

Page 1

SPC560P44L3, SPC560P44L5
LQFP100 (14 x 14 x 1.4 mm)
LQFP144 (20 x 20 x 1.4 mm)
SPC560P50L3, SPC560P50L5
32-bit Power Architecture® based MCU with 576 KB Flash memory
and 40 KB SRAM for automotive chassis and safety applications
Datasheet production data
Features
■ 64 MHz, single issue, 32-bit CPU core complex
(e200z0h)
– Compliant with Power Architecture
embedded category
– Variable Length Encoding (VLE)
■ Memory organization
– Up to 512 KB on-chip code flash memory
with ECC and erase/program controller
– Additional 64 (4 × 16) KB on-chip data flash
memory with ECC for EEPROM emulation
– Up to 40 KB on-chip SRAM with ECC
■ Fail safe protection
– Programmable watchdog timer
– Non-maskable interrupt
– Fault collection unit
■ Nexus L2+ interface
■ Interrupts
– 16-channel eDMA controller
– 16 priority level controller
■ General purpose I/Os individually
programmable as input, output or special
function
■ 2 general purpose eTimer units
– 6 timers each with up/down count
capabilities
– 16-bit resolution, cascadable counters
– Quadrature decode with rotation direction
flag
– Double buffer input capture and output
compare
■ Communications interfaces
– 2 LINFlex channels (LIN 2.1)
– 4 DSPI channels with automatic chip select
generation
– 1 FlexCAN interface (2.0B Active) with 32
message objects
®
– 1 safety port based on FlexCAN with 32
message objects and up to 7.5 Mbit/s
capability; usable as second CAN when not
used as safety port
– 1 FlexRay™ module (V2.1) with selectable
dual or single channel support, 32
message objects and up to 10 Mbit/s
(512 KB device only)
■ Two 10-bit analog-to-digital converters (ADC)
– 2 × 11 input channels, + 4 shared channels
– Conversion time < 1 µs including sampling
time at full precision
– Programmable ADC Cross Triggering Unit
(CTU)
– 4 analog watchdogs with interrupt
capability
■ On-chip CAN/UART bootstrap loader with Boot
Assist Module (BAM)
■ 1 FlexPWM unit: 8 complementary or
independent outputs with ADC synchronization
signals
Table 1. Device summary
Package
448 KB Flash 576 KB Flash
LQFP144 SPC560P44L5 SPC560P50L5
LQFP100 SPC560P44L3 SPC560P50L3
Part number
July 2012 Doc ID 14723 Rev 8 1/115
This is information on a product in full production.
www.st.com
1
Page 2

Contents SPC560P44Lx, SPC560P50Lx
Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1 Document overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Device comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.5 Feature details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.1 High performance e200z0 core processor . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.2 Crossbar switch (XBAR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.5.3 Enhanced direct memory access (eDMA) . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.4 Flash memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.5 Static random access memory (SRAM) . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5.6 Interrupt controller (INTC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.5.7 System status and configuration module (SSCM) . . . . . . . . . . . . . . . . . 16
1.5.8 System clocks and clock generation . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.5.9 Frequency-modulated phase-locked loop (FMPLL) . . . . . . . . . . . . . . . . 17
1.5.10 Main oscillator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.5.11 Internal RC oscillator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.5.12 Periodic interrupt timer (PIT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.5.13 System timer module (STM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.14 Software watchdog timer (SWT) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.15 Fault collection unit (FCU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.16 System integration unit – Lite (SIUL) . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.5.17 Boot and censorship . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.5.18 Error correction status module (ECSM) . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.5.19 Peripheral bridge (PBRIDGE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.5.20 Controller area network (FlexCAN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.5.21 Safety port (FlexCAN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
1.5.22 FlexRay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.5.23 Serial communication interface module (LINFlex) . . . . . . . . . . . . . . . . . 22
1.5.24 Deserial serial peripheral interface (DSPI) . . . . . . . . . . . . . . . . . . . . . . 23
1.5.25 Pulse width modulator (FlexPWM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.5.26 eTimer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
1.5.27 Analog-to-digital converter (ADC) module . . . . . . . . . . . . . . . . . . . . . . . 25
1.5.28 Cross triggering unit (CTU) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2/115 Doc ID 14723 Rev 8
Page 3

SPC560P44Lx, SPC560P50Lx Contents
1.5.29 Nexus development interface (NDI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.5.30 Cyclic redundancy check (CRC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.5.31 IEEE 1149.1 JTAG controller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
1.5.32 On-chip voltage regulator (VREG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2 Package pinouts and signal descriptions . . . . . . . . . . . . . . . . . . . . . . . 29
2.1 Package pinouts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 Pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.1 Power supply and reference voltage pins . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.2 System pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.2.3 Pin muxing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.2 Parameter classification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.3 Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.4 Recommended operating conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.5 Thermal characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.5.1 Package thermal characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.5.2 General notes for specifications at maximum junction temperature . . . 57
3.6 Electromagnetic interference (EMI) characteristics . . . . . . . . . . . . . . . . . 59
3.7 Electrostatic discharge (ESD) characteristics . . . . . . . . . . . . . . . . . . . . . 59
3.8 Power management electrical characteristics . . . . . . . . . . . . . . . . . . . . . 59
3.8.1 Voltage regulator electrical characteristics . . . . . . . . . . . . . . . . . . . . . . 59
3.8.2 Voltage monitor electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . 63
3.9 Power up/down sequencing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.10 DC electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.10.1 NVUSRO register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.10.2 DC electrical characteristics (5 V) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
3.10.3 DC electrical characteristics (3.3 V) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.10.4 Input DC electrical characteristics definition . . . . . . . . . . . . . . . . . . . . . 69
3.10.5 I/O pad current specification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.11 Main oscillator electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . 78
3.12 FMPLL electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.13 16 MHz RC oscillator electrical characteristics . . . . . . . . . . . . . . . . . . . . 81
Doc ID 14723 Rev 8 3/115
Page 4

Contents SPC560P44Lx, SPC560P50Lx
3.14 Analog-to-digital converter (ADC) electrical characteristics . . . . . . . . . . . 81
3.14.1 Input impedance and ADC accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
3.14.2 ADC conversion characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.15 Flash memory electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . 88
3.16 AC specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.16.1 Pad AC specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3.17 AC timing characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.17.1 RESET pin characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3.17.2 IEEE 1149.1 interface timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
3.17.3 Nexus timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.17.4 External interrupt timing (IRQ pin) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
3.17.5 DSPI timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4 Package characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.1 ECOPACK® . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.2 Package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.2.1 LQFP144 mechanical outline drawing . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.2.2 LQFP100 mechanical outline drawing . . . . . . . . . . . . . . . . . . . . . . . . . 106
5 Ordering information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Appendix A Abbreviations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
4/115 Doc ID 14723 Rev 8
Page 5

SPC560P44Lx, SPC560P50Lx List of tables
List of tables
Table 1. Device summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Table 2. SPC560P44Lx, SPC560P50Lx device comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Table 3. SPC560P44Lx, SPC560P50Lx device configuration differences . . . . . . . . . . . . . . . . . . . . . 8
Table 4. SPC560P44Lx, SPC560P50Lx series block summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Table 5. Supply pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 6. System pins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 7. Pin muxing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 8. Parameter classifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 9. Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 10. Recommended operating conditions (5.0 V) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Table 11. Recommended operating conditions (3.3 V) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Table 12. Thermal characteristics for 144-pin LQFP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Table 13. Thermal characteristics for 100-pin LQFP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 14. EMI testing specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 15. ESD ratings, . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 16. Approved NPN ballast components (configuration with resistor on base) . . . . . . . . . . . . . 60
Table 17. Voltage regulator electrical characteristics (configuration with resistor on base) . . . . . . . . 61
Table 18. Voltage regulator electrical characteristics (configuration without resistor on base) . . . . . 62
Table 19. Low voltage monitor electrical characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Table 20. PAD3V5V field description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Table 21. DC electrical characteristics (5.0 V, NVUSRO[PAD3V5V] = 0) . . . . . . . . . . . . . . . . . . . . . 66
Table 22. Supply current (5.0 V, NVUSRO[PAD3V5V] = 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Table 23. DC electrical characteristics (3.3 V, NVUSRO[PAD3V5V] = 1) . . . . . . . . . . . . . . . . . . . . . 67
Table 24. Supply current (3.3 V, NVUSRO[PAD3V5V] = 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Table 25. I/O supply segment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Table 26. I/O weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Table 27. I/O consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Table 28. Main oscillator output electrical characteristics (5.0 V, NVUSRO[PAD3V5V] = 0) . . . . . . . 78
Table 29. Main oscillator output electrical characteristics (3.3 V, NVUSRO[PAD3V5V] = 1) . . . . . . . 79
Table 30. Input clock characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Table 31. FMPLL electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Table 32. 16 MHz RC oscillator electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Table 33. ADC conversion characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Table 34. Program and erase specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Table 35. Flash memory module life. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Table 36. Flash memory read access timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Table 37. Output pin transition times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Table 38. RESET electrical characteristics. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Table 39. JTAG pin AC electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Table 40. Nexus debug port timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Table 41. External interrupt timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Table 42. DSPI timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Table 43. LQFP144 mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Table 44. LQFP100 package mechanical data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Table 45. Abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
Table 46. Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
Doc ID 14723 Rev 8 5/115
Page 6

List of figures SPC560P44Lx, SPC560P50Lx
List of figures
Figure 1. SPC560P44Lx, SPC560P50Lx block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 2. 144-pin LQFP pinout – Full featured configuration (top view) . . . . . . . . . . . . . . . . . . . . . . 29
Figure 3. 100-pin LQFP pinout – Airbag configuration (top view) . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 4. 100-pin LQFP pinout – Full featured configuration (top view) . . . . . . . . . . . . . . . . . . . . . . 31
Figure 5. Power supplies constraints (–0.3 V V
Figure 6. Independent ADC supply (–0.3 V V
Figure 7. Power supplies constraints (3.0 V V
Figure 8. Independent ADC supply (3.0 V V
DD_HV_IOx
DD_HV_REG
DD_HV_IOx
DD_HV_REG
Figure 9. Configuration with resistor on base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Figure 10. Configuration without resistor on base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Figure 11. Power-up typical sequence. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figure 12. Power-down typical sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figure 13. Brown-out typical sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Figure 14. Input DC electrical characteristics definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Figure 15. ADC characteristics and error definitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Figure 16. Input equivalent circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Figure 17. Transient behavior during sampling phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Figure 18. Spectral representation of input signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Figure 19. Pad output delay . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Figure 20. Start-up reset requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Figure 21. Noise filtering on reset signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Figure 22. JTAG test clock input timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Figure 23. JTAG test access port timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Figure 24. JTAG boundary scan timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Figure 25. Nexus output timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Figure 26. Nexus event trigger and test clock timings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Figure 27. Nexus TDI, TMS, TDO timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Figure 28. External interrupt timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Figure 29. DSPI classic SPI timing – Master, CPHA = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Figure 30. DSPI classic SPI timing – Master, CPHA = 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Figure 31. DSPI classic SPI timing – Slave, CPHA = 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Figure 32. DSPI classic SPI timing – Slave, CPHA = 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Figure 33. DSPI modified transfer format timing – Master, CPHA = 0. . . . . . . . . . . . . . . . . . . . . . . . 101
Figure 34. DSPI modified transfer format timing – Master, CPHA = 1. . . . . . . . . . . . . . . . . . . . . . . . 102
Figure 35. DSPI modified transfer format timing – Slave, CPHA = 0. . . . . . . . . . . . . . . . . . . . . . . . . 102
Figure 36. DSPI modified transfer format timing – Slave, CPHA = 1. . . . . . . . . . . . . . . . . . . . . . . . . 103
Figure 37. DSPI PCS strobe (PCSS) timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Figure 38. LQFP144 package mechanical drawing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Figure 39. LQFP100 package mechanical drawing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Figure 40. Commercial product code structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
6.0 V). . . . . . . . . . . . . . . . . . . . . . . . . 52
6.0 V) . . . . . . . . . . . . . . . . . . . . . . . . . 52
5.5 V). . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.5 V) . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6/115 Doc ID 14723 Rev 8
Page 7

SPC560P44Lx, SPC560P50Lx Introduction
1 Introduction
1.1 Document overview
This document provides electrical specifications, pin assignments, and package diagrams
for the SPC560P44/50 series of microcontroller units (MCUs). It also describes the device
features and highlights important electrical and physical characteristics. For functional
characteristics, refer to the device reference manual.
1.2 Description
This 32-bit system-on-chip (SoC) automotive microcontroller family is the latest
achievement in integrated automotive application controllers. It belongs to an expanding
range of automotive-focused products designed to address chassis applications—
specifically, electrical hydraulic power steering (EHPS) and electric power steering (EPS)—
as well as airbag applications.
This family is one of a series of next-generation integrated automotive microcontrollers
based on the Power Architecture technology.
The advanced and cost-efficient host processor core of this automotive controller family
complies with the Power Architecture embedded category. It operates at speeds of up to
64 MHz and offers high performance processing optimized for low power consumption. It
capitalizes on the available development infrastructure of current Power Architecture
devices and is supported with software drivers, operating systems and configuration code to
assist with users implementations.
1.3 Device comparison
Ta bl e 2 provides a summary of different members of the SPC560P44Lx, SPC560P50Lx
family and their features—relative to full-featured version—to enable a comparison among
the family members and an understanding of the range of functionality offered within this
family.
Table 2. SPC560P44Lx, SPC560P50Lx device comparison
Code flash memory (with ECC) 384 KB 512 KB
Data flash memory / EE option (with ECC) 64 KB
SRAM (with ECC) 36 KB 40 KB
Processor core 32-bit e200z0h
Instruction set VLE (variable length encoding)
CPU performance 0–64 MHz
FMPLL (frequency-modulated phase-locked loop)
module
INTC (interrupt controller) channels 147
PIT (periodic interrupt timer) 1 (includes four 32-bit timers)
Feature SPC560P44 SPC560P50
2
Doc ID 14723 Rev 8 7/115
Page 8

Introduction SPC560P44Lx, SPC560P50Lx
Table 2. SPC560P44Lx, SPC560P50Lx device comparison (continued)
Feature SPC560P44 SPC560P50
eDMA (enhanced direct memory access)
channels
FlexRay Yes
FlexCAN (controller area network) 2
16
(1)
(2),(3)
Safety port Yes (via second FlexCAN module)
FCU (fault collection unit) Yes
CTU (cross triggering unit) Yes
eTimer 2 (16-bit, 6 channels)
FlexPWM (pulse-width modulation) channels 8 (capturing on X-channels)
(4)
ADC (analog-to-digital converter) 2 (10-bit, 15-channel
)
LINFlex 2
DSPI (deserial serial peripheral interface) 4
CRC (cyclic redundancy check) unit Yes
JTAG controller Yes
Nexus port controller (NPC) Yes (Level 2+)
Digital power supply
(5)
3.3 V or 5 V single supply with external transistor
Analog power supply 3.3 V or 5 V
Supply
Internal RC oscillator 16 MHz
External crystal oscillator 4–40 MHz
Packages
LQFP100
LQFP144
Temperature Standard ambient temperature –40 to 125 °C
1. 32 message buffers, selectable single or dual channel support
2. Each FlexCAN module has 32 message buffers.
3. One FlexCAN module can act as a Safety Port with a bit rate as high as 7.5 Mbit/s.
4. Four channels shared between the two ADCs
5. The different supply voltages vary according to the part number ordered.
SPC560P44Lx, SPC560P50Lx is available in two configurations having different features:
full-featured and airbag. Ta bl e 3 shows the main differences between the two versions.
Table 3. SPC560P44Lx, SPC560P50Lx device configuration differences
CTU (cross triggering unit) Yes No
FlexPWM Yes No
Feature Full-featured Airbag
8/115 Doc ID 14723 Rev 8
Page 9
SPC560P44Lx, SPC560P50Lx Introduction
Table 3. SPC560P44Lx, SPC560P50Lx device configuration differences (continued)
Feature Full-featured Airbag
FlexRay Yes No
FMPLL (frequency-modulated phase-locked loop) module
1.4 Block diagram
Figure 1 shows a top-level block diagram of the SPC560P44Lx, SPC560P50Lx MCU.
2 (one FMPLL, one for
FlexRay)
1 (only FMPLL)
Doc ID 14723 Rev 8 9/115
Page 10

Introduction SPC560P44Lx, SPC560P50Lx
e200z0 Core
32-bit
general
purpose
registers
Special
purpose
registers
Integer
execution
unit
Exception
handler
Var ia ble
length
encoded
instructions
Instruction
unit
Load/store
unit
Branch
prediction
unit
JTAG
1.2 V regulator
control
XOSC
16 MHz
RC oscillator
FMPLL_0
(System)
Nexus port
controller
Interrupt
controller
eDMA
16 channels
Master
Master
Instruction
32-bit
Master
Data
32-bit
SRAM
(with ECC)
Slave Slave
Crossbar switch (XBAR, AMBA 2.0 v6 AHB)
Peripheral bridge
FCU
Legend:
ADC Analog-to-digital converter
BAM Boot assist module
CRC Cyclic redundancy check
CTU Cross triggering unit
DSPI Deserial serial peripheral interface
ECSM Error correction status module
eDMA Enhanced direct memory access
eTimer Enhanced timer
FCU Fault collection unit
Flash Flash memory
FlexCAN Controller area network
FlexPWM Flexible pulse width modulation
FMPLL Frequency-modulated phase-locked loop
INTC Interrupt controller
JTAG JTAG controller
LINFlex Serial communication interface (LIN support)
MC_CGM Clock generation module
MC_ME Mode entry module
MC_PCU Power control unit
MC_RGM Reset generation module
PIT Periodic interrupt timer
SIUL System integration unit Lite
SRAM Static random-access memory
SSCM System status and configuration module
STM System timer module
SWT Software watchdog timer
WKPU Wakeup unit
XOSC External oscillator
XBAR Crossbar switch
Slave
External ballast
Code Flash
(with ECC)
Data Flash
(with ECC)
Nexus 2+
eDMA
16 channels
FlexPWM
CTU
4×
2×
DSPI
2×
FlexCAN
LINFlex
Safety port
PIT
STM
SWT
MC_RGM
MC_CGM
MC_ME
BAM
SIUL
eTimer (6 ch)
FMPLL_1
(FlexRay, MotCtrl)
FlexRay
SSCM
1.2 V Rail V
REG
WKPU
CRC
Shared
Channels
Channels
10-bit 10-bit
0–10
0–10
channels
11–14
ADC_1ADC_0
ECSM
10/115 Doc ID 14723 Rev 8
Figure 1. SPC560P44Lx, SPC560P50Lx block diagram
Page 11
SPC560P44Lx, SPC560P50Lx Introduction
Table 4. SPC560P44Lx, SPC560P50Lx series block summary
Block Function
Analog-to-digital converter (ADC) Multi-channel, 10-bit analog-to-digital converter
Boot assist module (BAM)
Clock generation module
(MC_CGM)
Controller area network
(FlexCAN)
Cross triggering unit (CTU)
Crossbar switch (XBAR)
Block of read-only memory containing VLE code which is executed according to
the boot mode of the device
Provides logic and control required for the generation of system and peripheral
clocks
Supports the standard CAN communications protocol
Enables synchronization of ADC conversions with a timer event from the eMIOS
or from the PIT
Supports simultaneous connections between two master ports and three slave
ports; supports a 32-bit address bus width and a 32-bit data bus width
Cyclic redundancy check (CRC) CRC checksum generator
Deserial serial peripheral
interface (DSPI)
Enhanced direct memory access
(eDMA)
Provides a synchronous serial interface for communication with external
devices
Performs complex data transfers with minimal intervention from a host
processor via “n” programmable channels
Enhanced timer (eTimer) Provides enhanced programmable up/down modulo counting
Provides a myriad of miscellaneous control functions for the device including
Error correction status module
(ECSM)
program-visible information about configuration and revision levels, a reset
status register, wakeup control for exiting sleep modes, and optional features
such as information on memory errors reported by error-correcting codes
External oscillator (XOSC)
Provides an output clock used as input reference for FMPLL_0 or as reference
clock for specific modules depending on system needs
Fault collection unit (FCU) Provides functional safety to the device
Flash memory Provides non-volatile storage for program code, constants and variables
Frequency-modulated phaselocked loop (FMPLL)
Generates high-speed system clocks and supports programmable frequency
modulation
Interrupt controller (INTC) Provides priority-based preemptive scheduling of interrupt requests
JTAG controller
LINFlex controller
Provides the means to test chip functionality and connectivity while remaining
transparent to system logic when not in test mode
Manages a high number of LIN (Local Interconnect Network protocol)
messages efficiently with minimum load on CPU
Provides a mechanism for controlling the device operational mode and mode
Mode entry module (MC_ME)
transition sequences in all functional states; also manages the power control
unit, reset generation module and clock generation module, and holds the
configuration, control and status registers accessible for applications
Periodic interrupt timer (PIT) Produces periodic interrupts and triggers
Peripheral bridge (PBRIDGE) Interface between the system bus and on-chip peripherals
Power control unit (MC_PCU)
Reduces the overall power consumption by disconnecting parts of the device
from the power supply via a power switching device; device components are
grouped into sections called “power domains” which are controlled by the PCU
Doc ID 14723 Rev 8 11/115
Page 12

Introduction SPC560P44Lx, SPC560P50Lx
Table 4. SPC560P44Lx, SPC560P50Lx series block summary (continued)
Block Function
Pulse width modulator
(FlexPWM)
Reset generation module
(MC_RGM)
Static random-access memory
(SRAM)
Contains four PWM submodules, each of which is capable of controlling a
single half-bridge power stage and two fault input channels
Centralizes reset sources and manages the device reset sequence of the
device
Provides storage for program code, constants, and variables
Provides control over all the electrical pad controls and up 32 ports with 16 bits
System integration unit lite (SIUL)
of bidirectional, general-purpose input and output signals and supports up to 32
external interrupts with trigger event configuration
System status and configuration
module (SSCM)
System timer module (STM)
Provides system configuration and status data (such as memory size and
status, device mode and security status), device identification data, debug
status port enable and selection, and bus and peripheral abort enable/disable
Provides a set of output compare events to support AUTOSAR
system tasks
System watchdog timer (SWT) Provides protection from runaway code
Supports up to 18 external sources that can generate interrupts or wakeup
Wakeup unit (WKPU)
events, 1 of which can cause non-maskable interrupt requests or wakeup
events
1. AUTOSAR: AUTomotive Open System ARchitecture (see www.autosar.org)
(1)
and operating
12/115 Doc ID 14723 Rev 8
Page 13

SPC560P44Lx, SPC560P50Lx Introduction
1.5 Feature details
1.5.1 High performance e200z0 core processor
The e200z0 Power Architecture core provides the following features:
● High performance e200z0 core processor for managing peripherals and interrupts
● Single issue 4-stage pipeline in-order execution 32-bit Power Architecture CPU
● Harvard architecture
● Variable length encoding (VLE), allowing mixed 16-bit and 32-bit instructions
– Results in smaller code size footprint
– Minimizes impact on performance
● Branch processing acceleration using lookahead instruction buffer
● Load/store unit
– 1 cycle load latency
– Misaligned access support
– No load-to-use pipeline bubbles
● Thirty-two 32-bit general purpose registers (GPRs)
● Separate instruction bus and load/store bus Harvard architecture
● Hardware vectored interrupt support
● Reservation instructions for implementing read-modify-write constructs
● Long cycle time instructions, except for guarded loads, do not increase interrupt
latency
● Extensive system development support through Nexus debug port
● Non-maskable interrupt support
1.5.2 Crossbar switch (XBAR)
The XBAR multi-port crossbar switch supports simultaneous connections between four
master ports and three slave ports. The crossbar supports a 32-bit address bus width and a
32-bit data bus width.
The crossbar allows for two concurrent transactions to occur from any master port to any
slave port; but one of those transfers must be an instruction fetch from internal flash
memory. If a slave port is simultaneously requested by more than one master port,
arbitration logic will select the higher priority master and grant it ownership of the slave port.
All other masters requesting that slave port will be stalled until the higher priority master
completes its transactions. Requesting masters will be treated with equal priority and will be
granted access to a slave port in round-robin fashion, based upon the ID of the last master
to be granted access.
Doc ID 14723 Rev 8 13/115
Page 14

Introduction SPC560P44Lx, SPC560P50Lx
The crossbar provides the following features:
● 4 master ports:
– e200z0 core complex Instruction port
– e200z0 core complex Load/Store Data port
–eDMA
–FlexRay
● 3 slave ports:
– Flash memory (code flash and data flash)
–SRAM
– Peripheral bridge
● 32-bit internal address, 32-bit internal data paths
● Fixed Priority Arbitration based on Port Master
● Temporary dynamic priority elevation of masters
1.5.3 Enhanced direct memory access (eDMA)
The enhanced direct memory access (eDMA) controller is a second-generation module
capable of performing complex data movements via 16 programmable channels, with
minimal intervention from the host processor. The hardware micro architecture includes a
DMA engine which performs source and destination address calculations, and the actual
data movement operations, along with an SRAM-based memory containing the transfer
control descriptors (TCD) for the channels. This implementation is utilized to minimize the
overall block size.
The eDMA module provides the following features:
● 16 channels support independent 8, 16 or 32-bit single value or block transfers
● Supports variable sized queues and circular queues
● Source and destination address registers are independently configured to either post-
increment or to remain constant
● Each transfer is initiated by a peripheral, CPU, or eDMA channel request
● Each eDMA channel can optionally send an interrupt request to the CPU on completion
of a single value or block transfer
● DMA transfers possible between system memories, DSPIs, ADC, FlexPWM, eTimer
and CTU
● Programmable DMA channel multiplexer for assignment of any DMA source to any
available DMA channel with as many as 30 request sources
● eDMA abort operation through software
1.5.4 Flash memory
The SPC560P44Lx, SPC560P50Lx provides as much as 576 KB of programmable, nonvolatile, flash memory. The non-volatile memory (NVM) can be used for instruction and/or
data storage. The flash memory module interfaces the system bus to a dedicated flash
memory array controller. It supports a 32-bit data bus width at the system bus port, and a
128-bit read data interface to flash memory. The module contains four 128-bit wide prefetch
buffers. Prefetch buffer hits allow no-wait responses. Normal flash memory array accesses
are registered and are forwarded to the system bus on the following cycle, incurring two
wait-states.
14/115 Doc ID 14723 Rev 8
Page 15

SPC560P44Lx, SPC560P50Lx Introduction
The flash memory module provides the following features:
● As much as 576 KB flash memory
– 8 blocks (32 KB + 2×16 KB + 32 KB + 32 KB + 3×128 KB) code flash
– 4 blocks (16 KB + 16 KB + 16 KB + 16 KB) data flash
– Full Read While Write (RWW) capability between code and data flash
● Four 128-bit wide prefetch buffers to provide single cycle in-line accesses (prefetch
buffers can be configured to prefetch code or data or both)
● Typical flash memory access time: 0 wait states for buffer hits, 2 wait states for page
buffer miss at 64 MHz
● Hardware managed flash memory writes handled by 32-bit RISC Krypton engine
● Hardware and software configurable read and write access protections on a per-master
basis
● Configurable access timing allowing use in a wide range of system frequencies
● Multiple-mapping support and mapping-based block access timing (up to 31 additional
cycles) allowing use for emulation of other memory types.
● Software programmable block program/erase restriction control
● Erase of selected block(s)
● Read page sizes
– Code flash memory: 128 bits (4 words)
– Data flash memory: 32 bits (1 word)
● ECC with single-bit correction, double-bit detection for data integrity
– Code flash memory: 64-bit ECC
– Data flash memory: 64-bit ECC
● Embedded hardware program and erase algorithm
● Erase suspend, program suspend and erase-suspended program
● Censorship protection scheme to prevent flash memory content visibility
● Hardware support for EEPROM emulation
1.5.5 Static random access memory (SRAM)
The SPC560P44Lx, SPC560P50Lx SRAM module provides up to 40 KB of general-purpose
memory.
The SRAM module provides the following features:
● Supports read/write accesses mapped to the SRAM from any master
● Up to 40 KB general purpose SRAM
● Supports byte (8-bit), half word (16-bit), and word (32-bit) writes for optimal use of
memory
● Typical SRAM access time: 0 wait-state for reads and 32-bit writes; 1 wait state for 8-
and 16-bit writes if back to back with a read to same memory block
1.5.6 Interrupt controller (INTC)
The interrupt controller (INTC) provides priority-based preemptive scheduling of interrupt
requests, suitable for statically scheduled hard real-time systems. The INTC handles 147
selectable-priority interrupt sources.
Doc ID 14723 Rev 8 15/115
Page 16

Introduction SPC560P44Lx, SPC560P50Lx
For high priority interrupt requests, the time from the assertion of the interrupt request from
the peripheral to when the processor is executing the interrupt service routine (ISR) has
been minimized. The INTC provides a unique vector for each interrupt request source for
quick determination of which ISR has to be executed. It also provides a wide number of
priorities so that lower priority ISRs do not delay the execution of higher priority ISRs. To
allow the appropriate priorities for each source of interrupt request, the priority of each
interrupt request is software configurable.
When multiple tasks share a resource, coherent accesses to that resource need to be
supported. The INTC supports the priority ceiling protocol (PCP) for coherent accesses. By
providing a modifiable priority mask, the priority can be raised temporarily so that all tasks
which share the same resource can not preempt each other.
The INTC provides the following features:
● Unique 9-bit vector for each separate interrupt source
● 8 software triggerable interrupt sources
● 16 priority levels with fixed hardware arbitration within priority levels for each interrupt
source
● Ability to modify the ISR or task priority: modifying the priority can be used to implement
the Priority Ceiling Protocol for accessing shared resources.
● 2 external high priority interrupts directly accessing the main core and I/O processor
(IOP) critical interrupt mechanism
1.5.7 System status and configuration module (SSCM)
The system status and configuration module (SSCM) provides central device functionality.
The SSCM includes these features:
● System configuration and status
– Memory sizes/status
– Device mode and security status
– Determine boot vector
– Search code flash for bootable sector
–DMA status
● Debug status port enable and selection
● Bus and peripheral abort enable/disable
1.5.8 System clocks and clock generation
The following list summarizes the system clock and clock generation on the SPC560P44Lx,
SPC560P50Lx:
● Lock detect circuitry continuously monitors lock status
● Loss of clock (LOC) detection for PLL outputs
● Programmable output clock divider (1, 2, 4, 8)
● FlexPWM module and eTimer module can run on an independent clock source
● On-chip oscillator with automatic level control
● Internal 16 MHz RC oscillator for rapid start-up and safe mode: supports frequency
trimming by user application
16/115 Doc ID 14723 Rev 8
Page 17

SPC560P44Lx, SPC560P50Lx Introduction
1.5.9 Frequency-modulated phase-locked loop (FMPLL)
The FMPLL allows the user to generate high speed system clocks from a 4–40 MHz input
clock. Further, the FMPLL supports programmable frequency modulation of the system
clock. The PLL multiplication factor, output clock divider ratio are all software configurable.
The PLL has the following major features:
● Input clock frequency: 4–40 MHz
● Maximum output frequency: 64 MHz
● Voltage controlled oscillator (VCO)—frequency 256–512 MHz
● Reduced frequency divider (RFD) for reduced frequency operation without forcing the
PLL to relock
● Frequency-modulated PLL
– Modulation enabled/disabled through software
– Triangle wave modulation
● Programmable modulation depth (±0.25% to ±4% deviation from center frequency):
programmable modulation frequency dependent on reference frequency
● Self-clocked mode (SCM) operation
1.5.10 Main oscillator
The main oscillator provides these features:
● Input frequency range: 4–40 MHz
● Crystal input mode or oscillator input mode
● PLL reference
1.5.11 Internal RC oscillator
This device has an RC ladder phase-shift oscillator. The architecture uses constant current
charging of a capacitor. The voltage at the capacitor is compared by the stable bandgap
reference voltage.
The RC oscillator provides these features:
● Nominal frequency 16 MHz
● ±5% variation over voltage and temperature after process trim
● Clock output of the RC oscillator serves as system clock source in case loss of lock or
loss of clock is detected by the PLL
● RC oscillator is used as the default system clock during startup
1.5.12 Periodic interrupt timer (PIT)
The PIT module implements these features:
● 4 general purpose interrupt timers
● 32-bit counter resolution
● Clocked by system clock frequency
● Each channel can be used as trigger for a DMA request
Doc ID 14723 Rev 8 17/115
Page 18

Introduction SPC560P44Lx, SPC560P50Lx
1.5.13 System timer module (STM)
The STM module implements these features:
● One 32-bit up counter with 8-bit prescaler
● Four 32-bit compare channels
● Independent interrupt source for each channel
● Counter can be stopped in debug mode
1.5.14 Software watchdog timer (SWT)
The SWT has the following features:
● 32-bit time-out register to set the time-out period
● Programmable selection of system or oscillator clock for timer operation
● Programmable selection of window mode or regular servicing
● Programmable selection of reset or interrupt on an initial time-out
● Master access protection
● Hard and soft configuration lock bits
● Reset configuration inputs allow timer to be enabled out of reset
1.5.15 Fault collection unit (FCU)
The FCU provides an independent fault reporting mechanism even if the CPU is
malfunctioning.
The FCU module has the following features:
● FCU status register reporting the device status
● Continuous monitoring of critical fault signals
● User selection of critical signals from different fault sources inside the device
● Critical fault events trigger 2 external pins (user selected signal protocol) that can be
used externally to reset the device and/or other circuitry (for example, safety relay or
FlexRay transceiver)
● Faults are latched into a register
1.5.16 System integration unit – Lite (SIUL)
The SPC560P44Lx, SPC560P50Lx SIUL controls MCU pad configuration, external
interrupt, general purpose I/O (GPIO), and internal peripheral multiplexing.
The pad configuration block controls the static electrical characteristics of I/O pins. The
GPIO block provides uniform and discrete input/output control of the I/O pins of the MCU.
18/115 Doc ID 14723 Rev 8
Page 19

SPC560P44Lx, SPC560P50Lx Introduction
The SIU provides the following features:
● Centralized general purpose input output (GPIO) control of as many as 80 input/output
pins and 26 analog input-only pads (package dependent)
● All GPIO pins can be independently configured to support pull-up, pull down, or no pull
● Reading and writing to GPIO supported both as individual pins and 16-bit wide ports
● All peripheral pins (except ADC channels) can be alternatively configured as both
general purpose input or output pins
● ADC channels support alternative configuration as general purpose inputs
● Direct readback of the pin value is supported on all pins through the SIUL
● Configurable digital input filter that can be applied to some general purpose input pins
for noise elimination: as many as 4 internal functions can be multiplexed onto 1 pin
1.5.17 Boot and censorship
Different booting modes are available in the SPC560P44Lx, SPC560P50Lx: booting from
internal flash memory and booting via a serial link.
The default booting scheme uses the internal flash memory (an internal pull-down is used to
select this mode). Optionally, the user can boot via FlexCAN or LINFlex (using the boot
assist module software).
A censorship scheme is provided to protect the content of the flash memory and offer
increased security for the entire device.
A password mechanism is designed to grant the legitimate user access to the non-volatile
memory.
Boot assist module (BAM)
The BAM is a block of read-only one-time programmed memory and is identical for all
SPC560Pxx devices that are based on the e200z0h core. The BAM program is executed
every time the device is powered on if the alternate boot mode has been selected by the
user.
The BAM provides the following features:
● Serial bootloading via FlexCAN or LINFlex
● Ability to accept a password via the used serial communication channel to grant the
legitimate user access to the non-volatile memory
1.5.18 Error correction status module (ECSM)
The ECSM provides a myriad of miscellaneous control functions regarding program-visible
information about the platform configuration and revision levels, a reset status register, a
software watchdog timer, wakeup control for exiting sleep modes, and information on
platform memory errors reported by error-correcting codes and/or generic access error
information for certain processor cores.
The Error Correction Status Module supports a number of miscellaneous control functions
for the platform. The ECSM includes these features:
● Registers for capturing information on platform memory errors if error-correcting codes
(ECC) are implemented
● For test purposes, optional registers to specify the generation of double-bit memory
errors are enabled on the SPC560P44Lx, SPC560P50Lx.
Doc ID 14723 Rev 8 19/115
Page 20

Introduction SPC560P44Lx, SPC560P50Lx
The sources of the ECC errors are:
● Flash memory
● SRAM
1.5.19 Peripheral bridge (PBRIDGE)
The PBRIDGE implements the following features:
● Duplicated periphery
● Master access privilege level per peripheral (per master: read access enable; write
access enable)
● Write buffering for peripherals
● Checker applied on PBRIDGE output toward periphery
● Byte endianess swap capability
1.5.20 Controller area network (FlexCAN)
The SPC560P44Lx, SPC560P50Lx MCU contains one controller area network (FlexCAN)
module. This module is a communication controller implementing the CAN protocol
according to Bosch Specification version 2.0B. The CAN protocol was designed to be used
primarily as a vehicle serial data bus, meeting the specific requirements of this field: realtime processing, reliable operation in the EMI environment of a vehicle, cost-effectiveness
and required bandwidth. The FlexCAN module contains 32 message buffers.
20/115 Doc ID 14723 Rev 8
Page 21

SPC560P44Lx, SPC560P50Lx Introduction
The FlexCAN module provides the following features:
● Full implementation of the CAN protocol specification, version 2.0B
– Standard data and remote frames
– Extended data and remote frames
– Up to 8-bytes data length
– Programmable bit rate up to 1 Mbit/s
● 32 message buffers of up to 8-bytes data length
● Each message buffer configurable as Rx or Tx, all supporting standard and extended
messages
● Programmable loop-back mode supporting self-test operation
● 3 programmable mask registers
● Programmable transmit-first scheme: lowest ID or lowest buffer number
● Time stamp based on 16-bit free-running timer
● Global network time, synchronized by a specific message
● Maskable interrupts
● Independent of the transmission medium (an external transceiver is assumed)
● High immunity to EMI
● Short latency time due to an arbitration scheme for high-priority messages
● Transmit features
– Supports configuration of multiple mailboxes to form message queues of scalable
depth
– Arbitration scheme according to message ID or message buffer number
– Internal arbitration to guarantee no inner or outer priority inversion
– Transmit abort procedure and notification
● Receive features
– Individual programmable filters for each mailbox
– 8 mailboxes configurable as a six-entry receive FIFO
– 8 programmable acceptance filters for receive FIFO
● Programmable clock source
– System clock
– Direct oscillator clock to avoid PLL jitter
1.5.21 Safety port (FlexCAN)
The SPC560P44Lx, SPC560P50Lx MCU has a second CAN controller synthesized to run at
high bit rates to be used as a safety port. The CAN module of the safety port provides the
following features:
● Identical to the FlexCAN module
● Bit rate as fast as 7.5 Mbit/s at 60 MHz CPU clock using direct connection between
CAN modules (no physical transceiver required)
● 32 message buffers of up to 8 bytes data length
● Can be used as a second independent CAN module
Doc ID 14723 Rev 8 21/115
Page 22

Introduction SPC560P44Lx, SPC560P50Lx
1.5.22 FlexRay
The FlexRay module provides the following features:
● Full implementation of FlexRay Protocol Specification 2.1
● 32 configurable message buffers can be handled
● Dual channel or single channel mode of operation, each as fast as 10 Mbit/s data rate
● Message buffers configurable as Tx, Rx or RxFIFO
● Message buffer size configurable
● Message filtering for all message buffers based on FrameID, cycle count and message
ID
● Programmable acceptance filters for RxFIFO message buffers
1.5.23 Serial communication interface module (LINFlex)
The LINFlex (local interconnect network flexible) on the SPC560P44Lx, SPC560P50Lx
features the following:
● Supports LIN Master mode, LIN Slave mode and UART mode
● LIN state machine compliant to LIN1.3, 2.0, and 2.1 specifications
● Handles LIN frame transmission and reception without CPU intervention
● LIN features
– Autonomous LIN frame handling
– Message buffer to store Identifier and as much as 8 data bytes
– Supports message length as long as 64 bytes
– Detection and flagging of LIN errors (sync field, delimiter, ID parity, bit framing,
checksum, and time-out)
– Classic or extended checksum calculation
– Configurable Break duration as long as 36-bit times
– Programmable baud rate prescalers (13-bit mantissa, 4-bit fractional)
– Diagnostic features: Loop back; Self Test; LIN bus stuck dominant detection
– Interrupt-driven operation with 16 interrupt sources
● LIN slave mode features
– Autonomous LIN header handling
– Autonomous LIN response handling
● UART mode
– Full-duplex operation
– Standard non return-to-zero (NRZ) mark/space format
– Data buffers with 4-byte receive, 4-byte transmit
– Configurable word length (8-bit or 9-bit words)
– Error detection and flagging
– Parity, Noise and Framing errors
– Interrupt-driven operation with four interrupt sources
– Separate transmitter and receiver CPU interrupt sources
– 16-bit programmable baud-rate modulus counter and 16-bit fractional
– 2 receiver wake-up methods
22/115 Doc ID 14723 Rev 8
Page 23

SPC560P44Lx, SPC560P50Lx Introduction
1.5.24 Deserial serial peripheral interface (DSPI)
The deserial serial peripheral interface (DSPI) module provides a synchronous serial
interface for communication between the SPC560P44Lx, SPC560P50Lx MCU and external
devices.
The DSPI modules provide these features:
● Full duplex, synchronous transfers
● Master or slave operation
● Programmable master bit rates
● Programmable clock polarity and phase
● End-of-transmission interrupt flag
● Programmable transfer baud rate
● Programmable data frames from 4 to 16 bits
● Up to 20 chip select lines available
– 8 on DSPI_0
– 4 each on DSPI_1, DSPI_2 and DSPI_3
● 8 clock and transfer attributes registers
● Chip select strobe available as alternate function on one of the chip select pins for
deglitching
● FIFOs for buffering as many as 5 transfers on the transmit and receive side
● Queueing operation possible through use of the eDMA
● General purpose I/O functionality on pins when not used for SPI
1.5.25 Pulse width modulator (FlexPWM)
The pulse width modulator module (PWM) contains four PWM submodules, each capable of
controlling a single half-bridge power stage. There are also four fault channels.
This PWM is capable of controlling most motor types: AC induction motors (ACIM),
permanent magnet AC motors (PMAC), both brushless (BLDC) and brush DC motors
(BDC), switched (SRM) and variable reluctance motors (VRM), and stepper motors.
Doc ID 14723 Rev 8 23/115
Page 24

Introduction SPC560P44Lx, SPC560P50Lx
The FlexPWM block implements the following features:
● 16-bit resolution for center, edge-aligned, and asymmetrical PWMs
● Maximum operating clock frequency of 120 MHz
● PWM outputs can operate as complementary pairs or independent channels
● Can accept signed numbers for PWM generation
● Independent control of both edges of each PWM output
● Synchronization to external hardware or other PWM supported
● Double buffered PWM registers
– Integral reload rates from 1 to 16
– Half cycle reload capability
● Multiple ADC trigger events can be generated per PWM cycle via hardware
● Write protection for critical registers
● Fault inputs can be assigned to control multiple PWM outputs
● Programmable filters for fault inputs
● Independently programmable PWM output polarity
● Independent top and bottom deadtime insertion
● Each complementary pair can operate with its own PWM frequency and deadtime
values
● Individual software-control for each PWM output
● All outputs can be programmed to change simultaneously via a “Force Out” event
● PWMX pin can optionally output a third PWM signal from each submodule
● Channels not used for PWM generation can be used for buffered output compare
functions
● Channels not used for PWM generation can be used for input capture functions
● Enhanced dual-edge capture functionality
● eDMA support with automatic reload
● 2 fault inputs
● Capture capability for PWMA, PWMB, and PWMX channels not supported
24/115 Doc ID 14723 Rev 8
Page 25

SPC560P44Lx, SPC560P50Lx Introduction
1.5.26 eTimer
The SPC560P44Lx, SPC560P50Lx includes two eTimer modules. Each module provides
six 16-bit general purpose up/down timer/counter units with the following features:
● Maximum operating clock frequency of 120 MHz
● Individual channel capability
– Input capture trigger
– Output compare
– Double buffer (to capture rising edge and falling edge)
– Separate prescaler for each counter
– Selectable clock source
– 0–100% pulse measurement
– Rotation direction flag (Quad decoder mode)
● Maximum count rate
– External event counting: max. count rate = peripheral clock/2
– Internal clock counting: max. count rate = peripheral clock
● Counters are:
– Cascadable
– Preloadable
● Programmable count modulo
● Quadrature decode capabilities
● Counters can share available input pins
● Count once or repeatedly
● Pins available as GPIO when timer functionality not in use
1.5.27 Analog-to-digital converter (ADC) module
The ADC module provides the following features:
Analog part:
● 2 on-chip AD converters
– 10-bit AD resolution
– 1 sample and hold unit per ADC
– Conversion time, including sampling time, less than 1 µs (at full precision)
– Typical sampling time is 150 ns min. (at full precision)
– Differential non-linearity error (DNL) ±1 LSB
– Integral non-linearity error (INL) ±1.5 LSB
–TUE <3LSB
– Single-ended input signal up to 5.0 V
– The ADC and its reference can be supplied with a voltage independent from V
– The ADC supply can be equal or higher than V
– The ADC supply and the ADC reference are not independent from each other
(they are internally bonded to the same pad)
– Sample times of 2 (default), 8, 64, or 128 ADC clock cycles
DDIO
DDIO
Doc ID 14723 Rev 8 25/115
Page 26

Introduction SPC560P44Lx, SPC560P50Lx
Digital part:
● 2 × 13 input channels including 4 channels shared between the 2 converters
● 4 analog watchdogs comparing ADC results against predefined levels (low, high,
range) before results are stored in the appropriate ADC result location,
● 2 modes of operation: Normal mode or CTU control mode
● Normal mode features
– Register-based interface with the CPU: control register, status register, 1 result
register per channel
– ADC state machine managing 3 request flows: regular command, hardware
injected command, software injected command
– Selectable priority between software and hardware injected commands
– 4 analog watchdogs comparing ADC results against predefined levels (low, high,
range)
– DMA compatible interface
● CTU control mode features
– Triggered mode only
– 4 independent result queues (2 × 16 entries, 2 × 4 entries)
– Result alignment circuitry (left justified; right justified)
– 32-bit read mode allows to have channel ID on one of the 16-bit part
– DMA compatible interfaces
1.5.28 Cross triggering unit (CTU)
The cross triggering unit allows automatic generation of ADC conversion requests on user
selected conditions without CPU load during the PWM period and with minimized CPU load
for dynamic configuration.
It implements the following features:
● Double buffered trigger generation unit with as many as eight independent triggers
generated from external triggers
● Trigger generation unit configurable in sequential mode or in triggered mode
● Each Trigger can be appropriately delayed to compensate the delay of external low
pass filter
● Double buffered global trigger unit allowing eTimer synchronization and/or ADC
command generation
● Double buffered ADC command list pointers to minimize ADC-trigger unit update
● Double buffered ADC conversion command list with as many as 24 ADC commands
● Each trigger has the capability to generate consecutive commands
● ADC conversion command allows to control ADC channel from each ADC, single or
synchronous sampling, independent result queue selection
1.5.29 Nexus development interface (NDI)
The NDI (Nexus Development Interface) block provides real-time development support
capabilities for the SPC560P44Lx, SPC560P50Lx Power Architecture based MCU in
compliance with the IEEE-ISTO 5001-2003 standard. This development support is supplied
for MCUs without requiring external address and data pins for internal visibility. The NDI
26/115 Doc ID 14723 Rev 8
Page 27

SPC560P44Lx, SPC560P50Lx Introduction
block is an integration of several individual Nexus blocks that are selected to provide the
development support interface for this device. The NDI block interfaces to the host
processor and internal busses to provide development support as per the IEEE-ISTO 50012003 Class 2+ standard. The development support provided includes access to the MCU’s
internal memory map and access to the processor’s internal registers during run time.
The Nexus Interface provides the following features:
● Configured via the IEEE 1149.1
● All Nexus port pins operate at V
● Nexus 2+ features supported
(no dedicated power supply)
DDIO
– Static debug
– Watchpoint messaging
– Ownership trace messaging
– Program trace messaging
– Real time read/write of any internally memory mapped resources through JTAG
pins
– Overrun control, which selects whether to stall before Nexus overruns or keep
executing and allow overwrite of information
– Watchpoint triggering, watchpoint triggers program tracing
● Auxiliary Output Port
– 4 MDO (Message Data Out) pins
– MCKO (Message Clock Out) pin
– 2 MSEO
–EVTO
● Auxiliary Input Port
–EVTI
(Message Start/End Out) pins
(Event Out) pin
(Event In) pin
1.5.30 Cyclic redundancy check (CRC)
The CRC computing unit is dedicated to the computation of CRC off-loading the CPU. The
CRC module features:
● Support for CRC-16-CCITT (x25 protocol):
16
– x
● Support for CRC-32 (Ethernet protocol):
– x
● Zero wait states for each write/read operations to the CRC_CFG and CRC_INP
+ x12 + x5 + 1
32
+ x26 + x23 + x22 + x16 + x12 + x11 + x10 + x8 + x7 + x5 + x4 + x2 + x + 1
registers at the maximum frequency
1.5.31 IEEE 1149.1 JTAG controller
The JTAG controller (JTAGC) block provides the means to test chip functionality and
connectivity while remaining transparent to system logic when not in test mode. All data
input to and output from the JTAGC block is communicated in serial format. The JTAGC
block is compliant with the IEEE standard.
Doc ID 14723 Rev 8 27/115
Page 28

Introduction SPC560P44Lx, SPC560P50Lx
The JTAG controller provides the following features:
● IEEE Test Access Port (TAP) interface with 4 pins (TDI, TMS, TCK, TDO)
● Selectable modes of operation include JTAGC/debug or normal system operation.
● A 5-bit instruction register that supports the following IEEE 1149.1-2001 defined
instructions:
– BYPASS, IDCODE, EXTEST, SAMPLE, SAMPLE/PRELOAD
● A 5-bit instruction register that supports the additional following public instructions:
– ACCESS_AUX_TAP_NPC, ACCESS_AUX_TAP_ONCE
● 3 test data registers: a bypass register, a boundary scan register, and a device
identification register.
● A TAP controller state machine that controls the operation of the data registers,
instruction register and associated circuitry.
1.5.32 On-chip voltage regulator (VREG)
The on-chip voltage regulator module provides the following features:
● Uses external NPN (negative-positive-negative) transistor
● Regulates external 3.3 V /5.0 V down to 1.2 V for the core logic
● Low voltage detection on the internal 1.2 V and I/O voltage 3.3 V
28/115 Doc ID 14723 Rev 8
Page 29

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
108
107
106
105
104
103
102
101
100
99
98
97
96
95
94
93
92
91
90
89
88
87
86
85
84
83
82
81
80
79
78
77
76
75
74
73
3738394041424344454647484950515253545556575859606162636465666768697071
72
144
143
142
141
140
139
138
137
136
135
134
133
132
131
130
129
128
127
126
125
124
123
122
121
120
119
118
117
116
115
114
113
112
111
110
109
NMI
A[6]
D[1]
F[4]
F[5]
VDD_HV_IO0
VSS_HV_IO0
F[6]
MDO[0]
A[7]
C[4]
A[8]
C[5]
A[5]
C[7]
C[3]
VSS_LV_COR0
VDD_LV_COR0
F[7]
F[8]
VDD_HV_IO1
VSS_HV_IO1
F[9]
F[10]
F[11]
D[9]
VDD_HV_OSC
VSS_HV_OSC
XTAL
EXTAL
RESET
D[8]
D[5]
D[6]
VSS_LV_COR3
VDD_LV_COR3
A[4]
VPP_TEST
F[12]
D[14]
G[3]
C[14]
G[2]
C[13]
G[4]
D[12]
G[6]
VDD_HV_FL
VSS_HV_FL
D[13]
VSS_LV_COR1
VDD_LV_COR1
A[3]
VDD_HV_IO2
VSS_HV_IO2
TDO
TCK
TMS
TDI
G[5]
A[2]
G[7]
C[12]
G[8]
C[11]
G[9]
D[11]
G[10]
D[10]
G[11]
A[1]
A[0]
D[7]
G[0]
E[1]
E[3]
C[1]
E[4]
B[7]
E[5]
C[2]
E[6]
B[8]
E[7]
E[2]
VDD_HV_ADC0
VSS_HV_ADC0
B[9]
B[10]
B[11]
B[12]
VDD_HV_ADC1
VSS_HV_ADC1
D[15]
E[8]
B[13]
E[9]
B[15]
E[10]
B[14]
E[11]
C[0]
E[12]
E[0]
BCTRL
VDD_LV_REGCOR
VSS_LV_REGCOR
VDD_HV_REG
A[15]
A[14]
C[6]
G[1]
D[2]
F[3]
B[6]
F[2]
A[13]
F[1]
A[9]
F[0]
VSS_LV_COR2
VDD_LV_COR2
C[8]
D[4]
D[3]
VSS_HV_IO3
VDD_HV_IO3
D[0]
C[15]
C[9]
A[12]
E[15]
A[11]
E[14]
A[10]
E[13]
B[3]
F[14]
B[2]
F[15]
F[13]
C[10]
B[1]
B[0]
LQFP144
Note: Availability of port pin alternate functions depends on product selection.
2 Package pinouts and signal descriptions
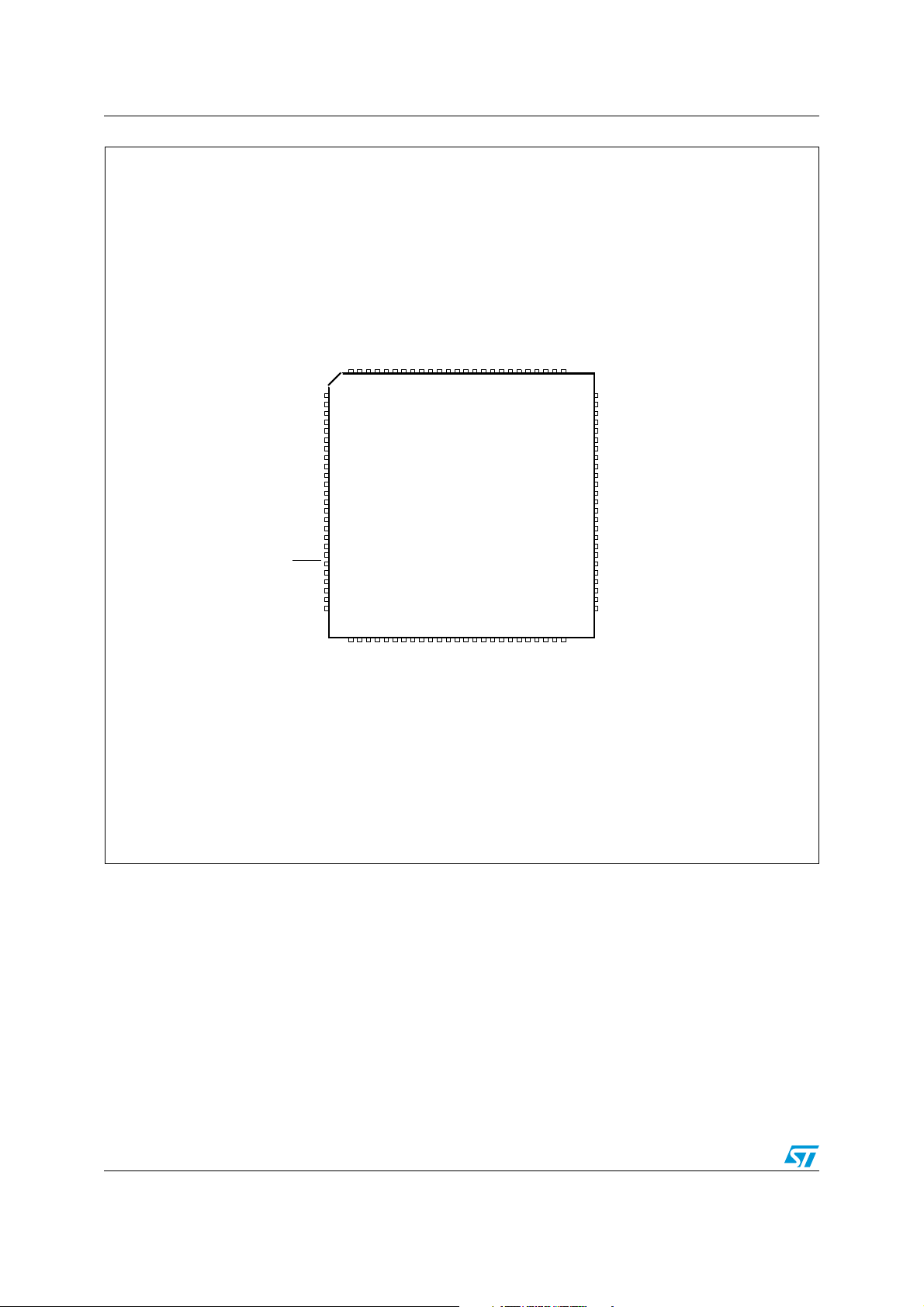
2.1 Package pinouts
The LQFP pinouts are shown in the following figures.
Figure 2. 144-pin LQFP pinout – Full featured configuration (top view)
Doc ID 14723 Rev 8 29/115
Page 30
Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
26272829303132333435363738394041424344454647484950
100
9998979695949392919089888786858483828180797877
76
NMI
A[6]
D[1]
A[7]
C[4]
A[8]
C[5]
A[5]
C[7]
C[3]
VSS_LV_COR0
VDD_LV_COR0
VDD_HV_IO1
VSS_HV_IO1
D[9]
VDD_HV_OSC
VSS_HV_OSC
XTAL
EXTAL
RESET
D[8]
D[5]
D[6]
VSS_LV_COR3
VDD_LV_COR3
A[4]
VPP_TEST
D[14]
C[14]
C[13]
D[12]
VDD_HV_FL
VSS_HV_FL
D[13]
VSS_LV_COR1
VDD_LV_COR1
A[3]
VDD_HV_IO2
VSS_HV_IO2
TDO
TCK
TMS
TDI
A[2]
C[12]
C[11]
D[11]
D[10]
A[1]
A[0]
D[7]
E[1]
C[1]
B[7]
C[2]
B[8]
E[2]
VDD_HV_ADC0
VSS_HV_ADC0
B[9]
B[10]
B[11]
B[12]
VDD_HV_ADC1
VSS_HV_ADC1
D[15]
B[13]
B[15]
B[14]
C[0]
E[0]
BCTRL
VDD_LV_REGCOR
VSS_LV_REGCOR
VDD_HV_REG
A[15]
A[14]
C[6]
D[2]
B[6]
A[13]
A[9]
VSS_LV_COR2
VDD_LV_COR2
C[8]
D[4]
D[3]
VSS_HV_IO3
VDD_HV_IO3
D[0]
C[15]
C[9]
A[12]
A[11]
A[10]
B[3]
B[2]
C[10]
B[1]
B[0]
LQFP100
Note: Availability of port pin alternate functions depends on product selection.
Figure 3. 100-pin LQFP pinout – Airbag configuration (top view)
30/115 Doc ID 14723 Rev 8
Page 31

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
26272829303132333435363738394041424344454647484950
100
9998979695949392919089888786858483828180797877
76
NMI
A[6]
D[1]
A[7]
C[4]
A[8]
C[5]
A[5]
C[7]
C[3]
VSS_LV_COR0
VDD_LV_COR0
VDD_HV_IO1
VSS_HV_IO1
D[9]
VDD_HV_OSC
VSS_HV_OSC
XTAL
EXTAL
RESET
D[8]
D[5]
D[6]
VSS_LV_COR3
VDD_LV_COR3
A[4]
VPP_TEST
D[14]
C[14]
C[13]
D[12]
VDD_HV_FL
VSS_HV_FL
D[13]
VSS_LV_COR1
VDD_LV_COR1
A[3]
VDD_HV_IO2
VSS_HV_IO2
TDO
TCK
TMS
TDI
A[2]
C[12]
C[11]
D[11]
D[10]
A[1]
A[0]
D[7]
E[1]
C[1]
B[7]
C[2]
B[8]
E[2]
VDD_HV_ADC0
VSS_HV_ADC0
B[9]
B[10]
B[11]
B[12]
VDD_HV_ADC1
VSS_HV_ADC1
D[15]
B[13]
B[15]
B[14]
C[0]
E[0]
BCTRL
VDD_LV_REGCOR
VSS_LV_REGCOR
VDD_HV_REG
A[15]
A[14]
C[6]
D[2]
B[6]
A[13]
A[9]
VSS_LV_COR2
VDD_LV_COR2
C[8]
D[4]
D[3]
VSS_HV_IO3
VDD_HV_IO3
D[0]
C[15]
C[9]
A[12]
A[11]
A[10]
B[3]
B[2]
C[10]
B[1]
B[0]
LQFP100
Note: Availability of port pin alternate functions depends on product selection.
Figure 4. 100-pin LQFP pinout – Full featured configuration (top view)
2.2 Pin description
2.2.1 Power supply and reference voltage pins
The following sections provide signal descriptions and related information about the
functionality and configuration of the SPC560P44Lx, SPC560P50Lx devices.
Ta bl e 5 lists the power supply and reference voltage for the SPC560P44Lx, SPC560P50Lx
devices.
Doc ID 14723 Rev 8 31/115
Page 32

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 5. Supply pins
Supply Pin
Symbol Description 100-pin 144-pin
VREG control and power supply pins. Pins available on 100-pin and 144-pin package.
BCTRL Voltage regulator external NPN ballast base control pin 47 69
or 5.0 V)
(3.3 V
Voltage regulator supply voltage 50 72
V
DD_HV_REG
1.2 V decoupling pins for core logic and regulator feedback.
V
DD_LV_REGCOR
Decoupling capacitor must be connected between this pins
and V
SS_LV_REGCOR
.
48 70
1.2 V decoupling pins for core logic and regulator feedback.
V
SS_LV_REGCOR
Decoupling capacitor must be connected between this pins
and V
DD_LV_REGCOR
.
49 71
ADC_0/ADC_1 reference and supply voltage. Pins available on 100-pin and 144-pin package.
V
DD_HV_ADC0
V
SS_HV_ADC0
V
DD_HV_ADC1
V
SS_HV_ADC1
(1)
ADC_0 supply and high reference voltage 33 50
ADC_0 ground and low reference voltage 34 51
ADC_1 supply and high reference voltage 39 56
ADC_1 ground and low reference voltage 40 57
Power supply pins (3.3 V or 5.0 V). All pins available on 144-pin package.
; VSS) available on 100-pin package.
DD
V
DD_HV_IO0
V
SS_HV_IO0
V
DD_HV_IO1
V
SS_HV_IO1
V
DD_HV_IO2
V
SS_HV_IO2
V
DD_HV_IO3
V
SS_HV_IO3
V
DD_HV_FL
V
SS_HV_FL
V
DD_HV_OSC
V
SS_HV_OSC
Five pairs (V
(2)
Input/Output supply voltage — 6
(2)
Input/Output ground — 7
Input/Output supply voltage 13 21
Input/Output ground 14 22
Input/Output supply voltage 63 91
Input/Output ground 62 90
Input/Output supply voltage 87 126
Input/Output ground 88 127
Code and data flash supply voltage 69 97
Code and data flash supply ground 68 96
Crystal oscillator amplifier supply voltage 16 27
Crystal oscillator amplifier ground 17 28
Power supply pins (1.2 V). All pins available on 100-pin and 144-pin package.
1.2 V Decoupling pins for core logic. Decoupling capacitor
V
DD_LV_COR0
must be connected between these pins and the nearest
V
SS_LV_COR
pin.
12 18
1.2 V Decoupling pins for core logic. Decoupling capacitor
V
SS_LV_COR0
must be connected between these pins and the nearest
V
DD_LV_COR
pin.
11 17
32/115 Doc ID 14723 Rev 8
Page 33

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 5. Supply pins (continued)
Supply Pin
Symbol Description 100-pin 144-pin
1.2 V Decoupling pins for core logic. Decoupling capacitor
V
DD_LV_COR1
must be connected between these pins and the nearest
V
SS_LV_COR
pin.
1.2 V Decoupling pins for core logic. Decoupling capacitor
V
SS_LV_COR1
must be connected between these pins and the nearest
V
DD_LV_COR
pin.
1.2 V Decoupling pins for core logic. Decoupling capacitor
V
DD_LV_COR2
must be connected between these pins and the nearest
V
SS_LV_COR
pin.
1.2 V Decoupling pins for core logic. Decoupling capacitor
V
SS_LV_COR2
must be connected between these pins and the nearest
V
DD_LV_COR
pin.
1.2 V Decoupling pins for on-chip PLL modules. Decoupling
V
DD_LV_COR3
capacitor must be connected between this pin and
V
SS_LV_COR3
.
1.2 V Decoupling pins for on-chip PLL modules. Decoupling
V
SS_LV_COR3
1. Analog supply/ground and high/low reference lines are internally physically separate, but are shorted via a double-bonding
connection on V
2. Not available on 100-pin package.
capacitor must be connected between this pin and
V
DD_LV_COR3
DD_HV_ADCx/VSS_HV_ADCx
.
pins.
65 93
66 94
92 131
93 132
25 36
24 35
2.2.2 System pins
Ta bl e 5 and Ta bl e 6 contain information on pin functions for the SPC560P44Lx,
SPC560P50Lx devices. The pins listed in Ta bl e 6 are single-function pins. The pins shown
in Ta bl e 7 are multi-function pins, programmable via their respective Pad Configuration
Register (PCR) values.
Table 6. System pins
Symbol Description Direction
MDO[0] Nexus Message Data Output—line 0 Output only Fast — 9
NMI Non-Maskable Interrupt Input only Slow — 1 1
XTAL
EXTAL
Dedicated pins. Available on 100-pin and 144-pin package.
Analog output of the oscillator amplifier
circuit; needs to be grounded if oscillator
is used in bypass mode
– Analog input of oscillator amplifier
circuit, when oscillator not in bypass
mode
– Analog input for clock generator when
oscillator in bypass mode
Pad speed
(1)
Pin
SRC = 0 SRC = 1 100-pin 144-pin
———1829
———1930
Doc ID 14723 Rev 8 33/115
Page 34

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 6. System pins (continued)
Pad speed
Symbol Description Direction
SRC = 0 SRC = 1 100-pin 144-pin
TMS JTAG state machine control Bidirectional Slow Fast 59 87
TCK JTAG clock Input only Slow — 60 88
TDI Test Data In Input only Slow Medium 58 86
TDO Test Data Out Output only Slow Fast 61 89
Reset pin, available on 100-pin and 144-pin package.
RESET
VPP_TEST
1. SCR values refer to the value assigned to the Slew Rate Control bits of the pad configuration register.
Bidirectional reset with Schmitt trigger
characteristics and noise filter
Test pin, available on 100-pin and 144-pin package.
Pin for testing purpose only. To be tied
to ground in normal operating mode.
Bidirectional Medium — 20 31
———74107
(1)
Pin
2.2.3 Pin muxing
Ta bl e 7 defines the pin list and muxing for the SPC560P44Lx, SPC560P50Lx devices.
Each row of Ta bl e 7 shows all the possible ways of configuring each pin, via alternate
functions. The default function assigned to each pin after reset is the ALT0 function.
SPC560P44Lx, SPC560P50Lx devices provide four main I/O pad types, depending on the
associated functions:
● Slow pads are the most common, providing a compromise between transition time and
low electromagnetic emission.
● Medium pads provide fast enough transition for serial communication channels with
controlled current to reduce electromagnetic emission.
● Fast pads provide maximum speed. They are used for improved NEXUS debugging
capability.
● Symmetric pads are designed to meet FlexRay requirements.
Medium and Fast pads can use slow configuration to reduce electromagnetic emission, at
the cost of reducing AC performance. For more information, see the datasheet’s “Pad AC
Specifications” section.
34/115 Doc ID 14723 Rev 8
Page 35

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 7. Pin muxing
Port
pin
Pad
configuration
register (PCR)
Alternate
function
A[0] PCR[0]
A[1] PCR[1]
(6)
(6)
(6)
PCR[2]
PCR[3]
PCR[4]
A[2]
A[3]
A[4]
(2)
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
—
—
ALT0
ALT1
ALT2
ALT3
—
—
ALT0
ALT1
ALT2
ALT3
—
—
(1),
Functions Peripheral
Port A (16-bit)
GPIO[0]
ETC[0]
SCK
F[0]
EIRQ[0]
GPIO[1]
ETC[1]
SOUT
F[1]
EIRQ[1]
GPIO[2]
ETC[2]
—
A[3]
SIN
ABS[0]
EIRQ[2]
GPIO[3]
ETC[3]
CS0
B[3]
ABS[2]
EIRQ[3]
GPIO[4]
ETC[0]
CS1
ETC[4]
FAB
EIRQ[4]
SIUL
eTimer_0
DSPI_2
FCU_0
SIUL
SIUL
eTimer_0
DSPI_2
FCU_0
SIUL
SIUL
eTimer_0
—
FlexPWM_0
DSPI_2
MC_RGM
SIUL
SIUL
eTimer_0
DSPI_2
FlexPWM_0
MC_RGM
SIUL
SIUL
eTimer_1
DSPI_2
eTimer_0
MC_RGM
SIUL
(3)
I/O
direction
(4)
I/O
I/O
O
O
I
I/O
I/O
O
O
I
I/O
I/O
—
O
I
I
I
I/O
I/O
I/O
O
I
I
I/O
I/O
O
I/O
I
I
Pad speed
(5)
Pin No.
SRC = 0 SRC = 1
100-pin
Slow Medium 51 73
Slow Medium 52 74
Slow Medium 57 84
Slow Medium 64 92
Slow Medium 75 108
144-pin
A[5] PCR[5]
A[6] PCR[6]
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
GPIO[5]
CS0
ETC[5]
CS7
EIRQ[5]
GPIO[6]
SCK
—
—
EIRQ[6]
SIUL
DSPI_1
eTimer_1
DSPI_0
SIUL
SIUL
DSPI_1
—
—
SIUL
I/O
I/O
I/O
O
I/O
I/O
—
—
Slow Medium 8 14
I
Slow Medium 2 2
I
Doc ID 14723 Rev 8 35/115
Page 36

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
A[7] PCR[7]
A[8] PCR[8]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
—
(1),
Functions Peripheral
GPIO[7]
SOUT
—
—
EIRQ[7]
GPIO[8]
—
—
—
SIN
EIRQ[8]
SIUL
DSPI_1
—
—
SIUL
SIUL
—
—
—
DSPI_1
SIUL
(3)
I/O
direction
(4)
I/O
O
—
—
I
I/O
—
—
—
I
I
Pad speed
SRC = 0 SRC = 1
Slow Medium 4 10
Slow Medium 6 12
(5)
Pin No.
100-pin
144-pin
A[9] PCR[9]
A[10] PCR[10]
A[11] PCR[11]
A[12] PCR[12]
A[13] PCR[13]
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
—
—
GPIO[9]
CS1
—
B[3]
FAULT[0]
GPIO[10]
CS0
B[0]
X[2]
EIRQ[9]
GPIO[11]
SCK
A[0]
A[2]
EIRQ[10]
GPIO[12]
SOUT
A[2]
B[2]
EIRQ[11]
GPIO[13]
—
B[2]
—
SIN
FAULT[0]
EIRQ[12]
SIUL
DSPI_2
—
FlexPWM_0
FlexPWM_0
SIUL
DSPI_2
FlexPWM_0
FlexPWM_0
SIUL
SIUL
DSPI_2
FlexPWM_0
FlexPWM_0
SIUL
SIUL
DSPI_2
FlexPWM_0
FlexPWM_0
SIUL
SIUL
—
FlexPWM_0
—
DSPI_2
FlexPWM_0
SIUL
I/O
O
—
O
I/O
I/O
O
I/O
I/O
I/O
O
O
I/O
O
O
O
I/O
—
O
—
Slow Medium 94 134
I
Slow Medium 81 118
I
Slow Medium 82 120
I
Slow Medium 83 122
I
Slow Medium 95 136
I
I
I
36/115 Doc ID 14723 Rev 8
Page 37

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
A[14] PCR[14]
A[15] PCR[15]
B[0] PCR[16]
B[1] PCR[17]
B[2] PCR[18]
B[3] PCR[19]
B[6] PCR[22]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
(1),
Functions Peripheral
GPIO[14]
TXD
ETC[4]
—
EIRQ[13]
GPIO[15]
—
ETC[5]
—
RXD
EIRQ[14]
Port B (16-bit)
GPIO[16]
TXD
ETC[2]
DEBUG[0]
EIRQ[15]
GPIO[17]
—
ETC[3]
DEBUG[1]
RXD
EIRQ[16]
GPIO[18]
TXD
—
DEBUG[2]
EIRQ[17]
GPIO[19]
—
—
DEBUG[3]
RXD
GPIO[22]
CLKOUT
CS2
—
EIRQ[18]
(3)
SIUL
Safety Port_0
eTimer_1
—
SIUL
SIUL
—
eTimer_1
—
Safety Port_0
SIUL
SIUL
FlexCAN_0
eTimer_1
SSCM
SIUL
SIUL
—
eTimer_1
SSCM
FlexCAN_0
SIUL
SIUL
LIN_0
—
SSCM
SIUL
SIUL
—
—
SSCM
LIN_0
SIUL
MC_CGL
DSPI_2
—
SIUL
I/O
direction
(4)
I/O
O
I/O
—
I
I/O
—
I/O
—
I
I
I/O
O
I/O
—
I
I/O
—
I/O
—
I
I
I/O
O
—
—
I
I/O
—
—
—
I
I/O
O
O
—
I
Pad speed
SRC = 0 SRC = 1
Slow Medium 99 143
Slow Medium 100 144
Slow Medium 76 109
Slow Medium 77 110
Slow Medium 79 114
Slow Medium 80 116
Slow Medium 96 138
(5)
Pin No.
100-pin
144-pin
Doc ID 14723 Rev 8 37/115
Page 38

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
B[7] PCR[23]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
—
(1),
Functions Peripheral
GPIO[23]
—
—
—
AN[0]
RXD
SIUL
—
—
—
ADC_0
LIN_0
Pad speed
SRC = 0 SRC = 1
(3)
I/O
direction
(4)
Input only — — 29 43
(5)
Pin No.
100-pin
144-pin
B[8] PCR[24]
B[9] PCR[25]
B[10] PCR[26]
B[11] PCR[27]
B[12] PCR[28]
ALT0
ALT1
ALT2
ALT3
—
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
GPIO[24]
—
—
—
AN[1]
ETC[5]
GPIO[25]
—
—
—
AN[11]
GPIO[26]
—
—
—
AN[12]
GPIO[27]
—
—
—
AN[13]
GPIO[28]
—
—
—
AN[14]
SIUL
—
—
—
ADC_0
eTimer_0
SIUL
—
—
—
ADC_0 / ADC_1
SIUL
—
—
—
ADC_0 / ADC_1
SIUL
—
—
—
ADC_0 / ADC_1
SIUL
—
—
—
ADC_0 / ADC_1
Input only — — 31 47
Input only — — 35 52
Input only — — 36 53
Input only — — 37 54
Input only — — 38 55
SIUL
—
—
—
ADC_1
LIN_1
B[13] PCR[29]
ALT0
ALT1
ALT2
ALT3
—
—
GPIO[29]
—
—
—
AN[0]
RXD
38/115 Doc ID 14723 Rev 8
Input only — — 42 60
Page 39

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
B[14] PCR[30]
B[15] PCR[31]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
—
—
ALT0
ALT1
ALT2
ALT3
—
—
(1),
Functions Peripheral
GPIO[30]
—
—
—
AN[1]
ETC[4]
EIRQ[19]
GPIO[31]
—
—
—
AN[2]
EIRQ[20]
Port C (16-bit)
SIUL
—
—
—
ADC_1
eTimer_0
SIUL
SIUL
—
—
—
ADC_1
SIUL
Pad speed
SRC = 0 SRC = 1
(3)
I/O
direction
(4)
Input only — — 44 64
Input only — — 43 62
(5)
Pin No.
100-pin
144-pin
C[0] PCR[32]
C[1] PCR[33]
C[2] PCR[34]
C[3] PCR[35]
C[4] PCR[36]
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
GPIO[32]
—
—
—
AN[3]
GPIO[33]
—
—
—
AN[2]
GPIO[34]
—
—
—
AN[3]
GPIO[35]
CS1
ETC[4]
TXD
EIRQ[21]
GPIO[36]
CS0
X[1]
DEBUG[4]
EIRQ[22]
SIUL
—
—
—
ADC_1
SIUL
—
—
—
ADC_0
SIUL
—
—
—
ADC_0
SIUL
DSPI_0
eTimer_1
LIN_1
SIUL
SIUL
DSPI_0
FlexPWM_0
SSCM
SIUL
Input only — — 45 66
Input only — — 28 41
Input only — — 30 45
I/O
O
I/O
Slow Medium 10 16
O
I
I/O
I/O
I/O
Slow Medium 5 11
—
I
Doc ID 14723 Rev 8 39/115
Page 40

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
C[5] PCR[37]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
—
(1),
Functions Peripheral
GPIO[37]
SCK
—
DEBUG[5]
FAULT[3]
EIRQ[23]
SIUL
DSPI_0
—
SSCM
FlexPWM_0
SIUL
(3)
I/O
direction
(4)
I/O
I/O
—
—
I
I
Pad speed
SRC = 0 SRC = 1
Slow Medium 7 13
(5)
Pin No.
100-pin
144-pin
C[6] PCR[38]
C[7] PCR[39]
C[8] PCR[40]
C[9] PCR[41]
C[10] PCR[42]
C[11] PCR[43]
C[12] PCR[44]
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
GPIO[38]
SOUT
B[1]
DEBUG[6]
EIRQ[24]
GPIO[39]
—
A[1]
DEBUG[7]
SIN
GPIO[40]
CS1
—
CS6
FAULT[2]
GPIO[41]
CS3
—
X[3]
FAULT[2]
GPIO[42]
CS2
—
A[3]
FAULT[1]
GPIO[43]
ETC[4]
CS2
CS0
GPIO[44]
ETC[5]
CS3
CS1
SIUL
DSPI_0
FlexPWM_0
SSCM
SIUL
SIUL
—
FlexPWM_0
SSCM
DSPI_0
SIUL
DSPI_1
—
DSPI_0
FlexPWM_0
SIUL
DSPI_2
—
FlexPWM_0
FlexPWM_0
SIUL
DSPI_2
—
FlexPWM_0
FlexPWM_0
SIUL
eTimer_0
DSPI_2
DSPI_3
SIUL
eTimer_0
DSPI_2
DSPI_3
I/O
I/O
O
—
I/O
—
O
—
I/O
O
—
O
I/O
O
—
I/O
I/O
O
—
O
I/O
I/O
O
I/O
I/O
I/O
O
O
Slow Medium 98 142
I
Slow Medium 9 15
I
Slow Medium 91 130
I
Slow Medium 84 123
I
Slow Medium 78 111
I
Slow Medium 55 80
Slow Medium 56 82
40/115 Doc ID 14723 Rev 8
Page 41

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
C[13] PCR[45]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
—
(1),
Functions Peripheral
GPIO[45]
ETC[1]
—
—
EXT_IN
EXT_SYNC
SIUL
eTimer_1
—
—
CTU_0
FlexPWM_0
(3)
I/O
direction
(4)
I/O
I/O
—
—
I
I
Pad speed
SRC = 0 SRC = 1
Slow Medium 71 101
(5)
Pin No.
100-pin
144-pin
C[14] PCR[46]
C[15] PCR[47]
D[0] PCR[48]
D[1] PCR[49]
D[2] PCR[50]
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
—
—
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
GPIO[46]
ETC[2]
EXT_TGR
—
GPIO[47]
CA_TR_EN
ETC[0]
A[1]
EXT_IN
EXT_SYNC
GPIO[48]
CA_TX
ETC[1]
B[1]
GPIO[49]
—
ETC[2]
EXT_TRG
CA_RX
GPIO[50]
—
ETC[3]
X[3]
CB_RX
SIUL
eTimer_1
CTU_0
—
SIUL
FlexRay_0
eTimer_1
FlexPWM_0
CTU_0
FlexPWM_0
Port D (16-bit)
SIUL
FlexRay_0
eTimer_1
FlexPWM_0
SIUL
—
eTimer_1
CTU_0
FlexRay_0
SIUL
—
eTimer_1
FlexPWM_0
FlexRay_0
I/O
I/O
O
—
I/O
O
I/O
O
I/O
O
I/O
O
I/O
—
I/O
O
I/O
—
I/O
I/O
Slow Medium 72 103
Slow Symmetric 85 124
I
I
Slow Symmetric 86 125
Slow Medium 3 3
I
Slow Medium 97 140
I
D[3] PCR[51]
D[4] PCR[52]
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
GPIO[51]
CB_TX
ETC[4]
A[3]
GPIO[52]
CB_TR_EN
ETC[5]
B[3]
SIUL
FlexRay_0
eTimer_1
FlexPWM_0
SIUL
FlexRay_0
eTimer_1
FlexPWM_0
I/O
O
I/O
O
I/O
O
I/O
O
Slow Symmetric 89 128
Slow Symmetric 90 129
Doc ID 14723 Rev 8 41/115
Page 42

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
D[5] PCR[53]
D[6] PCR[54]
D[7] PCR[55]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
(1),
Functions Peripheral
GPIO[53]
CS3
F[0]
SOUT
GPIO[54]
CS2
SCK
—
FAULT[1]
GPIO[55]
CS3
F[1]
CS4
SIN
SIUL
DSPI_0
FCU_0
DSPI_3
SIUL
DSPI_0
DSPI_3
—
FlexPWM_0
SIUL
DSPI_1
FCU_0
DSPI_0
DSPI_3
(3)
I/O
direction
(4)
I/O
O
O
O
I/O
O
I/O
—
I
I/O
O
O
O
I
Pad speed
SRC = 0 SRC = 1
Slow Medium 22 33
Slow Medium 23 34
Slow Medium 26 37
(5)
Pin No.
100-pin
144-pin
D[8] PCR[56]
D[9] PCR[57]
D[10] PCR[58]
D[11] PCR[59]
D[12] PCR[60]
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
—
GPIO[56]
CS2
—
CS5
FAULT[3]
GPIO[57]
X[0]
TXD
—
GPIO[58]
A[0]
CS0
—
GPIO[59]
B[0]
CS1
SCK
GPIO[60]
X[1]
—
—
RXD
SIUL
DSPI_1
—
DSPI_0
FlexPWM_0
SIUL
FlexPWM_0
LIN_1
—
SIUL
FlexPWM_0
DSPI_3
—
SIUL
FlexPWM_0
DSPI_3
DSPI_3
SIUL
FlexPWM_0
—
—
LIN_1
I/O
O
—
O
I/O
I/O
O
—
I/O
O
I/O
—
I/O
O
O
I/O
I/O
I/O
—
—
Slow Medium 21 32
I
Slow Medium 15 26
Slow Medium 53 76
Slow Medium 54 78
Slow Medium 70 99
I
D[13] PCR[61]
ALT0
ALT1
ALT2
ALT3
GPIO[61]
A[1]
CS2
SOUT
SIUL
FlexPWM_0
DSPI_3
DSPI_3
42/115 Doc ID 14723 Rev 8
I/O
O
O
O
Slow Medium 67 95
Page 43

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
D[14] PCR[62]
D[15] PCR[63]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
(1),
Functions Peripheral
GPIO[62]
B[1]
CS3
—
SIN
GPIO[63]
—
—
—
AN[4]
Port E(16-bit)
SIUL
FlexPWM_0
DSPI_3
—
DSPI_3
SIUL
—
—
—
ADC_1
Pad speed
SRC = 0 SRC = 1
(3)
I/O
direction
(4)
I/O
O
O
Slow Medium 73 105
—
I
Input only — — 41 58
(5)
Pin No.
100-pin
144-pin
E[0] PCR[64]
E[1] PCR[65]
E[2] PCR[66]
E[3] PCR[67]
E[4] PCR[68]
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
GPIO[64]
—
—
—
AN[5]
GPIO[65]
—
—
—
AN[4]
GPIO[66]
—
—
—
AN[5]
GPIO[67]
—
—
—
AN[6]
GPIO[68]
—
—
—
AN[7]
SIUL
—
—
—
ADC_1
SIUL
—
—
—
ADC_0
SIUL
—
—
—
ADC_0
SIUL
—
—
—
ADC_0
SIUL
—
—
—
ADC_0
Input only — — 46 68
Input only — — 27 39
Input only — — 32 49
Input only — — — 40
Input only — — — 42
Doc ID 14723 Rev 8 43/115
Page 44

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
E[5] PCR[69]
E[6] PCR[70]
E[7] PCR[71]
E[8] PCR[72]
E[9] PCR[73]
E[10] PCR[74]
E[11] PCR[75]
E[12] PCR[76]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
(1),
Functions Peripheral
GPIO[69]
—
—
—
AN[8]
GPIO[70]
—
—
—
AN[9]
GPIO[71]
—
—
—
AN[10]
GPIO[72]
—
—
—
AN[6]
GPIO[73]
—
—
—
AN[7]
GPIO[74]
—
—
—
AN[8]
GPIO[75]
—
—
—
AN[9]
GPIO[76]
—
—
—
AN[10]
SIUL
—
—
—
ADC_0
SIUL
—
—
—
ADC_0
SIUL
—
—
—
ADC_0
SIUL
—
—
—
ADC_1
SIUL
—
—
—
ADC_1
SIUL
—
—
—
ADC_1
SIUL
—
—
—
ADC_1
SIUL
—
—
—
ADC_1
Pad speed
SRC = 0 SRC = 1
(3)
I/O
direction
(4)
Input only — — — 44
Input only — — — 46
Input only — — — 48
Input only — — — 59
Input only — — — 61
Input only — — — 63
Input only — — — 65
Input only — — — 67
(5)
Pin No.
100-pin
144-pin
44/115 Doc ID 14723 Rev 8
Page 45

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
E[13] PCR[77]
E[14] PCR[78]
E[15] PCR[79]
F[0] PCR[80]
F[1] PCR[81]
F[2] PCR[82]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
(1),
Functions Peripheral
GPIO[77]
SCK
—
—
EIRQ[25]
GPIO[78]
SOUT
—
—
EIRQ[26]
GPIO[79]
—
—
—
SIN
EIRQ[27]
Port F (16-bit)
GPIO[80]
DBG0
CS3
—
EIRQ[28]
GPIO[81]
DBG1
CS2
—
EIRQ[29]
GPIO[82]
DBG2
CS1
—
SIUL
DSPI_3
—
—
SIUL
SIUL
DSPI_3
—
—
SIUL
SIUL
—
—
—
DSPI_3
SIUL
SIUL
FlexRay_0
DSPI_3
—
SIUL
SIUL
FlexRay_0
DSPI_3
—
SIUL
SIUL
FlexRay_0
DSPI_3
—
(3)
I/O
direction
(4)
I/O
I/O
—
—
I
I/O
O
—
—
I
I/O
—
—
—
I
I
I/O
O
O
—
I
I/O
O
O
—
I
I/O
O
O
—
Pad speed
SRC = 0 SRC = 1
Slow Medium — 117
Slow Medium — 119
Slow Medium — 121
Slow Medium — 133
Slow Medium — 135
Slow Medium — 137
(5)
Pin No.
100-pin
144-pin
F[3] PCR[83]
F[4] PCR[84]
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
GPIO[83]
DBG3
CS0
—
GPIO[84]
MDO[3]
—
—
SIUL
FlexRay_0
DSPI_3
—
SIUL
NEXUS_0
—
—
I/O
O
I/O
—
I/O
O
—
—
Slow Medium — 139
Slow Fast — 4
Doc ID 14723 Rev 8 45/115
Page 46

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
F[5] PCR[85]
F[6] PCR[86]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
(1),
Functions Peripheral
GPIO[85]
MDO[2]
—
—
GPIO[86]
MDO[1]
—
—
SIUL
NEXUS_0
—
—
SIUL
NEXUS_0
—
—
(3)
I/O
direction
(4)
I/O
O
—
—
I/O
O
—
—
Pad speed
SRC = 0 SRC = 1
Slow Fast — 5
Slow Fast — 8
(5)
Pin No.
100-pin
144-pin
F[7] PCR[87]
F[8] PCR[88]
F[9] PCR[89]
F[10] PCR[90]
F[11] PCR[91]
F[12] PCR[92]
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
GPIO[87]
MCKO
—
—
GPIO[88]
MSEO1
—
—
GPIO[89]
MSEO0
—
—
GPIO[90]
EVTO
—
—
GPIO[91]
—
—
—
EVTI
GPIO[92]
ETC[3]
—
—
SIUL
NEXUS_0
—
—
SIUL
NEXUS_0
—
—
SIUL
NEXUS_0
—
—
SIUL
NEXUS_0
—
—
SIUL
—
—
—
NEXUS_0
SIUL
eTimer_1
—
—
I/O
O
—
—
I/O
O
—
—
I/O
O
—
—
I/O
O
—
—
I/O
—
—
—
I/O
I/O
—
—
Slow Fast — 19
Slow Fast — 20
Slow Fast — 23
Slow Fast — 24
Slow Medium — 25
I
Slow Medium — 106
F[13] PCR[93]
ALT0
ALT1
ALT2
ALT3
GPIO[92]
ETC[4]
—
—
SIUL
eTimer_1
—
—
46/115 Doc ID 14723 Rev 8
I/O
I/O
—
—
Slow Medium — 112
Page 47

SPC560P44Lx, SPC560P50Lx Package pinouts and signal descriptions
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
F[14] PCR[94]
F[15] PCR[95]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
—
(1),
Functions Peripheral
GPIO[94]
TXD
—
—
GPIO[95]
—
—
—
RXD
Port G (12-bit)
SIUL
LIN_1
—
—
SIUL
—
—
—
LIN_1
(3)
I/O
direction
(4)
I/O
O
—
—
I/O
—
—
—
I
Pad speed
SRC = 0 SRC = 1
Slow Medium — 115
Slow Medium — 113
(5)
Pin No.
100-pin
144-pin
G[0] PCR[96]
G[1] PCR[97]
G[2] PCR[98]
G[3] PCR[99]
G[4] PCR[100]
G[5] PCR[101]
G[6] PCR[102]
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
GPIO[96]
F[0]
—
—
EIRQ[30]
GPIO[97]
F[1]
—
—
EIRQ[31]
GPIO[98]
X[2]
—
—
GPIO[99]
A[2]
—
—
GPIO[100]
B[2]
—
—
GPIO[101]
X[3]
—
—
GPIO[102]
A[3]
—
—
SIUL
FCU_0
—
—
SIUL
SIUL
FCU_0
—
—
SIUL
SIUL
FlexPWM_0
—
—
SIUL
FlexPWM_0
—
—
SIUL
FlexPWM_0
—
—
SIUL
FlexPWM_0
—
—
SIUL
FlexPWM_0
—
—
I/O
O
—
—
I/O
O
—
—
I/O
I/O
—
—
I/O
O
—
—
I/O
O
—
—
I/O
I/O
—
—
I/O
O
—
—
Slow Medium — 38
I
Slow Medium — 141
I
Slow Medium — 102
Slow Medium — 104
Slow Medium — 100
Slow Medium — 85
Slow Medium — 98
Doc ID 14723 Rev 8 47/115
Page 48

Package pinouts and signal descriptions SPC560P44Lx, SPC560P50Lx
Table 7. Pin muxing (continued)
Port
pin
Pad
configuration
register (PCR)
G[7] PCR[103]
G[8] PCR[104]
G[9] PCR[105]
Alternate
function
(2)
ALT0
ALT1
ALT2
ALT3
ALT0
ALT1
ALT2
ALT3
—
ALT0
ALT1
ALT2
ALT3
—
(1),
Functions Peripheral
GPIO[103]
B[3]
—
—
GPIO[104]
—
—
—
FAULT[0]
GPIO[105]
—
—
—
FAULT[1]
SIUL
FlexPWM_0
—
—
SIUL
—
—
—
FlexPWM_0
SIUL
—
—
—
FlexPWM_0
(3)
I/O
direction
(4)
I/O
O
—
—
I/O
—
—
—
I
I/O
—
—
—
I
Pad speed
SRC = 0 SRC = 1
Slow Medium — 83
Slow Medium — 81
Slow Medium — 79
(5)
Pin No.
100-pin
144-pin
ALT0
ALT1
G[10] PCR[106]
ALT2
ALT3
—
ALT0
ALT1
G[11] PCR[107]
ALT2
ALT3
—
1. ALT0 is the primary (default) function for each port after reset.
2. Alternate functions are chosen by setting the values of the PCR[PA] bitfields inside the SIU module.
PCR[PA] = 00 ALT0; PCR[PA] = 01 ALT1; PCR[PA] = 10 ALT2; PCR[PA] = 11 ALT3. This is intended to select
the output functions; to use one of the input-only functions, the PCR[IBE] bit must be written to ‘1’, regardless of the values
selected in the PCR[PA] bitfields. For this reason, the value corresponding to an input only function is reported as “—”.
3. Module included on the MCU.
4. Multiple inputs are routed to all respective modules internally. The input of some modules must be configured by setting the
values of the PSMI[PADSELx] bitfields inside the SIUL module.
5. Programmable via the SRC (Slew Rate Control) bits in the respective Pad Configuration Register.
6. Weak pull down during reset.
GPIO[106]
—
—
—
FAULT[2]
GPIO[107]
—
—
—
FAULT[3]
SIUL
—
—
—
FlexPWM_0
SIUL
—
—
—
FlexPWM_0
I/O
—
—
—
I/O
—
—
—
Slow Medium — 77
I
Slow Medium — 75
I
48/115 Doc ID 14723 Rev 8
Page 49

SPC560P44Lx, SPC560P50Lx Electrical characteristics
3 Electrical characteristics
3.1 Introduction
This section contains device electrical characteristics as well as temperature and power
considerations.
This microcontroller contains input protection against damage due to high static voltages.
However, it is advisable to take precautions to avoid application of any voltage higher than
the specified maximum rated voltages.
To enhance reliability, unused inputs can be driven to an appropriate logic voltage level
(V
or VSS). This can be done by the internal pull-up or pull-down resistors, which are
DD
provided by the device for most general purpose pins.
The following tables provide the device characteristics and its demands on the system.
In the tables where the device logic provides signals with their respective timing
characteristics, the symbol “CC” for Controller Characteristics is included in the Symbol
column.
In the tables where the external system must provide signals with their respective timing
characteristics to the device, the symbol “SR” for System Requirement is included in the
Symbol column.
Caution: All of the following parameter values can vary depending on the application and must be
confirmed during silicon characterization or silicon reliability trial.
3.2 Parameter classification
The electrical parameters are guaranteed by various methods. To give the customer a
better understanding, the classifications listed in Ta b le 8 are used and the parameters are
tagged accordingly in the tables where appropriate.
Table 8. Parameter classifications
Classification tag Tag description
Note: The classification is shown in the column labeled “C” in the parameter tables where
P Those parameters are guaranteed during production testing on each individual device.
C
T
D Those parameters are derived mainly from simulations.
Those parameters are achieved by the design characterization by measuring a statistically
relevant sample size across process variations.
Those parameters are achieved by design characterization on a small sample size from typical
devices under typical conditions unless otherwise noted. All values shown in the typical
column are within this category.
appropriate.
Doc ID 14723 Rev 8 49/115
Page 50

Electrical characteristics SPC560P44Lx, SPC560P50Lx
3.3 Absolute maximum ratings
Table 9. Absolute maximum ratings
(1)
Symbol Parameter Conditions
V
SS
V
DD_HV_IOx
V
SS_HV_IOx
SR Device ground — 0 0 V
(3)
3.3 V / 5.0 V input/output supply
SR
voltage with respect to ground (V
Input/output ground voltage with
SR
respect to ground (V
SS
)
SS
)
3.3 V / 5.0 V code and data flash
V
DD_HV_FL
SR
supply voltage with respect to ground
(VSS)
Code and data flash ground with
V
SS_HV_FL
SR
respect to ground (V
SS
)
3.3 V / 5.0 V crystal oscillator
SR
V
DD_HV_OSC
amplifier supply voltage with respect
to ground (VSS)
3.3 V / 5.0 V crystal oscillator
V
SS_HV_OSC
SR
amplifier reference voltage with
respect to ground (VSS)
Val ue
Min Max
— –0.3 6.0 V
— –0.1 0.1 V
—
Relative to
V
DD_HV_IOx
–0.3
V
DD_HV_IOx
— –0.1 0.1 V
—
Relative to
V
DD_HV_IOx
–0.3
V
DD_HV_IOx
— –0.1 0.1 V
6.0
6.0
(2)
+ 0.3
+ 0.3
Unit
V
V
V
DD_HV_REG
V
DD_HV_ADC0
(4)
V
SS_HV_ADC0
V
DD_HV_ADC1
4)
V
SS_HV_ADC1
TV
DD
V
IN
3.3 V / 5.0 V voltage regulator supply
SR
voltage with respect to ground (V
3.3 V / 5.0 V ADC_0 supply and high
SR
reference voltage with respect to
ground (VSS)
ADC_0 ground and low reference
SR
voltage with respect to ground (V
3.3 V / 5.0 V ADC_0 supply and high
(
SR
reference voltage with respect to
ground (VSS)
ADC_1 ground and low reference
SR
voltage with respect to ground (V
Slope characteristics on all VDD
SR
during power up
(5)
with respect to
ground (VSS)
Voltage on any pin with respect to
SR
ground (V
SS_HV_IOx
) with respect to
ground (VSS)
SS
SS
SS
)
)
)
—
Relative to
V
DD_HV_IOx
V
DD_HV_REG
<
–0.3
V
DD_HV_IOx
V
DD_HV_REG
2.7 V
–0.3
V
DD_HV_REG
>
2.7 V
— –0.1 0.1 V
V
DD_HV_REG
<
V
DD_HV_REG
2.7 V
–0.3
V
DD_HV_REG
>
2.7 V
— –0.1 0.1 V
—3.0
500 x 10
(0.5 [V/µs])
—
Relative to
V
DD_HV_IOx
–0.3
V
DD_HV_IOx
6.0
0.3
6.0
0.3
6.0
6.0
+ 0.3
+
+
3
+0.3
V
V
V
V/s
V
50/115 Doc ID 14723 Rev 8
Page 51

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 9. Absolute maximum ratings
(1)
(continued)
Val ue
Symbol Parameter Conditions
Min Max
V
DD_HV_REG
V
INAN0
ADC0 and shared ADC0/1 analog
SR
input voltage
(6)
2.7 V
V
DD_HV_REG
2.7 V
V
DD_HV_REG
V
INAN1
SR ADC1 analog input voltage
(7)
2.7 V
V
DD_HV_REG
2.7 V
I
INJPAD
I
INJSUM
I
VDD_LV
T
STG
T
J
1. Functional operating conditions are given in the DC electrical characteristics. Absolute maximum ratings are stress ratings
only, and functional operation at the maxima is not guaranteed. Stress beyond the listed maxima may affect device
reliability or cause permanent damage to the device.
2. Absolute maximum voltages are currently maximum burn-in voltages. Absolute maximum specifications for device stress
have not yet been determined.
3. The difference between each couple of voltage supplies must be less than 300 mV,
|V
DD_HV_IOy
4. The difference between ADC voltage supplies must be less than 100 mV, |V
5. Guaranteed by device validation
6. Not allowed to refer this voltage to V
7. Not allowed to refer this voltage to V
Injected input current on any pin
SR
during overload condition
Absolute sum of all injected input
SR
currents during overload condition
Low voltage static current sink
SR
through V
DD_LV
SR Storage temperature — –55 150 °C
SR Junction temperature under bias — –40 150 °C
– V
DD_HV_IOx
| < 300 mV.
DD_HV_ADV1
DD_HV_ADV0
, V
SS_HV_ADV1
, V
SS_HV_ADV0
>
V
SS_HV_ADV0
V
0.3
<
>
V
V
SS_HV_ADV0
SS_HV_ADV1
V
V
0.3
<
V
SS_HV_ADV1
V
— –10 10 mA
— –50 50 mA
— — 155 mA
DD_HV_ADC1
– V
DD_HV_ADC0
(2)
DD_HV_ADV0
0.3
DD_HV_ADV0
DD_HV_ADV1
0.3
DD_HV_ADV1
| < 100 mV.
+
+
Unit
V
V
V
V
Figure 5 shows the constraints of the different power supplies.
Doc ID 14723 Rev 8 51/115
Page 52

Electrical characteristics SPC560P44Lx, SPC560P50Lx
VDD_HV_xxx
VDD_HV_IOx
–0.3 V
6.0 V
–0.3 V
6.0 V
VDD_HV_ADCx
6.0 V
VDD_HV_REG
–0.3 V
2.7 V
–0.3 V
6.0 V
Figure 5. Power supplies constraints (–0.3 V V
DD_HV_IOx
6.0 V)
The SPC560P44Lx, SPC560P50Lx supply architecture allows of having ADC supply
managed independently from standard V
supply. Figure 6 shows the constraints of the
DD_HV
ADC power supply.
Figure 6. Independent ADC supply (–0.3 V V
52/115 Doc ID 14723 Rev 8
DD_HV_REG
6.0 V)
Page 53

SPC560P44Lx, SPC560P50Lx Electrical characteristics
3.4 Recommended operating conditions
Table 10. Recommended operating conditions (5.0 V)
Symbol Parameter Conditions
V
SS
V
DD_HV_IOx
V
SS_HV_IOx
SR Device ground — 0 0 V
(2)
5.0 V input/output supply
SR
voltage
—4.5 5.5V
SR Input/output ground voltage — 0 0 V
—4.5 5.5
5.0 V code and data flash
V
DD_HV_FL
V
SS_HV_FL
SR
supply voltage
Relative to
V
DD_HV_IOx
SR Code and data flash ground — 0 0 V
—4.5 5.5
5.0 V crystal oscillator amplifier
V
DD_HV_OSC
V
SS_HV_OSC
SR
supply voltage
5.0 V crystal oscillator amplifier
SR
reference voltage
Relative to
V
DD_HV_IOx
—0 0V
—4.5 5.5
V
DD_HV_REG
5.0 V voltage regulator supply
SR
voltage
Relative to
V
DD_HV_IOx
—4.5 5.5
V
DD_HV_ADC0
V
SS_HV_ADC0
(3)
5.0 V ADC_0 supply and high
SR
reference voltage
ADC_0 ground and low
SR
reference voltage
Relative to
V
DD_HV_REG
—0 0V
—4.5 5.5
V
DD_HV_ADC1
V
SS_HV_ADC1
V
DD_LV_REGCOR
(5)
(3)
(4),
5.0 V ADC_1 supply and high
SR
reference voltage
ADC_1 ground and low
SR
reference voltage
Relative to
V
DD_HV_REG
—0 0V
CC Internal supply voltage — — — V
Min Max
V
DD_HV_IOx
V
DD_HV_IOx
V
DD_HV_IOx
V
DD_HV_REG
V
DD_HV_REG
– 0.1 V
– 0.1 V
– 0.1 V
– 0.1 —
– 0.1 —
Value
DD_HV_IOx
DD_HV_IOx
DD_HV_IOx
(1)
Unit
V
+0.1
V
+0.1
V
+0.1
V
V
V
SS_LV_REGCOR
V
DD_LV_CORx
V
SS_LV_CORx
T
1. Parametric figures can be out of specification when voltage drops below 4.5 V, however, guaranteeing the full functionality.
In particular, ADC electrical characteristics and I/Os DC electrical specification may not be guaranteed.
2. The difference between each couple of voltage supplies must be less than 100 mV, |V
(4)
SR Internal reference voltage — 0 0 V
(4),(5)
CC Internal supply voltage — — — V
(4)
SR Internal reference voltage — 0 0 V
f
= 64 MHz –40 105
Ambient temperature under
A
SR
bias
CPU
= 60 MHz –40 125
f
CPU
DD_HV_IOy
– V
DD_HV_IOx
| < 100 mV.
Doc ID 14723 Rev 8 53/115
°C
Page 54

Electrical characteristics SPC560P44Lx, SPC560P50Lx
3. The difference between ADC voltage supplies must be less than 100 mV, |V
4. To be connected to emitter of external NPN. Low voltage supplies are not under user control—they are produced by an onchip voltage regulator—but for the device to function properly the low voltage grounds (V
voltage grounds (V
emitter.
5. The low voltage supplies (V
V
DD_LV_COR1
and V
SS_HV_xxx
DD_LV_COR2
voltage supply to the data flash module. Similarly, V
V
DD_LV_REGCOR
Table 11. Recommended operating conditions (3.3 V)
and V
) and the low voltage supply pins (V
DD_LV_xxx
) are not all independent.
are shorted internally via double bonding connections with lines that provide the low
DD_LV_REGCORx
are physically shorted internally, as are V
DD_LV_xxx
SS_LV_COR1
DD_HV_ADC1
) must be connected to the external ballast
and V
V
SS_LV_xxx
SS_LV_COR2
SS_LV_REGCOR
DD_HV_ADC0
| < 100 mV.
) must be shorted to high
are internally shorted.
and V
SS_LV_CORx
Val ue
Symbol Parameter Conditions
V
SS
V
DD_HV_IOx
V
SS_HV_IOx
SR Device ground — 0 0 V
(2)
3.3 V input/output supply
SR
voltage
SR Input/output ground voltage — 0 0 V
Min Max
—3.0 3.6V
(1)
—3.0 3.6
3.3 V code and data flash
V
DD_HV_FL
V
SS_HV_FL
SR
supply voltage
Relative to
V
DD_HV_IOx
V
DD_HV_IOx
– 0.1 V
DD_HV_IOx
+0.1
SR Code and data flash ground — 0 0 V
—3.0 3.6
V
DD_HV_OSC
V
SS_HV_OSC
3.3 V crystal oscillator amplifier
SR
supply voltage
3.3 V crystal oscillator amplifier
SR
reference voltage
Relative to
V
DD_HV_IOx
V
DD_HV_IOx
– 0.1 V
DD_HV_IOx
+0.1
—0 0V
.
Unit
V
V
V
DD_HV_REG
3.3 V voltage regulator supply
SR
voltage
Relative to
V
DD_HV_IOx
—3.0 5.5
—3.0 3.6
V
DD_HV_ADC0
V
SS_HV_ADC0
(3)
3.3 V ADC_0 supply and high
SR
reference voltage
ADC_0 ground and low
SR
reference voltage
Relative to
V
DD_HV_REG
—0 0V
—3.0 5.5
V
DD_HV_ADC1
V
SS_HV_ADC1
V
DD_LV_REGCOR
(5)
V
SS_LV_REGCOR
V
DD_LV_CORx
(3)
(4),
(4)
(4),(5)
3.3 V ADC_1 supply and high
SR
reference voltage
ADC_1 ground and low
SR
reference voltage
Relative to
V
DD_HV_REG
—0 0V
CC Internal supply voltage — — — V
SR Internal reference voltage — 0 0 V
CC Internal supply voltage — — — V
54/115 Doc ID 14723 Rev 8
V
DD_HV_IOx
V
DD_HV_REG
V
DD_HV_REG
– 0.1 V
DD_HV_IOx
– 0.1 5.5
– 0.1 5.5
+0.1
V
V
V
Page 55

SPC560P44Lx, SPC560P50Lx Electrical characteristics
VDD_HV_xxx
VDD_HV_IOx
3.0 V
5.5 V
3.0 V
5.5 V
3.3 V
3.3 V
Note: IO AC and DC characteristics are guaranteed only in the range of 3.0–3.6 V when
PAD3V5V is low, and in the range of 4.5–5.5 V when PAD3V5V is high.
Table 11. Recommended operating conditions (3.3 V) (continued)
Val ue
Symbol Parameter Conditions
V
SS_LV_CORx
(4)
SR Internal reference voltage — 0 0 V
T
A
Ambient temperature under
SR
bias
f
f
Min Max
= 64 MHz –40 105
CPU
= 60 MHz –40 125
CPU
(1)
1. Parametric figures can be out of specification when voltage drops below 4.5 V, however, guaranteeing the full functionality.
In particular, ADC electrical characteristics and I/Os DC electrical specification may not be guaranteed.
2. The difference between each couple of voltage supplies must be less than 100 mV, |V
3. The difference between each couple of voltage supplies must be less than 100 mV, |V
mV. As long as that condition is met, ADC_0 and ADC_1 can be operated at 5 V with the rest of the device operating at 3.3
V.
4. To be connected to emitter of external NPN. Low voltage supplies are not under user control—they are produced by an onchip voltage regulator—but for the device to function properly the low voltage grounds (V
voltage grounds (V
emitter.
SS_HV_xxx
5. The low voltage supplies (V
V
DD_LV_COR1
and V
DD_LV_COR2
voltage supply to the data flash module. Similarly, V
V
DD_LV_REGCOR
and V
) and the low voltage supply pins (V
DD_LV_xxx
) are not all independent.
are shorted internally via double bonding connections with lines that provide the low
DD_LV_REGCORx
are physically shorted internally, as are V
DD_LV_xxx
SS_LV_COR1
) must be connected to the external ballast
and V
DD_HV_IOy
DD_HV_ADC1
SS_LV_COR2
SS_LV_REGCOR
– V
DD_HV_IOx
– V
SS_LV_xxx
) must be shorted to high
are internally shorted.
| < 100 mV.
DD_HV_ADC0
and V
SS_LV_CORx
Unit
°C
| < 100
.
Figure 7 shows the constraints of the different power supplies.
Figure 7. Power supplies constraints (3.0 V V
DD_HV_IOx
Doc ID 14723 Rev 8 55/115
5.5 V)
Page 56

Electrical characteristics SPC560P44Lx, SPC560P50Lx
5.5 V
3.0 V
VDD_HV_REG
3.0 V
5.5 V
VDD_HV_ADCx
The SPC560P44Lx, SPC560P50Lx supply architecture allows the ADC supply to be
managed independently from the standard V
supply. Figure 8 shows the constraints of
DD_HV
the ADC power supply.
Figure 8. Independent ADC supply (3.0 V V
3.5 Thermal characteristics
3.5.1 Package thermal characteristics
Table 12. Thermal characteristics for 144-pin LQFP
Symbol Parameter Conditions
Thermal resistance junction-to-ambient,
JA
natural convection
Thermal resistance junction-to-board
JB
Thermal resistance junction-to-case
(3)
(top)
Junction-to-board, natural convection
JB
Junction-to-case, natural convection
JC
(1)
R
R
R
JCtop
1. Junction-to-ambient thermal resistance determined per JEDEC JESD51-7. Thermal test board meets
JEDEC specification for this package.
(5)
DD_HV_REG
5.5 V)
Single layer board—1s 54.2
Four layer board—2s2p 44.4
(2)
Four layer board—2s2p 29.9
Single layer board—1s 9.3
(4)
Operating conditions 30.2
Operating conditions 0.8
Typical
value
Unit
°C/
W
°C/
W
°C/
W
°C/
W
°C/
W
°C/
W
56/115 Doc ID 14723 Rev 8
Page 57

SPC560P44Lx, SPC560P50Lx Electrical characteristics
2. Junction-to-board thermal resistance determined per JEDEC JESD51-8. Thermal test board meets JEDEC
specification for the specified package.
3. Junction-to-case at the top of the package determined using MIL-STD 883 Method 1012.1. The cold plate
temperature is used for the case temperature. Reported value includes the thermal resistance of the
interface layer.
4. Thermal characterization parameter indicating the temperature difference between the board and the
junction temperature per JEDEC JESD51-2. When Greek letters are not available, the thermal
characterization parameter is written as Psi-JB.
5. Thermal characterization parameter indicating the temperature difference between the case and the
junction temperature per JEDEC JESD51-2. When Greek letters are not available, the thermal
characterization parameter is written as Psi-JC.
Table 13. Thermal characteristics for 100-pin LQFP
Symbol Parameter Conditions Typical value Unit
R
Thermal resistance junction-to-ambient,
JA
natural convection
(1)
Four layer board—2s2p 35.3
Single layer board—1s 47.3
(5)
(2)
Four layer board—2s2p 19.1
Single layer board—1s 9.7
(4)
Operating conditions 19.1
Operating conditions 0.8
R
R
JCtop
1. Junction-to-ambient thermal resistance determined per JEDEC JESD51-7. Thermal test board meets
JEDEC specification for this package.
2. Junction-to-board thermal resistance determined per JEDEC JESD51-8. Thermal test board meets JEDEC
specification for the specified package.
3. Junction-to-case at the top of the package determined using MIL-STD 883 Method 1012.1. The cold plate
temperature is used for the case temperature. Reported value includes the thermal resistance of the
interface layer.
4. Thermal characterization parameter indicating the temperature difference between the board and the
junction temperature per JEDEC JESD51-2. When Greek letters are not available, the thermal
characterization parameter is written as Psi-JB.
5. Thermal characterization parameter indicating the temperature difference between the case and the
junction temperature per JEDEC JESD51-2. When Greek letters are not available, the thermal
characterization parameter is written as Psi-JC.
Thermal resistance junction-to-board
JB
Thermal resistance junction-to-case
(3)
(top)
Junction-to-board, natural convection
JB
Junction-to-case, natural convection
JC
°C/
W
°C/
W
°C/
W
°C/
W
°C/
W
°C/
W
3.5.2 General notes for specifications at maximum junction temperature
An estimation of the chip junction temperature, TJ, can be obtained from Equation 1:
Equation 1 T
where:
T
A
R
JA
P
D
The junction to ambient thermal resistance is an industry standard value that provides a
quick and easy estimation of thermal performance. Unfortunately, there are two values in
= TA + (R
J
JA
* PD)
= ambient temperature for the package (°C)
= junction to ambient thermal resistance (°C/W)
= power dissipation in the package (W)
Doc ID 14723 Rev 8 57/115
Page 58

Electrical characteristics SPC560P44Lx, SPC560P50Lx
common usage: the value determined on a single layer board and the value obtained on a
board with two planes. For packages such as the PBGA, these values can be different by a
factor of two. Which value is closer to the application depends on the power dissipated by
other components on the board. The value obtained on a single layer board is appropriate
for the tightly packed printed circuit board. The value obtained on the board with the internal
planes is usually appropriate if the board has low power dissipation and the components are
well separated.
When a heat sink is used, the thermal resistance is expressed in Equation 2 as the sum of a
junction to case thermal resistance and a case to ambient thermal resistance:
Equation 2 R
JA
= R
JC
+ R
CA
where:
R
= junction to ambient thermal resistance (°C/W)
JA
R
JC
R
CA
R
is device related and cannot be influenced by the user. The user controls the thermal
JC
environment to change the case to ambient thermal resistance, R
= junction to case thermal resistance (°C/W)
= case to ambient thermal resistance (°C/W)
. For instance, the user
CA
can change the size of the heat sink, the air flow around the device, the interface material,
the mounting arrangement on printed circuit board, or change the thermal dissipation on the
printed circuit board surrounding the device.
To determine the junction temperature of the device in the application when heat sinks are
not used, the Thermal Characterization Parameter (
) can be used to determine the
JT
junction temperature with a measurement of the temperature at the top center of the
package case using Equation 3:
Equation 3 T
= TT + (JT x PD)
J
where:
T
T
JT
P
D
= thermocouple temperature on top of the package (°C)
= thermal characterization parameter (°C/W)
= power dissipation in the package (W)
The thermal characterization parameter is measured per JESD51-2 specification using a 40
gauge type T thermocouple epoxied to the top center of the package case. The
thermocouple should be positioned so that the thermocouple junction rests on the package.
A small amount of epoxy is placed over the thermocouple junction and over about 1 mm of
wire extending from the junction. The thermocouple wire is placed flat against the package
case to avoid measurement errors caused by cooling effects of the thermocouple wire.
References:
Semiconductor Equipment and Materials International
3081 Zanker Road
San Jose, CA 95134 U.S.A.
(408) 943-6900
MIL-SPEC and EIA/JESD (JEDEC) specifications are available from Global
Engineering Documents at 800-854-7179 or 303-397-7956.
JEDEC specifications are available on the WEB at http://www.jedec.org.
58/115 Doc ID 14723 Rev 8
Page 59

SPC560P44Lx, SPC560P50Lx Electrical characteristics
1. C.E. Triplett and B. Joiner, An Experimental Characterization of a 272 PBGA Within an
Automotive Engine Controller Module, Proceedings of SemiTherm, San Diego, 1998,
pp. 47–54.
2. G. Kromann, S. Shidore, and S. Addison, Thermal Modeling of a PBGA for Air-Cooled
Applications, Electronic Packaging and Production, pp. 53–58, March 1998.
3. B. Joiner and V. Adams, Measurement and Simulation of Junction to Board Thermal
Resistance and Its Application in Thermal Modeling, Proceedings of SemiTherm, San
Diego, 1999, pp. 212–220.
3.6 Electromagnetic interference (EMI) characteristics
Table 14. EMI testing specifications
Symbol Parameter Conditions Clocks Frequency
V
Radiated emissions
EME
Device configuration, test
conditions and EM testing per
standard IEC61967-2
Supply voltage = 5 V DC
Ambient temperature = 25 °C
Worst-case orientation
8MHz
f
OSC
64 MHz
f
CPU
No PLL frequency
modulation
8MHz
f
OSC
64 MHz
f
CPU
1% PLL frequency
modulation
150 kHz–150 MHz 16
150–1000 MHz 15
IEC Level M —
150 kHz–150 MHz 15
150–1000 MHz 14
IEC Level M —
3.7 Electrostatic discharge (ESD) characteristics
Table 15. ESD ratings
Symbol Parameter Conditions Value Unit
V
ESD(HBM)
V
ESD(CDM)
S
R
S
R
(1),(2)
Electrostatic discharge (Human Body Model) — 2000 V
750 (corners)
Electrostatic discharge (Charged Device Model) —
500 (other)
Level
(Max)
Unit
dBµV
dBµV
V
1. All ESD testing is in conformity with CDF-AEC-Q100 Stress Test Qualification for Automotive Grade Integrated Circuits.
2. A device will be defined as a failure if after exposure to ESD pulses the device no longer meets the device specification
requirements. Complete DC parametric and functional testing shall be performed per applicable device specification at
room temperature followed by hot temperature, unless specified otherwise in the device specification.
3.8 Power management electrical characteristics
3.8.1 Voltage regulator electrical characteristics
The internal voltage regulator requires an external NPN ballast to be connected as shown in
Figure 9. Ta bl e 1 6 contains all approved NPN ballast components. Capacitances should be
placed on the board as near as possible to the associated pins. Care should also be taken
Doc ID 14723 Rev 8 59/115
Page 60

Electrical characteristics SPC560P44Lx, SPC560P50Lx
BCTRL
VDD_LV_COR
C
DEC3
C
DEC2
C
DEC1
VDD_HV_REG
BJT
(1)
SPC560P44Lx,
1. Refer to Table 16.
R
B
to limit the serial inductance of the V
L
, see Ta bl e 1 7.
Reg
DD_HV_REG
, BCTRL and V
DD_LV_CORx
pins to less than
Note: The voltage regulator output cannot be used to drive external circuits. Output pins are used
only for decoupling capacitances.
V
DD_LV_COR
not possible to provide V
must be generated using internal regulator and external NPN transistor. It is
DD_LV_COR
through external regulator.
For the SPC560P44Lx, SPC560P50Lx microcontroller, capacitors, with total values not
below C
ballast transistor emitter. 4 capacitors, with total values not below C
close to microcontroller pins between each V
V
DD_LV_REGCOR/VSS_LV_REGCOR
C
DEC3
, should be placed between V
DEC1
pair . Additionally, capacitors with total values not below
, should be placed between the V
DD_LV_CORx/VSS_LV_CORx
DD_LV_CORx/VSS_LV_CORx
DD_HV_REG/VSS_HV_REG
close to external
, should be placed
DEC2
supply pairs and the
pins close to ballast
collector. Capacitors values have to take into account capacitor accuracy, aging and
variation versus temperature.
All reported information are valid for voltage and temperature ranges described in
recommended operating condition, Ta bl e 1 0 and Ta b le 1 1 .
60/115 Doc ID 14723 Rev 8
Figure 9. Configuration with resistor on base
Table 16. Approved NPN ballast components (configuration with resistor on base)
Part Manufacturer Approved derivatives
BCP68
BCX68 Infineon BCX68-10;BCX68-16;BCX68-25
ON Semi BCP68
NXP BCP68-25
Infineon BCP68-25
(1)
Page 61

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 16. Approved NPN ballast components (configuration with resistor on base)
Part Manufacturer Approved derivatives
BC868 NXP BC868
(1)
BC817
Infineon BC817-16;BC817-25;BC817SU;
NXP BC817-16;BC817-25
ST BCP56-16
Infineon BCP56-10;BCP56-16
BCP56
ON Semi BCP56-10
NXP BCP56-10;BCP56-16
1. For automotive applications please check with the appropriate transistor vendor for automotive grade
certification
Table 17. Voltage regulator electrical characteristics (configuration with resistor on base)
Value
Symbol C Parameter Conditions
Min Typ Max
Output voltage under
V
DD_LV_REGCOR
CC P
maximum load run supply
Post-trimming 1.15 — 1.32 V
current configuration
R
B
SR —
External resistance on bipolar
junction transistor (BJT) base
—18—22k
BJT from Ta bl e 1 6 . 3
C
DEC1
SR —
External decoupling/stability
ceramic capacitor
capacitances (i.e. X7R or
X8R capacitors) with nominal
value of 10 µF
BJT BC817, one capacitance
of 22 µF
19.5 30 — µF
14.3 22 µF
Unit
R
C
DEC2
C
DEC3
L
REG
Reg
SR —
SR —
SR —
SR —
Resulting ESR of all three
capacitors of C
DEC1
Resulting ESR of the unique
capacitor C
DEC1
External decoupling/stability
ceramic capacitor
External decoupling/stability
ceramic capacitor on
V
DD_HV_REG
Resulting ESL of V
BCTRL and V
DD_HV_REG
DD_LV_CORx
pins
Doc ID 14723 Rev 8 61/115
BJT from Ta bl e 1 6 . 3x10 µF.
Absolute maximum value
between 100 kHz and
——50m
10 MHz
BJT BC817, 1x 22 µF.
Absolute maximum value
between 100 kHz and
10 — 40 m
10 MHz
4 capacitances (i.e. X7R or
X8R capacitors) with nominal
1200 1760 — nF
value of 440 nF
3 capacitances (i.e. X7R or
X8R capacitors) with nominal
value of 10 µF; C
DEC3
has to
19.5 30 — µF
be equal or greater than
C
DEC1
,
———15nH
Page 62

Electrical characteristics SPC560P44Lx, SPC560P50Lx
BCTRL
VDD_LV_COR
C
DEC3
C
DEC2
C
DEC1
VDD_HV_REG
SPC560P44Lx,
BCP56,
BCP68,
BCX68,
BC817
Figure 10. Configuration without resistor on base
Table 18. Voltage regulator electrical characteristics (configuration without resistor on base)
Symbol C Parameter Conditions
Output voltage under
V
DD_LV_REGCOR
CC P
maximum load run supply
Post-trimming 1.15 — 1.32 V
current configuration
C
DEC1
R
C
DEC2
REG
SR —
SR —
SR —
External decoupling/stability
ceramic capacitor
Resulting ESR of all four
C
DEC1
External decoupling/stability
ceramic capacitor
4 capacitances 40 56 — µF
Absolute maximum value
between 100 kHz and
10 MHz
4 capacitances of 100 nF
each
External decoupling/stability
C
DEC3
SR —
ceramic capacitor on
VDD_HV_REG
L
Reg
SR —
Resulting ESL of V
BCTRL and V
DD_LV_CORx
DD_HV_REG
,
———15nH
pins
Value
Unit
Min Typ Max
——45m
400 — — nF
—40——µF
62/115 Doc ID 14723 Rev 8
Page 63

SPC560P44Lx, SPC560P50Lx Electrical characteristics
3.8.2 Voltage monitor electrical characteristics
The device implements a Power-on Reset module to ensure correct power-up initialization,
as well as three low voltage detectors to monitor the V
device is supplied:
● POR monitors V
during the power-up phase to ensure device is maintained in a safe
DD
reset state
● LVDHV3 monitors V
● LVDHV5 monitors V
● LVDLVCOR monitors low voltage digital power domain
Table 19. Low voltage monitor electrical characteristics
to ensure device reset below minimum functional supply
DD
when application uses device in the 5.0 V ± 10 % range
DD
and the V
DD
voltage while
DD_LV
Symbol C Parameter
V
PORH
V
PORUP
V
REGLVDMOK_H
V
REGLVDMOK_L
V
FLLVDMOK_H
V
FLLVDMOK_L
V
IOLVDMOK_H
V
IOLVDMOK_L
V
IOLVDM5OK_H
V
IOLVDM5OK_L
V
MLVDDOK_H
V
MLVDDOK_L
1. VDD = 3.3V ± 10% / 5.0V ± 10%, TA = –40 °C to T
T Power-on reset threshold — 1.5 2.7 V
P Supply for functional POR module TA = 25 °C 1.0 — V
P Regulator low voltage detector high threshold — — 2.95 V
P Regulator low voltage detector low threshold — 2.6 — V
P Flash low voltage detector high threshold — — 2.95 V
P Flash low voltage detector low threshold — 2.6 — V
P I/O low voltage detector high threshold — — 2.95 V
P I/O low voltage detector low threshold — 2.6 — V
P I/O 5V low voltage detector high threshold — — 4.4 V
P I/O 5V low voltage detector low threshold — 3.8 — V
P Digital supply low voltage detector high — — 1.145 V
P Digital supply low voltage detector low — 1.08 — V
, unless otherwise specified
A MAX
3.9 Power up/down sequencing
Conditions
(1)
Value
Unit
Min Max
To prevent an overstress event or a malfunction within and outside the device, the
SPC560P44Lx, SPC560P50Lx implements the following sequence to ensure each module
is started only when all conditions for switching it ON are available:
● A POWER_ON module working on voltage regulator supply controls the correct start-
up of the regulator. This is a key module ensuring safe configuration for all voltage
regulator functionality when supply is below 1.5V. Associated POWER_ON (or POR)
signal is active low.
● Several low voltage detectors, working on voltage regulator supply monitor the voltage
of the critical modules (voltage regulator, I/Os, flash memory and low voltage domain).
LVDs are gated low when POWER_ON is active.
● A POWER_OK signal is generated when all critical supplies monitored by the LVD are
available. This signal is active high and released to all modules including I/Os, flash
Doc ID 14723 Rev 8 63/115
Page 64

Electrical characteristics SPC560P44Lx, SPC560P50Lx
VDD_HV_REG
0V
3.3V
0V
3.3V
VDD_LV_REGCOR
0V
1.2V
0V
3.3V
POWER_ON
LVDM (HV)
0V
LVDD (LV)
3.3V
0V
POWER_OK
3.3V
RC16MHz Oscillator
0V
1.2V
P0 P1
0V
1.2V
Internal Reset Generation Module
FSM
~1us
V
POR_UP
V
PORH
V
LVDHV3H
V
MLVDOK_H
VDD_HV_REG
0V
3.3V
0V
3.3V
VDD_LV_REGCOR
0V
1.2V
3.3V
POWER_ON
LVDM (HV)
0V
LVDD (LV)
3.3V
0V
POWER_OK
3.3V
RC16MHz Oscillator
0V
1.2V
P0IDLE
0V
1.2V
Internal Reset Generation Module
FSM
V
LVDHV3L
V
PORH
0V
memory and RC16 oscillator needed during power-up phase and reset phase. When
POWER_OK is low the associated module are set into a safe state.
64/115 Doc ID 14723 Rev 8
Figure 11. Power-up typical sequence
Figure 12. Power-down typical sequence
Page 65

SPC560P44Lx, SPC560P50Lx Electrical characteristics
VDD_HV_REG
0V
3.3V
0V
3.3V
VDD_LV_REGCOR
0V
1.2V
3.3V
POWER_ON
LVDM (HV)
0V
LVDD (LV)
3.3V
0V
POWER_OK
3.3V
RC16MHz Oscillator
0V
1.2V
P0IDLE
0V
1.2V
Internal Reset Generation Module
FSM
V
LVDHV3L
0V
V
LVDHV3H
P1
~1us
3.10 DC electrical characteristics
3.10.1 NVUSRO register
Figure 13. Brown-out typical sequence
Portions of the device configuration, such as high voltage supply, and watchdog
enable/disable after reset are controlled via bit values in the non-volatile user options
(NVUSRO) register.
For a detailed description of the NVUSRO register, please refer to the device reference
manual.
NVUSRO[PAD3V5V] field description
The DC electrical characteristics are dependent on the PAD3V5V bit value. Ta b le 2 0 shows
how NVUSRO[PAD3V5V] controls the device configuration.
Table 20. PAD3V5V field description
1. Default manufacturing value before flash initialization is ‘1’ (3.3 V).
(1)
Value
0 High voltage supply is 5.0 V
1 High voltage supply is 3.3 V
Doc ID 14723 Rev 8 65/115
Description
Page 66

Electrical characteristics SPC560P44Lx, SPC560P50Lx
3.10.2 DC electrical characteristics (5 V)
Ta bl e 2 1 gives the DC electrical characteristics at 5 V (4.5 V < V
NVUSRO[PAD3V5V] = 0); see Figure 14.
Table 21. DC electrical characteristics (5.0 V, NVUSRO[PAD3V5V] = 0)
Symbol C Parameter Conditions
V
IL
V
IH
V
HYS
V
OL_S
V
OH_S
V
OL_M
V
OH_M
V
OL_F
V
OH_F
V
OL_SYM
V
OH_SYM
I
PU
I
PD
I
IL
I
IL
Min Max
D
— –0.1
(1)
Low level input voltage
P——0.35V
P
High level input voltage
—0.65V
DD_HV_IOx
D——V
T Schmitt trigger hysteresis — 0.1 V
DD_HV_IOx
P Slow, low level output voltage IOL=3mA — 0.1V
P Slow, high level output voltage IOH=–3mA 0.8V
DD_HV_IOx
P Medium, low level output voltage IOL=3mA — 0.1V
P Medium, high level output voltage IOH=–3mA 0.8V
DD_HV_IOx
P Fast, low level output voltage IOL=3mA — 0.1V
P Fast, high level output voltage IOH=–3mA 0.8V
DD_HV_IOx
P Symmetric, low level output voltage IOL=3mA — 0.1V
P Symmetric, high level output voltage IOH=–3mA 0.8V
V
P Equivalent pull-up current
P Equivalent pull-down current
Input leakage current (all
P
bidirectional ports)
Input leakage current (all ADC input-
P
only ports)
IN=VIL
V
IN=VIH
VIN=V
IL
V
IN=VIH
= –40 to 125 °C –1 1 µA
T
A
TA = –40 to 125 °C –0.5 0.5 µA
DD_HV_IOx
–130 —
—–10
10 —
—130
DD_HV_IOx
Value
DD_HV_IOx
< 5.5 V,
Unit
—V
(1)
V
V
V
V
V
V
µA
µA
DD_HV_IOx
—V
+0.1
—V
DD_HV_IOx
—V
DD_HV_IOx
—V
DD_HV_IOx
—V
DD_HV_IOx
—V
C
I
1. “SR” parameter values must not exceed the absolute maximum ratings shown in Table 9.
D Input capacitance — — 10 pF
IN
D RESET, equivalent pull-up current
PU
V
IN=VIL
V
IN=VIH
–130 —
—–10
66/115 Doc ID 14723 Rev 8
µA
Page 67

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 22. Supply current (5.0 V, NVUSRO[PAD3V5V] = 0)
Symbol C Parameter Conditions
(2)
(2)
(1)
(3)
(1)
V
DD_LV_CORx
externally forced at 1.3 V
V
DD_LV_CORx
externally forced at 1.3 V
V
DD_LV_CORx
externally forced at 1.3 V
V
DD_LV_CORx
externally forced at 1.3 V
DD_HV_FL
V
DD_HV_FL
V
DD_HV_ADC0
V
DD_HV_ADC1
f
ADC
at 5.0 V — 10 12
at 5.0 V — 15 19
at 5.0 V
at 5.0 V
= 16MHz
I
DD_LV_CORx
I
DD_FLASH
I
DD_ADC
RUN—Maximum mode
T
RUN—Typical mode
RUN—Maximum mode
P
HALT mode
STOP mode
Flash during read V
Supply current
T
Flash during erase operation on 1
(4)
(5)
flash module
ADC—Maximum mode
T
ADC—Typical mode
Value
Typ M ax
40 MHz 62 77
64 MHz 71 88
40 MHz 45 56
64 MHz 52 65
64 MHz 60 75
—1.510
—110
ADC_1 3.5 5
ADC_0 3 4
ADC_1 0.8 1
ADC_0 0.005 0.006
Unit
mA
I
DD_OSC
1. Maximum mode: FlexPWM, ADCs, CTU, DSPI, LINFlex, FlexCAN, 15 output pins, 1st and 2nd PLL enabled. I/O supply
current excluded.
2. Typical mode configurations: DSPI, LINFlex, FlexCAN, 15 output pins, 1st PLL only. I/O supply current excluded.
3. Code fetched from RAM, PLL_0: 64 MHz system clock (x4 multiplier with 16 MHz XTAL), PLL_1 is ON at
PHI_div2 = 120 MHz and PHI_div3 = 80 MHz, auxiliary clock sources set that all peripherals receive maximum frequency,
all peripherals enabled.
4. Halt mode configurations: code fetched from RAM, code and data flash memories in low power mode, OSC/PLL_0/PLL_1
are OFF, core clock frozen, all peripherals are disabled.
5. STOP “P” mode Device Under Test (DUT) configuration: code fetched from RAM, code and data flash memories OFF,
OSC/PLL_0/PLL_1 are OFF, core clock frozen, all peripherals are disabled.
T Oscillator V
DD_OSC
at 5.0 V 8 MHz 2.6 3.2
3.10.3 DC electrical characteristics (3.3 V)
Ta bl e 2 3 gives the DC electrical characteristics at 3.3 V (3.0 V < V
NVUSRO[PAD3V5V] = 1); see Figure 14.
Table 23. DC electrical characteristics (3.3 V, NVUSRO[PAD3V5V] = 1)
Symbol C Parameter Conditions
V
IL
Min Max
D
—–0.1
(2)
Low level input voltage
P——0.35V
DD_HV_IOx
(1)
Value
< 3.6 V,
—V
DD_HV_IOx
Unit
V
Doc ID 14723 Rev 8 67/115
Page 68

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Table 23. DC electrical characteristics (3.3 V, NVUSRO[PAD3V5V] = 1)
Symbol C Parameter Conditions
Min Max
V
V
HYS
V
OL_S
V
OH_S
V
OL_M
V
OH_M
V
OL_F
V
OH_F
V
OL_SYM
V
OH_SYM
I
PU
I
PD
I
I
C
IH
IL
IL
IN
High level input voltage
D——V
T Schmitt trigger hysteresis — 0.1 V
P Slow, low level output voltage IOL= 1.5 mA — 0.5 V
P Slow, high level output voltage IOH= –1.5 mA V
P Medium, low level output voltage IOL=2mA — 0.5 V
P Medium, high level output voltage IOH=–2mA V
P Fast, low level output voltage IOL= 1.5 mA — 0.5 V
P Fast, high level output voltage IOH= –1.5 mA V
P Symmetric, low level output voltage IOL= 1.5 mA — 0.5 V
P Symmetric, high level output voltage IOH= –1.5 mA V
P Equivalent pull-up current
P Equivalent pull-down current
Input leakage current (all
P
bidirectional ports)
Input leakage current (all ADC input-
P
only ports)
TA = –40 to 125 °C — 1 µA
T
D Input capacitance — — 10 pF
V
I
D RESET, equivalent pull-up current
P
PU
1. These specifications are design targets and subject to change per device characterization.
2. “SR” parameter values must not exceed the absolute maximum ratings shown in Table 9.
V
—0.65V
V
IN=VIL
V
IN=VIH
V
IN=VIL
V
IN=VIH
= –40 to 125 °C — 0.5 µA
A
IN=VIL
IN=VIH
DD_HV_IOx
DD_HV_IOx
DD_HV_IOx
DD_HV_IOx
DD_HV_IOx
DD_HV_IOx
–130 —
— –10
10 —
— 130
–130 —
— –10
(1)
(continued)
Value
Unit
—V
DD_HV_IOx
+0.1
V
(2)
—V
–0.8 — V
–0.8 — V
–0.8 — V
–0.8 — V
µA
µA
µA
68/115 Doc ID 14723 Rev 8
Page 69

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 24. Supply current (3.3 V, NVUSRO[PAD3V5V] = 1)
Symbol C Parameter Conditions
(2)
(2)
(1)
(3)
(1)
V
DD_LV_CORx
externally forced at 1.3 V
V
DD_LV_CORx
externally forced at 1.3 V
V
DD_LV_CORx
externally forced at 1.3 V
V
DD_LV_CORx
externally forced at 1.3 V
DD_HV_FL
V
DD_HV_FL
V
DD_HV_ADC0
V
DD_HV_ADC1
f
ADC
at 3.3 V — 8 10
at 3.3 V — 10 12
at 3.3 V
at 3.3 V
=16MHz
I
DD_LV_CORx
I
DD_FLASH
I
DD_ADC
RUN—Maximum mode
T
RUN—Typical mode
RUN—Maximum mode
HALT mode
P
STOP mode
Flash during read on single mode V
Supply current
T
Flash during erase operation on
(4)
(5)
single mode
ADC—Maximum mode
T
ADC—Typical mode
Val ue
Typ Max
40 MHz 62 77
64 MHz 71 89
40 MHz 45 56
64 MHz 53 66
64 MHz 60 75
—1.510
—110
ADC_1 2.5 4
ADC_0 2 4
ADC_1 0.8 1
ADC_0 0.005 0.006
Unit
mA
I
DD_OSC
1. Maximum mode: FlexPWM, ADCs, CTU, DSPI, LINFlex, FlexCAN, 15 output pins, 1st and 2nd PLL enabled. I/O supply
current excluded.
2. Typical mode: DSPI, LINFlex, FlexCAN, 15 output pins, 1st PLL only. I/O supply current excluded.
3. Code fetched from RAM, PLL_0: 64 MHz system clock (x4 multiplier with 16 MHz XTAL), PLL_1 is ON at
PHI_div2 = 120 MHz and PHI_div3 = 80 MHz, auxiliary clock sources set that all peripherals receive maximum frequency,
all peripherals enabled.
4. Halt mode configurations: code fetched from RAM, code and data flash memories in low power mode, OSC/PLL_0/PLL_1
are OFF, core clock frozen, all peripherals are disabled.
5. STOP “P” mode Device Under Test (DUT) configuration: code fetched from RAM, code and data flash memories OFF,
OSC/PLL_0/PLL_1 are OFF, core clock frozen, all peripherals are disabled.
T Oscillator V
at 3.3V 8MHz 2.4 3
DD_OSC
3.10.4 Input DC electrical characteristics definition
Figure 14 shows the DC electrical characteristics behavior as function of time.
Doc ID 14723 Rev 8 69/115
Page 70

Electrical characteristics SPC560P44Lx, SPC560P50Lx
V
IL
V
IN
V
IH
PDIx = ‘1’
V
DD
V
HYS
(GPDI register of SIUL)
PDIx = ‘0’
Figure 14. Input DC electrical characteristics definition
3.10.5 I/O pad current specification
The I/O pads are distributed across the I/O supply segment. Each I/O supply segment is
associated to a V
Table 25. I/O supply segment
DD/VSS
Package
12345 6 7
LQFP144 pin8 – pin20 pin23 – pin38 pin39 – pin55 pin58 – pin68 pin73 – pin89 pin92 – pin125 pin128 – pin5
LQFP100 pin15 – pin26 pin27 – pin38 pin41 – pin46 pin51 – pin61 pin64 – pin86 pin89 – pin10 —
Ta bl e 2 6 provides the weight of concurrent switching I/Os.
In order to ensure device functionality, the sum of the weight of concurrent switching I/Os on
a single segment should remain below 100%.
Table 26. I/O weight
Pad
NMI 1% 1% 1% 1%
PAD[6] 6% 5% 14% 13%
PAD[49] 5% 4% 14% 12%
PAD[84] 14% 10% — —
PA D[ 8 5] 9% 7 % — —
supply pair as described in Ta bl e 2 5.
Supply segment
LQFP144 LQFP100
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
70/115 Doc ID 14723 Rev 8
Page 71

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 26. I/O weight (continued)
LQFP144 LQFP100
Pad
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
PA D[ 8 6] 9% 6 % — —
MODO[0] 12% 8% — —
PAD[7] 4% 4% 11% 10%
PAD[36] 5% 4% 11% 9%
PAD[8] 5% 4% 10% 9%
PAD[37] 5% 4% 10% 9%
PAD[5] 5% 4% 9% 8%
PA D[ 3 9] 5% 4 % 9 % 8 %
PA D[ 3 5] 5% 4 % 8 % 7 %
PAD[87] 12% 9% — —
PA D[ 8 8] 9% 6 % — —
PAD[89] 10% 7% — —
PAD[90] 15% 11% — —
PA D[ 9 1] 6% 5 % — —
PA D[ 5 7] 8% 7 % 8 % 7 %
PAD[56] 13% 11% 13% 11%
PAD[53] 14% 12% 14% 12%
PAD[54] 15% 13% 15% 13%
PAD[55] 25% 22% 25% 22%
PAD[96] 27% 24% — —
PA D[ 6 5] 1% 1 % 1 % 1 %
PA D[ 6 7] 1% 1 % — —
PA D[ 3 3] 1% 1 % 1 % 1 %
PA D[ 6 8] 1% 1 % — —
PA D[ 2 3] 1% 1 % 1 % 1 %
PA D[ 6 9] 1% 1 % — —
PA D[ 3 4] 1% 1 % 1 % 1 %
PA D[ 7 0] 1% 1 % — —
PA D[ 2 4] 1% 1 % 1 % 1 %
PA D[ 7 1] 1% 1 % — —
PA D[ 6 6] 1% 1 % 1 % 1 %
PA D[ 2 5] 1% 1 % 1 % 1 %
PA D[ 2 6] 1% 1 % 1 % 1 %
Doc ID 14723 Rev 8 71/115
Page 72

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Table 26. I/O weight (continued)
LQFP144 LQFP100
Pad
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
PA D[ 8 6] 9% 6 % — —
MODO[0] 12% 8% — —
PAD[7] 4% 4% 11% 10%
PAD[36] 5% 4% 11% 9%
PAD[8] 5% 4% 10% 9%
PAD[37] 5% 4% 10% 9%
PAD[5] 5% 4% 9% 8%
PA D[ 3 9] 5% 4 % 9 % 8 %
PA D[ 3 5] 5% 4 % 8 % 7 %
PAD[87] 12% 9% — —
PA D[ 8 8] 9% 6 % — —
PAD[89] 10% 7% — —
PAD[90] 15% 11% — —
PA D[ 9 1] 6% 5 % — —
PA D[ 5 7] 8% 7 % 8 % 7 %
PAD[56] 13% 11% 13% 11%
PAD[53] 14% 12% 14% 12%
PAD[54] 15% 13% 15% 13%
PAD[55] 25% 22% 25% 22%
PAD[96] 27% 24% — —
PA D[ 6 5] 1% 1 % 1 % 1 %
PA D[ 6 7] 1% 1 % — —
PA D[ 3 3] 1% 1 % 1 % 1 %
PA D[ 6 8] 1% 1 % — —
PA D[ 2 3] 1% 1 % 1 % 1 %
PA D[ 6 9] 1% 1 % — —
PA D[ 3 4] 1% 1 % 1 % 1 %
PA D[ 7 0] 1% 1 % — —
PA D[ 2 4] 1% 1 % 1 % 1 %
PA D[ 7 1] 1% 1 % — —
PA D[ 6 6] 1% 1 % 1 % 1 %
PA D[ 2 5] 1% 1 % 1 % 1 %
PA D[ 2 6] 1% 1 % 1 % 1 %
72/115 Doc ID 14723 Rev 8
Page 73

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 26. I/O weight (continued)
LQFP144 LQFP100
Pad
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
PA D[ 8 6] 9% 6 % — —
MODO[0] 12% 8% — —
PAD[7] 4% 4% 11% 10%
PAD[36] 5% 4% 11% 9%
PAD[8] 5% 4% 10% 9%
PAD[37] 5% 4% 10% 9%
PAD[5] 5% 4% 9% 8%
PA D[ 3 9] 5% 4 % 9 % 8 %
PA D[ 3 5] 5% 4 % 8 % 7 %
PAD[87] 12% 9% — —
PA D[ 8 8] 9% 6 % — —
PAD[89] 10% 7% — —
PAD[90] 15% 11% — —
PA D[ 9 1] 6% 5 % — —
PA D[ 5 7] 8% 7 % 8 % 7 %
PAD[56] 13% 11% 13% 11%
PAD[53] 14% 12% 14% 12%
PAD[54] 15% 13% 15% 13%
PAD[55] 25% 22% 25% 22%
PAD[96] 27% 24% — —
PA D[ 6 5] 1% 1 % 1 % 1 %
PA D[ 6 7] 1% 1 % — —
PA D[ 3 3] 1% 1 % 1 % 1 %
PA D[ 6 8] 1% 1 % — —
PA D[ 2 3] 1% 1 % 1 % 1 %
PA D[ 6 9] 1% 1 % — —
PA D[ 3 4] 1% 1 % 1 % 1 %
PA D[ 7 0] 1% 1 % — —
PA D[ 2 4] 1% 1 % 1 % 1 %
PA D[ 7 1] 1% 1 % — —
PA D[ 6 6] 1% 1 % 1 % 1 %
PA D[ 2 5] 1% 1 % 1 % 1 %
PA D[ 2 6] 1% 1 % 1 % 1 %
Doc ID 14723 Rev 8 73/115
Page 74

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Table 26. I/O weight (continued)
LQFP144 LQFP100
Pad
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
PA D[ 8 6] 9% 6 % — —
MODO[0] 12% 8% — —
PAD[7] 4% 4% 11% 10%
PAD[36] 5% 4% 11% 9%
PAD[8] 5% 4% 10% 9%
PAD[37] 5% 4% 10% 9%
PAD[5] 5% 4% 9% 8%
PA D[ 3 9] 5% 4 % 9 % 8 %
PA D[ 3 5] 5% 4 % 8 % 7 %
PAD[87] 12% 9% — —
PA D[ 8 8] 9% 6 % — —
PAD[89] 10% 7% — —
PAD[90] 15% 11% — —
PA D[ 9 1] 6% 5 % — —
PA D[ 5 7] 8% 7 % 8 % 7 %
PAD[56] 13% 11% 13% 11%
PAD[53] 14% 12% 14% 12%
PAD[54] 15% 13% 15% 13%
PAD[55] 25% 22% 25% 22%
PAD[96] 27% 24% — —
PA D[ 6 5] 1% 1 % 1 % 1 %
PA D[ 6 7] 1% 1 % — —
PA D[ 3 3] 1% 1 % 1 % 1 %
PA D[ 6 8] 1% 1 % — —
PA D[ 2 3] 1% 1 % 1 % 1 %
PA D[ 6 9] 1% 1 % — —
PA D[ 3 4] 1% 1 % 1 % 1 %
PA D[ 7 0] 1% 1 % — —
PA D[ 2 4] 1% 1 % 1 % 1 %
PA D[ 7 1] 1% 1 % — —
PA D[ 6 6] 1% 1 % 1 % 1 %
PA D[ 2 5] 1% 1 % 1 % 1 %
PA D[ 2 6] 1% 1 % 1 % 1 %
74/115 Doc ID 14723 Rev 8
Page 75

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 26. I/O weight (continued)
LQFP144 LQFP100
Pad
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
PA D[ 2 7] 1% 1 % 1 % 1 %
PA D[ 2 8] 1% 1 % 1 % 1 %
PA D[ 6 3] 1% 1 % 1 % 1 %
PA D[ 7 2] 1% 1 % — —
PA D[ 2 9] 1% 1 % 1 % 1 %
PA D[ 7 3] 1% 1 % — —
PA D[ 3 1] 1% 1 % 1 % 1 %
PA D[ 7 4] 1% 1 % — —
PA D[ 3 0] 1% 1 % 1 % 1 %
PA D[ 7 5] 1% 1 % — —
PA D[ 3 2] 1% 1 % 1 % 1 %
PA D[ 7 6] 1% 1 % — —
PA D[ 6 4] 1% 1 % 1 % 1 %
PAD[0] 23% 20% 23% 20%
PAD[1] 21% 18% 21% 18%
PAD[107] 20% 17% — —
PAD[58] 19% 16% 19% 16%
PAD[106] 18% 16% — —
PAD[59] 17% 15% 17% 15%
PAD[105] 16% 14% — —
PAD[43] 15% 13% 15% 13%
PAD[104] 14% 13% — —
PAD[44] 13% 12% 13% 12%
PAD[103] 12% 11% — —
PAD[2] 11% 10% 11% 10%
PAD[101] 11% 9% — —
PAD[21] 10% 8% 10% 8%
TMS 1% 1% 1% 1%
TCK 1% 1% 1% 1%
PAD[20] 16% 11% 16% 11%
PAD[3] 4% 3% 4% 3%
PA D[ 6 1] 9% 8 % 9 % 8 %
PAD[102] 11% 10% — —
Doc ID 14723 Rev 8 75/115
Page 76

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Table 26. I/O weight (continued)
LQFP144 LQFP100
Pad
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
PAD[60] 11% 10% 11% 10%
PAD[100] 12% 10% — —
PAD[45] 12% 10% 12% 10%
PAD[98] 12% 11% — —
PAD[46] 12% 11% 12% 11%
PAD[99] 13% 11% — —
PAD[62] 13% 11% 13% 11%
PAD[92] 13% 12% — —
VPP_TEST 1% 1% 1% 1%
PAD[4] 14% 12% 14% 12%
PAD[16] 13% 12% 13% 12%
PAD[17] 13% 11% 13% 11%
PAD[42] 13% 11% 13% 11%
PAD[93] 12% 11% — —
PAD[95] 12% 11% — —
PAD[18] 12% 10% 12% 10%
PAD[94] 11% 10% — —
PAD[19] 11% 10% 11% 10%
PAD[77] 10% 9% — —
PAD[10] 10% 9% 10% 9%
PA D[ 7 8] 9% 8 % — —
PA D[ 1 1] 9% 8 % 9 % 8 %
PA D[ 7 9] 8% 7 % — —
PA D[ 1 2] 7% 7 % 7 % 7 %
PA D[ 4 1] 7% 6 % 7 % 6 %
PA D[ 4 7] 5% 4 % 5 % 4 %
PA D[ 4 8] 4% 4 % 4 % 4 %
PA D[ 5 1] 4% 4 % 4 % 4 %
PA D[ 5 2] 5% 4 % 5 % 4 %
PA D[ 4 0] 5% 5 % 6 % 5 %
PA D[ 8 0] 9% 8 % — —
PAD[9] 10% 9% 11% 10%
PAD[81] 10% 9% — —
76/115 Doc ID 14723 Rev 8
Page 77

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 26. I/O weight (continued)
LQFP144 LQFP100
Pad
Weight 5V Weight 3.3V Weight 5V Weight 3.3V
PAD[13] 10% 9% 12% 11%
PAD[82] 10% 9% — —
PAD[22] 10% 9% 13% 12%
PAD[83] 10% 9% — —
PAD[50] 10% 9% 14% 12%
PAD[97] 10% 9% — —
PAD[38] 10% 9% 14% 13%
PAD[14] 9% 8% 14% 13%
PAD[15] 9% 8% 15% 13%
Table 27. I/O consumption
Symbol C Parameter Conditions
Dynamic I/O current
CC D
for SLOW
CL = 25 pF
I
SWTSLW
(2)
configuration
Dynamic I/O current
CC D
for MEDIUM
CL = 25 pF
I
SWTMED
(2)
configuration
Dynamic I/O current
CC D
for FAST
CL = 25 pF
I
SWTFST
(2)
configuration
CL = 25 pF, 2 MHz
= 25 pF, 4 MHz — — 3.2
C
L
I
RMSSLW
Root medium square
CC D
I/O current for SLOW
configuration
= 100 pF, 2 MHz — — 6.6
C
L
C
= 25 pF, 2 MHz
L
= 25 pF, 4 MHz — — 2.3
C
L
= 100 pF, 2 MHz — — 4.7
C
L
(1)
V
= 5.0 V ± 10%,
DD
PAD3V5V = 0
= 3.3 V ± 10%,
V
DD
PAD3V5V = 1
V
= 5.0 V ± 10%,
DD
PAD3V5V = 0
V
= 3.3 V ± 10%,
DD
PAD3V5V = 1
V
= 5.0 V ± 10%,
DD
PAD3V5V = 0
= 3.3 V ± 10%,
V
DD
PAD3V5V = 1
V
= 5.0 V ± 10%,
DD
PAD3V5V = 0
V
= 3.3 V ± 10%,
DD
PAD3V5V = 1
Val ue
Unit
Min Typ Max
——20
mA
——16
——29
mA
——17
— — 110
mA
——50
——2.3
mA
——1.6
Doc ID 14723 Rev 8 77/115
Page 78

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Table 27. I/O consumption (continued)
Symbol C Parameter Conditions
= 25 pF, 13 MHz
C
L
= 25 pF, 40 MHz — — 13.4
C
Root medium square
I
RMSMED
CC D
I/O current for
MEDIUM
configuration
Root medium square
I
RMSFST
CC D
I/O current for FAST
configuration
Sum of all the static
I
AVGSEG
SR D
I/O current within a
supply segment
1. VDD = 3.3 V ± 10% / 5.0 V ± 10%, TA = –40 to 125 °C, unless otherwise specified
2. Stated maximum values represent peak consumption that lasts only a few ns during I/O transition.
L
= 100 pF, 13 MHz — — 18.3
C
L
= 25 pF, 13 MHz
C
L
C
= 25 pF, 40 MHz — — 8.5
L
= 100 pF, 13 MHz — — 11
C
L
C
= 25 pF, 40 MHz
L
= 25 pF, 64 MHz — — 33
C
L
= 100 pF, 40 MHz — — 56
C
L
C
= 25 pF, 40 MHz
L
= 25 pF, 64 MHz — — 20
C
L
= 100 pF, 40 MHz — — 35
C
L
V
= 5.0 V ± 10%, PAD3V5V = 0 — — 70
DD
= 3.3 V ± 10%, PAD3V5V = 1 — — 65
V
DD
(1)
V
= 5.0 V ± 10%,
DD
PAD3V5V = 0
V
= 3.3 V ± 10%,
DD
PAD3V5V = 1
V
= 5.0 V ± 10%,
DD
PAD3V5V = 0
V
= 3.3 V ± 10%,
DD
PAD3V5V = 1
Val ue
Unit
Min Typ Max
——6.6
mA
—— 5
——22
mA
——14
mA
3.11 Main oscillator electrical characteristics
The SPC560P44Lx, SPC560P50Lx provides an oscillator/resonator driver.
Table 28. Main oscillator output electrical characteristics (5.0 V,
NVUSRO[PAD3V5V] = 0)
Symbol C Parameter
Min Max
f
OSC
g
m
V
OSC
t
OSCSU
1. The start-up time is dependent upon crystal characteristics, board leakage, etc., high ESR and excessive
capacitive loads can cause long start-up time.
2. Value captured when amplitude reaches 90% of XTAL
SR —
—P
—T
—T
Oscillator
frequency
Transcondu
ctance
Oscillation
amplitude on
XTAL pin
Start-up
(1),(2)
time
440MHz
6.5 25 mA/V
1—V
8—ms
Value
Unit
78/115 Doc ID 14723 Rev 8
Page 79

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 29. Main oscillator output electrical characteristics (3.3 V,
NVUSRO[PAD3V5V] = 1)
Value
Symbol C Parameter
Min Max
Unit
f
OSC
V
t
OSCSU
1. The start-up time is dependent upon crystal characteristics, board leakage, etc., high ESR and excessive
2. Value captured when amplitude reaches 90% of XTAL
Table 30. Input clock characteristics
SR — Oscillator frequency 4 40 MHz
g
OSC
— P Transconductance 4 20 mA/V
m
— T Oscillation amplitude on XTAL pin 1 — V
— T Start-up time
capacitive loads can cause long start-up time.
(1),(2)
Symbol Parameter
f
SR Oscillator frequency 4 — 40 MHz
OSC
SR Frequency in bypass — — 64 MHz
f
CLK
t
SR Rise/fall time in bypass — — 1 ns
rCLK
SR Duty cycle 47.5 50 52.5 %
t
DC
3.12 FMPLL electrical characteristics
Table 31. FMPLL electrical characteristics
8—ms
Value
Unit
Min Typ Max
Symbol C Parameter Conditions
f
ref_crystal
f
ref_ext
f
PLLIN
f
FMPLLOUT
f
FREE
t
CYC
f
LORL
f
LORH
f
SCM
D PLL reference frequency range
Phase detector input frequency range
D
(after pre-divider)
D Clock frequency range in normal mode — 16 120 MHz
P Free-running frequency
D System clock period — — 1 / f
D Loss of reference frequency window
D Self-clocked mode frequency
(2)
(4),(5)
Crystal reference 4 40 MHz
—416MHz
Measured using clock
division — typically /16
Lower limit 1.6 3.7
(3)
Upper limit 24 56
—20150MHz
Doc ID 14723 Rev 8 79/115
(1)
Val ue
Unit
Min Max
20 150 MHz
SYS
ns
MHz
Page 80

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Table 31. FMPLL electrical characteristics (continued)
Val ue
Unit
Symbol C Parameter Conditions
(1)
Min Max
Short-term jitter
C
JITTER
CLKOUT period
T
jitter
(6),(7),(8),(9)
Long-term jitter (avg.
over 2 ms interval)
t
lpll
t
dc
f
LCK
f
UL
f
CS
f
DS
f
MOD
1. V
DD_LV_CORx
2. Considering operation with PLL not bypassed
3. “Loss of Reference Frequency” window is the reference frequency range outside of which the PLL is in self-clocked mode.
4. Self-clocked mode frequency is the frequency that the PLL operates at when the reference frequency falls outside the f
window.
5. f
VCO
mode.
6. This value is determined by the crystal manufacturer and board design.
7. Jitter is the average deviation from the programmed frequency measured over the specified interval at maximum f
Measurements are made with the device powered by filtered supplies and clocked by a stable external clock signal. Noise
injected into the PLL circuitry via V
percentage for a given interval.
8. Proper PC board layout procedures must be followed to achieve specifications.
9. Values are with frequency modulation disabled. If frequency modulation is enabled, jitter is the sum of C
fCS or f
10. Short term jitter is measured on the clock rising edge at cycle n and cycle n+4.
11. This value is determined by the crystal manufacturer and board design. For 4 MHz to 20 MHz crystals specified for this
PLL, load capacitors should not exceed these limits.
12. This specification applies to the period required for the PLL to relock after changing the MFD frequency control bits in the
synthesizer control register (SYNCR).
13. This value is true when operating at frequencies above 60 MHz, otherwise f
14. Modulation depth will be attenuated from depth setting when operating at modulation frequencies above 50 kHz.
DPLL lock time
D Duty cycle of reference
D Frequency LOCK range — 66% f
D Frequency un-LOCK range — -18 18 % f
D Modulation depth
D Modulation frequency
= 1.2 V ±10%; VSS = 0 V; TA = –40 to 125 °C, unless otherwise specified
self clock range is 20–150 MHz. f
(depending on whether center spread or down spread modulation is enabled).
DS
(11), (12)
SCM
DDPLL
(14)
represents f
and V
SSPLL
(10)
f
maximum 44%f
SYS
= 16 MHz
f
PLLIN
(resonator), f
PLLCLK
at
—10 ns
64 MHz, 4000 cycles
——200µs
—4060%
Center spread ±0.25 ±4.0
(13)
Down spread 0.5 8.0
— — 70 kHz
after PLL output divider (ERFD) of 2 through 16 in enhanced
SYS
and variation in crystal oscillator frequency increase the C
JITTER
is 2% (above 64 MHz).
CS
CLKOUT
% f
LOR
.
SYS
JITTER
and either
SYS
SYS
SYS
80/115 Doc ID 14723 Rev 8
Page 81

SPC560P44Lx, SPC560P50Lx Electrical characteristics
3.13 16 MHz RC oscillator electrical characteristics
Table 32. 16 MHz RC oscillator electrical characteristics
Value
Symbol C Parameter Conditions
Min Typ Max
f
RC
P RC oscillator frequency TA = 25 °C — 16 — MHz
Fast internal RC oscillator variation over temperature
RCMVAR
and
P
supply with respect to f
at TA = 25 °C in high-
RC
—–5—5%
frequency configuration
(1)
RCMTRIM
RCMSTEP
1. PTF = Post Trimming Frequency: The frequency of the output clock after trimming at typical supply voltage and
temperature
Post Trim Accuracy: The variation of the PTF
T
the 16 MHz
T Fast internal RC oscillator trimming step TA = 25 °C — 1.6 — %
from
T
= 25 °C –1 — 1 %
A
3.14 Analog-to-digital converter (ADC) electrical characteristics
The device provides a 10-bit successive approximation register (SAR) analog-to-digital
converter.
Unit
Doc ID 14723 Rev 8 81/115
Page 82

Electrical characteristics SPC560P44Lx, SPC560P50Lx
(2)
(1)
(3)
(4)
(5)
Offset Error OSE
Offset Error OSE
Gain Error GE
1 LSB (ideal)
1023
1022
1021
1020
1019
1018
5
4
3
2
1
0
7
6
1 2 3 4 5 6 7 1017 1018 1019 1020 1021 1022 1023
(1) Example of an actual transfer curve
(2) The ideal transfer curve
(3) Differential non-linearity error (DNL)
(4) Integral non-linearity error (INL)
(5) Center of a step of the actual transfer curve
1 LSB ideal = V
DD_ADC
/ 1024
V
in(A)
(LSB
ideal
)
code out
Figure 15. ADC characteristics and error definitions
3.14.1 Input impedance and ADC accuracy
To preserve the accuracy of the A/D converter, it is necessary that analog input pins have
82/115 Doc ID 14723 Rev 8
low AC impedance. Placing a capacitor with good high frequency characteristics at the input
pin of the device can be effective: the capacitor should be as large as possible, ideally
infinite. This capacitor contributes to attenuating the noise present on the input pin; further, it
sources charge during the sampling phase, when the analog signal source is a highimpedance source.
A real filter can typically be obtained by using a series resistance with a capacitor on the
input pin (simple RC filter). The RC filtering may be limited according to the source
impedance value of the transducer or circuit supplying the analog signal to be measured.
Page 83

SPC560P44Lx, SPC560P50Lx Electrical characteristics
V
A
RSRF+
R
EQ
-------------------- -
1
2
-- -LSB
R
F
C
F
R
S
R
L
R
SW1
C
P2
C
S
V
DD
Sampling
Source Filter Current Limiter
EXTERNAL CIRCUIT INTERNAL CIRCUIT SCHEME
C
P1
R
AD
Channel
Selection
V
A
RS: Source impedance
R
F
: Filter resistance
C
F
: Filter capacitance
R
L
: Current limiter resistance
R
SW1
: Channel selection switch impedance
R
AD
: Sampling switch impedance
C
P
: Pin capacitance (two contributions, C
P1
and CP2)
C
S
: Sampling capacitance
The filter at the input pins must be designed taking into account the dynamic characteristics
of the input signal (bandwidth) and the equivalent input impedance of the ADC itself.
In fact a current sink contributor is represented by the charge sharing effects with the
sampling capacitance: C
and CP2 being substantially two switched capacitances, with a
S
frequency equal to the ADC conversion rate, it can be seen as a resistive path to ground.
For instance, assuming a conversion rate of 1 MHz, with C
of 330 k is obtained (R
= 1 / (fc × (CS+CP2)), where fc represents the conversion rate at
EQ
equal to 3 pF, a resistance
S+CP2
the considered channel). To minimize the error induced by the voltage partitioning between
this resistance (sampled voltage on C
) and the sum of RS + RF, the external circuit
S+CP2
must be designed to respect the Equation 4:
Equation 4
Equation 4 generates a constraint for external network design, in particular on resistive
path.
Figure 16. Input equivalent circuit
Doc ID 14723 Rev 8 83/115
Page 84

Electrical characteristics SPC560P44Lx, SPC560P50Lx
V
A
V
A1
V
A2
t
T
S
V
CS
Voltage Transient on C
S
V <0.5 LSB
1
2
1 < (RSW + RAD) CS << T
S
2 = RL (CS + CP1 + CP2)
1
R
SWRAD
+=
CPC
S
CPCS+
-------------------- -
1R
SWRAD
+ CSTS«
A second aspect involving the capacitance network shall be considered. Assuming the three
capacitances C
, CP1 and C
F
are initially charged at the source voltage VA (refer to the
P2
equivalent circuit reported in Figure 16): A charge sharing phenomenon is installed when
the sampling phase is started (A/D switch closed).
Figure 17. Transient behavior during sampling phase
In particular two different transient periods can be distinguished:
● A first and quick charge transfer from the internal capacitance C
sampling capacitance C
occurs (CS is supposed initially completely discharged):
S
and CP2 to the
P1
considering a worst case (since the time constant in reality would be faster) in which
C
is reported in parallel to C
P2
C
are in series, and the time constant is
S
(call CP = CP1 + CP2), the two capacitances CP and
P1
Equation 5
Equation 5 can again be simplified considering only CS as an additional worst
condition. In reality, the transient is faster, but the A/D converter circuitry has been
designed to be robust also in the very worst case: the sampling time T
is always much
S
longer than the internal time constant:
Equation 6
The charge of C
voltage V
A1
and CP2 is redistributed also on CS, determining a new value of the
P1
on the capacitance according to Equation 7:
84/115 Doc ID 14723 Rev 8
Page 85

SPC560P44Lx, SPC560P50Lx Electrical characteristics
V
A1CSCP1CP2
++ VAC
P1CP2
+=
2R
L
C
SCP1CP2
++
8.5 2 8.5 R
LCSCP1CP2
++=T
S
V
A2CSCP1CP2CF
+++ VAC
F
V
A1
+CP1CP2+C
S
+=
f
0
f
Analog Source Bandwidth (VA)
f
0
f
Sampled Signal Spectrum (fC = conversion Rate)
f
C
f
Anti-Aliasing Filter (fF = RC Filter pole)
f
F
2 f0 fC (Nyquist)
f
F
f0 (Anti-aliasing Filtering Condition)
T
C
2 RFCF (Conversion Rate vs. Filter Pole)
Noise
Equation 7
● A second charge transfer involves also C
capacitance) through the resistance R
and C
were in parallel to CP1 (since the time constant in reality would be faster), the
S
(that is typically bigger than the on-chip
F
: again considering the worst case in which CP2
L
time constant is:
Equation 8
In this case, the time constant depends on the external circuit: in particular imposing
that the transient is completed well before the end of sampling time T
R
sizing is obtained:
L
, a constraints on
S
Equation 9
Of course, R
combination with R
definitively bigger than C
charge transfer transient) will be much higher than V
(charge balance assuming now C
shall be sized also according to the current limitation constraints, in
L
(source impedance) and RF (filter resistance). Being CF
S
, CP2 and CS, then the final voltage V
P1
already charged at VA1):
S
. Equation 10 must be respected
A1
(at the end of the
A2
Equation 10
The two transients above are not influenced by the voltage source that, due to the presence
of the R
C
with respect to the ideal source VA; the time constant RFCF of the filter is very high with
S
filter, is not able to provide the extra charge to compensate the voltage drop on
FCF
respect to the sampling time (T
Figure 18. Spectral representation of input signal
). The filter is typically designed to act as anti-aliasing.
S
Doc ID 14723 Rev 8 85/115
Page 86

Electrical characteristics SPC560P44Lx, SPC560P50Lx
V
A
V
A2
----------- -
C
P1CP2
+C
F
+
C
P1CP2
+CFC
S
++
------------------------------------------------------- -=
CF2048 C
S
Calling f0 the bandwidth of the source signal (and as a consequence the cut-off frequency of
the anti-aliasing filter, f
at least 2f
; it means that the constant time of the filter is greater than or at least equal to
0
twice the conversion period (T
sampling time T
S
), according to the Nyquist theorem the conversion rate fC must be
F
). Again the conversion period TC is longer than the
C
, which is just a portion of it, even when fixed channel continuous
conversion mode is selected (fastest conversion rate at a specific channel): in conclusion it
is evident that the time constant of the filter R
sampling time T
, so the charge level on CS cannot be modified by the analog signal source
S
is definitively much higher than the
FCF
during the time in which the sampling switch is closed.
The considerations above lead to impose new constraints on the external circuit, to reduce
the accuracy error due to the voltage drop on C
above, it is simple to derive Equation 11 between the ideal and real sampled voltage on C
; from the two charge balance equations
S
S
Equation 11
:
From this formula, in the worst case (when V
assuming to accept a maximum error of half a count, a constraint is evident on C
Equation 12
3.14.2 ADC conversion characteristics
Table 33. ADC conversion characteristics
Symbol C Parameter Conditions
V
INAN0
V
INAN1
f
CK
f
s
t
ADC_S
t
ADC_C
ADC0 and shared ADC0/1
SR
analog input voltage
ADC1 analog input voltage
SR
(4)
(2), (3)
(2),
—
—
ADC clock frequency
(depends on ADC
configuration)
SR —
(The duty cycle depends on
(5)
AD_clk
frequency)
—3
SR — Sampling frequency — — — 1.53 MHz
f
= 20 MHz,
ADC
— D Sample time
(7)
INPSAMP = 3
f
= 9 MHz,
ADC
INPSAMP = 255
f
— P Conversion time
(8)
= 20 MHz
ADC
INPCMP = 1
is maximum, that is for instance 5 V),
A
(1)
Value
Min Typ Max
V
SS_HV_ADV0
0.3
V
SS_HV_ADV1
0.3
(6)
V
DD_HV_ADV0
—
—
+ 0.3
V
DD_HV_ADV1
+ 0.3
—60MHz
125 — — ns
— — 28.2 µs
(9)
,
0.650 — — µs
value:
F
Unit
V
V
86/115 Doc ID 14723 Rev 8
Page 87

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 33. ADC conversion characteristics (continued)
Symbol C Parameter Conditions
(1)
Min Typ Max
ADC power-up delay (time
t
ADC_PU
needed for ADC to settle
SR —
exiting from software power
———1.5µs
down; PWDN bit = 0)
ADC input sampling
—D
capacitance
———2.5pF
— D ADC input pin capacitance 1 — — — 3 pF
— D ADC input pin capacitance 2 — — — 1 pF
=
=
——0.6k
——3k
———2k
Internal resistance of analog
—D
source
Internal resistance of analog
—D
source
V
DD_HV_ADC
5 V ± 10%
V
DD_HV_ADC
3.3 V ± 10%
R
C
C
C
R
S
P1
P2
SW1
AD
(10)
(10)
(10)
(10)
(10)
Current injection
on one ADC input,
I
— T Input current injection
INJ
different from the
converted one.
–5 — 5 mA
Remains within
TUE spec.
INL CC P Integral non-linearity No overload –1.5 — 1.5 LSB
DNL CC P Differential non-linearity No overload –1.0 — 1.0 LSB
OSE
CC T Offset error — — ±1 — LSB
Value
Unit
GE
CC T Gain error — — ±1 — LSB
TUE CC P
TUE CC T
1. VDD = 3.3 V to 3.6 V / 4.5 V to 5.5 V, TA = –40 °C to T
V
SS_HV_ADCx
2. V
3. Not allowed to refer this voltage to V
4. Not allowed to refer this voltage to V
5. AD_clk clock is always half of the ADC module input clock defined via the auxiliary clock divider for the ADC.
6. When configured to allow 60 MHz ADC, the minimum ADC clock speed is 9 MHz, below which precision is lost.
7. During the sample time the input capacitance CS can be charged/discharged by the external source. The internal
8. This parameter includes the sample time t
9. 20 MHz ADC clock. Specific prescaler is programmed on MC_PLL_CLK to provide 20 MHz clock to the ADC.
10. See Figure 16.
may exceed V
AINx
conversion will be clamped respectively to 0x000 or 0x3FF.
resistance of the analog source must allow the capacitance to reach its final voltage level within t
sample time t
clock t
ADC_S
Total unadjusted error
without current injection
Total unadjusted error with
current injection
to V
DD_HV_ADCx
SS_HV_AD
, changes of the analog input voltage have no effect on the conversion result. Values for the sample
ADC_S
depend on programming.
.
and V
DD_HV_AD
DD_HV_ADV1
DD_HV_ADV0
ADC_S
limits, remaining on absolute maximum ratings, but the results of the
, V
SS_HV_ADV1
, V
SS_HV_ADV0
.
— –2.5 — 2.5 LSB
—–3—3LSB
, unless otherwise specified and analog input voltage from
A MAX
. After the end of the
ADC_S
Doc ID 14723 Rev 8 87/115
Page 88

Electrical characteristics SPC560P44Lx, SPC560P50Lx
3.15 Flash memory electrical characteristics
Table 34. Program and erase specifications
Value
Symbol C Parameter
Min Typical
T
dwprogram
T
BKPRG
T
16kpperase
T
32kpperase
T
128kpperase
1. Typical program and erase times assume nominal supply values and operation at 25 °C. All times are subject to change
pending device characterization.
2. Initial factory condition: < 100 program/erase cycles, 25 °C, typical supply voltage.
3. The maximum program and erase times occur after the specified number of program/erase cycles. These maximum values
are characterized but not guaranteed.
4. Actual hardware programming times. This does not include software overhead.
5. Typical Bank programming time assumes that all cells are programmed in a single pulse. In reality some cells will require
more than one pulse, adding a small overhead to total bank programming time (see Initial Max column).
P Double Word (64 bits) Program Time
P Bank Program (512 KB)
P Bank Program (64 KB)
(4)(5)
(4)(5)
P 16 KB Block Pre-program and Erase Time — 300 500 5000 ms
P 32 KB Block Pre-program and Erase Time — 400 600 5000 ms
128 KB Block Pre-program and Erase
P
Time
(4)
—2250500µs
— 1.45 1.65 33 s
— 0.18 0.21 4.10 s
— 800 1300 7500 ms
(1)
Initial
max
(2)
Max
(3)
Unit
Table 35. Flash memory module life
Value
Symbol C Parameter Conditions
Min Typ
Number of program/erase cycles per block
P/E C
for 16 KB blocks over the operating
temperature range (T
)
J
— 100000 — cycles
Number of program/erase cycles per block
P/E C
for 32 KB blocks over the operating
temperature range (T
)
J
— 10000 100000 cycles
Number of program/erase cycles per block
P/E C
Retention C
1. Ambient temperature averaged over duration of application, not to exceed recommended product operating temperature
range.
for 128 KB blocks over the operating
temperature range (T
Minimum data retention at 85 °C average
ambient temperature
(1)
)
J
— 1000 100000 cycles
Blocks with 0–1000 P/E
cycles
Blocks with 10000 P/E
cycles
Blocks with 100000 P/E
cycles
20 — years
10 — years
5—years
Unit
88/115 Doc ID 14723 Rev 8
Page 89

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Table 36. Flash memory read access timing
Symbol C Parameter Conditions
(1)
Max value Unit
f
max
1. VDD = 3.3 V ± 10% / 5.0 V ± 10%, TA = –40 to 125 °C, unless otherwise specified
Maximum working frequency at given number of
C
wait states in worst conditions
3.16 AC specifications
3.16.1 Pad AC specifications
Table 37. Output pin transition times
Symbol C Parameter Conditions
t
tr
t
tr
t
tr
(3)
t
SYM
1. VDD = 3.3 V ± 10% / 5.0 V ± 10%, TA = –40 °C to T
includes device and package capacitances (C
2. C
L
3. Transition timing of both positive and negative slopes will differ maximum 50%
D
TC
DC
CC
Output transition time output pin
SLOW configuration
DC
(2)
TC
DC
D
TC
DC
CC
Output transition time output pin
MEDIUM configuration
DC
(2)
TC
DC
(2)
A MAX
PKG
< 5 pF).
CC D
CC T
Output transition time output pin
FAST configuration
Symmetric transition time, same drive
strength between N and P transistor
= 25 pF
C
L
= 50 pF — — 100
L
= 100 pF — — 125
L
= 25 pF
L
= 50 pF — — 50
L
= 100 pF — — 75
L
= 25 pF
C
L
= 50 pF — — 20
L
= 100 pF — — 40
L
= 25 pF
L
= 50 pF — — 25
L
= 100 pF — — 40
L
= 25 pF
C
L
C
= 50 pF — — 6
L
= 100 pF — — 12
C
L
C
= 25 pF
L
= 50 pF — — 7
C
L
C
= 100 pF — — 12
L
= 5.0 V ± 10%, PAD3V5V = 0 — — 4
V
DD
= 3.3 V ± 10%, PAD3V5V = 1 — — 5
V
DD
, unless otherwise specified
V
DD
PAD3V5V = 0
V
DD
PAD3V5V = 1
V
DD
PAD3V5V = 0
SIUL.PCRx.SRC = 1
V
DD
PAD3V5V = 1
SIUL.PCRx.SRC = 1
V
DD
PAD3V5V = 0
SIUL.PCRx.SRC = 1
V
DD
PAD3V5V = 1
SIUL.PCRx.SRC = 1
2 wait states 66
0 wait states 18
(1)
= 5.0 V ± 10%,
= 3.3 V ± 10%,
= 5.0 V ± 10%,
= 3.3 V ± 10%,
= 5.0 V ± 10%,
= 3.3 V ± 10%,
MHz
Value
Unit
Min Typ Max
——50
ns
——40
——10
ns
——12
—— 4
ns
—— 4
ns
Doc ID 14723 Rev 8 89/115
Page 90

Electrical characteristics SPC560P44Lx, SPC560P50Lx
V
DD_HV_IOx
/2
V
OH
V
OL
Rising
Edge
Output
Delay
Falling
Edge
Output
Delay
Pad
Data Input
Pad
Output
V
IL
V
DD
device reset forced by V
RESET
V
DDMIN
V
RESET
V
IH
device start-up phase
T
POR
Figure 19. Pad output delay
3.17 AC timing characteristics
3.17.1 RESET pin characteristics
The SPC560P44Lx, SPC560P50Lx implements a dedicated bidirectional RESET pin.
Figure 20. Start-up reset requirements
90/115 Doc ID 14723 Rev 8
Page 91

SPC560P44Lx, SPC560P50Lx Electrical characteristics
V
RESET
V
IL
V
IH
V
DD
filtered by
hysteresis
filtered by
lowpass filter
W
FRST
W
NFRST
hw_rst
‘1’
‘0’
filtered by
lowpass filter
W
FRST
unknown reset
state
device under hardware reset
Figure 21. Noise filtering on reset signal
Table 38. RESET electrical characteristics
Symbol C Parameter Conditions
V
IH
V
IL
V
HYS
V
OL
Input High Level CMOS
SR P
(Schmitt Trigger)
Input low Level CMOS
SR P
(Schmitt Trigger)
Input hysteresis CMOS
CC C
(Schmitt Trigger)
CC P Output low level
Push Pull, I
= 5.0 V ± 10%, PAD3V5V = 0
V
DD
OL
= 2mA,
(recommended)
Push Pull, I
V
= 5.0 V ± 10%, PAD3V5V = 1
DD
Push Pull, I
V
= 3.3 V ± 10%, PAD3V5V = 1
DD
OL
OL
= 1mA,
= 1mA,
(recommended)
(1)
Value
Min Typ Max
—0.65V
—VDD+0.4 V
DD
— –0.4 — 0.35V
—0.1V
DD
——V
——0.1V
(2)
——0.1V
——0.5
DD
DD
DD
Unit
V
V
Doc ID 14723 Rev 8 91/115
Page 92

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Table 38. RESET electrical characteristics (continued)
Symbol C Parameter Conditions
= 25pF,
C
L
= 5.0 V ± 10%, PAD3V5V = 0
V
DD
= 50pF,
C
L
V
= 5.0 V ± 10%, PAD3V5V = 0
DD
C
= 100pF,
L
V
= 5.0 V ± 10%, PAD3V5V = 0
DD
= 25pF,
C
L
= 3.3 V ± 10%, PAD3V5V = 1
V
DD
= 50pF,
C
L
V
= 3.3 V ± 10%, PAD3V5V = 1
DD
C
= 100pF,
L
V
= 3.3 V ± 10%, PAD3V5V = 1
DD
W
W
t
tr
FRST
NFRST
Output transition time
CC D
output pin
MEDIUM configuration
RESET
SR P
pulse
RESET
SR P
filtered pulse
(3)
input filtered
input not
Maximum delay before
internal reset is
CC D
t
POR
released after all
V
reach nominal
DD_HV
Monotonic V
DD_HV
supply
(1)
Value
Unit
Min Typ Max
——10
——20
——40
ns
——12
——25
——40
———40ns
— 500 — — ns
supply ramp — — 1 ms
= 3.3 V ± 10%, PAD3V5V = 1 10 — 150
V
|I
|CCP
WPU
1. VDD = 3.3 V ± 10% / 5.0 V ± 10%, TA = –40 °C to T
2. This is a transient configuration during power-up, up to the end of reset PHASE2 (refer to RGM module section of device
reference manual).
includes device and package capacitance (C
3. C
L
4. The configuration PAD3V5 = 1 when V
Nexus output (MDOx, EVTO, MCKO) are configured in input or in high impedance state.
Weak pull-up current
absolute value
DD
= 5.0 V ± 10%, PAD3V5V = 0 10 — 150
DD
= 5.0 V ± 10%, PAD3V5V = 1
V
DD
, unless otherwise specified
A MAX
<5pF).
PKG
= 5 V is only transient configuration during power-up. All pads but RESET and
DD
(4)
10 — 250
3.17.2 IEEE 1149.1 interface timing
JCYC
JDC
TCKRISE
Value
Min Max
CC D TCK cycle time — 100 — ns
CC D TCK clock pulse width (measured at V
DD_HV_IOx
/2) — 40 60 ns
CC D TCK rise and fall times (40% – 70%) — — 3 ns
CC D TMS, TDI data setup time — 5 — ns
Table 39. JTAG pin AC electrical characteristics
No. Symbol C Parameter Conditions
1t
2t
3t
4t
TMSS, tTDIS
µAV
Unit
92/115 Doc ID 14723 Rev 8
Page 93

SPC560P44Lx, SPC560P50Lx Electrical characteristics
TCK
1
2
2
3
3
Table 39. JTAG pin AC electrical characteristics (continued)
Value
No. Symbol C Parameter Conditions
Min Max
Unit
5t
TMSH, tTDIH
6t
TDOV
7t
8t
11 t
12 t
13 t
14 t
15 t
TDOI
TDOHZ
BSDV
BSDVZ
BSDHZ
BSDST
BSDHT
CC D TMS, TDI data hold time — 25 — ns
CC D TCK low to TDO data valid — — 40 ns
CC D TCK low to TDO data invalid — 0 — ns
CC D TCK low to TDO high impedance — 40 — ns
CC D TCK falling edge to output valid — — 50 ns
CC D
TCK falling edge to output valid out of high
impedance
— — 50 ns
CC D TCK falling edge to output high impedance — — 50 ns
CC D Boundary scan input valid to TCK rising edge — 50 — ns
CC D TCK rising edge to boundary scan input invalid — 50 — ns
Figure 22. JTAG test clock input timing
Doc ID 14723 Rev 8 93/115
Page 94

Electrical characteristics SPC560P44Lx, SPC560P50Lx
TCK
4
5
6
7
8
TMS, TDI
TDO
Figure 23. JTAG test access port timing
94/115 Doc ID 14723 Rev 8
Page 95

SPC560P44Lx, SPC560P50Lx Electrical characteristics
TCK
Output
Signals
Input
Signals
Output
Signals
11
12
13
14
15
Figure 24. JTAG boundary scan timing
3.17.3 Nexus timing
Table 40. Nexus debug port timing
No. Symbol C Parameter
1t
2t
3t
4t
5t
MCYC
MDOV
MSEOV
EVTOV
TCYC
(1)
CC D MCKO cycle time 32 — — ns
CC D MCKO low to MDO data valid
CC D MCKO low to MSEO data valid
CC D MCKO low to EVTO data valid
CC D TCK cycle time 64
Doc ID 14723 Rev 8 95/115
(2)
(2)
(2)
Value
Unit
Min Typ Max
——6ns
——6ns
——6ns
(3)
——ns
Page 96

Electrical characteristics SPC560P44Lx, SPC560P50Lx
1
3
4
MCKO
MDO
MSEO
EVTO
Output Data Valid
2
TCK
5
EVTI
EVTO
Table 40. Nexus debug port timing
(1)
(continued)
Value
No. Symbol C Parameter
Min Typ Max
t
NTDIS
6
t
NTMSS
t
NTDIH
7
t
NTMSH
8t
TDOV
9t
1. All Nexus timing relative to MCKO is measured from 50% of MCKO and 50% of the respective signal.
2. MDO, MSEO
3. Lower frequency is required to be fully compliant to standard.
TDOI
CC D TDI data setup time 6 — — ns
CC D TMS data setup time 6 — — ns
CC D TDI data hold time 10 — — ns
CC D TMS data hold time 10 — — ns
CC D TCK low to TDO data valid — — 35 ns
CC D TCK low to TDO data invalid 6 — — ns
, and EVTO data is held valid until next MCKO low cycle.
Unit
Figure 25. Nexus output timing
Figure 26. Nexus event trigger and test clock timings
96/115 Doc ID 14723 Rev 8
Page 97

SPC560P44Lx, SPC560P50Lx Electrical characteristics
TDO
6
7
TMS, TDI
8
TCK
9
Figure 27. Nexus TDI, TMS, TDO timing
3.17.4 External interrupt timing (IRQ pin)
Table 41. External interrupt timing
No. Symbol C Parameter Conditions
1t
2t
IPWH
3t
1. IRQ timing specified at f
SRC = 0b00.
2. Applies when IRQ pins are configured for rising edge or falling edge events, but not both.
3. N = ISR time to clear the flag
CC D IRQ pulse width low — 4 — t
IPWL
CC D IRQ pulse width high — 4 — t
CC D IRQ edge to edge time
ICYC
= 64 MHz and V
SYS
(1)
DD_HV_IOx
(2)
= 3.0 V to 5.5 V, TA = TL to TH, and CL = 200 pF with
—4 + N
Doc ID 14723 Rev 8 97/115
Value
Min Max
(3)
—t
Unit
CYC
CYC
CYC
Page 98

Electrical characteristics SPC560P44Lx, SPC560P50Lx
IRQ
2
3
1
Figure 28. External interrupt timing
3.17.5 DSPI timing
Table 42. DSPI timing
(1)
No. Symbol C Parameter Conditions
Master (MTFE = 0) 60 —
1t
2t
3t
4t
5t
6t
7t
8t
CC D DSPI cycle time
SCK
CC D CS to SCK delay — 16 — ns
CSC
CC D After SCK delay — 26 — ns
ASC
CC D SCK duty cycle — 0.4 * t
SDC
CC D Slave access time SS active to SOUT valid — 30 ns
A
CC D Slave SOUT disable time
DIS
CC D PCSx to PCSS time — 13 — ns
PCSC
CC D PCSS to PCSx time — 13 — ns
PASC
Slave (MTFE = 0) 60 —
SS
inactive to SOUT high
impedance or invalid
Master (MTFE = 0) 35 —
Slave 4 —
9t
CC D Data setup time for inputs
SUI
Master (MTFE = 1, CPHA = 0) 35 —
Master (MTFE = 1, CPHA = 1) 35 —
Master (MTFE = 0) –5 —
Val ue
Unit
Min Max
ns
SCK
0.6 * t
SCK
ns
—16ns
ns
10 t
CC D Data hold time for inputs
HI
Master (MTFE = 1, CPHA = 0) 11 —
Master (MTFE = 1, CPHA = 1) –5 —
98/115 Doc ID 14723 Rev 8
Slave 4 —
ns
Page 99

SPC560P44Lx, SPC560P50Lx Electrical characteristics
Data
Last Data
First Data
First Data Data Last Data
SIN
SOUT
PCSx
SCK Output
4
9
12
1
11
10
4
SCK Output
(CPOL=0)
(CPOL=1)
3
2
Note: Numbers shown reference Tab l e 4 2.
Table 42. DSPI timing
(1)
(continued)
No. Symbol C Parameter Conditions
Master (MTFE = 0) — 12
Slave — 36
11 t
CC D Data valid (after SCK edge)
SUO
Master (MTFE = 1, CPHA = 0) — 12
Master (MTFE = 1, CPHA = 1) — 12
Master (MTFE = 0) –2 —
Slave 6 —
12 t
CC D Data hold time for outputs
HO
Master (MTFE = 1, CPHA = 0) 6 —
Master (MTFE = 1, CPHA = 1) –2 —
1. All timing is provided with 50 pF capacitance on output, 1 ns transition time on input signal.
Val ue
Unit
Min Max
ns
ns
Figure 29. DSPI classic SPI timing – Master, CPHA = 0
Doc ID 14723 Rev 8 99/115
Page 100

Electrical characteristics SPC560P44Lx, SPC560P50Lx
Data
Last Data
First Data
SIN
SOUT
12
11
10
Last Data
Data
First Data
SCK Output
SCK Output
PCSx
9
(CPOL=0)
(CPOL=1)
Note: Numbers shown reference Ta bl e 4 2 .
Last Data
First Data
3
4
1
Data
Data
SIN
SOUT
SS
4
5
6
9
11
10
12
SCK Input
First Data
Last Data
SCK Input
2
(CPOL=0)
(CPOL=1)
Note: Numbers shown reference Ta bl e 4 2 .
Figure 30. DSPI classic SPI timing – Master, CPHA = 1
Figure 31. DSPI classic SPI timing – Slave, CPHA = 0
100/115 Doc ID 14723 Rev 8
 Loading...
Loading...