

Page 1
3-axis - ± 2g/± 8g smart digital output “piccolo” accelerometer
Feature
■ 2.16 V to 3.6 V supply voltage
■ 1.8 V compatible IOs
■ <1 mW power consumption
■ ± 2g/± 8g dynamically selectable full-scale
2
■ I
C/SPI digital output interface
■ Programmable multiple interrupt generator
■ Click and double click recognition
■ Embedded high pass filter
■ Embedded self test
■ 10000g high shock survivability
■ ECOPACK® RoHS and “Green” compliant
(see Section 9)
Description
The LIS302DL is an ultra compact low-power
three axes linear accelerometer. It includes a
sensing element and an IC interface able to
provide the measured acceleration to the external
world through I
The sensing element, capable of detecting the
acceleration, is manufactured using a dedicated
process developed by ST to produce inertial
sensors and actuators in silicon.
The IC interface is manufactured using a CMOS
process that allows to design a dedicated circuit
which is trimmed to better match the sensing
element characteristics.
2
C/SPI serial interface.
LIS302DL
MEMS motion sensor
LGA 14
The LIS302DL has dynamically user selectable
full scales of ± 2g/± 8g and it is capable of
measuring accelerations with an output data rate
of 100 Hz or 400 Hz.
A self-test capability allows the user to check the
functioning of the sensor in the final application.
The device may be configured to generate inertial
wake-up/free-fall interrupt signals when a
programmable acceleration threshold is crossed
at least in one of the three axes. Thresholds and
timing of interrupt generators are programmable
by the end user on the fly.
The LIS302DL is available in plastic Thin Land
Grid Array package (TLGA) and it is guaranteed
to operate over an extended temperature range
from -40 °C to +85 °C.
The LIS302DL belongs to a family of products
suitable for a variety of applications:
– Free-fall detection
– Motion activated functions
– Gaming and virtual reality input devices
– Vibration monitoring and compensation
(3x5x0.9mm)
Table 1. Device summary
Part number Temp range, ° CPackage Packing
LIS302DL -40 to +85 LGA Tray
LIS302DLTR -40 to +85 LGA Tape and reel ( 5000 pcs/reel )
LIS302DLTR8 -40 to +85 LGA Tape and reel ( 8000 pcs/reel )
October 2008 Rev 4 1/42
www.st.com
42
Page 2

Contents LIS302DL
Contents
1 Block diagram and pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.1 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Mechanical and electrical specifications . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Mechanical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3 Communication interface characteristics . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1 SPI - Serial Peripheral Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.2 I2C - inter IC control interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5 Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5.1 Sensitivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.5.2 Zero-g level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5.3 Self test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5.4 Click and double click recognition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Sensing element . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.2 IC interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Factory calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4 Application hints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.1 Soldering information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
5 Digital interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.1 I2C Serial Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.1.1 I2C operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5.2 SPI bus interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.2.1 SPI Read . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2.2 SPI Write . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2.3 SPI Read in 3-wires mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2/42
Page 3

LIS302DL Contents
6 Register mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7 Register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.1 WHO_AM_I (0Fh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.2 CTRL_REG1 (20h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.3 CTRL_REG2 (21h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7.4 CTRL_REG3 [Interrupt CTRL register] (22h) . . . . . . . . . . . . . . . . . . . . . . 28
7.5 HP_FILTER_RESET (23h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
7.6 STATUS_REG (27h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
7.7 OUT_X (29h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
7.8 OUT_Y (2Bh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
7.9 OUT_Z (2Dh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7.10 FF_WU_CFG_1 (30h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
7.11 FF_WU_SRC_1 (31h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
7.12 FF_WU_THS_1 (32h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
7.13 FF_WU_DURATION_1 (33h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
7.14 FF_WU_CFG_2 (34h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
7.15 FF_WU_SRC_2 (35h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.16 FF_WU_THS_2 (36h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.17 FF_WU_DURATION_2 (37h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.18 CLICK_CFG (38h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
7.19 CLICK_SRC (39h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
7.20 CLICK_THSY_X (3Bh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7.21 CLICK_THSZ (3Ch) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7.22 CLICK_TimeLimit (3Dh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7.23 CLICK_Latency (3Eh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
7.24 CLICK_Window (3Fh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
8 Typical performance characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
8.1 Mechanical characteristics at 25°C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
8.2 Mechanical characteristics derived from measurement in the -40°C to +85°C
temperature range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
8.3 Electro-mechanical characteristics at 25°C . . . . . . . . . . . . . . . . . . . . . . . 39
3/42
Page 4

Contents LIS302DL
9 Package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
10 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4/42
Page 5

LIS302DL List of tables
List of tables
Table 1. Device summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Table 2. Pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 3. Mechanical characteristics
(All the parameters are specified @ Vdd=2.5V, T = 25°C unless otherwise noted) . . . . . . 10
Table 4. Electrical characteristics
(All the parameters are specified @ Vdd=2.5V, T= 25°C unless otherwise noted) . . . . . . 11
Table 5. SPI slave timing values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Table 6. I2C slave timing values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Table 7. Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Table 8. Serial interface pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Table 9. Serial interface pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Table 10. SAD+Read/Write patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Table 11. Transfer when master is writing one byte to slave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Table 12. Transfer when master is writing multiple bytes to slave . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Table 13. Transfer when Master is receiving (reading) one byte of data from slave . . . . . . . . . . . . . 20
Table 14. ransfer when master is receiving (reading). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Table 15. Multiple bytes of data from slave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Table 16. Register address map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Table 17. WHO_AM_I (0Fh) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 18. CTRL_REG1 (20h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 19. CTRL_REG1 (20h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Table 20. CTRL_REG2 (21h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Table 21. CTRL_REG2 (21h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Table 22. High pass filter cut-off frequency configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 23. CTRL_REG3 (22h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 24. CTRL_REG3 (22h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 25. CTRL_REG3 (22h) truth table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Table 26. STATUS_REG (27h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Table 27. STATUS_REG (27h) register desription . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Table 28. OUT_X (29h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Table 29. OUT_Y (2Bh) register description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Table 30. OUT_Z (2Dh) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Table 31. FF_WW_CFG_1 (30h) register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Table 32. FF_WW_CFG_1(30h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Table 33. FF_WU_SRC_1 (31h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 34. FF_WU_SRC_1 (31h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 35. FF_WU_THS_1 (32h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 36. FF_WU_THS_1 (32h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 37. FF_WU_DURATION_1 (33h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 38. FF_WU_DURATION_1 (33h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 39. FF_WU_CFG_2 (34h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 40. FF_WU_CFG_2 (34h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 41. FF_WU_SRC_2 (35h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 42. FF_WU_SRC_2 (35h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 43. FF_WU_THS_2 (36h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 44. FF_WU_THS_2 (36h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 45. FF_WU_DURATION_2 (37h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 46. FF_WU_DURATION_2 (37h) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5/42
Page 6

List of tables LIS302DL
Table 47. CLICK_CFG (38h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Table 48. CLICK_CFG (38h) register description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Table 49. CLICK_CFG (38h) truth table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Table 50. CLICK_SRC (39h) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
Table 51. CLICK_SRC (39h) register description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 52. CLICK_THSY_X (3Bh) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 53. CLICK_THSY_X (3Bh) register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 54. CLICK_THSZ (3Ch) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 55. CLICK_THSZ (3Ch) register description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 56. CLICK_TimeLimit (3Dh) register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Table 57. CLICK_Latency (3Eh) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Table 58. CLICK_Window (3Fh) register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Table 59. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6/42
Page 7

LIS302DL List of figures
List of figures
Figure 1. Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 2. Pin connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Figure 3. SPI slave timing diagram (2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 4. I2C Slave timing diagram (4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Figure 5. LIS302DL electrical connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Figure 6. Read & write protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 7. SPI Read protocol. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 8. Multiple bytes SPI Read protocol (2 bytes example) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 9. SPI Write protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 10. Multiple bytes SPI Write protocol (2 bytes example) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 11. SPI Read protocol in 3-wires mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 12. X axis zero-g level at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 13. X axis sensitivity at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 14. Y axis zero-g level at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 15. Y axis sensitivity at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 16. Z axis zero-g level at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 17. Z axis sensitivity at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 18. X axis zero-g level change vs. temperature at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 19. X axis sensitivity change vs. temperature at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 20. Y axis zero-g level change vs. temperature at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 21. Y axis sensitivity change vs. temperature at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 22. Z axis zero-g level change vs. temperature at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 23. Z axis sensitivity change vs. temperature at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 24. Current consumption in normal mode at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 25. Current consumption in power down mode at 2.5V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 26. LGA 14: mechanical data and package dimensions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
7/42
Page 8
Block diagram and pin description LIS302DL
1 Block diagram and pin description
1.1 Block diagram
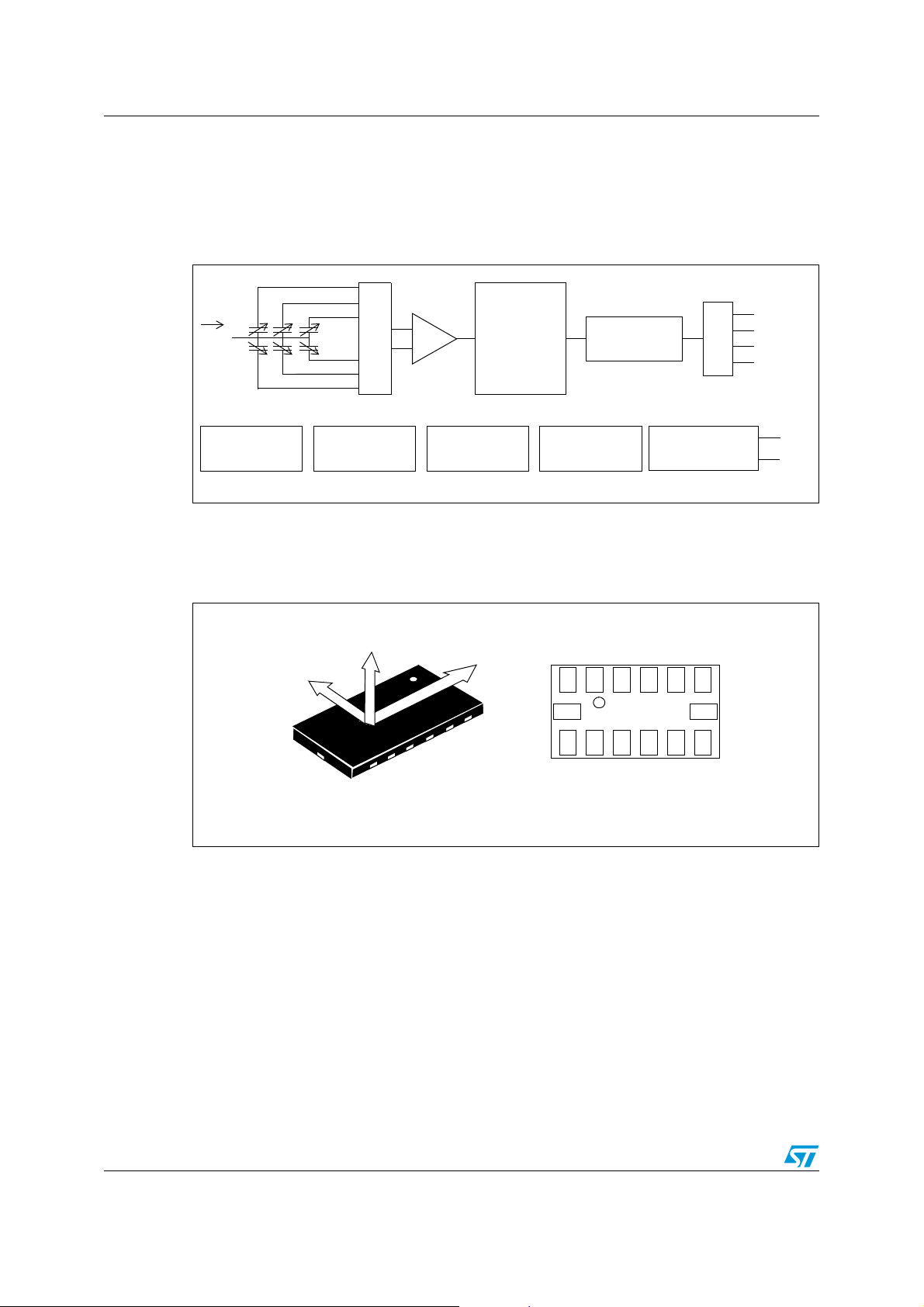
Figure 1. Block diagram
X+
Y+
Z+
a
MUX
Z-
Y-
X-
CHARGE
AMPLIFIER
A/D
CONVERTER
CONTROL LOGIC
I2C
SPI
CS
SCL/SPC
SDA/SDO/SDI
SDO
REFERENCESELF TEST
1.2 Pin description
Figure 2. Pin connection
Y
6
TOP VIEW
TRIMMING
CIRCUITS
Z
1
CLOCK
1
CONTROL LOGIC
&
INTERRUPT GEN.
6
INT 1
INT 2
X
13
8
13 8
BOTTOM VIEW
8/42
Page 9
LIS302DL Block diagram and pin description
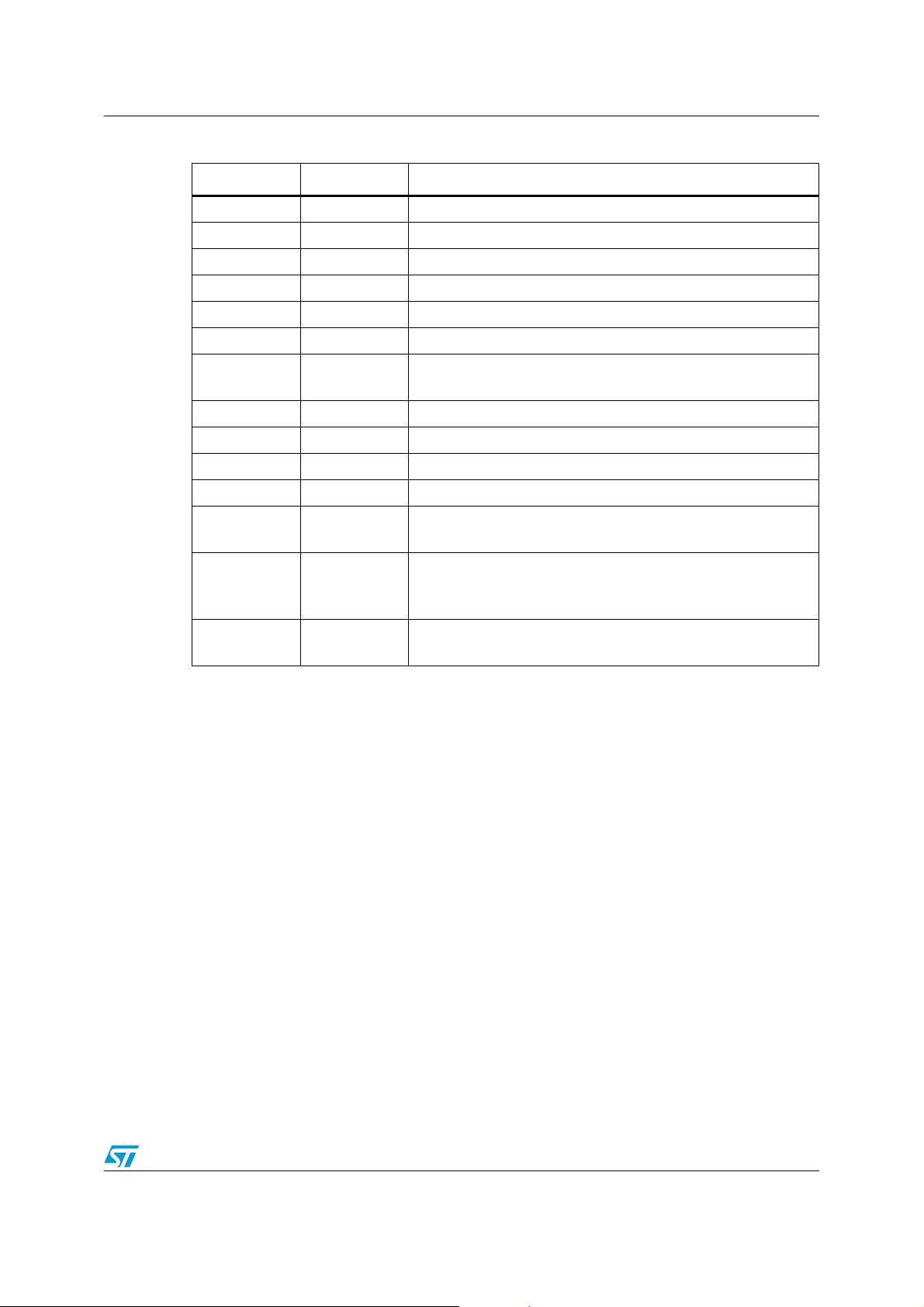
Table 2. Pin description
Pin# Name Function
1 Vdd_IO Power supply for I/O pins
2 GND 0V supply
3 Reserved Connect to Vdd
4 GND 0V supply
5 GND 0V supply
6 Vdd Power supply
7CS
SPI enable
2
C/SPI mode selection (1: I2C mode; 0: SPI enabled)
I
8 INT 1 Inertial interrupt 1
9 INT 2 Inertial interrupt 2
10 GND 0V supply
11 Reserved Connect to Gnd
12 SDO
SDA
13
SDI
SDO
14
SCL
SPC
SPI Serial Data Output
2
I
C less significant bit of the device address
2
C Serial Data (SDA)
I
SPI Serial Data Input (SDI)
3-wire Interface Serial Data Output (SDO)
2
C Serial Clock (SCL)
I
SPI Serial Port Clock (SPC)
9/42
Page 10
Mechanical and electrical specifications LIS302DL
2 Mechanical and electrical specifications
2.1 Mechanical characteristics
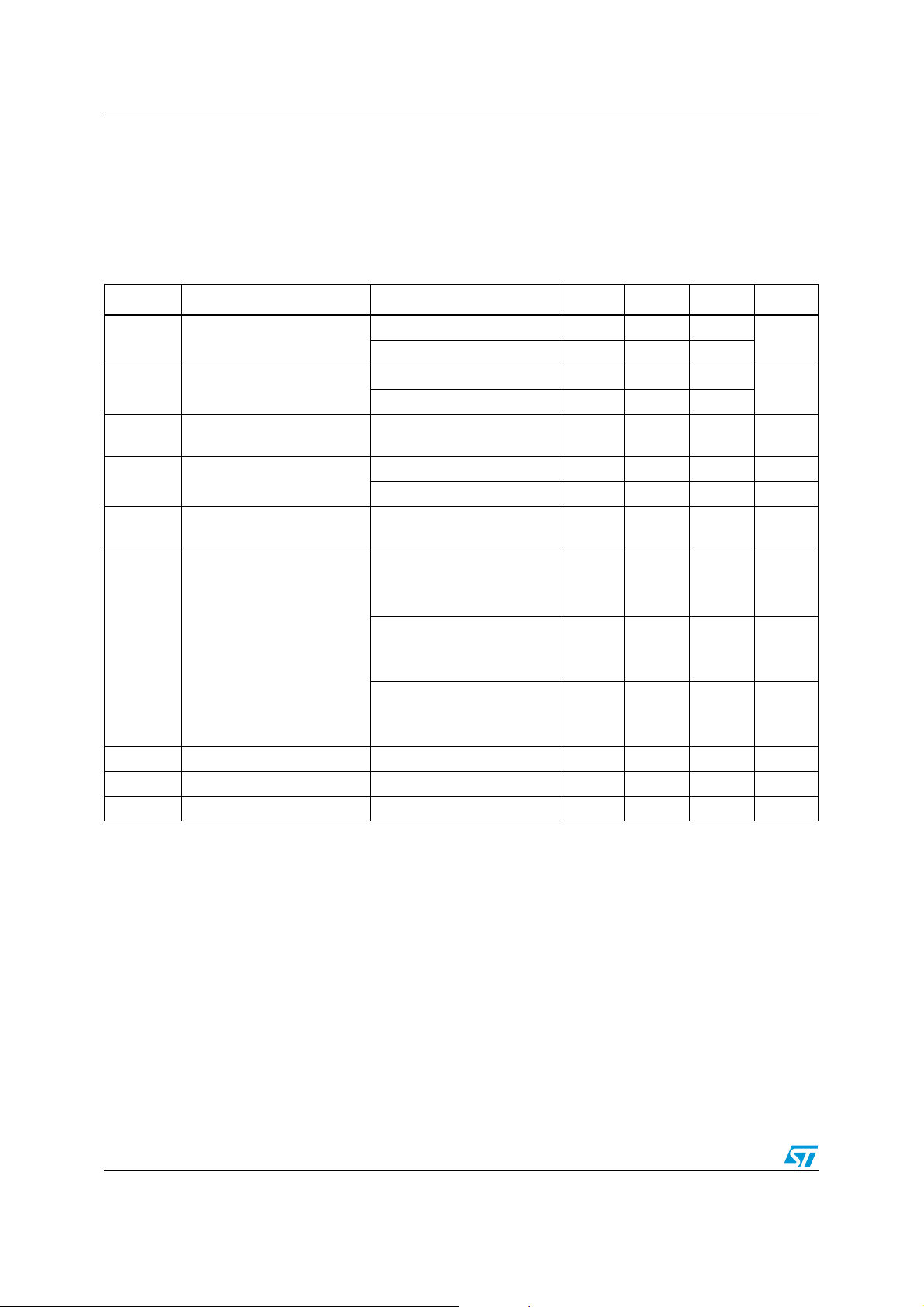
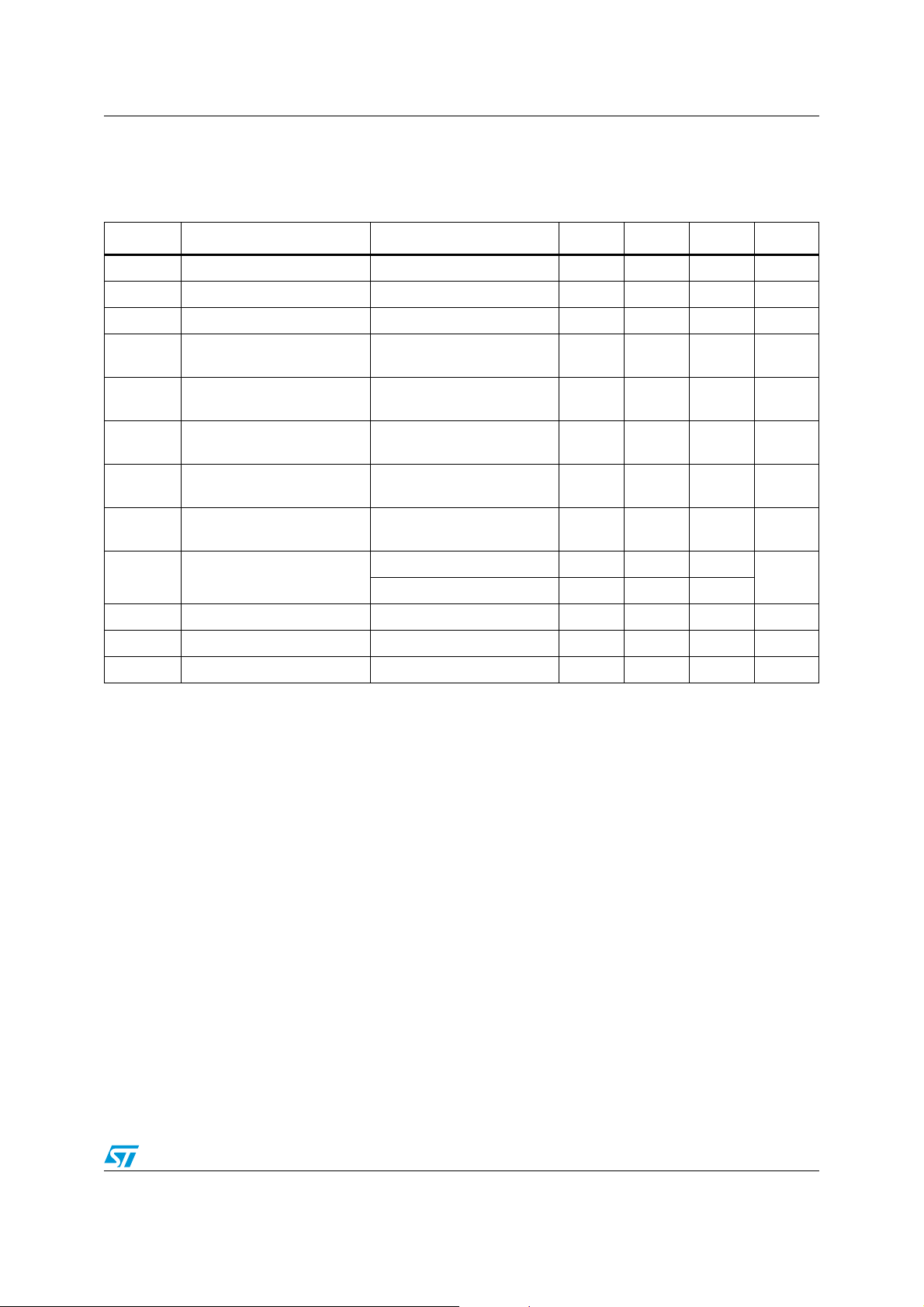
Table 3. Mechanical characteristics
(1)
(All the parameters are specified @ Vdd=2.5 V, T = 25°C unless otherwise noted)
Symbol Parameter Test conditions Min. Typ.
FS Measurement range
So Sensitivity
(3)
FS bit set to 0 ±2.0 ±2.3
FS bit set to 1 ±8.0 ±9.2
FS bit set to 0 16.2 18 19.8
FS bit set to 1 64.8 72 79.2
TCSO
Ty Of f
TCOff
Sensitivity change vs
temperature
Typical zero-g level offset
accuracy
(4),(5)
Zero-g level change vs
temperature
FS bit set to 0 ±0.01 %/°C
FS bit set to 0 ±40 mg
FS bit set to 1 ±60 mg
Max delta from 25°C
FS bit set to 0
STP bit used
-32 -3 LSb
X axis
FS bit set to 0
STP bit used
Y axis
332LSb
Vst
Self test output
(6),(7),(8),(9)
change
FS bit set to 0
STP bit used
332LSb
Z axis
BW System bandwidth
(10)
Top Operating temperature range -40 +85 °C
Wh Product weight 30 mgram
1. The product is factory calibrated at 2.5V. The device can be used from 2.16V to 3.6V
2. Typical specifications are not guaranteed
3. Verified by wafer level test and measurement of initial offset and sensitivity
4. Typical zero-g level offset value after MSL3 preconditioning
5. Offset can be eliminated by enabling the built-in high pass filter
6. If STM bit is used values change in sign for all axes
7. Self Test output changes with the power supply. Vst at 3.3V is typically in the range [-74; -7] LSb for X axis and [7;74] LSb for Y
and Z axes.
8.
“Self Test Output Change” is defined as OUTPUT[LSb]
1LSb=4.6g/256 at 8bit representation, ±2.3g Full-Scale
9. Output data reach 99% of final value after 3/ODR when enabling Self-Test mode due to device filtering
10. ODR is output data rate. Refer to Table 4 for specifications
(Self-test bit on ctrl_reg1=1)
-OUTPUT[LSb]
(2)
Max. Unit
±0.5 mg/°C
ODR/2 Hz
(Self-test bit on ctrl_reg1=0)
.
mg/digit
g
10/42
Page 11
LIS302DL Mechanical and electrical specifications
2.2 Electrical characteristics
Table 4. Electrical characteristics
(1)
(All the parameters are specified @ Vdd=2.5 V, T= 25°C unless otherwise noted)
Symbol Parameter Test conditions Min. Typ.
Vdd Supply voltage 2.16 2.5 3.6 V
Vdd_IO I/O pins supply voltage
(3)
1.71 Vdd+0.1 V
Idd Supply current T = 25°C, ODR=100Hz 0.3 0.4 mA
IddPdn
VIH
Current consumption in
power-down mode
Digital high level input
voltage
T = 25°C 1 5 µA
0.8*Vdd
_IO
VIL Digital low level input voltage
VOH High level output voltage
0.9*Vdd
_IO
VOL Low level output voltage
DR=0 100
ODR Output data rate
DR=1 400
BW System bandwidth
Ton Turn-on time
(4)
(5)
Top Operating temperature range -40 +85
1. The product is factory calibrated at 2.5V. The device can be used from 2.16V to 3.6V
2. Typical specification are not guaranteed
3. It is possible to remove Vdd maintaining Vdd_IO without blocking the communication busses, in this condition the
measurement chain is powered off.
4. Filter cut-off frequency
5. Time to obtain valid data after exiting Power-Down mode
(2)
Max. Unit
0.2*Vdd
_IO
0.1*Vdd
_IO
ODR/2 Hz
3/ODR s
V
V
V
V
Hz
°C
11/42
Page 12
Mechanical and electrical specifications LIS302DL
t
t
t
t
t
t
t
t
2.3 Communication interface characteristics
2.3.1 SPI - Serial Peripheral Interface
Subject to general operating conditions for Vdd and Top.
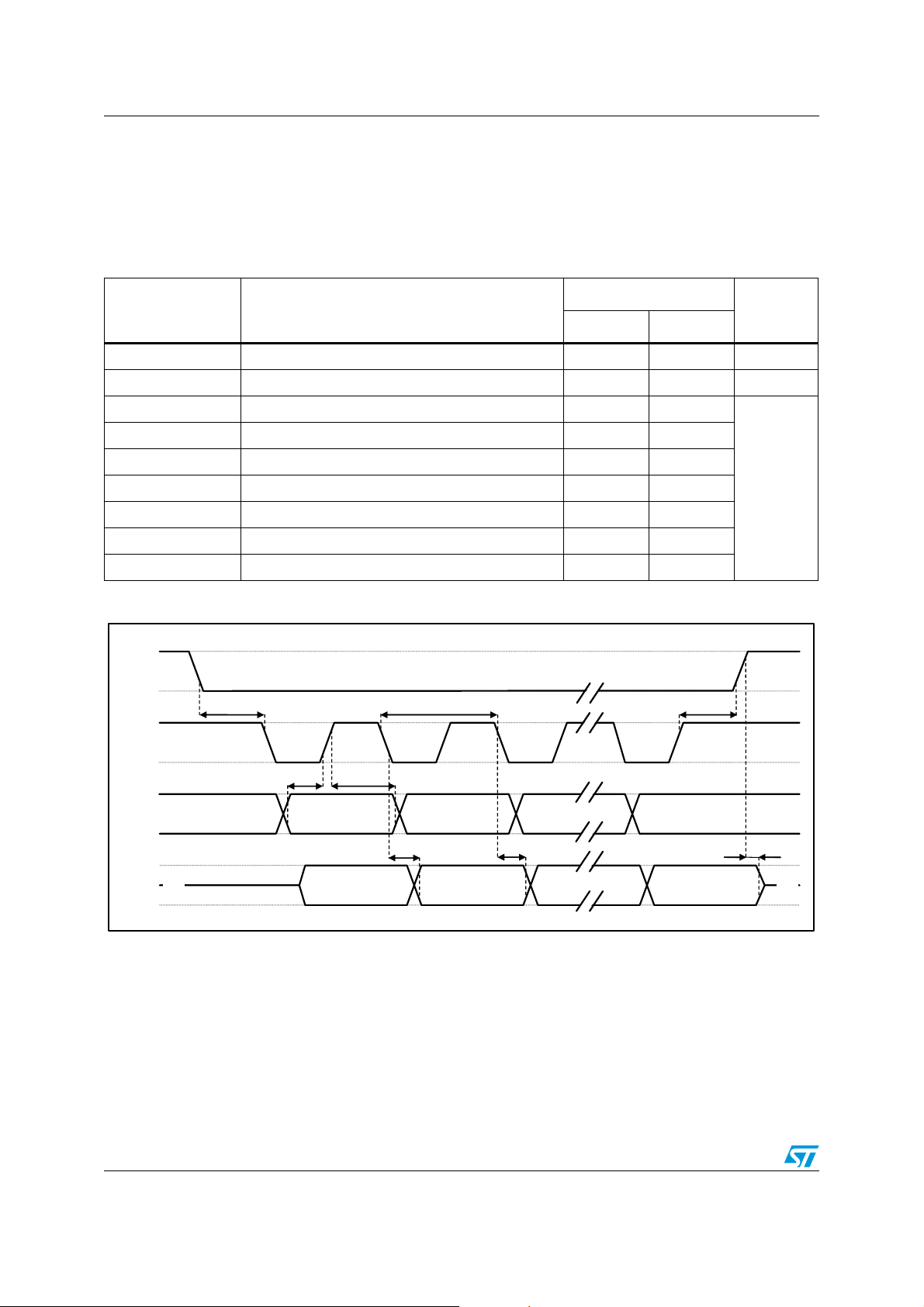
Table 5. SPI slave timing values
(1)
Val ue
Symbol Parameter
Min. Max.
tc(SPC) SPI clock cycle 100 ns
fc(SPC) SPI clock frequency 10 MHz
tsu(CS) CS setup time 5
th(CS) CS hold time 8
tsu(SI) SDI input setup time 5
Unit
th(SI) SDI input hold time 15
tv(SO) SDO valid output time 50
th(SO) SDO output hold time 6
tdis(SO) SDO output disable time 50
(2)
c(SPC)
h(SO)
CS
SPC
SDI
SDO
Figure 3. SPI slave timing diagram
(3)
su(CS)
(3)
h(SI)
MSB OUT
(3)
(3)
su(SI)
MSB IN
v(SO)
h(CS)
LSB IN
LSB OUT
ns
(3)
(3)
(3)
dis(SO)
(3)
1. Values are guaranteed at 10MHz clock frequency for SPI with both 4 and 3 wires, based on characterization results, not
tested in production
2. Measurement points are done at 0.2·Vdd_IO and 0.8·Vdd_IO, for both Input and Output port
3. When no communication is on-going, data on CS, SPC, SDI and SDO are driven by internal pull-up resistors
12/42
Page 13
LIS302DL Mechanical and electrical specifications
t
t
t
t
t
t
t
t
t
t
t
t
2.3.2 I2C - inter IC control interface
Subject to general operating conditions for Vdd and Top.
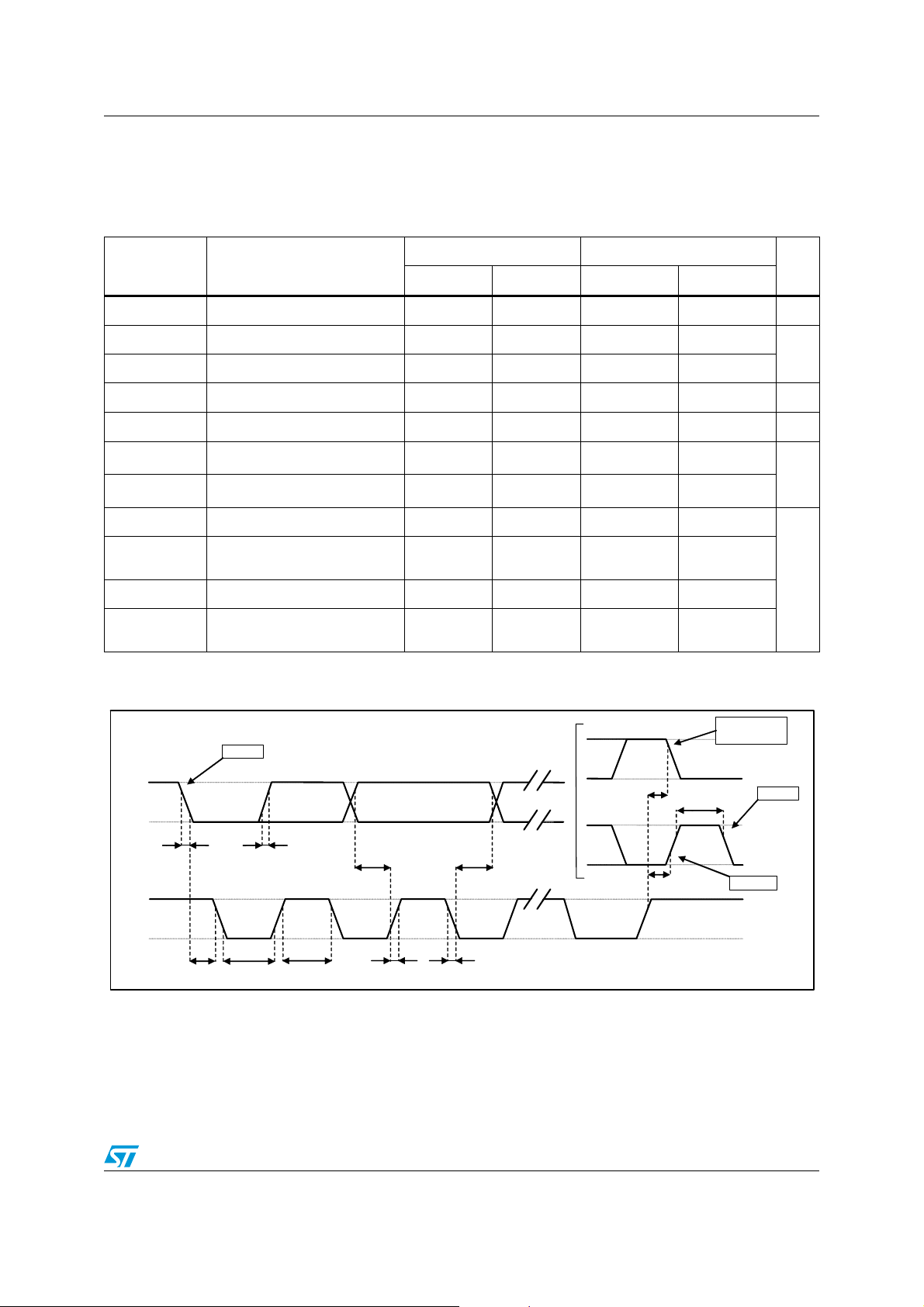
Table 6. I
2
C slave timing values
Symbol Parameter
f
(SCL)
t
w(SCLL)
t
w(SCLH)
t
su(SDA)
t
h(SDA)
t
r(SDA) tr(SCL)
t
f(SDA) tf(SCL)
t
h(ST)
t
su(SR)
t
su(SP)
t
w(SP:SR)
SCL clock frequency 0 100 0 400 KHz
SCL clock low time 4.7 1.3
SCL clock high time 4.0 0.6
SDA setup time 250 100 ns
SDA data hold time 0
SDA and SCL rise time 1000
SDA and SCL fall time 300
START condition hold time 4 0.6
Repeated START condition
setup time
STOP condition setup time 4 0.6
Bus free time between STOP
and START condition
I2C standard mode
(1)
I2C fast mode
Min Max Min Max
3.45
(2)
0
20 + 0.1C
20 + 0.1C
(3)
b
(3)
b
4.7 0.6
4.7 1.3
(1)
0.9
300
300
(2)
Unit
µs
µs
ns
µs
SDA
Figure 4. I
f(SDA)
START
2
C Slave timing diagram
r(SDA)
su(SDA)
(4)
h(SDA)
su(SR)
su(SP)
w(SP:SR)
REPEATED
START
START
STOP
SCL
h(ST)
1. Data based on standard I
2. A device must internally provide an hold time of at least 300ns for the SDA signal (referred to VIHmin of the SCL signal) to
bridge the undefined region of the falling edge of SCL
3. Cb = total capacitance of one bus line, in pF
4. Measurement points are done at 0.2·Vdd_IO and 0.8·Vdd_IO, for both port
w(SCLL)
2
C protocol requirement, not tested in production
w(SCLH)
r(SCL)
f(SCL)
13/42
Page 14

Mechanical and electrical specifications LIS302DL
2.4 Absolute maximum ratings
Stresses above those listed as “absolute maximum ratings” may cause permanent damage
to the device. This is a stress rating only and functional operation of the device under these
conditions is not implied. Exposure to maximum rating conditions for extended periods may
affect device reliability.
Table 7. Absolute maximum ratings
Symbol Ratings Maximum value Unit
Vdd Supply voltage -0.3 to 6 V
Vdd_IO I/O pins supply voltage -0.3 to 6 V
Vin
A
POW
A
UNP
T
T
STG
ESD Electrostatic discharge protection
Input voltage on any control pin
(CS, SCL/SPC, SDA/SDI/SDO)
Acceleration (any axis, powered, Vdd=2.5V)
Acceleration (any axis, unpowered)
Operating temperature range -40 to +85 °C
OP
Storage temperature range -40 to +125 °C
-0.3 to Vdd_IO +0.3 V
3000g for 0.5 ms
10000g for 0.1 ms
3000g for 0.5 ms
10000g for 0.1 ms
4 (HBM) kV
1.5 (CDM) kV
200 (MM) V
Note: Supply voltage on any pin should never exceed 6.0V
This is a mechanical shock sensitive device, improper handling can cause permanent
damages to the part
This is an ESD sensitive device, improper handling can cause permanent damages to
the part
2.5 Terminology
2.5.1 Sensitivity
Sensitivity describes the gain of the sensor and can be determined e.g. by applying 1g
acceleration to it. As the sensor can measure DC accelerations this can be done easily by
pointing the axis of interest towards the center of the Earth, noting the output value, rotating
the sensor by 180 degrees (point to the sky) and noting the output value again. By doing so,
±1g acceleration is applied to the sensor. Subtracting the larger output value from the
smaller one and dividing the result by 2 leads to the actual sensitivity of the sensor. This
value changes very little over temperature and also very little over time. The Sensitivity
Tolerance describes the range of Sensitivities of a large population of sensor.
14/42
Page 15

LIS302DL Mechanical and electrical specifications
2.5.2 Zero-g level
Zero-g level Offset (Off) describes the deviation of an actual output signal from the ideal
output signal if there is no acceleration present. A sensor in a steady state on a horizontal
surface will measure 0g in X axis and 0g in Y axis whereas the Z axis will measure 1g. The
output is ideally in the middle of the dynamic range of the sensor (content of OUT registers
00h, data expressed as 2’s complement number). A deviation from ideal value in this case is
called Zero-g offset. Offset is to some extent a result of stress to a precise MEMS sensor
and therefore the offset can slightly change after mounting the sensor onto a printed circuit
board or exposing it to extensive mechanical stress. Offset changes little over temperature,
see “Zero-g level change vs. temperature”. The Zero-g level of an individual sensor is stable
over lifetime. The Zero-g level tolerance describes the range of Zero-g levels of a population
of sensors.
2.5.3 Self test
Self Test allows to check the sensor functionality without moving it. The Self Test function is
off when the self-test bit of CTRL_REG1 (control register 1) is programmed to ‘0‘. When the
self-test bit of ctrl_reg1 is programmed to ‘1‘ an actuation force is applied to the sensor,
simulating a definite input acceleration. In this case the sensor outputs will exhibit a change
in their DC levels which is related to the selected full scale through the device sensitivity.
When Self Test is activated, the device output level is given by the algebraic sum of the
signals produced by the acceleration acting on the sensor and by the electrostatic test-force.
If the output signals change within the amplitude specified inside Table 3, than the sensor is
working properly and the parameters of the interface chip are within the defined
specification.
2.5.4 Click and double click recognition
The Click and Double Click recognition functions help to create man-machine interface with
little software overload. The device can be configured to output an interrupt signal on
dedicated pin when tapped in any direction.
If the sensor is exposed to a single input stimulus it generates an interrupt request on inertial
interrupt pin (INT1 and/or INT2). A more advanced feature allows to generate and interrupt
request when a “double click” with programmable time between the two events enabling a
“mouse button like” use.
This function can be fully programmed by the user in terms of expected amplitude and
timing of the stimuli.
15/42
Page 16

Functionality LIS302DL
3 Functionality
The LIS302DL is a ultracompact, low-power, digital output 3-axis linear accelerometer
packaged in a LGA package. The complete device includes a sensing element and an IC
interface able to take the information from the sensing element and to provide a signal to the
external world through an I
3.1 Sensing element
A proprietary process is used to create a surface micro-machined accelerometer. The
technology allows to carry out suspended silicon structures which are attached to the
substrate in a few points called anchors and are free to move in the direction of the sensed
acceleration. To be compatible with the traditional packaging techniques a cap is placed on
top of the sensing element to avoid blocking the moving parts during the moulding phase of
the plastic encapsulation.
When an acceleration is applied to the sensor the proof mass displaces from its nominal
position, causing an imbalance in the capacitive half-bridge. This imbalance is measured
using charge integration in response to a voltage pulse applied to the sense capacitor.
At steady state the nominal value of the capacitors are few pF and when an acceleration is
applied the maximum variation of the capacitive load is in fF range.
2
C/SPI serial interface.
3.2 IC interface
The complete measurement chain is composed by a low-noise capacitive amplifier which
converts into an analog voltage the capacitive unbalancing of the MEMS sensor and by
analog-to-digital converters.
The acceleration data may be accessed through an I
device particularly suitable for direct interfacing with a microcontroller.
The LIS302DL features a Data-Ready signal (RDY) which indicates when a new set of
measured acceleration data is available thus simplifying data synchronization in the digital
system that uses the device.
The LIS302DL may also be configured to generate an inertial Wake-Up and Free-Fall
interrupt signal accordingly to a programmed acceleration event along the enabled axes.
Both Free-Fall and Wake-Up can be available simultaneously on two different pins.
3.3 Factory calibration
The IC interface is factory calibrated for sensitivity (So) and Zero-g level (Off).
The trimming values are stored inside the device by a non volatile memory. Any time the
device is turned on, the trimming parameters are downloaded into the registers to be used
during the normal operation. This allows the user to use the device without further
calibration.
2
C/SPI interface thus making the
16/42
Page 17

LIS302DL Application hints
4 Application hints
Figure 5. LIS302DL electrical connection
Vdd
10uF
100nF
GND
6
Top VIEW
8
CS
Digital signal from/to signal controller.Signal’s levels are defined by proper selection of Vdd_IO
INT 1
INT 2
1
SDO
Vdd_IO
13
SDA/SDI/SDO
SCL/SPC
Z
Y
6
TOP VIEW
DIRECTIONS OF THE
DETECTABLE
ACCELERATIONS
1
8
13
The device core is supplied through Vdd line while the I/O pads are supplied through
Vdd_IO line. Power supply decoupling capacitors (100 nF ceramic, 10 µF Al) should be
placed as near as possible to the pin 6 of the device (common design practice).
X
All the voltage and ground supplies must be present at the same time to have proper
behavior of the IC (refer to Figure 5). It is possible to remove Vdd maintaining Vdd_IO
without blocking the communication busses, in this condition the measurement chain is
powered off.
The functionality of the device and the measured acceleration data is selectable and
accessible through the I
2
C/SPI interface.When using the I2C, CS must be tied high.
The functions, the threshold and the timing of the two interrupt pins (INT 1 and INT 2) can be
completely programmed by the user though the I
4.1 Soldering information
The LGA package is compliant with the ECOPACK®, RoHS and “Green” standard. It is
qualified for soldering heat resistance according to JEDEC J-STD-020C.
Leave “Pin 1 Indicator” unconnected during soldering.
Land pattern and soldering recommendation are available at www.st.com/mems
2
C/SPI interface.
.
17/42
Page 18

Digital interfaces LIS302DL
5 Digital interfaces
The registers embedded inside the LIS302DL may be accessed through both the I2C and
SPI serial interfaces. The latter may be SW configured to operate either in 3-wire or 4-wire
interface mode.
The serial interfaces are mapped onto the same pads. To select/exploit the I
line must be tied high (i.e connected to Vdd_IO).
Table 8. Serial interface pin description
PIN name PIN description
2
C interface, CS
CS
SCL/SPC
SDA/SDI/SDO
SDO SPI Serial Data Output (SDO)
SPI enable
I2C/SPI mode selection (1: I2C mode; 0: SPI enabled)
2
C Serial Clock (SCL)
I
SPI Serial Port Clock (SPC)
2
I
C Serial Data (SDA)
SPI Serial Data Input (SDI)
3-wire Interface Serial Data Output (SDO)
5.1 I2C Serial Interface
The LIS302DL I2C is a bus slave. The I2C is employed to write the data into the registers
whose content can also be read back.
The relevant I
Table 9. Serial interface pin description
Transmitter The device which sends data to the bus
Receiver The device which receives data from the bus
Master
2
C terminology is given in the table below.
Term Description
The device which initiates a transfer, generates clock signals and terminates a
transfer
Slave The device addressed by the master
There are two signals associated with the I2C bus: the Serial Clock Line (SCL) and the
Serial DAta line (SDA). The latter is a bidirectional line used for sending and receiving the
data to/from the interface. Both the lines are connected to Vdd_IO through a pull-up resistor
embedded inside the LIS302DL. When the bus is free both the lines are high.
2
The I
C interface is compliant with Fast Mode (400 kHz) I2C standards as well as the
Normal Mode.
18/42
Page 19

LIS302DL Digital interfaces
5.1.1 I2C operation
The transaction on the bus is started through a START (ST) signal. A START condition is
defined as a HIGH to LOW transition on the data line while the SCL line is held HIGH. After
this has been transmitted by the Master, the bus is considered busy. The next byte of data
transmitted after the start condition contains the address of the slave in the first 7 bits and
the eighth bit tells whether the Master is receiving data from the slave or transmitting data to
the slave. When an address is sent, each device in the system compares the first seven bits
after a start condition with its address. If they match, the device considers itself addressed
by the Master.
The Slave ADdress (SAD) associated to the LIS302DL is 001110xb. SDO pad can be used
to modify less significant bit of the device address. If SDO pad is connected to voltage
supply LSb is ‘1’ (address 0011101b) else if SDO pad is connected to ground LSb value is
‘0’ (address 0011100b). This solution permits to connect and address two different
accelerometer to the same I
Data transfer with acknowledge is mandatory. The transmitter must release the SDA line
during the acknowledge pulse. The receiver must then pull the data line LOW so that it
remains stable low during the HIGH period of the acknowledge clock pulse. A receiver which
has been addressed is obliged to generate an acknowledge after each byte of data has
been received.
2
The I
C embedded inside the LIS302DL behaves like a slave device and the following
protocol must be adhered to. After the start condition (ST) a salve address is sent, once a
slave acknowledge (SAK) has been returned, a 8-bit sub-address will be transmitted: the 7
LSb represent the actual register address while the MSB enables address auto increment. If
the MSb of the SUB field is 1, the SUB (register address) will be automatically incremented
to allow multiple data read/write.
2
C lines.
The slave address is completed with a Read/Write bit. If the bit was ‘1’ (Read), a repeated
START (SR) condition will have to be issued after the two sub-address bytes; if the bit is ‘0’
(Write) the Master will transmit to the slave with direction unchanged. Table 10 explains how
the SAD+Read/Write bit pattern is composed, listing all the possible configurations.
Table 10. SAD+Read/Write patterns
Command SAD[6:1] SAD[0] = SDO R/W SAD+R/W
Read 001110 0 1 00111001 (39h)
Write 001110 0 0 00111000 (38h)
Read 001110 1 1 00111011 (3Bh)
Write 001110 1 0 00111010 (3Ah)
Table 11. Transfer when master is writing one byte to slave
Master ST SAD + W SUB DATA SP
Slave SAK SAK SAK
Table 12. Transfer when master is writing multiple bytes to slave
Master ST SAD + W SUB DATA DATA SP
Slave SAK SAK SAK SAK
19/42
Page 20

Digital interfaces LIS302DL
Table 13. Transfer when Master is receiving (reading) one byte of data from slave
Master ST SAD + W SUB SR SAD + R NMAK SP
Slave SAK SAK SAK DATA
Table 14. ransfer when master is receiving (reading)
Master ST SAD + W SUB SR SAD + R MAK
Slave SAK SAK SAK DATA
Table 15. Multiple bytes of data from slave
Master MAK NMAK SP
Slave DATA DATA
Data are transmitted in byte format (DATA). Each data transfer contains 8 bits. The number
of bytes transferred per transfer is unlimited. Data is transferred with the Most Significant bit
(MSb) first. If a receiver can’t receive another complete byte of data until it has performed
some other function, it can hold the clock line, SCL LOW to force the transmitter into a wait
state. Data transfer only continues when the receiver is ready for another byte and releases
the data line. If a slave receiver doesn’t acknowledge the slave address (i.e. it is not able to
receive because it is performing some real time function) the data line must be left HIGH by
the slave. The Master can then abort the transfer. A LOW to HIGH transition on the SDA line
while the SCL line is HIGH is defined as a STOP condition. Each data transfer must be
terminated by the generation of a STOP (SP) condition.
In order to read multiple bytes, it is necessary to assert the most significant bit of the subaddress field. In other words, SUB(7) must be equal to 1 while SUB(6-0) represents the
address of first register to read.
In the presented communication format MAK is Master Acknowledge and NMAK is No
Master Acknowledge.
5.2 SPI bus interface
The LIS302DL SPI is a bus slave. The SPI allows to write and read the registers of the
device.
The Serial Interface interacts with the outside world with 4 wires: CS, SPC, SDI and SDO.
20/42
Page 21

LIS302DL Digital interfaces
Figure 6. Read & write protocol
CS
SPC
SDI
DI7DI6DI5DI4DI3DI2DI1DI0
DO7DO6DO5DO4DO3DO2DO1DO0
SDO
RW
MS
AD5 AD4 AD3 AD2 AD1 AD0
CS is the Serial Port Enable and it is controlled by the SPI master. It goes low at the start of
the transmission and goes back high at the end. SPC is the Serial Port Clock and it is
controlled by the SPI master. It is stopped high when CS is high (no transmission). SDI and
SDO are respectively the Serial Port Data Input and Output. Those lines are driven at the
falling edge of SPC and should be captured at the rising edge of SPC.
Both the Read Register and Write Register commands are completed in 16 clock pulses or
in multiple of 8 in case of multiple byte read/write. Bit duration is the time between two falling
edges of SPC. The first bit (bit 0) starts at the first falling edge of SPC after the falling edge
of CS while the last bit (bit 15, bit 23, ...) starts at the last falling edge of SPC just before the
rising edge of CS.
bit 0: RW
bit. When 0, the data DI(7:0) is written into the device. When 1, the data DO(7:0)
from the device is read. In latter case, the chip will drive SDO at the start of bit 8.
bit 1: MS
bit. When 0, the address will remain unchanged in multiple read/write commands.
When 1, the address will be auto incremented in multiple read/write commands.
bit 2-7: address AD(5:0). This is the address field of the indexed register.
bit 8-15: data DI(7:0) (write mode). This is the data that will be written into the device (MSb
first).
bit 8-15: data DO(7:0) (read mode). This is the data that will be read from the device (MSb
first).
In multiple read/write commands further blocks of 8 clock periods will be added. When MS
bit is 0 the address used to read/write data remains the same for every block. When MS
bit
is 1 the address used to read/write data is incremented at every block.
The function and the behavior of SDI and SDO remain unchanged.
21/42
Page 22

Digital interfaces LIS302DL
5.2.1 SPI Read
Figure 7. SPI Read protocol
CS
SPC
SDI
RW
MS
AD5 AD4 AD3 AD2 AD1 AD0
SDO
DO7 DO6 DO5DO4 DO3 DO2 DO1DO0
The SPI Read command is performed with 16 clock pulses. Multiple byte read command is
performed adding blocks of 8 clock pulses at the previous one.
bit 0: READ bit. The value is 1.
bit 1: MS
bit. When 0 do not increment address, when 1 increment address in multiple
reading.
bit 2-7: address AD(5:0). This is the address field of the indexed register.
bit 8-15: data DO(7:0) (read mode). This is the data that will be read from the device (MSb
first).
bit 16-... : data DO(...-8). Further data in multiple byte reading.
Figure 8. Multiple bytes SPI Read protocol (2 bytes example)
CS
SPC
SDI
SDO
5.2.2 SPI Write
Figure 9. SPI Write protocol
RW
AD5 AD4 AD3 AD2 AD1 AD0
MS
DO7DO6DO5DO4DO3DO2DO1DO0
DO15 DO14 DO13 DO12 DO11 DO10 DO9 DO8
CS
SPC
SDI
RW
AD5 AD4 AD3 AD2 AD1 AD0MS
22/42
DI7 DI6 DI5 DI4 DI3 DI2 DI1 DI0
Page 23

LIS302DL Digital interfaces
The SPI Write command is performed with 16 clock pulses. Multiple byte write command is
performed adding blocks of 8 clock pulses at the previous one.
bit 0: WRITE bit. The value is 0.
bit 1: MS
bit. When 0 do not increment address, when 1 increment address in multiple
writing.
bit 2 -7: address AD(5:0). This is the address field of the indexed register.
bit 8-15: data DI(7:0) (write mode). This is the data that will be written inside the device
(MSb first).
bit 16-... : data DI(...-8). Further data in multiple byte writing.
Figure 10. Multiple bytes SPI Write protocol (2 bytes example)
CS
SPC
SDI
RW
MS
AD5 AD4 AD3 AD2 AD1 AD0
5.2.3 SPI Read in 3-wires mode
3-wires mode is entered by setting to 1 bit SIM (SPI Serial Interface Mode selection) in
CTRL_REG2.
DI7 DI6 DI5 DI4 DI3 DI2 D I1 DI0 D I15 DI14 DI13 DI12 DI11 DI10 DI9 DI8
Figure 11. SPI Read protocol in 3-wires mode
CS
SPC
SDI/O
RW
MS
AD5 AD4 AD3 AD2 AD1 AD0
DO7 DO6 DO5 DO4 DO3 DO2 DO1 DO0
The SPI Read command is performed with 16 clock pulses:
bit 0: READ bit. The value is 1.
bit 1: MS
bit. When 0 do not increment address, when 1 increment address in multiple
reading.
bit 2-7: address AD(5:0). This is the address field of the indexed register.
bit 8-15: data DO(7:0) (read mode). This is the data that will be read from the device (MSb
first).
Multiple read command is also available in 3-wires mode.
23/42
Page 24

Register mapping LIS302DL
6 Register mapping
The table given below provides a listing of the 8 bit registers embedded in the device and
the related address:
Table 16. Register address map
Register address
Name Type
Hex Binary
Reserved (Do not modify) 00-0E Reserved
Who_Am_I r 0F 000 1111 00111011 Dummy register
Reserved (Do not modify) 10-1F Reserved
Ctrl_Reg1 rw 20 010 0000 00000111
Ctrl_Reg2 rw 21 010 0001 00000000
Ctrl_Reg3 rw 22 010 0010 00000000
HP_filter_reset r 23 010 0011 dummy Dummy register
Reserved (Do not modify) 24-26 Reserved
Status_Reg r 27 010 0111 00000000
Default Comment
-- r 28 010 1000 Not Used
OutX r 29 010 1001 output
-- r 2A 010 1010 Not Used
OutY r 2B 010 1011 output
-- r 2C 010 1100 Not Used
OutZ r 2D 010 1101 output
Reserved (Do not modify) 2E-2F Reserved
FF_WU_CFG_1 rw 30 011 0000 00000000
FF_WU_SRC_1(ack1) r 31 011 0001 00000000
FF_WU_THS_1 rw 32 011 0010 0000000x
FF_WU_DURATION_1 rw 33 011 0011 00000000
FF_WU_CFG_2 rw 34 011 0100 00000000
FF_WU_SRC_2 (ack2) r 35 011 0101 00000000
FF_WU_THS_2 rw 36 011 0110 00000000
FF_WU_DURATION_2 rw 37 011 0111 00000000
CLICK_CFG rw 38 011 1000 00000000
CLICK_SRC (ack) r 39 011 1001 00000000
-- 3A Not Used
CLICK_THSY_X rw 3B 011 1011 00000000
24/42
Page 25

LIS302DL Register mapping
Table 16. Register address map (continued)
Register address
Name Type
Hex Binary
CLICK_THSZ rw 3C 011 1100 00000000
CLICK_TimeLimit rw 3D 011 1101 00000000
CLICK_Latency rw 3E 011 1110 00000000
CLICK_Window rw 3F 011 1111 00000000
Default Comment
Registers marked as Reserved must not be changed. The writing to those registers may
cause permanent damages to the device.
The content of the registers that are loaded at boot should not be changed. They contain the
factory calibration values. Their content is automatically restored when the device is
powered-up.
25/42
Page 26

Register description LIS302DL
7 Register description
The device contains a set of registers which are used to control its behavior and to retrieve
acceleration data. The registers address, made of 7 bits, is used to identify them and to
write the data through serial interface.
7.1 WHO_AM_I (0Fh)
Table 17. WHO_AM_I (0Fh) register
00111011
Device identification register. This register contains the device identifier that for LIS302DL is
set to 3Bh.
7.2 CTRL_REG1 (20h)
Table 18. CTRL_REG1 (20h) register
DR PD FS STP STM Zen Yen Xen
Table 19. CTRL_REG1 (20h) register description
DR Data rate selection. Default value: 0
(0: 100 Hz output data rate; 1: 400 Hz output data rate)
PD Power Down Control. Default value: 0
(0: power down mode; 1: active mode)
FS Full Scale selection. Default value: 0
(refer to Table 3 for typical full scale value)
STP, STM Self Test Enable. Default value: 0
(0: normal mode; 1: self test P, M enabled)
Zen Z axis enable. Default value: 1
(0: Z axis disabled; 1: Z axis enabled)
Yen Y axis enable. Default value: 1
(0: Y axis disabled; 1: Y axis enabled)
Xen X axis enable. Default value: 1
(0: X axis disabled; 1: X axis enabled)
DR bit allows to select the data rate at which acceleration samples are produced. The
default value is 0 which corresponds to a data-rate of 100Hz. By changing the content of DR
to “1” the selected data-rate will be set equal to 400Hz.
PD bit allows to turn on the turn the device out of power-down mode. The device is in powerdown mode when PD= “0” (default value after boot). The device is in normal mode when PD
is set to 1.
STP, STM bit is used to activate the self test function. When the bit is set to one, an output
change will occur to the device outputs (refer to Table 3 and 4 for specification) thus
allowing to check the functionality of the whole measurement chain.
26/42
Page 27

LIS302DL Register description
Zen bit enables the generation of Data Ready signal for Z-axis measurement channel when
set to 1. The default value is 1.
Yen bit enables the generation of Data Ready signal for Y-axis measurement channel when
set to 1. The default value is 1.
Xen bit enables the generation of Data Ready signal for X-axis measurement channel when
set to 1. The default value is 1.
7.3 CTRL_REG2 (21h)
Table 20. CTRL_REG2 (21h) register
SIM BOOT -- FDS
Table 21. CTRL_REG2 (21h) register description
SIM SPI Serial Interface Mode selection. Default value: 0
(0: 4-wire interface; 1: 3-wire interface)
BOOT Reboot memory content. Default value: 0
(0: normal mode; 1: reboot memory content)
HP_FF_WU2HP_FF_W
U1
HP_coeff2 HP_coeff1
FDS Filtered Data Selection. Default value: 0
(0: internal filter bypassed; 1: data from internal filter sent to output register)
HP FF_WU2 High Pass filter enabled for FreeFall/WakeUp # 2. Default value: 0
(0: filter bypassed; 1: filter enabled)
HPFF_WU1 High Pass filter enabled for Free-Fall/Wake-Up #1. Default value: 0
(0: filter bypassed; 1: filter enabled)
HP coeff2
HP coeff1
High pass filter cut-off frequency configuration. Default value: 00
(See table below)
SIM bit selects the SPI Serial Interface Mode. When SIM is ‘0’ (default value) the 4-wire
interface mode is selected. The data coming from the device are sent to SDO pad. In 3-wire
interface mode output data are sent to SDA_SDI pad.
BOOT bit is used to refresh the content of internal registers stored in the flash memory
block. At the device power up the content of the flash memory block is transferred to the
internal registers related to trimming functions to permit a good behavior of the device itself.
If for any reason the content of trimming registers was changed it is sufficient to use this bit
to restore correct values. When BOOT bit is set to ‘1’ the content of internal flash is copied
inside corresponding internal registers and it is used to calibrate the device. These values
are factory trimmed and they are different for every accelerometer. They permit a good
behavior of the device and normally they have not to be changed. At the end of the boot
process the BOOT bit is set again to ‘0’.
FDS bit enables (FDS=1) or bypass (FDS=0) the high pass filter in the signal chain of the
sensor
HP_coeff[2:1]. These bits are used to configure high-pass filter cut-off frequency ft.
27/42
Page 28

Register description LIS302DL
Table 22. High pass filter cut-off frequency configuration
HP_coeff2,1
00 2 8
01 1 4
10 0.5 2
11 0.25 1
ft (Hz)
(DR=100 Hz)
7.4 CTRL_REG3 [Interrupt CTRL register] (22h)
Table 23. CTRL_REG3 (22h) register
IHL PP_OD I2CFG2 I2CFG1 I2CFG0 I1CFG2 I1CFG1 I1CFG0
Table 24. CTRL_REG3 (22h) register description
IHL Interrupt active high, low. Default value 0.
(0: active high; 1: active low)
PP_OD Push-pull/Open Drain selection on interrupt pad. Default value 0.
(0: push-pull; 1: open drain)
I2CFG2
I2CFG1
I2CFG0
I1CFG2
I1CFG1
I1CFG0
Data Signal on Int2 pad control bits. Default value 000.
(see table below)
Data Signal on Int1 pad control bits. Default value 000.
(see table below)
ft (Hz)
(DR=400 Hz)
Table 25. CTRL_REG3 (22h) truth table
I1(2)_CFG2 I1(2)_CFG1 I1(2)_CFG0 Int1(2) Pad
0 0 0 GND
001 FF_WU_1
010 FF_WU_2
0 1 1 FF_WU_1 or FF_WU_2
100 Data ready
1 1 1 Click interrupt
7.5 HP_FILTER_RESET (23h)
Dummy register. Reading at this address zeroes instantaneously the content of the internal
high pass-filter. If the high pass filter is enabled all three axes are instantaneously set to 0g.
This allows to overcome the settling time of the high pass filter.
28/42
Page 29

LIS302DL Register description
7.6 STATUS_REG (27h)
Table 26. STATUS_REG (27h) register
ZXYOR ZOR YOR XOR ZYXDA ZDA YDA XDA
Table 27. STATUS_REG (27h) register desription
X, Y and Z axis data overrun. Default value: 0
ZYXOR
ZOR
YOR
XOR
(0: no overrun has occurred;
1: new data has over written the previous one before it was read)
Z axis data overrun. Default value: 0
(0: no overrun has occurred;
1: a new data for the Z-axis has overwritten the previous one)
Y axis data overrun. Default value: 0
(0: no overrun has occurred;
1: a new data for the Y-axis has overwritten the previous one)
X axis data overrun. Default value: 0
(0: no overrun has occurred;
1: a new data for the X-axis has overwritten the previous one)
ZYXDA X, Y and Z axis new data available. Default value: 0
(0: a new set of data is not yet available; 1: a new set of data is available)
ZDA Z axis new data available. Default value: 0
(0: a new data for the Z-axis is not yet available;
1: a new data for the Z-axis is available)
YDA Y axis new data available. Default value: 0
(0: a new data for the Y-axis is not yet available;
1: a new data for the Y-axis is available)
XDA X axis new data available. Default value: 0
(0: a new data for the X-axis is not yet available;
1: a new data for the X-axis is available)
7.7 OUT_X (29h)
Table 28. OUT_X (29h) register
XD7 XD6 XD5 XD4 XD3 XD2 XD1 XD0
X axis output data.
7.8 OUT_Y (2Bh)
Table 29. OUT_Y (2Bh) register description
YD7 YD6 YD5 YD4 YD3 YD2 YD1 YD0
Y axis output data.
29/42
Page 30

Register description LIS302DL
7.9 OUT_Z (2Dh)
Table 30. OUT_Z (2Dh) register
ZD7 ZD6 ZD5 ZD4 ZD3 ZD2 ZD1 ZD0
Z axis output data.
7.10 FF_WU_CFG_1 (30h)
Table 31. FF_WW_CFG_1 (30h) register
AOI LIR ZHIE ZLIE YHIE YLIE XHIE XLIE
Table 32. FF_WW_CFG_1(30h) register description
AOI
LIR
ZHIE
And/or combination of Interrupt events. Default value: 0
(0: OR combination of interrupt events; 1: AND combination of interrupt events)
Latch Interrupt request into FF_WU_SRC reg with the FF_WU_SRC reg cleared by
reading FF_WU_SRC_1 reg. Default value: 0
(0: interrupt request not latched; 1: interrupt request latched)
Enable interrupt generation on Z high event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value higher than preset threshold)
ZLIE
YHIE
YLIE
XHIE
XLIE
Enable interrupt generation on Z low event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value lower than preset threshold)
Enable interrupt generation on Y high event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value higher than preset threshold)
Enable interrupt generation on Y low event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value lower than preset threshold)
Enable interrupt generation on X high event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value higher than preset threshold)
Enable interrupt generation on X low event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value lower than preset threshold)
30/42
Page 31

LIS302DL Register description
7.11 FF_WU_SRC_1 (31h)
Table 33. FF_WU_SRC_1 (31h) register
X IA ZHZLYHYLXHXL
Table 34. FF_WU_SRC_1 (31h) register description
IA
Interrupt active. Default value: 0
(0: no interrupt has been generated; 1: one ore more interrupt has been generated)
ZH
ZL
YH
YL
XH
XL
Z high. Default value: 0
(0: no interrupt, 1: ZH event has occurred)
Z low. Default value: 0
(0: no interrupt; 1: ZL event has occurred)
Y high. Default value: 0
(0: no interrupt, 1: YH event has occurred)
Y low. Default value: 0
(0: no interrupt, 1: YL event has occurred)
X high. Default value: 0
(0: no interrupt, 1: XH event has occurred)
X low. Default value: 0
(0: no interrupt, 1: XL event has occurred)
Free-fall and wake-up source register. Read only register.
Reading at this address clears FF_WU_SRC_1 register and the FF, WU 1 interrupt and
allows the refreshment of data in the FF_WU_SRC_1 register if the latched option was
chosen.
7.12 FF_WU_THS_1 (32h)
Table 35. FF_WU_THS_1 (32h) register
DCRM THS6 THS5 THS4 THS3 THS2 THS1 THS0
Table 36. FF_WU_THS_1 (32h) register description
DCRM
THS6, THS0 Free-fall / wake-up threshold: default value: 000 000x
Resetting mode selection. Default value: 0
(0: counter resetted; 1: counter decremented)
Most significant bit (DCRM) is used to select the resetting mode of the duration counter. If
DCRM=0 counter is resetted when the interrupt is no more active else if DCRM=1 duration
counter is decremented.
31/42
Page 32

Register description LIS302DL
7.13 FF_WU_DURATION_1 (33h)
Table 37. FF_WU_DURATION_1 (33h) register
D7 D6 D5 D4 D3 D2 D1 D0
Table 38. FF_WU_DURATION_1 (33h) register description
D7-D0 Duration value. Default value: 0000 0000
Duration register for Free-Fall/Wake-Up interrupt 1. Duration step and maximum value
depend on the ODR chosen. Step 2.5 msec, from 0 to 637.5 msec if ODR=400Hz, else step
10 msec, from 0 to 2.55 sec when ODR=100Hz. The counter used to implement duration
function is blocked when LIR=1 in configuration register and the interrupt event is verified
7.14 FF_WU_CFG_2 (34h)
Table 39. FF_WU_CFG_2 (34h) register
AOI LIR ZHIE ZLIE YHIE YLIE XHIE XLIE
Table 40. FF_WU_CFG_2 (34h) register description
AOI And/or combination of Interrupt events. Default value: 0
(0: OR combination of interrupt events; 1: AND combination of interrupt events)
LIR Latch interrupt request into FF_WU_SRC reg with the FF_WU_SRC reg cleared by
reading FF_WU_SRC_2 reg. Default value: 0
(0: interrupt request not latched; 1: interrupt request latched)
ZHIE Enable interrupt generation on Z high event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value higher than preset threshold)
ZLIE Enable interrupt generation on Z low event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value lower than preset threshold)
YHIE Enable interrupt generation on Y high event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value higher than preset threshold)
YLIE Enable interrupt generation on Y low event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value lower than preset threshold)
XHIE Enable interrupt generation on X high event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value higher than preset threshold)
XLIE Enable interrupt generation on X low event. Default value: 0
(0: disable interrupt request;
1: enable interrupt request on measured accel. value lower than preset threshold)
32/42
Page 33

LIS302DL Register description
7.15 FF_WU_SRC_2 (35h)
Table 41. FF_WU_SRC_2 (35h) register
X IA ZH ZLYHYLXHXL
Table 42. FF_WU_SRC_2 (35h) register description
IA Interrupt active. Default value: 0
(0: no interrupt has been generated;
1: one or more interrupt event has been generated)
ZH Z high. Default value: 0
(0: no interrupt; 1: ZH event has occurred)
ZL Z low. Default value: 0
(0: no interrupt; 1: ZL event has occurred)
YH Y high. Default value: 0
(0: no interrupt; 1: YH event has occurred)
YL Y low. Default value: 0
(0: no interrupt; 1: YL event has occurred)
XH X high. Default value: 0
(0: no interrupt; 1: XH event has occurred)
XL X low. Default value: 0
(0: no interrupt; 1: XL event has occurred)
Free-fall and wake-up source register. Read only register.
Reading at this address clears FF_WU_SRC_2 register and the FF, WU 2 interrupt and
allows the refreshment of data in the FF_WU_SRC_2 register if the latched option was
chosen.
7.16 FF_WU_THS_2 (36h)
Table 43. FF_WU_THS_2 (36h) register
DCRM THS6 THS5 THS4 THS3 THS2 THS1 THS0
Table 44. FF_WU_THS_2 (36h) register description
DCRM Resetting mode selection. Default value: 0
(0: counter resetted; 1: counter decremented)
THS6, THS0 Free-fall / wake-up Threshold. Default value: 000 0000
Most significant bit (DCRM) is used to select the resetting mode of the duration counter. If
DCRM=0 counter is resetted when the interrupt is no more active else if DCRM=1 duration
counter is decremented.
7.17 FF_WU_DURATION_2 (37h)
Table 45. FF_WU_DURATION_2 (37h) register
D7 D6 D5 D4 D3 D2 D1 D0
33/42
Page 34

Register description LIS302DL
Table 46. FF_WU_DURATION_2 (37h) register description
D7-D0 Duration value. Default value: 0000 0000
Duration register for Free-Fall/Wake-Up interrupt 2. Duration step and maximum value
depend on the ODR chosen. Step 2.5 msec, from 0 to 637.5 msec if ODR=400Hz, else step
10 msec, from 0 to 2.55 sec when ODR=100Hz. The counter used to implement duration
function is blocked when LIR=1 in configuration register and the interrupt event is verified.
7.18 CLICK_CFG (38h)
Table 47. CLICK_CFG (38h) register
- LIR Double_Z Single_Z Double_Y Single_Y Double_X Single_X
Table 48. CLICK_CFG (38h) register description
LIR Latch interrupt request into CLICK_SRC reg with the CLICK_SRC reg
refreshed by reading CLICK_SRC reg. Default value: 0
(0: interrupt request not latched; 1: interrupt request latched)
Double_Z Enable interrupt generation on double click event on Z axis. Default value: 0
(0: disable interrupt request; 1: enable interrupt request)
Single_Z Enable interrupt generation on single click event on Z axis. Default value: 0
(0: disable interrupt request; 1: enable interrupt request)
Double_Y Enable interrupt generation on double click event on Y axis. Default value: 0
(0: disable interrupt request; 1: enable interrupt request)
Single_Y Enable interrupt generation on single click event on Y axis. Default value: 0
(0: disable interrupt request; 1: enable interrupt request)
Double_X Enable interrupt generation on double click event on X axis. Default value: 0
(0: disable interrupt request; 1: enable interrupt request)
Single_X Enable interrupt generation on single click event on X axis. Default value: 0
(0: disable interrupt request; 1: enable interrupt request)
Table 49. CLICK_CFG (38h) truth table
Double_Z / Y / X Single_Z / Y / X Click output
000
01Single
1 0 Double
1 1 Single or double
7.19 CLICK_SRC (39h)
Table 50. CLICK_SRC (39h) register
X IA Double_Z Single_Z Double_Y Single_Y Double_X Single_X
34/42
Page 35

LIS302DL Register description
Table 51. CLICK_SRC (39h) register description
IA Interrupt active. Default value: 0
(0: no interrupt has been generated;
1: one or more interrupt event has been generated)
Double_Z Double click on Z axis event. Default value: 0
(0: no interrupt; 1: Double Z event has occurred)
Single_Z Single click on Z axis event. Default value: 0
(0: no interrupt; 1: Single Z event has occurred)
Double_Y Double click on Y axis event. Default value: 0
(0: no interrupt; 1: Double Y event has occurred)
Single_Y Single click on Y axis event.Default value: 0
(0: no interrupt; 1: Single Y event has occurred)
Double_X Double click on X axis event. Default value: 0
(0: no interrupt; 1: Double X event has occurred)
Single_X Single click on X axis event. Default value: 0
(0: no interrupt; 1: Single X event has occurred)
7.20 CLICK_THSY_X (3Bh)
Table 52. CLICK_THSY_X (3Bh) register
THSy3 THSy2 THSy1 THSy0 THSx3 THSx2 THSx1 THSx0
Table 53. CLICK_THSY_X (3Bh) register description
THSy3-THSy0 Click threshold on Y axis. Default value: 0000
THSx3-THSx0 Click threshold on X axis. Default value: 0000
From 0.5g(0001) to 7.5g(1111) with step of 0.5g.
7.21 CLICK_THSZ (3Ch)
Table 54. CLICK_THSZ (3Ch) register
XXXXTHSz3THSz2THSz1THSz0
Table 55. CLICK_THSZ (3Ch) register description
THSz3-THSz0 Click Threshold on Z axis. Default value: 0000
From 0.5g(0001) to 7.5g(1111) with step of 0.5g.
7.22 CLICK_TimeLimit (3Dh)
Table 56. CLICK_TimeLimit (3Dh) register
Dur7 Dur6 Dur5 Dur4 Dur3 Dur2 Dur1 Dur0
From 0 to 127.5msec with step of 0.5 msec,
35/42
Page 36

Register description LIS302DL
7.23 CLICK_Latency (3Eh)
Table 57. CLICK_Latency (3Eh) register
Lat7 Lat6 Lat5 Lat4 Lat3 Lat2 Lat1 Lat0
From 0 to 255 msec with step of 1 msec.
7.24 CLICK_Window (3Fh)
Table 58. CLICK_Window (3Fh) register
Win7 Win6 Win5 Win4 Win3 Win2 Win1 Win0
From 0 to 255 msec with step of 1 msec.
36/42
Page 37

LIS302DL Typical performance characteristics
8 Typical performance characteristics
8.1 Mechanical characteristics at 25°C
Figure 12. X axis 0-g level at 2.5V Figure 13. X axis sensitivity at 2.5V
30
25
15
20
15
Percent of parts [%]
10
5
0
−150 −100 −50 0 50 100 150
Zero−g Level Offset [mg]
10
Percent of parts [%]
5
0
16 16.5 17 17.5 18 18.5 19 19.5 20
Sensitivity [mg/digits]
Figure 14. Y axis 0-g level at 2.5V Figure 15. Y axis sensitivity at 2.5V
30
25
20
15
Percent of parts [%]
10
5
0
−150 −100 −50 0 50 100 150
Zero−g Level Offset [mg]
14
12
10
8
6
Percent of parts [%]
4
2
0
16 16.5 17 17.5 18 18.5 19 19.5 20
Sensitivity [mg/digits]
Figure 16. Z axis 0-g level at 2.5V Figure 17. Z axis sensitivity at 2.5V
25
15
20
15
10
Percent of parts [%]
5
0
−150 −100 −50 0 50 100 150
Zero−g Level Offset [mg]
10
Percent of parts [%]
5
0
16 16.5 17 17.5 18 18.5 19 19.5 20
Sensitivity [mg/digits]
37/42
Page 38

Typical performance characteristics LIS302DL
8.2 Mechanical characteristics derived from measurement in the
-40°C to +85°C temperature range
Figure 18. X axis 0-g level change vs
temperature at 2.5V
35
30
25
20
15
Percent of parts (%)
10
5
0
−3 −2 −1 0 1 2 3
0−g level drift (mg/οC)
Figure 20. Y axis 0-g level change vs
temperature at 2.5V
35
30
25
20
15
Percent of parts (%)
10
5
0
−3 −2 −1 0 1 2 3
0−g level drift (mg/οC)
Figure 19. X axis Sensitivity change vs
temperature at 2.5V
60
50
40
30
20
Percent of parts (%)
10
0
−0.05 0 0.05
sensitivity drift (%/deg. C)
Figure 21. Y axis sensitivity change Vs
temperature at 2.5V
60
50
40
30
20
Percent of parts (%)
10
0
−0.05 0 0.05
sensitivity drift (%/deg. C)
Figure 22. Z axis 0-g level change vs
temperature at 2.5V
35
30
25
20
15
Percent of parts (%)
10
5
0
−2 −1 0 1 2 3 4
38/42
0−g level drift (mg/οC)
Figure 23. Z axis sensitivity change vs
temperature at 2.5V
60
50
40
30
20
Percent of parts (%)
10
0
−0.05 0 0.05
sensitivity drift (%/deg. C)
Page 39

LIS302DL Typical performance characteristics
8.3 Electro-mechanical characteristics at 25°C
Figure 24. Current consumption in normal
mode at 2.5V
30
25
20
15
Percent of parts [%]
10
5
0
200 220 240 260 280 300 320 340 360 380 400
Current consumption [uA]
Figure 25. Current consumption in power
down mode at 2.5V
35
30
25
20
15
Percent of parts (%)
10
5
0
−1 0 1 2 3 4 5
current consumption (uA)
39/42
Page 40

Package information LIS302DL
9 Package information
In order to meet environmental requirements, ST offers these devices in ECOPACK®
packages. These packages have a lead-free second level interconnect. The category of
second Level Interconnect is marked on the package and on the inner box label, in
compliance with JEDEC Standard JESD97. The maximum ratings related to soldering
conditions are also marked on the inner box label. ECOPACK is an ST trademark.
ECOPACK specifications are available at: www.st.com
.
Figure 26. LGA 14: mechanical data and package dimensions
DIM.
A1 0.920 1.000 0.0362 0.0394
A2 0.700 0.0275
A3 0.180 0.220 0.260 0.0071 0.0 087 0.0102
D1 2.850 3.000 3.150 0.1122 0.1181 0.1240
E1 4.850 5.000 5.150 0.1909 0.1 968 0.2027
e 0.800 0.0315
d 0.300 0.0118
L1 4.000 0.1575
N 1.360 0.0535
N1 1.200 0.0472
P1 0.965 0.975 0.985 0.0380 0.0 384 0.0386
P2 0.640 0.650 0.660 0.0252 0.0 256 0.0260
T1 0.750 0.80 0 0.850 0.0295 0.0315 0.0335
T2 0.450 0.50 0 0.550 0.0177 0.0197 0.0217
R 1.200 1.600 0.0472 0.0630
h 0.150 0.0059
k 0.050 0.0020
i 0.100 0.0039
s 0.100 0.0039
mm inch
MIN. TYP. MAX. MIN. TYP. MAX.
OUTLINE AND
MECHANICAL DATA
LGA14 (3x5x0.92mm) Pitch 0.8mm
Land Grid Array Package
40/42
7773587 C
Page 41

LIS302DL Revision history
10 Revision history
Table 59. Document revision history
Date Revision Changes
3-Oct-2006 1 Initial release.
6-Feb-2007 2
25-Oct-2007 3
21-Oct-2008 4 Updated self test limits (Table 3)
Added functions and registers information and typical performance
characteristics
Added interfaces timing characteristics and global datasheet review
to improved readability
41/42
Page 42

LIS302DL
Please Read Carefully:
Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the
right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any
time, without notice.
All ST products are sold pursuant to ST’s terms and conditions of sale.
Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no
liability whatsoever relating to the choice, selection or use of the ST products and services described herein.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this
document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products
or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such
third party products or services or any intellectual property contained therein.
UNLESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SALE ST DISCLAIMS ANY EXPRESS OR IMPLIED
WARRANTY WITH RESPECT TO THE USE AND/OR SALE OF ST PRODUCTS INCLUDING WITHOUT LIMITATION IMPLIED
WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS
OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT.
UNLESS EXPRESSLY APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT
RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING
APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY,
DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE
GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.
Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void
any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any
liability of ST.
ST and the ST logo are trademarks or registered trademarks of ST in various countries.
Information in this document supersedes and replaces all information previously supplied.
The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.
© 2008 STMicroelectronics - All rights reserved
STMicroelectronics group of companies
Australia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan -
Malaysia - Malta - Morocco - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America
www.st.com
42/42
 Loading...
Loading...