

Page 1
NT68F62
8-Bit Microcontroller for Monitor (32K Flash MTP Type)
Features
Operating voltage range: 4.5V to 5.5V
CMOS technology for low power consumption
6502 8-bit CMOS CPU core
8 MHz operation frequency
32K bytes of flash memory for Multi -Times Program
512 bytes of RAM
2Kbytes Masked BootROM for ISP.
One 8-bit base timer
13 channels of 8-bit PWM outputs with 5V open drain
4 channel A/D converters with 6-bit resolution
25 bi-directional I/O port pins (8 dedicated I/O pins)
Hsync/Vsync signals processor for separate &
composite signals, including hardware sync signals
polarity detection and freq. counters with 2 sets of
Hsync counting intervals
Hsync/Vsync polarity controlled output, 5 selectable
free run output signals and self-test patterns, automute function, half freq. I/O function
Two built-in IIC bus interfaces support VESA
DDC1/2B+
General Description
The NT68F62 is a new generation of monitor µC for autosync and digital control applications. Particularly, this chip
supports various functions to allow users to easily develop
USB monitors. It contains the 6502 8-bit CPU core, 512
bytes of RAM for use as working RAM and as stack area,
32K bytes of Flash memory, 13-channels of 8-bit PWM D/A
converters, 4-channel A/D converters for detection of keys
which can save I/O pins, one 8-bit pre-loadable base timer,
an internal Hsync and Vsync signals processor and a
watch-dog timer, which prevents the system from abnormal
Two layers of interrupt management
NMI interrupt sources
- INTE0 (External INT with selectable edge trigger)
- INTMUTE (Auto Mute Activated)
IRQ interrupt sources
- INTS0/1 (SCL Go-low INT)
- INTA0/1 (Slave Address Matched INT)
- INTTX0/1 (Shift Register INT)
- INTRX0/1 (Shift Register INT)
- INTNAK0/1 (No Acknowledge)
- INTSTOP0/1 (Stop Condition Occurred INT)
- INTE1 (External INT with Selectable Edge Trigger)
- INTV (VSYNC INT)
- INTMR (Base Timer INT)
- INTADC (AD Conversion Done INT)
Hardware watch-dog timer function
40-pin P-DIP and 42-pin S-DIP packages
operation and two IIC bus interfaces. The user can store
EDID data in the 128 bytes of RAM for DDC1/2B, so that
the user can reduce a dedicated EEPROM for EDID. The
half frequency output function can save the external oneshot circuit. All of these designs are borne of our
committment to offer our user savings on component costs.
The 42 pin S-DIP IC provides two additional I/O pins –
port40 & port41, Part number NT68F62U represents the SDIP IC. For future reference, port40 & port42 are only
available for the 42 pin S-DIP IC.
1 V1.0
Page 2
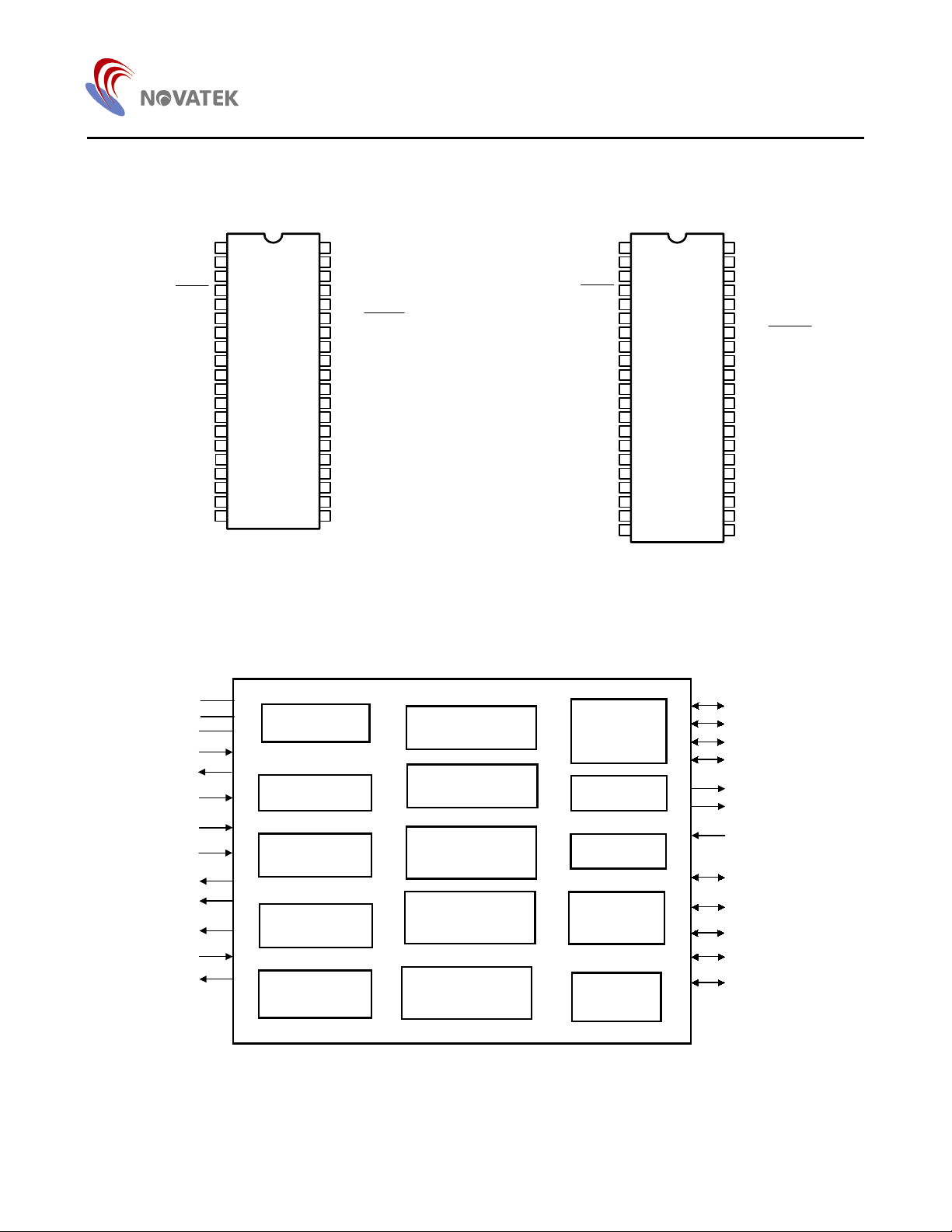
Pin Configurations
40-Pin P-DIP 42-Pin S-DIP
40
39
38
37
36
35
34
33
NT68F62
32
31
30
29
28
27
26
25
24
23
22
21
VSYNCI/INTV [XA8]
HSYNCI[0]
DAC3 [NV]
DAC4/SCL1 [ERASE]
DAC5/SDA1 [MASS]
DAC6 [EXRSTB]
CREG[TMR]
P07/HSYNCO [XA1]
P06/VSYNCO [XA0]
P05/DAC12 [XY5]
P04/DAC11 [XY4]
P03/DAC10 [XY3]
P02/DAC9 [XY2]
P01/DAC8 [XY1]
P00/DAC7 [XY0]
P31/SCL0 [XA7]
P30/SDA0 [XA6]
P20 [DB0]
P21 [DB1]
P22 [DB2]
VDD
P40
GND
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
NT68F62U
[PG] DAC2
[0] DAC1/ADC3
[YE] DAC0/ADC2
[VPP] RESET
[8MHZ]OSCO
[0]OSCI
[OE/SE] P15/INTE0
[XE] P14/PATTERN
[XA5] P13/HALFI
[XA4] P12/HALFO
[XA3] P11/ADC1
[XA2] P10/ADC0
[1]P16/INTE1
[DB7] P27
[DB6] P26
[DB5] P25
[DB4] P24
[DB3] P23
* [ ]: Flash Mode
[PG] DAC2
[0] DAC1/ADC3
[YE] DAC0/ADC2
[VPP] RESET
VDD
GND
[8MHZ]OSCO
[OE/SE] P15/INTE0
[XE] P14/PATTERN
[0]OSCI
[XA5] P13/HALFI
[XA4] P12/HALFO
[XA3] P11/ADC1
[XA2] P10/ADC0
[1]P16/INTE1
[DB7] P27
[DB6] P26
[DB5] P25
[DB4] P24
[DB3] P23
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
* [ ]: Flash Mode
42
VSYNCI/INTV [XA8]
41
HSYNCI[0]
40
DAC3 [NV]
39
DAC4/SCL1 [ERASE]
38
DAC5/SDA1 [MASS]
P41
37
DAC6 [EXRSTB]
36
CREG[TMR]
35
P07/HSYNCO [XA1]
34
33
P06/VSYNCO [XA0]
P05/DAC12 [XY5]
32
31
P04/DAC11 [XY4]
30
P03/DAC10 [XY3]
P02/DAC9 [XY2]
29
P01/DAC8 [XY1]
28
P00/DAC7 [XY0]
27
26
P31/SCL0 [XA7]
25
P30/SDA0 [XA6]
24
P20 [DB0]
23
P21 [DB1]
P22 [DB2]
22
NT68F62
Block Diagram
V
DD
CREG
GND
OSCI
OSCO
INTE0/1
VSYNCI/INTV
HSYNCI
VSYNCO
HSYNCO
PATTERN
HALFI
HALFO
Voltage
Regulator
Timing Generator
CPU core
6502
Interrupt
Controller
H/V Sync Signals
Processor
32KB Flash memory &
2KB BootROM
SRAM + STACK
512 Bytes
8-Bit Base Timer
Watch Dog Timer
JEDEC Control
Block
IIC BUS
PWM DACs
A/D Converter
I/O Ports
ISP Control
Block
SCL0
SDA0
SCL1
SDA1
DAC0 - DAC7
DAC8 - DAC12
ADC0 - ADC3
P00 - P07
P10 - P16
P20 - P27
P30 - P31
P40 - P41
2
Page 3
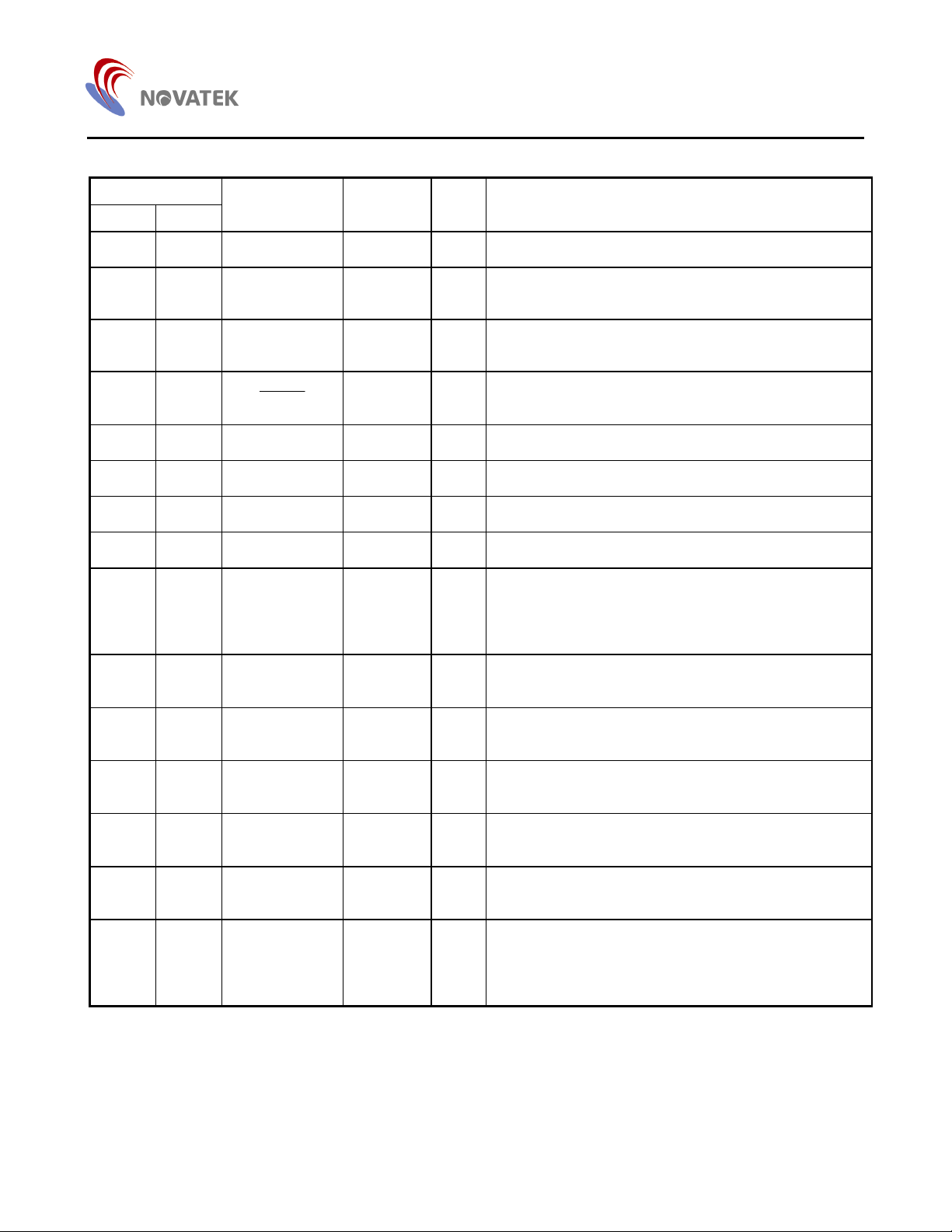
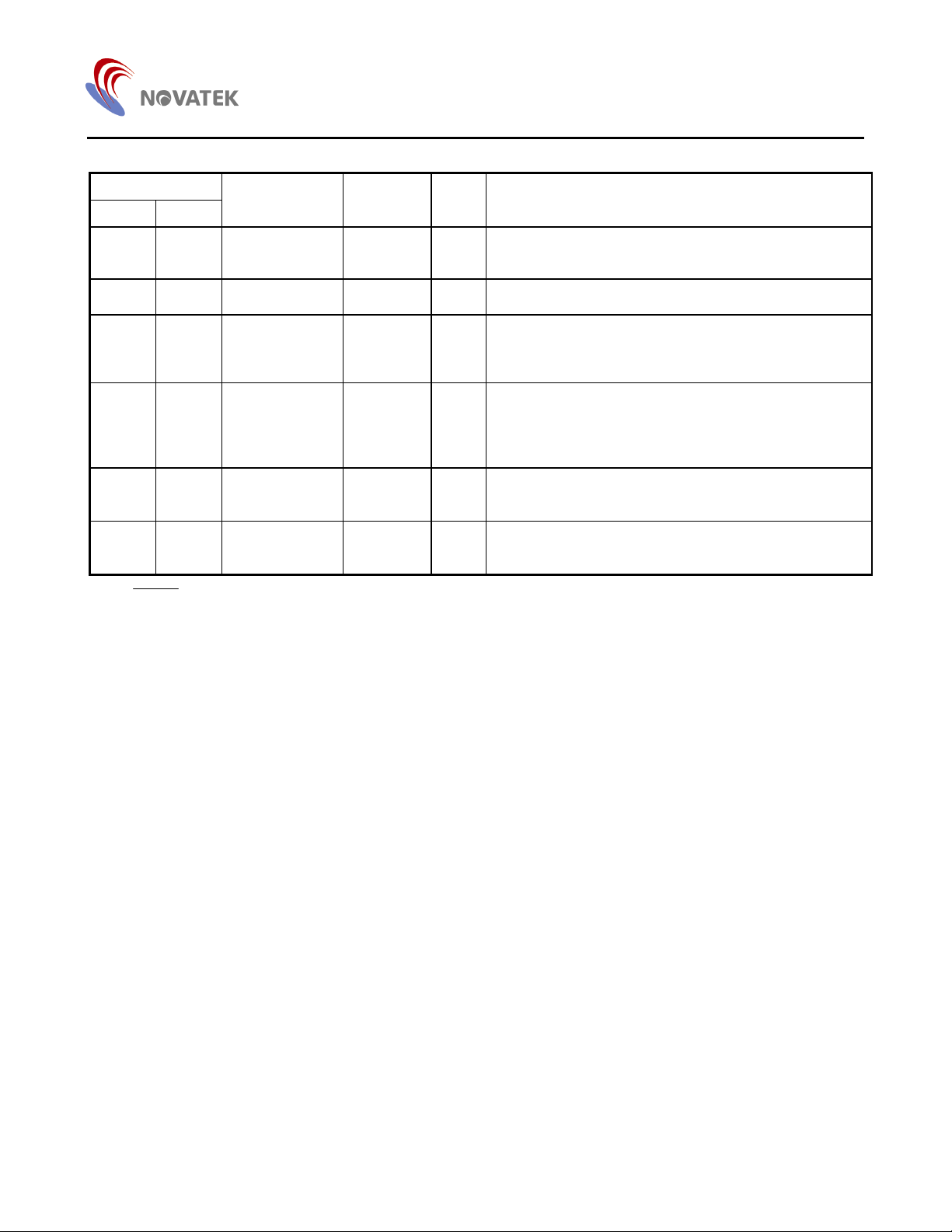
Pin Description
Pin No.
40 Pin 42 Pin
1 1 DAC2 O Open drain 5V, D/A converter output 2
Designation Reset Init. I/O Description
NT68F62
2 2 DAC1/ADC3 DAC1 O
3 3 DAC0/ADC2 DAC0 O
4 4
5 5 VDD P Power
6 7 GND P Ground
7 8 OSCO O Crystal OSC output
8 9 OSCI I Crystal OSC input
9 10 P15/INTE0 I/O
10 11 P14/PATTERN I/O
11 12 P13/HALFI P13 I/O
RESET
I
Open drain 5V, D/A converter output 1, shared with the A/D
converter channel 3 input
Open drain 5V, D/A converter output 0, shared with the A/D
converter channel 2 input
Schmitt Trigger input pin, low active reset with internal
pulled down 50KΩ resistor *
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with input pin of external interrupt source0 (NMI),
withSchmitt trigger, selectable triggered, and internal pulled
up 22KΩ resistor
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the output of the self test pattern
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the half hsync input
12 13 P12/HALFO P12 I/O
13 14 P11/ADC1 P11 I/O
14 15 P10/ADC0 P10 I/O
15 16 P16/INTE1 P16 I/O
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the half hsync output
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the A/D converter channel 1 input
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the A/D converter channel 0 input
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with input pin of external interrupt source1, with
Schmitt Trigger, selectable triggered, and an internal pulled
up 22KΩ resistor
3
Page 4
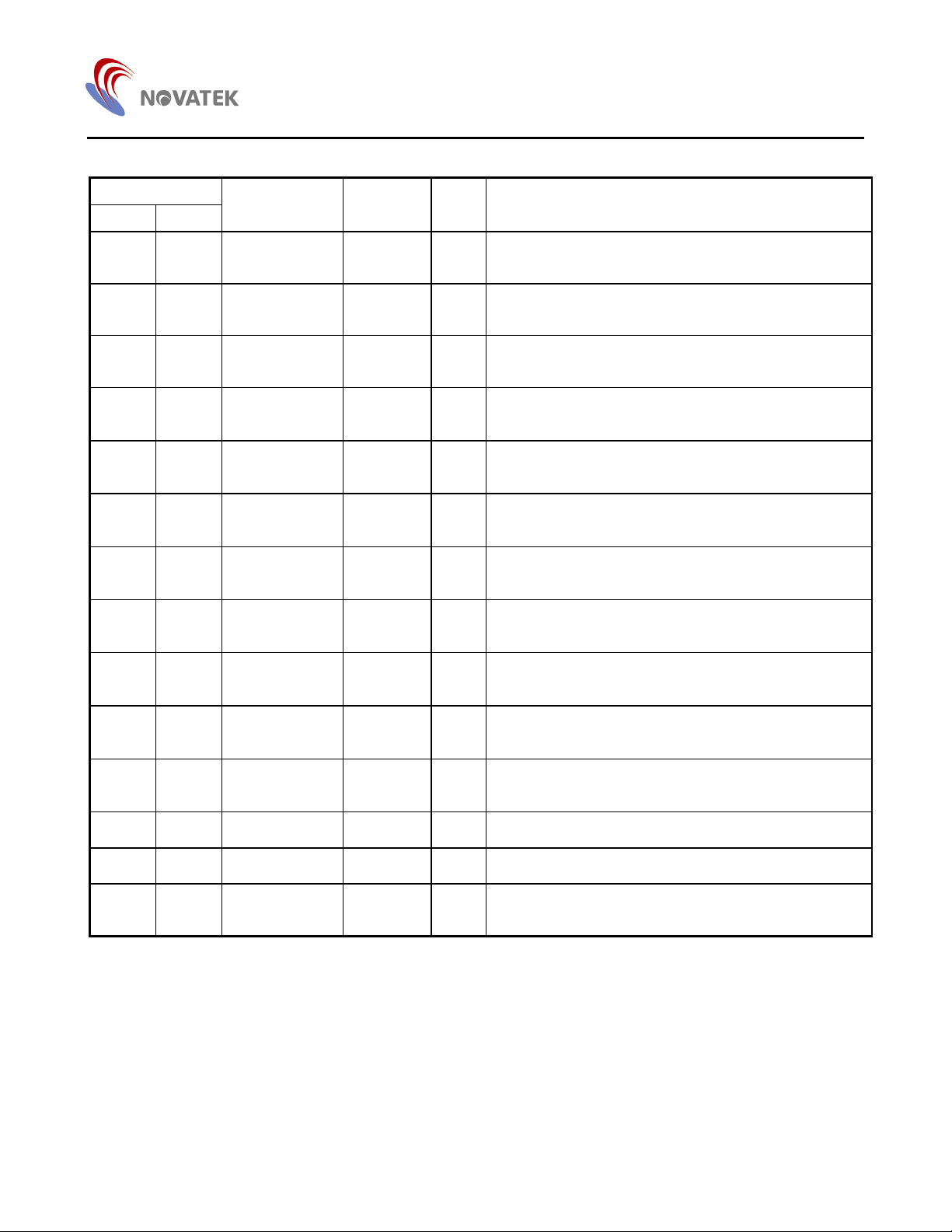
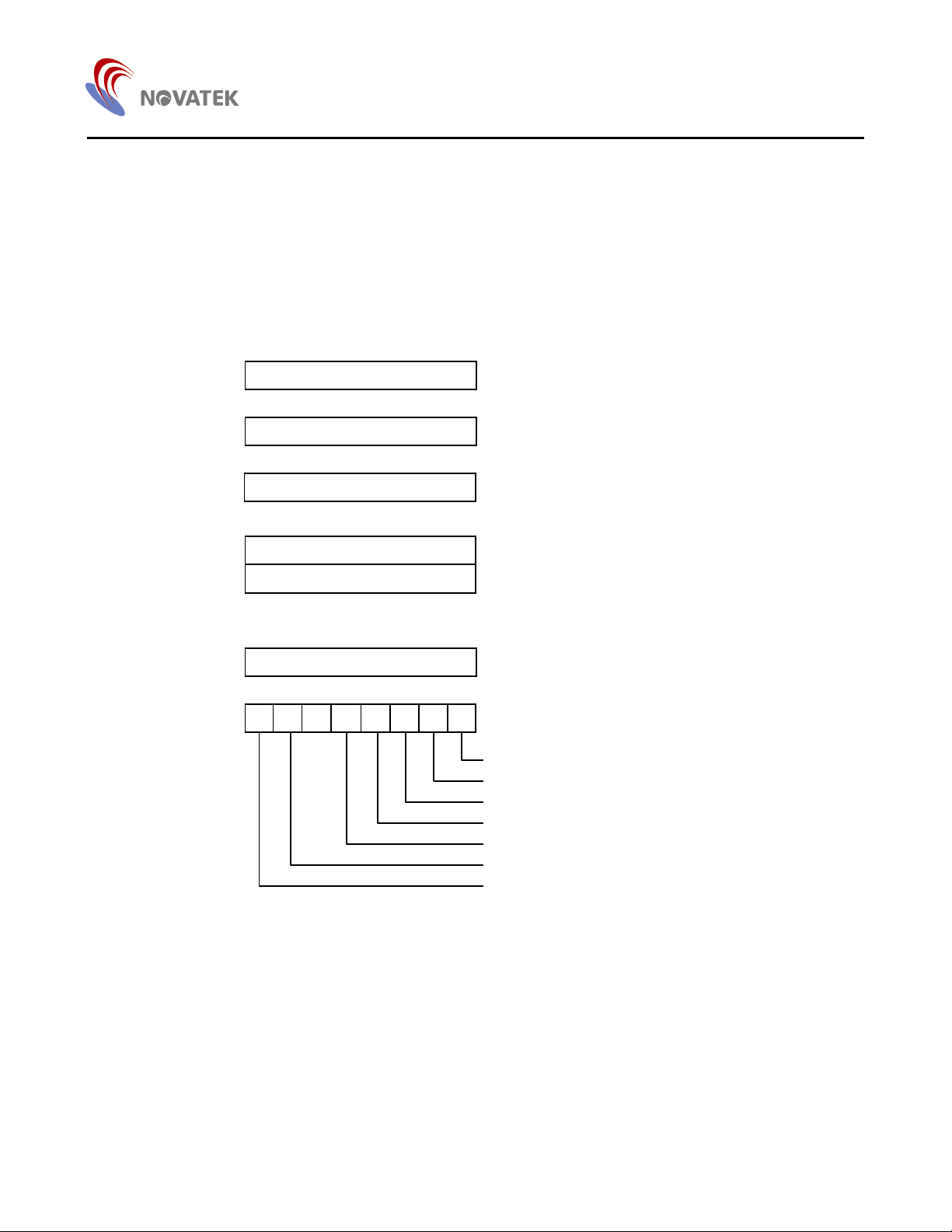
Pin Description (continued)
NT68F62
Pin No.
40 Pin 42 Pin
16 - 23 17 - 24 P27 – P20 I/O
24 25 P30/SDA0 P30 I/O
25 26 P31/SCL0 P31 I/O
26 27 P00/DAC7 P00 I/O
27 28 P01/DAC8 P01 I/O
28 29 P02/DAC9 P02 I/O
29 30 P03/DAC10 P03 I/O
30 31 P04/DAC11 P04 I/O
Designation Reset Init. I/O Description
Bi-directional I/O pin, push-pull structure with high current
drive/sink capability
Open drain 5V bi-directional I/O pin P30, shared with the
SDA0 pin of IIC bus Schmitt Trigger buffer
Open drain 5V bi-directional I/O pin P31, shared with the
SCL0 pin of IIC bus Schmitt Trigger buffer
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with open drain 5V D/A converter output 7
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the open drain 5V D/A converter output 8
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the open drain 5V D/A converter output 9
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the open drain 5V D/A converter output 10
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the open drain 5V D/A converter output 11
31 32 P05/DAC12 P05 I/O
32 33 P06/VSYNCO P06 I/O
33 34 P07/HSYNCO P07 I/O
34 35 DAC7 O Open drain 5V, D/A converter output 7
35 36 DAC6 O Open drain 5V, D/A converter output 6
36 38 DAC5/SDA1 DAC5 O
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the open drain 5V D/A converter output 12
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the vsync out
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
shared with the hsync out
Open drain 5V, D/A converter output 5, shared with open
drain SDA1 line of IIC bus, Schmitt Trigger buffer
4
Page 5
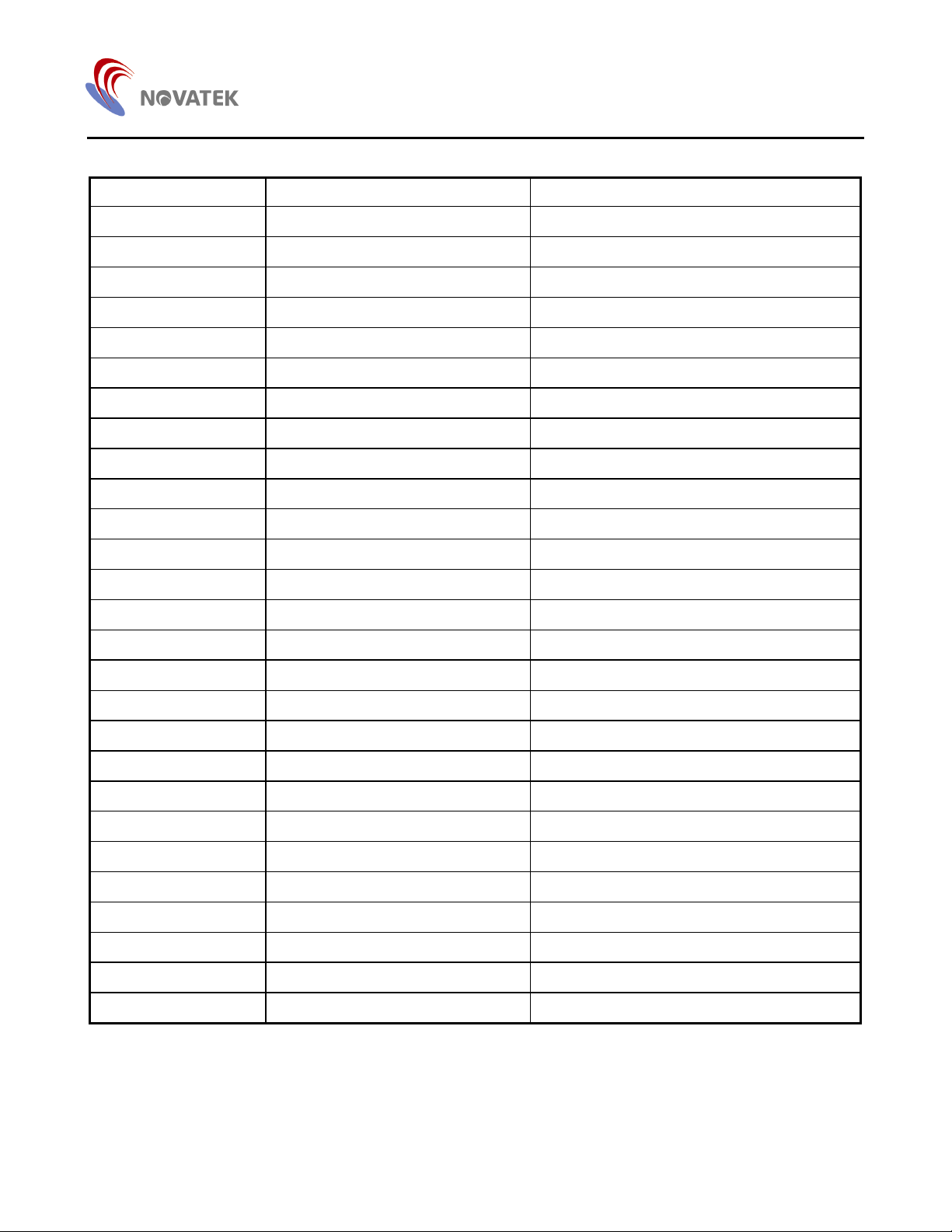
Pin Description (continued)
NT68F62
Pin No.
40 Pin 42 Pin
37 39 DAC4/SCL1 DAC4 O
38 40 DAC3 O Open drain 5V, D/A converter output 3
39 41 HSYNCI I
40 42 VSYNCI/INTV VSYNCI I
- 6 P40 I/O
- 37 P41 I/O
* This RESET pin must be pulled high by an external pulled-up resistor (5KΩ suggestion), or it will remain at low voltage to
continually rest system.
Designation Reset Init. I/O Description
Open drain 5V, D/A converter output 4, shared with the
open drain SCL1 line of IIC bus, Schmitt Trigger buffer
Debouncing & Schmitt Trigger input pin for video horizontal
sync signal, internal pull high, shared with the composite
sync input
Debouncing & Schmitt trigger input pin for video vertical
sync signal, internal pull high, shared with the input pin of
the external interrupt source, intv, with Schmitt Trigger,
selectable triggered and internal pulled up 22KΩ resistor
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
only 42 pin S-DIP available
Bi-directional I/O pin with internal pulled up 22KΩ resistor,
only 42 pin S-DIP available
5
Page 6
NT68F62
Functional Description
1. 6502 CPU
The 6502 is an 8-bit CPU that provides 56 instructions, decimal and binary arithmetic, thirteen addressing modes, true
indexing capability, programmable stack pointer and variable length stack, a wide selection of addressable memory ranges,
and interrupt input options.
The CPU clock cycle is 4MHz (8MHz system clock divided by 2). Please refer to the 6502 data sheet for more detailed
information.
07
Accumnlator A
7
Index Register Y
70
Index Register X
Program Counter PCH
PCL
70
7
Stack Pointer SP
7
NV
B
0
815
0
0
C
ZID
Status Register P
Carry
Zero
IRQ Disable
Decimal Mode
BRK Command
Overflow
Negative
1=TRUE
1=Result ZERO
1=DISABLE
1=TRUE
1=BRK
1=TRUE
1=NEG
Figure 1.1. The 6502 CPU Registers and Status Flags
6
Page 7
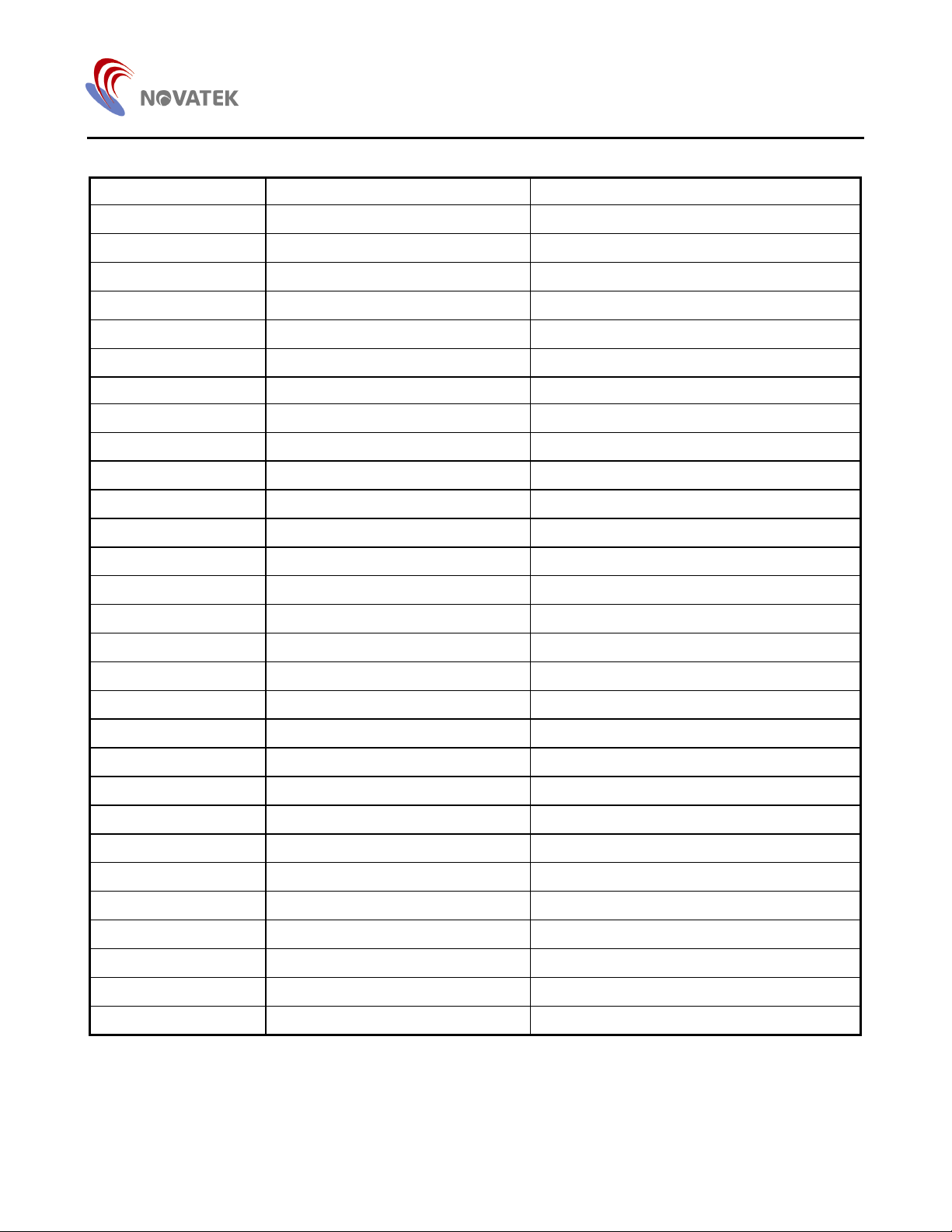
2. Instruction Set List
Instruction Code Meaning Operation
NT68F62
ADC Add with carry
AND Logical AND
ASL Shift left one bit
BCC Branch if carry clears
BCS Branch if carry sets
BEQ Branch if equal to zero
BIT Bit test
BMI Branch if minus
BNE Branch if not equal to zero
BPL Branch if plus
BRK Break
BVC Branch if overflow clears
BVS Branch if overflow sets
CLC Clear carry
CLD Clear decimal mode
A + M + C → A, C
A•M → A
C ← M7…M0 ← 0
Branch on C = 0
Branch on C = 1
Branch on Z = 1
A•M, M7→N, M6→V
Branch on N = 1
Branch on Z = 0
Branch on N = 0
Forced Interrupt PC+2↓ PC↓
Branch on V = 0
Branch on V = 1
0 → C
0 → D
CLI Clear interrupt disable bit
CLV Clear overflow
CMP Compare Accumulator to memory
CPX Compare with index register X
CPY Compare with index register Y
DEC Decrement memory by one
DEX Decrement index X by one
DEY Decrement index Y by one
EOR Logical exclusive-OR
INC Increment memory by one
INX Increment index X by one
INY Increment index Y by one
0 → I
0 → V
A - M
X - M
Y - M
M - 1 → M
X - 1 → X
Y - 1 → Y
A ⊕ M→A
M + 1 → M
X + 1 → X
Y + 1 → Y
7
Page 8
Instruction Set List (continued)
Instruction Code Meaning Operation
NT68F62
JMP Jump to new location
JSR Jump to subroutine
LDA Load accumulator with memory
LDX Load index register X with memory
LDY Load index register Y with memory
LSR Shift right one bit
NOP No operation No operation (2 cycles)
ORA Logical OR
PHA Push accumulator on stack
PHP Push status register on stack
PLA Pull accumulator from stack
PLP Pull status register from stack
ROL Rotate left through carry
ROR Rotate right through carry
RTI Return from interrupt
RTS Return from subroutine
(PC+1)→ PCL, (PC+2)→ PCH
PC+2↓, (PC+1)→ PCL, (PC+2)→ PCH
M → A
M → X
M → Y
0 → M7…M0 → C
A + M → A
A ↓
P ↓
A ↑
P ↑
C ← M7…M0 ← C
C → M7…M0 → C
P ↑, PC ↑
PC ↑, PC+1 → PC
SBC Subtract with borrow
SEC Set carry
SED Set decimal mode
SEI Set interrupt disable status
STA Store accumulator in memory
STX Store index register X in memory
STY Store index register Y in memory
TAX Transfer accumulator to index X
TAY Transfer accumulator to index Y
TSX Transfer stack pointer to index X
TXA Transfer index X to accumulator
TXS Transfer index X to stack pointer
TYA Transfer index Y to accumulator
* Refer to 6502 programming data book for more details.
A - M - C → A, C
1 → C
1 → D
1 → I
A → M
X → M
Y → M
A → X
A → Y
S → X
X → A
X → S
Y → A
8
Page 9
NT68F62
3. RAM: 512 X 8 bits
The built-in 512 X 8-bit SRAM is used for data memory and stack area. The RAM addressing range is from $0080 to $027F.
The contents of RAM are undetermined at power-up and are not affected by system reset. Software programmers can
allocate stack area in the RAM by setting stack pointer register (S). Since the 6502 default stack pointer is $01FF,
programmers must set S register to FFH when starting the program.
as; LDX #$FF
TXS
$0000
$003E
$0080
$01FF
$027F
$0280
$77FF
$7800
( 2 K Bytes )
$7FFA NMI-L
$7FFB
$7FFC RST-L
$7FFD
$7FFE
$7FFF
$8000
( 32 K Bytes )
System Registers
Unused
RAM
( 512 Bytes )
Unused
Boot
ROM
NMI-H
RST-H
IRQ-L
IRQ-H
Flash
Memory
stack pointer
NMI vector
RESET vector
IRQ vector
$FFFA NMI-L
$FFFB
$FFFC RST-L
$FFFD
$FFFE
$FFFF
NMI-H
RST-H
IRQ-L
IRQ-H
NMI vector
RESET vector
IRQ vector
4.1. BootROM: 2K X 8 bits
NT68F62 Provides 2K bytes of Boot-ROM for ISP. The memory space is from $7800 to $7FFF. The addresses, from $7FFA
to $7FFF, are reserved for the 6502 CPU vector.
4.2. Flash memory: 32K X 8 bits
NT68F62 provides 32K flash memory space for programming. The flash memory space is located from $8000 to $FFFF.
The addresses, from $FFFA to $FFFF, are reserved for the 6502 CPU vectors, thus users must arrange them by
themselves. This flash memory can be progammed repeatly at limited times to guarantee its performance.
9
Page 10
NT68F62
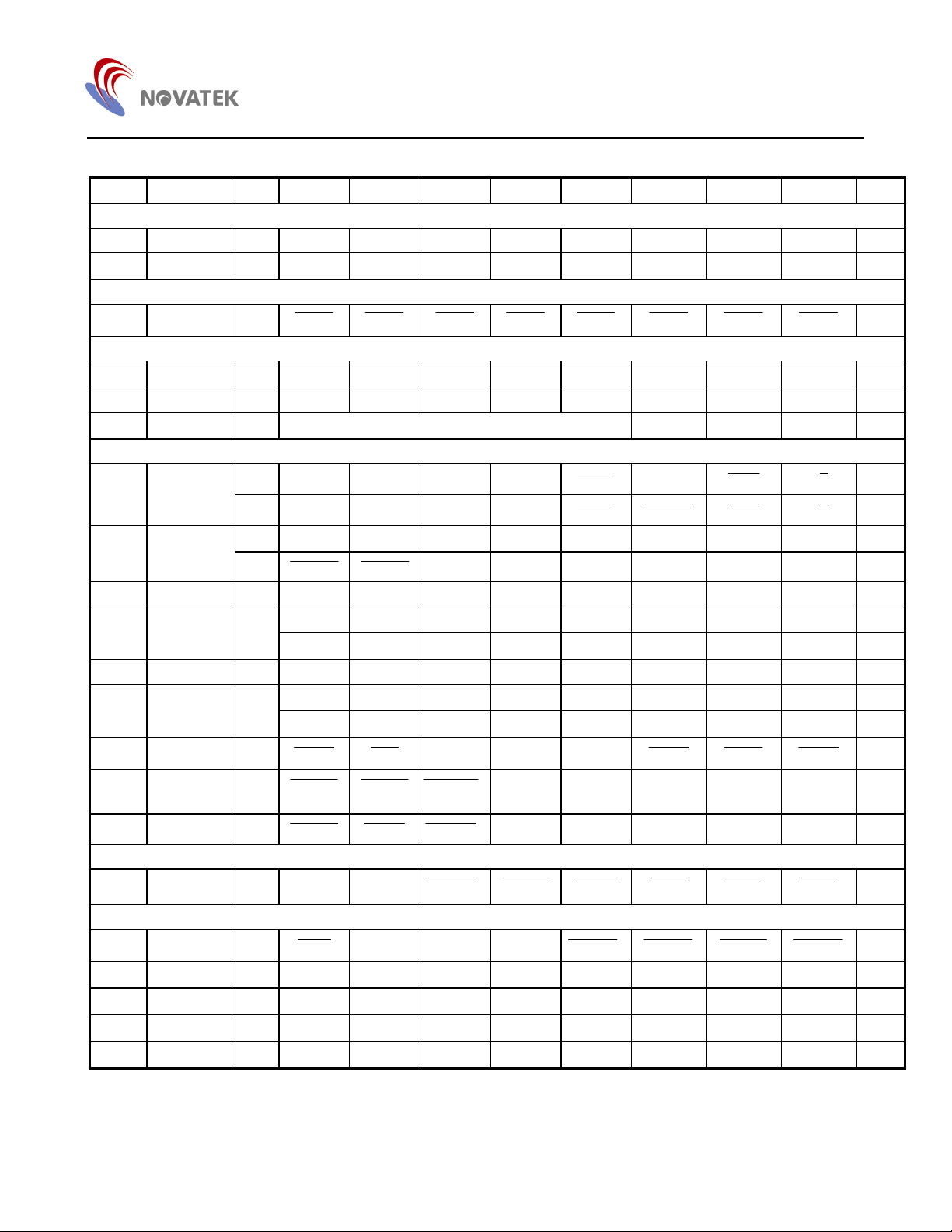
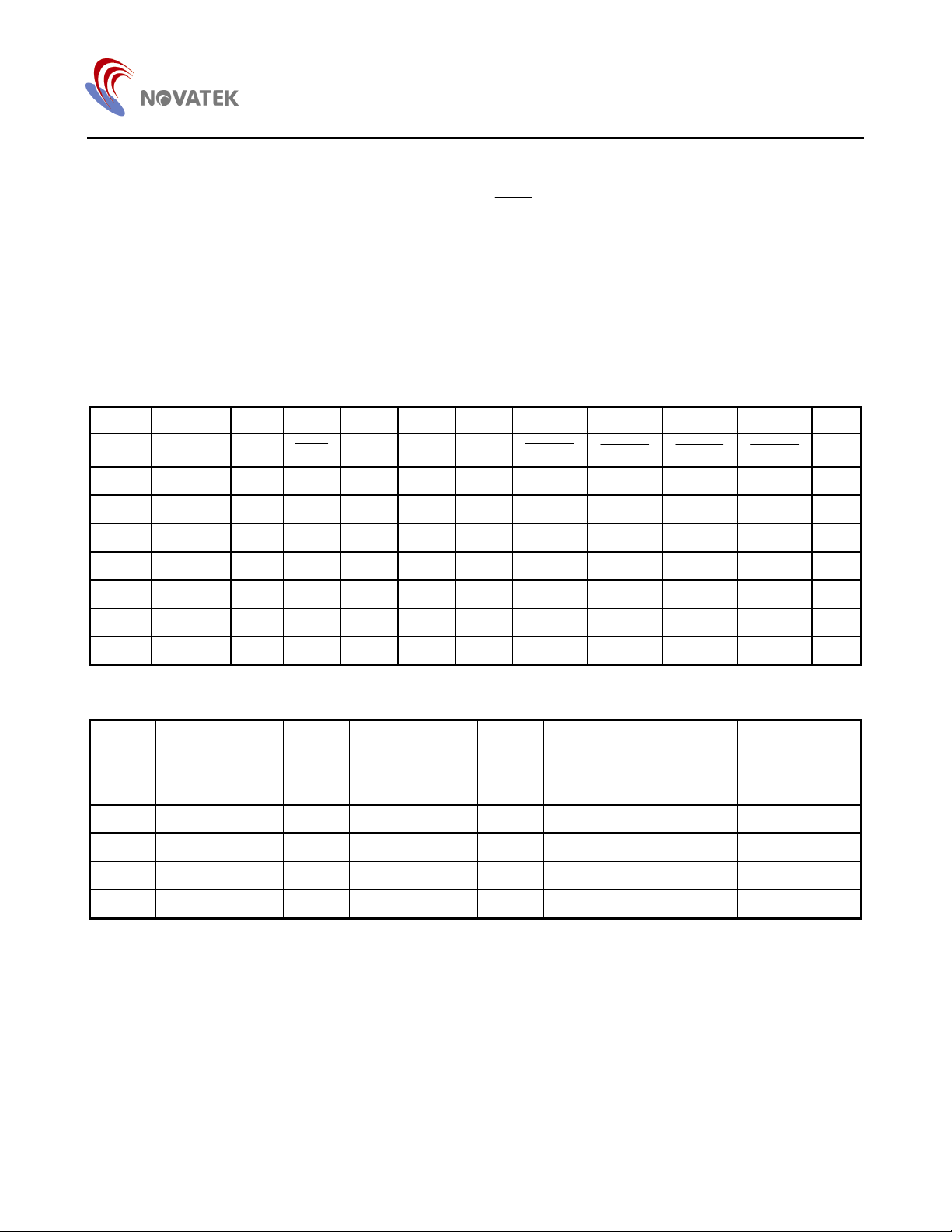
5. System Registers
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
Control Registers for I/O Port0 & Port1
$0000 PT0 FFH P07 P06 P05 P04 P03 P02 P01 P00 RW
$0001 PT1 7FH
$0002 PT2DIR FFH
$0003 PT2 FFH P27 P26 P25 P24 P23 P22 P21 P20 RW
$0004 PT3 03H
$0005 PT4 03H Only available for the 42 Pin SDIP version
$0006 SYNCON
$0008 HCNT L 00H HCL7 HCL6 HCL5 HCL4 HCL3 HCL2 HCL1 HCL0 R
$000A VCNT L 00H VCL7 VCL6 VCL5 VCL4 VCL3 VCL2 VCL1 VCL0 R
$000C FREECON FFH
$000D HALFCON FFH
$000E AUTOMUTE FFH
$000F ENDAC FFH
$0010 ENADC FFH
$0011 AD0 REG C0H
$0012 AD1 REG 00H
$0013 AD2 REG 00H
$0014 AD3 REG 00H
FFH
FFH
FFH
FFH
―
P27OE P26OE P25OE P24OE P23OE
― ― ― ― ― ―
― ― ― ―
― ― ― ―
― ―
ENHOUT ENHOUT
HCNTOV
CLRHOV
VCNTOV
CLRVOV
ENPAT
ENHALF
ENHDIFF
― ―
CSTA
― ―
― ―
― ―
― ―
P16 P15 P14 P13 P12 P11 P10 RW
Control Register to Control Port2 I/O Direction
P22OE
Control Registers for I/O Port2 - 4
―
Control Registers for Synprocessor
―
INSEN
INSEN
HSYNCI VSYNCI HPOLI VPOLI HPOLO VPOLO R $0007 HV CON
― ― ― ―
― ― ―
― ― ― ― ― ― ―
―
― ― ― ― ― ― ―
PAT1
NOHALF
ENPOL ENOVER
Control Registers to Enable PWM 8 - 15 Channels
Control Registers for ADC 0 - 3 Channels
― ― ―
VCH5 VCH4 VCH3 VCH2 VCH1 VCH0 R $000B VCNT H 00H
― ― ―
― ― ― ― ―
HALFPOL
ENDK12 ENDK11
―
AD05 AD04 AD03 AD02 AD01 AD00 R
AD15 AD14 AD13 AD12 AD11 AD10 R
AD25 AD24 AD23 AD22 AD21 AD20 R
AD35 AD34 AD33 AD32 AD31 AD30 R
HCH3 HCH2 HCH1 HCH0 R $0009 HCNT H 00H
HDIFFVL3 HDIFFVL2 HDIFFVL1 HDIFFVL0 W
ENDK10
ENADC3 ENADC2 ENADC1 ENADC0
ENHSEL
FREQ2
ENDK9
P21OE
P31 P30 RW
P41 P40 RW
HSEL
HSEL
HPOLO VPOLO W
FREQ1
ENDK8
P20OE
S/C
S/C
FREQ0
ENDK7
W
R
W
W
W
W
W
W
W
10
Page 11
NT68F62
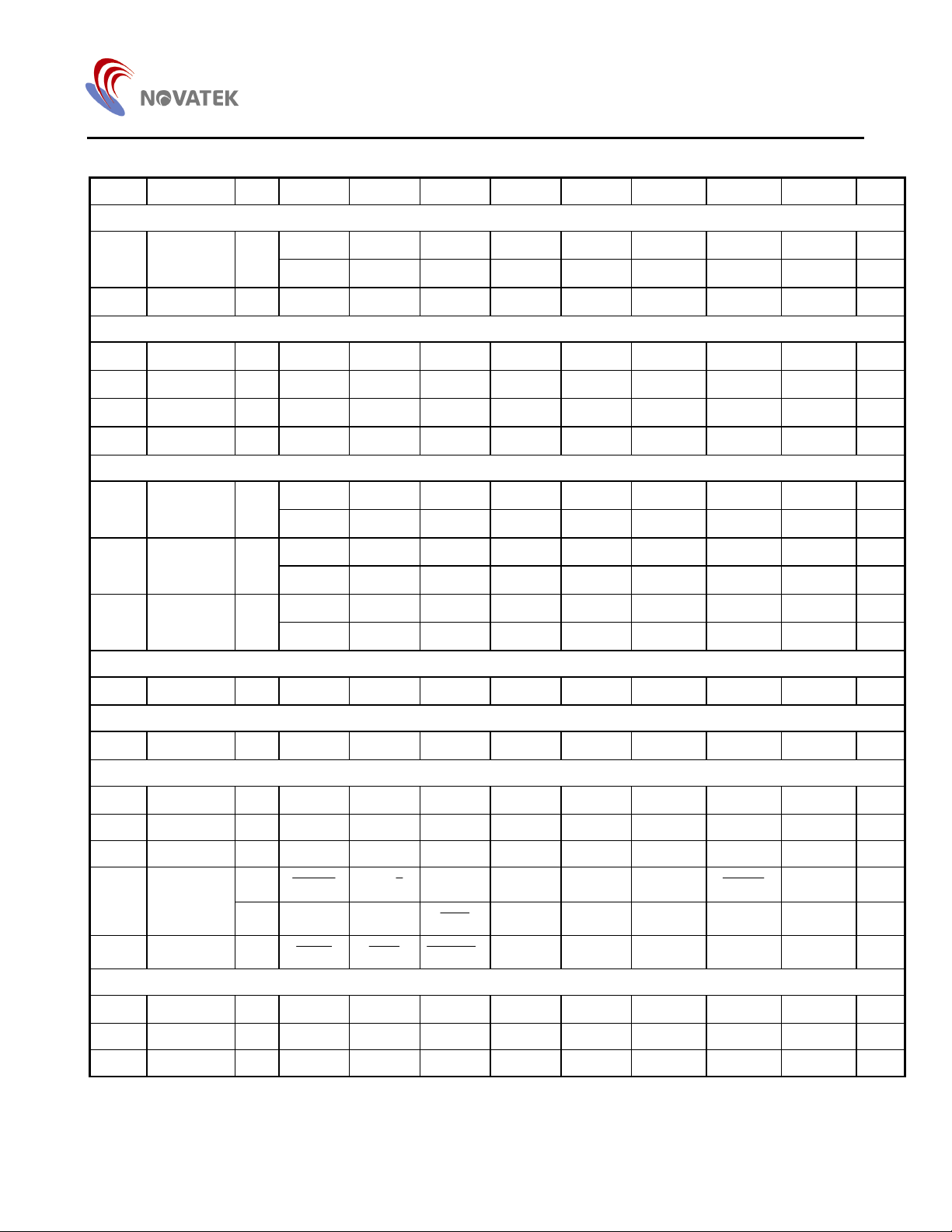
System Registers (continued)
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
Control Register for Polling (Read) Interrupt Groups & Clearing (Write) INTE0 & INTMUTE Interrupt Requests
$0016 NMIPOLL 00H
$0017 IRQPOLL 00H
$0018 IENMI 00H
$0019 IEIRQ0 00H
$001A IEIRQ1 00H
$001B IEIRQ2 00H
Control Registers for Polling (Read) & Clearing (Write) Interrupt Requests
$001E IRQ2 00H
$001F TRIGGER FFH
― ― ― ― ― ―
― ― ― ― ― ―
― ― ― ― ―
Control Registers of Interrupt Enable
― ― ― ― ― ―
― ―
― ―
― ― ― ―
― ―
― ―
― ―
― ―
― ― ― ―
― ― ― ―
Selection of Edge Triggered for INTV, INTE0 & 1 Interrupts
― ― ― ― ―
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 RW
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 RW
INTADC INTV INTE1 INTMR RW
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 R $001C IRQ0 00H
CLRS0 CLRA0 CLRTX0 CLRRX0 CLRNAK0 CLRSTOP0 W
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 R $001D IRQ1 00H
CLRS1 CLRA1 CLRTX1 CLRRX1 CLRNAK1 CLRSTOP1 W
INTADC INTV INTE1 INTMR R
CLRADC CLRV CLRE1 CLRMR W
IRQ2 IRQ1 IRQ0 R
INTVR INTE1R INTE0R R/W
INTE0 INTMUTE R
CLRE0 CLRMUTE W
INTE0 INTMUTE RW
Control Registers for Clearing Watch Dog Timer
$0020 CLR WDT
$0021 CH0ADDR A0H ADR7 ADR6 ADR5 ADR4 ADR3 ADR2 ADR1
$0022 CH0TXDAT 00H TX7 TX6 TX5 TX4 TX3 TX2 TX1 TX0 W
$0023 CH0RXDAT 00H RX7 RX6 RX5 RX4 RX3 RX2 RX1 RX0 R
$0024 CH0CON
$0025 CH0CLK FFH
$0026 CH1ADDR A0H ADR7 ADR6 ADR5 ADR4 ADR3 ADR2 ADR1
$0027 CH1TXDAT 00H TX7 TX6 TX5 TX4 TX3 TX2 TX1 TX0 W
$0028 CH1RXDAT 00H RX7 RX6 RX5 RX4 RX3 RX2 RX1 RX0 R
―
E0H
0 1 0 1 0 1 0 1 W
Control Register for DDC1/2B+ of Channel 0
W
W
R
W
ENDDC
― ―
MODE
MD1/
2
―
SRW
MRW RSTART
Control Register for DDC1/2B+ of Channel 1
START STOP
START STOP
― ―
―
―
― ― ―
DDC2BR2 DDC2BR1 DDC2BR0 W
TXACK
―
―
11
Page 12
NT68F62
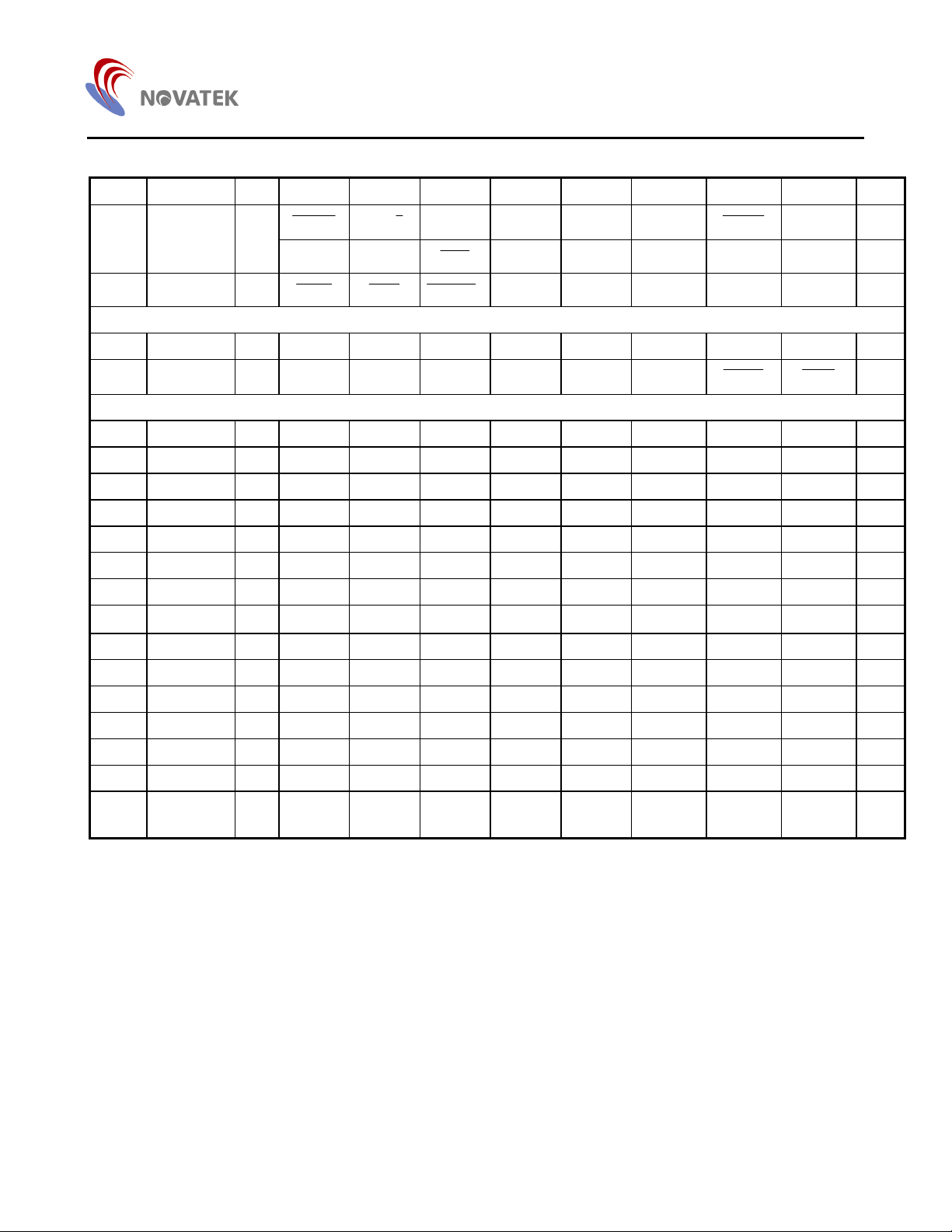
System Registers (continued)
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0029 CH1CON E0H
$002A CH1CLK FFH
$002E BT 00H BT7 BT6 BT5 BT4 BT3 BT2 BT1 BT0 W
$002F BTCON 03H
$0030 DACH0 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0031 DACH1 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0032 DACH2 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0033 DACH3 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0034 DACH4 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0035 DACH5 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0036 DACH6 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0037
$0038 DACH7 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0039 DACH8 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003A DACH9 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
ENDDC
― ―
MODE
― ― ― ― ― ―
― ― ― ― ― ― ― ― ―
MD1/
2
MRW RSTART
Control Registers for Base Timer
Control Registers for PWM Channel 0 - 13
―
SRW
START STOP
START STOP
― ―
―
― ― ―
DDC2BR2 DDC2BR1 DDC2BR0 W
TXACK
BTCLK
―
ENBT
W
R
W
$003B DACH10 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003C DACH11 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003D DACH12 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003E ISP REG
00H
03H
ISP
DDC1_ISP
CH1_A0
DDC0_IS
P
CH0_A0
R
W
12
Page 13
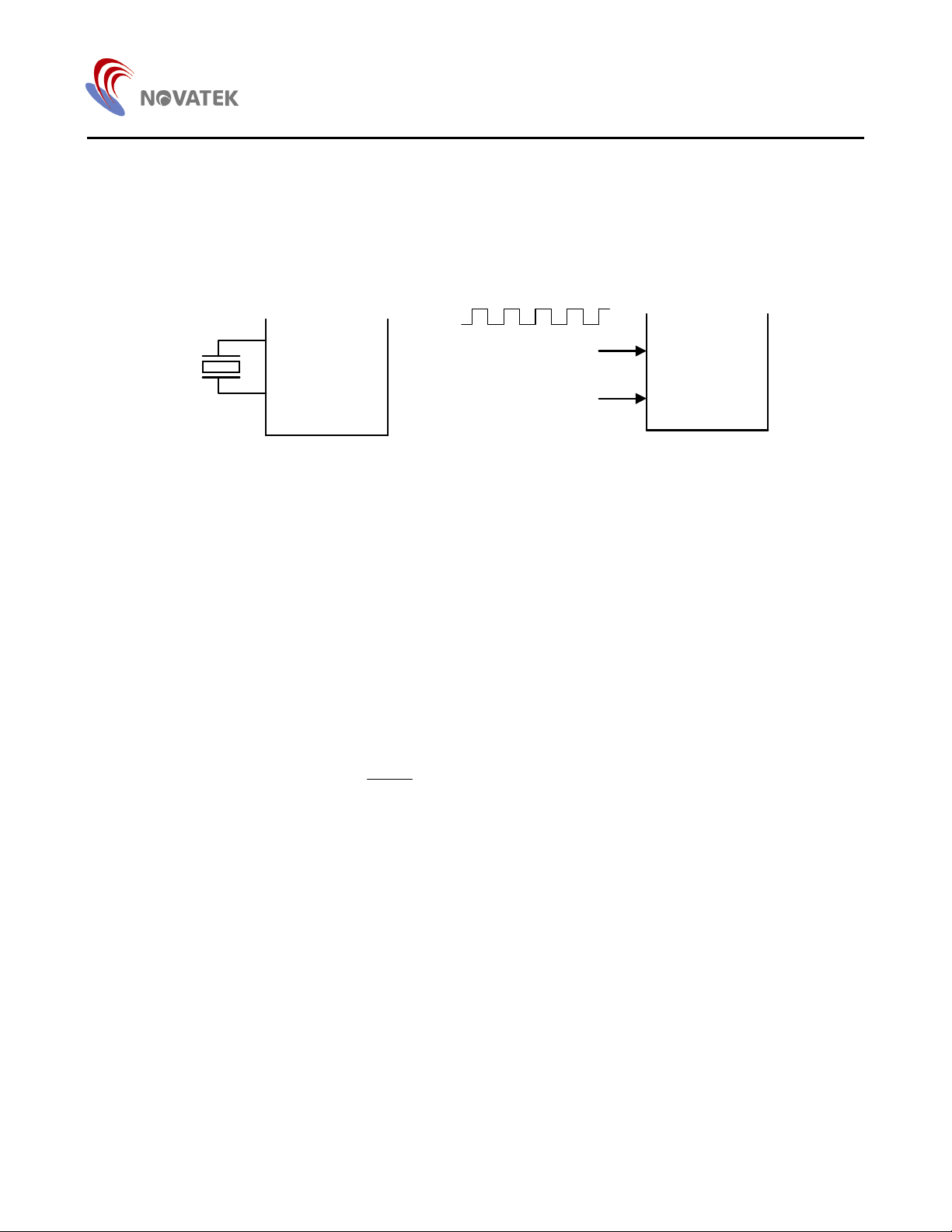
6. Timing Generator
This block generates the system timing and control signals
to be supplied to the CPU and on-chip peripherals. A
crystal quartz, ceramic resonator, or an external clock
signal which will be provided to the OSCI pin generates
system timing. It generates 8MHz for the system clock and
4MHz for the CPU. Although internal circuits have a
NT68F62
feedback resistor and compacitor included, users can
externally add these components for proper operating.
The typical clock frequency is 8MHz. Different frequencies
will affect the operation of those on-chip peripherals whose
operating frequency is based on the system clock.
OSCI
8MHz
OSCO
(1)
NT68F62
Figure 6.1. Oscillator Connections
7. RESET
The NT68F62 can be reset by the external reset pin or by
the internal watch-dog timer. This is used to reset or start
the microcontroller from a POWER DOWN condition.
During the time that this reset pin is held LOW (*reset line
must be held LOW for at least two CPU clock cycles),
writing to or from the µC is inhibited. When a positive edge
is detected on the RESET input, the µC will immediately
begin the reset sequence.
After a system initialization time of six CPU clock cycles,
the mask interrupt flag will be set and the µC will load the
program counter from the memory vector locations $FFFC
and $FFFD. This is the start location for program control.
An internal Schmitt Trigger buffer at the
provided to improve noise immunity.
RESET
pin is
External Clock
Unconnected
The reset status is as follows:
1. PORT0、PORT1、PORT2、PORT3 (& PORT4) pins
will act as I/O ports with HIGH output
2. Sync processor counters reset and VCNT | HCNT
latches cleared
3. All sync outputs are disabled
4. Base timer is disabled and cleared
5. Various Interrupt sources are disabled and cleared
6. A/D converter is disabled and stopped
7. DDC1/2B+ function is disabled
8. PWM DAC0 – DAC6 output 50% duty waveform and
DAC7 - DAC12 is disabled
9. Watch-dog timer is cleared and enabled
OSCI
OSCO
NT68F62
(2)
13
Page 14
8. A/D Converters
NT68F62
The structure of these analog to digital converters is 6-bit
successive approximation. Analog voltage is supplied from
external sources to the A/D input pins and the result of the
conversion is stored in the 6-bit data latch registers ($0011
& $0014). The A/D channels are activated by clearing the
correspondent control bits in the ENADC control register.
When users write '0' into one of the enabled control bits, its
correspondent I/O pin or DAC will be switched to the A/D
converter input pin (ADC0 & ADC1 are shared with
PORT10 & PORT 11; ADC2 & ADC3 are shared with
DAC0 & DAC1). Conversion will be started by clearing the
CSTA
bit (CONVERSION START) in the ENADC control
register. When the conversion is finished, the system will
set this INTADC bit. Users can monitor this bit to get the
valid A/D conversion data in the AD latch registers ($0011 $0014). Users can also open the interrupt sources to
remind users to get the stable digital data. Notice that only
at the activated A/D channel, its latched data are available.
The analog voltage to be measured should be stable during
the conversion operation and the variation must not exceed
LSB for the best accuracy in measurement.
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0010 ENADC FFH
$0011 AD0 REG C0H
$0012 AD1 REG 00H
$0013 AD2 REG 00H
$0014 AD3 REG 00H
$001B IEIRQ2 00H
$001E IRQ2 00H
CSTA
― ―
― ―
― ―
― ―
― ― ― ―
― ― ― ―
― ― ― ―
― ― ―
AD05 AD04 AD03 AD02 AD01 AD00 R
AD15 AD14 AD13 AD12 AD11 AD10 R
AD25 AD24 AD23 AD22 AD21 AD20 R
AD35 AD34 AD33 AD32 AD31 AD30 R
ENADC3 ENADC2 ENADC1 ENADC0
INTADC INTV INTE1 INTMR R/W
INTADC INTV INTE1 INTMR R
CLRADC CLRV CLRE1 CLRMR W
W
Reference ADC Table
(V
= 5.0V)
DD
15 1.50V 1C 2.06V 23 2.59V 2A 3.14V
16 1.58V 1D 2.12V 24 2.67V 2B 3.22V
17 1.66V 1E 2.20V 25 2.75V 2C 3.30V
18 1.74V 1F 2.28V 26 2.82V 2D 3.38V
19 1.82V 20 2.35V 27 2.91V 2E 3.46V
1A 1.90V 21 2.44V 28 2.98V 2F 3.54V
1B 1.98V 22 2.51V 29 3.07V 30 3.62V
Note: It is strongly recommended that the ADC’s input signal should be allocated within the ADC’s linear voltage
range (1.5V~3.5V) to obtain a stable digital value. Do not use the outer ranges (0V~1.4V & 3.6V~5.0V) in which
the converted digital value is not guaranteed.
14
Page 15
NT68F62
9. PWM DACs
There are 13 PWM D/A converters with 8-bit resolution in the NT68F62. All of these D/A (DAC0 - DAC12) converters are of
open-drain output structure with an external 5V applied maximum. DAC0 – DAC6 are dedicated PWM channels, and DAC7 DAC12 are shared with the I/O pins. These shared PWM channels are activated by clearing the correspondent control bits in
the ENDAC control register ($000F). When users write '0' into one of the enable control bits, its correspondent I/O pin will be
switched to a PWM output pin.
The PWM refresh rate is 62.5KHz operating on an 8MHz system clock. There are 13 readable DACH registers
corresponding to 13 PWM channels ($0030 - $003D). Each PWM output pulse width is programmable by setting the 8 bit
digital to the corresponding DACH registers. When these DACH registers are set to 00H, the DAC will output LOW (GND
level) and every 1 bit addition will add 62.5ns pulse width. After reset, all DAC outputs are set to 80H (1/2 duty output).
(Please refer to Figure 9.1 for the detailed timing diagram of the PWM D/A output.)
(Pulse Width Modulation D/A Converters)
Fosc
8MHz
255 0 1 2 m
00
01
3 m-1 0
255
1PWM value :
02
03
m
255(FF)
Figure 9.1. The DAC Output Timing Diagram and Wave Table
15
Page 16
NT68F62
PWM DACs (continued)
DAC0 & DAC1 are shared with the ADC2 & ADC3 input pins respectively. If ENADC2/3 bit in the ENADC control register is
cleared to LOW, the A/D converters will activate simultaneously. After the chip is reset, ENADC2/3 bits will be in HIGH state
and DAC0 & DAC1 will act as PWM output pins.
DAC4 & DAC5 are shared with SCL1 & SDA1 I/O pins respectively. If users clear the
ENDDC
bit in the CH1CON control
register to LOW, channel 1 of the DDC will be activated. When used as the DDC channel, the I/O port will be of an open
drain structure and include a 'Schmitt Trigger' buffer for noise immunity. After the chip is reset,
ENDDC
bits will be in HIGH
state and DAC4 - DAC5 will act as PWM output pins.
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$000F ENDAC FFH
$0010 ENADC FFH
$0030 DACH0 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0031 DACH1 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0032 DACH2 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0033 DACH3 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0034 DACH4 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0035 DACH5 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0036 DACH6 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0037
― ― ― ― ― ― ― ― ―
― ―
CSTA
ENDK12 ENDK11 ENDK10 ENDK9
― ― ―
ENADC3 ENADC2 ENADC1 ENADC0
ENDK8
ENDK7
W
W
$0038 DACH7 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$0039 DACH8 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003A DACH9 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003B DACH10 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003C DACH11 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
$003D DACH12 80H DKVL7 DKVL6 DKVL5 DKVL4 DKVL3 DKVL2 DKVL1 DKVL0 RW
DAC control register ($000F) and DAC value register ($0030 - $003D)
16
Page 17
NT68F62
10. Watch-Dog Timer (WDT)
The NT68F62 implements a watch-dog timer reset to avoid
system stop or malfunction. The clock of the WDT is taken
from the on-chip RC oscillator, which does not require any
external components. Thus, the WDT will run, even if the
clock on the OSCI/OSCO pins of the device has been
stopped. The WDT time interval is about 0.5 second. The
as; LDA #$55
STA $0020
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0020 CLR WDT - 0 1 0 1 0 1 0 1 W
WDT must be cleared within every 0.5 second when the
software is in normal sequence, otherwise the WDT will
overflow and cause a reset. The WDT is cleared and
enabled after the system is reset, and can not be disabled
by the software. Users can clear the WDT by writing 55H to
the CLRWDT register ($0020).
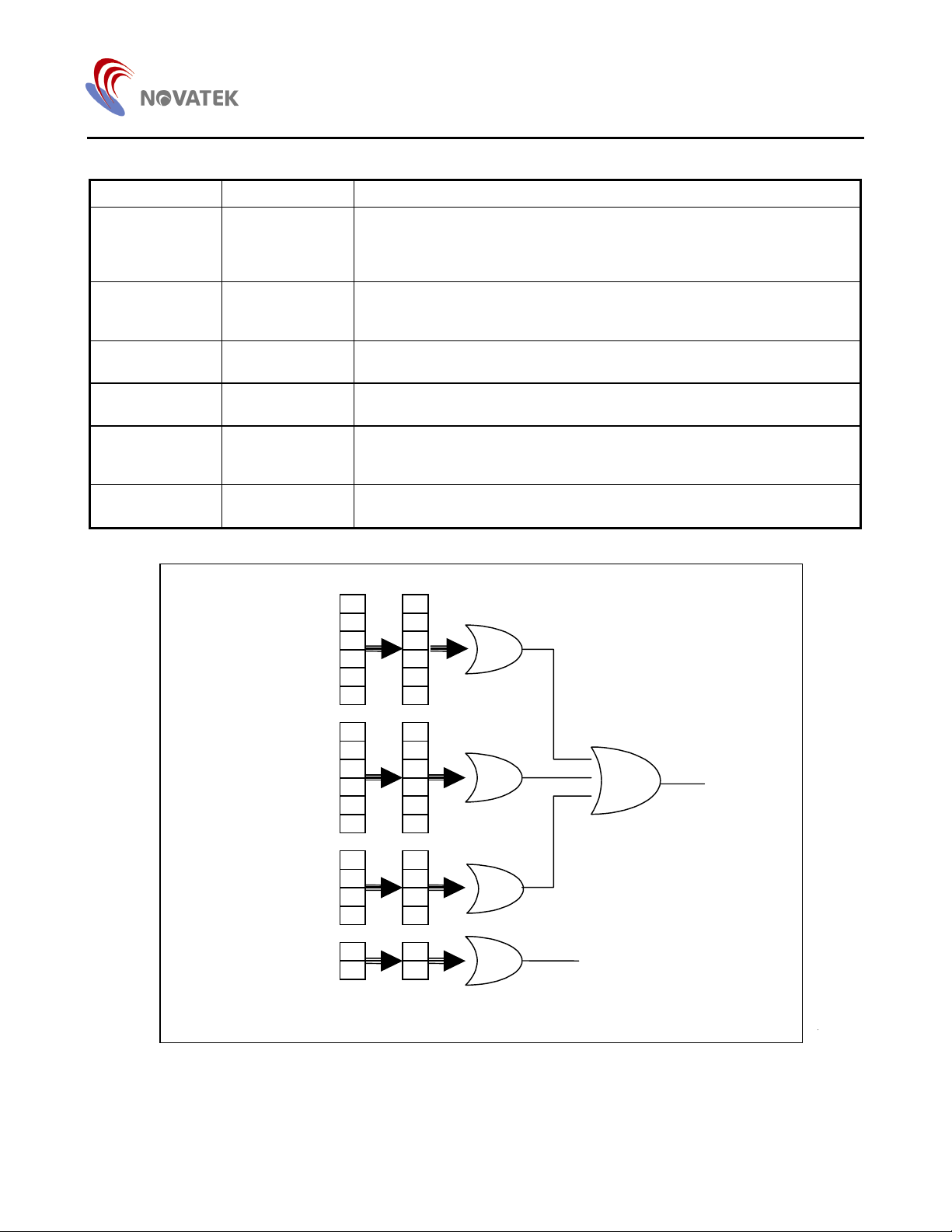
11. Interrupt Controller
The system provides two kinds of interrupt sources: NMI &
IRQ. The NMI cannot be masked if user enabled this NMI
interrupt. Users will execute the NMI interrupt vector any
time that sources are activated. The IRQ interrupts can be
masked by executing a CLI instruction or by setting the
interrupt mask flag directly in the µC status register. In the
process of an IRQ interrupt, if the interrupt mask flag is not
set, the µC will begin an interrupt sequence. The program
counter and processor status register will be stored in the
stack. The µC will then set the interrupt mask flag high so
that no further interrupts may occur. At the end of this
cycle, the program counter will be loaded from addresses
$FFFE & $FFFF, thus transferring program control to the
memory vector located at these addresses. For NMI
interrupt, µC will transfer execution sequence to the
memory vector located at addresses $FFFA & $FFFB.
When manipulating various interrupt sources, NT68F62
divides them into two groups for accessing them easily.
One is the NMI group and the other is the IRQ group.
- The NMI group includes INTE0, INTMUTE.
- The IRQ group includes the subgroup of IRQ0,
IRQ1,RQ2:
IRQ0: DDC1/2B+ Channel 0 interrupt sources; It
includes INTS0, INTA0, INTTX0, INTRX0,
INTNAK0 and INTSTOP0 interrupts.
IRQ1: DDC1/2B+ Channel 1 interrupt sources; It
includes INTS0, INTA1, INTTX1, INTRX1,
INTNAK1 and INTSTOP1.
IRQ2: It includes INTADC, INTV, INTE1 and INTMR
interrupt sources.
Below are the interrupt sources.
Nonmaskable Interrupt Group:
Interrupt Meaning Action
INTE0 INT External 0 INT
INTMUTE Auto Mute
It will be activated by the rising or falling edge of the external interrupt pulse.
The triggered edge can be selected by EDGE0 bit.
It will be activated when the mute condition occurs (Hsync frequency change).
Please refer the synprocessor section for a more detailed explanation.
Maskable Interrupt Group:
Interrupt Meaning Action
INTADC
INTV INT Vsync INT It will be activated by the rising edge of every vsync pulse.
INTE1 INT External 1 INT
INTMR INT Timer INT
A/D Conversion
Done
User activates the ADC by clearing the
conversion is done, this bit will be set.
It will be activated by the rising or falling edge of the external interrupt pulse.
The triggered edge can be selected by EDGE1 bit.
It will be activated by the rising edge of every ??? when the Base Timer
counter overflows and counting from $FF to $00.
17
CSTART
bit. When the AD
Page 18
NT68F62
DDC Channel 0/1 Maskable Interrupt Sources:
Interrupt Meaning Action
INTS INT SCL Go-Low INT In DDC1 mode, it will be activated when the external device proceed a DDC2
communication. This action includes pulling the SCL line to ground or sending
out a 'START' condition directly. The system will respond to this action by
changing DDC1 mode to DDC2 slave mode.
INTA INT Address Matched
INT
It will be activated in DDC2 slave mode when the external device calls a
NT68F62 slave address. If this calling address matches the NT68F62 address,
the system will generate this interrupt to remind the user
INTTX INT Transfer Buffer
Empty INT
INTRX INT Receiving Buffer
Overflow INT
INTNAK INT No Acknowledge
INT
It will be activated in DDC2 mode when the transmission buffer, IIC_TXDAT, is
empty in transmission mode.
It will be activated in DDC2 mode when the new data are stored in the
IIC_RXDAT register in receive mode.
In transmission mode, this interrupt will be activated when the NT68F62 has
send out one byte of data but the external device does not respond with an
acknowledgement bit to it.
INTSTOP INT DDC2 Stop INT In SLAVE mode, this interrupt will be activated when the NT68F62 receives a
'STOP' condition.
INTSTOP0
INTNAK0
INTRX0
INTTX0
INTA0
INTS0
INTSTOP1
INTNAK1
INTRX1
INTTX1
INTA1
INTS1
INTMR
INTE1
INTV
INTADC
INTMUTE
INTE0
IRQ0
IRQ1
IRQ2
NMIPOLL IENMI
IEIRQ0
IEIRQ1
IEIRQ2
IRQ0
IRQ1
IRQ (to CPU 6502)
IRQ2
NMI (to CPU 6502)
Figure 11.1. Interrupt Controller Structure
18
Page 19

NT68F62
Enabling Interrupts: The system will disable all of these
interrupts after reset. Users can enable each of the
interrupts by setting the interrupt enable bits at the IENMI,
IEIRQ0 ~ IEIRQ2 control registers. For example, if users
want to enable the external interrupt 0 (INTE0), write '1' to
the INTE0 bit in the IENMI control register. At the INTE0
pin, whenever NT68F62 detects an interrupt message, it
will generate an interrupt sequence to fetch the NMI vector.
Because these IEX control registers can be read, users can
read back what interrupts he has activated. At polling
sequence, users need not poll those unactivated interrupts.
Requesting Interrupts be set : No matter whether the user
has set the interrupt enable bits or not, if the interrupt
triggered condition is matched, the system will set the
correspondent bits in the IRQ0 ~ IRQ3 control registers or
in the NMIPOLL control register (INTE0 & INTMUTE bits).
For example, if at the VSYNCI pin, the system detects a
pulse occurring, the system will set the INTV bit in the IRQ2
control register.
Interrupt Groups: The system divides the IRQ interrupt
sources into several groups, ex IRQ0, IRQ1, and IRQ2. In
each of these groups, if its membership in one of the
interrupt groups has been activated, its group bit in the
IRQPOLL control register will be set. For example, if the
INTS0 of the first DDC1/2B+ channel is activated, the
INTS0 bit in the IRQ0 control register will be set and the
IRQ0 bit in the IRQPOLL control register will also be set.
Notice that the IRQ0 bit in the IRQPOLL control register will
be cleared by the system when all of its interrupt sources,
INTS0, INTA0, INTTX0, INTRX0, INTNAK0 and INTSTOP0
have been cleared by the user or the system. The NMI
group follows the same procedure as the IRQ groups.
Polling Interrupts: When an NMI interrupt occurs, during the
NMI interrupt service routine, users must poll the INTE0 &
INTMUTE bit in the NMIPOLL control register to confirm the
NMI interrupt source. The polling sequence decides the
priority of the NMI interrupt acceptance. When an IRQ
interrupt occurrs, during the IRQ interrupt service routine,
users must poll the IRQ0 – IRQ2 in the IRQPOLL control
register to confirm the IRQ interrupt source. In the same
way, the polling sequence decides the priority of the IRQ
interrupt acceptance. When deciding the IRQ source, users
can further confirm the real interrupt source by polling the
Correspondent IRQX control register ($001C - $001E).
Clearing the Interrupt Request bit: When an interrupt
occurrs, the CPU will jump to the address defined by the
interrupt vector to execute the interrupt service routine.
Users can check which one of the interrupt sources is
activated and operating a task. Upon entering the interrupt
service routine, the request bit that caused the interrupt
must be cleared by the user before finishing the service
routine and returning to the normal instruction sequence. If
users forget to clear this request bit, after returning to the
main program, it will interrupt CPU again because the
request bit remains activated. Simply, users just need to
write '1' to the polling bits in the NMIPOLL & IRQX registers
($0016 & $001C - $001E) to clear those completed
interrupt sources.
Selecting interrupt trigger edge: INTVR, INTE0R & INTE1R
interrupt sources are the edge triggered type of interrupts.
The system allows the selection of rising or falling edge
triggers to be used under the user’s control. After reset, the
rising edge triggers are provided and the content is 'FF' in
the TRIGGER control register ($001F). The user just clears
the control bits in this TRIGGER register and switches
these interrupts to be falling edge triggered.
19
Page 20

NT68F62
Control Bit Description
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
Control Register for Polling Interrupt
$0016 NMIPOLL 00H
$0017 IRQPOLL 00H
$0018 IENMI 00H
$0019 IEIRQ0 00H
$001A IEIRQ1 00H
$001B IEIRQ2 00H
Control Registers for Polling (Read) & Clearing (Write) Interrupt Requests
$001D IRQ1 00H
$001F TRIGGER FFH
― ― ― ― ― ―
― ― ― ― ― ―
― ― ― ― ―
Control Registers of Interrupt Enable
― ― ― ― ― ―
― ―
― ―
― ― ― ―
― ―
― ―
― ―
― ―
― ― ― ―
Selection of Edge Triggers for INTE0 & 1 Interrupt
― ― ― ― ―
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 RW
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 RW
INTADC INTV INTE1 INTMR RW
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 R $001C IRQ0 00H
CLRS0 CLRA0 CLRTX0 CLRRX0 CLRNAK0 CLRSTOP0 W
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 R
CLRS1 CLRA1 CLRTX1 CLRRX1 CLRNAK1 CLRSTOP1 W
CLRADC CLRV CLRE1 CLRMR W
IRQ2 IRQ1 IRQ0 R
INTVR INTE1R INTE0R R/W
INTE0 INTMUTE R
CLRE0 CLRMUTE W
INTE0 INTMUTE RW
20
Page 21

NT68F62
12. I/O PORTs
The NT68F62 has 25 pins dedicated to input and output.
These pins are grouped into 4 ports.
12.1. PORT0: P00 - P07
PORT0 is an 8-bit bi-directional CMOS I/O port with PMOS
as internal pull-up (Figure 12.1). Each pin of PORT0 may
be bit programmed as an input or output port without
software controlling the data direction register. When Port0
works as an output, the data to be output are latched to the
port data register and output to the pin. PORT0 pins that
have '1's written to them are pulled HIGH by the internal
PMOS pull-ups. In this state they can be used as inputs
and then the input signals can be read. This port output is
high after reset.
P00 - P05 are shared with DAC7 - DAC12 respectively. If
ENDK7
ENDK12
-
to LOW in the ENDAC register,
is set
P00 - P05 will act as DAC7 - DAC12 respectively (Figure
12.2). After the chip is reset,
ENDK7
ENDK12
-
will be in
the HIGH state and P00 - P05s will act as I/O ports.
P06 、 P07 are shared with VSYNCO & HSYNCO
respectively. If
ENHOUT、ENVOUT
to LOW in the
is set
HVCON register, P06 、 P07 will act as VSYNCO &
HSYNCO respectively (Figure 12.3). After the chip is reset,
ENHOUT
ENVOUT
&
will be in the HIGH state and
P06、P07 will act as I/O pins.
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0000 PT0 FFH P07 P06 P05 P04 P03 P02 P01 P00 RW
$0007 HV CON
$000F ENDAC FFH
FFH
FFH
― ―
ENHOUT ENVOUT
― ―
HSYNCI VSYNCI HPOLI VPOLI HPOLO VPOLO R
― ― ― ―
ENDK12
ENDK11
ENDK10 ENDK9 ENDK8
HPOLO VPOLO W
ENDK7
W
V
DD
PWM
Data In
PWM
Output
Data Out
Data In
Figure 12.1. I/O Structure
I/O
Figure 12.2. PWM Output Structure
V
DD
O/P
Data Out
Figure 12.3. Output Structure
21
Page 22

NT68F62
12.2. Port1: P10 - P16
PORT10 - PORT16 is a 7-bit bi-directional CMOS I/O port
with PMOS as internal pull-up (Figure 12.1). Each bidirectional I/O pin may be bit programmed as an input or
output port without software controlling the data direction
register. When Port1 works as an output, the data to be
output is latched to the port data register and output to the
pin. Port1 pins that have '1's written to them are pulled high
by the internal PMOS pull-ups. In this state they can be
used as inputs and then the input signals can be read. This
port output is high after reset.
P10 & P11 are shared with AD0 & AD1 input pins
respectively. If the ENADC0/
bit in the ENADC control
1
register is cleared to LOW, the A/D converters will activate
simultaneously. After the chip is reset, ENADC0/1 bits will
be in the HIGH state and P10 - P11 will act as I/O pins.
P12、P13 are shared with the HALF SIGNALS input and
OUTPUT pins by accessing the OUTCON control register.
If the
ENHALF
bit is cleared to LOW, P13 will switch to
HALFHI pin (input pin) and P12 will switch to HALFHO pin
(output pin, Figure 12.3). For HALFHI & HALFHO pin
descriptions, please refer half frequency function in the H/V
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0001 PT1 7FH
$000C FREECON FFH
$0010 ENADC FFH
$0018 IENMI 00H
$001B IEIRQ2 00H
ENPAT
―
CSTA
― ― ― ― ― ―
― ― ― ― ―
P16 P15 P14 P13 P12 P11 P10 RW
― ― ―
PAT0
― ― ―
V
DD
sync processor paragraph. After the chip is reset, the
ENHALF
bits will be in the HIGH state and P12、P13 will
act as I/O pins.
P14 is shared with the output pin of the self test pattern. If
users clear the
PATTERN
bit in the SYNCON control
register and the free running function has been activated,
the P14 will switch to be the output pin of the self test
pattern. This pattern output pin is of the push-pull structure.
After the chip is reset, the
PATTERN
bits will be in the
HIGH state and P14 will act as an I/O pin. (Refer to the
'Syncprocessor' section for more detailed information.)
P15 & P16 can be shared with the external interrupt INTE0
& INTE1 pins if the INTE0/1 bits are set in the control
register of the interrupt enable ($0018 & $001B). These
interrupt pins have 'Schmitt Trigger' input buffers. After the
chip is reset, INTE0/1 bits will be in the HIGH state and P15
& P16 will act as I/O pins.
Refer to the 'INTERRUPT CONTROLLER' paragraph
above for more details about the interrupt function.
FREQ2
ENADC3 ENADC2 ENADC1 ENADC0
INTV INTE1 INTMR RW
FREQ1
INTE0 INTMUTE RW
V
DD
FREQ0
W
W
Data Input
Figure 12.4. Schmitt Input Structure
I/P
Data Out
.
I/O
Data OE
Data In
Figure 12.5. I/O Structure
22
Page 23

NT68F62
12.3. PORT2: P20 - P27
PORT2, an 8-bit bi-directional I/O port (Figure 12.5), may be programmed as an input or output pin by the software control.
When setting the PT2DIR control bit to '0', its correspondent pin will act as an output pin. On the other hand, clear PT2DIR
bit to '1'and it will act as an input pin. When programmed as an input pin, it has an internal pull-up resistor. When
programmed as an output pin, the data to be output is latched to the port data register and output to the pin with a push-pull
structure. This port acts as an input port after reset.
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0002 PT2DIR FFH
$0003 PT2 FFH P27 P26 P25 P24 P23 P22 P21 P20 RW
$0010 ENADC FFH
$0029 CH1CON FFH
P27OE P26OE P25OE P24OE P23OE
― ― ―
CSTA
ENDDC
MD1/
SRW
2
START STOP RXACK TXACK
ENADC3 ENADC2 ENADC1 ENADC0
P22OE
P21OE
P20OE
―
W
W
RW
12.4. PORT3: P30 - P31
PORT3 is a 2 bit bi-directional open-drain I/O port (Figure 12.6). Each pin of Port3 may be bit programmed as an input or
output port with open drain structure. When Port3 works as an output pin, the data to be output is latched to the port data
register and output to the pin. When Port3 pins have '1's written to them, users must connect PORT3 with the external
pulled-up resistor and then PORT3 can be used as an input (the input signal can be read). This port output is hiGH after
reset.
P30、P31 include Schmitt Trigger buffers for noise immunity and can be configured as the IIC pins SDA0 & SCL0
respectively. If
ENDDC
respectively and will be of an open drain structure (Figure 12.6). After the chip is reset, this
state and PORT3 will act as I/O pin.
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0004 PT3 FFH
$0024 CH0CON FFH
is set to LOW in the CH0DDC control register, P30、P31 will act as SDA0 & SCL0 I/O pins
bit will be in the HIGH
P31 P30 RW
―
RW
― ― ― ― ― ―
ENDDC
MD1/
SRW
2
START STOP RXACK TXACK
ENDDC
I/O
Data Out
Data In
Figure 12.6. PORT3
23
Page 24

NT68F62
12.5. PORT4: P40 - P41
PORT4 is available only on the 42pin SDIP IC. PORT40 - PORt41 is a 2-bit bi-directional CMOS I/O port with PMOS internal
pull-up (Figure 12.1). Each bi-directional I/O pin may be bit programmed as an input or output port without software
controlling the data direction register. When Port4 works as an output port, the data to be output is latched to the port data
register and output to the pin. Port4 pins that have '1's written to them are pulled high by the internal PMOS pull-ups. In this
state they can be used as input pins. The input signal can be read. This port outputs HIGH after reset.
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$0005 PT4 FFH
― ― ― ― ― ―
P41 P40 RW
13. H/V Sync Signals Processor
The functions of the sync processor include polarity detection, Hsync & Vsync signals counting, and programmable sync
signals output. It also provides 3-sets of free running signals and special outputs of the test pattern during the burn-in
process when activating the free running output function. The NT68F62 can properly handle either composite or separate
sync signal inputs even without sync signal input. As to processing the composite sync signal, a hardware separator will be
activated to extract the HSYNC signal under the users control. The input at HSYNCI can be either a pure horizontal sync
signal or a composite sync signal. For the sync waveform refer to Figure 13.1 & Figure 13.2.
The sync processor block diagram is shown in Figure 13.3. Both VSYNCI & HSYNCI pins have Schmitt Triggers and filtering
processes to improve noise immunity. Any pulse that is shorter than 125 ns, will be regarded as a glitch and will be ignored.
(a) Positive polarity
(b) Negative polarity
Figure 13.1. Separate H Sync. Waveform
(a) Positive Polarity
(b) Negative Polarity
Figure 13.2. Composite H Sync. Waveform
24
Page 25

NT68F62
VCNTL
VCNTH
HCNTL
HCNTH
HSYNCO
VSYNC
INPUT
HSYNC
INPUT
Schmitt
Trigger
Schmitt
Trigger
H
INTV
Digital
Filter
Digital
Filter
V
Sync
Separator
S/C
Control
Logic
8us
V
1
HSEL
H & V
Sync.
Polarity
Detector
0
1
ENHSEL
0
1
INTMUTE
HPOLI
0
16.384 ms
32.968 ms
H
AUTO
MUTE
HPOLO
H Sync.
Output
Control
counter
H sync.
counter
V sync.
Latch
V sync.
H sync.
Latch
Enable
Enable
Reset
Enable
Reset
Enable
ENPAT, PAT10/1
FREQ0/1/2
S/C
V
V
0
1
VPOLI
FREE_RUN
Control
V Sync.
Output
Control
VPOLO
Pattern
O/P
Control
PATTERN
VSYNCO
Figure 13.3. Sync. Processor Block Diagram
25
Page 26

NT68F62
13.1. V & H Counter Register: VCNTL/H, HCNTL/H
Vsync counter: VCNTL/H, the 14-bit READ ONLY register, contains information on the Vsync frequency. An internal counter
counts the numbers of 8us pulses between two VSYNC pulses. When the next VSYNC signal is recognized, the counter is
stopped and the VCNTH/L register latches the counter value. Then the counter counts from zero again for evaluating the
next VSYNC time interval. The counted data can be converted to the time duration between two successive Vsync pulses. If
there is no VSYNC signal , the counter will overflow and set the VCNTOV bit (in the VCNTH register) to HIGH. Once the
VCNTOV is set to HIGH, it stays in the HIGH state until '1' is written to it (CLRVOV bit).
Hsync counter: If the
ENHSEL
The HCNTL/H control registers contain the numbers of Hsync pulse between two Vsync pulses. These data can determine if
the Hsync frequency is valid or not to determine the accurate video mode.
The system supports two other options of the time interval for the user to count the frequency of Hsync pulses. If users clear
ENHSEL
the
and set the
interval. The time interval is defined below:
bit is set to HIGH, the internal counter counts the Hsync pulses between two Vsync pulses.
HSEL
bits properly, this internal counter counts the Hsync pulses during a system defined time
ENHSEL HSEL
Hsync Freq
Note
1 - Disabled After system reset or users disabling
0 0 16.384 ms
0 1 32.768 ms
After system reset, this interval will be disabled and the content of
ENHSEL
&
HSEL0
bits will be '1'. When this function is
disabled, the HCNTL/H counter works on the VSYNC pulse. It is invalid to write '00' to them.
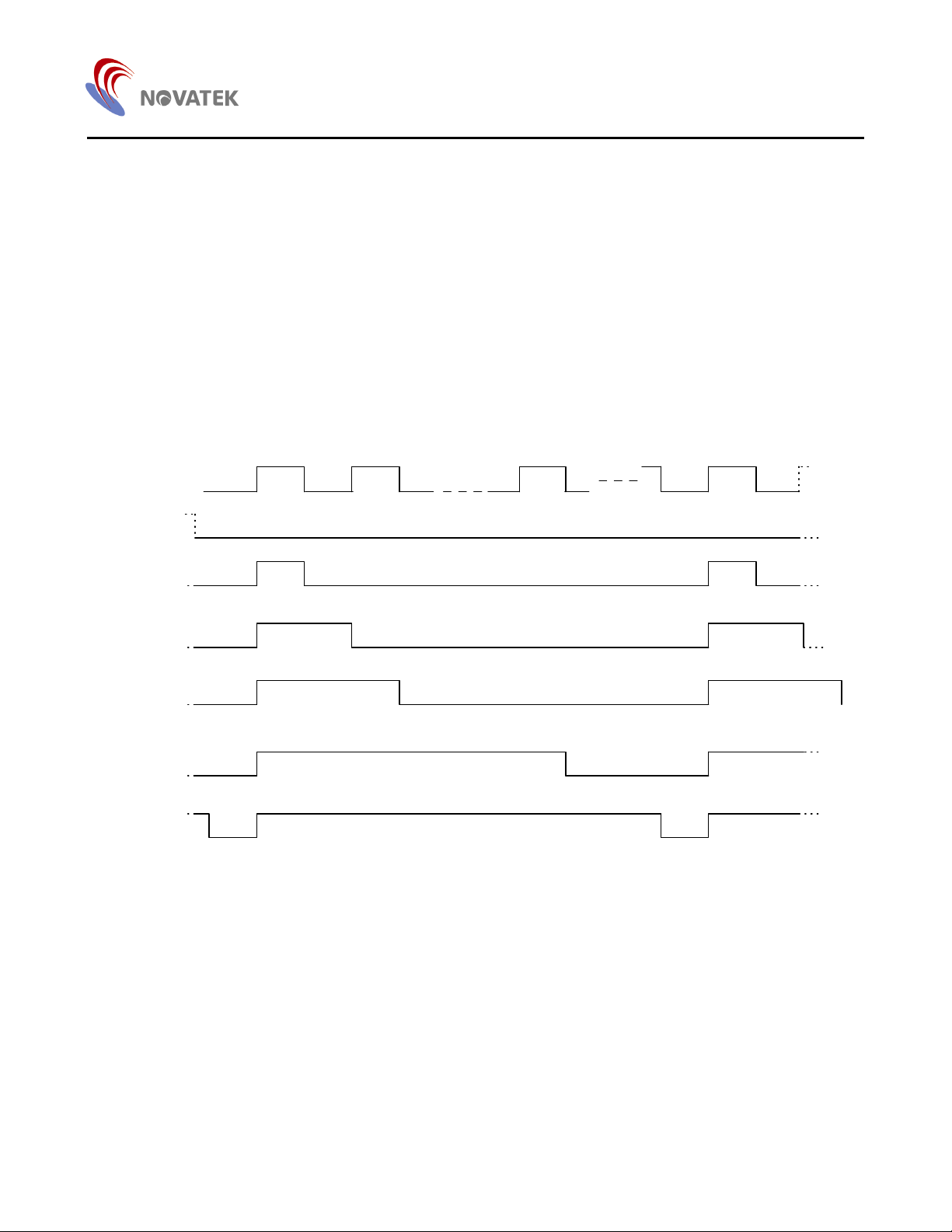
Latching the hsync counter: The counted value will be latched by the HCNTH/L register pairs that are updated by the Vsync
pulse or by the system defined time interval. (Refer to the Figure 13.4 for the operation of the HCNTL/H counter.) If the
counter overflows, the HCNTOV bit (in the HCNTH register) will be set to HIGH. Once the HCNTOV is set to HIGH, it keeps
in the HIGH state until '1' is written to it (CLRHOV bit). When setting this CLRHOV bit, the HCNT counter will not be reset to
zero.
Latch HCNT register
Reset H sync. counter
Start pulse counting
VSYNCI
HSYNCI
Latch HCNT register
Reset H sync. counter
Start pulse counting
●●●●
●●●●
●●●●
●●●●
●●●●
●●●●
16.384ms/32.768ms
(Setting HSEL0/1 bits)
HSYNCI
Figure 13.4. Hsync Counter Operation
26
●●●●
●●●●
●●●●
●●●●
●●●●
●●●●
Page 27

NT68F62
(1) HSYNCI
●
●
●
Composite H sync. waveform (H EOR V)
●
●
(2) HSYNCI
●
Composite H sync. waveform (H OR V)
Hsync pulse or no pulse, the output signal of Hsync will be inserted.
2µs
HSYNCO
●
●
●
Original
Hsync Pulse
Inserted Hsync Pulse
Original
Hsync Pulse
VSYNCO
Widen 9µs
Figure 13.5. Composite H & V Sync. Processing
27
Page 28

NT68F62
Sync. Mode
Processing
System Default:
S/C = '1' & ENSEL = '1'
Open INTV & clear INTV flag
STAND-BY Mode
Yes
NORMAL Mode
Seperate Sync.
Read VCNT|HCNT
INTV ?
Yes
Delay 132 ms
VCNTOV = '1'
?
No
HCNTH = '00'
?
No
Counter Register
Freq.
Calculating
No
Yes
Clear VCNTOV & HCNTOV
Open INTV & clear INTV flag
NORMAL Mode
Composite Sync.
Set S/C = '0'
Delay 132 ms
VCNTOV = '1'
?
No
HCNTH ='00'
?
No
Read VCNT|HCNT
Counter Register
Yes
Yes
Set S/C = '1' & ENSEL = ''0'
& SELECT TIME INTRVAL
(16.384 or 32.968ms)
Clear VCNTOV & HCNTOV
Delay 2 * TIME INTELVAL
HCNTH = '00'
Suspend Mode
Worng Mode
Freq.
Calculating
1. Extract VCNTL/H 14 bit data
Off Mode
Yes
?
No
2. 14 bits data * 8 us
= Vsync. time duration
3. Its reciprocal
is Vsync. freq.
1. Extract HCNTL/H
12 bit data
2. 12 bit data * Vsync. freq.
= Hsync. freq.
or 12 bits data/time interval
(16.382 or 32.968 ms)
3. Its reciprocal
is Hsync. time duration.
Return
Return
Figure 13.6. H & V Sync. Software Control Flow Chart (for reference only)
28
Page 29

13.2. Sync Processor Control Register:
Polarity: The detection of Hsync or Vsync polarity is
achieved by the hardware circuit that samples the sync
signal's voltage level periodically. Users can read the
HPOLI & VPOLI bits from the HVCON register, the bit = '1'
represents positive polarity and '0' represents negative
polarity. Furthermore, users can read the HSYNCI and
VSYNCI bits in the HVCON register to detect the H & V
sync input signal. Users can control the polarity of the H &
V sync output signal by writing the appropriate data to the
HPOLO and VPOLO bits in the HVCON register, '1'
represents positive polarity and '0', negative polarity.
Composite sync: Users have to determine whether the
incoming signal is separate sync or composite sync and set
C
ENHSEL/HSEL
the S/
signal is composite and after setting S/C to '0', the sync
separator block will be activated (please refer to Figure
13.5). At the area of a Vsync pulse, there can exist Hsync
pulses or not. For the output of Hsync, users can activate
hardware to interpolate the Hsync pulses in that area by
clearing the
is fixed at 2uS and the time interval is the same as the
previous one. According to the last Hsync pulse outside the
Vsync pulse duration, the hardware will arrange the interval
of these hardware interpolated pulses. These inserted
Hsync pulse perhaps have maximum phase deviation of
125 nS. The Vsync pulse can be extracted by hardware
from the composite Hsync signal and the delay time of the
output Vsync signal will be limited to less than 20ns. To
insert the Hsync pulse safely, the extracted Vsync pulse will
be widened about 9µs. Although , the system will insert the
Hsync pulse evenly, the last inserted Hsync pulse will have
a different frequency from the original ones.
The system will not implement this insertion function so
users must clear the
register to activate this function. After reset, the S/
INSEN
HCNT counter latches to zero.
&
INSEN
bit. The width of these inserted pulses
bits default value are HIGH and clear the VCNT |
Free Running Freq.
1 0 0 0 8M/256=31.2K Hsync/512=61.0Hz
2 0 0 1 8M/4/9/5=44.4K Hsync/512=86.8Hz
3 0 1 0 8M/128=62.5K Hsync/3/5/7/8=74.4Hz
4 0 1 1 8M/4/5/5=80K Hsync/1024=78.1Hz
5 1 0 0/1 8M/4/2/11=90.9K Hsync/1024=88.7Hz
1 1 0
1 1 1
bit properly. If the input sync
INSEN
bit in the SYNCON control
FREQ2 FREQ1 FREQ0
C
&
NT68F62
Sync output: In pin assignment, VSYNCO & HSYNCO
represent Vsync & Hsync output, which are shared with
P06 & P07 respectively. If
to '0' in the HVCON register, P06 & P07 will act as
VSYNCO & HSYNCO output pins. When the input sync is a
separate signal, the V/HSYNCO will output the same signal
as the input without delay. But if the input sync is a
composite signal, the VSYNCO signal will have a fixed
delay time of about 20ns and the HSYNCO has a nonfixed
delay time of about 125ns.
Half frequency Input and output: In pin assignment, when
users set
HALFHO pin will act as an output pin and output half of the
input signal in the HALFHI pin with 50% duty (see Figure
13.7). If set
signal in the HALFHI pin and the user can control its
polarity of output HALFHO by setting HALFPOL bit, '1' for
positive and '0' for negative polarity. After the chip is reset,
ENHALF
state and P12 & P13 will act as I/O pins. It is recommended
to add a Schmitt Trigger buffer at the front of the HALFI pin.
Free run signal output: The user can select one of the free
running frequencies (listed below) outputting to HYSNCO &
VSYNCO pin by setting the
does not enable the H/VSYNCO by clearing the
or the
invalid. After system reset, NT68F62 does not provide free
running frequency and both of the FREQ0/1/2 bits are set
to ' 1'. The free running frequency can be set according the
table below:
Hsync Freq. Vsync Freq. Note
Disabled Free
Run function
ENHALF
、
ENHOUT
bits to '0' in the HALFCON register, the
NOHALF
NOHALF
bits, any setting of
ENVOUT
to '0', HALFHO will output the same
& HALFPOL will be in the HIGH
FREQ0/1/2
ENHOUT
&
bits. If the user
FREQ0/1/2
Figure 13.7
After System
are set
ENVOUT
bits will be
Refer to
Reset
29
Page 30

NT68F62
Self test pattern: On activating the free running function, the system will generate the test pattern when clearing the
ENPAT
bit. The PORT14 pin will switch from I/O pin to pattern output pin (push-pull structure). The system provides four types of test
&
PAT0
bits to select the pattern type (Figure 13.8). If the free run function has not
PAT0
bits will be invalid. Refer to the Figure 13.9 for the porch time of the video
patterns. Refer to the figure below. Set the
been enabled, any change of
ENPAT
pattern.
PAT0 Test Pattern Note
0 (1) Only activated when
ENPAT
bit is cleared
1 (2)
The porches of the self test pattern are listed below:
Free Running
Freq.
1
2
3
4
5
Front Porch of
VBLANK
128µs 864µs
BACK Porch of
VBLANK
Front Porch of
HBLANK
460ns
BACK Porch of
HBLANK
VSYNC
PULSE WIDTH
2.00µs 64µs 1µs
PULSE WIDTH
90.5µs 589µs 1.18µs 1.93µs 64µs 1µs
51µs 528µs
51.5µs 596µs
46.6µs 515µs
424ns
185ns
436ns
1.92µs 64µs 1µs
1.94µs 64µs 1µs
1.94µs 64µs 1µs
HSYNC
Mode change detection: The system provides a hardware detection of a Sync signal change and supports the user to
respond to this transition with a proper process as soon as possible. There are three kinds of detection that will set the
INTMUTE bit.
Hsync counter: Users can enable the HDIFF comparison by clearing the
ENHDIFF
bit and then preloading a different value
to the HDIFF0-3 bits in the AUTOMUTE control register ($000E). The system will latch the new value of theHsync counter
and compare it with the last latched value. If this difference is great than the user defined value at theHDIFF0-3 bits then the
system will set the INTMUTE interrupt bit.
H/V polarity: Users can enable polarity detection by clearing the
ENPOL
bit. The system will set the INTMUTE bit when the
polarity of Hsync or Vsync have been changed.
H/V counter overflow: Users can enable the detection of sync counters overflow by clearing the
ENOVER
bit. The system
will set the INTMUTE bit whenever the counter of Hsync or Vsync has overflowed.
The above three sources of setting this INTMUTE bit can be enabled or disabled by user. If the user opens this interrupt and
this interrupt event occured, the system will generate a NMI interrupt to remind users any time. At the user's manipulation, a
software debounce to confirm the transition of a sync signal one more time will make the frequency detection more stable
and reliable, but it will affect the response time. After the system reset, this 'automute' function will be disabled and the
HDIFF0~2 control bits will be cleared to ' $0F'.
HALFHI
HALFHO: Half freq. Output signal (50% duty)
HALFHO output signal when NOHALF bit clear to LOW
(the same signal as in the HALFHI pin)
Figure 13.7. Half Freq. Sync. Waveform
30
Page 31

NT68F62
(1) (2)
Figure 13.8. Two Types of Testing Pattern
µ
s
Back-Porch
Back-Porch
64
Front-Porch
1µs
Front-Porch
VSYNC
Video
HSYNC
Video
Figure 13.9. The Porch of the Free Running Self Test Pattern
31
Page 32

NT68F62
13.3 Power Saving Mode detect:
Video modes are listed below, especially from mode 2 to mode 4 just for power saving. All of the modes can be easily
detected by NT68F62 (Figure 13.6).
Mode H-Sync V-Sync
(1) Normal Active Active
(2) Stand-by Inactive Active
(3) Suspend Active Inactive
(4) Off Inactive Inactive
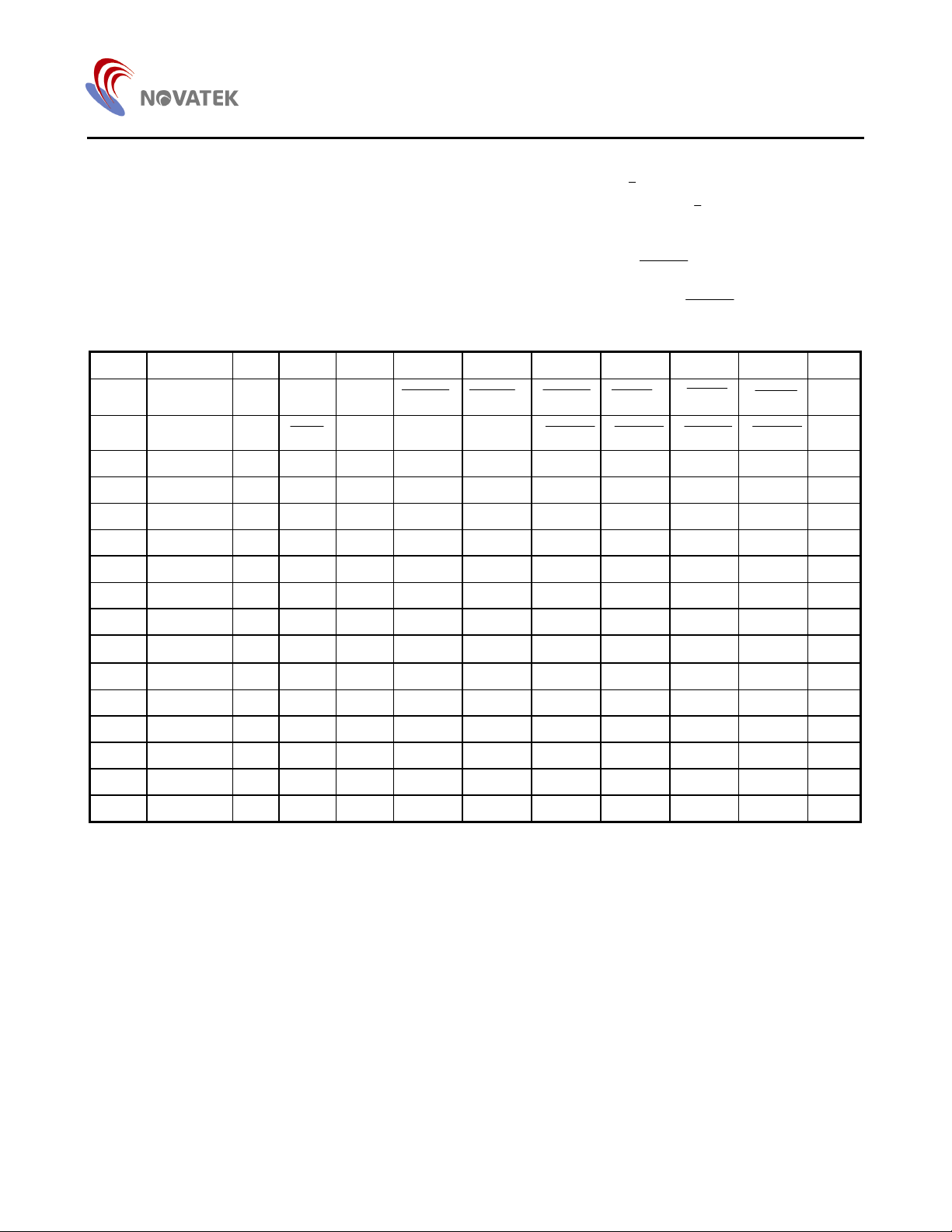
Control Bit Description:
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
Control Registers for Synprocessor
$0006 SYNCON
$0007 HV CON
$0008 HCNT L 00H HCL7 HCL6 HCL5 HCL4 HCL3 HCL2 HCL1 HCL0 R
$0009 HCNT H 00H
$000A VCNT L 00H VCL7 VCL6 VCL5 VCL4 VCL3 VCL2 VCL1 VCL0 R
$000B VCNT H 00H
$000C FREECON FFH
$000D HALFCON FFH
$000E AUTOMUTE FFH
FFH
FFH
FFH
FFH
― ― ― ―
― ― ― ―
― ―
ENHOUT ENVOUT
HCNTOV
CLRHOV
VCNTOV
CLRVOV
ENPAT
ENHALF
ENHDIFF
INSEN
INSEN ENHSEL HSEL
HSYNCI VSYNCI HPOLI VPOLI HPOLO VPOLO R
― ― ― ―
― ― ―
― ― ― ― ― ― ―
―
― ― ― ― ― ― ―
PAT0
NOHALF
ENPOL ENOVER
VCH5 VCH4 VCH3 VCH2 VCH1 VCH0 R
― ― ―
HALFPOL
― ― ― ― ―
―
HCH3 HCH2 HCH1 HCH0 R
HDIFFVL3 HDIFFVL2 HDIFFVL1 HDIFFVL0 W
―
HPOLO VPOLO W
FREQ2 FREQ1 FREQ0
HSEL
S/C
S/C
R
W
W
W
W
W
32
Page 33

14. Base Timer (BT)
The BASE TIMER is an 8-bit counter, and its clock source
can be chosen from 1µs or 1ms by setting the BTCLK bit
('0' for 1µs and '1' for 1ms). The BT can be enabled or
disabled by the
will start counting while clearing the
the chip is reset, the BTCLK and
(the BT is disabled). Before enabling the BT, it can be
1us
1ms
bit in the BTCON register. The BT
ENBT
bit to ‘0’. After
ENBT
bits are set to '1'
ENBT
0
BT7
BT6 BT5 BT4 BT3 BT2 BT1 BT0
1
NT68F62
preloaded with a value by writing a value to the BT register
(write only) at any time and then the BT will start to count
up from this preloaded value. When the BT’s value reaches
FFH, it will generate a timer interrupt if the timer interrupt is
enabled, and then the counter will wrap around to 00H. The
timer’s maximum interval is 256ms or 256µs depending on
the BTCLK value.
INTMR INT
BTCLK
Control Bit Description:
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
$002E BT 00H BT7 BT6 BT5 BT4 BT3 BT2 BT1 BT0 W
$002F BT CON 03H
― ― ― ― ― ―
BTCLK
ENBT
W
33
Page 34

15. IIC Bus Interface: DDC1 & DDC2B Slave Mode
Interface: IIC bus interface is a two-wire, bi-directional
serial bus which provides a simple, efficient way for data
communication between devices, and minimizes the cost of
connecting among various peripheral devices. NT68F62
provides two IIC channels. Both of them are shared with I/O
pins and their structures are open drain. When the system
is reset, these channels are originally of general I/O pin
structure. All of these IIC bus functions will be activated
only after their
registers).
DDC1 & DDC2B+ function: Two modes of operation have
been implemented in the NT68F62, uni-directional mode
(DDC1 mode) and bi-directional mode (DDC2B+ mode).
These channels will be activated as DDC1 function initially
when users enable the DDC function. These channels will
switch automatically to DDC2B+ function from DDC1
function when a low pulse greater than 500ns is detected
on the SCL line. Users can start a master communication
directly from the DDC1 communication by clearing the
MODE
bit in the CH0/1CLK control register.
The channels can return to DDC1 function when users set
the MD1/
ENDDC
bit to '1' in the CH0/1CON registers.
2
bits are cleared to '0' (CH0/1CON
15.1. DDC1 bus interface
Vsync input and SDA pin: In DDC1 function, the Vsync pin
is used as an input clock pin and the SDA pin is used as a
data output pin. This function comprises two data buffers:
one is the preloading data buffer for putting one byte data
in advance by the user (CH0/1TXDAT), and the other is the
shift register for shifting out one bit data to the SDA line,
which users can not access directly. These two data buffers
cooperate properly. For the timing diagram please refer to
Figure 15.1. After the system resets, the IIC bus interface is
in DDC1 mode.
NT68F62
Data transfer: At first, the user must put one byte of
transmitted data into the CH0/1TXDAT register in advance,
and activate the IIC bus by setting the
Then open the INTTX0/1 interrupt source by setting
INTTX0/1 to '1' in the IEIRQ0/1 registers. On the first 9
rising edges of Vsync, the system will shift out invalid bits in
the shift register to the SDA pin to empty the shift register.
When the shift register is empty and on the next rising edge
of Vsync, it will load data from the CH0/1TXDAT registers
to the internal shift register. At the same time, the NT68F62
will shift out the MSB bit and generate an INTTX0/1
interrupt to remind the user to put the next byte data into
the CH0/1TXDAT register. After eight rising clocks, there
will have been eight bits shifted out in proper order and shift
register will become empty again. At the ninth rising clock,
it will shift the ninth bit (null bit '1') out to the SDA. And on
the next rising edge of Vsync clock, the system will
generate an INTTX0/1 interrupt again. In the same way, the
NT68F62 will load new data from the CH0/1TXDAT
registers to the internal shift register and shift out one bit
right away. Beware: the user should put one new data into
the CH0/1TXDAT registers before the shift register is empty
(the next INTTX0/1 interrupt). If not, the hardware will
transmit the last byte of data repeatedly.
Vsync clock: Only in the separate SYNC mode can the
Vsync pulse be used as a data transfer clock and its
frequency can be up to 25KHz maximum. In composite
Vsync mode, NT68F62 can not transmit any data to the
SDA pin, regardless of whether the Vsync can be extracted
from the composite Hsync signal.
ENDDC
bit to '0'.
34
Page 35

NT68F62
Control Bit Description:
Addr. Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
― ― ― ― ― ―
INTE0 INTMUTE R $0016 NMIPOLL 00H
― ― ― ― ― ―
$0017 IRQPOLL 00H
$0019 IEIRQ0 00H
$001A IEIRQ1 00H
$001C IRQ0 00H
$001D IRQ1 00H
$0021 CH0ADDR A0H ADR7 ADR6 ADR5 ADR4 ADR3 ADR2 ADR1
$0022 CH0TXDAT 00H TX7 TX6 TX5 TX4 TX3 TX2 TX1 TX0 W
$0023 CH0RXDAT 00H RX7 RX6 RX5 RX4 RX3 RX2 RX1 RX0 R
$0024 CH0CON E0H
$0025 CH0CLK FFH
― ― ― ― ―
― ―
― ―
― ―
― ―
― ―
― ―
ENDDC
― ―
MODE
Control Register for DDC1/2B+ of Channel 0
MD1/
MRW
Control Register for DDC1/2B+ of Channel 1
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 RW
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 RW
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 R
CLRS0 CLRA0 CLRTX0 CLRRX0 CLRNAK0 CLRSTOP0 W
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 R
CLRS1 CLRA1 CLRTX1 CLRRX1 CLRNAK1 CLRSTOP1 W
2
―
SRW
RSTART
START STOP
START STOP RXACK
― ―
IRQ2 IRQ1 IRQ0 R
―
DDC2BR2 DDC2BR1 DDC2BR0 W
CLRE0 CLRMUTE W
W
W
R
TXACK
― ―
―
―
$0026 CH1ADDR A0H ADR7 ADR6 ADR5 ADR4 ADR3 ADR2 ADR1
$0027 CH1TXDAT 00H TX7 TX6 TX5 TX4 TX3 TX2 TX1 TX0 W
$0028 CH1RXDAT 00H RX7 RX6 RX5 RX4 RX3 RX2 RX1 RX0 R
$0029 CH1CON E0H
$002A CH1CLK FFH
$003E ISP REG
00H
03H
ENDDC
― ―
MODE
MD1/
MRW
2
―
SRW
RSTART
START STOP
START STOP RXACK
― ―
―
DDC2BR2 DDC2BR1 DDC2BR0 W
ISP DDC1_ISP
TXACK
― ―
CH1_A0
―
―
DDC0_ISP
CH0_A0 R W
W
W
R
35
Page 36

NT68F62
ENDDC
(in CH0CON register)
●
●
Vsync Pulse
INTV
Load data in the CH0TXDAT
register to shift register
12 34
●
●
●
●
●
91234 567
●
8912
●
●
●
●
●
●
●
INTTX
User can load next byte data
to CH0TXDAT register
●
● ●
SDA
Invalid data
●
Shift
register
876
87654321
MSB
First Byte Data
●
5
Figure 15.1. DDC1 Mode Timing Diagram
15.2. DDC2B + Slave & Master Mode Bus Interface
The built-in DDC2B+ IIC bus Interface features are as follows:
SLAVE mode (NT68F62 is addressed by a master that
drives SCL signal)
- MASTER mode (NT68F62 addresses external
devices and sends out the SCL clock)
- Compatible with IIC bus standard
- One default $A0 slave address ( can be disabled ) and
one user programmable address
- Automatic wait state insertion
- Interrupt generation for status control
- Detection of START and STOP signals
The DDC2B+ will be activated as SLAVE mode initially.
Users can switch to MASTER mode by clearing the
bit under either of these conditions listed as follows:
MODE
●
●
●
●
Null
●
187
Bit
LSB
543 1862
Second Byte Data
Null
Bit
●
●
7
1. After entering into DDC1 function and clearing this bit,
the system will be changed from DDC1 to DDC2B+
MASTER mode operation.
2. After entering into DDC2B+ slave mode function and
clearing this bit, the system will be changed from slave
mode into master mode operation.
bit, the system will send out a
During clearing of the
'START' condition and wait for the user to put the calling
address into the CH0/1TXDAT control register. Notice: the
user must predetermine the direction of the master mode
transmission before putting the calling address.
Below is the DDC2B+ function with channel 0, and the
manipulation of channel 1 is the same as channel 0.
MODE
36
Page 37

START
CONDITION
SDA
SCL
●
●
1 - 7
●
89
1 - 7
●
●
●
89
1 - 7
●
●
●
89
NT68F62
STOP
CONDITION
IIDAT Reg.
bit stream
ADDRESS R/W ACK DATA
●
●
●
8765 187
MSB
4
LSB
ACK
MSB
Figure 15.2. DDC2B Data Transfer
LSB
ACK
ACK
MSB
ACK
DATA
543 1862
7
●
●
●
37
Page 38

NT68F62
SCL
SDA
(external device)
INTS
INTA
INTRX
START
AddressS R/W PDATAA DATAA A
From external device to NT68F62
From NT68F62 to external device
A
0
DATA
Data transferred
from external device
A = Acknowledge
S = START
P = STOP
(a) WRITE Mode Data Format
wait
1
010000
R/W
0
DATA DATA
wait
wait
DATA
STOP
SDA
(NT68F62)
A
A
A
(b) WRITE Mode Timing Diagram
Figure 15.3. DDC2B Write Mode Spec.
A
38
Page 39

NT68F62
SCL
SDA
(external device)
INTS
INTA
INTTX
NT68F62 AddressS R/W PDATAA DATAA A
1
From external device to NT68F62
From NT68F62 to external device
DATAA
Data transferred
from NT68F62
A = Acknowledge
A = No acknowledge
S = START
P = STOP
(a) Read Mode Data Format
START
wait
1
0100001
wait
R/W
wait
A
STOP
A
SDA
(NT68F62)
user load first data into TXDAT buffer
Figure 15.4. DDC2B Read Mode Spec.
A
DATA DATA
(b) READ Mode Timing Diagram
39
Page 40

15.3. DDC2B Slave Mode Bus Interface
Enable IIC and INTS: After the user clears the
ENDDC
‘0’, NT68F62 will enter into DDC1 mode, and it will switch
to DDC2B SLAVE mode when a low pulse is detected on
the SCL line. The DDC2B bus consists of two wires, SCL
and SDA; SCL is the data transmission clock and SDA is
the data line. NT68F62 will remind the user that the mode
has changed by generating an INTS interrupt. When users
2
set MD1/
to '1' at this time, the NT68F62 will return back
to DDC1 mode. (For DDC2B please refer to Figure 15.2.)
The figure exhibits what isimportant in IIC: START signal,
slave ADDRESS, transferred data (proceed byte by byte)
and a STOP signal.
Start condition: When SCL & SDA lines are at HIGH state,
an external device (master) may initiate communication by
sending a START signal (defined as SDA from high to low
transition while SCL is at high state). When there is a
START condition, NT68F62 will set the 'START' bit to '1'
and the user can poll this status bit to control the DDC2B
transmission at any time. This bit will stay as '1' until the
user clears it. After sending a START signal for DDC2B
communication, an external device can repeatedly send a
start condition without sending a STOP signal to terminate
this communication. This is used by the external device to
communicate with another slave or with the same slave in a
different mode (Read or Write mode) without releasing the
bus.
Address matched and INTA0: After the STARTcondition a
slave address is sent by an external device. When the IIC
bus interface changes to DDC2B mode, NT68F62 will act
as a receiver first to receive this one byte data. This
address data is 7 bits long followed by the eighth bit (R/W)
that the system receives as an address data from an
external device,
INTSTOP
INTTX
TXACK
in
9 bits Shift Register
INTNAK
INTRX
INTA
R/W
DDC2BR [2..0]
Compare Logic
ADDR
Figure 15.5. DDC Structure Block
to
STOP Detector
TXDAT
RXDAT
Clock Generator
NT68F62
and stores in the CH0RXDAT register. The system
indicates the data transfer direction. The NT68F62
supports the 'A0' default address and another set of
addresses that can be accessed by writing to the
CH0ADDR register. The ‘A0’ default address of the DDC
channel 0 or 1 can be disabled by bit0 or bit1 at the
CH0/1_A0 control register ($3E). Upon receiving the calling
address from an external device, the system will compare
this received data with the default 'A0' address (if it is not
disabled) and the data in the CH0ADDR register. If either of
these addresses matches, the system will set the INTA0 bit
in the IRQ0 register. If the user sets the INTA0 bit to '1' (in
the IEIRQ0 register) in advanced and addresses match, the
NT68F62 will generate an INTA0 interrupt. Under the
address matching condition, the NT68F62 will send an
acknowledgement bit to an external device. If the address
does not match, the NT68F62 will not generate the INTA0
interrupt and will neglect the data change on the SDA line
in the future.
Data transmission direction: In the INTA0 interrupt servicing
routine, the user must check the LSB of the address data in
the CH0RXDAT register. According to the IIC bus protocol,
this bit indicates the DDC2B data transfer direction in later
transmission; '1' indicates a request for a 'READ MODE'
action (external master device read data from system), '0'
indicates a 'WRITE MODE' action (external master device
write data to system). For the timing about READ mode
and WRITE mode please refer to Figure 15.3 and Figure
15.4. The data transfer can proceed byte by byte in a
direction specified by the R/
address is received.
The system will switch to either 'READ' mode or 'WRITE'
mode automatically whichever is determined by this
direction bit.
out
clk
ENDDC
MD1/2
INTS
MODE
bit after a successful slave
W
SDA
VSYNC
SCL
40
Page 41

Data transfer and wait: The data on the SDA line must be
stable during the HIGH period of the clock on the SCL line.
The HIGH and LOW state of the SDA line can only change
when the clock signal on the SCL line is LOW. Each byte of
data is eight bits long and one clock pulse for one bit of
data transfer. Data is transferred with the most significant
bit (MSB) first. In the wired-AND connection, any slower
device can hold the SCL line LOW to force the faster
device into a waiting state. Data transmission will be
suspended until the slower device is ready for the next byte
transfer by releasing the SCL line.
Acknowledge: The acknowledgment will be generated at
the ninth clock by whomever is receiving data. In the
WRITE MODE, the NT68F62 system must respond to this
acknowledgment. Users should clear the
CH0CON to open the ‘ACK’ function. After receiving one
byte of data from the external device, NT68F62 will
automatically send this acknowledgment bit.
In the READ mode, an external device must respond to the
acknowledgment bit after every byte of data is sent out.
The system will set the INTNAK bit when the external
device does not send out the '0' acknowledgment bit.
Furthermore, the user can open this interrupt source by
clearing the INTNAK bit in the IEIRQ0 register.
The INTTX0 & INTRX0 interrupt: After NT68F62 completes
one byte transmission or receiving, it will generate INTTX0
(READ mode) & INTRX0 (WRITE mode) interrupts. These
interrupts are generated at the falling edge of the ninth
clock. Users can control the flow of DDC2B transmissions
at these interrupts.
The INTRX0 on the WRITE mode: NT68F62 reads data
from the external master device. When users detect an
INTRX0 interrupt, it means that one byte of data has been
received and the user can read out by accessing the
CH0RXDAT control register. At the same time, if the user
responded to an 'ACK' signal beforehand, the shift register
will send out this 'ACK' bit (low voltage) and continue to
receive the next byte data. If both of the shift register and
the CH0RXDAT register are full and the user still does not
load data from the CH0RXDAT register, the NT68F62
system will let the SCL pin keep ‘LOW’ and will wait for
user to retrieve this collected data. After the user obtains
one byte of data from the CH0RXDAT register, the SCL will
be released for generation of the SCL transmission clock.
At this time , the external device can continue sending the
next byte of data to NT68F62. The timing diagram refers to
Figure 15.3. The user must respond with a NAK signal
beforehand to stop the transmission.
TXACK
bit in the
NT68F62
The INTTX0 on the READ mode: An external device can
read data from NT68F62. During INTTX0 interrupt, the
system will load new data from the CH0TXDAT register
which the user has earlier put into this internal shift register.
Then , the system will begin to send out this new data
continually . After this newly loaded data had been shifted
out by every SCL clock, the system will request the user to
put the next byte of data into the CH0TXDAT register by
the INTTX0 interrrupt.
If both of the shift register and the CH0TXDAT register are
empty and the user still cannot load data into the
CH0TXDAT register, the NT68F62 system will let SCL pin
keep ‘LOW’ and wait the another new data after receiving
the acknowledgment bit from external device.
When SCL is held low by the system and after the user had
put one new byte of data into the CH0TXDAT register, the
SCL will be released for generation of the SCL
transmission clock. At this time, the system will load this
byte of data into the shift register and generate an INTTX0
interrupt again to remind the user to putt the next byte into
the CH0TXDAT register. For the timing diagram refer to
Figure 15.4.
After every one byte of data transfer, the system will
monitor if the external master device has sent out the
acknowledgment bit or not. If not, the system will set the
INTNAK bit (the acknowledgment is LOW signal). Users
will get an INTNAK interrupt if the INTNAK has been
enabled as a interrupt source.
STOP condition: When SCL & SDA lines have been
released (held on 'high' state), DDC2B data transfer is
always terminated by a STOP condition generated by an
external device. A STOP signal is defined as a LOW to
HIGH transition of SDA while SCL is at HIGH state. When
there is a STOP condition, NT68F62 will set the 'STOP' bit
& INTSTOP bit to '1' and the user can poll this status bit or
open a INTSTOP interrupt to control the DDC2B
transmission at any time. This bit will stay as '1' until the
user clears it by writing '1' to this bit. Notice: The SCL and
SDA lines must conform to IIC bus specifications. For the
software flowchart please refer to Figure 15.6. Please refer
to the standard IIC bus specification for details.
Change to DDC1 mode: After an external device terminates
DDC2 transmission by sending a STOP condition, users
can set MD1/
other hand, when the SCL line has been released (pulledup), the user can force NT68F62 to DDC1 mode
communication at any time.
to '1' for changing to DDC1 mode. On the
2
41
Page 42

Polling
DDC2
Interrupt
IRQ0/1 Group
Service Routine
Need
Polling
INTS?
yes
INTS
?
yes
Change To DDC2
Slave Mode &
RECEIVING Mode
Put Slave Addr. Into
CH0ADDR Reg.
Open INTA
No
Need
Polling
INTA?
yes
INTA
?
yes
Read Out the SRW bit
Reset Buffer Index
READ Mode
?
No
Open
INTRX, INTNAK
& INTA
No
No
yes
Put One Byte data Into
CH0TXDAT Reg.
Open
INTTX, INTNAK &
INTA
WRITE
Mode
Need
Polling
INTRX?
yes
INTRX
?
yes
Read One Byte
Data From
CH0RXDAT Reg.
Recv.
Over
?
yes
Return to
DDC1?
yes
Open
INTA & INTV
No
No
No
No
Open
INTA
Open
INTRX, INTNAK &
INTA
READ
Mode
Put $FF Into
CH0TXDAT Reg.
(release SDA line)
INTA & INTV
Need
Polling
INTTX?
INTTX
?
Trans.
Over
?
Return to
DDC1?
Open
NT68F62
No
yes
No
yes
No
yes
No
Open
INTTX, INTNAK
yes
Open
INTA
& INTA
Need
Polling
INTNAK?
yes
INTNAK?
yes
Transmission failed
System release SCL &
SDA & send out STOP
condition User can do
some process
No
No
DDC1
Need
Polling
INTV?
yes
INTV
?
yes
Change To
DDC1 Mode
(MD_CON = 1)
Put One Byte
Data Into
CH0TXDATReg.
Open
INTTX & INTS
No
No
Other INT.
Service
Return
SLAVE Mode Operation
Figure 15.6. Slave Mode INT Operation
42
Page 43

15.4 DDC2B+ Master Mode Bus Interface
Most of the DDC manipulation is the same as SLAVE mode
except the SCL clock generation. In the MASTER mode,
the control of the SCL clock source belongs to NT68F62.
Users must set the calling address and transmission
MODE
direction in advance. Access the
control the transmission flow of DDC2B+ master mode
communication.
Start condition: After user clears the
bits, the system will generate a 'START' condition on the
SCL & SDA lines and wait for the user to put the calling
address into the TXDAT buffer and send it to SDA line. The
frequency of SCL is dependant on the baud-rate setting
value (DDCBR0 - DDCBR2) in the register CH0CLK. The
data transmission direction will be dependant on the
bit and the LSB of the calling address, '1' for read operation
and '0' for write operation.
Calling address: The calling address is 8 bits long. It should
be put in the CH0TXDAT. The setting of the LSB bit in this
TXDAT buffer should be the same as the
STOP condition: There are several cases in which the
system will send out a 'STOP' condition on the SCL & SDA
lines. First, in the 'READ' operation, if the user sets the
TXACK bit to '1', the system will send out the 'NAK'
condition on the bus after receiving one byte of data and
will then send out the 'STOP' condition automatically later.
Second, in the 'START' condition and after the sending out
a calling address, if no slave has responded to an 'ACK'
signal, the master will send out the 'STOP' condition
automatically. Third, if the user sets the
the system will generate a 'STOP' condition after the
current byte transmission is done. Notice that if the slave
device did not release the SCL and SDA line, the system
can not send out the 'STOP' condition.
After the 'STOP' condition, the master will release the SCL
& SDA lines and return to SLAVE mode.
The INTTX0 & INTRX0 interrupt: After NT68F62 completes
one byte transmission or receiving of data, it will generate
INTTX0 (WRITE mode) & INTRX0 (READ mode) interrupts.
Users can control the flow of DDC2B transmission at these
interrupts.
The INTRX0 on the read mode: NT68F62 reads data from
an external slave device. When users detect an INTRX0
interrupt, it means that one byte data has been received
and the user can read out by accessing CH0RXDAT control
register. At the same time, if the user sent an 'ACK' signal
beforehand, the shift register will send out an 'ACK' bit (low
&
ENDDC
MRW
MODE
MRW
&
bit.
bit to '1',
bits to
MODE
MRW
NT68F62
voltage) and continue to receive the next byte of data. If
both the shift register and the CH0RXDAT register are full
and the user still does not load data from the CH0RXDAT
register, the SCL will be held LOW and will wait for
NT68F62. After the user has received one byte of data
from the CH0RXDAT register, the SCL will be released for
generation of SCL transmission clock. An external device
can continue sending the next byte of data to NT68F62.
Refer to Figure 15.7 for the timing diagram. The user must
respond to a NAK signal in advance to stop the
transmission. Before the last two bytes of data are
received, the user should respond with a 'NAK' signal.
Then, the system will send out a 'NAK' bit after receiving
the last byte of data and enact the 'STOP' condition to
notify the slave that current transmission is terminated.
The INTTX0 on the WRITE mode: The external device
reads data from NT68F62. During an INTTX0 interrupt, the
system will load new data (that the user has already put
into the internal shift register) from the CH0TXDAT register
and continue sending out this new data. After this new
loading data has been shifted out by every SCL clock, the
system will request the user to put the next byte of data into
the CH0TXDAT register.
If both of the shift register and the CH0TXDAT register are
empty and the user still cannot load data into the
CH0TXDAT register, the NT68F62 system will let SCL pin
keep ‘LOW’ and wait the another new data after receiving
the acknowledgment bit from external device.
If SCL is held low by the system, and the user has put one
new byte of data into the CH0TXDAT register, the SCL will
be released for generation of SCL transmission clock. At
this time, the system will load this byte of data into the shift
register and generate an INTTX0 interrupt again to remind
the user to put the next byte into the CH0TXDAT register.
Refer to Figure 15.8 for the timing diagram.
Repeat start condition: If the user clears the
to '0' in the ' WRITE' operation, the system will send out a
'Repeat Start'. Notice that if the slave device does not
release the SCL and SDA lines, the system can not send
out a 'REPEAT START condition.
SCL baud rate selection: There are three Baud Rate bits for
users to select one of eight clock rates on the SCL line.
After a system reset, the default value of these Baud Rate
bits (DDC2BR0-2) are '111'.
RSTART
bit
43
Page 44

NT68F62
DDC2BR2 DDC2BR1 DDC2BR0 Baud Rate
0.00 0.00 0.00 400K
0.00 0.00 1.00 200K
0.00 1.00 0.00 100K
0.00 1.00 1.00 50K
1.00 0.00 0.00 25K
1.00 0.00 1.00 12.5K
1.00 1.00 0.00 6.25K
1.00 1.00 1.00 3.125K
SCL
SDA
(external device
putting data)
SDA
(NT68F62)
INTRX
START
wait
R/W
1 2 3 4 5 6 7 8
A
DATA
MODE = 0
Wait for user to put calling address into TXDAT buffer
ADDRESS
If user does not read out this byte data from RXDAT buffer,
the shift register will wait after receiving next byte data
Figure 15.7. DDC2B+ MASTER READ Mode Timiing
wait
9
1 2 3 4 5 6 7 8
DATA
If user read out first byte data from RXDAT buffer,
system will respond ACK, NAK or REPeat START
A
Before user reads out this byte data from RXDAT buffer,
he can set TXACK = 1 to terminate communication
9
1 2 3 4 5 6 7 8
A
wait
9
DATA
STOP
A
44
Page 45

NT68F62
SCL
SDA
(external device)
SDA
(NT68F62)
INTTX
System will wait if user didn't send out the first byte
data. As user loaded one byte data into TXDAT buffer,
system will latch to shift register and send out MSB bit
right away.
wait
MODE = 0
wait for user putting calling address into TXDAT buffer
START
1 2 3 4 5 6 7 8 9
ADDRESS
wait
R/W
A
1 2 3 4 5 6 7 8 9
A
After sending out first byte data, user will get another
INTTX to put next byte data into TXDAT buffer,
If user does not send out the second byte data, the
system will wait again after shifted out first byte data.
DATA DATA
wait
A
1 2 3 4 5 6 7 8 9
If user wants to terminate this communication,
he can set MODE = 1 to send out STOP condition
or clear RSTART = 0 to send out REPEAT START
Figure 15.8. DDC2B+ MASTER WRITE Mode Timing
wait
A
STOP
45
Page 46

NT68F62
Control Register:
Addr Register INIT Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0 R/W
Control Register for Polling Interrupt Groups
$0017 IRQPOLL 00H
$0018 IENMI 00H
$0019 IEIRQ0 00H
$001A IEIRQ1 00H
$001B IEIRQ2 00H
$001D IRQ1 00H
― ― ― ― ― ―
― ― ― ― ― ―
― ― ― ― ―
Control Registers of Interrupt Enable
― ― ― ― ― ―
― ―
― ―
― ― ― ― ―
Control Registers for Polling Interrupt Requests
― ―
― ―
― ―
― ―
― ― ― ―
― ― ― ―
Control Register for DDC1/2B+ of Channel 0
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 W
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 W
INTS0 INTA0 INTTX0 INTRX0 INTNAK0 INTSTOP0 R $001C IRQ0 00H
CLRS0 CLRA0 CLRTX0 CLRRX0 CLRNAK0 CLRSTOP0 W
INTS1 INTA1 INTTX1 INTRX1 INTNAK1 INTSTOP1 R
CLRS1 CLRA1 CLRTX1 CLRRX1 CLRNAK1 CLRSTOP1 W
INTADC INTV INTE1 INTMR R $001E IRQ2 00H
CLRADC CLRV CLRE1 CLRMR W
IRQ2 IRQ1 IRQ0 R
INTV INTE1 INTMR W
INTE0 INTMUTE R $0016 NMIPOLL 00H
CLRE0 CLRMUT
E
INTE0 INTMUTE W
W
$0021 CH0ADDR A0H ADR7 ADR6 ADR5 ADR4 ADR3 ADR2 ADR1
$0022 CH0TXDAT 00H TX7 TX6 TX5 TX4 TX3 TX2 TX1 TX0 W
$0023 CH0RXDAT 00H RX7 RX6 RX5 RX4 RX3 RX2 RX1 RX0 R
$0024 CH0CON E0H
$0025 CH0CLK FFH
$0026 CH1ADDR A0H ADR7 ADR6 ADR5 ADR4 ADR3 ADR2 ADR1
$0027 CH1TXDAT 00H TX7 TX6 TX5 TX4 TX3 TX2 TX1 TX0 W
$0028 CH1RXDAT 00H RX7 RX6 RX5 RX4 RX3 RX2 RX1 RX0 R
$0029 CH1CON E0H
$002A CH1CLK FFH
ENDDC
ENDDC
MD1/2
― ―
MODE
MD1/2
― ―
MODE
MRW
Control Register for DDC1/2B+ of Channel 1
MRW
―
SRW
RSTART
―
SRW
RSTART
START STOP
START STOP
― ―
START STOP
START STOP
― ―
―
― ― ―
DDC2BR2 DDC2BR1 DDC2BR0 W
―
DDC2BR2 DDC2BR1 DDC2BR0 W
TXACK
TXACK
― ―
―
―
―
―
W
W
R
W
W
R
46
Page 47

NT68F62
Master Receiver
Reset Buffer Index
Last Comm,
is Repeat Start?
Yes
No
Just Recv.
One Byte Data?
Yes
After Recv. Data
Send Repeat Start?
No
Send NO_ACK
Set Last Byte Flag
Send Address
Open INTTX INTNAK
No
No
Yes
ENDDC = 0
Send Address
Send Repeat Start
set last byte flag
Open INTRX & INTNAK
MODE = 0
Send Address
Open INTTX & INTNAK
No
Just Recv.
One Byte Data?
Yes
After Recv. Data
Send Repeat Start?
No
ENDDC = 0
Send NO_ACK
Set Last Byte Flag
Yes
ENDDC = 0
Send Address
Send Repeat Start
Set Last Byte Flag
Open INTTX & INTNAK
Wait INT
Recev. Over?
Return
Yes
No
Figure 15.9. Master Receiver Operation
Master transmitter
Reset buffer index
Last Comm,
is Repeat Start?
Yes
Send Address
Send Repeat Start
Open INTTX INTNAK
Wait INT
Trans. Over?
Yes
No
MODE = 0
Send Address
No
Open INTTX & INTNAK
Return
Figure 15.10. Master Transmitter Operation
47
Page 48

NT68F62
Interrupt
IRQ0/1 Group
Service Routine
Need
Polling
INTRX?
Yes
INTRX ?
Yes
last byte
data ?
Yes
Read One Byte
Data From
CH0RXDATReg.
Receiver Over
close INT interrupt
No
No
No
CH0RXDATReg.
Open INTRX & INTNAK INT
Last two
byte data?
Yes
send repeat
start?
Yes
Send repeat start
set last byte flag
Read One Byte
Data From
No
No
Send repeat start
set last byte flag
Read One Byte
Data From
CH0RXDATReg.
Need
Polling
INTTX?
Yes
INTTX?
Yes
Last byte
Trans.?
Yes
send repeat
start?
Yes
Send repeat start
Trans. over
close INT interrupt
No
No
No
No
Write 1 to MODE bit
(system send out a STOP)
Open INTRX & INTNAK INT
Put next byte data
into
CH0TXDATReg.
Need
No
Polling
INTNAK?
yes
Calling
Address?
No
yes
No
Yes
INTNAK?
No Slave Device Exist
System will send outSTOP &
set MODE bit to 1 automatically
Other interruptProcess
or Have someerror
Transmission failed
Write 1 to MODE bit
(system send out a STOP)
Return
Figure 15.11. Master Mode INT Operation
48
Page 49

User Referenced Flow Chart
Comparison With NT68P61A
Item NT68P61A Status NT68F62 Status Notes
Maximum ROM Size 24K Bytes 32K Bytes
RAM Size 256 Bytes 512 Bytes
NT68F62
PWM Channel 14 channels
5V & 12V Open Drain O/P
PWM Channel Refresh
Rate
A/D Converter Channel 2 channels 4 channels 6 bit resolution
V Counter Bit No. 12 Bits
H Interval 8.192 ms 16.384 & 32.768 ms
Auto Mute X O
Free Run Freq. 2 sets 5 sets
Self Test Pattern X O 2 self test patterns
IIC Bus Channel 1 channel 2 channels
IIC Bus Baud Rate Max 100KHz Max 400KHz
IIC Mode Supported DDC1/2B DDC1/2B+
External Interrupt 1 set 2 sets
NMI Interrupt X O
31.25 KHz 62.5 KHz
(handle Vsync freq. down
to 30.5Hz)
13 channels
5V Open Drain O/P Only
14 Bits
(handle Vsync freq. down
to 7.6Hz)
Interrupt Trigger Edge
Programmable
MASK ROM option 24K 32K
X O
49
Page 50

NT68F62
DC Electrical Characteristics
(VDD = 5V, TA = 25°C, Oscillator freq. = 8MHz, Unless otherwise specified)
Symbol Parameter Min. Typ. Max. Unit Conditions
IDD Operating Current 20 mA No Loading
V
Input High Voltage 2 V P00-P07, P12-P16,
IH1
P20-P27, P40, P41
RESET
V
Input High Voltage 3 V SCL0/1, SDA0/1,P10, P11, P30, P31 pins
IH2
V
Input Low Voltage 0.8 V P00-P07, P12-P16,
IL1
, HALFHI INTE0, INTE1
P20-P27, P40, P41
RESET
V
Input Low Voltage 1.5 V SCL0/1, SDA0/1, P10, P11 P30 ,P31 pins
IL2
IIH Input High Current -200 -350
P00-P07, P10-P16,
µA
, HALFHI, INTE0, INTE1
P20-P27, P40,P41
VSYNCI, HSYNCI, HALFHI,
=2.4V);
(VIH
V
Output High Voltage 2.4 V P00-P07, P10-P16, P40,
OH1
P41 (I
= -100µA)
OH
VSYNCO, HSYNCO (IOH
HALFHO (I
= -4mA)
OH
PATTERN, P20-P27 (IOH
RESET
= -4mA)
= -10mA)
V
Output High Voltage
OH2
5 V External applied voltage
(DAC0-DAC12)
VOL Output Low Voltage 0.4 V P00-P07, P10-P16, P40,
P41, DAC0-12 (IOL
SCL0/1, SDA0/1 (I
VSYNCO, HSYNCO (IOL
HALFHO (I
= 4mA)
OL
PATTERN, P20-P27 ( I
ROL Pull Down Resistor ( RESET) 25 50
R
Pull up Resistor
OH1
11 22 33
KΩ
KΩ
(INTE0, INTE1)
R
Pull up Resistor
OH2
11 22 33
KΩ
(PORT0, PORT1, & PORT4)
VIH Input High Voltage 2.2 V
HSYNCI,VSYNCI
VIL Input Low Voltage 1.2 V
V
Input Jitter Low Voltage 1.6 2.0 V HSYNCI
jitterH
V
Input Jitter High Voltage 1.0 1.4 V HSYNCI
jitterL
= 4mA)
= 5mA)
OL
= 4mA)
OL
= 10mA)
50
Page 51

NT68F62
HSI
V
V
jitterH
= 1.8V
V
jitterL
= 1.2V
= 2.2V
IH
VIL = 0.8V
HSO
51
Page 52

NT68F62
AC Electrical Characteristics (V
DD
= 5V, TA = 25°C, Oscillator freq.= 8MHz, unless otherwise specified)
Symbol Parameter Min. Typ. Max. Unit Conditions
Fsys System Clock 8 MHz
t
A/D Conversion Time 750
CNVT
µs
Voffset A/D Converter Error 1 LSB
Vlinear A/D Input Dynamic Range of
1.5 3.5 V
Linearity Conversion
t
The Delay Time of Vsync input
DELAY
and Vsync output
t
Reset Pulse Width Low 2 t
RESET
Fvsync Vsync Input Frequency 8 25K Hz t
t
Vsync Input Pulse Width 8 300
VPW
Fhsync Hsync Input Frequency 30 120 KHz t
t
Maximum Pulse Width of Hsync
HPW1
20 ns Composite sync with fixed
delay (Refer Figure 13.5)
CYCLE
t
CYCLE
VSYNC
= 2/ Fsys
= 1/Fvsync
µs
= 1/Fhsync
HSYNC
0.25 7
µs
Input High (Positive Polarity)
t
Minimum Pulse Width of Hsync
HPW2
9.125
µs
Input Low (Positive Polarity)
t
Counting Deviation of Base
ERROR1
1
µs 1µs clock source
Timer
t
Counting Deviation of Base
ERROR2
1 ms 1ms clock source
Timer
52
Page 53

DDC1 Mode
Symbol Parameter Min. Typ. Max. Unit Conditions
t
VPW
Fvsync
t
DD
t
MODE
SCL
Vsync High Time
Vsync Input Frequency
Data Valid
Time for Transition to DDC2B
Mode
t
DD
0.50
32
200
300
25K
500
500
µs
Hz
ns
ns
t
VSYNC
=1/Fvsync
t
MODE
NT68F62
SDA
VSYNC
Composite
Hsync Input
Extracted
Vsync Output
t
Bit 0 Null Bit Bit 7 Bit 6
VPW
●
●
t
HPW2
t
HPW1
DELAY
DELAY
t
DELAYDELAY
●
53
Page 54

DDC2B+ Mode
Symbol Parameter Min. Typ. Max. Unit
f
SCL
SCL Clock Frequency
400
NT68F62
KHz
t
BUF
tHD; STA Hold Time for START Condition
t
LOW
t
HIGH
tSU; STA Set-up Time for a Repeated START Condition 1.3
tHD; DAT Data Hold Time 200
tSU; DAT Data Set-up Time 300
t
R
t
F
tSU; STO Set-up Time for STOP Condition
SDA
Bus Free Between a STOP and START Condition
LOW Period of the SCL Clock 1.3
HIGH Period of the SCL Clock 0.8
Rising Time of Both SDA and SCL Signals
Falling Time of Both SDA and SCL Signals
BUF
t
4.7
0.8
0.80
1
µs
300
µs
µs
µs
µs
µs
ns
ns
ns
µs
F
t
HIGH
t
54
START
tHD; STA
tSU; STA
SU
t
; STO
STOP
R
LOW
t
t
SCL
tHD; STA tSU; DAT
STOP START
tHD; DAT
Page 55

Ordering Information
Part No. Packages
NT68F62 40L P-DIP
NT68F62U 42L S-DIP
NT68F62
55
Page 56

Package Information
P-DIP 40L Outline Dimensions
E1
NT68F62
unit: inches/mm
D
2140
1
S
AL
A2
B
B1
20
A1
Base Plane
Seating Plane
e1
a
E
C
eA
Symbol Dimensions in inches Dimensions in mm
A 0.210 Max. 5.33 Max.
A1 0.010 Min. 0.25 Min.
A2 0.155±0.010 3.94±0.25
B 0.018 +0.004 0.46 +0.10
B1 0.050 +0.004 1.27 +0.10
C 0.010 +0.004 0.25 +0.10
D 2.055 Typ. (2.075 Max.) 52.20 Typ. (52.71 Max.)
E 0.600±0.010 15.24±0.25
E1 0.550 Typ. (0.562 Max.) 13.97 Typ. (14.27 Max.)
e1 0.100±0.010 2.54±0.25
L 0.130±0.010 3.30±0.25
α 0° ~ 15° 0° ~ 15°
eA 0.655±0.035 16.64±0.89
S 0.093 Max. 2.36 Max.
-0.002 -0.05
-0.002 -0.05
-0.002 -0.05
Notes:
1. The maximum value of dimension D includes end flash.
2. Dimension E1 does not include resin fins.
3. Dimension S includes end flash.
56
Page 57

Package Information
S-DIP 42L Outline Dimensions
42
pin 1 index
E
NT68F62
unit: inches/mm
D
22
1
Z
AL
A2
b1
b
e
21
A1
Base Plane
Seating Plane
M
E
C
e1
MH
Symbol Dimensions in inches Dimensions in mm
A 0.200 Max. 5.08 Max.
A1 0.020 Min. 0.51 Min.
A2 0.157 Max. 4.0 Max.
b 0.051 Max. 1.3 Max.
0.031 Min. 0.8 Min.
b1 0.021 Max. 0.53 Max.
0.016 Min. 0.40 Min.
c 0.013 Max. 0.32 Max.
0.010 Min. 0.23 Min.
(1)
D
1.531 Max. 38.9 Max.
1.512 Min. 38.4 Min.
(1)
E
0.551 Max. 14.0 Max.
0.539 Min. 13.7 Min.
e 0.070 1.778
e1 0.600 15.24
L 0.126 Max. 3.2 Max.
0.114 Min. 2.9 Min.
ME 0.622 Max. 15.80 Max.
0.600 Min. 15.24 Min.
MH 0.675 Max. 17.15 Max.
0.626 Min. 15.90 Min.
w 0.007 0.18
(1)
Z
0.068 Max. 1.73 Max.
Notes:
1. Plastic or metal protrusions of 0.25 mm maximum per side are not included.
57
 Loading...
Loading...