


PIC16(L)F1826/27
Data Sheet
18/20/28-Pin Flash Microcontrollers
with nanoWatt XLP Technology
2011 Microchip Technology Inc. DS41391D
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding device
applications and the like is provided only for your convenience
and may be superseded by updates. It is your responsibility to
ensure that your application meets with your specifications.
MICROCHIP MAKES NO REPRESENTATIONS OR
WARRANTIES OF ANY KIND WHETHER EXPRESS OR
IMPLIED, WRITTEN OR ORAL, STATUTORY OR
OTHERWISE, RELATED TO THE INFORMATION,
INCLUDING BUT NOT LIMITED TO ITS CONDITION,
QUALITY, PERFORMANCE, MERCHANTABILITY OR
FITNESS FOR PURPOSE. Microchip disclaims all liability
arising from this information and its use. Use of Microchip
devices in life support and/or safety applications is entirely at
the buyer’s risk, and the buyer agrees to defend, indemnify and
hold harmless Microchip from any and all damages, claims,
suits, or expenses resulting from such use. No licenses are
conveyed, implicitly or otherwise, under any Microchip
intellectual property rights.
Trademarks
The Microchip name and logo, the Microchip logo, dsPIC,
K
EELOQ, KEELOQ logo, MPLAB, PIC, PICmicro, PICSTART,
32
PIC
logo, rfPIC and UNI/O are registered trademarks of
Microchip Technology Incorporated in the U.S.A. and other
countries.
FilterLab, Hampshire, HI-TECH C, Linear Active Thermistor,
MXDEV, MXLAB, SEEVAL and The Embedded Control
Solutions Company are registered trademarks of Microchip
Technology Incorporated in the U.S.A.
Analog-for-the-Digital Age, Application Maestro, CodeGuard,
dsPICDEM, dsPICDEM.net, dsPICworks, dsSPEAK, ECAN,
ECONOMONITOR, FanSense, HI-TIDE, In-Circuit Serial
Programming, ICSP, Mindi, MiWi, MPASM, MPLAB Certified
logo, MPLIB, MPLINK, mTouch, Omniscient Code
Generation, PICC, PICC-18, PICDEM, PICDEM.net, PICkit,
PICtail, REAL ICE, rfLAB, Select Mode, Total Endurance,
TSHARC, UniWinDriver, WiperLock and ZENA are
trademarks of Microchip Technology Incorporated in the
U.S.A. and other countries.
SQTP is a service mark of Microchip Technology Incorporated
in the U.S.A.
All other trademarks mentioned herein are property of their
respective companies.
© 2011, Microchip Technology Incorporated, Printed in the
U.S.A., All Rights Reserved.
Printed on recycled paper.
ISBN: 978-1-61341-124-7
Microchip received ISO/TS-16949:2002 certification for its worldwide
headquarters, design and wafer fabrication facilities in Chandler and
Tempe, Arizona; Gresham, Oregon and design centers in California
and India. The Company’s quality system processes and procedures
are for its PIC
devices, Serial EEPROMs, microperipherals, nonvolatile memory and
analog products. In addition, Microchip’s quality system for the design
and manufacture of development systems is ISO 9001:2000 certified.
®
MCUs and dsPIC® DSCs, KEELOQ
®
code hopping
DS41391D-page 2 2011 Microchip Technology Inc.
PIC16(L)F1826/27
18/20/28-Pin Flash Microcontrollers wit h na noWatt XLP Techno logy
High-Performance RISC CPU:
• C Compiler Optimized Architecture
• 256 bytes Data EEPROM
• Up to 8 Kbytes Linear Program Memory
Addressing
• Up to 384 bytes Linear Data Memory Addressing
• Interrupt Capability with Automatic Context Saving
• 16-Level Deep Hardware Stack with Optional
Overflow/Underflow Reset
• Direct, Indirect and Relative Addressing modes:
- Two full 16-bit File Select Registers (FSRs)
- FSRs can read program and data memory
Flexible Oscillator Struc ture:
• Precision 32 MHz Internal Oscillator Block:
- Factory calibrated to ± 1%, typical
- Software selectable frequencies range of
31 kHz to 32 MHz
• 31 kHz Low-Power Internal Oscillator
• Four Crystal modes up to 32 MHz
• Three External Clock modes up to 32 MHz
• 4X Phase-Lock Loop (PLL)
• Fail-Safe Clock Monitor:
- Allows for safe shutdown if peripheral clock
stops
• Two-Speed Oscillator Start-up
• Reference Clock Module:
- Programmable clock output frequency and
duty-cycle
Special Microcontroller Features:
• 1.8V-5.5V Operation – PIC16F1826/27
• 1.8V-3.6V Operation – PIC16LF1826/27
• Self-Programmable under Software Control
• Power-on Reset (POR), Power-up Timer (PWRT)
and Oscillator Start-up Timer (OST)
• Programmable Brown-out Reset (BOR)
• Extended Watchdog Timer (WDT):
- Programmable period from 1ms to 268s
• Programmable Code Protection
• In-Circuit Serial Programming™ (ICSP™) via
two pins
• In-Circuit Debug (ICD) via two pins
• Enhance Low-Voltage Programming
• Power-Saving Sleep mode
Extreme Low-Power Management PIC16LF1826/27 with nanoWatt XLP:
• Operating Current: 75 A @ 1 MHz, 1.8V, typical
• Sleep mode: 30 nA
• Watchdog Timer: 500 nA
• Timer1 Oscillator: 600 nA @ 32 kHz
Analog Features:
• Analog-to-Digital Converter (ADC) Module:
- 10-bit resolution, 12 channels
- Auto acquisition capability
- Conversion available during Sleep
• Analog Comparator Module:
- Two rail-to-rail analog comparators
- Power mode control
- Software controllable hysteresis
• Voltage Reference Module:
- Fixed Voltage Reference (FVR) with 1.024V,
2.048V and 4.096V output levels
- 5-bit rail-to-rail resistive DAC with positive
and negative reference selection
Peripheral Highlight s:
• 15 I/O Pins and 1 Input Only Pin:
- High current sink/source 25 mA/25 mA
- Programmable weak pull-ups
- Programmable interrupt-on- change pins
• Timer0: 8-Bit Timer/Counter with 8-Bit Prescaler
• Enhanced Timer1:
- 16-bit timer/counter with prescaler
- External Gate Input mode
- Dedicated, low-power 32 kHz oscillator driver
• Up to three Timer2-types: 8-Bit Timer/Counter with
8-Bit Period Register, Prescaler and Postscaler
• Up to two Capture, Compare, PWM (CCP) Modules
• Up to two Enhanced CCP (ECCP) Modules:
- Software selectable time bases
- Auto-shutdown and auto-restart
- PWM steering
• Up to two Master Synchronous Serial Port
(MSSP) with SPI and I
- 7-bit address masking
- SMBus/PMBus
• Enhanced Universal Synchronous Asynchronous
Receiver Transmitter (EUSART) Module
• mTouch™ Sensing Oscillator Module:
- Up to 12 input channels
• Data Signal Modulator Module:
- Selectable modulator and carrier sources
•SR Latch:
- Multiple Set/Reset input options
- Emulates 555 Timer applications
2
CTM with:
TM
compatibility
2011 Microchip Technology Inc. DS41391D-page 3

PIC16(L)F1826/27
PDIP, SOIC
PIC16(L)F1826/27
1
2
3
4
18
17
16
15
5
6
7
14
13
12
RA2
RA3
RA4
RA5/MCLR
/VPP
VSS
RB0
RB1
RA1
RA0
RA7
RA6
V
DD
RB7
RB6
8
9
11
10
RB2
RB3
RB5
RB4
SSOP
PIC16(L)F1826/27
1
2
3
4
20
19
18
17
5
7
8
16
14
13
RA2
RA3
RA4
RA5/MCLR
/VPP
VSS
RB0
RB1
RA1
RA0
RA7
RA6
V
DD
RB7
RB6
9
10
12
11
RB2
RB3
RB5
RB4
6
15
VSS
VDD
PIC16(L)F1826/27 Family Types
Program
Memory
Device
Words
Data
Memory
SRAM
(bytes)
(1)
I/O’s
(bytes)
10-bit ADC (ch)
CapSense (ch)
Comparators
Timers (8/16-bit)
Data EEPROM
MSSP
EUSART
ECCP (Full-Bridge)
CCP
SR Latch
ECCP (Half-Bridge)
PIC16LF1826 2K 256 256 16 12 12 2 2/1 1 1 1 — — Yes
PIC16F1826 2K 256 256 16 12 12 2 2/1 1 1 1 — — Yes
PIC16LF1827 4K 38425616121224/112112Yes
PIC16F1827 4K 384 256 16 12 12 2 4/1 1 2 1 1 2 Yes
Note 1: One pin is input only.
Pin Diagram – 18-Pin PDIP, SOIC
(PIC16(L)F1826/27)
Pin Diagram – 20-Pin SSOP (PIC16(L)F1826/27)
DS41391D-page 4 2011 Microchip Technology Inc.
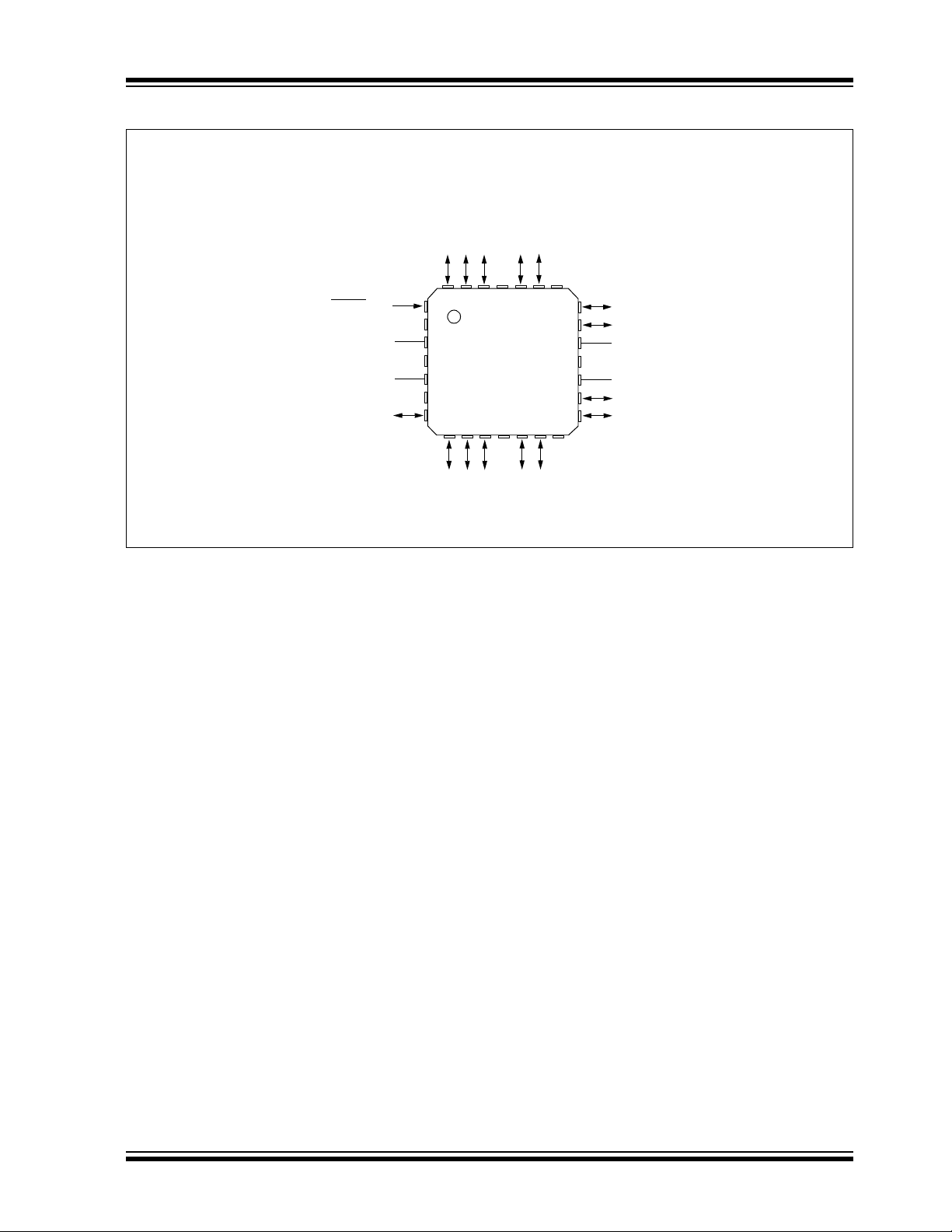
Pin Diagram – 28-Pin QFN/UQFN (PIC16(L)F1826/27)
PIC16(L)F1826/27
RA2
RA3
RA4
RA5/MCLR/VPP
VSS
RB0
RB1
RA1
RA0
RA7
RA6
V
DD
RB7
RB6
RB2
RB3
RB5
RB4
VSS
VDD
NC
NC
282726
25
24
23
1
2
3
4
5
6
7
8
9
10
11
22
21
20
19
18
17
16
15
14
13
12
NC
NC
NC
NC
NC
NC
QFN/UQFN
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 5

DS41391D-page 6 2011 Microchip Technology Inc.
TABLE 1: 18/20/28-PIN SUMMARY (PIC16(L)F1826/27)
18-Pin PDIP/SOIC
I/O
28-Pin QFN/UQFN
20-Pin SSOP
ANSEL
A/D
Reference
Cap Sense
Comparator
SR Latch
Timers
CCP
EUSART
MSSP
Interrupt
Modulator
Pull-up
Basic
PIC16(L)F1826/27
RA0 17 19 23 Y AN0 — CPS0 C12IN0- — — — — SDO2
RA1 18 20 24 Y AN1 — CPS1 C12IN1- — — — — SS2
RA2 1 1 26 Y AN2 VREF-
DACOUT
RA3 2 2 27 Y AN3 VREF+ CPS3 C12IN3-
CPS2 C12IN2-
C12IN+
— — — — — — — N —
SRQ — CCP3
(2)
— — — — N —
(2)
(2)
— — N —
— — N —
C1IN+
C1OUT
P2B
CCP2
P2A
P1A
(1)
(1,2)
(1)
(1,2)
(1,2)
(1)
(2)
— — — — N —
— SDO1
(1)
(1)
— — Y
— — N OSC2
(3)
MCLR, VPP
CLKOUT
— — — — N OSC1
(1)
— — INT
IOC
— Y —
RA4 3 3 28 Y AN4 — CPS4 C2OUT SRNQ T0CKI CCP4
RA5 4 4 1 N — — — — — — — — SS1
RA6 15 17 20 N — — — — — — P1D
RA7 16 18 21 N — — — — — — P1C
RB0 6 7 7 N — — — — SRI T1G CCP1
FLT0
RB1 7 8 8 Y AN11 — CPS11 — — — — RX
RB2 8 9 9 Y AN10 — CPS10 — — — — RX
RB3 9 10 10 Y AN9 — CPS9 — — — CCP1
P1A
(1,4)
(1,4)
RB4 10 11 12 Y AN8 — CPS8 — — — — — SCL1
DT
TX
CK
(1,4)
(1,4)
(1)
,DT
(1,4)
(1,4)
SDA1
SDI1
(1)
SDA2
SDI2
(1,4)
SDO1
IOC — Y —
(2)
IOC MDMIN Y —
(2)
— — IOC MDOUT Y —
IOC MDCIN2 Y —
SCK1
RB5 11 12 13 Y AN7 — CPS7 — — — P1B TX
RB6 12 13 15 Y AN5 — CPS5 — — T1CKI
T1OSI
RB7 13 14 16 Y AN6 — CPS6 — — T1OSO P1D
P1C
CCP2
P2A
P2B
(1,4)
(1,2,4)
(1,2,4)
(1,4)
(1,2,4)
CK
(1)
(1)
— — IOC — Y ICSPCLK/
— — IOC MDCIN1 Y ICSPDAT/
SCL2
SCK2
SS1
(1,4)
(2)
IOC — Y —
(2)
ICDCLK
ICDDAT
VDD 14 15,16 17,19 — — — — — — — — — — — — — VDD
Vss55,63,5———— — —— — — — ——— VSS
Note 1: Pin functions can be moved using the APFCON0 or APFCON1 register.
2: Functions are only available on the PIC16(L)F1827.
3: Weak pull-up always enabled when MCLR
4: Default function location.
is enabled, otherwise the pull-up is under user control.
CLKR
CLKIN

PIC16(L)F1826/27
Table of Contents
1.0 Device Overview .......................................................................................................................................................................... 9
2.0 Enhanced Mid-Range CPU........................................................................................................................................................ 15
3.0 Memory Organization................................................................................................................................................................. 17
4.0 Device Configuration.................................................................................................................................................................. 43
5.0 Oscillator Module (With Fail-Safe Clock Monitor)....................................................................................................................... 51
6.0 Reference Clock Module............................................................................................................................................................ 69
7.0 Resets ........................................................................................................................................................................................ 73
8.0 Interrupts .................................................................................................................................................................................... 81
9.0 Power-Down Mode (Sleep) ........................................................................................................................................................ 95
10.0 Watchdog Timer (WDT) ............................................................................................................................................................. 97
11.0 Data EEPROM and Flash Program Memory Control ............................................................................................................... 101
12.0 I/O Ports ................................................................................................................................................................................... 117
13.0 Interrupt-on-Change ................................................................................................................................................................. 131
14.0 Fixed Voltage Reference (FVR) ............................................................................................................................................... 135
15.0 Temperature Indicator.............................................................................................................................................................. 137
16.0 Analog-to-Digital Converter (ADC) Module .............................................................................................................................. 139
17.0 Digital-to-Analog Converter (DAC) Module .............................................................................................................................. 153
18.0 SR Latch................................................................................................................................................................................... 157
19.0 Comparator Module.................................................................................................................................................................. 163
20.0 Timer0 Module ......................................................................................................................................................................... 173
21.0 Timer1 Module ......................................................................................................................................................................... 177
22.0 Timer2/4/6 Modules.................................................................................................................................................................. 191
23.0 Data Signal Modulator (DSM) .................................................................................................................................................. 193
24.0 Capture/Compare/PWM (ECCP1, ECCP2, ECCP3, CCP4) Modules ..................................................................................... 203
25.0 Master Synchronous Serial Port (MSSP) Module .................................................................................................................... 231
26.0 Enhanced Universal Synchronous Asynchronous Receiver Transmitter (EUSART) ............................................................... 285
27.0 Capacitive Sensing Module ...................................................................................................................................................... 315
28.0 In-Circuit Serial Programming
29.0 Instruction Set Summary.......................................................................................................................................................... 325
30.0 Electrical Specifications............................................................................................................................................................ 339
31.0 DC and AC Characteristics Graphs and Tables....................................................................................................................... 371
32.0 Development Support............................................................................................................................................................... 379
33.0 Packaging Information.............................................................................................................................................................. 383
Appendix A: Revision History............................................................................................................................................................. 393
Appendix B: Device Differences ........................................................................................................................................................ 393
Index .................................................................................................................................................................................................. 395
The Microchip Web Site..................................................................................................................................................................... 403
Customer Change Notification Service .............................................................................................................................................. 403
Customer Support .............................................................................................................................................................................. 403
Reader Response .............................................................................................................................................................................. 404
Product Identification System ............................................................................................................................................................ 405
™ (ICSP™) ................................................................................................................................ 321
2011 Microchip Technology Inc. DS41391D-page 7
PIC16(L)F1826/27
TO OUR VALUED CUSTOMERS
It is our intention to provide our valued customers with the best documentation possible to ensure successful use of your Microchip
products. To this end, we will continue to improve our publications to better suit your needs. Our publications will be refined and
enhanced as new volumes and updates are introduced.
If you have any questions or comments regarding this publication, please contact the Marketing Communications Department via
E-mail at docerrors@microchip.com or fax the Reader Response Form in the back of this data sheet to (480) 792-4150. We
welcome your feedback.
Most Current Data Sheet
To obtain the most up-to-date version of this data sheet, please register at our Worldwide Web site at:
http://www.microchip.com
You can determine the version of a data sheet by examining its literature number found on the bottom outside corner of any page.
The last character of the literature number is the version number, (e.g., DS30000A is version A of document DS30000).
Errata
An errata sheet, describing minor operational differences from the data sheet and recommended workarounds, may exist for current
devices. As device/documentation issues become known to us, we will publish an errata sheet. The errata will specify the revision
of silicon and revision of document to which it applies.
To determine if an errata sheet exists for a particular device, please check with one of the following:
• Microchip’s Worldwide Web site; http://www.microchip.com
• Your local Microchip sales office (see last page)
When contacting a sales office, please specify which device, revision of silicon and data sheet (include literature number) you are
using.
Customer Notification System
Register on our web site at www.microchip.com to receive the most current information on all of our products.
DS41391D-page 8 2011 Microchip Technology Inc.

1.0 DEVICE OVERVIEW
The PIC16(L)F1826/27 are described within this data
sheet. They are available in 18/20/28-pin packages.
Figure 1-1 shows a block diagram of the
PIC16(L)F1826/27 devices. Table 1-2 shows the pinout
descriptions.
Reference Ta bl e 1 -1 for peripherals available per
device.
TABLE 1-1: DEVICE PERIPHERAL
SUMMARY
Peripheral
PIC16(L)F1826/27
PIC16F/LF1826
ADC ●●
Capacitive Sensing Module ●●
Digital-to-Analog Converter (DAC) ●●
Digital Signal Modulator (DSM) ●●
EUSART ●●
Fixed Voltage Reference (FVR) ●●
Reference Clock Module ●●
SR Latch ●●
Capture/Compare/PWM Modules
ECCP1 ●●
ECCP2 ●
CCP3 ●
CCP4 ●
Comparators
C1 ●●
C2 ●●
Master Synchronous Serial Ports
MSSP1 ●●
MSSP2 ●
Timers
Timer0 ●●
Timer1 ●●
Timer2 ●●
Timer4 ●
Timer6 ●
PIC16(L)F1827
2011 Microchip Technology Inc. DS41391D-page 9
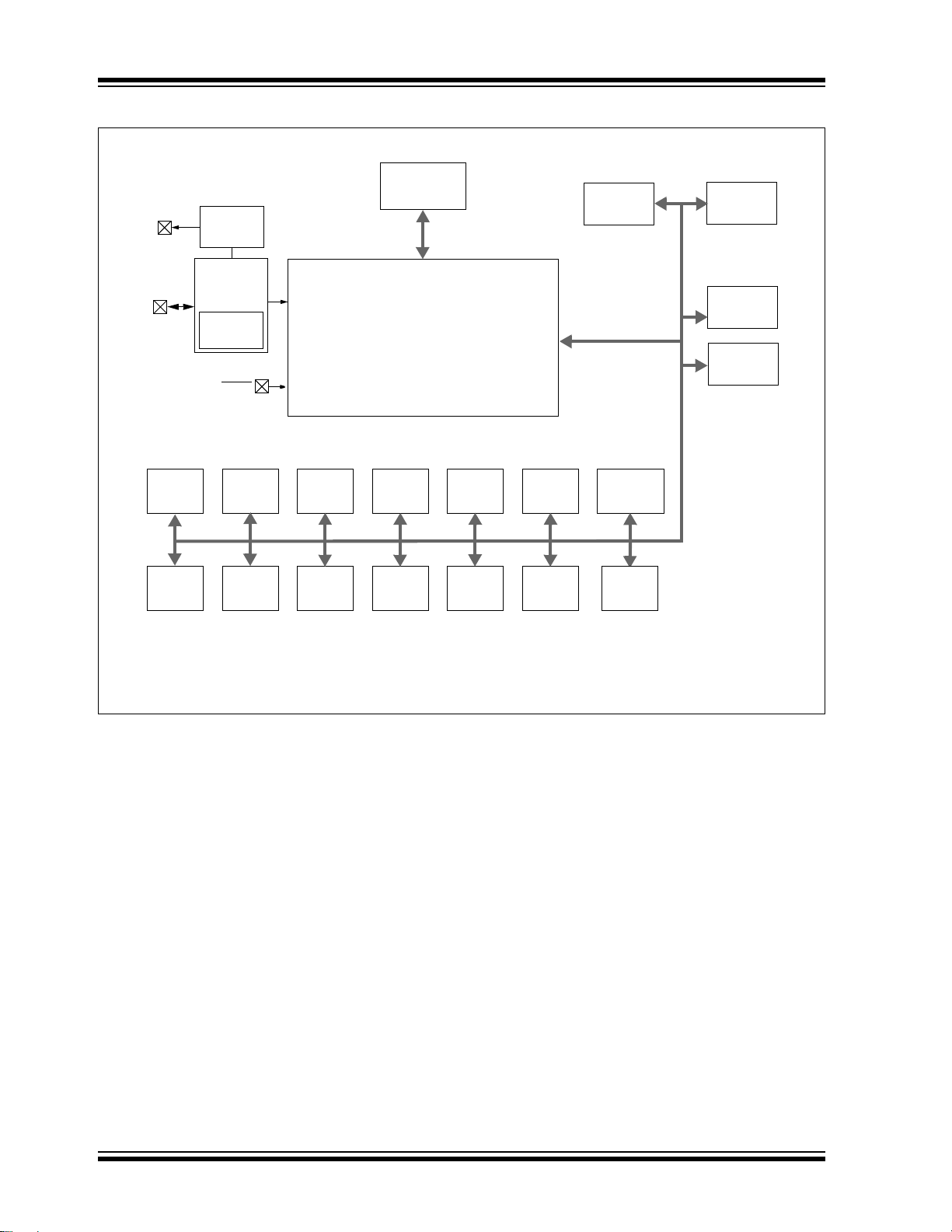
PIC16(L)F1826/27
PORTA
EUSART
Comparators
MSSPx
Timer2-
Timer1Timer0
ECCPx
ADC
10-Bit
CCPx
PORTB
SR
Latch
Note 1: See applicable chapters for more information on peripherals.
2: See Ta bl e 1 -1 for peripherals available on specific devices.
CPU
Program
Flash Memory
EEPROM
RAM
OSC1/CLKIN
OSC2/CLKOUT
Timing
Generation
INTRC
Oscillator
MCLR
(Figure 2-1)
Modulator
CapSense
Clock
CLKR
Reference
Type s
DAC
FVR
FIGURE 1-1: PIC16(L)F1826/27 BLOCK DIAGRAM
DS41391D-page 10 2011 Microchip Technology Inc.
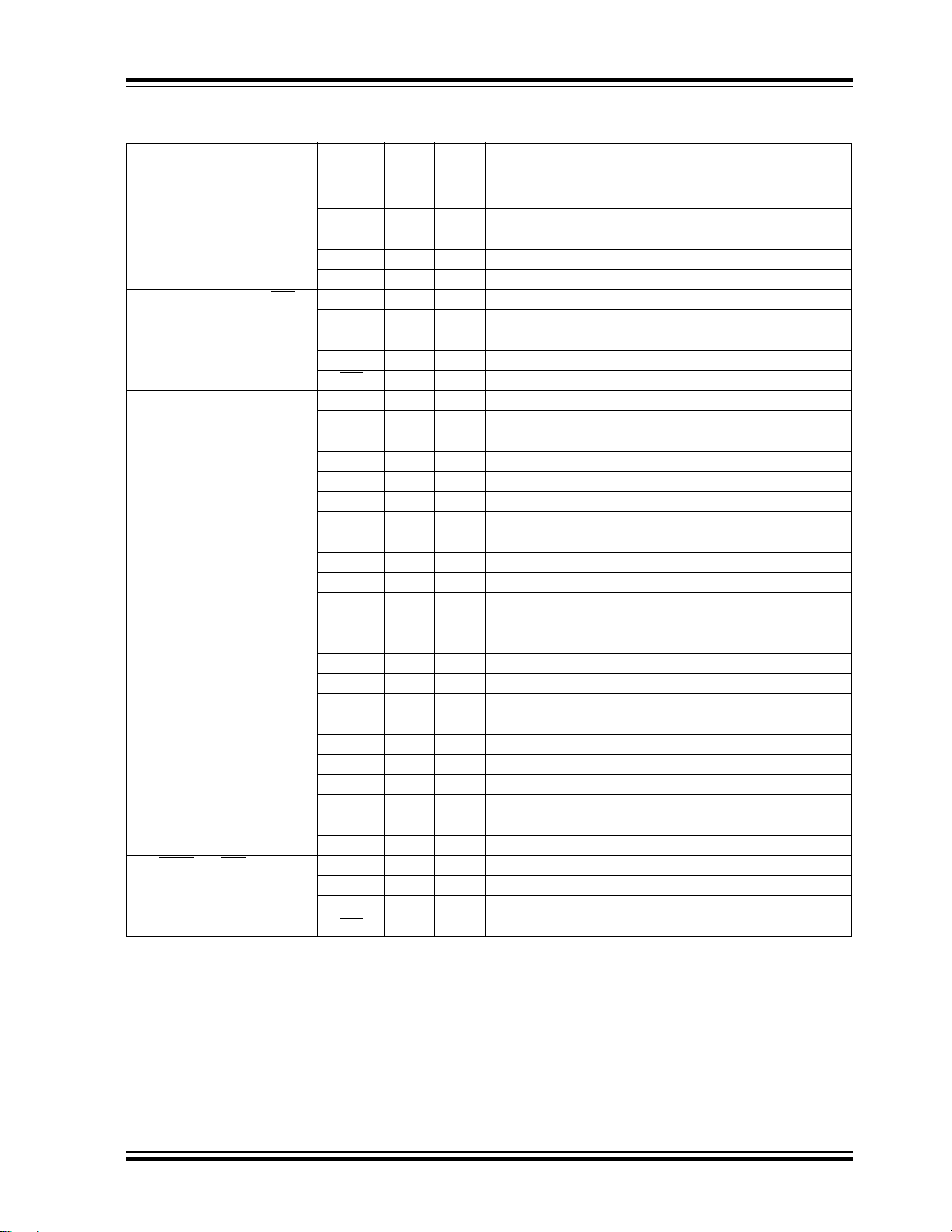
T ABLE 1-2: PIC16(L)F1826/27 PINOUT DESCRIPTION
Input
Name Function
Type
Output
Type
PIC16(L)F1826/27
Description
RA0/AN0/CPS0/C12IN0-/
(2)
SDO2
RA0 TTL CMOS General purpose I/O.
AN0 AN — A/D Channel 0 input.
CPS0 AN — Capacitive sensing input 0.
C12IN0- AN — Comparator C1 or C2 negative input.
SDO2 — CMOS SPI data output.
(2)
RA1/AN1/CPS1/C12IN1-/SS2
RA1 TTL CMOS General purpose I/O.
AN1 AN — A/D Channel 1 input.
CPS1 AN — Capacitive sensing input 1.
C12IN1- AN — Comparator C1 or C2 negative input.
ST — Slave Select input 2.
RA2/AN2/CPS2/C12IN2-/
C12IN+/V
REF-/DACOUT
SS2
RA2 TTL CMOS General purpose I/O.
AN2 AN — A/D Channel 2 input.
CPS2 AN — Capacitive sensing input 2.
C12IN2- AN — Comparator C1 or C2 negative input.
C12IN+ AN — Comparator C1 or C2 positive input.
REF- AN — A/D Negative Voltage Reference input.
V
DACOUT — AN Voltage Reference output.
RA3/AN3/CPS3/C12IN3-/C1IN+/
REF+/C1OUT/CCP3
V
(2)
/SRQ
RA3 TTL CMOS General purpose I/O.
AN3 AN — A/D Channel 3 input.
CPS3 AN — Capacitive sensing input 3.
C12IN3- AN — Comparator C1 or C2 negative input.
C1IN+ AN — Comparator C1 positive input.
REF+ AN — A/D Voltage Reference input.
V
C1OUT — CMOS Comparator C1 output.
CCP3 ST CMOS Capture/Compare/PWM3.
SRQ — CMOS SR latch non-inverting output.
RA4/AN4/CPS4/C2OUT/T0CKI/
(2)
/SRNQ
CCP4
RA4 TTL CMOS General purpose I/O.
AN4 AN — A/D Channel 4 input.
CPS4 AN — Capacitive sensing input 4.
C2OUT — CMOS Comparator C2 output.
T0CKI ST — Timer0 clock input.
CCP4 ST CMOS Capture/Compare/PWM4.
SRNQ — CMOS SR latch inverting output.
RA5/MCLR
/VPP/SS1
Legend: AN = Analog input or output CMOS= CMOS compatible input or output OD = Open Drain
TTL = TTL compatible input ST = Schmitt Trigger input with CMOS levels I
(1,2)
RA5 TTL CMOS General purpose I/O.
MCLR
V
PP HV — Programming voltage.
SS1
ST — Master Clear with internal pull-up.
ST — Slave Select input 1.
2
C™ = Schmitt Trigger input with I2C
HV = High Voltage XTAL = Crystal levels
Note 1: Pin functions can be moved using the APFCON0 or APFCON1 register.
2: Functions are only available on the PIC16(L)F1827.
3: Default function location.
2011 Microchip Technology Inc. DS41391D-page 11
PIC16(L)F1826/27
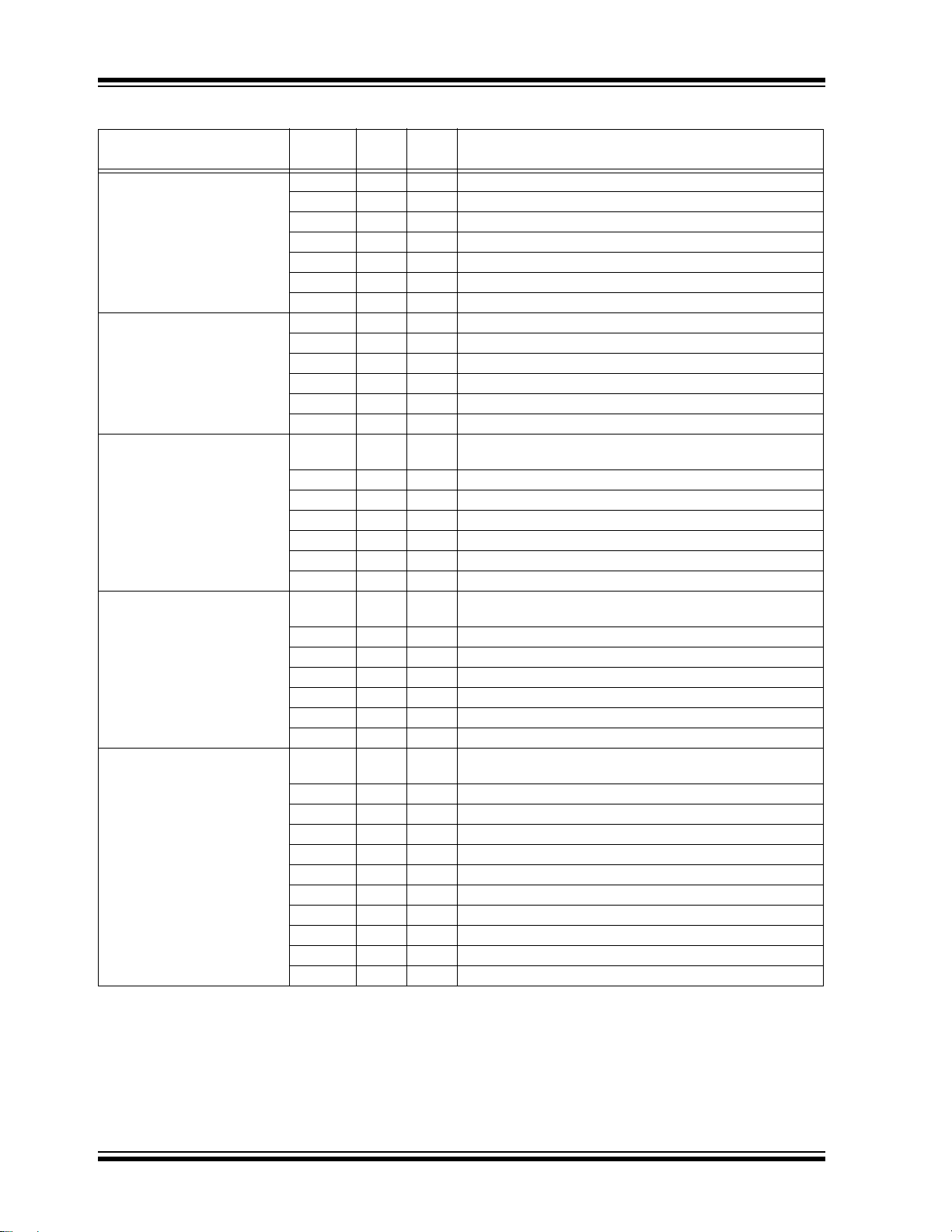
TABLE 1-2: PIC16(L)F1826/27 PINOUT DESCRIPTION (CONTINUED)
Input
Name Function
RA6/OSC2/CLKOUT/CLKR/
(1)
P1D
/P2B
(1,2)
/SDO1
(1)
RA6 TTL CMOS General purpose I/O.
OSC2 — XTAL Crystal/Resonator (LP, XT, HS modes).
CLKOUT — CMOS F
CLKR — CMOS Clock Reference Output.
P1D — CMOS PWM output.
P2B — CMOS PWM output.
SDO1 — CMOS SPI data output 1.
RA7/OSC1/CLKIN/P1C
CCP2
(1,2)
/P2A
(1,2)
/
RA7 TTL CMOS General purpose I/O.
OSC1 XTAL — Crystal/Resonator (LP, XT, HS modes).
(1)
CLKIN CMOS — External clock input (EC mode).
P1C — CMOS PWM output.
CCP2 ST CMOS Capture/Compare/PWM2.
P2A — CMOS PWM output.
RB0/T1G/CCP1
/INT/
RB0 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
(1)
(1)
/P1A
SRI/FLT0
T1G ST — Timer1 Gate input.
CCP1 ST CMOS Capture/Compare/PWM1.
P1A — CMOS PWM output.
INT ST — External interrupt.
SRI ST — SR latch input.
FLT0 ST — ECCP Auto-Shutdown Fault input.
RB1/AN11/CPS11/RX
(1,3)
DT
/SDA1/SDI1
/
RB1 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
(1,3)
AN11 AN — A/D Channel 11 input.
CPS11 AN — Capacitive sensing input 11.
RX ST — USART asynchronous input.
DT ST CMOS USART synchronous data.
SDA1 I
SDI1 CMOS — SPI data input 1.
RB2/AN10/CPS10/MDMIN/
(1,3)
(1,3)
(1)
TX
SDA2
/CK
(2)
/SDI2
/RX
(2)
/DT
/SDO1
(1)
(1,3)
/
RB2 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
AN10 AN — A/D Channel 10 input.
CPS10 AN — Capacitive sensing input 10.
MDMIN — CMOS Modulator source input.
TX — CMOS USART asynchronous transmit.
CK ST CMOS USART synchronous clock.
RX ST — USART asynchronous input.
DT ST CMOS USART synchronous data.
SDA2 I
SDI2 ST — SPI data input 2.
SDO1 — CMOS SPI data output 1.
Legend: AN = Analog input or output CMOS= CMOS compatible input or output OD = Open Drain
TTL = TTL compatible input ST = Schmitt Trigger input with CMOS levels I
HV = High Voltage XTAL = Crystal levels
Note 1: Pin functions can be moved using the APFCON0 or APFCON1 register.
2: Functions are only available on the PIC16(L)F1827.
3: Default function location.
Output
Type
Type
OSC/4 output.
Individually enabled pull-up.
Individually enabled pull-up.
2
C™ OD I2C™ data input/output 1.
Individually enabled pull-up.
2
C™ OD I2C™ data input/output 2.
Description
2
C™ = Schmitt Trigger input with I2C
DS41391D-page 12 2011 Microchip Technology Inc.
PIC16(L)F1826/27
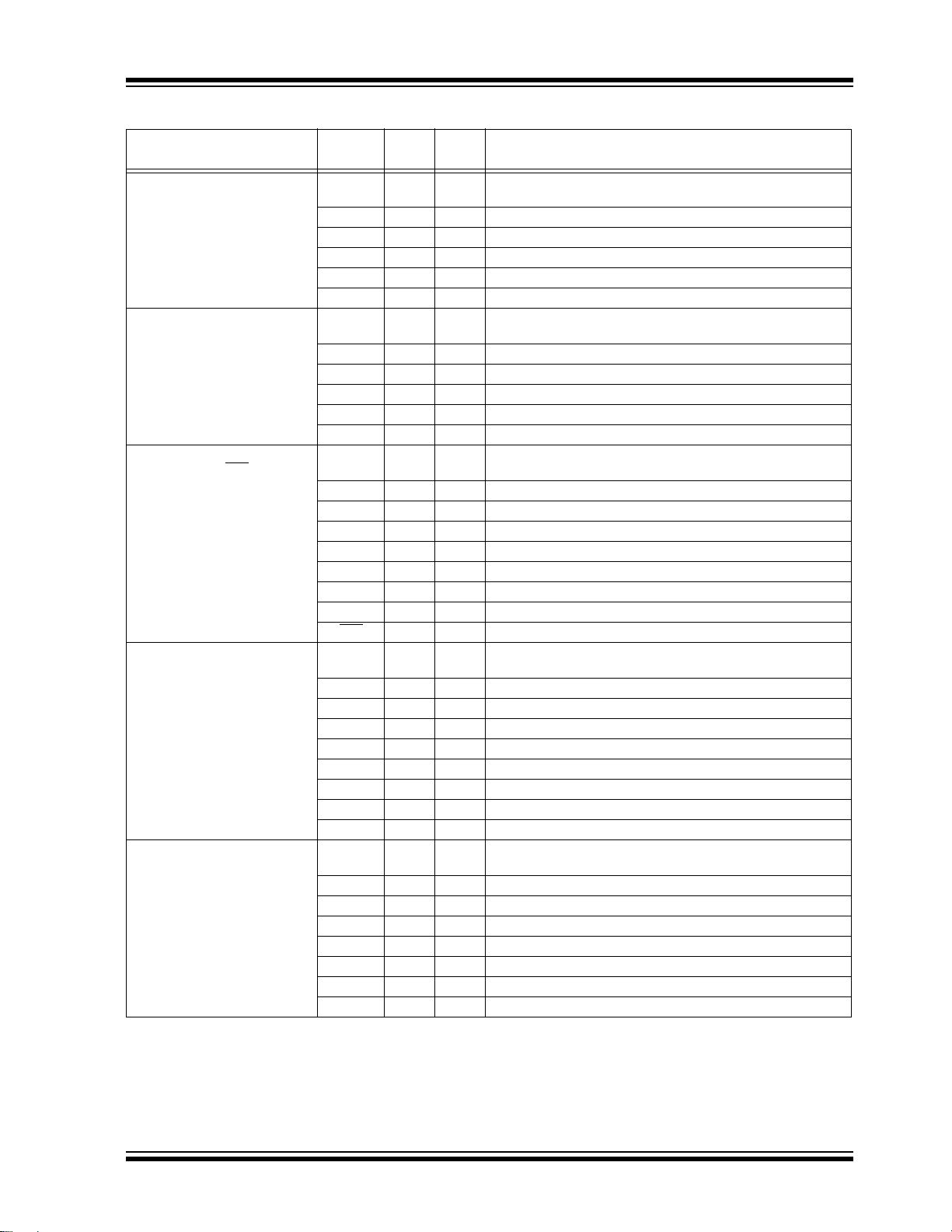
TABLE 1-2: PIC16(L)F1826/27 PINOUT DESCRIPTION (CONTINUED)
Input
Name Function
RB3/AN9/CPS9/MDOUT/
CCP1
(1,3)
/P1A
(1,3)
RB3 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
AN9 AN — A/D Channel 9 input.
CPS9 AN — Capacitive sensing input 9.
MDOUT — CMOS Modulator output.
CCP1 ST CMOS Capture/Compare/PWM1.
P1A — CMOS PWM output.
RB4/AN8/CPS8/SCL1/SCK1/
RB4 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
MDCIN2
AN8 AN — A/D Channel 8 input.
CPS8 AN — Capacitive sensing input 8.
SCL1 I
SCK1 ST CMOS SPI clock 1.
MDCIN2 ST — Modulator Carrier Input 2.
(1)
(1)
/CK
/
RB5/AN7/CPS7/P1B/TX
SCL2
(2)
/SCK2
(2)
/SS1
(1,3)
RB5 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
AN7 AN — A/D Channel 7 input.
CPS7 AN — Capacitive sensing input 7.
P1B — CMOS PWM output.
TX — CMOS USART asynchronous transmit.
CK ST CMOS USART synchronous clock.
SCL2 I
SCK2 ST CMOS SPI clock 2.
SS1
RB6/AN5/CPS5/T1CKI/T1OSI/
P1C
(1,3)
/CCP2
(1,2,3)
/P2A
(1,2,3)
ICSPCLK
RB6 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
/
AN5 AN — A/D Channel 5 input.
CPS5 AN — Capacitive sensing input 5.
T1CKI ST — Timer1 clock input.
T1OSO XTAL XTAL Timer1 oscillator connection.
P1C — CMOS PWM output.
CCP2 ST CMOS Capture/Compare/PWM2.
P2A — CMOS PWM output.
ICSPCLK ST — Serial Programming Clock.
RB7/AN6/CPS6/T1OSO/
P1D
(1,3)
/P2B
(1,2,3)
/MDCIN1/
ICSPDAT
RB7 TTL CMOS General purpose I/O. Individually controlled interrupt-on-change.
AN6 AN — A/D Channel 6 input.
CPS6 AN — Capacitive sensing input 6.
T1OSO XTAL XTAL Timer1 oscillator connection.
P1D — CMOS PWM output.
P2B — CMOS PWM output.
MDCIN1 ST — Modulator Carrier Input 1.
ICSPDAT ST CMOS ICSP™ Data I/O.
Legend: AN = Analog input or output CMOS= CMOS compatible input or output OD = Open Drain
TTL = TTL compatible input ST = Schmitt Trigger input with CMOS levels I
HV = High Voltage XTAL = Crystal levels
Note 1: Pin functions can be moved using the APFCON0 or APFCON1 register.
2: Functions are only available on the PIC16(L)F1827.
3: Default function location.
Output
Type
Type
Individually enabled pull-up.
Individually enabled pull-up.
2
C™ OD I2C™ clock 1.
Individually enabled pull-up.
2
C™ OD I2C™ clock 2.
ST — Slave Select input 1.
Individually enabled pull-up.
Individually enabled pull-up.
Description
2
C™ = Schmitt Trigger input with I2C
2011 Microchip Technology Inc. DS41391D-page 13

PIC16(L)F1826/27
TABLE 1-2: PIC16(L)F1826/27 PINOUT DESCRIPTION (CONTINUED)
Input
Name Function
V
DD VDD Power — Positive supply.
V
SS VSS Power — Ground reference.
Legend: AN = Analog input or output CMOS= CMOS compatible input or output OD = Open Drain
Note 1: Pin functions can be moved using the APFCON0 or APFCON1 register.
TTL = TTL compatible input ST = Schmitt Trigger input with CMOS levels I
HV = High Voltage XTAL = Crystal levels
2: Functions are only available on the PIC16(L)F1827.
3: Default function location.
Type
Output
Type
Description
2
C™ = Schmitt Trigger input with I2C
DS41391D-page 14 2011 Microchip Technology Inc.

2.0 ENHANCED MID-RANGE CPU
This family of devices contain an enhanced mid-range
8-bit CPU core. The CPU has 49 instructions. Interrupt
capability includes automatic context saving. The
hardware stack is 16 levels deep and has Overflow and
Underflow Reset capability. Direct, Indirect, and
Relative addressing modes are available. Two File
Select Registers (FSRs) provide the ability to read
program and data memory.
• Automatic Interrupt Context Saving
• 16-level Stack with Overflow and Underflow
• File Select Registers
• Instruction Set
2.1 Automatic Interrupt Context Saving
During interrupts, certain registers are automatically
saved in shadow registers and restored when returning
from the interrupt. This saves stack space and user
code. See Section 8.5 “Automatic Context Saving”,
for more information.
PIC16(L)F1826/27
2.2 16-level Stack with Overflow and Underflow
These devices have an external stack memory 15 bits
wide and 16 words deep. A Stack Overflow or Underflow will set the appropriate bit (STKOVF or STKUNF)
in the PCON register, and if enabled will cause a software Reset. See section Section 3.4 “Stack” for more
details.
2.3 File Select Registers
There are two 16-bit File Select Registers (FSR). FSRs
can access all file registers and program memory,
which allows one Data Pointer for all memory. When an
FSR points to program memory, there is one additional
instruction cycle in instructions using INDF to allow the
data to be fetched. General purpose memory can now
also be addressed linearly, providing the ability to
access contiguous data larger than 80 bytes. There are
also new instructions to support the FSRs. See
Section 3.4 “Stack”for more details.
2.4 Instruction Set
There are 49 instructions for the enhanced mid-range
CPU to support the features of the CPU. See
Section 29.0 “Instruction Set Summary” for more
details.
2011 Microchip Technology Inc. DS41391D-page 15

PIC16(L)F1826/27
Data Bus
8
14
Program
Bus
Instruction reg
Program Counter
8 Level Stack
(13-bit)
Direct Addr
7
12
Addr MUX
FSR reg
STATUS reg
MUX
ALU
Power-up
Timer
Oscillator
Start-up Timer
Power-on
Reset
Watchdog
Timer
Instruction
Decode &
Control
Timing
Generation
OSC1/CLKIN
OSC2/CLKOUT
V
DD
8
8
Brown-out
Reset
12
3
VSS
Internal
Oscillator
Block
Configuration
Data Bus
8
14
Program
Bus
Instruction reg
Program Counter
8 Level Stack
(13-bit)
Direct Addr
7
Addr MUX
FSR reg
STATUS reg
MUX
ALU
W reg
Instruction
Decode &
Control
Timing
Generation
V
DD
8
8
3
VSS
Internal
Oscillator
Block
Configuration
15
Data Bus
8
14
Program
Bus
Instruction Reg
Program Counter
16-Level Stack
(15-bit)
Direct Addr
7
RAM Addr
Addr MUX
Indirect
Addr
FSR0 Reg
STATUS Reg
MUX
ALU
Instruction
Decode and
Control
Timing
Generation
V
DD
8
8
3
VSS
Internal
Oscillator
Block
Configuration
Flash
Program
Memory
RAM
FSR regFSR reg
FSR1 Reg
15
15
MUX
15
Program Memory
Read (PMR)
12
FSR regFSR reg
BSR Reg
5
FIGURE 2-1: CORE BLOCK DIAGRAM
DS41391D-page 16 2011 Microchip Technology Inc.
PIC16(L)F1826/27
3.0 MEMORY ORGANIZATION
There are three types of memory in PIC16(L)F1826/27:
Data Memory, Program Memory and Data EEPROM
Memory
• Program Memory
• Data Memory
• Data EEPROM memory
(1)
.
- Core Registers
- Special Function Registers
- General Purpose RAM
- Common RAM
- Device Memory Maps
- Special Function Registers Summary
Note 1: The Data EEPROM Memory and the
method to access Flash memory through
the EECON registers is described in
Section 11.0 “Data EEPROM and Flash
Program Memory Control”.
(1)
The following features are associated with access and
control of program memory and data memory:
• PCL and PCLATH
•Stack
• Indirect Addressing
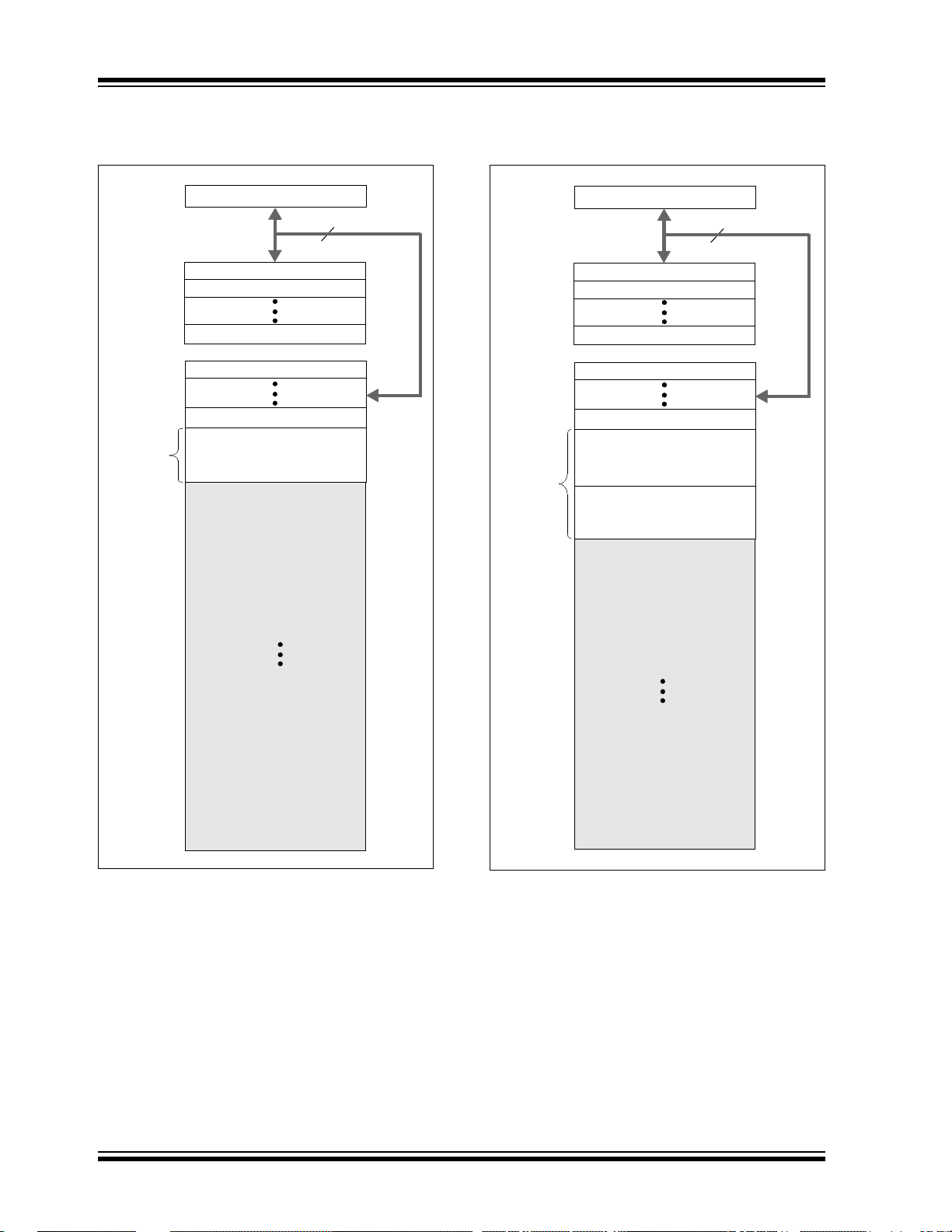
3.1 Program Memory Organization
The enhanced mid-range core has a 15-bit program
counter capable of addressing a 32K x 14 program
memory space. Table 3-1 shows the memory sizes
implemented for the PIC16(L)F1826/27 family.
Accessing a location above these boundaries will cause
a wrap-around within the implemented memory space.
The Reset vector is at 0000h and the interrupt vector is
at 0004h (see Figures 3-1 and 3-2).
TABLE 3-1: DEVICE SIZES AND ADDRESSES
Device Program Memory Space (Words) Last Program Memory Address
PIC16(L)F1826 2,048 07FFh
PIC16(L)F1827 4,096 0FFFh
2011 Microchip Technology Inc. DS41391D-page 17
PIC16(L)F1826/27
PC<14:0>
15
0000h
0004h
Stack Level 0
Stack Level 15
Reset Vector
Interrupt Vector
Stack Level 1
0005h
On-chip
Program
Memory
Page 0
07FFh
Wraps to Page 0
Wraps to Page 0
Wraps to Page 0
0800h
CALL, CALLW
RETURN, RETLW
Interrupt, RETFIE
Rollover to Page 0
Rollover to Page 0
7FFFh
PC<14:0>
15
0000h
0004h
Stack Level 0
Stack Level 15
Reset Vector
Interrupt Vector
CALL, CALLW
RETURN, RETLW
Stack Level 1
0005h
On-chip
Program
Memory
Page 0
07FFh
Rollover to Page 0
0800h
0FFFh
1000h
7FFFh
Page 1
Rollover to Page 1
Interrupt, RETFIE
FIGURE 3-1: PROGRAM MEMORY MAP
AND STACK FOR
PIC16(L)F1826
FIGURE 3-2: PROGRAM MEMORY MAP
AND STACK FOR
PIC16(L)F1827
DS41391D-page 18 2011 Microchip Technology Inc.

3.1.1 READING PROGRAM MEMORY AS
constants
BRW ;Add Index in W to
;program counter to
;select data
RETLW DATA0 ;Index0 data
RETLW DATA1 ;Index1 data
RETLW DATA2
RETLW DATA3
my_function
;… LOTS OF CODE…
MOVLW DATA_INDEX
call constants
;… THE CONSTANT IS IN W
DATA
There are two methods of accessing constants in program memory. The first method is to use tables of
RETLW instructions. The second method is to set an
FSR to point to the program memory.
3.1.1.1 RETLW Instruction
The RETLW instruction can be used to provide access
to tables of constants. The recommended way to create
such a table is shown in Example 3-1.
EXAMPLE 3-1: RETLW INSTRUCTION
PIC16(L)F1826/27
The BRW instruction makes this type of table very simple to implement. If your code must remain portable
with previous generations of microcontrollers, then the
BRW instruction is not available so the older table read
method must be used.
2011 Microchip Technology Inc. DS41391D-page 19

PIC16(L)F1826/27
constants
RETLW DATA0 ;Index0 data
RETLW DATA1 ;Index1 data
RETLW DATA2
RETLW DATA3
my_function
;… LOTS OF CODE…
MOVLW LOW constants
MOVWF FSR1L
MOVLW HIGH constants
MOVWF FSR1H
MOVIW 0[FSR1]
;THE PROGRAM MEMORY IS IN W
Addresses BANKx
x00h or x80h INDF0
x01h or x81h INDF1
x02h or x82h PCL
x03h or x83h STATUS
x04h or x84h FSR0L
x05h or x85h FSR0H
x06h or x86h FSR1L
x07h or x87h FSR1H
x08h or x88h BSR
x09h or x89h WREG
x0Ah or x8Ah PCLATH
x0Bh or x8Bh INTCON
3.1.1.2 Indirect Read with FSR
The program memory can be accessed as data by setting bit 7 of the FSRxH register and reading the matching INDFx register. The MOVIW instruction will place the
lower 8 bits of the addressed word in the W register.
Writes to the program memory cannot be performed via
the INDF registers. Instructions that access the program memory via the FSR require one extra instruction
cycle to complete. Example 3-2 demonstrates accessing the program memory via an FSR.
The HIGH directive will set bit<7> if a label points to a
location in program memory.
EXAMPLE 3-2: ACCESSING PROGRAM
MEMORY VIA FSR
3.2.1 CORE REGISTERS
The core registers contain the registers that directly
affect the basic operation. The core registers occupy
the first 12 addresses of every data memory bank
(addresses x00h/x08h through x0Bh/x8Bh). These
registers are listed below in Ta bl e 3 -2. For for detailed
information, see Tab le 3 -5 .
TABLE 3-2: CORE REGISTERS
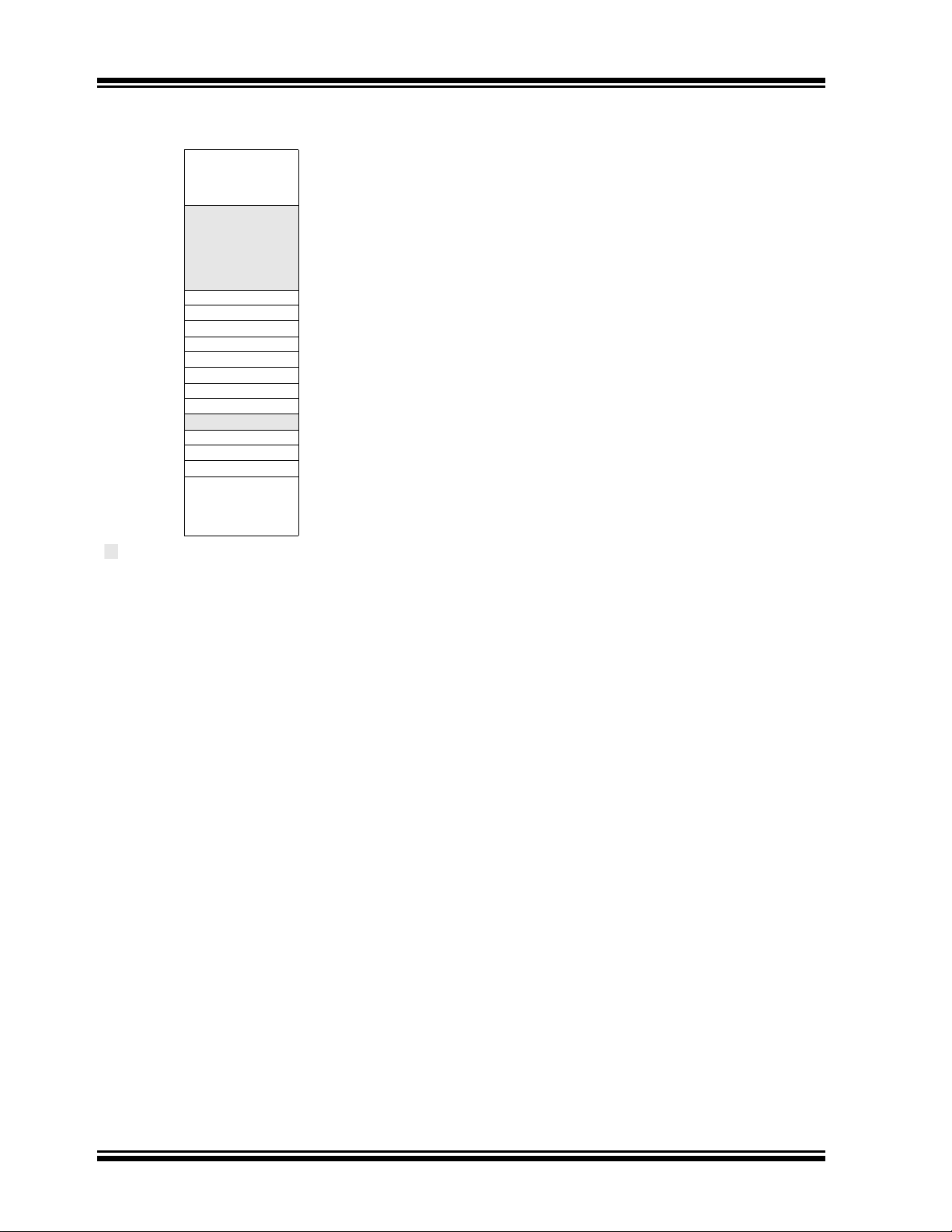
3.2 Data Memory Organization
The data memory is partitioned in 32 memory banks
with 128 bytes in a bank. Each bank consists of
(Figure 3-3):
• 12 core registers
• 20 Special Function Registers (SFR)
• Up to 80 bytes of General Purpose RAM (GPR)
• 16 bytes of common RAM
The active bank is selected by writing the bank number
into the Bank Select Register (BSR). Unimplemented
memory will read as ‘0’. All data memory can be
accessed either directly (via instructions that use the
file registers) or indirectly via the two File Select
Registers (FSR). See Section 3.5 “Indirect
Addressing” for more information.
Data Memory uses a 12-bit address. The upper 7-bit of
the address define the Bank address and the lower
5-bits select the registers/RAM in that bank.
DS41391D-page 20 2011 Microchip Technology Inc.

PIC16(L)F1826/27
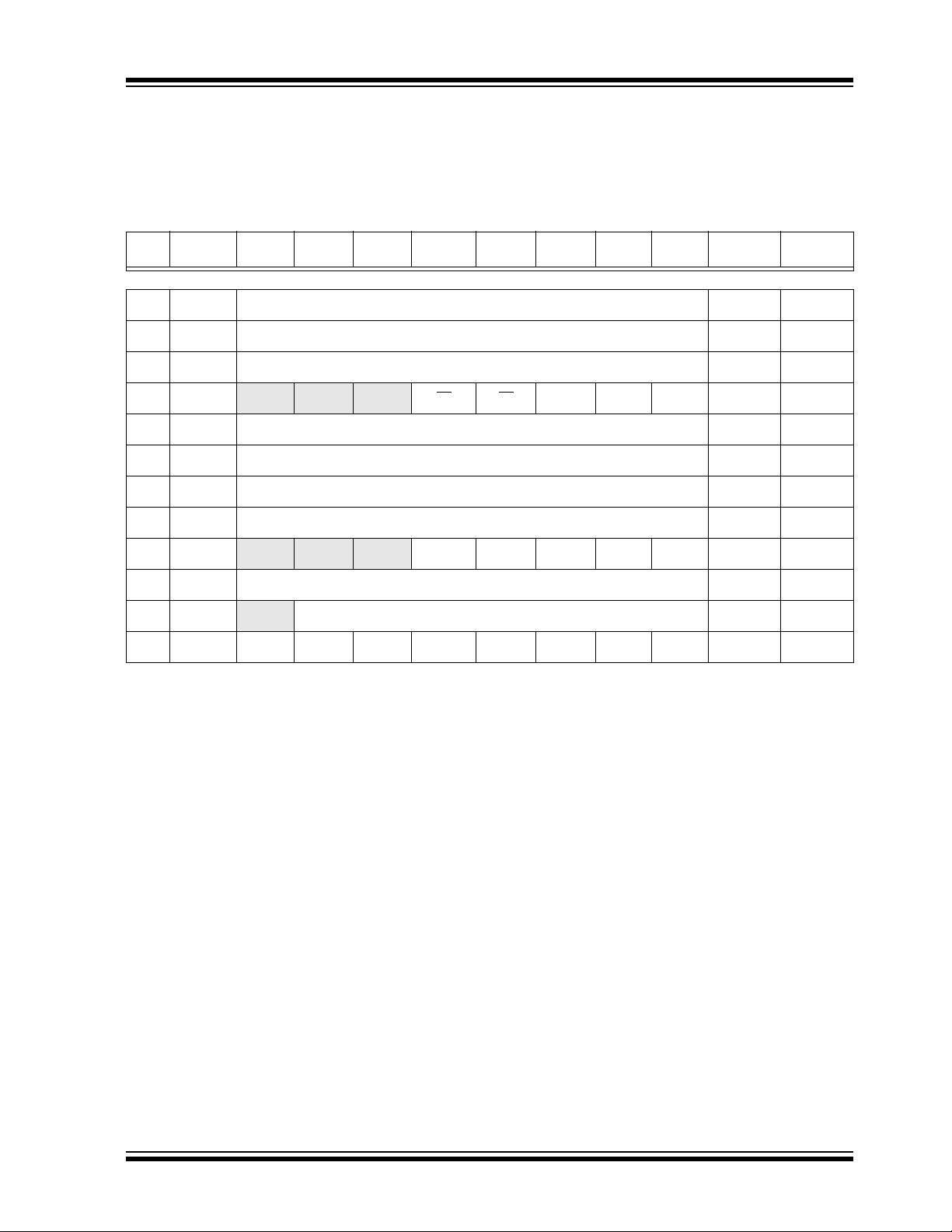
3.2.1.1 STATUS Register
The STATUS register, shown in Register 3-1, contains:
• the arithmetic status of the ALU
• the Reset status
The STATUS register can be the destination for any
instruction, like any other register. If the STATUS
register is the destination for an instruction that affects
the Z, DC or C bits, then the write to these three bits is
disabled. These bits are set or cleared according to the
device logic. Furthermore, the TO
writable. Therefore, the result of an instruction with the
STATUS register as destination may be different than
intended.
and PD bits are not
For example, CLRF STATUS will clear the upper three
bits and set the Z bit. This leaves the STATUS register
as ‘000u u1uu’ (where u = unchanged).
It is recommended, therefore, that only BCF, BSF,
SWAPF and MOVWF instructions are used to alter the
STATUS register, because these instructions do not
affect any Status bits. For other instructions not
affecting any Status bits (Refer to Section 29.0
“Instruction Set Summary”).
Note 1: The C and DC bits operate as Borrow
and Digit Borrow out bits, respectively, in
subtraction.
REGISTER 3-1: STATUS: STATUS REGISTER
U-0 U-0 U-0 R-1/q R-1/q R/W-0/u R/W-0/u R/W-0/u
— — —
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared q = Value depends on condition
TO
PD ZDC
(1)
(1)
C
bit 7-5 Unimplemented: Read as ‘0’
bit 4 TO
bit 3 PD
bit 2 Z: Zero bit
bit 1 DC: Digit Carry/Digit Borrow
bit 0 C: Carry/Borrow
Note 1: For Borrow, the polarity is reversed. A subtraction is executed by adding the two’s complement of the
second operand. For rotate (RRF, RLF) instructions, this bit is loaded with either the high-order or low-order
bit of the source register.
: Time-out bit
1 = After power-up, CLRWDT instruction or SLEEP instruction
0 = A WDT time-out occurred
: Power-down bit
1 = After power-up or by the CLRWDT instruction
0 = By execution of the SLEEP instruction
1 = The result of an arithmetic or logic operation is zero
0 = The result of an arithmetic or logic operation is not zero
bit (ADDWF, ADDLW, SUBLW, SUBWF instructions)
1 = A carry-out from the 4th low-order bit of the result occurred
0 = No carry-out from the 4th low-order bit of the result
(1)
bit
(ADDWF, ADDLW, SUBLW, SUBWF instructions)
1 = A carry-out from the Most Significant bit of the result occurred
0 = No carry-out from the Most Significant bit of the result occurred
(1)
(1)
2011 Microchip Technology Inc. DS41391D-page 21

PIC16(L)F1826/27
0Bh
0Ch
1Fh
20h
6Fh
70h
7Fh
00h
Common RAM
(16 bytes)
General Purpose RAM
(80 bytes maximum)
Core Registers
(12 bytes)
Special Function Registers
(20 bytes maximum)
Memory Region
7-bit Bank Offset
3.2.2 SPECIAL FUNCTION REGISTER
The Special Function Registers are registers used by
the application to control the desired operation of
peripheral functions in the device. The Special Function
Registers occupy the 20 bytes after the core registers of
every data memory bank (addresses x0Ch/x8Ch
through x1Fh/x9Fh). The registers associated with the
operation of the peripherals are described in the
appropriate peripheral chapter of this data sheet.
3.2.3 GENERAL PURPOSE RAM
There are up to 80 bytes of GPR in each data memory
bank. The Special Function Registers occupy the 20
bytes after the core registers of every data memory
bank (addresses x0Ch/x8Ch through x1Fh/x9Fh).
3.2.3.1 Linear Access to GPR
The general purpose RAM can be accessed in a
non-banked method via the FSRs. This can simplify
access to large memory structures. See Section 3 .5.2
“Linear Data Memory” for more information.
3.2.4 COMMON RAM
There are 16 bytes of common RAM accessible from all
banks.
FIGURE 3-3: BANKED MEMORY
PARTITIONING
DS41391D-page 22 2011 Microchip Technology Inc.
3.2.5 DEVICE MEMORY MAPS
The memory maps for the device family are as shown
in Table 3-3 and Tab le 3 -4 .

2011 Microchip Technology Inc. DS41391D-page 23
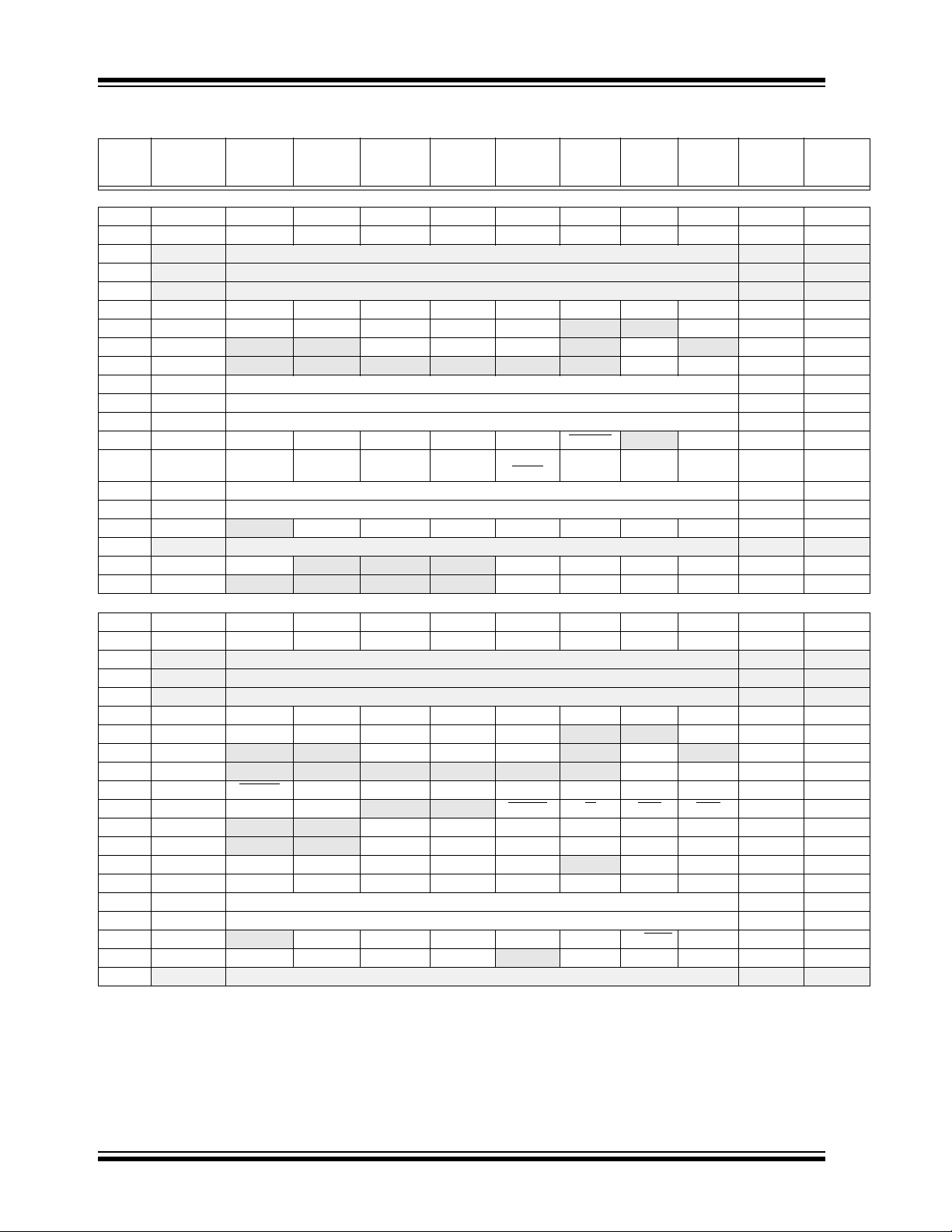
TABLE 3-3: PIC16(L)F1826/27 MEMORY MAP
BANK 0 BANK 1 BANK 2 BANK 3 BANK 4 BANK 5 BANK 6 BANK 7
000h
Core Registers
(Ta bl e 3 - 2)
00Bh 08Bh 10Bh 18Bh 20Bh 28Bh 30Bh 38Bh
00Ch PORTA 08Ch TRISA 10Ch LATA 18Ch ANSELA 20Ch WPUA 28Ch
00Dh PORTB 08Dh TRISB 10Dh LATB 18Dh ANSELB 20Dh WPUB 28Dh
00Eh
00Fh
010h
—08Eh—10Eh—18Eh—20Eh—28Eh—30Eh—38Eh—
—08Fh—10Fh—18Fh—20Fh—28Fh—30Fh—38Fh—
—090h—110h—190h—210h—290h— 310h — 390h —
011h PIR1 091h PIE1 111h CM1CON0 191h EEADRL 211h SSP1BUF 291h CCPR1L 311h CCPR3L
012h PIR2 092h PIE2 112h CM1CON1 192h EEADRH 212h SSP1ADD 292h CCPR1H 312h CCPR3H
013h PIR3
014h PIR4
015h TMR0 095h OPTION 115h CMOUT 195h EECON1 215h SSP1CON 295h CCP1AS 315h
016h
017h
018h
019h
01Ah
01Bh
01Ch
01Dh
TMR1L 096h PCON 116h BORCON 196h EECON2 216h SSP1CON2 296h PSTR1CON 316h
TMR1H 097h WDTCON 117h FVRCON 197h
T1CON 098h OSCTUNE 118h DACCON0 198h
T1GCON 099h OSCCON 119h DACCON1 199h RCREG 219h
TMR2 09Ah OSCSTAT 11Ah SRCON0 19Ah TXREG 21Ah
PR2 09Bh ADRESL 11Bh SRCON1 19Bh SPBRGL 21Bh
T2CON 09Ch ADRESH 11Ch
— 09Dh ADCON0 11Dh APFCON0 19Dh RCSTA 21Dh
01Eh CPSCON0 09Eh ADCON1 11Eh APFCON1 19Eh TXSTA 21Eh SSP2CON2
01Fh CPSCON1 09Fh
020h
General
Purpose
06Fh 0EFh 16Fh 1EFh 26Fh 2EFh
070h 0F0h
Register
96 Bytes
07Fh 0FFh 17Fh 1FFh 27Fh 2FFh 37Fh 3FFh
Legend: = Unimplemented data memory locations, read as ‘0’
Note 1: Available only on PIC16(L)F1827.
(1)
(1)
080h
Core Registers
(Ta bl e 3 - 2)
093h PIE3
094h PIE4
0A0h
General
Purpose
Register
80 Bytes
Accesses
70h – 7Fh
100h
Core Registers
(Table 3-2)
(1)
113h CM2CON0 193h EEDATL 213h SSP1MASK 293h CCP1CON 313h CCP3CON
(1)
114h CM2CON1 194h EEDATH 214h SSP1STAT 294h PWM1CON 314h — 394h IOCBP
180h
Core Registers
(Table 3-2)
200h
Core Registers
(Table 3-2)
— 217h SSP1CON3 297h — 317h — 397h —
—218h— 298h CCPR2L
SSP2BUF
SSP2ADD
SSP2MASK
— 19Ch SPBRGH 21Ch SSP2STAT
SSP2CON
—11Fh— 19Fh BAUDCON 21Fh SSP2CON3
120h
General
Purpose
Register
80 Bytes
1A0h
General
Purpose
Register
80 Bytes
220h General
(1)
Purpose
Register
48 Bytes
Unimplemented
Read as ‘0’
170h
Accesses
70h – 7Fh
1F0h
Accesses
70h – 7Fh
270h
Accesses
70h – 7Fh
280h
Core Registers
(Table 3-2)
300h
Core Registers
(Table 3-2)
— 30Ch — 38Ch —
— 30Dh — 38Dh —
(1)
(1)
(1)
— 395h IOCBN
— 396h IOCBF
(1)
318h CCPR4L
Read as ‘0’
(1)
319h CCPR4H
(1)
31Ah CCP4CON
(1)
31Bh —39Bh—
(1)
31Ch — 39Ch MDCON
(1)
31Dh
(1)
31Eh
320h
Unimplemented
(1)
299h CCPR2H
(1)
29Ah CCP2CON
(1)
29Bh PWM2CON
(1)
29Ch CCP2AS
(1)
29Dh PSTR2CON
(1)
29Eh CCPTMRS
(1)
29Fh —31Fh—39Fh
2A0h
(1)
Unimplemented
(1)
(1)
(1)
—
—
Read as ‘0’
36Fh 3EFh
2F0h
Accesses
70h – 7Fh
370h
Accesses
70h – 7Fh
380h
Core Registers
(Table 3-2)
391h —
392h —
393h —
398h —
399h —
39Ah CLKRCON
39Dh
39Eh
3A0h
MDSRC
MDCARL
MDCARH
Unimplemented
Read as ‘0’
3F0h
Accesses
70h – 7Fh
PIC16(L)F1826/27

DS41391D-page 24 2011 Microchip Technology Inc.
Legend: = Unimplemented data memory locations, read as ‘0’
BANK 8 BANK 9 BANK 10 BANK 11 BANK 12 BANK 13 BANK 14 BANK 15
400h
40Bh
Core Registers
(Ta bl e 3 -2 )
480h
48Bh
Core Registers
(Ta bl e 3 -2 )
500h
50Bh
Core Registers
(Ta bl e 3 -2 )
580h
58Bh
Core Registers
(Ta bl e 3 -2 )
600h
60Bh
Core Registers
(Ta bl e 3 -2 )
680h
68Bh
Core Registers
(Ta bl e 3 -2 )
700h
70Bh
Core Registers
(Ta bl e 3 -2 )
780h
78Bh
Core Registers
(Ta bl e 3 -2 )
40Ch
—
48Ch
—
50Ch
—
58Ch
—
60Ch
—
68Ch
—
70Ch
—
78Ch
—
40Dh
—
48Dh
—
50Dh
—
58Dh
—
60Dh
—
68Dh
—
70Dh
—
78Dh
—
40Eh
—
48Eh
—
50Eh
—
58Eh
—
60Eh
—
68Eh
—
70Eh
—
78Eh
—
40Fh
—
48Fh
—
50Fh
—
58Fh
—
60Fh
—
68Fh
—
70Fh
—
78Fh
—
410h
—
490h
—
510h
—
590h
—
610h
—
690h
—
710h
—
790h
—
411h
—
491h
—
511h
—
591h
—
611h
—
691h
—
711h
—
791h
—
412h
—
492h
—
512h
—
592h
—
612h
—
692h
—
712h
—
792h
—
413h
—
493h
—
513h
—
593h
—
613h
—
693h
—
713h
—
793h
—
414h
—
494h
—
514h
—
594h
—
614h
—
694h
—
714h
—
794h
—
415h
TMR4
(1)
495h
—
515h
—
595h
—
615h
—
695h
—
715h
—
795h
—
416h
PR4
(1)
496h
—
516h
—
596h
—
616h
—
696h
—
716h
—
796h
—
417h
T4CON
(1)
497h
—
517h
—
597h
—
617h
—
697h
—
717h
—
797h
—
418h
—
498h
—
518h
—
598h
—
618h
—
698h
—
718h
—
798h
—
419h
—
499h
—
519h
—
599h
—
619h
—
699h
—
719h
—
799h
—
41Ah
—
49Ah
—
51Ah
—
59Ah
—
61Ah
—
69Ah
—
71Ah
—
79Ah
—
41Bh
—
49Bh
—
51Bh
—
59Bh
—
61Bh
—
69Bh
—
71Bh
—
79Bh
—
41Ch
TMR6
(1)
49Ch
—
51Ch
—
59Ch
—
61Ch
—
69Ch
—
71Ch
—
79Ch
—
41Dh
PR6
(1)
49Dh
—
51Dh
—
59Dh
—
61Dh
—
69Dh
—
71Dh
—
79Dh
—
41Eh
T6CON
(1)
49Eh
—
51Eh
—
59Eh
—
61Eh
—
69Eh
—
71Eh
—
79Eh
—
41Fh
—
49Fh
—
51Fh
—
59Fh
—
61Fh
—
69Fh
—
71Fh
—
79Fh
—
420h
Unimplemented
Read as ‘0’
4A0h
Unimplemented
Read as ‘0’
520h
Unimplemented
Read as ‘0’
5A0h
Unimplemented
Read as ‘0’
620h
Unimplemented
Read as ‘0’
6A0h
Unimplemented
Read as ‘0’
720h
Unimplemented
Read as ‘0’
7A0h
Unimplemented
Read as ‘0’
46Fh 4EFh 56Fh 5EFh 66Fh 6EFh 76Fh 7EFh
470h
Accesses
70h – 7Fh
4F0h
Accesses
70h – 7Fh
570h
Accesses
70h – 7Fh
5F0h
Accesses
70h – 7Fh
670h
Accesses
70h – 7Fh
6F0h
Accesses
70h – 7Fh
770h
Accesses
70h – 7Fh
7F0h
Accesses
70h – 7Fh
47Fh
4FFh 57Fh
5FFh 67Fh 6FFh 77Fh 7FFh
TABLE 3-3: PIC16(L)F1826/27 MEMORY MAP (CONTINUED)
PIC16(L)F1826/27

2011 Microchip Technology Inc. DS41391D-page 25
BANK16 BANK17 BANK18 BANK19 BANK20 BANK21 BANK22 BANK23
800h
80Bh
Core Registers
(Ta bl e 3 -2 )
880h
88Bh
Core Registers
(Ta bl e 3 -2 )
900h
90Bh
Core Registers
(Ta bl e 3 -2 )
980h
98Bh
Core Registers
(Ta bl e 3 -2 )
A00h
A0Bh
Core Registers
(Ta bl e 3 -2 )
A80h
A8Bh
Core Registers
(Ta bl e 3 -2 )
B00h
B0Bh
Core Registers
(Ta bl e 3 -2 )
B80h
B8Bh
Core Registers
(Ta bl e 3 -2 )
80Ch
Unimplemented
Read as ‘0’
88Ch
Unimplemented
Read as ‘0’
90Ch
Unimplemented
Read as ‘0’
98Ch
Unimplemented
Read as ‘0’
A0Ch
Unimplemented
Read as ‘0’
A8Ch
Unimplemented
Read as ‘0’
B0Ch
Unimplemented
Read as ‘0’
B8Ch
Unimplemented
Read as ‘0’
86Fh 8EFh 96Fh
9EFh
A6Fh
AEFh
B6Fh
BEFh
870h
Common RAM
(Accesses
70h – 7Fh)
8F0h
Common RAM
(Accesses
70h – 7Fh)
970h
Common RAM
(Accesses
70h – 7Fh)
9F0h
Common RAM
(Accesses
70h – 7Fh)
A70h
Common RAM
(Accesses
70h – 7Fh)
AF0h
Common RAM
(Accesses
70h – 7Fh)
B70h
Common RAM
(Accesses
70h – 7Fh)
BF0h
Common RAM
(Accesses
70h – 7Fh)
87Fh 8FFh 97Fh 9FFh A7Fh AFFh B7Fh BFFh
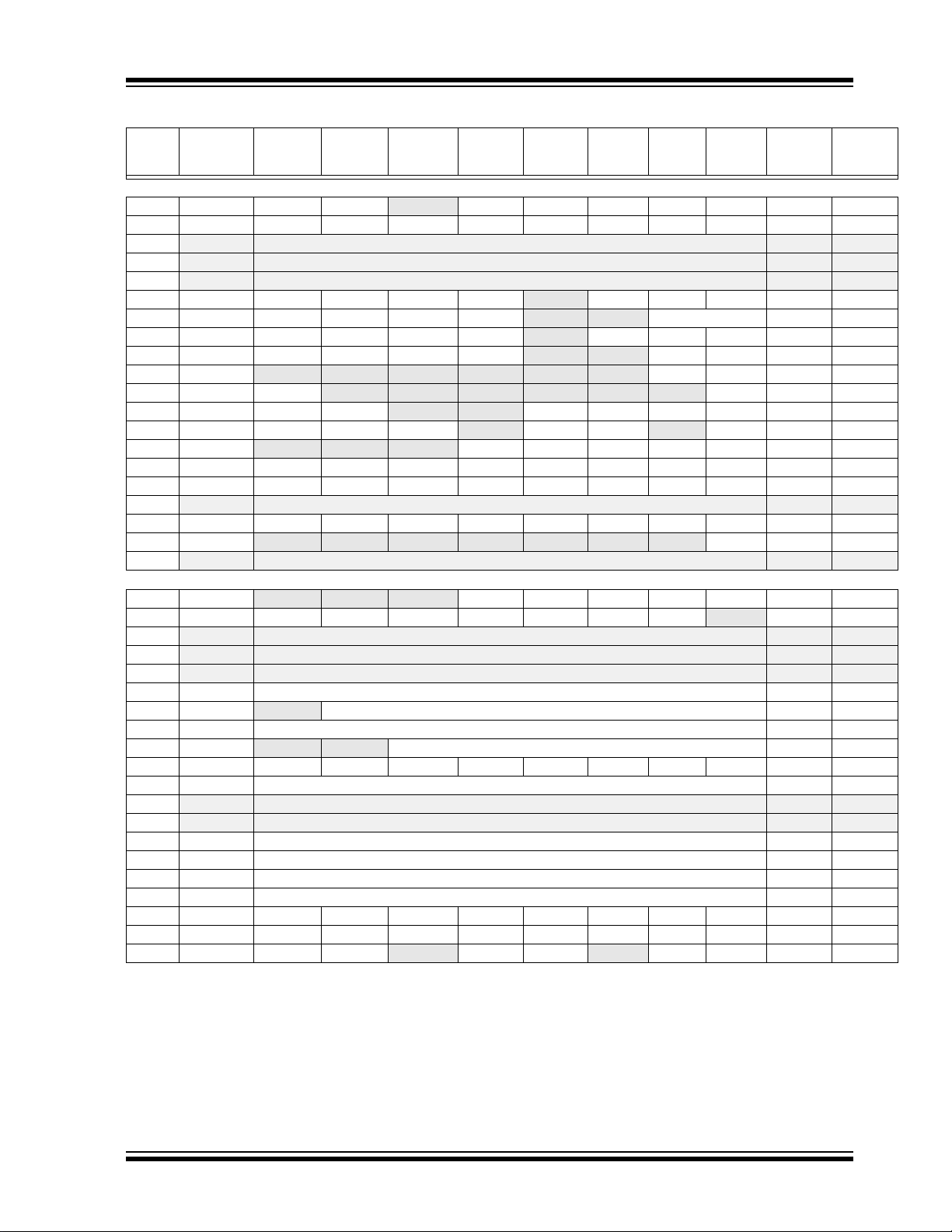
Legend: = Unimplemented data memory locations, read as ‘0’
BANK 24 BANK 25 BANK 26 BANK 27 BANK 28 BANK 29 BANK 30 BANK 31
C00h
C0Bh
Core Registers
(Ta bl e 3 -2 )
C80h
C8Bh
Core Registers
(Ta bl e 3 -2 )
D00h
D0Bh
Core Registers
(Ta bl e 3 -2 )
D80h
D8Bh
Core Registers
(Ta bl e 3 -2 )
E00h
E0Bh
Core Registers
(Ta bl e 3 -2 )
E80h
E8Bh
Core Registers
(Ta bl e 3 -2 )
F00h
F0Bh
Core Registers
(Ta bl e 3 -2 )
F80h
F8Bh
Core Registers
(Ta bl e 3 -2 )
C0Ch
C6Fh
Unimplemented
Read as ‘0’
C8Ch
CEFh
Unimplemented
Read as ‘0’
D0Ch
D6Fh
Unimplemented
Read as ‘0’
D8Ch
DEFh
Unimplemented
Read as ‘0’
E0Ch
E6Fh
Unimplemented
Read as ‘0’
E8Ch
EEFh
Unimplemented
Read as ‘0’
F0Ch
F6Fh
Unimplemented
Read as ‘0’
F8Ch
F9Fh
Unimplemented
Read as ‘0’
FA0h
See Tab l e 3 - 4 for
more information
FEFh
C70h
Accesses
70h – 7Fh
CF0h
Accesses
70h – 7Fh
D70h
Accesses
70h – 7Fh
DF0h
Accesses
70h – 7Fh
E70h
Accesses
70h – 7Fh
EF0h
Accesses
70h – 7Fh
F70h
Common RAM
(Accesses
70h – 7Fh)
FF0h
Common RAM
(Accesses
70h – 7Fh)
C7Fh
CFFh D7Fh DFFh E7Fh EFFh F7Fh FFFh
TABLE 3-3: PIC16(L)F1826/27 MEMORY MAP (CONTINUED)
PIC16(L)F1826/27
PIC16(L)F1826/27
= Unimplemented data memory locations, read as ‘0’,
Bank 31
F80h
F8Bh
Core Registers
(Ta bl e 3 -2 )
F8Ch
FE3h
Unimplemented
Read as ‘0’
FE4h
STATUS_SHAD
FE5h
WREG_SHAD
FE6h
BSR_SHAD
FE7h
PCLATH_SHAD
FE8h
FSR0L_SHAD
FE9h
FSR0H_SHAD
FEAh
FSR1L_SHAD
FEBh
FSR1H_SHAD
FECh
—
FEDh
STKPTR
FEEh
TOSL
FEFh
TOSH
FF0h
Common RAM
(Accesses
70h – 7Fh)
FFFh
TABLE 3-4: PIC16(L)F1826/27 MEMORY MAP (CONTINUED)
DS41391D-page 26 2011 Microchip Technology Inc.
PIC16(L)F1826/27
3.2.6 CORE FUNCTION REGISTERS SUMMARY
The Core Function registers listed in Ta bl e 3 - 5 can be
addressed from any Bank.
TABLE 3-5: CORE FUNCTION REGISTERS SUMMARY
Addr Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Bank 0-31
x00h or
INDF0
x80h
x01h or
INDF1
x81h
x02h or
PCL Program Counter (PC) Least Significant Byte 0000 0000 0000 0000
x82h
x03h or
STATUS
x83h
x04h or
FSR0L Indirect Data Memory Address 0 Low Pointer 0000 0000 uuuu uuuu
x84h
x05h or
FSR0H Indirect Data Memory Address 0 High Pointer 0000 0000 0000 0000
x85h
x06h or
FSR1L Indirect Data Memory Address 1 Low Pointer 0000 0000 uuuu uuuu
x86h
x07h or
FSR1H Indirect Data Memory Address 1 High Pointer 0000 0000 0000 0000
x87h
x08h or
BSR
x88h
x09h or
WREG Working Register 0000 0000 uuuu uuuu
x89h
x0Ah or
PCLATH
x8Ah
x0Bh or
INTCON GIE PEIE TMR0IE INTE IOCIE TMR0IF INTF IOCIF 0000 0000 0000 0000
x8Bh
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, read as ‘0’, r = reserved.
Addressing this location uses contents of FSR0H/FSR0L to address data memory
(not a physical register)
Addressing this location uses contents of FSR1H/FSR1L to address data memory
(not a physical register)
— — —TOPD ZDCC---1 1000 ---q quuu
— — — BSR4 BSR3 BSR2 BSR1 BSR0 ---0 0000 ---0 0000
— Write Buffer for the upper 7 bits of the Program Counter -000 0000 -000 0000
Shaded locations are unimplemented, read as ‘0’.
Value on
POR, BOR
xxxx xxxx uuuu uuuu
xxxx xxxx uuuu uuuu
Value on all
other Resets
2011 Microchip Technology Inc. DS41391D-page 27
PIC16(L)F1826/27
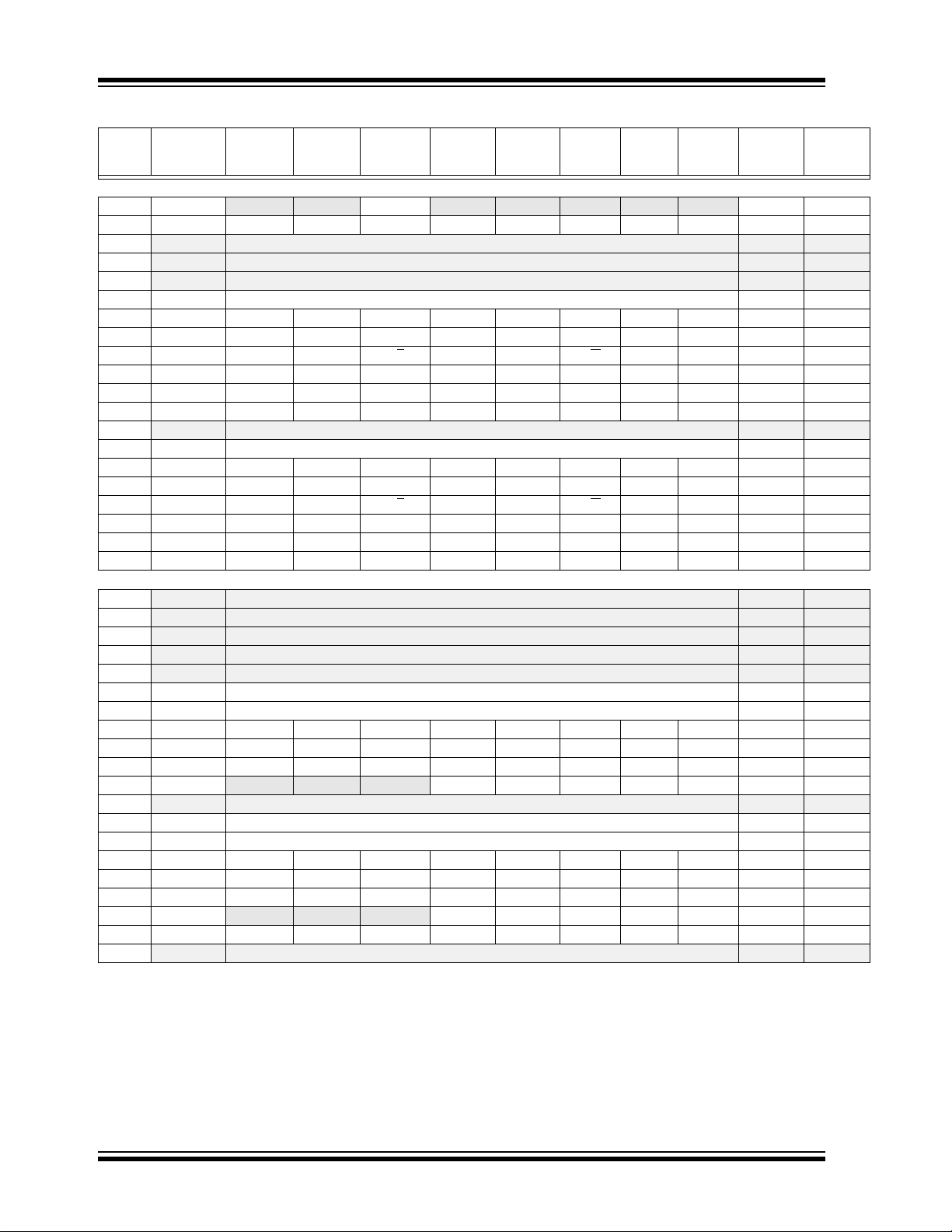
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on
POR, BOR
Bank 0
00Ch PORTA
00Dh PORTB
00Eh
00Fh
010h
011h PIR1 TMR1GIF ADIF RCIF TXIF SSP1IF CCP1IF TMR2IF TMR1IF 0000 0000 0000 0000
012h PIR2 OSFIF C2IF C1IF EEIF BCL1IF
013h PIR3
014h PIR4
015h TMR0 Timer0 Module Register xxxx xxxx uuuu uuuu
016h TMR1L Holding Register for the Least Significant Byte of the 16-bit TMR1 Register xxxx xxxx uuuu uuuu
017h TMR1H Holding Register for the Most Significant Byte of the 16-bit TMR1 Register xxxx xxxx uuuu uuuu
018h T1CON TMR1CS1 TMR1CS0 T1CKPS1 T1CKPS0 T1OSCEN T1SYNC
019h T1GCON TMR1GE T1GPOL T1GTM T1GSPM T1GGO/
01Ah TMR2 Timer2 Module Register 0000 0000 0000 0000
01Bh PR2 Timer2 Period Register 1111 1111 1111 1111
01Ch T2CON
01Dh
01Eh CPSCON0 CPSON
01Fh CPSCON1
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
(1)
(1)
— Unimplemented — —
RA7
RB7 RB6 RB5 RB4 RB3 RB2
— — CCP4IF CCP3IF TMR6IF —
— — — — — — BCL2IF SSP2IF ---- --00 ---- --00
— T2OUTPS3 T2OUTPS2 T2OUTPS1 T2OUTPS0 TMR2ON T2CKPS1 T2CKPS0 -000 0000 -000 0000
— — — — CPSCH3 CPSCH2 CPSCH1 CPSCH0 ---- 0000 ---- 0000
RA6 RA5 RA4 RA3 RA2
— —CCP2IF
DONE
— — — CPSRNG1 CPSRNG0 CPSOUT T0XCS 0--- 0000 0--- 0000
T1GVAL T1GSS1 T1GSS0 0000 0x00 uuuu uxuu
RA1
RB1 RB0
TMR4IF
—TMR1ON0000 00-0 uuuu uu-u
RA0
xxxx xxxx xxxx xxxx
xxxx xxxx xxxx xxxx
(1)
0000 0--0 0000 0--0
— --00 0-0- --00 0-0-
Bank 1
08Ch TRISA TRISA7 TRISA6 TRISA5 TRISA4 TRISA3 TRISA2 TRISA1 TRISA0 1111 1111 1111 1111
08Dh TRISB TRISB7 TRISB6 TRISB5 TRISB4 TRISB3 TRISB2 TRISB1 TRISB0 1111 1111 1111 1111
08Eh
08Fh
090h
091h PIE1 TMR1GIE ADIE RCIE TXIE SSP1IE CCP1IE TMR2IE TMR1IE 0000 0000 0000 0000
092h PIE2 OSFIE C2IE C1IE EEIE BCL1IE
093h PIE3
094h PIE4
095h
096h PCON STKOVF STKUNF
097h WDTCON
098h OSCTUNE
099h OSCCON SPLLEN IRCF3 IRCF2 IRCF1 IRCF0
09Ah OSCSTAT T1OSCR PLLR OSTS HFIOFR HFIOFL MFIOFR LFIOFR HFIOFS 10q0 0q00 qqqq qq0q
09Bh ADRESL A/D Result Register Low xxxx xxxx uuuu uuuu
09Ch ADRESH A/D Result Register High xxxx xxxx uuuu uuuu
09Dh ADCON0
09Eh ADCON1 ADFM ADCS2 ADCS1 ADCS0
09Fh
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
Note 1: PIC16(L)F1827 only.
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
(1)
(1)
OPTION_REG
— Unimplemented — —
Shaded locations are unimplemented, read as ‘0’.
— — CCP4IE CCP3IE TMR6IE —
— — — — — — BCL2IE SSP2IE ---- --00 ---- --00
WPUEN INTEDG TMR0CS TMR0SE PSA PS2 PS1 PS0 1111 1111 1111 1111
— —RMCLRRI POR BOR 00-- 11qq qq-- qquu
— — WDTPS4 WDTPS3 WDTPS2 WDTPS1 WDTPS0 SWDTEN --01 0110 --01 0110
— — TUN5 TUN4 TUN3 TUN2 TUN1 TUN0 --00 0000 --00 0000
— CHS4 CHS3 CHS2 CHS1 CHS0
— ADNREF
— — CCP2IE
TMR4IE
— SCS1 SCS0 0011 1-00 0011 1-00
GO/DONE
ADPREF1
(1)
0000 0--0 0000 0--0
— --00 0-0- --00 0-0-
ADON -000 0000 -000 0000
ADPREF0 0000 -000 0000 -000
Value on all
other
Resets
DS41391D-page 28 2011 Microchip Technology Inc.
PIC16(L)F1826/27
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY (CONTINUED)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on
POR, BOR
Bank 2
10Ch LATA LATA7 LATA6 — L ATA4 LATA3 LATA2 LATA1 L ATA0 xx-x xxxx uu-u uuuu
10Dh LATB LATB7 LATB6 LATB5 LATB4 LATB3 LATB2 LATB1 LATB0 xxxx xxxx uuuu uuuu
10Eh
10Fh
110h
111h CM1CON0 C1ON C1OUT C1OE C1POL
112h CM1CON1 C1INTP C1INTN C1PCH1 C1PCH0
113h CM2CON0 C2ON C2OUT C2OE C2POL
114h CM2CON1 C2INTP C2INTN C2PCH1 C2PCH0
115h CMOUT
116h BORCON SBOREN
117h FVRCON FVREN FVRRDY
118h DACCON0 DACEN DACLPS DACOE
119h DACCON1
11Ah SRCON0 SRLEN SRCLK2 SRCLK1 SRCLK0 SRQEN SRNQEN SRPS SRPR 0000 0000 0000 0000
11Bh SRCON1 SRSPE SRSCKE SRSC2E SRSC1E SRRPE SRRCKE SRRC2E SRRC1E 0000 0000 0000 0000
11Ch
11Dh APFCON0 RXDTSEL SDO1SEL SS1SEL P2BSEL
11Eh APFCON1
11Fh
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— C1SP C1HYS C1SYNC 0000 -100 0000 -100
— — C1NCH<1:0> 0000 --00 0000 --00
— C2SP C2HYS C2SYNC 0000 -100 0000 -100
— — C2NCH1 C2NCH0 0000 --00 0000 --00
— — — — — — MC2OUT MC1OUT ---- --00 ---- --00
— — — — — — BORRDY 1--- ---q u--- ---u
Reserved Reserved CDAFVR1 CDAFVR0 ADFVR1 ADFVR0 0qrr 0000 0qrr 0000
— DACPSS1 DACPSS0 — DACNSS 000- 00-0 000- 00-0
— — — DACR4 DACR3 DACR2 DACR1 DACR0 ---0 0000 ---0 0000
— Unimplemented — —
— — — — — — — TXCKSEL ---- ---0 ---- ---0
— Unimplemented — —
(1)
CCP2SEL
(1)
P1DSEL P1CSEL CCP1SEL 0000 0000 0000 0000
Bank 3
18Ch ANSELA — — — ANSA4 ANSA3 ANSA2 ANSA1 ANSA0 ---1 1111 ---1 1111
18Dh ANSELB ANSB7 ANSB6 ANSB5 ANSB4 ANSB3 ANSB2 ANSB1
18Eh
18Fh
190h
191h EEADRL EEPROM / Program Memory Address Register Low Byte 0000 0000 0000 0000
192h EEADRH
193h EEDATL EEPROM / Program Memory Read Data Register Low Byte xxxx xxxx uuuu uuuu
194h EEDATH
195h EECON1 EEPGD CFGS LWLO FREE WRERR WREN WR RD 0000 x000 0000 q000
196h EECON2 EEPROM control register 2 0000 0000 0000 0000
197h
198h
199h RCREG USART Receive Data Register 0000 0000 0000 0000
19Ah TXREG USART Transmit Data Register 0000 0000 0000 0000
19Bh SPBRGL Baud Rate Generator Data Register Low 0000 0000 0000 0000
19Ch SPBRGH Baud Rate Generator Data Register High 0000 0000 0000 0000
19Dh RCSTA SPEN RX9 SREN CREN ADDEN FERR OERR RX9D 0000 000x 0000 000x
19Eh TXSTA CSRC TX9 TXEN SYNC SENDB BRGH TRMT TX9D 0000 0010 0000 0010
19Fh BAUDCON ABDOVF RCIDL
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
Note 1: PIC16(L)F1827 only.
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— EEPROM / Program Memory Address Register High Byte -000 0000 -000 0000
— — EEPROM / Program Memory Read Data Register High Byte --xx xxxx --uu uuuu
— Unimplemented — —
— Unimplemented — —
— SCKP BRG16 — WUE ABDEN 01-0 0-00 01-0 0-00
Shaded locations are unimplemented, read as ‘0’.
— 1111 111- 1111 111-
Value on all
other
Resets
2011 Microchip Technology Inc. DS41391D-page 29
PIC16(L)F1826/27
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY (CONTINUED)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on
POR, BOR
Bank 4
20Ch WPUA — —WPUA5— — — — — --1- ---- --1- ----
20Dh WPUB WPUB7 WPUB6 WPUB5 WPUB4 WPUB3 WPUB2 WPUB1 WPUB0 1111 1111 1111 1111
20Eh
20Fh
210h
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
211h SSP1BUF Synchronous Serial Port Receive Buffer/Transmit Register xxxx xxxx uuuu uuuu
212h SSP1ADD ADD7 ADD6 ADD5 ADD4 ADD3 ADD2 ADD1 ADD0 0000 0000 0000 0000
213h SSP1MSK MSK7 MSK6 MSK5 MSK4 MSK3 MSK2 MSK1 MSK0 1111 1111 1111 1111
214h SSP1STAT SMP CKE D/A
PSR/WUA BF 0000 0000 0000 0000
215h SSP1CON1 WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 0000 0000 0000 0000
216h SSP1CON2 GCEN ACKSTAT ACKDT ACKEN RCEN PEN RSEN SEN 0000 0000 0000 0000
217h SSP1CON3 ACKTIM PCIE SCIE BOEN SDAHT SBCDE AHEN DHEN 0000 0000 0000 0000
218h
219h SSP2BUF
21Ah SSP2ADD
21Bh SSP2MSK
21Ch SSP2STAT
21Dh SSP2CON1
21Eh SSP2CON2
21Fh SSP2CON3
— Unimplemented — —
(1)
Synchronous Serial Port Receive Buffer/Transmit Register xxxx xxxx uuuu uuuu
(1)
ADD7 ADD6 ADD5 ADD4 ADD3 ADD2 ADD1 ADD0 0000 0000 0000 0000
(1)
MSK7 MSK6 MSK5 MSK4 MSK3 MSK2 MSK1 MSK0 1111 1111 1111 1111
(1)
SMP CKE D/A PSR/WUA BF 0000 0000 0000 0000
(1)
WCOL SSPOV SSPEN CKP SSPM3 SSPM2 SSPM1 SSPM0 0000 0000 0000 0000
(1)
GCEN ACKSTAT ACKDT ACKEN RCEN PEN RSEN SEN 0000 0000 0000 0000
(1)
ACKTIM PCIE SCIE BOEN SDAHT SBCDE AHEN DHEN 0000 0000 0000 0000
Bank 5
28Ch — Unimplemented — —
28Dh
28Eh
28Fh
290h
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
291h CCPR1L Capture/Compare/PWM Register 1 (LSB) xxxx xxxx uuuu uuuu
292h CCPR1H Capture/Compare/PWM Register 1 (MSB) xxxx xxxx uuuu uuuu
293h CCP1CON P1M1 P1M0 DC1B1 DC1B0 CCP1M3 CCP1M2 CCP1M1 CCP1M0 0000 0000 0000 0000
294h PWM1CON P1RSEN P1DC6 P1DC5 P1DC4 P1DC3 P1DC2 P1DC1 P1DC0 0000 0000 0000 0000
295h CCP1AS CCP1ASE CCP1AS2 CCP1AS1 CCP1AS0 PSS1AC1 PSS1AC0 PSS1BD1 PSS1BD0 0000 0000 0000 0000
296h PSTR1CON
297h
298h CCPR2L
299h CCPR2H
29Ah CCP2CON
— Unimplemented — —
(1)
(1)
(1)
29Bh PWM2CON
29Ch CCP2AS
(1)
29Dh PSTR2CON
29Eh CCPTMRS
29Fh
— Unimplemented — —
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
(1)
Shaded locations are unimplemented, read as ‘0’.
— — — STR1SYNC STR1D STR1C STR1B STR1A ---0 0001 ---0 0001
Capture/Compare/PWM Register 2 (LSB) xxxx xxxx uuuu uuuu
Capture/Compare/PWM Register 2 (MSB) xxxx xxxx uuuu uuuu
P2M1 P2M0 DC2B1 DC2B0 CCP2M3 CCP2M2 CCP2M1 CCP2M0 0000 0000 0000 0000
(1)
P2RSEN P2DC6 P2DC5 P2DC4 P2DC3 P2DC2 P2DC1 P2DC0 0000 0000 0000 0000
CCP2ASE CCP2AS2 CCP2AS1 CCP2AS0 PSS2AC1 PSS2AC0 PSS2BD1 PSS2BD0 0000 0000 0000 0000
(1)
— — — STR2SYNC STR2D STR2C STR2B STR2A ---0 0001 ---0 0001
C4TSEL1 C4TSEL0 C3TSEL1 C3TSEL0 C2TSEL1 C2TSEL0 C1TSEL1 C1TSEL0 0000 0000 0000 0000
Note 1: PIC16(L)F1827 only.
Value on all
other
Resets
DS41391D-page 30 2011 Microchip Technology Inc.

PIC16(L)F1826/27
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY (CONTINUED)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on
POR, BOR
Bank 6
30Ch — Unimplemented — —
30Dh
30Eh
30Fh
310h
311h CCPR3L
312h CCPR3H
313h CCP3CON
314h
315h
316h
317h
318h CCPR4L
319h CCPR4H
31Ah CCP4CON
31Bh
31Ch
31Dh
31Eh
31Fh
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
(1)
Capture/Compare/PWM Register 3 (LSB) xxxx xxxx uuuu uuuu
(1)
Capture/Compare/PWM Register 3 (MSB) xxxx xxxx uuuu uuuu
(1)
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
(1)
(1)
(1)
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— — DC3B1 DC3B0 CCP3M3 CCP3M2 CCP3M1 CCP3M0 --00 0000 --00 0000
Capture/Compare/PWM Register 4 (LSB) xxxx xxxx uuuu uuuu
Capture/Compare/PWM Register 4 (MSB) xxxx xxxx uuuu uuuu
— — DC4B1 DC4B0 CCP4M3 CCP4M2 CCP4M1 CCP4M0 --00 0000 --00 0000
Bank 7
38Ch — Unimplemented — —
38Dh
38Eh
38Fh
390h
391h
392h
393h
394h IOCBP IOCBP7 IOCBP6 IOCBP5 IOCBP4 IOCBP3
395h IOCBN IOCBN7 IOCBN6 IOCBN5 IOCBN4 IOCBN3
396h IOCBF IOCBF7 IOCBF6 IOCBF5 IOCBF4 IOCBF3
397h
398h
399h
39Ah CLKRCON CLKREN CLKROE CLKRSLR CLKRDC1 CLKRDC0
39Bh
39Ch MDCON MDEN MDOE MDSLR MDOPOL
39Dh MDSRC MDMSODIS
39Eh MDCARL MDCLODIS MDCLPOL MDCLSYNC
39Fh MDCARH MDCHODIS MDCHPOL MDCHSYNC
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
Note 1: PIC16(L)F1827 only.
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
IOCBP2 IOCBP1 IOCBP0
IOCBN2 IOCBN1 IOCBN0
IOCBF2 IOCBF1 IOCBF0
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
CLKRDIV2 CLKRDIV1 CLKRDIV0
— Unimplemented — —
— — —
Shaded locations are unimplemented, read as ‘0’.
— — —
MDMS3 MDMS2 MDMS1 MDMS0
—
—
MDCL3 MDCL2 MDCL1 MDCL0
MDCH3 MDCH2 MDCH1 MDCH0
MDBIT
0000 0000 0000 0000
0000 0000 0000 0000
0000 0000 0000 0000
0011 0000 0011 0000
0010 ---0 0010 ---0
x--- xxxx u--- uuuu
xxx- xxxx uuu- uuuu
xxx- xxxx uuu- uuuu
Value on all
Resets
other
2011 Microchip Technology Inc. DS41391D-page 31

PIC16(L)F1826/27
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY (CONTINUED)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Value on
POR, BOR
Bank 8
40Ch — Unimplemented — —
40Dh
40Eh
40Fh
410h
411h
412h
413h
414h
415h TMR4
416h PR4
417h T4CON
418h
419h
41Ah
41Bh
41Ch TMR6
41Dh PR6
41Eh T6CON
41Fh
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
Note 1: PIC16(L)F1827 only.
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
(1)
(1)
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
(1)
— Unimplemented — —
Shaded locations are unimplemented, read as ‘0’.
Timer4 Module Register 0000 0000 0000 0000
Timer4 Period Register 1111 1111 1111 1111
(1)
(1)
(1)
— T4OUTPS3 T4OUTPS2 T4OUTPS1 T4OUTPS0 TMR4ON T4CKPS1 T4CKPS0 -000 0000 -000 0000
Timer6 Module Register 0000 0000 0000 0000
Timer6 Period Register 1111 1111 1111 1111
— T6OUTPS3 T6OUTPS2 T6OUTPS1 T6OUTPS0 TMR6ON T6CKPS1 T6CKPS0 -000 0000 -000 0000
Value on all
other
Resets
DS41391D-page 32 2011 Microchip Technology Inc.

PIC16(L)F1826/27
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY (CONTINUED)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Bank 9
48Ch
—
49Fh
Bank 10
50Ch
—
51Fh
Bank 11
58Ch
—
59Fh
Bank 12
60Ch
—
61Fh
Bank 13
68Ch
—
69Fh
Bank 14
70Ch
—
71Fh
Bank 15
78Ch
—
79Fh
Bank 16
80Ch
—
86Fh
Bank 17
88Ch
—
8EFh
Bank 18
90Ch
—
96Fh
Bank 19
98Ch
—
9EFh
Bank 20
A0Ch
—
A6Fh
Bank 21
A8Ch
—
AEFh
Bank 22
B0Ch
—
B6Fh
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
Note 1: PIC16(L)F1827 only.
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
Shaded locations are unimplemented, read as ‘0’.
Value on
POR, BOR
Value on all
other
Resets
2011 Microchip Technology Inc. DS41391D-page 33

PIC16(L)F1826/27
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY (CONTINUED)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Bank 23
B8Ch
—
BEFh
Bank 24
C0Ch
—
C6Fh
Bank 25
C8Ch
—
CEFh
Bank 26
D0Ch
—
D6Fh
Bank 27
D8Ch
—
DEFh
Bank 28
E0Ch
—
E6Fh
Bank 29
E8Ch
—
EEFh
Bank 30
F0Ch
—
F6Fh
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
Note 1: PIC16(L)F1827 only.
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
— Unimplemented — —
Shaded locations are unimplemented, read as ‘0’.
Value on
POR, BOR
Value on all
other
Resets
DS41391D-page 34 2011 Microchip Technology Inc.

PIC16(L)F1826/27
TABLE 3-6: SPECIAL FUNCTION REGISTER SUMMARY (CONTINUED)
Address Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Bank 31
F8Ch
—
FE3h
FE4h STATUS_
FE5h WREG_
FE6h BSR_
FE7h PCLATH_
FE8h FSR0L_
FE9h FSR0H_
FEAh FSR1L_
FEBh FSR1H_
FECh
FEDh
FEEh
FEFh
Legend: x = unknown, u = unchanged, q = value depends on condition, - = unimplemented, r = reserved.
Note 1: PIC16(L)F1827 only.
— Unimplemented — —
— — — — — Z_SHAD DC_
SHAD
Working Register Shadow 0000 0000 uuuu uuuu
SHAD
— — — Bank Select Register Shadow ---x xxxx ---u uuuu
SHAD
— Program Counter Latch High Register Shadow -xxx xxxx uuuu uuuu
SHAD
Indirect Data Memory Address 0 Low Pointer Shadow xxxx xxxx uuuu uuuu
SHAD
Indirect Data Memory Address 0 High Pointer Shadow xxxx xxxx uuuu uuuu
SHAD
Indirect Data Memory Address 1 Low Pointer Shadow xxxx xxxx uuuu uuuu
SHAD
Indirect Data Memory Address 1 High Pointer Shadow xxxx xxxx uuuu uuuu
SHAD
— Unimplemented — —
STKPTR
TOSL
TOSH
Shaded locations are unimplemented, read as ‘0’.
— — — Current Stack pointer ---1 1111 ---1 1111
Top-of-Stack Low byte xxxx xxxx uuuu uuuu
— Top-of-Stack High byte -xxx xxxx -uuu uuuu
SHAD
C_SHAD ---- -xxx ---- -uuu
Value on
POR, BOR
Value on all
other
Resets
2011 Microchip Technology Inc. DS41391D-page 35

PIC16(L)F1826/27
PCLPCH
0
14
PC
06
7
ALU Result
8
PCLATH
PCLPCH
0
14
PC
06
4
OPCODE <10:0>
11
PCLATH
PCLPCH
0
14
PC
06
7
W
8
PCLATH
Instruction with
PCL as
Destination
GOTO, CALL
CALLW
PCL
PCH
0
14
PC
PC + W
15
BRW
PCLPCH
0
14
PC
PC + OPCODE <8:0>
15
BRA
3.3 PCL and PCLATH
The Program Counter (PC) is 15 bits wide. The low byte
comes from the PCL register, which is a readable and
writable register. The high byte (PC<14:8>) is not directly
readable or writable and comes from PCLATH. On any
Reset, the PC is cleared. Figure 3-4 shows the five
situations for the loading of the PC.
FIGURE 3-4: LOADING OF PC IN
DIFFERENT SITUATIONS
3.3.3 COMPUTED FUNCTION CALLS
A computed function CALL allows programs to maintain
tables of functions and provide another way to execute
state machines or look-up tables. When performing a
table read using a computed function CALL, care
should be exercised if the table location crosses a PCL
memory boundary (each 256-byte block).
If using the CALL instruction, the PCH<2:0> and PCL
registers are loaded with the operand of the CALL
instruction. PCH<6:3> is loaded with PCLATH<6:3>.
The CALLW instruction enables computed calls by combining PCLATH and W to form the destination address.
A computed CALLW is accomplished by loading the W
register with the desired address and executing CALLW.
The PCL register is loaded with the value of W and
PCH is loaded with PCLATH.
3.3.4 BRANCHING
The branching instructions add an offset to the PC.
This allows relocatable code and code that crosses
page boundaries. There are two forms of branching,
BRW and BRA. The PC will have incremented to fetch
the next instruction in both cases. When using either
branching instruction, a PCL memory boundary may be
crossed.
If using BRW, load the W register with the desired
unsigned address and execute BRW. The entire PC will
be loaded with the address PC + 1 + W.
If using BRA, the entire PC will be loaded with PC + 1 +,
the signed value of the operand of the BRA instruction.
3.3.1 MODIFYING PCL
Executing any instruction with the PCL register as the
destination simultaneously causes the Program Counter PC<14:8> bits (PCH) to be replaced by the contents
of the PCLATH register. This allows the entire contents
of the program counter to be changed by writing the
desired upper 7 bits to the PCLATH register. When the
lower 8 bits are written to the PCL register, all 15 bits of
the program counter will change to the values contained in the PCLATH register and those being written
to the PCL register.
3.3.2 COMPUTED GOTO
A computed GOTO is accomplished by adding an offset to
the program counter (ADDWF PC L). When performing a
table read using a computed GOTO method, care should
be exercised if the table location crosses a PCL memory
boundary (each 256-byte block). Refer to Application
Note AN556, “Implementing a T able Read” (DS00556).
DS41391D-page 36 2011 Microchip Technology Inc.

PIC16(L)F1826/27
TOSH:TOSL
TOSH:TOSL
0x0F
0x0E
0x0D
0x0C
0x0B
0x0A
0x09
0x08
0x03
0x02
0x01
0x00
0x04
0x05
0x06
0x07
0x1F
Stack Reset Disabled
(STVREN = 0)
Stack Reset Enabled
(STVREN = 1)
0x0000
Initial Stack Configuration:
After Reset, the stack is empty. The
empty stack is initialized so the Stack
Pointer is pointing at 0x1F. If the Stack
Overflow/Underflow Reset is enabled, the
TOSH/TOSL registers will return ‘0’. If
the Stack Overflow/Underflow Reset is
disabled, the TOSH/TOSL registers will
return the contents of stack address 0x0F.
STKPTR = 0x1F
STKPTR = 0x1F
3.4 Stack
All devices have a 16-level x 15-bit wide hardware
stack (refer to Figures 3-5 through 3-8). The stack
space is not part of either program or data space. The
PC is PUSHed onto the stack when CALL or CALLW
instructions are executed or an interrupt causes a
branch. The stack is POPed in the event of a RETURN,
RETLW or a RETFIE instruction execution. PCLATH is
not affected by a PUSH or POP operation.
The stack operates as a circular buffer if the STVREN
bit is programmed to ‘0‘ (Configuration Word 2). This
means that after the stack has been PUSHed sixteen
times, the seventeenth PUSH overwrites the value that
was stored from the first PUSH. The eighteenth PUSH
overwrites the second PUSH (and so on). The
STKOVF and STKUNF flag bits will be set on an Overflow/Underflow, regardless of whether the Reset is
enabled.
Note 1: There are no instructions/mnemonics
called PUSH or POP. These are actions
that occur from the execution of the
CALL, CALLW, RETURN, RETLW and
RETFIE instructions or the vectoring to
an interrupt address.
3.4.1 ACCESSING THE STACK
The stack is available through the TOSH, TOSL and
STKPTR registers. STKPTR is the current value of the
Stack Pointer. TOSH:TOSL register pair points to the
TOP of the stack. Both registers are read/writable. TOS
is split into TOSH and TOSL due to the 15-bit size of the
PC. To access the stack, adjust the value of STKPTR,
which will position TOSH:TOSL, then read/write to
TOSH:TOSL. STKPTR is 5 bits to allow detection of
overflow and underflow.
Note: Care should be taken when modifying the
STKPTR while interrupts are enabled.
During normal program operation, CALL, CALLW and
Interrupts will increment STKPTR while RETLW,
RETURN, and RETFIE will decrement STKPTR. At any
time STKPTR can be inspected to see how much stack
is left. The STKPTR always points at the currently used
place on the stack. Therefore, a CALL or CALLW will
increment the STKPTR and then write the PC, and a
return will unload the PC and then decrement STKPTR.
Reference Figure 3-5 through Figure 3-8 for examples
of accessing the stack.
FIGURE 3-5: ACCESSING THE STACK EXAMPLE 1
2011 Microchip Technology Inc. DS41391D-page 37

PIC16(L)F1826/27
TOSH:TOSL
0x0F
0x0E
0x0D
0x0C
0x0B
0x0A
0x09
0x08
0x03
0x02
0x01
0x00
0x04
0x05
0x06
0x07
Return Address
This figure shows the stack configuration
after the first CALL or a single interrupt.
If a RETURN instruction is executed, the
return address will be placed in the
Program Counter and the Stack Pointer
decremented to the empty state (0x1F).
STKPTR = 0x00
TOSH:TOSL
0x0F
0x0E
0x0D
0x0C
0x0B
0x0A
0x09
0x08
0x03
0x02
0x01
0x00
0x04
0x05
0x06
0x07
Return Address
After seven CALLs, or six CALLs and an
interrupt, the stack looks like the figure
on the left. A series of RETURN instructions
will repeatedly place the return addresses
into the Program Counter and pop the stack.
STKPTR = 0x06
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
FIGURE 3-6: ACCESSING THE STACK EXAMPLE 2
FIGURE 3-7: ACCESSING THE STACK EXAMPLE 3
DS41391D-page 38 2011 Microchip Technology Inc.

FIGURE 3-8: ACCESSING THE STACK EXAMPLE 4
TOSH:TOSL
0x0F
0x0E
0x0D
0x0C
0x0B
0x0A
0x09
0x08
0x03
0x02
0x01
0x00
0x04
0x05
0x06
0x07
Return Address
When the stack is full, the next CALL or
interrupt will set the Stack Pointer to
0x10. This is identical to address 0x00
so the stack will wrap and overwrite the
return address at 0x00. If the Stack
Overflow/Underflow Reset is enabled, a
Reset will occur and location 0x00 will
not be overwritten.
STKPTR = 0x10
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
Return Address
PIC16(L)F1826/27
3.4.2 OVERFLOW/UNDERFLOW RESET
If the STVREN bit in Configuration Word 2 is
programmed to ‘1’, the device will be reset if the stack
is PUSHed beyond the sixteenth level or POPed
beyond the first level, setting the appropriate bits
(STKOVF or STKUNF, respectively) in the PCON
register.
3.5 Indirect Addressing
The INDFn registers are not physical registers. Any
instruction that accesses an INDFn register actually
accesses the register at the address specified by the
File Select Registers (FSR). If the FSRn address
specifies one of the two INDFn registers, the read will
return ‘0’ and the write will not occur (though Status bits
may be affected). The FSRn register value is created
by the pair FSRnH and FSRnL.
The FSR registers form a 16-bit address that allows an
addressing space with 65536 locations. These locations
are divided into three memory regions:
• Traditional Data Memory
• Linear Data Memory
• Program Flash Memory
2011 Microchip Technology Inc. DS41391D-page 39

PIC16(L)F1826/27
0x0000
0x0FFF
Traditional
FSR
Address
Range
Data Memory
0x1000
Reserved
Linear
Data Memory
Reserved
0x2000
0x29AF
0x29B0
0x7FFF
0x8000
0xFFFF
0x0000
0x0FFF
0x0000
0x7FFF
Program
Flash Memory
Note: Not all memory regions are completely implemented. Consult device memory tables for memory limits.
0x1FFF
FIGURE 3-9: INDIRECT ADDRESSING
DS41391D-page 40 2011 Microchip Technology Inc.

3.5.1 TRADITIONAL DATA MEMORY
Indirect AddressingDirect Addressing
Bank Select
Location Select
4BSR 6
0
From Opcode
FSRxL70
Bank Select
Location Select
0000 0001 0010 1111
0x00
0x7F
Bank 0 Bank 1 Bank 2 Bank 31
0
FSRxH70
0000
The traditional data memory is a region from FSR
address 0x000 to FSR address 0xFFF. The addresses
correspond to the absolute addresses of all SFR, GPR
and common registers.
FIGURE 3-10: TRADITIONAL DATA MEMORY MAP
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 41

PIC16(L)F1826/27
7
0
1
7
0
0
Location Select
0x2000
FSRnH
FSRnL
0x020
Bank 0
0x06F
0x0A0
Bank 1
0x0EF
0x120
Bank 2
0x16F
0xF20
Bank 30
0xF6F
0x29AF
0
7
1
7
0
0
Location Select
0x8000
FSRnH
FSRnL
0x0000
0x7FFF
0xFFFF
Program
Flash
Memory
(low 8
bits)
3.5.2 LINEAR DATA MEMORY
The linear data memory is the region from FSR
address 0x2000 to FSR address 0x29AF. This region is
a virtual region that points back to the 80-byte blocks of
GPR memory in all the banks.
Unimplemented memory reads as 0x00. Use of the
linear data memory region allows buffers to be larger
than 80 bytes because incrementing the FSR beyond
one bank will go directly to the GPR memory of the next
bank.
The 16 bytes of common memory are not included in
the linear data memory region.
FIGURE 3-11: LINEAR DATA MEMORY
MAP
3.5.3 PROGRAM FLASH MEMORY
To make constant data access easier, the entire
program Flash memory is mapped to the upper half of
the FSR address space. When the MSB of FSRnH is
set, the lower 15 bits are the address in program
memory which will be accessed through INDF. Only the
lower 8 bits of each memory location is accessible via
INDF. Writing to the program Flash memory cannot be
accomplished via the FSR/INDF interface. All
instructions that access program Flash memory via the
FSR/INDF interface will require one additional
instruction cycle to complete.
FIGURE 3-12: PROGRAM FLASH
MEMORY MAP
DS41391D-page 42 2011 Microchip Technology Inc.

4.0 DEVICE CONFIGURATION
Device Configuration consists of Configuration Word 1
and Configuration Word 2, Code Protection and Device
ID.
4.1 Configuration Words
There are several Configuration Word bits that allow
different oscillator and memory protection options.
These are implemented as Configuration Word 1 at
8007h and Configuration Word 2 at 8008h.
Note: The DEBUG bit in Configuration Word is
managed automatically by device
development tools including debuggers
and programmers. For normal device
operation, this bit should be maintained as
a '1'.
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 43

PIC16(L)F1826/27
REGISTER 4-1: CONFIGURATION WORD 1
R/P-1 R/P-1 R/P-1 R/P-1 R/P-1 R/P-1/1
FCMEN IESO CLKOUTEN
bit 13 bit 8
R/P-1 R/P-1 R/P-1 R/P-1 R/P-1 R/P-1 R/P-1 R/P-1
CP
bit 7 bit 0
Legend:
R = Readable bit P = Programmable bit U = Unimplemented bit, read as ‘1’
‘0’ = Bit is cleared ‘1’ = Bit is set -n = Value when blank or after Bulk Erase
bit 13 FCMEN: Fail-Safe Clock Monitor Enable bit
bit 12 IESO: Internal External Switchover bit
bit 11 CLKOUTEN
bit 10-9 BOREN<1:0>: Brown-out Reset Enable bits
bit 8 CPD: Data Code Protection bit
bit 7 CP
bit 6 MCLRE: MCLR/VPP Pin Function Select bit
bit 5 PWRTE
bit 4-3 WDTE<1:0>: Watchdog Timer Enable bit
MCLRE PWRTE WDTE<1:0> FOSC<2:0>
1 = Fail-Safe Clock Monitor is enabled
0 = Fail-Safe Clock Monitor is disabled
1 = Internal/External Switchover mode is enabled
0 = Internal/External Switchover mode is disabled
: Clock Out Enable bit
If
FOSC configuration bits are set to LP, XT, HS modes:
This bit is ignored, CLKOUT function is disabled. Oscillator function on the CLKOUT pin.
All other
11 = BOR enabled
10 = BOR enabled during operation and disabled in Sleep
01 = BOR controlled by SBOREN bit of the BORCON register
00 = BOR disabled
1 = Data memory code protection is disabled
0 = Data memory code protection is enabled
1 = Program memory code protection is disabled
0 = Program memory code protection is enabled
If LVP bit =
If LVP bit =
1 = PWRT disabled
0 = PWRT enabled
11 = WDT enabled
10 = WDT enabled while running and disabled in Sleep
01 = WDT controlled by the SWDTEN bit in the WDTCON register
00 = WDT disabled
FOSC modes:
1 = CLKOUT function is disabled. I/O function on the CLKOUT pin.
0 = CLKOUT function is enabled on the CLKOUT pin
(2)
: Code Protection bit
1:
This bit is ignored.
0:
1 =MCLR
0 =MCLR
/VPP pin function is MCLR; Weak pull-up enabled.
/VPP pin function is digital input; MCLR internally disabled; Weak pull-up under control of
WPUE3 bit.
: Power-up Timer Enable bit
BOREN<1:0> CPD
DS41391D-page 44 2011 Microchip Technology Inc.

REGISTER 4-1: CONFIGURATION WORD 1 (CONTINUED)
bit 2-0 FOSC<2:0>: Oscillator Selection bits
111 = ECH: External Clock, High-Power mode (4-20 MHz): device clock supplied to CLKIN pin
110 = ECM: External Clock, Medium-Power mode (0.5-4 MHz): device clock supplied to CLKIN pin
101 = ECL: External Clock, Low-Power mode (0-0.5 MHz): device clock supplied to CLKIN pin
100 = INTOSC oscillator: I/O function on CLKIN pin
011 = EXTRC oscillator: External RC circuit connected to CLKIN pin
010 = HS oscillator: High-speed crystal/resonator connected between OSC1 and OSC2 pins
001 = XT oscillator: Crystal/resonator connected between OSC1 and OSC2 pins
000 = LP oscillator: Low-power crystal connected between OSC1 and OSC2 pins
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 45

PIC16(L)F1826/27
REGISTER 4-2: CONFIGURATION WORD 2
R/P-1 R/P-1 U-1 R/P-1 R/P-1 R/P-1/1
(1)
LVP
bit 13 bit 8
U-1 U-1 U-1 R/P-1/1 U-1 U-1 R/P-1 R/P-1
— — — Reserved — —WRT<1:0>
bit 7 bit 0
Legend:
R = Readable bit P = Programmable bit U = Unimplemented bit, read as ‘1’
‘0’ = Bit is cleared ‘1’ = Bit is set -n = Value when blank or after Bulk Erase
bit 13 LVP: Low-Voltage Programming Enable bit
1 = Low-voltage programming enabled
0 = High-voltage on MCLR
bit 12 DEBUG: In-Circuit Debugger Mode bit
1 = In-Circuit Debugger disabled, ICSPCLK and ICSPDAT are general purpose I/O pins
0 = In-Circuit Debugger enabled, ICSPCLK and ICSPDAT are dedicated to the debugger
bit 11 Unimplemented: Read as ‘1’
bit 10 BORV: Brown-out Reset Voltage Selection bit
1 = Brown-out Reset voltage set to 1.9V (typical)
0 = Brown-out Reset voltage set to 2.5V (typical)
bit 9 STVREN: Stack Overflow/Underflow Reset Enable bit
1 = Stack Overflow or Underflow will cause a Reset
0 = Stack Overflow or Underflow will not cause a Reset
bit 8 PLLEN: PLL Enable bit
1 = 4xPLL enabled
0 = 4xPLL disabled
bit 7-5 Unimplemented: Read as ‘1’
bit 4 Reserved: This location should be programmed to a ‘1’.
bit 3-2 Unimplemented: Read as ‘1’
bit 1-0 WRT<1:0>: Flash Memory Self-Write Protection bits
2 kW Flash memory (PIC16(L)F1826 only)
11 = Write protection off
10 = 000h to 1FFh write-protected, 200h to 7FFh may be modified by EECON control
01 = 000h to 3FFh write-protected, 400h to 7FFh may be modified by EECON control
00 = 000h to 7FFh write-protected, no addresses may be modified by EECON control
4 kW Flash memory (PIC16(L)F1827 only)
11 = Write protection off
10 = 000h to 1FFh write-protected, 200h to FFFh may be modified by EECON control
01 = 000h to 7FFh write-protected, 800h to FFFh may be modified by EECON control
00 = 000h to FFFh write-protected, no addresses may be modified by EECON control
DEBUG
must be used for programming
(2)
—BORVSTVRENPLLEN
:
:
Note 1: The LVP bit cannot be programmed to ‘0’ when Programming mode is entered via LVP.
2: The DEBUG
including debuggers and programmers. For normal device operation, this bit should be
maintained as a '1'.
DS41391D-page 46 2011 Microchip Technology Inc.
bit in Configuration Word is managed automatically by device development tools

4.2 Code Protection
Code protection allows the device to be protected from
unauthorized access. Program memory protection and
data EEPROM protection are controlled independently.
Internal access to the program memory and data
EEPROM are unaffected by any code protection
setting.
4.2.1 PROGRAM MEMORY PROTECTION
The entire program memory space is protected from
external reads and writes by the CP
Word 1. When CP
program memory are inhibited and a read will return all
‘0’s. The CPU can continue to read program memory,
regardless of the protection bit settings. Writing the
program memory is dependent upon the write
protection setting. See Section 4.3 “Write
Protection” for more information.
= 0, external reads and writes of
4.2.2 DATA EEPROM PROTECTION
The entire data EEPROM is protected from external
reads and writes by the CPD
nal reads and writes of data EEPROM are inhibited.
The CPU can continue to read and write data EEPROM
regardless of the protection bit settings.
bit in Configuration
bit. When CPD = 0, exter-
PIC16(L)F1826/27
4.3 Write Protection
Write protection allows the device to be protected from
unintended self-writes. Applications, such as bootloader software, can be protected while allowing other
regions of the program memory to be modified.
The WRT<1:0> bits in Configuration Word 2 define the
size of the program memory block that is protected.
4.4 User ID
Four memory locations (8000h-8003h) are designated
as ID locations where the user can store checksum or
other code identification numbers. These locations are
readable and writable during normal execution. See
Section 11.5 “User ID, Device ID and Configuration
Word Access” for more information on accessing
these memory locations.
checksum calculation, see the “PIC16F/LF1826/27
Memory Programming Specification” (DS41390).
For more information on
2011 Microchip Technology Inc. DS41391D-page 47

PIC16(L)F1826/27
4.5 Device ID and Revision ID
The memory location 8006h is where the Device ID and
Revision ID are stored. The upper nine bits hold the
Device ID. The lower five bits hold the Revision ID. See
Section 11.5 “User ID, Device ID and Configuration
Word Access” for more information on accessing
these memory locations.
Development tools, such as device programmers and
debuggers, may be used to read the Device ID and
Revision ID.
DS41391D-page 48 2011 Microchip Technology Inc.

PIC16(L)F1826/27
Device
DEVICEID<13:0> Values
DEV<8:0> REV<4:0>
PIC16F1826 10 0111 100 x xxxx
PIC16F1827 10 0111 101 x xxxx
PIC16LF1826 10 1000 100 x xxxx
PIC16LF1827 10 1000 101 x xxxx
REGISTER 4-3: DEVICEID: DEVICE ID REGISTER
RRRRRR
bit 13 bit 8
RRRRRRRR
DEV<2:0> REV<4:0>
bit 7 bit 0
Legend:
R = Readable bit
u = Bit is unchanged
‘1’ = Bit is set
bit 13-5 DEV<8:0>: Device ID bits
W = Writable bit
x = Bit is unknown
‘0’ = Bit is cleared
(1)
DEV<8:3>
U = Unimplemented bit, read as ‘1’
-n/n = Value at POR and BOR/Value at all other Resets
P = Programmable bit
bit 4-0 REV< 4:0>: Revision ID bits
These bits are used to identify the revision.
Note 1: This location cannot be written.
2011 Microchip Technology Inc. DS41391D-page 49

PIC16(L)F1826/27
NOTES:
DS41391D-page 50 2011 Microchip Technology Inc.

PIC16(L)F1826/27
5.0OSCILLATOR MODULE (WITH FAIL-SAFE CLOCK MONITOR)
5.1 Overview
The oscillator module has a wide variety of clock
sources and selection features that allow it to be used
in a wide range of applications while maximizing performance and minimizing power consumption. Figure 5-1
illustrates a block diagram of the oscillator module.
Clock sources can be supplied from external oscillators,
quartz crystal resonators, ceramic resonators and
Resistor-Capacitor (RC) circuits. In addition, the system
clock source can be supplied from one of two internal
oscillators and PLL circuits, with a choice of speeds
selectable via software. Additional clock features
include:
• Selectable system clock source between external
or internal sources via software.
• Two-Speed Start-up mode, which minimizes
latency between external oscillator start-up and
code execution.
• Fail-Safe Clock Monitor (FSCM) designed to
detect a failure of the external clock source (LP,
XT, HS, EC or RC modes) and switch
automatically to the internal oscillator.
• Oscillator Start-up Timer (OST) ensures stability
of crystal oscillator sources
The oscillator module can be configured in one of eight
clock modes.
1. ECL – External Clock Low-Power mode
(0 MHz to 0.5 MHz)
2. ECM – External Clock Medium-Power mode
(0.5 MHz to 4 MHz)
3. ECH – External Clock High-Power mode
(4 MHz to 32 MHz)
4. LP – 32 kHz Low-Power Crystal mode.
5. XT – Medium Gain Crystal or Ceramic Resonator
Oscillator mode (up to 4 MHz)
6. HS – High Gain Crystal or Ceramic Resonator
mode (4 MHz to 20 MHz)
7. RC – External Resistor-Capacitor (RC).
8. INTOSC – Internal oscillator (31 kHz to 32 MHz).
Clock Source modes are selected by the FOSC<2:0>
bits in the Configuration Word 1. The FOSC bits
determine the type of oscillator that will be used when
the device is first powered.
The EC clock mode relies on an external logic level
signal as the device clock source. The LP, XT, and HS
clock modes require an external crystal or resonator to
be connected to the device. Each mode is optimized for
a different frequency range. The RC clock mode
requires an external resistor and capacitor to set the
oscillator frequency.
The INTOSC internal oscillator block produces low,
medium, and high frequency clock sources, designated
LFINTOSC, MFINTOSC, and HFINTOSC. (see
Internal Oscillator Block, Figure 5-1). A wide selection
of device clock frequencies may be derived from these
three clock sources.
2011 Microchip Technology Inc. DS41391D-page 51

PIC16(L)F1826/27
FOSC<2:0>
Oscillator
T1OSCEN
Enable
Oscillator
T1OSO
T1OSI
Clock Source Option
for other modules
OSC1
OSC2
Sleep
LP, XT, HS, RC, EC
T1OSC
CPU and
Postscaler
MUX
MUX
16 MHz
8 MHz
4 MHz
2 MHz
1 MHz
250 kHz
500 kHz
IRCF<3:0>
31 kHz
500 kHz
Source
Internal
Oscillator
Block
WDT, PWRT, Fail-Safe Clock Monitor
16 MHz
Internal Oscillator
(HFINTOSC)
Clock
Control
SCS<1:0>
HFPLL
31 kHz (LFINTOSC)
Two-Speed Start-up and other modules
Oscillator
31 kHz
Source
500 kHz
(MFINTOSC)
125 kHz
31.25 kHz
62.5 kHz
FOSC<2:0> = 100
Peripherals
Sleep
External
Timer1
4 x PLL
FIGURE 5-1: SIMPLIFIED PIC® MCU CLOCK SOURCE BLOCK DIAGRAM
DS41391D-page 52 2011 Microchip Technology Inc.

PIC16(L)F1826/27
OSC1/CLKIN
OSC2/CLKOUT
Clock from
Ext. System
PIC
®
MCU
FOSC/4 or
I/O
(1)
Note 1: Output depends upon CLKOUTEN bit of the
Configuration Word 1.
5.2 Clock Source Types
Clock sources can be classified as external or internal.
External clock sources rely on external circuitry for the
clock source to function. Examples are: oscillator modules (EC mode), quartz crystal resonators or ceramic
resonators (LP, XT and HS modes) and Resistor-Capacitor (RC) mode circuits.
Internal clock sources are contained internally within
the oscillator module. The internal oscillator block has
two internal oscillators and a dedicated Phase-Lock
Loop (HFPLL) that are used to generate three internal
system clock sources: the 16 MHz High-Frequency
Internal Oscillator (HFINTOSC), 500 kHz (MFINTOSC)
and the 31 kHz Low-Frequency Internal Oscillator
(LFINTOSC).
The system clock can be selected between external or
internal clock sources via the System Clock Select
(SCS) bits in the OSCCON register. See Section 5.3
“Clock Switching” for additional information.
5.2.1 EXTERNAL CLOCK SOURCES
An external clock source can be used as the device
system clock by performing one of the following
actions:
• Program the FOSC<2:0> bits in the Configuration
Word 1 to select an external clock source that will
be used as the default system clock upon a
device Reset.
• Write the SCS<1:0> bits in the OSCCON register
to switch the system clock source to:
- Timer1 Oscillator during run-time, or
- An external clock source determined by the
value of the FOSC bits.
See Section 5.3 “Clock Switching”for more information.
5.2.1.1 EC Mode
The External Clock (EC) mode allows an externally
generated logic level signal to be the system clock
source. When operating in this mode, an external clock
source is connected to the OSC1 input.
OSC2/CLKOUT is available for general purpose I/O or
CLKOUT. Figure 5-2 shows the pin connections for EC
mode.
EC mode has 3 power modes to select from through
Configuration Word 1:
• High-power, 4-32 MHz (FOSC = 111)
• Medium power, 0.5-4 MHz (FOSC = 110)
• Low-power, 0-0.5 MHz (FOSC = 101)
The Oscillator Start-up Timer (OST) is disabled when
EC mode is selected. Therefore, there is no delay in
operation after a Power-on Reset (POR) or wake-up
from Sleep. Because the PIC
®
MCU design is fully
static, stopping the external clock input will have the
effect of halting the device while leaving all data intact.
Upon restarting the external clock, the device will
resume operation as if no time had elapsed.
FIGURE 5-2: EXTERNAL CLOCK (EC)
MODE OPERATION
5.2.1.2 LP, XT, HS Modes
The LP, XT and HS modes support the use of quartz
crystal resonators or ceramic resonators connected to
OSC1 and OSC2 (Figure 5-3). The three modes select
a low, medium or high gain setting of the internal
inverter-amplifier to support various resonator types
and speed.
LP Oscillator mode selects the lowest gain setting of the
internal inverter-amplifier. LP mode current consumption
is the least of the three modes. This mode is designed to
drive only 32.768 kHz tuning-fork type crystals (watch
crystals).
XT Oscillator mode selects the intermediate gain
setting of the internal inverter-amplifier. XT mode
current consumption is the medium of the three modes.
This mode is best suited to drive resonators with a
medium drive level specification.
HS Oscillator mode selects the highest gain setting of the
internal inverter-amplifier. HS mode current consumption
is the highest of the three modes. This mode is best
suited for resonators that require a high drive setting.
Figure 5-3 and Figure 5-4 show typical circuits for
quartz crystal and ceramic resonators, respectively.
2011 Microchip Technology Inc. DS41391D-page 53

PIC16(L)F1826/27
Note 1: A series resistor (RS) may be required for
quartz crystals with low drive level.
2: The value of R
F varies with the Oscillator mode
selected (typically between 2 M to 10 M.
C1
C2
Quartz
R
S
(1)
OSC1/CLKIN
RF
(2)
Sleep
To Internal
Logic
PIC® MCU
Crystal
OSC2/CLKOUT
Note 1: A series resistor (RS) may be required for
ceramic resonators with low drive level.
2: The value of R
F varies with the Oscillator mode
selected (typically between 2 M to 10 M.
3: An additional parallel feedback resistor (R
P)
may be required for proper ceramic resonator
operation.
C1
C2
Ceramic
R
S
(1)
OSC1/CLKIN
RF
(2)
Sleep
To Internal
Logic
PIC® MCU
RP
(3)
Resonator
OSC2/CLKOUT
FIGURE 5-3: QUARTZ CRYSTAL
OPERATION (LP, XT OR
HS MODE)
Note 1: Quartz crystal characteristics vary
according to type, package and
manufacturer. The user should consult the
manufacturer data sheets for specifications
and recommended application.
2: Always verify oscillator performance over
DD and temperature range that is
the V
expected for the application.
3: For oscillator design assistance, reference
the following Microchip Applications Notes:
• AN826, “Crystal Oscillator Basics and
Crystal Selection for rfPIC
Devices” (DS00826)
• AN849, “Basic PIC
(DS00849)
• AN943, “Practical PIC
Analysis and Design” (DS00943)
• AN949, “Making Your Oscillator Work”
(DS00949)
®
and PIC
®
Oscillator Design”
®
Oscillator
FIGURE 5-4: CERAMIC RESONATOR
OPERATION
(XT OR HS MODE)
5.2.1.3 Oscillator Start-up Timer (OST)
If the oscillator module is configured for LP, XT or HS
modes, the Oscillator Start-up Timer (OST) counts
1024 oscillations from OSC1. This occurs following a
Power-on Reset (POR) and when the Power-up Timer
(PWRT) has expired (if configured), or a wake-up from
Sleep. During this time, the program counter does not
®
increment and program execution is suspended. The
OST ensures that the oscillator circuit, using a quartz
crystal resonator or ceramic resonator, has started and
is providing a stable system clock to the oscillator
module.
In order to minimize latency between external oscillator
start-up and code execution, the Two-Speed Clock
Start-up mode can be selected (see Section 5.4
“Two-Speed Clock Start-up Mode”).
DS41391D-page 54 2011 Microchip Technology Inc.
5.2.1.4 4X PLL
The oscillator module contains a 4X PLL that can be
used with both external and internal clock sources to
provide a system clock source. The input frequency for
the 4X PLL must fall within specifications. See the PLL
Clock Timing Specifications in Section 30.0
“Electrical Specifications”.
The 4X PLL may be enabled for use by one of two
methods:
1. Program the PLLEN bit in Configuration Word 2
to a ‘1’.
2. Write the SPLLEN bit in the OSCCON register to
a ‘1’. If the PLLEN bit in Configuration Word 2 is
programmed to a ‘1’, then the value of SPLLEN
is ignored.

PIC16(L)F1826/27
C1
C2
32.768 kHz
T1OSI
To Internal
Logic
PIC® MCU
Crystal
T1OSO
Quartz
OSC2/CLKOUT
CEXT
REXT
PIC® MCU
OSC1/CLKIN
F
OSC/4 or
Internal
Clock
VDD
VSS
Recommended values: 10 k REXT 100 k, <3V
3 k R
EXT 100 k, 3-5V
C
EXT > 20 pF, 2-5V
Note 1: Output depends upon CLKOUTEN bit of the
Configuration Word 1.
I/O
(1)
5.2.1.5 TIMER1 Oscillator
The Timer1 Oscillator is a separate crystal oscillator
that is associated with the Timer1 peripheral. It is optimized for timekeeping operations with a 32.768 kHz
crystal connected between the T1OSO and T1OSI
device pins.
The Timer1 Oscillator can be used as an alternate system clock source and can be selected during run-time
using clock switching. Refer to Section 5.3 “Clock
Switching” for more information.
FIGURE 5-5: QUARTZ CRYSTAL
OPERATION (TIMER1
OSCILLATOR)
5.2.1.6 External RC Mode
The external Resistor-Capacitor (RC) modes support
the use of an external RC circuit. This allows the
designer maximum flexibility in frequency choice while
keeping costs to a minimum when clock accuracy is not
required.
The RC circuit connects to OSC1. OSC2/CLKOUT is
available for general purpose I/O or CLKOUT. The
function of the OSC2/CLKOUT pin is determined by the
state of the CLKOUTEN
bit in Configuration Word 1.
Figure 5-6 shows the external RC mode connections.
FIGURE 5-6: EXTERNAL RC MODES
Note 1: Quartz crystal characteristics vary
according to type, package and
manufacturer. The user should consult the
manufacturer data sheets for specifications
and recommended application.
2: Always verify oscillator performance over
DD and temperature range that is
the V
expected for the application.
3: For oscillator design assistance, reference
the following Microchip Applications Notes:
• AN826, “Crystal Oscillator Basics and
Crystal Selection for rfPIC
Devices” (DS00826)
• AN849, “Basic PIC
(DS00849)
• AN943, “Practical PIC
2011 Microchip Technology Inc. DS41391D-page 55
Analysis and Design” (DS00943)
• AN949, “Making Your Oscillator Work”
(DS00949)
• TB097, “Interfacing a Micro Crystal
MS1V-T1K 32.768 kHz Tuning Fork
Crystal to a PIC16F690/SS” (DS91097)
• AN1288, “Design Practices for
Low-Power External Oscillators”
(DS01288)
®
and PIC
®
Oscillator Design”
®
Oscillator
The RC oscillator frequency is a function of the supply
voltage, the resistor (R
EXT) and capacitor (CEXT) values
and the operating temperature. Other factors affecting
the oscillator frequency are:
• threshold voltage variation
• component tolerances
• packaging variations in capacitance
®
The user also needs to take into account variation due
to tolerance of external RC components used.

PIC16(L)F1826/27
5.2.2 INTERNAL CLOCK SOURCES
The device may be configured to use the internal oscillator block as the system clock by performing one of the
following actions:
• Program the FOSC<2:0> bits in Configuration
Word 1 to select the INTOSC clock source, which
will be used as the default system clock upon a
device Reset.
• Write the SCS<1:0> bits in the OSCCON register
to switch the system clock source to the internal
oscillator during run-time. See Section 5.3
“Clock Switching”for more information.
In INTOSC mode, OSC1/CLKIN is available for general
purpose I/O. OSC2/CLKOUT is available for general
purpose I/O or CLKOUT.
The function of the OSC2/CLKOUT pin is determined
by the state of the CLKOUTEN
Word 1.
The internal oscillator block has two independent
oscillators and a dedicated Phase-Lock Loop, HFPLL
that can produce one of three internal system clock
sources.
1. The HFINTOSC (High-Frequency Internal
Oscillator) is factory calibrated and operates at
16 MHz. The HFINTOSC source is generated
from the 500 kHz MFINTOSC source and the
dedicated Phase-Lock Loop, HFPLL. The
frequency of the HFINTOSC can be
user-adjusted via software using the OSCTUNE
register (Register 5-3).
2. The MFINTOSC (Medium-Frequency Internal
Oscillator) is factory calibrated and operates at
500 kHz. The frequency of the MFINTOSC can
be user-adjusted via software using the
OSCTUNE register (Register 5-3).
3. The LFINTOSC (Low-Frequency Internal
Oscillator) is uncalibrated and operates at
31 kHz.
bit in Configuration
5.2.2.1 HFINTOSC
The High-Frequency Internal Oscillator (HFINTOSC) is
a factory calibrated 16 MHz internal clock source. The
frequency of the HFINTOSC can be altered via
software using the OSCTUNE register (Register 5-3).
The output of the HFINTOSC connects to a postscaler
and multiplexer (see Figure 5-1). One of nine
frequencies derived from the HFINTOSC can be
selected via software using the IRCF<3:0> bits of the
OSCCON register. See Section5.2.2.7 “Internal
Oscillator Clock Switch Timing” for more information.
The HFINTOSC is enabled by:
• Configure the IRCF<3:0> bits of the OSCCON
register for the desired HF frequency, and
•FOSC<2:0> = 100, or
• Set the System Clock Source (SCS) bits of the
OSCCON register to ‘1x’.
The High Frequency Internal Oscillator Ready bit
(HFIOFR) of the OSCSTAT register indicates when the
HFINTOSC is running and can be utilized.
The High Frequency Internal Oscillator Status Locked
bit (HFIOFL) of the OSCSTAT register indicates when
the HFINTOSC is running within 2% of its final value.
The High Frequency Internal Oscillator Status Stable
bit (HFIOFS) of the OSCSTAT register indicates when
the HFINTOSC is running within 0.5% of its final value.
5.2.2.2 MFINTOSC
The Medium-Frequency Internal Oscillator
(MFINTOSC) is a factory calibrated 500 kHz internal
clock source. The frequency of the MFINTOSC can be
altered via software using the OSCTUNE register
(Register 5-3).
The output of the MFINTOSC connects to a postscaler
and multiplexer (see Figure 5-1). One of nine
frequencies derived from the MFINTOSC can be
selected via software using the IRCF<3:0> bits of the
OSCCON register. See Section5.2.2.7 “Internal
Oscillator Clock Switch Timing” for more information.
The MFINTOSC is enabled by:
• Configure the IRCF<3:0> bits of the OSCCON
register for the desired HF frequency, and
•FOSC<2:0> = 100, or
• Set the System Clock Source (SCS) bits of the
OSCCON register to ‘1x’
The Medium Frequency Internal Oscillator Ready bit
(MFIOFR) of the OSCSTAT register indicates when the
MFINTOSC is running and can be utilized.
DS41391D-page 56 2011 Microchip Technology Inc.

PIC16(L)F1826/27
5.2.2.3 Internal Oscillator Frequency
Adjustment
The 500 kHz internal oscillator is factory calibrated.
This internal oscillator can be adjusted in software by
writing to the OSCTUNE register (Register 5-3). Since
the HFINTOSC and MFINTOSC clock sources are
derived from the 500 kHz internal oscillator a change in
the OSCTUNE register value will apply to both.
The default value of the OSCTUNE register is ‘0’. The
value is a 6-bit two’s complement number. A value of
1Fh will provide an adjustment to the maximum
frequency. A value of 20h will provide an adjustment to
the minimum frequency.
When the OSCTUNE register is modified, the oscillator
frequency will begin shifting to the new frequency. Code
execution continues during this shift. There is no
indication that the shift has occurred.
OSCTUNE does not affect the LFINTOSC frequency.
Operation of features that depend on the LFINTOSC
clock source frequency, such as the Power-up Timer
(PWRT), Watchdog Timer (WDT), Fail-Safe Clock
Monitor (FSCM) and peripherals, are not affected by the
change in frequency.
5.2.2.4 LFINTOSC
The Low-Frequency Internal Oscillator (LFINTOSC) is
an uncalibrated 31 kHz internal clock source.
The output of the LFINTOSC connects to a postscaler
and multiplexer (see Figure 5-1). Select 31 kHz, via
software, using the IRCF<3:0> bits of the OSCCON
register. See Section 5.2.2.7 “Internal Oscillator
Clock Switch Timing” for more information. The
LFINTOSC is also the frequency for the Power-up Timer
(PWRT), Watchdog Timer (WDT) and Fail-Safe Clock
Monitor (FSCM).
The LFINTOSC is enabled by selecting 31 kHz
(IRCF<3:0> bits of the OSCCON register = 000) as the
system clock source (SCS bits of the OSCCON
register = 1x), or when any of the following are
enabled:
• Configure the IRCF<3:0> bits of the OSCCON
register for the desired LF frequency, and
•FOSC<2:0> = 100, or
• Set the System Clock Source (SCS) bits of the
OSCCON register to ‘1x’
Peripherals that use the LFINTOSC are:
• Power-up Timer (PWRT)
• Watchdog Timer (WDT)
• Fail-Safe Clock Monitor (FSCM)
The Low Frequency Internal Oscillator Ready bit
(LFIOFR) of the OSCSTAT register indicates when the
LFINTOSC is running and can be utilized.
5.2.2.5 Internal Oscillator Frequency
Selection
The system clock speed can be selected via software
using the Internal Oscillator Frequency Select bits
IRCF<3:0> of the OSCCON register.
The output of the 16 MHz HFINTOSC and 31 kHz
LFINTOSC connects to a postscaler and multiplexer
(see Figure 5-1). The Internal Oscillator Frequency
Select bits IRCF<3:0> of the OSCCON register select
the frequency output of the internal oscillators. One of
the following frequencies can be selected via software:
• 32 MHz (requires 4X PLL)
•16 MHz
•8 MHz
•4 MHz
•2 MHz
•1 MHz
• 500 kHz (Default after Reset)
•250 kHz
•125 kHz
•62.5 kHz
•31.25 kHz
• 31 kHz (LFINTOSC)
Note: Following any Reset, the IRCF<3:0> bits
of the OSCCON register are set to ‘0111’
and the frequency selection is set to
500 kHz. The user can modify the IRCF
bits to select a different frequency.
The IRCF<3:0> bits of the OSCCON register allow
duplicate selections for some frequencies. These duplicate choices can offer system design trade-offs. Lower
power consumption can be obtained when changing
oscillator sources for a given frequency. Faster transition times can be obtained between frequency changes
that use the same oscillator source.
2011 Microchip Technology Inc. DS41391D-page 57

PIC16(L)F1826/27
5.2.2.6 32 MHz Internal Oscillator
Frequency Selection
The Internal Oscillator Block can be used with the 4X
PLL associated with the External Oscillator Block to
produce a 32 MHz internal system clock source. The
following settings are required to use the 32 MHz internal clock source:
• The FOSC bits in Configuration Word 1 must be
set to use the INTOSC source as the device system clock (FOSC<2:0> = 100).
• The SCS bits in the OSCCON register must be
cleared to use the clock determined by
FOSC<2:0> in Configuration Word 1
(SCS<1:0> = 00).
• The IRCF bits in the OSCCON register must be
set to the 8 MHz HFINTOSC set to use
(IRCF<3:0> = 1110).
• The SPLLEN bit in the OSCCON register must be
set to enable the 4xPLL, or the PLLEN bit of the
Configuration Word 2 must be programmed to a
‘1’.
Note: When using the PLLEN bit of the
Configuration Word 2, the 4xPLL cannot
be disabled by software and the 8 MHz
HFINTOSC option will no longer be
available.
The 4xPLL is not available for use with the internal
oscillator when the SCS bits of the OSCCON register
are set to ‘1x’. The SCS bits must be set to ‘00’ to use
the 4xPLL with the internal oscillator.
5.2.2.7 Internal Oscillator Clock Switch
Timing
When switching between the HFINTOSC, MFINTOSC
and the LFINTOSC, the new oscillator may already be
shut down to save power (see Figure 5-7). If this is the
case, there is a delay after the IRCF<3:0> bits of the
OSCCON register are modified before the frequency
selection takes place. The OSCSTAT register will
reflect the current active status of the HFINTOSC,
MFINTOSC and LFINTOSC oscillators. The sequence
of a frequency selection is as follows:
1. IRCF<3:0> bits of the OSCCON register are
modified.
2. If the new clock is shut down, a clock start-up
delay is started.
3. Clock switch circuitry waits for a falling edge of
the current clock.
4. The current clock is held low and the clock
switch circuitry waits for a rising edge in the new
clock.
5. The new clock is now active.
6. The OSCSTAT register is updated as required.
7. Clock switch is complete.
See Figure 5-7 for more details.
If the internal oscillator speed is switched between two
clocks of the same source, there is no start-up delay
before the new frequency is selected. Clock switching
time delays are shown in Table 5-1.
Start-up delay specifications are located in the
oscillator tables of Section 30.0 “Electrical
Specifications”.
DS41391D-page 58 2011 Microchip Technology Inc.

FIGURE 5-7: INTERNAL OSCILLATOR SWITCH TIMING
HFINTOSC/
LFINTOSC
IRCF <3:0>
System Clock
HFINTOSC/
LFINTOSC
IRCF <3:0>
System Clock
0 0
0 0
Start-up Time
2-cycle Sync Running
2-cycle Sync Running
HFINTOSC/ LFINTOSC (FSCM and WDT disabled)
HFINTOSC/
LFINTOSC (Either FSCM or WDT enabled)
LFINTOSC
HFINTOSC/
IRCF <3:0>
System Clock
= 0 0
Start-up Time 2-cycle Sync
Running
LFINTOSC HFINTOSC/MFINTOSC
LFINTOSC turns off unless WDT or FSCM is enabled
MFINTOSC
MFINTOSC
MFINTOSC
MFINTOSC
MFINTOSC
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 59

PIC16(L)F1826/27
5.3 Clock Switching
The system clock source can be switched between
external and internal clock sources via software using
the System Clock Select (SCS) bits of the OSCCON
register. The following clock sources can be selected
using the SCS bits:
• Default system oscillator determined by FOSC
bits in Configuration Word 1
• Timer1 32 kHz crystal oscillator
• Internal Oscillator Block (INTOSC)
5.3.1 SYSTEM CLOCK SELECT (SCS)
BITS
The System Clock Select (SCS) bits of the OSCCON
register selects the system clock source that is used for
the CPU and peripherals.
• When the SCS bits of the OSCCON register = 00,
the system clock source is determined by value of
the FOSC<2:0> bits in the Configuration Word 1.
• When the SCS bits of the OSCCON register = 01,
the system clock source is the Timer1 oscillator.
• When the SCS bits of the OSCCON register = 1x,
the system clock source is chosen by the internal
oscillator frequency selected by the IRCF<3:0>
bits of the OSCCON register. After a Reset, the
SCS bits of the OSCCON register are always
cleared.
Note: Any automatic clock switch, which may
occur from Two-Speed Start-up or
Fail-Safe Clock Monitor, does not update
the SCS bits of the OSCCON register. The
user can monitor the OSTS bit of the
OSCSTAT register to determine the current
system clock source.
5.3.3 TIMER1 OSCILLATOR
The Timer1 Oscillator is a separate crystal oscillator
associated with the Timer1 peripheral. It is optimized
for timekeeping operations with a 32.768 kHz crystal
connected between the T1OSO and T1OSI device
pins.
The Timer1 oscillator is enabled using the T1OSCEN
control bit in the T1CON register. See Section 21.0
“Timer1 Module with Gate Control” for more
information about the Timer1 peripheral.
5.3.4 TIMER1 OSCILLATOR READY
(T1OSCR) BIT
The user must ensure that the Timer1 Oscillator is
ready to be used before it is selected as a system clock
source. The Timer1 Oscillator Ready (T1OSCR) bit of
the OSCSTAT register indicates whether the Timer1
oscillator is ready to be used. After the T1OSCR bit is
set, the SCS bits can be configured to select the Timer1
oscillator.
When switching between clock sources, a delay is
required to allow the new clock to stabilize. These oscillator delays are shown in Table 5-1.
5.3.2 OSCILLATOR START-UP TIME-OUT
STATUS (OSTS) BIT
The Oscillator Start-up Time-out Status (OSTS) bit of
the OSCSTAT register indicates whether the system
clock is running from the external clock source, as
defined by the FOSC<2:0> bits in the Configuration
Word 1, or from the internal clock source. In particular,
OSTS indicates that the Oscillator Start-up Timer
(OST) has timed out for LP, XT or HS modes. The OST
does not reflect the status of the Timer1 Oscillator.
DS41391D-page 60 2011 Microchip Technology Inc.

PIC16(L)F1826/27
5.4 Two-Speed Clock Start-up Mode
Two-Speed Start-up mode provides additional power
savings by minimizing the latency between external
oscillator start-up and code execution. In applications
that make heavy use of the Sleep mode, Two-Speed
Start-up will remove the external oscillator start-up
time from the time spent awake and can reduce the
overall power consumption of the device. This mode
allows the application to wake-up from Sleep, perform
a few instructions using the INTOSC internal oscillator
block as the clock source and go back to Sleep without
waiting for the external oscillator to become stable.
Two-Speed Start-up provides benefits when the oscillator module is configured for LP, XT, or HS modes.
The Oscillator Start-up Timer (OST) is enabled for
these modes and must count 1024 oscillations before
the oscillator can be used as the system clock source.
If the oscillator module is configured for any mode
other than LP, XT or HS mode, then Two-Speed
Start-up is disabled. This is because the external clock
oscillator does not require any stabilization time after
POR or an exit from Sleep.
If the OST count reaches 1024 before the device
enters Sleep mode, the OSTS bit of the OSCSTAT register is set and program execution switches to the
external oscillator. However, the system may never
operate from the external oscillator if the time spent
awake is very short.
Note: Executing a SLEEP instruction will abort
the oscillator start-up time and will cause
the OSTS bit of the OSCSTAT register to
remain clear.
5.4.1 TWO-SPEED START-UP MODE CONFIGURATION
Two-Speed Start-up mode is configured by the
following settings:
• IESO (of the Configuration Word 1) = 1; Inter-
nal/External Switchover bit (Two-Speed Start-up
mode enabled).
• SCS (of the OSCCON register) = 00.
• FOSC<2:0> bits in the Configuration Word 1
configured for LP, XT or HS mode.
Two-Speed Start-up mode is entered after:
• Power-on Reset (POR) and, if enabled, after
Power-up Timer (PWRT) has expired, or
• Wake-up from Sleep.
TABLE 5-1: OSCILLATOR SWITCHING DELAYS
Switch From Switch To Frequency Oscillator Delay
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
(1)
31 kHz
31.25 kHz-500 kHz
Oscillator Warm-up Delay (T
31.25kHz-16MHz
DC – 32 MHz 2 cycles
DC – 32 MHz 1 cycle of each
32 kHz-20 MHz 1024 Clock Cycles (OST)
31.25 kHz-500 kHz
31.25kHz-16MHz
2 s (approx.)
31 kHz 1 cycle of each
WARM)
LFINTOSC
Sleep/POR
MFINTOSC
HFINTOSC
Sleep/POR EC, RC
LFINTOSC EC, RC
Sleep/POR
Any clock source
Timer1 Oscillator
LP, XT, HS
MFINTOSC
HFINTOSC
Any clock source LFINTOSC
Any clock source Timer1 Oscillator 32 kHz 1024 Clock Cycles (OST)
PLL inactive PLL active 16-32 MHz 2 ms (approx.)
Note 1: PLL inactive.
2011 Microchip Technology Inc. DS41391D-page 61

PIC16(L)F1826/27
0 1 1022 1023
PC + 1
TOSTT
INTOSC
OSC1
OSC2
Program Counter
System Clock
PC - N
PC
5.4.2 TWO-SPEED START-UP SEQUENCE
1. Wake-up from Power-on Reset or Sleep.
2. Instructions begin execution by the internal
oscillator at the frequency set in the IRCF<3:0>
bits of the OSCCON register.
3. OST enabled to count 1024 clock cycles.
4. OST timed out, wait for falling edge of the
internal oscillator.
5. OSTS is set.
6. System clock held low until the next falling edge
of new clock (LP, XT or HS mode).
7. System clock is switched to external clock
source.
FIGURE 5-8: TWO-SPEED START-UP
5.4.3 CHECKING TWO-SPEED CLOCK STATUS
Checking the state of the OSTS bit of the OSCSTAT
register will confirm if the microcontroller is running
from the external clock source, as defined by the
FOSC<2:0> bits in the Configuration Word 1, or the
internal oscillator.
DS41391D-page 62 2011 Microchip Technology Inc.

PIC16(L)F1826/27
External
LFINTOSC
÷ 64
S
R
Q
31 kHz
(~32 s)
488 Hz
(~2 ms)
Clock Monitor
Latch
Clock
Failure
Detected
Oscillator
Clock
Q
Sample Clock
5.5 Fail-Safe Clock Monitor
The Fail-Safe Clock Monitor (FSCM) allows the device
to continue operating should the external oscillator fail.
The FSCM can detect oscillator failure any time after
the Oscillator Start-up Timer (OST) has expired. The
FSCM is enabled by setting the FCMEN bit in the
Configuration Word 1. The FSCM is applicable to all
external Oscillator modes (LP, XT, HS, EC, Timer1
Oscillator and RC).
FIGURE 5-9: FSCM BLOCK DIAGRAM
5.5.1 FAIL-SAFE DETECTION
The FSCM module detects a failed oscillator by
comparing the external oscillator to the FSCM sample
clock. The sample clock is generated by dividing the
LFINTOSC by 64. See Figure 5-9. Inside the fail
detector block is a latch. The external clock sets the
latch on each falling edge of the external clock. The
sample clock clears the latch on each rising edge of the
sample clock. A failure is detected when an entire
half-cycle of the sample clock elapses before the
external clock goes low.
5.5.3 FAIL-SAFE CONDITION CLEARING
The Fail-Safe condition is cleared after a Reset,
executing a SLEEP instruction or changing the SCS bits
of the OSCCON register. When the SCS bits are
changed, the OST is restarted. While the OST is
running, the device continues to operate from the
INTOSC selected in OSCCON. When the OST times
out, the Fail-Safe condition is cleared and the device
will be operating from the external clock source. The
Fail-Safe condition must be cleared before the OSFIF
flag can be cleared.
5.5.4 RESET OR WAKE-UP FROM SLEEP
The FSCM is designed to detect an oscillator failure
after the Oscillator Start-up Timer (OST) has expired.
The OST is used after waking up from Sleep and after
any type of Reset. The OST is not used with the EC or
RC Clock modes so that the FSCM will be active as
soon as the Reset or wake-up has completed. When
the FSCM is enabled, the Two-Speed Start-up is also
enabled. Therefore, the device will always be executing
code while the OST is operating.
Note: Due to the wide range of oscillator start-up
times, the Fail-Safe circuit is not active
during oscillator start-up (i.e., after exiting
Reset or Sleep). After an appropriate
amount of time, the user should check the
Status bits in the OSCSTAT register to
verify the oscillator start-up and that the
system clock switchover has successfully
completed.
5.5.2 FAIL-SAFE OPERATION
When the external clock fails, the FSCM switches the
device clock to an internal clock source and sets the bit
flag OSFIF of the PIR2 register. Setting this flag will
generate an interrupt if the OSFIE bit of the PIE2
register is also set. The device firmware can then take
steps to mitigate the problems that may arise from a
failed clock. The system clock will continue to be
sourced from the internal clock source until the device
firmware successfully restarts the external oscillator
and switches back to external operation.
The internal clock source chosen by the FSCM is
determined by the IRCF<3:0> bits of the OSCCON
register. This allows the internal oscillator to be
configured before a failure occurs.
2011 Microchip Technology Inc. DS41391D-page 63

PIC16(L)F1826/27
OSCFIF
System
Clock
Output
Sample Clock
Failure
Detected
Oscillator
Failure
Note: The system clock is normally at a much higher frequency than the sample clock. The relative frequencies in
this example have been chosen for clarity.
(Q)
Te st
Test Test
Clock Monitor Output
FIGURE 5-10: FSCM TIMING DIAGRAM
DS41391D-page 64 2011 Microchip Technology Inc.

PIC16(L)F1826/27
5.6 Oscillator Control Registers
REGISTER 5-1: OSCCON: OSCILLATOR CONTROL REGISTER
R/W-0/0 R/W-0/0 R/W-1/1 R/W-1/1 R/W-1/1 U-0 R/W-0/0 R/W-0/0
SPLLEN IRCF<3:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7 SPLLEN: Software PLL Enable bit
If PLLEN in Configuration Word 1 =
SPLLEN bit is ignored. 4x PLL is always enabled (subject to oscillator requirements)
If PLLEN in Configuration Word 1 = 0:
1 = 4x PLL Is enabled
0 = 4x PLL is disabled
bit 6-3 IRCF<3:0>: Internal Oscillator Frequency Select bits
000x =31 kHz LF
0010 =31.25 kHz MF
0011 =31.25 kHz HF
0100 =62.5 kHz MF
0101 =125 kHz MF
0110 =250 kHz MF
0111 =500 kHz MF (default upon Reset)
1000 =125 kHz HF
1001 =250 kHz HF
1010 =500 kHz HF
1011 =1 MHz HF
1100 =2 MHz HF
1101 =4 MHz HF
1110 =8 MHz or 32 MHz HF(see Section 5.2.2.1 “HFINTOSC”)
1111 =16 MHz HF
bit 2 Unimplemented: Read as ‘0’
bit 1-0 SCS<1:0>: System Clock Select bits
1x = Internal oscillator block
01 = Timer1 oscillator
00 = Clock determined by FOSC<2:0> in Configuration Word 1.
(1)
(1)
(1)
(1)
1:
—
SCS<1:0>
Note 1: Duplicate frequency derived from HFINTOSC.
2011 Microchip Technology Inc. DS41391D-page 65

PIC16(L)F1826/27
REGISTER 5-2: OSCSTAT: OSCILLATOR STATUS REGISTER
R-1/q R-0/q R-q/q R-0/q R-0/q R-q/q R-0/0 R-0/q
T1OSCR PLLR OSTS HFIOFR HFIOFL MFIOFR LFIOFR HFIOFS
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared q = Conditional
bit 7 T1OSCR: Timer1 Oscillator Ready bit
If T1OSCEN =
1 = Timer1 oscillator is ready
0 = Timer1 oscillator is not ready
If T1OSCEN =
1 = Timer1 clock source is always ready
bit 6 PLLR 4x PLL Ready bit
1 = 4x PLL is ready
0 = 4x PLL is not ready
bit 5 OSTS: Oscillator Start-up Time-out Status bit
1 = Running from the clock defined by the FOSC<2:0> bits of the Configuration Word 1
0 = Running from an internal oscillator (FOSC<2:0> = 100)
bit 4 HFIOFR: High Frequency Internal Oscillator Ready bit
1 = HFINTOSC is ready
0 = HFINTOSC is not ready
bit 3 HFIOFL: High Frequency Internal Oscillator Locked bit
1 = HFINTOSC is at least 2% accurate
0 = HFINTOSC is not 2% accurate
bit 2 MFIOFR: Medium Frequency Internal Oscillator Ready bit
1 = MFINTOSC is ready
0 = MFINTOSC is not ready
bit 1 LFIOFR: Low Frequency Internal Oscillator Ready bit
1 = LFINTOSC is ready
0 = LFINTOSC is not ready
bit 0 HFIOFS: High Frequency Internal Oscillator Stable bit
1 = HFINTOSC is at least 0.5% accurate
0 = HFINTOSC is not 0.5% accurate
1:
0:
DS41391D-page 66 2011 Microchip Technology Inc.

PIC16(L)F1826/27
REGISTER 5-3: OSCTUNE: OSCILLATOR TUNING REGISTER
U-0 U-0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0
— — TUN<5:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7-6 Unimplemented: Read as ‘0’
bit 5-0 TUN<5:0>: Frequency Tuning bits
011111 = Maximum frequency
011110 =
•
•
•
000001 =
000000 = Oscillator module is running at the factory-calibrated frequency.
111111 =
•
•
•
100000 = Minimum frequency
TABLE 5-2: SUMMARY OF REGISTERS ASSOCIATED WITH CLOCK SOURCES
(1)
(1)
Register
on Page
94
97
187
Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
OSCCON SPLLEN IRCF3 IRCF2 IRCF1 IRCF0
OSCSTAT T1OSCR PLLR OSTS HFIOFR HFIOFL MFIOFR LFIOFR
OSCTUNE
PIE2 OSFIE
PIR2
T1CON
Legend: — = unimplemented locations read as ‘0’. Shaded cells are not used by clock sources.
Note 1: PIC16(L)F1827 only.
— — TUN5 TUN4 TUN3 TUN2 TUN1 TUN0 67
C2IE C1IE EEIE BCL1IE
OSFIF
TMR1CS1 TMR1CS0 T1CKPS1 T1CKPS0 T1OSCEN T1SYNC — TMR1ON
C2IF C1IF EEIF BCL1IF — — CCP2IF
— SCS1 SCS0 65
—
— CCP2IE
HFIOFS 66
TABLE 5-3: SUMMARY OF CONFIGURATION WORD ASSOCIATED WITH CLOCK SOURCES
Name Bits Bit -/7 Bit -/6 Bit 13/5 Bit 12/4 Bit 11/3 Bit 10/2 Bit 9/1 Bit 8/0
CONFIG1
Legend: — = unimplemented locations read as ‘0’. Shaded cells are not used by clock sources.
13:8
7:0
— — FCMEN IESO CLKOUTEN BOREN1 BOREN0 CPD
CP MCLRE PWRTE WDTE1 WDTE0 FOSC2 FOSC1 FOSC0
Register
on Page
50
2011 Microchip Technology Inc. DS41391D-page 67

PIC16(L)F1826/27
NOTES:
DS41391D-page 68 2011 Microchip Technology Inc.

PIC16(L)F1826/27
6.0 REFERENCE CLOCK MODULE
The reference clock module provides the ability to send
a divided clock to the clock output pin of the device
(CLKR) and provide a secondary internal clock source
to the modulator module. This module is available in all
oscillator configurations and allows the user to select a
greater range of clock submultiples to drive external
devices in the application. The reference clock module
includes the following features:
• System clock is the source
• Available in all oscillator configurations
• Programmable clock divider
• Output enable to a port pin
• Selectable duty cycle
• Slew rate control
The reference clock module is controlled by the
CLKRCON register (Register 6-1) and is enabled when
setting the CLKREN bit. To output the divided clock signal to the CLKR port pin, the CLKROE bit must be set.
The CLKRDIV<2:0> bits enable the selection of 8 different clock divider options. The CLKRDC<1:0> bits
can be used to modify the duty cycle of the output
(1)
. The CLKRSLR bit controls slew rate limiting.
clock
Note 1: If the base clock rate is selected without
a divider, the output clock will always
have a duty cycle equal to that of the
source clock, unless a 0% duty cycle is
selected. If the clock divider is set to base
clock/2, then 25% and 75% duty cycle
accuracy will be dependent upon the
source clock.
For information on using the reference clock output
with the modulator module, see Section 23.0 “Data
Signal Modulator”.
6.3 Conflicts with the CLKR Pin
There are two cases when the reference clock output
signal cannot be output to the CLKR pin, if:
• LP, XT or HS Oscillator mode is selected.
• CLKOUT function is enabled.
Even if either of these cases are true, the module can
still be enabled and the reference clock signal may be
used in conjunction with the modulator module.
6.3.1 OSCILLATOR MODES
If LP, XT or HS oscillator modes are selected, the
OSC2/CLKR pin must be used as an oscillator input pin
and the CLKR output cannot be enabled. See
Section 5.2 “Clock Source Types” for more informa-
tion on different oscillator modes.
6.3.2 CLKOUT FUNCTION
The CLKOUT function has a higher priority than the
reference clock module. Therefore, if the CLKOUT
function is enabled by the CLKOUTEN
tion Word 1, F
pin. Reference Section 4.0 “Device Configuration”
for more information.
OSC/4 will always be output on the port
bit in Configura-
6.4 Operation During Sleep
As the reference clock module relies on the system
clock as its source, and the system clock is disabled in
Sleep, the module does not function in Sleep, even if
an external clock source or the Timer1 clock source is
configured as the system clock. The module outputs
will remain in their current state until the device exits
Sleep.
6.1 Slew Rate
The slew rate limitation on the output port pin can be
disabled. The slew rate limitation can be removed by
clearing the CLKRSLR bit in the CLKRCON register.
6.2 Effects of a Reset
Upon any device Reset, the reference clock module is
disabled. The user's firmware is responsible for
initializing the module before enabling the output. The
registers are reset to their default values.
2011 Microchip Technology Inc. DS41391D-page 69

PIC16(L)F1826/27
6.5 Reference Clock Control Register
REGISTER 6-1: CLKRCON: REFERENCE CLOCK CONTROL REGISTER
R/W-0/0 R/W-0/0 R/W-1/1 R/W-1/1 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0
CLKREN CLKROE CLKRSLR CLKRDC<1:0> CLKRDIV<2:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7 CLKREN: Reference Clock Module Enable bit
1 = Reference Clock module is enabled
0 = Reference Clock module is disabled
bit 6 CLKROE: Reference Clock Output Enable bit
1 = Reference Clock output is enabled on CLKR pin
0 = Reference Clock output disabled on CLKR pin
bit 5 CLKRSLR: Reference Clock Slew Rate Control limiting enable bit
1 = Slew Rate limiting is enabled
0 = Slew Rate limiting is disabled
bit 4-3 CLKRDC<1:0>: Reference Clock Duty Cycle bits
11 = Clock outputs duty cycle of 75%
10 = Clock outputs duty cycle of 50%
01 = Clock outputs duty cycle of 25%
00 = Clock outputs duty cycle of 0%
bit 2-0 CLKRDIV<2:0> Reference Clock Divider bits
111 = Base clock value divided by 128
110 = Base clock value divided by 64
101 = Base clock value divided by 32
100 = Base clock value divided by 16
011 = Base clock value divided by 8
010 = Base clock value divided by 4
001 = Base clock value divided by 2
000 = Base clock value
(2)
(1)
(3)
Note 1: In this mode, the 25% and 75% duty cycle accuracy will be dependent on the source clock duty cycle.
2: In this mode, the duty cycle will always be equal to the source clock duty cycle, unless a duty cycle of 0%
is selected.
3: To route CLKR to pin, CLKOUTEN
Word 1 = 0 will result in F
DS41391D-page 70 2011 Microchip Technology Inc.
OSC/4. See Section 6.3 “Conflicts with the CLKR Pin” for details.
of Configuration Word 1 = 1 is required. CLKOUTEN of Configuration

PIC16(L)F1826/27
TABLE 6-1: SUMMARY OF REGISTERS ASSOCIATED WITH REFERENCE CLOCK SOURCES
Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
CLKRCON CLKREN CLKROE CLKRSLR CLKRDC1 CLKRDC0
Legend: — = unimplemented locations read as ‘0’. Shaded cells are not used by reference clock sources.
CLKRDIV2 CLKRDIV1 CLKRDIV0
TABLE 6-2: SUMMARY OF CONFIGURATION WORD WITH REFERENCE CLOCK SOURCES
Name Bits Bit -/7 Bit -/6 Bit 13/5 Bit 12/4 Bit 11/3 Bit 10/2 Bit 9/1 Bit 8/0
CONFIG1
Legend: — = unimplemented locations read as ‘0’. Shaded cells are not used by reference clock sources.
13:8
7:0
— — FCMEN IESO CLKOUTEN BOREN1 BOREN0 CPD
CP MCLRE PWRTE WDTE1 WDTE0 FOSC2 FOSC1 FOSC0
Register
on Page
70
Register
on Page
44
2011 Microchip Technology Inc. DS41391D-page 71

PIC16(L)F1826/27
NOTES:
DS41391D-page 72 2011 Microchip Technology Inc.

PIC16(L)F1826/27
External Reset
MCLR
VDD
WDT
Time-out
Power-on
Reset
LFINTOSC
PWRT
64 ms
PWRTEN
Brown-out
Reset
BOR
RESET Instruction
Stack
Pointer
Stack Overflow/Underflow Reset
Sleep
MCLRE
Enable
Device
Reset
Zero
Programming Mode Exit
7.0 RESETS
There are multiple ways to reset this device:
• Power-on Reset (POR)
• Brown-out Reset (BOR)
•MCLR
•WDT Reset
• RESET instruction
• Stack Overflow
• Stack Underflow
• Programming mode exit
To a llo w V
can be enabled to extend the Reset time after a BOR
or POR event.
A simplified block diagram of the On-Chip Reset Circuit
is shown in Figure 7-1.
FIGURE 7-1: SIMPLIFIED BLOCK DIAGRAM OF ON-CHIP RESET CIRCUIT
Reset
DD to stabilize, an optional power-up timer
2011 Microchip Technology Inc. DS41391D-page 73

PIC16(L)F1826/27
7.1 Power-on Reset (POR)
The POR circuit holds the device in Reset until VDD has
reached an acceptable level for minimum operation.
Slow rising V
performance may require greater than minimum V
The PWRT, BOR or MCLR
extend the start-up period until all device operation
conditions have been met.
7.1.1 POWER-UP TIMER (PWRT)
The Power-up Timer provides a nominal 64 ms timeout on POR or Brown-out Reset.
The device is held in Reset as long as PWRT is active.
The PWRT delay allows additional time for the V
rise to an acceptable level. The Power-up Timer is
enabled by clearing the PWRTE bit in Configuration
Word 1.
The Power-up Timer starts after the release of the POR
and BOR.
For additional information, refer to Application Note
AN607, “Power-up Trouble Shooting” (DS00607).
TABLE 7-1: BOR OPERATING MODES
BOREN<1:0> SBOREN Device Mode BOR Mode
DD, fast operating speeds or analog
DD.
features can be used to
DD to
11 X X Active Waits for BOR ready
Awake Active
10 X
Sleep Disabled
7.2 Brown-Out Reset (BOR)
The BOR circuit holds the device in Reset when Vdd
reaches a selectable minimum level. Between the
POR and BOR, complete voltage range coverage for
execution protection can be implemented.
The Brown-out Reset module has four operating
modes controlled by the BOREN<1:0> bits in Configuration Word 1. The four operating modes are:
• BOR is always on
• BOR is off when in Sleep
• BOR is controlled by software
• BOR is always off
Refer to Tab le 7 -1 for more information.
The Brown-out Reset voltage level is selectable by
configuring the BORV bit in Configuration Word 2.
DD noise rejection filter prevents the BOR from trig-
A V
gering on small events. If V
duration greater than parameter T
will reset. See Figure 7-2 for more information.
Device Operation
upon release of POR
DD falls below VBOR for a
BORDC, the device
Device Operation
upon wake- up from
Sleep
(1)
Waits for BOR ready
01
00 X X Disabled Begins immediately
Note 1: Even though this case specifically waits for the BOR, the BOR is already operating, so there is no delay in
start-up.
1
X
0 Disabled Begins immediately
7.2.1 BOR IS ALWAYS ON
When the BOREN bits of Configuration Word 1 are set
to ‘11’, the BOR is always on. The device start-up will
be delayed until the BOR is ready and V
than the BOR threshold.
BOR protection is active during Sleep. The BOR does
not delay wake-up from Sleep.
DD is higher
7.2.2 BOR IS OFF IN SLEEP
When the BOREN bits of Configuration Word 1 are set
to ‘10’, the BOR is on, except in Sleep. The device
start-up will be delayed until the BOR is ready and VDD
is higher than the BOR threshold.
BOR protection is not active during Sleep. The device
wake-up will be delayed until the BOR is ready.
Active Begins immediately
7.2.3 BOR CONTROLLED BY SOFTWARE
When the BOREN bits of Configuration Word 1 are set
to ‘01’, the BOR is controlled by the SBOREN bit of the
BORCON register. The device start-up is not delayed
by the BOR ready condition or the V
BOR protection begins as soon as the BOR circuit is
ready. The status of the BOR circuit is reflected in the
BORRDY bit of the BORCON register.
BOR protection is unchanged by Sleep.
DD level.
DS41391D-page 74 2011 Microchip Technology Inc.

FIGURE 7-2: BROWN-OUT SITUATIONS
TPWRT
(1)
VBOR
V
DD
Internal
Reset
VBOR
V
DD
Internal
Reset
TPWRT
(1)
< TPWRT
TPWRT
(1)
VBOR
V
DD
Internal
Reset
Note 1: TPWRT delay only if PWRTE bit is programmed to ‘0’.
PIC16(L)F1826/27
REGISTER 7-1: BORCON: BROWN-OUT RESET CONTROL REGISTER
R/W-1/u U-0 U-0 U-0 U-0 U-0 U-0 R-q/u
SBOREN
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared q = Value depends on condition
bit 7 SBOREN: Software Brown-out Reset Enable bit
bit 6-1 Unimplemented: Read as ‘0’
bit 0 BORRDY: Brown-out Reset Circuit Ready Status bit
— — — — — —BORRDY
If BOREN <1:0> in Configuration Word 1
01:
SBOREN is read/write, but has no effect on the BOR.
If BOREN <1:0> in Configuration Word 1 =
01:
1 = BOR Enabled
0 = BOR Disabled
1 = The Brown-out Reset circuit is active
0 = The Brown-out Reset circuit is inactive
2011 Microchip Technology Inc. DS41391D-page 75

PIC16(L)F1826/27
7.3 MCLR
The MCLR is an optional external input that can reset
the device. The MCLR
MCLRE bit of Configuration Word 1 and the LVP bit of
Configuration Word 2 (Ta b le 7 - 2).
function is controlled by the
TABLE 7-2: MCLR CONFIGURATION
MCLRE LVP MCLR
00Disabled
10Enabled
x1Enabled
7.3.1 MCLR ENABLED
When MCLR is enabled and the pin is held low, the
device is held in Reset. The MCLR
DD through an internal weak pull-up.
V
The device has a noise filter in the MCLR
The filter will detect and ignore small pulses.
Note: A Reset does not drive the MCLR pin low.
pin is connected to
Reset path.
7.3.2 MCLR DISABLED
When MCLR is disabled, the pin functions as a general
purpose input and the internal weak pull-up is under
software control. See Section 12.2 “PORTA Regis-
ters” for more information.
7.4 Watchdog Timer (WDT) Reset
The Watchdog Timer generates a Reset if the firmware
does not issue a CLRWDT instruction within the time-out
period. The TO and PD bits in the STATUS register are
changed to indicate the WDT Reset. See Section 10.0
“Watchdog Timer” for more information.
7.7 Programming Mode Exit
Upon exit of Programming mode, the device will
behave as if a POR had just occurred.
7.8 Power-Up Timer
The Power-up Timer optionally delays device execution
after a BOR or POR event. This timer is typically used to
allow VDD to stabilize before allowing the device to start
running.
The Power-up Timer is controlled by the PWRTE
Configuration Word 1.
bit of
7.9 Start-up Sequence
Upon the release of a POR or BOR, the following must
occur before the device will begin executing:
1. Power-up Timer runs to completion (if enabled).
2. Oscillator start-up timer runs to completion (if
required for oscillator source).
3. MCLR
The total time-out will vary based on oscillator configuration and Power-up Timer configuration. See
Section 5.0 “Oscillator Module (With Fail-Safe
Clock Monitor)” for more information.
The Power-up Timer and oscillator start-up timer run
independently of MCLR
long enough, the Power-up Timer and oscillator startup timer will expire. Upon bringing MCLR
device will begin execution immediately (see Figure 7-
3). This is useful for testing purposes or to synchronize
more than one device operating in parallel.
must be released (if enabled).
Reset. If MCLR is kept low
high, the
7.5 RESET Instruction
A RESET instruction will cause a device Reset. The RI
bit in the PCON register will be set to ‘0’. See Ta b le 7 -4
for default conditions after a RESET instruction has
occurred.
7.6 Stack Overflow/Underflow Reset
The device can reset when the Stack Overflows or
Underflows. The STKOVF or STKUNF bits of the PCON
register indicate the Reset condition. These Resets are
enabled by setting the STVREN bit in Configuration Word
2. See Section 3 .4.2 “Overflow/Underflow Reset”for
more information.
DS41391D-page 76 2011 Microchip Technology Inc.

FIGURE 7-3: RESET START-UP SEQUENCE
TOST
TMCLR
TPWRT
VDD
Internal POR
Power-Up Timer
MCLR
Internal RESET
Oscillator Modes
Oscillator Start-Up Timer
Oscillator
F
OSC
Internal Oscillator
Oscillator
F
OSC
External Clock (EC)
CLKIN
F
OSC
External Crystal
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 77

PIC16(L)F1826/27
7.10 Determining the Cause of a Reset
Upon any Reset, multiple bits in the STATUS and
PCON register are updated to indicate the cause of the
Reset. Ta b le 7 - 3 and Ta b le 7 - 4 show the Reset conditions of these registers.
TABLE 7-3: RESET STATUS BITS AND THEIR SIGNIFICANCE
STKOVF STKUNF RMCLR RI POR BOR TO PD Condition
00110x11Power-on Reset
00110x0xIllegal, TO
00110xx0Illegal, PD is set on POR
0011u011Brown-out Reset
uuuuuu0uWDT Reset
uuuuuu00WDT Wake-up from Sleep
uuuuuu10Interrupt Wake-up from Sleep
uu0uuuuuMCLR
uu0uuu10MCLR
u u u 0 u u u u RESET Instruction Executed
1uuuuuuuStack Overflow Reset (STVREN = 1)
u1uuuuuuStack Underflow Reset (STVREN = 1)
is set on POR
Reset during normal operation
Reset during Sleep
(1)
(2)
STATUS
Register
---1 0uuu uu-- uuuu
PCON
Register
TABLE 7-4: RESET CONDITION FOR SPECIAL REGISTERS
Condition
Power-on Reset 0000h ---1 1000 00-- 110x
MCLR
Reset during normal operation 0000h ---u uuuu uu-- 0uuu
MCLR Reset during Sleep 0000h ---1 0uuu uu-- 0uuu
WDT Reset 0000h ---0 uuuu uu-- uuuu
WDT Wake-up from Sleep PC + 1 ---0 0uuu uu-- uuuu
Brown-out Reset 0000h ---1 1uuu 00-- 11u0
Interrupt Wake-up from Sleep PC + 1
RESET Instruction Executed 0000h ---u uuuu uu-- u0uu
Stack Overflow Reset (STVREN = 1) 0000h ---u uuuu 1u-- uuuu
Stack Underflow Reset (STVREN = 1) 0000h ---u uuuu u1-- uuuu
Legend: u = unchanged, x = unknown, - = unimplemented bit, reads as ‘0’.
Note1: When the wake-up is due to an interrupt and Global Enable bit (GIE) is set, the return address is pushed on
the stack and PC is loaded with the interrupt vector (0004h) after execution of PC + 1.
2: If a Status bit is not implemented, that bit will be read as ‘0’.
Program
Counter
DS41391D-page 78 2011 Microchip Technology Inc.

PIC16(L)F1826/27
7.11 Power Control (PCON) Register
The Power Control (PCON) register contains flag bits
to differentiate between a:
• Power-on Reset (POR
• Brown-out Reset (BOR)
• Reset Instruction Reset (RI
•MCLR Reset (RMCLR)
• Stack Underflow Reset (STKUNF)
• Stack Overflow Reset (STKOVF)
The PCON register bits are shown in Register 7-2.
REGISTER 7-2: PCON: POWER CONTROL REGISTER
R/W/HS-0/q R/W/HS-0/q U-0 U-0 R/W/HC-1/q R/W/HC-1/q R/W/HC-q/u R/W/HC-q/u
STKOVF STKUNF
bit 7 bit 0
Legend:
HC = Bit is cleared by hardware HS = Bit is set by hardware
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -m/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared q = Value depends on condition
)
)
— —
RMCLR
RI POR BOR
bit 7 STKOVF: Stack Overflow Flag bit
1 = A Stack Overflow occurred
0 = A Stack Overflow has not occurred or set to ‘0’ by firmware
bit 6 STKUNF: Stack Underflow Flag bit
1 = A Stack Underflow occurred
0 = A Stack Underflow has not occurred or set to ‘0’ by firmware
bit 5-4 Unimplemented: Read as ‘0’
bit 3 RMCLR
1 = A MCLR Reset has not occurred or set to ‘1’ by firmware
0 = A MCLR
bit 2 RI
1 = A RESET instruction has not been executed or set to ‘1’ by firmware
0 = A RESET instruction has been executed (set to ‘0’ in hardware upon executing a RESET instruction)
bit 1 POR
1 = No Power-on Reset occurred
0 = A Power-on Reset occurred (must be set in software after a Power-on Reset occurs)
bit 0 BOR
1 = No Brown-out Reset occurred
0 = A Brown-out Reset occurred (must be set in software after a Power-on Reset or Brown-out Reset
: MCLR Reset Flag bit
Reset has occurred (set to ‘0’ in hardware when a MCLR Reset occurs)
: RESET Instruction Flag bit
: Power-on Reset Status bit
: Brown-out Reset Status bit
occurs)
2011 Microchip Technology Inc. DS41391D-page 79

PIC16(L)F1826/27
TABLE 7-5: SUMMARY OF REGISTERS ASSOCIATED WITH RESETS
Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Register
on Page
BORCON SBOREN
PCON STKOVF STKUNF
STATUS
WDTCON
Legend: — = unimplemented bit, reads as ‘0’. Shaded cells are not used by Resets.
Note 1: Other (non Power-up) Resets include MCLR
— — —TOPD Z DC C
— — WDTPS4 WDTPS3 WDTPS2 WDTPS1 WDTPS0 SWDTEN 99
— — — — — — BORRDY 75
— —RMCLRRI POR BOR 79
Reset and Watchdog Timer Reset during normal operation.
21
DS41391D-page 80 2011 Microchip Technology Inc.

8.0 INTERRUPTS
D
CK
R
Q
D
CK
R
Q
RBx
IOCBNx
IOCBPx
Q2
D
CK
S
Q
Q4Q1
Data bus =
0 or 1
Write IOCBFx
IOCIE
To data bus
IOCBFx
Edge
Detect
IOC interrupt
to CPU core
From all other
IOCBFx individual
pin detectors
Q1
Q2
Q3
Q4
Q4Q1
Q1
Q2
Q3
Q4
Q1
Q2
Q3
Q4
Q4
Q4Q1
Q4Q1
Q4Q1
The interrupt feature allows certain events to preempt
normal program flow. Firmware is used to determine
the source of the interrupt and act accordingly. Some
interrupts can be configured to wake the MCU from
Sleep mode.
This chapter contains the following information for
Interrupts:
• Operation
• Interrupt Latency
• Interrupts During Sleep
•INT Pin
• Automatic Context Saving
Many peripherals produce Interrupts. Refer to the
corresponding chapters for details.
A block diagram of the interrupt logic is shown in
Figure 8-1.
FIGURE 8-1: INTERRUPT LOGIC
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 81

PIC16(L)F1826/27
8.1 Operation
Interrupts are disabled upon any device Reset. They
are enabled by setting the following bits:
• GIE bit of the INTCON register
• Interrupt Enable bit(s) for the specific interrupt
events)
• PEIE bit of the INTCON register (if the Interrupt
Enable bit of the interrupt event is contained in the
PIEx registers)
The INTCON, PIRx registers record individual interrupts via interrupt flag bits. Interrupt flag bits will be set,
regardless of the status of the GIE, PEIE and individual
interrupt enable bits.
The following events happen when an interrupt event
occurs while the GIE bit is set:
• Current prefetched instruction is flushed
• GIE bit is cleared
• Current Program Counter (PC) is pushed onto the
stack
• Critical registers are automatically saved to the
shadow registers (See “Section 8.5 “Automatic
Context Saving”.”)
• PC is loaded with the interrupt vector 0004h
The firmware within the Interrupt Service Routine (ISR)
should determine the source of the interrupt by polling
the interrupt flag bits. The interrupt flag bits must be
cleared before exiting the ISR to avoid repeated
interrupts. Because the GIE bit is cleared, any interrupt
that occurs while executing the ISR will be recorded
through its interrupt flag, but will not cause the
processor to redirect to the interrupt vector.
The RETFIE instruction exits the ISR by popping the
previous address from the stack, restoring the saved
context from the shadow registers and setting the GIE
bit.
For additional information on a specific interrupt’s
operation, refer to its peripheral chapter.
8.2 Interrupt Latency
Interrupt latency is defined as the time from when the
interrupt event occurs to the time code execution at the
interrupt vector begins. The latency for synchronous
interrupts is 3 or 4 instruction cycles. For asynchronous
interrupts, the latency is 3 to 5 instruction cycles,
depending on when the interrupt occurs. See Figure 8-2
and Figure 8.3 for more details.
Note 1: Individual interrupt flag bits are set,
regardless of the state of any other
enable bits.
2: All interrupts will be ignored while the GIE
bit is cleared. Any interrupt occurring
while the GIE bit is clear will be serviced
when the GIE bit is set again.
DS41391D-page 82 2011 Microchip Technology Inc.

Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
OSC1
CLKOUT
PC 0004h 0005h
PC
Inst(0004h)NOP
GIE
Q1 Q2 Q3 Q4Q1 Q2 Q3 Q4
1 Cycle Instruction at PC
PC
Inst(0004h)NOP
2 Cycle Instruction at PC
FSR ADDR PC+1 PC+2 0004h 0005h
PC
Inst(0004h)NOP
GIE
PCPC-1
3 Cycle Instruction at PC
Execute
Interrupt
Inst(PC)
Interrupt Sampled
during Q1
Inst(PC)
PC-1 PC+1
NOP
PC
New PC/
PC+1
0005hPC-1
PC+1/FSR
ADDR
0004h
NOP
Interrupt
GIE
Interrupt
INST(PC) NOPNOP
FSR ADDR PC+1 PC+2 0004h 0005h
PC
Inst(0004h)NOP
GIE
PCPC-1
3 Cycle Instruction at PC
Interrupt
INST(PC) NOPNOP
NOP
Inst(0005h)
Execute
Execute
Execute
PIC16(L)F1826/27
FIGURE 8-2: INTERRUPT LATENCY
2011 Microchip Technology Inc. DS41391D-page 83

PIC16(L)F1826/27
Q2Q1 Q3 Q4 Q2Q1 Q3 Q4 Q2Q1 Q3 Q4 Q2Q1 Q3 Q4 Q2Q1 Q3 Q4
OSC1
CLKOUT
INT pin
INTF
GIE
INSTRUCTION FLOW
PC
Instruction
Fetched
Instruction
Executed
Interrupt Latency
PC PC + 1
PC + 1
0004h
0005h
Inst (0004h)
Inst (0005h)
Dummy Cycle
Inst (PC)
Inst (PC + 1)
Inst (PC – 1)
Inst (0004h)
Dummy Cycle
Inst (PC)
—
Note 1: INTF flag is sampled here (every Q1).
2: Asynchronous interrupt latency = 3-5 T
CY. Synchronous latency = 3-4 TCY, where TCY = instruction cycle time.
Latency is the same whether Inst (PC) is a single cycle or a 2-cycle instruction.
3: CLKOUT not available in all Oscillator modes.
4: For minimum width of INT pulse, refer to AC specifications in Section 30.0 “Electrical Specifications””.
5: INTF is enabled to be set any time during the Q4-Q1 cycles.
(1)
(2)
(3)
(4)
(5)
(1)
FIGURE 8-3: INT PIN INTERRUPT TIMING
DS41391D-page 84 2011 Microchip Technology Inc.

8.3 Interrupts During Sleep
Some interrupts can be used to wake from Sleep. To
wake from Sleep, the peripheral must be able to
operate without the system clock. The interrupt source
must have the appropriate Interrupt Enable bit(s) set
prior to entering Sleep.
On waking from Sleep, if the GIE bit is also set, the
processor will branch to the interrupt vector. Otherwise,
the processor will continue executing instructions after
the SLEEP instruction. The instruction directly after the
SLEEP instruction will always be executed before
branching to the ISR. Refer to Section 9.0 “Power-
Down Mode (Sleep)” for more details.
8.4 INT Pin
The INT pin can be used to generate an asynchronous
edge-triggered interrupt. This interrupt is enabled by
setting the INTE bit of the INTCON register. The
INTEDG bit of the OPTION_REG register determines on
which edge the interrupt will occur. When the INTEDG
bit is set, the rising edge will cause the interrupt. When
the INTEDG bit is clear, the falling edge will cause the
interrupt. The INTF bit of the INTCON register will be set
when a valid edge appears on the INT pin. If the GIE and
INTE bits are also set, the processor will redirect
program execution to the interrupt vector.
PIC16(L)F1826/27
8.5 Automatic Context Saving
Upon entering an interrupt, the return PC address is
saved on the stack. Additionally, the following registers
are automatically saved in the Shadow registers:
• W register
• STATUS register (except for TO
• BSR register
• FSR registers
• PCLATH register
Upon exiting the Interrupt Service Routine, these registers are automatically restored. Any modifications to
these registers during the ISR will be lost. If modifications to any of these registers are desired, the corresponding Shadow register should be modified and the
value will be restored when exiting the ISR. The
Shadow registers are available in Bank 31 and are
readable and writable. Depending on the user’s application, other registers may also need to be saved.
and PD)
2011 Microchip Technology Inc. DS41391D-page 85

PIC16(L)F1826/27
8.6 Interrupt Control Registers
8.6.1 INTCON REGISTER
The INTCON register is a readable and writable
register, that contains the various enable and flag bits
for TMR0 register overflow, interrupt-on-change and
external INT pin interrupts.
Note: Interrupt flag bits are set when an interrupt
condition occurs, regardless of the state of
its corresponding enable bit or the Global
Enable bit, GIE, of the INTCON register.
User software should ensure the appropriate interrupt flag bits are clear prior to
enabling an interrupt.
REGISTER 8-1: INTCON: INTERRUPT CONTROL REGISTER
R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R-0/0
GIE PEIE TMR0IE INTE IOCIE TMR0IF INTF IOCIF
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7 GIE: Global Interrupt Enable bit
1 = Enables all active interrupts
0 = Disables all interrupts
bit 6 PEIE: Peripheral Interrupt Enable bit
1 = Enables all active peripheral interrupts
0 = Disables all peripheral interrupts
bit 5 TMR0IE: Timer0 Overflow Interrupt Enable bit
1 = Enables the Timer0 interrupt
0 = Disables the Timer0 interrupt
bit 4 INTE: INT External Interrupt Enable bit
1 = Enables the INT external interrupt
0 = Disables the INT external interrupt
bit 3 IOCIE: Interrupt-on-Change Enable bit
1 = Enables the interrupt-on-change
0 = Disables the interrupt-on-change
bit 2 TMR0IF: Timer0 Overflow Interrupt Flag bit
1 = TMR0 register has overflowed
0 = TMR0 register did not overflow
bit 1 INTF: INT External Interrupt Flag bit
1 = The INT external interrupt occurred
0 = The INT external interrupt did not occur
bit 0 IOCIF: Interrupt-on-Change Interrupt Flag bit
1 = When at least one of the interrupt-on-change pins changed state
0 = None of the interrupt-on-change pins have changed state
(1)
(1)
Note 1: The IOCIF Flag bit is read-only and cleared when all the Interrupt-on-Change flags in the IOCBF register
have been cleared by software.
DS41391D-page 86 2011 Microchip Technology Inc.

PIC16(L)F1826/27
8.6.2 PIE1 REGISTER
The PIE1 register contains the interrupt enable bits, as
shown in Register 8-2.
REGISTER 8-2: PIE1: PERIPHERAL INTERRUPT ENABLE REGISTER 1
R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0
TMR1GIE ADIE RCIE TXIE SSP1IE CCP1IE TMR2IE TMR1IE
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7 TMR1GIE: Timer1 Gate Interrupt Enable bit
1 = Enables the Timer1 Gate Acquisition interrupt
0 = Disables the Timer1 Gate Acquisition interrupt
bit 6 ADIE: A/D Converter (ADC) Interrupt Enable bit
1 = Enables the ADC interrupt
0 = Disables the ADC interrupt
bit 5 RCIE: USART Receive Interrupt Enable bit
1 = Enables the USART receive interrupt
0 = Disables the USART receive interrupt
bit 4 TXIE: USART Transmit Interrupt Enable bit
1 = Enables the USART transmit interrupt
0 = Disables the USART transmit interrupt
bit 3 SSP1IE: Synchronous Serial Port 1 (MSSP1) Interrupt Enable bit
1 = Enables the MSSP1 interrupt
0 = Disables the MSSP1 interrupt
bit 2 CCP1IE: CCP1 Interrupt Enable bit
1 = Enables the CCP1 interrupt
0 = Disables the CCP1 interrupt
bit 1 TMR2IE: TMR2 to PR2 Match Interrupt Enable bit
1 = Enables the Timer2 to PR2 match interrupt
0 = Disables the Timer2 to PR2 match interrupt
bit 0 TMR1IE: Timer1 Overflow Interrupt Enable bit
1 = Enables the Timer1 overflow interrupt
0 = Disables the Timer1 overflow interrupt
Note: Bit PEIE of the INTCON register must be
set to enable any peripheral interrupt.
2011 Microchip Technology Inc. DS41391D-page 87

PIC16(L)F1826/27
8.6.3 PIE2 REGISTER
The PIE2 register contains the interrupt enable bits, as
shown in Register 8-3.
REGISTER 8-3: PIE2: PERIPHERAL INTERRUPT ENABLE REGISTER 2
R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 U-0 U-0 R/W-0/0
OSFIE C2IE C1IE EEIE BCL1IE — —CCP2IE
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7 OSFIE: Oscillator Fail Interrupt Enable bit
1 = Enables the Oscillator Fail interrupt
0 = Disables the Oscillator Fail interrupt
bit 6 C2IE: Comparator C2 Interrupt Enable bit
1 = Enables the Comparator C2 interrupt
0 = Disables the Comparator C2 interrupt
bit 5 C1IE: Comparator C1 Interrupt Enable bit
1 = Enables the Comparator C1 interrupt
0 = Disables the Comparator C1 interrupt
bit 4 EEIE: EEPROM Write Completion Interrupt Enable bit
1 = Enables the EEPROM Write Completion interrupt
0 = Disables the EEPROM Write Completion interrupt
bit 3 BCL1IE: MSSP1 Bus Collision Interrupt Enable bit
1 = Enables the MSSP1 Bus Collision Interrupt
0 = Disables the MSSP1 Bus Collision Interrupt
bit 2-1 Unimplemented: Read as ‘0’
bit 0 CCP2IE: CCP2 Interrupt Enable bit
1 = Enables the CCP2 interrupt
0 = Disables the CCP2 interrupt
Note: Bit PEIE of the INTCON register must be
set to enable any peripheral interrupt.
(1)
Note 1: PIC16(L)F1827 only.
DS41391D-page 88 2011 Microchip Technology Inc.

PIC16(L)F1826/27
8.6.4 PIE3 REGISTER
The PIE3 register contains the interrupt enable bits, as
shown in Register 8-4.
REGISTER 8-4: PIE3: PERIPHERAL INTERRUPT ENABLE REGISTER 3
U-0 U-0 R/W-0/0 R/W-0/0 R/W-0/0 U-0 R/W-0/0 U-0
— — CCP4IE CCP3IE TMR6IE —TMR4IE—
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7-6 Unimplemented: Read as ‘0’
bit 5 CCP4IE: CCP4 Interrupt Enable bit
1 = Enables the CCP4 interrupt
0 = Disables the CCP4 interrupt
bit 4 CCP3IE: CCP3 Interrupt Enable bit
1 = Enables the CCP3 interrupt
0 = Disables the CCP3 interrupt
bit 3 TMR6IE: TMR6 to PR6 Match Interrupt Enable bit
1 = Enables the TMR6 to PR6 Match interrupt
0 = Disables the TMR6 to PR6 Match interrupt
bit 2 Unimplemented: Read as ‘0’
bit 1 TMR4IE: TMR4 to PR4 Match Interrupt Enable bit
1 = Enables the TMR4 to PR4 Match interrupt
0 = Disables the TMR4 to PR4 Match interrupt
bit 0 Unimplemented: Read as ‘0’
Note: Bit PEIE of the INTCON register must be
set to enable any peripheral interrupt.
(1)
Note 1: This register is only available on PIC16(L)F1827.
2011 Microchip Technology Inc. DS41391D-page 89

PIC16(L)F1826/27
8.6.5 PIE4 REGISTER
The PIE4 register contains the interrupt enable bits, as
shown in Register 8-5.
REGISTER 8-5: PIE4: PERIPHERAL INTERRUPT ENABLE REGISTER 4
U-0 U-0 U-0 U-0 U-0 U-0 R/W-0/0 R/W-0/0
— — — — — — BCL2IE SSP2IE
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7-2 Unimplemented: Read as ‘0’
bit 1 BCL2IE: MSSP2 Bus Collision Interrupt Enable bit
1 = Enables the MSSP2 Bus Collision Interrupt
0 = Disables the MSSP2 Bus Collision Interrupt
bit 0 SSP2IE: Master Synchronous Serial Port 2 (MSSP2) Interrupt Enable bit
1 = Enables the MSSP2 interrupt
0 = Disables the MSSP2 interrupt
(1)
Note 1: The PIE4 register is available only on the
PIC16(L)F1827 device.
2: Bit PEIE of the INTCON register must be
set to enable any peripheral interrupt.
(1)
Note 1: This register is only available on PIC16(L)F1827.
DS41391D-page 90 2011 Microchip Technology Inc.

PIC16(L)F1826/27
8.6.6 PIR1 REGISTER
The PIR1 register contains the interrupt flag bits, as
shown in Register 8-6.
REGISTER 8-6: PIR1: PERIPHERAL INTERRUPT REQUEST REGISTER 1
R/W-0/0 R/W-0/0 R-0/0 R-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0
TMR1GIF ADIF RCIF TXIF SSP1IF CCP1IF TMR2IF TMR1IF
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
Note: Interrupt flag bits are set when an interrupt
condition occurs, regardless of the state of
its corresponding enable bit or the Global
Enable bit, GIE, of the INTCON register.
User software should ensure the
appropriate interrupt flag bits are clear prior
to enabling an interrupt.
bit 7 TMR1GIF: Timer1 Gate Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 6 ADIF: A/D Converter Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 5 RCIF: USART Receive Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 4 TXIF: USART Transmit Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 3 SSP1IF: Synchronous Serial Port 1 (MSSP1) Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 2 CCP1IF: CCP1 Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 1 TMR2IF: Timer2 to PR2 Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 0 TMR1IF: Timer1 Overflow Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
2011 Microchip Technology Inc. DS41391D-page 91

PIC16(L)F1826/27
8.6.7 PIR2 REGISTER
The PIR2 register contains the interrupt flag bits, as
shown in Register 8-7.
REGISTER 8-7: PIR2: PERIPHERAL INTERRUPT REQUEST REGISTER 2
R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 R/W-0/0 U-0 U-0 R/W-0/0
OSFIF C2IF C1IF EEIF BCL1IF — —CCP2IF
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
Note: Interrupt flag bits are set when an interrupt
condition occurs, regardless of the state of
its corresponding enable bit or the Global
Enable bit, GIE, of the INTCON register.
User software should ensure the
appropriate interrupt flag bits are clear prior
to enabling an interrupt.
(1)
bit 7 OSFIF: Oscillator Fail Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 6 C2IF: Comparator C2 Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 5 C1IF: Comparator C1 Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 4 EEIF: EEPROM Write Completion Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 3 BCL1IF: MSSP1 Bus Collision Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 2-1 Unimplemented: Read as ‘0’
bit 0 CCP2IF: CCP2 Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
Note 1: PIC16(L)F1827 only.
(1)
DS41391D-page 92 2011 Microchip Technology Inc.

PIC16(L)F1826/27
8.6.8 PIR3 REGISTER
The PIR3 register contains the interrupt flag bits, as
shown in Register 8-8.
REGISTER 8-8: PIR3: PERIPHERAL INTERRUPT REQUEST REGISTER 3
U-0 U-0 R/W-0/0 R/W-0/0 R/W-0/0 U-0 R/W-0/0 U-0
— — CCP4IF CCP3IF TMR6IF —TMR4IF—
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
Note: Interrupt flag bits are set when an interrupt
condition occurs, regardless of the state of
its corresponding enable bit or the Global
Enable bit, GIE, of the INTCON register.
User software should ensure the
appropriate interrupt flag bits are clear prior
to enabling an interrupt.
(1)
bit 7-6 Unimplemented: Read as ‘0’
bit 5 CCP4IF: CCP4 Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 4 CCP3IF: CCP3 Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 3 TMR6IF: TMR6 to PR6 Match Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 2 Unimplemented: Read as ‘0’
bit 1 TMR4IF: TMR4 to PR4 Match Interrupt Flag bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 0 Unimplemented: Read as ‘0’
Note 1: This register is only available on PIC16(L)F1827.
2011 Microchip Technology Inc. DS41391D-page 93

PIC16(L)F1826/27
8.6.9 PIR4 REGISTER
The PIR4 register contains the interrupt flag bits, as
shown in Register 8-9.
(1)
Note 1: The PIR4 register is available only on the
PIC16(L)F1827 device.
2: Interrupt flag bits are set when an inter-
rupt condition occurs, regardless of the
state of its corresponding enable bit or
the Global Enable bit, GIE, of the
INTCON register. User software should
ensure the appropriate interrupt flag bits
are clear prior to enabling an interrupt.
REGISTER 8-9: PIR4: PERIPHERAL INTERRUPT REQUEST REGISTER 4
(1)
U-0 U-0 U-0 U-0 U-0 U-0 R/W/HS-0/0 R/W/HS-0/0
— — — — — — BCL2IF SSP2IF
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -n/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared HS = Bit is set by hardware
bit 7-2 Unimplemented: Read as ‘0’
bit 1 BCL2IF: MSSP2 Bus Collision Interrupt Flag bit
1 = A Bus Collision was detected (must be cleared in software)
0 = No Bus collision was detected
bit 0 SSP2IF: Master Synchronous Serial Port 2 (MSSP2) Interrupt Flag bit
1 = The Transmission/Reception/Bus Condition is complete (must be cleared in software)
0 = Waiting to Transmit/Receive/Bus Condition in progress
Note 1: This register is only available on PIC16(L)F1827.
TABLE 8-1: SUMMARY OF REGISTERS ASSOCIATED WITH INTERRUPTS
Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
INTCON GIE PEIE TMR0IE INTE IOCIE TMR0IF INTF IOCIF 86
OPTION_REG
PIE1 TMR1GIE ADIE RCIE TXIE SSP1IE CCP1IE TMR2IE TMR1IE 87
PIE2 OSFIE C2IE C1IE EEIE BCL1IE
(1)
PIE3
(1)
PIE4
PIR1
PIR2
(1)
PIR3
(1)
PIR4
Legend: — = unimplemented locations read as ‘0’. Shaded cells are not used by Interrupts.
Note 1: PIC16(L)F1827 only.
WPUEN INTEDG TMR0CS TMR0SE PSA PS2 PS1 PS0 177
—
— — CCP4IE CCP3IE TMR6IE —TMR4IE—89
— — — — — —
TMR1GIF ADIF RCIF TXIF SSP1IF CCP1IF TMR2IF TMR1IF
OSFIF C2IF C1IF EEIF BCL1IF
— — CCP4IF CCP3IF TMR6IF —TMR4IF—93
— — — — — —
— —CCP2IF
— CCP2IE
BCL2IE SSP2IE
BCL2IF SSP2IF
Register
on Page
(1)
(1)
88
90
91
92
94
DS41391D-page 94 2011 Microchip Technology Inc.

PIC16(L)F1826/27
9.0 POWER-DOWN MODE (SLEEP)
The Power-Down mode is entered by executing a
SLEEP instruction.
Upon entering Sleep mode, the following conditions
exist:
1. WDT will be cleared but keeps running, if
enabled for operation during Sleep.
bit of the STATUS register is cleared.
2. PD
3. TO bit of the STATUS register is set.
4. CPU clock is disabled.
5. 31 kHz LFINTOSC is unaffected and peripherals
that operate from it may continue operation in
Sleep.
6. Timer1 oscillator is unaffected and peripherals
that operate from it may continue operation in
Sleep.
7. ADC is unaffected, if the dedicated FRC clock is
selected.
8. Capacitive Sensing oscillator is unaffected.
9. I/O ports maintain the status they had before
SLEEP was executed (driving high, low or highimpedance).
10. Resets other than WDT are not affected by
Sleep mode.
Refer to individual chapters for more details on
peripheral operation during Sleep.
To minimize current consumption, the following conditions should be considered:
• I/O pins should not be floating
• External circuitry sinking current from I/O pins
• Internal circuitry sourcing current from I/O pins
• Current draw from pins with internal weak pull-ups
• Modules using 31 kHz LFINTOSC
• Modules using Timer1 oscillator
I/O pins that are high-impedance inputs should be
pulled to V
rents caused by floating inputs.
Examples of internal circuitry that might be sourcing
current include modules such as the DAC and FVR
modules. See Section 17.0 “Digital-to-Analog Con-
verter (DAC) Module” and Section 14.0 “Fixed Voltage Reference (FVR)” for more information on these
modules.
DD or VSS externally to avoid switching cur-
9.1 Wake-up from Sleep
The device can wake-up from Sleep through one of the
following events:
1. External Reset input on MCLR
2. BOR Reset, if enabled
3. POR Reset
4. Watchdog Timer, if enabled
5. Any external interrupt
6. Interrupts by peripherals capable of running during Sleep (see individual peripheral for more
information)
The first three events will cause a device Reset. The
last three events are considered a continuation of program execution. To determine whether a device Reset
or wake-up event occurred, refer to Section 7.10
“Determining the Cause of a Reset”.
When the SLEEP instruction is being executed, the next
instruction (PC + 1) is prefetched. For the device to
wake-up through an interrupt event, the corresponding
interrupt enable bit must be enabled. Wake-up will
occur regardless of the state of the GIE bit. If the GIE
bit is disabled, the device continues execution at the
instruction after the SLEEP instruction. If the GIE bit is
enabled, the device executes the instruction after the
SLEEP instruction, the device will then call the Interrupt
Service Routine. In cases where the execution of the
instruction following SLEEP is not desirable, the user
should have a NOP after the SLEEP instruction.
The WDT is cleared when the device wakes up from
Sleep, regardless of the source of wake-up.
pin, if enabled
2011 Microchip Technology Inc. DS41391D-page 95

PIC16(L)F1826/27
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1
Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4
OSC1
(1)
CLKOUT
(2)
Interrupt flag
GIE bit
(INTCON reg.)
Instruction Flow
PC
Instruction
Fetched
Instruction
Executed
PC PC + 1 PC + 2
Inst(PC) = Sleep
Inst(PC - 1)
Inst(PC + 1)
Sleep
Processor in
Sleep
Interrupt Latency
(4)
Inst(PC + 2)
Inst(PC + 1)
Inst(0004h)
Inst(0005h)
Inst(0004h)
Dummy Cycle
PC + 2 0004h 0005h
Dummy Cycle
T
OST
(3)
PC + 2
Note 1: XT, HS or LP Oscillator mode assumed.
2: CLKOUT is not available in XT, HS, or LP Oscillator modes, but shown here for timing reference.
3: T
OST = 1024 TOSC (drawing not to scale). This delay applies only to XT, HS or LP Oscillator modes.
4: GIE = 1 assumed. In this case after wake-up, the processor calls the ISR at 0004h. If GIE = 0, execution will continue in-line.
9.1.1 WAKE-UP USING INTERRUPTS
When global interrupts are disabled (GIE cleared) and
any interrupt source has both its interrupt enable bit
and interrupt flag bit set, one of the following will occur:
• If the interrupt occurs before the execution of a
SLEEP instruction
- SLEEP instruction will execute as a NOP.
- WDT and WDT prescaler will not be cleared
bit of the STATUS register will not be set
-TO
-PD
bit of the STATUS register will not be
cleared.
• If the interrupt occurs during or after the execu-
tion of a SLEEP instruction
- SLEEP instruction will be completely exe-
cuted
- Device will immediately wake-up from Sleep
- WDT and WDT prescaler will be cleared
-TO
bit of the STATUS register will be set
-PD bit of the STATUS register will be cleared.
Even if the flag bits were checked before executing a
SLEEP instruction, it may be possible for flag bits to
become set before the SLEEP instruction completes. To
determine whether a SLEEP instruction executed, test
bit. If the PD bit is set, the SLEEP instruction
the PD
was executed as a NOP.
FIGURE 9-1: WAKE-UP FROM SLEEP THROUGH INTERRUPT
TABLE 9-1: SUMMARY OF REGISTERS ASSOCIATED WITH POWER-DOWN MODE
Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
INTCON GIE PEIE TMR0IE INTE IOCIE TMR0IF INTF IOCIF 91
IOCBF IOCBF7 IOCBF6 IOCBF5 IOCBF4 IOCBF3 IOCBF2 IOCBF1 IOCBF0 134
IOCBN IOCBN7 IOCBN6 IOCBN5 IOCBN4 IOCBN3 IOCBN2 IOCBN1 IOCBN0 134
IOCBP IOCBP7 IOCBP6 IOCBP5 IOCBP4 IOCBP3 IOCBP2 IOCBP1 IOCBP0 134
PIE1 TMR1GIE ADIE RCIE
PIE4
(1)
PIE2
PIR1
PIR2
PIR4
(1)
STATUS
WDTCON
Legend: — = unimplemented, read as ‘0’. Shaded cells are not used in Power-down mode.
Note 1: PIC16(L)F1827 only.
DS41391D-page 96 2011 Microchip Technology Inc.
OSFIE C2IE C1IE EEIE BCL1IE
— — — — — —
TMR1GIF ADIF RCIF
OSFIF C2IF C1IF EEIF BCL1IF — — CCP2IF
— — — — — —
— — —TOPD Z DC C
— — WDTPS4 WDTPS3 WDTPS2 WDTPS1 WDTPS0 SWDTEN 105
TXIE SSP1IE CCP1IE TMR2IE TMR1IE 92
—
TXIF SSP1IF CCP1IF TMR2IF TMR1IF
— CCP2IE
BCL2IE SSP2IE
BCL2IF SSP2IF
(1)
(1)
Register on
Page
93
95
96
97
99
23

10.0 WATCHDOG TIMER
LFINTOSC
23-bit Programmable
Prescaler WDT
WDT Time-out
WDTPS<4:0>
SWDTEN
Sleep
WDTE<1:0> = 11
WDTE<1:0> = 01
WDTE<1:0> = 10
The Watchdog Timer is a system timer that generates
a Reset if the firmware does not issue a CLRWDT
instruction within the time-out period. The Watchdog
Timer is typically used to recover the system from
unexpected events.
The WDT has the following features:
• Independent clock source
• Multiple operating modes
- WDT is always on
- WDT is off when in Sleep
- WDT is controlled by software
- WDT is always off
• Configurable time-out period is from 1 ms to 256
seconds (typical)
• Multiple Reset conditions
• Operation during Sleep
FIGURE 10-1: WATCHDOG TIMER BLOCK DIAGRAM
PIC16(L)F1826/27
2011 Microchip Technology Inc. DS41391D-page 97

PIC16(L)F1826/27
10.1 Independent Clock Source
The WDT derives its time base from the 31 kHz
LFINTOSC internal oscillator. Time intervals in this
chapter are based on a nominal interval of 1 ms. See
Section 30.0 “Electrical Specifications” for the
LFINTOSC tolerances.
10.2 WDT Operating Modes
The Watchdog Timer module has four operating modes
controlled by the WDTE<1:0> bits in Configuration
Word 1. See Table 10-1.
10.2.1 WDT IS ALWAYS ON
When the WDTE bits of Configuration Word 1 are set to
‘11’, the WDT is always on.
WDT protection is active during Sleep.
10.2.2 WDT IS OFF IN SLEEP
When the WDTE bits of Configuration Word 1 are set to
‘10’, the WDT is on, except in Sleep.
WDT protection is not active during Sleep.
10.2.3 WDT CONTROLLED BY SOFTWARE
When the WDTE bits of Configuration Word 1 are set to
‘01’, the WDT is controlled by the SWDTEN bit of the
WDTCON register.
WDT protection is unchanged by Sleep. See
Table 10-1 for more details.
TABLE 10-1: WDT OPERATING MODES
WDTE<1:0> SWDTEN
Device
Mode
WDT
Mode
10.3 Time-Out Period
The WDTPS bits of the WDTCON register set the
time-out period from 1 ms to 256 seconds (nominal).
After a Reset, the default time-out period is 2 seconds.
10.4 Clearing the WDT
The WDT is cleared when any of the following conditions occur:
•Any Reset
• CLRWDT instruction is executed
• Device enters Sleep
• Device wakes up from Sleep
• Oscillator fail event
• WDT is disabled
• Oscillator Start-up TImer (OST) is running
See Table 10-2 for more information.
10.5 Operation During Sleep
When the device enters Sleep, the WDT is cleared. If
the WDT is enabled during Sleep, the WDT resumes
counting.
When the device exits Sleep, the WDT is cleared
again. The WDT remains clear until the OST, if
enabled, completes. See Section 5.0 “Oscillator
Module (With Fail-Safe Clock Monitor)” for more
information on the OST.
When a WDT time-out occurs while the device is in
Sleep, no Reset is generated. Instead, the device
wakes up and resumes operation. The TO
in the STATUS register are changed to indicate the
event. See Register 3-1 for more information.
and PD bits
11 X XActive
10 X
1
01
0 Disabled
00 X X Disabled
Awake Active
Sleep Disabled
Active
X
TABLE 10-2: WDT CLEARING CONDITIONS
Conditions WDT
WDTE<1:0> = 00
WDTE<1:0> = 01 and SWDTEN = 0
WDTE<1:0> = 10 and enter Sleep
CLRWDT Command
Oscillator Fail Detected
Exit Sleep + System Clock = T1OSC, EXTRC, INTOSC, EXTCLK
Exit Sleep + System Clock = XT, HS, LP Cleared until the end of OST
Change INTOSC divider (IRCF bits) Unaffected
DS41391D-page 98 2011 Microchip Technology Inc.
Cleared

PIC16(L)F1826/27
10.6 Watchdog Control Register
REGISTER 10-1: WDTCON: WATCHDOG TIMER CONTROL REGISTER
U-0 U-0 R/W-0/0 R/W-1/1 R/W-0/0 R/W-1/1 R/W-1/1 R/W-0/0
— — WDTPS<4:0> SWDTEN
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
u = Bit is unchanged x = Bit is unknown -m/n = Value at POR and BOR/Value at all other Resets
‘1’ = Bit is set ‘0’ = Bit is cleared
bit 7-6 Unimplemented: Read as ‘0’
bit 5-1 WDTPS<4:0>: Watchdog Timer Period Select bits
Bit Value = Prescale Rate
00000 = 1:32 (Interval 1 ms nominal)
00001 = 1:64 (Interval 2 ms nominal)
00010 = 1:128 (Interval 4 ms nominal)
00011 = 1:256 (Interval 8 ms nominal)
00100 = 1:512 (Interval 16 ms nominal)
00101 = 1:1024 (Interval 32 ms nominal)
00110 = 1:2048 (Interval 64 ms nominal)
00111 = 1:4096 (Interval 128 ms nominal)
01000 = 1:8192 (Interval 256 ms nominal)
01001 = 1:16384 (Interval 512 ms nominal)
01010 = 1:32768 (Interval 1s nominal)
01011 = 1:65536 (Interval 2s nominal) (Reset value)
01100 = 1:131072 (2
01101 = 1:262144 (2
01110 = 1:524288 (2
01111 = 1:1048576 (2
10000 = 1:2097152 (2
10001 = 1:4194304 (2
10010 = 1:8388608 (2
17
) (Interval 4s nominal)
18
) (Interval 8s nominal)
19
) (Interval 16s nominal)
20
) (Interval 32s nominal)
21
) (Interval 64s nominal)
22
) (Interval 128s nominal)
23
) (Interval 256s nominal)
(1)
10011 = Reserved. Results in minimum interval (1:32)
•
•
•
11111 = Reserved. Results in minimum interval (1:32)
bit 0 SWDTEN: Software Enable/Disable for Watchdog Timer bit
If WDTE<1:0> =
This bit is ignored.
If WDTE<1:0> =
1 = WDT is turned on
0 = WDT is turned off
If WDTE<1:0> =
This bit is ignored.
Note 1: Times are approximate. WDT time is based on 31 kHz LFINTOSC.
2011 Microchip Technology Inc. DS41391D-page 99
00:
01:
1x:

PIC16(L)F1826/27
TABLE 10-3: SUMMARY OF REGISTERS ASSOCIATED WITH WATCHDOG TIMER
Name Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
OSCCON
STATUS
WDTCON
Legend: x = unknown, u = unchanged, – = unimplemented locations read as ‘0’. Shaded cells are not used by Watchdog Timer.
— IRCF<3:0> —SCS<1:0>
— — —TOPD Z DC C
— — WDTPS<4:0> SWDTEN
TABLE 10-4: SUMMARY OF CONFIGURATION WORD WITH WATCHDOG TIMER
Name Bits Bit -/7 Bit -/6 Bit 13/5 Bit 12/4 Bit 11/3 Bit 10/2 Bit 9/1 Bit 8/0
CONFIG1
Legend: — = unimplemented location, read as ‘0’. Shaded cells are not used by Watchdog Timer.
13:8
7:0
— — FCMEN IESO CLKOUTEN BOREN<1:0> CPD
CP MCLRE PWRTE WDTE<1:0> FOSC<2:0>
Register
on Page
69
21
99
Register
on Page
44
DS41391D-page 100 2011 Microchip Technology Inc.
 Loading...
Loading...