

Page 1
SEMICONDUCTOR TECHNICAL DATA
1
REV 0
Motorola, Inc. 1997
7/97
!
The MC100SX1451FI100 AutoBahn chip is a high–speed serial–
to–parallel, parallel–to–serial transceiver. The AutoBahn can be used to
implement a high–speed, half–duplex, bi–directional serial data link with
an effective data transfer rate of 100MByte/sec. A higher performance
AutoBahn chip, with user selectable serial data transfer rates of 100 or
200MByte/s, is planned (see the MC100SX1451FI200 datasheet).This
serial link can be used to establish multi–point or point–to–point
connections. A unique differential cutoff driver switches from a standard
PECL VOH level to cutoff. In the cutoff state the outputs present a high
impedance which is required to implement a true shared bus. The part
features a 32–bit wide parallel TTL compatible I/O interface that can
connect directly with standard memory or bus transceiver devices. The
control pins are all TTL compatible to simplify interfacing requirements.
The serial interface is PECL (Positive Emitter Coupled Logic) which
provides excellent transmission line drive capability. Because the serial
bus is implemented using differential ECL technology, the receiver
circuitry exhibits excellent common mode noise rejection.
• 100MByte/s Serial Data Transfer Capability
• TTL Compatible Parallel Interface
• Supports 16– or 32–Bit Data Bus Interfaces
• Bus Driving Differential ECL Serial Outputs
• On–Board Clock Recovery and Data Synchronization
• 64–Pin Surface Mount CQFP Packaging
• Parallel Data Bus Handshake Control
An innovative data synchronizing architecture allows data to be transmitted in bursts without preamble bits. This allows
instantaneous data acquisition without the inherent overhead of traditional PLL clock recovery. Thus, the data transfer is nearly
overhead free with only one synchronization bit for every byte of data transmitted. Insertion and removal of synchronization bits
are totally transparent to the user.
The AutoBahn supports variable data transfer rates. This is accomplished by combining the fixed burst transfer rates of 50 or
100MByte/s with a flexible method of allowing data to be written into the AutoBahn for transfer. If new data has not been written
into the parallel data register prior to the completion of a serial data burst, the AutoBahn will insert a gap in the serial data stream.
Therefore, the effective throughput of the serial bus is throttled by the speed of the parallel host interface which writes data to the
chip.
With its very high block data transfer capability and instantaneous start up ability, the AutoBahn is ideally suited for multimedia
graphics applications and parallel processing architectures requiring multi–processor communication links.
Motorola’s state–of–the–art MOSAIC V process allows for the realization of 1.8GHz internal clock rates at power levels
which are compatible with today’s low profile surface mount packages. Furthermore, the design is implemented with a
flow–through pinout architecture to simplify PCB layout and routing. The board space efficiency of the CQFP ensures that the
AutoBahn device will prove valuable in the most demanding space conscious applications.
The AutoBahn chip works from a single +5.0V supply. Separate internal VCC busses isolate the TTL outputs from the high
speed PECL circuitry.
AutoBahn and Spanceiver are trademarks of PEP Modular Computers.
‘Spanceiver’ has been formed as a contraction of Serial/Parallel Transceiver .
MOSAIC V is a trademark of Motorola, Inc.
AUTOBAHN
SPANCEIVER
FI SUFFIX
CERAMIC QFP PACKAGE
CASE 963–02
Page 2
MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
2
CONTROL
REGISTER
ERROR
REGISTER
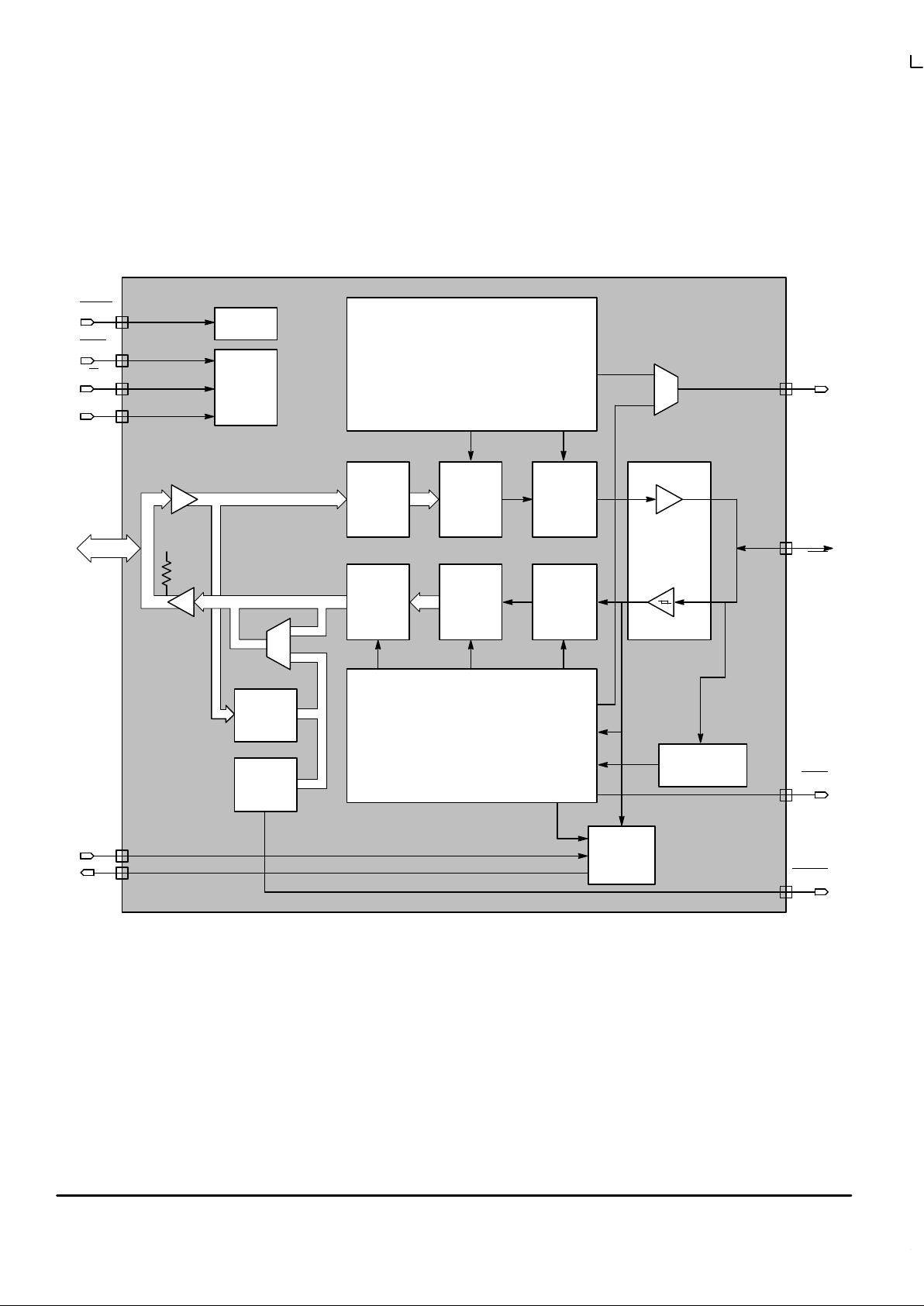
Figure 1. Simplified Block Diagram
TRANSMIT
REGISTER
PISO
SHIFT
REGISTER
SYNC
BIT
GENERATOR
RECEIVE
REGISTER
SIPO
SHIFT
REGISTER
SYNC
BIT
EXTRACT
PLL
CLOCK
GENERATOR
DIFFERENTIAL
DETECTOR
PISO
CONTROL
LOGIC
SIPO
CONTROL
LOGIC
SERIAL
BUS
TRANSCEIVER
FULL
BUSY
ERROR
FOSC
C1
D31–
D00
REGSEL
REGISTER
READ/
WRITE
LOGIC
RESET
LOGIC
R/W
STRB
RESET
SER
SER
Page 3
MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
3 MOTOROLA
PIN DESCRIPTIONS
Name I/O Description
TTL COMPATIBLE I/O
RESET I Asynchronous reset signal which places the AutoBahn into default state. In most applications, RESET should
only have to be asserted on system startup.
R/W I Read/Write control signal. Used to select between writing to or reading from the AutoBahn.
REGSEL I Control signal used to select between the Parallel Data Register and the Control and Error Register(s). A logic
‘H’ selects the data register while a logic ‘L’ selects the Control and Error Register(s).
D00 – D31 I/O Bi–directional data inputs/outputs. These pins comprise the data bus to be used to interface to the user host
interface. D00 is the least significant bit.
STRB I Data strobe signal. During a write, it indicates that data is valid on the parallel bus. While in a read, it indicates
that the AutoBahn can now place data on the parallel interface.
FULL O Signal which indicates that the transmitter or receiver presently contains data. In conjunction with the STRB
signal, it is used to implement a two signal handshake for parallel data transfers.
BUSY O Serial bus BUSY signal, used to indicate to the parallel interface that the AutoBahn bus is presently in use.
ERROR O Control output which is used to indicate that the AutoBahn has identified a fault condition. The error condition
can then be read out from the Error Register.
FOSC I 25.00MHz clock source from a crystal oscillator reference.
PECL COMPATIBLE I/O
SER/SER I/O Differential serial data inputs/outputs which operate at modified PECL levels.
POWER, GROUND AND FILTER PINS
Name Number Description
C1 1 PLL Filter Capacitor Pin
V
CCE
1 Positive Supply for Internal PECL Logic Circuitry
V
CCO
1 Positive Supply for PECL Outputs
V
EE
1 Ground for PECL
V
CCT
7 Positive Supply for TTL Compatible Signals
V
EET
8 Ground for TTL Compatible Signals
V
CCX
1 Positive Supply for VCO
V
EEX
1 Ground for VCO
BLOCK DIAGRAM FUNCTIONAL DESCRIPTION
Reset Logic
The Reset Logic generates the internal reset signal used
to set the device into a known state. The reset signal clears
the Control and Error Registers and resets the SIPO and
PISO Control Logic. The external reset signal is validated
with the FOSC input clock to assure that a valid reset pulse
has been applied to the chip. The external reset input pin
(RESET
) must be low for a minimum of 125 nsec after the
FOSC input is stable. STRB
assertion may occur no earlier
than 500 nsec after RESET
deassertion (reset recovery
time).
Control Register
The Control Register is used to configure the operation of
the AutoBahn. The register fields are described in detail in
the section containing the Control and Error Register Bit
Definition.
Register Read/Write Control Logic
This logic is utilized to access the Transmit Register, the
Receive Register, and the Control and Error Registers from
the parallel bus. The interface protocol utilizes two direction
control signals (R/W
and REGSEL). The actual handshake to
Page 4

MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
4
read or write data from the chip is accomplished with the
input STRB
signal , combined with the output FULL signal.
Transmit Register
The transmit register is a 32–bit wide parallel–loadable
register. This register interfaces to the bi–directional TTL
compatible data bus. Access to this register is controlled via
the Register Read/Write Logic.
PISO Shift Register
The PISO (Parallel In/Serial Out) Register accepts data
from the Transmit Register and converts it into a serial bit
stream. This register is under control of the PISO Control
Logic. The shift register can be adjusted to handle 16–bit or
32–bit data traffic based on the state of the appropriate field
in the Control Register.
PISO Control Logic
The PISO (Parallel In/Serial Out) Control Logic is
responsible for controlling the transfer of data out from the
AutoBahn to the serial bus. This logic interfaces to the PISO
Shift Register and the SYNC Bit Generator. It is driven by the
PLL Clock Generator.
SYNC Bit Generator
This circuitry inserts one bit of timing information into the
data stream before every byte of data is sent to the Serial Bus
Transceiver and transmitted. This timing information is used
by the receiver to properly re–clock the incoming data
stream. T o support the maximum data rate of 100 MByte/sec,
the actual serial shift rate is 900 MBit/s NRZ, rather than
800 MBit/s NRZ. The insertion and removal of SYNC bits is
transparent to the end user.
Serial Bus Transceiver
The transceiver implements a two signal bi–directional
differential bus. The transceiver circuitry consists of a highly
sensitive differential receiver and a cutoff driver . The receiver
accepts a differential signal from the serial bus. This
differential signal is amplified and limited by the receiver
before being routed to the clock generation circuitry for clock
extraction and data re–timing.
The cutoff driver is used to transmit serial data on to the
bus. The outputs switch between a normal HIGH level (VOH)
and a cutoff LOW signal – when low the output emitter
follower is turned ’off’, thus presenting a high impedance to
the bus. If the cutoff driver is disabled, both outputs of the
differential pair go to the cutoff state so the bus resource is
available for use by other AutoBahn chips sharing the
same bus.
Differential Detector
The differential detector is used to recognize when the
serial bus goes out of the cutoff state and into a differential
steady state condition. The differential detector is only
utilized at the very start of a transmission. The detector
informs the SIPO Control Logic that the serial bus is no
longer in cutoff so that the bus BUSY
signal can be asserted
by the device.
PLL Clock Generator
The Clock Generator circuitry synthesizes a master timing
clock from the frequency reference signal (FOSC) input. The
clock generator provides timing signals used to support the
transfer rate of 900 MBit/s. The clock is generated by a
Phase Locked Loop (PLL) which requires a simple external
capacitor to set the loop filter bandwidth. The value for C1 is
2700 pF . This circuitry is used to provide the master timing for
the PISO and SIPO Control Logic blocks.
SYNC Bit Extractor
The SYNC Bit Extractor removes each SYNC bit from the
incoming data stream. It is controlled by the SIPO Control
Logic. If a SYNC bit is not detected at the proper bit time in
the extraction process, a field will be set in the Error Register
to indicate that a transmission error has occurred.
SIPO Shift Register
The SIPO (Serial In/Parallel Out) Register accepts data
from the SYNC Bit Extractor and converts it into a parallel
word that is then transferred to the Receive Register. The
operation of this shift register is controlled by the SIPO
Control Logic.
SIPO Control Logic
The SIPO (Serial In/Parallel Out) Control Logic is
responsible for controlling the transfer of data into the
AutoBahn. This circuitry performs all the critical control
functions to allow the AutoBahn to accept and process the
incoming serial data stream. The SIPO Control Logic has the
ability to detect certain transmission related errors and set
the appropriate field(s) in the Error Register.
Receive Register
The receive register is a 32–bit wide parallel load register.
It accepts data from the SIPO (Serial In/Parallel Out) Shift
Register. This register interfaces to the bi–directional TTL
compatible data bus. Access to this register is controlled via
the Register Read/Write Logic.
Error Register
The AutoBahn has the capability to detect certain
transmission related error conditions. These errors are
detected by the SIPO Control Logic which sets the
appropriate error field in the Error Register. The register fields
are described in detail in the section containing the Control
and Error Register Bit Definition. The Error Register has
additional logic that is used to generate the ERROR
signal.
Page 5

MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
5 MOTOROLA
Differential SER detected
Figure 2. Transmit and Receive State Diagram
SER (Serial Data)
in CUTOFF
New data written into Transmit Register
SER differential,
Waiting for 15nS
15nS Timer Expired
NO new data written
into Transmit Register
New data written
into Transmit Register
New data written
into Transmit Register
Reset
4 longword
timer expired
AUTOBAHN
TRANSMIT State Diagram
Waiting for
differential SER
[Assert BUSY signal]
Waiting for Start bit
Start bit observed
Receiving serial
data words
NO new start bit observed
New start bit
observed
New start bit
observed
Reset
AUTOBAHN
RECEIVE State Diagram
Waiting four longword
periods since latest
start bit
4 longword timer expired
[Negate BUSY signal]
Waiting for 10nS
Transmitting
serial data words
Waiting four longword
periods since latest
start bit
10nS timer
expired
THEORY OF OPERATION AND TRANSMIT TIMING PRINCIPLE
The AutoBahn is a high speed data mover resource for
use in parallel bus systems, such as the VMEbus. It is also
suitable for proprietary bus architectures and point–to–point
links. All necessary logic, such as multiplexing/
de–multiplexing, control, and timing generation is
incorporated on chip. External control signals and a
frequency reference must be provided to the device.
Arbitration is off loaded to the parallel bus system; thus, no
collision detection or protocol overhead is required for the
chip. The AutoBahn has three primary operating modes:
– Idle
– Transmit
– Receive
Figure 2 has been included to aid in understanding the
operation of the device.
Idle Mode
After the device has been reset, the default operating
mode is Idle. In the default condition the serial bus is cut off
and the receiver is ’listening’ to detect activity on the serial
bus. The function of this mode is to detect serial bus activity
and assert a BUSY
signal. In a VME type application, this
signal is used by the local controller to determine when to
arbitrate for the serial bus resource.
Transmit Mode
To begin a transfer, data is written into the parallel data
register. This event starts an internal timeout timer. The
AutoBahn transfers the data to the serial transmit register,
inserts timing information, and shifts the data out the serial
bus. The timing information adds one additional bit into the
data stream for every byte of data. Because the data is NRZ,
a 900MBit/s data rate translates into a maximum frequency
of 450MHz.
If a new word has been loaded into the parallel data
register, the next transfer will begin. Otherwise, the
differential output driver will hold the serial bus at the state of
the last data bit transmitted. The bus will be held in this state
until new data is loaded into the parallel data register or the
timeout time expires.
The timeout timer runs for a period of four 32–bit transfer
times. The transfer rate is selected through control register
select bits. As an example, in 32–bit mode with a transfer rate
Page 6
MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
6
of 100MByte/s, a new data word is transferred approximately
every 40ns (32 data bits + 4 synchronization bits = 36 bits *
1.1ns/bit). For this case, the timeout timer runs for
approximately 160ns. The timeout timer is re–started every
time a new serial word transmission begins.
The transmit timeout timer serves two functions. It allows
the termination of block data transfers without the need for
explicit external control. After the last word in a data block is
written into the device, the timeout timer will expire and the
device will return to the idle state. More importantly, it allows
the AutoBahn to support a broad range of data transfer rates.
If a hardware design application only needs capacity to
transfer data at 60MByte/s, the AutoBahn will automatically
burst the data out at 100MByte/sec and insert pauses in the
serial data stream to accommodate the slower parallel data
transfer rate. This means the user can tailor the design of the
parallel memory interface to meet the needs of the
application, while still taking advantage of the performance of
the AutoBahn.
Since the AutoBahn only has one level of elastic storage,
the receiver memory interface must be able to support the
same transfer rate as the transmitter.
Receive Mode
When the AutoBahn is operating in receive mode it strips
off the timing information and clocks the data into the serial
register. When the register is full, it transfers the data into the
parallel data register and asserts the FULL signal pin to
indicate the presence of data. The interface hardware
detects the presence of new data and reads out the content
of the data register. In receive mode, a timeout timer is also
employed to handle the end of data transfer termination. The
receive timeout timer operates in the same manner as the
transmit timeout timer. Every time new data is received, the
timeout timer is re–started. If no data is received, the timeout
timer will expire and the part will return to the idle state.
Typical data transmission waveforms are shown in Figure 3
and Figure 4.
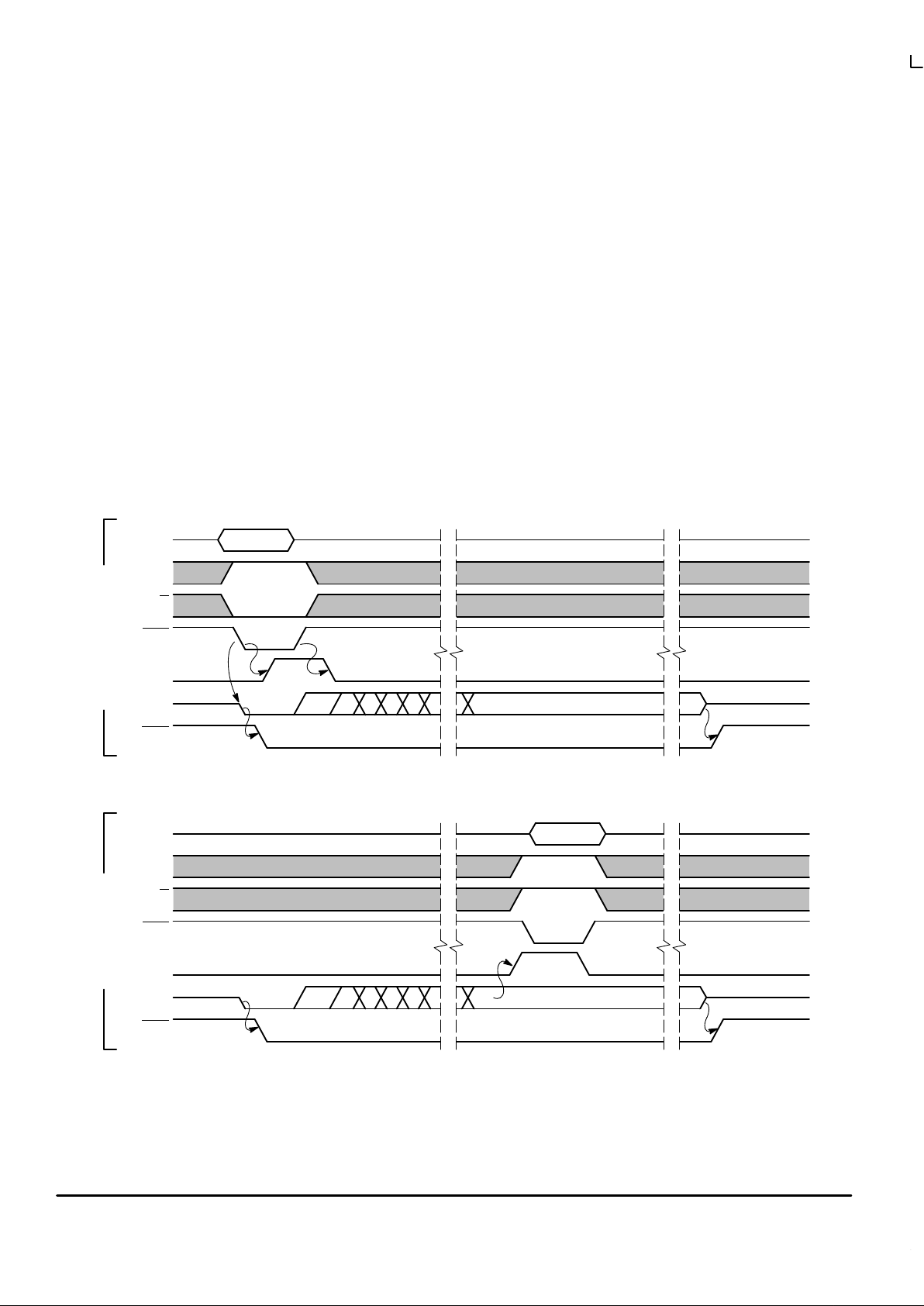
Figure 3. Transmit and Receive Timing for a Single 32–Bit Longword Transmissions
REGSEL
D00:D31
R/W
STRB
FULL
SER
BUSY
WRITE DATA
TIMEOUT DELAY
D31SYNC D0 D1 D2 D3
CUTOFF CUTOFF
TRANSMITTING AUTOBAHN
REGSEL
D00:D31
R/W
STRB
FULL
SER
BUSY
READ DATA
TIMEOUT DELAY
D31
CUTOFF CUTOFF
RECEIVING AUTOBAHN
SYNC D0 D1 D2 D3
Page 7

MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
7 MOTOROLA
Figure 4. Transmit and Receive Timing for Burst Transmission
REGSEL
D00:D31
R/W
STRB
FULL
SER
BUSY
WRITE DATA
36–BIT SERIAL
CUTOFF
TRANSMITTING AUTOBAHN
REGSEL
D00:D31
R/W
STRB
FULL
SER
BUSY
RECEIVING AUTOBAHN
WRITE DATA WRITE DATA WRITE DATA WRITE DATA
36–BIT SERIAL 36–BIT SERIAL 36–BIT SERIAL
READ DATA
36–BIT SERIAL
CUTOFF
READ DATA READ DATA
36–BIT SERIAL 36–BIT SERIAL 36–BIT SERIAL
Figure 5. Simplified Application Circuit
AUTOBAHN
32–BIT DATA BUS
STRB
FULL
R/W
REGSEL
SER
SER
LOGIC
(PAL)
SERIAL BUS
OSCILLAT OR
FOSC
CONTROL SIGNALS
DATA BUS
AUTOBAHN
MC100SX1451
GND
Note 3
V
EEX
(20)
V
EE
(8)
V
EET
(3,11,18,30
36,43,51,59)
GND
Note 3
V
CCT
(7,14,33,39,
47,55,63)
GND
Note 1
V
CCT
(+5V)
V
CCO
(26)
GND
40pF
V
CCE
(+5V)
0.22
µ
F
0.22µF
1
µ
H
Note 2
V
CCX
(22)
GND
40pF
V
CCE
(+5V)
0.22µF
Note 1: Capaitor located close to every pin.
Note 2: If separate supply planes for ECL and TTL are available, the inductor is
not necessary.
Note 3: A common ground plane for TTL and ECL must be used.
Figure 6. Power Supply Filtering
APPLICATION CIRCUIT AND POWER SUPPLY
ADDRESS BUS
V
CCE
(41)
C1
V
CCx
C1
2700pF
V
CC
(56)
Page 8

MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
8
PECL DESIGN CONSIDERA TIONS
The differential serial bus is realized using PECL (Positive
Emitter Coupled Logic). PECL is normal ECL with the V
CC
and VEE power supplies levels shifted from ground and –5.2V
to +5.0V and ground respectively. This change simplifies the
requirements of interfacing high speed ECL circuitry and TTL
circuitry on the same chip and improves the user system
architecture because only a single power supply is required.
The output driver circuitry is an open emitter, emitter
follower which generates PECL levels when terminated by a
pull down resistor to an appropriate reference voltage. The
output emitter follower circuitry is optimized to drive
transmission lines. To minimize line reflections, the
transmission line should be terminated with the line
characteristic impedance, in most cases 50Ω. The simplest
and most robust method of realizing this termination in PECL
is with a resistor divider network referenced to VCC. This
means the PECL output levels and the termination voltage
will then be referenced to the same VCC supply.
Figure 8 is the equivalent circuit for the serial bus.
Resistors R1 and R2 are used to implement a simple voltage
divider with the characteristic impedance of the transmission
line. The following equations are used to solve for these
values.
R1 = R2 ({VCC – VTT}/{VTT – VEE})
R2 = ZO ({VCC – VEE}/{VCC – VTT})
VTT = VCC (R2/{R1 + R2})
For the typical setup:
VCC = 5.0V; VEE = GND; VTT = 3.0V; and ZO = 50Ω
R2 = 50 ({5 – 0}/{5–3}) = 125Ω
R1 = 125 ({5–3}/{3–0}) = 83.3Ω
More detailed information about PECL and thevenin
equivalent termination schemes can be found in Motorola
Application Note AN1406/D – “Designing with PECL”.
Figure 7. Typical Bus Application
PARALLEL BUS
INTERFACE
AUTO
BAHN
CARD 1
PARALLEL BUS
INTERFACE
AUTO
BAHN
CARD 2
PARALLEL BUS
INTERFACE
AUTO
BAHN
CARD N
TRADITIONAL
PARALLEL BUS
DIFFERENTIAL BI–DIRECTIONAL SERIAL
BUS
RESISTOR DIVIDER
TERMINATION NETWORK
BACKPLANE
Figure 8. Equivalent Circuit for Serial Bus
R2
R1
V
CC
R2
R1
V
CC
R2
R1
V
CC
R2
R1
V
CC
AUTOBAHN 1 AUTOBAHN N
CONTROLLED IMPEDANCE
TRANSMISSION LINES
Page 9

MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
9 MOTOROLA
CONTROL AND ERROR REGISTER BIT DEFINITIONS
Figure 9. Control and Error Register Definitions
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
CLEAR
FACTORY TEST
FACTORY TEST
16–/32–BIT MODE
RESERVED
WRITE:
15
14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
CLEAR
FACTORY TEST
FACTORY TEST
16–/32–BIT MODE
RESERVED
READ:
FACTOR Y
TEST
FACTORY TEST
IGNORE TIMEOUT
SYNC BIT ERROR
WORD MISSING ERROR
ERROR CONTROL
FACTORY TEST
IGNORE TIMEOUT
OVERWRITE ERROR
FACTOR Y
TEST
Clear
Asserting this bit clears the internal control logic and
terminates any transmit or receive activity. To remove the
Clear condition, this bit must be set to a logic ‘H’ which sets
the chip into the Idle mode.
H Normal Operation
L Clear
16/32 Bit Mode
This bit defines the data width on the host interface. This
feature allows the AutoBahn chip to be used in systems with
either 16–bit or 32–bit data width without the need for
additional interface hardware. In 16–bit mode, the data bus
used is D00 – D15.
H 32–bit data width
L 16–bit data width
Factory Test
These bits are used by the manufacturer for testing the
product. It must be set to a logic ‘H’ state for proper operation.
H Normal Operation
Ignore Timeout
This bit is used to disable the timeout timer for the
transmitter. The purpose of this bit is to allow for the
establishment of permanent or temporary dedicated links.
When this bit is asserted, the timeout timer will be ignored by
the PISO Control Logic. This bit only needs to be set in the
transmitting AutoBahn chip. To exit this mode, the Control
Register must be accessed, and the field must be
de–asserted.
H Normal Operation
L Disable Timeout
Overwrite Error Flag
This bit will be set if the data in the parallel register is
overwritten. This can occur in Receive mode if data is not
read from the parallel register in a timely manner. The
overwrite error does not occur in idle mode.
H Overwrite
L No Overwrite
Word Missing Error
This bit will be asserted if the second half of a 32–bit
transfer is not completed before the time out timer expires.
This can occur if the transmitter fails to complete the transfer .
This field will be asserted only after the timeout timer expires.
H Word Missing Error
L No Error
SYNC Bit Missing Error
This bit will be asserted if the AutoBahn detects that a
SYNC bit has not been received at the proper time by the
PISO Control Logic. If this bit has been asserted then the
data has been corrupted.
H SYNC Bit Missing Error
L No Error
Page 10

MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
10
Reserved Bits
All reserved bits are allocated for future enhancements.
The user must write logic ‘H’ values into these bits. Reserved
bits are read back as ‘do not care’.
CRYSTAL OSCILLATOR REQUIREMENTS
The AutoBahn requires a high quality frequency source
(FOSC) which is used as the reference for the PLL Clock
Generator. The performance requirements were targeted to
provide the AutoBahn chip appropriate design margin for the
serial data transfer operation as well as to allow the user
flexibility is selecting a commercially available low cost
crystal oscillator. Below is a list of the key performance
attributes of the crystal oscillator.
Parameter Rating
Frequency 25.000MHz
Stability ±100ppm
Output Levels TTL
Duty Cycle 45% / 55% at 1.5V
Rise/Fall Time ≤7nsec
Operating Range 0°C to 70°C
Startup Time 10msec
There are many suppliers of high quality crystal oscillator
frequency sources which meet or exceed the above
requirements. One such supplier is JVC. Their part numbers
for 25MHz oscillators are as follows: VX4321–2500 (Metal
Can) or SMC2500 (SMD).
THERMAL CONSIDERATIONS
As in any system, proper thermal management is
essential to establish the appropriate trade–off between
performance, density, reliability, and cost. In particular, the
designer should be aware of the reliability implications of
continuously operating semiconductor devices at high
junction temperatures.
The increasing use of surface mount devices (SMD) is
putting a greater emphasis on the need for better thermal
system management. SMD devices require less board space
than their through–hole equivalents; so, designs
incorporating SMD technologies have a higher thermal
density. To optimize the thermal management of the system,
it is imperative that the user understand all the variables
which contribute to the device junction temperature.
By proper package selection, the vendor can select the
proper package and die attach method to decrease the
thermal resistance and thus the junction temperature of the
device. The user has the greatest control of additional
variables which commonly impact the thermal performance
of the device. Ambient temperatures, air flow, and related
cooling techniques are obvious user–controlled variables;
however, PCB substrate material, layout density, size of the
air gap between the board and the package, amount of
exposed copper interconnect, use of thermally conductive
epoxies, and the number of boards in a chassis can all have
significant impacts on the thermal performance of the
system.
PCB substrates have different thermal characteristics
which should be explored when considering alternatives. The
user should also account for the different power dissipations
of various components in the system and space them on the
PCB accordingly. In this way the heat load is spread across a
larger area and “hot spots” do not appear in the layout.
Copper interconnect traces act as heat radiators; therefore,
improved thermal dissipation can be achieved through the
addition of interconnect traces on the top layer. Finally,
thermally conductive epoxies can accelerate the transfer of
heat from the device to the PCB where it can be more easily
transferred to the ambient.
The following equation can be used to estimate the
junction temperature of a device in a given environment:
TJ = TA + PD∗Θ
JA
TJJunction Temperature
TAAmbient Temperature
PDPower Dissipation
ΘJAAverage Package Thermal Resistance
(Junction – Ambient)
The power dissipation is comprised of two elements: the
internal gate power and the power associated with the output
signals. Essentially, the two contributors can be calculated
separately , then added to give the total power dissipation for
the device. The source of the output power distribution
depends on whether the device is transmitting or receiving. In
transmit mode, the PECL outputs are dissipating power,
while in receive mode, the parallel outputs are dissipating
dynamic power. The worst case condition, when the
AutoBahn is in receive mode, is described below.
PD = P
static
+ Po
(TTL)
where Pstatic = ICC * V
CC
V
CC
Operating voltage
I
CC
Static DC Current
and Po (TTL) = No* CL * FD * VS
^2
CL Capacitive load (in pF)
FD Parallel Data Rate (0.5 * # MBits/sec)
VS Output Swing
No Number of outputs (16 or 32)
Page 11

MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
11 MOTOROLA
For a typical application:
CL 20 pF
FD 0.5* 100 MBits/s
VS 3.8 V
No 32 outputs
V
CC
5V
I
CC
700 mA
PD = 470 * 5 + 32 * 20pF * 25 MHz*3.8
2
PD = 3.5 + 0.231W = 3.73W
The ceramic quad flat package selected is manufactured
from an Aluminum nitride (AlN) ceramic material for optimum
thermal performance. A table of the average ΘJA values for
this package under various air flow conditions is listed below:
Air Flow (m/sec) ΘJA (°C/W)
0 40
1 32
2 23
With this information, the user can estimate the junction
temperature of the device in their application.
MAXIMUM RATINGS*
Symbol Parameter Value Unit
V
CC
Power Supply (VEE = 0V) –0.5 to 6.5 V
V
IN
Input Voltage (VEE = 0V) –0.5 to 6.5 V
I
OUT
PECL Output Current Continuous
Surge
50
100
mA
I
OUT–TTL
TTL Output Current TBD
T
A
Operating Temperature Range 0 to 70 °C
T
STG
Storage Temperature Range –50 to +175 °C
T
J
Maximum Junction Temperature 175 °C
* Maximum Ratings are those values beyond which damage to the device may occur. Functional operation should be restricted to the
Recommended Operating Conditions.
TTL DC CHARACTERISTICS (V
CCT
= VCC = V
CCO
= 5.0V ±5%)
Symbol Parameter Min Typ Max Unit Condition
I
IH
Input HIGH Current 0.7 µA VIN = V
CC
I
IL
Input LOW Current –0.6 mA VIN = GND
V
OH
Output HIGH Voltage 2.5 V IOH = –2mA
V
OL
Output LOW Voltage 0.5 V IOL = 5.0mA
V
IH
Input HIGH Voltage 2.0 V
V
IL
Input LOW Voltage 0.8 V
I
OZ
Tri–State Current ±15 µA
I
CC
Device Current Drain 700 760 mA
100E PECL DC CHARACTERISTICS (V
CCT
= VCC = V
CCO
= 5.0V ±5%)
Symbol Parameter Min Max Unit Condition
I
IH
Input HIGH Current 200 µA
I
IL
Input LOW Current 0.500 µA
V
OH
Output HIGH Voltage 3.975 4.25 V
V
CUT
Output CUTOFF Voltage 3.000 3.07 V Note 1.
V
IH
Input HIGH Voltage 3.835 4.12 V
V
IL
Input LOW Voltage 3.000 3.07 V
VPP (DC) Input Sensitivity 150 mV Note 2.
NOTE: PECL levels are referenced to VCC and will vary 1:1 with power supply. The outputs are loaded with an equivalent 25Ω termination to +3.0V .
The values shown are for VCC = V
CCO
= V
CCT
= 5.0V .
1. Valid when the equivalent termination voltage is 3.0V to assure proper operation.
2. VPP is the minimum differential input voltage required to assure proper operation.
Page 12

MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
12
AC CHARACTERISTICS (VCC = V
CCO
= V
CCT
= 5.0V ±5%; VEE = V
EEX
= V
EET
= GND)
Wave–
0°C 25°C 70°C
Symbol
Characteristic
N
ame
form
Min Typ* Max Min Typ* Max Min Typ* Max Unit
Condition
t
s
Setup Time
R/W
→STRB
REGSEL→STRB
Data→STRB
T2 2 1.0 1.0 1.0 ns
t
h
Hold Time
STRB
→R/W
STRB→REGSEL
T3 2 3.0 3.0 3.0 ns
t
pd
Propagation Delay
STRB
→FULL
T4 2 4.0 6.0 9.0 4.0 6.0 9.0 4.0 6.0 9.0 ns
t
h
Hold Time
STRB
→Data
T5 2 3.0 3.0 3.0 ns
t
pd
Propagation Delay
SER→BUSY
T6 3 6.0 8.0 10.0 6.0 8.0 10.0 6.0 8.0 10.0 ns
t
s
Setup Time
R/W
→STRB
REGSEL→STRB
T7 4 2.0 2.0 2.0 ns
t
h
Hold Time
STRB
→R/W
STRB→REGSEL
T8 4 1.0 1.0 1.0 ns
t
pd
Propagation Delay
STRB
→Data Valid
T9 4 7.0 8.5 18.0 7.0 8.5 18.0 7.0 8.5 18.0 ns
Note 1 on
page 13
t
pd
Propagation Delay
STRB
→FULL
T10 4 5.5 8.0 10.0 5.5 8.0 10.0 5.5 8.0 10.0 ns
Note 1 on
page 13
t
pd
Propagation Delay
STRB
→Data Invalid
T11 4 12.0 14.0 17.0 12.0 14.0 17.0 12.0 14.0 17.0 ns
Note 1 on
page 13
t
s
Setup Time
R/W
→STRB
REGSEL→STRB
Data→STRB
T12 5 1.0 1.0 1.0 ns
t
h
Hold Time
STRB
→R/W
STRB→REGSEL
T13 5 3.0 3.0 3.0 ns
t
h
Hold Time
STRB
→Data
T14 5 3.0 3.0 3.0 ns
t
pw
Pulse Width STRB T15 5 7.0 12.0 7.0 12.0 7.0 12.0 ns
t
s
Setup Time
R/W
→STRB
REGSEL→STRB
T16 6 2.0 2.0 2.0 ns
t
h
Hold Time
STRB
→R/W
STRB→REGSEL
T17 6 2.0 2.0 2.0 ns
t
pd
Propagation Delay
STRB
→Data Valid
T18 6 7.0 8.5 18.0 7.0 8.5 18.0 7.0 8.5 18.0 ns
t
pw
Pulse Width STRB T19 6 7.0 12.0 7.0 12.0 7.0 12.0 ns
t
pd
Propagation Delay
STRB
→Data Invalid
T20 6 14.0 17.0 14.0 17.0 14.0 17.0 ns
tr, t
f
TTL Rise/Fall Time — — 3.0
6.1
12.6
3.0 ns
10 – 90%
15pF Load
tr, t
f
PECL Rise/Fall Time — — 200
770
930
200 ps 20 – 80%
* Values for 0°C and 70°C are target values. Typicals for 25°C are taken from a small measurement database. Min and Max values are derived
from using 3 sigmas point of the data distribution and will be added when the data becomes available.
Page 13

MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
13 MOTOROLA
Note 1:
Propagation Delay T9
Becasue the typical use of the AutoBahn is in a shared bus
system, the propagartion delay T9 (STRB –> data valid) is
the time between the falling edge of STRB
and OUTPUT
ACTIVE of the receiver. The crosspoint of 1.5V is dependent
on the bus environment. See Figure 10.
Propagation Delay T10
This value is taken with the high impedance active probe.
With a higher load at the pin, this value will be higher up
to 5%.
Propagation Delay T11
The definition of the propagation delay T11 corresponds to
T9. In this case, T11 is the time between the rising edge of
STRB
and the HIGH IMPEDANCE of the receiver. That
means, other talker of the common bus have to wait for T11 to
send datas to the bus. See Figure 10.
T9 T11
OUTPUT ACTIVE HIGH ZHIGH Z
Figure 10. Definition of the Waveforms STRB → Data Valid
DATA
STRB
1.5V
0V
Load C=15pF
R=1k
Ω
TIMING WAVEFORMS
STRB (I)
SER (O)
SER (O)
T1
1.5V
50%
Waveform 1. Start of Transmit Timing
D00:D31 (I)
R/W (I) 1.5V1.5V
REGSEL (I) 1.5V1.5V
STRB (I) 1.5V
FULL (O) 1.5V
HIGH Z DATA VALID
1
1.5V HIGH Z
1
T4
T3
T2
T5
Waveform 2. Transmit Mode – Data Transfer Handshake
NOTE 2: T1 (STRB to SER differential) is indeterminate, varying from 3 to 9 bit clock cycles
due to synchronization circuitry to avoid metastability.
NOTE 3
NOTE 3: STRB deassertion to next FULL a minimum of 18 nsec.
Page 14

MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
14
SER (I)
50%
SER (I)
BUSY (O)
T6
1.5V
Waveform 3. Timing for Detection of a Steady–State Differential Condition on the Serial Bus
R/W (I) 1.5V1.5V
REGSEL (I) 1.5V1.5V
D00:D31 (I)
DATA VALID
1
HIGH Z
1
STRB (I) 1.5V
FULL (O) 1.5V
T8
T7 T9
T10 T11
Waveform 4. Receive Mode – Data Transfer Handshake
D00:D31 (I)
R/W (I) 1.5V1.5V
REGSEL (I) 1.5V1.5V
STRB (I) 1.5V
HIGH Z DATA VALID
1
1.5V HIGH Z
1
T13
T15
Waveform 5. Write to Control Register
1.5V
T12
T14
R/W (I) 1.5V1.5V
REGSEL (I) 1.5V1.5V
D00:D31 (I)
DATA VALID
1
HIGH Z
1
STRB (I) 1.5V
T17
T16 T18
T19 T20
Waveform 6. Read from the Control and Error Registers
Page 15

MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
15 MOTOROLA
R/W
RESET
ERROR
D10
D11
VEET
D12
D13
D14
VCCT
VCC
D15
D16
VEET
D17
D18
D19
VCCT
D20
FULL
VEET
REGSEL
VCCO
SER
VCCX
FOSC
VEEX
C1
VEET
D09
VCCT
D08
D07
D06
VEET
D05
VCCE
D04
VCCT
D03
D02
VEET
D01
D00
VCCT
D21
D22
VEET
D23
D24
D25
VCCT
VEE
D26
D27
VEET
D28
D29
VCCT
D30
D31
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
12345678910111213141516
48 47 46 45 44 43 42 41 40 39 38 37 36 35 34 33
32
MC100SX1451
Figure 11. Pinout: 64–Lead CQFP (Top View)
SER
STRB
BUSY
Page 16

MC100SX1451FI100
MOTOROLA ECLinPS and ECLinPS Lite
DL140 — Rev 3
16
FI SUFFIX
CERAMIC QFP PACKAGE
CASE 963–02
ISSUE A
OUTLINE DIMENSIONS
NOTES:
1. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DATUM PLANE –H– IS LOCATED AT BOTTOM OF
LEAD AND IS COINCIDENT WITH THE LEAD
WHERE THE LEAD EXITS THE PLASTIC BODY AT
THE BOTTOM OF THE PARTING LINE.
4. DATUMS –A–, –B– AND –D– TO BE DETERMINED
AT DATUM PLANE –H–.
5. DIMENSIONS S AND V TO BE DETERMINED AT
SEATING PLANE –C–.
6. DIMENSIONS A AND B DEFINE MAXIMUM
CERAMIC BODY DIMENSION INCLUDING GLASS
PROTRUSION AND MISMATCH BETWEEN
CERAMIC BODY AND COVER.
DIMAMIN MAX MIN MAX
INCHES
13.90 14.10 0.547 0.555
MILLIMETERS
B 13.90 14.10 0.547 0.555
C 3.00 4.11 0.118 0.162
D 0.30 0.45 0.012 0.018
E 2.54 3.22 0.100 0.127
F 0.30 0.40 0.012 0.016
G 0.80 BSC 0.031 BSC
H 0.45 0.89 0.018 0.035
J 0.13 0.23 0.005 0.009
K 0.65 0.95 0.026 0.037
L 12.00 REF 0.472 REF
N 0.13 0.17 0.005 0.007
P 0.40 BSC 0.016 BSC
Q 0 7 0 7
R 0.13 0.30 0.005 0.012
S 16.95 17.45 0.667 0.687
T 0.13 ––– 0.005 –––
U 0 ––– 0 –––
V 16.95 17.45 0.667 0.687
W 0.35 0.45 0.014 0.018
X 1.60 REF 0.063 REF
____
__
L
L BV
A
S
G
H
EC
SEATING
PLANE
0.01 (0.004)
DETAIL C
DETAIL A
Q
U
X
T
R
W
K
DATUM
PLANE
DETAIL C
1
16
17
32
33
48
49
64
–A–
–B–
–H–
DATUM
PLANE
–C–
–D–
–H–
B
B
P
DETAIL A
D
F
J
N
VIEW ROTATED 90
CLOCKWISE
_
SECTION B–B
BASE METAL
–A–, –B–, –D–
S
A–B
M
0.02 (0.008) D
S
C
S
A–B
M
0.20 (0.008) D
S
C
A–B0.05 (0.002)
S
A–B
M
0.20 (0.008) D
S
H
S
A–B
M
0.20 (0.008) D
S
C
A–B0.05 (0.002)
S
A–B
M
0.20 (0.008) D
S
H
Page 17

MC100SX1451FI100
ECLinPS and ECLinPS Lite
DL140 — Rev 3
17 MOTOROLA
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”
must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of
others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that
Motorola was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal
Opportunity/Affirmative Action Employer.
MC100SX1451FI100/D
◊
Mfax is a trademark of Motorola, Inc.
How to reach us:
USA/EUROPE /Locations Not Listed: Motorola Literature Distribution; JAPAN: Nippon Motorola Ltd.: SPD, Strategic Planning Office, 4–32–1,
P.O. Box 5405, Denver, Colorado 80217. 303–675–2140 or 1–800–441–2447 Nishi–Gotanda, Shinagawa–ku, Tokyo 141, Japan. 81–3–5487–8488
Mfax: RMFAX0@email.sps.mot.com – TOUCHT ONE 602–244–6609 ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
– US & Canada ONLY 1–800–774–1848 51 Ting Kok Road, Ta i Po, N.T., Hong Kong. 852–26629298
INTERNET: http://motorola.com/sps
 Loading...
Loading...