

Page 1

D
ATA SHEET
O K I N E T W O R K P R O D U C T S
ML53812-2
H.100/H.110 CT Bus System Interface and
Time-Slot Interchange
January 2000
Page 2

Revision History
September 1999 320101-005 Previous Release
January 2000 320101-006 Timing tables altered on page 50:
“Local Clock and Frame Synchronization Timing”,
“Local Clock to CT Bus Clock Skew”, and
“Local Serial Stream Timing”
Timing diagram (Figure 11) atered on page 51:
“Local Clock and Frame Synchronization Timing”
Oki Semiconductor
Page 3

Contents
Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Pin Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
ML53812-2 176-Pin LQFP Pin Assignment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Signal descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Functional Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Local Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
CT Bus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Test Access Port . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Pin Continuity Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Analog PLL Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Microprocessor Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Analog PLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Slave PLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Master PLL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Reference Master . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Local Clock and Frame Sync . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Local Streams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
CT Bus Streams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
CT_D disable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Diagnostic Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
GPIO Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Message Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Microprocessor Address Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Command/Status Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Internal Address Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Configuration Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Device ID Registers (Read Only) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Stream Switch Routing Registers, AR = 1007h:1000h (Ch. 7:0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Stream Switch Connection Mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Transmit Switch Routing Registers, AR = 20ffh:2000h (Ch. 255:0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Receive Switch Routing Registers, AR = 30ffh:3000h (Ch. 255:0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Indirect Transmit Switch Parallel Access Registers, AR = 40ffh:4000h (Ch. 255:0) . . . . . . . . . . . . . . . . . . . 45
Indirect Receive Switch Parallel Access Registers, AR = 50ffh:5000h (Ch. 255:0) . . . . . . . . . . . . . . . . . . . . 45
Electrical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Absolute Maximum Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Recommended Operating Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
DC Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
AC Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
H.100/H.110 Bus Timing Specification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Clock Skew Requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
ML53812-2 Package specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
LQFP176 Package Outlines and Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
LQFP176 Mounting Pad Reference Measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Oki Semiconductor
Page 4

■ ■
–––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Oki Semiconductor
Page 5

ML53812-2
H.100/H.110CT Bus System Interface and Time Slot Interchange
1.0 DESCRIPTION
The ML53812-2 is a complete CT Bus system interface and time slot interchange device that provides a
cost-effective connection between a computer board’s telephony interfaces or signal processing resources
and the CT Bus. The ML53812-2 is an evolution of existing time-slot interchange ICs which offers seam-
less interoperability with SCbus devices.
A key element in computer telephony (CT) equipment is the auxiliary telecom bus. Most manufacturers
of high-capacity CT equipment have used one or more types of telecom buses to transport and switch
low-latency communications traffic between boards within the computer, bypassing the computer’s
main I/O and memory buses. To simplify the integration of devices that incorporate a telecom bus, the
Enterprise Computer Telephony Forum (ECTF) developed a standard bus (H.100/H.110 CT Bus™) that
provides compatibility modes with the most prevalent telecom buses today (SCbus™ and MVIP-90™),
as well as the capacity and feature set needed to support the next generation of high capacity CT servers.
The new CT Bus is embraced by Dialogic under the Signal Computing System Architecture™ (SCSA™)
umbrella of open standards for building interoperable CT systems.
The ML53812-2 runs in both 4 MHz and 8 MHz SCbus modes and supports the switching features
needed to integrate CT Bus devices with 4 MHz SCbus, 8 MHz SCbus, and 2 MHz MVIP-90 devices.
Because the H.100/H.110 CT Bus uses an identical switching model and clock speeds to that used for the
SCbus, developers have unparalleled flexibility in integrating these two types of devices, or in transition-
ing from one type to the other.
The ML53812-2 takes full advantage of the mandatory and optional features defined in the ECTF H.100
and H.110 interoperability specifications. It is a non-blocking 512 x 4096 time slot switch, interfacing up
to 512 ports on its parent device to any of the 4096 time slots on the new CT Bus. The high number of local
time slots available makes it easier to design high-density CT hardware, supporting as many as eight net-
work interfaces or 256 voice processing ports per chip.
This powerful chip is offered in an ultra slim profile (176-pin LQFP package, with a 24 mm x 24 mm x 1.4
mm body size) that makes it possible to mount the chip on either side of the board. The chip is fully soft-
ware programmable, and can be controlled by a variety of microprocessors, including Intel and Motorola
in both multiplexed and nonmultiplexed modes.
1Oki Semiconductor
Page 6

■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
2.0 FEATURES
• High functionality, low cost implementation of
the ECTF H.100/H.110 interoperability
specifications.
• Simple to connect PCI and cPCI™ board-level
circuitry to the universally accepted CT Bus™.
• Ultra slim profiling (176-pin LQFP package).
• Up to 512 programmable connections (256
transmit and 256 receive) to any of the 4096
time slots on the H.100/H.110 CT Bus.
• 8-channel stream-to-stream switching for data
stream connections at variable rates.
• Implementation of all compatibility signals for
complete interoperability with existing 4 MHz
SCbus™, 8 MHz SCbus, 2 MHz MVIP-90™
devices, and H-MVIP™.
• Provides reliable clock synchronization for
network-grade connection to digital network
interfaces.
2.1 Applications
• Supports all H.100/H.110 CT Bus clock fallback
features.
• Choice of constant or minimum switching
delay on a per time slot basis.
• 3.3 V I/O with 5 V tolerant input.
• Supports multiplexed and nonmultiplexed
address/data bus modes for both Intel and
Motorola microprocessors.
• Supports CT Bus optional message channel
interface, for both H.100 (PCI) and H.110 (cPCI)
applications.
• Supports a variety of framing formats via a
configurable local bus.
• Efficient microprocessor interface access to
Local and CT Bus data streams through direct
parallel access to/from transmit and receive
switch.
• Low and high-density computer telephony hardware (PCI and cPCI platforms)
• Enhanced service platforms
• Private branch exchanges (PBXs)
• Wireless base stations
• Internet telephony systems
• Digital trunking equipment
2 Oki Semiconductor
Page 7

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2
3.0 PIN CONFIGURATION
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
■
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
88
87
86
85
84
83
82
81
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
123456789
1011121314151617181920212223242526272829303132333435363738394041424344
Figure 1. ML53812-2 176-Pin LQFP Pin Configuration
3Oki Semiconductor
Page 8
■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
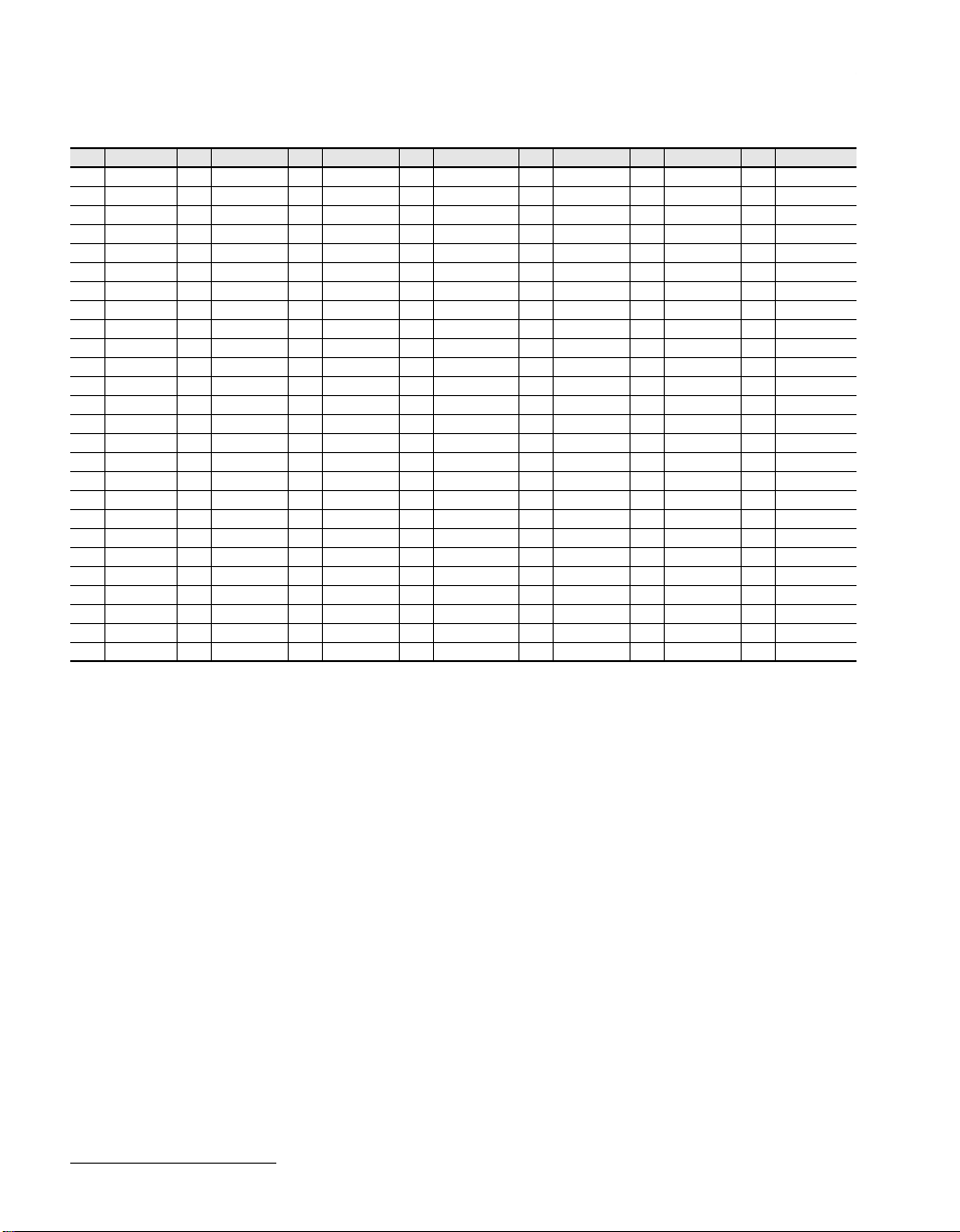
3.1 ML53812-2 176-Pin LQFP Pin Assignment
Pin Pin Name Pin Pin Name Pin Pin Name Pin Pin Name Pin Pin Name Pin Pin Name Pin Pin Name
1 VDDC 27 D_6 53 VSSO 79 VDDO 105 CT_D_9 131 CT_D_25 157 L_SI_6
2 ALE 28 A_6 54 APPL_CLKREF 80 CT_FRAME_B_N 106 CT_D_10 132 VSSC 158 L_SI_7
3 VDDO 29 D_7 55 APLL_TEST 81 VSSO 107 VDDO 133 VDDC 159 VSSO
4 CS_N 30 A_7 56 TMS 82 CT_NETREF_2 108 CT_D_11 134 CT_D_26 160 L_SO_0
5 RD_N 31 A_8 57 TCK 83 CT_NETREF_1 109 VSSO 135 VDDO 161 L_SO_1
6 WR_N 32 A_9 58 TRST_N 84 VDDO 110 CT_D_12 136 CT_D_27 162 L_SO_2
7 VSSO 33 NC 59 TDI 85 CT_C8_A 111 CT_D_13 137 VSSO 163 L_SO_3
8 RESET 34 VDDO 60 TDO 86 VSSO 112 VDDO 138 CT_D_28 164 VDDO
9 I_N 35 L_NETREF_0 61 VDDO 87 CT_FRAME_A_N 113 CT_D_14 139 CT_D_29 165 L_SO_4
10 INT 36 L_NETREF_1 62 MC_TXD 88 VSSC 114 VSSO 140 VDDO 166 L_SO_5
11 VDDO 37 L_NETREF_2 63 MC_RXD 89 VDDC 115 CT_D_15 141 CT_D_30 167 L_SO_6
12 D_0 38 L_NETREF_3 64 MC_CLK 90 CT_D_0 116 CT_D_16 142 CT_D_31 168 L_SO_7
13 A_0 39 VSSO 65 VSSO 91 VDDO 117 VDDO 143 VSSO 169 VSSO
14 D_1 40 L_NETREF_4 66 C16_NEG_N 92 CT_D_1 118 CT_D_17 144 GPIO_0 170 L_CLK_0
15 A_1 41 L_NETREF_5 67 C16_POS_N 93 CT_D_2 119 CT_D_18 145 GPIO_1 171 L_FS_0
16 VSSO 42 L_NETREF_6 68 VDDO 94 VSSO 120 VSSO 146 VDDO 172 L_CLK_1
17 D_2 43 L_NETREF_7 69 C4_N 95 CT_D_3 121 CT_D_19 147 GPIO_2 173 L_FS_1
18 A_2 44 VSSC 70 C2 96 CT_D_4 122 VDDO 148 GPIO_3 174 CT_D_DISABLE
19 D_3 45 VDDC 71 VSSO 97 VDDO 123 CT_D_20 149 VSSO 175 TEST
20 A_3 46 VDDO 72 SCLKX2_N 98 CT_D_5 124 VSSO 150 L_SI_0 176 VSSC
21 VDDO 47 APLL_VDDO 73 SCLK 99 VSSO 125 CT_D_21 151 L_SI_1
22 D_4 48 APLL_VDDC 74 VDDO 100 CT_D_6 126 CT_D_22 152 L_SI_2
23 A_4 49 APPL_PC 75 FR_COMP_N 101 VDDO 127 VDDO 153 L_SI_3
24 D_5 50 APPL_VCO 76 CT_MC 102 CT_D_7 128 CT_D_23 154 VDDO
25 A_5 51 APPL_VSSC 77 VSSO 103 CT_D_8 129 CT_D_24 155 L_SI_4
26 VSSO 52 APLL_VSSO 78 CT_C8_B 104 VSSO 130 VSSO 156 L_SI_5
[1]
1. In this document, signals ending with “_N” are “active low” (eg. CS_N). Note that in the H.100/H110 specification, active low is indicated with a
preceding forward slash (eg. /CS).
4 Oki Semiconductor
Page 9

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2
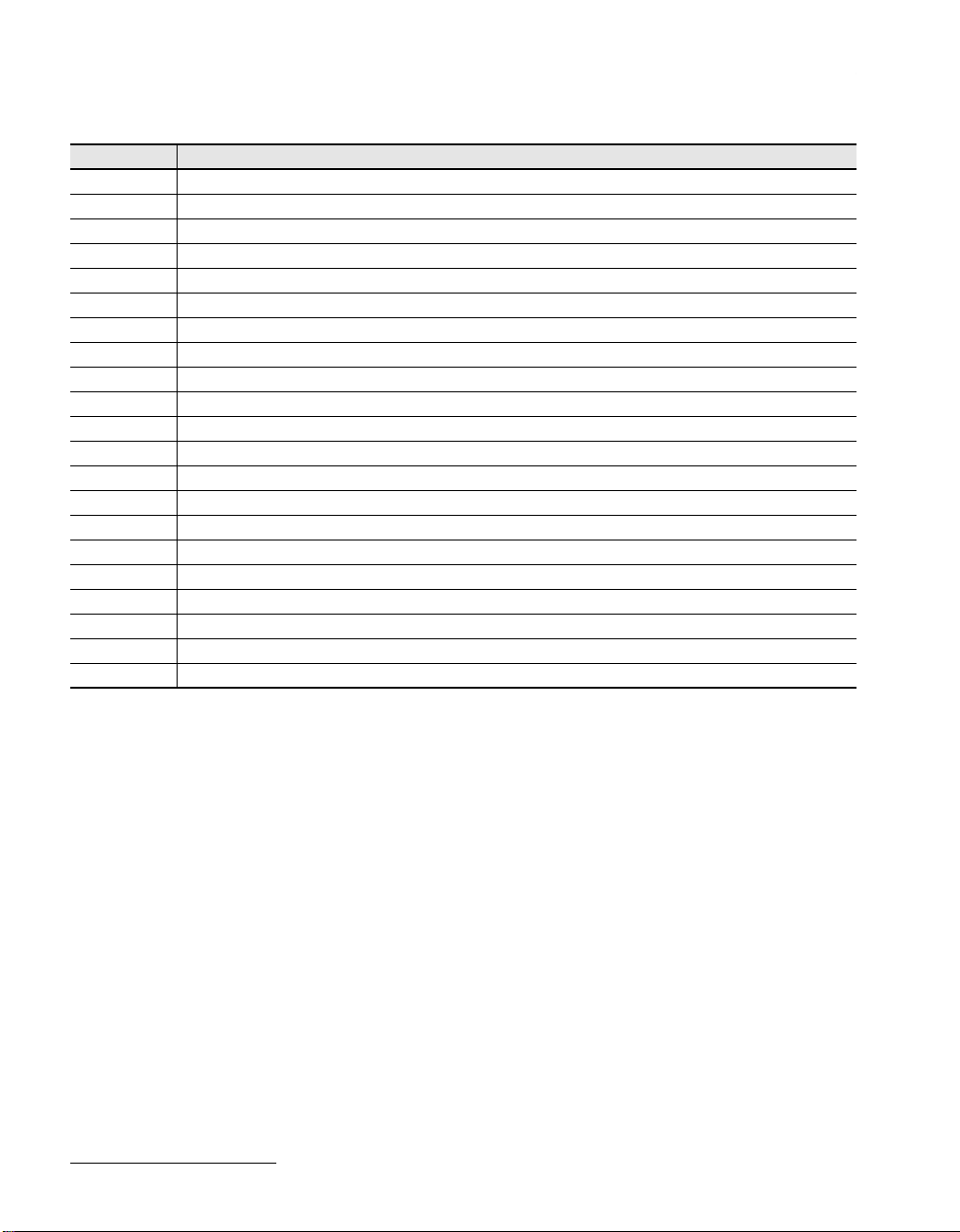
4.0 SIGNAL DESCRIPTIONS
Signal Description
Name
D_[7:0] Microprocessor Data Bus. (I/O, TTL Schmitt, 8 mA, 5V tolerant)
A_ [9:0] Microprocessor Address Bus. (Input, TTL Schmitt, 5V tolerant)
ALE (AS) Intel Bus Mode - Address Latch Enable. Motorola Bus Mode - Address Strobe. The Microprocessor Address Bus A[9:0] is latched
CS_N Chip Select. This active low signal selects the ML53812-2 for a microprocessor read or write operation. (Input, TTL Schmitt, 5V
RD_N (STRB_N) Intel Bus Mode - Microprocessor Bus Read. Motorola Bus Mode - Microprocessor Bus Strobe. (Input, TTL Schmitt, 5V tolerant)
WR_N (R/W_N) Intel Bus Mode - Microprocessor Bus Write. Motorola Bus Mode - Microprocessor Bus Read/Write signal.
RESET Reset. This active high input signal initializes the microprocessor interface, configuration, and routing registers. (Input, TTL
I_N (M) Microprocessor Bus Mode. When this input is low, Intel Bus Mode is selected. When this input is high, Motorola Bus Mode is
CT_D_DISABLE CT_D Global disable. (I/O, TTL Schmitt, 8 mA, 50 k Pull Up, 5V tolerant)
L_NETREF_[7:0] Local Network Reference [7:0] Input. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
L_SI_[7:0] Local bus Serial Input Data Input. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
MC_TXD Message Channel Transmit Data Input. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
APLL_CLKREF Analog PLL Clock Reference Input. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
APLL_VDDO +3.3 Volt Analog PLL I/O Power Supply
APLL_VDDC +3.3 Volt Analog PLL Core Power Supply
APLL_PC Analog PLL Phase Comparator Analog Output
APLL_VCO Analog PLL VCO Analog Input
APLL_VSSC Analog PLL Core Ground
APLL_VSSO Analog PLL I/O Ground
APLL_TEST Analog PLL Test Enable Input. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
TEST Test Select. This input enables the pin continuity test. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
TMS Test Access Port Mode Select. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
TCK Test Access Port Clock. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
TRST_N Test Access Port Reset. (active low). (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
TDI Test Access Port Data Input. (Input, TTL Schmitt, 50 k Pull Up, 5V tolerant)
INT Interrupt Output. (I/O, TTL Schmitt, 50 k Pull Up, 8 mA, 5V tolerant)
CT_D_[31:0] CT Bus Serial Data Streams. (I/O, PCI, 5V tolerant)
CT_FRAME_A_N CT Bus "A" Frame Sync. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
CT_C8_A CT Bus "A" 8 MHz Clock. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
CT_NETREF_1 CT Bus Network Reference 1. (I/O, PCI, 5V tolerant)
CT_NETREF_2 CT Bus Network Reference 2. (I/O, PCI, 5V tolerant)
CT_FRAME_B_N CT Bus "B" Frame Sync. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
CT_C8_B CT Bus "B" 8 MHz Clock. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
CT_MC CT Bus Message Channel. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
[1]
Description
internally on the falling edge of this signal. (Input, TTL Schmitt, 5V tolerant)
tolerant)
(Input, TTL Schmitt, 5V tolerant)
Schmitt, 5V tolerant)
selected. (Input, TTL Schmitt, 5V tolerant)
■
5Oki Semiconductor
Page 10
■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Signal Description
Name
FR_COMP_N Compatibility frame sync used by SCbus, MVIP-90, and H-MVIP. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
SCLK SCbus Clock. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
SCLKX2_N SCbus X2 Clock. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
C2 MVIP-90 2.048 MHz Clock. (I/O, TTL Schmitt, 6 mA, 5V tolerant)
C4_N MVIP-90 4.096 MHz Clock. (I/O, TTL Schmitt, 6 mA, 5V tolerant)
C16_POS_N H-MVIP 16.384 MHz Positive active low Clock. High to low transition on frame boundary. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
C16_NEG_N H-MVIP 16.384 MHz Negative active low Clock. Low to high transition on frame boundary. (I/O, TTL Schmitt, 24 mA, 5V tolerant)
L_CLK_1 Local bus Clock 1. (I/O, TTL Schmitt, 24 mA, 50 k Pull Up, 5 V tolerant)
L_FS_1 Local bus Frame Sync 1. (I/O, TTL Schmitt, 24 mA, 50 k Pull Up, 5V tolerant)
L_CLK_0 Local bus Clock 0. (I/O, TTL Schmitt, 24 mA, 50 k Pull Up, 5 V tolerant)
L_FS_0 Local bus Frame Sync 0. (I/O, TTL Schmitt, 50 k Pull Up, 24 mA, 5V tolerant)
L_SO_[7:0] Local bus Serial Output Data Streams. (I/O, TTL Schmitt, 50 k Pull Up, 8 mA, 5V tolerant)
MC_CLK Message Channel Clock Output. (I/O, TTL Schmitt, 50 k Pull Up, 6 mA, 5V tolerant)
MC_RXD Message Channel Receive Data Output. (I/O, TTL Schmitt, 50 k Pull Up, 6 mA, 5V tolerant)
GPIO_[3:0] General Purpose I/O ports. (I/O, TTL Schmitt, 24 mA, 50 k Pull Up, 5V tolerant)
TDO Test Access Port Data Output. (Output, 6 mA, 5V tolerant)
NC No Connect
VDDO +3.3 Volt I/O Power Supply
VSSO I/O Ground
VDDC +3.3 Volt Core Power Supply
VSSC Core Ground
1. Signals ending in “_N” are active low.
[1]
Description
6 Oki Semiconductor
Page 11

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2
5.0 FUNCTIONAL DESCRIPTION
The ML53812-2 has the following interfaces:
■
• Microprocessor Interface
• Local Serial Data In
• Local Serial Data Out
• Local Timing
Microprocessor
Interface
Local Serial
Data In
Local Serial
Data Out
Local Timing
APLL
Reference Clock
Configuration &
Routing Register
Internal Control
• Analog PLL Reference Clock
• CT Bus Timing
• CT Bus Serial Data
8 Channel
Stream Switch
256 x 4096
Transmit Switch
Local
Connect
4352 x 256
Receive Switch
Internal Timing
Slave Digital
PLL
Master
Digital PLL
Analog
PLL
131.072 MHz
Figure 2. Block Diagram
CT Bus Serial Data
CT Bus Timing
5.1 Local Bus
The local bus consists of up to eight serial input ports and eight serial output ports, totalling 512 possible
local bus connections to the CT Bus. The input and output ports can be configured independently as two
groups of four 2 Mb/s streams, two 4 Mb/s streams, or one 8 Mb/s stream. The chip includes two independent, configurable local clock and frame synchronization signals. The local clocks have configurable
polarity and frequency that can be set to 2 MHz, 4 MHz, 8 MHz, or 16 MHz regardless of local stream
data rate. The local frame syncs also have a configurable polarity and can be set to use one of three framing formats (early, straddle, or late).
To transfer data to and from the local bus, the ML53812-2 allows the user to select a minimum delay or
constant delay buffer mode on a per channel basis. In the minimum delay mode, the input-output buffer
transfer occurs on the next 2 Mb/s time slot boundary, reducing any potential channel delay for classic
voice processing applications. In the constant delay mode, the buffer transfer occurs at the frame boundary for bundling and proper switching of wide-band data, for data sent on the ISDN H channel.
7Oki Semiconductor
Page 12

■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
5.2 CT Bus
The ML53812-2 provides access to all 4096 CT Bus time slots. The upper 16 data lines run at 8 Mb/s,
while the lower 16 data lines can be configured, in groups of four, to run at 8 Mb/s, 4 Mb/s, or 2 Mb/s
for compatibility with SCbus and MVIP-90 devices.
The chip uses an internal analog phase locked loop (PLL) as a rate multiplier to produce a 131.072 MHz
internal clock locked to a variety of reference frequencies. This high frequency internal clock provides
fine grained correction steps (7.6 nS) for the master and slave digital PLLs. The main CT Bus network reference signal can be configured to run at 8 kHz, 1.544 MHz, or 2048 MHz. The timing for the CT Bus can
be configured to be derived from the local clock and frame sync signals to allow multiple chips to be connected to the CT Bus without overloading the reference clock line.
The ML53812-2 incorporates internal master digital PLL circuitry that is designed to meet the jitter attenuation, holdover and Maximum Time Interval Error (MTIE) requirements of 62411 Stratum 3,4 and 4E.
This enables the ML53812-2 to be well suited for developers of digital telephone network interfaces,
where reliable clock synchronization is critical. Because the circuitry is internal, board designers do not
have to add expensive or custom circuitry to support these types of environments.
The ML53812-2 also includes an 8-channel stream-to-stream switch to connect one CT Bus data stream to
another at the same or different data rates. This type of connection makes it possible for CT Bus compatible devices (such as SCbus and MVIP-90) to efficiently exchange data even though they operate at different rates. This stream switch enables switching between any of the 32 CT Bus data streams operating at
2, 4, or 8 Mb/s. Depending upon the data stream rates, the stream switch provides a minimum of 256 and
a maximum of 1024 unidirectional time slot connections. Stream switches in other ML53812-2 devices,
within a system, may be used simultaneously to increase switching capability.
5.3 Test Access Port
The current version of the ML53812-2 does not support IEEE 1149.1 Boundary Scan. The Test Access Port
on the ML53812-2 passes TDI through to TDO when TMS and TRST_N are both high which simplifiers
the transition to eventual Boundary Scan support. Drive TMS and TRST_N both low for normal operation.
5.4 Pin Continuity Test
For normal operation, the TEST pin is driven low. When the TEST pin is high, all pins except VDD, VSS,
NC, APLL_PC, APLL_VCO, TMS, TCK, TRST_N, TDI, TDO, TEST are sequentially "NAND’ed" with
ALE and output on TDO. This test allows each input pin to be toggled and a corresponding output to be
observed on the TDO pin to verify the proper connection of the ML53812-2 to a printed circuit board.
5.5 Analog PLL Test
For normal operation, the APLL_TEST pin is driven low.
5.6 Microprocessor Interface
Both Intel and Motorola microprocessor bus interfaces are supported. Drive I_N (M) low for Intel mode
and high for Motorola mode. Multiplexed addresses are latched on the falling edge of ALE (AS). If multiplexed address is not used, drive ALE (AS) high. Multiplexed address and data must be connected to
both A_ and D_ pins.
8 Oki Semiconductor
Page 13

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2
5.7 Analog PLL
The analog PLL is used to create an internal 131.072 MHz clock locked to one of several reference frequencies. The analog PLL reference signal is input on the APLL_CLKREF pin and should be a stable
clock typically
±
25 ppm. An external loop filter is required (see
Figure 3
).
■
0.01 µF
R2
100Ω
CI
R1
19 kΩ
APLL_PC
APLL_VCO
APLL_VSS
Figure 3. Analog PLL Loop Filter
5.8 Slave PLL
The slave PLL is used to generate all of the internal timing for the ML53812-2. Even when the ML538122 is enabled as master, the slave PLL is still in operation. The slave PLL is a fast tracking digital PLL operating at 131.072 MHz.
The slave PLL can be configured to lock to one of the following sources:
• CT_C8_A and CT_FRAME_A
• CT_C8_B and CT_FRAME_B
• SCLK and FR_COMP
• C2 and FR_COMP
• L_CLK_0 and L_FS_0
• L_CLK_1 and L_FS_1
5.9 Master PLL
The master PLL is used to generate timing for the CT Bus. The master PLL is a digital PLL operating at
131.072 MHz. When operating as primary master the PLL can lock to one of eight local network references, or one of two CT Bus network references. These reference signals may be 8 kHz, 1.536 MHz, 1.544
MHz or 2.048 MHz. When operating as secondary master the PLL locks to the primary CT Bus master.
The master PLL can be configured to automatically switch from secondary to primary in the event of a
CT Bus timing error.
The master PLL can be configured to drive either the CT Bus "A" or "B" signals as well as all of the compatibility clocks defined in the H.100/H.110 Specifications.
When operating as the primary master, the PLL provides jitter attenuation with a cut-off frequency of
1.25 Hz and a roll-off of 20dB per decade. When operating as the secondary master, the PLL is fast tracking.
When operating as the primary master, the PLL has a lock range of ±488 ppm (minus the tolerance of
APLL_CLKREF source). The maximum lock time is 3s. Holdover stability is 0.06 ppm, resulting in a
frame slip rate of 42/day, assuming no drift in APLL_CLKREF source, exceeding the 62411 Stratum 3
requirement of 255/day. During normal operation new holdover values are updated at 128ms intervals.
9Oki Semiconductor
Page 14

■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
To make an MTIE compliant reference switch, enable "Condition Master PLL reference", select the "Master PLL Reference", and configure the "Master PLL Mode " to normal.The master PLL will be locked to
the selected reference.
The following sequence will produce an MTIE-compliant reference switch:
1. Change the "Master PLL Mode" from Normal to Holdover. The master PLL can also be configured to
make this change automatically in the event of a master PLL error.
2. Change the "Master PLL Reference Select" to the new reference, or change the reference source of
CT_NETREF.
3. Change the "Master PLL Mode" back to Normal.
MTIE Specifications
ML53812-2
MTIE during rearrangement 100 ns 1 µs
Phase change slope 81 ns / 1.326 ms 81 ns / 1.326 ms
62411 Stratum 3 and 4E
5.10 Reference Master
CT_NETREF_1 and CT_NETREF_2 can be independently configured to output a reference signal to the
CT Bus selected from one of eight local network reference inputs. The local network references can be
passed through or divided by 192, 193, or 256.
5.11 Local Clock and Frame Sync
Two sets of local clock and frame sync are provided. A variety of clock frequencies, polarities, and framing formats may be selected to allow "glue less" local port interfacing. Each set of local clock and frame
sync may be configured separately. The frequency selection is independent of the local stream rate.
5.12 Local Streams
The local streams consist of up to eight serial input ports and eight serial output ports, defined as two
groups of 128 time-slots. Each group can be independently configured to operate as four 2 Mb/s streams,
two 4 Mb/s streams, or one 8 Mb/s stream.
Local Stream Time Slot to Channel Mapping
Local stream 8Mb/s stream rate time slot 127:0 4Mb/s stream rate time slot 63:0 2Mb/s stream rate time slot 31:0
L_SI_0,L_SO_0 channel 127:0 channel 63:0 channel 31:0
L_SI_1,L_SO_1 - channel 127:64 channel 63:32
L_SI_2,L_SO_2 - - channel 95:64
L_SI_3,L_SO_3 - - channel 127:96
L_SI_4,L_SO_4 channel 255:128 channel 191:128 channel 159:128
L_SI_5,L_SO_5 - channel 255:192 channel 191:160
L_SI_6,L_SO_6 - - channel 223:192
L_SI_7,L_SO_7 - - channel 255:224
10 Oki Semiconductor
Page 15

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2
5.13 CT Bus Streams
Connection to all 32 CT Bus streams is supported without restriction. The upper 16 streams run at 8Mb/s
while the lower 16 may be configured, in groups of four, to operate at 8Mb/s, 4Mb/s, or 2Mb/s.
5.14 CT_D disable
The user may disable all CT_D output streams in the event of a bus timing error. When enabled, an error
on the slave PLL reference source causes the CT_D streams to be tri-stated until an entire frame time
without errors has passed. The CT_D_DISABLE signal is provided to link multiple ML53812-2 devices.
5.15 Diagnostic Mode
Diagnostic mode tri-states all CT Bus signals while internally looping-back CT Bus outputs to inputs.
This mode allows a printed circuit board containing the ML53812-2 to be thoroughly tested without
causing CT Bus errors.
5.16 Interrupts
The ML53812-2 supports the following interrupt sources:
• CT Bus A Error
• CT Bus B Error
CT Bus A (CT Bus B) error is detected when CT_C8_A (CT_C8_B) rising edge does not occur within
35 ns of the expected time, relative to the previous period (see
Figure 4
) or when CT_FRAME_A_N
(CT_FRAME_B_N) low does not occur when expected. (See ECTF H.100/H.110 Specifications for
details on CT_C8_(A/B) and CT_FRAME_(A/B)_N signal timing.)
• SCbus Error
SCbus error is detected when SCLK does not transition at close to the expected frequency (C_[25:24]
determines the expected frequency) or FR_COMP_N low does not occur when expected. (See ECTF
H.100/H.110 Specifications for details on SCLK, SCLKx2, and FR_COMP_N signal timing.)
• MVIP Error
MVIP error is detected when C2 does not transition at close to 2 MHz, or FR_COMP_N low does not
occur when expected. (See ECTF H.100/H.110 Specifications for details on C2 and FR_COMP_N signal timing).
• Master PLL Out of Lock Error
Master PLL error is detected when the master PLL is not locked to the selected Reference defined by
C_[43:40].
• Frame Boundary
Frame Boundary interrupt is not an error condition, and occurs when the internal state machine
crosses a frame boundary.
• GPIO
GPIO interrupt occurs when one or more of the GPIO inputs match the programmed latch polarity,
defined by C_[167:136].
■
11Oki Semiconductor
Page 16

■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
The interrupts are both globally and individually maskable, and are signaled to the processor via the INT
pin (pin 10). The INT pin can be configured to operate as either push-pull or open drain, and its polarity
(active high or active low) is also selectable.
All of these interrupt latches have an individual enable/clear register and an individual interrupt mask
register associated with them.
Rising edge of CT_C8 occurring
after this limit will trigger an
interrupt (if enabled).
CT_C8_(A/B)
Expected Delay (Approx. 125 ns) Late Allowance (35 ns)
Figure 4. CT_C8_A and CT_C8_B Error Detection
5.17 GPIO Ports
Four general purpose input/output ports are provided. The ports may be individually configured to a
variety of modes and can also be used as interrupt sources. Possible uses of the GPIO ports would be controlling H.100/H.110 termination switches or implementing the SCbus CLKFAIL signal.
5.18 Message Channel
The ML53812-2 provides a complete interface between the CT_MC CT Bus signal and a local HDLC controller. This includes generation of MC_CLK as well as buffering of MC_TXD and MC_RXD.
12 Oki Semiconductor
Page 17

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2
6.0 REGISTERS
6.1 Microprocessor Address Map
With Direct Parallel Access Disabled (C_[96] = 0) (Default)
A_[2:0]
7h Reserved
6h Data Register 2 (DR_2)
5h Data Register 1 (DR_1)
4h Data Register 0 (DR_0)
3h Reserved
2h Address Register 1 (AR_1)
1h Address Register 0 (AR_0)
0h Command/Status Register
With Direct Parallel Access Enabled (C_[96] = 1)
A_[9:0]
3FFh:300h Direct Receive Switch Parallel Access Ch. 255:0
2FFh:200h Direct Transmit Switch Parallel Access Ch. 255:0
1FFh:008h Reserved
007h Reserved
006h Data Register 2 (DR_2)
005h Data Register 1 (DR_1)
004h Data Register 0 (DR_0)
003h Reserved
002h Address Register 1 (AR_1)
001h Address Register 0 (AR_0)
000h Command/Status Register
Register
Register
■
13Oki Semiconductor
Page 18

■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
6.2 Command/Status Register
D_[7:0]
0 Busy (Read Only)
1 Read Command (Write Only)
2 Write Command (Write Only)
3 Terminate Command (Write Only)
4 Reserved
5 Reserved
6 Reserved
7 Reset (Read/Write)
Definition
Busy (D_0) (Read Only)
This bit is set ("1") when a Command that requires synchronization with the ML53812-2's internal state machine has been initiated, and cleared ("0")
when the command has been completed.
For Commands that do not require synchronization this bit is always clear ("0").
The following commands require synchronization:
• Routing Memory Write command
• In-Direct Parallel Access Read or Write command
Read (D_1) (Write Only)
Setting this bit ("1") initiates a synchronized read of the register pointed to by the Address Register. When the Busy bit is clear ("0"), the contents of
the register to be read are available by reading the Data Register. It is NOT necessary to clear ("0") this bit after it has been set ("1").
Note: For "Reads" that do not require synchronization (all "Reads" except In-Direct Parallel Access Read) it is
not necessary to set this bit. The Data Registers can be read immediately after writing the Address Register.
Write (D_2) (Write Only)
Setting this bit ("1") initiates a write of the register pointed to by the Address Register. It is NOT necessary to clear ("0") this bit after it has been set ("1").
Terminate (D_3) (Write Only)
Setting this bit ("1") terminates a command that requires synchronization with the ML53812-2's internal state machine. The command in process is
completed asynchronously and the Busy bit is cleared. It is NOT necessary to clear ("0") this bit after it has been set ("1").
Reset (D_7) (Read/Write)
Setting this bit ("1") resets the ML53812-2 and initializes the Configuration and Routing Registers. This command is analogous to the function of the
RESET pin. Clearing this bit ("0") returns the ML53812-2 to normal operation, ready to be configured.
14 Oki Semiconductor
Page 19

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2
■
6.3 Internal Address Map
AR
0014h:0000h Configuration
00ffh:00fch Device ID
1007h:1000h Stream Switch Routing Ch. 7:0
20ffh:2000h Transmit Switch Routing Ch. 255:0
30ffh:3000h Receive Switch Routing Ch. 255:0
40ffh:4000h Indirect Transmit Switch Parallel Access Ch. 255:0
50ffh:5000h Indirect Receive Switch Parallel Access Ch. 255:0
1. AR is the concatenation of AR_1 and AR_0.
2. All other locations reserved (Read-back = 00, Write has no effect).
[1] [2]
Register
15Oki Semiconductor
Page 20

■
ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
6.4 Configuration Registers
Note: All "Reserved" configuration registers should be written "0".
Configuration Register Byte 0, AR = 0000h
DR_0
0 0 Diagnostic Mode
1 1 Test Mode
2 2 APLL Power-down Mode
3 3 APLL Bypass Mode
[7:4] [7:4] APLL CLKREF Frequency [3:0]
C Definition
Diagnostic Mode (C_ [0]) (Read/Write)
Set to 0 for normal operation
0
→
Diagnostic Mode Disabled
1
→
Diagnostic Mode Enabled (Default)
Test Mode (C_ [1]) (Read/Write)
Enables testing with the slave DPLL bypassed. Set to 0 for normal operation.
0
→
Test Mode Disabled (Default)
1
→
Test Mode Enabled
APLL Power-down Mode (C_ [2]) (Read/Write)
Powers down analog PLL, resets APLL charge pump. Set to 0 for normal operation.
0
→
APLL Power-down Mode Disabled
1
→
APLL Power-down Mode Enabled (Default)
APLL Bypass Mode (C_ [3]) (Read/Write)
APLL Bypass used during simulation and testing. Set to 0 for normal operation.
0 → APLL Bypass Mode Disabled
1 → APLL Bypass Mode Enabled (Default)
APLL CLKREF Frequency [3:0] (C_ [7:4]) (Read/Write)
Put APLL in Power-down (C_[2] = 1) when changing APLL CLKREF Frequency.
0h → 65.536 MHz (32 X 2.048 MHz) (Default)
1h → 49.152 MHz (24 X 2.048 MHz)
2h → 32.768 MHz (16 X 2.048 MHz)
3h → 16.384 MHz (8 X 2.048 MHz)
4h → 8.192 MHz (4 X 2.048 MHz)
5h → 4.096 MHz (2 X 2.048 MHz)
6h → 2.048 MHz
7h - fh → Reserved
16 Oki Semiconductor
Page 21

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 1, AR = 0001h
DR_0 C Definition
[1:0] [9:8] Slave Bus Mode [1:0]
2 10 Slave Local Timing Source Select
3 11 Advance Slave PLL Timing
4 12 Slave CT Manual/Auto Mode
5 13 Slave CT A/B Select
6 14 Slave CT A/B Read-back
7 15 Reserved
Slave Bus Mode [1:0] (C_ [9:8]) (Read/Write)
00 → CT Bus - Slave to CT_C8 & CT_FRAME (see Slave CT A/B Select) (Default)
01 → SCbus - Slave to SCLK & FR_COMP
10 → MVIP - Slave to C2 & FR_COMP
11 → Local - Slave to L_CLK & L_FS (see Slave Local Timing Source Select)
1. When local slave mode is selected, L_CLK frequency, polarity and output enable, and L_FS polarity, position and output enable must be configured
accordingly.
[1]
Slave Local Timing Source Select (C_ [10]) (Read/Write)
0 → L_CLK_0, L_FS_0 (Default)
1 → L_CLK_1, L_FS_1
Advance Slave PLL Timing (C_ [11]) (Read/Write)
The slave PLL timing may be advanced one 7.6 ns period to compensate for delay. Set to 0 for normal operation.
0 → Advance Slave PLL Timing Disabled (Default)
1 → Advance Slave PLL Timing Enabled
Slave CT Manual/Auto Mode (C_ [12]) (Read/Write)
0 → Slave CT Manual Mode (Default)
1 → Slave CT Auto Mode
1. In auto mode, slave will only switch when an error exists on the current signal set and NOT on the other signal set.
[1]
Slave CT A/B Select (C_ [13]) (Read/Write)
Select signal set in manual mode then switch to auto.
0 → CT A Select (Default)
1 → CT B Select
Slave CT A/B Read-back (C_ [14]) (Read Only)
0 → CT A Selected
1 → CT B Selected
17Oki Semiconductor
Page 22

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 2, AR = 0002h
DR_0 C Definition
0 16 Master CT Enable
1 17 Master CT A/B Select
2 18 Reserved
3 19 Advance Master PLL Timing
4 20 Master Manual/Auto Mode
5 21 Master Primary/Secondary Select
6 22 Master Primary/Secondary Read-back
7 23 Reserved
Master CT Enable (C_ [16]) (Read/Write)
Enables the Master PLL to drive the CT Bus.
0 → Master Disabled (Default)
1 → Master Enabled
Master CT A/B Select (C_ [17]) (Read/Write)
Selects the signal set driven by the Master PLL.
0 → CT_C8_A & CT_FRAME_A (Default)
1 → CT_C8_B & CT_FRAME_B
1. When in Secondary Master mode, the signal set (A or B) NOT selected here is used as the reference.
[1]
Advance Master PLL Timing (C_ [19]) (Read/Write)
When operating as secondary master, the master PLL timing may be advanced one 7.6 ns clock period to compensate for delay.
Set to 0 for normal operation.
0 → Advance Master PLL Timing Disabled (Default)
1 → Advance Master PLL Timing Enabled
Master Manual/Auto Mode (C_ [20]) (Read/Write)
0 → Master Manual Mode (Default)
1 → Master Auto Mode
1. Master Auto mode allows Secondary Master to become Primary if an error occurs on the reference signal set. To switch back to Secondary Master
it is necessary to go into manual mode.
[1]
Master Primary/Secondary Select (C_ [21]) (Read/Write)
0 → Primary Master Select (Default)
1 → Secondary Master Select
Master Primary/Secondary Read-back (C_ [22]) (Read Only)
0 → Primary Master Selected
1 → Secondary Master Selected
18 Oki Semiconductor
Page 23

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 3, AR = 0003h
DR_0 C Definition
[1:0] [25:24] SCbus SCLK Frequency [1:0]
2 26 SCbus Master Enable - SCLK, SCLKX2 & FR_COMP
3 27 Reserved
4 28 MVIP-90 Master Enable - C2, C4 & FR_COMP
5 29 H-MVIP Master Enable - C2, C4, C16 & FR_COMP
6 30 Reserved
7 31 Reserved
SCbus SCLK Frequency [1:0] (C_ [25:24]) (Read/Write)
00 → 2.048 MHz (Default)
01 → 4.096 MHz
10 → 8.192 MHz
11 → Reserved
SCbus Master Enable (C_ [26]) (Read/Write)
When enabled as Primary Master, this register enables the SCLK, SCLKX2 & FR_COMP signals to be driven.
0 → SCbus Master Disabled (Default)
1 → SCbus Master Enabled
MVIP-90 Master Enable (C_ [28]) (Read/Write)
When enabled as Primary Master, this register enables the C2, C4 & FR_COMP signals to be driven.
0 → MVIP-90 Master Disabled (Default)
1 → MVIP-90 Master Enabled
H-MVIP Master Enable (C_ [29]) (Read/Write)
When enabled as Primary Master, this register enables the C2, C4, C16 & FR_COMP signals to be driven.
0 → H-MVIP Master Disabled (Default)
1 → H-MVIP Master Enabled
19Oki Semiconductor
Page 24

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 4, AR = 0004h
DR_0 C Definition
[2:0] [34:32] Master PLL Mode [2:0]
3 35 Reserved
[5:4] [37:36] Master PLL Mode Read-back [1:0]
6 38 Condition Master PLL Reference
7 39 Reserved
Master PLL Mode [2:0] (C_ [34:32]) (Read/Write)
000 → Normal (Default)
001 → Reserved
010 → Holdover
011 → Free Run
100 → Reserved
101 → Reserved
110 → Auto Normal to Holdover switch on Master PLL error
111 → Auto Normal to Free Run switch on Master PLL error
1. Master PLL error occurs when the Master PLL is out of lock with its reference signal. It is necessary to manually select "Normal" to go back to
normal operation after an auto switch has occurred.
[1]
Master PLL Mode Read-back [1:0] (C_ [37:36]) (Read Only)
00 → Normal
01 → Reserved
10 → Holdover
11 → Free Run
Condition Master PLL Reference (C_ [38]) (Read/Write)
When enabled, conditions a change in references for MTIE compatibility.
0 → Condition Master PLL Reference Disabled (Default)
1 → Condition Master PLL Reference Enabled
20 Oki Semiconductor
Page 25

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 5, AR = 0005h
DR_0 C Definition
[3:0] [43:40] Master PLL Reference Select [3:0]
4 44 Reserved
[6:5] [46:45] Master PLL Reference Frequency [1:0]
7 47 Reserved
Master PLL Reference Select [3:0] (C_ [43:40]) (Read/Write)
0h → None (Default)
1h → Reserved
2h → Reserved
3h → Reserved
4h → Reserved
5h → Reserved
6h → CT_NETREF_1
7h → CT_NETREF_2
8h → L_NETREF_0
9h → L_NETREF_1
ah → L_NETREF_2
bh → L_NETREF_3
ch → L_NETREF_4
dh → L_NETREF_5
eh → L_NETREF_6
fh → L_NETREF_7
Master PLL Reference Frequency [1:0] (C_ [46:45]) (Read/Write)
00 → 8 kHz (Default)
01 → 1.536 MHz
10 → 1.544 MHz
11 → 2.048 MHz
21Oki Semiconductor
Page 26

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 6, AR = 0006h
DR_0 C Definition
[3:0] [51:48] CT_NETREF_1 Source Select [3:0]
4 52 Reserved
[6:5] [54:53] CT_NETREF_1 Divider [1:0]
7 55 CT_NETREF_1 Output Enable
CT_NETREF_1 Source Select [3:0] (C_ [51:48]) (Read/Write)
0h → None (Default)
1h → Reserved
2h → Reserved
3h → Reserved
4h → Reserved
5h → Reserved
6h → Reserved
7h → Reserved
8h → L_NETREF_0
9h → L_NETREF_1
ah → L_NETREF_2
bh → L_NETREF_3
ch → L_NETREF_4
dh → L_NETREF_5
eh → L_NETREF_6
fh → L_NETREF_7
CT_NETREF_1 Divider [1:0] (C_ [54:53]) (Read/Write)
00 → Divide source by 1 (Default)
01 → Divide source by 192
10 → Divide source by 193
11 → Divide source by 256
CT_NETREF_1 Output Enable (C_ [55]) (Read/Write)
0 → CT_NETREF_1 Output Tri-stated (Default)
1 → CT_NETREF_1 Output Enabled
22 Oki Semiconductor
Page 27

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 7, AR = 0007h
DR_0 C Definition
[3:0] [59:56] CT_NETREF_2 Source Select [3:0]
4 60 Reserved
[6:5] [62:61] CT_NETREF_2 Divider [1:0]
7 63 CT_NETREF_2 Output Enable
CT_NETREF_2 Source Select [3:0] (C_ [59:56]) (Read/Write)
0h → None (Default)
1h → Reserved
2h → Reserved
3h → Reserved
4h → Reserved
5h → Reserved
6h → Reserved
7h → Reserved
8h → L_NETREF_0
9h → L_NETREF_1
ah → L_NETREF_2
bh → L_NETREF_3
ch → L_NETREF_4
dh → L_NETREF_5
eh → L_NETREF_6
fh → L_NETREF_7
CT_NETREF_2 Divider [1:0] (C_ [62:61]) (Read/Write)
00 → Divide source by 1 (Default)
01 → Divide source by 192
10 → Divide source by 193
11 → Divide source by 256
CT_NETREF_2 Output Enable (C_ [63]) (Read/Write)
0 → CT_NETREF_2 Output Tri-stated (Default)
1 → CT_NETREF_2 Output Enabled
23Oki Semiconductor
Page 28

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 8, AR = 0008h
DR_0 C Definition
0 64 L_CLK_0, L_FS_0 Output Enable
1 65 L_CLK_1, L_FS_1 Output Enable
2 66 CT_D_ Output Enable Mode
3 67 CT_D_DISABLE Output Enable
4 68 CT_D_DISABLE
5 69 CT_D_DISABLE On Input
6 70 CT_D_DISABLE On Error
7 71 CT_D_DISABLE Read-back
L_CLK_0, L_FS_0 Output Enable (C_ [64]) (Read/Write)
0 → L_CLK_0, L_FS_0 Output Tri-stated (Default)
1 → L_CLK_0, L_FS_0 Output Enabled
L_CLK_1, L_FS_1 Output Enable (C_ [65]) (Read/Write)
0 → L_CLK_1, L_FS_1 Output Tri-stated (Default)
1 → L_CLK_1, L_FS_1 Output Enabled
CT_D_ Output Enable Mode (C_ [66]) (Read/Write)
0 → CT_D_[31:0] Output Tri-stated before bit cell boundary - Based on H.100/H.110 (Default)
1 → CT_D_[31:0] Output Tri-stated at bit cell boundary
CT_D_DISABLE Output Enable (C_ [67]) (Read/Write)
0 → CT_D_DISABLE pin Output Tri-stated (Default)
1 → CT_D_DISABLE pin Output Enabled
CT_D_DISABLE (C_ [68]) (Read/Write)
0 → CT_D_ Outputs Enabled (Default)
1 → CT_D_ Outputs Disabled
CT_D_DISABLE On Input (C_ [69]) (Read/Write)
0 → CT_D_DISABLE On Input Disabled (Default)
1 → CT_D_DISABLE On Input Enabled
CT_D_DISABLE On Error (C_ [70]) (Read/Write)
0 → CT_D_DISABLE On Error Disabled (Default)
1 → CT_D_DISABLE On Error Enabled
CT_D_DISABLE Read-back (C_ [71]) (Read Only)
0 → CT_D_ Outputs Enabled
1 → CT_D_ Outputs Disabled
24 Oki Semiconductor
Page 29

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 9, AR = 0009h
DR_0 C Definition
[1:0] [73:72] L_SI_[3:0], L_SO_[3:0] Stream Rate [1:0]
[3:2] [75:74] L_CLK_0 Frequency [1:0]
4 76 L_CLK_0 Polarity
5 77 L_FS_0 Polarity
[7:6] [79:78] L_FS_0 Position [1:0]
L_SI_[3:0], L_SO_[3:0] Stream Rate [1:0] (C_ [73:72]) (Read/Write)
00 → 2.048 Mb/s (L_SI_[3:0], L_SO_[3:0]) (Default)
01 → 4.096 Mb/s (L_SI_[1:0], L_SO_[1:0])
10 → 8.192 Mb/s (L_SI_[0], L_SO_[0])
11 → Reserved
L_CLK_0 Frequency [1:0] (C_ [75:74]) (Read/Write)
00 → 2.048 MHz (Default)
01 → 4.096 MHz
10 → 8.192 MHz
11 → 16.384 MHz
1. Note: the L_CLK_0 frequency need not match the L_SI and L_SO stream frequencies, neither need it match the CT_C8 frequency when configured
as slave-to-CT.
[1]
L_CLK_0 Polarity (C_ [76]) (Read/Write)
0 → L_CLK_0 Non-Inverted (Default)
1 → L_CLK_0 Inverted
L_FS_0 Polarity (C_ [77]) (Read/Write)
0 → L_FS_0 Non-Inverted (Default)
1 → L_FS_0 Inverted
L_FS_0 Position [1:0] (C_ [79:78]) (Read/Write)
00 → Early - L_FS_0 occurs during the last L_CLK_0 period of the frame (Default)
01 → Straddle - L_FS_0 straddles the frame boundary
10 → Late - L_FS_0 occurs during the first L_CLK_0 period of the frame
11 → Reserved
25Oki Semiconductor
Page 30

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 10, AR = 000ah
DR_0 C Definition
[1:0] [81:80] L_SI_[7:4], L_SO_[7:4] Stream Rate [1:0]
[3:2] [83:82] L_CLK_1 Frequency [1:0]
4 84 L_CLK_1 Polarity
5 85 L_FS_1 Polarity
[7:6] [87:86] L_FS_1 Position [1:0]
L_SI_[7:4], L_SO_[7:4] Stream Rate [1:0] (C_ [81:80]) (Read/Write)
00 → 2.048 Mb/s (L_SI_[7:4], L_SO_[7:4]) (Default)
01 → 4.096 Mb/s (L_SI_[5:4], L_SO_[5:4])
10 → 8.192 Mb/s (L_SI_[4], L_SO_[4])
11 → Reserved
L_CLK_1 Frequency [1:0] (C_ [83:82]) (Read/Write)
00 → 2.048 MHz (Default)
01 → 4.096 MHz
10 → 8.192 MHz
11 → 16.384 MHz
1. Note: the L_CLK_1 frequency need not match the L_SI and L_SO stream frequencies, neither need it match the CT_C8 frequency when configured
as slave-to-CT.
[1]
L_CLK_1 Polarity (C_ [84]) (Read/Write)
0 → L_CLK_1 Non-Inverted (Default)
1 → L_CLK_1 Inverted
L_FS_1 Polarity (C_ [85]) (Read/Write)
0 → L_FS_1 Non-Inverted (Default)
1 → L_FS_1 Inverted
L_FS_1 Position [1:0] (C_ [87:86]) (Read/Write)
00 → Early - L_FS_1 occurs during the last L_CLK_1 period of the frame (Default)
01 → Straddle - L_FS_1 straddles the frame boundary
10 → Late - L_FS_1 occurs during the first L_CLK_1 period of the frame
11 → Reserved
26 Oki Semiconductor
Page 31

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 11, AR = 000bh
DR_0 C Definition
[1:0] [89:88] CT_D_[3:0] Data Stream Rate [1:0]
[3:2] [91:90] CT_D_[7:4] Data Stream Rate [1:0]
[5:4] [93:92] CT_D_[11:8] Data Stream Rate [1:0]
[7:6] [95:94] CT_D_[15:12] Data Stream Rate [1:0]
CT_D_[3:0] Data Stream Rate [1:0] (C_ [89:88]) (Read/Write)
00 → 2.048 Mb/s
01 → 4.096 Mb/s
10 → 8.192 Mb/s (Default)
11 → Reserved
CT_D_[7:4] Data Stream Rate [1:0] (C_ [91:90]) (Read/Write)
00 → 2.048 Mb/s
01 → 4.096 Mb/s
10 → 8.192 Mb/s (Default)
11 → Reserved
CT_D_[11:8] Data Stream Rate [1:0] (C_ [93:92]) (Read/Write)
00 → 2.048 Mb/s
01 → 4.096 Mb/s
10 → 8.192 Mb/s (Default)
11 → Reserved
CT_D_[15:12] Data Stream Rate [1:0] (C_ [95:94]) (Read/Write)
00 → 2.048 Mb/s
01 → 4.096 Mb/s
10 → 8.192 Mb/s (Default)
11 → Reserved
27Oki Semiconductor
Page 32

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 12, AR = 000ch
DR_0 C Definition
0 96 Direct Parallel Access Enable
1 97 Microprocessor Watchdog Enable
2 98 APLL Clock Watchdog Enable
3 99 Reserved
4 100 Message Channel Registered TXD Enable
5 101 Message Channel Output Disable
6 102 Reserved
7 103 Reserved
Direct Parallel Access Enable (C_ [96]) (Read/Write)
0 → Direct Parallel Access disabled (Default)
1 → Direct Parallel Access enabled
Microprocessor Watchdog Enable (C_ [97]) (Read/Write)
When enabled, the ML53812-2 enters into reset after the Analog PLL clocks for 256mS (± 50%).
Each time C_[97] is cleared (0) and then set (1), the microprocessor watchdog count is reset.
0 → Microprocessor Watchdog disabled (Default)
1 → Microprocessor Watchdog enabled
APLL Clock Watchdog Enable (C_ [98]) (Read/Write)
When enabled, C_[98] will read back as being set (1) until the Analog PLL clocks for 125 µS (± 50%), then will read back as being cleared (0). Each
time C_[98] is cleared (0) and then set (1), the clock watchdog count is reset.
0 → APLL Clock Watchdog disabled (Default)
1 → APLL Clock Watchdog enabled
Message Channel Registered TXD Enable (C_ [100]) (Read/Write)
0 → MC_TXD passed though to CT_MC (Default)
1 → MC_TXD registered to CT_MC on rising edge of MC_CLK
Message Channel Output Disable with Loop-back (C_ [101]) (Read/Write)
When CT_MC output is disabled, the local message channel circuitry can be tested without disturbing the CT Bus.
0 → CT_MC Output enabled (Default)
1 → CT_MC Output Tri-stated, MC_TXD looped back to MC_RXD
28 Oki Semiconductor
Page 33

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 13, AR = 000dh
DR_0 C Definition
0 104 INT Polarity
1 105 INT Mask
2 106 INT Output Driver Configuration
3 107 INT
4 108 Reserved
5 109 Reserved
6 110 Reserved
7 111 Reserved
INT Polarity (C_ [104]) (Read/Write)
0 → INT Active Low (Default)
1 → INT Active High
INT Mask (C_ [105]) (Read/Write)
0 → INT Unmasked
1 → INT Masked (Default)
INT Output Driver Configuration (C_ [106]) (Read/Write)
0 → Open Drain (Default)
1 → Push-Pull
INT (C_ [107]) (Read Only)
This register is the logical or of all unmasked interrupt sources.
0 → All unmasked interrupts false
1 → Any unmasked interrupt true
29Oki Semiconductor
Page 34

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 14, AR = 000eh
DR_0 C Definition
0 112 CT Bus A Error Interrupt Mask
1 113 CT Bus B Error Interrupt Mask
2 114 SCbus Error Interrupt Mask
3 115 MVIP Error Interrupt Mask
4 116 Master PLL Error Interrupt Mask
5 117 Frame Boundary Interrupt Mask
6 118 Reserved
7 119 Reserved
1. Masking an interrupt disables that interrupt from being OR’ed together with other interrupts to the INT pin. The state of the latches are accessible
while masked (polling mode).
[1]
CT Bus A Error Interrupt Mask (C_ [112]) (Read/Write)
0 → CT Bus A Error Interrupt Unmasked
1 → CT Bus A Error Interrupt Masked (Default)
CT Bus B Error Interrupt Mask (C_ [113]) (Read/Write)
0 → CT Bus B Error Interrupt Unmasked
1 → CT Bus B Error Interrupt Masked (Default)
SCbus Error Interrupt Mask (C_ [114]) (Read/Write)
0 → SCbus Error Interrupt Unmasked
1 → SCbus Error Interrupt Masked (Default)
MVIP Error Interrupt Mask (C_ [115]) (Read/Write)
0 → MVIP Error Interrupt Unmasked
1 → MVIP Error Interrupt Masked (Default)
Master PLL Error Interrupt Mask (C_ [116]) (Read/Write)
0 → Master PLL Error Interrupt Unmasked
1 → Master PLL Error Interrupt Masked (Default)
Frame Boundary Interrupt Mask (C_ [117]) (Read/Write)
0 → Frame Boundary Interrupt Unmasked
1 → Frame Boundary Interrupt Masked (Default)
30 Oki Semiconductor
Page 35

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 15, AR = 000fh
DR_0 C Definition
0 120 CT Bus A Error Latch Clear
1 121 CT Bus B Error Latch Clear
2 122 SCbus Error Latch Clear
3 123 MVIP Error Latch Clear
4 124 Master PLL Error Latch Clear
5 125 Frame Boundary Latch Clear
6 126 Reserved
7 127 Reserved
CT Bus A Error Latch Clear (C_ [120]) (Read/Write)
0 → CT Bus A Error Latch Enabled
1 → CT Bus A Error Latch held clear (Default)
CT Bus B Error Latch Clear (C_ [121]) (Read/Write)
0 → CT Bus B Error Latch Enabled
1 → CT Bus B Error Latch held clear (Default)
SCbus Error Latch Clear (C_ [122]) (Read/Write)
0 → SCbus Error Latch Enabled
1 → SCbus Error Latch held clear (Default)
MVIP Error Latch Clear (C_ [123]) (Read/Write)
0 → MVIP Error Latch Enabled
1 → MVIP Error Latch held clear (Default)
Master PLL Error Latch Clear (C_ [124]) (Read/Write)
0 → Master PLL Error Latch Enabled
1 → Master PLL Error Latch held clear (Default)
Frame Boundary Latch Clear (C_ [125]) (Read/Write)
0 → Frame Boundary Latch Enabled
1 → Frame Boundary Latch held clear (Default)
31Oki Semiconductor
Page 36

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 16, AR = 0010h
DR_0 C Definition
0 128 CT Bus A Error Latch
1 129 CT Bus B Error Latch
2 130 SCbus Error Latch
3 131 MVIP Error Latch
4 132 Master PLL Error Latch
5 133 Frame Boundary Latch
6 134 Reserved
7 135 Reserved
CT Bus A Error Latch (C_ [128]) (Read Only)
0 → CT Bus A Error Latch False
1 → CT Bus A Error Latch True
CT Bus B Error Latch (C_ [129]) (Read Only)
0 → CT Bus B Error Latch False
1 → CT Bus B Error Latch True
SCbus Error Latch (C_ [130]) (Read Only)
0 → SCbus Error Latch False
1 → SCbus Error Latch True
MVIP Error Latch (C_ [131]) (Read Only)
0 → MVIP Error Latch False
1 → MVIP Error Latch True
Master PLL Error Latch (C_ [132]) (Read Only)
0 → Master PLL Error Latch False
1 → Master PLL Error Latch True
Frame Boundary Latch (C_ [133]) (Read Only)
0 → Frame Boundary Latch False
1 → Frame Boundary Latch True
32 Oki Semiconductor
Page 37

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 17, AR = 0011h
DR_0 C Definition
0 136 GPIO_0 Input
1 137 GPIO_0 Output
2 138 GPIO_0 Output Enable
3 139 GPIO_0 Output Driver Configuration
4 140 GPIO _0 Latch Polarity
5 141 GPIO _0 Interrupt Mask
6 142 GPIO _0 Latch Clear
7 143 GPIO _0 Latch
GPIO_0 Input (C_ [136]) (Read Only)
0 → GPIO_0 Input = 0
1 → GPIO_0 Input = 1
GPIO_0 Output (C_ [137]) (Read/Write)
0 → GPIO_0 Output = 0 (Default)
1 → GPIO_0 Output = 1
GPIO_0 Output Enable (C_ [138]) (Read/Write)
0 → GPIO_0 Output Tri-stated (Default)
1 → GPIO_0 Output Enabled
GPIO_0 Output Driver Configuration (C_ [139]) (Read/Write)
0 → Open Drain (Default)
1 → Push-Pull
GPIO _0 Latch Polarity (C_ [140]) (Read/Write)
0 → GPIO _0 Latch set when GPIO_0 input = 0 (Default)
1 → GPIO _0 Latch set when GPIO_0 input = 1
GPIO _0 Interrupt Mask (C_ [141]) (Read/Write)
0 → GPIO _0 Interrupt Unmasked
1 → GPIO _0 Interrupt Masked (Default)
GPIO _0 Latch Clear (C_ [142]) (Read/Write)
0 → GPIO _0 Latch Enabled
1 → GPIO _0 Latch held clear (Default)
GPIO _0 Latch (C_ [143]) (Read Only)
0 → GPIO _0 Latch False
1 → GPIO _0 Latch True
33Oki Semiconductor
Page 38

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 18, AR = 0012h
DR_0 C Definition
0 144 GPIO_1 Input
1 145 GPIO_1 Output
2 146 GPIO_1 Output Enable
3 147 GPIO_1 Output Driver Configuration
4 148 GPIO _1 Latch Polarity
5 149 GPIO _1 Interrupt Mask
6 150 GPIO _1 Latch Clear
7 151 GPIO _1 Latch
GPIO_1 Input (C_ [144]) (Read Only)
0 → GPIO_1 Input = 0
1 → GPIO_1 Input = 1
GPIO_1 Output (C_ [145]) (Read/Write)
0 → GPIO_1 Output = 0 (Default)
1 → GPIO_1 Output = 1
GPIO_1 Output Enable (C_ [146]) (Read/Write)
0 → GPIO_1 Output Tri-stated (Default)
1 → GPIO_1 Output Enabled
GPIO_1 Output Driver Configuration (C_ [147]) (Read/Write)
0 → Open Drain (Default)
1 → Push-Pull
GPIO _1 Latch Polarity (C_ [148]) (Read/Write)
0 → GPIO _1 Latch set when GPIO_1 input = 0 (Default)
1 → GPIO _1 Latch set when GPIO_1 input = 1
GPIO _1 Interrupt Mask (C_ [149]) (Read/Write)
0 → GPIO _1 Interrupt Unmasked
1 → GPIO _1 Interrupt Masked (Default)
GPIO _1 Latch Clear (C_ [150]) (Read/Write)
0 → GPIO _1 Latch Enabled
1 → GPIO _1 Latch held clear (Default)
GPIO _1 Latch (C_ [151]) (Read Only)
0 → GPIO _1 Latch False
1 → GPIO _1 Latch True
34 Oki Semiconductor
Page 39

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Configuration Register Byte 19, AR = 0013h
DR_0 C Definition
0 152 GPIO_2 Input
1 153 GPIO_2 Output
2 154 GPIO_2 Output Enable
3 155 GPIO_2 Output Driver Configuration
4 156 GPIO _2 Latch Polarity
5 157 GPIO _2 Interrupt Mask
6 158 GPIO _2 Latch Clear
7 159 GPIO _2 Latch
GPIO_2 Input (C_ [152]) (Read Only)
0 → GPIO_2 Input = 0
1 → GPIO_2 Input = 1
GPIO_2 Output (C_ [153]) (Read/Write)
0 → GPIO_2 Output = 0 (Default)
1 → GPIO_2 Output = 1
GPIO_2 Output Enable (C_ [154]) (Read/Write)
0 → GPIO_2 Output Tri-stated (Default)
1 → GPIO_2 Output Enabled
GPIO_2 Output Driver Configuration (C_ [155]) (Read/Write)
0 → Open Drain (Default)
1 → Push-Pull
GPIO _2 Latch Polarity (C_ [156]) (Read/Write)
0 → GPIO _2 Latch set when GPIO_2 input = 0 (Default)
1 → GPIO _2 Latch set when GPIO_2 input = 1
GPIO _2 Interrupt Mask (C_ [157]) (Read/Write)
0 → GPIO _2 Interrupt Unmasked
1 → GPIO _2 Interrupt Masked (Default)
GPIO _2 Latch Clear (C_ [158]) (Read/Write)
0 → GPIO _2 Latch Enabled
1 → GPIO _2 Latch held clear (Default)
GPIO _2 Latch (C_ [159]) (Read Only)
0 → GPIO _2 Latch False
1 → GPIO _2 Latch True
35Oki Semiconductor
Page 40

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Configuration Register Byte 20, AR = 0014h
DR_0 C Definition
0 160 GPIO_3 Input
1 161 GPIO_3 Output
2 162 GPIO_3 Output Enable
3 163 GPIO_3 Output Driver Configuration
4 164 GPIO _3 Latch Polarity
5 165 GPIO _3 Interrupt Mask
6 166 GPIO _3 Latch Clear
7 167 GPIO _3 Latch
GPIO_3 Input (C_ [160]) (Read Only)
0 → GPIO_3 Input = 0
1 → GPIO_3 Input = 1
GPIO_3 Output (C_ [161]) (Read/Write)
0 → GPIO_3 Output = 0 (Default)
1 → GPIO_3 Output = 1
GPIO_3 Output Enable (C_ [162]) (Read/Write)
0 → GPIO_3 Output Tri-stated (Default)
1 → GPIO_3 Output Enabled
GPIO_3 Output Driver Configuration (C_ [163]) (Read/Write)
0 → Open Drain (Default)
1 → Push-Pull
GPIO _3 Latch Polarity (C_ [164]) (Read/Write)
0 → GPIO _3 Latch set when GPIO_3 input = 0 (Default)
1 → GPIO _3 Latch set when GPIO_3 input = 1
GPIO _3 Interrupt Mask (C_ [165]) (Read/Write)
0 → GPIO _3 Interrupt Unmasked
1 → GPIO _3 Interrupt Masked (Default)
GPIO _3 Latch Clear (C_ [166]) (Read/Write)
0 → GPIO _3 Latch Enabled
1 → GPIO _3 Latch held clear (Default)
GPIO _3 Latch (C_ [167]) (Read Only)
0 → GPIO _3 Latch False
1 → GPIO _3 Latch True
36 Oki Semiconductor
Page 41

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
6.5 Device ID Registers (Read Only)
Device ID byte 3, AR = 00ffh
DR_0 Definition
[7:4] Version [3:0]
[3:0] Part Number [15:12]
Device ID byte 2, AR = 00feh
DR_0 Definition
[7:0] Part Number [11:4]
Device ID byte 1, AR = 00fdh
DR_0 Definition
[7:4] Part Number [3:0]
[3:0] Manufacturer ID [10:7]
Device ID byte 0, AR = 00fch
DR_0 Definition
[7:1] Manufacturer ID [6:0]
0 0 = Device does not support Boundary Scan
1 = Device supports Boundary Scan
ML53812-2 Device ID byte [3:0] = 20 8c 00 00h
37Oki Semiconductor
Page 42

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
6.6 Stream Switch Routing Registers, AR = 1007h:1000h (Ch. 7:0)
Note: To ensure compatibility with possible future versions of this device, write “0” to all "Reserved" bits in the
routing registers. All "Reserved" routing registers read-back "0".
DR_0 Definition
[4:0] Input Data Stream [4:0]
[7:5] Reserved (write zero)
Input Data Stream [4:0] (Read/Write)
00h → CT_D_[0] (Default)
01h → CT_D_[1]
02h → CT_D_[2]
• •
• •
1eh → CT_D_[30]
1fh → CT_D_[31]
DR_1 Definition
[4:0] Output Data Stream [4:0]
[6:5] Reserved (write zero)
7 Output Enable
Output Data Stream [4:0] (Read/Write)
00h → CT_D_[0] (Default)
01h → CT_D_[1]
02h → CT_D_[2]
• •
• •
1eh → CT_D_[30]
1fh → CT_D_[31]
Output Enable (Read/Write)
0 → Output Disabled (Default)
1 → Output Enabled
DR_2 Definition
[1:0] Partition [1:0]
[7:2] Reserved (write zero)
Partition [1:0] (Read/Write)
Selects which time-slots are used when rate conversion is taking place. See the following table for a
description of the partition function.
38 Oki Semiconductor
Page 43

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
6.7 Stream Switch Connection Mapping
Input Data
Stream Rate
2 Mb/s 2 Mb/s 0 0 to 1, 1 to 2, 2 to 3, … , 31 to 0
4 Mb/s 2 Mb/s 0 0 to 1, 2 to 2, 4 to 3, … , 62 to 0
8 Mb/s 2 Mb/s 0 0 to 1, 4 to 2, 8 to 3, … , 124 to 0
Output Data
Stream Rate
4 Mb/s 0 0 to 2, 1 to 4, 2 to 6, … , 31 to 0
8 Mb/s 0 0 to 4, 1 to 8, 2 to 12, … , 31 to 0
4 Mb/s 0 0 to 1, 1 to 2, 2 to 3, … , 63 to 0
8 Mb/s 0 0 to 2, 1 to 4, 2 to 6, … , 63 to 0
4 Mb/s 0 0 to 1, 2 to 2, 4 to 3, … , 126 to 0
8 Mb/s 0 0 to 1, 1 to 2, 2 to 3, … , 127 to 0
Partition Timeslot Connection
1 0 to 3, 1 to 5, 2 to 7, … , 31 to 1
1 0 to 5, 1 to 9, 2 to 13, … , 31 to 1
2 0 to 6, 1 to 10, 2 to 14, … , 31 to 2
3 0 to 7, 1 to 11, 2 to 15, … , 31 to 3
1 1 to 1, 3 to 2, 5 to 3, … , 63 to 0
1 0 to 3, 1 to 5, 2 to 7, … , 63 to 1
1 1 to 1, 5 to 2, 9 to 3, … , 125 to 0
2 2 to 1, 6 to 2, 10 to 3, … , 126 to 0
3 3 to 1, 7 to 2, 11 to 3, … , 127 to 0
1 1 to 1, 3 to 2, 5 to 3, … , 127 to 0
Frame Boundary
CT_D time-slots @ 8mb/s
CT_D time-slots @ 4mb/s 123 62 63 0 1 2
CT_D time-slots @ 2mb/s 30 31 0 1
12312412512612701234
Figure 5. CT Bus Data Stream Switching
The Stream Switch provides a data stream-to-data stream connection capability. Switching between any
of the 32 CT Bus data streams operating at 2, 4, or 8 Mb/s is supported. Eight stream switch channels are
provided. Individual time-slots are not tri-state controlled. Buffering is done on single timeslots rather
than entire frames. This trade-off complicates the connection matrix, but without this compromise it
would not be practical to implement the Stream Switch.
Depending upon the data stream rates, the stream switch provides a minimum of 256 and a maximum of
1024 uni-directional timeslot connections. Stream switches in other ML53812-2 devices in a system may
be used simultaneously to increase switching capability. The output of the stream switch is multiplexed
with the output of the transmit switch, with the transmit switch having priority.
39Oki Semiconductor
Page 44

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
The main application of the Stream Switch is to provide an inter-rate exchange highway allowing legacy
Bus devices operating at different rates to exchange data.
A typical configuration of the Stream Switch using 2 switch channels and 3 streams to provide 32 full
duplex connections between SCbus (operating at 4 MHz) and MVIP is outlined below.
Example:
Stream switch channel 0 is configured with CT_D_0 as the input data stream and the even time-slots
(partition = 0) of CT_D_8 as the output data stream.
Stream switch channel 1 is configured with the odd timeslots (partition = 1) of CT_D_8 as the input data
stream and CT_D_1 as the output data stream.
CT_D _0 (MVIP) 1
CT_D _1 (MVIP)
CT_D _8 (SCbus) 63
31 0
012
01234
Figure 6. Data Stream Switching Example
40 Oki Semiconductor
Page 45

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
6.8 Transmit Switch Routing Registers, AR = 20ffh:2000h (Ch. 255:0)
Note: To ensure compatibility with subsequent versions of this device, write “0” to all "Reserved" bits in the
routing registers. All "Reserved" routing registers read-back "0".
DR_0 Definition
[6:0] Output Time-slot
7 Reserved (write zero)
Output Time-slot [6:0] (Read/Write)
Selects the CT_D time-slot for transmit channel routing.
00h → Time-slot 0 (Default)
01h → Time-slot 1
02h → Time-slot 2
• •
• •
7eh → Time-slot 126
7fh → Time-slot 127
Note: Internally all time-slots run at 8Mb/s. To transmit on CT_D data streams running at a slower rate, use
the following conversion:
If CT_D data stream is operating at 4Mb/s, transmit switch output time-slot = CT_D time-slot X 2.
If CT_D data stream is operating at 2Mb/s, transmit switch output time-slot = CT_D time-slot X 4.
DR_1 Definition
[4:0] Output Data Stream
[6:5] Reserved (write zero)
7 Output Enable
Output Data Stream [4:0] (Read/Write)
Selects the CT_D Data stream for transmit channel routing.
00h → CT_D_[0] (Default)
01h → CT_D_[1]
02h → CT_D_[2]
• •
• •
1eh → CT_D_[30]
1fh → CT_D_[31]
Output Enable (Read/Write)
Controls the Output Enable for the selected CT Bus data stream and time-slot.
0 → Output Disabled (Default)
1 → Output Enabled
41Oki Semiconductor
Page 46

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
DR_2 Definition
0 Delay
1 CT Bus Connect
2 Source
[7:3] Reserved (write zero)
Delay (Read/Write)
Selects the switching delay mode. When set to Constant, data is switched on frame boundaries resulting in a constant 1 frame delay and allowing
"bundling". When set to Minimum, data is switched on 2Mb/s timeslot boundaries reducing the delay through the switch for certain combinations of
input to output time-slots.
0 → Constant (Default)
1 → Minimum
Note: Do not use Minimum delay mode on channels using parallel data source.
CT Bus Connect Enable (Read/Write)
Enables the switch to be used for CT Bus to CT Bus connection without externally connecting L_SO to L_SI. When enabled, the L_SI input is replaced
by the corresponding L_SO output. CT Bus connect allows inter-operability switching to be provided by any unused transmit and receive switch pair.
0 → CT Bus Connect Disabled (Default)
1 → CT Bus Connect Enabled
Note: The receive switch output enable register does not have to be set to make this connection.
Source (Read/Write)
Selects the transmit channel data source. When set to 0, Serial TDM data from L_SI or L_SO (see CT Bus Connect Enable) is selected. When set to 1,
the corresponding parallel access register is selected as the source of the transmit channel data.
0 → Serial TDM data (Default)
1 → Parallel microprocessor data
Note: The Serial TDM data and the parallel access register share common registers within the transmit switch.
Therefore it is necessary to write to the parallel access register after the source is changed to parallel
microprocessor data.
42 Oki Semiconductor
Page 47

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
6.9 Receive Switch Routing Registers, AR = 30ffh:3000h (Ch. 255:0)
Note: To ensure compatibility with subsequent versions of this device, write “0” to all "Reserved" bits in the
routing registers. All "Reserved" routing registers read-back "0".
DR_0 Definition
[6:0] Input Time-slot
7 Reserved (write zero)
Input Time-slot [6:0] (Read/Write)
Selects the CT_D time-slot for receive channel routing.
00h → Time-slot 0 (Default)
01h → Time-slot 1
02h → Time-slot 2
• •
• •
7eh → Time-slot 126
7fh → Time-slot 127
Note: Internally all time-slots run at 8Mb/s. To receive from CT_D streams running at a slower rate, use the
following conversion:
If CT_D stream is operating at 4Mb/s, receive switch input time-slot register = CT_D time-slot X 2 + 1.
If CT_D stream is operating at 2Mb/s, receive switch input time-slot register = CT_D time-slot X 4 + 3.
DR_1 Definition
[4:0] Input Data Stream
[6:5] Reserved (write zero)
7 Output Enable
Input Data Stream [4:0] (Read/Write)
Selects the CT_D data stream for receive channel routing.
00h → CT_D_[0] (Default)
01h → CT_D_[1]
02h → CT_D_[2]
• •
• •
1eh → CT_D_[30]
1fh → CT_D_[31]
Output Enable (Read/Write)
Controls the Output Enable for the channel’s local stream.
0 → Output Disabled (Default)
1 → Output Enabled
43Oki Semiconductor
Page 48

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
DR_2 Definition
0 Delay
1 Local Connect
2 Source
[7:3] Reserved (write zero)
Delay (Read/Write)
Selects the switching delay mode. When set to Constant, data is switched on frame boundaries resulting in a constant 1 frame delay and allowing
"bundling". When set to Minimum, data is switched on 2Mb/s timeslot boundaries reducing the delay through the switch for certain combinations of
input to output time-slots.
0 → Constant (Default)
1 → Minimum
Note: Do not use Minimum delay mode on channels using parallel data source.
Local Connect Enable (Read/Write)
Enables the receive switch to be used for local connection. When enabled, a transmit channel is connected to a receive channel without using the CT
Bus.
0 → Local Connect Disabled (Default)
1 → Local Connect Enabled
Note: When Local Connect is Enabled, the Receive Switch routing registers DR_0 and DR_1 are redefined as the
8 bits of the transmit channel number instead of the CT_D time-slot and stream as shown below:
DR_0_[6:0] → Transmit channel bits [6:0]
DR_1_[7]
DR_1_[0]→ →
Output Enable
Transmit Channel bit [7]
Source (Read/Write)
Selects the receive channel data source. When set to 0, Serial TDM data from the CT Bus data stream or transmit channel (see Local Connect Enable)
is selected. When set to 1, the channels parallel access register is selected as the source of the receive channel data.
0 → Serial TDM data (Default)
1 → Parallel microprocessor data
Note: The Serial TDM data and the parallel access register share common registers within the receive switch.
Therefore it is necessary to write to the parallel access register after the source is changed to parallel
microprocessor data.
44 Oki Semiconductor
Page 49

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
6.10 Indirect Transmit Switch Parallel Access Registers, AR = 40ffh:4000h (Ch. 255:0)
DR_0 Definition
[7:0] TDM Data [1:8]
TDM Data [1:8] (Read/Write)
Writing to this register provides the transmit data when the transmit switch channel is configured to use parallel microprocessor data as its source (to
CT_D). This register and the serial input buffer share common hardware, therefore this register must be written after the transmit switch channel
source is changed from serial TDM data to parallel microprocessor data.
The transmit switch channel output buffer data obtained by reading the TDM data register. When the transmit switch channel is configured to use serial
TDM data as its source, the data from the local SI channel can be monitored. When the transmit switch channel is configured to use parallel
microprocessor data as its source, the data written into this register can be monitored.
Note: When converted from parallel to serial, TDM Data Bit 1 is transmitted first.
6.11 Indirect Receive Switch Parallel Access Registers, AR = 50ffh:5000h (Ch. 255:0)
DR_0 Definition
[7:0] TDM Data [1:8]
TDM Data [1:8] (Read/Write)
Writing to this register provides the receive data when the receive switch channel is configured to use parallel microprocessor data as its source (to
L_SO). This register and the serial input buffer share common hardware, so this register must be written after the receive switch channel source is
changed from serial TDM data to parallel microprocessor data.
The receive switch channel output buffer data is obtained by reading the TDM Data register. When the receive switch channel is configured to use serial
TDM data as its source, the data from the CT_D stream and timeslot selected in the receive switch routing registers can be monitored. When the receive
switch channel is configured to use parallel microprocessor data as its source, the data written into this register can be monitored.
Note: When converted from parallel to serial, TDM Data Bit 1 is transmitted first.
45Oki Semiconductor
Page 50

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
7.0 ELECTRICAL SPECIFICATIONS
7.1 Absolute Maximum Ratings
Parameter Symbol Test Conditions Min Max Unit
Storage Temperature T
Power Supply Voltage V
Input Voltage V
S
PS
I
7.2 Recommended Operating Conditions
Parameter Symbol Test Conditions Min Max Unit
Ambient Temperature T
Supply Voltage V
A
DD
7.3 DC Electrical Characteristics
Parameter Symbol Test Conditions Min Max Unit
Core Supply Current I
I/O Supply Current I
Analog PLL Supply Current I
Input High Voltage V
Input Low Voltage V
Schmitt Input High Voltage V
Schmitt Input Low Voltage V
Schmitt Input Hysteresis Voltage V
Output High Voltage - PCI V
Output Low Voltage - PCI V
Output High Voltage – 24mA V
Output Low Voltage – 24mA V
Output High Voltage – 8mA V
Output Low Voltage – 8mA V
Output High Voltage – 6mA V
Output Low Voltage – 6mA V
50 k Pull-up Current I
I/O Leakage Current I
DDC
DDO
DDA
IH
IL
t+
t-
HYS
OH-PCI
OL-PCI
OH-24mA
OL-24mA
OH-8mA
OL-8mA
OH-6mA
OL-6mA
P
LI/O
V
= 3.6V 125 mA
DDC
V
= 3.6V 140 mA
DDO
V
= 3.6V 10 mA
DDA
IOH = -2 mA 2.4 V
IOL = 6 mA 0.55 V
IOH = -24 mA 2.4 V
IOL = 24 mA 0.4 V
IOH = -8 mA 2.4 V
IOL = 8 mA 0.4 V
IOH = -6 mA 2.4 V
IOL = 6 mA 0.4 V
V
= 0 V -15 -170 µA
PAD
V
= VDD or V
I/O
SS
-65 150 °C
-0.3 4.6 V
-0.3 6 V
-40 85 °C
3.0 3.6 V
2.0 5.5 V
-0.5 0.8 V
2.05 5.5 V
-0.5 0.7 V
±0.4 V
±10 µA
NOTES:
1. PCI Drivers meet the AC Specifications for the PCI 5V signaling environment.
2. Pin Capacitance: Input pins = 6 pF, Output pins = 9 pF, Bi-directional pins = 10 pF.
46 Oki Semiconductor
Page 51

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
7.4 AC Electrical Characteristics
Note: Signals ending in “_N” are active low.
Microprocessor Interface Timing - Intel Bus Mode, Non-multiplexed Address
Parameter Symbol Min Typ Max Unit
CS_N setup to WR_N ↑ t1 40 ns
WR_N pulse width t2 40 ns
A_[9:0] setup to WR_N ↓ (C_96=1) t3 5 ns
A_[2:0] setup to WR_N ↑(C_96=0) t4 40 ns
A_[9:0] hold from WR_N ↑ t5 5 ns
D_[7:0] setup to WR_N ↑ t6 40 ns
D_[7:0] hold from WR_N ↑ t7 5 ns
D_[7:0] float to valid delay from CS_N RD_N, and A_[9:0] t8 0 50 ns
D_[7:0] valid to float delay from CS_N or RD_N t9 0 10 ns
1. Timing measured with 100 pF load on D_[7:0].
2. Write cycle may be controlled by CS_N or WR_N.
3. ALE=1.
t1
CS_N
[1] [2] [3]
RD_N
t2
WR_N
t3
t4
A_[9:0]
D_[7:0]
t5
t7t6 t8 t9
Figure 7. Microprocessor Interface Timing - Intel Bus Mode, Non-multiplexed Address
47Oki Semiconductor
Page 52

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
Microprocessor Interface Timing - Motorola Bus Mode, Non-multiplexed Address
[1] [2] [3]
Parameter Symbol Min Typ Max Unit
CS_N setup to STRB_N ↑ t1 40 ns
STRB_N pulse width t2 40 ns
R/W_N setup to STRB_N ↓ t3 5 ns
R/W_N hold from STRB_N ↑ t4 5 ns
A_[9:0] setup to STRB_N ↓ (C_96=1) t5 5 ns
A_[2:0] setup to STRB_N ↑ (C_96=0) t6 40 ns
A_[9:0] hold from STRB_N ↑ t7 5 ns
D_[7:0] setup to STRB_N ↑ t8 40 ns
D_[7:0] hold from STRB_N ↑ t9 5 ns
D_[7:0] float to valid delay from CS_N, STRB_N, and A_[9:0] t10 0 50 ns
D_[7:0] valid to float delay from CS_N or STRB_N t11 0 10 ns
1. Timing measured with 100 pF load on D_[7:0].
2. Write cycle may be controlled by CS_N or STRB_N.
3. AS=1.
t1
CS_N
t2
STRB_N
t3
R/W_N
t5
t6
A_[9:0]
D_[7:0]
t4 t3 t4
t7
t9t8 t10 t11
Figure 8. Microprocessor Interface Timing - Motorola Bus Mode, Non-multiplexed Address
48 Oki Semiconductor
Page 53

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Microprocessor Interface Timing - Multiplexed Address
Parameter Symbol Min Typ Max Unit
ALE (AS) pulse width t1 20 ns
A_[9:0] setup to ALE (AS) ↓ t2 5 ns
A_[9:0] hold from ALE (AS) ↓ t3 5 ns
t1
ALE (AS)
t2
A_[9:0]
t3
Figure 9. Microprocessor Interface Timing - Multiplexed Address
Reset Timing
Parameter Symbol Min Typ Max Unit
RESET pulse width t1 50 ns
RESET
t1
Figure 10. Reset Timing
49Oki Semiconductor
Page 54

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
]
Local Clock and Frame Synchronization Timing
Parameter Symbol Min Typ Max Unit
L_CLK period (2.048 MHz) t1a 488 ns
L_CLK period (4.096 MHz) t1b 244 ns
L_CLK period (8.192 MHz) t1c 122 ns
L_CLK period (16.384 MHz) t1d 61 ns
L_FS delay from L_CLK _ (Early position) t2 -10 +10 ns
L_FS delay from L_CLK _ (Straddle position) t3 -10 +10 ns
L_FS delay from L_CLK _ (Late position) t4 -10 +10 ns
1. Timing measured with 100 pF load on all Local bus outputs.
2. L_CLK and L_FS shown with positive polarity, timing is equivalent when signals are inverted.
Local Clock to CT Bus Clock Skew
Parameter Symbol Min Typ Max Unit
With C_11 (Advance Slave DPLL Timing) set to 0 (default) t5 +22.5 / -0 Ns
With C_11 (Advance Slave DPLL Timing) set to 1 t5 +15 / -7.5 Ns
1. When reference L_CLK is more stable, there is no reduction in the amplitude of the skew, but a reduction in the number of occurrences. The further
away from the center frequency, the more frequently the skew occurs. The skew amplitude will jump in steps, but the range will remain the same.
Test conditions were 65.536 MHz (C_[7:4]= 0) and 2.048 MHz (C_[7:4] = 6).
[1]
[1] [2]
Local Serial Stream Timing
L_SO float to valid delay from Bit Cell Boundary t6 -10 +10 ns
L_SO valid to valid delay from Bit Cell Boundary t7 -10 +10 ns
L_SO valid to float delay from Bit Cell Boundary t8 -10 +10 ns
2,048Mb/s Sample Point from Bit Cell Boundary t9a +335.5 ns
4,096Mb/s Sample Point from Bit Cell Boundary t9b +213.5 ns
8.192Mb/s Sample Point from Bit Cell Boundary t9c +91.5 ns
L_SI Setup to Sample Point t10 10 ns
L_SI Hold to Sample Point t11 10 ns
1. The Bit Cell Boundary is defined by the relative edge of L_CLK (
(C_[76] = 0; C_[77] = 0; C_[84] = 0; C_[85] = 0))
[1]
Parameter Symbol Min Typ Max Unit
Figure 11
assumes that L_CLK and L_FS polarities are both non-inverted
50 Oki Semiconductor
Page 55

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
Frame Boundary
(Bit Cell Boundary)
t5
CT_C8_A/B
L_CLK
Bit Cell Boundary
t1
Bit Cell Boundary
Bit Cell Boundary
L_FS
L_FS
L_FS
L_SO_[7:0]
L_SI_[7:0]
t2
t3
t2
t3
t4
t6
t9
t10
t11
t4
t7
t8
Figure 11. Local Clock and Frame Synchronization Timing
51Oki Semiconductor
Page 56

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
H.100/H.110 Clock Alignment
(Extract from H.100/H.110 Specifications, Rev. 1.0)
CT_FRAME_(A/B)_N
CT_C8_(A/B)
FR_COMP_N
C16 _N
C2
C4 _N
SCLK (2.048 MHz)
SCLK x2* (2 x 2.048MHz)
SCLK (4.096MHz)
SCLK x2* (2 x 4.096MHz)
SCLK (8.192MHz)
SCLK x2* (2 x 8.192MHz)
Note: C16_N, C2, and C4_N not defined in H.110.
52 Oki Semiconductor
Figure 12. H.100/H.110 Clock Alignment
Page 57

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
H.100/H.110 Frame Structure
(Extract from H.100/H.110 Specifications, Rev. 1.0)
CT_FRAME
_(A/B)_N
CT_C8_(A/B)
CT_Dx
Time Slot
812345678 112345678
0 127
Figure 13. H.100/H.110 Frame Structure
H.100/H.110 Detailed Data Bus Timing
(Extract from H.100/H.110 Specifications, Rev. 1.0)
CT_FRAME
_(A/B)_N
CT_C8_(A/B)
Data Out
Data In
Tfs
Tfp
Ts 127 Bit 8 Ts 0 Bit 1
Tfh
Tc8h Tc8I
TzdoTdoz
Tdv
Tsamp
125 µS
1 Bit Cell
2.0V
0.6V
2.0V
0.6V
Tc8p
Tdod
2.4V
0.4V
Tdiv
1.4V
Figure 14. H.100/H.110 Detailed Data Bus Timing
53Oki Semiconductor
Page 58

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
7.5 H.100/H.110 Bus Timing Specification
(Extract from H.100/H.110 Specifications, Rev. 1.0)
Parameter Symbol Min Typ Max Unit Notes
Clock edge rate (All Clocks) H.100 0.25 2 V/ns
CT_C8_(A/B) and CT_FRAME_(A/B)_N
H.110 0.25 2 V/ns
edge rate
CT_NETREF edge rate H.110 0.3 V/ns
Clock CT_C8_(A/B) Period Tc8p 122.066-Φ 122.074+Φ ns
Clock CT_C8_(A/B) High Time H.100 Tc8h 49-Φ 73+Φ ns
H.110 63-Φ 69+Φ ns
Clock CT_C8_(A/B) Low Time H.100 Tc8l 49-Φ 73+Φ ns
H.110 63-Φ 69+Φ ns
Data Sample Point Tsamp 90 ns
Data Output to HiZ Time H.100 Tdoz -20 0 ns
H.110 -10 0 ns
Data HiZ to Output Time H.100 Tzdo 0 22 ns
H.110 0 11 ns
Data Output Delay Time H.100 Tdod 0 22 ns
H.110 0 11 ns
Data Valid Time H.100 Tdv 0 69 ns
H.110 0 83 ns
Data Invalid Time H.100 Tdiv 102 112 ns
H.110 102 112 ns
CT_FRAME_(A/B)_N Width Tfp 90 122 180 ns
CT_FRAME_(A/B)_N Setup Time Tfs 45 90 ns
CT_FRAME_(A/B)_N Hold Time Tfh 45 90 ns
Phase Correction Φ 010ns
1. The rise and fall times are determined by the edge rate in V/nS. A maximum edge rate is the fastest rate at which a clock transitions.
2. 10% - 90%. Test Load = 150 pF.
3. Tc8p Min and Max are under free-run conditions assuming ±32 ppm clock accuracy.
4. Non-cumulative, Tc8p requirements still need to be met.
5. Duty Cycle measured at transmitter under no load conditions.
6. For reference only
7. Test Load - 200 pF
8. Measured at the transmitter.
9. Tdoz and Tzdo apply at every time-slot boundary.
10. Test Load - 12 pF
11. Measured at the receiver.
12. Reference only: Tdv = Max. clock cable delay + Max. data cable delay + Max. data HiZ to output time = 12nS + 35nS + 22 nS = 69nS. Max. clock
cable delay and max. data cable delay are worst case numbers based on electrical simulation.
13. Reference only: Tdv = Max. clock backplane delay + Max. data backplane delay + Max. data HiZ to output time = 26nS + 46nS + 11nS = 83nS. Max.
clock delay and max. data delay are worst case numbers based on electrical simulation.
14. Based on worst case electrical simulation.
15. This range accounts for Φ (Phase Correction).
16. Tcell = Max. clock backplane delay + Max. data backplane delay + Max. Tzdo + (Min. Tdiv - Max. Tdv) + Max Tdoz + F = 26nS + 46nS + 11nS +
(102nS - 83nS) + 10nS + 10nS = 122nS. Max. clock delay and max. data delay are worst case numbers based on electrical simulation.
[1]
[1]
[2]
[3]
[4]
[4] [5]
[4]
[4] [5]
[6]
[7] [8] [9]
[8] [9] [10]
[7] [8] [9]
[8] [9] [10]
[7] [8]
[8] [10]
[7] [11] [12]
[11] [13] [14]
[15] [16]
[17]
54 Oki Semiconductor
Page 59

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
17. Φ (Phase Correction) results from PLL timing corrections.
H.100. Measuring conditions: Data lines Vth (threshold voltage) = 1.4V
Vhi (test high voltage) = 2.4V
Vlo (test low voltage) = 0.4V
Input signal edge rate = 1 V/nS
Clock and Frame lines Vt+ (test high voltage) = 2.0V
Vt- (test low) = 0.6V
Input signal edge rate = 1 V/nS
H.110. Measuring conditions: Data lines Vhi (test high voltage) = 2.0V
Vlo (test low voltage) = 0.8V
Input signal edge rate = 1 V/nS
Clock and Frame lines Vt+ (test high voltage) = 2.0V
Vt- (test low voltage) = 0.6V
Input signal edge rate = 1 V/nS
55Oki Semiconductor
Page 60

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
7.6 Clock Skew Requirements
(Extract from H.100/H.110 Specifications, Rev. 1.0)
Parameter Symbol Min Typ Max Unit Notes
(H.100) Max Skew between CT_C8 "A" and "B" Tskc8 ±10 ±Φ ns
(H.110) Max Skew between CT_C8 "A" and "B" Tskc8 ±10 ±Φ ns
(H.100) Max Skew between CT_C8_A and any
Tskcomp ±5 ns
compatibility clock
(H.110) Max Skew between CT_C8_A and any
Tskcomp ±5 ns
compatibility clock
1. Test Load – 200 pF.
2. Assumes "A" and "B" masters in adjacent slots.
3. When static skew is 10nS and, in the same clock cycle, each clock performs a 10nS phase correction in opposite directions, a maximum skew of
30nS will occur during that clock cycle.
4. Meeting the skew requirements in Table 2 and the requirements of Section 2.3 (in the H.100/H.110 Specifications, Rev. 1.0) could require the
PLL’s generating CT_C8 to have different time constants when acting as primary and secondary clock masters.
5. Test Load - "A" load = "B" load.
[1] [2] [3] [4]
[2] [3] [4] [5]
[1]
[5]
CT_C8_A
CT_C8_B
Tskc8
Vt+
Vt+
Inter-operability Clocks
Figure 15. Clock Skew Requirements
CT_C8_A
Vt+
Tskcomp
Vt+
Vt-
Tskcomp
56 Oki Semiconductor
Page 61

––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––– ■ ML53812-2 ■
8.0 ML53812-2 PACKAGE SPECIFICATIONS
8.1 LQFP176 Package Outlines and Dimensions
0.17 ± 0.05
26.0 ± 0.2 sq.
1.25 TYP
88
45
M
0.10
Seating Plane
1.25 TYP
1.0 ± 0.2
1.7 MAX.
1.4 ± 0.05
0 ~ 0.2
132 89
133
24.0 ± 0.1 sq.
176
144
0.5 0.22 ± 0.05
Index Mark
Mirror Finish
0.10
0.25
0 ~ 10°
0.5 TYP
0.6 ± 0.15
All measurements are in millimeters or degrees
57Oki Semiconductor
Page 62

■ ML53812-2 ■ ––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––
8.2 LQFP176 Mounting Pad Reference Measurements
0.5 0.25
24.4
LQFP176-P-2424-0.50-BK
58 Oki Semiconductor
24.4
1.0
All measurements are in millimeters
Page 63

The information contained herein can change without notice owing to product and/or technical improvements.
Please make sure before using the product that the information you are referring to is up-to-date.
The outline of action and examples of application circuits described herein have been chosen as an explanation of the standard action
and performance of the product. When you actually plan to use the product, please ensure that the outside conditions are reflected in
the actual circuit and assembly designs.
Oki assumes no responsibility or liability whatsoever for any failure or unusual or unexpected operation resulting from misuse, neglect,
improper installation, repair, alteration or accident, improper handling, or unusual physical or electrical stress including, but not limited
to, exposure to parameters outside the specified maximum ratings or operation outside the specified operating range.
Neither indemnity against nor license of a third party's industrial and intellectual property right,etc.is granted by us in connection with
the use of product and/or the information and drawings contained herein. No responsibility is assumed by us for any infringement of a
third party's right which may result from the use thereof.
When designing your product, please use our product below the specified maximum ratings and within the specified operating ranges,
including but not limited to operating voltage, power dissipation, and operating temperature.
The products listed in this document are intended for use in general electronics equipment for commercial applications (e.g.,office
automation, communication equipment, measurement equipment, consumer electronics, etc.).These products are not authorized for
use in any system or application that requires special or enhanced quality and reliability characteristics nor in any system or application
where the failure of such system or application may result in the loss or damage of property or death or injury to humans. Such
applications include, but are not limited to: traffic control, automotive, safety, aerospace, nuclear power control, and medical, including
life support and maintenance.
Certain parts in this document may need governmental approval before they can be exported to certain countries. The purchaser
assumes the responsibility of determining the legality of export of these parts and will take appropriate and necessary steps, at their
own expense, for export to another country.
Copyright 2000 Oki Semiconductor; Copyright 2000 Dialogic Corporation.
This document may not, in whole or in part, be reproduced, stored in a retrieval system, translated, or transmitted in any form or by any
means, electronic or mechanical, without the express written consent of Dialogic Corporation or Oki Semiconductor.
This document contains preliminary information that is subject to change without notice. While every effort has been made to ensure
the accuracy of this document, due to ongoing improvements and revisions neither Dialogic nor Oki Semiconductor can guarantee the
accuracy of printed material after the date of publication, nor can they accept responsibility for errors or omissions. Dialogic and Oki
Semiconductor reserve the right to make changes to the product(s) described, or information contained herein, as needed.
Neither Dialogic Corporation nor Oki Semiconductor guarantees the suitability of the product(s) described for any particular
implementation. Nor does either company accept responsibility for any loss or damage of whatever nature resulting from the use of, or
reliance upon, the information contained herein.
Dialogic is a registered trademark, and CT612, SCSA, SCxbus, and the Signal Computing System Architecture are trademarks of
Dialogic Corporation. CT Bus is a trademark of the Enterprise Computer Telephony Forum (ECTF). CompactPCI is a registered
trademark of the PCI Industrial Computers Manufacturers Group (PICMG). MVIP and MVIP-90 are trademarks of Natural
MicroSystems. All other names, products, and services are the trademarks or registered trademarks of their respective organizations.
Oki Semiconductor reserves the right to make changes in specifications at anytime and without notice. This information furnished by
Oki Semiconductor in this publication is believed to be accurate and reliable. However, no responsibility is assumed by Oki
Semiconductor for its use; nor for any infringements of patents or other rights of third parties resulting from its use. No license is
granted under any patents or patent rights of Oki.
Oki Semiconductor
Page 64

Oki REGIONAL SALES OFFICES
Northwest Area
785 N. Mary Avenue
Sunnyvale, CA 94086
Tel: 408/720-8940
Fax: 408/720-8965
North Central Area
300 Park Blvd.
Suite 365
Itasca, IL 60143
Tel: 630/250-1313
Fax: 630/250-1414
Northeast Area
138 River Road
Shattuck Office Center
Andover, MA 01810
Tel: 978/688-8687
Fax: 978/688-8896
Southwest Area
2302 Martin Street
Suite 250
Irvine, CA 92715
Tel: 949/752-1843
Fax: 949/752-2423
Southeast Area
1590 Adamson Parkway
Suite 220
Morrow, GA 30260
Tel: 770/960-9660
Fax: 770/960-9682
Oki Web Site:
http://www.okisemi.com
For Oki Literature:
Call toll free 1-800-OKI-6388
(6 a.m. to 5 p.m. Pacific Time)
Oki Stock No:
320101-006
Corporate Headquarters
785 N. Mary Avenue
Sunnyvale, CA 94086-2909
Tel: 408/720-1900
Fax: 408/720-1918
 Loading...
Loading...