

Datasheet MCM6226BBXJ35, MCM6226BBXJ35R2, MCM6226BBXJ20, MCM6226BBXJ20R2, MCM6226BBXJ25 Datasheet (Motorola)
...Page 1
MOTOROLA
SEMICONDUCTOR TECHNICAL DATA
128K x 8 Bit Static Random
Access Memory
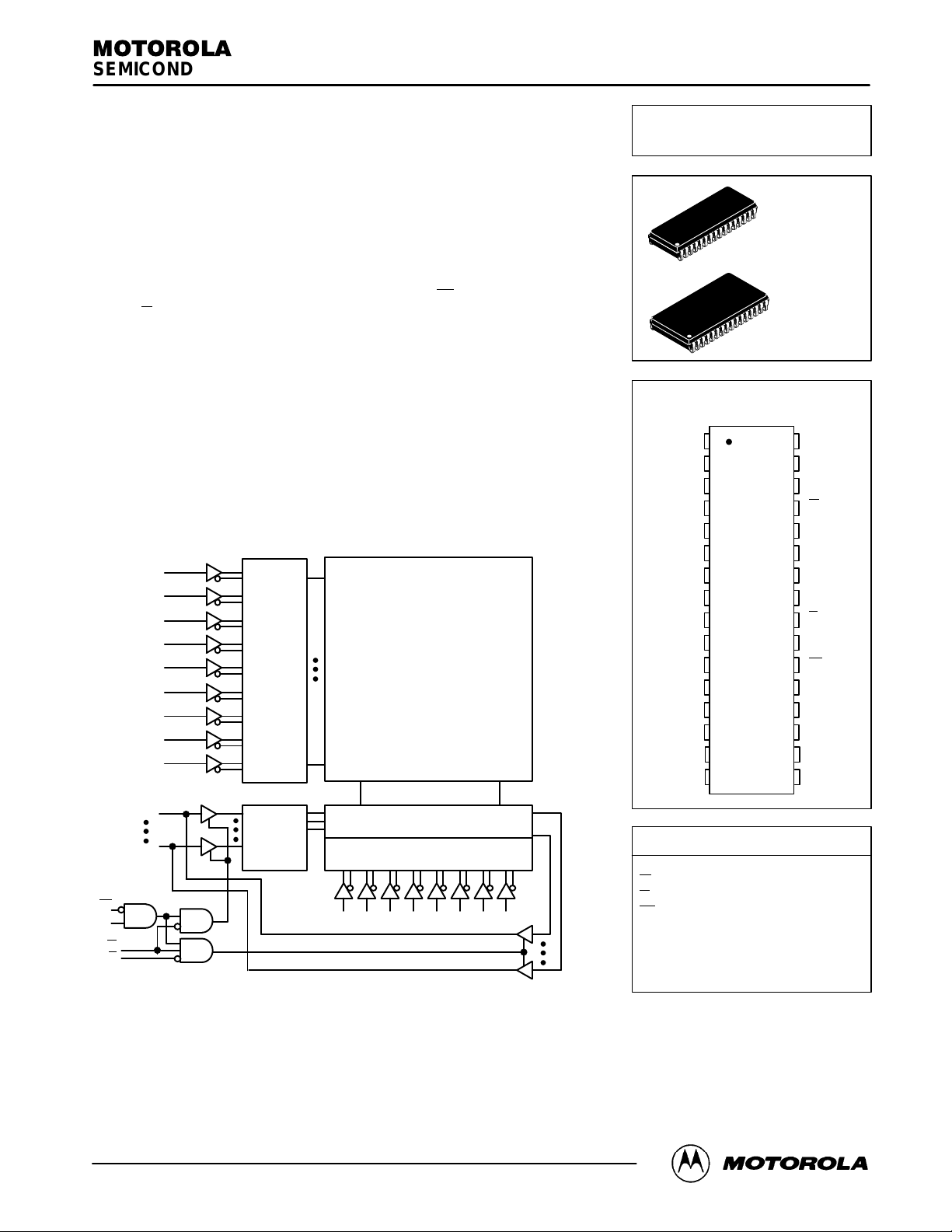
The MCM6226BB is a 1,048,576 bit static random access memory organized
as 131,072 words of 8 bits. Static design eliminates the need for external clocks
or timing strobes while CMOS circuitry reduces power consumption and provides
for greater reliability .
The MCM6226BB is equipped with both chip enable (E1
enable (G
) pins, allowing for greater system flexibility and eliminating bus conten-
tion problems.
The MCM6226BB is available in 300 mil and 400 mil, 32 lead surface–mount
SOJ packages.
• Single 5 V ± 10% Power Supply
• Fast Access Times: 15/17/20/25/35 ns
• Equal Address and Chip Enable Access Times
• All Inputs and Outputs are TTL Compatible
• Three State Outputs
• Low Power Operation: 190/180/165/150/130 mA Maximum, Active AC
BLOCK DIAGRAM
A
A
A
A
A
A
A
A
A
ROW
DECODER
MEMORY MATRIX
512 ROWS x
2048 COLUMNS
and E2) and output
Order this document
by MCM6226BB/D
MCM6226BB
XJ PACKAGE
400 MIL SOJ
CASE 857A–02
EJ PACKAGE
300 MIL SOJ
CASE 857–02
PIN ASSIGNMENT
1
NC
A
2
3
A
A
4
5
A
6
A
A
7
8
A
A
9
A
10
11
A
12
A
13
DQ
14
DQ
15
DQ
V
16
SS
V
32
CC
A
31
E2
30
W
29
A
28
A
27
A
26
A
25
G
24
23
A
22
E1
DQ
21
20
DQ
19
DQ
18
DQ
DQ
17
DQ
DQ
E1
E2
W
G
REV 2
10/31/96
Motorola, Inc. 1996
MOTOROLA FAST SRAM
CONTROL
INPUT
DATA
COLUMN I/O
COLUMN DECODER
A
A
AA
AAAA
PIN NAMES
A Address Inputs. . . . . . . . . . . . . . . . . . . .
W
G
E1
, E2 Chip Enables. . . . . . . . . . . . . . . .
DQ Data Inputs/Outputs. . . . . . . . . . . . .
NC No Connection. . . . . . . . . . . . . . . . . .
V
CC
V
SS
+ 5 V Power Supply. . . . . . . . . . . . .
Write Enable. . . . . . . . . . . . . . . . . . . . .
Output Enable. . . . . . . . . . . . . . . . . . .
Ground. . . . . . . . . . . . . . . . . . . . . . . .
MCM6226BB
1
Page 2
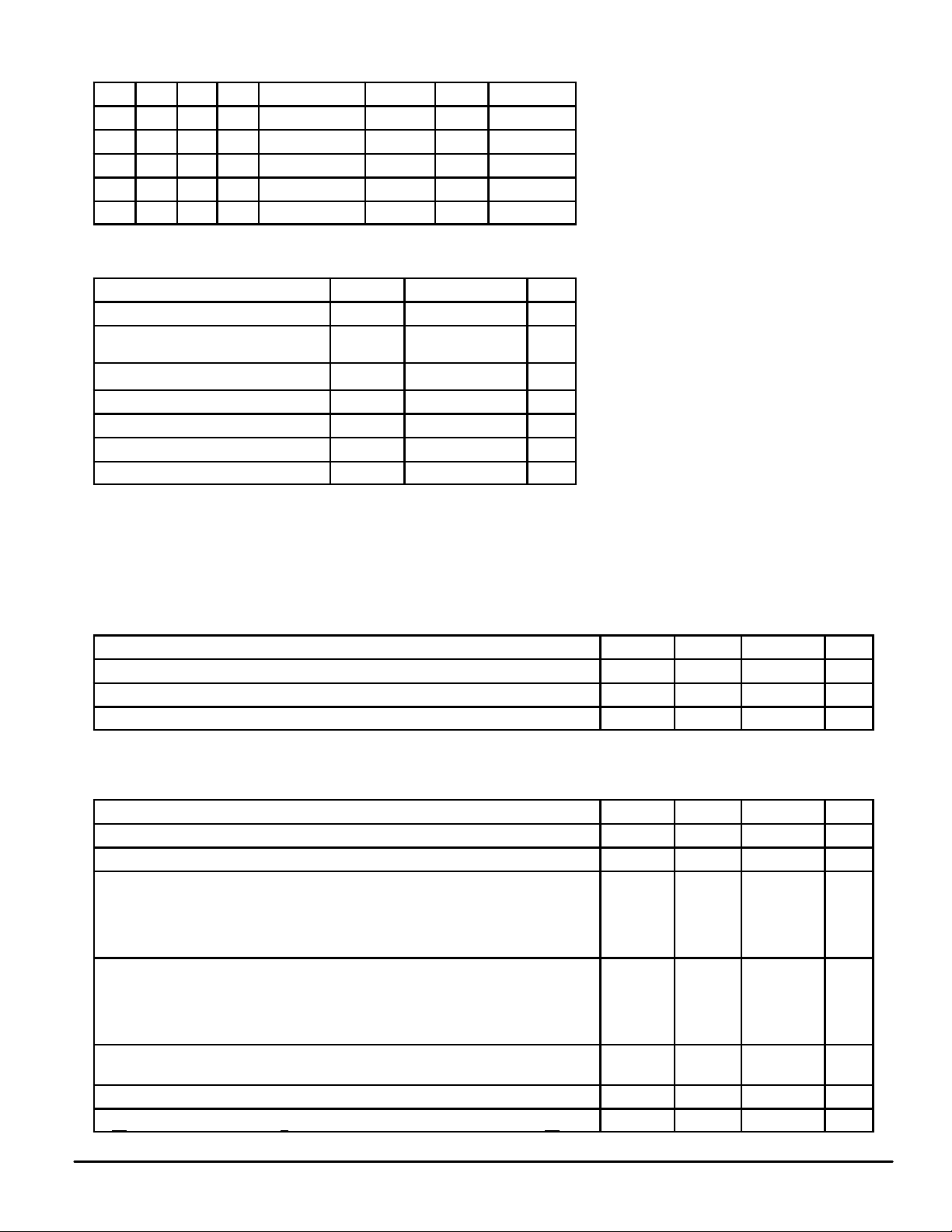
TRUTH TABLE
E1 E2 G W Mode I/O Pin Cycle Current
H X X X Not Selected High–Z — I
X L X X Not Selected High–Z — I
L H H H Output Disabled High–Z — I
L H L H Read D
L H X L Write D
H = High, L = Low, X = Don’t Care
out
in
Read I
Write I
SB1
SB1
, I
, I
CCA
CCA
CCA
SB2
SB2
ABSOLUTE MAXIMUM RATINGS (See Note)
Rating
Power Supply Voltage Relative to V
Voltage Relative to VSS for Any Pin
Except V
Output Current (per I/O) I
Power Dissipation P
Temperature Under Bias T
Operating Temperature T
Storage Temperature T
NOTE: Permanent device damage may occur if ABSOLUTE MAXIMUM RATINGS are
CC
exceeded. Functional operation should be restricted to RECOMMENDED OPERATING CONDITIONS. Exposure to higher than recommended voltages for
extended periods of time could affect device reliability.
SS
Symbol Value Unit
V
CC
Vin, V
out
bias
stg
out
D
A
– 0.5 to 7.0 V
– 0.5 to VCC + 0.5 V
± 20
1.0 W
– 10 to + 85 °C
0 to + 70 °C
– 55 to + 150 °C
mA
This device contains circuitry to protect the
inputs against damage due to high static voltages or electric fields; however, it is advised
that normal precautions be taken to avoid
application of any voltage higher than maximum rated voltages to these high–impedance
circuits.
This CMOS memory circuit has been designed to meet the dc and ac specifications
shown in the tables, after thermal equilibrium
has been established. The circuit is in a test
socket or mounted on a printed circuit board
and transverse air flow of at least 500 linear feet
per minute is maintained.
DC OPERA TING CONDITIONS AND CHARACTERISTICS
(VCC = 5.0 V ± 10%, TA = 0 to 70°C, Unless Otherwise Noted)
RECOMMENDED OPERATING CONDITIONS
Parameter Symbol Min Max Unit
Supply Voltage (Operating Voltage Range) V
Input High Voltage V
Input Low Voltage V
*VIL (min) = – 0.5 V dc; VIL (min) = – 2.0 V ac (pulse width ≤ 20 ns).
**VIH (max) = VCC + 0.3 V dc; VIH (max) = VCC + 2 V ac (pulse width ≤ 20 ns).
DC CHARACTERISTICS AND SUPPLY CURRENTS
Parameter Symbol Min Max Unit
Input Leakage Current (All Inputs, Vin = 0 to VCC) I
Output Leakage Current (E* = VIH, V
AC Active Supply Current (I
VIL or VIH, VIL = 0, VIH ≥ 3 V, cycle time ≥ t
VCC = max) MCM6226BB–20: t
AC Standby Current (VCC = max, E* = VIH, f = f
CMOS Standby Current (E* ≥ VCC – 0.2 V, Vin ≤ VSS + 0.2 V
or ≥ VCC – 0.2 V, VCC = max, f = 0 MHz)
Output Low Voltage (IOL = + 8.0 mA) V
Output High Voltage (IOH = – 4.0 mA) V
*E1 and E2 are represented by E in this data sheet. E2 is of opposite polarity to E1.
out
= 0 to VCC) I
out
= 0 mA, all inputs = MCM6226BB–15: t
min, MCM6226BB–17: t
AVAV
MCM6226BB–25: t
MCM6226BB–35: t
) MCM6226BB–15: t
max
MCM6226BB–17: t
MCM6226BB–20: t
MCM6226BB–25: t
MCM6226BB–35: t
AVAV
AVAV
AVAV
AVAV
AVAV
AVAV
AVAV
AVAV
AVAV
AVAV
= 15 ns
= 17 ns
= 20 ns
= 25 ns
= 35 ns
= 15 ns
= 17 ns
= 20 ns
= 25 ns
= 35 ns
CC
IH
IL
lkg(I)
lkg(O)
I
CCA
I
SB1
I
SB2
OL
OH
4.5 5.5 V
2.2 VCC + 0.3** V
– 0.5* 0.8 V
— ± 1 µA
— ± 1 µA
—
—
—
—
—
—
—
—
—
—
— 5 mA
— 0.4 V
2.4 — V
195
180
165
150
130
45
40
35
30
25
mA
mA
MCM6226BB
2
MOTOROLA FAST SRAM
Page 3
CAPACITANCE (f = 1.0 MHz, dV = 3.0 V, T
Input Capacitance All Inputs Except Clocks and DQs
I/O Capacitance DQ C
= 25°C, Periodically Sampled Rather Than 100% Tested)
A
Characteristic
E1
, E2, G, and W
Symbol Typ Max Unit
C
in
C
ck
I/O
4
5
5 8 pF
6
8
AC OPERA TING CONDITIONS AND CHARACTERISTICS
(VCC = 5.0 V ± 10%, TA = 0 to + 70°C, Unless Otherwise Noted)
Input Pulse Levels 0 to 3.0 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Input Rise/Fall Time 2 ns. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Input Timing Measurement Reference Level 1.5 V. . . . . . . . . . . . . . .
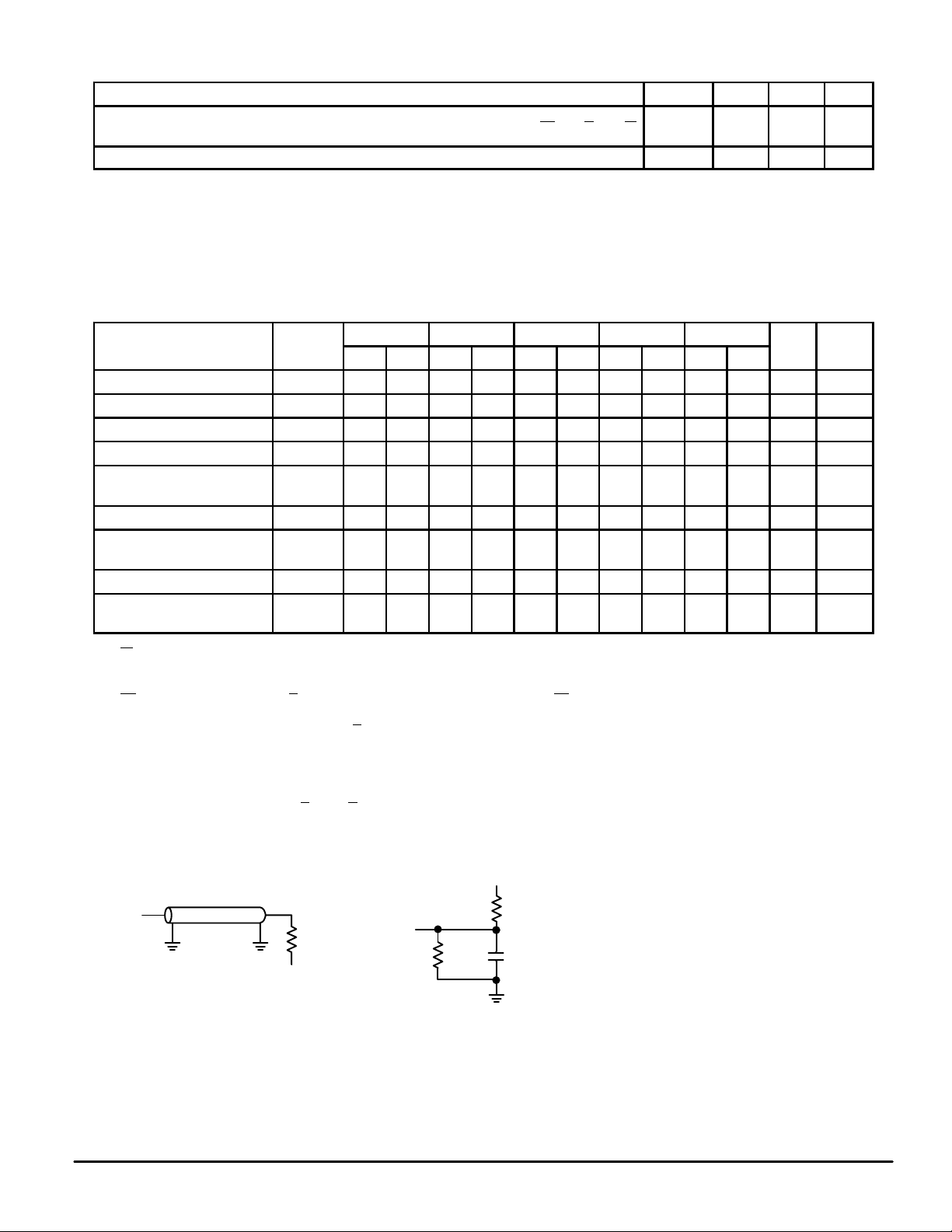
READ CYCLE TIMING (See Notes 1, 2, and 3)
6226BB–15 6226BB–17 6226BB–20 6226BB–25 6226BB–35
Parameter Symbol Min Max Min Max Min Max Min Max Min Max Unit Notes
Read Cycle Time t
Address Access Time t
Enable Access Time t
Output Enable Access Time t
Output Hold from Address
Change
Enable Low to Output Active t
Output Enable Low to Output
Active
Enable High to Output High–Z t
Output Enable High to Output
High–Z
NOTES:
1. W
is high for read cycle.
2. Product sensitivities to noise require proper grounding and decoupling of power supplies as well as minimization or elimination of bus contention conditions during read and write cycles.
3. E1
and E2 are represented by E in this data sheet. E2 is of opposite polarity to E1.
4. All timings are referenced from the last valid address to the first transitioning address.
5. Addresses valid prior to or coincident with E
6. At any given voltage and temperature, t
and from device to device.
7. Transition is measured ± 500 mV from steady–state voltage with load of Figure 1b.
8. This parameter is sampled and not 100% tested.
9. Device is continuously selected (E
AVAV
AVQV
ELQV
GLQV
t
AXQX
ELQX
t
GLQX
EHQZ
t
GHQZ
≤ VIL, G ≤ VIL).
15 — 17 — 20 — 25 — 35 — ns 4
— 15 — 17 — 20 — 25 — 35 ns
— 15 — 17 — 20 — 25 — 35 ns 5
— 6 — 7 — 7 — 8 — 8 ns
3 — 3 — 3 — 3 — 3 — ns
5 — 5 — 5 — 5 — 5 — ns 6, 7, 8
0 — 0 — 0 — 0 — 0 — ns 6, 7, 8
— 6 — 7 — 7 — 8 — 8 ns 6, 7, 8
— 6 — 7 — 7 — 8 — 8 ns 6, 7, 8
going low.
max is less than t
EHQZ
Output Timing Measurement Reference Level 1.5 V. . . . . . . . . . . . .
Output Load See Figure 1a. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ELQX
min, and t
max is less than t
GHQZ
min, both for a given device
GLQX
pF
OUTPUT
Z0 = 50
Ω
(a) (b)
MOTOROLA FAST SRAM
RL = 50
VL = 1.5 V
Ω
+5 V
OUTPUT
255
Ω
Figure 1. AC Test Loads
480
5 pF
TIMING LIMITS
The table of timing values shows either a
Ω
minimum or a maximum limit for each parameter. Input requirements are specified from
the external system point of view. Thus, address setup time is shown as a minimum
since the system must supply at least that
much time. On the other hand, responses
from the memory are specified from the device point of view. Thus, the access time is
shown as a maximum since the device never
provides data later than that time.
MCM6226BB
3
Page 4

A (ADDRESS)
READ CYCLE 1 (See Notes 1, 2, 3, and 9)
t
AVAV
t
AXQX
Q (DATA OUT)
A (ADDRESS)
E (CHIP ENABLE)
(OUTPUT ENABLE)
G
Q (DATA OUT)
I
CC
SUPPLY CURRENT
I
SB
HIGH–Z
t
ELICCH
t
AVQV
READ CYCLE 2 (See Notes 3 and 5)
t
AVAV
t
ELQV
t
ELQX
t
GLQV
t
GLQX
t
AVQV
DATA VALIDPREVIOUS DATA VALID
DATA VALID
t
EHQZ
t
GHQZ
t
EHICCL
MCM6226BB
4
MOTOROLA FAST SRAM
Page 5

WRITE CYCLE 1 (W Controlled, See Notes 1, 2, 3, and 4)
6226BB–15 6226BB–17 6226BB–20 6226BB–25 6226BB–35
Parameter Symbol Min Max Min Max Min Max Min Max Min Max Unit Notes
Write Cycle Time t
Address Setup Time t
Address Valid to End of W rite t
Write Pulse Width t
Data Valid to End of W rite t
Data Hold TIme t
Write Low to Data High–Z t
Write High to Output Active t
Write Recovery Time t
NOTES:
1. A write occurs during the overlap of E
2. Product sensitivities to noise require proper grounding and decoupling of power supplies as well as minimization or elimination of bus contention conditions during read and write cycles.
3. E1
and E2 are represented by E in this data sheet. E2 is of opposite polarity to E1.
4. If G
goes low coincident with or after W goes low, the output will remain in a high–impedance state.
5. All timings are referenced from the last valid address to the first transitioning address.
6. Transition is measured ± 500 mV from steady–state voltage with load of Figure 1b.
7. This parameter is sampled and not 100% tested.
8. At any given voltage and temperature, t
AVAV
AVWL
AVWH
WLWH,
t
WLEH
DVWH
WHDX
WLQZ
WHQX
WHAX
15 — 17 — 20 — 25 — 35 — ns 5
0 — 0 — 0 — 0 — 0 — ns
12 — 14 — 15 — 17 — 20 — ns
12 — 14 — 15 — 17 — 20 — ns
7 — 8 — 9 — 10 — 11 — ns
0 — 0 — 0 — 0 — 0 — ns
— 6 — 7 — 7 — 8 — 8 ns 6, 7, 8
5 — 5 — 5 — 5 — 5 — ns 6, 7, 8
0 — 0 — 0 — 0 — 0 — ns
low and W low.
max is less than t
WLQZ
min both for a given device and from device to device.
WHQX
A (ADDRESS)
E
(CHIP ENABLE)
W
(WRITE ENABLE)
D (DATA IN)
Q (DATA OUT)
WRITE CYCLE 1 (W Controlled See Notes 1, 2, 3, and 4)
t
AVAV
t
AVWH
t
WLWH
t
WLEH
t
AVWL
t
WLQZ
HIGH–Z HIGH–Z
t
DVWH
DATA VALID
t
WHAX
t
WHDX
t
WHQX
MOTOROLA FAST SRAM
MCM6226BB
5
Page 6

WRITE CYCLE 2 (E Controlled, See Notes 1, 2, 3, and 4)
ELEH,
6226BB–15 6226BB–17 6226BB–20 6226BB–25 6226BB–35
Parameter Symbol Min Max Min Max Min Max Min Max Min Max Unit Notes
Write Cycle Time t
Address Setup Time t
Address Valid to End of W rite t
Enable to End of Write t
Write Pulse Width t
Data Valid to End of W rite t
Data Hold Time t
Write Recovery Time t
NOTES:
1. A write occurs during the overlap of E
2. Product sensitivities to noise require proper grounding and decoupling of power supplies as well as minimization or elimination of bus contention conditions during read and write cycles.
3. E1
and E2 are represented by E in this data sheet. E2 is of opposite polarity to E1.
4. If G
goes low coincident with or after W goes low, the output will remain in a high–impedance state.
5. All timings are referenced from the last valid address to the first transitioning address.
6. If E
goes low coincident with or after W goes low, the output will remain in a high–impedance state.
7. If E
goes high coincident with or before W goes high, the output will remain in a high–impedance state.
AVAV
AVEL
AVEH
ELEH,
t
ELWH
WLEH
DVEH
EHDX
EHAX
15 — 17 — 20 — 25 — 35 — ns 5
0 — 0 — 0 — 0 — 0 — ns
12 — 14 — 15 — 17 — 20 — ns
12 — 14 — 15 — 17 — 20 — ns 6, 7
12 — 14 — 15 — 17 — 20 — ns
7 — 8 — 9 — 10 — 11 — ns
0 — 0 — 0 — 0 — 0 — ns
0 — 0 — 0 — 0 — 0 — ns
low and W low.
WRITE CYCLE 2 (E Controlled See Notes 1, 2, 3, and 4)
A (ADDRESS)
E
(CHIP ENABLE)
W (WRITE ENABLE)
D (DATA IN)
Q (DATA OUT)
Motorola Memory Prefix
Part Number
t
AVEL
HIGH–Z
ORDERING INFORMATION
(Order by Full Part Number)
MCM 6226BB XX XX XX
t
AVEH
t
AVAV
t
ELEH
t
ELWH
t
WLEH
t
DVEH
DATA VALID
t
EHDX
Shipping Method (R2 = Tape and Reel, Blank = Rails)
Speed (15 = 15 ns, 17 = 17 ns, 20 = 20 ns, 25 = 25 ns,
35 = 35 ns)
Package (XJ = 400 mil SOJ, EJ = 300 mil SOJ)
t
EHAX
Full Part Numbers — MCM6226BBXJ15 MCM6226BBXJ15R2 MCM6226BBEJ15 MCM6226BBEJ15R2
MCM6226BB
6
MCM6226BBXJ17 MCM6226BBXJ17R2 MCM6226BBEJ17 MCM6226BBEJ17R2
MCM6226BBXJ20 MCM6226BBXJ20R2 MCM6226BBEJ20 MCM6226BBEJ20R2
MCM6226BBXJ25 MCM6226BBXJ25R2 MCM6226BBEJ25 MCM6226BBEJ25R2
MCM6226BBXJ35 MCM6226BBXJ35R2 MCM6226BBEJ35 MCM6226BBEJ35R2
MOTOROLA FAST SRAM
Page 7

P ACKAGE DIMENSIONS
32 LEAD
400 MIL SOJ
CASE 857A–02
32 PL
32
17
N
1
16
0.17 (0.007)ST
-AL
0.17 (0.007)ST
F
0.17 (0.007)ST
DETAIL Z
32 PL
D
S
A
B
S
NOTE 3
S
B
P
SS
B
A
G
-BC
0.10 (0.004)
SEATING
K
DETAIL Z
-T-
PLANE
R
0.25 (0.010)
S
E
RADIUS
S
S
S
T
B
A
NOTE 3
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
S
A
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. TO BE DETERMINED AT PLANE -T-.
4. DIMENSION A & B DO NOT INCLUDE MOLD
PROTRUSION. MOLD PROTRUSION SHALL NOT
EXCEED 0.15 (0.006) PER SIDE.
5. DIMENSION A & B INCLUDE MOLD MISMATCH AND
ARE DETERMINED AT THE PARTING LINE.
MILLIMETERS INCHES
MIN MINMAX MAX
DIM
A
B
C
D
E
F
G
K
L
N
P
R
S
20.83
10.03
3.26
0.41
2.24
0.67
1.27 BSC
0.89
0.64 BSC
0.76
11.05
9.27
0.77
21.08
10.29
3.75
0.50
2.48
0.81
1.14
1.14
11.30
9.52
1.01
0.820
0.395
0.128
0.016
0.088
0.026
0.050 BSC
0.035
0.025 BSC
0.030
0.435
0.365
0.030
0.830
0.405
0.148
0.020
0.098
0.032
0.045
0.045
0.445
0.375
0.040
MOTOROLA FAST SRAM
MCM6226BB
7
Page 8

32 LEAD
300 MIL SOJ
CASE 857–02
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
32 PL
F
1732
1
16
M
–A–
L
G
–X–
NOTE 3
K
DETAIL Z
0.10 (0.004)
SEATING
-T-
PLANE
NOTE 4
32 PL
D
-B-
R S
P
B0.17 (0.007)
B0.25 (0.010)
SS
SS
A0.17 (0.007)
NOTE 5
A0.17 (0.007)
E
RADIUS
NOTE 5
SS
SS
C
3. DATUM PLANE -X- LOCATED AT TOP OF MOLD
PARTING LINE AND COINCIDENT WITH TOP OF
LEAD, WHERE LEAD EXITS BODY.
4. TO BE DETERMINED AT PLANE -X-.
5. TO BE DETERMINED AT PLANE -T-.
6. DIMENSION A & B DO NOT INCLUDE MOLD
PROTRUSION. MOLD PROTRUSION SHALL NOT
EXCEED 0.15 (0.006) PER SIDE.
7. 857-01 IS OBSOLETE, NEW STANDARD 857-02.
MILLIMETERS INCHES
MIN MINMAX MAX
DIM
A
B
C
D
E
F
G
K
L
N
P
R
S
20.83
7.50
3.26
0.41
2.24
0.67
1.27 BSC
0.89
0.64 BSC
0.76
8.38
6.60
0.77
21.08
7.74
3.75
0.50
2.48
0.81
1.14
1.14
8.64
6.86
1.01
0.820
0.295
0.128
0.016
0.088
0.026
0.050 BSC
0.035
0.025 BSC
0.030
0.330
0.260
0.030
0.830
0.305
0.148
0.020
0.098
0.032
0.045
0.045
0.340
0.270
0.040
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”
must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of
others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that
Motorola was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal
Opportunity/Affirmative Action Employer.
Mfax is a trademark of Motorola, Inc.
How to reach us:
USA/EUROPE/ Locations Not Listed: Motorola Literature Distribution; JAPAN: Nippon Motorola Ltd.: SPD, Strategic Planning Office, 4–32–1,
P.O. Box 5405, Denver, Colorado 80217. 303–675–2140 or 1–800–441–2447 Nishi–Gotanda, Shinagawa–ku, Tokyo 141, Japan. 81–3–5487–8488
Mfax: RMFAX0@email.sps.mot.com – TOUCHTONE 602–244–6609 ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
– US & Canada ONLY 1–800–774–1848 51 Ting Kok Road, T ai Po, N.T., Hong Kong. 852–26629298
INTERNET: http://motorola.com/sps
MCM6226BB
◊
MOTOROLA FAST SRAM
MCM6226BB/D
8
 Loading...
Loading...