

Datasheet PBL3771-1NS, PBL3771-1QNS, PBL3771-1QNT, PBL3771-1SOS, PBL3771-1SOT Datasheet (Ericsson)
Page 1
February 1999
PBL 3771/1
PBL 3771/1
Precision Stepper Motor Driver
Description
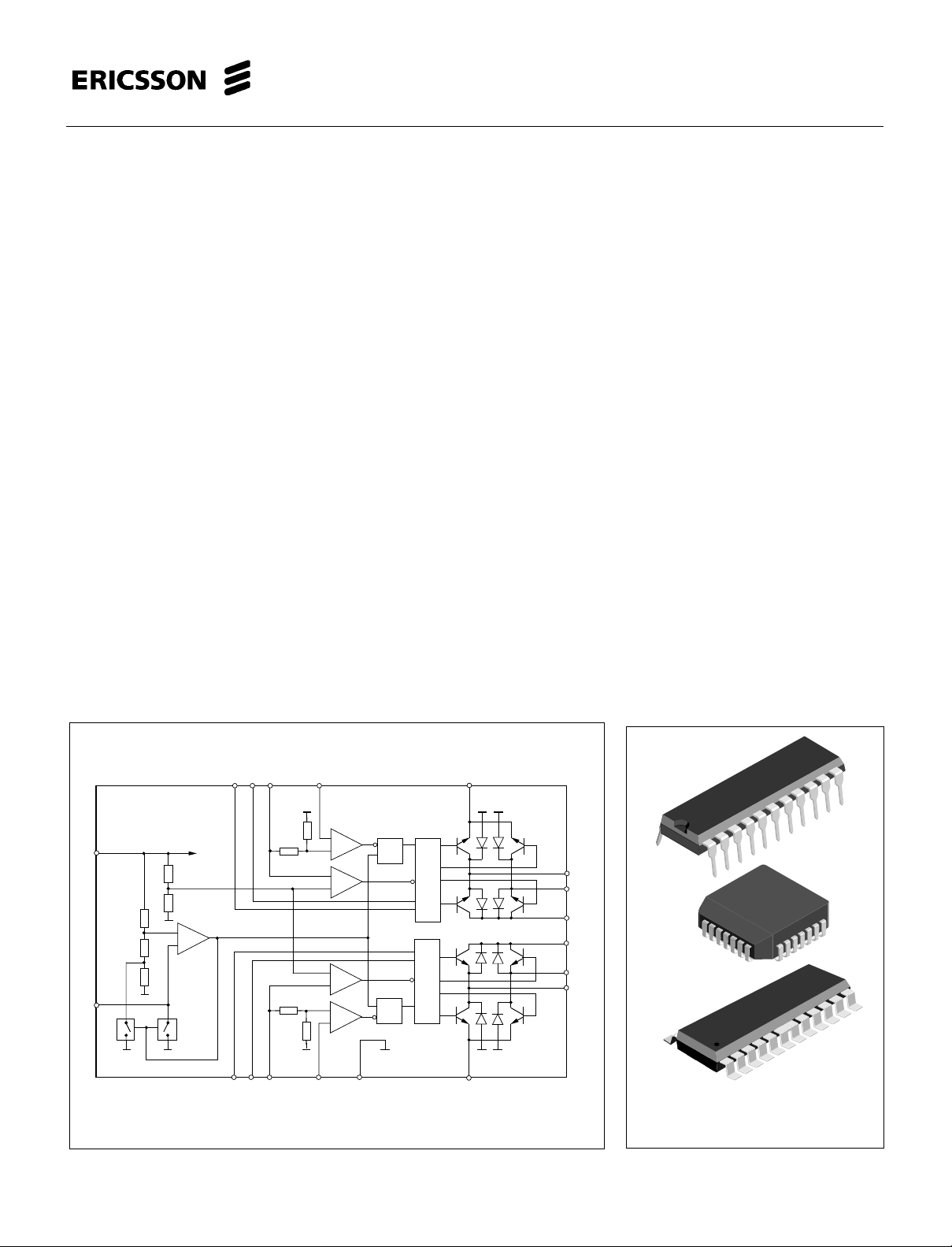
The PBL 3771/1 is a switch-mode, constant-current driver IC (chopper) with two
channels, one for each winding of a two-phase stepper motor. The circuit is especially
developed for use in microstepping applications in conjunction with the matching dual
DAC (Digital-to-Analog Converter) PBM 3960. A complete driver system consists of
these two ICs, a few passive components and a microprocessor for generation of the
proper control and data codes required for microstepping.
The PBL 3771/1 contains a clock oscillator, which is common for both driver
channels; a set of comparators and flip-flops implementing the switching control; and
two H-bridges with internal recirculation diodes. Voltage supply requirements are +5 V
for logic and +10 to +45 V for the motor. Maximum output current is 650 mA per
channel.
A special logic function is used to select slow or fast current decay in the output
stage for improved high-speed microstepping.
The close match between the two driver channels guarantees consistent output
current ratios and motor positioning accuracy.
Key Features
• Dual chopper driver in a single
package.
• 650 mA output current per channel.
• Close matching between channels for
high microstepping accuracy.
• Selectable slow/fast current decay for
improved high-speed microstepping.
• Improved low-level linearity.
• Specially matched to Dual DAC
PBM 3960.
• Selection of packages, 22-pin
“batwing” DIP, 24 pin "batwing" SOIC
or 28-lead PLCC with lead-frame for
heat-sinking through PC board
copper.
PBL 3771/1
V
CC
RC
V
CC
+
–
Figure 1. Block diagram.
Phase
Phase
VR1CD
1
1
C
1
–
+
+
–
–
+
+
–
R
S
SRQ
Q
Logic
Logic
E
1
M
A1
M
B1
V
MM1
V
MM2
M
B2
M
A2
PBL
3771/1
PBL 3771/1
VR2CD
2
2
GNDC
2
E
2
28-pin PLCC package
22-pin plastic DIP package
24-pin SO package
1
Page 2
PBL 3771/1
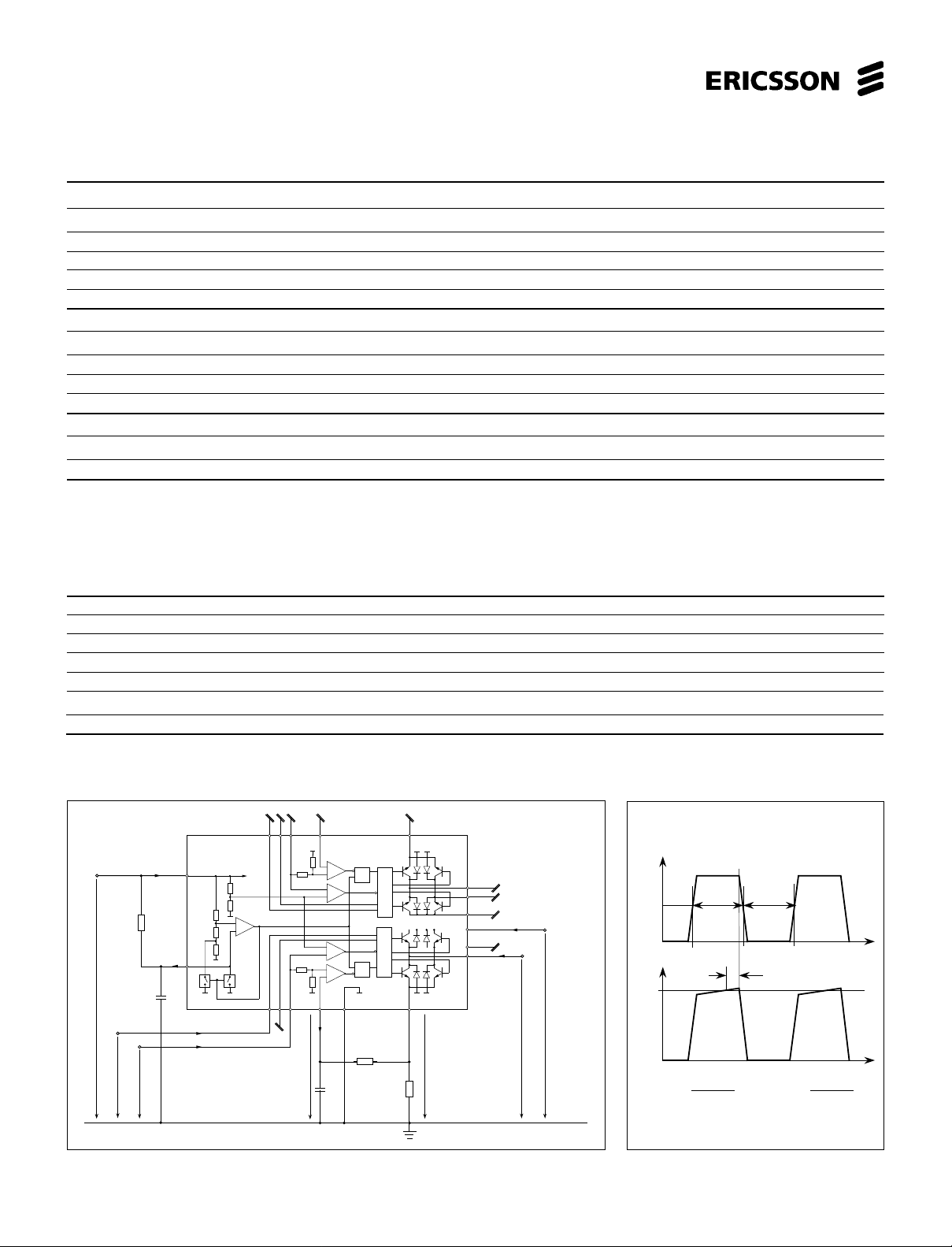
50 %
V
CH
t
on
t
off
V
E
| V – V |
MA MB
t
d
t
t
f =
s
tont
off
+
D =
t
t
on
off
+
1
t
on
Maximum Ratings
Parameter Pin no. (DIL) Symbol Min Max Unit
Voltage
Logic supply 11 V
Motor supply 3, 20 V
Logic inputs 7, 8, 15, 16 V
Comparator inputs 10, 13 V
Reference inputs 9, 14 V
Current
Motor output current 1, 4, 19, 22 I
Logic inputs 7, 8, 15, 16 I
Analog inputs 10, 13 I
Oscillator charging current 12 I
Temperature
Operating junction temperature T
Storage temperature** T
** Circuit only. The packaging can handle max 60°C
Recommended Operating Conditions
CC
MM
I
C
R
M
I
A
RC
J
S
07V
045V
-0.3 6 V
-0.3 V
CC
V
-0.3 7.5 V
-700 +700 mA
-10 mA
-10 mA
5mA
-40 +150 °C
-55 +150 °C
Parameter Symbol Min Typ Max Unit
Logic supply voltage V
Motor supply voltage V
Motor output current *** I
Junction temperature **** T
Rise time logic inputs t
Fall time logic inputs t
Oscillator timing resistor R
*** In microstepping mode, “sine/cosine” drive where I
= 650 • cos(θ) and I2 = 650 • sin(θ) mA, otherwise 500 mA/channel both
1
CC
MM
M
J
r
f
T
4.75 5 5.25 V
10 40 V
-650 650 mA
-20 +125 °C
2 µs
2 µs
2 15 20 kohms
channels fully on.
****See operating temperature chapter.
4
1
3
20
22
19
Pin numbers refer to
DIL-package
M
A1
M
B1
V
MM1
V
MM2
M
B2
I I
M OL
M
A2
I
MM
V
V
MM
M
V
MA
Phase
1
PBL 3771/1
V
I
CC
CC
11
15 kW
R
T
I
RC
RC
12
3 300 pF
V
CC
C
T
I I I
I IH IL
V
I
V
IH
V
V
IL
V
I
A
A
R
7
V
CC
+
–
16
Phase
2
15 14
1
1
10
98
–
R
+
S
+
–
–
+
SRQ
+
–
5, 6, 17, 18
13
VR2CD
2
GNDC
2
I
C
I
A
820 pF
C
1 kW
C
V
CH
V
C
C
VR1CD
E
1
2
Q
Logic
Logic
21
E
2
R
C
V
E
R
S
Figure 2. Definitions of symbols.
2
Figure 3. Definition of terms.
Page 3
PBL 3771/1
Electrical Characteristics
Electrical characteristics over recommended operating conditions, unless otherwise noted. -20°C - TJ - +125°C.
Parameter Symbol fig. Conditions Min Typ Max Unit
General
Supply current I
Total power dissipation P
Turn-off delay t
Logic Inputs
Logic HIGH input voltage V
Logic LOW input voltage V
Logic HIGH input current I
Logic LOW input current I
Reference Inputs
Input resistance R
Input current I
Turn-off voltage V
Comparator Inputs
Threshold voltage V
| V
- V
CH1
| mismatch V
CH2
Input current I
Motor Outputs
Lower transistor saturation voltage I
Lower transistor leakage current V
Lower diode forward voltage drop I
Upper transistor saturation voltage I
Upper transistor leakage current V
Upper diode forward voltage drop I
Chopper Oscillator
Chopping frequency f
Ref.
CC
D
VMM = 40 V, IM1= 450 mA, IM2= 0 mA. 1.4 1.6 W
38 50 mA
Notes 2, 3.
V
= 40 V, IM1 = IM2 = 318 mA. 1.6 1.8 W
MM
Notes 2, 3.
3Ta = +25°C, dVC/dt ≥ 50 mV/µs. 1.0 1.5 µs
d
Note 3.
IH
IL
IH
IL
R
R
TO
CH
CH,diff
C
s
VI = 2.4 V 20 µA
VI = 0.4 V -0.4 mA
Ta = +25°C 5 kohms
Ta = +25°C, VR = 2.5 V. 0.5 1.0 mA
RC = 1 kohms, VR = 2.5 V 430 450 470 mV
RC = 1 kohms 1 mV
= 500 mA 1.00 1.20 V
M
= 41 V, VE = VR = 0 V, VC = V
MM
= 500 mA 1.10 1.25 V
M
= 500 mA 1.20 1.35 V
M
= 41 V, VE = VR = 0 V, VC = V
MM
= 500 mA 1.00 1.25 V
M
3CT = 3300 pF, RT = 15 kohms 25.0 26.5 28.0 kHz
2.0 V
20 29 38 mV
-10 1 µA
CC
CC
0.8 V
300 µA
300 µA
Thermal Characteristics
Parameter Symbol fig. Conditions Min Typ Max Unit
Thermal resistance Rth
Notes
1. All voltages are with respect to ground. Currents are positive into, negative out of specified terminal.
2. All ground pins soldered onto a 20 cm
3. Not covered by final test program.
4. Switching duty cycle D = 30%, f
Ref.
13 DIL package. 11 °C/W
J-BW
Rth
13 DIL package. Note 2. 40 °C/W
J-A
Rth
13 PLCC package. 9 °C/W
J-BW
Rth
13 PLCC package. Note 2. 35 °C/W
J-A
Rth
13 SO package. 13 °C/W
J-BW
Rth
13 SO package. Note 2. 42 °C/W
J-A
2
PCB copper area with free air convection.
= 26.5 kHz.
S
3
Page 4

PBL 3771/1
MB
VMM
MA
GND
GND
Phase
CD
VR
V
NC
C
1
2
1
E
3
1
4
1
5
1
6
7
8
1
9
1
10
1
11
1
cc
PBL
3771/1 SO
1
M
B1
NC
24
MB
23
2
E
22
2
VMM
21
2
20
MA
2
GND
19
18
17
16
15
14
1312
GND
Phase
CD
VR
C
2
RC
2
2
2
Phase
V
MM1
M
GND
GND
CD
V
2
E
1
3
4
A1
5
PBL
6
3771/1N
7
1
8
1
9
V
R1
10
C
1
11
CC
22
21
20
19
18
17
16
15
14
13
12
M
B2
E
2
V
MM2
M
A2
GND
GND
Phase
CD
2
V
R2
C
2
RC
2
A2
M
GND
GND
GND
GND
GND
1
GND
432
5
V
MM2
E
6
2
M
7
B2
M
8
B1
PBL 3771/1QN
GND
2
9
10
E
1
V
11
MM1
12131415161718
A1
M
GND
Phase
282726
GND
GND
2
CD
1
Phase
25
24
23
22
21
20
19
Figure 4. Pin configuration.
Pin Description
Refer to figure 4.
SO DIP PLCC Symbol Description
21 8 MB1Motor output B, channel 1. Motor current flows from MA1 to MB1 when Phase1 is HIGH.
32 10 E
43 11 V
1
MM1
54 12 MA1Motor output A, channel 1. Motor current flows from MA1 to MB1 when Phase1 is HIGH.
6,7, 5,6, 1-3,9, GND Ground and negative supply. Note: these pins are used thermally for heat-sinking.
18,19 17,18 13-17,28 Make sure that all ground pins are soldered onto a suitably large copper ground
8 7 18 Phase
98 19 CD
10 9 20 V
11 10 21 C
12 11 22 V
R1
1
CC
13 12 23 RC Clock oscillator RC pin. Connect a 15 kohm resistor to VCC and a 3300 pF capacitor to
14 13 24 C
15 14 25 V
2
R2
16 15 26 CD
17 16 27 Phase
20 19 4 M
21 20 5 V
22 21 6 E
MM2
2
23 22 7 M
Common emitter, channel 1. This pin connects to a sensing resistor to ground.
Motor supply voltage, channel 1, 10 to 40 V. V
MM1
and V
should be connected together.
MM2
plane for efficient heat sinking.
Controls the direction of motor current at outputs MA1 and MB1. Motor current flows from M
1
to MB1 when Phase1 is HIGH.
Current decay control, channel 1. A logic HIGH on this input results in
1
a LOW results in
fast
current decay, see “Functional Description.”
slow
Reference voltage, channel 1. Controls the threshold voltage for the comparator and hence
the output current. Input resistance is typically 2.5 kohms, ±20%.
Comparator input channel 1. This input senses the instantaneous voltage across the
sensing resistor, filtered by an RC network. The threshold voltage for the comparator is
(0.450 / 2.5) • VR1, i.e. 450 mV at VR1 = 2.5 V.
Logic voltage supply, nominally +5 V.
ground to obtain the nominal switching frequency of 26.5 kHz.
Comparator input channel 2. This input senses the instantaneous voltage across the
sensing resistor, filtered by an RC network. The threshold voltage for the comparator is
(0.450 / 2.5) • VR1, i.e. 450 mV at VR1 = 2.5 V.
Reference voltage, channel 2. Controls the threshold voltage for the comparator and hence
the output current. Input resistance is typically 2.5 kohms, ±20%.
Current decay control, channel 2. A logic HIGH on this input results in
2
a LOW results in
Controls the direction of motor current at outputs MA2 and MB2. Motor current flows from M
2
fast
current decay, see “Functional Description.”
slow
to MB2 when Phase2 is HIGH.
Motor output A, channel 2. Motor current flows from MA2 to MB2 when Phase2 is HIGH.
A2
Motor supply voltage, channel 2, 10 to 40 V. V
MM1
and V
should be connected together.
MM2
Common emitter, channel 2. This pin connects to a sensing resistor to ground.
Motor output B, channel 2. Motor current flows from MA2 to MB2 when Phase2 is HIGH.
B2
current decay,
current decay,
V
R2
C
2
RC
V
CC
C
1
V
R1
CD
1
A1
A2
4
Page 5

PBL 3771/1
Functional Description
Each channel of the PBL 3771/1
consists of the following sections: an
H-bridge output stage, capable of driving
up to 650 mA continuous motor current
(or 500 mA, both channels driven), a
logic section that controls the output
transistors, an S-R flip-flop, and two
comparators. The oscillator is common
to both channels.
Constant current control is achieved
by switching the current to the windings.
This is done by sensing the (peak)
voltage across a current-sensing
resistor, R
series with the motor winding, and
feeding that voltage back to a
comparator. When the motor current
reaches a threshold level, determined by
the voltage at the reference input, V
the comparator resets the flip-flop, which
turns off the output transistors. The
current decreases until the clock
oscillator triggers the flip-flop, which
turns on the output transistors again,
and the cycle is repeated.
, effectively connected in
S
,
R
The current-decay rate during the
turn-off portion of the switching cycle,
can be selected fast or slow by the CD
input.
In slow current-decay mode, only one
of the lower transistors in the H-bridge
(those closest to the negative supply) is
switched on and off, while one of the
upper transistors is held constantly on.
During turn-off, the current recirculates
through the upper transistor (which one
depends on current direction) and the
corresponding free-wheeling diode
connected to V
, see figure 5.
MM
In fast current decay mode, both the
upper and lower transistors are
switched. During the off-time, the
freewheeling current is opposed by the
supply voltage, causing a rapid discharge of energy in the winding.
Fast current decay may be required in
half- and microstepping applications
when rapid changes of motor current are
necessary. Slow current decay,
however, gives less current ripple, and
should always be selected, if possible, to
mini-mize core losses and switching
noise.
Applications Information
Current control
The output current to the motor winding
is mainly determined by the voltage at
the reference input and the value of the
sensing resistor, R
Chopping frequency, winding
inductance, and supply voltage will affect
the current level, but to much less
extent. Fast current decay setting will
produce somewhat lower (average)
current than slow current decay. The
peak current through the sensing
resistor (and motor winding) can be
expressed as:
= 0.18 • (VR / RS) [A]
I
M,peak
i.e., with a recommended value of 1 ohm
for the sensing resistor, R
reference voltage will produce an output
current of approximately 450 mA. To
improve noise immunity on the V
the control range may be increased to
5 volts if RS is correspondingly changed
to 2 ohms.
.
S
, a 2.5 V
S
input,
R
Motor Current
1
2
3
FAST Current Decay
SLOW Current Decay
V (+5 V)
CC
0.1 mF 0.1 mF
11 3 20
V
7
Phase
8
CD
9
V
16
Phase
15
R
s
+5 V
1
32
Time
CD
14
V
RC
12
15 kW
3 300 pF
GND
(V )
CC MM
CC
1
1
R1
2
2
R2
5, 6,
17, 18
VV
MM1 MM2
PBL 3771/1
2
2
13
R
S
11
10
1 kW 1 kW
820 pF 820 pF
1.0 W 1.0 W
M
A1
M
B1
M
A2
M
B2
ECECGND
2
21
4
1
19
22
R
S
V
MM
+
10 mF
STEPPER
MOTOR
Pin numbers refer
to DIL package.
GND (V )
Figure 5. Output stage with current paths
during turn -on, turn-off and phase shift.
Figure 6. Typical stepper motor application with PBL 3771/1.
5
Page 6

PBL 3771/1
External components
The voltage across the sensing resistor
is fed back to the comparator via a lowpass filter section, to prevent erroneous
switching due to switching transients.
The recommended filter component
values, 1 kohm and 820 pF, are suitable
for a wide range of motors and
operational conditions.
Since the low-pass filtering action
introduces a small delay of the signal to
the comparator, peak voltage across the
sensing resistor, and hence the peak
motor current, will reach a slightly higher
level than the threshold, V
, set by the
C
reference voltage
(VC = 450 mV @VR = 2.5 V).
The time constant of the low-pass filter
may therefore be reduced to minimize
the delay and optimize low-current
performance, especially if a low (12 V)
supply voltage is used. Increasing the
time constant may result in unstable
switching.
The frequency of the clock oscillator is
set by the R-C combination at pin RC.
The recommended values give a
nominal frequency of 26.5 kHz. A lower
frequency will result in higher current
ripple and may cause audible noise from
the motor, while increasing the
frequency results in higher switching
losses and possibly increased iron
losses in the motor.
The sensing resistor, R
, should be
S
selected for maximum motor current.
The relationship between peak motor
current, reference voltage and the value
is described under “Current
of R
S
control” above. Be sure not to exceed
the maximum output current which is
650 mA per channel (or 500 mA per
channel, both channels fully on, see
“Recommended Operating Conditions”).
Motor selection
The PBL 3771/1 is designed for bipolar
motors, i.e., motors that have only one
winding per phase. A unipolar motor,
having windings with a center tap, can
also be used, see figure 14.
The chopping principle in the
PBL 3771/1 is based on a constant
frequency and a varying duty cycle. This
scheme imposes certain restrictions on
motor selection. Unstable chopping can
occur if the chopping duty cycle exceeds
approximately 50%. To avoid this, it is
necessary to choose a motor with a low
winding resistance. Low winding
resistance means less inductance and
will therefore enable higher stepping
rates, however it also means less torque
capability. A compromise has to be
made.
Choose a motor with the lowest
possible winding resistance that still
gives the required torque and use as
high supply voltage as possible without
exceeding the maximum recommended
40 V. Check that the chopping duty cycle
does not exceed 50% at maximum
current.
Since the PBL 3771/1 produces a
regulated, constant output current it is
not necessary to use a motor that is
rated at the same voltage as the actual
supply voltage. Only rated current needs
to be considered. Typical motors to be
used together with the PBL 3771/1 have
voltage ratings of 5 to 12 V, while the
supply voltage usually ranges from 24 to
40 V.
To
µP
+2.5V
V (+5 V)
CC
+
0.1 µF 0.1 µF
14
D0
7
D7
15
16
17
22
GND
(V )
CC MM
PBM 3960/1
A0
A1
6
WR
CS
RESET
1
VV
Ref
5
V
DD
SS
18
Sign
CD
DA
Sign
CD
DA
3
1
4
1
2
1
20
2
19
2
21
2
+5 V
7
8
9
16
15
14
15 kΩ
3 300 pF
Phase
CD
V
Phase
CD
V
RC
12
R1
R2
11 3 20
V
CC
1
1
PBL 3771/1
2
2
11
5, 6,
17, 18
10
820 pF 820 pF
VV
MM1 MM2
2
2
13
1 kΩ 1 kΩ
1.0 Ω 1.0 Ω
R
S
M
A1
M
B1
M
A2
M
B2
ECECGND
2
21
R
4
1
19
22
S
10 µF
STEPPER
MOTOR
Pin numbers refer
to DIL package.
GND (V
V
MM
)
Figure 7. Microstepping system with PBM 3960 /1 and PBL 3771/1.
6
Page 7

PD (W)
0 .10 .20 .30 .40 .50 .60
IM (A)
0
1.0
2.0
3.0
VMM = 14V
VMM = 36V
General
.2
.4
.6
.8
1.0
V
CE Sat
(V)
0 .10 .20 .30 .40 .50 .60
IM (A)
Tj = 25
°C
Tj = 125
°C
Phase inputs. A logic HIGH on a Phase
input gives positive current flowing out
from M
into MB. A logic LOW gives a
A
current in the opposite direction.
Slow/fast current decay. A logic HIGH
on the CD input gives slow current
decay, a logic LOW gives fast current
decay.
Heat sinking. Soldering the four center
pins onto a free PCB copper area of 20
2
(approx. 1.8" x 1.8", copper foil
cm
thickness = 35 µm) permits the circuit to
operate with a maximum of 320 mA
output current, both channels driving, at
ambient temperatures up to +70°C.
Consult figures 12 and 13 in order to
determine the necessary copper area for
heat sinking if higher currents are
required.
Thermal shutdown. The circuit is
equipped with a thermal shutdown
function that reduces the output current
at chip temperatures above +160°C.
Operating temperature. The max recommended operating temperature is
125°C. This gives an estimated lifelength
of about 5 years at continous drive, A
change of ±10° would increase/decrease
the lifelength of the circuit with about 5
years.
Vd (V)
°C
Tj = 25
1.0
.8
.6
.4
.2
0
0 .10 .20 .30 .40 .50 .60
Tj = 125
°C
IM (A)
Figure 8. Typical upper diode voltage
drop vs. recirculating current.
Vd (V)
°C
1.0
.8
.6
.4
.2
Tj = 25
Tj = 125
°C
PBL 3771/1
V
(V)
CE Sat
1.2
1.0
.8
.6
.4
.2
0 .10 .20 .30 .40 .50 .60
Figure 9. Typical source saturation
voltage vs. output current.
Tj = 25
°C
Tj = 125
°C
IM (A)
0
0 .10 .20 .30 .40 .50 .60
IM (A)
Figure 10. Typical lower diode voltage
drop vs. recirculating current.
Max allow power dis
Figure 12. Power dissipation vs. motor current, both channels driven, T
Figure 11 Typical sink saturation voltage
vs. output current.
= 25°C.
a
7
Page 8

PBL 3771/1
Thermal resistance [°C/W]
80
70
60
50
40
30
20
5101520
PCB copper foil area [cm ]
PLCC package
DIP package
30 3525
2
24-pin SO
Figure 13. Thermal Resistance vs. PC Board copper area and suggested layout.
Best for high speed
PBL 3771/1
Best for high torque
PBL 3771/1
22-pin
DIP
28-pin
PLCC
Figure 14. Connection of unipolar motors.
Information given in this data sheet is believed to be
accurate and reliable. However no responsibility is
assumed for the consequences of its use nor for any
infringement of patents or other rights of third parties
which may result from its use. No license is granted
by implication or otherwise under any patent or patent
rights of Ericsson Components. These products are
sold only according to Ericsson Components' general
conditions of sale, unless otherwise confirmed in
writing.
Specifications subject to change without
notice.
1522-PBL 3771/1 Uen. Rev B
© Ericsson Components AB 1999
Ericsson Components AB
SE-164 81 Kista-Stockholm, Sweden
Telephone: +46 8 757 50 00
Ordering Information
Package Part No.
DIP Tube PBL 3771/1NS
PLCC Tube PBL 3771/1QNS
PLCC Tape & Reel PBL 3771/1QNT
SO tube PBL 3771/1SOS
SO Tape & Reel PBL 3771/1SOT
8
 Loading...
Loading...