

Page 1
DEVICES INCORPORATED
LMU18
16 x 16-bit Parallel Multiplier
LMU18
DEVICES INCORPORATED
FEATURES DESCRIPTION
❑❑
❑ 35 ns Worst-Case Multiply Time
❑❑
❑❑
❑ Low Power CMOS Technology
❑❑
❑❑
❑ Full 32-bit Output Port —
❑❑
No Multiplexing Required
❑❑
❑ Two’s Complement, Unsigned, or
❑❑
Mixed Operands
❑❑
❑ Three-State Outputs
❑❑
❑❑
❑ 84-pin PLCC, J-Lead
❑❑
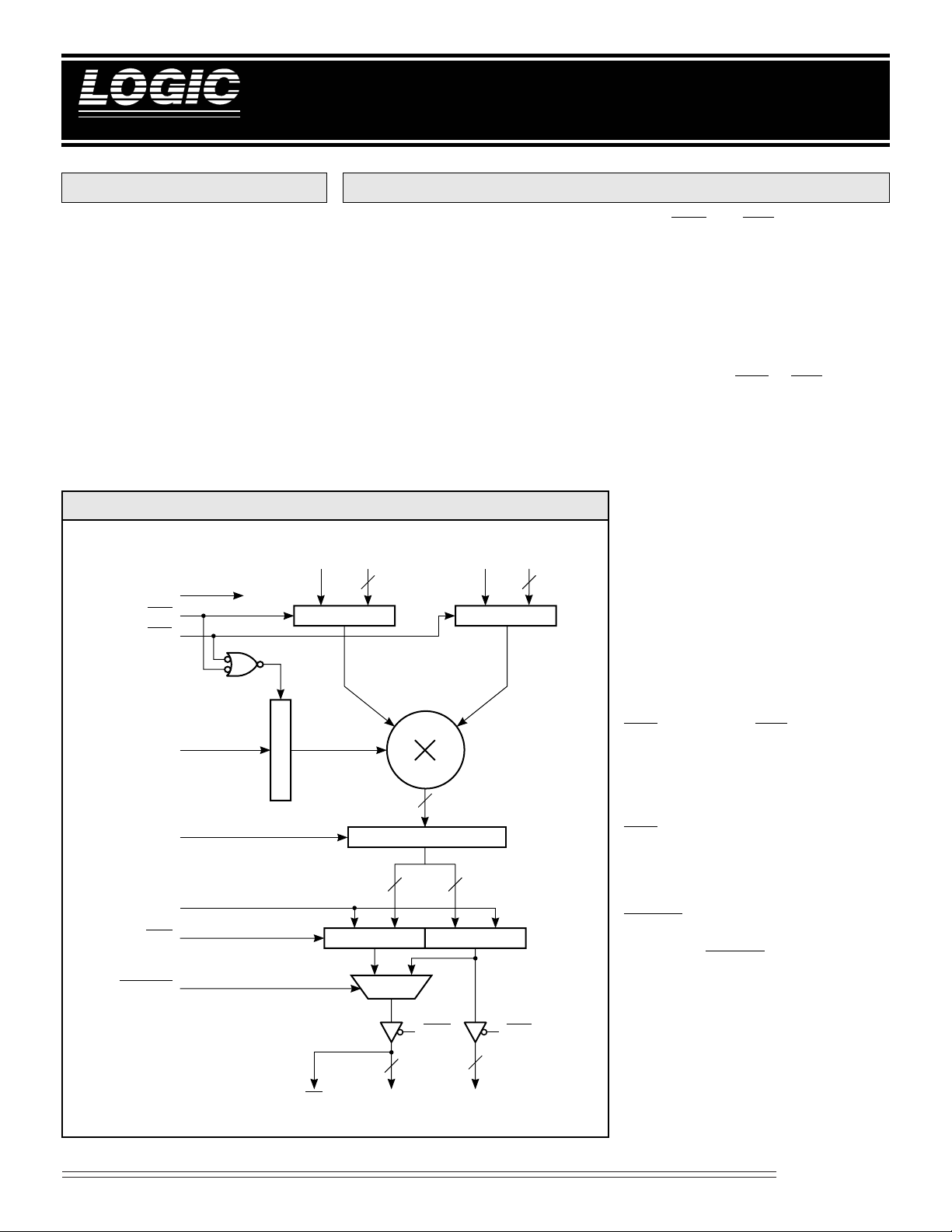
The LMU18 is a high-speed, low
power 16-bit parallel multiplier.
The LMU18 is an 84-pin device
which provides simultaneous access
to all outputs.
The LMU18 produces the 32-bit
product of two 16-bit numbers.
Data present at the A inputs, along
with the TCA control bit, is loaded
into the A register on the rising edge
of CLK. B data and the TCB control
bit are similarly loaded. Loading of
the A and B registers is controlled
LMU18 BLOCK DIAGRAM
A
15-0
16 16
CLK
ENA
ENB
RND
TCA TCB
A REGISTER B REGISTER
16 x 16-bit Parallel Multiplier
by the ENA and ENB controls. When
HIGH, these controls prevent application of the clock to the respective
register. The TCA and TCB controls
specify the operands as two’s complement when HIGH, or unsigned
magnitude when LOW.
RND is loaded on the rising edge of CLK,
providing either ENA or ENB are LOW.
RND, when HIGH, adds ‘1’ to the
most significant bit position of the
least significant half of the product.
Subsequent truncation of the 16 least
significant bits produces a result
correctly rounded to 16-bit precision.
At the output, the Right Shift control (RS)
B
15-0
selects either of two output formats. RS
LOW produces a 31-bit product with a
copy of the sign bit inserted in the MSB
postion of the least significant half. RS
HIGH gives a full 32-bit product. Two
16-bit output registers are provided to
hold the most and least significant
halves of the result (MSP and LSP) as
defined by RS. These registers are loaded
on the rising edge of CLK, subject to the
ENR control. When ENR is HIGH, clocking of the result registers is prevented.
RS
FT
ENR
MSPSEL
REGISTER
R
31
32
FORMAT ADJUST
16 16
REGISTERRESULT
OEM OEL
16
R
31-16
R
15-0
1
16
For asynchronous output these registers
may be made transparent by setting the
feed through control (FT) HIGH and
ENR LOW.
The two halves of the product may be
routed to a single 16-bit three-state
output port (MSP) via a multiplexer.
MSPSEL LOW causes the MSP outputs to
be driven by the most significant half of
the result. MSPSEL HIGH routes the
least significant half of the result to the
MSP pins. The MSB of the result is available in both true and complemented
form to aid implementation of higher
precision multipliers.
Multipliers
08/16/2000–LDS.18-O
Page 2
DEVICES INCORPORATED
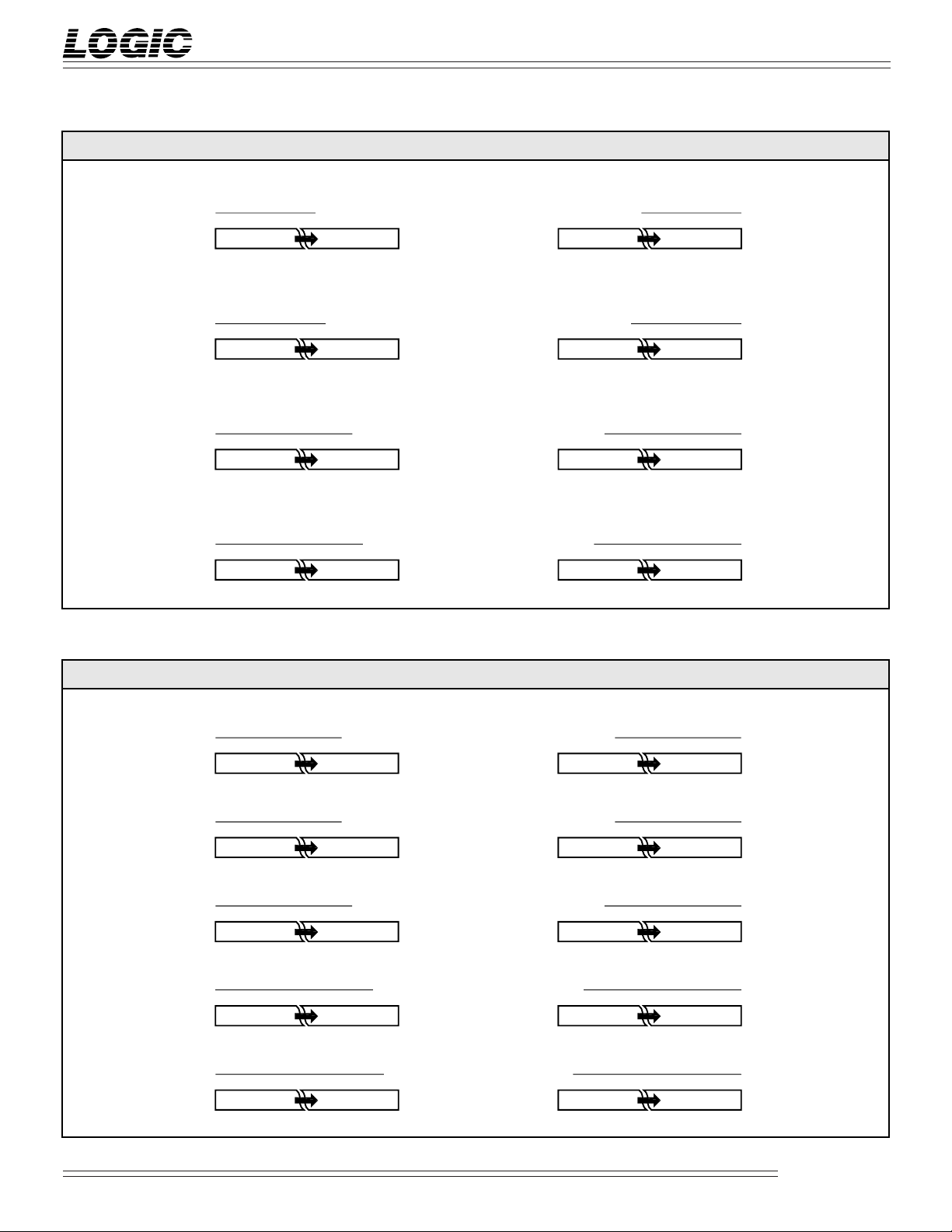
FIGURE 1A.INPUT FORMATS
LMU18
16 x 16-bit Parallel Multiplier
AIN BIN
Fractional Two’s Complement (TCA, TCB = 1)
15 14 13 2 1 0
0
–2
2–12
–2
(Sign)
15 14 13 2 1 0
–2
(Sign)
15
2142
13
15 14 13 2 1 0
–12–22–3
2
15 14 13 2 1 0
15214213
2
FIGURE 1B.OUTPUT FORMATS
–132–142–15
2
–2
(Sign)
0
2–12
Integer Two’s Complement (TCA, TCB = 1)
15 14 13 2 1 0
15 14 13 2 1 0
22212
0
–2
(Sign)
15
2142
Unsigned Fractional (TCA, TCB = 0)
15 14 13 2 1 0
–142–152–16
2
–12–22–3
2
Unsigned Integer (TCA, TCB = 0)
15 14 13 2 1 0
22212
0
15214213
2
–2
13
–132–142–15
2
22212
–142–152–16
2
22212
0
0
MSP LSP
Fractional Two’s Complement (RS = 0)
31 30 29 18 17 16
0
–2
(Sign)
2–12
–2
–132–142–15
2
Fractional Two’s Complement (RS = 1)
31 30 29 18 17 16
1
–2
(Sign)
202
–1
–122–132–14
2
Integer Two’s Complement (RS = 1)
31 30 29 18 17 16
–2
(Sign)
31
2302
29
2182172
31 30 29 18 17 16
–12–22–3
2
–142–152–16
2
31 30 29 18 17 16
2312302
29
2182172
15 14 13 2 1 0
–2
(Sign)
15 14 13 2 1 0
2
15 14 13 2 1 0
16
2152142
Unsigned Fractional (RS = 1)
15 14 13 2 1 0
2
Unsigned Integer (RS = 1)
15 14 13 2 1 0
16
2152142
0
–162–17
2
–152–162–17
–172–182–19
–282–292–30
2
–282–292–30
2
13
13
22212
–302–312–32
2
22212
0
0
Multipliers
2
08/16/2000–LDS.18-O
Page 3
DEVICES INCORPORATED
LMU18
16 x 16-bit Parallel Multiplier
MAXIMUM RATINGS
Storage temperature ........................................................................................................... –65°C to +150°C
Operating ambient temperature........................................................................................... –55°C to +125°C
VCC supply voltage with respect to ground............................................................................ –0.5 V to +7.0V
Input signal with respect to ground ........................................................................................ –3.0 V to +7.0 V
Signal applied to high impedance output ............................................................................... –3.0 V to +7.0 V
Output current into low outputs............................................................................................................. 25 mA
Latchup current ............................................................................................................................... > 400 mA
OPERATING CONDITIONS
Active Operation, Commercial 0°C to +70°C 4.75 V ≤ VCC ≤ 5.25 V
Active Operation, Military –55°C to +125°C 4.50 V ≤ VCC ≤ 5.50V
ELECTRICAL CHARACTERISTICS
Above which useful life may be impaired (Notes 1, 2, 3, 8)
To meet specified electrical and switching characteristics
Mode Temperature Range (Ambient) Supply Voltage
Over Operating Conditions (Note 4)
Symbol Parameter Test Condition Min Typ Max Unit
VOH Output High Voltage VCC = Min., IOH = –2.0 mA 2.4 V
VOL Output Low Voltage VCC = Min., IOL = 8.0 mA 0.5 V
VIH Input High Voltage 2.0 VCC V
VIL Input Low Voltage (Note 3) 0.0 0.8 V
IIX Input Current Ground ≤ VIN ≤ VCC (Note 12) ±20 µA
IOZ Output Leakage Current Ground ≤ VOUT ≤ VCC (Note 12) ±20 µA
ICC1 VCC Current, Dynamic (Notes 5, 6) 25 45 mA
ICC2 VCC Current, Quiescent (Note 7) 1.5 mA
Multipliers
3
08/16/2000–LDS.18-O
Page 4

DEVICES INCORPORATED
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
3
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
4
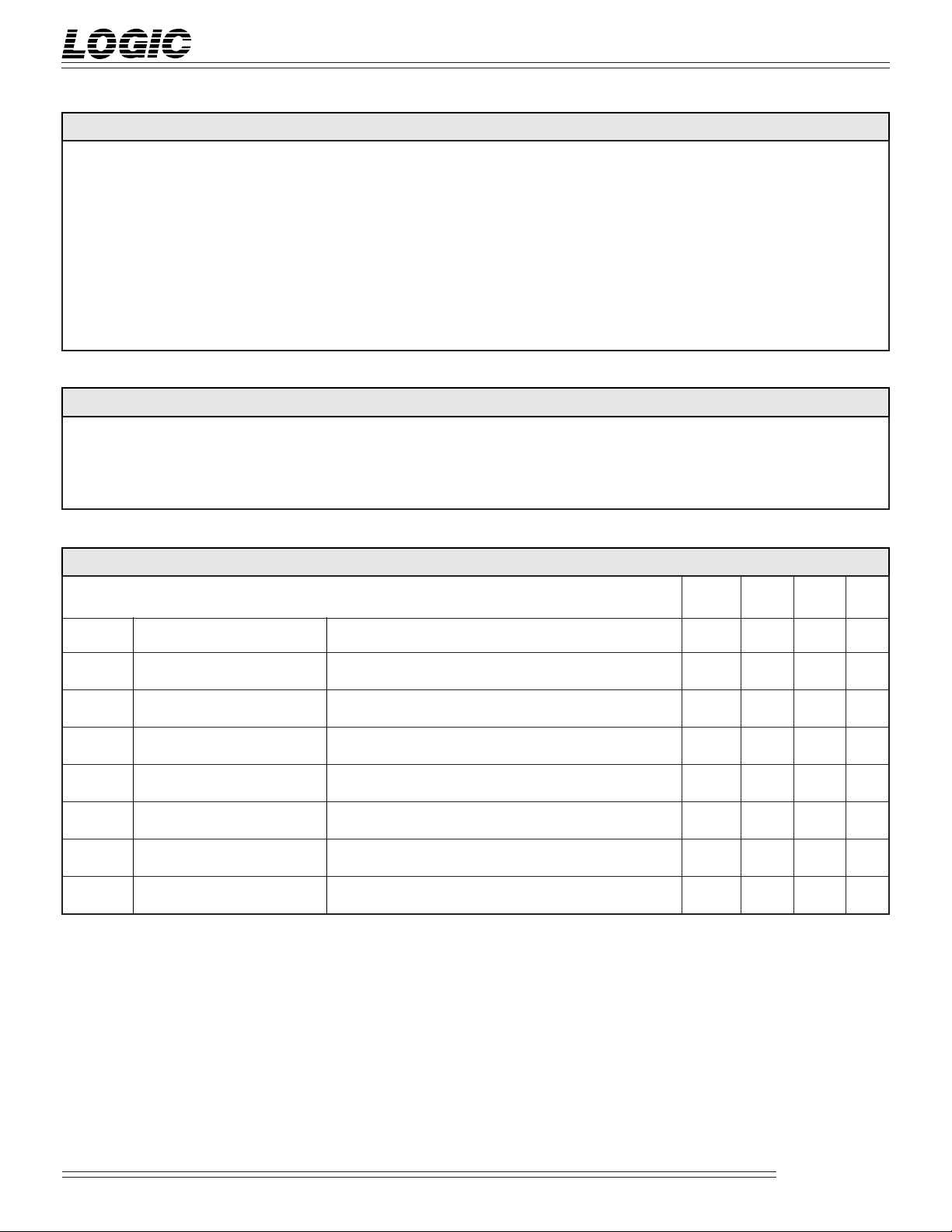
SWITCHING CHARACTERISTICS
LMU18
16 x 16-bit Parallel Multiplier
COMMERCIAL OPERATING RANGE (0°C to +70°C)
Symbol Parameter Min Max Min Max Min Max Min Max
tMC Clocked Multiply Time 65 45 35 20
tMUC Unclocked Multiply Time 85 65 55 30
tPW Clock Pulse Width 15 15 15 9
tS Input Setup Time 15 15 12 11
tH Input Hold Time 5 5 5 1
tD Output Delay 30 30 28 18
tSEL Output Select Delay 25 25 25 18
tENA Three-State Output Enable Delay (Note 11) 25202018
tDIS Three-State Output Disable Delay (Note 11) 24202018
MILITARY OPERATING RANGE (–55°C to +125°C)
Symbol Parameter Min Max Min Max Min Max
tMC Clocked Multiply Time 75 55 45 25
tMUC Unclocked Multiply Time 95 85 65 38
tPW Clock Pulse Width 20 15 15 10
tS Input Setup Time 15 15 12 12
tH Input Hold Time 5 5 5 2
tD Output Delay 35 35 33 20
tSEL Output Select Delay 30 30 30 20
tENA Three-State Output Enable Delay (Note 11)25202020
tDIS Three-State Output Disable Delay (Note 11)24202020
Notes 9, 10 (ns)
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
Notes 9, 10 (ns)
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
2345678901234567890123456789012123456789012
65
75
LMU18–
*
45 35 20
2345678901
*
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
2345678901
LMU18–
*
55
*
45
*
25
*
SWITCHING WAVEFORMS
INPUT
ENA, ENB
ENR
2345678901234567890123
*DISCONTINUED SPEED GRADE
CLOCK
MSPSEL
OEM
OEL
31-0
R
t
S
t
H
t
t
S
t
PW
t
DIS
t
PW
t
MC
HIGH IMPEDANCE
4
t
MUC
t
ENA
H
t
PW
t
D
t
SEL
Multipliers
08/16/2000–LDS.18-O
Page 5

DEVICES INCORPORATED
S1
I
OH
I
OL
V
TH
C
L
DUT
OE
0.2 V
t
DIS
t
ENA
0.2 V
1.5 V 1.5 V
3.5V Vth
1
Z
0
Z
Z
1
Z
0
1.5 V
1.5 V
0V Vth
VOL*
V
OH
*
V
OL
*
V
OH
*
Measured V
OL
with IOH = –10mA and IOL = 10mA
Measured V
OH
with IOH = –10mA and IOL = 10mA
NOTES
LMU18
16 x 16-bit Parallel Multiplier
1. Maximum Ratings indicate stress
specifications only. Functional operation of these products at values beyond
those indicated in the Operating Conditions table is not implied. Exposure to
maximum rating conditions for extended periods may affect reliability.
2. The products described by this specification include internal circuitry designed to protect the chip from damaging substrate injection currents and accumulations of static charge. Nevertheless, conventional precautions should
be observed during storage, handling,
and use of these circuits in order to
avoid exposure to excessive electrical
stress values.
3. This device provides hard clamping of
transient undershoot and overshoot. Input levels below ground or above VCC
will be clamped beginning at –0.6 V and
VCC + 0.6 V. The device can withstand
indefinite operation with inputs in the
range of –0.5 V to +7.0 V. Device operation will not be adversely affected, however, input current levels will be well in
excess of 100 mA.
9. AC specifications are tested with
input transition times less than 3 ns,
output reference levels of 1.5 V (except
tDIS test), and input levels of nominally
0 to 3.0 V. Output loading may be a
resistive divider which provides for
specified IOH and IOL at an output
voltage of VOH min and VOL max
respectively. Alternatively, a diode
bridge with upper and lower current
sources of IOH and IOL respectively,
and a balancing voltage of 1.5 V may be
used. Parasitic capacitance is 30 pF
minimum, and may be distributed.
This device has high-speed outputs capable of large instantaneous current
pulses and fast turn-on/turn-off times.
As a result, care must be exercised in the
testing of this device. The following
measures are recommended:
a. A 0.1 µF ceramic capacitor should be
installed between VCC and Ground
leads as close to the Device Under Test
(DUT) as possible. Similar capacitors
should be installed between device VCC
and the tester common, and device
ground and tester common.
11. For the tENA test, the transition is
measured to the 1.5 V crossing point
with datasheet loads. For the tDIS test,
the transition is measured to the
±200mV level from the measured
steady-state output voltage with
±10mA loads. The balancing voltage, VTH, is set at 3.5 V for Z-to-0
and 0-to-Z tests, and set at 0 V for Zto-1 and 1-to-Z tests.
12. These parameters are only tested at
the high temperature extreme, which is
the worst case for leakage current.
FIGURE A. OUTPUT LOADING CIRCUIT
FIGURE B. THRESHOLD LEVELS
4. Actual test conditions may vary from
those designated but operation is guaranteed as specified.
5. Supply current for a given application can be accurately approximated by:
2
NCV F
where
4
N = total number of device outputs
C = capacitive load per output
V = supply voltage
F = clock frequency
6. Tested with all outputs changing every cycle and no load, at a 5 MHz clock
rate.
7. Tested with all inputs within 0.1 V of
VCC or Ground, no load.
8. These parameters are guaranteed
but not 100% tested.
b. Ground and VCC supply planes
must be brought directly to the DUT
socket or contactor fingers.
c. Input voltages should be adjusted to
compensate for inductive ground and VCC
noise to maintain required DUT input
levels relative to the DUT ground pin.
10. Each parameter is shown as a minimum or maximum value. Input requirements are specified from the point
of view of the external system driving
the chip. Setup time, for example, is
specified as a minimum since the external system must supply at least that
much time to meet the worst-case requirements of all parts. Responses from
the internal circuitry are specified from
the point of view of the device. Output
delay, for example, is specified as a
maximum since worst-case operation of
any device always provides data within
that time.
5
Multipliers
08/16/2000–LDS.18-O
Page 6

DEVICES INCORPORATED
ORDERING INFORMATION
84-pin
LMU18
16 x 16-bit Parallel Multiplier
B
B
B
B
B
B
ENB
CLK
OEL
GND
V
CC
R
R
R
R
R
R
R
R
R
R
B9B8B7B6B5B4B3B2B1B0A0A1A2A3A4A5A6A7A8A9A
1234567
12
10
13
11
14
12
15
13
16
14
17
15
18
19
20
21
22
23
0
24
1
25
2
26
3
27
4
28
5
29
6
30
7
31
8
32
9
891011 78 77 76 75
36353433 50 51 52 53
15
R10R11R12R13R14R
CC
V
GND
84 83 82 81 80 79
Top
View
4443 45 46 47 493837 39 40 41 42
16R17R18R19R20R21R22R23R24R25R26R27R28
R
48
10
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
A
11
A
12
A
13
A
14
A
15
ENA
RND
TCA
TCB
V
CC
GND
GND
MSPSEL
FT
RS
OEM
ENR
R
31
R
31
R
30
R
29
Speed
45 ns
35 ns
Plastic J-Lead Chip Carrier
(J3)
0°C to +70°C — COMMERCIAL SCREENING
LMU18JC45
LMU18JC35
Multipliers
6
08/16/2000–LDS.18-O
Page 7

DEVICES INCORPORATED
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
ORDERING INFORMATION
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
84-pin
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
23456789012345678901234567890121234567890123456789012345678901212345678901234567890123456789012
12345
A
B
7
B
9
B
B
10
B
12
C
B
11
B
13
D
B
14
B
15
E
GND
CLK
OEL
F
ENB
V
0
R
G
2
R
1
R
H
R
5
R
4
J
R
8
R
6
K
R
R
10
R
7
L
R
12
R
9
R
6
B
4
B
1
B
B
6
B
5
B
8
3
B
2
A
1
B
0
A
0
Top View
Through Package
CC
(i.e., Component Side Pinout)
R
3
R
17
R
18
R
14
GND
V
11
R
15
13
CC
16
R
19
R
Discontinued Package
7 8 9 10 11
A
2
A
3
A
4
R
22
R
21
R
20
Ceramic Pin Grid Array
Speed
(G3)
0°C to +70°C — COMMERCIAL SCREENING
–55°C to +125°C — COMMERCIAL SCREENING
–55°C to +125°C — MIL-STD-883 COMPLIANT
7
16 x 16-bit Parallel Multiplier
A
5
A
7
A
8
A
11
A
6
A
9
A
10
A
13
A
12
A
14
A
15
ENA
V
CC
TCA
TCB
GND
GND
RND
FT
ENR
30
R
R
29
R
26
MSPSEL
OEM
31
R
R
31
R
28
Multipliers
RS
R
24
27
R
R
23
R
25
LMU18
08/16/2000–LDS.18-O
 Loading...
Loading...