

Page 1
SEMICONDUCTOR TECHNICAL DATA
1
REV 6
Motorola, Inc. 1995
10/95
#
! "
High–Performance Silicon–Gate CMOS
The MC54/74HC4060 is i dentical i n pinout t o the standard CMOS
MC14060B. The device inputs are compatible with standard CMOS outputs;
with pullup resistors, they are compatible with LSTTL outputs.
This device consists of 14 master–slave flip–flops and an oscillator with a
frequency that is controlled either by a crystal or by an RC circuit connected
externally. The output of each flip–flop feeds the next, and the frequency at
each output is half that of the preceding one. The state of the counter
advances on the negative–going edge of Osc In. The active–high Reset is
asynchronous and disables the oscillator to allow very low power consumption during standby operation.
State changes of the Q outputs do not occur simultaneously because of
internal ripple delays. Therefore, decoded output signals are subject to
decoding spikes and may need to be gated with Osc Out 2 of the HC4060.
• Output Drive Capability: 10 LSTTL Loads
• Outputs Directly Interface to CMOS, NMOS, and TTL
• Operating Voltage Range: 2 to 6 V
• Low Input Current: 1 µA
• High Noise Immunity Characteristic of CMOS Devices
• In Compliance with the Requirements Defined by JEDEC Standard
No. 7A
• Chip Complexity: 390 FETs or 97.5 Equivalent Gates
LOGIC DIAGRAM
OSC IN
RESET
12
11
OSC OUT 1 OSC OUT 2
10 9
Q14
Q13
Q12
Q10
Q9
Q8
Q7
Q6
Q5
Q4
7
5
4
6
14
13
15
1
2
3
PIN 16 = V
CC
PIN 8 = GND
PIN ASSIGNMENT
FUNCTION TABLE
13
14
15
16
9
10
11
125
4
3
2
1
8
7
6
RESET
Q9
Q8
Q10
V
CC
OSC OUT 2
OSC OUT 1
OSC IN
Q6
Q14
Q13
Q12
GND
Q4
Q7
Q5
Clock Reset Output State
L No Change
L Advance to Next State
X H All Outputs are Low
N SUFFIX
PLASTIC PACKAGE
CASE 648–08
1
16
J SUFFIX
CERAMIC PACKAGE
CASE 620–10
1
16
ORDERING INFORMATION
MC54HCXXXXJ
MC74HCXXXXN
MC74HCXXXXDT
Ceramic
Plastic
TSSOP
1
16
DT SUFFIX
TSSOP PACKAGE
CASE 948F–01
Page 2
MC54/74HC4060
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
2
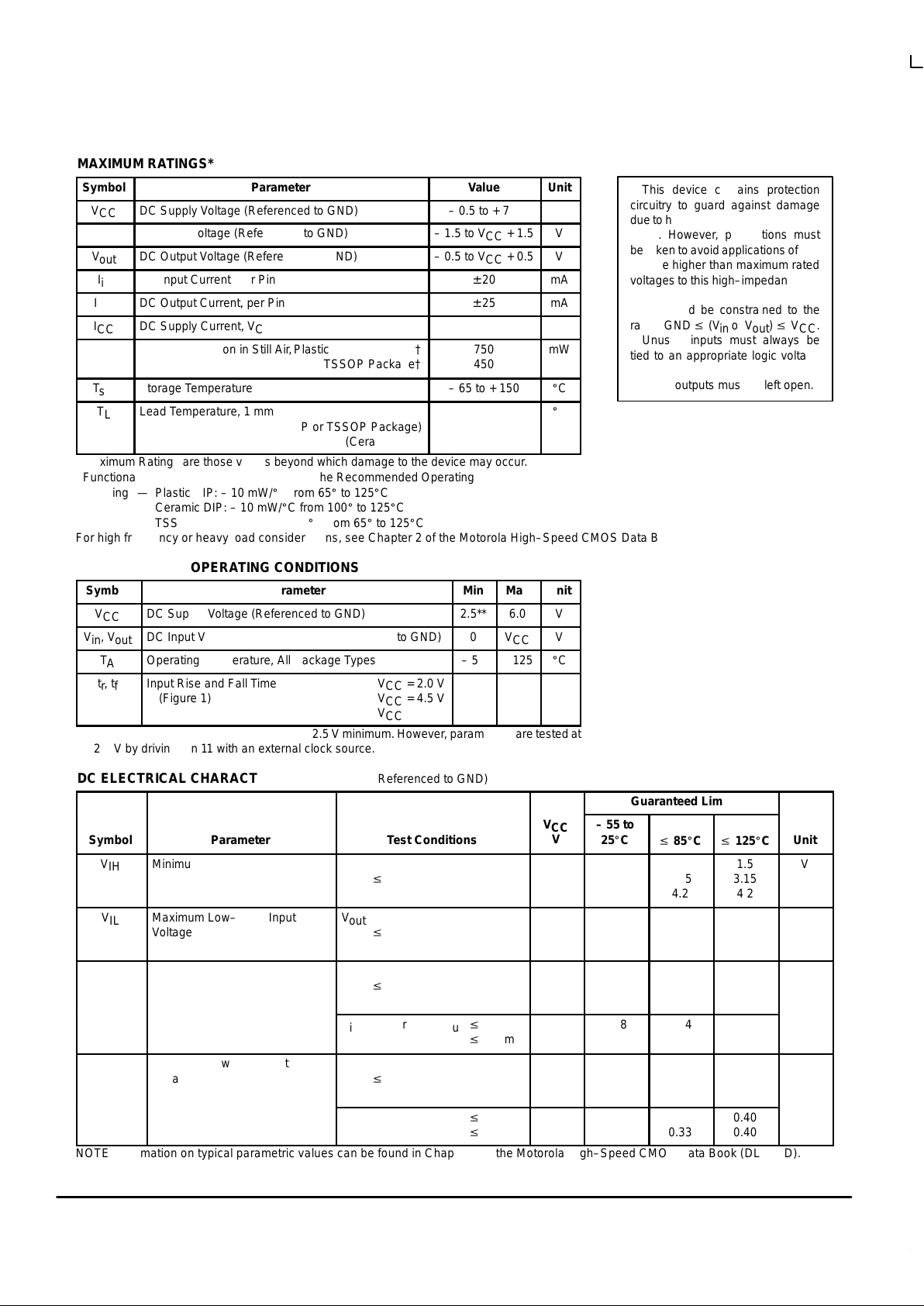
MAXIMUM RATINGS*
Symbol
Parameter
Value
Unit
V
CC
DC Supply Voltage (Referenced to GND)
– 0.5 to + 7.0
V
V
in
DC Input Voltage (Referenced to GND)
– 1.5 to VCC + 1.5
V
V
out
DC Output Voltage (Referenced to GND)
– 0.5 to VCC + 0.5
V
I
in
DC Input Current, per Pin
± 20
mA
I
out
DC Output Current, per Pin
± 25
mA
I
CC
DC Supply Current, VCC and GND Pins
± 50
mA
P
D
Power Dissipation in Still Air,Plastic or Ceramic DIP†
TSSOP Package†
750
450
mW
T
stg
Storage Temperature
– 65 to + 150
_
C
T
L
Lead Temperature, 1 mm from Case for 10 Seconds
(Plastic DIP or TSSOP Package)
(Ceramic DIP)
260
300
_
C
*Maximum Ratings are those values beyond which damage to the device may occur.
Functional operation should be restricted to the Recommended Operating Conditions.
†Derating — Plastic DIP: – 10 mW/_C from 65_ to 125_C
Ceramic DIP: – 10 mW/_C from 100_ to 125_C
TSSOP Package: – 6.1 mW/_C from 65_ to 125_C
For high frequency or heavy load considerations, see Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
RECOMMENDED OPERATING CONDITIONS
Symbol
Parameter
Min
Max
Unit
V
CC
DC Supply Voltage (Referenced to GND)
2.5**
6.0
V
Vin, V
out
DC Input Voltage, Output Voltage (Referenced to GND)
0
V
CC
V
T
A
Operating Temperature, All Package Types
– 55
+ 125
_
C
tr, t
f
Input Rise and Fall Time VCC = 2.0 V
(Figure 1) VCC = 4.5 V
VCC = 6.0 V
0
0
0
1000
500
400
ns
**The oscillator is guaranteed to function at 2.5 V minimum. However, parametrics are tested at
2.0 V by driving Pin 11 with an external clock source.
DC ELECTRICAL CHARACTERISTICS (Voltages Referenced to GND)
Guaranteed Limit
Symbol
Parameter
Test Conditions
V
CC
V
– 55 to
25_C
v
85_Cv 125_C
Unit
V
IH
Minimum High–Level Input
Voltage
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| v 20 µA
2.0
4.5
6.0
1.5
3.15
4.2
1.5
3.15
4.2
1.5
3.15
4 2
V
V
IL
Maximum Low–Level Input
Voltage
V
out
= 0.1 V or VCC – 0.1 V
|I
out
| v 20 µA
2.0
4.5
6.0
0.3
0.9
1.2
0.3
0.9
1.2
0.3
0.9
1.2
V
V
OH
Minimum High–Level Output
Voltage (Q4–Q10, Q12–Q14)
Vin = VIH or V
IL
|I
out
| v 20 µA
2.0
4.5
6.0
1.9
4.4
5.9
1.9
4.4
5.9
1.9
4.4
5.9
V
Vin = VIH or VIL|I
out
| v 4.0 mA
|I
out
| v 5.2 mA
4.5
6.0
3.98
5.48
3.84
5.34
3.70
5.20
V
OL
Maximum Low–Level Output
Voltage (Q4–Q10, Q12–Q14)
Vin = VIH or V
IL
|I
out
| v 20 µA
2.0
4.5
6.0
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
V
Vin = VIH or VIL|I
out
| v 4.0 mA
|I
out
| v 5.2 mA
4.5
6.0
0.26
0.26
0.33
0.33
0.40
0.40
NOTE: Information on typical parametric values can be found in Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
This device contains protection
circuitry to guard against damage
due to high static voltages or electric
fields. However, precautions must
be taken to avoid applications of any
voltage higher than maximum rated
voltages to this high–impedance circuit. For proper operation, Vin and
V
out
should be constrained to the
range GND v (Vin or V
out
) v VCC.
Unused inputs must always be
tied to an appropriate logic voltage
level (e.g., either GND or VCC).
Unused outputs must be left open.
Page 3
MC54/74HC4060
High–Speed CMOS Logic Data
DL129 — Rev 6
3 MOTOROLA
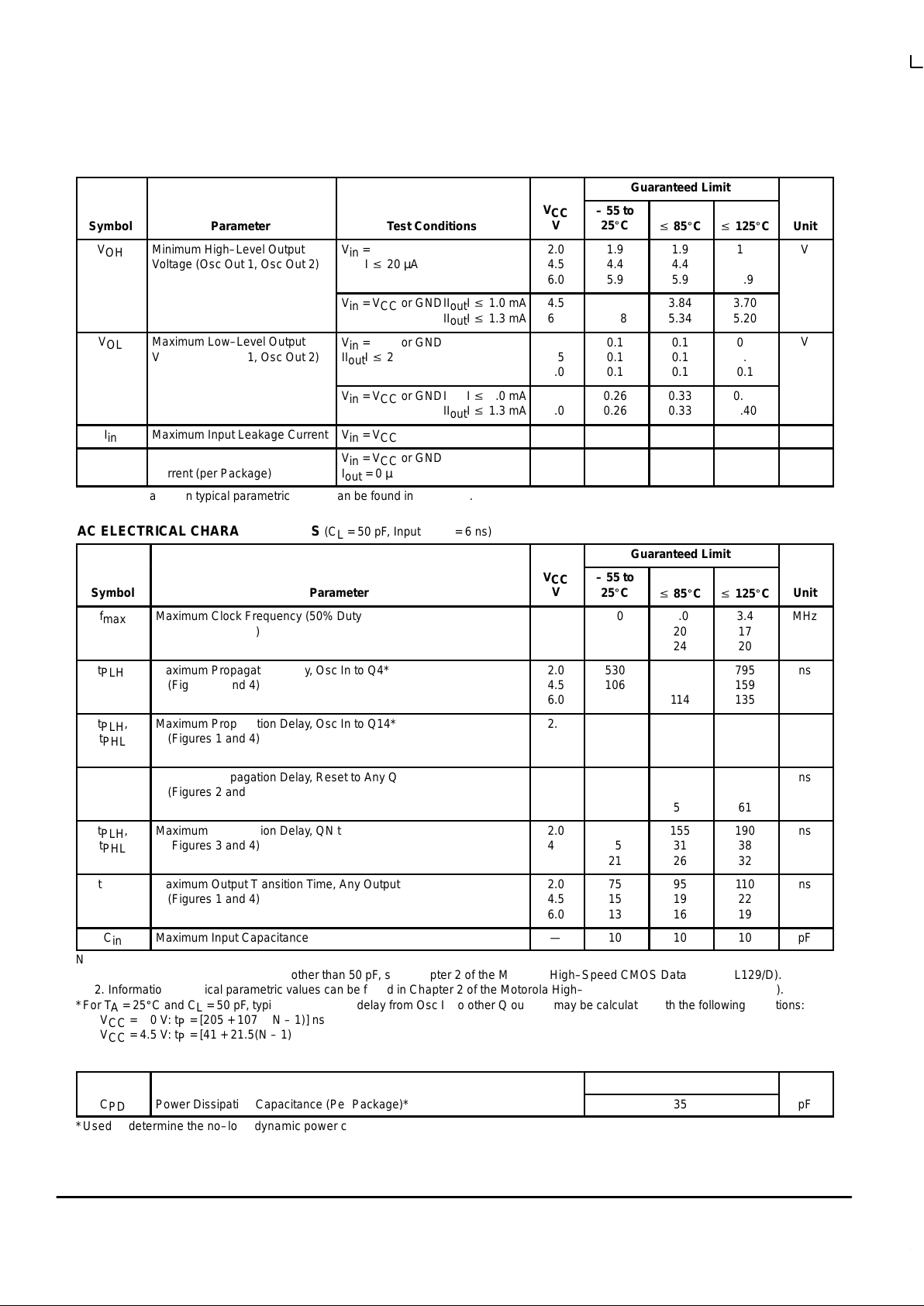
DC ELECTRICAL CHARACTERISTICS (Voltages Referenced to GND) (Continued)
Guaranteed Limit
Symbol
Parameter
Test Conditions
V
CC
V
– 55 to
25_C
v
85_Cv 125_C
Unit
V
OH
Minimum High–Level Output
Voltage (Osc Out 1, Osc Out 2)
Vin = VCC or GND
II
out
I v 20 µA
2.0
4.5
6.0
1.9
4.4
5.9
1.9
4.4
5.9
1.9
4.4
5.9
V
Vin = VCC or GNDII
out
Iv1.0 mA
II
out
Iv1.3 mA
4.5
6.0
3.98
5.48
3.84
5.34
3.70
5.20
V
OL
Maximum Low–Level Output
Voltage (Osc Out 1, Osc Out 2)
Vin = VCC or GND
II
out
I v 20 µA
2.0
4.5
6.0
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
V
Vin = VCC or GNDII
out
Iv1.0 mA
II
out
Iv1.3 mA
4.5
6.0
0.26
0.26
0.33
0.33
0.40
0.40
I
in
Maximum Input Leakage Current
Vin = VCC or GND
6.0
± 0.1
± 1.0
± 1.0
µA
I
CC
Maximum Quiescent Supply
Current (per Package)
Vin = VCC or GND
I
out
= 0 µA
6.0
8
80
160
µA
NOTE: Information on typical parametric values can be found in Chapter 4.
AC ELECTRICAL CHARACTERISTICS (C
L
= 50 pF, Input tr = tf = 6 ns)
Guaranteed Limit
Symbol
Parameter
V
CC
V
– 55 to
25_C
v
85_Cv 125_C
Unit
f
max
Maximum Clock Frequency (50% Duty Cycle)
(Figures 1 and 4)
2.0
4.5
6.0
5.0
25
29
4.0
20
24
3.4
17
20
MHz
t
PLH
,
t
PHL
Maximum Propagation Delay, Osc In to Q4*
(Figures 1 and 4)
2.0
4.5
6.0
530
106
91
665
133
114
795
159
135
ns
t
PLH
,
t
PHL
Maximum Propagation Delay, Osc In to Q14*
(Figures 1 and 4)
2.0
4.5
6.0
1600
320
272
2000
400
344
2400
480
408
ns
t
PHL
Maximum Propagation Delay, Reset to Any Q
(Figures 2 and 4)
2.0
4.5
6.0
240
48
41
300
60
51
360
72
61
ns
t
PLH
,
t
PHL
Maximum Propagation Delay, QN to QN + 1
(Figures 3 and 4)
2.0
4.5
6.0
125
25
21
155
31
26
190
38
32
ns
t
TLH
,
t
THL
Maximum Output Transition Time, Any Output
(Figures 1 and 4)
2.0
4.5
6.0
75
15
13
95
19
16
110
22
19
ns
C
in
Maximum Input Capacitance
—
10
10
10
pF
NOTES:
1. For propagation delays with loads other than 50 pF, see Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
2. Information on typical parametric values can be found in Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
*For TA = 25_C and CL = 50 pF, typical propagation delay from Osc In to other Q outputs may be calculated with the following equations:
VCC = 2.0 V: tP = [205 + 107.5(N – 1)] ns
VCC = 4.5 V: tP = [41 + 21.5(N – 1)] ns
VCC = 6.0 V: tP = [35 + 18.3(N – 1)] ns
Typical @ 25°C, VCC = 5.0 V
C
PD
Power Dissipation Capacitance (Per Package)*
35
pF
*Used to determine the no–load dynamic power consumption: PD = CPD V
CC
2
f + ICC VCC. For load considerations, see Chapter 2 of the
Motorola High–Speed CMOS Data Book (DL129/D).
Page 4

MC54/74HC4060
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
4
TIMING REQUIREMENTS (Input t
r
= tf = 6 ns)
Guaranteed Limit
Symbol
Parameter
V
CC
V
– 55 to
25_C
v
85_Cv 125_C
Unit
t
rec
Minimum Recovery Time, Reset Inactive to Osc In*
(Figure 2)
2.0
4.5
6.0
100
20
17
125
25
21
150
30
26
ns
t
w
Minimum Pulse Width, Osc In
(Figure 1)
2.0
4.5
6.0
80
16
14
100
20
17
120
24
20
ns
t
w
Minimum Pulse Width, Reset
(Figure 2)
2.0
4.5
6.0
80
16
14
100
20
17
120
24
20
ns
tr, t
f
Maximum Input Rise and Fall Times
(Figure 1)
2.0
4.5
6.0
1000
500
400
1000
500
400
1000
500
400
ns
NOTE: Information on typical parametric values can be found in Chapter 2 of the Motorola High–Speed CMOS Data Book (DL129/D).
*Osc In driven with external clock.
PIN DESCRIPTIONS
INPUTS
Osc In (Pin 11)
Negative–edge triggering clock input. A high–to–low transition on this input advances the state of the counter. Osc In
may be driven by an external clock source.
Reset (Pin 12)
Active–high reset. A high level applied to this input asynchronously resets the counter to its zero state (forcing all Q outputs low) and disables the oscillator.
OUTPUTS
Q4–Q10, Q12–Q14 (Pins 7, 5, 4, 6, 14, 13, 15, 1, 2, 3)
Active–high outputs. Each QN output divides the oscillator
frequency by 2N. The user should note that Q1, Q2, Q3, and
Q11 are not available as outputs.
Osc Out 1, Osc Out 2 (Pins 10, 9)
Oscillator outputs. These pins are used in conjunction with
Osc In and the external components to form an oscillator.
(See Figures 4 and 5). When Osc In is being driven with an
external clock source, Osc Out 1 and Osc Out 2 must be left
open circuited. With the crystal oscillator configuration in Figure 6, Osc Out 2 must be left open circuited.
SWITCHING WAVEFORMS
RESET
Q
CLOCK
V
CC
GND
V
CC
GND
50%
50%
50%
t
PHL
t
rec
Figure 1.
Figure 2.
Figure 3.
OSC IN
Q1
90%
50%
10%
V
CC
GND
t
f
t
r
t
PLH
t
PHL
t
TLH
t
THL
QN
QN + 1
90%
50%
10%
V
CC
GND
50%
50%
t
PLH
t
PHL
*Includes all probe and jig capacitance
CL*
TEST POINT
DEVICE
UNDER
TEST
OUTPUT
t
w
1/f
max
t
w
Figure 4. Test Circuit
Page 5

MC54/74HC4060
High–Speed CMOS Logic Data
DL129 — Rev 6
5 MOTOROLA
R
Q
Q
C
C
C
CRQ
Q C
CRQ
Q
R
CCQC
CRQ
Q C
CRQ
Q
RESET
EXPANDED LOGIC DIAGRAM
OSC IN
OSC OUT 1
OSC OUT 2
R
Q
Q
3
12
11
10
9
Q14
2
Q13
1
Q12
5
Q5
7
Q4
R
Q6 = PIN 4
Q7 = PIN 6
Q8 = PIN 14
Q9 = PIN 13
Q10 = PIN 15
VCC = PIN 16
GND = PIN 8
RESET
12
OSC IN 11 OSC OUT 1 10 OSC OUT 2 9
R
tc
R
S
C
tc
For 2.0 V ≤ VCC ≤ 6.0 V
10 Rtc > RS > 2 R
tc
400 Hz ≤ f ≤ 400 kHz
1
3 RtcC
tc
f ≈ (f in Hz, Rtc in ohms, Ctc in farads)
The formula may vary for other frequencies.
Figure 5. Oscillator Circuit Using RC Configuration
Page 6

MC54/74HC4060
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
6
Figure 6. Pierce Crystal Oscillator Circuit
RESET
12
11 OSC IN 10 OSC OUT 1 9 OSC OUT 2
R
f
R1
C1 C2
Table 1. Crystal Oscillator Amplifier Specifications
TA = 25_C (Input = Pin 11, Output = Pin 10)
Type
Input Resistance, R
in
Output Impedance, Z
out
(4.5 V supply)
Input Capacitance, C
in
Output Capacitance, C
out
Series Capacitance, C
a
3 Vdc supply
Open loop voltage 4 Vdc supply
gain with output at 5 Vdc supply
full swing, α 6 Vdc supply
Positive Reactance (Pierce)
60 MΩ minimum
200 Ω (see text)
5 pF typical
7 pF typical
5 pF typical
5.0 expected minimum
4.0 expected minimum
3.3 expected minimum
3.1 expected minimum
PIERCE CRYSTAL OSCILLATOR DESIGN
Figure 7. Equivalent Crystal Networks
21 2121
R
S
XeRe
L
S
C
S
C
O
Values are supplied by crystal manufacturer (parallel resonant crystal)
Figure 8. Series Equivalent Crystal Load Figure 9. Parasitic Capacitances
of the Amplifier
NOTE: C = C1 + Cin and R = R1 + R
out
. Co is considered as part of the
load. Ca and Rf typically have minimal effect below 2 MHz.
Values are listed in Table 1.
R
s
jX
Ls
–jX
Cs
Z
load
–jX
Co
–jX
C2
–jX
C
R
R
load
X
load
C
in
C
out
C
a
Page 7

MC54/74HC4060
High–Speed CMOS Logic Data
DL129 — Rev 6
7 MOTOROLA
DESIGN PROCEDURES
The following procedure applies for oscillators operating below 2 MHz where Z is a resistor R1. Above 2 MHz, additional im-
pedance elements should be considered: C
out
and Ca of the amp, feedback resistor Rf, and amplifier phase shift error from 180_.
Step 1: Calculate the equivalent series circuit of the crystal at the frequency of oscillation.
– jX
Co (Rs + jXLs – jXC
s
– jX
Co + Rs + jXLs – jXC
s
Ze = = Re + jX
e
Reactance jXe should be positive, indicating that the crystal is operating as an inductive reactance at the oscillation frequency
The maximum Rs for the crystal should be used in the equation.
Step 2: Determine β, the attenuation, of the feedback network. For a closed–loop gain of 2, Aνβ = 2,β = 2/Aν where Aν is
the gain of the HC4060 amplifier.
Step 3: Determine the manufacturer’s loading capacitance. For example: A manufacturer may specify an external load capaci-
tance of 32 pF at the required frequency.
Step 4: Determine the required Q of the system, and calculate R
load
. For example, a manufacturer specifies a crystal Q
of 100,000. In–circuit Q is arbitrarily set at 20% below crystal Q or 80,000. Then R
load
= (2πfoLs/Q) – Rs where Ls and Rs are
crystal parameters.
Step 5: Simultaneously solve, using a computer,
(with feedback phase shift = 180_)
XC • X
C2
β =
R • Re + XC2 (Xe – XC)
(1)
= X
C
load
(where the loading capacitor is an external load, not including Co)
ReXC
2
(2)
Xe = XC2 + XC +
R
(3)
RX
C
o
XC2[(XC + XC2) (XC + X
C
o
) – XC(XC + X
Co + XC2
)]
R
load
=
X
2
C2(XC
+
X
Co)
2
+ R2(XC +
X
C
o
+ XC2)
2
Here R = R
out
+ R1. R
out
is amp output resistance, R1 is Z. The C corresponding to XC is given by C = C1 + Cin.
Alternately, pick a value for R1 (i.e., let R1 = Rs). Solve Equations 1 and 2 for C1 and C2. Use Equation 3 and the fact that
Q = 2πfoLs/(Rs + R
load
) to find in–circuit Q. If Q is not satisfactory pick another value for R1 and repeat the procedure.
CHOOSING R1
Power is dissipated in the effective series resistance of the
crystal. The drive level specified by the crystal manufacturer
is the maximum stress that a crystal can withstand without
damage or excessive shift in frequency R1 limits the drive
level.
To verify that the maximum dc supply voltage does not
overdrive the crystal, monitor the output frequency as a function of voltage at Osc Out 2 (Pin 9). The frequency should
increase very slightly as the dc supply voltage is increased.
An overdriven crystal will decrease in frequency or become
unstable with an increase in supply voltage. The operating
supply voltage must be reduced or R1 must be increased in
value it the overdriven condition exists. The user should note
that the oscillator start–up time is proportional to the value of
R1.
SELECTING R
f
The feedback resistor, Rf, typically ranges up to 20 MΩ. R
f
determines the gain and bandwidth of the amplifier. Proper
bandwidth insures oscillation at the correct frequency plus
roll–off to minimize gain at undesirable frequencies, such as
the first overtone. Rf must be large enough so as to not affect
the phase of the feedback network in an appreciable manner.
ACKNOWLEDGEMENTS AND RECOMMENDED
REFERENCES
The following publications were used in preparing this data
sheet and are hereby acknowledged and recommended for
reading:
Technical Note TN–24, Statek Corp.
Technical Note TN–7, Statek Corp.
D. Babin, “Designing Crystal Oscillators”, Machine Design,
March 7, 1985.
D. Babin, “Guidelines for Crystal Oscillator Design”,
Machine Design, April 25, 1985.
ALSO RECOMMENDED FOR READING:
E. Hafner, “The Piezoelectric Crystal Unit – Definitions and
Method of Measurement”, Proc. IEEE, Vol. 57, No. 2, Feb.
1969.
D. Kemper, L. Rosine, “Quartz Crystals for Frequency
Control”, Electro–Technology, June, 1969.
P. J. Ottowitz, “A Guide to Crystal Selection”, Electronic
Design, May, 1966.
Page 8

MC54/74HC4060
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
8
TIMING DIAGRAM
1 2 4 8 16 32 64 128 256 512 1024 2048
OSC IN
RESET
Q4
Q5
Q6
Q7
Q8
Q9
Q10
Q11
Q12
4096 8192 16,384
Q13
Q14
Page 9

MC54/74HC4060
High–Speed CMOS Logic Data
DL129 — Rev 6
9 MOTOROLA
OUTLINE DIMENSIONS
J SUFFIX
CERAMIC PACKAGE
CASE 620–10
ISSUE V
N SUFFIX
PLASTIC PACKAGE
CASE 648–08
ISSUE R
19.05
6.10
—
0.39
1.40
0.21
3.18
19.93
7.49
5.08
0.50
1.65
0.38
4.31
0
°
0.51
15
°
1.01
1.27 BSC
2.54 BSC
7.62 BSC
MIN MINMAX MAX
INCHES MILLIMETERS
DIM
0.750
0.240
—
0.015
0.055
0.008
0.125
0.785
0.295
0.200
0.020
0.065
0.015
0.170
0.050 BSC
0.100 BSC
0.300 BSC
A
B
C
D
E
F
G
J
K
L
M
N
0
°
0.020
15
°
0.040
NOTES:
1. DIMENSIONING AND TOLERANCING PER
ANSI Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. DIMENSION L TO CENTER OF LEAD WHEN
FORMED PARALLEL.
4. DIM F MAY NARROW TO 0.76 (0.030) WHERE
THE LEAD ENTERS THE CERAMIC BODY.
1 8
916
–A
–
–B
–
C
KN
G
E
F
D 16 PL
–T
–
SEATING
PLANE
M
L
J 16 PL
0.25 (0.010) T A
M
S
0.25 (0.010) T B
M
S
MIN MINMAX MAX
INCHES MILLIMETERS
DIM
A
B
C
D
F
G
H
J
K
L
M
S
18.80
6.35
3.69
0.39
1.02
0.21
2.80
7.50
0
°
0.51
19.55
6.85
4.44
0.53
1.77
0.38
3.30
7.74
10
°
1.01
0.740
0.250
0.145
0.015
0.040
0.008
0.110
0.295
0
°
0.020
0.770
0.270
0.175
0.021
0.070
0.015
0.130
0.305
10
°
0.040
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: INCH.
3. DIMENSION L TO CENTER OF LEADS WHEN
FORMED PARALLEL.
4. DIMENSION B DOES NOT INCLUDE MOLD FLASH.
5. ROUNDED CORNERS OPTIONAL.
2.54 BSC
1.27 BSC
0.100 BSC
0.050 BSC
–A
–
B
1 8
916
F
H
G
D
16 PL
S
C
–T
–
SEATING
PLANE
K
J
M
L
T A0.25 (0.010)
M M
Page 10

MC54/74HC4060
MOTOROLA High–Speed CMOS Logic Data
DL129 — Rev 6
10
OUTLINE DIMENSIONS
DT SUFFIX
PLASTIC TSSOP PACKAGE
CASE 948F–01
ISSUE O
ÇÇ
ÇÇ
ÇÇ
DIM MIN MAX MIN MAX
INCHESMILLIMETERS
A 4.90 5.10 0.193 0.200
B 4.30 4.50 0.169 0.177
C ––– 1.20 ––– 0.047
D 0.05 0.15 0.002 0.006
F 0.50 0.75 0.020 0.030
G 0.65 BSC 0.026 BSC
H 0.18 0.28 0.007 0.011
J 0.09 0.20 0.004 0.008
J1 0.09 0.16 0.004 0.006
K 0.19 0.30 0.007 0.012
K1 0.19 0.25 0.007 0.010
L 6.40 BSC 0.252 BSC
M 0 8 0 8
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSION A DOES NOT INCLUDE MOLD FLASH.
PROTRUSIONS OR GATE BURRS. MOLD FLASH OR
GATE BURRS SHALL NOT EXCEED 0.15 (0.006) PER
SIDE.
4. DIMENSION B DOES NOT INCLUDE INTERLEAD
FLASH OR PROTRUSION. INTERLEAD FLASH OR
PROTRUSION SHALL NOT EXCEED
0.25 (0.010) PER SIDE.
5. DIMENSION K DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR PROTRUSION
SHALL BE 0.08 (0.003) TOTAL IN EXCESS OF THE K
DIMENSION AT MAXIMUM MATERIAL CONDITION.
6. TERMINAL NUMBERS ARE SHOWN FOR
REFERENCE ONLY.
7. DIMENSION A AND B ARE TO BE DETERMINED AT
DATUM PLANE –W–.
_ _ _ _
SECTION N–N
SEATING
PLANE
IDENT.
PIN 1
1
8
16
9
DETAIL E
J
J1
B
C
D
A
K
K1
H
G
DETAIL E
F
M
L
2X L/2
–U–
S
U0.15 (0.006) T
S
U0.15 (0.006) T
S
U
M
0.10 (0.004) V
S
T
0.10 (0.004)
–T–
–V–
–W–
0.25 (0.010)
16X REFK
N
N
How to reach us:
USA/EUROPE: Motorola Literature Distribution; JAPAN: Nippon Motorola Ltd.; Tatsumi–SPD–JLDC, Toshikatsu Otsuki,
P.O. Box 20912; Phoenix, Arizona 85036. 1–800–441–2447 6F Seibu–Butsuryu–Center, 3–14–2 Tatsumi Koto–Ku, Tokyo 135, Japan. 03–3521–8315
MFAX: RMFAX0@email.sps.mot.com –TOUCHTONE (602) 244–6609 HONG KONG: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
INTERNET: http://Design–NET.com 51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852–26629298
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit,
and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters can and do vary in different
applications. All operating parameters, including “T ypicals” must be validated for each customer application by customer’s technical experts. Motorola does
not convey any license under its patent rights nor the rights of others. Motorola products are not designed, intended, or authorized for use as components in
systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of
the Motorola product could create a situation where personal injury or death may occur. Should Buyer purchase or use Motorola products for any such
unintended or unauthorized application, Buyer shall indemnify and hold Motorola and its officers, employees, subsidiaries, affiliates, and distributors harmless
against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death
associated with such unintended or unauthorized use, even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part.
Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
MC54/74HC4060/D
*MC54/74HC4060/D*
◊
CODELINE
 Loading...
Loading...