

Page 1
SEMICONDUCTOR TECHNICAL DATA
3–1
REV 6
Motorola, Inc. 1995
10/95
High–Performance Silicon–Gate CMOS
The MC574HC4046A is similar in function to the MC14046 Metal gate
CMOS device. The device inputs are compatible with standard CMOS
outputs; with pullup resistors, they are compatible with LSTTL outputs.
The HC4046A phase–locked loop contains three phase comparators, a
voltage–controlled oscillator (VCO) and unity gain op–amp DEM
OUT
. The
comparators have two common signal inputs, COMPIN, and SIGIN. Input
SIGIN and COMPIN can be used directly coupled to large voltage signals, or
indirectly coupled (with a series capacitor to small voltage signals). The
self–bias circuit adjusts small voltage signals in the linear region of the
amplifier. Phase comparator 1 (an exclusive OR gate) provides a digital error
signal PC1
OUT
and m aintains 90 d egrees phase shift at the center
frequency between SIGIN and COMPIN signals (both at 50% duty cycle).
Phase comparator 2 (with leading–edge sensing logic) provides digital error
signals P C2
OUT
and P CP
OUT
and maintains a 0 degree phase shift
between SIGIN and COMPIN signals (duty cycle is immaterial). The linear
VCO produces an output signal VCO
OUT
whose frequency is determined by
the voltage of input VCOIN signal and the capacitor and resistors connected
to pins C1A, C1B, R1 and R2. The unity gain op–amp output DEM
OUT
with
an external resistor is used where the VCOIN signal is needed but no loading
can be tolerated. The inhibit input, when high, disables the VCO and all
op–amps to minimize standby power consumption.
Applications include FM and FSK modulation and demodulation, frequency synthesis and multiplication, frequency discrimination, tone decoding,
data synchronization and conditioning, voltage–to–frequency conversion
and motor speed control.
• Output Drive Capability: 10 LSTTL Loads
• Low Power Consumption Characteristic of CMOS Devices
• Operating Speeds Similar to LSTTL
• Wide Operating Voltage Range: 3.0 to 6.0 V
• Low Input Current: 1.0
µA Maximum (except SIG
IN
and COMPIN)
• In Compliance with the Requirements Defined by JEDEC Standard
No. 7A
• Low Quiescent Current: 80 µA Maximum (VCO disabled)
• High Noise Immunity Characteristic of CMOS Devices
• Diode Protection on all Inputs
• Chip Complexity: 279 FETs or 70 Equivalent Gates
Pin No. Symbol Name and Function
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
PCP
OUT
PC1
OUT
COMP
IN
VCO
OUT
INH
C1A
C1B
GND
VCO
IN
DEM
OUT
R1
R2
PC2
OUT
SIG
IN
PC3
OUT
V
CC
Phase Comparator Pulse Output
Phase Comparator 1 Output
Comparator Input
VCO Output
Inhibit Input
Capacitor C1 Connection A
Capacitor C1 Connection B
Ground (0 V) V
SS
VCO Input
Demodulator Output
Resistor R1 Connection
Resistor R2 Connection
Phase Comparator 2 Output
Signal Input
Phase Comparator 3 Output
Positive Supply Voltage
PIN ASSIGNMENT
D SUFFIX
SOIC PACKAGE
CASE 751B–05
N SUFFIX
PLASTIC PACKAGE
CASE 648–08
1
16
1
16
ORDERING INFORMATION
MC74HCXXXXAN
MC74HCXXXXAD
Plastic
SOIC
13
14
15
16
9
10
11
125
4
3
2
1
8
7
6
R2
PC2
out
SIG
in
PC3
out
V
CC
VCO
in
DEM
out
R1
VCO
out
COMP
in
PC1
out
PCP
out
GND
C1B
C1A
INH
Page 2
MC74HC4046A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–2
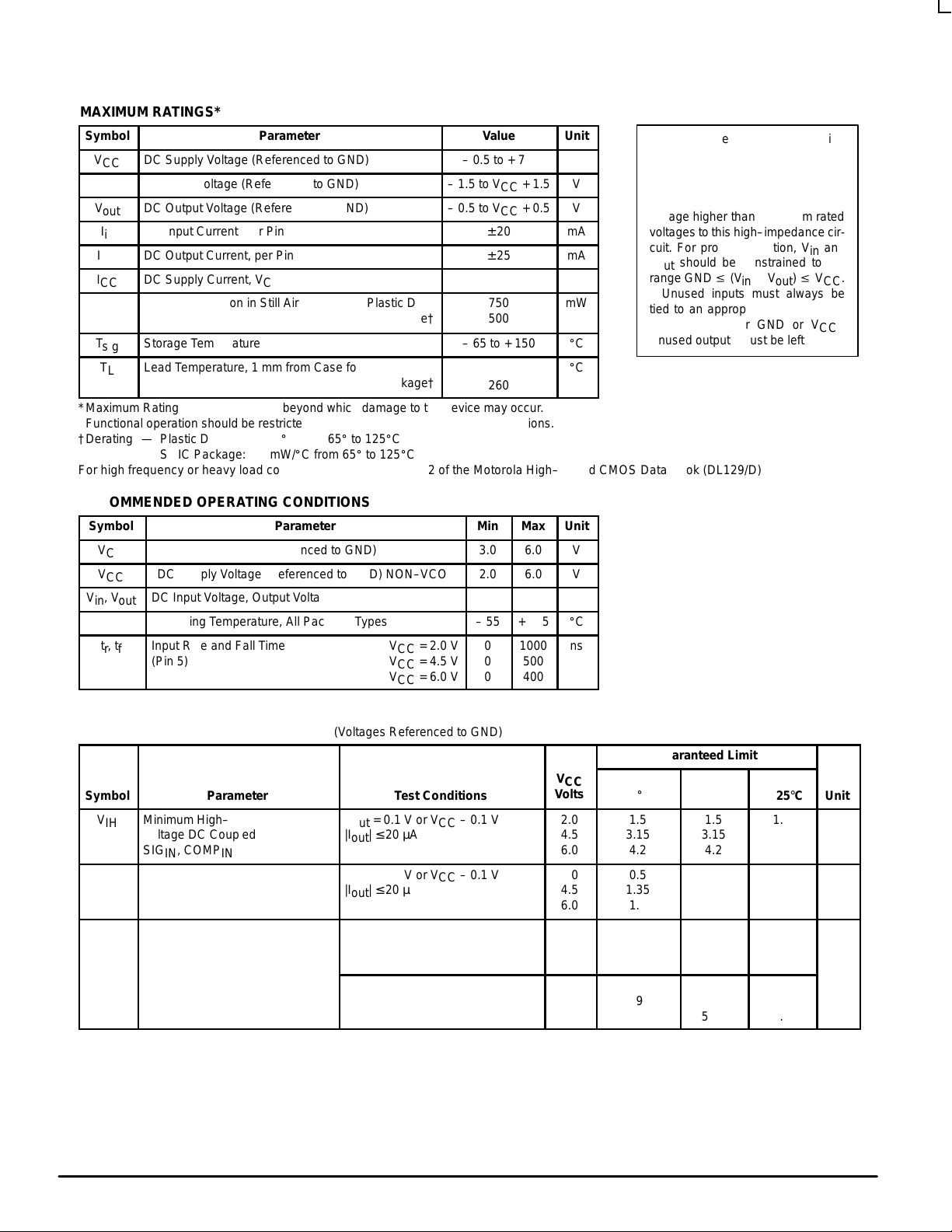
MAXIMUM RATINGS*
Symbol
Parameter
Value
Unit
V
CC
DC Supply Voltage (Referenced to GND)
– 0.5 to + 7.0
V
V
in
DC Input Voltage (Referenced to GND)
– 1.5 to VCC + 1.5
V
V
out
DC Output Voltage (Referenced to GND)
– 0.5 to VCC + 0.5
V
I
in
DC Input Current, per Pin
± 20
mA
I
out
DC Output Current, per Pin
± 25
mA
I
CC
DC Supply Current, VCC and GND Pins
± 50
mA
P
D
Power Dissipation in Still Air Plastic DIP†
SOIC Package†
750
500
mW
T
stg
Storage Temperature
– 65 to + 150
_
C
T
L
Lead Temperature, 1 mm from Case for 10 Seconds
Plastic DIP and SOIC Package†
260
_
C
*Maximum Ratings are those values beyond which damage to the device may occur.
Functional operation should be restricted to the Recommended Operating Conditions.
†Derating — Plastic DIP: – 10 mW/_C from 65_ to 125_C
SOIC Package: – 7 mW/_C from 65_ to 125_C
For high frequency or heavy load considerations, see Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
RECOMMENDED OPERATING CONDITIONS
Symbol
Parameter
Min
Max
Unit
V
CC
DC Supply Voltage (Referenced to GND)
3.0
6.0
V
V
CC
DC Supply Voltage (Referenced to GND) NON–VCO 2.0 6.0 V
Vin, V
out
DC Input Voltage, Output Voltage (Referenced to GND)
0
V
CC
V
T
A
Operating Temperature, All Package Types
– 55
+ 125
_
C
tr, t
f
Input Rise and Fall Time VCC = 2.0 V
(Pin 5) VCC = 4.5 V
VCC = 6.0 V
0
0
0
1000
500
400
ns
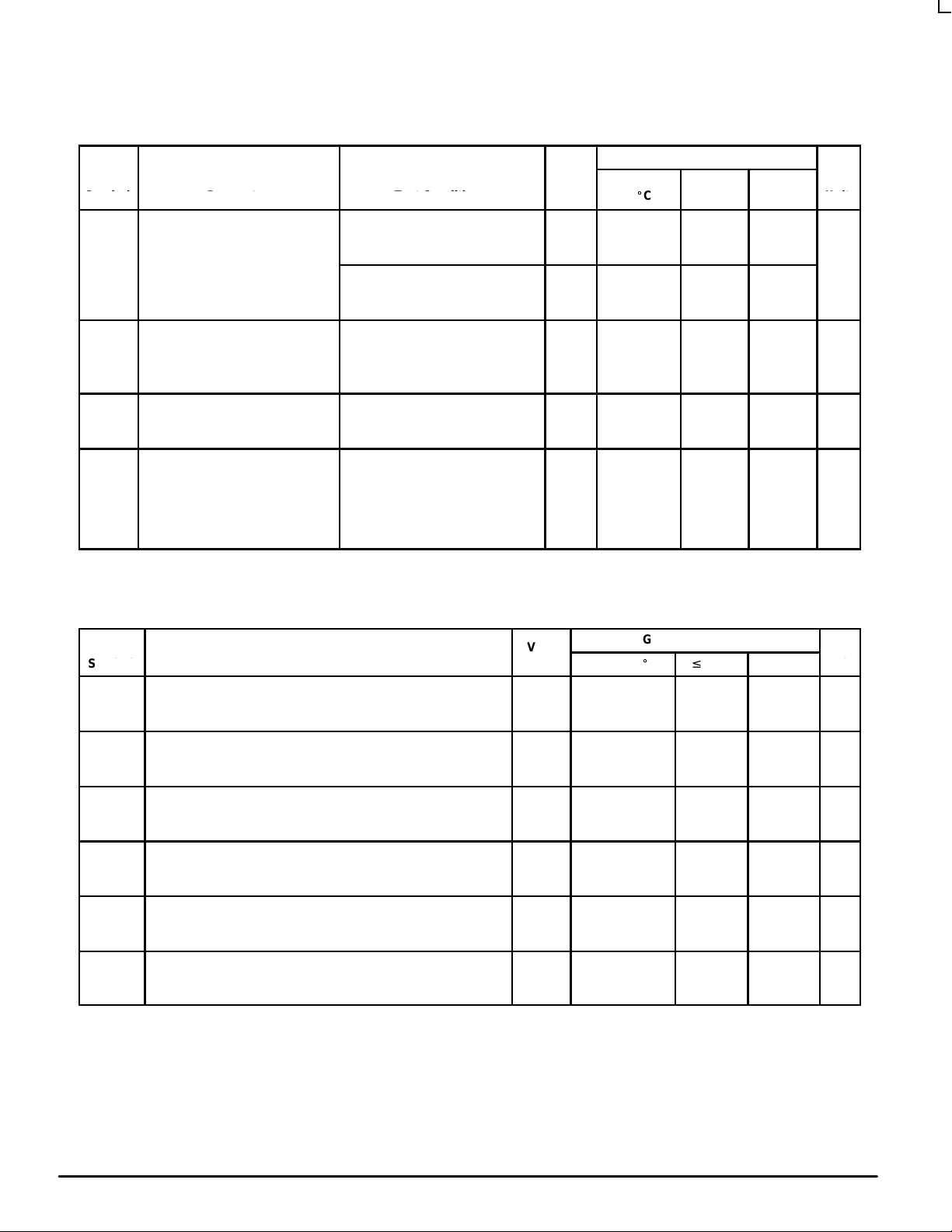
[Phase Comparator Section]
DC ELECTRICAL CHARACTERISTICS
(Voltages Referenced to GND)
Guaranteed Limit
Symbol
Parameter
Test Conditions
V
CC
Volts
– 55 to
25_C
≤ 85°C
≤ 125°C
Unit
V
IH
Minimum High–Level Input
Voltage DC Coupled
SIGIN, COMP
IN
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| ≤ 20 µA
2.0
4.5
6.0
1.5
3.15
4.2
1.5
3.15
4.2
1.5
3.15
4.2
V
V
IL
Maximum Low–Level Input
Voltage DC Coupled
SIGIN, COMP
IN
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| ≤ 20 µA
2.0
4.5
6.0
0.5
1.35
1.8
0.5
1.35
1.8
0.5
1.35
1.8
V
V
OH
Minimum High–Level
Output Voltage
PCP
OUT
, PCn
OUT
Vin = VIH or V
IL
|I
out
| ≤ 20 µA
2.0
4.5
6.0
1.9
4.4
5.9
1.9
4.4
5.9
1.9
4.4
5.9
V
Vin = VIH or V
IL
|I
out
| ≤ 4.0 mA
|I
out
| ≤ 5.2 mA
4.5
6.0
3.98
5.48
3.84
5.34
3.7
5.2
(continued)
This device contains protection
circuitry to guard against damage
due to high static voltages or electric
fields. However, precautions must
be taken to avoid applications of any
voltage higher than maximum rated
voltages to this high–impedance circuit. For proper operation, Vin and
V
out
should be constrained to the
range GND v (Vin or V
out
) v VCC.
Unused inputs must always be
tied to an appropriate logic voltage
level (e.g., either GND or VCC).
Unused outputs must be left open.
Page 3
MC74HC4046A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–3 MOTOROLA
[Phase Comparator Section]
DC ELECTRICAL CHARACTERISTICS – continued
(Voltages Referenced to GND)
Guaranteed Limit
Symbol
Parameter
Test Conditions
V
CC
Volts
– 55 to
25_C
≤ 85°C
≤ 125°C
Unit
V
OL
Maximum Low–Level
Output Voltage Qa–Qh
PCP
OUT
, PCn
OUT
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| ≤ 20 µA
2.0
4.5
6.0
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
V
Vin = VIH or V
IL
|I
out
| ≤ 4.0 mA
|I
out
| ≤ 5.2 mA
4.5
6.0
0.26
0.26
0.33
0.33
0.4
0.4
I
in
Maximum Input Leakage Current
SIGIN, COMP
IN
Vin = VCC or GND
2.0
3.0
4.5
6.0
± 3.0
± 7.0
± 18.0
± 30.0
± 4.0
± 9.0
± 23.0
± 38.0
± 5.0
± 11.0
± 27.0
± 45.0
µA
I
OZ
Maximum Three–State
Leakage Current
PC2
OUT
Output in High–Impedance State
Vin = VIH or V
IL
V
out
= VCC or GND
6.0 ± 0.5 ± 5.0 ± 10 µA
I
CC
Maximum Quiescent Supply
Current (per Package)
(VCO disabled)
Pins 3, 5 and 14 at V
CC
Pin 9 at GND; Input Leakage at
Pins 3 and 14 to be excluded
Vin = VCC or GND
|I
out
| = 0 µA
6.0 4.0 40 160 µA
NOTE: Information on typical parametric values can be found in Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
[Phase Comparator Section]
AC ELECTRICAL CHARACTERISTICS
(CL = 50 pF, Input tr = tf = 6.0 ns)
Guaranteed Limit
Symbol
Parameter
V
CC
Volts
– 55 to 25_C
≤ 85°C ≤ 125°C
Unit
t
PLH
,
t
PHL
Maximum Propagation Delay, SIGIN/COMPIN to PC1
OUT
(Figure 1)
2.0
4.5
6.0
175
35
30
220
44
37
265
53
45
ns
t
PLH
,
t
PHL
Maximum Propagation Delay, SIGIN/COMPIN to PCP
OUT
(Figure 1)
2.0
4.5
6.0
340
68
58
425
85
72
510
102
87
ns
t
PLH
,
t
PHL
Maximum Propagation Delay, SIGIN/COMPIN to PC3
OUT
(Figure 1)
2.0
4.5
6.0
270
54
46
340
68
58
405
81
69
ns
t
PLZ
,
t
PHZ
Maximum Propagation Delay, SIGIN/COMPIN Output
Disable Time to PC2
OUT
(Figures 2 and 3)
2.0
4.5
6.0
200
40
34
250
50
43
300
60
51
ns
t
PZH
,
t
PZL
Maximum Propagation Delay, SIGIN/COMPIN Output
Enable Time to PC2
OUT
(Figures 2 and 3)
2.0
4.5
6.0
230
46
39
290
58
49
345
69
59
ns
t
TLH
,
t
THL
Maximum Output Transition Time
(Figure 1)
2.0
4.5
6.0
75
15
13
95
19
16
110
22
19
ns
Page 4
MC74HC4046A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–4
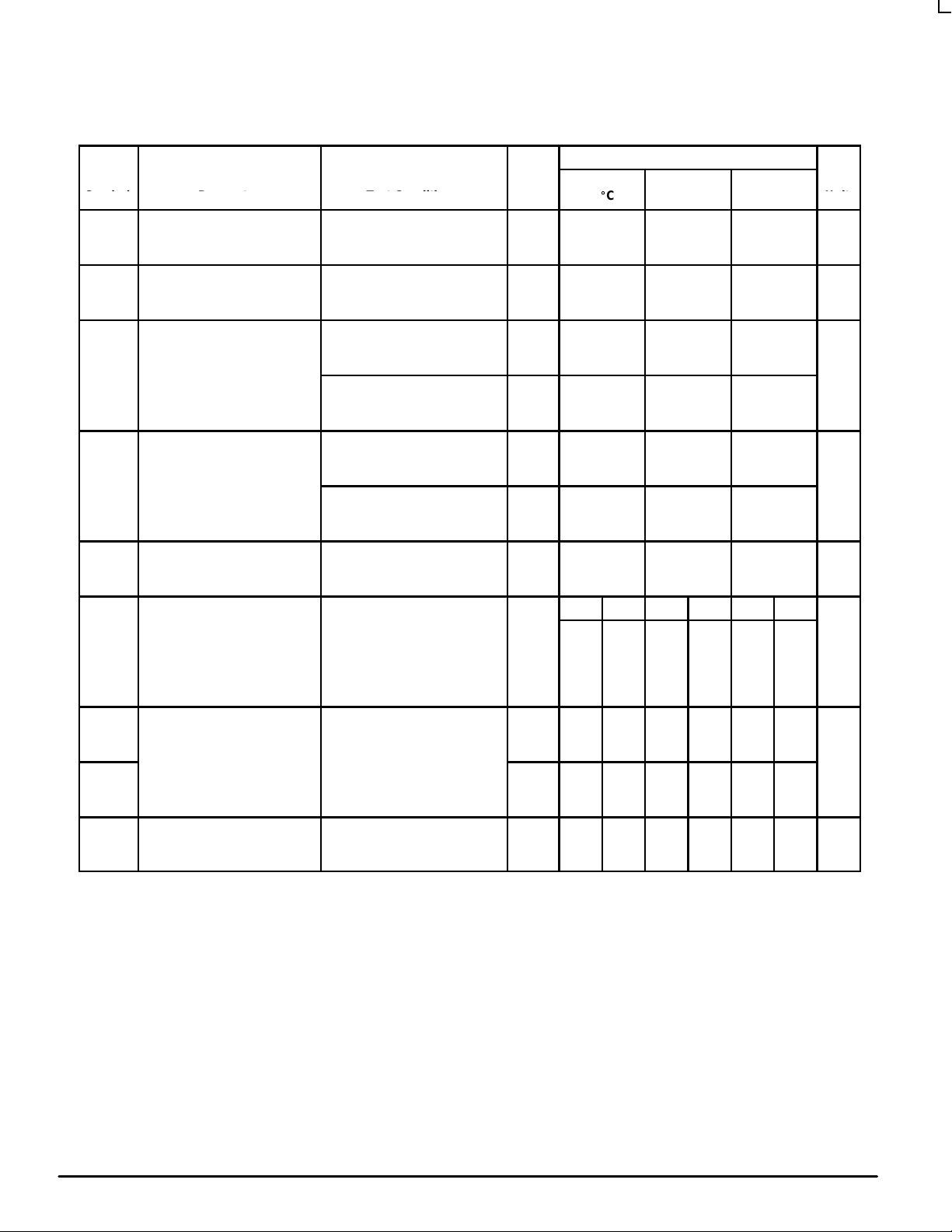
[VCO Section]
DC ELECTRICAL CHARACTERISTICS
(Voltages Referenced to GND)
Guaranteed Limit
Symbol
Parameter
Test Conditions
V
CC
Volts
– 55 to
25_C
≤ 85°C
≤ 125°C
Unit
V
IH
Minimum High–Level
Input Voltage
INH
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| ≤ 20 µA
3.0
4.5
6.0
2.1
3.15
4.2
2.1
3.15
4.2
2.1
3.15
4.2
V
V
IL
Maximum Low–Level
Input Voltage
INH
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| ≤ 20 µA
3.0
4.5
6.0
0.90
1.35
1.8
0.9
1.35
1.8
0.9
1.35
1.8
V
V
OH
Minimum High–Level
Output Voltage
VCO
OUT
Vin= VIH or V
IL
|I
out
| ≤ 20 µA
3.0
4.5
6.0
1.9
4.4
5.9
1.9
4.4
5.9
1.9
4.4
5.9
V
Vin= VIH or V
IL
|I
out
| ≤ 4.0 mA
|I
out
| ≤ 5.2 mA
4.5
6.0
3.98
5.48
3.84
5.34
3.7
5.2
V
OL
Maximum Low–Level
Output Voltage
VCO
OUT
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| ≤ 20 µA
3.0
4.5
6.0
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
V
Vin= VIH or V
IL
|I
out
| ≤ 4.0 mA
|I
out
| ≤ 5.2 mA
4.5
6.0
0.26
0.26
0.33
0.33
0.4
0.4
I
in
Maximum Input
Leakage Current
INH, VCO
IN
Vin= VCC or GND 6.0 0.1 1.0 1.0 µA
Min Max Min Max Min Max
Operating Voltage Range at
VCOIN over the range
specified for R1; For linearity
see Fig. 15A, Parallel value of
R1 and R2 should be > 2.7 kΩ
INH = V
IL
3.0
4.5
6.0
0.1
0.1
0.1
1.0
2.5
4.0
0.1
0.1
0.1
1.0
2.5
4.0
0.1
0.1
0.1
1.0
2.5
4.0
V
R1 Resistor Range 3.0
4.5
6.0
3.0
3.0
3.0
300
300
300
3.0
3.0
3.0
300
300
300
3.0
3.0
3.0
300
300
300
kΩ
R2 3.0
4.5
6.0
3.0
3.0
3.0
300
300
300
3.0
3.0
3.0
300
300
300
3.0
3.0
3.0
300
300
300
C1 Capacitor Range 3.0
4.5
6.0
40
40
40
No
Limit
pF
V
VCO
IN
Page 5
MC74HC4046A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–5 MOTOROLA
[VCO Section]
AC ELECTRICAL CHARACTERISTICS
(CL = 50 pF, Input tr = tf = 6.0 ns)
Guaranteed Limit
V
– 55 to 25_C
≤ 85°C
≤ 125°C
Symbol
Parameter
V
CC
Volts
Min Max Min Max Min Max
Unit
∆f/T Frequency Stability with
Temperature Changes
(Figure 13A, B, C)
3.0
4.5
6.0
%/K
fo VCO Center Frequency
(Duty Factor = 50%)
(Figure 14A, B, C, D)
3.0
4.5
6.0
3
11
13
MHz
∆fVCO VCO Frequency Linearity 3.0
4.5
6.0
See Figures 15A, B, C %
∂ VCO Duty Factor at VCO
OUT
3.0
4.5
6.0
Typical 50% %
[Demodulator Section]
DC ELECTRICAL CHARACTERISTICS
Guaranteed Limit
V
– 55 to 25_C
≤ 85°C
≤ 125°C
Symbol
Parameter
Test Conditions
V
CC
Volts
Min Max Min Max Min Max
Unit
RS Resistor Range At RS > 300 kΩ the
Leakage Current can
Influence VDEM
OUT
3.0
4.5
6.0
50
50
50
300
300
300
kΩ
V
OFF
Offset Voltage
VCOIN to VDEM
OUT
Vi = VVCOIN = 1/2 VCC;
Values taken over RS
Range.
3.0
4.5
6.0
See Figure 12 mV
RD Dynamic Output
Resistance at DEM
OUT
VDEM
OUT
= 1/2 V
CC
3.0
4.5
6.0
Typical 25 Ω Ω
Page 6

MC74HC4046A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–6
SWITCHING WAVEFORMS
Figure 1. Figure 2.
Figure 3. Figure 4. Test Circuit
SIGIN, COMP
IN
INPUTS
50%
90%
50%
10%
PCP
OUT
, PC1
OUT
PC3
OUT
OUTPUTS
V
CC
GND
t
PHL
t
PLH
t
TLH
t
THL
SIGIN
INPUT
COMP
IN
INPUT
50%
90%
50%
PC2
OUT
OUTPUT
V
CC
GND
t
PZH
t
PHZ
50%
V
CC
GND
V
OH
HIGH
IMPEDANCE
SIGIN
INPUT
COMP
IN
INPUT
50%
10%
PC2
OUT
OUTPUT
V
CC
GND
t
PZL
t
PLZ
50%
V
CC
GND
V
OL
HIGH
IMPEDANCE
TEST POINT
CL*
OUTPUT
DEVICE
UNDER
TEST
*INCLUDES ALL PROBE AND JIG CAPACITANCE
50%
Page 7

MC74HC4046A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–7 MOTOROLA
DETAILED CIRCUIT DESCRIPTION
Voltage Controlled Oscillator/Demodulator Output
The VCO requires two or three external components to operate. These are R1, R2, C1. Resistor R1 and Capacitor C1
are selected to determine the center frequency of the VCO
(see typical performance curves Figure 14). R2 can be used
to set the offset frequency with 0 volts at VCO input. For example, if R2 is decreased, the offset frequency is increased.
If R2 is omitted the VCO range is from 0 Hz. The effect of R2
is shown in Figure 24, typical performance curves. By increasing the value of R2 the lock range of the PLL is increased and the gain (volts/Hz) is decreased. Thus, for a
narrow lock range, large swings on the VCO input will cause
less frequency variation.
Internally, the resistors set a current in a current mirror, as
shown in Figure 5. The mirrored current drives one side of
the capacitor. Once the voltage across the capacitor charges
up to V
ref
of the comparators, the oscillator logic flips the capacitor which causes the mirror to charge the opposite side
of the capacitor. The output from the internal logic is then taken to VCO output (Pin 4).
The input to the VCO is a very high impedance CMOS input and thus will not load down the loop filter, easing the filters design. In o rder t o make s ignals at t he VCO i nput
accessible without degrading the loop performance, the VCO
input voltage is buffered through a unity gain Op–amp to Demod Output. This Op–amp can drive loads of 50K ohms or
more and provides no loading effects to the VCO input voltage (see Figure 12).
An inhibit input is provided to allow disabling of the VCO
and all Op–amps (see Figure 5). This is useful if the internal
VCO is not being used. A logic high on inhibit disables the
VCO and all Op–amps, minimizing standby power consumption.
Figure 5. Logic Diagram for VCO
_
+
_
+
_
+
I
1
I
2
R
2
12
V
REF
VCO
IN
R
1
9
11
10
5
6
7
4
+ +
V
ref
C1
(EXTERNAL)
DEMOD
OUT
CURRENT
MIRROR
I1 + I2 = I
3
VCO
OUT
INH
I
3
–
–
Page 8

MC74HC4046A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–8
The output of the VCO is a standard high speed CMOS
output with an equivalent LS–TTL fan out of 10. The VCO
output is approximately a square wave. This output can either directly feed the COMPIN of the phase comparators or
feed external prescalers (counters) to enable frequency synthesis.
Phase Comparators
All three phase comparators have two inputs, SIGIN and
COMPIN. The SIGIN and COMPIN have a special DC bias
network that enables AC coupling of input signals. If the signals are not AC coupled, standard 54HC/74HC input levels
are required. Both input structures are shown in Figure 6.
The outputs of these comparators are essentially standard
54HC/74HC outputs (comparator 2 is TRI–STATEABLE). In
normal operation VCC and ground voltage levels are fed to
the loop filter. This differs from some phase detectors which
supply a current to the loop filter and should be considered in
the design. (The MC14046 also provides a voltage).
Figure 6. Logic Diagram for Phase Comparators
SIG
IN
COMP
IN
V
CC
V
CC
V
CC
14
3
13
1
15
2
PC2
OUT
PCP
OUT
PC3
OUT
PC1
OUT
Phase Comparator 1
This c omparator i s a simple X OR gate s imilar to t he
54/74HC86. Its operation is similar to an overdriven balanced modulator. To maximize lock range the input frequencies must have a 50% duty cycle. Typical input and output
waveforms are shown in Figure 7. The output of the phase
detector feeds the loop filter which averages the output voltage. The frequency range upon which the PLL will lock onto
if initially out of lock is defined as the capture range. The capture range for phase detector 1 is dependent on the loop filter
design. The capture range can be as large as the lock range,
which is equal to the VCO frequency range.
To see how the detector operates, refer to Figure 7. When
two square wave signals are applied to this comparator, an
output waveform (whose d uty cycle is dependent on the
phase difference between the two signals) results. As the
phase difference increases, the output duty cycle increases
and the voltage after the loop filter increases. In order to
achieve lock when the PLL input frequency increases, the
VCO input voltage must increase and the phase difference
between COMPIN and SIGIN will increase. At an input frequency equal to f
min
, the VCO input is at 0 V. This requires
the phase detector output to be grounded; hence, the two input signals must be in phase. When the input frequency is
f
max
, the VCO input must be VCC and the phase detector in-
puts must be 180 degrees out of phase.
Figure 7. Typical Waveforms for PLL Using
Phase Comparator 1
V
CC
GND
SIG
IN
COMP
IN
PC1
OUT
VCO
IN
Page 9

MC74HC4046A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–9 MOTOROLA
The XOR is more susceptible to locking onto harmonics of
the SIGIN than the digital phase detector 2. For instance, a
signal 2 times the VCO frequency results in the same output
duty cycle as a signal equal to the VCO frequency . The difference is that the output frequency of the 2f example is twice
that of the other example. The loop filter and VCO range
should be designed to prevent locking on to harmonics.
Phase Comparator 2
This detector is a digital memory network. It consists of
four flip–flops and some gating logic, a three state output and
a phase pulse output as shown in Figure 6. This comparator
acts only on the positive edges of the input signals and is independent of duty cycle.
Phase comparator 2 operates in such a way as to force the
PLL into lock with 0 phase difference between the VCO output and the signal input positive waveform edges. Figure 8
shows some typical loop waveforms. First assume that SIG
IN
is leading the COMPIN. This means that the VCO’s frequency must be increased to bring its leading edge into proper
phase alignment. Thus the phase detector 2 output is set
high. This will cause the loop filter to charge up the VCO input, increasing the VCO frequency . Once the leading edge of
the COMPIN is detected, the output goes TRI–STATE holding the VCO input at the loop filter voltage. If the VCO still
lags the SIGIN then the phase detector will again charge up
the VCO input for the time between the leading edges of both
waveforms.
If the VCO leads the SIGIN then when the leading edge of
the VCO is seen; the output of the phase comparator goes
low. This discharges the loop filter until the leading edge of
the SIGIN is detected at which time the output disables itself
again. This has the effect of slowing down the VCO to again
make the rising edges of both waveforms coincidental.
When the PLL is out of lock, the VCO will be running either
slower or faster than the SIGIN. If it is running slower the
phase detector will see more SIGIN rising edges and so the
output of the phase comparator will be high a majority of the
time, raising the VCO’s frequency. Conversely, if the VCO is
running faster than the SIGIN, the output of the detector will
be low most of the time and the VCO’s output frequency will
be decreased.
As one can see, when the PLL is locked, the output of
phase comparator 2 will be disabled except for minor corrections at the leading edge of the waveforms. When PC2 is
TRI–STATED, the PCP output is high. This output can be
used to determine when the PLL is in the locked condition.
This detector has several interesting characteristics. Over
the entire VCO frequency range there is no phase difference
between the COMPIN and the SIGIN. The lock range of the
PLL is the same as the capture range. Minimal power was
consumed in the loop filter since in lock the detector output is
a high impedance. When no SIGIN is present, the detector
will see only VCO leading edges, so the comparator output
will stay low, forcing the VCO to f
min
.
Phase comparator 2 is more susceptible to noise, causing
the PLL to unlock. If a noise pulse is seen on the SIGIN, the
comparator treats it as another positive edge of the SIG
IN
and will cause the output to go high until the VCO leading
edge is seen, potentially for an entire SIGIN period. This
would cause the VCO to speed up during that time. When using PC1, the output of that phase detector would be disturbed
for only the short duration of the noise spike and would cause
less upset.
Phase Comparator 3
This is a positive edge–triggered sequential phase detector using an RS flip–flop as shown in Figure 6. When the PLL
is using this comparator, the loop is controlled by positive signal transitions and the duty factors of SIGIN and COMP
IN
are not important. It has some similar characteristics to the
edge sensitive comparator. To see how this detector works,
assume input pulses are applied to the SIGIN and COMPIN’s
as shown in Figure 9. When the SIGIN leads the COMPIN,
the flop is set. This will charge the loop filter and cause the
VCO to speed up, bringing the comparator into phase with
the SIGIN. The phase angle between SIGIN and COMPIN varies from 0° to 360° and is 180° at fo. The voltage swing for
PC3 is greater than for PC2 but consequently has more ripple
in the signal to the VCO. When no SIGIN is present the VCO
will be forced to f
max
as opposed to f
min
when PC2 is used.
The operating characteristics of all three phase comparators should be compared to the requirements of the system
design and the appropriate one should be used.
Figure 8. Typical Waveforms for PLL Using
Phase Comparator 2
V
CC
GND
SIG
IN
COMP
IN
PC2
OUT
VCO
IN
PCP
OUT
HIGH IMPEDANCE OFF–STATE
Figure 9. Typical Waveform for PLL Using
Phase Comparator 3
VCC
GND
SIG
IN
COMP
IN
PC3
OUT
VCO
IN
Page 10

MC74HC4046A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–10
Figure 10. Input Resistance at SIGIN, COMPIN with
∆VI = 1.0 V at Self–Bias Point
Figure 11. Input Current at SIGIN, COMPIN with
∆VI = 500 mV at Self–Bias Point
Figure 12. Offset Voltage at Demodulator Output as
a Function of VCOIN and R
S
Figure 13A. Frequency Stability versus Ambient
Temperature: VCC = 3.0 V
800
0
VCC=3.0 V
VCC=4.5 V
VCC=6.0 V
1/2 VCC–1.0 V 1/2 V
CC
4.0
–4.0
1/2VCC – 500 mV
VI (V)
1/2 V
CC
1/2 VCC + 500 mV
0
6.0
0
0
3.0 6.0
VCC=4.5 V RS=300 k
VCC=4.5 V RS=50 k
VCC=3.0 V RS=300 k
VCC=3.0 V RS=50 k
DEMOD OUT
15
10
5.0
0
–5.0
–10
–15
–100 –50 0 50 100 150
R1=100 k
Ω
R1=300 k
Ω
R1=3.0 k
Ω
R1=100 k
Ω
R1=300 k
Ω
R1=3.0 k
Ω
VCC = 3.0 V
C1 = 100 pF; R2 =
∞
; V
VCOIN
=1/3 V
CC
FREQUENCY STABILITY (%)
AMBIENT TEMPERATURE (°C)
VCC=3.0 V
VCC=4.5 V
VCC=6.0 V
R
I
Ω
)(k
400
I
I
( A)
µ
V
DEM
OUT
VCC=6.0 V RS=300 k
VCC=6.0 V RS=50 k
Figure 13B. Frequency Stability versus Ambient
Temperature: VCC = 4.5 V
Figure 13C. Frequency Stability versus Ambient
Temperature: VCC = 6.0 V
R1=100 k
Ω
R1=300 k
Ω
R1=3.0 k
Ω
15
10
5.0
0
–5.0
–10
–15
–100 –50 0 50 100 150
VCC= 4.5 V
C1 = 100 pF; R2 =
∞
; V
VCOIN
= 1/2 V
CC
AMBIENT TEMPERATURE (
°
C)
FREQUENCY STABILITY (%)
FREQUENCY STABILITY (%)
R1=100 k
Ω
R1=3.0 k
Ω
6.0
4.0
0
–2.0
–10
–100 –50 0 50 100 150
VCC= 6.0 V
C1 = 100 pF; R2 =
∞
; V
VCOIN
=1/2 V
CC
AMBIENT TEMPERATURE (
°
C)
–8.0
–6.0
–4.0
2.0
8.0
10
R1=300 k
Ω
1/2 VCC+1.0 V
VI (V)
VCOIN (V)
=
Page 11

MC74HC4046A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–11 MOTOROLA
Figure 14A. VCO Frequency (f
VCO
) as a Function
of the VCO Input Voltage (V
VCOIN
)
Figure 14B. VCO Frequency (f
VCO
) as a Function
of the VCO Input Voltage (V
VCOIN
)
VCC = 6.0 V
VCC = 4.5 V
VCC = 3.0 V
R1 = 3.0 k
Ω
C1 = 39 pF
0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
23
21
19
17
15
13
11
9
7.0
V
VCOIN
(V)
(MHz)f
VCO
0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
70
60
50
40
30
20
10
0
V
VCOIN
(V)
(KHz)f
VCO
VCC = 6.0 V
VCC = 4.5 V
VCC = 3.0 V
R1 = 3.0 k
Ω
C1 = 0.1 µ
F
Figure 14C. VCO Frequency (f
VCO
) as a Function
of the VCO Input Voltage (V
VCOIN
)
Figure 14D. VCO Frequency (f
VCO
) as a Function
of the VCO Input Voltage (V
VCOIN
)
0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
2.0
1.0
0
V
VCOIN
(V)
(MHz)f
VCO
VCC = 6.0 V
VCC = 4.5 V
VCC = 3.0 V
R1 = 300 k
Ω
C1 = 39 pF
4.5
0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
1.0
V
VCOIN
(V)
(KHz)f
VCO
4.5
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
VCC = 6.0 V
VCC = 4.5 V
VCC = 3.0 V
R1 = 300 k
Ω
C1 = 0.1 µ
F
Figure 15A. Frequency Linearity versus
R1, C1 and V
CC
Figure 15B. Definition of VCO Frequency Linearity
∆
f
VCO
(%)
2.0
1.0
–2.0
0
–1.0
10
0
10
1
10
2
10
3
R1 (k
Ω
)
R2 = ∞
; ∆
V = 0.5 V
C1 = 39 pF
C1 = 1.0 µ
F
f
2
f
0
f
0
′
f
1
MIN 1/2 V
CC
MAX
∆
V = 0.5 V OVER THE VCC RANGE:
FOR VCO LINEARITY
f
0
′
= (f1 + f2) / 2
LINEARITY = (f
0
′
– f0) / f0′
) x 100%
VCC=
4.5 V
6.0 V
3.0 V
4.5 V
6.0 V
3.0 V
Page 12

MC74HC4046A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–12
Figure 16. Power Dissipation versus R1 Figure 17. Power Dissipation versus R2
Figure 18. DC Power Dissipation of
Demodulator versus R
S
Figure 19. VCO Center Frequency versus C1
R1 (kΩ)
10
6
10
5
10
4
10
3
10
0
10
1
10
2
10
3
P
R1
W)
µ
(
VCC= 6.0 V, C1= 40 pF
VCC= 6.0 V, C1= 1.0 µF
VCC= 4.5 V, C1= 40 pF
VCC= 3.0 V, C1= 40 pF
VCC= 3.0 V, C1= 1.0 µF
CL= 50 pF; R2 =∞; V
VCOIN
= 1/2 VCC FOR VCC= 4.5 V AND 6.0 V;
V
VCOIN
= 1/3 VCC FOR VCC= 3.0 V; T
amb
= 25°C
VCC= 6.0 V, C1= 40 pF
VCC= 6.0 V, C1= 1.0 µF
VCC= 4.5 V, C1= 40 pF
VCC= 4.5 V, C1= 1.0 µF
VCC= 4.5 V, C1= 1.0 µF
VCC= 3.0 V, C1= 1.0 µF
CL= 50 pF; R1 =∞; V
VCOIN
= 0 V; T
amb
= 25°C
10
6
10
5
10
4
10
3
10
0
10
1
10
2
10
3
R2 (k
Ω
)
P
R2
W)
µ
(
P
DEM
( W)
µ
RS (kΩ)
10
3
10
2
10
1
10
0
10
1
10
2
10
3
R1 = R2 =∞; T
amb
= 25°C
VCC=6.0 V
VCC=4.5 V
VCC=3.0 V
10
1
10
2
10
3
10
4
10
5
10
6
C1 (pF)
6.0 V
4.5 V
3.0 V
6.0 V
4.5 V
3.0 V
VCC=
INH = GND; T
amb
= 25°C; R2 =∞; V
VCOIN
= 1/3 V
CC
R1=3.0 k
Ω
R1=100 k
Ω
R1=300 k
Ω
f
VCO
(Hz)
10
8
10
7
10
6
10
5
10
4
10
3
10
2
VCC= 3.0 V, C1= 40 pF
6.0 V
4.5 V
3.0 V
Figure 20. Frequency Offset versus C1 Figure 21. Typical Frequency Lock Range (2fL)
versus R1C
1
f
off
(Hz)
10
8
10
7
10
6
10
5
10
4
10
3
10
2
10
1
C1 (pF)
10
1
10
2
10
3
10
4
10
5
10
6
6.0 V
4.5 V
3.0 V
6.0 V
4.5 V
3.0 V
6.0 V
4.5 V
3.0 V
VCC=
10
8
10
7
10
6
10
5
10
4
10
3
10
2
2
fL
(Hz)
10
–7
10
–6 10–5
10
–4
10
–3
10
–2
10
–1
R1C1
R1 =∞; V
VCOIN
= 1/2 VCC FOR VCC= 4.5 V AND 6.0 V;
V
VCOIN
= 1/3 VCC FOR VCC= 3.0 V; INH = GND; T
amb
= 25°C
R2=3.0 k
Ω
R2=100 k
Ω
R2=300 k
Ω
VCC= 4.5 V; R2 =
∞
Page 13

MC74HC4046A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–13 MOTOROLA
Figure 22. R2 versus f
max
Figure 23. R2 versus f
min
Figure 24. R2 versus Frequency Lock Range (2fL)
FREQ. (MHz)
1.0 10
1
10
4
10
5
10
2
10
3
0
5.0
10
15
20
C1=39 pF
R2 ( k
Ω
)
10
0
10
1
10
4
10
5
10
6
C1=39 pF
10
2
10
3
–2.0
0
4.0
2.0
6.0
8.0
10
12
14
FREQ. (MHz)
R2 ( kΩ)
R1=10 k
Ω
R1=3 k
Ω
R1=20 k
Ω
R1=30 k
Ω
R1=40 k
Ω
R1=50 k
Ω
R1=100 k
Ω
R1=300 k
Ω
R1=3.0 k
Ω
R1=20 k
Ω
R1=30 k
Ω
R1=100 k
Ω
R1=300 k
Ω
R1=50 k
Ω
R2 ( kΩ)
1.0 10
1
10
2
10
3
10
4
10
5
2f
0
10
20
C1=39 pF
R1=10 k
Ω
R1=3.0 k
Ω
R1=20 k
Ω
R1=30 k
Ω
R1=40 k
Ω
R1=50 k
Ω
R1=100 k
Ω
R1=300 k
Ω
R1=40 k
Ω
L
(MHz)
R1=10 k
Ω
Page 14

MC74HC4046A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–14
APPLICATION INFORMATION
The following information is a guide for approximate values of R1, R2, and C1. Figures 19, 20, and 21 should be used as
references as indicated below, also the values of R1, R2, and C1 should not violate the Maximum values indicated in the DC
ELECTRICAL CHARACTERISTICS tables.
Phase Comparator 1 Phase Comparator 2 Phase Comparator 3
R2 = ∞ R2 0
R
R2 = ∞ R2 0
R
R2 = ∞ R2 0
R
• Given f0
• Use f0 with Figure
19 to determine
R1 and C1.
(see Figure 23 for
characteristics of
the VCO operation)
• Given f0 and fL
• Calculate f
min
f
min
= f0–fL
• Determine values
of C1 and R2 from
Figure 20.
• Determine R1–C1
from Figure 21.
• Calculate value of
R1 from the value
of C1 and the
product of R1C1
from Figure 21.
(see Figure 24 for
characteristics of the
VCO operation)
• Given f
max
and f0
• Determine the
value of R1 and
C1 using Figure 19
and use Figure 21
to obtain 2fL and
then use this to
calculate f
min
.
• Given f0 and fL
• Calculate f
min
f
min
= f0–fL
• Determine values
of C1 and R2 from
Figure 20.
• Determine R1–C1
from Figure 21.
• Calculate value of
R1 from the value
of C1 and the
product of R1C1
from Figure 21.
(see Figure 24 for
characteristics of the
VCO operation)
• Given f
max
and f0
• Determine the
value of R1 and
C1 using Figure 19
and Figure 21 to
obtain 2fL and
then use this to
calculate f
min
.
• Given f0 and fL
• Calculate f
min:
f
min
= f0–fL
• Determine values
of C1 and R2 from
Figure 20.
• Determine R1–C1
from Figure 21.
• Calculate value of
R1 from the value
of C1 and the
product of R1C1
from Figure 21.
(see Figure 24 for
characteristics of the
VCO operation)
Page 15

MC74HC4046A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–15 MOTOROLA
OUTLINE DIMENSIONS
N SUFFIX
PLASTIC PACKAGE
CASE 648–08
ISSUE R
MIN MINMAX MAX
INCHES MILLIMETERS
DIM
A
B
C
D
F
G
H
J
K
L
M
S
18.80
6.35
3.69
0.39
1.02
0.21
2.80
7.50
0
°
0.51
19.55
6.85
4.44
0.53
1.77
0.38
3.30
7.74
10
°
1.01
0.740
0.250
0.145
0.015
0.040
0.008
0.110
0.295
0
°
0.020
0.770
0.270
0.175
0.021
0.070
0.015
0.130
0.305
10
°
0.040
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. DIMENSION L TO CENTER OF LEADS WHEN
FORMED PARALLEL.
4. DIMENSION B DOES NOT INCLUDE MOLD FLASH.
5. ROUNDED CORNERS OPTIONAL.
2.54 BSC
1.27 BSC
0.100 BSC
0.050 BSC
–A
–
B
1 8
916
F
H
G
D
16 PL
S
C
–T
–
SEATING
PLANE
K
J
M
L
T A0.25 (0.010)
M M
0.25 (0.010) T B A
M
S S
MIN MINMAX MAX
MILLIMETERS INCHES
DIM
A
B
C
D
F
G
J
K
M
P
R
9.80
3.80
1.35
0.35
0.40
0.19
0.10
0
°
5.80
0.25
10.00
4.00
1.75
0.49
1.25
0.25
0.25
7
°
6.20
0.50
0.386
0.150
0.054
0.014
0.016
0.008
0.004
0
°
0.229
0.010
0.393
0.157
0.068
0.019
0.049
0.009
0.009
7
°
0.244
0.019
1.27 BSC 0.050 BSC
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSIONS A AND B DO NOT INCLUDE
MOLD PROTRUSION.
4. MAXIMUM MOLD PROTRUSION 0.15 (0.006)
PER SIDE.
5. DIMENSION D DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR
PROTRUSION SHALL BE 0.127 (0.005) TOTAL
IN EXCESS OF THE D DIMENSION AT
MAXIMUM MATERIAL CONDITION.
1
8
916
–A
–
–B
–
D 16 PL
K
C
G
–T
–
SEATING
PLANE
R X 45°
M
J
F
P 8 PL
0.25 (0.010) B
M M
D SUFFIX
PLASTIC SOIC PACKAGE
CASE 751B–05
ISSUE J
How to reach us:
USA/EUROPE: Motorola Literature Distribution; JAPAN: Nippon Motorola Ltd.; Tatsumi–SPD–JLDC, Toshikatsu Otsuki,
P.O. Box 20912; Phoenix, Arizona 85036. 1–800–441–2447 6F Seibu–Butsuryu–Center, 3–14–2 Tatsumi Koto–Ku, Tokyo 135, Japan. 03–3521–8315
MFAX: RMFAX0@email.sps.mot.com –TOUCHTONE (602) 244–6609 HONG KONG: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
INTERNET: http://Design–NET.com 51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852–26629298
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit,
and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters can and do vary in different
applications. All operating parameters, including “T ypicals” must be validated for each customer application by customer’s technical experts. Motorola does
not convey any license under its patent rights nor the rights of others. Motorola products are not designed, intended, or authorized for use as components in
systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of
the Motorola product could create a situation where personal injury or death may occur. Should Buyer purchase or use Motorola products for any such
unintended or unauthorized application, Buyer shall indemnify and hold Motorola and its officers, employees, subsidiaries, affiliates, and distributors harmless
against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death
associated with such unintended or unauthorized use, even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part.
Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
MC74HC4046A/D
*MC74HC4046A/D*
◊
CODELINE
 Loading...
Loading...