

Datasheet SCN2681AE1A44, SCN2681AE1F40, SCN2681AE1N24, SCN2681AE1N28, SCN2681AE1N40 Datasheet (Philips)
...Page 1

SCN2681
Dual asynchronous receiver/transmitter
(DUART)
Product specification
Supersedes data of 1995 May 01
IC19 Data Handbook
1998 Sep 04
INTEGRATED CIRCUITS
Page 2
Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
2
1998 Sep 04 853–1077 19970
DESCRIPTION
The Philips Semiconductors SCN2681 Dual Universal
Asynchronous Receiver/Transmitter (DUART) is a single-chip
MOS-LSI communications device that provides two independent
full-duplex asynchronous receiver/transmitter channels in a single
package. It interfaces directly with microprocessors and may be
used in a polled or interrupt driven system.
The operating mode and data format of each channel can be
programmed independently. Additionally, each receiver and
transmitter can select its operating speed as one of eighteen fixed
baud rates, a 16X clock derived from a programmable counter/timer,
or an external 1X or 16X clock. The baud rate generator and
counter/timer can operate directly from a crystal or from external
clock inputs. The ability to independently program the operating
speed of the receiver and transmitter make the DUART particularly
attractive for dual-speed channel applications such as clustered
terminal systems.
Each receiver is quadruply buffered to minimize the potential of
receiver over-run or to reduce interrupt overhead in interrupt driven
systems. In addition, a flow control capability is provided to disable
a remote DUART transmitter when the buffer of the receiving device
is full.
Also provided on the SCN2681 are a multipurpose 7-bit input port
and a multipurpose 8-bit output port. These can be used as general
purpose I/O ports or can be assigned specific functions (such as
clock inputs or status/interrupt outputs) under program control.
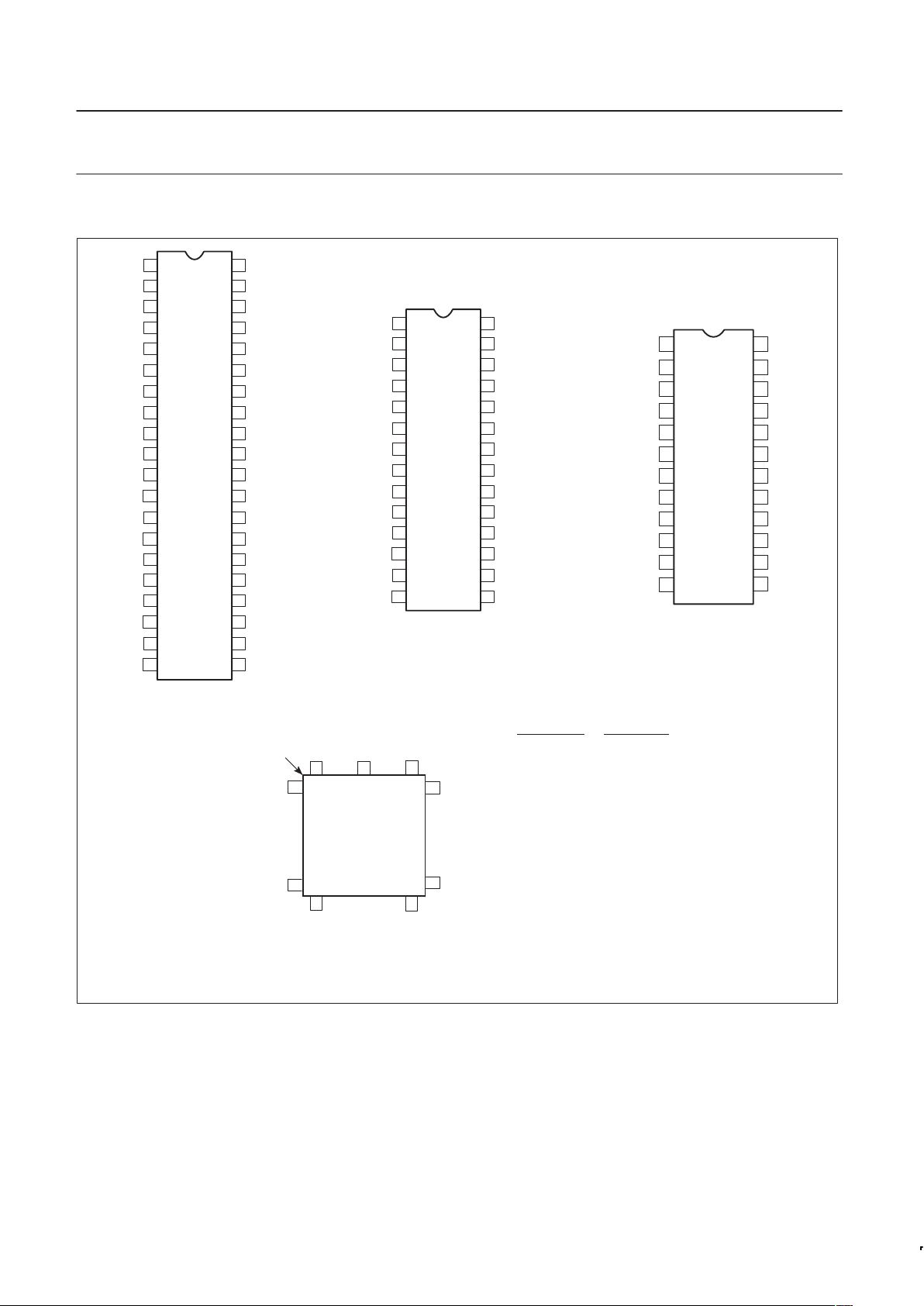
The SCN2681 is available in three package versions: 40-pin and
28–pin, both 0.6” wide DIPs; a compact 24-pin 0.4” wide DIP; and a
44-pin PLCC.
FEA TURES
•Dual full-duplex asynchronous receiver/transmitter
•Quadruple buffered receiver data registers
•Programmable data format
– 5 to 8 data bits plus parity
– Odd, even, no parity or force parity
– 1, 1.5 or 2 stop bits programmable in 1/16-bit increments
•Programmable baud rate for each receiver and transmitter
selectable from:
– 22 fixed rates: 50 to 115.2k baud
•16-bit programmable Counter/Timer
– Non-standard rates to 115.2Kb
– One user-defined rate derived from programmable
timer/counter
– External 1X or 16X clock
•Parity, framing, and overrun error detection
•False start bit detection
•Line break detection and generation
•Programmable channel mode
– Normal (full-duplex)
– Automatic echo
– Local loopback
– Remote loopback
•Multi-function programmable 16-bit counter/timer
•Multi-function 7-bit input port
– Can serve as clock or control inputs
– Change of state detection on four inputs
– 100kΩ typical pull-up resistor
•Multi-function 8-bit output port
– Individual bit set/reset capability
– Outputs can be programmed to be status/interrupt signals
•Versatile interrupt system
– Single interrupt output with eight maskable interrupting
conditions
– Output port can be configured to provide a total of up to six
separate wire-ORable interrupt outputs
•Maximum data transfer: 1X – 1MB/sec, 16X – 125kB/sec
•Automatic wake-up mode for multidrop applications
•Start-end break interrupt/status
•Detects break which originates in the middle of a character
•On-chip crystal oscillator
•Single +5V power supply
•Commercial and industrial temperature ranges available
•DIP and PLCC packages
ORDERING INFORMATION
ORDER CODE
Commercial Industrial
DESCRIPTION
VCC = +5V +5%, TA = 0°C to +70°C VCC = +5V +10%, TA = -40°C to +85°C
Plastic DIP Plastic LCC Plastic DIP Plastic LCC
24-Pin
1
SCN2681AC1N24 Not available SCN2681AE1N24 Not available
28-Pin
2
SCN2681AC1N28 Not available SCN2681AE1N28 Not available
40-Pin
2
SCN2681AC1N40 Not available SCN2681AE1N40 Not available
44-Pin Not available SCN2681AC1A44 Not available SCN2681AE1A44
NOTES:
1. 400mil-wide Dual In-Line Package
2. 600mil-wide Dual In-Line Package
Page 3
Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
3
PIN CONFIGURATIONS
PIN/FUNCTION PIN/FUNCTION
1NC 23NC
2 A0 24 INTRN
3 IP3 25 D6
4A1 26D4
5 IP1 27 D2
6A2 28D0
7 A3 29 OP6
8 IP0 30 OP4
9 WRN 31 OP2
10 RDN 32 OP0
11 RXDB 33 TXDA
12 NC 34 NC
13 TXDB 35 RXDA
14 OP1 36 X1/CLK
15 OP3 37 X2
16 OP5 38 RESET
17 OP7 39 CEN
18 D1 40 IP2
19 D3 41 IP6
20 D5 42 IP5
21 D7 43 IP4
22 GND 44 V
CC
24
23
22
2120
19
18
17
16
15
28
27
12
10
11
9
8
7
6
5
4
3
2
1
14
13
26
25
29
30
31
32
33
34
35
36
37
38
39
40
DIP
V
CC
IP4
IP5
IP6
IP2
CEN
RESET
X2
X1/CLK
RXDA
TXDA
OP0
OP2
OP4
OP6
D0
D2
D4
D6
INTRN
A0
IP3
A1
IP1
A2
A3
IP0
WRN
RDN
RXDB
TXDB
OP1
OP3
OP5
OP7
D1
D3
D5
D7
GND
24
23
22
21
20
19
18
17
16
15
28
27
12
10
11
9
8
7
6
5
4
3
2
1
14
13
26
25
V
CC
IP2
CEN
RESET
X2
X1/CLK
RXDA
TXDA
OP0
D0
D2
D4
D6
INTRNGND
D7
D5
D3
D1
OP1
TXDB
RXDB
RDN
WRN
A3
A2
A1
A0
DIP
1
2
3
4
5
6
7
8
9
10
11
12
23
22
21
20
19
18
17
16
15
14
13
A1
A2
A3
WRN
RDN
RXDB
TXDB
D1
D3
D5
D7
GND
DIP
24
A0
V
CC
CEN
RESET
X1/CLK
RXDA
TXDA
D0
D2
D4
D6
INTRN
1
39
17
28
40
29
18
7
PLCC
6
TOP VIEW
INDEX
CORNER
SD00084
Figure 1. Pin Configurations
Page 4
Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
4
PIN DESCRIPTION
APPLICABLE
SYMBOL
40/44 28 24
TYPE
NAME AND FUNCTION
D0–D7 X X X I/O Data Bus: Bidirectional 3-State data bus used to transfer commands, data and status be-
tween the DUART and the CPU. D0 is the least significant bit.
CEN X X X I Chip Enable: Active-Low input signal. When Low, data transfers between the CPU and the
DUART are enabled on D0-D7 as controlled by the WRN, RDN and A0-A3 inputs. When
High, places the D0-D7 lines in the 3-State condition.
WRN X X X I Write Strobe: When Low and CEN is also Low, the contents of the data bus is loaded into
the addressed register. The transfer occurs on the rising edge of the signal.
RDN X X X I Read Strobe: When Low and CEN is also Low, causes the contents of the addressed regis-
ter to be presented on the data bus. The read cycle begins on the falling edge of RDN.
A0–A3 X X X I Address Inputs: Select the DUART internal registers and ports for read/write operations.
RESET X X X I Reset: A High level clears internal registers (SRA, SRB, IMR, ISR, OPR, OPCR), puts
OP0–OP7 in the High state, stops the counter/timer, and puts Channels A and B in the inac-
tive state, with the TxDA and TxDB outputs in the mark (High) state. Clears Test modes, sets
MR pointer to MR1.
INTRN X X X O Interrupt Request: Active-Low, open-drain, output which signals the CPU that one or more
of the eight maskable interrupting conditions are true.
X1/CLK X X X I Crystal 1: Crystal connection or an external clock input. A crystal of a clock the appropriate
frequency (nominally 3.6864 MHz) must be supplied at all times. For crystal connections see
Figure 7, Clock Timing.
X2 X X I Crystal 2: Crystal connection. See Figure 7. If a crystal is not used it is best to keep this pin
not connected although it is permissible to ground it.
RxDA X X X I Channel A Receiver Serial Data Input: The least significant bit is received first. “Mark” is
High, “space” is Low.
RxDB X X X I Channel B Receive Serial Data Input: The least significant bit is received first. “Mark” is
High, “space” is Low.
TxDA X X X O Channel A Transmitter Serial Data Output: The least significant bit is transmitted first.
This output is held in the “mark” condition when the transmitter is disabled, idle or when oper-
ating in local loopback mode. “Mark” is High, “space” is Low.
TxDB X X X O Channel B Transmitter Serial Data Output: The least significant bit is transmitted first.
This output is held in the “mark” condition when the transmitter is disabled, idle or when oper-
ating in local loopback mode. “Mark” is High, “space” is Low.
OP0 X X O Output 0: General purpose output or Channel A request to send (RTSAN, active-Low). Can
be deactivated automatically on receive or transmit.
OP1 X X O Output 1: General purpose output or Channel B request to send (RTSBN, active-Low). Can
be deactivated automatically on receive or transmit.
OP2 X O Output 2: General purpose output or Channel A transmitter 1X or 16X clock output, or Chan-
nel A receiver 1X clock output.
OP3 X O Output 3: General purpose output or open-drain, active-Low counter/timer output or Channel
B transmitter 1X clock output, or Channel B receiver 1X clock output.
OP4 X O Output 4: General purpose output or Channel A open-drain, active-Low, RxRDYA/FFULLA
output.
OP5 X O Output 5: General purpose output or Channel B open-drain, active-Low, RxRDYB/FFULLB
output.
OP6 X O Output 6: General purpose output or Channel A open-drain, active-Low, TxRDYA output.
OP7 X O Output 7: General purpose output or Channel B open-drain, active-Low, TxRDYB output.
IP0 X I Input 0: General purpose input or Channel A clear to send active-Low input (CTSAN). Pin
has an internal V
CC
pull-up device supplying 1 to 4 A of current.
IP1 X I Input 1: General purpose input or Channel B clear to send active-Low input (CTSBN). Pin
has an internal V
CC
pull-up device supplying 1 to 4 A of current.
IP2 X X I Input 2: General purpose input or counter/timer external clock input. Pin has an internal V
CC
pull-up device supplying 1 to 4 A of current.
IP3 X I Input 3: General purpose input or Channel A transmitter external clock input (TxCA). When
the external clock is used by the transmitter, the transmitted data is clocked on the falling
edge of the clock. Pin has an internal V
CC
pull-up device supplying 1 to 4 A of current.
IP4 X I Input 4: General purpose input or Channel A receiver external clock input (RxCA). When the
external clock is used by the receiver, the received data is sampled on the rising edge of the
clock. Pin has an internal V
CC
pull-up device supplying 1 to 4 A of current.
Page 5

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
5
PIN DESCRIPTION (Continued)
APPLICABLE
SYMBOL
40/44 28 24
TYPE
NAME AND FUNCTION
IP5 X I Input 5: General purpose input or Channel B transmitter external clock input (TxCB). When
the external clock is used by the transmitter, the transmitted data is clocked on the falling
edge of the clock. Pin has an internal V
CC
pull-up device supplying 1 to 4 A of current.
IP6 X I Input 6: General purpose input or Channel B receiver external clock input (RxCB). When the
external clock is used by the receiver, the received data is sampled on the rising edge of the
clock. Pin has an internal V
CC
pull-up device supplying 1 to 4 A of current.
V
CC
X X I Power Supply: +5V supply input.
GND X X I Ground
ABSOLUTE MAXIMUM RATINGS
1
SYMBOL
PARAMETER RATING UNIT
T
A
Operating ambient temperature range
2
See Note 4 °C
T
STG
Storage temperature range -65 to +150 °C
All voltages with respect to ground
3
-0.5 to +6.0 V
NOTES:
1. Stresses above those listed under Absolute Maximum Ratings may cause permanent damage to the device. This is a stress rating only and
functional operation of the device at these or any other condition above those indicated in the operation section of this specification is not
implied.
2. For operating at elevated temperatures, the device must be derated based on +150
o
C maximum junction temperature.
3. This product includes circuitry specifically designed for the protection of its internal devices from damaging effects of excessive static
charge. Nonetheless, it is suggested that conventional precautions be taken to avoid applying any voltages larger than the rated maxima.
4. Parameters are valid over specified temperature range. See Ordering information table for applicable operating temperature range and V
CC
supply range.
DC ELECTRICAL CHARACTERISTICS
1, 2, 3
T
A
= -40°C to +85°C, V
CC
= +5.0V 10%
LIMITS
SYMBOL
PARAMETER
TEST CONDITIONS
Min Typ Max
UNIT
V
IL
V
IH
V
IH
V
IH
V
OL
V
OH
V
OH
Input low voltage
Input high voltage (except X1/CLK)
5
Input high voltage (except X1/CLK)
4
Input high voltage (X1/CLK)
Output low voltage
Output high voltage (except o.d. outputs)
5
Output high voltage (except o.d. outputs)
4
I
OL
= 2.4mA
I
OH
= -400µA
I
OH
= -400µA
2
2.5
4
2.4
2.9
0.8
0.4
V
V
V
V
V
V
V
I
IL
I
LL
I
X1L
I
X1H
I
X2L
I
X2H
I
OC
I
OCC
Input leakage current
Data bus 3-stage leakage current
X1/CLK low input current
X1/CLK high input current
X2 low input current
X2 high input current
Open-collector output leakage current
Power supply current
VIN = 0 to V
CC
VO = 0.4 to V
CC
VIN = 0, X2 grounded
VIN = 0, X2 floated
V
IN
= VCC, X2 grounded
VIN = VCC, X2 floated
VIN = 0, X1/CLK floated
VIN = VCC, X1/CLK floated
VO = 0.4 to V
CC
0°C to +70°C version
-40°C to +85°C version
-10
-10
-4
-3
-1
0
-100
0
-10
-2
-1.5
0.2
3.5
-30
+30
10
10
0
0
1
10
0
100
10
150
175
µA
µA
mA
mA
mA
mA
µA
µA
µA
mA
mA
NOTES:
1. Parameters are valid over specified temperature range. See Ordering information table for applicable operating temperature range and V
CC
supply range.
2. All voltage measurements are referenced to ground (GND). For testing, all inputs except X1/CLK swing between 0.4V and 2.4V with a
transition time of 20ns maximum. For X1/CLK this swing is between 0.4V and 4.4V . All time measurements are referenced at input voltages
of 0.8V and 2.0V as appropriate.
3. Typical values are at +25°C, typical supply voltages, and typical processing parameters.
4. T
A
< 0°C
5. T
A
> 0°C
Page 6
Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
6
AC CHARACTERISTICS T
A
= -40°C to +85°C1, V
CC
= +5.0V 10%
2, 3, 4, 5
LIMITS
SYMBOL
PARAMETER
Min Typ Max
UNIT
Reset Timing (Figure 3)
t
RES
RESET pulse width 200 ns
Bus Timing (Figure 4)
6
t
AS
A0-A3 setup time to RDN, WRN Low 10 ns
t
AH
A0-A3 hold time from RDN, WRN Low 100 ns
t
CS
CEN setup time to RDN, WRN Low 0 ns
t
CH
CEN hold time from RDN, WRN High 0 ns
t
RW
WRN, RDN pulse width 225 ns
t
DD
Data valid after RDN Low 175 ns
t
DF
Data bus floating after RDN High 100 ns
t
DS
Data setup time before WRN High 100 ns
t
DH
Data hold time after WRN High 20 ns
t
RWD
High time between READs and/or WRITE
7, 8
200 ns
Port Timing (Figure 5)
6
t
PS
Port input setup time before RDN Low 0 ns
t
PH
Port input hold time after RDN High 0 ns
t
PD
Port output valid after WRN High 400 ns
Interrupt Timing (Figure 6)
t
IR
INTRN (or OP3-OP7 when used as interrupts) negated from:
Read RHR (RxRDY/FFULL interrupt) 300 ns
Write THR (TxRDY interrupt) 300 ns
Reset command (delta break interrupt) 300 ns
Stop C/T command (counter interrupt) 300 ns
Read IPCR (input port change interrupt) 300 ns
Write IMR (clear of interrupt mask bit) 300 ns
Clock Timing (Figure 7)
10
t
CLK
X1/CLK High or Low time 100 ns
f
CLK
X1/CLK frequency 2.0 3.6864 4.0 MHz
t
CTC
CTCLK (IP2) High or Low time 100 ns
f
CTC
CTCLK (IP2) frequency 0 4.0 MHz
t
RX
9
RxC High or Low time 220 ns
f
RX
9
RxC frequency (16X)
(1X)
0
0
2.0
1.0
MHz
MHz
t
TX
9
TxC High or Low time 220 ns
f
TX
9
TxC frequency (16X)
(1X)
0
0
2.0
1.0
MHz
MHz
Transmitter T iming (Figure 8)
t
TXD
9
TxD output delay from TxC external clock input on IP pin 350 ns
t
TCS
9
Output delay from TxC low at OP pin to TxD data output 0 150 ns
Receiver Timing (Figure 10)
t
RXS
9
RxD data setup time before RxC high at external clock input on IP pin 240 ns
t
RXH
9
RxD data hold time after RxC high at external clock input on IP pin 200 ns
NOTES:
1. For operating at elevated temperatures, the device must be derated based on +150°C maximum junction temperature.
2. Parameters are valid over specified temperature range.
3. All voltage measurements are referenced to ground (GND). For testing, all inputs except X1/CLK swing between 0.4V and 2.4V with a
transition time of <
20ns. For X1/CLK this swing is between 0.4V and 4.4V . All time measurements are referenced at input voltages of 0.8V
and 2.0V as appropriate.
4. Typical values are at +25°C, typical supply voltages, and typical processing parameters.
5. Test condition for outputs: C
L
= 150pF, except interrupt outputs. Test condition for interrupt outputs: CL = 50pF, R
L
= 2.7kΩ to VCC.
6. Timing is illustrated and referenced to the WRN and RDN inputs. The device may also be operated with CEN as the ‘strobing’ input. In this
case, all timing specifications apply referenced to the falling and rising edges of CEN, CEN and RDN (also CEN and WRN) are ANDed
internally . As a consequence, the signal asserted last initiates the cycle and the signal negated first terminates the cycle.
7. If CEN is used as the ‘strobing’ input, the parameter defines the minimum High times between one CEN and the next. The RDN signal must
be negated for t
RWD
to guarantee that any status register changes are valid.
8. Consecutive write operations to the same command register require at least three edges of the X1 clock between writes.
9. This parameter is not applicable to the 28-pin device.
10.Operation to 0MHz is assured by design. However, operation at low frequencies is not tested and has not been characterized.
Page 7
Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
7
BLOCK DIAGRAM
8
D0–D7
RDN
WRN
CEN
A0–A3
RESET
INTRN
X1/CLK
X2
4
BUS BUFFER
OPERATION CONTROL
ADDRESS
DECODE
R/W CONTROL
INTERRUPT CONTROL
IMR
ISR
TIMING
BAUD RATE
GENERATOR
CLOCK
SELECTORS
COUNTER/
TIMER
XTAL OSC
CSRA
CSRB
ACR
CTUR
CHANNEL A
TRANSMIT
HOLDING REG
TRANSMIT
SHIFT REGISTER
RECEIVE
HOLDING REG (3)
RECEIVE
SHIFT REGISTER
MRA1, 2
CRA
SRA
INPUT PORT
CHANGE OF
STATE
DETECTORS (4)
OUTPUT PORT
FUNCTION
SELECT LOGIC
OPCR
TxDA
RxDA
IP0-IP6
OP0-OP7
V
CC
GND
CONTROL
TIMING
INTERNAL DATABUS
CHANNEL B
(AS ABOVE)
IPCR
ACR
OPR
CTLR
RxDB
TxDB
8
7
SD00085
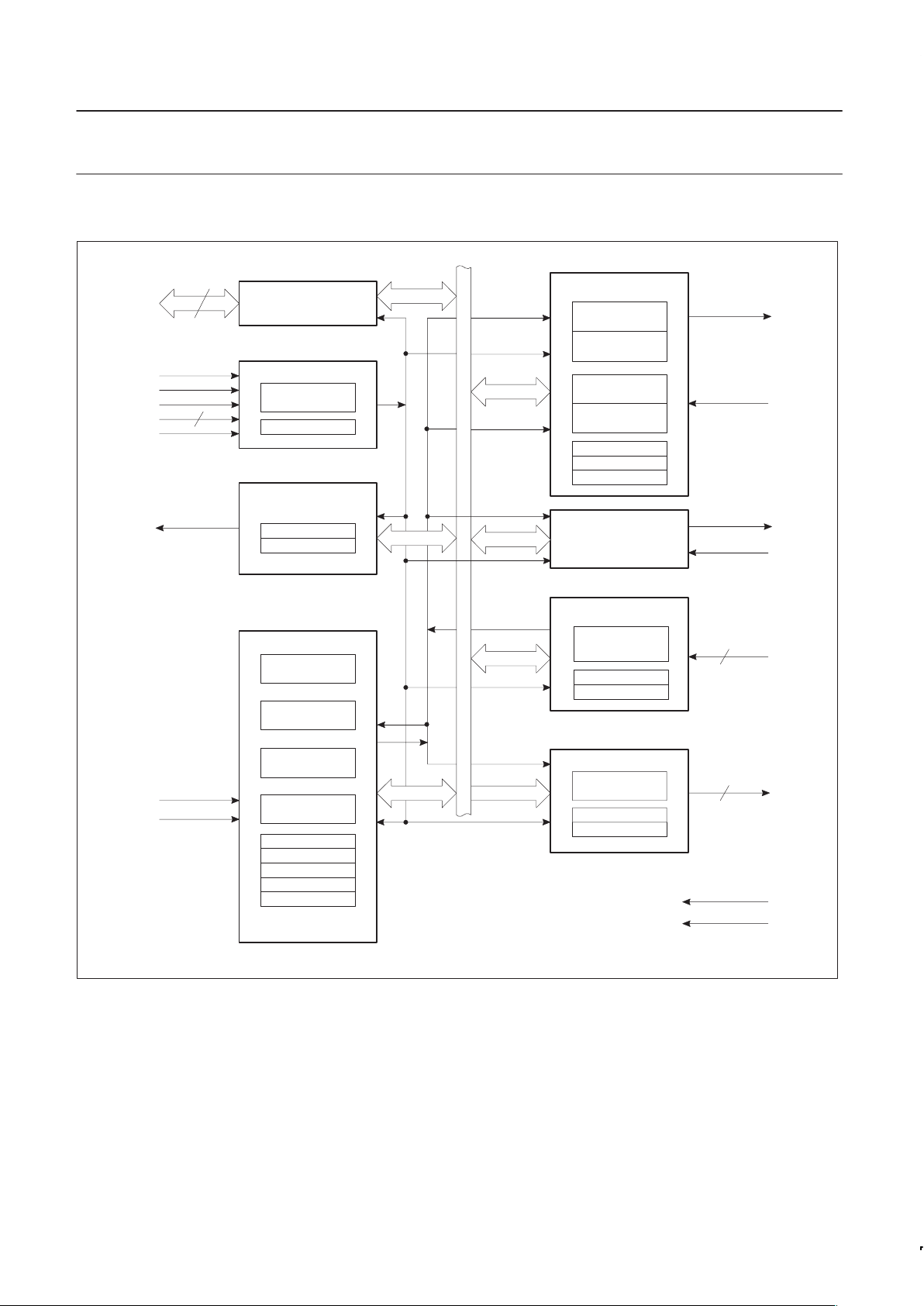
Figure 2. Block Diagram
BLOCK DIAGRAM
The SCN2681 DUART consists of the following eight major sections:
data bus buffer, operation control, interrupt control, timing,
communications Channels A and B, input port and output port.
Refer to the block diagram.
Data Bus Buffer
The data bus buffer provides the interface between the external and
internal data buses. It is controlled by the operation control block to
allow read and write operations to take place between the controlling
CPU and the DUART.
Operation Control
The operation control logic receives operation commands from the
CPU and generates appropriate signals to internal sections to
control device operation. It contains address decoding and read and
write circuits to permit communications with the microprocessor via
the data bus buffer.
Interrupt Control
A single active-Low interrupt output (INTRN) is provided which is
activated upon the occurrence of any of eight internal events.
Associated with the interrupt system are the Interrupt Mask Register
Page 8

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
8
(IMR) and the Interrupt Status Register (ISR). The IMR may be
programmed to select only certain conditions to cause INTRN to be
asserted. The ISR can be read by the CPU to determine all
currently active interrupting conditions.
Outputs OP3-OP7 can be programmed to provide discrete interrupt
outputs for the transmitter, receivers, and counter/timer.
Timing Circuits
The timing block consists of a crystal oscillator, a baud rate
generator, a programmable 16-bit counter/timer, and four clock
selectors. The crystal oscillator operates directly from a 3.6864MHz
crystal connected across the X1/CLK and X2 inputs. If an external
clock of the appropriate frequency is available, it may be connected
to X1/CLK. The clock serves as the basic timing reference for the
Baud Rate Generator (BRG), the counter/timer, and other internal
circuits. A clock signal within the limits specified in the
specifications section of this data sheet must always be supplied to
the DUART.
If an external clock is used instead of a crystal, both X1 and X2
should use a configuration similar to the one in Figure 7.
The baud rate generator operates from the oscillator or external
clock input and is capable of generating 18 commonly used data
communications baud rates ranging from 50 to 38.4k baud. The
clock outputs from the BRG are at 16X the actual baud rate. The
counter/timer can be used as a timer to produce a 16X clock for any
other baud rate by counting down the crystal clock or an external
clock. The four clock selectors allow the independent selection, for
each receiver and transmitter, of any of these baud rates or external
timing signal.
Counter/Timer (C/T)
The counter timer is a 16 bit programmable divider that operates
one of three modes: Counter, Timer or Time Out mode. In all three
modes it uses the 16-bit value loaded to the CTUR and CTLR
registers. (Counter timer upper and lower preset registers).
•In the timer mode it generates a square wave.
•In the counter mode it generates a time delay.
•In the time out mode it monitors the receiver data flow and signals
data flow has paused. In the time out mode the receiver controls
the starting/stopping of the C/T.
The counter operates as a down counter and sets its output bit in
the ISR (Interrupt Status Register) each time it passes through 0.
The output of the counter/timer may be seen on one of the OP pins
or as an Rx or Tx clock.
The Timer/Counter is controlled with six (6) “commands”; Start C/T,
Stop C/T, write C/T , preset registers, read C/T value, set or reset
time out mode.
Please see the detail of the commands under the Counter/Timer
register descriptions.
Communications Channels A and B
Each communications channel of the SCN2681 comprises a
full-duplex asynchronous receiver/transmitter (UART). The
operating frequency for each receiver and transmitter can be
selected independently from the baud rate generator, the counter
timer, or from an external input.
The transmitter accepts parallel data from the CPU, converts it to a
serial bit stream, inserts the appropriate start, stop, and optional
parity bits and outputs a composite serial stream of data on the TxD
output pin. The receiver accepts serial data on the RxD pin,
converts this serial input to parallel format, checks for start bit, stop
bit, parity bit (if any), or break condition and sends an assembled
character to the CPU.
The input port pulse detection circuitry uses a 38.4kHz sampling
clock derived from one of the baud rate generator taps. This results
in a sampling period of slightly more than 25µs (this assumes that
the clock input is 3.6864MHz). The detection circuitry, in order to
guarantee that a true change in level has occurred, requires two
successive samples at the new logic level be observed. As a
consequence, the minimum duration of the signal change is 25µs if
the transition occurs “coincident with the first sample pulse”. The
50µs time refers to the situation in which the change-of-state is “just
missed” and the first change-of-state is not detected until 25µs later.
Input Port
The inputs to this unlatched 7-bit port can be read by the CPU by
performing a read operation at address D16. A High input results in
a logic 1 while a Low input results in a logic 0. D7 will always read
as a logic 1. The pins of this port can also serve as auxiliary inputs
to certain portions of the DUART logic.
Four change-of-state detectors are provided which are associated
with inputs IP3, IP2, IP1 and IP0. A High-to-Low or Low-to-High
transition of these inputs lasting longer than 25 – 50µs, will set the
corresponding bit in the input port change register. The bits are
cleared when the register is read by the CPU. Any change-of-state
can also be programmed to generate an interrupt to the CPU.
All the IP pins have a small pull-up device that will source 1 to 4 A
of current from V
CC
. These pins do not require pull-up devices or
V
CC
connections if they are not used.
Output Port
The output port pins may be controlled by the OPR, OPCR, MR and
CR registers. Via appropriate programming they may be just
another parallel port to external circuits, or they may represent many
internal conditions of the UART. When this 8-bit port is used as a
general purpose output port, the output port pins drive a state which
is the complement of the Output Port Register (OPR). OPR(n) = 1
results in OP(n) = Low and vice versa. Bits of the OPR can be
individually set and reset. A bit is set by performing a write operation
at address E16 with the accompanying data specifying the bits to be
set (1 = set, 0 = no change).
Likewise, a bit is reset by a write at address F16 with the
accompanying data specifying the bits to be reset (1 = reset, 0 = no
change).
Outputs can be also individually assigned specific functions by
appropriate programming of the Channel A mode registers (MR1A,
MR2A), the Channel B mode registers (MR1B, MR2B), and the
Output Port Configuration Register (OPCR).
Please note that these pins drive both high and low. HOWEVER
when they are programmed to represent interrupt type functions
(such as receiver ready, transmitter ready or counter/timer ready)
they will be switched to an open drain configuration in which case an
external pull-up device would be required.
TRANSMITTER OPERATION
The SCN2681 is conditioned to transmit data when the transmitter is
enabled through the command register. The SCN2681 indicates to
the CPU that it is ready to accept a character by setting the TxRDY
bit in the status register. This condition can be programmed to
Page 9

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
9
generate an interrupt request at OP6 or OP7 and INTRN. When a
character is loaded into the Transmit Holding Register (THR), the
above conditions are negated. Data is transferred from the holding
register to transmit shift register when it is idle or has completed
transmission of the previous character. The TxRDY conditions are
then asserted again which means one full character time of buffering
is provided. Characters cannot be loaded into the THR while the
transmitter is disabled.
The transmitter converts the parallel data from the CPU to a serial
bit stream on the TxD output pin. It automatically sends a start bit
followed by the programmed number of data bits, an optional parity
bit, and the programmed number of stop bits. The least significant
bit is sent first. Following the transmission of the stop bits, if a new
character is not available in the THR, the TxD output remains High
and the TxEMT bit in the Status Register (SR) will be set to 1.
Transmission resumes and the TxEMT bit is cleared when the CPU
loads a new character into the THR.
If the transmitter is disabled, it continues operating until the
character currently being transmitted is completely sent out. The
transmitter can be forced to send a continuous Low condition by
issuing a send break command.
The transmitter can be reset through a software command. If it is
reset, operation ceases immediately and the transmitter must be
enabled through the command register before resuming operation.
If CTS operation is enable, the CTSN input must be Low in order for
the character to be transmitted. If it goes High in the middle of a
transmission, the character in the shift register is transmitted and
TxDA then remains in the marking state until CTSN goes Low. The
transmitter can also control the deactivation of the RTSN output. If
programmed, the RTSN output will be reset one bit time after the
character in the transmit shift register and transmit holding register
(if any) are completely transmitted, if the transmitter has been
disabled.
Receiver
The SCN2681 is conditioned to receive data when enabled through
the command register. The receiver looks for a High-to-Low
(mark-to-space) transition of the start bit on the RxD input pin. If a
transition is detected, the state of the RxD pin is sampled each 16X
clock for 7 1/2 clocks (16X clock mode) or at the next rising edge of
the bit time clock (1X clock mode). If RxD is sampled High, the start
bit is invalid and the search for a valid start bit begins again. If RxD
is still Low, a valid start bit is assumed and the receiver continues to
sample the input at one bit time intervals at the theoretical center of
the bit, until the proper number of data bits and parity bit (if any)
have been assembled, and one stop bit has been detected. The
least significant bit is received first. The data is then transferred to
the Receive Holding Register (RHR) and the RxRDY bit in the SR is
set to a 1. This condition can be programmed to generate an
interrupt at OP4 or OP5 and INTRN. If the character length is less
than eight bits, the most significant unused bits in the RHR are set to
zero.
After the stop bit is detected, the receiver will immediately look for
the next start bit. However, if a non-zero character was received
without a stop bit (framing error) and RxD remains Low for one half
of the bit period after the stop bit was sampled, then the receiver
operates as if a new start bit transition had been detected at that
point (one-half bit time after the stop bit was sampled).
The parity error, framing error, overrun error and received break
state (if any) are strobed into the SR at the received character
boundary , before the RxRDY status bit is set. If a break condition is
detected (RxD is Low for the entire character including the stop bit),
a character consisting of all zeros will be loaded into the RHR and
the received break bit in the SR is set to 1. The RxD input must
return to high for two (2) clock edges of the X1 crystal clock for the
receiver to recognize the end of the break condition and begin the
search for a start bit. This will usually require a high time of one
X1 clock period or 3 X1 edges since the clock of the controller
is not synchronous to the X1 clock.
Receiver FIFO
The RHR consists of a First-In-First-Out (FIFO) stack with a
capacity of three characters. Data is loaded from the receive shift
register into the topmost empty position of the FIFO. The RxRDY bit
in the status register is set whenever one or more characters are
available to be read, and a FFULL status bit is set if all three stack
positions are filled with data. Either of these bits can be selected to
cause an interrupt. A read of the RHR outputs the data at the top of
the FIFO. After the read cycle, the data FIFO and its associated
status bits (see below) are ‘popped’ thus emptying a FIFO position
for new data.
Receiver Status Bits
In addition to the data word, three status bits (parity error, framing
error, and received break) are also appended to each data character
in the FIFO (overrun is not). Status can be provided in two ways, as
programmed by the error mode control bit in the mode register. In
the ‘character’ mode, status is provided on a character-by-character
basis; the status applies only to the character at the top of the FIFO.
In the ‘block’ mode, the status provided in the SR for these three bits
is the logical-OR of the status for all characters coming to the top of
the FIFO since the last ‘reset error’ command was issued. In either
mode reading the SR does not affect the FIFO. The FIFO is
‘popped’ only when the RHR is read. Therefore the status register
should be read prior to reading the FIFO.
If the FIFO is full when a new character is received, that character is
held in the receive shift register until a FIFO position is available. If
an additional character is received while this state exits, the
contents of the FIFO are not affected; the character previously in the
shift register is lost and the overrun error status bit (SR[4] will be
set-upon receipt of the start bit of the new (overrunning) character).
The receiver can control the deactivation of RTS. If programmed to
operate in this mode, the RTSN output will be negated when a valid
start bit was received and the FIFO is full. When a FIFO position
becomes available, the RTSN output will be re-asserted
automatically. This feature can be used to prevent an overrun, in
the receiver, by connecting the RTSN output to the CTSN input of
the transmitting device.
Receiver Reset and Disable
Receiver disable stops the receiver immediately – data being
assembled if the receiver shift register is lost. Data and status in the
FIFO is preserved and may be read. A re-enable of the receiver
after a disable will cause the receiver to begin assembling
characters at the next start bit detected.
A receiver reset will discard the present shift register data, reset the
receiver ready bit (RxRDY), clear the status of the byte at the top of
the FIFO and re-align the FIFO read/write pointers. This has the
appearance of “clearing or flushing” the receiver FIFO. In fact, the
FIFO is NEVER cleared! The data in the FIFO remains valid until
overwritten by another received character. Because of this,
erroneous reading or extra reads of the receiver FIFO will miss-align
Page 10

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
10
the FIFO pointers and result in the reading of previously read data.
A receiver reset will re-align the pointers.
Multidrop Mode
The DUART is equipped with a wake up mode for multidrop
applications. This mode is selected by programming bits MR1A[4:3]
or MR1B[4:3] to ‘11’ for Channels A and B, respectively. In this
mode of operation, a ‘master’ station transmits an address character
followed by data characters for the addressed ‘slave’ station. The
slave stations, with receivers that are normally disabled, examine
the received data stream and ‘wake up’ the CPU (by setting RxRDY)
only upon receipt of an address character. The CPU compares the
received address to its station address and enables the receiver if it
wishes to receive the subsequent data characters. Upon receipt of
another address character, the CPU may disable the receiver to
initiate the process again.
A transmitted character consists of a start bit, the programmed
number of data bits, and Address/Data (A/D) bit, and the
programmed number of stop bits. The polarity of the transmitted
A/D bit is selected by the CPU by programming bit
MR1A[2]/MR1B[2]. MR1A[2]/MR1B[2] = 0 transmits a zero in the
A/D bit position, which identifies the corresponding data bits as data
while MR1A[2]/MR1B[2] = 1 transmits a one in the A/D bit position,
which identifies the corresponding data bits as an address. The
CPU should program the mode register prior to loading the
corresponding data bits into the THR.
In this mode, the receiver continuously looks at the received data
stream, whether it is enabled or disabled. If disabled, it sets the
RxRDY status bit and loads the character into the RHR FIFO if the
received A/D bit is a one (address tag), but discards the received
character if the received A/D bit is a zero (data tag). If enabled, all
received characters are transferred to the CPU via the RHR. In
either case, the data bits are loaded into the data FIFO while the
A/D bit is loaded into the status FIFO position normally used for
parity error (SRA[5] or SRB[5]). Framing error, overrun error, and
break detect operate normally whether or not the receive is enabled.
PROGRAMMING
The operation of the DUART is programmed by writing control words
into the appropriate registers. Operational feedback is provided via
status registers which can be read by the CPU. The addressing of
the registers is described in Table 1.
The contents of certain control registers are initialized to zero on
RESET. Care should be exercised if the contents of a register are
changed during operation, since certain changes may cause
operational problems.
For example, changing the number of bits per character while the
transmitter is active may cause the transmission of an incorrect
character. In general, the contents of the MR, the CSR, and the
OPCR should only be changed while the receiver(s) and
transmitter(s) are not enabled, and certain changes to the ACR
should only be made while the C/T is stopped.
Mode registers 1 and 2 of each channel are accessed via
independent auxiliary pointers. The pointer is set to MR1x by
RESET or by issuing a ‘reset pointer’ command via the
corresponding command register . Any read or write of the mode
register while the pointer is at MR1x, switches the pointer to MR2x.
The pointer then remains at MR2x, so that subsequent accesses are
always to MR2x unless the pointer is reset to MR1x as described
above.
Mode, command, clock select, and status registers are duplicated
for each channel to provide total independent operation and control.
Refer to Table 2 for register bit descriptions. The reserved
registers at addresses H‘02’ and H‘OA’ should never be read during
normal operation since they are reserved for internal diagnostics.
T able 1. SCN2681 Register Addressing
A3 A2 A1 A0 READ (RDN = 0) WRITE (WRN = 0)
0 0 0 0 Mode Register A (MR1A, MR2A) Mode Register A (MR1A, MR2A)
0 0 0 1 Status Register A (SRA) Clock Select Register A (CSRA)
0 0 1 0 BRG Test * Command Register A (CRA)
0 0 1 1 Rx Holding Register A (RHRA) Tx Holding Register A (THRA)
0 1 0 0 Input Port Change Register (IPCR) Aux. Control Register (ACR)
0 1 0 1 Interrupt Status Register (ISR) Interrupt Mask Register (IMR)
0 1 1 0 Counter/Timer Upper Value (CTU) C/T Upper Preset Value (CRUR)
0 1 1 1 Counter/Timer Lower Value (CTL) C/T Lower Preset Value (CTLR)
1 0 0 0 Mode Register B (MR1B, MR2B) Mode Register B (MR1B, MR2B)
1 0 0 1 Status Register B (SRB) Clock Select Register B (CSRB)
1 0 1 0 1X/16X Test Command Register B (CRB)
1 0 1 1 Rx Holding Register B (RHRB) Tx Holding Register B (THRB)
1 1 0 0 *Reserved* *Reserved*
1 1 0 1 Input Ports IP0 to IP6 Output Port Conf. Register (OPCR)
1 1 1 0 Start Counter Command Set Output Port Bits Command
1 1 1 1 Stop Counter Command Reset Output Port Bits Command
* See Table 5 for BRG T est frequencies in this data sheet, and
“Extended baud rates for SCN2681, SCN68681, SCC2691, SCC2692,
SCC68681 and SCC2698B”
in application notes elsewhere in this publication.
Page 11

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
11
Table 2. Register Bit Formats
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
RxRTS
CONTROL
RxINT
SELECT
ERROR
MODE*
PARITY MODE
PARITY
TYPE
BITS PER
CHARACTER
MR1A
MR1B
0 = No
1 = Yes
0 = RxRDY
1 = FFULL
0 = Char
1 = Block
00 = With Parity
01 = Force Parity
10 = No Parity
11 = Multidrop Mode
0 = Even
1 = Odd
00 = 5
01 = 6
10 = 7
11 = 8
NOTE:
*In block error mode, block error conditions must be cleared by using the error reset command (command 4x) or a receiver reset.
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
CHANNEL MODE
TxRTS
CONTROL
CTS
ENABLE Tx
STOP BIT LENGTH*
MR2A
MR2B
00 = Normal
01 = Auto-Echo
10 = Local loop
11 = Remote loop
0 = No
1 = Yes
0 = No
1 = Yes
0 = 0.563 4 = 0.813 8 = 1.563 C = 1.813
1 = 0.625 5 = 0.875 9 = 1.625 D = 1.875
2 = 0.688 6 = 0.938 A = 1.688 E = 1.938
3 = 0.750 7 = 1.000 B = 1.750 F = 2.000
NOTE:
*Add 0.5 to values shown for 0 – 7 if channel is programmed for 5 bits/char.
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
CSRA
RECEIVER CLOCK SELECT TRANSMITTER CLOCK SELECT
CSRB
See Text See Text
NOTE:
* See Table 5 for BRG T est frequencies in this data sheet, and
“Extended baud rates for SCN2681, SCN68681, SCC2691, SCC2692,
SCC68681 and SCC2698B”
in application notes elsewhere in this publication.
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
CRA
MISCELLANEOUS COMMANDS DISABLE Tx ENABLE Tx DISABLE Rx ENABLE Rx
CRB
Not used –
should be 0
See Text 0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
NOTE:
*Access to the upper four bits of the command register should be separated by three (3) edges of the X1 clock. A disabled transmitter cannot
be loaded.
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
SRA
RECEIVED
BREAK*
FRAMING
ERROR*
PARITY
ERROR*
OVERRUN
ERROR
TxEMT TxRDY FFULL RxRDY
SRB
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
NOTE:
* These status bits are appended to the corresponding data character in the receive FIFO. A read of the status provides these bits (7:5) from
the top of the FIFO together with bits (4:0). These bits are cleared by a “reset error status” command. In character mode they are discarded
when the corresponding data character is read from the FIFO. In block error mode, block error conditions must be cleared by using the error
reset command (command 4x) or a receiver reset.
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
OP7 OP6 OP5 OP4 OP3 OP2
OPCR
0 = OPR[7]
1 = TxRDYB
0 = OPR[6]
1 = TxRDYA
0 = OPR[5]
1 = RxRDY/
FFULLB
0 = OPR[4]
1 = RxRDY/
FFULLA
00 = OPR[3]
01 = C/T OUTPUT
10 = TxCB(1x)
11 = RxCB(1x)
00 = OPR[2]
01 = TxCA(16x)
10 = TxCA(1x)
11 = RxCA(1x)
OPR BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
OPR bit 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
OP pin 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
NOTE:
The level at the OP pin is the inverse of the bit in the OPR register.
Page 12

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
12
Table 2. Register Bit Formats (Continued)
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
ACR
BRG SET
SELECT
COUNTER/TIMER
MODE AND SOURCE
DELTA
IP 3 INT
DELTA
IP 2 INT
DELTA
IP 1 INT
DELTA
IP 0 INT
0 = set 1
1 = set 2
See Table 4
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
IPCR
DELTA
IP 3
DELTA
IP 2
DELTA
IP 1
DELTA
IP 0
IP 3 IP 2 IP 1 IP 0
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = Low
1 = High
0 = Low
1 = High
0 = Low
1 = High
0 = Low
1 = High
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
ISR
INPUT
PORT
CHANGE
DELTA
BREAK B
RxRDY/
FFULLB
TxRDYB
COUNTER
READY
DELTA
BREAK A
RxRDY/
FFULLA
TxRDYA
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
0 = No
1 = Yes
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
IMR
IN. PORT
CHANGE
INT
DELTA
BREAK B
INT
RxRDY/
FFULLB
INT
TxRDYB
INT
COUNTER
READY
INT
DELTA
BREAK A
INT
RxRDY/
FFULLA
INT
TxRDYA
INT
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
0 = Off
1 = On
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
CTUR C/T[15] C/T[14] C/T[13] C/T[12] C/T[11] C/T[10] C/T[9] C/T[8]
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
CTLR C/T[7] C/T[6] C/T[5] C/T[4] C/T[3] C/T[2] C/T[1] C/T[0]
MR1A – Channel A Mode Register 1
MR1A is accessed when the Channel A MR pointer points to MR1.
The pointer is set to MR1 by RESET or by a ‘set pointer’ command
applied via CRA. After reading or writing MR1A, the pointer will
point to MR2A.
MR1A[7] – Channel A Receiver Request-to-Send Control
This bit controls the deactivation of the RTSAN output (OP0) by the
receiver. This output is normally asserted by setting OPR[0] and
negated by resetting OPR[0]. MR1A[7] = 1 causes RTSAN to be
negated upon receipt of a valid start bit if the Channel A FIFO is full.
However, OPR[0] is not reset and RTSAN will be asserted again
when an empty FIFO position is available. This feature can be used
for flow control to prevent overrun in the receiver by using the
RTSAN output signal to control the CTSN input of the transmitting
device.
MR1A[6] – Channel A Receiver Interrupt Select
This bit selects either the Channel A receiver ready status (RxRDY)
or the Channel A FIFO full status (FFULL) to be used for CPU
interrupts. It also causes the selected bit to be output on OP4 if it is
programmed as an interrupt output via the OPCR.
MR1A[5] – Channel A Error Mode Select
This bit select the operating mode of the three FIFOed status bits
(FE, PE, received break) for Channel A. In the ‘character’ mode,
status is provided on a character-by-character basis; the status
applies only to the character at the top of the FIFO. In the ‘block”
mode, the status provided in the SR for these bits is the
accumulation (logical-OR) of the status for all characters coming to
the top of the FIFO since the last ‘reset error’ command for Channel
A was issued.
MR1A[4:3| – Channel A Parity Mode Select
If ‘with parity’ or ‘force parity’ is selected a parity bit is added to the
transmitted character and the receiver performs a parity check on
incoming data MR1A[4:3] + 11 selects Channel A to operate in the
special multidrop mode described in the Operation section.
MR1A[2] – Channel A Parity Type Select
This bit selects the parity type (odd or even) if the ‘with parity’ mode
is programmed by MR1A[4:3], and the polarity of the forced parity bit
if the ‘force parity’ mode is programmed. It has no effect if the ‘no
parity’ mode is programmed. In the special multidrop mode it
selects the polarity of the A/D bit.
MR1A[1:0] – Channel A Bits Per Character Select
This field selects the number of data bits per character to be
transmitted and received. The character length does not include the
start, parity, and stop bits.
Page 13

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
13
MR2A – Channel A Mode Register 2
MR2A is accessed when the Channel A MR pointer points to MR2,
which occurs after any access to MR1A. Accesses to MR2A do not
change the pointer.
MR2A[7:6] – Channel A Mode Select
Each channel of the DUART can operate in one of four modes.
MR2A[7:6] = 00 is the normal mode, with the transmitter and
receiver operating independently. MR2A[7:6] = 01 places the
channel in the automatic echo mode, which automatically
re-transmits the received data. The following conditions are true
while in automatic echo mode:
1. Received data is re-clocked and retransmitted on the TxDA output.
2. The receive clock is used for the transmitter.
3. The receiver must be enabled, but the transmitter need not be
enabled.
4. The Channel A TxRDY and TxEMT status bits are inactive.
5. The received parity is checked, but is not regenerated for transmission, i.e. transmitted parity bit is as received.
6. Character framing is checked, but the stop bits are retransmitted
as received.
7. A received break is echoed as received until the next valid start
bit is detected.
8. CPU to receiver communication continues normally, but the CPU
to transmitter link is disabled.
Two diagnostic modes can also be configured. MR2A[7:6] = 10
selects local loopback mode. In this mode:
1. The transmitter output is internally connected to the receiver
input.
2. The transmit clock is used for the receiver.
3. The TxDA output is held High.
4. The RxDA input is ignored.
5. The transmitter must be enabled, but the receiver need not be
enabled.
6. CPU to transmitter and receiver communications continue normally.
The second diagnostic mode is the remote loopback mode, selected
by MR2A[7:6] = 11. In this mode:
1. Received data is re-clocked and re-transmitted on the TxDA
output.
2. The receive clock is used for the transmitter.
3. Received data is not sent to the local CPU, and the error status
conditions are inactive.
4. The received parity is not checked and is not regenerated for
transmission, i.e., transmitted parity is as received.
5. The receiver must be enabled.
6. Character framing is not checked and the stop bits are retransmitted as received.
7. A received break is echoed as received until the next valid start
bit is detected.
The user must exercise care when switching into and out of the
various modes. The selected mode will be activated immediately
upon mode selection, even if this occurs in the middle of a received
or transmitted character. Likewise, if a mode is deselected the
device will switch out of the mode immediately. An exception to this
is switching out of autoecho or remote loopback modes: if the
deselection occurs just after the receiver has sampled the stop bit
(indicated in autoecho by assertion of RxRDY), and the transmitter
is enabled, the transmitter will remain in autoecho mode until the
entire stop has been retransmitted.
MR2A[5] – Channel A Transmitter Request-to-Send Control
CAUTION: When the transmitter controls the OP pin (usually used
for the RTSN signal) the meaning of the pin is not RTSN at all!
Rather, it signals that the transmitter has finished the transmission
(i.e., end of block).
This bit allows deactivation of the RTSN output by the transmitter.
This output is manually asserted and negated by the appropriate
commands issued via the command register. MR2[5] set to 1
caused the RTSN to be reset automatically one bit time after the
character(s) in the transmit shift register and in the THR (if any) are
completely transmitted (including the programmed number of stop
bits) if a previously issued transmitter disable is pending. This
feature can be used to automatically terminate the transmission as
follows:
1. Program the auto-reset mode: MR2[5]=1
2. Enable transmitter, if not already enabled
3. Assert RTSN via command
4. Send message
5. After the last character of the message is loaded to the THR,
disable the transmitter. (If the transmitter is underrun, a special
case exists. See note below.)
6. The last character will be transmitted and the RTSN will be reset
one bit time after the last stop bit is sent.
NOTE: The transmitter is in an underrun condition when both the
TxRDY and the TxEMT bits are set. This condition also exists
immediately after the transmitter is enabled from the disabled or
reset state. When using the above procedure with the transmitter in
the underrun condition, the issuing of the transmitter disable must be
delayed from the loading of a single, or last, character until the
TxRDY becomes active again after the character is loaded.
MR2A[4] – Channel A Clear-to-Send Control
If this bit is 0, CTSAN has no effect on the transmitter. If this bit is a
1, the transmitter checks the state of CTSAN (IPO) each time it is
ready to send a character. If IPO is asserted (Low), the character is
transmitted. If it is negated (High), the TxDA output remains in the
marking state and the transmission is delayed until CTSAN goes
Low. Changes in CTSAN while a character is being transmitted do
not affect the transmission of that character..
MR2A[3:0] – Channel A Stop Bit Length Select
This field programs the length of the stop bit appended to the
transmitted character. Stop bit lengths of .563 TO 1 AND .563 to 2
bits. In increments of 0.625 bit, can be programmed for character
lengths of 6, 7, and 8 bits. For a character lengths of 5 bits, 1.0625
to 2 stop bits can be programmed in increments of .0625 bit.
The receiver only checks for a ‘mark’ condition at the center of the
first stop bit position (one bit time after the last data bit, or after the
parity bit is enabled) in all cases.
If an external 1X clock is used for the transmitter, MR2A[3] = 0
selects one stop bit and MR2A[3] = 1 selects two stop bits to be
transmitted.
Page 14

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
14
MR1B – Channel B Mode Register 1
MR1B is accessed when the Channel B MR pointer points to MR1.
The pointer is set to MR1 by RESET or by a ‘set pointer’ command
applied via CRB. After reading or writing MR1B, the pointer will
point to MR2B.
MR2B – Channel B Mode Register 2
MR2B is accessed when the Channel B MR pointer points to MR2,
which occurs after any access to MR1B. Accesses to MR2B do not
change the pointer.
The bit definitions for mode registers 1 and 2 are identical to the bit
definitions for MRA and MR2A except that all control actions apply
to the Channel B receiver and transmitter and the corresponding
inputs and outputs.
CSRA – Channel A Clock Select Register
CSRA[7:4] – Channel A Receiver Clock Select
This field selects the baud rate clock for the Channel A receiver as
follows:
CSRA[7:4]
ACR[7] = 0
Baud Rate
ACR[7] = 1
0000 50 75
0001 110 110
0010 134.5 134.5
0011 200 150
0100 300 300
0101 600 600
0110 1,200 1,200
0111 1,050 2,000
1000 2,400 2,400
1001 4,800 4,800
1010 7,200 1,800
1011 9,600 9,600
1100 38.4k 19.2k
1101 T imer Timer
1110 IP4–16X IP4–16X
1111 IP4–1X IP4–1X
(See also Table 5)
The receiver clock is always a 16X clock except for CSRA[7] = 111 1.
CSRA[3:0] – Channel A Transmitter Clock Select
This field selects the baud rate clock for the Channel A transmitter.
The field definition is as per CSR[7:4] except as follows:
CSRA[3:0]
ACR[7] = 0
Baud Rate
ACR[7] = 1
1110
1111
IP3–16X
IP3–1X
IP3–16X
IP3–1X
The transmitter clock is always a 16X clock except for CSR[3:0] =
1111.
CSRB – Channel B Clock Select Register
CSRB[7:4] – Channel B Receiver Clock Select
This field selects the baud rate clock for the Channel B receiver.
The field definition is as per CSRA[7:4] except as follows:
CSRB[7:4]
ACR[7] = 0
Baud Rate
ACR[7] = 1
1110
1111
IP6–16X
IP6–1X
IP6–16X
IP6–1X
The receiver clock is always a 16X clock except for CSRB[7:4] = 11 11.
CSRB[3:0] – Channel B Transmitter Clock Select
This field selects the baud rate clock for the Channel B transmitter.
The field definition is as per CSRA[7:4] except as follows:
CSRB[3:0]
ACR[7] = 0
Baud Rate
ACR[7] = 1
1110
1111
IP5–16X
IP5–1X
IP5–16X
IP5–1X
The transmitter clock is always a 16X clock except for CSRB[3:0] =
1111.
CRA – Channel A Command Register
CRA is a register used to supply commands to Channel A. Multiple
commands can be specified in a single write to CRA as long as the
commands are non-conflicting, e.g., the ‘enable transmitter’ and
‘reset transmitter’ commands cannot be specified in a single
command word.
CRA[7] – Not Used
Should be set to zero for upward compatibility with newer parts.
CRA[6:4] – Channel A Miscellaneous Command
The encoded value of this field may be used to specify a single
command as follows:
CRA[6:4] – COMMAND
000 No command.
001 Reset MR pointer. Causes the Channel A MR pointer to point
to MR1.
010 Reset receiver. Resets the Channel A receiver as if a hard-
ware reset had been applied. The receiver is disabled and
the FIFO is flushed.
011 Reset transmitter. Resets the Channel A transmitter as if a
hardware reset had been applied.
100 Reset error status. Clears the Channel A Received Break,
Parity Error, and Overrun Error bits in the status register
(SRA[7:4]). Used in character mode to clear OE status (although RB, PE and FE bits will also be cleared) and in block
mode to clear all error status after a block of data has been
received.
101 Reset Channel A break change interrupt. Causes the Chan-
nel A break detect change bit in the interrupt status register
(ISR[2]) to be cleared to zero.
Page 15

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
15
110 Start break. Forces the TxDA output Low (spacing). If the
transmitter is empty the start of the break condition will be
delayed up to two bit times. If the transmitter is active the
break begins when transmission of the character is completed. If a character is in the THR, the start of the break will
be delayed until that character, or any other loaded subsequently are transmitted. The transmitter must be enabled for
this command to be accepted.
111 Stop break. The TxDA line will go High (marking) within two
bit times. TxDA will remain High for one bit time before the
next character, if any, is transmitted.
CRA[3] – Disable Channel A Transmitter
This command terminates transmitter operation and reset the
TxDRY and TxEMT status bits. However, if a character is being
transmitted or if a character is in the THR when the transmitter is
disabled, the transmission of the character(s) is completed before
assuming the inactive state. A disable transmitter cannot be loaded.
CRA[2] – Enable Channel A Transmitter
Enables operation of the Channel A transmitter. The TxRDY status
bit will be asserted.
CRA[1] – Disable Channel A Receiver
This command terminates operation of the receiver immediately – a
character being received will be lost. The command has no effect
on the receiver status bits or any other control registers. If the
special multidrop mode is programmed, the receiver operates even
if it is disabled. See Operation section.
CRA[0] – Enable Channel A Receiver
Enables operation of the Channel A receiver. If not in the special
wake up mode, this also forces the receiver into the search for
start-bit state.
CRB – Channel B Command Register
CRB is a register used to supply commands to Channel B. Multiple
commands can be specified in a single write to CRB as long as the
commands are non-conflicting, e.g., the ‘enable transmitter’ and
‘reset transmitter’ commands cannot be specified in a single
command word.
The bit definitions for this register are identical to the bit definitions
for CRA, except that all control actions apply to the Channel B
receiver and transmitter and the corresponding inputs and outputs.
SRA – Channel A Status Register
SRA[7] – Channel A Received Break
This bit indicates that an all zero character of the programmed
length has been received without a stop bit. Only a single FIFO
position is occupied when a break is received: further entries to the
FIFO are inhibited until the RxDA line to the marking state for at
least one-half a bit time two successive edges of the internal or
external 1X clock. This will usually require a high time of one X1
clock period or 3 X1 edges since the clock of the controller is not
synchronous to the X1 clock.
When this bit is set, the Channel A ‘change in break’ bit in the ISR
(ISR[2]) is set. ISR[2] is also set when the end of the break
condition, as defined above, is detected.
The break detect circuitry can detect breaks that originate in the
middle of a received character. However, if a break begins in the
middle of a character, it must persist until at least the end of the next
character time in order for it to be detected.
SRA[6] – Channel A Framing Error
This bit, when set, indicates that a stop bit was not detected when
the corresponding data character in the FIFO was received. The
stop bit check is made in the middle of the first bit position.
SRA[5] – Channel A Parity Error
This bit is set when the ‘with parity’ or ‘force parity’ mode is
programmed and the corresponding character in the FIFO was
received with incorrect parity.
In the special multidrop mode the parity error bit stores the receive
A/D bit.
SRA[4] – Channel A Overrun Error
This bit, when set indicates that one or more characters in the
received data stream have been lost. It is set upon receipt of a new
character when the FIFO is full and a character is already in the
receive shift register waiting for an empty FIFO position. When this
occurs, the character in the receive shift register (and its break
detect, parity error and framing error status, if any) is lost.
This bit is cleared by a ‘reset error status’ command.
SRA[3] – Channel A Transmitter Empty (TxEMTA)
This bit will be set when the transmitter underruns, i.e., both the
TxEMT and TxRDY bits are set. This bit and TxRDY are set when
the transmitter is first enabled and at any time it is re-enabled after
either (a) reset, or (b) the transmitter has assumed the disabled
state. It is always set after transmission of the last stop bit of a
character if no character is in the THR awaiting transmission.
It is reset when the THR is loaded by the CPU, a pending
transmitter disable is executed, the transmitter is reset, or the
transmitter is disabled while in the underrun condition.
SRA[2] – Channel A Transmitter Ready (TxRDYA)
This bit, when set, indicates that the THR is empty and ready to be
loaded with a character. This bit is cleared when the THR is loaded
by the CPU and is set when the character is transferred to the
transmit shift register. TxRDY is reset when the transmitter is
disabled or reset, and is set when the transmitter is first enabled,
viz., characters loaded into the THR while the transmitter is disabled
will not be transmitted.
SRA[1] – Channel A FIFO Full (FFULLA)
This bit is set when a character is transferred from the receive shift
register to the receive FIFO and the transfer causes the FIFO to
become full, i.e., all three FIFO positions are occupied. It is reset
when the CPU reads the RHR. If a character is waiting in the
receive shift register because the FIFO is full, FFULL will not be
reset when the CPU reads the RHR.
SRA[0] – Channel A Receiver Ready (RxRDY A)
This bit indicates that a character has been received and is waiting
in the FIFO to be read by the CPU. It is set when the character is
transferred from the receive shift to the FIFO and reset when the
CPU reads the RHR, if after this read there are not more characters
still in the FIFO.
SRB – Channel B Status Register
The bit definitions for this register are identical to the bit definitions
for SRA, except that all status applies to the Channel B receiver and
transmitter and the corresponding inputs and outputs.
Page 16

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
16
OPCR – Output Port Configuration Register
OPCR[7] – OP7 Output Select
This bit programs the OP7 output to provide one of the following:
– The complement of OPR[7].
– The Channel B transmitter interrupt output which is the comple-
ment of TxRDYB. When in this mode OP7 acts as an Open- Collector output. Note that this output is not masked by the contents
of the IMR.
OPCR[6] – OP6 Output Select
This bit programs the OP6 output to provide one of the following:
– The complement of OPR[6].
– The Channel A transmitter interrupt output which is the comple-
ment of TxRDYA. When in this mode OP6 acts as an Open-Collector output. Note that this output is not masked by the contents
of the IMR.
OPCR[5] – OP5 Output Select
This bit programs the OP5 output to provide one of the following:
– The complement of OPR[5].
– The Channel B transmitter interrupt output which is the comple-
ment of ISR[5]. When in this mode OP5 acts as an Open-Collector
output. Note that this output is not masked by the contents of the
IMR.
OPCR[4] – OP4 Output Select
This field programs the OP4 output to provide one of the following:
– The complement of OPR[4].
– The Channel B transmitter interrupt output which is the comple-
ment of ISR[1]. When in this mode OP4 acts as an Open-Collector output. Note that this output is not masked by the contents of
the IMR.
OPCR[3:2] – OP3 Output Select
This bit programs the OP3 output to provide one of the following:
– The complement of OPR[3].
– The counter/timer output, in which case OP3 acts as an Open-
Collector output. In the timer mode, this output is a square wave
at the programmed frequency . In the counter mode, the output
remains High until terminal count is reached, at which time it goes
Low. The output returns to the High state when the counter is
stopped by a stop counter command. Note that this output is not
masked by the contents of the IMR.
– The 1X clock for the Channel B transmitter, which is the clock that
shifts the transmitted data. If data is not being transmitted, a free
running 1X clock is output.
– The 1X clock for the Channel B receiver, which is the clock that
samples the received data. If data is not being received, a free
running 1X clock is output.
OPCR[1:0] – OP2 Output Select
This field programs the OP2 output to provide one of the following:
– The complement of OPR[2].
– The 16X clock for the Channel A transmitter. This is the clock
selected by CSRA[3:0], and will be a 1X clock if
CSRA[3:0] = 111 1.
– The 1X clock for the Channel A transmitter, which is the clock that
shifts the transmitted data. If data is not being transmitted, a free
running 1X clock is output.
– The 1X clock for the Channel A receiver, which is the clock that
samples the received data. If data is not being received, a free
running 1X clock is output.
ACR – Auxiliary Control Register
ACR[7] – Baud Rate Generator Set Select
This bit selects one of two sets of baud rates to be generated by the
BRG:
Set 1: 50, 110, 134.5, 200, 300, 600, 1.05k, 1.2k, 2.4k, 4.8k,
7.2k, 9.6k, and 38.4k baud.
Set 2: 75, 110, 134.5, 150, 300, 600, 1.2k, 1.8k, 2.0k, 2.4k, 4.8k,
9.6k, and 19.2k baud.
The selected set of rates is available for use by the Channel A and
B receivers and transmitters as described in CSRA and CSRB.
Baud rate generator characteristics are given in Table 3.
ACR[6:4] – Counter/Timer Mode And Clock Source Select
This field selects the operating mode of the counter/timer and its
clock source as shown in Table 4.
ACR[3:0] – IP3, IP2, IP1, IP0 Change-of-State Interrupt Enable
This field selects which bits of the input port change register (IPCR)
cause the input change bit in the interrupt status register (ISR[7]) to
be set. If a bit is in the ‘on’ state the setting of the corresponding bit
in the IPCR will also result in the setting of ISR[7], which results in
the generation of an interrupt output if IMR[7] = 1. If a bit is in the
‘off’ state, the setting of that bit in the IPCR has no effect on ISR[7].
IPCR – Input Port Change Register
IPCR[7:4] – IP3, IP2, IP1, IP0 Change-of-State
These bits are set when a change-of-state, as defined in the input
port section of this data sheet, occurs at the respective input pins.
They are cleared when the IPCR is read by the CPU. A read of the
IPCR also clears ISR[7], the input change bit in the interrupt status
register. The setting of these bits can be programmed to generate
an interrupt to the CPU.
IPCR[3:0] – IP3, IP2, IP1, IP0 Current State
These bits provide the current state of the respective inputs. The
information is unlatched and reflects the state of the input pins at the
time the IPCR is read.
ISR – Interrupt Status Register
This register provides the status of all potential interrupt sources.
The contents of this register are masked by the Interrupt Mask
Register (IMR). If a bit in the ISR is a ‘1’ and the corresponding bit
in the IMR is also a ‘1’, the INTRN output will be asserted. If the
corresponding bit in the IMR is a zero, the state of the bit in the ISR
has no effect on the INTRN output. Note that the IMR does not
mask the reading of the ISR – the true status will be provided
regardless of the contents of the IMR. The contents of this register
are initialized to 00
16
when the DUART is reset.
ISR[7] – Input Port Change Status
This bit is a ‘1’ when a change-of-state has occurred at the IP0, IP1,
IP2, or IP3 inputs and that event has been selected to cause an
interrupt by the programming of ACR[3:0]. The bit is cleared when
the CPU reads the IPCR.
Page 17

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
17
ISR[6] – Channel B Change In Break
This bit, when set, indicates that the Channel B receiver has
detected the beginning or the end of a received break. It is reset
when the CPU issues a Channel B ‘reset break change interrupt’
command.
ISR[5] – Channel B Receiver Ready or FIFO Full
The function of this bit is programmed by MR1B[6]. If programmed
as receiver ready, it indicates that a character has been received in
Channel B and is waiting in the FIFO to be read by the CPU. It is
set when the character is transferred from the receive shift register
to the FIFO and reset when the CPU reads the RHR. If after this
read there are more characters still in the FIFO the bit will be set
again after the FIFO is ‘popped’. If programmed as FIFO full, it is
set when a character is transferred from the receive holding register
to the receive FIFO and the transfer caused the Channel B FIFO to
become full; i.e., all three FIFO positions are occupied. It is reset
when the CPU reads the RHR. If a character is waiting in the
receive shift register because the FIFO is full, the bit will be set
again when the waiting character is loaded into the FIFO.
ISR[4] – Channel B Transmitter Ready
This bit is a duplicate of TxRDYB (SRB[2]).
ISR[3] – Counter Ready.
In the counter mode, this bit is set when the counter reaches
terminal count and is reset when the counter is stopped by a stop
counter command.
In the timer mode, this bit is set once each cycle of the generated
square wave (every other time that the counter/timer reaches zero
count). The bit is reset by a stop counter command. The command,
however, does not stop the counter/timer.
ISR[2] – Channel A Change in Break
This bit, when set, indicates that the Channel A receiver has
detected the beginning or the end of a received break. It is reset
when the CPU issues a Channel A ‘reset break change interrupt’
command.
ISR[1] – Channel A Receiver Ready Or FIFO Full
The function of this bit is programmed by MR1A[6]. If programmed
as receiver ready, it indicates that a character has been received in
Channel A and is waiting in the FIFO to be read by the CPU. It is
set when the character is transferred from the receive shift register
to the FIFO and reset when the CPU read the RHR. IF after this
read there are more characters still in the FIFO the bit will be set
again after the FIFO is ‘popped’. If programmed as FIFO full, it is
set when a character is transferred from the receive holding register
to the receive FIFO and the transfer caused the Channel A FIFO to
become full; i.e., all three FIFO positions are occupied. It is reset
when the CPU reads the RHR. If a character is waiting in the
receive shift register because the FIFO is full, the bit will be set
again when the ISR[0] and IMR waiting character is loaded into the
FIFO.
ISR[0] – Channel A Transmitter Ready
This bit is a duplicate of TxRDYA (SRA[2]).
IMR – Interrupt Mask Register
The programming of this register selects which bits in the ISR
causes an interrupt output. If a bit in the ISR is a ‘1’ and the
corresponding bit in the IMR is also a ‘1’ the INTRN output will be
asserted. If the corresponding bit in the IMR is a zero, the state of
the bit in the ISR has no effect on the INTRN output. Note that the
IMR does not mask the programmable interrupt outputs OP3–OP7
or the reading of the ISR.
CTUR and CTLR – Counter/Timer Registers
The CTUR and CTLR hold the eight MSBs and eight LSBs,
respectively, of the value to be used by the counter/timer in either
the counter or timer modes of operation. The minimum value which
may be loaded into the CTUR/CTLR registers is 0002
16
. Note that
these registers are write-only and cannot be read by the CPU.
In the timer (programmable divider) mode, the CT generates a
square wave with a period of twice the value (in clock periods) of the
CTUR and CTLR.
If the value in CTUR and CTLR is changed, the current half-period
will not be affected, but subsequent half periods will be. In this
mode the C/T runs continuously. Receipt of a start counter
command (read with A3-A0 = 1110) causes the counter to terminate
the current timing cycle and to begin a new cycle using the values in
CTUR and CTLR. The waveform so generated is often used for a
data clock. The formula for calculating the divisor n to load to the
CTUR and CTLR for a particular 1X data clock is shown below:
n +
counter clock frequency
16x2xbaud rate desired
Often this division will result in a non-integer number; 26.3, for
example. One can only program integer numbers in a digital divider.
Therefore, 26 would be chosen. This gives a baud rate error of
0.3/26.3 which is 1.14%; well within the ability asynchronous mode
of operation.
The counter ready status bit (ISR[3]) is set once each cycle of the
square wave. The bit is reset by a stop counter command (read
with A3-A0 = 111 1). The command however, does not stop the C/T.
The generated square wave is output on OP3 if it is programmed
to be the C/T output.
On power up and after reset, the timer/counter runs in timer mode
and can only be restarted. Because it cannot be shut off or stopped,
and runs continuously in timer mode, it is recommended that at
initialization, the output port (OP3) should be masked off through the
OPCR[3:2] = 00 until the T/C is programmed to the desired
operational state.
In the counter mode, the C/T counts down the number of pulses
loaded into CTUR and CTLR by the CPU. Counting begins upon
receipt of a counter command. Upon reaching terminal count
(0000
16
), the counter ready interrupt bit (ISR[3]) is set. The counter
continues counting past the terminal count until stopped by the CPU.
If OP3 is programmed to be the output of the C/T, the output
remains High until terminal count is reached, at which time it goes
Low. The output returns to the High state and ISR[3] is cleared
when the counter is stopped by a stop counter command. The CPU
may change the values of CTUR and CTLR at any time, but the new
count becomes effective only on the next start counter command. If
new values have not been loaded, the previous count values are
preserved and used for the next count cycle.
In the counter mode, the current value of the upper and lower 8 bits
of the counter (CTU, CTL) may be read by the CPU.
It is recommended that the counter be stopped when reading to
prevent potential problems which may occur if a carry from the lower
8 bits to the upper 8 bits occurs between the times that both halves
of the counter are read. However, note that a subsequent start
counter command will cause the counter to begin a new count cycle
using the values in CTUR and CTLR.
Page 18

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
18
Table 3. Bit Rate Generator Characteristics Crystal or Clock = 3.6864MHz
NORMAL RATE (BAUD) ACTUAL 16x CLOCK (kHz) ERROR (%)
50 0.8 0
75 1.2 0
110 1.759 -0.069
134.5 2.153 0.059
150 2.4 0
200 3.2 0
300 4.8 0
600 9.6 0
1050 16.756 -0.260
1200 19.2 0
1800 28.8 0
2000 32.056 0.175
2400 38.4 0
4800 76.8 0
7200 115.2 0
9600 153.6 0
14.4K 230.4 0
19.2k 307.2 0
28.8K 460.8 0
38.4k 614.4 0
57.6K 921.6 0
115.2K 1843.2K 0
NOTE: Duty cycle of 16x clock is 50% ± 1%.
Asynchronous UART communications can tolerate frequency error
of 4.1% to 6.7% in a “clean” communications channel. The percent
of error changes as the character length changes. The above
percentages range from 5 bits not parity to 8 bits with parity and one
stop bit. The error with 8 bits no parity and one stop bit is 4.6%. If a
stop bit length of 9/16 is used, the error tolerance will approach 0
due to a variable error of up to 1/16 bit time in receiver clock phase
alignment to the start bit.
Table 4. ACR 6:4 Field Definition
ACR 6:4 MODE CLOCK SOURCE
000 Counter External (IP2)
001 Counter TxCA – 1x clock of Channel A transmitter
010 Counter TxCB – 1x clock of Channel B transmitter
011 Counter Crystal or external clock (x1/CLK) divided by 16
100 Timer (square wave) External (IP2)
101 Timer (square wave) External (IP2) divided by 16
110 Timer (square wave) Crystal or external clock (x1/CLK)
111 Timer (square wave) Crystal or external clock (x1/CLK) divided by 16
NOTE: Timer mode generates a squarewave.
Page 19

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
19
TIMING DIAGRAMS
RESET
t
RES
SD00086
Figure 3. Reset Timing
A0–A3
CEN
t
AS
t
CS
t
CH
RDN
t
RW
t
RWD
D0–D7
(READ)
t
DD
t
DF
FLOAT FLOATVALID
NOT
VALID
WDN
t
RWD
VALID
D0–D7
(WRITE)
t
DS
t
DH
t
AH
SD00087
Figure 4. Bus Timing
RDN
IP0–IP6
WRN
OP0–OP7
t
PS
t
PH
t
PD
OLD DATA NEW DATAV
M
V
OH
V
OL
VM = 1.5V
SD00089
Figure 5. Port Timing
Page 20

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
20
TIMING DIAGRAMS (Continued)
NOTES:
1. INTRN or OP3 – OP7 when used as interrupt outputs.
2. The test for open-drain outputs is intended to guarantee switching of the output transistor. Measurement of this response is referenced from themidpoint of the switching signal, V
M
, to a
point 0.5V above VOL. This point represents noise margin that assures true switching has occurred. Beyond this level, the effects of external circuitry and test environment are pronounced
and can greatly affect the resultant measurement.
V
M
V
OL
+0.5V
V
OL
RDN
OR
WRN
INTERRUPT
1
OUTPUT
t
IR
SD00090
Figure 6. Interrupt Timing
t
CLK
t
CTC
t
Rx
t
Tx
X1/CLK
CTCLK
RxC
TxC
+5V
1KΩ
X1
X2
X2
3.6864MHz
X1
C1
C2
DRIVING FROM
EXTERNAL SOURCE
SCN2681
74LS04
CLOCK
TO OTHER
CHIPS
1K
+5V
CRYSTAL SERIES RESISTANCE3 SHOULD BE LESS THAN 180Ω
R1: 100K - 1Meg (See design note)
C1 = C2: 0-5pF + (STRAY < 5pF)
t
CLK
t
CTC
t
Rx
t
Tx
OPEN
When using an external clock it is preferred to drive X2 and leave X1 open.
X2 is the input to the internal driver, while X1 is the output.
TO THE REST
OF THE DUART
CIRCUITS
R1
U1
R1 is only required if U1 will not drive to X2 high level.
Previous specifications indicated X2 should be grounded and X1
should be driven. This is still acceptable. It is electrically easier to drive
the amplifier input than to overdrive its output.
R2
R2 = 50kΩ to 150kΩ
SD00091
Figure 7. Clock Timing
t
TXD
t
TCS
1 BIT TIME
(1 OR 16 CLOCKS)
TxD
TxC
(INPUT)
TxC
(1X OUTPUT)
SD00092
Figure 8. Transmit
Page 21

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
21
TIMING DIAGRAMS (Continued)
t
RXS
t
RXH
RxC
(1X INPUT)
RxD
SD00093
Figure 9. Receiver Timing
TRANSMITTER
ENABLED
TxD D1 D2 D3 D4 D6BREAK
TxRDY
(SR2)
WRN
D1 D2 D3 D4 D6START
BREAK
STOP
BREAK
D5 WILL
NOT BE
TRANSMITTED
CTSN
1
(IP0)
RTSN
2
(OP0)
OPR(0) = 1 OPR(0) = 1
NOTES:
1. Timing shown for MR2(4) = 1.
2. Timing shown for MR2(5) = 1.
SD00094
Figure 10. Transmitter Timing
Page 22

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
22
TIMING DIAGRAMS (Continued)
D1 D2 D3 D4 D5 D6 D7 D8
RxD
D6, D7, D8 WILL BE LOST
RECEIVER
ENABLED
RxRDY
(SR0)
FFULL
(SR1)
RxRDY/
FFULL
(OP5)
2
RDN
STATUS DATA
D1
STATUS DATAD2STATUS DATAD3STATUS DATA
D4
D5 WILL
BE LOST
OVERRUN
(SR4)
RESET BY COMMAND
RTS
1
(OP0)
OPR(0) = 1
NOTES:
1. Timing shown for MR1(7) = 1.
2. Shown for OPCR(4) = 1 and MR(6) = 0.
SD00095
Figure 11. Receiver T iming
TRANSMITTER
ENABLED
TxD
ADD#1
TxRDY
(SR2)
WRN
MR1(4–3) = 11
MR1(2) = 1
1
BIT 9
D0 0
BIT 9
ADD#2 1
BIT 9
MASTER STATION
ADD#1MR1(2) = 0 D0 MR1(2) = 1 ADD#2
RxD
ADD#1 1
BIT 9
D0 0
BIT 9
ADD#2 1
BIT 9
PERIPHERAL STATION
0
BIT 9
0
BIT 9
RECEIVER
ENABLED
RxRDY
(SR0)
RDN/WRN
MR1(4–3) = 11 ADD#1
STATUS DATA
D0
STATUS DATA
ADD#2
SD00096
Figure 12. Wake-Up Mode
Page 23

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
23
Output Port Notes
The output ports are controlled from three places: the OPCR
register, the OPR register, and the MR registers. The OPCR
register controls the source of the data for the output ports OP2
through OP7. The data source for output ports OP0 and OP1 is
controlled by the MR and CR registers. When the OPR is the
source of the data for the output ports, the data at the ports is
inverted from that in the OPR register. The content of the OPR
register is controlled by the “Set Output Port Bits Command” and the
“Reset Output Bits Command”. These commands are at E and F,
respectively. When these commands are used, action takes place
only at the bit locations where ones exist. For example, a one in bit
location 5 of the data word used with the “Set Output Port Bits”
command will result in OPR5 being set to one. The OP5 would then
be set to zero (V
SS
). Similarly, a one in bit position 5 of the data
word associated with the “Reset Output Ports Bits” command would
set OPR5 to zero and, hence, the pin OP5 to a one (V
DD
).
The CTS, RTS, CTS Enable Tx signals
CTS (Clear To Send) is usually meant to be a signal to the
transmitter meaning that it may transmit data to the receiver. The
CTS input is on pin IP0 for TxA and on IP1 for TxB. The CTS signal
is active low; thus, it is called CTSAN for TxA and CTSBN for TxB.
RTS is usually meant to be a signal from the receiver indicating that
the receiver is ready to receive data. It is also active low and is,
thus, called RTSAN for RxA and RTSBN for RxB. RTSAN is on pin
op0 and RTSBN is on OP1. A receiver’s RTS output will usually be
connected to the CTS input of the associated transmitter. Therefore,
one could say that RTS and CTS are different ends of the same
wire!
MR2(4) is the bit that allows the transmitter to be controlled by the
CTS pin (IP0 or IP1). When this bit is set to one AND the CTS input
is driven high, the transmitter will stop sending data at the end of the
present character being serialized. It is usually the RTS output of
the receiver that will be connected to the transmitter’s CTS input.
The receiver will set RTS high when the receiver FIFO is full AND
the start bit of the fourth character is sensed. Transmission then
stops with four valid characters in the receiver. When MR2(4) is set
to one, CTSN must be at zero for the transmitter to operate. If
MR2(4) is set to zero, the IP pin will have no effect on the operation
of the transmitter.
MR1(7) is the bit that allows the receiver to control OP0. When OP0
(or OP1) is controlled by the receiver, the meaning of that pin will be
RTS. However, a point of confusion arises in that OP0 (or OP1)
may also be controlled by the transmitter. When the transmitter is
controlling this pin, its meaning is not RTS at all. It is, rather, that
the transmitter has finished sending its last data byte. Programming
the OP0 or OP1 pin to be controlled by the receiver and the
transmitter at the same time is allowed, but would usually be
incompatible.
RTS is expressed at the OP0 or OP1 pin which is still an output port.
Therefore, the state of OP0 or OP1 should be set low for the
receiver to generate the proper RTS signal. The logic at the output
is basically a NAND of the OPR register and the RTS signal as
generated by the receiver. When the RTS flow control is selected
via the MR(7) bit state of the OPR register is not changed.
Terminating the use of “Flow Control” (via the MR registers) will
return the OP0 or OP1 pins to the control of the OPR register.
Transmitter Disable Note
The sequence of instructions enable transmitter — load transmit
holding register — disable transmitter will result in nothing being
sent if the time between the end of loading the transmit holding
register and the disable command is less that 3/16 bit time in the
16x mode or one bit time in the 1x mode. Also, if the transmitter,
while in the enabled state and underrun condition, is immediately
disabled after a single character is loaded to the transmit holding
register, that character will not be sent.
In general, when it is desired to disable the transmitter before the
last character is sent AND the TxEMT bit is set in the status register
(TxEMT is always set if the transmitter has underrun or has just
been enabled), be sure the TxRDY bit is active immediately before
issuing the transmitter disable instruction. TxRDY sets at the end of
the “start bit” time. It is during the start bit that the data in the
transmit holding register is transferred to the transmit shift register.
Non-standard baud rates are available as shown in Table 5 below,
via the BRG Test function.
Page 24

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
24
Table 5. Baud Rates Extended
Normal BRG BRG Test
CSR[7:4] ACR[7] = 0 ACR[7] = 1 ACR[7] = 0 ACR[7] = 1
0000 50 75 4,800 7,200
0001 110 110 880 880
0010 134.5 134.5 1,076 1,076
0011 200 150 19.2K 14.4K
0100 300 300 28.8K 28.8K
0101 600 600 57.6K 57.6K
0110 1,200 1,200 115.2K 115.2K
0111 1,050 2,000 1,050 2,000
1000 2,400 2,400 57.6K 57.6K
1001 4,800 4,800 4,800 4,800
1010 7,200 1,800 57.6K 14.4K
1011 9,600 9,600 9,600 9,600
1100 38.4K 19.2K 38.4K 19.2K
1101 Timer Timer Timer Timer
1110 I/O2 – 16X I/O2 – 16X I/O2 – 16X I/O2 – 16X
1111 I/O2 – 1X I/O2 – 1X I/O2 – 1X I/O2 – 1X
NOTE: Each read on address H‘2’ will toggle the baud rate test mode. When in the BRG test mode, the baud rates change as shown to the left.
This change affects all receivers and transmitters on the DUART. See
“Extended baud rates for SCN2681, SCN68681, SCC2691, SCC2692,
SCC68681 and SCC2698B”
in application notes elsewhere in this publication
The test mode at address H‘A’ changes all transmitters and receivers to the 1x mode and connects the output ports to some internal nodes.
A condition that occurs infrequently has been observed where the receiver will ignore all data. It is caused by a corruption of the start bit
generally due to noise. When this occurs the receiver will appear to be asleep or locked up. The receiver must be reset for the UART to
continue to function properly.
Reset in the Normal Mode (Receiver Enabled)
Recovery can be accomplished easily by issuing a receiver software reset followed by a receiver enable. All receiver data, status and
programming will be preserved and available before reset. The reset will NOT affect the programming.
Reset in the Wake-Up Mode (MR1[4:3] = 11)
Recovery can also be accomplished easily by first exiting the wake-up mode (MR1[4:3] = 00 or 01 or 10), then issuing a receiver software
reset followed by a wake-up re-entry (MR1[4:3] = 11). All receiver data, status and programming will be preserved and available before
reset. The reset will NOT affect the programming.
The receiver has a digital filter designed to reject “noisy” data transitions and the receiver state machine was designed to reject noisy start
bits or noise that might be considered a start bit. In spite of these precautions, corruption of the start bit can occur in 15ns window
approximately 100ns prior to the rising edge of the data clock. The probability of this occurring is less than 10
–5
at 9600 baud.
A corrupted start bit may have some deleterious effects in ASYNC operation if it occurs within a normal data block. The receiver will tend
to align its data clock to the next ‘0’ bit in the data stream, thus potentially corrupting the remainder of the data block. A good design
practice, in environments where start bit corruption is possible, is to monitor data quality (framing error, parity error, break change and
received break) and “data stopped” time out periods. Time out periods can be enabled using the counter/timer in the SCC2691, SCC2692,
SCC2698B and SC68692 products. This monitoring can indicate a potential start bit corruption problem.
SD00097
Page 25

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
25
DIP24: plastic dual in-line package; 24 leads (400 mil) SOT248-1
Page 26

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
26
DIP28: plastic dual in-line package; 28 leads (600 mil) SOT117-1
Page 27

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
27
DIP40: plastic dual in-line package; 40 leads (600 mil) SOT129-1
Page 28

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
28
PLCC44: plastic leaded chip carrier; 44 leads SOT187-2
Page 29

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
29
NOTES
Page 30

Philips Semiconductors Product specification
SCN2681Dual asynchronous receiver/transmitter (DUART)
1998 Sep 04
30
Definitions
Short-form specification — The data in a short-form specification is extracted from a full data sheet with the same type number and title. For
detailed information see the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one
or more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation of the device at these or
at any other conditions above those given in the Characteristics sections of the specification is not implied. Exposure to limiting values for extended
periods may affect device reliability.
Application information — Applications that are described herein for any of these products are for illustrative purposes only. Philips
Semiconductors make no representation or warranty that such applications will be suitable for the specified use without further testing or
modification.
Disclaimers
Life support — These products are not designed for use in life support appliances, devices or systems where malfunction of these products can
reasonably be expected to result in personal injury . Philips Semiconductors customers using or selling these products for use in such applications
do so at their own risk and agree to fully indemnify Philips Semiconductors for any damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to make changes, without notice, in the products, including circuits, standard
cells, and/or software, described or contained herein in order to improve design and/or performance. Philips Semiconductors assumes no
responsibility or liability for the use of any of these products, conveys no license or title under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that these products are free from patent, copyright, or mask work right infringement, unless
otherwise specified.
Philips Semiconductors
811 East Arques Avenue
P.O. Box 3409
Sunnyvale, California 94088–3409
Telephone 800-234-7381
Copyright Philips Electronics North America Corporation 1998
All rights reserved. Printed in U.S.A.
Date of release: 09-98
Document order number: 9397 750 04362
Data sheet
status
Objective
specification
Preliminary
specification
Product
specification
Product
status
Development
Qualification
Production
Definition
[1]
This data sheet contains the design target or goal specifications for product development.
Specification may change in any manner without notice.
This data sheet contains preliminary data, and supplementary data will be published at a later date.
Philips Semiconductors reserves the right to make chages at any time without notice in order to
improve design and supply the best possible product.
This data sheet contains final specifications. Philips Semiconductors reserves the right to make
changes at any time without notice in order to improve design and supply the best possible product.
Data sheet status
[1] Please consult the most recently issued datasheet before initiating or completing a design.
 Loading...
Loading...