

Page 1
DATA SH EET
Product specification
File under Integrated Circuits, IC01
1999 Jun 17
INTEGRATED CIRCUITS
SAA7327
Digital servo processor and
Compact Disc decoder with
integrated DAC for video CD
(CD7 II)
Page 2

1999 Jun 17 2
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
CONTENTS
1 FEATURES
2 GENERAL DESCRIPTION
3 ORDERING INFORMATION
4 QUICK REFERENCE DATA
5 BLOCK DIAGRAM
6 PINNING
7 FUNCTIONAL DESCRIPTION
7.1 Decoder part
7.1.1 Principal operational modes of the decoder
7.1.2 Decoding speed and crystal frequency
7.1.3 Lock-to-disc mode
7.1.4 Standby modes
7.2 Crystal oscillator
7.3 Data slicer and clock regenerator
7.4 Demodulator
7.4.1 Frame sync protection
7.4.2 EFM demodulation
7.5 Subcode data processing
7.5.1 Q-channel processing
7.5.2 EIAJ 3 and 4-wire subcode (CD graphics)
interfaces
7.5.3 V4 subcode interface
7.6 FIFO and error corrector
7.6.1 Flags output (CFLG)
7.7 Audio functions
7.7.1 De-emphasis and phase linearity
7.7.2 Digital oversampling filter
7.7.3 Concealment
7.7.4 Mute, full-scale, attenuation and fade
7.7.5 Peak detector
7.8 DAC interface
7.8.1 Internal bitstream Digital-to-Analog Converter
(DAC)
7.8.2 External DAC interface
7.9 EBU interface
7.9.1 Format
7.10 KILL circuit
7.11 Audio features off
7.12 The VIA interface
7.13 Spindle motor control
7.13.1 Motor output modes
7.13.2 Spindle motor operating modes
7.13.3 Loop characteristics
7.13.4 FIFO overflow
7.14 Servo part
7.14.1 Diode signal processing
7.14.2 Signal conditioning
7.14.3 Focus servo system
7.14.4 Radial servo system
7.14.5 Off-track counting
7.14.6 Defect detection
7.14.7 Off-track detection
7.14.8 High-level features
7.14.9 Driver interface
7.14.10 Laser interface
7.14.11 Radial shock detector
7.15 Microcontroller interface
7.15.1 Microcontroller interface (4-wire bus mode)
7.15.2 Microcontroller interface (I2C-bus mode)
7.15.3 Decoder registers and shadow registers
7.15.4 Summary of functions controlled by decoder
registers 0 to F
7.15.5 Summary of functions controlled by shadow
registers
7.15.6 Summary of servo commands
7.15.7 Summary of servo command parameters
8 LIMITING VALUES
9 CHARACTERISTICS
10 OPERATING CHARACTERISTICS
(SUBCODE INTERFACE TIMING)
11 OPERATING CHARACTERISTICS (I2S-BUS
TIMING)
12 OPERATING CHARACTERISTICS
(MICROCONTROLLER INTERFACE TIMING)
13 APPLICATION INFORMATION
14 PACKAGE OUTLINE
15 SOLDERING
15.1 Introduction to soldering surface mount
packages
15.2 Reflow soldering
15.3 Wave soldering
15.4 Manual soldering
15.5 Suitability of surface mount IC packages for
wave and reflow soldering methods
16 DEFINITIONS
17 LIFE SUPPORT APPLICATIONS
18 PURCHASE OF PHILIPS I2C COMPONENTS
Page 3

1999 Jun 17 3
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
1 FEATURES
• Integrated bitstream DAC with differential outputs,
operating at 96fs with 3rd order noise shaper; typical
performance of −95 dB signal-to-noise ratio (EIAJ
A-weighted)
• Separate serial input and output interfaces allow data
‘loopback’ mode for use of onboard DAC as stand-alone
DAC for digital audio signals
• Up to 2 times speed mode
• Lock-to-disc mode
• Full error correction strategy, t = 2 and e = 4
• Full subcode (CD graphics) interface
• All standard decoder functions implemented digitally on
chip
• FIFO overflow concealment for rotational shock
resistance
• Digital audio interface (EBU), audio and data
• 2 and 4 times oversampling integrated digital filter,
including fsmode
• Audio data peak level detection
• Kill interface for external DAC deactivation during digital
silence
• All SAA737x (CD7) digital servo and high-level functions
• Low focus noise
• Improved playability performance
• Automatic closed-loop gain control available for focus
and radial loops
• Pulsed sledge support
• Electronic damping of fast radial actuator during long
jump
• Microcontroller loading LOW
• High-level servo control option
• High-level mechanism monitor
• Communication may be via TDA1301/SAA7345
compatible bus or I
2
C-bus
• On-chip clock multiplier allows the use of 8.4672,
16.9344 or 33.8688 MHz crystals or ceramic
resonators.
2 GENERAL DESCRIPTION
The SAA7327 (CD7 II) is a single chip combining the
functions of a CD decoder, digital servo and bitstream
DAC, especially designed for Video CD applications.
The decoder/servo part is based on the SAA737x (CD7)
and is software compatible with this design. Extra
functions are controlled by use of ‘shadow’ registers
(see Section 7.15.3).
Supply of this Compact Disc IC does not convey an
implied license under any patent right to use this IC in any
Compact Disc application.
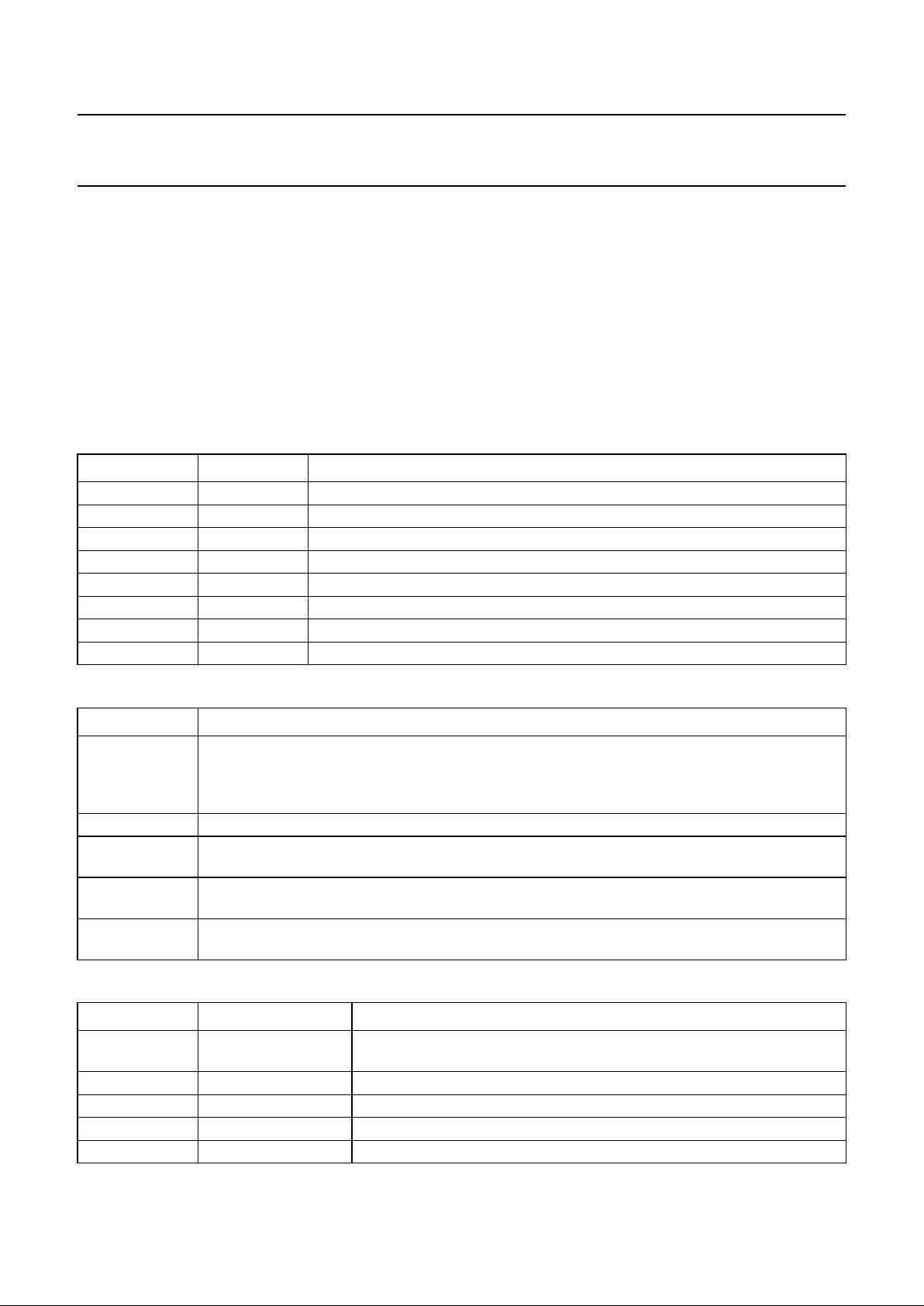
3 ORDERING INFORMATION
TYPE
NUMBER
PACKAGE
NAME DESCRIPTION VERSION
SAA7327H QFP64 plastic quad flat package; 64 leads (lead length 1.6 mm);
body 14 × 14 × 2.7 mm
SOT393-1
Page 4
1999 Jun 17 4
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
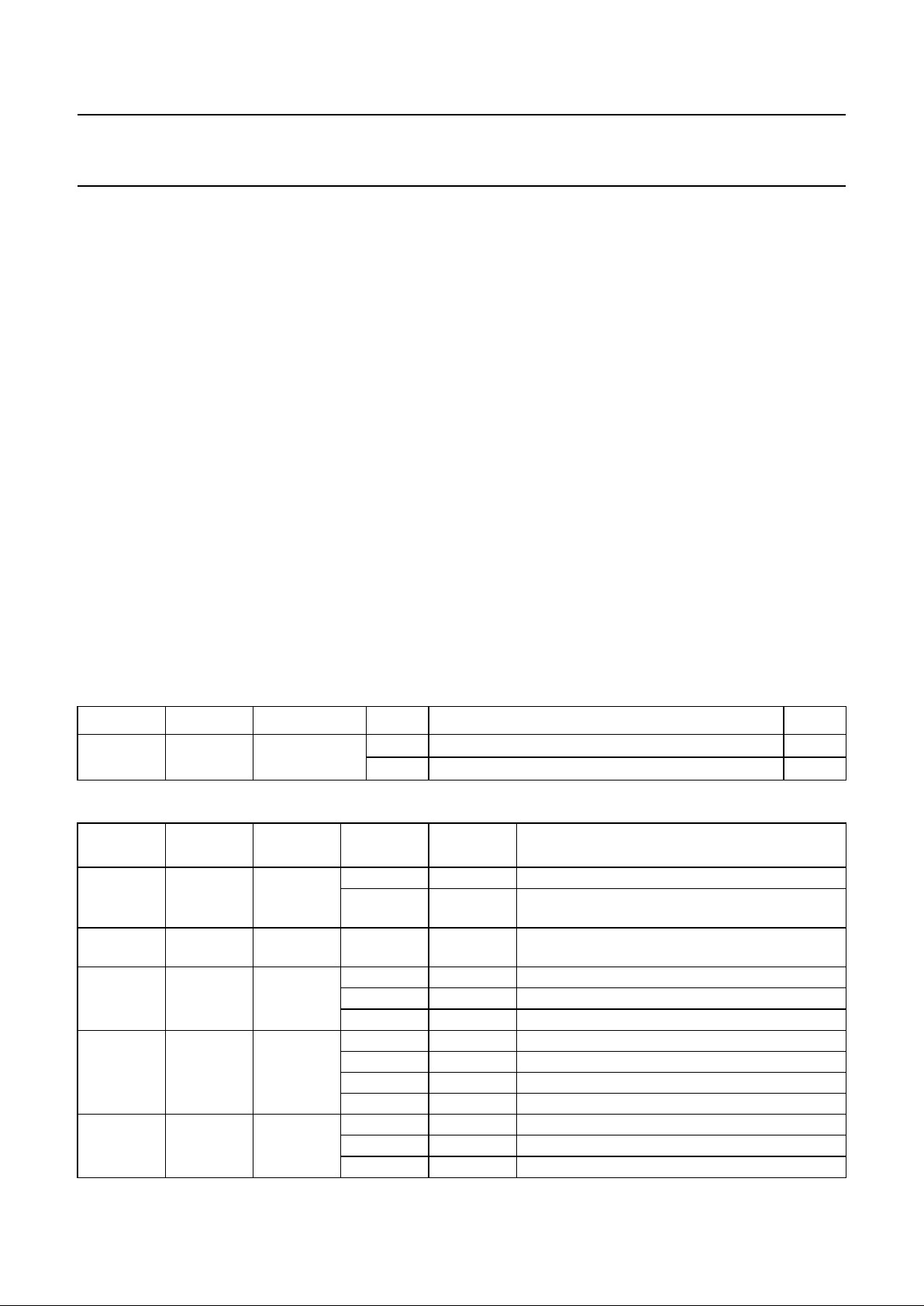
4 QUICK REFERENCE DATA
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
DD
supply voltage 3.0 3.3 3.6 V
I
DD
supply current n = 1 mode − 20 − mA
f
xtal
crystal frequency 8 8.4672 35 MHz
T
amb
ambient temperature −10 − +70 °C
T
stg
storage temperature −55 − +125 °C
S/N
DAC
onboard DAC signal-to-noise
ratio
1 kHz; 1fs;
EIAJ A-weighted;
see Figs 38 and 39
−90 −95 − dB
Page 5
1999 Jun 17 5
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
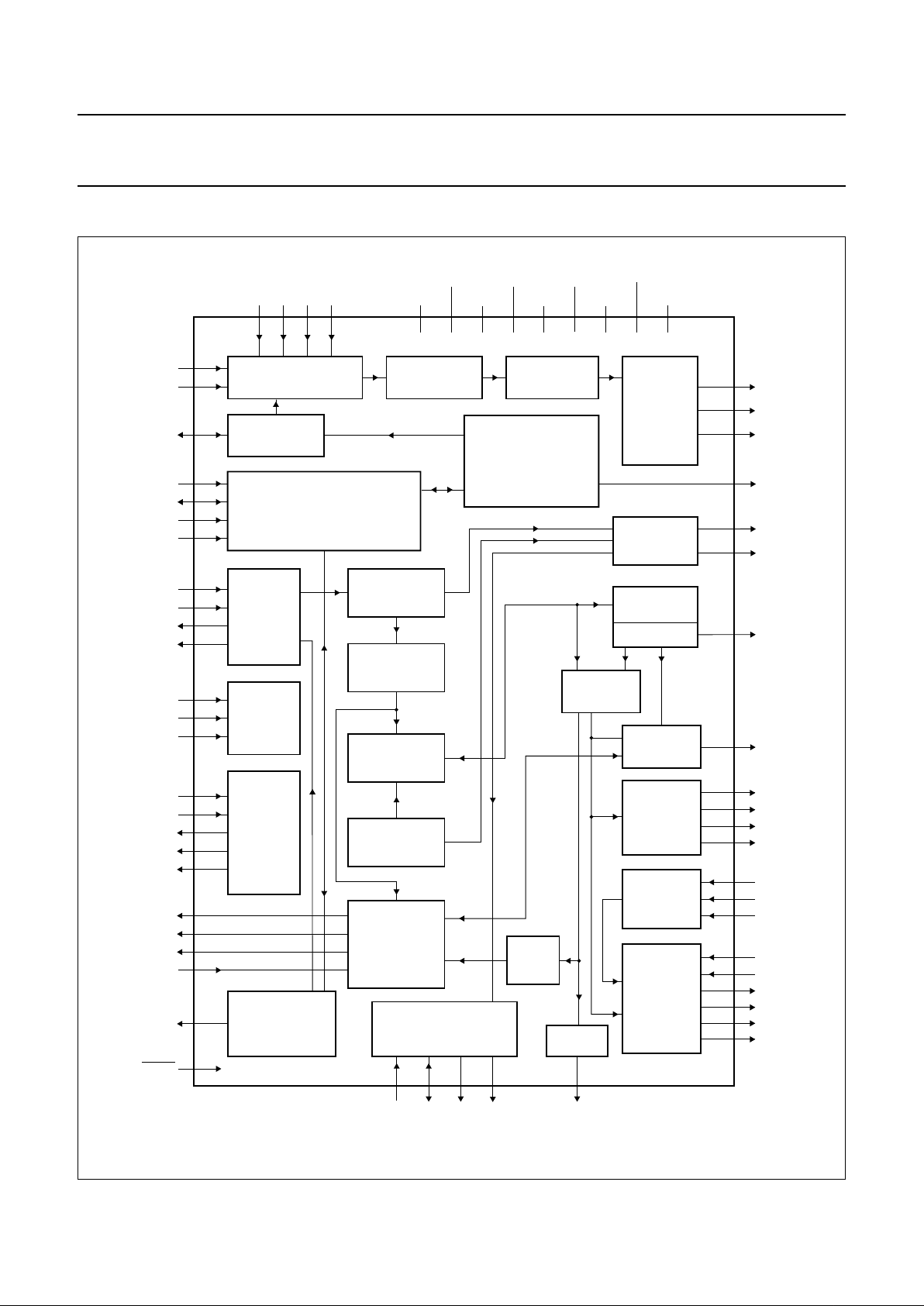
5 BLOCK DIAGRAM
Fig.1 Block diagram.
handbook, full pagewidth
DECODER
MICRO-
CONTROLLER
INTERFACE
VERSATILE PINS
INTERFACE
SUBCODE
PROCESSOR
KILL
PEAK
DETECT
SERIAL DATA
INTERFACE
TIMING
TEST
ADC
V
ref
GENERATOR
FRONT-END
DIGITAL
PLL
MOTOR
CONTROL
AUDIO
PROCESSOR
EBU
INTERFACE
ERROR
CORRECTOR
MICROCONTROLLER
INTERFACE
PRE-
PROCESSING
CONTROL
FUNCTION
CONTROL
PART
EFM
DEMODULATOR
SRAM
RAM
ADDRESSER
OUTPUT
STAGES
FLAGS
12
13
7
40
39
41
42
2
1
3
6
25
31
44
24
16
15
26
49
48
47
46
45
43
38
63 34 61 62 32
8 9 10 11 4 14 5 17 33 50 58 52 57
54
55
56
64
59
60
53
51
30
29
28
27
V
RIN
I
ref
R2
SCL
SDA
RAB
SILD
HFIN
HFREF
ISLICE
TEST1
TEST2
TEST3
SELPLL
CRIN
CROUT
CL16
CL11/4
SBSY
SFSY
SUB
RCK
STATUS
R1
D1 D2 D3 D4
V
SSA1
V
DDA2
V
SSD2
V
DDD2(C)
V
SSA2
V
DDA1
V
SSD1
V
SSD3
V
DDD1(P)
V1 V2/V3 V4 V5 KILL
EF
DATA
WCLK
SCLK
SERIAL DATA
(LOOPBACK)
INTERFACE
37
35
36
SDI
WCLI
SCLI
BITSTREAM
DAC
20
21
18
19
LP
22
RN
23
RP
LN
V
pos
V
neg
DOBM
MOTO2
MOTO1
LDON
SL
FO
RA
CFLG
RESET
SAA7327
MGS234
Page 6
1999 Jun 17 6
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
6 PINNING
SYMBOL PIN DESCRIPTION
HFREF 1 comparator common mode input
HFIN 2 comparator signal input
ISLICE 3 current feedback output from data slicer
V
SSA1
4
(1)
analog ground 1
V
DDA1
5
(1)
analog supply voltage 1
I
ref
6 reference current output
V
RIN
7 reference voltage for servo ADCs
D1 8 unipolar current input 1 (central diode signal input)
D2 9 unipolar current input 2 (central diode signal input)
D3 10 unipolar current input 3 (central diode signal input)
D4 11 unipolar current input 4 (central diode signal input)
R1 12 unipolar current input 1 (satellite diode signal input)
R2 13 unipolar current input 2 (satellite diode signal input)
V
SSA2
14
(1)
analog ground 2
CROUT 15 crystal/resonator output
CRIN 16 crystal/resonator input
V
DDA2
17
(1)
analog supply voltage 2
LN 18 DAC left channel differential negative output
LP 19 DAC left channel differential positive output
V
neg
20 DAC negative reference input
V
pos
21 DAC positive reference input
RN 22 DAC right channel differential negative output
RP 23 DAC right channel differential positive output
SELPLL 24 selects whether internal clock multiplier PLL is used
TEST1 25 test control input 1 (this pin should be tied LOW)
CL16 26 16.9344 MHz system clock output
DATA 27 serial d4(1) data output (3-state)
WCLK 28 word clock output (3-state)
SCLK 29 serial bit clock output (3-state)
EF 30 C2 error flag output (3-state)
TEST2 31 test control input 2 (this pin should be tied LOW)
KILL 32 kill output (programmable; open-drain)
V
SSD1
33
(1)
digital ground 1
V2/V3 34 versatile I/O: versatile input 2 or versatile output 3 (open-drain)
WCLI 35 word clock input (for data loopback to DAC)
SDI 36 serial data input (for data loopback to DAC)
SCLI 37 serial bit clock input (for data loopback to DAC)
RESET 38 Power-on reset input (active LOW)
SDA 39 microcontroller interface data I/O line (I
2
C-bus; open-drain output)
SCL 40 microcontroller interface clock line input (I
2
C-bus)
Page 7
1999 Jun 17 7
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Note
1. All supply pins must be connected to the same external power supply voltage.
RAB 41 microcontroller interface R/
W and load control line input (4-wire bus mode)
SILD 42 microcontroller interface
R/W and load control line input (4-wire bus mode)
STATUS 43 servo interrupt request line/decoder status register output (open-drain)
TEST3 44 test control input 3 (this pin should be tied LOW)
RCK 45 subcode clock input
SUB 46 P-to-W subcode bits output (3-state)
SFSY 47 subcode frame sync output (3-state)
SBSY 48 subcode block sync output (3-state)
CL11/4 49 11.2896 or 4.2336 MHz (for microcontroller) clock output
V
SSD2
50
(1)
digital ground 2
DOBM 51 bi-phase mark output (externally buffered; 3-state)
V
DDD1(P)
52
(1)
digital supply voltage 1 for periphery
CFLG 53 correction flag output (open-drain)
RA 54 radial actuator output
FO 55 focus actuator output
SL 56 sledge control output
V
DDD2(C)
57
(1)
digital supply voltage 2 for core
V
SSD3
58
(1)
digital ground 3
MOTO1 59 motor output 1; versatile (3-state)
MOTO2 60 motor output 2; versatile (3-state)
V4 61 versatile output 4
V5 62 versatile output 5
V1 63 versatile input 1
LDON 64 laser drive on output (open-drain)
SYMBOL PIN DESCRIPTION
Page 8

1999 Jun 17 8
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.2 Pin configuration.
handbook, full pagewidth
SAA7327H
MGS249
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
SBSY
SFSY
SUB
RCK
TEST3
STATUS
SILD
RAB
SCL
SDA
SCLI
SDI
WCLI
V2/V3
V
SSD1
HFREF
HFIN
ISLICE
V
SSA1
V
DDA1
I
ref
V
RIN
D1
D2
D3
D4
R1
R2
V
SSA2
CROUT
CRIN 33
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
LDONV1V5
V4
MOTO2
MOTO1
V
SSD3VDDD2(C)
SL
FO
RA
CFLG
V
DDD1(P)
DOBM
V
SSD2
CL11/4
V
DDA2
LN
LP
V
neg
V
pos
RN
RP
SELPLL
TEST1
CL16
DATA
WCLK
SCLK
EF
TEST2
KILL 49
RESET
7 FUNCTIONAL DESCRIPTION
7.1 Decoder part
7.1.1 P
RINCIPAL OPERATIONAL MODES OF THE DECODER
The decoding part supports a full audio specification and
can operate at two different disc speeds, from
single-speed (n = 1) to 2 times speed (n = 2). The factor
‘n’ is called the overspeed factor. A simplified data flow
through the decoder part is illustrated in Fig.7.
7.1.2 DECODING SPEED AND CRYSTAL FREQUENCY
The SAA7327 is a two speed decoding device, with an
internal Phase-Locked Loop (PLL) clock multiplier.
Depending on the crystal frequency used and the internal
clock settings (selectable via decoder register B), the
playback speeds shown in Table 1 are possible, where ‘n’
is the overspeed factor (1 or 2).
An internal clock multiplier is present, controlled by
SELPLL, and should only be used if a 8.4672 or
16.9344 MHz crystal, ceramic resonator or external clock
is present.
Page 9
1999 Jun 17 9
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.1.3 LOCK-TO-DISC MODE
For Electronic Shock Absorption (ESA) applications, the
SAA7327 can be put into lock-to-disc mode. This allows
Constant Angular Velocity (CAV) disc playback with
varying input data rates from the inside-to-outside of the
disc.
In the lock-to-disc mode, the FIFO is blocked and the
decoder will adjust its output data rate to the disc speed.
Hence, the frequency of the I2S-bus (WCLK and SCLK)
clocks are dependent on the disc speed. In the lock-to-disc
mode there is a limit on the maximum variation in disc
speed that the SAA7327 will follow. Disc speeds must
always be within 25% to 100% range of their nominal
value. The lock-to-disc mode is enabled/disabled by
decoder register E.
7.1.4 S
TANDBY MODES
The SAA7327 may be placed in two standby modes
selected by decoder register B (it should be noted that the
device core is still active):
• Standby 1: ‘CD-STOP’ mode; most I/O functions are
switched off
• Standby 2: ‘CD-PAUSE’ mode; audio output features
are switched off, but the motor loop, the motor output
and the subcode interfaces remain active; this is also
called a ‘Hot Pause’.
In the standby modes the various pins will have the
following values:
• MOTO1 and MOTO2: put in high-impedance, PWM
mode (standby 1 and reset: operating in standby 2); put
in high-impedance, PDM mode (standby 1 and reset:
operating in standby 2)
• SCL and SDA: no interaction; normal operation
continues
• SCLK, WCLK, DATA, EF and DOBM: 3-state in both
standby modes; normal operation continues after reset
• CRIN, CROUT, CL16 and CL11/4: no interaction;
normal operation continues
• V1, V2/V3, V4, V5 and CFLG: no interaction; normal
operation continues.
Table 1 Playback speeds
Notes
1. The CL11 output is always a 5.6448 MHz clock if a 16.9344 MHz external clock is used and SELPLL = 0. CL11 is
available on the CL11/4 output, enabled by programming shadow register 3 (see Section 7.15.3).
2. Data capture performance is not optimized for this option.
REGISTER B SELPLL
CRYSTAL FREQUENCY (MHz) CL11
FREQUENCY
(MHz)
(1)33.8688 16.9344 8.4672
00XX 0 n = 1 −−11.2896
00XX 1 −−n = 1 11.2896
01XX 0 − n=1 − 5.6448
01XX 1 − n=1 − 11.2896
10XX 0 n = 2 −−11.2896
10XX 1 −−n = 2 11.2896
11XX 0 − n=2
(2)
− 5.6448
11XX 1 − n=2 − 11.2896
Page 10
1999 Jun 17 10
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
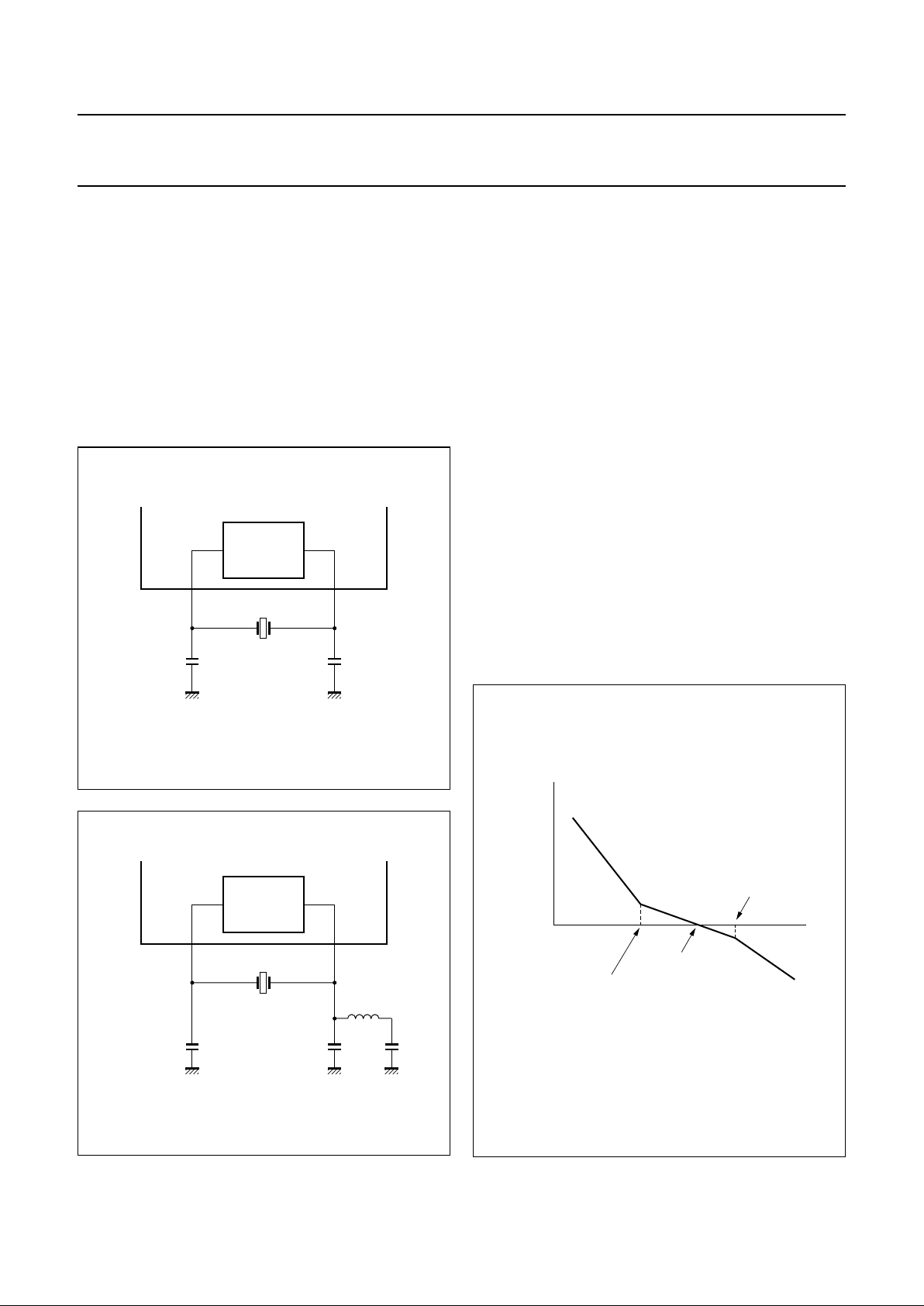
7.2 Crystal oscillator
The crystal oscillator is a conventional 2-pin design
operating between 8 and 35 MHz. This oscillator is
capable of operating with ceramic resonators and with
both fundamental and third overtone crystals. External
components should be used to suppress the fundamental
output of the third overtone crystals as shown in
Figs 3 and 4. Typical oscillation frequencies required are
8.4672, 16.9344 or 33.8688 MHz depending on the
internal clock settings used and whether or not the clock
multiplier is enabled.
Fig.3 8.4672 MHz fundamental configuration.
handbook, halfpage
OSCILLATOR
8.4672 MHz
CRIN
CROUT
SAA7327
33 pF33 pF
MGS246
Fig.4 33.8688 MHz overtone configuration.
handbook, halfpage
OSCILLATOR
33.8688 MHz
CRIN
CROUT
SAA7327
3.3 µH
1 nF10 pF10 pF
MGS247
7.3 Data slicer and clock regenerator
The SAA7327 has an integrated slice level comparator
which can be clocked by the crystal frequency clock, or
4 times the crystal frequency clock (if SELPLL is set HIGH
while using a 16.9344 MHz crystal and register 4 is set to
0XXX), or 8 times the crystal frequency clock (if SELPLL is
set HIGH while using an 8.4672 MHz crystal, and
register 4 is set to 0XXX). The slice level is controlled by
an internal current source applied to an external capacitor
under the control of the Digital Phase-Locked Loop
(DPLL).
Regeneration of the bit clock is achieved with an internal
fully digital PLL. No external components are required and
the bit clock is not output. The PLL has two registers
(8 and 9) for selecting bandwidth and equalization.
The PLL response is shown in Fig.5.
For certain applications an off-track input is necessary.
This is internally connected from the servo part (its polarity
can be changed by the foc_parm1 parameter), but may be
input via the V1 pin if selected by register C. If this flag is
HIGH, the SAA7327 will assume that its servo part is
following on the wrong track, and will flag all incoming
HF data as incorrect.
Fig.5 Digital PLL loop response.
MGS178
handbook, halfpage
f
3. PLL, LPF
2. PLL bandwidth
1. PLL integrator
PLL
loop
response
1, 2and 3 are programmable via decoder register 8.
Page 11

1999 Jun 17 11
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.6 Data slicer showing typical application components (for n = 1).
47 pF
HFREF
HFIN
ISLICE
22 kΩ
2.2 kΩ
100 nF
100 nF
1 nF
HF input
crystal
clock
DQ
DPLL
V
SSA
V
SSA
V
SS
MGS179
V
DD
100 µA
100 µA
7.4 Demodulator
7.4.1 F
RAME SYNC PROTECTION
A double timing system is used to protect the demodulator
from erroneous sync patterns in the serial data.
The master counter is only reset if:
• A sync coincidence is detected; sync pattern occurs
588 ±1 EFM clocks after the previous sync pattern
• A new sync pattern is detected within ±6 EFM clocks of
its expected position.
The sync coincidence signal is also used to generate the
PLL lock signal, which is active HIGH after 1 sync
coincidence found, and reset LOW if during 61
consecutive frames no sync coincidence is found. The PLL
lock signal can be accessed via the SDA or STATUS pins
selected by decoder registers 2 and 7.
Also incorporated in the demodulator is a Run Length 2
(RL2) correction circuit. Every symbol detected as RL2 will
be pushed back to RL3. To do this, the phase error of both
edges of the RL2 symbol are compared and the correction
is executed at the side with the highest error probability.
7.4.2 EFM
DEMODULATION
The 14-bit EFM data and subcode words are decoded into
8-bit symbols.
Page 12

1999 Jun 17 12
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
Fig.7 Simplified data flow of decoder functions.
o
k, full pagewidth
SUBCODE
PROCESSOR
DIGITAL PLL
AND
DEMODULATOR
FIFO
ERROR
CORRECTOR
FADE/MUTE/
INTERPOLATE
DIGITAL
FILTER
PHASE
COMPENSATION
DE-EMPHASIS
FILTER
KILL
1
0
1
0
1
0
1
0
1
0
I2S/EIAJ BUS
INTERFACE
I2S/EIAJ
LOOPBACK
INTERFACE
WCLI
SCLI
SDI
LN
LP
RN
RP
SCLK
WCLK
DATA
EF
decoder
reg 3
V
neg
decoder reg C
decoder reg 3
reg F
decoder reg A
1
0
1: decoder reg 3 ≠ 101X
0: decoder reg 3 = 101X
(CD-ROM modes)
1: shadow reg 7 = XX1X
0: shadow reg 7 = XX0X
1: shadow reg 7 = XX1X
0: shadow reg 7 = XX0X
0: reg D = XX01
1: decoder reg A = XX0X
0: decoder reg A ≠ XX1X
V4 SUBCODE
INTERFACE
MICROCONTROLLER
INTERFACE
CD GRAPHICS
INTERFACE
EBU
INTERFACE
SBSY
SFSY
SUB
RCK
DOBM
V4
SDA
output from
data slicer
1: decoder reg 3 = XX10
(1fs mode)
0: decoder reg 3 ≠ XX10
1: no pre-emphasis detected
OR reg D = 01XX
(de-emphasis signal at V5)
0: pre-emphasis detected
AND reg D ≠ 01XX
KILL
V3
MGS180
1
0
ONBOARD
DAC
1: shadow reg 7 = XXX1
0: shadow reg 7 = XXX0
1
0
1
0
Page 13
1999 Jun 17 13
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.5 Subcode data processing
7.5.1 Q-
CHANNEL PROCESSING
The 96-bit Q-channel word is accumulated in an internal
buffer. The last 16 bits are used internally to perform a
Cyclic Redundancy Check (CRC). If the data is good, the
SUBQREADY-I signal will go LOW. SUBQREADY-I can
be read via the SDA or STATUS pins, selected via decoder
register 2. Good Q-channel data may be read from SDA.
7.5.2 EIAJ 3
AND 4-WIRE SUBCODE (CD GRAPHICS)
INTERFACES
Data from all the subcode channels (P-to-W) may be read
via the subcode interface, which conforms to EIAJ
CP-2401. The interface is enabled and configured as
either a 3 or 4-wire interface via decoder register F.
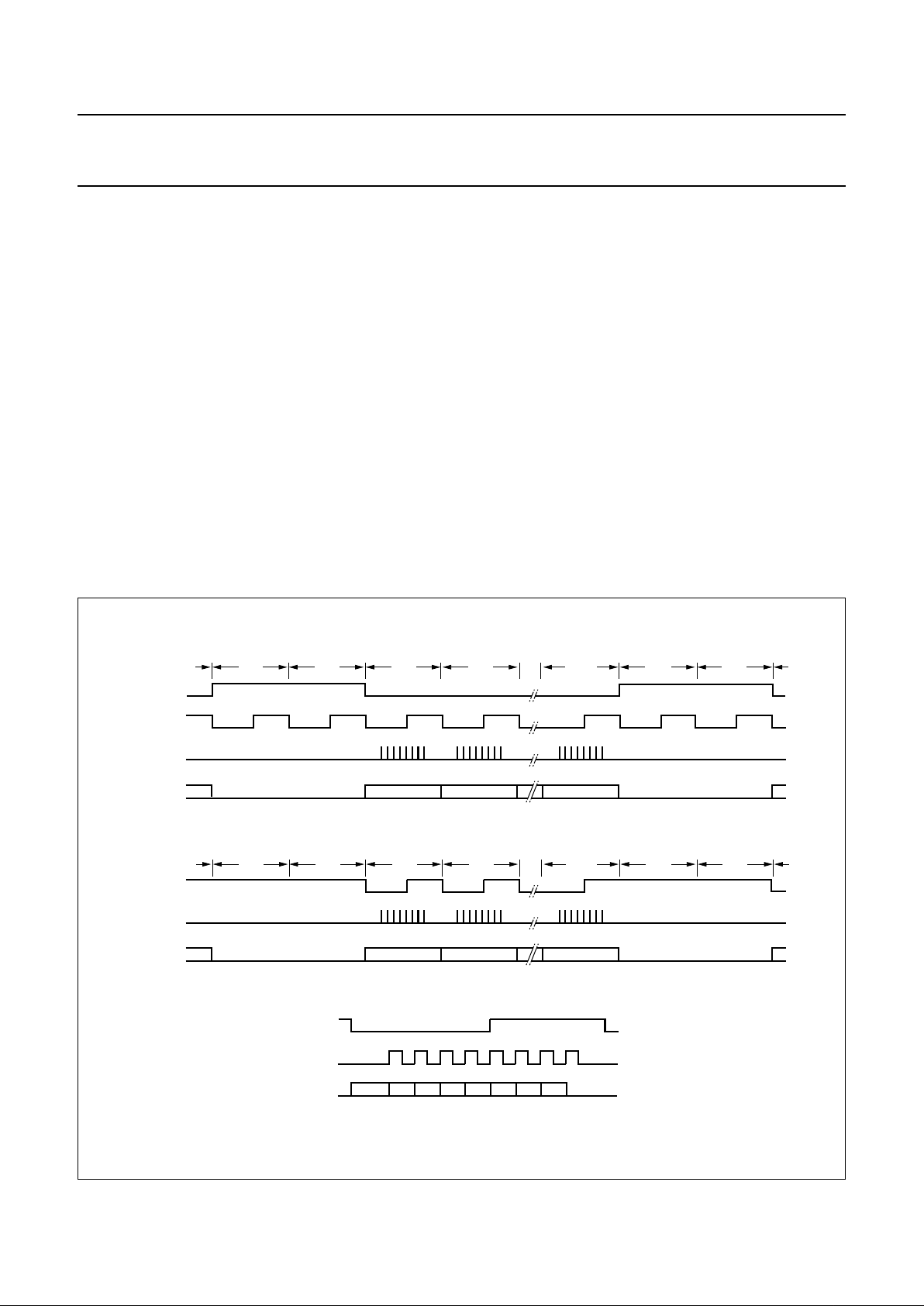
The subcode interface output formats are illustrated in
Fig.8, where the RCK signal is supplied by another device
such as a CD graphics decoder.
7.5.3 V4
SUBCODE INTERFACE
Data of subcode channels, Q-to-W, may be read via pin V4
if selected via decoder register D. The format is similar to
RS232 and is illustrated in Fig.9. The subcode sync word
is formed by a pause of (200/n) µs minimum. Each
subcode byte starts with a logic 1 followed by 7 bits
(Q-to-W). The gap between bytes is variable between
(11.3/n) µs and (90/n) µs.
The subcode data is also available in the EBU output
(DOBM) in a similar format.
Fig.8 EIAJ subcode (CD graphics) interface format.
handbook, full pagewidth
SBSY
SFSY
RCK
SUB
SFSY
RCK
SUB
SFSY
RCK
SUB
EIAJ 4-wire subcode interface
EIAJ 3-wire subcode interface
SF0 SF1
SF2 SF3 SF97 SF0 SF1
P-W P-W P-W
P-W P-W P-W
PQRSTUVW
MBG410
SF0 SF1 SF2 SF3 SF97 SF0 SF1
Page 14

1999 Jun 17 14
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.9 Subcode format and timing on pin V4.
n = disc speed.
W96 1QRSTUVW 1Q
200/n µs
min
11.3/n
µs
11.3/n µs min
90/n µs max
MBG401
7.6 FIFO and error corrector
The SAA7327 has a ±8 frame FIFO. The error corrector is
a t = 2, e = 4 type, with error corrections on both C1
(32 symbol) and C2 (28 symbol) frames. Four symbols are
used from each frame as parity symbols. This error
corrector can correct up to two errors on the C1 level and
up to four errors on the C2 level.
The error corrector also contains a flag processor. Flags
are assigned to symbols when the error corrector cannot
ascertain if the symbols are definitely good. C1 generates
output flags which are read after (de-interleaving) by C2,
to help in the generation of C2 output flags.
The C2 output flags are used by the interpolator for
concealment of uncorrectable errors. They are also output
via the EBU signal (DOBM). The EF output will flag bytes
in error in both audio and CD-ROM modes.
7.6.1 FLAGS OUTPUT (CFLG)
The flags output pin CFLG shows the status of the error
corrector and interpolator and is updated every frame
(7.35 × n kHz). In the SAA7327 chip a 1-bit flag is present
on the CFLG pin as illustrated in Fig.10. This signal shows
the status of the error corrector and interpolator.
The first flag bit, F1, is the absolute time sync signal, the
FIFO-passed subcode sync and relates the position of the
subcode sync to the audio data (DAC output). This flag
may also be used in a super FIFO or in the synchronization
of different players. The output flags can be made
available at bit 4 of the EBU data format (LSB of the 24-bit
data word), if selected by decoder register A.
Fig.10 Flag output timing diagram.
n = disc speed.
handbook, full pagewidth
F1 F2 F3 F4 F5 F6 F7 F8 F1F8
11.3/n
µs
33.9/n µs
33.9/n µs
MBG425
Page 15
1999 Jun 17 15
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
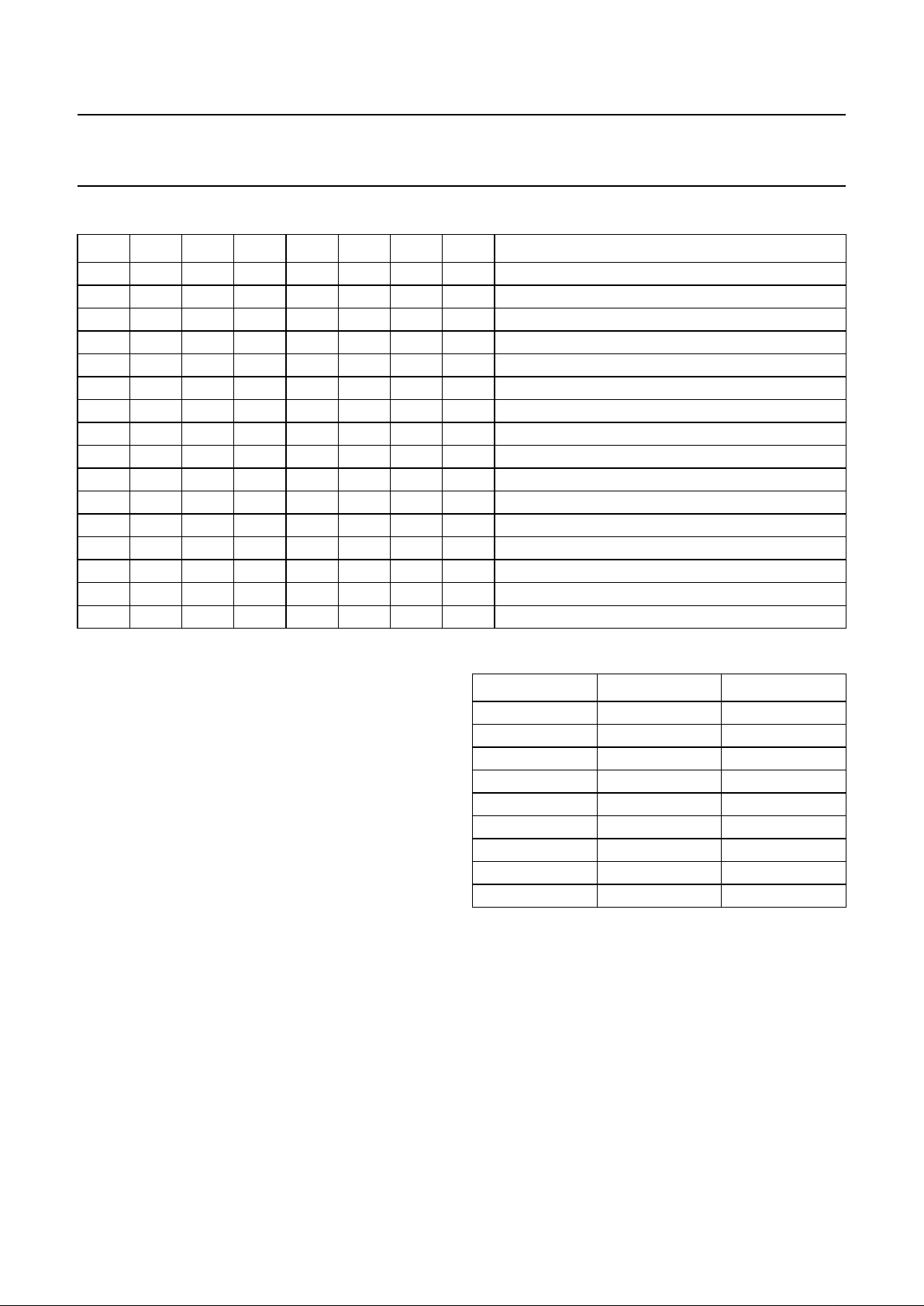
Table 2 Output flags
F1 F2 F3 F4 F5 F6 F7 F8 DESCRIPTION
0XXXXXXXno absolute time sync
1XXXXXXXabsolute time sync
X 0 0 X X X X X C1 frame contained no errors
X 0 1 X X X X X C1 frame contained 1error
X 1 0 X X X X X C1 frame contained 2errors
X 1 1 X X X X X C1 frame uncorrectable
X X X 0 0 X X 0 C2 frame contained no errors
X X X 0 0 X X 1 C2 frame contained 1 error
X X X 0 1 X X 0 C2 frame contained 2 errors
X X X 0 1 X X 1 C2 frame contained 3 errors
X X X 1 0 X X 0 C2 frame contained 4 errors
X X X 1 1 X X 1 C2 frame uncorrectable
X X X X X 0 0 X no interpolations
X X X X X 0 1 X at least one 1-sample interpolation
X X X X X 1 0 X at least one hold and no interpolations
X X X X X 1 1 X at least one hold and one 1-sample interpolation
7.7 Audio functions
7.7.1 D
E-EMPHASIS AND PHASE LINEARITY
When pre-emphasis is detected in the Q-channel
subcode, the digital filter automatically includes a
de-emphasis filter section. When de-emphasis is not
required, a phase compensation filter section controls the
phase of the digital oversampling filter to ≤±1° within the
band 0 to 16 kHz. With de-emphasis the filter is not phase
linear.
If the de-emphasis signal is set to be available at V5,
selected via decoder register D, then the de-emphasis
filter is bypassed.
7.7.2 D
IGITAL OVERSAMPLING FILTER
For optimizing performance with an external DAC, the
SAA7327 contains a 2 to 4 times oversampling IIR filter.
The filter specification of the 4 times oversampling filter is
given in Table 3.
These attenuations do not include the sample-and-hold at
the external DAC output or the DAC post filter. When using
the oversampling filter, the output level is scaled −0.5 dB
down, to avoid overflow on full-scale sine wave inputs
(0 to 20 kHz).
Table 3 Filter specification
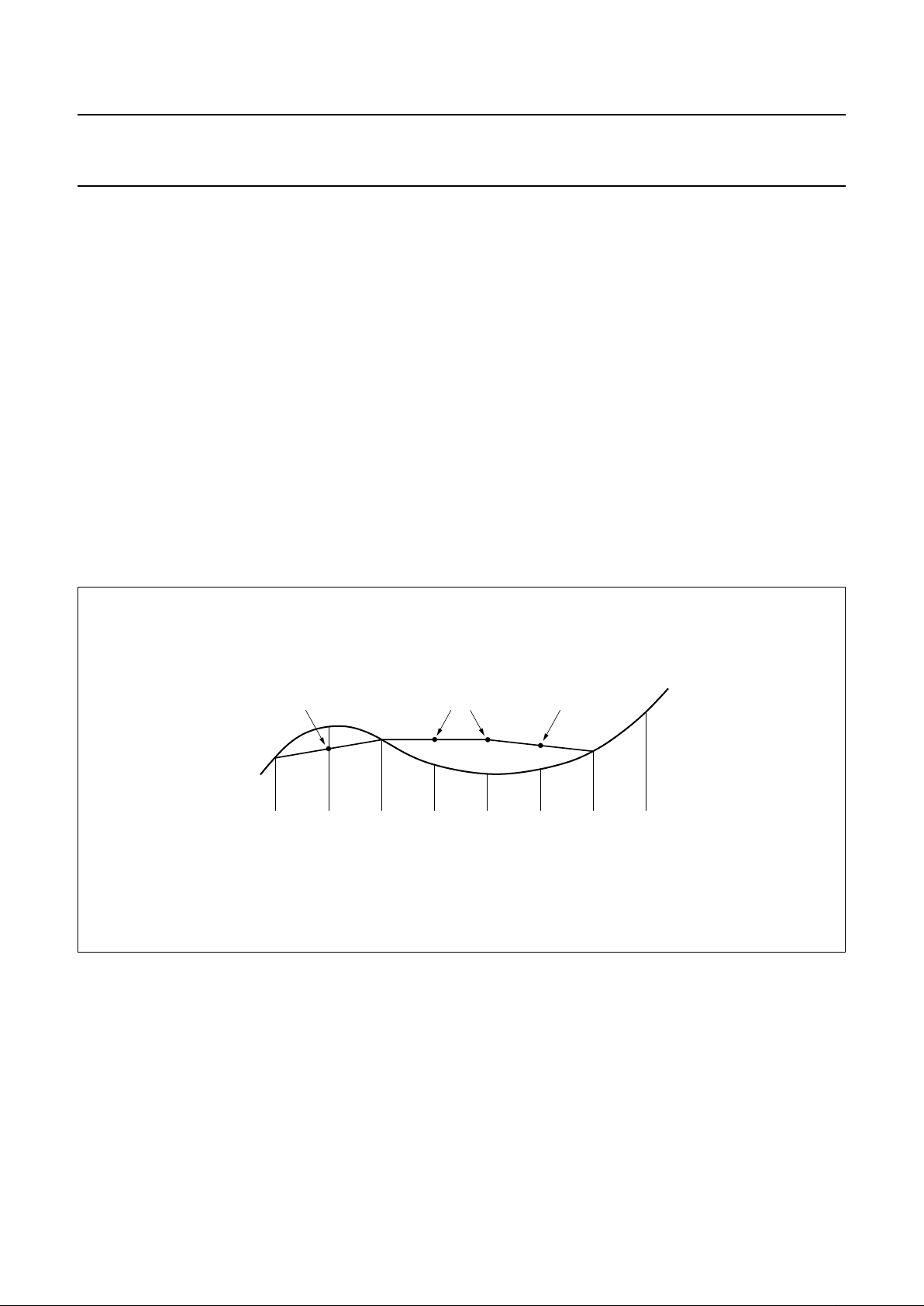
7.7.3 CONCEALMENT
A 1-sample linear interpolator becomes active if a single
sample is flagged as erroneous but cannot be corrected.
The erroneous sample is replaced by a level midway
between the preceding and following samples. Left and
right channels have independent interpolators. If more
than one consecutive non-correctable sample is found, the
last good sample is held. A 1-sample linear interpolation is
then performed before the next good sample (see Fig.11).
In CD-ROM modes (i.e. the external DAC interface is
selected to be in a CD-ROM format) concealment is not
executed.
PASS BAND STOP BAND ATTENUATION
0 to 9 kHz −≤0.001 dB
19 to 20 kHz −≤0.03 dB
− 24 kHz ≥25 dB
− 24 to 27 kHz ≥38 dB
− 27 to 35 kHz ≥40 dB
− 35 to 64 kHz ≥50 dB
− 64 to 68 kHz ≥31 dB
− 68 kHz ≥35 dB
− 69 to 88 kHz ≥40 dB
Page 16
1999 Jun 17 16
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.7.4 MUTE, FULL-SCALE, ATTENUATION AND FADE
A digital level controller is present on the SAA7327 which
performs the functions of soft mute, full-scale, attenuation
and fade; these are selected via decoder register 0:
• Mute: signal reduced to 0 in a maximum of 128 steps;
(3/n) ms
• Attenuate: signal scaled by −12 dB
• Full-scale: ramp signal back to 0 dB level; from mute
takes (3/n) ms
• Fade: activates a 128 stage counter which allows the
signal to be scaled up/down by 0.07 dB steps
– 128 = full-scale
– 120 = −0.5 dB (i.e. full-scale if oversampling filter
used)
–32=−12 dB
– 0 = mute.
7.7.5 PEAK DETECTOR
The peak detector measures the highest audio level
(absolute value) on positive peaks for left and right
channels. The 8 most significant bits are output in the
Q-channel data in place of the CRC bits. Bits 81 to 88
contain the left peak value (bit 88 = MSB) and
bits 89 to 96 contain the right peak value (bit 96 = MSB).
The values are reset after reading Q-channel data via
SDA.
Fig.11 Concealment mechanism.
Interpolation Hold Interpolation
MGA372
OK Error OK Error Error Error OK OK
Page 17

1999 Jun 17 17
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.8 DAC interface
7.8.1 I
NTERNAL BITSTREAM DIGITAL-TO-ANALOG CONVERTER (DAC)
The onboard bitstream DAC operates at a clock frequency of 96fs and is designed for operation with an audio input at
1fs. Optimum performance is dependent on the application circuit used and careful consideration should be given to the
recommended application circuits shown in Figs 38 and 39. The onboard DAC is controlled from shadow register 7
(see Section 7.15.3 for definition of shadow registers). This shadow register controls routing of data into the onboard
DAC and also controls the DAC output pins, which can be held at zero when the onboard DAC is not required;
see Table 4.
Table 4 Shadow register
Audio data from the decoder part of SAA7327 can be routed as described in the following two subsections.
SHADEN
SHADOW
ADDRESS
REGISTER DATA FUNCTION RESET
1 0111 (7H) control of
onboard DAC
XXX0 hold onboard DAC outputs at
zero
reset
XXX1 enable onboard DAC outputs −
XX0X use external DAC or route audio
data into onboard DAC
(loopback mode)
reset
XX1X route audio data into onboard
DAC (non-loopback mode)
−
7.8.1.1 Use onboard DAC
In this mode, shadow register 7 should be set to XX11.
This routes audio data from the decoder section of CD7 II
into the onboard DAC and enables the DAC output pins
(LN, LP, RN and RP). It should be noted that the DAC
interface format (set by decoder register 3) must be set to
16-bit 1fsmode, either I2S-bus or EIAJ format, for optimum
DAC performance to be achieved. CD-ROM mode can
also be used if interpolation is not required.
When using this mode, the serial data output pins for
interfacing with an external DAC or VCD decoder (SCLK,
WCLK, DATA and EF) are set to high-impedance.
7.8.1.2 Loopback external data into onboard DAC
The onboard DAC can also be set to accept digital audio
inputs from an external source, e.g. audio from a VCD
decoder IC. This is known as loopback mode and is
enabled by setting shadow register 7 to XX01. This
enables the serial data output pins SCLK, WCLK, DATA
and EF so that data can be routed to the external VCD
decoder (or external DAC).
The digital audio data output from the VCD decoder can
then also be input to the onboard DAC on the SAA7327 by
utilising the serial data input interface (SCLI, SDI and
WCLI).
In this mode, a wide range of data formats to the external
VCD IC can be programmed as shown in Table 4.
However, the serial inputs on the SAA7327 will always
expect the input digital audio data from the VCD IC to be
16-bit 1fs and the same data format, either I2S-bus or EIAJ,
as the serial output format (set by decoder register 3).
In fact, the onboard DAC will also accept 18-bit I2S-bus
data; in this case the 16 MSBs only will be read and the
2 LSBs discarded.
Page 18
1999 Jun 17 18
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.8.2 EXTERNAL DAC INTERFACE
Audio data from the CD10 decoder can be sent direct to an
external DAC, identical to the SAA737x series. This is
similar to the ‘loopback’ mode, but in this case the internal
DAC outputs can be held at zero i.e. shadow register 7 is
set to XX00. The SAA7327 is compatible with a wide range
of external DACs. Eleven formats are supported and are
given in Table 4. Figures 12 and 13 show the Philips
I2S-bus and the EIAJ data formats respectively. When the
decoder is operated in lock-to-disc mode, the SCLK
frequency is dependent on the disc speed factor ‘d’.
All formats are MSB first and f
s
is (44.1 × n) kHz.
The polarity of the WCLK and the data can be inverted;
selectable by decoder register 7. It should be noted that
EF is only a defined output in CD-ROM and 1fsmodes.
When using an external DAC (or when using the onboard
DAC in non-loopback mode), the serial data inputs to the
onboard DAC (SCLI, SDI and WCLI) should be left
unconnected.
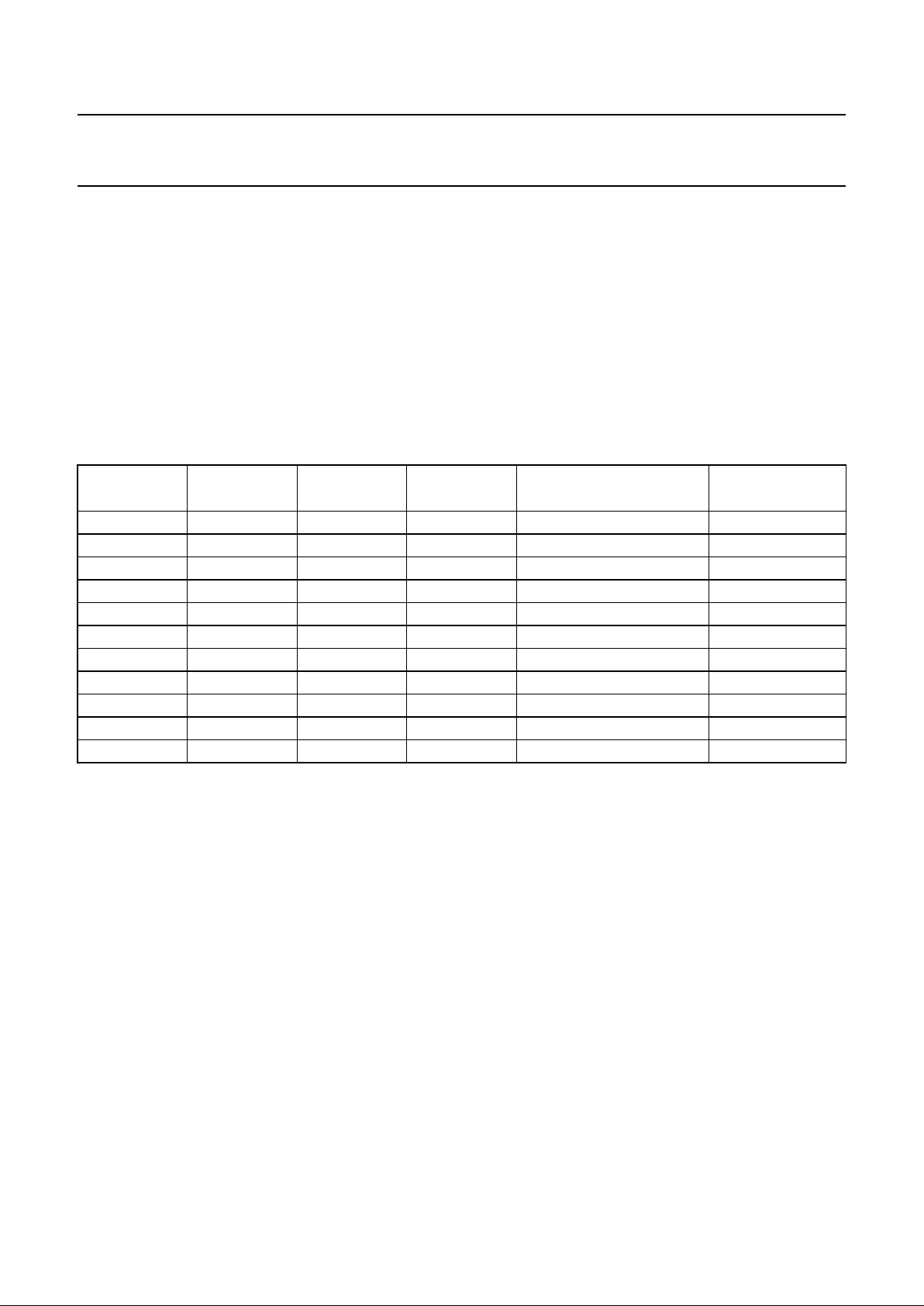
Table 5 DAC interface formats
Note
1. In this mode the first 16 bits contain data, but if any of the fade, attenuate or de-emphasis filter functions are activated
then the first 18 bits contain data.
REGISTER 3
SAMPLE
FREQUENCY
NUMBER OF
BITS
SCLK (MHz) FORMAT INTERPOLATION
1010 f
s
16 2.1168 × n CD-ROM (I2S-bus) no
1011 f
s
16 2.1168 × n CD-ROM (EIAJ) no
1110 f
s
16/18
(1)
2.1168 × n Philips I2S-bus 16/18 bits
(1)
yes
0010 f
s
16 2.1168 × n EIAJ 16 bits yes
0110 f
s
18 2.1168 × n EIAJ 18 bits yes
0000 4f
s
16 8.4672 × n EIAJ 16 bits yes
0100 4f
s
18 8.4672 × n EIAJ 18 bits yes
1100 4f
s
18 8.4672 × n Philips I2S-bus 18 bits yes
0011 2f
s
16 4.2336 × n EIAJ 16 bits yes
0111 2f
s
18 4.2336 × n EIAJ 18 bits yes
1111 2f
s
18 4.2336 × n Philips I2S-bus 18 bits yes
Page 19
1999 Jun 17 19
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
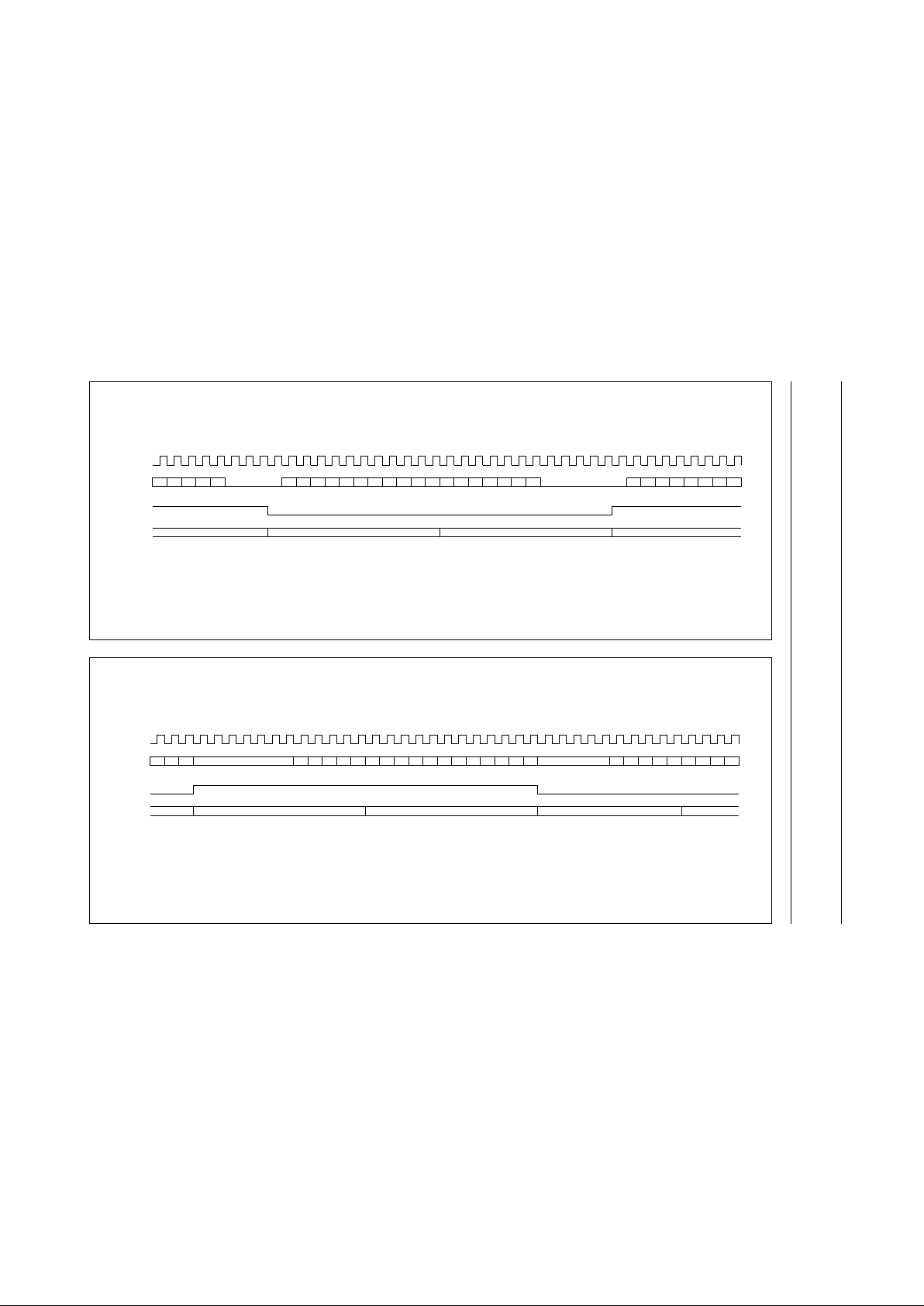
LEFT CHANNEL DATA (WCLK NORMAL POLARITY)
SCLK
15 14
15 1410DATA
WCLK
LSB error flag MSB error flag LSB error flag MSB error flag
EF
(CD-ROM
AND Ifs MODES ONLY)
01
MBG424
Fig.12 Philips I2S-bus data format (16-bit word length shown).
SCLK
17
170DATA
WCLK
0
LEFT CHANNEL DATA
MSB error flag LSB error flag MSB error flag
MBG423
EF
(CD-ROM
AND Ifs MODES ONLY)
Fig.13 EIAJ data format (18-bit word length shown).
Page 20
1999 Jun 17 20
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.9 EBU interface
The bi-phase mark digital output signal at pin DOBM is in
accordance with the format defined by the IEC958
specification. Three different modes can be selected via
decoder register A:
• DOBM pin held LOW
• Data taken before concealment, mute and fade (must
always be used for CD-ROM modes)
• Data taken after concealment, mute and fade.
7.9.1 FORMAT
The digital audio output consists of 32-bit words
(‘subframes’) transmitted in bi-phase mark code (two
transitions for a logic 1 and one transition for a logic 0).
Words are transmitted in blocks of 384. The formats are
given in Table 6.
Table 6 Format
Table 7 Description of Table 6
Table 8 Bit assignment
FUNCTION BITS DESCRIPTION
Sync 0 to 3 −
Auxiliary 4 to 7 not used; normally zero
Error flags 4 CFLG error and interpolation flags when selected by register A
Audio sample 8 to 27 first 4 bits not used (always zero) twos complement LSB = bit 12, MSB = bit 27
Validity flag 28 valid = logic 0
User data 29 used for subcode data (Q-to-W)
Channel status 30 control bits and category code
Parity bit 31 even parity for bits 4 to 30
FUNCTION DESCRIPTION
Sync The sync word is formed by violation of the bi-phase rule and therefore does not contain any data.
Its length is equivalent to 4 data bits. The 3 different sync patterns indicate the following situations:
sync B: start of a block (384 words), word contains left sample; sync M: word contains left sample
(no block start) and sync W: word contains right sample.
Audio sample Left and right samples are transmitted alternately.
Validity flag Audio samples are flagged (bit 28 = 1) if an error has been detected but was uncorrectable. This
flag remains the same even if data is taken after concealment.
User data Subcode bits Q-to-W from the subcode section are transmitted via the user data bit. This data is
asynchronous with the block rate.
Channel status The channel status bit is the same for left and right words. Therefore a block of 384 words contains
192 channel status bits. The category code is always CD. The bit assignment is given in Table 8.
FUNCTION BITS DESCRIPTION
Control 0 to 3 copy of CRC checked Q-channel control bits 0 to 3; bit 2 is logic 1 when
copy permitted; bit 3 is logic 1 when recording has pre-emphasis
Reserved mode 4 to 7 always zero
Category code 8 to 15 CD: bit 8 = logic 1, all other bits = logic 0
Clock accuracy 28 to 29 set by register A; 10 = level I; 00 = level II; 01 = level III
Remaining 6 to 27 and 30 to 191 always zero
Page 21
1999 Jun 17 21
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.10 KILL circuit
The KILL circuit detects digital silence by testing for an
all-zero or all-ones data word in the left or right channel
prior to the digital filter. The output is switched active LOW
when silence has been detected for at least 270 ms, or if
mute is active, or in CD-ROM modes. Two modes are
available which can be selected by decoder register C:
• Pin KILL: KILL active LOW indicates silence detected on
both left and right channels
• Pin KILL: KILL active LOW indicates silence detected on
left channel. V3 active LOW indicates silence detected
on right channel.
It should be noted that when mute is active or in CD-ROM
modes the output(s) are switched LOW.
7.11 Audio features off
The audio features can be turned off (selected by decoder
register E) which affects the following functions:
• Digital filter, fade, peak detector, KILL circuit (but
outputs KILL, V3 still active) are disabled
• V5 (if selected to be the de-emphasis flag output) and
the EBU outputs become undefined.
It should be noted that the EBU output should be set LOW
prior to switching the audio features off and after switching
audio features back on a full-scale command should be
given.
7.12 The VIA interface
The SAA73727 has four pins that can be reconfigured for
different applications. One of these pins, V2/V3, can be
programmed as an input (V2) or as an output (V3). Control
of the V2/V3 pin is via shadow register 3; see Table 9:
Selection of the V2/V3 pin does not affect the function
programmed by decoder register C i.e. the V2/V3 pin can
be changed from V2 to V3 function either before or after
setting the desired function via decoder register 1100.
Selection of, for instance, a V3 function while the V2/V3
pin is set to V2 will not affect the V2 functionality.
The functions of these versatile pins is identical to the
SAA737x series. The functions of these versatile pins is
programmed by decoder registers C and D, as shown in
Table 10.
Table 9 V2/V3 configuration
Table 10 Pin applications
SHADEN ADDRESS REGISTER DATA FUNCTION RESET
1 0011 (3H) control of
V2/V3 pin
0XXX V2/V3 pin configured as V2 input reset
1XXX V2/V3 pin configured as V3 output (open-drain) −
PIN NAME
PIN
NUMBER
TYPE
REGISTER
ADDRESS
REGISTER
DATA
FUNCTION
V1 63 input 1100 XXX1 external off-track signal input
− XXX0 internal off-track signal used input may be read
via decoder status bit; selected via register 2
V2 36 input −−input may be read via decoder status bit;
selected via register 2
V3 36 output 1100 XX0X KILL output for right channel
− X01X output = 0
− X11X output = 1
V4 61 output 1101 0000 4-line motor drive (using V4 and V5)
− XX01 Q-to-W subcode output
− XX10 output = 0
− XX11 output = 1
V5 62 output 1101 01XX de-emphasis output (active HIGH)
− 10XX output = 0
− 11XX output = 1
Page 22

1999 Jun 17 22
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.13 Spindle motor control
7.13.1 M
OTOR OUTPUT MODES
The spindle motor speed is controlled by a fully integrated
digital servo. Address information from the internal
±8 frame FIFO and disc speed information are used to
calculate the motor control output signals. Several output
modes, selected by decoder register 6, are supported:
• Pulse density, 2-line (true complement output),
(1 × n) MHz sample frequency
• PWM output, 2-line, (22.05 × n) kHz modulation
frequency
• PWM output, 4-line, (22.05 × n) kHz modulation
frequency
• CDV motor mode.
7.13.1.1 Pulse density output mode
In the pulse density mode the motor output pin (MOTO1)
is the pulse density modulated motor output signal. A 50%
duty factor corresponds with the motor not actuated,
higher duty factors mean acceleration, lower mean
braking. In this mode, the MOTO2 signal is the inverse of
the MOTO1 signal. Both signals change state only on the
edges of a (1 × n) MHz internal clock signal. Possible
application diagrams are illustrated in Fig.14.
7.13.1.2 PWM output mode (2-line)
In the PWM mode the motor acceleration signal is put in
pulse-width modulation form on the MOTO1 output.
The motor braking signal is pulse-width modulated on the
MOTO2 output. The timing is illustrated in Fig.15. A typical
application diagram is illustrated in Fig.16.
Fig.14 Motor pulse density application diagrams.
MGA363 - 1
MOTO2
V
DD
V
SS
MOTO1
M
22 kΩ
10 nF
+
–
22 kΩ
10 nF
+
–
V
SS
V
SS
MOTO1
M
22 kΩ
10 nF
+
–
22 kΩ
22 kΩ
V
SS
V
DD
V
SS
22 kΩ
22 kΩ
Fig.15 2-line PWM mode timing.
rep
t = 45 µs
t 240 ns
dead
Accelerate Brake
MOTO1
MOTO2
MGA366
Page 23

1999 Jun 17 23
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.13.1.3 PWM output mode (4-line)
Using two extra outputs from the versatile pins interface, it is possible to use the SAA7327 with a 4-input motor bridge.
The timing is illustrated in Fig.17. A typical application diagram is illustrated in Fig.18.
Fig.16 Motor 2-line PWM mode application diagram.
MGA365 - 2
V
SS
+
M
MOTO1 MOTO2
10 Ω
100 nF
Fig.17 4-line PWM mode timing.
MOTO1
MOTO2
V4
V5
rep
t = 45 µs t 240 ns
dead
ovl
t = 240 ns
Accelerate Brake
MGA367 - 1
Page 24

1999 Jun 17 24
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.18 Motor 4-line PWM mode application diagram.
MGA364 - 2
V
SS
+
M
MOTO1
V4
MOTO2
V5
100 nF
10 Ω
7.13.1.4 CDV/CAV output mode
In the CDV motor mode, the FIFO position will be put in
pulse-width modulated form on the MOTO1 pin [carrier
frequency (300 × d) Hz], where ‘d’ is the disc speed factor.
The PLL frequency signal will be put in pulse-density
modulated form (carrier frequency 4.23 × n MHz) on the
MOTO2 pin. The integrated motor servo is disabled in this
mode.
The PWM signal on MOTO1 corresponds to a total
memory space of 20 frames, therefore the nominal FIFO
position (half full) will result in a PWM output of 60%.
In the lock to-disc (CAV) mode the CDV motor mode is the
only mode that can be used to control the motor.
7.13.2 S
PINDLE MOTOR OPERATING MODES
The operation modes of the motor servo is controlled by
decoder register 1 (see Table 11).
In the SAA7327 decoder there is an anti-windup mode for
the motor servo, selected via decoder register 1. When the
anti-wind-up mode is activated the motor servo integrator
will hold if the motor output saturates.
7.13.2.1 Power limit
In start mode 1, start mode 2, stop mode 1 and stop
mode 2, a fixed positive or negative voltage is applied to
the motor. This voltage can be programmed as a
percentage of the maximum possible voltage, via
register 6, to limit current drain during start and stop.
The following power limits are possible; 100% (no power
limit), 75%, 50%, or 37% of maximum.
7.13.3 L
OOP CHARACTERISTICS
The gain and crossover frequencies of the motor control
loop can be programmed via decoder registers 4 and 5.
The following parameter values are possible:
• Gains: 3.2, 4.0, 6.4, 8.0, 12.8, 16, 25.6 and 32
• Crossover frequency f4: 0.5 × n Hz, 0.7 × n Hz,
1.4 × n Hz and 2.8 × nHz
• Crossover frequency f3: 0.85 × n Hz, 1.71 × n Hz and
3.42 × n Hz.
It should be noted that the crossover frequencies f3and f
4
are scaled with the overspeed factor ‘n’ whereas the gains
are not.
Page 25

1999 Jun 17 25
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.13.4 FIFO OVERFLOW
If FIFO overflow occurs during Play mode (e.g.: as a result of motor rotational shock), the FIFO will be automatically reset
to 50% and the audio interpolator tries to conceal as much as possible to minimize the effect of data loss.
Table 11 Operating modes
MODE DESCRIPTION
Start mode 1 The disc is accelerated by applying a positive voltage to the spindle motor . No decisions are involved
and the PLL is reset. No disc speed information is available for the microcontroller.
Start mode 2 The disc is accelerated as in start mode 1, however the PLL will monitor the disc speed. When the
disc reaches 75% of its nominal speed, the controller will switch to jump mode. The motor status
signals selectable via register 2 are valid.
Jump mode Motor servo enabled but FIFO kept reset at 50%, integrator is held. The audio is muted but it is
possible to read the subcode. It should be noted that in the CD-ROM modes the data, on EBU and
the I
2
S-bus is not muted.
Jump mode 1 Similar to jump mode but motor integrator is kept at zero. Used for long jumps where there is a large
change in disc speed.
Play mode FIFO released after resetting to 50%. Audio mute released.
Stop mode 1 Disc is braked by applying a negative voltage to the motor. No decisions are involved.
Stop mode 2 The disc is braked as in stop mode 1 but the PLL will monitor the disc speed. As soon as the disc
reaches 12% (or 6%, depending on the programmed brake percentage, via register E) of its nominal
speed, the MOTSTOP status signal will go HIGH and switch the motor servo to Off mode.
Off mode Motor not steered.
Fig.19 Motor servo mode diagram.
MGA362 - 2
G
f
4
fBW
3
f
Page 26

1999 Jun 17 26
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.14 Servo part
7.14.1 D
IODE SIGNAL PROCESSING
The photo detector in conventional two-stage three-beam
Compact Disc systems normally contains six discrete
diodes. Four of these diodes (three for single foucault
systems) carry the Central Aperture signal (CA) while the
other two diodes (satellite diodes) carry the radial tracking
information. The CA signal is processed into an HF signal
(for the decoder function) and LF signal (information for the
focus servo loop) before it is supplied to the SAA7327.
The analog signals from the central and satellite diodes
are converted into a digital representation using
Analog-to-Digital Converters (ADCs).
The ADCs are designed to convert unipolar currents into a
digital code. The dynamic range of the input currents is
adjustable within a given range, which is dependent on the
value of the external reference current (I
ref
) resistor and
the values programmed in shadow registers A and C.
The magnitude of the signal currents for the central
aperture diodes D1 to D4 and the radial diodes R1 and R2
are programmed separately to sixteen separate current
ranges.
The maximum input currents with an external 30 kΩ
reference current resistor are given in Table 12.
Table 12 Shadow register settings to control diode input current ranges
SHADEN BIT
SHADOW
REGISTER
ADDRESS DATA FUNCTION INITIAL
1A
signal
magnitude
control for
diodes
D1 to D4
1010 0000 (0.042).I
ref
= 1.006 µA (nom) −
0001 (0.083).I
ref
= 2.013 µA (nom) −
0010 (0.125).I
ref
= 3.019 µA (nom) −
0011 (0.167).I
ref
= 4.025 µA (nom) −
0100 (0.208).I
ref
= 5.031 µA (nom) −
0101 (0.25).I
ref
= 6.034 µA (nom) −
0110 (0.292).I
ref
= 7.044 µA (nom) −
0111 (0.333).I
ref
= 8.05 µA (nom) −
1000 (0.375).I
ref
= 9.056 µA (nom) −
1001 (0.417).I
ref
= 10.063 µA (nom) −
1010 (0.458).I
ref
= 11.069 µA (nom) −
1011 (0.5).I
ref
= 12.075 µA (nom) −
1100 (0.542).I
ref
= 13.081 µA (nom) −
1101 (0.583).I
ref
= 14.088 µA (nom) −
1110 (0.625).I
ref
= 15.094 µA (nom) −
1111 (0.667).I
ref
= 16.1 µA (nom) reset
Page 27

1999 Jun 17 27
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
1C
signal
magnitude
control for
diodes
R1 and R2
1100 0000 (0.042).I
ref
= 1.006 µA (nom) −
0001 (0.083).I
ref
= 2.013 µA (nom) −
0010 (0.125).I
ref
= 3.019 µA (nom) −
0011 (0.167).I
ref
= 4.025 µA (nom) −
0100 (0.208).I
ref
= 5.031 µA (nom) −
0101 (0.25).I
ref
= 6.034 µA (nom) −
0110 (0.292).I
ref
= 7.044 µA (nom) −
0111 (0.333).I
ref
= 8.05 µA (nom) −
1000 (0.375).I
ref
= 9.056 µA (nom) −
1001 (0.417).I
ref
= 10.063 µA (nom) −
1010 (0.458).I
ref
= 11.069 µA (nom) −
1011 (0.5).I
ref
= 12.075 µA (nom) −
1100 (0.542).I
ref
= 13.081 µA (nom) −
1101 (0.583).I
ref
= 14.088 µA (nom) −
1110 (0.625).I
ref
= 15.094 µA (nom) −
1111 (0.667).I
ref
= 16.1 µA (nom) reset
SHADEN BIT
SHADOW
REGISTER
ADDRESS DATA FUNCTION INITIAL
7.14.2 SIGNAL CONDITIONING
The digital codes retrieved from the ADCs are applied to
logic circuitry to obtain the various control signals.
The signals from the central aperture diodes are
processed to obtain a normalised focus error signal.
where the detector set-up is assumed as shown in Fig.20.
In the event of single Foucault focusing method, the signal
conditioning can be switched under software control such
that the signal processing is as follows:
The error signal, FEn, is further processed by a
proportional integral and differential (PID) filter section.
A Focus OK (FOK) flag is generated by means of the
central aperture signal and an adjustable reference level.
This signal is used to provide extra protection for the
Track-Loss (TL) generation, the focus start-up procedure
and the dropout detection.
FE
n
D1 D2–
D1 D2+
---------------------
D3 D4–
D3 D4+
---------------------
–=
FE
n
2
D1 D2–
D1 D2+
---------------------
×=
The radial or tracking error signal is generated by the
satellite detector signals R1 and R2. The radial error
signal can be formulated as follows:
RE
s
= (R1 − R2) × re_gain + (R1 + R2) × re_offset
where the index ‘s’ indicates the automatic scaling
operation which is performed on the radial error signal.
This scaling is necessary to avoid non-optimum dynamic
range usage in the digital representation and reduces the
radial bandwidth spread. Furthermore, the radial error
signal will be made free from offset during start-up of the
disc.
The four signals from the central aperture detectors,
together with the satellite detector signals generate a track
position signal (TPI) which can be formulated as follows:
TPI = sign [(D1 + D2 + D3 + D4) − (R1 + R2) × sum_gain]
where the weighting factor sum_gain is generated
internally by the SAA7327 during initialization.
Page 28

1999 Jun 17 28
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.20 Detector arrangement.
handbook, full pagewidth
D3
D1
D2
SATELLITE
DIODE R1
SATELLITE
DIODE R2
D1
D3
D2
D4
SATELLITE
DIODE R1
SATELLITE
DIODE R2
D1
D2
D3
D4
SATELLITE
DIODE R1
SATELLITE
DIODE R2
single Foucault astigmatic focus double Foucault
MBG422
7.14.3 FOCUS SERVO SYSTEM
7.14.3.1 Focus start-up
Five initially loaded coefficients influence the start-up
behaviour of the focus controller. The automatically
generated triangular voltage can be influenced by
3 parameters; for height (ramp_height) and DC offset
(ramp_offset) of the triangle and its steepness
(ramp_incr).
For protection against false focus point detections two
parameters are available which are an absolute level on
the CA-signal (CA_start) and a level on the FEn signal
(FE_start). When this CA level is reached the FOK signal
becomes true.
If the FOK signal is true and the level on the FEn signal is
reached, the focus PID is enabled to switch on when the
next zero crossing is detected in the FEn signal.
7.14.3.2 Focus position control loop
The focus control loop contains a digital PID controller
which has 5 parameters which are available to the user.
These coefficients influence the integrating (foc_int),
proportional (foc_lead_length, part of foc_parm3) and
differentiating (foc_pole_lead, part of foc_parm1) action of
the PID and a digital low-pass filter (foc_pole_noise, part
of foc_parm2) following the PID. The fifth coefficient
foc_gain influences the loop gain.
7.14.3.3 Dropout detection
This detector can be influenced by one parameter
(CA_drop). The FOK signal will become false and the
integrator of the PID will hold if the CA signal drops below
this programmable absolute CA level. When the FOK
signal becomes false it is assumed, initially, to be caused
by a black dot.
Page 29

1999 Jun 17 29
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.14.3.4 Focus loss detection and fast restart
Whenever FOK is false for longer than approximately
3 ms, it is assumed that the focus point is lost. A fast
restart procedure is initiated which is capable of restarting
the focus loop within 200 to 300 ms depending on the
programmed coefficients of the microcontroller.
7.14.3.5 Focus loop gain switching
The gain of the focus control loop (foc_gain) can be
multiplied by a factor of 2 or divided by a factor of 2 during
normal operation. The integrator value of the PID is
corrected accordingly. The differentiating (foc_pole_lead)
action of the PID can be switched at the same time as the
gain switching is performed.
7.14.3.6 Focus automatic gain control loop
The loop gain of the focus control loop can be corrected
automatically to eliminate tolerances in the focus loop.
This gain control injects a signal into the loop which is used
to correct the loop gain. Since this decreases the optimum
performance, the gain control should only be activated for
a short time (for example, when starting a new disc).
7.14.4 R
ADIAL SERVO SYSTEM
7.14.4.1 Level initialization
During start-up an automatic adjustment procedure is
activated to set the values of the radial error gain (re_gain),
offset (re_offset) and satellite sum gain (sum_gain) for TPI
level generation. The initialization procedure runs in a
radial open loop situation and is ≤300 ms. This start-up
time period may coincide with the last part of the motor
start-up time period:
• Automatic gain adjustment: as a result of this
initialization the amplitude of the RE signal is adjusted to
within ±10% around the nominal RE amplitude
• Offset adjustment: the additional offset in RE due to the
limited accuracy of the start-up procedure is less than
±50 nm
• TPI level generation: the accuracy of the initialization
procedure is such that the duty factor range of TPI
becomes 0.4 < duty factor < 0.6 (default duty
factor = TPI HIGH/TPI period).
7.14.4.2 Sledge control
The microcontroller can move the sledge in both directions
via the steer sledge command.
7.14.4.3 Tracking control
The actuator is controlled using a PID loop filter with user
defined coefficients and gain. For stable operation
between the tracks, the S-curve is extended over 0.75 of
the track. On request from the microcontroller, S-curve
extension over 2.25 tracks is used, automatically changing
to access control when exceeding those 2.25 tracks.
Both modes of S-curve extension make use of a
track-count mechanism. In this mode, track counting
results in an ‘automatic return-to-zero track’, to avoid
major music rhythm disturbances in the audio output for
improved shock resistance. The sledge is continuously
controlled, or provided with step pulses to reduce power
consumption using the filtered value of the radial PID
output. Alternatively, the microcontroller can read the
average voltage on the radial actuator and provide the
sledge with step pulses to reduce power consumption.
Filter coefficients of the continuous sledge control can be
preset by the user.
7.14.4.4 Access
The access procedure is divided into two different modes
(see Table 13), depending on the requested jump size.
Table 13 Access modes
Note
1. Microcontroller presettable.
The access procedure makes use of a track counting
mechanism, a velocity signal based on a fixed number of
tracks passed within a fixed time interval, a velocity set
point calculated from the number of tracks to go and a user
programmable parameter indicating the maximum sledge
performance.
If the number of tracks remaining is greater than the
brake_distance then the sledge jump mode should be
activated or, the actuator jump should be performed.
The requested jump size together with the required sledge
breaking distance at maximum access speed defines the
brake_distance value.
ACCESS
TYPE
JUMP SIZE
(1)
ACCESS
SPEED
Actuator jump 1 - brake_distance decreasing
velocity
Sledge jump brake_distance - 32768 maximum
power to
sledge
(1)
Page 30

1999 Jun 17 30
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
During the actuator jump mode, velocity control with a
PI controller is used for the actuator. The sledge is then
continuously controlled using the filtered value of the radial
PID output. All filter parameters (for actuator and sledge)
are user programmable.
In the sledge jump mode maximum power (user
programmable) is applied to the sledge in the correct
direction while the actuator becomes idle (the contents of
the actuator integrator leaks to zero just after the sledge
jump mode is initiated). The actuator can be electronically
damped during sledge jump. The gain of the damping loop
is controlled via the hold_mult parameter.
Fast track jumping circuitry can be enabled/disabled via
the xtra_preset parameter.
7.14.4.5 Radial automatic gain control loop
The loop gain of the radial control loop can be corrected
automatically to eliminate tolerances in the radial loop.
This gain control injects a signal into the loop which is used
to correct the loop gain. Since this decreases the optimum
performance, the gain control should only be activated for
a short time (for example, when starting a new disc).
This gain control differs from the level initialization.
The level initialization should be performed first.
The disadvantage of using the level initialization without
the gain control is that only tolerances from the front-end
are reduced.
7.14.5 O
FF-TRACK COUNTING
The track position signal (TPI) is a flag which is used to
indicate whether the radial spot is positioned on the track,
with a margin of ±1⁄4 of the track-pitch. In combination with
the radial polarity flag (RP) the relative spot position over
the tracks can be determined.
These signals are, however, afflicted with some
uncertainties caused by:
• Disc defects such as scratches and fingerprints
• The HF information on the disc, which is considered as
noise by the detector signals.
In order to determine the spot position with sufficient
accuracy, extra conditions are necessary to generate a
Track Loss signal (TL) and an off-track counter value.
These extra conditions influence the maximum speed and
this implies that, internally, one of the following three
counting states is selected:
1. Protected state: used in normal play situations. A good
protection against false detection caused by disc
defects is important in this state.
2. Slow counting state: used in low velocity track jump
situations. In this state a fast response is important
rather than the protection against disc defects (if the
phase relationship between TL and RP of1⁄2π radians
is affected too much, the direction cannot then be
determined accurately).
3. Fast counting state: used in high velocity track jump
situations. Highest obtainable velocity is the most
important feature in this state.
7.14.6 D
EFECT DETECTION
A defect detection circuit is incorporated into the
SAA7327. If a defect is detected, the radial and focus error
signals may be zeroed, resulting in better playability.
The defect detector can be switched off, applied only to
focus control or applied to both focus and radial controls
under software control (part of foc_parm1).
The defect detector (see Fig.21) has programmable set
points selectable by the parameter defect_parm.
Fig.21 Block diagram of defect detector.
handbook, full pagewidth
DECIMATION
FILTER
FAST
FILTER
DEFECT
GENERATION
PROGRAMMABLE
HOLD-OFF
SLOW
FILTER
defect
output
sat1
sat2
+
−
MBG421
Page 31

1999 Jun 17 31
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.14.7 OFF-TRACK DETECTION
During active radial tracking, off-track detection has been
realised by continuously monitoring the off-track counter
value. The off-track flag becomes valid whenever the
off-track counter value is not equal to zero. Depending on
the type of extended S-curve, the off-track counter is reset
after 0.75 extend or at the original track in the 2.25 track
extend mode.
7.14.8 H
IGH-LEVEL FEATURES
7.14.8.1 Interrupt mechanism and STATUS pin
The STATUS pin is an output which is active LOW, its
output is selected by decoder register 7 to be either the
decoder status bit (active LOW) selected by decoder
register 2 (only available in 4-wire bus mode) or the
interrupt signal generated by the servo part.
8 signals from the interrupt status register are selectable
from the servo part via the interrupt_mask parameter.
The interrupt is reset by sending the read high-level status
command. The 8 signals are as follows:
• Focus lost: dropout of longer than 3 ms
• Subcode ready
• Subcode absolute seconds changed
• Subcode discontinuity detected: new subcode time
before previous subcode time, or more than 10 frames
later than previous subcode time
• Radial error: during radial on-track, no new subcode
frame occurs within time defined by playwatchtime
parameter; during radial jump, less than 4 tracks have
been crossed during time defined by jumpwatchtime
parameter
• Autosequencer state change
• Autosequencer error
• Subcode interface blocked: the internal decoder
interface is being used.
It should be noted that if the STATUS pin output is selected
via decoder register 2 and either the microcontroller writes
a different value to decoder register 2 or the decoder
interface is enabled then the STATUS output will change.
7.14.8.2 Decoder interface
The decoder interface allows decoder registers 0 to F to
be programmed and subcode Q-channel data to be read
via servo commands. The interface is enabled/disabled by
the preset latch command (and the xtra_preset
parameter).
7.14.8.3 Automatic error handling
Three Watchdogs are present:
• Focus: detects focus dropout of longer than 3 ms, sets
focus lost interrupt, switches off radial and sledge
servos, disables drive to disc motor
• Radial play: started when radial servo is on-track mode
and a first subcode frame is found; detects when
maximum time between two subcode frames exceeds
time set by playwatchtime parameter; then sets radial
error interrupt, switches radial and sledge servos off,
puts disc motor in jump mode
• Radial jump: active when radial servo is in long jump or
short jump modes; detects when the off-track counter
value decreases by less than 4 tracks between two
readings (time interval set by jumpwatchtime
parameter); then sets radial jump error, switches radial
and sledge servos off to cancel jump.
The focus Watchdog is always active, the radial
Watchdogs are selectable via the radcontrol parameter.
7.14.8.4 Automatic sequencers and timer interrupts
Two automatic sequencers are implemented (and must be
initialized after power-on):
• Autostart sequencer: controls the start-up of focus,
radial and motor
• Autostop sequencer: brakes the disc and shuts down
servos.
When the automatic sequencers are not used it is possible
to generate timer interrupts, defined by the
time_parameter coefficient.
7.14.8.5 High-level status
The read high-level status command can be used to obtain
the interrupt, decoder, autosequencer status registers and
the motor start time. Use of the read high-level status
command clears the interrupt status register, and
re-enables the subcode read via a servo command.
7.14.9 D
RIVER INTERFACE
The control signals (pins RA, FO and SL) for the
mechanism actuators are pulse density modulated.
The modulating frequency can be set to either
1.0584 MHz (DSD mode) or 2.1168 MHz; controlled via
the xtra_preset parameter. An analog representation of
the output signals can be achieved by connecting a
1st-order low-pass filter to the outputs.
Page 32

1999 Jun 17 32
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
During reset (i.e. RESET pin is held LOW) the RA, FO
and SL pins are high-impedance.
7.14.10 L
ASER INTERFACE
The LDON pin (open-drain output) is used to switch the
laser off and on. When the laser is on, the output is
high-impedance. The action of the LDON pin is controlled
by the xtra_preset parameter; the pin is automatically
driven if the focus control loop is active.
7.14.11 R
ADIAL SHOCK DETECTOR
The shock detector (see Fig.22) can be switched on during
normal track following, and detects within an adjustable
frequency whether disturbances in the radial spot position
relative to the track exceed an adjustable level (controlled
by shock_level).
Every time the radial tracking error exceeds this level the
radial control bandwidth is switched to twice its original
bandwidth and the loop gain is increased by a factor of 4.
The shock detection level is adjustable in 16 steps from
0% to 100% of the traverse radial amplitude which is sent
to an amplitude detection unit via an adjustable band-pass
filter (controlled by sledge_parm1); lower corner frequency
can be set at either 0 or 20 Hz, and upper corner
frequency at 750 or 1850 Hz. The shock detector is
switched off automatically during jump mode.
Fig.22 Block diagram of radial shock detector.
handbook, full pagewidth
RE
MGC914
SHOCK
OUTPUT
HIGH-PASS FILTER
(0 or 20 Hz)
LOW-PASS FILTER
(750 or 1850 Hz)
AMPLITUDE
DETECTION
7.15 Microcontroller interface
Communication on the microcontroller interface can be
set-up in two different modes:
• 4-wire bus mode: protocol compatible with SAA7345
(CD6) and TDA1301 (DSIC2) where:
– SCL = serial clock
– SDA = serial data
– RAB=R/W control and data strobe (active HIGH) for
writing to decoder registers 0 to F, reading status bit
selected via decoder register 2 and reading
Q-channel subcode
– SILD = R/W control and data strobe (active LOW) for
servo commands.
• I
2
C-bus mode: I2C-bus protocol where SAA7327
behaves as slave device, activated by setting
RAB = HIGH and SILD = LOW where:
–I2C-bus slave address (write mode) = 30H
–I2C-bus slave address (read mode) = 31H
– Maximum data transfer rate = 400 kbits/s.
It should be noted that only servo commands can be used
therefore, writing to decoder registers 0 to F, reading
decoder status and reading Q-channel subcode data must
be performed by servo commands.
Page 33

1999 Jun 17 33
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.15.1 MICROCONTROLLER INTERFACE (4-WIRE BUS MODE)
7.15.1.1 Writing data to registers 0 to F
The sixteen 4-bit programmable configuration registers,
0 to F (see Table 14), can be written to via the
microcontroller interface using the protocol shown in
Fig.23.
It should be noted that SILD must be held HIGH; A3 to A0
identifies the register number and D3 to D0 is the data.
The data is latched into the register on the LOW-to-HIGH
transition of RAB.
7.15.1.2 Writing repeated data to registers 0 to F
The same data can be repeated several times (e.g. for a
fade function) by applying extra RAB pulses as shown in
Fig.24. It should be noted that SCL must stay HIGH
between RAB pulses.
7.15.1.3 Reading decoder status information on SDA
There are several internal status signals, selected via
register 2, which can be made available on the SDA line:
SUBQREADY-I: LOW if new subcode word is ready in
Q-channel register
MOTSTART1: HIGH if motor is turning at 75% or more
of nominal speed
MOTSTART2: HIGH if motor is turning at 50% or more
of nominal speed
MOTSTOP: HIGH if motor is turning at 12% or less of
nominal speed; can be set to indicate 6% or less
(instead of 12% or less) via register E
PLL lock: HIGH if sync coincidence signals are found
V1: follows input on pin V1
V2: follows input on pin V2
MOTOR-OV: HIGH if the motor servo output stage
saturates
FIFO-OV: HIGH if FIFO overflows
SHOCK: MOTSTART2 + PLL Lock + MOTOR-OV +
FIFO-OV + servo interrupt signal + OTD (HIGH if shock
detected)
LA-SHOCK: latched SHOCK signal.
The status read protocol is shown in Fig.25. It should be
noted that SILD must be held HIGH.
7.15.1.4 Reading Q-channel subcode
To read the Q-channel subcode direct in the 4-wire bus
mode, the SUBQREADY-I signal should be selected as
status signal. The subcode read protocol is illustrated in
Fig.26.
It should be noted that SILD must be held HIGH; after
subcode read starts, the microcontroller may take as long
as it wants to terminate the read operation; when enough
subcode has been read (1 to 96 bits), terminate reading by
pulling RAB LOW.
Alternatively, the Q-channel subcode can be read using a
servo command as follows:
• Use the read high-level status command to monitor the
subcode ready signal
• Send the read subcode command, and read the
required number of bytes (up to 12)
• Send the read high-level status command; to re-enable
the decoder interface.
7.15.1.5 Behaviour of the SUBQREADY-I signal
When the CRC of the Q-channel word is good, and no
subcode is being read, the SUBQREADY-I status signal
will react as shown in Fig.27. When the CRC is good and
the subcode is being read, the timing in Fig.28 applies.
If t1 (SUBQREADY-I status LOW to end of subcode read)
is below 2.6/n ms, then t2= 13.1/n ms (i.e.: the
microcontroller can read all subcode frames if it completes
the read operation within 2.6/n ms after the subcode is
ready). If these criteria are not met, it is only possible to
guarantee that t3 will be below 26.2/n ms (approximately).
If subcode frames with failed CRCs are present, the
t2and t3 times will be increased by 13.1/n ms for each
defective subcode frame.
It should be noted that in the lock-to-disc mode ‘n’ is
replaced by ‘d’, which is the disc speed factor.
Page 34

1999 Jun 17 34
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.15.1.6 Write servo commands
A write data command is used to transfer data (a number
of bytes) from the microcontroller, using the protocol
shown in Fig.29. The first of these bytes is the command
byte and the following are data bytes; the number
(between 1 and 7) depends on the command byte.
It should be noted that RAB must be held LOW;
the command or data is interpreted by the SAA7327 after
the HIGH-to-LOW transition of SILD; there must be a
minimum time of 70 µs between SILD pulses.
7.15.1.7 Writing repeated data in servo commands
The same data byte can be repeated by applying extra
SILD pulses as illustrated in Fig.30. SCL must be HIGH
between the SILD pulses.
7.15.1.8 Read servo commands
A read data command is used to transfer data (status
information) to the microcontroller, using the protocol
shown in Fig.31. The first byte written determines the type
of command. After this byte a variable number of bytes can
be read. It should be noted that RAB must be held LOW;
after the end of the command byte (LOW-to-HIGH
transition on SILD) there must be a delay of 70 µs before
reading data is started (i.e. the next HIGH-to-LOW
transition on SILD); there must be a minimum time of 70 µs
between SILD pulses.
7.15.2 M
ICROCONTROLLER INTERFACE (I
2
C-BUS MODE)
Bytes are transferred over the interface in groups (i.e.
servo commands) of which there are two types: write data
commands and read data commands.
The sequence for a write data command (that requires
3 data bytes) is as follows:
• Send START condition
• Send address 30H (write)
• Write command byte
• Write data byte 1
• Write data byte 2
• Write data byte 3
• Send STOP condition.
It should be noted that more than one command can be
sent in one write sequence.
The sequence for a read data command (that reads 2 data
bytes) is as follows:
• Send START condition
• Send address 30H (write)
• Write command byte
• Send STOP condition
• Send START condition
• Send address 31H (read)
• Read data byte 1
• Read data byte 2
• Send STOP condition.
It should be noted that the timing constraints specified for
the read and write servo commands must still be adhered
to.
Fig.23 Microcontroller write protocol for registers 0 to F.
A3 A2 A1 A0 D3 D2 D1 D0
SDA
(SAA7327)
SCL
(microcontroller)
RAB
(microcontroller)
SDA
(microcontroller)
MGS236
high-impedance
Page 35

1999 Jun 17 35
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.24 Microcontroller write protocol for registers 0 to F (repeat mode).
A3 A2 A1 A0 D3 D2 D1 D0
SDA
(SAA7327)
MGS237
SCL
(microcontroller)
RAB
(microcontroller)
SDA
(microcontroller)
high-impedance
Fig.25 Microcontroller read protocol for decoder status on SDA.
SDA
(SAA7327)
MGS238
STATUS
SCL
(microcontroller)
RAB
(microcontroller)
SDA
(microcontroller)
high-impedance
Page 36

1999 Jun 17 36
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.26 Microcontroller protocol for reading Q-channel subcode.
Q1 Q2 Q3
Qn – 1
SDA
(SAA7327)
MGS239
Qn – 2 Qn
STATUS
CRC
OK
SCL
(microcontroller)
RAB
(microcontroller)
Fig.27 SUBQREADY-I status timing when no subcode is read.
SDA
(SAA7327)
10.8/n ms 15.4/n ms
2.3/n
ms
READ start allowed
high-impedance
CRC OK CRC OK
MGS240
SCL
(microcontroller)
RAB
(microcontroller)
Page 37

1999 Jun 17 37
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.28 SUBQREADY-I status timing when subcode is read.
Q1 Q2 Q3 Qn
SDA
(SAA7327)
t
2
t
1
t
3
MGS241
SCL
(microcontroller)
RAB
(microcontroller)
Fig.29 Microcontroller protocol for write servo commands.
handbook, full pagewidth
D7 D6 D5 D4 D3 D2 D1 D0
SDA
(SAA7327)
SILD
(microcontroller)
SCL
(microcontroller)
SDA
(microcontroller)
SILD
(microcontroller)
SDA
(microcontroller)
COMMAND DATA1 DATA2 DATA3
command or data byte
high-impedance
microcontroller write (one byte: command or data)
microcontroller write (full command)
MGS242
Page 38

1999 Jun 17 38
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.30 Microcontroller protocol for repeated data in write servo commands.
handbook, full pagewidth
SILD
(microcontroller)
SDA
(microcontroller)
microcontroller write (full command)
COMMAND DATA1
MBG413
Fig.31 Microcontroller protocol for read servo commands.
handbook, full pagewidth
DATA1 DATA2 DATA3
COMMAND
SILD
(microcontroller)
SILD
(microcontroller)
SCL
(microcontroller)
SDA
(microcontroller)
SDA (SAA7327)
SDA (SAA7327)
D7 D6 D5
D4 D3 D2
D1 D0
data byte
microcontroller read (one data byte)
microcontroller read (full command)
MGS243
Page 39

1999 Jun 17 39
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.15.3 DECODER REGISTERS AND SHADOW REGISTERS
To maintain compatibility with the SAA737x series,
decoder registers 0 to F are identical to the SAA7370.
However, to control the extra functionality of SAA7327, a
new set of registers called shadow registers have been
implemented.
These are accessed by using the LSB of decoder
register F. This bit is called SHADEN (shadow registers
enable) on SAA7327. When this bit is set to logic 1 (i.e.
decoder register F set to XXX1), any subsequent
addresses will be decoded by the shadow registers.
In fact, only four addresses are implemented as shadow
registers; 3, 7, A and C. Any other addresses sent while
SHADEN = 1 are invalid and have no effect.
When SHADEN is set to logic 0 (decoder register F set to
XXX0) all subsequent addresses are decoded by the main
decoder registers again.
Access to decoder register F is always enabled so that
SHADEN can be set or reset as required.
The SHADEN bit and subsequent shadow registers are
programmed identically to the main decoder registers, i.e.
they can be directly programmed when using SAA7327 in
4-wire mode or programmed via the servo interface when
using 3-wire or I
2
C-bus modes.
The main decoder registers are shown in Table 14.
The functions implemented using shadow registers are
shown in Table 16.
7.15.4 S
UMMARY OF FUNCTIONS CONTROLLED BY DECODER REGISTERS 0 TO F
Table 14 Registers 0 to F
REGISTER ADDRESS DATA FUNCTION INITIAL
(1)
0
(fade and
attenuation)
0000 0000 mute reset
0010 attenuate −
0001 full-scale −
0100 step down −
0101 step up −
1
(motor mode)
0001 X000 motor off mode reset
X001 motor stop mode 1 −
X010 motor stop mode 2 −
X011 motor start mode 1 −
X100 motor start mode 2 −
X101 motor jump mode −
X111 motor play mode −
X110 motor jump mode 1 −
1XXX anti-windup active −
0XXX anti-windup off reset
Page 40

1999 Jun 17 40
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
2
(status control
to servo part not the
STATUS pin)
0010 0000 status = SUBQREADY-I reset
0001 status = MOTSTART1 −
0010 status = MOTSTART2 −
0011 status = MOTSTOP −
0100 status = PLL Lock −
0101 status = V1 −
0110 status = V2 −
0111 status = MOTOR-OV −
1000 status = FIFO overflow −
1001 status = shock detect −
1010 status = latched shock detect −
1011 status = latched shock detect reset −
3
(DAC output)
0011 1010 I
2
S-bus; CD-ROM mode −
1011 EIAJ; CD-ROM mode −
1100 I2S-bus; 18-bit; 4fs mode reset
1111 I
2
S-bus; 18-bit; 2fs mode −
1110 I
2
S-bus; 16-bit; fs mode −
0000 EIAJ; 16-bit; 4f
s
−
0011 EIAJ; 16-bit; 2f
s
−
0010 EIAJ; 16-bit; f
s
−
0100 EIAJ; 18-bit; 4f
s
−
0111 EIAJ; 18-bit; 2f
s
−
0110 EIAJ; 18-bit; f
s
−
4
(motor gain)
0100 X000 motor gain G = 3.2 reset
X001 motor gain G = 4.0 −
X010 motor gain G = 6.4 −
X011 motor gain G = 8.0 −
X100 motor gain G = 12.8 −
X101 motor gain G = 16.0 −
X110 motor gain G = 25.6 −
X111 motor gain G = 32.0 −
0XXX disable comparator clock divider reset
1XXX enable comparator clock divider; only if SELLPLL
set HIGH
−
5
(motor
bandwidth)
0101 XX00 motor f
4
= 0.5 × n Hz reset
XX01 motor f
4
= 0.7 × nHz −
XX10 motor f
4
= 1.4 × nHz −
XX11 motor f
4
= 2.8 × nHz −
00XX motor f
3
= 0.85 × n Hz reset
01XX motor f
3
= 1.71 × nHz −
10XX motor f
3
= 3.42 × nHz −
REGISTER ADDRESS DATA FUNCTION INITIAL
(1)
Page 41

1999 Jun 17 41
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
6
(motor output
configuration)
0110 XX00 motor power maximum 37% reset
XX01 motor power maximum 50% −
XX10 motor power maximum 75% −
XX11 motor power maximum 100% −
00XX MOTO1, MOTO2 pins 3-state reset
01XX motor PWM mode −
10XX motor PDM mode −
11XX motor CDV mode −
7
(DAC output
and status
control)
0111 XX00 interrupt signal from servo at STATUS pin reset
XX10 status bit from decoder status register at STA TUS
pin
−
X0XX DAC data normal value reset
X1XX DAC data inverted value −
0XXX left channel first at DAC (WCLK normal) reset
1XXX right channel first at DAC (WCLK inverted) −
8
(PLL loop filter
bandwidth)
see Table 15 −
9
(PLL
equalization)
1001 0011 PLL loop filter equalization reset
0001 PLL 30 ns over-equalization −
0010 PLL 15 ns over-equalization −
0100 PLL 15 ns under-equalization −
0101 PLL 30 ns under-equalization −
A
(EBU output)
1010 XX0X EBU data before concealment −
XX1X EBU data after concealment and fade reset
X0X0 level II clock accuracy (<1000 ppm) reset
X0X1 level I clock accuracy (<50 ppm) −
X1X0 level III clock accuracy (>1000 ppm) −
X1X1 EBU off - output low −
0XXX flags in EBU off reset
1XXX flags in EBU on −
B
(speed control)
1011 X0XX 33.8688 MHz crystal present, or 8.4672 MHz (or
16.9344 MHz) crystal with SELPLL set HIGH
reset
X1XX 16.9344 MHz crystal present −
0XXX single-speed mode reset
1XXX double-speed mode −
XX00 standby 1: ‘CD-STOP’ mode reset
XX10 standby 2: ‘CD-PAUSE’ mode −
XX11 operating mode −
REGISTER ADDRESS DATA FUNCTION INITIAL
(1)
Page 42

1999 Jun 17 42
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Note
1. The initial column shows the Power-on reset state.
C
(versatile pins
interface)
1100 XXX1 external off-track signal input at V1 −
XXX0 internal off-track signal used (V1 may be read via
status)
reset
XX0X kill-L at KILL output, kill-R at V3 output −
001X V3 = 0; single KILL output reset
011X V3 = 1; single KILL output −
D
(versatile pins
interface)
1101 0000 4-line motor (using V4 and V5) −
XX01 Q-to-W subcode at V4 −
XX10 V4 = 0 −
XX11 V4 = 1 reset
01XX de-emphasis signal at V5, no internal
de-emphasis filter
−
10XX V5 = 0 −
11XX V5 = 1 reset
E 1110 00XX audio features disabled −
01XX audio features enabled reset
XX0X lock-to-disc mode disabled reset
XX1X lock-to-disc mode enabled −
XXX0 motor brakes to 12% reset
XXX1 motor brakes to 6% −
F
(subcode
interface and
shadow
register
enable)
1111 X0XX subcode interface off reset
X1XX subcode interface on −
0XXX 4-wire subcode reset
1XXX 3-wire subcode −
XXX0 SHADEN = 0; shadow registers not enabled;
addresses will be decoded by main decoder
registers
reset
XXX1 SHADEN = 1; shadow registers enabled; all
subsequent addresses will be decoded by
shadow registers, not decoder registers
−
REGISTER ADDRESS DATA FUNCTION INITIAL
(1)
Page 43

1999 Jun 17 43
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Table 15 Loop filter bandwidth
Note
1. The initial column shows the Power-on reset state.
7.15.5 S
UMMARY OF FUNCTIONS CONTROLLED BY SHADOW REGISTERS
Table 16 Shadow register settings
REGISTER ADDRESS DATA
FUNCTION
INITIAL
(1)LOOP
BANDWIDTH
(Hz)
INTERNAL
BANDWIDTH
(Hz)
LOW-PASS
BANDWIDTH
(Hz)
8
(PLL loop filter
bandwidth)
1000 0000 1640 × n 525 × n 8400 × n −
0001 3279 × n 263 × n 16800 × n −
0010 6560 × n 131 × n 33600 × n −
0100 1640 × n 1050 × n 8400 × n −
0101 3279 × n 525 × n 16800 × n −
0110 6560 × n 263 × n 33600 × n −
1000 1640 × n 2101 × n 8400 × n −
1001 3279 × n 1050 × n 16800 × n reset
1010 6560 × n 525 × n 33600 × n −
1100 1640 × n 4200 × n 8400 × n −
1101 3279 × n 2101 × n 16800 × n −
1110 6560 × n 1050 × n 33600 × n −
SHADEN BIT
SHADOW
REGISTER
ADDRESS DATA FUNCTION INITIAL
13
control of
versatile and
clock pins
0011 XXX0 select CL4 on CL11/4 output reset
XXX1 select CL11 on CL11/4 output −
XX0X enable CL11/4 output pin reset
XX1X set CL11/4 output pin to
high-impedance
−
X0XX enable CL16 output pin reset
X1XX set CL16 output pin to
high-impedance
−
0XXX V2/V3 pin configured as
V2 input
reset
1XXX V2/V3 pin configured as
V3 output (open-drain)
−
Page 44

1999 Jun 17 44
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
17
control of
onboard DAC
0111 XXX0 hold onboard DAC outputs at
zero
reset
XXX1 enable onboard DAC outputs −
XX0X use external DAC or route audio
data into onboard DAC
(loopback mode)
reset
XX1X route audio data into onboard
DAC (non-loopback mode)
−
7
servo
reference
pin 7, V
RIN
X1XX use internal reference for servo
reference voltage
reset
X0XX use external reference for
servo reference voltage
−
1A
signal
magnitude
control for
diodes
D1 to D4
1010 0000 (0.042).I
ref
= 1.006 µA (nom) −
0001 (0.083).I
ref
= 2.013 µA (nom) −
0010 (0.125).I
ref
= 3.019 µA (nom) −
0011 (0.167).I
ref
= 4.025 µA (nom) −
0100 (0.208).I
ref
= 5.031 µA (nom) −
0101 (0.25).I
ref
= 6.034 µA (nom) −
0110 (0.292).I
ref
= 7.044 µA (nom) −
0111 (0.333).I
ref
= 8.05 µA (nom) −
1000 (0.375).I
ref
= 9.056 µA (nom) −
1001 (0.417).I
ref
= 10.063 µA (nom) −
1010 (0.458).I
ref
= 11.069 µA (nom) −
1011 (0.5).I
ref
= 12.075 µA (nom) −
1100 (0.542).I
ref
= 13.081 µA (nom) −
1101 (0.583).I
ref
= 14.088 µA (nom) −
1110 (0.625).I
ref
= 15.094 µA (nom) −
1111 (0.667).I
ref
= 16.1 µA (nom) reset
SHADEN BIT
SHADOW
REGISTER
ADDRESS DATA FUNCTION INITIAL
Page 45

1999 Jun 17 45
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
1C
signal
magnitude
control for
diodes
R1 and R2
1100 0000 (0.042).I
ref
= 1.006 µA (nom) −
0001 (0.083).I
ref
= 2.013 µA (nom) −
0010 (0.125).I
ref
= 3.019 µA (nom) −
0011 (0.167).I
ref
= 4.025 µA (nom) −
0100 (0.208).I
ref
= 5.031 µA (nom) −
0101 (0.25).I
ref
= 6.034 µA (nom) −
0110 (0.292).I
ref
= 7.044 µA (nom) −
0111 (0.333).I
ref
= 8.05 µA (nom) −
1000 (0.375).I
ref
= 9.056 µA (nom) −
1001 (0.417).I
ref
= 10.063 µA (nom) −
1010 (0.458).I
ref
= 11.069 µA (nom) −
1011 (0.5).I
ref
= 12.075 µA (nom) −
1100 (0.542).I
ref
= 13.081 µA (nom) −
1101 (0.583).I
ref
= 14.088 µA (nom) −
1110 (0.625).I
ref
= 15.094 µA (nom) −
1111 (0.667).I
ref
= 16.1 µA (nom) reset
SHADEN BIT
SHADOW
REGISTER
ADDRESS DATA FUNCTION INITIAL
Page 46

1999 Jun 17 46
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.15.6 SUMMARY OF SERVO COMMANDS
A list of the servo commands is given in Table 17. These are fully compatible with SAA7370.
Table 17 SAA7327 servo commands
Notes
1. These commands only available when internal decoder interface is enabled.
2. <peak_l> and <peak_r> bytes are clocked out LSB first.
3. Decoder status flag information in <dec_stat> is only valid when the internal decoder interface is enabled.
COMMANDS CODE BYTES PARAMETERS
Write commands
Write_focus_coefs1 17H 7 <foc_parm3> <foc_int> <ramp_incr> <ramp_height>
<ramp_offset> <FE_start> <foc_gain>
Write_focus_coefs2 27H 7 <defect_parm> <rad_parm_jump> <vel_parm2>
<vel_parm1> <foc_parm1> <foc_parm2> <CA_drop>
Write_focus_command 33H 3 <foc_mask> <foc_stat> <shock_level>
Focus_gain_up 42H 2 <foc_gain> <foc_parm1>
Focus_gain_down 62H 2 <foc_gain> <foc_parm1>
Write_radial coefs 57H 7 <rad_length_lead> <rad_int> <rad_parm_play>
<rad_pole_noise> <rad_gain> <sledge_parm2>
<sledge_parm_1>
Preset_Latch 81H 1 <chip_init>
Radial_off C1H 1 ‘1CH’
Radial_init C1H 1 ‘3CH’
Short_jump C3H 3 <tracks_hi> <tracks_lo> <rad_stat>
Long_jump C5H 5 <brake_dist> <sledge_U_max> <tracks_hi> <tracks_lo>
<rad_stat>
Steer_sledge B1H 1 <sledge_level>
Preset_init 93H 3 <re_offset> <re_gain> <sum_gain>
Write_decoder_reg
(1)
D1H 1 <decoder_reg_data>
Write_parameter A2H 2 <param_ram_addr> <param_data>
Read commands
Read_Q_subcode
(1)(2)
0H up to 12 <Q_sub1 to 10> <peak_l> <peak_r>
Read_status 70H up to 5 <foc_stat> <rad_stat> <rad_int_lpf> <tracks_hi>
<tracks_lo>
Read_hilevel_status
(3)
E0H up to 4 <intreq> <dec_stat> <seq_stat> <motor_start_time>
Read_aux_status F0H up to 3 <re_offset> <re_gain> <sum_gain>
Page 47

1999 Jun 17 47
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
7.15.7 SUMMARY OF SERVO COMMAND PARAMETERS
Table 18 Servo command parameters
PARAMETER
RAM
ADDRESS
AFFECTS POR VALUE DETERMINES
foc_parm_1 − focus PID − end of focus lead
defect detector enabling
foc_parm_2 − focus PID − focus low-pass
focus error normalising
foc_parm_3 − focus PID − focus lead length
minimum light level
foc_int 14H focus PID − focus integrator crossover frequency
foc_gain 15H focus PID 70H focus PID loop gain
CA_drop 12H focus PID − sensitivity of dropout detector
ramp_offset 16H focus ramp − asymmetry of focus ramp
ramp_height 18H focus ramp − peak-to-peak value of ramp voltage
ramp_incr − focus ramp − slope of ramp voltage
FE_start 19H focus ramp − minimum value of focus error
rad_parm_play 28H radial PID − end of radial lead
rad_pole_noise 29H radial PID − radial low-pass
rad_length_lead 1CH radial PID − length of radial lead
rad_int 1EH radial PID − radial integrator crossover frequency
rad_gain 2AH radial PID 70H radial loop gain
rad_parm_jump 27H radial jump − filter during jump
vel_parm1 1FH radial jump − PI controller crossover frequencies
vel_parm2 32H radial jump − jump pre-defined profile
speed_threshold 48H radial jump − maximum speed in fastrad mode
hold_mult 49H radial jump 00H electronic damping
sledge bandwidth during jump
brake_dist_max 21H radial jump − maximum sledge distance allowed in fast
actuator steered mode
sledge_long_brake 58H radial jump FFH brake distance of sledge
sledge_Umax − sledge − voltage on sledge during long jump
sledge_level − sledge − voltage on sledge when steered
sledge_parm_1 36H sledge − sledge integrator crossover frequency
sledge_parm_2 17H sledge − sledge low-pass frequencies
sledge gain
sledge operation mode
sledge_pulse1 46H pulsed sledge − pulse width
sledge_pulse2 64H pulsed sledge − pulse height
defect_parm - defect detector − defect detector setting
shock_level - shock detector − shock detector operation
playwatchtime 54H Watchdog − radial on-track Watchdog time
Page 48

1999 Jun 17 48
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
jumpwatchtime 57H Watchdog − radial jump Watchdog time-out
radcontrol 59H Watchdog − enable/disable automatic radial off feature
chip_init - set-up − enable/disable decoder interface
xtra_preset 4AH set-up 38H laser on/off
RA, FO and SL PDM modulating frequency
fast jumping circuit on/off
cd6cmd 4DH decoder
interface
− decoder part commands
interrupt_mask 53H STATUS pin − enabled interrupts
seq_control 42H autosequencer − autosequencer control
focus_start_time 5EH autosequencer − focus start time
motor_start_time1 5FH autosequencer − motor start 1 time
motor_start_time2 60H autosequencer − motor start 2 time
radial_init_time 61H autosequencer − radial initialization time
brake_time 62H autosequencer − brake time
RadCmdByte 63H autosequencer − radial command byte
osc_inc 68H focus/radial
AGC
− AGC control
frequency of injected signal
phase_shift 67H focus/radial
AGC
− phase shift of injected signal
level1 69H focus/radial
AGC
− amplitude of signal injected
level2 6AH focus/radial
AGC
− amplitude of signal injected
agc_gain 6CH focus/radial
AGC
− focus/radial gain
PARAMETER
RAM
ADDRESS
AFFECTS POR VALUE DETERMINES
Page 49

1999 Jun 17 49
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
8 LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 134).
Notes
1. All V
DD
(and V
pos
) connections and VSS (and V
neg
) connections must be made externally to the same power supply.
2. Equivalent to discharging a 100 pF capacitor via a 1.5 kΩ series resistor with a rise time of 15 ns.
3. Equivalent to discharging a 200 pF capacitor via a 2.5 µH series inductor.
9 CHARACTERISTICS
V
DD
= 3.0 to 3.6 V; VSS= 0 V; T
amb
= −10 to +70 °C; unless otherwise specified.
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
DD
supply voltage note 1 −0.5 +3.6 V
V
I(max)
maximum input voltage
any input −0.5 V
DD
+ 0.5 V
pins SDA, SCL, RAB and SILD −0.5 +5.5 V
V
O
output voltage (any output) −0.5 +3.6 V
V
DDdiff
difference between V
DDA
, V
DDD
and V
pos
−± 0.25 V
I
O
output current (continuous) −± 20 mA
I
I(d)
DC input diode current (continuous) −± 20 mA
V
es
electrostatic handling note 2 −2000 +2000 V
note 3 −200 +200 V
T
amb
ambient temperature −10 +70 °C
T
stg
storage temperature −55 +125 °C
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Supply
V
DD
supply voltage 3.0 3.3 3.6 V
I
DD
supply current VDD= 3.3 V; n = 1 mode − 20 − mA
V
DD
= 3.3 V; n = 2 mode − 25 − mA
Bitstream DAC output (V
DDD
= 3.3 V, V
pos
= 3.3 V; VSS= 0 V, V
neg
= 0 V; T
amb
=25°C)
D
IFFERENTIAL OUTPUTS: PINS LN, LP, RN AND RP
S/N signal-to-noise ratio EIAJ A-weighted; note 1 −90 −95 − dB
(THD + N)/S total harmonic distortion
plus noise-to-signal ratio
at 0 dB; note 1 −−83 −80 dB
Servo and decoder analog functions (V
DDA
= 3.3 V; V
SSA
=0V; T
amb
=25°C)
R
EFERENCE GENERATOR: PIN I
ref
V
Iref
reference voltage level 0.6 0.7245 0.8 V
I
ref
input reference current − 24.15 −µA
R
Iref
external resistor − 30 − kΩ
Page 50

1999 Jun 17 50
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Decoder analog front-end (V
DDA
= 3.3 V; V
SSA
=0V; T
amb
=25°C)
C
OMPARATOR INPUTS: PINS HFIN AND HFREF
f
clk
clock frequency note 2 8 − 70 MHz
V
th(sw)
switching voltage
threshold
− 0.5V
DD
− V
V
i(HFIN)
input voltage level (HFIN) − 1.0 − V
Servo analog part (V
DDA
= 3.3 V; V
SSA
=0V; T
amb
=25°C; R
Iref
=30kΩ)
P
INS D1 TO D4; R1 AND R2
I
D(max)
maximum input current
for central diode input
signal
note 3 1.006 − 16.1 µA
I
R(max)
maximum input current
for satellite diode input
signal
note 3 1.006 − 16.1 µA
V
RIN
internally generated
reference voltage
note 4 − 0.75 − V
externally generated
reference voltage
applied to V
RIN
(pin 7)
note 4 0.5 − 0.5VDD+0.1V
(THD + N)/S total harmonic distortion
plus noise-to-signal ratio
at 0 dB; note 5 −−50 −45 dB
S/N signal-to-noise ratio − 55 − dB
PSRR power supply ripple
rejection at V
DDA2
note 6 − 45 − dB
G
tol
gain tolerance note 7 −20 0 +20 %
∆G
v
variation of gain between
channels
−−2%
α
cs
channel separation − 60 − dB
Digital inputs
P
INS RESET AND V1 (CMOS INPUT WITH PULL-UP RESISTOR AND HYSTERESIS)
V
thr(sw)
switching voltage
threshold rising
−−0.8V
DDD
V
V
thf(sw)
switching voltage
threshold falling
0.2V
DDD
−−V
V
hys
hysteresis voltage 1.35 1.65 − V
R
i(pu)
input pull-up resistance Vi=0V − 160 − kΩ
C
i
input capacitance −−10 pF
t
resL
reset pulse width
(active LOW)
RESET only 1 −−µs
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Page 51

1999 Jun 17 51
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
PIN SELPLL (CMOS INPUT WITH PULL-UP RESISTOR)
V
IL
LOW-level input voltage −0.3 − +0.3V
DDD
V
V
IH
HIGH-level input voltage 0.7V
DDD
− V
DDD
+ 0.3 V
R
i(pu)
input pull-up resistance Vi=0V − 160 − kΩ
C
i
input capacitance −−10 pF
PINS TEST1, TEST2 AND TEST3 (CMOS INPUTS WITH PULL-DOWN RESISTORS)
V
IL
LOW-level input voltage −0.3 − +0.3V
DDD
V
V
IH
HIGH-level input voltage 0.7V
DDD
− V
DDD
+ 0.3 V
R
i(pu)
input pull-down
resistance
Vi=V
DDD
− 160 − kΩ
C
i
input capacitance −−10 pF
INPUT: RCK, WCLI, SDI AND SCLI (CMOS INPUTS)
V
IL
LOW-level input voltage −0.3 − +0.3V
DDD
V
V
IH
HIGH-level input voltage 0.7V
DDD
− V
DDD
+ 0.3 V
I
LI
input leakage current Vi=0−V
DDD
−10 − +10 µA
C
i
input capacitance −−10 pF
PINS SCL, SILD AND RAB (5 V TOLERANT CMOS INPUTS)
V
IL
LOW-level input voltage −0.3 − +0.2V
DDD
V
V
IH
HIGH-level input voltage 0.8V
DDD
− 5.5 V
I
LI
input leakage current Vi=0−V
DDD
−10 − +10 µA
C
i
input capacitance −−10 pF
Digital outputs
P
INS V4 AND V5
V
OL
LOW-level output voltage IOL=4mA 0 − 0.4 V
V
OH
HIGH-level output
voltage
IOH= −4mA V
DDD
− 0.4 − V
DDD
V
C
L
load capacitance −−100 pF
t
o(r)
output rise time CL=20pF;
0.4 V − (V
DDD
− 0.4)
−−10 ns
t
o(f)
output fall time CL=20pF;
(V
DDD
− 0.4) − 0.4 V
−−10 ns
Open-drain outputs
P
INS CFLG, STATUS,KILL AND LDON (OPEN-DRAIN OUTPUT)
V
OL
LOW-level output voltage IOL=1mA 0 − 0.4 V
I
OL
LOW-level output current −−2mA
C
L
load capacitance −−50 pF
t
o(f)
output fall time CL=50pF;
(V
DDD
− 0.4) − 0.4 V
−−30 ns
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Page 52

1999 Jun 17 52
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
3-state outputs
PINS EF, SCLK, WCLK, DATA, CL16, RA, FO, SL, SBSY, SFSY, SUB AND CL11/4
V
OL
LOW-level output voltage IOL=1mA 0 − 0.4 V
V
OH
HIGH-level output
voltage
IOH= −1mA V
DDD
− 0.4 − V
DDD
V
C
L
load capacitance −−35 pF
t
o(r)
output rise time CL=20pF;
0.4Vto(V
DDD
− 0.4)
−−15 ns
t
o(f)
output fall time CL=20pF;
(V
DDD
− 0.4) to 0.4 V
−−15 ns
I
ZO
output 3-state leakage
current
Vi=0−V
DD
−10 − +10 µA
(WHEN CL11/4 CONFIGURED AS CL11 OUTPUT)
t
OH
output HIGH time
(relative to clock period)
Vo=1.5V 455055%
PINS MOTO1, MOTO2 AND DOBM
V
OL
LOW-level output voltage IOL=4mA 0 − 0.4 V
V
OH
HIGH-level output
voltage
IOH= −4mA V
DDD
− 0.4 − V
DD
V
C
L
load capacitance −−100 pF
t
o(r)
output rise time CL=20pF;
0.4 V − (V
DDD
− 0.4)
−−10 ns
t
o(f)
output fall time CL=20pF;
(V
DDD
− 0.4) − 0.4 V
−−10 ns
I
ZO
output 3-state leakage
current
Vi=0−V
DD
−10 − +10 µA
Digital input/output
P
IN SDA (5 V TOLERANT CMOS INPUT/OPEN-DRAIN I
2
C-BUS OUTPUT)
V
IL
LOW-level input voltage −0.3 − +0.2V
DDD
V
V
IH
HIGH-level input voltage 0.8V
DDD
− 5.5 V
I
ZO
3-state leakage current Vi=0−V
DDD
−10 − +10 µA
C
i
input capacitance −−10 pF
V
OL
LOW-level output voltage IOL=2mA 0 − 0.4 V
I
OL
LOW-level output current −−6mA
C
L
load capacitance −−50 pF
t
o(f)
output fall time CL=20pF;
0.85V
DDD
− 0.4
−−15 ns
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Page 53

1999 Jun 17 53
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Notes
1. Assumes use of external components as shown in the application diagram (Figs 38 or 39).
2. Highest clock frequency at which data slicer produces 1010 output in analog self-test mode.
3. The maximum input current depends on the value of the external resistor connected to I
ref
and the settings of shadow
registers A and C:
a) With R
Iref
=30kΩ, minimum I
max
= (0.042). I
ref
⇒ (0.042) × (24.15 µA) = 1.006 µA.
b) With R
Iref
=30kΩ, maximum I
max
= (0.667). I
ref
⇒ (0.667) × (24.15 µA) = 16.1 µA.
4. V
RIN
can be set to an internal source or an externally applied reference voltage using shadow register 7.
5. Measuring bandwidth: 200 Hz to 20 kHz, f
i(ADC)
= 1 kHz.
6. f
ripple
= 1 kHz, V
ripple
= 0.5 V (p-p).
7. Gain of the ADC is defined as G
ADC=fsys/Imax
(counts/µA); thus digital output = Ii× G
ADC
where:
a) Digital output = the number of pulses at the digital output in counts/s and Ii= the DC input current in µA.
b) The maximum input current depends on R
Iref
and on shadow registers A and C.
c) The gain tolerance is the deviation from the calculated gain.
PIN V2/V3 (CMOS INPUT WITH PULL-UP RESISTOR AND HYSTERESIS/OPEN-DRAIN OUTPUT)
V
thr(sw)
switching voltage
threshold rising
−−0.8V
DDD
V
V
thf(sw)
switching voltage
threshold falling
0.2V
DDD
−−V
V
hys
hysteresis voltage 1.35 1.65 − V
R
i(pu)
input pull-up resistance Vi=0V − 120 − kΩ
C
i
input capacitance −−10 pF
V
OL
LOW-level output voltage IOL=1mA 0 − 0.4 V
I
OL
LOW-level output current −−1mA
C
L
load capacitance −−25 pF
t
o(f)
output fall time CL=20pF;
(V
DDD
− 0.4) − 0.4 V
−−15 ns
Crystal oscillator
I
NPUT: PIN CRIN (EXTERNAL CLOCK)
V
IL
LOW-level input voltage −0.3 − 0.2V
DD
V
V
IH
HIGH-level input voltage 0.8V
DD
− VDD+ 0.3 V
I
LI
input leakage current −10 − +10 µA
C
i
input capacitance −−10 pF
OUTPUT: PIN CROUT; see Figs 3 and 4
f
xtal
crystal frequency 8 8.4672 35 MHz
g
m
mutual conductance at
start-up
− 30 − mA/V
C
fb
feedback capacitance −−5pF
C
o
output capacitance −−10 pF
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Page 54

1999 Jun 17 54
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
10 OPERATING CHARACTERISTICS (SUBCODE INTERFACE TIMING)
V
DD
= 3.0 to 3.6 V; VSS= 0 V; T
amb
= −10 to +70 °C; unless otherwise specified.
Note
1. The subcode timing is directly related to the overspeed factor ‘n’ in normal operating mode. ‘n’ is replaced by the disc
speed factor ‘d’, in lock-to-disc mode.
SYMBOL PARAMETER MIN. TYP. MAX. UNIT
Subcode interface timing (single-speed × n); see Fig.32; note 1
I
NPUT: PIN RCK
t
CLKH
input clock HIGH time 2/n 4/n 6/n µs
t
CLKL
input clock LOW time 2/n 4/n 6/n µs
t
r
input clock rise time −−80/n ns
t
f
input clock fall time −−80/n ns
t
d(SFSY-RCK)
delay time SFSY to RCK 10/n − 20/n µs
OUTPUTS: PINS SBSY, SFSY AND SUB (CL= 20 pF)
T
cy(block)
block cycle time 12.0/n 13.3/n 14.7/n ms
t
W(SBSY)
SBSY pulse width −−300/n µs
T
cy(frame)
frame cycle time 122/n 136/n 150/n µs
t
W(SFSY)
SFSY pulse width (3-wire mode only) −−366/n µs
t
SFSYH
SFSY HIGH time −−66/n µs
t
SFSYL
SFSY LOW time −−84/n µs
t
d(SFSY-SUB)
delay time SFSY to SUB (P data) valid −−1/n µs
t
d(RCK-SUB)
delay time RCK falling to SUB −−0µs
t
h(RCK-SUB)
hold time RCK to SUB −−0.7/n µs
Page 55

1999 Jun 17 55
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.32 Subcode interface timing diagram.
handbook, full pagewidth
t
W(SBSY)
t
W(SFSY)
t
r
V
DD
– 0.8 V
V
DD
– 0.8 V
t
SFSYL
t
SFSYH
T
cy(block)
T
cy(frame)
t
f
t
d(SFSY−RCK)
t
d(SFSY−SUB)
t
h(RCK−SUB)
t
d(RCK−SUB)
SBSY
SFSY
RCK
SUB
SFSY
(4-wire mode)
SFSY
(3-wire mode)
0.8 V
0.8 V
0.8 V
MGL718
Page 56

1999 Jun 17 56
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
11 OPERATING CHARACTERISTICS (I2S-BUS TIMING)
V
DD
= 3.0 to 3.6 V; VSS= 0 V; T
amb
= −10 to +70 °C; unless otherwise specified.
Note
1. The I
2
S-bus timing is directly related to the overspeed factor ‘n’ in the normal operating mode. In the lock-to-disc
mode ‘n’ is replaced by the disc speed factor ‘d’.
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
I
2
S-bus timing (single-speed × n); see Fig.33; note 1
CLOCK OUTPUT: PIN SCLK (CL= 20 pF)
T
cy
output clock period sample rate = f
s
− 472.4/n − ns
sample rate = 2f
s
− 236.2/n − ns
sample rate = 4f
s
− 118.1/n − ns
t
CH
clock HIGH time sample rate = f
s
166/n −−ns
sample rate = 2f
s
83/n −−ns
sample rate = 4f
s
42/n −−ns
t
CL
clock LOW time sample rate = f
s
166/n −−ns
sample rate = 2f
s
83/n −−ns
sample rate = 4f
s
42/n −−ns
OUTPUTS: PINS WCLK, DATAAND EF (CL= 20 pF)
t
su
set-up time sample rate = f
s
95/n −−ns
sample rate = 2f
s
48/n −−ns
sample rate = 4f
s
24/n −−ns
t
h
hold time sample rate = f
s
95/n −−ns
sample rate = 2f
s
48/n −−ns
sample rate = 4f
s
24/n −−ns
Fig.33 I2S-bus timing diagram.
DD
V – 0.8 V
0.8 V
DD
V – 0.8 V
0.8 V
t
CH
MBG407
t
CL
clock period T
cy
SCLK
WCLK
DATA
EF
t
h
t
su
Page 57

1999 Jun 17 57
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
12 OPERATING CHARACTERISTICS (MICROCONTROLLER INTERFACE TIMING)
V
DD
= 3.0 to 3.6 V; VSS= 0 V; T
amb
= −10 to +70 °C; unless otherwise specified.
SYMBOL PARAMETER CONDITIONS
NORMAL MODE LOCK-TO-DISC MODE
UNIT
MIN. MAX. MIN. MAX.
Microcontroller interface timing (4-wire bus mode; writing to decoder registers 0 to F; reading Q-channel
subcode and decoder status); see Figs 34 and 35; note 1
I
NPUTS SCL AND RAB
t
CL
input LOW time 480/n + 20 − 2400/n + 20 − ns
t
CH
input HIGH time 480/n + 20 − 2400/n + 20 − ns
t
r
rise time − 480/n − 480/n ns
t
f
fall time − 480/n − 480/n ns
READ MODE (CL= 20 pF)
t
dRD
delay time RAB to SDA
valid
− 50 − 50 ns
t
PD
propagation delay SCL
to SDA
720/n − 20 960/n + 20 720/n + 20 4800/n + 20 ns
t
dRZ
delay time RAB to SDA
high-impedance
− 50 − 50 ns
WRITE MODE (CL= 20 pF)
t
suD
set-up time SDA to SCL note 2 20 − 720/n − 20 − 720/n − ns
t
hD
hold time SCL to SDA − 960/n + 20 − 4800/n + 20 ns
t
suCR
set-up time SCL to RAB 240/n + 20 − 1200/n + 20 − ns
t
dWZ
delay time SDA
high-impedance to RAB
0 − 0 − ns
Microcontroller interface timing (4-wire bus mode; servo commands); see Figs 36 and 37; notes 3 and 4
I
NPUTS SCL AND SILD
t
L
input LOW time 710 − 710 − ns
t
H
input HIGH time 710 − 710 − ns
t
r
rise time − 240 − 240 ns
t
f
fall time − 240 − 240 ns
READ MODE (CL= 20 pF)
t
dLD
delay time SILD to
SDA valid
− 25 − 25 ns
t
PD
propagation delay SCL
to SDA
− 950 − 950 ns
t
dLZ
delay time SILD to
SDA high-impedance
− 50 − 50 ns
t
sCLR
set-up time SCL to
SILD
480 − 480 − ns
t
hCLR
hold time SILD to SCL 830 − 830 − ns
Page 58

1999 Jun 17 58
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Notes
1. The 4-wire bus mode microcontroller interface timing for writing to decoder registers 0 to F, and reading Q-channel
subcode and decoder status, is a function of the overspeed factor ‘n’. In the lock-to-disc mode the maximum data
rate is lower.
2. Negative set-up time means that the data may change after clock transition.
3. If a 16.9344 MHz crystal is used and SELPLL = 0 then the timings are divided-by-2 until the microcontroller has
written X1XX to register B.
WRITE MODE (CL= 20 pF)
t
sD
set-up time SDA to SCL 0 − 0 − ns
t
hD
hold time SCL to SDA 950 − 950 − ns
t
sCL
set-up time SCL to
SILD
480 − 480 − ns
t
hCL
hold time SILD to SCL 120 − 120 − ns
t
dPLP
delay between two
SILD pulses
70 − 70 −µs
t
dWZ
delay time SDA
high-impedance to
SILD
0 − 0 − ns
SYMBOL PARAMETER CONDITIONS
NORMAL MODE LOCK-TO-DISC MODE
UNIT
MIN. MAX. MIN. MAX.
Fig.34 4-wire bus microcontroller timing; read mode (Q-channel subcode and decoder status information).
SDA (SAA7327)
SCL
RAB
t
r
t
r
0.8 V
t
f
t
f
VDD − 0.8 V
VDD − 0.8 V
0.8 V
VDD − 0.8 V
0.8 V
t
PD
t
CL
t
CH
t
dRD
t
dRZ
high-impedance
MGS244
Page 59

1999 Jun 17 59
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.35 4-wire bus microcontroller timing; write mode (decoder registers 0 to F).
handbook, full pagewidth
SCL
RAB
t
r
t
f
DD
V – 0.8 V
0.8 V
DD
V – 0.8 V
0.8 V
t
hD
t
CL
t
CH
t
dWZ
MBG405
t
r
t
f
DD
V – 0.8 V
0.8 V
t
CL
t
CH
t
suCR
t
suD
SDA
(microcontroller)
high-impedance
Fig.36 4-wire bus microcontroller timing; read mode (servo commands).
handbook, full pagewidth
t
dLD
t
hCLR
t
sCLR
t
PD
t
dLZ
0.8 V
0.8 V
0.8 V
V
DD
− 0.8 V
V
DD
− 0.8 V
V
DD
− 0.8 V
SILD
SCL
SDA
(SAA7327)
MGS245
Page 60

1999 Jun 17 60
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
Fig.37 4-wire bus microcontroller timing; write mode (servo commands).
handbook, full pagewidth
t
dPLP
t
L
t
sCL
t
dWZ
t
hCL
t
H
t
hD
t
sD
t
L
0.8 V
0.8 V
0.8 V
V
DD
- 0.8 V
V
DD
– 0.8 V
V
DD
– 0.8 V
SILD
SCL
SDA
(microcontroller)
MBG416
Page 61

1999 Jun 17 61
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
13 APPLICATION INFORMATION
an
dbook, full pagewidth
MGS248
22 kΩ
1 kΩ
10 kΩ
10 kΩ
30 kΩ
2.2 Ω
SAA7327
MECHANISM
AND
HF
AMPLIFIER
(TDA1300)
(4)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
SBSY
SFSY
SUB
RCK
TEST3
STATUS
SILD
RAB
SCL
SDA
SCLI
SDI
WCLI
V2/V3
V
SSD1
HFREF
HFIN
ISLICE
V
SSA1
V
DDA1
V
DDA
I
ref
V
RIN
D1
D2
D3
D4
R1
R2
V
SSA2
CROUT
CRIN
33
17 18 19 20
left output
21 22 23 24 25 26 27 28 29
to external
DAC
30 31 32
64 63 62 61 60 59 58 57 56 55
to power
amplifiers
54 53 52 51
to DOBM
transformer
to CD graphics/subcode interface
50
LDONV1V5V4MOTO2
MOTO1
V
SSD3VDDD2(C)
SLFORA
CFLG
V
DDD1(P)
DOBM
V
SSD2
CL11/4
V
DDA2
LN
LP
V
neg
V
pos
RN
RP
SELPLL
TEST1
CL16
DATA
WCLK
SCLK
EF
TEST2
KILL
49
RESET
33 µF
33 pF
33 pF
100 nF
100 nF
220 pF
220 pF
220 pF
220 pF
220 pF
220 pF
O6
O5
O1
O4
O3
O2
2
5
4
1
3
6
9
7
RFE
LDON
47 pF
(3)
(1)
100 nF
1.5
nF
220
nF
1.5
nF
(2)
100 nF
1 nF
22 nF
100 nF
V
DDA
V
DDD
1/2 V
DDD
(2)
1/2 V
DDD
(2)
MOTOR
INTERFACE
to microcontroller
interface
to ESA
serial data
loopback
V
DDD
V
DDD
2.2 Ω
V
DDD
2.2 Ω
4.7
kΩ
V
DDD
4.7
kΩ
100
nF
100 nF
47
µF
33 µF 33 µF
33 µF
2.2 Ω
22kΩ11
kΩ
22
kΩ
220
pF
11
kΩ
10 kΩ
right output
22kΩ22
kΩ
11 kΩ
220
pF
220
pF
220
pF
11
kΩ
10 kΩ
Fig.38 Typical application diagram for current mechanisms.
(1) For crystal oscillator see Figs 3 and4.
(2) 1.5 nF capacitors connected between pins
LN andLP, and RN andRP must be placed as
near to the pins as possible. This also applies to
the 220 nF and 47µF capacitors connected
between pins V
neg
and V
pos
.
(3) For single-speed applications, use 47 pF
capacitors, for double-speed use 22 pF
capacitors.
(4) The connections to TDA1300 are shown for
single Foucault mechanisms.
Page 62

1999 Jun 17 62
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
This text is here in white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here in
_white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader.This text is here inThis text is here in
white to force landscape pages to be rotated correctly when browsing through the pdf in the Acrobat reader. white to force landscape pages to be ...
d
book, full pagewidth
MGS235
22 kΩ
10 kΩ
1 kΩ
30 kΩ
2.2 Ω
SAA7327
LP FILTER
(5)
V I
(5)
OEIC
(4)
TZA1024
(4)
1
RFEQO
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
SBSY
SFSY
SUB
RCK
TEST3
STATUS
SILD
RAB
SCL
SDA
SCLI
SDI
WCLI
V2/V3
V
SSD1
HFREF
HFIN
ISLICE
V
SSA1
V
DDA1
V
DDA
I
ref
V
RIN
D1
D2
D3
D4
R1
R2
V
SSA2
CROUT
CRIN
33
17 18 19 20
left output
21 22 23 24 25 26 27 28 29
to external
DAC
30 31 32
64 63 62 61 60 59 58 57 56 55
to power
amplifiers
54 53 52 51
to DOBM
transformer
to CD graphics/subcode interface
50
LDONV1V5V4MOTO2
MOTO1
V
SSD3VDDD2(C)
SLFORA
CFLG
V
DDD1(P)
DOBM
V
SSD2
CL11/4
V
DDA2
LN
LP
V
neg
V
pos
RN
RP
SELPLL
TEST1
CL16
DATA
WCLK
SCLK
EF
TEST2
KILL
49
RESET
33 µF
33 pF
33 pF
100 nF
100 nF
220 pF
220 pF
220 pF
220 pF
220 pF
220 pF
S2
S1
D4
D3
D2
D1
VCOM
10
CMFB
8
DIN
ΣD1-D4
(4)
RFFB
9
PWRON
7
5
47 pF
(3)
(1)
100 nF
1.5
nF
220
nF
1.5
nF
(2)
100 nF
3 nF
100 nF
V
DDA
V
DDD
1/2 V
DDD
(2)
1/2 V
DDD
(2)
MOTOR
INTERFACE
to microcontroller
interface
to ESA
serial data
loopback
V
CC
V
DDD
V
DDD
2.2 Ω
V
DDD
2.2 Ω
4.7
kΩ
V
DDD
4.7
kΩ
100
nF
100 nF
47
µF
33 µF 33 µF
33 µF
2.2 Ω
22kΩ11
kΩ
22
kΩ
220
pF
11
kΩ
10 kΩ
right output
22kΩ22
kΩ
11 kΩ
220
pF
220
pF
220
pF
11
kΩ
10 kΩ
Fig.39 Typical application diagram for voltage mechanisms.
(1) For crystal oscillator see Figs 3 and4.
(2) 1.5 nF capacitors connected between pins
LN andLP, and RN andRP must be placed as near
to the pins as possible. This also applies to the
220 nF and 47µF capacitors connected between
pins V
neg
and V
pos
. Power supplies and V
DDD
reference inputs (1⁄2V
DDD
) for DAC operational
amplifiers must be low noise.
(3) For single-speed applications, use 47 pF capacitors,
for double-speed use 22 pF capacitors.
(4) For connections between OEIC and TZA1024, refer
to TZA1024 device specification.
(5) Resistor values for V to I conversion depend on
OEIC and current range set on CD7 II.
Page 63

1999 Jun 17 63
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
14 PACKAGE OUTLINE
UNIT A1A2A3b
p
cE
(1)
eH
E
LL
p
Zywv θ
REFERENCES
OUTLINE
VERSION
EUROPEAN
PROJECTION
ISSUE DATE
IEC JEDEC EIAJ
mm
0.25
0.10
2.75
2.55
0.25
0.45
0.30
0.23
0.13
14.1
13.9
0.8
17.45
16.95
1.2
0.8
7
0
o
o
0.16 0.100.161.60
DIMENSIONS (mm are the original dimensions)
Note
1. Plastic or metal protrusions of 0.25 mm maximum per side are not included.
1.03
0.73
SOT393-1 MS-022
96-05-21
97-08-04
D
(1) (1)(1)
14.1
13.9
H
D
17.45
16.95
E
Z
1.2
0.8
D
e
θ
E
A
1
A
L
p
detail X
L
(A )
3
B
16
y
c
E
H
A
2
D
Z
D
A
Z
E
e
v M
A
1
64
49
48 33
32
17
X
b
p
D
H
b
p
v M
B
w M
w M
0 5 10 mm
scale
pin 1 index
QFP64: plastic quad flat package; 64 leads (lead length 1.6 mm); body 14 x 14 x 2.7 mm
SOT393-1
A
max.
3.00
Page 64

1999 Jun 17 64
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
15 SOLDERING
15.1 Introduction to soldering surface mount
packages
This text gives a very brief insight to a complex technology.
A more in-depth account of soldering ICs can be found in
our
“Data Handbook IC26; Integrated Circuit Packages”
(document order number 9398 652 90011).
There is no soldering method that is ideal for all surface
mount IC packages. Wave soldering is not always suitable
for surface mount ICs, or for printed-circuit boards with
high population densities. In these situations reflow
soldering is often used.
15.2 Reflow soldering
Reflow soldering requires solder paste (a suspension of
fine solder particles, flux and binding agent) to be applied
to the printed-circuit board by screen printing, stencilling or
pressure-syringe dispensing before package placement.
Several methods exist for reflowing; for example,
infrared/convection heating in a conveyor type oven.
Throughput times (preheating, soldering and cooling) vary
between 100 and 200 seconds depending on heating
method.
Typical reflow peak temperatures range from
215 to 250 °C. The top-surface temperature of the
packages should preferable be kept below 230 °C.
15.3 Wave soldering
Conventional single wave soldering is not recommended
for surface mount devices (SMDs) or printed-circuit boards
with a high component density, as solder bridging and
non-wetting can present major problems.
To overcome these problems the double-wave soldering
method was specifically developed.
If wave soldering is used the following conditions must be
observed for optimal results:
• Use a double-wave soldering method comprising a
turbulent wave with high upward pressure followed by a
smooth laminar wave.
• For packages with leads on two sides and a pitch (e):
– larger than or equal to 1.27 mm, the footprint
longitudinal axis is preferred to be parallel to the
transport direction of the printed-circuit board;
– smaller than 1.27 mm, the footprint longitudinal axis
must be parallel to the transport direction of the
printed-circuit board.
The footprint must incorporate solder thieves at the
downstream end.
• For packages with leads on four sides, the footprint must
be placed at a 45° angle to the transport direction of the
printed-circuit board. The footprint must incorporate
solder thieves downstream and at the side corners.
During placement and before soldering, the package must
be fixed with a droplet of adhesive. The adhesive can be
applied by screen printing, pin transfer or syringe
dispensing. The package can be soldered after the
adhesive is cured.
Typical dwell time is 4 seconds at 250 °C.
A mildly-activated flux will eliminate the need for removal
of corrosive residues in most applications.
15.4 Manual soldering
Fix the component by first soldering two
diagonally-opposite end leads. Use a low voltage (24 V or
less) soldering iron applied to the flat part of the lead.
Contact time must be limited to 10 seconds at up to
300 °C.
When using a dedicated tool, all other leads can be
soldered in one operation within 2 to 5 seconds between
270 and 320 °C.
Page 65

1999 Jun 17 65
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
15.5 Suitability of surface mount IC packages for wave and reflow soldering methods
Notes
1. All surface mount (SMD) packages are moisture sensitive. Depending upon the moisture content, the maximum
temperature (with respect to time) and body size of the package, there is a risk that internal or external package
cracks may occur due to vaporization of the moisture in them (the so called popcorn effect). For details, refer to the
Drypack information in the
“Data Handbook IC26; Integrated Circuit Packages; Section: Packing Methods”
.
2. These packages are not suitable for wave soldering as a solder joint between the printed-circuit board and heatsink
(at bottom version) can not be achieved, and as solder may stick to the heatsink (on top version).
3. If wave soldering is considered, then the package must be placed at a 45° angle to the solder wave direction.
The package footprint must incorporate solder thieves downstream and at the side corners.
4. Wave soldering is only suitable for LQFP, TQFP and QFP packages with a pitch (e) equal to or larger than 0.8 mm;
it is definitely not suitable for packages with a pitch (e) equal to or smaller than 0.65 mm.
5. Wave soldering is only suitable for SSOP and TSSOP packages with a pitch (e) equal to or larger than 0.65 mm; it is
definitely not suitable for packages with a pitch (e) equal to or smaller than 0.5 mm.
PACKAGE
SOLDERING METHOD
WAVE REFLOW
(1)
BGA, SQFP not suitable suitable
HLQFP, HSQFP, HSOP, HTSSOP, SMS not suitable
(2)
suitable
PLCC
(3)
, SO, SOJ suitable suitable
LQFP, QFP, TQFP not recommended
(3)(4)
suitable
SSOP, TSSOP, VSO not recommended
(5)
suitable
Page 66

1999 Jun 17 66
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
16 DEFINITIONS
17 LIFE SUPPORT APPLICATIONS
These products are not designed for use in life support appliances, devices, or systems where malfunction of these
products can reasonably be expected to result in personal injury. Philips customers using or selling these products for
use in such applications do so at their own risk and agree to fully indemnify Philips for any damages resulting from such
improper use or sale.
18 PURCHASE OF PHILIPS I
2
C COMPONENTS
Data sheet status
Objective specification This data sheet contains target or goal specifications for product development.
Preliminary specification This data sheet contains preliminary data; supplementary data may be published later.
Product specification This data sheet contains final product specifications.
Limiting values
Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one or
more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation
of the device at these or at any other conditions above those given in the Characteristics sections of the specification
is not implied. Exposure to limiting values for extended periods may affect device reliability.
Application information
Where application information is given, it is advisory and does not form part of the specification.
Purchase of Philips I
2
C components conveys a license under the Philips’ I2C patent to use the
components in the I2C system provided the system conforms to the I2C specification defined by
Philips. This specification can be ordered using the code 9398 393 40011.
Page 67

1999 Jun 17 67
Philips Semiconductors Product specification
Digital servo processor and Compact Disc decoder
with integrated DAC for video CD (CD7 II)
SAA7327
NOTES
Page 68

© Philips Electronics N.V. SCA
All rights are reserved. Reproduction in whole or in part is prohibited without the prior written consent of the copyright owner.
The information presented in this document does not form part of any quotation or contract, is believed to be accurate and reliable and may be changed
without notice. No liability will be accepted by the publisher for any consequence of its use. Publication thereof does not convey nor imply any license
under patent- or other industrial or intellectual property rights.
Internet: http://www.semiconductors.philips.com
1999 66
Philips Semiconductors – a worldwide company
Netherlands: Postbus 90050, 5600 PB EINDHOVEN, Bldg. VB,
Tel. +31 40 27 82785, Fax. +31 40 27 88399
New Zealand: 2 Wagener Place, C.P.O. Box 1041, AUCKLAND,
Tel. +64 9 849 4160, Fax. +64 9 849 7811
Norway: Box 1, Manglerud 0612, OSLO,
Tel. +47 22 74 8000, Fax. +47 22 74 8341
Pakistan: see Singapore
Philippines: Philips Semiconductors Philippines Inc.,
106 Valero St. Salcedo Village, P.O. Box 2108 MCC, MAKATI,
Metro MANILA, Tel. +63 2 816 6380, Fax. +63 2 817 3474
Poland: Ul. Lukiska 10, PL 04-123 WARSZAWA,
Tel. +48 22 612 2831, Fax. +48 22 612 2327
Portugal: see Spain
Romania: see Italy
Russia: Philips Russia, Ul. Usatcheva 35A, 119048 MOSCOW,
Tel. +7 095 755 6918, Fax. +7 095 755 6919
Singapore: Lorong 1, Toa Payoh, SINGAPORE 319762,
Tel. +65 350 2538, Fax. +65 251 6500
Slovakia: see Austria
Slovenia: see Italy
South Africa: S.A. PHILIPS Pty Ltd., 195-215 Main Road Martindale,
2092 JOHANNESBURG, P.O. Box 58088 Newville 2114,
Tel. +27 11 471 5401, Fax. +27 11 471 5398
South America: Al. Vicente Pinzon, 173, 6th floor,
04547-130 SÃO PAULO, SP, Brazil,
Tel. +55 11 821 2333, Fax. +55 11 821 2382
Spain: Balmes 22, 08007 BARCELONA,
Tel. +34 93 301 6312, Fax. +34 93 301 4107
Sweden: Kottbygatan 7, Akalla, S-16485 STOCKHOLM,
Tel. +46 8 5985 2000, Fax. +46 8 5985 2745
Switzerland: Allmendstrasse 140, CH-8027 ZÜRICH,
Tel. +41 1 488 2741 Fax. +41 1 488 3263
Taiwan: Philips Semiconductors, 6F, No. 96, Chien Kuo N. Rd., Sec. 1,
TAIPEI, Taiwan Tel. +886 2 2134 2886, Fax. +886 2 2134 2874
Thailand: PHILIPS ELECTRONICS (THAILAND) Ltd.,
209/2 Sanpavuth-Bangna Road Prakanong, BANGKOK 10260,
Tel. +66 2 745 4090, Fax. +66 2 398 0793
Turkey: Yukari Dudullu, Org. San. Blg., 2.Cad. Nr. 28 81260 Umraniye,
ISTANBUL, Tel. +90 216 522 1500, Fax. +90 216 522 1813
Ukraine: PHILIPS UKRAINE, 4 Patrice Lumumba str., Building B, Floor 7,
252042 KIEV, Tel. +380 44 264 2776, Fax. +380 44 268 0461
United Kingdom: Philips Semiconductors Ltd., 276 Bath Road, Hayes,
MIDDLESEX UB3 5BX, Tel. +44 208 730 5000, Fax. +44 208 754 8421
United States: 811 East Arques Avenue, SUNNYVALE, CA 94088-3409,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
Uruguay: see South America
Vietnam: see Singapore
Yugoslavia: PHILIPS, Trg N. Pasica 5/v, 11000 BEOGRAD,
Tel. +381 11 62 5344, Fax.+381 11 63 5777
For all other countries apply to: Philips Semiconductors,
International Marketing & Sales Communications, Building BE-p, P.O. Box 218,
5600 MD EINDHOVEN, The Netherlands, Fax. +31 40 27 24825
Argentina: see South America
Australia: 34 Waterloo Road, NORTH RYDE, NSW 2113,
Tel. +61 2 9805 4455, Fax. +61 2 9805 4466
Austria: Computerstr. 6, A-1101 WIEN, P.O. Box 213,
Tel. +43 1 60 101 1248, Fax. +43 1 60 101 1210
Belarus: Hotel Minsk Business Center, Bld. 3, r. 1211, Volodarski Str. 6,
220050 MINSK, Tel. +375 172 20 0733, Fax. +375 172 20 0773
Belgium: see The Netherlands
Brazil: see South America
Bulgaria: Philips Bulgaria Ltd., Energoproject, 15th floor,
51 James Bourchier Blvd., 1407 SOFIA,
Tel. +359 2 68 9211, Fax. +359 2 68 9102
Canada: PHILIPS SEMICONDUCTORS/COMPONENTS,
Tel. +1 800 234 7381, Fax. +1 800 943 0087
China/Hong Kong: 501 Hong Kong Industrial Technology Centre,
72 Tat Chee Avenue, Kowloon Tong, HONG KONG,
Tel. +852 2319 7888, Fax. +852 2319 7700
Colombia: see South America
Czech Republic: see Austria
Denmark: Sydhavnsgade 23, 1780 COPENHAGEN V,
Tel. +45 33 29 3333, Fax. +45 33 29 3905
Finland: Sinikalliontie 3, FIN-02630 ESPOO,
Tel. +358 9 615 800, Fax. +358 9 6158 0920
France: 51 Rue Carnot, BP317, 92156 SURESNES Cedex,
Tel. +33 1 4099 6161, Fax. +33 1 4099 6427
Germany: Hammerbrookstraße 69, D-20097 HAMBURG,
Tel. +49 40 2353 60, Fax. +49 40 2353 6300
Hungary: see Austria
India: Philips INDIA Ltd, Band Box Building, 2nd floor,
254-D, Dr. Annie Besant Road, Worli, MUMBAI 400 025,
Tel. +91 22 493 8541, Fax. +91 22 493 0966
Indonesia: PT Philips Development Corporation, Semiconductors Division,
Gedung Philips, Jl. Buncit Raya Kav.99-100, JAKARTA 12510,
Tel. +62 21 794 0040 ext. 2501, Fax. +62 21 794 0080
Ireland: Newstead, Clonskeagh, DUBLIN 14,
Tel. +353 1 7640 000, Fax. +353 1 7640 200
Israel: RAPAC Electronics, 7 Kehilat Saloniki St, PO Box 18053,
TEL AVIV 61180, Tel. +972 3 645 0444, Fax. +972 3 649 1007
Italy: PHILIPS SEMICONDUCTORS, Piazza IV Novembre 3,
20124 MILANO, Tel. +39 02 67 52 2531, Fax. +39 02 67 52 2557
Japan: Philips Bldg 13-37, Kohnan 2-chome, Minato-ku,
TOKYO 108-8507, Tel. +81 3 3740 5130, Fax. +81 3 3740 5057
Korea: Philips House, 260-199 Itaewon-dong, Yongsan-ku, SEOUL,
Tel. +82 2 709 1412, Fax. +82 2 709 1415
Malaysia: No. 76 Jalan Universiti, 46200 PETALING JAYA, SELANGOR,
Tel. +60 3 750 5214, Fax. +60 3 757 4880
Mexico: 5900 Gateway East, Suite 200, EL PASO, TEXAS 79905,
Tel. +9-5 800 234 7381, Fax +9-5 800 943 0087
Middle East: see Italy
Printed in The Netherlands 545002/01/pp68 Date of release: 1999 Jun 17 Document order number: 9397 750 04961
 Loading...
Loading...