

Page 1
April 2000 1/77
This is preliminary information on a new product now in development. Details are subject to change without notice.
Rev. 1.2
■ High Performance 16-bit CPU
● CPU Frequency: 0 to 50 MHz
● 40ns instruction cycle time at 50-MHz CPU
clock
● Multiply-Accumulate unit (MAC)
● 4-stage pipeline
● Register-based design with multiple
variable register banks
● Enhanced boolean bit manip ulation
facilities
● Additional instructions to support HLL and
operating systems
● Single-cycle context switching support
● 1024 bytes on-Chip special function
register area
■ Memory Organisation
● 1KByte on-chip RAM
● Up to 16 MBytes linear address space for
code and data (1 MByte with SSP used)
■ External Memory Interface
● Programmable external bus characteristics
for different address ranges
● 8-bit or 16-bit external data bus
● Multiplexed or demultiplexed external
address/data buses
● Five programmable chip-select signals
● Hold and hold-acknowledge bus arbitration
support
■ One Channel PWM Unit
● Fail Safe Protection
● Programmable watchdog timer
● Oscillator Watchdog
■ Interrupt
● 8-channel interrupt-driven single-cycle data
transfer facilities via peripheral event
controller (PEC)
● 16-priority-level interrupt system with 17
sources, sample-rate down to 40 ns
■ Timers
● Two multi-functional general purpose timer
units with 5 timers
● Clock Generation via on-chip PLL, or via
direct or prescaled clock input
■ Serial Channels
● Synchronous/asynchronous
● High-speed-synchronous serial port SSP
■ Up to 77 general purpose I/O lines
■ No bootstrap loader
■ Electrical Characteristics
● 5V Tolerant I/Os
● 5V Fail-Safe Inputs (Port 5)
● Power: 3.3 Volt +/-0.3V
● Idle and power down modes
■ Support
● C-compilers, macro-assembler packages,
emulators, evaluation boards, HLLdebuggers, simulators, logic analyser
disassemblers, programming boards
■ Package
● 100-Pin Thin Quad Flat Pack (TQFP)
ST10 CORE
DPRAM
Interrupt Controller
P.4
P.1 P.0
Po.2
P.6
P.3
Dedicated
pins
ASC GPT1/2
&PEC
WDT
XSSP
P.5
OSC
PLL
P.7
PWM
MAC
ST10R272L
16-BIT LOW VOLTAGE RO MLESS MCU WITH MAC
PRODUCT PREVIEW
1
Page 2

2/77
Table of Contents
77
1
1 PIN DESCRIPTIO N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 FUNCTIONAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 MEMORY MAPPING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4 CENTRAL PROCESSING UNIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5 MULTIPLY-ACCUMULATE UNIT (MAC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5.1 MAC FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2 MAC OPERATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
6 INTERRUPT AND TRAP FUNCTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6.1 INTERRUPT SOURCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
6.2 HARDWARE TRAPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7 PARALLEL P ORTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
8 EXTERNAL BUS CONTROLLER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
9 PWM MODUL E . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
10 GENERAL PU RPOSE TIMERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
10.1 GPT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
10.2 GPT2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
11 SERIAL CHANNELS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
12 WATCHDOG TIMER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
13 SYSTEM RESET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
14 POWER REDUCTION MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
15 SPECIAL FUNCTION REGISTERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
16 ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
16.1 ABSOLUTE MAXIMUM RAT INGS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
16.2 DC CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
16.3 AC CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Page 3

3/77
Table of Contents
16.3.1 CPU clock generation mechanisms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
16.3.2 Memory cycle variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
16.3.3 Multiplexed bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
16.3.4 Demultiplexed bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
16.3.5 CLKOUT and READY
/READY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
16.3.6 External bus arbitration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
16.3.7 External hardware reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
16.3.8 Syn chronous serial port timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
17 PACKAGE MECHANICAL DAT A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
18 ORDERING IN FORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Page 4
4/77
ST10R272L - PIN DESCRIPTION
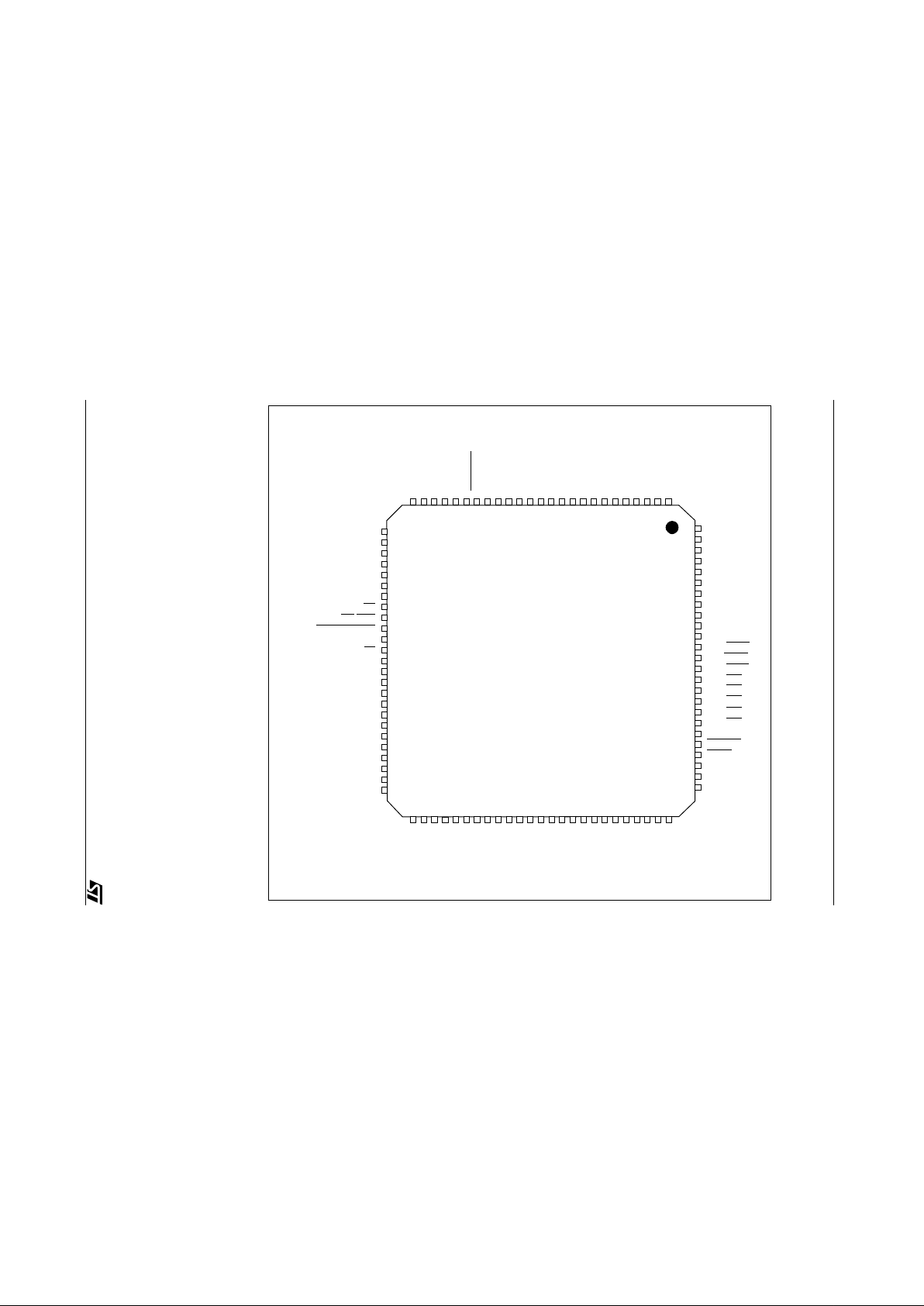
1 PIN DESCRIPTION
Figure 1 TQFP-100 pin configuration (top view)
12345678910111213141516171819202122232425
26
272829303132 33 34 35 36 37 38 39 40414243444546 47 48 49 50
75747372717069686766656463626160595857565554535251
100999897969594939291908988878685848382818079787776
P5 .1 3/T5IN
P5.14/T4EUD
P5.15/T2EUD
V
SS
XTAL1
XTAL2
V
DD
P3.0
P3 .1 /T6OU T
P3.2/CAPIN
P3 .3 /T3OU T
P3 .4 /T3EU D
P3 .5 /T 4IN
P3 .6 /T 3IN
P3 .7 /T 2IN
P3.8
P3.9
P3.10/TxD0
P3.11/RxD0
P3.12/BHE/WRH
P3.13
P3.15/CLKOUT
P4 .0 /A16
P4 .1 /A17
P4 .2 /A18
P1H.6/A14
P1H.5/A13
P1H.4/A12
P1H.3/A11
P1H.2/A10
V
SSVDD
P1H.1/A9
P1H.0/A8
P1L.7/A7
P1L.6/A6
P1L.5/A5
P1L.4/A4
P1L.3/A3
P1L.2/A2
P1L.1/A1
P1L.0/A0
P0H.7/AD15
P0H.6/AD14
P0H.5/AD13
P0H.4/AD12
P0H.3/AD11
P0H.2/AD10
P0H.1/AD9
P0H.0/AD8
P5.12/T6IN
P5.11/T5EUD
P5.10/T6EUD
P7.3/POUT3
P7.2
P7.1
P7.0
P2.11/EX3IN
P2.10/EX2IN
P2.9/EX1IN
P2.8/EX0IN
P6.7/BREQ
P6.6/HLDA
P6.5/HOLD
P6.4/CS4
P6.3/CS3
P6.2/CS2
P6.1/CS1
P6.0/CS0
NMI
RSTOUT
RSTIN
V
DD
V
SS
P1H.7/A15
P4.3/A19
V
SS
V
DD
P4.4/A20/SSPCE1
P4.5/A21/SSPCE0
P4.6/A22/SSPDAT
P4.7/A23/SSPCLK
RD
WR/WRL
READY/READY
ALE
EA
V
DD
V
SS
RPD
P0L.0/AD0
P0L.1/AD1
P0L.2/AD2
P0L.3/AD3
P0L.4/AD4
P0L.5/AD5
P0L.6/AD6
P0L.7/AD7
V
DD
V
SS
ST10R 272L
1
Page 5
5/77
ST10R272L - PIN DESCR IPTION
Symbol
Pin Number
(TQFP)
Input (I)
Output (O)
Kind
1)
Function
P5.10
–P5.15
98-100
1- 3
I
I
5S5S6-bit input-only port with Schmitt-Trigger characteristics.
Port 5 pins also serve as timer inputs:
98 I 5S P5.10 T6EUD GPT2 Timer T6 Ext.Up/Down
Ctrl.Input
99 I 5S P5.11 T5EUD GPT2 Timer T5 Ext.Up/Down
Ctrl.Input
100 I 5S P5.12 T6IN GPT2 Timer T6 Count Input
1 I 5S P5.13 T5IN GPT2 Timer T5 Count Input
2 I 5S P5.1 4 T4 EUD GPT1 Timer T4 Ex t. Up / Down
Ctrl.Input
3 I 5S P5.1 5 T2 EUD GPT1 Timer T2 Ex t. Up / Down
Ctrl.Input
XTAL1
XTAL2
5 I 3T X TAL1: Input to the oscillator amplifier and internal clock
generator
6 O 3T XTAL2: Output of the oscillator amplifier circuit.
To clock the device from an external source, drive
XTAL1, while leaving XTAL2 unconnected.
Observe minimum and maximum high/low and
rise/fall times specified in the AC Characteristics.
Table 1 Pin definiti ons
1
Page 6
6/77
ST10R272L - PIN DESCR IPTION
P3.0 –
P3.13
P3.15
8-21
22
I/O
I/O
5T 5TA 15-bit (P3.14 is missing) bidirectional I/O port. Port 3 is bit-
wise programmable for input or output via direction bits. For a
pin configured as input, the output driver is put into highimpedance state. Port 3 outputs can be configured as push/
pull or open drain drivers. The following pins have alternate
functions:
9 O 5T P3.1 T6OUT GPT2 Timer T6 toggle latch output
10 I 5T P3. 2 CAPIN GPT2 Register CAPREL capture
input
11 O 5T P3.3 T3OUT GPT1 Timer T3 toggle latch output
12 I 5T P3. 4 T3EUD GPT1 Timer T3 ext.up/down ctrl.input
13 I 5T P3. 5 T4IN GPT1 Timer T4 input for count/gate/
reload/capture
14 I 5T P 3.6 T3IN GPT1 Timer T3 count/ gate input
15 I 5T P3. 7 T2IN GPT1 Timer T2 input for count/gate/
reload/capture
18 O 5T P3.10 TxD0 ASC0 clock/data output (asyn./syn.)
19 I/O 5T P3. 11 RxD0 ASC0 data input (asyn.) or I/O (syn.)
20 O 5T P3.12 BHE
Ext. Memory High Byte Enable Signal
O5T WRH
Ext. Memory High Byte Write Strobe
22 O 5T P3.15 CLKOUT System clock output (=CPU clock)
Symbol
Pin Number
(TQFP)
Input (I)
Output (O)
Kind
1)
Function
Table 1 Pin definiti ons
1
Page 7
7/77
ST10R272L - PIN DESCR IPTION
P4.0–
P4.7
23-26
29-32-
I/O 5T An 8-bit bidirectional I/O port. Port 8 is bit-wise programmable
for input or output via direction bits. For a pin configured as
input, the output driver is put into high-impedance state.
Port 4 can be used to output the segment address lines for
external bus configuration.
23 O 5T P4.0 A16 Least Significant Segment Addr. Line
... ... ... ... ... ...
26 O 5T P4.3 A19 Segment Address Line
29 O 5T P4.4 A20 Segment Address Line
O 5T SSPCE1 Chip Enable Line 1
30 O 5T P4.5 A21 Segment Address Line
O 5T SSPCE0 SSPChip Enable Line 0
31 O 5T P4.6 A22 Segment Address Line
I/O 5T SSPDAT SSP Data Input/Outpu t Line
32 O 5T P4.7 A23 Most Significant Segment Addr. Line
O 5T SSPCLK S SP Clock Output Line
RD
33 O 5T External Memory Read Strobe. RD is activated for every exter-
nal instruction or data read access.
WR/
WRL
34 O 5T External Memory Write Strobe. In WR-mode, this pin is acti-
vated for every external data write access. In WRL-mode, this
pin is activated for low byte data write accesses on a 16-bit
bus, and for every data write access on an 8-bit bus.
See WRCFG in the SYSCON register for mode selection.
READY/
READY
35 I 5T Ready Input. Active level is programmable. When the Ready
function is enabled, the selected inactive level at this pin dur-
ing an external memory access will f orce t he insertion of mem-
ory cycle time waitstates until the pin returns to the selected
active level. Polarity is pro gram mable.
Symbol
Pin Number
(TQFP)
Input (I)
Output (O)
Kind
1)
Function
Table 1 Pin definiti ons
1
Page 8
8/77
ST10R272L - PIN DESCR IPTION
ALE 36 O 5T Address Latch Enable Output. Can be used for latching the
address into external memory or an address latch in the multi-
plexed bus modes.
EA
37 I 5T E xt ernal Access Enable pin. Low level at this pin during and
after reset forces the ST10R272L to begin instruction execu-
tion out of external memory. A high level forces execution out
of the internal ROM. The ST10R272L must have this pin tied
to ‘0’.
PORT0:
P0L.0–
P0L.7,
P0H.0 -
P0H.7
41 - 48
51 - 58
I/O 5T PORT0 has two 8-bit bidirectional I/O ports P0L and P0H. It is
bit-wise programmable for input or output via direction bits. For
a pin configured as input, the output driver is put into high-
impedance state.
For external bus configuration, PORT0 acts as address (A)
and address/data (AD) bus in multiplexed bus modes and as
the data (D) bus in demultiplexed bus modes.
PORT1:
P1L.0–
P1L.7,
P1H.0 -
P1H.7
59- 66
67, 68
71-76
I/O 5T PORT1 has two 8-bit bidirectional I/O ports P1L and P1H. It is
bit-wise programmable for input or output via direction bits. For
a pin configured as input, the output driver is put into high-
impedance state. PORT1 acts as a 16-bit address bus (A) in
demultiplexed bus modes and also after switching from a
demultiplexed bus mode to a multiplexed bus mode.
Symbol
Pin Number
(TQFP)
Input (I)
Output (O)
Kind
1)
Function
Table 1 Pin definiti ons
Demultiplexed bus modes
Data Path Width: 8-bit 16-bit
P0L.0 – P0L.7: D0 – D7 D0 - D7
P0H.0 – P0H.7: I/O D8 - D15
Multiplexed bus modes
Data Path Width: 8-bit 16-bit
P0L.0 – P0L.7: AD0 – AD7 AD0 - AD7
P0H.0 – P0H.7: A8 – A15 AD8 – AD15
1
Page 9
9/77
ST10R272L - PIN DESCR IPTION
RSTIN 79 I 5T Reset Input with Schmitt-Tr ig ger characteristics. Resets the
device when a low level is applied for a specified duration while
the oscillator is running. An internal pullup resi stor enables
power-on reset using only a capacitor connected to
V
SS
. With
a bonding option, the RSTIN
pin can also be pulled-down for
512 internal clock cycles for hardware, software or watchdog
timer triggered resets
RSTOUT
80 O 5T Internal Reset Indication Output. This pin is set to a low level
when the part is executes hardware-, software- or watchdog
timer reset. RSTOUT
remains low until the EINIT (end of ini-
tialization) instruction is executed.
NMI
81 I 5S Non-Maskable Interrupt Input. A high to low transition at this
pin causes the CPU to vector to the NMI trap routine.
If it is not used, NMI
should be pulled high externally.
P6.0P6.7
82-89 I/O 5T An 8-bit bidirectional I/O port. Port 6 is bit-wise programmable
for input or output via direction bits. For a pin configured as
input, the output driver is put into high-impedance state. Port 6
outputs can be configured as push/pull or open drain drivers.
The following Port 6 pins have alternate functions:
82 O 5T P6.0 CS0
Chip Select 0 Output
... ... ... ... ... ...
86 O 5T P6.4 CS4
Chip Select 4 Output
87 I 5T P 6. 5 HOL D
External Master Hold Request Input
(Master mode: O, Slave mode: I)
88 I/O 5T P6.6 HLDA
Hold Acknowledge Output
89 O 5T P6.7 BRE Q
Bus Request Output
Symbol
Pin Number
(TQFP)
Input (I)
Output (O)
Kind
1)
Function
Table 1 Pin definiti ons
1
Page 10
10/77
ST10R272L - PIN DESCR IPTION
P2.8 –
P2.11
90 - 93 I/O 5T Por t 2 is a 4-bit bidirectional I/O port. It is bit-wise programma-
ble for input or output via di rection bits. For a pin configured as
input, the output driver is put into high-impedance state. Port 2
outputs can be configured as push/pull or open drain drivers.
The following Port 2 pins have alternate functions:
90 I 5T P 2.8 EX0IN Fast External Interrupt 0 Input
... ... ... ... ... ...
93 I 5T P 2.11 EX 3IN Fast External Interrupt 3 Input
P7.0 –
P7.3
94 - 97 I/O 5T Por t 7 is a 4-bit bidirectional I/O port. It is bit-wise programma-
ble for input or output via di rection bits. For a pin configured as
input, the output driver is put into high-impedance state. Port
7outputs can be configured as push/pull or open drain drivers.
The following Port 7 pins have alternate functions:
97 O 5T P7.3 POUT3 PWM (Channel 3) Output
RPD 40 I/O 5T Input timing pin for the return from powerdown circuit and
power-up asynchronous reset.
V
DD
7, 28,
38, 49,
69, 78
- PO Digital supply voltage.
V
SS
4, 27,
39, 50,
70, 77
- PO Digital ground.
1) The following I/O kinds are used. Refer to
ELECTRICAL CHARACTERISTICS
on
page 40 for a detailed description.
PO: Power pin
3T: 3 V tolerant pin (voltage max. respect to Vss is -0.5 to VDD + 0.5)
5V: 5 V tolerant pin (voltage max. respect to Vss is -0.5 to 5.5 only if chip is powered)
5S: 5 V tolerant and f ail-safe pin (-0.5-5.5 ma x. voltage w.r.t. Vss ev en if chip is n ot pow-
ered).
Symbol
Pin Number
(TQFP)
Input (I)
Output (O)
Kind
1)
Function
Table 1 Pin definiti ons
1
Page 11
11/77
ST10R272L - FUNCTIONAL DESCRIPTION
2 FUNCTI ONAL DESCRIPTION
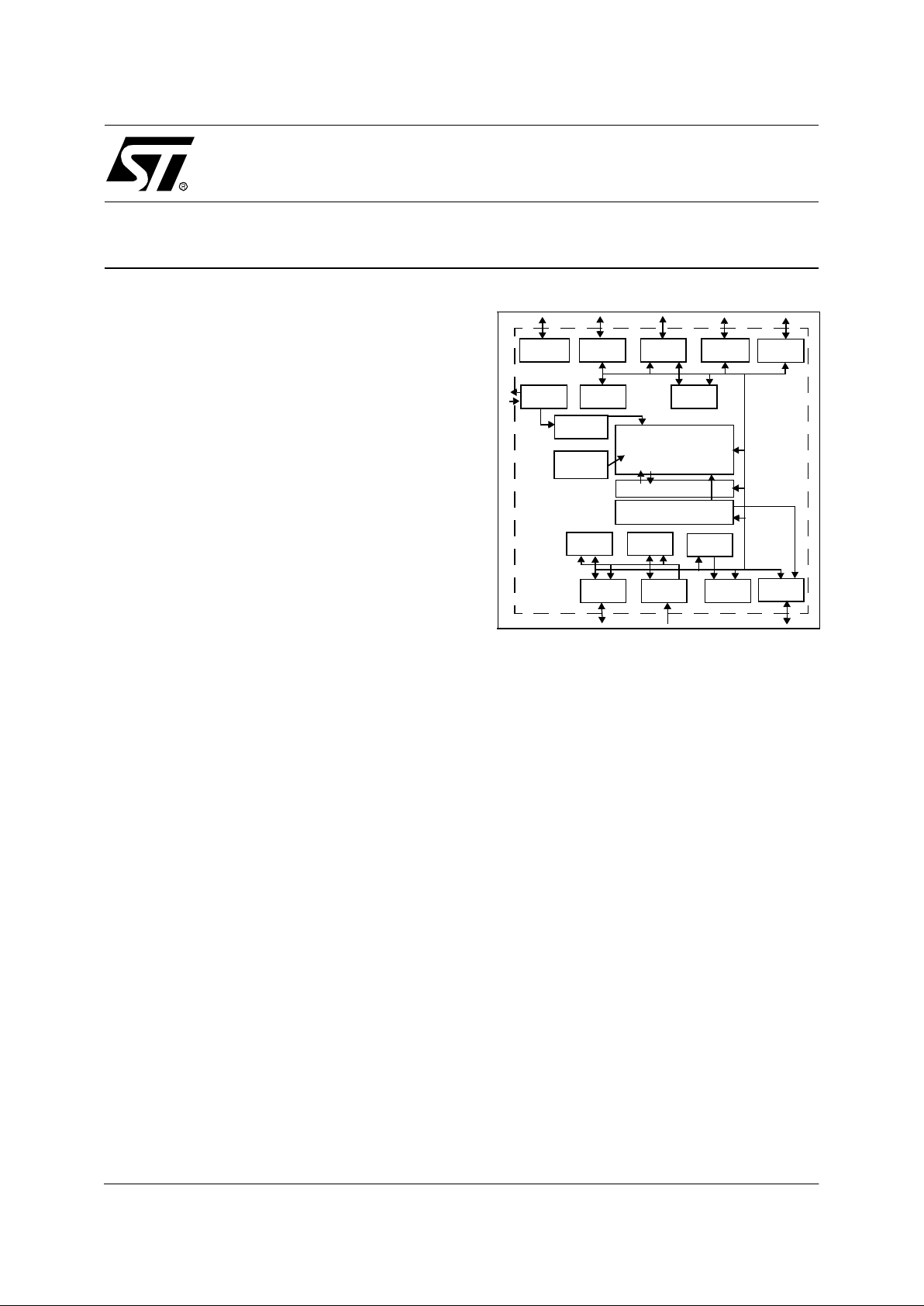
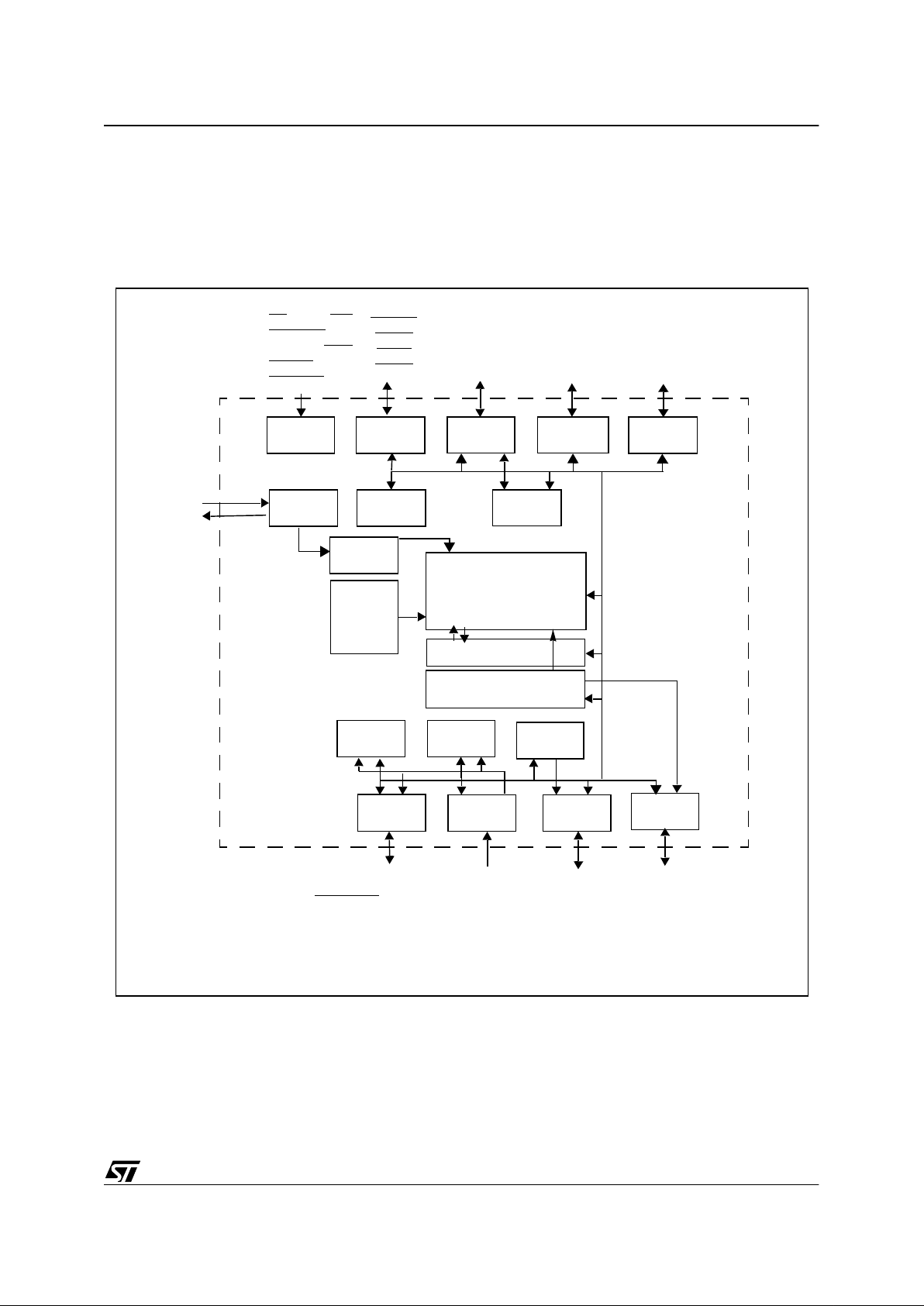
ST10R272L architecture combines the advantages of both RISC and CISC processors wi th
an advanced peripheral subsystem. The following block diagram overviews the different onchip components and the internal bus structure.
Figure 2 Block diagram
ST10 CO RE
1KByte
DPRAM
Interrupt Controller
Port 4
Port 1
8-bit
2x8-bit
Port 0
2x8-bit
Port 2
4-bit
Port 6
8-bit
I/O
CS(4:0)
I/O
HOLD
HLDA
BREQ
A(15:0)
I/O, D(7:0)
D(15:8), D(7:0)
A(15:8), AD(7:0)
AD(15:8), AD(7:0)
I/O
Port 3
15-bit
I/O
EXIN(3:0)
XTAL1
dedicated
pins
ASC GPT1/2
&
PEC
I/O
CLKOUT,
BHE/WRH
, RxD0,
TxD0, T2IN, T3IN,
T4IN, T3EUD,
T3OUT, CAPIN,
T6OUT
I
T2EUD,
T4EUD, T5IN,
T6IN, T5EUD,
T6EUD
EA, ALE, RD,
WR/WRL,
READY, NMI,
RSTIN,
RSTOUT
WDT
XSSP
4-bit
I/O
A(23:16),
SSPCLK,
SSPDAT,
SSPCE(1:0)
Port 5
6-bit
OSC
PLL
XTAL2
Port 7
4-bit
PWM
I/O
POUT3
MAC
1
Page 12
12/77
ST10R272L - MEMORY MA PPING
3 MEMORY MAPPING
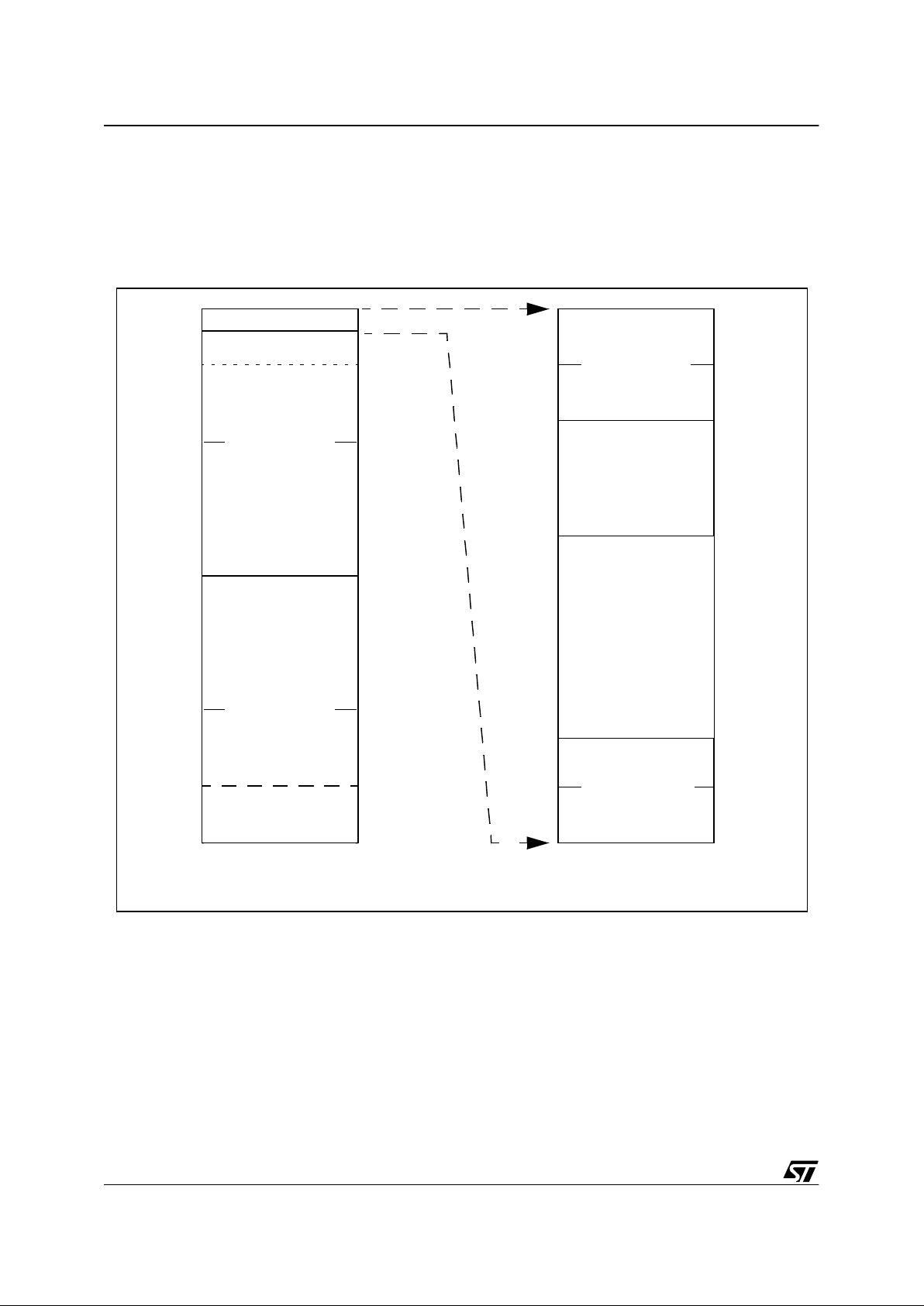
The ST10R272L is a ROMless device, the internal RAM space is 1 KByte. The RAM address
space is used for variables, register banks, the system stack, the PEC pointers (in 00’FCE0h
- 00’FCFFh) and the bit-addressable space (in 00’FD00h - 00’FDFFh).
Figure 3 Memory map
XSSP
Data Page 0
Data Page 1
Data Page 2
Data Page 3
00’0000h
00’4000h
00’8000h
00’F000h
00’F000h
00’FFFFh
00’0000h
00’1FFFh
8K-byte
00’EF00h
00’EFFFh
256 Byte
internal
memory
00’F000h
00’F200h
00’FE00h
00’FFFFh
SFR Area
(reserved)
1K-Byte
RAM/SFR
DPRAM / SFR Area
4 K-Byte
System Segment 0
64 K-Byte
External
memory
00’FE20h
00’FE3Fh
00’FF20h
00’FF3Fh
ESFR Area
(reserved)
00’F020h
00’F03Fh
00’FF20h
00’FF3Fh
RAM
00’FA00h
Block 1
Block 0
1
Page 13
13/77
ST10R272L - CENTRAL PROCESSING UNIT
4 CENTRAL PROCESSING UNIT
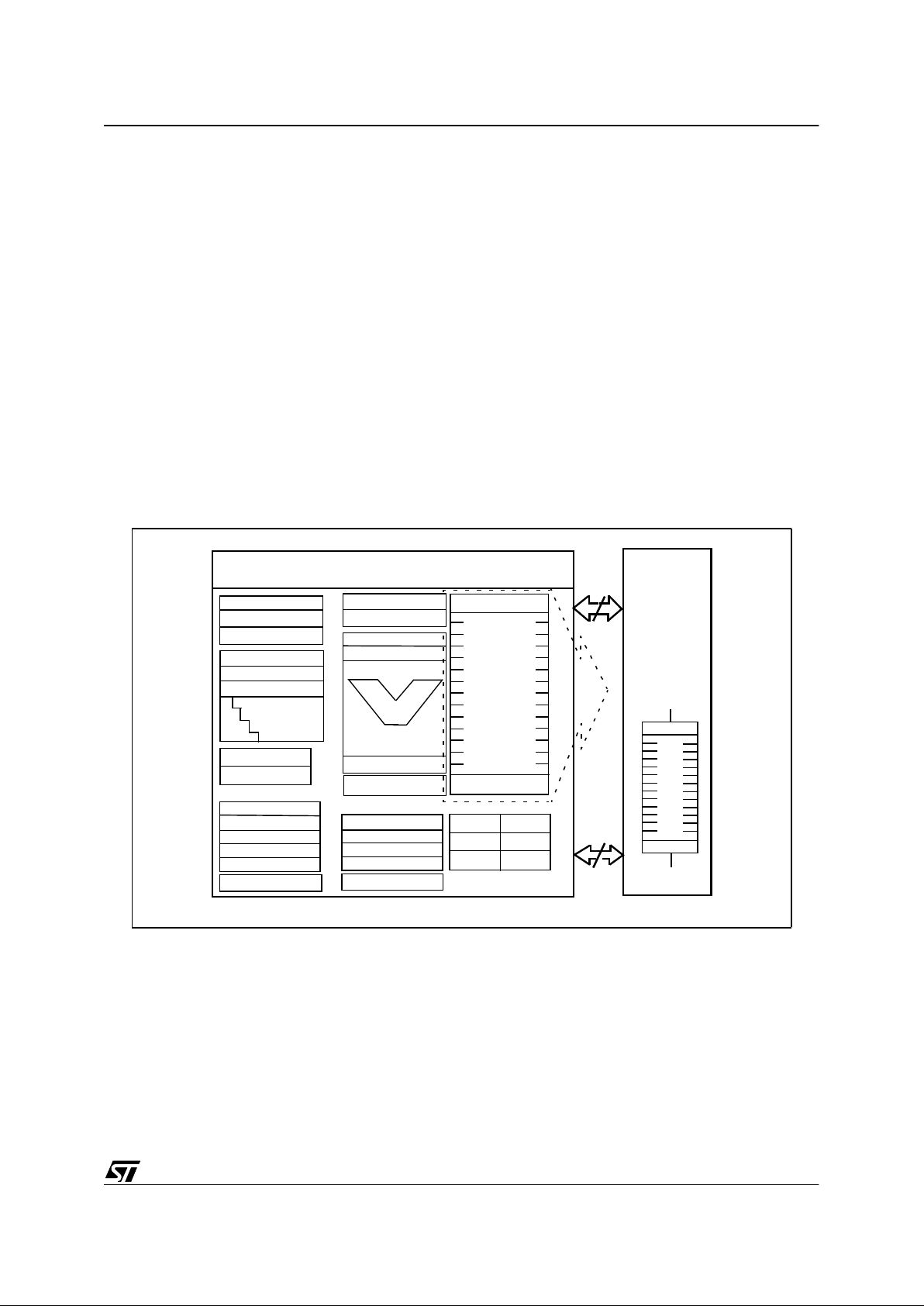
The main core of the CPU contains a 4-stage instruction pipeline, a MAC multiplyaccumulation unit, a separate multiply and divide unit, a bit-mask generator and a barrel
shifter. Most instructions can be ex ecuted i n one machine cycle r equiring 40ns at 50MHz CPU
clock.
The CPU includes an actual register context consisting of 16 wordwide GPRs physically
located in the on-chip RAM area. A Context Pointer (CP) register determines the base
address of the activ e register bank to be ac cessed b y the CPU . T he number of r egister banks
is only restricted by the available internal RAM space. For easy parameter passing, one
register bank may overlap others.
A system stack of up to 1024 bytes is provided as a storage for temporary data. The system
stack is al located in the on-chip RAM area, and it i s accessed by the C PU via the stac k pointer
(SP) register. Two separate SFRs, STKOV and STKUN, are compared against the stack
pointer value during each stack access to detect stack overflow or underflow.
Figure 4 CPU block diagram
16
16
Internal
RAM
1KByte
R15
R0
General
Purpose
Registers
R0
R15
MDH
MDL
Barrel-Shift
Mul./Div.-HW
Bit-Mask Gen.
ALU
16-Bit
Context Ptr
ADDRSEL 1
ADDRSEL 2
ADDRSEL 3
ADDRSEL 4
Code Seg. Ptr.
CPU
IDX0
IDX1
QX1
QX0
QR0
QR1
SP
STKOV
STKUN
Exec. Unit
Instr. Ptr
Instr. Reg
4-Stage
Pipeline
PSW
SYSCON
BUSCON 0
BUSCON 1
BUSCON 2
BUSCON 3
BUSCON 4
Data Pg. Ptrs
1
Page 14
14/77
ST10R272L - MULTIPLY-ACCUMULATE UNIT (MAC)
5 MULTIPLY-ACCUMULATE UNIT (MAC)
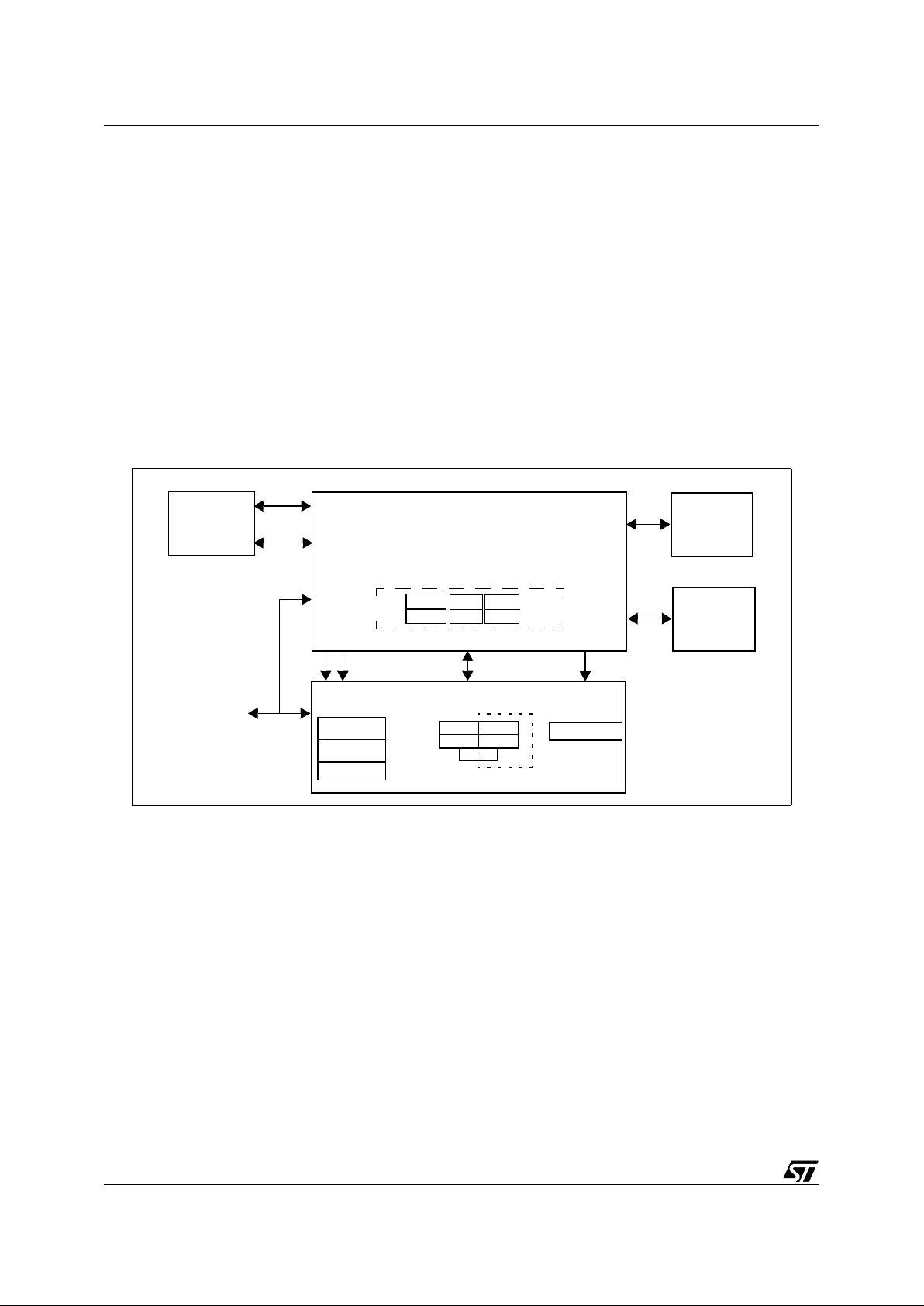
The MAC is a specialized co-processor added to the ST10R272L CPU core to improve the
performance of signal processing algorithms. It includes:
• a multiply-accumulate unit
• an address generation unit, able to feed the mac unit with 2 operands per cycle
• a repeat unit, to execute a series of multiply-accumulate instructions
New addressing capabilities enable the CPU to supply the MAC with up to 2 operands per
instruction cycle. MAC instructions: multiply, multiply-accumulate, 32-bit signed arithmetic
operations and the CoMOV transfer ins tru ction have been added to the standard instruction
set. Full details are provided in the ‘ST10 Family Programming Manual’.
Figure 5 MAC architecture
MAC CoProcessor
dual-port
internal RAM
external
memory
memory
program
new addressing features
IDX0
IDX1
QX0
QX1
QR0
QR1
operands
control
program code
data buses
16 x16
multiplier
40-bit ALU
shifter
MCW
MAL
MRW MAH
MSW
repeat unit
40-bit accumulator
Peripheral
interface
ST10R272L CPU
1
Page 15

15/77
ST10R272L - MULTIPLY-ACCU MULATE UNIT (MAC)
5.1 MAC Features
Enhanced addressing capabilities
•
Double indirect addressing mode with pointer post-modification.
• Parallel Data Move allows one operand move during Multiply-Accumulate instructions
without penalty.
• CoSTORE instruction (for fast access to the MAC SFRs) and CoMOV (for fast memory to
memory table transfer).
General
•
Two-cycle execution for all MAC operations.
• 16 x 16 signed/unsigned parallel multiplier.
• 40-bit signed arithmetic unit with automatic saturation mode.
• 40-bit accumulator.
• 8-bit left/right shifter.
• Scaler (one-bit left shifter)
• Data limiter
• Full instruction set with multiply and multiply-accumulate, 32-bit signed arithmetic and
compare instructions.
• Three 16-bit status and control registers: MSW: MAC Status Word, MCW: MAC Control
Word, MRW: MAC Repeat Word.
Progra m control
•
Repeat Unit allows some MAC co-pr ocessor instructions to be repeated up to 8192 times .
Repeated instructions may be interrupted.
• MAC interrupt (Class B Trap) on MAC condition flags.
1
Page 16

16/77
ST10R272L - MULTIPLY-ACCUMULATE UNIT (MAC)
5.2 MAC Operation
Instruction pipelini ng
All MAC instructions use the 4-stage pipeline. During each stage the following tasks are
performed:
• FETCH: All new instructions are double-word instructions.
• DECODE: If required, operand addresses are calculated and the resulting operands are
fetched. IDX and GPR pointers are post-modified if necessary.
• EXECUTE: Performs the MAC operation. At the end of the cycle, the Accumulator and the
MAC condition flags are updated if required. Modified GPR pointers are written-back
during this stage, if required.
• WRITEBACK: Operand write-back in the case of parallel data move.
Note At least one instruction which does not use the MAC must be inserted between two
instructions that read from a MAC register. This is because the Accumulator and the
status of the MAC are modified during the Execute stage. The CoSTORE instruction
has been added to allow access to the MAC registers immediately after a MAC
operation.
Address generation
MAC instructions can use some standard ST10 addressing modes such as GPR direct or
#data4 for immediate shift value.
New addressing modes have been added to supply the MAC with two new operands per
instruction cycle. These allow indirect addressing with address pointer post-modification.
Double indirect addressing requires two pointers. Any GPR can be used for one pointer, the
other pointer is provided by one of two specific SFRs IDX0 and IDX1. Two pairs of offset
registers QR0/QR1 and QX0/QX1 are associated with each pointer (GPR or IDX
i
). The GPR
pointer allows access to the entire memory space, but IDX
i
are limited to the internal Dual-
Port RAM, except for the CoMOV instruction.
1
Page 17
17/77
ST10R272L - MULTIPLY-ACCU MULATE UNIT (MAC)
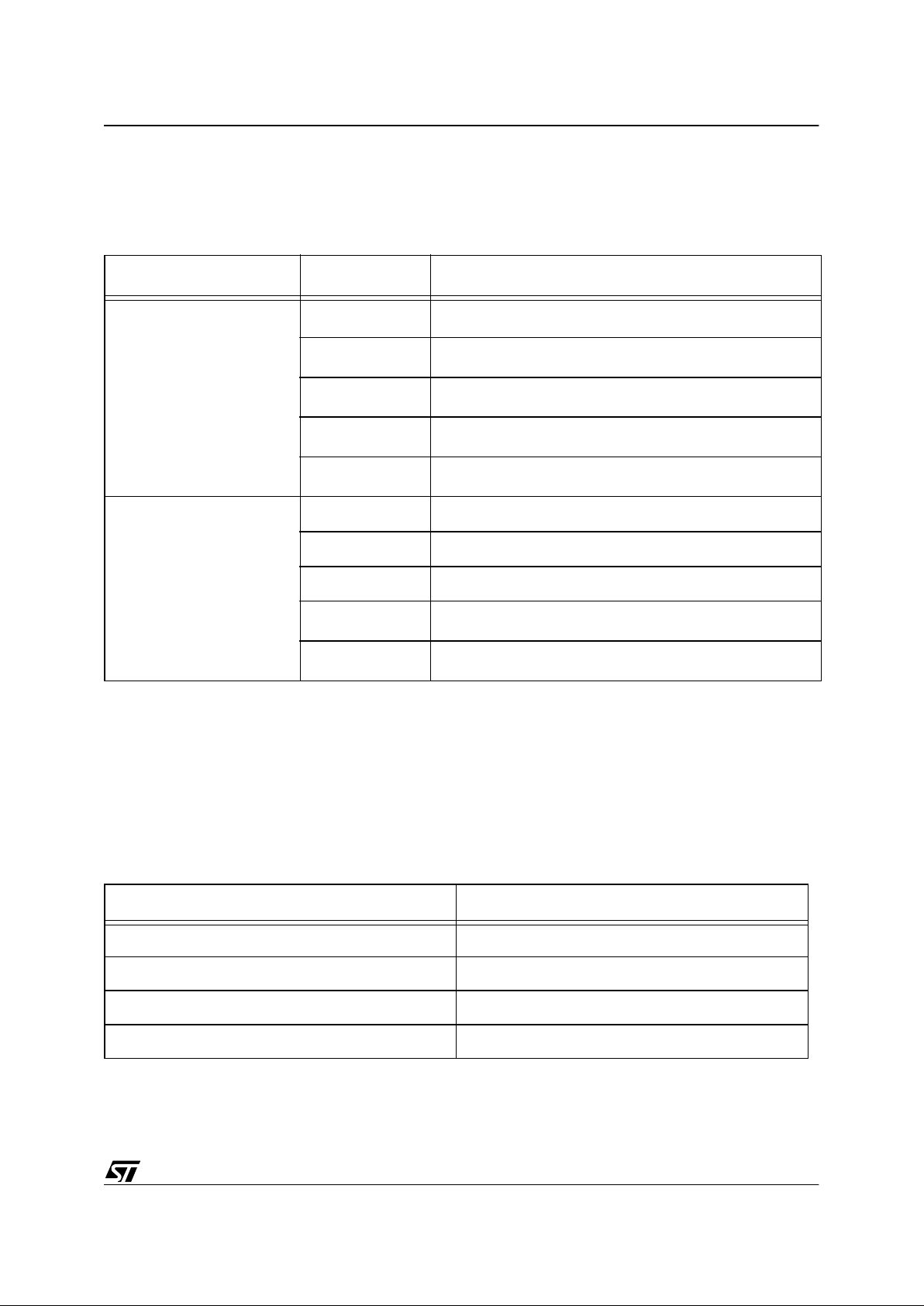
The following table shows the various combinations of pointer post-modification for each of
these 2 new addressing modes. In this document the symbols “[Rw
n
⊗]” and “[IDXi⊗]” refer to
these addressing modes.
For the CoMACM class of instruction, Parallel Data Move mechanism is implemented. This
class of instruction is only a vailable with double indirect addres sing mode. P ar al lel D ata Mo v e
allows the operand pointed by IDX
i
to be moved to a new location in parallel with the MAC
operation. The write-back address of Parallel Data Move is calculated depending on the postmodification of IDX
i
. It is obtained by the rev erse oper ation than the one used to calculate the
new value of IDX
i
. The following table shows these rules.
Symbol Mnemonic Address Pointer Operation
“[IDXi⊗]” stands for [IDXi](IDX
i
) ← (IDXi) (no-op)
[IDXi+](IDX
i
) ← (IDXi) +2 (i=0,1)
[IDXi -] (IDXi) ← (IDXi) -2 (i=0,1)
[IDXi + QXj](IDX
i
) ← (IDXi) + (QXj) (i, j =0,1)
[IDXi - QXj](IDX
i
) ← (IDXi) - (QXj) (i, j =0,1)
“[Rw
n
⊗]” stands for [Rwn] (Rwn) ← (Rwn) (no-op)
[Rwn+] (Rwn) ← (Rwn) +2 (n=0-15)
[Rwn-] (Rwn) ← (Rwn) -2 (k=0-15)
[Rwn+QRj] (Rwn) ← (Rwn) + (QRj) (n=0-15;j =0,1)
[Rwn - QRj] (Rwn ) ← (Rwn) - (QRj) (n=0-15; j =0,1)
Table 2 Pointer post-modification combinations for IDXi and Rwn
Instructio n Writeback Address
CoMACM [IDX
i
+],... <IDXi-2>
CoMACM [IDX
i
-],... <IDXi+2>
CoMACM [IDX
i
+QXj],... <IDXi-QXj>
CoMACM [IDX
i
-QXj],... <IDXi+QXj>
Table 3 Parallel data move addressing
1
Page 18
18/77
ST10R272L - MULTIPLY-ACCUMULATE UNIT (MAC)
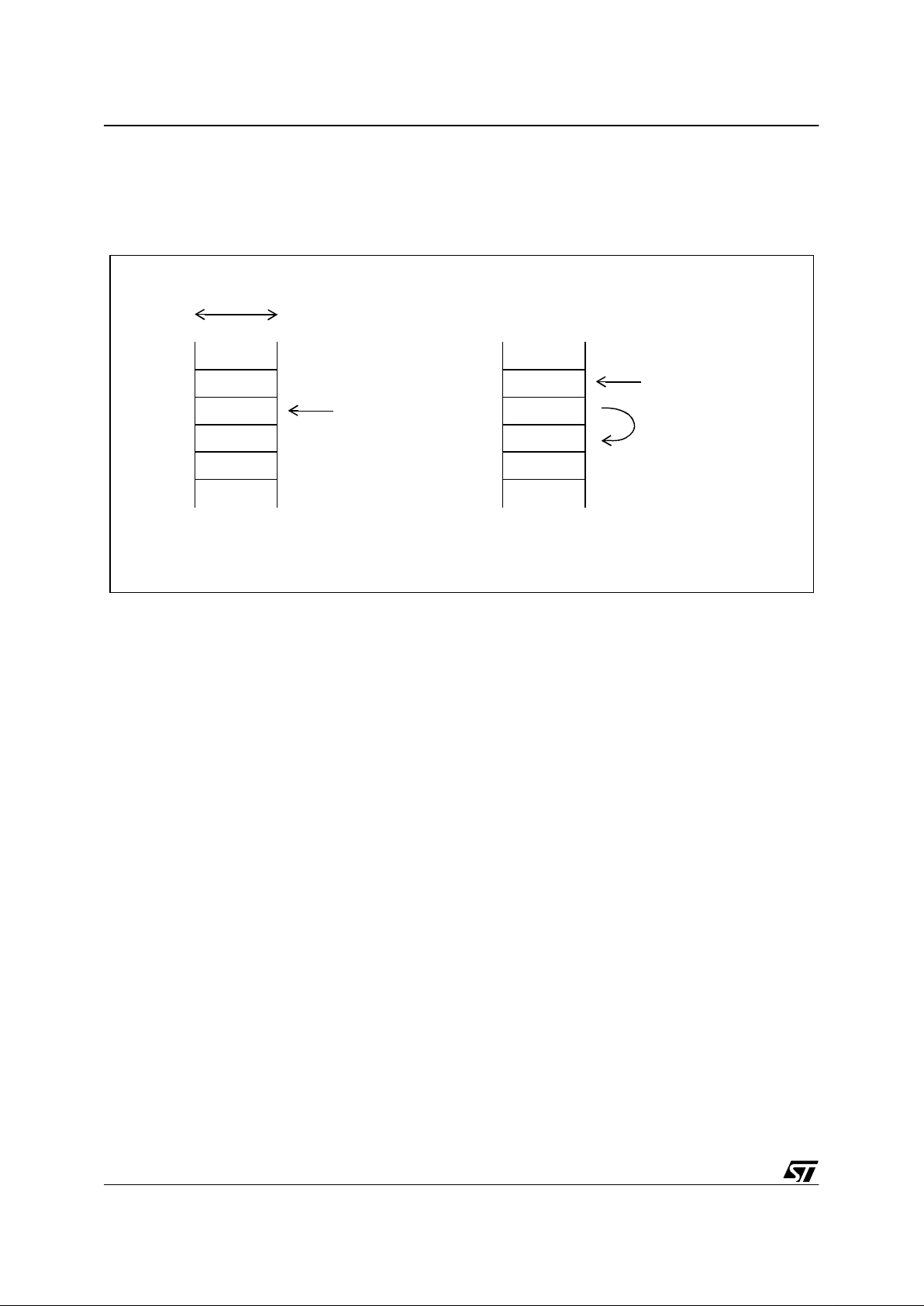
The Parallel Data Move shifts a table of operands in parallel with a computation on those
operands. Its specific use is for signal processing algorithms like filter computation. The
following figure gives an example of Parallel Data Move with CoMACM instruction.
16 x 16 signed/unsigned parallel mul tiplier
The multiplier executes 16 x 16-bit parallel signed/unsigned fractional and integer multiplies.
The multiplier has two 16-bit i nput ports, and a 32-bit product output port. The input ports can
accept data from the MA-bus and from the MB-bus. The output is sign-extended and then
feeds a scaler that shifts the multiplier output according to the shift mode bit MP specified in
the co-processor Control Word (MCW). The product can be shifted one bit left to compensate
for the extra sign bit gained in multiplying two 16-bit signed (2’s complement) fractional
numbers if bit MP is set.
40-bit signed arithmetic unit
The arithmetic unit over 32 bits wide to allow intermediate overflow in a series of multiply/
accumulate operations. The extension flag E, contained in the most significant byte of MSW,
is set when the Accumulator has overflowed beyond the 32-bit boundary, that is, when there
are significant (non-sign) bits in the top eight (signed arithmetic) bits of the Accumulator.
The 40-bit arithmetic unit has two 40-bit input ports A and B. The A-input port accepts data
from 4 possible sources: 00,0000,0000h, 00,0000,8000h (round), the sign-extended product,
or the sign-extended data c on veyed b y the 32-bit b us result ing from the concatenation of MAand MB-buses. Product and Concatenation can be shifted left by one according to MP for the
multiplier or to the i ns truction f or the concatenation. The B-input port is fed either by the 40-bit
shifted/not shifted and inverted/not inverted accumulator or by 00,0000,0000h. A-input and B-
Figure 6 Example of parallel data move
CoMACM [IDX0+], [R2+]
X
n+2
n
n-2
n-4
16-bit
IDX0 X
X
n+2
n
n-2
n-4
IDX0
Parallel Data Move
After ExecutionBefore Execution
1
Page 19

19/77
ST10R272L - MULTIPLY-ACCU MULATE UNIT (MAC)
input ports can receive 00,0000,0000h to allow direct transfers from the B-source and Asource, respectively, to the Accumulator (case of Multiplication, Shift.). The output of the
arithmetic unit goes to the Accumulator.
It is also possible to saturate the Accumulator on a 32-bit value, automatically after every
accumulation. Automatic saturation is enabled by setting the saturation bit MS in the MCW
register. When the Accumulator is in the saturation mode and an 32-bit overflow occurs, the
accumulator is loaded with either the most positive or the most negative value representable
in a 32-bit value, depending on the direction of the overflow. The value of the Accumulator
upon saturation is 00,7fff,ffffh (positive) or ff,8000,0000h (negative) in signed arithmetic.
Automatic saturation sets the SL flag MSW. This flag is a sticky flag which means it stays set
until it is explicitly reset by the user.
40-bit overflow of the Accumulator sets the SV flag in MSW. This flag is also a sticky flag.
40-bit accumulator register
The 40-bit Accumulator consists of three SFR registers MAH, MAL and MAE. MAH and MAL
are 16-bit wide. MAE is 8-bit wide and is contained within the least significant byte of MSW.
Most co-processor operations specify the 40-bit Accumulator register as source and/or
destination operand.
Data limite r
Saturation arithmetic is also provided to selectively limit overflow, when reading the
accumulator by means of a CoSTORE <destination>
MAS instruction. Limiting is performed
on the MAC Accumulator. If the contents of the Accumulator can be represented in the
destination operand size without overflow, the data limiter is disabled and the operand is not
modified. If the contents of the accumulator cannot be represented without overflow in the
destination operand size, the limiter will substitute a ‘limited’ data as explained in the f ollowing
table.
Note In this case, the accumulator and the status register are not affected. MAS readable
from a CoSTORE instruction.
Register E bit N bit Output of the Limiter
x 0 x unchanged
MAS 1 0 7fffh
MAS 1 1 8000h
Table 4 Data Limit Values
1
Page 20

20/77
ST10R272L - MULTIPLY-ACCUMULATE UNIT (MAC)
Accumulator shi fter
The Accumulator shifter is a parallel shifter with a 40-bit input and a 40-bit output. The source
operand of the shifter is the Accumulator and the possible shifting operations are:
• No shift (Unmodified)
• Up to 8-bit Arithmetic Left Shift
• Up to 8-bit Arithmetic Right Shift
E, SV and SL bits from MSW are affected by Left shifts, theref or e i f the s atur ation mechanism
is enabled (MS), the behavior is similar to the one of the arithmetic unit. The carry flag C is
also affected by left shifts.
Repeat unit
The MAC includes a repeat unit allowing the repetition of some co-processor instructions up
to 2
13
(8192) times. The repeat count may be specified either by an immediate value (up to 31
times) or by the content of the Repeat Count ( bits 12 to 0) i n the MAC Repeat Word (MRW). If
the Repeat Count equals “N” the instruction will be executed “N+1” times. At each iteration of
a cumulative instruction the Repeat Count is tested for zero. If it is zero the instruction is
terminated else the Repeat Count is decremented and the instruction is repeated. During
such a repeat sequence, the Repeat Flag in MRW is set until the last execution of the
repeated instruction.
The syntax of repeated instructions is shown in the following examples:
In example 1, the instruction is repeated according to a 5-bit immediate value. The Repeat
Count in MRW is automatically loaded with this value minus one (MRW=23).
In this example, the instruction is repeated according to the Repeat Count in MRW . Notice that
due to the pipeline processing at least one instruction should be inserted between the write of
MRW and the next repeated instruction.
Repeat sequences may be interrupted. When an interrupt occurs during a repeat sequence,
the sequence is stopped and the i nterrupt routine i s e xecuted. The repeat sequence resumes
at the end of the interrupt routine. During the interrupt, MR remains set, indicating that a
repeated instruction has been interrupted and the Repeat Count holds the number (minus 1)
1 Repeat #24 times
CoMAC[IDX0+],[R0+] ; repeated 24 times
1 MOV MRW, #00FFh ; load MRW
NOP ; instruction latency
Repeat MRW times
CoMACM [IDX1-],[R2+] ; repeated 256 times
1
Page 21
21/77
ST10R272L - MULTIPLY-ACCU MULATE UNIT (MAC)
of repetition that remains to complete the sequence. If the R epeat Unit is us ed in the i nterrupt
routine, MRW must be saved by the user and restored before the end of the interrupt routine.
Note The Repeat Count should be used with caution. In this case MR should be written as
0. In general MR should not be set by the user otherwise correct instruction
processing can not be guaranteed.
MAC interrupt
The MAC can generate an interrupt according to the value of the status flags C (carry), SV
(overf low), E (ex tension) or SL (limit) of the MSW . T he MAC interrupt is globally enabl ed when
the MIE flag in MCW is set. When it is enabled the flags C, SV, E or SL can triggered a MAC
interrupt when they are set provided that the corresponding mask flag CM, VM, EM or LM in
MCW is also set. A MAC interrupt request set the MIR flag in MSW , this flag must be reset by
the user during the interrupt routine otherwise the interrupt processing restarts when
returning from the interrupt routine.
The MAC interrupt is implemented as a Class B hardware trap (trap number Ah - trap priority
I). The associated Trap Flag in the TFR register is MACTRP, bit #6 of the TFR (Remember
that this flag must also be reset by the user in the case of an MAC interrupt request).
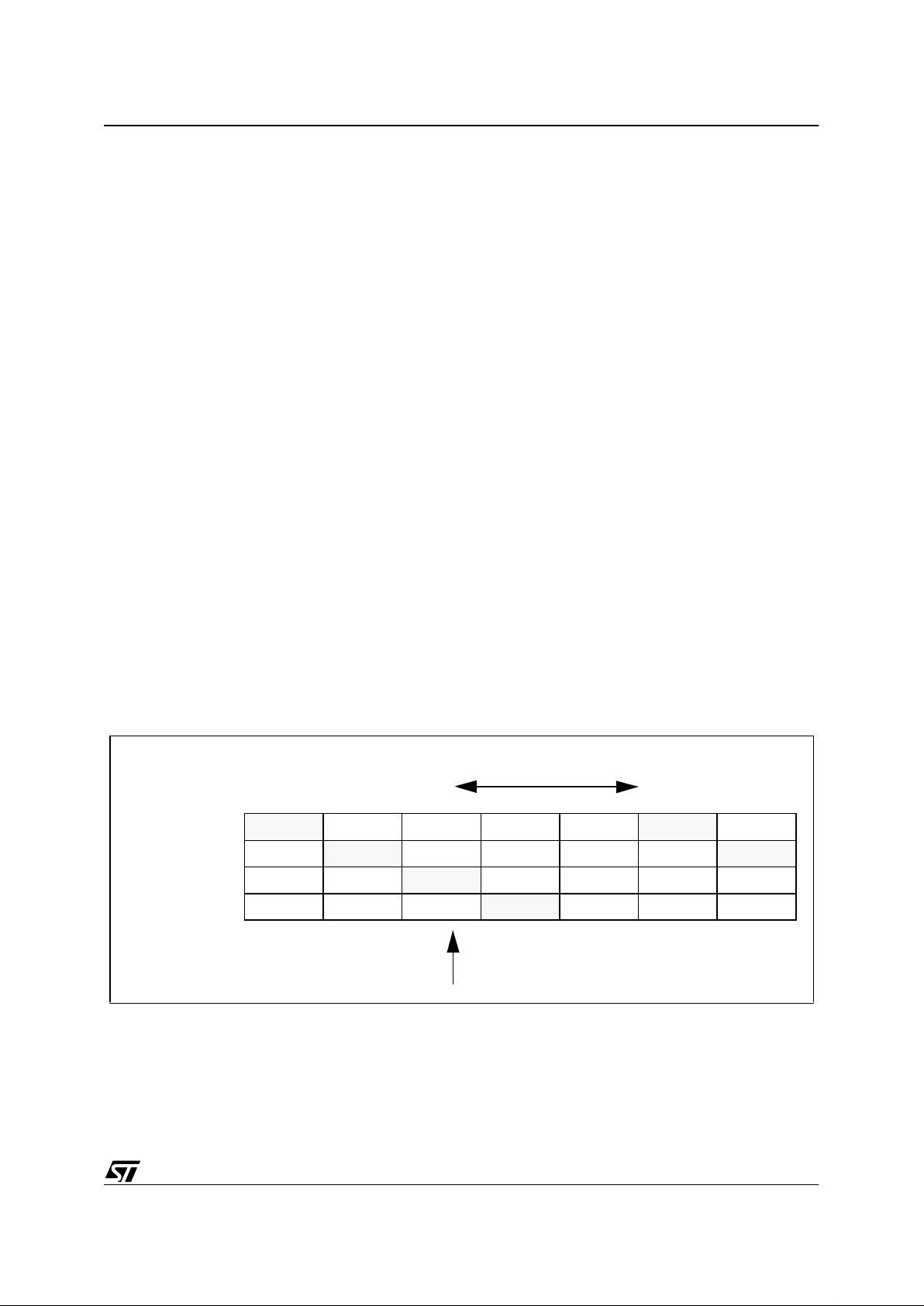
As the MAC status flags are updated (or eventually written by software) during the Execute
stage of the pipeline, the response time of a MAC interrupt request is 3 instruction cycles (see
Figure 3). It is the number of instruction cycles required between the time the request is sent
and the time the first instruction located at the interrupt vector location enters the pipeline.
Note that the IP value stacked after a MAC interrupt does not point to the instruction that
triggers the interrupt.
Figure 7 Pipeline diagram for MAC interrupt response time
N
N-1
N-2
N-3
N+1
N
N-1
N-2
N+2
N+1
N
N-1
N+4
TRAP (1)
N+2
N+1
I1
TRAP (2)
TRAP (1)
N+2
I2
I1
TRAP (2)
TRAP (1)
N+3
N+2
N+1
N
FETCH
DECODE
EXECUTE
WRITEBACK
MAC Interrupt Request
Response Time
1
Page 22

22/77
ST10R272L - INTERRUPT AND TRAP FUNCTIONS
Number representation & rounding
The MAC supports the two’s-complement representation of binary numbers. In this format,
the sign bit is the MSB of the binary word. This is set to zero for positive numbers and set to
one for negative numbers. Unsigned numbers are supported only by multiply/multiplyaccumulate instructions which specifies whether each operand is signed or unsigned.
In two’s complement fractional format, the N-bit operand is represented using the 1.[N-1]
format (1 signed bit, N-1 fractional bits). Such a format can represent numbers between -1
and +1-2
-[N-1]
. This format is suppor ted when MP of MCW is set.
The MAC implements ‘two’s complement rounding’. With this rounding type, one is added to
the bit to the right of the rounding point (bit 15 of MAL), before truncation (MAL is cleared).
6 INTERRUPT AND TRAP FUNCTIONS
The architecture of the ST10R272L supports s everal mechanisms for fast and flexible
response to the service requests that can be generated from various sources, internal or
external to the microcontroller. Any of these interrupt requests can be programmed to be
serviced, either by the Interrupt Controller or by the Peripheral Event Controller (PEC).
In a standard interrupt service, program executi on is suspended and a branch to the interrupt
service routine is performed. For a PEC service, just one cycle is ‘stolen’ from the current
CPU activity. A PEC service is a single, byte or word data transfer between any two memory
locations, with an additional increment of either the PEC source or the destination pointer. An
individual PEC transfer counter is decremented for each PEC service, except in the
continuous transfer mode. When this counter reaches zero , a standard interrupt is performed
to the corresponding source-related vector location. PEC services are very well suited, for
example, to the transmission or reception of blocks of data. The ST10R272L has 8 PEC
channels, each of which offers fast interrupt-driven data transfer capabilities.
A separate control register which contains an interrupt request flag, an interrupt enable flag
and an interrupt priority bitfield, exists f or each of the possib le interrupt sources. Via it s related
register, each source can be programmed to one of sixteen interrupt priority levels. Once
having been accepted by the CPU, an interrupt service can only be interrupted by a higher
priority service request. For standard interrupt processing, each of the possible interrupt
sources has a dedicated vector location.
Fast external interrupt inputs are provided to service external interrupts with high precision
requirements. These fast interrupt inputs, feature programmable edge detection (rising edge,
falling edge or both edges).
Software interrupts are supported by means of the ‘TRAP’ instruc tion in combination with an
individual trap (interrupt) number.
1
Page 23

23/77
ST10R272L - INTERRUPT AND TRAP FUNCTIONS
6.1 Interrupt Sources
Source of Interru pt or PEC
Service Request
Request
Flag
Enable
Flag
Interrupt
Vector
Vector
Location
Trap
Number
External Interrupt 0 CC8IR CC8IE CC8INT 60h 18h
External Interrupt 1 CC9IR CC9IE CC9INT 64h 19h
External Interrupt 2 CC10IR CC10IE CC10INT 68h 1Ah
External Interrupt 3 CC11IR CC11IE CC11INT 6Ch 1Bh
GPT1 Timer 2 T2IR T2IE T2INT 88h 22h
GPT1 Timer 3 T3IR T3IE T3INT 8Ch 23h
GPT1 Timer 4 T4IR T4IE T4INT 90h 24h
GPT2 Timer 5 T5IR T5IE T5INT 94h 25h
GPT2 Timer 6 T6IR T6IE T6INT 98h 26h
GPT2 CAPREL Register CRIR CRIE CRINT 9Ch 27h
ASC0 T ransmit S0TIR S0TIE S0TINT A8h 2Ah
ASC0 Transmit Buffer S0TBIR S0 T BIE S0 TB IN T 11Ch 47h
ASC0 Receive S0RIR S0RIE S0RINT ACh 2Bh
ASC0 Error S0EIR S0EIE S0EINT B0h 2Ch
PWM Channel 3 PWMIR PWMIE PWMINT FCh 3Fh
SSP Interrupt XP1IR X P 1IE X P1I NT 104h 41h
PLL Unlock XP3I R XP3IE X P3I NT 10Ch 43h
Table 5 List of possible interrupt sources, flags, vector and trap numbers
1
Page 24
24/77
ST10R272L - INTERRUPT AND TRAP FUNCTIONS
6.2 Hardware Trap s
Exceptions or error conditions that arise during run-time are called Hardware T raps. Hardware
traps cause immediate non-maskable system reaction similar to a standard interrupt service
(branching to a dedicated vector table location). The occurrence of a hardware trap is
additionally signified by an individual bit in the trap flag register (TFR). Except when another
higher prioritized trap service is in progress, a hardware trap will interrupt any actual progr am
ex ecution. In turn, hardware trap services can not normally be interrupted by standard or PEC
interrupts. The following tab le shows all of the possible ex ceptions or error conditions that can
arise during run-time:
Exception Condition T rap Flag Trap Vector
Vector
Location
Trap
Number
Trap
Priority
Reset Functions:
Hardware Reset RESET 00’0000
h 00h III
Software Reset RESET 00’0000
h 00h III
Watchdog Timer Overflow RESET 00’0000
h 00h III
Class A Hardware Traps:
Non-Maskable Interrupt NMI NMITRAP 00’0008
h 02h II
Stack Overflow STKOF STOTRAP 00’0010
h 04h II
Stack Underflow STKUF STUTRAP 00’0018
h 06h II
Class B Hardware Traps:
Undefined opcode UNDOPC BTRAP 00’0028h 0A
h I
Protected instruction fault PRTFLT BTRAP 00’0028h 0A
h I
Illegal word operand access ILLOPA BTRAP 00’0028h 0A
h I
Illegal instruction access ILLINA BTRAP 00’0028h 0A
h I
Illegal external bus access ILLBUS B TRAP 00’0028h 0A
h I
MAC trap MACTRP BTRAP 00’0028h 0A
h I
Reserved [2C
h – 3Ch][0Bh – 0Fh]
Software Traps
TRAP Instruction Any [00’0000
h
– 00’01FC
h]
steps of 4
h
Any
[00
h – 7Fh]
Current
CPU
Priority
Table 6 Exceptions or error conditions
1
Page 25

25/77
ST10R272L - PARALLEL PORTS
7 PARALLEL POR TS
The ST10R272L provides up to 77 I/O lines organized into 7 input/output ports and one input
port. All port lines are bit-addressable, and all input/output lines are individually (bit-wise)
programmable as inputs or outputs by direction registers. The I/O ports are true bidirectional
ports which are switched to high impedance state when configured as inputs. The output
drivers of three I/O ports can be configured (pin by pin) for push/pull operation or open-drain
operation by control registers. During the internal reset, all port pins are configured as inputs.
All port lines have programmable alternate input or output functions associated with them.
PORT0 and PORT1 may be used as address and data lines when accessing external
memory , while P ort 4 outputs the additional segment address bits A23/19/17...A16 in systems
where segmentation is enabled to access more than 64 KBytes of memory. Port 6 provides
optional bus arbitration signals (BREQ
, HLDA, HOLD) and chip select signals. Port 3 includes
alternate functions of timers, serial interfaces, the optional bus control signal BHE
and the
system clock output (CLKOUT). Port 5 is used for timer control signals. Port 2 lines can be
used as fast external interrupt lines. Port 7 includes alternate function for the PWM signal. All
port lines that are not used for these alternate functions may be used as general purpose I/O
lines.
8 EXTERNA L BUS CONTR OLLER
All external memory accesses are performed by the on-chip External B us Controller which
can be programmed either to single chip mode when no external memory is required, or to the
following external memory access modes:
In the demultiplex ed b us modes, addresses are output on PORT1 and data is input/output on
PORT0/P0L, respectively. In the multiplex ed bus modes both addresses and data use PORT0
for input/output.
Memory cycle time, memory tri-state time, length of ALE and read write delay are
programmable so that a wide range of different memory types and external peripherals can be
used. Up to 4 independent address windows can be defined (via ADDRSELx / BUSCONx
register pairs) to access different resources with different bus characteristics. These address
windows are arranged hier archically where BUSCON4 ov errides BUSCON3 etc. All accesses
to locations not covered by these 4 address windows are controlled by BUSCON0. Up to 5
exte r nal CS
signals (4 windows plus default) can be generated to reduce external glue logic.
Access to very slow memories is supported by the READY function.
A HOLD
/HLDA protocol is available for bus arbitration so that external resources can be
shared with other bu s masters. In slav e mode, the s lave controller can be connec ted to another master controller without glue logic. For applications which require less than 16 MBytes
16-bit data, demultiplexed 16-/18-/20-/24-bit addresses
16-bit data, multiplexed 16-/18-/20-/24-bit addresses
8-bit data, multiplexed 16-/18-/20-/24-bit addresses
8-bit data, demultiplexed 16-/18-/20-/24-bit addresses
1
Page 26

26/77
ST10R272L - PWM MODULE
of external memory space, the address space can be restricted to 1 MByte, 256 KByte or to 64
KByte.
9PWM MODULE
A 1-channel Pulse Width Modulation (PWM) Module operates on channel 3. The pulse width
modulation module can generate up to four PWM output signals using edge-aligned or centrealigned PWM. In addition, the PWM module can generate PWM burst signals and single shot
outputs. The table below shows the PWM frequencies for different resolutions. The level of
the output signals is selectable and the PWM module can generate interrupt requests.
Mode 0
edge aligned
Resolution 8-bit 10-bit 12-bit 14-bit 16-bit
CPU clock/1 20ns 195.3 KHz 48.83KHz 12.21KHz 3.052KHz 762.9Hz
CPU clock/64 1.28ns 3.052KHz 762.9Hz 190.7Hz 47.68Hz 11.92Hz
Mode 1
center aligned
Resolution 8-bit 10-bit 12-bit 14-bit 16-bit
CPU clock/1 20ns 97.66KHz 24.41KHz 6.104KHz 1.525KHz 381.5Hz
CPU clock/64 1.28ns 1.525Hz 381.5 Hz 95.37Hz 23.84Hz 0Hz
Table 7 PWM unit frequencies and resolution at 50MHz CPU clock
1
Page 27

27/77
ST10R272L - GENERAL PURPOSE TIMERS
10 GENERAL PURPOSE TIMERS
The GPTs are flexible multifunctional timer/counters used f or time-related tasks such as e vent
timing and counting, pulse width and duty cycle measurements, pulse generation or pulse
multiplication. The GPT unit contains five 16-bit timers, organized in two separate modules,
GPT1 and GPT2. Each timer in each module m ay operate independently in a number of
different modes, or may be concatenated with another timer of the same module.
10.1 GPT1
Each of the three timers T2, T3, T4 of the GPT1 module can be configured individually f or one
of four basic modes of operation: timer, gated timer, counter mode and incremental
interface mode. In timer mode, the input clock for a timer is derived from the CPU clock,
divided by a programmable prescaler. In counter mode, the timer is clocked in reference to
external events. Pulse width or duty cycle measurement is supported in gated timer mode
where the operation of a timer is controlled by the ‘gate’ level on an external input pin. For
these purposes, each timer has one associated port pin (TxIN) which serves as gate or clock
input. Table 8 GPT1 timer input frequencies, resolution and periods lists the timer input
frequencies, resoluti on and periods f or eac h pre-s caler option at 50MHz CPU cl oc k. T his al so
applies to the Gated Timer Mode of T3 and to the auxiliary timers T2 and T4 in Timer and
Gated Timer Mode
The count direction (up/down) for each timer is programmable by software or may additionally
be altered dynamically by an external signal on a port pin (TxEUD).
In Incremental Interface Mode, the GPT1 timers (T2, T3, T4) can be directly connected to the
incremental position sensor signals A and B by their respective inputs TxIN and TxEUD.
Direction and count signals are internally derived from these two input signals so that the
contents of the respective timer Tx corresponds to the sensor position. The third position
sensor signal TOP0 can be connected to an interrupt input.
Timer T3 has output toggle latches (TxOTL) which changes state on each timer over-flow/
underflow. The state of this latch may be output on port pins (TxOUT) e. g. for time out
monitoring of external hardware components, or ma y be used internally to clock timers T2 and
T4 for measuring long time periods with high resolution.
In addition to their basic operating modes, timers T2 and T4 may be configured as reload or
capture registers f or timer T3. When used as capture or reload registers, timers T2 and T4 are
stopped. The contents of timer T3 is captured into T2 or T4 in response to a signal at their
associated input pins (TxIN). Timer T3 is reloaded with the contents of T2 or T4 triggered
either by an ex ternal signal or by a selectabl e state transiti on of its toggle latch T3O TL. When
both T2 and T4 are configured to alternately reload T3 on opposite state tr ansitions of T 3O T L
with the low and high times of a PWM signal, this signal can be constantly generated without
software intervention.
1
Page 28

28/77
ST10R272L - GENERAL PURPOSE TIMERS
F
CPU
=50MHz
Timer input selection
000b 001b 010b 011b 100b 101b 110b 111b
Prescaler
Factor
8 16 32 64 128 256 512 1024
Input
Frequency
6.25 MHz 3.125
MHz
1.5625
MHz
781
KHz
391
KHz
195
KHz
97.5
KHz
48.83
KHz
Resolution 160ns 32 0ns 640ns 1.28 us 2.56 us 5.12 us 10.24 us 20.48 us
Period 10.49ms 20 .97 ms 41 .94 ms 83 .88ms 168m s 336ms 672ms 1.342s
Table 8 GPT1 timer input frequencies, resolution and periods
Figure 8 GPT1 block diagram
2n n= 3 ...10
2
n
n= 3 ...10
2
n
n= 3 ...10
T2EUD
T2IN
CPU Clock
CPU Clock
CPU Clock
T3IN
T4IN
T3EUD
T4EUD
T2
Mode
T3
Mode
T4
Mode
GPT1 Timer T2
GPT1 Timer T3
GPT1 Timer T4
T3OTL
Reload
Capture
U/D
U/D
Reload
Capture
Interrupt
Request
Interrupt
Request
Interrupt
Request
T3OUT
U/D
1
Page 29

29/77
ST10R272L - GENERAL PURPOSE TIMERS
10.2 GPT2
The GPT2 module provides precise event control and time measurement. It includes two
timers (T5, T6) and a capture/reload register (CAPREL). Both timers can be clocked with an
input clock derived from the CPU clock via a programmable prescaler or with e xternal signals.
The count direction (up/down) for each timer is programmable by software or altered
dynamically by an external signal on a port pin (TxEUD). Concatenation of the timers is
supported by the output toggle latch (T6OTL) of timer T6, which changes its state on each
timer overflow/underflow.
The state of T6OT L may be used to cloc k timer T5, or ma y be output on a port pin T6OUT. The
overflow s/underflows of timer T6 reload the CAPREL register. The CAPREL register captures
the contents of T5 based on an external signal transition on the corresponding port pin
(CAPIN), and timer T5 may optionally be cleared after the capture procedure. This allows
absolute time differences to be measured or pulse multiplication to be performedwithout
software overhead.
F
CPU
=50MHz
Timer input selection
000b 001b 010b 011b 100b 101b 110b 111b
Prescaler
Factor
4 8 16 32 64 128 256 512
Input
Frequency
12.5 MHz 6.25 MHz 3.125
MHz
1.563
MHz
781
KHz
391
KHz
195
KHz
97.6
KHz
Resolution 80ns 160 ns 320ns 640ns 1.28 us 2.56 us 5.12 us 10.24 us
Period 5.24ms 10.49ms 20.97m s 41. 94m s 83.88ms 167.7ms 335.5m s 671ms
Table 9 GPT2 timer in put frequencies, resolution and periods
1
Page 30

30/77
ST10R272L - SERIAL CHANNELS
11 SERIAL CHANNELS
Serial communication with other microcontrollers, proces sors, terminals or external peripheral
components is provided by two serial interfaces with different functionality, an Asynchronous/
Synchronous Serial Channel (ASC0) and a Synchronous Serial Port (SSP).
ASC0
A dedicated baud rate generator sets up standard baud rates without oscillator tuning. 3
separate interrupt vectors are provided for transmission, reception, and erroneous reception.
In asynchronous mode, 8- or 9-bit data frames are transmitted or received, preceded by a start
bit and terminated by one or two stop bits. Fo r multiprocessor comm unication, a mechanism
to distinguish address from data bytes has been included (8-bit data + wake up bit mode).
In synchronous mode, the ASC0 transm its or receives bytes (8 bits) synchronously to a s hift
clock which is generated by the ASC0. The ASC0 always shifts the LSB first. A loop back
option is available for testing purposes.
A number of optional hardware error detection capabilities have been included to increase the
reliability of data transfers. A parity bit can be generated automatically on transmission, or
checked on reception. Framing error detection recognizes data frames with missing stop bits.
An overrun error is generated if the last character received was not read out of the receive
buffer register at the time the reception of a new character is complete.The table below lists
Figure 9 GPT2 block diagram
2n n=2...9
2
n
n=2...9
T5EU D
T5IN
CPU Clock
CPU Clock
T6IN
T6EUD
T5
Mode
T6
Mode
GP T2 Timer T5
GPT2 Timer T6
U/D
Interrupt
Request
U/D
GPT2 CAPREL
T60TL
Toggle FF
T6OUT
CAPIN
Reload
Inte rr up t
Request
Capture
Clear
Inte rr up t
Request
1
Page 31

31/77
ST10R272L - SERIAL CHANN ELS
various commonly used baud rates together with the required reload values and the deviation
errors compared to the intended baudrate.
SSP transmits 1...3 bytes or receives 1 byte after sending 1...3 bytes synchronously to a shift
clock which is generated b y the SSP. The SSP can start shifting with the LSB or with the MSB
and is used to select shifting and latching clock edges, and clock polarity . Up to two chip select
lines may be activ ated in order to direct data transf ers to one or both of two peripheral devices.
When the SSP is enabled, the four upper pins of Port4 can not be used as general purpose
IO. Note that the segment address selection done via the system st art-up configuration during
reset has priority and overrides the SSP functions on these pins.
S0BRS = ‘0’, f
CPU
= 50MHz S0BRS = ‘1’, f
CPU
= 50MHz
Baud Rate
(Baud)
Deviation Error Reload Value
Baud Rate
(Baud)
Deviation Error Reload V al ue
1562500 0.0% / 0.0% 0000
H
/ 0000
H
1041666 0.0% / 0.0% 0000H / 0000
H
56000 +3.3% / -0.4% 001AH / 001BH56000 +3.3% / -2.1% 0011H / 0012
H
38400 +1.7% / -0.8% 0027H / 0028
H
38400 +0.5% / -3.1% 001AH / 001B
H
19200 +0.5% / -0.8% 0050H / 0051
H
19200 +0.5% /-1.4% 0035H / 0036
H
9600 +0.5% / -0.1% 00A1H/ 00A2
H
9600 +0.5% / -0.5% 006BH / 006C
H
4800 +0.2% / -0.1% 0144H / 0145
H
4800 0.0% / -0.5% 00D8H / 00D9
H
2400 0.0% / -0.1% 028AH / 028BH2400 0.0% / -0.2% 01B1H / 01B2
H
1200 0.0% / -0.1% 0515H / 0516
H
1200 0.0% / -0.1% 0363H / 0364
H
600 0.0% / 0.0% 0A2BH / 0A2CH600 0.0% / -0.1% 06C7H / 06C8
H
190 +0.4% /+0.4% 1FFFH / 1FFFH75 0.0% / 0.0% 363FH / 3640
H
127 +0.1% / +0.1% 1FFFH / 1FFF
H
Table 10 Common ly used bau d rates, required reload values and deviation errors
SSPCKS Value Synchronous baud rate
000 SSP clock = CPU clock divided by 2 25 MBit/s
001 SSP clock = CPU clock divided by 4 12.5 MBit/s
010 SSP clock = CPU clock divided by 8 6.25 MBit/s
Table 11 Synchronous b a ud rate and SSPCKS reloa d values
1
Page 32

32/77
ST10R272L - WATCHDOG TIMER
12 WATCH DO G TIMER
The Watchdog Timer is a fail-safe mechanism which limits the malfunction time of the
controller . The Watchdog Timer is always enabled after device reset and can only be disabled
in the time interval until the EINIT (end of initialization) instruction has been executed. In this
way, the chip’s start-up procedure is always monitored. The software must be designed to
service the Watchdog Timer before it overflows. If, due to hardware or software related
failures, the software fails to maintain the Watchdog Timer, it will overflow generating an
internal hardware reset and pulling the RSTOUT
pin low to reset external hardware
components.
The Watchdog Timer is a 16-bit timer, clocked with the system clock divided either by 2 or by
128. The high byte of the Watchdog Timer register can be set to a pre-specified reload value
(stored in WDTREL) in order to allow further variation of the monitored time interval. Each
time it is serviced by the application software, the high byte of the Watchdog Timer is
reloaded. The table below shows the watchdog time range which for a 50MHz CPU clock
rounded to 3 significant figures.
011 SSP clock = CPU clock divided by 16 3.13 MBit/s
100 SSP clock = CPU clock divided by 32 1.56 MBit/s
101 SSP clock = CPU clock divided by 64 781 KBit/s
110 SSP clock = CPU clock divided by 128 391 KBit/s
111 SSP clock = CPU clock divided by 256 195 KBit/s
Reload value
in WDTREL
Prescaler for f
CPU
2 (WD TIN = ‘0’ ) 128 (WDTIN = ‘ 1 ’)
FF
H
10.24 µs 655 µs
00
H
2.62 ms 168 ms
Table 12 Watchdog timer range
SSPCKS Value Synchronous baud rate
Table 11 Synchronous b a ud rate and SSPCKS reloa d values
1
Page 33

33/77
ST10R272L - SYSTEM R ESET
13 SYSTEM RESET
The following type of reset are implemented on the ST10R272L:
Asynchronous hardware reset: Asynchronous reset does not require a stabilized clock
signal on XTAL1 as it is not internally resynchronized, it resets the microcontroller into its
default reset state. Asynchronous reset is required on chip power-up and can be used during
catastrophic situations. The rising edge of the RSTIN pin is internally resynchronized before
exiting the reset condition, therefore, only the entry to hardware reset is asynchronous.
Synchronous hardware reset (warm reset): A war m synchronous hardware reset is
triggered when the reset input signal RSTIN
is latched low and Vpp pin is high. The I/Os are
immediately (asynchronously) set in high impedance, RSTOUT
is driven low. After RSTIN
negation is detected, a short transition period elapses, during which pending internal hold
states are cancelled and any current internal access cycles are completed, external bus
cycles are aborted. Then, the internal reset sequence is active for 1024 TCL (512 CPU clock
cycles). During this reset sequence, if bit BDRSTEN was previously set by software (bit 5 in
SYSCON register), RSTIN
pin is driven low and internal reset signal is asserted to reset the
microcontroller in its default state . Note that after all reset sequence, bit BDRSTEN is cleared.
After the reset sequence has been completed, the RSTIN input is sampled. When the reset
input signal is active at that time the internal reset condition is prolonged until RSTIN
becomes inactive.
Software reset: The reset sequence can be trigger ed at any time by the protected
instruction SRST (software reset). This instruction can be executed deliberately within a
program, e.g. to leave bootstrap loader mode, or on a hardware trap that reveals a system
failure. As for a synchronous hardware reset, the reset sequence lasts 1024 TCL (512 CPU
clock cycles), and drives the RSTIN
pin low.
Watchdog timer reset: When the watchdog timer is not disabled during the initialization or
serviced regularly during program execution it will overflow and trigger the reset sequence.
Unlike hardware and software resets, the watchdog reset completes a running external bus
cycle if this bus cycle does not use READY
, or if READY is sampled active (low) after the
programmed waitstates. When READY
is sampled inactive (high) after the programmed
waitstates the running external bus cycle is aborted. Then the internal reset sequence is
started. The watchdog reset cannot occur while the ST10R 272L is in bootstrap loader mode.
Bidirectional reset: This reset makes the watchdog timer reset and software reset
externally visible. It is active for the duration of an internal reset sequences caused by a
watchdog timer reset and software reset. Therefore, the bidirectional reset transforms an
internal watchdog timer reset or software reset into an external hardware reset with a
minimum duration of 1024 TCL.
1
Page 34

34/77
ST10R272L - POWER REDUC TION MODES
14 POWER REDUCTION MODES
Two different power reduction modes with different levels of power reduction can be entered
under software control.
In Idle mode the CPU is stopped, while the peripherals continue their operation. Idle mode
can be terminated by any reset or interrupt request.
In Po wer Do wn mod e both the CPU and the peripheral s are stopped. P o wer Down mode can
now be configured by software in order to be terminated only by a hardware reset or by an
external interrupt source on fast external interrupt pins.
All external bus actions are completed before Idle or Power Down mode is entered. However,
Idle or Power Down mode is not entered if READY is enabled, but has not been activated
(driven low f or negativ e polarity, or driven high for positive polarity) during the last bus access.
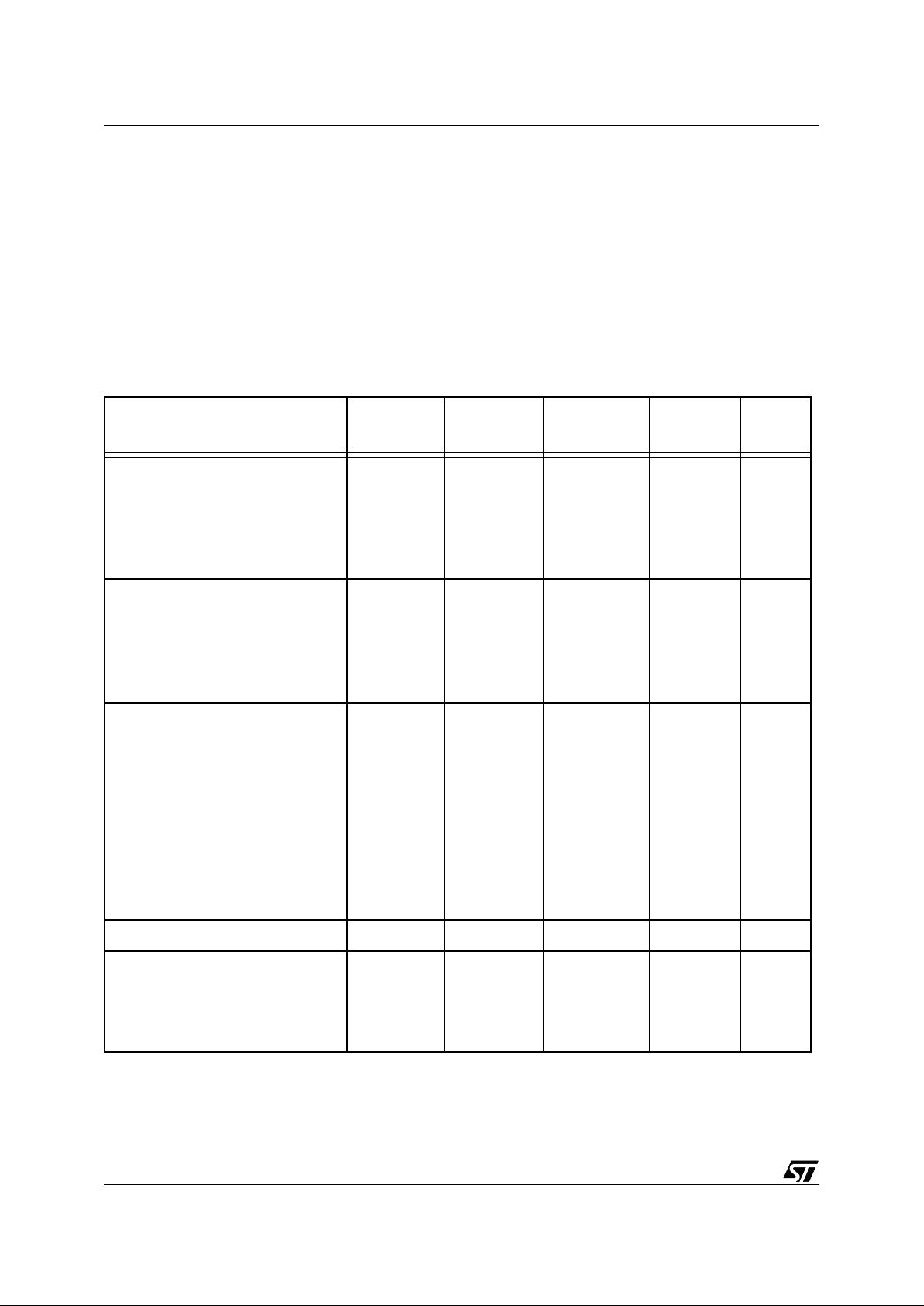
15 SPECIA L FUNCTION REGI STERS
The following table lists all ST10R272L SFRs in alphabetical order.
Bit-addressable SFRs are marked with the letter “b” in column “Name”. SFRs within the
Extended SFR-Space (ESFRs) are marked with the letter “E” in column “Physical Address”.
An SFR can be specified by its individual mnemonic name. Depending on the selected
addressing mode, an SFR can be accessed by its physical address (using the Data Page
Pointers), or by its short 8-bit address (without using the Data Page Pointers).
Name
Physical
Address
8-Bit
Address
Description
Reset
Value
ADDRSEL1 FE18h 0Ch Address Select Register 1 0000h
ADDRSEL2 FE1Ah 0Dh Address Select Register 2 0000h
ADDRSEL3 FE1Ch 0E h Address Select Register 3 0000h
ADDRSEL4 FE1Eh 0Fh Address Select Register 4 0000h
BUSCON0 b FF0Ch 86h Bus Configuration Register 0 0XX0h
BUSCON1 b FF14h 8Ah Bus Configuration Register 1 0000h
BUSCON2 b FF16h 8Bh Bus Configuration Register 2 0000h
BUSCON3 b FF18h 8Ch Bus Configuration Register 3 0000h
BUSCON4 b FF1Ah 8Dh Bus Configuration Register 4 0000h
CAPREL FE4A h 25 h GPT2 Capture/Reload Register 0000h
CC8IC b FF88h C4h EX0IN Interrupt Control Register 0000h
Table 13 Special functional r e gisters
1
Page 35

35/77
ST10R272L - SPECIAL FUNCTION REGISTERS
CC9IC b FF8Ah C5h EX1IN Interrup t Control Register 0000h
CC10IC b FF8Ch C6h EX2IN Interrup t Control Register 0000h
CC11IC b FF8Eh C7h EX3IN Interrupt Control Register 0000h
CP FE10h 08h CPU Context Pointer Register FC00h
CRIC b FF6Ah B5h GPT2 CAPREL Interrupt Control Register 0000h
CSP FE08h 04h CP U Code Segment Pointer Register (read only) 0000h
DP0L b F100h E 80h P 0L Direction Control Register 00h
DP0H b F102h E 81h P0h Direction Control Register 00h
DP1L b F104h E 82h P1L Direction Control Register 00h
DP1H b F106h E 83h P1h Direction Control Register 00h
DP2 b FFC2h E1h Port 2 Direction Control Register -0--h
DP3 b FFC6h E3h Port 3 Direction Control Register 0000h
DP4 b FFCAh E5h Port 4 Direction Control Register 00h
DP6 b FFCEh E7h Port 6 Direction Control Register 00h
DP7 b FFD2h E9h Port 7 Direction Control Register -0h
DPP0 FE00h 00h CPU Data Page Pointer 0 Register (10 bits) 0000h
DPP1 FE02h 01h CPU Data Page Pointer 1 Register (10 bits) 0001h
DPP2 FE04h 02h CPU Data Page Pointer 2 Register (10 bits) 0002h
DPP3 FE06h 03h CPU Data Page Pointer 3 Register (10 bits) 0003h
EBUSCON b F10Eh E 87H Extended BUSCON register 0000h
EXICON b F1C0h E E0h External Interrupt Control Register 0000h
IDCHIP F07Ch E 3Eh Dev ice Identifier Register 1101h
IDMANUF F07Eh E 3Fh Manufacturer/Process Identifier Register 0201h
IDMEM F07Ah E 3Dh On-chip Memory Identifier Register 0000h
IDPROG F078h E 3Ch Programming Voltage Identifier Register 0000h
IDX0 b FF08h 84h MAC Unit Address Pointer 0 0000h
Name
Physical
Address
8-Bit
Address
Description
Reset
Value
Table 13 Special functional r e gisters
1
Page 36

36/77
ST10R272L - SPECIAL FUNCTION REGISTERS
IDX1 b FF0Ah 85h MAC Unit Address Pointer 1 0000h
MAH FE5Eh 2Fh MAC Unit Accumulator - High Word 0000h
MAL FE5Ch 2Eh MAC Unit Accumulator - Low Word 0000h
MCW FF DCh EEh MAC Unit Control Word 0000h
MDC b FF0Eh 87h CPU Multiply Divide Control Register 0000h
MDH FE0Ch 06h CPU Multiply Divide Register – High Word 0000h
MDL FE0Eh 07h CPU Multiply Divide Register – Low Word 0000h
MRW b FFDAh EDh MAC Unit Repeat Word 0000h
MSW b FF DEh EFh MAC Unit Status Word 0200h
ODP2 b F1C2h E E1h Port 2 Open Drain Control Register -0--h
ODP3 b F1C6h E E3h Port 3 Open Drain Control Register 0000h
ODP6 b F1CEh E E7h Port 6 Open Drain Control Register 00h
ODP7 b F1D2h E E9h Port 7 Open Drain Control Register -0h
ONES FF1E h 8Fh Constant Value 1’s Register (read only) FFF Fh
P0L b FF00 h 80h Port 0 Low Register (Lower half of PORT0) 00h
P0H b FF02h 81 h Port 0 High Register (Upper half of PORT0) 00h
P1L b FF04 h 82h Port 1 Low Register (Lower half of PORT1) 00h
P1H b FF06h 83 h Port 1 High Register (Upper half of PORT1) 00h
P2 b FFC0h E0h Port 2 Register (4 bits) -0--h
P3 b FFC 4h E2 h Port 3 Register 0000h
P4 b FFC8h E4h Port 4 Register (8 bits) 00h
P5 b FFA2h D1h Port 5 Register (read only) XXXXh
P6 b FFCCh E6h Port 6 Register (8 bits) 00h
P7 b FFD0h E8h P ort 7Register (4 bits) -0h
PECC0 FEC0h 60h P EC Channel 0 Control Register 0000h
PECC1 FEC2h 61h P EC Channel 1 Control Register 0000h
Name
Physical
Address
8-Bit
Address
Description
Reset
Value
Table 13 Special functional r e gisters
1
Page 37

37/77
ST10R272L - SPECIAL FUNCTION REGISTERS
PECC2 FEC4h 62h P EC Channel 2 Control Register 0000h
PECC3 FEC6h 63h P EC Channel 3 Control Register 0000h
PECC4 FEC8h 64h P EC Channel 4 Control Register 0000h
PECC5 FECAh 65h PEC Channel 5 Control Register 0000h
PECC6 FECCh 66h PEC Channel 6 Control Register 0000h
PECC7 FECEh 67h PEC Channel 7 Control Register 0000h
PP3 F03Eh E 1Fh PWM Module Period Register 3 0000h
PSW b FF10h 88h CPU Program Status Word 0000h
PW3 FE36h 1Bh PWM Module Pulse Width Register 3 0000h
PWMCON0 b FF30h 98h PWM Module Control Register 0 0000h
PWMCON1 b FF32h 99h PWM Module Control Register 1 0000h
PWMIC b F17Eh E BFh PWM M odule Interrupt Control Register 0000h
QR0 F004h E 02h MAC Unit Offset Register R0 (8 bits) 00h
QR1 F006h E 03h MAC Unit Offset Register R1 (8 bits) 00h
QX0 F000 h E 00h MAC Unit Offset Register X0 (8 bits) 00h
QX1 F002 h E 01h MAC Unit Offset Register X1 (8 bits) 00h
RP0H b F108 h E 84h System Start-up Configuration Register (Rd. only) XXh
S0BG FEB4h 5Ah Serial Channel 0 baud rate generator reload reg 0000h
S0CON b FFB0h D8h Ser ial Channel 0 Control Register 0000h
S0EIC b FF70 h B8h Ser ial Channel 0 Error Interrupt Control Register 0000h
S0RBUF FEB2h 59h Serial Channel 0 receive buffer reg. (rd only) XXh
S0RIC b FF6Eh B7h Serial Channel 0 Receive Interrupt Control Reg. 00 00h
S0TBIC b F19Ch
E
CEh Serial Channel 0 transmit buffer interrupt control
reg
0000h
S0TBUF FEB0h 58h Serial Channel 0 transmit buffer register (wr only) 00h
S0TIC b FF6Ch B6h Serial Channel 0 Transmit Interrupt Control Regis-
ter
0000h
Name
Physical
Address
8-Bit
Address
Description
Reset
Value
Table 13 Special functional r e gisters
1
Page 38

38/77
ST10R272L - SPECIAL FUNCTION REGISTERS
SP FE12h 09h CPU System Stack Pointer Register FC00h
SSPCON0 EF00h X --- SSP Control Register 0 0000h
SSPCON1 EF02h X --- SSP Control Register 1 0000h
SSPRTB EF04h X --- SSP Receive/Transmi t Bu ffer XXXXh
SSPTBH EF06h X --- SSP Transmit Buffer High XXXXh
STKOV FE14 h 0Ah CPU Stack Overflow Pointer Register FA00h
STKUN FE16h 0Bh CPU Stack Underflow Pointer Register FC00h
SYSCON b FF12h 89h CP U System Configuration Register
0xx0h
1)
T2 FE40h 20 h GPT1 Timer 2 Register 0000h
T2CON b FF40h A0h GPT1 Timer 2 Control Register 0000h
T2IC b FF60h B0h GPT1 Timer 2 Interrupt Control Register 0000h
T3 FE42h 21 h GPT1 Timer 3 Register 0000h
T3CON b FF42h A1h GPT1 Timer 3 Control Register 0000h
T3IC b FF62h B1h GPT1 Timer 3 Interrupt Control Register 0000h
T4 FE44h 22 h GPT1 Timer 4 Register 0000h
T4CON b FF44h A2h GPT1 Timer 4 Control Register 0000h
T4IC b FF64h B2h GPT1 Timer 4 Interrupt Control Register 0000h
T5 FE46h 23 h GPT2 Timer 5 Register 0000h
T5CON b FF46h A3h GPT2 Timer 5 Control Register 0000h
T5IC b FF66h B3h GPT2 Timer 5 Interrupt Control Register 0000h
T6 FE48h 24 h GPT2 Timer 6 Register 0000h
T6CON b FF48h A4h GPT2 Timer 6 Control Register 0000h
T6IC b FF68h B4h GPT2 Timer 6 Interrupt Control Register 0000h
TFR b FFA Ch D6h Trap Flag Register 0000h
WDT FEAEh 57h Watchdog Timer Register (read only) 0000h
WDTCON FFAEh D7h Watchdog Timer Control Register
000xh
2)
Name
Physical
Address
8-Bit
Address
Description
Reset
Value
Table 13 Special functional r e gisters
1
Page 39

39/77
ST10R272L - SPECIAL FUNCTION REGISTERS
Note 1. The sy stem configuration is selected during reset.
Note 2. Bit WDTR indicates a watchdog timer triggered reset.
XP1IC b F18Eh E C7h SSP Interrupt Control Register 0000h
XP3IC b F19Eh E CFh PLL unlock Interrupt Control Register 0000h
ZEROS b FF1Ch 8Eh Constant Value 0’s Register (read only) 0000h
Name
Physical
Address
8-Bit
Address
Description
Reset
Value
Table 13 Special functional r e gisters
1
Page 40

40/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16 ELECTRICAL CHARACTERIST ICS
16.1 Absolute Maximum Ratings
• Ambient temperature under bias (T
A
):......................................................... -40 to +85 °C
• Storage temperature (T
ST
):.......................................................................– 65 to +150 °C
• Voltage on V
DD
pins with respect to ground (VSS):..................................... – 0.5 to +4.0 V
• Voltage on any pin with respect to ground (V
SS
): ................................ –0.5 to VDD +0.5 V
• Voltage on any 5V tolerant pin with respect to ground (V
SS
): .......................–0.5 to 5.5 V
• Voltage on any 5V fail-safe pin with respect to ground (V
SS
): .......................–0.5 to 5.5 V
• Input current on any pin during overload condition: ..................................–10 to +10 mA
• Absolute sum of all input currents during overload condition: .............................|100 mA|
• Power dissipation:................................................................................. ....................1.0 W
Note Stresses above those listed under “Absolute Maximum Ratings” may cause
permanent damage to the device. This is a stress rating only and functional
operation of the device at these or any other conditions above those indicated in the
operational sections of this specification is not guaranteed. Exposure to absolute
maximum rating conditions for extended periods may affect device reliability. During
overload conditions (V
IN>VDD
or VIN<VSS) the voltage on pins with respect to ground
(V
SS
) must not exceed the values defined by the Absolute Maximum Ratings.
The parameters listed in thi s section represent both the ST10R272L controller characteristics
and the system requirements. To aid parameters interpretation in design evaluation, the a
symbol column is marked:
CC for Controller Characteristics: The ST10R272L logic provides signals with the
respective timing characteristics.
SR for System Requirement: The external system must provide signals with the
respective timing characteristics to the ST10R272L.
1
Page 41

41/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Remarks on 5 volt tolerant (5T ) and 5 v olt fail-safe (5S) pins
The 5V tolerant input and output pi ns can sustain an absol ute maximum exte rnal voltage of
5.5V.
However, signals on unterminated bus lines might have overshoot above 5.5V, presenting
latchup and hot carrier ris ks. Whi le these r isks are under evaluation, observe the followi ng security recommendations:
• Maximum peak voltage on 5V tolerant pin with respect to ground (V
SS
)= +6 V
• If the ringing of the external signal exceeds 6V, then clip the signal to the 5V supply.
Power supply failure condition
The power supply failure condition is a state where the chip is NOT supplied but is connected
to active signal lines. There are several cases:
• 3.3V external lines on 3.3V (3T) pin on the non powered chip:............... NOT Acceptable
• 3.3V external lines on 5V tolerant (5T) pin on the non powered chip:............. Acceptable
The 5V tolerant buffer do not leak: external signals not altered. No reliability problem.
• 3.3V external lines on 5V fail-safe (5S) pin on the non powered chip: ............Acceptable
The 5V tolerant buffer do not leak: external signals not altered. No reliability problem.
• 5.5V external lines on 5V tolerant (5T) pin on the non powered chip:............. Acceptable
For VERY SHORT times only: the buffers do not leak (external signals not altered) but
there is a fast degr adati on of the gate oxides in the buffers . The total maxim um time under
this stress condition is 2 days. This limits this configuration to short power-up/down
sequences. For 10 year life time, the maximum duty factor is 1/1800 allowing e.g. a
maximum stress duration of 48 seconds per day.
• 5.5V external lines on 5V fail-safe (5S) pin on the non powered chip: ............Acceptable
• 6V transient signals on 5V tolerant (5T) pin on the non powered chip:...NOT Acceptable
• 6V transient signals on 5V fail-safe (5S) pin on the non powered chip:.......... Acceptable
1
Page 42

42/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.2 DC Characteristics
V
DD
= 3.3V ± 0.3V VSS = 0 V Reset active TA = -40 to +85 °C
Parameter Symbol
Limit Values
Unit Test Condition
min. max.
Input low voltage
V
IL
SR – 0.3 0.8 V –
Input high voltage
(all except RSTIN
and XTAL1)
V
IH
SR 2.0
V
DD
+ 0.3
V–
Input high voltage RSTIN,
RPD
V
IH1
SR
0.6
V
DD
V
DD
+ 0.3
V–
Input high voltage XTAL1
V
IH2
SR
0.7
V
DD
V
DD
+ 0.3
V–
Output low voltage
(ALE, RD
, WR, BHE, CLKOUT,
RSTIN
,RSTOUT, CSX)
V
OL
CC – 0.4 V
I
OL
= 4 mA
Output low voltage
(all other outputs)
V
OL1
CC – 0.4 V
I
OL1
= 2 mA
Output high voltage
ALE, RD
, WR, BHE, CLKOUT,
RSTIN
,RSTOUT, CSX)
V
OH
CC 2.4 – V
I
OH
= –4 mA
Output high voltage
1)
(all other outputs)
V
OH1
CC 2.4 – V
I
OH
= – 2mA
Input leakage current (3T pins)
I
OZ
CC – ±10 µA
0 V<
V
IN<VDD
Input leakage current (5T, 5S
pins)
I
OZ1
CC – ±10
±100
7)
µA
µA
0 V<
V
IN<VDD
VDD<VIN<5.0V
7)
RSTIN pull-up resistor
2)
R
RST
CC 20 300 kΩ
V
IN
= 0 V
Read/Write pullup current
3)
I
RWH
4)
–-40µA
V
OUT
= 2.4 V
Read/Write pullup current
3
I
RWL
5)
-500 – µA
V
OUT
= 0.4 V
ALE pulldown current
3
I
ALEL
4
40 – µA
V
OUT
= 0.4 V
ALE pulldown current
3
I
ALEH
5
–500µAV
OUT
= 2.4 V
Port 6 (C S
) pullup current
3
I
P6H
4
–-40µAV
OUT
= 2.4 V
Port 6 (C S
) pullup current
3
I
P6L
5
-500 – µA
V
OUT
= 0.4 V
Table 14 DC characteristics
1
Page 43

43/77
ST10R272L - ELECTRICAL CHARACTERISTICS
PORT0 configuration current
3
I
P0H
4
–-4µAVIN = V
IHmin
I
P0L
5
-50 – µAVIN = V
ILmax
RPD pulldown current
2
I
RPD
5
100 500 µAV
OUT
= V
DD
XTAL1 input current
I
IL
CC – ±20 µA
0 V <
V
IN
< V
DD
Pin capacitance
6)
(digital inputs/outputs)
C
IO
CC – 10 pF
f = 1 MHz
T
A
= 25 °C
Power supply current
I
CC
–15 +
2.5 * f
CPU
mA
f
CPU
in [MHz]
7)
Idle mode supply current
I
ID
–10 +
0.9 * f
CPU
mA
RSTIN
= V
IH1
f
CPU
in [MHz]
7
Power-down mode supply current
I
PD 8
–200 µA
V
DD
= 3.6 V
9
1) This specification is not valid for outputs which are switched to open drain mode. In this case
the resp ec ti ve out pu t w ill fl oa t and the re su lti n g vo ltage comes from the extern al c ir c uitry .
2) This specification is only valid during reset, or interruptible power-down mode, after reception of an exte r nal in t e rr up t signal that will wak e u p the CPU.
3) This specification is only valid during reset, hold or adapt-mode. Port 6 pins are only affected
if they are used for CS
output and the open drain function is not enabled.
4) The maximum current may be drawn while the signal line remains inactive.
5) The minimum current must be drawn in order to drive the signal line active.
6) Not 100% tested, guaranteed by design characterization.
7) Supply current is a function of operating frequency as illustrated in Figure 10 on page 44.
This parameter is tested at V
DD
max and 50 MHz CPU clock with all outputs disconnected
and all inputs at V
IL
or VIH with an infinite execution of NOP instruction fetched from external
memory (16-bit dem ux bus mode, no waitstates, no memory tri-state waitstates, normal
ALE).
8) Typical value at 25°C = 20 µA.
9) This parameter is tested including leakage currents. All inputs (including pins configured as
inputs) at 0 V to 0.1 V or at V
DD
– 0.1 V to VDD, V
REF
= 0 V, all outputs (including pins con-
figured as outputs) disconnected.
Parame ter Symbol
Limit Values
Unit Test Condition
min. max.
Table 14 DC characteristics
1
Page 44

44/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 10 Supply/idle current vs operating frequency
Supply/idle current [mA]
f
CPU
[MHz]
10 20
30 40
200
150
100
15
I
CCmax
I
IDmax
50
1
Page 45

45/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3 AC Characteristics
Test conditions
•
Input pulse levels:........................................................................................... 0 to +3.0 V
• Input rise and fall times (10%-90%):........................................................................ 2.5 ns
• Input timing reference levels:................................................................................. +1.5 V
• Output timing reference levels:.............................................................................. +1.5 V
• Output load:.................................................................................................see Figure 12
Figure 11 Input waveform s
Figure 12 Output load circuit waveform
≤ 2.5ns
10%
90%
≤ 2.5 ns
10%
90%
0 V
3 V
1.5V
1.5V
timing ref. points
V
OL
V
OH
1.5V 1.5V
timing reference points
~
V
ref
IOL = 1mA
I
OH
= 1mA
From output
under test
CL = 50pF
3.3 V
1
Page 46

46/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 13 Float waveforms
V
OL
V
OH
timing reference
VOH - 0.15 V
points
VOL + 0.15 V
V
LOAD
V
LOAD
- 0.15 V
V
LOAD
+0.15 V
~
V
ref
IOL = 5 mA
From output
under test
CL = 5 pF
3.3 V
For timing purposes a port pin is no longer floating when a 150 mV change from load
voltage occurs, but begins to float when a 150 mV change from the loaded VOH/VOL
level occurs.
CL is 5 pF for floating measurements only.
IOH = 5 mA
1
Page 47

47/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.1 CPU Clock Generation Mechanisms
ST10R2 72L intern al ope ration is c ontrol led by the C PU cloc k f
CPU
. Both edges of the CPU
clock can trigger internal (e.g. pipeline) or external (e.g. bus cycles) operations. The external
timing (AC Characteristics) specification therefore depends on the time between two c onsec-
utive edges of the CPU clock, called “TCL” (see figure below).
The CPU clock signal can be generated by different mechanism s. The duration of TCLs and
their variation (and also the external timing) depends on the f
CPU
generation mechanism. This
must be considered when calculating ST10R272L timing.
The CPU clock generation mechanism is set during reset by the logic levels on pins P0.15-13
(P0H.7-5).
Figure 14 CPU clock g eneration mechanisms
P0.15-13 (P0H.7-5)
CPU frequency
f
CPU
= f
XTAL
* F
External clock
input range 1050MHz
Notes
111
F
XTAL
* 4
2.5 to 12.5 MHz Default configuration
110
F
XTAL
* 3
3.33 to 16.66 MHz
101
F
XTAL
* 2
5 to 25 MHz
Table 15 CPU clock generation mechanisms
TCLTCL
TCLTCL
f
CPU
f
XTAL
f
CPU
f
XTAL
Phase Locked Loop Operation (PLL factor=4)
Direct Clock Drive
TCL TCL
f
CPU
f
XTAL
Prescaler Operation
1
Page 48

48/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Prescaler operation
Set when pins P0.15-13 (P0H.7-5) equal ’001’ during reset, the CPU clock is derived from the
internal oscillator (input clock signal) by a 2:1 prescaler.
The frequency of f
CPU
is half the frequency of f
XTAL
and the high and low time of f
CPU
(i.e. the
duration of an individual TCL) is defined by the period of the input clock f
XTAL
.
The timings listed in the AC characteristics that refer to TCLs therefore can be calculated
using the period of f
XTAL
for any TCL.
Note that if the bit OWDDIS in SYSCON register is cleared, the PLL r uns on i ts free-running
frequency and delivers the clock signal for the Oscillator Watchdog. If bit OWDDIS is set, then
the PLL is switched off.
Direct drive
When pins P0.15-13 (P0H.7-5) equal ’011’ during reset, the on-chip phase locked loop is
disabled and the CPU clock is driven from the internal oscillator with the input clock signal.
The frequency of f
CPU
directly follows the frequency of f
XTAL
so the high and low time of f
CPU
(i.e. the duration of an individual TCL) is defined by the duty cycle of the input clock f
XT AL
.
The TCL timing below must be calculated using the minimum possible TCL which can be
calculated by the formula:
For two consecutive TCLs the deviation caused by the duty cycle of f
XTAL
is compensated so
the duration of 2TCL is always 1/f
XTAL
. Therefore, the minimum value TCL
min
has to be used
only once for timings that require an odd number of TCLs (1,3,...). Timings that require an
even number of TCLs (2,4,...) may use the formula: .
100
F
XTAL
* 5
2 to 10 MHz
011
F
XTAL
* 1
1 to 50 MHz
Direct drive
1)
010
F
XTAL
* 1.5
6.66 to 33.33 MHz
001
F
XTAL
/ 2
2 to 100 MHz CP U clock via 2:1 prescaler
000
F
XTAL
* 2.5 4 to 20 MHz
1) The maximum depends on the duty cycle of the external clock signal. The maximum input frequency is 25 MHz when using an ex ternal crystal oscillator, but
higher frequencies can be applied with an external clock source.
P0.15-13 (P0H.7-5)
CPU frequency
f
CPU
= f
XTAL
* F
External clock
input range 1050MHz
Notes
Table 15 CPU clock generation mechanisms
TCL
min
1 f
XTAL
⁄ DC
min
× DC(= duty cycle)=
2TCL 1 f
XTAL
⁄=
1
Page 49

49/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Note The addr ess float timings in M u ltiplexed bus mode (t11 and t45) use
instead of .
Note that if the bit OWDDIS in SYSCON register is cleared, the PLL r uns on i ts free-running
frequency and delivers the clock signal for the Oscillator Watchdog. If bit OWDDIS is set, then
the PLL is switched off.
Oscillator Watchdog (OWD)
When the clock option s elected i s direc t driv e or dir ect driv e w ith prescaler, in order to provide
a fail safe mechanism in case of a loss of the external clock, an oscillator watchdog is
implemented as an additional functionality of the PLL circuitry. This oscillator watchdog
operates as follows:
After a reset, the Oscillator Watchdog is enabled by default. To disable the OWD, set bit 4 of
SYSCON register OWDDIS.
When the OWD is enabled, the PLL runs on its free-running frequency and increments the
Oscillator Watchdog counter. On each transition of the XTAL1 pin, the Oscillator Watchdog is
cleared. If an external clock failure occurs, then the Oscillator Watchdog counter overflows
(after 16 PLL clock cycles). The CPU clock signal will be switched to the PLL free-running
clock signal, and the Oscillator Watchdog Interrupt Request (XP3INT) is flagged. The CPU
clock will not s witch back to the e xternal clock ev en if a valid e xternal clock e xits on XTAL1 pin.
Only a hardware reset can switch the CPU clock source back to direct clock input.
When the OWD is disabled, the CPU clock is always f ed from the oscillator input and the PLL
is switched off to decrease power supply current.
Phase locked loop
For all other combinations of pins P0.15-13 (P0H.7-5) during reset the on-chip phase locked
loop is enabled and provides the CPU clock. The PLL multiplies the input frequency by the
factor F which is selected via the combination of pins P0.15-13 (i.e. f
CPU
= f
XTAL
* F). With
every F’th transition of f
XT AL
the PLL circuit synchronizes the CPU clock to the input clock. In
this way, f
CPU
is constantly adjusted so it is locked to f
XTAL
. The slight variation causes a jitter
of f
CPU
which affects individual TCL duration.Therefore, AC characteri stics that refer to TCLs
must be calculated using the minimum possible TCL.
The actual minimum value for TCL depends on the jitter of the PLL. As the PLL constantly
adjusts its output frequency, it corresponds to the applied input frequency (cr ys tal or
oscillator). The relative de viation for periods of more than one TCL is lower than for one single
TCL. For a period of
N
* TCL the minimum value is computed using the corresponding
deviation D
N
:
TCL
max
1 f
XTAL
⁄ DC
max
×= TCL
min
TCL
min
TCL
NOM
1 DN100⁄–()×=
D
N
4N15⁄–()%[]±=
1
Page 50

50/77
ST10R272L - ELECTRICAL CHARACTERISTICS
where N = number of consecutive TCLs and 1 ≤ N ≤ 40. So f or a period of 3 TCLs (i.e. N = 3):
and
PLL jitter is an important factor for b us cycles using wai tstates and for the operation of timers,
serial interfaces, etc. For slower operations and longer periods (e.g. pulse train generation or
measurement, lower baudrates, etc.) the deviation caused by the PLL jitter is negligible.
Figure 15 Approximated maximum PLL jitter
D
3
4315⁄–=
3.8%=
3TCL
min
3TCL
NOM
1 3.8 100⁄–()×=
3TCL
NOM
0.962 36.07nsec @ f c pu=50MHz()×=
3216
8
42
±
1
±
2
±
3
±
4
M a x .jitter [% ]
N
This formula is valid for 1<N<40 and 10<f
cpu
<50
1
Page 51

51/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.2 Memory Cycle Variables
The timing tables below use three variables derived from the BUSCONx registers and
represent programmed memory cycle characteristics. Table 16 describes how these variabl es
are computed.
Description Symbol Values
ALE Extension
t
A
TCL * <ALECTL>
Memory Cycle Time Waitstates
t
C
2TCL * (15 - <MCTC>)
Memory Tristate Time
t
F
2TCL * (1 - <MTTC>)
Table 16 Memory cycle variables
1
Page 52

52/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.3 Multiplexed Bus
V
DD
= 3.3 V ± 0.3 V VSS = 0 V
T
A
= -40 to +85 °C
C
L
= 50 pF
ALE cycle time = 6 TCL + 2
t
A
+ tC + tF (60 ns at 50-MHz CPU clock without waitstates)
Parameter Symbol
Max. CPU Clock
= 50 MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
ALE high time
t
5
CC
7 +
t
A
–
TCL - 3 +
t
A
–ns
Address (P1, P4), BHE
setup to ALE
t
6
CC
3 +
t
A
–
TCL - 7 +
t
A
–ns
Address (P0) setup to ALE
t
6m
CC
5 +
t
A
–
TCL - 5 +
t
A
–ns
Address hold after ALE
t
7
CC
5 +
t
A
–
TCL - 5 +
t
A
–ns
ALE falling edge to RD
,
WR
(with RW-delay)
t
8
CC
5 +
t
A
–
TCL - 5 +
t
A
–ns
ALE falling edge to RD
,
WR
(no RW-delay)
t
9
CC
-5 +
t
A
–
-5 +
t
A
–ns
Address float after RD
,
(with RW-delay)
1)
t
10
CC –
5
1
–
5
1
ns
Address float after RD
,
(no RW-delay)
1
t
11
CC –
15
1
–
TCL + 5
1
ns
RD
, WR low time
(with RW-delay)
t
12
CC
13 +
t
C
–
2TCL - 7+
t
C
–ns
RD
, WR low time
(no RW-delay)
t
13
CC
23 +
t
C
–
3TCL - 7 +
t
C
–ns
RD
to valid data in
(wit h RW-del ay)
t
14
SR –
5 +
t
C
– 2TCL - 15
+
t
C
ns
RD
to valid data in
(no RW-delay)
t
15
SR –
15 +
t
C
– 3TCL - 15
+
t
C
ns
ALE low to va lid data in
t
16
SR – 15
+
t
A
+ t
C
– 3TCL - 15
+
t
A
+ t
C
ns
Address to valid data in
t
17
SR – 20
+
2t
A
+ t
C
– 4TCL - 20
+
2t
A
+ t
C
ns
Table 17 Mul tiplexed bus
1
Page 53

53/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Data hold after RD
rising edge
t
18
SR 0 –0 – ns
Data float after RD
rising
edge
12))
t
19
SR –
15 +
t
F
2
–
2TCL - 5 +
t
F
2
ns
Data valid to WR
t
22
CC
13 +
t
C
–
2TCL - 7 +
t
C
–ns
Data hold after WR
t
23
CC
13 +
t
F
–
2TCL - 7+
t
F
–ns
ALE rising edge after RD
,
WR
t
25
CC
10 +
t
F
–
2TCL - 10 +
t
F
–ns
Address hold after RD
, WR
t
27
CC
10 +
t
F
–
2TCL - 10 +
t
F
–ns
Latched CS
setup to ALE
t
38
CC
-7 +
t
A
3 + t
A
-7 + t
A
3 + t
A
ns
Unlatched CS
setup to
ALE
t
38u
CC
3 +
t
A
–
TCL - 7 +
t
A
–ns
Latched CS
low to V alid
Data In
t
39
SR – 13
+
tC + 2t
A
– 3TCL - 17
+
tC + 2t
A
ns
Unlatched CS
low to Valid
Data In
t
39u
SR – 23
+
tC + 2t
A
– 4TCL - 17
+
tC + 2t
A
ns
Latched CS
hold after RD,
WR
t
40
CC
20 +
t
F
–
3TCL - 10 +
t
F
–ns
Unlatched CS
hold after
RD
, WR
t
40u
CC
10 +
t
F
–
2TCL - 10 +
t
F
–ns
ALE fall. edge to RdCS
,
WrCS
(with RW delay)
t
42
CC
7 +
t
A
–
TCL - 3 +
t
A
–ns
ALE fall. edge to RdCS
,
WrCS
(no RW delay)
t
43
CC
-3 +
t
A
–
-3 +
t
A
–ns
Address float after RdCS
(with RW delay)
1
t
44
CC –
3
1
–
3
1
ns
Address float after RdCS
(no RW delay)
1
t
45
CC –
13
1
–
TCL + 3
1
ns
Parameter S ymbol
Max. CPU Clock
= 50 MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
Table 17 Mul tiplexed bus
1
Page 54

54/77
ST10R272L - ELECTRICAL CHARACTERISTICS
RdCS to Valid Data In
(with RW delay)
t
46
SR –
3 +
t
C
– 2TCL - 17
+
t
C
ns
RdCS
to Valid Data In
(no RW delay)
t
47
SR –
13 +
t
C
– 3TCL - 17
+
t
C
ns
RdCS
, WrCS Low Time
(with RW delay)
t
48
CC
13 +
t
C
–
2TCL - 7+
t
C
–ns
RdCS
, WrCS Low Time
(no RW delay)
t
49
CC
23 +
t
C
–
3TCL - 7+
t
C
–ns
Data valid to WrCS
t
50
CC
10 +
t
C
–
2TCL - 10 +
t
C
–ns
Data hold after RdCS
t
51
SR0–0 – ns
Data float after RdCS
1 2
t
52
SR –
13 +
t
F
2
–
2TCL - 7 +
t
F
2
ns
Address hold after
RdCS
, WrCS
t
54
CC
10 +
t
F
–
2TCL - 10 +
t
F
–ns
Data hold after WrCS
t
56
CC
10 +
t
F
–
2TCL - 10 +
t
F
–ns
1) Output loading is specified using Figure 13 (CL = 5 pF).
2) This delay assumes that the fo llowing bus cycle is a multiplexe d bus cycl e. If n ext bus cycl e
is demultiplexed, refer to demuxultiplexed equivalent AC timing.
Parameter Symbol
Max. CPU Clock
= 50 MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
Table 17 Mul tiplexed bus
1
Page 55

55/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 16 External memory cycle:
multiplexed bus, with/witho ut read/write delay, normal AL E
Data In
Data Out
Address
Address
t
38
t
10
ALE
CSx
BUS
P0
Read Cycle
RD
BUS
P0
Write Cycle
WR,
WRL
, WRH
t
5
t
16
t
39
t
40
t
25
t
27
t
18
t
14
t
22
t
23
t
12
t
8
t
8
t
6m
t
19m
CLKOUT
Address
A23-A16
(A15-A8)
BHE
t
17
t
6
t
7
t
9
t
11
t
13
t
15
t
16
t
12
t
13
Address
t
9
t
39u
t
38u
t
40u
1
Page 56

56/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 17 External memory cycle:
multiplexed bus, with/without read/write delay, extended ALE
Data Out
Address
Data In
Address
Address
ALE
RD
Write Cycle
WR
WRL,
WRH
t
5
t
16
t
6m
t
7
t
39
t
40
t
14
t
8
t
18
t
23
t
6d/b
Read Cycle
t
27
BUS
P0
BUS
P0
t
38
t
10
t
19m
CSx
CLKOUT
t
25
t
17
t
9
t
11
t
15
t
12
t
13
t
8
t
10
t
9
t
11
t
12
t
13
t
22
A23-A16
(A15-A8)
BHE
t
40u
t
39u
t
38u
1
Page 57

57/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 18 External memory cycle:
multiplexed bus, with/witho ut read/write delay, normal AL E, read/write chip select
Data In
Data Out
Address
Address
t
44
ALE
BUS
P0
Read Cycle
RdCSx
BUS
P0
Write Cycle
WrCSx
t
5
t
16
t
25
t
27
t
51
t
46
t
50
t
56
t
48
t
42
t
42
t
6m
t
52m
CLKOUT
Address
A23-A16
(A15-A8)
BHE
t
17
t
6b/d
t
7
t
43
t
45
t
49
t
47
t
16
t
48
t
49
Address
t
43
1
Page 58

58/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 19 External memory cycle:
multiplexed bus, with/without read/write delay, extended ale, read/write chip select
Data Out
Address
Data In
Address
Address
ALE
RdCSx
Write Cycle
WR
WRL,
WRH
t
5
t
16
t
6m
t
7
t
46
t
42
t
42
t
50
t
18
t
56
t
6d/b
Read Cycle
t
54
BUS
P0
BUS
P0
t
44
t
19m
A23-A16
(A15-A8)
BHE
CLKOUT
t
25
t
17
t
43
t
45
t
47
t
48
t
49
t
49
t
43
t
48
t
44
t
45
1
Page 59

59/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.4 Demultiplexed Bus
V
DD
= 3.3 V ± 0.3 V VSS = 0 V
T
A
= -40 to +85 °C
C
L
= 50 pF
ALE cycle time = 4 TCL + 2
t
A
+ tC + tF (40 ns at 50 MHz CPU clock without waitstates)
Parameter Symbol
Max CPU Clock 50MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
ALE high time
t
5
CC
7 +
t
A
–
TCL - 3 +
t
A
–ns
Address (P1, P4), BHE
setup to ALE
t
6
CC
3 +
t
A
–
TCL - 7 +
t
A
–ns
Address setup to RD
, WR
(with RW-delay)
t
80
CC
13 +
2t
A
–
2TCL - 7 +
2t
A
–ns
Address setup to RD
, WR
(no RW-delay)
t
81
CC
3 +
2t
A
–
TCL - 7 +
2t
A
–ns
RD
, WR low time
(with RW-delay)
t
12
CC
13 +
t
C
–
2TCL - 7 +
t
C
–ns
RD
, WR low time
(no RW-delay)
t
13
CC
23 +
t
C
–
3TCL - 7 +
t
C
–ns
RD
to valid data in
(wit h RW-del ay)
t
14
SR –
5 +
t
C
– 2TCL - 15
+
t
C
ns
RD
to valid data in
(no RW-delay)
t
15
SR –
15 +
t
C
– 3TCL - 15
+
t
C
ns
ALE low to va lid data in
t
16
SR –
15 +
t
A
+ t
C
– 3TCL - 15
+
t
A
+ t
C
ns
Address to valid data in
t
17
SR –
20 +
2t
A
+
t
C
– 4TCL - 20
+
2t
A
+ t
C
ns
Data hold after RD
rising edge
t
18
SR 0 – 0 – ns
Data float after RD
rising
edge (with RW-delay)
1) 2)
t
20
SR – 15
+
t
F
+ 2t
A
2
–2TCL - 5
+
t
F
+ 2t
A
2
ns
Data float after RD
rising
edge (no RW-delay)
1 2
t
21
SR –
5 +
t
F
+
2t
A
2
–TCL - 5
+
t
F
+ 2t
A
2
ns
Data valid to WR
t
22
CC
13 +
t
C
–
2TCL - 7 +
t
C
–ns
Table 18 Demultiplexed bus
1
Page 60

60/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Data hold after WR
t
24
CC
5 +
t
F
–
TCL - 5 +
t
F
–ns
ALE rising edge after RD
,
WR
t
26
CC
-5 +
t
F
–
-5 +
t
F
–ns
Address hold after RD
, WR
t
28
CC 0 (no t
F)
-9+t
F (tF>0)
–
0 (no
t
F
)
-9 +
t
F (tF>0)
–ns
Address hold after WRH
t
28h
CC -1 (no t
F)
-8
+t
F (tF>0)
–
-1 (no
t
F
)
-8 +
t
F (tF>0)
–ns
Latched CS
setup to ALE
t
38
CC
-7 +
t
A
3 + t
A
-7 + t
A
3 + t
A
ns
Unlatched CS
setup to ALE
t
38u
CC
3 +
t
A
–
TCL - 7 +
t
A
–ns
Latched CS
low to V alid
Data In
t
39
SR – 13
+
tC + 2t
A
– 3TCL - 17
+
tC + 2t
A
ns
Unlatched CS
low to Valid
Data In
t
39u
SR – 23
+
tC + 2t
A
– 4TCL - 17
+
tC + 2t
A
ns
Latched CS
hold after RD,
WR
t
41
CC
3 +
t
F
–
TCL - 7 +
t
F
–ns
Unlatched CS
hold after RD,
WR
t
41u
CC 0 (no t
F)
-7
+t
F (tF>0)
–
0 (no
t
F
)
-7 +
t
F (tF>0)
–ns
Address setup to RdCs
,
WrCs
(with RW-delay)
t
82
CC
13 +
2t
A
–
2TCL - 7 +
2t
A
–ns
Address setup to RdCs
,
WrCs
(no RW-delay)
t
83
CC
3 +
2t
A
–
TCL - 7 +
2t
A
–ns
RdCS
to Valid Data In
(with RW-delay)
t
46
SR –
3 +
t
C
–
2TCL - 17 +
t
C
ns
RdCS
to Valid Data In
(no RW-delay)
t
47
SR –
13 +
t
C
–
3TCL - 17 +
t
C
ns
RdCS
, WrCS Low Time
(with RW-delay)
t
48
CC
11 +
t
C
–
2TCL - 9 +
t
C
–ns
RdCS
, WrCS Low Time
(no RW-delay)
t
49
CC
21 +
t
C
–
3TCL - 9 +
t
C
–ns
Data valid to WrCS
t
50
CC
13 +
t
C
–
2TCL - 7 +
t
C
–ns
Parameter Symbol
Max CPU Clock 50MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
Table 18 Demultiplexed bus
1
Page 61

61/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Data hold after RdCS
t
51
SR 0 –0 – ns
Data float after RdCS
(with RW-delay)
1 2
t
53
SR –
13 +
t
F +
2tA
2
–2TCL - 7
+
t
F + 2tA
2
ns
Data float after RdCS
(no RW-delay)
1 2
t
68
SR –
3 +
t
F+ 2tA
2
–TCL - 7
+
t
F + 2tA
2
ns
Address hold after
RdCS
, WrCS
t
55
CC
-5 +
t
F
–
-5 +
t
F
–ns
Data hold after WrCS
t
57
CC
3 +
t
F
–
TCL - 7 +
t
F
–ns
1) Output loading is specified using Figure 13 with CL = 5 pF.
2) This delay assumes that the following bus cycle is a demultiplexed bus cycle and that the
data bus will only be driven ext ernally when the RD
or RdCs signal becomes active. RW-
delay and
t
A
refer to the following bus cycle. If the following bus cycle is a muxtiplexed bus
cycle, refer to equival e nt mult i ple xe d AC timing (which are still applicable d ue to au tomati c
insertion an idle state (2TCL) when switching from Demultiplexed to Multiplexed Bus Mode.
Parameter Symbol
Max CPU Clock 50MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
Table 18 Demultiplexed bus
1
Page 62

62/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 20 External memory cycle:
demultiplexed bus, with/without read/write delay, no rmal ALE
Data In
Data Out
t
38
ALE
CSx
P0 BUS
(D15-D8)
D7-D0
Read Cycle
RD
P0 BUS
(D15-D8)
D7-D0
Write Cycle
WR(L),
WRH
t
5
t
16
t
39
t
41
t
18
t
14
t
22
t
12
CLKOUT
Address
A23-A16
(A15-A8)
BHE
t
17
t
13
t
15
t
12
t
13
t
21d
t
20d
t
81
t
80
t
26
t
24
t
39u
t
38u
t
41u
t
28, t28h
t
6
t
80
t
81
1
Page 63

63/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 21 External memory cycle:
demultiplexed bus, with/without read/write delay, extended ALE
Address
ALE
RD
Write Cycle
WR(L),
WRH
t
5
t
16
t
39
t
41
t
14
t
24
t
6
t
38
t
20d
CSx
CLKOUT
t
26
t
17
t
15
t
12
t
13
t
12
t
13
t
22
A23-A16
(A15-A8)
BHE
Data In
P0 BUS
(D15-D8)
D7-D0
Read Cycle
t
18
t
21d
t
38u
t
39u
t
41u
t
28
,
t
28h
Data Out
t
80
t
81
t
80
t
81
P0 BUS
(D15-D8)
D7-D0
1
Page 64

64/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 22 External memory cycle:
demultiplexed bus, with/without read/write delay, normal ALE, read/write chip select
Data In
Data Out
ALE
P0 BUS
(D15-D8)
D7-D0
Read Cycle
RdCsx
P0 BUS
(D15-D8)
D7-D0
Write Cycle
WrCSx
t
5
t
16
t
51
t
46
t
50
t
48
CLKOUT
Address
A23-A16
(A15-A8)
BHE
t
17
t
49
t
47
t
48
t
49
t
68d
t
53d
t
83
t
82
t
26
t
57
t
55
t
6
t
82
t
83
1
Page 65

65/77
ST10R272L - ELECTRICAL CHARACTERISTICS
Figure 23 External memory cycle:
demultiplexed bus, no read/write d e lay, extended ALE, read/write chip select
Address
ALE
RdCSx
Write Cycle
WrCSx
t
5
t
16
t
46
t
57
t
6
t
53d
CLKOUT
t
26
t
17
t
47
t
48
t
49
t
48
t
49
t
50
A23-A16
(A15-A8)
BHE
Data In
P0 BUS
(D15-D8)
D7-D0
Read Cycle
t
51
t
68d
t
55
Data Out
t
82
t
83
t
82
t
83
P0 BUS
(D15-D8)
D7-D0
1
Page 66

66/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.5 CLKOUT and READY/READY
V
DD
= 3.3 V ± 0.3 V VSS = 0 V
T
A
= -40 to +85 °C
C
L
= 50 pF
Parame ter Symbol
Max. CPU Clock
= 50 MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
CLKOUT cycle time
t
29
CC 20 20 2TCL 2TCL ns
CLKOUT high time
t
30
CC 5 – TCL – 5 – ns
CLKOUT low time
t
31
CC 5 – TCL – 5 – ns
CLKOUT rise time
1)
1) Measured between 0.3 and 2.7 volts
t
32
CC –
3
1
–
3
1
ns
CLKOUT fa l l time
1
t
33
CC –
3
1
–
3
1
ns
CLKOUT rising edge to
ALE falling edge
t
34
CC
-3 +
t
A
5 + t
A
-3 + t
A
5 + t
A
ns
Synchronous READY
setup time to CLKOUT
t
35
SR 9 – 9 – ns
Synchronous READY
hold time after CLKOUT
t
36
SR 0 – 0 – ns
Asynchronous READY
low time
t
37
SR 27 – 2TCL + 7 – ns
Asynchronous READY
setup time
2)
2) These timings assure recognition at a specific clock edge for test purposes only.
t
58
SR 9 – 9 – ns
Asynchronous READY
hold time
2
t
59
SR 0 – 0 – ns
Async. REA DY hold time
after RD
, WR high (Demulti-
plexed Bus)
3)2
3) Demultiplexed bus is the worst case. For multiplexed bus, 2TCL should be added
to the maximum values. This adds even more time for deactivating READY.
2tA and tC refer to the following bus cycle, tF refers to the current bus cycle.
t
60
SR 0 0
+
2t
A
+ tc+ t
F
3
0TCL - 10
+
2t
A
+ tc+ t
F
3
ns
Table19CLKOUT and READY/READY
1
Page 67

67/77
ST10R272L - ELECTRICAL CHARACTERISTICS
1 Cycle as programmed, including MCTC waitstates (Example shows 0 MCTC WS).
2 The leading edge of the respective command depends on RW-delay.
3READY
(or READY) sampled HIGH (resp. LOW) at this sampling point generates a
READY controlled waitstate, READY
(resp. READY) sampled LOW (resp. HIGH) at this
sampling point terminates the currently running bus cycle.
4READY
(resp. READY) may be deactivated in response to the trailing (rising) edge of the
corresponding command (RD
or WR).
5 If the Asynchronous READY
(or READY) signal does not fulfill the indicated setup and
hold times with respect to CLKOUT (e.g. because CLKOUT is not enabled), it must fulfill t
37 in order to be safely synchronized. This is guaranteed, if READY is removed in
response to the command (see Note 4)).
Figure 24 CLKOUT and READY
/READY
Sync
READY
t
35
t
36
t
35
t
36
Async
READY
t
58
t
59
t
58
t
59
t
37
3)
3)
5)
t
60
4)
see 6)
3)
3)
CLKOUT
ALE
t
30
t
34
Sync
READY
t
35
t
36
t
35
t
36
Async
READY
t
58
t
59
t
58
t
59
waitstate
READY
MUX/Tris ta te 6)
t
32
t
33
t
29
Running cycle 1)
t
31
t
37
3)
3)
5)
Command
RD, WR
t
60
4)
2)
7)
3)
3)
1
Page 68

68/77
ST10R272L - ELECTRICAL CHARACTERISTICS
6 Multiplexed bus modes have a MUX waitstate added after a bus cycle, and an additional
MTTC waitstate may be inserted here. For a multiplexed bus with MTTC waitstate this
delay is 2 CLKOUT cycles, for a demultiplexed bus without MTTC waitstate this delay is
zero.
7 The next external bus cycle may start here.
1
Page 69

69/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.6 External Bus Arbitration
V
DD
= 3.3 V ± 0.3 V VSS = 0 V
T
A
= -40 to +85 °C
C
L
= 50 pF
Parame ter Symbol
Max. CPU Clock
= 50 MHz
Variable CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
HOLD
input setup time
to CLKOUT
t
61
SR
15 – 15 – ns
CLKOUT to HLDA
high
or BREQ
low delay
t
62
CC
– 10 – 10 ns
CLKOUT to HLDA
low
or BREQ
high delay
t
63
CC
– 10 – 10 ns
CSx
release
t
64
CC
– 15 – 15 ns
CSx
drive
t
65
CC
-3 15 -3 15 ns
Other signals release
t
66
CC
– 15 – 15 ns
Other signals drive
t
67
CC
-3 15 -3 15 ns
Table 20 External bus arbitration
1
Page 70

70/77
ST10R272L - ELECTRICAL CHARACTERISTICS
1 The ST10R272L will complete the running bus cycle before granting bus access.
2 This is the first opportunity for BREQ
to become active.
3 The CS
outputs will be resistive high (pullup) after t64.
Figure 25 External bus arbitration, releasing the bus
CLKOUT
HOLD
t
61
HLDA
t
63
Other
Signals
t
66
1)
CSx
(On P6.x)
t
64
1)
2)
BREQ
t
62
3)
1
Page 71

71/77
ST10R272L - ELECTRICAL CHARACTERISTICS
1 This is the last chance for BREQ to trigger the regain-sequence indicated.
Even if BREQ
is activated earlier, the regain-sequence is initiated by HOLD going high.
Please note that HOLD
may also be de-activated without the ST10R272L requesting the
bus.
2 The next ST10R272L driven bus cycle may start here.
Figure 26 External bus arbitration, (regaining the bus)
CLKOUT
HOLD
HLDA
Other
Signals
t
62
CSx
(On P6.x)
t
67
t
62
1)
2)
t
65
t
61
BREQ
t
63
t
62
1
Page 72

72/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.7 External Hardware Reset
V
DD
= 3.3 V ± 0.3 V VSS = 0 V
TA = -40 to +85 °C
C
L
= 50 pF
Parameter Symbol
Max. CPU Clock
= 50 MHz
V ari abl e CPU Clock
1/2TCL = 1 to 50 MHz
Unit
min. max. min. max.
Sync. RSTIN
low time
1)
1) On power-up reset, the RSTIN pin must be asserted until a stable clock signal is available
(about 10...50 ms to allow the on-chip oscillator to stabilize) and until System Start-up Configuration is correct on P ORT 0 (abo ut 50 µs for internal pull up de vice s to loa d 50 pF from
V
IL
min to VIHmin).
t
70
SR
50 – 4 TCL + 10 – ns
RSTIN
low to internal
reset sequence start
t
71
CC
4164 16 TCL
internal reset sequence,
(RSTIN
internally pulled
low)
t
72
CC
1024 1024 1024 1024 TCL
RSTIN
rising edge to inter-
nal reset condition end
t
73
CC
4646TCL
PORT0 syste m start-up
configuration setup to
RSTIN
rising edge
2))
2) The value of bits 0 (EMU), 1 (ADA PT), 13 to 15 (Clock Configuration) are loaded during
hardware reset as lo ng as i nterna l reset s ignal is act ive, and have an immediate ef fect on
the system.
t
74
SR
100 – 100 – ns
PORT0 syste m start-up
configuration hold after
RSTIN
rising edge
t
75
SR
1616TCL
Bus signals drive from
internal reset end
t
76
CC
0 20 0 20 ns
RSTIN
low to signals
release
t
77
CC
– 50 – 50 ns
ALE rising edge from internal reset condition end
t
78
CC
8888TCL
Async. RSTIN
low time
1
t
79
SR
1500 – 1500 – ns
Table 21 External hardware reset
1
Page 73

73/77
ST10R272L - ELECTRICAL CHARACTERISTICS
1 The ST10R272L is reset in its default state asynchronously with RSTIN. The internal
RAM content may be altered if an internal write access is in progress.
2 On power-up, RSTIN
must be asserted t79 after a stabilized CPU clock signal is available.
3 Internal pullup devices are active on the PORT0 lines, so - input level is high if the respec-
tive pin is left open - or is low if the respective pin is connected to an external pulldown
device.
4 The ST10R272L starts execution here at address 00’0000h.
5RSTOUT
stays active until execution of the EINIT (end of initialization) instruction.
6 Activation of the IO pins is controlled by software
Figure 27 External asynchronous hardware reset (power-up reset): Vpp low
RSTIN
PORT1
(Demux Bus)
t
76
PORT0
t
75
4)
Internal
Reset
Signal
t
73
3)
t
792)
t
74
ALE
RD, WR
RSTOUT
5)
Other IOs
6)
t
77
t
78
1)
1
Page 74

74/77
ST10R272L - ELECTRICAL CHARACTERISTICS
.
1 The pending internal hold states are cancelled and the current internal access cycle (if
any) is completed.
2RSTIN pulled low by internal device during internal reset sequence.
3 The reset condition may ends here if RSTIN
pin is sampled high after t72.
4 Internal pullup devices are active on the PORT0 lines. Their input level is high if the
respective pin is left open, or is low if the respective pin is connected to an external pulldown device by resistive high (pullup) after t64.
5 The ST10R272L starts execution here at address 00’0000h.
6RSTOUT
stays active until execution of the EINIT (End of Initialization) instruction.
7 Activation of the IO pins is controlled by software.
Figure 28 External synch ro nous hardware reset (warm reset): Vpp high
RSTIN
t
70
PORT1
(Demux B us)
t
76
t
711)
PORT0
t
75
5)
Internal
Reset
Signal
t
73
4)
t
722)
t
74
3)
ALE
RD, WR
RSTOUT
6)
Other IOs
7)
t
77
t
78
1
Page 75

75/77
ST10R272L - ELECTRICAL CHARACTERISTICS
16.3.8 Synchronous Serial Port Timing
V
CC
= 3.3 V ± 0.3 V VSS = 0 V
TA = -40 to +85 °C
C
L
= 50 pF
Parameter Symbol
Max. Baudrate
= 25 MBd
Variable Baudrate
= 0.2 to 25 MBd
Unit
min. max. min. max.
SSP clock cycle time
t
200
CC 40 40 4 TCL 512 TCL ns
SSP clock high time
t
201
CC 13 – t
200
/2 - 7 – ns
SSP clock low time
t
202
CC 13 – t
200
/2 - 7 – ns
SSP clock rise time
t
203
CC – 3 – 3 ns
SSP clock fall time
t
204
CC – 3 – 3 ns
CE active before shift edge
t
205
CC 13 – t
200
/2 - 7 – ns
CE inactive after latch edge
t
206
CC 33 47 t
200
- 7 t
200
+ 7 ns
Write data valid after shift edge
t
207
CC – 7 – 7 ns
Write data hold after shift edge
t
208
CC 0 – 0 – ns
Write data hold after latch edge
t
209
CC 15 25 t
200
/2 - 5 t
200
/2 + 5 ns
Read data active after latch edge
t
210
SR 27 – t
200
/2 + 7 – ns
Read data setup time before latch edge
t
211
SR 15 – 15 – ns
Read data hold time after latch edge
t
212
SR 0 – 0 – ns
Table 22 Synchronous serial por t timing
Page 76

76/77
ST10R272L - ELECTRICAL CHARACTERISTICS
1 The transition of shift and latch edge of SSPCLK is programmable. This figure uses the
falling edge as shift edge (drawn bold).
2 The bit timing is repeated for all bits to be transmitted or received.
3 The active level of the chip enable lines is programmable. This figure uses an active low
CE (drawn bold). At the end of a transmission or reception the CE signal is disab led in si ngle transfer mode. In continuous transfer mode it remains active.
Figure 29 SSP write timing
Figure 30 SSP read timing
t
204
t
203
SSPCLK
SSPCEx
SSPDAT
t
205
t
207
t
207
t
207
t
208
t
209
t
206
1st Bit Last Bit2nd Bit
t
200
t
201
t
202
1)
3)
2)
t
211
SSPCLK
SSPCEx
SSPDAT
t
209
t
206
last Wr. Bit
Lst.In Bit
1)
3)
2)
t
212
1st.In Bit
t
210
Page 77

77/77
ST10R272L - PACKAGE MECHANICAL DATA
17 PA CKAGE MECHANI CAL DAT A
18 ORDERING INFORMATION
Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the consequences
of use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No license is granted
by implic ation or otherwise under any paten t or patent r i ghts of STMicroelectroni cs. Speci fications me nt i oned in this publication are subj ect
to change without notice. This publication supersedes and replaces all information previously supplied. STMicroelectronics products are not
authorized for use as crit i cal component s i n l i f e support devices or systems wi thout the exp ress written approval of STMicroelectronics.
The ST logo is a registered trademark of STMicroelectronics
2000 STMicroelectronics - All Rights Reserved.
Purchase of I
2
C Components by STMicroelectronics conveys a license under the Philips I2C Patent. Rights to use these components in an
I
2
C system i s granted provided that the system conform s to the I2C Standard Specification as defined by Philips.
STMicroelectron ic s Group of Com panies
Australi a - Brazil - China - Finland - France - Germany - Hong Kong - India - Italy - Japan - Malaysia - Mal ta - Morocco - Singapore - Spain
Sweden - Switzerla nd - United King dom - U.S.A.
http://www.s t. com
Figure 31 Package outline TQFP100 (14 x 14 mm)
Sales type Temperature range P ackage
ST10R272LT1 0°C to 70°C
TQFP100 (14x 14)
ST10R272LT6 -40°C to +85°C
Table 1:
Di
m
mm inches
Mi Ty Ma Mi Ty Ma
A1.60.0
A 1.3 1.4 1.4 0.0 0.0 0.0
D 15. 16. 16. 0.6 0.6 0.6
D 13. 14. 14. 0.5 0.5 0.5
D 12. 0.4
E 15. 16. 16. 0.6 0.6 0.6
E 13. 14. 14. 0.5 0.5 0.5
E 12. 0.4
e0.5 0.0
Number of Pins
N25
 Loading...
Loading...