

Page 1
FEATURES
■
Easy Drive Technology Enables Rail-to-Rail Inputs
with Zero Differential Input Current
■
Directly Digitizes High Impedance Sensors with
Full Accuracy
■
Programmable Gain from 1 to 256
■
Integrated Temperature Sensor
■
GND to VCC Input/Reference Common Mode Range
■
Programmable 50Hz, 60Hz or Simultaneous
50Hz/60Hz Rejection Mode
■
2ppm (0.25LSB) INL, No Missing Codes
■
1ppm Offset and 15ppm Full-Scale Error
■
Selectable 2x Speed Mode (15Hz Using Internal
Oscillator)
■
No Latency: Digital Filter Settles in a Single Cycle
■
Single Supply 2.7V to 5.5V Operation
■
Internal Oscillator
■
Available in a Tiny (3mm × 3mm) 10-Lead
DFN Package
U
APPLICATIO S
■
Direct Sensor Digitizer
■
Weight Scales
■
Direct Temperature Measurement
■
Strain Gauge Transducers
■
Instrumentation
■
Industrial Process Control
■
DVMs and Meters
LTC2480
16-Bit ∆Σ ADC with Easy Drive
Input Current Cancellation
U
DESCRIPTIO
The LTC®2480 combines a 16-bit plus sign No Latency ∆Σ
analog-to-digital converter with patented Easy DriveTM technology. The patented sampling scheme eliminates dynamic
input current errors and the shortcomings of on-chip buffering through automatic cancellation of differential input
current. This allows large external source impedances and
input signals, with rail-to-rail input range to be directly digitized while maintaining exceptional DC accuracy.
The LTC2480 includes on-chip programmable gain, a
temperature sensor and an oscillator. The LTC2480 can be
configured to provide a programmable gain from 1 to 256
in 8 steps, measure an external signal or internal temperature sensor and reject line frequencies. 50Hz, 60Hz or
simultaneous 50Hz/60Hz line frequency rejection can be
selected as well as a 2x speed-up mode.
The LTC2480 allows a wide common mode input range
(0V to V
reference can be as low as 100mV or can be tied directly
to VCC. The LTC2480 includes an on-chip trimmed oscillator eliminating the need for external crystals or oscillators. Absolute accuracy and low drift are automatically
maintained through continuous, transparent, offset and
full-scale calibration.
, LTC and LT are registered trademarks of Linear Technology Corporation.
No Latency ∆Σ and Easy Drive are trademarks of Linear Technology Corporation.
All other trademarks are the property of their respective owners.
Patent Pending.
) independent of the reference voltage. The
CC
TM
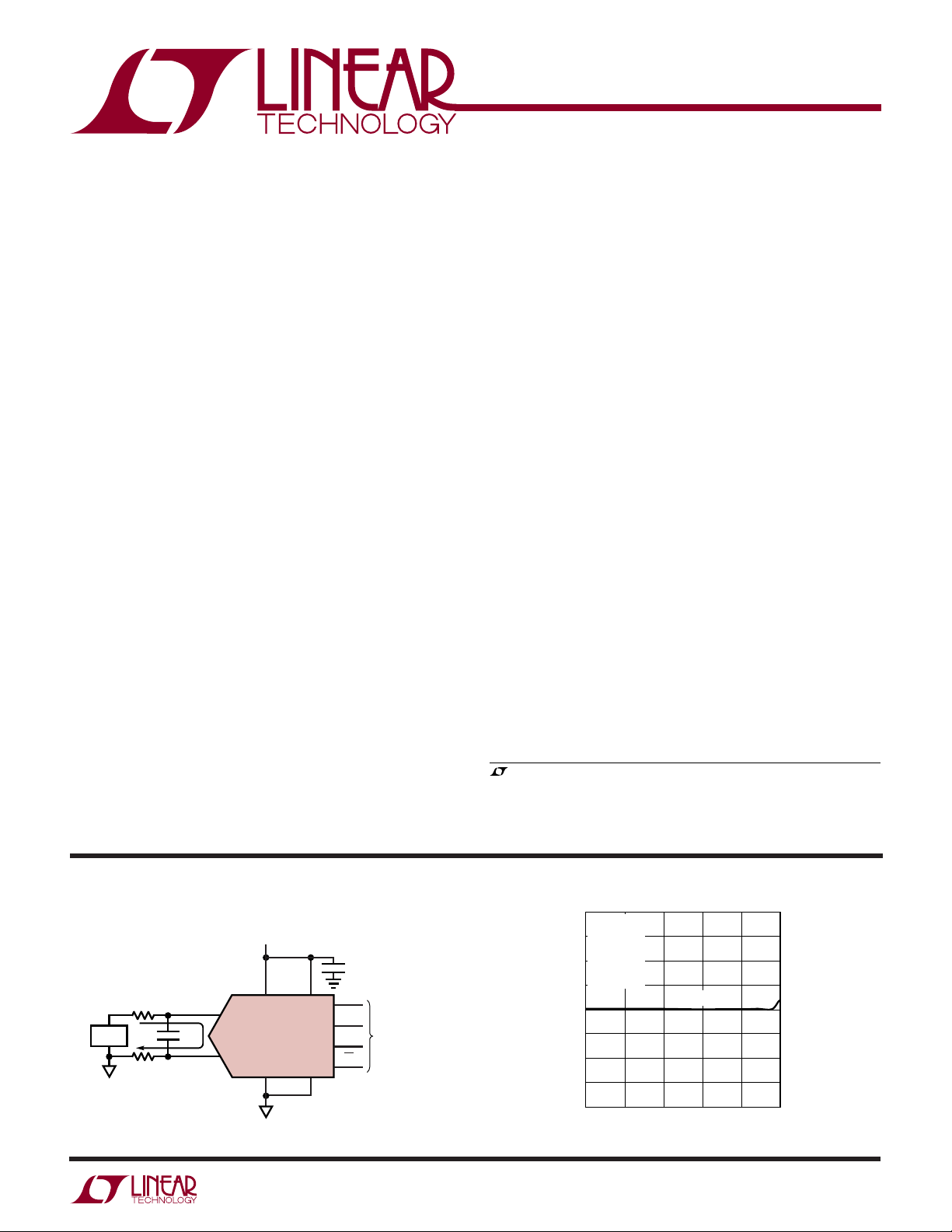
TYPICAL APPLICATIO
V
CC
SENSE
10k
10k
I
DIFF
= 0
1µF
V
IN
V
IN
V
REF
+
LTC2480
–
GND F
U
+FS Error vs R
80
VCC = 5V
= 5V
V
REF
60
+
= 3.75V
V
IN
–
= 1.25V
V
IN
40
= GND
1µF
SDI
V
CC
SDO
4-WIRE
SCK
SPI INTERFACE
CS
O
2480 TA01
F
O
= 25°C
T
A
20
0
–20
+FS ERROR (ppm)
–40
–60
–80
10 100 10k
1
R
SOURCE
CIN = 1µF
SOURCE
at IN+ and IN
1k
(Ω)
–
100k
2480 TA04
2480f
1
Page 2
LTC2480
PACKAGE/ORDER I FOR ATIO
UU
W
WWWU
ABSOLUTE AXI U RATI GS
(Notes 1, 2)
Supply Voltage (VCC) to GND...................... – 0.3V to 6V
Analog Input Voltage to GND ....... –0.3V to (V
+ 0.3V)
CC
Reference Input Voltage to GND .. –0.3V to (VCC + 0.3V)
Digital Input Voltage to GND ........ –0.3V to (V
Digital Output Voltage to GND ..... –0.3V to (V
+ 0.3V)
CC
+ 0.3V)
CC
Operating Temperature Range
LTC2480C ................................................... 0°C to 70°C
LTC2480I ................................................ –40°C to 85°C
Storage Temperature Range ................ –65°C to 125°C
SDI
V
CC
V
REF
IN
IN
10-LEAD (3mm × 3mm) PLASTIC DFN
Consult LTC Marketing for parts specified with wider operating temperature ranges.
*The temperature grade is identified by a label on the shipping container.
TOP VIEW
1
2
11
3
+
4
–
5
DD PACKAGE
T
= 125°C, θJA = 43°C/ W
JMAX
EXPOSED PAD (PIN 11) IS GND
MUST BE SOLDERED TO PCB
10
9
8
7
6
F
O
SCK
GND
SDO
CS
ORDER PART
NUMBER
LTC2480CDD
LTC2480IDD
DD PART MARKING*
LBJY
UW
ELECTRICAL CHARACTERISTICS ( OR AL SPEED)
over the full operating temperature range, otherwise specifications are TA = 25°C. (Notes 3, 4)
PARAMETER CONDITIONS MIN TYP MAX UNITS
Resolution (No Missing Codes) 0.1 ≤ V
Integral Nonlinearity 5V ≤ VCC ≤ 5.5V, V
2.7V ≤ VCC ≤ 5.5V, V
Offset Error 2.5V ≤ V
Offset Error Drift 2.5V ≤ V
Positive Full-Scale Error 2.5V ≤ V
Positive Full-Scale Error Drift 2.5V ≤ V
Negative Full-Scale Error 2.5V ≤ V
Negative Full-Scale Error Drift 2.5V ≤ V
Total Unadjusted Error 5V ≤ VCC ≤ 5.5V, V
5V ≤ VCC ≤ 5.5V, V
2.7V ≤ VCC ≤ 5.5V, V
Output Noise 5V ≤ VCC ≤ 5.5V, V
Internal PTAT Signal TA = 27°C 420 mV
Internal PTAT Temperature Coefficient 1.4 mV/°C
Programmable Gain ● 1 256
≤ VCC, –FS ≤ VIN ≤ +FS (Note 5) ● 16 Bits
REF
= 5V, V
REF
= 2.5V, V
REF
≤ VCC, GND ≤ IN+ = IN– ≤ VCC (Note 14) ● 0.5 2.5 µV
REF
≤ VCC, GND ≤ IN+ = IN– ≤ V
REF
≤ VCC, IN+ = 0.75V
REF
≤ VCC, IN+ = 0.75V
REF
≤ VCC, IN+ = 0.75V
REF
≤ VCC, IN+ = 0.75V
REF
= 2.5V, V
REF
= 5V, V
REF
= 2.5V, V
REF
= 5V, GND ≤ IN– = IN+ ≤ VCC (Note 13) 0.6 µV
REF
= 2.5V (Note 6) ● 2 10 ppm of V
IN(CM)
IN(CM)
= 1.25V (Note 6) 1 ppm of V
IN(CM)
CC
, IN– = 0.25V
REF
, IN– = 0.25V
REF
, IN– = 0.25V
REF
, IN– = 0.25V
REF
= 1.25V 15 ppm of V
IN(CM)
= 2.5V ppm of V
IN(CM)
REF
REF
REF
REF
= 1.25V ppm of V
The ● denotes specifications which apply
REF
REF
10 nV/°C
● 25 ppm of V
0.1 ppm of
● 25 ppm of V
0.1 ppm of
REF
/°C
V
REF
REF
/°C
V
REF
REF
REF
REF
RMS
2
2480f
Page 3
LTC2480
ELECTRICAL CHARACTERISTICS (2x SPEED)
The ● denotes specifications which apply over the full
operating temperature range, otherwise specifications are TA = 25°C. (Notes 3, 4)
PARAMETER CONDITIONS MIN TYP MAX UNITS
Resolution (No Missing Codes) 0.1 ≤ V
Integral Nonlinearity 5V ≤ VCC ≤ 5.5V, V
2.7V ≤ VCC ≤ 5.5V, V
Offset Error 2.5V ≤ V
Offset Error Drift 2.5V ≤ V
Positive Full-Scale Error 2.5V ≤ V
Positive Full-Scale Error Drift 2.5V ≤ V
Negative Full-Scale Error 2.5V ≤ V
Negative Full-Scale Error Drift 2.5V ≤ V
Output Noise 5V ≤ VCC ≤ 5.5V, V
≤ VCC, –FS ≤ VIN ≤ +FS (Note 5) ● 16 Bits
REF
= 5V, V
REF
= 2.5V, V
REF
≤ VCC, GND ≤ IN+ = IN– ≤ VCC (Note 14) ● 0.5 2 mV
REF
≤ VCC, GND ≤ IN+ = IN– ≤ V
REF
≤ VCC, IN+ = 0.75V
REF
≤ VCC, IN+ = 0.75V
REF
≤ VCC, IN+ = 0.75V
REF
≤ VCC, IN+ = 0.75V
REF
= 5V, GND ≤ IN– = IN+ ≤ VCC (Note 13) 0.84 µV
REF
= 2.5V (Note 6) ● 2 10 ppm of V
IN(CM)
= 1.25V (Note 6) 1
IN(CM)
CC
, IN– = 0.25V
REF
, IN– = 0.25V
REF
, IN– = 0.25V
REF
, IN– = 0.25V
REF
REF
REF
REF
REF
100 nV/°C
● 25 ppm of V
0.1 ppm of
● 25 ppm of V
0.1 ppm of
REF
REF
/°C
V
REF
REF
/°C
V
REF
RMS
Programmable Gain (Note 15) ● 1 128
U
CO VERTER CHARACTERISTICS
temperature range, otherwise specifications are at TA = 25°C. (Notes 3, 4)
PARAMETER CONDITIONS MIN TYP MAX UNITS
Input Common Mode Rejection DC 2.5V ≤ V
Input Common Mode Rejection 2.5V ≤ V
50Hz ±2%
Input Common Mode Rejection 2.5V ≤ V
60Hz ±2%
Input Normal Mode Rejection 2.5V ≤ V
50Hz ±2%
Input Normal Mode Rejection 2.5V ≤ V
60Hz ±2%
Input Normal Mode Rejection 2.5V ≤ V
50Hz/60Hz ±2%
Reference Common Mode 2.5V ≤ V
Rejection DC
Power Supply Rejection DC V
Power Supply Rejection, 50Hz ± 2% V
Power Supply Rejection, 60Hz ± 2% V
REF
REF
REF
≤ VCC, GND ≤ IN– = IN+ ≤ V
REF
≤ VCC, GND ≤ IN– = IN+ ≤ V
REF
≤ VCC, GND ≤ IN– = IN+ ≤ V
REF
≤ VCC, GND ≤ IN– = IN+ ≤ V
REF
≤ VCC, GND ≤ IN– = IN+ ≤ V
REF
≤ VCC, GND ≤ IN– = IN+ ≤ V
REF
≤ VCC, GND ≤ IN– = IN+ ≤ V
REF
= 2.5V, IN– = IN+ = GND 120 dB
= 2.5V, IN– = IN+ = GND (Notes 7, 9) 120 dB
= 2.5V, IN– = IN+ = GND (Notes 8, 9) 120 dB
The ● denotes specifications which apply over the full operating
(Note 5) ● 140 dB
CC
(Note 5) ● 140 dB
CC
(Note 5) ● 140 dB
CC
(Notes 5, 7) ● 110 120 dB
CC
(Notes 5, 8) ● 110 120 dB
CC
(Notes 5, 9) ● 87 dB
CC
(Note 5) ● 120 140 dB
CC
UUU
A ALOG I PUT AUD REFERE CE
temperature range, otherwise specifications are at TA = 25°C. (Note 3)
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
+
IN
–
IN
FS Full Scale of the Differential Input (IN+ – IN–) ● 0.5V
LSB Least Significant Bit of the Output Code ● FS/2
V
IN
V
REF
Absolute/Common Mode IN+ Voltage GND – 0.3V VCC + 0.3V V
Absolute/Common Mode IN– Voltage GND – 0.3V VCC + 0.3V V
Input Differential Voltage Range (IN+ – IN–) ● –FS +FS V
Reference Voltage Range ● 0.1 V
The ● denotes specifications which apply over the full operating
/GAIN V
REF
16
CC
2480f
3
V
Page 4
LTC2480
UUU
A ALOG I PUT AUD REFERE CE
temperature range, otherwise specifications are at TA = 25°C. (Note 3)
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
CS (IN+)IN
CS (IN–)IN
CS (V
)V
REF
I
(IN+)IN+ DC Leakage Current Sleep Mode, IN+ = GND ● –10 1 10 nA
DC_LEAK
I
(IN–)IN– DC Leakage Current Sleep Mode, IN– = GND ● –10 1 10 nA
DC_LEAK
I
DC_LEAK (VREF
+
Sampling Capacitance 11 pF
–
Sampling Capacitance 11 pF
Sampling Capacitance 11 pF
REF
)V
DC Leakage Current Sleep Mode, V
REF
The ● denotes specifications which apply over the full operating
REF
= V
CC
● –100 1 100 nA
UU
DIGITAL I PUTS A D DIGITAL OUTPUTS
operating temperature range, otherwise specifications are at T
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
V
IH
V
IL
V
IH
V
IL
I
IN
I
IN
C
IN
C
IN
V
OH
V
OL
V
OH
V
OL
I
OZ
High Level Input Voltage 2.7V ≤ VCC ≤ 5.5V ● VCC – 0.5 V
, SDI
CS, F
O
Low Level Input Voltage 2.7V ≤ VCC ≤ 5.5V ● 0.5 V
, SDI
CS, F
O
High Level Input Voltage 2.7V ≤ VCC ≤ 5.5V (Note 10) ● VCC – 0.5 V
SCK
Low Level Input Voltage 2.7V ≤ VCC ≤ 5.5V (Note 10) ● 0.5 V
SCK
Digital Input Current 0V ≤ VIN ≤ V
, SDI
CS, F
O
Digital Input Current 0V ≤ VIN ≤ VCC (Note 10) ● –10 10 µA
SCK
Digital Input Capacitance 10 pF
CS, F
, SDI
O
Digital Input Capacitance 10 pF
SCK
High Level Output Voltage IO = –800µA ● VCC – 0.5 V
SDO
Low Level Output Voltage IO = 1.6mA ● 0.4 V
SDO
High Level Output Voltage IO = –800µA ● VCC – 0.5 V
SCK
Low Level Output Voltage IO = 1.6mA ● 0.4 V
SCK
Hi-Z Output Leakage ● –10 10 µA
SDO
= 25°C. (Note 3)
A
CC
The ● denotes specifications which apply over the full
● –10 10 µA
WU
POWER REQUIRE E TS
otherwise specifications are at TA = 25°C. (Note 3)
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
V
CC
I
CC
Supply Voltage ● 2.7 5.5 V
Supply Current Conversion Mode (Note 12) ● 160 250 µA
The ● denotes specifications which apply over the full operating temperature range,
Sleep Mode (Note 12)
● 12 µA
2480f
4
Page 5
LTC2480
WU
TI I G CHARACTERISTICS
range, otherwise specifications are at TA = 25°C. (Note 3)
SYMBOL PARAMETER CONDITIONS MIN TYP MAX UNITS
f
EOSC
t
HEO
t
LEO
t
CONV_1
t
CONV_2
f
ISCK
D
ISCK
f
ESCK
t
LESCK
t
HESCK
t
DOUT_ISCK
t
DOUT_ESCK
t
1
t
2
t
3
t
4
t
KQMAX
t
KQMIN
t
5
t
6
t
7
t
8
External Oscillator Frequency Range (Note 15) ● 10 4000 kHz
External Oscillator High Period ● 0.125 100 µs
External Oscillator Low Period ● 0.125 100 µs
Conversion Time for 1x Speed Mode 50Hz Mode ● 157.2 160.3 163.5 ms
Conversion Time for 2x Speed Mode 50Hz Mode ● 78.7 80.3 81.9 ms
Internal SCK Frequency Internal Oscillator (Note 10) 38.4 kHz
Internal SCK Duty Cycle (Note 10) ● 45 55 %
External SCK Frequency Range (Note 10) ● 4000 kHz
External SCK Low Period (Note 10) ● 125 ns
External SCK High Period (Note 10) ● 125 ns
Internal SCK 24-Bit Data Output Time Internal Oscillator (Notes 10, 12) ● 0.61 0.625 0.64 ms
External SCK 24-Bit Data Output Time (Note 10) ● 24/f
CS↓ to SDO Low ● 0 200 ns
CS↑ to SDO High Z ● 0 200 ns
CS↓ to SCK↓ Internal SCK Mode ● 0 200 ns
CS↓ to SCK↑ External SCK Mode ● 50 ns
SCK↓ to SDO Valid ● 200 ns
SDO Hold After SCK↓ (Note 5) ● 15 ns
SCK Set-Up Before CS↓ ● 50 ns
SCK Hold After CS↓ ● 50 ns
SDI Setup Before SCK↑ (Note 5) ● 100 ns
SDI Hold After SCK↑ (Note 5) ● 100 ns
The ● denotes specifications which apply over the full operating temperature
60Hz Mode
Simultaneous 50Hz/60Hz Mode
External Oscillator
60Hz Mode
Simultaneous 50Hz/60Hz Mode
External Oscillator
External Oscillator (Notes 10, 11) f
External Oscillator (Notes 10, 11)
● 131.0 133.6 136.3 ms
● 144.1 146.9 149.9 ms
● 41036/f
● 65.6 66.9 68.2 ms
● 72.2 73.6 75.1 ms
● 20556/f
● 192/f
(in kHz) ms
EOSC
(in kHz) ms
EOSC
/8 kHz
EOSC
(in kHz) ms
EOSC
(in kHz) ms
ESCK
Note 1: Absolute Maximum Ratings are those values beyond which the life
of the device may be impaired.
Note 2: All voltage values are with respect to GND.
Note 3: VCC = 2.7V to 5.5V unless otherwise specified.
V
= V
REFCM
/2, FS = 0.5V
REF
VIN = IN+ – IN–, V
IN(CM)
/GAIN
REF
= (IN+ + IN–)/2
Note 4: Use internal conversion clock or external conversion clock source
with f
= 307.2kHz unless otherwise specified.
EOSC
Note 5: Guaranteed by design, not subject to test.
Note 6: Integral nonlinearity is defined as the deviation of a code from a
straight line passing through the actual endpoints of the transfer curve.
The deviation is measured from the center of the quantization band.
Note 7: 50Hz mode (internal oscillator) or f
= 256kHz ±2% (external
EOSC
oscillator).
Note 8: 60Hz mode (internal oscillator) or f
= 307.2kHz ±2% (external
EOSC
oscillator).
Note 9: Simultaneous 50Hz/60Hz mode (internal oscillator) or f
EOSC
=
280kHz ±2% (external oscillator).
Note 10: The SCK can be configured in external SCK mode or internal SCK
mode. In external SCK mode, the SCK pin is used as digital input and the
driving clock is f
output and the output clock signal during the data output is f
Note 11: The external oscillator is connected to the F
oscillator frequency, f
. In internal SCK mode, the SCK pin is used as digital
ESCK
, is expressed in kHz.
EOSC
pin. The external
O
ISCK
.
Note 12: The converter uses the internal oscillator.
Note 13: The output noise includes the contribution of the internal
calibration operations.
Note 14: Guaranteed by design and test correlation.
Note 15: Refer to Applications Information section for performance vs
data rate graphs.
2480f
5
Page 6
LTC2480
INPUT VOLTAGE (V)
–12
TUE (ppm OF V
REF
)
–4
4
12
–8
0
8
–0.75 –0.25 0.25 0.75
2480 G03
1.25–1.25
VCC = 2.7V
V
REF
= 2.5V
V
IN(CM)
= 1.25V
F
O
= GND
85°C
25°C
–45°C
INPUT VOLTAGE (V)
–3
INL (ppm OF V
REF
)
–1
1
3
–2
0
2
–0.75 –0.25 0.25 0.75
2480 G06
1.25–1.25
VCC = 2.7V
V
REF
= 2.5V
V
IN(CM)
= 1.25V
F
O
= GND
–45°C, 25°C, 90°C
UW
TYPICAL PERFOR A CE CHARACTERISTICS
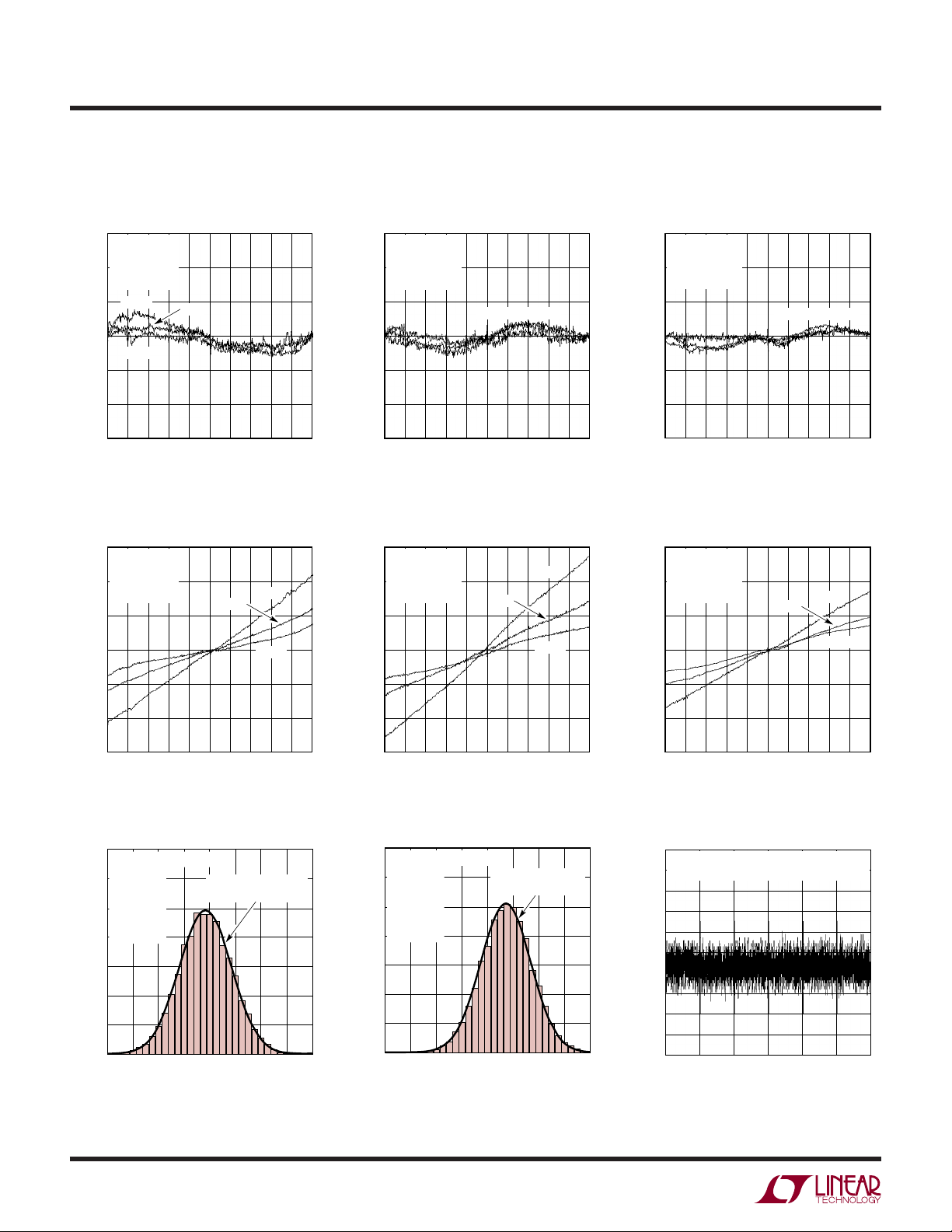
Integral Nonlinearity
(VCC = 5V, V
3
VCC = 5V
= 5V
V
REF
2
)
1
REF
0
–1
INL (ppm OF V
–2
–3
= 2.5V
V
IN(CM)
= GND
F
O
–45°C
85°C
–1.5 –0.5 0.5 1.5
INPUT VOLTAGE (V)
Total Unadjusted Error
(VCC = 5V, V
12
VCC = 5V
= 5V
V
REF
8
)
4
REF
0
V
IN(CM)
F
O
= 2.5V
= GND
REF
25°C
REF
= 5V)
= 5V)
25°C
85°C
–45°C
2480 G04
Integral Nonlinearity
(VCC = 5V, V
3
VCC = 5V
= 2.5V
V
REF
2
)
1
REF
0
–1
INL (ppm OF V
–2
2.5–2–2.5 –1 0 1 2
–3
= 1.25V
V
IN(CM)
= GND
F
O
–0.75 –0.25 0.25 0.75
= 2.5V)
REF
–45°C, 25°C, 90°C
INPUT VOLTAGE (V)
1.25–1.25
2480 G05
Total Unadjusted Error
(VCC = 5V, V
12
VCC = 5V
V
8
V
F
)
4
REF
0
REF
IN(CM)
= GND
O
= 5V
= 1.25V
= 2.5V)
REF
85°C
25°C
–45°C
Integral Nonlinearity
(VCC = 2.7V, V
= 2.5V)
REF
Total Unadjusted Error
(VCC = 2.7V, V
= 2.5V)
REF
–4
TUE (ppm OF V
–8
–12
–1.5 –0.5 0.5 1.5
INPUT VOLTAGE (V)
2.5–2–2.5 –1 0 1 2
2480 G01
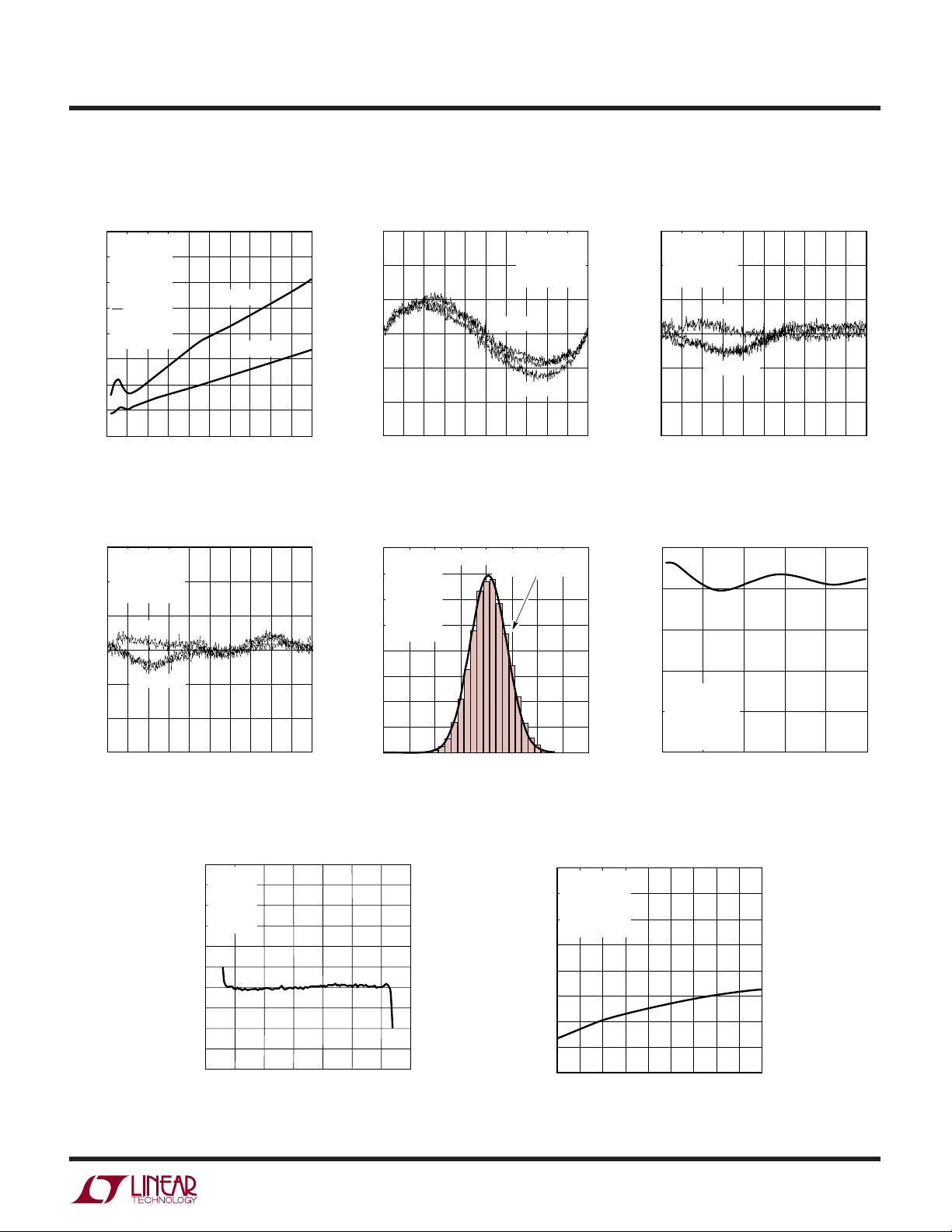
Noise Histogram (6.8sps) Long-Term ADC Readings
14
10,000 CONSECUTIVE
READINGS
12
= 5V
V
CC
= 5V
V
REF
= 0V
V
10
IN
GAIN = 256
= 25°C
T
A
8
6
4
NUMBER OF READINGS (%)
2
0
–3
–1.8 –0.6
–2.4 1.2
–1.2 0 1.8
OUTPUT READING (µV)
RMS = 0.60µV
AVERAGE = –0.69µV
0.6
2480 G07
–4
TUE (ppm OF V
–8
–12
–0.75 –0.25 0.25 0.75
INPUT VOLTAGE (V)
Noise Histogram (7.5sps)
14
10,000 CONSECUTIVE
READINGS
12
= 2.7V
V
CC
= 2.5V
V
REF
= 0V
V
10
IN
GAIN = 256
= 25°C
T
A
8
6
4
NUMBER OF READINGS (%)
2
0
–3
–1.8 –0.6
–2.4 1.2
–1.2 0 1.8
OUTPUT READING (µV)
2480 G02
RMS = 0.59µV
AVERAGE = –0.19µV
0.6
2480 G08
1.25–1.25
5
–1
ADC READING (µV)
–2
–3
–4
–5
VCC = 5V, V
GAIN = 256, T
4
3
2
1
0
0
= 5V, VIN = 0V, V
REF
= 25°C, RMS NOISE = 0.60µV
A
10
20
TIME (HOURS)
30 40
IN(CM)
= 2.5V
50
60
2480 G09
6
2480f
Page 7
UW
V
REF
(V)
0
–0.3
OFFSET ERROR (ppm OF V
REF
)
–0.2
–0.1
0
0.1
0.2
0.3
1234
2480 G18
5
VCC = 5V
REF
–
= GND
V
IN
= 0V
V
IN(CM)
= GND
GAIN = 256
T
A
= 25°C
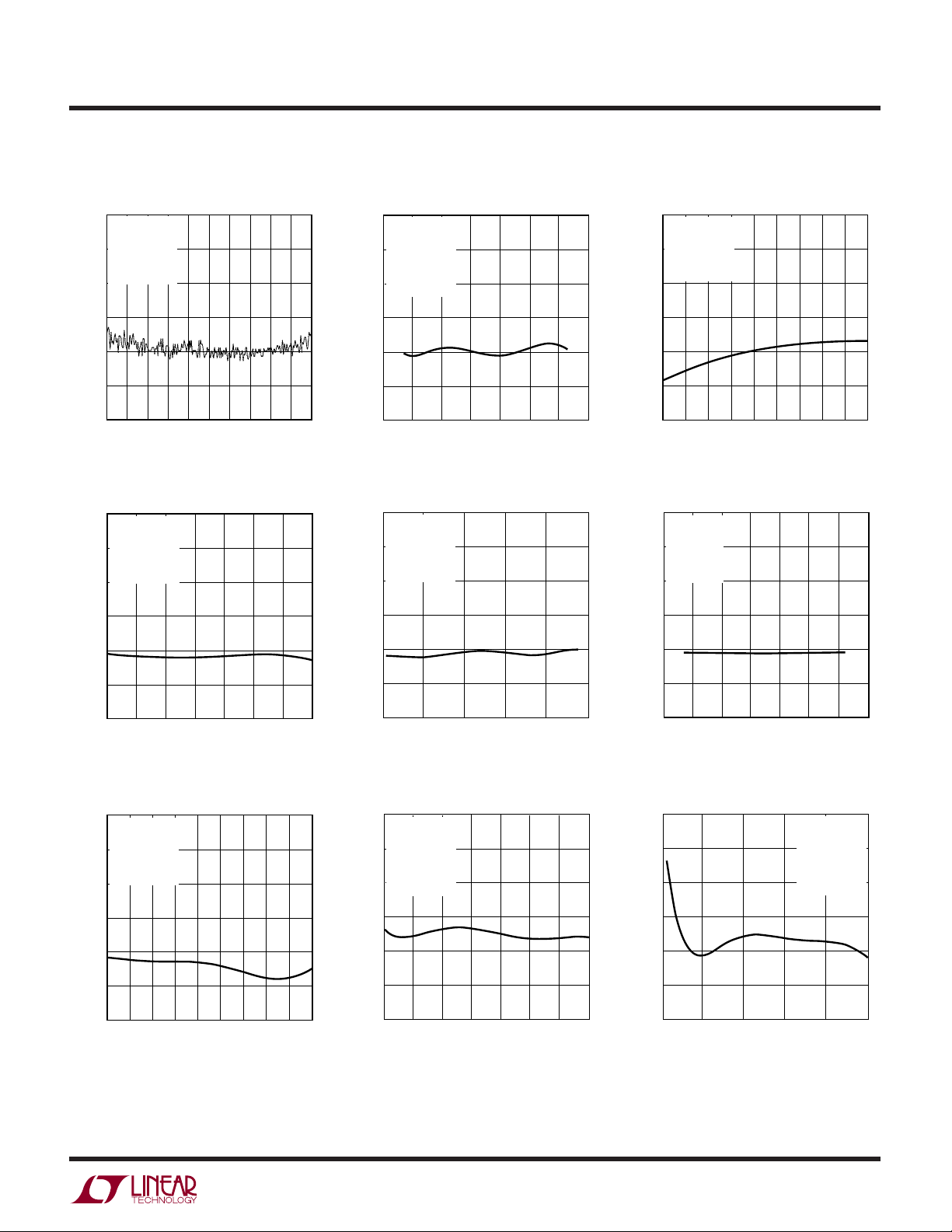
TYPICAL PERFOR A CE CHARACTERISTICS
RMS Noise
vs Input Differential Voltage RMS Noise vs V
)
REF
1.0
0.9
0.8
VCC = 5V
= 5V
V
REF
GAIN = 256
= 2.5V
V
IN(CM)
= 25°C
T
A
1.0
0.9
0.8
VCC = 5V
= 5V
V
REF
= 0V
V
IN
V
IN(CM)
GAIN = 256
= 25°C
T
A
= GND
IN(CM)
LTC2480
RMS Noise vs Temperature (TA)
1.0
VCC = 5V
= 5V
V
REF
0.9
= 0V
V
IN
= GND
V
IN(CM)
GAIN = 256
0.8
0.7
0.6
RMS NOISE (ppm OF V
0.5
0.4
–1.5 –0.5 0.5 1.5
INPUT DIFFERENTIAL VOLTAGE (V)
RMS Noise vs V
1.0
V
= 2.5V
REF
= 0V
V
IN
= GND
V
0.9
IN(CM)
GAIN = 256
= 25°C
T
A
0.8
0.7
RMS NOISE (µV)
0.6
0.5
0.4
2.7
3.1 3.5
CC
4.3 5.1 5.5
3.9 4.7
VCC (V)
2480 G10
2480 G13
0.7
RMS NOISE (µV)
0.6
0.5
2.5–2–2.5 –1 0 1 2
0.4
–1
01
RMS Noise vs V
1.0
VCC = 5V
= 0V
V
IN
0.9
V
IN(CM)
GAIN = 256
= 25°C
T
A
0.8
0.7
RMS NOISE (µV)
0.6
0.5
0.4
0
356
24
V
(V)
IN(CM)
2480 G11
REF
= GND
1234
V
(V)
REF
2480 G14
5
0.7
RMS NOISE (µV)
0.6
0.5
0.4
–45
–30 –15 15
0 304560
TEMPERATURE (°C)
Offset Error vs V
0.3
VCC = 5V
= 5V
V
REF
)
REF
–0.1
OFFSET ERROR (ppm OF V
–0.3
0.2
0.1
–0.2
V
GAIN = 256
T
0
–1
= 0V
IN
= 25°C
A
01
75 90
2480 G12
IN(CM)
356
24
V
(V)
IN(CM)
2480 G15
Offset Error vs Temperature
0.3
VCC = 5V
V
0.2
V
)
V
REF
F
0.1
0
–0.1
OFFSET ERROR (ppm OF V
–0.2
–0.3
–45
= 5V
REF
= 0V
IN
= GND
IN(CM)
= GND
O
–30 0
–15
30 90
45
15
TEMPERATURE (°C)
Offset Error vs V
0.3
REF+ = 2.5V
–
= GND
REF
)
REF
OFFSET ERROR (ppm OF V
60
75
2480 G16
0.2
0.1
–0.1
–0.2
–0.3
V
V
GAIN = 256
T
0
2.7
= 0V
IN
IN(CM)
= 25°C
A
3.1 3.5
= GND
CC
4.3 5.1 5.5
3.9 4.7
VCC (V)
2480 G17
Offset Error vs V
REF
2480f
7
Page 8
LTC2480
TEMPERATURE (°C)
–45 –30
300
FREQUENCY (kHz)
304
310
–15
30
45
2480 G26
302
308
306
150
60 75
90
VCC = 4.1V
V
REF
= 2.5V
V
IN
= 0V
V
IN(CM)
= GND
F
O
= GND
TEMPERATURE (°C)
–45
0
SLEEP MODE CURRENT (µA)
0.2
0.6
0.8
1.0
2.0
1.4
–15
15
30 90
2480 G32
0.4
1.6
1.8
1.2
–30 0
45
60
75
VCC = 5V
VCC = 2.7V
FO = GND
CS = V
CC
SCK = NC
SDO = NC
SDI = GND
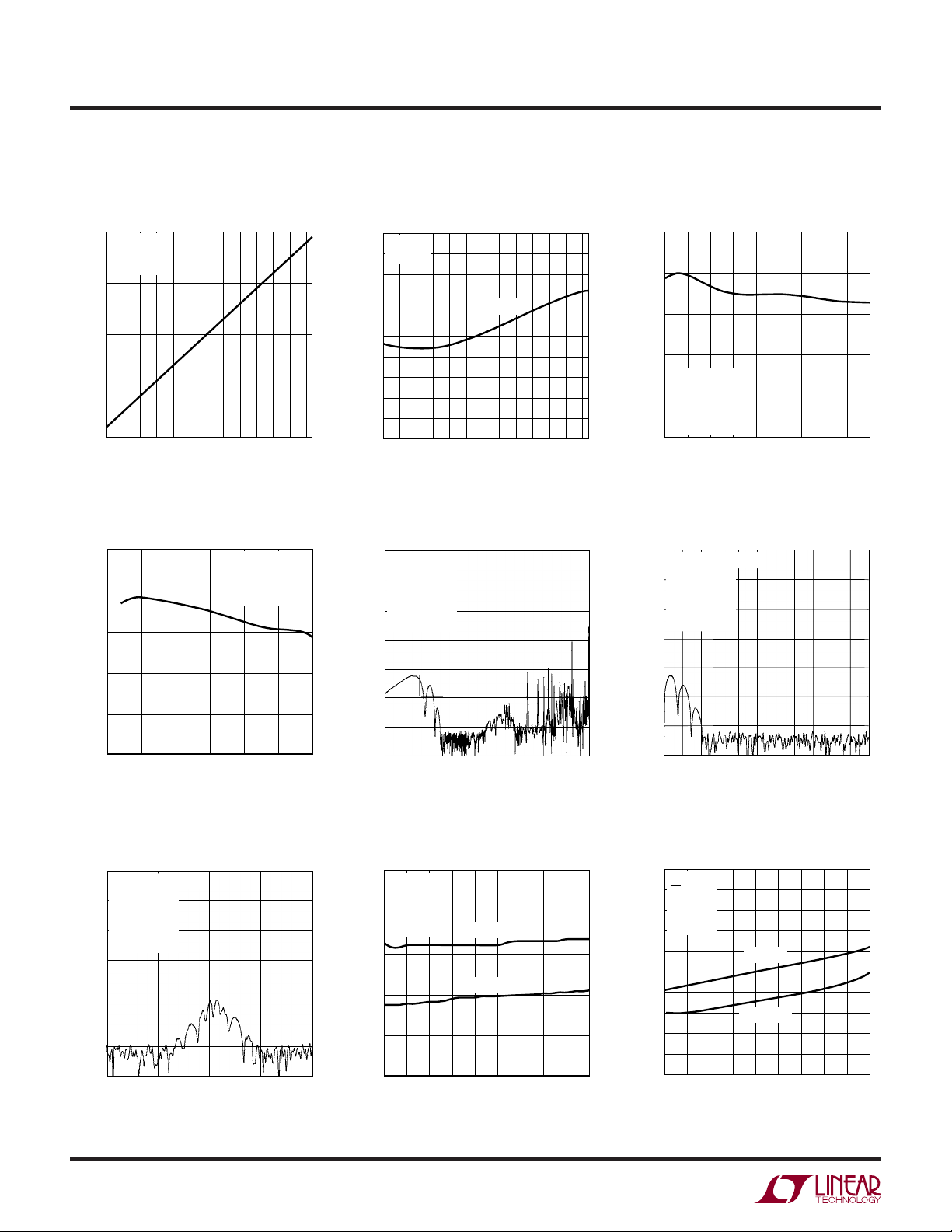
UW
TYPICAL PERFOR A CE CHARACTERISTICS
Temperature Sensor
vs Temperature
0.40
VCC = 5V
= 1.4V
V
REF
= GND
F
O
0.35
(V)
REF
0.30
/V
PTAT
V
0.25
0.20
–60
30090–30 60
TEMPERATURE (°C)
On-Chip Oscillator Frequency
vs V
CC
310
308
306
V
REF
V
IN
V
IN(CM)
F
O
= 2.5V
= 0V
= GND
2480 G24
= GND
120
Temperature Sensor Error
vs Temperature
5
VCC = 5V
4
= GND
F
O
3
2
1
0
–1
–2
TEMPERATURE ERROR (°C)
–3
–4
–5
–30
–60
0
TEMPERATURE (°C)
PSRR vs Frequency at V
0
VCC = 4.1V DC
= 2.5V
V
REF
–20
+
= GND
IN
–
= GND
IN
–40
= GND
F
O
= 25°C
T
A
–60
On-Chip Oscillator Frequency
vs Temperature
V
= 1.4V
REF
30
60
90
120
2480 G25
CC
PSRR vs Frequency at V
0
VCC = 4.1V DC ±1.4V
= 2.5V
V
REF
–20
+
= GND
IN
–
= GND
IN
–40
= GND
F
O
= 25°C
T
A
–60
CC
FREQUENCY (kHz)
REJECTION (dB)
8
–100
–120
–140
304
302
300
2.5
3.5 4.0 4.5
3.0
VCC (V)
PSRR vs Frequency at V
0
VCC = 4.1V DC ±0.7V
= 2.5V
V
REF
–20
+
= GND
IN
–
= GND
IN
–40
= GND
F
O
= 25°C
T
A
–60
–80
30600
30650 30700 30800
FREQUENCY AT VCC (Hz)
CC
30750
5.0 5.5
2480 G27
2480 G30
–80
REJECTION (dB)
–100
–120
–140
1
10 100
FREQUENCY AT VCC (Hz)
Conversion Current
vs Temperature
200
FO = GND
CS = GND
SCK = NC
180
SDO = NC
SDI = GND
160
140
CONVERSION CURRENT (µA)
120
100
–30 0
–15
–45
10k 1M
1k 100k
VCC = 5V
VCC = 2.7V
30 90
45
15
TEMPERATURE (°C)
–80
REJECTION (dB)
–100
–120
2480 G28
–140
100
120 160
140
0
60
80
40
20
FREQUENCY AT VCC (Hz)
180
220200
2480 G29
Sleep Mode Current
vs Temperature
60
75
2480 G31
2480f
Page 9
UW
INPUT VOLTAGE (V)
–3
INL (ppm OF V
REF
)
–1
1
3
–2
0
2
–0.75 –0.25 0.25 0.75
2480 G35
1.25–1.25
VCC = 5V
V
REF
= 2.5V
V
IN(CM)
= 1.25V
F
O
= GND
90°C
–45°C, 25°C
TYPICAL PERFOR A CE CHARACTERISTICS
LTC2480
Conversion Current
vs Output Data Rate
500
V
= V
REF
CC
IN+ = GND
450
–
= GND
IN
SCK = NC
400
SDO = NC
SDI = GND
350
CS GND
= EXT OSC
F
O
300
= 25°C
T
A
250
SUPPLY CURRENT (µA)
200
150
100
0
20 40 60 1007010 30 50 90
OUTPUT DATA RATE (READINGS/SEC)
VCC = 5V
Integral Nonlinearity (2x Speed
Mode; VCC = 2.7V, V
3
VCC = 2.7V
= 2.5V
V
REF
2
)
1
REF
0
–1
INL (ppm OF V
–2
–3
= 1.25V
V
IN(CM)
= GND
F
O
90°C
–45°C, 25°C
–0.75 –0.25 0.25 0.75
INPUT VOLTAGE (V)
REF
VCC = 3V
80
= 2.5V)
2480 G33
2480 G36
Integral Nonlinearity (2x Speed
Mode; V
3
2
)
1
REF
0
–1
INL (ppm OF V
–2
–3
= 5V, V
CC
–1.5 –0.5 0.5 1.5
INPUT VOLTAGE (V)
= 5V)
REF
VCC = 5V
V
REF
V
IN(CM)
F
O
25°C, 90°C
–45°C
= 5V
= GND
= 2.5V
2.5–2–2.5 –1 0 1 2
2480 G34
Noise Histogram
(2x Speed Mode)
16
10,000 CONSECUTIVE
READINGS
14
= 5V
V
CC
= 5V
V
REF
12
= 0V
V
IN
GAIN = 256
10
= 25°C
T
A
8
6
4
NUMBER OF READINGS (%)
2
1.25–1.25
0
179
181.4 183.8 188.6
OUTPUT READING (µV)
RMS = 0.86µV
AVERAGE = 0.184mV
186.2
2480 G37
Integral Nonlinearity (2x Speed
Mode; V
RMS Noise vs V
= 5V, V
CC
REF
REF
(2x Speed Mode)
1.0
0.8
0.6
0.4
RMS NOISE (µV)
VCC = 5V
= 0V
V
IN
0.2
0
0
V
IN(CM)
F
O
T
A
= GND
= 25°C
= GND
1
3
2
V
(V)
REF
= 2.5V)
4
5
2480 G38
200
198
196
194
192
190
188
186
OFFSET ERROR (µV)
184
182
180
–1
Offset Error vs V
(2x Speed Mode)
VCC = 5V
= 5V
V
REF
= 0V
V
IN
= GND
F
O
= 25°C
T
A
2
1
0
V
IN(CM)
IN(CM)
3
(V)
Offset Error vs Temperature
(2x Speed Mode)
240
VCC = 5V
= 5V
V
REF
230
= 0V
V
IN
= GND
V
IN(CM)
220
= GND
F
O
210
200
190
OFFSET ERROR (µV)
180
170
5
6
2480 G39
4
160
–30 90
–45
–15
15
30
0
TEMPERATURE (°C)
75
45
60
2480 G40
2480f
9
Page 10
LTC2480
FREQUENCY AT VCC (Hz)
1
0
–20
–40
–60
–80
–100
–120
–140
1k 100k
2480 G43
10 100
10k 1M
REJECTION (dB)
VCC = 4.1V DC
REF
+
= 2.5V
REF
–
= GND
IN
+
= GND
IN
–
= GND
F
O
= GND
T
A
= 25°C
UW
TYPICAL PERFOR A CE CHARACTERISTICS
Offset Error vs V
(2x Speed Mode)
250
V
= 2.5V
REF
= 0V
V
IN
V
IN(CM)
200
= GND
F
O
= 25°C
T
A
150
100
OFFSET ERROR (µV)
50
0
2 2.5
= GND
3
CC
4
3.5
VCC (V)
4.5
5
2480 G41
PSRR vs Frequency at V
(2x Speed Mode)
0
VCC = 4.1V DC ±1.4V
+
= 2.5V
REF
–20
–
= GND
REF
+
= GND
IN
–
–40
= GND
IN
= GND
F
O
= 25°C
T
A
–60
5.5
Offset Error vs V
(2x Speed Mode)
240
VCC = 5V
= 0V
V
IN
230
V
IN(CM)
= GND
F
O
220
= 25°C
T
A
210
200
190
OFFSET ERROR (µV)
180
170
160
0
CC
REF
= GND
12 4
3
V
(V)
REF
2480 G42
PSRR vs Frequency at V
(2x Speed Mode)
0
VCC = 4.1V DC ±0.7V
REF
–20
REF
IN
–40
IN
F
O
T
A
–60
5
+
= 2.5V
–
= GND
+
= GND
–
= GND
= GND
= 25°C
PSRR vs Frequency at V
(2x Speed Mode)
CC
CC
PI FU CTIO S
SDI (Pin 1): Serial Data Input. This pin is used to select the
GAIN, line frequency rejection, input, temperature sensor
and 2x speed mode. Data is shifted into the SDI pin on the
rising edge of serial clock (SCK).
VCC (Pin 2): Positive Supply Voltage. Bypass to GND
(Pin 8) with a 1µF tantalum capacitor in parallel with 0.1µF
ceramic capacitor as close to the part as possible.
V
pin can have any value between 0.1V and VCC. The negative
reference input is GND (Pin 8).
–80
RREJECTION (dB)
–100
–120
–140
0
U
(Pin 3): Positive Reference Input. The voltage on this
REF
60
80
40
20
FREQUENCY AT VCC (Hz)
UU
100
120 160
140
180
220200
2480 G44
–80
REJECTION (dB)
–100
–120
–140
30600
30650 30700 30800
FREQUENCY AT VCC (Hz)
30750
2480 G45
IN+ (Pin 4), IN– (Pin 5): Differential Analog Inputs. The
voltage on these pins can have any value between GND –
0.3V and VCC + 0.3V. Within these limits the converter
bipolar input range (VIN = IN+ – IN–) extends from –0.5 •
V
/GAIN to 0.5 • V
REF
/GAIN. Outside this input range the
REF
converter produces unique overrange and underrange
output codes.
CS (Pin 6): Active LOW Chip Select. A LOW on this pin
enables the digital input/output and wakes up the ADC.
Following each conversion the ADC automatically enters
the Sleep mode and remains in this low power state as long
2480f
10
Page 11
LTC2480
U
UU
PI FU CTIO S
as CS is HIGH. A LOW-to-HIGH transition on CS during the
Data Output transfer aborts the data transfer and starts a
new conversion.
SDO (Pin 7): Three-State Digital Output. During the Data
Output period, this pin is used as the serial data output.
When the chip select CS is HIGH (CS = V
is in a high impedance state. During the Conversion and
Sleep periods, this pin is used as the conversion status
output. The conversion status can be observed by pulling
CS LOW.
GND (Pin 8): Ground. Shared pin for analog ground,
digital ground and reference ground. Should be connected
directly to a ground plane through a minimum impedance.
SCK (Pin 9): Bidirectional Digital Clock Pin. In Internal
Serial Clock Operation mode, SCK is used as the digital
output for the internal serial interface clock during the Data
), the SDO pin
CC
Input/Output period. In External Serial Clock Operation
mode, SCK is used as the digital input for the external
serial interface clock during the Data Output period. A weak
internal pull-up is automatically activated in Internal Serial
Clock Operation mode. The Serial Clock Operation mode is
determined by the logic level applied to the SCK pin at
power up or during the most recent falling edge of CS.
F
(Pin 10): Frequency Control Pin. Digital input that
O
controls the conversion clock. When FO is connected to
GND the converter uses its internal oscillator running at
307.2kHz. The conversion clock may also be overridden
by driving the FO pin with an external clock in order to
change the output rate or the digital filter rejection null.
Exposed Pad (Pin 11): This pin is ground and should be
soldered to the PCB ground plane. For prototyping purposes, this pin may remain floating.
UU
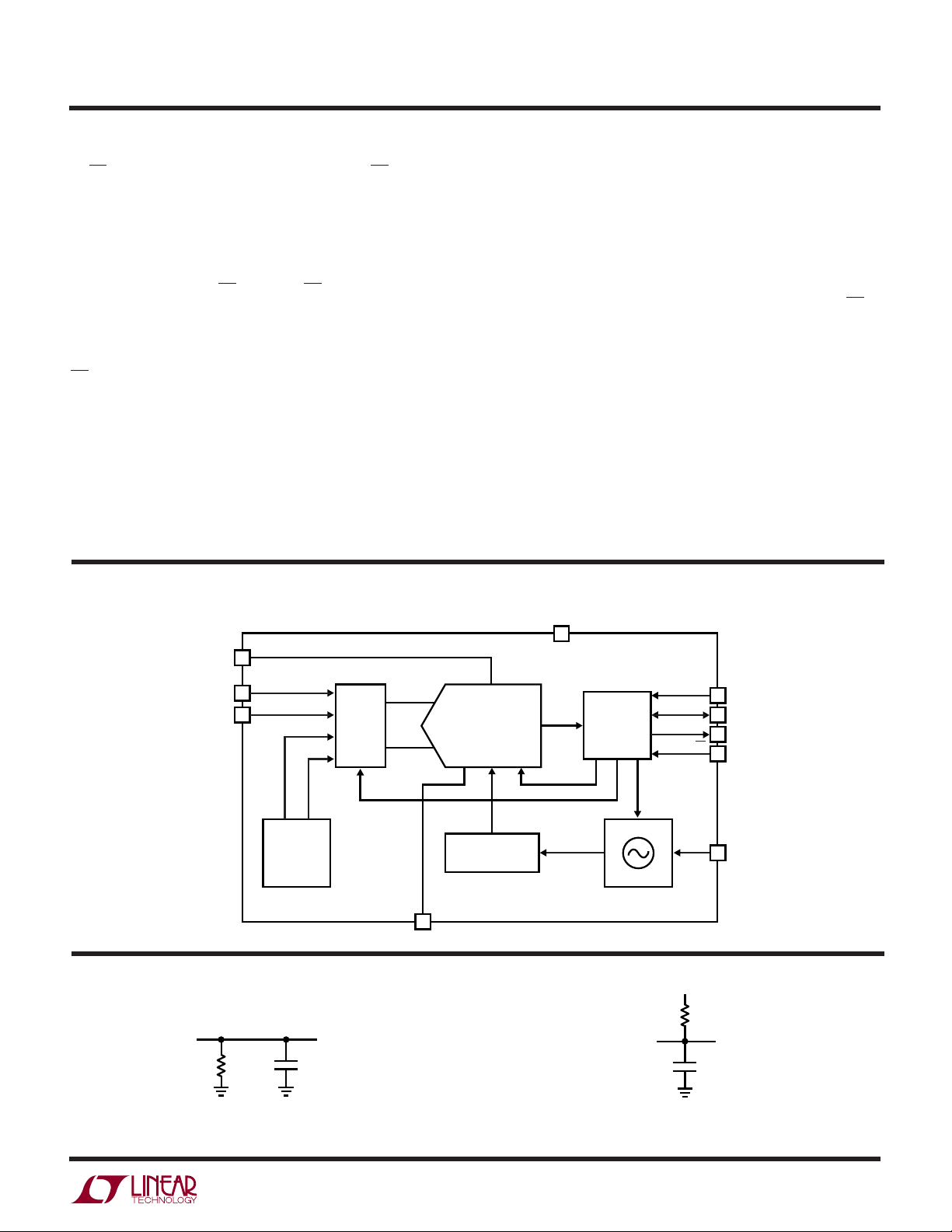
W
FU CTIO AL BLOCK DIAGRA
V
REF
3
+
IN
4
–
IN
5
TEMP
SENSOR
MUX
TEST CIRCUITS
SDO
1.69k
C
LOAD
= 20pF
+
IN
–
IN
REF
AUTOCALIBRATION
GND
8
+
REF
3RD ORDER
∆Σ ADC
(1-256)
–
AND CONTROL
GAIN
2
V
CC
SDI
1
SCK
SERIAL
INTERFACE
INTERNAL
OSCILLATOR
SDO
9
SD0
7
CS
6
F
O
10
2480 FD
V
CC
1.69k
= 20pF
C
LOAD
Hi-Z TO V
VOL TO V
VOH TO Hi-Z
OH
OH
2480 TA02
Hi-Z TO V
VOH TO V
VOL TO Hi-Z
OL
OL
2480 TA03
2480f
11
Page 12

LTC2480
WUW
TI I G DIAGRA S
CS
Timing Diagram Using Internal SCK
SDO
SCK
SDI
SDO
SCK
SDI
SLEEP
t
1
t
t
3
t
8
t
7
KQMIN
t
KQMAX
t
2
2480 TD1
CONVERSIONDATA IN/OUT
Timing Diagram Using External SCK
CS
SLEEP
t
1
t
5
t
6
t
4
t
8
t
7
t
KQMIN
t
KQMAX
t
2
2480 TD2
CONVERSIONDATA IN/OUT
WUUU
APPLICATIO S I FOR ATIO
CONVERTER OPERATION
Converter Operation Cycle
The LTC2480 is a low power, delta-sigma analog-todigital converter with an easy to use 4-wire serial interface
and automatic differential input current cancellation. Its
operation is made up of three states. The converter operating cycle begins with the conversion, followed by the low
power sleep state and ends with the data output (see
Figure 1). The 4-wire interface consists of serial data
output (SDO), serial clock (SCK), chip select (CS) and
serial data input (SDI).
Initially, the LTC2480 performs a conversion. Once the
conversion is complete, the device enters the sleep state.
12
CONVERT
SLEEP
FALSE
CS = LOW
AND
SCK
TRUE
DATA OUTPUT
CONFIGURATION INPUT
2480 F01
Figure 1. LTC2480 State Transition Diagram
2480f
Page 13

WUUU
APPLICATIO S I FOR ATIO
LTC2480
While in this sleep state, power consumption is reduced by
two orders of magnitude. The part remains in the sleep
state as long as CS is HIGH. The conversion result is held
indefinitely in a static shift register while the converter is
in the sleep state.
Once CS is pulled LOW, the device exits the low power
mode and enters the data output state. If CS is pulled HIGH
before the first rising edge of SCK, the device returns to the
low power sleep mode and the conversion result is still
held in the internal static shift register. If CS remains LOW
after the first rising edge of SCK, the device begins
outputting the conversion result. Taking CS high at this
point will terminate the data input and output state and
start a new conversion. The conversion result is shifted
out of the device through the serial data output pin (SDO)
on the falling edge of the serial clock (SCK) (see Figure 2).
The LTC2480 includes a serial data input pin (SDI) in
which data is latched by the device on the rising edge of
SCK (Figure 2). The bit stream applied to this pin can be
used to select various features of the LTC2480, including
an on-chip temperature sensor, programmable GAIN, line
frequency rejection and output data rate. Alternatively, this
pin may be tied to ground and the part will perform
conversions in a default state. In the default state (SDI
grounded) the device simply performs conversions on the
user applied input with a GAIN of 1 and simultaneous
rejection of 50Hz and 60Hz line frequencies.
Through timing control of the CS and SCK pins, the
LTC2480 offers several flexible modes of operation
(internal or external SCK and free-running conversion
modes). These various modes do not require programming configuration registers; moreover, they do not disturb the cyclic operation described above. These modes of
operation are described in detail in the Serial Interface
Timing Modes section.
Easy Drive Input Current Cancellation
The LTC2480 combines a high precision delta-sigma ADC
with an automatic differential input current cancellation
front end. A proprietary front-end passive sampling
network transparently removes the differential input current. This enables external RC networks and high impedance sensors to directly interface to the LTC2480 without
external amplifiers. The remaining common mode input
current is eliminated by either balancing the differential
input impedances or setting the common mode input
equal to the common mode reference (see Automatic
Input Current Cancellation section). This unique architecture does not require on-chip buffers enabling input signals to swing all the way to ground and up to VCC.
Furthermore, the cancellation does not interfere with the
transparent offset and full-scale auto-calibration and the
absolute accuracy (full scale + offset + linearity) is maintained even with external RC networks.
Accessing the Special Features of the LTC2480
The LTC2480 combines a high resolution, low noise ∆Σ
analog-to-digital converter with an on-chip selectable temperature sensor, programmable gain, programmable digital filter and output rate control. These special features are
selected through a single 8-bit serial input word during the
data input/output cycle (see Figure 2).
The LTC2480 powers up in a default mode commonly
used for most measurements. The device will remain in
this mode as long as the serial data input (SDI) is low. In
this default mode, the measured input is external, the
GAIN is 1, the digital filter simultaneously rejects 50Hz and
60Hz line frequency noise, and the speed mode is 1x
(offset automatically, continuously calibrated).
A simple serial interface grants access to any or all special
functions contained within the LTC2480. In order to
change the mode of operation, an enable bit (EN) followed
by up to 7 bits of data are shifted into the device (see
Table 1). The first 3 bits (GS2, GS1, GS0) control the GAIN
of the converter from 1 to 256. The 4th bit (IM) is used to
select the internal temperature sensor as the conversion
input, while the 5th and 6th bits (FA, FB) combine to
determine the line frequency rejection mode. The 7th bit
(SPD) is used to double the output rate by disabling the
offset auto calibration.
2480f
13
Page 14

LTC2480
WUUU
APPLICATIO S I FOR ATIO
CS
BIT 23
SDO
Hi-Z
SCK
SDI
SLEEP DATA INPUT/OUTPUT
EOC
EN GS2 GS1 GS0 IM FBFA SPD DON’T CARE
Table 1. Selecting Special Modes
Gain
EN GS2 GS1
X
0
0
1
0
1
0
1
0
1
1
1
1
1
1
1
1
1
0
1
0
1
0
1
0
1
1
1
1
1
1
1
1
1
1
1
1
1
1
X
1
X
1
X
1
X
X
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
Any Gain
X
X
X
X
GS0
X
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
X
X
X
X
BIT 21
BIT 20 BIT 19 BIT 18
SIGDMY
MSB B16
CONVERSION RESULT
Figure 2. Input/Output Data Timing
Rejection
Mode
IM FA FB SPD Comments
XX X
X
0
0
0
0
0
0
0
Any
0
Rejection
0
Mode
0
0
0
0
0
0
0
0
0
0
0
1
0
1
0
1
0
1
0
1
1
1
1
0
1
Speed
0
1
0
1
0
1
Keep Previous Mode
External Input, Gain = 1, Autocalibration
0
External Input, Gain = 4, Autocalibration
0
External Input, Gain = 8, Autocalibration
0
External Input, Gain = 16, Autocalibration
0
External Input, Gain = 32, Autocalibration
0
External Input, Gain = 64, Autocalibration
0
External Input, Gain = 128, Autocalibration
0
External Input, Gain = 256, Autocalibration
0
External Input, Gain = 1, 2x Speed
1
External Input, Gain = 2, 2x Speed
1
External Input, Gain = 4, 2x Speed
1
External Input, Gain = 8, 2x Speed
1
External Input, Gain = 16, 2x Speed
1
External Input, Gain = 32, 2x Speed
1
External Input, Gain = 64, 2x Speed
1
External Input, Gain = 128, 2x Speed
1
External Input, Simultaneous 50Hz/60Hz Rejection
External Input, 50Hz Rejection
Any
External Input, 60Hz Rejection
Reserved, Do Not Use
Temperature Input, 50Hz/60Hz Rejection, Gain = 1, Autocalibration
X
Temperature Input, 50Hz Rejection, Gain = 1, Autocalibration
X
Temperature Input, 60Hz Rejection, Gain = 1, Autocalibration
X
Reserved, Do Not Use
X
2480 TBL1
BIT 4
LSB
BIT 3
BIT 2BIT 22
GS2
PREVIOUS
CONFIGURATION BITS
BIT 1 BIT 0
GS0GS1
IM
CONVERSION
2480 F02
14
2480f
Page 15

WUUU
APPLICATIO S I FOR ATIO
LTC2480
Table 2a. The LTC2480 Performance vs GAIN in Normal Speed Mode (VCC = 5V, V
GAIN 1 4 8 16 32 64 128 256 UNIT
Input Span ±2.5 ±0.625 ±0.312 ±0.156 ±78m ±39m ±19.5m ±9.76m V
LSB 38.1 9.54 4.77 2.38 1.19 0.596 0.298 0.149 µV
Noise Free Resolution* 65536 65536 65536 65536 65536 65536 32768 16384 Counts
Gain Error 55555558ppm of FS
Offset Error 0.5 0.5 0.5 0.5 0.5 0.5 0.5 0.5 µV
Table 2b. The LTC2480 Performance vs GAIN in 2x Speed Mode (VCC = 5V, V
GAIN 1248163264128 UNIT
Input Span ±2.5 ±1.25 ±0.625 ±0.312 ±0.156 ±78m ±39m ±19.5m V
LSB 38.1 19.1 9.54 4.77 2.38 1.19 0.596 0.298 µV
Noise Free Resolution* 65536 65536 65536 65536 65536 65536 45875 22937 Counts
Gain Error 55555555ppm of FS
Offset Error 200 200 200 200 200 200 200 200 µV
*The resolution in counts is calculated as the FS divided by LSB or the RMS noise value, whichever is larger.
GAIN (GS2, GS1, GS0)
The input referred gain of the LTC2480 is adjustable from
1 to 256. With a gain of 1, the differential input range is
±V
/2 and the common mode input range is rail-to-rail.
REF
As the GAIN is increased, the differential input range is
reduced to ±V
/2 • GAIN but the common mode input
REF
range remains rail-to-rail. As the differential gain is increased, low level voltages are digitized with greater
REF
Rejection Mode (FA, FB)
The LTC2480 includes a high accuracy on-chip oscillator
with no required external components. Coupled with a 4th
order digital lowpass filter, the LTC2480 rejects line frequency noise. In the default mode, the LTC2480 simultaneously rejects 50Hz and 60Hz by at least 87dB. The
LTC2480 can also be configured to selectively reject 50Hz
or 60Hz to better than 110dB.
REF
= 5V)
= 5V)
resolution. At a gain of 256, the LTC2480 digitizes an input
signal range of ±9.76mV with over 16,000 counts.
Speed Mode (SPD)
Temperature Sensor (IM)
The LTC2480 includes an on-chip temperature sensor. The
temperature sensor is selected by setting IM = 1 in the serial
input data stream. Conversions are performed directly on
the temperature sensor by the converter. While operating
in this mode, the device behaves as a temperature to bits
converter. The digital reading is proportional to the absolute temperature of the device. This feature allows the
converter to linearize temperature sensors or continuously
remove temperature effects from external sensors. Several
applications leveraging this feature are presented in more
detail in the applications section. While operating in this
mode, the gain is set to 1 and the speed is set to normal independent of the control bits (GS2, GS1, GS0 and SPD).
The LTC2480 continuously performs offset calibrations.
Every conversion cycle, two conversions are automatically performed (default) and the results combined. This
result is free from offset and drift. In applications where
the offset is not critical, the autocalibration feature can be
disabled with the benefit of twice the output rate.
Linearity, full-scale accuracy and full-scale drift are identical for both 2x and 1x speed modes. In both the 1x and
2x speed there is no latency. This enables input steps or
multiplexer channel changes to settle in a single conversion
cycle easing system overhead and increasing the effective
conversion rate.
2480f
15
Page 16

LTC2480
WUUU
APPLICATIO S I FOR ATIO
Output Data Format
The LTC2480 serial output data stream is 24 bits long. The
first 3 bits represent status information indicating the sign
and conversion state. The next 17 bits are the conversion
result, MSB first. The remaining 4 bits indicate the configuration state associated with the current conversion
result. The third and fourth bit together are also used to
indicate an underrange condition (the differential input
voltage is below –FS) or an overrange condition (the
differential input voltage is above +FS).
In applications where the processor generates 32 clock
cycles, or to remain compatible with higher resolution
converters, the LTC2480’s digital interface will ignore
extra clock edges seen during the next conversion period
after the 24th and output “1” for the extra clock cycles.
Furthermore, CS may be pulled high prior to outputting all
24 bits, aborting the data out transfer and initiating a new
conversion.
Bit 23 (first output bit) is the end of conversion (EOC)
indicator. This bit is available at the SDO pin during the
conversion and sleep states whenever the CS pin is LOW.
This bit is HIGH during the conversion and goes LOW
when the conversion is complete.
Bit 22 (second output bit) is a dummy bit (DMY) and is
always LOW.
Bit 21 (third output bit) is the conversion result sign indicator (SIG). If VIN is >0, this bit is HIGH. If VIN is <0, this
bit is LOW.
Bit 20 (fourth output bit) is the most significant bit (MSB)
of the result. This bit in conjunction with Bit 21 also
provides the underrange or overrange indication. If both
Bit 21 and Bit 20 are HIGH, the differential input voltage is
above +FS. If both Bit 21 and Bit 20 are LOW, the
differential input voltage is below –FS.
The function of these bits is summarized in Table 3.
Table 3. LTC2480 Status Bits
BIT 23 BIT 22 BIT 21 BIT 20
INPUT RANGE EOC DMY SIG MSB
VIN ≥ 0.5 • V
0V ≤ VIN < 0.5 • V
–0.5 • V
VIN < – 0.5 • V
REF
≤ VIN < 0V 0001
REF
REF
REF
0011
0010
0000
Bits 20-4 are the 16-bit plus sign conversion result MSB
first.
Bits 3-0 are the corresponding configuration bits for the
present conversion result. Bits 3-1 are the gain set bits and
bit 0 is IM (see Figure 2).
Data is shifted out of the SDO pin under control of the serial
clock (SCK) (see Figure 2). Whenever CS is HIGH, SDO
remains high impedance and any externally generated
SCK clock pulses are ignored by the internal data out shift
register.
In order to shift the conversion result out of the device, CS
must first be driven LOW. EOC is seen at the SDO pin of the
device once CS is pulled LOW. EOC changes in real time
16
Table 4. LTC2480 Output Data Format
DIFFERENTIAL INPUT VOLTAGE BIT 23 BIT 22 BIT 21 BIT 20 BIT 19 BIT 18 BIT 17 … BIT 4
* EOC DMY SIG MSB
V
IN
VIN* ≥ FS** 0 0110 0 0…0
FS** – 1LSB 0 0101 1 1…1
0.5 • FS** 0 0101 0 0…0
0.5 • FS** – 1LSB 0 0100 1 1…1
0 00100 0 0…0
–1LSB 0 0011 1 1…1
–0.5 • FS** 0 0011 0 0…0
–0.5 • FS** – 1LSB 0 0010 1 1…1
–FS** 0 0010 0 0…0
VIN* < –FS** 0 0001 1 1…1
*The differential input voltage VIN = IN+ – IN–. **The full-scale voltage FS = 0.5 • V
REF
/GAIN.
2480f
Page 17

WUUU
APPLICATIO S I FOR ATIO
LTC2480
from HIGH to LOW at the completion of a conversion. This
signal may be used as an interrupt for an external
microcontroller. Bit 23 (EOC) can be captured on the first
rising edge of SCK. Bit 22 is shifted out of the device on the
first falling edge of SCK. The final data bit (Bit 0) is shifted
out on the falling edge of the 23rd SCK and may be latched
on the rising edge of the 24th SCK pulse. On the falling
edge of the 24th SCK pulse, SDO goes HIGH indicating the
initiation of a new conversion cycle. This bit serves as EOC
(Bit 23) for the next conversion cycle. Table 4 summarizes
the output data format.
+
As long as the voltage on the IN
within the –0.3V to (V
and IN– pins is maintained
+ 0.3V) absolute maximum
CC
operating range, a conversion result is generated for any
differential input voltage VIN from –FS = –0.5 • V
to +FS = 0.5 • V
/GAIN. For differential input voltages
REF
REF
/GAIN
greater than +FS, the conversion result is clamped to the
value corresponding to the +FS + 1LSB. For differential
input voltages below –FS, the conversion result is clamped
to the value corresponding to –FS – 1LSB.
Conversion Clock
A major advantage the delta-sigma converter offers over
conventional type converters is an on-chip digital filter
(commonly implemented as a SINC or Comb filter). For high
resolution, low frequency applications, this filter is typically
designed to reject line frequencies of 50Hz or 60Hz plus their
harmonics. The filter rejection performance is directly related to the accuracy of the converter system clock. The
LTC2480 incorporates a highly accurate on-chip oscillator.
This eliminates the need for external frequency setting components such as crystals or oscillators.
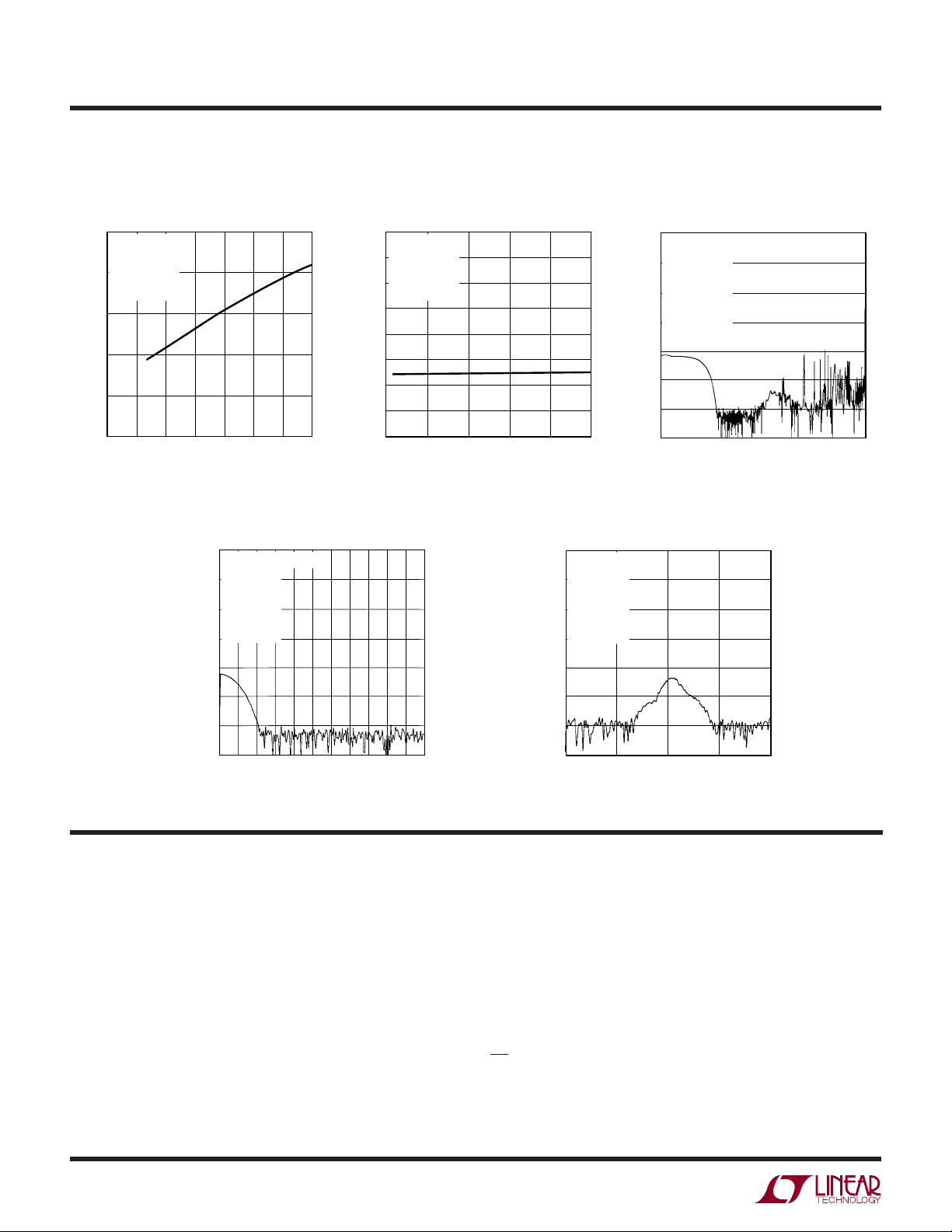
Frequency Rejection Selection (FO)
The LTC2480 internal oscillator provides better than 110dB
normal mode rejection at the line frequency and all its
harmonics (up to the 255th) for 50Hz ±2% or 60Hz ±2%,
or better than 87dB normal mode rejection from 48Hz to
62.4Hz. The rejection mode is selected by writing to the
on-chip configuration register and the default mode at
POR is simultaneous 50Hz/60Hz rejection.
When a fundamental rejection frequency different from
50Hz or 60Hz is required or when the converter must be
–80
–85
–90
–95
–100
–105
–110
–115
–120
–125
NORMAL MODE REJECTION (dB)
–130
–135
–140
–12 –8 –4 0 4 8 12
DIFFERENTIAL INPUT SIGNAL FREQUENCY
DEVIATION FROM NOTCH FREQUENCY f
Figure 3. LTC2480 Normal Mode Rejection When Using
an External Oscillator
EOSC
/5120(%)
2480 F03
synchronized with an outside source, the LTC2480 can
operate with an external conversion clock. The converter
automatically detects the presence of an external clock
signal at the FO pin and turns off the internal oscillator. The
frequency f
of the external signal must be at least
EOSC
10kHz to be detected. The external clock signal duty cycle
is not significant as long as the minimum and maximum
specifications for the high and low periods t
HEO
and t
LEO
are observed.
While operating with an external conversion clock of a
frequency f
normal mode rejection in a frequency range of f
, the LTC2480 provides better than 110dB
EOSC
EOSC
/5120
± 4% and its harmonics. The normal mode rejection as a
function of the input frequency deviation from f
EOSC
/5120
is shown in Figure 3.
Whenever an external clock is not present at the FO pin, the
converter automatically activates its internal oscillator and
enters the Internal Conversion Clock mode. The LTC2480
operation will not be disturbed if the change of conversion
clock source occurs during the sleep state or during the
data output state while the converter uses an external
serial clock. If the change occurs during the conversion
state, the result of the conversion in progress may be
outside specifications but the following conversions will
not be affected. If the change occurs during the data output
state and the converter is in the Internal SCK mode, the
serial clock duty cycle may be affected but the serial data
stream will remain valid.
2480f
17
Page 18

LTC2480
WUUU
APPLICATIO S I FOR ATIO
Table 5. LTC2480 State Duration
STATE OPERATING MODE DURATION
CONVERT Internal Oscillator 60Hz Rejection 133ms, Output Data Rate ≤ 7.5 Readings/s for 1x Speed Mode
67ms, Output Data Rate ≤ 15 Readings/s for 2x Speed Mode
50Hz Rejection 160ms, Output Data Rate ≤ 6.2 Readings/s for 1x Speed Mode
80ms, Output Data Rate ≤ 12.5 Readings/s for 2x Speed Mode
50Hz/60Hz Rejection 147ms, Output Data Rate ≤ 6.8 Readings/s for 1x Speed Mode
73.6ms, Output Data Rate ≤ 13.6 Readings/s for 2x Speed Mode
External Oscillator FO = External Oscillator 41036/f
with Frequency f
/5120 Rejection) 20556/f
(f
EOSC
SLEEP As Long As CS = HIGH, After a Conversion is Complete
DATA OUTPUT Internal Serial Clock FO = LOW/HIGH As Long As CS = LOW But Not Longer Than 0.62ms
(Internal Oscillator) (24 SCK Cycles)
FO = External Oscillator with As Long As CS = LOW But Not Longer Than 192/f
Frequency f
External Serial Clock with As Long As CS = LOW But Not Longer Than 24/f
Frequency f
kHz (24 SCK Cycles)
SCK
EOSC
kHz 1x Speed Mode
EOSC
2x Speed Mode
kHz (24 SCK Cycles)
s, Output Data Rate ≤ f
EOSC
s, Output Data Rate ≤ f
EOSC
/41036 Readings/s for
EOSC
/20556 Readings/s for
EOSC
EOSC
SCK
ms
ms
Table 5 summarizes the duration of each state and the
achievable output data rate as a function of FO.
Ease of Use
The
LTC2480
data output has no latency, filter settling
delay or redundant data associated with the conversion
cycle. There is a one-to-one correspondence between the
conversion and the output data. Therefore, multiplexing
multiple analog voltages is easy.
The LTC2480 performs offset and full-scale calibrations
every conversion cycle. This calibration is transparent to
the user and has no effect on the cyclic operation described
above. The advantage of continuous calibration is extreme
stability of offset and full-scale readings with respect to time,
supply voltage change and temperature drift.
Power-Up Sequence
The LTC2480 automatically enters an internal reset state
when the power supply voltage VCC drops below approximately 2V. This feature guarantees the integrity of the
conversion result and of the serial interface mode selection.
When the VCC voltage rises above this critical threshold,
the converter creates an internal power-on-reset (POR)
signal with a duration of approximately 4ms. The POR
signal clears all internal registers. Following the POR
signal, the LTC2480 starts a normal conversion cycle and
follows the succession of states described in Figure 1. The
first conversion result following POR is accurate within the
specifications of the device if the power supply voltage is
restored within the operating range (2.7V to 5.5V) before
the end of the POR time interval.
On-Chip Temperature Sensor
The LTC2480 contains an on-chip PTAT (proportional to
absolute temperature) signal that can be used as a temperature sensor. The internal PTAT has a typical value of
420mV at 27°C and is proportional to the absolute temperature value with a temperature coefficient of 420/(27 + 273)
= 1.40mV/°C (SLOPE), as shown in Figure 4. The internal
PTAT signal is used in a single-ended mode referenced to
device ground internally. The GAIN is automatically set to
one (independent of the values of GS0, GS1, GS2) in order
to preserve the PTAT property at the ADC output code and
avoid an out of range error. The 1x speed mode with automatic offset calibration is automatically selected for the
internal PTAT signal measurement as well.
18
2480f
Page 19

WUUU
APPLICATIO S I FOR ATIO
LTC2480
When using the internal temperature sensor, if the output
code is normalized to R
SDO
= V
PTAT/VREF
, the temperature
is calculated using the following formula:
RV
•
=
K
SDO REF
SLOPE
in Kelvin
T
and
RV
•
SDO REF
T
=°
C
SLOPE
–
in C273
where SLOPE is nominally 1.4mV/°C.
Since the PTAT signal can have an initial value variation
which results in errors in SLOPE, to achieve better temperature measurements, a one-time calibration is needed
to adjust the SLOPE value. The converter output of the
PTAT signal, R0
, is measured at a known temperature
SDO
T0 (in °C) and the SLOPE is calculated as:
SLOPE
RV
=
•
SDO REF
T
+00 273
This calibrated SLOPE can be used to calculate the
temperature.
If the same V
temperature measurement, the actual value of the V
source is used during calibration and
REF
REF
is
not needed to measure the temperature as shown in the
calculation below:
•
RV
SDO REF
T
=
C
SLOPE
R
SDO
=+
0
R
SDO
600
500
(mV)
400
PTAT
V
300
200
–60
Figure 4. Internal PTAT Signal vs Temperature
–
273
•–
0 273 273
T
()
VCC = 5V
IM = 1
= GND
F
O
SLOPE = 1.40mV/°C
30090–30 60
TEMPERATURE (°C)
120
2480 F04
Reference Voltage Range
The LTC2480 external reference voltage range is 0.1V to
. The converter output noise is determined by the
V
CC
thermal noise of the front-end circuits, and as such, its
value in nanovolts is nearly constant with reference voltage. Since the transition noise (600nV) is much less than
the quantization noise (V
/217), a decrease in the refer-
REF
ence voltage will increase the converter resolution. A
reduced reference voltage will also improve the converter
performance when operated with an external conversion
clock (external FO signal) at substantially higher output
data rates (see the Output Data Rate section). V
REF
must
be ≥1.1V to use the internal temperature sensor.
The negative reference input to the converter is internally
tied to GND. GND (Pin 8) should be connected to a ground
plane through as short a trace as possible to minimize
voltage drop. The LTC2480 has an average operational
current of 160µA and for 0.1Ω parasitic resistance, the
voltage drop of 16µV causes a gain error of 3.2ppm for
V
= 5V.
REF
Input Voltage Range
The analog input is truly differential with an absolute/
common mode range for the IN+ and IN– input pins
extending from GND – 0.3V to VCC + 0.3V. Outside
these limits, the ESD protection devices begin to turn on
and the errors due to input leakage current increase
rapidly. Within these limits, the LTC2480 converts the
bipolar differential input signal, VIN = IN+ – IN–, from –FS
to +FS where FS = 0.5 • V
/GAIN. Outside this range, the
REF
converter indicates the overrange or the underrange condition using distinct output codes. Since the differential
input current cancellation does not rely on an on-chip
buffer, current cancellation as well as DC performance is
maintained rail-to-rail.
I
nput signals applied to IN+ and IN– pins may extend by
300mV below ground and above VCC. In order to limit any
fault current, resistors of up to 5k may be added in series
with the IN+ and IN– pins without affecting the performance of the devices. The effect of the series resistance
on the converter accuracy can be evaluated from the
curves presented in the Input Current/Reference Current
sections. In addition, series resistors will introduce a
2480f
19
Page 20

LTC2480
WUUU
APPLICATIO S I FOR ATIO
temperature dependent offset error due to the input
leakage current. A 1nA input leakage current will develop
a 1ppm offset error on a 5k resistor if V
has a very strong temperature dependency.
SERIAL INTERFACE TIMING MODES
The LTC2480’s 4-wire interface is SPI and MICROWIRE
compatible. This interface offers several flexible modes of
operation. These include internal/external serial clock,
3- or 4-wire I/O, single cycle or continuous conversion.
The following sections describe each of these serial interface timing modes in detail. In all these cases, the converter can use the internal oscillator (FO = LOW or FO =
HIGH) or an external oscillator connected to the FO pin.
Refer to Table 6 for a summary.
External Serial Clock, Single Cycle Operation
(SPI/MICROWIRE Compatible)
This timing mode uses an external serial clock to shift out
the conversion result and a CS signal to monitor and
control the state of the conversion cycle, see Figure 5.
The serial clock mode is selected on the falling edge of CS.
To select the external serial clock mode, the serial clock pin
(SCK) must be LOW during each CS falling edge.
The serial data output pin (SDO) is Hi-Z as long as CS is
HIGH. At any time during the conversion cycle, CS may be
pulled LOW in order to monitor the state of the converter.
While CS is pulled LOW, EOC is output to the SDO pin.
EOC = 1 while a conversion is in progress and EOC = 0 if
the device is in the sleep state. Independent of CS, the
device automatically enters the low power sleep state once
the conversion is complete.
= 5V. This error
REF
When the device is in the sleep state, its conversion result
is held in an internal static shift register. The device
remains in the sleep state until the first rising edge of SCK
is seen while CS is LOW. The input data is then shifted in
via the SDI pin on the rising edge of SCK (including the
first rising edge) and the output data is shifted out of the
SDO pin on each falling edge of SCK
external circuitry to latch the output on the rising edge of
SCK. EOC can be latched on the first rising edge of SCK
and the last bit of the conversion result can be latched on
the 24th rising edge of SCK. On the 24th falling edge of
SCK, the device begins a new conversion. SDO goes HIGH
(EOC = 1) indicating a conversion is in progress.
applications where the processor generates 32 clock
cycles, or to remain compatible with higher resolution
converters, the LTC2480’s digital interface will ignore
extra clock edges seen during the next conversion period
after the 24th and outputs “1” for the extra clock cycles.
At the conclusion of the data cycle, CS may remain LOW
and EOC monitored as an end-of-conversion interrupt.
Alternatively, CS may be driven HIGH setting SDO to Hi-Z.
As described above, CS may be pulled LOW at any time in
order to monitor the conversion status.
Typically, CS remains LOW during the data output state.
However, the data output state may be aborted by pulling
CS HIGH anytime between the first rising edge and the 24th
falling edge of SCK (see Figure 6). On the rising edge of CS,
the device aborts the data output state and immediately
initiates a new conversion. If the device has not finished
loading the last input bit SPD of SDI by the time CS is pulled
HIGH, the SDI information is discarded and the previous
configuration is kept. This is useful for systems not requiring all 24 bits of output data, aborting an invalid conversion
cycle or synchronizing the start of a conversion.
. This enables
In
Table 6. LTC2480 Interface Timing Modes
CONVERSION DATA CONNECTION
SCK CYCLE OUTPUT and
CONFIGURATION SOURCE CONTROL CONTROL WAVEFORMS
External SCK, Single Cycle Conversion External CS and SCK CS and SCK Figures 5, 6
External SCK, 3-Wire I/O External SCK SCK Figure 7
Internal SCK, Single Cycle Conversion Internal CS↓ CS↓ Figures 8, 9
Internal SCK, 3-Wire I/O, Continuous Conversion Internal Continuous Internal Figure 10
20
2480f
Page 21

WUUU
APPLICATIO S I FOR ATIO
REFERENCE
0.1V TO V
TEST EOC
(OPTIONAL)
CS
SDO
SCK
(EXTERNAL)
TEST EOC
BIT 23
EOC
2.7V TO 5.5V
1µF
VOLTAGE
ANALOG
INPUT
210
V
F
CC
O
LTC2480
3
V
REF
CC
4
+
IN
5
–
IN
SCK
SDO
GND
SDI
1
9
7
6
CS
8
INT/EXT CLOCK
4-WIRE
SPI INTERFACE
BIT 4BIT 19 BIT 18 BIT 17 BIT 16BIT 20BIT 21BIT 22
LSB
LTC2480
BIT 0
IMMSBSIG
TEST EOC
Hi-ZHi-ZHi-Z
SDI*
CS
SDO
CONVERSION
DON’T CARE
EOC
SLEEPSLEEP
TEST EOC
EN GS2 GS1 GS0 IM FA FB SPD
DATA OUTPUT CONVERSION
Figure 5. External Serial Clock, Single Cycle Operation
2.7V TO 5.5V
1µF
210
V
F
CC
O
TEST EOC
(OPTIONAL)
Hi-Z
LTC2480
INPUT
3
V
REF
CC
4
+
IN
5
–
IN
MSBSIG
REFERENCE
VOLTAGE
0.1V TO V
ANALOG
BIT 23BIT 0
EOC
Hi-Z Hi-ZHi-Z
SCK
SDO
GND
SDI
1
9
7
6
CS
8
INT/EXT CLOCK
4-WIRE
SPI INTERFACE
DON’T CARE
2480 F05
BIT 8BIT 19 BIT 18 BIT 17 BIT 16 BIT 9BIT 20BIT 21BIT 22
TEST EOC
SCK
(EXTERNAL)
SDI*
DATA
OUTPUT
DON’T CARE DON’T CARE
CONVERSIONSLEEP
SLEEP
EN GS2 GS1 GS0 IM FA FB SPD
DATA OUTPUT
SLEEP
Figure 6. External Serial Clock, Reduced Data Output Length
CONVERSION
21
2480 F06
2480f
Page 22

LTC2480
WUUU
APPLICATIO S I FOR ATIO
External Serial Clock, 3-Wire I/O
This timing mode utilizes a 3-wire serial I/O interface. The
conversion result is shifted out of the device by an externally generated serial clock (SCK) signal, see Figure 7. CS
may be permanently tied to ground, simplifying the user
interface or transmission over an isolation barrier.
The external serial clock mode is selected at the end of the
power-on reset (POR) cycle. The POR cycle is concluded
typically 4ms after V
exceeds approximately 2V. The level
CC
applied to SCK at this time determines if SCK is internal or
external. SCK must be driven LOW prior to the end of POR
in order to enter the external serial clock timing mode.
Since CS is tied LOW, the end-of-conversion (EOC) can be
continuously monitored at the SDO pin during the convert
and sleep states. EOC may be used as an interrupt to an
external controller indicating the conversion result is
ready. EOC = 1 while the conversion is in progress and
EOC = 0 once the conversion ends. On the falling edge of
EOC, the conversion result is loaded into an internal static
shift register. The input data is then shifted in via the SDI
pin on the rising edge of SCK (including the first rising
edge) and the output data is shifted out of the SDO pin on
each falling edge of SCK. EOC can be latched on the first
rising edge of SCK. On the 24th falling edge of SCK, SDO
goes HIGH (EOC = 1) indicating a new conversion has
begun. In applications where the processor generates 32
clock cycles, or to remain compatible with higher resolution converters, the LTC2480’s digital interface will ignore
extra clock edges seen during the next conversion period
after the 24th and outputs “1” for the extra clock cycles.
Internal Serial Clock, Single Cycle Operation
This timing mode uses an internal serial clock to shift out
the conversion result and a CS signal to monitor and
control the state of the conversion cycle, see Figure 8.
In order to select the internal serial clock timing mode, the
serial clock pin (SCK) must be floating (Hi-Z) or pulled
HIGH prior to the falling edge of CS. The device will not
enter the internal serial clock mode if SCK is driven LOW
on the falling edge of CS. An internal weak pull-up resistor
is active on the SCK pin during the falling edge of CS;
therefore, the internal serial clock timing mode is automatically selected if SCK is not externally driven.
The serial data output pin (SDO) is Hi-Z as long as CS is
HIGH. At any time during the conversion cycle, CS may be
pulled LOW in order to monitor the state of the converter.
Once CS is pulled LOW, SCK goes LOW and EOC is output
to the SDO pin. EOC = 1 while a conversion is in progress
and EOC = 0 if the device is in the sleep state.
CS
SDO
SCK
(EXTERNAL)
SDI*
22
CONVERSION
2.7V TO 5.5V
1µF
210
V
F
CC
LTC2480
ANALOG
INPUT
MSBSIG
3
V
SDI
REF
CC
4
5
SCK
SDO
+
IN
CS
–
IN
GND
DATA OUTPUT CONVERSION
REFERENCE
VOLTAGE
0.1V TO V
BIT 23
EOC
DON’T CARE DON’T CARE
EN GS2 GS1 GS0 IM FA FB SPD
INT/EXT CLOCK
O
1
9
3-WIRE
SPI INTERFACE
7
6
8
BIT 4BIT 19 BIT 18 BIT 17 BIT 16BIT 20BIT 21BIT 22
LSB
Figure 7. External Serial Clock, CS = 0 Operation
BIT 0
IM
2480 F07
2480f
Page 23

WUUU
APPLICATIO S I FOR ATIO
LTC2480
When testing EOC, if the conversion is complete (EOC = 0),
the device will exit the low power mode during the EOC
test. In order to allow the device to return to the low power
sleep state, CS must be pulled HIGH before the first rising
edge of SCK. In the internal SCK timing mode, SCK goes
HIGH and the device begins outputting data at time t
after the falling edge of CS (if EOC = 0) or t
EOCtest
EOCtest
after EOC
goes LOW (if CS is LOW during the falling edge of EOC).
The value of t
oscillator. If F
frequency f
EOSC
is pulled HIGH before time t
is 12µs if the device is using its internal
EOCtest
is driven by an external oscillator of
O
, then t
EOCtest
is 3.6/f
EOCtest
in seconds. If CS
EOSC
, the device returns to
the sleep state and the conversion result is held in the
internal static shift register.
If CS remains LOW longer than t
, the first rising
EOCtest
edge of SCK will occur and the conversion result is serially
shifted out of the SDO pin. The data I/O cycle concludes
after the 24th rising edge. The input data is shifted in via
the SDI pin on the rising edge of SCK (including the first
rising edge) and the output data is shifted out of the SDO
pin on each falling edge of SCK. The internally generated
serial clock is output to the SCK pin. This signal may be
used to shift the conversion result into external circuitry.
EOC can be latched on the first rising edge of SCK and the
last bit of the conversion result on the 24th rising edge of
SCK. After the 24th rising edge, SDO goes HIGH (EOC = 1),
SCK stays HIGH and a new conversion starts.
CS remains LOW during the data output state. However,
the data output state may be aborted by pulling CS HIGH
anytime between the first and 24th rising edge of SCK (see
Figure 9). On the rising edge of CS, the device aborts the
data output state and immediately initiates a new conversion. If the device has not finished loading the last input bit
SPD of SDI by the time CS is pulled HIGH, the SDI
information is discarded and the previous configuration is
still kept. This is useful for systems not requiring all 24 bits
of output data, aborting an invalid conversion cycle, or
synchronizing the start of a conversion. If CS is pulled
HIGH while the converter is driving SCK LOW, the internal
pull-up is not available to restore SCK to a logic HIGH state.
This will cause the device to exit the internal serial clock
mode on the next falling edge of CS. This can be avoided
by adding an external 10k pull-up resistor to the SCK pin
or by never pulling CS HIGH when SCK is LOW.
SDO
SCK
(INTERNAL)
SDI*
2.7V TO 5.5V
1µF
210
V
F
CC
LTC2480
ANALOG
INPUT
BIT 19 BIT 18 BIT 17 BIT 16BIT 20BIT 21BIT 22
3
V
SDI
REF
CC
4
5
DATA OUTPUT CONVERSIONCONVERSION
SCK
SDO
+
IN
CS
–
IN
GND
REFERENCE
VOLTAGE
0.1V TO V
TEST EOC
CS
Hi-Z Hi-Z Hi-Z Hi-Z
DON’T CARE DON’T CARE
SLEEP
SLEEP
<t
EOCtest
BIT 23
EOC
EN GS2 GS1 GS0 IM FA FB SPD
MSBSIG
INT/EXT CLOCK
O
1
9
4-WIRE
7
SPI INTERFACE
6
8
V
CC
10k
BIT 4
LSB IM
BIT 0
Figure 8. Internal Serial Clock, Single Cycle Operation
TEST EOC
2480 F08
2480f
23
Page 24

LTC2480
WUUU
APPLICATIO S I FOR ATIO
Whenever SCK is LOW, the LTC2480’s internal pull-up at
pin SCK is disabled. Normally, SCK is not externally driven
if the device is in the internal SCK timing mode. However,
certain applications may require an external driver on SCK.
If this driver goes Hi-Z after outputting a LOW signal, the
LTC2480’s internal pull-up remains disabled. Hence, SCK
remains LOW. On the next falling edge of CS, the device is
switched to the external SCK timing mode. By adding an
external 10k pull-up resistor to SCK, this pin goes HIGH once
the external driver goes Hi-Z. On the next CS falling edge,
the device will remain in the internal SCK timing mode.
A similar situation may occur during the sleep state when
CS is pulsed HIGH-LOW-HIGH in order to test the conversion status. If the device is in the sleep state (EOC = 0),
SCK will go LOW. Once CS goes HIGH (within the time
period defined above as t
), the internal pull-up is
EOCtest
activated. For a heavy capacitive load on the SCK pin, the
internal pull-up may not be adequate to return SCK to a
HIGH level before CS goes low again. This is not a concern
under normal conditions where CS remains LOW after
detecting EOC = 0. This situation is easily overcome by
adding an external 10k pull-up resistor to the SCK pin.
Internal Serial Clock, 3-Wire I/O,
Continuous Conversion
This timing mode uses a 3-wire interface. The conversion
result is shifted out of the device by an internally generated
serial clock (SCK) signal, see Figure 10. CS may be permanently tied to ground, simplifying the user interface or
transmission over an isolation barrier.
The internal serial clock mode is selected at the end of the
power-on reset (POR) cycle. The POR cycle is concluded
approximately 1ms after VCC exceeds 2V. An internal weak
pull-up is active during the POR cycle; therefore, the
internal serial clock timing mode is automatically selected
if SCK is not externally driven LOW (if SCK is loaded such
that the internal pull-up cannot pull the pin HIGH, the
external SCK mode will be selected).
During the conversion, the SCK and the serial data output
pin (SDO) are HIGH (EOC = 1). Once the conversion is
complete, SCK and SDO go LOW (EOC = 0) indicating the
conversion has finished and the device has entered the
low power sleep state. The part remains in the sleep state
a minimum amount of time (1/2 the internal SCK period)
SDO
SCK
(INTERNAL)
SDI*
2.7V TO 5.5V
1µF
210
V
F
CC
LTC2480
INPUT
3
V
SDI
REF
CC
4
5
SCK
SDO
+
IN
CS
–
IN
GND
BIT 19 BIT 18 BIT 17 BIT 16BIT 20BIT 21BIT 22
MSBSIG
REFERENCE
VOLTAGE
0.1V TO V
TEST EOC
>t
EOCtest
CS
BIT 0
EOC
Hi-Z Hi-Z Hi-Z Hi-Z Hi-Z
DATA
OUTPUT
(OPTIONAL)
TEST EOC
DON’T CARE DON’T CARE
<t
EOCtest
BIT 23
EOC
EN GS2 GS1 GS0 IM FA FB SPD
SLEEPSLEEP
ANALOG
O
1
9
7
6
8
DATA OUTPUT
INT/EXT CLOCK
4-WIRE
SPI INTERFACE
V
CC
10k
BIT 8
Figure 9. Internal Serial Clock, Reduce Data Output Length
CONVERSIONCONVERSIONSLEEP
TEST EOC
2480 F09
24
2480f
Page 25

WUUU
APPLICATIO S I FOR ATIO
CS
SDO
SCK
(INTERNAL)
BIT 23
EOC
2.7V TO 5.5V
1µF
REFERENCE
VOLTAGE
0.1V TO V
ANALOG
INPUT
BIT 19 BIT 18 BIT 17 BIT 16BIT 20BIT 21BIT 22
210
V
F
CC
O
LTC2480
3
V
REF
CC
4
+
IN
5
–
IN
SCK
SDO
GND
SDI
1
9
7
6
CS
8
INT/EXT CLOCK
3-WIRE
SPI INTERFACE
V
CC
10k
BIT 4 BIT 0
LSBMSBSIG
LTC2480
IM
SDI*
DON’T CARE DON’T CARE
EN GS2 GS1 GS0 IM FA FB SPD
Figure 10. Internal Serial Clock, CS = 0 Continuous Operation
then immediately begins outputting data. The data input/
output cycle begins on the first rising edge of SCK and
ends after the 24th rising edge. The input data is then
shifted in via the SDI pin on the rising edge of SCK
(including the first rising edge) and the output data is
shifted out of the SDO pin on each falling edge of SCK.
The internally generated serial clock is output to the SCK
pin. This signal may be used to shift the conversion result
into external circuitry. EOC can be latched on the first
rising edge of SCK and the last bit of the conversion result
can be latched on the 24th rising edge of SCK. After the
24th rising edge, SDO goes HIGH (EOC = 1) indicating a
new conversion is in progress. SCK remains HIGH during
the conversion.
PRESERVING THE CONVERTER ACCURACY
The LTC2480 is designed to reduce as much as possible
the conversion result sensitivity to device decoupling,
PCB layout, antialiasing circuits, line frequency perturbations and so on. Nevertheless, in order to preserve the
24-bit accuracy capability of this part, some simple precautions are required.
DATA OUTPUT CONVERSIONCONVERSION
2480 F10
Digital Signal Levels
The LTC2480’s digital interface is easy to use. Its digital
inputs (SDI, FO, CS and SCK in External SCK mode of
operation) accept standard CMOS logic levels and the internal hysteresis receivers can tolerate edge transition times
as slow as 100µs. However, some considerations are re-
quired to take advantage of the exceptional accuracy and
low supply current of this converter.
The digital output signals (SDO and SCK in Internal SCK
mode of operation) are less of a concern because they are
not generally active during the conversion state.
While a digital input signal is in the range 0.5V to
(VCC– 0.5V), the CMOS input receiver draws additional
current from the power supply. It should be noted that,
when any one of the digital input signals (SDI, FO, CS
and SCK in External SCK mode of operation) is within
this range, the power supply current may increase even
if the signal in question is at a valid logic level. For
micropower operation, it is recommended to drive all
digital input signals to full CMOS levels [VIL < 0.4V and
VOH > (VCC – 0.4V)].
2480f
25
Page 26

LTC2480
WUUU
APPLICATIO S I FOR ATIO
During the conversion period, the undershoot and/or
overshoot of a fast digital signal connected to the pins can
severely disturb the analog to digital conversion process.
Undershoot and overshoot occur because of the impedance mismatch of the circuit board trace at the converter
pin when the transition time of an external control signal
is less than twice the propagation delay from the driver to
the LTC2480
signal propagation velocity is approximately 183ps/inch
for internal traces and 170ps/inch for surface traces.
Thus, a driver generating a control signal with a minimum
transition time of 1ns must be connected to the converter
pin through a trace shorter than 2.5 inches. This problem
becomes particularly difficult when shared control lines
are used and multiple reflections may occur. The solution
is to carefully terminate all transmission lines close to
their characteristic impedance.
Parallel termination near the LTC2480 pin will eliminate this
problem but will increase the driver power dissipation. A
series resistor between 27Ω and 56Ω placed near the driver
output pin will also eliminate this problem without additional
power dissipation. The actual resistor value depends upon
the trace impedance and connection topology.
An alternate solution is to reduce the edge rate of the control signals. It should be noted that using very slow edges
will increase the converter power supply current during the
transition time. The differential input architecture reduces
the converter’s sensitivity to ground currents.
Particular attention must be given to the connection of the
FO signal when the LTC2480 is used with an external
conversion clock. This clock is active during the conversion time and the normal mode rejection provided by the
internal digital filter is not very high at this frequency. A
normal mode signal of this frequency at the converter
reference terminals can result in DC gain and INL errors.
A normal mode signal of this frequency at the converter
input terminals can result in a DC offset error. Such
perturbations can occur due to asymmetric capacitive
coupling between the FO signal trace and the converter
input and/or reference connection traces. An immediate
solution is to maintain maximum possible separation
between the FO signal trace and the input/reference signals. When the FO signal is parallel terminated near the
. For reference, on a regular FR-4 board,
converter, substantial AC current is flowing in the loop
formed by the FO connection trace, the termination and the
ground return path. Thus, perturbation signals may be
inductively coupled into the converter input and/or reference. In this situation, the user must reduce to a minimum
the loop area for the F
the differential input and reference connections. Even
when F
EMI threats which will be minimized by following good
layout practices.
Driving the Input and Reference
The input and reference pins of the LTC2480 converter are
directly connected to a network of sampling capacitors.
Depending upon the relation between the differential input
voltage and the differential reference voltage, these capacitors are switching between these four pins transferring small amounts of charge in the process. A simplified
equivalent circuit is shown in Figure 11.
For a simple approximation, the source impedance R
driving an analog input pin (IN+, IN–, V
considered to form, together with RSW and CEQ (see
Figure 11), a first order passive network with a time
constant τ = (RS + RSW) • CEQ. The converter is able to
sample the input signal with better than 1ppm accuracy if
the sampling period is at least 14 times greater than the
input circuit time constant τ. The sampling process on the
four input analog pins is quasi-independent so each time
constant should be considered by itself and, under worstcase circumstances, the errors may add.
When using the internal oscillator, the LTC2480’s frontend switched-capacitor network is clocked at 123kHz
corresponding to an 8.1µs sampling period. Thus, for
settling errors of less than 1ppm, the driving source
impedance should be chosen such that τ ≤ 8.1µs/14 =
580ns. When an external oscillator of frequency f
used, the sampling period is 2.5/f
error of less than 1ppm, τ ≤ 0.178/f
Automatic Differential Input Current Cancellation
In applications where the sensor output impedance is low
(up to 10kΩ with no external bypass capacitor or up to
500Ω with 0.001µF bypass), complete settling of the input
is not driven, other nearby signals pose similar
0
signal as well as the loop area for
O
+
or GND) can be
REF
EOSC
and, for a settling
EOSC
.
EOSC
2480f
S
is
26
Page 27

APPLICATIO S I FOR ATIO
IIN IIN
VV
R
I REF
VV V
R
V
VR
VD
R
VV V
R
V
VR
where
AVG AVG
IN CM REF CM
EQ
AVG
REF
V
REF
INCM REFCM
EQ
IN
REF EQ
REF T
EQ
REF REF CM IN CM
EQ
IN
REF EQ
+
+
()=()
=
−
•
()
=
• − +
•
−
•
−≅
+
()
–
() ()
() ()
.
.
.
.• •
.–
.•
–
•
05
15
05
05
15
05
2
2
:
.
V
VININ
V
IN IN
R M INTERNAL OSCILLATOR Hz MODE
REFCM
IN
INCM
EQ
=
⎛
⎝
⎜
⎞
⎠
⎟
= −
=
+
⎛
⎝
⎜
⎞
⎠
⎟
=
= Ω
=•
()
+
+ −
+ −
2
2
271 60Ω
R 2.98 M INTERNAL OSCILLATOR 50Hz AND 60Hz MODE
R 0.833 10 / f EXTERNAL OSCILLATOR
D IS THE DENSITY OF A DIGITAL TRANSITION AT THE MODULATOR OUTPUT
EQ
EQ
12
EOSC
T
WHERE REF– IS INTERNALLY TIED TO GND
occurs. In this case, no errors are introduced and direct
digitization of the sensor is possible.
For many applications, the sensor output impedance combined with external bypass capacitors produces RC time
constants much greater than the 580ns required for 1ppm
accuracy. For example, a 10kΩ bridge driving a 0.1µF
bypass capacitor has a time constant an order of magnitude greater than the required maximum. Historically,
settling issues were solved using buffers. These buffers
led to increased noise, reduced DC performance (Offset/
Drift), limited input/output swing (cannot digitize signals
near ground or V
power. The LTC2480 uses a proprietary switching algorithm that forces the average differential input current to
zero independent of external settling errors. This allows
accurate direct digitization of high impedance sensors
without the need of buffers. Additional errors resulting
from mismatched leakage currents must also be taken into
account.
The switching algorithm forces the average input current
on the positive input (I
current on the negative input (I
conversion cycle, the average differential input current
(I
IN+
I
REF
V
REF
I
IN
V
IN
I
IN
V
IN
I
REF
GND
SWITCHING FREQUENCY
= 123kHz INTERNAL OSCILLATOR
f
SW
= 0.4 • f
f
SW
–
– I
) is zero. While the differential input current is
IN
V
CC
+
+
+
+
–
–
–
I
I
V
V
CC
I
I
V
EXTERNAL OSCILLATOR
EOSC
LEAK
LEAK
CC
LEAK
LEAK
CC
), added system cost and increased
CC
+
) to be equal to the average input
I
LEAK
I
LEAK
I
LEAK
I
LEAK
IN
RSW (TYP)
10k
RSW (TYP)
10k
RSW (TYP)
10k
RSW (TYP)
10k
–
). Over the complete
IN
2480 F11
WUUU
zero, the common mode input current (I
proportional to the difference between the common mode
input voltage (V
voltage (V
REFCM
In applications where the input common mode voltage is
equal to the reference common mode voltage, as in the
case of a balance bridge type application, both the differential and common mode input current are zero. The
accuracy of the converter is unaffected by settling errors.
Mismatches in source impedances between IN+ and IN
also do not affect the accuracy.
In applications where the input common mode voltage is
constant but different from the reference common mode
voltage, the differential input current remains zero while
the common mode input current is proportional to the
difference between V
common mode of 2.5V and an input common mode of
1.5V, the common mode input current is approximately
0.74µA (in simultaneous 50Hz/60Hz rejection mode). This
common mode input current has no effect on the accuracy
if the external source impedances tied to IN+ and IN– are
matched. Mismatches in these source impedances lead to
a fixed offset error but do not affect the linearity or fullscale reading. A 1% mismatch in 1kΩ source resistances
leads to a 15ppm shift (74µV) in offset voltage.
C
EQ
12pF
(TYP)
Figure 11. LTC2480 Equivalent Analog Input Circuit
) and the common mode reference
INCM
).
INCM
and V
LTC2480
IN
. For a reference
REFCM
+
+ I
–
)/2 is
IN
2480f
27
–
Page 28

LTC2480
WUUU
APPLICATIO S I FOR ATIO
R
SOURCE
V
V
INCM
INCM
+ 0.5V
– 0.5V
IN
R
SOURCE
IN
C
EXT
C
EXT
Figure 12. An RC Network at IN+ and IN
80
VCC = 5V
= 5V
V
REF
60
+
= 3.75V
V
IN
–
= 1.25V
V
IN
40
= GND
F
O
= 25°C
T
A
20
0
–20
+FS ERROR (ppm)
–40
–60
–80
1
C
EXT
10 100 10k
R
SOURCE
Figure 13. +FS Error vs R
C
EXT
= 100pF
C
EXT
= 1nF, 0.1µF, 1µF
1k
(Ω)
SOURCE
= 0pF
at IN+ or IN
C
PAR
≅20pF
C
PAR
≅20pF
2480 F13
IN
LTC2480
IN
100k
+
common mode input current varies proportionally with
input voltage. For the case of balanced input impedances,
the common mode input current effects are rejected by the
large CMRR of the LTC2480 leading to little degradation in
–
2480 F12
accuracy. Mismatches in source impedances lead to gain
errors proportional to the difference between the common
mode input voltage and the common mode reference
voltage. 1% mismatches in 1kΩ source resistances lead
to worst-case gain errors on the order of 15ppm or 1LSB
–
(for 1V differences in reference and input common mode
voltage). Table 7 summarizes the effects of mismatched
source impedance and differences in reference/input common mode voltages.
Table 7. Suggested Input Configuration for LTC2480
BALANCED INPUT UNBALANCED INPUT
RESISTANCES RESISTANCES
Constant C
V
– V
IN(CM)
REF(CM)
> 1nF at Both C
EXT
> 1nF at Both IN
EXT
IN+ and IN–. Can Take and IN–. Can Take Large
Large Source Resistance Source Resistance.
with Negligible Error Unbalanced Resistance
Results in an Offset
Which Can be Calibrated
Varying C
V
– V
IN(CM)
REF(CM)
> 1nF at Both IN
EXT
and IN–. Can Take Large Capacitors and Avoid
+
Minimize IN+ and IN
Source Resistance with Large Source Impedance
–
Negligible Error (<5k Recommended)
+
–
80
VCC = 5V
= 5V
V
REF
60
+
= 1.25V
V
IN
–
= 3.75V
V
IN
40
= GND
F
O
= 25°C
T
A
20
0
–20
–FS ERROR (ppm)
–40
–60
–80
1
Figure 14. –FS Error vs R
C
= 1nF, 0.1µF, 1µF
EXT
C
= 100pF
EXT
C
EXT
10 100 10k
R
SOURCE
1k
(Ω)
SOURCE
= 0pF
100k
2480 F14
at IN+ or IN
–
In applications where the common mode input voltage
varies as a function of input signal level (single-ended
input, RTDs, half bridges, current sensors, etc.), the
The magnitude of the dynamic input current depends upon
the size of the very stable internal sampling capacitors and
upon the accuracy of the converter sampling clock. The
accuracy of the internal clock over the entire temperature
and power supply range is typically better than 0.5%. Such
a specification can also be easily achieved by an external
clock. When relatively stable resistors (50ppm/°C) are
used for the external source impedance seen by IN+ and
IN–, the expected drift of the dynamic current and offset
will be insignificant (about 1% of their respective values
over the entire temperature and voltage range). Even for
the most stringent applications, a one-time calibration
operation may be sufficient.
In addition to the input sampling charge, the input ESD
protection diodes have a temperature dependent leakage
current. This current, nominally 1nA (±10nA max), results
in a small offset shift. A 1k source resistance will create a
1µV typical and 10µV maximum offset voltage.
2480f
28
Page 29

WUUU
APPLICATIO S I FOR ATIO
Reference Current
In a similar fashion, the LTC2480 samples the differential
reference pins V
of charge to and from the external driving circuits thus
producing a dynamic reference current. This current does
not change the converter offset, but it may degrade the
gain and INL performance. The effect of this current can be
analyzed in two distinct situations.
For relatively small values of the external reference capacitors (C
< 1nF), the voltage on the sampling capacitor
REF
settles almost completely and relatively large values for
the source impedance result in only small errors. Such
values for C
REF
gain performance without significant benefits of reference
filtering and the user is advised to avoid them.
Larger values of reference capacitors (C
required as reference filters in certain configurations.
Such capacitors will average the reference sampling charge
and the external source resistance will see a quasi constant reference differential impedance.
In the following discussion, it is assumed the input and
reference common mode are the same. Using internal
oscillator for 60Hz mode, the typical differential reference resistance is 1MΩ which generates a full-scale
(V
/2) gain error of 0.51ppm for each ohm of source
REF
resistance driving the V
related difference resistance is 1.1MΩ and the resulting
full-scale error is 0.46ppm for each ohm of source
resistance driving the V
related difference resistance is 1.2MΩ and the resulting
full-scale error is 0.42ppm for each ohm of source
resistance driving the V
external oscillator with a frequency f
version clock operation), the typical differential reference
resistance is 0.30 • 1012/f
resistance driving the V
f
ppm gain error. The typical +FS and –FS errors for
EOSC
various combinations of source resistance seen by the
V
pin and external capacitance connected to that pin
REF
are shown in Figures 15-18.
+
and GND transferring small amount
REF
will deteriorate the converter offset and
> 1nF) may be
REF
pin. For 50Hz/60Hz mode, the
REF
pin. For 50Hz mode, the
REF
pin. When FO is driven by an
REF
(external con-
EOSC
Ω and each ohm of source
EOSC
pin will result in 1.67 • 10–6 •
REF
LTC2480
2
–V
/(V
IN
• REQ) – (0.5 • V
REF
pin current as expressed in Figure 11. When using internal
oscillator and 60Hz mode, every 100Ω of reference source
resistance translates into about 0.67ppm additional INL
error. When using internal oscillator and 50Hz/60Hz mode,
every 100Ω of reference source resistance translates into
about 0.61ppm additional INL error. When using internal
oscillator and 50Hz mode, every 100Ω of reference source
resistance translates into about 0.56ppm additional INL
error. When FO is driven by an external oscillator with a
frequency f
translates into about 2.18 • 10–6 • f
V
REF
, every 100Ω of source resistance driving
EOSC
tional INL error. Figure 19 shows the typical INL error due
to the source resistance driving the V
C
values are used. The user is advised to minimize the
REF
source impedance driving the V
In applications where the reference and input common
mode voltages are different, extra errors are introduced.
For every 1V of the reference and input common mode
voltage difference (V
REFCM
each Ohm of reference source resistance introduces an
extra (V
REFCM
– V
INCM
)/(V
which is 0.074ppm when using internal oscillator and
60Hz mode. When using internal oscillator and 50Hz/60Hz
mode, the extra full-scale gain error is 0.067ppm. When
using internal oscillator and 50Hz mode, the extra gain
error is 0.061ppm. If an external clock is used, the corresponding extra gain error is 0.24 • 10–6 • f
The magnitude of the dynamic reference current depends
upon the size of the very stable internal sampling capacitors and upon the accuracy of the converter sampling
clock. The accuracy of the internal clock over the entire
temperature and power supply range is typically better
than 0.5%. Such a specification can also be easily achieved
by an external clock. When relatively stable resistors
(50ppm/°C) are used for the external source impedance
seen by V
+
and GND, the expected drift of the dynamic
REF
current gain error will be insignificant (about 1% of its
value over the entire temperature and voltage range). Even
for the most stringent applications a one-time calibration
operation may be sufficient.
• DT)/REQ in the reference
REF
ppm addi-
EOSC
pin when large
REF
pin.
REF
– V
REF
) and a 5V reference,
INCM
• REQ) full-scale gain error,
ppm.
EOSC
In addition to this gain error, the converter INL performance is degraded by the reference source impedance.
The INL is caused by the input dependent terms
In addition to the reference sampling charge, the reference
pins ESD protection diodes have a temperature dependent
2480f
29
Page 30

LTC2480
WUUU
APPLICATIO S I FOR ATIO
90
VCC = 5V
80
= 5V
V
REF
+
= 3.75V
V
IN
70
–
= 1.25V
V
IN
= GND
F
O
60
= 25°C
T
A
50
40
30
+FS ERROR (ppm)
20
10
0
–10
C
= 0.01µF
REF
= 0.001µF
C
REF
= 100pF
C
REF
= 0pF
C
REF
10
0
100
R
SOURCE
Figure 15. +FS Error vs R
10
0
C
C
REF
C
VCC = 5V
= 5V
V
REF
+
= 1.25V
V
IN
–
= 3.75V
V
IN
= GND
F
O
= 25°C
T
A
= 0.01µF
REF
= 0.001µF
= 100pF
REF
C
REF
10
= 0pF
100
R
SOURCE
–10
–20
–30
–40
–50
–FS ERROR (ppm)
–60
–70
–80
–90
0
1k
(Ω)
SOURCE
1k
(Ω)
at V
10k
REF
10k
100k
2480 F15
(Small C
100k
2480 F16
REF
0
–100
–200
C
= 1µF, 10µF
REF
–300
VCC = 5V
–FS ERROR (ppm)
–400
–500
)
Figure 18. –FS Error vs R
)
REF
INL (ppm OF V
–10
10
8
6
4
2
0
–2
–4
–6
–8
0
VCC = 5V
V
V
T
C
–0.5
V
REF
V
IN
V
IN
F
O
T
A
REF
IN(CM)
A
REF
= 5V
+
= 1.25V
–
= 3.75V
= GND
= 25°C
200
= 5V
= 25°C
= 10µF
–0.3
= 2.5V
400
R
–0.1
VIN/V
SOURCE
600
(Ω)
SOURCE
0.1
(V)
REF
C
= 0.01µF
REF
C
REF
800
at V
R = 1k
R = 500Ω
R = 100Ω
0.3
= 0.1µF
2480 F18
(Large C
REF
2480 F19
1000
0.5
REF
)
Figure 16. –FS Error vs R
500
VCC = 5V
V
REF
V
IN
400
V
IN
= GND
F
O
= 25°C
T
A
300
200
+FS ERROR (ppm)
100
0
0
Figure 17. +FS Error vs R
30
= 5V
+
= 3.75V
–
= 1.25V
200
400
R
SOURCE
SOURCE
C
= 1µF, 10µF
REF
600
(Ω)
SOURCE
at V
C
C
REF
at V
REF
= 0.1µF
REF
= 0.01µF
800
REF
(Small C
1000
2480 F17
(Large C
REF
REF
)
Figure 19. INL vs Differential Input Voltage and
Reference Source Resistance for C
REF
> 1µF
leakage current. This leakage current, nominally 1nA
(±10nA max), results in a small gain error. A 100Ω source
resistance will create a 0.05µV typical and 0.5µV maxi-
mum full-scale error.
Output Data Rate
When using its internal oscillator, the LTC2480 produces
up to 7.5 samples per second (sps) with a notch frequency
of 60Hz, 6.25sps with a notch frequency of 50Hz and
6.82sps with the 50Hz/60Hz rejection mode. The actual
output data rate will depend upon the length of the sleep
and data output phases which are controlled by the user
and which can be made insignificantly short. When oper-
)
ated with an external conversion clock (FO connected to an
2480f
Page 31

WUUU
APPLICATIO S I FOR ATIO
LTC2480
external oscillator), the LTC2480 output data rate can be
increased as desired. The duration of the conversion
phase is 41036/f
EOSC
. If f
= 307.2kHz, the converter
EOSC
behaves as if the internal oscillator is used and the notch
is set at 60Hz.
An increase in f
over the nominal 307.2kHz will
EOSC
translate into a proportional increase in the maximum
output data rate. The increase in output rate is nevertheless accompanied by three potential effects, which must
be carefully considered.
First, a change in f
will result in a proportional change
EOSC
in the internal notch position and in a reduction of the
converter differential mode rejection at the power line
frequency. In many applications, the subsequent performance degradation can be substantially reduced by relying upon the LTC2480’s exceptional common mode rejection and by carefully eliminating common mode to differential mode conversion sources in the input circuit. The
user should avoid single-ended input filters and should
maintain a very high degree of matching and symmetry in
the circuits driving the IN+ and IN– pins.
Second, the increase in clock frequency will increase
proportionally the amount of sampling charge transferred
through the input and the reference pins. If large external
input and/or reference capacitors (CIN, C
) are used, the
REF
previous section provides formulae for evaluating the
effect of the source resistance upon the converter performance for any value of f
reference capacitors (CIN, C
. If small external input and/or
EOSC
) are used, the effect of the
REF
external source resistance upon the LTC2480 typical
performance can be inferred from Figures 13, 14, 15 and
16 in which the horizontal axis is scaled by 307200/f
EOSC
.
Third, an increase in the frequency of the external oscillator above 1MHz (a more than 3× increase in the output data
rate) will start to decrease the effectiveness of the internal
autocalibration circuits. This will result in a progressive
degradation in the converter accuracy and linearity. Typical measured performance curves for output data rates up
to 100 readings per second are shown in Figures 20 to 27.
In order to obtain the highest possible level of accuracy from
this converter at output data rates above 20 readings per
second, the user is advised to maximize the power supply
voltage used and to limit the maximum ambient operating
50
V
= V
IN(CM)
VCC = V
40
V
)
F
REF
30
20
10
OFFSET ERROR (ppm OF V
0
–10
REF(CM)
= 5V
REF
= 0V
IN
= EXT CLOCK
O
TA = 85°C
TA = 25°C
20 40 60 80
OUTPUT DATA RATE (READINGS/SEC)
10010030507090
2480 F20
Figure 20. Offset Error vs Output Data Rate and Temperature
3500
V
= V
IN(CM)
VCC = V
3000
F
)
REF
2500
2000
1500
1000
+FS ERROR (ppm OF V
500
0
0
REF(CM)
= 5V
REF
= EXT CLOCK
O
TA = 85°C
T
= 25°C
A
50
60 80
70
30
40
20
10
OUTPUT DATA RATE (READINGS/SEC)
90
2480 F21
100
Figure 21. +FS Error vs Output Data Rate and Temperature
0
–500
)
REF
–1000
–1500
–2000
–2500
–FS ERROR (ppm OF V
V
= V
IN(CM)
–3000
VCC = V
REF
= EXT CLOCK
F
O
–3500
0
20
10
OUTPUT DATA RATE (READINGS/SEC)
TA = 85°C
REF(CM)
= 5V
30
40
50
T
= 25°C
A
70
60 80
90
2480 F22
100
Figure 22. –FS Error vs Output Data Rate and Temperature
2480f
31
Page 32

LTC2480
WUUU
APPLICATIO S I FOR ATIO
24
22
TA = 85°C
20
18
16
V
RESOLUTION (BITS)
14
12
10
= V
IN(CM)
VCC = V
V
F
RES = LOG 2 (V
0
REF(CM)
= 5V
REF
= 0V
IN
= EXT CLOCK
O
30
20
10
OUTPUT DATA RATE (READINGS/SEC)
Figure 23. Resolution (Noise
REF
40
/NOISE
50
= 25°C
T
A
)
RMS
70
60 80
RMS
90
2480 F23
≤ 1LSB)
vs Output Data Rate and Temperature
22
20
18
T
40
/INL
50
= 25°C
A
)
MAX
60 80
70
90
2480 F24
TA = 85°C
16
14
RESOLUTION (BITS)
V
= V
IN(CM)
VCC = V
12
10
REF
= EXT CLOCK
F
O
RES = LOG 2 (V
0
20
10
OUTPUT DATA RATE (READINGS/SEC)
REF(CM)
= 5V
30
REF
100
100
24
22
VCC = 5V, V
20
18
16
V
RESOLUTION (BITS)
14
VIN = 0V
F
O
12
T
RES = LOG 2 (V
10
0
REF
= V
IN(CM)
REF(CM)
= EXT CLOCK
= 25°C
A
30
20
10
OUTPUT DATA RATE (READINGS/SEC)
Figure 26. Resolution (Noise
= 2.5V
/NOISE
REF
40
V
50
= V
CC
REF
)
RMS
70
60 80
RMS
= 5V
90
2480 F26
≤ 1LSB)
100
vs Output Data Rate and Reference Voltage
22
20
18
16
VCC = 5V, V
V
= V
IN(CM)
14
RESOLUTION (BITS)
VIN = 0V
–
= GND
REF
= EXT CLOCK
F
O
12
= 25°C
T
A
RES = LOG 2 (V
10
0
20
10
OUTPUT DATA RATE (READINGS/SEC)
= 2.5V
REF
REF(CM)
REF
30
VCC = V
/INL
MAX
50
40
REF
)
70
60 80
= 5V
90
2480 F27
100
32
Figure 24. Resolution (INL
MAX
≤ 1LSB)
vs Output Data Rate and Temperature
20
V
= V
IN(CM)
VIN = 0V
F
)
15
O
T
REF
10
5
0
OFFSET ERROR (ppm OF V
–5
–10
0
REF(CM)
= EXT CLOCK
= 25°C
A
VCC = V
VCC = 5V, V
20
10
OUTPUT DATA RATE (READINGS/SEC)
REF
30
40
= 2.5V
50
60 80
REF
= 5V
70
90
Figure 25. Offset Error vs Output
Data Rate and Reference Voltage
2480 F25
100
Figure 27. Resolution (INL
≤ 1LSB) vs
MAX
Output Data Rate and Reference Voltage
temperature. In certain circumstances, a reduction of the
differential reference voltage may be beneficial.
Input Bandwidth
The combined effect of the internal SINC4 digital filter and
of the analog and digital autocalibration circuits determines the LTC2480 input bandwidth. When the internal
oscillator is used with the notch set at 60Hz, the 3dB input
bandwidth is 3.63Hz. When the internal oscillator is used
with the notch set at 50Hz, the 3dB input bandwidth is
3.02Hz. If an external conversion clock generator of frequency f
bandwidth is 11.8 • 10–6 • f
is connected to the FO pin, the 3dB input
EOSC
.
EOSC
2480f
Page 33

WUUU
APPLICATIO S I FOR ATIO
LTC2480
Due to the complex filtering and calibration algorithms
utilized, the converter input bandwidth is not modeled
very accurately by a first order filter with the pole located
at the 3dB frequency. When the internal oscillator is used,
the shape of the LTC2480 input bandwidth is shown in
Figure 28. When an external oscillator of frequency f
EOSC
is used, the shape of the LTC2480 input bandwidth can be
derived from Figure 28, 60Hz mode curve in which the
horizontal axis is scaled by f
The conversion noise (600nV
/307200.
EOSC
typical for V
RMS
REF
= 5V)
can be modeled by a white noise source connected to a
noise free converter. The noise spectral density is 47nV√Hz
for an infinite bandwidth source and 64nV√Hz for a single
0.5MHz pole source. From these numbers, it is clear that
particular attention must be given to the design of external
amplification circuits. Such circuits face the simultaneous
requirements of very low bandwidth (just a few Hz) in
order to reduce the output referred noise and relatively
high bandwidth (at least 500kHz) necessary to drive the
input switched-capacitor network. A possible solution is a
high gain, low bandwidth amplifier stage followed by a
high bandwidth unity-gain buffer.
When external amplifiers are driving the LTC2480, the
ADC input referred system noise calculation can be simplified by Figure 29. The noise of an amplifier driving the
LTC2480 input pin can be modeled as a band limited white
noise source. Its bandwidth can be approximated by the
bandwidth of a single pole lowpass filter with a corner
frequency fi. The amplifier noise spectral density is ni.
From Figure 29, using fi as the x-axis selector, we can find
on the y-axis the noise equivalent bandwidth freqi of the
input driving amplifier. This bandwidth includes the band
limiting effects of the ADC internal calibration and filtering. The noise of the driving amplifier referred to the
converter input and including all these effects can be
calculated as N = ni • √freqi. The total system noise
(referred to the LTC2480 input) can now be obtained by
summing as square root of sum of squares the three ADC
input referred noise sources: the LTC2480 internal noise,
the noise of the IN+ driving amplifier and the noise of the
IN– driving amplifier.
If the FO pin is driven by an external oscillator of frequency
f
, Figure 29 can still be used for noise calculation if the
EOSC
0
–1
–2
–3
–4
–5
INPUT SIGNAL ATTENUATION (dB)
–6
0
DIFFERENTIAL INPUT SIGNAL FREQUENCY (Hz)
Figure 28. Input Signal Bandwidth Using the Internal Oscillator
100
10
1
INPUT REFERRED NOISE
EQUIVALENT BANDWIDTH (Hz)
0.1
0.1 1 10 100 1k 10k 100k 1M
Figure 29. Input Referred Noise Equivalent Bandwidth
of an Input Connected White Noise Source
x-axis is scaled by f
ratio f
/307200, the Figure 29 plot accuracy begins to
EOSC
50Hz MODE 60Hz MODE
1
2
60Hz MODE
50Hz MODE
INPUT NOISE SOURCE SINGLE POLE
EQUIVALENT BANDWIDTH (Hz)
/307200. For large values of the
EOSC
50Hz AND
60Hz MODE
3
4
5
2480 F28
2480 F29
decrease, but at the same time the LTC2480 noise floor
rises and the noise contribution of the driving amplifiers
lose significance.
Normal Mode Rejection and Antialiasing
One of the advantages delta-sigma ADCs offer over conventional ADCs is on-chip digital filtering. Combined with
a large oversampling ratio, the LTC2480 significantly
simplifies antialiasing filter requirements. Additionally,
the input current cancellation feature of the LTC2480
allows external lowpass filtering without degrading the DC
performance of the device.
2480f
33
Page 34

LTC2480
WUUU
APPLICATIO S I FOR ATIO
The SINC4 digital filter provides greater than 120dB normal mode rejection at all frequencies except DC and
integer multiples of the modulator sampling frequency
(fS). The LTC2480’s autocalibration circuits further simplify the antialiasing requirements by additional normal
mode signal filtering both in the analog and digital domain.
Independent of the operating mode, fS = 256 • fN = 2048
• f
OUTMAX
where fN is the notch frequency and f
OUTMAX
is
the maximum output data rate. In the internal oscillator
mode with a 50Hz notch setting, fS =
12800Hz, with
50Hz/60Hz rejection, fS = 13960Hz and with a 60Hz notch
setting f
f
EOSC
= 15360Hz. In the external oscillator mode, fS =
S
/20. The performance of the normal mode rejection
is shown in Figures 30 and 31.
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
INPUT NORMAL MODE REJECTION (dB)
–110
–120
0f
S2fS3fS4fS5fS6fS7fS8fS9fS
DIFFERENTIAL INPUT SIGNAL FREQUENCY (Hz)
10fS11fS12f
2480 F30
S
In 1x speed mode, the regions of low rejection occurring
at integer multiples of f
have a very narrow bandwidth.
S
Magnified details of the normal mode rejection curves are
shown in Figure 32 (rejection near DC) and Figure 33
(rejection at fS = 256fN) where fN represents the notch
frequency. These curves have been derived for the external oscillator mode but they can be used in all operating
modes by appropriately selecting the fN value.
The user can expect to achieve this level of performance
using the internal oscillator as it is demonstrated by Figures 34, 35 and 36. Typical measured values of the normal
mode rejection of the LTC2480 operating with an internal
oscillator and a 60Hz notch setting are shown in Figure 34
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
INPUT NORMAL MODE REJECTION (dB)
–110
–120
0f
2fS3fS4fS5fS6fS7fS8fS9fS10f
S
DIFFERENTIAL INPUT SIGNAL FREQUENCY (Hz)
S
2480 F31
34
Figure 30. Input Normal Mode Rejection,
Internal Oscillator and 50Hz Notch Mode
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
INPUT NORMAL MODE REJECTION (dB)
–110
–120
fN0 2fN3fN4fN5fN6fN7fN8f
INPUT SIGNAL FREQUENCY (Hz)
fN = f
EOSC/5120
2480 F32
N
Figure 31. Input Normal Mode Rejection, Internal
Oscillator and 60Hz Notch Mode or External Oscillator
0
–10
–20
–30
–40
–50
–60
–70
–80
–90
–100
INPUT NORMAL MODE REJECTION (dB)
–110
–120
250f
252fN254fN256fN258fN260fN262f
N
INPUT SIGNAL FREQUENCY (Hz)
N
2480 F33
Figure 32. Input Normal Mode Rejection at DC Figure 33. Input Normal Mode Rejection at fS = 256f
N
2480f
Page 35

WUUU
APPLICATIO S I FOR ATIO
LTC2480
0
–20
–40
–60
–80
NORMAL MODE REJECTION (dB)
–100
–120
0
15 30 45 60 75 90 105 120 135 150 165 180 195 210 225 240
MEASURED DATA
CALCULATED DATA
INPUT FREQUENCY (Hz)
VCC = 5V
V
= 5V
REF
V
IN(CM)
V
IN(P-P)
T
= 25°C
A
= 2.5V
= 5V
2480 F34
Figure 34. Input Normal Mode Rejection vs Input Frequency
with Input Perturbation of 100% Full Scale (60Hz Notch)
0
–20
–40
–60
–80
NORMAL MODE REJECTION (dB)
–100
–120
0
12.5 25 37.5 50 62.5 75 87.5 100 112.5 125 137.5 150 162.5 175 187.5 200
INPUT FREQUENCY (Hz)
MEASURED DATA
CALCULATED DATA
VCC = 5V
V
= 5V
REF
V
IN(CM)
V
IN(P-P)
T
= 25°C
A
= 2.5V
= 5V
2480 F35
Figure 35. Input Normal Mode Rejection vs Input Frequency
with Input Perturbation of 100% Full Scale (50Hz Notch)
0
–20
–40
–60
–80
NORMAL MODE REJECTION (dB)
–100
–120
0
20 40 60 80 100 120 140 160 180 200 220
MEASURED DATA
CALCULATED DATA
INPUT FREQUENCY (Hz)
VCC = 5V
V
= 5V
REF
V
IN(CM)
V
IN(P-P)
T
= 25°C
A
= 2.5V
= 5V
2483 F36
Figure 36. Input Normal Mode Rejection vs Input Frequency
with Input Perturbation of 100% Full Scale (50Hz/60Hz Mode)
superimposed over the theoretical calculated curve. Similarly, the measured normal mode rejection of the LTC2480
for the 50Hz rejection mode and 50Hz/60Hz rejection mode
are shown in Figures 35 and 36.
As a result of these remarkable normal mode specifications, minimal (if any) antialias filtering is required in front
of the LTC2480. If passive RC components are placed in
front of the LTC2480, the input dynamic current should be
considered (see Input Current section). In this case, the
differential input current cancellation feature of the LTC2480
allows external RC networks without significant degradation in DC performance.
Traditional high order delta-sigma modulators, while providing very good linearity and resolution, suffer from potential instabilities at large input signal levels. The
proprietary architecture used for the LTC2480 third order
modulator resolves this problem and guarantees a predictable stable behavior at input signal levels of up to 150%
of full scale. In many industrial applications, it is not uncommon to have to measure microvolt level signals superimposed over volt level perturbations and the LTC2480 is
eminently suited for such tasks. When the perturbation is
differential, the specification of interest is the normal mode
rejection for large input signal levels. With a reference
voltage V
= 5V, the LTC2480 has a full-scale differen-
REF
tial input range of 5V peak-to-peak. Figures 37 and 38
show measurement results for the LTC2480 normal mode
rejection ratio with a 7.5V peak-to-peak (150% of full scale)
input signal superimposed over the more traditional normal mode rejection ratio results obtained with a 5V peakto-peak (full scale) input signal. In Figure 37, the LTC2480
uses the internal oscillator with the notch set at 60Hz (F
O
= LOW) and in Figure 38 it uses the internal oscillator with
the notch set at 50Hz. It is clear that the LTC2480 rejection
performance is maintained with no compromises in this
extreme situation. When operating with large input signal
levels, the user must observe that such signals do not
violate the device absolute maximum ratings.
Using the 2x speed mode of the LTC2480, the device
bypasses the digital offset calibration operation to double
the output data rate. The superior normal mode rejection
is maintained as shown in Figures 30 and 31. However, the
magnified details near DC and fS = 256fN are different, see
Figures 39 and 40. In 2x speed mode, the bandwidth is
11.4Hz for the 50Hz rejection mode, 13.6Hz for the 60Hz
rejection mode and 12.4Hz for the 50Hz/60Hz rejection
2480f
35
Page 36

LTC2480
WUUU
APPLICATIO S I FOR ATIO
0
–20
–40
V
= 5V
IN(P-P)
V
= 7.5V
IN(P-P)
(150% OF FULL SCALE)
VCC = 5V
V
= 5V
REF
V
INCM
T
= 25°C
A
= 2.5V
–20
–40
0
V
= 5V
IN(P-P)
V
= 7.5V
IN(P-P)
(150% OF FULL SCALE)
VCC = 5V
V
= 5V
REF
V
IN(CM)
T
= 25°C
A
= 2.5V
–60
–80
NORMAL MODE REJECTION (dB)
–100
–120
0
15 30 45 60 75 90 105 120 135 150 165 180 195 210 225 240
INPUT FREQUENCY (Hz)
Figure 37. Measured Input Normal Mode Rejection vs
Input Frequency with Input Perturbation of 150% Full
Scale (60Hz Notch)
0
–20
–40
–60
–80
INPUT NORMAL REJECTION (dB)
–100
–120
0
f
N2fN3fN4fN5fN6fN7fN8fN
INPUT SIGNAL FREQUENCY (fN)
2480 F39
2480 F37
–60
–80
NORMAL MODE REJECTION (dB)
–100
–120
0
12.5 25 37.5 50 62.5 75 87.5 100 112.5 125 137.5 150 162.5 175 187.5 200
INPUT FREQUENCY (Hz)
Figure 38. Measured Input Normal Mode Rejection vs
Input Frequency with Input Perturbation of 150% Full
Scale (50Hz Notch)
0
–20
–40
–60
–80
INPUT NORMAL REJECTION (dB)
–100
–120
250248 252 254 256 258 260 262 264
INPUT SIGNAL FREQUENCY (fN)
2480 F48
2480 F38
Figure 39. Input Normal Mode Rejection 2x Speed Mode
0
–20
–40
–60
–80
NORMAL MODE REJECTION (dB)
–100
–120
25 75
0
MEASURED DATA
CALCULATED DATA
50
125 225
100
INPUT FREQUENCY (Hz)
150
VCC = 5V
V
= 5V
REF
V
INCM
V
IN(P-P)
F
= GND
O
T
= 25°C
A
175
= 2.5V
= 5V
200
2480 F41
Figure 41. Input Normal Mode Rejection vs Input Frequency,
2x Speed Mode and 50Hz/60Hz Mode
mode. Typical measured values of the normal mode
rejection of the LTC2480 operating with the internal oscillator and 2x speed mode is shown in Figure 41.
Figure 40. Input Normal Mode Rejection 2x Speed Mode
–70
–80
–90
–100
–110
–120
NORMAL MODE REJECTION (dB)
–130
–140
48
50 52
DIFFERENTIAL INPUT SIGNAL FREQUENCY (Hz)
NO AVERAGE
56 60 62
54 58
WITH
RUNNING
AVERAGE
2480 F42
Figure 42. Input Normal Mode Rejection 2x Speed Mode
When the LTC2480 is configured in 2x speed mode, by
performing a running average, a SINC1 notch is combined
with the SINC4 digital filter, yielding the normal mode
2480f
36
Page 37

WUUU
APPLICATIO S I FOR ATIO
LTC2480
rejection identical as that for the 1x speed mode. The
averaging operation still keeps the output rate with the
following algorithm:
Result 1 = average (sample 0, sample 1)
Result 2 = average (sample 1, sample 2)
……
Result n = average (sample n – 1, sample n)
The main advantage of the running average is that it
achieves simultaneous 50Hz/60Hz rejection at twice the
effective output rate, as shown in Figure 42. The raw
output data provides a better than 70dB rejection over
48Hz to 62.4Hz, which covers both 50Hz ±2% and 60Hz
±2%. With running average on, the rejection is better than
87dB for both 50Hz ±2% and 60Hz ±2%.
Complete Thermocouple Measurement System with
Cold Junction Compensation
The LTC2480 is ideal for direct digitization of thermocouples
and other low voltage output sensors. The input has a typical
offset error of 500nV (2.5µV max) offset drift of 10nV/°C
and a noise level of 600nV
. The input span may be
RMS
optimized for various sensors by setting the gain of the
PGA. Using an external 5V reference with a PGA gain of 64
gives a ±78mV input range—perfect for thermocouples.
Figure 44 (last page of this data sheet) is a complete type
K thermocouple meter. The only signal conditioning is a
simple surge protection network. In any thermocouple
meter, the cold junction temperature sensor must be at the
same temperature as the junction between the thermocouple materials and the copper printed circuit board
traces. The tiny LTC2480 can be tucked neatly underneath
an Omega MPJ-K-F thermocouple socket ensuring close
thermal coupling.
The LTC2480’s 1.4mV/°C PTAT circuit measures the cold
junction temperature. Once the thermocouple voltage and
cold junction temperature are known, there are many ways
of calculating the thermocouple temperature including a
straight-line approximation, lookup tables or a polynomial
curve fit. Calibration is performed by applying an accurate
500mV to the ADC input derived from an LT®1236 reference and measuring the local temperature with an accurate thermometer as shown in Figure 43. In calibration
mode, the up and down buttons are used to adjust the local
temperature reading until it matches an accurate thermometer. Both the voltage and temperature calibration
are easily automated.
The complete microcontroller code for this application is
available on the LTC2480 product webpage at:
http://www.linear.com
It can be used as a template for may different instruments
and it illustrates how to generate calibration coefficients
for the onboard temperature sensor. Extensive comments
detail the operation of the program. The read_LTC2480()
function controls the operation of the LTC2480 and is
listed below for reference.
5V
NC1M4V0
C8
ISOTHERMAL
LT1236
62
IN OUT
5
+
G1
TRIM
GND
4
R7
8k
R8
1k
TYPE K
THERMOCOUPLE
JACK
(OMEGA MPJ-K-F)
R2
2k
26.3C
4
5
3
REF
LTC2480
GND
V
GND
+
IN
–
IN
1µF
2
CC
6
CS
9
SCK
7
SDO
1
SDI
10
F
O
118
2480 F43
C7
0.1µF
Figure 43. Calibration Setup
2480f
37
Page 38

LTC2480
WUUU
APPLICATIO S I FOR ATIO
/*** read_LTC2480() ************************************************************
This is the function that actually does all the work of talking to the LTC2480.
The spi_read() function performs an 8 bit bidirectional transfer on the SPI bus.
Data changes state on falling clock edges and is valid on rising edges, as
determined by the setup_spi() line in the initialize() function.
A good starting point when porting to other processors is to write your own
spi_write function. Note that each processor has its own way of configuring
the SPI port, and different compilers may or may not have built-in functions
for the SPI port. Also, since the state of the LTC2480’s SDO line indicates
when a conversion is complete you need to be able to read the state of this line
through the processor’s serial data input. Most processors will let you read
this pin as if it were a general purpose I/O line, but there may be some that
don’t.
When in doubt, you can always write a “bit bang” function for troubleshooting
purposes.
The “fourbytes” structure allows byte access to the 32 bit return value:
struct fourbytes // Define structure of four consecutive bytes
{ // To allow byte access to a 32 bit int or float.
int8 te0; //
int8 te1; // The make32() function in this compiler will
int8 te2; // also work, but a union of 4 bytes and a 32 bit int
int8 te3; // is probably more portable.
};
Also note that the lower 4 bits are the configuration word from the previous
conversion. The 4 LSBs are cleared so that
they don’t affect any subsequent mathematical operations. While you can do a
right shift by 4, there is no point if you are going to convert to floating point
numbers - just adjust your scaling constants appropriately.
*******************************************************************************/
signed int32 read_LTC2480(char config)
{
union // adc_code.bits32 all 32 bits
{ // adc_code.by.te0 byte 0
signed int32 bits32; // adc_code.by.te1 byte 1
struct fourbytes by; // adc_code.by.te2 byte 2
} adc_code; // adc_code.by.te3 byte 3
output_low(CS); // Enable LTC2480 SPI interface
while(input(PIN_C4)) {} // Wait for end of conversion. The longest
// you will ever wait is one whole conversion period
// Now is the time to switch any multiplexers because the conversion is finished
// and you have the whole data output time for things to settle.
adc_code.by.te3 = 0; // Set upper byte to zero.
adc_code.by.te2 = spi_read(config); // Read first byte, send config byte
adc_code.by.te1 = spi_read(0); // Read 2nd byte, send speed bit
adc_code.by.te0 = spi_read(0); // Read 3rd byte. ‘0’ argument is necessary
// to act as SPI master!! (compiler
// and processor specific.)
output_high(CS); // Disable LTC2480 SPI interface
// Clear configuration bits and subtract offset. This results in
// a 2’s complement 32 bit integer with the LTC2480’s MSB in the 2^20 position
adc_code.by.te0 = adc_code.by.te0 & 0xF0;
adc_code.bits32 = adc_code.bits32 - 0x00200000;
return adc_code.bits32;
} // End of read_LTC2480()
38
2480f
Page 39

PACKAGE DESCRIPTIO
LTC2480
U
DD Package
10-Lead Plastic DFN (3mm × 3mm)
(Reference LTC DWG # 05-08-1698)
0.675 ±0.05
3.50 ±0.05
1.65 ±0.05
(2 SIDES)2.15 ±0.05
PACKAGE
OUTLINE
0.25 ± 0.05
2.38 ±0.05
RECOMMENDED SOLDER PAD PITCH AND DIMENSIONS
PIN 1
TOP MARK
(SEE NOTE 5)
0.200 REF
0.50
BSC
(2 SIDES)
3.00 ±0.10
(4 SIDES)
0.75 ±0.05
0.00 – 0.05
1.65 ± 0.10
(2 SIDES)
R = 0.115
TYP
2.38 ±0.10
(2 SIDES)
BOTTOM VIEW—EXPOSED PAD
0.38 ± 0.10
106
15
0.25 ± 0.05
0.50 BSC
(DD10) DFN 0403
NOTE:
1. DRAWING TO BE MADE A JEDEC PACKAGE OUTLINE M0-229 VARIATION OF (WEED-2).
CHECK THE LTC WEBSITE DATA SHEET FOR CURRENT STATUS OF VARIATION ASSIGNMENT
2. ALL DIMENSIONS ARE IN MILLIMETERS
3. DIMENSIONS OF EXPOSED PAD ON BOTTOM OF PACKAGE DO NOT INCLUDE
MOLD FLASH. MOLD FLASH, IF PRESENT, SHALL NOT EXCEED 0.15mm ON ANY SIDE
4. EXPOSED PAD SHALL BE SOLDER PLATED
5. SHADED AREA IS ONLY A REFERENCE FOR PIN 1 LOCATION ON THE
TOP AND BOTTOM OF PACKAGE
Information furnished by Linear Technology Corporation is believed to be accurate and reliable.
However, no responsibility is assumed for its use. Linear Technology Corporation makes no representation that the interconnection of its circuits as described herein will not infringe on existing patent rights.
2480f
39
Page 40

LTC2480
TYPICAL APPLICATIO
ISOTHERMAL
R2
2k
TYPE K
THERMOCOUPLE
JACK
(OMEGA MPJ-K-F)
5V
1
R6
5k
2
3
U
CONTRAST
3
REF
4
+
IN
LTC2480
–
IN
5
GND
5V
V
CC
2 × 16 CHARACTER
LCD DISPLAY
(OPTREX DMC162488
OR SIMILAR)
GND D0
D1 D2 D3
5V
V
GND
2
CC
118
CS
SCK
SDO
SDI
F
O
D7
D6
D5
D4
EN
RW
RS
CALIBRATE
C8
1µF
6
9
7
1
10
C7
0.1µF
5V
R5
R4
R3
2
1
10k
10k
10k
PIC16F73
18
RC7
17
RC6
16
RC5
15
RC4
14
RC3
13
RC2
12
RC1
11
RC0
28
RB7
27
RB6
26
RB5
25
RB4
24
RB3
23
RB2
22
RB1
21
RB0
7
RA5
6
RA4
5
RA3
4
RA2
3
RA1
2
RA0
V
OSC1
OSC2
MCLR
V
V
2480 F44
20
DD
9
10
1
9
SS
19
SS
6MHz
R1
10k
5V
C6
0.1µF
Y1
D1
BAT54
5V
DOWN UP
Figure 44. Complete Type K Thermocouple Meter
RELATED PARTS
PART NUMBER DESCRIPTION COMMENTS
LTC1050 Precision Chopper Stabilized Op Amp No External Components 5µV Offset, 1.6µV
LT1236A-5 Precision Bandgap Reference, 5V 0.05% Max Initial Accuracy, 5ppm/°C Drift
LT1460 Micropower Series Reference 0.075% Max Initial Accuracy, 10ppm/°C Max Drift
LTC2400 24-Bit, No Latency ∆Σ ADC in SO-8 0.3ppm Noise, 4ppm INL, 10ppm Total Unadjusted Error, 200µA
LTC2401/LTC2402 1-/2-Channel, 24-Bit, No Latency ∆Σ ADCs in MSOP 0.6ppm Noise, 4ppm INL, 10ppm Total Unadjusted Error, 200µA
LTC2404/LTC2408 4-/8-Channel, 24-Bit, No Latency ∆Σ ADCs 0.3ppm Noise, 4ppm INL, 10ppm Total Unadjusted Error, 200µA
with Differential Inputs
LTC2410 24-Bit, No Latency ∆Σ ADC with Differential Inputs 0.8µV
LTC2411/LTC2411-1 24-Bit, No Latency ∆Σ ADCs with Differential Inputs in MSOP 1.45µV
Noise, 2ppm INL
RMS
Noise, 4ppm INL,
RMS
Simultaneous 50Hz/60Hz Rejection (LTC2411-1)
LTC2413 24-Bit, No Latency ∆Σ ADC with Differential Inputs Simultaneous 50Hz/60Hz Rejection, 800nV
LTC2415/ 24-Bit, No Latency ∆Σ ADCs with 15Hz Output Rate Pin Compatible with the LTC2410
LTC2415-1
LTC2414/LTC2418 8-/16-Channel 24-Bit, No Latency ∆Σ ADCs 0.2ppm Noise, 2ppm INL, 3ppm Total Unadjusted Errors 200µA
LTC2420 20-Bit, No Latency ∆Σ ADC in SO-8 1.2ppm Noise, 8ppm INL, Pin Compatible with LTC2400
LTC2430/LTC2431 20-Bit, No Latency ∆Σ ADCs with Differential Inputs 2.8µV Noise, SSOP-16/MSOP Package
LTC2435/LTC2435-1 20-Bit, No Latency ∆Σ ADCs with 15Hz Output Rate 3ppm INL, Simultaneous 50Hz/60Hz Rejection
LTC2440 High Speed, Low Noise 24-Bit ∆Σ ADC 3.5kHz Output Rate, 200nV Noise, 24.6 ENOBs
LTC2482 16-Bit ∆Σ ADC with Easy Drive Inputs Pin Compatible with LTC2480/LTC2484
LTC2484 24-Bit ∆Σ ADC with Easy Drive Inputs Pin Compatible with LTC2480/LTC2482
LT/TP 0405 500 • PRINTED IN THE USA
© LINEAR TECHNOLOGY CORPORATION 2005
40
Linear Technology Corporation
1630 McCarthy Blvd., Milpitas, CA 95035-7417
(408) 432-1900 ● FAX: (408) 434-0507
●
www.linear.com
P-P
RMS
Noise
Noise
2480f
 Loading...
Loading...