

Datasheet MSK4202RHU, MSK4202KRHU, MSK4202KRHD, MSK4202HRHS, MSK4202RHD Datasheet (MSK)
...Page 1
ISO 9001 CERTIFIED BY DSCC
70 VOLT 10 AMP RAD-HARD
H-BRIDGE PWM MOTOR
4202RH
M.S.KENNEDY CORP.
4707 Dey Road Liverpool, N.Y. 13088 (315) 701-6751
DRIVER/AMPLIFIER
FEATURES:
User Adjustable PWM Frequency
70 Volt, 10 Amp Capability
Self-Contained Smart Lowside/Highside Drive Circuitry
Internal PWM Generation, Shoot-through Protection
Isolated Case Allows Direct Heatsinking
On Board 5Volt Rad-Hard Regulator
Available Fully Screened To MIL-PRF-38534 Class K and Class H
Total Dose Rated to 100K RAD
Logic Level High Side Enable Control
Logic Level Disable Input
DESCRIPTION:
The MSK 4202RH is a radiation hardened complete H-Bridge hybrid intended for use in DC brushed motor control
applications or Class D switchmode amplification in space or other severe operating environments. The design will exhibit
high resistance to Single Event Effects (SEE), Single Event Gate Rupture (SEGR), total dose up to 100K RAD and neutron
tolerance for military applications. All of the drive/control circuitry for the lowside and highside switches are internal to the
hybrid, as well as a +5V linear regulator. The PWM circuitry is internal as well, leaving the user to only provide an analog
signal for the motor speed/direction, or audio signal for switchmode audio amplification. The MSK 4202RH is packaged in
a space efficient isolated 18 pin power package available in three lead form configurations that can be directly connected
to a heatsink.
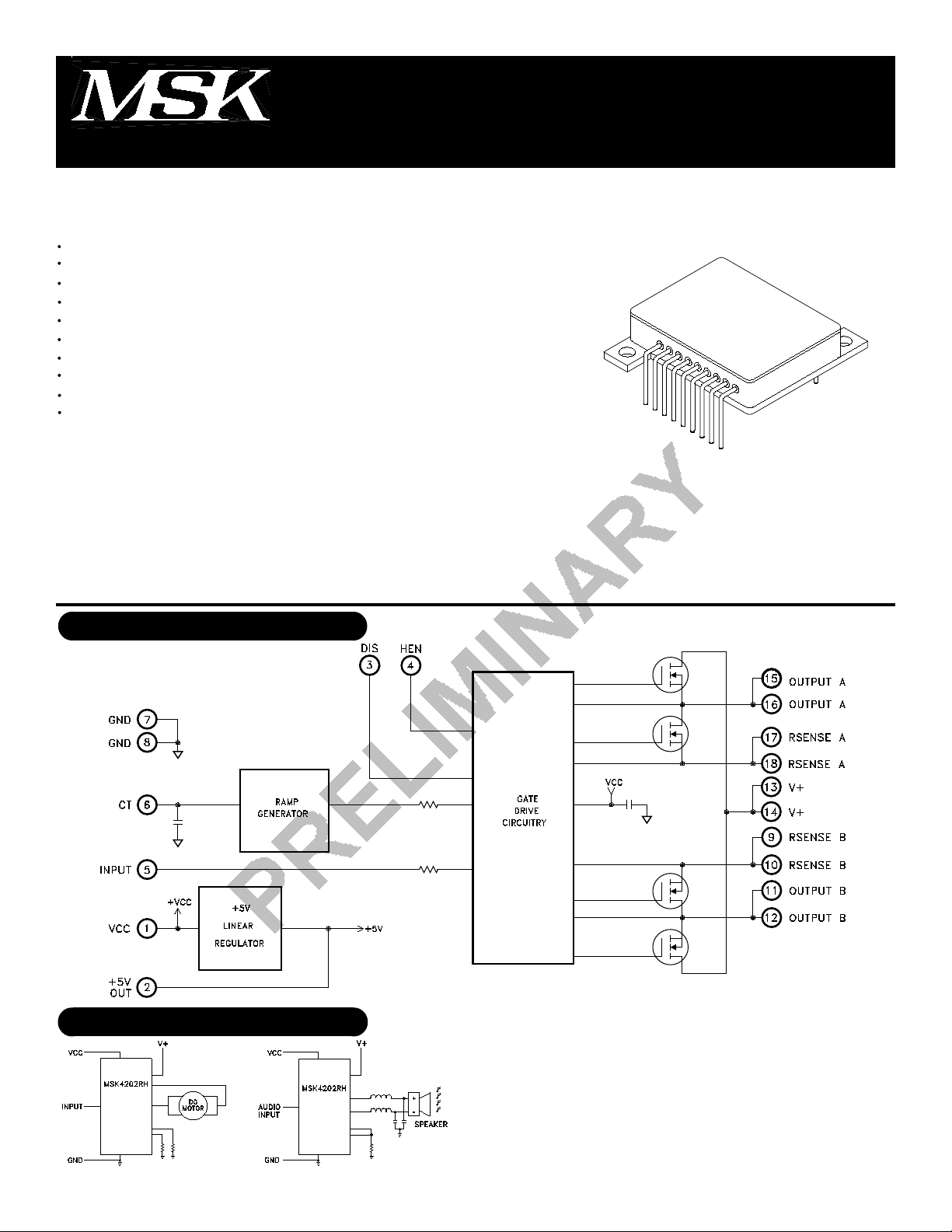
EQUIVALENT SCHEMATIC
MIL-PRF-38534 QUALIFIED
CERTIFIED TO CLASS K
TYPICAL APPLICATIONS
1
Rev. A 5/00
Page 2
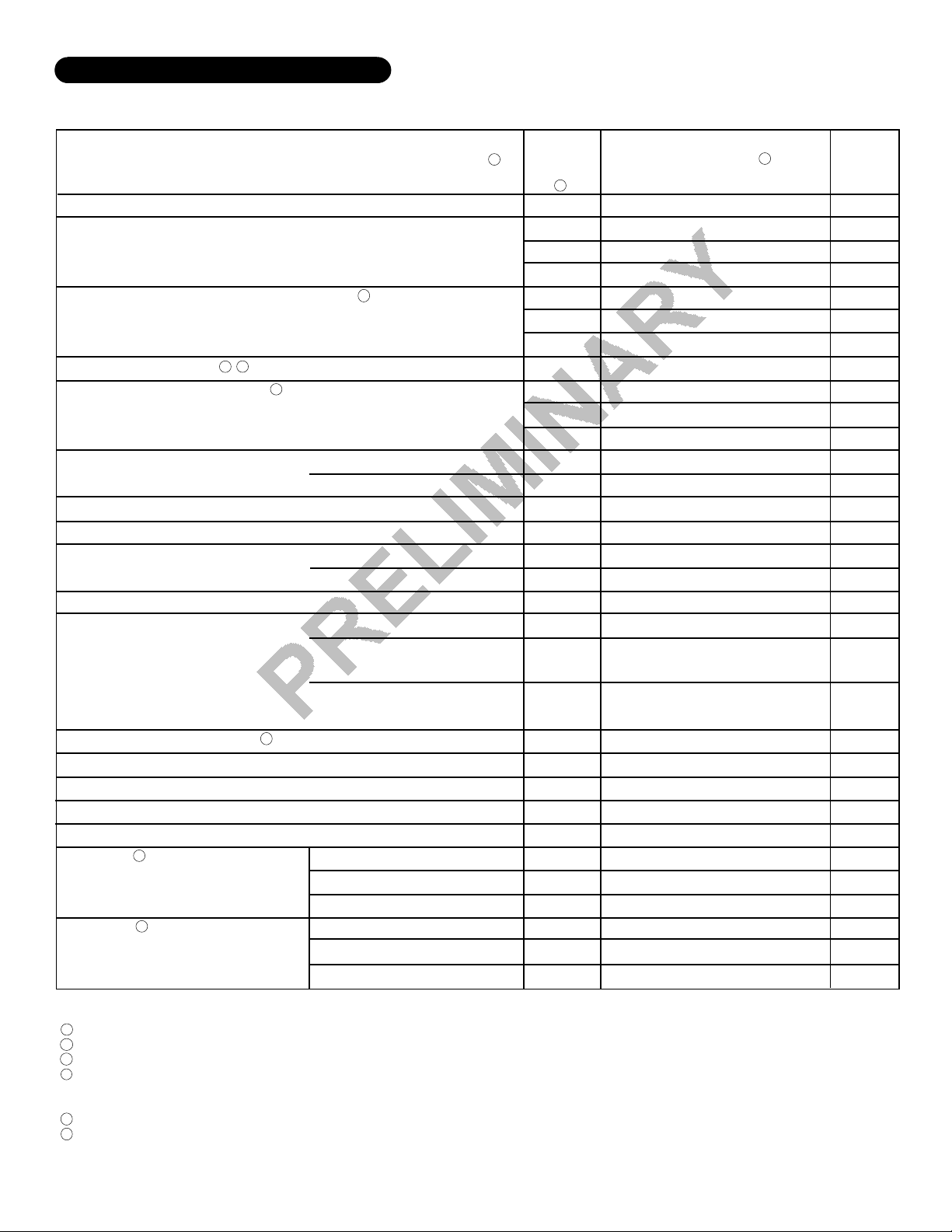
ELECTRICAL SPECIFICATIONS
Parameter
OUTPUT CHARACTERISTICS
VDS(ON) Voltage (Each MOSFET)
Instantaneous Forward Voltage, Each MOSFET
(Intrinsic Diode)
2
RDS (ON) each mosfet
Leakage Current, Each MOSFET
PWM Frequency
Vcc SUPPLY CHARACTERISTICS
Quiescent Current
+5V OUT
OUTPUT DUTY CYCLE
SWITCHING CHARACTERISTICS
Rise-Time
Fall-Time
Dead-Time
LOGIC CONTROL INPUTS
DIS Input
HEN Input
2
2
6
VIN=5V
VIN=OV
2
2
Output A=100% Duty Cycle High
Output B = 0% Duty Cycle Low
Output A=0% Duty Cycle Low
Output B = 100% Duty Cycle High
Test Conditions
ID=10A
2
IS=10A
ID =10A TC =125°C
V+=70V
CT=N/C
CT=300pF TO GND
VIN=2.5V
IOUT=0mA
IOUT=100mA
VIN=2.5VDC Both Outputs
RL=1K A to B
RL=1K A to B
RL=1K A to B
Input Voltage LO
Input Voltage HI
Input Current (High or Low)
Input Voltage LO
Input Voltage HI
Input Current (High or Low)
1
Subgroup
Group A
4
1
2
3
1
2
3
-
1
2
3
4,5,6
4,5,6
1,2,3
1,2,3
1,2,3
4,5,6
7
7
-
-
-
1,2,3
1,2,3
1,2,3
1,2,3
1,2,3
1,2,3
Min.
-
-
-
-
-
-
-
-
-
-
40
TBD
-
4.9
4.75
40
-
-
-
-
-
-
2.0
-
-
2.0
-
MSK 4202RH
Typ.
0.5
1.0
0.2
TBD
TBD
TBD
0.075
25
100
25
45
20
20
5.0
5.0
50
Verify
Verify
75
350
100
-
-
±100
-
-
±100
3
3030
30
3030
Max.
1.0
2.0
1.0
1.8
1.9
1.8
0.1
50
500
50
50
TBD
TBD
5.1
5.25
60
-
-
TBD
TBD
-
0.8
-
±250
0.8
-
±250
Units
V
V
V
V
V
V
Ω
uA
uA
uA
KHz
KHZ
mA
V
V
%
P/F
P/F
nS
nS
nS
V
V
uA
V
V
uA
NOTES:
VCC=12V, V+=28V, RSENSE A,B=Ground, CT=N/C, DIS=OV, HEN=N/C unless otherwise specified
1
Guaranteed by design but not tested. Typical parameters are representative of actual device performance but are for reference only.
2
Devices shall be 100% tested to subgroups 1,2,3,4, and 7. Subgroup 5 and 6 testing available upon request.
3
Subgroup 1,4,7 TA=TC= +25°C
4
2,5 TA=TC= +125°C
3,6 TA=TC= -55°C
Industrial grade devices shall be 100% tested at 25°C only.
5
The internal on resistance is for the die only. This should be used for thermal calculations only.
6
2
Rev. A 5/00
22
Page 3

ABSOLUTE MAXIMUM RATINGS
V+
High Voltage Supply
VCC
Logic Supply
IOUT
Continuous Output Current
IPK
Peak Output Current
VOUT
Output Voltage Range
IOUT
(+5V Regulator)
VIN
Input Voltage
VIN
Logic Input Voltage
○○○○○○○○○○○○○○○○
○○○○○○○○○○○○○○○○○○○
○○○○○○○○○○○
○○○○○○○○○○○○○○○
GND-2V min. to V+ max.
○○○○○○○○○○○○○○○○
○○○○○○○○○○○○○○○○○○
○○○○○○○○○○○○
APPLICATION NOTES
MSK 4202RH PIN DESCRIPTIONS
70V
16V
10A
23A
500mA
5.5V
OV to TBD
TST
Storage Temperature Range
TLD
Lead Temperature Range
(10 Seconds)
TC
Case Operating Temperature
TJ
Junction Temperature
θJc
Thermal Resistance
(Output FETS)
○○○○○○○○○○○○○○○
(+5Vout Regulator)
○○○
-65°C to +150°C
○○○○○○○○○○
○○○
-55°C to +125°C
○○○○○○○○○○○○
○○○○○○○○○○○○○
300°C
+175°C
2.0°C/W
12°C/W
VCC - Is the low voltage supply for powering internal
logic and drivers for the lowside and highside MOSFETS.
The supplies for the highside drivers are derived from this
voltage. The +5V regulator also gets its supply voltage
from this pin.
V+ - Is the high voltage H-bridge supply. The MOSFETS
obtain the drive current from this supply pin. The voltage
on this pin is limited by the drive IC. The MOSFETS are
rated at 100 volts. Proper by-passing to GND with suffi-
cient capacitance to suppress any voltage transients, and
to ensure removing any drooping during switching, should
be done as close to the pins on the hybrid as possible.
OUTPUT A - Is the output pin for one half of the bridge.
Increasing the input voltage causes increasing duty cycles
at this output.
OUTPUT B - Is the output pin for the other half of the
bridge. Decreasing the input voltage causes increasing
duty cycles at this output.
RSENSE A - Is the connection for the bottom of the A half
bridge. This can have a sense resistor connection to the
V+ return ground for current limit sensing, or can be con-
nected directly to ground. The maximum voltage on this
pin is ±2 volts with respect to GND.
RSENSE B - Is the connection for the bottom of the B half
bridge. This can have a sense resistor connection to the
V+ return ground for current limit sensing, or can be con-
nected directly to ground. The maximum voltage on this
pin is ±2 volts with respect to GND.
GND - Is the return connection for the input logic and
Vcc.
INPUT - Is an analog input for controlling the PWM pulse
width of the bridge. A voltage higher than 2.5V will pro-
duce greater than 50% duty cycle pulses out of OUTPUT
A. A voltage lower than 2.5V will produce greater than
50% duty cycle pulses out of OUTPUT B.
DIS - Is the connection for disabling all 4 output switches.
DIS high overrides all other inputs. When taken low, ev-
erything functions normally. An internal pullup to Vcc will
keep DIS high if left unconnected. This pin should be
grounded if not used.
HEN - Is the connection for enabling the high side output
switches. When taken low, HEN overrides other inputs
and the high side switches remain off. When HEN is high,
everything functions normally. An internal pullup to Vcc
will keep HEN high if left unconnected.
+5V OUT- Is the output of the internal linear regulator.
This pin should be bypassed to GND using a 4.7µF tanta-
lum capacitor and a 0.1µF ceramic capacitor . This pin
can supply up to 500mA of output current for powering
other external circuitry, depending on case temperature
and input voltage.
CT- Is a connection to the internal ramp generator. An
external capacitor can be connected from this pin to GND
to lower the PWM frequency. The following chart is use-
ful to determine a capacitor for a lower PWM frequency.
CT (pF)
TBD
TBD
TBD
TBD
TBD
TBD
TBD
PWM FREQUENCY
1KHz
10KHz
15KHz
20KHz
25KHz
35KHZ
40KHz
3
Rev. A 5/00
Page 4

TYPICAL SYSTEM OPERATION
This is a diagram of a typical application of the MSK 4202RH. The design Vcc voltage is +12 volts and should have a good low
ESR bypass capacitor such as a tantalum. The analog input can be an analog speed control voltage from a potentiometer, other
analog circuitry or by microprocessor and a D/A converter. This analog input gets pulled by the current control circuitry in the proper
direction to reduce the current flow in the bridge if it gets too high. The gain of the current control amplifier will have to be set to
obtain the proper amount of current limiting required by the system.
Current sensing is done in this case by a 0.1 ohm sense resistor to sense current from both legs of the bridge separately. It is
important to make the high current traces as big as possible to keep inductance down. The storage capacitor connected to the V+
and the hybrid should be large enough to provide the high energy pulse without the voltage sagging too far. A low ESR ceramic
capacitor or large polypropylene capacitor will be required. Mount capacitor as close to hybrid as possible. The connection between
GND and the V+ return should not be carrying any motor current. The sense resistor signal is common mode filtered as necessary
to feed the limiting circuitry for the microprocessor. This application will allow full four quadrant torque control for a closed loop
servo system.
A snubber network is usually required, due to the inductance in the power loop. It is important to design the snubber network to
suppress any positive spikes above 70V and negative spikes below -2V with respect to GROUND.
4
Rev.A 5/00
Page 5

MECHANICAL SPECIFICATIONS
ALL DIMENSIONS ARE ±0.01 INCHES UNLESS OTHERWISE LABELED
ORDERING INFORMATION
MSK4202 H RH U
LEAD CONFIGURATIONS
S= STRAIGHT; U= BENT UP; D= BENT DOWN
RADIATION HARDENED
SCREENING
BLANK= INDUSTRIAL; H= MIL-PRF-38534 CLASS H
K= MIL-PRF-38534 CLASS K
GENERAL PART NUMBER
The above example is a Military grade class H hybrid with leads bent up.
M.S. Kennedy Corp.
8170 Thompson Rd., Cicero, New York 13039-9393
Tel. (315) 699-9201
FAX (315) 699-8023
The information contained herein is believed to be accurate at the time of printing. MSK reserves the right to make
changes to its products or specifications without notice, however, and assumes no liability for the use of its products.
5
Rev.A 5/00
 Loading...
Loading...