

Page 1
SEMICONDUCTOR TECHNICAL DATA
1
REV 4
Motorola, Inc. 1997
1/97
The MC88915 Clock Driver utilizes phase–locked loop
technology to lock its low skew outputs’ frequency and phase
onto an input reference clock. It is designed to provide clock
distribution for high performance PC’s and workstations.
The PLL allows the high current, low skew outputs to lock
onto a single clock input and distribute it with essentially zero
delay to multiple components on a board. The PLL also allows
the MC88915 to multiply a low frequency input clock and
distribute it locally at a higher (2X) system frequency . Multiple
88915’s can lock onto a single reference clock, which is ideal
for applications when a central system clock must be
distributed synchronously to multiple boards (see Figure 7).
Five “Q” outputs (QO–Q4) are provided with less than 500
ps skew between their rising edges. The Q5
output is inverted
(180° phase shift) from the “Q” outputs. The 2X_Q output runs
at twice the “Q” output frequency, while the Q/2 runs at 1/2 the
“Q” frequency.
The VCO is designed to run optimally between 20 MHz and
the 2X_Q Fmax specification. The wiring diagrams in Figure 5
detail the different feedback configurations which create
specific input/output frequency relationships. Possible
frequency ratios of the “Q” outputs to the SYNC input are 2:1,
1:1, and 1:2.
The FREQ_SEL pin provides one bit programmable
divide–by in the feedback path of the PLL. It selects between
divide–by–1 and divide–by–2 of the VCO before its signal
reaches the internal clock distribution section of the chip (see
the block diagram on page 2). In most applications
FREQ_SEL should be held high (÷1). If a low frequency
reference clock input is used, holding FREQ_SEL low (÷2) will
allow the VCO to run in its optimal range (>20 MHz).
In normal phase–locked operation the PLL_EN pin is held
high. Pulling the PLL_EN pin low disables the VCO and puts
the 88915 in a static “test mode”. In this mode there is no
frequency limitation on the input clock, which is necessary for
a low frequency board test environment. The second SYNC
input can be used as a test clock input to further simplify
board–level testing (see detailed description on page 11).
A lock indicator output (LOCK) will go high when the loop is
in steady–state phase and frequency lock. The LOCK output
will go low if phase–lock is lost or when the PLL_EN pin is low.
Under certain conditions the lock output may remain low, even
though the part is phase–locked. Therefore the LOCK output
signal should not be used to drive any active circuitry; it should
be used for passive monitoring or evaluation purposes only.
Yield Surface Modeling and YSM are trademarks of Motorola, Inc.
Features
• Five Outputs (QO–Q4) with Output–Output Skew < 500
ps each being phase and frequency locked to the SYNC
input
• The phase variation from part–to–part between the SYNC
and FEEDBACK inputs is less than 550 ps (derived from
the tPD specification, which defines the part–to–part
skew)
• Input/Output phase–locked frequency ratios of 1:2, 1:1,
and 2:1 are available
• Input frequency range from 5MHz – 2X_Q FMAX spec
• Additional outputs available at 2X and +2 the system “Q”
frequency. Also a Q
(180° phase shift) output available
• All outputs have ±36 mA drive (equal high and low) at
CMOS levels, and can drive either CMOS or TTL inputs.
All inputs are TTL–level compatible
• Test Mode pin (PLL_EN) provided for low frequency
testing. Two selectable CLOCK inputs for test or
redundancy purposes
PLL_ENGNDQ1V
CC
Q0GND
FREQ_SEL
LOCK
GND
Q2
V
CC
Q3
GND
Q/2
RC1
GND(AN)
VCC(AN)
SYNC[1]
SYNC[0]
REF_SEL
FEEDBACK
2X_QRST V
CC
V
CC
Q4Q5 GND
25
24
23
22
21
20
1911
10
9
8
7
6
5
18171612 13 14 15
2627284321
28–Lead Pinout (Top View)
ORDERING INFORMATION
MC88915FN55 PLCC
MC88915FN70 PLCC
FN SUFFIX
PLASTIC PLCC
CASE 776–02
Page 2
MC88915
MOTOROLA TIMING SOLUTIONS
BR1333 — Rev 6
2
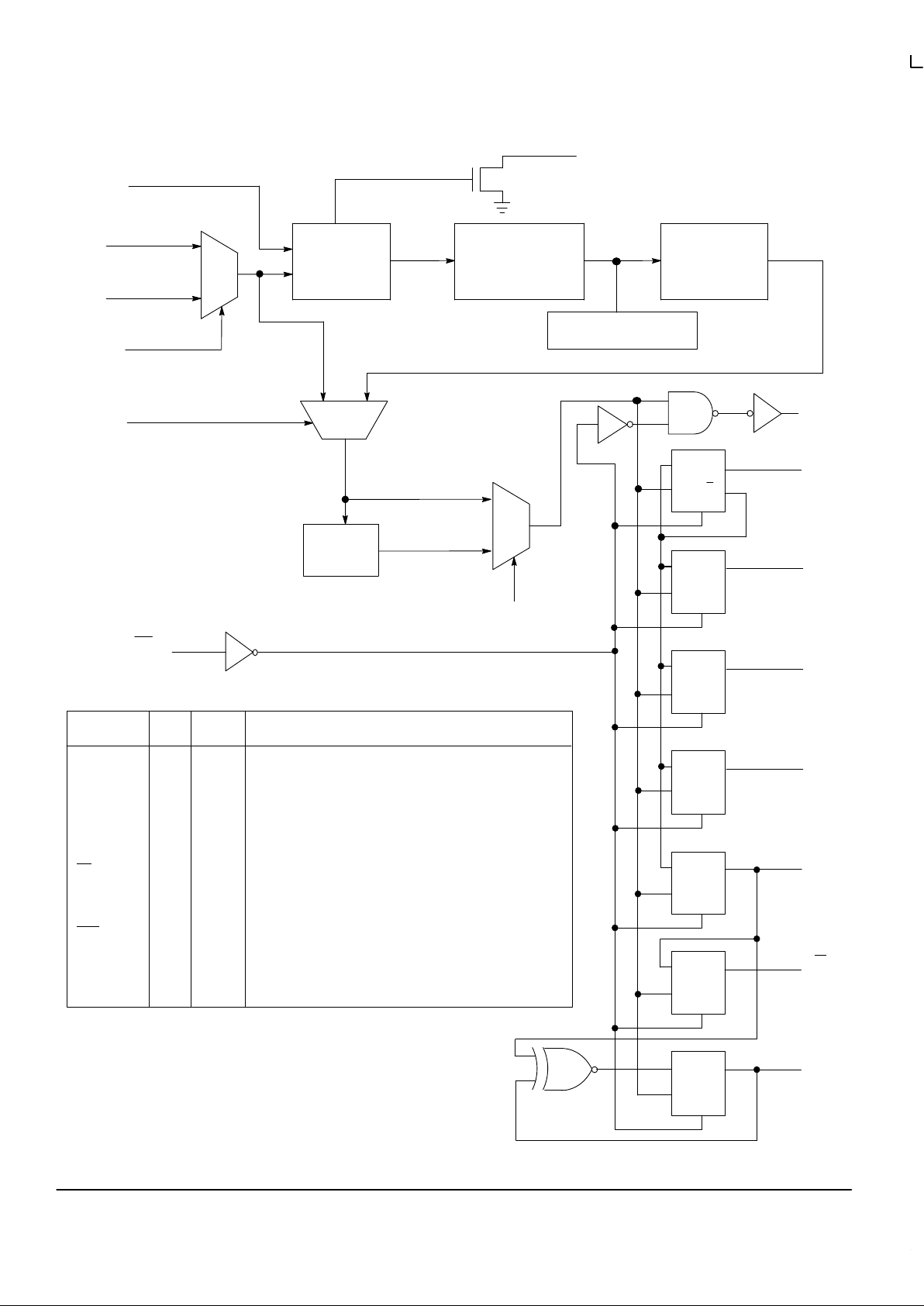
MC88915 Block Diagram
M
U
X
0
1
M
U
X
0
1
MUX
1
0
PLL_EN
R
R
R
R
R
R
R
RST
FEEDBACK
Q/2
Q
CP
D
LOCK
Q5
Q4
Q
CP
D
Q
CP
D
EXTERNAL REC NETWORK
(RC1 Pin)
REF_SEL
SYNC (1)
SYNC (0)
CHARGE PUMP/LOOP
FILTER
DIVIDE
BY TWO
Q3
Q
CP
D
Q2
Q1
Q0
2x_Q
Q
CP
D
Q
CP
D
Q
Q
CP
D
(
÷
1)
(
÷
2)
FREQ_SEL
OSCILLATOR
VOLTAGE
CONTROLLED
PHASE/FREQ.
DETECTOR
Reference clock input
Reference clock input
Chooses reference between sync[0] & Sync[1]
Selects Q output frequency
Feedback input to phase detector
Input for external RC network
Clock output (locked to sync)
Inverse of clock output
2 x clock output (Q) frequency (synchronous)
Clock output(Q) frequency
÷
2 (synchronous)
Indicates phase lock has been achieved (high when locked)
Asynchronous reset (active low)
Disables phase–lock for low freq. testing
Power and ground pins (note pins 8, 10 are
“quiet” supply pins for internal logic only)
Input
Input
Input
Input
Input
Input
Output
Output
Output
Output
Output
Input
Input
1
1
1
1
1
1
5
1
1
1
1
1
1
11
PIN SUMMARY
SYNC[0]
SYNC[1]
REF_SEL
FREQ_SEL
FEEDBACK
RC1
Q(0–4)
Q5
2x_Q
Q/2
LOCK
RST
PLL_EN
VCC,GND
Pin Name Num I/O Function
Page 3
MC88915
TIMING SOLUTIONS
BR1333 — Rev 6
3 MOTOROLA
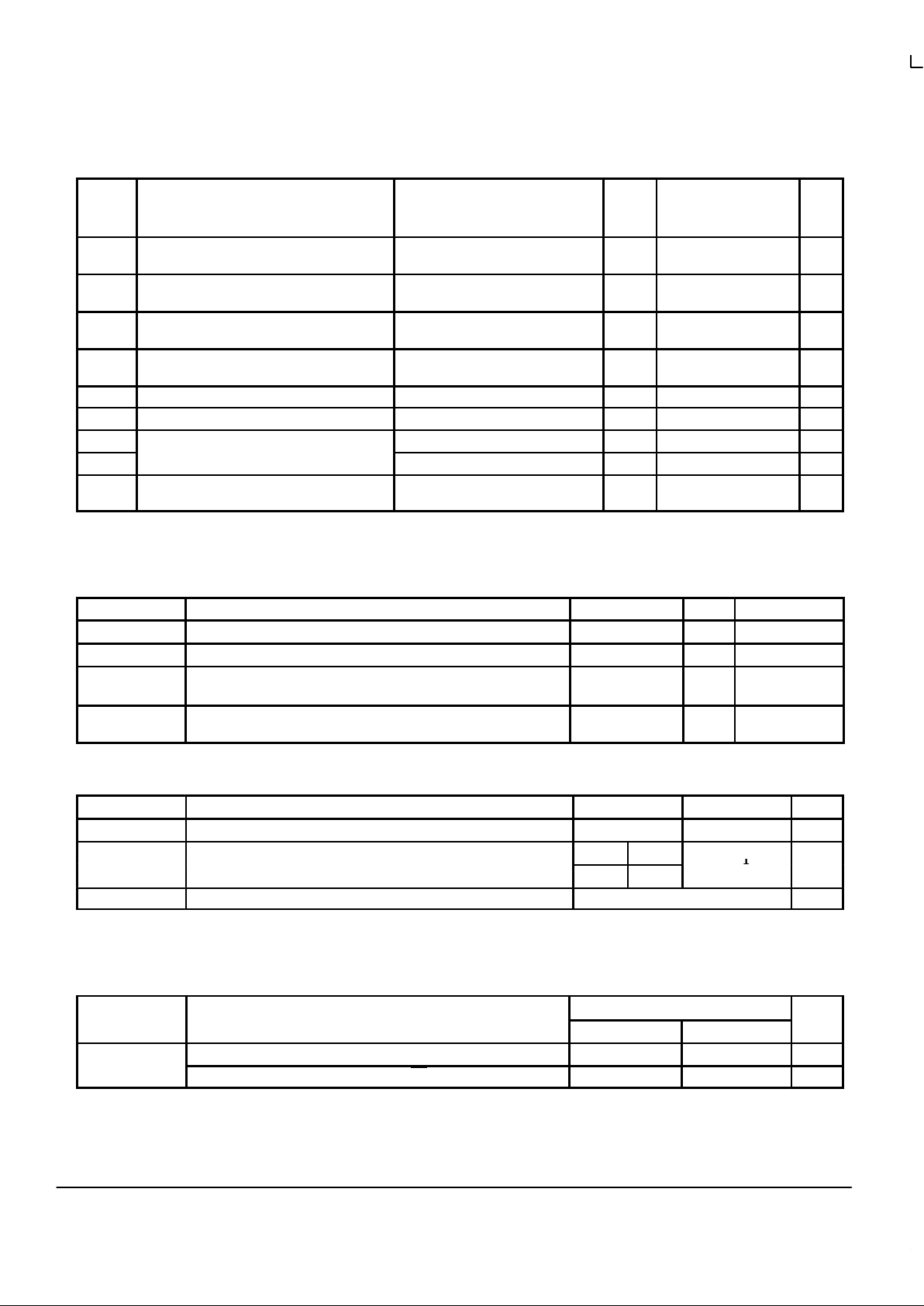
DC ELECTRICAL CHARACTERISTICS (Voltages Referenced to GND; TA =0° C to + 70° C, VCC = 5.0V ± 5%)
Symbol Parameter Test Conditions V
CC
V
Guaranteed Limit Unit
V
IH
Minimum High–Level Input
Voltage
V
out
= 0.1 V or VCC – 0.1 V 4.75
5.25
2.0
2.0
V
V
IL
Maximum Low–Level Input
Voltage
V
out
= 0.1 V or VCC – 0.1 V 4.75
5.25
0.8
0.8
V
V
OH
Minimum High–Level Output
Voltage
Vin = VIH or V
IL
IOH = –36 mA
1
4.75
5.25
4.01
4.51
V
V
OL
Maximum Low–Level Output
Voltage
Vin = VIH or V
IL
IOL = 36 mA
1
4.75
5.25
0.44
0.44
V
I
in
Maximum Input Leakage Current VI = VCC or GND 5.25 ±1.0 µA
I
CCT
Maximum ICC/Input VI = VCC – 2.1 V 5.25
1.5
2
mA
I
OLD
Minimum Dynamic Output Current
3
V
OLD
= 1.0V Max 5.25 88 mA
I
OHD
V
OHD
= 3.85 V Max 5.25 –88 mA
I
CC
Maximum Quiescent Supply
Current (per Package)
VI = VCC or GND 5.25 1.0 mA
1. IOL and IOH are 12mA and –12mA respectively for the LOCK output.
2. The PLL_EN input pin is not guaranteed to meet this specification.
3. Maximum test duration is 2.0ms, one output loaded at a time.
CAPACITANCE AND POWER SPECIFICATIONS
Symbol Parameter Typical Values Unit Conditions
C
IN
Input Capacitance 4.5 pF VCC = 5.0 V
C
PD
Power Dissipation Capacitance 40 pF VCC = 5.0 V
PD
1
Power Dissipation @ 33MHz with 50Ω Thevenin Termination 15 mW/Output
120 mW/Device
mW VCC = 5.0 V
T = 25°C
PD
2
Power Dissipation @ 33MHz with 50Ω Parallel Termination to GND 37.5 mW/Output
300 mW/Device
mW VCC = 5.0 V
T = 25° C
SYNC INPUT TIMING REQUIREMENTS
Symbol Parameter Min Max Unit
t
RISE
, t
FALL
Maximum Rise and Fall times, (SYNC Inputs: From 0.8V – 2.0V) – 3.0 ns
FN55 FN70
t
CYCLE
I
nput Clock Period
(SYNC I
nputs
)
36 28.5
200
1
ns
Duty Cycle Input Duty Cycle (SYNC Inputs) 50% ±25%
1. Information in Fig. 5 and in the “General AC Specification Notes”, Note #3 describes this specification and its actual limits depending on the
application.
FREQUENCY SPECIFICATIONS (TA =0° C to + 70° C, VCC = 5.0V ±5%, CL = 50pF)
Guaranteed Minimum
Symbol Parameter MC88915FN55 MC88915FN70 Unit
f
max
1
Maximum Operating Frequency
(2X_Q Output)
55 70 MHz
Maximum Operating Frequency (Q0–Q4,Q5 Output) 27.5 35 MHz
1. Maximum Operating Frequency is guaranteed with the part in a phase–locked condition, and all outputs loaded at 50 pF.
Page 4
MC88915
MOTOROLA TIMING SOLUTIONS
BR1333 — Rev 6
4
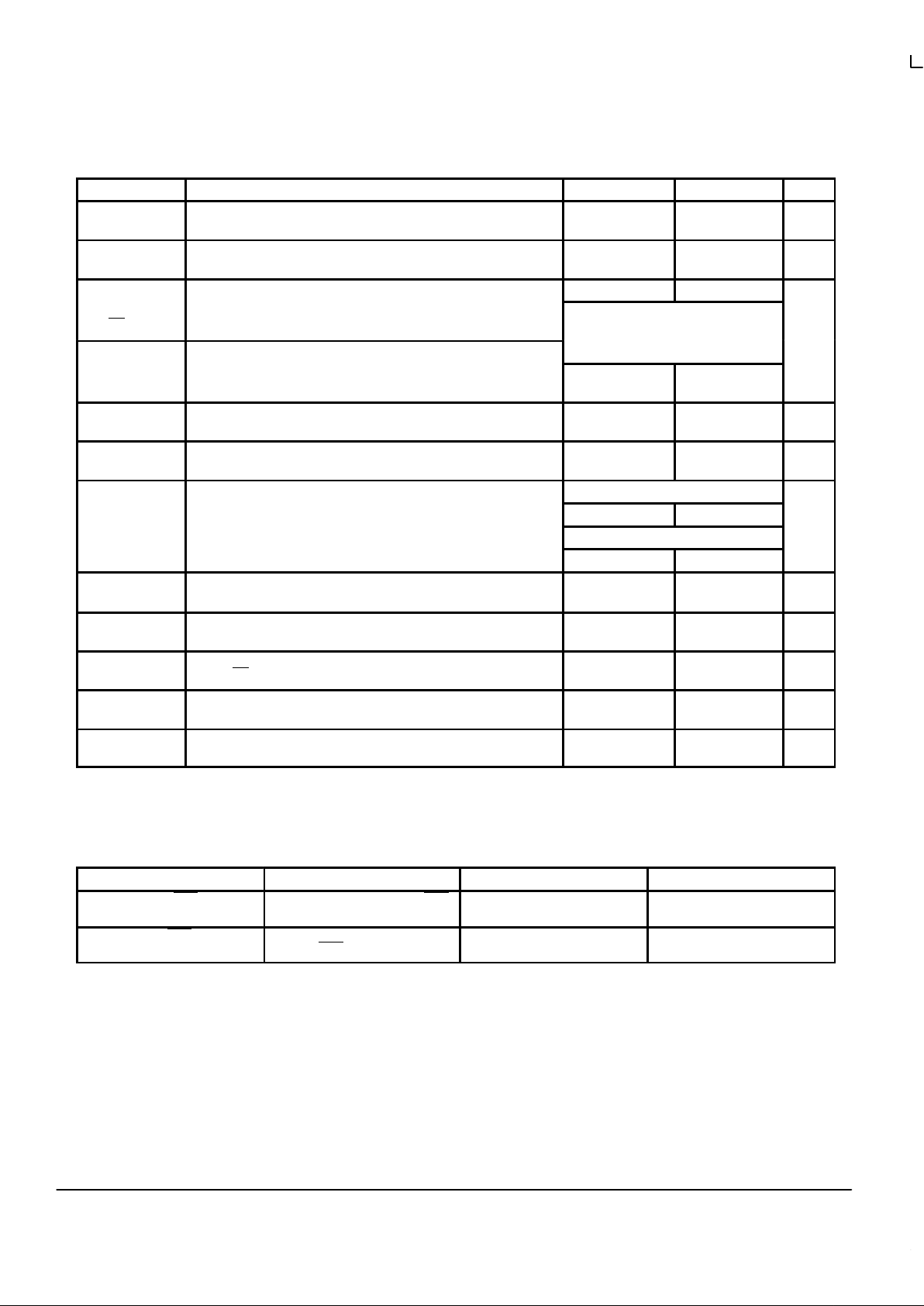
AC ELECTRICAL CHARACTERISTICS (TA =0° C to +70° C, VCC = 5.0V ±5%, CL = 50pF)
Symbol Parameter Min Max Unit
t
RISE
, t
FALL
(Outputs)
Rise and Fall Times, all Outputs Into a 50 pF, 500 Ω Load
(Between 0.2VCC and 0.8VCC)
1.0 2.5 ns
t
RISE
, t
FALL
3
(2X_Q Output)
Rise and Fall Time, 2X_Q Output Into a 20 pF Load With Termination specified in note 2 (Between 0.8 V and 2.0 V)
0.5 1.6 ns
t
Pulse Width
3Output Pulse Width (Q0, Q1, Q3, Q4, Q5, Q/2 @VCC/2) 0.5t
CYCLE
– 0.5 0.5t
CYCLE
+ 0.5
(Q0,Q1,Q3,Q4,
Q5,Q/2)
t
CYCLE
= 1/Freq. at which the “Q”
Outputs are running ns
t
Pulse Width
3
(Q2 only)
Output Pulse Width (Q2 Output @ VCC/2) 0.5t
CYCLE
– 0.6 0.5t
CYCLE
+ 0.6
t
Pulse Width
3
(2X_Q Output)
Output Pulse Width (2X_Q Output @ 1.5 V) (See AC Note 2) 0.5t
CYCLE
– 0.5 0.5t
CYCLE
+ 0.5 ns
t
Pulse Width
3
(2X_Q Output)
Output Pulse Width (2X_Q Output @ VCC/2) 0.5t
CYCLE
– 1.0 0.5t
CYCLE
+ 1.0 ns
tPD
3
(470kΩ From RC1 to An.VCC)
(Sync–Feedback) SYNC input to feedback delay –1.05 –0.50
(meas. @ SYNC0 or 1 and FEEDBACK input pins) (470kΩ From RC1 to An.GND) ns
(See General AC Specification note 4 and Fig. 2 for explanation) +1.25 +3.25
t
SKEWr
1,3
(Rising)
Output–to–Output Skew Between Outputs Q0 – Q4, Q/2
(Rising Edges Only)
– 500 ps
t
SKEWf
1,3
(Falling)
Output–to–Output Skew Between Outputs Q0 – Q4
(Falling Edges Only)
– 750 ps
t
SKEWall
1,3
Output–to–Output Skew Between Outputs 2X_Q, Q/2, Q0 – Q4
Rising, Q5 Falling
– 750 ps
t
LOCK
Time Required to acquire 2 Phase–Lock from time SYNC Input Signal is Received.
1 10 ms
t
PHL
(Reset – Q)
Propagation Delay, RST to Any Output (High–Low) 1.5 13.5 ns
1. Under equally loaded conditions, CL ≤50pF (±2pF), and at a fixed temperature and voltage.
2. With VCC fully powered–on and an output properly connected to the FEEDBACK pin. t
LOCK
Max. is with C1 = 0.1µF, t
LOCK
Min is with
C1 = 0.01µF.
3. These specifications are not tested, they are guaranteed by statistical characterization. See General AC Specification note 1.
RESET TIMING REQUIREMENTS
1
Symbol
Parameter Minimum Unit
t
REC
, RST
to SYNC
Reset Recovery Time rising RST
edge to falling SYNC edge
9.0 ns
tW, RST
LOW
Minimum Pulse Width,
RST
input LOW
5.0 ns
1. These reset specs are valid only when PLL_EN is LOW and the part is in Test mode (not in phase–lock)
Page 5

MC88915
TIMING SOLUTIONS
BR1333 — Rev 6
5 MOTOROLA
General AC Specification Notes
1. Several specifications can only be measured when the
MC88915 is in phase–locked operation. It is not possible
to have the part in phase–lock on ATE (automated test
equipment). Statistical characterization techniques were
used to guarantee those specifications which cannot be
measured on the ATE. MC88915 units were fabricated
with key transistor properties intentionally varied to
create a 14 cell designed experimental matrix. IC
performance was characterized over a range of transistor
properties (represented by the 14 cells) in excess of the
expected process variation of the wafer fabrication area.
Response Surface Modeling (RSM) techniques were
used to relate IC performance to the CMOS transistor
properties over operation voltage and temperature. IC
Performance to each specification and fab variation were
used in conjunction with Yield Surface Modeling (YSM
) methodology to set performance limits of ATE testable
specifications within those which are to be guaranteed by
statistical characterization. In this way all units passing
the ATE test will meet or exceed the non–tested
specifications limits.
2. These two specs (t
RlSE/FALL
and t
PULSE
Width 2X_Q
output) guarantee that the MC88915 meets the 25 MHz
68040 P–Clock input specification (at 50 MHz). For these
two specs to be guaranteed by Motorola, the termination
scheme shown below in Figure 1 must be used.
3. The wiring Diagrams and written explanations in Figure 5
demonstrate the input and output frequency relationships
for three possible feedback configurations. The allowable
SYNC input range for each case is also indicated. There
are two allowable SYNC frequency ranges, depending
whether FREQ_SEL is high or low. Although not shown, it
is possible to feed back the Q5
output, thus creating a
180° phase shift between the SYNC input and the “Q”
outputs. Table 1 below summarizes the allowable SYNC
frequency range for each possible configuration.
88915
2X_Q
Output
R
s
ZO (CLOCK TRACE)
68040
P–Clock
Input
Rs = Zo – 7
Ω
Figure 1. MC68040 P–Clock Input Termination Scheme
Rp = 1.5 Z
o
R
p
FREQ_SEL
Level
Feedback
Output
Allowable SYNC Input
Frequency Range (MHZ)
Corresponding VCO
Frequency Range
Phase Relationships
of the “Q” Outputs
to Rising SYNC Edge
HIGH Q/2 5 to (2X_Q FMAX Spec)/4 20 to (2X_Q FMAX Spec) 0°
HIGH Any “Q” (Q0–Q4) 10 to (2X_Q FMAX Spec)/2 20 to (2X_Q FMAX Spec) 0°
HIGH Q5 10 to (2X_Q FMAX Spec)/2 20 to (2X_Q FMAX Spec) 180°
HIGH 2X_Q 20 to (2X_Q FMAX Spec) 20 to (2X_Q FMAX Spec) 0°
LOW Q/2 2.5 to (2X_Q FMAX Spec)/8 20 to (2X_Q FMAX Spec) 0°
LOW Any “Q” (Q0–Q4) 5 to (2X_Q FMAX Spec)/4 20 to (2X_Q FMAX Spec) 0°
LOW Q5 5 to (2X_Q FMAX Spec)/4 20 to (2X_Q FMAXSpec) 180°
LOW 2X_Q 10 to (2X_Q FMAX Spec)/2 20 to (2X_Q FMAXSpec) 0°
Table 1. Allowable SYNC Input Frequency Ranges for Different Feedback Configurations.
4. A 1 MΩ resistor tied to either Analog VCC or Analog GND
as shown in Figure 2 is required to ensure no jitter is
present on the MC88915 outputs. This technique causes
a phase offset between the SYNC input and the output
connected to the FEEDBACK input, measured at the
input pins. The tPD spec describes how this offset varies
with process, temperature, and voltage. The specs were
arrived at by measuring the phase relationship for the 14
lots described in note 1 while the part was in
phase–locked operation. The actual measurements were
made with a 10 MHz SYNC input (1.0 ns edge rate from
0.8 V – 2.0 V) with the Q/2 output fed back. The phase
measurements were made at 1.5 V . The Q/2 output was
terminated at the FEEDBACK input with 100Ω to VCC and
100 Ω to ground.
Page 6

MC88915
MOTOROLA TIMING SOLUTIONS
BR1333 — Rev 6
6
2.25ns OFFSET
With the 470KΩ resistor tied in this fashion, the tPD specification
measured at the input pins is:
330
Ω
R2
330
Ω
R2
FEEDBACK OUTPUT
SYNC INPUT
FEEDBACK OUTPUT
SYNC INPUT
5.0V
3.0V
5.0V
ANALOG VCC
ANALOG GND
RC1
470K
Ω
REFERENCE
RESISTOR
0.1
µ
F
C1
With the 470K
Ω
resistor tied in this fashion, the tPD specification
measured at the input pins is:
EXTERNAL LOOP FILTER
ANALOG GND
RC1
470K
Ω
REFERENCE
RESISTOR
0.1
µ
F
C1
Figure 2. Depiction of the Fixed SYNC to Feedback Offset (tPD) Which is
Present When a 470KΩ Resistor is Tied to VCC or Ground
3.0V
tPD = 2.25ns
±
1.0ns tPD = –0.775ns ± 0.275ns
–0.775ns OFFSET
5. The t
SKEWr
specification guarantees that the rising edges
of outputs Q/2, Q0, Q1, Q2, Q3, and Q4 will always fall
within a 500ps window within one part. However, if the
relative position of each output within this window is not
specified, the 500 ps window must be added to each side
of the tPD specification limits to calculate the total
part–to–part skew. For this reason the absolute
distribution of these outputs are provided in table 2. When
taking the skew data, Q0 was used as a reference, so all
measurements are relative to this output. The information
in Table 2 is derived from measurements taken from the
14 process lots described in Note 1, over the temperature
and voltage range.
Output
–
(ps)
+
(ps)
Q0 0 0
Q1 –72 40
Q2 –44 276
Q3 –40 255
Q4 –274 –34
Q/2 –16 250
2X_Q –633 –35
Table 2. Relative Positions of Outputs Q/2, Q0–Q4, 2X_Q, Within the 500ps t
SKEWr
Spec Window
Page 7

MC88915
TIMING SOLUTIONS
BR1333 — Rev 6
7 MOTOROLA
6. Calculation of Total Output–to–Skew between multiple
parts (Part–to–Part skew)
By combining the tPD specification and the information in
Note 5, the worst case output–to–output skew between
multiple 88915’s connected in parallel can be calculated.
This calculation assumes that all parts have a common
SYNC input clock with equal delay of that input signal to
each part. This skew value is valid at the 88915 output
pins only (equally loaded), it does not include PCB trace
delays due to varying loads.
With a 1MΩ resistor tied to analog VCC as shown in note
4, the tPD spec. limits between SYNC and the Q/2 output
(connected to the FEEDBACK pin) are –1.05ns and
–0.5ns. To calculate the skew of any given output
between two or more parts, the absolute value of the
distribution of that output given in table 2 must be
subtracted and added to the lower and upper tPD spec
limits respectively. For output Q2, [276 – (–44)] = 320ps is
the absolute value of the distribution. Therefore [–1.05ns
– 0.32ns] = –1.37ns is the lower tPD limit, and [–0.5ns +
0.32ns] = –0.18ns is the upper limit. Therefore the worst
case skew of output Q2 between any number of parts is
|(–1.37) – (–0.18)| = 1.19ns. Q2 has the worst case skew
distribution of any output, so 1.2ns is the absolute worst
case output–to–output skew between multiple parts.
7. Note 4 explains that the tPD specification was measured
and is guaranteed for the configuration of the Q/2 output
connected to the FEEDBACK pin and the SYNC input
running at 10MHz. The fixed offset (tPD) as described
above has some dependence on the input frequency and
at what frequency the VCO is running. The graphs of
Figure 3 demonstrate this dependence.
The data presented in Figure 3 is from devices
representing process extremes, and the measurements
were also taken at the voltage extremes (VCC = 5.25V
and 4.75V). Therefore the data in Figure 3 is a realistic
representation of the variation of tPD.
SYNC INPUT FREQUENCY (MHz)
3.5
3.0
2.5
2.0
1.5
1.0
0.5
0 5 10 15 20 25
3.5
3.0
2.5
2.0
1.5
1.0
0.5
2.5 5.0 7.5 10.0 12.5 15.0 17.5
2.5 5.0 7.5 10.0 12.5 15.0 17.5
–0.5
–1.0
–1.5
–2.0
2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0 22.5 25.0 27.5
tPD
SYNC to
FEEDBACK
(ns)
SYNC INPUT FREQUENCY (MHz)
Figure 3a.
tPD versus Frequency Variation for Q/2 Output Fed
Back, Including Process and Voltage Variation @ 25
°
C
(With 1M
Ω
Resistor Tied to Analog VCC)
–0.50
–0.75
–1.00
–1.25
–1.50
tPD
SYNC to
FEEDBACK
(ns)
tPD
SYNC to
FEEDBACK
(ns)
tPD
SYNC to
FEEDBACK
(ns)
Figure 3b.
tPD versus Frequency Variation for Q4 Output Fed
Back, Including Process and Voltage Variation @ 25
°
C
(With 1M
Ω
Resistor Tied to Analog VCC)
Figure 3c.
tPD versus Frequency Variation for Q/2 Output Fed
Back, Including Process and Voltage Variation @ 25
°
C
(With 1M
Ω
Resistor Tied to Analog GND)
Figure 3d.
tPD versus Frequency Variation for Q4 Output Fed
Back, Including Process and Voltage Variation @ 25
°
C
(With 1M
Ω
Resistor Tied to Analog GND)
SYNC INPUT FREQUENCY (MHz)SYNC INPUT FREQUENCY (MHz)
Page 8

MC88915
MOTOROLA TIMING SOLUTIONS
BR1333 — Rev 6
8
Q/2 OUTPUT
t
CYCLE
SYNC INPUT
• The MC88915 aligns rising edges of the FEEDBACK input and SYNC input, therefore the SYNC input does
not require a 50% duty cycle.
• All skew specs are measured between the V
CC
/2 crossing point of the appropriate output edges.All skews
are specified as ‘windows’, not as a ± deviation around a center point.
• If a “Q” output is connected to the FEEDBACK input (this situation is not shown), the “Q” output frequency
would match the SYNC input frequency, the 2X_Q output would run at twice the SYNC frequency, and the
Q/2 output would run at half the SYNC frequency.
Timing Notes:
(These waveforms represent the hook–up configuration of Figure 5a on page 9)
FEEDBACK
INPUT
SYNC INPUT
(SYNC[1] or
SYNC[0])
Figure 4. Output / Input Switching Waveforms and Timing Diagrams
t
CYCLE “Q” OUTPUTS
2X_Q OUTPUT
Q5
OUTPUT
t
SKEWf
t
SKEWf
t
SKEWR
t
SKEWr
t
SKEWALL
Q0 – Q4
OUTPUTS
PD
t
Page 9

MC88915
TIMING SOLUTIONS
BR1333 — Rev 6
9 MOTOROLA
Figure 5c. Wiring Diagram and Frequency Relationships with 2X_Q Output Feed Back
Figure 5b. Wiring Diagram and Frequency Relationships With Q4 Output Feed Back
Figure 5a. Wiring Diagram and Frequency Relationships With Q/2 Output Feed Back
Q4
Q4
Q5
Allowable Input Frequency Range:
20MHz to (2X_Q FMAX Spec) (for FREQ_SEL HIGH)
10MHz to (2X_Q FMAX Spec)/2 (for FREQ_SEL LOW)
Allowable Input Frequency Range:
10MHz to (2X_Q FMAX Spec)/2 (for FREQ_SEL HIGH)
5MHz to (2X_Q FMAX Spec)/4 (for FREQ_SEL LOW)
In this application, the 2X_Q output is connected
to the FEEDBACK input. The internal PLL will line
up the positive edges of 2X_Q and SYNC, thus the
2X_Q frequency will equal the SYNC frequency.
The Q/2 output will always run at 1/4 the 2X_Q frequency, and the “Q” outputs will run at 1/2 the
2X_Q frequency.
2:1 Input to “Q” Output Frequency Relationship
In this application, the Q4 output is connected to
the FEEDBACK input. The internal PLL will line up
the positive edges of Q4 and SYNC, thus the Q4
frequency (and the rest of the “Q” outputs) will
equal the SYNC frequency. The Q/2 output will always run at 1/2 the “Q” frequency, and the 2X_Q
output will run at 2X the “Q” frequency.
1:1 Input to “Q” Output Frequency Relationship
Allowable Input Frequency Range:
5MHz to (2X_Q FMAX Spec)/4 (for FREQ_SEL HIGH)
2.5MHz to (2X_Q FMAX Spec)/8 (for FREQ_SEL LOW)
In this application, the Q/2 output is connected to
the FEEDBACK input. The internal PLL will line up
the positive edges of Q/2 and SYNC, thus the Q/2
frequency will equal the SYNC frequency. The “Q”
outputs (Q0–Q4, Q5
) will always run at 2X the Q/2
frequency, and the 2X_Q output will run at 4X the
Q/2 frequency.
1:2 Input to “Q” Output Frequency Relationship
25 MHz FEEDBACK SIGNAL
12.5 MHz FEEDBACK SIGNAL
12.5 MHz
SIGNAL
12.5 MHz
SIGNAL
50 MHz FEEDBACK SIGNAL
2X_Q
ANALOG V
CC
CRYSTAL
OSCILLATOR
50 MHz INPUT
HIGH
LOW
HIGH
HIGH
PLL_EN
FQ_SEL
Q0 Q1
Q2
Q3
Q/2
RST
FEEDBACK
REF_SEL
SYNC[0]
ANALOG GND
RC1
MC88915
EXTERNAL
LOOP
FILTER
50 MHz SIGNAL
2X_Q
ANALOG V
CC
CRYSTAL
OSCILLATOR
25 MHZ INPUT
HIGH
LOW
HIGH
HIGH
PLL_EN
FQ_SEL Q0 Q1
Q2
Q3
Q/2
RST
FEEDBACK
REF_SEL
SYNC[0]
ANALOG GND
RC1
MC88915
EXTERNAL
LOOP
FILTER
50 MHz SIGNAL
2X_Q
ANALOG V
CC
25MHz
“Q”
CLOCK
OUTPUTS
CRYSTAL
OSCILLATOR
12.5 MHz INPUT
HIGH
LOW
HIGH
HIGH
PLL_EN
FQ_SEL Q0 Q1
Q2
Q3
Q/2
Q4
RST
FEEDBACK
REF_SEL
SYNC[0]
ANALOG GND
RC1
MC88915
Q5
Q5
EXTERNAL
LOOP
FILTER
25MHz
“Q”
CLOCK
OUTPUTS
25MHz
“Q”
CLOCK
OUTPUTS
Page 10

MC88915
MOTOROLA TIMING SOLUTIONS
BR1333 — Rev 6
10
Figure 6. Recommended Loop Filter and Analog Isolation Scheme for the MC88915
47
Ω
BOARD V
CC
0.1µF (LOOP
FILTER CAP)
330
Ω
470K
Ω
0.1µF HIGH
FREQ
BYPASS
10µF LOW
FREQ BYPASS
47
Ω
BOARD GND
8
9
10
ANALOG V
CC
RC1
ANALOG GND
ANALOG LOOP FILTER/VCO
SECTION OF THE MC88915
28–PIN PLCC PACKAGE (NOT
DRAWN TO SCALE)
A SEPARATE ANALOG POWER SUPPLY IS NOT NECESSARY AND
SHOULD NOT BE USED. FOLLOWING THESE PRESCRIBED GUIDELINES
IS ALL THAT IS NECESSAR Y TO USE THE MC88915 IN A NORMAL DIGITAL
ENVIRONMENT .
Notes Concerning Loop Filter and Board Layout Issues
1. Figure 6 shows a loop filter and analog isolation scheme
which will be effective in most applications. The following
guidelines should be followed to ensure stable and
jitter–free operation:
1a.All loop filter and analog isolation components should be
tied as close to the package as possible. Stray current
passing through the parasitics of long traces can cause
undesirable voltage transients at the RC1 pin.
1b.The 47Ω resistors, the 10µF low frequency bypass
capacitor, and the 0.1µF high frequency bypass capacitor
form a wide bandwidth filter that will minimize the 88915’s
sensitivity to voltage transients from the system digital
VCC supply and ground planes. This filter will typically
ensure that a 100mV step deviation on the digital V
CC
supply will cause no more than a 100pS phase deviation
on the 88915 outputs. A 250mV step deviation on V
CC
using the recommended filter values should cause no
more than a 250pS phase deviation; if a 25µF bypass
capacitor is used (instead of 10µF) a 250mV VCC step
should cause no more than a 100pS phase deviation.
If good bypass techniques are used on a board design
near components which may cause digital VCC and
ground noise, the above described VCC step deviations
should not occur at the 88915’s digital VCC supply. The
purpose of the bypass filtering scheme shown in Figure 6
is to give the 88915 additional protection from the power
supply and ground plane transients that can occur in a
high frequency, high speed digital system.
1c.There are no special requirements set forth for the loop
filter resistors (470K and 330Ω). The loop filter capacitor
(0.1µF) can be a ceramic chip capacitior, the same as a
standard bypass capacitor.
1d.The 470K reference resistor injects current into the
internal charge pump of the PLL, causing a fixed offset
between the outputs and the SYNC input. This also
prevents excessive jitter caused by inherent PLL
dead–band. If the VCO (2X_Q output) is running above
40MHz, the 470K resistor provides the correct amount of
current injection into the charge pump (2–3µA). If the
VCO is running below 40MHz, a 1MΩ reference resistor
should be used (instead of 470K).
2. In addition to the bypass capacitors used in the analog
filter of Figure 6, there should be a 0.1µF bypass
capacitor between each of the other (digital) four VCC pins
and the board ground plane. This will reduce output
switching noise caused by the 88915 outputs, in addition
to reducing potential for noise in the ‘analog’ section of the
chip. These bypass capacitors should also be tied as
close to the 88915 package as possible.
Page 11

MC88915
TIMING SOLUTIONS
BR1333 — Rev 6
11 MOTOROLA
MC88915 System Level Testing Functionality
When the PLL_EN pin is low, the VCO is disabled and the 88915 is in low frequency “test mode”. In test mode (with FREQ_SEL
high), the 2X_Q output is inverted from the selected SYNC input, and the “Q” outputs are divide–by–2 (negative edge triggered)
of the SYNC input, and the Q/2 output is divide–by–4. With FREQ_SEL low the 2X_Q output is divide–by–2 of the SYNC, the “Q”
outputs divide–by–4, and the Q/2 output divide–by–8. These relationships can be seen on the block diagram. A recommended
test configuration would be to use SYNC0 as the test clock input, and tie PLL_EN and REF_SEL together and connect them to
the test select logic. When these inputs are low, the 88915 is in test mode and the SYNC0 input is selected.
This functionality is needed since most board–level testers run at 1 MHz or below, and the 88915 cannot lock onto that low of an
input frequency. In the test mode described above, any frequency test signal can be used.
Figure 7. Representation of a Potential Multi–Processing Application Utilizing the MC88915
for Frequency Multiplication and Low Board–to–Board Skew
MC88915
PLL
2f
2f
MC88915
PLL
SYSTEM
CLOCK
SOURCE
CPU
CARD
CPU
CARD
MEMORY
CARDS
CMMU CMMU
CMMU
CMMU
CMMU
CPU
CLOCK
@ f
CMMU CMMU
CMMU
CMMUCMMU
CPU
2f
PLL
MEMORY
CONTROL
CLOCK @ 2f
AT POINT OF USE
CLOCK @ 2f
AT POINT OF USE
DISTRIBUTE
CLOCK @ f
Page 12

MC88915
MOTOROLA TIMING SOLUTIONS
BR1333 — Rev 6
12
OUTLINE DIMENSIONS
FN SUFFIX
PLASTIC PACKAGE
CASE 776–02
ISSUE D
NOTES:
1. DATUMS –L–, –M–, AND –N– DETERMINED
WHERE TOP OF LEAD SHOULDER EXITS
PLASTIC BODY AT MOLD PARTING LINE.
2. DIMENSION G1, TRUE POSITION TO BE
MEASURED AT DATUM –T–, SEATING PLANE.
3. DIMENSIONS R AND U DO NOT INCLUDE
MOLD FLASH. ALLOWABLE MOLD FLASH IS
0.010 (0.250) PER SIDE.
4. DIMENSIONING AND TOLERANCING PER
ANSI Y14.5M, 1982.
5. CONTROLLING DIMENSION: INCH.
6. THE PACKAGE TOP MAY BE SMALLER THAN
THE PACKAGE BOTTOM BY UP TO 0.012
(0.300). DIMENSIONS R AND U ARE
DETERMINED AT THE OUTERMOST
EXTREMES OF THE PLASTIC BODY
EXCLUSIVE OF MOLD FLASH, TIE BAR
BURRS, GATE BURRS AND INTERLEAD
FLASH, BUT INCLUDING ANY MISMATCH
BETWEEN THE TOP AND BOTTOM OF THE
PLASTIC BODY.
7. DIMENSION H DOES NOT INCLUDE DAMBAR
PROTRUSION OR INTRUSION. THE DAMBAR
PROTRUSION(S) SHALL NOT CAUSE THE H
DIMENSION TO BE GREATER THAN 0.037
(0.940). THE DAMBAR INTRUSION(S) SHALL
NOT CAUSE THE H DIMENSION TO BE
SMALLER THAN 0.025 (0.635).
–N–
–M–
–L–
V
W
D
D
Y BRK
28 1
VIEW S
S
L–M
S
0.010 (0.250) N
S
T
S
L–M
M
0.007 (0.180) N
S
T
0.004 (0.100)
G1
G
J
C
Z
R
E
A
SEATING
PLANE
S
L–M
M
0.007 (0.180) N
S
T
–T–
B
S
L–M
S
0.010 (0.250) N
S
T
S
L–M
M
0.007 (0.180) N
S
T
U
S
L–M
M
0.007 (0.180) N
S
T
Z
G1X
VIEW D–D
S
L–M
M
0.007 (0.180) N
S
T
K1
VIEW S
H
K
F
S
L–M
M
0.007 (0.180) N
S
T
DIM MIN MAX MIN MAX
MILLIMETERSINCHES
A 0.485 0.495 12.32 12.57
B 0.485 0.495 12.32 12.57
C 0.165 0.180 4.20 4.57
E 0.090 0.110 2.29 2.79
F 0.013 0.019 0.33 0.48
G 0.050 BSC 1.27 BSC
H 0.026 0.032 0.66 0.81
J 0.020 ––– 0.51 –––
K 0.025 ––– 0.64 –––
R 0.450 0.456 11.43 11.58
U 0.450 0.456 11.43 11.58
V 0.042 0.048 1.07 1.21
W 0.042 0.048 1.07 1.21
X 0.042 0.056 1.07 1.42
Y ––– 0.020 ––– 0.50
Z 2 10 2 10
G1 0.410 0.430 10.42 10.92
K1 0.040 ––– 1.02 –––
____
Page 13

MC88915
TIMING SOLUTIONS
BR1333 — Rev 6
13 MOTOROLA
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”
must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of
others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that
Motorola was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal
Opportunity/Affirmative Action Employer.
How to reach us:
USA/EUROPE/Locations Not Listed: Motorola Literature Distribution; JAP AN: Nippon Motorola Ltd.; Tatsumi–SPD–JLDC, 6F Seibu–Butsuryu–Center,
P.O. Box 5405; Denver, Colorado 80217. 303–675–2140 or 1–800–441–2447 3–14–2 Tatsumi Koto–Ku, Tokyo 135, Japan. 81–3–3521–8315
Mfax: RMFAX0@email.sps.mot.com – TOUCHTONE 602–244–6609 ASIA/P ACIFIC: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
INTERNET: http://Design–NET.com 51 Ting Ko k Road, Tai Po, N.T., Hong Kong. 852–26629298
MC88915/D
◊
 Loading...
Loading...