

Datasheet PDSP16256A, PDSP16256AC, PDSP16256AC1R, PDSP16256B0, PDSP16256C0 Datasheet (MITEL)
...Page 1
PDSP16256/A
Programmable FIR Filter
DS3709 Issue 7.1 June 1999
Features
● Sixteen MACs in a Single Device
● Basic Mode is 16-Tap Filter at up to 25MHz
Sample Rates
● Programmable to give up to 128 Taps with
Sampling Rates Proportionally Reducing to
3·125MHz
● 16-bit Data and 32-bit Accumulators
● Can be configured as One Long Filter or Two
Half-Length Filters
● Decimate-by-two Option will Double the Filter
Length
● Coefficients supplied from Host System or local
EPROM
Applications
● High Performance Digital Filters
Description
The PDSP16256 contains sixteen multiplier accumulators, which can be multi cycled to provide
from 16 to 128 stages of digital filtering. Input data
and coefficients are both represented by 16-bit
two’s complement numbers with coefficients
converted internally to 12 bits and the results being
accumulated up to 32 bits.
In 16-tap mode the device samples data at the
system clock rate of up to 25MHz. If a lower sample
rate is acceptable then the number of stages can be
increased in powers of two up to a maximum of 128.
Each time the number of stages is doubled, the
sample clock rate must be halved with respect to the
system clock. With 128 stages the sample clock is
therefore one eighth of the system clock.
In all speed modes devices can be cascaded to
provide filters of any length, only limited by the
possibility of accumulator overflow. The 32-bit
results are passed between cascaded devices
without any intermediate scaling and subsequent
loss of precision.
Ordering Information
Commercial (0°C to 170°C)
PDSP16256A/C0/AC 25MHz, PGA package
Industrial (240°C to 185°C)
PDSP16256 B0/AC 20MHz, PGA package
PDSP16256 B0/GC 20MHz, QFP package
Military (255°C to 1125°C)
PDSP16256 MC/AC1R 20MHz, MIL-STD-883*
(latest revision), PGA package
PDSP16256 MC/GC1R 20MHz, MIL-STD-883*
(latest revision), QFP package
*See notes following Electrical Characteristics for further
information on MIL-STD-883 screening
Associated Products
PDSP16350 I/Q Splitter/NCO
PDSP16510A FFT Processor
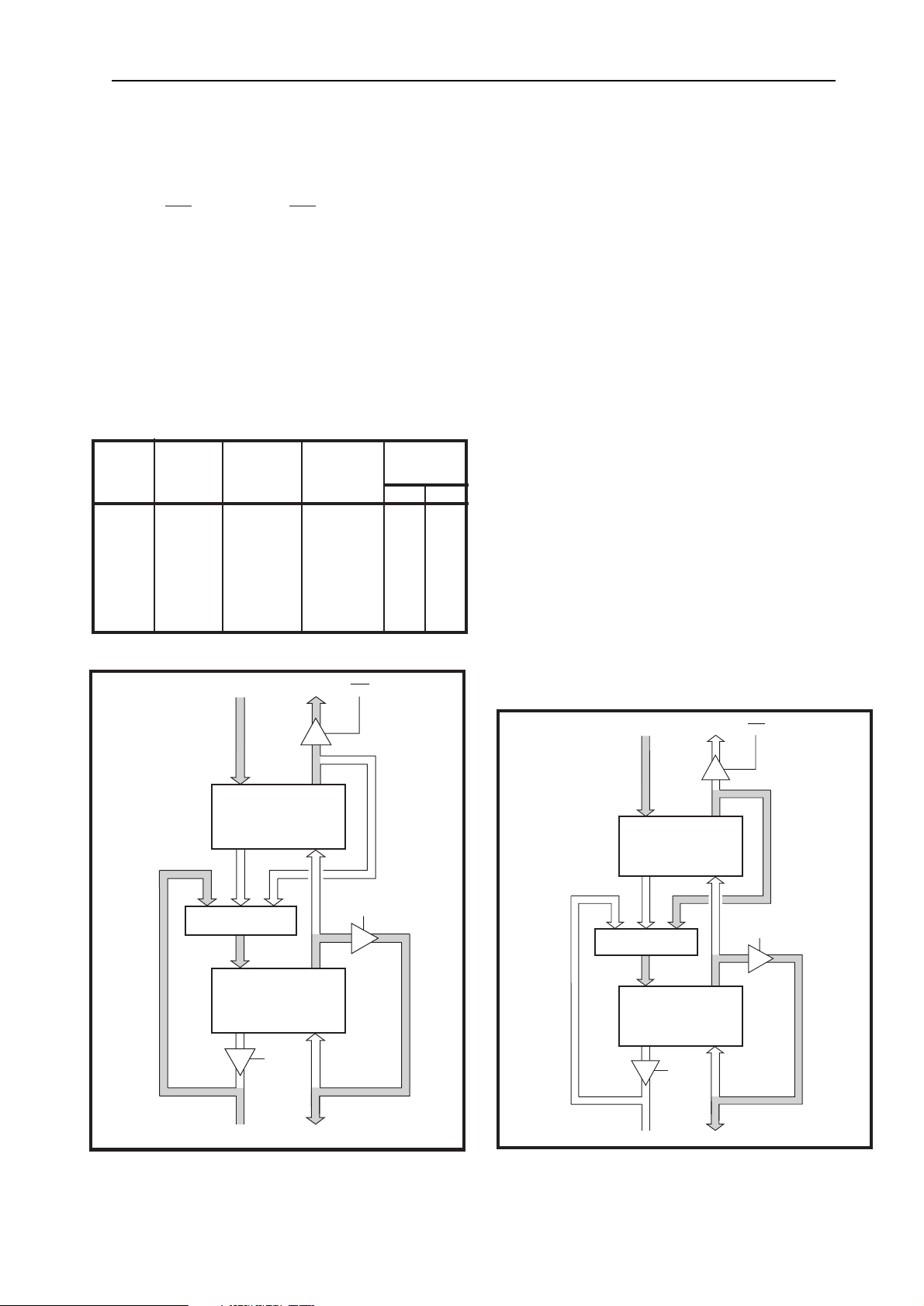
The device can be configured as either one long
filter or two separate filters with half the number of
taps in each. Both networks can have independent
inputs and outputs.
Both single and cascaded devices can be operated
in decimate-by-two mode. The output rate is then
half the input rate, but twice the number of stages
are possible at a given sample rate. A single device
with a 20MHz clock would then, for example,
provide a 128-stage low pass filter, with a 5MHz
input rate and 2·5MHz output rate.
Coefficients are stored internally and can be down
loaded from a host system or an EPROM. The latter
requires no additional support, and is used in stand
alone applications. A full set of coefficients is then
automatically loaded at power on, or at the request
of the system. A single EPROM can be used to
provide coefficients for up to 16 devices.
Page 2
PDSP16256
CHANGE
COEFF
POWER-ON
RESET
RES
PDSP
16256
EPROM
GNDSCLK
OUTPUT
DATA
INPUT
DATA
EPROM
ADDR DATA
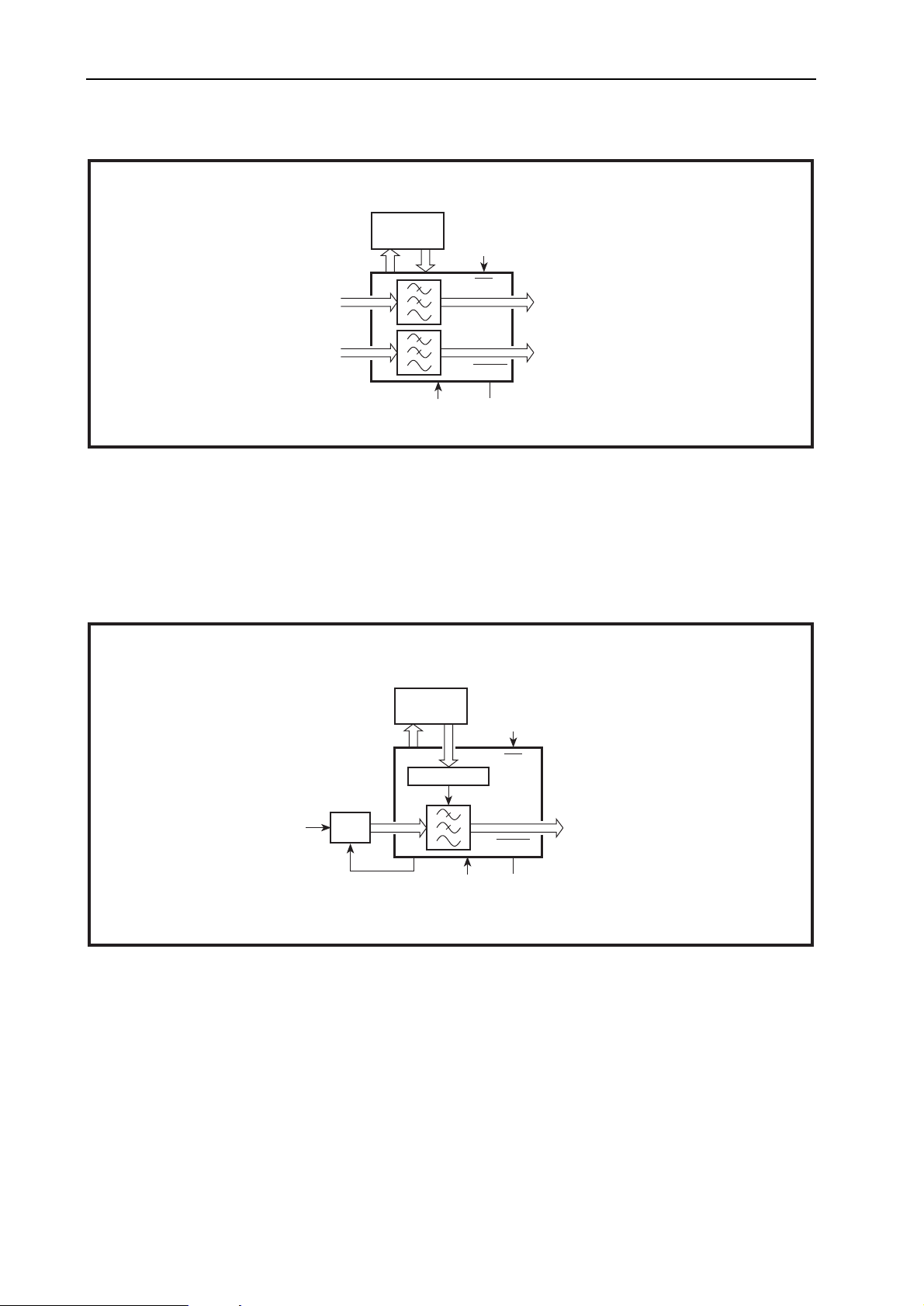
Figure. 1 A dual filter application
ANALOG
INPUT
EPROM
ADDR DATA
COEFFICIENTS
CHANGE
COEFF
POWER-ON
RESET
RES
PDSP
16256
ADC
CLKOP
EPROM
GNDSCLK
OUTPUT
Figure. 2 Typical system application
DATA
2
Page 3
PDSP16256
Signal
Description
DA15:0 16-bit data input bus to Network A.
DB15:0 Delayed data output bus in the single filter mode. Connected to the data input bus of the next device in a
cascaded chain. Input to Network B in the dual filter modes.
X31:0 Expansion input bus in the single filter mode. Connected to the previous filter output in a cascaded chain.
The inputs are not used on a single device system or on the Termination device in a cascaded chain. The
X bus provides the output from Network B in both dual modes.
F31:0 In single filter mode this bus holds the main device output. In dual mode it holds the output from Network A.
FEN Filter enable. The first high present on an SCLK rising edge defines the first data sample. The control register
and coefficient memory must be configured befor FEN is enabled.The signal must stay active whilst valid
data is being received and must be low if FRUN is high.
DFEN Delayed filter enable. This output is connected to the Filter Enable input of the next device in a cascaded
chain when moving towards the termination device and with multiple stand-alone EPROM-loaded
configurations. It is used to coordinate the control logic within each device.
SWAP Selects either the upper or lower set of coefficients for Bank Swap. A low selects the lower bank, a high the
upper bank.
FRUN In EPROM load mode, when high this signal allows continuous filter operations to occur without the need for
the initial FEN edge. If the device is not a single, interface or master device then this pin must be tied low.
DCLR
A low on this signal on the SCLK rising edge will clear all the internal accumulators.
low for a single cycle, signal BUSY will indicate when the internal clearing is complete. After a clear the
need only remain
DCLR
device must be re-synchronised to the data stream using FEN. It is recommended that FEN is taken low
at the same time as clear. FEN may then be taken high to synchronise the data stream once BUSY has
returned low.
C15:0 16-bit coefficient input bus. In the Byte mode of operation, C15:8 have alternative uses as explained in the
text.
A7:0 Coefficient address bus. In the EPROM mode A7:0 are address outputs for an EPROM. In the remote host
mode they are inputs from the host. A7 is not used when coefficients are loaded as 16-bit words.
CCS This pin is similar in operation to A7:0 and provides a higher order address bit. When low the coefficients
WEN
CS
BYTE
EPROM
are loaded, when high the control register is loaded.
In the remote mode this pin is an input which when low enables the load operation. In the EPROM mode
it is an output which provides the write enable for other slave devices.
This pin is always an input and must also be low for the internal write operation to occur.
When this pin is tied low, coefficients are loaded as two 8-bit bytes. When the pin is high they are loaded
as 16-bit words. In the EPROM mode this pin is ignored.
When this pin is tied low coefficients are loaded as bytes from an external EPROM. The device outputs an
address on A7:0. When the pin is high coefficients must be loaded from a remote master. They can then
be transferred individually rather than as a complete set.
SCLK The main system clock; all operations are synchronous with this clock. The clock rate must be either 1, 2,
4, or 8 times the required data sampling rate. The factor used depends on the required filter length.
CLKOP This output, when used to enable SCLK, can provide a data sampling clock. It has the effect of dividing the
OEN
SCLK rate by 1, 2, 4 or 8 depending on the filter mode selected.
Tri-state enable for the F bus. When high the outputs will be high impedance.
device and does not therefore take effect until the first SCLK rising edge
OEN
is registered onto the
BUSY A high on this signal indicates that the device is completing internal operations and is not yet able to accept
RES
new data. The signal is used during automatic EPROM loading, reset and accumulator clearing.
When this pin is low the control logic and accumulators are reset. In the EPROM mode it will initiate a load
sequence when it goes high.
NOTES
1. Unused buses (e.g. X31:0 when the device is configured in single or termination mode) can be set to any value. They should however be
maintained at a valid logic level to avoid an increase in power consumption.
2. To ensure correct input voltage thresholds are maintained all the VDD and GND pins must be connected to adequate power and ground planes.
Table 1 Pin descriptions
3
Page 4
PDSP16256
EXTRA PIN D4,
CONNECTED TO D3
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
AC144
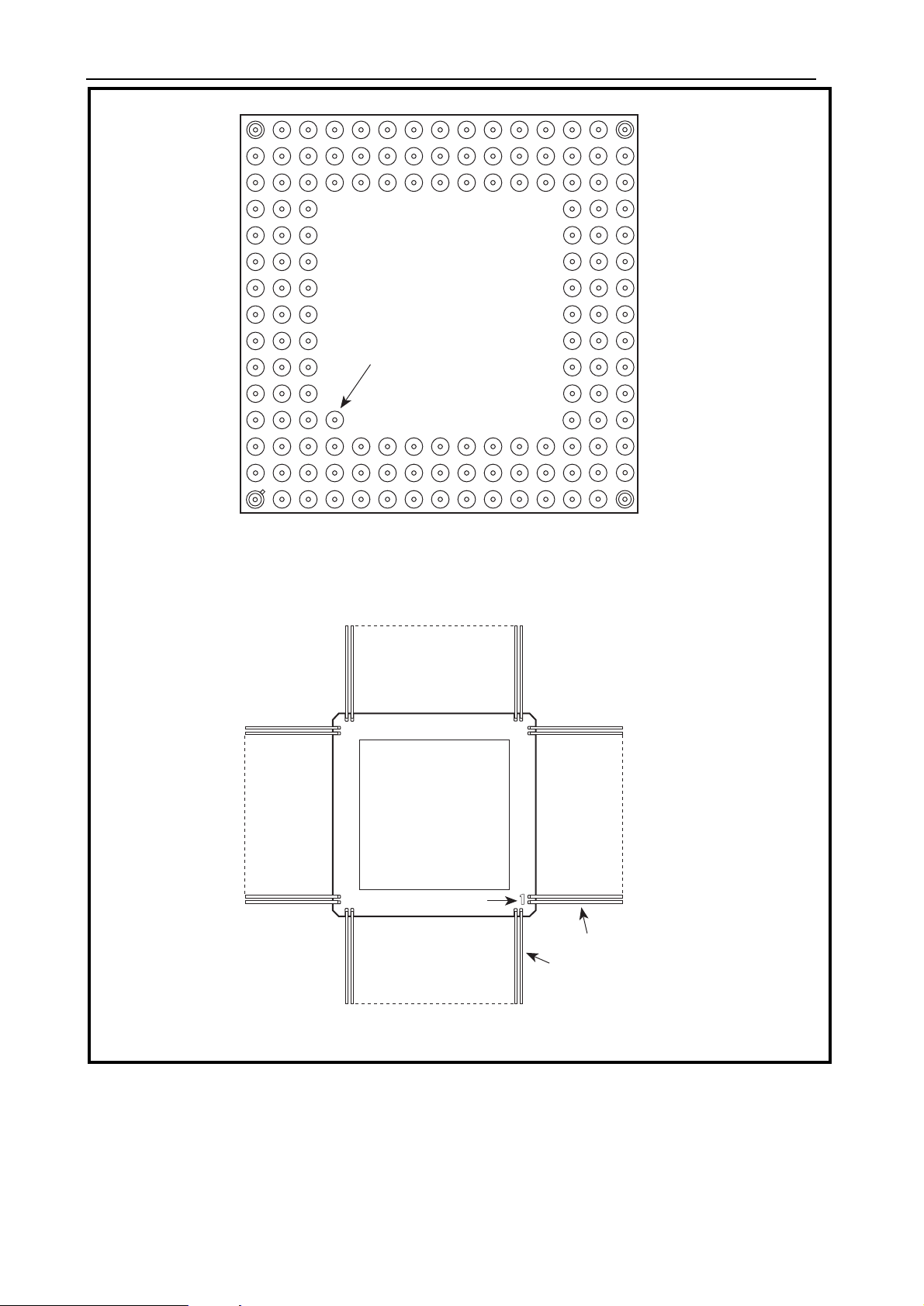
Fig. 3a Pin connections for 144 pin PGA package (bottom view)
PIN 1 INDEX
PIN 1
PIN 172
GC172
Fig. 3b Pin connections for 172 pin QFP (top view)
Figure. 3 Pin connection diagrams (not to scale). See T able 1 for signal descriptions and Table 2 for
pinouts.
4
Page 5
PDSP16256
GG
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
AC
A15
B15
D13
C14
G15
C15
D14
J15
E13
D15
E14
E15
F13
F14
F15
G14
G13
H14
H15
H13
J14
K15
-
J13
K14
L15
K13
L14
M15
L13
M14
N15
-
N14
M13
P15
P14
N13
R15
Signal
F0
F1
F2
F3
V
DD
F4
F5
GND
F6
F7
F8
F9
F10
F11
F12
GND
F13
F14
F15
V
DD
F16
F17
F18
F19
V
DD
F20
F21
GND
F22
F23
F24
F25
F26
F27
F28
GND
F29
F30
F31
V
DD
FEN
DFEN
DCLR
GG
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
AC
R14
N12
P13
R13
P12
N11
R12
P11
R11
R9
N10
P10
R10
P9
R7
N9
P8
R8
N8
P7
R6
-
N7
P6
R5
N6
P5
R4
-
N5
P4
R3
P3
N4
-
R2
P2
N3
-
-
R1
Signal
SWAP
GND
OEN
CLKOP
V
DD
DA0
DA1
DA2
DA3
DA4
DA5
GND
DA6
DA7
DA8
DA9
V
DD
DA10
DA11
DA12
DA13
DA14
DA15
GND
C0
C1
C2
C3
C4
C5
V
DD
C6
C7
C8
C9
C10
GND
C11
C12
C13
V
DD
GND
C14
GG
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
AC
P1
N2
N1
M2
L3
M1
M3
L2
L1
K3
K2
K1
J2
J3
G1
H2
H1
J1
H3
G2
F1
G3
F2
E1
F3
E2
D1
E3
D2
C1
C2
D3
B1
B2
C3
Signal
C15
-
-
GND
GND
WEN
CCS
CS
-
V
DD
RES
SLCK
GND
-
V
DD
BYTE
EPROM
A0
A1
A2
A3
A4
V
DD
A5
A6
GND
A7
DB0
DB1
DB2
-
GND
DB3
DB4
DB5
DB6
DB7
-
V
DD
DB8
DB9
DB10
DB11
DB12
DB13
DB14
-
GND
DB15
-
V
DD
GG
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
AC
A1
A2
C4
B3
A3
B4
C5
A4
B5
A5
A7
C6
B6
A6
B7
C7
B8
A9
A8
C8
B9
A10
C9
B10
A11
C10
-
B11
A12
C11
-
B12
A13
B13
C12
A14
-
B14
-
C13
Signal
GND
BUSY
X0
V
DD
X1
X2
X3
X4
X5
X6
GND
X7
X8
V
DD
X9
X10
X11
X12
X13
X14
GND
X15
X16
X17
X18
X19
X20
X21
X22
GND
X23
X24
X25
V
DD
X26
X27
X28
X29
X30
GND
X31
V
DD
FRUN
NOTE. All GND and VDD pins must be used
T able 2 Pin connections for AC144 and GC172 packages
5
Page 6
PDSP16256
DA15:0 F31:0 OEN
SCLK FRUN
SWAP
A7:0
C15:0
CCS
WEN
CS
BYTE
EPROM
FEN
DFEN
DCLR
RES
COEFFICIENT
STORAGE
AND
CONTROL
CLKOP BUSY
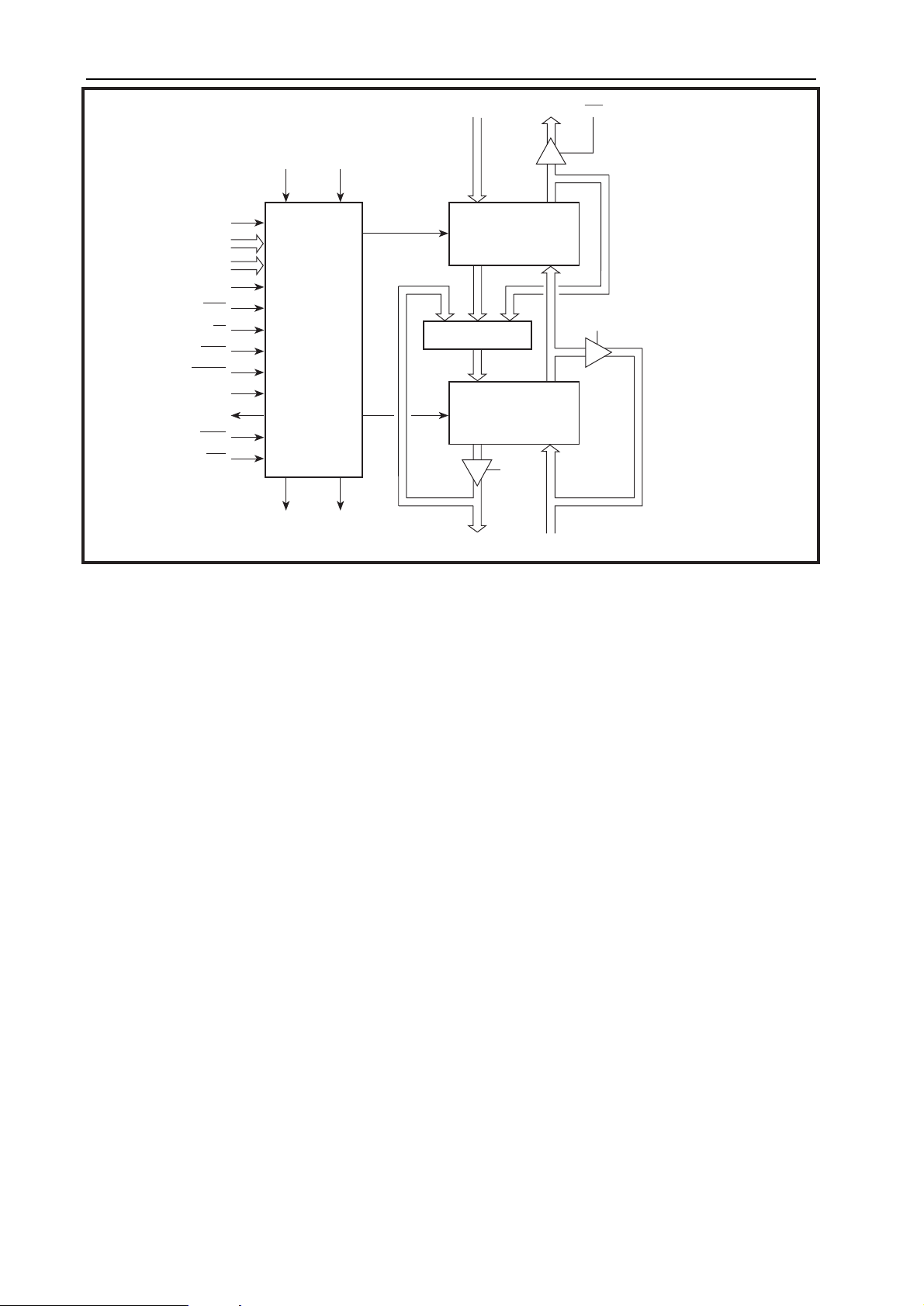
Figure. 4 Block Diagram
Operational Overview
The PDSP16256 is an application specific FIR filter for
use in high performance digital signal processing
systems. Sampling rates can be up to 25MHz. The
device provides the filter function without any software
development, and the options are simply selected by
loading a control register. The device can be user
configured as either a single filter, or as two separate
filters. The latter can provide two independent filters for
the in-phase and quadrature channels after IQ splitting,
or can provide two filters in cascade for greater stop
band rejection.
The device operates from a system clock, with rates up
to 25MHz. This clock must be 1, 2, 4, or 8 times the
required sampling frequency, with the higher
multiplication rates producing longer filter networks at
the expense of lower sampling rates. Devices can be
connected in cascade to produce longer filter lengths.
This can be accomplished without the need for any
additional external data delays, and all the single device
options remain available.
Continuous inputs are accepted, and continuous results
produced after the internal pipeline delay. Connection
can be made directly to an A-D converter. The filter
operation can be synchronised to a Filter Enable signal
(FEN) whose positive going edge marks the first data
sample. The internal multiplier accumulator array can be
cleared with a dedicated input. This is necessary if
erroneous results obtained during the normal data ‘flush
6
NETWORK
A
DUAL
MUX
NETWORK
B
SINGLE
MODE
DB15:0 X31:0
MODE
through’ are not permissible in the system.
Coefficients can be loaded from a host system using a
conventional peripheral interface and separate data
bus. Alternatively, they can be loaded as a complete set
from a byte wide EPROM. The device produces
addresses for the EPROM and a BUSY output indicates
that the transfer is occurring. Up to sixteen devices can
have their coefficients supplied from a single EPROM.
These devices need not necessarily be part of the same
filter network.
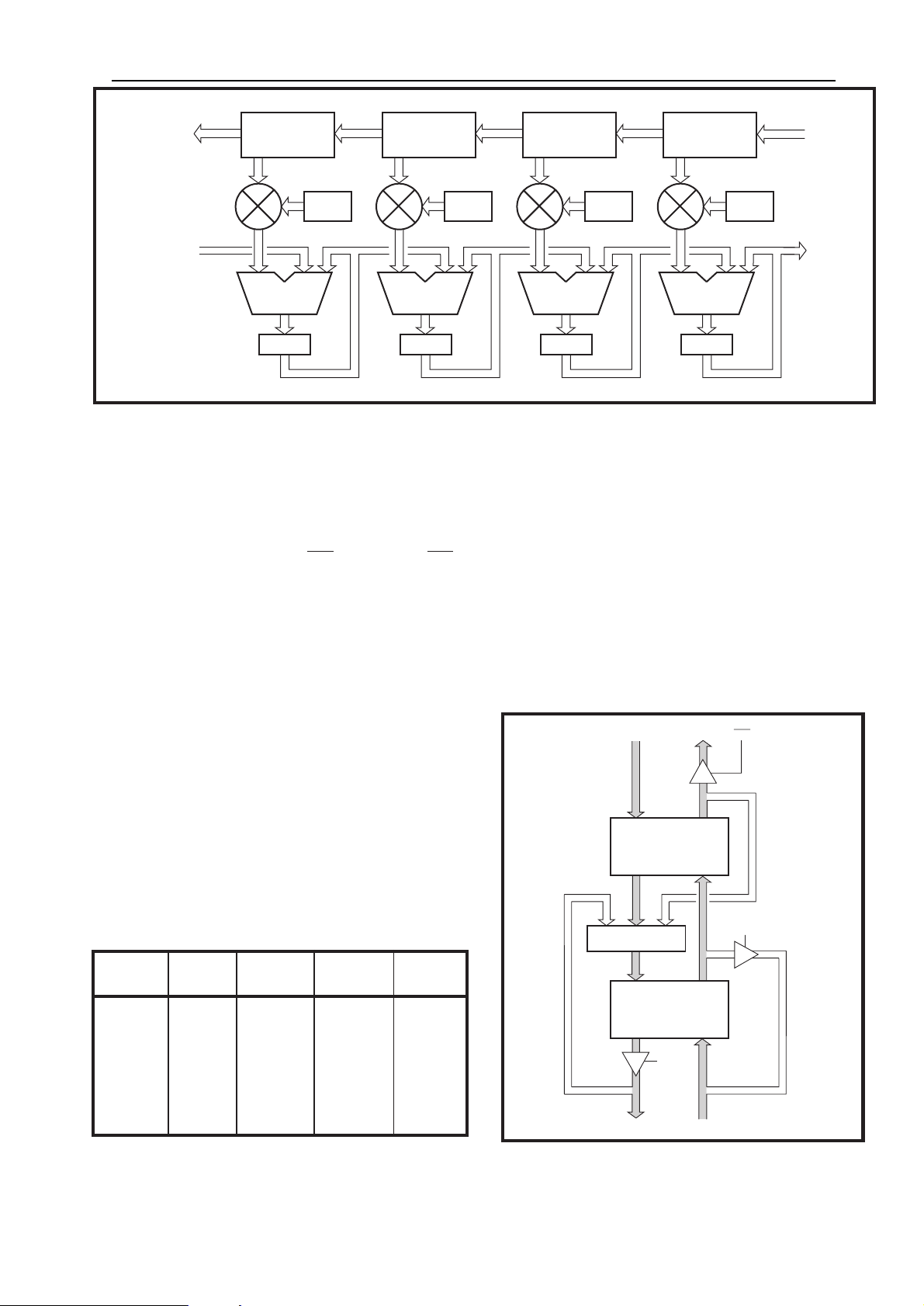
Each of the filter networks shown in Fig. 4 contains eight
systolic multiplier accumulator stages; an example with
four stages is shown in Fig. 5. Input data flows through
the delay lines and is presented for multiplication with the
required coefficient. This is added to either the last result
from this accumulator or the result from the previous
accumulator. The filter results progress along the adders
at the data sample rate. If the sample rate equals SCLK
divided by four, for example, then the accumulated result
is passed onto the next stage every fourth cycle. The
structure described is highly efficient when used to
calculate filtered results from continuous input data.
A comprehensive digital filter design program is
available for PC compatible machines. This will optimise
the filter coefficients for the filter type required and
number of taps available at the selected sample rate
within the PDSP16256 device. An EPROM file can be
automatically generated in Motorola S-record format.
Page 7
PDSP16256
DATA
OUT
ACCUMULATE
EXPANSION
IN
DATA
DELAY LINE
COEFF
ADDER
2
1
Z
RAM
DATA
DELAY LINE
COEFF
ADDER
2
1
Z
RAM
Figure. 5 Filter network diagram
Single Filter Options
When operating as a single filter the device accepts data
on the 16-bit DA bus at the selected sample rate, see
Figs. 5 and 6. Results are presented on the 32-bit F bus,
which may be tristated using the
registered onto the device and does not therefore take
effect until the first SCLK rising edge. Devices may be
cascaded this allows filters with more taps than available
from a single device. To accomplish this two further
buses are utilised. The DB bus presents the input data to
the next device in cascade after the appropriate delay,
while, partial results are accepted on the X bus.
input. Signal
OEN
OEN
DATA
DELAY LINE
COEFF
ADDER
2
1
Z
RAM
DATA
DELAY LINE
COEFF
ADDER
2
1
Z
RAM
the higher frequency components present in the input.
The Nyquist criterion, specifying that the sampling rate
must be at least double the highest frequency component, can still then be satisfied even though the sampling
rate has been halved.
is
The system clock latency for a single device is shown in
Table 3. This is defined as the delay from a particular data
sample being available on the input pins to the first result
including that input appearing on the output pins. It does
not include the delay needed to gather N samples, for an
N tap filter, before a mathematically correct result is
obtained.
DATA
IN
RESULT
OUT
Single filter mode is selected by setting control register bit
15 to a one. The required filter length is then selected
using control register bits 14 and 13 as summarised in
Table 3. The options define the number of times each
multiplier accumulator is used per sample clock period.
This can be once, twice, four times, or eight times.
In addition a normal/decimate bit (CR12) allows the filter
length to be doubled at any sample rate. This is possible
when the filter coefficients are selected to produce a low
pass filter, since the filtered output would then not contain
CR Input Output Filter Setup
14 13 12 Rate Rate Length Latency
0 0 0 SCLK SCLK 16 Taps 16
0 0 1 SCLK SCLK/2 32 Taps 17
0 1 0 SCLK/2 SCLK/2 32 Taps 16
0 1 1 SCLK/2 SCLK/4 64 Taps 18
1 0 0 SCLK/4 SCLK/4 64 Taps 20
1 0 1 SCLK/4 SCLK/8 128 Taps 24
1 1 0 SCLK/8 SCLK/8 128 Taps 24
Table 3 Single Filter options Figure. 6 Single Filter bus utilisation
DA15:0 F31:0 OEN
NETWORK
A
DUAL
MUX
NETWORK
B
SINGLE
MODE
DB15:0 X31:0
MODE
7
Page 8
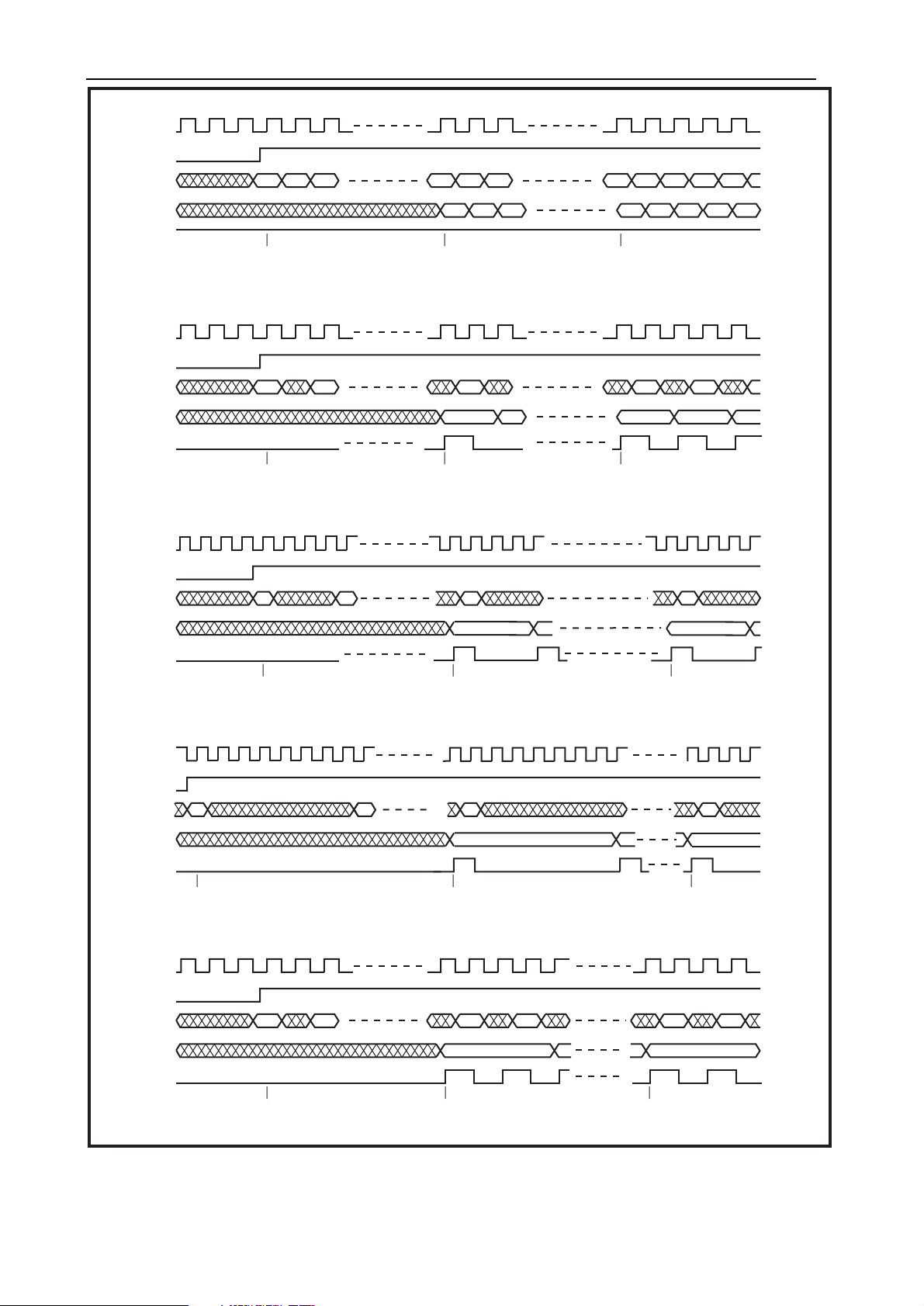
PDSP16256
SPEED MODE 0 (Data input and output at f
SCLK
FEN
DA15:0
F31:0
CLKOP
123
ABC
) CR14:13 = 00, CR12 = 0. CLKOP held high.
SCLK
16 17 18
First data point (A)
is read on edge 1
SPEED MODE 1 (Data input and output at half f
SCLK
FEN
DA15:0
F31:0
CLKOP
123
AB
SCLK
16 17 18
First data point (A)
is read on edge 1
SPEED MODE 2 (Data input and output at a quarter f
SCLK
FEN
DA15:0
123
AB
45 23 24
A′ B′ C′
First valid result
including data point (A)
available after edge 16
) CR14:13 = 01, CR12 = 0
A′ B′
First valid result
including data point (A)
available after edge 16
) CR14:13 = 10, CR12 = 0
SCLK
20 21 22
31 32 33
A′′ B′′ C′′
34 35
D′′ E′′
Valid result contains
the first 16 data points
available after edge 31
78 79 80
A′′ B′′ C′′
81 82
Valid result contains
the first 32 data points
available after edge 78
272 273
274 275 276
F31:0
CLKOP
First data point (A)
is read on edge 1
SPEED MODE 3 (Data input and output at an eighth f
SCLK
FEN
DA15:0
F31:0
CLKOP
SPEED MODE 1 Decimating (Data input at half f
SCLK
FEN
DA15:0
F31:0
123
A
45
First data point (A)
is read on edge 1
123
AB
6789
B
SCLK
18 19 20
A′ B′
First valid result
including data point (A)
available after edge 20
) CR14:13 = 11, CR12 = 0
SCLK
24 25 26
A′ B′
27 28
29 30 31 32
First valid result
including data point (A)
available after edge 24
and output at a quarter f
21 22
B′
SCLK
A′′ B′′
Valid result contains
the first 64 data points
available after edge 272
1040
1041 1042 1043
A′′
Valid result contains
the first 128 data points
available after edge 1040
) CR14:13 = 01, CR12 = 1.
142 143 144
B′′
145
CLKOP
First data point (A)
is read on edge 1
First valid result
including data point (A)
available after edge 18
Valid result contains
the first 64 data points
available after edge 142
Figure. 7 Single Filter timing diagrams
8
Page 9
PDSP16256
Dual Indipendant Filter Options
When operating as two independent filters the device
accepts 16 bit data on both the DA and DB buses at the
selected sample rate, see Fig. 8. Results are available
from both the F and X buses. The F bus may be tristated
using the
OEN
input. Signal
device and does not therefore take effect until the first
SCLK rising edge
Each filter must be configured in the same manner, and
multiple device expansion is not possible due to the pin
re-organization. The latter requirement can, of course,
still be satisfied by several devices configured as single
filters.
Dual independent filter mode is selected by setting
control register bits 15 and 4 to a zero. The required filter
CR Input Output Filter Setup
141312 Rate Rate Length Latency
0 0 0 SCLK SCLK 8 Taps 16 27
0 0 1 SCLK SCLK/2 16 Taps 17 0 1 0 SCLK/2 SCLK/2 16 Taps 16 28
0 1 1 SCLK/2 SCLK/4 32 Taps 18 1 0 0 SCLK/4 SCLK/4 32 Taps 20 36
1 0 1 SCLK/4 SCLK/8 64 Taps 24 1 1 0 SCLK/8 SCLK/8 64 Taps 24 40
Table 4. Dual Filter options
DA15:0 F31:0 OEN
OEN
is registered onto the
Ind Cas
length is selected using control register bits 14 and 13 as
summarised in Table 4, which also shows the resulting
latency. As in single filter mode normal or decimate-bytwo operation can be selected using control register bit
12.
Dual Cascaded Filter Options
When operating as two cascaded filters the device accepts 16 bit data on the DA bus at the selected sample
rate. Results are presented on the 32-bit X bus, see Fig.
9. Each filter must be configured in the same manner.
Multiple device expansion is not possible in this mode.
Dual cascaded filter mode is selected by setting control
register bit 15 to a zero and bit 4 to a one. The required
filter length is selected using control register bits 14 and
13 as summarised in Table 4, which also shows the
resulting latency. The decimate-by-two option is not
available in this mode.
The data for the second filter network is extracted as the
middle 16 bits from the first networks accumulated result.
For successful operation the first filter network must have
unity gain. See the section on filter accuracy for more
details.
The cascade option is used to increase the stop band
rejection in a practical filter application. Theoretically,
increasing the number of taps in an FIR filter will increase
the stop band rejection, but this assumes floating point
calculations with no accuracy limitations. In practice, with
fixed point arithmetic, better performance is achieved
with two smaller filters in series.
NETWORK
A
MUX
NETWORK
B
SINGLE
MODE
DB15:0 X31:0
DUAL
MODE
DA15:0 F31:0 OEN
NETWORK
A
DUAL
MUX
NETWORK
B
SINGLE
MODE
DB15:0 X31:0
MODE
Figure. 9 Dual cascaded filter bus utilisationFigure. 8 Dual independent filter bus utilisation
9
Page 10

PDSP16256
Filter Accuary
Input data and coefficients are both represented by 16bit two’s complement numbers. The coefficients are
converted to twelve bits by rounding towards zero. This
is achieved as follows. If the coefficient is positive then
the least significant 4 bits are discarded. If the coefficient
is negative then the logical ‘OR’ of the least significant 4
bits are added to the remainder of the word. Twelve bit
coefficients can be used directly provided the least
significant four bits are set to zero.
INPUT DATA
COEFFICIENT
The FIR filter results are calculated using a multiplier
accumulator structure as shown in Fig. 10. The truncation and word growth allowed for in the data path are
explained in Fig. 10. The 16-bit data and 12-bit coefficient inputs (each with one sign bit before the binary
point), are presented to the multiplier. This produces a
28-bit result with two bits before the binary point. Producing the full 28-bit result ensures that if both the data and
coefficients are set to logic 1 a valid result is generated.
Prior to entering the accumulator the least significant 4
bits of the multiplier result are truncated and the resulting
24 bits sign extended to 32 bits. The final accumulator
result is 32 bits with 10 bits before the binary point. Thus
9 bits of word growth are allowed within the accumulator.
All accumulator bits are made available on the output
pins.
In cascade mode the middle 16 bits from the network A
accumulator are fed round to the network B data inputs,
see Fig. 11.
INPUT DATA
S
ADDER
ACCUMULATOR
RESULT
Figure. 10 Multiplier Accumulator
-14-13-12-11-10-9-8-7-6-5-4-3-2-1 -15
10
COEFFICIENT
MULTIPLIER RESULT
ACCUMULATOR RESULT
S S S S S S S S S 0
ACCUMULATOR RESULT
S 8 7 6 5 4 3 2 1 0
S
S 0 -26
-11-10-9-8-7-6-5-4-3-2-1
Multiplication producing a 28-bit result
Sign extended to 32 bits, least significant 4 bits truncated
These bits are passed to filter network B during cascade mode
Figure. 11 Filter accuracy
-25-24-23-22-14-13-12-11-10-9-8-7-6-5-4-3-2-1
-22-14-13-12-11-10-9-8-7-6-5-4-3-2-1
-22-14-13-12-11-10-9-8-7-6-5-4-3-2-1
Page 11

Cascading Devices
PDSP16256
When the filter requirements are beyond the capabilities
of a single device, it is possible to connect several
devices in cascade increasing the number of taps available at the required sample rate. Within each device all
filter length, decimate, and bank swap options are still
possible, but each device in the chain must be similarly
programmed and configured as a single filter.
The number of devices which can be cascaded is only
limited by the possibility of overflow in the 32-bit intermediate accumulations. If more than sixteen devices are
cascaded in auto EPROM load mode, then an additional
EPROM will be needed.
In modes where the data sample rate does not equal the
clock rate. Then the cascade arrangement shown in Fig.
12 is used. Delayed data is passed from device to device
in one direction, while intermediate results flow in the
opposite direction. The interface device both accepts the
input data and produces the final result. It is not necessary for each device to know its exact position in the
chain, but the device which receives the input data and
produces the final result must be identified, as must the
device which terminates the chain. The former is known
as the Interface device and the latter as the Termination
device, all others are Intermediate devices. Control
Register bits CR11:10 are used to define these positions
as shown in Table 6.
The control logic in each of the devices must be synchronised with respect to the Interface device. This is achieved
by connecting the Delayed Filter Enable output (DFEN)
to the Filter Enable input (FEN) of the next device in the
chain. The Interface device, itself, needs a FEN signal
produced by the system, unless in EPROM mode, where
FRUN may be pulled high. Even when the latter is true,
the FEN connection must be made between the remaining devices in the chain. By effectively extending the
filter length, the cascade latency is therefore the same
as for the single device in the same mode. Once the
pipeline is initially flushed the latency is as given in
Table 3.
When devices are cascaded such that the data sample
rate equals the clock rate, (Control register bits 14:13 =
00), then a different cascade configuration must be
used. This is shown in Fig. 13. The number of devices
that can be cascaded is, again, only limited by the 32-bit
accumulators.
In this mode the delayed data is passed from device to
device in the same direction as the intermediate results.
The device which accepts the input data is now at the
opposite end of the chain to the device which produces
the final result. The control logic in each of the devices
must be synchronised this is achieved by connecting all
the device FEN inputs to the global FEN. The cascade
latency for the complete filter is built up from the 12
delays from the termination device, 8 delays from the
interface device and additional intermediate devices
each adding 4 delays.
Avalable Options
RESULTS
DATA IN FEN
DA15:0
INTERFACE
DEVICE
DB15:0
DA15:0
INTERMEDIATE
DB15:0
DA15:0
TERMINATION
DEVICE
DB15:0
OUT
FEN F31:0
DFEN X31:0
FEN F31:0
DEVICE
DFEN X31:0
FEN F31:0
DFEN X31:0
Figure. 12 Three-device cascaded system
No more than 128 coefficients can be stored internally.
This limits the filter length / decimate / bank swap options
to those which do not require more than that number of
coefficients. Thus when a filter with 128 taps is to be
implemented in a single device, it is not possible to
decimate or bank swap. When a filter with 64 taps is
implemented, decimate or bank swap are possible, but
not both. With all other filter lengths, all decimate and
bank swap configurations are possible.
11
Page 12

PDSP16256
FENRESULTS
FEN F31:0
DB15:0
INTERFACE
DEVICE
DFEN X31:0
DA15:0
FEN F31:0
DB15:0
INTERMEDIATE
DEVICE
DFEN X31:0
DA15:0
FEN F31:0
DB15:0
TERMINATION
DEVICE
DFEN X31:0
DA15:0
DATA IN
OUT
Figure. 13 Full speed cascaded system
12
127
127
0
64
63
0
128 TAP
NO SWAP
POSSIBLE
64 TAP
FILTER B
NO SWAP
POSSIBLE
FILTER A
NO SWAP
POSSIBLE
127
127
64
63
96
95
64
63
32
31
0
0
127
UPPER
BANK
64
63
NOT USED
UPPER
BANK
LOWER
BANK
32
31
LOWER
BANK
0
(a) Single Filters
127
B UPPER
BANK
NOT USED
A UPPER
BANK
64
63
B UPPER
B LOWER
BANK
A LOWER
BANK
48
47
A UPPER
32
31
B LOWER
16
15
A LOWER
0
(b) Dual Filters
Figure. 14 Coefficient memory map
127
32
31
16
15
127
32
31
0
0
16 TAP32 TAP64 TAP
NOT USED
UPPER
BANK
LOWER
BANK
8 TAP16 TAP32 TAP
NOT USED
B UPPER
A UPPER
B LOWER
A LOWER
Page 13

PDSP16256
Filter Control
Two control modes are available selected by input
signal FRUN. In EPROM load mode, when FRUN is
tied high the device will commence operation once the
coefficients have been loaded. The CLKOP signal
indicates when new input data is required and that new
results are available, see Fig. 7. In both EPROM and
remote master load modes, when FRUN is tied low
filter operation will not commence until a high has been
detected on signal FEN. This mode allows synchronisation to an existing data stream. FEN should be taken
high when the first valid data sample is available so
that both are read into the device on the next SCLK
rising edge. Proper device operation requires FEN to
be low during control register and coefficient loading
both in EPROM mode and Remote Master mode. After
loading coefficients, filter operation is determined by
FRUN and FEN as described above.
During device reset
mum of 16 SCLK cycles. After a reset the control
register returns to its default state of 8C80
places the device into the following mode :
●
Single filter
●
Sample rate equal to the clock rate
●
Non-decimating
●
A single device (Not in a cascade chain)
●
Bank swap selected by bit in the control register
Coeficient Bank Swap
A Bank Swap feature is provided which allows all
coefficients to be simultaneously replaced with a different set. A bit in the Control Register (CR7) allows
the swap to be controlled by either input signal SWAP
or Control Register bit (CR6). The latter is useful if the
device is controlled by a microprocessor, when driving
a separate pin would entail additional address decoding logic and an external latch.
If SWAP or bit CR6 is low, the coefficients used will be
those loaded into the lower banks illustrated in Fig. 14.
When the SWAP or CR6 is high, the upper banks are
used.
The actual swap will occur when the next sampling
clock active going transition occurs. This can be up to
seven system clocks later than the swap transition,
and is filter length dependent. The first valid filtered
output will then occur after the pipeline latencies given
in Tables 3 and 4.
must be held low for a mini-
RES
HEX
. This
Loading Coefficients
When the device is to operate in a stand alone
application then the coefficients can be down loaded
as a complete set from a previously programmed
EPROM. Alternatively if the system contains a microprocessor they can be individually transferred from a
remote master under software control. In any mode
the system clock must be present and stable during
the transfer, and the addressing scheme is such that
the least significant address specifies the coefficient
applied to the first multiplier seen by incoming data.
The addresses used during the load operation are
those illustrated in Fig. 15. The Control Register is
loaded when CCS is high. In byte mode address A0 is
used to select the portion of control register loaded,
otherwise the address bits are redundant. When an
EPROM is used to provide coefficients, this redundancy causes the number of locations needed for any
device to be double that for the coefficients alone.
Auto EPROM LOAD
When
EPROM
the role of a master device in the system and controls
the loading of coefficients from an external EPROM,
see Fig.15. A load sequence commences when
the
RES
coefficient has been loaded. BUSY goes high to
indicate that a load sequence is occurring and the
filter output is invalid. The device will not commence
a filter operation until the FEN edge is received after
BUSY has gone low. This requirement can be avoided
if FRUN is tied high.
The address bus pins become outputs on the Master
device, and produce a new address every four system
clock periods. This four clock interval, minus output
delays and the data set up time, defines the available
EPROM access time.
The coefficients are always loaded as bytes. The
state ofb the
nored. This arrangement also allows the eight most
significant coefficient bus pins (C15:8) to be used for
other purposes as described later. Since the 16-bit
coefficients are loaded in two bytes the A0 pin specifies the required byte. The maximum number of
stored coefficients is 128, eight address outputs are
therefore provided for the EPROM. These eight outputs from the Master must also drive the address
inputs on the slave devices.
is tied low, the PDSP16256 assumes
input goes high, and will continue until every
pin on the master device is ig-
BYTE
13
Page 14

PDSP16256
SCLK
A7:0
CCS
RES
BUSY
SCLK
A7:0
CCS
C15:12
00 01
LOAD MASTER CONTROL
REGISTER
00 01
LOAD FIRST COEFFICIENT
VALID ADDR VALID ADDR
LOAD LAST COEFFICIENT
00
Fig. 15a EPROM load sequence
FE FF 00 01 00 01 FE FF 00 01 00 01
0000 0001 0001 0010
LOAD LAST
MASTER
COEFFICIENT
LOAD SLAVE 1
CONTROL
REGISTER
LOAD SLAVE 1
COEFFICIENTS
LOAD LAST
SLAVE 1
COEFFICIENT
LOAD SLAVE 2
CONTROL
REGISTER
LOAD SLAVE 2
COEFFICIENTS
Fig. 15b EPROM load sequence for a cascaded system
Figure. 15 EPROM load sequence timing diagrams
EPROM
ADDRESS
LSB
MSB
DATA
A7:0
CCS
C15:12
C7:0
A7:0
CCS
C15:12
C7:0
A7:0
CCS
C15:12
C7:0
PDSP16256
MASTER
PDSP16256
SLAVE 1
PDSP16256
SLAVE 2
C11:8
CS
EPROM
BYTE
WEN
C11:8
CS
EPROM
BYTE
WEN
C11:8
CS
EPROM
BYTE
WEN
(2 SLAVES)
0010
GND
GND
GND
0001
GND
V
DD
GND
0010
GND
V
DD
GND
14
Figure. 16 Three device auto EPROM load
Page 15

PDSP16256
When the filter length is less than the maximum, the
PDSP16256 will only transfer the correct number of
coefficients, and one or more significant address bits
will remain low. Sufficient coefficients are always loaded
to allow for a possible Bank Swap to occur, and the
EPROM allocation must allow for this even if the
feature is not to be used. Table 5 shows the number of
coefficients loaded for each of the modes.
If several devices are cascaded, only one device
assumes the role of the Master by having its
grounded. It produces a
signal for the other de-
WEN
EPROM
pin
vices, plus four higher order address outputs on C15:12,
see Fig. 16. The extra address bits on C15:12 define
separate areas of EPROM, containing coefficients for
up to fifteen additional devices. The least significant
block of memory must always be allocated to the
Master device. The additional devices need not in
practice be all part of the same cascaded chain, but
can consist of several independent filters. They must,
however, all havetheir
pins tied low. FRUN can
BYTE
still be used to start these independent filters after all
the devices have been loaded. In this case, however,
each slave FEN pin should be driven by DFEN from the
master device.
When one EPROM is supplying information for several
devices, some means of selectively enabling each
additional device must be provided. This is achieved
by using the C11:8 pins on the slave devices as binary
coded inputs to define one to fifteen extra devices.
These coded inputs always correspond to the block
address used for the segment of EPROM allocated to
that device. Code ‘all zeros’ must not be used since the
Master device has implied use of the bottom segment.
This is necessary since the C11:8 pins are alternatively used on the Master device to define the number
of devices supported by the EPROM.
In addition to providing the most significant addresses
to the EPROM, the C15:12 address outputs from the
master device must also drive the C15:12 inputs on the
slave devices. These C15:12 inputs are internally
compared to the C11:8 inputs to decide if that device
is currently to be loaded. This approach avoids the
need for external decoders and makes theCSinput
redundant. This input, however, must be tied low on
every device in an EPROM supported system.
The Control Coefficient pin (CCS) is used to define
when the control register is to be loaded. It becomes an
output on the Master device which provides an EPROM
address bit next in significance above A7:0, and also
drives the CCS inputs on the slave devices. This output
is high for the first two EPROM transfers in order to
access the control information, and then remains low
whilst the coefficients are loaded. This control information is thus not stored adjacent to the coefficients within
the EPROM, and in fact the EPROM must provide
twice the storage necessary to contain the coefficients
alone. All but two of the bytes in the additional half are
redundant. See Fig.17 for the EPROM memory map.
DEVICE 2
DEVICE 1
COEFFICIENTS
PER DEVICE
32 64 128
511
255
194
193
192
191
386
385
384
383
128
127
256
255
66
65
64
63
130
129
128
127
0
Control Number of
Register Coefficients
Loaded
1023
NOT USED
770
769
CONTROL REG
768
767
FILTER
COEFFICIENTS
512
511
NOT USED
258
257
CONTROL REG
256
255
FILTER
COEFFICIENTS
0
0
NOTE:
The EPROM memory map assumes that, for the 32 and 64
coefficient per device options, the unused address pins are
unconnected. If all address pins are connected as shown in
Fig. 16 then the 128 coefficients per device memory map
column should be used. Only those coefficients required will be
read, hence the upper portions of the coefficient address space
will be ignored.
14 13 12
000 32
001 64
010 64
011 128
100 128
101 128
110 128
1 1 1 Invalid Mode
Table 5. Number of coefficients loaded
Figure. 17 EPROM Memory Map
15
Page 16

PDSP16256
Using a Remote Master
When a remote master is used to load
coefficients,
EPROM
must be tied high and a
conventional peripheral interface is then provided. It
is not possible, however, to read coefficients already
stored. The master supplies an address and data
bus, and writes to the PDSP16256 occur under the
control of synchronousCSand
inputs. The
WEN
Coefficient Control Register pin (CCS) must be driven
by a master address line higher in significance than
A7:0. Both the
andCSsignals must be low for
WEN
the load operation to occur. When loading the control
register theCSsignal must be held low for a further 2
cycles, see Fig. 20. Since the internal write operation
is actually performed with the system clock, it is
necessary for the clock to be present during the
transfer.
The
input defines whether coefficients are
BYTE
loaded as a single 16 bit word or two 8-bit bytes. The
latter saves on connections to the remote master.
Address bits A7:0 are used in byte mode. 16-bit word
mode uses bits A6:0, A7 being redundant. When
writing in byte mode the least significant byte (A0 = 0)
must be written first followed by the most significant
byte (A0 = 1).
In byte mode the internal comparison between C15:12
and C11:8 is made, regardless of the state of
EPROM
For this reason pins C15:8 should all be tied low when
a remote master is used with byte transfers. This
ensures that the internal comparison gives equality
and allows the load operation to occur.
The address and coefficient buses plus
the
andCSsignals must all meet the specified
WEN
set up and hold times with respect to the system
clock, see Fig 20 and Switching Characteristics.
This synchronous interface is optimum for the
majority of high end applications, when individual
coefficients must be updated at sample clock rates.
However, if the coefficients are to be loaded under
software control from a general purpose
microprocessor, the processor’s
WRITE STROBE
probably be asynchronous with the SCLK clock
used by the PDSP16256. In this case external
synchronising logic is needed, as shown in Fig.18.
Fig. 19 shows the recommended loading sequence
and filter operation initiation. The simplest technique
is to reset the device prior to loading a set of
coefficients. Coefficients may be loaded once BUSY
returns low or 22 cycles after
is taken high.
RES
When loading a device from a remote master the
control register must be loaded first followed by the
filter coefficients. Fig. 19 shows the required loading
sequence, two examples are given one for byte
mode the other for word mode. A gap of at least one
cycle must be left after loading the control register
.
before loading the first coefficient.
Filter operations are started by presenting the first
data word at the same time as raising signal FEN;
FRUN should always be low.
will
16
Page 17

SCLK
PDSP16256
PROCESSOR WRITE STROBE
SCLK
PROCESSOR WRITE STROBE
REGISTERED STROBE
PDSP16256 WEN
ADDRESS/DATA
A7:0/C15:0
ADDRESS
DATA
REGISTERED INTO
SYNCHRONISATION
REGISTER
DQ
COEFFICIENT
LOAD
STATE MACHINE
WEN
PDSP
16256
HOLD
CIRCUIT
STROBE
ADDRESS AND DATA VALID
A7:0 AND C15:0 HELD AFTER FALLING EDGE OF WRITE STROBE
STROBE
REGISTERED
INTO STATE
MACHINE
A7:0
C15:0
COEFFICIENT
INPUT CLOCKED
TO PDSP16256 ON
THIS EDGE
Figure. 18 Remote Master synchronisation
17
Page 18

PDSP16256
DEVICE RESET
1234567 1617 373839
SCLK
RES
BUSY
RES must be held low
for 16 cycles
BYTE WIDE COEFFICIENT LOAD
1234567
SCLK
CCS
A7:0
C15:0
CS
WEN
Control register loaded
with CCS high
00 01 00 01 02 03 3E 3F
00 AC 10 00 20 00 00 02
Blank cycles Coefficients loaded into the required address location.
BUSY goes active Coefficient loading may start
once BUSY has returned low
8 67 68 69 70 71
CS
This example uses byte wide loading (
BYTE
held low).
must be maintained
for two cycles
WORD WIDE COEFFICIENT LOAD
1234567
SCLK
CCS
A7:0
C15:0
CS
WEN
Control register loaded
00 01 02 03 1E 1F
AC00 0020 0030 0040 0050 001F 0200
00
0010
Blank cycles Coefficients loaded into the required address location.
with CCS high
START OF FILTER OPERATION
1234567
SCLK
FEN
DA15:0
F31:0
0010
0000
0020 0030 0040 0050 00A0
8 34 35 36 37 38
04
This example uses word wide loading (
8 916171819
BYTE
held high).
0090
0001
0001 0004 00040000 0000 0000 0000 0000 0000 0000 0000 0000
18
CLKOP
The first data sample
is read as FEN goes high
The first result available. CLKOP
indicates the first active result cycle
Figure. 19 Device startup timing diagrams
Page 19

Control Register
PDSP16256
The internal operation of the PDSP16256 is
controlled by the status of a 16-bit control register. In
the dual filter modes both networks are controlled by
the same register. The significance of the various
bits are shown in Table 6. Tables 7 and 8 define the
control register bit interdependence for the filter and
bank swapping modes.
Bits Decode Function
15 0 Dual filter mode
15 1 Single filter mode
14:13 00 Sample rate is the system clock
14:13 01 Sample rate is half the system clock
14:13 10 Sample rate is quarter the system
clock
14:13 11 Sample rate is eighth the system clock
12 0 Output rate equals the input rate
12 1 Decimate-by-two
11:10 00 Intermediate device
11:10 01 Interface device
11:10 10 Termination device
11:10 11 Single device
9:8 00 These bits MUST be at logical zero
7 0 Bank swap is controlled by input pin
7 1 Bank swap is controlled by Bit 6
6 0 Lower bank if bit 7 is set
6 1 Upper bank if bit 7 is set
5 This bit must be at logical zero
4 0 Two independent filters
4 1 Two filters in cascade
3:0 These bits MUST be at logical zero
The control register is double buffered. This allows
the writing of a new control word without affecting the
current operation of the device. To activate the new
control register after it has been written to the device
the bank swap signal must be toggled. After a reset
the active control register is loaded directly and bank
swap need not be used.
Control
Register
Bits
15 4
0 0 Two independent filters
0 1 Two filters in cascade
1 X Single Filter
Function
Table 7 Control register filter mode bits
Control
Register
Bits
765
0 X 0 Control by input pin
1 0 0 Lower bank selected
1 1 0 Upper bank selected
X X 1 Swap on every sample clock
Function
Table 8 Control register bank swap bits
Table 6 Control register bit allocation
19
Page 20

PDSP16256
SCLK
CCS
CS
WEN
C15:0
A7:0
t
VALID ADDRESS
HS
VALID DATA
t
HH
(a) Coefficient Write
Figure. 20 Remote Master setup and hold timings
SCLK
A7:0
C15:12
CCS
C7:0
SCLK
t
CL
CCS
CS
WEN
C15:0
A7:0
t
VALID ADDRESS
t
HS
VALID DATA
HH
(b) Control Register Write
∼
CLK 1 CLK 2 CLK 9
t
CD
VALID ADDRESS
VALID ADDRESS
∼
∼
∼
∼
∼
∼
∼
∼
∼
∼
∼
tHSt
∼
∼
∼
∼
t
HH
CD
t
CH
t
HH
SCLK
OEN
F31:0
OUTPUT PINS
INPUT PINS
Figure. 21 EPROM load timings
t
CZF
t
HIGH Z
CL
t
t
OS
t
CD
VALID DATA
VALID DATA VALID DATAVALID DATA
OH
Figure. 22 Operating timings
t
CH
t
CVF
VALID DATA
tHSt
HH
20
Page 21
PDSP16256
Electrical Characteristics
The Electrical Characteristics are guaranteed over the following range of operating conditions, unless
otherwise stated:
Commercial: T
IndustriaL: T
Military: T
AMB =
= 0°C to+70°C, VDD = +5V±5%, GND = 0V
AMB
= -40°C to +85°C, VDD = +5V±10%, GND = 0V
AMB
-55°C to +125°C, VDD = +5V±10%, GND = 0V
Static Characteristics
Characteristic Symbol
Output high voltage
Output low voltage
Input high voltage (CMOS)
Input low voltage (CMOS)
Input high voltage (TTL)
Input low voltage (TTL)
Input leakage current
Input capacitance
Output leakage current
Output short circuit current
V
OH
V
OL
V
IH
V
IL
V
IH
V
IL
I
IN
C
IN
I
OZ
I
OS
Switching Characteristics (see Figs. 20, 21 and 22)
Characteristic
Input signal setup to clock rising edge
Input signal hold after clock rising edge
set up to clock rising edge
OEN
hold after clock rising edge
OEN
Clock rising edge to output signal valid
Clock frequency
Clock high time
Clock low time
Clock to data valid F bus from high impedance
Clock to data high impedance F bus
V
current
DD
NOTE 1. VDD = 15·5V, outputs unloaded, clock frequency = Max.
Symbol
t
HS
t
HH
t
OS
t
OH
t
CD
f
SCLK
t
CH
t
CL
t
CVF
t
CZF
I
DD
Value
Min. Typ. Max.
2·4
-
0·4
3·5
-
1·0
2·0
-
210
0·8
110
10
250
10
Commercial
Max.
Min.
8
4
20
4
5
18
11
-
-
-
-
-
-
26
25
-
30
30
400
150
300
Industrial
Min. Max.
20
20
12
Units
-
-
-
V
IOH = 4mA
V
I
V
SCLK input only
V
SCLK input only
V
All other inputs
V
All other inputs
µA
GND < V
= 4mA
OH
Conditions
< V
IN
DD
pF
µA
GND < V
mA
VDD = 15·5V
Military
Min.
8
-
8
4
-
4
-
20
4
-
4
5
28
-
20
-
30
-
30
5
-
-
20
-
12
-
-
380
Max.
-
-
-
28
20
-
30
30
380
OUT
< V
MHz
mA
DD
ns
ns
ns
ns
ns
ns
ns
ns
ns
ConditionsUnits
30pF
See Fig. 23
See Fig. 23
See Note 1
21
Page 22

PDSP16256
Test Waveform measurement level
Delay from
output high
to output
high impedance
Delay from
output low
to output
high impedance
Delay from
output high
impedance to
output low
1·5V
V
H
V
L
0·5V
0·5V
0·5V
1·5V
I
OL
DUT
30pF
Delay from
output high
impedance to
output high
V
is the voltage reached when the output is driven high
H
VL is the voltage reached when the output is driven low
1·5V
0·5V
Figure. 23 Three state delay measurement
Absolute Maximum Ratings (Note 1)
Supply voltage, V
Input voltage, V
Output voltage, V
Clamp diode current per pin, I
Static discharge voltage (HBM)
Storage temperature, T
Maximum junction temperature, T
DD
IN
OUT
S
(see note 2)
K
JMAX
Commercial grade
Industrial grade
Military grade
Package power dissipation
Thermal resistance, Junction-to-Case, θ
NOTES
1. Exceeding these ratings may cause permanent
damage. Functional operation under these conditions
is not implied.
2. Maximum dissipation should not be exceeded for
more than 1 second, only one output to be tested at
any one time.
3. Exposure to absolute maximum ratings for extended
periods may affect device reliablity.
4. Current is defined as negative into the device.
5. The θ
data assumes that heat is extracted from the
JC
top of the package.
6. Maximum junction temperature, T
with power applied.
20·5V to 17·0V
20·5V to VDD 10·5V
20·5V to V
10·5V
DD
18mA
500V
265°C to1150°C
1100°C
1110°C
1150°C
3000mW
JC
, is specified
JMAX
5°C/W
I
OH
Three state delay measurement load
PDSP16256 MC AC1R and PDSP16256 MC GC1R
(MIL-STD-883 PARTS)
Polyimide is used as an inter-layer dielectric as
glassification. Polymeric material meeting the
requirements of MIL-STD-883 test method 5011 is used
for die attach.
Life tesst/burn-in connections are given in Tables 9 and
10 on the following pages.
Change Notification
The change notification requirements of MIL-PRF-38535
will be implemented on MIL-STD-883 grade devices.
Known customers will be notified of any changes since
the last buy when ordering further parts if significant
changes have been made.
Rev.
DateAMAR 1993BSEPT 1995CJAN 1998DAUG 1998
22
Page 23

PDSP16256
Pin
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10
A11
A12
A13
A14
A15
B1
B2
B3
B4
B5
B6
B7
B8
B9
B10
B11
B12
B13
B14
B15
C1
C2
C3
C4
C5
C6
C7
Voltage
N/C
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
15·0V
0V/180k
0V
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
N/C
N/C
N/C
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
N/C
N/C
N/C
N/C
0V/180k
0V/180k
0V/180k
0V/180k
Pin
C8
C9
C10
C11
C12
C13
C14
C15
D1
D2
D3
D4
D13
D14
D15
E1
E2
E3
E13
E14
E15
F1
F2
F3
F13
F14
F15
G1
G2
G3
G13
G14
G15
H1
H2
H3
H13
Voltage
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
0V
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
N/C
15·0V
N/C
N/C
N/C
N/C
15·0V
15·0V/180k
15·0V/180k
15·0V/180k
N/C
Pin
H14
H15
J1
J2
J3
J13
J14
J15
K1
K2
K3
K13
K14
K15
L1
L2
L3
L13
L14
L15
M1
M2
M3
M13
M14
M15
N1
N2
N3
N4
N5
N6
N7
N8
N9
N10
N11
Voltage
N/C
N/C
0V
0V/180k
0V/180k
N/C
N/C
0V
0V/180k
0V/180k
0V/180k
N/C
N/C
N/C
15·0V
15·0V
RESET
N/C
N/C
N/C
CLOCK
15·0V
0V
N/C
N/C
N/C
0V
15·0V
15·0V/180k
15·0V
15·0V
0V
0V
15·0V
15·0V
0V
0V
Pin
N12
N13
N14
N15
P1
P2
P3
P4
P5
P6
P7
P8
P9
P10
P11
P12
P13
P14
P15
R1
R2
R3
R4
R5
R6
R7
R8
R9
R10
R11
R12
R13
R14
R15
Voltage
15·0V
N/C
N/C
N/C
15·0V/180k
15·0V/180k
15·0V
15·0V
0V
0V
15·0V
15·0V
15·0V
0V
0V
0V
N/C
0V
N/C
0V/180k
15·0V
15·0V
0V
0V
15·0V
15·0V
15·0V
0V
15·0V
0V
0V
0V
15·0V
N/C
Table 9 Life test/burn-in connections for PDSP16256 MC AC1R (PGA). NOTE: PDA is 5% and based on
groups 1 and 7
23
Page 24

PDSP16256
Pin
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
Voltage
N/C
N/C
N/C
N/C
15·0V
N/C
N/C
0V
N/C
N/C
N/C
N/C
N/C
N/C
N/C
0V
N/C
N/C
N/C
15·0V
N/C
N/C
N/C
N/C
15·0V
N/C
N/C
0V
N/C
N/C
N/C
N/C
N/C
N/C
N/C
0V
N/C
N/C
N/C
15·0V
0V
N/C
N/C
Pin
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
Voltage
15·0V
0V
15·0V
N/C
15·0V
0V
0V
0V
0V
0V
0V
0V
0V
0V
15·0V
15·0V
15·0V
15·0V
15·0V
15·0V
15·0V
15·0V
15·0V
0V
0V
0V
0V
0V
0V
0V
15·0V
15·0V
15·0V
15·0V
15·0V
15·0V
0V
15·0V
15·0V/180k
15·0V/180k
15·0V
0V
0V/180k
Pin
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
Voltage
15·0V/180k
0V
0V
15·0V
0V
15·0V
15·0V
RESET
CLOCK
0V
15·0V
15·0V
15·0V
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
15·0V
15·0V/180k
15·0V/180k
0V
15·0V/180k
N/C
N/C
N/C
0V
N/C
N/C
N/C
N/C
N/C
15·0V
N/C
N/C
N/C
N/C
N/C
N/C
N/C
0V
N/C
15·0V
Pin
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
Voltage
0V
N/C
0V/180k
15·0V
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
0V
0V/180k
0V/180k
15·0V
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
0V/180k
0V
0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
0V
15·0V/180k
15·0V/180k
15·0V/180k
15·0V
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
15·0V/180k
0V
15·0V/180k
15·0V
0V
Table 10 Life test/burn-in connections for PDSP16256 MC GC1R (QFP). NOTE: PDA is 5% and based on
groups 1 and 7
24
Page 25

Page 26

Page 27

Page 28

http://www.mitelsemi.com
World Headquarters - Canada
Tel: +1 (613) 592 2122
Fax: +1 (613) 592 6909
North America Asia/Pacific Europe, Middle East,
Tel: +1 (770) 486 0194 Tel: +65 333 6193 and Africa (EMEA)
Fax: +1 (770) 631 8213 Fax: +65 333 6192 Tel: +44 (0) 1793 518528
Fax: +44 (0) 1793 518581
Information relating to products and services furnished herein by Mitel Corporation or its subsidiaries (collectively “Mitel”) is believed to be reliable. However, Mitel assumes no
liability for errors that may appear in this publication, or for liability otherwise arising from the application or use of any such information, product or service or for any infringement of
patents or other intellectual property rights owned by third parties which may result from such application or use. Neither the supply of such information or purchase of product or
service conveys any license, either express or implied, under patents or other intellectual property rights owned by Mitel or licensed from third parties by Mitel, whatsoever.
Purchasers of products are also hereby notified that the use of product in certain ways or in combination with Mitel, or non-Mitel furnished goods or services may infringe patents or
other intellectual property rights owned by Mitel.
This publication is issued to provide information only and (unless agreed by Mitel in writing) may not be used, applied or reproduced for any purpose nor form part of any order or
contract nor to be regarded as a representation relating to the products or services concerned. The products, their specifications, services and other information appearing in this
publication are subject to change by Mitel without notice. No warranty or guarantee express or implied is made regarding the capability, performance or suitability of any product or
service. Information concerning possible methods of use is provided as a guide only and does not constitute any guarantee that such methods of use will be satisfactory in a specific
piece of equipment. It is the user’s responsibility to fully determine the performance and suitability of any equipment using such information and to ensure that any publication or
data used is up to date and has not been superseded. Manufacturing does not necessarily include testing of all functions or parameters. These products are not suitable for use in
any medical products whose failure to perform may result in significant injury or death to the user. All products and materials are sold and services provided subject to Mitel’s
conditions of sale which are available on request.
M Mitel (design) and ST-BUS are registered trademarks of MITEL Corporation
Mitel Semiconductor is an ISO 9001 Registered Company
Copyright 1999 MITEL Corporation
All Rights Reserved
Printed in CANADA
TECHNICAL DOCUMENTATION - NOT FOR RESALE
 Loading...
Loading...