

Page 1
MC145220MOTOROLA
1
" !
!"
BiCMOS
The MC145220 is a low–voltage, single–chip frequency synthesizer with
serial interface capable of direct usage up to 1.1 GHz. The device simultaneously supports two loops. The two on–chip dual–modulus prescalers may be
independently programmed to divide by either 32/33 or 64/65.
The device consists of two dual–modulus prescalers, two 6–stage A
counters, two 12–stage N counters, two fully programmable 13–stage R
(reference) counters, and two lock detectors. Four phase/frequency detectors
are included: two with current source/sink outputs and two with double–ended
outputs.
The counters are programmed via a synchronous serial port which is SPI
compatible. The serial port is byte–oriented to facilitate control via an MCU. Due
to the innovative BitGrabber Plus registers, the MC145220 may be cascaded
with other peripherals featuring BitGrabber Plus without requiring leading
dummy bits or multiple address bits in the serial data stream. In addition,
BitGrabber Plus peripherals may be cascaded with existing BitGrabber
peripherals. Because this device is a dual synthesizer, a single steering bit is
used in the serial data stream to direct the data to either side of the chip.
The phase/frequency detectors have linear transfer functions (no dead
zones). The current delivered by the current source/sink outputs is controllable
via the serial port.
Also featured are low–power standby for either one or both loops and
on–board support of an external crystal. In addition, the part may be configured
such that the REFin pin accepts an external reference signal. In this
configuration, the REF
out
pin may be programmed to output the REF
in
frequency divided by 1, 2, 4, 8, or 16.
• Operating Frequency: 40 to 1100 MHz
• Operating Supply Voltage Range: 2.7 to 5.5 V
• Supply Current: Both PLLs Operating — 12 mA Nominal
One PLL Operating, One on Standby — 6.5 mA Nominal
Both PLLs on Standby — 30 µA Maximum
• Phase Detector Output Current: Up to 2 mA @ 5 V
Up to 1 mA @ 3 V
• Operating Temperature Range: – 40 to 85°C
• Independent R Counters Allow Use of Different Step Sizes for Each Loop
• Double–Buffered R Register — Reference and Loop Divide Ratios
Updated Simultaneously
• R Counter Division Range: 1 and 10 to 8,191
• Dual–Modulus Capability Provides Total Division of the VCO Frequency up
to 262,143
• Direct Interface to Motorola SPI Data Port
• Evaluation Kit Available (Part Number MC145220EVK)
• See Application Note AN1253/D for Low–Pass Filter Design, and
AN1277/D for Offset Reference PLLs for Fine Resolution or Fast Hopping
NOTE: This product has been evaluated for operation over a wider range than 40 MHz to 1.1 GHz. If your design requires a wider
frequency range, contact your local Motorola representative for further information.
BitGrabber and BitGrabber Plus are trademarks of Motorola, Inc.
Order this document
by MC145220/D
SEMICONDUCTOR TECHNICAL DATA
PIN ASSIGNMENT
F SUFFIX
SOG PACKAGE
CASE 803C
DT SUFFIX
TSSOP
CASE 948D
ORDERING INFORMATION
MC145220F SOG Package
MC145220DT TSSOP
20
1
20
1
GND
′
LD
′
13
14
15
16
CLK
D
in
PD
out
′/φR′
8
7
6
5
4
3
2
1
f
in
f
in
GND
PD
out
/
φ
R
LD
REF
out
REF
in
18
19
20
17
fin′
ENB11
12
10
9
OUTPUT A
V+
V+
′
Rx/
φ
V
Rx′/
φV′
fin′
Motorola, Inc. 1998
REV 4
1/98 TN98012300
Page 2
MC145220 MOTOROLA
2
8
7
f
in
f
in
2
1
3
BUFFER
AND
CONTROL
REF
out
REF
in
23
7
13
BitGrabber Plus
R REGISTER
16 BITS
Rs
Rs
′
13–STAGE
R COUNTER
13–STAGE
R
′
COUNTER
BitGrabber Plus
A REGISTER
23 BITS
A AND N COUNTERS
32/33 OR
64/65
PRESCALER
RATIO
18
32/33 OR
64/65
PRESCALER
A
′
& N′ COUNTERS
23
BitGrabber Plus
A
′
REGISTER
23 BITS
RATIO
13
14
f
in
′
fin′
23
24 1/2 STAGE
SHIFT REGISTER
ADDRESS
LOGIC AND
STORAGE
11
20
ENB
D
in
19
CLK
2
5
PLL / PLL
′
SELECT FROM
A REGISTER
(INTERNAL)
MUX
f
R
f
R
′
f
V
f
V
′
PORT
17
16
10
18
PHASE/
FREQUENCY
DETECTOR
PAIR
2
BitGrabber Plus
C
′
REGISTER
7 BITS
LD
′
Rx′/
φV′
OUTPUT A
PD
out
′/φR′
LD
Rx/
φ
V
PD
out
/
φ
R
BitGrabber Plus
C REGISTER
7 BITS
PHASE/
FREQUENCY
DETECTOR
PAIR
STBY
(INTERNAL)
STBY
′
(INTERNAL)
2
4
5
DATA OUT
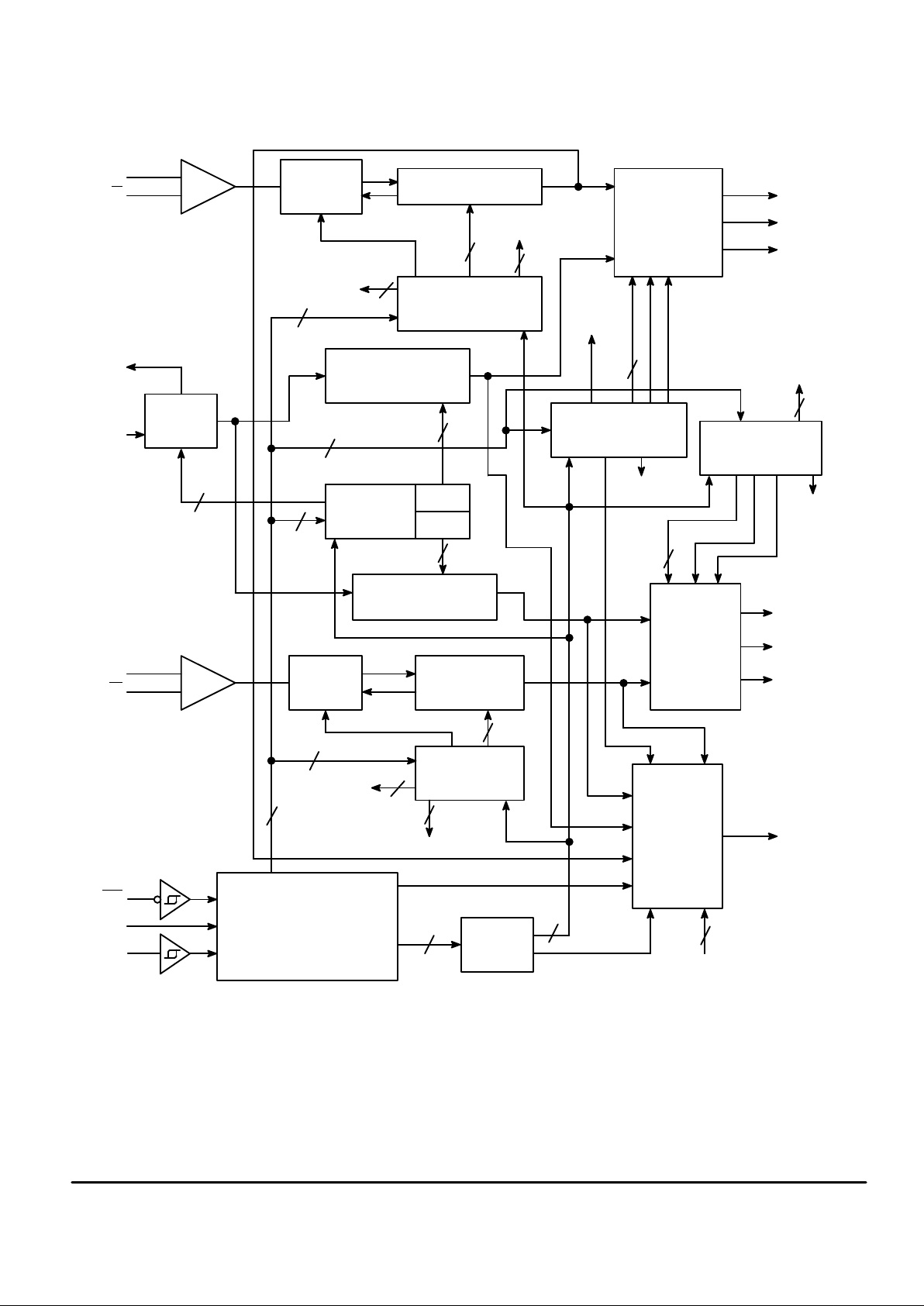
PIN 9 = V+ (Positive Power to the main PLL, Reference Circuit, and a portion of the Serial Port)
PIN 6 = GND (Ground to the main PLL, Reference Circuit, and a portion of the Serial Port)
PIN 12 = V+′ (Positive Power to PLL′ and a portion of the Serial Port)
PIN 15 = GND′ (Ground to PLL′ and a portion of the Serial Port)
13
18
16
2
3
POLARITY
GAIN
PDA/B SELECT
2
UNUSED
2
TO MUX FOR
OUTPUT A
UNUSED
POLARITY
GAIN
PDA/B SELECT
2
UNUSED
2
2
(INTERNAL)
(INTERNAL)
f
R
′
f
R
f
V
f
V
′
BLOCK DIAGRAM
DOUBLE BUFFER
Page 3
MC145220MOTOROLA
3
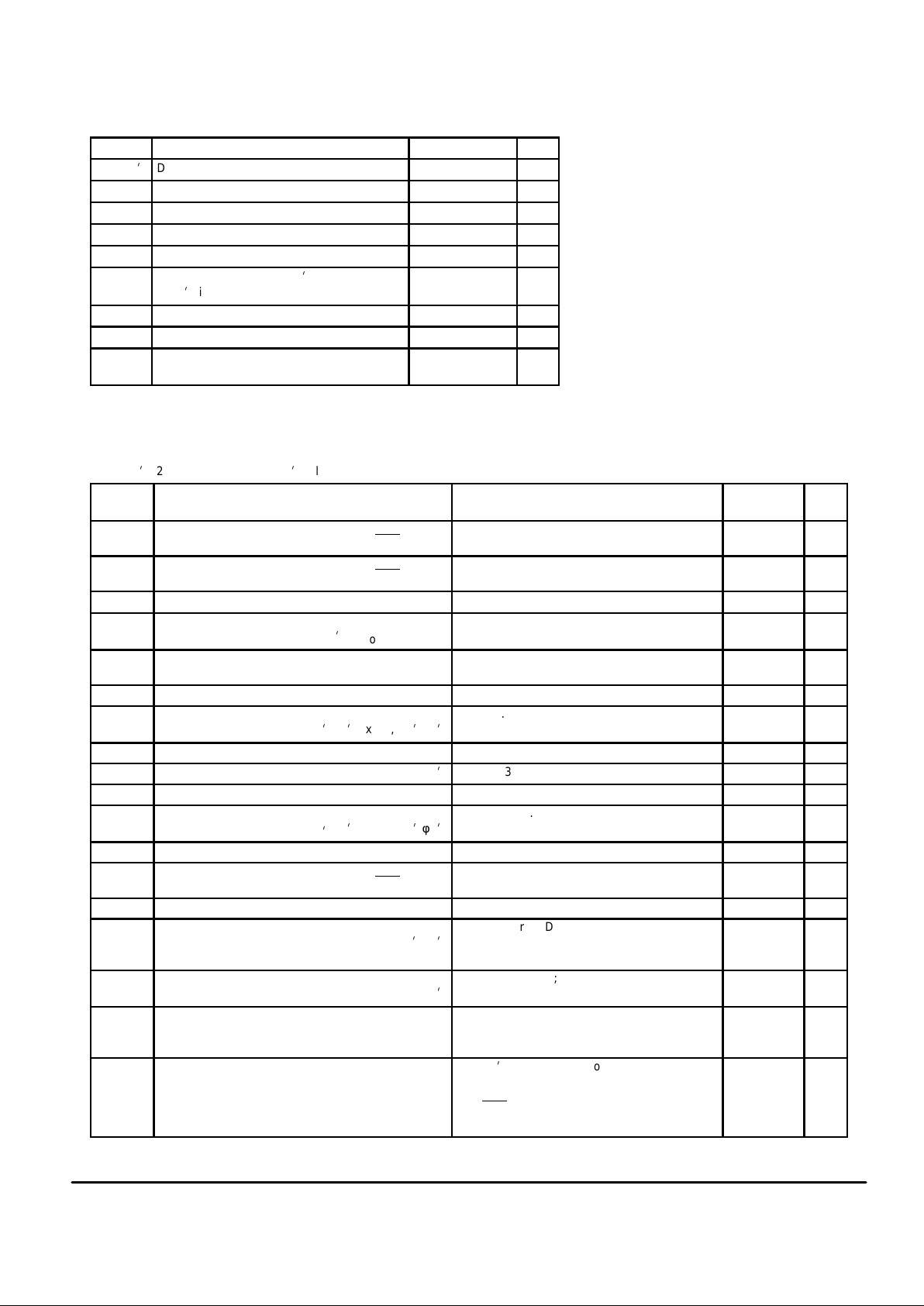
MAXIMUM RATINGS* (Voltages Referenced to GND, unless otherwise stated)
Symbol Parameter Value Unit
V+, V+
i
DC Supply Voltage – 0.5 to + 6.0 V
V
in
DC Input Voltage – 0.5 to V+ + 0.5 V
V
out
DC Output Voltage – 0.5 to V+ + 0.5 V
I
in
DC Input Current, per Pin ± 10 mA
I
out
DC Output Current, per Pin ± 20 mA
I
DC Supply Current, V+, V+i, GND, and
GNDi Pins
30 mA
P
D
Power Dissipation, per Package 300 mW
T
stg
Storage Temperature – 65 to + 150 °C
T
L
Lead Temperature, 1 mm from Case for
10 Seconds
260 °C
*Maximum Ratings are those values beyond which damage to the device may occur.
Functional operation should be restricted to the limits in the Electrical Characteristics
tables or Pin Descriptions section.
ELECTRICAL CHARACTERISTICS
(V+ = V+i = 2.7 to 5.5 V , GND = GNDi, Voltages Referenced to GND, TA = – 40 to 85°C, unless otherwise stated)
Symbol
Parameter Test Condition
Guaranteed
Limit
Unit
V
IL
Maximum Low–Level Input Voltage
(Din, CLK, ENB
, REFin)
Device in Reference Mode, dc Coupled 0.3 x V+ V
V
IH
Minimum High–Level Input Voltage
(Din, CLK, ENB
, REFin)
Device in Reference Mode, dc Coupled 0.7 x V+ V
V
Hys
Minimum Hysteresis Voltage (CLK, ENB) 100 mV
V
OL
Maximum Low–Level Output Voltage
(LD, LDi, REF
out
, Output A)
I
out
= 20 µA, Device in Reference Mode;
Output A Not Selected as Port
0.1 V
V
OH
Minimum High–Level Output Voltage
(REF
out
, Output A)
I
out
= – 20 µA, Device in Reference Mode;
Output A Not Selected as Port
V+ – 0.1 V
I
OL
Minimum Low–Level Output Current (REF
out
) V
out
= 0.3 V 0.5 mA
I
OL
Minimum Low–Level Output Current
(PD
out/φR
, PD
out
i
/φRi
, Rx/φV, Rxi/φVi
)
V
out
= 0.3 V; Phase/Frequency Detectors
Configured with φR, φV Outputs
0.5 mA
I
OL
Minimum Low–Level Output Current (Output A) V
out
= 0.3 V 0.5 mA
I
OL
Minimum Low–Level Output Current (LD, LDi)
V
out
= 0.3 V 0.5 mA
I
OH
Minimum High–Level Output Current (REF
out
) V
out
= V+ – 0.3 V – 0.4 mA
I
OH
Minimum High–Level Output Current
(PD
out/φR
, PD
out
i/φR
i
, Rx/φV, Rxi/φVi
)
V
out
= V+ – 0.3 V; Phase/Frequency Detectors
Configured with φR, φV Outputs
– 0.4 mA
I
OH
Minimum High–Level Output Current (Output A) V
out
= V+ – 0.3 V; Output A Not Selected as Port – 0.4 mA
I
in
Maximum Input Leakage Current
(Din, CLK, ENB, REFin)
Vin = V+ or GND; Device in XTAL Mode ± 1.0 µA
I
in
Maximum Input Current (REFin) Vin = V+ or GND; Device in Reference Mode ± 150 µA
I
OZ
Maximum Output Leakage Current
(PD
out/φR
, PD
out
i
/φRi
)
V
out
= V+ or GND; Phase/Frequency Detectors
Configured with PD
out
Output, Output in High–
Impedance State
± 150 nA
I
OZ
Maximum Output Leakage Current
(Output A, LD, LDi)
V
out
= V+ or GND; Output A Selected as Port;
Output in High–Impedance State
± 5 µA
I
STBY
Maximum Standby Supply Current Vin = V+ or GND; Outputs Open; Both PLLs in
Standby Mode, Shut–Down Crystal Mode or
REF
out
–Static–Low Reference Mode
30 µA
I
T
Total Operating Supply Current
fin = fini
= 1.1 GHz; both loops active;
REFin = 13 MHz @ 1 V p–p;
Output A = Inactive; All Outputs = No Connect;
Din, ENB
, CLK = V+ or GND; Phase/Frequency
Detectors Configured with φR, φV Outputs
* mA
*The nominal value is 12 mA. This is not a guaranteed limit.
This device contains protection circuitry to
guard against damage due to high static voltages or electric fields. However, precautions
must be taken to avoid applications of any voltage higher than maximum rated voltages to this
high–impedance circuit.
Page 4
MC145220 MOTOROLA
4
ANALOG CHARACTERISTICS — CURRENT SOURCE/SINK OUTPUTS — PD
out/φR
AND PD
out
′/φR′
(Phase/Frequency Detectors Configured with PD
out
Outputs, I
out
≤ 2 mA @V+ = V+i = 4.5 to 5.5 V , I
out
≤ 1 mA @V+ = V+i = 2.7 to 4.4 V ,
GND = GNDi, Voltages Referenced to GND)
Parameter Test Condition
Guaranteed
Limit
Unit
Maximum Source Current Variation Part–to–Part (Notes 3 and 4) V
out
= 0.5 x V+ ± 20 %
Maximum Sink–versus–Source Mismatch (Note 3) V
out
= 0.5 x V+ 12 %
Output Voltage Range (Note 3) I
out
variation ≤ 20% 0.5 to V+ – 0.5 V V
NOTES:
1. Percentages calculated using the following formula: (Maximum Value – Minimum Value)/Maximum Value.
2. See Rx Pin Description for external resistor values.
3. This parameter is guaranteed for a given temperature within – 40 to 85°C and given supply voltage within 2.7 to 5.5 V.
4. Applicable for the Rx/φV or Rx′/φV′ reference pin tied to the GND or GND′ pin through a resistor. See Pin Descriptions for suggested resistor
values.
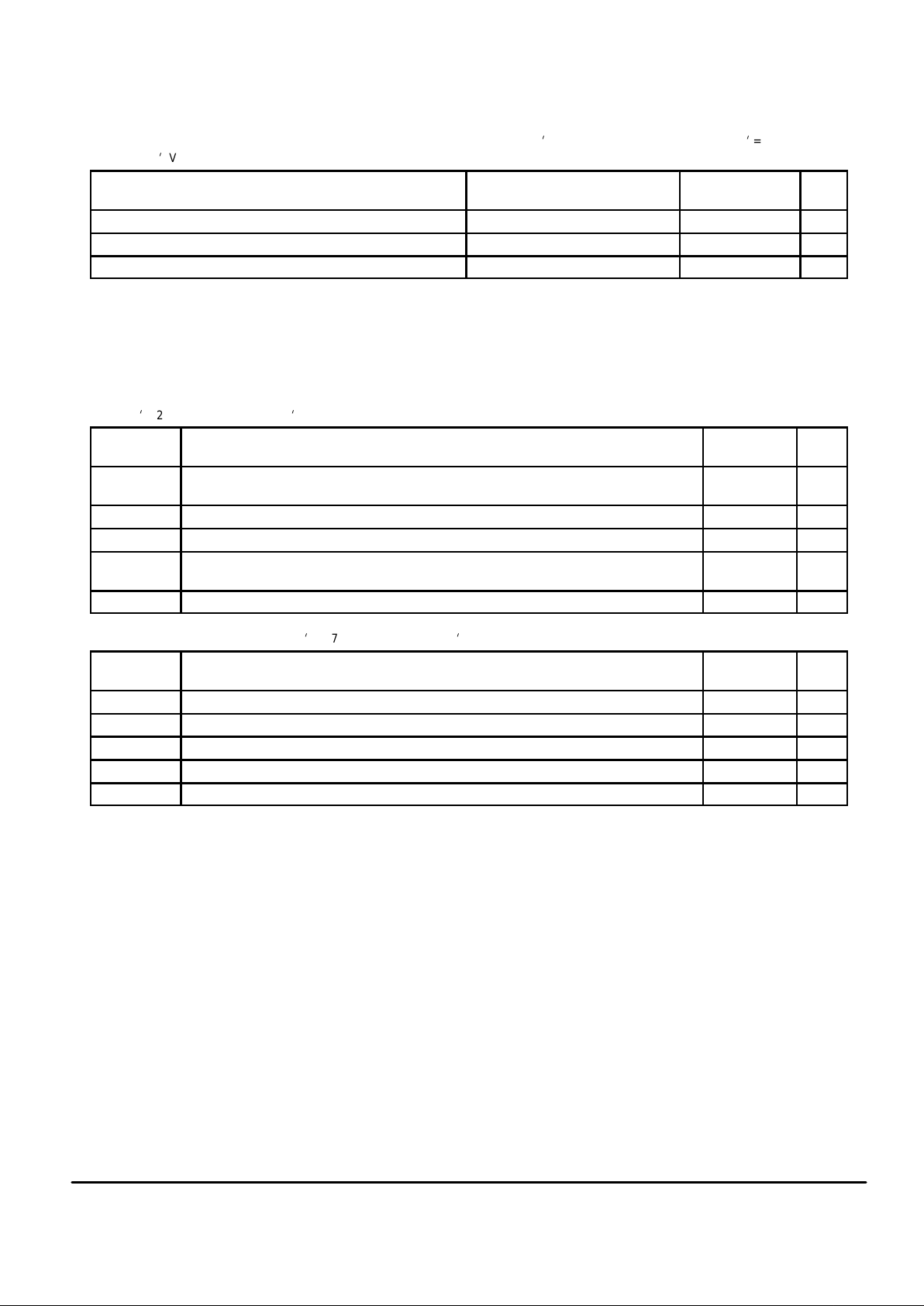
AC INTERFACE CHARACTERISTICS
(V+ = V+i = 2.7 to 5.5 V , GND = GNDi, TA = – 40 to 85°C, CL = 25 pF, Input tr = tf = 10 ns)
Symbol
Parameter
Guaranteed
Limit
Unit
f
clk
Serial Data CLK Frequency (Figure 1)
NOTE: Refer to Clock tw below
dc to 2.0 MHz
t
PLH
, t
PHL
Maximum Propagation Delay, CLK to Output A (Selected as Data Out) (Figures 1 and 5) 200 ns
t
PZL
, t
PLZ
Maximum Propagation Delay, ENB to Output A (Selected as Port) (Figures 2 and 6) 200 ns
t
TLH
, t
THL
Maximum Output Transition T ime, Output A; t
THL
only, on Output A when Selected as Port
(Figures 1, 5, and 6)
200 ns
C
in
Maximum Input Capacitance — Din, CLK, ENB 10 pF
TIMING REQUIREMENTS (V+ = V+
i
= 2.7 to 5.5 V , GND = GNDi, TA = – 40 to 85°C, Input tr = tf = 10 ns unless otherwise indicated)
Symbol
Parameter
Guaranteed
Limit
Unit
tsu, t
h
Minimum Setup and Hold Times, Din versus CLK (Figure 3) 50 ns
tsu, th, t
rec
Minimum Setup, Hold, and Recovery Times, ENB versus CLK (Figure 4) 100 ns
t
w
Minimum Pulse Width, ENB (Figure 4) * cycles
t
w
Minimum Pulse Width, CLK (Figure 1) 250 ns
tr, t
f
Maximum Input Rise and Fall Times — CLK (Figure 1) 100 µs
*The minimum limit is 3 REFin cycles or 195 fin or fin′ cycles with selection of a 64/65 prescale ratio or 99 fin or fin′ cycles with selection of a 32/33
prescale ratio, whichever is greater.
Page 5
MC145220MOTOROLA
5
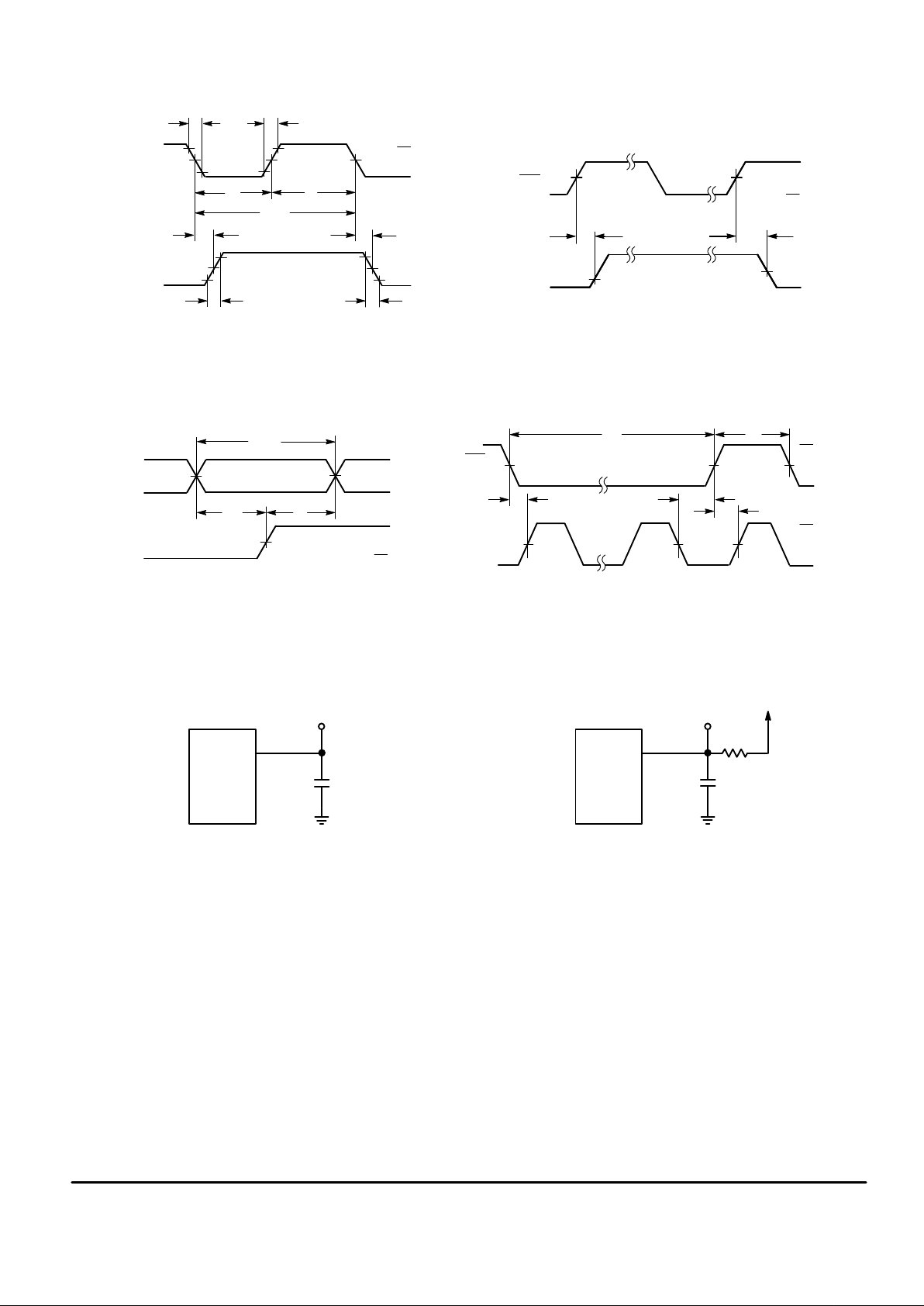
Figure 1. Figure 2.
10%
V+
GND
1/f
clk
OUTPUT A
(DATA OUT)
CLK
90%
50%
90%
50%
10%
t
PLH
t
PHL
t
TLH
t
THL
t
w
t
w
t
f
t
r
ENB
OUTPUT A
10%
V+
GND
50%
t
PLZ
50%
t
PZL
D
in
CLK
50%
VALID
50%
t
su
t
h
V+
GND
V+
GND
Figure 3.
CLK
ENB
50%
t
su
t
h
FIRST
CLOCK
LAST
CLOCK
t
rec
50%
V+
GND
V+
GND
t
w
t
w
Figure 4.
TEST POINT
DEVICE
UNDER
TEST
CL*
*Includes all probe and fixture capacitance.
TEST POINT
DEVICE
UNDER
TEST
CL*
*Includes all probe and fixture capacitance.
V+
7.5 k
Ω
Figure 5. Figure 6.
Page 6
MC145220 MOTOROLA
6
LOOP SPECIFICATIONS (V+ = V+
i
= 2.7 to 5.5 V unless otherwise indicated, GND = GNDi, TA = – 40 to 85°C)
Guaranteed
Operating Range
Symbol Parameter Test Condition Min Max Unit
P
in
Input Sensitivity Range, fin or fini
(Figure 7)
40 MHz ≤ frequency < 300 MHz
300 MHz ≤ frequency < 700 MHz
700 MHz ≤ frequency < 1100 MHz
– 2
– 5
– 16
8
6
4
dBm*
∆P
in
Difference Allowed Between fin and fini
10 dB
—
Isolation Between fin and fini
15 dB
f
ref
Input Frequency, REFin Externally Driven in
Reference Mode (Figure 8)
Vin ≥ 400 mV p–p, R Counter set to divide
ratio such that fR ≤ 1 MHz, REF Counter set
to divide ratio such that REF
out
≤ 5 MHz
4 27
MHz
f
XTAL
Crystal Frequency, Crystal Mode (Figure 9) C1 ≤ 30 pF, C2 ≤ 30 pF, Includes Stray
Capacitance; R Counter and REF Counter
same as above V+ = 2.7 V
V+ = 3.5 V
V+ = 4.5 V
V+ = 5.5 V
2
2
2
2
10
13
15
15
MHz
f
out
Output Frequency, REF
out
(Figures 10 and 12) CL = 25 pF dc 5 MHz
f Operating Frequency of the Phase Detectors dc 1 MHz
t
w
Output Pulse Width, φR, φV, φRi
, φVi
(Figures 11 and 12)
fR in Phase with fV, CL = 25 pF 16 125 ns
C
in
Input Capacitance, REF
in
— 5 pF
*Power level at the input to the dc block.
Page 7
MC145220MOTOROLA
7
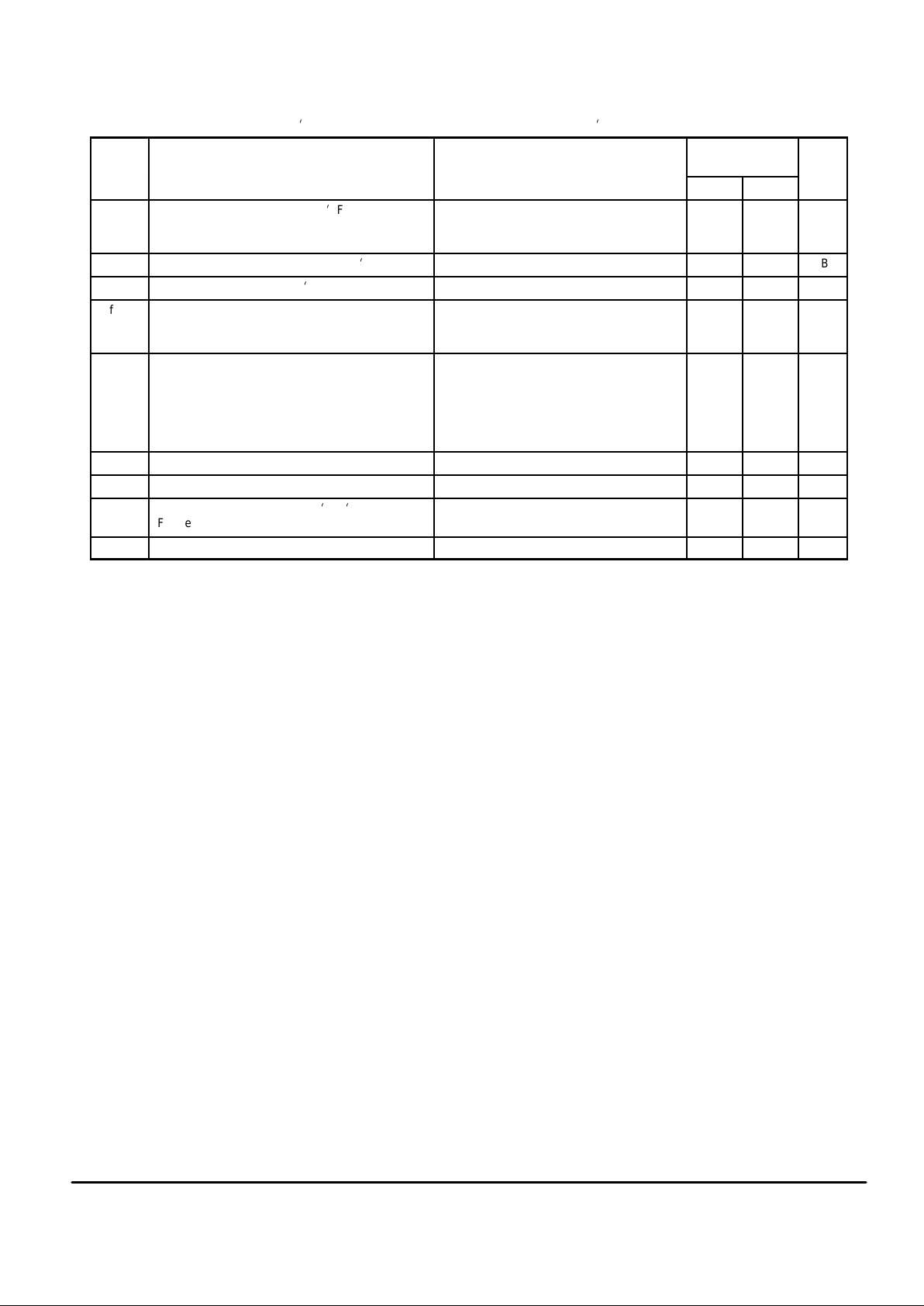
DEVICE
UNDER
TEST
TEST
POINT
f
in
OUTPUT A
Figure 7. Test Circuit
(fv)
Figure 8. Test Circuit — Reference Mode
DC
BLOCK
50
Ω
PAD
SINE WAVE
GENERAT OR
50
Ω
f
in
GND V+
GNDiV+
i
DEVICE
UNDER
TEST
TEST
POINT
REF
in
OUTPUT A
(fR)
0.01 µF
50
Ω
*
SINE WAVE
GENERAT OR
50
Ω
GND V+
GNDiV+
i
V
in
TEST
POINT
REF
out
*Characteristic Impedance
NOTE: Alternately, the 50 Ω pad may be a T network.
DEVICE
UNDER
TEST
TEST
POINT
REF
in
OUTPUT A
Figure 9. Test Circuit — Crystal Mode
(fR)
REF
out
GND V+
GNDiV+
i
C1
C2
REF
out
1/f
out
50%
Figure 10. Switching Waveform
OUTPUT
t
w
50%
Figure 11. Switching Waveform
TEST POINT
DEVICE
UNDER
TEST
CL*
*Includes all probe and fixture capacitance.
Figure 12. Test Circuit
Page 8
MC145220 MOTOROLA
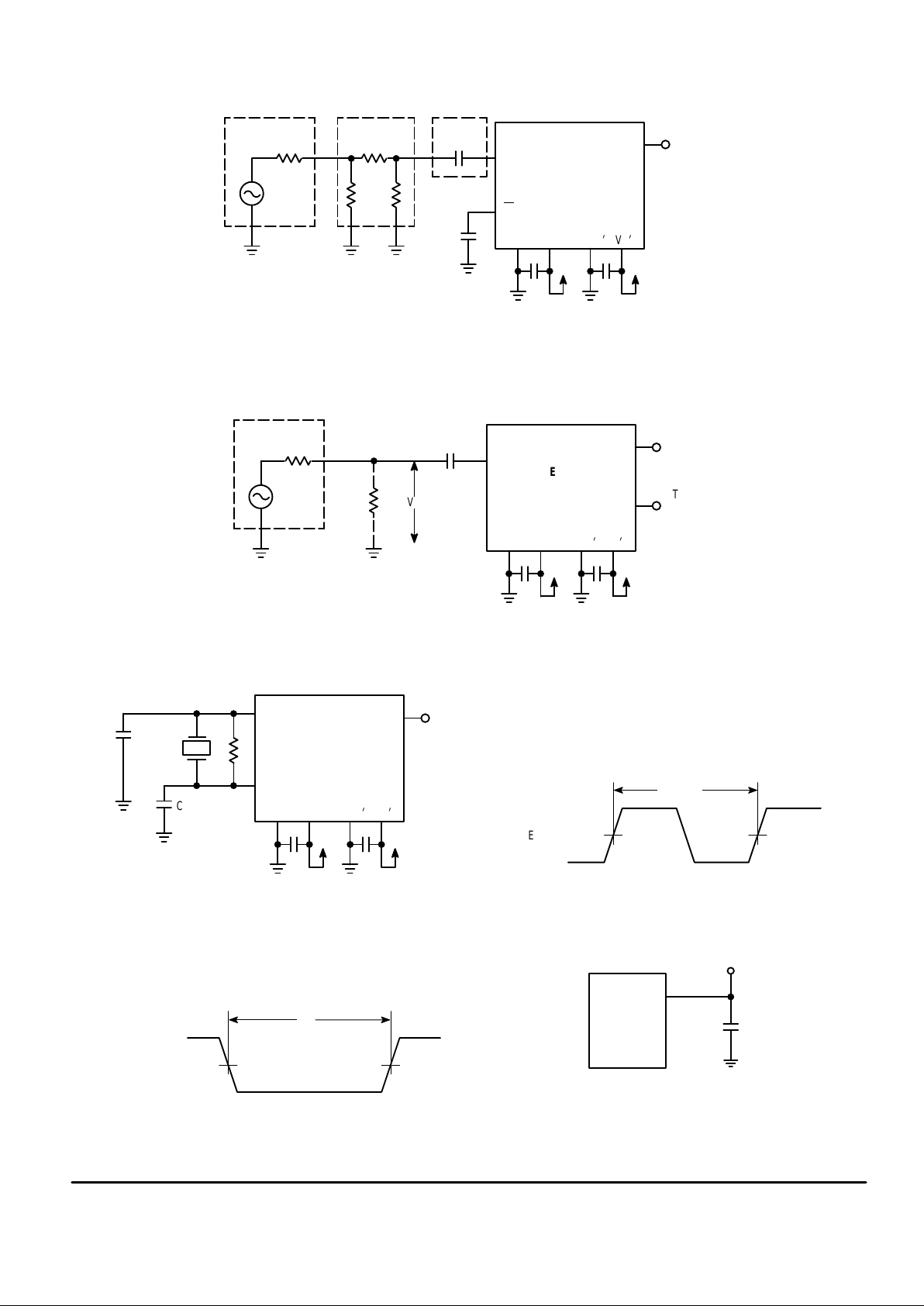
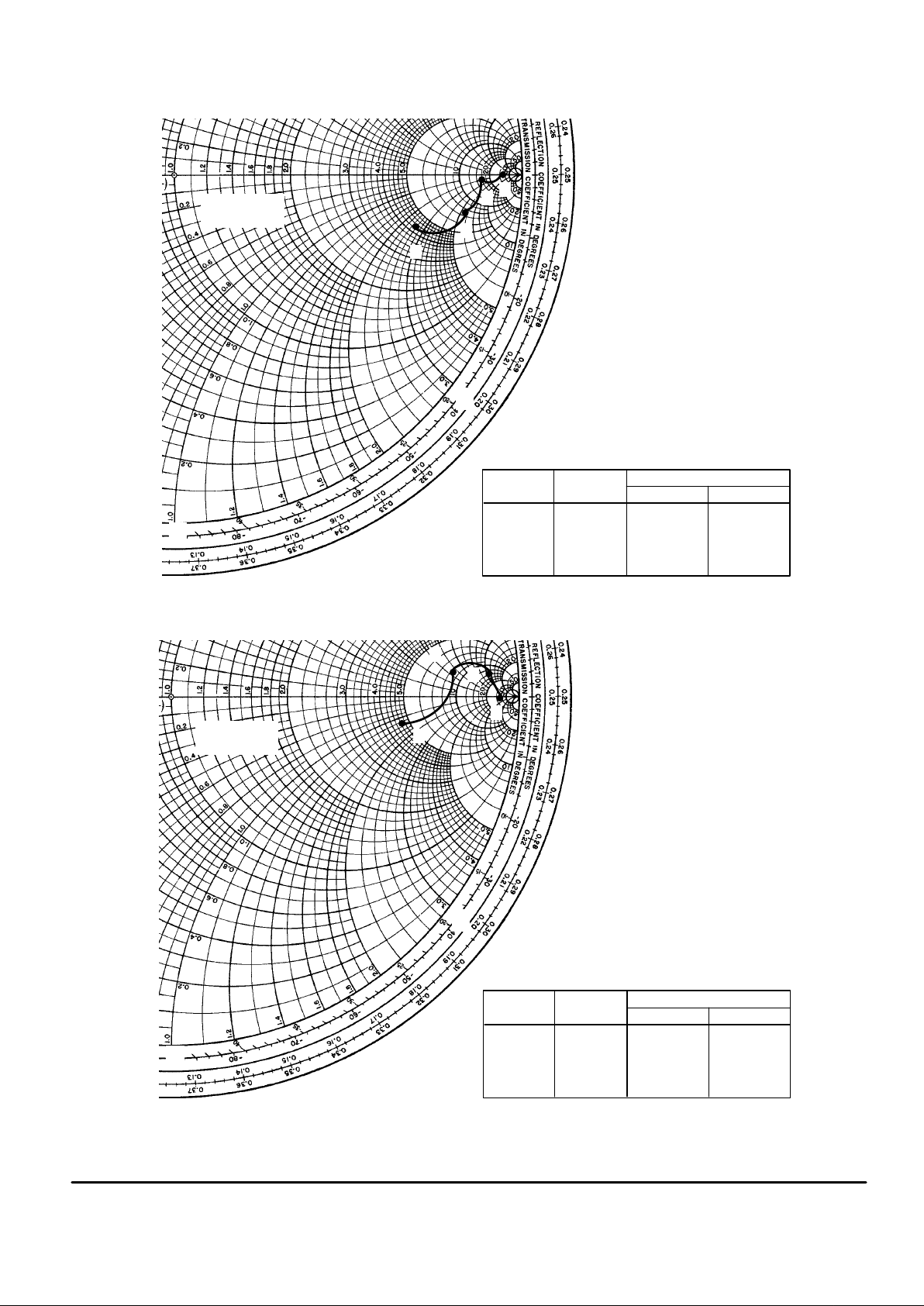
8
Frequency
(MHz)
Point
Impedance (Ω)
3 V Supply
5 V Supply
50
400
800
1100
E
F
G
H
1900 + j 149
878 + j 703
705 + j 208
215 – j 69.3
1930 + j 214
746 + j 741
626 + j 327
243 – j 61.3
Frequency
(MHz)
Point
Impedance (Ω)
3 V Supply
5 V Supply
50
400
800
1100
A
B
C
D
1900 – j 157
1440 – j 228
552 – j 380
196 – j 141
1970 – j 102
1510 + j 19
671 – j 334
223 – j 147
fin (PIN 8) – SOG PACKAGE
f
in
′
(PIN 13) – SOG PACKAGE
Figure 13. Nominal Input Impedance of fin and fin′ — Series Format (R + jX)
(50 – 1100 MHz)
–j2
–j1
A
B
C
D
fin (PIN 8)
SOG PACKAGE
–j2
–j1
E
F
G
H
fin′
(PIN 13)
SOG PACKAGE
Page 9
MC145220MOTOROLA
9
PIN DESCRIPTIONS
DIGITAL INTERFACE PINS
D
in
Serial Data Input (Pin 20)
The bit stream begins with the MSB and is shifted in on the
low–to–high transition of CLK. The bit pattern is 1 byte (8
bits) long to access the C or configuration registers, 2 bytes
(16 bits) to access the first buffer of the R registers, or
3 bytes (24 bits) to access the A registers (see Table 1). The
values in the registers do not change during shifting because
the transfer of data to the registers is controlled by ENB
.
NOTE
The value programmed for the N counter must be
greater than or equal to the value of the A counter.
The 13 LSBs of the R registers are double–buffered. As indicated above, data is latched into the first buffer on a 16–bit
transfer. (The 3 MSBs are not double–buffered and have an
immediate effect after a 16–bit transfer.) The two second
buffers of the R register contain the two 13–bit divide ratios
for the R counters. These second buffers are loaded with the
contents of the first buffer as follows. Whenever the A register is loaded, the Rs (second) buffer is loaded from the R
(first) buffer . Similarly , whenever the Ai register is loaded, the
Rsi (second) buffer is updated from the R (first) buffer. This
allows presenting new values to the R, A, and N counters
simultaneously. Note that two different R counter divide
ratios may be established: one for the main PLL and another
for PLLi.
The bit stream does not need address bits due to the innovative BitGrabber Plus registers. A steering bit is used to
direct data to either the main PLL or PLLi section of the chip.
Data is retained in the registers over a supply range of 2.7 to
5.5 V. The formats are shown in Figures 14, 15, and 16.
Din typically switches near 50% of V+ to maximize noise
immunity. This input can be directly interfaced to CMOS
devices with outputs guaranteed to switch near rail–to–rail.
When interfacing to NMOS or TTL devices, either a level
shifter (MC74HC14A, MC14504B) or pull–up resistor of 1 kΩ
to 10 kΩ must be used. Parameters to consider when sizing
the resistor are worst–case IOL of the driving device, maximum tolerable power consumption, and maximum data rate.
Table 1. Register Access
(MSBs are shifted in first; C0, R0, and A0 are the LSBs)
Number
of Clocks
Accessed
Register
Bit
Nomenclature
8
16
24
Other Values ≤ 32
Values > 32
C Registers
R Register,
First Buffer
A Registers
Not Allowed
See Figures
24 to 27
C7, C6, C5, . . ., C0
R15, R14, R13, . . ., R0
A23, A22, A21, . . ., A0
CLK
Serial Data Clock Input (Pin 19)
Low–to–high transitions on CLK shift bits available at the
Din pin, while high–to–low transitions shift bits from Output A
(when configured as Data Out, see Pin 10). The 24–1/2
stage shift register is static, allowing clock rates down to dc in
a continuous or intermittent mode.
Eight clock cycles are required to access the C registers.
Sixteen clock cycles are needed for the first buffer of the R
register. Twenty–four cycles are used to access the A registers. See Table 1 and Figures 14, 15, and 16. The number of
clocks required for cascaded devices is shown in Figures 25
through 27.
CLK typically switches near 50% of V+ and has a Schmitt–
triggered input buffer. Slow CLK rise and fall times are allowed. See the last paragraph of Din for more information.
NOTE
To guarantee proper operation of the power–on
reset (POR) circuit, the CLK pin must be held at
GND (with ENB
being a don’t care) or ENB must
be held at the potential of the V+ pin (with CLK being a don’t care) during power–up. Floating, toggling, or having these pins in the wrong state
during power–up does not harm the chip, but
causes two potentially undesirable effects. First,
the outputs of the device power up in an unknown
state. Second, if two devices are cascaded, the A
Registers must be written twice after power up.
After these two accesses, the two cascaded chips
perform normally .
ENB
Active–Low Enable Input (Pin 11)
This pin is used to activate the serial interface to allow the
transfer of data to/from the device. When ENB
is in an inactive high state, shifting is inhibited and the port is held in the
initialized state. To transfer data to the device, ENB
(which
must start inactive high) is taken low, a serial transfer is
made via Din and CLK, and ENB
is taken back high. The
low–to–high transition on ENB transfers data to the C or A
registers and first buffer of the R register, depending on the
data stream length per Table 1.
NOTE
Transitions on ENB
must not be attempted while
CLK is high. This puts the device out of synchronization with the microcontroller. Resynchronization occurs whenever ENB
is high and CLK is
low.
This input is Schmitt–triggered and switches near 50% of
V+, thereby minimizing the chance of loading erroneous data
into the registers. See the last paragraph of Din for more
information.
For POR information, see the note for the CLK pin.
Page 10

MC145220 MOTOROLA
10
OUTPUT A
Configurable Digital Output (Pin 10)
Output A is selectable as fR, fV, fRi
, fVi
, Data Out, or Port.
Bits A21 and A22 and the steering bit (A23) control the selection; see Figure 15. When selected as Port, the pin becomes
an open–drain N–channel MOSFET output. As such, a
pullup device is needed for pin 10. With all other selections,
the pin is a totem–pole (push–pull) output.
If A22 = A21 = high, Output A is configured as fR when the
steering bit is low and fRi
when the bit is high. These signals
are the buffered outputs of the 13–stage R counters. The signals appear as normally low and pulse high. The signals can
be used to verify the divide ratios of the R counters. These
ratios extend from 10 to 8191 and are determined by the
binary value loaded into bits R0 – R12 in the R register . Also,
direct access to the phase detectors via the REFin pin is
allowed by choosing a divide value of one. See Figure 16.
The maximum frequency at which the phase detectors operate is 1 MHz. Therefore, the frequency of fR and fRi
should
not exceed 1 MHz.
If A22 = high and A21 = low, Output A is configured as f
V
when the steering bit is low and fVi
when the bit is high.
These signals are the buffered outputs of the 12–stage N
counters. The signals appear as normally low and pulse
high. The signals can be used to verify the operation of the
prescalers, A counters, and N counters. The divide ratio between the fin or fin′ input and the fV or fVi
signal is N x P + A.
N is the divide ratio of the N counter, P is 32 with a 32/33
prescale ratio or 64 with a 64/65 prescale ratio, and A is the
divide ratio of the A counter. These ratios are determined by
bits loaded into the A registers. See Figure 15. The maximum frequency at which the phase detectors operate is
1 MHz. Therefore, the frequency of fV and fVi
should not
exceed 1 MHz.
If A22 = low and A21 = high, Output A is configured as
Data Out. This signal is the serial output of the 24–1/2 stage
shift register. The bit stream is shifted out on the high–to–low
transition of the CLK input. Upon power up, Output A is
automatically configured as Data Out to facilitate cascading
devices.
If A22 = A21 = low, Output A is configured as Port. This
signal is a general–purpose digital output which may be used
as an MCU port expander. This signal is low when the Port
bit (C1) of the C register is low, and high impedance when
the Port bit is high. See Figure 14.
REFERENCE PINS
REFin and REF
out
Reference Oscillator Input and Output (Pins 1 and 2)
Configurable Pins for a Crystal or an External Reference.
This pair of pins can be configured in one of two modes: the
crystal mode or the reference mode. Bits R13, R14, and R15
in the R register control the modes as shown in Figure 16.
In the crystal mode, these pins form a reference oscillator
when connected to terminals of an external parallel–resonant crystal. Frequency–setting capacitors of appropriate
values, as recommended by the crystal supplier, are connected from each of the two pins to ground (up to a maximum
of 30 pF each, including stray capacitance). An external resistor of 1 MΩ to 15 MΩ is connected directly across the pins
to ensure linear operation of the amplifier. The required connections for the crystal are shown in Figure 9. To turn on the
oscillator, bits R15, R14, and R13 must have an octal value
of one (001 in binary). This is the active–crystal mode shown
in Figure 16. In this mode, the crystal oscillator runs and the
R Counter divides the crystal frequency, unless the part is in
standby. If the part is placed in standby via the C or C′ register, the oscillator runs, but the R or R′ counter is stopped, respectively. However, if bits R15 to R13 have a value of 0, the
oscillator is stopped, which saves additional power. This is
the shut–down crystal mode shown in Figure 16, and can be
engaged whether in standby or not.
In the reference mode, REFin (pin 1) accepts a signal from
an external reference oscillator, such as a TCXO. A signal
swinging from at least the VIL to VIH levels listed in the Elec-
trical Characteristics table may be directly coupled to the
pin. If the signal is less than this level, ac coupling must be
used as shown in Figure 8. The ac–coupled signal must be at
least 400 mV p–p. Due to an on–board resistor which is
engaged in the reference modes, an external biasing resistor
tied between REFin and REF
out
is not required.
With the reference mode, the REF
out
pin is configured as
the output of a divider. As an example, if bits R15, R14,
and R13 have an octal value of seven, the frequency at
REF
out
is the R EFin frequency divided by 16. In addition,
Figure 16 shows how to obtain ratios of eight, four, and two.
A ratio of one–to–one can be obtained with an octal value of
three. Upon power up, a ratio of eight is automatically initialized. The maximum frequency capability of the REF
out
pin is 5 MHz for large output swings (VOH to VOL) and 25 pF
loads. Therefore, for REFin frequencies above 5 MHz, the
one–to–one ratio may not be used for these large signal
swing and large CL requirements. Likewise, for RE Fin frequencies above 10 MHz, the ratio must be more than two.
If REF
out
is unused, an octal value of two should be used
for R15, R14, and R13 and the RE F
out
pin should be
floated. A value of two allows REFin to be functional while
disabling REF
out
, which minimizes dynamic power con-
sumption and electromagnetic interference (EMI).
LOOP PINS
fin, f
in
and fini
, fini
Frequency Inputs (Pins 8, 7 and 13, 14)
These pins feed the onboard RF amplifiers which drive the
prescalers. These inputs may be fed differentially. However,
they usually are used in single–ended configurations (shown
in Figure 7). Note that fin is driven while f
in
must be tied to ac
ground (via capacitor). The signal sources driving these pins
originate from external VCOs.
Motorola does not recommend driving f
in
while terminating
fin because this configuration is not tested for sensitivity. The
sensitivity is dependent on the frequency as shown in the
Loop Specifications table.
Page 11

MC145220MOTOROLA
11
PD
out/φR
, PD
out
i
/φRi
Single–Ended Phase/Frequency Detector Outputs
(Pins 4 and 17)
When the C2 bits in the C or Ci registers are low, these
pins are independently configured as single–ended outputs
PD
out
or PD
out
i
, respectively. As such, each pin is a three–
state current–source/sink output for use as a loop error signal when combined with an external low–pass filter. The
phase/frequency detector is characterized by a linear transfer function. The operation of the phase/frequency detector is
described below and is shown in Figure 17.
POL bit (C0) in the C register = low (see Figure 14)
Frequency of fV > fR or Phase of fV Leading fR: current–
sinking pulses from a floating state
Frequency of fV < fR or Phase of fV Lagging fR: current–
sourcing pulses from a floating state
Frequency and Phase of fV = fR: essentially a floating
state; voltage at pin determined by loop filter
POL bit (C0) = high
Frequency of fV > fR or Phase of fV Leading fR: current–
sourcing pulses from a floating state
Frequency of fV < fR or Phase of fV Lagging fR: current–
sinking pulses from a floating state
Frequency and Phase of fV = fR: essentially a floating
state; voltage at pin determined by loop filter
These outputs can be enabled, disabled, and inverted via
the C and Ci registers. If desired, these pins can be forced to
the floating state by utilization of the standby feature in the C
or Ci registers (bit C6). This is a patented feature.
The phase detector gain is controllable by bits C4 and C5:
gain (in amps per radian) = PD
out
current in amps divided
by 2π.
PD
out/φR
, Rx/
φV and PD
out
i
/φRi
, Rxi/φVi
Double–Ended Phase/Frequency Detector Outputs
(Pins 4, 5 and 17, 16)
When the C2 bits in the C or Ci registers are high, these
two pairs of pins are independently configured as double–
ended outputs φR, φV or φRi
, φVi
, respectively. As such,
these outputs can be combined externally to generate a loop
error signal. Through use of a Motorola patented technique,
the detector’s dead zone has been eliminated. Therefore, the
phase/frequency detector is characterized by a linear transfer function. The operation of the phase/frequency detectors
are described below and are shown in Figure 17.
POL bit (C0) in the C register = low (see Figure 14)
Frequency of fV > fR or Phase of fV Leading fR: φV =
negative pulses, φR = essentially high
Frequency of fV < fR or Phase of fV Lagging fR: φV =
essentially high, φR = negative pulses
Frequency and Phase of fV = fR: φV and φR remain
essentially high, except for a small minimum time period
when both pulse low in phase
POL bit (C0) = high
Frequency of fV > fR or Phase of fV Leading fR: φR =
negative pulses, φV = essentially high
Frequency of fV < fR or Phase of fV Lagging fR: φR =
essentially high, φV = negative pulses
Frequency and Phase of fV = fR: φV and φR remain
essentially high, except for a small minimum time period
when both pulse low in phase
These outputs can be enabled, disabled, or interchanged
via C register bits C6 or C0. This is a patented feature. Note
that when disabled in standby, these outputs are forced to
their rest condition (high state). See Figure 14.
The φR and φV output signals swing from approximately
GND to V+.
LD and LD
i
Lock Detector Outputs (Pins 3 and 18)
Each output is essentially at a high–impedance state with
very narrow low–going pulses of a few nanoseconds when
the respective loop is locked (fR and fV of the same phase
and frequency). The output pulses low when fV and fR are
out of phase or different frequencies. LD is the logical ANDing of φR and φV, while LDi is the logical ANDing of φRi
and
φVi
. See Figure 17.
Upon power up, on–chip initialization circuitry forces LD
and LDi to the high–impedance state. These pins are low
during standby . If unused, LD should be tied to GND and LD
i
should be tied to GNDi.
These outputs have open–drain N–channel MOSFET drivers. This facilitates a wired–OR function. See Figure 21.
Rx/φV and Rxi/φVi
External Current Setting Resistors (Pins 5 and 16)
When the C2 bits in the C or Ci registers are low, these two
pins are independently configured as current setting pins Rx
or Rxi, respectively. As such, resistors tied between each of
these pins and GND and GNDi, in conjunction with bits C4
and C5 in the C and Ci registers, determine the amount of
current that the PD
out
pins sink and source. When bits C4
and C5 are both set high, the maximum current is obtained;
see Table 2 for other values of current.
Table 2. PD
out
or PD
out
′ Current
C5 C4 Current
0
0
1
1
0
1
0
1
5%
50%
80%
100%
The formula for determining the value of Rx or Rxi is as
follows.
Rx =
V1 – V2
I
where Rx is the value of external resistor in ohms, V1 is the
supply voltage, V2 is 1.5 V for a reference current through Rx
of 100 µA or 1.745 V for a reference current of 200 µA, and I
is the reference current flowing through Rx or Rxi.
The reference current flowing through Rx or Rx′ is multiplied by a factor of approximately 10 (in the 100% current
mode) and delivered by the PD
out
or PD
out
′ pin, respectively .
To achieve a maximum phase detector output current of
1 mA, the resistor should be about 15 kΩ when a 3 V supply
is employed. See Table 3.
Table 3. Rx Values
Supply
Voltage
Rx
PD
out
or PD
out
′
Current in
100% Mode
3 V
5 V
15 kΩ
16 kΩ
1 mA
2 mA
Page 12

MC145220 MOTOROLA
12
Do not use a decoupling capacitor on the Rx or Rxi pin.
Use of a capacitor causes undesirable current spikes to appear on the phase detector output when invoking the standby
mode.
POWER SUPPLY PINS
V+ and V+
i
Positive Supply Potentials (Pins 9 and 12)
V+ supplies power to the main PLL, reference circuit, and
a portion of the serial port. V+i supplies power to PLLi and a
portion of the serial port. Both V+ and V+i must be at the
same voltage level and may range from 2.7 V to 5.5 V with
respect to the GND and GNDi pins.
For optimum performance, V+ should be bypassed to
GND and V+i bypassed to GNDi using separate low–inductance capacitors mounted very close to the MC145220. Lead
lengths and printed circuit board traces to the capacitors
should be minimized. (The very fast switching speed of the
device can cause excessive current spikes on the power
leads if they are improperly bypassed.)
GND and GND
i
Grounds (Pins 6 and 15)
The GND pin is the ground for the main PLL and GNDi is
the ground for PLLi.
Page 13

MC145220MOTOROLA
13
ENB
CLK
*
D
in
C7 C6 C5 C4 C3 C2 C1 C0
12345678
MSB LSB
*At this point, the new byte is transferred to the C or Ci register and stored. No other registers are affected.
C7 – Steer: Used to direct the data to either the C or Ci register. A low level directs data to the C register; a high
level is for the Ci register.
C6 – Standby: When set high, places both the main PLL and PLLi (when C6 is set in the C register) or PLLi only
(when C6 is set in the Ci register) in the standby mode for reduced power consumption. The associated
PD
out
is forced to the floating state, the associated counters (A, N, and R) are inhibited from counting,
the associated Rx current is shut off, and the associated prescaler stops counting and is placed in
a low current mode. The associated double–ended phase/frequency detector outputs are forced to
a high level. In standby, the associated LD output is placed in the low–state, thus indicating “not locked”
(open loop). During standby, data is retained in all registers and any register may be accessed.
In standby, the condition of the REF/OSC circuitry is determined by bits R13, R14, and R15 in the
R register per Figure 16. However, if REF
out
=
static low
is selected, the internal feedback resistor
is disconnected and the REFin is inhibited when both PLL and PLLi are placed in standby via the
C register. Thus, the REFin only presents a capacitive load. Note: PLL/PLLi standby does not affect
the other modes of the REF/OSC circuitry as determined by bits R13, R14, and R15 in the R register.
The PLLi standby mode (controlled from the Ci register) has no effect on the REF/OSC circuit.
When C6 is reset low, the associated PLL (or PLLs) is (are) taken out of standby in two steps. First,
the REFin (only in 1 mode, PLL/PLLi in standby) resistor is reconnected, REFin (only 1 mode) is gated
on, all counters are enabled, and the Rx current is enabled. Any fR and fV signals are inhibited from
toggling the phase/frequency detectors and lock detectors. Second, when the appropriate fR pulse
occurs, the A and N counters are jam loaded, the prescaler is gated on, and the phase/frequency
and lock detectors are initialized. Immediately after the jam load, the A, N, and R counters begin counting
down together. At this point, the fR and fV pulses are enabled to the phase and lock detectors. (Patented
feature.)
C5, C4 – I2, I1: Independently controls the PD
out
or PD
out
′ source/sink current per Table 2. With both bits high, the
maximum current (as set by Rx or Rx′) is available. POR forces C5 and C4 to high levels.
C3 – Spare: Unused
C2 – PDA/B: Independently selects which phase/frequency detector is to be used. When set high, the double–ended
detector is selected with outputs φR and φV or φRi
and φVi
. When reset low, the current source/sink
detector is selected with outputs PD
out
or PD
out
i
. In the second case, the appropriate Rx or Rxi pin
is tied to an external resistor. POR forces C2 low.
C1 – Port: When the Output A pin is selected as “Port” via bits A22 and A21, C1 of the C register determines
the state of Output A. When C1 is set high, Output A is forced to the high–impedance state; C1 low
forces Output A low. The Port bit is not affected by the standby mode. Note: C1 of the Ci register
is not used in any mode.
C0 – POL: Selects the output polarity of the associated phase/frequency detectors. When set high, this bit inverts
the associated current source/sink output and interchanges the associated double–ended output relative
to the waveforms in Figure 17. Also, see the phase detector output pin descriptions for more information.
This bit is cleared low at power up.
Figure 14. C and Ci Register Accesses and Format (8 Clock Cycles are Used)
Page 14

MC145220 MOTOROLA
14
A22
A21
A20
A19
A18
A17
A16
A15
A14
A13
A12
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
A0
A23
NOTE 3
234567891011121314151617181920212223241
MSB LSB
001
1
010
1
PORT
DATA OUTff
BINARY
VALUE
OUTPUT A
FUNCTION
(NOTES 1 AND 4)
000
0
3
012
3
E
A COUNTER = 0
A COUNTER = 1
A COUNTER = 2
A COUNTER = 3
A COUNTER = 62
÷
4 1 NOT ALLOWED
HEXADECIMAL VALUE
FOR A COUNTER
3
4
F
0
A COUNTER = 63
NOT ALLOWED
÷
...
F
...
F NOT ALLOWED
÷÷÷
÷
...
...
NOTES:
1. A power-on initialize circuit forces the Output A function to default to Data Out.
2. The values programmed for the N counter must be greater than or equal to the values programmed for the A counter. This results in a total divide value = N x P + A where
3. At this point, the three new bytes are transferred to the A register if bit A23 is a “0” or A register if A23 is a “1”. In addition, the 13 LSBs in the first buffer of the R register are
ENB
CLK
Figure 15. A and Ai Register Accesses and Format (24 Clock Cycles are Used)
D
in
0
1
32/33
64/65
PRESCALE
RATIO
0
1
MAIN PLL, A REGISTER
PLL , A REGISTER
STEER
N is the value programmed for the N counter, P is 32 if bit A20 is low or 64 if A20 is high, and A is the value programmed for the A counter.
ii
000
000
0
000
111
1
012
012
3
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
...
F
F
...
F
F
...
E
F
N COUNTER = 4094
N COUNTER = 4095
÷
÷
HEXADECIMAL VALUE
FOR N COUNTER
014
.
.
.
.
.
.
.
.
.
N COUNTER = 19
÷
N COUNTER = 18÷N COUNTER = 20
÷
(NOTE 4)
AND BITS A7 AND A6
R
V
OR f
OR f
R
V
i
i
transferred to the R register’s relative second buffer, Rs or Rs . Thus, the R, N, and A (or R , N , and A ) counters can be presented new divide ratios at the same time. The first
buffer of the R register is not affected. The C or C registers are not affected.
i
i
i
i
ii
4. A “0” for the Steering bit allows selection of f , f , Data Out, or Port by bits A21 and A22. A “1” for the Steering bit allows selection of f , , f , Data Out, or Port.
R
i
RV
V
i
Page 15

MC145220MOTOROLA
15
ENB
CLK
D
in
123
45 78
MSB LSB
910
11 12 13 14 15 16
0
0
0
0
0
0
0
0
0
0
0
0
0
·
·
·
F
F
0
0
0
0
0
0
0
0
0
0
0
0
0
·
·
·
F
F
0
1
2
3
4
5
6
7
8
9
A
B
C
·
·
·
E
F
NOT ALLOWED
R COUNTER =
÷
1 (NOTE 6)
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
NOT ALLOWED
R COUNTER =
÷
10
R COUNTER =
÷
11
R COUNTER =
÷
12
R COUNTER = ÷8190
R COUNTER =
÷
8191
HEXADECIMAL VALUE
0
0
0
0
0
0
0
0
0
0
0
0
0
·
·
·
1
1
BINARY VALUE
0
1
2
3
4
5
6
7
CRYST AL MODE, SHUT DOWN
CRYST AL MODE, ACTIVE
REFERENCE MODE, REFin ENABLED AND REF
out
STATIC LOW
REFERENCE MODE, REF
out
= REFin (BUFFERED)
REFERENCE MODE, REF
out
= REFin/2
REFERENCE MODE, REF
out
= REFin/4
REFERENCE MODE, REF
out
= REFin/8 (NOTE 3)
REFERENCE MODE, REF
out
= REFin/16
OCTAL VALUE
NOTES:
1. Bits R15
– R13 control the configurable “Buffer and Control” block (see Block Diagram).
2. Bits R12 – R0 control the “13–stage R counter” blocks (see Block Diagram).
3. A power–on initialize circuit forces a default REFin to REF
out
ratio of eight.
4. At this point, bits R13, R14, and R15 are stored and sent to the “Buffer and Control” block in the Block Diagram. Bits R0
– R12 are loaded
into the first buffer in the double–buffered section of the R register . Therefore, the R or R′ counter divide ratio is not altered yet and retains
the previous ratio loaded. The C, Ci, A, and Ai registers are not affected.
5. Bits R0 – R12 are transferred to the second buffer of the R register (Rs in the Block Diagram) on a subsequent 24–bit write to the A
register. The bits are transferred to Rsi on a subsequent 24–bit write to the Ai register. The respective R counter begins dividing by the
new ratio after completing the rest of its present count cycle.
6. Allows direct access to reference input of phase/frequency detectors.
NOTE
4
6
R1 R0R5
R4
R3 R2
R15 R14
R13 R12 R11 R10
R9
R8 R7 R6
Figure 16. R Register Access and Format (16 Clock Cycles are Used)
Page 16

MC145220 MOTOROLA
16
NOTES:
1. At this point, when both fR and fV are in phase, the output source and sink circuits are turned on for a short interval.
2. The PD
out
either sources or sinks current during out–of–lock conditions. When locked in phase and frequency, the output
is mostly in a floating condition and the voltage at that pin is determined by the low–pass filter capacitor. PD
out
, φR, and φ
V
are shown with the polarity bit (POL) = low; see Figure 14 for POL.
3. VH = High voltage level, VL = Low voltage level.
4. The waveforms are applicable to both the main PLL and PLL′.
f
R
REFERENCE
REFin
÷
R
f
V
FEEDBACK
fin
÷
(N x P + A)
PD
out
φ
R
φ
V
LD
V
H
V
L
SOURCING CURRENT
HIGH IMPEDANCE
V
H
V
L
FLOAT
V
H
V
L
V
L
V
L
V
H
SINKING CURRENT
NOTE 1
Figure 17. Phase/Frequency Detectors and Lock Detector Output Waveforms
Page 17

MC145220MOTOROLA
17
DESIGN CONSIDERA TIONS
CRYSTAL OSCILLATOR CONSIDERATIONS
The following options may be considered to provide a reference frequency to Motorola’s CMOS frequency synthesizers.
Use of a Hybrid Crystal Oscillator
Commercially available temperature–compensated crystal
oscillators (TCXOs) or crystal–controlled data clock oscillators provide very stable reference frequencies. An oscillator
capable of CMOS logic levels at the output may be direct or
dc coupled to REFin. If the oscillator does not have CMOS
logic levels on the outputs, capacitive or ac coupling to REF
in
must be used. See Figure 8.
For additional information about TCXOs and data clock
oscillators, please consult the latest version of the
eem Elec-
tronic Engineers Master Catalog,
the
Gold Book,
or similar
publications.
Design an Off–Chip Reference
The user may design an off–chip crystal oscillator using
discrete transistors or ICs specifically developed for crystal
oscillator applications, such as the MC12061 MECL device.
The reference signal from the MECL device is ac coupled to
REFin. (See Figure 8.) For large amplitude signals (standard
CMOS logic levels), dc coupling may be used.
Use of the On–Chip Oscillator Circuitry
The on–chip amplifier (a digital inverter) along with an appropriate crystal may be used to provide a reference source
frequency. A fundamental mode crystal, parallel resonant at
the desired operating frequency, should be connected as
shown in Figure 18.
The crystal should be specified for a loading capacitance,
CL, which does not exceed approximately 20 pF when used
near the highest operating frequency of the MC145220.
Assuming R1 = 0 Ω, the shunt load capacitance, CL, presented across the crystal can be estimated to be:
CL =
CinC
out
Cin + C
out
+ Ca + C
stray
+
C1 • C2
C1 + C2
where
Cin = 5 pF (see Figure 19)
C
out
= 6 pF (see Figure 19)
Ca = 1 pF (see Figure 19)
C1 and C2 = external capacitors (see Figure 18)
C
stray
= the total equivalent external circuit stray
capacitance appearing across the crystal
terminals
The oscillator can be “trimmed” on–frequency by making
either a portion or all of C1 variable. The crystal and associated components must be located as close as possible to the
REFin and REF
out
pins to minimize distortion, stray capacitance, stray inductance, and startup stabilization time.
Circuit stray capacitance can also be handled by adding the
appropriate stray value to the values for Cin and C
out
. For
this approach, the term C
stray
becomes zero in the above
expression for CL.
Power is dissipated in the effective series resistance of the
crystal, Re, in Figure 20. The maximum drive level specified
by the crystal manufacturer represents the maximum stress
that the crystal can withstand without damage or excessive
shift in operating frequency. R1 in Figure 18 limits the drive
level. The use of R1 is not necessary in most cases.
To verify that the maximum dc supply voltage does not
cause the crystal to be overdriven, monitor the output frequency (fR) at Output A as a function of supply voltage.
(REF
out
is not used because loading impacts the oscillator.)
The frequency should increase very slightly as the dc supply
voltage is increased. An overdriven crystal decreases in frequency or becomes unstable with an increase in supply voltage. The operating supply voltage must be reduced or R1
must be increased in value if the overdriven condition exists.
Note that the oscillator start–up time is proportional to the
value of R1.
Through the process of supplying crystals for use with
CMOS inverters, many crystal manufacturers have developed expertise in CMOS oscillator design with crystals. Discussions with such manufacturers can prove very helpful.
See Table 4.
Figure 18. Pierce Crystal Oscillator Circuit
R1*
C2C1
FREQUENCY
SYNTHESIZER
REF
out
REF
in
R
f
*May be needed in certain cases. See text.
Figure 19. Parasitic Capacitances of the
Amplifier and C
stray
C
in
C
out
Ca
REF
in
REF
out
C
stray
Figure 20. Equivalent Crystal Networks
NOTE: V alues are supplied by crystal manufacturer
(parallel resonant crystal).
2
1
2
121
R
S
L
S
C
S
ReX
e
C
O
Page 18

MC145220 MOTOROLA
18
RECOMMENDED READING
Technical Note TN–24, Statek Corp.
Technical Note TN–7, Statek Corp.
E. Hafner, “The Piezoelectric Crystal Unit – Definitions and
Method of Measurement”,
Proc. IEEE,
Vol. 57, No. 2, Feb.
1969.
D. Kemper, L. Rosine, “Quartz Crystals for Frequency
Control”,
Electro–Technology
, June 1969.
P. J. Ottowitz, “A Guide to Crystal Selection”,
Electronic
Design
, May 1966.
D. Babin, “Designing Crystal Oscillators”,
Machine Design
,
March 7, 1985.
D. Babin, “Guidelines for Crystal Oscillator Design”,
Machine Design
, April 25, 1985.
Table 4. Partial List of Crystal Manufacturers
Motorola — Internet Address
http://motorola.com
(Search for resonators)
United States Crystal Corp.
Crystek Crystal
Statek Corp.
Fox Electronics
NOTE: Motorola cannot recommend one supplier over another and in no way suggests
that this is a complete listing of crystal manufacturers.
Page 19

MC145220MOTOROLA
19
ASSUMING GAIN A IS VERY LARGE, THEN:
Z(s) =
ζ
=
ωn=
PHASE–LOCKED LOOP — LOW–PASS FILTER DESIGN
(B)
A
C
R
2
C
VCO
(A)
φ
R
φ
V
R
1
R
1
R
2
K
φ
K
VCO
NC
R
2
sC
K
φKVCO
NCR
1
ωnR2C
2
R2sC + 1
R1sC
NOTE:
For (B), R1 is frequently split into two series resistors; each resistor is equal to R1 divided by 2. A capacitor CC is then placed from the
midpoint to ground to further filter the error pulses. The value of CC should be such that the corner frequency of this network does not
significantly affect ωn.
DEFINITIONS:
N = T otal Division Ratio in Feedback Loop
Kφ (Phase Detector Gain) = I
PDout
/2π amps per radian for PD
out
Kφ (Phase Detector Gain) = V+/2
π volts per radian for φ
V
and φ
R
K
VCO
(VCO Transfer Function) =
2π∆f
VCO
∆V
VCO
For a nominal design starting point, the user might consider a damping factor
ζ ≈ 0.7 and a natural loop frequency ω
n
≈ (2πfR/50)
where fR is the frequency at the phase detector input. Larger ωn values result in faster loop lock times and, for similar sideband filtering,
higher fR–related VCO sidebands.
RECOMMENDED READING:
Gardner, Floyd M.,
Phaselock Techniques (second edition).
New York, Wiley–Interscience, 1979.
Manassewitsch, Vadim,
Frequency Synthesizers: Theory and Design (second edition).
New York, Wiley–Interscience, 1980.
Blanchard, Alain,
Phase–Locked Loops: Application to Coherent Receiver Design.
New York, Wiley–Interscience, 1976.
Egan, William F.,
Frequency Synthesis by Phase Lock.
New York, Wiley–Interscience, 1981.
Rohde, Ulrich L.,
Digital PLL Frequency Synthesizers Theory and Design.
Englewood Cliffs, NJ, Prentice–Hall, 1983.
Berlin, Howard M.,
Design of Phase–Locked Loop Circuits, with Experiments.
Indianapolis, Howard W. Sams and Co., 1978.
Kinley, Harold,
The PLL Synthesizer Cookbook.
Blue Ridge Summit, PA, Tab Books, 1980.
Seidman, Arthur H.,
Integrated Circuits Applications Handbook
, Chapter 17, pp. 538–586. New Y ork, John Wiley & Sons.
Fadrhons, Jan, “Design and Analyze PLLs on a Programmable Calculator,”
EDN
. March 5, 1980.
AN535, Phase–Locked Loop Design Fundamentals, Motorola Semiconductor Products, Inc., 1970.
AR254, Phase–Locked Loop Design Articles, Motorola Semiconductor Products, Inc., Reprinted with permission from
Electronic Design,
1987.
AN1253, An Improved PLL Design Method Without ωn and ζ, Motorola Semiconductor Products, Inc., 1995.
–
+
K
VCO
C
N
K
φ
1 + sRC
NOTE:
For (A), using Kφ in amps per radian with the filter’s impedance transfer function, Z(s), maintains units of volts per radian for the detector/
filter combination. Additional sideband filtering can be accomplished by adding a capacitor C′ across R. The corner ωc = 1/RC′ should be
chosen such that ωn is not significantly affected.
C
VCO
R
PD
out
radians per volt
Either loop filter (A) or (B) is frequently followed by additional sideband filtering to further attenuate fR–related VCO sidebands. This
additional filtering may be active or passive.
=
ωnRC
2
Z(s) =
ζ
=
ωn=
Page 20

MC145220 MOTOROLA
20
20
19
18
17
16
15
14
13
12
11
LOW–PASS
FILTER
′
VCO
′
OUTPUT
′
BUFFER
′
+V
+V
1
2
3
4
LOW–PASS
FILTER
VCO
OUTPUT
5
6
7
+V
9
8
10
+V
MCU
NOTE 4
GENERAL PURPOSE
DIGITAL OUTPUT
REF
in
REF
out
LD
PD
out
/
φ
R
Rx/
φ
V
GND
f
in
f
in
V+
OUTPUT A
(PORT)
D
in
CLK
LD
i
PD
out
i/φRi
Rxi/
φVi
GND
i
fini
fini
V+
i
ENB
BUFFER
MC145220
NOTE 5
R1
Q1
NOTE 6
NOTES:
1. The PD
out
output is fed to an external loop filter. See the Phase–Locked Loop — Low–Pass Filter Design page for additional informa-
tion.
2. For optimum performance, bypass the V+ and V+i pins to GND and GNDi with low–inductance capacitors.
3. The R counter is programmed for a divide value = REFin/fR. Typically , fR is the tuning resolution required for the VCO. Also, the VCO
frequency divided by fR = NT = N S P + A; this determines the values (N, A) that must be programmed into the N and A counters,
respectively. P is the lower divide ratio of the dual–modulus prescaler (i.e., 32 or 64).
4. Pull–up voltage must be at the same potential as the V+ pin or less. Pull–up device other than a resistor may be used. (Pull–up device
not required when Output A is configured as fR, fR′, fV, fV′, DATA OUT.)
5. LD and LD′ are open–drain outputs. This allows the wired–OR configuration shown. Note that R1 and Q1 form the “pull–up device”.
6. Use of Q1 is optional and depends on loading.
Figure 21. Application Showing Use of the Two Single–Ended Phase/Frequency Detectors
Page 21

MC145220MOTOROLA
21
20
19
18
17
16
15
14
13
12
11
LOW–PASS
FILTER
′
VCO
′
OUTPUT
′
BUFFER
′
+V
+V
1
2
3
4
LOW–PASS
FILTER
VCO
OUTPUT
5
6
7
+V
9
8
10
+V
MCU
NOTE 4
GENERAL PURPOSE
DIGITAL OUTPUT
REF
in
REF
out
LD
PD
out
/
φ
R
Rx/
φ
V
GND
f
in
f
in
V+
OUTPUT A
(PORT)
D
in
CLK
LD
i
PD
out
i/φRi
Rxi/
φVi
GND
i
fini
fini
V+
i
ENB
BUFFER
MC145220
NOTE 5
R1
Q1
NOTE 6
NOTES:
1. The φR and φV outputs are fed to an external combiner/loop filter. See the Phase–Locked Loop — Low–Pass Filter Design page
for additional information. The φR and φV outputs swing rail–to–rail. Therefore, the user should be careful not to exceed the common
mode input range of the op amp used in the combiner/loop filter.
2. For optimum performance, bypass the V+ and V+i pins to GND and GNDi with low–inductance capacitors.
3. The R counter is programmed for a divide value = REFin/fR. Typically, fR is the tuning resolution required for the VCO. Also, the
VCO frequency divided by fR = NT = N S P + A; this determines the values (N, A) that must be programmed into the N and A counters,
respectively. P is the lower divide ratio of the dual–modulus prescaler (i.e., 32 or 64).
4. Pull–up voltage must be at the same potential as the V+ pin or less. Pull–up device other than a resistor may be used. (Pull–up
device not required when Output A is configured as fR, fR′, fV, fV′, DATA OUT.)
5. LD and LD′ are open–drain outputs. This allows the wired–OR configuration shown. Note that R1 and Q1 form the “pull–up device”.
6. Use of Q1 is optional and depends on loading.
Figure 22. Application Showing Use of the Two Double–Ended Phase/Frequency Detectors
Page 22

MC145220 MOTOROLA
22
20
19
18
17
16
15
14
13
12
11
LOW–PASS
FILTER
′
VCO
′
OUTPUT
′
BUFFER
′
+V
+V
1
2
3
4
LOW–PASS
FILTER
VCO
OUTPUT
5
6
7
+V
9
8
10
+V
MCU
NOTE 4
GENERAL PURPOSE
DIGITAL OUTPUT
REF
in
REF
out
LD
PD
out
/
φ
R
Rx/
φ
V
GND
f
in
f
in
V+
OUTPUT A
(PORT)
D
in
CLK
LD
i
PD
out
′/φR′
Rxi/
φVi
GND
i
fini
fini
V+
i
ENB
BUFFER
MC145220
NOTE 5
R1
Q1
NOTE 6
NOTES:
1. See the Phase–Locked Loop — Low–Pass Filter Design page for additional information.
2. For optimum performance, bypass the V+ and V+i pins to GND and GNDi with low–inductance capacitors.
3. The R counter is programmed for a divide value = REFin/fR. Typically, fR is the tuning resolution required for the VCO. Also, the
VCO frequency divided by fR = NT = N S P + A; this determines the values (N, A) that must be programmed into the N and A counters,
respectively. P is the lower divide ratio of the dual–modulus prescaler (i.e., 32 or 64).
4. Pull–up voltage must be at the same potential as the V+ pin or less. Pull–up device other than a resistor may be used. (Pull–up
device not required when Output A is configured as fR, fR′, fV, fV′, DATA OUT.)
5. LD and LD′ are open–drain outputs. This allows the wired–OR configuration shown. Note that R1 and Q1 form the “pull–up device”.
6. Use of Q1 is optional and depends on loading.
Figure 23. Application Showing Use of Both the Single– and Double–Ended Phase/Frequency Detectors
CMOS
MCU
OUTPUT A
(DATA OUT)
ENB
CLKD
in
DEVICE #1
OUTPUT A
(DATA OUT)
ENB
CLKD
in
DEVICE #2
OPTIONAL
Figure 24. Cascading Two Devices
NOTE: See related Figures 25, 26, and 27.
Page 23

MC145220MOTOROLA
23
1 2 7 8 9 10 15161718 23242526 3132
C OR C REGISTER BITS OF DEVICE #2
IN FIGURE 24
*At this point, the new bytes are transferred to the C or C registers of both devices and stored. No other registers are affected.
C7
C6 C0 X X X X X X C7 C6 C0
CLK
*
ENB
D
in
i
i
C OR C REGISTER BITS OF DEVICE #1
IN FIGURE 24
i
Figure 25. Accessing the C or C′ Registers of
Two Cascaded MC145220 Devices
(32 Clock Cycles are Used)
Page 24

MC145220 MOTOROLA
24
Figure 26. Accessing the A or A′ Registers of
Two Cascaded MC145220 Devices
(48 Clock Cycles are Used)
12
7 8 9 151617 232425 3132
A OR A REGISTER BITS OF DEVICE #1
IN FIGURE 24
A23 A22 A16 A15 A8 A7 A0 A23 A16
38 39 40 47 48
A9 A8 A0
*At this point, the new bytes are transferred to the A or A registers of both devices and stored. Additionally, for both devices, the 13 LSBs in each of the first buffers of the
*
CLK
ENB
D
in
i
ii
i
A OR A REGISTER BITS OF DEVICE #2
IN FIGURE 24
i
i
i
R Registers are transferred to the respective R register’s second buffer. Thus, the R, N, and A (R , N , and A ) counters can be presented new divide ratios at the same
time. The first buffer of each R register is not affected. None of the C or C registers are af fected.
Page 25

MC145220MOTOROLA
25
12
7 8 9 151617 232425
R REGISTER BITS OF DEVICE #2
IN FIGURE 24
R REGISTER BITS OF DEVICE #1
IN FIGURE 24
R15 R14 R8 R7 R0 X X R15
31 32 33 39 40
R8 R7
R0
NOTE 1
NOTES APPLICABLE TO EACH DEVICE:
1. At this point, bits R13, R14, and R15 are stored and sent to the Buffer and Control block in the Block Diagram. Bits R0 through R12 are loaded into the
2. See note of Figure 26 for the method of loading the second buffers in the R register to achieve new divide ratios.
CLK
ENB
D
in
i
Figure 27. Accessing the R Registers of
Two Cascaded MC145220 Devices
(40 Clock Cycles are Used)
first buffer in the double–buffered section of the R register. Therefore, the R and R counter divide ratios are not altered yet and retain the previous
ratios loaded. The other registers are not affected.
Page 26

MC145220 MOTOROLA
26
P ACKAGE DIMENSIONS
F SUFFIX
SOG (SMALL OUTLINE GULL–WING) PACKAGE
CASE 803C–01
DIMAMIN MAX MIN MAX
INCHES
12.35 12.80 0.486 0.504
MILLIMETERS
B 5.10 5.45 0.201 0.215
C 1.95 2.05 0.077 0.081
D 0.35 0.50 0.014 0.020
E ––– 0.81 ––– 0.032
F 12.40* 0.488*
G 1.15 1.39 0.045 0.055
H 0.59 0.81 0.023 0.032
J 0.18 0.27 0.007 0.011
K 1.10 1.50 0.043 0.059
L 0.05 0.20 0.001 0.008
M 0 10
N 0.50 0.85 0.020 0.033
S 7.40 8.20 0.291 0.323
__
0 10
__
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSIONS A AND B DO NOT INCLUDE
MOLD PROTRUSION.
4. MAXIMUM MOLD PROTRUSION 0.15 (0.008)
PER SIDE.
5. DIMENSION D DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR
PROTRUSION SHALL BE 0.13 (0.006) TOTAL IN
EXCESS OF THE D DIMENSION AT MAXIMUM
MATERIAL CONDITION.
*APPROXIMATE
A0.13 (0.005)MTB
SS
0.13 (0.005)MB
M
S 10 PL
G
D 20 PL
L
C
0.10 (0.004)
SEATING
PLANE
K
N
J
M
E
1
20
11
10
–A–
–F–
–B–
–T–
DT SUFFIX
TSSOP (THIN SHRUNK SMALL OUTLINE PACKAGE)
CASE 948D–03
A
T
M
B
L
D
C
G
H
J
-U-
0.200 (0.008)
DIMAMIN MAX MIN MAX
INCHES
6.60 0.260
MILLIMETERS
B 4.30 4.50 0.169 0.177
C 0.95 1.05 0.037 0.041
D 0.05 0.25 0.002 0.010
F 0.45 0.55 0.018 0.022
G 0.65 BSC 0.026 BSC
H 0.275 0.375 0.010 0.015
J 0.09 0.24 0.004 0.009
K 0.16 0.32 0.006 0.013
L 6.30 6.50 0.248 0.256
M 0 10 0 10
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSION A DOES NOT INCLUDE MOLD
FLASH, PROTRUSIONS OR GATE BURRS.
MOLD FLASH OR GATE BURRS SHALL NOT
EXCEED 0.15 (0.006) PER SIDE.
4. DIMENSION B DOES NOT INCLUDE
INTERLEAD FLASH OR PROTRUSION.
INTERLEAD FLASH OR PROTRUSION SHALL
NOT EXCEED 0.25 (0.010) PER SIDE.
5. DIMENSION K DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR
PROTRUSION SHALL BE 0.08 (0.003) TOTAL IN
EXCESS OF THE K DIMENSION AT MAXIMUM
MATERIAL CONDITION.
6. TERMINAL NUMBERS ARE SHOWN FOR
REFERENCE ONLY.
7. DIMENSION A AND B ARE TO BE
DETERMINED AT DATUM PLANE -U-.
°°°°
F
M
K
K1
J
J1
A
A
J1 0.09 0.18 0.004 0.007
K1 0.16 0.26 0.006 0.010
20
11
10
1
20 X K REF
PIN ONE
IDENTIFICATION
SEATING
PLANE
-T-
0.100 (0.004)
SECTION A-A
Page 27

MC145220MOTOROLA
27
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”
must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of
others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that
Motorola was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal
Opportunity/Affirmative Action Employer.
Mfax is a trademark of Motorola, Inc.
How to reach us:
USA/EUROPE/Locations Not Listed: Motorola Literature Distribution; JAP AN: Nippon Motorola Ltd.: SPD, Strategic Planning Office, 141,
P.O. Box 5405, Denver, Colorado 80217. 1–303–675–2140 or 1–800–441–2447 4–32–1 Nishi–Gotanda, Shagawa–ku, Tokyo, Japan. 03–5487–8488
Mfax: RMFAX0@email.sps.mot.com – TOUCHT ONE 1–602–244–6609 ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
Moto rola Fax B ack System – US & Canada ONLY 1–800–774–1848 51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852–26629298
– http://sps.motorola.com/mfax/
HOME PAGE: http://motorola.com/sps/ CUSTOMER FOCUS CENTER: 1–800–521–6274
MC145220/D
◊
 Loading...
Loading...