

Page 1
SEMICONDUCTOR TECHNICAL DATA
3–1
REV 6
Motorola, Inc. 1995
10/95
!
! "
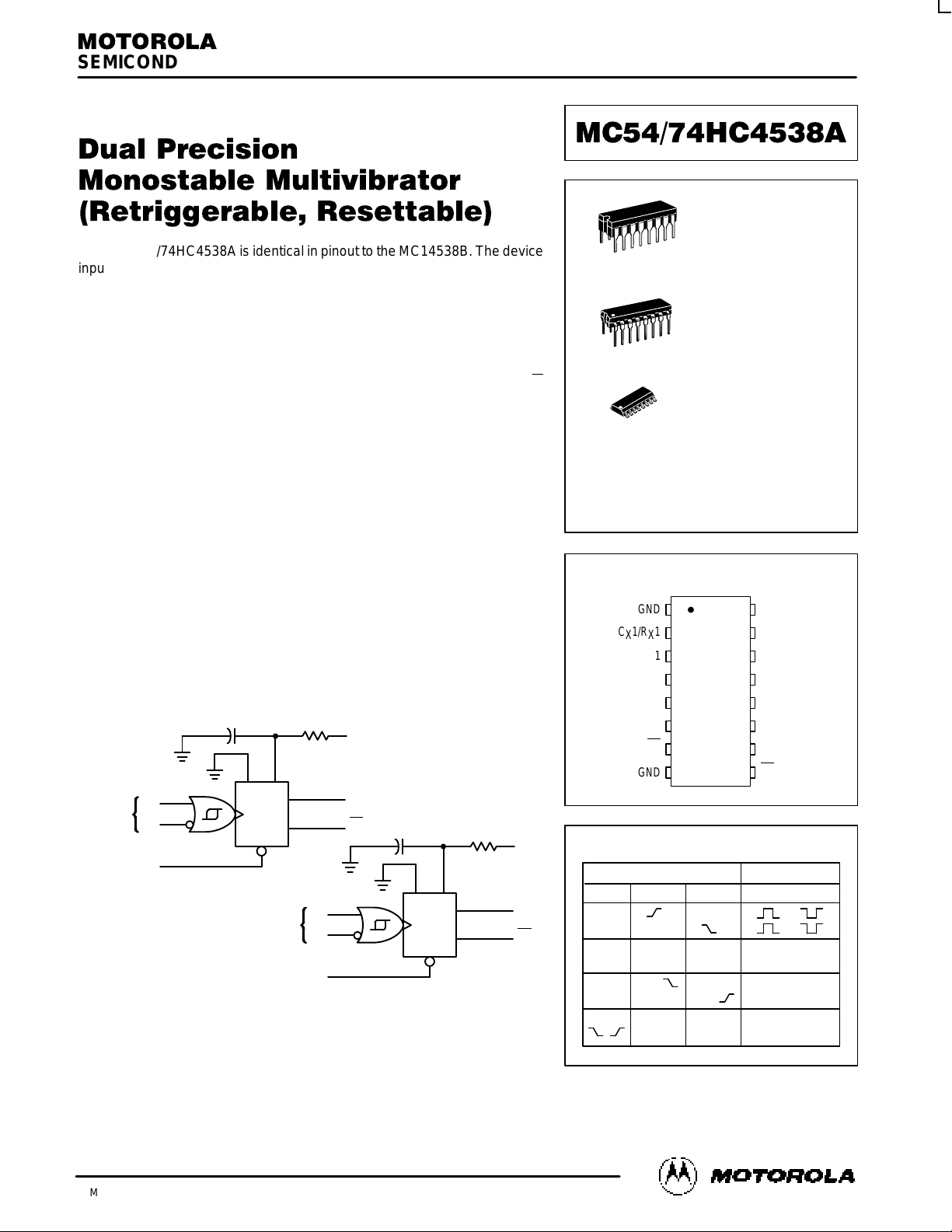
The MC54/74HC4538A is identical in pinout to the MC14538B. The device
inputs are compatible with standard CMOS outputs; with pullup resistors,
they are compatible with LSTTL outputs.
This dual monostable multivibrator may be triggered by either the positive
or the negative edge of an input pulse, and produces a precision output
pulse over a wide range of pulse widths. Because the device has conditioned
trigger inputs, there are no trigger–input rise and fall time restrictions. The
output pulse width is determined by the external timing components, Rx and
Cx. The device has a reset function which forces the Q output low and the Q
output high, regardless of the state of the output pulse circuitry.
• Unlimited Rise and Fall Times Allowed on the Trigger Inputs
• Output Pulse is Independent of the Trigger Pulse Width
• ± 10% Guaranteed Pulse Width Variation from Part to Part (Using the
Same Test Jig)
• Output Drive Capability: 10 LSTTL Loads
• Outputs Directly Interface to CMOS, NMOS and TTL
• Operating Voltage Range: 3.0 to 6.0 V
• Low Input Current: 1.0 µA
• High Noise Immunity Characteristic of CMOS Devices
• In Compliance with the Requirements Defined by JEDEC Standard
No. 7A
• Chip Complexity: 145 FETs or 36 Equivalent Gates
LOGIC DIAGRAM
PIN 16 = V
CC
PIN 8 = GND
RX AND CX ARE EXTERNAL COMPONENTS
PIN 1 AND PIN 15 MUST BE HARD WIRED TO GND
CX1 RX1
V
CC
Q1
RESET 1
B1
A1
TRIGGER
INPUTS
Q1
1 2
4
5
3
6
7
CX2 RX2
V
CC
Q2
RESET 2
B2
A2
TRIGGER
INPUTS
Q2
15 14
12
11
13
10
9
PIN ASSIGNMENT
13
14
15
16
9
10
11
125
4
3
2
1
8
7
6
A2
RESET 2
CX2/RX2
GND
V
CC
Q2
Q2
B2
A1
RESET 1
CX1/RX1
GND
GND
Q1
Q1
B1
FUNCTION TABLE
Inputs Outputs
Reset A B Q Q
H H
H L
H X L Not Triggered
H H X Not Triggered
H L,H, H Not Triggered
H L L,H, Not Triggered
L X X L H
X X Not Triggered
D SUFFIX
SOIC PACKAGE
CASE 751B–05
N SUFFIX
PLASTIC PACKAGE
CASE 648–08
ORDERING INFORMATION
MC54HCXXXXAJ
MC74HCXXXXAN
MC74HCXXXXAD
Ceramic
Plastic
SOIC
1
16
1
16
J SUFFIX
CERAMIC PACKAGE
CASE 620–10
1
16
Page 2
MC54/74HC4538A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–2
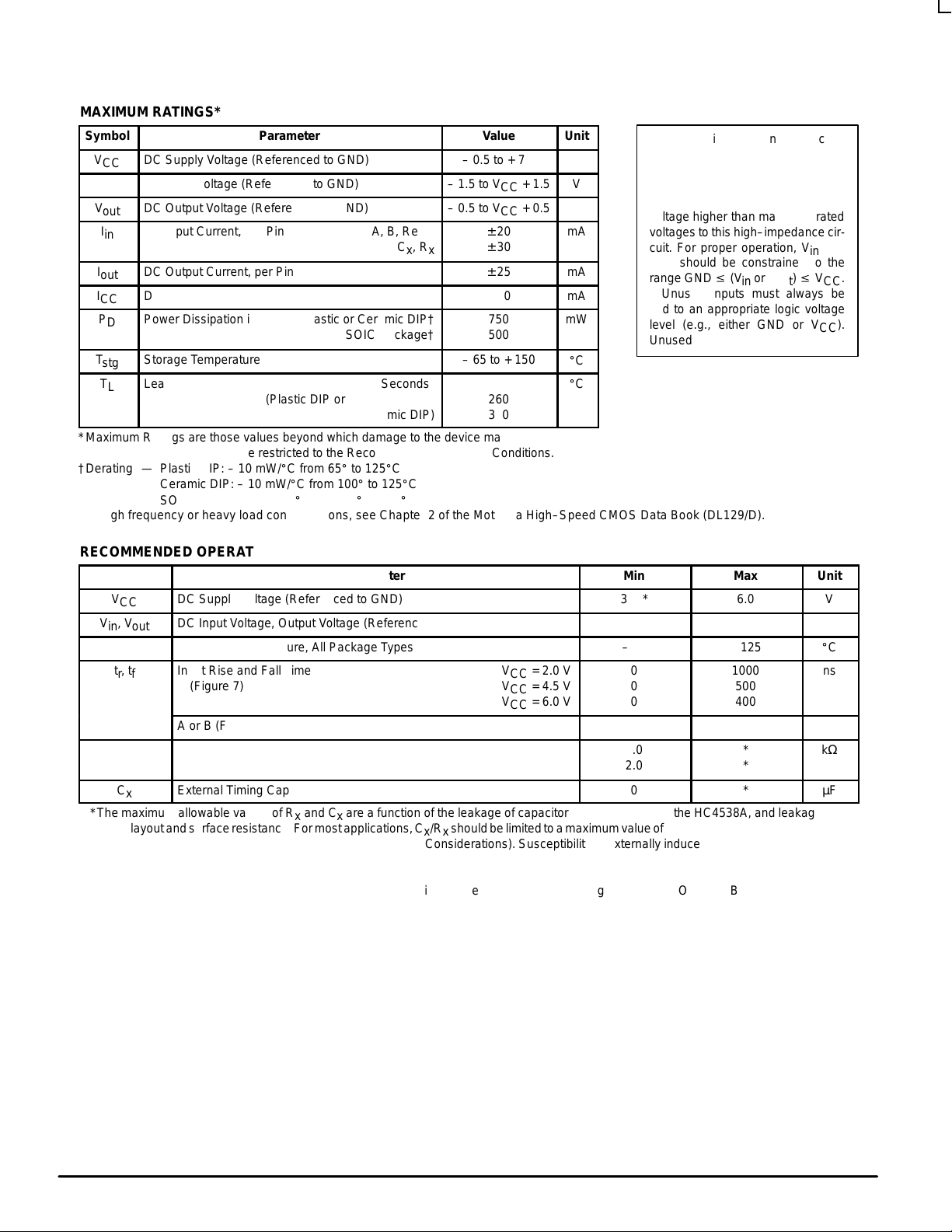
MAXIMUM RATINGS*
Symbol
Parameter
Value
Unit
V
CC
DC Supply Voltage (Referenced to GND)
– 0.5 to + 7.0
V
V
in
DC Input Voltage (Referenced to GND)
– 1.5 to VCC + 1.5
V
V
out
DC Output Voltage (Referenced to GND)
– 0.5 to VCC + 0.5
I
in
DC Input Current, per Pin A, B, Reset
Cx, R
x
± 20
± 30
mA
I
out
DC Output Current, per Pin
± 25
mA
I
CC
DC Supply Current, VCC and GND Pins
± 50
mA
P
D
Power Dissipation in Still Air,Plastic or Ceramic DIP†
SOIC Package†
750
500
mW
T
stg
Storage Temperature
– 65 to + 150
_
C
T
L
Lead Temperature, 1 mm from Case for 10 Seconds
(Plastic DIP or SOIC Package)
(Ceramic DIP)
260
300
_
C
*Maximum Ratings are those values beyond which damage to the device may occur.
Functional operation should be restricted to the Recommended Operating Conditions.
†Derating — Plastic DIP: – 10 mW/_C from 65_ to 125_C
Ceramic DIP: – 10 mW/_C from 100_ to 125_C
SOIC Package: – 7 mW/_C from 65_ to 125_C
For high frequency or heavy load considerations, see Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
RECOMMENDED OPERATING CONDITIONS
Symbol
Parameter
Min
Max
Unit
V
CC
DC Supply Voltage (Referenced to GND)
3.0**
6.0
V
Vin, V
out
DC Input Voltage, Output Voltage (Referenced to GND)
0
V
CC
V
T
A
Operating Temperature, All Package Types
– 55
+ 125
_
C
Input Rise and Fall Time VCC = 2.0 V
(Figure 7) VCC = 4.5 V
VCC = 6.0 V
0
0
0
1000
500
400
ns
A or B (Figure 5)
—
No Limit
R
x
External Timing Resistor VCC < 4.5 V
VCC ≥ 4.5 V
1.0
2.0
*
*
kΩ
C
x
External Timing Capacitor
0
*
µF
*The maximum allowable values of Rx and Cx are a function of the leakage of capacitor Cx, the leakage of the HC4538A, and leakage due to
board layout and surface resistance. For most applications, Cx/Rx should be limited to a maximum value of 10 µF/1.0 MΩ. V alues of Cx > 1.0 µF
may cause a problem during power down (see Power Down Considerations). Susceptibility to externally induced noise signals may occur for
Rx > 1.0 MΩ.
**The HC4538A will function at 2.0 V but for optimum pulse width stability, VCC should be above 3.0 V.
NOTE: Information on typical parametric values can be found in Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
This device contains protection
circuitry to guard against damage
due to high static voltages or electric
fields. However, precautions must
be taken to avoid applications of any
voltage higher than maximum rated
voltages to this high–impedance circuit. For proper operation, Vin and
V
out
should be constrained to the
range GND v (Vin or V
out
) v VCC.
Unused inputs must always be
tied to an appropriate logic voltage
level (e.g., either GND or VCC).
Unused outputs must be left open.
tr, t
f
Page 3
MC54/74HC4538A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–3 MOTOROLA
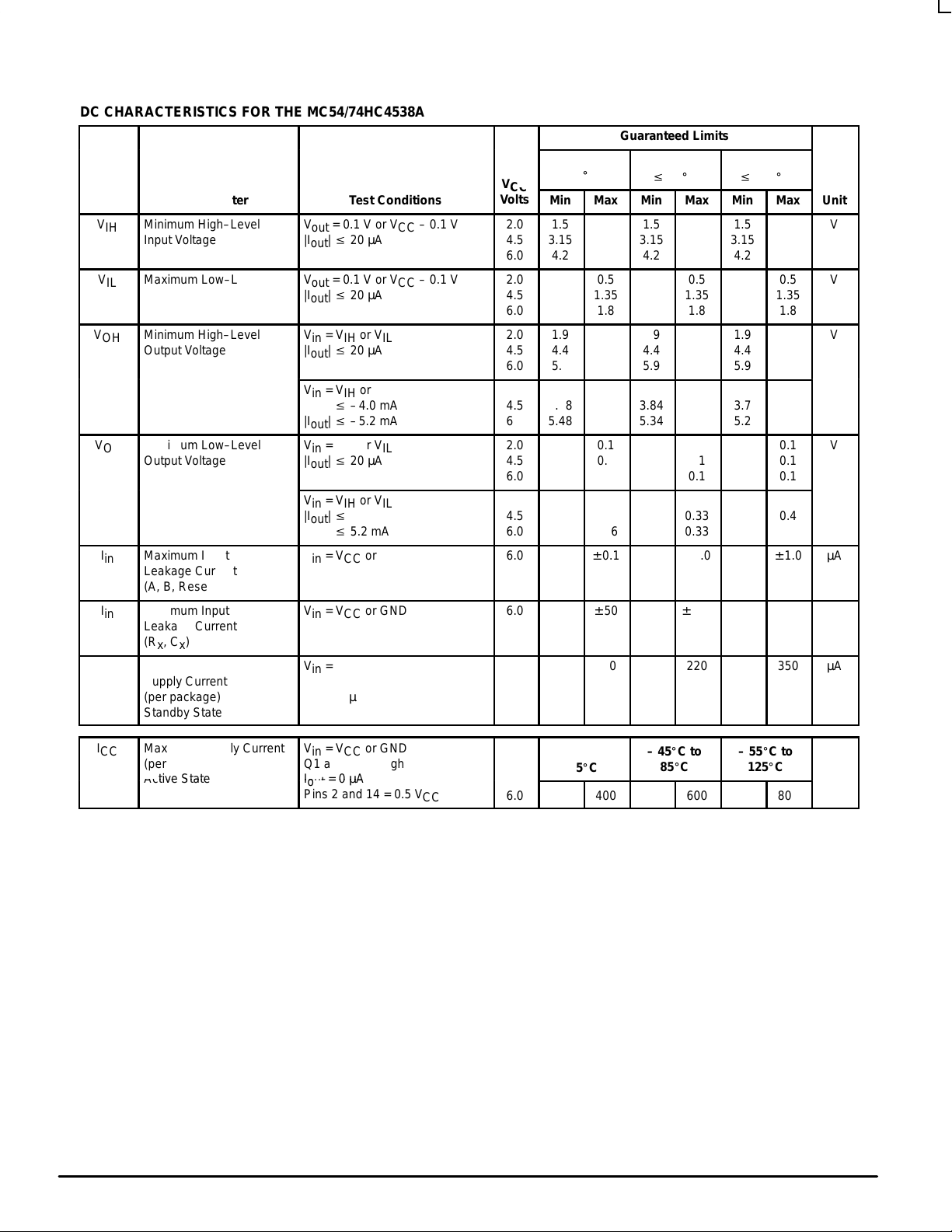
DC CHARACTERISTICS FOR THE MC54/74HC4538A
Guaranteed Limits
V
– 55 to
25_C
v
85_C
v
125_C
Symbol
Parameter
Test Conditions
V
CC
Volts
Min
Max
Min
Max
Min
Max
Unit
V
IH
Minimum High–Level
Input Voltage
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| v 20 µA
2.0
4.5
6.0
1.5
3.15
4.2
1.5
3.15
4.2
1.5
3.15
4.2
V
V
IL
Maximum Low–Level
Input Voltage
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| v 20 µA
2.0
4.5
6.0
0.5
1.35
1.8
0.5
1.35
1.8
0.5
1.35
1.8
V
Vin = VIH or V
IL
|I
out
| v 20 µA
2.0
4.5
6.0
1.9
4.4
5.9
1.9
4.4
5.9
1.9
4.4
5.9
Vin = VIH or V
IL
|I
out
| v –4.0 mA
|I
out
| v –5.2 mA
4.5
6.0
3.98
5.48
3.84
5.34
3.7
5.2
Vin = VIH or V
IL
|I
out
| v 20 µA
2.0
4.5
6.0
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
Vin = VIH or V
IL
|I
out
| v 4.0 mA
|I
out
| v 5.2 mA
4.5
6.0
0.26
0.26
0.33
0.33
0.4
0.4
I
in
Maximum Input
Leakage Current
(A, B, Reset)
Vin = VCC or GND
6.0
± 0.1
± 1.0
± 1.0
µA
I
in
Maximum Input
Leakage Current
(Rx, Cx)
Vin = VCC or GND
6.0
± 50
± 500
± 500
nA
I
CC
Maximum Quiescent
Supply Current
(per package)
Standby State
Vin = VCC or GND
Q1 and Q2 = Low
I
out
= 0 µA
6.0
130
220
350
µA
25_C
– 45_C to
85_C
– 55_C to
125_C
Active State
I
out
= 0 µA
Pins 2 and 14 = 0.5 V
CC
400
600
800
µA
V
V
Minimum High–Level
OH
Output Voltage
Maximum Low–Level
OL
Output Voltage
V
V
I
CC
Maximum Supply Current
(per package)
Vin = VCC or GND
Q1 and Q2 = High
6.0
Page 4
MC54/74HC4538A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–4
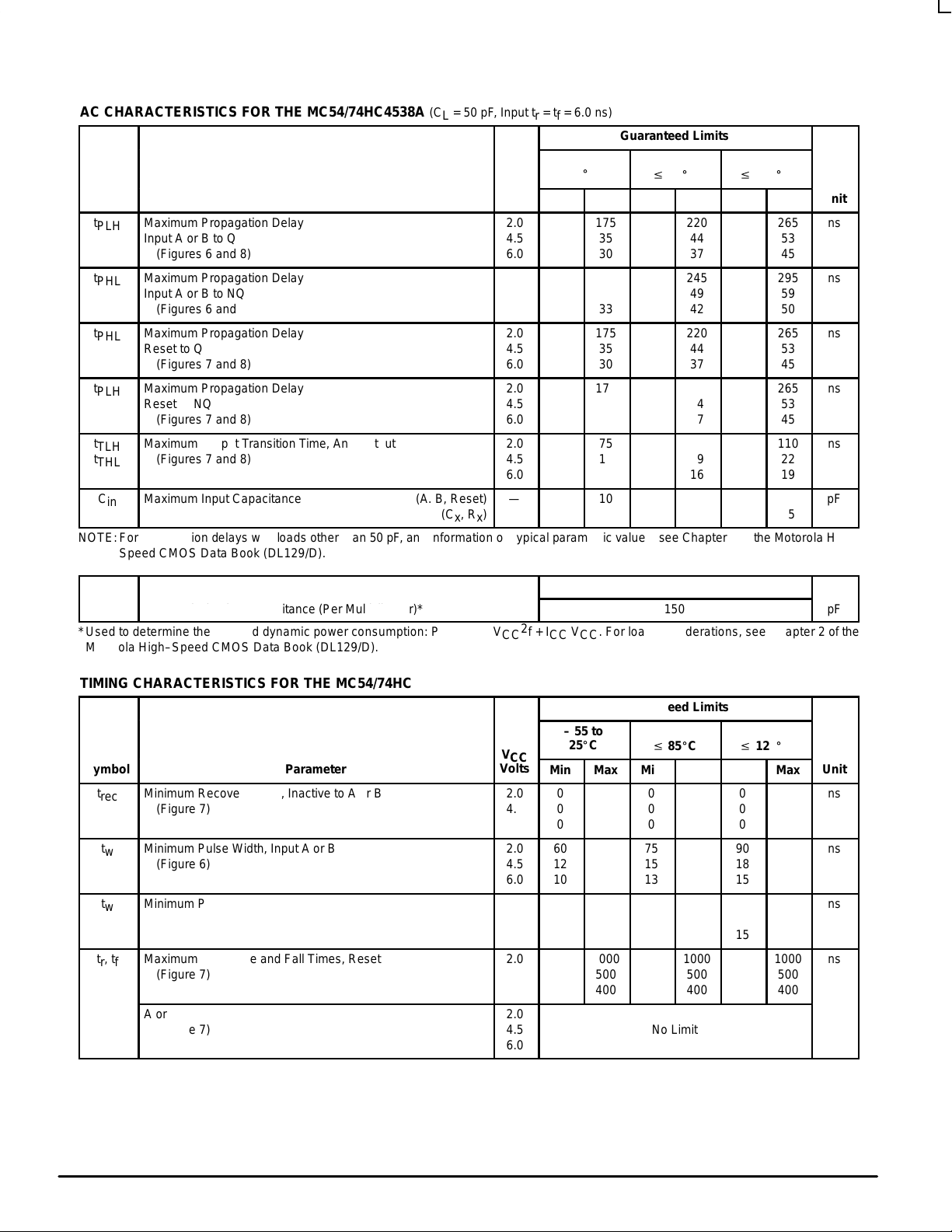
AC CHARACTERISTICS FOR THE MC54/74HC4538A (C
L
= 50 pF, Input tr = tf = 6.0 ns)
Guaranteed Limits
– 55 to
25_C
v
85_C
v
125_C
Symbol
Parameter
V
CC
Volts
Min
Max
Min
Max
Min
Max
Unit
t
PLH
Maximum Propagation Delay
Input A or B to Q
(Figures 6 and 8)
2.0
4.5
6.0
175
35
30
220
44
37
265
53
45
ns
t
PHL
Maximum Propagation Delay
Input A or B to NQ
(Figures 6 and 8)
2.0
4.5
6.0
195
39
33
245
49
42
295
59
50
ns
t
PHL
Maximum Propagation Delay
Reset to Q
(Figures 7 and 8)
2.0
4.5
6.0
175
35
30
220
44
37
265
53
45
ns
t
PLH
Maximum Propagation Delay
Reset to NQ
(Figures 7 and 8)
2.0
4.5
6.0
175
35
30
220
44
37
265
53
45
ns
t
TLH
t
THL
Maximum Output Transition Time, Any Output
(Figures 7 and 8)
2.0
4.5
6.0
75
15
13
95
19
16
110
22
19
ns
C
in
Maximum Input Capacitance (A. B, Reset)
(Cx, Rx)
—
10
25
10
25
10
25
pF
NOTE: For propagation delays with loads other than 50 pF, and information on typical parametric values, see Chapter 2 of the Motorola High–
Speed CMOS Data Book (DL129/D).
Typical @ 25°C, VCC = 5.0 V
150
*Used to determine the no–load dynamic power consumption: PD = CPD V
CC
2
f + ICC VCC. For load considerations, see Chapter 2 of the
Motorola High–Speed CMOS Data Book (DL129/D).
TIMING CHARACTERISTICS FOR THE MC54/74HC4538A (Input t
r
= tf = 6.0 ns)
Guaranteed Limits
– 55 to
25_C
v
85_C
v
125_C
Symbol
Parameter
V
CC
Volts
Min
Max
Min
Max
Min
Max
Unit
t
rec
Minimum Recovery Time, Inactive to A or B
(Figure 7)
2.0
4.5
6.0
0
0
0
0
0
0
0
0
0
ns
t
w
Minimum Pulse Width, Input A or B
(Figure 6)
2.0
4.5
6.0
60
12
10
75
15
13
90
18
15
ns
t
w
Minimum Pulse Width, Reset
(Figure 7)
2.0
4.5
6.0
60
12
10
75
15
13
90
18
15
ns
Maximum Input Rise and Fall Times, Reset
(Figure 7)
2.0
4.5
6.0
1000
500
400
1000
500
400
1000
500
400
A or B
(Figure 7)
2.0
4.5
6.0
No Limit
C
Power Dissipation Capacitance (Per Multivibrator)*
PD
tr, t
f
pF
ns
Page 5

MC54/74HC4538A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–5 MOTOROLA
OUTPUT PULSE WIDTH CHARACTERISTICS (C
L
= 50 pF)t
Conditions
Guaranteed Limits
V
– 55 to
25_C
v
85_C
v
125_C
Symbol
Parameter
Timing Components
V
CC
Volts
Min
Max
Min
Max
Min
Max
Unit
τ
Output Pulse Width*
(Figures 6 and 8)
Rx = 10 kΩ, Cx = 0.1 µF
5.0
0.63
0.77
0.6
0.8
0.59
0.81
ms
—
Pulse Width Match
Between Circuits in the
same Package
—
—
± 5.0
%
—
Pulse Width Match
Variation (Part to Part)
—
—
± 10
%
*For output pulse widths greater than 100 µs, typically τ = kRxCx, where the value of k may be found in Figure 1.
Figure 1. Typical Output Pulse Width Constant, k,
versus Supply Voltage
(For output pulse widths > 100 µs: τ = kRxCx)
Figure 2. Output Pulse Width versus
Timing Capacitance
Figure 3. Normalized Output Pulse Width
versus Power Supply Voltage
0.8
0.7
0.6
0.5
0.4
0.3
10 s
1 s
100 ms
10 ms
1 ms
100
µ
s
10
µ
s
1
µ
s
100 ns
1.1
1
0.9
0.8
0.7
0.6
0.5
1 2 3 4 5 6 7 0.00001 0.0001 0.001 0.01 0.1 1 10 100
1 2 3 4 5 6 7
VCC, POWER SUPPLY VOLTAGE (VOLTS) CAPACITANCE (
µ
F)
VCC, POWER SUPPLY VOLTAGE (VOLTS)
k, OUTPUT PULSE WIDTH CONSTANT (TYPICAL)
OUTPUT PULSE WIDTH ( )
τ
OUTPUT PULSE WIDTH (t)
(NORMALIZED TO 5 V NUMBER)
TA = 25°C
VCC = 5 V, TA = 25°C
1 M
Ω
100 k
Ω
10 k
Ω
1 k
Ω
TA = 25°C
Rx = 100 k
Ω
Cx = 1000 pF
Rx = 1 M
Ω
Cx = 0.1 µF
Page 6

MC54/74HC4538A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–6
Figure 4. Normalized Output Pulse Width
versus Power Supply Voltage
Figure 5. Normalized Output Pulse Width
versus Power Supply Voltage
1.1
1.05
1
0.95
0.9
0.85
0.8
1.03
1.02
1.01
1
0.99
0.98
0.97
–75 –50 –25 0 25 50 75 100 125 150
–75 –50 –25 0 25 50 75 100 125 150
TA, AMBIENT TEMPERATURE (
°
C)
TA, AMBIENT TEMPERATURE (
°
C)
OUTPUT PULSE WIDTH ( )
τ
(NORMALIZED TO 25 C NUMBER)
°
Rx = 10 k
Ω
Cx = 0.1 µF
VCC = 6 V
VCC = 3 V
Rx = 10 k
Ω
Cx = 0.1 µF
VCC = 5.5 V
VCC = 4.5 V
VCC = 5 V
OUTPUT PULSE WIDTH ( )
τ
(NORMALIZED TO 25 C NUMBER)
°
Page 7

MC54/74HC4538A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–7 MOTOROLA
SWITCHING WAVEFORMS
Figure 6.
A
B
Q
Q
A
B
RESET
Q
Q
50%
t
PLH
50%
50%
t
PLH
50%
GND
V
CC
GND
V
CC
t
r
t
f
90%
10%
t
f
t
TLH
t
THL
90%
10%
90%
10%
t
PLH
t
PHL
50%
50%
t
f
90%
10%
50%
50%
(RETRIGGERED PULSE)
50%
GND
V
CC
GND
V
CC
GND
V
CC
t
w(H)
t
w(L)
t
w(L)
t
rec
τ
+ t
rr
t
rr
τ
t
PHL
t
PHL
Figure 7.
*Includes all probe and jig capacitance
Figure 8. Test Circuit
CL*
TEST POINT
DEVICE
UNDER
TEST
OUTPUT
τ
τ τ
Page 8

MC54/74HC4538A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–8
PIN DESCRIPTIONS
INPUTS
A1, A2 (Pins 4, 12)
Positive–edge trigger inputs. A rising–edge signal on
either of these pins triggers the corresponding multivibrator
when there is a high level on the B1 or B2 input.
B1, B2 (Pins 5, 11)
Negative–edge t rigger inputs. A falling–edge signal on
either of these pins triggers the corresponding multivibrator
when there is a low level on the A1 or A2 input.
Reset 1, Reset 2 (Pins 3, 13)
Reset inputs (active low). When a low level is applied to
one of these pins, the Q output of the corresponding multivibrator is reset to a low level and the Q
output is set to a high
level.
CX1/RX1 and CX2/RX2 (Pins 2 and 14)
External timing components. These p ins are tied to the
common points of the external timing resistors and capaci-
tors (see the Block Diagram). Polystyrene c apacitors are
recommended for optimum pulse width control. Electrolytic
capacitors are not recommended due t o high l eakages
associated with these type capacitors.
GND (Pins 1 and 15)
External ground. The external timing capacitors discharge
to ground through these pins.
OUTPUTS
Q1, Q2 (Pins 6, 10)
Noninverted monostable outputs. These pins (normally
low) pulse high when the multivibrator is triggered at either
the A or the B input. The width of the pulse is determined by
the external timing components, RX and CX.
Q1
, Q2 (Pins 7, 9)
Inverted monostable outputs. These pins (normally high)
pulse low when the multivibrator is triggered at either the A or
the B input. These outputs are the inverse of Q1 and Q2.
+
–
+
–
Figure 9.
RxCx
V
CC
M1
2 k
Ω
M3
M2
A
B
RESET
POWER
ON
RESET
RESET LATCH
TRIGGER CONTROL
RESET CIRCUIT
TRIGGER CONTROL
CIRCUIT
OUTPUT
LATCH
UPPER
REFERENCE
CIRCUIT
Vre, UPPER
LOWER
REFERENCE
CIRCUIT
Vre, LOWER
Q
Q
CCBQ
R
V
CC
LOGIC DETAIL
(1/2 THE DEVICE)
Page 9

MC54/74HC4538A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–9 MOTOROLA
CIRCUIT OPERATION
Figure 12 shows the HC4538A configured in the retriggerable mode. Briefly, the device operates as follows (refer to
Figure 10): In the quiescent state, the external timing capacitor, Cx, is charged to VCC. When a trigger occurs, the Q output g oes h igh a nd Cx discharges q uickly t o the lower
reference voltage (V
ref
Lower [ 1/3 VCC). Cx then charges,
through Rx, back up to the upper reference voltage (V
ref
Upper [ 2/3 VCC), at which point the one–shot has timed out
and the Q output goes low.
The following, more detailed description of the circuit operation refers to both the logic detail (Figure 9) and the timing
diagram (Figure 10).
QUIESCENT STATE
In the quiescent state, before an input trigger appears, the
output latch is high and the reset latch is high (#1 in Figure 10). Thus the Q output (pin 6 or 10) of the monostable
multivibrator is low (#2, Figure 10).
The output of the trigger–control circuit is low (#3), and
transistors M1, M2, and M3 are turned off. The external timing capacitor, Cx, is charged to VCC (#4), and both the upper
and lower reference circuit has a low output (#5).
In addition, the output of the trigger–control reset circuit is
low.
TRIGGER OPERATION
The HC4538A is triggered by either a rising–edge signal at
input A (#7) or a falling–edge signal at input B (#8), with the
unused trigger input and the Reset input held at the voltage
levels shown in the Function Table. Either trigger signal will
cause the output of the trigger–control circuit to go high (#9).
The trigger–control circuit going high simultaneously initiates two events. First, the output latch goes low, thus taking
the Q output of the HC4538A to a high state (#10). Second,
transistor M3 is turned on, which allows the external timing
capacitor, Cx, to rapidly discharge t oward ground (#11).
(Note that the voltage across Cx appears at the input of both
the upper and lower reference circuit comparator).
When Cx discharges to the reference voltage of the lower
reference circuit (#12), the outputs of both reference circuits
will be high (#13). The trigger–control reset circuit goes high,
resetting the trigger–control circuit flip–flop to a low state
(#14). This turns transistor M3 off again, allowing Cx to begin
to charge back up toward VCC, with a time constant t = RxC
x
(#15). Once the voltage across Cx charges to above the lower reference voltage, the lower reference circuit will go low
allowing the monostable multivibrator to be retriggered.
2
18
1
6
5
4
17
143
9
8
7
QUIESCENT
STATE
TRIGGER CYCLE
(A INPUT)
TRIGGER CYCLE
(B INPUT)
RESET RETRIGGER
t
rr
V
ref
UPPER
V
ref
LOWER
TRIGGER INPUT A
(PIN 4 OR 12)
TRIGGER INPUT B
(PIN 5 OR 11)
TRIGGER-CONTROL
CIRCUIT OUTPUT
RX/CX INPUT
(PIN 2 OR 14)
UPPER REFERENCE
CIRCUIT
LOWER REFERENCE
CIRCUIT
RESET INPUT
(PIN 3 OR 13)
RESET LATCH
Q OUTPUT
(PIN 6 OR 10)
Figure 10. Timing Diagram
10
11
12
13
15
16
19
20
21
22
23
24
25
τ τ + t
rr
13
τ
Page 10

MC54/74HC4538A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–10
When Cx charges up to the reference voltage of the upper
reference circuit (#17), the output of the upper reference circuit goes low (#18). This causes the output latch to toggle,
taking the Q output of the HC4538A to a low state (#19), and
completing the time–out cycle.
POWER–DOWN CONSIDERATIONS
Large values of Cx may cause problems when powering
down the HC4538A because of the amount of energy stored
in the capacitor. When a system containing this device is
powered down, the capacitor may discharge from V
CC
through the input protection diodes at pin 2 or pin 14. Current
through the protection d iodes must b e limited to 30 mA;
therefore, the turn–off time of the VCC power supply must not
be f aster t han t = VCC
Cx/(30 m A). F or e xample, i f
VCC = 5.0 V and Cx = 15 µF, the VCC supply must turn off no
faster than t = (5.0 V)(15 µF)/30 mA = 2.5 ms. This is usually
not a problem because power supplies are heavily filtered
and cannot discharge at this rate.
When a more rapid decrease of VCC to zero volts occurs,
the HC4538A may sustain damage. To avoid this possibility,
use an external damping diode, Dx, connected as shown in
Figure 11. Best results can be achieved if diode Dx is chosen
to be a germanium or Schottky type diode able to withstand
large current surges.
RESET AND POWER ON RESET OPERATION
A low voltage applied to the Reset pin always forces the Q
output of the HC4538A to a low state.
The timing diagram illustrates the case in which reset occurs (#20) while Cx is charging up toward the reference voltage o f the upper reference c ircuit (#21). When a reset
occurs, the output of the reset latch goes low (#22), turning
on transistor M1. Thus Cx is allowed to quickly charge up to
VCC (#23) to await the next trigger signal.
On power up of the HC4538A the power–on reset circuit
will be high causing a reset condition. This will prevent the
trigger–control circuit from accepting a trigger input during
this state. The HC4538A’s Q outputs are low and the Q
not
outputs are high.
RETRIGGER OPERATION
When used in the retriggerable mode (Figure 12), the
HC4538A may be retriggered during timing out of the output
pulse at any time after the trigger–control circuit flip–flop has
been reset (#24), and the voltage across Cx is above the lower reference voltage. As long as the Cx voltage is below the
lower reference voltage, the reset of the flip–flop is high, disabling any trigger pulse. This prevents M3 from turning on
during this period resulting in an output pulse width that is
predictable.
The amount of undershoot voltage on RxCx during the
trigger mode is a function of loop delay , M3 conductivity, and
VDD. Minimum retrigger time, trr (Figure 7), is a function of
1) time to discharge RxCx from VDD to lower reference
voltage (T
discharge
); 2) loop delay (T
delay
); 3) time to charge
RxCx from the undershoot voltage back to the lower reference voltage (T
charge
).
Figure 13 shows the device configured in the non–retrig-
gerable mode.
An Application Note (AN1558/D) titled
Characterization of
Retrigger Time in the HC4538A Dual Precision Monstable
Multivibrator
is being prepared. Please consult the factory for
its availability.
D
X
C
X
V
CC
Q
Q
RESET
A
B
Figure 11. Discharge Protection During Power Down
R
X
Page 11

MC54/74HC4538A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–11 MOTOROLA
TYPICAL APPLICATIONS
RESET = V
CC
RISING–EDGE
TRIGGER
B = V
CC
RESET = V
CC
RISING–EDGE
TRIGGER
A = GND
RESET = V
CC
FALLING–EDGE
TRIGGER
RESET = V
CC
FALLING–EDGE
TRIGGER
Figure 12. Retriggerable Monostable Circuitry Figure 13. Non–retriggerable Monostable Circuitry
C
X
V
CC
Q
Q
A
B
R
X
C
X
V
CC
Q
Q
A
B
R
X
C
X
V
CC
Q
Q
B
R
X
C
X
V
CC
Q
Q
A
B
R
X
ONE–SHOT SELECTION GUIDE
100 ns 1µs 10µs 100µs 1 ms 10 ms 100 ms 1 s 10 s
MC14528B
MC14536B
MC14538B
MC14541B
HC4538A*
*Limited operating voltage (2–6 V)
23 HR
5 MIN
TOTAL OUTPUT PULSE WIDTH RANGE
RECOMMENDED PULSE WIDTH RANGE
Page 12

MC54/74HC4538A
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
3–12
OUTLINE DIMENSIONS
J SUFFIX
CERAMIC PACKAGE
CASE 620–10
ISSUE V
N SUFFIX
PLASTIC PACKAGE
CASE 648–08
ISSUE R
19.05
6.10
—
0.39
1.40
0.21
3.18
19.93
7.49
5.08
0.50
1.65
0.38
4.31
0
°
0.51
15
°
1.01
1.27 BSC
2.54 BSC
7.62 BSC
MIN MINMAX MAX
INCHES MILLIMETERS
DIM
0.750
0.240
—
0.015
0.055
0.008
0.125
0.785
0.295
0.200
0.020
0.065
0.015
0.170
0.050 BSC
0.100 BSC
0.300 BSC
A
B
C
D
E
F
G
J
K
L
M
N
0
°
0.020
15
°
0.040
NOTES:
1. DIMENSIONING AND TOLERANCING PER
ANSI Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. DIMENSION L TO CENTER OF LEAD WHEN
FORMED PARALLEL.
4. DIM F MAY NARROW TO 0.76 (0.030) WHERE
THE LEAD ENTERS THE CERAMIC BODY.
1 8
916
–A
–
–B
–
C
K
N
G
E
F
D 16 PL
–T
–
SEATING
PLANE
M
L
J 16 PL
0.25 (0.010) T A
M
S
0.25 (0.010) T B
M
S
MIN MINMAX MAX
INCHES MILLIMETERS
DIM
A
B
C
D
F
G
H
J
K
L
M
S
18.80
6.35
3.69
0.39
1.02
0.21
2.80
7.50
0
°
0.51
19.55
6.85
4.44
0.53
1.77
0.38
3.30
7.74
10
°
1.01
0.740
0.250
0.145
0.015
0.040
0.008
0.110
0.295
0
°
0.020
0.770
0.270
0.175
0.021
0.070
0.015
0.130
0.305
10
°
0.040
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. DIMENSION L TO CENTER OF LEADS WHEN
FORMED PARALLEL.
4. DIMENSION B DOES NOT INCLUDE MOLD FLASH.
5. ROUNDED CORNERS OPTIONAL.
2.54 BSC
1.27 BSC
0.100 BSC
0.050 BSC
–A
–
B
1 8
916
F
H
G
D
16 PL
S
C
–T
–
SEATING
PLANE
K
J
M
L
T A0.25 (0.010)
M M
0.25 (0.010) T B A
M
S S
MIN MINMAX MAX
MILLIMETERS INCHES
DIM
A
B
C
D
F
G
J
K
M
P
R
9.80
3.80
1.35
0.35
0.40
0.19
0.10
0
°
5.80
0.25
10.00
4.00
1.75
0.49
1.25
0.25
0.25
7
°
6.20
0.50
0.386
0.150
0.054
0.014
0.016
0.008
0.004
0
°
0.229
0.010
0.393
0.157
0.068
0.019
0.049
0.009
0.009
7
°
0.244
0.019
1.27 BSC 0.050 BSC
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSIONS A AND B DO NOT INCLUDE
MOLD PROTRUSION.
4. MAXIMUM MOLD PROTRUSION 0.15 (0.006)
PER SIDE.
5. DIMENSION D DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR
PROTRUSION SHALL BE 0.127 (0.005) TOTAL
IN EXCESS OF THE D DIMENSION AT
MAXIMUM MATERIAL CONDITION.
1
8
916
–A
–
–B
–
D 16 PL
K
C
G
–T
–
SEATING
PLANE
R X 45°
M
J
F
P 8 PL
0.25 (0.010) B
M M
D SUFFIX
PLASTIC SOIC PACKAGE
CASE 751B–05
ISSUE J
Page 13

MC54/74HC4538A
High–Speed CMOS Logic Data
DL129 — Rev 6
3–13 MOTOROLA
How to reach us:
USA/EUROPE: Motorola Literature Distribution; JAPAN: Nippon Motorola Ltd.; Tatsumi–SPD–JLDC, Toshikatsu Otsuki,
P.O. Box 20912; Phoenix, Arizona 85036. 1–800–441–2447 6F Seibu–Butsuryu–Center, 3–14–2 Tatsumi Koto–Ku, Tokyo 135, Japan. 03–3521–8315
MFAX: RMFAX0@email.sps.mot.com –TOUCHTONE (602) 244–6609 HONG KONG: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
INTERNET: http://Design–NET.com 51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852–26629298
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit,
and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters can and do vary in different
applications. All operating parameters, including “T ypicals” must be validated for each customer application by customer’s technical experts. Motorola does
not convey any license under its patent rights nor the rights of others. Motorola products are not designed, intended, or authorized for use as components in
systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of
the Motorola product could create a situation where personal injury or death may occur. Should Buyer purchase or use Motorola products for any such
unintended or unauthorized application, Buyer shall indemnify and hold Motorola and its officers, employees, subsidiaries, affiliates, and distributors harmless
against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death
associated with such unintended or unauthorized use, even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part.
Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
MC54/74HC4538A/D
*MC54/74HC4538A/D*
◊
CODELINE
 Loading...
Loading...