 74

ST62P52C ST62P62C
Notes:
74/78
73
Page 75

ST6252C
ST6262B
8-BIT ROM MCUs WITH A/D CONVERTER,
SAFE RESET AUTO-RELOAD TIMER, ROM AND EEPROM
■ 3.0 to 6.0V Supply Operating Range
■ 8 MHzMaximum Clock Frequency
■ -40 to+125°C Operating TemperatureRange
■ Run, Wait and Stop Modes
■ 5 InterruptVectors
■ Look-up Table capability in Program Memory
■ Data Storage in Program Memory:
User selectable size
■ Data RAM: 128 bytes
■ DataEEPROM: 64 bytes(none on ST62T52C)
■ 9 I/Opins, fully programmable as:
– Input with pull-up resistor
– Input without pull-up resistor
– Input with interrupt generation
– Open-drain or push-pull output
– Analog Input
■ 5 I/Olines can sinkupto30mA todriveLEDs or
TRIACs directly
■ 8-bit Timer/Counter with 7-bit programmable
prescaler
■ 8-bit Auto-reload Timerwith 7-bit programmable
prescaler (AR Timer)
■ Digital Watchdog
■ Oscillator SafeGuard
■ Low Voltage Detector for Safe Reset
■ 8-bit A/D Converter with 4 analog inputs
■ On-chip Clockoscillator canbe drivenbyQuartz
Crystal Ceramic resonator or RCnetwork
■ User configurable Power-on Reset
■ One external Non-Maskable Interrupt
■ ST626x-EMU2 Emulation and Development
System (connects to an MS-DOS PC via a
parallel port)
(See end of Datasheet for Ordering Information)
PDIP16
PSO16
SSOP16
DEVICE SUMMARY
DEVICE
ST6252C 1836 - Yes
ST6262B 1836 64 No
ROM
(Bytes)
EEPROM LVD & OSG
Rev. 2.7
November 1999 75/78
74
Page 76

ST6252C ST6262B
1 GENERAL DESCRIPTION
1.1 INTRODUCTION
The ST6252C and ST6262B are mask programmed ROM version of ST62T52C and
ST62T62C OTP devices.
They offer the same functionality as OTPdevices,
selecting as ROM options the options defined in
the programmableoptionbyte of the OTP version,
except the LVD &OSGoptions that are not available on the ST6262B ROMdevice.
Figure 1. Programming wave form
TEST
15
14V typ
10
5
0.5s min
1.2 ROM READOUT PROTECTION
If the ROM READOUT PROTECTION option is
selected, a protection fuse can be blown to prevent any access to theprogram memory content.
In case the user wants to blow this fuse, highvoltage must be applied onthe TEST pin.
Figure 2. Programming Circuit
5V
47mF
100nF
V
SS
V
DD
TEST
100mA
max
4mA typ
150 µstyp
t
VR02001
PROTECT
TEST
100nF
Note: ZPD15 is used for overvoltage protection
ZPD15
15V
14V
VR02003
76/78
75
Page 77

ST6252C ST6262B
ST6252C and ST6262B MICROCONTROLLER OPTION LIST
Customer . . . . . ....................
Address . . . . . ....................
.........................
Contact . . . . . ....................
Phone No . . . . . ....................
Reference . . . . . ....................
STMicroelectronics references
Device: [ ] ST6252C [ ] ST6262B
Package: [ ] Dual in Line Plastic [ ] SmallOutline Plasticwith condionning:
[ ] Standard (Stick)
[ ] Tape & Reel
[ ]Shrink Small Outline Plastic
Temperature Range: [ ] 0°Cto+70°C[]-40°Cto+85°C[]-40°C to + 125°C
Special Marking: [ ] No [ ] Yes ”_ _ _ _ _ _ _ _ _ _ _ ”
Authorized characters are letters, digits, ’.’,’-’, ’/’ and spaces only.
Maximum character count: DIP16: 9
SO16: 5
Oscillator Source Selection: [ ] Crystal Quartz/Ceramic resonator
[ ] RC Network
Watchdog Selection: [ ] Software Activation
[ ] Hardware Activation
Power on Reset Delay [ ] 32768cycle delay
[ ] 2048 cycle delay
ROM Readout Protection: [ ] Disabled (Fuse cannot be blown)
[ ] Enabled (Fuse can be blown by the customer)
Note: No part is delivered with protected ROM.
The fuse must be blown for protection to be effective.
External STOP Mode Control [ ] Enabled [ ] Disabled
PB2-PB3 Pull-Up at RESET [ ] Enabled [ ] Disabled
LVD Reset* [ ] Enabled [ ] Disabled
ADC Synchro* [ ] Enabled [ ] Disabled
Oscillator Safe Guard* [ ] Enabled [ ] Disabled
*ST6252C only
Comments : Supply Operating Range in the application:
Oscillator Fequency in the application:
Notes . . . . . ....................
Signature . . .. . ....................
Date . . . . . ....................
77/78
76
Page 78

ST6252C ST6262B
1.3 ORDERING INFORMATION
from it. Thislisting refersexactlytothemaskwhich
will be used to produce the specified MCU. The
The following section deals with the procedure for
transfer ofcustomer codes to STMicroelectronics.
1.3.1 Transfer of Customer Code
Customer code is made up of the ROM contents
and the list of the selected mask options. The
ROM contents are to be sent on diskette, or by
electronic means, withthe hexadecimal file generated by the development tool. All unused bytes
must be set to FFh.
The selected mask options are communicated to
STMicroelectronics using the correctly filled OPTION LIST appended.
1.3.2 Listing Generation and Verification
When STMicroelectronics receives the user’s
ROM contents, a computer listing is generated
Table 2. ROM version Ordering Information
Sales Type ROM EEPROM (Bytes) Temperature Range Package
ST6252CB1/XXX
ST6252CB6/XXX
ST6252CB3/XXX
ST6252CM1/XXX
ST6252CM6/XXX
ST6252CM3/XXX
ST6252CN1/XXX
ST6252CN6/XXX
ST6252CN3/XXX
ST6262BB1/XXX
ST6262BB6/XXX
ST6262BB3/XXX
ST6262BM1/XXX
ST6262BM6/XXX
ST6262BM3/XXX
ST6262BN1/XXX
ST6262BN6/XXX
ST6262BN3/XXX
1836 Bytes None
1836 Bytes 64
listing is then returned to the customer who must
thoroughly check, complete, sign and return it to
STMicroelectronics. The signed listing forms a
part of the contractual agreement for the creation
of the specific customer mask.
The STMicroelectronics Sales Organization will be
pleased to provide detailed information on contractual points.
Table 1. ROM Memory Map for ST6252C/62B
Device Address Description
0000h-087Fh
0880h-0F9Fh
0FA0h-0FEFh
0FF0h-0FF7h
0FF8h-0FFBh
0FFCh-0FFDh
0FFEh-0FFFh
0 to +70°C
-40 to+ 85°C
-40 to + 125°C
0 to +70°C
-40 to+ 85°C
-40 to + 125°C
0 to +70°C
-40 to+ 85°C
-40 to + 125°C
0 to +70°C
-40 to+ 85°C
-40 to + 125°C
0 to +70°C
-40 to+ 85°C
-40 to + 125°C
0 to +70°C
-40 to+ 85°C
-40 to + 125°C
Reserved
User ROM
Reserved
Interrupt Vectors
Reserved
NMI Interrupt Vector
Reset Vector
PDIP16
PSO16
SSOP16
PDIP16
PSO16
SSOP16
Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the consequences
of useof suchinformation nor forany infringement ofpatents or otherrights ofthird parties which may resultfrom itsuse. No license is granted
by implicationor otherwise under any patent or patent rights of STMicroelectronics. Specifications mentioned in this publication are subject
to change without notice. This publication supersedes and replaces all information previously supplied. STMicroelectronics products are not
authorized for use as critical components in life support devices or systems without the express written approval ofSTMicroelectronics.
The ST logo is a registered trademark of STMicroelectronics
2
Purchase of I
Australia - Brazil - China - Finland - France -Germany - Hong Kong - India - Italy -Japan - Malaysia - Malta - Morocco - Singapore - Spain
78/78
C Components by STMicroelectronics conveys alicense under the Philips I2C Patent. Rights to use these components in an
2
C system is granted provided that the system conforms to the I2C Standard Specification asdefined by Philips.
I
1999 STMicroelectronics - All Rights Reserved.
STMicroelectronics Group of Companies
Sweden - Switzerland - United Kingdom - U.S.A.
http://www.st.com
 Loading...
Loading...